Dpt. Teoría de la Señal, Telemática y ... -...
15
TSTC Robótica Industrial Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada
Transcript of Dpt. Teoría de la Señal, Telemática y ... -...
TSTC
Robótica IndustrialDpt. Teoría de la Señal, Telemática y Comunicaciones
Robótica IndustrialUniversidad de Granada
TSTCTema 6: Elementos de Control enRobótica
ActuadoresS.1
El motor de corriente continuaS.1.1
IntroducciónS.0
El motor paso-a-pasoS.1.2
Elementos de transmisión de energíaS.2
Sensores internosS.3
Sensores de posiciónS.3.1
Sensores de velocidadS.3.2
Sensores externosS.4
TSTC
S0. Introducción
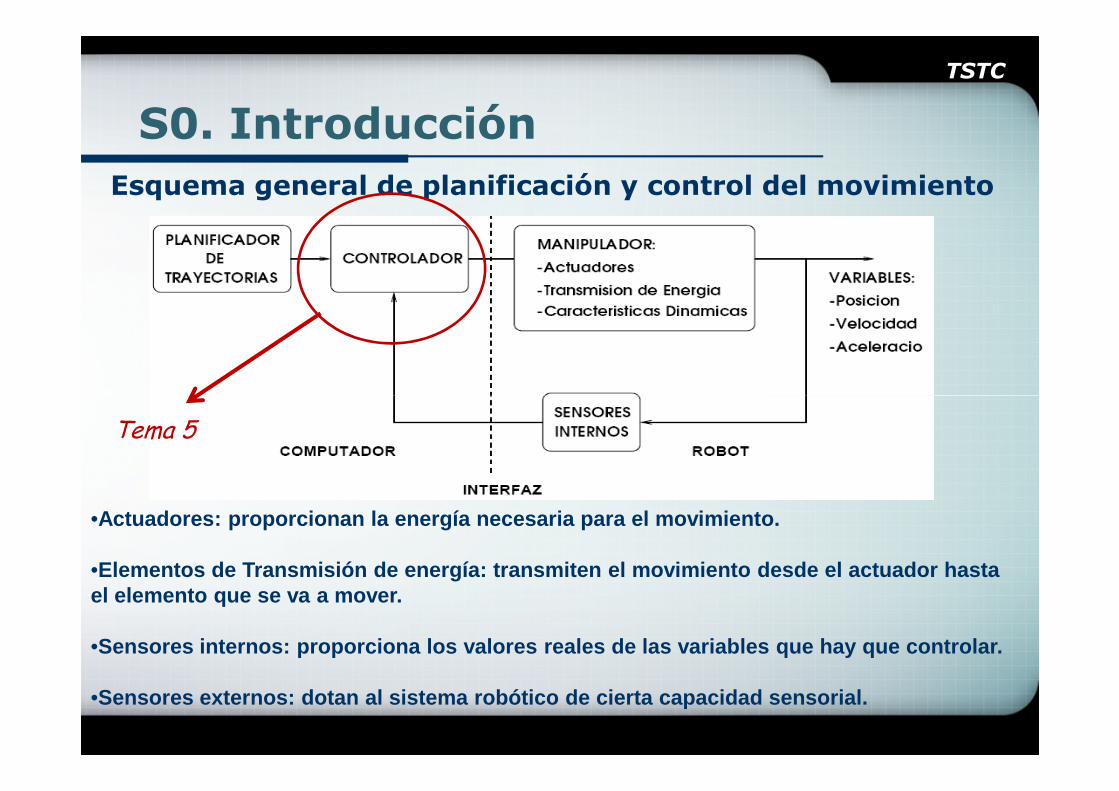
Esquema general de planificación y control del movimiento
Tema 5
•Actuadores: proporcionan la energía necesaria para el movimiento.
•Elementos de Transmisión de energía: transmiten el movimiento desde el actuador hasta el elemento que se va a mover.
•Sensores internos: proporciona los valores reales d e las variables que hay que controlar.
•Sensores externos: dotan al sistema robótico de cie rta capacidad sensorial.

TSTC
S1. ActuadoresFUNCIÓN:Proporcionan la energía necesaria para el movimiento. Convierten la señal que sale del controlador (Salida del conversor A/D) en movimiento. Suelen incluir una amplificador de potencia para aumentar la señal de control. TIPOS:
1. PARA ALTAS POTENCIAS:
1. Motores hidráulicos (motores de aceite a presión): más precisos. Apropiados para entornos peligrosos en los que se necesita precisión. Requieren mantenimiento.entornos peligrosos en los que se necesita precisión. Requieren mantenimiento.
2. Motores neumáticos (motores de aire comprimido): más baratos que los hidráulicos. Tienen precisión limitada debida a la compresibilidad del aire y baja velocidad de respuesta.
2. PARA POTENCIAS MEDIA Y BAJA: motores eléctricos
1. Motor de corriente continua : limpio y preciso. De baja potencia. Mejorable mediante motores especiales y engranajes.
2. Motor paso-a-paso: poco precisos. Admiten control en bucle abierto (no es imprescindible la realimentación

TSTC
S1. El motor de corriente continua
FUNDAMENTO: toda carga eléctrica inmersa en un campo magnético B está sometida a una fuerza F = qv x B
Esto se puede generalizar para las cargas en movimiento que circulan por una espira formando una corriente i(t)movimiento que circulan por una espira formando una corriente i(t)
Sobre las espiras se va a generar un par de fuerzas Tau proporcional a la intensidad de corriente que circula por la espira.
Ka=cte del motor que depende de la intensidad de B
señal de control
movimiento

TSTC
S1. El motor de corriente continua
Aparece una FUERZA CONTRAELECTROMOTRIZ: toda espira (o bobina) en movimiento dentro de un campo magnético genera una tensión eb entre sus extremos, que es proporcional a la velocidad angular de la espira y opuesta a la tensión externa aplicada
velocidad angular
corriente real del inducido

TSTC
S1. El motor de corriente continua
FUNCION DE TRANSFERENCIA DEL MOTOR
Ecuación mecánica del sistema
Señal de control
Movimiento
Tipo 1: error de posición=0 en los sistemas realimentados

TSTC
S1. El motor de corriente continua
Modelo detallado: incluye autoinducción por disipac iones y rozamiento

TSTC
S1. El motor paso-a-paso
FUNDAMENTO: recibe una secuencia de pulsos eléctricos de forma que por cada pulso recibido giran un ángulo incremental fijo
Estátor: 4 polos electromagnéticos
Rótor: Imán permanente de 2 polos
FUNDAMENTO: Conmutando las corrientes del estátor (impulsos eléctricos discretos) se consigue el movimiento continuo del rótor.
TSTC
S2. Elementos de transmisión de energía
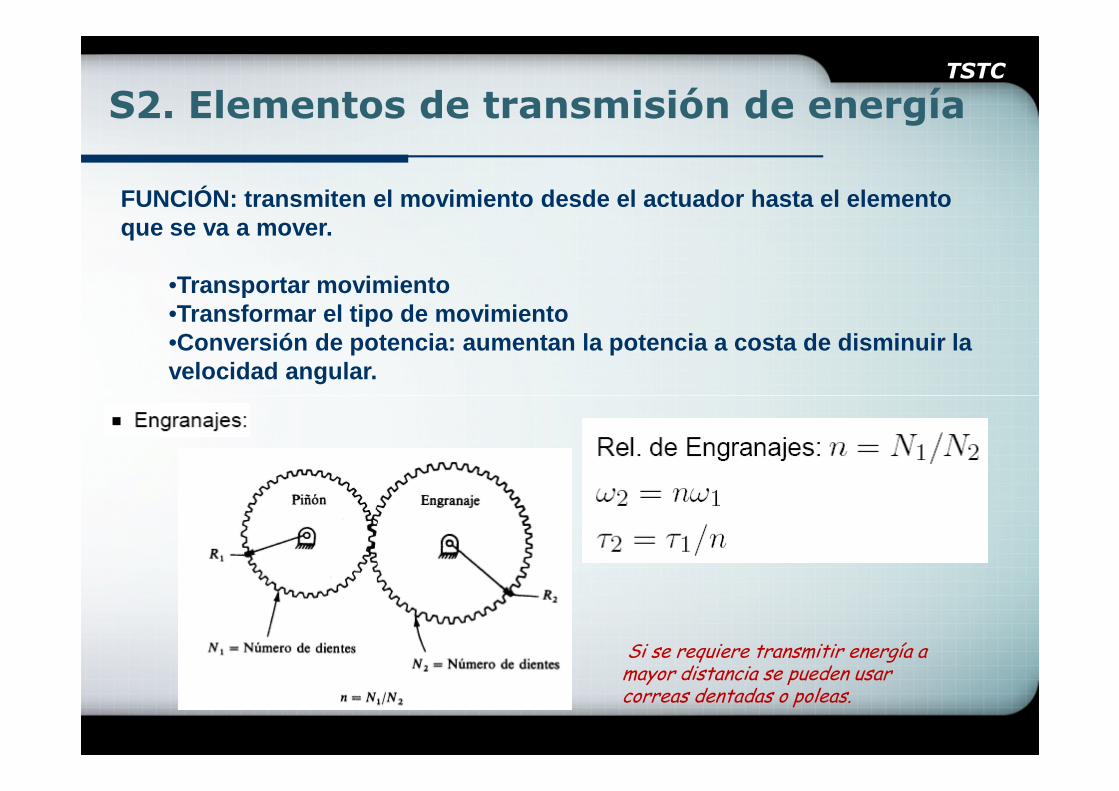
FUNCIÓN: transmiten el movimiento desde el actuador hasta el elemento que se va a mover.
•Transportar movimiento•Transformar el tipo de movimiento•Conversión de potencia: aumentan la potencia a cost a de disminuir la velocidad angular.
Si se requiere transmitir energía a mayor distancia se pueden usar correas dentadas o poleas.
TSTC
S2. Elementos de transmisión de energía
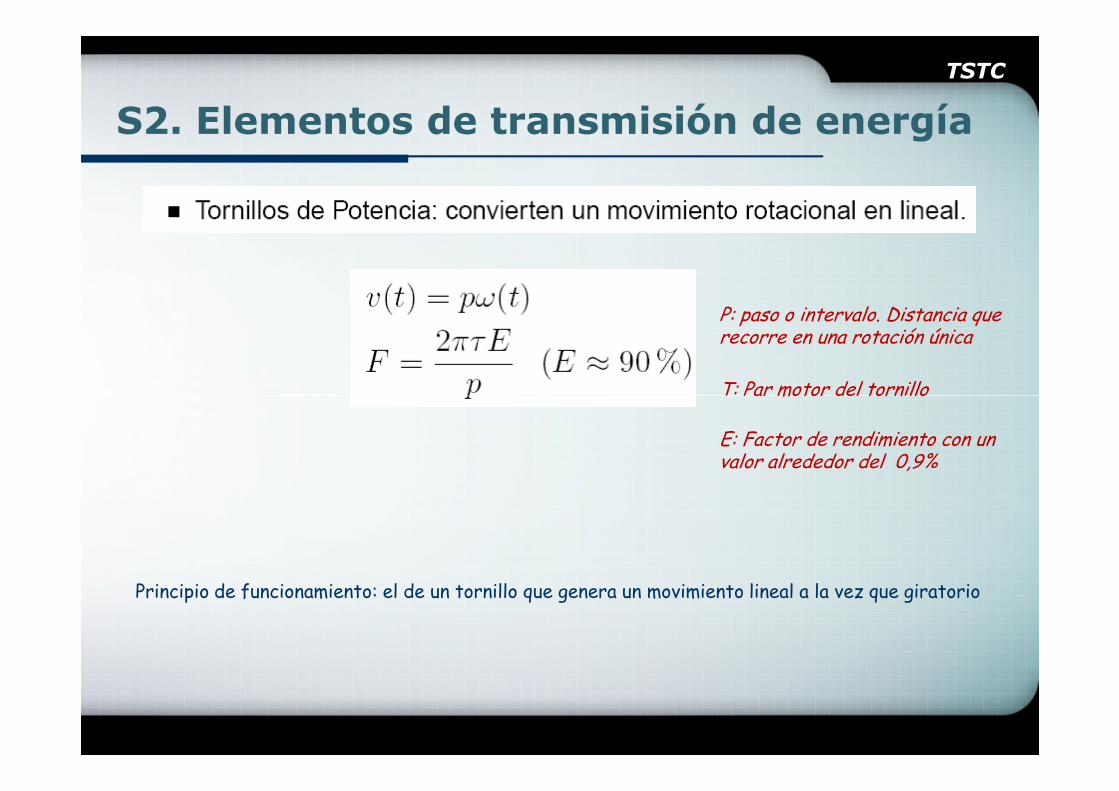
P: paso o intervalo. Distancia que recorre en una rotación única
T: Par motor del tornillo
Principio de funcionamiento: el de un tornillo que genera un movimiento lineal a la vez que giratorio
T: Par motor del tornillo
E: Factor de rendimiento con un valor alrededor del 0,9%

TSTC
S3. Sensores internos
1. SENSORES DE POSICIÓN
SENSORES INTERNOS: proporciona los valores reales d e las variables que hay que controlar.
Inconveniente: rozamiento del contador de salida sobre la resistencia. Puede producir un malfuncionamiento con el progresivo desgaste

TSTC
S3. Sensores internos
1. SENSORES DE POSICIÓN
Célula fotoeléctrica que transforma la luz en una secuencia de pulsos eléctricos

TSTC
S3. Sensores internos
TSTC
S4. Sensores externos
Utilidad : los sensores externos dotan al sistema robótico de capacidad sensorial. Hacen posible que el sistema tome sobre la marcha sus propias decisiones
SENSORES MÁS USADOS :
1. Sensores de visión (cámaras): sirven para identificar el tipo de objeto y su posición. En el caso más simple sólo detectan la presencia o ausencia de posición. En el caso más simple sólo detectan la presencia o ausencia de objetos.
2. Sensores de fuerza: útiles en aplicaciones en las que hay contacto entre objetos.