División de Ciencias Básicas e Ingeniería148.206.53.84/tesiuami/UAM1238.pdf · activa el...
60
UNIVERSIDAD AUTóNOMA METROPOLITANA UNIDAD IZTAPALAPA División de Ciencias Básicas e Ingeniería Departamento de Ingeniería Eléctrica Prototipo de un control electrónico básico de incubadora, Para la termorregulación neonatal Tesis que presentan los alumnos: Rivero Zepeda Rafael Gerard0 90327241 Solís Paulino Leonor Isabel 91 325010 P ara I ao btención del grado de Licenciatura en hgeniería Biomédica . , Asesor: If J .< Donaciano JiménezVázbez i Marzo de 2001 T
Transcript of División de Ciencias Básicas e Ingeniería148.206.53.84/tesiuami/UAM1238.pdf · activa el...

UNIVERSIDAD AUTóNOMA METROPOLITANA
UNIDAD IZTAPALAPA
División de Ciencias Básicas e Ingeniería
Departamento de Ingeniería Eléctrica
Prototipo de un control electrónico básico de incubadora, Para la termorregulación neonatal
Tesis que presentan los alumnos:
Rivero Zepeda Rafael Gerard0 90327241 Solís Paulino Leonor Isabel 91 325010
P ara I a o btención del grado de Licenciatura en hgeniería Biomédica .,
Asesor: If J .< Donaciano Jiménez V á z b e z
i
Marzo de 2001 T



VROTOTIPO DE UN CONTROL E L E C T R ~ N I C O BÁSICO DE INCUBADORA, PARA TERMORREGULACIÓN
NEONATAL

lndice
Capítulo 1 Antecedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Capítulo 2 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 Limpieza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Seguridad y simplicidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Una fácil y exacta regulación . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Capítulo 3 Justificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.lObjetivo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 Hipótesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.3 Material . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Capítulo 4 Marco Teórico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.1 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.2 Funcionamiento del Módulo de Control . . . . . . . . . . . . . . . . . . . . . 10
Capítulo 5 Norma Oficial Mexicana . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1 Definición de Incubadora . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2 Temperatura de la Incubadora . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.3 Temperatura Promedio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.4 Temperatura de Equilibrio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.5 CondiciGn de Temperatura Estable . . . . . . . . . . . . . . . . . . . . . . . . 15
5.6 Variabilidad de la Temperatura . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.7 Temperatura de Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
15
5.9 Símbolos y Abreviaturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.1 O Especificaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.1 1 Condiciones Ambientales de Operación . . . . . . . . . . . . . . . . . . . . . 17
5.8 Temperatura de la lncubador . . . . . . . . . . . . . . . . . . . . . . . . . . . a

5.1 2 Tensión de Alimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1 3 Materiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.14 Chasis (Módulo de Control) . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.1 5 Características Térmicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.1 6 Alarmas e Indicadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ’ 22
5.17 Niveles de sonido DBA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.1 8 Características Eléctricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 Capítulo 6 Metodología . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.1 Etapa 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.1 . 1 Análisis de la Etapa 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 29 6.1.2 Selector de Temperatura . . . . . . . . . . . . . . . . . . . . . . . . 34
6.2 Etapa 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.3 Etapa 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.3 Etapa 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Capítulo 7 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Capítulo 8 Discusión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Capitulo 9 Bibliografía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53


Prólogo
La complejidad del cuidado de la salud nos ha llevado a proponer soluciones sencillas y practicas. Dentro de las cuales abordamos en concreto el área del cuidado neonatal.
En esta tesis proponemos un control básico para regular la temperatura corporal del neonato {de forma indirecta), ya sea para su ambientación o bien para su observación en caso de problemas de salud menores. En esta última parte queremos resaltar que en algunos lugares, como son las sierras, estos equipos básicos marcan una gran diferencia en la mortalidad infantil, ya que son utilizados para cuidados intensivos.
Este prototipo pretende crear un microambiente similar al que tendría el vientre materno, con la opción de regular la temperatura y la humedad. Esto favorece en mayor grado el cuidado del neonato que se tenga en observación.
La base fundamental en que se desarrolló este prototipo es utilizando un termómetro y un control electrónico para regular la temperatura. El termómetro cumple con la función de sensar y desplegar la temperatura que se tiene en el interior del equipo. Por otro lado, el control permite regular o seleccionar la temperatura del interior. De tal manera que el especialista tiene la opción de utilizar un cierto rango de temperatura para cada uno de los casos.
Una vez que el especialista selecciona la temperatura que requiere, el circuito activa un calefactor, a través del cual pasa un flujo de aire para ser calentado. Este flujo es direccionado por canales metal-mecánicos al interior de la burbuja (capacete), creando la atmósfera adecuada. Este mismo flujo vuelve a ser absorbido por el lado opuesto de la burbuja, por medio de la turbina. En este punto se tiene el sensor del termómetro, el cual indica la temperatura que tiene el microambiente, permitiendo la comparación entre la temperatura seleccionada y la sensada. El flujo reingresa al calefactor, cerrando así el circuito que crea un ambiente estable.
Una vez que se tiene la temperatura deseada, el circuito continua comparando ambas temperaturas y en caso de obtener una lectura menor en el termómetro activa el calefactor, desactivándolo en cuanto ambas lecturas son iguales.
De esta manera sencilla y practica se diseño el prototipo de un control que permite la creación de un ambiente adecuado para el cuidado neonatal.

1 ANTECEDENTES
Dentro de los diversos problemas de salud que presenta la población de nuestro País,
se encuentra la elevada tasa de mortalidad infantil, principalmente en las poblaciones
más alejadas de las grandes ciudades. Para entender mejor la magnitud del problema,
es importante mencionar que en contraste con nuestra realidad, los países
desarrollados poseen una mortalidad infantil inferior a 1 O x 1000 nacidos vivos['51.
La población mas vulnerable a la supervivencia son los infantes prematuros. Un infante
prematuro es aquel que nace con la piel, esqueleto y órganos de un feto de siete
meses, de manera que sus tejidos no han tenido el tiempo suficiente para madurar, y
por lo tanto, no esta listo aun para completar un cambio en su medio ambiente; es
posible que los mecanismos adaptivos del cuerpo humano, sobrepasen las dificultades
y poder así adquirir el equilibrio necesario para adaptarse a la vida; pero aun así
existirá una condición de peligro antes de alcanzar esta condición de equilibrio; ya que
aún cuando un infante prematuro puede reaccionar con un extraordinario éxito a este
nuevo ambiente externo, puede existir el riesgo de haber una recaída y originar la
muerte.
Es por esto que ios infantes prematuros Gecesitan el uso de equipos de monitoreo y
soporte que sustituyan de alguna forma el medio ambiente que tenían cuando se
encontraban en el útero materno.
Independientemente de los cuidados que necesita un infante prematuro tales como una
alimentación adecuada, etc., también necesitan un medio ambiente que los mantenga a
una temperatura y humedad constantes, de manera que conforme pasa el tiempo el
RI\,'ERO. SOLÍS. 1

neonato prematuro debe ir evolucionando y aprendiendo a regular su temperatura para
adaptarse al nuevo ambiente externo.
En las localidades de las poblaciones alejadas, un elevado número de niños recién
nacidos con problemas de salud muere, por carencia de equipos médicos básicos en
los hospitales, principalmente por falta de incubadoras.
La incubadora es la herramienta principal para la atención de neonatos con problemas
graves de salud, cuya función es brindar al niño recién nacido un ambiente similar al
vientre materno, lo que significa una temperatura cercana a la corporal, suficiente
humedad, oxigenación y esterilidad.
Teóricamente, una incubadora perfecta debería contener una solución salina en vez de
aire caliente, manteniendo al infante suspendido en esta solución; imitando mas de
cerca el interior uterino. Sin embargo, esto es imposible de crear, de tal manera que
debemos conformarnos con una atmósfera en vez de una hidrosfera; pero lo mas
importante es que este tipo de ambiente previene el riesgo de que el infante caiga en
un estado de hipotermia. [ ' I
Pero no solo los infantes prematuros necesitan de LP aparato que los ayude a regular
su temperatura, también los infantes que han nacido en condiciones normales, pueden
requerir del uso de las incubadoras, sobre todo cuando las condiciones ambientales
son muy frías, tal y como sucede en las partes altas como son las sierras, o en lugares
que se encuentran alejados de las grandes ciudades en donde se puede tener mayores
cuidados; ya que de esta manera se va acondicionando al neonato a vivir a la
temperatura externa o medio ambiente de forma gradual.
FUVERO. SOLÍS. 2

Esta realidad es la motivación que nos compromete a desarrollar un prototipo de
incubadora con tecnología nacional, que permita reducir los costos de fabricación y
ahorrar divisas por gastos de importación.
Para cump!ir en forma apropiada con el objetivo de proporcionar artificialmente dichas
condiciones ambientales al recién nacido, una incubadora debe estar conformada por
dos sistemas que interactúen entre sí, un sistema mecánico robusto y funcional, que en
conjunto con un sistema electrónico inteligente y confiable, permitan controlar todas las
actividades que debe realizar la incubadora del modo más eficiente posible.
RWERO. SOLÍS. 3

Capítulo 2
2 INTRODUCCION
Uno de los problemas más serios en la practica obstétrica, es el cuidado adecuado del
infante prematuro en sus primeras semanas de vida.[*]
De manera que en ausencia de cuartos especiales de cuidados para neonatos, el uso
de una incubadora puede ser una mejor opción para su cuidado.
Los principales requisitos para este tipo de aparatos son:
2.1 Limpieza. El aparato debe ser construido de manera que sea fácil de limpiar para mantener un
grado de asepsia óptimo, con el fin de que no se desarrollen microorganismos que
puedan atacar al infante, sobre todo en infantes prematuros, que son los que ofrecen
una mayor vulnerabilidad contra los ataques de microorganismos.
2.2 Seguridad y simplicidad en su manejo
Es decir que no provoque riesgos al infante y al operador del equipo tales como son un
calentamiento excesivo que pudiera provocar una deshidratación al infante o que
pueda provocar quemaduras a ambos; que tenga una adecuada circulación de aire
fresco (ventilación), además de poder usarse sin tener un entrenamiento muy
especializado sobre el funcionamiento uso y servicio de estos aparatos.
Ventilación y oxigenación adecuada
RIVERO. SOLÍS. 4

TERt {ORREG GLcl CION iVEONA T.4 L Se necesita una ventilación y oxigenación adecuada de manera que el flujo de aire no
se estanque, con lo que aumentaría la temperatura y por lo tanto podría provocar una
deshidratación del infante, además dependiendo de la prescripción medica, se le
administra oxígeno al microambiente; el equipo debe contar con una entrada y
señalización adecuados para el suministro de oxígeno, de manera que no constituya
un riesgo.
2.3 Una fácil y exacta regulación de la temperatura
Este es el punto mas importante que debe tener una incubadora, ya que el equipo debe
ser capaz de regular la temperatura interna del microambiente con una mínima
variación, de manera que al infante no se le ponga en riesgo por cambios bruscos de
temperatura. Además, el sistema de control para un equipo sencillo debe contar con
elementos que no sean costosos pero que al mismo tiempo, sean fáciles de conseguir
en el mercado para su mantenimiento y su buen uso. Un equipo que sea simple y
barato en su construcción, se vuelve una herramienta indispensable para cualquier
hospital pequeño que no tenga la infraestructura económica necesaria o mínima para
adquirir equipos más caros y sofisticados.
Las partes principales que componen una incubadora sencilla se muestran en la figura
1 .
RIVERO. SQLIS. 5

TERMORREGlJLACION NEONATAL
PARTES Y CONTROLES
1 _- CAPACETE 2.- ENTRADA PARA BASCULA PESA BEBE 3.- ACCESOS TIPO ARO IRIS 4.- MANGAS 5.- PUERTA DE SERVICIO 6.- COLCHON 7.- CHAROLA PORTA COLCHON 8.- PLATAFORMA PRINCIPAL 9.- BISAGRAS CAPACETE DERECHA CON
SEGURO - IZQUIERDA SIN SEGURO 10.- MANIJA CAPACETE 11 .- MANIJAS DE POSICIONES
12.- CUERPO DE INCUBADORA 13.- PERILLA PARA CONTROL DE
HUMEDAD 14.- NIVEL DE AGUA 15.- MODULO DE CONTROL 16.- PORTA FILTRO DE AIRE Y OXIGENO
EN LA PARTE POSTERIOR 17.- GABINETE PORTA INCUBADORA 18.- PUERTAS DE GABINETE 19.- RUEDAS SIN FRENO 20.- RUEDAS CON FRENO
vT"4í" I
' I
Figura 1. Partes y controles principales de una incubadora.
RIVERO. SOLÍS. 6

Capítulo 3
3 JUSTlFlCAClON
El propósito de crear un módulo de control que sea barato y fácil de operar nace de la
necesidad que tienen las clínicas que se encuentran en áreas poco accesibles y por lo
tanto donde las innovaciones tecnológicas no son muy frecuentes, además de las
clínicas que cuentan con escasos recursos económicos para poder adquirir equipos
que sean demasiado sofisticados y que por lo tanto lleva aunado a ello un costo en la
necesidad de contar con un especialista que de cursos acerca del manejo del aparato,
además del costo que implica el conseguir las refacciones en caso de realizar el
servicio de mantenimiento correctivo; ya que si se trata de equipo muy sofisticado y
sobre todo equipo importado, las refacciones se elevan y el tiempo que tardan en poder
llegar se incrementa, aparte de que debe contratarse a personal calificado para brindar
un adecuado servicio; lo que redunda principalmente en dos factores que son: tiempo y
dinero.
En cuanto a la cuestión económica sabemos que las clínicas que no se encuentran tan
cerca de !as grandes ciudades obviamente no tienen todos los recursos a la mano.
Respecto al tiempo, sabemos que es un factor de mayor importancia, pues un aparato
que no se encuentra disponible debido a que está en reparación o a que para conseguir
los componentes en el mercado es difícil o son muy caros, trae como consecuencia
que en una emergencia el infante pueda morir.
Debido a esto, realizamos una propuesta de incubadora simple, pero funcional y
confiable, en donde los componentes son fáciles de adquirir en el mercado sin
necesidad de realizar importaciones y cuyo servicio no es tan largo ni difícil de realizar.
RIVERO. SOLÍS. 7

3.1 OB J ETlVO
0 El objetivo del presente trabajo es brindar una contribución tecnológica básica,
desarrollando un módulo de control electrónico para incubadora, mediante tecnología
comercia¡ en nuestro País.
3.2 HIP~TESIS
Mediante la implementación de tecnología comercial, se desarrollará un módulo de
control electrónico para incubadora que permitirá la termorregulación neonatal,
contando con la protección mínima para el neonato.
RIVERO. SOLIS. 8

3.3
1
1
1
2
1
1
1
1
1
MATERIAL Placa de cobre
Convertidor analógico digital para displays a 3 % dígitos
Displays de 7 segmentos
Sensores de temperatura
Resistencias variables
Circuitos amplificadores operacionales
Material electrónico diverso
Calefactor
Motor
Turbina
Elementos de soporte y conexión
Cámara de acrílico
Manuales diversos de circuitos y componentes electrónicos
PC
Programa de simulación workbench
RIVERO. SOLÍS. 9

TER1 IORREGtiLACIÓN NEON1 íY L
Capítulo 4
4 MARCO TEORICO
4.1 GENERALIDADES El panel de control de la incubadora le permite al usuario seleccionar la temperatura a
la cual se desea tener dentro del microambiente. Cuenta también con alarma visual y
audible de alta temperatura, lo que garantiza una adecuada vigilancia al neonato;
además a la temperatura de 38 "C el calefactor interrumpe su funcionamiento, con lo
que se garantiza aún más una protección contra sobretemperatura .
4.2 FUNCIONAMIENTO DEL MODULO DE CONTROL Para el funcionamiento del equipo, este cuenta con un interruptor de
apagado/encendido, situado en el módulo de control; al activarse en la posición de
encendido, se enciende a su vez el indicador de color amarillo (LED) que indica
ACTIVADO.
Para la generación de temperatura, el calefactor funciona por medio de comparadores
de voltaje. es decrr. el sensor de temperatura se encarga de convertir la temperatura
sensada a un voltaje determinado, con lo que por medio de un voltaje de referencia se
comparan entre sí para determinar si el calefactor interrumpe su funcionamiento o
continúa calentando. Es importante aclarar que el elemento calefactor no es
realimentado con la temperatura del neonato.
Para la selección de la temperatura se gira la perilla que se encuentra situada en el
panel de control, seleccionando el valor de temperatura al cual desea mantener el
microambiente. Para verificar que el calefactor se encuentra en su estado activo, debe
mantenerse encendido en el mismo panel frontal el indicador verde (LED); si éste se
RIVERO. SOLIS. 10

encuentra apagado, es signo de que el calefactor no se encuentra activo y por lo tanto
no se está generando calor para el microambiente.
Si por otro motivo dentro del microambiente existiera una condición de alta
temperatura, es decir, que se sobrepase de 39 "C debe escucharse la alarma audible,
y debe encenderse el indicador rojo (LED) esto nos indica que debe corregirse la
condición de alta temperatura para evitar daño al neonato.

El módulo de contra1 está formado por ; un gabinete desmontable en el cual se encuentran :
1 .- DOS MANIJAS 2.- CUATRO PERILLAS DE SUJECION 3.- CABLE DE ALIMENTACION 4.- FUSIBLE 3 AMPERS 5.- INTERRUPTOR GENERAL 6.- INDICADOR VISUAL DE ENCENDIDO 7.- PERILLA PARA SELECCION DE TEMPERATURA 8.- INDICADOR VISUAL DE
CALEFACTOR FUNCIO
9.- INDICADOR VISUAL DE ALARMA 10.- TERMOMETRO DIGITAL 11 .- SENSOR DE TEMPERATURA
PARA CONTROL 12.- VENTILADOR 13.- SENSOR DE TEMPERATURA
PARA ALARMA 14.- RESISTENCIA CALEFACTORA
! .L. _. ',-A ,",. . .* . d.. 'L -.'.- , .,U ., .
Partes del m6dulo de control PARTE POSTERIOR
Figura 2. Módulo de control
"
RLVERO, SOLÍS. -~
12

Capítulo 5
5 NORMA OFICIAL MEXICANA
La principal responsabilidad del desarrollo de equipo, en este caso de un prototipo de
módulo de control para incubadora, es cumplir con las normas establecidas por el País
de origen (México). Lo anterior nos lleva a revisar la Norma Oficial Mexicana NOM-066-
SSAI-1993. Esta norma establece las especificaciones sanitarias de las incubadoras
para recién nacidos.
El objetivo de esta Norma es establecer los requisitos mínimos de seguridad y
funcionamiento que deben cumplir las incubadoras de cuidados generales para recién
nacidos prematuros, las cuales son impulsadas eléctricamente para asistir al bebé en el
mantenimiento de su balance térmico controlando las condiciones adecuadas de
temperatura, humedad y aislamiento del medio ambiente exterior.
Sin embargo, como la Norma establece los requisitos para una incubadora, únicamente
se tomaron los puntos o apartados correspondientes al correcto funcionamiento
electrónico de dicha incubadora. Estos apartados fueron analizados y cubiertos, casi en
su totalidad. por el prototipo aquí presentado.
Los puntos que no fueron cubiertos son aquellos en los cuales se requiere del equipo
completo para verificar su correcto funcionamiento o bien requieren de ajustes en el
diseño.
Para establecer de forma correcta la relación entre las especificaciones y el circuito, se
realizó una selección de ellas, marcandolas como subincisos de este capítulo, y se

estableció la forma de operación del circuito o bien se indican las pruebas necesarias
para su correcto funcionamiento.
5.1 Definición de Incubadora. Aparato provisto de una cámara aislada que mantiene a una temperatura constante en
atmósfera controlada a un recién nacido prematuro para continuar su desarrollo normal.
Este equipo electromédico diseñado para contener un bebé tiene secciones
transparentes que permiten observarlo.
Incubadora para Cuidados Generales de Recién Nacidos: Incubadora en que se
controla la temperatura del aire del compartimiento del recién nacido.
5.2 Temperatura de la incubadora. Es la temperatura medida en el aire dentro de la incubadora en un puntó central 1 O cm
arriba del centro de la superficie del colchón, en el compartimiento del recién nacido.
*Se toma como referencia el rango de 28°C a 38"C, estos datos se relacionaron con el
voltaje medido en el circuito, tomando como parámetro una relación lineal entre la
temperatura y el voltaje (2.8 V a 3.8V).
5.3 Temperatura promedio. Es el valor promedio de las lecturas de temperatura máxima y mínima efectuadas en un
punto especificado dentro del compartimiento del recién nacido logrado en una
condición de temperatura estable.
Una vez que se tenga el módulo en funcionamiento se debe meter a la cámara
permitiendo que la temperatura en el interior de la misma permanezca estable en un
tiempo determinado (aproximadamente 48 hrs), esto con una vigilancia continua y
registros de la temperatura en intervalos regulares, se propone un registro cada hora.
"
RIbERO. SOLIS. ~
14
5.4 Temperatura de equilibrio. Es la temperatura promedio alcanzada cuando la temperatura varía no en más de
0.2OC en una hora.
*Esta prueba se debe realizar dentro de la cámara, sin embargo el circuito en un
ambiente cerrado y sin variaciones de corriente no varía más de 0.2"C.
5.5 Condici6n de temperatura estable. La condición alcanzada cuando la temperatura en el compartimiento del bebé no varía
más de 1 K (1 OC) en el periodo de una hora y la temperatura promedio no varía más de
0.2K (0.2OC) durante este periodo.
*Prueba no realizada, debido a la falta de cámara.
5.6 Variabilidad de la temperatura. Son los cambios registrados en la temperatura de la incubadora durante una hora,
después que se ha alcanzado la temperatura de equilibrio.
*Prueba no realizada. debido a la falta de cámara.
5.7 Temperatura de control. Es la seleccionada en el control de temperatura.
Esta temperatura es la que ncs marca el seiectw de temperatura y que se encuentra
linealizada
5.8 Temperatura de la incubadora. Temperatura en un punto dentro de la incubadora, a 10 cm por arriba del centro de la
superficie del colchón.
RIVERO. SOLÍS. -
15

5.9 Símbolos y abreviaturas.
NOM Norma Oficial Mexicana
SI Sistema Internacional de Unidades de Medida
VCA Volts de Corriente Alterna
NIE Clasificación de materiales aislantes
CA Corriente alterna
cc Corriente continua
DBA Decibeles con una curva de ponderación “A”
Una vez que el prototipo se desarrolla para producción se deben utilizar los símbolos y
abreviaturas antes mencionadas.
5.1 O Especificaciones Las incubadoras deben tener un sistema de acondicionamiento ambiental con cámara
aislada que debe reducir la pérdida y ganancia de calor por radiación, aminorar la
penetración de ruidos, humedad controlada, concentraciones controladas de oxígeno,
con alarmas visuales y audibles conectadas a los sensores especificos que señalan
alteraciones en los rangos establecidos.

5.1 1 Condiciones ambientales de operación.
Temperatura: 293 K a 305 K (2OOC a El rango de temperatura del módulo es de
32OC) 28°C a 38°C.
Humedad relativa: 60% f 20%
Presión barométrica: 75.4 kPa a 100.1 kPa (580 mmHg a 770
mmHg).
Velocidad del aire: 10 a 15 cm/seg. Se maneja un motor de 1500 RPM, el cual
entra en el rango requerido. Para mayor
seguridad se requiere una prueba fisica en
el interior de la incubadora utilizando un
anemómetro.
5.12 Tensión de alimentación. Debe trabajar a 127 volts k 10% de tolerancia a 60 hertz.
*Este rango se cumple en su totalidad.
5.3 3 Materiales. Los materiales deben ser resistentes y no sufrir deformaciones que afecten el
funcionamiento de la incubadora bajo condiciones normales de operación. No se
admite fuente radiante a excepción de la lámpara de fototerapia.
Se debe evitar emplear materiales inflamables en la construcción del equipo.
.~
RIVERO. SOLÍS. ~
17

Los materiales metálicos deben estar protegidos contra la corrosión. Todas las
superficies en el compartimento del recién nacido, ductos, unidad humidificadora y
otros componentes del sistema de circulación del aire, deben ser fácilmente accesibles
a la limpieza y desinfección.
*Se utilizan materiales como el aluminio o bien metales con recubrimiento y aislantes.
5.14 Chasis (módulo de control). Debe estar integrado a la caja mayor y contener los elementos de control de la
incubadora. Debe estar protegido contra daños y otros riesgos de trabajo
El módulo de control deberá removerse por medio de un sistema que permita el
aseguramiento óptimo al chasis principal.
*El módulo se ajusta mecánicamente al equipo, por medio de perillas

5.1 5 Características térmicas.
Temperatura de El control de temperatura de la El rango se maneja
equilibrio incubadora debe lograr este entre 27°C y 37°C.
equilibrio desde 296.15 K
(23OC) y no más de 31 0.1 5 K
(37OC).
Sobregiro de la Debe alcanzar un máximo de El equipo se alarma a
máxima temperatura 312.15 K (39OC) , por medio de 39°C interrumpiendo
de control. una acción especial del el funcionamiento del
operador sobre el dispositivo de calefactor.
ajuste de temperatura. Este
modo de operación debe ser
indicado con una luz de
advertencia u otra señal
fácilmente reconocible o
combinado con una indicación
relevante para este sobregiro
de temperatura.
Exactitud de la k 0.3 K (OC) temperatura indicada,
K ("C).
Se tiene f 0.2 OC

Correlación entre la k 0.7 K (+ 0.7OC)
temperatura indicada y
la temperaiura de
control, K (OC).
Temperatura de las 31 3.15 K (4OOC) máximo
superficies que están
en contacto con el
recién nacido, K (OC).
Temperatura de las 31 3.15 K (4OOC) máximo
superficies accesibles
al recién nacido (en
condiciones normales
de operación o cuando
cesa la circulación de
aire o el control
principal de
temperatura falla). K
("C)
En superficies 31 3.15 K (4OOC) máximo
metálicas.
No se realizó la
prueba.
Se reqiere la cámara.
Se reqiere la cámara.
Se requiere la
cámara.
-~ - RIVERO. SOLIS. LO

En superficies no 316.15 K (43OC) máximo
metálicas.
Temperatura de las 31 3.15 K (4OOC) máximo
superficies accesibles
al operador durante la
operación normal de la
incubadora, K ( O C ) .
En superficies 333.15 K (60.15OC) máximo
metálicas de alta
conductividad térmica.
En superficies de 343.15 K (7OOC) máximo.
plástico de baja
conductividad térmica
o de madera.
Se requiere la
cámara.
Se requiere la
cámara.
El calefactor alcanza
una temperatura
máxima de 60°C.
Se requiere la
cámara.
RtVERO. SOL&. 21

5.16 Alarmas e indicadores
Termostato o dispositivo La incubadora debe disponer El corte de la energía
electrónico de control para de un dispositivo que active se tiene a 38°C y la
el rango de temperatura de una alarma de alta activación de la alarma
control hasta 310.15 K temperatura y corte la energía es a 39°C. (37OC). en el calefactor, cuando la
temperatura de la incubadora
sea igual o mayor de 31 1.15 K
(38OC).
Termostato o dispositivo La incubadora debe disponer La activación de la
electrónico de control para de un dispositivo que active alarma es 39OC. el rango del sobregiro en una alarma de alta
la máxima temperatura de temperatura y corte la energía
control, hasta 312.15 K en el calefactor, cuando la
(39OC). temperatura de la incubadora
sea igual o mayor de 31 3.1 5 K
(4OOC).
Dispositivo de protección El termostato de alta No se tiene
contra desajustes temperatura debe disponer de
accidentales en un dispositivo que prevenga termostatos o dispositivo cambios accidentales del
electrónico de control con ajuste interno! durante el
ajuste interno. mantenimiento preventivo o el
servicio del equipo.
RIVERO. SOLIS. 22

5.16 Continuación .....
Dispositivo para verificar la
integridad de los sensores
de las alarmas de alta
temperatura.
Alarma para falla en la
circulación del aire.
Lapso en que la alarma
para falla en la circulación
del aire entra en
funcionamiento: en tres
minutos.
Indicador de temperatura
de la incubadora.
El equipo debe disponer de
este dispositivo, que debe
operar durante el uso normal,
sin necesidad de interrumpir
la terapia.
El equipo debe disponer de
una alarma audible y visual.
Debe ser especificado por el
fabricante.
El equipo debe disponer de un
indicador independiente de
cualquier dispositivo de
control. La temperatura
indicada debe ser claramente
visible y legible, sin tener que
abrir el compartimiento del
recién nacido. La indicación
puede ser continua,
intermitente o activada por el
usuario.
No se tiene.
Se utiliza la alarma de
alta temperatura.
La alarma entra en
funcionamiento cuando
registra una alta
temperatura.
El indicador es visual
(LED) y cambia de
intensidad.
RIVERO. SOLÍS 23

En el compartimiento del recién nacido, en No debe ser mayor de 60 DBA
condiciones normales de operación.
En el compartimiento del recién nacido, con todas No debe ser mayor de 80 DBA.
las alarmas activadas.
En el exterior de la incubadora a 3 m de distancia a No debe ser mayor de 65 DBA.
una altura de 1.8 m, con cada una de las alarmas
activadas.
Para los apartados anteriores se maneja un buzzer con las siguientes características
FRECUENCIA NIVEL DE CONSUMO DE VOLTAJE DE
MOD.
SONIDO MIN. MAX. A IZVCD VCD kHz TONO PRESION DEL CORRIENTE OPERACIóN OSCILATORIA
MIN. mA 30 cm/lSVCDdB
BGD3 Constante 95 3 - 28 3.5 2 0.5 ' O I
5iD 1 + lento 1.2 !
1 !
j j Hz F 20% I
CONEXION
ES
Cables
~~ ~~~
Temperatura de operación:
-20 - + 60 "C !
BGD3LCID
RIVERO. SOLÍS. ".
21

Se observa que el buzzer utilizado maneja 95 dB, sin embargo este buzzer debe
atravesar varias paredes antes de llegar al neonato, lo cual disminuye los dB hasta en .
un 35%, obteniendo con ello menos de los 60 dB que marca la Norma,
5.18 Características eléctricas
Límites de corriente de
riesgo.
Dispositivo de protección
contra sobrecorriente.
Interruptor de energía
eléctrica.
Cable de alimentación
Tipo de ciavija del cable de
airmentaci6n.
Requisitos generales de
seguridad eléctrica.
Debe satisfacer la prueba NOM J-137-1971,
Debe tener
Debe interrumpir simultáneamente el paso de energía
en los cables de vivo y neutro.
De una longitud mínima de 3 m. Debe ser del calibre
y tipo que cumpla lo especificado en las normas de
referencia para los requerimientos eléctricos de la
incubadora.
La clavija debe ser de grado hospitalario y
necesariarnecte ;cvWcra tres terminales. El vivo, el
neutro y el tercero trerra física.
A menos que se especifique otra cosa, la NOM-J-5-
1981 incubadora debe cumplir con los requisitos
apllcables indicados en la norma de referencia.
RIVERO. SOLÍS 25
5.18 Continuación .....
Seguro de alivio del cable Debe evitar que los esfuerzos mecánicos sobre el
de alimentación. cable de alimentación, tales como jalón o tirón se
transmitan al cableado interno o las terminales de
conexión. Además debe cumplir lo especificado en la
norma de referencia NOM J-195-1980.
Indicador
eléctrica.
Voltaje de
nominal, vca
de energía Debe disponer de un indicador visual que señale que
la incubadora está funcionando al accionar el
interruptor general.
alimentación Debe ser 127 vca k 10%. El equipo debe funcionar
dentro de especificaciones en este rango.
Daños al equipo debido a Para variaciones del voltaje entre 95 vca y 140 vca, el
variaciones en el voltaje de equipo no debe sufrir daños.
alimentación.
Rigidez dieléctrica.
Impedancia a tierra.
Los aislamientos y espaciamientos eléctricos deben
soportar sir: d a b ia aplicación por un minuto de 1000
vca más dos ~ec23s e¡ máximo voltaje de operación o
por 1 segundo, ¡a aplicación de 1200 vca más 2.4
veces el vo!taje nominal de operación.
Debe satisfacer las pruebas.
RIVERO. SOL&. 26

Capítulo 6
6 METODOLOGíA
El proyecto propuesto que aquí exponemos se encuentra organizado en cuatro etapas
las cuales son:
ETAPA 1 Diseño del circuito para seleccionar la temperatura de operación de la incubadora así como sensor la temperatura ambiente.
ETAPA 2 diseño de la alarma de alta temperatura, así como la habilitación del elemento
calefactor para generar calor
ETAPA 3 Diseño de la fuente de alimentación para energizar a todo el sistema
ETAPA 4 Acoplamiento de todas las etapas anteriores
6.1 ETAPA 1
En esta primera etapa se requiere habilitar el calefactor cuando el selector de
temperatura marque una temperatura mayor a la detectada por el sensor de
temperatura.
La figura 3 nos muestra en un diagrama a bloques !a secuencia que debe llevar el
diseño del circuito.

comparador del calefactor I " - - - - - '
I temperatura
Figura 3. Diagrama a bloques de la etapa 1.
El primer bloque indica un sensor de temperatura, el cual deberá tener una relación de
10 mV por grado (sería lo ideal). El sensor se conecta a un compensador de offset, ya
sea negativo o positivo, para realizar la corrección necesaria sobre el sensor. La salida
del compensador entra a una terminal del comparador. Por otro lado, la otra entrada del
comparador es la que proviene del selector de temperatura, que debe tener un rango
de 27 a 37 "C (en voltaje sería de 0.27 a 0.37 Volts). En caso de que el comparador
detecte que ambas entradas son diferentes el calefactor seguirá activado, una vez que
estas ectradas sean iguales el calefactor se desactmrá.
Se eiigló ei sensor de temperatura de la serie lM35 debido a sus características como
son:
Salida de voltaje lineal en la escaia de grados Celsius
No requiere calibración externa.
Se puede alimentar con una sola fuente, o bien puede utilizar fuente dual.
RIVERO. SOLIS. 28

Factor lineal de +10.0 mV. / "C.
Bajo costo.
Exactitud garantizada de 0.5 "C a temperatura ambiente.
6.1.1 Análisis de la etapa 1
El sensor se conecta a un compensador de offset, de manera que se puede variar el
nivel de offset según nuestras necesidades; sobre todo para ajustar la lectura que se
visualizará en el display, la cual debe ser similar a la registrada por el sensor. La señal
de salida de este compensador entra a una terminal de un amplificador sumador cuyo
nivel de ganancia es de diez, con el fin de enviarse a un circuito comparador de voltaje,
el cual se encargará de habilitar o deshabilitar a un circuito Triac que generará el
disparo de energía para el calefactor. Por otra parte, la señal que nos entrega la salida
de este amplificador, se envía de manera inmediata al bloque que manejará el
despliegue.
RILYERO. SOLÍS. ". . . - "
29

"I& KL7107
mo,.. . &-o* Iral
TO 4*aLCU
FULL =*LE U W ~ mRIT
1QI OmV 1- mv
CIRCUITO DE OPERACIóN TlPlCO DEL 7107
Figura 4. Configuración del C.I. 7107.
El despliegue lo realizamos utilizando como plataforma el circuito integrado ICL7107
(figura 4), el cual es un manejador de despliegues (display drivers), cuyas
características entre otras tenemos las siguientes:
Contiene un convertidor analógico-digital
No requiere de componentes externos para la interfase con los displays
Gran exactitud
Aún así, la entrada antes del driver está amplificada. pero como se dijo anteriormente,
esta sólo sirve para utilizarse en el comparador. de manera que en la entrada del driver,
la señal debe atenuarse en un factor de diez, esto I C hacemos por medio de un divisor
de voltaje según las hojas de especificaciones; de tal manera que a la salida, el circuito
por sí solo desplegará en los indicadores Ics números correspondientes.
RIVERO. SOLIS. -3 o

TER1IORREG C% 1 CI6;V .VEO:L:-17: 1 L Ahora bien, en la otra entrada del circuito comparador, tendremos la señal de control, la
cual corresponde al nivel de voltaje equivalente a la temperatura de control que
deseamos seleccionar.
Esta temperatura de control, la obtenemos mediante un simple divisor de voltaje por
medio de arreglos de resistencias para obtener un voltaje fijo. Este voltaje se acopla al
comparador por medio de un buffer.
Cabe mencionar que para la etapa anteriormente descrita utilizamos para los amplificadores y comparador un circuito integrado, el LM324, esto debido a que el
circuito integrado viene en una presentación de cuatro amplificadores operacionales,
con lo que nos ahorramos espacio y mayor cantidad de componentes, además por las
características descritas en sus hojas de especificaciones, las cuales pueden revisarse
en los anexos del presente reporte.
Ahora, en el circuito comparador tendremos en la entrada inversora la señal
proveniente del amplificador y en la entrada no inversora la señal de control, de tal
manera que cuando la señal proveniente del sensor es mayor a la del circuito de
control, el amplificador va a saturación negativa, lo contrario ocurre cuando la señal de
control es mayor que la del sensor; así, el amplificador se encontrará en saturación
positiva.
Así pues, la salida del comparador. se aplicars a la entrada de un circuito
optoacoplador. esto se logra colocando un circuito llamado de prueba según las hojas
de especificaciones (ver anexos).
De tal manera que se permite acoplar los circuitos que utilizan voltaje directo con el
voltaje de la línea; es decir sirven de interfase para poder conectar el elemento
generador de radiación (resistencia eléctrica).

TER\lORREGl.Z4 CI¡j.l' :VEO.C:-I TIL
A continuación se describen los cálculos más relevantes para la elaboración de la
presente etapa.
Para obtener un voltaje adecuado, se requiere de un amplificador
La selección del rengo de temperatura es de 28" C (límite inferior) a 38°C (límite
superior), escalando estos valores a voltaje se requieren 0.28 V a 0.38 V. Se utiliza un
amplificador de 1 :I O, obteniendo una salida de 2.8 V a 3.8 V.
Considerando un amplificador operacional ideal, se utiliza un amplificador-inversor
Figura 5. Amplificador Inversor.
La relación de este circuito es
v2 = o v* = VI o
Is = vs y If= vo
2 Rs Rf
"""""""""""""""~ (1 )
"""""""""""""""~ (2)

si If + I, = I , , I1 = o Y i f = - / , ""-""""""""""""" (3)
Para obtener el límite inferior (28"C), utilizamos la relación (2) y (3) de la cual
obtenemos
- vs = vo
Rs Rf
"
Despejamos Rr y tomamos Vs, = 0.28 V y Vo = 2.8 VI fijando Rs = 100 kR y. La
relación obtenida es
Rf = Vo Rs "
v s
Sustituyendo valores
Rfi = 2.8V (I00 ki2) = (10)(100 kR) = 1000 kR = 1 MR
0.28 V
Para obtener el límite superior (38°C); utilizamos la misma relación y sustituimos
valores
Rf, = 3 . 8 V (100 kR) = ( I O ) (I00 kf2) = 1000 kf2 = 1 M a
0.38 V
Ambos resultados obtenidos para Rf nos indican que la relación es lineal.
RiVERO. SOLIS. 3 3

TER.\ /ORREG 1 :LI c-~d.~. L v ~ o x ~ ~ . - l L
6.1.2 Selector de temperatura
Para el selector de temperatura se utiliza un divisor de voltaje con un valor fijo de
voltaje como referencia.
L e I v2
La relación del circuito anterior es
v2 = & vs
RI
Para el límite inferior
V2 = 2.8 V, despejando R2 y fijando el valor de RI = 18 kt2
3 2 Ri = 2.8 V (18 kn) = (0.56) (18 kR) = 10.08 kR
V S 5.0 V
Para el límite superior
V2 = 3.8 VI despejando R2 y fijando el valor de RI = 18 kR

R:! = l/a Rq = 3.8 V (18 kn) = (0.76) (18 k n ) = 13.68 kt2
vs 5.0 V
Por lo tanto, por los valores obtenidos se requiere de un trimpot de 20 kt2
Para realizar el ajuste exacto se utilizan dos divisores de voltaje uno para el límite
inferior y superior, realizando el ajuste como parte de la calibración y determinando el
rango de 2.8 V a 3.8 V.
Superior PI E- RI
- v
RI p3 r - W
8'4 Inferior
Figura 6. Selector de temperatura.
Dividiendo el anterior clrcuito en dos partes. inferior y stiperior! tenemos un circuito de
la siguiente forma
R1 V-E RO. SOL I S. " ~ _ _ _
3 3

Considerando que PI = P2 = 20 k!3
Si en PI hay 2.8 V y en P2 hay 3.8 V, entonces
PI = 10.08 kR y P2= 13.68 k 0 ; Vi = 2.8 V y Vs = 3.8 V
Calculando P3 para limite inferior, tenemos que
P3 =x (RI + PI)
vs
Sustituyendo valores
P3 = 2.844 (18 kQ + 10.08 kR) = (0.56)(28.08 kQ) = 15.72 kR
5.0 SC
Calculando P3 para limite superior, tenemos que
P3 =x (RI + P I )
us
KIVERO. SOLIS. 36

Sustituyendo valores
P3 = 3.8 V ( I 8 kQ + 13.68 kR) = (0.76)(31.68 kQ) = 24.08 kR
5.0 V
De acuerdo a los valores obtenidos se requiere de un trimpot de 50 kR para seleccionar
la temperatura. La salida del amplificador-inversor y de P3 entran al comparador y en el
momento en que sean iguales se desactiva el calefactor.
6.2 ETAPA 2 Esta etapa, consiste en elaborar un circuito que genere la señal de habilitación de la
alarma, para esto utilizamos el circuito integrado LM358, cuyas características se
pueden ver en los anexos.
La cámara de calentamiento contiene una resistencia eléctrica, la cual calienta el flujo
de aire por convección forzada a través de un ventilador impulsado por un motor
eléctrico. La ausencia de flujo puede deberse a diferentes causas: obstrucción de la
trayectoria de entrada de aire a la cámara,. obstrucción de la trayectoria de salida de
aire a la cámara y falla en el motor que impulsa el ventilador. Los efectos de la falla se
manifiestan en dos formas: calentamiento de !a cámara o sobretemperatura y
disr,inuclón de presién y velocidad en el fiup Ge alre El sistema desarrollado cltiliza un
sensor de temperatura para !a detección de la falla a través del incremento de
temperatura en la cámara.
Esta etapa debe habilitar la alarma cuando el sensor de respaldo detecte una
sobretemperatura (mayor o igual a 39°C).
____ FUVERO. SOLIS. 37
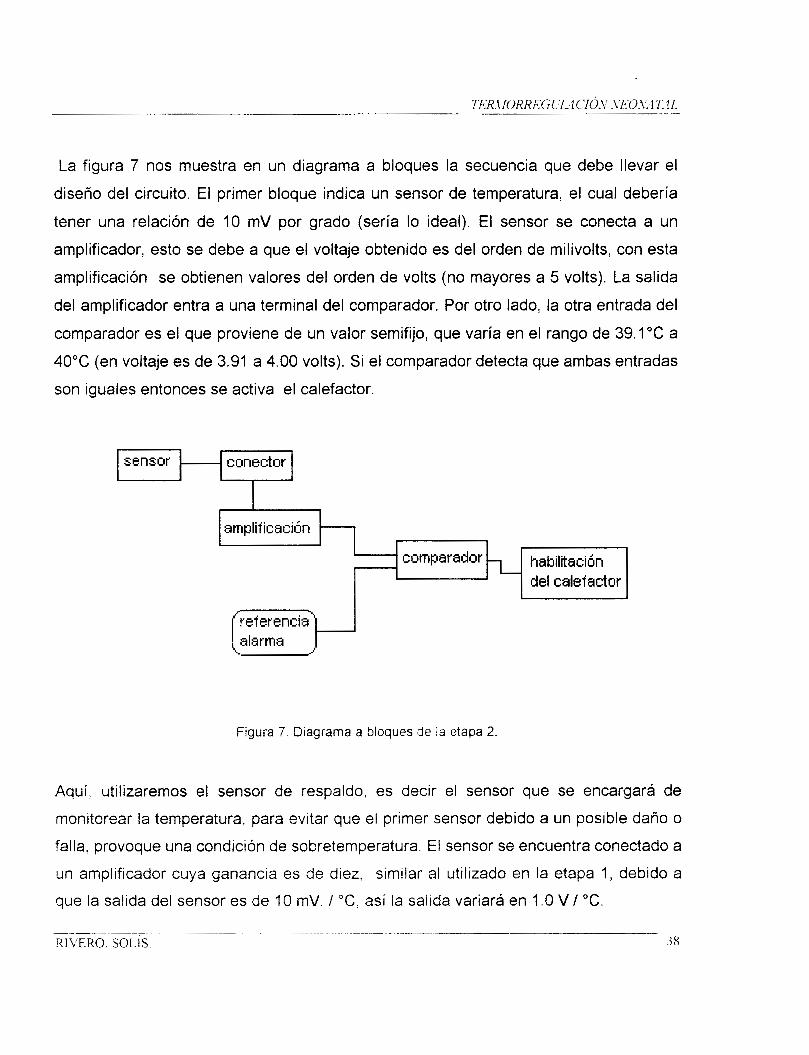
La figura 7 nos muestra en un diagrama a bloques la secuencia que debe llevar el
diseño del circuito. El primer bloque indica un sensor de temperatura, el cual debería
tener una relación de 10 mV por grado (sería lo ideal). El sensor se conecta a un
amplificador, esto se debe a que el voltaje obtenido es del orden de milivolts, con esta
amplificación se obtienen valores del orden de volts (no mayores a 5 volts). La salida
del amplificador entra a una terminal del comparador. Por otro lado, la otra entrada del
comparador es el que proviene de un valor semifijo, que varía en el rango de 39.1 "C a
40°C (en voltaje es de 3.91 a 4.00 volts). Si el comparador detecta que ambas entradas
son iguales entonces se activa el calefactor.
comparador habilitacibn del calefactor
alarma
Figura 7. Diagrama a bloques de la etapa 2
Aquí. utilizaremos el sensor de respaldo, es decir el sensor que se encargará de
monitorear la temperatura, para evitar que el primer sensor debido a un posible daño o
falla, provoque una condición de sobretemperatura. El sensor se encuentra conectado a
un amplificador cuya ganancia es de diez, similar al utilizado en la etapa 1 , debido a
que la salida del sensor es de 1 O mV. / "C, así la salida variará en 1 . O V / "C.

Fijando el valor de R1 a 200 kQ, se obtiene que R2 = 1 MQ
Voltaje de referencia para alarma de alta temperatura
Para este voltaje se utiliza un divisor de voltaje con un valor fijo de voltaje como
referencia.
v2
La relación del circuito anterior es
v2 = & vs
Rt
Para el límite inferior
R:, = 1 Q y fijando el valor de R, = 18 kQ
V, = &VS = IR (8V) = 0.44 V
R1 18kQ

Para el límite superior
R2 = 20 kR y fijando el valor de Rf = 18 kR
V2 =&VS = 20 kR (8V) = 8.88 V
R1 18kR
Por lo tanto, por los valores obtenidos se requiere de un trimpot de 20 kR
Recordando la relación
Vo = R1 + R2
vi R1
Sustituyendo valores
Vo = 200 kQ + 1 MQ (0.39 V) (5) = 1.96 V
200 kC2
El valor obtenid3 ertra dentro del rango
6.3 ETAPA 3 La fuente regulada se desarrollará en base a ¡os requerimientos de los circuitos de las
etapas 1 y 2. Sin embargo. en principio se requiere de 5, +I2 y -12 volts. Para su
construcción se utilizará un transforrrador y componentes electrónicos diversos.
Utilizamos para ello un transformador con derivación central con una entrada de 127
VAC. y una salida de 18 VAC.

Por medio de un circuito puente de diodos rectificamos la señal, posteriormente, con
circuitos integrados reguladores de k 12 V. de corriente directa obtenemos los voltajes
anteriormente mencionados, este voltaje lo utilizaremos para alimentar los circuitos de
amplificación provenientes de los sensores de temperatura, así como circuitos
relacionados en la activación de alarmas, relevador, etc.
Debemos tener también una salida de k 5V. para alimentar al circuito controlador de
despliegue, ya que este tiene tensiones de polarización TTL., esta también la
obtenemos utilizando reguladores de voltaje para ello.
Figura 9. Fuente regulada
Figura 1 O. Configuración del reaulador de voltaje.
- - ______ ".
RIVERO. SOLIS. ""
43

Figura 11. Fuente de alimentación: rectificación de onda completa.
6.4 ETAPA 4
En esta ÚRima etapa se realiza el acoplamiento de las etapas anteriores, anexando el
bloque de despliegue de temperatura.
AI acoplar las etapas 1 y 2 se realiza el ajuste necesario para habilitar el disparo del
calefactor (figura 12-bloque acoplamiento). este ajuste es necesario debido a que la
etapa 1 desact~va e! calefactor y la etapa 2 activa E! csiefador. de tal forma que ambas
quedan en activado Esta habilitación realiza el disparo para la activación del calefactor.
El calefactor continua activado mientras no se cumpla alguna de las sigurentes
condiciones: la temperatura sensada sea menor a la seleccionada y/o la temperatura
sensada sea menor a la indicada en referencia de alarma, en caso de que se llegue a
esta temperatura o sea mayor se activará la alarma de sobretemperatura (visual y
audible). La figura 12 muestra el diagrama a bloques del circuito final.

. ..
sensor conector .. - .
Convertidor AID Despliegue j
I compensacibn I L
de offset comparador . . " . " " . . "
selector de temperatura
I
-1 disparo l - r l habiltacicin disparo a calefactor
calefactor
amplificaci6n -
- comparador -
alarma
I::,q=
r
FIJENTE REGULADA
LÍNEA turbina y motor
Figura 12. Diagrama a bloques del sistema completo "control de incubadora".
RIVERO. SOLIS. 45

l
I

7 RESULTADOS
Los resultados que se obtuvieron en el diseño del control electrónico, fueron los
siguientes:
En la elaboración de la etapa 1, el Único problema que tuvimos fue al implementar el
circuito selector de temperatura, ya que como se había planteado al principio, por medio
de un divisor de voltaje para la selección de temperatura mínima y máxima empleando un
potenciómetro, observamos que la selección de la temperatura no era lineal; es decir, en
los extremos sí encontramos los valores de voltajes correspondientes a una temperatura
mínima y máxima, pero para los valores intermedios, no encontramos una relación lineal,
ya que al medir los voltajes correspondientes a los valores de temperatura calculados, no
correspondían a los voltajes medidos en el multímetro.
De manera que para solucionar nuestro problema, intentamos resolverlo usando un
circuito comercial llamado atenuador de volumen, utilizado para los equipos de audio;
debido a que el circuito contenía un potenciómetro que según el fabricante era lineal en
todo su rango dinámico de operación. El inconveniente de esta opcibn fue que el circuito
anteriormente mencionado resultaba demasiado caro y por 10 tanto se elevaba el costo de
la implementación~ por lo que optamos por diseñar u n circuito divisor de voltaje hecho con
resistencias convencionales que nos generara tiRa sa!:da de voltaje proporcional al voltaje
necesario para desplegarlo en los indicadores. utilizando también un selector a pasos
para seleccionar un valor determinado de voltaje.
Esta opci6n resultó apropiada ya que al verificar 10s voltajes en la salida de dicho divisor,
estos no tenían una variación tal que afectara el funcionamiento de la etapa así como el
despliegue de temperatura observado. Como se observa en la siguiente figura.

l o o O m v 1mDb #
CIRCUITO DE OPERACION TlPlCO DEL 7107
Figura 14. Circuito de operación del 7107.
Para la configuración del circuito driver (ICL 7107), utilizando la hoja de especificaciones
de MAXIM, optamos por tomar el circuito de aplicación típica, con lo cual desplegamos de
manera adecuada la temperatura obtenida a la salida del circuito amplificador que toma la
temperatura del sensor y que podemos visualizar en los indicadores.
Para la elabGracion de la etapa 2, practicamente no obtuvimos problema alguno en su
implementacion. ya I;Ae esta funcionó de ia "aIz;.3-2 271 que ncsoiros esperábamos, el
Único inconveniente que consideramos se debe cziífsxonar, es el desarrollo de un
circuito que seleccione el voltaje necesario para la alarma de alta temperatura; sin perder
de vlsta el hecho de que el diseño debe ser barato pero eficiente. Además al revisar las
NOM: faltaron las implementaciones de algunas alarmas que no se habían contemplado,
pero que no son tan difíciles de implementar.

En cuanto a la habilitación del calefactor, este no tuvo problemas para generar la
activación/desactivación que nos proporcionara la energía necesaria para su
funcionamiento.
La implementación de la etapa 3 fue la más simple, ya que sólo requeríamos una fuente
de alimentación que nos proporcionara los voltajes necesarios para el buen
funcionamiento de los circuitos integrados utilizados en las etapas anteriores además de
que no existieran grandes variaciones al acoplar todas las etapas. Esto lo logramos
utilizando circuitos reguladores de voltaje de k 12 VCD, k 5 VCD, y +8 VCD, suficientes
para energizar todo el circuito entero.
La elección de los componentes se realizó de manera que presentaran la resistencia
suficiente en su aplicación, es decir, que el consumo de energía no afectara en su
funcionamiento ya sea deteriorándolos o bien provocando fallas en los demás elementos.
Por lo general se utilizaron elementos que soportaran cantidades de corriente mayores a
500 mA.
La configuración de la fuente de alimentación se desarrolló de la forma más simple
basándonos en las sugerencias dadas por los fabricantes.
Por iiitirno. la etapa 4. referente al acoplo de todas ias ztapas anteriores, se realizó con
éxito. presentando un poco de problemas sólo en la etapa de despliegue de la
temperatura, esto debido a que la tablilla de experimentación al parecer presentaba
defectos en sus pistas, ya que la información vista en los despliegues era demasiado
parpadeante y poco estable, esta deficiencia se corrigió al momento de pasar la
lmplementación en circuito impreso.

El módulo de control resultante tiene las siguientes características:
Sistema de control
Sistema de alarma
Rango de temperatura
Termómetro
Resolución del termómetro
Voltaje de alimentación
Frecuencia de línea
Potencia de consumo
Consumo de corriente
Electrónico
Audible y visual de alta temperatura
28 "C. a 38 "C.
Con despliegue digital
k0.2 "C.
127 Vac. +1 O %.
60 Hz.
500 VV.
4 A.

Capítulo 8
8 DISCUSION
AI acoplar las etapas, se encontraron ciertos contratiempos, como fueron, el que la salida
de los amplificadores en ocasiones no obteníamos los voltajes esperados, esto no era
debido a que el diseño estuviera mal, sino que en ocasiones al hacer las conexiones en la
tablilla de experimentación, se nos pasaba conectar la alimentación, o bien se
desconectaban algunos cables, de manera que parecía haber errores.
Otros contratiempos fueron al momento de tratar de calibrar el termómetro digital, ya que
al utilizar trimpot, debíamos de encontrar un punto exacto de resistencia para que el valor
visualizado fuera el correcto, quizá en este punto debemos de aplicarnos un poco mas;
además si queremos seguir al pie de la letra las recomendaciones de la Norma Oficial
Mexicana, dista mucho de lo que en realidad tenemos; pues se deben hacer estudios
grandes por ejemplo el nivel de ruido medido dentro de la incubadora, no tenemos la
manera de poder realizarlo, o bien, otro ejemplo de lo que nos faltó, fueron algunas
alarmas de más que quizá por el tiempo o bien por falta de información adecuada, no
pudimos implementar; aunque como nuestro propósito era realizar un módulo sencillo
para termorregulación, no las tomamos en cuenta.
En cuanto a los sensores que utilizamos, funcionan, pero en ocasiones son demasiado
sensibles al menos cuando probamos el circuito al aire libre y no en la cámara, esto
debido quizá a que alrededor del sensor circulaban las corrientes de aire, lo que hacia
que el despliegue en el termómetro digital no se mantuviera constante; para corroborar lo
anterior de manera fácil y rápida, con las manos hicimos una especie de “casa”, de
manera tal que las corrientes de aire no fuesen tan significativas; con esto se observó que
la temperatura en el despliegue se estabilizaba. Por lo que concluimos que dentro de la
cámara el sensor y por lo tanto el termómetro deben comportarse de manera más
estable.
IIlVER( ), SOLIS -
51

Un aspecto más que debe mejorarse es el diseño de la fuente, claro que al comparar
diseños de otros equipos y sobre todo de equipos importados, estos tienen una
infraestructura mucho mejor que la aquí propuesta; esto quizá debido a que para el
desarrollo de tales aparatos, son elaborados por un equipo de profesionales avocados a
problemas demasiado específicos dentro del diseño; pues para poder cumplir con todos
los requisitos de las normas vigentes deben realizarse demasiadas pruebas y por un gran
periodo de tiempo.
Cabe hacer mención que debemos realizar el circuito anteriormente propuesto sobre la
placa de cobre, es decir, realizar su circuito impreso y verificar que realmente hace lo
programado, además de incorporar los requisitos electrónicos que faltaron por cubrir
según la NOM.
Por último, podemos concluir que al menos para fines prácticos el circuito funciona
adecuadamente, ya que cada etapa funciona como lo habíamos esperado; sobre todo en
la parte de habilitación y deshabilitación de la etapa de potencia hacia el elemento
calefactor y en la etapa de alarma de alta temperatura; pues esta se activa en cuanto se
sobrepasa ligeramente el valor límite previamente seleccionado.

Capítulo 9
9 BIBLIOGRAFIA:
1- The Children's Incubator British Medical Journal 2: 1528, Decembre 14". 1895.
2-An Efficient and inexpensive Incubator Herbert Thoms, M. D.
American Journal of Obstetrices and Diseases of Women and Children 78.542-544 191 9
3- Premature Infants Vanderpoel Adriance, M.D. American Journey of Sciences 121 :410-421, 1901
4- The Problem of Premature Infant J. W. Ballantyne, M.D. , et al. British Medical Journal 1: 1 196-1200, May 17, 1902
5- The Sloane Hospital Incubator Edwin B. Cragin, M.D.
JAMA63 (11): 947, Sept. 12 1914
6- An Electric-Heated Water-Jacketed Infant icubator and Bed for Use in the Care of Premature and Poorly Nourished Infants Julius H. Hess. M.D.. Chicago JAMA 64( 13): 1068-9. March 27. 191 5
7- Inctibator"3aby Shows \Nilliam A. Silverman, M.D: Pediatrics 64(2): 127-1 41. August 1979
8- The Warming Crib John Barttlet , M.D. The Chicago Medical Journal and Examiner 54:449-454, May 1887.
9- Norma Oficial Mexicana Que establece las especlficaciones sanitarias de las incubadoras para recién nacidos 25 de Julio de 1995 Diario Oficial

1 O- Manual de Circuitos Integrados Lineales Motorola
11- Manual de transistores de pequeña setial Motorola
12- Manual de transistores de potencia Motorola
13- Manual de sensores de presición National Semicondutor
14- Internet: página web Maxim.com
15- Sistema de control digital para incubadora y monitoreo de temperatura corporal de neonatos. César A. Carranza De la Cruz, Ronald Javier Leiva Coriat