
Ecuaciones en Derivadas Parciales Curso de Introducción
296
Departamento de Análisis Matemático Universidad de La Laguna Ecuaciones en Derivadas Parciales Curso de Introducción José C. Sabina de Lis La Laguna, 26 de septiembre de 2014
Transcript of Ecuaciones en Derivadas Parciales Curso de Introducción

Departamento de Análisis MatemáticoUniversidad de La Laguna
Ecuaciones en Derivadas Parciales
Curso de Introducción
José C. Sabina de Lis
La Laguna, 26 de septiembre de 2014


Índice general
INTRODUCCIÓN vi
1. Algunas Edp’s de referencia 11.1. Definiciones básicas. Ecuaciones de primer orden . . . . . . . . . 1
1.1.1. Recapitulación de ecuaciones diferenciales ordinarias . . . 11.2. Ecuaciones de primer orden . . . . . . . . . . . . . . . . . . . . . 3
1.2.1. Ecuación del transporte simple . . . . . . . . . . . . . . . 41.2.2. Ecuaciones lineales: coeficientes constantes . . . . . . . . 51.2.3. Ecuación de Burgers . . . . . . . . . . . . . . . . . . . . . 61.2.4. Funciones radiales . . . . . . . . . . . . . . . . . . . . . . 71.2.5. Funciones homogéneas . . . . . . . . . . . . . . . . . . . . 71.2.6. Introducción a los coeficientes variables . . . . . . . . . . 8
1.3. Ecuaciones de segundo orden . . . . . . . . . . . . . . . . . . . . 91.3.1. Ecuación de Laplace . . . . . . . . . . . . . . . . . . . . . 101.3.2. Problema de Dirichlet . . . . . . . . . . . . . . . . . . . . 121.3.3. La ecuación de ondas . . . . . . . . . . . . . . . . . . . . 131.3.4. La ecuación del calor . . . . . . . . . . . . . . . . . . . . . 141.3.5. Ecuación de las superficies mínimas: un ejemplo de ecua-
ción cuasilineal . . . . . . . . . . . . . . . . . . . . . . . . 151.3.6. El problema de Cauchy: generalidades . . . . . . . . . . . 15
1.4. Ecuaciones de orden superior . . . . . . . . . . . . . . . . . . . . 171.5. La Ecuación de Ondas . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.1. La ecuación de las ondas unidimensional . . . . . . . . . . 181.5.2. Ecuación de las ondas bidimensional . . . . . . . . . . . . 24
1.6. La Ecuación del Calor . . . . . . . . . . . . . . . . . . . . . . . . 281.7. La ecuación del calor unidimensional . . . . . . . . . . . . . . . . 28
1.7.1. La ecuación del calor n-dimensional . . . . . . . . . . . . 321.7.2. Difusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2. Primer orden 472.1. Ecuaciones lineales y cuasilineales . . . . . . . . . . . . . . . . . . 47
2.1.1. Ecuaciones lineales . . . . . . . . . . . . . . . . . . . . . . 472.2. Ecuaciones cuasilineales . . . . . . . . . . . . . . . . . . . . . . . 51
iii

iv ÍNDICE GENERAL
2.3. La ecuación general de primer orden . . . . . . . . . . . . . . . . 552.4. Integrales primeras . . . . . . . . . . . . . . . . . . . . . . . . . . 612.5. Integrales completas . . . . . . . . . . . . . . . . . . . . . . . . . 632.6. Lagrange-Charpit . . . . . . . . . . . . . . . . . . . . . . . . . . . 652.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3. El problema de Cauchy 753.1. Funciones analíticas . . . . . . . . . . . . . . . . . . . . . . . . . 753.2. El problema general de Cauchy . . . . . . . . . . . . . . . . . . . 793.3. Teorema de Cauchy-Kowalevski . . . . . . . . . . . . . . . . . . . 843.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4. Ecuación de ondas 934.1. Clasificación de ecuaciones lineales . . . . . . . . . . . . . . . . . 934.2. Transformación de operadores de segundo orden . . . . . . . . . 954.3. Clasificación de ecuaciones lineales . . . . . . . . . . . . . . . . . 98
4.3.1. Operadores en el plano . . . . . . . . . . . . . . . . . . . . 984.3.2. Operadores con coeficientes constantes . . . . . . . . . . . 103
4.4. Ecuación de ondas unidimensional . . . . . . . . . . . . . . . . . 1054.4.1. El problema de valor inicial . . . . . . . . . . . . . . . . . 1054.4.2. Velocidad de propagación finita de las perturbaciones . . 1064.4.3. Soluciones generalizadas. Propagación de discontinuidades 1074.4.4. Soluciones simétricas . . . . . . . . . . . . . . . . . . . . . 1094.4.5. El problema no homogéneo . . . . . . . . . . . . . . . . . 110
4.5. Problemas de contorno . . . . . . . . . . . . . . . . . . . . . . . . 1124.5.1. Problemas de Dirichlet y Neumann homogéneos . . . . . . 1164.5.2. Oscilaciones libres . . . . . . . . . . . . . . . . . . . . . . 1184.5.3. Problemas de Dirichlet y Neumann no homogéneos . . . . 1184.5.4. Problemas de contorno perturbados . . . . . . . . . . . . 120
4.6. Problemas semilineales . . . . . . . . . . . . . . . . . . . . . . . . 1204.6.1. Problemas de valor inicial . . . . . . . . . . . . . . . . . . 1204.6.2. Problemas de contorno . . . . . . . . . . . . . . . . . . . . 123
4.7. Ecuación de ondas n-dimensional . . . . . . . . . . . . . . . . . . 1234.7.1. Unicidad . . . . . . . . . . . . . . . . . . . . . . . . . . . 1234.7.2. Medias esféricas . . . . . . . . . . . . . . . . . . . . . . . 1254.7.3. El problema de valor inicial en el caso n = 3 . . . . . . . . 1274.7.4. Propagación de ondas en el plano n = 2 . . . . . . . . . . 130
4.8. El caso n-dimensional . . . . . . . . . . . . . . . . . . . . . . . . 1314.8.1. Dimensiones impares . . . . . . . . . . . . . . . . . . . . . 1314.8.2. Método del descenso de Hadamard . . . . . . . . . . . . . 134
4.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135

ÍNDICE GENERAL v
5. Ecuación del calor 1475.1. Problema de valor inicial . . . . . . . . . . . . . . . . . . . . . . . 1475.2. El problema perturbado . . . . . . . . . . . . . . . . . . . . . . . 1525.3. No unicidad de soluciones . . . . . . . . . . . . . . . . . . . . . . 1525.4. Soluciones analíticas . . . . . . . . . . . . . . . . . . . . . . . . . 1545.5. Problemas de valor inicial y contorno . . . . . . . . . . . . . . . . 1545.6. Principios del máximo . . . . . . . . . . . . . . . . . . . . . . . . 1565.7. Principios del máximo . . . . . . . . . . . . . . . . . . . . . . . . 1605.8. Soluciones positivas . . . . . . . . . . . . . . . . . . . . . . . . . . 1635.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
6. Series de Fourier 1736.1. Series de Fourier: introducción . . . . . . . . . . . . . . . . . . . 1736.2. Espacios de Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . 1746.3. Series de Fourier: primeras propiedades . . . . . . . . . . . . . . 1796.4. Resultados de convergencia puntual . . . . . . . . . . . . . . . . . 1816.5. Cuestiones complementarias . . . . . . . . . . . . . . . . . . . . . 1856.6. Convergencia uniforme . . . . . . . . . . . . . . . . . . . . . . . . 1876.7. Fenómeno de Gibb . . . . . . . . . . . . . . . . . . . . . . . . . . 1906.8. Teorema de Lusin . . . . . . . . . . . . . . . . . . . . . . . . . . . 1936.9. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
7. Separación de Variables 1997.1. Ecuación del calor . . . . . . . . . . . . . . . . . . . . . . . . . . 1997.2. Función de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . 2017.3. Ecuación de ondas . . . . . . . . . . . . . . . . . . . . . . . . . . 2037.4. Ecuación de ondas amortiguada . . . . . . . . . . . . . . . . . . . 2057.5. Problemas no homogéneos: función de Green . . . . . . . . . . . 207
7.5.1. El problema de Dirichlet . . . . . . . . . . . . . . . . . . . 2117.5.2. Propiedades del operador solución . . . . . . . . . . . . . 212
7.6. Funciones de Green . . . . . . . . . . . . . . . . . . . . . . . . . . 2187.7. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220
8. Ecuación de Laplace (n = 2) 2258.1. Fórmula de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . 225
8.1.1. Dominios simplemente conexos . . . . . . . . . . . . . . . 2298.1.2. Deducción geométrica de la fórmula de Poisson . . . . . . 2308.1.3. Problema de Dirichlet en un rectángulo . . . . . . . . . . 232
8.2. Ecuación de Poisson . . . . . . . . . . . . . . . . . . . . . . . . . 2338.3. Singularidades evitables . . . . . . . . . . . . . . . . . . . . . . . 2408.4. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241

vi ÍNDICE GENERAL
9. Ecuación de Laplace (Rn) 2479.1. Identidades de Green. Solución fundamental . . . . . . . . . . . . 2479.2. Propiedades de las funciones de Green . . . . . . . . . . . . . . . 2499.3. Ecuación de Laplace en la bola . . . . . . . . . . . . . . . . . . . 2519.4. Funciones armónicas: propiedades . . . . . . . . . . . . . . . . . . 2529.5. Método de Perron . . . . . . . . . . . . . . . . . . . . . . . . . . 2549.6. El semiespacio . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2589.7. La ecuación de Poisson . . . . . . . . . . . . . . . . . . . . . . . . 2599.8. Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
A. Funciones diferenciables 269
B. Series Múltiples 273
C. Superficies. Integrales de superficie 277
D. Diferenciación bajo el signo integral 285
BIBLIOGRAFÍA 287

Introducción
Estas son unas notas “dinámicas” sobre ecuaciones en derivadas parcia-les(“edp’s” en lo que sigue), es decir, en continua remodelación. Al estar colgadasen la red nos podemos permitir ese lujo. Disculpe el posible lector el númeroinmoderado de erratas tipográficas y algunas de las otras (que he tratado dedisipar hasta el exterminio con el paso del tiempo).
Las edp’s dan al estudiante de matemáticas la impresión –ese fue al menosmi caso– de materia caprichosa. Se aplica un enorme esfuerzo al estudio de tres“meros” casos particulares de segundo orden. Esto, en mis tiempos, donde lacarrera ponía gran énfasis en materias tan abstractas como la topolgía gene-ral o el cáculo diferencial en espacios de Banach, resultaba desolador para elprincipiante.
Otro agravante, cada pequeño avance en el análisis de estas ecuaciones (v. g.de “coeficientes constantes” a “coeficientes variables”) supone un esfuerzo consi-derables incluso en las situaciones más humildes (v. g. la ecuación de ondas convelocidad variable). Como subrayaba mi querido profesor de entonces, CarlosFernández Pérez, nada que ver con las “ode’s” donde teoremas de existencia,unicidad y dependencia continua se formulan limpia y concisamente desde elprincipio.
Pues bien, en lo que aquí se expone, más de lo mismo. . . . Las leccionesque siguen tratan de imitar las que hace ya muchos años recibí sobre edp’s.Las actuales materias de licenciatura/grado contemplan metas mucho menosambiciosas (en la generalidad de los centros se estudia muy poco de edp’s). Trasla lectura del índice resulta evidente que hay temas suficientes para surtir variasde estas nuevas asignaturas.
Es un placer reconocer las deudas contraídas en la redacción de estas notas.La científica espero haberla saldado unas líneas atrás. Sobre textos, un buennúmero de los ejercicios provienen de [21]. Ya de estudiante, el de Folland [9]me resultó siempre muy sugestivo. Por su cuidada exposción y detalle en loscálculos, [16] ha sido siempre un importante pilar para mi docencia. Nada setrata aquí sobre soluciones débiles. Si ese fuese el caso, aparte de [16] los textosde [1] y [5] serían de referencia obligada.
Espero que el lector saque el mejor provecho de este manuscrito virtual.
José C. Sabina de Lis (http://josabina.wbs.ull.es)La Laguna 26 de septiembre de 2014.
vii

viii ÍNDICE GENERAL

Capítulo 1
Algunas ecuaciones dereferencia en la teoría
1.1. Definiciones básicas. Ecuaciones de primerorden
1.1.1. Recapitulación de ecuaciones diferenciales ordina-rias
Una función
F : R× Rk+1 −→ R(t, y0, . . . , yk) 7−→ F (t, y0, . . . , yk),
define la ecuación diferencial ordinaria de orden k,
F (t, x, x′, . . . , x(k)) = 0. (1.1)
Se dice que x = x(t), x : J ⊂ R → R, J un intervalo, x diferenciable, es unasolución de (1.1) si,
F (t, x(t), x′(t), . . . , x(k)(t)) = 0,
para cada t ∈ J .El marco de referencia para el que se hace la teoría de las ecuaciones (1.1)
corresponde al caso en que F tiene la estructura:
F (t, y0, . . . , yk) = yk − f(t, y0, . . . , yk−1),
y (1.1) se puede escribir en la forma que se suele llamar “normalizada”:
x(k) = f(t, x, . . . , x(k−1)). (1.2)
1

2 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
En el curso de ecuaciones diferenciales ordinarias se estudian la “teoría” y “apli-caciones” de la ecuación (1.2).
Los hechos teóricos más significativos se pueden describir en los siguientestérminos:
• Bajo condiciones muy generales sobre f = f(y0, . . . , yk−1) la ecuación(1.2) admite infinitas soluciones.
• Se pueden hallar soluciones de (1.2) que satisfacen condiciones adicionales“prefijadas” en un instante arbitrario t0.
Esto sugiere que bajo condiciones adecuadas el conjunto de soluciones de(1.2) es finito dimensional.
El siguiente resultado –que lleva asociado los nombres de Cauchy, Peano,Lipschitz y Lindelöff– resume los aspectos fundamentales de las ecuaciones dife-renciales ordinarias. Como se tratará de explicar en el presente curso no existeuna contrapartida para ecuaciones en derivadas parciales –salvo que se impon-gan condiciones muy restrictivas– del mismo.
Teorema 1.1. Si la función f es continua, el problema (llamado de valor inicialo de Cauchy),
x(k) = f(t, x, . . . , x(k−1))
x(t0) = ξ0...x(k−1)(t0) = ξk−1,
(P )
admite al menos una solución no prolongable (x, J), J = (α, ω), para cada
(t0, ξ0, . . . , ξk−1) ∈ R× Rk.
Si f es además localmente Lipschitziana en (y0, . . . , yk−1) (por ejemplo si∂f
∂y0,
. . . ,∂f
∂yk−1existen y son continuas) tal solución es única.
Observaciones 1.1.
a) El problema de Cauchy está inspirado en el principio determinista de Galileosegún el cual el comportamiento futuro de una partícula queda determinado porsu velocidad y posición iniciales. En el caso unidimensional se estaría hablando,por ejemplo, del problema de valor inicial:
x′′ = f(x)
x(t0) = x0
x′(t0) = v0.
Revísese el caso del oscilador armónico f(x) = −x. La solución del problemaprecedente es x(t) = x0 cos(t− t0) + v0 sen(t− t0).

1.2. ECUACIONES DE PRIMER ORDEN 3
b) La teoría se desarrolla de una forma más simétrica en formato n dimensional.Se consideran campos F = F (t, u), F : R×Rn → Rn con lo que u : J ⊂ R → Rn
y el problema (P) adopta la forma:dudt = F (t, u)
u(t0) = u0.
La ecuación (1.2) se escribe en forma equivalente como,u′1 = u2...u′k = f(t, u1, . . . , uk),
en donde x(t) = u1(t).c) Una cuestión nada trivial es la determinación del intervalo máximo (α, ω)de existencia. Si por ejemplo ω < +∞ la solución sufrirá con toda seguridaduna singularidad en t = ω. Como en el caso u′ = u2 este tipo de singularidades(comúnmente llamadas de tipo “blow-up”) no se detectan en el segundo miembrode la ecuación.
Como balance final podemos afirmar que una ecuación diferencial ordinariaadmite, bajo condiciones muy poco restrictivas, infinitas soluciones. Las solu-ciones se determinan con unicidad cuando se imponen condiciones iniciales.
Ejercicio 1.1. Se define x(θ) = |x|θ−1x, θ > 0. Para x = 0 prúebese que (x(θ))′ =
θ|x|θ−1, (|x|θ)′ = θx(θ−1), mientras(x(θ)
)−1= x(1/θ). Discútase con todo detalle
la existencia y unicidad de soluciones para el problema,x′ = |x|θ
x(t0) = x0.
Nos ocuparemos en lo que sigue de la discusión de diversos aspectos elemen-tales de la teoría de ecuaciones en derivadas parciales.
1.2. Ecuaciones de primer ordenSe considera la función,
F : Ω× R× Rn −→ R(x, z, p1, . . . , pn) 7−→ F (x, z, p1, . . . , pn),
donde Ω ⊂ Rn es un dominio (conjunto abierto y conexo).
Definición 1.2. Una función u ∈ C1(Ω) define una solución de la ecuación enderivadas parciales de primer orden:
F (x, u,∇u) = 0,
si F (x, u(x),∇u(x)) = 0 para cada x ∈ Ω.

4 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
Ejemplos 1.2.a) Cuando F (x, z, p1, . . . , pn) =
∑ni=1 ai(x)pi + a0(x)z − f(x) es lineal en (p, z)
la ecuación (1):n∑
i=1
ai(x)∂u
∂xi+ a0(x)u = f(x),
se llama lineal.b) Si F (x, z, p1, . . . , pn) =
∑ni=1 ai(x, z)pi−b(x, z) sólo es lineal en p, la ecuación:n∑
i=1
ai(x, u)∂u
∂xi= b(x, u),
se llama cuasilineal.c) Una ecuación no englobada en los casos anteriores se llamará fuertemente nolineal. Por ejemplo la así denominada ecuación eikonal (ecuación de la ópticageométrica):
|∇u|2 = c2,
donde c es la velocidad de la luz.
En los siguientes ejemplos se efectúa una prospección de cómo responden lasecuaciones de primer orden a las cuestiones de existencia y número de solucio-nes así como a la posibilidad de imponer condiciones adicionales de tipo “valorinicial”.
1.2.1. Ecuación del transporte simpleToma la forma,
ut + cux = 0. (1.3)Admite como soluciones en R2 a los llamados frentes de onda (“travelling wa-ves"),
u(x, t) = h(x− ct),
donde se conoce a c como velocidad de propagación.Como en el caso de las edo’s, un problema de Cauchy permite determinar
todas las soluciones de (1.3). A tal efecto es más sugestivo escribir (1.3) en laforma,
ut = −cux,e imaginarse que el valor inicial es toda una función de x mientras que el “lugar”de los datos iniciales es, en vez de un punto, todo el eje x.
Teorema 1.3. Para cada φ ∈ C1(R) el problema,ut + cux = 0
u(x, 0) = φ(x)
sólo admite u = φ(x− ct) como solución.
Demostración. Basta probar que las soluciones se conservan sobre las rectasx = x0 + ct.

1.2. ECUACIONES DE PRIMER ORDEN 5
1.2.2. Ecuaciones lineales: coeficientes constantesLa ecuación:
a1ux + a2uy + a0(x, y)u = f(x, y),
ai ∈ R constantes, de la que la del transporte es un caso particular, puedetratarse por métodos absolutamente elementales.
El caso más sencillo a2 = 0,a1ux + a0(x, y)u = f(x, y)
u(w1s, w2s) = φ(s),
admite inmediatamente como solución:
u(x, y) = h(y)e−∫ x0
a0(t,y)a1
dt − 1
a1
∫ x
0
e−∫ xt
a0(τ,y)a1
dτf(t, y) dt,
en la que h se determina resolviendo la ecuación:
φ(s) = h(w2s)e−
∫ w1s0
a0(t,w2s)a1
dt − 1
a1
∫ w1s
0
e−∫ w1st
a0(τ,w2s)a1
dτf(t, y) dt. (1.4)
Se observa inmediatamente que (1.4) se puede resolver para φ’s arbitrarias siem-pre que w2 = 0.
El caso general: a1ux + a2uy + a0(x, y)u = f(x, y)
u(w1s, w2s) = φ(s),
se puede tratar por reducción al caso anterior. Como v = (a1, a2) = (0, 0)basta con transformar las coordenadas para anular uno de los coeficientes de lasderivadas de primer orden. En otras palabras, la ecuación se puede escribir,
∂u
∂v+ a0u = f,
y basta elegir nuevas coordenadas x′, y′ para que ∂u/∂v = ∂u/∂x′. Por ejemplo,
(x, y) = x′v + y′w w = (−a2, a1) .
Es decir, (xy
)=
(a1 −a2a2 a1
)(x′
y′
),(
x′
y′
)=
1
a21 + a22
(a1 a2−a2 a1
)(xy
).
La ecuación transformada adopta la forma,
ux′ + a0(x′, y′)u = f(x′, y′),

6 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
donde,
a0 = a0(a1x′ − a2y
′, a2x′ + a1y
′) f = f(a1x′ − a2y
′, a2x′ + a1y
′),
mientras,u(x, y) = u(|v|−2(a1x+ a2y), |v|−2(−a2x+ a1y)).
La condición inicial se transforma en,
u(|v|−2(a1w1 + a2w2)s, |v|−2(−a2w1 + a1w2)s) = φ(s).
1.2.3. Ecuación de BurgersUna magnitud fundamental para describir el comportamiento de un fluido
es el campo de velocidades. Si se busca el campo de velocidades u = u(x, t) deun fluido unidimensional, x ∈ R, de forma que cada partícula fluida se muevecon velocidad constante, se llega a la ecuación:
ut + uux = 0.
Es similar a la del transporte simple con la particularidad de que la velocidadde propagación c queda reemplazada por la propia función incógnita u. Para laresolución del problema de valor inicial:
ut + uux = 0
u(x, 0) = φ(x),(P )
φ ∈ C1(R), puede intentarse –por analogía con el caso anterior– la ecuaciónimplícita,
u = φ(x− ut). (E)
Se comprueba inmediatamente que si tal u existe, u resuelve (P). Por otro lado,el teorema de la función implícita permite asegurar la existencia de una únicasolución u de (E) definida en un entorno U de t = 0 que cumple la condiciónu(x, 0) = φ(x). Podemos enunciar así el siguiente resultado.
Teorema 1.4. El problema (P) admite una única solución u ∈ C1(U) en elsentido de que si u1 ∈ C1(U1) es otra solución con U1 ⊃ U , u = u1 en U .
Demostración. La unicidad consiste en probar que toda posible solución v =v(x, t) satisface la ecuación funcional (E). Para ello recordamos que las partículasfluidas tienen velocidad constante. Es decir, si resolvemos:
x′ = v(x, t)
x(0) = x0,
se tiene que v(x, t) = v(x0, 0) sobre la solución x = x(t). Pero v(x0, 0) = h(x0)mientras x(t) = x0 + h(x0)t. Por tanto v(x, t) = h(x0), luego:
v(x, t) = h(x− vt),
que era el objetivo.

1.2. ECUACIONES DE PRIMER ORDEN 7
1.2.4. Funciones radialesUna función u ∈ C1(R2 \ 0 se dice radial si u = h(r), r =
√x2 + y2.
Satisfacen la ecuación:
yux − xuy = 0 (x, y) ∈ R2 \ 0.
Otra vez, un problema de valor inicial permite caracterizar sus soluciones.En el siguiente resultado la sugerencia es observar la ecuación como un pro-
blema de primer orden en y donde el dato inicial se toma en una curva “trans-versal” a la dirección con respecto a la que se deriva.
Teorema 1.5. Para cada φ ∈ C1(R+) el problema:xuy = yux
u(x, 0) = φ(x),
admite una única solución, que es radial.
Demostración. La unicidad es consecuencia de la conservación de las solucionessobre las circunferencias r = r0.
1.2.5. Funciones homogéneasUna función u ∈ C1(Rn \ 0) se dice homogénea de grado α si:
u(tx) = tαu(x) ∀t > 0.
Derivando con respecto a t:
n∑i=1
xi∂u
∂xi(tx) = αtα−1u(x),
y haciendo t = 1 se llega a la ecuación (denominada) de Euler,
n∑i=1
xi∂u
∂xi= αu.
Es fácil decidir qué tipo de comportamiento exhiben las soluciones sobre lossemirayos x = tx0, t > 0.
Teorema 1.6. El problema de Cauchy,∑n
i=1 xi∂u
∂xi= αu
u(x) = φ(x) |x| = 1,
admite para cada φ una única solución que es una función homogénea.

8 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
Demostración. Para x fijo el grupo t−αu(tx) se conserva en t para las solucionesde la ecuación de Euler.
Observación 1.3. Nótese que la condición inicial determina ella sola una únicafunción homogénea de grado α:
u(x) = |x|αφ(x
|x|
).
1.2.6. Introducción a los coeficientes variablesSi a1 = a1(x, y), a2 = a2(x, y) son funciones de clase C1 en R2, la ecuación
de primer orden:a1(x, y)ux + a2(x, y)uy = 0,
describe aquellas funciones que se conservan cuando se las observa en la direcciónvariable del campo X = (a1, a2). Nada más natural que considerar las curvasdel plano γ que son tangentes a X. Por definición tales curvas son las órbitasde la edo:
x′ = a1(x, y)
y′ = a2(x, y).(S)
Es inmediato comprobar que u se conserva sobre cualquier órbita γ de (S) si ysólo si u cumple la edp propuesta. Resolver el problema:
a1(x, y)ux + a2(x, y)uy = 0
u(x, 0) = φ(x),(P )
es construir u = u(x, y) que cumple:
u(x, y) = φ(x0),
sobre órbita γx0 que pasa por (x0, 0) y esto para cada x0. La posible arbitrarie-dad en la elección del dato φ requiere suponer que:
a2(x, 0) = 0 x ∈ R.
El cálculo de órbitas de (S) que pasan por el eje 0x se hace como sigue. Elproblema,
dx
dy=a1(x, y)
a2(x, y)
x(0) = x0,
admite una única solución x = X(y, x0). En la ecuación,
x−X(y, x0) = 0,
x0 se puede despejar en términos de (x, y) bajo la forma de una función C1,ξ = ξ(x, y). Si se quiere, las órbitas por el eje x son la familia uniparamétricade curvas,
ξ(x, y) = x0,

1.3. ECUACIONES DE SEGUNDO ORDEN 9
con x0 el parámetro. Cubriendo todos los detalles con el debido rigor –y la ayudade la teoría de edo’s– puede probarse el siguiente resultado.
Teorema 1.7. Para cada φ ∈ C1(R) y bajo la condición de transversalidadde órbitas a2(x, 0) = 0, x ∈ R el problema (P) admite una única soluciónu ∈ C1(U) definida en un cierto entorno U del eje x.
Demostración. La solución no puede ser otra que u(x, y) = φ(ξ(x, y)).
Ejemplo 1.4. El problema: xux + uy = 0
u(x, 0) = φ(x),
conduce a la ecucación:dx
dy= x.
La condición x(0) = x0 lleva a x0 = xe−y. La solución es pues u = φ(xe−y).
1.3. Ecuaciones de segundo ordenSi Ω ⊂ Rn es un dominio de Rn, una función:
F : Ω× R× Rn × Rn2 −→ R(x, z, p, q) 7−→ F (x, z, p, q),
donde p = (pi), q = (qij), define la ecuación en derivadas parciales de segundoorden:
F (x, u, (∂iu), (∂iju)) = 0, (1)
en el sentido de que u ∈ C2(Ω) resuelve (1) si F (x, u(x), (∂iu(x)), (∂iju(x))) = 0en cada x ∈ Ω.
Una ecuación lineal en el grupo de variables (p, q) se llama lineal:
n∑i,j=1
aij(x)∂iju+n∑
i=1
ai(x)∂iu+ a0(x)u = f(x),
mientras que una ecuación cuasilineal es aquella en la que F sólo es lineal en elgrupo q y la ecuación toma la forma:
n∑i,j=1
aij(x, u,∇u)∂iju = b(x, u,∇u).
La generalidad de los cursos avanzados de ecuaciones en derivadas parciales, in-cluso los más ambiciosos, sólo alcanza a tratar las ecuaciones lineales de segundoorden. En especial las tres ecuaciones de la física matemática: las ecuaciones deLaplace (y Poisson), del calor y de las ondas que pasamos a presentar a conti-nuación.

10 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
1.3.1. Ecuación de LaplaceUna masa puntual M localizada en el origen 0 ∈ R3 crea una perturbación
en el medio circundante de forma que una partícula puntual en la posiciónx = (x1, x2, x3) sufre una fuerza por unidad de masa
F (x) = −GM|x|2
x
|x|= −GM
r3x r = |x|,
donde G es la constante de gravitación. La fuerza F deriva de un potencialV = V (x), es decir:
F (x) = ∇V (x).
En efecto, ensayando una función radial V (x) = U(r), el que
Vxi = −(GM/r3)xi = −(GM/r2)xi/r
nos lleva a que
V (x) =GM
r.
Se conoce a V como el potencial Newtoniano.Por otro lado,
Vxixi =
(U ′
r
)xi
xi +U ′
r=
(U ′
r
)′x2ir
+U ′
r.
En nuestro caso U ′/r = −GM/r3, (U ′/r)′ = 3GM/r4. Por tanto,
3∑i=1
Vxixi = r
(U ′
r
)′
+ 3U ′
r= 0.
Para una función u ∈ C2(Ω), Ω ⊂ Rn, el grupo:
∆u :=n∑
i=1
∂iiu =n∑
i=1
∂2u
∂x2i,
se conoce como el Laplaciano de u (se llamará a ∆ el operador Laplaciano).Se ha comprobado que el potencial Newtoniano V = GM/r satisface la
ecuación:∆V = 0
en R3 \ 0.Se llama a:
∆u = 0 x ∈ Ω, (L)
la ecuación de Laplace en Ω. Decimos que u es armónica en Ω si satisface (L).El potencial Newtoniano es armónico en R3 \ 0.
Un ejemplo fundamental de función armónica en el plano lo dan las de-terminaciones de la función argumento θ = θ(x, y). Para construir una de

1.3. ECUACIONES DE SEGUNDO ORDEN 11
ellas sea “arctag x” la inversa de la tangente en (−π/2, π/2). Sobre el domi-nio Ω = R2 \ (0, y) : y ≥ 0 definimos:
θ(x, y) =
arctag (y/x) x > 0
π/2 y > 0 , x = 0
arctag (y/x) + π x < 0.
Es inmediato ver que θ ∈ C∞(Ω) y que es armónica en Ω. Se verá más adelanteque todas las funciones armónicas se generan a partir de la función argumento.
Otra gran clase de ejemplos de funciones armónicas en el plano lo suministranlas funciones holomorfas. Si Ω ⊂ C es un domino del plano complejo, z = x+ iy,y f : Ω → C es una función derivable en sentido complejo en Ω, es decir, ellímite:
f ′(z0) = lımz→0
f(z0 + z)− f(z0)
z, (2)
existe para cada z0 ∈ Ω, entonces escribiendo: f(z) = u(x, y) + iv(x, y) es fácilver que se cumplen las ecuaciones de Cauchy-Riemann:
ux = vy uy = −vx. (3)
Basta para ello tomar z real en (2) e igualar el límite al correspondiente valorcuando z es imaginario puro (Ejercicio). Admitiendo la existencia de las deriva-das de orden dos para u y v es inmediato concluir de (3) que u y v son armónicasen Ω.
La experiencia del curso nos enseñará que el operador Laplaciano se relacionabien con las rotaciones de Rn. De hecho, si u es radial, u = U(r) entonces,
∆u = U ′′(r) +n− 1
rU ′(r)
De ahí la ecuación de Laplace en Rn \ 0 para funciones radiales da como solu-ciones (módulo constantes):
U(r) =
Cn
rn−2n ≥ 3
C2 log r n = 2 .
A efectos de cálculo suele hacerse una elección precisa de las constantes Cn (vermás adelante la solución fundamental del operador Laplaciano).
Finalmente, la teoría de gravitación proporciona otro modelo de ecuaciónasociada al operador Laplaciano. Supongamos ahora que la masa M que per-turba el espacio no está localizada en un punto sino que ocupa un dominioΩ ⊂ R3 (un planeta) en la que está distribuida según una densidad de masaρ = ρ(x).
La fuerza neta de atracción por unidad de masa sobre una partícula en laposición espacial x viene dada por la integral:
F (x) = −∫Ω
Gρ(y)
|x− y|3(y − x) dy.

12 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
Dicha fuerza deriva del potencial,
V (x) =
∫Ω
Gρ(y)
|x− y|dy,
que se llama potencial Newtoniano con densidad ρ. Si –como es natural– ρ ∈L1(Ω) entonces, una aplicación escrupulosa de los resultados de derivación bajoel signo integral (cf. Anexo) permite concluir que:
∆V = 0 x ∈ R3 \ Ω.
Si además ρ es un poco más regular, por ejemplo, ρ ∈ C1(Ω) ∩ L∞(Ω) (Ωacotado) entonces V satisface la ecuación:
∆V = −4πGρ(x) x ∈ Ω.
Los cálculos implicados ahora en la demostración son más delicados que unamera derivación bajo el signo integral y se desarrollarán en los Capítulos VIIIy IX correspondientes a la teoría del potencial.
Para f definida en un dominio Ω ⊂ Rn se conoce a:
∆u = f(x) x ∈ Ω,
se conoce como la ecuación de Poisson.
1.3.2. Problema de Dirichlet
A la luz de lo explicado, existe una infinidad de funciones armónicas u en undominio Ω. Basta construir los potenciales u ∈ C2(Ω) asociados a las infinitasdistribuciones de masa ρ ∈ C1(Ω1) con Ω1 ∩ Ω = ∅.
La siguiente definición se atribuye a Riemann.
Definición 1.8. Sea Ω ⊂ Rn un dominio con frontera no vacía ∂Ω y φ unafunción dada que es continua en ∂Ω. Se dice que u ∈ C2(Ω)∩C(Ω) es solucióndel problema de Dirichlet para la ecuación de Laplace si:
∆u = 0 x ∈ Ω
u = φ x ∈ ∂Ω.(1.5)
El contexto en el que surgió dicho problema es el de la teoría de las funcionescomplejas. Para hallar una solución del problema se introdujo el funcional:
D(u) =
∫Ω
|∇u|2 dx,
donde se supone que Ω es un dominio acotado de Rn y u varía en la clase
D = u ∈ C1(Ω) : u = φ si x ∈ ∂Ω.

1.3. ECUACIONES DE SEGUNDO ORDEN 13
Se propuso el siguiente problema de tipo variacional: hallar u ∈ D tal que
D(u) = ınfv∈D
D(v). (1.6)
En su tiempo –mediados del XIX– se daba por sentado la existencia de unasolución de éste último.
La conexión con el problema de Dirichlet (1.5) se resume en las siguientespropiedades.
Propiedad 1.9. Si u ∈ D resuelve (1.6):∫Ω
∇u∇v dx = 0 ∀v ∈ C1(Ω) y v|∂Ω = 0.
Propiedad 1.10. Si u, v ∈ C1(Ω) entonces:
D(u) = D(v) +D(u− v) + 2
∫Ω
∇u∇(u− v).
En particular (1.6) admite a lo más una solución.
Propiedad 1.11. Sea u ∈ D ∩ C2(Ω). Entonces u resuelve (1.5) ⇔ u resuelve(1.6).
Observaciones 1.5.
Las condiciones bajo las que (1.6) admite solución no son en absoluto obvias.Dependen de la geometría del dominio. Un ámbito natural lo proporcionan losdominios de clase C1 (Anexo).
Cuando φ sólo es continua la existencia de (1.6) queda en entredicho incluso enel círculo.
Si (1.6) admite solución no es inmediato probar que dicha solución es dos vecesderivable y cumple la ecuación de Laplace.
Que (1.6) admite solución es lo que se dio en llamar (palabras de Riemann) el“principio de Dirchlet”.
1.3.3. La ecuación de ondasUna magnitud u = u(x, t), (x, t) ∈ Ω×R, mide la “desviación” de un medio
continuo –dotado de propiedades elásticas– con respecto a la configuración deequilibrio, representada por u = 0 (u puede representar una cualquiera de lascomponentes del vector desplazamiento que señala la desviación con respectoal equilibrio). El medio puede ser unidimensional (una cuerda), bidimensional(una membrana) o tridimensional (un sólido elástico). Como comprobaremos enla Sección 1.5, cuando el medio detenta propiedades de elasticidad adecuadas,u cumple –bajo la hipótesis de variaciones de pequeña amplitud– la ecuación:
∂2u
∂t2= c2∆u,

14 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
conocida como ecuación de ondas. El número c > 0 representa, como veremos, lavelocidad de propagación de las perturbaciones. La propagación de señales acús-ticas, la radiación de energía y la propagación de señales electromagnéticas sonotros de los fenónmenos que pueden describirse mediante la ecuación de ondas.La conservación de la energía es una característica de los procesos gobernadospor dicha ecuación. La variable t tiene el sentido de tiempo. Si el medio puedeconsiderarse “ilimitado”, un problema de valor inicial “natural” para la ecuaciónde ondas es:
∂2u
∂t2= c2∆u
u(x, 0) = φ0(x)
ut(x, 0) = φ1(x) ,
para posición y velocidad φ0, φ1 prefijadas. Otros términos representando fric-ción aerodinámica o fuentes de perturbación externas pueden aparecer en laecuación (Sección 1.5):
∂2u
∂t2+ but = c2∆u+ F (x, t).
1.3.4. La ecuación del calor
La energía calorífica, bajo condiciones de variabilidad pequeña, es transpor-tada por un proceso denominado difusión, de regiones de alta temperatura hastazonas de temperatura inferior. En términos de la ley de Fourier (de la que ha-blaremos en la S. 1.6) este fenómeno de transporte se describe en función de latemperatura u = u(x, t) mediante la ecuación del calor:
∂u
∂t= k∆u, (4)
en la que la constante k resume las propiedades de conductividad del medio(aquí supuesto isótropo). De nuevo t representa el tiempo y si estamos supo-niendo que el medio es ilimitado (las condiciones externas pueden considerarsedespreciables), un problema de valor inicial natural para (4) es,
∂u
∂t= k∆u
u(x, 0) = φ(x),
donde φ es la temperatura inicial.Una característica de los procesos simulados por (4) es su carácter disipativo
en el sentido de degradar la energía (son además de naturaleza fuertementeirreversible). Como veremos más adelante, (4) tiene la propiedad de velocidadinfinita de propagación de las perturbaciones.

1.3. ECUACIONES DE SEGUNDO ORDEN 15
1.3.5. Ecuación de las superficies mínimas: un ejemplo deecuación cuasilineal
El siguiente ejemplo pertenece al círculo de los problemas variacionales –fun-damentales en física teórica– cuyo estudio general se desarrolla en el Cálculo deVariaciones.
Consideremos un dominio acotado Ω ⊂ Rn de clase C1 (cf. Anexo) y h =h(x) ∈ C1(Ω) una función prefijada. En X = u ∈ C1(Ω) : u|∂Ω = h introdu-cimos el funcional:
J : X −→ Ru 7−→ J(u),
definido por:
J(u) =
∫Ω
√1 + |∇u|2 dx.
J mide el área de la superficie S = z = u(x) : x ∈ Ω en Rn+1. Un problemanatural es hallar u tal que:
J(u) = ınfv∈X
J(v). (P ).
Una condición necesaria para que u sea solución de (P) es que:
d
dt(J(u+ tφ))|t=0 = 0,
para toda φ ∈ C10 (Ω). Esto significa que:∫
Ω
∇u∇φ√1 + |∇u|2
dx = 0 ∀φ ∈ C10 (Ω). (5)
Si se hace la hipótesis adicional de que u ∈ C2(Ω) entonces el teorema de ladivergencia (cf. Anexo) nos lleva a:∫
Ω
div
(∇u√
1 + |∇u|2
)φ dx = 0 ∀φ ∈ C1
0 (Ω),
por lo que llegamos a que u resuelve el problema:div
(∇u√
1 + |∇u|2
)= 0 x ∈ Ω
u = h x ∈ ∂Ω.
1.3.6. El problema de Cauchy: generalidadesComo en el caso de edo’s y algunos ejemplos de edp’s de primer orden vistos
en el §I.1.2 nos planteamos la existencia de condiciones similares a las de valorinicial que determinen “con unicidad” las soluciones de una edp. Esto ya presu-pone algo nada trivial en el caso de edp’s como es la propia existencia de un

16 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
número suficiente de soluciones que permita ajustar éste u otro tipo concebiblede condiciones. En efecto, se dará en el Capítulo III un ejemplo de edp linealcon coeficientes complejos que no admite soluciones en absoluto.
Módulo un estudio más profundo en el Capítulo III trataremos ahora desugerir que el problema de Cauchy para una edp de segundo orden en el planoconsiste en prefijar, de manera arbitraria, sobre una curva C1 dada Γ = (x, y) =(f(s), g(s)) : s ∈ I los valores de la solución u = u(x, y) y de su derivada normala Γ, es decir ∂u/∂ν donde, por ejemplo, ν = (−g′, f ′)/
√f ′2 + g′2 (′ = d/ds,
mientras se supone (f ′, g′) = (0, 0) en Γ).A tal efecto consideramos:
uyy = f(x, y, u, uy)
u(x, 0) = φ0(x)
uy(x, 0) = φ1(x),
(6)
que es ciertamente un caso muy particular de un problema más ambicioso queconsideraremos más tarde como es:
uyy = f(x, y, u, ux, uy, uxy, uyy)
u(x, 0) = φ0(x)
uy(x, 0) = φ1(x).
(7)
En el caso en que (6) toma la forma uyy + u = 0, u(x, 0) = φ0(x), uy(x, 0) =φ1(x) la solución es u = φ0(x) cos y + φ1(x) sen y. En general un teorema deexistencia y unicidad de soluciones para (6) está ya recogido en la teoría deedo’s. En efecto para, pongamos, G = G(x, z, p, λ), G : R×R×R×R → R, declase C1, el problema:
u′′ = G(x, u, u′, λ)
u(x0) = ξ0
u′(x0) = ξ1,
(8)
admite una única solución u = U(x, x0, ξ0, ξ1, λ). Se puede así construir unaúnica solución local de (6) si, usando la jerga de (8) observamos en (6) a x comoel parámetro λ y ponemos como solución:
u = U(y, 0, φ0(x), φ1(x), x).
No obstante, adelantamos que sólo podremos garantizar la existencia de solu-ciones de (7) bajo condiciones muy restrictivas.
Si por otra parte nos limitamos al caso lineal:
a11uxx + 2a12uxy + a22uyy + a1ux + a2uy + a0u = F (x, y),
una de las posibilidades es, por ejemplo, la ecuación:
uxy = F (x, y). (9)

1.4. ECUACIONES DE ORDEN SUPERIOR 17
Si nos limitamos a cualquiera de los ejes como curva destinataria de las con-diciones iniciales se observa que (9) no es propiamente de segundo orden conrespecto a la variable x o y. Eso da lugar a la introducción de otro tipo posiblede problema de valor inicial donde las condiciones se toman en ejes distintos.Por ejemplo,
uxy = F (x, y)
u(0, y) = φ(y)
ux(x, 0) = ψ(x).
Una integración directa nos da que la solución de (10) –problema que se llamade tipo Goursat– es:
u = φ(y) +
∫ x
0
ψ(ξ) dξ +
∫ x
0
∫ y
0
F (ξ, η) dη dξ.
En los ejercicios abundaremos un poco más sobre este tipo de cuestiones.
1.4. Ecuaciones de orden superiorSi consideramos funciones u de clase Ck en un dominio Ω ⊂ Rn (u ∈
Ck(Ω)) es decir funciones que admiten todas las posibles derivadas parciales∂lu/∂xi1 . . . ∂xil de órdenes l ≤ k de forma que tales derivadas parciales definenfunciones continuas en Ω, se sabe –ver Capítulo III para detalles precisos– quetodas esas posibles derivadas parciales coinciden con alguna de las derivadascanónicas:
∂αu =∂|α|u
∂xα11 . . . ∂xαn
n,
donde α = (α1, . . . , αn) ∈ (N ∪ 0)n, |α| = α1 + · · · + αn. Si N(k) designael número de α′s con |α| ≤ k (la “derivada de orden cero” una de ellas), unafunción
F : Ω× RN(k) −→ R(x, (yα)) 7−→ F (x, (yα)),
define la edp de orden k:F (x, (∂αu)) = 0,
en el sentido de que u ∈ Ck(Ω) resuelve (1) si F (x, (∂αu(x))) = 0 en cada x ∈ Ω.Las ecuaciones lineales corresponden a elecciones de F ’s que son lineales en
la variable y = (yα), es decir F (x, (yα)) =∑
|α|≤k aα(x)yα − f(x):∑|α|≤k
aα(x)∂αu = f(x).
En relación con las ecuaciones diferenciales es muchas veces convenientes ha-blar de operadores diferenciales lineales, en este caso con coeficientes aα en undominio Ω, es decir aplicaciones:
L : Ck(Ω) −→ C(Ω)u 7−→ Lu =
∑|α|≤k aα(x)∂
αu,

18 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
Figura 1.1: Cuerda elástica
donde se supone que las aα ∈ C(Ω). La ecuación anterior se abrevia comoLu = f .
La ecuación lineal de orden superior al segundo más estudiada quizás sea:
∆2u = f(x),
∆ el operador Laplaciano, que aparece en teoría de elasticidad. Se conoce a ∆2
como el operador biarmónico.Las ecuaciones cuasilineales corresponden a F ′s lineales en el grupo de va-
riables yα con |α| = k,∑|α|=k
aα(x, (∂βu)|β|≤k−1)∂
αu = b(x, (∂βu)|β|≤k−1).
Se puede decir que salvo para clases especiales de ecuaciones (por ejemplolas lineales) no se conoce una teoría general para edp’s de orden superior a dos.Deberíamos citar como ejemplo interesante la ecuación de Korteweg-de Vries(KdV) que aparece en el estudio de ondas de agua (“water waves”) y teoría desolitones:
ut + uux + uxxx = 0.
1.5. La Ecuación de Ondas
1.5.1. La ecuación de las ondas unidimensionalConsideramos una cuerda elástica que se halla en en estado de reposo -en
ausencia de fuerzas exteriores- por el efecto de una fuerza de tensión T0 a lo largode la misma, al estar anclada entre los puntos O y P del eje Ox. Supondremosque tiene longitud l (Figura 1.1).
La situación física a describir consiste en separar la cuerda de su posiciónde equilibrio, creando la deformación una fuerza recuperadora que genera elmovimiento de la misma. El estado futuro de la cuerda -en términos del tiempot- se representará por las ecuaciones:
x = x(s, t) y = y(s, t) 0 ≤ s ≤ l t ≥ 0,

1.5. LA ECUACIÓN DE ONDAS 19
donde s es un parámetro que se define mediante el convenio de que X(s, t) =(x, y) represente el punto de la cuerda que inicialmente (t = 0) se hallaba en laposición (x, y) = (s, 0). Admitiremos que en cada instante, la masa de un tramos1 ≤ s ≤ s2 viene expresada por: ∫ s2
s1
ρ(s) ds,
donde la función continua ρ(s) designa la densidad lineal de masa, ρ(s) > 0 en0 ≤ s ≤ l.
En todo momento suponemos que el movimiento tiene lugar en el plano x-y.Las condiciones iniciales son:
x(s, 0) = s
xt(s, 0) = 0
y(s, 0) = f(s)
yt(s, 0) = g(s),(CI)
en donde 0 ≤ s ≤ l. Por otra parte, el proceso impone las condiciones decontorno:
x(0, t) = 0, x(l, t) = l, y(0, t) = y(l, t) = 0, t ≥ 0. (CC)
Suponemos que sobre cada porción s1 ≤ s ≤ s2 de la cuerda actúa una fuerzavertical neta (dirigida hacia abajo) de módulo:
F (s1, s2) =
∫ s2
s1
ρ(s)F (x(s, t), t) ds.
En otros términos F = F (x, t) es una densidad de fuerzas verticales por unidadde masa en el punto x y en el instante t. Por ejemplo, en el caso del peso, F = gy F (s1, s2) = g
∫ s2s1ρ(s) ds, donde la integral representa la masa del trozo de
cuerda.Para determinar las ecuaciones del movimiento analizaremos las fuerzas so-
bre un trozo de cuerda si−1 ≤ s ≤ si, 0 = s0 ≤ s1 ≤ · · · ≤ sn = l. Su momentolineal viene dado por:
pi =
(∫ si
si−1
ρ(s)xt ds,
∫ si
si−1
ρ(s)yt ds.
),
Las ecuaciones del movimiento se obtendrán escribiendo la segunda ley de New-ton (para la variación del momento lineal):
dp
dt= FE
i + F Ii ,
con FEi (respectivamente F I
i ) la fuerza exterior (respectivamente interior) netaactuando sobre el trozo si−1 ≤ s ≤ si. Por hipótesis, si−1 ≤ s ≤ si está sometidoa la fuerza exterior:
FEi = (0,−F (si−1, si)) =
(0,−
∫ si
si−1
ρ(s)F (x(s, t), t) ds
).

20 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
Falta por precisar quiénes son las fuerzas internas (de corto alcance) que actúansobre la porción si−1 ≤ s ≤ si de la cuerda. Para ello es necesario dar una leyque describa cómo es la naturaleza de las fuerzas de tensión en los extremos.Esto equivale a describir las propiedades elásticas de la cuerda.
En primer lugar medimos el alargamiento neto sufrido por si−1 ≤ s ≤ si enel instante t: ∫ si
si−1
√x2s + y2s ds−∆s (∆s = si − si−1),
donde xs = xs(s, t), ys = ys(s, t). El alargamiento medio por unidad de longitud,
1
∆s
∫ si
si−1
√x2s + y2s ds− 1.
Así, el alargamiento puntual por unidad de longitud o densidad de alargamientoes finalmente:
e =√x2s + y2s − 1.
Una primera hipótesis de elasticidad es que en cada punto s la fuerza de tensiónT (s, t) vaya dirigida en la dirección de la tangente, es decir (si T (s, t) designa elmódulo):
T (s, t) = T (s, t)t(s, t),
con t(s, t) = (xs, ys)/√x2s + y2s el unitario tangente en s. Esto significa que el
material que constituye la cuerda es tal que su ”reacción a la deformación”,cuando uno quiere ”separar” una sección transversal imaginaria de su contigua,es puramente normal a dicha sección. En otras palabras, no hay fricciones tan-genciales (fatigas), o si se quiere, no hay ”oposición” a la flexión.
La segunda hipótesis de elasticidad es que el módulo de la tensión sea unafunción exclusiva de e y de s,
T (s, t) = T (e, s),
con T (0, t) = T0, donde T0 es la tensión de la cuerda en reposo. DesarrollandoT se obtiene:
T = T0 + T ′e (0, s)e+O(e2).
Por ejemplo, el caso particular T = T0 + ke (k constante, el módulo deelasticidad) da lugar a la conocida ley de Hooke. De aquí se deduce que laresultante de las fuerzas internas sobre si−1 ≤ s ≤ si resulta ser:
F Ii = T (si, t)t(si, t)− T (si−1, t)t(si−1, t) = T (s, t)t(s, t)
∣∣∣sisi−1
.
Como,
T (s, t)t(s, t)∣∣∣sisi−1
=
∫ si
si−1
∂
∂s(T (s, t)t(s, t)) ds,

1.5. LA ECUACIÓN DE ONDAS 21
Figura 1.2: Elemento de cuerda
la identidad para la derivada del momento lineal da lugar a las ecuaciones:∂
∂s
(T xse+ 1
)= ρxtt
∂
∂s
(T yse+ 1
)= ρytt + ρF.
(1.7)
El problema consiste entonces en determinar las funciones x = x(s, t), y = y(s, t)a partir de (1), y las condiciones (CI) y (CC), donde f , g y T son datos delproblema. El carácter fuertemente no lineal de las ecuaciones (1.7) sugiere, enprimera aproximación, su linealización, para llegar a un modelo más sencillo.
La forma de llevar a cabo este proceso es como sigue. Vamos a imagi-narnos que el tiempo t y las funciones f , g junto con sus derivadas hastael orden dos son pequeñas. Más precisamente consideramos el vector Φ =(t, f, g, f ′, g′, f ′′, g′′) con módulo |Φ| = (|t|, |f |∞, . . . , |g′′|∞), siendo, por ejem-plo |f |∞ = sup0≤x≤l |f(x)|. A continuación, separaremos en (1.7) los térmi-nos ”lineales”, e. d. O(|Φ|), de los de orden superior o(|Φ|), despreciando és-tos últimos frente a los primeros. La ecuación resultante (1.9) es la aproxi-mación lineal a (1.7). Conviene recordar la notación u(x) = o(v(x)) (respec-tivamente u(x) = O(v(x)) cuando x → 0 si u(x)/v(x) → 0 (respectivamente|u(x)| ≤M |v(x)|, M > 0) cuando x→ 0.
En primer lugar obsérvese que:
xs = 1 +O(t2), xss = O(t2),
o si se quiere,xs = 1 +O(|Φ|2), xss = O(|Φ|2).
Por tanto, para t ∼ 0 la ecuación x = x(s, t) define s = s(x, t). Podemosconsiderar entonces v(x, t) = y(s(x, t), t) y resulta que:
ys = vxxs
yt = vxxt + vt
ytt = vtt + vxxx2t + 2vxtxt + vxxtt,

22 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
que llevado a (1.7), y teniendo en cuenta que:
∂
∂s
(T yse+ 1
)=
∂
∂s
(T xse+ 1
vx
)= ρxttvx +
∂
∂s
(T yse+ 1
x2s
)vxx,
da lugar a
ρvtt =
(T
e+ 1x2s − ρx2t
)− 2ρxtvxt − ρF,
que se puede escribir como:
vtt = −F +T0ρvxx +
1
ρ
(T
e+ 1x2s − T0 − ρx2t
)vxx − 2xtvxt,
es decir,
vtt = −F +T0ρ(x)
vxx−
T0ρ(s)
ρ(s)− ρ(x)
ρ(x)vxx +
1
ρ
(T
e+ 1x2s − T0 − ρx2t
)vxx − 2xtvxt,
En el segundo miembro de dicha ecuación, −F = O(1). Enseguida se ve que:
T0ρ(x)
vxx = O(|Φ|),
mientras que (T
e+ 1x2s − T0 − ρx2t
)vxx − 2ρxtvxt = o(|Φ|), (1.8)
ya que, de hecho, tal cantidad es del orden de |Φ|2, mientras que
T0ρ(s)
ρ(s)− ρ(x)
ρ(x)vxx = O(|Φ|3)
cuando t, f y g son pequeños. En conclusión,
vtt =T0ρ(x)
vxx − F, (1.9)
es la aproximación lineal de (1.7).Comencemos estudiando los órdenes de magnitud de vxx y vxt. Se tiene,
v(x, t) = y(s(x, t), t)
vx = yssx, vxx = ysss2x + yssxx
vxt = yssstsx + ystsx + yssxt.
De x = x(s(x, t), t) se tiene que
1 = xssx,

1.5. LA ECUACIÓN DE ONDAS 23
0 = xsss2x + xssxx,
de donde sx = O(1), mientras que sxx = O(t2). Por tanto, vxx es del orden deϕ, es decir vxx = O(|Φ|). Sin embargo, st = O(t), sxt = O(t) pues derivandocon respecto a t la identidad 1 = xssx se llega a 0 = xssstsx + xstxs + xssxt ybasta tener en cuenta que xst = O(t). Así
vxt = O(t)(yss + ys) +O(|yst).
Como yss+ys = f ′′+f ′+(g′′+g′)t+O(t2) = O(|Φ|), yst = g′+O(t) = O(|Φ|),entonces vxt = O(|Φ|). Así, el término xtvxt en la ecuación,
vtt = −F +T0ρ(x)
vxx−
T0ρ(s)
ρ(s)− ρ(x)
ρ(x)vxx +
1
ρ
(T
e+ 1x2s − T0 − ρx2t
)vxx − 2xtvxt, (1.10)
es despreciable frente a vxx. En cuanto al coeficiente de vxx en (1.8) (ver (1.10))sabemos que ys = O(|Φ|). Luego,
e =√x2s + y2s − 1 =
√1 +O(t2 + |Φ|2)− 1 =
√1 +O(|Φ|2)− 1 = O(|Φ|2),
pues√1 + u = 1 +O(u), xs = 1 +O(t2). Por otro lado,
T(1 + e)
= (T0 +O(e))(1 +O(e)) = T0 +O(e) = T0 +O(|Φ|2),
mientras que ρx2t = O(t2), por ello dicho coeficiente es de orden 2 en Φ, luego deorden 3 en Φ al multiplicar por vxx. También será entonces despreciable frentea vxx.
En cuanto a ρ(s(x, t))−ρ(x), nótese que ρ(s(x, t))−ρ(x) = ρ′(x+θ(s(x, t)−x))(s(x, t)−x), con 0 < θ < 1. Como s(x, t) = x+O(t2), ρ(s(x, t))−ρ(x) = O(t2).Al ser ρ > 0 en 0 ≤ s ≤ 0, tenemos que el tercer sumando en el segundo miembrode (4) es del orden de |Φ|3 y podemos despreciarlo frente a vxx.
Resumiendo, (1.9) es la linealización de (1.10).Si volvemos a las condiciones iniciales, como s(x, 0) = x, mientras st(x, 0) =
0 resulta que v = v(x, t) satisface el problema de contorno y valor inicial:utt = c2uxx − F (x, t) 0 < x < l, t > 0
u(x, 0) = f(x), 0 ≤ x ≤ l
u(x, 0) = f(x), 0 ≤ x ≤ l
u(0, t) = u(l, t) = 0 t ≥ 0.
(1.11)
Hemos puesto c2 = T0/ρ(x), donde c se define como la velocidad de propa-gación de las perturbaciones. Las condiciones de contorno en (1.11) se llamande tipo Dirichlet homogéneas. Otras posibles condiciones de contorno (de tipoNeumann):
ux(0, t) = ux(l, t) = 0,

24 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
o (de tipo Robin),
−ux(0, t) + β1u(0, t) = ux(l, t) + β2u(l, t) = 0.
Por otra parte, pueden considerarse problemas mixtos de contorno donde sealternan condiciones de diferente tipo en los extremos. También pueden consi-derarse condiciones de contorno no homogéneas, por ejemplo:
u(0, t) = α(t), u(l, t) = β(t),
que en este caso (α y β datos) se llamarían de tipo Dirichlet no homogéneo.La ecuación (1.9) puede contener más términos, por ejemplo:
vtt =T0ρvxx − bvt − F, (1.12)
donde el término −bvt representa una fricción aerodinámica. Se conoce a (1.12)como la ecuación de las ondas “amortiguada” mientras que (1.9) es la ecuaciónde las ondas “forzada” o “perturbada” por F .
1.5.2. Ecuación de las ondas bidimensionalVamos a repetir la experiencia del caso unidimensional con una membrana
elástica sujeta a un bastidor ∂Ω que es la frontera –regular, es decir una curvade clase Ck, k ≥ 1– de un dominio Ω del plano. La extensión directa del casoanterior sugeriría considerar los movimientos en la forma:
x = x(s1, s2, t) y = y(s1, s2, t) z = z(s1, s2, t) (s1, s2) ∈ Ω,
sin embargo, supondremos para simplificar que el movimiento es puramentevertical y así, supondremos que si inicialmente, la membrana M está en reposobajo el efecto de una tensión constante T0, e. d.,
x ≡ s1, y ≡ s2, z ≡ 0,
consideramos que x ≡ s1 y y ≡ s2 en los movimientos futuros, con lo que elperfil de la membrana se puede escribir como:
u = u(x, y, t), (x, y) ∈ Ω.
Cada trozo D de la membrana,
D = D(t) = z = u(x, y, t)/(x, y) ∈ D,
está sometido a la acción de fuerzas exteriores al sistema (gravedad, fricciónaerodinámica) y a fuerzas interiores debidas a la variación de la tensión porelasticidad del material.
La segunda ley de Newton establece las ecuaciones del movimiento en laforma:
p′ = F Ii + FE
i ,

1.5. LA ECUACIÓN DE ONDAS 25
Figura 1.3: Balance de fuerzas en la membrana
donde p es el momento lineal de D que vale:
p =
(∫D
ρ(x, y)xt dxdy,
∫D
ρ(x, y)yt dxdy,
∫D
ρ(x, y)ut dxdy
),
y donde admitiremos que las dos primeras componentes son cero. Contabiliza-mos la fuerza externa neta sobre D en la forma:
FEi =
(0, 0,−
∫ρ(x, y)F (x, y, t) dxdy
),
(de nuevo ρ > 0 en Ω representa la densidad de M). Para las fuerzas interioresintroducimos la tasa (densidad) de deformación puntual:
e =√1 + |∇u|2 − 1,
a la que se llega por el mismo razonamiento que en el caso de la cuerda. Ahora,las fuerzas de tensión sobre D en un punto P actúan siguiendo la direcciónde la normal unitaria exterior ν a D que es además tangente a M en dichopunto. Para calcular ν en P = (x0, y0, u(x0, y0)) suponemos que f y g sonregulares en ∂D = x = f(s), y = g(s)1; tomamos el vector unitario tangenteτ = (f ′, g′)/
√f ′2 + g′2 y la normal unitaria exterior a ∂D en el plano: n =
(g′,−f ′)/√f ′2 + g′2, y entonces:
ν(P ) =1√
1 + |∇u|2√
1 + u2τ(n1 + uτuy, n2 − uτux, un)
=1√
1 + |∇u|2√
1 + u2τ(n+ uτ (uy,−ux), un),
donde uτ = ∇u · τ , y un = ∇u · n.Una vez establecida la dirección de la fuerza de tensión T (P, t) en el punto
P e instante t, es necesario observar que en elasticidad, el módulo T (P, t) de Tva a medir la magnitud de la tensión por unidad de longitud de arco dl en ∂D.
1Se supone que f , g recorren ∂D siguiendo las agujas del reloj.

26 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
En otras palabras, para conocer la magnitud de la fuerza neta sobre un arco Γde ∂D, basta con efectuar la integral de línea:∫
Γ
T (P, t) dl =
∫ b
a
T (P )
√f ′2 + g′2 + |∇u · (f ′, g′)|2 ds,
en donde hemos parametrizado Γ en la forma (f(s), g(s), u(f(s), g(s))|a < s <b. De ahí, la resultante de las fuerzas internas sobre D será:
F Ii =
∫∂D
T (P ) dl
=
(∫∂D
T (P )n+ uτ (uy,−ux)√1 + |∇u|2
√1 + u2τ
dl,
∫∂D
T (P )un√
1 + |∇u|2√1 + u2τ
dl
),
en donde, si M no sufre desplazamientos horizontales habrá de ser:(∫∂D
T (P )n+ uτ (uy,−ux)√1 + |∇u|2
√1 + u2τ
dl
)= 0.
Falta pues definir la relación que liga la tensión T (P ) con la deformación e.Como antes (Ley de Hooke), admitiremos que:
T (P ) = T (e, P ) = T0 +O(e).
Podemos ya escribir las ecuaciones del movimiento que establecen:
p′ = FEi + F I
i ,
es decir,(∫Ω
ρxtt dxdy,
∫Ω
ρytt dxdy,
∫Ω
ρztt dxdy
)=
(0, 0,−
∫Ω
F (x, y, t) dxdy
)+
(∫∂Ω
T (P )n+ uτ (uy,−ux)√1 + |∇u|2
√1 + u2τ
dl,
∫∂Ω
T (P )un√
1 + |∇u|2√1 + u2τ
dl
).
(1)Ahora pasamos al capítulo de linealizaciones. Vamos a suponer que a lo largodel movimiento los desplazamientos son lo suficientemente pequeños como paraque lo sean u y ∇u (en estado de reposo u ≡ 0) 2. En este caso:√f ′2 + g′2 + |∇u · (f ′, g′)|2 =
√f ′2 + g′2 +O(|∇u|2)
e = O(|∇u|2), T (P ) = T (e, P ) = T0 +O(|∇u|2)1√
1 + |∇u|2√
1 + u2τ= 1 +O(|∇u|2), un√
1 + |∇u|2√1 + u2τ
= un +O(|∇u|3),
2Este es el tipo de argumento que se usa en la ecuación del péndulo θ′′ = −k sen θ dondese hace la aproximación sen θ ∼ θ cuando la amplitud de la oscilación es pequeña.

1.5. LA ECUACIÓN DE ONDAS 27
mientras que uτ (uy,−ux) = O(|∇u|2). Despreciando en (1) los términos deorden superior a u y |∇u| llegamos a las identidades:(∫
∂Ω
T0n dl
)= 0,
que es compatible con el hecho de que xtt = ytt = 0 en Ω, y:∫Ω
ρutt dxdy = −∫Ω
ρF (x, y, t) dxdy +
∫∂Ω
T0un dl. (2)
Por el teorema de la divergencia:∫∂Ω
T0un dl =
∫Ω
T0div (∇u) dxdy.
Llegamos así a la relación:∫Ω
ρutt − T0∆u+ ρF dxdy = 0,
que es la versión integral de la ecuación que deseamos obtener.El mismo argumento nos conduce a la ecuación:∫
D
ρutt − T0∆u+ ρF dxdy = 0, (3)
siendo D cualquier subdominio regular pequeño (por ejemplo un rectángulo)contenido en Ω. Por tanto, la función u(x, y, t) es la solución del problema decontorno y valor inicial:
utt =T0ρ∆u− F (x, y) ∈ Ω
u(x, y, 0) = φ(x, y) (x, y) ∈ Ω
ut(x, y, 0) = ψ(x, y) ∈ Ω
u(x, y, t) = 0 (x, y) ∈ ∂Ω.
(P )
Se conoce a (P) como un problema de contorno de tipo Dirichlet homogéneo.Como en el caso unidimensional pueden considerarse otro tipo de condicionesde contorno como la de tipo Neumann:
∂u
∂n(x, y, t) = 0 (x, y) ∈ ∂Ω,
o Robin:∂u
∂n(x, y, t) + βu(x, y, t)u = 0 (x, y) ∈ ∂Ω,
en donde n es la normal unitaria exterior a ∂Ω y β es una función continua ypositiva. Todas las condiciones pueden considerarse en versión no homogénea,por ejemplo:
∂u
∂n(x, y, t) + βu(x, y, t)u = α(x, y, t) (x, y) ∈ ∂Ω,

28 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
en la que α es un dato. La ecuación de las ondas puede contener otros téminosen el segundo miembro, por ejemplo:
utt =T0ρ∆u− but − F,
que se llama ecuación de las ondas amortiguada. De nuevo el término T0/ρ sedesigna por c2 y a c se la denomina velocidad de propagación.
1.6. La Ecuación del Calor
1.7. La ecuación del calor unidimensional
Las siguientes consideraciones tienen por objeto describir cómo se alcanza elequilibrio térmico en los sólidos y cómo se transporta el calor de unas zonas aotras del mismo, bajo ciertas condiciones razonables 3.
De una manera completamente informal podemos decir que la temperatura ude un sólido es una medida del estado de movimiento de sus moléculas, evaluadoa través de la energía cinética promedio de las mismas. Es por tanto una energíaa la que se puede asignar una escala de medidas (usando bien unidades típicasde trabajo, o bien el grado centígrado).
Dos sólidos distintos en contacto o bien dos zonas de un mismo sólido adistinta temperatura intercambian “calor” Q. Más precisamente. Al ponerse encontacto, el que posee un estado de movimiento más agitado en sus moléculas(más caliente), transmite parcialmente dicho estado de movimiento (energíacinética) al de menor grado (más frío), hasta alcanzar finalmente un estado deequilibrio. Sin embargo, la cantidad de energía liberada por el de temperaturamás alta no coincide con la diferencia de temperaturas. La tal energía liberada(por definición el incremento de calor ∆Q) es proporcional al incremento detemperatura:
∆Q = m c ∆u = ρ c v∆u,
donde m es la masa, ρ la densidad, v el volumen y c es el calor específico, que esla cantidad de calor –característica de cada substancia– necesaria para elevar latemperatura de una unidad de masa en un grado. Es decir, la misma cantidadde masa de substancias distintas “liberan” distinta cantidad de energía cuandosu temperatura “baja” un grado. En otras palabras, si se comunica una cantidadde calor Q (= energía) a un sólido, sólo una fracción de dicha energía pasa aincrementar el valor neto de la energía cinética de las moléculas (= incrementode temperatura).
Una propiedad fundamental de la energía calorífica es que ésta se transportapor difusión. Genéricamente, si se calienta un sólido en una zona, el calor sedesplaza con una cierta velocidad de zonas de alta temperatura a zonas de baja
3cf. Landau, Ajiezer, Lifshitz, “Curso de Física General, Mecánica y Física Molecular”,Editorial Mir, Moscú (1984).

1.7. LA ECUACIÓN DEL CALOR UNIDIMENSIONAL 29
Figura 1.4: Experimento fundamental
temperatura. Eso se pone de manifiesto, por ejemplo, con el siguiente experi-mento. Consideramos el sistema abierto formado por una placa de un ciertomaterial homogéneo, delimitada por dos planos paralelos separados una distan-cia l considerablemente menor que la superficie de las placas, que así, puedenconsiderarse infinitas. La tapa superior se mantiene a una temperatura u0 mien-tras que la inferior se mantiene a una temperatura u1 < u0 (por eso el sistemase dice abierto). Si u0−u1 no es muy grande se observa al cabo de cierto tiempo–el suficiente para que el sistema alcance el equilibrio– que la energía calorífica“fluye” hacia abajo a razón de:
Φ = ku0 − u1
l
unidades de energía por unidad de tiempo y unidad de área. La magnitud Φ sellama flujo calorífico y k el coeficiente de conductividad que depende de cadamaterial. Si A designa el área de una sección paralela a las caras exteriores, lacantidad de calor que atraviesa A por unidad de tiempo es:
Φ A = ku0 − u1
lA.
Así mismo, la temperatura a lo largo de la sección toma el perfil: u(x) = u0 +((u1 − u0)/l)x, por lo que la ley para el flujo se puede escribir en la forma:Φ = −kux.
En el experimento anterior hemos esperado una cantidad de tiempo suficientecomo para que se “estabilice” la temperatura de todas las secciones de la placa.Si en las mismas condiciones, suponemos que el sistema no ha alcanzado elequilibrio, e. d. no ha transcurrido un tiempo característico, podemos formulartodavía una ley para el flujo. Para ello razonamos como sigue (las alturas semiden en sentido decreciente). Tomamos dos secciones de alturas x0, x0 + h,con h pequeño como para que u(x0+h) ∼ u(x0). En este caso, el flujo caloríficoen la sección x0 y el instante t vendrá dado por:
Φ(x0, t) = −ku(x0 + h, t)− u(x0, t)
h∼ −k∂u
∂x(x0, t).

30 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
Figura 1.5: Flujo estacionario
Obsérvese que al no haber alcanzado el sistema el estado de equilibrio la tem-peratura depende del tiempo. Hemos deducido así lo que se conoce como leyde Fourier. A saber: en un cuerpo en el que el calor fluye únicamente en unadirección y en el que las variaciones de temperatura u(x, t) (temperatura enun instante t y en una sección x0) no son muy altas la cantidad de calor queatraviesa la unidad de área transversal por unidad de tiempo viene dada por:
Φ(x0, t) = −k∂u∂x
(x0, t). (1)
En términos físicos, la magnitud que designa cómo varía otra magnitud porunidad de área transversal a una superficie S y por unidad de tiempo, se llamaflujo de esa magnitud (aquí Φ es el flujo de calor y la identidad (1) es la ley deFourier).
La ley de Fourier nos lleva a la ecuación que satisface la temperatura u(x, t)antes de alcanzar el estado de equilibrio. La ecuación es consecuencia de la ley deconservación de la energía. En efecto, consideremos dos secciones suficientementepróximas x0 y x1. La variación de calor por unidad de tiempo en dicho intervaloviene dada por:
A∫ x1
x0
ρc∂u
∂tdx,
en donde A mide el área transversal de una tal sección del sólido. Como el únicomecanismo por el que hay variaciones de calor en la sección es –de momento–el transporte por difusión, tal variación de la energía se debe únicamente alcalor que ha salido o entrado a través de las paredes x = x0, x1. Sea A(t0, h)la cantidad de calor que ha entrado en la sección durante el intervalo t0 ≤t ≤ t0 + h mientras que B(t0, h) se define como la cantidad de calor que haabandonado la sección entre dichos instantes. Así mismo, sea Q(t) la cantidadde calor acumulada en la sección en el instante t. Evidentemente se tiene:
Q(t0 + h)−Q(t0) = A(t0, h)−B(t0, h).

1.7. LA ECUACIÓN DEL CALOR UNIDIMENSIONAL 31
Figura 1.6: Diversos perfiles unidimensionales
Por tanto, la variación de energía por unidad de tiempo en el intervalo tambiénse puede calcular en la forma:
dQ
dt= lım
h→0
Q(t0 + h)−Q(t0)
h= lım
h→0
A(t0, h)
h− lım
h→0
B(t0, h)
h= A(t0)− B(t0).
(2)Para hacerse una idea del balance (2), es conveniente observar la siguiente figuray notar que:
A = −kux(x1, t0)A, B = −kux(x2, t0)A en (a)
A = −kux(x2, t0)A, B = kux(x1, t0)A en (b)
A = −kux(x1, t0)A+ kux(x2, t0)A, B = 0 en (c)
A = 0, B = −kux(x2, t0)A+ kux(x1, t0)A en (d).
Nótese que en todos los casos:
A(t0)− B(t0) =−ku(x0, t0) + kux(x1, t0)
A.
De la ley de conservación de la energía se tiene entonces que:∫ x2
x1
ρcut(x, t) dt = kux∣∣x2
x1,
de donde:ρcut = kuxx, (3)

32 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
que es la ecuación del calor (o de difusión) unidimensional. Hemos llegado asía la conclusión de que la evolución de la temperatura u(x, t) en un sólido enel que el calor se propaga en una dirección x, cuyos extremos se encuentrana temperaturas u0, u1 se describe mediante el problema de valor inicial y decontorno:
ρcut = uxx, t > 0, 0 < x < l
u(x, 0) = φ(x), 0 < x < l
u(0, t) = u0, u(l, t) = u1, t > 0.
Se pueden considerar otro tipo de condiciones. Por ejemplo, la de aislamientotérmico (condiciones de Neumann):
ux(0, t) = ux(l, t) = 0, t > 0.
También las de enfriamiento con el medio a través de las paredes (ley de Newton,condiciones de Robin):
ux(0, t) = ν(u(0, t)− T0), ux(l, t) = −ν(u(l, t)− T0),
donde ν > 0 y T0 es la temperatura del medio.Por otra parte, (3) puede incluir otros términos. Si por ejemplo f(x, t) desig-
na una densidad de producción de calor dentro del sólido –hay un “calentador”en su interior– por unidad de masa y unidad de tiempo, entonces (3) se convierteen:
cut =k
ρuxx + f(x, t).
En este modelo los términos producción (f > 0) y consumo (f < 0) se puedenintercambiar, dando lugar a la misma ecuación.
1.7.1. La ecuación del calor n-dimensionalConsideremos ahora un sólido Ω encerrado por una superficie regular ∂Ω
constituido por un material que en todas las direcciones goza de las mismaspropiedades de conductividad (isótropo). Queremos hacer el siguiente experi-mento. Inicialmente el cuerpo ha acumulado calor no homogéneamente, e. d.hay zonas más calientes que otras. Dentro de Ω consideramos una superficieregular S y queremos estudiar cómo es el flujo de calor de una parte a otrade la superficie (si la zona de un lado está más caliente que la del otro, habrátrasvase de calor ΦS de un lado a otro de la superficie). Para ello orientamos Scon uno de sus campos unitarios normales ν = ν(P ), P ∈ S. Nos fijamos en unpunto P0 ∈ S y consideramos un trozo pequeño S0 de superficie que rodee a P0,tan pequeño que se pueda aproximar bien por un trozo homólogo π0 del planotangente π, (x− P0)ν(P0) = 0, a S en P0.
De momento nos conformamos con estudiar el flujo calorífico a través de π0.Para ello, estudiamos la evolución de la temperatura sobre un pequeño segmentode la recta normal x = P0 + ξν, |ξ| < ε. Si U(ξ, t) = u(P0 + ξν, t) representala temperatura en el segmento. Este problema es esencialmente unidimensional,

1.7. LA ECUACIÓN DEL CALOR UNIDIMENSIONAL 33
Figura 1.7: Flujo en un elemento de superficie
Figura 1.8: Sección unidimensional de la temperatura
si estamos en las proximidades de P0. La ley de Fourier unidimensional prediceque la cantidad de calor que pasa a través de π0 en la dirección de ν por unidadde tiempo, e. d. el flujo calorífico a través de π0, Φ(P0, π0), viene dado por:
Φ(P0, π0, ν) = −k∂U∂ξ |t=0
área(π0) = −k∇u(P0) · ν área(π0)
= −k∂u∂ν
(P0) área(π0).
Como S0 ∼ π0 y área(S0) := dS ∼ área(π0) (dS es el elemento de área de lasuperficie S), podemos aproximar el flujo a través de S0 en la dirección de νcomo:
Φ(S0, ν) = −k∂u∂ν
(P0) dS.
El flujo en S0 se globaliza a toda la superficie S de la manera obvia:
Φ(S, ν) = −k∫S
∂u
∂νdS. (4)
La identidad (4) sugiere una versión vectorial Φ del flujo de temperatura enel siguiente sentido. Definimos el campo de flujo calorífico Φ (abreviado el flujo)

34 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
como aquél que permite calcular el flujo a través de S en la dirección ν, Φ(S, ν),en la forma:
Φ(S, ν) =∫SΦ · ν dS.
Hemos llegado así a le versión n dimensional de la ley de Fourier que estableceque el vector flujo Φ se expresa:
Φ = −k∇u. (5)
Para hallar la versión n dimensional de la ecuación del calor (3) razonamosusando el argumento del caso unidimensional. Sea B una pequeña bola en Ω, defrontera ∂B. Por un lado, la variación de calor por unidad de tiempo en B seexpresa como: ∫
Bρcut dx.
Por otro lado, la variación de calor por unidad de tiempo Q(t0) se vuelve aexpresar (ver notación anterior) como:
Q = A− B.
Para hacernos una idea de cómo son A y B consideramos ∂B− = x ∈ ∂B|∇u ·ν < 0 y ∂B+ = x ∈ ∂B|∇u · ν > 0, siendo ν el campo unitario exterior a ∂B.Entonces, A es como antes, la cantidad de calor que entra en B por unidad detiempo (en t0) mientras que B es la correspondiente cantidad de calor que salede B por unidad de tiempo en t = t0. Se tienen entonces las relaciones:
A =
∫∂B+
k∇u · ν dS, B =
∫∂B−
−k∇u · ν dS.
De donde,
A− B =
∫Bk∂u
∂νdS.
De la ley de conservación de la energía tenemos entonces que:∫Bρcut dx =
∫Bk∂u
∂νdS,
que por el teorema de la divergencia –o directamente suponiendo que B es unpequeño cubo en Ω– se transforma en:∫
Bρcut dx =
∫Bk∆u dx,
y siendo B una bola arbitrariamente pequeña llegamos a:
cρut = k∆u x ∈ Ω, t > 0.

1.7. LA ECUACIÓN DEL CALOR UNIDIMENSIONAL 35
Si el sólido estaba inicialmente a una temperatura φ(x) y las paredes se mantie-nen, por ejemplo a cero grados (condiciones de Dirichlet homogéneas) conclui-mos que el comportamiento de la temperatura en Ω a lo largo del tiempo siguela solución del problema de contorno y valor inicial:
ρcut = ∆u, t > 0, x ∈ Ω
u(x, 0) = φ(x), x ∈ Ω
u(x, t) = 0, x ∈ ∂Ω, t > 0.
La condición de contorno se puede sustituir por otra de aislamiento térmico(condición de contorno de tipo Neumann):
∂u
∂n= 0, x ∈ ∂Ω, t > 0,
o bien por una condición de intercambio con el medio (condición de Robin):
∂u
∂n= −τu, x ∈ ∂Ω, t > 0,
en la que hemos supuesto que la temperatura exterior a Ω es de cero grados yτ es el coeficiente de transferencia.
1.7.2. DifusiónCuando una substancia soluble en un fluido se deposita en una cierta zona
de éste (el fluido se considera en reposo y localizado en un dominio Ω ⊂ Rn)se observa que la substancia difunde y es transportada de zonas de alta a bajaconcentración. Si u(x, t) representa la concentración (masa por unidad de vo-lumen) se observa experimentalmente que el (vector) flujo de masa viene dadopor:
Φ = −D∇u, (1)
en donde D se llama el coeficiente de difusión. En otras palabras, si S es untrozo de superficie regular en Ω con campo unitario normal ν se tiene que laintegral de superficie: ∫
S−D∂u
∂νdS,
proporciona la cantidad de masa que es transportada a través de S por unidadde tiempo, en la dirección del campo ν. La relación (1), equivalente a la ley deFourier, se conoce en como la ley de Fick. Argumentando de la misma manera(invocando ahora el principio de conservación de la masa) se obtiene que laconcentración u = u(x, t) satisface:
ut = D∆u, x ∈ Ω, t > 0, (2)
que se conoce como ecuación de difusión. Como en el caso de la ecuación delcalor, las soluciones de (2) se determinan con la ayuda de condiciones inicialesy de contorno sobre ∂Ω, idénticas a las de dicha ecuación.

36 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
1.8. Ejercicios1. Decídase cuál de los siguientes operadores son lineales:
a) Lu = ux + xuy
b) Lu = ux + uuy
c) Lu = ux + u2y
d) Lu = ux + uy + 1
f) Lu =√1 + x2(cos y)ux + uyxy − arctag(y/x)u.
2. Se considera el operador lineal L, con coeficientes aα(x) definidos en undominio Ω ⊂ Rn:
Lu =∑
|α|≤m
aα(x)∂αu, u ∈ Cm(Ω).
Asociadas a L se consideran las ecuaciones homogéneas:
Lu = 0, (H)
y no homogénea:Lu = f(x). (C)
Pruébese que el conjunto Sh de soluciones de (H) forma un espacio vecto-rial, mientras que el de (C), Sc, es un espacio afín.
3. Para n = 1, es decir, u = u(x) con x ∈ R, hállese la dimensión del espaciode soluciones de:
u′′′ − 3u′′ + 4u = 0.
4. Si ahora n = 2, e. d., u = u(x, y), ¿Es finito-dimensional el espacio desoluciones Sh = u ∈ C2(R2)/Lu = 0 si la ecuación 4 es:
uxx + u = 0?
5. Prúebese que u(x, y) = f(x)g(y) es solución de la e.d.p.
uuxy = uxuy,
cualesquiera que sean f, g ∈ C1(R).
6. Prúebese que para cada n > 0:
un(x, y) = sennx senhny
es una solución de uxx + uyy = 0. ¿Es finita la dimensión del espacio desoluciones de la ecuación de Laplace?
4La misma cuestión para la ecuación de Laplace uxx + uyy = 0 es menos inmediata, perola respuesta está implícita en el problema 6.

1.8. EJERCICIOS 37
7. Hállense las soluciones de las siguientes ecuaciones, en cada caso, sometidasa las condiciones dadas.
a) 3uy + uxy = 0.
b) (1 + x2)ux + uy = 0.
c) yux + xuy = 0 junto con u(0, y) = e−y2
.
d) aux + buy + cu = 0.
e) ux + uy + u = ex+2y junto con u(x, 0) = 0.
8. Hállese la solución general de la ecuación
aux + buy = f(x, y),
donde f(x, y) es una función continua arbitraria, escribiendo la soluciónen la forma:
u(x, y) = (a2 + b2)−12
∫L
f ds+ g(bx− ay),
donde g es una función C1 arbitraria, L es el arco de característica del ejey al punto (x, y), y la integral es una integral de línea.
9. Resuélvase, mediante el método del cambio de coordenadas la ecuación:
ux + 2uy + (2x− y)u = 2x2 + 3xy − 2y2.
10. Un fluido unidimensional con velocidad u = u(x, t) (u de clase C1 enR2) transporta una cierta substancia en la dirección x cuya concentraciónviene dada por la función ρ = ρ(x, t), (ρ también C1) sin que intervengaotro fenómeno en dicho transporte. Demuéstrese que satisface la ecuación:
(ρu)x + ρt = 0, ecuación de continuidad.
Nota. Un resultado análogo se tiene en n dimensiones (problema 15). Sinembargo, debe ser preparado convenientemente.
11. Se considera el campo de velocidades de un fluido- u = u(x, t), u : Rn ×R → Rn, de clase C1. Para t0, y cada y ∈ Rn, el problema de Cauchy:
x′ = u(x, t)
x(t0) = y,
admite una única solución que escribimos: x = x(t, y) (Teorema de Picard-Lindelöff). Además x = x(t, y) es también de clase C1 en (t, y). Escríbase:Φ(t) = ∂x
∂y (t, y) (donde y ∈ Rn se mantiene fijo).

38 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
12. Pruébese que Φ(t) es una matriz fundamental de la ecuación:
z′ = A(t)z,
donde A(t) = ∂u∂x (x(t, y), t). Es decir, que Φ′(t) = A(t)Φ(t), mientras que
Φ(t0) = I.
13. Utilícese el teorema de Jacobi 5 para concluir que:
detΦ(t) = detΦ(t0) exp∫ t
t0
div u(x(s, y), s) ds.
14. Sea Ω un dominio acotado de Rn. Si t es suficientemente pequeño, se puededefinir:
Ωt = x(t, y)/y ∈ Ω.Consideremos ahora una función C1, ρ = ρ(x, t). Hállese la derivada, conrespecto a t de la función M =M(t), dada por:
M(t) =
∫Ωt
ρ(x, t) dx.
Nota. Cuando ρ es una densidad de masa y u es la velocidad de un fluido,M(t) describe la variación, por unidad de tiempo, de la masa que en t = t0estaba localizada en el dominio Ω.
15. Consideramos el movimiento de un fluido n-dimensional cuyas párticulasfluidas describen las trayectorias de x′ = u(x, t) (u : Rn×R → Rn de claseC1 el campo de velocidades). Como en 10 suponemos que la concentraciónρ = ρ(x, t), ρ : Rn × R → R es C1. Demuéstrese que la ecuación decontinuidad tiene la forma:
div(ρu) + ρt = 0.
La misma situación que en el 10 pero ahora
16. El movimiento ondulatorio (p.e. sonido) en un medio unidimensional (p.e. un gas o un fluido) con viscosidad despreciable se describe mediante elcampo de velocidades u(x, t), la densidad ρ = ρ(x, t) o la presión p(x, t)(generalmente hay una ley de estado que liga presión y densidad), bajolas ecuaciones:
ρux + uρx + ρt = 0, 0 < x < l
ρut + ρuux + px = ρF, 0 < x < l,
donde F (x, t) mide una fuerza dada por unidad de masa que actua sobreel fluido. Hállense la velocidad u(x), presión p(x) y densidad ρ(x) de equi-librio (e. d., no dependientes de t) siempre que F = −g, p = αργ (α > 0,γ > 1) y u(0, t) = 0, p(l, t) = p0.
5Sea x′ = A(t)x una ecuación lineal donde la matriz A(t) es continua y sea Φ(t) unamatriz fundamental de la ecuación. Si se pone ξ(t) = det Φ(t) entonces ξ(t) satisface a su vezla ecuación lineal ξ′ = traza A(t) ξ.

1.8. EJERCICIOS 39
17. Se considera la ecuación de orden k = β1 + β2 (n = 2):
∂β1
1 ∂β2
2 u(x, y) = 0, (x, y) ∈ R2.
Defínase adecuadamente un problema de tipo Goursat para dicha ecua-ción con β1 datos funcionales en el eje Ox y β2 datos funcionales en eleje Oy. Prúebese el correspondiente teorema de existencia y unicidad desoluciones.
18. Estúdiese la existencia y unicidad de soluciones de los problemas:uxy = 0
ux(x, 0) = f(x)
uy(0, y) = g(y),
uxy = 0
u(x, 0) = f(x)
u(0, y) = g(y),
siendo f y g adecuadamente regulares, y satisfaciéndose la condición decompatibilidad: f(0) = g(0).
19. Hállense las soluciones generales de los problemas:uxy = F (x, y)
ux(x, 0) = f(x)
u(0, y) = g(y),
(P1)
uxy = F (x, y)
ux(x, 0) = f(x)
uy(0, y) = g(y),
(P2)
uxy = F (x, y)
u(x, 0) = f(x)
u(0, y) = g(y),
(P3)
siendo F ∈ C(R2), f , g adecuadamente regulares y f(0) = g(0) en loscasos (P2 y (P3).
20. Para F (x, y) continua en R2, hállese la solución del problemauxy = −F (x, y)u(x, x) = 0
ux(x, x) = uy(x, x).
21. Sea J0(z) la solución regular (cerca del origen) de la ecuación de Besselde orden cero:
z2d2u
dz2+ z
du
dz+ z2u = 0,
que satisface: u(0) = 1. Defínase:
v0(x, y) = J0(i2√xy) i2 = −1.

40 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
a) Demuéstrese que u = v0(x, y) es una solución de la ecuación de Helmholtzcompleja:
uxy − u = 0.
b) Para φ(t) y ψ(t) contínuas en R, determinar qué ecuaciones satisfacen lasfunciones:
v1(x, y) =
∫ x
0
φ(t)v0(x− t, y) dt,
v2(x, y) =
∫ y
0
ψ(t)v0(x, y − t) dt.
c) Dése por conocido el hecho de que para toda f ∈ C1 y toda g ∈ C2 elproblema:
uxy = u
ux(x, 0) = f(x)
u(0, y) = g(y),
admite una única solución C2. Pruébese entonces que la solución generalde la ecuación de Helmholzt compleja tiene la forma:
u(x, y) =
∫ x
0
φ(t)v0(x− t, y) dt+
∫ y
0
ψ(t)v0(x, y − t) dt+ Cv0(x, y),
donde C es una cierta constante que debe ser identificada.
22. Desígnense por x = x(s, t), y = y(s, t) (x e y funciones de clase C2),0 ≤ s ≤ l, t ≥ 0 las ecuaciones paramétricas de una cuerda elástica quese mantiene sujeta en los extremos (x, y) = (0, 0) y (x, y) = (l, 0) y que encondiciones de equilibrio – e. d. no sometida a fuerzas exteriores– satisfacex(s, t) = s, y(s, t) ≡ 0 estando sometida a una tensión en cada punto iguala T0. Se supondrá que en todo instante la densidad de masa de la cuerdaviene dada por la función continua ρ = ρ(s), que su movimiento sólo tienelugar en el plano x, y, estando sometida a una densidad de fuerzas vertical(en el sentido de (0,−1)) F (x, t). La hipótesis de elasticidad se entenderáen el sentido de que la tensión T (s, t) actúa tangencialmente y el móduloT (s, t) satisface la relación:
T (s, t) = T (e, s) = T0 +∂T∂e
(0, s)e+O(e2),
donde T = T (e, s) es C2 y e =√x2s + y2s−1 es la tasa de deformación local
por unidad de longitud. Demuéstrese que las ecuaciones del movimientovienen dadas por:
∂
∂s
(T
e+1∂x∂s
)= ρxtt
∂
∂s
(T
e+1∂y∂s
)= ρytt − ρF (x, t),

1.8. EJERCICIOS 41
junto con las condiciones de contorno:
x(0, t) = x(l, t) = y(0, t) = y(l, t) = 0,
para cada t ≥ 0.Se supondrá siempre que las condiciones iniciales para x(t, s) son
x(s, 0) = s, xt(s, 0) = 0, 0 ≤ l ≤ l,
mientras que las de y(s, t) son
y(s, 0) = f(s), xt(s, 0) = g(s), 0 ≤ l ≤ l,
donde f es C1 y g es C2. Véase el Cap. I del libro de Weinberger.
23. Vamos a considerar ahora un camino alternativo para linealizar las ecua-ciones del ejercicio anterior, bajo las mismas hipótesis sobre la tensión dela cuerda. La idea es imaginar el proceso como una pequeña perturba-ción (de orden ε) de la situación de equilibrio. Vamos a considerar quela fuerza F y las condiciones iniciales dependen de ε en la forma siguien-te: F (x, t, ε) = εG(x, t), x(s, 0, ε) = s, xt(s, 0, ε) = 0, y(s, 0, ε) = f(s)ε,yt(s, 0, ε) = g(s)ε, manteniendo, para todo valor de ε las condiciones decontorno del problema anterior. Tenemos así una familia parametrizadade movimientos, x = x(s, t, ε), y = y(s, t, ε) que para ε = 0 debe ser:x = s, y = 0. Uno debe tener -suponiendo regularidad por doquier- que:x(s, t, ε) = s + x1(s, t)ε + O(ε2), y(s, t, ε) = y1(s, t)ε + O(ε2). Pruébeseentonces que y1(s, t) satisface la ecuación de las ondas:
y1tt =T0ρy1xx − ρG(s, t).
24. Consideremos las ecuaciones de la propagación de perturbaciones en ungas compresible (Ejercicio 16):
(ρu)x + ρt = 0, 0 < x < l,
ρut + ρuux + px = ρF, 0 < x < l.(1)
Vamos a linealizar las ecuaciones (1) imitando el camino del ejercicio an-terior. Para ello supondremos que p = p(ρ) es una función regular (C1) deρ, que F = F (x, t, ε) es una función regular en ε de la forma F = ε G(x, t)con G continua y que las funciones incógnita u y ρ son funciones regularesde un pequeño parámetro ε (de clase C1), e. d. u = u(x, t, ε), ρ = ρ(x, t, ε)que satisfacen u(x, t, 0) = 0, ρ(x, t, 0) = ρ0 > 0. En otras palabras, esta-mos suponiendo que el régimen del gas es una pequeña perturbación de lasituación de equilibrio ρ = ρ0, u = 0 en la que no hay fuerzas exteriores
(F = 0 para ε = 0). Demuéstrese que las funciones u1 =∂u
∂ε(x, t, 0) y
ρ1 =∂ρ
∂ε(x, t, 0) verifican sendas ecuaciones de ondas, a determinar.

42 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
25. Consideremos una cadena flexible u = u(s, t), x = x(s, t), 0 ≤ s ≤ l quepende verticalmente del punto (0, 0) sometida a la fuerza de gravedad yque se mueve horizontalmente -en el sentido del eje u- debido a los efectosde la tensión. Supondremos que en cada punto, la fuerza de tensión -queactúa tangencialmente- nivela –e. .d, es igual– al peso de la cuerda de esepunto hacia abajo. Hállense las ecuaciones del movimiento.
26. Una cable –ahora inextensible– pende de dos puntos situados a la mismaaltura y se halla en reposo (formando una figura característica parecidaa una parábola). Se supone que la tensión del cable en cada punto siem-pre actúa tangencialmente. Si ρ(s) (s la longitud de arco) es la densidadlineal del cable y τ0 la tensión en el punto más bajo, hállese la ecuacióndiferencial (ahora ordinaria) que satisface la curva que lo describe. Hálleseexplícitamente si ρ es constante (la curva resultante se llama Catenaria).
27. Hállense las posibles soluciones estacionarias (i. e. no dependientes de t)de la ecuación de las ondas:
vtt =T0ρ(x)
vxx − F (x), 0 < x < l,
bajo condiciones de Dirichlet homogéneas:
u(0, t) = u(l, t) = 0, t ≥ 0,
y bajo condiciones de Neumann homogéneas:
ux(0, t) = ux(l, t) = 0, t ≥ 0.
28. Sea Ω = (a, b)× (c, d) y u ∈ C2(Ω). Demostrar que,∫∂Ω
T0 un ds =
∫Ω
T0∆u dx,
donde T0 es constante y un representa la derivada normal exterior en ∂Ω(ds denota el elemento de longitud de arco).
Pruébese también que si γ es una curva cerrada y C1, siendo n un campounitario normal a γ, entonces∫
γ
T0 n ds = 0.
29. Una versión tridimensional de las ecuaciones del Ejercicio 16 resulta ser:∂ρ∂t + div (ρu) = 0,
ρ(∂u∂t + ∂u
∂xu)+∇p = ρF (x, t),
en donde ahora x = (x, y, z), u = u(x, t) es un campo C2 en R3, p = p(x)es la presión que como allí es una función regular de la densidad p = p(ρ)

1.8. EJERCICIOS 43
en donde F = F (x, t) es un campo C1 de fuerzas con valores en R3. Elsistema de ecuaciones describe las perturbaciones en un gas tridimensional(p.e. la propagación del sonido en el aire) y, suponiendo que u, ∂u
∂x y ρ−ρ0son pequeños en módulo una versión linealizada de las ecuaciones tiene laforma:
∂ρ∂t + ρ0div u = 0,∂u∂t +
c20ρ0∇ρ = 0,
donde escribimos c20 = p′(ρ0) y suponemos por simplicidad que F = 0.Demuéstrese que si rot u = 0 en t = 0 entonces rot u(x, t) = 0 para todot ≥ 0. Demuéstrese además que el campo u y la densidad ρ satisfacen laecuación de las ondas:
∂2u∂t2 = c20∆u,∂2ρ∂t2 = c20∆ρ.
30. (Concepto de Flujo). Sea u = u(x, t) un campo C1 en Rn, S una superficiesimple y S1, S1 compacta, una porción de S transversal a u, e. d.,
u(x, t) · ν(x) = 0, ∀t ≥ 0, x ∈ S1.
Para normalizar supongamos que u · ν > 0 (se recuerda que ν designa elcampo normal a S1). Fijado t0 y t > t0, “convenientemente” próximo a t0definimos V (t) el “volumen” ocupado por las partículas que han cruzado através de S1 -en el sentido de u- entre los instantes t0 y t, e. d. el volumende fluido que ha penetrado por S1 entre esos instantes, siguiendo el campode velocidades x′ = u(x, t). Prúebese que:
d
dtV (t)|t=t0
=
∫S1
u · ν dσ. (1)
Se conoce a (1) como el flujo de volumen a través de S1 en t = t0.
31. En las condiciones del Ejercicio 30 sea A una cierta substancia que estransportada por u(x, t) y que tiene por concentración c = c(x, t), c(x, t)continua. Hállese la cantidad de masa de A que atraviesa S1 por unidadde tiempo en t = t0. Prúebese que dicha cantidad vale (flujo de masa através de S1) ∫
S1
c(x, t)u · ν dσ.
32. Un fenónmeno análogo al del transporte de calor por difusión es el deltransporte de masa, también por difusión, de una cierta substancia A.Cuando una concentración inicial c0(x) (i.e. masa por unidad de volu-men) de la misma se deposita en un fluido (disolvente) en reposo, ésta estransportada -por efectos de la dinámica molecular del fluido- por difusiónsiguiendo la ley de Fick (que es completamente análoga a la de Fourier).Esto significa físicamente que la substancia es transportada desde zonas de

44 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA
alta concentración hacia zonas de baja concentración. Es decir, si tenemosuna porción compacta S1 de una superficie simple S, la cantidad de masatransportada (¡aunque el fluido esté en reposo!) a través de S1 siguiendosu campo normal ν(x) y por unidad de tiempo vendrá dada por:
ΦS1 = −∫S1
d∂c
∂ν. (1)
ΦS1 es el flujo de masa a través de S1 debido a la difusión. d es el coeficientede difusión. Otra forma de expresar la ley de Fick es decir que el vector“flujo de masa” Φ en cada punto x es:
Φ(x) = −d∇c(x, t),
donde c = c(x, t) representa la concentración de A como función de laposición espacial y el tiempo.
33. Si el fluido ocupa una región del espacio Ω y el único mecanismo que inter-viene en el transporte de masa es la difusión (fluido en reposo), pruébeseque c satisface la ecuación del calor:
∂c
∂t= d∆c.
34. Supongamos ahora que el fluido está en movimiento en Ω, bajo un campode velocidades u(x, t). Así la substancia A es transportada, además depor difusión, por el arrastre u(x, t) a que la somete el fluido. Pruébese queahora la concentración c satisface:
∂c
∂t= div (d∇c)− div (cu).
(Véase el Ejercicio 10).
35. (Teorema de Liouville). Supongamos que un fluido con campo C1 de ve-locidades u(x, t) ocupa una región abierta Ω de Rn, y que Ω1 ⊂ Ω1 ⊂ Ω,con Ω1 compacto. Para t > t0 convenientemente próximo a t sea (Ω1)t ellugar ocupado en el instante t por las partículas que estuvieron en Ω1 ent = t0. Prúebese que:
vol (Ω1)t =
∫Ω1
e∫ tt0
div u(x(s,y),s) dsdy,
donde x(t, y) denota la única solución del problema x′ = u(x, t), conx(t0) = y, y ∈ Ω1. ¿ Se te ocurre alguna explicación a por qué se lla-man “incompresibles” los fluidos que cumplen la ecuación:
div u(x, t) = 0, t ≥ 0, x ∈ Ω?

1.8. EJERCICIOS 45
36. Se considera una barra de longitud l en la dirección del eje x que tie-ne sección A lo suficientemente pequeña como para que el calor difundasolamente en la dirección de x, luego la temperatura será de la formau = u(x, t). Admitamos además que el flujo de calor Φ a través de lapared lateral de la barra sigue la Ley de Newton, es decir, que Φ es pro-porcional a la diferencia (u − T0), donde T0 es la temperatura ambiente.Dedúzcase la ecuación para la temperatura.
37. Se considera una barra cilíndrica y tridimensional en la que el calor di-funde transversalmente al eje de simetría mientras que las variaciones detemperatura son despreciables en el sentido de dicho eje. Suponiendo quela temperatura u sólo depende de la distancia al eje de la barra, hálleseuna ecuación para dicha temperatura u(x, y, z, t) en el interior de la barra(tómese por ejemplo el eje Oz en la dirección como eje de la barra).
38. Hállese la ecuación de difusión del calor en coordenadas esféricas de R3.
39. Se considera una barra homogénea de longitud l, coeficiente de conductivi-dad térmica k; lo suficientemente fina como para que la difusión del calorsólo se considere en sentido longitudinal. Se ha realizado un experimentoen el que, tras comenzar con una temperatura homogénea de T0 grados enla barra, y mantenerla a una temperatura constante T1 en los extremos, seobserva que la temperatura en el punto medio viene dada por una funciónf(t). Si repetimos el experimento con una barra de las mismas caracterís-ticas (mismo ancho y conductividad térmica), inicialmente sometida a T ∗
0
grados y mantenida permanentemente a T ∗1 grados en sus extremos, y de
longitud l∗ ¿Qué ley f∗(t) seguirá la temperatura en el punto medio de labarra?
Indicación. Dése por conocida la unicidad de solucines para el problemade valor inicial y de Dirichlet para la ecuación del calor.
40. 6 El tiempo de cocción de un asado de 5 libras que inicialmente se hallabaa una temperatura de 40 grados, al introducirlo en un horno de 350 grados,es de dos horas ¿Cuál será el tiempo de cocción de una asado de 10 librascon la misma forma y en las mismas condiciones?
6cf. M. S. Klamkin, SIAM Review, Vol. 3, n. 2, pp. 167-169.

46 CAPÍTULO 1. ALGUNAS EDP’S DE REFERENCIA

Capítulo 2
Ecuaciones en derivadasparciales de primer orden
2.1. Ecuaciones lineales y cuasilineales
2.1.1. Ecuaciones linealesLa ecuación en derivadas parciales lineal de primer orden más general es
(Capítulo 1)Lu = f(x), x ∈ Ω, (2.1)
donde,
L =
n∑i=1
ai(x)∂
∂xi+ b(x),
siendo Ω ⊂ Rn un dominio (abierto y conexo), ai(x) ∈ C1(Ω), para cada i,b(x), f(x) ∈ C(Ω). Mantendremos estas hipótesis a lo largo de todo el capítulo.Se denotará A(x) = (a1, · · · , an), así Lu = ∂
∂A + b.Una superficie simple S ⊂ Ω de clase Ck viene definida una parametrización
(g, U), U ⊂ Rn−1 un dominio y g = g(s), g : U → Rn de clase Ck (k ≥ 2) deforma que S = g(U) y tal que:
N =∂g
∂s1∧ · · · ∧ ∂g
∂sn−1= 0, ∀s ∈ U.
Si S es una superficie simple ν = N|N | representa el campo unitario normal a
S asociado a (g, U), mientras que el espacio tangente a S en x0 = g(s0) es:
TSx0 = span∂g
∂s1(s0), · · · ,
∂g
∂sn−1(s0)
.
Finalmente, se dice que una funcón ϕ : S → R es de clase C1 en S si ϕ g ∈C1(U). Véase el Anexo para más detalles.
47

48 CAPÍTULO 2. PRIMER ORDEN
Es fácil ver que si y(t) = g(σ(t)), a < t < b, σ = σ(t) de clase C1, σ(0) = s0es una curva en S entonces su vector tangente en x0, y(0) ∈ TSx0 .
Definición 2.1. Sea ϕ ∈ C1(S). El problema de Cauchy para (2.1) en S consisteen hallar (u,U), S ⊂ U ⊂ Ω, U abierto, u : U → R de clase C1 tal que:
Lu = f, x ∈ Ω
u|S = ϕ.(2.2)
Por analogía con el curso de ecuaciones diferenciales ordinarias diremos que(u,U) es una solución local de (2.2). Como allí, la siguiente noción parece naturala primera vista: (2.2) goza de la propiedad de unicidad de soluciones si para cadapar de soluciones locales (ui,Ui), i = 1, 2, resulta que u1 = u2 sobre U1∩U2. Estadefinición parece sugerir que en caso de darse la unicidad de soluciones, todaslas soluciones locales (u,U) acaban siendo restricciones de una cierta soluciónmaximal (u∗,U∗) de (2.2). Sin embargo, comprobaremos que ni siquiera en elcaso del problema (2.2) se verifica la propiedad de unicidad de soluciones en elsentido que se ha enunciado. Sí se demostrará que todas las soluciones locales(u,U) coinciden en un cierto entorno de la superficie S. Por tanto, nocionesbásicas en la teoría de ecuaciones diferenciales ordinarias como solución local yprolongabilidad no pueden extenderse al contexto de (2.2).
La función ϕ se llama dato de Cauchy. En general (Capítulo 1) no todasuperficie sirve para imponer datos de Cauchy. Por ejemplo, supongamos queΓ = x(t)/a < t < b es una solución de x′ = A(x) cuya gráfica Γ ⊂ S.Entonces S no admite datos ϕ arbitrarios. En efecto, sobre Γ, u = ϕ. Si ponemosϕ(t) = ϕ(x(t)), ϕ debe satisfacer:
ϕ′ + b = f a < t < b,
con f = f(x(t)), b = b(x(t)). Luego ϕ no se puede elegir arbitrariamente. Lassuperficies adecuadas son las siguientes.
Definición 2.2. Una superficie S se dice no característica con respecto a (2.1)si:
A(x) · ν(x) = 0, ∀x ∈ S. (2.3)
S es característica siA(x) · ν(x) = 0, ∀x ∈ S. (2.4)
Observación 2.1. De lo dicho más se deduce que aquellas superficies que con-tengan órbitas de x′ = A(x) no son admisibles para el problema de Cauchy. Lassuperficies características son siempre la unión de órbitas de dicha ecuación.
Lema 2.3. Sea S ⊂ Rn una superficie simple y F = F (x) ∈ C1(Rn,Rn) uncampo C1. Entonces S es invariante frente a x′ = F (x) si y sólo si F (x) estangente a S en cada x ∈ S. En particular, si S es característica, S es la uniónde órbitas de x′ = A(x).

2.1. ECUACIONES LINEALES Y CUASILINEALES 49
Demostración. Si x0 ∈ S, ponemos x0 = g(s0) mientras para cada s ∈ U ,A(g(s)) =
∑αi(s)∂g/∂si. Resolvemos s′ = α(s) junto con s(0) = s0. Resulta
que x(t) = g(s(t)) es la solución de x′ = A(x), x(0) = x0 que por construcciónestá es S. El recíproco es inmediato.
Definición 2.4. Las órbitas de x′ = A(x) se denominan curvas característicasde la ecuación (2.1).
Las superficies no caracterí sticas son las adecuadas para el problema deCauchy. Esto se apoya en el hecho –que precisamos ahora– de que la ecuaciónes “de orden 1” en la dirección de la normal a S. La filosofía del argumento,aunque formal, es la misma para ecuaciones de orden superior.
Si f(t, x) es C∞ y no se sabe cómo resolver el problema
x′ = f(t, x)
x(t0) = x0,
lo que está claro es que dicho problema permite al menos obtener una expresiónformal de la solución x(t) si ésta fuese C∞:
x(t) =∞∑
n=0
an(t− t0)n.
Consideramos el siguiente caso particular de (2.2):
∂U
∂t= −a−1
n
n−1∑i=1
ai∂U
∂si+ bU − f
U(s, 0) = ϕ(s).
(2.5)
Hemos tomado S = xn = 0 y llamado s = (s1, · · · , sn−1) = (x1, · · · , xn−1),t = xn. Naturalmente hemos supuesto que an = 0 para |t|, |s| pequeños. Si todoslos datos son C∞ entonces U(t, s) puede obtenerse formalmente como:
U(s, t) =∑α,m
aα,m(s− s0)αtm.
(¡Hágase con dos variables (n = 2)!).Si ahora tratamos con una superficie no característica S, el problema (2.2)
se transforma en (2.5) si hacemos el cambio de variable local:
U(s, t) = u(g(s) + tν(s)), ϕ(s) = ϕ(g(s)),
donde |s− s0|, |t| son pequeños. Nótese que bajo dicho cambio:
x = g(s) + tν(s), t = T (x), s = S(x) (2.6)

50 CAPÍTULO 2. PRIMER ORDEN
se tiene que:
∂lU
∂tl(s0, 0) =
dl
dtl(u(g(s0) + tν(s0))|t=0
=∂lu
∂νl(x0)
∂U
∂si(s0, 0) = ∇u(x0)
∂g
∂si,
en donde x0 = g(s0) ∈ S. Por tanto, las derivadas con respecto a t de Urepresentan derivadas normales de u en S mientras que las derivadas de U conrespecto a si representan derivadas tangenciales. Haciendo el cambio (2.6) sellega a que U satisface (2.5) con los valores:
an(s, t) = A(x) · ∇T (x), ai = A(x) · ∇Si,
para 1 ≤ i ≤ n− 1. Nótese que ∇T = ν en S, por eso an(s, t) = 0 si |s− s0|, |t|son pequeños. En efecto: an(s, t) = A(x) · ν(x) = 0, en virtud a la condición deno caractericidad.
Teorema 2.5. Sea S una superficie no característica para la ecuación (2.1).Entonces, cualquiera que sea el dato de Cauchy ϕ ∈ C1(S) el problema (P)admite una solución local (u,U) que es única en el sentido siguiente: si (u1,U1)es otra solución local, existe una abierto V1 ⊂ Ω, S ⊂ V1 ⊂ U ∩ U1 tal queu = u1 en V1.
Observaciones 2.2.
a) La técnica de la prueba del teorema se llama “método de las características”.
b) La existencia de soluciones locales no se puede mejorar en general para obtenersoluciones definidas globalmente donde lo estén los coeficientes. Tómese porejemplo S = (x, y) = (s, 0) : s > 0, ϕ(s) = 0 y la ecuación:
yux − xuy = 1 (x, y) ∈ R2 − (0, 0).
Este problema admite infinitas soluciones no prolongables (ver e)). Tales so-luciones presentan discontinuidades donde los coeficientes son regulares. Véasetambién la sección de problemas.
c) No es difícil ver que la solución obtenida por el métdodo de las característicasdepende continuamente del dato ϕ. Es decir, si ϕn es una sucesión de funcionesC1 que converge uniformemente sobre compactos de S a una ϕ de clase C1
entonces un(x) → u(x) uniformemente sobre compactos.
d) El entorno U es A-convexo en el sentido de que cada x ∈ U se escribe:x = X(t, g(s)) para algún t y g(s) ∈ S (notamos por x(t) = X(t, y) a laúnica solución de x′ = A(x), junto con x(0) = y) y además: [g(s), x]A = x =X(τ, g(s))/0 ≤ τ ≤ t está contenido en U . Pues bien, dada otra solución local(u1,U1), el entorno V1 que se menciona en el teorema 1 se puede expresar como:
V1 = x ∈ U ∩ U1 : [g(s), x]A ⊂ U1, si x = X(t, g(s)).

2.2. ECUACIONES CUASILINEALES 51
e) [No unicidad local]. Consideremos el problema:
yux − xuy = 1
u(x, 0) = h(x), x > 0.(P )
Sean 0 < α1 < α2 < 2π dos ángulos y sean θ1(x, y) y θ2(x, y) dos determina-ciones del argumento con líneas de corte en las semirrectas ri, x = t cosαi, y =t sen αi, t ≥ 0. Pues bien, los pares (ui,Ui) con:
ui = h(√x2 + y2)− θi(x, y),
con (x, y) ∈ Ui = R2 − ri son dos soluciones locales tales que u1 = u2 enα1 < arg (x, y) < α2. Por tanto no se cumple que u1 = u2 en U1 ∩ U2. Véasetambién la sección de ejercicios.
2.2. Ecuaciones cuasilinealesLa ecuación cuasilineal de primer orden más general toma la forma:
n∑i=1
ai(x, u)∂u
∂xi= b(x, u) x ∈ Ω, (2.7)
donde se supone en lo que sigue que las funciones ai(x, y), b(x, y) ∈ C1(Ω×R),mientras que S representa una superficie simple parametrizada por x = g(s),g ∈ Ck(U,Rn), U abierto de Rn−1, k ≥ 2. Denotaremos análogamente por A alcampo: A(x, y) = (a1(x, y), · · · , an(x, y)).
El estudio de las soluciones de (2.7) es de nuevo abordable mediante ecua-ciones diferenciales ordinarias. En efecto, las soluciones u de (2.7) definen su-perficies en Rn × R (las superficies integrales),
y − u(x) = 0,
cuya normal (∇u,−1) debe ser ortogonal al campo (A(x, y), b(x, y)) en cadapunto (x, y) = (x, u(x)). En otras palabras, el campo (A(x, y), b(x, y)) caracteri-za las soluciones de (2.7) como sus superficies invariantes. Esto es consecuenciadel Lema 2.3 o del siguiente razonamiento directo. Si y = u(x) es invariantefrente a la ecuación:
x′ = A(x, y)
y′ = b(x, y),(2.8)
y(t) = u(x(t)) para toda solución, con lo que derivando,∑ai(x(t), u(x(t)))∂xi
u(x(t)) = b(x(t), u(x(t))),
y u resuelve (2.1). Recíprocamente, si u resuelve (2.7) tomamos x0, y0 = u(x0).Formamos la solución (x(t), y(t)) de (2.8) con dato (x0, y0) y por otro ladoy1(t) = u(x(t)). Sabemos que y′ = b(x(t), y), y(0) = y0. Derivando se tiene

52 CAPÍTULO 2. PRIMER ORDEN
y′1 = b(x(t), y1), y1(0) = y0. Por tanto y = y1 con lo que y(t) = u(x(t)) luegoy = u(x) es invariante frente a (2.8).
La (2.8) se llama la ecuación de las características asociada a (2.7).Se recuerda la siguiente definición.
Definición 2.6. Sea V = V (x) una función real C1 en Ω y sea F : Ω → Rn
un campo C1 en Ω. Decimos que V (x) es una integral primera para la ecuaciónx′ = F (x) si V (x(t)) = constante para cada solución de la ecuación.
Es inmediato comprobar que V es una integral primera de x′ = F (x) en Ωsí y sólo sí ∇u(x)F (x) = 0 en Ω. La siguiente propiedad expresa el hecho deque las superficies de nivel de integrales primeras de la ecuación (2.8) dan lugara superficies integrales de (2.7).
Propiedad 2.7. Sea V = V (x, y) de clase C1 en Ω × R una integral primerade (2.8). Supongamos que, para c ∈ R la ecuación
V (x, y) = c
define a y = u(x) donde u ∈ C1(Ω1), Ω1 ⊂ Rn un dominio, de forma que∂V∂y = 0 en y = u(x), x ∈ Ω1. Entonces u define una solución de u en Ω1.
La estructura local de las integrales primeras de una ecuación se recoge enla siguiente propiedad.
Propiedad 2.8. Sea F = F (x), F ∈ C1(Rn,Rn) un campo tal que F (x0) = 0,e. d. x = x0 no es una singularidad de F . Existe entonces un entorno U de x0y n− 1 integrales primeras V1(x), . . . , Vn−1(x), con rango (V1, . . . , Vn−1)
′(x) =n − 1 para cada x ∈ U , de forma que si V (x) es otra integral primera en Uentonces V (x) = H(V1(x), . . . , Vn−1(x)), x ∈ U , para una cierta aplicación C1,H = H(y1, . . . , yn−1).
Como en el caso lineal, nos ocupamos del problema de Cauchy para (2.7),considerando las mismas definiciones de solución local y de unicidad de solucio-nes. Específicamente, de la existencia de soluciones (u,U) de:
n∑i=1
ai(x, u)∂u
∂xi= b(x, u), x ∈ Ω
u|∂Ω= ϕ,
(2.9)
donde S es una superficie regular y U es un abierto de Ω, S ⊂ U ⊂ Ω, u ∈ C1(Ω)satisface (2.7) y u(x) = ϕ(x) en S. Se supone, por tanto, que ϕ es C1 y que lasuperficie S es C2.
Para poder considerar la clase más amplia posible de datos iniciales ϕ esnecesario -como en ecuaciones lineales- imponer condiciones a S. Sin embargo,en el caso cuasilineal, también deben imponerse restricciones a los propios datosϕ. La condición de no caractericidad que vamos a introducir, está justificada sipensamos que para resolver (2.9) vamos a construir soluciones u = u(x) trazandoórbitas de (2.8) desde (x, ϕ(x))/x ∈ S . En la siguiente definición se establecela condición de no caractericidad con la que trabajaremos.

2.2. ECUACIONES CUASILINEALES 53
Definición 2.9. Diremos que la superficie S y el dato ϕ ∈ C1(S) satisfacen lacondición de transversalidad si:
A(x, ϕ(x)) · ν(x) = 0, ∀x ∈ S. (2.10)
Otra manera de escribir (2.10) es∣∣∣∣∣∣∣∂g1∂s1
· · · a1(g(s), ϕ(g(s)))...
. . ....
∂gn∂s1
· · · an(g(s), ϕ(g(s)))
∣∣∣∣∣∣∣ = 0.
Observaciones 2.3.
a) Es muy fácil interpretar la condición de transversalidad en n = 2 tomandoS = (x, y) = (g1(s), g2(s))/a < s < b, h(s) = ϕ(g1(s), g2(s)).
b) Supongamos que (S, ϕ) son característicos, es decir:
A(x, ϕ(x)) · ν(x) = 0, x ∈ S.
Si (2.9) admite una solución u = u(x) con dato ϕ entonces A(x, ϕ(x)) es tangentea S. Por tanto, x0 ∈ S implica x(t) ∈ S si x(t) es la solución de:
x′ = A(x, ϕ(x)) x(0) = x0.
Como x(t) ∈ S y u = ϕ en S tendremos que y(t) = u(x(t)) = ϕ(x(t)) juntocon x(t) es una solución de (2.8), con datos iniciales (x0, y0) = (x0, ϕ(x0)). Esoquiere decir que la variedad de datos (x, ϕ(x)) es invariante frente a (2.8).Puede probarse que entonces (2.9) admite infinitas soluciones, lo que va contranuestros propósitos. En el caso n = 2,
a1ux + a2uy = b(x, y, u)
u(f(s), g(s)) = h(s), a < s < b.
Que (f, g, h) sean caracterí sticos equivale a que (f, g, h) parametrice una órbitade (2.8). No es difí cil comprobar que en ese caso el problema precedente admiteinfinitas soluciones.
Teorema 2.10. En las hipótesis precedentes para A, b, ϕ,S supongamos que ϕ yS satisfacen la condición de transversalidad (2.10). Entonces el problema (2.9)admite una solución local (u,U) que es única en los mismos términos que en elTeorema 2.5.
Demostración. Se construye la solución (x(t), y(t)) de (2.8) con dato (x0, y0) =(g(s), h(s)). El teorema de la función implícita permite hallar u tal que y(t) =u(x(t)). Toda otra solución u1 que pase por (x0, y0) cumplirá y(t) = u1(x(t)).Por tanto, la unicidad. De aquí es fácil hallar un dominio mínimo de unicidad.

54 CAPÍTULO 2. PRIMER ORDEN
La ecuación de BurgersUn caso particular de las ecuaciones de la dinámica de gases define el campo
de velocidades de un gas cuyas partículas se mueven con velocidad constante:
uy + uux = 0.
Tal es la ecuación de Burgers (v. Capítulo 1). Supongamos que tenemos un datoinicial:
u(x, 0) = h(x), x ∈ R
con h ∈ C1. Veamos que el problema de valores inciales carece de solucionesdefinidas en todo y ≥ 0 salvo que h(x) sea creciente: x1 ≤ x2 ⇒ h(x1) ≤ h(x2),para cualesquiera x1, x2. En efecto, si g1(s) = s, g2(s) = 0, entonces ecuaciónde las características es:
x′ = z, y′ = 1, z′ = 0,
con las condiciones iniciales:
x(0) = s, y(0) = 0, z(0) = h(s).
De ahí se deduce que una expresión implícita para u es (cf. Capítulo 1):
u = h(x− uy).
Las proyecciones x, y de las curvas características tienen la forma: x = s+ th(s),y = t, es decir
y =1
h(s)(x− s). (rs)
Sobre rs la solución siempre toma el valor h(s). Por eso, si h(s1) = h(s2), rs1 yrs2 se cortan en
x =s1h(s2)− s2h(s1)
h(s2)− h(s1), y = − s2 − s1
h(s2)− h(s1),
de lo que se deduce que las soluciones no pueden estar definidas en dicho punto.Cerca de un tal punto u experimenta una salto de magnitud |h(s2) − h(s1)|cuando nos aproximamos por la caraterí sticas. Es natural que ux “explote” endichos puntos. En efecto, sobre rs se tiene que:
ux =h′(s)
1 + yh′(s).
Si h′(s) = 0, |ux| se hará infinita si y → − 1h′(s) .

2.3. LA ECUACIÓN GENERAL DE PRIMER ORDEN 55
2.3. La ecuación general de primer ordenLa ecuación en derivadas parciales de primer orden más general es:
F (x, u,∇u) = 0, x ∈ Ω. (2.11)
Suponemos que las soluciones u ∈ C1(Ω) mientras que F : Ω × R × Rn → Res una función de clase C2. Como en los casos precedentes, todavía es posibleestudiar la existencia de soluciones de (2.11) mediante una ecuación diferencialordinaria. Como en las secciones precedentes, S designará una superficie simpleregular de clase C2 parametrizada por x = g(s), s ∈ U ⊂ Rn−1, U un ciertodominio.
El primer paso en el estudio de (2.11) consiste en obtener -aunque sólo seaformalmente- cuál es el equivalente para (2.11) de la ecuación de las caracte-rísticas. Para ello escribimos F = F (x, y, p), x = (xi), p = (pj). La hipótesisbásica consiste en admitir que es posible determinar la solución u = u(x) sobreciertas curvas x = x(t). Así pues escribimos y(t) = u(x(t)) y yj(t) = ∂u
∂xj(x(t)) y
tratamos de hallar una ecuación diferencial para las funciones x(t), y(t), yj(t),es decir, funciones ai(x, y, Y ), b(x, y, Y ), cj(x, y, Y ), Y = (yj), de forma que:
x′i = ai(x, y, Y )
y′ = b(x, y, Y )
y′j = cj(x, y, Y ), 1 ≤ i, j ≤ n.
(2.12)
Pues bien, si x′ = A(x, y, Y ) entonces se tiene que
y′(t) =
n∑j=1
∂u
∂xjx′j(t) =
n∑j=1
yjak = A(x, y, Y ) · Y.
Con ello sólo falta hallar un posible candidato para A y las ecuaciones paray′j(t). Vamos a hacer las dos cosas a la vez. Por un lado si yj(t) = ∂u
∂xj(x(t)) al
derivar:
y′j(t) =n∑
k=1
x′k(t)∂2u
∂xj∂xk(x(t)) =
n∑k=1
ak(x, y, Y )∂2u
∂xj∂xk(x(t)). (2.13)
Por otra parte si F (x, u(x),∇u(x)) = 0, al derivar con respecto a xj y hacerx = x(t):
Fxj + Fyuxj (x(t)) +
n∑k=1
Fpk
∂2u
∂xk∂xj(x(t)) = 0. (2.14)
Es decir,n∑
k=1
Fpk
∂2u
∂xk∂xj(x(t)) = −Fxj − Fyyj(t). (2.15)
Ahora obsérvese que si se compara el segundo miembro de (2.13) con el primerode (2.15), ámbas expresiones coinciden si tomamos ai(x, y, Y ) = Fpi(x, y, Y ) (lo

56 CAPÍTULO 2. PRIMER ORDEN
que es coherente con el caso cuasilineal donde F (x, y, p) =∑n
i=1 ai(x, y)pi yai(x, y, Y ) = ai(x, y) =
∂F∂pi
). Bajo esta elección de los ai(x, y, Y ) se pueden almenos cerrar las ecuaciones para x(t), y(t) y yj(t), sin necesidad de introducircomo incógnitas las derivadas de orden superior: yα(t) = ∂αu(x(t)), observadassobre x(t). En efecto, se tiene:
y′j(t) = −Fxj − Fyyj .
Así las ecuaciones en conjunto son:
x′i =∂F
∂pi, 1 ≤ i ≤ n
y′ =
n∑i=1
∂F
∂piyi
y′j = − ∂F
∂xj− Fyyj . 1 ≤ j ≤ n
(2.16)
Se llama a (2.16) la ecuación de las caracterí sticas de (2.11). Si (x(t), y(t), Y (t))satisface (2.16), se “espera” que los valores de las soluciones de (2.11), u = u(x)y de ∇u(x) sobre x(t) se deduzcan de (2.16) mediante y(t) = u(x(t)) y que secumpla Y (t) = ∇u(x(t)).
Como en las secciones precedentes, si ϕ ∈ C1(S) es lícito plantearse el pro-blema de Cauchy:
F (x, u,∇u) = 0
u = ϕ x ∈ S.(2.17)
Asimismo, la naturaleza de las técnicas que se van a emplear sólo permiten es-tablecer la existencia de soluciones locales (u,U) cuya definición no repetiremos.Para resolver entonces (2.17) se tienen que determinar las condiciones inicialespara (2.16). Es obvio cuáles son las condiciones para x(t), y(t):
x(0) = g(s), y(0) = ϕ(g(s)). (2.18)
Las condiciones iniciales y1(0) = y1(s), · · · , yn(0) = yn(s) vienen dadas por elsistema (se obtiene derivando u(g(s)) = ϕ(g(s)) respecto a si, 1 ≤ i ≤ n− 1):
∂ϕ g∂si
=n∑
j=1
yj(s)∂gj∂si
1 ≤ i ≤ n− 1
F (g(s), ϕ(g(s)), y1(s), · · · , yn(s)) = 0.
(2.19)
Teniendo en cuenta la última ecuación en (2.19) una hipótesis que nos vemosobligados a admitir es la existencia, para cada s ∈ U , de al menos una solu-ción Y (s) = (yj(s)) de dicho sistema siendo las yj(s) de clase C1 en U . Otrahipótesis ya familiar que introducimos es la condición de transversalidad (2.21).

2.3. LA ECUACIÓN GENERAL DE PRIMER ORDEN 57
Suponemos que sobre las soluciones Y (s) de (2.19) se satisface:∣∣∣∣∣∣∣∂g1∂s1
· · · Fp1(g(s), ϕ(g(s)), Y (s))...
. . ....
∂gn∂s1
· · · Fpn(g(s), ϕ(g(s)), Y (s))
∣∣∣∣∣∣∣ = 0. (2.20)
Debe advertirse que puede haber más de una familia yj(s) de funciones quesatisfagan (2.19) y (2.21). Esto ocurrirá si, por ejemplo, (2.11) es de “grado”superior a 1 en el gradiente |∇u|.
Ejemplo 2.4. Para la ecuación u2x+u2y = 1 si S viene definida por (g1(s), g2(s)),a < s < b, h(s) = ϕ(g1(s), g2(s)) = 1, las posibles elecciones de (y1, y2) son:
(y1, y2) = ± 1√g′1
2 + g′22(g′2,−g′1).
Nótese que al ser (g′1, g′2) = 0, se da (2.21). Estúdiese el caso general correspon-diente a un dato h(s).
Envolvente de una familia de superficies. Se considera una familia de superficiesSλ, dada por H(x, y, z, λ) = 0, H de clase C2, ∇H(·, λ) = 0 en Sλ. Unaenvolvente de la familia es otra superficie E , dada por g(x, y, z) = 0 de formaque
E = ∪λγλ γλ ⊂ Sλ ∩ E ,
y tal que ∇g = ∇H(·, λ) en cada γλ1. Es decir E hace un contacto de primerorden con cada Sλ.
Una manera de hallar E es proceder como sigue. Para λ fijo, las secciones deSλ por superficies próximas Sµ son γλ,µ, es decir:
H(x, y, z, λ) = 0
H(x, y, z, µ) = 0es decir
H(x, y, z, λ) = 0
H(x, y, z, µ)−H(x, y, z, λ)
µ− λ= 0.
Si µ→ λ la curva límite γλ tiene por ecuación a:H(x, y, z, λ) = 0
Hλ(x, y, z, λ) = 0.(γλ)
La unión de tales curvas genera la superficie envolvente E . Una manera analíticade proceder es como sigue. Genéricamente Hλ = 0 se puede resolver despejando
1A efectos de su uso posterior no necesitamos pedir la condición más fuerte γλ = Sλ∩E. Elcálculo de la envolvente que sigue no permite probar esa identidad. En resumen la envolventeque calcularemos es una superficie constituida por curvas γλ donde E hace un contacto deorden 1 con cada Sλ para cada λ.

58 CAPÍTULO 2. PRIMER ORDEN
λ en términos de (x, y, z), en la forma λ = Gk(x, y, z), para quizás varias Gk,k ∈ K. Así, γλ puede representarse como la unión de varias γk,λ con:
H(x, y, z, λ) = 0
λ = Gk(x, y, z).(γk,λ)
La unión de las curvas γk,λ constituye una superficie Ek que tiene la propiedadbuscada y se puede describir mediante la ecuación gk(x, y, z) = 0 donde
gk = H(x, y, z,Gk(x, y, z)).
En efecto si gk(x, y, z) = 0 entonces P = (x, y, z) cumple H(P, λ) = 0, λ =Gk(P ) y P ∈ γk,λ. Está claro que Ek tiene la propiedad deseada.
Más tarde haremos uso de las superficies envolventes que acabamos de cons-truir.
Ejemplo 2.5. Considérese la familia de esferas (x−λ)2+y2+ z2−1 = 0, λ ∈ R.
Deducción geométrica de la ecuación de las características 2. Para n = 2 toma-mos x, y como variables independientes, z = u, p = ux, q = uy y escribimosF = F (x, y, z, p, q). La ecuación (2.11) es:
F (x, y, u, ux, uy) = 0.
De nuevo la idea es construir las soluciones u = u(x, y) de una forma geométrica.Es decir, considerar su gráfica z = u(x, y) 3 como la unión de las gráficas desoluciones 4 x = x(t), y = y(t), z = z(t) (z(t) = u(x(t), y(t))) de una ciertaecuación diferencial ordinaria. Para ello necesitamos deducir (geométricamente)cómo es el campo (dx, dy, dz). Procedemos como sigue. Si u(x, y) es soluciónde (2.11), en cada P0 = (x0, y0, z0), z0 = u(x0, y0), la normal (p0, q0,−1), p0 =ux(x0, y0), q0 = uyx(x0, y0) a la superficie z = u(x, y):
F (x0, y0, z0, p, q) = 0, (2.21)
para p = p0, q = q0. La ecuación (2.21) define entonces en P0 = (x0, y0, z0) unafamilia uniparamétrica de planos tangentes 5:
z − z0 = p(x− x0) + q(y − y0), (2.22)
cuya envolvente E se llama el cono de Monge en P0. Se razona ahora como sigue:el plano tangente a una superficie integral z = u(x, y) en P0, al pertenecer a lafamilia (2.22) corta a E en una curva γp 6. El vector tangente (dx, dy, dz) a γp
2cf. el libro de Fritz John.3Una superficie integral.4Órbitas.5(2.21) expresa, v. g., q como una función de p.6Es una recta generatriz del cono.

2.3. LA ECUACIÓN GENERAL DE PRIMER ORDEN 59
en P0 es tangente a E y a z = u(x, y). ¡ Ese es el vector que estamos buscando!Según lo dicho, γp viene dada por:
z − z0 = p(x− x0) + q(y − y0)
0 = x− x0 +dq
dp(y − y0) ,
luego, dz = pdx+ qdy
0 = dx+dq
dpdy.
Comodq
dp= −Fp
Fqla última ecuación se puede escribir
dx
Fp=
dy
Fq
7. En conse-
cuencia, en cada punto (x, y, u(x, y)) de una superficie integral, el campo:
x′ = Fp(x, y, u(x, y), ux(x, y), uy(x, y))
y′ = Fq(x, y, u(x, y), ux(x, y), uy(x, y))
z′ = pFp(x, y, u(x, y), ux(x, y), uy(x, y)) + qFq(x, y, u(x, y), ux(x, y), uy(x, y)),
con p = ux(x, y), q = uy(x, y) debe ser tangente a dicha superficie. Si llamamosp(t) = ux(x(t), y(t)), q(t) = uy(x(t), y(t)) entonces, para hallar las ecuacionesde p y q se procede como antes:
p′ = uxxx′ + uxyy
′ = uxxFp + uxyFq
q′ = uyxx′ + uyyy
′ = uyxFp + uyyFq,
mientras que derivando (2.11) primero con respecto a x y después con respectoa y obtenemos:
Fx + Fzux + Fpuxx + Fquyx = 0
Fy + Fzuy + Fpuxy + Fquyy = 0,
de donde se tiene que:p′ = −Fx − Fzp
q′ = −Fy − Fzq,
que completan las ecuaciones diferenciales buscadas.Es costumbre llamar a una solución de la ecuación característica:
x′ = Fp
y′ = Fq
z′ = pFp + qFq
p′ = −Fx − Fzp
q′ = −Fy − Fzq,
(2.23)
7Esto se debe leer como x′ = αFp, y′ = αFq , para algún α.

60 CAPÍTULO 2. PRIMER ORDEN
una banda característica. En efecto (x(t), y(t), z(t), p(t), q(t)) puede interpretar-se como una curva (x(t), y(t), z(t)) con un plano asociado:
ζ − z = p(t)(ξ − x) + q(t)(η − y).
Como dz = pdx+ qdy se tiene que la curva es tangente al plano en cada punto.Nos podemos así imaginar una superficie integral como la envolvente de unafamilia de bandas características. Obsérvese que cada banda queda determinadasi se fija un punto y un plano inicial. Eso permite plantearse la posibilidad deresolver el problema de Cauchy para (2.11) sobre una curva dato Γ: x = f(s), y =g(s), z = h(s), a < s < b, donde f, g, h son de clase C2. Integramos así (2.23)bajo las condiciones:
x(0) = f(s)
y(0) = g(s)
z(0) = h(s).
(2.24)
Sin embargo, para resolver (2.23) necesitamos los valores iniciales de p y q.Como se vio más arriba los valores iniciales p(0) = φ(s), q(0) = ψ(s) tienen quecumplir:
h′(s) = φf ′ + ψg′
F (f, g, h, φ, ψ) = 0.(2.25)
Al considerar entonces el problema de Cauchy:F (x, y, u, ux, uy) = 0
u(f, g) = h, a < s < b(2.26)
siempre se supone que los datos f, g, h habilitan la existencia de funciones C1,φ,ψ que satisfacen el sistema (2.25) y además la condición de transversalidad:∣∣∣∣ f ′ g′
Fp(f, g, h, φ, ψ) Fp(f, g, h, φ, ψ)
∣∣∣∣ = 0. (2.27)
Podemos enunciar por fin el siguiente resultado.
Teorema 2.11. Supongamos que Γ = (f, g, h)/a < s < b es una curva C2
y que existen funciones C1, φ(s), ψ(s), a < s < b que satisfacen (2.25) y(2.27) , entonces el problema (2.26) admite una solución local (u,U). Además,toda otra solución local (u1,U1) que coincida hasta el orden 1 con u(x, y) enS = (f, g)/a < s < b también coincide con u(x, y) en un cierto entornoabierto V1 ⊂ U ∩ U1 de S.
Observación 2.6. Se dice que dos funcionesu(x, y), v(x, y), de clase C1 coincidenhasta el orden 1 en (x0, y0) si:
u(x0, y0) = v(x0, y0), ux(x0, y0) = vx(x0, y0), uy(x0, y0) = vy(x0, y0).
Por otra parte el Teorema 2.11 habla de unicidad de soluciones locales –en elsentido que se ha usado en el capítulo– cuando, de acuerdo con la ecuación y lacurva Γ, se elige un campo gradiente ∇u = (φ,ψ) sobre S.

2.4. INTEGRALES PRIMERAS 61
Demostración del Teorema 2.11. La existencia sigue las ideas del caso cuasili-neal. Sin embargo hay algún detalle que no es trivial. Lo primero es resolver(2.23) bajo las condiciones
(x(0), y(0), z(0), p(0), q(0)) = (f(s), g(s), h(s), φ(s), ψ(s)),
para obtener
(x, y, z, p, q) = (X(t, s), Y (t, s), Z(t, s), P (t, s), Q(t, s)).
Es fácil invertir x = X(t, s), y = Y (t, s) en la forma s = S(x, y), t = T (x, y),lo que permite proponer u = Z(T, S) como posible solución. Derivando conrespecto a t se concluye que:
F (X(t, s), Y (t, s), Z(t, s), P (t, s), Q(t, s)) = 0.
Pero comprobar que u es solución pasa por justificar que:
ux(X(t, s), Y (t, s)) = P (t, s) uy(X(t, s), Y (t, s)) = Q(t, s). (2.28)
Unas cuentas prueban que:(Zt
Zs
)=
(Xt YtXs Ys
)(uxuy
) (Zt
Zs
)=
(Xt YtXs Ys
)(PQ
). (2.29)
De todas las relaciones la más delicada es la última que se prueba observandoque A(t, s) = PXs+QYs−Zs cumple A(0, s) = 0 mientras At = FzA. De (2.29)se sigue (2.28).
Para la unicidad se toma una solución u de la ecuación y se plantea laecuación diferencial ordinaria:
x′ = Fp(x, y, u(x, y), ux(x, y), uy(x, y))
y′ = Fq(x, y, u(x, y), ux(x, y), uy(x, y)),
con lo que,z(t) = u(x(t), y(t)),
cumple z′ = uxFp + uyFq. Si, por ejemplo, p(t) = ux(x(t), y(t)) se tiene p′ =uxxFp + uxyFq, que vía la ecuación en derivadas parciales se puede escribirp′ = −Fx − pFz.
2.4. Ecuaciones cuasilineales e integrales prime-ras
Recordemos que si V = V (x1, · · · , xn, y) es una integral primera de la ecua-ción:
x′i = ai(x1, · · · , xn, y) 1 ≤ i ≤ n
y′ = b(x1, · · · , xn, y)(2.30)

62 CAPÍTULO 2. PRIMER ORDEN
en un cierto dominio Ω ⊂ Rn × R, entonces, para cada λ ∈ R donde
V (x1, · · · , xn, y) = λ ,
define y = u(x1, · · · , xn) se tiene que u es una solución de:
n∑i=1
aiuxi = b(x1, · · · , xn, u). (2.31)
Consideremos por simplicidad el problema de Cauchy en el caso n = 2. Nosproponemos hallar una solución y = u(x1, x2) (la denotaremos z = u(x, y)) quesatisfaga:
u(f(s), g(s)) = h(s), a < s < b,
para ciertas funciones dato f, g, h, de clase C1, que cumplen la condición detransversalidad. Basta con hallar una integral primera V (x, y, z) de:
x′ = a1(x, y, z)
y′ = a2(x, y, z)
z′ = b(x, y, z)
(2.32)
de forma que V (f(s), g(s), h(s)) = 0 para a < s < b. El siguiente métodopara encontrar V , por su naturaleza sólo tiene validez local. En la práctica losresultados suelen ser por regla general globales. Siempre existen dos integralesprimeras independientes de (2.32), Vi = Vi(x, y, z), i = 1, 2. Las órbitas de(2.32) que pasan por los puntos P (s) = (f(s), g(s), h(s)) -cuya unión genera lasuperficie solución-vienen dadas por los sistemas:
V1(x, y, z) = c1(s)
V2(x, y, z) = c2(s)
para ciertas funciones C1, c1, c2 (véase la sección de Ejercicios). En general,y1 = c1(s), y2 = c2(s) definen una curva en el plano y1–y2 (razónese, por ejemplo,qué sucedería si c′1(s) ≡ 0). Por tanto existe una función F = F (y1, y2) declase C1 tal que F (c1(s), c2(s)) = 0 para cada s. Como F (V1(x, y, z), V2(x, y, z))también es una integral primera, V (x, y, z) = F (V1(x, y, z), V2(x, y, z)) es laintegral primera buscada.
Ejemplo 2.7. Tomemos y + uuy = 0 junto con u(x, 0) = h(x) de forma queh(x) = 0 para cada x. Bien, se tiene que V1 = x y V2 = y2 + z2 son integralesprimeras de (2.32). El sistema V1(P (s)) = c1(s) y V2(P (s)) = c2(s) da c1 = s,c2 = h2(s). Así, F = y2 −h(y1)
2, V = V2 −h(V1)2 y la solución estará implícita
eny2 + z2 − h(x)2 = 0.
Integrales Primeras. Una integral primera de (2.32) es una función C1, V (x, y, z),que satisface (en un cierto dominio de R3):
Vxa1 + Vya2 + Vzb = 0.

2.5. INTEGRALES COMPLETAS 63
En la práctica el cálculo de una integral primera consiste en hallar funcionesP,Q,R tales que Pa1 +Qa2 + Rb = 0 de forma que, para alguna función V setenga P = Vx, Q = Vy, R = Vz. Una manera de facilitar la búsqueda de P,Q,Rconsiste en partir de la ecuación orbital de (2.32):
dx
a1=dy
a2=dz
b
Por la propiedad fundamental de las fracciones equivalentes:
dx
a1=dy
a2=dz
b=Pdx+Qdy +Rdz
Pa1 +Qa2 +Rb.
Si se consigue Pa1 + Qa2 + Rb = 0 entonces Pdx + Qdy + Rdz = 0. Integrarésta última ecuación es –por definición– hallar las funciones V .
Ejemplo 2.8.x′ = x(y − z)
y′ = y(z − x)
z′ = z(x− y).
Al escribir:dx
x(y − z)=
dy
y(z − x)=
dz
z(x− y)
se ve que:1
xdx
(y − z)=
1
ydy
(z − x)=
1
zdz
(x− y)
de donde,1
xdx+
1
ydy +
1
zdz = 0,
con lo que V = log (xyz). Nótese que también se puede tomar V = xyz.
2.5. Superficies integrales y envolventes. Integra-les completas
Consideremos la ecuación general en dos variables:
F (x, y, u, ux, uy, ) = 0. (2.33)
Llamaremos superficie integral de (2.33) a la gráfica en R3, (x, y, z) : z =u(x, y) de cualquier solución u(x, y) de (2.33). Una superficie integral, puedetambién expresarse en la forma H(x, y, z) = 0. En la Sección 2.3 del presentecapítulo se introdujo la noción de superficie envolvente E , g(x, y, z) = 0, de unafamilia Sλ de superficies H(x, y, z, λ) = 0, así como un método para hallarg. En estos términos, vamos a probar que si las Sλ son superficies integrales,entonces también la envolvente es una superficie integral.

64 CAPÍTULO 2. PRIMER ORDEN
Recordemos que E consta de la unión de curvas γλ de forma que cada γλ ⊂Sλ. Comprobamos que para cada λ, E y Sλ no sólo hacen un contacto de ordenuno en γλ sino que además:
∇g(x, y, z) = ∇H(x, y, z, λ), (2.34)
para (x, y, z) ∈ γλ. Así, para cada punto (x, y, z) ∈ γλ de la envolvente se tiene
que −gxgz
= −Hx
Hzy −gy
gz= −Hy
Hz. La solución u definida por H(x, y, z, λ) = 0
verifica ux = −Hx
Hzy uy = −Hy
Hz, mientras la función U definida por g(x, y, z) = 0
satisface Ux = ux, Uy = uy en γλ. Por eso:
F (x, y, U, Ux, Uy, ) = 0,
pues U = u,Ux = ux, Uy = uy en γλ. En consecuencia g(x, y, z) = 0 define unasuperficie integral.
Verificamos (2.34). La envolvente es E = ∪λγλ donde γλ se define medianteel sistema:
H(x, y, z, λ) = 0
λ = G(x, y, z)
donde Hλ = 0 define a λ como función de (x, y, z) mediante λ = G. La ecuaciónimplícita de E es g(x, y, z) = 0 con g = H(x, y, z,G). Así si el punto P =(x, y, z) ∈ E entonces P ∈ γλ donde λ viene dado por λ = G(P ). Como:
gx = Hx +HλGx, gy = Hy +HλGy, gz = Hz +HλGz,
al ser Hλ(P ) = 0 se tendrá ∇g(P ) = ∇H(P ).Se llama integral completa de (2.33) a una familia biparamétrica
H(x, y, z, λ, µ) = 0,
de superficies integrales de (2.33). Una integral general de (2.33) es una envol-vente de una subfamilia uniparamétrica de una integral completa. La envolvente-si existe- de todas las integrales generales de una ecuación constituye una in-tegral singular de dicha ecuación. Vamos a mostrar cómo la existencia de unaintegral completa puede llevar a la resolución del problema de Cauchy. Paraello suponemos que los datos de Cauchy (f(s), g(s), h(s)), a < s < b satisfacenlas hipótesis del Teorema 2.11. La idea consiste en determinar una subfamiliauniparamétrica λ = λ(s), µ = µ(s) de forma que su envolvente contenga a lacurva Γ = (f, g, h) : a < s < b. Ello requiere que se satisfaga el sistema:
H(f(s), g(s), h(s), λ(s), µ(s)) = 0
Hλ(f(s), g(s), h(s), λ(s), µ(s))′(s) +Hµ(f(s), g(s), h(s), λ(s), µ(s))µ
′(s) = 0.
Por tanto, las funciones λ, µ buscadas se determinan despejando λ, µ en términosde s en el sistema:
H(P (s), λ(s), µ(s)) = 0
Hx(P (s), λ(s), µ(s))f′ +Hy(P (s), λ(s), µ(s))g
′ +Hz(P (s), λ(s), µ(s))h′ = 0,

2.6. LAGRANGE-CHARPIT 65
con P (s) = (f(s), g(s), h(s)). Una vez determinadas las funciones λ(s), µ(s)la envolvente de la familia H(x, y, z, λ(s), µ(s)) = 0 proporciona la soluciónbuscada.
Ejemplo 2.9. Consideremos la ecuación de tipo Clairaut:
u = xux + yuy +1
2(u2x + u2y)
y la condición u(x, 0) = 12 (1 − x2). Una familia de superficies integrales es:
z = λx+ µy + 12 (λ
2 + µ2). El sistema es:
λs+1
2(λ2 + µ2) =
1
2(1− s2)
λ = −s.
Luego λ = −s, µ = ±1. Las subfamilias uniparámetricas son z = −sx ± y +12 (s
2 + 1). Para hallar las envolventes:
− sx± y +1
2(s2 + 1) = 0
s = x,
siendo la ecuación de las envolventes (por tanto las soluciones): z = −x2 ± y +12 (x
2 + 1).
Observación 2.10. La idea de integral completa se inspira en la de integralgeneral en el caso de ordinarias. Allí, una familia uniparamétrica de curvasgenera una ecuación. Análogamente, una familia biparamétrica de superficiesH(x, y, z, λ, µ) = 0 define en general una ecuación de primer orden. En efecto,basta con despejar λ, µ en el sistema:
Hx +Hzp = 0
Hy +Hzq = 0
en términos de x, y, z, p, q. La ecuación buscada es F (x, y, u, ux, uy) = 0 conF = H(x, y, z, λ(x, y, z, p, q), µ(x, y, z, p, q)).
2.6. Cálculo de integrales completas. Método deLagrange–Charpit
El método de Lagrange–Charpit proporciona una técnica para hallar inte-grales completas de ecuaciones de primer orden del tipo (2.33). Consiste en losiguiente. Se supone que
H = H(x, y, z, p, q)

66 CAPÍTULO 2. PRIMER ORDEN
es una integral primera de la ecuación característica:
x′ = Fp
y′ = Fq
z′ = pFp + qFq
p′ = −Fx − pFz
q′ = −Fy − qFz
de forma que se satisface:
∂(F,H)
∂(p, q)=
∣∣∣∣Fp Fq
Hp Hq
∣∣∣∣ = 0.
Se admite también que para cada λ el sistema:
F (x, y, z, p, q) = 0
H(x, y, z, p, q) = λ(2.35)
define p, q como funciones C1 de (x, y, z, λ), es decir, (2.35) define:
p = ϕ(x, y, z, λ)
q = ψ(x, y, z, λ).(2.36)
La hipótesis sobre∂(F,H)
∂(p, q)junto con el teorema de la función implícita im-
plican que ϕ y ψ son funciones C1. Genéricamente, una solución u(x, y) de(2.33) se describe por el método de las características, en el sentido de quelocalmente se tiene la existencia de una solución x(t), . . . , q(t) de la ecuaciónde las curvas características tal que z(t) = u(x(t), y(t)), p(t) = ux(x(t), y(t)),q(t) = uy(x(t), y(t)) (ver la sección de Ejercicios). Por eso, H(x(t), . . . , q(t)) = λ(constante). Se admite que todas las soluciones x(t), . . . , q(t) que generan u(x, y)hacen H(x(t), . . . , q(t)) = λ. Entonces u satisface el sistema:
ux = ϕ(x, y, u, λ)
uy = ψ(x, y, u, λ).(2.37)
En conclusión, la existencia de H en las condiciones prescritas permite obteneralgunas soluciones de (2.33) - ¡no todas satisfacerán que H = λ! - siempre quese sepa cómo trabajar con las ecuaciones (2.37), más sencillas que la (2.33).
En el curso de ecuaciones diferenciales ordinarias se estudia un caso parti-cular: el de las ecuaciones exactas. Para M(x, y) y N(x, y) funciones dato, setrata de hallar las soluciones de ux =M,uy = N . El siguiente resultado (véaseel Ejercicio 23) establece las condiciones precisas de existencia y unicidad.
Propiedad 2.12. Supongamos que ϕ, ψ son funciones C1 en un dominio Ω ⊂R4. Entonces (2.37) admite soluciones locales en Ω sí y sólo sí se tiene que:
ϕ+ ϕzψ = ψx + ψzϕ, (2.38)
en Ω. Además, para λ fijado, dado un punto (x0, y0, z0) existe una única soluciónlocal u(x, y) de (2.37) tal que u(x0, y0) = z0.

2.6. LAGRANGE-CHARPIT 67
Si H es una integral primera en las condiciones dadas se demuestra –verEjercicio 24– que las funciones ϕ y ψ definidas en (2.36) como soluciones de(2.35) satisfacen la condición de integrabilidad (2.38). Por tanto, la integraciónde (2.37) da lugar –con λ fijo– a una familia uniparamétrica –tómese µ = z0 comoparámetro– de soluciones. Finalmente al hacer variar λ se obtiene una familiabiparamétrica de soluciones z = u(x, y, λ, µ). Este es el método de Lagrange-Charpit para el cálculo de una integral completa de la ecuación (2.33).
Como se ha dicho, el primer paso consiste en hallar una integral primeraH de la ecuación característica. Para ello conviene escribir la ecuación orbitalasociada:
dx
Fp=dy
Fq=
dz
pFp + qFq= − dp
Fx + pFz= − dq
Fy + qFz,
y proceder como se ha indicado más arriba. Una vez halladas H, ϕ, ψ se debeintegrar la ecuación:
ϕdx+ ψdy − dz = 0, (2.39)
es decir, hallar una función V (x, y, z) de clase C1 tal que Vx = ϕ, Vy = ψ,Vz = −1 8. Las ecuaciones V (x, y, z) = µ proporcionarán las soluciones de(2.37). Por razones de cálculo algunas veces conviene multiplicar (2.39) por unfactor integrante ζ(x, y, z). Si V es una solución de la nueva ecuación, es decirVx = ζϕ, Vy = ζψ, Vz = −ζ, entonces las ecuaciones V = µ también dan lassoluciones de (2.37).
Ejemplo 2.11. Consideremos la ecuación:
zpq = p+ q.
Tomando F = p+ q − zpq, escribimos para el cálculo de una integral primera:
dx
1− zq=
dy
1− zp=
dz
p+ q − 2zpq= − dp
p2q= − dq
q2p.
De la última igualdad1
pdp− 1
qdq = 0 y una integral primera es H =
p
q. Llegamos
así al sistema:zpq = p+ q
p = λq.
Se tienen dos opciones: ϕ = ψ = 0, que pone de manifiesto que todas lasconstantes son soluciones y ϕ = 1+λ
z , ψ = 1+λλz . Finalmente, integramos:
1 + λ
zdx+
1 + λ
λzdy − dz = 0,
la que, multiplicada por ζ = z –para separar las variables– da:
(1 + λ)dx+1 + λ
λdy − zdz = 0.
8La condición (2.38) asegura la existencia de tales V (x, y, z).

68 CAPÍTULO 2. PRIMER ORDEN
La integral completa es:
(1 + λ)x+1 + λ
λy − z2
2= µ.
Observación 2.12 (Superficies Ortogonales). Se considera una familia unipara-métrica Hλ de superficies,
H(x, y, z, λ) = 0,
que podría obtenerse alternativamente en la forma Λ(x, y, z) = λ, λ ∈ R. Si setiene una superficie fija z = u(x, y) (S) ésta corta genéricamente a cada una delas Hλ según una curva Γλ en R3:
(Γλ)
H(x, y, z, λ) = 0
z = u(x, y)
Λ(x, y, z) = λ
z = u(x, y),
es decir, si γλ ⊂ R2 designa la curva plana γλ = (x, y) : Λ(x, y, u(x, y)) = λentonces,
Γλ = (x, y, z) : (x, y) ∈ γλ z = u(x, y).
Diremos que la superficie S es ortogonal a la familia Hλ (ver Ejercicio 15) silas normales a S y Hλ son ortogonales en Γλ para cada λ. En ese caso habrá detenerse:
Hx(x, y, z, λ)ux +Hy(x, y, z, λ)uy = Hz(x, y, z, λ) (x, y, z) ∈ Γλ λ ∈ R.
De manera equivalente,
Hx(x, y, u,Λ(x, y, u))ux +Hy(x, y, u,Λ(x, y, u))uy = Hz(x, y, u,Λ(x, y, u)),(2.40)
donde (x, y) ∈ Ω ⊂ R2 (Ω es típicamente un cierto abierto de R2). La ecuación(2.40) es la de las superficies ortogonales a la familia Hλ.
2.7. Ejercicios1. Hállense las soluciones de los siguientes problemas de Cauchy:
a) ux + uy = u2; u(x, 0) = h(x).
b) uy = xuux; u(x, 0) = x.
c) xux + yuy + uz = u; u(x, y, 0) = h(x, y).
d) xuy − yux = u; u(x, 0) = h(x), x ∈ R+.
2. Considérese la ecuación aux+buy = 0 y la curva de datos S = (x, 0)/x ≥0. Para el dato ϕ = 0 hállense dos soluciones locales (u,U) y (u1,U1) queno coincidan sobre U ∩ U1.

2.7. EJERCICIOS 69
3. Ecuación de Burgers. Se considera la ecuación:
uy + uux = 0, (B)
en la que y representa el tiempo y u = u(x, y) representa el campo develocidades de un gas en la dirección del eje x.
a) Demostrar que si u es solución de (B), la velocidad de cada partícula esconstante.
b) Si h = h(x) es C1 y no decreciente, entonces la ecuación (B) sometida ala condición:
u(x, 0) = h(x), x ∈ R (C)
admite una única solución definida en todo y ≥ 0.
c) Si además h es Lipschitz en R pruébese que la solución de (B) - (C) existepara |y| ≤ ε para un cierto ε > 0. ¿Qué sucede si h no es Lipschitz?
d) Hállese la solución correspondiente al dato h = s2 − 1.
4. Se considera el problema de Cauchy:
ut = ux + u(1− u); u(x, 0) = ϕ(x). (P )
a) Demostrar que la solución de (P) está definida en todo (x, t) ∈ R2 siϕ ∈ C1, 0 ≤ ϕ(x) ≤ 1, para cada x ∈ R.
b) ¿Qué sucede si ∃x0 ∈ R tal que ϕ(x0) /∈ [0, 1]?
5. Una función u(x), x ∈ Rn se dice homogénea de grado α = 0 si:
u(tx) = tαu(x), ∀t > 0, x ∈ Rn. (H)
El teorema de Euler establece que u ∈ C1(Rn \ 0) cumple (H) si y sólosi u satisface la e.d.p.:
n∑i=1
xi∂u
∂xi= αu, x ∈ Rn \ 0. (E)
Estúdiense las soluciones de (E) con las técnicas de las ecuación en deri-vadas parciales’s de primer orden.
6. Calcular la ecuación en derivadas parcialesde primer orden que satisfacentodas las funciones radiales u en R2. Estudiar el problema de Cauchy parala ecuación resultante.
7. Calcular la ecuación en derivadas parcialesde primer orden que satisfacentodas las esferas de radio 1 en R3 con centro en el plano x–y. Descríbanselos conos de normales y de Monge para la ecuación resultante así como
la solución del problema de Cauchy con dato h(x, 0) =1
2.

70 CAPÍTULO 2. PRIMER ORDEN
8. Hállese la edp de primer orden que satisfacen las funciones u = f(x2−y2),para f ∈ C1(R). Estúdiese el problema de Cauchy correspondiente.
9. Estúdiense desde el punto de vista geométrico las soluciones del problemade Cauchy para la ecuación:
mux + nuy − p = 0 (x, y) ∈ R2,
siendo m,n, p constantes. Hállese la solución con dato u(x, 0) = f(x),f ∈ C1.
10. Sobre una curva C1, Γ = (g1, g2))/a < s < b estúdiese la solución delproblema de Cauchy para la ecuación Eikonal:
c2(u2x + u2y) = 1,
con dato u(g1(s), g2(s)) = h(s). En el caso h constante se llama frente deondas Γt en el instante t a la curva de nivel u = t. Determinar Γt en el casoen que Γ es la circunferencia unidad y en el de la elipse x2/a2+y2/b2 = 1.
11. Supongamos que u = u(x, y) es una solución de:
a(x, y)ux + b(x, y)uy = −u (x, y) ∈ Ω,
donde u ∈ C1(Ω) y Ω es la bola unidad de R2. Supongamos que ax+by > 0para todo (x, y) ∈ ∂Ω. Demuéstrese que entonces u se anula idénticamenteen todo Ω.
12. Se considera la ecuación en derivadas parciales:
u2x + u2y = u2.
Estúdiense las soluciones de la ecuación característica. Hállense las so-luciones de los problemas correspondientes a datos: u(cos s, sen s) = 1,u(s, 0) = 1.
13. Estúdiense los problemas de Cauchy:uy = u3x
u(x, 0) = 2x3/2,
u = xux + yuy +
1
2(u2x + u2y)
u(x, 0) =1
2(1− x2).
14. Para F de clase C2 demuéstrese que toda solución u de:
uy = F (ux), u(x, 0) = h(x),
se puede escribir como:
u = (F (p)− pF ′(p))y + h(x− yF (p)),
donde p se expresa en términos de x e y mediante la relación:
p = h′(x+ yF ′(p)).

2.7. EJERCICIOS 71
15. Superficies ortogonales. Consideremos una familia uniparamétrica de su-perficies Sλ, λ ∈ R, definidas como H(x, y, z, λ) = 0, λ ∈ R. Pruébeseque una cierta superficie definida en R3 por z = u(x, y), (H y u regulares)es ortogonal a la familia Sλ sí:
Hxux +Hyuy = Hz,
siempre que z = u(x, y). Hállese una familia ortogonal a la familia:
x2 + y2 = 2λz.
Hállese asimismo una superficie ortogonal a todas las de la familia:
z(x+ y) = λ(3z + 1),
que pase además por el círculo x2 + y2 = 1, z = 1.
16. Teorema de rectificación de campos. SeaG ⊂ Rn un abierto, f ∈ C1(G,Rn)un campo C1, x0 ∈ G un punto no singular de f , es decir f(x0) = 0. De-muéstrese que existe un entorno U de x0 y un difeomorfismo C1, T ∈C1(U,Rn), sobre T (U) tal que T ′(x)f(x) = en = (0, · · · , 1), x ∈ Rn. Si enU se efectúa el cambio de variable y = T (x) hállese la expresión para laecuación transformada de x′ = f(x).
Indicación. La idea es empezar desde la parte final: ¿cómo transformarlas soluciones de x′ = f(x) mediante y = T (x) de forma que y′ = en.
17. Estructura de las integrales primeras. Sean f y x0 como en el problema 16.Demuéstrese que existen n− 1 integrales primeras Hi = Hi(x1, · · · , xn) ∈C1(U,R), 1 ≤ i ≤ n − 1 de forma que si H = H(x1, · · · , xn) es otraintegral primera definida en U entonces H = F (H1, · · · ,Hn−1), para unacierta función F = F (y1, · · · , yn−1) de clase C1. Además H1, . . . , Hn−1
son funcionalmente independientes en el sentido de que
rango (∇H1(x), . . . ,∇Hn−1(x)) = n− 1 x ∈ U.
18. Considérense un campo f y un punto no singular x0 de f . Sea V1(x),. . . ,Vn−1(x), x ∈ U una familia de integrales primeras independientes de x′ =f(x) en un entorno U de x0. Para los valores V1(x0) = c1, . . . , Vn−1(x0) =cn−1 se considera el sistema:
V1(x) = c1
...Vn−1(x) = cn−1.
(2.41)
Pruébese que las únicas soluciones de (2.41) en un entorno U ′ ⊂ U de x0forman una curva Γ = ϕ(t)/|t| < ε que es una órbita de x′ = f(x).

72 CAPÍTULO 2. PRIMER ORDEN
19. Calcúlense dos integrales primeras independientes para las ecuaciones:
x′ = x(y − z) y′ = y(z − x) z′ = z(x− y)x′ = x2(y3 − z3) y′ = y2(z3 − x3) z′ = z2(x3 − y3).
20. Para a1(x, y, z), a2(x, y, z), b(x, y, z) de clase C1 en R3 se considera el pro-blema de Cauchy con datos u(f(s), g(s)) = h(s), a < s < b, f, g, h declase C1. Admitiendo que se satisface la condición de transversalidad y laexistencia de dos integrales primeras independientes V1(x, y, z), V2(x, y, z)de la ecuación característica, utilícense éstas para hallar una solución localde dicho problema.
21. Estúdiese el problema de Cauchy para las siguientes ecuaciones:
a) y + uuy = 0 (n = 2).b) uux =
√1− u2, u(x, x) = h(x).
c) yux − xuy = 0 con gráfica z = u(x, y) pasando por la curva z = my,x2 + (y − α)2 = R2.
d) x2ux + y2uy = (x+ y)u.
e) (2xy − 1)ux + (u− 2x2)uy = 2(x− yu), pasando por la curva y = 0,z = 1.
f) (x−y)ux+(y−x−u)uy = u, pasando por la curva z = 0, x2+y2 = 1.
Indicación Un par de integrales para (5) son por ejemplo: V1 = y + xz,V2 = x2 + y2 + z.
22. Sea F = F (x, y, z, p, q) ∈ C2(R5), y u = u(x, y) una solución C2 de laecuación:
F (x, y, u, ux, uy) = 0.
Estúdiese bajo qué condiciones es posible asegurar la existencia de unasolución x(t), y(t), z(t), p(t), q(t) de la ecuación característica de formaque se tengan -localmente- las identidades:
z(t) = u(x(t), y(t)), p(t) = ux(x(t), y(t)), q(t) = uy(x(t), y(t)).
Nota. El problema pregunta cuándo una solución dada de la ecuación sepuede obtener por el método de las carcterísticas.
23. Sean ϕ(x, y, z), ψ(x, y, z) funciones C1 en un abierto Ω de R3. Pruébeseque una condición necesaria y suficiente para la existencia de solucioneslocales de la ecuación:
ux = ϕ(x, y, u), uy = ψ(x, y, u), (E)
viene dada por la identidad:
ϕy + ϕzψ = ψx + ψzϕ, en Ω. (2.42)
Demuéstrese que fijado un punto x0 ∈ Ω, en un cierto entorno U de x0existe una familia uniparamétrica de soluciones de (E).

2.7. EJERCICIOS 73
24. (Método de Lagrange–Charpit). Sea F = F (x, y, z, p, q) ∈ C2(R5) y su-pongamos que H = H(x, y, z, p, q) ∈ C1(R5) es una integral primera de laecuación característica asociada a la ecuación en derivadas parciales:
F (x, y, u, ux, uy) = 0.
Admitamos que para cada λ ∈ R el sistema de ecuaciones:F (x, y, z, p, q) = 0
H(x, y, z, p, q) = λ,
define p = ϕ(x, y, z, λ), q = ψ(x, y, z, λ), con det∂(F,H)
∂(p, q)= 0 (de donde
se deduce que ϕ, ψ son C1). Demuéstrese entonces que ϕ y ψ satisfacen lacondición de integrabilidad (2.42).
25. Se recuerda que una integral completa de la ecuación en derivadas parciales
F (x, y, u, ux, uy) = 0,
es una familia biparamétrica de superficies integrales (soluciones) z =u(x, y, λ, µ). Pruébense los siguientes resultados.
a) (Ecuación de Clairaut). Si la ecuación tiene la forma u = xux + yuy +f(ux, uy) entonces u = αx+ βy + f(α, β) es una integral completa.
b) La ecuación de la forma uy = f(ux) admite una integral completa de laforma u = λx+ f(λ)y + µ.
c) Si la ecuación es de la forma ux = f(x, uy) admite una integral completade la forma: u =
∫ x
af(s, λ) ds+ λy + µ.
d) Considérese la ecuación ux = f(u, uy) y supóngase que la identidad p =f(z, λp) define a p = P (λ, z). Pruébese que dicha ecuación admite unaintegral completa de la forma:∫ u
a
ds
P (λ, s)= x+ λy + µ.
e) Para f1(x, ux) = f2(y, uy):
u =
∫ x
a
ϕ1(s, λ) ds+
∫ y
b
ϕ2(s, λ) ds+ µ,
es una integral completa.
26. Hállese una integral completa de las ecuaciones:
p+ q = pq p2z2 + q2 = 1zpq = p+ q qz = (p2 + q2)yzpq = p2(p2 + xq) + q2(q2 + yp) c2(p2 + q2) = 1px5 − 4q3x2 + 6x2z = 2 2(z + xp+ pq) = yp2.

74 CAPÍTULO 2. PRIMER ORDEN
27. Hállese la (o las soluciones) de los problemas de Cauchy:
a) uxuy = u, pasando por la curva Γ definida por x = 0, y2 = z.
b) xu2x + yuy = u, pasando por Γ dada por y = 1, x− z = 0.
c) u2x − u2y = u, pasando por 4z + x2 = 0, y = 0.
d) u2x + u2y = 1, pasando por la curva definida por y = 1, z2 − x2 = 1.
28. Resuélvanse los problemas de Cauchy:
a) pq + 1− u = 0
u = 2x+ 1
y = 2,
b) pq − 3xy − 2u = 0
u = 15y
x = 5,
c) p2 + q2 − 4u = 0
u = y2
x = 0.

Capítulo 3
Problema de Cauchy.Teorema deCauchy–Kowlevski
3.1. Funciones analíticas realesSe revisan en el Anexo los conceptos básicos de diferenciabilidad en varias
variables. Se presenta asimismo una introducción a las series múltiples. Se mues-tran allí ejemplos no triviales de la siguiente clase de funciones.
Definición 3.1. Se dice que una función u : Ωabto. ⊂ Rn → R es analítica enx0 ∈ Ω si existe un entorno N(x0) ⊂ Ω de x0 y una familia de coeficientes cαtales que1:
u(x) =∑α
cα(x− x0)α, ∀x ∈ N(x0).
Se dice que u es analítica en Ω si lo es en cada uno de los puntos x ∈ Ω.
Propiedad 3.2. Si u : Ω → R es analítica en Ω entonces u es de clase C∞ enΩ y para cada x0 ∈ Ω se tiene que
u(x) =∑α
1
α!∂αu(x0)(x− x0)
α x ∈ N(x0) ,
siendo N(x0) un entorno de x0 en Ω. Además, para cada x0 existen M, r > 0tales que:
|∂αu(x)| ≤M|α|!r|α|
, ∀x ∈ N(x0), α ∈ Nn. (3.1)
Observación 3.1. Las estimaciones locales (3.1) de las derivadas caracterizan laanaliticidad de una función u, supuesta de clase C∞ en Ω.
1Obsérvese que la convergencia ya conlleva convergencia absoluta (véase el Anexo).
75

76 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
Propiedad 3.3. Sea u : Ωabto. ⊂ Rn → R de clase C∞. Entonces, u es analíticasí y sólo sí para cada K ⊂ Ω compacto existen constantes M, r > 0 que sólodependen de K tales que:
|∂αu(x)| ≤M|α|!r|α|
, ∀x ∈ K,α ∈ Nn.
Definición 3.4. Se dice que la serie de potencias∑
α cαxα es mayorada por∑
α aαxa si |cα| ≤ aα para cada α. Se denotará:
∑α cαx
α ≪∑
α aαxα.
Para r = (r1, . . . , rn) ∈ Rn+, x0 = (x0i) ∈ Rn, designaremos por D(x0, r) =
x/|xi − x0i| < ri, 1 ≤ i ≤ n.Se tienen las siguientes propiedades.
Propiedad 3.5. Si∑
α aαxα es analítica en un entorno D(0, r) de x = 0,
r = (r, . . . , r), y∑
α cαxα ≪
∑α aαx
α entonces c(x) =∑
α cαxα también es
analítica en D(0, r).
Propiedad 3.6. Sea c(x) =∑
α cαxα analítica en un entorno de x = 0. En-
tonces existen M, r > 0 tales que la serie ϕM,r(x) = M∑
α r−|α|xα mayora a
la serie c(x).
Nótese que:
ϕM,r(x) =Mrn
(r − x1) . . . (r − xn),
en ∥x∥∞ < r mientras que la serie∑
α r−|α|xα es mayorada por
∑α
|α|!α!
r−|α|xα.Luego ésta última serie también puede utilizarse para mayorar a la serie de la
propiedad anterior. Obsérvese que∑
α
|α|!α!
r−|α|xα converge en ∥x∥1 < r a lafunción:
ψM,r(x) =Mr
r − (x1 + · · ·+ xn).
Nótese asimismo que si cα = 0 para α = 0, es decir la serie no tiene término deorden cero, entonces se puede tomar como mayorante a:
ψM,r(x) =M(x1 + · · ·+ xn)
r − (x1 + · · ·+ xn).
Teorema 3.7 (Regla de la Cadena). Sean f : Ωabto. ⊂ Rn → Rp, f =(f1(x), . . . , fp(x)), g : Ωabto.
1 ⊂ Rp → R, g = g(u) funciones analíticas. En-tonces, para cada x ∈ Ω donde f(x) ∈ Ω1 se tiene que g f = g(f(x)) esanalítica en x.
Demostración. La función g f es C∞ en Ω luego basta con demostrar que laserie de Taylor converge a la función en un entorno adecuado de cada puntox0 ∈ Ω. Sin pérdida de generalidad puede asumirse que x0 = 0 y que f(0) = 0.

3.1. FUNCIONES ANALÍTICAS 77
Se necesita información precisa sobre la relación entre los coeficientes de losdesarrollos en serie de las funciones fi, g y g f . A tal fin ponemos:
fi =∑α =0
aiαxα, 1 ≤ i ≤ p,
yg =
∑β
bβuβ , u = (u1, . . . , up).
Representemos la serie formal de Taylor de g f como:
g(f(x)) =∑γ
cγxγ .
Obsérvese que los coeficientes cγ son calculables y responden a una expresiónde la forma:
cγ = Pγ,|γ|+1
((a1α)|α|≤|γ|, . . . , (a
pα)|α|≤|γ|, (bβ)|β|≤|γ|
)donde Pγ,k
((y1α)|α|≤|γ|, . . . , (y
pα)|α|≤|γ|(zβ)|β|≤|γ|
)es un polinomio con coeficien-
tes positivos y grado k en las variables:
((y1α)|α|≤|γ|, . . . , (ypα)|α|≤|γ|, (zβ)|β|≤|γ|) ∈ RNn(|γ|) × . . .RNn(|γ|) × RNp(|γ|) ,
y donde Nn(k) = card α ∈ Nn : |α| ≤ k. Es importante subrayar que talespolinomios Pγ,k son universales en el sentido de que no dependen de las funcionesf y g. De esta relación se sigue que si mayoramos las fi y g, la serie formalcorrespondiente a la composición de las mayorantes, mayora a la serie formal deg f .
Nótese ahora que:
fi ≪Mrs
r − si = 1, . . . , p s =
∑xi ,
pues f(0) = 0. Por otro lado,
g ≪ Mr
r − σσ =
∑uj ,
luego
g f ≪ M
r
r − s
1− pM+rr2 s
siendo ésta última analítica en |s| < r2/(pM + r) luego analítica en |x1|+ · · ·+|xn| < r2/(pM + r). Como corolario, g f es analítica.
Observación 3.2. La función:
r − s
1− pM+rr2 s
= (r − s)∞∑
n=0
(pM + r
r2
)n
sn = r +∞∑
n=1
cnsn,

78 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
donde
cn =pM
r
(r + Pm
r2
)n−1
n ≥ 1.
Luego:r − s
1− pM+rr2 s
=∑α
c|α||α|!α!
xα.
Esto prueba la afirmación de analiticidad formulada más arriba
La siguiente propiedad se conoce como el principio de prolongación analítica(compárese con el caso de una variable compleja).
Propiedad 3.8. Supongamos que f, g : Ω → R son analíticas en un dominioΩ ⊂ Rn y que ∃x0 ∈ Ω tal que ∂αf(x0) = ∂αg(x0) para cada α ∈ Nn. Entoncesf(x) = g(x) para todo x ∈ Ω.
Demostración. El conjunto x ∈ Ω : ∀α ∂αf(x) = ∂αg(x) es no vacío, cerradoy abierto.
Teorema 3.9 (Teorema de la Función Implícita [11]). Sean
f : Uabierto ⊂ Rn × Rm −→ Rm
(x, y) 7−→ f(x, y),
una función real analítica, (x0, y0) ∈ U tales que:
i) f(x0, y0) = 0,
ii)∂f
∂y(x0, y0) ∈Mm×m(R) es no singular.
Entonces existe un entorno de (x0, y0) en el que las soluciones de la ecuación
f(x, y) = 0,
son exactamente de la forma (x, y) = (x, h(x)) donde h : V ⊂ Rn → Rm es unafunción real analítica, x0 ∈ V y h(x0) = y0.
Demostración. La existencia y unicidad de h, con h de clase C∞ en un ciertoentorno de x0 es consecuencia de la versión estándar del teorema de la funciónimplícita. Se trata de probar que la serie formal de Taylor de h
h(x) =∑α
cα(x− x0)α,
converge en un entorno de x0.Para probar este extremo suponemos sin pérdida de generalidad que x0 = 0
e y0 = 0. Llamando L0 =∂f
∂y(x0, y0) escribimos la ecuación en la forma:
y = g(x, y),

3.2. EL PROBLEMA GENERAL DE CAUCHY 79
dondeg(0, 0) = 0
∂g
∂y(0, 0) = 0.
Basta tomar g(x, y) = y − L−10 f(x, y). Se tiene ahora que:
cα = Pα((∂βx∂
γy g(0, 0))|α|+|β|≤|α|, (cθ)|θ|<|α|),
en donde Pα es una función vectorial polinómica de todos sus argumentos cuyoscoeficientes son positivos. Esto implica que si g(x, y) ≪ G(x, y), e
y = G(x, y) (3.2)
define y = H(x) donde H es analítica, entonces h ≪ H y h es analítica en uncierto entorno de x = 0 que es lo que se busca. Bien, se toma como mayorante:
Gi(x, y) =rM
r − s− σ−M −M
σ
r:= ψ(s, σ) i = 1, . . . ,m,
donde s = x1 + · · ·+ xn, σ = y1 + · · ·+ ym. Para esta elección las ecuaciones:
yi = ψ(s, σ) ⇒ σ = mψ(s, σ) ⇒ σ = h1(s),
con h1(s) analítica y h1(0) = 0, por tanto la solución de (3.2) cerca de (x, y) =(0, 0) es yi = ψ(s, h1(s)) que es una función analítica y hemos terminado.
Observación 3.3. Una expresión explícita de h1 es:
h1(s) =1
2
r2
mM + r− s−
√(r2
mM + r− s
)2
− 4Mr
M + rs
.
Para comprobar que es analítica cerca de cero es útil recordar el desarrollobinomial:
(1 + x)α =
∞∑k=0
α(α− 1) . . . (α− k + 1)
k!xk (α ∈ R).
3.2. El problema general de CauchyRecordemos que N(k) = card α ∈ Nn/|α| ≤ k y RN(k) = (yα)/|α| ≤ k,
donde los índices α se toman con el orden que ya se introdujo. Asimismo, sea
F0 : Ω× RN(k) −→ R(x, (yα)) 7−→ F0(x, (yα)
una función continua.Consideremos una superficie simple S ⊂ Ω de clase Ck+1 en un dominio
Ω ⊂ Rn, S = x = g(s) : s ∈ U, siendo U ⊂ Rn−1 un dominio abierto y

80 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
g ∈ Ck+1(U,Rn) y una familia de k funciones φ0(x), . . . , φk−1(x) definidas2en S tales que φi ∈ Ck−i(S). Fijemos en S uno cualquiera de los dos camposunitarios normales ν(x) de clase Ck. Se dice que una función u(x) ∈ Ck(U),donde U es un entorno abierto de S en Ω, es una solución local del problema deCauchy con datos φ0(x), . . . , φk−1(x):
F0(x, (∂αu)|α|≤k) = 0, x ∈ U ⊂ Ω
∂iu
∂νi(x) = φi(x), x ∈ S, 0 ≤ i ≤ k − 1,
(3.3)
si F (x, u(x), (∂αu(x))|α|≤k) = 0 en U y si
∂iu
∂νi(x) =
di
dtiu(x+ tν(x))|t=0
= φi(x), (3.4)
en S, 0 ≤ i ≤ k − 1. La elección de las k primeras derivadas normales ∂iu/∂νi,0 ≤ i ≤ k− 1 en S no es caprichosa. En efecto, se puede considerar el problemade Cauchy más general
F0(x, (∂αu)|α|≤k) = 0, x ∈ U ⊂ Ω
∂αu(x) = φα(x), x ∈ S, 0 ≤ |α| ≤ k − 1,(3.5)
que consiste fijar como datos en S todas las derivadas de u de orden α con|α| ≤ k − 1; es decir:
∂uα(x) = φα(x), x ∈ S, |α| ≤ k − 1, (3.6)
siendo cada una de las φα(x) de clase Ck−|α| en S. En las líneas que siguen seprueba que tales problemas son esencialmente equivalentes. En efecto, conocerlas φα en (3.6) permite calcular las φi en (3.4). Sin embargo, las φα no se puedendar de manera independiente: deben cumplir condiciones de compatibilidad quelas hacen depender de las k derivadas normales en (3.4) (ver (3.10)).
También se definirán las condiciones de caractericidad que deben ser satisfe-chas por ecuaciones y datos en los problemas problemas a considerar. Por otraparte, como los métodos de existencia de soluciones que siguen se apoyan enargumentos locales, es decir se basan en construir soluciones u(x) de (3.3) enun cierto entorno V de cada punto x0 ∈ S, vamos a estudiar transformacioneslocales de (3.3) que lo van a normalizar y, de paso, permitirán introducir elconcepto de caractericidad más conveniente.
Como se sabe del Capítulo 2, cerca de cada x0 = g(s0) ∈ S se tiene laexistencia de entornos V0 = |x−x0| < ε en Rn y U0 = |s− s0| < ε× (−ε, ε)en Rn−1 × R tales que la aplicación:
H : U0 −→ V0
(s, t) 7−→ x
2φ(x) ∈ Cl(S) si ∃Φ(x) de Cl en Rn tal que φ = Φ|S .

3.2. EL PROBLEMA GENERAL DE CAUCHY 81
definida por:x = g(s) + tν(g(s)) (3.7)
es Ck con inversa Ck:
s = S(x), t = T (x), x ∈ V0.
Pues bien, en V0 el problema (3.3) es equivalente al problema:F1(s, t, U, (∂
βs ∂
γt U)|β|+γ≤k) = 0, (s, t) ∈ U0
∂iU
∂ti(s, 0) = φi(s), x ∈ S, 0 ≤ i ≤ k − 1,
(3.8)
φi(s) := φi(g(s)), donde U(s, t) = u(g(s)+tν(g(s))) y, como puede comprobarse:
∂iU
∂ti(s, 0) =
∂iu
∂νi(g(s)),
para cada 0 ≤ i ≤ k − 1. En efecto, nótese que aplicando la regla de la cadenase tiene:
∂αu =∑
|β|+γ≤|α|
aβγ(x)∂βs ∂
γt U.
Obsérvese que los coeficientes aβγ(x) dependen de α. Veamos ahora que si seconocen las k derivadas normales de (3.4) también se conocen todas las derivadasde (3.6) sobre S. En efecto,
∂βs ∂γt U(s, 0) = ∂βs φγ(s), |β|+ γ ≤ k − 1,
de donde,∂αu =
∑|β|+γ≤|α|
aβγ(x)∂βs φγ .
Por el contrario, si se conocen todas las derivadas ∂αu = φα de (3.6) entoncesse obtienen inmediatamente todas las derivadas normales (3.4) pues:
φi(x) =∂iu
∂νi(x) =
∑|α|=i
1
α!∂αu(x)να =
∑|α|=i
1
α!φαν
α, 0 ≤ i ≤ k − 1. (3.9)
Sin embargo las φα deben estar sujetas a condiciones de compatibilidad queimpiden que se puedan tomar arbitrariamente. Teniendo en cuenta (3.9) y lasrelaciones de más arriba, las condiciones de compatibilidad son:
φα(x) = ∂αu =∑
|β|+γ≤|α|
aβγ(x)∂βs φγ ,
para cada |α| ≤ k − 1, x ∈ S. Es decir, las condiciones (3.6) se relacionan conlas (3.4) mediante:
φα(x) = Pα(x, (φi(x))i≤|α|). (3.10)

82 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
En conclusión, bajo las condiciones de compatibilidad (3.10), los problemas(3.3) y (3.5) son equivalentes. Por otra parte (3.8) es el equivalente local deambos problemas. Esta es la razón por la que en el problema general de Cauchy(3.3) sólo se impusieron datos sobre las derivadas normales.
En virtud del cambio (3.7) sólo consideraremos de aquíen adelante el pro-blema (3.3) en su versión (3.8):
F1(s, t, (∂βs ∂
γt u)|β|+γ≤k) = 0, (s, t) ∈ U0
∂iu
∂ti(s, 0) = φi(s), x ∈ S, 0 ≤ i ≤ k − 1,
(3.11)
en donde hemos escrito u(s, t) en lugar de U(s, t) y φi en vez de φi.Vamos ahora a introducir el concepto de no caractericidad. En líneas gene-
rales, diremos que (3.11) es no característico si en la ecuación se puede despejarla derivada ∂kt u(s, t) en términos de las restantes derivadas de orden inferior:
∂kt u = F2(s, t, (∂βs ∂
γt u)|β|+γ≤k,γ<k).
La definición precisa es como sigue:
Definición 3.10. Se dice que el problema de Cauchy (3.11) es no caracterís-tico con respecto a los datos φ0(s), . . . , φk−1(s) si existen funciones reales ycontinuas:
G = G(s, t, (yβ,γ)|β|+γ≤k,γ<k
), ψ = ψ(s),
definidas en s ∈ U0, |t| < ε,
y ∈ Q := (yβ,γ)|β|+γ≤k,γ<k : |yβ,γ − ∂βs φγ(s)| < ε1, |β|+ γ ≤ k, γ < k
para ciertos ε, ε1 positivos, cumpliendo:
ψ(s) = G(s, 0, (∂βs φγ(s))|β|+γ≤k,γ<k),
junto con:∂F1
∂y0,k(s, 0, (∂βs φγ(s))|β|+γ≤k,γ<k, ψ(s)) = 0, (3.12)
de forma que la única solución(s, t, (yβ,γ)|β|+γ≤k
)de la ecuación:
F1
(s, t, (yβ,γ)|β|+γ≤k
)= 0,
con s ∈ U0, |t| < ε, y ∈ Q, |y0,k − ψ(s)| < ε2 se escribe en la forma:
y0,k = G(s, t, (yβ,γ)|β|+γ≤k
).
Observación 3.4. Que el problema (3.11) es no carcaterístico significa que laecuación es de orden k con respecto a la variable t cuando se la observa “cerca”de los datos.

3.2. EL PROBLEMA GENERAL DE CAUCHY 83
Observación 3.5. En la práctica se busca una solución z = ψ(s) de la ecuación:
F1(s, 0, (∂βs φγ(s))|β|+γ≤k,γ<k, z) = 0,
que cumpla la condición de transversalidad (3.12). El teorema de la funciónimplícita permite entonces obtener la función G.
Si en el contexto del problema original (3.3), F0, S y los datos son analíticosel problema local (3.12) da lugar a F1 y datos correspondientes que son analí-ticos. Si en ese caso, F1 cumple la condición (3.12) para cierta ψ, la función Gresultante también es analítica (Teorema 3.9).
Ejemplo 3.6. Consideremos la ecuación de orden 2 en dos variables:
F (s, t, u, us, ut, uss, ust, utt) = 0,
donde:F (s, t, y00, y10, y01, y20, y11, y02) = F (s, t, Y, y02),
siendo Y = (y00, . . . , y11), y donde:
F = a(s, t, Y )y202 + 2b(s, t, Y )y02 + c(s, t, Y ),
en donde se considera que a(s, t, Y ) = 0 y b2−ac > 0. Si u(s, 0) = φ0, ut(s, 0) =φ1 entonces:
G =−b±
√b2 − ac
a,
mientras que los candidatos a ψ(s) son:
ψ =−b±
√b2 − ac
a,
donde en la última ecuación las funciones están evaluadas en t = 0 y en lascondiciones iniciales.
Definición 3.11. Se dice que el problema (3.3) es no característico cuando elproblema transformado (3.11) es no característico.
Observación 3.7. Que (3.3) es no característico significa que la ecuación es deorden k en la dirección de la normal y que dicha derivada se puede despejar entérminos de las restantes derivadas, cerca de la superficie S y de los datos deCauchy.
A partir de ahora nos centraremos en el estudio de problemas de Cauchy dela forma:
∂kt u = F (s, t, (∂βs ∂γt u)|β|+γ≤k,γ<k), s ∈ U , |t| < ε
∂iu
∂ti(s, 0) = φi(s), 0 ≤ i ≤ k − 1, s ∈ U ,
(3.13)
donde U ⊂ Rn−1 es un dominio y ε > 0. Sin embargo conviene recordar que(3.13) es siempre la versión local -tras una transformación de coordenadas deltipo (3.7)- del problema de Cauchy general (3.3), cuando éste es no caracterís-tico.

84 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
3.3. Teorema de Cauchy-Kowalevski
En lo que sigue se supone que:
F : U × (−ε, ε)× RN(k)−1 → R(s, t, (yα)) → F (s, t, (yα))
con U ⊂ Rn−1 un dominio, es una función analítica. Asimismo se supondráque las funciones φ0(s), . . . , φk−1(s) son anlíticas en U . Tenemos entonces elsiguiente resultado:
Teorema 3.12 (Teorema de Cauchy-Kowalevski). Bajo las hipótesis preceden-tes el problema de Cauchy (3.13) admite una única solución local analítica(u,Ω), donde Ω es un entorno abierto y conexo de (s, 0) : s ∈ U en Rn.La unicidad debe entenderse en el sentido siguiente: si (u1,Ω1) es otra soluciónlocal analítica entonces u = u1 en la componente conexa de Ω∩Ω1 que contienea U × 0. Más aún se tiene que u(x) extiende u1(x) de Ω ∩ Ω1 a Ω.
Observaciones 3.8.
a) La propiedad de unicidad anunciada sólo concierne a soluciones analíticas.Es consecuencia de la propiedad de continuación para funciones analíticas ydel hecho de que, para cada (s0, 0), s0 ∈ U , el desarrollo de Taylor de cualquiersolución analítica es el mismo. En consecuencia cualquier solución analítica u(x)en (s0, 0) está definida en un entorno de “seguridad” V0 = |s| < ε, |t| < ε, o esprolongable a dicho entorno. Además, todas las soluciones analíticas, definidasen V0 deben coincidir en tal entorno. Por contraste a las ecuaciones diferencialesordinarias es muy complicado aquí clarificar que podría significar la noción desolución analítica no continuable.
b) La demostración consiste en construir, para cada (s0, 0), s0 ∈ U una soluciónlocal analítica (v0(x),V0) siendo V0 de la forma V0 = |s| < ε0, |t| < ε0. Como,por el principio de prolongación analítica, v1(x) = v2(x) en V1 ∩ V2 si se dael caso de que V1 ∩ V2 = ϕ, entonces la solución (u,Ω) se obtiene haciendoΩ =
∪σi∈U Vi y definiendo u(x) en Ω de forma que u|Vi
= vi para cada Vi. Poreso basta con demostrar el siguiente resultado.
Proposición 3.13. Supongamos que F (s, t, (yβ,γ)|β|+γ≤k,γ<k) es analí tica,mientras que las funciones φ0(s), . . . , φk−1(s) son analí ticas en un entorno de(s, t) = (0, 0). Entonces (3.13) admite una única solución analítica u(x) definidaen un entorno V = |s| < ε, |t| < ε de (s, t) = (0, 0).
La demostración de la proposición previa se deduce de la siguiente propiedad.
Proposición 3.14. En las condiciones de la Proposición 1 existen n − 1 fun-ciones matriciales m × m, analíticas A1 = A1(s, Y ), . . . , An−1 = An−1(s, Y ),Y ∈ Rm, y una función vectorial analítica B = B(s, Y ) ∈ Rm, de forma que laexistencia de una solución analítica (u,V) en las condiciones de la Proposición

3.3. TEOREMA DE CAUCHY-KOWALEVSKI 85
1 equivale a la existencia de una solución (Y,V), Y = Y (s, t) = (yj(s, t))1≤j≤m
del sistema m×m, Yt =
∑i=1,n−1
Ai(s, Y )Ysi +B(s, Y )
Y (s, 0) = 0.
A su vez, la prueba de tal proposición se reduce a la del siguiente caso sencillo,cuya demostración es la generalización inmediata del método de la mayorantepara ecuaciones diferenciales ordinarias de Briot-Bouquet y Cauchy.
Proposición 3.15. Supongamos que a = a(s, u), b = b(s, u) son analíticas enun entorno de (s, u) = (0, 0), (s, u) ∈ R2. Entonces el problema:
ut = a(s, u)us + b(s, u)
u(s, 0) = 0,
admite una única solución analítica definida en un entorno (s, t) ∈ (−ε, ε) ×(−ε, ε).
Observaciones 3.9.a) El teorema de Cauchy-Kowalevski se puede extender, sin alterar la demos-tración, al caso en que u(s, t) toma valores complejos. Habremos de suponerentonces que:
F : U × (−ε, ε)× CN(k)−1 −→ C(s, t, (yα)) 7−→ F (s, t, (yα))
es analítica 3. Análogamente, sin apenas cambios en la demostración, el resul-tado es cierto para sistemas de ecuaciones, e. d., la función u(s, t) toma valoresvectoriales.
b) El teorema de Cauchy-Kowalevski es falso si se intenta relajar “analítica” porclase C∞. En efecto si tomamos el problema:
uxx + uyy = 0, x2 + y2 < ε
u(x, 0) = f(x)
uy(x, 0) = g(x),
la existencia de una solución C2 en un entorno de (0, 0) conlleva -lo que no esinmediato- la analiticidad de f y g en x = 0. El problema carecerá pues desoluciones si f o g son C∞ y no anlí ticas en x = 0. Más notable es el siguienteresultado -que tampoco es en absoluto inmediato- de Lewy (1957) (véase elFolland). Si F (t) es C∞ pero no analítica en un entorno de t = 0 la ecuación deprimer orden:
ux + iuy − 2(x+ iy)ut = F (t),
carece de soluciones C1 en un entorno de (x, y, t) = (0, 0, 0) ∈ R3.3Es más estético suponer que F es analítica en (s, t, (yβ,γ)) ∈ Cn−1 × C× CN(k)−1, |s| <
ε, |t| < ε, restringiendo después s ∈ Rn−1, t ∈ R

86 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
c) El teorema de Cauchy–Kowalevski requiere para su validez que la superficieS, datos y ecuación en (3.3) sean no cacrteísticos, o si se quiere, que en (3.13)hayamos despejado la derivada del orden de la ecuación en la variable t y enel segundo miembro no aparezcan derivadas en t de orden superior (es decir,precisamente en el formato en el que se ha escrito (3.13)). En efecto, el problemade Cauchy,
ut = uxx x ∈ R, t > 0
u(x, 0) = f(x) ,
con f analítica en x = 0 carece en general de soluciones analí ticas en un entornocompleto |x| < ε, |t| < ε de (x, t) = (0, 0) (véase la sección de problemas). Ellose debe a que el problema no es legítimamente de orden dos en t.
d) El teorema de Cauchy–Kowalevskii sólo afirma la unicidad de soluciones analí-ticas para (3.13). Sin embargo no queda excluida la existencia de otras posiblessoluciones no analíticas. Un teorema debido a Holmgren (v. el libro de FritzJohn [11]) asegura que si F es lineal en (3.13), es decir,
∂kt u =∑
|β|+γ≤k,γ<k
aβγ(s, t)∂βs ∂
γt u+ f(s, t) s ∈ U , |t| < ε
∂iu
∂ti(s, 0) = φi(s), 0 ≤ i ≤ k − 1, s ∈ U ,
(3.14)
entonces tal problema sólo admite la solución analítica. De hecho, lo que sedemuestra es que si los coeficientes aβγ son analíticos entonces (PL) admite alo más una solución clásica para f ∈ C(U) y φi ∈ Ck−i(U ∩ t = 0).
e) Finalmente, otra imperfección del resultado es la no dependencia continua enlos datos. Asílo prueba el siguiente ejemplo de Hadamard,
uxx + uyy = 0
u(x, 0) = 0
uy(x, 0) =1
ksen kx ,
k ∈ N. La solución del problema (vía separación de variables) es
uk(x, y) =1
k2(sen kx)(senh ky) .
Mientras los datos decrecen exponencialmente a 0, cualquiera que sea (x0, y0)tan próximo al eje 0x como se desee, x0 = 0 (mod. Z), la sucesión uk(x0, y0)siempre contiene subsucesiones uk′(x0, y0) tales que |uk′(x0, y0)| → +∞.
3.4. EjerciciosEn los problemas que siguen α, β, γ ∈ N∗n son multiíndices mientras que
x, y ∈ Rn son vectores.

3.4. EJERCICIOS 87
1. (Teorema Binomial). Demuéstrese que:
(x+ y)α =∑
β,γ,β+γ=α
α!
β!γ!xβyγ .
2. (Desarrollo de Taylor para un polinomio en Rn). Sea f(x) un polinomiode grado m, x ∈ Rn, pruébese que:
f(x) =∑
|α|≤m
1
α!∂αf(0)xα.
3. (Teorema Multinomial). Para cualquier m ∈ N, y x = (x1, . . . , xn) ∈ Rn,pruébese que:
(x1 + · · ·+ xn)m =
∑|α|=m
m!
α!xα.
4. (Teorema de Leibnitz). Sean f y g funciones de clase Cm. Pruébese que:
∂α(fg) =∑
β,γ,β+γ=α
α!
β!γ!∂βf∂gg,
∀α, |α| ≤ m.
5. Demuéstrese que para cada multiíndice α ∈ Nn se tiene:
α! ≤ |α|! ≤ n|α|α!.
6. Prúebese que ∂βxα =α!
(α− β)!xα−βsi α ≥ β y ∂βxα = 0 en otro caso.
7. Prúebese que si f : Rn → R es Cm, x, y ∈ Rn, t ∈ R, entonces:
dm
dtmf(x+ ty) =
∑|α|=m
|α|!α!
∂αf(x+ ty)yα.
8. Sean∑c+α y
∑c−α las partes positiva y negativa de
∑cα (es decir c+α =
1
2(cα + |cα|), c−α = −1
2(cα − |cα|)). Demuéstrese que
∑cα converge sí y
sólo sí convergen∑c+α y
∑c−α , siendo:
∑cα =
∑c+α−
∑c−α . Demuéstrese
asimismo que∑cα converge sí y sólo sí converge
∑|cα|.
9. Demuéstrese que para α, β ∈ Nn, max1≤i≤n |xi| < 1:∑α≥β
α!
(α− β)!xα−β =
β!
(1− x1)β1+1 . . . (1 + xn)βn+1.

88 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
Análgomente:∑α≥β
|α|!(α− β)!
xα−β =|β|!
(1− x1 − · · · − xn)1+|β| ,
siempre que |x1|+ . . . |xn| < 1.
10. (Método de la Mayorante, ecuaciones diferenciales ordinarias). Sea f =f(t, x) real y analítica en un entorno de (t, x) = (0, 0). Pruébese que elproblema de Cauchy:
x′ = f(t, x)
x(0) = 0
admite una solución analítica en un entorno |t| < ε de t = 0. En 1889,H. Poincaré introdujo una mejora del resultado precedente que establecela dependencia analítica con respecto a parámetros y datos iniciales. Másprecisamente, se supone que:
f = f(t, x, λ),
es analítica cuando t ∼ t0, x ∼ x0, λ ∼ λ0. Se representa por:
x = x(t, τ, ξ, λ),
la solución (única y, según se sabe ya, analítica en t ∼ t0) del problema:x′ = f(t, x, λ)
x(τ) = ξ.
Pruébese que x = x(t, τ, ξ, λ) es analítica en (t, τ, ξ, λ) ∼ (t0, t0, x0, λ0) esdecir, x = x(t, τ, ξ, λ) se puede describir mediante la serie de potencias:
x(t, τ, ξ, λ) =∑α
cα(t− t0)α1(τ − t0)
α2(ξ − x0)α3(λ− λ0)
α4 ,
donde α = (α1, α2, α3, α4) y la serie converge absolutamente en un ciertoentorno de (t0, t0, x0, λ0) en R4.
11. (Método de la mayorante, ecuaciones en derivadas parciales de primerorden I ). Sean a = a(s, u), b(s, u) reales y analíticas en un entorno de(s, u) = (0, 0) en R2. Demuéstrese que:
ut = a(s, u)us + b(s, u)
u(s, 0) = 0
admite una solución analítica u(s, t) definida en un entorno |s|, |t| < εde (0, 0).

3.4. EJERCICIOS 89
12. Supongamos que u = u(s1, . . . , sn−1, z) es analítica en un entorno delpunto:
(s1, . . . , sn−1, z) = (0, . . . , 0, 0) ∈ Rn−1 × R.
Demuéstrese que existen constantes positivas M, ε tales que si u(s, z) =∑α,k cαks
αzk (s = (s1, . . . , sn−1)) entonces:∑α,k
cαksαzk ≪
∑α,k
cαksαzk,
en donde: ∑α,k
cαksαzk = ϕ(s, z),
donde:
ϕ =ε2M
(ε− s1 − . . . sn−1)(ε− z),
siempre que |s1|+ · · ·+ |sn−1| < ε, |z| < ε.
13. (Método de la mayorante, ecuaciones en derivadas parciales de primerorden II ). Sean a = a(s, u), b = b(s, u), s = (s1, . . . , sn−1), reales yanalíticas en un entorno de (s, u) = (0, 0) en Rn−1×R (s = (s1, . . . , sn−1)).Demuéstrese que:
ut = a1(s, u)us1 + . . . an−1(s, u)usn−1 + b(s, u),
u(s, 0) = 0
admite una solución analítica u(s, t) definida en un entorno |s1|, . . . , |sn|, |t| <ε de (0, 0) ∈ Rn−1 × R.
Indicación. Al mayorar, ténganse en cuenta los Ejercicios 10 y 12.
14. Sean A = A(s, u) ∈ Mm×m y B = B(s, u) ∈ Rm analíticas en un entornode (0, 0) ∈ R2. Consideremos el sistema:
Ut = A(s, U)Us +B(s, U)
U(s, 0) = 0.
Demuéstrese que admite un sistema mayorante de la forma:
Ut = A(s, U)Us + B(s, U)
U(s, 0) = 0,(3.15)
donde A = (aij), B = (bi) y aij = bi = φ(s, u), siendo φ =ε2M
(ε− s)(ε− u)para ciertos M ≥ 0, ε > 0. Pruébese que el sistema mayorante admite unaúnica solución analítica, definida cerca de (0, 0).

90 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
15. Supóngase que en el Ejercicio 12 tomamos la variable z ∈ Rm y que u(s, z)es analítica cerca de (0, 0) ∈ Rn−1 × Rm. Pruébese ahora que si
u(s, z) =∑α,β
cαksαzβ ,
entonces se puede construir una serie mayorante:
u(s, z) =∑α,β
cαksαzβ ,
cuya suma, para |s1|+ . . . |sn−1| < ε, |z1|+ . . . |zm| < ε, ε > 0 suficiente-mente pequeño, viene dada por:
ϕ =ε2M
(ε− s1 − . . . sn−1)(ε− z1 − . . . zm), M ≥ 0.
16. Sean A = A(s, U) ∈Mm×m y B = B(s, U) ∈ Rm analíticas en un entornode (0, 0) ∈ Rn−1 × Rm. Consideremos el sistema:
Ut =n−1∑i=1
A(si, U)Usi +B(s, U)
U(s, 0) = 0.
Como en casos anteriores, demuéstrese que admite un sistema mayorantede la forma:
Ut =
n−1∑i=1
A(si, U)Usi +B(s, U)
U(s, 0) = 0.
donde A = (aij(s, U), B = (bi(s, U)) y donde aij = bi = ϕ(s, U), siendo
φ =ε2M
(ε− s1 − · · · − sn−1)(ε− U1 − . . . Um)
para ciertos M ≥ 0, ε > 0. Pruébese que el sistema mayorante admite unaúnica solución analítica, definida cerca de (0, 0).
17. Soluciones analíticas de la ecuación del calor. Se considera el problema deCauchy:
ut = uxx
u(x, 0) = f(x),(3.16)
donde suponemos que f = f(x) es par y analítica en un entorno de x = 0 y,por tanto, f(x) =
∑a2kx
2k, para |x| < ρ donde 0 < ρ−1 = lim |a2n|12n
(ρ es el radio de convergencia de la serie). Demuéstrese que basta conque (3.16) admita una solución analítica local en todo un entorno |x| <

3.4. EJERCICIOS 91
ε, |t| < ε de (x, t) = (0, 0) para que necesariamente f(x) sea analítica entodo R (es decir entera) 4. Demuéstrese que además f(x) ha que satisfacerla estimación:
|f(x)| ≤ ea|x|2
, (3.17)
para cierta constante positiva a > 0. ¿Contradice este hecho al teoremade Cauchy-Kowalevski ? ¿Qué se puede decir si f(x) impar? ¿Y en el casogeneral?
Indicación. La analiticidad de u(x, t) cerca de (0, 0) implica la de u(0, t) =∑ (2k)!
k!a2kt
k. Si ρ1 es el radio de convergencia de ésta última serie, prué-bese que ρ1 > 0 implica ρ = +∞.
18. Hállese la solución analítica del problema:
utt + uss = 0
u(s, t) = 0, s ∈ R, k ∈ N
ut(s, 0) = ke−k/2 sen kx s ∈ R, k ∈ N.
Indicación. Una forma alternativa es hallar soluciones en forma de pro-ducto u(s, t) = S(s)T (t).
19. Sea Ω ⊂ R2 un dominio simétrico con respecto al eje Ox1 que corta adicho eje en un intervalo abierto I. Sea u(x1, x2) una función armónica enΩ (es decir ∆u = 0 en Ω) que satisface u(x1, 0) = 0. Demuéstrese que ues impar en y es decir: u(x,−y) = −u(x, y) en Ω.
Indicación. Dése por conocido el resultado que más se demostrará yque afirma que si u ∈ C2(Ω) es armónica en Ω es también analítica en Ω(Capítulo 9).
20. Sea u(x, y, t) una solución de la ecuación de las ondas:
utt = ∆u, (n = 2).
Considérense los datos de Cauchy:
u(x, y, t) = f(x, y, t), ut(x, y, t) = g(x, y, t),
sobre la superficiet = ϕ(x, y). (3.18)
Suponiendo que f, g, ϕ son analíticas y que (3.18) satisface una condiciónadecuada de “no caractericidad”, redúzcase dicho problema a otro norma-lizado en el que S se transforme en el plano t = 0
4Se mostrará en el Capítulo 5 que la fórmula de Poisson proporciona, bajo condicionesadecuadas, soluciones analíticas de (3.17) en t > 0 . Aquí se consideran soluciones analíticas,no en t > 0 sino también en −ε < t, con ε > 0.

92 CAPÍTULO 3. EL PROBLEMA DE CAUCHY
21. (*) Sea u(x, y) una solución de ∆u = 0 expresada en coordenadas polaresx = r cos θ, y = r sen θ. En el círculo unidad r = 1 tómense los datos deCauchy:
u = f(θ), ur = g(θ),
donde f y g son reales analíticas y periódicas de periodo 2π. Demuéstreseque existe una solución analítica definida para todo θ real y |r − 1| sufi-cientemente pequeño. Prúbese que si f y g son polinomios trigonométricos(es decir, de la forma p(cos θ, sen θ) donde p es un polinomio) entonces lassoluciones existen en todo R2\0.Indicación. Utilícense soluciones especiales de la forma einθr±n.

Capítulo 4
Clasificación de ecuacioneslineales. Ecuación de ondas
4.1. Clasificación de ecuaciones linealesComo se dijo en el Capítulo 1, un operador diferencial (lineal) de orden m y
coeficientes en Ω es una aplicación:
L : Cm(Ω) −→ C(Ω)u 7−→ Lu,
donde,Lu =
∑|α|≤m
aα(x)∂αu,
con los coeficientes aα ∈ C(Ω). Se define la parte principal de L como el opera-dor:
L0u =∑
|α|=m
aα(x)∂αu.
La forma característica en el punto x del operador L se define como el polinomiohomogéneo de grado m dado por:
σx(L, ξ) = σx(ξ) =∑
|α|=m
aα(x)ξα.
Un vector ξ ∈ Rn \ 0 se dice característico para L si se tiene que:
σx(ξ) = 0. (4.1)
La variedad característica carx(L) de L en x se define como el conjunto de losξ ∈ Rn que cumplen (4.1).
Finalmente, una noción que nos encontramos en el Capítulo 3 es la de su-perficie característica. Se dice que una superficie C1, S es “no característica” (r.
93

94 CAPÍTULO 4. ECUACIÓN DE ONDAS
“característica”) si para cada x ∈ S se tiene que σx(ν(x)) = 0 (r. σx(ν(x)) = 0),con ν(x) un campo normal a S.
Ejercicio 4.1. Demuéstrese que si ξ es no característico para L en x entoncesL es de orden m en la dirección de ξ en el sentido de que una transformación,digamos lineal, x → x′ que lleve la dirección de ξ al eje x′1 transformará eloperador en otro donde aparece la derivada pura de orden m en la variablex′1, afectada de un coeficiente que no se anula en las proximidades del puntox′ = x′(x).
Ejercicio 4.2. Sea L0 la parte principal del operador L. Pruébese que:
L0(e⟨x,ξ⟩) = σ(ξ)e⟨x,ξ⟩,
donde hemos suprimido la referencia a x tanto en L0 como en σ y
⟨x, ξ⟩ =n∑
i=1
xiξi.
Ejemplo 4.1. Los operadores que siguen tienen las variedades característicasseñaladas:
1. Lu = ∂1u, carx(L) = ξ1 = 0 en Rn.
2. Lu = ∆u (operador Laplaciano), carx(L) = 0 en Rn.
3. Lu = ∂n+1u−∆u (operador del calor), carx(L) = ξ1 = · · · = ξn = 0 enRn+1.
4. Lu = ∂2n+1u −∆u (operador de ondas), carx(L) = ξ2n+1 =∑n
i=1 ξ2i en
Rn+1.
5. Lu = ∂1u+ i∂2u (operador de Cauchy-Riemann), carx(L) = 0 en R2.
6. Lu = ∆2u (operador biarmónico), carx(L) = 0.
La siguiente definición es crucial en la teoría de ecuaciones en derivadasparciales lineales.
Definición 4.1. Se dice que un operador diferencial lineal L es elíptico en Ωsi carece de vectores característicos en todo x ∈ Ω. En otros términos, si paratodo x ∈ Ω ∑
|α|=m
aα(x)ξα = 0 ⇒ ξ = 0.

4.2. TRANSFORMACIÓN DE OPERADORES DE SEGUNDO ORDEN 95
4.2. Transformación de operadores de segundoorden
Un operador general de segundo orden tiene la forma:
Lu =∑
i,j=1,...,n
aij∂iju+∑
i=1,...,n
ai∂iu+ a0u,
donde podemos suponer, al ser u ∈ C2(Ω), que aij = aji pues el grupo:
aij∂ij + aji∂jiu =1
2(aij + aji) ∂iju+
1
2(aij + aji) ∂jiu = a′ij∂ij + a′ji∂jiu,
donde ahora a′ij = a′ji.Si para sendos dominios Ω, Q de Rn se tiene un difeomorfismo C2
g : Ω −→ Qx 7−→ y = g(x),
es decir un cambio de las coordenadas x por las y entonces el operador sufreuna transformación:
L(∂x)u = L(∂y)u,
donde u(y) = u(g−1(y)) y
L(∂y)u =∑
i,j=1,...,n
aij∂iju+∑
i=1,...,n
ai∂iu+ a0u.
Se trata de establecer la relación entre los nuevos coeficientes (los de L) y losantiguos (los de L). Ahora:
∂xiu =∑k
∂u
∂yk
∂yk∂xi
=∑k
∂yk∂xi
∂yku
∂xixju =∑k,l
∂yk∂xi
∂yl∂xj
∂ykylu+
∑k
∂2yk∂xi∂xj
∂yku
∂αx u =
((∂y
∂x
)t
∂yu
)α
+∑
|β|<|α|
bβ∂βy u,
de forma que en la última igualdad entendemos que:
∂xu =
∂x1u...
∂xnu
=
(∂y
∂x
)t
∂yu =
∂x1y1 . . . ∂x1yn...
. . ....
∂xny1 . . . ∂xnyn
∂y1u
...∂ynu
,
y en el primer sumando, las derivadas de y con respecto a x se multiplican, lasderivadas con respecto a y se iteran.

96 CAPÍTULO 4. ECUACIÓN DE ONDAS
Definiendo la forma bilineal característica (por abuso de notación repetimosla notación de la forma característica):
σx : Rn × Rn −→ R(v, w) 7−→ σx(v, w),
dada por:σx(v, w) =
∑i,j
aij(x)viwj ,
tenemos que:
L(∂x)u =∑
i,j=1,...,n
aij∂iju+∑
i=1,...,n
ai∂iu+ a0u
=∑
i,j=1,...,n
aij
∑k,l=1,...,n
∂yk∂xi
∂yl∂xj
∂ykylu+
∑k=1,...,n
∂2yk∂xi∂xj
∂yku
+
∑i=1,...,n
ai
∑k=1,...,n
∂yk∂xi
∂yku
+ a0u
=∑
k,l=1,...,n
∑i,j=1,...,n
aij∂yk∂xi
∂yl∂xj
∂ykylu
+∑
k=1,...,n
∑i,j=1,...,n
aij∂2yk∂xi∂xj
+∑
i=1,...,n
ai∂yk∂xi
∂yku+ a0u
=∑
k,l=1,...,n
σx(∇yk,∇yl)∂ykylu+
∑k=1,...,n
(L1yk) ∂yku+ a0u,
donde el operador L1 es el resultado de suprimir de L el término de orden ceroen u, es decir:
L1u =∑
i,j=1,...,n
aij∂iju+∑
i=1,...,n
ai∂iu.
Por tanto,akl(y) = σg−1(y)(∇yk,∇yl)ak(y) = L1yk.
Ejemplo 4.2. 1) Laplaciano en coordenadas polares. En coordenadas polares,x = r cos θ
y = r sen θ,
r > 0, 0 < θ < 2π, se tiene:
∆u = aurr + 2burθ + cuθθ + dur + euθ,

4.2. TRANSFORMACIÓN DE OPERADORES DE SEGUNDO ORDEN 97
donde:a = ⟨∇r,∇r⟩ = 1
b = ⟨∇r,∇θ⟩ = 0
c = ⟨∇θ,∇θ⟩ = 1
r2
d = ∆r =1
re = ∆θ = 0.
Por tanto,
∆u = urr +1
r2uθθ +
1
rur.
2) Laplaciano en coordenadas cilíndricas. Cuando:x = r cos θ
y = r sen θ
z = z,
r > 0, 0 < θ < 2π, z ∈ R, el Laplaciano toma la forma:
∆u = urr +1
r2uθθ + uzz +
1
rur.
3) Laplaciano en coordenadas esféricas. Ahora,x = r senϕ cos θ
y = r senϕ sen θ
z = r cosϕ,
r > 0, 0 < ϕ < π, 0 < θ < 2π. Un poco de geometría, por ejemplo, noslleva a que:
⟨∇r,∇θ⟩ = ⟨∇r,∇ϕ⟩ = ⟨∇θ,∇ϕ⟩ = 0.
Como ϕ = arccos (z/r):
∇r = 1
r(x, y, z)
∇θ = 1
r senϕ(− sen θ, cos θ, 0)
∇ϕ =1
r2√x2 + y2
(zx, zy,−x2 − y2)
∆r =2
r∆θ = 0
∆ϕ =cosϕ
(r2 senϕ),
con lo que |∇ϕ|2 = 1/r2, con lo que:
∆u = urr +1
r2 sen2 ϕuθθ +
1
r2uϕϕ +
2
rur +
cosϕ
r2 senϕuϕ.
Equivalentemente,
∆u = urr +1
r2 sen2 ϕuθθ +
1
r2 senϕ(senϕ uϕ)ϕ+
2
rur.

98 CAPÍTULO 4. ECUACIÓN DE ONDAS
4.3. Clasificación de ecuaciones lineales
4.3.1. Operadores en el planoEn el caso del plano tenemos un operador de segundo orden L con coeficientes
continuos y definidos en un dominio plano Ω ⊂ R2,
Lu = a(x, y)uxx + 2b(x, y)uxy + c(x, y)uyy + d(x, y)ux + e(x, y)uy + f(x, y)u
= L0u+ d(x, y)ux + e(x, y)uy + f(x, y)u.
Nos proponemos encontrar nuevas coordenadas (ξ, η) en las que la parte prin-cipal L0 de L adopte la forma más sencilla posible. En otras palabras, hallarfunciones:
ξ = ξ(x, y)
η = η(x, y),
que simplifiquen la expresión de L0. Los coeficientes de L0 son:
a = σ(∇ξ,∇ξ) = a(x, y)ξ2x + 2b(x, y)ξxξy + c(x, y)ξ2y
b = σ(∇ξ,∇η) = a(x, y)ξxηx + b(x, y)(ξxηy + ξyηx) + c(x, y)ξyηy
c = σ(∇η,∇η) = a(x, y)η2x + 2b(x, y)ηxηy + c(x, y)η2y.
Nada más natural que estudiar la edp de primer orden:
a(x, y)ϕ2x + 2b(x, y)ϕxϕy + c(x, y)ϕ2y = 0. (4.2)
Como las construcciones que siguen son locales, trabajaremos en entornos ade-cuados de puntos P0 = (x0, y0) ∈ Ω. Por otra parte supondremos que:
a, b, c ∈ C1(Ω).
Admitiremos que a(P0) = 0. Caso contrario tendríamos b(P0) = 0, salvo que ay b se anulen en un entorno U de P0. En ese caso:
L0 = 2b(x, y)ux,y en U . (4.3)
Entonces, como la forma característica es:
σ(v, w) = b(v1w2 + v2w1),
para el cambio: x1 = x+ y
y1 = x− y
tendremos: a = 2b = −c, b = 0 y (3) toma la forma:
L0u = 2bux1x1 − uy1y1.
Luego (3) no es otra cosa que el operador de ondas (módulo b).

4.3. CLASIFICACIÓN DE ECUACIONES LINEALES 99
Por tanto, supondremos que a = 0 cerca de P0 ∈ Ω. La ecuación (2) seescribe entonces:
a
(ϕxϕy
)2
+ 2bϕxϕy
+ c = 0. (4.4)
Cabe considerar tres opciones.Caso hiperbólico. El discriminante:
d = b2 − ac > 0,
en Ω. La ecuación (4) equivale al par de ecuaciones:
ϕxϕy
=−b±
√d
a(:= λ±),
también:ϕx − λ±ϕy = 0. (4.5)
Hallar soluciones de (5) es hallar integrales primeras de:dx
dt= 1
dy
dt= −λ±.
A tal fin, resolvemos: dy
dx= −λ±
y(x0) = ξ,
y en la solución y = Y (x, ξ) despejamos –cerca de P0– ξ = ξ(x, y) (habrá unpar ξ, η correspondientes a los dos valores λ± de λ).
En efecto, consideramos:
H(x, y, ξ) = 0, (4.6)
con H(x, y, ξ) = y − Y (x, ξ) y (6) se cumple en (x0, y0, y0) mientras
Hξ(x0, y0, y0) = −1.
Basta entonces aplicar el teorema de la función implícita. Es importante observarque:
1− Yξ(x, ξ)ξy = 0,
luego ξy(P0) = 1 (luego ξx = λ±). Por otro lado,
∂(ξ, η)
∂(x, y)=
∣∣∣∣ξx ξyηx ηy
∣∣∣∣ = ξyηy(λ+ − λ−) = 2ξyηy
√d
a.
El valor del jacobiano es 2√d/a en P0, luego cerca de tal punto (ξ, η) define
un genuino cambio de variable. Las coordenadas ξ, η se llaman coordenadas

100 CAPÍTULO 4. ECUACIÓN DE ONDAS
características del operador L (terminología que es coherente con los Capítulos2 y 3, en particular ξ(x, y) = c1 y η(x, y) = c2 serán curvas características).
Bajo esta elección de coordenadas la parte principal del operador transfor-mado es:
L0u = 2buξη,
donde,b = a(x, y)ξxηx + b(x, y)(ξxηy + ξyηx) + c(x, y)ξyηy
= aλ+λ− + b(λ+ + λ−) + cξyηy = −2d
aξyηy.
Resumiendo, en el caso hiperbólico la nueva parte principal es,
L0u = −4d
aξyηyuξη.
Como mayor conclusión todo L hiperbólico en Ω puede escribirse localmentecomo el operador de ondas.
Ejemplos 4.3.
1) Para el operador de ondas:
cu = utt − c2uxx,
la ecuación de las curvas características es:
ϕ2t − c2ϕ2x = 0,
es decirϕt ∓ cϕx = 0,
luego una elección de las coordenadas características es:
ξ = x+ ct η = x− ct.
Así(d = c2):cu = −4c2uξη.
2) La ecuación:
uxx − 2 senxuxy − cos2 xuyy − cosxuy = 0,
se escribe:−2uξη = 0
en las coordenadas: ξ = y − cosx + x, ξ = y − cosx − x. Nótese que d = 1,λ± = senx ± 1, la ecuación que da las características es: dy/dx = − senx ∓ 1,mientras L(ξ) = L(η) = 0.

4.3. CLASIFICACIÓN DE ECUACIONES LINEALES 101
Caso parabólico. Es el correspondiente a:
d = b2 − ac = 0,
en Ω.Tenemos una sola raíz:
λ = − b
a
de aλ2 + 2bλ+ c = 0, y eligiendo una solución como en el caso anterior de:
ϕx − λϕy = 0,
es decir, de:
ϕx +b
aϕy = 0,
(con ξy = 0 cerca de P0) y tomando por ejemplo:
η = x,
llegamos a que:a = 0
b = aξx + bξy = 0
c = a,
con lo que la nueva forma principal es:
L0u = auηη.
Finalmente,∂(ξ, η)
∂(x, y)=
∣∣∣∣ξx ξyηx ηy
∣∣∣∣ = ξy = 0,
por lo que tenemos un verdadero cambio de variable local.
Ejemplo 4.4.1) La ecuación del calor L(u) = ut − uxx es el ejemplo por antonomasia deoperador parabólico.
2) La ecuación:
x2uxx − 2xyuxy + y2uyy + xux + yuy = 0,
es parabólica con:d = x2y2 − x2y2 = 0,
con lo que una elección de ξ sale de la solución general de dy/dx = −y/x esdecir ξ = yx. Con η = x la ecuación transformada es
ηuηη + uη = 0,
pues L(ξ) = 0, L(η) = η. Las soluciones son de la forma: u = F (ξ)+G(ξ) log η =F (xy) +G(xy) log x.

102 CAPÍTULO 4. ECUACIÓN DE ONDAS
Caso elíptico 1. Cuando:d = b2 − ac < 0
en Ω –caso denominado elíptico 2– la ecuación (2) carece de soluciones reales.La función:
λ =−b(x, y) +
√b2(x, y)− a(x, y)c(x, y)
a(x, y),
toma valores complejos. Supondremos que λ = λ(x, y) puede extenderse a unafunción C1 en C2 (una condición necesaria y suficiente es que a, b, c sean ana-líticas reales en (x, y)).
El problema: dy
dx= −λ(x, y)
y(x0) = ξ,
admite una solución compleja y = Y (x, ξ) que es C1 en la variable (x, ξ) ∈ C2 dedonde se puede despejar ξ = ϕ(x, y), ϕ una función compleja y C1 que cumple:
aϕ2x + 2bϕxϕy + cϕ2y = 0.
Poniendo ϕ = ξ + iη la ecuación lleva a las igualdades:
a(ξ2x − η2x) + 2b(ξxξy − η − xηy) + c(ξ2y − η2y) = 0
aξxηx + b(ξxηy + ξyηx) + cξyηy = 0.
Por tanto b = 0 mientras a = b. La nueva expresión de la forma principal será:
L0 = auξξ + uηη.
Es decir, y módulo un factor multiplicativo, el caso elíptico es localmente eloperador Laplaciano (en los términos de orden superior).
Ejemplo 4.5. La ecuación de Tricomi:
yuxx + uyy = 0,
tiene d = −y. Es hiperbólica en y < 0. En este caso tenemos: λ± = ∓1/√−y
que dan posibles ξ, η bajo la forma:
ξ = x+2
3(−y)3/2 η = x− 2
3(−y)3/2,
mientras L(ξ) = −L(η) = 1/(2√−y), b = 2y. En la región y < 0 la ecuación de
Tricomi adopta la forma:
uξη −1
8(−y)3/2(uξ − uη) = 0.
1Ver [25]2Terminología coherente con la de la Sección 4.1.

4.3. CLASIFICACIÓN DE ECUACIONES LINEALES 103
La ecuación es elíptica en y > 0 con λ = i√y . Integrando dy/dx = −i/√y
obtenemos como candidatas a ξ, η las funciones: ξ = 2/3y3/2, η = x con loque a = y. Asímismo L(ξ) = 1/(2
√y), L(η) = 0. La ecuación en coordenadas
características adopta la forma:
uξξ + uηη +3
ξuξ = 0.
4.3.2. Operadores con coeficientes constantesCuando los coeficientes de la parte principal L son constantes, aún en el caso
n-dimensional L0 puede simplificarse considerablemente usado álgebra lineal. Serecuerda el siguiente resultado.
Teorema 4.2 (Teorema Espectral). Sea A una matriz real simétrica n × n.Existe entonces una matriz ortogonal P (P−1 = P t) tal que:
P tAP = P−1AP = diag (λ1n+)→ . . . λn+
n−)→ . . . λn++n−0 . . . 0) =
λ1 0 . . . 00 λ2 . . . 0...
.... . .
...0 0 . . . λn
donde λ1, . . . , λn+ son los autovalores positivos de A, λn++1, . . . , λn++n− son loscorrespondientes autovalores negativos mientras r = n+ +n− es exactamente elrango de A.
Si representamos:P = col (P1 . . . Pn)
e introducimos el cambio de variable:
yi = gi(x) = P tiX =
∑l=1,...,n
plixl,
es decir Y = P tX tenemos:
σ(∇gi,∇gj) = P tiAPj = λiδij ,
por lo que:
Lu =∑
i=1,...,n
λi∂2u
∂y2i+
∑i=1,...,n
ai(x)∂u
∂yi+ a0(y)u,
en donde ai = ⟨(ai(x)), Pi⟩, 1 ≤ i ≤ n.Concluimos asíque:
L0u =∑
i=1,...,n+
λi∂2u
∂y2i+
∑i=n++1,...,n++n−
λi∂2u
∂y2i.

104 CAPÍTULO 4. ECUACIÓN DE ONDAS
haciendo el cambio ηi = yi/√λi si 1 ≤ i ≤ n+, ηi = yi/
√−λi si n+ + 1 ≤ i ≤
n+ + n−, yi = ηi si se da el caso en que el rango r = n+ + n− < n, L0 tomafinalmente la forma:
L0u =∑
i=1,...,n+
∂2u
∂y2i−
∑i=n++1,...,n++n−
∂2u
∂y2i. (4.7)
De acuerdo con las cuentas efectuadas tenemos la siguiente clasificación de ope-radores con coeficientes constantes.
El operador L se dice
• elíptico si r = n+ + n− = n mientras n+ = n o n− = n. Es este casoL0 = ±∆n,
• estrictamente hiperbólico si r = n+ + n− = n mientras n+ = n − 1 on− = n− 1. En este caso L0 = ∆n−1 − ∂2/∂x2n o L0 = ∂2/∂x21 −∆n−1,
• ultrahiperbólico si r = n+ + n− = n pero 2 ≤ n+, n− (n ≥ 4),
• parabólico si r = n+ + n− = n− 1 mientras n+ = n− 1 o n− = n− 1. Eneste caso L0 = ±∆n−1.
Observación 4.6. Cuando r = n se dice que L es no degenerado (degenerado encaso contrario).
Los números n+, n− y r sólo dependen de la matriz A. En caso de coeficientesvariables A = A(x) = (aij(x)) se dice que el operador L es elíptico, parabólico ohiperbólico en x ∈ Ω si A(x) lo es. Por la continuidad del espectro con respectoa los coeficientes, si éstos son continuos y A es no degenerada, las propiedadesde elipticidad e hiperbolicidad se mantendrán en las proximidades de un puntode referencia.
Ejercicio 4.3. Comprobar que para n = 2 y coeficientes constantes las defini-ciones de elíptico, parabólico e hiperbólico coinciden con las ya dadas.
Ejercicio 4.4. Pruébese que L es elíptico en x ∈ Ω (se suponen coeficientesvariables) si y sólo si: ∣∣∣∣∣∣
∑i,j=1,...,n
aij(x)ξiξj
∣∣∣∣∣∣ ≥ λ(x)|ξ|2,
para alguna constante positiva λ(x) > 0 y todo ξ ∈ Rn.
Observación 4.7. Se probó en el plano la reducción de la parte principal L0 alos tres tipos:
L0 = µ(x, y)
uξξ + uηηuξξuξξ − uηη,

4.4. ECUACIÓN DE ONDAS UNIDIMENSIONAL 105
en los casos elíptico, parabólico e hiperbólico. En coeficientes variables no esposible en general reducir L para llegar a una parte principal:
L0u = µ(x)
∑i=1,...,n
εi∂2u
∂y2i,
donde los εi’s toman valores ±1 y 0. Ello nos llevaría a buscar n funcionesg = gi(x) satisfaciendo por un lado:
⟨∇gi,∇gj⟩ = 0 1 ≤ i < j ≤ n, (4.8)
((n− 1)n/2 ecuaciones) junto con,
⟨∇gi,∇gi⟩ = ⟨∇gi0 ,∇gi0⟩ i = i0,
(n− 1 ecuaciones adicionales). Como:
(n− 1)(n+ 2)
2≤ n,
sólo si n ≤ 2 tendremos para n ≥ 3 más ecuaciones que incógnitas lo que nohará factible en general la resolubilidad del correspondiente sistema.
4.4. Ecuación de ondas unidimensional
4.4.1. El problema de valor inicialBasados por ejemplo en el modelo de la cuerda vibrante, nos planteamos en
primer lugar el estudio del problema de valor inicial:utt = c2uxx x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R .
(4.9)
Usaremos la notación del operador D’Alambertiano:
cu = utt − c2uxx
para representar en algunos casos el operador de ondas.
Teorema 4.3 (Fórmula de D’Alambert). Para cada f ∈ C2(R), g ∈ C1(R) elproblema de valor inicial (4.9):
utt = c2uxx x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R .
admite como única solución clásica a:
u(x, t) =1
2f(x+ ct) + f(x− ct)+ 1
2c
∫ x+ct
x−ct
g(s) ds. (4.10)

106 CAPÍTULO 4. ECUACIÓN DE ONDAS
Observaciones 4.8.
a) Las posibles soluciones de (P) pueden extenderse a t ∈ R. De hecho la ecuaciónes reversible en t en el sentido de que es invariante frente al cambio t→ −t.
b) Es conveniente representar por u = u(x, t, t0, f, g) a la solución del problema:utt = c2uxx x ∈ R, t > t0
u(x, t0) = f(x) x ∈ Rut(x, t0) = g(x) x ∈ R .
Tal solución viene dada en términos de la del problema en t = 0 como sigue:
u(x, t, t0, f, g) = u(x, t− t0, 0, f, g) .
Demostración del Teorema 4.3. La introducción de las coordenadas caracterís-ticas:
ξ = x+ ct η = x− ct,
permite escribir:cu = −4c2uξη.
Toda solución de cu = 0 en t ≥ 0 adopta entonces la forma:
u = F (ξ) +G(η). (4.11)
Cálculos elementales llevan a que:
F (ξ) =1
2f(ξ) + 1
c
∫ ξ
0
g(s) ds+ C
G(η) =1
2f(η)− 1
c
∫ η
0
g(s) ds − C ,
(4.12)
con C una constante arbitraria. Esta construcción lleva implícita tanto la exis-tencia como unicidad de soluciones clásicas.
Observación 4.9. La expresión (4.11), (4.12) asegura que la solución de (4.9) es lasuperposición de dos ondas viajeras con velocidades de propagación respectivasdadas por ±c.
4.4.2. Velocidad de propagación finita de las perturbacio-nes
Dado el punto (x, t) con t > 0 las rectas características:
ξ = ξ η = η,
con ξ = x+ct, η = x−ct delimitan las regiones donde “el pasado"de la solución,t ≤ t, influye sobre el valor de u en (x, t) y donde el valor u(x, t) influirá sobre

4.4. ECUACIÓN DE ONDAS UNIDIMENSIONAL 107
los valores futuros de la solución. Tales son respectivamente el cono pasado deluz:
Γ−(x, t) = (x, t) : ξ ≤ ξ, η ≥ η,
y el cono futuro de luz:
Γ+(x, t) = (x, t) : ξ ≥ ξ, η ≤ η,
por el punto (x, t). En efecto para t > 0 y según (1):
u(x, t) =1
2f(ξ) + f(η)+ 1
2c
∫ ξ
η
g(s) ds
Luego la solución usa la información en Γ−(x, t) ∩ t = 0. Alternativamente,para cualquier t0 < t la solución puede observarse como la que tomó datosiniciales u y ut en t = t0. Usando la notación precedente:
u(x, t) = u(x, t, t0, u(·, t0, 0, f, g), ut(·, t0, 0, f, g)),
que dice que u(x, t) también se construye usando la información de la propia uconfinada en Γ−(x, t) ∩ t = t0.
Un argumento simétrico muestra que Γ+(x, t) es la región donde la informa-ción en el punto (x, t) afectará a la solución u. Por eso a Γ+(x, t) también se lellama la “región de influencia"del punto (x, t).
El mismo género de argumentos geométricos llevan al siguiente resultado.
Teorema 4.4. Sean f ∈ C2(R), g ∈ C1(R) funciones con somporte compacto.Entonces la solución de (P) es tal que u(·, t) tiene soporte compacto para cadat. Además, cualquiera que sea el intervalo [a, b] cumpliendo:
sop f ∪ sop g ⊂ [a, b],
se tendrá que sop u(·, t) ⊂ [a(t), b(t)] con a(t) = a− ct, b(t) = b+ ct.
Observaciones 4.10. a) Nótese que el soporte se expande con velocidad c, esojustifica la terminología de velocidad de propagación finita de las pertur-baciones.
b) Es muy formativo el estudio de los casos particulares: f con soporte com-pacto, g = 0, f = 0, g con soporte compacto, respectivamente.
4.4.3. Soluciones generalizadas. Propagación de disconti-nuidades
La fórmula de D’Alambert requiere muy poca regularidad en los datos f yg para dar sentido al segundo miembro de (4.10). Si f y g no son tan regularescomo en el Teorema 4.3 podemos decir que la fórmula de D’Alambert define unasolución generalizada de (??). Puede justificarse la definición por el artificio deaproximar f y g por fn y gn regulares. Bajo condiciones muy generales en

108 CAPÍTULO 4. ECUACIÓN DE ONDAS
los límites fn → f , gn → g se tiene un → u y se concluye que la solucióngeneralizada u es límite de soluciones clásicas. Por ejemplo si los límites de fn,gn son uniformes o uniformes sobre compactos, un → u uniformemente sobrecompactos de R2.
Una segunda intuición que se hace evidente es que la ecuación de ondaspreserva las discontinuidades, que se propagan con velocidad constante c a travésde las características ξ = ξ0, η = η0.
Para uso posterior es conveniente fijar la siguiente definición.
Definición 4.5. Diremos que f es de clase Ck a trozos si existen a1 < . . . < aNy existen N+1 funciones fi ∈ Ck(R) tales que f(x) = f1(x) para x < a1, f(x) =fN+1(x) en x > aN , f(x) = fi(x) en ai < x < ai+1 para cada i ∈ 1, . . . , N−1.
Resumiendo, tales funciones f junto con sus derivadas hasta el orden k ad-miten a lo más discontinuidades de salto en los puntos x = ai. Representaremospor,
σf(l)(ai) = f (l)(ai+)− f (l)(ai−),
el salto de la derivada l-ésima de f en x = ai.Admitamos ahora que f y g son respectivamente C2 y C1 a trozos e inves-
tiguemos dónde dejan de ser regulares la solución generalizada u de (P) y susderivadas hasta el orden dos. No se pierde generalidad si se supone que los ai’sson los mismos para f y g.
Recordando que:
u =1
2f(ξ) + f(η)+ 1
2c
∫ ξ
η
g(s) ds,
tenemos,
ux =1
2f ′(ξ) + f ′(η)+ 1
2cg(ξ)− g(η)
uxx =1
2f ′′(ξ) + f ′′(η)+ 1
2cg′(ξ)− g′(η)
ut =c
2f ′(ξ)− f ′(η)+ 1
2g(ξ) + g(η)
utt =c2
2f ′′(ξ) + f ′′(η)+ c
2g′(ξ) + g′(η)
uxt =c
2f ′(ξ)− f ′(η)+ 1
2g′(ξ) + g′(η) .
Considerando cada una de las derivadas como una función de x para cada t fijo

4.4. ECUACIÓN DE ONDAS UNIDIMENSIONAL 109
tenemos para x∓i (t) = ai ∓ ct,
σu(x∓i (t)) =
1
2σf (ai)
σux(x∓i (t)) =
1
2σf ′(ai)±
1
2cσg(ai)
σuxx(x∓i (t)) =
1
2σf ′′(ai)±
1
2cσg′(ai)
σut(x∓i (t)) = ± c
2σf ′(ai) +
1
2σg(ai)
σutt(x∓i (t)) =
c
2σf ′′(ai)±
c
2σg′(ai)
σuxt(x∓i (t)) = ± c
2σf ′′(ai) +
1
2σg(ai) .
siempre que x∓i (t) = x∓j (t) cuando i = j. Si para ai < aj tenemos x+i = x−j (enese caso t = (aj − ai)/2c) entonces:
σu(x+i (t)) =
1
2(σf (ai) + σf (aj))
σux(x+i (t)) =
1
2(σf ′(ai) + σf ′(aj)) +
1
2c(σg(aj)− σg(ai))
σuxx(x+i (t)) =
1
2(σf ′′(ai) + σf ′′(ai)) +
1
2c(σg′(aj)− σg′(ai))
σut(x+i (t)) =
c
2(σf ′(aj)− σf ′(ai)) +
1
2(σg(aj) + σg(ai))
σutt(x+i (t)) =
c
2(σf ′′(aj) + σf ′′(ai)) +
c
2(σg′(aj)− σg′(ai))
σuxt(x+i (t)) =
c
2(σf ′′(aj)− σf ′′(ai)) +
1
2(σg(aj) + σg(ai)) .
Resumiendo, las discontinuidades “circulan” a través de las características, convelocidad constante y manteniendo la magnitud del salto. Este hecho es típicode las ecuaciones hiperbólicas (ver [11] para más información).
4.4.4. Soluciones simétricasLa propiedad de unicidad de soluciones permite transvasar las simetrías de
los datos a la solución. Diremos que f = f(x) es
• periódica de período T si f(x+ T ) = f(x) para todo x ∈ R,
• par (impar) con respecto a x0 si f(x′) = f(x) (f(x′) = −f(x)) para todox ∈ R, donde x′ = 2x0 − x.
Teorema 4.6. Supongamos que f ∈ C2(R), g ∈ C1(R).
1. Si f , g son impares con respecto a x0, u(·, t) es impar con respecto a x0para todo t ∈ R.

110 CAPÍTULO 4. ECUACIÓN DE ONDAS
2. Si f , g son pares con respecto a x0, u(·, t) es par con respecto a x0 paratodo t ∈ R.
3. Si f , g son T-periódicas, u(·, t) es T-periódica para todo t ∈ R.
4.4.5. El problema no homogéneoSuponemos ahora que F (x, t) y Fx(x, t) son continuas en R× [0,+∞). Nos
proponemos resolver el problema perturbado:utt = c2uxx + F (x, t) x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R .
(4.13)
Como se sabe basta con hallar la solución u0(x, t) de:utt = c2uxx + F (x, t) x ∈ R, t > 0
u(x, 0) = 0 x ∈ Rut(x, 0) = 0 x ∈ R .
(4.14)
Lo más difícil es dar con el candidato a u0. En la ecuación de ondas se disponede diversas opciones para determinar u0.
A) Fórmula de variación de las constantes de Lagrange. Es común a todos losproblemas lineales. Si A es un operador lineal en RN la solución de
du
dt= Au u(0) = ξ0,
es u = eAtξ0 que puede visualizarse como una acción lineal sobre ξ0 que dependedel tiempo t. La fórmula de variación de las constantes de Lagrange proporcionala solución u0 de:
du
dt= Au+ F (t) u(0) = 0,
en la forma:
u0 =
∫ t
0
eA(t−τ)F (τ) dτ.
Estas ideas se aplican inmediatamente a nuestro caso y al de todos los problemaslineales concebibles.
En efecto, (P) se puede interpretar como:
dw
dt= Aw w(0) = w0, (4.15)
donde w = (w1, w2) = (u, ut), w0 = (f, g), el operador A:
A : C2(R)× C1(R) −→ C1(R)× C(R)w 7−→ Aw = (w2, c
2w1xx).

4.4. ECUACIÓN DE ONDAS UNIDIMENSIONAL 111
La solución de (P) se puede escribir como:
w = Φ(t)w0 = (Φ1(t)w0,Φ2(t)w0),
con:
Φ1(t)w0 = Φ1(t)(f, g) =1
2f(ξ) + f(η)+ 1
2c
∫ ξ
η
g(s) ds.
Una manera abstracta de interpretar (5) es considerar:
dw
dt= Aw + (0,F(t)) w(0) = 0, (4.16)
donde:F : R −→ C1(R)
t 7−→ F(t) = F (·, t).Una solución formal de (6) es, según la fórmula de variación de las constantesde Lagrange,
wp(t) =
∫ t
0
Φ(t− τ)(0,F(τ)) dτ.
Si seleccionamos la primera componente w1p de wp tenemos que:
w1p(t) =
1
2c
∫ t
0
∫ ·−c(t−τ)
·+c(t−τ)
F (s, τ) dsdτ.
Precisamente w1p es la candidata a solución u0 de (5). Una espresión más razo-
nable es:u0(x, t) =
1
2c
∫∫Γ−(x,t)∩t≥0
F (s, τ) dsdτ.
La región Γ−(x, t) ∩ t ≥ 0 se llama triángulo característico con vértice en(x, t).
B) Coordenadas características. El problema (4.14) en coordenadas caracterís-ticas adopta la forma:
uξη = − 14c2 F (ξ, η)
u(ξ, ξ) = 0
uξ(ξ, ξ) = uη(ξ, ξ),
(4.17)
con F (ξ, η) = F ((ξ + η)/2, (ξ − η)/2c). La solución de (4.17) resulta ser,
u = φ(ξ) + ψ(η)− 1
4c2
∫ ξ
0
(∫ η
0
F (s1, s2) ds2
)ds1. (4.18)
Un cálculo elemental revela que:
φ(ξ) =1
4c2
∫ ξ
0
(∫ s1
0
F (s1, s2) ds2
)ds1 + α
ψ(η) =1
4c2
∫ η
0
(∫ s2
0
F (s1, s2) ds1
)ds2 − α.

112 CAPÍTULO 4. ECUACIÓN DE ONDAS
Al substituir en (4.18) tenemos (obsérvense con cuidado los distintos recintosde integración implicados):
u(ξ, η) =1
4c2
∫∫T
F (s1, s2)ds1ds2,
donde T es el triángulo característico:
T = (s1, s2) : s1 > s2, s1 < ξ, s2 > η,
con ξ = x+ ct, η = x− ct. Si efectuamos el cambio de variable:
s =s1 + s2
2τ =
s1 − s22c
,
en la integral doble obtenemos de nuevo la expresión para u0,
u0(x, t) =1
2c
∫∫Γ−(x,t)∩t≥0
F (s, τ) dsdτ.
C) Método de Duhamel. Una tercera técnica para construir la solución de (4.14)es el llamado método de Duhamel que se desarrolla en los Ejercicios 24 y 25 deeste capítulo.
Resumiendo, hemos probado el siguiente resultado.
Teorema 4.7. Sean f ∈ C2(R), g ∈ C1(R), F, Fx ∈ C(R× [0,+∞)). Entonces,la solución del problema perturbado:
utt = c2uxx + F (x, t) x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R ,
tiene como única solución a:
u =1
2f(x+ct)+f(x−ct)+ 1
2c
∫ x+ct
x−ct
g(s) ds+1
2c
∫ t
0
∫ x−c(t−τ)
x+c(t−τ)
F (s, τ) dsdτ.
4.5. Problemas de contornoEl problema físico que genera el modelo de la ecuación de ondas sugiere que
la unicidad de soluciones sólo se podrá conseguir cuando además de condicionesiniciales se impongan condiciones de contorno si se trabaja en un dominio confrontera no vacía (un intervalo con alguno de sus extremos finito). En estasección trataremos con intervalos finitos Ω = (0, l) (relegamos Ω = (a,+∞) a lasección de ejercicios).
Nos ocuparemos de estudiar los problemas:utt = c2uxx + F (x, t) 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
B0u = α(t) Blu = β(t) t > 0 ,
(4.19)

4.5. PROBLEMAS DE CONTORNO 113
donde Bx0 representa el operador de contorno en la frontera a, b de un intervaloΩ = (a, b), es decir x0 = a o x0 = b. La condición de contorno se dirá de tipo:
• Dirichlet si Bx0u = u(x0, t),
• Neumann si Bx0u = ν ∂u∂x (x0, t) donde ν = −1 si x0 = a, ν = 1 si x0 = b
(el operador ν ∂∂x se llama derivada normal exterior).
• Robin si Bx0u = ν ∂u∂x (x0, t) + bu(x0, t) con b ≥ 0.
El problema (4.19) se dirá de tipo Dirichlet, Neumann o Robin si, respectiva-mente, ambas condiciones en (4.19) son Dirichlet, Neumann o Robin. Si en cadaextremo hay condiciones distintas hablaremos de problema mixto.
Diremos que u = u(x, t) es una solución clásica de (4.19) si u ∈ C2([0, l] ×[0,+∞)). Nuestro primer resultado es de unicidad. La elección del coeficienteprocede de la deducción física (Capítulo 1).
Teorema 4.8. El problema de contorno y valor inicial:utt = c2(x)uxx + F (x, t) 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
B0u = α(t) Blu = β(t) t > 0 ,
con c2(x) = T0/ρ(x), ρ ∈ C[0, l], ρ(x) > 0 para x ∈ [0, l], admite a lo más unasolución clásica.
Demostración. Si u es solución de:
utt = c2(x)uxx + F (x, t),
entonces:ρutt − T0uxx = ρF
ρuttut − T0uxxut = ρFut
ρuttut + T0uxuxt − (T0uxxut + T0uxuxt) = ρFut
1
2(ρu2t + T0u
2x)t − T0(uxut)x = ρFut .
Integrando de 0 a l con respecto a x:
1
2
∫ l
0
(ρu2t + T0u2x)t dx− T0uxut|l0 =
∫ l
0
ρ(s)F (s, t)ut(s, t) ds. (4.20)
Escribamos,
E(t) =1
2
∫ l
0
(ρu2t + T0u2x) dx.

114 CAPÍTULO 4. ECUACIÓN DE ONDAS
Integrando (4.20) con respecto a t entre t = 0 a t = t llegamos a:
E(t)− E(0)−T02
(∫ t
0
(ux(l, τ)ut(l, τ)− ux(0, τ)ut(0, τ)) dτ
)
=
∫ t
0
∫ l
0
ρ(s)F (s, τ)ut(s, τ) dsdτ.
Si u1, u2 son dos soluciones clásicas del problema, la diferencia v = u1 − u2satisface un problema donde F , f , g, α y β son nulos, con lo que se llega a que:
1
2
∫ l
0
(ρu2t + T0u2x) dx = 0,
para cada t, de donde se deduce fácilmente que v(x, t) = 0 en (x, t) ∈ [0, l] ×[0,+∞).
Observación 4.11. Si en el problema de contorno las fuerzas exteriores son cero(F = 0) junto con las condiciones de contorno (α = β = 0), de los cálculosanteriores se deduce:
1
2
∫ l
0
(ρu2t (s, t) + T0u2x(s, t)) dx =
1
2
∫ l
0
(ρg(s)2 + T0(f′(s))2) dx.
En otras palabras, se conserva la energía total del proceso.
Región de influencia 3 sobre un punto (x, t). En la demostración del teoremaprecedente hemos probado que cuando f = g = 0, si además F , α, β son nulasen t < t entonces u = 0 en R = [0, l] × [0, t]. Comprobaremos cómo hay unaregión más pequeña que R y con vértice en cada (x, t), 0 ≤ x ≤ l, donde seobserva el mismo fenómeno.
Supondremos que la tal región de influencia P está limitada por dos curvast = Q1(x), t = Q2(x) incidentes en (x, t) con Qi(x) ≤ t, Q1 definida en [0, x],Q2 en [x, l] (ver Figura 9). En P se tiene, según hemos visto,
1
2(ρu2t + T0u
2x)t − T0(uxut)x = 0. (4.21)
Si definimos por t = Q(x) la unión de las dos curvas e integramos (4.21) sobreP tenemos:
1
2
∫∫P
(ρu2t + T0u2x)t dsdτ =
1
2
∫ l
0
∫ Q(s)
0
(ρu2t + T0u2x)t dsdτ
=1
2
∫ l
0
(ρu2t (s,Q(s)) + T0u2x(s,Q(s))) ds.
3Ver [26]

4.5. PROBLEMAS DE CONTORNO 115
Figura 4.1: Dominio de influencia sobre el punto (x, t)
Por otro lado:∫∫P
(uxut)x dsdτ =
∫ t
0
∫ l2(τ)
l1(τ)
(uxut)xdsdτ
=
∫ t
0
(ux(l2(τ), τ)ut(l2(τ), τ)− ux(l1(τ), τ)ut(l1(τ), τ)) dτ,
donde si t1 = Q1(0), t2 = Q2(l) se tiene l1 = 0 en τ ≤ t1, l2 = l para t ≤ t2.Si por simplicidad suponemos condiciones Dirichlet o Neumann resulta que:∫∫
P
(uxut)x dsdτ =∫ t
t2
ux(Q−12 (τ), τ)ut(Q
−12 (τ), τ) dτ −
∫ t
t1
ux(Q−11 (τ), τ)ut(Q
−11 (τ), τ) dτ.
Haciendo el cambio s = Q−1i (τ),∫∫
P
(uxut)x dsdτ = −∫ l
x
uxutQ′2(s) ds−
∫ x
0
uxutQ′1(s) ds
= −∫ l
0
uxutdQ
dsds = −
∫ l
0
uxutdt
dxdx.
Por tanto: ∫∫P
12(ρu2t + T0u
2x)t − T0(uxut)x dsdτ
=
∫ l
0
[1
2ρu2t +
1
2T0u
2x + T0uxut
dt
dx
]dx = 0,
entendiéndose en la última integral que t = Q(x). Recordando que c2 = T0/ρ(x)

116 CAPÍTULO 4. ECUACIÓN DE ONDAS
resulta que:∫ l
0
1
2ρ
[u2t + c2u2x + 2c2uxut
dt
dx
]dx =∫ l
0
1
2ρ
[ut + c2ux
dt
dx
]2+ c4u2x
[1
c2−(dt
dx
)2]
dx = 0.
(4.22)
Si: (dt
dx
)2
=1
c2,
tendremos, si tenemos en cuenta que P ⊂ t ≤ t, las expresiones de t = Qi(x),i = 1, 2:
t(x) =
t−
∫ x
x
1
c(s)ds 0 < x < x
t−∫ x
x
1
c(s)ds x < x < l.
(4.23)
De (4.22) y (4.23) se deduce que ut = ux = 0 en (x, t) y con el mismo argumentose tiene que ux = ut = 0 en P . De ahí, u = 0 en P si F , α, β son nulas en P , aparte de f = g = 0 en [0, l].
4.5.1. Problemas de Dirichlet y Neumann homogéneosSupongamos que el problema de Dirichlet homogéneo:
utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = u(l, t) = 0 t > 0 ,
(4.24)
admite una solución clásica u. Entonces f y g, supuestas C2 y C1 respectiva-mente en [0, l], han de satisfacer las condiciones de compatibilidad siguientes:
f(0) = f(l) = f ′′(0) = f ′′(l) = 0
g(0) = g(l) = 0.(4.25)
Análogamente, para el problema de Neumann,utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
ux(0, t) = ux(l, t) = 0 t > 0 ,
(4.26)
habrá de tenerse: f ′(0) = f ′(l) = 0
g′(0) = g′(l) = 0.(4.27)

4.5. PROBLEMAS DE CONTORNO 117
Así pues (4.25) y (4.27) son condiciones necesarias para la existencia de solu-ciones clásicas.
Ahora unas consideraciones elementales de simetría. Si f = f(x) ∈ C(R)es impar con respecto a x = 0 y 2l-periódica entonces f es también impar conrespecto a x = l. En efecto,
f(2l − x) = f(−x) = −f(x).
Por tanto, f(0) = f(l) = 0. Supongamos por otra parte que f ∈ C2[0, l] satisface(4.25). Si efectuamos la extensión impar a [−l, l] y después la extensión 2l-periódica a R obtenemos además una función f , de clase C2, que es impar conrespecto a x0 = 0. En efecto, si x ∈ R, x = x0 + 2kl para k ∈ Z, x0 ∈ [−l, l]. Six0 ∈ [0, l]:
f(x) = f(x0 + 2kl) = f(x0) = −f(−x0) = −f(−x0 − 2kl) = −f(−x).
Si x0 ∈ [−l, 0] resulta:
f(x) = f(x0 + 2kl) = f(x0)
= −f(−x0) = −f(−x0) = −f(−x0 − 2kl) = −f(−x).
Análogamente, f = f(x) ∈ C(R), par con respecto a x = 0 y 2l-periódicaimplican que f es también par con respecto a x = l. Si, por otro lado, f ∈ C2[0, l]satisface (4.27), la extensión par a [−l, l] primero y 2l-periódica después a R danlugar una función C2, f , que es par con respecto a x0 = 0.
Teorema 4.9. Sean f ∈ C2[0, l], g ∈ C1[0, l] funciones que satisfacen las con-diciones (4.25). Entonces el problema de Dirichlet (4.24) admite una única so-lución clásica u ∈ C2([0, l] × [0,+∞)). La misma conclusión se obtiene para elproblema de Neumann (4.26) bajo datos f ∈ C2[0, l], g ∈ C1[0, l] satisfaciendo(4.27).
Demostración. Para (4.24) efectuamos las extensiones impares y 2l-periódicasf , g de f y g y resolvemos el problema de valor inicial:
utt = c2uxx x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R .
Su solución u = u(x, t) da la única solución del problema de Dirichlet. Análogasconsideraciones llevan a la solución del problema de Neumann (4.26).
Ejercicio 4.5 (Condiciones mixtas). Sea f ∈ C2[0, l] tal que f(0) = f ′(0) = l.Efectuamos sucesivamente: la extensión impar a [−l, 0], la extensión par conrespecto a x0 = l a [l, 3l] y la extensión 4l-periódica a R. Pruébese que talextensión f es C2, impar en x0 = 0 y par en x0 = l. Probar, bajo condiciones

118 CAPÍTULO 4. ECUACIÓN DE ONDAS
de compatibilidad adecuadas, la existencia de una única solución clásica delproblema mixto:
utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = ux(l, t) = 0 t > 0 .
(4.28)
4.5.2. Oscilaciones libresEs conveniente recordar el siguiente,
Ejercicio 4.6. Sea g ∈ C(R) T-periódica. Entonces G(t) =∫ t
0g es T -periódica
si y sólo si∫ T
0g = 0.
El próximo resultado evidencia la existencia de oscilaciones libres en el pro-blema de la cuerda vibrante bajo diversas condiciones de contorno.
Teorema 4.10. Sean f ∈ C2[0, l], g ∈ C1[0, l]. Entonces,
1. La solución u de (4.24) (respectivamente, (4.28)), f , g cumpliendo lascondiciones de compatibilidad (4.25) (r. las correspondientes condiciones
de compatibilidad) es2l
c-periódica (r.
4l
c-periódica) en t.
2. La solución u de (4.26), f , g cumpliendo las condiciones de compatibilidad
(4.27) es2l
c-periódica en t si y sólo si
∫ l
0g = 0.
Ejercicio 4.7 (Propagación de discontinuidades). Usar el teorema precedentepara probar que si f y g son, respectivamente, C2 y C1 a trozos (esto inclui-ría posiblemente la violación de alguna de las condiciones de compatibilidad)entonces las discontinuidades se propagan con velocidad c en los dos sentidos,mantienen la magnitud del salto y se reflejan en los bordes x = 0, x = l.
4.5.3. Problemas de Dirichlet y Neumann no homogéneosConsideramos ahora los problemas,
utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = α(t), u(l, t) = β(t) t > 0 ,
(4.29)
y utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
ux(0, t) = α(t), ux(l, t) = β(t) t > 0 .
(4.30)

4.5. PROBLEMAS DE CONTORNO 119
La búqueda de soluciones clásicas requiere en cada caso las condiciones de com-patibilidad:
α(0) = f(0)
α′(0) = g(0)
α′′(0) = c2f ′′(0)
β(0) = f(l)
β′(0) = g(l)
β′′(0) = c2f ′′(l)
(4.31)
y, α(0) = f ′(0)
α′(0) = g′(0)
β(0) = f ′(l)
β′(0) = g′(l),(4.32)
respectivamente.Por simplicidad vamos a construir la solución a (4.29). La hallaremos bajo
la forma:u = F (ξ) +G(η).
Las condiciones iniciales nos dan F , G en [0, l] como:
F (ξ) =1
2f(ξ) +
1
2c
∫ ξ
0
g
G(η) =1
2f(η)− 1
2c
∫ η
0
g.
La validez de la condición de contorno en x = 0 nos lleva a:
α(t) = F (ct) +G(−ct).
Esto permite definir G en [−l, 0] como:
G(η) = α(−ηc)− F (−η). (4.33)
La condición en x = l:
β(t) = F (l + ct) +G(l − ct),
permite definir F en el intervalo [l, 3l] en la forma:
F (ξ) = β(ξ − l
c)−G(2l − ξ). (4.34)
En definitiva, las relaciones (4.33), (4.34) permiten extender F y G de forma queu define la solución de (4.29). Las condiciones (4.30) aseguran la regularidad delas extensiones. Para (4.31) (y condiciones de contorno adecuadas) se procedede la misma forma. En todos los casos, G debe extenderse a η ≤ 0, F a ξ ≥ l.
Ejercicio 4.8. Calcúlense algunas etapas de la construcción de F y G para lascondiciones u(0, t) = α(t), ux(l, t) + bu(l, t) = β(t), b ≥ 0.
Ejercicio 4.9. En el problema de Dirichlet, comprobar la regularidad de G enη = 0 y la de F en ξ = l.

120 CAPÍTULO 4. ECUACIÓN DE ONDAS
4.5.4. Problemas de contorno perturbadosConsidérese a título de ejemplo el problema de Dirichlet:
utt = c2uxx + F (x, t) 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = α(t), u(l, t) = β(t) t > 0 ,
(4.35)
en el que se supone que F, Fx ∈ C([0, l]× [0,+∞)). Una manera de proceder esextender primero F a una F de suerte que F , Fx ∈ C(R × [0,+∞)). Despuésresolver el problema:
utt = c2uxx + F (x, t) x ∈ R, t > 0
u(x, 0) = 0 x ∈ R
ut(x, 0) = 0 x ∈ R,
con solución u que al restarla de la de (4.35) nos lleva a:vtt = c2vxx 0 < x < l, t > 0
u(x, 0) = f(x)− u(x, 0) 0 ≤ x ≤ l
ut(x, 0) = g(x)− ut(x, 0) 0 ≤ x ≤ l
u(0, t) = α(t)− u(0, t), u(l, t) = β(t)− u(l, t) t > 0 ,
problema del que se ha tratado.
Ejercicio 4.10. Considérese una distribución de densidad de fuerzas de clase C1
en [0, l] que cumple F (0) = F (l) = 0. Demuéstrese que la solución de:utt = c2uxx + F (x) 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = α(t), u(l, t) = β(t) t > 0 ,
es también 2l/c-periódica en t.
4.6. Problemas semilineales
4.6.1. Problemas de valor inicialLas ideas precedentes se aplican –apoyándonos en las ecuaciones diferenciales
ordinarias– al estudio de la existencia y unicidad de soluciones locales para elproblema semilineal:
utt = c2uxx + F (x, t, u, ux, ut) x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R ,

4.6. PROBLEMAS SEMILINEALES 121
donde por brevedad supondremos que F = F (x, t, y1, y2, y3) es de clase C1 enR5. La idea es fabricar una solución local (u,U), u ∈ C1(U), U un abierto quecontiene al eje x.
La versión del problema en coordenadas características es:uξη = − 1
4c2F (ξ, η, u, uξ, uη)
u(ξ, ξ) = f(ξ)
uξ(ξ, ξ)− uη(ξ, ξ) = g(ξ),
(4.36)
donde F se deduce de manera obvia a partir de F .Si fijamos x0 toda posible solución de (4.36) cerca de ξ = η = x0 ha de
satisfacer la identidad de punto fijo:
u = u0 +1
4c2
∫ ξ
η
∫ s1
η
F (s1, s2, u, uξ, uη) ds2ds1, (4.37)
con u0 = 12f(ξ) + f(η)+ 1
2c
∫ ξ
ηg(s) ds.
Para δ > 0 llamamos Qδ = [x0 − δ, x0 + δ] × [x0 − δ, x0 + δ]. Si fijamos δ0,R0, números positivos y
K = (ξ, η, z, p, q) ∈ R5 : (ξ, η) ∈ Qδ,
|z − u0(ξ, η)|, |p− u0ξ(ξ, η)|, |q − u0η(ξ, η)| ≤ R0,
definimos:L = sup
(ξ,η,z,p,q)∈K|F |+ |Fξ|+ |Fη|.
Para resolver la ecuación de punto fijo (4.37) cerca de (x0, x0) tomamos δ, δ1menores que δ0 y R0, respectivamente, construimos:
Xδ,δ1 = u ∈ C1(Qδ) : |u− u0|1 ≤ δ1.
Definimos el operador:
T : Xδ,δ1 −→ C1(Qδ)v 7−→ T (v)
,
donde:
T (v) = u0 +1
4c2
∫ ξ
η
∫ s1
η
F(s1, s2, v) ds2ds1, (4.38)
siendo F(s1, s2, v) = F (s1, s2, v, vξ, vη).Se pueden elegir δ y δ1 de forma que T sea contractivo de Xδ,δ1 sobre si
mismo. En efecto:
T (v)ξ = u0ξ +1
4c2
∫ ξ
η
F(ξ, s2, v) ds2
T (v)η = u0η −1
4c2
∫ ξ
η
F(s1, η, v) ds1,

122 CAPÍTULO 4. ECUACIÓN DE ONDAS
con lo que, para cada v ∈ Xδ,δ1 :
|T (v)− u0| ≤Lδ2
c2
|T (v)ξ − u0ξ| ≤Lδ
2c2
|T (v)η − u0η| ≤Lδ
2c2
mientras:
|T (v1)− T (v2)| ≤Lδ2
c2|v1 − v2|1
|T (v1)ξ − T (v2)ξ| ≤Lδ
2c2|v1 − v2|1
|T (v1)η − T (v2)η| ≤Lδ
2c2|v1 − v2|1.
Una elección adecuada de δ > 0 permite probar la invariancia de Xδ,δ1 juntocon la contractiviad de T en Xδ,δ1 .
Hemos probado asíel siguiente resultado.
Teorema 4.11. Sea F = F (x, t, y1, y2, y3) una función de clase C1. Entoncespara cada f ∈ C2(R), g ∈ C1(R) el problema de valor inicial:
utt = c2uxx + F (x, t, u, ux, ut) x ∈ R, t > 0
u(x, 0) = f(x) x ∈ Rut(x, 0) = g(x) x ∈ R ,
admite una única solución local (u,U).
Demostración. Basta con asociar a cada x0 ∈ R la solución local (ux0 ,Qδ (x0))
que hemos construido con unicidad. Como ux0 = ux′0
siQδ (x0) ∩
Qδ (x′0) = ∅
resultará que:
U = ∪x0∈RQδ (x0).
Observación 4.12. Las dimensiones del dominio de existencia U de las posiblessoluciones locales están sometidas esencialmente a las mismas condiciones devariabilidad y finitud que en el caso de ecuaciones diferenciales ordinarias. Enel ejemplo:
utt = c2uxx + (α+ 1)uα x ∈ R, t > 0
u(x, 0) = u0 x ∈ Rut(x, 0) = 0 x ∈ R ,
donde α > 1 y se toma u0 > 0 constante. La solución explota uniformementecuando t→ T+ donde:
T =1√2
∫ +∞
u0
ds√uα+1 − uα+1
0
.

4.7. ECUACIÓN DE ONDAS N -DIMENSIONAL 123
4.6.2. Problemas de contorno
Las resultados de la sección se aplican al problema de contorno semilineal:utt = c2uxx + F (u) x ∈ (0, l), t > 0
u(x, 0) = f(x) x ∈ [0, l]
ut(x, 0) = g(x) x[0, l],
u(0, t) = u(l, t) = 0,
con tal que F sea C1 e impar en u (F (−u) = −F (u)) (f ∈ C2[0, l], g ∈ C1[0, l]cumpliendo las condiciones de compatibilidad (4.25)). En efecto basta extenderf , g a R como en el problema de Dirichlet y probar que u detenta las simetríasadecuadas.
4.7. Ecuación de ondas n-dimensional
4.7.1. Unicidad de soluciones para el problema de valor
Las superficies carcterísticas del operador de ondas cu = utt − ∆xu sonϕ(x, t) = 0, (x, t) ∈ R× Rn, donde
ϕ2t + |∇ϕ|2 = 0.
El caso más importante de tales superficies son los “conos de luz”. Para (x0, t0) ∈Rn × R la unión de las rectas:
x = x0 + cu(τ − t0) t = τ τ ∈ R,
con u ∈ Rn, |u| = 1, constituyen los conos de luz Γ− (τ ≤ t0) y Γ+ (τ ≥ t0). Lasección de Γ+ con t = τ ≥ t0 es el lugar geométrico de los puntos que se hanalejado rectilíneamente de x = x0 a una velocidad c (típicamente, la velocidadde la luz). La ecuación de los conos de luz es:
Γ(x0, t0) = (x, t) : |x− x0|2 = c|t− t0|.
(Γ+ corresponde por ejemplo a t ≥ t0).El primer resultado fundamental es el siguiente (prueba inspirada en la de
[24] para n = 3).
Teorema 4.12 (Unicidad). Sea u ∈ C2(Rn × R) una solución clásica del pro-blema de valor inicial:
utt = c2∆u (x, t) ∈ Rn × Ru(x, 0) = 0 x ∈ Rn
ut(x, 0) = 0 x ∈ Rn.

124 CAPÍTULO 4. ECUACIÓN DE ONDAS
Entonces u(x, t) = 0 para todo (x, t) ∈ Rn × R. En particular, para cada f =f(x), g = g(x), F = F (x, t) el problema:
utt = c2∆u+ F (x, t) (x, t) ∈ Rn × Ru(x, 0) = f(x) x ∈ Rn
ut(x, 0) = g(x) x ∈ Rn.
admite a lo más una solución clásica.
Demostración. Tenemos, para u ∈ C2(Rn × R):
2utcu = 2ututt − c2∑
2utuxixi
= 2ututt − c2∑
(2utuxixi + 2utxiuxi) + c2∑
2utxiuxi
= (u2t + |∇u|2)t − 2c2∑
(utuxi)xi
= (u2t + |∇u|2)t − 2c2div (ut∇u).
Para P0 = (x0, t0), t0 > 0, tomamos (comparar con el triángulo característico):
T (P0) = (x, t) : t ≥ 0 , c2(t0 − t) ≥ |x− x0|,
cuya superficie lateral llamaremos por abuso de notación Γ−(P0).Como utcu = 0 integrando en T (P0) y aplicando el teorema de la diver-
gencia:
0 =
∫|x−x0|≤ct0
(−2c2ut∇u, u2t + c2|∇u|2).(0,−1) dx
+1√
1 + c2
∫Γ−
(−2c2ut∇u, u2t + c2|∇u|2).( x− x0|x− x0|
, c) dS
=1√
1 + c2
∫Γ−
−2c2ut∇ux− x0|x− x0|
+ c(u2t + c2|∇u|2) dS
=c√
1 + c2
∫Γ−
u2t + c2|∇u|2 − 2c2∇uutx− x0|x− x0|
dS
=c√
1 + c2
∫Γ−
∣∣∣∣ut x− x0|x− x0|
− c∇u∣∣∣∣2 dS.
Concluimos que sobre Γ−(P0) (de ecuación c(t− t0) = |x− x0|) se tiene:
utx− x0|x− x0|
= c∇u(x).
Para cualquier curva en Γ−(P0):
x = x(s) t = −1
c|x− x0|+ t0,

4.7. ECUACIÓN DE ONDAS N -DIMENSIONAL 125
se cumple que:
d
dsu(x(s), t0 −
1
c|x− x0|) =
(∇u− 1
cut
x− x0|x− x0|
)x′(s)
=1
c
(c∇u− ut
x− x0|x− x0|
)x′(s) = 0.
Por tanto u se conserva sobre la superficie lateral Γ−(P0) y como en la base escero se tiene en particular u(P0) = 0. Como P0 es arbitrario, u = 0.
Un corolario inmediato de la demostración es la propiedad de velocidad depropagación finita de las perturbaciones.
Teorema 4.13. Sea u ∈ C2(Rn × R) una solución del problema:utt = c2∆u (x, t) ∈ Rn × Ru(x, 0) = f(x) x ∈ Rn
ut(x, 0) = g(x) x ∈ Rn.
en la que f y g tienen soporte compacto. Entonces u(·, t) tiene soporte compactopara todo t ∈ R.
4.7.2. Medias esféricas
Una aplicación lineal TL(Rn) se dice ortogonal si T−1 = T t. O(Rn) denotaráel conjunto de tales transformaciones. Es un ejercicio probar que si u es soluciónde la ecuación de ondas cu = 0 entonces todas sus rotaciones uT (x, t) =u(Tx, t) también satisfacen la ecuación de ondas.
Sea h ∈ C(Rn), r > 0 y Sr(x) = y : |y − x| = r la esfera de centro x yradio r (ωn = área (S1)). Representamos por:
Mh(x, r) =1
ωnrn−1
∫Sr(x)
h(y) dSy =1
ωn
∫S1
h(x+ rw) dSw,
la media de h sobre Sr(x) (es un promedio de las “rotaciones” de h alrededor dex y a una distancia r > 0).
Propiedad 4.14. Sea h ∈ C(Rn) entonces:
1. Mh(x, r) se puede extender de forma par a todo r ∈ R: Mh(x,−r) =Mh(x, r) con lımr→0Mh(x, r) = h(x).
2. Si h ∈ Cs(Rn) entonces Mh(x, r) es Cs en (x, r): Mh ∈ Cs(Rn × R).
Observación 4.13. Si h es C1,Mh es también C1 en r y por tanto ∂Mh/∂r(x, 0) =0.

126 CAPÍTULO 4. ECUACIÓN DE ONDAS
Lema 4.15. Sea h ∈ C2(Rn). Entonces:
∂
∂rMh(x, r) =
1
rn−1∆x
(∫ r
0
ρn−1Mh(x, ρ) dρ
).
En particular:
∂
∂r
(rn−1 ∂
∂rMh(x, r)
)= rn−1∆xMh(x, r).
Es decir∂2
∂r2Mh +
n− 1
r
∂Mh
∂r= ∆xMh(x, r). (4.39)
Observación 4.14. Se conoce a (4.39) como la ecuación de Darboux.
Lema 4.16. Si u = u(x, t) ∈ C2(Rn×R) satisface la ecuación de ondas cu = 0entonces, para x ∈ Rn fijo:
∂2
∂t2Mu(x, r, t) = c2
(∂2
∂r2+n− 1
r
∂
∂r
)Mu(x, r, t). (4.40)
Consecuencia de los Lemas 4.15 y 4.16 es el siguiente resultado.
Corolario 4.17. Sea u = u(x, t) ∈ C2(Rn × R) una solución del problema devalor inicial:
utt = c2∆u (x, t) ∈ Rn × Ru(x, 0) = f(x) x ∈ Rn
ut(x, 0) = g(x) x ∈ Rn.
Entonces, para cada x ∈ Rn fijo se tiene que:∂2
∂t2Mu(x, r, t) = c2
(∂2
∂r2+n− 1
r∂∂r
)Mu(x, r, t) r ∈ R, t > 0
Mu(x, r, 0) =Mf (x, r) r ∈ R(Mu)t(x, r, 0) =Mg(x, r) r ∈ R.
(4.41)
Observación 4.15. La ecuación (4.40) es la ecuación de ondas para una funciónradial. La media Mu resuelve, como función radial, el problema de valor inicialcorrespondiente a las medias de los datos iniciales.
Demostración del Lema 4.15. Tenemos:
Mh(x, r) =1
ωn
∫|ξ|=1
h(x+ rξ) dSξ.

4.7. ECUACIÓN DE ONDAS N -DIMENSIONAL 127
Por tanto:
∂Mh
∂r(x, r) =
1
ωn
∫|ξ|=1
∑∂ih(x+ rξ)ξi dSξ
=1
ωn
∫|ξ|≤1
∑∂ξi (∂ih(x+ rξ)) dξ
=1
ωn
∫|ξ|<1
r∆xh(x+ rξ) dξ
=r1−n
ωn∆x
(∫|y−x|<r
h(y) dy
)
= r1−n∆x
(∫ r
0
[1
ωn
∫|w|=1
h(x+ ρw)ρn−1 dSw
]dρ
)
= r1−n∆x
(∫ r
0
ρn−1Mh(x, ρ) dρ
).
4.7.3. El problema de valor inicial en el caso n = 3
Supongamos que u = u(x, t) es una solución clásica del problema (n = 3):utt = c2∆u x ∈ R3, t > 0
u(x, 0) = f(x), ut(x, 0) = g(x) x ∈ R3.(4.42)
La media alrededor de x, u(r, t) =Mu(x, r, t) satisface:
utt = c2(urr +
2
rur
),
mientras u(r, 0) =Mf (x, r), ut(r, 0) =Mg(x, r). En particular:
(ru)tt = c2 (ru)rr .
Por tanto v(r, t) := ru(r, t) resuelve el problema de valor inicial,vtt = c2vrr r ∈ R, t > 0
v(r, 0) = rMf (x, r)
vt(r, 0) = rMg(x, r).
Entonces,
ru(r, t) =1
2(r + ct)Mf (x, r + ct)+
1
2(r − ct)Mf (x, r − ct) +
1
2c
∫ r+ct
r−ct
sMg(x, s) ds.

128 CAPÍTULO 4. ECUACIÓN DE ONDAS
De la paridad de Mf en r:
Mu(x, r, t) =
(r + ct)Mf (x, ct+ r)− (ct− r)Mf (x, ct− r)
2r+
1
2cr
∫ r+ct
r−ct
sMg(x, s) ds
=1
2r
(2rMf (x, ct) + 2ct
∂Mf
∂r(x, ct)r + o(r)
)+
1
2rcη(r)Mg(x, η(r))2r,
con ct− r < η(r) < ct+ r. Al hacer tender r a cero:
u(x, t) =Mf (x, ct) + ct∂Mf
∂r(x, ct) +
ct
cMg(x, ct)
= tMg(x, ct) +∂
∂t(tMf (x, ct)) .
Se ha obtenido entonces el siguiente resultado.
Teorema 4.18 (Fórmula de Kirchhoff). Si u ∈ C2(R3 × R) es la solución delproblema (4.42) entonces u = u(x, t) se puede representar en la forma:
u(x, t) =1
4πc2t
∫Sct(x)
g(y) dSy +∂
∂t
(1
4πc2t
∫Sct(x)
f(y) dSy
)(4.43)
Asímismo podemos concluir el recíproco.
Teorema 4.19. Para f ∈ C3(R3), g ∈ C2(R3) (regularidad que es precisa paraque el segundo miembro de (4.43) sea C2), la identidad (4.43) proporciona lasolución clásica de (4.42).
Demostración. Escribiendo (4.43) como u = u1 + u2 basta con probar que u1cumple (4.42) con f = 0. En efecto, si g es suficientemente regular u2 = u1tcumple u2 = 0 y u2 = g, u2t = 0 en t = 0.
Ahora,
u1 =t
4π
∫|w|=1
g(x+ ctw) dSw,
luego,
∆u1 =t
4π
∫|w|=1
∆g(x+ ctw) dSw,
mientras,
u1t =u1t
+t
4π
∫|w|=1
c∇g(x+ ctw)w dSw
=u1t
+1
4πct
∫Sct(x)
∇g(x+ ctw)w dSct
=u1t
+1
4πct
∫Bct(x)
∆g(y) dy
=u1t
+1
4πctI(t),

4.7. ECUACIÓN DE ONDAS N -DIMENSIONAL 129
con I(t) =∫Bct(x)
∆g(y) dy. Asímismo,
u1tt =1
t
(u1t
+1
4πctI
)− u1t2
− 1
4πct2I +
1
4πctI ′ =
1
4πctI ′.
Sin embargo,
I ′ =
(∫ ct
0
(∫Sρ(x)
∆g dSρ
)dρ
)′
= c
∫Sct(x)
∆g dSct
= c(ct)2∫|w|=1
∆g(x+ ctw) dSw.
Luego u1tt = ∆u1. Por otra parte está claro que u1 satisface las condicionesiniciales.
Ejercicio 4.11. Sea f continua en Rn. Prúebese que:
d
dr
(∫|x−x0|≤r
f(x) dx
)=
∫|x−x0|=r
f(x) dSx.
Principio de Huygens
La identidad de Kichhoff (4.43) encierra una interesante propiedad de lapropagación de perturbaciones en el espacio. A tal efecto, supongamos que f yg tienen soporte compacto en (4.42) y sea K = sop f ∪ sop g.
Tomemos un punto del espacio x0 inicialmente en reposo, x0 /∈ K. Podemosdefinir:
d := dist (x0,K) D := sup|x0 − y| : y ∈ K.
De la fórmula (4.43) se sigue que la solución u(x0, t) = 0 para t < t0 := d/c, esdecir la perturbación emplea d/c unidades de tiempo en alcanzar x0, mientras denuevo u(x0, t) = 0 para t > D/c, es decir el medio “recupera” el reposo al cabode un tiempo finito. Este efecto se conoce como principio fuerte de Huygens. Unalectura posible: en el espacio podemos distinguir los sonidos porque las diversasseñales acústicas tras perturbar un punto se dejan unas a otras el medio “limpio”de excitaciones. Alternativamente: la estela de las ondas desaparece en tiempofinito.
Por otro lado, el conjunto:
Γt = x ∈ R3 : dist (x,K) = ct,
es claramente la “interfaz” que va señalando en el tiempo la frontera entre lazona perturbada y la zona sin perturbar. Se llama a Γt el frente de ondas. Unareinterpretación de la fórmula de Kirchhoff revela que cada punto del espacioalcanzado por el frente de ondas se convierte a su vez en un emisor con lasmismas características que los datos iniciales.

130 CAPÍTULO 4. ECUACIÓN DE ONDAS
4.7.4. Propagación de ondas en el plano n = 2
Si en la fórmula de Kirchhoff (4.43) los datos inciales f y g no dependen dex3, por ejemplo, entonces la solución u tampoco. Se resuelve así el problema devalor inicial en el plano:
utt = c2∆u (x1, x2) ∈ R2, t > 0
u(x1, x2, 0) = f(x1, x2) (x1, x2) ∈ R2
ut(x1, x2, 0) = g(x1, x2) (x1, x2) ∈ R2,
(4.44)
en los siguientes términos. Ponemos x = (x1, x2), y = (y1, y2) y f(x1, x2, x3) =f(x) y se tiene:
1
4πc2t
∫Sct((x,x3))
f(y, y3) dS(y,y3) =1
4πc2t
∫Bct(x)⊂R2
2ct√c2t2 − |y − x|2
f(y) dy
=1
2πc
∫Bct(x)⊂R2
f(y)√c2t2 − |y − x|2
dy.
Por tanto, si f ∈ C3(R2), g ∈ C2(R3) podemos concluir que la solución delproblema (6) es:
u(x1, x2, t) =1
2πc
∂
∂t
(∫Bct(x)
f(y)√c2t2 − |y − x|2
dy
)+
1
2πc
∫Bct(x)
g(y)√c2t2 − |y − x|2
dy. (4.45)
Observación 4.16. El principio de Huygens falla en el plano. En efecto, supon-gamos que g tiene soporte compacto K en el segundo sumando ug de (4.45).Para t ≥ t0 con t0 el máximo teniendo K ⊂ Bct(x) resulta que:
ug(x, t) =1
2πc
∫K
g(y)√c2t2 − |y − x|2
dy → 0,
cuando t→ +∞. Más aún:
ug(x, t) ∼1
2πc2t
∫K
g(y) dy t→ +∞.
Análogamente,
uf (x, t) ∼ − 1
2πc2t2
∫K
f(y) dy t→ +∞.
En conclusión cuando una perturbación inicial localizada afecta a un punto P0
(después de que lo alcance el frente de ondas Γt), dicha perturbación se mantienetípicamente para todos los valores futuros del tiempo. Sin embargo, la amplitudde la perturbación tiende a cero cuando t→ +∞.

4.8. EL CASO N -DIMENSIONAL 131
Transformaciones de Lorentz
Son las transformaciones lineales T ∈ L(Rn × R) que dejan invariante eloperador de ondas c
4. Como es natural, tales transformaciones forman nece-sariamente un grupo.
Si ponemos c = 1 para simplificar, y escribimos
u = ux1x1 − ux2x2 − · · · − uxnxn ,
la forma característica es
σ(ξ, η) = ξ1η1 − ξ2η2 − · · · − ξnηn.
Las ecuaciones de T serán:ξi =
∑j
fijxj ,
donde:
1 = f211 −n∑
j=2
f21j
0 = f11fl1 −n∑
j=2
f1jflj
−δkl = fk1fl1 −n∑
j=2
fkjflj 2 ≤ k, l ≤ n.
Un caso particular de tales transformaciones es:
(fij) =
±1 0 . . . 00 f22 . . . f2n...
.... . .
...0 fn2 . . . fnn
,
donde (fkl)2≤k,l≤n es ortogonal. Una discusión completa de todas las transfor-maciones de Lorentz se relega a la sección de ejercicios (Ejercicio 29).
4.8. El caso n-dimensional
4.8.1. Dimensiones impares
Ya sabemos que la media M(r, t) =Mu(x, r, t) de una solución clásica de laecuación de ondas satisface la ecuación de Euler-Darboux-Poisson:
Mtt = c2Mrr −n− 1
rMr.
4cf. [12].

132 CAPÍTULO 4. ECUACIÓN DE ONDAS
Para φ = φ(r) consideramos el operador:
Lk(∂r)φ =
(1
r
∂
∂r
)k−1
(r2k−1φ(r)) k ∈ N.
Se tienen entonces las relaciones (Ejercicio 33, [9]):
∂2
∂r2Lk(∂r)φ =
(1
r
∂
∂r
)k
(r2k∂φ
∂r(r)),
Lk(∂r)φ =k−1∑j=0
cjrj+1φ(j),
dondec0 = (2k − 1)!!
y además, Lk(∂r)φ es impar si φ es par.La observación importante es que cuando la dimensión n es impar, n = 2k+1,
entonces v(r, t) = Lk(∂r)M(r, t) cumple la ecuación de ondas unidimensional(pondremos c = 1 para simplificar):
(LkM)rr =
(1
r
∂
∂r
)k
(r2kMr)
=
(1
r
∂
∂r
)k−1(r2k−1Mrr +
2k
rMr
)= (LkM)tt.
Por tanto, si u es la solución del problemautt = ∆u (x, t) ∈ Rn × Ru(x, 0) = f(x), ut(x, 0) = g(x) x ∈ Rn,
(4.46)
entonces,
LkM(r, t) =1
2ψ(r + t) +
1
2ψ(r − t) +
1
2
∫ r+t
r−t
ϕ(s) ds, (4.47)
con ψ = LkMf , ϕ = LkMg. Diviendo en (4.47) por r y haciendo tender r → 0:
c0u(x, t) = ψ′(t) + ϕ(t),
es decir,
u(x, t) =1
c0
∂
∂t
(1
t
∂
∂t
)k−1
t2k−1Mf (x, t) +1
c0
(1
t
∂
∂t
)k−1
t2k−1Mg(x, t).

4.8. EL CASO N -DIMENSIONAL 133
En otras palabras, si n = 2 + 1, n ≥ 3,
u(x, t) =1
(n− 2)!!
∂
∂t
(1
t
∂
∂t
)n−32
tn−2Mf (x, t)
+1
(n− 2)!!
(1
t
∂
∂t
)n− 3
2tn−2Mg(x, t). (4.48)
La validez de (4.48) requiere que f sea de clase C(n−1)/2 y g de clase C(n−3)/2.Tenemos, por otro lado, el siguiente resultado.
Teorema 4.20. Sean n = 2 + 1, n0 = max2, n− 3
2, f ∈ Cn0+1(Rn), g ∈
Cn0(Rn). Entonces u = u(x, t) definida por (4.48) es la solución de (4.46).
Demostración. Poniendo n = 2k + 1,
u1 = Lk(∂t)Mg(x, t) =1
c0
(1
t
∂
∂t
)k−1
t2k−1Mg(x, t),
basta con demostrar que u1 define la solución de la ecuación de ondas con u = 0y ut = g en t = 0.
Como Mg(x, t) es par en t se tiene entonces que u1(x, 0) = 0. La validez dela segunda condición inicial es inmediata.
Por otro lado:
∆u1 =1
c0
(1
t
∂
∂t
)k−1(t2k−1
ωn
∫|w|=1
∆g(x+ tw) dSw
),
mientras,
u1tt =1
c0
(1
t
∂
∂t
)k(t2k
(1
ωn
∫|w|=1
g(x+ tw) dSw
)t
)
=1
c0
(1
t
∂
∂t
)k−1(1
t
∂
∂t
)(1
ωn
∫|w|=1
∇g(x+ tw)wt2k dSw
)
=1
c0
(1
t
∂
∂t
)k−1(1
t
∂
∂t
)(1
ωn
∫Bt(x)
∆g(y) dy
)
=1
c0
(1
t
∂
∂t
)k−1(t2k−1
ωn
∫|w|=1
∆g(x+ tw) dSw
)= ∆u1 .
Se he empleado que:(∫Bt(x)
∆g(y) dy
)t
=
(∫ t
0
ρ2k∫|w|=1
∆g(x+ ρw) dSwdρ
)t
= t2k∫|w|=1
∆g(x+ tw) dSw.

134 CAPÍTULO 4. ECUACIÓN DE ONDAS
Esto concluye la demostración.
4.8.2. Método del descenso de HadamardEscribiendo x′ = (x1, . . . , xn−1) supongamos que u = u(x′, xn, t) resuelve:
utt = c2∆x′u+ c2uxnxn
u(x′, xn, 0) = f(x′), ut(x′, xn, 0) = g(x′).
(4.49)
Entonces u no depende de xn pues para todo a ∈ R, ua(x, t) = u(x′, xn + a, t)es también solución de (4.49). Por tanto u = ua que implica uxn = 0.
Supongamos ahora que n = 2. Entonces n+ 1 = 2 + 1. Si g = g(x), x ∈ Rn,es suficientemente regular, definimos g(x, xn+1) = g(x).
Ponemos,
u1(x, xn+1, t) =1
(n− 1)!!
(1
t
∂
∂t
)n−22
(tn−1Mg(x, xn+1, t)).
Tendremos que u1 no depende de xn+1 y u1(x, t) = u1(x, 0, t) es solución de:utt = ∆u x ∈ Rn t ∈ Ru(x, 0) = 0 x ∈ Rn
ut(x, 0) = g(x) x ∈ Rn,
donde ahora n es par. El paso de u1 a u1 se llama método del descenso. Para laforma explícita de u1 observamos:
u1(x, xn+1, t) =
1
(n− 1)!!
(1
t
∂
∂t
)n−22
(tn−1
ωn+1
∫|(w,wn+1)|=1
g(x+ tw, twn+1) dS(w,wn+1)
)
=1
(n− 1)!!
(1
t
∂
∂t
)n−22
(tn−1
ωn+1
∫|(w,wn+1)|=1
g(x+ tw) dS(w,wn+1)
)
=1
(n− 1)!!
(1
t
∂
∂t
)n−22
(2tn−1
ωn+1
∫|y|≤1
g(x+ ty)√1− |y|2
dy
)
=2
ωn+1(n− 1)!!
(1
t
∂
∂t
)n−22
(tn−1
∫Bt(x)
g(z)√t2 − |z − x|2
dy
),
pues,
dS(w,wn+1) =dy√
1− |y|2y ∈ Rn |y| ≤ 1.
Por tanto la solución de:utt = ∆u x ∈ Rn t ∈ Ru(x, 0) = f(x) x ∈ Rn
ut(x, 0) = g(x) x ∈ Rn,

4.9. EJERCICIOS 135
es, cuando n es par,
u(x, t) =2
ωn+1(n− 1)!!
(1
t
∂
∂t
)n−22
(tn−1
∫Bt(x)
g(z)√t2 − |z − x|2
dy
)2
ωn+1(n− 1)!!
∂
∂t
(1
t
∂
∂t
)n−22
(tn−1
∫Bt(x)
f(z)√t2 − |z − x|2
dy
),
supuesto que g ∈ C(n+2)/2(Rn) y f ∈ C(n+4)/2(Rn).
4.9. Ejercicios1. (Ecuaciones hiperbólicas). Se considera la ecuación de segundo orden li-
neal:auxx + 2buxy + cuyy = 0,
donde a, b, c son constates que satisfacen b2 − ac > 0, a = 0. Hágase uncambio de variables:
ξ = ξ(x, y)
η = η(x, y),
para obtener una nueva ecuación en las variables ξ, η de la forma:
auξξ + 2buξη + cuηη,
determinando los nuevos coeficientes: a, b, c. Pruébese que existen dosvalores αi, i = 1, 2 tales que haciendo ξ = x+ α1y, η = x+ α2y se llega auna ecuación en donde a = c = 0, es decir, a la ecuación:
uξη = 0.
2. Pruébese que toda solución u de clase C2 en R2 de uxy = 0 se puedeescribir en la forma u = F (x) +G(y).
3. Expresar las siguientes ecuaciones en coordenadas carcterísticas:uxx + 2uxy − 3uyy + 2ux + 6uy = 0
uxx + 4uxy + 5uyy + ux + 2uy = 0
uxx − 2uxy + uyy + αux + βuy + cu = 0
uxx − 2 cosxuxy − (3 + sen2 x)uyy − yuy = 0
tag2 x uxx − 2ytag xuxy + y2uyy + tag3 xux = 0
yuxx + uyy = 0 (ecuación de Tricomi)x2uxx + 2xyuxy − 3y2uyy − 2xux + 4yuy + 16x4u = 0
(1 + x2)uxx + (1 + y2)uyy + xux + yuy = 0
sen2 xuxx − 2y senxuxy + y2uyy = 0
uxx + yuyy + αuy = 0.

136 CAPÍTULO 4. ECUACIÓN DE ONDAS
4. Se considera la ecuación de ondas de coeficientes variables
utt − c2(x)uxx = 0,
donde c = c(x) es positiva y de clase C1. Escríbase en coordenadas cara-caterísticas.
Indicación. Es conveniente introducir la función Γ(x) =∫ x
01/c(s) ds.
En ese casos una posible elección de las coordenadas características esξ = Γ(x) + t, η = Γ(x)− t.
5. Hallar la forma general de las soluciones de las ecuaciones siguientes:
uxx − 2 senxuxy − cos2 xuyy − cosxuy = 0
x2uxx − 2xyuxy + y2uyy + xux + yuy = 0
∂∂x
(x2ux
)= x2uyy
(x− y)uxy − ux + uy = 0
x2uxx + 2xyuxy + y2uyy + 2yzuyz + z2uzz + 2zxuzx = 0
utt = a11uxx + 2a12uxy + a22uyy, con aij > 0, a11a22 = a212.
uxxxx − 2uxxyy + uyyyy = 0.
6. Entre todas las ecuaciones lineales y homogéneas de segundo orden y coe-ficientes constantes,
auxx + 2buxy + cuyy + dux + euy + fu = 0,
prúebese que las únicas invariantes frente a rotaciones son las de la forma:
a∆u+ fu = 0.
7. Redúzcase la ecuación elíptica:
uxx + 3uyy − 2ux + 24uy + 5u = 0,
a la forma vxx+vyy+cv = 0 mediante un cambio de la forma: u = veαx+βy
y después un cambio de escala: y′ = γy.
8. Se considera la ecuación de segundo orden:
(Lu =)a11uxx − 2a12uxy + a22uyy + b1ux + b2uy = 0,
donde d = a212−a11a22 > 0. Se dice que u = u(x, y) es una solución funcio-nalmente invariante de la ecuación si F (u) también es solución, cualquieraque sea F , F ∈ C2(R). Estúdiense las condiciones necesarias y suficientespara la existencia de soluciones funcionalmente invariantes, aprovechandolos resultados para formular una solución general de dicha ecuación.

4.9. EJERCICIOS 137
9. Sea L como en el Ejercicio 8. Demuéstrese que si,
a11b22 + 2a12b1b2 + a22b
21 + 4dc = 0,
entonces la ecuación lineal de segundo orden:
L(u) + cu = 0,
admite la solución general:
u(x, y) = e(kx+my)/2d [ϕ1(α1x− y) + ϕ2(α2x− y)] ;
donde ϕ1, ϕ2 son funciones arbitrarias, k = a22b1 − a12b2, m = a11b2 −a12b1, y α1, α2 son las raíces de la ecuación:
a11α2 − 2a12α+ a22 = 0.
10. Hállese la solución de los problemas de Cauchy:
utt = c2uxx, u(x, 0) = f(x), ut(x, 0) = g(x),
para las parejas de datos iniciales: a) (f, g) = (ex, senx), b) (f, g) =(log(1 + x2), 4 + x).
11. En el problema
utt = c2uxx, u(x, 0) = f(x), ut(x, 0) = g(x),
se toma f = 0, g = φ, donde φ(x) = 1 si −a ≤ x ≤ a, φ(x) = 0 enotro caso. Dése una descripción de u(·, t) para los valores de t siguientes:t = a
2c ,ac ,
3a2c ,
2ac ,
5ac .
12. Hállese la solución de los problemas de Cauchy:
utt = c2uxx + F (x, t), u(x, 0) = f(x), ut(x, 0) = g(x),
para los siguientes juegos de funciones: a) (f, g, F ) = (0, 0, xt), b) (f, g, F ) =(0, 0, eax), c) (f, g, F ) = (senx, 1 + x, cosx).
13. Dedúzcase la solución general del problema
utt = c2uxx + F (x, t), u(x, 0) = f(x), ut(x, 0) = g(x),
en las condiciones de regularidad estándar: f ∈ C2, g ∈ C1, F ∈ C1, enx ∈ R, t ≥ 0, usando las coordenadas características ξ = x+ct, η = x−ct.
14. Dedúzcase la existencia de soluciones para los problemas de Dirichlet yNeumann en la semirrecta:
utt = c2uxx, x > 0, t ≥ 0
u(x, 0) = f(x), ut(x, 0) = g(x), x ≥ 0
u(0, t) = α(t),

138 CAPÍTULO 4. ECUACIÓN DE ONDAS
yutt = c2uxx, x > 0, t ≥ 0
u(x, 0) = f(x), ut(x, 0) = g(x), x ≥ 0
ux(0, t) = β(t).
Para ello supóngase que f, g, α, β tienen la regularidad necesaria y cum-plen adecuadas condiciones de compatibilidad. Demuéstrese también launicidad de soluciones del problema.
15. Hállese la solución de utt = 4uxx en 0 < x < ∞, u(0, t) = 0, u(x, 0) = 1,ut(x, 0) = 0. Localícense las singularidades de la solución.
16. Hállese la solución de utt = c2uxx, 0 < x < ∞, donde u(x, 0) = 0,ut(x, 0) = V , y donde:
ut(0, t) + aux(0, t) = 0,
siendo a, V constantes positivas, a > c.
17. Para la solución u(x, t) de utt = uxx en 0 < x < 1, u(x, 0) = x2(1 − x),ut(x, 0) = (1− x)2, u(0, t) = u(1, t) = 0, t ≥ 0, hállense u( 23 , 2), u(
14 ,
72 ).
18. Hállese la solución de utt = 9uxx en 0 < x < π2 , u(x, 0) = cosx, ut(x, 0) =
0, ux(0, t) = 0, u(π2 , t) = 0.
19. Resuélvase utt = c2uxx en 0 < x < l, u(x, 0) = 0, ut(x, 0) = x, u(0, t) =u(l, t) = 0.
20. Cualquier paralelogramo ordenado A,B,C,D con sus lados paralelos a laslíneas carcaterísticas ξ = c1, η = c2 se llamará característico.
Sea Ω ⊂ R2 un abierto convexo y sea u ∈ C2(Ω). Pruébese la siguientepropiedad: “u(x, t) es una solución de la ecuación de las ondas utt = c2uxxen Ω sí y solamente sí u(A) + u(C) = u(B) + u(D) cualquiera que sea elparalelogramo característico A,B,C,D contenido en Ω”.
Utilícese la propiedad precedente para describir un procedimiento geomé-trico que permita hallar la solución del problema:
utt = c2uxx, 0 < x <∞, t ≥ 0,
u(x, 0) = f(x), ut(x, 0) = g(x),
u(0, t) = α(t), t ≥ 0,
bajo condiciones adecuadas de regularidad, así como de compatibilidadpara los datos f, g, α. Procédase de la misma manera con el problema deDirichlet no homogéneo:
utt = c2uxx, 0 < x < l, t ≥ 0,
u(x, 0) = f(x), ut(x, 0) = g(x), 0 < x < l
u(0, t) = α(t), u(l, t) = β(t) t ≥ 0,

4.9. EJERCICIOS 139
nuevamente, bajo las condiciones de regularidad y compatibilidad reque-ridas a los datos f, g, α, β.
21. Ondas Esféricas. Una onda esférica u(r, t) es una solución de la ecuaciónde ondas tridimensional utt = c2∆u que sólo depende de la distancia alorigen r y del tiempo t. Pruébese que:
utt = c2(urr +
2
rur
).
Efectúese el cambio de variables v = ru para obtener la ecuación de ondasunidimensional vtt = c2vrr. Para funciones φ(r) ∈ C2, ϕ(r) ∈ C1, ámbaspares, hállese la solución del problema:
utt = c2∆u, x ∈ R3, t ≥ 0,
u(x, 0) = φ(r), ut(x, 0) = ϕ(r).
22. Considérese el modelo de la cuerda vibrante en las condiciones del Ejer-cicio 22. Los desplazamientos u = u(x, t) de la cuerda, sometida a lascondiciones de contorno u(0, t) = u(l, t) = 0 satisfacen:
utt = c2uxx + F (x, t), t > 0, 0 < x < l,
donde c2 = T0/ρ(x), T0 es la tensión en equilibrio, ρ ∈ C([0, l]), ρ > 0la densidad. Por simplicidad vamos a suponer que u es C2 en t ≥ 0,0 ≤ x ≤ l. Las energías cinética K(t) y potencial P (t) en el instante t sedefinen respectivamente como:
K =1
2
∫ l
0
ρu2t dx P =T02
∫ l
0
u2x dx,
mientras que la energía total se define como E(t) = K(t)+P (t). Prúebeseque:
E(t) =1
2
∫ l
0
ρg2 dx+T02
∫ l
0
f ′2dx+
∫ t
0
∫ l
0
ρF dx dt.
En el caso de la membrana vibrante, si suponemos que Ω = [a, b] × [c, d](un rectángulo), que la densidad ρ ∈ C(Ω), ρ > 0 y que, por tanto, elmovimiento u = u(x, y, t) satisface el problema:
utt =T0
ρ(x, y)∆u+ F (x, y, t), (x, y) ∈ Ω, t > 0
u(x, y, 0) = f(x, y), ut(x, y, 0) = g(x, y)
u(x, y, 0) = 0, (x, y) ∈ ∂Ω, t > 0,
que por simplicidad supondremos C2 en Ω×[0,+∞), dénse entonces defini-ciones naturales para K y P (la energía total será obviamente E = K+P )que lleven al valor explícito de E(t) en términos de F .

140 CAPÍTULO 4. ECUACIÓN DE ONDAS
23. Prúebese la unicidad de soluciones clásicas u ∈ C2([0, l] × [0,+∞)) delproblema de contorno y valor inicial,
utt = c2(x)uxx + F (x, t), 0 < x < l, t > 0
u(x, 0) = f(x), ut(x, 0) = g(x), 0 < x < l
− ux(0, t) + bu(0, t) = α(t), ux(l, t) + bu(l, t) = β(t), t > 0,
en donde f ∈ C2[0, l], g ∈ C1[0, l], α, β ∈ C2[0,+∞), F ∈ C([0, l] ×[0,+∞)) y c2(x) = T0
ρ(x) , con T0 > 0, ρ ∈ C[0, l], ρ(x) > 0. Utilícese paraello el principio de conservación de la energía.
Si, para t > 0, x ∈ [0, l], P = (x, t) estúdiese el dominio T (P ) del planoen el que F = 0 en T (P ) implica, si f = g = 0 y α = β = 0 para t ≤ t,que u(P ) = 0, junto con u = 0 en T (P ).
24. (Método de Duhamel). Tratamos aquí de resolver, por un tercer caminoalternativo, el problema,
utt = c2uxx + F (x, t)
u(x, 0) = f(x)
ut(x, 0) = g(x).
(4.50)
Como sabemos basta con calcular la solución que corresponde a f = g = 0.En este caso procedamos como sigue. Suponemos que F y ∂F/∂u soncontinuas en t ≥ 0 y, para cada τ ≥ 0 llamamos w(x, t, τ) a la solución(única) del problema:
utt = c2uxx
u(x, τ) = 0
ut(x, τ) = F (x, τ).
Prúebese entonces que
u(x, t) =
∫ t
0
w(x, t, τ) dτ,
es la solución de (4.50) para f = g = 0 (obsérvese que w se puede hallarexplícitamente).
25. Extender el método de Duhamel a varias dimensiones. Para ello supóngaseque el PVI:
utt = c2∆u+ F (x, t) x ∈ Rn, t > 0
u(x, 0) = f(x) x ∈ Rn
ut(x, 0) = g(x) x ∈ Rn.
(4.51)
tiene la propiedad de unicidad de soluciones, mientras que admite unasolución siempre que F = 0 y f y g sean suficientemente regulares 5 (ver
5Cuando n ≥ 2, f ∈ C2, g ∈ C1 no es la regularidad suficiente para tener solucionesclásicas. Ver [11], Part. Diff. Equs. 4a Edición.

4.9. EJERCICIOS 141
Ejercicios 36 y 37 del presente capítulo). Siguiendo la idea del Ejercicio 24hállese una expresión para la solución de (4.51) supuesto que F es continuay de clase C2 en x ∈ Rn.
26. Consideremos el PVI semilineal,
utt = c2uxx + F (x, t, u, ux, ut)
u(x, 0) = f(x)
ut(x, 0) = g(x)
que escrito en coordenadas características ξ = x− ct, η = x+ ct es
uξη = − 1
4c2F (ξ, η, u, uξ, uη)
u(ξ, ξ) = f(ξ)
uξ(ξ, ξ)− uη(ξ, ξ) = c−1g(ξ).
(4.52)
Introduciendo (u, v, w) = (u, uξ, uη) pruébese que (4.52) es equivalente alsistema de primer orden,
uη = w
vη = − 1
4c2F (ξ, η, u, v, w)
wξ = − 1
4c2F (ξ, η, u, v, w),
(4.53)
junto con las condiciones iniciales u|B = f , v|B = 12 (f
′ + 1cg), w|B =
12 (f
′ − 1cg), siendo B la primera bisectriz ξ = η.
Pruébese también que toda solución clásica de (4.53) satisface la identidadde punto fijo,
u = f(ξ)−∫ ξ
η
w(ξ, s) ds
v =1
2(f ′(ξ) +
1
cg(ξ)) +
1
4c2
∫ ξ
η
F (ξ, s, u, v, w) ds
w =1
2(f ′(η)− 1
cg(η))− 1
4c2
∫ ξ
η
F (s, η, u, v, w) ds.
(4.54)
Si, en coordenadas ξ, η, Qδ = [x0−δ, x0+δ]× [x0−δ, x0+δ] para x0 fijadoy δ > 0, utilícese (4.54) para construir un operador T en X = C(Qδ,R3)cuyos puntos fijos den las soluciones de (4.53). Pruébese que si F es declase C1 en R5 puede encontrarse una bola en X (δ pequeño) en la queel problema tiene una única solución (reprodúzcase el desarrollo análogopresentado en el capítulo).

142 CAPÍTULO 4. ECUACIÓN DE ONDAS
27. Consideremos la solución del u = u(x, t) del problema de Dirichlet
utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = u(l, t) = 0 t > 0,
donde f , g son suficientemente regulares y satisfacen las correspondientescondiciones de compatibilidad. Prúebese que u es periódica en t de periodo2l/c. ¿Qué sucede en el caso del problema de Neumann?
28. En base a las ideas de extensión y simetría constrúyase la solución delproblema “mixto”
utt = c2uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
ut(x, 0) = g(x) 0 ≤ x ≤ l
u(0, t) = ux(l, t) = 0 t > 0,
estableciendo las condiciones de regularidad y compatibilidad que debensatisfacer los datos f y g del problema.
29. Se considera la ecuación de ondas n-dimensional (c = 1),
ux1x1 − ux2x2 − · · ·uxn+1xn+1 = 0 .
Estúdiese la forma de todas las transformaciones lineales que la dejaninvariante, probando que forman un grupo (transformaciones de Lorentz,ver [12]).
En el caso particular n = 1,
ux1x1 − ux2x2 = 0,
hállense explícitamente todas esas transformaciones.
Indicación. En el último caso, efectúese el giro preliminar ξ = 1√2(x−y),
η = 1√2(x+ y), para trabajar con la ecuación 2uξη = 0.
30. Prúebese que la solución del problema de Cauchy (n = 3),
utt = c2∆u x ∈ R2, t ∈ Ru(x, 0) = f(x)
ut(x, 0) = g(x)
con f ∈ C3, g ∈ C2 es
u = tMg(x, ct) +∂
∂t(tMf (x, ct)),

4.9. EJERCICIOS 143
donde Mh(x, r) es el promedio de h sobre la esfera y : |y − x| = r:
Mh(x, r) =1
ωnrn−1
∫|y−x|=r
h(y) dSy,
ωn el área de la esfera unidad en Rn.
31. Aplíquese el método del descenso de Hadamard para probar que la solucióndel problema de Cauchy bidimensional,
utt = c2∆u x ∈ R2, t ∈ Ru(x, 0) = f(x)
ut(x, 0) = g(x)
es
u =1
2πc
∫Bct(x)
g(y)√c2t2 − |x− y|2
+∂
∂t
(1
2πc
∫Bct(x)
f(y)√c2t2 − |x− y|2
).
(4.55)Tomar como punto de partida la solución general del problema de Cauchyen el caso tridimensional.Procediendo de nuevo con el método del descenso, hállese la solución delproblema de Cauchy unidimesional a partir de la del bidimensional (4.55).
32. Supongamos que u(x, t) satisface la ecuación de ondas n-dimensional,
utt = c2∆u .
Prúebese que su media esférica Mu(x, r, t) (abreviada M(r, t)) cumple, conrespecto a la variables (r, t), la ecuación de Euler-Darboux-Poisson,
Mtt = c2Mrr +
n− 1
rMr
.
33. Sea φ = φ(r) una función regular de r, y consideremos el operador dife-rencial
Lk(∂r)φ =
(1
r
∂
∂r
)k−1 (r2k−1φ(r)
), k ∈ N .
Pruébese la relación
∂2
∂r2Lk(∂r)φ =
(1
r
∂
∂r
)k (r2k
∂φ
∂r(r)).
Análogamente, establézcase que,
Lk(∂r)φ =k−1∑j=0
cjrj+1φ(j) ,
con los cj constantes y c0 = (2k − 1)!!.Finalmente, pruébese que si φ(r) es par, entonces Lk(∂r)φ(r) es una fun-ción impar de r.

144 CAPÍTULO 4. ECUACIÓN DE ONDAS
34. Sea M = M(r, t) una solución clásica de la ecuación de Euler-Darboux-Poisson. Defínase (supuesta M suficientemente regular)
v(r, t) = Lk(∂r)M(r, t),
donde Lk(∂r) es el operador diferencial del Ejercicio 33. Demuéstrese quev = v(r, t) es una solución de la ecuación de ondas unidimesional,
vtt = c2vrr ,
siempre que n = 2k + 1 (compárese con el caso tridimensional).
35. Sea u = u(x, t) ∈ C2(Rn × R) la solución del problema de Cauchy,
utt = c2∆u x ∈ Rn, t ∈ Ru(x, 0) = f(x)
ut(x, 0) = g(x) ,
(4.56)
donde n es un número impar, n = 2k + 1. Sean asimismo M(r, t) =Mu(x, r, t) mientras v(r, t) = Lk(∂r)M(r, t), φ(r) = Lk(∂r)Mf (x, r),
ϕ(r) = Lk(∂r)Mg(x, r),
donde Lk(∂r) es el operador diferencial del Ejercicio 33. Prúebese que,
v =1
2
φ(ct+ r)− φ(ct− r)
+
1
2c
∫ ct+r
ct−r
ϕ(s) ds . (4.57)
(Recuérdese que φ y ϕ son, en este caso, impares). Dedúzcase de (4.57)que la solución clásica de (4.56) satisface
u(x, t) =1
(n− 2)!!(Lk(∂t)(Mg(x, ct))) +
1
(n− 2)!!
∂
∂t(Lk(∂t)(Mf (x, ct)))
=1
(n− 2)!!
(1t
∂
∂t
)(n−3)/2
(tn−2
ωn
∫|y|=1
g(x+ cty) dSy
)
+1
(n− 2)!!
∂
∂t
(1t
∂
∂t
)(n−3)/2
(tn−2
ωn
∫|y|=1
f(x+ cty) dSy
)(4.58)
Nota. En (4.58) las actuaciones del operador Lk(∂t) se entienden sobrelas funciones compuestas de t, Mg(x, ct) y Mf (x, ct). Asimismo en (4.58)se hace necesario suponer que f y g son suficientemente regulares: f ∈C(n+3)/2, g ∈ C(n+1)/2.
36. Supongamos que f ∈ C(n+3)/2, g ∈ C(n+1)/2, con n impar (como en elEjercicio 35). Pruébese entonces que la u(x, t) es efectivamente solucióndel problema de Cauchy n-dimensional (4.56).

4.9. EJERCICIOS 145
37. Aplíquese el método del descenso para establecer, partiendo de (4.58), quesi n = 2 la solución del problema de Cauchy (4.56) adopta la forma,
u =2
cn−1ωn+1(n− 1)!!
(1t
∂
∂t
)(n−2)/2
(∫Bct(x)
g(y)√c2t2 − |x− y|2
)dy+
2
cn−1ωn+1(n− 1)!!
∂
∂t
(1t
∂
∂t
)(n−2)/2
(∫Bct(x)
f(y)√c2t2 − |x− y|2
)dy
.
Supóngase para ello que f ∈ C(n+4)/2, g ∈ C(n+2)/2.
38. (Ondas Planas). Consideremos que en el problema de Cauchy (4.56) losdatos iniciales f(x) y g(x) tienen la propiedad de que:
f(x) = F (w · x) g(x) = G(w · x) ,
donde w ∈ Rn, |w| = 1, w · x =∑n
i=1 wixi. Pruébese entonces que lasolución del problema (4.56) tiene la forma siguiente:
u(x, t) =1
2(F (w · x+ ct) + F (w · x− ct)) +
1
2c
∫ w·x+ct
w·x−ct
g(s) ds .
Nota. Toda función de la forma u(x, t) = U(w · x+ δt) se denomina ondaplana con velocidad de propagación δ, vector número de onda w y faseθ = w · x+ δt.

146 CAPÍTULO 4. ECUACIÓN DE ONDAS

Capítulo 5
La ecuación del calor
5.1. Problema de valor inicialNos ocuparemos en primer lugar del estudio del problema de valor inicial:
ut = uxx x ∈ R t > 0
u(x, 0) = f(x) x ∈ R.(5.1)
Las consideraciones de similaridad que siguen llevan al candidato a solución 1
de (5.1).Primeramente obsérvese que si u(x, t) resuelve,
ut = uxx, (5.2)
entonces,v = u(±x+ y, t+ τ),
es también solución cualesquiera que sean y, τ ∈ R.Análogamente,
vλ = u(√λx, λt) λ > 0, (5.3)
también es solución de (5.2) para todo λ > 0.Si θ = θ(x) es la función de Heaviside, θ(x) = 1 para t ≥ 0, θ(x) = 0 para
t < 0 un problema básico que se puede plantear (descartando los casos triviales)es,
ut = uxx x ∈ R t > 0
u(x, 0) = θ(x) x ∈ R.(5.4)
Como θ es invariante frente a cambios de escala, θ(x) = θ(λx), (5.3) y la hipo-tética unicidad de soluciones nos llevan a conjeturar,
u(√λx, λt) = u(x, t) ∀λ > 0. (5.5)
1Más tarde se comprobará que salvo restricciones en la clase de las soluciones a tratar,(5.1) carece de la propiedad de unicidad de soluciones clásicas.
147

148 CAPÍTULO 5. ECUACIÓN DEL CALOR
Eligiendo λ = 1/t en (5.5) llegamos a
u(x, t) = u(x√t, 1),
que nos sugiere buscar soluciones de (5.4) de la forma,
u(x, t) = ϕ
(x√t
).
Poniendo ζ = x/√t llegamos fácilmente a:
ϕ′′ +ζ
2ϕ′ = 0,
bajo las condiciones,
lımζ→−∞
ϕ(ζ) = 0 lımζ→+∞
ϕ(ζ) = 1.
Teniendo en cuenta el valor de la integral gaussiana∫R e
−s2 ds =√π obtenemos,
ϕ(ζ) =1√4π
∫ ζ
−∞e−
s2
4 ds =1√π
∫ ζ/2
−∞e−z2
dz,
alternativamente,
ϕ(ζ) =1
2+
1
2Erf (
ζ
2),
donde Erf es la función error,
Erf (ζ) =2√π
∫ ζ
0
e−z2
dz.
Por tanto, un candidato a solución de (5.4) es,
uθ(x, t) =1
2+
1√π
∫ x/√4t
0
e−z2
dz.
Propiedad 5.1. uθ ∈ C∞t > 0, resuelve (5.2) y
lımt→0+,x→x0
u(x, t) =
0 x < 0
1 x > 0.
Ejercicio 5.1. Pruébese que para cada τ ∈ [0, 1] existe una curva Γ en t > 0 talque:
lımP→(0,0),P∈Γ
u = τ.

5.1. PROBLEMA DE VALOR INICIAL 149
Sea ahora I = [a, b], χI su función característica. Es inmediato que unasolución de (1) para el dato f = cχI es,
u = cuθ(b− x, t) + uθ(x− a, t)− 1,
es decir,
u =c√π
∫ (x−a)/√4t
(x−b)/√4t
e−z2
dz.
Por otra parte, si f ∈ C[a, b] y la consideramos extendida por 0 a R podemosdar una aproximación poligonal de la forma,
fn(x) =
n∑i=1
f(yi)χIi(x),
con yi = a+ ih, h = (b− a)/n, yi ∈ Ii. Una solución correspondiente a fn es
un(x, t) =n∑
i=1
f(yi)uχIi(x, t)
=n∑
i=1
f(yi)√π
∫ (x−yi−1)/√4t
(x−yi)/√4t
e−z2
dz
=
n∑i=1
1√4πt
f(yi)e−(x−yi)
2/4th,
con yi ∈ Ii. Para t > 0 fijado, el teorema de Bliss nos dice que,
un ∼n∑
i=1
1√4πt
f(yi)e−(x−yi)
2/4th, (5.6)
cuando n→ ∞. Tomando límites en (5.6) cuando n→ +∞ obtenemos:
u(x, t) =1√4πt
∫Re−(x−y)2/4tf(y) dy. (5.7)
Nada más natural que proponer (5.7) –fórmula de Poisson– como candidato asolución de (5.1). Por otro lado, y usando las ideas de separación de variables(ejercicio unas líneas más abajo), si f ∈ C(Rn) un posible candidato a solucióndel problema n-dimensional:
ut = ∆u x ∈ Rn t > 0
u(x, 0) = f(x) x ∈ Rn,(5.8)
es,
u(x, t) =1
(√4πt)n
∫Re−|x−y|2/4tf(y) dy. (5.9)

150 CAPÍTULO 5. ECUACIÓN DEL CALOR
Ejercicio 5.2. Si u1(x1, t), . . . , un(xn, t) son soluciones de (5.2) verfíquese que
u(x, t) = u1(x1, t) . . . un(xn, t)
es solución de ut = ∆u.
Conviene fijar las notaciones:
Ckb (Rn) = f ∈ Ck(Rn) : sup |∂αf(x)| <∞ |α| ≤ k,
Ck,k/2(Rn × R+) = u ∈ C(Rn × R+) : ∂αx ∂jt u ∈ C(Rn × R+) |α|+ 2j ≤ k.
Teorema 5.2. Para f ∈ Cb(Rn) representemos por
u = Kf(x, t) = 1
(√4πt)
n
∫Re−|x−y|2/4tf(y) dy.
Entonces
1. u ∈ C∞(Rn×R+)∩C(Rn× [0,+∞)) define una solución clásica de (5.8),es decir,
lım(x,t)→(x0,0)
u(x, t) = f(x0).
2. (Conservación de la energía) Si además f ∈ L1(Rn) entonces:∫Rn
u(x, t) dx =
∫Rn
f(x) dx t > 0.
3. (Comparación con el dato inicial)
ınf f ≤ u(x, t) ≤ sup f x ∈ Rn, t > 0.
4. Si f ∈ Ckb (Rn) entonces u ∈ C
k,k/2b (Rn × [0,+∞)). Más aún, para |α| +
2j ≤ k, v = ∂αx ∂jt u resuelve,vt = ∆v x ∈ Rn t > 0
v(x, 0) = ∂αx (∆jf(x)) x ∈ Rn.
Demostración. Nos limitaremos a las ideas principales. Denotemos por,
K(x, y, t) = (√4πt)−ne−|x−y|2/(4t)
al núcleo del calor. Fijemos (x0, t0), t0 > 0 y ε > 0 pequeño. Para todo α, j setiene,
∂αx ∂jtK(x, y, t) = P (
1
t, x− y)e−|x−y|2/(4t)
donde P = P (τ, z) es un cierto polinomio,
P (τ, z) =∑r,β
ar,βτrzβ .

5.1. PROBLEMA DE VALOR INICIAL 151
De ahí,
|∂αx ∂jtK(x, y, t)| ≤
∑r,β
|ar,β |1
tr|x− y||β|e−|x−y|2/(4t).
Cuando |t− t0|, |x− x0| ≤ ε, tenemos,∑r,β
|ar,β |1
tr|x− y||β| ≤
∑r,β
|ar,β |1
(t0 − ε)r
∑s≤|β|
(|β|s
)(|x0|+ ε)|β|−s|y|s.
Por otro lado, para todo ν < 1, ν ∼ 1, existe δ > 0 tal que,
|y − x|2 ≥ |y|2 − 2(|x0|+ ε)|y| ≥ ν|y|2 − δ y ∈ Rn.
Por lo tanto,e−|x−y|2/(4t) ≤ eδ/(4(t0+ε))e−ν|y|2/(4(t0+ε)).
De ahí, para un cierto polinomio de coeficientes positivos Q,∫Rn
|∂αx ∂jtK(x, y, t)||f(y)| dy ≤
∫Rn
Q(|y|)e−ν|y|2/(4(t0+ε)) dy <∞. (5.10)
Esto prueba la regularidad de u. Los demás resultados se dejan como ejercicio(cf. [11]).
Observación 5.1. Si f es medible y
|f(x)| ≤Mea|x|2
, (5.11)
a > 0, se sigue de (5.10) que u = Kf define una solución clásica de (5.8) en0 < t < 1/(4a) cumpliendo:
lım(x,t)→(x0,0)
u(x, t) = f(x0), (5.12)
en los puntos de continuidad x0 de f . Probémoslo. En efecto, |f(y)−f(x0)| ≤ ε/2para |y − x0| ≤ δ. Así,
|u(x, t)− f(x0)| ≤ε
2+
1
(√4πt)n
∫|y−x|≥δ/2
e−|y−x|2/(4t)|f(y)− f(x0)| dy,
siempre que |x − x0| ≤ δ/2 (el primer sumando corresponde a una integraciónsobre Bδ/2(x)). Podemos ahora acotar |f(y)− f(x0)| ≤ M1e
a|y|2 , con lo que lasegunda integral se estima en la forma,
M1
(√π)n
∫|ζ|≥δ/(2
√4t)
e(4ta−1)|z|2+2a√4t|z|+|x|2 dz
≤ M1e(|x0|+δ/2)2
(√π)n
∫|ζ|≥δ/(2
√4t)
e−12 |z|
2+|z| dz → 0,
cuando t→ 0+.

152 CAPÍTULO 5. ECUACIÓN DEL CALOR
Observación 5.2. Es inmediato comprobar que si en (5.8), f tiene soporte com-pacto, f ≥ 0, por ejemplo (f = 0) entonces u = Kf(x, t) > 0, para todo x ent > 0. Comprobaremos que lo mismo ocurre cuando tratamos con problemas decontorno (donde hay unicidad). Esto significa que las perturbaciones iniciales sepropagan con velocidad infinita.
Ejercicio 5.3. Pruébese la estimación:
|K(x, y, t)| ≤( n
2πe
)n/2 1
|x− y|n.
5.2. El problema perturbadoSi consideramos el problema,
ut = ∆u+ F (x, t) x ∈ Rn t > 0
u(x, 0) = 0 x ∈ Rn,(5.13)
el método de variación de las constantes (ver Capítulo 4) nos lleva a que uncandidato a solución de (P) es:
u(x, t) =
∫ t
0
1
(4π(t− τ))n
∫Rn
e−|x−y|2/(4(t−τ))F (y, τ) dydτ. (5.14)
Justificar que (5.14) es una solución clásica de (5.13) es más delicado y requierecierta regularidad de F en x. La demostración del siguiente teorema se omite(cf. [16]).
Teorema 5.3. Sean F, ∂xF ∈ C(Rn × [0,∞)) ∩ L∞(Rn × [0,∞)). Entonces(5.14) define una solución del problema (5.13).
Observación 5.3. Sobre la existencia de las derivadas parciales hasta el orden2 véase el Ejemplo 9.13 del Capítulo 9. La derivabilidad de F en x se puederelajar a continuidad Hölderiana. Sin embargo, la solución puede no existir si Fes meramente continua (véase [16]).
5.3. No unicidad de solucionesResulta sorprendente que el problema de valor inicial:
ut = uxx x ∈ R t ∈ Ru(x, 0) = 0 x ∈ R.
(5.15)
admite una una solución no trivial. La construcción que describimos a continua-ción se debe a Tychonoff ([11]). Ver [27] para otra clase de ejemplos. Buscamosuna solución de
uxx = ut (x, t) ∈ R2
u(0, t) = g(t) t ∈ Rux(0, t) = 0 t ∈ R,

5.3. NO UNICIDAD DE SOLUCIONES 153
en la forma:
u =∞∑j=0
gj(t)xj .
Una substitución formal en la ecuación lleva a:
u =
∞∑m=0
1
(2m)!g(m)(t)x2m. (5.16)
Para darle validez a (5.16) como solución elegimos:
g(t) =
exp−t−α t > 0
0 t ≤ 0,
con α > 1. La analiticidad de g en t > 0 y la fórmula de Cauchy prueban(Ejercicio 11) la existencia de θ > 0 tal que:
|g(k)(t)| < k!
(θt)ke−
12 t
−α
t > 0,
para todo k ≥ 0. En particular,∞∑
m=0
1
(2m)!|g(m)(t)||x|2m ≤
( ∞∑m=0
1
m!
(|x|2
θt
)m)e−
12 t
−α
≤ e|x|2θt − 1
2 t−α
, (5.17)
para t > 0. La estimación (5.17) dice que la serie en (5.16) converge uniforme-mente sobre compactos de t > 0 y que dicha serie converge uniformemente acero para x en compactos cuando t→ 0+ (u es trivialmente 0 en t ≤ 0).
Apelando a los cálculos hechos en el Capítulo 3, la serie (5.16) puede serderivada término a término infinitas veces con respecto a x de forma que elresultado converge uniformemente en (x, t) , para |x| ≤M y todo t ∈ R. Eso sedebe a que:
∞∑m=0
1
(2m)!|g(m)(t)||x|2m ≤ e
|M|2θt − 1
2 t−α
≤ K <∞,
para |x| ≤ M , t > 0. En efecto obtenemos la estimación uniforme de los coefi-cientes de la serie,
1
(2m)!|g(m)(t)| ≤ K
M2m.
De aquí, las derivadas de la serie en x convergen uniformemente en (x, t) siempreque x esté acotado. Al derivar (5.16) término a término j veces con respecto at uno descubre que el resultado es la serie de ∂2jx u. Como ésta converge unifor-memente en (x, t) resulta que:
∂jt u = ∂2jx u.
Por la misma razón ∂jt ∂αx u = ∂2j+αx u con lo que u ∈ C∞(R2), define una solución
no trivial de (5.15) que se anula en t ≤ 0.

154 CAPÍTULO 5. ECUACIÓN DEL CALOR
5.4. Soluciones analíticas de la ecuación del calorLa solución de Poisson,
u = Kf(x, t) = 1
(√4πt)n
∫Rn
e−|x−y|2/(4t)f(y) dy,
pongamos, para f ∈ L∞(Rn), es automáticamente C∞ en t > 0. Más aún, puedeprolongarse analíticamente a x ∈ Cn, t ∈ C con ℜ(t) > 0 ([11]). En efecto, bastadar valores x ∈ Cn en la expresión:
n∑i=1
(xi − yi)2,
poniendo t ∈ C. Más precisamente, para t = σ + iτ , x = ξ + iη, ξ, η ∈ Rn setiene:∣∣∣∣ 1
(√4πt)n
e−|x−y|2/(4t)∣∣∣∣
=
(1 +
τ2
σ2
)n/4
e|η|2/4σ
(1
(√4π(σ + τ2σ−1)
n e−|(ξ+τσ−1η−y|2/(4(σ+τ2σ−1))
)
=
(1 +
τ2
σ2
)n/4
e|η|2/4σK(ξ + τσ−1η, y, σ + τ2σ−1).
Estimando la integral de Poisson y la de sus derivadas se obtiene que u es C1
en Cn × ℜ(z) > 0. En particular, u = u(x, t) es real analítica.
Observación 5.4. La analiticidad real de la solución del problema de valor inicial(P) se gana inmediatamente para t > 0. Podría pensarse que si f es real analíticau también lo es para |t| < ε, aunque ε varíe de punto a punto. Un contraejemplodebido a la propia S. Kowalevski –precisamente el Ejercicio 17 del Capítulo 3 –demuestra que esto en general no sucede.
5.5. Problemas de valor inicial y contornoEl modelo físico que da lugar a la ecuación del calor sugiere plantearse el
problema de contorno y valor inicial:ut = uxx + F (x, t) 0 < x < l, t > 0
u(x, 0) = f(x) 0 < x < l
B0u = α(t),Blu(t) = β(t) t > 0,
donde B0, Bl son los operadores de contorno de Dirichlet, Neumann o Robin(cf. Capítulo IV). La regularidad hasta la frontera precisará también de condi-ciones de compatibilidad adecuadas. En versión n-dimensional, si Ω ⊂ Rn es un

5.5. PROBLEMAS DE VALOR INICIAL Y CONTORNO 155
dominio acotado de Rn el problema es,ut = ∆u+ F (x, t) x ∈ Ω, t > 0
u(x, 0) = f(x) x ∈ Ω
Bu = α(x, t) x ∈ ∂Ω, t > 0,
(5.18)
donde en este caso Bu = u (Dirichlet), Bu =∂u
∂ν(Neumann), Bu =
∂u
∂ν+b(x, t)u
(Robin, b ≥ 0).El siguiente resultado admite la correspondiente contrapartida unidimensio-
nal (donde es posible introducir condiciones mixtas). Debe resaltarse la regula-ridad que se impone a las soluciones.
Teorema 5.4. Sea Ω ⊂ Rn un dominio acotado y C1 de Rn. Entonces elproblema de valor inicial y de contorno (5.18) admite a lo más una soluciónclásica u ∈ C2(Ω× [0, T )).
Demostración. Basta con estudiar el comportamiento de la integral,∫Ω
u2(x, t) dx .
Usando las ideas de simetría el problema de Dirichlet homogéneout = uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 < x < l
u(0, t) = u(l, t) = 0 t > 0,
(5.19)
admite una solución clásica u siempre que f sea mínimamente regular. Bastaextender f de forma impar y 2π periódica f a R y después aplicar la fórmulade Poisson:
u =1√4πt
∫ +∞
−∞e−
(x−y)2
4t f(y) dy.
Si f ∈ C[0, π], la restricción de u a 0 < x < l define una solución C∞ en t > 0 deforma que u → f cuando t → 0+ en uniformemente sobre compactos de (0, l).En realidad, u está definida en R× (0,+∞). Las condiciones de compatibilidadf(0) = f(l) = 0 implican que u es una solución clásica que ajusta uniformementecon el dato f cuando t→ 0+. En el caso Neumann,
ut = uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 < x < l
ux(0, t) = ux(l, t) = 0 t > 0,
(5.20)
basta tener f ∈ C1[0, l] y las condiciones de compatibilidad f ′(0) = f ′(l) = 0para tener una solución clásica única que es C1 en t ≥ 0 (siempre es C∞ ent > 0.

156 CAPÍTULO 5. ECUACIÓN DEL CALOR
5.6. Principios del máximo para la ecuación delcalor
Para Ω ⊂ Rn, T > 0 usaremos la siguiente notación. QT = Ω × (0, T ) ⊂Rn ×R. Por otro lado ΓT = (Ω×0)∪ (∂Ω× [0, T ]) (la frontera parabólica deQT ). En los enunciados que siguen y para abreviar escribiremos Lu = ut −∆upara representar el operador del calor.
Teorema 5.5 (Principio del máximo débil). Sea u ∈ C2,1(QT )∩C(QT ) tal que:
Lu ≤ 0
en QT . Entonces,supQT
u ≤ supΓT
.
Una consecuencia importante del teorema es el llamado principio de compa-ración.
Corolario 5.6. Sean u, v ∈ C2,1(QT ) ∩ C(QT ) tales que:
Lu ≤ Lv para (x, t) ∈ QT u ≤ v en cada (x, t) ∈ ΓT .
Entonces:u ≤ v (x, t) ∈ QT .
En particular, para cada F , f y α el problema de Dirichlet:ut = ∆u+ F (x, t) x ∈ Ω, t > 0
u(x, 0) = f(x) x ∈ Ω
u(x, t) = α(x, t) x ∈ ∂Ω, t > 0,
admite a lo más una solución clásica u ∈ C2,1(QT ) ∩ C(QT ).
Observación 5.5. Nótese que se ha mejorado, para el problema de Dirichlet, laregularidad exigida a las soluciones a los efectos de la unicidad.
El principio débil del máximo puede refinarse al extremo de que una solu-ción clásica u de Lu = 0 en QT sólo puede tomar los extremos en la fronteraparabólica, salvo que sea constante (cf. [18]). En las propiedades que siguenE ⊂ Rn × R designa un dominio mientras Lu = ut −∆u.
Teorema 5.7 (Principio Fuerte del Máximo). Sea u ∈ C2(E) tal que:
Lu ≤ 0 (x, t) ∈ E,
en tanto que u ≤M en E para cierta constante M . Si existe P1 = (x1, t1) ∈ Etal que u(x1, t1) = M entonces u = M para todos los hiperplanos t = t0 quepuedan conectarse en E por segmentos verticales x = x0 con la componenteconexa en E de t = t1 ∩ E que contiene a P1.

5.6. PRINCIPIOS DEL MÁXIMO 157
La demostración se fracciona en tres lemas (cf. [18]).
Lema 5.8. Supongamos que u ∈ C2(E) satisface u ≤M en E mientras que Bes una bola B ⊂ B ⊂ E de forma que:
1. u < M en B,
2. ∃P ∈ ∂B tal que u(P ) =M .
Entonces, necesariamente, el hiperplano tangente a B en P adopta la format = constante.
El Lema 5.8 afirma que el máximo sólo puede tomarse en lo más alto o lomás bajo de la bola.
La propiedad siguiente es válida para toda función continua u ∈ C(E) quesatisfaga la tesis del Lema 5.8.
Lema 5.9. Supongamos, como en el Lema 1, que Lu ≤ 0 en E, mientras u ≤Men E. Si u(P0) < M para algún P0 = (x0, t0) ∈ E entonces u < M en toda lacomponente conexa de t = t0 que pasa por P0.
Lema 5.10. Sea u ∈ C2(E) tal que Lu ≤ 0 y u ≤ M en E. Supongamosque u < M en t0 < t < t1 ∩ E (o en una cualquiera de las componentesconexas C de dicho conjunto). Entonces u(P ) < M en todo P ∈ E, P = (x1, t1)(respectivamente, que además cumpla P ∈ C).
Observación 5.6.
a) Cuando E = Ω × (0, T ), Ω ⊂ Rn un dominio y se permite además que u searegular hasta t = T , es decir u ∈ C2,1(QT ∪t = T) entonces que u(x, T ) =Men algún (x, T ), x ∈ Ω, implica que u ≡M .
b) La conclusión del principio fuerte del máximo sigue siendo válida si el operadordel calor se substituye por otros operadores parabólicos más generales (cf. [18],Ejercicios 13-20). En particular para:
Lu = ut −∆u+
n∑i=1
bi(x, t)∂iu+ h(x, t)u,
donde los coeficientes bi y h son, por ejemplo, continuos y acotados en E ⊂Rn × R, el coeficiente del término de orden cero cumple:
h ≥ 0 en E,
mientras al supremo se le impone la restricción de signo:
M ≥ 0.
Véanse más detalles en la sección de problemas.

158 CAPÍTULO 5. ECUACIÓN DEL CALOR
c) Supongamos que M = supE u mientras que u(P ) = M para cierto P ∈ ∂E.Si ν es cualquier dirección exterior a E en P se cumple (supuesta la existenciade la derivada) que:
∂u
∂ν(P ) ≥ 0.
Un teorema de A. Friedman, que generaliza un resultado análogo de Hopf paraecuaciones elípticas afirma que bajo las condiciones del principio fuerte:
∂u
∂ν(P ) > 0,
siempre que u < M cerca de P , que dicha derivada exista y que ν sea unadirección exterior no paralela al eje t. La segunda condición puede relajarsereemplazando la derivada por una derivada inferior de Dini.
Es conveniente precisar con detalle tal resultado.
Teorema 5.11. Sea L un operador en las condiciones de la Observación 5.6–b)mientras P ∈ ∂E es un punto donde:
1. Existe una bola B ⊂ E tal que P ∈ ∂B (una bola interior a E tangente a∂E en P ).
2. u < M en B, donde M = u(P ), M ≥ 0.
Entonces, para toda dirección exterior ν al dominio E en P se tiene:
∂u
∂ν(P ) > 0,
si es que tal derivada existe (la derivada puede reemplazarse por una derivadade Dini adecuada).
Un corolario inmediato del principio fuerte del máximo es el llamado prin-cipio de comparación fuerte (problema de Dirichlet).
Teorema 5.12 (Principio de comparación fuerte). Sea Ω ⊂ Rn un dominioacotado, T > 0, u, v ∈ C2,1(QT ) ∩ C(QT ) tales que:
Lu ≤ Lv en QT ,
junto con,u ≤ v sobre ΓT .
Entonces se da una y sólo una de las siguientes opciones: o bien u = v en QT
o bien u(x, t) < v(x, t) para todo (x, t) ∈ QT .
Tenemos también el siguiente resultado para el problema de Dirichlet unidi-mensional.

5.6. PRINCIPIOS DEL MÁXIMO 159
Teorema 5.13. Sea f ∈ C[0, l] tal que f(0) = f(l) = 0. Entonces el problema deDirichlet para la ecuación del calor ut = uxx admite una única solución clásicau ∈ C2,1((0, l)× (0,+∞))∩C([0, l]× [0,+∞)). Si además f ≥ 0 entonces o bienu ≡ 0 o bien u > 0 en (0, l)× (0,+∞).
El siguiente resultado es un principio de comparación para todas las condi-ciones de contorno B consideradas al principio de la sección.
Teorema 5.14 (Principio general de comparación). Sea Ω ⊂ Rn un dominioacotado y C2 de Rn mientras u, v ∈ C2,1(QT ∪ t = T)∩C1,0(QT ) satisfacen:
Lu ≤ Lv en QT
u ≤ v en t = 0
Bu ≤ Bv en (x, t) ∈ ∂Ω× (0, T ].
Entonces u ≤ v en QT .
Demostración. El caso Dirichlet ya se ha tratado. Consideremos los otros dosproblemas de contorno. Si
w = u− v,
todo consiste en probar queM = supw ≤ 0. Caso contrarioM > 0 y tendríamos
u(Pm) =M,
sólo en algún Pm ∈ ΓT . En efecto u(P1) = M con P1 ∈ QT ∪ t = T lleva au =M en QT que no es posible.
Caben dos opciones. Primero que en el operador de contorno,
Bu =∂u
∂ν+ bu,
tengamos b(x, t) > 0 en cada (x, t) ∈ ΓT con t > 0. En ese supuesto se tiene:
∂w
∂ν(Pm) ≤ −b(Pm)u(Pm) = −b(Pm)M < 0,
lo que no puede ser. En un máximo en la frontera como Pm siempre se ha de
tener∂w
∂ν(Pm) ≥ 0.
Si b llega a anularse total o parcialmente en ∂Ω × (0, T ] (el primer casocorresponde a condiciones de Neumann) habremos de proceder con más cuidado.
En primer lugar, afirmamos (véase ejercicio al final de la prueba) la existenciade ϕ ∈ C2(Ω), ϕ > 0 en Ω tal que:
ϕν = γϕ,
sobre ∂Ω y γ es una constante prefijada arbitraria. Hacemos,
w = e−λtϕv,

160 CAPÍTULO 5. ECUACIÓN DEL CALOR
obteniendo,
vt ≥ ∆v + 2ϕ−1∇ϕ∇v +(λ+ ϕ−1∆ϕ
)v (x, t) ∈ QT ∪ t = T
v ≤ 0 x ∈ Ω, t = 0vν + (γ + b)v ≤ 0 x ∈ ∂Ω.
Ahora, γ y λ pueden elegirse, sucesivamente, para que se tengan las condiciones,
γ + b > 0 en ∂Ω , λ+ ϕ−1∆ϕ > 0 en QT .
Aplicando la primera parte concluimos que v ≤ 0, luego w ≤ 0 que es lo que sedeseaba probar.
Ejercicio 5.4. Constrúyase ϕ en los casos Ω = (0, l) un intervalo, Ω = BR(0)una bola en Rn.
Observaciones 5.7.
a) La construcción de ϕ en un dominio general Ω se apoya en la función distanciaa la frontera ∂Ω, d = d(x),
d : x ∈ Ω : dist (x, ∂Ω) < ε −→ Rx 7−→ d(x) = dist (x∂Ω),
que es tan regular como ∂Ω, en este caso C2. Ver [13], Capítulo XIV, para unadiscusión detallada de la función distancia d en términos de la geometría de lafrontera.
b) El teorema de comparación proporciona la unicidad para condiciones de con-torno generales y menos regularidad, a saber: u ∈ C2,1(QT∪Ω×T)∩C1,0(QT ).
Ejercicio 5.5. En las condiciones de regularidad del teorema de comparaciónsea u una solución clásica del problema:
ut = ∆u x ∈ Ω, t > 0
u = f t = 0
Bu = 0 x ∈ ∂Ω.
Demuéstrese que:|u(x, t)| ≤ sup
Ω|f |.
5.7. Principios del máximo en dominios no aco-tados
El siguiente teorema señala una clase de funciones en la que es posible ga-rantizar la unicidad de soluciones para el problema de Cauchy.

5.7. PRINCIPIOS DEL MÁXIMO 161
Teorema 5.15. Supongamos que u ∈ C2,1(0 < t < T ) ∩ C([0, T ]) satisface:
ut ≤ ∆u x ∈ Rn, 0 < t < T
u(x, 0) = f(x) x ∈ Rn,
que satisface la condición de crecimiento exponencial:
u(x, t) ≤Mea|x|2
.
Entonces,u(x, t) ≤ sup f .
Una consecuencia del teorema es la siguiente propiedad de unicidad. Si u1,u2 son soluciones del problema de valor inicial
ut = ∆u x ∈ Rn, 0 < t < T
u(x, 0) = f(x) x ∈ Rn,(5.21)
satisfaciendo la condición de crecimiento
|u(x, t)| ≤Mea|x|2
, (5.22)
quizás para diferentes a’s y M ’s, entonces u1 = u2. En particular (5.21) sóloadmite, si f ∈ Cb(Rn), una solución acotada: la solución de Poisson. Como reglageneral, para problemas en dominios no acotados, condiciones de crecimientocomo (5.22) juegan el papel de condiciones de contorno en “el infinito”.
Demostración. Primeramente introducimos la solución especial,
v(x, t) =1
(4π(T ∗ − t))n/2e|x−y|2/4(T∗−t),
que se obtiene –esencialmente– haciendo el cambio t→ −t, x→ ix el la ecuacióndel calor, en la que observamos a y ∈ Rn como un parámetro. Fijamos Q =BR(y)× (0, T ) e intentamos aplicar el principio del máximo a:
w = u− µv (µ > 0).
El claro que w ≤ f en t = 0 mientras en |x− y| = R,
w(x, t) ≤Mea(|y|+R)2 − µ
(4πT ∗)n/2eR
2/4T∗.
El segundo miembro tiende a −∞ cuanto R→ +∞, previa suposición de que:
a <1
4T ∗
es decir T ∗ < 1/4a mientras se ha admitido implícitamente que T < T∗. Luegono hay problema si T < 1/4a. El principio débil del máximo nos permite concluirque:
u(y, t) ≤ supBR(y)
f ≤ sup f,

162 CAPÍTULO 5. ECUACIÓN DEL CALOR
y como y es arbitrario conseguimos la tesis. Si, por contra, 1/4a ≤ T , frac-cionamos el intervalo de tiempo en un número finito de intervalos de extremos0 < T1 < · · ·TN−1 < T y longitud menor que 1/4a donde aplicamos el teoremaanterior. Esto concluye la prueba.
Observación 5.8. Un resultado más débil que el teorema previo pero igualmenteeficaz para probar la unicidad de soluciones clásicas u bajo la condición decrecimiento (5.22) es el siguiente. Supóngase que Lu ≤ 0 mientras u ≤ 0 ent = 0. Vamos a probar que u ≤ 0 en 0 ≤ t ≤ T .
Consideramos la solución especial,
v(x, t) =1
(1− 4At)n/2eA|x|2/(1−4At),
e intentamos aplicar el principio del máximo a:
w = u−M(R)v
en Q = BR(0)× (0, T ). Para tener,
MeaR2
≤ M(R)
(1− 4At)n/2eAR2/(1−4At),
basta con elegir M(R) =Me(a−A)R2
y suponer que T < 1/4A o bien A < 1/4T .Con esta elección tendremos w ≤ 0 en Q. Para (x0, t0) fijo y R grande
tenemos:
u(x0, t0) ≤M(R)
(1− 4At0)n/2eA|x0|2/(1−4At0).
Si elegimos A de forma que a < A < 1/4T resultará que el segundo miembro dela desigualdad se anula cuando R → +∞. Luego u(x0, t0) ≤ 0. Es decir u ≤ 0.Sin embargo se ha supuesto que a < 1/4T . Si éste no fuera el caso se procedecomo en la última demostración y volvemos a concluir que u ≤ 0.
Ejercicio 5.6. Sin apelar a los resultados expuestos pruébese directamente queel problema:
ut = ∆u+ F (x, t)
u(x, 0) = f(x),
admite a lo más una solución clásica u ∈ C2,1(0 < t < T) ∩ C(0 ≤ t ≤ T)y acotada.
Indicación. Usar la función auxiliar ([17]),
v(x, t) =M
(2t+
|x|2
n
).

5.8. SOLUCIONES POSITIVAS 163
5.8. Soluciones positivas del problema de valorinicial
Hemos presentado contraejemplos a la unicidad de soluciones clásicas u ∈C2,1(0 < t < T) ∩ C(0 ≤ t ≤ T) del problema de valor inicial:
ut = uxx x ∈ R 0 < t < T
u(x, 0) = f(x) x ∈ R.(5.23)
Un notable teorema de Widder ([27], [11]) afirma que en la clase de las solucionesno negativas (5.23) sólo admite una solución. Una variación trivial dice quela solución es única en la clase de las soluciones acotadas inferiormente. Lanovedad del teorema consiste entonces en que la unicidad es consecuencia deuna condición de tipo “unilateral”.
Con mayor precisión.
Teorema 5.16. El problema (5.23) admite a lo más una única solución clásicau ∈ C2,1(0 < t < T) ∩ C(0 ≤ t ≤ T) y no negativa u ≥ 0 (obviamente,f ∈ C(R), f ≥ 0).
Más aún, si tal solución u existe ésta es real analítica en 0 < t < T y puederepresentarse mediante la fórmula de Poisson:
u(x, t) =
∫RK(x, y, t)f(y) dy. (5.24)
Observación 5.9. Lo notable de (5.24) es que se desconocen a priori condicionesde crecimiento sobre f en el infinito.
Demostración. Es delicada y consta de las siguientes etapas.a) Usando el principio del máximo se demuestra que u queda por encima de
la solución formal de Poisson (5.24):
0 ≤ v(x, t) :=
∫RK(x, y, t)f(y) dy ≤ u(x, t).
Consideraciones estándar en la teoría de funciones analíticas permiten entoncesprobar –con cuidado– que v(x, t) es efectivamente una solución clásica de (5.23)que es analítica en 0 < t < T .
b) Se toma la diferencia w = u − v. Es una solución no negativa de (5.23)con f = 0 (lo que supone la reducción al caso de dato inicial nulo). El objetivoes probar que w = 0. Por razones técnicas se introduce:
W (x, t) =
∫ t
0
w(x, s) ds.
Aunque las derivadas wx, wxx pudieran diverger o no existir en t = 0 se de-muestra (cf. [11]) que W es una solución clásica de (5.23) con dato f = 0. Latesis del teorema se deduce de que W = 0.

164 CAPÍTULO 5. ECUACIÓN DEL CALOR
c) Usando la convexidad de W y algunas cuentas delicadas se establece laestimación:
W (x, t) ≤Mea|x|2
,
en 0 ≤ t ≤ T − ε. Los teoremas previos nos llevan en este caso a que W = 0 en0 ≤ t ≤ T − ε. Iterando el argumento completamos a W = 0 en toda la franja0 ≤ t ≤ T . Esto concluye la demostración.
5.9. Ejercicios1. Se define la función error como sigue:
Erf(x) =2√π
∫ x
0
e−y2
dy.
Utilizando dicha función dése una solución de los problemas de Cauchypara la ecuación del calor ut = uxx en R con datos iniciales: a) f(x) = 1si |x| < l y f(x) = 0 si |x| > l, b) f(x) = 1 si x > 0, f(x) = 3 si x < 0,c) f(x) = χI , e. d., la función característica de un intervalo arbitrarioI = [a, b].
2. Sea f = f(x) una función continua en Rn para la que existen M ≥ 0 ya > 0 de forma que: |f(x)| ≤ Mea|x|
2
en Rn. Demuéstrese que la fórmulade Poisson:
u(x, t) = K(f)(x, t) =1
(4πt)n/2
∫Rn
e−|x−y|2
4t f(y) dy,
define una solución en C2(Rn × (0, 14a ))∩C(R
n × [0, 14a )) del problema de
Cauchy:
ut = ∆u x ∈ Rn, 0 < t <1
4au(x, 0) = f(x) x ∈ Rn.
3. Sea Ω un dominio acotado de R3 y supongamos que Ω está aislado térmica-mente y posee una fuente calorífica con densidad −f(x), x = (x1, x2, x3).La evolución de la temperatura u(x, t) vendrá dada por la solución delproblema:
∂u
∂t= ∆u− f(x), x ∈ Ω, t > 0,
u(x, 0) = u0(x), x ∈ Ω,
∂u
∂ν= 0, x ∈ ∂Ω,
siendo u0(x) la temperatura inicial. Las configuraciones estacionarias dela temperatura cumplirán entonces el problema de contorno:
∆u = f(x), x ∈ Ω,
∂u
∂ν= 0, x ∈ ∂Ω.
(5.25)

5.9. EJERCICIOS 165
¿Serán únicas las soluciones del problema (5.25)?. Admitamos que f ∈C(Ω) y supongamos que todas las soluciones u(x) de (5.25) están enC1(Ω)∩C2(Ω). Demuéstrese que una condición necesaria para que (5.25)admita una solución es que: ∫
Ω
f dx = 0.
4. Hállense las soluciones estacionarias del problema:cρut = kuxx + αu, t > 0, 0 < x < l,
u(0, t) = u(l, t) = 0, t ≥ 0.
¿ Para qué valores de α serán únicas las soluciones? En todo momento sesupondrá que las soluciones del problema son C2 en [0, l].
5. Supongamos que las soluciones del problema:cρAut = kAuxx − µP (u− T0), t > 0, 0 < x < l,
u(x, 0) = u0(x), 0 ≤ x ≤ l,
ux(0, t) = ux(l, t) = 0, t ≥ 0,
son C2 en [0, l] y t ≥ 0. Demuéstrese que la temperatura u(x, t) se esta-biliza en media cuadrática en torno al valor T0, es decir:
lımt→+∞
∫ l
0
(u(x, t)− T0)2 dx = 0.
¿Cuántas soluciones estacionarias admite el problema? ¿Cuántas solucio-nes homogéneas (e. d., no dependientes de x) admite el problema?
6. Estúdiese la forma genérica de las soluciones de la ecuación del calor:
ut = uxx, x ∈ R,
que tienen la forma u(x, t) = X(x)T (t). En particular, calcúlense todaslas soluciones de la forma exp(αx+ βt), α, β ∈ C. A partir de esta familiade soluciones, calcúlense otras familias, por derivación e integración defamilias uniparamétricas.
7. Se dice que vn es un polinomio calórico de grado n si tal función es el
coeficiente dezn
n!en el desarrollo de exp(xz + tz2). En otras palabras,
exp(xz + tz2) =∑n≥0
vn(x, t)zn
n!.

166 CAPÍTULO 5. ECUACIÓN DEL CALOR
a) Demuéstrese que
vn(x, t) = n!
[n/2]∑k=0
tk
k!
xn−2k
(n− 2k)!,
donde [·] es la función parte entera.b) Demuéstrese que
vn(x, 0) = xn, v2n(0, t) =2n!
n!tn, v2n+1(0, t) = 0.
c) Demuéstrese que los vn(x, t) satisfacen la ecuación del calor ut = uxx.
8. Hállese una solución del problema de Cauchy para la ecuación del calorunidimensional con dato inicial u(x, 0) = x2. Una guía para hacerlo esla que sigue. Prúebese que si u(x, t) es una hipotética solución entoncesuxxx(x, t) también satisface la ecuación del calor con dato g(x) ≡ 0. Con-clúyase de aquí (¡ilegalmente !) que uxxx(x, t) ≡ 0 lo que lleva a una posibleforma general de la solución.
9. La misma cuestión que en el problema anterior con el dato f(x) = e−x.
10. Resuélvase el problema de Cauchy para la ecuación del calor: ut = kuxx−bt2u, u(x, 0) = ϕ(x) ∈ Cb(R). Para ello hágase un cambio adecuado de laforma u(x, t) = h(t)v(x, t).
11. Sea f(x) acotada y continua a trozos en R, e. d., exiten x1 < . . . , < xNtales que f|(−∞,x1)
, f|(x1,x2), . . . f|(xN−1,xN )
, f|(xN ,+∞)son continuas, siendo
los límites (que supondremos existen) f(xi−), f(xi+) finitos. Si:
u(x, t) = K(f)(x, t) =1√4πt
∫ +∞
−∞e−
|x−y|24t f(y) dy,
hállense los límites:lımt→0+ u(xi, t).Indicación. Estúdiese con detalle el caso en que f(x) = θ(x) = 1 si x ≥ 0,θ(x) = 0 si x < 0.
12. Calcúlese la solución del problema:
ut = ∆u t > 0, x ∈ Rn
u(x, 0) = eα|x|2
, x ∈ Rn,
que se obtiene por medio de la fórmula de Poisson.
13. Sea f(x) ∈ Cb(Rn) una función radialmente simétrica, es decir f(x) =h(|x|), x ∈ Rn. Prúebese entonces que la función:
u(x, t) = K(f)(x, t) =1
(4πt)n/2
∫Rn
e−|x−y|2
4t f(y) dy,
es también radialmente simétrica con respecto a x.

5.9. EJERCICIOS 167
14. Sea f(x) ∈ Ckb (Rn), Ck
b (Rn) = f : Rn → R/∂αf(x) ∈ Cb(Rn)para |α| ≤k. Pruébese que si u(x, t) = K(f)(x, t) entonces ∂αx ∂
jt u ∈ Cb(Rn×[0,+∞)
siempre que 2j + |α| ≤ k.
15. (Transformación de Apell). Sea K(x, t) = 1√4πt
e−x2
4t el núcleo del calor enuna dimensión. Demúestrese que si u(x, t), x ∈ R, t ∈ R es una soluciónde la ecuación del calor ut = uxx entonces:
v(x, t) = K(x, t)u(x
t,−1
t), t > 0,
es también una solución de dicha ecuación para t > 0.
16. Sea α > 0 un número real positivo y designemos por g : R → R la funcióndefinida por:
g(t) = exp (−t−α), para t > 0, g(t) = 0, si t ≤ 0.
Pruébese la existencia de una constante θ = θ(α), 0 < θ < 1 de forma que:
|g(k)(t)| ≤ k!
(θt)kexp (
1
2t−α), para cada t > 0.
Indicación. Utilícese el hecho de que g(z) es holomorfa en ℜ(z) = t > 0para aplicar la fórmula de Cauchy:
g(k)(t) =k!
2πi
∫Γ
g(ζ)
(ζ − t)k+1dζ,
Donde, para t > 0, Γ es la circunferencia de centro t y radio r = θteligiéndose 0 < θ < 1 de forma que ℜ(z−α) > 1
2 t−α para todo z ∈ Γ.
17. (Decaimiento de la Energía en la Ecuación del Calor). Sean ui(x, t) ∈C2,1([0, l]× [0,+∞)), i = 1, 2 soluciones del problema de Dirichlet:
ut = uxx 0 < x < l, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
u(0, t) = α(t), u(l, t) = β(t).
Pruébese la identidad u1 = u2. Para ello consideérese la diferencia w(x, t) =u1(x, t)− u2(x, t) y pruébese que la función:
E(t) =
∫ l
0
w(ξ, t)2 dξ,
es no creciente para t ≥ 0.
18. Sean a(x, t), b(x, t) ∈ L∞(QT ), a(x, t) ≥ k > 0 en QT , L u = ut −a(x, t)uxx + b(x, t)ux. Si u ∈ C2,1(QT ∪ t = T) satisface Lu ≤ 0 enQT ∪ t = T pruébese que
supQT
u ≤ supΓT
u .

168 CAPÍTULO 5. ECUACIÓN DEL CALOR
19. Sea L el operador del problema 13 y sea E ⊂ R2 un dominio del plano x-ten donde u ∈ C2,1(E) cumple Lu ≤ 0, mientras u ≤ M para una ciertaconstante M .
a) Si B ⊂ B ⊂ E es una bola donde u < M en B mientras u(P ) = Mpara algún P ∈ ∂B. Demostrar que P = (x0, t0) es tal que t0 tomael valor máximo o el valor mínimo posible en ∂B.
b) Si P = (x1, t1) ∈ E es tal que u < M en una componente conexa Cde E ∩ t0 < t < t1 tal que P ∈ ∂C pruébese que u(P ) < M
20. Demostrar el principio fuerte del máximo para el operador L en las con-diciones del problema 13. Demuéstrese asimismo el principio del máximode Hopf para dicho operador.
21. Sean bi(x) ∈ L∞(Ω), 1 ≤ i ≤ n y considérese el operador parabólico:Lu = ut − ∆u +
∑ni=1 bi(x)∂iu en un dominio E ⊂ Rn × R del espacio
x-t. Demuéstrense los principios débil y fuerte del máximo para dichooperador. Pruébese también el principio del máximo de Hopf.
22. Sean aij(x), bi(x) ∈ L∞(Ω), Ω ⊂ Rn un dominio acotado, aij = aji deforma que el operador
Lu = −n∑
i,j=1
aij∂iju+n∑
i=1
bi(x)∂iu ,
es elíptico en Ω, es decir, existe una función λ = λ(x) > 0 en Ω tal que
n∑i,j=1
aij(x)ξiξj ≥ λ(x)|ξ|2 para cada ξ ∈ Rn. (5.26)
Supóngase además que o bien los aij son continuos (con lo que λ(x) serácontinua) o bien que λ(x) ≥ λ(K) > 0 sobre cada compacto K ⊂ Ω.
Demuéstrese que si u ∈ C2(Ω) ∩ C(Ω) cumple Lu ≤ 0 en Ω entoncessupΩ u ≤ sup∂Ω u.
Indicación. Para ε > 0 razonar en Ωε = x ∈ Ω : d(x, ∂Ω) > ε intro-duciendo u = v − ηϕ, η > 0 pequeño, η ∼ 0, ϕ = expα|x − x0|2 conα > 0, x0 ∈ Ω. Para α > 0 suficientemente grande es posible conseguir queL(ϕ) < 0 en Ωε. Uno concluye así que supΩε
u ≤ sup∂Ωεu. Para obtener
supΩ u ≤ sup∂Ω u basta con hacer ε → 0+ (haciendo las comprobacionespertinentes).
23. Supongamos que el operador L del problema anterior es fuertemente elíp-tico en el sentido de que la función λ(x) en (5.26) satisface la siguientecondición de positividad fuerte:
λ(x) ≥ λ0 > 0 x ∈ Ω .

5.9. EJERCICIOS 169
Pruébese entonces el principio del máximo de Hopf. Es decir, sea u ∈C2(Ω)∩C1(Ω), B ⊂ Ω es una bola interior a Ω que es además tangente a∂Ω en un P ∈ ∂Ω, de forma que u < M en B mientras u(P ) =M . Si ν esla normal unitaria exterior a Ω en P entonces
∂u
∂ν(P ) > 0 .
Nótese que no supone novedad alguna el que ∂u/∂ν(P ) ≥ 0.
24. Principios del máximo y términos de orden cero I) . Demuéstrese que eloperador Lu = −u′′ − u no cumple el principio del máximo.
25. Principios del máximo y términos de orden cero II). Sea h = h(x, t) ∈L∞(E), una función continua y no negativa en E, con E un dominio deRn × R. Considérese el operador Lu = ut − ∆u + h(x, t)u, que comobien se ve se diferencia de todos los aquí tratados en el término en u(véase el problema anterior). Sea asimismo u ∈ C2,1(E) tal que u ≤ Men E. Pruébese2 que si P ∈ E y además u(P ) = M con la condiciónadicional M ≥ 0 entonces se obtienen las conclusiones del principio fuertedel máximo y del principio de Hopf (supuesto en el último caso que u llegaC1 hasta la frontera ∂E). Búsquese un contraejemplo si h < 0.
26. Probar el principio de comparación: si u y v son soluciones de la ecuacióndel calor, u ≤ v en t = 0 y x = 0, l entonces u ≤ v. Pruébese que sivt − vxx ≥ 0, 0 ≤ x ≤ π, t > 0, v(0, t) ≥ 0, v(π, t) ≥ 0, v(x, 0) ≥ senx,entonces v(x, t) ≥ e−t senx.
27. (Sub y supersoluciones para la ecuación del calor). Sea Ω ⊂ Rn un dominioacotado y, para T > 0, definamos QT = (x, t)/x ∈ Ω, 0 < t < T. SeaC2,1(QT ) = u ∈ C(QT )/ut, ∂
αx u ∈ C(QT ), para |α| ≤ 2. Se dice que
v(x, t) ∈ C(QT )∩C2,1(QT ) (respectivamente w(x, t)) es una supersolución(r. subsolución) del problema:
ut = ∆u (x, t) ∈ QT
u(x, 0) = f(x) x ∈ Ω
u(x, t) = g(x, t) x ∈ ∂Ω, 0 ≤ t < T,
(5.27)
si vt ≥ ∆v (r. ≤ ) en QT , v(x, 0) ≥ f(x), x ∈ Ω (r. ≤) y v(x, t) ≥ g(x, t)(r. ≤) para x ∈ Ω, 0 ≤ t < T .Demuéstrese que si u(x, t) ∈ C(QT ) ∩ C2,1(QT ) es la única solución de(5.27) entonces:
w(x, t) ≤ u(x, t) ≤ v(x, t).
En el caso Ω = (0, l) y f(x) ∈ C1([0, l]), f(x) ≥ 0, g(x, t) ≡ 0, demués-trese que u(x, t) ≥ 0 para todo t ≥ 0, 0 ≤ x ≤ l y que u(., t) tiendeexponencialmente a 0 cuando t→ +∞.
2En realidad basta con cerciorarse de que los pasos claves, a saber, los Lemas 5.8 y 5.10(el Lema 5.9 es consecuencia inmediata del Lema 5.8), siguen siendo válidos en las nuevascondiciones.

170 CAPÍTULO 5. ECUACIÓN DEL CALOR
28. Se considera la solución 1 − x2 − 2t de la ecuación del calor ut = uxx.Localícense sus máximos en QT .
29. Sea u una solución de ut = uxx en 0 ≤ x ≤ l, t ≥ 0, y sean M(T ) =supQT
u, m(T ) = ınfQTu. Estúdiense las propiedades de crecimiento y
decrecimiento en T de tales funciones.
30. Sea u la solución de ut = uxx con u(0, t) = u(1, t) = 0, u(x, 0) = x(1− x).
a) Probar que u > 0 en 0 < x < 1, t > 0.
b) Para t > 0, sea µ(t) = supu(·, t). Probar que µ es no creciente. Paraello supóngase que si µ(t) = u(X(t), t), entoncesX(t) es diferenciable.
c) Pruébese que u(x, t) = u(1− x, t).
d) Pruébese que 0 < u < 1
e) Prúebese que∫ 1
0u2 dx es decreciente en t.
31. El siguiente ejercicio establece que el principio del máximo no es ciertopara la ecuación ut = xuxx, −2 < x < 2. Verificar que u = −2xt − x2 esuna solución. Hállese su máximo en el dominio [−2, 2]× [0, 1].
32. Comprúebese que u = 1 − x2 − 2kt satisface la ecuación del calor: ut =kuxx. Estúdiese la localización de sus máximos y mínimos en QT paraΩ = (0, 1).
33. Considérse el problema de Dirichlet homogéneo:
ut = uxx 0 < x < 1, t > 0
u(x, 0) = 4x(1− x) 0 < x < 1
u(0, t) = u(1, t) = 0 t > 0,
y admitamos que admite una solución u ∈ C2,1((0, 1)×(0,+∞)∩C([0, 1]×[0,+∞)). Pruébese que 0 < u(x, t) < 1 para todo t > 0. Pruébese queu(x, t) = u(1− x, t) para todo (x, t).
34. (cf. [10]) Se considera el operador del calor unidimensional Lu = ut − uxxdefinido en el dominio:
E = x2 + t2 < R2 , t < γ1x , t < γ2x,
donde γ2 < 0 < γ1. Se considera:
u(x, t) = (t− γ1x)(γ2x− t) + 1,
Demuéstrese que:
a) Lu ≤ 0 en D
b) u(P ) < u((0, 0)) en D.

5.9. EJERCICIOS 171
Sin embargo, falla la tesis del teorema de Hopf enunciado en el §6 ¿Cuáles la explicación?
35. La ecuación de Korteweg-de Vries (KdV):
ut − δuux + uxxx = 0,
se usa para describir la propagación de “ondas de agua”. Emular la de-ducción autosimiliar de la fórmula de Poisson para dar una solución delproblema de valor inicial para KdV con dato:
u(x, 0) = θ(x) x ∈ R,
para llegar a un problema de comportamiento asintótico de ecuacionesdiferenciales ordinarias.

172 CAPÍTULO 5. ECUACIÓN DEL CALOR

Capítulo 6
Series de Fourier
6.1. Series de Fourier: introducciónEn el Capítulo 7 sobre separación de variables se plantea de forma muy
natural el siguiente problema. Dada una función f : [−π, π] → R determinarcoeficientes an, bn tales que,
f(x) = a0 +
∞∑n=1
an cosnx+ bn sennx. (6.1)
Como se espera o desea que (6.1) se satisfaga puntualmente es natural que su-pongamos siempre que f es 2π-periódica. Usaremos Ck(T ), L2(T ) para repre-sentar a las funciones 2π-periódicas que son Ck o que pertenecen a L2(−π, π).
Que (6.1) sea verosímil requiere resolver primero una cuestión fundamental:la determinación de los coeficientes en términos de f . Las identidades:∫ π
−π
sennx senmx dx = πδnm∫ π
−π
cosnx cosmx dx = πδnm∫ π
−π
sennx cosmx dx = 0,
(n, m ∈ N cualesquiera) son cruciales a este respecto. Multiplicando ambosmiembros de (6.1) por 1 = cos 0x, cosnx y sennx, respectivamente, integrandoen [−π, π] y permutando formalmente la integral y la serie, obtenemos:
a0 =1
2π
∫ π
−π
f(x) dx
an =1
π
∫ π
−π
f(x) cosnx dx
bn =1
π
∫ π
−π
f(x) sennx dx.
173

174 CAPÍTULO 6. SERIES DE FOURIER
La forma de calcular los coeficientes tiene mucho que ver con el cómputo de lascoordenadas de un vector x en un espacio euclídeo (E, ⟨·, ·⟩) de dimensión Ncon respecto a una base ortonormal e1, . . . , eN. En efecto:
x =N∑
n=1
xnen,
donde xn = ⟨x, en⟩. En el caso de las series de Fourier debemos considerar unespacio (de dimensión infinita) con producto escalar,
⟨f, g⟩ =∫ π
−π
f(x)g(x) dx,
mientras el sistema ortonormal es
1/√2π, 1/
√π cosnxn∈N, 1/
√π cosnxn∈N.
Para poner en orden estas ideas desarrollamos a continuación algunos hechosbásicos sobre espacios de Hilbert, la versión infinitodimensional de los espacioseuclídeos.
Ejercicio 6.1. Hallar la serie de Fourier de la función f(x) = x.
6.2. Espacios de Hilbert
Sea H un espacio vectorial (real o complejo). Un producto escalar (real) enH es una aplicación bilineal b : H ×H → R tal que:
1) ∀x ∈ H : b(x, x) ≥ 0 y b(x, x) = 0 si y sólo si x = 0.
2) ∀x, y ∈ H : b(x, y) = b(y, x) (b es simétrica).
En el caso complejo b toma valores complejos, ∀x ∈ H, b(·, x) y b(x, ·) sonlineales y se dice que b es sesquilineal (= 1 + 1
2 lineal) 1. En este caso 6.2) semantiene mientras 6.2) se reemplaza por,
2’) ∀x, y ∈ H : b(x, y) = b(y, x) (b es hermítica).
Se suele representar b(x, y) = ⟨x, y⟩. Dos vectores x, y se dicen ortogonales si⟨x, y⟩ = 0. Se introduce la longitud (módulo) |x| de x como:
|x| =√⟨x, x⟩.
1En un espacio vectorial complejo, aplicaciones “semilineales” f son las que cumplen f(x+y) = f(x) + f(y) mientras f(λx) = λf(x) para escalares λ ∈ C.

6.2. ESPACIOS DE HILBERT 175
Se tienen inmediatamente los teoremas del coseno, de pitágoras y las identidadesdel paralelogramo y de polarización (x, y son arbitrarios en H)
|x± y|2 = |x|2 + |y|2 ± 2ℜ⟨x, y⟩|x+ y|2 = |x|2 + |y|2 si y sólo si ⟨x, y⟩ = 0
|x+ y|2 + |x− y|2 = 2|x|2 + 2|y|2
ℜ⟨x, y⟩ = 1
4|x+ y|2 − |x− y|2
ℑ⟨x, y⟩ = 1
4|ix− y|2 − |ix+ y|2,
(ℜz, ℑz las partes real e imaginaria de z ∈ C). Otra consecuencia de las propie-dades del producto escalar es la desigualdad de Cauchy-Schwarz:
|⟨x, y⟩| ≤ |x||y|, (6.2)
para x, y arbitrarios. En efecto, descartamos los casos triviales x = 0, ⟨x, y⟩ = 0 ysuponemos que |x| = 1. Hallamos una base ortonormal de spanx, y. Llamamosu1 = x, u2 = (y − ⟨x, y⟩x)/|y − ⟨x, y⟩x| y fácilmente obtenemos:
y = ⟨x, y⟩u1 + |y − ⟨x, y⟩x|u2,
de donde,|y|2 = |⟨x, y⟩|2 + |y − ⟨x, y⟩x|2,
que implica (6.2).De la desigualdad de Cauchy-Schwarz se deduce la de Minkowsky,
|x+ y| ≤ |x|+ |y|.
Por tanto, todo espacio H con un producto interior b = ⟨·, ·⟩ es un espacionormado con respecto al módulo | · |. H es un espacio de Hilbert si es completocon respecto a | · |.
El ejemplo fundamental de espacio de Hilbert es:
l2 = xn :∑
|xn|2 < +∞,
donde las xn pueden ser reales o complejas. En este caso ⟨xn, yn⟩ =∑xnyn (⟨xn, yn⟩ =
∑xnyn en el caso complejo).
Un segundo ejemplo importante es L2(Ω) para Ω ⊂ Rn medible:
L2(Ω) = u : Ω → R (resp. C) : u es medible, |u|2es integrable-Lebesgue.
Se hace la identificación f = g si las funciones sólo difieren en un conjunto demedida cero. El producto escalar es:
⟨f, g⟩ =∫Ω
f(x)g(x) dx
(resp.
∫Ω
f(x)g(x) dx
).
Conviene ahora recordar algunas propiedades elementales.

176 CAPÍTULO 6. SERIES DE FOURIER
Proposición 6.1. Si H es un espacio de Hilbert, entonces una serie∑xn para
la que∑
|xn| converge es también convergente y:
|∑
xn| ≤∑
|xn|.
Tal serie se dirá absolutamente convergente.Si tenemos una serie convergente en H,
∑xn = x ∈ H, entonces:
⟨x, y⟩ = ⟨∑
xn, y⟩ =∑
⟨xn, y⟩,
para cada y ∈ H.
Nuestro objetivo más inmediato es dar sentido a la serie de Fourier de unafunción 2π-periódica f . Un primer resultado en esta dirección es el siguiente.
Teorema 6.2 (Teorema de la proyección). Sea H un espacio de Hilbert, M ⊂ Hun subespacio cerrado, M = H. Entonces, para cada x ∈ H existe un únicoy ∈M tal que:
|x− y| = dist (x,M). (6.3)
Además
1. x− y ∈M⊥ donde M⊥ = z : ∀y1 ∈M , ⟨z, y1⟩ = 0
2. La aplicación π : H → H que a x → y := π(x) es lineal y continua con∥π∥ = 1.
Demostración. Cualquier y que resuelva el problema (A) de la mejor aproxima-ción cumple x− y ∈M⊥. En efecto, para y1 ∈M se tiene:
|x− y|2 ≤ |x− y + ty1|2 = |x− y|2 + t2|y1|2 + 2⟨x− y, y1⟩t,
es decir (hemos supuesto el espacio real para simplificar):
0 ≤ t2|y1|2 + 2⟨x− y, y1⟩t,
para todo t ∈ R. Por tanto ⟨x− y, y1⟩ = 0.En particular, la solución del problema de aproximación es única. Para otra
solución y′ ∈M se tendría:
y − y′ = y − x+ x− y′ ∈M⊥,
que lleva a y − y′ = 0.Para la existencia de y sea d = dist (x,M) > 0. Existe yn ⊂ M con
|x− yn| → d. De la identidad del paralelogramo se tiene:
4|x− yn + ym2
|2 + |yn − ym|2 = 2|x− yn|2 + 2|x− ym|2.
Por ello,
|yn − ym|2 ≤ 2(|x− yn|2 − d2) + 2(|x− ym|2 − d2) → 0

6.2. ESPACIOS DE HILBERT 177
cuando n,m→ ∞. Esto prueba existencia de y.La aditividad de π se prueba así,
|(x1 + x2)− y|2 = |(x1 − y1) + (x2 − y2)− y + y1 + y2|2 =
|(x1 + x2)− (y1 + y2)|2 + |y − (y1 + y2)|2,
donde hemos puesto yi = π(xi). Más abajo veremos que hubiese bastado conver que (x1 + x2)− (y1 + y2) ∈M⊥.
El resto de la demostración se deja como ejercicio.
Observaciones 6.1.a) El teorema asegura la existencia de la “mejor aproximación"y = π(x) de x porelementos de y. π(x) se llama la proyección ortogonal de x sobre M .
b) SiM es finitodimensional,M = spane1, . . . , eN con e1, . . . , eN ortonormalno es difícil comprobar que y = π(x) =
∑Ni=1 xiei, xi = ⟨x, ei⟩. En efecto, para
escalares arbitrarios yi se tiene:
|x−N∑i=1
xiei|2 ≤ |x−N∑i=1
xiei|2 + |N∑i=1
(xi − yi)ei|2
= |x−N∑i=1
xiei|2 +N∑i=1
|xi − yi|2
= |x−N∑i=1
yiei|2.
La diferencia entre el último y el primer término de la cadena de desigualdadeses precisamente:
∑Ni=1 |xi − yi|2. Se hace mínimo (método de los mínimos cua-
drados) para la elección xi = yi. Obsérvese que x−π(x) es obviamente ortogonala M y por eso se tiene:
|π(x)|2 =N∑i=1
|xi|2 ≤ |π(x)|2 + |x− π(x)|2 = |x|2.
c) Hemos probado que para cualquier subespacio cerrado M ⊂ H, H admite ladescomposición:
H =M ⊕M⊥,
siendo la suma directa topológica ([1]).
Una consecuencia de la observación b) es la siguiente propiedad general.
Proposición 6.3 (Método de los mínimos cuadrados). Sea M un subespaciocerrado propio de H, x ∈ H. Entonces, y ∈M satisface:
|x− y| = dist (x,M).
si y sólo si x− y ∈M⊥.

178 CAPÍTULO 6. SERIES DE FOURIER
Demostración. Para y1 ∈M se tiene:
|x− y1|2 = |(x− y) + (y − y1)|2 = |x− y|2 + |y − y1|2 ≥ |x− y|2.
Proposición 6.4 (Desigualdad de Bessel). Sea eii∈I ⊂ H una familia orto-normal, es decir, ⟨ei, ej⟩ = 0 si i = j, |ei| = 1 para cada i. Entonces, para cadax ∈ H la familia:
x =∑i∈I
xiei =∑i∈I
⟨x, ei⟩ei,
es sumable en H. x se llama la serie de Fourier de x y xi es el i-ésimo coeficientede Fourier de x con respecto a dicha familia. Además:
|x|2 =∑i∈I
|xi|2 ≤ |x|2. (6.4)
Demostración. Sea J ⊂ I cualquier parte finita. Resulta que:
|x|2 = |x− SJ |2 + |SJ |2 ≥ |SJ |2 =∑i∈J
|xi|2,
con SJ =∑
i∈J xiei. Se deduce de ahíque:∑i∈I
|xi|2 ≤ |x|2.
Como:|SJ |2 =
∑i∈J
|xi|2,
y la familia∑
i∈I |xi|2 < +∞ se tiene la convergencia de la familia propuesta aun valor x que cumple (3). De hecho,
|x|2 =∑i∈I
|xi|2.
Probaremos a continuación que el subespacio generado por una familia or-tonormal eii∈I coincide con el de todas las series de Fourier de los elementosx ∈ H con respecto a dicha familia.
Proposición 6.5. Sea eii∈I una familia ortonormal en H y M el subespaciogenerado por la familia, es decir,
M = spaneii∈I. (6.5)
Entonces,M =
∑i∈I
xiei :∑i∈I
|xi|2 < +∞.

6.3. SERIES DE FOURIER: PRIMERAS PROPIEDADES 179
Más aún, para cada x ∈ H se tiene que:
π(x) = x =∑i∈I
⟨x, ei⟩ei.
Demostración. Resulta obvio que x − x ∈ M⊥ y que x ∈ M , por eso se tieneque x = π(x) donde x es la serie de Fourier de x.
Asímismo, el segundo miembro M1 de (4) cumple claramente M1 ⊂M . Paraprobar el contenido contrario sea x ∈M arbitrario, x su serie de Fourier y sea:
x = lımSJn ,
con Jn ⊂ I finito y SJn =∑
i∈Jnx(n)i ei. Pongamos xn =
∑i∈Jn
⟨x, ei⟩ei. Setiene entonces:
|x− xn|2 = |(x− x) + (x− xn)|2 = |x− x|2 + |x− xn|2 ≥ |x− x|2,
puesto que x− x ∈M⊥. Ahora, ya sabemos que:
|x− xn|2 ≤ |x− SJn |2.
Eso quiere decir que |x− x| = 0.
Observación 6.2. Sea eii∈I ortonormal y M como en la proposición. Parax ∈ H, x ∈M su serie de Fourier en eii∈I . Nos preguntamos a cuántos otrosx′ les corresponde la misma serie de Fourier x que a x. Obviamente el conjuntode tales x’s es:
x+M⊥.
Los elementos de H vendrán caracterizados por su serie de Fourier sólo cuandoM⊥ = 0, es decir M = H. En este caso especial se tiene la siguiente definición.
Definición 6.6. Un sistema ortonormal eii∈I se dice completo en H, tambiénuna base de Hilbert para H, si M = H.
Proposición 6.7. Un sistema ortonormal eii∈I es completo si, para x arbi-trario en H, de la propiedad:
∀i ∈ I ⟨x, ei⟩ = 0,
se sigue:x = 0.
6.3. Series de Fourier: primeras propiedadesLa forma de calcular los coeficientes de la serie de Fourier de una función f
ha llevado al espacio L2(T ), que es un espacio de Hilbert. La familia:
1/√2π, 1/
√π cosnxn∈N, 1/
√π cosnxn∈N
es ortonormal. Comprobaremos más tarde que es además completa. La siguientepropiedad es un caso particular de los resultados de la sección previa.

180 CAPÍTULO 6. SERIES DE FOURIER
Proposición 6.8. Para f ∈ L2(−π, π) su serie de Fourier converge en f ∈L2(−π, π) a una función f ,
f = a0 +∞∑
n=1
an cosnx+ bn sennx.
Además,|f |22 = π2a20 +
∑a2n + b2n.
Si g ∈ L2(−π, π) es otra función con serie Fourier,
g = α0 +∞∑
n=1
αn cosnx+ βn sennx,
entonces,⟨f , g⟩2 = π2a0α0 +
∑anαn + bnβn.
Observación 6.3. Si f es la serie de Fourier de f ∈ L2(−π, π), con suma parcialN -ésima SN , entonces (desigualdad de Cauchy–Schwarz)
|f − SN |L1 = ⟨|f − SN |, χ[−π,π]⟩2 ≤√2π|f − SN |2,
luego lımSN = f en L1 lo que significa que la serie de Fourier f de f puede serintegrada término a término y, para cada a, x ∈ [−π, π], se tiene:∫ x
a
f(x) dx = a0(x− a) +
∞∑n=1
−bnn(cosnx− cosna) +
ann(sennx− senna).
En la Sección 6.6 se demuestra el siguiente resultado que enunciamos ahoraa los efectos de establecer el teorema de completitud.
Teorema 6.9. Sea f ∈ C(T ) continua tal que existe la derivada f ′ exceptoquizás en un número finito de puntos, con f ′ ∈ L2(T ) (por ejemplo, f es C1 atrozos). Entonces,
f = a0 +∞∑
n=1
an cosnx+ bn sennx (uniformemente),
f ′ =
∞∑n=1
nbn cosnx− nan sennx (en L2).
Teorema 6.10 (Teorema de Completitud). Si f ∈ L2(T ), entonces f es lasuma de su serie de Fourier. En particular, para todo par de funciones f , g ∈L2(−π, π) con desarrollos de Fourier,
f = a0 +∞∑
n=1
an cosnx+ bn sennx,

6.4. RESULTADOS DE CONVERGENCIA PUNTUAL 181
g = α0 +
∞∑n=1
αn cosnx+ βn sennx,
se tienen (identidades de Parseval):
|f |22 = π2a20 +∑
a2n + b2n,
⟨f, g⟩2 = π2a0α0 +∑
anαn + bnβn.
Demostración. Por la acción combinada de los teoremas de Lusin (véase la Sec-ción 6.8) y Weierstrass tenemos que
f = lım fn (L2),
con fn un polinomio. Si p = p(x) es, por ejemplo un polinomio, y definimos:
pε(x) =
p(ε− π)
ε(x+ π) −π ≤ x ≤ −π + ε
p(x) −π + ε < x < π − ε
p(π − ε)
ε(π − x) π − ε ≤ x ≤ π,
entonces pε → p en L2 cuando ε→ 0+. Esto significa que podemos suponer quelos fn son C1 a trozos, 2π-periódicos y su serie de Fourier converge uniforme-mente. Sea S(n)
N la suma parcial N -ésima de la serie de Fourier de fn. Tenemosque para ε > 0 arbitrario:
|f − fnε |2 ≤ ε
2,
para cierto nε. Asímismo,
|fnε − S(nε)N |2 ≤ ε
2,
para N ≥ Nε.Si SN designa la suma parcial N -ésima de la serie de Fourier de f se tiene,
|f − SN |2 ≤ |f − S(nε)N |2 ≤ |f − fnε |2 + |fnε − S
(nε)N |2 ≤ ε,
para N ≥ Nε, lo que prueba la parte principal del teorema.
6.4. Resultados de convergencia puntual
El primer resultado se debe esencialmente a Riemann y es básico para presen-tar una de sus contribuciones más importantes a la teoría: que la convergenciade la serie de Fourier en un punto sólo depende de la estructura local de lafunción en dicho punto.

182 CAPÍTULO 6. SERIES DE FOURIER
Lema 6.11 (Lema de Riemann-Lebesge). Sea f ∈ L1(−π, π). Entonces:
lım
∫ π
−π
f(x) cosnx dx = lım
∫ π
−π
f(x) sennx dx = 0. (6.6)
Demostración. Si f ∈ L2(−π, π) el resultado es obvio. Por otra parte, si f ∈ L1
(los coeficientes en (6.6) tienen sentido) se tiene que:
f(x) = lımA→+∞
fA(x) ∀ c. t. x ∈ (−π, π),
donde fA = χ|f(x)|>Af . En efecto, el límite falla en los puntos donde |f | tomael valor +∞, que es de medida cero:
||f(x)| > A| ≤ |f |1A
A > 0.
Por otra parte,
|aAn − an| =∣∣∣∣ 1π∫ π
−π
(fA(x)− f(x)) cosnx dx
∣∣∣∣≤ 1
π
∫ π
−π
|fA(x)− f(x)| dx
=1
π
∫|f(x)|>A
|f | → 0,
uniformemente en n cuando A→ +∞. Como,
|an| ≤ |aA(ε)n |+ |aA(ε)
n − an| ≤ ε,
para A(ε) suficientemente grande y para n ≥ n(ε) como para que el primersumando sea inferior a ε/2, resulta que an → 0. Se procede con bn de maneraanáloga.
Sea ahora f ∈ L1(−π, π) una función 2π-periódica cuya serie de Fouriertiene suma parcial N -ésima SN (x). Entonces:
SN (x) =1
π
∫ π
−π
f(t)12+
N∑1
cosn(x− t) dt.
Se tiene:
1
2+
N∑1
cosny =
sen
(N +
1
2
)y
2 sen1
2y
.
En efecto si S es el primer miembro,
(sen
y
2
)S =
1
2sen
y
2+
N∑1
sen(n+1
2)− sen(n− 1
2) =
1
2sen(N +
1
2).

6.4. RESULTADOS DE CONVERGENCIA PUNTUAL 183
Se llama núcleo de Dirichlet de orden N a la expresión:
DN (y) =
sen
(N +
1
2
)y
2π sen1
2y
.
Proposición 6.12. El núcleo de Dirichlet presenta las siguientes propiedades,
1. DN = DN (y) es C∞ y 2π-periódico.
2. Dn(y) = DN (−y), DN (y) > 0 en |y| < π/(N +1
2), se anula en los puntos
yk = kπ/(N+1
2), k ≤ N , del intervalo (0, π), mientras DN (y) ∼ 1
π(N+
1
2)
cuando y → 0.
3. Se tiene que: ∫ π
−π
DN (y) dy = 1.
Obsérve que la suma parcial SN de la serie de f se puede escribir:
SN (x) =
∫ π
−π
DN (x− t)f(t) dt = DN ∗ f(x).
Por otra parte, no es difícil probar que si f es T -periódica, f ∈ L1(0, T ), entonces∫ a+T
af es constante para todo a ∈ R. Por ello,
SN (x) =
∫ π
−π
DN (x− t)f(t) dt
=
∫ π
−π
DN (t− x)f(t) dt
=
∫ π−x
−π−x
DN (z)f(x+ z) dz
=
∫ π
−π
DN (z)f(z + x) dz.
Podemos ya demostrar el siguiente resultado.
Teorema 6.13 (Convergencia puntual). Sea f ∈ L1(−π, π) una función 2π-periódica, mientras x0 ∈ [−π, π] es tal que:
f(t+ x0)− f(x0)
|t|(6.7)
con t = 0 está en L1(−π, π) (condición de Dini). Entonces la serie de Fourierde f converge a f(x0) en x = x0, es decir,
f(x0) = a0 +
∞∑n=1
an cosnx0 + bn sennx0.

184 CAPÍTULO 6. SERIES DE FOURIER
Observaciones 6.4. Observaciones Cualquiera de las siguientes condiciones im-plican la validez de (6.7) en x = x0:
1. f Hölder continua en x = x0 de exponente 0 < α < 1:
|f(x)− f(x0)| ≤ C|x− x0|α,
para x ∼ x0, C > 0.
2. f Lipschitz continua en x = x0
|f(x)− f(x0)| ≤ L|x− x0|,
para x ∼ x0, L > 0.
3. f es derivable en x = x0.
Las tres condiciones implican también la continuidad de f en x = x0. Sinembargo no es cierto que la sola continuidad de f en x = x0 garantiza laconvergencia de la serie de Fourier de f a f(x0) en x = x0 (ver el contraejemplounas líneas más abajo). Por otra parte, nótese que la Lipschtzianidad de f enx = x0 es equivalente a la finitud de los cuatro números de Dini: D±f(x0±),donde, por ejemplo,
D+f(x0) = limx→x0+
f(x)− f(x0)
x− x0.
Demostración del Teorema 6.13. Tenemos,
SN (x0)− f(x0) =
∫ π
−π
DN (z)(f(z + x0)− f(x0) dz
=
∫ π
−π
z
sen(z/2)
f(z + x0)− f(x0)
zsen(N +
1
2)z dz → 0,
cuando N → ∞ en virtud del lema de Riemann-Lebesge.
Una consecuencia de la demostración es lo que se conoce como el principiode localización de Riemann que viene a asegurar que la convergencia de la seriede Fourier en x = x0 es una propiedad local.
Proposición 6.14. Si f ∈ L1(T ) y existe ε > 0 tal que f = 0 ∀ c. t. x ∈(x0 − ε, x0 + ε) entonces:
a0 +∞∑
n=1
an cosnx0 + bn sennx0 = 0.
Para aplicar los resultados sobre series de Fourier, por ejemplo a funcionescontinuas f en [−π, π], se extiende primero f como una función 2π-periódica aR (v.g. f(x) = ex). Es entonces natural que aparezcan discontinuidades en laextensión (si f(−π) = f(π)). El siguiente resultado, debido a Dirichlet, tieneque ver con ese tipo de situaciones.

6.5. CUESTIONES COMPLEMENTARIAS 185
Teorema 6.15. Sea f ∈ L1(T ) satisfaciendo que las funciones
f(x0 + t)− f(x0−)
tχt < 0 f(x0 + t)− f(x0+)
tχt > 0, (6.8)
(t = 0) son localmente integrables. Entonces,
f(x0−) + f(x0+)
2= a0 +
∞∑n=1
an cosnx0 + bn sennx0.
La demostración es una variante de la del teorema anterior. Nótese que si fes por ejemplo C1 a trozos se cumple (6.8) en los puntos de discontinuidad.
6.5. Algunas cuestiones adicionales sobre la con-vergencia de las series de Fourier
El siguiente ejemplo de Fejér (1910) (cf. [23]) muestra que la continuidad nobasta para la convergencia puntual. Un primer ejemplo en esta dirección habíasido dado ya por Du Bois-Reymond en 1876.
Se consideran los grupos ordenados de números:
Gn = 1
2n− 1, . . . , 1,−1, . . . ,− 1
2n− 1,
a los que se asocian (r un parámetro) las funciones:
ϕ(n, r, x) =
cos(r + 1)x
2n− 1+ · · ·+ cos(r + n)x− cos(r + n+ 1)x− · · · − cos(r + 2n)x
2n− 1
=n∑
ν=1
cos(r + n− ν + 1)x
2ν − 1−
n∑ν=1
cos(r + n+ ν)x
2ν − 1.
La familia ϕ(n, r, ·) está uniformemente acotada. En efecto,
ϕ(n, r, x) = 2 sen(r + n+1
2)x
n∑ν=1
sen(ν − 12 )x
2ν − 1
= 2 sen(r + n+1
2)x
2n∑λ=1
sen(λ2 )x
λ− 1
2
n∑λ=1
senλx
λ
,
mientras las expresiones,
SN (x) =N∑1
sen kx
k,
se mantienen acotadas.

186 CAPÍTULO 6. SERIES DE FOURIER
Basta escribir:
SN (x) =
∫ x
0
(cos t+ · · ·+ cosnt) dt
=
∫ (N+1/2)x
0
senu
udu+
∫ x
0
(1
2 sen t2
− 1
t
)sen(n+
1
2)t dt− x
2,
de donde se deduce la acotación uniforme de SN , primero en [0, π], después en[−π, 0] (refelexión), y después por periodicidad a todo R.
Ejercicio 6.2. Efectuar un estudio detallado de∫ x
0
senu
udu,
en R+.
Ahora consideramos una sucesión creciente de enteros λ1 < λ2 < · · · y lasucesión ordenada de coeficientes αn que se deduce de la unión:
Gλ1 ∪ Gλ2 ∪ · · ·
donde los elementos de Gλnson los de Gλn
multiplicados por 1/n2. Debe notarseque para cada n: ∑
αn∈Gλn
αn = 0.
Finalmente construimos la serie formal:∞∑
n=1
αn cosnx. (6.9)
Se observa que: ∑αn∈Gλn
αn cosnx =1
n2ϕ(λn, 2λ1 + · · · 2λn−1, x)
pues el primer elemento del grupo Gλn ocupa el número de orden 2λ1+· · · 2λn−1,el último 2λn unidades más.
La serie (6.9) puede sumarse por “paquetes” en el sentido de que:
f(x) =∑n
∑αn∈Gλn
αn cosnx =∑n
1
n2ϕ(λn, 2λ1 + · · · 2λn−1, x),
y es inmediato que dicha serie converge uniformemente a una función continuaf(x). Su m-ésimo coeficiente de Fourier se halla haciendo:∫ 2π
0
f(x) cosmx dx =∑n
∫ 2π
0
1
n2ϕ(λn, 2λ1 + · · · 2λn−1, x) cosmx dx
= παm.

6.6. CONVERGENCIA UNIFORME 187
Por lo tanto, (6.9) es exactamente la serie de Fourier de f . Veamos que dichaserie no converge en x = 0 (la razón es que para sumar dicha serie hay que“desempaquetarla"lo que causa la no convergencia). En efecto, si sn es la sumaparcial n-ésima de
∞∑n=1
αn,
entonces la subsucesión:
s2λ1+···+2λn−1+λn =1
n2
1 +
1
3+ · · ·+ 1
2λn − 1
∼ log λn
2n2,
cuando n → ∞. Si elegimos λn adecuadamente, v. g. λn = nn2
es claro que talsubsucesión diverge como log n y la serie
∑∞n=1 αn diverge.
Observaciones 6.5.a) Usando el principio de acotación uniforme se puede probar (cf. [19], Capítulo5) la existencia un subconjunto denso E ⊂ C(T ) de forma que la serie de Fourierde cada f ∈ E diverge sobre un conjunto denso en [−π, π].
b) Carleson probó en 1966 que la serie de Fourier de cada f ∈ L2(T ) converge af , ∀ c. t. x ∈ (−π, π). Eso dice que el conjunto de divergencia de las funcionesf ∈ E de a) debe ser necesariamente de medida cero.
6.6. Convergencia uniformeUn primer resultado elemental es el siguiente.
Proposición 6.16. Si f ∈ C2 es 2π periódica, f es la suma uniforme de suserie de Fourier.
El resultado se sigue de la identidades (en L2),
f = a0 +
∞∑n=1
an cosnx+ bn sennx
f ′ =∞∑
n=1
nbn cosnx− nan sennx
f ′′ = −∞∑
n=1
n2an cosnx+ n2bn sennx.
En particular:
|an|, |bn| ≤1
πn2|f ′′|1,
que prueba la convergencia absoluta y uniforme de la serie de Fourier.Supongamos más sencillamente que f ∈ C1(T ). Una integración por partes
establece que:a′n = nbn b′n = −nan,

188 CAPÍTULO 6. SERIES DE FOURIER
por lo que∑∞
n=1 n2a2n + n2b2n <∞. Para estimar la convergencia escribimos:
|SM (x)− SN (x)|2 ≤ 2M∑
n=N
1
n2
M∑n=N
n2a2n + n2b2n,
y se deduce la convergencia uniforme.Con un poco más de generalidad, si f ∈ C(T ), f ′ existe excepto quizás en
un número finito de puntos ai con f ′ ∈ L2(−π, π) entonces:∫ π
−π
f ′(x) cosnx dx =∑i
∫ ai
−ai−1
f ′(x) cosnx dx =∑i
lımε→0+
∫ ai−ε
−ai−1+ε
f ′(x) cosnx dx
= n∑i
f sennx|aiai−1
−∫ ai
−ai−1
f(x) sennx dx
= −n∫ π
−π
f(x) sennx dx.
Luego, como antes tenemos a′n = −nbn y, por el mismo razonamiento, b′n = nan.Más aún si f ∈ C(T ) es absolutamente continua, luego:
f(x) = f(a) +
∫ x
a
g,
para alguna g ∈ L1(T ) y cualquier a ∈ [−π, π], una cuidadosa aplicación delteorema de Fubini demuestra (cf. [19]), una vez más, que se tienen las relaciones:∫ π
−π
g(x) cosnx dx = −n∫ π
−π
f(x) sennx dx∫ π
−π
g(x) sennx dx = n
∫ π
−π
f(x) cosnx dx,
por tanto, a′n = −nbn, b′n = nan. Si además g ∈ L2 (g es la derivada en casitodo punto de f) se tendrá la convergencia de la serie
∑n2a2n + n2b2n.
Podemos finalmente enunciar nuestro resultado de convergencia uniforme.
Teorema 6.17. Sea f ∈ C(T ) satisfaciendo alguna de las condiciones prece-dentes. Entonces,
f = a0 +∞∑
n=1
an cosnx+ bn sennx,
uniformemente. Más aún,
sup[−π,π]
|SM (x)− SN (x)| ≤√2
√√√√ M∑n=N
1
n2
√√√√ M∑n=N
n2a2n + n2b2n.
Observaciones 6.6.

6.6. CONVERGENCIA UNIFORME 189
a) Haciendo M → +∞ en la última ecuación tenemos la estimación uniformedel error,
sup[−π,π]
|f(x)− SN (x)| ≤√
2
π
√√√√π2
6−
N∑1
1
n2
√√√√∫ π
−π
f ′2 − πN∑1
n2a2n + n2b2n.
Hemos usado que:∞∑
n=1
1
n2=π2
6.
Para probarlo consideramos f(x) = x en [−π, π]. Su serie de Fourier es:
f(x) = 2
∞∑n=1
(−1)n+1 1
n,
de lo que, al ser, ∫ π
−π
x2 dx =2π3
6,
se tiene:2π3
6= 4π
∞∑n=1
1
n2,
de donde el resultado.
b) Puede ser de utilidad observar que si f ∈ Ck−1(T ), con f (k−1) C1 a trozos,la serie de Fourier de f :
f = a0 +∞∑
n=1
an cosnx+ bn sennx,
se puede derivar k − 1 veces término a término siendo las series resultantesuniformemente convergentes, mientras:
f (k) =∞∑
n=1
an(cosnx)(k) + bn(sennx)
(k),
en L2(T ). Por otro lado,
∞∑n=1
n2la2n + b2n < +∞,
para 0 ≤ l ≤ k.

190 CAPÍTULO 6. SERIES DE FOURIER
6.7. Convergencia uniforme sobre compactos: fe-nómeno de Gibb
Cuando una función f presenta una discontinuidad de salto en un puntox = x0 y es relativamente regular cerca de x = x0, las sumas parciales SN
de la serie de Fourier desarrollan cuando N → +∞ un tipo característico deefecto de capa límitite en x = x0 conocido como fenónmeno de Gibb. Mientraslo describimos probaremos que la serie de Forier de una función C1 a trozosconverge uniformemente sobre compactos del conjunto de continuidad.
Vamos a comenzar analizando un caso especial: f(x) = 12 signo(x) (cf. [22]).
En este caso:
SN (x) =
(−∫ 0
−π
+
∫ π
0
)senM(x− y)
sen(x−y2 )
dy
4π,
con M = N +1
2. Hacemos θ =M(x− y), mientras llamamos:
φ(θ) =sen θ
M sen( θ2M )
,
y tenemos:
SN (x) =
(−∫ Mx
Mx+Mπ
+
∫ Mx−Mπ
Mx
)(−1)φ(θ)
dθ
4π
=
(−∫ Mx+Mπ
Mx
+
∫ Mx
Mx−Mπ
)φ(θ)
dθ
4π
=
(∫ Mx
−Mx
+
∫ −Mx
Mx−Mπ
−∫ Mx+Mπ
Mx
)φ(θ)
dθ
4π
=
(∫ Mx
−Mx
−∫ Mx
−Mx+Mπ
−∫ Mx+Mπ
Mx
)φ(θ)
dθ
4π
=
(∫ Mx
−Mx
−∫ Mx+Mπ
−Mx+Mπ
)φ(θ)
dθ
4π
= I1 − I2.
Vamos ahora a estudiar el comportamiento de la suma parcial cerca de x = 0.Para ello supongamos que:
|Mx| ≤ K.
Tenemos:
I1 = 2
∫ Mx
0
sen θ
M sen( θ2M )
dθ
4π∼∫ Mx
0
sen θ
θ
dθ
4π∼∫ K
0
sen θ
θ
dθ
4π,

6.7. FENÓMENO DE GIBB 191
Figura 6.1: Fenómeno de Gibb
cuando N → +∞. Por otra parte,
I2 =
∫ Mπ+Mx
Mπ−Mx
sen θ
M sen( θ2M )
dθ
4π=
∫ Mx
−Mx
sen(Mπ + s)
M sen(π
2+
s
2M)
ds
4π.
Como |Mx| ≤ K la integral I2 tiende a cero cuando N → +∞.Por tanto para Mx = K > 0 tenemos que:
SN (x) ∼∫ K
0
sen θ
θ
dθ
2π,
cuando N → ∞ (M = N +1
2). El valor máximo de SN (x) corresponderá a
valores de K que hagán máxima la integral. A este respecto, dicha integral espositiva para K > 0 y el máximo se alcanza en K = π. Por tanto en los puntos:
x =π
M,
SN (x) alcanza su valor asintótico máximo que viene dado por:
SN (π
M) ∼ 1
2π
∫ π
0
sen θ
θ
dθ
∼0′59 = 0′50 + 0′09.
La suma parcial N -ésima desarrolla entonces un “pliegue"que tiene de alto 0′59,un total de un 9 % más que el valor de convergencia puntual en x > 0 quees exactamente 0′5. La situación simétrica ocurre en x = − π
M. La Figura 6.1
ilustra gráficamente dicho comportamiento. La Figura 6.2, cortesía de MATLAB,corresponde a la suma parcial S17(x) de la serie de la función signo(x).
En realidad hemos probado un resultado más general.

192 CAPÍTULO 6. SERIES DE FOURIER
Teorema 6.18. Sea f 2π-periódica y C1 a trozos. Sea a un punto de disconti-nuidad donde el valor del salto es σ = f(a+)− f(a−). Entonces, para
x±N = a± π(N +
1
2
) ,se tiene que la suma parcial N -ésima de la serie de Fourier satisface que:
SN (x±N ) ∼ σI +f(a−) + f(a+)
2
siendo I = 12π
∫ π
0sen θθ dθ.
Vamos a estudiar por último la convergencia uniforme sobre compactos dela serie de una función C1 a trozos. Para ello, basta con estudiar el ejemplo de
f(x) =1
2signo (x). Sean,
0 < x1 < x2 < π,
se tiene,
SN (x2)− SN (x1) = 2
(∫ Mx2
Mx1
+
∫ Mx2+Mπ
Mx1+Mπ
)φ(θ)
dθ
4π.
Tras un cambio de variable, la primera integral toma la forma:
1
2π
∫ x2
x1
senMs
sen s2
ds =
1
2πM− cosMs cosec
s
2|x2x1
+
∫ x2
x1
cosMs cosec′(s
2) ds → 0,
uniformemente en 0 < ε ≤ x1 < x2 ≤ π − ε cuando N → +∞.La segunda integral se puede escribir como:∫ Mx2
Mx1
sen(Mπ + s)
M sen(π
2+ s
2M
ds
4π=
∫ x2
x1
sen(M(π + s)
sen(π
2+ s
2
ds
4π,
y una cuenta como la de arriba prueba la convergencia uniforme a cero de laintegral en 0 < ε ≤ x1 < x2 ≤ π − ε cuando N → +∞.
Hemos probado por tanto el siguiente resultado.
Teorema 6.19. Si f es C1 a trozos y 2π-periódica entonces su serie de Fourierconverge a f uniformemente sobre compactos del conjunto de continuidad de f .

6.8. TEOREMA DE LUSIN 193
−4 −3 −2 −1 0 1 2 3 4−1.5
−1
−0.5
0
0.5
1
1.5
f(t)s17(t)
Figura 6.2: Suma parcial de orden 17 de la función signo(x)
6.8. Teorema de LusinLa aproximación de funciones integrables por funciones continuas es conse-
cuencia del siguiente resultado general (cf. [19]).
Teorema 6.20 (Teorema de Lusin). Sea Ω ⊂ Rn medible, |Ω| < ∞. Si f esmedible en Ω (f ∈ M(Ω)), para cada ε > 0 existe gε ∈ C0(Rn) cumpliendosup |g| ≤ sup |f | tal que:
|x ∈ Ω : f = gε| < ε.
Se tiene como consecuencia.
Corolario 6.21. Si f ∈ M(Ω), |Ω| < +∞, |f | ≤ 1, existe una sucesión gn ∈C0(Rn), |gn|∞ ≤ 1 tal que:
lım gn(x) = f(x) ∀ c. t. x ∈ Ω.
Demostración. Escogemos gn tal que |An := f = gn| ≤ 2−n. Entonces, y∀ c. t. x ∈ Ω cada x ∈ Ω está a lo más en un número finito de An’s (Ejercicio).
Ejercicio 6.3. Sea An ⊂ RN una sucesión de conjuntos medibles tal que:∑n
|An| <∞.

194 CAPÍTULO 6. SERIES DE FOURIER
Usando la integrabilidad de∑
n χAn(x) pruébese que ∀ c. t. x ∈ RN , x ∈ RN
está a lo más en un número finito de An’s.
Corolario 6.22. Sea f ∈ Lp(Ω), |Ω| < +∞, 1 ≤ p ≤ +∞. Entonces existe unasucesión gn ∈ C0(Rn) verificando:
lım gn(x) = f(x) en Lp(Ω).
6.9. Ejercicios
1. Sea f ∈ L2(0, π). Prúebese que f puede desarrollarse en la forma:
f = a0 +
∞∑n=1
an cosnx,
o bien en la forma,
f =∞∑
n=1
bn sennx,
siendo ambos desarrollos convergentes en L2(0, π) ¿ Qué se podrá decirde la convergencia puntual? Análogamente, si f ∈ L2(a, b) demuéstreseque f puede expresarse como la suma en L2(a, b) de una serie de senosadecuada, o de una serie de cosenos, o mediante una serie que involu-cra simultáneamente a senos y cosenos. Analizar también la convergenciapuntual.
2. Sea f ∈ L2(T,C) compleja. Determínense cuáles han de ser los coeficientescomplejos cnn∈Z para que:
f(x) =∑n∈Z
cneinx.
en L2(T,C). Pruése que si f ∈ L2(T,C) y usamos tales cn la serie convergeen L2(T,C) a una función f ∈ L2(T,C) que cumple:
|f |2 ≤ |f |2.
3. En el presente ejercicio vamos a probar que toda f ∈ L2(T,C) es la sumaen L2 de su serie de Fourier:
f =+∞∑−∞
cneinx.
Para ello seguiremos los siguientes pasos.

6.9. EJERCICIOS 195
a) El teorema de Stone-Weierstrass permite probar que los polinomiostrigonométricos,
p(x) = a0 +
N∑n=1
an cosnx+ bn sennx,
son densos en C(T ). Prúebese que los polinomios trigonométricoscomplejos,
p(x) =
N∑n=−N
cneinx,
también son densos en C(T,C).b) Demuéstrese que si f ∈ C(T,C), f es la suma en L2 de su serie de
Fourier.
c) Usando los resultados del Capítulo demuétrese que C(T,C) es densoen L2(T,C). Si SN es la suma parcial N -ésima de la serie de Fourierde f ∈ L2(T,C), verifíquese la desigualdad:
|f − SM |22 ≤ |f − SM |22 + |SM − SN |22 = |f − SN |22,
válida para todo M ≥ N . Combinar esta desigualdad con (2) paraconcluir que SN → f en L2(T,C).
4. Usar el método de ortonormalización de Schmidt para obtener una baseortonormal en el subespacio P2(x) ⊂ L2(0, 1) de los polinomios de gradomenor o igual que dos. Hállese la mejor aproximación con respecto a lanorma de L2(0, 1) de la función f(x) = ex por polinomios de grado menoro igual que dos.
5. Sea f(x) = |x| en el intervalo (−π, π). Elegir los coeficientes en:
f2(x) =1
2a0 + a1 cosx+ b1 senx+ a2 cos 2x+ b2 sen 2x,
para minimizar el error en L2(−π, π).
6. Hállese la serie de Fourier en senos de f = 1 en (0, π).
7. Calcúlese la suma de la serie:∞∑
n=1
1
(2n− 1)2.
8. Usar series de Fourier y la función f(x) = x2 para determinar la suma dela serie: ∑ 1
n4.

196 CAPÍTULO 6. SERIES DE FOURIER
9. Pruébese que:
lım
∫ π
0
log x senx dx = 0.
10. Sea f ∈ L2(T ). Denotemos por SN (x) la suma parcial N-ésima de su seriede Fourier:
SN (x) = a0 +∞∑
n=1
an cosnx+ bn sennx.
a) Pruébese que:
SN (x) =1
2π
∫ π
−π
f(x+ τ)DN (τ) dτ,
donde DN (τ) =sen(N+ 1
2 )τ
sen τ2
(Núcleo de Dirichlet). Pruébese ademásque:
1
2π
∫ π
−π
DN (τ) dτ = 1.
b) Sea f ∈ L2(−π, π). Pruébese que si la función fx0 = f(x+x0)−f(x0)x ∈
L1(−π, π) entonces la serie de Fourier de f converge a f(x0) en x = x0(criterio de Dini).
c) Si f ∈ L2(−π, π) es derivable en x = x0 se tiene convergencia de laserie de Fourier de f en x0 al valor f(x0).
11. Hállense las series de Fourier de ex, x, sen3 x en (−π, π). Calcular la sumade la serie de Fourier de ex en x = π.
12. Sea f una función C2 y 2π-periódica en R. Demúestrese que la serie deFourier converge uniformemente a f .
13. (Teorema de Localización). Como consecuencia del teorema de Riemann-Lebesgue pruébese que si f ∈ L1(−π, π) se anula en un entorno de x0entonces su serie de Fourier converge a 0 en dicho punto. Si dos funcionesf, g ∈ L1 coinciden en algún entorno de un punto x0, ¿ Qué se puede decirde sus series de Fourier en tal punto?
14. Sea f ∈ L2(−π, π) una función 2π-periódica en R que es derivable en(−π, π) excepto quizás en un número finito de puntos. Supóngase que fes continua en [−π, π] y que la derivada f ′ ∈ L2(−π, π).
a) Pruébese que para −π ≤ a ≤ x ≤ π se tiene:
f(x) = f(a) +
∫ x
a
f ′(t) dt.
b) Prúebese que la serie de Fourier de f converge uniformemente a f

6.9. EJERCICIOS 197
Indicación. Úsese el siguiente resultado que puede consultarse en el librode Rudin [19] (Capítulo VII): Si f(x) es diferenciable en todo el intervalo[a, b] con derivada f ′ ∈ L1(a, b) entonces
f(x) = f(a) +
∫ x
a
f ′ dt,
para todo x.
15. (Teorema de Completitud). Admitiendo que el conjunto de las funcio-nes de clase C∞ en (−π, π) con soporte compacto contenido en dichointervalo (clase de funciones que se representa por C∞
0 (−π, π)) es den-so en L2(−π, π) 2 , demuéstrese que la serie de Fourier de cualquierf ∈ L2(−π, π) converge a f en la norma de L2(−π, π).
16. Una consecuencia del teorema de Lusin (cf. [19] o el Anexo) es que lasfunciones continuas con soporte compacto en (−π, π) son densas en Lp.Utilizar este hecho para probar que toda f ∈ L2 puede aproximarse en L2
por funciones fn que satisfacen las condiciones del problema 9 y deducirde ahíel teorema de completitud.
17. Se considera el problema de Dirichlet homogéneo para la ecuación delcalor:
ut = duxx 0 < x < π, t > 0
u(x, 0) = f(x) 0 ≤ x ≤ l
u(0, t) = u(π, t) = 0, t ≥ 0,
y su solución “formal":
u(x, t) =∞∑
n=1
bne−dn2t sennx, (6.10)
obtenida por el método de separación de variables; donde:
f(x) =∞∑
n=1
bn sennx (6.11)
con bn = 2π
∫ π
0f(x) sennx dx, es el desarrollo en serie de Fourier en se-
nos de f(x). Admitamos que f ∈ C2([−π, π]) satisface las condiciones decompatibilidad:
f(0) = f(π) = f ′′(0) = f ′′(π) = 0.
a) Pruése que ∃c > 0 tal que |bn| ≤ c para todo n. Dedúzcase de ahí queu(x, t) definida por (1) es de clase C∞ en t > 0, 0 < x < π. Pruébeseque u(x, t) es efectivamente solución de la ecuación del calor.
2Véase el libro de W. Rudin [19].

198 CAPÍTULO 6. SERIES DE FOURIER
b) Pruébese que la serie de Fourier en senos de f , (2), converge unifor-memente en [0, π].
c) Designemos por uN (x, t) la suma parcial N -ésima de la serie (6.10),siendo fN (x) la correspondiente suma parcial de la serie (6.11). Prué-bese que uN (x, 0) = fN (x). Utilícese el principio del máximo parademostrar que:
max0≤t<T,0≤x≤π
|uN (x, t)− uM (x, t)| ≤ max0≤x≤π
|fN (x)− fM (x)|,
cualquiera que sean M ≤ N ∈ N y T > 0. Conclúyase que (6.10) esuna solución clásica del problema de Cauchy, e. d., C2 en 0 < t, 0 <x < π y continua en 0 ≤ t, 0 ≤ x ≤ π 3.
3cf. [26], Sección 22.

Capítulo 7
Separación de Variables
El objetivo del capítulo es revisar las soluciones de algunos problemas co-nocidos mediante el método de separación de variables, de larga tradición en lafísica matemática desde finales del siglo XVIII. Supondremos que el intervalo devariación de la variable espacial es (0, π). Esto no reviste pérdida de generalidaden los problemas que se estudiarán.
7.1. Ecuación del calorEl problema de contorno y valor inicial,
ut = uxx 0 < x < π, t > 0
u(x, 0) = f(x) 0 < x < π
u(0, t) = u(π, t) = 0 t > 0,
(7.1)
puede tratarse ensayando soluciones de la forma:
u = X(x)T (t),
que llevan a la ecuaciónT ′
T=X ′′
X.
De la igualdad resulta el problema de contorno:X ′′ + λX = 0 0 < x < π
X(0) = X(π) = 0.(7.2)
La existencia de soluciones no triviales requiere que λ = −n2, n ∈ N junto conXn = Bn sennx mientras que Tn = B′
ne−n2t. La combinación,
u =N∑
n=0
bne−n2t sennx,
199

200 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
permite resolver (7.1) con f ’s de la forma,
f =
N∑n=1
bn sennx.
Esta clase –finitodimensional– de datos iniciales es claramente insuficiente porlo que parece sobradamente razonable preguntarse cuánto es de grande la clasede datos representables bajo la forma:
f =
∞∑n=1
bn sennx, (7.3)
para después proponer,
u =∞∑
n=1
bne−n2t sennx,
al menos como solución formal. Sobre la representabilidad de f en la forma(7.1) tratamos largamente en el Capítulo ??. Sabemos, por ejemplo que sif ∈ L2(0, π), (1) converge en L2(0, π) bajo la elección de coeficientes bn =(2/π)
∫ π
0f(x) sennx dx. Se tiene el siguiente resultado.
Teorema 7.1. Sea f ∈ C[0, π], f(0) = f(π) = 0, ∃f ′(x) para x ∈ (0, π) conf ′ ∈ L2(0, π) entonces:
u =
∞∑n=1
bne−n2t sennx ∈ C∞t > 0 ∩ Ct ≥ 0, (7.4)
define una solución clásica del problema (7.1).
Observaciones 7.1.
a) En el Capítulo ?? resolvimos (7.1) bajo menos regularidad para f . A saberf ∈ C[0, π], f(0) = f(π) = 0.
b) Para que (7.33) sea C∞ en t > 0 basta con que los coeficientes bn esténacotados.
c) En la prueba de la continuidad de (7.33) hasta t = 0 el principio débil delmáximo juega un papel importante.
d) Con las técnicas de reflexión del Capítulo ?? se prueba que la versión “Neu-mann” del problema (7.1):
ut = uxx 0 < x < π, t > 0
u(x, 0) = f(x) 0 < x < π
ux(0, t) = ux(π, t) = 0 t > 0,
(7.5)
admite una única solución clásica, u ∈ C2t > 0 ∩ C1t ≥ 0 cuando f ∈C1[0, π], f ′(0) = f ′(π) = 0. Mediante separación de variables y un argumento

7.2. FUNCIÓN DE GREEN 201
simétrico si f ∈ C[0, π], f ′ ∈ L2(0, π), (7.5) admite la solución clásica, u ∈C2t > 0 ∩ Ct ≥ 0 de la forma:
u = a0 +∞∑
n=1
ane−n2t cosnx ∈ C∞t > 0 ∩ Ct ≥ 0, (7.6)
an = (2/π)∫ π
0f(x) cosnx dx, a0 = (1/π)
∫ π
0f(x) dx. Las condiciones f ∈
C1[0, π], f ′(0) = f ′(π) = 0 junto con f ′′ ∈ L2(0, π) bastan para justificarque (7.6) define una solución clásica, C1 hasta t = 0.
7.2. Función de Green: problema de valor inicialSupongamos que f ∈ L1(0, π) entonces:
u(x, t) =
∞∑n=1
2
π
∫ π
0
f(ξ)e−n2t sennx sennξ dξ =2
π
∫ π
0
∞∑n=1
f(ξ)e−n2t sennx sennξ dξ.
En efecto, la serie permuta con la integral por ejemplo en virtud de que sifn ∈ L1(Ω),
∑∞n=1 |fn|L1(Ω) < +∞ entonces f =
∑∞n=1 fn ∈ L1(Ω), |f | ≤∑∞
n=1 |fn|L1(Ω),∫Ωf =
∑∞n=1
∫Ωfn. En nuestro caso:
∞∑n=1
∫ π
0
|f(ξ)e−n2t sennx sennξ| dξ ≤∞∑
n=1
∫ π
0
e−n2t|f(ξ)| dξ <∞.
Conviene introducir el núcleo (función de Green),
G(ξ, x, t) =2
π
∞∑n=1
e−n2t sennx sennξ ∈ C∞t > 0.
Nuestra solución se escribe entonces,
u(x, t) =
∫ π
0
G(ξ, x, t)f(ξ) dξ. (7.7)
El siguiente resultado pone de manifiesto lo útil que es la representación (7.7) dela solución. Debe notarse que en el Cap. V no se consideraron datos f ∈ L1(0, π).
Teorema 7.2. Sea f ∈ L1(0, π). Entonces u ∈ C∞t > 0. Si, por otra parte,f ∈ L∞(0, π), entonces u está acotada en t > 0 mientras lım(x,t)→(x0,0) u(x, t) =f(x0) en los puntos de continuidad de x0 ∈ (0, π) de f .
Demostración. Lo primero que probaremos es:
G(ξ, x, t) ≥ 0,
para t > 0. La igualdad es obvia si ξ o x son cero módulo π. Por otro lado, si
G(ξ0, x0, t0) < 0,

202 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
en (ξ0, x0) ∈ (0, π) × (0, π) entonces G < 0 en |ξ − ξ0| < δ donde localizamosuna función f ∈ C1
0 [0, π], con sop f ⊂ |ξ − ξ0| < δ, f positiva en su soporte.Tenemos entonces para la solución uf de (7.1) con este dato:
u(x0, t0) < 0,
que va contra el principio débil del máximo.Por otro lado, ∫ π
0
G(ξ, x, t) dξ ≤ 1. (7.8)
Esto es muy interesante porque si, por ejemplo, f ∈ C[0, π], f(0) = f(π) = 0 setiene la afirmación enunciada en el Ejercicio 7.1.
Por tanto, si un ∈ Ct ≥ 0 es la solución clásica de (7.1) con dato fn, u laobtenida como:
u =
∫ π
0
G(ξ, x, t)f(ξ) dξ,
resulta:|u− un| ≤
∫ π
0
G(ξ, x, t)|f − fn| dξ ≤ |f − fn|∞.
Luego un → u uniformemente en t ≥ 0. Esto significa que u ∈ Ct ≥ 0 es lasolución clásica de (7.1).
Otra consecuencia inmediata de (7.8) es que si f ∈ L∞(0, π) entonces u dadapor (G) es también una función acotada en t ≥ 0.
Probemos (7.8). Consideramos fn = 1 en [1/n, π − 1/n], fn el segmentoinclinado desde el valor 1 a los extremos del intervalo, mientras un es la soluciónasociada. Resulta, del principio del máximo:∫ π
0
G(ξ, x, t)fn(ξ) dξ ≤ 1.
Tomando límites se llega al resultado deseado.Por otro lado se tiene que:∫ π
0
G(ξ, x, t) sen ξ dξ = e−t senx.
Esto permite escribir, 0 < x0 < π, la diferencia:
u(x, t)− f(x0) = ∫ x0+δ
x0−δ
+
∫I\[x0−δ,x0+δ]
G(ξ, x, t)[f(ξ)− f(x0)et sen ξ
senx] dξ.
Mientras la primera integral se hace arbitrariamente pequeña con δ, para lasegunda hay que proceder con más cuidado. En efecto, el integrando de éstapermanece acotado. Poniendo Iδ = [x0−δ, x0+δ] escogemos una función fδ ≥ 0con soporte Iδ tal que fδ = 1 en Iδ/2. Si uδ es la solución de (7.1) correspondientea fδ resulta que: ∫
I\IδG(ξ, x, t) dξ ≤ 1− uδ.

7.3. ECUACIÓN DE ONDAS 203
La integral tenderá uniformemente a 0 con x ∈ Iδ/2 cuando t→ 0+. Esto pruebala convergencia a cero de la segunda integral.
Ejercicio 7.1. Si f ∈ C[0, π], f(0) = f(π) = 0 entonces f = lım fn uniforme-mente, donde fn es continua, C1 a trozos y fn(0) = fn(π) = 0.
Corolario 7.3. Si f ∈ C[0, π], f(0) = f(π) = 0, entonces
u =
∫ π
0
G(ξ, x, t)f(ξ) dξ,
es la solución cláscica de (7.1).
7.3. Ecuación de ondasEl problema de Dirichlet para la ecuación de ondas,
utt = c2uxx 0 < x < π, t > 0
u(x, 0) = f(x) 0 < x < π
ut(x, 0) = g(x) 0 < x < π
u(0, t) = u(π, t) = 0 t > 0,
(7.9)
puede tratarse con el método de separación de variables. El buscar solucionesde la forma:
u = X(x)T (t),
nos lleva igualmente a la ecuación:
X ′′
X=
1
c2T ′′
T.
Ésta a su vez al problema de contorno,
X ′′ + λX = 0
X(0) = X(π) = 0,
que proporciona los valores λn = n2 a los que corresponden soluciones Xn(x) =An sennx. Los mismos valores de λ = n2 permiten determinar las funciones det, Tn(t) = Bn cosnct+ Cn sennct. Alternativamente,
XnTn = (an cosnct+ bn sennct) sennx (n ∈ N).
Por este simple procedimiento podemos determinar la solución de la familiafinito dimensional de datos iniciales,
f =N∑
n=1
αn sennx
g =N∑
n=1
βn sennx.

204 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Tal solución es,
uN (x, t) =N∑
n=1
(αn cosnct+βnnc
sennct) sennx.
De los resultados del Capítulo ?? sabemos que si f ∈ C2[0, π], g ∈ C1[0, π]cumplen las condiciones de compatibilidad f(0) = f ′′(0) = f(π) = f ′′(π) = 0,g(0) = g(π) = 0 entonces podemos representarlas,
f =∞∑
n=1
αn sennx
g =∞∑
n=1
βn sennx
G =
∫ x
0
g(s) ds =∞∑
n=1
βnn
−∞∑
n=1
βnn
cosnx.
siendo en todos los casos uniforme la convergencia. La serie, en principio formal,
u =
∞∑n=1
(αn cosnct+βnnc
sennct) sennx
=∞∑
n=1
αn cosnct sennx+∞∑
n=1
βnnc
sennct sennx := u1 + u2,
(7.10)
se puede reinterpretar en los términos siguientes,
u1 =∞∑
n=1
αn cosnct sennx =1
2
∞∑n=1
αn senn(x+ ct) +1
2
∞∑n=1
αn senn(x− ct)
=1
2f(x+ ct)− f(x− ct),
luego u1 es C2 –aunque no sea posible derivar dos veces la serie término atérmino– y es la solución de (7.9) correspondiente a g = 0. Análogamente,
u2 =∞∑
n=1
βnnc
sennct sennx =1
2c−
∞∑n=1
βnnc
cosn(x+ ct) +∞∑
n=1
βnnc
cosn(x− ct)
=1
2cG(x+ ct)−G(x− ct).
De nuevo, u2 es C2 y define la solución de (7.9) con f = 0, aunque –como antes–no estemos autorizados a derivar dos veces la serie. Por tanto, (7.10) representala solución a pesar de que las manipulaciones de diferenciabilidad término atérmino de la serie no son en principio posibles 1.
1Este fenómeno también se observa en las ecuaciones de Poisson y del Calor (con términode perturbación). Se obtiene una representación de la solución en la que no siempre es posiblederivar bajo el signo integral.

7.4. ECUACIÓN DE ONDAS AMORTIGUADA 205
En caso de condiciones Neumann,
ux(0, t) = ux(π, t) = 0, (7.11)
junto con datos f ∈ C2[0, π], g cumpliendo las correspondientes condiciones decompatibilidad se tienen las representaciones (uniformemente convergentes):
f = α0 +
∞∑n=1
αn cosnx
g = β0 +
∞∑n=1
βn cosnx
G =
∫ x
0
g(s) ds = β0x+∞∑
n=1
βnn
sennx.
Aplicando el método de separación de variables como en la primera parte, lle-gamos a la siguiente expresión formal de la solución,
u = a0 + b0t+∞∑
n=1
(an cosnct+ bn sennct) cosnx.
Teniendo en cuenta los datos los coeficientes que se obtienen son:
u = α0 + β0t+∞∑
n=1
(αn cosnct+βnnc
sennct) cosnx. (7.12)
En efecto, es otra vez fácil probar que:
u =1
2f(x+ ct) + f(x− ct)+ 1
2cG(x+ ct) +G(x− ct),
que es la fórmula de D’Alambert del Capítulo ??.
7.4. Ecuación de ondas amortiguadaLos mismos métodos nos permiten considerar problemas más complicados
como el correspondiente a la ecuación de ondas con fricción aerodinámica:utt + 2aut = c2uxx 0 < x < π, t > 0
u(x, 0) = f(x) 0 < x < π
ut(x, 0) = g(x) 0 < x < π
u(0, t) = u(π, t) = 0 t > 0,
(7.13)
con a > 0. Al usar separación de variables y considerar soluciones de la formau = X(x)T (t) llegamos a la ecuación:
1
c2T ′′ + 2aT ′
T=X ′′
X= −λ.

206 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Las condiciones Dirichlet determinan λn = n2 junto con Xn = cn sennx. Si, porsimplicidad, ponemos g = 0, las T ’s vienen determinadas por:
T ′′ + 2aT ′ + n2cT = 0
T ′(0) = 0,
y por ello,
Tn(t) =
e−at[cosh√a2 − n2c2t+
a√a2 − n2c2
senh√a2 − n2c2t] n <
a
c
e−at[1 + at] n =a
c
e−at[cos√n2c2 − a2t+
a√n2c2 − a2
sen√n2c2 − a2t] n >
a
c,
donde Tn se ha normalizado para cumplir Tn(0) = 1. Si tomamos f ∈ L2(0, π)una expresión formal de la solución es:
u =∞∑
n=1
bnTn(t) sennx, (7.14)
con f =∑∞
n=1 bn sennx. A los efectos de estudiar la convergencia de la seriepodemos considerarla escrita en la forma:
u = u1 + u2 =∑
n≤a/c
bnTn(t) sennx+∑
n>a/c
bnTn(t) sennx.
Las estimaciones de la serie recaerán sobre la parte u2. Si, por ejemplo, f ∈C2[0, π], f(0) = f(π) = f ′′(0) = f ′′(π) = 0, f ′′ es derivable en todo (0, π) conderivada f ′′′ ∈ L2(0, π), entonces:
∞∑n=1
n6b2n <∞,
lo que nos da la convergencia uniforme de las derivadas de orden dos de la serie7.14. Por ejemplo, la serie formal que corresponde a la derivada de orden doscon respecto a x da lugar a:
|M∑N
−n2bnTn(t) sennx|2 ≤ M∑N
n6b2nM∑N
1
n2.
Esto prueba la convergencia uniforme en t ≥ 0 de la serie
∞∑n=1
−n2bnTn(t) sennx.
Para las otras derivadas de orden 2 basta con observar que Tn(t) = O(1), T ′n(t) =
O(n), T ′′n (t) = O(n2) uniformemente en t ≥ 0 cuando n→ ∞.

7.5. PROBLEMAS NO HOMOGÉNEOS: FUNCIÓN DE GREEN 207
Sin embargo, para que (7.14) represente una función C2 y defina una soluciónde (P), basta con menos regularidad en f , como en la ecuación de ondas. Laidea clave es que:
Tn(t) ∼ e−at cosnct,
cuando n→ +∞. Usando esa referencia podemos observar la solución como,
u = e−at∞∑
n=1
bn cosnct sennx+∞∑
n=1
bn[Tn(t)− e−at cosnct] sennx
=e−at
2f(x+ ct) + f(x− ct)+
∞∑n=1
bn[Tn(t)− e−at cosnct] sennx.
(7.15)
Se tiene, por otra parte se tiene que:
Tn − e−at cosnct = O(1/n)
(Tn − e−at cosnct)′ = O(1)
(Tn − e−at cosnct)′′ = O(n),
uniformemente en 0 ≤ t ≤ T , para cada T > 0, cuando n → +∞. En conse-cuencia, la convergencia de la serie
∑∞n=1 n
4b2n basta para asegurar que (7.15)se puede derivar término a término hasta el orden dos. Tal convergencia estáasegurada si f ∈ C1[0, π], f(0) = f(π) y existe f ′′ en (0, π) con f ′′ ∈ L2(0, π).Estas condiciones se cumplen sobradamente si f ∈ C2[0, π] y f(0) = f(π) = 0(que de rebote es la condición necesaria y suficiente para que la primera par-te de la solución sea C2). Resulta llamativo observar que si f ′ es sólo C1 atrozos la serie es C2, pero la parte D’Alambert no. Las discontinuidades de laderivadas segundas se propagan a través de la parte D’Alambert siguiendo lascaracterísticas según se ha observado en el Capítulo ??.
7.5. Problemas no homogéneos: función de GreenConsideraremos el operador lineal,
Lu = (pu′)′ + qu,
donde u ∈ C2[a, b], p ∈ C1[a, b], p(x) ≥ p0 > 0 en [a, b], q ∈ C[a, b]. Definimos eloperador de contorno,
B : C[a, b] −→ R2
u 7−→ Bu,por,
Bu =
(m1 n1 p1 q1m2 n2 p2 q2
)u(a)u′(a)u(b)u′(b)
.
El primer resultado recuerda el comportamiento de los sistemas lineales finitodimensionales.

208 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Teorema 7.4 (Teorema de la Alternativa). El problema,Lu = f a < x < b
Bu = h(7.16)
para f ∈ C[a, b], h ∈ R2,
1) o bien admite una solución única u ∈ C2[a, b] para cada (f, h) ∈ C2[a, b]×R2,
2) o bien el problema homogéneo,Lu = f a < x < b
Bu = h
admite soluciones no triviales.
Demostración. La existencia de solución para cada (f, h) equivale a la unicidadde soluciones. En efecto la existencia de soluciones dice que con f = 0, elproblema (7.16) admite solución para todo h ∈ R2. Si v1, v2 es un sistemafundamental de soluciones, el sistema:
c1B(v1) + c2B(v2) = h,
admite soluciones para cada h ∈ R2. Esto es equivalente a rango B(v1),B(v2) =2 (la condición no depende del sistema v1, v2 elegido).
Recíprocamente, si rango B(v1),B(v2) = 2 para resolver (7.16) tomamosuna solución cualquiera u = uf de Lu = f , ponemos:
u = c1v1 + c2v2 + uf ,
y determinamos c1, c2 en el sistema,
c1B(v1) + c2B(v2) = h− B(uf ).
Tras esta discusión es claro que la opción 2) es la única alternativa a la opción1) del teorema. Esto cierra la prueba.
Definición 7.5. Las condiciones de contorno definidas por B se dicen críticaspara L en [a, b] si se da la opción 2) del teorema. Se dirán no críticas en casocontrario.
Observación 7.2. Si las condiciones de contorno son no críticas, la solución de(7.16) se puede fragmentar en u = u1 + u2 donde
Lu1 = 0
B(u1) = h
Lu2 = f
B(u2) = 0.
El cálculo de u1 es un problema elemental cuando se conoce un sistema funda-mental v1, v2. La del segundo se puede expresar mediante un operador lineal

7.5. PROBLEMAS NO HOMOGÉNEOS: FUNCIÓN DE GREEN 209
K : C[a, b] → C[a, b], el operador solución, cuyas propiedades estudiaremos condetalle. En particular probaremos la existencia de una función:
G : [a, b]× [a, b] −→ R(x, t) 7−→ G(x, t),
la función de Green del problema de contorno, tal que:
u(x) = Kf =
∫ b
a
G(x, t)f(t) dt. (7.17)
Teorema 7.6. Supongamos que las condiciones de contorno del problema (7.16)son no críticas. Existe entonces una función única G ∈ C([a, b]× [a, b]) con lassiguientes propiedades (∆ = (x, t) ∈ [a, b]× [a, b] : x = t):Gx ∈ C([a, b]× [a, b] \∆) con
Gx(t+, t)−Gx(t−, t) =1
p(t).
Para cada t ∈ [a, b] tiene,
LxG(·, t) = 0 x ∈ [a, b] \ tB(G(·, t) = 0.
La solución de (7.16) con h = 0 se escribe en la forma (7.17).
A efectos de probar el teorema resulta conveniente disponer de una expresiónpara la solución del problema,
Lu = f a < x < b
u(a) = u′(a) = 0.
Si v1, v2 es un sistema fundamental de soluciones, el clásico método de varia-ción de las constantes consiste en hallar c1, c2 tales que,
u = c1v1 + c2v2,
es la solución del problema (ci funciones de t). Ello nos lleva a considerar elsistema,
c′1v1 + c′2v2 =
c′1v′1 + c′2v
′2 =
f
p.
El determinante de la matriz de coeficientes es el Wronskiano de v1, v2,
W =
∣∣∣∣v1 v2v′1 v′2
∣∣∣∣ = 0,
mientras,
c1 =
∫ x
a
− v2(t)f(t)p(t)W (t)
dt c2 =
∫ x
a
v1(t)f(t)
p(t)W (t)dt.

210 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Podemos escribir entonces,
u =
∫ x
a
−v1(x)v2(t)− v1(t)v2(x)
p(t)W (t)f(t) dt =
∫ b
a
R(x, t)f(t) dt,
donde,
R(x, t) =
−v1(x)v2(t)− v1(t)v2(x)
p(t)W (t)t ≤ x
0 t > x.
Debe observarse que p(x)W (x) se mantiene constante en [a, b]. Se llama a Rla función de influencia o función de Green unilateral. Debe notarse que R =R(x, t) cumple:
LxR(·, t) = 0 x ≥ t
R(·, t)|x=t = 0
R′x(·, t)|x=t =
1
p(t).
Si el problema de contorno,
Lu = f a < x < b
B(u) = 0,
es no crítico, la función de Green se puede calcular poniendo,
u = c1v1 + c2v2 +
∫ b
a
R(x, t)f(t) dt.
Las condiciones de contorno homogéneas se cumplen si,
c1B(v1) + c2B(v2) = −∫ b
a
B(R(·, t))f(t) dt. (7.18)
Si ponemos B(v) = (B1(v),B2(v)) la solución de (E) es:
c1 =
∫ b
a[−B1(R(·, t))B2(v2) + B2(R(·, t))B1(v2)]f(t) dt
B1(v1)B2(v2)− B2(v1)B1(v2),
c2 =
∫ b
a[−B1(v1)B2(R(·, t)) + B2(v1))B1(R(·, t))]f(t) dt
B1(v1)B2(v2)− B2(v1)B1(v2).
Por tanto,
G(x, t) =[−B1(R(·, t))B2(v2) + B2(R(·, t))B1(v2)]v1(x)
B1(v1)B2(v2)− B2(v1)B1(v2)
+[−B1(v1)B2(R(·, t)) + B2(v1))B1(R(·, t))]v2(x)
B1(v1)B2(v2)− B2(v1)B1(v2)+R(x, t).
(7.19)

7.5. PROBLEMAS NO HOMOGÉNEOS: FUNCIÓN DE GREEN 211
Es claro que G se ha construido para que,
u =
∫ b
a
G(x, t)f(t) dt, (7.20)
sea la solución del problema Lu = f , B(u) = 0.
Demostración del Teorema 7.6. Que (7.20) define la solución del problema yalo hemos probado.
En la identidad (1) está el que G ∈ C([a, b]× [a, b]) pues la misma propiedades cierta para R. Por otro lado,
Rx(t+ 0, t)−Rx(t− 0, t) =1
p(t),
luego la misma identidad se cumple para G.Por construcción se cumple que:
LG(·, t) = 0 x ∈ [a, b] \ t.
Finalmente, la propia construcción de G ya lleva también implícita la validezde:
B(G·, t)) = 0 t ∈ [a, b].
La unicidad de la función de Green se deduce fácilmente de que, por ejemplo,∫ b
a
G(x, t)f(t) dt =
∫ b
a
G1(x, t)f(t) dt,
para toda f ∈ C[a, b].
7.5.1. El problema de Dirichlet
En este caso B1(v) = v(a), B2(v) = v(b). De (1) y en el caso x ≤ t tenemos,para D = v1(a)v2(b)− v1(b)v2(a), lo siguiente:
DG(x, t) = R(b, t)v2(a)v1(x)−R(b, t)v1(a)v2(x).
Por tanto, si K = pW (v1, v2) entonces,
KDG(x, t) = −[v1(x)v2(a)− v1(a)v2(x)][v1(b)v2(t)− v1(t)v2(b)].
Teniendo en cuenta, como puede comprobarse que G(x, t) = G(t, x) podemosconcluir que,
G(x, t) =
1
KD[v1(t)v2(a)− v1(a)v2(t)][v1(x)v2(b)− v1(b)v2(x)] x > t
1
KD[v1(x)v2(a)− v1(a)v2(x)][v1(t)v2(b)− v1(b)v2(t)] x ≤ t .

212 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Naturalmente, la condición de existencia de la función de Green se resume enque D = 0.
Por otro lado, una solución completa del problema:
L(u) = f
u(a) = α u(b) = β ,(7.21)
se puede obtener de una forma especial. Nótese –comprobando que las derivadasinvertidas son legítimas– que:
L(∂tG(·, t)) = 0 x = t.
Por tanto v1 = ∂tG(·, a), v2 = ∂tG(·, b) son soluciones de la ecuación. ComoG(a, t) = G(b, t) = 0 se tendrá que ∂tG(a, t) = 0 en t > a, ∂tG(b, t) = 0 en
t < b. Entonces v1(b) = v2(a) = 0. Por otra parte, v1(a) = ∂tG(a+, a) =1
p(a),
v2(b) = ∂tG(b−, b) = − 1
p(b). La solución de (7.21) puede escribirse, usando el
sistema fundamental de soluciones v1/p(a), v2/p(b), como,
u =
∫ b
a
G(x, t)f(t) dx+α
p(a)∂tG(x, a)−
β
p(b)∂tG(x, b).
Esta identidad se conoce como identidad de Green (ver Capítulos 8 y 9). Sitenemos en cuenta que f = Lu, tal expresión permite representar una funciónC2 arbitraria en [a, b] en términos de Lu y de sus valores frontera.
7.5.2. Propiedades del operador soluciónSi designamos por E = u ∈ C2[a, b] : B(u) = 0 y las condiciones de
contorno son no críticas para el operador L, entonces L : E → C[a, b] se in-vierte mediante el operador solución (operador integral de núcleo G), Kf =∫ b
aG(x, t)f(t) dt. En efecto:
L(Kf) = f f ∈ C[a, b].
Por otro lado, K(Lu) = u para todo u ∈ E en virtud de la unicidad de solucionesdel problema. Por tanto L : E → C[a, b] es invertible y su inverso es el operadorK : C[a, b] → C[a, b] cuyo rango es E . Nótese que la criticidad de las condicionesde contorno se reduce a que el N(L) sea trivial o no.
Cuando se está interesado es la resolución del problema,
Lu = f,
f ∈ C[a, b], u ∈ E el estudio es más completo si a la vez se considera la familiauniparamétrica de problemas:
Lu− λu = f, (7.22)

7.5. PROBLEMAS NO HOMOGÉNEOS: FUNCIÓN DE GREEN 213
λ ∈ R, u ∈ E , f ∈ C[a, b]. El teorema de la alternativa nos enseña que (7.22) esresoluble para todo f si y sólo si N(L− λI) = 0, I : E → C[a, b] la inclusión.Como estamos en la hipótesis de que N(L) = 0, λ = 0 y por tanto queN(L − λI) = 0 significa que existe u = 0 con:
L(u) = λu u ∈ E (7.23)
es decir,K(u) = µu, (7.24)
con1
λ. Se llama a (7.23) y su homólogo (7.24) el problema de autovalores aso-
ciado a L. Como K : C[a, b] → C[a, b], el problema (7.24) es mucho más naturalque el (7.23). El operador K puede extenderse de hecho a espacios más generales.Por razones técnicas consideramos L2(a, b).
Teorema 7.7. El operador solución K define un operador continuo, K : L2(a, b) →L2(a, b). Además,
∥K∥L(L2) ≤
(∫ b
a
∫ b
a
G2 dxdt
)1/2
.
Por otra parte, K(L2) ⊂ C1[a, b] siendo,
(Kf)′ =∫ b
a
G′x(x, t)f(t) dt.
En cuanto a la simetría de la función de Green tenemos la siguiente propiedadútil.
Teorema 7.8. Las siguientes propiedades son equivalentes,
1) El operador K : L2(a, b) → L2(a, b) es autoadjunto, es decir ⟨Kf, g⟩L2 =⟨f,Kg⟩L2 , para cualesquiera f , g ∈ L2.
2) El operador L : E → L2 es simétrico en el sentido de que ⟨Lu, v⟩L2 =⟨u,Lv⟩L2 , para u, v ∈ E cualesquiera.
3) Se tiene que p(u′v − uv′)|ba = 0 para u, v ∈ E cualesquiera.
4) G(x, t) = G(t, x), para todo (x, t) ∈ [a, b]× [a, b].
Observación 7.3. En el caso de las denominadas condiciones de contorno sepa-radas (Dirichlet, Neumann, Robin, Mixtas),(
m1 n1 p1 q1m2 n2 p2 q2
)=
(m1 n1 0 00 0 p2 q2
),
o de las condiciones de contorno periódicas,(m1 n1 p1 q1m2 n2 p2 q2
)=
(1 0 −1 00 1 0 −1
), (7.25)
con p(a) = p(b) se tiene que las funciones de Green correspondiente son simé-tricas.

214 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Definición 7.9. Se dice que el problema de contorno (7.16) es autoadjunto sise satisface la condición 1) del teorema precedente.
La siguiente es una propiedad característica de todos los problemas autoad-juntos.
Teorema 7.10. Todos los posibles autovalores λ de un problema autoadjunto,L(u) = λu
B(u) = 0,
son reales. Por otra parte a dos autovalores distintos λ = λ′ siempre correspon-den autofunciones ϕ, ϕ′ ortogonales. Finalmente, en el caso de condiciones decontorno separadas (7.25) todos los posibles autovalores λ son simples.
Un problema no elemental es el de la propia existencia de autovalores. Parasugerir las ideas principales conviene revisar el caso finito dimensional. Si A esuna matriz real simétrica n× n se comprueba que,
µ1 = sup|x|=1
⟨Ax, x⟩, (7.26)
es el máximo autovalor de A y que si el máximo se alcanza en v, v es también unautovector asociado a µ1. Los operadores autoadjuntos K son la versión infinitodimensional de las matrices simétricas.
Definición 7.11. Se dice que K : L2[a, b] → L2[a, b] es autoadjunto si cumplela identidad 1) del teorema anterior.
En el problema variacional (7.26) la existencia de v está garantizada por lacompacidad de la esfera unidad. Nos ocupamos ahora de probar que lo mismoocurre cuando reemplazamos A por el operador solución K y trabajamos en elespacio L2(a, b). La falta de compacidad de la bola unidad en L2 la suple lasiguiente propiedad de compacidad del operador K. En lo que sigue abreviamosC = C[a, b], L2 = L2[a, b].
Lema 7.12. El operador solución K : L2 → C es compacto en el sentido de quetoda sucesión Kun admite una subsucesión convergente en C a condición deque un esté acotada en L2.
Demostración. No es difícil comprobar que si L es la cota L2 de un entonces|un(x) − un(y)| ≤ L
√b− a sup[a,b] |G(x, ·) − G(y, ·)|. La continuidad uniforme
de G implica la equicontinuidad de Kun. La tesis se sigue del teorema deAscoli-Arzela.
Un resultado clave es el siguiente.
Teorema 7.13. Si K : L2 → L2 es autoadjunto entonces
∥K∥ = sup|u|=1
|⟨Ku, u⟩| .

7.5. PROBLEMAS NO HOMOGÉNEOS: FUNCIÓN DE GREEN 215
Demostración. Llamando η = sup|u|=1 |⟨Ku, u⟩| es obvio que η ≤ ∥K∥. Por otrolado,
⟨K(u± v), u± v⟩ = ⟨Ku, u⟩+ ⟨Kv, v⟩ ± 2ℜ⟨Ku, v⟩,
mientras,±⟨K(u± v), u± v⟩ ≤ η|u± v|2.
La combinación de las dos desigualdades resulta en,
4ℜ⟨Ku, v⟩ ≤ 2η(|u|2 + |v|2),
donde tomando |u| = 1, v = Ku/|u| resulta |Ku| ≤ η.
La existencia de autovalores se expresa en los siguientes términos.
Teorema 7.14. Si K : L2 → L2 es compacto y autoadjunto entonces admite unautovalor µ0 que cumple |µ0| = ∥K∥.
Demostración. La compacidad de K nos permite garantizar la existencia de unasolución u0 = 0 del problema variacional,
supu=0
|⟨Ku, u⟩||u|2
.
Al formarq(t) =
|⟨K(u0 + tv), (u0 + tv)⟩||u0 + tv|2
,
la condición q′(0) = 0 se lee ℜ⟨Ku0, v⟩ = µ0ℜ⟨u0, v⟩ donde µ0 = ⟨Ku0, u0⟩/|u0|2.La misma cuenta cambiando v por iv da ℑ⟨Ku0, v⟩ = µ0ℑ⟨u0, v⟩. Por tanto,
Ku0 = µ0u0,
y u0 es un autovalor asociado a µ0 donde |µ0| = ∥K∥.
Observación 7.4. Vamos a obtener la sucesión completa de autovalores de K.Consideramos u0 como arriba con |u0| = 1. Definimos K1u = Ku− µ0⟨u, u0⟩u0.Resulta:
⟨K1u, u0⟩ = 0,
para todo u. Como Ku = K1u + ⟨u, u0⟩u0 resulta |Ku|2 = |K1u|2 + |⟨u, u0⟩|2.Por otro lado, el operador K1 es también compacto y autoadjunto. Resulta puesque
|µ1| = ∥K1∥
es un autovalor con autovector normalizado u1 (|u1| = 1). Es decir,
Ku1 = µ1u1.
De arriba, ⟨u1, u0⟩ = 0. Por otro lado,
Ku1 = K1u1 + ⟨u1, u0⟩u0 = µ1u1.

216 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Por tanto µ1 es también un autovector de K. Además,
|µ1| = ∥K1∥ ≤ ∥K∥ = |µ0|.
Procediendo de manera análoga se genera una sucesión de autovalores µn conmódulos decrecientes (las repeticiones son posibles) y que en el caso del operadorsolución, del que suponemos que N(K) = 0, es infinita. En efecto, la únicamanera de parar el proceso es que Km = 0 lo que implica que
Kf =
m−1∑1
µi⟨f, ui⟩ui.
Al aplicar L,
f =
m−1∑1
⟨f, ui⟩ui,
para f continua y arbitraria lo que no puede ser. Esto garantiza la existenciade un sistema ortonormal un.
Pasamos a establecer un resultado de suma importancia.
Teorema 7.15. Sea K el operador solución del problema autoadjuntoLu = f a < x < b
Bu = 0,(7.27)
siendo un el correspondiente sistema ortonormal de autofunciones. Entonces,para toda f ∈ E = u ∈ C2[a, b] : Bu = 0 se tiene que la serie de Fourierasociada a f converge uniformemente a f :
f =∞∑
n=1
⟨f, un⟩un. (7.28)
Demostración. De las conclusiones del Capítulo ?? sabemos (desigualdad deBessel) que la serie converge en L2 y
∞∑n=1
|⟨f, un⟩|2 ≤ ∥f∥2.
Ahora, ∫ b
a
G(x, t)uk(t) dt = µkuk(x) a ≤ x ≤ b.
Por tanto, para x fijo,
G(x, ·) ∼∞∑
n=1
µnun(x)un,

7.5. PROBLEMAS NO HOMOGÉNEOS: FUNCIÓN DE GREEN 217
por lo que∞∑
n=1
|µn|2|un(x)|2 ≤∫ b
a
|G(x, t)|2 dt,
que al integrar en [a, b] nos permite concluir,
∞∑n=1
µ2n ≤ (b− a)2|G|2∞,Q,
donde Q = [a, b] × [a, b]. Una conclusión muy importante es que la serie de loscuadrados de los autovalores es convergente. Esto tiene dos consecuencias. Laprimera, que ahora se sabe de manera efectiva que existen infinitos autovaloresde K (la sucesión µn no puede estabilizarse en un valor constante). La segunda,que µn → 0.
Sabemos asimismo que ∥Km∥ = |µm|. Es decir, para u ∈ C arbitraria,
|Ku−m∑1
µk⟨u, uk⟩uk|2 ≤ ∥Km∥|u| = |µm||u| → 0,
cuando m→ ∞. En particular,
Ku =∞∑1
µk⟨u, uk⟩uk, (7.29)
en L2.Por otro lado, para M ≥ N arbitrarios, x ∈ [a, b],
|M∑N
µk⟨u, uk⟩uk(x)| = |K(
M∑N
⟨u, uk⟩uk)| ≤ (b− a)1/2∥G∥∞|M∑N
⟨u, uk⟩uk(x)|2.
Por tanto la convergencia en (7.29) es además uniforme. Sin embargo, parau ∈ C la serie (7.29) se puede escribir en el formato:
Ku =∞∑1
⟨Ku, uk⟩uk,
basta observar ahora que cualquier f ∈ E se puede escribir en como f = Kupara concluir la prueba.
Un corolario inmediato es la siguiente generalización del teorema de comple-titud del capítulo anterior.
Teorema 7.16. Sea un una sucesión ortonormal de autofunciones del pro-blema (7.23). Entonces,
f =∞∑
n=1
⟨f, un⟩un,
en L2 para toda f ∈ L2.

218 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Observación 7.5. Debe tenerse en cuenta que los autovalores de (7.23) son λn =µ−1n y que por tanto |λn| → +∞.
Ejemplo 7.6. Consideremos la ecuación del calor con término lineal de absorción:
ut = uxx − au (a > 0),
0 < x < π, bajo condiciones mixtas,
u(0, t) = ux(π, t) = 0.
El método de separación de variables nos conduce al problema de autovalores,
X ′′ + aX = −λX X(0) = X(π) = 0.
Los autovalores son λn = a+ (2n− 1
2)2 y las correspondientes autofunciones
Xn = sen(2n− 1
2)x ,
n ∈ N. La solución formal por separación de variables es,
u(x, t) = e−at∞∑
n=1
bne−(2n−1)2t/4 sen(
2n− 1
2)x.
Cualquiera que sea f ∈ C2[0, π] cumpliendo las condiciones de contorno dalugar a una solución clásica si substituimos los bn de la expresión superior porlos coeficientes de la serie de Fourier bn = (2/π)
∫ π
0f(x) sen(2n − 1)/2x dx de
f .
7.6. Función de Green para la ecuación del calorDel problema,
ut = uxx + F (x, t) 0 < x < π, t > 0
u(x, 0) = f(x) 0 < x < π
u(0, t) = u(π, t) t > 0,
la fracción de la solución correspondiente a F = 0 fue estudiada en la Sección7.1. Se representó bajo la forma (7.7):
u =
∫ t
0
G(ξ, x, t) dξ.
con G =2
π
∑∞n=1 e
−n2t sennx sennξ. Nos ocupamos ahora de la parte f = 0, esdecir de
ut = uxx + F (x, t) 0 < x < π, t > 0
u(x, 0) = 0 0 < x < π
u(0, t) = u(π, t) t > 0.
(7.30)

7.6. FUNCIONES DE GREEN 219
Si se admite la existencia de una solución clásica u ∈ C20 ≤ x ≤ π, t > 0 conF continua en 0 ≤ x ≤ π, t ≥ 0 podemos escribir (las convergencias se entiendenen L2(0, π)),
u =
∞∑n=1
bn(t) sennx
ut =∞∑
n=1
b′n(t) sennx
uxx =∞∑
n=1
−n2bn(t) sennx
F =∞∑
n=1
Bn(t) sennx,
con bn(t) = (2/π)∫ π
0u(x, t) sennx dx y donde, por ejemplo, el coeficiente de
Fourier bn o bn de uxx o ut se calculan integrando por partes para involucrara bn (¡no se ha derivado término a término!). Por otro lado se tiene Bn(t) =(2/π)
∫ π
0F (x, t) sennx dx.
De la ecuación resulta que b′n + n2bn = Bn junto con bn(0) = 0, lo queconduce a la expresión explícita de bn:
bn(t) =
∫ t
0
e−n2(t−τ)Bn(τ) dτ.
Las bn’s se estiman fácilmente en la forma siguiente,
|bn(t)|2 ≤ 1
2n2
∫ t
0
Bn(τ) dτ.
Se comprueba que
|q∑p
bn(t) sennx|2 ≤ 1
π
q∑p
1
n2∫ t
0
∫ π
0
F 2.
Hemos probado así que toda solución clásica en las condiciones de regularidadseñaldas se puede representar por la serie uniformemente convergente en cadabanda 0 ≤ t ≤ T dada por,
u(x, t) =
∞∑n=1
∫ t
0
e−n2(t−τ)Bn(τ) sennx dτ. (7.31)
Si F es suficientemente regular, por ejemplo F y Fx continuas en t ≥ 0, x ∈ [0, π],F (0, t) = F (π, 0) = 0 mientras existe Fxx con Fxx ∈ L2((0, π)×(0, t)) para todot > 0 entonces la serie (7.31) define una función de clase C2,1 que puede serderivada término a término.

220 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
Como observación final, un intercambio formal de las integrales involucradasen (7.31) con la serie nos lleva a la representación de la solución:
u(x, t) =
∫ t
0
∫ π
0
G(ξ, x, t− τ)F (ξ, τ) dξdτ. (7.32)
Ya sabemos que el núcleo es C∞ en t > 0 y que cumple la ecuación del calorcon respecto a t. Puede demostrarse en realidad el siguiente resultado, que seapoya directamente en la fórmula de representación (7.32).
Teorema 7.17. Supongamos que F y Fx son continuas en t ≥ 0, 0 ≤ x ≤ π.Entonces (7.32) representa la solución clásica del problema perturbado (7.30).
Observación 7.7. La fórmula (7.32) puede deducirse formalmente a partir de(7.7) por el método de variación de las constantes de Lagrange.
7.7. Ejercicios
1. Hállense, por separación de variables, las soluciones de la ecuación delcalor ut = uxx bajo las condiciones que se indican:
a) u(0, t) = u(π, t) = 0, u(x, 0) = sen3 x, x ∈ (0, π).
b) ux(0, t) = ux(π, t) = 0, u(x, 0) = senx, x ∈ (0, π).
c) u(a, t) = u(b, t) = 0, u(x, 0) = (x− a)(b− x), x ∈ (a, b).
2. Se considera el problema de Dirichlet para la ecuación de ondas,utt = c2uxx 0 < x < l, t > 0u(x, 0) = f(x) 0 ≤ x ≤ lut(x, 0) = g(x) 0 ≤ x ≤ lu(0, t) = u(l, 0) = 0 t ≥ 0,
para f de clase C2 y g de clase C1 en [0, l], satisfaciendo las correspon-dientes condiciones de compatibilidad. Pruébese que la solución puederepresentarse en la forma,
u =
∞∑n=1
(an cos
nπc
lt+ bn sen
nπc
lt)sen
nπ
lx.
La misma cuestión relativa al problema de Neumann y la expresión
u = a0 + b0t+∞∑
n=1
(an cos
nπc
lt+ bn sen
nπc
lt)cos
nπ
lx.
¿Cuándo es b0 = 0 y qué implica ello sobre la solución del problema?

7.7. EJERCICIOS 221
3. Estúdiese el problema de autovalores (ecuaciones diferenciales ordinarias):−X” = X, 0 < x < l
−X ′(0) + a0X(0) = 0, X ′(l) + alX(l) = 0.
Apróvechese la información para construir expresiones formales –bajo desa-rrollos en serie– de autofunciones de los problemas de contorno y valorinicial
utt = c2uxx 0 < x < π, t > 0u(x, 0) = f(x) 0 ≤ x ≤ πut(x, 0) = 0 0 ≤ x ≤ π−ux(0, t) + a0u(0, t) = 0, t ≥ 0,ux(l, 0) + alu(l, t) = 0 t ≥ 0,
así como: ut = uxx 0 < x < π, t > 0u(x, 0) = f(x) 0 ≤ x ≤ π−ux(0, t) + a0u(0, t) = 0, t ≥ 0,ux(l, 0) + alu(l, t) = 0 t ≥ 0.
4. Se considera el problema de Dirichlet y valor inicial para la ecuación deondas con amortiguamiento:
utt + 2aut = c2uxx 0 < x < π, t > 0u(x, 0) = f(x) 0 ≤ x ≤ πut(x, 0) = 0 0 ≤ x ≤ πu(0, t) = u(π, 0) = 0 t ≥ 0,
donde a, c son constantes positivas. Supóngase que f ∈ C3 en [0, π] y quesatisface las correspondientes condiciones de compatibilidad. Constrúyaseuna solución en forma de serie por el método de separación de variables.
5. Analícese, bajo condiciones adecuadas, la solución del problema de con-torno y valor inicial (ecuación de los telegrafístas):
utt + 2aut + bu = c2uxx 0 < x < π, t > 0u(x, 0) = 0 0 ≤ x ≤ πut(x, 0) = g(x) 0 ≤ x ≤ πu(0, t) = u(π, 0) = 0 t ≥ 0.
6. Estúdiese por separación de variables la solución del problema ut = uxx 0 < x < 1, t > 0u(x, 0) = x 0 ≤ x ≤ 1ux(0, t) = u(1, 0) = 0 t ≥ 0.

222 CAPÍTULO 7. SEPARACIÓN DE VARIABLES
7. Demúestrese que la ecuación:
uxx + uxy + uyy = 0,
admite soluciones en la forma X(x)Y (y). Como indicación, hállese unaexpresión para Y ”/Y que debe derivarse con respecto a x.
8. Se considera el operador L = (pu′)′ + qu, p de clase C1 y positiva en[a, b], mientras q es continua en dicho intervalo. Si G(x, ξ) es la función deGreen bajo condiciones Dirichlet, prúebese que Gξ(·, a) y Gξ(·, b) formanun sistema fundamental de Lu = 0. Prúebese también que la solución delproblema de Dirichlet:
Lu = f(x) 0 < x < 1
u(0) = α, u(1) = β,
se puede expresar en los siguientes términos:
u =
∫ b
a
G(x, ξ)f(ξ) dx+ βp(b)Gξ(·, b)− αp(a)Gξ(·, a).
9. Si f es continua en el intervalo 0 ≤ x ≤ 1, hállese la solución del problema:((1 + x)2u′)′ − u = −f 0 < x < 1
u(0) = u(1) = 0.
10. (Funciones de Green, ecuaciones diferenciales ordinarias). Sea f continuaen 0 ≤ x ≤ 1, y sea Lu = u”− u. Hállese la solución de los problemas decontorno:
Lu = −f 0 < x < 1
u(0) = u(1) = 0,
Lu = −f 0 < x < 1
u′(0) = u′(1) = 0,Lu = −ex 0 < x < 1
u(0) = u′(1) = 0,
Lu = − senx 0 < x < 1
u(0) = α, u(1) = β.
11. En el espacio se considera el recinto esférico 0 < a < r < b, r2 = x2+ y2+z2. Hállense las soluciones de los problemas:
∆u = 0 a < r < b
u(a) = A u(b) = B,
∆u = f a < r < b
u(a) = A u(b) = B,
siendo f una función radial y continua.
12. En el recinto esférico 0 < a < r < b, r2 = x2 + y2 + z2, se considera elproblema uxx+uyy+uzz = 1, bajo condiciones de contorno u = 0 en r = a,∂u∂n = 0 en r = b. Hállese su solución. ¿Se podría resolver explícitamente elproblema reemplazando la unidad en el segundo miembro por una funcióncontinua y radial arbitraria f(r)?

7.7. EJERCICIOS 223
13. Considérese el recinto del problema anterior y supóngase que ha alcanzadouna temperatura estacionaria u(x, y, z) tras mantener la cara interior a100oC mientras la exterior se refrigera a razón de un flujo ∂u
∂n = −γ <0, γ constante. Determínese entonces la temperatura, hallando su valormáximo y mínimo. ¿Puede elegirse γ de forma que la temperatura de lacara exterior sea de 20oC?
14. Se consideran los problemas de contorno: (ru′)′ − n2
ru = −r f(r) , 0 < r < a
u acotada cuando r → 0+, u(a) = 0,
en donde n = 0, 1, . . . , siendo f continua. Prúebese entonces que las con-diciones de contorno son no críticas, y que la solución se escribe en laforma:
u(r) =
∫ a
0
Gn(r, ρ) f(ρ)ρ dρ, (7.33)
donde,
Gn(r, ρ) =
1
2n(r/a)n((a/ρ)n − (ρ/a)n) 0 < r ≤ ρ
1
2n(ρ/a)n((a/r)n − (r/a)n) ρ < r ≤ a,
para n ≥ 1 mientras
G0(r, ρ) =
log
(a
ρ
)0 < r ≤ ρ
log(ar
)ρ < r ≤ a.
15. Hallar la solución formal del problema ut = uxx + F (x, t), 0 < x < π,t > 0, u(x, 0) = 0 y condiciones de contorno mixtas u(0, t) = ux(π, t) = 0,t > 0.

224 CAPÍTULO 7. SEPARACIÓN DE VARIABLES

Capítulo 8
Ecuación de Laplace en elplano
8.1. Fórmula de Poisson. Funciones armónicasComenzamos con el problema de Dirichlet para la ecuación de Laplace en el
círculo unidad B1(0) del plano :∆u = 0 (x, y) ∈ B1(0)
u = f(x, y) (x, y) ∈ ∂B1(0).(8.1)
Definimos como solución clásica u de (8.1) la que satisface u ∈ C2(B) ∩ C(B)(escribiremos B en vez de B1(0) para abreviar). Más generalmente, el problemade Dirichlet n-dimensional en un dominio acotado Ω ⊂ Rn para solucionesclásicas consiste en hallar u ∈ C2(Ω) ∩ C(Ω) tal que:
∆u = 0 x ∈ Ω
u = f x ∈ ∂Ω,(8.2)
donde f ∈ C(∂Ω) es un dato.La unicidad de soluciones para (8.2) es consecuencia del principio del máximo
débil. A saber.
Teorema 8.1 (Principio débil del máximo). Supongamos que u ∈ C2(Ω)∩C(Ω)satisface:
−∆u ≤ 0
en Ω entonces,supΩu = sup
∂Ωu.
Observación 8.1. El correspondiente “principio del mínimo” se obtiene sin másque cambiar el −∆u ≤ 0 por −∆u ≥ 0 en el enunciado.
225

226 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
Es conveniente introducir las siguientes definiciones.
Definición 8.2. Definición Se dice que u de clase C2 es armónica (r. subar-mónica, superarmónica) en un dominio Ω ⊂ Rn si −∆u = 0 (r. ≤ 0, ≥ 0) enΩ.
Una consecuencia inmediata del principio del máximo es el principio de com-paración.
Corolario 8.3. Sea Ω ⊂ Rn un dominio acotado y u, v ∈ C2(Ω) ∩ C(Ω), talesque −∆u ≤ −∆v en Ω mientras u ≤ v en ∂Ω. Entonces u ≤ v en Ω. Enparticular, el problema:
∆u = F x ∈ Ω
u = f x ∈ ∂Ω,(8.3)
admite a lo más una solución clásica para cada f ∈ C(∂Ω), F ∈ C(Ω).
Volvamos ahora a un problema más concreto como es garantizar la exis-tencia de soluciones clásicas para (8.1). Escribiendo la ecuación de Laplace encoordenadas polares (usamos otra vez el símbolo u(r, θ) para representar a u)el problema se interpreta como resolver,
urr +1
rur +
1
r2uθθ = 0, (8.4)
cumpliendo la condición de contorno
u(1, θ) = f(θ).
En principio suponemos que f es C1 y 2π periódica (f ∈ C1(T )). Siguiendola estrategia del método de separación de variables, buscamos soluciones de laforma:
u = R(r)Θ(θ),
donde tenemos en cuenta que R, Θ han de ser C2 junto con las condiciones deperiodicidad:
Θ(θ + 2π) = Θ(θ) θ ∈ R.
El correspondiente problema de contorno es,Θ′′ + λΘ = 0
Θ(0) = Θ(2π)
Θ′(0) = Θ′(2π),
con lo que los autovalores son λn = n2, n ∈ N∪0 y Θn = an cosnθ+ bn sennθ.La ecuación para R es,
r2R′′ + rR− n2R = 0.
Imponiendo la condición de que R es regular en r = 0 deducimos Rn = cnrn,
n ∈ N ∪ 0.

8.1. FÓRMULA DE POISSON 227
Una solución formal de (8.1) es por tanto,
u = a0 +∞∑
n=1
rn(an cosnθ + bn sennθ), (8.5)
donde naturalmente an, bn son los coeficientes de la serie de Fourier de f . De lashipótesis sobre f la serie converge uniformemente en R. Usando el principio delmáximo se ve que (8.5) converge uniformemente en B. Por tanto u es continua.Es inmediato comprobar que todas las posibles derivadas término a términode (8.5), con respecto a r, θ, generan series uniformemente convergentes sobrecompactos de r < 1. Eso significa que u cumple la ecuación (8.4). Finalmente,unas cuentas detalladas establecen que las derivadas cartesianas ux, uy, uxx,uxy, uyy están definidas, con ayuda de las derivadas de (8.5) término a término,por series uniformemente convergentes sobre compactos de B. Por tanto ∆u escontinua. De ahí ∆u = 0 en B (pues esto ya era cierto en casi todo punto).
Observación 8.2. Se comprueba sin problemas que PN = a0+∑N
1 rn(an cosnθ+bn sennθ) es un polinomio en (x, y) de grado N . Es decir (8.5) es una serie depotencias uniformemente convergente en B. Ello implica que u es en realidadreal analítica 1 en B. En cualquier caso (8.5) es la serie de Taylor de u centradaen (0,0).
La identidad (8.5) se puede manipular para llegar a una expresión integralde f . Esto permite relajar la regularidad de f de C1 a continua. En efecto,podemos escribir,
u(r, θ) = lımN→∞
1
π
∫ π
−π
f(t)12+
N∑1
rn cosn(θ − t) dt
=1
π
∫ π
−π
f(t)12+
∞∑n=1
rn cosn(θ − t) dt,
en virtud de la convergencia uniforme del integrando. Usando, por ejemplo, la
parte real de la serie geométrica compleja 1 +∑∞
n=1(reiϕ)n =
1
1− reiϕse llega
a que:1
2+
∞∑n=1
rn cosn(θ − t) =1
2
1− r2
r2 + 1− 2r cos(θ − t).
Por tanto,
u(r, θ) =1− r2
2π
∫ π
−π
f(t)
r2 + 1− 2r cos(θ − t)dt.
En coordenadas cartesianas,
u(x) =1− r2
2π
∫|y|=1
f(y)
|x− y|2dy. (8.6)
1Una serie uniformemente convergente de polinomios es siempre una función real analítica([11]).

228 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
Se conoce a (8.6) como fórmula de Poisson. Tiene perfecto sentido si f ∈ C(T )(¡menos regularidad es posible!). En principio (8.6) da una representación detoda solución clásica. En particular se tiene:
1 =1− r2
2π
∫|y|=1
1
|x− y|2dy x ∈ B. (8.7)
El siguiente resultado asegura que (8.6) proporciona todas las soluciones clásicasde (8.1).
Teorema 8.4. Si f es continua en r = 1, (8.6) extendida con el valor f enr = 1 define la única solución clásica de (8.1).
Es inmediato que la solución de (8.1) en la bola BR(P ) es exactamente,
u(x) =R2 − |x− P |2
2πR
∫|y−P |=R
f(y)
|x− y|2dSy. (8.8)
En particular, si u ∈ C2(Ω) es armónica en Ω entonces se tiene:
u(P ) =1
2πR
∫|y−P |=R
f(y) dSy, (8.9)
cualquiera que sea la bola BR(P ) ⊂ Ω. Esta es la propiedad de la media. Setiene además lo siguiente.
Teorema 8.5. Si u ∈ C2(Ω) es armónica y BR(P ) es como arriba entonces,
u(P ) =1
πR2
∫∫|y−P |≤R
f(y) dy. (8.10)
Demostración. Se propone como ejercicio.
Del hecho de que toda función armónica en Ω se puede representar cerca decualquier punto P ∈ Ω en la forma (8.8) se tiene lo siguiente.
Teorema 8.6. Si u ∈ C2(Ω) es armónica en Ω entonces u ∈ C∞(Ω).
Demostración. Se propone como ejercicio.
Otra conclusión importante.
Teorema 8.7 (Principio fuerte del máximo). Sea Ω un dominio del plano dondeu es armónica con M = supΩ u <∞. Si para algún x0 ∈ Ω, u(x0) =M entoncesu =M .
Por otro lado, la propiedad de la media caracteriza asimismo las funcionesarmónicas.
Teorema 8.8. Supongamos que u ∈ C(Ω) satisface la propiedad de la media enΩ, es decir, para toda bola BR(P ) ⊂ Ω se cumple la identidad (8.9). Entoncesu es armónica en Ω.

8.1. FÓRMULA DE POISSON 229
Como se ha dicho, la fórmula de Poisson permite datos más generales quef ∈ C(T ). Por ejemplo f ∈ L1(T ) ó f ∈ L∞(T ). En este último caso (8.6) definede nuevo una función u armónica y acotada (ver (8.7)) que cumple:
lımQ→P
u(Q) = f(P ),
si P ∈ ∂B es un punto de continuidad de f . Si f es continua a trozos en elsentido de que sólo presenta un número finito de discontinuidades de salto (por
ejemplo la función característica de un arco
RS), la fórmula de Poisson da unasolución acotada de (8.1) que ajusta con f en los puntos de continuidad. Lasolución es además única en la clase de las funciones acotadas en B. Esto esconsecuencia del siguiente resultado.
Teorema 8.9 (Teorema de Phragmén-Lindelöf). Sea u armónica en un do-minio acotado Ω ⊂ R2, u ∈ L∞(Ω) mientras u ∈ C(Ω \ P1, . . . , PN) dondeP1, . . . , Pn ⊂ ∂Ω. Entonces:
ınf∂Ω\P1,...,PN
u ≤ u(x) ≤ sup∂Ω\P1,...,PN
u x ∈ Ω.
8.1.1. Dominios simplemente conexos
En la sección de ejercicios se estudian las aplicaciones conformes del plano. Seidentifican éstas con las funciones holomorfas con derivada no nula. Se pruebatambién que las aplicaciones conformes transforman funciones armónicas enfunciones armónicas. Por otra parte, un conocido teorema de Riemann (ver [19],Cap. 14) establece que todo dominio simplemente conexo Ω del plano, Ω = R2,se puede transformar mediante un homeomorfismo conforme T ∈ H(Ω) en eldisco unidad B. Si Ω es acotado y de frontera ∂Ω simple en el sentido de quetodo punto P ∈ ∂Ω es el extremo de un arco Γ que cumple Γ \P ⊂ Ω, entoncesla transformación conforme T ∈ H(Ω) se puede extender a un homeomorfismoT : Ω → B (ver [19], Cap. 14).
Tenemos así un teorema general de existencia de soluciones.
Teorema 8.10. Sea Ω ⊂ R2 un dominio acotado y simplemente conexo delplano con frontera simple. Entonces el problema de Dirichlet,
∆u = 0 en Ω
u = f en ∂Ω,
admite, para cada f ∈ C(Ω), una única solución clásica.
Observación 8.3. Puede demostrarse más generalmente (ver por ejemplo [4],Cap. X) que el problema de Dirichlet (8.1) es siempre resoluble en cualquierdominio Ω del plano en el que R2 \ Ω carezca de componentes conexas que sereduzcan a un punto (ver la Sección 8.3).

230 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
8.1.2. Deducción geométrica de la fórmula de Poisson
La fórmula de Poisson se puede deducir a partir de argumentos geométricoselementales apoyados en la función argumento θ = θ(x, y) (ver el Capítulo 1).
Primeramente obtenemos una solución del problema,∆u = 0 (x, y) ∈ B
u = χAB (x, y) ∈ ∂B(8.11)
donde χAB es la función característica de un arco orientado
AB correspondientea un ángulo central θ0.
Definimos φ(P ) como el ángulo orientado con vértice en P y medido desdeel segmento PA al PB. Lo primero que debe observarse es que φ es constantesobre cada uno de los arcos abiertos y orientados
BA,
AB en ∂B. De hecho:φ = θ0/2 sobre
BA, φ = π + θ0/2 en
AB, mientras las curvas de nivel de φ
son arcos capaces sobre
AB. Un arco capaz sobre
AB es el lugar de los puntosque observan
AB bajo un ángulo constante. De hecho, se comprueba que dicholugar es un arco de circunferencia.
Por otro lado, una expresión analítica para φ es la siguiente,
φ(P ) = θ(P −B)− θ(P −A). (8.12)
Si, por ejemplo, A y B están en x ≥ 0 φ es inmediatamente armónica en B.Otras posiciones de A, B requieren emplear la función argumento con línea decorte en el eje x ≤ 0.
La función ψ(P ) =1
πφ(P ) − θ0
2 es pues la única solución acotada del
problema (8.11). De nuestra experiencia con la ecuación del calor sabemos queesta solución básica permite llegar a soluciones muy generales.
En efecto, si f ∈ C(T ) y fraccionamos ∂B en n arcos, es decir el intervalo(0, 2π) en 0 ≤ θ1 ≤ · · · θn = 2π una aproximación poligonal de f es fn =∑n
1 f(θi)χ(θi−1,θi) con θi ∈ (θi−1, θi). Si ui es la solución correspondiente aldato χ(θi−1,θi) entonces,
ui(x, y) =1
πh(θi−1 +∆θ)− h(θi−1),
donde ∆θ = θi − θi−1,
h(θ) = arctag(y − sen θ
x− cos θ− θ
2
).
Nótese que,
h′(θ) =1− r2
2[r2 + 1 + 2(x cos θ + y sen θ].

8.1. FÓRMULA DE POISSON 231
Si ufn es la solución acotada correspondiente a fn entonces,
ufn(x, y) =1
π
n∑i=1
f(θi)h(θi−1 +∆θ)− h(θi−1)
=1
2π
n∑i=1
1− r2
r2 + 1 + 2(x cos θi + y sen θi)f(θi)∆θ,
donde θi, θi ∈ (θi−1, θi) y ∆θ = θi− θi−1. Cuando n→ ∞ el valor límite de ufnes,
uf (x, y) =1− r2
2π
∫ 2π
0
f(θ)
r2 + 1 + 2(x cos θ + y sen θ)dθ,
que es precisamente la fórmula de Poisson.
Observación 8.4. La construcción de la función φ en (8.12) muestra que
lımr→1
φ(r, α) = lımr→1
φ(r, β) =1
2(θ0 + π),
donde α, β son los ángulos correspondientes a A, B, θ0 = β − α. Este ejemplopermite probar que para cada τ ∈ [θ0/2, θ0/2 + π] existe un arco Γ de círculoque pasa por A y B donde φ|Γ = τ .
Más generalmente, se tiene lo siguiente.
Teorema 8.11. Sea u la solución acotada de (8.1) que corresponde a un datocontinuo a trozos f que exhibe una discontinuidad de salto en P0 = P0(θ0).Entonces, para todo τ intermedio a f(θ0−) y f(θ0+) existe un arco de círculoque pasa por P donde lımP→P0,P∈Γ u(P ) = τ . Además,
lımr→1−
u(r, θ0) =1
2f(θ0+) + f(θ0−).
Observaciones 8.5.
a) La función
u(r, θ) =1− r2
1 + r2 − 2r cos θ,
es armónica en B y se anula en ∂B \ (1, 0). Sin embargo no es idénticamentenula. Nótese que u(r, 0) crece sin límite cuando r → 1−.
b) La demostración pone de manifiesto que la propiedad de acotación puede subs-tituirse por la menos restrictiva de que u ∈ C(Ω \ P1, . . . , PN ), P1, . . . , PN ⊂∂Ω, junto con
lımP→Pi
u(P )
log |P − Pi|= 0 1 ≤ i ≤ N.
c) Cuando el dato f es continuo a trozos y P ∈ ∂B es un punto de discontinuidadde salto de f en P entonces u sufre un tipo de discontinuidad que ya observamosen la ecuación del calor (ver la Sección 8.1.2).

232 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
8.1.3. Problema de Dirichlet en un rectángulo
Consideremos el rectángulo Q = [0, π] × [0, A], A > 0 y el dato f que escero en todos los lados de Q excepto en y = 0 donde f(x, 0) = f(x) ∈ C1[0, π],función que cumple f(0) = f(π) = 0.
El método de separación de variables y el principio débil del máximo nosllevan a que la solución clásica del problema,
∆u = 0 (x, y) ∈ Q
u = f (x, y) ∈ ∂Q,
viene expresada por:
u(x, y) =∞∑
n=1
bnsenhnA
sennx senhn(A− y), (8.13)
donde
bn =2
π
∫ π
0
f(x) sennx dx.
Si consideramos el núcleo,
G(ξ, x, y) =2
π
∞∑n=1
senhnA
senhn(A− y)sennx sennξ,
obtenemos una función C∞ que es armónica en 0 < y < A. En efecto, laserie junto con todas sus derivadas converge uniformemente sobre compactos de0 < y < A. Bajo la hipótesis de acotación de f la serie (8.11) se puede escribircomo,
u(x, y) =
∫ π
0
G(ξ, x, y)f(ξ) dξ. (8.14)
Usando los mismos argumentos que en la Sección ?? del Capítulo 7 se pruebaque:
G(ξ, x, y) ≥ 0 0 ≤ ξ ≤ π 0 ≤ x ≤ π 0 < y < A,
mientras, ∫ π
0
G(ξ, x, y) dξ ≤ 1 0 ≤ x ≤ π 0 < y < A.
Por otro lado, ∫ π
0
G(ξ, x, y) sen ξ dξ =senh(A− y)
senhAsenx,
es decir, ∫ π
0
G(ξ, x, y)senhA sen ξ
senh(A− y) senxdξ = 1.

8.2. ECUACIÓN DE POISSON 233
Si x0 ∈ I = (0, π) es un punto de continuidad de f ∈ L∞(I), Iδ = [x0−δ, x0+δ],entonces
|u(x, y)− f(x0)| ≤ ∫Iδ
+
∫I\Iδ
G(ξ, x, y)|f(ξ)− f(x0)senhA sen ξ
senh(A− y) senx| dξ.
La primera integral puede hacerse tan pequeña como se quiera con tal que lo seaδ. La segunda (Sección ?? del Capítulo 7) se hace pequeña si x ∼ x0 y t → 0.Hemos probado así el siguiente resultado.
Teorema 8.12. Para f = f(x, y) continua y arbitraria, el problema de Diri-chlet,
∆u = 0 (x, y) ∈ Q
u(x, y) = f(x, y) (x, y) ∈ ∂Q,
admite una solución acotada u ∈ C2(Q) ∩ C(Q \ A,B,C,D), donde A, B, C yD son los vértices de Q.
Observaciones 8.6.
a) La solución construída en el teorema por el método de separación de variablesse extiende por continuidad a todo Q pues coincide con la solución clásica quese obtiene en virtud del teorema de la aplicación de Riemann.
b) Si en las consideraciones precedentes f ∈ L∞ tiene una discontinuidad desalto en x0 ∈ (0, π) el comportamiento de la solución acotada u puede estudiarseteniendo en cuenta la determinación del argumento θ1(x−x0, y), donde la líneade corte de θ1 es el semieje y ≤ 0.
8.2. Ecuación de Poisson
Nos ocupamos ahora de estudiar un tema más delicado como es problemade Dirichlet para la ecuación de Poisson,
−∆u = F en Bu = 0 en ∂B.
(8.15)
Lo primero que hacemos es usar el método de separación de variables para pro-ducir una representación integral de la solución clásica. A tal efecto suponemosque u ∈ C2(B)∩C(B) resuelve (8.15), en particular F ∈ C(B). Transformamos(8.15) a coordenadas polares (r, θ) y para cada 0 < r < 1 representamos u(r, ·),

234 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
ur(r, ·), urr(r, ·), uθθ(r, ·) y F (r, ·) en serie de Fourier para tener,
u(r, ·) = a0(r) +∞∑
n=1
an(r) cosnθ + bn(r) sennθ
ur(r, ·) = a′0(r) +∞∑
n=1
a′n(r) cosnθ + b′n(r) sennθ
urr(r, ·) = a′′0(r) +
∞∑n=1
a′′n(r) cosnθ + b′′n(r) sennθ
uθθ(r, ·) = −∞∑
n=1
n2an(r) cosnθ + n2bn(r) sennθ
F (r, ·) = A0(r) +∞∑
n=1
An(r) cosnθ +Bn(r) sennθ,
siendo las convergencias en L2(0, 2π). La ecuación en derivadas parciales,
urr +urr
+uθθr2
= 0,
lleva a las ecuaciones para los coeficientes:
u′′(r) +1
ru′(r)− n2
r2u = −F (r) 0 < r < 1, (8.16)
donde n = 0, 1, . . . . Los coeficientes a0, an, bn quedan determinados como fun-ciones C2 en (0, 1) que se anulan en r = 1 mientras en el origen satisfacen lapropiedad de estar acotadas. El segundo miembro de (8.16) es en cada caso A0,An y Bn, respectivamente.
El problema de contorno fundamental es pues,(ru′)′ − n2
r u = rF (r)
u(1) = 0 , u = O(1) para r → 0,(8.17)
donde F ∈ C[0, 1]. Usando las ideas del Capítulo 7 (ver Ejercicios) la soluciónde (8.17) se puede representar en forma integral como,
u(r) =
∫ 1
0
Gn(r, ρ)ρ dρ, (8.18)
donde,
G0(r, ρ) =
log(
1
r) r > ρ
log(1
ρ) r ≤ ρ,
mientras,
Gn(r, ρ) =
1
2n(r−n − rn) ρn r > ρ
1
2n(ρ−n − ρn) rn r ≤ ρ,

8.2. ECUACIÓN DE POISSON 235
para n ≥ 1. De (8.18) podemos estimar u como sigue,
|u(r)|2 ≤ 1
4n2∫ 1
0
4n2G2(r, ρ)ρ dρ∫ 1
0
F 2(ρ)ρ dρ. (8.19)
Por otro lado,∫ 1
0
4n2G2(r, ρ)ρ dρ =
∫ r
0
(1− r2n)2(ρ
r)2nρ dρ+
∫ 1
r
(1− ρ2n)2(r
ρ)2nρ dρ
= r2∫ 1
0
u2n+1 du+
∫ 1
r
(1− ρ2n)2(r
ρ)2nρ dρ
≤ 1
2n+ 1+ r2
∫ 1
r
(r
ρ)2n−1 1
rdρ
≤ 1
2n+ 1+
∫ ∞
1
dz
z2n−1
≤ 2
2n+ 1.
Concluimos entonces que la solución de (8.17) satisface la estimación,
|u(r)|2 ≤ 1
4n2(n+ 12 )
∫ 1
0
F 2(ρ)ρ dρ. (8.20)
Recordamos ahora que cualquier solución clásica se se representa en la forma,
u(r, ·) = a0(r) +
∞∑n=1
an(r) cosnθ + bn(r) sennθ, (8.21)
donde an =∫ 1
0GnAnρ dρ, bn =
∫ 1
0GnBnρ dρ. Hemos supuesto que F ∈ C(B)
(bastaría para lo que sigue F ∈ C(B) ∩ L2(B)). Comprobamos que la serieconverge además uniformemente en B. En efecto:
|N∑M
an(r) cosnθ + bn(r) sennθ|2 ≤ N∑M
2
n21
4
∫ 1
0
N∑M
A2n(ρ) +B2
n(ρ)ρ dρ
≤ N∑M
2
n2 1
4π
∫ 1
0
∫ 2π
0
F 2(ρ, θ) dθρ dρ
≤ N∑M
2
n2 1
4π
∫∫B
F 2 dxdy.
Vamos a mejorar ahora la expresión (8.21) para llegar a una representaciónintegral de la solución de (8.15). Si tenemos en cuenta la relación funcional

236 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
entre an, bn y F podemos escribir,
u(r, θ) =
∫ 1
0
G0(r, ρ)A0(ρ)ρdρ+
∞∑n=1
∫ 1
0
Gn(r, ρ)(An(ρ) cosnθ +Bn(ρ) sennθ)ρ dρ.
Permutando formalmente la serie con la integral con respecto a ρ, expresando An
y Bn en términos de F e intercambiando –ahora legítimamente– las integralescon la serie llegamos a la expresión:
u(r, θ) =
∫ 1
0
∫ 2π
0
G(r, θ, ρ, t)F (ρ, t)ρ dρdt, (8.22)
en donde para r > ρ,
G(r, θ, ρ, t) =1
2πlog(1
r) +
∞∑n=1
1
n(r−n − rn)ρn cosn(θ − t), (8.23)
mientras que si r < ρ el valor de G se obtiene intercambiando los valores de ry de ρ. Por otro lado, para ρ = r la serie en (8.23) converge uniformemente conrespecto a t ∈ [0, 2π]. Asimismo, si 0 < z < 1 tenemos,
∞∑n=1
zn
ncosnα =
∫ z
0
∞∑n=1
ζn−1 cosnα dζ =
∫ z
0
cosα− ζ
1 + ζ2 − 2ζ cosαdζ
= −1
2log[1 + z2 − 2z cosα].
Al introducir estos resultados en (8.23) obtenemos tras algunas cuentas,
G(r, θ, ρ, t) =1
4π− log[r2+ ρ2− 2rρ cos(θ− t)]+ log[1+ r2ρ2− 2rρ cos(θ− t)].
(8.24)Nótese que G es simétrica en el sentido de que no varía cuando se intercambianentre sí (r, θ) y (ρ, t). En coordenadas cartesianas, si y∗ designa el simétrico dey con respecto a la circunferencia unidad, y∗ = y/|y|2, la función G adopta laforma,
G(x, y) =1
2π[− log |x− y|+ log |y||x− y∗|], (8.25)
mientras la representación en coordenadas cartesianas (8.22) toma la forma,
u(x) =
∫∫B
G(x, y)F (x, y) dy. (8.26)
Se conoce a G = G(x, y) como la función de Green del problema de Dirichlet enel círculo. Debe observarse que G satisface G(x, y) = G(y, x), que para y ∈ B,∆xG(·, y) = 0 mientras que para cada y ∈ B, G(x, y) = 0 en |x| = 1. Otra

8.2. ECUACIÓN DE POISSON 237
propiedad importante es que G ≥ 0. Es más, sólo se anula si |x| = 1 o |y| = 1.En efecto,
G = log
(1 + r2ρ2 − 2rρ cos(θ − t)
1 + r2ρ2 − 2rρ cos(θ − t)
).
Que el argumento sea mayor o igual que 1 equivale a que:
(1− r2)(1− ρ2) ≥ 0.
La expresión,
Γ2(x) =1
2πlog |x|,
se denomina solución fundamental del Laplaciano ∆ en el plano.Toda la discusión previa ha tenido como objetivo probar el siguiente resul-
tado.
Teorema 8.13. Si F ∈ C1(B) ∩ L∞(B) entonces
u(x) =
∫∫B
G(x, y)F (y) dy. (8.27)
define una solución clásica del problema (8.15).
La demostración del teorema es elaborada y consta de varias etapas. Enprimer lugar observamos G = −Γ2(x− y) +G2(x, y). El término:
U(x) =
∫∫B
G2(x, y)F (y) dy,
es de clase C∞ en B. En efecto, para x en una bola B0 ⊂ B tanto G2 como todassus posibles derivadas se mantienen uniformemente acotadas con y ∈ B. El casomás delicado es el de la continuidad. A tal efecto nótese que log(|y|2|x− y∗|2) =log(1+|x|2|y|2−2xy) y que permanece acotada en valor absoluto si x ∈ B0 ⊂ B,y ∈ B. En particular, U es una función armónica en B.
El término,
V (x) =
∫∫B
Γ2(x− y)F (y) dy,
es más delicado de manejar y a su estudio consagramos las siguientes líneas. Seconoce a V como potencial logarítmico con densidad F .
Lema 8.14. Si F ∈ L∞(B) el potencial logarítmico V con densidad F es C1
en B y además
∂xiV (x) =
∫∫B
∂xiΓ2(x− y)F (y) dy i = 1, 2.
En particular, la función u definida por (8.27) es C1 y,
∂xiu(x) =
∫∫B
∂xiG(x, y)F (y) dy i = 1, 2.

238 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
Demostración. Se considera η ∈ C∞(R) tal que η = 0 en t ≤ 1, η = 1 si t ≥ 2mientras η ≥ 0. Para ε > 0 la función:
Vε(x) =
∫∫B
Γ2(x− y)η(|x− y|/ε)F (y) dy,
es C∞ en R2 mientras Vε → V , ∂xiVε → Vi uniformemente en R2 cuandoε→ 0+, donde:
Vi(x) =
∫∫B
∂xiΓ2(x− y)F (y) dy,
i = 1, 2. Esto prueba el Lema.
Consideramos ahora la solución clásica del problema:−∆u = 1 en Bu = 0 en ∂B.
Tal solución ha de ser radial por lo que es fácil de calcular y viene dada por
u =1
4(1 − r2). Si se tiene en cuenta la forma del desarrollo en serie de G se
concluye que:1
4(1− r2) =
∫∫B
G(x, y) dy.
En efecto la parte de la serie en los términos cosn(θ − t) desaparece y,∫∫B
G dy =1
2π2π
∫ r
0
log(1
r)ρ dρ+ 2π
∫ r
0
log(1
ρ)ρ dρ =
1
4(1− r2).
Del lema anterior,
−xi2
=
∫∫B
∂xiG(x, y) dy i = 1, 2.
Consideramos finalmente las funciones:
ui(x) = ∂xiu+xi2F (x) =
∫∫B
∂xiG(x, y)(F (y)− F (x)) dy,
i = 1, 2. Usando el argumento del lema y la diferenciabilidad de F en B se tieneque las funciones
wi(x) =
∫∫B
∂xiG(x, y)(F (y)− F (x)) dy,
son C1 con derivadas primeras,
∂xjwi(x) =
∫∫B
∂xixjG(x, y)(F (y)− F (x)) dy −∫∫
B
∂xiG(x, y)∂xjF (x) dy.

8.2. ECUACIÓN DE POISSON 239
Se concluye entonces que, por un lado, ∂x1v1 + ∂x2v2 = ∆u+ F (x) + x1
2 ∂x1F +x2
2 ∂x2F , mientras que de ∆xG(·, y) = 0 para x ∈ B\ y se deduce ∂x1v1+∂x2v2 =x1
2 ∂x1F + x2
2 ∂x2F . Por tanto −∆u = F en B.Finalmente la función u definida en (8.27) satisface también la condición de
contorno pues,
|u| ≤ |F |∞,B
∫∫B
G dy ≤ |F |∞,B
4(1− r2) → 0,
cuando r → 1−. Esto cierra la demostración del teoremaUna consecuencia de la demostración es el siguiente,
Corolario 8.15. Si F ∈ C1(B) ∩ L∞(B) el correspondiente potencial logarít-mico V :
V (x) =
∫∫B
Γ2(x− y)F (y) dy i = 1, 2.
es C2 en y satisface ∆V = F en B.
Con más generalidad se tiene lo siguiente.
Teorema 8.16. Sea Ω ⊂ R2 un dominio acotado mientras F ∈ C1(Ω)∩L∞(Ω).Entonces, el potencial logarítmico V con densidad F en Ω:
V (x) =
∫∫Ω
Γ2(x− y)F (y) dy,
es C2 en Ω y satisface ∆V = F en Ω.
Demostración. Para ε > 0 pequeño y x0 ∈ Ω arbitrario, tomamos Fε ∈ C1(R2)donde Fε = F en |x− x0| ≤ ε/2 y Fε = 0 para |x− x0| ≥ ε. Si:
Vε(x) =
∫∫Ω
Γ2(x− y)Fε(y) dy,
entonces V − Vε es armónica en |x− x0| < ε/2, mientras, por el corolario, Vε esC2 en |x− x0| < ε y ∆Vε = Fε. Por tanto V es C2 en |x− x0| < ε/2 y ∆V = Fen dicha región.
Hemos fabricado la función de Green del problema de Dirichet para la ecua-ción de Poisson en la bola (se normalizó el radio a la unidad para simplificar).En dominios generales Ω y en dimensiones superiores esta noción se extiende alos efectos de obtener una representación integral del tipo (8.27) para la solucióndel problema de Dirichlet. La definición adecuada a tales propósitos es la quesigue.
Definición 8.17. Sea Ω ⊂ R2 un dominio. Se dice que:
G : Ω× Ω −→ R(x, y) 7−→ G(x, y)
es una función de Green para el problema de Dirichlet en Ω si:

240 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
1. G = −Γ2(x− y) + h(x, y), donde h(·, y) ∈ C2(Ω)∩C(Ω) para cada y ∈ Ω.
2. Para cada y ∈ Ω, u = h(·, y) es la solución clásica del problema,
∆xu = 0 x ∈ Ω
u(x) = Γ2(x− y) x ∈ ∂Ω.
De la propia definición se desprende la unicidad de la función de Green sobreΩ. Por otro lado, la función de Green que hemos obtenido en el caso del círculocumple los requisitos de la definición.
En el contexto n-dimensional exploraremos más aspectos de las funciones deGreen.
8.3. Singularidades evitablesUno de los objetivos de la sección es probar con un ejemplo que la continuidad
de F no es suficiente para asegurar la existencia de soluciones clásicas para elproblema:
−∆u = F en Ω
u = 0 en ∂Ω,(8.28)
ni siquiera en el caso de la bola.Para ello son necesarios algunos resultados de interés en sí mismos.El primero describe singularidades evitables de las funciones armónicas.
Teorema 8.18. Sea u ∈ C2(Ω) armónica en Ω \ x1, . . . , xN . Supóngase queademás,
u(x) = o(Γ2(x− xi)) x→ xi,
para i ∈ 1, . . . , N. Entonces u admite una única extensión armónica a todoΩ.
El resultado es consecuencia de la siguiente propiedad.
Lema 8.19. Supongamos que u es armónica en B \ 0, u = 0 en ∂B mientrasu = o(Γ2(x)) cuando x→ 0. Entonces u = 0 en B \ 0.
Demostración. Fijamos P0 ∈ B \ 0. Para ε > 0 arbitrario elegimos 0 < ρ < |P0|tal que:
|u(x)| < −ε log ρ |x| = ρ.
Formamos el anillo Aρ = ρ < |x| < 1 y tenemos que u < −ε log |x| y queu > ε log |x| en ∂Aρ. Del principio de comparación concluimos que |u(x)| ≤−ε log |x| en Aρ. En particular,
|u(P0)| ≤ −ε log |P0|,
para cada ε > 0. Por tanto u(P0) = 0.

8.4. EJERCICIOS 241
Una consecuencia indirecta del lema es lo siguiente.
Corolario 8.20. El problema de Dirichlet,−∆u = 0 en Ω
u = f en ∂Ω,
en general no es resoluble en Ω = B \ 0.
Demostración. En efecto, se trataría de resolver ∆u = 0 en B \ 0, con u ∈C2(B \ 0) ∩ C(B) y valores u(0) = A, u = f en r = 1 prefijados de antemano.Sin embargo, del lema, el único valor posible para A es precisamente,
A =1
2πR
∫|y|=R
f(y) dSy.
En consecuencia A no puede prefijarse libremente con independencia de f .
Otra consecuencia importante del lema es el siguiente contraejemplo de exis-tencia de soluciones clásicas para el problema de Dirichlet.
Teorema 8.21. El problema de Dirichlet,∆u =x22 − x212ρ2
[4(− log r)−1/2 +
1
2(− log r)−3/2
]en BR
u = (− logR)1/2(x21 − x22) en r = R,
no admite soluciones clásicas.
Demostración. Consideramos u1 = (− log r)1/2(x21 − x22). Se comprueba que ues C1 en BR pero no es C2. Por otro lado,
∆u1 =x22 − x212ρ2
[4(− log r)−1/2 +
1
2(− log r)−3/2
],
en BR \ 0. Si existiese una solución clásica u ∈ C2(BR) ∩ C(B) tendríamos,por el lema, que u = u1 en 0 < r < R lo que es imposible. Por tanto elproblema no admite soluciones clásicas. Debe observarse que el segundo miembroF ∈ C(BR).
8.4. Ejercicios1. Estúdiese por separación de variables la solución del problema de Dirichlet
para la ecuación de Laplace:
∆u = 0 x ∈ Ba
u = f x ∈ ∂Ba,
donde Ba es la bola centrada en el origen y de radio a en el plano, y f(x, y)es de clase C1 en la circunferencia de radio a, ∂Ba.

242 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
2. Pruébese que si f en el problema anterior es sólo continua, la solución delproblema de Dirichlet en la bola
∆u = 0 x ∈ Ba
u = f x ∈ ∂Ba,
existe y viene dada por la fórmula de Poisson,
u(x) =1
2πa
∫|y|=a
a2 − |x|2
|y − x|2dSy.
3. Se considera el sector W = 0 < r < a, 0 < θ < β. Estúdiese, por elmétodo de separación de variables la solución del problema de contorno∆u = 0 en W , u = 0 en θ = 0, β, mientras que se impone u(a, θ) = f(θ)donde f es, por ejemplo, continua en 0 ≤ θ ≤ β. Analícese el correspon-diente problema reemplazando la condición Dirichlet, por la de Neumann∂u∂n (a, θ) = g(θ).
4. Analícese el problema de Dirichlet ∆u = 0 en el anillo plano a < r < b,bajo condiciones de Dirichlet u = f en r = a, u = g en r = b, f y gcontinuas. Utilícese el método de separación de variables.
5. Analícese por el método de separación de variables la solución del problemaexterior de Dirichlet plano: ∆u = 0 en r > a, u = f en r = a, f continua,mientras que se impone la condición de que u esté acotada.
6. Si k es una constante positiva, hállense las soluciones radiales de la ecua-ción de Helmholtz uxx + uyy = k2u.
7. Hállese (separación de variables) la solución del problema plano ∆u = 0en a < r < b, α < θ < β, u = 0 en θ = α, β, u = f en r = a, mientrasu = g en r = b, siendo f y g continuas.
8. Pruébese que si u es armónica en una región Ω del plano, entonces u esC∞.
9. Pruébese que si u es armónica en una región Ω del plano, entonces u cumpleel teorema de la media. Es decir, para toda bola cerrada B = BR(x0) ⊂ Ωse tiene,
u(x0) =1
2πR
∫|y−x0|=R
u(y) dSy.
Pruébese que también,
u(x0) =1
πR2
∫∫|y−x0|≤R
u(y) dy.
10. Pruébese usando la fórmula de Poisson que toda función continua y pe-riódica en R, f = f(θ) puede aproximarse uniformemente por polinomiostrigonométricos pn(θ) = a0 +
∑N1 an cosnθ + bn sennθ.

8.4. EJERCICIOS 243
11. Descríbase la estructura de los polinomios armónicos en el plano.
Indicación. Si u es un polinomio armónico cumple ∆u = 0 en la bolaunidad con un dato de frontera f(θ) de una clase especial.
12. Una aplicación biyectiva (P,Q) : Ω → Ω1 y C1 entre dos dominos del planoΩ, Ω1 se dice conforme si preserva los ángulos de curvas incidentes. ¿Quéforma tienen tales transformaciones?. Pruébese que las transformacionesconformes preservan las funciones armónicas.
13. (Desigualdad de Harnack). Sea u armónica en en |x| < a, continua hasta|x| = a y no negativa. Pruébese que si |ξ| < a entonces,
(a− |ξ|)(a+ |ξ|)
u(0) ≤ u(ξ) ≤ (a+ |ξ|)(a− |ξ|)
u(0).
14. (Estimaciones del Gradiente). Sea Ω un dominio acotado de R2, u armó-nica en Ω y sea B = BR(x0) ⊂ B ⊂ Ω. Prúebese que,
|∂iu(x0)| ≤2
Rsup∂B
|u|,
para i = 1, 2. Utilícese para ello que ∂iu es también armónica, junto conla propiead de la media y el teorema de la divergencia. Conclúyase que
|∂iu(x0)| ≤2
d(x0, ∂Ω)supΩ
|u|.
15. (Teorema de Liouville). Prúebese que si u es armónica y acotada en R2
es entonces constante (aplíquese el problema anterior a bolas con radiocreciendo a infinito).
16. Sea u ∈ C∞(Ω) con x0 ∈ Ω. La serie formal de Taylor de u en x0 se definecomo ∑
α∈N2
1
α!∂αu(x0)(x− x0)
α,
donde α = (α1, α2), α! = α1!α2! y ∂αu = ∂α1x1∂α2
ξ2u.
Prúebese que si u es armónica en un dominio Ω, x0 ∈ Ω, entonces, siBR(x0) ⊂ Ω,
u(x) =∑α∈N2
1
α!∂αu(x0)(x− x0)
α, (8.29)
donde la serie converge absoluta y uniformemente en la tal bola |x−x0| ≤R. Puede suponerse para ello que x0 = 0 (¿Por qué?), recordar que u esde clase C∞ y que en virtud a la fórmula de Poisson, tenemos:
u(x) = a0 +∑n≥0
( rR
)n(an cosnθ + bn sennθ) , (8.30)

244 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
que converge absoluta y unifermemente en |x| ≤ R. Utilícese que las su-mas parciales de (8.30) son polinomios, junto con la caracterización delpolinomio de Taylor para concluir que (8.30) es en realidad la versión enpolares de (8.29).
17. (Principio del Máximo y términos gradiente). Sea u ∈ C2(Ω) ∩ C(Ω) unasolución de:
∆u+∑
ai∂iu = 0,
en Ω, donde se supone que los coeficientes ai(x) son acotados en Ω. Prué-bese que:
mın∂Ω
u ≤ u(x) ≤ max∂Ω
u.
18. (Teorema de Phragmén-Lindelöf). Sea Ω un dominio plano y acotado,(x0, y0) ∈ ∂Ω un punto de su frontera y sea u una función armónica enΩ, continua en Ω execpto quizás en (x0, y0). Supóngase que u(x, y) ≤ Mpara (x, y) ∈ ∂Ω, (x, y) = (x0, y0). Si se tiene:
lım(x,y)→(x0,y0)
u(x, y)/log
2R2
((x− x0)2 + (y − y0)2)
= 0,
donde R > 0 es tal que el dominio Ω ⊂(x− x0)
2 + (y − y0)2 < R2
.
Pruébese que también u(x, y) ≤M en Ω.
Analícese con detalle el ejemplo:
u(x, y) =1− r2
1 + r2 − 2r cos θ,
siendo r y θ las coordenadas polares de (x, y), 0 ≤ r < 1.
Indicación. Estúdiese la validez del principio del máximo para la funciónauxiliar v(x, y) dada por la identidad:
u(x, y) = v(x, y) log2R2
((x− x0)2 + (y − y0)2).
19. ¿Es la función
ψ(r, θ) = cotag−1
(2r sen θ
1 + r2 − 2r cos θ
),
armónica en el disco unidad? Véase Weimberger [26], Sección 25.
20. Sea Arg P la determinación del argumento con discontinuidad en el se-mieje real positivo. Sean A,B puntos de la circunferencia unidad ∂B1.Pruébese que ψ(P ) = Arg (P −B)− Arg (P −A) es armónica y acotadaen B1. ¿Cuál es su comportamiento en la frontera? Estúdiese con detallelos comportamientos en los puntos A y B.

8.4. EJERCICIOS 245
21. Resuélvase los problemas de contorno:
a)urr +
1rur +
1r2uθθ = 0 0 < r < 1
u(1, θ) = sen3 θ + sen θ cos θ 0 ≤ θ ≤ 2π.
b)urr +
1rur +
1r2uθθ = 0 0 < r < 1
u(1, θ) = 1, 0 < θ < π, u(1, θ) = 0, π < θ < 2π.
c)∆u = 0 (x, y) ∈ B4(O)
u(x, y) = x4 x2 + y2 = 16.
22. Sea Q el rectángulo 0 ≤ x ≤ l1, 0 ≤ y ≤ l2 y considére una funciónf = f(x, y) de clase C1 definida en la frontera ∂Q que se anula en losvértices del mismo. Construir la solución del problema de Dirichlet:
∆u = 0 x ∈ Q
u = f x ∈ ∂Q,
por el método de separación de variables.
23. Resolver el problema∆u = 0, 0 < x < 1, 0 < y < 1
u(x, 1) = 0, 0 < x < 1
u(0, y) = u(1, y) = 0, 0 < y < 1
u(x, 0) = 1.
24. Hallar la solución del problema ∆u = y(1 − y) sen3 x en 0 < x < π,0 < y < 1, bajo condiciones Dirichlet homogéneas.
25. (Función de Green en el rectángulo). Hallar la solución formal del problema∆u = −F (x, y) en el rectángulo 0 < x < π, 0 < y < A y condicionesDirichlet homogéneas.
26. Sea G = G((x1, x2), (y1, y2)) la función de Green para el problema deDirichlet en el círculo unidad. Bajo las equivalencias obvias, comprobarque se puede escribir en la forma,
G(z, z1) =−1
2πlog |z − z1|+
1
2πlog |1− zz1| z, z1 ∈ C, |z|, |z1| < 1.
Si, por otra parte, z = g(ζ) es holomorfa en Ω, continua en Ω y aplicabiyectivamente Ω en el círculo unidad prúebese que
GΩ(ζ, ζ1) = G(g(ζ), g(ζ1)),
es una función de Green para el problema de Dirichlet en Ω.

246 CAPÍTULO 8. ECUACIÓN DE LAPLACE (N = 2)
27. Prúebese que la función de Green Ga para el problema de Dirichlet en labola Ba(0) toma la forma:
Ga(x, y) = G( xa,y
a
)) =
1
2π[− log |x− y|+ log | y
a||x− y∗|],
donde y∗ = a2y
|y|2es el simétrico de y con respecto a la circunferencia
|x| = a.
28. Estúdiese el comportamiento de la transformación bilineal
ζ = z +a2
z,
sobre el círculo |z| < b, b > a > 0. Usar el resultado para determinar lafunción de Green del problema de Dirichlet en una elipse.

Capítulo 9
Ecuación de Laplacen–dimensional
9.1. Identidades de Green. Solución fundamental
Recordamos que un dominio acotado Ω ⊂ Rn de clase Ck es un abierto yconexo cuya frontera ∂Ω es una superficie de clase Ck mientras Ω está localmentede un sólo lado de la frontera (ver Anexo). Designamos por ν = ν(x) al camponormal unitario exterior (“la normal exterior” para abreviar) a ∂Ω.
Lema 9.1. Sea Ω ⊂ Rn un dominio acotado y C1 mientras u, v ∈ C2(Ω).Entonces (primera identidad de Green),∫
Ω
u∆v = −∫Ω
∇u∇v +∫∂Ω
u∂v
∂ν.
En consecuencia (segunda identidad de Green),∫Ω
u∆v − v∆u =
∫∂Ω
u∂v
∂ν− v
∂u
∂ν.
Una propiedad característica del operador Laplaciano es su invariancia frentea rotaciones en Rn. Es por ello natural estudiar sus soluciones radiales en Rn. Seconoce como solución fundamental de −∆ a una elección normalizada u = Γn(x)de dichas soluciones. Específicamente:
Γn(x) =
1
n(2− n)ωn|x|2−n n ≥ 3
1
2πlog |x| n = 2,
donde ωn =2πn/2
nΓ(n/2)es el volumen de la bola unidad en Rn.
247

248 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Ejercicio 9.1. Pruébese que para x ∈ Rn \ 0 se tiene la estimación:
|∂αΓn(x)| ≤ C(n, |α|)|x|2−n−|α|.
El siguiente resultado permite representar una función C2 en términos de suLaplaciano y diversas expresiones integrales que involucran la solución funda-mental.
Teorema 9.2. Sea Ω un abierto acotado y C1 mientras u ∈ C2(Ω). Entonces,
u(x) =
∫∂Ω
u(y)∂Γn(y − x)
∂ν− Γn(y − x)
∂u
∂ν(y) dSy +
∫Ω
Γn(y − x)∆u(y) dy.
(9.1)
Observación 9.1. Si Ω es un dominio C1 puede probarse, usando que la funcióndistancia a la frontera d(x) es C1 (ver [13], Cap. 14), que Ωε = x ∈ Ω : d(x) >ε es un dominio C1 para ε pequeño. Esto permite relajar en (9.1) la condiciónu ∈ C2(Ω) por u ∈ C1(Ω) ∩ C2(Ω) junto con ∆u ∈ L1(Ω). Basta para ello conestablecer (9.1) en Ωε y hacer ε→ 0+.
Observación 9.2. Si Ω ⊂ Rn es un dominio acotado de clase C1 y ρ0 = ρ0(x) ∈L1(Ω) la función,
V0(x) =
∫Ω
Γn(x− y)ρ0(y) dy,
se conoce como potencial de volumen o potencial Newtoniano con densidad ρ0.Si ρ1 ∈ L1(∂Ω) la función:
V1(x) =
∫∂Ω
Γn(y − x)ρ1(y) dSy,
se denomina potencial de capa simple con densidad ρ1 mientras que,
V2(x) =
∫∂Ω
∂Γn
∂ν(y − x)ρ2(y) dSy,
con ρ2 ∈ L2(∂Ω) define el potencial de capa doble y densidad ρ2.Resulta inmediato comprobar que los potenciales de capa simple y capa doble
son funciones armónicas en Ω.
Proposición 9.3. Si u ∈ C2(Ω) es armónica en Ω entonces u es de clase C∞
en Ω
Demostración. Tomamos cualquier bola B ⊂ B ⊂ Ω y escribimos,
u(x) =
∫B
u(y)∂Γn
∂ν− Γn(y − x)
∂u
∂ν(y) dy, (9.2)
con x ∈ B. Tal representación prueba que u ∈ C∞(B).

9.2. PROPIEDADES DE LAS FUNCIONES DE GREEN 249
Supongamos que u ∈ C2(Ω) ∩ C1(Ω) mientras ∆u ∈ L1(Ω), o más senci-llamente que u ∈ C2(Ω), donde naturalmente se supone que Ω es un dominioacotado de clase C1.
Admitamos que existe una función h = h(x, y), h : Ω × Ω → R, h(·, y) ∈C2(Ω) ∩ C1(Ω) tal que u = h(·, y) resuelve:
∆xh(·, y) = 0 en Ω
h(· − y) = Γn(· − y) en ∂Ω,(9.3)
para cada y ∈ Ω, tenemos entonces de las identidades de Green que para cadax ∈ Ω:
0 =
∫∂Ω
u(z)∂h∂ν
(z, x)− h(z, x)∂u
∂ν dSz +
∫Ω
h(z, x)∆u(z) dz. (9.4)
Combinando (9.1) y (9.4),
u(x) =
∫∂Ω
−u(y)∂G∂ν
(y, x) dSy +
∫Ω
G(y, x)−∆u(y) dy, (9.5)
donde hemos puesto,
G(x, y) = −Γn(x− y) + h(x, y).
Se conoce a G como la función de Green para el problema de Dirichlet enel dominio Ω. Supuesto que u ∈ C2(Ω) ∩ C1(Ω) es una solución clásica delproblema,
−∆u = f(x) en Ω
u = g(x) en ∂Ω,(9.6)
donde, por ejemplo, f ∈ L1(Ω), entonces la identidad (9.5) permite representarla solución como,
u(x) = −∫∂Ω
g(y)∂G
∂ν(y, x) dSy +
∫Ω
G(y, x)f(y) dy x ∈ Ω . (9.7)
La expresión sugiere cuál ha de ser el candidato a solución y en efecto (9.7)proporciona la solución de (9.6) cuando concurren condiciones de regularidadadecuadas sobre los datos. Debe observarse el rol que desempeña Γn en la cons-trucción de la función de Green (de ahí el apelativo de solución fundamental).A este respecto conviene revisar las conclusiones del caso del plano n = 2 en elcírculo.
9.2. Propiedades de las funciones de GreenAlgunas consecuencias importantes de la función de Green que se deducen
de la definición se reseñan a continuación.

250 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Teorema 9.4. Sea Ω ⊂ Rn un dominio C1 y G = G(x, y) la correspondientefunción de Green (del problema de Dirichlet). Entonces,
i) G(x, y)+Γn(x−y) ∈ C(Ω×Ω) o también G ∈ C((Ω×Ω)\ (x, y) : x = y).
ii) G(x, y) = G(y, x) para (x, y) ∈ Ω × Ω. En particular G ∈ C(Ω × Ω \(x, y) : x = y).
iii) G > 0 para x, y ∈ Ω, x = y.
iv) Para f ∈ L∞(Ω) (Ω acotado) se tiene que:∫Ω
G(x, y)f(y) dy → 0 x→ ∂Ω.
Demostración. Del principio del máximo se sigue que G(·, yn) → G(·, y) unifor-memente en Ω si yn → y en Ω lo que largamente prueba i).
A los efectos de ii) se considera el dominio “perforado” Ωε = Ω \ (Bε(x1) ∪Bε(x2)). Aplicando la segunda identidad de Green a la pareja de funcionesu(x) = G(x, x1), v(x) = G(x, x2) en Ωε obtenemos,
−∫|w|=1
G(x1 + εw, x1)(−
∂G
∂ρ)(x1 + ρw, x2)|ρ=ε
−G(x1 + εw, x2)(−∂G
∂ρ)(x1 + ρw, x1)|ρ=ε
dSw
=
∫|w|=1
G(x2 + εw, x1)(−
∂G
∂ρ)(x2 + ρw, x2)|ρ=ε
−G(x2 + εw, x2)(−∂G
∂ρ)(x2 + ρw, x1)|ρ=ε
dSw
en donde al hacer tender ε→ 0+ se deduce G(x1, x2) = G(x2, x1).Para iii) basta aplicar el principio del máximo a u(x) = G(x, y) en Ω\Bε(y)
con ε > 0 convenientemente pequeño.Finalmente, se demostrará en la Sección 9.5 que el problema:
−∆u = 1 x ∈ Ω
u = 0 x ∈ ∂Ω,
admite una solución clásica v en todo dominio acotado y C1. En particular(v > 0 en Ω):
supdist(x,∂Ω)≤δ
∫Ω
G(x, y) dy → 0,
cuando δ → 0+. De ahí se sigue inmediatamente iv).

9.3. ECUACIÓN DE LAPLACE EN LA BOLA 251
Observación 9.3. A los efectos de construir funciones de Green en algunos casosprácticos es conveniente usar argumentos de simetría. Supongamos que se conocela función de Green GΩ(x, y) de un dominio Ω mientras Ω1 ⊂ Ω es un subdomi-nio de Ω para el que existe una aplicación continua e inyectiva g : Ω1 → Ω talque g(Ω1) ∩ Ω1 = ∅, Ω = g(Ω1) ∪ Σ ∪ Ω1 con Σ = x : g(x) = x. Si,
GΩ(x, y) = GΩ(g(x), g(y)),
para x, y ∈ Ω, se comprueba fácilmente que,
G(x, y) = GΩ(x, y)−GΩ(x, g(y)),
es la función de Green para el dominio Ω1.
Ejemplo 9.4. Aunque el dominio Ω = Rn no se ajusta estrictamente al formatoteórico que hemos desarrollado vamos a calcular la función de Green del semi-espacio Ω1 = Rn
+ = xn > 0. Para ello escribimos x = (x′, xn), x′ ∈ Rn−1,Σ = xn = 0 y g la simetría: g(x) = (x′,−xn). La función de Green –luegoprecisaremos en qué contexto– para el semiespacio será:
G(x, y) = −Γn(x− y) + Γn(x− g(y)).
Véanse más ejemplos en la sección de Ejercicios.
9.3. Ecuación de Laplace en la bolaLa identidad (9.7) junto con las ideas del capítulo anterior nos llevarán a la
solución u de: ∆u = 0 en Bu = g(x) en ∂B,
(9.8)
con B = x : |x| < R. El candidato natural a función de Green es:
G(x, y) = −Γn(x− y) + Γn(|y|R
(x− y∗)),
donde y∗ = R2 y
|y|2es el simétrico de y con respecto a la esfera |y| = R. Si
Γn(s) = (1/2π) log s para n = 2, Γn(s) = (1/n(2 − n)ωn)s2−n cuando n ≥ 2
entonces una escritura conveniente para G es la que sigue:
G(x, y) = −Γn(√
|x|2 + |y|2 − 2xy) + Γn(
√(|x||y|/R)2 +R2 − 2xy).
Nótese que G es simétrica.La expresión para ∂G/∂ν es:
∂G
∂ν(x, y)∣∣|x|=R
= −n∑
i=1
∂G
∂xi(x, y)∣∣|x|=R
νi = −n∑
i=1
∂G
∂xi(x, y)∣∣|x|=R
xiR.

252 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Por tanto (n ≥ 3):∂G
∂ν(x, y) = − 1
nωnR
R2 − |y|2
|x− y|n.
Si u ∈ C2(B) ∩ C1(B) es una solución clásica del problema de Dirichlet (9.8)entonces u se puede representar como:
u(x) =R2 − |x|2
nωnR
∫|y|=R
g(y)
|y − x|ndSy x ∈ B. (9.9)
Sin embargo, si u ∈ C2(B) ∩ C(B) (no llega C1 hasta el borde) entonces para|x| < R− ε con ε > 0 pequeño tenemos,
u(x) =(R− ε)2 − |x|2
nωnR
∫|y|=R−ε
u(y)
|y − x|ndSy x ∈ B. (9.10)
Volvemos a obtener (9.9) si hacemos ε→ 0+ en (9.10). Más aún, (9.9) define lasolución clásica del problema de Dirichlet (9.8).
Teorema 9.5 (Fórmula de Poisson). Para g continua y arbitraria, la función
u(x) =R2 − |x|2
nωnR
∫|y|=R
g(y)
|y − x|ndSy x ∈ B,
extendida a ∂B con el valor g define la solución clásica del problema (9.8).
Observación 9.5. En la prueba hay dos hechos básicos para probar la continui-dad de u hasta la frontera (es obvio que u en (9.9) es armónica en B). Primero,−∂G/∂ν ≥ 0. Segundo, la unicidad de soluciones clásicas implica que:
1 =R2 − |x|2
nωnR
∫|y|=R
dSy
|y − x|nx ∈ B.
9.4. Funciones armónicas: propiedadesSe recuerda que u ∈ C2(Ω) es armónica (r. subarmónica, superarmónica) en
Ω si −∆u = 0 (r. ≤ 0, ≥ 0) en Ω. Como en el caso del plano se demuestra a partirde la integral de Poisson que toda función armónica cumple las propiedades dela media, es decir:
u(x) =1
nωnRn−1
∫|y|=R
u(y) dSy,
junto con:
u(x) =1
ωnRn
∫|y|≤R
u(y) dy.
Más generalmente, se tiene el,

9.4. FUNCIONES ARMÓNICAS: PROPIEDADES 253
Teorema 9.6. Sea u ∈ C2(Ω) armónica (r. subarmónica, superarmónica) enΩ. Entonces para toda bola B ⊂ Ω se tienen (respectivamente):
u(x) = (≤,≥)1
nωnRn−1
∫|y|=R
u(y) dSy,
junto con,
u(x) = (≤,≥)1
ωnRn
∫|y|≤R
u(y) dy.
Una consecuencia inmediata es el siguiente resultado.
Teorema 9.7 (Principio fuerte del máximo). Si u ∈ C2(Ω) es subarmónica enΩ, M = supΩ u y existe x0 ∈ Ω tal que u(x0) = M entonces u = M sobre lacomponente conexa C de x0 en Ω.
Observación 9.6. De la prueba se deduce fácilemente que toda función continuaque satisfaga la propiedad de la media cumple también el principio fuerte delmáximo. Se tiene además la siguiente caracterización.
Proposición 9.8. Una función continua u ∈ C(Ω) en un abierto Ω es armónicasi y sólo si satisface la propiedad de la media.
El siguiente resultado es sumamente útil en muchas direcciones. Particular-mente para demostrar que toda sucesión acotada de funciones armónicas defineuna familia normal.
Teorema 9.9 (Estimaciones del gradiente). Si u ∈ C2(Ω) es armónica enton-ces,
|∂αu(y)| ≤(n|α|dy
)|α|
supΩu,
con dy = dist (y, ∂Ω). En particular, para todo subdominio Ω′ ⊂ Ω′ ⊂ Ω setiene,
|∂αu(y)| ≤(n|α|d
)|α|
supΩu, (9.11)
con d = dist (Ω′, ∂Ω).
La observación siguiente podía haberse obtenido ya directamente de la re-presentación (A) (9.2) de las funciones armónicas.
Teorema 9.10. Si u ∈ C2(Ω) es armónica en Ω entonces u es real analítica enΩ.
Demostración. Tomamos B2R(x0) ⊂ Ω, M una cota de |u| en dicha bola. Laserie de Taylor (u es C∞) converge absolutamente en |x−x0| ≤ θR si 0 < θ < 1es pequeño. En efecto:
∑α
1
α!∂αu(x0)(x− x0)
α ≪M∑α
|α|!α!
(nθ|α|)|α|
|α|!=M
∞∑m=0
mm
m!(n2θ)m.

254 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Nótese que para cierto η > 0,
M∞∑
m=m0
mm
m!(n2θ)m ≤ (1 + η)M
∞∑m=m0
(n2eθ)m√2πm
< +∞,
supuesto que n2eθ < 1. Por otro lado el resto de orden N en |x − x0| ≤ θR secomporta de la forma siguiente,∑|α|=N
1
α!∂αu(x0 + ζ(x− x0))(x− x0)
α ≪M∑
|α|=N
(n2θ)NNN
N !∼ (n2eθ)N√
2πN→ 0,
cuando N → ∞, supuesto como arriba que n2eθ < 1. Esto concluye la demos-tración.
Una consecuencia combinada del teorema de Ascoli-Arzela, de las estimacio-nes (9.11) y de un proceso diagonal de Cantor es el siguiente teorema de tipoMontel.
Teorema 9.11. Si un ∈ C2(Ω) es una sucesión de funciones armónicas en unabierto Ω con la propiedad de que supΩ |un| ≤ M para cierta constante M >0 entonces un admite una subsucesión que converge en la topología compactaabierta de Ω a una función u ∈ C2(Ω) que es también armónica en Ω.
El siguiente resultado se conoce como desigualdad de Harnack para funcionesarmónicas.
Teorema 9.12. Sea u ∈ C2(Ω), u ≥ 0 una función armónica en Ω. Entonces,para todo subdominio acotado Ω′ ⊂ Ω′ ⊂ Ω existe una constante C = C(Ω′,Ω)tal que:
supΩ′
u ≤ C ınfΩ′u.
Una consecuencia del mismo es el siguiente resultado que también lleva aso-ciado el nombre de Harnack.
Teorema 9.13. Sea un ∈ C2(Ω) una sucesión creciente de funciones armónicasen Ω para la que existe y ∈ Ω tal que un(y) está acotada. Entonces un convergeen la topología compacta abierta de Ω a una función armónica u ∈ C2(Ω).
9.5. Problema de Dirichlet: dominios generalesQueremos estudiar la existencia de soluciones clásicas de
∆u = 0 en Ω
u = g(x) en ∂Ω,(9.12)
donde Ω ⊂ Rn es un dominio acotado completamente general, salvo algunasrestricciones en la frontera. El método que vamos a describir requiere la intro-ducción de una noción más general de función subarmónica (r. superamónica)que el que se ha considerado.

9.5. MÉTODO DE PERRON 255
Definición 9.14. Una función continua u ∈ C(Ω) se dice subarmónica si paratoda bola B ⊂ Ω y toda función armónica h en B, h ∈ C2(B)∩C(B) con u ≤ hen ∂B se tiene u ≤ h en B.
La noción de función superarmónica se establece invirtiendo las desigualda-des.
Proposición 9.15. Sea u ∈ C(Ω) subarmónica en Ω. Entonces,
i) Para toda bola B ⊂ Ω se tiene u ≤ uB donde v = uB es la solución clásicadel problema de Dirichlet:
∆v = 0 en B
v = u en ∂B.
ii) Para toda bola B = BR(x0) ⊂ Ω se tiene:
u(x0) ≤1
|Br(x0)|
∫BR(x0)
u(y) dy.
En particular, toda función subarmónica cumple el principio fuerte delmáximo.
iii) Sean u, v ∈ C(Ω) funciones sub y superarmónicas en Ω tales que u ≤ ven ∂Ω. Entonces, o bien u = v en Ω o bien u < v en Ω.
iv) Dada una función subarmónica u en Ω una bola arbitraria B ⊂ Ω y lafunción uB considerada en i) se tiene que la función:
U(x) =
uB(x) x ∈ B
u(x) x ∈ Ω \B
es también subarmónica en Ω.
Supongamos que el dato g ∈ L∞(∂Ω). Se dice que u ∈ C(Ω) es una subfun-ción (“unterfunktion”) para el problema de Dirichlet (9.12) si u es subarmónicay además u ≤ g en ∂Ω. De manera simétrica se define la noción de superfunción(“oberfunktion”).
Proposición 9.16. Si u, u ∈ C(Ω) son una subfunción y una superfunciónarbitrarias del problema de Dirichlet (9.12) entonces toda solución clásica u ∈C2(Ω) ∩ C(Ω) de dicho problema satisface:
u ≤ u ≤ u,
en Ω.
El resultado crucial es el siguiente.

256 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Teorema 9.17 (O. Perron). Supongamos que g = g(x) es acotada en ∂Ω ydefinamos:
S = v ∈ C(Ω) : v es subarmónica en Ω , v ≤ g en ∂Ω.
Entonces:u = sup
v∈Sv,
es armónica en Ω.
De manera análoga la expresión
u = ınfv∈U
v,
con U = v ∈ C(Ω) : v es superarmónica en Ω , v ≥ g en ∂Ω también defineuna función armónica. Cuando g ∈ C(∂Ω) toda solución clásica u ∈ C(Ω) ∩C2(Ω) del problema (9.12) ha de satisfacer u ≤ u ≤ u. La cuestión es sabercuándo es cierto que lımx→x0 u(x) = g(x0) para x0 ∈ ∂Ω. Responder a estapregunta pasa por introducir la noción de función barrera de H. Poincaré y depunto regular x0 ∈ ∂Ω.
Definición 9.18. Un punto x0 ∈ ∂Ω se dice regular para el operador Laplacianosi existe una función barrera en x0. Es decir, existe una función superarmónicaw = w(x) ∈ C(Ω) con la propiedad de que w > 0 en Ω \ x0 mientras w(x0) = 0.
Lema 9.19. Sea Ω ⊂ Rn un dominio, x0 ∈ ∂Ω un punto que admite una barreralocal, es decir existe una bola centrada en x0, w ∈ C(B ∩ Ω), w superamónicaen B∩Ω con w(x0) = 0 y w > 0 en B∩Ω\x0. Entonces, para toda bola B′ ⊂ Bcentrada en x0, w|B′ admite una extensión w a Ω que es una función barreraen x0.
Demostración. Basta definir (m = ınfB\B′ w):
w(x) =
mın(m,w(x)) x ∈ B′
m x ∈ Ω \B′.
Se comprueba que w es una barrera en x0.
Lema 9.20. Sea Ω ⊂ Rn y g ∈ L∞(∂Ω) continua en x = x0. Si x0 admite unafunción barrera y u es la función armónica construida en el Teorema de Perronentonces
lımx→x0
u(x) = g(x0).
Se tiene además lo siguiente.
Teorema 9.21. Sea Ω un dominio acotado de Rn mientras la función g escontinua en ∂Ω. El problema de Dirichlet (9.12) admite una solución clásica siy sólo si todos los puntos de la frontera ∂Ω son regulares.

9.5. MÉTODO DE PERRON 257
Observaciones 9.7.
a) La condición de punto regular para un dominio Ω del plano no es demasiadorestrictiva. En efecto, la geometría de los puntos regulares es muy “permisiva”pues basta con que un punto x0 ∈ ∂Ω sea accesible desde Ω \ R2, es decir elextremo de una arco γ contenido en R2 \ Ω para que exista una barrera. Enefecto, para B centrada en x0 pequeña podemos construir una determinación θdel argumento en B ∩ Ω. Una función barrera local es:
w = − log r
log2 r + θ2,
con r = |x− x0|. Este tipo de función barrera permite concluir que el problemade Dirichlet es resoluble en todo dominio plano en el que ninguna componenteconeza de R2 \Ω se reduzca a un punto (esta condición geométrica es necesariay suficiente para la resolubiliad del problema de Dirichlet, ver [4]).
b) En n ≥ 3 la geometría de los puntos regualres es más sutil. Cuando x0 ∈ ∂Ωyace en una esfera x : |x − y| = R donde BR(y) \ x0 ⊂ Rn \ Ω, una barreralocal es:
w(x) = R2−n − |x− y|2−n.
Hay otras condiciones geométricas sencillas que bastan para la existencia de unabarrera local en x = x0. Si Ω es un dominio acotado y C1 todos los puntos dela frontera ∂Ω satisfacen la condición del “cono exterior” por lo que se puedeasegurar que son regulares (véanse los Ejercicios).
c) N. Wiener caracterizó en 1924 la “cantidad” necesaria de “espacio” fuera deΩ, y en las proximidades de x0 para que exista una barrera local. El siguienteejemplo se debe a H. Lebesgue (1913). Describe la geometría típica de un punto“no regular”.
Teorema 9.22 (Lebesgue). En R3 \ I, I = (0, 0, z) : 0 ≤ z ≤ 1 se considerala función:
v(x, y, z) =
∫ 1
0
ds√x2 + y2 + (z − s)2
.
Se define el dominio,
Ω = √x2 + y2 + z2 < 1 ∩ v(x, y, z) < 1 + c,
donde c > 0. Entonces (0, 0, 0) es un punto no regular para el problema deDirichlet en Ω.
Observación 9.8. Se tiene en realidad que v es armónica en R3 \ I mientrasv toma el valor v = 1 + (c − ε) en superficies Sε dentro de Ω que pasan por(0, 0, 0) formando allí una cúspide simétrica con respecto al eje 0z. Eso quieredecir que el problema de Dirichlet (9.12) con dato g(x) = v(x) en ∂Ω carecede soluciones clásicas. En efecto, v no lo es porque ni siquiera es continua en

258 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
(0, 0, 0). El esfuerzo de la prueba reside en demostrar que si u es una soluciónclásica de,
∆u = 0 en Ω
u = v en ∂Ω.
entonces u = v en Ω lo que contradice la hipótesis de que u sea una soluciónclásica.
Observación 9.9. Como corolario de la sección hemos establecido que todo do-minio Ω ⊂ Rn acotado y C1 admite una función de Green G = G(x, y). Debeadvertirse sin embargo que los métodos desarrollados no aseguran la regularidadC1 de G hasta la frontera. Esta clase de información requiere un tratamientomás elaborado (cf. [13]).
9.6. El semiespacioEl problema de Dirichlet cuando Ω = Rn+1
+ es resoluble con unicidad siimponemos condiciones de crecimiento en el infinito a las soluciones. En la Sec-ción 9.2 ya se obtuvo una función de Green formal en Ω = Rn+1
+ . El siguienteresultado establece condiciones de existencia y unicidad para el problema deDirichlet.
Teorema 9.23. Para cada φ ∈ Cb(Rn) el problema de Dirichlet,∆u = 0 (x, xn+1) ∈ Rn+1
+
u = φ (x, 0) ∈ ∂Rn+1+ ,
admite una única solución acotada u ∈ C2(Rn+1+ ) ∩ Cb(xn+1 ≥ 0) que viene
dada explícitamente por la expresión,
u(x, t) =2t
(n+ 1)ωn+1
∫Rn
φ(y)
|(x− y, t)|n+1dy.
Demostración. La unicidad es consecuencia de combinar el teorema de Liouvilley el principio de reflexión de Schwartz en xn+1 = 0 (véanse los Ejercicios).
Por otro lado, usando:
G(ξ, η) = −Γ2(ξ − η) + Γ2(ξ − η∗),
donde ξ = (x, xx+1), η = (y, yn+1), η∗ = (y,−yn+1) podemos proponer “formal-mente” a:
u(ξ) = −∫Rn
∂G
∂ν(ζ, ξ)φ(ζ) dSζ =
∫Rn
∂G
∂yn+1(ζ, ξ)|yn+1=0φ(y, 0) dy, (9.13)
como solución del problema. Se tiene:
∂G
∂yn+1((y, 0), (x, t)) =
1
(n+ 1)ωn+1
2t
|(x− y, t)|n+1.

9.7. LA ECUACIÓN DE POISSON 259
y dicha derivada es armónica en (x, t) (es a su vez la derivada de una funciónarmónica). La función subintegral en (9.13) es integrable para φ ∈ L∞ arbitrariapues,
1
(n+ 1)ωn+1
∫Rn
2t
|(x− y, t)|n+1dy =
2nωn
(n+ 1)ωn+1
∫ ∞
0
ρn−1
(ρ2 + 1)n+12
dρ
=Γ((n+ 1)/2√πΓ(n/2)
∫ ∞
0
zn2 −1(z + 1)−
n+12 dz =
Γ((n+ 1)/2√πΓ(n/2)
∫ 1
0
t12−1(1− t)
n2 −1 dt
=Γ((n+ 1)/2√πΓ(n/2)
B(1
2,n
2) = 1.
Finalmente, para la continuidad hasta la frontera sea x0 ∈ Rn un punto decontinuidad de φ y, con ε > 0 pequeño, supóngase |φ(x)−φ(x0)| ≤
ε
2si |x−x0| ≤
δ (δ > 0). La positividad del núcleo permite establecer:
|u(x, t)− φ(x0)| ≤ε
2+
2t
(n+ 1)ωn+1
∫|y−x|≥ δ
2
|φ(y)− φ(x0)||(x− y, t)|n+1
dy
≤ ε
2+
2t
(n+ 1)ωn+1
∫|y−x|≥ δ
2
2K
|(x− y, t)|n+1dy
≤ ε
2+
2t
(n+ 1)ωn+1
∫|z|≥ δ
2t
2Ktn
tn+1|z|2 + 1n+12
dz
≤ ε,
si |x−x0| ≤ δ y t es lo suficientemente pequeño como para que la última integralsea inferior a ε/2 (K ha designado una cota de φ).
9.7. La ecuación de PoissonNos ocupamos ahora de investigar condiciones suficientes para la existencia
de soluciones clásicas del problema de Dirichlet para la ecuación de Poisson:−∆u = f x ∈ Ω
u = g x ∈ ∂Ω.(9.14)
La idea principal es eliminar el término f de la ecuación utilizando el potencialde volumen Vf :
Vf (x) =
∫Ω
Γn(x− y)f(y) dy.
En el caso plano, el problema quedó esencialmente zanjado en los siguientestérminos: a) no basta la continuidad de f para la existencia de soluciones clási-cas, b) el problema admite soluciónque si f es de clase C1 en Ω. En el presentecapítulo vamos a llegar un poco más lejos en el sentido que relajaremos lascondiciones de regularidad sobre f .

260 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
A tal efecto conviene introducir la siguiente definición. Se dice que f : Ω ⊂Rn → R es Hölder continua de exponente α ∈ (0, 1] en el punto x0 ∈ Ω si:
[f ]α,x0 := sup|x−x0|≤δ,x=x0
|f(x)− f(x0)||x− x0|α
< +∞,
para cierto δ > 0. Diremos que f es localmente Hölderiana de exponente α ∈(0, 1] en Ω, lo que denotaremos f ∈ Cα(Ω), si para todo subdominio acotadoΩ1 ⊂ Ω1 ⊂ Ω se tiene que:
[f ]α,Ω1 := supx,y∈Ω1,x=y
|f(x)− f(y)||x− y|α
< +∞.
En todo lo que resta de sección Ω denotará un dominio acotado de Rn.La primera propiedad del potencial de volumen es el siguiente,
Lema 9.24. Sea f ∈ L∞(Ω). Entonces Vf ∈ C1b (Rn). Además,
∂iVf (x) =
∫Ω
∂iΓn(x− y)f(y) dy 1 ≤ i ≤ n.
Para llegar a clase C2 necesitamos un poco más de regularidad, a saber,
Lema 9.25. Si f ∈ Cα(Ω) ∩ L∞(Ω), 0 < α ≤ 1, entonces el potencial Vf ∈C2(Ω). Además:
∂ijVf (x) =
∫Ω0
∂ijΓn(x− y)(f(y)− f(x)) dy− f(x)
∫∂Ω0
∂iΓn(x− y)νj(y) dSy ,
i, j ∈ 1, . . . , n, x ∈ Ω, donde Ω ⊂ Ω ⊂ Ω0 es un dominio regular que contiene aΩ. Finalmente,
∆Vf = f.
Observación 9.10. Si bien es necesario algo más que continuidad en f para tenerVf ∈ C2(Ω) se demuestra en cambio que Vf es más regular que C2. En efecto,si 0 < α < 1 entonces Vf ∈ C2,α(Ω), es decir todas las derivadas segundas ∂ijVfde Vf son Hölderianas en Ω: ∂ijVf ∈ Cα(Ω) para i, j ∈ 1, . . . , n.
Una consecuencia inmediata del Lema 9.25 es el siguiente resultado de exis-tencia para el problema de Dirichlet.
Teorema 9.26. Sea Ω un dominio acotado de Rn para el que todos los puntosde ∂Ω son regulares mientras f ∈ Cα(Ω)∩L∞(Ω) con 0 < α ≤ 1. Entonces paratoda g ∈ C(∂Ω) el problema (9.14) admite una solución clásica u ∈ C2(Ω) ∩C(Ω).
La demostración del Lema 9.24 es consecuencia del siguiente resultado dediferenciación de integrales singulares uniformemente convergentes.

9.7. LA ECUACIÓN DE POISSON 261
Lema 9.27. Sea Ω ⊂ Rn un dominio acotado de Rn, G ∈ C((Ω×Ω) \ (x, y) :x = y). Supongamos además que para cada x ∈ Ω la función G(x, ·) ∈ L1(Ω) ytiene una singularidad uniformemente integrable en y = x. Es decir:∫
Bε(x)∩Ω
|G(x, y)| dy → 0+, (9.15)
uniformemente en x ∈ Ω cuando ε → 0+. Entonces, para toda f ∈ L∞(Ω) lafunción,
F (x) =
∫Ω
G(x, y)f(y) dy,
es continua en Ω.
Ejemplo 9.11. El núcleo de Riesz:
G(x, y) =C
|x− y|α,
x, y ∈ Rn, α > 0, satisface las condiciones del Lema 3 para α < n.
Demostración del Lema 9.27. Usaremos el teorema de la convergencia domina-da (la demostración que se da en [10] es, a nuestro juicio, substancialmente maścomplicada). Para ε > 0 introducimos (χ denota la función característica):
Fε(x) =
∫Ω
χ|y−x|>εG(x, y)f(y) dy.
De la hipótesis de continuidad sobre G se tiene la existencia de una constanteM =M(ε) tal que,
|χ|y−x|≥ ε2G(x, y)f(y)| ≤M |f |∞
para todo x ∈ Ω y casi todo y ∈ Ω. Por otro lado, si xn → x0 en Ω es inmediatoque
χ|y−xn|>εG(xn, y)f(y) → χ|y−x0|>εG(x0, y)f(y),
∀ c. t. y ∈ Ω. En efecto, |y − x0| > ε (respectivamente, |y − x0| < ε) conlleva|y − xn| > ε (r. |y − x0| < ε) para n ≥ n0. En el primer caso:
χ|y−xn|>εG(xn, y)f(y) = G(xn, y) → G(x0, y) = χ|y−x0|>εG(x0, y)f(y),
en el segundo, χ|y−xn|>εG(xn, y)f(y) = χ|y−x0|>εG(x0, y)f(y) = 0 paran ≥ n0. Por tanto, Fε es continua en Ω. Finalmente es obvio que Fε → Funiformemente en Ω cuando ε→ 0+, lo que prueba la continuidad de F .
En cuanto a la diferenciabilidad de integrales singulares uniformemente in-tegrables tenemos lo siguiente.

262 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Lema 9.28. Supongamos n ≥ 2 y sea G = G(x, y) ∈ C(Ω× Ω \∆) con∂G
∂xi∈
C(Ω× Ω \∆), ∆ = (x, y) : x = y, funciones uniformemente integrables en elsentido del Lema 9.27. Entonces para f ∈ L∞(Ω) la función:
F (x) =
∫Ω
G(x, y)f(y) dy,
es continuamente derivable con respecto a xi en Ω y
∂iF (x) =
∫Ω
∂xiG(x, y)f(y) dy.
En general, si existen las derivadas parciales ∂αxG en x = y siendo las ∂αxG ∈C(Ω× Ω \∆) uniformemente integrables para |α| ≤ k entonces F ∈ Ck(Ω) y
∂αF (x) =
∫Ω
∂αxG(x, y)f(y) dy.
Demostración. Fijemos x0 ∈ Ω y definamos
Fi(x) =
∫Ω
∂xiG(x, y)f(y) dy.
Del lema 3 sabemos que Fi ∈ C(Ω). Por otro lado para h ∈ R suficientementepequeño y designando por [x0, x0 + hei] = x0 + shei : 0 ≤ s ≤ 1 tenemos lacadena de identidades:∫ h
0
Fi(x0 + sei) ds =
∫ h
0
∫Ω
∂xiG(x0 + shei, y)f(y) dyds
=
∫ h
0
∫Ω\[x0,x0+hei]
∂xiG(x0 + shei, y)f(y) dyds
=
∫Ω\[x0,x0+hei]
∫ h
0
∂xiG(x0 + shei, y) dsf(y) dy
=
∫Ω\[x0,x0+hei]
G(x0 + hei, y)f(y) dy−∫Ω\[x0,x0+hei]
G(x0, y)f(y) dy
=
∫Ω
G(x0 + hei, y)f(y) dy −∫Ω
G(x0, y)f(y) dy
= F (x0 + hei)− F (x0),
en las que el intercambio de integrales iteradas viene avalado por el teorema deFubini. Lo que se ha probado entonces es que ∂iF (x0) = Fi(x0). La demostracióndel resto de las afirmaciones es rutinaria.

9.7. LA ECUACIÓN DE POISSON 263
Observación 9.12. La restricción n ≥ 2 del lema está implícita en el hecho deque el segmento [x0, x0 +hei] tiene medida de Lebesgue cero en Rn para n ≥ 2.Más aún, el resultado es significativamente falso en dimensión n = 1. En efecto,si Ω = (a, b) y tomamos como núcleo G(x, y) = θ(x− y) la función de Heaviside
resulta∂G
∂x= 0 para x = y. Pero además para f ∈ L∞(a, b):
F (x) =
∫ b
a
θ(x− y)f(y) dy =
∫ x
a
f(y) dy,
la cual en general no es diferenciable en la totalidad de los puntos de (a, b).
Ejemplo 9.13 (Solución fundamental de la ecuación del calor). Tomemos
U(x, t) =1
(√4πt)
e−|x|24t ,
si t > 0, U(x, t) = 0 si t ≤ 0 pero (x, t) = (0, 0).Para QT = 0 < t < T (T > 0), f ∈ L∞(Q) formamos
u(x, t) =
∫∫QT
U(x− ξ, t− τ)f(ξ, τ) dξdτ =
∫ t
0
∫Rn
U(x− ξ, t− τ)f(ξ, τ) dξdτ.
La función u es continua pues∫ t
t−δ
∫|ξ−x|<δ
U(x− ξ, t− τ)|f(ξ, τ)| dξdτ → 0
uniformemente en (x, t) cuando δ → 0+. Además u ∈ C1,0(QT ) con derivadas:
∂xiu =
∫∫QT
∂xiU(x− ξ, t− τ)f(ξ, τ) dξdτ,
pues ∫ t
t−δ
∫|ξ−x|<δ
∂xiU(x− ξ, t− τ)|f(ξ, τ)| dξdτ → 0
uniformemente en (x, t) cuando δ → 0+. En efecto esta última integral se con-trola por
C
∫ t
t−δ
∫|ξ−x|<δ
|xi − ξ|(t− τ)
e−|x−ξ|2
4tdξdτ
(t− τ)n/2≤
C
∫ δ
0
∫|y|≤ δ√
s
1√syie
− 14 |y|
2
dydτ ≤ C
∫ δ
0
ds√s.
Si f ∈ C1,0(QT ) con derivadas espaciales ∂xif ∈ L∞(QT ) entonces u es C2,1
con derivadas de segundo orden:
∂2xixju =
1
πn/2
∫ t
0
∫Rn
yi√t− τ
e−|y|2∂xjf(x+ 2y√t− τ , τ) dydτ.

264 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
Para ello es mejor transvasar la x a f en la integral, después derivar f conrespecto a xi, reescribir la derivada como una derivada con respecto a ξi integrarpor partes y cargar la derivada a la exponencial. Todo esto da:
∂xiu =1
πn/2
∫ t
0
∫Rn
yi√t− τ
e−|y|2f(x+ 2y√t− τ , τ) dydτ.
Esta expresión ya está preparada para ser derivada una vez más. Además lasderivadas resultantes cumplen ∂2xixj
∈ L∞(QT ).
9.8. Ejercicios1. Obtener la función de Green para el problema de Dirichlet en los siguientes
dominios de Rn:
a) La semiesfera de Rn, Ω = Ba(0) ∩ xn > 0.b) En R3, el octante x1 ≥ 0, x2 ≥ 0, x3 ≥ 0.c) En R3, el octante de esfera Ω = Ba(0) ∩ x1, x2, x3 > 0.
2. Dése una definición adecuada para la función de Green y el problema deNeumann en un dominio acotado y C1 de Rn, justificando la definición conla correspondiente fórmula de representación de soluciones del problema.A tal efecto seguir la siguiente guía de instrucciones.
a) Probar que si u ∈ C2(Ω) es una solución clásica del problema:∆u = f x ∈ Ω∂u
∂ν= g x ∈ ∂Ω,
(N)
entonces: ∫Ω
f =
∫∂Ω
g. (C)
Utilizar libremente en lo que sigue que (C) es también condición suficien-te para la existencia de al menos una solución clásica del problema deNeumann (N).
b) Pruébese que: ∫∂Ω
∂Γn
∂ν(y − x) dSy = 1,
x ∈ Ω.
c) Determínese la constante α ∈ R para que el problema:∆h = f x ∈ Ω∂h
∂ν= Γn(· − y)− α x ∈ ∂Ω,
(A)
admita al menos una solución h1 = h1(x, y).

9.8. EJERCICIOS 265
d) Sea h1 una cualquiera de las soluciones clásicas del problema (A). Fórmesela función:
G1(x, y) = −Γn(x− y) + h1(x, y).
Demuéstrese que toda solución clásica (prescindimos deliberadamente delos detalles de regularidad) del problema (N), supuesto que exista (ver 1))se puede representar en la forma:
u(x) =1
|∂Ω|n−1
∫∂Ω
u(y) dSy
+
∫∂Ω
G1(y, x)∂u
∂ν(y) dSy −
∫Ω
G1(y, x)∆u(y) dy ,
x ∈ Ω, es decir:
u(x) =1
|∂Ω|n−1
∫∂Ω
u(y) dSy
+
∫∂Ω
G1(y, x)g(y) dSy −∫Ω
G1(y, x)f(y) dy .
De la fórmula de representación (G) se deduce las únicas soluciones paraf = 0 y g = 0 son las constantes. Otra conclusión es que si f y g cumplen lacondición de compatibilidad de existencia de soluciones, existe una únicasolución de (P) con promedio fijado.
3. Pruébese el teorema de representación de Green en el plano, a saber, siu ∈ C2(Ω) donde Ω es acotado y C1, entonces se tiene que:
u(y) =
∫∂
(u(x)
∂Γ2
∂ν(x− y)− Γ2(x− y)
∂u
∂ν(x)
)dsx
+
∫Ω
Γ(x− y)∆u(x) dx,
siendo Γ2(z) = 12π log |z| la solución fundamental del Laplaciano en el
plano.
4. Sea Ω ⊂ Rn un dominio que es simétrico con respecto al plano xn = 0con sección no vacía T en el hiperplano xn = 0. Denotemos x = (x′, xn),x′ ∈ Rn−1, Ω+ = Ω ∩ xn > 0, Ω− = (x′,−xn) : x ∈ Ω+. Demuéstrese(principio de reflexión de Schwarz) que toda función u ∈ C2(Ω+)∩C(Ω+),armónica en Ω+ se extiende a una única función armónica en Ω.Indicación. Usar el teorema de la media.
5. Sea u armónica y no negativa en la bola BR(0) (continua hasta la frontera).De la integral de Poisson demuéstrese la desigualdad de Harnack,
Rn−2(R− |x|)(R+ |x|)n−1
u(0) ≤ u(x) ≤ Rn−2(R+ |x|)(R− |x|)n−1
u(0).

266 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
6. Demuéstrese que u ∈ C(Ω) es subarmónica en Ω si y sólo si satisfacelocalmente la desigualdad del valor medio, es decir ∀y ∈ Ω, ∃δ = δ(y) > 0tal que:
u(y) ≤ 1
nωnRn−1
∫∂BR(y)
u(y) dSy,
para cada 0 < R ≤ δ.
7. Usar las ideas del capítulo para probar que si u es armónica en Ω ⊂ Rn setiene la estimación interior del gradiente en x0 ∈ ∂Ω:
|∂iu(x0)| ≤n
d0(u(x0)− ınf
Ωu) d0 = dist (x0, ∂Ω).
Análogamente,
|∂iu(x0)| ≤n
d0(sup
Ωu− u(x0)) d0 = dist (x0, ∂Ω).
Pruébese que:
|∂iu(x0)| ≤n
d0u(x0) d0 = dist (x0, ∂Ω)
si u ≥ 0.
8. Pruébese (teorema de Liouville) que toda función armónica en Rn y aco-tada superiormente es constante.
9. Singularidades evitables. Sea u ∈ C2(BR(0)\0)∩C(BR(0)\0) una funciónarmónica tal que u = 0 en |x| = R mientras,
u(x) = o(Γn(x)),
cuando x → 0. Demuéstrese que u = 0 en BR(0) \ 0. Como corolariopruébese que si u ∈ C2(Ω \ x1, . . . , xN ) es armónica junto con u(x) =o(Γn(x − xi)) cuando x → xi, para cada i ∈ 1, . . . , N entonces u ad-mite una única extensión armónica a Ω. Finalmente, demuéstrese que elproblema de Dirichlet para la ecuación de Laplace está mal propuesto entoda región G de la forma G = Ω \ x1, . . . , xN donde Ω es un abierto deRn y x1, . . . , xN es una familia finita de puntos de Ω.
Indicación. Seguir las ideas del Capítulo ?? (anterior).
10. Se considera la solución clásica u ∈ C2(B)∩C(B), donde B = BR(0), delproblema de Dirichlet para la ecuación de Laplace:
∆u = F (x) x ∈ B
u(x) = G(x) x ∈ ∂B,
siendo F y G funciones continuas y radiales: F (x) = f(|x|), G(x) = g(|x|)para sendas funciones f y g. Demuéstrese que también u(x) es radial.

9.8. EJERCICIOS 267
Obténgase la misma conclusión en un anillo Aa,b = a < |x| < b. En elmismo género de ideas, demuéstrese que si f = f(x) es radial, en Ω ⊂ Rn
(luego Ω es una bola o un anillo) entonces el correspondiente potencial devolumen V (x) =
∫ΩΓ(x − y)f(y) dy es también radial. Pruébese que si
n = 3 y si f es constante en el anillo Aa,b entonces ∇V = 0 dentro de lacavidad |x| < a.
11. En una región Ω del espacio R3 se considera una distribución de masascon densidad f(y), que supondremos acotada, e. d. f ∈ L∞(Ω). Por tanto,la masa neta de Ω resultará ser:
M =
∫Ω
f(y) dy.
Si se considera el potencial newtoniano con densidad f
V (x) = −4πG
∫Ω
Γ3(x− y)f(y) dy = G
∫Ω
f(y)
|x− y|dy,
donde Γ3 representa la solución fundamental del laplaciano, pruébese que
V (x) ∼ GM
|x|
uniformemente cuando |x| → ∞. ¿Qué conclusión se puede sacar de esteresultado?
12. Consideremos la sucesión de problemas de Dirichlet:∆u = 0 x ∈ Ω
u(x) = gn(x) x ∈ ∂Ω,
donde Ω es un dominio acotado de Rn y gn es una sucesión de funcionescontinuas en ∂Ω tal que gn → g uniformemente en ∂Ω. Supongamos quecada (Pn) admite la solución clásica un ∈ C2(Ω) ∩C(Ω). Utilizar la suce-sión un para establecer la existencia de la solución clásica del problemalímite:
∆u = 0 x ∈ Ω
u(x) = g(x) x ∈ ∂Ω.
13. Un dominio acotado Ω ⊂ Rn tiene la propiedad exterior del cono si pa-ra cada x0 existe un cono recto K = K(u, θ) := tx ∈ Rn : 0 ≤ t ≤1,dist ( x
|x| , u) ≤ θ tal que (x0 + εK) \ x0 ⊂ Rn \ Ω para algún ε > 0.Denotando por ω ∈ Sn−1 la variable angular en Rn determínese en x0 unafunción barrera de la forma rλw(ω).
14. Problema de Dirchlet “exterior”. Considérese para n ≥ 3 el problema dehallar u ∈ C2|x| > R ∩ C|x| ≥ R, R > 0, tal que:
∆u = 0 |x| > R
u = g |x| = R,(E)

268 CAPÍTULO 9. ECUACIÓN DE LAPLACE (RN )
junto con la condición de contorno en el infinito:
lım|x|→+∞
u(x) = γ, (I)
donde γ es asimismo una constante prefijada.
a) Sea Ω = |x| > R.Pruébese que la transformación de Kelvin:
y =R2
|x|2x,
aplica Ω en B \ 0 (B = BR(0)). Introdúzcase el cambio de variable:
v(y) = |y|2−nu
(R2
|y|2y
)y = 0,
y demuéstrese que si u es solución de (E)-(I) entonces v es armó-nica en B \ 0 con una singularidad evitable en el origen, por tantosatisfaciendo el problema de Dirichlet:
∆v = 0 |y| < R
u = R2−ng |y| = R.(A)
b) Usar la fórmula de Poisson para resolver (A), observando que:
|x∗ − ζ| = R
|x||x− ζ| |ζ| = R,
con x∗ =R2
|x|2x. Ajustar después la condición (I) con ayuda de alguna
función armónica conveniente. Contrastar los resultados con el cason = 2 estudiado por separación de variables en el Capítulo ??.

Apéndice A
Funciones diferenciables
Dada una función real u : Ω → R, u = u(x), Ω ⊂ Rn un dominio (es decir unconjunto abierto y conexo) resulta bien conocida la noción de derivada parcialde orden k ∈ N de u en un punto x ∈ Ω (aquí N designa los naturales con el 0).
Para uso posterior se fijan las siguientes notaciones:
α ∈ Nn, α = (α1, . . . , αn),
|α| = α1 + · · ·+ αn, α! = α1! . . . αn!,
si ξ ∈ Rn es un vector, ξα = ξα11 . . . ξαn
n ,
si k ∈ N, N(k) = card α ∈ Nn : |α| ≤ k,
para α, β ∈ α ∈ Nn : |α| ≤ k, se dice que α < β si o bien |α| < |β| o porcontra, |α| = |β| pero αi < βi donde i = min j : 1 ≤ j ≤ n, αj = βj,
a cada vector c = (cα)|α|≤k ∈ RN(k) se asocia el polinomio de grado k enx1, . . . , xn:
p(x) =∑|α|≤k
cαxα.
Nótese entonces que el espacio de polinomios de grado k es isomorfo a RN(k).Se dice que u : Ω → R es de clase Ck en Ω si admite todas las derivadas
parciales u(x),∂u
∂x1(x), . . . ,
∂ku
∂kxn(x) y tales funciones son continuas en Ω. Se
denota Ck(Ω) al conjunto de tales funciones. Una de las versiones del teoremade Schwartz 1, viene a decir lo siguiente: si todas las derivadas parciales de ordenl− 1 de una función real u(x) son continuas en el entorno de un punto x0 ∈ Rn
y si una derivada parcial específica de orden l de u(x) - llamémosla vl(x) - existeen dicho entorno y es continua, entonces existen y coinciden con vl(x) todasaquellas derivadas parciales vl(x) de u(x) de orden l que involucran el mismonúmero de derivadas parciales respecto de las mismas variables que aparecen en
1Ver, por ejemplo, T. M. Apostol 2a edición, nota en página 436.
269

270 APÉNDICE A. FUNCIONES DIFERENCIABLES
vl(x), aunque tomadas en distinto orden. Luego si en vl(x) se deriva -en el ordenque sea- α1 veces con respecto a x1, . . . , αn veces con respecto a xn (algunosde los αi muy bien pudieran ser cero) todas esas derivadas vl(x) coinciden conla derivada canónica:
∂lu
∂α1x1 . . . ∂αnxn(x).
Siguiendo a L. Schwartz dicha derivada se denota como ∂αu(x), en referencia almultiíndice α ∈ Nn. Por tanto, si 0 ≤ l ≤ k por cada α ∈ Nn, |α| = l tendremosun total de |α|!
α! = l!α! derivadas parciales de orden l de u(x) que coinciden con
∂αu(x). Por otra parte el número total de derivadas parciales de u ∈ Ck(Ω)de orden l coincide con el de las combinaciones con repetición de n elementostomados l a l, CRn,l, es decir Cn+l−1,l =
(n+l−1
l
).
Se repasan a continuación algunas nociones de cálculo diferencial en variasvariables. Para u : Ω ⊂ Rn → Rp, Ω abierto de Rp, se dice que u(x) es diferen-ciable en x0 ∈ Ω si ∃L ∈ L(Rn,Rp) tal que:
u(x) = u(x0) + L(x− x0) + o(|x− x0|), x→ x0.
Decimos que L es la derivada o la diferencial de u en x0 y escribimos L =du|x=x0
= u′(x0) (también Du(x0)). Si e1, . . . , en son los vectores de la basecanónica de Rn la diferenciabilidad de u en x0 implica la existencia de todas lasderivadas parciales ∂u
∂xi(x0) = L(ei). Por otra parte, la existencia y continuidad
de las n funciones ∂u∂xi
(x) en un entorno U de x0, implica la diferenciabilidad deu en x0, donde L viene representada en la base canónica mediante las fórmulasprecedentes.
Admitimos ahora que u : Ω → R es diferenciable en cada x ∈ Ω. Si u′ = u′(x),u′ : Ω → L(Rn,R) es diferenciable en x0, su derivada u′′(x0) ∈ L(Rn,L(Rn,R))(usaremos también los símbolos D2u(x0) y d2u|x=x0
). Para v1 ∈ Rn se tendráu′′(x0)(v1) ∈ L(Rn,R). Por eso u′′(x0)(v1)(v2) ∈ R y ésta última función esbilineal en (v1, v2). Por eso escribimos:
u′′(x0)(v1)(v2) = u′′(x0)(v1, v2).
Se tiene además la siguiente propiedad:
u′′(x0)(ei, ej) =∂2u
∂xj∂xi(x0),
para cada i, j. Si vj = (vji ), j = 1, 2 entonces:
u′′(x0)(v1, v2) =∑i1,i2
v1i1v2i2
∂2u
∂xi2∂xi1(x0).
Si todas las funciones ∂2u∂xi2∂xi1
(x) existen en un entorno U de x0 y son continuasen x0, entonces ∃u′′(x0).

271
En general, si u : Ω → R admite las k−1 primeras diferenciales, con u(k−1) :Ω → Lk−1(Rn,R), siendo Lm(Rn,R) el espacio de las aplicaciones m lineales,e. d., aplicaciones
L : Rn× m· · · ×Rn −→ R(v1, . . . , vm) 7−→ L(v1, . . . , vm)
que son lineales en cada vi cuando se fijan las demás variables, entonces laderivada (diferencial) k -ésima u(k)(x0) si existe, se define como la derivada deu(k−1) en x0. Además:
u(k)(x0)(ei1 , . . . , eik) =∂ku
∂xik · · · ∂xi1,
para cada i1, . . . , ik ∈ 1, . . . , n. Puede probarse además 2 que la propia exis-tencia de u(k)(x0) ya lleva consigo que dicha apliciación multilineal es simétrica:
u(k)(x0)(vσ(1), . . . , vσ(n)) = u(k)(x0)(v1, . . . , vn)
para cualesquiera vi ∈ Rn y permutación σ del grupo simétrico de orden n.En particular, nótese que la identidad de las derivadas cruzadas ∂iju(x0) =∂jiu(x0) se deduce de la mera existencia de u′′(x0) (¡Comparar con el teoremade Schwartz!). Con la misma notación de arriba vi = (vij) se tendrá entoncesque:
u(k)(v1, . . . , vk) =n∑
i1,...,ik=1
v1i1 . . . vkik
∂ku
∂xik · · · ∂xi1.
Ahora, si u es de clase Ck en Ω y hallamos el valor de la diferencial k-ésimaen (v1, . . . , vk) = (v, . . . , v) con v = (vi), la simetría de u(k)(x0) nos lleva a laidentidad:
u(k)(x0)(v, . . . , v) =n∑
i1,...,ik=1
vi1 . . . vik∂ku
∂xik · · · ∂xi1
=∑|α|=k
k!
α!vα11 . . . vαn
n ∂αu(x0)
=∑|α|=k
k!
α!vα∂αu(x0).
Normalmente escribiremos u(k)(x0)(v, . . . , v) = u(k)(x0)(v)k.
Otro resultado importante es la regla de la cadena. Si f : Ωabto. ⊂ Rn → Rm,g : Ωabto.
1 ⊂ Rm → Rp son diferenciables, entonces gf lo es y (gf)′ = g′f ′. Enotros términos, si g = g(y) = (g1(y), . . . , gp(y)), f = f(x) = (f1(x), . . . , fm(x)),entonces para cada 1 ≤ j ≤ m:
∂gj(f(x))
∂xi=
m∑l=1
∂gj∂yl
∂fl∂xi
.
2Ver J. Dieudonné, Introducción al análisis, Vol. I.

272 APÉNDICE A. FUNCIONES DIFERENCIABLES
En particular, si u : Ω ⊂ Rn → R es de clase Ck entonces, ∀x ∈ Ω, v ∈ Rn y0 ≤ m ≤ k se tiene que:
dm
dtmu(x+ tv) = u(m)(x+ tv)(v)m =
∑|α|=m
m!
α!vα∂αu(x+ tv).
Una consecuencia inmediata de la última identidad es el teorema de Taylorpara funciones u : Ωabto. ⊂ Rn → R de clase Ck. A saber, si x0 ∈ Ω y x ∈ Ω estal que el segmento [x0, x] = x0 + ζ(x− x0)/1 ≤ ζ ≤ 1 ⊂ Ω entonces:
u(x) =∑
|α|≤k−1
1
α!∂αu(x0)(x− x0)
α +∑|α|=k
1
α!∂αu(x0 + θ(x− x0))(x− x0)
α,
donde 0 < θ < 1.Cuando una función es de clase C∞ en Ω en cada x0 ∈ Ω tiene sentido la
serie formal de Taylor∑
α1α!∂
αu(x0)(x− x0)α y es natural preguntarse cuándo
la serie de Taylor representa, localmente en Ω, a la función dada. Por ejemplo,si P (x) en un polinomio en Rn de grado k, entonces es inmediato comprobarque, ∀x0 ∈ Rn:
P (x) =∑|α|≤k
1
α!∂αu(x0)(x− x0)
α.
Tales funciones son las se denominan analíticas (reales) (Capítulo 3).

Apéndice B
Series Múltiples
Definición B.1. Decimos que una serie∑
α cα es convergente 1 si ∃s ∈ R talque, para toda familia creciente de índices Ak ⊂ Nn (e d. Ak finita, Ak ⊂ Ak+1
para cada2 k ∈ N y ∪kAk = Nn) se tiene que3:
lımSAk= s.
Cada elección de una familia de Ak’s da lugar a un “método” para sumar laserie. Por ejemplo:
∑α
xα = lım
(k∑
α1=1
xα11
). . .
(k∑
αn=1
xαnn
)=
1
(1− x1) . . . (1− xn),
siempre que ∥x∥∞ < 1. Aquí Ak = ∥α∥∞ ≤ k.Nuestra definición de convergencia requiere que todo método de sumar la
serie dé lugar a la misma suma. Se tiene la siguiente propiedad:
Teorema B.2. La serie∑
α cα es convergente 4 a s sí y sólo sí ∀ε > 0 existeAε ⊂ Nn finito, tal que ∀A ⊂ Nn, A finito, A ⊃ Aε, se tiene que |SA − s| < ε.
Definición B.3. La serie∑
α cα satisface la condición de Cauchy si ∀ε > 0existe Aε ⊂ Nn finito, tal que ∀A ⊂ Nn finito con A ∩ Aε = ϕ, se tiene que|SA| < ε.
Teorema B.4. La serie∑
α cα es convergente sí y sólo sí satisface la condiciónde Cauchy.
1La definición y resultados que siguen son una variación mínima de los que sobre el temase dan en “Méthodes Mathématiques pour les Sciences Physiques"por L. Schwartz, Hermann,París (1965).
2Suponemos que 0 ∈ N.3Para cada A ⊂ Nn finita escribiremos la suma parcial con índices en A como SA =
Σα∈Acα.4Es esta afirmación lo que se suele tomar como definición de convergencia de una serie
múltiple.
273

274 APÉNDICE B. SERIES MÚLTIPLES
Es conveniente observar que si una serie∑
α cα tiene todos sus términoscα ≥ 0 entonces es evidente que s < +∞ o bien s = +∞ y su suma no puedeser otra que:
s = supA⊂Nn
sA.
Se tiene además el siguiente teorema.
Teorema B.5. La serie∑
α cα es convergente sí y sólo sí es absolutamenteconvergente, e. d.,
∑α |cα| < +∞.
En otras palabras, la clase de convergencia que aquí se considera se reduceen última instancia a la de series no negativas (se descartan las series “condicio-nalmente convergentes").
Teorema B.6. Supongamos que∑
α cα es convergente. Si Bm es una particiónde Nn entonces todas las series parciales
∑β∈Bm
cβ son convergentes, pongamosa sm, y además
∑α cα =
∑m sm.
Definición B.7. Sean cα = cα(x) una familia de funciones reales en un abiertoΩ ⊂ Rn. Se dice que la serie
∑α cα(x) converge uniformemente en Ω si ∀ε > 0
existe m(ε) ∈ N tal que ∀A ⊂ |α| > m(ε) se tiene que
|SA(x)| < ε para cada x ∈ Ω.
Obsérvese que la definición equivale a que en la condición de Cauchy para∑α cα(x), Aε sólo dependa de ε y no de x ∈ Ω. Por otro lado, si
∑α cα(x) con-
verge uniformemente en Ω la sucesión de sumas parciales Sm(x) =∑
|α|≤m cα(x)
converge uniformemente en Ω a la suma∑
α cα(x) de la serie.Diremos que la serie Σαaα mayora a Σαcα, y escribimos Σαcα ≪ Σαaα, si
para cada α se tiene que |cα| ≤ aα.Se tiene el siguiente resultado.
Teorema B.8 (Teorema “M” de Weierstrass). En las condiciones precedentessupongamos que las funciones cα(x) son de clase Ck en Ω y que para cadaβ ∈ Nn, 0 ≤ |β| ≤ k, la serie
∑α ∂
βcα(x) <<∑
α cβα con
∑α c
βα < +∞,
entonces la suma de la serie c(x) =∑
α cα(x) es de clase Ck de forma que, paracada β,
∂βc(x) =∑α
∂βcα(x).
Demostración. Se ve inmediatamente que Sm(x) es de Cauchy en sentido uni-forme en Ω. Fijados x0 ∈ Ω, ε > 0, ∃δ = δ(ε, x0) con |Sn(x) − Sn(y)| < ε parax, y ∈ Bδ(x0) y n arbitrario. De ahí se deduce fácilmente que s(x) = lımSm(x)es continua en x = x0.
Para la diferenciabilidad definimos por ejemplo vi =∑∂icα(x). Como,
Sm(x) = Sm(x0) +
∫ t
0
∂iSm(x0 + s ei) ds ,

275
si x = x0 + t ei, resulta entonces que
s(x) = s(x0) +
∫ t
0
vi(x0 + s ei) ds .
Luego ∂is(x0) = vi(x0).
Ejemplo B.1. La función
1
(1− x1) . . . (1− xn)=∑α
xα
se obtiene como una serie en Ω = x/||x||∞ < 1. Es de clase C∞, pero ademástodas sus derivadas se pueden obtener derivando término a término dicha serie.Para ello, basta con demostrar que las series derivadas convergen uniformementesobre compactos de Ω. Bastará con mayorarlas en ||x||∞ ≤ r < 1. La seriederivada β veces es: ∑
α
α!
(α− β)!xα−β := A.
Se recuerda ahora que una serie de potencias f(z) =∑
n an(z − z0)n se puede
derivar término a término, y la serie y todas las series derivadas convergenuniformemente en cada disco |z − z0| ≤ r para cada 0 < r < ρ, donde ρ es elradio de convergencia ρ−1 = lım(|an|)
1n . En particular:
k!
(1− z)k+1=∑n≥k
k!
(n− k)!zn−k
converge absoluta y uniformemente en |z| ≤ r < 1. Por ello,
A≪∑γ
(β + γ)!
γ!|xγ | =
lımm→+∞
(m∑
γ1=1
(β1 + γ1)!
γ1!|xγ1
1 |
). . .
(m∑
γn=n
(βn + γn)!
γn!|xγn
n |
)=
β!
(1− |x1|)β1+1 . . . (1− |xn|)βn+1≤
β!
(1− r)|β|+n< +∞,
de lo que se deduce la afirmación formulada más arriba.
Teorema B.9. Sea∑
α cαxα una serie de potencias que converge (por tanto
absolutamente) en z = (zi) con |zi| > 0 para cada i, e.d.,∑α
|cα||zα| < +∞.

276 APÉNDICE B. SERIES MÚLTIPLES
Entonces∑
α cαxα converge absolutamente a una función c(x) de clase C∞ enel polidisco 5 D(0, |z|) = x/|xi| < |zi|, 1 ≤ i ≤ n. Además, para cada β ∈ Nn,x ∈ D(0, |z|) se tiene que:
∂βc(x) =∑α≥β
α!
(α− β)!cαx
α−β .
En particular c(x) =∑
α1α!∂
αc(0)xα. Por otra parte, para cada x1 ∈ D(0, |z|)se tiene que:
c(x) =∑α
cα(x− x1)α,
donde la serie converge en un cierto entorno N(x1) ⊂ D(0, |z|) de x1 y donde,para cada α se tiene que:
cα =∑β≥α
β!
α!(β − α)!cβ x
β−α1 .
Finalmente, para cada x1 ∈ D(0, |z|) existe un entorno N(x1) ⊂ D(0, |z|) de x1y constantes positivas M, r > 0 tales que:
|∂αc(x)| ≤M|α|!r|α|
, ∀x ∈ N(x1).
Propiedad B.10. Supongamos que∑
α cαxα es una serie formal de potencias
tal que:
lim(|cα|)1/|α| =1
λ< +∞,
entonces c(x) =∑
α cαxα converge absolutamente en ∥x∥∞ < λ. Además λ =
sup r tal que la serie converge absolutamente en D(0, r), r = (r, . . . , r), r > 0.
No obstante, la geometría del dominio de convergencia absoluta de una serieno tiene por qué ser un “cubo”. Para tener un polidisco, basta multiplicar nseries de potencias
∑ainx
ni de cada una de las coordenadas xi. Un ejemplo más
exótico es∑aα1α2x
α1yα2 con aα1α2 = δα1α2/α1α2 (δij la delta de Kronecker).Es fácil ver que el dominio de convergencia absoluta es |xy| ≤ 1.
5Para r = (r1, . . . , rn) ∈ Rn+, x0 = (x0i) ∈ Rn, designaremos por D(x0, r) = x/|xi−x0i| <
ri, 1 ≤ i ≤ n.

Apéndice C
Superficies. Integrales desuperficie
Las siguientes líneas recogen la materia básica que usaremos sobre integra-ción de superficies.
Se dice que S ⊂ Rn es una superficie simple de clase Ck, k ≥ 1, si existeU ⊂ Rn−1 abierto y conexo y una apilciación de clase Ck
g : U −→ Rn
s 7−→ g(s),
x = (x1, . . . , xn), s = (s1, . . . , sn−1), tales que:
S = x = g(s)|s ∈ U , (C.1)
g = g(s) es inyectiva (C.2)
y
rango∂g
∂s1, . . . ,
∂g
∂sn−1
= n− 1 ∀s ∈ U. (C.3)
El par (g, U) se denomina una parametrización de S. Fijadas S y (g, U), dire-mos que (g, U), g : U → Rn, x = g(σ), σ = (σ1, . . . , σn−1), g de clase Ck, gsatisfaciendo (C.1), (C.2), (C.3), es una parametrización equivalente de S si laaplicación g−1 g : U → U es un homeomorfismo Ck con inverso también Ck.Así pues, una superficie Ck se define a través de todas sus parametrizacionesequivalentes.
No es muy difícil probar que g define un homeomorfismo local, e. d., surestricción a un pequeño entorno de cualquier punto p ∈ U es un homeomorfismo(Ejercicio). Así, g define un homeomorfismo de U sobre S. Análogamente, lamisma cuenta puede aprovecharse para comprobar que dos parametrizacionesarbitrarias g y g son siempre equivalentes. Para ambas afirmaciones, la idea
277

278 APÉNDICE C. SUPERFICIES. INTEGRALES DE SUPERFICIE
para probar las condiciones de homeomorfismo y difeomorfismo local consiste enescribir los parámetros s (s ∼ s0) en términos de n−1 de las x′s, xi1 , . . . , xin−1 ,
sj = Sj(xi1 , . . . , xin−1), 1 ≤ j ≤ n− 1 ,
donde x ∼ x0, x0 = g(s0).Para x0 = g(s0) ∈ S, el plano tangente a S en x0 se define:
TSx0 = span∂g
∂s1, . . . ,
∂g
∂sn−1
∣∣s=s0
. (C.4)
Una curva γ regular en Rn es todo conjunto de la forma γ = x = g(s)/g : I →Rn, g de clase C1, I ⊂ R un intervalo abierto, g′ = 0 en I.
Puede probarse (Ejercicio) que toda curva γ en una superficie simple S,γ ⊂ S, se puede escribir como γ = x = g(s(t))|t ∈ I donde s : I → Rn−1
define una curva Cl en Rn−1, siendo I ⊂ R un intervalo. Se tiene la siguienteproposición inmediata (Ejercicio).
Proposición C.1. El plano tangente TSx0 a S en x0 coincide con el conjuntode los vectores tangentes en x0, de cada una de las curvas en S que pasan porx0.
Es también inmediato probar que si (g, U) y (g, U) son parametrizacionesequivalentes entonces los planos tangentes definidos por medio de g y g a travésde (C.4) coinciden. Es decir, TSx0 no depende de la parametrización (Ejercicio).
Ejemplos C.1.a) Para x ∈ Rn escribimos x = (x′, xn) con x′ = (x1, . . . , xn−1). Si f = f(x′),f : U → R, U ⊂ Rn−1 un dominio, f ∈ Ck(U), entonces xn = f(x′) es unasuperficie Ck. Su plano tangente en x0 está generado por los vectores
e1 + f ′x1en, . . . , en−1 + f ′xn−1
en∣∣x0.
b) Si F ∈ Ck(Ω), S := F = 0, donde ∇F = 0 ∀x ∈ S, se comprueba que unentorno S suficientemente pequeño de z en S con z ∈ S arbitrario, es siempreuna superficie Ck. Si x0 ∈ S el plano tangente en x0 tiene por ecuación: (x −x0) · ∇F (x0) = 0.
Consideremos ahora el siguiente determinante:∣∣∣∣∣∣∣∣∣∣a1 . . . an∂g1∂s1
· · · ∂gn∂s1
.... . .
...∂g1
∂sn−1· · · ∂gn
∂sn−1
∣∣∣∣∣∣∣∣∣∣.
Se define el producto exterior de los vectores ∂g∂s1
, . . . , ∂g∂sn−1
como:
∂g
∂s1∧ · · · ∧ ∂g
∂sn−1= A1e1 + · · ·+Anen,

279
donde Ai representa el adjunto del elemento ai del determinante. Si escribimos:
N(s) =∂g
∂s1∧ · · · ∧ ∂g
∂sn−1,
resulta que N(s) es ortogonal al plano tangente a S en x = g(s), para cadas ∈ U . En particular, dicho plano se podrá representar en x0 = g(s0) como(x − x0)N(s0) = 0. Por eso se dice que N(s) es el campo normal a S asociadoa la parametrización (g, U). Como cada x ∈ S se escribe de manera única comox = g(s) con s = g−1(x), la parametrización permite definirN como una función(en realidad un campo) de x ∈ §, N = N(x), que es de clase Ck−1.
Ejemplos C.2. Para S definida como xn = f(x′), x′ = (x1, . . . , xn−1) se tieneque:
N = (−1)n(fx1 , . . . , fxn−1 ,−1).
Si S se representa por F (x) = 0, de la expresión anterior y el teorema de laFunción Implí cita se deduce,
N = (−1)n+1∇FFxn
.
Consideremos ahora otra parametrización x = g(σ) de S y calculamos elcampo normal en dicha parametrización: N(σ). Se tiene,
N(σ) =∂g
∂σ1∧ · · · ∧ ∂g
∂σn−1.
Si denotamos por G : U → U , σ = G(s) la aplicación G = g−1 g, G =(G1, . . . , Gn−1), entonces,
N(s) = det G′(s) N(σ)∣∣σ=G(s), (C.5)
donde det G′(s) = det(∂Gk
∂sl
)es el determinante jacobiano (denotado usual-
mente∂(G1, . . . , Gn−1)
∂(s1, . . . , sn−1)) que es por tanto no nulo en U . Se dice entonces que
la parametrización g tiene la misma orientación que g si det G′(s) > 0 en U ,siendo las orientaciones distintas si el determinante jacobiano es negativo. Enconclusión, una superficie simple sólo admite dos orientaciones. Los “lados de lasuperficie” se definen mediante la orientación con respecto a una parametriza-ción que sirve de referencia. Análogamente, se define el campo unitario normalS, con respecto a g, como
ν(x) =N(s(x))
|N(s(x))|s = g−1(x) .
Es obvio de (C.5) que si g define otra parametrización, entonces
ν(x) = signo (G′(s(x))) ν(x),

280 APÉNDICE C. SUPERFICIES. INTEGRALES DE SUPERFICIE
donde σ = G(s) y ν(x) = N(σ(x))/|N(σ(x))|, σ(x) = g−1(x). Es decir, cual-quiera que sea la parametrización solamente hay dos campos unitarios normales:±ν(s).
Sea ahora f : S → R una función que cumple que f g es medible en U . Sedefine la integral de superficie de f sobre S, que representaremos
∫S f dS como,∫
Sf dS =
∫U
f(g(s)) |N(s)| ds, (C.6)
siempre que la integral de Lebesgue en (C.6) exista. Si tal es el caso se dice quef es integrable-Lebesgue en S y se escribe f ∈ L1(S). Se comprueba que si f esintegrable sobre S con respecto a una parametrización g, lo es con respecto acualquier otra parametrización equivalente g, siendo el resultado de la integralindependiente de g. Es habitual llamar a dS = |N(s)| ds el elemento de área deS. De hecho, se define como área de S a la correspondiente integral en dondef = 1.
Ejemplo C.3. Las coordenadas esféricas en Rn se definen por inducción como,
x1 = ρ cos θ1
x2 = ρ sen θ1 cos θ2...
xn−1 = ρ sen θ1 sen θ2 · · · sen θn−2 cos θn−1
xn = ρ sen θ1 sen θ2 · · · sen θn−2 sen θn−1,
en donde 0 ≤ θ1, · · · ≤ θn−2 ≤ π, 0 < θn−1 < 2π. Nótese que la aplicación
(ρ, θ1, . . . , θn−1) → x
define un difeomorfismo de (0,+∞)× (0, π)×· · · (0, π)× (0, 2π) en Rn \N , N =xn−1 ≥ 0, xn = 0. Cuando en una integral n-dimensional se hace el cambiode variable a esféricas de Rn, x = x(ρ, θ1, . . . , θn−1), tenemos que eliminar Ndel recinto Ω de integración. Esto no supone ningún problema porque N tienemedida de Lebesgue zero. Por otro lado, el elemento de volumen dx se transformade acuerdo con la ley:
dx = ρn−1 senn−2 θ1 senn−3 θ2 · · · sen θn−2 dρdθ1 · · · dθn−1. (5)
Pues bien, resulta que el elemento de área de la esfera de centro cero y de radior vale:
dSr = rn−1 senn−2 θ1 senn−3 θ2 · · · sen θn−2 dθ1 · · · dθn−1 = rn−1dS1,
donde dS1 representa el área de la esfera unidad Sn−1 en Rn. Se deduce de aquíque el área σn de la esfera unidad en Rn viene dado por:
σn =2πn/2
Γ(n/2),

281
donde Γ(z) =∫∞0e−uuz−1 dz. En efecto, la integral∫ π
0
senk θ dθ =Γ((k + 1)/2)Γ(1/2)
Γ((k + 2)/2),
mientras Γ(1/2) =√π. Por otro lado, de la relación de recurrencia Γ(x+ 1) =
xΓ(x) resulta,
Γ(n2
)=
(n/2− 1)! n = 2
(n− 1)!
4[n/2][n/2]!
√π n = 2 + 1.
Así, el área de la esfera de radio r vale rn−1σn. Una simple integración muestraque el volumen de la bola de radio r es rn
n σn. Para uso posterior reservaremosel símbolo,
ωn =σnn
=2πn/2
nΓ(n/2).
para representar el volumen de la bola unidad en Rn.Finalmente, es costumbre representar la fórmula (5) como,
dx = ρn−1 dρ dS1,
donde dS1 representa el elemento de área de la esfera unidad de Rn.
Ejemplo C.4. Si f(x) = F (r), r = |x| es una función radial e integrable en eldominio esférico: Ω = a < |x| < b su integral se puede escribir como,∫
Ω
f dx = ωn
∫ b
a
F (r)rn−1 dr.
En particular, para f = e−|x|2 tenemos,∫Rn
e−|x|2 dx = ωn
∫ ∞
0
e−r2rn−1 dr = ωnΓ(n/2)
2= πn/2 .
Sea F : S → Rn un campo sobre una superficie simple S, orientada con uncampo unitario normal ν(x). Se llama flujo de F a través de S en el sentido dela normal ν a la integral, ∫
SF · ν dS,
supuesto que dicha integral exista. Remitimos a los Ejercicios del Capítulo 1para una interpretación física de la noción de flujo.
El concepto de superficie simple se extiende, por razones técnicas, al desuperficie de clase Ck (k ≥ 1). La propia esfera en R3 no es una superficiesimple (¿por qué?). Decimos que S es una superficie de clase Ck si S = S1∪· · ·∪Sm donde cada Si es una superficie simple y donde además si (gi, Ui), (gj , Uj)parametrizan respectivamente a Si y Sj con Si ∩ Sj = ϕ entonces g−1
j gi :

282 APÉNDICE C. SUPERFICIES. INTEGRALES DE SUPERFICIE
g−1i (Si ∩ Sj) → gj(Si ∩ Sj) es un homeomorfismo de clase Ck, con inverso Ck.
Se dice que Simi=1 es una estructura diferenciable de S.Si f : S → R, se define la integral de superficie de f sobre S en los términos
siguientes:∫Sf dS =
∫S1
f dS1 +
∫S2\S1
f dS2 + · · ·∫Sm\(S1∪···Sm−1)
f dSm, (6)
siempre que todas las integrales del segundo miembro existan. Se demuestra queel valor de la integral no depende de la elección de las superficies simples Si queconstituyen S, e. d., de la estructura diferenciable. En efecto si Siqi=1 es otraestructura diferenciable de S, entonces∫
Sf dS =
∫S1
f dS1 +
∫S2\S1
f dS2 + · · ·∫Sq\(S1∪···Sq−1)
f dSq,
Se dice que S es orientable si es posible elegir una familia de parametrizacio-nes de forma que el signo de los determinantes det ((g−1
j gi)′(s)) sea el mismo,siempre que Si ∩ Sj = ϕ. En este caso se puede definir sobre S un campo uni-tario normal ν que es continuo sobre S. En general se sabe que toda superficiecompacta y Ck de Rn (por ejemplo la esfera) es orientable. También se sabeque hay superficies, en el sentido aquí considerado, que no son orientables. Esun buen ejercicio construir una estructura diferenciable de la banda de Möbius,probando después que es una superficie no orientable de R3.
Ejercicio C.1. Comprúebese que la parametrización:x = a cosϕ+ t b cosϕ cos ϕ
2
y = a senϕ+ t b senϕ cos ϕ2
z = t b sen ϕ2
donde 0 < b < a, 0 ≤ ϕ ≤ 2π, −1 < t < 1, define una superficie equivalente a labanda de Möbius.
Otra noción importante es la de dominio acotado de clase Ck. Son los abiertosy conexos Ω ⊂ Rn acotados tales que su frontera ∂Ω es una superficie Ck, queal ser compacta, resulta ser orientable. Satisfacen la condición adicional de quees posible elegir un campo unitario normal a ∂Ω, ν = ν(x), de forma que paracada x ∈ ∂Ω los puntos x + tν(x) ∈ Ω para 0 ≤ t < ε, mientras x + tν(x) ∈ Ωpara −ε < t < 0, donde ε > 0 es suficientemente pequeño. Para Ω un dominiode clase Ck, ν siempre designará tal campo normal que se llama la “normalunitaria exterior”.
Se debe resaltar (ver [8], p. 354) que que toda superficie compacta S de Rn
es la frontera de un abierto de clase Ck (no necesariamente acotado), de formaque uno de sus campos normales es “exterior” a dicho abierto.
Podemos finalmente enunciar el siguiente resultado fundamental.

283
Teorema C.2 (Teorema de la divergencia). Sean Ω ⊂ Rn un dominio acotadode clase Ck, k ≥ 1 y F : Ω → Rn un campo C1 definido en Ω. Entonces setiene: ∫
∂Ω
F · ν dS =
∫Ω
div F dx.
Una consecuencia importante del teorema de la divergencia es el
Corolario C.3 (Fórmula de integración por partes). Sea Ω ⊂ Rn como en elteorema anterior y sean P,Q ∈ C1(Ω). Entonces,∫
Ω
∂P
∂xiQ dx =
∫∂Ω
PQνi dS −∫Ω
∂Q
∂xiP dx ,
donde νi representa la componente i-ésima del campo unitario y normal exteriora ∂Ω.
Ejemplos C.5.
a) Comprúebese la identidad en el teorema de la divergencia para Ω la esfera deradio a en R3 y F = r2x, con x = (x1, x2, x3).
b) Para f = f(x) = (f1, f2, f3) de clase C1 en R3 y cumpliendo |f(x)| ≤ 1/(|x|3+1), pruébese que ∫
R3
div f dx = 0 .

284 APÉNDICE C. SUPERFICIES. INTEGRALES DE SUPERFICIE

Apéndice D
Diferenciación bajo el signointegral
Sean Ω ⊂ Rn, Q ⊂ Rm abiertos (típicamente Q es o bien Rm o un pequeñ oentorno de un punto). Sea asimismo una función adecuada
f : Ω×Q −→ R(x, y) 7−→ f(x, y)
y nos preguntamos cuándo
F (y) =
∫Ω
f(x, y) dx ,
es una función suficientemente regular de y ∈ Q. Por ejemplo, si f es k vecesderivable con respecto a y, cuándo podremos derivar k veces F y cuándo elresultado de derivar equivale a derivar bajo el signo integral. El siguiente teoremahace posible la operación bajo las condiciones más razonables.
Como terminología preliminar diremos que f : Ω×Q→ R es una función deCarathéodory si f(·, y) es medible en Ω para cada y ∈ Q, mientras que f(x, ·)es continua en Q para c.t. x ∈ Ω. Entre las propiedades más interesantes deesta clase de funciones –que no demostraremos y que de momento tampocovamos a usar– señalemos las siguientes. Si u = u(x) es medible en Ω, entoncesU(x) := f(x, u(x)) coincide en c.t. x de Ω con una función medible en Ω. Si lasun = un(x) son medibes en Ω y un → u en c. t. p. x ∈ Ω (con lo que u coincidecon una función medible en c. t. p., (cf. [19]), entonces f(x, un(x)) → f(x, u(x))para c. t. x ∈ Ω.
La definición precedente se extiende de la manera obvia a funciones f :S × Q → R, S una superficie regular de clase Ck, obteniéndose las mismaspropiedades.
Podemos ya enunciar el resultado relevante de la sección.
285

286 APÉNDICE D. DIFERENCIACIÓN BAJO EL SIGNO INTEGRAL
Teorema D.1. Supongamos que las funciones ∂αy f(x, y) son de Carathéodorypara |α| ≤ k. Supongamos además que existe g = g(x) ∈ L1(Ω) tal que
|∂αy f(x, y)| ≤ g(x), y ∈ Q, |α| ≤ k para c. t.x ∈ Ω.
Entonces la función
F (y) =
∫Ω
f(x, y) dx
es de clase Ck en Q y además:
∂αF (y) =
∫Ω
∂αy f(x, y) dx ,
para todo |α| ≤ k.
Una consecuencia inmediata es el
Corolario D.2. Sea S una superficie Ck, mientras que las funciones ∂αy f(x, y)son de Carathéodory en S × Q, para |α| ≤ k. Supongamos además que existeg = g(x) ∈ L1(S) tal que
|∂αy f(x, y)| ≤ g(x), y ∈ Q, |α| ≤ k para c. t.x ∈ S.
Entonces la función
F (y) =
∫Sf(x, y) dSx
es de clase Ck en Q y además:
∂αF (y) =
∫S∂αy f(x, y) dSx ,
para todo |α| ≤ k.

Bibliografía
[1] H. Brezis, Análisis Funcional. Alianza Universidad Textos. Madrid, 1984.
[2] B. M. Budak, A. A. Samarskii, A. N. Tikhonov, Problemas de la físicamatemática (2 Vols.). Mir. Moscú, 1984.
[3] J. Crank, Mathematics of diffusion. Clarendon Press. Oxford, 1993.
[4] J. B. Conway, Functions of one complex variable. Springer. New York,1975.
[5] L. C. Evans, Partial differential equations. Graduate Studies in Mathema-tics, 19. American Mathematical Society, Providence, RI, 2010.
[6] A. Dou, Ecuaciones en derivadas parciales. Dossat. Madrid, 1970.
[7] E. DiBenedetto, Partial Differential Equations. Birkhäuser, Boston, 1995.
[8] W. Fleming, Functions of Several Variables. Springer. New York, 1977.
[9] G. Folland, Introduction to Partial Differential Equations. Princeton Uni-versity Press. Princeton, N. J., 1976.
[10] A. Friedman, Partial Differential Equations of Parabolic Type. Prentice-Hall, Englewood Cliffs, N. J., 1964.
[11] Fritz John, Partial Differential Equations. Springer. Berlín, 1980.
[12] P. R. Garabedian, Partial Differential Equations. John Willey. NewYork, 19**.
[13] D. Gilbarg, N. Trudinger, Elliptic Partial Differential Equations ofSecond Order. Springer. Berlín, 1983.
[14] S. Godounov, Ecuaciones de la física matemática. Mir. Moscú, 1978.
[15] K. Gustafson, Introduction to Partial Differential Equations and HilbertSpace Methods. John Wiley. New York, 1980.
[16] V. Mijailov, Ecuaciones en derivadas parciales. Mir. Moscú, 1978.
287

288 BIBLIOGRAFÍA
[17] I. Peral, Primer Curso de Ecuaciones en Derivadas Parciales. Addison-Wesley/Universidad Autónoma de Madrid. Madrid, 1995.
[18] M. Proter, H. Weinberger, Maximum Principles in Differential Equations.Springer–Verlag, New York, 1984.
[19] W. Rudin, Real and Complex Analysis. McGraw-Hill. New York, 1987.
[20] R. Seeley, Introducción a las series e integrales de Fourier. Reverté. Bar-celona, 1970.
[21] M. M. Smirnov, Second-Order Partial Differential Equations. Noordhoff.Groningen, 1966.
[22] W. Strauss, Partial Differential Equations: An Introduction. John Wiley.New York, 1992.
[23] E. C. Titchmarsh, The theory of functions. Oxford University Press.Oxford, 1944.
[24] A. A. Samarskii, A. N. Tikhonov, Equations from Mathematical Phy-sics. Pergamon Press. New York, 1963.
[25] V. S. Vladimirov, Equations from mathematical physics. Marcel Dekker.New York, 1971.
[26] H. F. Weimberger, Ecuaciones en Derivadas Parciales (con métodos devariable compleja y transformadas integrales). Reverté. Barcelona, 1970.
[27] D. V. Widder, The heat equation. Academic Press, New York, 1975.

![[v.P.mijailov] Ecuaciones Diferenciales en Derivadas Parciales](https://static.fdocuments.ec/doc/165x107/55cf9b5c550346d033a5c4ab/vpmijailov-ecuaciones-diferenciales-en-derivadas-parciales.jpg)










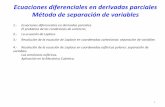
![Ecuaciones Diferenciales en Derivadas Parciales[1]](https://static.fdocuments.ec/doc/165x107/55cf9265550346f57b961a0e/ecuaciones-diferenciales-en-derivadas-parciales1.jpg)


