
DPS (1)
42
Universidad Dr. José Matías Delgado. Facultad de Ingeniería. “Sistemas Electrónicos” “SISTEMAS DIGITALES PARA TRATAMIENTO DE SEÑAL” Catedrático: Ing. Fidencio Castillo. Integrantes: Nombre Hércules Méndez, Rene Mauricio Nº de carnet. 2012-02219 Rivas Rodríguez, Fátima Esmeralda 2011-01643 Ciclo: 02-2014. Fecha de defensa. Viernes 17 de octubre de 2014.
-
Upload
timy-rodriguez -
Category
Documents
-
view
217 -
download
0
description
Sistemas digitales para tratamiento de señal, evolucion historicas, tipos de DSP, etc.
Transcript of DPS (1)
Universidad Dr. José Matías Delgado.Facultad de Ingeniería.“Sistemas Electrónicos”
“SISTEMAS DIGITALES PARA TRATAMIENTO DE SEÑAL”
Catedrático:Ing. Fidencio Castillo.
Integrantes:
NombreHércules Méndez, Rene Mauricio
Nº de carnet.2012-02219
Rivas Rodríguez, Fátima Esmeralda 2011-01643
Ciclo:02-2014.
Fecha de defensa.Viernes 17 de octubre de 2014.
INDICE
INTRODUCCION...........................................................................................................................3
OBJETIVOS..................................................................................................................................4
GENERAL:................................................................................................................................4
ESPECÍFICOS:...........................................................................................................................4
INTRODUCCIÓN A DSP.........................................................................................................5
¿QUÉ ES UN DSP?................................................................................................................6
EVOLUCIÓN HISTÓRICA........................................................................................................6
TIPOS DE PROCESADORES DSP.............................................................................................8
ARQUITECTURA INTERNA DEL DSP.....................................................................................10
ESTRUCTURAS DE LA MEMORIA EN LOS DSPS............................................................................10
APLICACIONES DEL DSP......................................................................................................13
CLASIFICACIÓN DE LOS DSP’S.............................................................................................16
DSP DE TEXAS INSTRUMENTS.............................................................................................18
CONCLUSION.............................................................................................................................33
INTRODUCCION
Podemos decir que cuando realizamos cualquier proceso digital para modificar la representación digital de una señal estamos haciendo procesado digital. Como proceso digital puede ser desde el más sencillo realizado por una puerta lógica al más complejo realizado por un circuito específico de procesador digital de señales (DSP). Cuando hablamos de proceso digital nos estamos refiriendo habitualmente a un programa que funciona en un PC, microcontrolador, DSP o dispositivos de lógica programable.
Una posible definición de procesado digital de señales es la siguiente: “El Procesado Digital de Señales se ocupa de la representación, transformación y manipulación de señales discretas desde el punto de vista de la información que contienen”.
A continuación en el siguiente documento se presenta información acerca del Tratamiento Digital de Señal y se hace del conocimiento los diversos dispositivos implementados para dicho proceso. Además de las bases históricas en las que se fundamenta el procesado digital, exponiendo técnicas, aplicaciones y otros aspectos que involucran los DSP.
OBJETIVOS
General: Adquirir una nueva perspectiva conociendo más a fondo los Sistemas Digitales para
el Tratamiento de Señal.
Específicos:
Obtener conocimientos generales acerca del procesamiento digital de señales Adquirir las destrezas para aplicar los conocimientos adquiridos en señales del
mundo real. Conocer diversas aplicaciones directas del procesamiento digital de señales en las
tecnologías actuales.
SISTEMAS DIGITALES PARA TRATAMIENTO DE SEÑAL
INTRODUCCIÓN A DSP
Señales.
Una señal es una magnitud física de interés que habitualmente es una función del tiempo. Voltaje en una línea telefónica (voltaje frente a tiempo). Ondas sonoras producidas por un interlocutor. (Presión frente al tiempo). Cotizaciones en bolsa de un producto (valores frente al tiempo).
En el contexto del procesado digital de señales muchas de las señales proceden de medidas del mundo real (sonidos, temperatura, luz, etc.).
Para poder utilizar estas señales necesitamos un transductor o sensor, que es un dispositivo que nos permite transformar la magnitud física en una magnitud eléctrica variable, en general una tensión.
Muchas de las señales de interés son analógicas, en las que en cualquier instante de tiempo pueden tomar cualquier valor de amplitud entre unos niveles determinados. El procesado digital no puede trabajar directamente con estas señales por lo que es necesaria una conversión de las mismas. Los procesos de muestreo y cuantificación realizan esta tarea, obteniendo una secuencia de números que representan, aproximadamente, la señal original.
Es necesario decidir 2 parámetros:
¿Con que velocidad tomamos muestras de las señal analógica?
¿Qué precisión empleamos para representar la amplitud?
Existen sistemas digitales que crean la señales internamente en lugar de emplear señales externas es el caso de la síntesis de voz o la generación de tonos telefónicos de marcación.
Señales sinusoidales, cuadradas y en general casi cualquier forma arbitraria pueden ser generadas digitalmente.
Las señales a las que hemos hecho referencia hasta ahora son señales unidimensionales, sin embargo el procesado de señales puede ser también utilizado para señales de más dimensiones como por ejemplo en procesado de imágenes o vídeo.
¿Qué es un DSP?
Los DSP o procesadores digitales de señal son microprocesadores específicamente diseñados para el procesado digital de señal. Algunas de sus características más básicas como el formato aritmético, la velocidad, la organización de la memoria o la arquitectura interna hacen que sean o no adecuados para una aplicación en particular, así como otras que no hay que olvidar, como puedan ser el coste o la disponibilidad de una extensa gama de herramientas de desarrollo.
EVOLUCIÓN HISTÓRICA
Los primeros sistemas DSP utilizaban componentes estándar para construir desplazadores, sumadores y multiplicadores. El diseño de estos últimos avanzó con la utilización de técnicas pipe-line, y los primeros multiplicadores que operaban en un único ciclo de reloj se implementaron en los primeros ‘70. con componentes ECL estándar.
En 1971, Lincon Laboratories construyó el FDP (Fast Digital Processor), con un ciclo de multiplicación de 600 ns pero que necesitaba 10.000 circuitos integrados. Tenía también los problemas inherentes a la utilización de una arquitectura von Neumann. Su sucesor, el Lincoln LSP/2, que ya utilizaba una arquitectura Harvard, era 4 veces más rápido con la tercera parte de circuitos integrados que su predecesor. Hacia mitad de los ‘70, otros grupos habían logrado computadores para procesado digital de señal con ciclos de multiplicación del orden de 200nseg,pero tan caros que no resultaban comercialmente viables. Se disponía, pues, de la estructura básica, pero sólo cuando la tecnología de fabricación de integrados se hubo desarrollado lo suficiente comenzaron a aparecer dispositivos operativos.
A principios de los 80 se presentaron los primeros dispositivos DSP.
Todos ellos utilizaban arquitectura Harvard para separar memoria de datos y programa. Esto permitía que una instrucción y un dato pudieran direccionarse y accederse al mismo tiempo. No obstante, la verdadera aportación de la arquitectura Harvard era permitir el acceso a dos espacios de memoria simultáneamente, pudiendo así obtener los dos términos del producto incluidos en la multiplicación de la ecuación anterior. Por ello, los DSP utilizan una arquitectura Harvard modificada, en la cual el espacio de memoria de programa contiene también datos (por ejemplo, en el caso de un filtro digital, los coeficientes del filtro suelen localizarse en memoria de programa, mientras que las muestras de la señal se localizan en memoria de datos).
Los primeros DSP utilizaban un formato de representación de datos en coma fija (en una sección posterior se comentarán los formatos de representación). A partir de la segunda mitad de la década de los ‘80 aparecen los DSP de coma flotante. En la actualidad, existe una gran cantidad de familias de procesadores DSP desarrolladas por diversos fabricantes.
El objetivo de ejecución de algoritmos de Procesado Digital en tiempo real condiciona la concepción de los DSP, intentando optimizar dos características básicas: precisión y velocidad. Algunos factores que influyen en la precisión son:
La anchura del bus, que está relacionada con la precisión de los datos y resultados en memoria. En el caso de coma fija, suelen ser de 16 bits, mientras que para coma flotante, la anchura es de 32 bits.
La utilización de aritmética expandida, para evitar desbordamientos en los cálculos intermedios y finales.
El uso de escalado previo de los datos, que permite modificar el rango dinámico de la señal a tratar evitando también desbordamientos. Respecto a la velocidad, los factores más influyentes son:
Cálculo eficiente de productos y sumas. Debido al gran flujo de datos implicado en las operaciones a procesar, es deseable disponer de un generador de direcciones de datos que permita acceder a los mismos sin utilizar tiempo de la ALU de cálculo.
También es interesante, para no utilizar tiempo de las unidades de computación, disponer de una unidad que determine automáticamente la secuencia de ejecución de instrucciones, encargándose del control de saltos y bucles. La inclusión de todos estos factores en la definición de la arquitectura DSP lleva a la utilización de diversas unidades funcionales, que deben poder trabajar con un elevado grado de paralelismo. En una sección posterior se comentarán estos componentes de la arquitectura genérica de un DSP.
Además de las unidades básicas apuntadas anteriormente, es frecuente que los DSP incluyan en el mismo chip periféricos tales como puertos serie o paralelo, temporizadores, módulos de memoria, etc., motivado por la gran interactividad que suelen presentar los algoritmos de procesado digital (adquisición, almacenamiento y transmisión de datos). La inclusión de estos módulos mejora la velocidad de acceso del procesador a la vez que reduce costes.
TIPOS DE PROCESADORES DSP
Existen diversas alternativas a la implementación de algoritmos de procesado digital.
Centrándonos en la aproximación DSP, existen diversos formatos en los que podemos encontrar este tipo de procesadores, dependiendo de la aplicación para la que vayan a ser utilizados:
El más habitual es el procesador encapsulado en un chip, que aparece incorporado a diseños sobre placas de circuito impreso.
Los módulos multichip (MCM) incorporan en el mismo encapsulado varios circuitos integrados, consiguiéndose así una especie de superchip que permite una mayor densidad de integración del sistema total. Los MCM pueden incluir varios procesadores (DSP y de otro tipo), así como memoria, etc.
Una generalización de esto es integrar varios procesadores en el mismo circuito integrado, mejorando las características del sistema y reduciendo el consumo.
Otra estrategia opuesta a las comentadas es distribuir el procesador en varios encapsulados (chip sets). Esto puede ser necesario si el procesador es muy complejo o se necesita un gran número de pines de entrada/salida, proporcionándose además una flexibilidad suplementaria en la combinación de unidades funcionales del procesador.
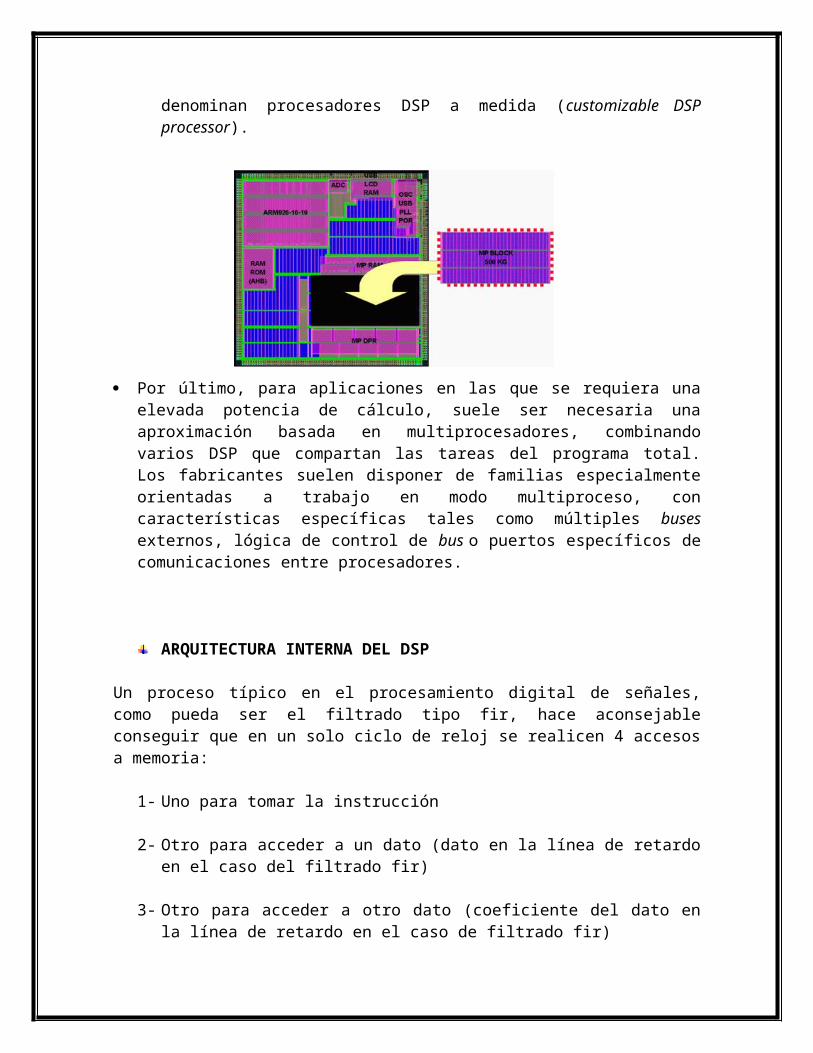
Los núcleos DSP (DSP core) son procesadores prediseñados que los fabricantes proporcionan para ser integrados en chips específicos junto al resto de circuito de desarrollo propio. Permite una solución intermedia entre la utilización de un DSP convencional y un circuito específico, mejorando los costes y tiempos de desarrollo del último y aprovechando la flexibilidad del primero. Se obtienen así dispositivos basados en DSP estándar orientados a aplicaciones específicas, como comunicaciones, multimedia, etc. Estos núcleos, dependiendo del fabricante, pueden incorporar sólo el procesador o también memoria y periféricos, y pueden utilizarse insertándolos en el diseño del ASIC como un módulo más, sin posibilidades de modificación, o pudiendo cambiar determinadas características del mismo orientadas a la aplicación, por ejemplo añadiendo una nueva unidad funcional. En este último caso, se denominan procesadores DSP a medida (customizable DSP processor).
Por último, para aplicaciones en las que se requiera una elevada potencia de cálculo, suele ser necesaria una aproximación basada en multiprocesadores, combinando varios DSP que compartan las tareas del programa total. Los fabricantes suelen disponer de familias especialmente orientadas a trabajo en modo multiproceso, con características específicas tales como múltiples buses externos, lógica de control de bus o puertos específicos de comunicaciones entre procesadores.
ARQUITECTURA INTERNA DEL DSP
Un proceso típico en el procesamiento digital de señales, como pueda ser el filtrado tipo fir, hace aconsejable conseguir que en un solo ciclo de reloj se realicen 4 accesos a memoria:
1- Uno para tomar la instrucción
2- Otro para acceder a un dato (dato en la línea de retardo en el caso del filtrado fir)
3- Otro para acceder a otro dato (coeficiente del dato en la línea de retardo en el caso de filtrado fir)
4- Otro para mover el dato (desplazarlo una posición a la derecha en la línea de retardo en el caso de filtrado fir)
ESTRUCTURAS DE LA MEMORIA EN LOS DSPs
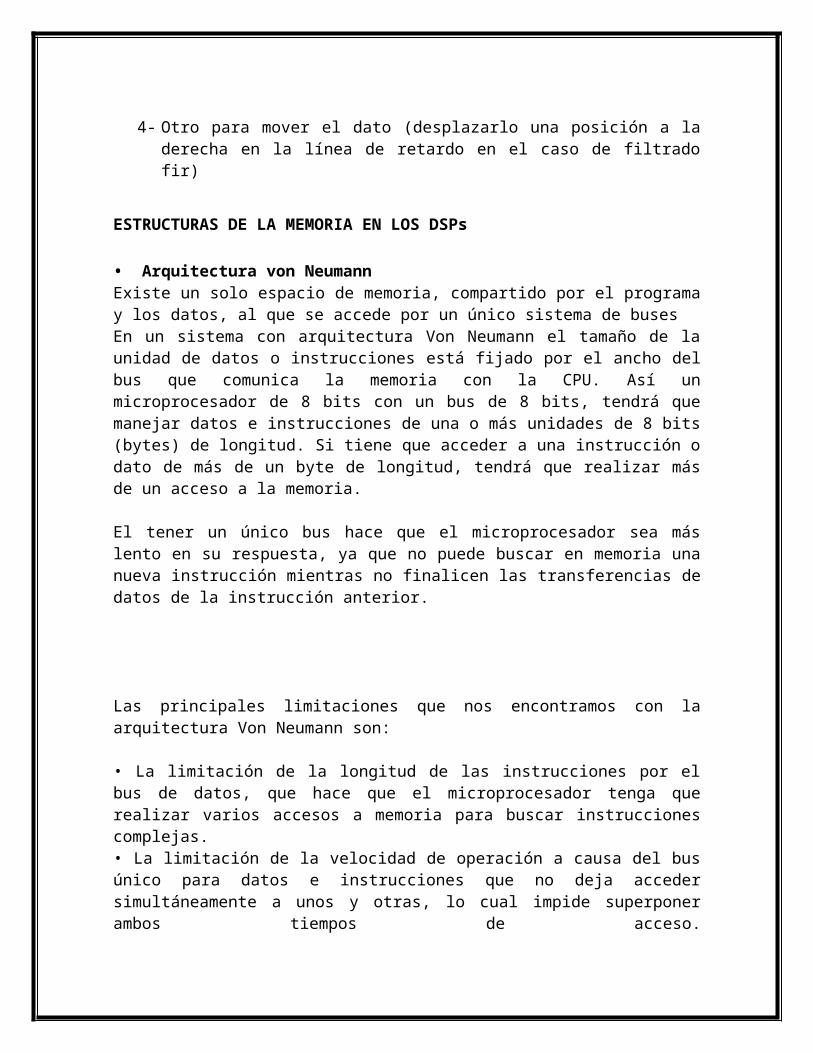
• Arquitectura von NeumannExiste un solo espacio de memoria, compartido por el programa y los datos, al que se accede por un único sistema de busesEn un sistema con arquitectura Von Neumann el tamaño de la unidad de datos o instrucciones está fijado por el ancho del bus que comunica la memoria con la CPU. Así un microprocesador de 8 bits con un bus de 8 bits, tendrá que manejar datos e instrucciones de una o más unidades de 8 bits (bytes) de longitud. Si tiene que acceder a una instrucción o dato de más de un byte de longitud, tendrá que realizar más de un acceso a la memoria.
El tener un único bus hace que el microprocesador sea más lento en su respuesta, ya que no puede buscar en memoria una nueva instrucción mientras no finalicen las transferencias de datos de la instrucción anterior.
Las principales limitaciones que nos encontramos con la arquitectura Von Neumann son:
• La limitación de la longitud de las instrucciones por el bus de datos, que hace que el microprocesador tenga que realizar varios accesos a memoria para buscar instrucciones complejas.• La limitación de la velocidad de operación a causa del bus único para datos e instrucciones que no deja acceder simultáneamente a unos y otras, lo cual impide superponer ambos tiempos de acceso.
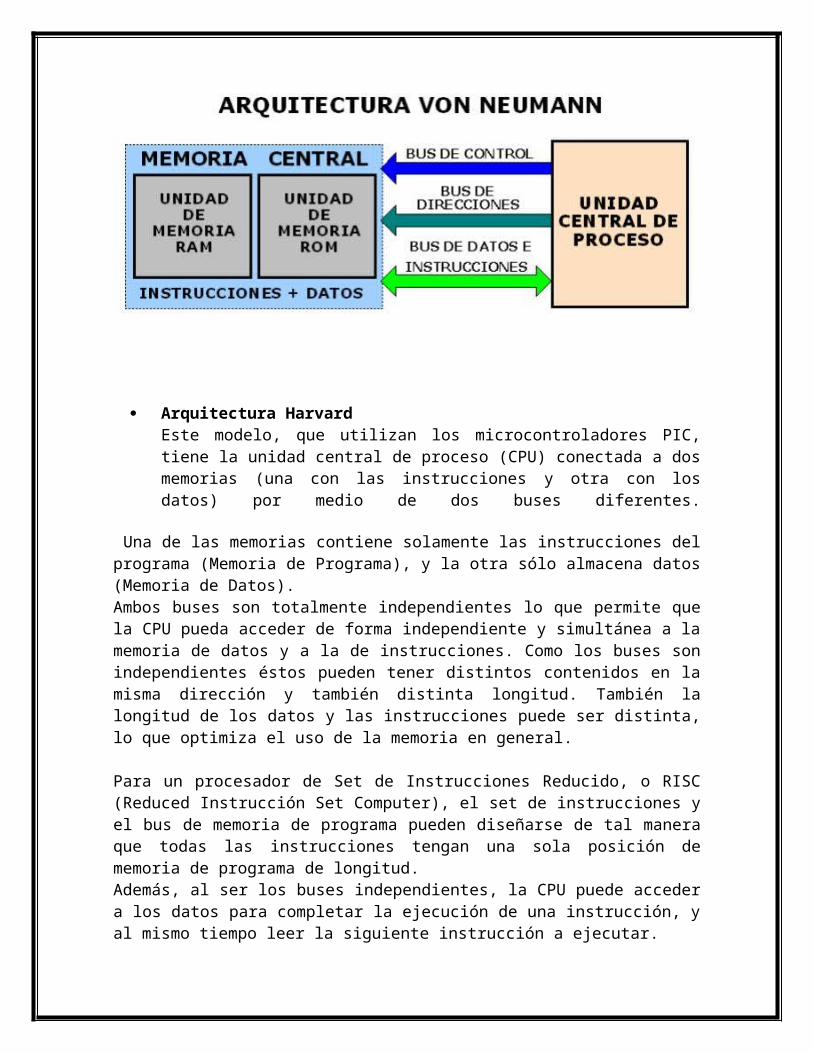
Arquitectura HarvardEste modelo, que utilizan los microcontroladores PIC, tiene la unidad central de proceso (CPU) conectada a dos memorias (una con las instrucciones y otra con los datos) por medio de dos buses diferentes.
Una de las memorias contiene solamente las instrucciones del programa (Memoria de Programa), y la otra sólo almacena datos (Memoria de Datos).Ambos buses son totalmente independientes lo que permite que la CPU pueda acceder de forma independiente y simultánea a la memoria de datos y a la de instrucciones. Como los buses son independientes éstos pueden tener distintos contenidos en la misma dirección y también distinta longitud. También la longitud de los datos y las instrucciones puede ser distinta, lo que optimiza el uso de la memoria en general.
Para un procesador de Set de Instrucciones Reducido, o RISC (Reduced Instrucción Set Computer), el set de instrucciones y el bus de memoria de programa pueden diseñarse de tal manera que todas las instrucciones tengan una sola posición de memoria de programa de longitud.
Además, al ser los buses independientes, la CPU puede acceder a los datos para completar la ejecución de una instrucción, y al mismo tiempo leer la siguiente instrucción a ejecutar.
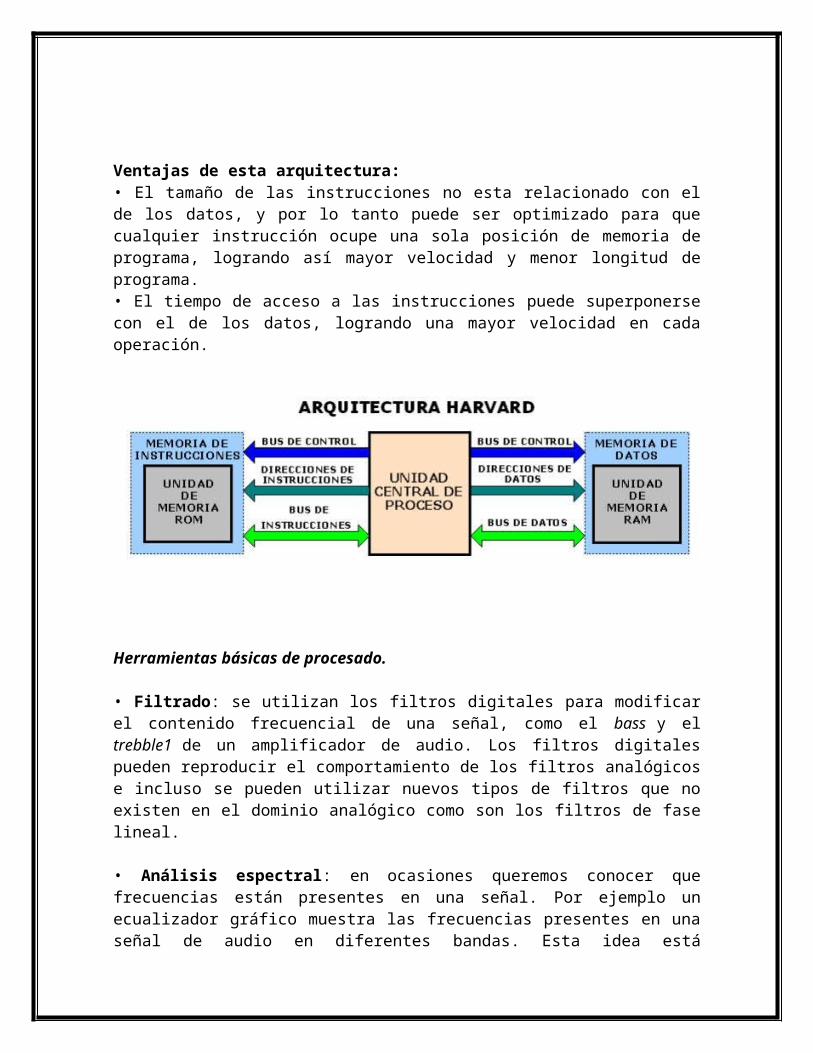
Ventajas de esta arquitectura:• El tamaño de las instrucciones no esta relacionado con el de los datos, y por lo tanto puede ser optimizado para que cualquier instrucción ocupe una sola posición de memoria de programa, logrando así mayor velocidad y menor longitud de programa.• El tiempo de acceso a las instrucciones puede superponerse con el de los datos, logrando una mayor velocidad en cada operación.
Herramientas básicas de procesado.
• Filtrado: se utilizan los filtros digitales para modificar el contenido frecuencial de una señal, como el bass y el trebble1 de un amplificador de audio. Los filtros digitales pueden reproducir el comportamiento de los filtros analógicos e incluso se pueden utilizar nuevos tipos de filtros que no existen en el dominio analógico como son los filtros de fase lineal.
• Análisis espectral: en ocasiones queremos conocer que frecuencias están presentes en una señal. Por ejemplo un ecualizador gráfico muestra las frecuencias presentes en una señal de audio en diferentes bandas. Esta idea está íntimamente ligada con la idea de transformaciones, que no son más que herramientas matemáticas que nos permite describir las señales en términos de sus valores a lo largo de tiempo (dominio temporal) o bien a partir de las frecuencias contenidas en dicha señal (dominio frecuencial). Veremos que la descripción de señales y también sistemas en el dominio frecuencial puede facilitar el procesado.
• Síntesis: los sistemas DSP pueden generar desde tonos sencillos hasta simular fielmente la voz humana. La síntesis incluye la generación de funciones trigonométricas, números aleatorios, osciladores digitales, etc.
Correlación: la correlación la podemos entender como un tipo particular de filtrado, en el que el filtro deja pasar un tipo particular de señal. Utilizamos la correlación para determinar periodicidades de una señal, comparando tramos anteriores de la misma con tramos actuales, y en general para determinar el grado de similitud entre señales.
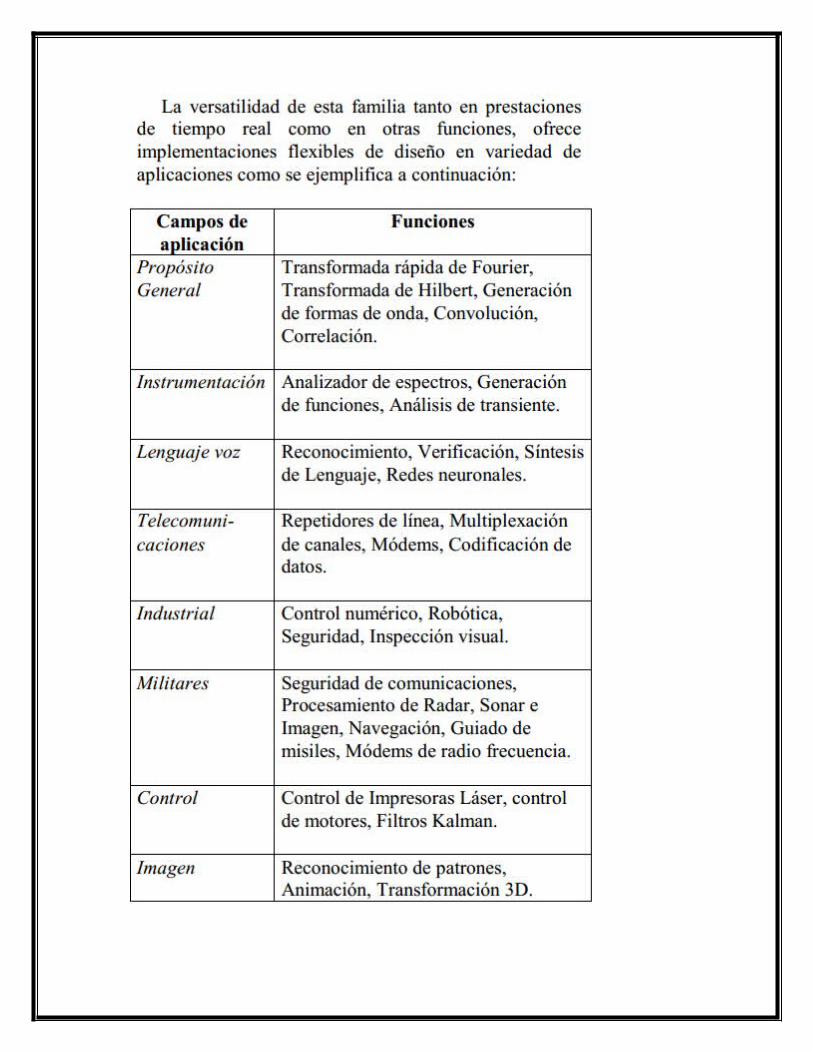
APLICACIONES DEL DSP
Tanto si el procesado se realiza con microprocesadores genéricos o con hardware específico, los costes están decreciendo continuamente y su prestaciones aumentando. Esto ha hecho que su uso se esté extendiendo cada vez más reemplazando la electrónica analógica y en algunos casos creando nuevo productos que no sería posibles sin el PDS. A continuación se presentan algunas aplicaciones.
• Propósito general Filtros digitales • Voz/Habla Síntesis y reconocimiento de voz, reconocimiento de
interlocutor, compresión de voz.• Gráficos/Imagen Compresión/Transmisión de imágenes, reconocimiento,
realidad virtual • Control/Regulación Servocontrol, control de discos, modelización de
sistemas, lógica difusa. • Telecomunicaciones Módems, Cancelación de ecos, multiplexación de
canales, ecualización de canales, criptografía.• Consumo Juguetes, TV y audio digitales, Cámaras • Industria Control numérico, monitorización de la línea de red,
acondicionamiento de señales • Instrumentación Analizadores de espectro, PLL • Aplicaciones militares RADAR, SONAR• Automoción ABS, posicionamiento global • Electromedicina Diagnóstico automático, Sistemas de obtención y
tratamiento de imágenes médicas, prótesis, TAC, RMN
El DSP ha mejorados dispositivos analógicos existentes como el teléfono, televisión, radio, música electrónica, electrónica del automóvil y ha creado nuevo productos como el CD, DAT, los módems, reconocimiento de voz e imágenes, etc. Pero, ¿Cuáles han sido las razones para que le procesado digital haya experimentado este gran “tirón” frente a los diseños analógico?
Ventajas de un sistema de procesado digital frente a un sistema analógico. ƒ
Programabilidad/Flexibilidad : Al tratarse de sistemas programados se facilita el cambio de los algoritmos sin necesidad de modificar el circuito como ocurre con los sistemas analógicos. Dependiendo de que la programabilidad sea en el proceso de fabricación, o a posteriori los circuitos disponen de diferentes tipos se memoria (ROM, EEPROM, RAM).
Repetitividad: La memoria y la lógica de un procesador no se alteran. Procesos repetibles no influenciados por derivas térmicas, tolerancias de los componentes, no necesarios ajustes individuales. Los algoritmos de procesado son ecuaciones matemáticas por lo que su resultado no varía aunque se cambie el dispositivo (DSP, microprocesador etc.) ƒ
Coste: Un sistema programado puede modificar su funcionamiento (algoritmo) sin modificar la circuitería como ocurre con los sistemas analógicos, que deben modificar el número de componentes. ƒ
Implementación de sistemas sin equivalente analógico: Existen sistemas digitales sin equivalente analógico como los filtros FIR. Digitalmente se pueden generar formas de onda arbitrarias. Se pueden almacenar las señales para un procesado posterior. ƒ
Existencia de un gran número de herramientas de diseño: Muchas de las tareas de procesado como la derivación de algoritmos y la obtención de fórmulas ya están hechas y existen programas como Matlab que permiten obtener los coeficientes de un filtro sin necesidad de conocer todo el desarrollo matemático subyacente. Existen herramientas que permiten automatizar el proceso casi al completo, desde el diseño hasta la programación del dispositivo sobre el que se va a ejecutar el programa. Si bien para poder utilizar todas estas herramientas es necesario conocer los fundamentos básicos del procesado
Limitaciones de un sistema de procesado digital.El Procesado Digital de la Señal no es sin duda el sustituto completo y radical del analógico. De hecho, muchas señales presentan un ancho de banda excesivamente grande como para permitir su tratamiento digital en tiempo real. Para dichas señales, el procesado analógico o, actualmente el óptico, son la solución. Sin embargo, cuando existan dispositivos digitales con la suficiente velocidad de proceso, o se desarrollen algoritmos que reduzcan la carga computacional, el tratamiento digital será preferible.
Elementos básicos de un sistema de procesado digital.Por lo que hemos comentado hasta ahora parece obvio que en un sistema de procesado digital, en general, necesita interactuar con el exterior para recoger las señales analógicas que queremos procesar y posteriormente devolver estas señal al dominio analógico, si bien existen tareas de procesado como las simulaciones o la síntesis de señales en las que o necesariamente estarán todas esta etapas.
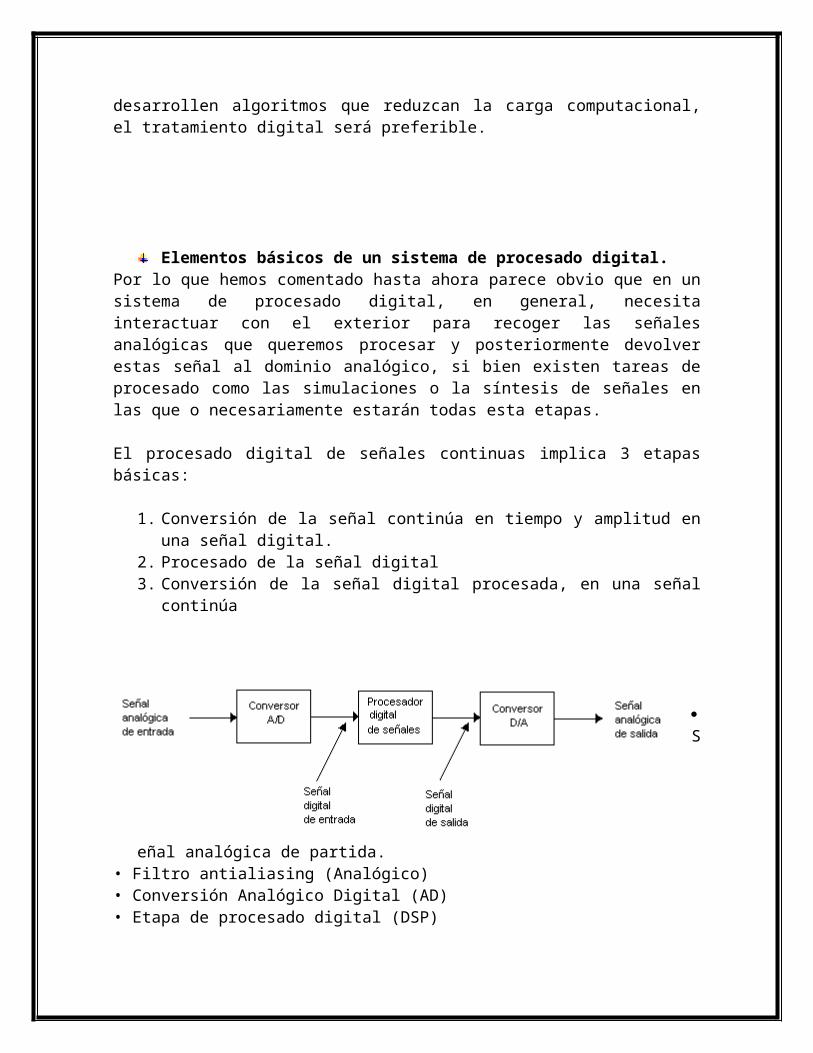
El procesado digital de señales continuas implica 3 etapas básicas:
1. Conversión de la señal continúa en tiempo y amplitud en una señal digital. 2. Procesado de la señal digital 3. Conversión de la señal digital procesada, en una señal continúa
S
eñal analógica de partida. • Filtro antialiasing (Analógico) • Conversión Analógico Digital (AD) • Etapa de procesado digital (DSP) • Conversión Digital Analógica • Filtro reconstructor o suavizado (Analógico)
CLASIFICACIÓN DE LOS DSP’S
Los DSP’s pueden ser clasificados atendiendo a diferentes criterios. La clasificación más extendida es la que tiene en cuenta la precisión con que se realizan las operaciones. Atendiendo a este criterio tenemos la siguiente clasificación:
• DSP’s de coma fija: los datos se representan en formato de coma fija. Presentan el problema de la limitación del rango dinámico de los datos que pueden representar.
Por contra, su precio es bastante más económico que los de coma flotante. El número de bits usados para representar los datos varía entre los DSP’s de 16 bits y los de 24 bits.Los primeros se aplican sobre todo en control, telecomunicaciones y codificación de voz. Los segundos tienen prácticamente totalmente copado el mercado del audio profesional, siendo una solución intermedia entre los DSP’s de coma fija de 16 bits y los de coma flotante de 32 bits.
• DSP’s de coma flotante: los datos son representados con formato de coma flotante. Su rango dinámico es mucho mayor que los de coma fija. I
Hay unanimidad en el mercado en cuanto al número de bits usados para representar datos: 32 bits. Su juego de operaciones soportan también operaciones con datos en formato coma fija.
Los nuevos miembros de ambos tipos de DSP’s coinciden en que el juego de instrucciones tienden a parecerse a las de los lenguajes de alto nivel (lenguaje C sobre todo). Esto facilita el empleo de compiladores cruzados, de tal forma que facilita el proceso de programación de los DSP’s, sin tener un conocimiento de la arquitectura del DSP empleado.
DSP DE TEXAS INSTRUMENTS
Texas Instruments engloba su conjunto de DSP’s mediante el prefijo TMS320.
Como ya se ha mencionado anteriormente, fue el primer fabricante de estos nuevos dispositivos allá por el año 1.984.
Sus productos están ampliamente consolidados en el mercado y ocupan una posición de privilegio respecto a sus competidores. Sin embargo, en algunos ámbitos de aplicación el mercado lo tienen copado otros fabricantes. Las ventajas de los DSP’s de Texas respecto a los de la competencia son:
• Gama de productos más amplia. • Líderes en soluciones de mercado. • Fabricación consolidada y compromiso de entrega. • Amplia variedad en opciones de encapsulado. • Mejor soporte técnico desde la aparición de la idea hasta la consecución del Producto. • Bajo coste en sistemas de desarrollo y módulos de evaluación. • Simuladores hardware fiables. • Existencia de compiladores cruzados para lenguajes de alto nivel. • Existencia de Debuggers. • Existencia de Emuladores en tiempo real. • Amplia librería de software para aplicaciones. • Servicio hotline de asistencia técnica, también accesible desde Internet • Para algunos de sus productos, hay otros posibles fabricantes por lo que la dependencia tecnológica es menor.
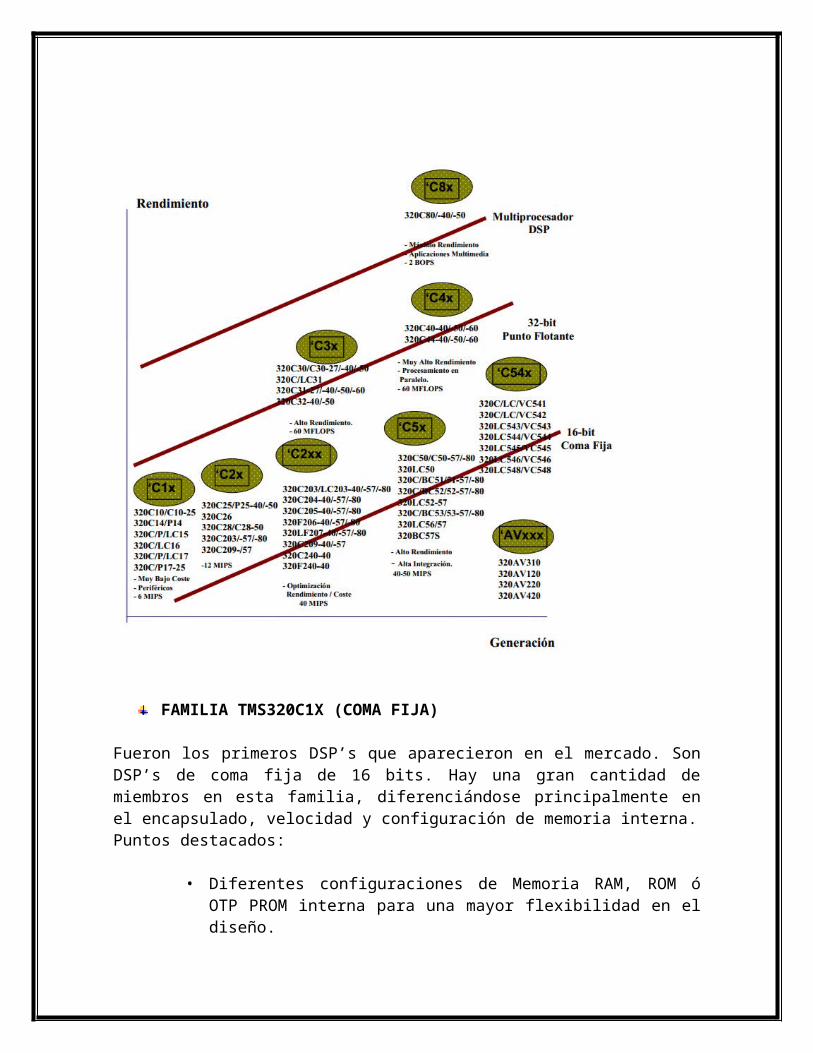
La siguiente gráfica representa las diferentes generaciones de DSP’s que conforman la oferta de Texas Instruments.
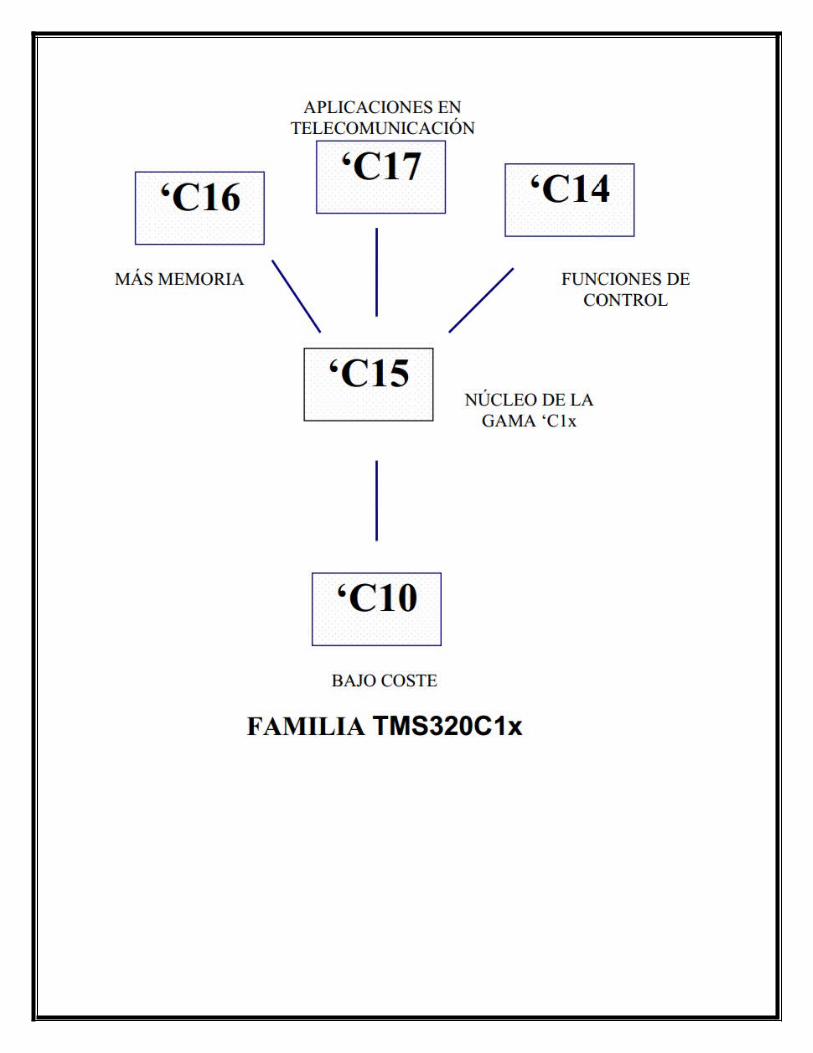
FAMILIA TMS320C1X (COMA FIJA)
Fueron los primeros DSP’s que aparecieron en el mercado. Son DSP’s de coma fija de 16 bits. Hay una gran cantidad de miembros en esta familia, diferenciándose principalmente en el encapsulado, velocidad y configuración de memoria interna. Puntos destacados:
• Diferentes configuraciones de Memoria RAM, ROM ó OTP PROM interna para una mayor flexibilidad en el diseño.
• En ella se encuentran muchos de los DSP’s más económicos del mercado. • Capacidad de integración a través de la librería cDSP. • Posibilidad de escoger entre 5 versiones (‘C10,’C14,’C15,’C16,’C17) para
optimizar los costes del sistema.
APLICACIONES FUNDAMENTALES:
• Sistema antibloqueo de frenos (ABS). • Instrumentos musicales. • Medidores de energía. • Servomecanismos y control de motores. • Contestadores automáticos digitales.
Características :
144 palabras de memoria RAM interna programable para el ‘C10, 256 palabras para el resto de dispositivos ‘C1x.
1.5k palabras de programa en ROM en el ‘C10, 4k en el ‘C14,’C15,’C17 y 8k en el ‘C16. Opciones con 4k palabras de memoria OTP de programa. Posibilidad de direccionar hasta 64k palabras de datos externos en el ‘C16, 4k para los demás dispositivos. Unidad aritmético-lógica de 32 bits. 32 bits a la salida del multiplicador de la ALU (Dos entradas de 16 bits). Multiplicación en un solo ciclo de instrucción. Hasta 4 timers internos para el control de operaciones. Hasta ocho niveles de anidamiento en la pila hardware Dos registros auxiliares. 4 canales de entrada y de salida en el ‘C 14,’C15 y ‘C17. Registro de desplazamiento de 16 bit. Estados de espera para comunicación con memorias/periféricos externos más lentos.
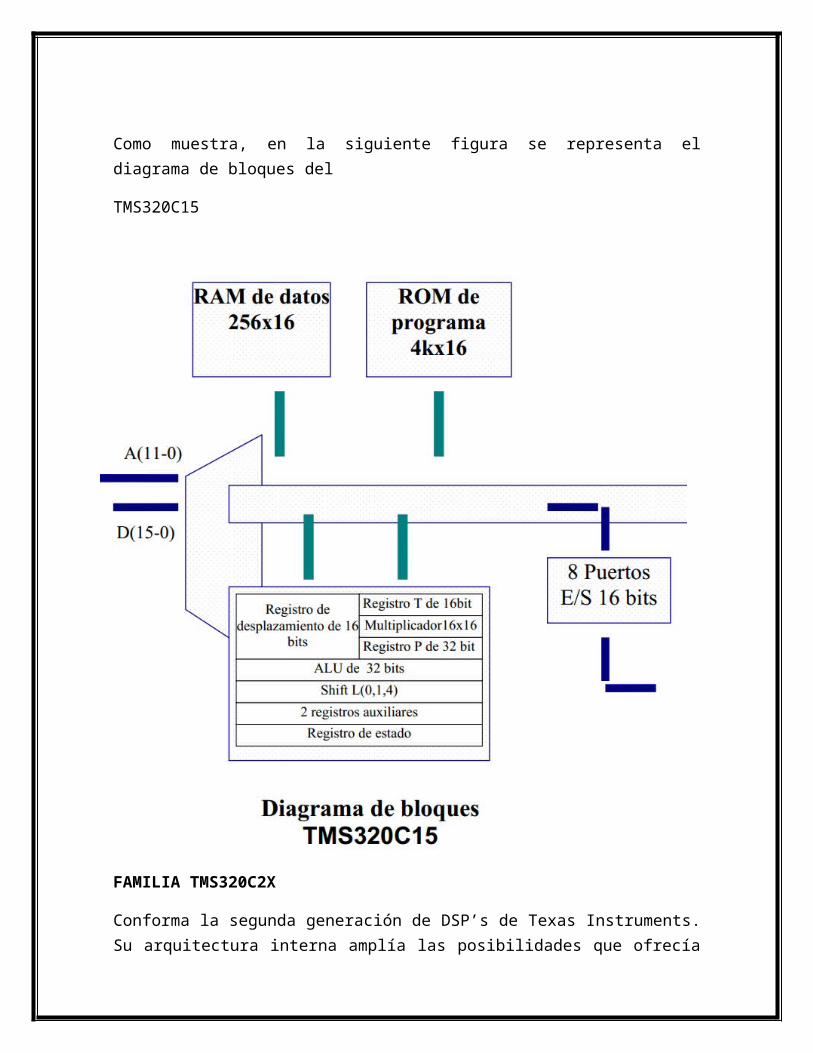
Como muestra, en la siguiente figura se representa el diagrama de bloques del
TMS320C15
FAMILIA TMS320C2X
Conforma la segunda generación de DSP’s de Texas Instruments. Su arquitectura interna amplía las posibilidades que ofrecía la primera generación. Al igual que ésta, sus miembros son de coma fija de 16 bits.
Puntos destacados:
• Diferentes configuraciones de memoria RAM, ROM ó OTP PROM interna para una mayor flexibilidad en el diseño.
• Un gran gama de herramientas de desarrollo de desarrollo desde $99, desde módulos de inicio hasta emuladores en tiempo real.
• Capacidad de integración a través del paquete cDSP. • Posibilidad de escoger entre 3 versiones (‘C25,’C26,’C28) para optimizar los
costes del sistema.
APLICACIONES FUNDAMENTALES:
• Sistema de frenos antideslizamiento. • Servomecanismos y control de motores. • Control de robots. • Telecomunicaciones. • Sistemas de sonido, procesamiento de voz. • Aplicaciones de filtrado digital.
CARACTERÍSTICAS :
• 544 palabras de memoria RAM interna de datos programable (incluida 256 de programa/datos).
• 1568 palabras de memoria RAM configurable entre programa/datos en el C26.
• 4k palabras de ROM de programa interna para el ‘C25. • Opciones con 4k palabras de memoria interna OTP ROM de programa. • Capacidad de direccionamiento hasta un total de 128k palabras de
memoria de datos/programa externa. • ALU y acumulador de 32 bits. • Multiplicador paralelo de 16x16 bits con resultado de 32 bits. • Instrucciones de multiplicación/acumulación con un solo ciclo de
instrucción. • Mejora en las instrucciones repetitivas para conseguir un uso eficiente de la
memoria de programa e incrementar la velocidad de ejecución. • Instrucciones para desplazamiento de bloques de datos/programa para
facilitar la gestión de programa. • Timer interno para operaciones de control. • Hasta 8 registros auxiliares.
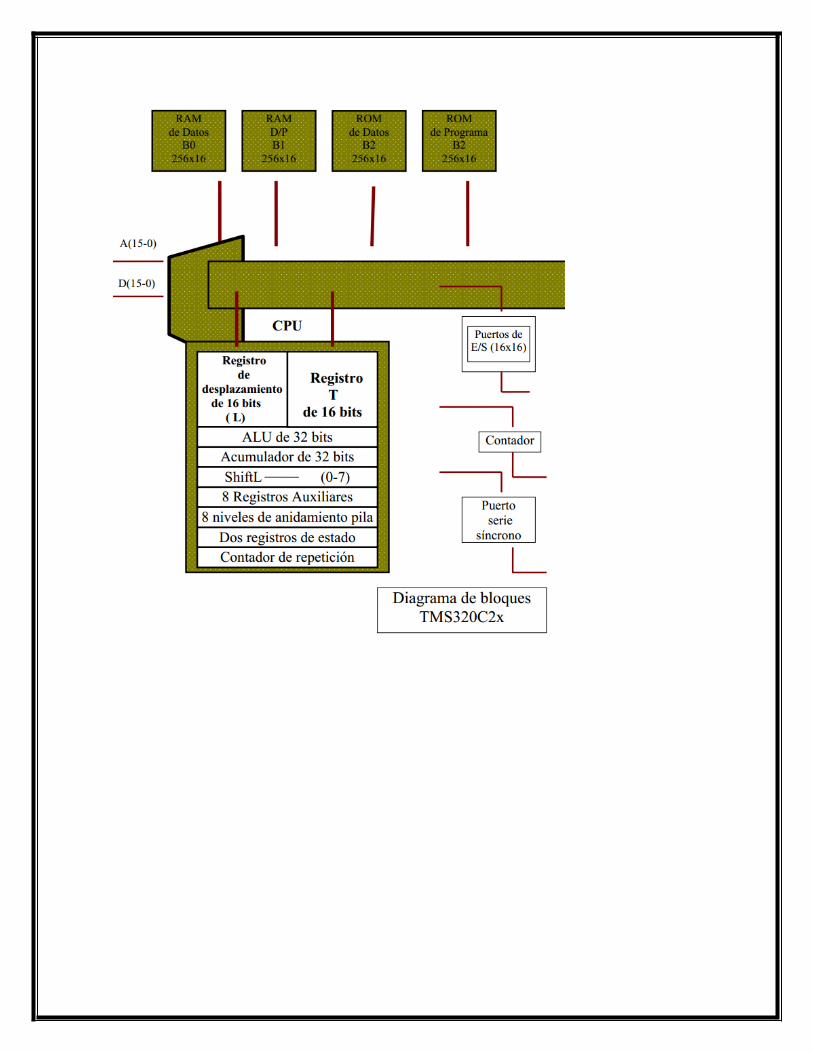
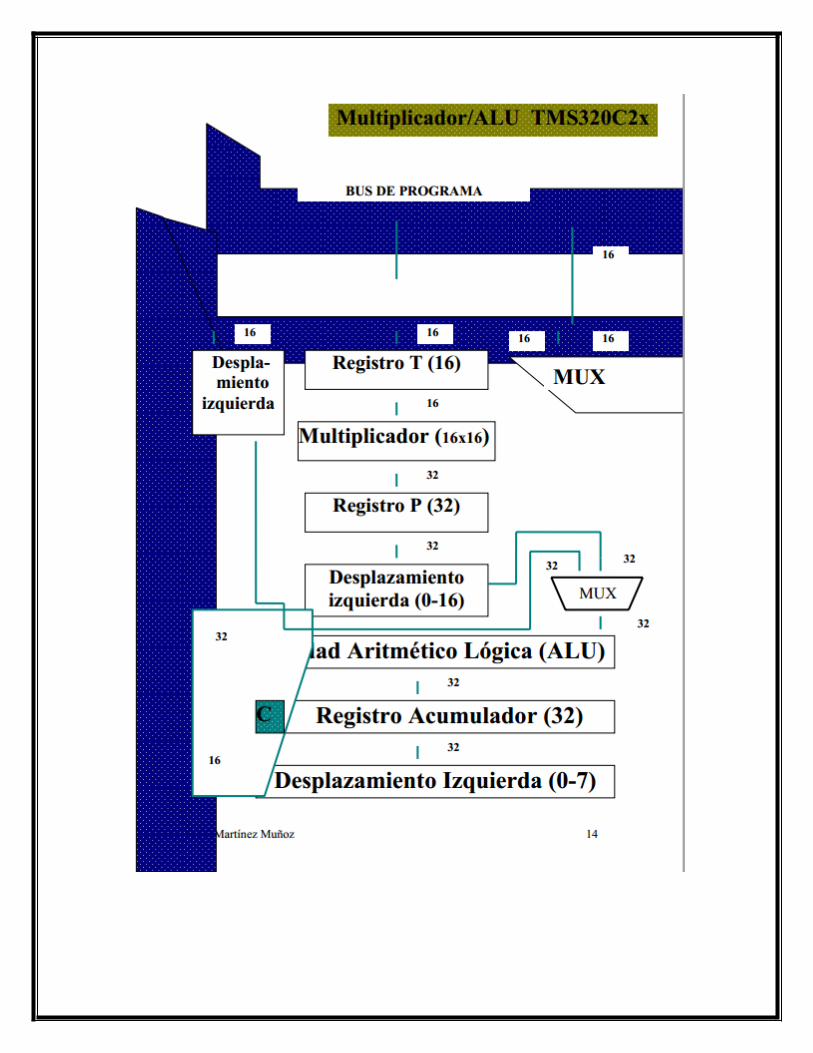
En las dos siguientes figuras se representa el diagrama de bloques de esta familia de
DSP’s.
FAMILIA TMS320C3X
Es la primera generación de DSP’s de Texas Instruments de coma flotante. La longitud de palabra es de 32 bit.
PUNTOS DESTACADOS:
• Potencia de cálculo de hasta 60 MFLOPS (millones de operaciones en coma flotante por segundo).
• Alta eficiencia usando lenguaje C. • Gran espacio de direccionamiento: 16Mwords. • Gestión rápida de memoria con DMA interna.
APLICACIONES FUNDAMENTALES:
• Audio digital. • Gráficos 3-D. • Impresoras láser, fotocopiadoras, escáners. • Escáners de código de barras. • Video conferencia. • Automatización industrial y robótica. • Correo de voz y Faxs. • Servomecanismos y control de motores. • Redes de comunicaciones.
CARACTERÍSTICAS :
Ciclos de instrucción de 33-ns. 30 MIPS. 60 MFLOPS. 330 MOPS. Ancho de banda E/S de 120 Mbytes/second. Multiplicación paralela y operaciones aritmético/lógicas con números enteros o en coma flotante en un único chip. 8 registros con precisión extendida. Control de sistema y operaciones numéricas. Controlador de DMA para E/S simultáneas y operaciones en la CPU. Temporizadores. Puertos serie. Paralelismo del bus para permitir desplazamiento rápido de datos.
FAMILIA TMS320C4X
Es también de coma flotante de 32 bits. Está pensada sobre todo para el procesamiento paralelo, por lo que cuenta con interfaz de comunicación muy rápidas.
PUNTOS DESTACADOS:
• Hasta 60 MFLOPS. • Gran incremento de potencia de cálculo y de comunicaciones. • Capacidad de multiproceso. • Escalabilidad. • Tolerante a fallos.
APLICACIONES FUNDAMENTALES:
• Comunicaciones de muy alta velocidad. • Realidad virtual, simuladores. • Procesamiento de rádar/sónar/imagen. • Gráficos 3-D. • Control de robots. • Reconocimiento de voz. • Infraestructura de telecomunicaciones.
CARACTERÍSTICAS :
6 puertos de comunicaciónes para comunicación entre procesadores a alta velocidad: Máxima velocidad de transferencia asíncrona de 32 Mbytes/s por cada puerto. Comunicación directa de procesador-procesador sin circuitería adicional. Coprocesador DMA con 6 canales para E/S simultáneas y operaciones de la CPU. Alta velocidad de la CPU del DSP capaz de 330 MOPS y 384 Mbytes/s: Hasta 11 operaciones por ciclo de instrucción. Ciclos de instrucción de 33, 40 y 50 ns. Dos buses externos de direcciones y datos semejantes, permitiendo sistemas con memoria compartida y alta velocidad de transferencia de datos, transferencias en un único ciclo: Velocidad de transferencia de datos por un puerto de hasta 120 Mbytes/s (‘C40-60).
FAMILIA TMS320C5X
Vuelve a ser una familia de procesadores de coma fija de 16 bits.
PUNTOS DESTACADOS:
Potencia de cálculo de hasta 50 MIPS. Precios de venta desde $0.30 por MIP. Versiones de 3 y 5V. Diferentes versiones de encapsulado: 100 pins TQFP/PQFP, 128 pins TQFP, 132 pins PQFP y 144 pins TQFP. Diferentes versiones de memoria RAM y ROM integradas. Emulación JTAG Compatible con ‘C1x, ‘C2x y ‘C2xx.
APLICACIONES FUNDAMENTALES:
• Teléfonos inalámbricos y móviles. • Módems de alta velocidad. • Comunicaciones personales. • Sistemas de sonido y procesamiento de voz. • Impresoras láser, fotocopiadoras. • Otras aplicaciones de telecomunicación. • Multimedia. • Control de discos duros.
Características:
• El ciclo de instrucción del DSP ‘C5x es de 20 ns. • Potencia de procesamiento de 50 MIPS. • Consumos a razón de 1.15mA/MIPS. • Disponibles diferentes configuraciones de memoria RAM y ROM interna. • Emulación on-chip, eliminando los retardos de propagación asociados a las
antiguas tecnologías de emulación. • Código fuente compatible con el ‘C1x, ‘C2x y ‘C2xx. • Proporciona un tratamiento de bit a alta velocidad sin tener que modificar
los bits de estado de la ALU ó registros. • Permite, sin lógica adicional, la conexión de memoria externa lenta y
dispositivos de entrada/salida, reduciendo costes. • Los 12 registros más fundamentales de la CPU están duplicados.
Familia TMS320C54x
También es de coma fija. Son más rápidos que la familia ‘C5x.
Puntos destacados:
• Hasta 66 MIPS. • Operación Viterbi integrada. • Tres modos de bajo consumo. • Diferentes configuraciones de RAM y ROM internas. • Puerto serie con auto-buffer. • Interfaz puerto host. • Encapsulado ultra pequeño (100, 128 y 144 pins TQFPs).
APLICACIONES FUNDAMENTALES:
• Comunicaciones digitales móviles. • Sistemas personales de comunicación. • Módems. • Telecomunicaciones avanzadas. • Comunicaciones digitales inalámbricas. • Envío de datos en sistemas móviles.
Características:
• 66 MIPS. • Acelerador Viterbi integrado. • Opera a 2.7 y 5V. • Direcciones de 40 bits y dos acumuladores de 40 bits para la ejecución de
operaciones en paralelo. • ALU de 40 bits configurable como dos de 16 con capacidad de realizar dos
operaciones en un único ciclo. • Multiplicador 17x17 que permite las operaciones con enteros con y sin
signo. • 4 buses internos y dos generadores de direcciones que permiten realizar
diferentes operaciones y facilitan el acceso a memoria. • 8 registros auxiliares. • Dispone como herramienta del compilador de c para DSP de coma fija más
avanzado del sector. • Modos de bajo consumo para aplicaciones en que se usan baterías.
Familia TMS320C8x
Integra varias unidades de proceso en el mismo encapsulado. Estas unidades de proceso son de coma fija de 16 bits.
Puntos destacados:
Arquitectura de ‘C8x Arquitectura MIMD (Múltiple instrucción - Múltiple dato) totalmente programable. Instrucciones avanzadas de DSP. Procesador principal RISC de 32 bit. Controlador de transferencia. Velocidad de transferencia de hasta 400 Mbytes/sec. Capacidad de direccionamiento hasta 4 Gbytes. Ciclos de instrucción de 17, 20 y 25 ns.
• TMS320C80 :
Controlador de vídeo. 4 DSPs trabajando en paralelo. 50 kbytes de RAM interna. 2 BOPS. Encapsulados 305 pins PGA, 352 BGA.
• TMS320C82 :
2 DSPs trabajando en paralelo. 44 kbytes de RAM interna. 1.5 BOPS. Encapsulado 352 BGA. Aplicaciones Fundamentales: Vídeo conferencia. Vídeo teléfonos. Telecomunicaciones a alta velocidad. Procesamiento de imagen y vídeo. Estaciones de trabajo multimedia. Aceleradores de gráficos 2-D y 3-D. Realidad virtual. Seguridad. Sistemas de rádar y sónar.
Características:
Controlador inteligente de transferencia interno y memoria (SRAM).
Procesamiento paralelo múltiple de 32 bit. La ALU de 32 bit puede ser configurada como 2 de 16 bits ó 4 de 8 bits
para proceso paralelo de datos con baja precisión. Interfaz directa con DRAM, SRAM y VRAM. Interfaz de bus externo dinámico de 8, 16, 32 y 64 bit.
Familia TMS320AVxxx (DCP)
Están orientados a una aplicación determinada. Está compuesta por varios miembros.
Puntos destacados TMS320AV110 (Decodificador de audio MPEG):
• Decodificador de audio ISO-MPEG en un único chip. • Decodifica los modos mono, estéreo, dual y joint stereo. • Soporta todas las frecuencias de muestreo y bit rates de MPEG, incluido el
formato libre. • Acepta entrada de datos a ráfagas hasta una velocidad de 15 Mbits/s. • Encapsulado pequeño de 120-pins plastic quad flat package (PQFP).
Puntos destacados TMS320AV120 (Decodificador de audio MPEG):
• No requiere un microprocesador host para inicialización y operación. • Acepta SCR y PTS de audio y proporciona sincronización automática. • Proporciona información de estado al inicio de cada trama. • Encapsulado PLCC de 44 pins de bajo coste.
Puntos destacados TMS320AV220 (Decodificador de vídeo MPEG):
• Interfaz directa con el decodificador de audio MPEG ‘AV110 y el codificador NTSC ‘AV120.
• Sistema decodificador integrado con buffer para entrada de audio. • Sincronización automática de audio y vídeo sin necesidad de lógica externa. • Soporta formatos de salida de vídeo NTSC y PAL.• Soporta resolución SIF y CCI R 601.
Puntos destacados TMS320AV420 (Codificador digital NTSC):
• Codificador digital NTSC en un único chip. • Interpolación de línea vertical para MPEG-1 de vídeo.
• Entrada : RGB, YUV 4:4:4 ó YUV 4:2:2. • Salida s-vídeo (C e Y). • Circuito interno para generación de señal de sincronismo. • Encapsulado 80 pins quad flat package.
CONCLUSION
El Procesamiento de señales trata de la representación, transformación y manipulación de señales y de la importancia que contienen. Cuando se refiere al procesado digital de señales, se refiere a la representación mediante secuencias de números de precisión finita.
Además el procesamiento digital de señales representa el futuro en el estudio de nuevas tecnologías que de la mano de campos de la ingeniería como la electrónica concretaran la evolución de la misma y garantizaran avances tan significativos que la calidad de vida de los seres humanos se incrementara de forma sustancial. En este sentido, la fabricación y diseño de nuevas arquitecturas y el incremento de la velocidad del cálculo matemático de estos microprocesadores, que por lo general es en tiempo real, serán las principales características que estarán estrechamente ligada al tipo de aplicación que se le quiera dar, lo que quiere decir, que la tendencia es que siga evolucionando el PDS con arquitecturas que estén cada vez más adaptadas a las necesidades y particularidades de las diferentes aplicaciones. De tal manera que a nivel de prestaciones puede atender exigencias particulares como por ejemplo la domótica, donde el usuario demanda los requisitos; sin embargo existen otros aspectos a considerar como el costo y el consumo que pueden disminuir el número el interés en su estudio.
Finalmente se puede decretar el triunfo inminente del procesamiento digital de señales sobre el procesamiento analógico de señales con un gran número de ventajas a nivel de costos y tamaño de los componentes, así como también la confiabilidad y fidelidad que nos ofrece el PDS, con respecto a la calidad de la señal.


















