LIBRO Resist en CIA de Materiales (Beer) Problemas Resueltos
Upload
hector-heckCategory
view
765download
53description
Universidad Nacional de San Cristobal deHuamanga
Facultad de Ingeniera Minas, Geologa y Civil
Escuela de Formacion Profesional de Ingeniera Civil
CURSO
DINAMICA (IC-244)
SOLUCION DE PROBLEMAS -
CINETICA DE UNA PARTICULA Y CUERPO
RIGIDOBeer - Jhonston
DOCENTE:
Ing. CASTRO PEREZ Cristian
ALUMNOS:
AYALA BIZARRO Rocky G.
CONTRERAS VENTURA Samir
VARGAS NAUPA Hilmar
ZARATE LAZO Dick F.
Ayacucho, Julio de 2013
Indice GeneralIndice General
Captulo 1 Problemas de Dinamica Pagina 1
1.1 Leyes de Newton Cuerpo Rgido 2Ejericio Nro 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Trabajo y Energa en Cuerpo Rgido 5Ejericio Nro 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Problema de Computadora . . . . . . . . . . . . . . . . . . . . . . . . . 7
Ejericio Nro 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Ejericio Nro 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Ejericio Nro 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Ejericio Nro 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Ejericio Nro 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Ejericio Nro 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Ejericio Nro 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Ejericio Nro 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Ejericio Nro 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Ejericio Nro 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Ejericio Nro 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Ejericio Nro 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Ejericio Nro 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1ING. CIVILFG
F
r
x
y
z
x0
y0
z0
0
0
+y
+xN
f R
T
Mg
+
T0
mg
v
y
x
60
30
z
A
B
120 ft
vB
vA
C H A P T E R
691
Kinetics of Particles:
Newtons Second Law
bee29400_ch12_690-726.indd Page 691 12/3/08 9:27:13 PM user-s172bee29400_ch12_690-726.indd Page 691 12/3/08 9:27:13 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
UNSCH
Newtons Second Law
N I N T H ED I T I O N
VECTOR MECHANICS
FOR ENGINEERS
Statics and Dynamics
Ferdinand P. Beer
Late of Lehigh University
E. Russell Johnston, Jr.
University of Connecticut
David F. Mazurek
U.S. Coast Guard Academy
Phillip J. Cornwell
Rose-Hulman Institute of Technology
Elliot R. Eisenberg
The Pennsylvania State University
bee29400_fm_i-xxiv.indd Page i 12/18/08 3:39:27 PM user-s172bee29400_fm_i-xxiv.indd Page i 12/18/08 3:39:27 PM user-s172 /Volumes/204/MHDQ078/work%0/indd%0/Volumes/204/MHDQ078/work%0/indd%0
Ferdinand P. Beer
Late of Lehigh University
E.
Russell
Johnston, Jr.
University of Connecticut
DINMICA:
DINAMICA
FOR ENGINEERS
v
v0
y
x
z
Problemas de Dinamica
Dinamica IC-244 Problemas de Dinamica
1.1 Leyes de Newton Cuerpo Rgido
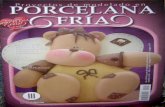
Ejercicio 1.1 El movimiento de una barra uniforme AB de 5kg de masa y longitud
L=750mm se gua por medio de dos ruedas pequenas de masa despreciable
que ruedan sobre la superficie mostrada. Si la barra se suelta desde
el reposo cuando q = 20, determine inmediatamente despues de laaceleracion a) la aceleracion angular de la barra y b) la reaccion en
A.(Problema Nro 122)
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
Solucion:
Datos
m = 5kg
L = 750mm
q = 20
LA ACELERACION RELATIVA SERA
aB = aA + aA/B
[aB ] = [aA] + [L.]aA/B = L.
En las siguientes imagenes se vera de donde salen la aB, aA y aA/B.
Ingeniera Civil2
Ing. Civil
Dinamica IC-244 Problemas de Dinamica
DIAGRAMA DE ACELERACIONES
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
Aplicando Ley de Senos
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 106916.120 The 4-lb uniform rod AB is attached to collars of negligible masswhich may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and man at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
aBsin70 =
aAsin50 =
L.sin60
aA = 1.085LaB = 0.884L
Descomponiendo las ecuaciones de la aceleracion en coordenadas xy
ax = 1.085Lcos60 + 0.5L sin20
ax = 0.542L+ 0.171Lax = 0.7135L (1.1)
ay = 1.085L sin60 0.5Lcos20ay = 0.938L+ 0.469L
ay = 0.469L (1.2)
DIAGRAMAS DE CUERPO LIBRE
En el triangulo ABE
] ABE = 70] BAE = 50
Ingeniera Civil3
Ing. Civil
Dinamica IC-244 Problemas de Dinamica
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
750
W=mg
A
B
1031stated, without proof (Sec. 3.3), that the conditions of equilibrium or
motion of a rigid body remain unchanged if a force F acting at a given
point of the rigid body is replaced by a force F9 of the same magni-
tude and same direction, but acting at a different point, provided
that the two forces have the same line of action. But since F and F9
have the same moment about any given point, it is clear that they
form two equipollent systems of external forces. Thus, we may now
prove, as a result of what we established in the preceding section,
that F and F9 have the same effect on the rigid body (Fig. 3.3).
The principle of transmissibility can therefore be removed from
the list of axioms required for the study of the mechanics of rigid
bodies. These axioms are reduced to the parallelogram law of addi-
tion of vectors and to Newtons laws of motion.
16.6 SOLUTION OF PROBLEMS INVOLVING
THE MOTION OF A RIGID BODY
We saw in Sec. 16.4 that when a rigid body is in plane motion, there
exists a fundamental relation between the forces F1, F2, F3, . . . , acting
on the body, the acceleration a of its mass center, and the angular
acceleration A of the body. This relation, which is represented in Fig.
16.7 in the form of a free-body-diagram equation, can be used to deter-
mine the acceleration a and the angular acceleration A produced by a
given system of forces acting on a rigid body or, conversely, to deter-
mine the forces which produce a given motion of the rigid body.
The three algebraic equations (16.6) can be used to solve prob-
lems of plane motion. However, our experience in statics suggests
that the solution of many problems involving rigid bodies could be
simplied by an appropriate choice of the point about which the
moments of the forces are computed. It is therefore preferable to
remember the relation existing between the forces and the accelera-
tions in the pictorial form shown in Fig. 16.7 and to derive from this
fundamental relation the component or moment equations which t
best the solution of the problem under consideration.
The fundamental relation shown in Fig. 16.7 can be presented
in an alternative form if we add to the external forces an inertia vec-
tor 2m a of sense opposite to that of a, attached at G, and an inertia
couple 2 IA of moment equal in magnitude to Ia and of sense oppo-
site to that of A (Fig. 16.10). The system obtained is equivalent to
zero, and the rigid body is said to be in dynamic equilibrium.
Whether the principle of equivalence of external and effective
forces is directly applied, as in Fig. 16.7, or whether the concept of dy-
namic equilibrium is introduced, as in Fig. 16.10, the use of free-body-
diagram equations showing vectorially the relationship existing between
the forces applied on the rigid body and the resulting linear and angular
accelerations presents considerable advantages over the blind application
of formulas (16.6). These advantages can be summarized as follows:
1. The use of a pictorial representation provides a much clearer under-
standing of the effect of the forces on the motion of the body.
We recall that the last of Eqs. (16.6) is valid only in the case of the plane motion of
a rigid body symmetrical with respect to the reference plane. In all other cases, the
methods of Chap. 18 should be used.
Fig. 16.10
F1
F2
= 0F3
F4
am
aa
aI G
16.6 Solution of Problems Involving the
Motion of a Rigid Body
Fig. 3.3 (repeated)
F
=F'
bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
20
100 mm
0.469
0.17
60
20
0.469
0.17
Iamax
may
0.714
A
B
EE
Ley de senos
BEsin50 =
Lsin60
BE = 0.885L
Suma de Momentos
ME =
(ME)
mg(0.4698L) = I+max(0.714) +may(0.469)
0.469mgL= 112mL2 +m(0.714)(0.714) +m(0.469)(0.469)
0.469mgL=mL2(0.813)a (1.3)
Calculando
= 0.5778 gL= 0.57789.810.75
= 7.56rad/s (1.4)
Ingeniera Civil4
Ing. Civil
Dinamica IC-244 Problemas de Dinamica
CALCULANDO LA REACCION EN A
Fx =
(Fx)
Asin60 =maxAsin60 =ma0.714Asin60 = (5)(0.714)(0.75)(7.557)
A= 23.3rad/s (1.5)
1.2 Trabajo y Energa en Cuerpo Rgido
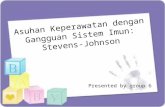
Ejercicio 1.2 El disco A con peso de 10lb y radio r=6in, se encuentra en reposo cuando
esta en contacto con la banda BC, la cual se mueve hacia la derecha con
velocidad constante V= 40ft/s. Si k = 0.20 entre el disco y la bandadetermine el numero de revoluciones ejecutadas por el disco antes de
alcanzar una velocidad angular constante.(Problema Nro 17.8)
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
750
W=mg
A
B
1031stated, without proof (Sec. 3.3), that the conditions of equilibrium or
motion of a rigid body remain unchanged if a force F acting at a given
point of the rigid body is replaced by a force F9 of the same magni-
tude and same direction, but acting at a different point, provided
that the two forces have the same line of action. But since F and F9
have the same moment about any given point, it is clear that they
form two equipollent systems of external forces. Thus, we may now
prove, as a result of what we established in the preceding section,
that F and F9 have the same effect on the rigid body (Fig. 3.3).
The principle of transmissibility can therefore be removed from
the list of axioms required for the study of the mechanics of rigid
bodies. These axioms are reduced to the parallelogram law of addi-
tion of vectors and to Newtons laws of motion.
16.6 SOLUTION OF PROBLEMS INVOLVING
THE MOTION OF A RIGID BODY
We saw in Sec. 16.4 that when a rigid body is in plane motion, there
exists a fundamental relation between the forces F1, F2, F3, . . . , acting
on the body, the acceleration a of its mass center, and the angular
acceleration A of the body. This relation, which is represented in Fig.
16.7 in the form of a free-body-diagram equation, can be used to deter-
mine the acceleration a and the angular acceleration A produced by a
given system of forces acting on a rigid body or, conversely, to deter-
mine the forces which produce a given motion of the rigid body.
The three algebraic equations (16.6) can be used to solve prob-
lems of plane motion. However, our experience in statics suggests
that the solution of many problems involving rigid bodies could be
simplied by an appropriate choice of the point about which the
moments of the forces are computed. It is therefore preferable to
remember the relation existing between the forces and the accelera-
tions in the pictorial form shown in Fig. 16.7 and to derive from this
fundamental relation the component or moment equations which t
best the solution of the problem under consideration.
The fundamental relation shown in Fig. 16.7 can be presented
in an alternative form if we add to the external forces an inertia vec-
tor 2m a of sense opposite to that of a, attached at G, and an inertia
couple 2 IA of moment equal in magnitude to Ia and of sense oppo-
site to that of A (Fig. 16.10). The system obtained is equivalent to
zero, and the rigid body is said to be in dynamic equilibrium.
Whether the principle of equivalence of external and effective
forces is directly applied, as in Fig. 16.7, or whether the concept of dy-
namic equilibrium is introduced, as in Fig. 16.10, the use of free-body-
diagram equations showing vectorially the relationship existing between
the forces applied on the rigid body and the resulting linear and angular
accelerations presents considerable advantages over the blind application
of formulas (16.6). These advantages can be summarized as follows:
1. The use of a pictorial representation provides a much clearer under-
standing of the effect of the forces on the motion of the body.
We recall that the last of Eqs. (16.6) is valid only in the case of the plane motion of
a rigid body symmetrical with respect to the reference plane. In all other cases, the
methods of Chap. 18 should be used.
Fig. 16.10
F1
F2
= 0F3
F4
am
aa
aI G
16.6 Solution of Problems Involving the
Motion of a Rigid Body
Fig. 3.3 (repeated)
F
=F'
bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
20
100 mm
0.469
0.17
60
20
0.469
0.17
Iamax
may
0.714
A
B
EE
1096 Plane Motion of Rigid Bodies: Energy and Momentum Methods
17.7 Disk A is of constant thickness and is at rest when it is placed in
contact with belt BC , which moves with a constant velocity v .
Denoting by mk the coefcient of kinetic friction between the disk
and the belt, derive an expression for the number of revolutions
executed by the disk before it attains a constant angular velocity.
17.8 Disk A, of weight 10 lb and radius r 5 6 in., is at rest when it is
placed in contact with belt BC, which moves to the right with a
constant speed v 5 40 ft/s. Knowing that m 5k 0.20 between the
disk and the belt, determine the number of revolutions executed
by the disk before it attains a constant angular velocity.
17.9 Each of the gears A and B has a mass of 2.4 kg and a radius of gyra-
tion of 60 mm, while gear C has a mass of 12 kg and a radius of
gyration of 150 mm. A couple M of constant magnitude 10 N ? m is
applied to gear C. Determine (a) the number of revolutions of gear
C required for its angular velocity to increase from 100 to 450 rpm,
(b) the corresponding tangential force acting on gear A.
17.10 Solve Prob. 17.9, assuming that the 10-N ? m couple is applied to
gear B.
17.11 The double pulley shown weighs 30 lb and has a centroidal radius
of gyration of 6.5 in. Cylinder A and block B are attached to cords
that are wrapped on the pulleys as shown. The coefcient of
kinetic friction between block B and the surface is 0.25. Knowing
that the system is released from rest in the position shown, deter-
mine (a) the velocity of cylinder A as it strikes the ground, (b) the
total distance that block B moves before coming to rest.
B
rA
C
v
Fig. P17.7 and P17.8
A B
80 mm 80 mm
200 mmC
M
Fig. P17.9
A
C
3 ft
25 lb
B
20 lb
10 in.
6 in.
Fig. P17.11
P
10 in.
15 in.
A
B
C
D
6 in.
8 in.
Fig. P17.12
17.12 The 8-in.-radius brake drum is attached to a larger ywheel that
is not shown. The total mass moment of inertia of the ywheel and
drum is 14 lb ? ft ? s2 and the coefcient of kinetic friction between
the drum and the brake shoe is 0.35. Knowing that the initial
angular velocity of the ywheel is 360 rpm counterclockwise,
determine the vertical force P that must be applied to the pedal
C if the system is to stop in 100 revolutions.
bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
B
rA
C
v
rA
C
W=mg
N=mg
F=usmgSolucion:
Datos
o = 0
r = 6in
V = 40ft/s
s = 0.20
Ingeniera Civil5
Ing. Civil
Dinamica IC-244 Problemas de Dinamica
La unica fuerza que hace el trabajo es F . el momento en A es M = rF :
U12 =MU12 = rFU12 = r(smg)
La velocidad angular se vuelve constante cuando o2 =V
r:
consideramos a T como el trabajo realizado
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
750
W=mg
A
B
1031stated, without proof (Sec. 3.3), that the conditions of equilibrium or
motion of a rigid body remain unchanged if a force F acting at a given
point of the rigid body is replaced by a force F9 of the same magni-
tude and same direction, but acting at a different point, provided
that the two forces have the same line of action. But since F and F9
have the same moment about any given point, it is clear that they
form two equipollent systems of external forces. Thus, we may now
prove, as a result of what we established in the preceding section,
that F and F9 have the same effect on the rigid body (Fig. 3.3).
The principle of transmissibility can therefore be removed from
the list of axioms required for the study of the mechanics of rigid
bodies. These axioms are reduced to the parallelogram law of addi-
tion of vectors and to Newtons laws of motion.
16.6 SOLUTION OF PROBLEMS INVOLVING
THE MOTION OF A RIGID BODY
We saw in Sec. 16.4 that when a rigid body is in plane motion, there
exists a fundamental relation between the forces F1, F2, F3, . . . , acting
on the body, the acceleration a of its mass center, and the angular
acceleration A of the body. This relation, which is represented in Fig.
16.7 in the form of a free-body-diagram equation, can be used to deter-
mine the acceleration a and the angular acceleration A produced by a
given system of forces acting on a rigid body or, conversely, to deter-
mine the forces which produce a given motion of the rigid body.
The three algebraic equations (16.6) can be used to solve prob-
lems of plane motion. However, our experience in statics suggests
that the solution of many problems involving rigid bodies could be
simplied by an appropriate choice of the point about which the
moments of the forces are computed. It is therefore preferable to
remember the relation existing between the forces and the accelera-
tions in the pictorial form shown in Fig. 16.7 and to derive from this
fundamental relation the component or moment equations which t
best the solution of the problem under consideration.
The fundamental relation shown in Fig. 16.7 can be presented
in an alternative form if we add to the external forces an inertia vec-
tor 2m a of sense opposite to that of a, attached at G, and an inertia
couple 2 IA of moment equal in magnitude to Ia and of sense oppo-
site to that of A (Fig. 16.10). The system obtained is equivalent to
zero, and the rigid body is said to be in dynamic equilibrium.
Whether the principle of equivalence of external and effective
forces is directly applied, as in Fig. 16.7, or whether the concept of dy-
namic equilibrium is introduced, as in Fig. 16.10, the use of free-body-
diagram equations showing vectorially the relationship existing between
the forces applied on the rigid body and the resulting linear and angular
accelerations presents considerable advantages over the blind application
of formulas (16.6). These advantages can be summarized as follows:
1. The use of a pictorial representation provides a much clearer under-
standing of the effect of the forces on the motion of the body.
We recall that the last of Eqs. (16.6) is valid only in the case of the plane motion of
a rigid body symmetrical with respect to the reference plane. In all other cases, the
methods of Chap. 18 should be used.
Fig. 16.10
F1
F2
= 0F3
F4
am
aa
aI G
16.6 Solution of Problems Involving the
Motion of a Rigid Body
Fig. 3.3 (repeated)
F
=F'
bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
20
100 mm
0.469
0.17
60
20
0.469
0.17
Iamax
may
0.714
A
B
EE
1096 Plane Motion of Rigid Bodies: Energy and Momentum Methods
17.7 Disk A is of constant thickness and is at rest when it is placed in
contact with belt BC , which moves with a constant velocity v .
Denoting by mk the coefcient of kinetic friction between the disk
and the belt, derive an expression for the number of revolutions
executed by the disk before it attains a constant angular velocity.
17.8 Disk A, of weight 10 lb and radius r 5 6 in., is at rest when it is
placed in contact with belt BC, which moves to the right with a
constant speed v 5 40 ft/s. Knowing that m 5k 0.20 between the
disk and the belt, determine the number of revolutions executed
by the disk before it attains a constant angular velocity.
17.9 Each of the gears A and B has a mass of 2.4 kg and a radius of gyra-
tion of 60 mm, while gear C has a mass of 12 kg and a radius of
gyration of 150 mm. A couple M of constant magnitude 10 N ? m is
applied to gear C. Determine (a) the number of revolutions of gear
C required for its angular velocity to increase from 100 to 450 rpm,
(b) the corresponding tangential force acting on gear A.
17.10 Solve Prob. 17.9, assuming that the 10-N ? m couple is applied to
gear B.
17.11 The double pulley shown weighs 30 lb and has a centroidal radius
of gyration of 6.5 in. Cylinder A and block B are attached to cords
that are wrapped on the pulleys as shown. The coefcient of
kinetic friction between block B and the surface is 0.25. Knowing
that the system is released from rest in the position shown, deter-
mine (a) the velocity of cylinder A as it strikes the ground, (b) the
total distance that block B moves before coming to rest.
B
rA
C
v
Fig. P17.7 and P17.8
A B
80 mm 80 mm
200 mmC
M
Fig. P17.9
A
C
3 ft
25 lb
B
20 lb
10 in.
6 in.
Fig. P17.11
P
10 in.
15 in.
A
B
C
D
6 in.
8 in.
Fig. P17.12
17.12 The 8-in.-radius brake drum is attached to a larger ywheel that
is not shown. The total mass moment of inertia of the ywheel and
drum is 14 lb ? ft ? s2 and the coefcient of kinetic friction between
the drum and the brake shoe is 0.35. Knowing that the initial
angular velocity of the ywheel is 360 rpm counterclockwise,
determine the vertical force P that must be applied to the pedal
C if the system is to stop in 100 revolutions.
bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
B
rA
C
v
rA
C
W=mg
N=mg
F=usmg
T1 = 0
T2 =12(12mr
2)(
Vr
)2T2 =
mV 2
4
T1+U12 = T2 (2.6)
0+r(smg) =mV 2
4 (2.7)
=mV 2
4r(smg)rad (2.8)
=V 2
8pir(sg)rev (2.9)
PARA r=6in , s= 0.20, V=40ft/s
= 402
8pir(0.6)(32.2)
= 19.77rev (2.10)
Ingeniera Civil6
Ing. Civil
Dinamica IC-244 Problemas de Dinamica
Ejercicio 1.3 Cada una de las dos barras ligeras e identicas que se muestran tiene
una longitud L=30in. Si el sistema se suelta desde el reposo cuando
las barras estan horizontales, utilice software para calcular y graficas
la velocidad angular de la barra BC y la velocidad del punto AB para
valores de desde 0 hasta 90(Problema de computadora Nro 17.C5)
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
750
W=mg
A
B
1031stated, without proof (Sec. 3.3), that the conditions of equilibrium or
motion of a rigid body remain unchanged if a force F acting at a given
point of the rigid body is replaced by a force F9 of the same magni-
tude and same direction, but acting at a different point, provided
that the two forces have the same line of action. But since F and F9
have the same moment about any given point, it is clear that they
form two equipollent systems of external forces. Thus, we may now
prove, as a result of what we established in the preceding section,
that F and F9 have the same effect on the rigid body (Fig. 3.3).
The principle of transmissibility can therefore be removed from
the list of axioms required for the study of the mechanics of rigid
bodies. These axioms are reduced to the parallelogram law of addi-
tion of vectors and to Newtons laws of motion.
16.6 SOLUTION OF PROBLEMS INVOLVING
THE MOTION OF A RIGID BODY
We saw in Sec. 16.4 that when a rigid body is in plane motion, there
exists a fundamental relation between the forces F1, F2, F3, . . . , acting
on the body, the acceleration a of its mass center, and the angular
acceleration A of the body. This relation, which is represented in Fig.
16.7 in the form of a free-body-diagram equation, can be used to deter-
mine the acceleration a and the angular acceleration A produced by a
given system of forces acting on a rigid body or, conversely, to deter-
mine the forces which produce a given motion of the rigid body.
The three algebraic equations (16.6) can be used to solve prob-
lems of plane motion. However, our experience in statics suggests
that the solution of many problems involving rigid bodies could be
simplied by an appropriate choice of the point about which the
moments of the forces are computed. It is therefore preferable to
remember the relation existing between the forces and the accelera-
tions in the pictorial form shown in Fig. 16.7 and to derive from this
fundamental relation the component or moment equations which t
best the solution of the problem under consideration.
The fundamental relation shown in Fig. 16.7 can be presented
in an alternative form if we add to the external forces an inertia vec-
tor 2m a of sense opposite to that of a, attached at G, and an inertia
couple 2 IA of moment equal in magnitude to Ia and of sense oppo-
site to that of A (Fig. 16.10). The system obtained is equivalent to
zero, and the rigid body is said to be in dynamic equilibrium.
Whether the principle of equivalence of external and effective
forces is directly applied, as in Fig. 16.7, or whether the concept of dy-
namic equilibrium is introduced, as in Fig. 16.10, the use of free-body-
diagram equations showing vectorially the relationship existing between
the forces applied on the rigid body and the resulting linear and angular
accelerations presents considerable advantages over the blind application
of formulas (16.6). These advantages can be summarized as follows:
1. The use of a pictorial representation provides a much clearer under-
standing of the effect of the forces on the motion of the body.
We recall that the last of Eqs. (16.6) is valid only in the case of the plane motion of
a rigid body symmetrical with respect to the reference plane. In all other cases, the
methods of Chap. 18 should be used.
Fig. 16.10
F1
F2
= 0F3
F4
am
aa
aI G
16.6 Solution of Problems Involving the
Motion of a Rigid Body
Fig. 3.3 (repeated)
F
=F'
bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
20
100 mm
0.469
0.17
60
20
0.469
0.17
Iamax
may
0.714
A
B
EE
1096 Plane Motion of Rigid Bodies: Energy and Momentum Methods
17.7 Disk A is of constant thickness and is at rest when it is placed in
contact with belt BC , which moves with a constant velocity v .
Denoting by mk the coefcient of kinetic friction between the disk
and the belt, derive an expression for the number of revolutions
executed by the disk before it attains a constant angular velocity.
17.8 Disk A, of weight 10 lb and radius r 5 6 in., is at rest when it is
placed in contact with belt BC, which moves to the right with a
constant speed v 5 40 ft/s. Knowing that m 5k 0.20 between the
disk and the belt, determine the number of revolutions executed
by the disk before it attains a constant angular velocity.
17.9 Each of the gears A and B has a mass of 2.4 kg and a radius of gyra-
tion of 60 mm, while gear C has a mass of 12 kg and a radius of
gyration of 150 mm. A couple M of constant magnitude 10 N ? m is
applied to gear C. Determine (a) the number of revolutions of gear
C required for its angular velocity to increase from 100 to 450 rpm,
(b) the corresponding tangential force acting on gear A.
17.10 Solve Prob. 17.9, assuming that the 10-N ? m couple is applied to
gear B.
17.11 The double pulley shown weighs 30 lb and has a centroidal radius
of gyration of 6.5 in. Cylinder A and block B are attached to cords
that are wrapped on the pulleys as shown. The coefcient of
kinetic friction between block B and the surface is 0.25. Knowing
that the system is released from rest in the position shown, deter-
mine (a) the velocity of cylinder A as it strikes the ground, (b) the
total distance that block B moves before coming to rest.
B
rA
C
v
Fig. P17.7 and P17.8
A B
80 mm 80 mm
200 mmC
M
Fig. P17.9
A
C
3 ft
25 lb
B
20 lb
10 in.
6 in.
Fig. P17.11
P
10 in.
15 in.
A
B
C
D
6 in.
8 in.
Fig. P17.12
17.12 The 8-in.-radius brake drum is attached to a larger ywheel that
is not shown. The total mass moment of inertia of the ywheel and
drum is 14 lb ? ft ? s2 and the coefcient of kinetic friction between
the drum and the brake shoe is 0.35. Knowing that the initial
angular velocity of the ywheel is 360 rpm counterclockwise,
determine the vertical force P that must be applied to the pedal
C if the system is to stop in 100 revolutions.
bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
B
rA
C
v
rA
C
W=mg
N=mg
F=usmg
1143Computer Problems 17.C4 Collar C has a mass of 2.5 kg and can slide without friction on rod AB. A spring of constant 750 N/m and an unstretched length r0 5
500 mm is attached as shown to the collar and to the hub B. The total mass
moment of inertia of the rod, hub, and spring is known to be 0.3 kg2
? m
about B. Initially the collar is held at a distance of 500 mm from the axis
of rotation by a small pin protruding from the rod. The pin is suddenly
removed as the assembly is rotating in a horizontal plane with an angular
velocity V 0 of 10 rad/s. Denoting by r the distance of the collar from the
axis of rotation, use computational software to calculate and plot the angular
velocity of the assembly and the velocity of the collar relative to the rod for
values of r from 500 to 700 mm. Determine the maximum value of r in the
ensuing motion.
17.C5 Each of the two identical slender bars shown has a length L 5 30 in.
Knowing that the system is released from rest when the bars are horizontal,
use computational software to calculate and plot the angular velocity of rod
AB and the velocity of point D for values of u from 0 to 90.
A
B
r0
w0
C
Fig. P17.C4
A
B
Dq
LL
Fig. P17.C5
bee29400_ch17_1080-1143.indd Page 1143 12/16/08 3:12:11 PM user-s172bee29400_ch17_1080-1143.indd Page 1143 12/16/08 3:12:11 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
A
B
Dq
LL
q
B
q
L
A
B
q
LB
q
L
L L L LLLLL/2 LLLL/2 LLLL/2 LLLL/2
WAB=w
W=mg
W=mg W=mg
AB
D
W=mg
LLLL
h=L/2(sen(q))
qA
B
D
q
LLLL
h=L/2(sen(q))
qA
B
D
vAB=wL/2
WBD=w
WBD=w
C
vB=wL/2
vAB=wL/2
vBD=wL/2
vD=(CD)w
EED=L/2
CENTRO INSTANTNEO
DE ROTACIN
Solucion:
Datos
L = 30in
Las barras parten desde el reposo cuando = 0 primera imagen de la izquierda,hallamos la Vd para angulos desde = 0 hasta = 90 usando incrementos de = 10
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
750
W=mg
A
B
1031stated, without proof (Sec. 3.3), that the conditions of equilibrium or
motion of a rigid body remain unchanged if a force F acting at a given
point of the rigid body is replaced by a force F9 of the same magni-
tude and same direction, but acting at a different point, provided
that the two forces have the same line of action. But since F and F9
have the same moment about any given point, it is clear that they
form two equipollent systems of external forces. Thus, we may now
prove, as a result of what we established in the preceding section,
that F and F9 have the same effect on the rigid body (Fig. 3.3).
The principle of transmissibility can therefore be removed from
the list of axioms required for the study of the mechanics of rigid
bodies. These axioms are reduced to the parallelogram law of addi-
tion of vectors and to Newtons laws of motion.
16.6 SOLUTION OF PROBLEMS INVOLVING
THE MOTION OF A RIGID BODY
We saw in Sec. 16.4 that when a rigid body is in plane motion, there
exists a fundamental relation between the forces F1, F2, F3, . . . , acting
on the body, the acceleration a of its mass center, and the angular
acceleration A of the body. This relation, which is represented in Fig.
16.7 in the form of a free-body-diagram equation, can be used to deter-
mine the acceleration a and the angular acceleration A produced by a
given system of forces acting on a rigid body or, conversely, to deter-
mine the forces which produce a given motion of the rigid body.
The three algebraic equations (16.6) can be used to solve prob-
lems of plane motion. However, our experience in statics suggests
that the solution of many problems involving rigid bodies could be
simplied by an appropriate choice of the point about which the
moments of the forces are computed. It is therefore preferable to
remember the relation existing between the forces and the accelera-
tions in the pictorial form shown in Fig. 16.7 and to derive from this
fundamental relation the component or moment equations which t
best the solution of the problem under consideration.
The fundamental relation shown in Fig. 16.7 can be presented
in an alternative form if we add to the external forces an inertia vec-
tor 2m a of sense opposite to that of a, attached at G, and an inertia
couple 2 IA of moment equal in magnitude to Ia and of sense oppo-
site to that of A (Fig. 16.10). The system obtained is equivalent to
zero, and the rigid body is said to be in dynamic equilibrium.
Whether the principle of equivalence of external and effective
forces is directly applied, as in Fig. 16.7, or whether the concept of dy-
namic equilibrium is introduced, as in Fig. 16.10, the use of free-body-
diagram equations showing vectorially the relationship existing between
the forces applied on the rigid body and the resulting linear and angular
accelerations presents considerable advantages over the blind application
of formulas (16.6). These advantages can be summarized as follows:
1. The use of a pictorial representation provides a much clearer under-
standing of the effect of the forces on the motion of the body.
We recall that the last of Eqs. (16.6) is valid only in the case of the plane motion of
a rigid body symmetrical with respect to the reference plane. In all other cases, the
methods of Chap. 18 should be used.
Fig. 16.10
F1
F2
= 0F3
F4
am
aa
aI G
16.6 Solution of Problems Involving the
Motion of a Rigid Body
Fig. 3.3 (repeated)
F
=F'
bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172bee29400_ch16_1024-1079.indd Page 1031 12/16/08 10:32:19 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
20
100 mm
0.469
0.17
60
20
0.469
0.17
Iamax
may
0.714
A
B
EE
1096 Plane Motion of Rigid Bodies: Energy and Momentum Methods
17.7 Disk A is of constant thickness and is at rest when it is placed in
contact with belt BC , which moves with a constant velocity v .
Denoting by mk the coefcient of kinetic friction between the disk
and the belt, derive an expression for the number of revolutions
executed by the disk before it attains a constant angular velocity.
17.8 Disk A, of weight 10 lb and radius r 5 6 in., is at rest when it is
placed in contact with belt BC, which moves to the right with a
constant speed v 5 40 ft/s. Knowing that m 5k 0.20 between the
disk and the belt, determine the number of revolutions executed
by the disk before it attains a constant angular velocity.
17.9 Each of the gears A and B has a mass of 2.4 kg and a radius of gyra-
tion of 60 mm, while gear C has a mass of 12 kg and a radius of
gyration of 150 mm. A couple M of constant magnitude 10 N ? m is
applied to gear C. Determine (a) the number of revolutions of gear
C required for its angular velocity to increase from 100 to 450 rpm,
(b) the corresponding tangential force acting on gear A.
17.10 Solve Prob. 17.9, assuming that the 10-N ? m couple is applied to
gear B.
17.11 The double pulley shown weighs 30 lb and has a centroidal radius
of gyration of 6.5 in. Cylinder A and block B are attached to cords
that are wrapped on the pulleys as shown. The coefcient of
kinetic friction between block B and the surface is 0.25. Knowing
that the system is released from rest in the position shown, deter-
mine (a) the velocity of cylinder A as it strikes the ground, (b) the
total distance that block B moves before coming to rest.
B
rA
C
v
Fig. P17.7 and P17.8
A B
80 mm 80 mm
200 mmC
M
Fig. P17.9
A
C
3 ft
25 lb
B
20 lb
10 in.
6 in.
Fig. P17.11
P
10 in.
15 in.
A
B
C
D
6 in.
8 in.
Fig. P17.12
17.12 The 8-in.-radius brake drum is attached to a larger ywheel that
is not shown. The total mass moment of inertia of the ywheel and
drum is 14 lb ? ft ? s2 and the coefcient of kinetic friction between
the drum and the brake shoe is 0.35. Knowing that the initial
angular velocity of the ywheel is 360 rpm counterclockwise,
determine the vertical force P that must be applied to the pedal
C if the system is to stop in 100 revolutions.
bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172bee29400_ch17_1080-1143.indd Page 1096 12/16/08 10:21:17 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
B
rA
C
v
rA
C
W=mg
N=mg
F=usmg
1143Computer Problems 17.C4 Collar C has a mass of 2.5 kg and can slide without friction on rod AB. A spring of constant 750 N/m and an unstretched length r0 5
500 mm is attached as shown to the collar and to the hub B. The total mass
moment of inertia of the rod, hub, and spring is known to be 0.3 kg2
? m
about B. Initially the collar is held at a distance of 500 mm from the axis
of rotation by a small pin protruding from the rod. The pin is suddenly
removed as the assembly is rotating in a horizontal plane with an angular
velocity V 0 of 10 rad/s. Denoting by r the distance of the collar from the
axis of rotation, use computational software to calculate and plot the angular
velocity of the assembly and the velocity of the collar relative to the rod for
values of r from 500 to 700 mm. Determine the maximum value of r in the
ensuing motion.
17.C5 Each of the two identical slender bars shown has a length L 5 30 in.
Knowing that the system is released from rest when the bars are horizontal,
use computational software to calculate and plot the angular velocity of rod
AB and the velocity of point D for values of u from 0 to 90.
A
B
r0
w0
C
Fig. P17.C4
A
B
Dq
LL
Fig. P17.C5
bee29400_ch17_1080-1143.indd Page 1143 12/16/08 3:12:11 PM user-s172bee29400_ch17_1080-1143.indd Page 1143 12/16/08 3:12:11 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
A
B
Dq
LL
q
B
q
L
A
B
q
LB
q
L
L L L LLLLL/2 LLLL/2 LLLL/2 LLLL/2
WAB=w
W=mg
W=mg W=mg
AB
D
W=mg
LLLL
h=L/2(sen(q))
qA
B
D
q
LLLL
h=L/2(sen(q))
qA
B
D
vAB=wL/2
WBD=w
WBD=w
C
vB=wL/2
vAB=wL/2
vBD=wL/2
vD=(CD)w
EED=L/2
CENTRO INSTANTNEO
DE ROTACIN
Dimensiones:
AB = BC = L
Ingeniera Civil7
Ing. Civil
Dinamica IC-244 Problemas de Dinamica
A B
(v ) = 96 km/hB 0(v ) = 0A 0
x
d
B
(v ) = 62 mi /hB 0d
(v ) = 96 km/hB 1(v ) = 5aA 1 A
90m
v = vA B
t = 5+t1
t = 5s
A
(v ) = 0A 0
t = 0t = 5s
B
(v ) = 96 km/hB 0
t = 0
desacelera
90m
x
1.0
0.5
0
0.5
1.0
0.2 0.40.6
y/y /x11
x
y
xz
2y
2A
2x
2A
2z
2B = 1
Problems 1069 16.120 The 4-lb uniform rod AB is attached to collars of negligible mass which may slide without friction along the xed rods shown. Rod AB
is at rest in the position u 5 25 when a horizontal force P is applied
to collar A, causing it to start moving to the left with an acceleration
of 12 ft/s2. Determine (a) the force P, (b) the reaction at B.
25 in.
q 70
A
B
Fig. P16.120 and P16.121
60 q
L
A
B
200 mm
200 mm
100 mm
A
B
D
C
Fig. P16.124
16.121 The 4-lb uniform rod AB is attached to collars of negligible mass
which may slide without friction along the xed rods shown. If rod
AB is released from rest in the position u 5 25, determine imme-
diately after release (a) the angular acceleration of the rod, (b) the
reaction at B.
16.122 The motion of the uniform rod AB of mass 5 kg and length L 5
750 mm is guided by small wheels of negligible mass that roll on
the surface shown. If the rod is released from rest when u 5 20,
determine immediately after release (a) the angular acceleration of
the rod, (b) the reaction at A.
16.123 End A of the 8-kg uniform rod AB is attached to a collar that can
slide without friction on a vertical rod. End B of the rod is attached
to a vertical cable BC. If the rod is released from rest in the posi-
tion shown, determine immediately after release (a) the angular
acceleration of the rod, (b) the reaction at A.
L = 750 mm
30 = q
A
B
C
Fig. P16.123
16.124 The 4-kg uniform rod ABD is attached to the crank BC and is t-
ted with a small wheel that can roll without friction along a vertical
slot. Knowing that at the instant shown crank BC rotates with an
angular velocity of 6 rad/s clockwise and an angular acceleration of
15 rad/s2 counterclockwise, determine the reaction at A.
bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172bee29400_ch16_1024-1079.indd Page 1069 12/16/08 5:14:35 PM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
60
750
PROBLEMS
1063
16.75 Show that the couple IA of Fig. 16.15 can be eliminated by attach-
ing the vectors mat and ma n at a point P called the center of per-
cussion, located on line OG at a distance GP 5 k2/r from the mass
center of the body.
16.76 A uniform slender rod of length L 5 36 in. and weight W 5 4 lb hangs
freely from a hinge at A. If a force P of magnitude 1.5 lb is applied
at B horizontally to the left (h 5 L), determine (a) the angular
acceleration of the rod, (b) the components of the reaction at A.
G
a
r
mat
ma n
P
O
Fig. P16.75
C
G
B
A
P
L
2
L
2
r
Fig. P16.78
A
B
h
L
P
Fig. P16.76
A
A'
l
x
w
Fig. P16.80
16.77 In Prob. 16.76, determine (a) the distance h for which the hori-
zontal component of the reaction at A is zero, (b) the correspond-
ing angular acceleration of the rod.
16.78 A uniform slender rod of length L 5 900 mm and mass m 5 4 kg
is suspended from a hinge at C. A horizontal force P of magnitude
75 N is applied at end B. Knowing that r 5 225 mm, determine
(a) the angular acceleration of the rod, (b) the components of the
reaction at C.
16.79 In Prob. 16.78, determine (a) the distance r for which the hori-
zontal component of the reaction at C is zero, (b) the correspond-
ing angular acceleration of the rod.
16.80 A uniform slender rod of length l and mass m rotates about a verti-
cal axis AA9 with a constant angular velocity V . Determine the
tension in the rod at a distance x from the axis of rotation.
bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172bee29400_ch16_1024-1079.indd Page 1063 12/16/08 10:33:08 AM user-s172 /Volumes/204/MHDQ077/work%0/indd%0/Volumes/204/MHDQ077/work%0/indd%0
aA
20
aB
GA
B
750
20
aA/B
GA
B
20
Punto Fijo
Fig. P16.120 and P16.121
aA/B
aA
aB
60
50
70
750
W=mg
A
B
1031stated, without proof (Sec. 3.3), that the conditions of equilibrium or
motion of a rigid body remain unchanged if a force F acting at a given
point of the rigid body is replaced by a force F9 of the same magni-
tude and same direction, but acting at a different point, provided
that the two forces have the same line of action. But since F and F9
have the same moment about any given point, it is clear that they
form two equipollent systems of external forces. Thus, we may now
prove, as a result of what we established in the preceding section,
that F and F9 have the same effect on the rigid body (Fig. 3.3).
The principle of transmissibility can therefore be removed from
the list of axioms required for the study of the mechanics of rigid
bodies. These axioms are reduced to the parallelogram law of addi-
tion of vectors and to Newtons laws of motion.
16.6 SOLUTION OF PROBLEMS INVOLVING
THE MOTION OF A RIGID BODY
We saw in Sec. 16.4 that when a rigid body is in plane motion, there
exists a fundamental relation between the forces F1, F2, F3, . . . , acting
on the body, the acceleration a of its mass center, and the angular
acceleration A of the body. This relation, which is represented in Fig.
16.7 in the form of a free-body-diagram equation, can be used to deter-
mine the acceleration a and the angular acceleration A produced by a
given system of forces acting on a rigid body or, conversely, to deter-
mine the forces which produce a given motion of the rigid body.
The three algebraic equations (16.6) can be used to solve prob-
lems of plane motion. However, our experience in statics suggests
that the solution of many problems involving rigid bodies could be
simplied by an appropriate choice of the point about which the
moments of the forces are computed. It is therefore preferable to
remember the relation existing between the forces and the accelera-
tions in the pictorial form shown in Fig. 16.7 and to derive from this
fundamental relation the component or moment equations which t
best the solution of the problem under consideration.
The fundamental relation shown in Fig. 16.7 can be presented
in an alternative form if we add to the external forces an inertia vec-
tor 2m a of sense opposite to that of a, attached at G, and an inertia