Diseño en AutoCAD de robot sembrador de semillas de fresa ...
86
DISEÑO EN AUTOCAD DE ROBOT SEMBRADOR DE SEMILLAS DE FRESA: FRESABOT III Autores Juan Carlos Flórez González 20182197050 Víctor Manuel Castellanos Pabón 20182197040 Tutor Lindsay Álvarez Pomar Doctora en Ingeniería UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS Especialización en Gestión de Proyectos de Ingeniería Facultad de Ingeniería Bogotá, Colombia agosto de 2019
Transcript of Diseño en AutoCAD de robot sembrador de semillas de fresa ...

DISEÑO EN AUTOCAD DE ROBOT
SEMBRADOR DE SEMILLAS DE FRESA:
FRESABOT III
Autores
Juan Carlos Flórez González 20182197050
Víctor Manuel Castellanos Pabón 20182197040
Tutor
Lindsay Álvarez Pomar
Doctora en Ingeniería
UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS
Especialización en Gestión de Proyectos de Ingeniería
Facultad de Ingeniería
Bogotá, Colombia
agosto de 2019
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 2
CONTENIDO
RESUMEN ......................................................................................................................... 8
PALABRAS CLAVE ........................................................................................................... 8
INTRODUCCIÓN ............................................................................................................... 9
1. CONTEXTO E IDENTIFICACIÓN DEL PROYECTO ................................................ 11
1.1 ANALISIS DE INTERESADOS .......................................................................... 11
1.2 ANÁLISIS DEL PROBLEMA .............................................................................. 13
1.3 ANÁLISIS DE OBJETIVOS ................................................................................ 15
1.4 SELECCIÓN DE LA ESTRATEGIA ÓPTIMA ..................................................... 16
1.5 ALCANCES ....................................................................................................... 17
1.6 ESTRUCTURA ANALÍTICA DEL PROYECTO .................................................. 18
1.7 RESUMEN NARRATIVO DE OBJETIVOS Y ACTIVIDADES ............................ 19
1.8 ANÁLISIS DE INDICADORES ........................................................................... 19
1.9 MATRIZ DE MARCO LÓGICO .......................................................................... 21
1.10 NORMATIVIDAD APLICABLE AL PROYECTO ................................................. 23
2. ANÁLISIS DEL MERCADO ...................................................................................... 25
2.1 ESTUDIO SOCIOECONOMICO ........................................................................ 25
2.2 DEFINICIÓN DE LA CADENA FRESA .............................................................. 25
2.3 ÁREA, PRODUCCIÓN Y RENDIMIENTO ......................................................... 26
2.3.1 Área, producción y rendimiento departamental de fresa ............................. 26
2.3.2 Área, producción y rendimiento nacional .................................................... 27
2.3.3 Área, producción y rendimiento a nivel mundial .......................................... 29
2.4 COMERCIO INTERNACIONAL ......................................................................... 29
2.4.1 Balanza comercial ...................................................................................... 29
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 3
2.4.2 Exportaciones de fresa (toneladas) ............................................................ 31
2.4.3 Importación de fresa (toneladas) ................................................................ 32
2.5 precios nacionales ............................................................................................. 32
3. PLANIFICACIÓN DEL PROYECTO .......................................................................... 35
3.1. PROCESOS Y SU CLASIFICACIÓN ................................................................. 35
3.2. CRONOGRAMA DE ACTIVIDADES .................................................................. 36
3.3. EVALUACIÓN DE RIESGOS ............................................................................ 36
3.4. OBJETIVO PRINCIPAL ..................................................................................... 37
3.5. OBJETIVOS ESPECIFICOS .............................................................................. 37
3.6. LINEAMIENTOS ESTRATÉGICOS ................................................................... 37
3.6.1. POLÍTICA INTEGRAL HSEQ .................................................................... 39
3.6.2. VARIABLES QUE AFECTAN EL PROYECTO ........................................... 39
3.7. POLÍTICA DE CALIDAD .................................................................................... 41
4. INGENIERIA DEL PROYECTO ................................................................................ 42
4.1. RECURSOS ...................................................................................................... 43
4.2. LOCALIZACIÓN ................................................................................................ 43
4.3. METODOLOGÍA ................................................................................................ 43
4.4. DISEÑO MECÁNICO DEL ROBOT ................................................................... 45
4.5. DISEÑO ELECTRICO ....................................................................................... 45
5. ESTUDIO ADMINISTRATIVO ................................................................................... 55
5.1. MISIÓN .............................................................................................................. 56
5.2. VISIÓN .............................................................................................................. 56
5.3. ESTRUCTURA ORGANIZACIONAL.................................................................. 56
5.3.1. Mapa de procesos ...................................................................................... 56
5.3.2. Organigrama............................................................................................... 57
5.3.3. Perfiles de los cargos ................................................................................. 58
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 4
5.4. ANÁLISIS LEGAL .............................................................................................. 58
6. ESTUDIO ECONÓMICO - FINANCIERO .................................................................. 60
6.1. MAQUINARIA Y EQUIPO .................................................................................. 61
6.2. MATERIA PRIMA .............................................................................................. 62
6.3. MANO DE OBRA ............................................................................................... 63
6.3.1. Operativa .................................................................................................... 63
6.3.2. Administrativa ............................................................................................. 64
6.4. INGRESOS........................................................................................................ 65
6.5. OTROS GASTOS .............................................................................................. 65
6.6. FLUJOS DE CAJA ............................................................................................. 66
6.7. VAN, TIR Y RELACIÓN BENEFICIO/COSTO ................................................... 69
6.8. ANALISIS DE SENSIBILIDAD ........................................................................... 69
7. CONCLUSIONES Y RECOMENDACIONES ............................................................ 71
7.1. CONCLUSIONES .............................................................................................. 71
7.2. RECOMENDACIONES ...................................................................................... 72
8. REFERENCIAS ........................................................................................................ 74
ANEXO ............................................................................................................................ 77
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 5
LISTA DE TABLAS
Tabla 1. Análisis de Involucrados. ................................................................................... 13
Tabla 2. Selección estrategia óptima. .............................................................................. 17
Tabla 3. Matriz de Alcances. ........................................................................................... 17
Tabla 4. Resumen de Objetivos....................................................................................... 19
Tabla 5. Análisis de Indicadores. ..................................................................................... 21
Tabla 6. Análisis de Participación. ................................................................................... 22
Tabla 7. Normatividad. .................................................................................................... 24
Tabla 8. Los rendimientos estimados están dados por datos del agricultor en cada región.
........................................................................................................................................ 26
Tabla 9. Área, producción y rendimiento nacional. .......................................................... 28
Tabla 10. Importaciones y Exportaciones de la fresas. .................................................... 30
Tabla 11. Países de destino del cultivo de fresas. ........................................................... 31
Tabla 12. Importaciones de fresa (toneladas). ................................................................. 32
Tabla 13. Precios Nacionales. ......................................................................................... 32
Tabla 14. Costo del precio de la fresa en el año 2015 comparado con el año 2016. ....... 33
Tabla 15. Clasificación de los procesos. .......................................................................... 35
Tabla 16. Cronograma de Actividades. ............................................................................ 36
Tabla 17. Matriz de Valoración de Riesgo. ...................................................................... 36
Tabla 18. Variables que afectan el proyecto. ................................................................... 40
Tabla 19. Maquinaria y Equipos (Diseño). ....................................................................... 61
Tabla 20. Maquinaria y Equipos (Prototipo a Futuro). ...................................................... 61
Tabla 21. Costos de materiales de Diseño. ..................................................................... 62
Tabla 22. Costos de materiales Prototipo a Futuro. ......................................................... 63
Tabla 23. Mano de obra del Diseño. ................................................................................ 64
Tabla 24. Mano de obra del Prototipo a Futuro. ............................................................... 64
Tabla 25. Mano de Obra del Diseño. ............................................................................... 64
Tabla 26. Mano de Obra Prototipo a Futuro. ................................................................... 64
Tabla 27. Ingresos de Diseño Sin Financiación. .............................................................. 65
Tabla 28. Ingresos del Prototipo a Futuro Con Financiación. ........................................... 65
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 6
Tabla 29. Otros Gastos del Diseño. ................................................................................. 65
Tabla 30. Otros Gastos Prototipo a Futuro. ..................................................................... 65
Tabla 31. Flujo de Caja Robot sembrador (Capital Propio) - Intermedio .......................... 66
Tabla 32. Flujo de Caja Robot sembrador (Capital Propio) - Pesimista ........................... 67
Tabla 33. Flujo de Caja Robot sembrador (Con Financiación) - Optimista ....................... 68
Tabla 34. VAN, TIR y relación Beneficio/Costo. ............................................................... 69
Tabla 35. Análisis de Sensibilidad ................................................................................... 69
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 7
LISTA DE ILUSTRACIONES
Ilustración 1. Árbol de Problemas. .................................................................................. 15
Ilustración 2. Árbol de Objetivos. .................................................................................... 16
Ilustración 3. Estructura Analítica del proyecto. .............................................................. 18
Ilustración 4. Análisis del problema. Marco Lógico. ........................................................ 23
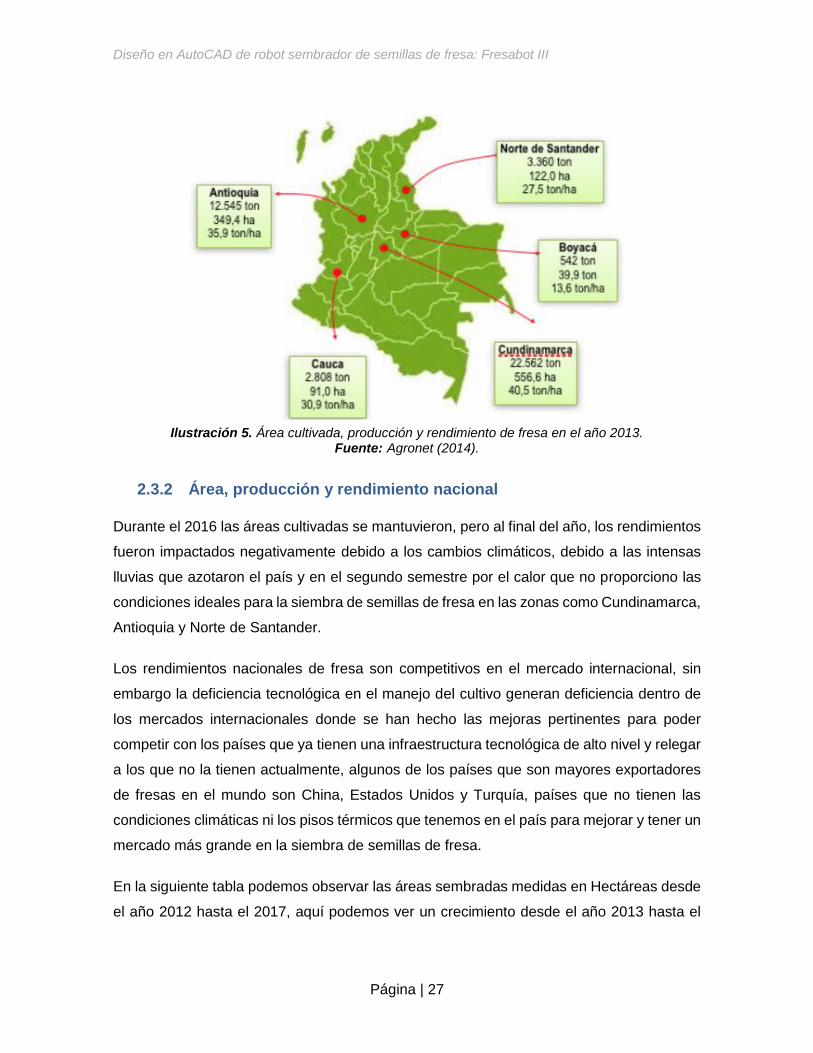
Ilustración 5. Área cultivada, producción y rendimiento de fresa en el año 2013. ........... 27
Ilustración 6. Caracterización zonas de producción........................................................ 28
Ilustración 7. Principales países productores de fresa en el 2012. ................................. 29
Ilustración 8. Diagrama de funcionamiento de la cadena comercial de la fresa. ............. 30
Ilustración 9. Histórico grafico de precios mayoristas de la central de abastos de Bogotá.
........................................................................................................................................ 33
Ilustración 10. Principales destinos de las exportaciones de fresa desde Colombia en el
2013. ............................................................................................................................... 34
Ilustración 11. Principales países importadores de fresa y valor de las importaciones en el
2013. ............................................................................................................................... 34
Ilustración 12. Procesos de desarrollo para el inicio y seguimiento del proyecto sembrador
de semillas de fresas. ...................................................................................................... 38
Ilustración 13. Actividades de cultivo de fresa. ............................................................... 38
Ilustración 14. Etapas fenológicas del cultivo de la fresa. ............................................... 40
Ilustración 15. Calendario de siembra, labores y cosecha del cultivo de la fresa en
Colombia. ........................................................................................................................ 40
Ilustración 16. Plano Eléctrico. ....................................................................................... 46
Ilustración 17. Mapa de procesos. .................................................................................. 57
Ilustración 18. Organigrama administrativo. ................................................................... 58

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 8
RESUMEN
El diseño para un robot sembrador de semillas de fresas se realiza para mejorar la calidad
de vida de las personas que se dedican a esta actividad, obteniendo una mayor
productividad en el proceso de siembra en la agricultura de precisión, lo que se busca es
mejorar las técnicas empleadas en la actualidad referentes a la mano de obra, tiempo de
ejecución y producto final, para lograr un mejor desempeño en otras áreas, de igual manera
se quiere demostrar que en nuestro país se están haciendo aportes de innovación en el
área agrícola, lo que se desea es encontrar una solución que sea de bajo costo, que
preserve al medio ambiente y que esté al alcance de nuestros agricultores, donde podemos
evidenciar un atraso considerable, respecto a los demás países en la producción de cultivo
de fresas.
PALABRAS CLAVE
Automatización, Diseño, Simulación, Tecnológico, Robot, Fresas.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 9
INTRODUCCIÓN
En la actualidad, existen nuevas tecnologías en todas las áreas del conocimiento, como por
ejemplo las áreas de la medicina, construcción, sistemas, entre otras, sin embargo en el
área de la agricultura en nuestro país no existe la implementación de nuevas ideas
tecnológicas aplicadas a la siembra de semillas, debido a muchos factores como lo es los
altos costos a nivel de investigación e innovación tecnológica a los cuales se incluyen los
costos de los equipos a utilizar, la mano de obra y la falta de recursos tanto económicos
como financieros. Este tipo de innovaciones buscan mejorar los procesos técnicos al
momento de su ejecución manteniendo unos estándares de calidad altos en el mercado,
controlando procesos como la temperatura, la calidad del suelo y demás condiciones
presentes a la hora de su realización.
En Colombia, la cadena de Fresa fue creada en el año 2015, esta fue conformada por
representantes de agricultores, comerciantes, gremios, agroindustrias, comercializadores y
entes académicos de los principales departamentos productores de fresa como lo son:
Cundinamarca, Boyacá, Tolima, Antioquia, Cauca y Valle del cauca. Actualmente la
Universidad Nacional implementa unos paquetes tecnológicos de monitoreo y control, los
cuales permiten a los productores desarrollar estándares de calidad que les permitan
mejorar la exportación a diferentes países, se espera que a 2030 se logre alcanzar las
metas propuestas en el Programa dado por el estado llamado, Programa de Transformación
Productiva – PTP.
Lo anterior motivó a los integrantes del equipo de investigación a realizar el trabajo de grado
en el área de la agricultura, diseñando un robot sembrador de semillas de fresa llamado
Fresabot III, dicho trabajo aplicara los conocimientos adquiridos en la especialización de
gestión de proyectos en ingeniería, dados en la Universidad Distrital Francisco José de
Caldas.
Finalmente, es importante señalar que la utilidad de la presente investigación va mucho
más allá para cualquier persona interesada en el tema, porque este proyecto brinda nuevas
ideas aplicadas en un área poco estudiada en términos de avances tecnológicos como lo
es la agricultura.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 10
Esperamos que el lector de este documento pueda conocer los estándares internacionales
de la gestión de proyecto de ingeniería, y observar el contexto de la investigación realizada
en el tema que conlleva al presente trabajo de grado.
En conclusión, en el presente estudio se efectuó la investigación de mercados para
determinar la demanda y oferta, así como el plan de ventas del proyecto.
Adicionalmente, se determina el estudio técnico, basado en el diseño del producto, diseño
del proceso, y dimensionamiento del sistema productivo. Se estableció el diseño y
dimensionamiento del sistema administrativo y legal. Se efectuó el análisis ambiental del
sistema del diseño del producto. Y por último, se realizó el análisis financiero y económico,
que permitió definir la viabilidad financiera del proyecto.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 11
1. CONTEXTO E IDENTIFICACIÓN DEL PROYECTO
En el presente capítulo se expone la identificación del problema central del proyecto; a
través de árboles de problema y relaciones de causa y efecto, establecer la situación actual,
la deseada y las alternativas de solución. Por otra parte, a través del árbol de medios y fines
se define el objetivo del proyecto. De igual manera se implementa la matriz de Marco Lógico
como herramienta de planeación para estructurar de forma resumida las actividades a
desarrollar y los resultados esperados en el proyecto.
A continuación, se realizara la identificación de los interesados.
1.1 ANALISIS DE INTERESADOS
a. Agricultores: Son los principales interesados en la comercialización de fresas, con
este proyecto se busca lograr mayores índices de rentabilidad y mantener un flujo
adecuado de recursos para las necesidades que genere la producción.
Se busca llegar en primera instancia a las personas que están actualmente
involucrados en la agricultura, por medio de nuevos productos e innovaciones, poco
a poco puedan competir con mercados en el extranjero, mejorando el desarrollo de
nuevos cultivos haciendo un proceso mucho más rápido y optimo, un producto a
bajo costo, de buena calidad y que pueda satisfacer las necesidades que estamos
planteando.
Según el estudio realizado por (Lía García Pérez (2012)). Durante el avance
tecnológico de esta época en los últimos años, se ha podido evidenciar un
crecimiento en el auge de la maquinaria agrícola que ha tenido como objetivo
principal la automatización de tareas que pueden ser complicados para el ser
humano por el riesgo o la fatiga que estás implican, y por ende una disminución en
la precisión en la siembra de productos en general. Con la automatización los
procesos de siembra son más eficientes, en la disminución de tiempos en el proceso
y la ayuda de los sensores para el estado de las semillas.
Otro estudio relacionado con la agricultura por (Silva Daniel Jiménez (2016)). En los
últimos años el uso de invernaderos para la producción agrícola ha sido fundamental

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 12
para el crecimiento exponencial en México. Este crecimiento ha generado un cambio
importante tanto en las herramientas, instrumentos y forma del cultivo, porque
mientras se hace de manera tradicional la siembra directa en el suelo, como lo han
hecho nuestros antepasados, la manera de producir por medio del invernadero es
por medio de charolas donde se lleva a cabo el proceso de germinación.
b. Proveedores: El proyecto está enfocado en el área de la producción de fresas, por
lo que los proveedores entran en la lista como segundos interesas dado que
incentiva una demanda de sus insumos. De igual manera es necesario que la
producción tengan estándares de alta calidad para el mercado internacional.
c. Comercializadores: Otro de las partes interesadas son los gremios de cultivos en
el país, lo que se desea es que este diseño no solo sea aplicado a un solo producto,
sino por el contrario que muchas otras agremiaciones o personas relacionadas a
otros alimentos lo puedan utilizar para tener mucha más producción y calidad;
además tenemos un factor primordial, en este momento el país cuenta con un alto
porcentaje de importaciones, pero se está proyectando a ser un exportador
potencial, teniendo los recursos necesarios para los mejores procesos de siembra,
en el país tenemos condiciones que nos hacen competidores en el mundo debido a
que no contamos con estaciones meteorológicas como ocurre en el continente
Europeo o América del Norte, donde surgen algunos de los problemas más
comunes como son los cambios climáticos, podemos estar generando mayor
producción en los cultivos, obteniendo una mayor demanda y por ende podamos
estar compitiendo con los mercados internacionales, logrando así cumplir con los
estándares de calidad, los cuales deben tener una excelente gestión tanto en su
planeación, ejecución y producción del producto a entregar, cumpliendo con los
objetivos, dado que la competencia que se tiene actualmente con otros países, en
donde a la fecha tienen sistemas implementados que buscan mejorar la calidad de
sus productos, también cuentan con vías de acceso para el transporte de alimentos
idóneos a las necesidades del productor y del cliente; además de un factor
importante que es el conocimiento de la gente en temas relacionados con la
agricultura, al igual cuentan con sistemas tecnológicos como los sensores y equipos
que monitorean continuamente, dando así la posibilidad de solucionar problemas
mucho más rápido sin afectar la producción y la siembra de productos.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 13
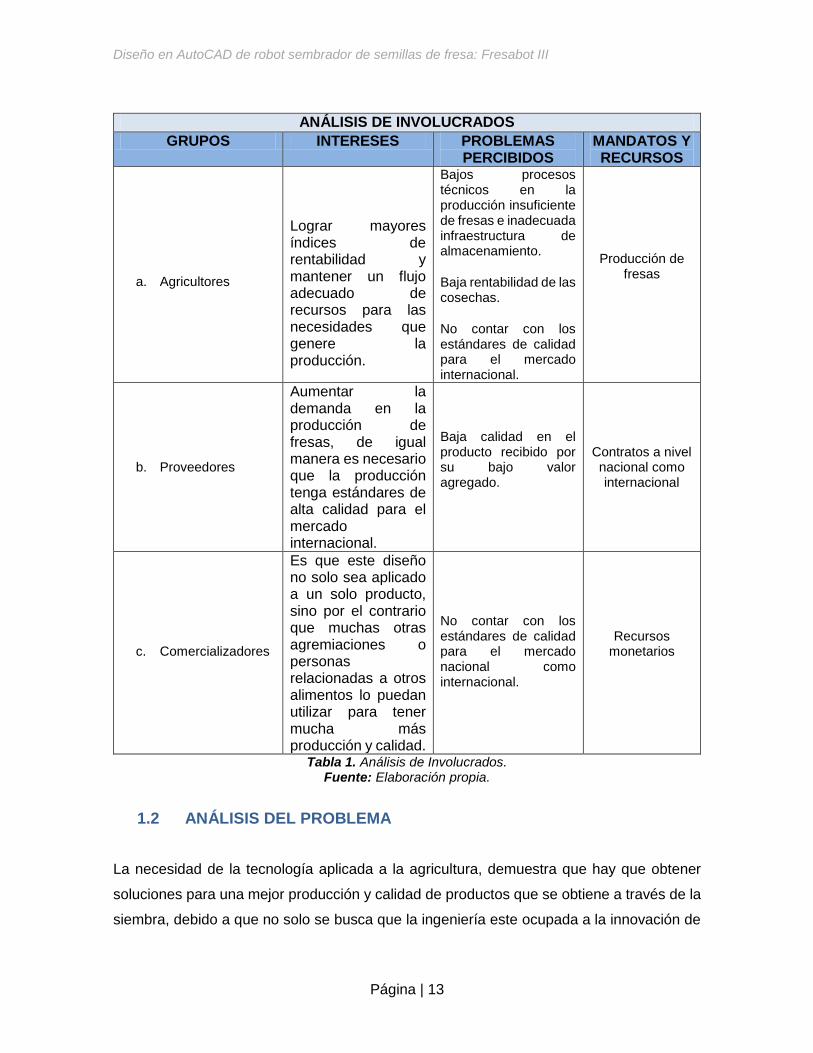
ANÁLISIS DE INVOLUCRADOS
GRUPOS INTERESES PROBLEMAS PERCIBIDOS
MANDATOS Y RECURSOS
a. Agricultores
Lograr mayores índices de rentabilidad y mantener un flujo adecuado de recursos para las necesidades que genere la producción.
Bajos procesos técnicos en la producción insuficiente de fresas e inadecuada infraestructura de almacenamiento.
Baja rentabilidad de las cosechas.
No contar con los estándares de calidad para el mercado internacional.
Producción de
fresas
b. Proveedores
Aumentar la demanda en la producción de fresas, de igual manera es necesario que la producción tenga estándares de alta calidad para el mercado internacional.
Baja calidad en el producto recibido por su bajo valor agregado.
Contratos a nivel nacional como internacional
c. Comercializadores
Es que este diseño no solo sea aplicado a un solo producto, sino por el contrario que muchas otras agremiaciones o personas relacionadas a otros alimentos lo puedan utilizar para tener mucha más producción y calidad.
No contar con los estándares de calidad para el mercado nacional como internacional.
Recursos monetarios
Tabla 1. Análisis de Involucrados. Fuente: Elaboración propia.
1.2 ANÁLISIS DEL PROBLEMA
La necesidad de la tecnología aplicada a la agricultura, demuestra que hay que obtener
soluciones para una mejor producción y calidad de productos que se obtiene a través de la
siembra, debido a que no solo se busca que la ingeniería este ocupada a la innovación de
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 14
nuevos productos, también se busca que los métodos actuales sean mejorados para llegar
a mercados internacionales, cabe resaltar que para llegar a esto se debe contar con los
equipos, herramientas, sistemas, procedimientos, en otros, todos estos estandarizados
para lograr una alta eficiencia en la producción y lograr competir con el mercado actual,
sino se realiza adecuadamente esperando que llegue la tecnología a nuestro país, esta
puede ser obsoleta, de baja calidad e ineficiente para la aplicación requerida, se busca
hacer un diseño de un modelo adecuado a nuestros suelos, nutrientes, semillas y algunas
otras variables que se adecuen al lugar donde se implementara este sistema dando
solución al problema planteado en la investigación.
La solución que vamos a plantear es el diseño de un robot sembrador de fresas llamado
Fresabot III, que ayude a la producción de la siembra de semillas de fresa, mejorando los
tiempos de ejecución y calidad, ya que en la actualidad se está teniendo la cantidad
suficiente de fresas para el mercado interno, según estudio realizado por la Universidad
Nacional, en el año 2012, en ese momento existían nada más que 700 hectáreas de fresas
en todo el país, para el año 2017, tenemos un aumento significativo de 2500 hectáreas,
este beneficio hace que la producción tenga un precio bajo y pueda tener mayor
participación en el mercado, al considerar la parte de exportación a otros países, no se tiene
la cantidad óptima para satisfacer la demanda, pero actualmente existe una empresa
llamada Kabala, que no solo ayuda a la siembra y el cultivo de fresas, sino también explica
como por medio de la tecnología y recursos necesarios podemos enviar productos al
extranjeros con estándares de alta calidad.
Otro de los aspectos que podemos abordar, es la distancia que debe existir entre cada una
de las plantas, deben tener una distancia de 40 cm, por las raíces que estas tienen pueden
solaparse con otra planta, logrando así que no tengamos una siembra correcta y por el
contrario perdidas en los cultivos, la profundidad para la siembra de semillas de fresa debe
ser de aproximadamente de 5 cm a 7 cm, 1 mililitro de agua diario para que pueda mojar la
semilla y propagarse de manera adecuada, también debemos tener un PH de la tierra bajo
en sales para tener buena calidad de la siembra alrededor de 5,5 y 6,5 de lo contrario, no
se puede garantizar que funcione y por ende se tenga una baja calidad de siembra de
semillas de fresas.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 15
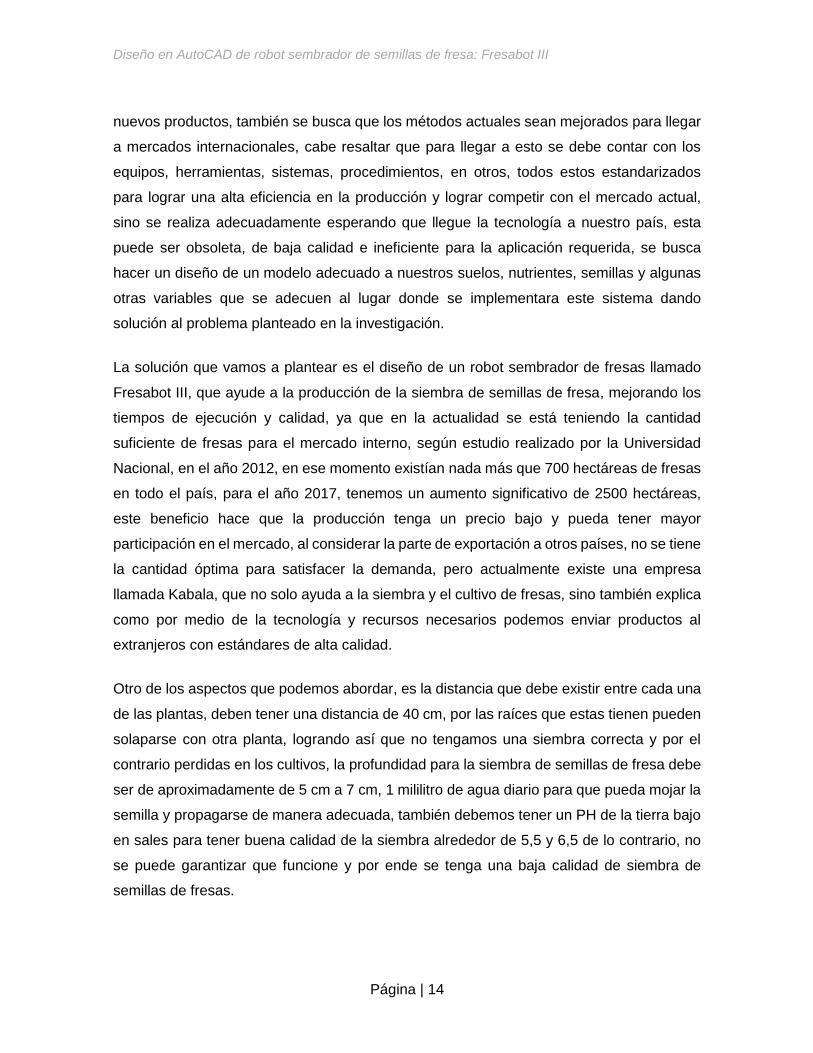
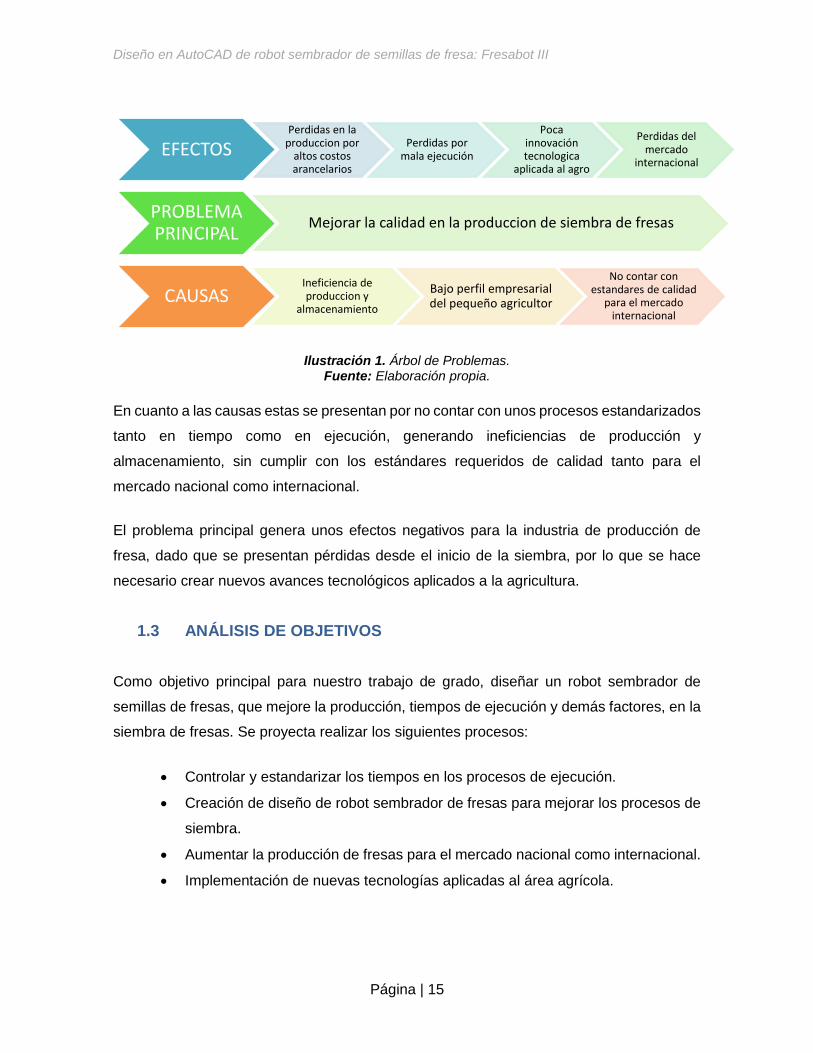
Ilustración 1. Árbol de Problemas. Fuente: Elaboración propia.
En cuanto a las causas estas se presentan por no contar con unos procesos estandarizados
tanto en tiempo como en ejecución, generando ineficiencias de producción y
almacenamiento, sin cumplir con los estándares requeridos de calidad tanto para el
mercado nacional como internacional.
El problema principal genera unos efectos negativos para la industria de producción de
fresa, dado que se presentan pérdidas desde el inicio de la siembra, por lo que se hace
necesario crear nuevos avances tecnológicos aplicados a la agricultura.
1.3 ANÁLISIS DE OBJETIVOS
Como objetivo principal para nuestro trabajo de grado, diseñar un robot sembrador de
semillas de fresas, que mejore la producción, tiempos de ejecución y demás factores, en la
siembra de fresas. Se proyecta realizar los siguientes procesos:
Controlar y estandarizar los tiempos en los procesos de ejecución.
Creación de diseño de robot sembrador de fresas para mejorar los procesos de
siembra.
Aumentar la producción de fresas para el mercado nacional como internacional.
Implementación de nuevas tecnologías aplicadas al área agrícola.
EFECTOSPerdidas en la
produccion por altos costos arancelarios
Perdidas por mala ejecución
Poca innovación tecnologica
aplicada al agro
Perdidas del mercado
internacional
PROBLEMA PRINCIPAL
Mejorar la calidad en la produccion de siembra de fresas
CAUSASIneficiencia de produccion y
almacenamiento
Bajo perfil empresarial del pequeño agricultor
No contar con estandares de calidad
para el mercado internacional

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 16
Ilustración 2. Árbol de Objetivos. Fuente: Elaboración propia.
1.4 SELECCIÓN DE LA ESTRATEGIA ÓPTIMA
Las alternativas de solución al problema planteado se relacionan a continuación:
Diseño del robot para mejorar los tiempos en la ejecución y calidad de la siembra
de fresas.
Crear una nueva generación de agricultores para tener una demanda constante.
Capacitación presencial, para la población sobre las nuevas técnicas de cultivos
y manejo de producción de las fresas aumentado así su competitividad.
Teniendo en cuenta las alternativas de solución y contando con los recursos que tenemos
para su implementación e impacto en la comunidad y los problemas que pueden surgir al
ejecutarlos. A continuación, se mencionan 3 criterios para la evaluación de las alternativas
propuestas, con una calificación siendo 1 la nota más baja y 6 la nota más alta:
1. Costo del Proyecto.
2. Efectividad y calidad en el proceso.
3. Mercado nacional e internacional.
Los criterios para aprobación, serán distribuidos de la siguiente manera:
1. Costo del Proyecto. (30%)
2. Efectividad y calidad en el proceso. (30%)
3. Mercado nacional e internacional. (40%)
EFECTOSAumentar la produccion
de calidad en la produccion de fresa
Disminuciono en las perdidas de produccion y producto
final
Contar con el mercado nacional como internacional
OBJETIVO PRINCIPAL
Diseñar un robot sembrador de semillas de fresas
CAUSASEstandarizar los tiempos en los
procesos de ejecución.
Diseño de robot sembrador de fresas
para mejorar los procesos de siembra.
Producción de fresas para el
mercado nacional como internacional.
Nuevas tecnologías aplicadas al
área agrícola.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 17
Alternativa Criterio Calificación Resultado Total Diseño del robot para mejorar los tiempos en la ejecución y calidad de la siembra de fresas.
1 4 1,20 3,70 2 3 0,90
3 4 1,60
Crear una nueva generación de agricultores para tener una demanda constante.
1 2 0,60 3,10 2 3 0,90
3 4 1,60
Capacitación presencial, para la población sobre las nuevas técnicas de cultivos y manejo de producción de las fresas aumentado así su competitividad.
1
3
0,90
3,30
2
4
1,20
3
3
1,20
Tabla 2. Selección estrategia óptima. Fuente: Elaboración propia.
Como conclusión de las alternativas propuestas se obtuvo que la mejor solución para dicho
problema es el diseño del robot para mejorar los tiempos en la ejecución y calidad de la
siembra de fresas, debido a que es la que genera mayor impacto al generar una disminución
en las falencias con las que se cuenta en la actualidad a la hora de realizar el proceso de
siembra, de igual manera es importante que los agricultores cuenten con una buena
capacitación para la implementación de nuevas tecnologías.
1.5 ALCANCES
Luego de análisis del problema, se hace necesario realizar la matriz de alcance para obtener las necesidades y limitar el proyecto:
CONSIDERACIONES
EXTERNAS CONSIDERACIONES
INTERNAS LINEA DEL
SERVICIO DE PROYECTO
ALCANCE DEL PROYECTO
Tener claro los
procesos actuales y la
problemática a la cual
lleva en proyecto
Estudio del proyecto
Diseño de robot sembrador de semillas de fresa, el cual debe contar con los siguiente: 1. Diseño óptimo. 2. Cumplir con la
normatividad vigente.
3. Mejorar los procesos de siembra tanto en su ejecución como tiempo.
4. El diseño se plantea con batería recargable.
Teniendo en cuenta consideraciones internas y externas, se busca que el diseño propuesto del robot sembrador de semillas de fresas mejore los procesos realizados a la hora de la siembra para disminuir las pérdidas de producción, y alcanzar los estándares de calidad para el mercado internacional.
Planeación
Verificar el diseño
Realización de diseño
Entrega final Soporte de diseño
Cierre del proyecto
Tabla 3. Matriz de Alcances. Fuente: Elaboración propia.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 18
Una vez realizado las consideraciones externas e internas del proyecto podemos ver la
línea del servicio del proyecto y de esta forma tener de forma clara el alcance del proyecto
enfocando las actividades misionales, la problemática y la necesidad que se presentan en
el proyecto.
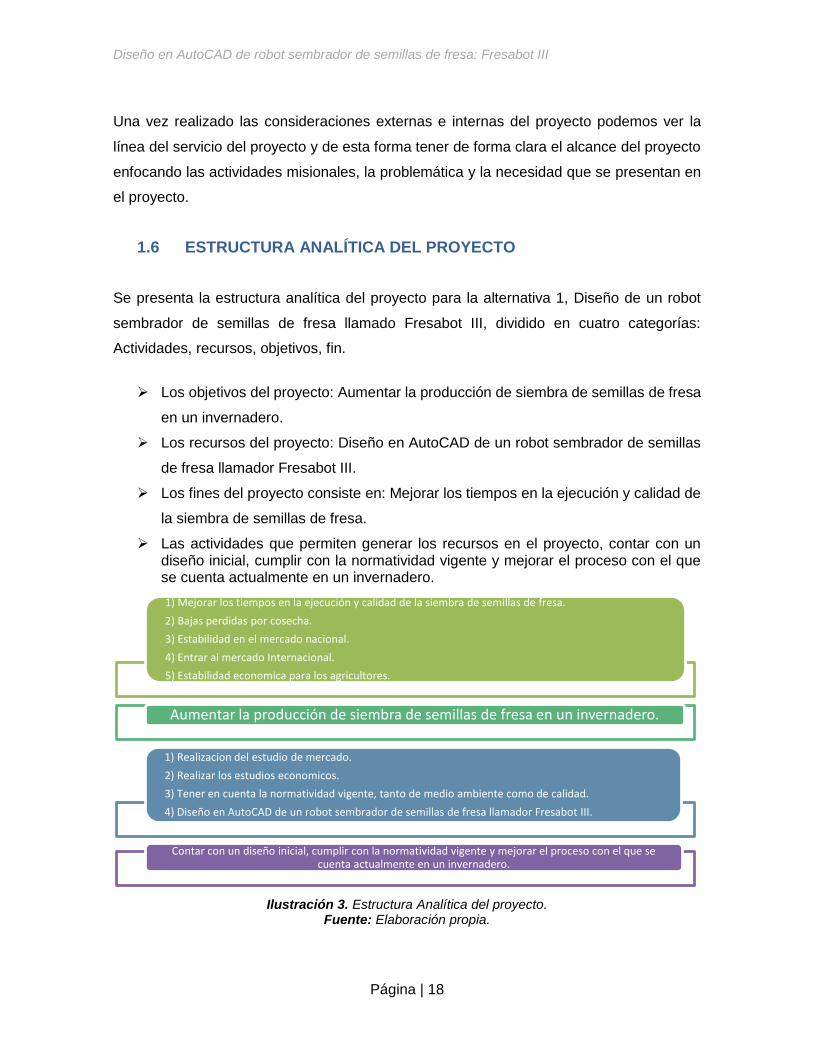
1.6 ESTRUCTURA ANALÍTICA DEL PROYECTO
Se presenta la estructura analítica del proyecto para la alternativa 1, Diseño de un robot
sembrador de semillas de fresa llamado Fresabot III, dividido en cuatro categorías:
Actividades, recursos, objetivos, fin.
Los objetivos del proyecto: Aumentar la producción de siembra de semillas de fresa
en un invernadero.
Los recursos del proyecto: Diseño en AutoCAD de un robot sembrador de semillas
de fresa llamador Fresabot III.
Los fines del proyecto consiste en: Mejorar los tiempos en la ejecución y calidad de
la siembra de semillas de fresa.
Las actividades que permiten generar los recursos en el proyecto, contar con un diseño inicial, cumplir con la normatividad vigente y mejorar el proceso con el que se cuenta actualmente en un invernadero.
Ilustración 3. Estructura Analítica del proyecto.
Fuente: Elaboración propia.
1) Mejorar los tiempos en la ejecución y calidad de la siembra de semillas de fresa.
2) Bajas perdidas por cosecha.
3) Estabilidad en el mercado nacional.
4) Entrar al mercado Internacional.
5) Estabilidad economica para los agricultores.
Aumentar la producción de siembra de semillas de fresa en un invernadero.
1) Realizacion del estudio de mercado.
2) Realizar los estudios economicos.
3) Tener en cuenta la normatividad vigente, tanto de medio ambiente como de calidad.
4) Diseño en AutoCAD de un robot sembrador de semillas de fresa llamador Fresabot III.
Contar con un diseño inicial, cumplir con la normatividad vigente y mejorar el proceso con el que se cuenta actualmente en un invernadero.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 19
1.7 RESUMEN NARRATIVO DE OBJETIVOS Y ACTIVIDADES
A través de la información obtenida en el árbol de objetivos sumado a la estructura analítica
del proyecto, se realiza el siguiente resumen de lo definido.
Resumen Narrativo de Objetivos
• Objetivos del proyecto: Mejorar los tiempos en la ejecución y calidad de la siembra de semillas de fresa, Bajas perdidas por cosecha, Estabilidad en el mercado nacional, Entrar al mercado Internacional y Estabilidad económica para los agricultores.
• Recursos del proyecto: Aumentar la producción de siembra de semillas de fresa en un invernadero.
• Fines del proyecto: Realización del estudio de mercado, Realizar los estudios económicos, Tener en cuenta la normatividad vigente, tanto de medio ambiente como de calidad y Diseño en AutoCAD de un robot sembrador de semillas de fresa llamador Fresabot III.
• Actividades: 1. Realizar la viabilidad del proyecto. 2. Realizar el estudio de mercado. 3. Realizar el estudio de demanda. 4. Conocer el proceso actual de siembra de semillas de fresas. 5. Realizar el comparativo entre lo actual y lo proyectado. 6. Realizar el diagrama de procesos según diseño propuesto. 7. Realizar estudio Económico y Financiero. 8. Identificar la normatividad vigente aplicable al proyecto. 9. Entrega de diseño de robot sembrador de semillas de fresas- Fresabot III. 10. Definición del personal requerido para realización del diseño. 11. Conclusiones y recomendaciones para el diseño
Tabla 4. Resumen de Objetivos. Fuente: Elaboración propia.
1.8 ANÁLISIS DE INDICADORES
Con el diseño del robot sembrador de semillas de fresas los productores tendrán un 20%
adicional de la rentabilidad sobre su producción con la que cuenta actualmente, el precio
nacional de la fresa se caracteriza por ser constante; tanto que en los últimos 10 años las
variaciones han estado por debajo del 10 %, también puede eliminar los intermediarios que
aparecen al fijar un alto precio del producto, además de esto se espera que el otro 20% de
los comercializadores, los cuales al necesitar este producto comenzaran a pagar un precio
más adecuado a los agricultores de la región.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 20
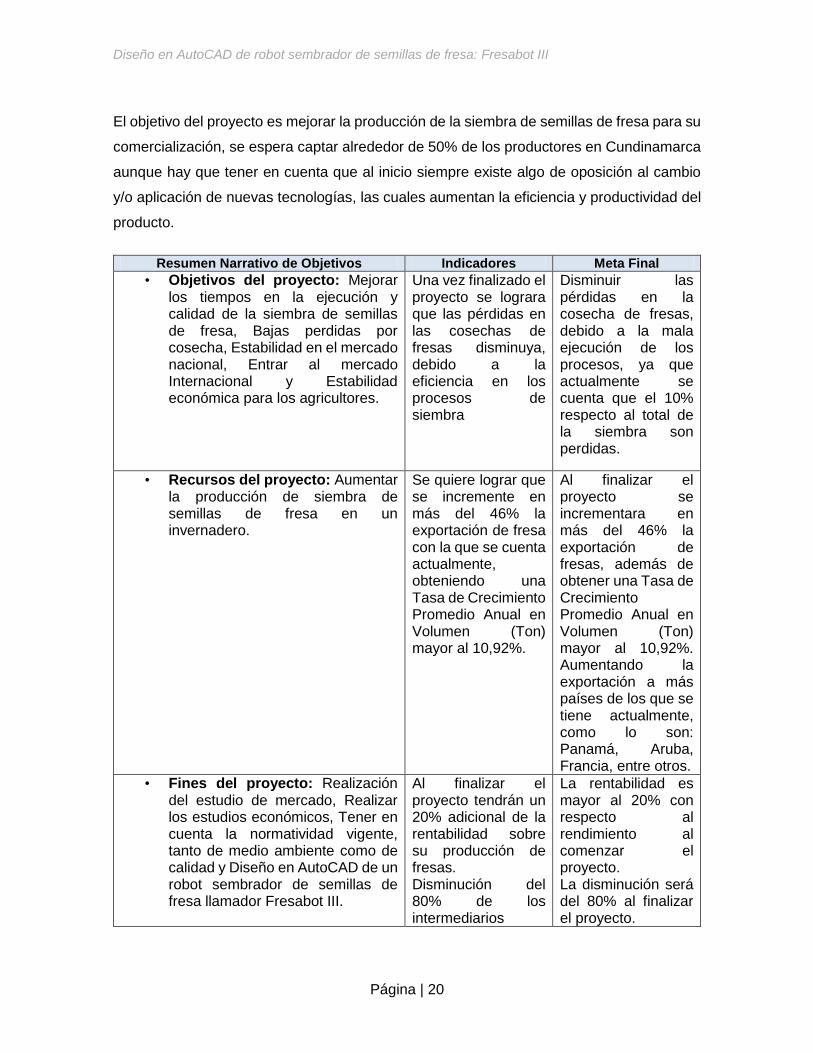
El objetivo del proyecto es mejorar la producción de la siembra de semillas de fresa para su
comercialización, se espera captar alrededor de 50% de los productores en Cundinamarca
aunque hay que tener en cuenta que al inicio siempre existe algo de oposición al cambio
y/o aplicación de nuevas tecnologías, las cuales aumentan la eficiencia y productividad del
producto.
Resumen Narrativo de Objetivos Indicadores Meta Final
• Objetivos del proyecto: Mejorar los tiempos en la ejecución y calidad de la siembra de semillas de fresa, Bajas perdidas por cosecha, Estabilidad en el mercado nacional, Entrar al mercado Internacional y Estabilidad económica para los agricultores.
Una vez finalizado el proyecto se lograra que las pérdidas en las cosechas de fresas disminuya, debido a la eficiencia en los procesos de siembra
Disminuir las pérdidas en la cosecha de fresas, debido a la mala ejecución de los procesos, ya que actualmente se cuenta que el 10% respecto al total de la siembra son perdidas.
• Recursos del proyecto: Aumentar la producción de siembra de semillas de fresa en un invernadero.
Se quiere lograr que se incremente en más del 46% la exportación de fresa con la que se cuenta actualmente, obteniendo una Tasa de Crecimiento Promedio Anual en Volumen (Ton) mayor al 10,92%.
Al finalizar el proyecto se incrementara en más del 46% la exportación de fresas, además de obtener una Tasa de Crecimiento Promedio Anual en Volumen (Ton) mayor al 10,92%. Aumentando la exportación a más países de los que se tiene actualmente, como lo son: Panamá, Aruba, Francia, entre otros.
• Fines del proyecto: Realización del estudio de mercado, Realizar los estudios económicos, Tener en cuenta la normatividad vigente, tanto de medio ambiente como de calidad y Diseño en AutoCAD de un robot sembrador de semillas de fresa llamador Fresabot III.
Al finalizar el proyecto tendrán un 20% adicional de la rentabilidad sobre su producción de fresas. Disminución del 80% de los intermediarios
La rentabilidad es mayor al 20% con respecto al rendimiento al comenzar el proyecto. La disminución será del 80% al finalizar el proyecto.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 21
• Actividades: 1. Realizar la viabilidad del proyecto. 2. Realizar el estudio de mercado. 3. Realizar el estudio de demanda. 4. Conocer el proceso actual de
siembra de semillas de fresas. 5. Realizar el comparativo entre lo
actual y lo proyectado. 6. Realizar el diagrama de procesos
según diseño propuesto. 7. Realizar estudio Económico y
Financiero. 8. Identificar la normatividad vigente
aplicable al proyecto. 9. Entrega de diseño de robot
sembrador de semillas de fresas- Fresabot III.
10. Definición del personal requerido para realización del diseño.
11. Conclusiones y recomendaciones para el diseño
Tabla 5. Análisis de Indicadores. Fuente: Elaboración propia.
1.9 MATRIZ DE MARCO LÓGICO
Problema.
Actualmente en el país no contamos con las herramientas necesarias para tener una mayor
producción de semillas de fresas, debido a muchos factores como lo es el desconocimiento
de las nuevas tecnologías aplicadas a la agricultura o la tradición heredada por cada uno
de las personas que están en el campo agrícola, lo que se busca con este proyecto es
mejorar esos problemas que aparecen durante el proceso de la siembra y dar una solución
viable y práctica, para que las personas tengan procesos con estándares de calidad y vean
en la demanda mejores resultados y más ganancias para la persona que lo vaya adquirir
además de ser un sistema de fácil manejo con la capacitación adecuada.
Debemos tener en cuenta que en Colombia, existen varias regiones donde se pueden
cultivar semillas de fresas sin ningún inconveniente, pero debemos buscar que las zonas
donde ya se cuente con los cultivos, tengan un atractivo más grande e importante, no solo
para mantener la calidad de las fresa, que es un mercado que se encuentra tanto a nivel

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 22
nacional como internacional en un crecimiento en el país, donde se puede satisfacer la
demanda a nivel nacional pero si pensamos en exportación a nivel internacional no se
puede cumplir con los requerimientos mínimos, se debe trabajar en primera instancia con
los procesos de semillas de fresas y después modernizar la cadena de valor para que las
personas deseen el producto, no solo por su alto valor nutricional también por la calidad y
la cantidad de personas en el mundo que consumen esta fruta va en aumento cada año,
en Colombia la principal fuente de ingreso no es la comercialización de dicho producto.
Análisis de participación
Los grupos que podemos identificar en este problema son los usuarios y funcionamiento
del Robot.
Situación Diseño del Robot Usuario
Problemas
Afectación del funcionamiento dado por el diseñador por no contar con las especificaciones requeridas, según el manual de uso.
Pérdidas económicas por falta de producción de las semillas de fresa.
Componentes electrónicos que no funcionen de la manera correcta.
Lentitud en el proceso de la siembra de semillas de fresa.
Poca capacitación por los técnicos encargados del funcionamiento del robot.
Mano de obra que manipulen el robot sin tener conocimiento del diseño y funcionamiento.
Intereses
Económicos y Políticos
Satisfacción del cliente
Conexión
Mejoramiento continuo del diseño del robot
Ofrecer la posibilidad de mejorar el diseño del robot teniendo en cuenta el valor económico.
Tabla 6. Análisis de Participación. Fuente: Elaboración propia.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 23
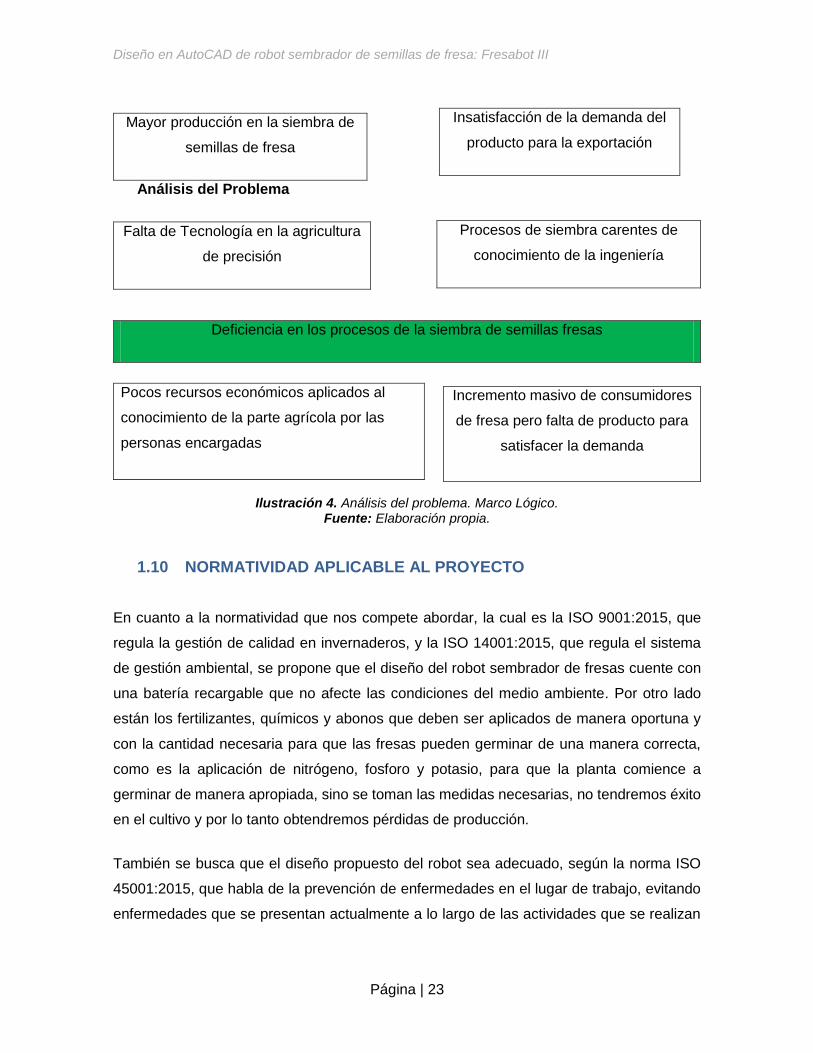
Mayor producción en la siembra de
semillas de fresa
Análisis del Problema
Falta de Tecnología en la agricultura
de precisión
Ilustración 4. Análisis del problema. Marco Lógico.
Fuente: Elaboración propia.
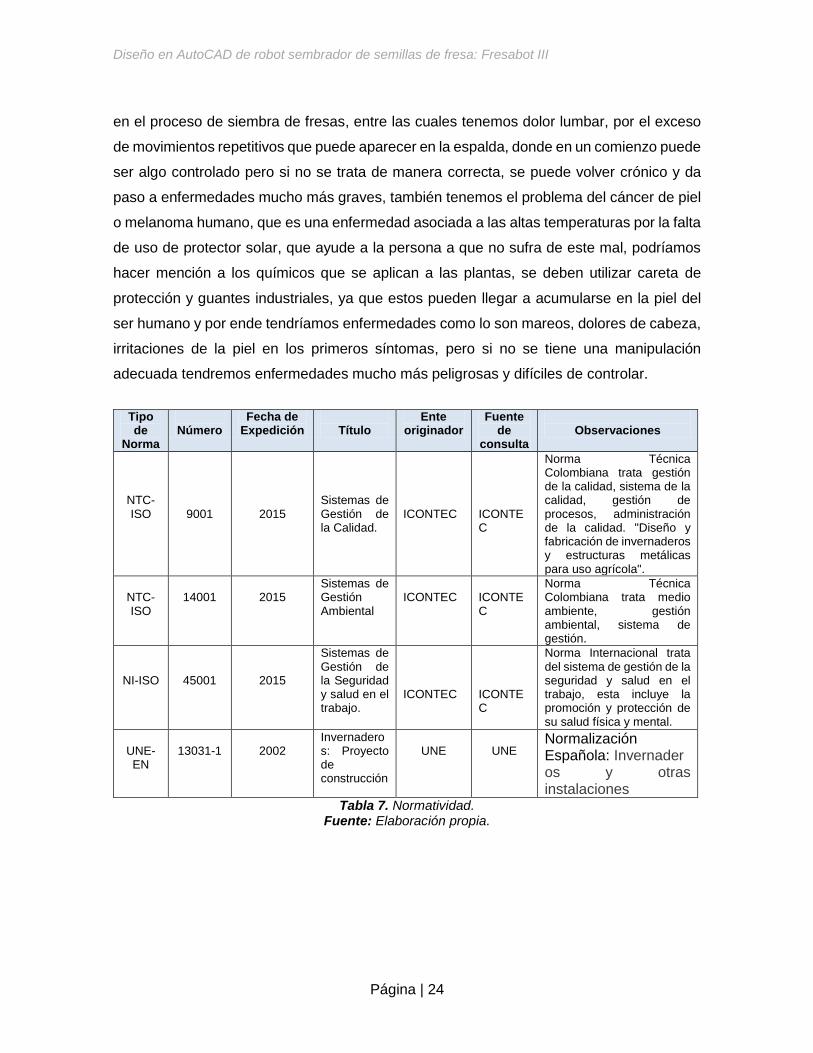
1.10 NORMATIVIDAD APLICABLE AL PROYECTO
En cuanto a la normatividad que nos compete abordar, la cual es la ISO 9001:2015, que
regula la gestión de calidad en invernaderos, y la ISO 14001:2015, que regula el sistema
de gestión ambiental, se propone que el diseño del robot sembrador de fresas cuente con
una batería recargable que no afecte las condiciones del medio ambiente. Por otro lado
están los fertilizantes, químicos y abonos que deben ser aplicados de manera oportuna y
con la cantidad necesaria para que las fresas pueden germinar de una manera correcta,
como es la aplicación de nitrógeno, fosforo y potasio, para que la planta comience a
germinar de manera apropiada, sino se toman las medidas necesarias, no tendremos éxito
en el cultivo y por lo tanto obtendremos pérdidas de producción.
También se busca que el diseño propuesto del robot sea adecuado, según la norma ISO
45001:2015, que habla de la prevención de enfermedades en el lugar de trabajo, evitando
enfermedades que se presentan actualmente a lo largo de las actividades que se realizan
Insatisfacción de la demanda del
producto para la exportación
Procesos de siembra carentes de
conocimiento de la ingeniería
Deficiencia en los procesos de la siembra de semillas fresas
Pocos recursos económicos aplicados al
conocimiento de la parte agrícola por las
personas encargadas
Incremento masivo de consumidores
de fresa pero falta de producto para
satisfacer la demanda
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 24
en el proceso de siembra de fresas, entre las cuales tenemos dolor lumbar, por el exceso
de movimientos repetitivos que puede aparecer en la espalda, donde en un comienzo puede
ser algo controlado pero si no se trata de manera correcta, se puede volver crónico y da
paso a enfermedades mucho más graves, también tenemos el problema del cáncer de piel
o melanoma humano, que es una enfermedad asociada a las altas temperaturas por la falta
de uso de protector solar, que ayude a la persona a que no sufra de este mal, podríamos
hacer mención a los químicos que se aplican a las plantas, se deben utilizar careta de
protección y guantes industriales, ya que estos pueden llegar a acumularse en la piel del
ser humano y por ende tendríamos enfermedades como lo son mareos, dolores de cabeza,
irritaciones de la piel en los primeros síntomas, pero si no se tiene una manipulación
adecuada tendremos enfermedades mucho más peligrosas y difíciles de controlar.
Tipo de
Norma
Número
Fecha de Expedición
Título
Ente originador
Fuente de
consulta
Observaciones
NTC-ISO
9001
2015
Sistemas de Gestión de la Calidad.
ICONTEC
ICONTEC
Norma Técnica Colombiana trata gestión de la calidad, sistema de la calidad, gestión de procesos, administración de la calidad. "Diseño y fabricación de invernaderos y estructuras metálicas para uso agrícola".
NTC-ISO
14001
2015
Sistemas de Gestión Ambiental
ICONTEC
ICONTEC
Norma Técnica Colombiana trata medio ambiente, gestión ambiental, sistema de gestión.
NI-ISO
45001
2015
Sistemas de Gestión de la Seguridad y salud en el trabajo.
ICONTEC
ICONTEC
Norma Internacional trata del sistema de gestión de la seguridad y salud en el trabajo, esta incluye la promoción y protección de su salud física y mental.
UNE-EN
13031-1
2002
Invernaderos: Proyecto de construcción
UNE
UNE
Normalización Española: Invernaderos y otras instalaciones
Tabla 7. Normatividad. Fuente: Elaboración propia.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 25
2. ANÁLISIS DEL MERCADO
En el presente capitulo se explicara el tema de análisis del mercado, el cual incluye el
estudio de la población departamental, nacional y mundial, el cual contara con el área,
producción y rendimiento, posteriormente se mostrara el estudio realizado en el comercio
internacional, precios Nacionales e Internacionales al presente año, los costos de
producción, empleos generados y los Instrumentos de política.
2.1 ESTUDIO SOCIOECONOMICO
Teniendo en cuenta que no existen estudios sobre la automatización en los procesos de
agricultura de precisión, para verificar su producción y comercialización en nuestro país,
por tal razón no existen datos socioeconómicos de dichos procesos, para el estudio actual
tendremos en cuenta los datos de la industria en la cadena valor de la Universidad Nacional
en toda Colombia y en Cundinamarca, este último como municipio para la realización del
proceso. Lo anterior hace mención a elevar los índices de producción de semillas de fresa
por medio del diseño de un robot sembrador.
2.2 DEFINICIÓN DE LA CADENA FRESA
La cadena de Fresa fue creada en el 2015 y conformada por representantes de agricultores,
comercializadores, gremios, agroindustria, comercializadores y entes académicos de los
principales departamentos productores de fresa (Cundinamarca, Boyacá y Tolima,
Antioquia, Cauca y Valle del Cauca).
• La cadena está implementando paquetes tecnológicos a través de la Universidad
Nacional, los cuales les permita a los productores desarrollar estándares de calidad
que les permita lograr la exportación y alcanzar las metas propuestas por el
Programa de Transformación Productiva (PTP) a 2030.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 26
• La cadena de Fresa está formulando los acuerdos de competitividad, como base
fundamental de vinculación entre el sector productivo y comercial y las entidades de
apoyo, para la consolidación de una cadena productiva dinámica y progresista.
2.3 ÁREA, PRODUCCIÓN Y RENDIMIENTO
2.3.1 Área, producción y rendimiento departamental de fresa
El 90 % de la producción total del país se encuentra en Cundinamarca (71%), Antioquia
(16%) y Cauca (5,2%).
Los rendimientos estimados están dados por datos del agricultor en cada región, y
corresponde al cálculo de producción en un ciclo de dos años que se divide en dos para
obtener un dato de rendimiento por año.
Departamentos
Área (Ha) Producción (Tn) Rendimiento (Tn*ha-1)
2014 2015* 2016* 2017* 2014 2015* 2016* 2017* 2014 2015* 2016* 2017*
Cundinamarca 816 1.180 826 909 22.869 64.900 38.616 42.478 40 55 47 47
Antioquia 445 260 220 242 12.245 9.360 6.732 7.405 36 36 31 31
Cauca 128 85 80 88 3.384 4.208 3.366 3.703 32 50 42 42
N. Santander 146 50 35 39 3.777 1.500 893 982 28 30 26 26
Boyacá 43 31 25 28 560 1.535 1.052 1.157 13 50 42 42
Caldas 22 7 5 6 190 250 152 167 38 36 30 30
Nariño 32 10 8 9 182 385 262 288 6 39 33 33
Quindío 2 4 4 4 0 132 112 123 0 33 28 28
Tolima 2 1 1 1 8 36 30 33 5 36 30 30
Valle 8 22 18 20 263 666 463 509 34 30 26 26
Total 1.644 1.650 1.222 1.344 43.478 82.972 51.678 56.846 35.28 39 33 42
Tabla 8. Los rendimientos estimados están dados por datos del agricultor en cada región. Fuente: AGRONET – Base Evaluaciones Agrícolas Municipales – Secretaria de la Cadena.
*Estimado 2015-2016-2017.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 27
Ilustración 5. Área cultivada, producción y rendimiento de fresa en el año 2013.
Fuente: Agronet (2014).
2.3.2 Área, producción y rendimiento nacional
Durante el 2016 las áreas cultivadas se mantuvieron, pero al final del año, los rendimientos
fueron impactados negativamente debido a los cambios climáticos, debido a las intensas
lluvias que azotaron el país y en el segundo semestre por el calor que no proporciono las
condiciones ideales para la siembra de semillas de fresa en las zonas como Cundinamarca,
Antioquia y Norte de Santander.
Los rendimientos nacionales de fresa son competitivos en el mercado internacional, sin
embargo la deficiencia tecnológica en el manejo del cultivo generan deficiencia dentro de
los mercados internacionales donde se han hecho las mejoras pertinentes para poder
competir con los países que ya tienen una infraestructura tecnológica de alto nivel y relegar
a los que no la tienen actualmente, algunos de los países que son mayores exportadores
de fresas en el mundo son China, Estados Unidos y Turquía, países que no tienen las
condiciones climáticas ni los pisos térmicos que tenemos en el país para mejorar y tener un
mercado más grande en la siembra de semillas de fresa.
En la siguiente tabla podemos observar las áreas sembradas medidas en Hectáreas desde
el año 2012 hasta el 2017, aquí podemos ver un crecimiento desde el año 2013 hasta el

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 28
año 2015 y en los años siguientes podemos ver una disminución debido a los problemas
climatológicos que surgieron que no mantuviéramos el rendimiento como en años
anteriores. Siguiendo con los datos podemos observar que la producción cada año sigue
en aumento, comenzando en el año de 2012 con aproximadamente 43444 toneladas y en
el año 2017 podemos ver que ha tenido un aumento hasta lograr un valor de 56846, para
el nivel nacional es bueno pero para poder competir con mercados internacionales queda
insuficiente.
NACIONAL 2012 2013 2014 2015 2016* 2017*
Área Sembrada (ha) 1.508 1.605 1.620 1.656 1.222 1344
Producción (t) 43.444 42.453 44.553 55.719 40.847 56.846
Rendimiento (t*ha-1) 40,45 35,37 33,99 37,07 1 42
Tabla 9. Área, producción y rendimiento nacional. Fuente: Informe EVAS. Secretaria de Desarrollo Agroeconómico. Cadena de la fresa 2017. Estudio
de la Universidad Nacional. [𝑂𝑛𝑙𝑖𝑛𝑒]. Available: https://sioc.minagricultura.gov.co/Fresa/Pages/default.aspx.
Caracterización zonas de producción.
Ilustración 6. Caracterización zonas de producción. Fuente: Sistema de Información de Gestión y Desempeño de Organizaciones de
Cadenas.[𝑂𝑛𝑙𝑖𝑛𝑒]. Available: https://sioc.minagricultura.gov.co/Fresa/Pages/default.aspx.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 29
2.3.3 Área, producción y rendimiento a nivel mundial
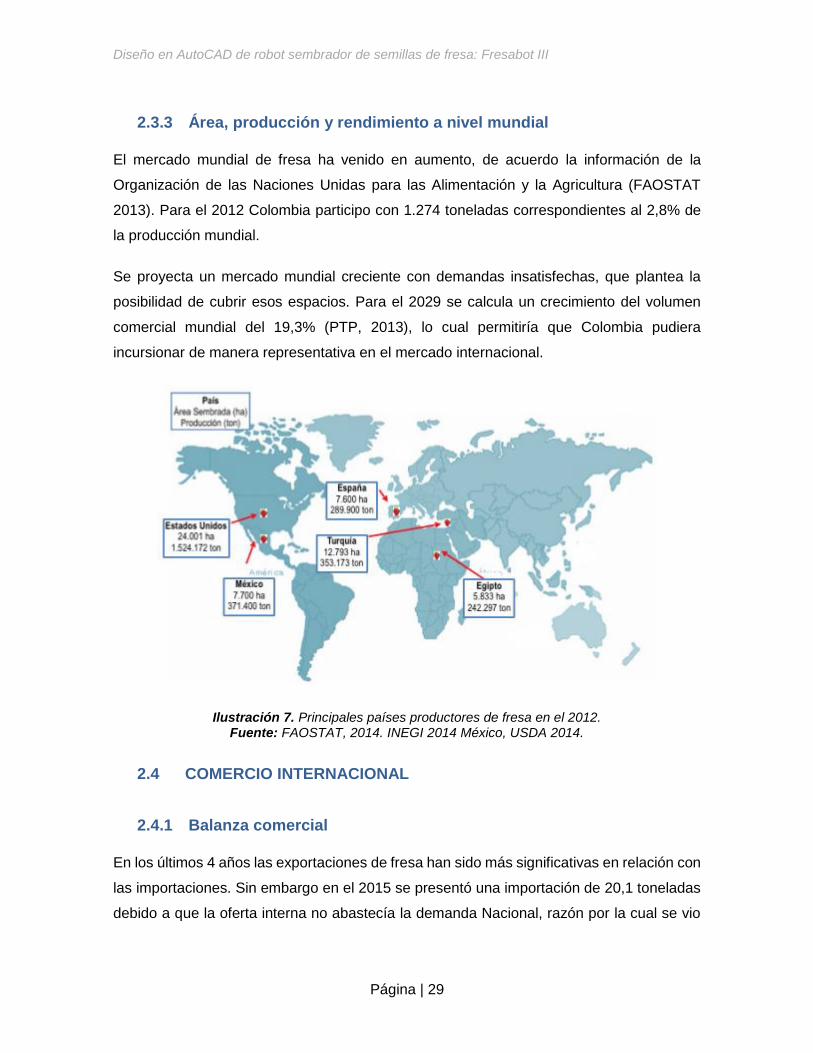
El mercado mundial de fresa ha venido en aumento, de acuerdo la información de la
Organización de las Naciones Unidas para las Alimentación y la Agricultura (FAOSTAT
2013). Para el 2012 Colombia participo con 1.274 toneladas correspondientes al 2,8% de
la producción mundial.
Se proyecta un mercado mundial creciente con demandas insatisfechas, que plantea la
posibilidad de cubrir esos espacios. Para el 2029 se calcula un crecimiento del volumen
comercial mundial del 19,3% (PTP, 2013), lo cual permitiría que Colombia pudiera
incursionar de manera representativa en el mercado internacional.
Ilustración 7. Principales países productores de fresa en el 2012. Fuente: FAOSTAT, 2014. INEGI 2014 México, USDA 2014.
2.4 COMERCIO INTERNACIONAL
2.4.1 Balanza comercial
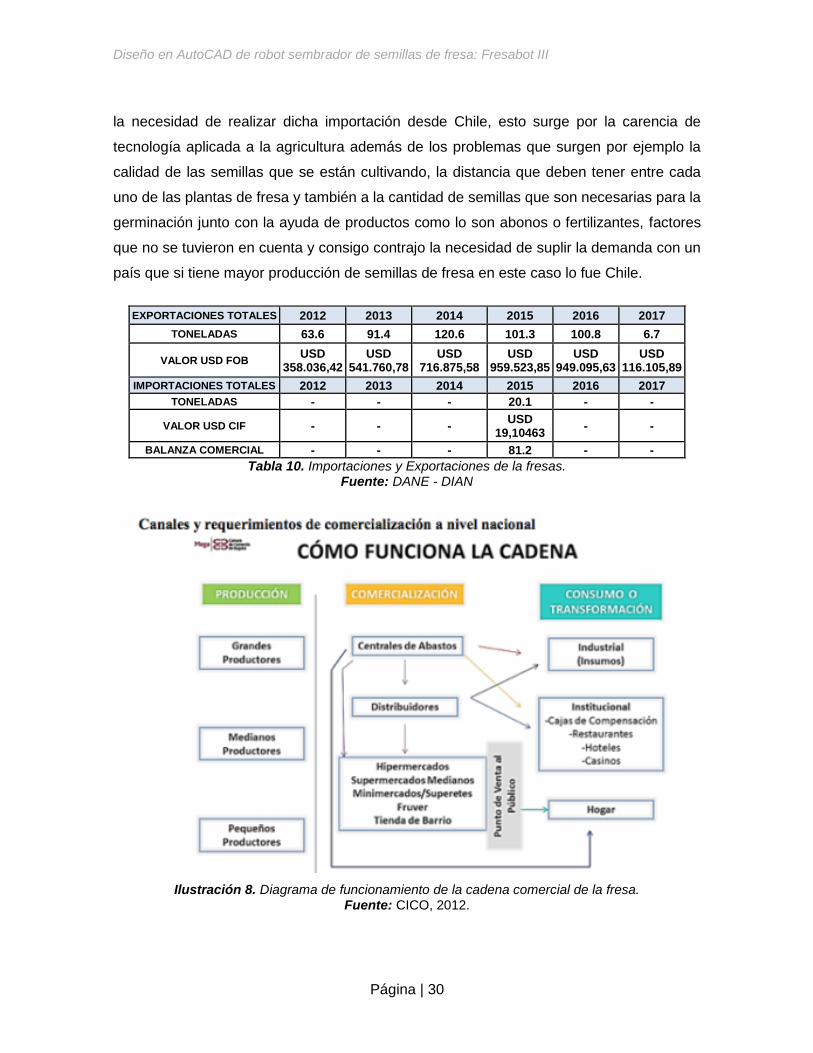
En los últimos 4 años las exportaciones de fresa han sido más significativas en relación con
las importaciones. Sin embargo en el 2015 se presentó una importación de 20,1 toneladas
debido a que la oferta interna no abastecía la demanda Nacional, razón por la cual se vio
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 30
la necesidad de realizar dicha importación desde Chile, esto surge por la carencia de
tecnología aplicada a la agricultura además de los problemas que surgen por ejemplo la
calidad de las semillas que se están cultivando, la distancia que deben tener entre cada
uno de las plantas de fresa y también a la cantidad de semillas que son necesarias para la
germinación junto con la ayuda de productos como lo son abonos o fertilizantes, factores
que no se tuvieron en cuenta y consigo contrajo la necesidad de suplir la demanda con un
país que si tiene mayor producción de semillas de fresa en este caso lo fue Chile.
EXPORTACIONES TOTALES 2012 2013 2014 2015 2016 2017
TONELADAS 63.6 91.4 120.6 101.3 100.8 6.7
VALOR USD FOB USD
358.036,42 USD
541.760,78 USD
716.875,58 USD
959.523,85 USD
949.095,63 USD
116.105,89
IMPORTACIONES TOTALES 2012 2013 2014 2015 2016 2017
TONELADAS - - - 20.1 - -
VALOR USD CIF - - - USD
19,10463 - -
BALANZA COMERCIAL - - - 81.2 - -
Tabla 10. Importaciones y Exportaciones de la fresas. Fuente: DANE - DIAN
Ilustración 8. Diagrama de funcionamiento de la cadena comercial de la fresa. Fuente: CICO, 2012.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 31
2.4.2 Exportaciones de fresa (toneladas)
La Tasa de Crecimiento promedio anual en Volumen(Ton) para las exportación de los
últimos 6 años es del 10.92 %, este se ha incrementado en 46% y también cuenta con la
apertura de nuevos mercados como lo es Curazao quien desde el 2015 ha comenzado a
comprar fresa, este es uno de los mercados que se desea mantener pero también lograr
alcanzar otros países de mayor consumo por persona y demanda de este producto, no solo
por el costo también se debe ofrecer un producto de excelente calidad para la persona que
lo desea adquirir.
El mercado más representativo sigue siendo Panamá, quien a pesar de haber bajado su
demanda encabeza la lista de países consumidores de fresa Colombiana, donde se puede
ver que los países Europeos desde el año 2014 no adquieren el producto por la demanda
interna que tiene además los estándares de calidad y él envió de alimentos, por medio
marítimo o aéreo junto con los aranceles, no se ha logrado penetrar en este mercado
internacional, también por la falta de asociaciones y empresas involucradas para tratar de
llegar a nuevos mercados, para tener mayores ingresos brutos no solo para la producción
sino para tener un producto que sea de alta calidad a un precio más elevado por la demanda
que este puede llegar a tener en otros países.
Países destino 2012 2013 2014 2015 2016 2017
ANTILLAS HOLANDESAS
17,34 25,40 7,04 - - -
PANAMA 36,66 56,25 106,97 92,09 89,55 8,85
ARUBA 6,41 9,80 6,54 - - -
FRANCIA 2,38 - - - - -
ESTADOS UNIDOS 0,60 - - 0,10 - -
CURAZAO - - 7,99 11,20 2,54
OTROS 0,252 - 0,026 1,147 0,01 -
TOTAL 63,64 91,44 120,57 338,82 100,77 11,40 Tabla 11. Países de destino del cultivo de fresas.
Fuente: DIAN-DANE.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 32
2.4.3 Importación de fresa (toneladas)
Las importaciones se han incrementado considerablemente debido principalmente a la
afectación de los cultivos por el fenómeno niño que ha dañado las cosechas y la calidad de
la fruta principalmente.
La expectativas se presentan con acuerdos comerciales y productivos con empresarios
Extranjeros y Nacionales. La cadena viene trabajando en ubicación de zonas con
potencialidad para el cultivo de la Fresa que sea más competitivas.
Países origen 2012 2013 2014 2015* 2016*
CHILE 20.2
EEUU 11 22.9 29.5 31.6 3.8
ITALIA 1.8 3 2.4 1.1 0.1
MEXICO 1.8 2.3 10.8
TAILANDIA 0.3
CHINA 16.9
Total Mundo 12.9 27.7 34.5 80.8 3.9
Tabla 12. Importaciones de fresa (toneladas). Fuente: AGRONET. Estimaciones 2015 y 2016.
2.5 PRECIOS NACIONALES
Los precios han aumentado cerca del 20 % comparando marzo del presente año, con el
mismo periodo del año pasado, debido al fenómeno de El Niño. Se espera que se mantenga
esta alza hasta finales del año, cuando el establecimiento de nuevas áreas empiecen
producción.
A pesar del comportamiento en estos últimos meses, el precio nacional de la fresa se
caracteriza por ser constante; tanto que en los últimos 10 años las variaciones han estado
por debajo del 10 %.
Precio Nacional 2012 2013 2014 2015 2016*
Industrial ($/ton) 1400 1450 1550 1700 1850
Fruta Fresca ($/ton) 4022 4135 4625 4530 5234
Tabla 13. Precios Nacionales.
Fuente: Productores, Corabastos, [𝑂𝑛𝑙𝑖𝑛𝑒]. Available: http://www.corabastos.com.co/historico/ reportes/

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 33
Como lo podemos evidenciar desde el año 2012, tenemos un valor industrial de 1400
dólares con rendimientos de 4022 dólares por cultivo de fruta, así sigue creciendo el valor
con el paso de los años hasta llegar hasta el año 2016 donde tenemos un valor de 1850
dólares el valor industrial y tenemos un rendimiento de 5234 dólares, donde se puede ver
que el mercado de la fresa en Colombia, genera grandes rendimientos si se mejoran los
procesos de siembra de semillas de fresa y así tener una mayor producción en la cosecha
de fresas, dado que los precios aumentan cerca del 20% comparado con años anteriores,
debido a los problemas climáticos que aparecen como es el fenómeno del niño, lo que hace
que exista una baja en las producciones en la siembra de semillas de fresa, además
tenemos el valor de la fresa que se mantiene constante en los últimos años y se encuentra
por debajo del 10%, si por otro lado se lograra una mayor producción tendríamos fresas de
mejor calidad y alto valor nutricional, lo que esto puede hacernos competitivos en el
mercado internacional, no solo por el tamaño y peso de nuestras fresas que serán de
primera de calidad, también la venta en nuestro mercado tendrá un valor más costoso
generando para los cultivadores y productores mejores ganancias para invertir
posteriormente en mejorar nuevos procesos para tener una agricultura más eficiente y
tecnológica, con respecto a otros países que ya están invirtiendo en mejorarlo para tener
mejores beneficios en el área agrícola.
Precio al Productor ($*KG-1) 2015 2016*
PRIMERA 3200 4680
SEGUNDA 2550 3644
TERCERA 1950 2280
CUARTA 1200 1440
Tabla 14. Costo del precio de la fresa en el año 2015 comparado con el año 2016.
Fuente: Productores, Corabastos, [𝑂𝑛𝑙𝑖𝑛𝑒]. Available: http://www.corabastos.com.co/historico/ reportes/
Ilustración 9. Histórico grafico de precios mayoristas de la central de abastos de Bogotá. Fuente: Programa de Apoyo Agrícola y Agroindustrial vicepresidencia de fortalecimiento
empresarial Cámara de Comercio de Bogotá 2015. [𝑂𝑛𝑙𝑖𝑛𝑒]. Available:
https://bibliotecadigital.ccb.org.co/bitstream/handle/11520/14312/Fresa.pdf?sequence=1&isAllowed=y
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 34
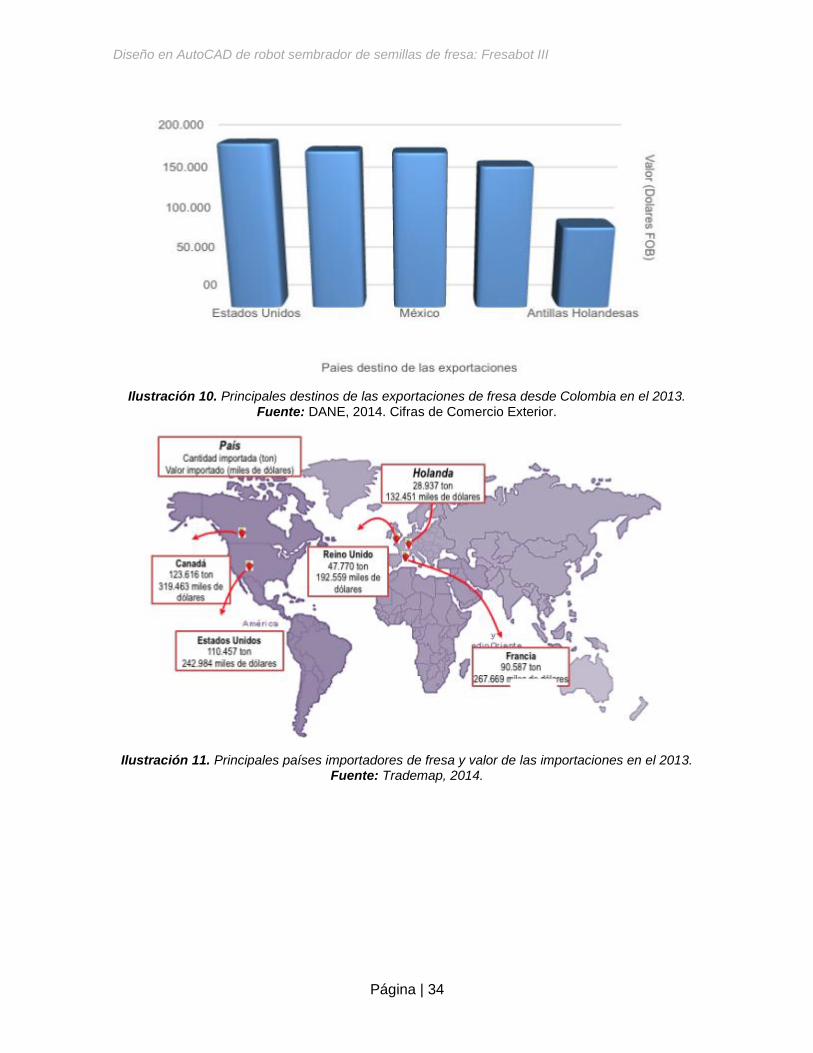
Ilustración 10. Principales destinos de las exportaciones de fresa desde Colombia en el 2013. Fuente: DANE, 2014. Cifras de Comercio Exterior.
Ilustración 11. Principales países importadores de fresa y valor de las importaciones en el 2013. Fuente: Trademap, 2014.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 35
3. PLANIFICACIÓN DEL PROYECTO
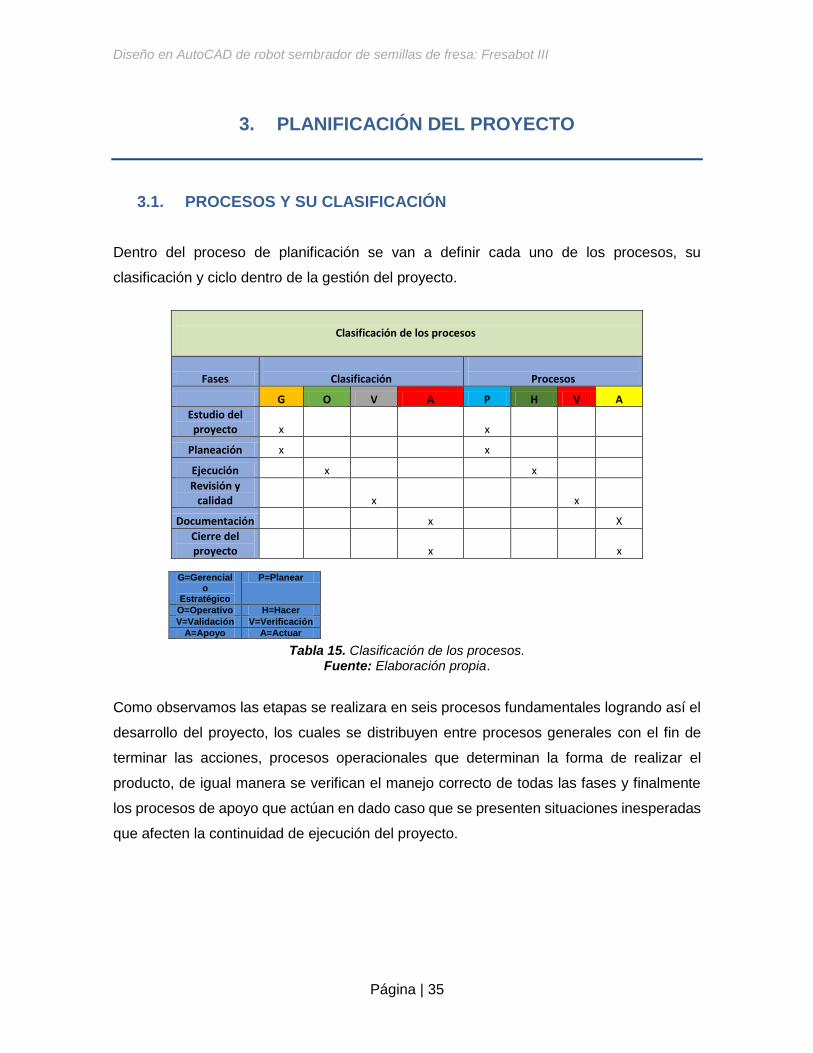
3.1. PROCESOS Y SU CLASIFICACIÓN
Dentro del proceso de planificación se van a definir cada uno de los procesos, su
clasificación y ciclo dentro de la gestión del proyecto.
Clasificación de los procesos
Fases
Clasificación
Procesos
G O V A P H V A
Estudio del proyecto x x
Planeación x x
Ejecución x x
Revisión y calidad x x
Documentación x X
Cierre del proyecto x x
Tabla 15. Clasificación de los procesos.
Fuente: Elaboración propia.
Como observamos las etapas se realizara en seis procesos fundamentales logrando así el
desarrollo del proyecto, los cuales se distribuyen entre procesos generales con el fin de
terminar las acciones, procesos operacionales que determinan la forma de realizar el
producto, de igual manera se verifican el manejo correcto de todas las fases y finalmente
los procesos de apoyo que actúan en dado caso que se presenten situaciones inesperadas
que afecten la continuidad de ejecución del proyecto.
G=Gerencial o
Estratégico
P=Planear
O=Operativo H=Hacer
V=Validación V=Verificación
A=Apoyo A=Actuar

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 36
3.2. CRONOGRAMA DE ACTIVIDADES
De acuerdo a la planificación de cada uno de los procesos, estamos incluyendo las
actividades a desarrollar el siguiente cronograma de actividades, el cual se define cada una
de las labores para llegar al fin determinado. Después se puede ver que el tiempo máximo
de ejecución es de aproximadamente 11 meses, el cual abarca todos los procesos y su
tiempo necesario, para dar al proyecto el inicio y el fin correspondiente de la mejor manera.
Tabla 16. Cronograma de Actividades. Fuente: Elaboración propia.
3.3. EVALUACIÓN DE RIESGOS
A continuación se realizara un análisis de todos los aspectos necesarios para la planeación
de nuestro proyecto, se hace una revisión y manejo de los riesgos clasificándolos,
verificando el manejo que debemos tener y visualizando las acciones que se deben hacer
para no cometer los riesgos.
Matriz de Valoración de Riesgos
Consecuencias
Bajo Medio Alto Resultado de la actividad
Recesión Económica 3 Acuerdo comerciales en la compra de materia prima.
Desarrollo Tecnológico Industrial
4
Garantizar la innovación de nuestro producto en calidad y
tecnológica
Desastres Naturales 1 Ninguno
Reglamentación del sistema
2 Creación de leyes necesarias para la función del robot
Tabla 17. Matriz de Valoración de Riesgo. Fuente: Elaboración propia.
Fases Actividades Mes
Estudio del proyecto
1. Realizar la viabilidad del
proyecto. Agosto Septiembre Octubre Noviembre Diciembre Enero Febrero Marzo Abril Mayo Junio
Estudio del proyecto
2. Realizar el estudio de
mercado.
Estudio del proyecto
3. Realizar el estudio de
demanda.
Planeación 4. Conocer el proceso actual de siembra de semillas de fresas.
Planeación 5. Realizar el comparativo entre lo actual y lo proyectado.
Planeación 6. Realizar el diagrama de
procesos según diseño propuesto.
Planeación 7. Realizar estudio Económico y
Financiero.
Revisión y calidad
8. Identificar la normatividad
vigente aplicable al proyecto.
Ejecución
9. Elaboración y entrega de
diseño de robot sembrador de semillas de fresas- Fresabot III.
Revisión y calidad
10. Definición del personal
requerido para realización del diseño.
Revisión y calidad
11. Conclusiones y recomendaciones para el diseño
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 37
La calificación se hace de 1 a 5 donde la calificación más baja es el número 1 y la más alta
5, es decir que si es baja es más fácil buscar una solución al riesgo mientras que si es alta
es más difícil de conseguir una solución oportuna al riesgo.
3.4. OBJETIVO PRINCIPAL
Diseñar y simular un robot para la siembra de semillas de fresa para mejorar la producción
en un ambiente controlado.
3.5. OBJETIVOS ESPECIFICOS
Diseñar la parte mecánica del robot sembrador de semillas de fresa con
herramientas de diseño CAD con el fin de establecer ventajas mecánicas y físicas
en un futuro montaje real.
Diseñar el circuito eléctrico del robot sembrador de semillas de fresa, para
establecer consideraciones a tener en cuenta en la selección de controladores y
actuadores, para una posible implementación en el futuro.
Simular en software especializado para robótica, para la obtención de información
como movimientos, velocidades y demás variables de análisis necesario antes de
una implementación real.
Entregar de manual de usuario de las especificaciones y funcionamiento del robot
sembrador de semillas de fresa para una posible implementación en el futuro.
3.6. LINEAMIENTOS ESTRATÉGICOS
Excelencia en el servicio al cliente al adquirir nuestro producto.
Capacidad tecnológica a la necesidad de nuestro cliente.
Gestión del conocimiento de la ingeniería para mejorar el producto.
Consolidación para estar mejor posicionados en el mercado.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 38
Ilustración 12. Procesos de desarrollo para el inicio y seguimiento del proyecto sembrador de semillas de fresas.
Fuente: Elaboración propia.
Ilustración 13. Actividades de cultivo de fresa. Fuente: Programa de Apoyo Agrícola y Agroindustrial vicepresidencia de fortalecimiento
empresarial Cámara de Comercio de Bogotá 2015. [𝑂𝑛𝑙𝑖𝑛𝑒]. Available: https://bibliotecadigital.ccb.org.co/bitstream/handle/11520/14312/Fresa.pdf?sequence=1&isAllo
wed=y
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 39
3.6.1. POLÍTICA INTEGRAL HSEQ
Fresabot III es un proyecto dedicado a la generación, distribución y comercialización de
diseño de robot sembrador de fresas para generar mayor producción y calidad del producto
en un ambiente controlado como lo es un invernadero.
Desarrollar y controlar eficazmente, procesos y servicios que satisfagan las expectativas de
nuestros clientes y otros grupos de interés.
Promover y mantener buenos niveles de seguridad y salud para las personas involucradas
en el proceso de siembra, además de tener un cuidado del medio ambiente, debido a que
estos propósitos son importantes para la eficaz realización de nuestras operaciones con
impacto en la calidad de los servicios que suministramos a la comunidad que trabaja en la
agricultura.
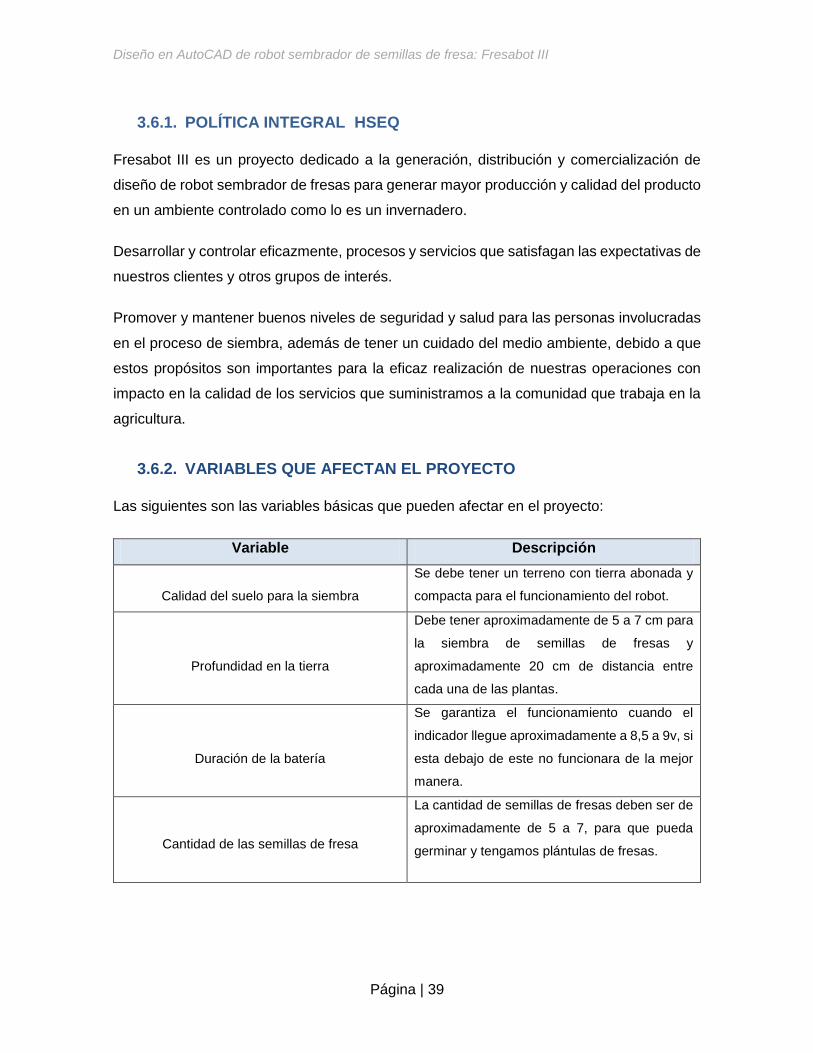
3.6.2. VARIABLES QUE AFECTAN EL PROYECTO
Las siguientes son las variables básicas que pueden afectar en el proyecto:
Variable Descripción
Calidad del suelo para la siembra
Se debe tener un terreno con tierra abonada y
compacta para el funcionamiento del robot.
Profundidad en la tierra
Debe tener aproximadamente de 5 a 7 cm para
la siembra de semillas de fresas y
aproximadamente 20 cm de distancia entre
cada una de las plantas.
Duración de la batería
Se garantiza el funcionamiento cuando el
indicador llegue aproximadamente a 8,5 a 9v, si
esta debajo de este no funcionara de la mejor
manera.
Cantidad de las semillas de fresa
La cantidad de semillas de fresas deben ser de
aproximadamente de 5 a 7, para que pueda
germinar y tengamos plántulas de fresas.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 40
Recurso Humano
Capacitar de la mejor manera para el
funcionamiento y operación del robot para evitar
problemas en su funcionamiento.
Interferencias
Son señales externamente transmitidas a la
misma frecuencia ocasionando algún tipo de
ruido al sistema que pueda alterar el
funcionamiento del robot sembrador de fresas.
Tabla 18. Variables que afectan el proyecto. Fuente: Elaboración propia.
Ilustración 14. Etapas fenológicas del cultivo de la fresa.
Fuente: Bonilla, 2010.
Ilustración 15. Calendario de siembra, labores y cosecha del cultivo de la fresa en Colombia. Fuente: Programa de Apoyo Agrícola y Agroindustrial vicepresidencia de fortalecimiento
empresarial Cámara de Comercio de Bogotá 2015. [𝑂𝑛𝑙𝑖𝑛𝑒]. Available: https://bibliotecadigital.ccb.org.co/bitstream/handle/11520/14312/Fresa.pdf?sequence=1&isAllowed
=y
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 41
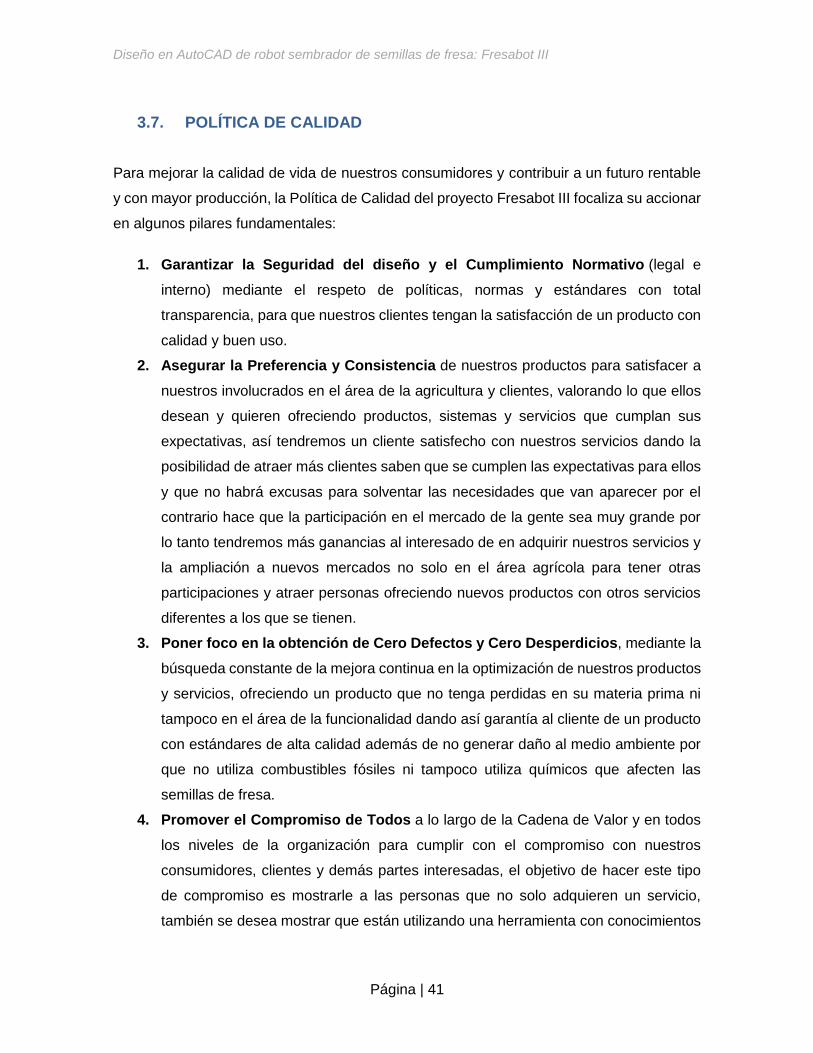
3.7. POLÍTICA DE CALIDAD
Para mejorar la calidad de vida de nuestros consumidores y contribuir a un futuro rentable
y con mayor producción, la Política de Calidad del proyecto Fresabot III focaliza su accionar
en algunos pilares fundamentales:
1. Garantizar la Seguridad del diseño y el Cumplimiento Normativo (legal e
interno) mediante el respeto de políticas, normas y estándares con total
transparencia, para que nuestros clientes tengan la satisfacción de un producto con
calidad y buen uso.
2. Asegurar la Preferencia y Consistencia de nuestros productos para satisfacer a
nuestros involucrados en el área de la agricultura y clientes, valorando lo que ellos
desean y quieren ofreciendo productos, sistemas y servicios que cumplan sus
expectativas, así tendremos un cliente satisfecho con nuestros servicios dando la
posibilidad de atraer más clientes saben que se cumplen las expectativas para ellos
y que no habrá excusas para solventar las necesidades que van aparecer por el
contrario hace que la participación en el mercado de la gente sea muy grande por
lo tanto tendremos más ganancias al interesado de en adquirir nuestros servicios y
la ampliación a nuevos mercados no solo en el área agrícola para tener otras
participaciones y atraer personas ofreciendo nuevos productos con otros servicios
diferentes a los que se tienen.
3. Poner foco en la obtención de Cero Defectos y Cero Desperdicios, mediante la
búsqueda constante de la mejora continua en la optimización de nuestros productos
y servicios, ofreciendo un producto que no tenga perdidas en su materia prima ni
tampoco en el área de la funcionalidad dando así garantía al cliente de un producto
con estándares de alta calidad además de no generar daño al medio ambiente por
que no utiliza combustibles fósiles ni tampoco utiliza químicos que afecten las
semillas de fresa.
4. Promover el Compromiso de Todos a lo largo de la Cadena de Valor y en todos
los niveles de la organización para cumplir con el compromiso con nuestros
consumidores, clientes y demás partes interesadas, el objetivo de hacer este tipo
de compromiso es mostrarle a las personas que no solo adquieren un servicio,
también se desea mostrar que están utilizando una herramienta con conocimientos

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 42
de ingeniería que estimula y desea mayor producción para la siembra de semillas
de fresa, logrando así que las personas alrededor de la parte agrícola miren y se
animen a participar de la mejor manera no solo está ayudando a crecer su mercado
también están apostando en las personas que lo están desarrollando y lo están
implementando a su alcance, el deseo es tener una Colombia con una mayor
participación de mercados extranjeros.
5. Desarrollo de procesos seguros y libres de actividades ilícitas, corrupción y soborno.
6. Mejorar los procesos, así mismo estandarizarlos, controlarlos y asegurarlos.
7. Fomentar la cultura de hechos y datos.
8. Garantizar el cumplimiento de la legislación aplicable al proyecto.
4. INGENIERIA DEL PROYECTO
La ingeniería del proyecto también llamado estudio técnico-operativo, permite acercar la
planificación del proyecto al nivel de la ejecución del proyecto. En esta sección se debe
presentar la planificación operativa integral, es decir, los requisitos del bien o servicio, su
diseño, rediseño o definición, lo cual debe poder representarse en una ficha técnica que
muestre los atributos del producto (bien o servicio), luego se debe definir el proceso para la
fabricación del bien, o de la prestación del servicio, si es el caso. En todo caso, se debe
hacer claridad del proceso, el cual debería ser representado mediante diagramas que
incluyan las etapas, las variables de respuesta (o dependientes, salida de cada etapa), las
variables independientes (o de control), estas últimas definiendo los limites superior e
inferior. Lo anterior permitirá tomar decisiones sobre tecnologías para cada etapa, esto será
la adopción, adaptación o desarrollo de tecnologías.
La definición de tecnologías da paso a la capacidad del proyecto (tamaño del sistema de
producción o de operaciones en caso de servicios), en la cual se evidencian los factores
condicionantes, tales como recursos, tiempos, materiales, puestos de trabajo, operarios,
empleados directos, áreas, en concordancia al plan de ventas o al C.P.M-PERT del
proyecto, también se incluye la macro y micro localización.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 43
En esta sección se relacionan el orden de ejecución de las actividades a realizar y los
resultados a obtener en función de tiempo. Debe detallarse con bastante claridad el
itinerario a seguir en el cumplimiento de los objetivos previstos. El estudio técnico debe
concluir con el análisis del impacto ambiental (línea base, matriz de impacto, regulaciones,
licencias y estudio de responsabilidad social como impacto del proyecto).
4.1. RECURSOS
Algunos de los recursos para el correcto manejo tecnológico, un ingeniero o un arquitecto
con especializados con conocimientos en AutoCAD, para la realización del diseño del robot
sembrador de semillas de fresa, donde se pueda observar cada uno de los detalles que
tendría este dispositivo electrónico, por medio de una simulación en 3D donde muestre cada
una de las partes que componen este robot y pueda mostrar el paso a paso del proceso de
la siembra de semillas de fresa.
4.2. LOCALIZACIÓN
El proyecto se realizara en el municipio de Cundinamarca, en primera estancia porque es
el lugar más cercano a la Ciudad de Bogotá además de ser uno de los principales sectores
donde las fresas tienen mayor participación en el mercado, otro de los factores que vamos
a tener en cuenta es un invernadero, porque necesitamos para la realización del proyecto
una tierra abonada y rica en nutrientes que no afecte el funcionamiento, dado que hay
diferentes tipos de suelo rocosos, arcillosos, húmedos y en estos, no se garantiza un
proceso optimo, y por último la temperatura es la óptima para la siembra de semillas de
fresa para que tenga un brote optimo y pueda generar mayor cantidad de fresas sembradas.
4.3. METODOLOGÍA
El trabajo se desarrollara en 3 partes fundamentales las cuales son el diseño mecánico, el
diseño electrónico, en el cual se incluye todos los sistemas y elementos requeridos para su
correcto funcionamiento y por último la simulación del robot sembrador de semilla de fresa,
llamado Fresabot III.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 44
Diseño Mecánico:
Para el diseño se eligió los sistemas que muevan la estructura del robot sembrador
de semillas de fresa por lo cual la elección del motor se convierte en un paso
fundamental en el diseño, adicionalmente contara con una batería recargable para
el funcionamiento del robot en cuando a posicionamiento comunicación con el
controlador y algunos factores ambientales.
El diseño mecánico incluye una de las partes más importantes del trabajo y es el
diseño geométrico del robot, con esto se quiere decir que se diseñara cada una de
las piezas que el robot necesite para su construcción y ensamblaje final utilizando
un CAD adecuado para este fin, se generaran los planos correspondientes a lo
anteriormente nombrado.
La elección del material, en este aspecto se buscara un material adecuado para la
construcción del robot sembrador de semillas de fresa, un material que tenga
beneficios tanto en su costo, como en su manipulación y que sea de fácil acceso.
Diseño Electrónico:
Diseñar las etapas de potencia necesarias para el correcto funcionamiento de los
elementos (motores) elegidos para el movimiento del robot sembrador de semillas
de fresa.
Elección de batería necesaria para suministrar la energía necesaria para el correcto
funcionamiento del sistema.
Diseño del Software:
Elección del programa que se utilizara para realizar el entorno virtual y posterior
simulación del robot sembrador de semillas de fresa, llamado Fresabot III.
Diseño del entorno virtual en el programa escogido para tal fin, en el cual se pueda
insertar nuestro diseño mecánico del robot sembrador de semillas de fresa, en el
cual se pueda insertar nuestro diseño mecánico del robot y ver el funcionamiento
que este tiene.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 45
4.4. DISEÑO MECÁNICO DEL ROBOT
La estructura del robot esta soportada en un sistema de tracción de oruga, para que pueda
avanzar en cualquier terreno sin tener ningún problema, en la base tenemos una tolva para
que gire en ambos lados sin afectar el funcionamiento del robot, se hicieron estudios y es
la mejor aplicación, porque si se mueve el robot por los sensores pueden afectar y no hacer
el proceso de sembrar las semillas en el agujero que se realizara por medio de los motores
DC y motor de torque, el primero se utiliza para bajar la broca y haga la respectiva
perforación en el suelo mientras que el otro se utiliza para darle fuerza sin afectar el
movimiento del robot y por ultimo gira 180° para quedar en la misma posición y sembrar las
semillas de fresa, para posteriormente avanzar y tapar las semillas de fresa, realizando así
el proceso de la agricultura de precisión para mejorar la producción de semillas de fresa.
4.5. DISEÑO ELECTRICO
En el siguiente diagrama podemos ver el diseño interno del robot, donde podemos ver cada
uno de las partes que va a componer el robot, podemos detallar el funcionamiento de la
oruga, para que avanza en sentido de línea recta, también tenemos el taladro y el motor
para el desplazamiento del robot, también tenemos el micro controlador llamado Arduino
donde se programa las funciones que debe realizar el robot, una pantalla LCD donde se
puede ver la función que está haciendo y el nombre que tiene el robot además de mostrar
cuantas veces va a sembrar, por ejemplo si el usuario coloca el numero 1 el realizara 2
siembras porque tiene que existir una distancia de 40 cm entre cada una de ellas para que
no se traslapen las raíces, siguiendo con este plano cuenta con una batería recargable de
12V a 110V para que en caso de tener la batería baja pueda recargarse y funcionar
nuevamente y por ultimo cuenta con un interruptor el cual funciona para activar o apagar el
robot sin tener ningún problema.
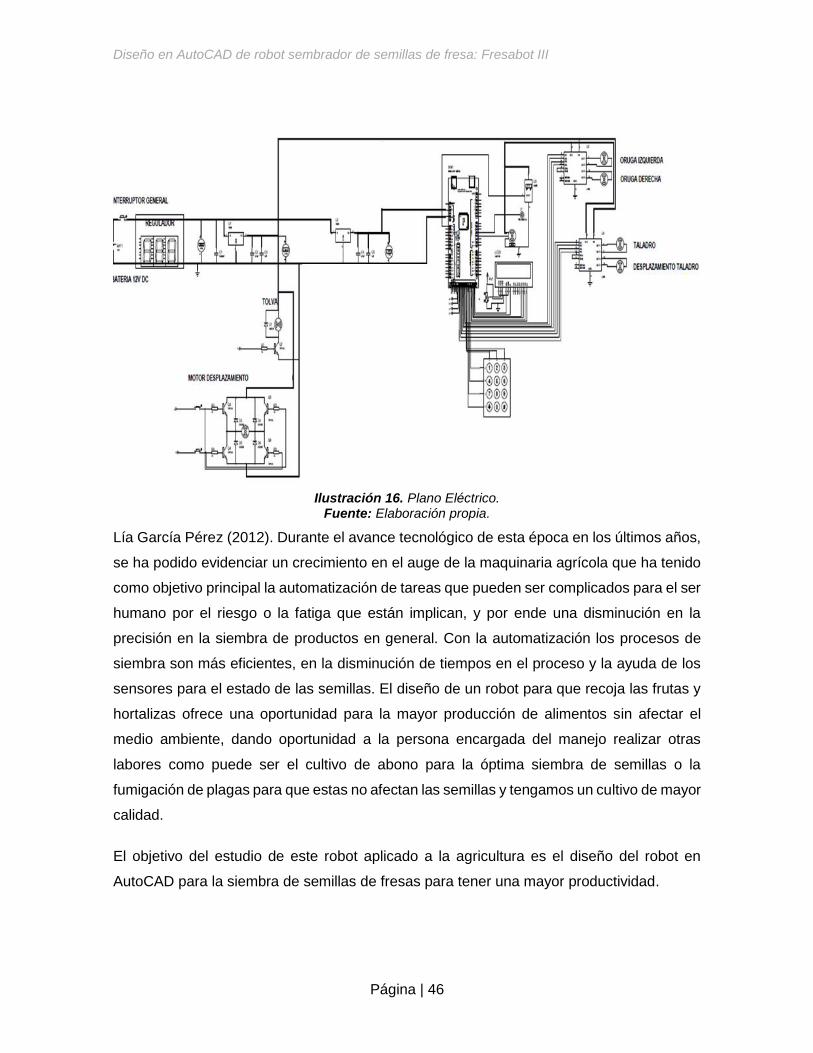
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 46
Ilustración 16. Plano Eléctrico. Fuente: Elaboración propia.
Lía García Pérez (2012). Durante el avance tecnológico de esta época en los últimos años,
se ha podido evidenciar un crecimiento en el auge de la maquinaria agrícola que ha tenido
como objetivo principal la automatización de tareas que pueden ser complicados para el ser
humano por el riesgo o la fatiga que están implican, y por ende una disminución en la
precisión en la siembra de productos en general. Con la automatización los procesos de
siembra son más eficientes, en la disminución de tiempos en el proceso y la ayuda de los
sensores para el estado de las semillas. El diseño de un robot para que recoja las frutas y
hortalizas ofrece una oportunidad para la mayor producción de alimentos sin afectar el
medio ambiente, dando oportunidad a la persona encargada del manejo realizar otras
labores como puede ser el cultivo de abono para la óptima siembra de semillas o la
fumigación de plagas para que estas no afectan las semillas y tengamos un cultivo de mayor
calidad.
El objetivo del estudio de este robot aplicado a la agricultura es el diseño del robot en
AutoCAD para la siembra de semillas de fresas para tener una mayor productividad.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 47
Silva Daniel Jiménez (2016). En los últimos años el uso de invernaderos para la producción
agrícola ha sido fundamental para el crecimiento exponencial en México. Este crecimiento
ha generado un cambio importante tanto en las herramientas, instrumentos y forma del
cultivo, porque mientras se hace de manera tradicional la siembra directa en el suelo, como
lo han hecho nuestros antepasados, la manera de producir por medio del invernadero es
por medio de charolas donde se lleva a cabo el proceso de germinación. En el mercado
existen una gran cantidad maquinarias que hacen el proceso de depósito de sustrato, riego
o fumigación, pero para ambientes como lo son una pequeña empresa no existen en la
actualidad por que no es rentable para la persona que vende esta tecnología debido a la
poca ganancia que genera. El diseño y construcción de un prototipo de maquina
sembradora de semillas viable para un invernadero, para lograr una mayor eficiencia de la
mano obra empleada para que desarrolle otros procesos mientras este realiza en proceso
de la siembra y reducir tiempos generando una mayor calidad en el proceso de la siembra
y el monitoreo de las variables que pueden aparecer por medio de sensores, para la calidad
y producción del alimento.
Automatización en la ingeniería para el desarrollo del prototipo del robot, para la integración
de la agricultura y la ingeniería, por medio de simuladores que muestren el progreso
además de la construcción del robot con materiales reciclables, que lo hacen competir
contra otros que pueden ser de alto costo pero no satisfacen las necesidades de nuestros
campesinos, por su alto costo y daño al terreno donde se están sembrando semillas por su
peso y combustible.
La estructura debe estar basada en un sistema oruga que pueda maniobrar en un sistema
de un invernadero y soportar el peso de los motores, controlador y pantalla LCD para
realizar el proceso de la siembra de semillas.
Jimmy Andrés Ochoa (2017). En la actualidad existen muchos desarrollos de robots para
toda aplicación que pueden ser integrados por ejemplo a la agricultura o la medicina, el
objetivo es realizar un prototipo de robot que pueda manejar en terrenos hostiles, como lo
pueden ser rocosos o desiertos y que tenga la funcionalidad por medio de micro
controladores y sensores para verificar el estado de las variables como la temperatura y la
humedad. Existen muchos modelos para la exploración de muchos terrenos como una mina
o lugares donde han ocurrido siniestros por ejemplo un terremoto, que tienen un elevado
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 48
costo de creación y son difíciles de manejar por las personas que no tienen conocimiento
en la ingeniería o si no tienen fundamentos básicos en tecnología de sistemas de
dispositivos. También existe la oportunidad de desarrollo de nuevos prototipos, más
económicos que no afecten por ejemplo la calidad del suelo donde se realiza la siembra,
por el peso de los modelos existentes en el sector privado, dando la oportunidad del
monitoreo de las muchas variables que pueden aparecer en un cultivo por medio de
sensores, dando así un paso de calidad para tener un cultivo optimo y con mayor producción
en la cosecha de estos alimentos.
Este prototipo cuenta con una pantalla LCD, que nos dice la distancia que hay entre cada
una de las semillas sembradas, por medio de un registro de distancia programado en el
micro controlador, cuenta con servomotores de gran potencia para la excavación en
terrenos de tierra abonada que son de gran dificultad y el uso de una tolva para la siembra
de semillas de fresas, además de ser autónomo para que no exista intromisión de la mano
de obra humana durante el proceso de agricultura de precisión.
Durante el avance del siglo XX, hemos podido evidenciar un crecimiento de la
automatización en la parte agrícola para el mejoramiento de la siembra de las semillas, para
mejorar la calidad de los alimentos pero también ayudar a las personas encargadas de este
proceso para que por medio de la ingeniería puedan realizar otras funciones y no exista
degaste físico o pérdida de tiempo y puedan realizar nuevas laborales sin que afecte el
cultivo. No solo se busca que los procesos de siembra sean más efectivos para la
producción de alimentos también se busca disminuir la mano de obra, crear un ambiente
menos nocivo para las semillas por culpa de fertilizantes que pueden afectar a las personas
por su alta concentración y el funcionamiento de robots autónomos para que trabajen en
horas de la noche sin tener la supervisión de muchos operarios para cultivar los alimentos.
En el desarrollo de dispositivos autónomos, para la ayuda de la siembra de los diferentes
productos, Cristian Bolívar (2016) hemos podido identificar que la idea es mejorar la calidad
de vida para las personas por el esfuerzo que genera el hacer este proceso de manera
manual, no solo por el tiempo que este requiere desde la parte humana también desde la
parte agrícola generando problemas en la disposición del producto en la tierra, también las
condiciones por las altas temperaturas que estos deben estar dispuestas a recibir, por
ejemplo el calor intenso en un invernadero por el plástico de los invernaderos o por las
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 49
heladas que se pueden manifestar en las horas de la noche para que no se pierda el cultivo,
por un mal cuidado de las personas a cargo. Siguiendo con este avance tenemos el caso
Diego Cadena (2015) donde manifiesta el avance de siembra de semillas por sistema de
charolas para que estas tengan un crecimiento más eficaz, por medio de una maquina
sembradora de semillas en un invernadero para reducir la capacidad de mano de obra,
menos maltrato al terreno donde se piensa sembrar y mayor demanda en la producción de
los diferentes productos. En la universidad UDELAR (2015) se realizó un sistema de
navegación controlado llamado SINAAPROSE, un robot que es capaz de realizar una
siembra de semillas en un terreno aproximadamente de 2 metros cuadrados por medio de
sensores, GPS y electrónica, para colaborar a los campesinos en la agricultura de precisión.
La implementación de la tecnología aplicado a la agricultura ha mejorada la forma siembra
como se hacía tradicionalmente en épocas anteriores a este siglo, Lía García Pérez (2016),
donde manifiesta que estos procesos generan dos direcciones por un lado tenemos el
desarrollo e implantación de objetos manipuladores para desarrollo de actividades agrícolas
en espacios extensos como la cosecha, fertilización, guadañar, etc. Pero por otro lado
tenemos el desarrollo de nuevos productos que sean autónomos y puedan realizar
diferentes funciones sin inferencia de la mano de obra humana sino por el contrario estos
sean supervisores en los diferentes procedimientos que estos ejecuten, en el manejo de un
tractor para que no afecte la calidad del terreno por el peso que este posee y las llantas que
afectan los nutrientes del terreno. Otro ejemplo de dispositivos autónomos en la agricultura,
Elizabeth Centurión (2015) nos presenta un prototipo para la creación de una sembradora
semiautónoma que ayude en la tarea de sembrar semillas de quinua en la costa del Perú,
donde el método de siembra sea por cama y se utilice riego por goteo. La necesidad del
desarrollo de una sembradora de este tipo nació por la exigencia de obtener productos de
mayor calidad (tamaño uniforme, evitar plagas, etc.). En el avance de desarrollo de
dispositivos autónomos capaces de realizar actividades en exteriores Iván Almeida (2017),
realizo pruebas con un robot para el desplazamiento en terrenos hostiles por medio de GPS
para verificar variables importantes en la siembra de productos desde la humedad hasta el
tipo de terreno, puede ser del tipo rocoso o árido, por medio de sensores y un sistema de
tracción robusto idóneo para ser operado desde un niño hasta un ingeniero.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 50
Según Bragachini M (2017), uno de los avances tecnológicos más notables de los últimos
años en la agricultura en Argentina, se puede diferenciar, por la nueva generación de
agroquímicos, la biotecnología y la agricultura de precisión. Complementariamente,
ayudando este proceso de cambio y favoreciendo su adopción, está la mecanización
agrícola asociada a la informática y la robótica y el almacenamiento de los granos en silo
bolsa entre otras cosas. La tecnología ha revolucionado la producción agropecuaria,
impactando positivamente y de manera productiva, ambiental y social en todos los procesos
mediante los cuales se obtienen grano excelente de calidad, como el maíz, frijol o arvejas.
Para el ingeniero, Hahn Villalba (2016) , En el Paraguay existen reportes sobre trabajos de
investigación realizados con herramientas de Agricultura de Precisión desde inicios de la
década pasada a través del Centro Regional de Investigación Agrícola (CRIA) actualmente
denominado Instituto Paraguayo de Tecnología Agraria (IPTA) donde se han publicado
trabajos de monitoreo de cosecha geo referenciada relacionándolas con la fertilidad de los
suelos, malezas, germinación, entre otros, para encontrar causas que genera variabilidad
de producción por parcela y su posible solución con las herramientas que se tienen a la
mano dado el avance progresivo de la tecnología.
Con el desarrollo de tecnología para Hoffman E. (2016), la diferencia más importante se
realiza mediante técnicas de sensores remoto utilizando sensores activos es posible
analizar directamente mediante espectrometría, en forma instantánea, y a muy bajo costo
el estado de la vegetación (i.e. contenido de clorofila, área foliar, nitrógeno absorbido)
utilizando la reflectancia característica de los materiales a medir (vegetación, suelo, restos
secos). Los sensores activos miden la reflectancia de la luz emitida por un sensor,
independientemente de la intensidad de la luz solar. Esto habilita a que las medidas puedan
ser tomadas a cualquier hora del día, en días soleados y nublados, incluso por la noche,
logrando así mayor oportunidad de lectura, mayor precisión e independencia de las
condiciones ambientales. Todos los sensores activos desarrollados hasta el momento
basan su análisis en dos-tres bandas espectrales en tres regiones específicas (660-680nm,
730nm, 780-850nm).
Actualmente en Colombia se encuentra un gran desarrollo de robots autónomos para las
diferentes tipos de siembra de cualquier producto, en la Uniagraria (2017), se realiza un
prototipo por medio de un dron, capaz de sembrar media arroba de papa, para que
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 51
posteriormente fuera fertilizado y después echar tierra y mejorar la siembra del producto,
en Uruguay en la universidad Equinoccial (2014), se creó un dispositivo electrónico que
funciona por medio de GPS para realizar la siembra de maíz por medio de surcos, para
controlar desde la siembra de semillas de maíz hasta la distancia entre cada una de ellas
y el control de plagas y por ultimo tenemos el caso de un robot sembrador en México
Instituto de Estudios Superiores del Istmo de Tehuantepec (2016) por medio de Bluetooth
este realiza el funcionamiento de motores por medio de un dispositivo móvil, para la
realización del arado que en muchas ocasiones es realizada por un animal y está construido
con materiales reciclables realiza el proceso completo a bajo costo ayudando a la mano de
obra que son los campesinos en tareas arduas para ellos.
Para el desarrollo de este proyecto, se busca un enfoque innovador, ¿Qué variables
ambientales se deben tener en cuenta en la automatización en la siembra de semillas de
fresas? El objetivo es mejorar la calidad de vida de los campesinos en el proceso de la
siembra de semillas de fresas disminuyendo la mano de obra que se utiliza en la agricultura
de precisión, en un ambiente controlado como lo es un invernadero, logrando el diseño de
un robot autónomo capaz de realizar una excavación en el suelo, posteriormente la siembra
de semillas de fresas y por ultimo cubrir con tierra las semillas y realizar el proceso completo
de la siembra.
Todos los días en el mundo, tenemos avances tecnológicos y el desarrollo de nuevos
productos aplicados a cualquier oficio en el mundo, donde la mano de obra del ser humano
ya no es necesaria, como se utilizaba tiempo atrás, en todos los aspectos financieros,
económicos, médicos, agricultura, vemos la necesidad de automatizar todas las labores
para que la calidad de vida de las personas mejore de una forma más rápida y el tiempo de
respuesta en cada actividad sea más eficiente, generando menos ocupación de tiempo para
las personas en asuntos indiferentes y por otro lado generando la posibilidad de pensar
nuevas ideas para innovar el mundo donde estamos viviendo y organizar con criterio su
jornada laboral y mejoramiento de su espacio personal.
Diego Venegas (2016) nos habla como el desarrollo de la automatización en la agricultura,
aumenta la calidad de los alimentos, por que la persona que está observando la actividad
del robot, puede realizar otros encargos y como los tipos de agricultura industrial afectan
los productos por mal uso de químicos causando enfermedades en las personas que
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 52
consumen los productos, busca un desarrollo de un prototipo de robot que pueda ser
autónomo y capaz de funcionar en surcos, para mejorar el terreno de desarrollo de la
siembra y como ampliar los campos de acción por ejemplo fertilizante necesario o cantidad
necesaria de agua para que no se pierdan los nutrientes de la semilla.
Se debe hacer un diseño de un robot que sea capaz de soportar las variables de un
invernadero, tengamos en cuenta que algunas de las más importantes las podemos
encontrar en la temperatura por los plásticos que recubren, estas áreas genera un calor
que puede afectar la calidad de las semillas, también tenemos el caso contrario por ejemplo,
el invierno donde por culpa de la lluvia podemos perder cultivos enteros por no tomar las
medidas necesarias antes de que ocurra este problema, así también podríamos analizarlo
por ejemplo con la humedad, terreno, estándares de la semilla, entre otros problemas.
Se debe hacer una estructura que sea capaz de soportar el robot, debido a que por su peso
y los componentes que están en la parte superior de nuestro robot puede afectar la calidad
del suelo donde vamos a sembrar, porque tenemos en la parte arriba de la oruga, un
sistema de tracción para que este pueda avanzar en este terreno sin ningún problema,
después debemos tener motores que tengan la capacidad de hacer huecos en el suelo y
que tengan también una broca para un terreno como lo es un invernadero, además
debemos asegurar que estos hagan la profundidad exacta entre 5 y 7 cm, para que la
semilla este totalmente cubierta y por ultimo tener en la parte inferior una pala para que el
robot cubra la semilla y hacer todo el sistema autónomo para la siembra de semillas de
fresas.
Es necesario porque los avances de la agricultura demuestra que al tener la aplicación de
las ciencias en los diferentes cultivos de nuestro país, genera un desarrollo de mejor calidad
tanto en la producción como en la cosecha además en el mundo la demanda de alimento
en el mundo, no se detiene todos los días en la tierra aumenta el número de seres humanos,
lo que genera una demanda para las personas como los agricultores, porque no es solo
cosechar es mejorar los estándares de calidad de la siembra, para que esta persona pueda
generar más productos si le damos la oportunidad de ver crecimiento tecnológico junto con
el apoyo de estas personas para tener una vida más tranquila pero ofreciendo productos
con agricultura de precisión de orden mundial.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 53
Lo que no puede faltar en el desarrollo de proyecto, la necesidad de hacer un robot con
materiales reciclables, que no afecten nuestro planeta, porque nuestro diseño va
encaminado a bajo costo, actualmente existen muchos tractores, drones, hexápodos, etc.
Que son de alto costo y no satisfacen las necesidades del agricultor o de las personas que
los adquieren, debido a la energía que utilizan que en muchas ocasiones en diésel o ACPM,
lo cual es nocivo para el medio ambiente por las emisiones de este producto o por ejemplo
los repuestos de estos componentes, son de alto costo además que no se consiguen en
nuestro país deben ser importados, instalados especializadas donde su mano de obra es
de un valor alto y por último la vida útil de estos componentes es corta porque siempre
están mejorando y desarrollando nuevos diseños generando pérdidas elevadas para las
personas que adquieren estos producto, debemos cuidar el medio ambiente y realizar el
diseño con objetos que tengamos a la mano, que en ningún momento estarán bajando la
calidad de nuestro producto por el contrario estamos dando valor agregado a objetos que
la gente desperdicia y no les ve la utilidad que puede generar para la sociedad.
Algunas de las variables ambientales aplicadas a la agricultura, son la hidrología, calidad
de agua, suelos y aspectos socioeconómicos. El propósito de dichas evaluaciones es poder
determinar los efectos de las actividades que se están proponiendo y como estos efectos
pueden transferirse a otras variables para que puedan implementarse con otras ya existente
por ejemplo con la humedad, temperatura, nutrientes de la tierra. Otras de las variables que
podemos encontrar es el régimen de flujo, crecidas o avenidas, nivel freático, zonas de
recarga de acuíferos, concentración de sólidos, sustancias toxicas, compuestos orgánicos,
contaminación de los suelos, capacidad de uso del suelo, sedimentación, relieve,
topografía y paisaje, migración animal y por último la biodiversidad.
Los criterios ambientales a tener en cuenta en el desarrollo de nuestro robot, la calidad del
suelo, si tenemos un suelo muy árido, rocoso o lodoso, podríamos perfectamente daños los
componentes de este mismo, debe tener buena calidad además de ser una tierra abonada
y sin piedras que puedan pérdida de calidad de nuestros motores o broca de perforación
por las semillas que se está sembrando, otro criterio a tener en cuenta es la energía de
alimentación se debe hacer con baterías que sean recargables y con alta autonomía, para
que la duración y la carga sean inversamente proporcional al funcionamiento de este
producto. Además de los criterios mencionados, debemos contar con semillas de alta

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 54
calidad, suelos con buenos nutrientes para cultivo de productos, aplicación exacta de
químicos necesarios para que los animales, las plagas y las personas no tengan problemas
de salud por agentes tóxicos.
La automatización con variables ambientales, nos ayuda a la necesidad de tener mejores
servicios y productos para la forma de vivir que tenemos, en el mundo la ayuda para los
humanos con ayuda de los robots es vital para todos los trabajadores, no existe en la
actualidad, alguna actividad que no sea aplicada para la creación de robots, lo podemos
ver en la actividad automotriz a través caso de construcción de autos, por medios de brazos
mecánicos, que ensamblan las partes, en la medicina la ayuda de materiales para la
creación de órganos humanos, que van desde el desarrollo de un marcapasos o corazón
hasta la creación de un riñón para un trasplante, también tenemos el caso de robots para
la limpieza y muchas otras actividades.
En la agricultura que es donde nos compete, debemos hacer un robot que cumpla todos los
procesos para la siembra de semillas de fresas, que va desde la excavación en el suelo
hasta la siembra y posteriormente tapar el hueco dando así una ayuda a la agricultura de
precisión. Algunas de las variables ambientales que están presentes es la calidad del suelo,
es importante debido a que si no tenemos los nutrientes necesarios es probable que nuestro
producto no llegue a la maduración del desarrollo de las fresas, la humedad es un factor
importantísimo de deben tener la aplicación de agua que va entre los 25 a 40 ml, para que
no se altere el proceso de germinación del producto, se deben cubrir con plásticos y hacer
los surcos necesarios, para que el robot pueda avanzar en el terreno y sembrar a distancias
determinadas para que las raíces de las semillas no atrasen los procesos por la reabsorción
de las semillas o el robo de nutrientes por la unión de una o más raíces, perdiendo así
calidad de las semillas de fresa sembradas, también otra variable que puede aparecer en
nuestro el uso masivo de pesticidas o químicos, porque algunas veces por realizar una alta
demanda en el producto, podemos tener pérdidas, la calidad de la comida con ayuda de la
biogenética, no trae los nutrientes necesarios, a futuro puede generar en las personas
enfermedades silenciosas pero que a la hora de la aparición de estas pueden ser dolorosas,
debido al consumo de productos que no deben ser tratados químicamente, se debe hacer
la calidad de la siembra con estrictos regímenes que no solo sean buenas a la hora de la

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 55
cosecha también deben tener muy buena calidad para las personas que lo vayan a
consumir para que no aparezca ningún daño a corto o largo plazo.
La novedad de nuestro producto se debe a que en el desarrollo de nuevas tecnologías, no
existe un sembrador de semillas de fresas, tenemos algunos modelos como lo son de maíz
el más común a la hora de un desarrollo tecnológico, también tenemos robots sembradores
de papas por medio de un dron y sistema GPS, para que recorra un determinado espacio,
pero lo que se desea construir es un robot que ayude al medio ambiente con una energía
que no sea radioactiva para los productos en el invernadero además de la construcción con
materiales reciclables, que lo hace competidor con otras innovaciones, porque no solo se
busca que sea de un costo bajo sino el reciclaje de partes de otros productos que la gente
se deshace de ellos pero que se le pueden dar un valor agregado para cuidado de las
futuras generaciones por la reutilización de materiales. Al tener estos dos factores vemos
que no solo es posible el desarrollo de este producto para las semillas de fresa también
podemos realizar infinidades de prototipos que puedan cumplir determinadas funciones sin
dejar de lado la mano de obra humana, se busca mejorar la calidad de la siembra de
semillas de fresas no dejar sin trabajo a las personas que nos ofrecen y venden productos
para el consumo de los alimentos, es aplicar los conocimientos de la ingeniería para mejorar
la agricultura de precisión en nuestro país.
5. ESTUDIO ADMINISTRATIVO
En cuanto al estudio administrativo, se realiza el análisis organizacional. Se define la misión
y visión del proyecto. Se presentara la estructura organizacional conformada por el mapa
de procesos, organigrama y roles, responsabilidades y autoridades.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 56
5.1. MISIÓN
Fresabot III: Ofrecemos soluciones para una mayor productividad y calidad en la siembra
de semillas de fresa, estamos innovando en el desarrollo de productos en el área agrícola
para las necesidades que tengan los clientes para sus diferentes productos.
5.2. VISIÓN
Deseamos ser una empresa reconocida e importante en el área agrícola no solo a nivel
nacional también internacional, enfocada en la solución de problemas en el tema de la
agricultura, gracias a los nuevos desarrollos, con gran calidad en nuestros procesos para
cumplir con la mayoría de los criterios de nuestros clientes teniendo tecnología de última
generación en el diseño de nuestro robot. Estamos comprometidos con el fortalecimiento
de la cadena productiva frutícola de Colombia, con el desarrollo de innovación tecnológica
en el área de la agricultura.
Valores y Principios
Excelencia y calidad de nuestro producto.
Confianza en el diseño del robot Fresabot III.
Mejoramiento continuo para satisfacción del cliente y producción de la siembra
de semillas de fresas.
Apoyo en la inversión para nuestros clientes.
5.3. ESTRUCTURA ORGANIZACIONAL
5.3.1. Mapa de procesos
El mapa de procesos ofrece una visión general del sistema de gestión integral. En él se
representan los procesos que integran el Sistema de Gestión, así como la interrelación que
se generan entre ellos en busca de la satisfacción del cliente y partes interesadas.
La estructura del mapa identifica tres tipos de procesos:
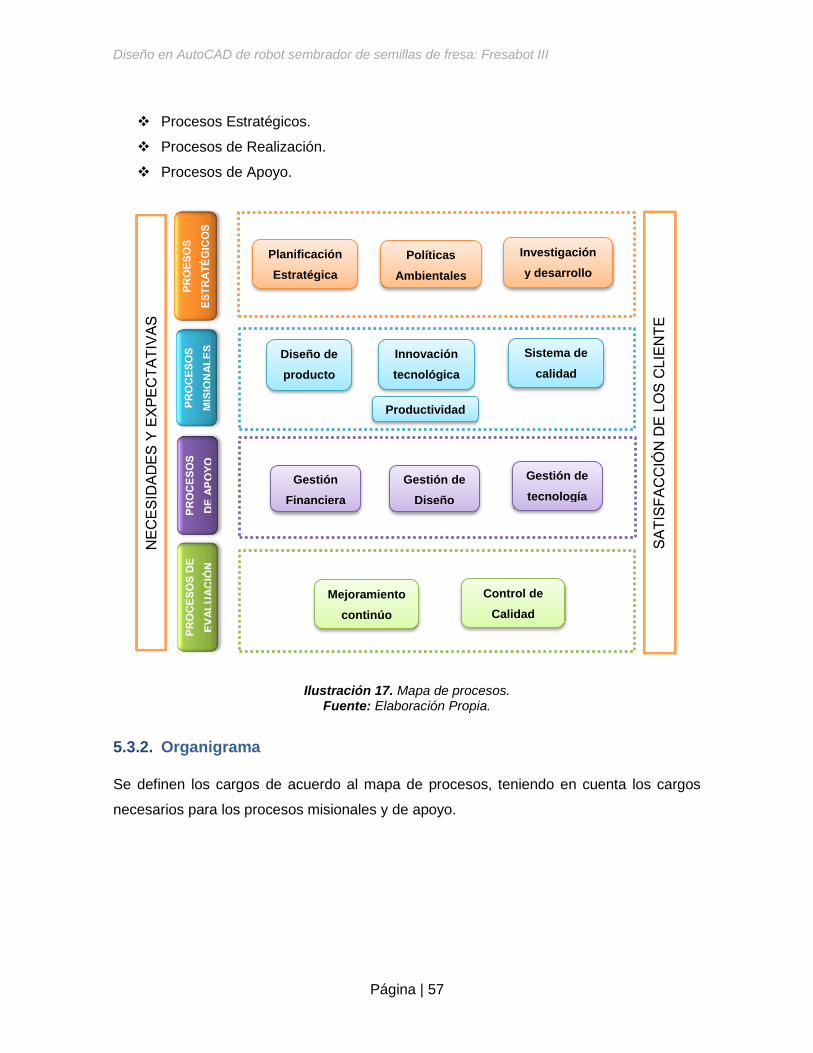
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 57
Procesos Estratégicos.
Procesos de Realización.
Procesos de Apoyo.
Ilustración 17. Mapa de procesos. Fuente: Elaboración Propia.
5.3.2. Organigrama
Se definen los cargos de acuerdo al mapa de procesos, teniendo en cuenta los cargos
necesarios para los procesos misionales y de apoyo.
Planificación
Estratégica
Políticas
Ambientales
Productividad
Sistema de
calidad
Innovación
tecnológica
Gestión
Financiera
Mejoramiento
continúo
Investigación
y desarrollo
Diseño de
producto
Gestión de
Diseño
Gestión de
tecnología
Control de
Calidad
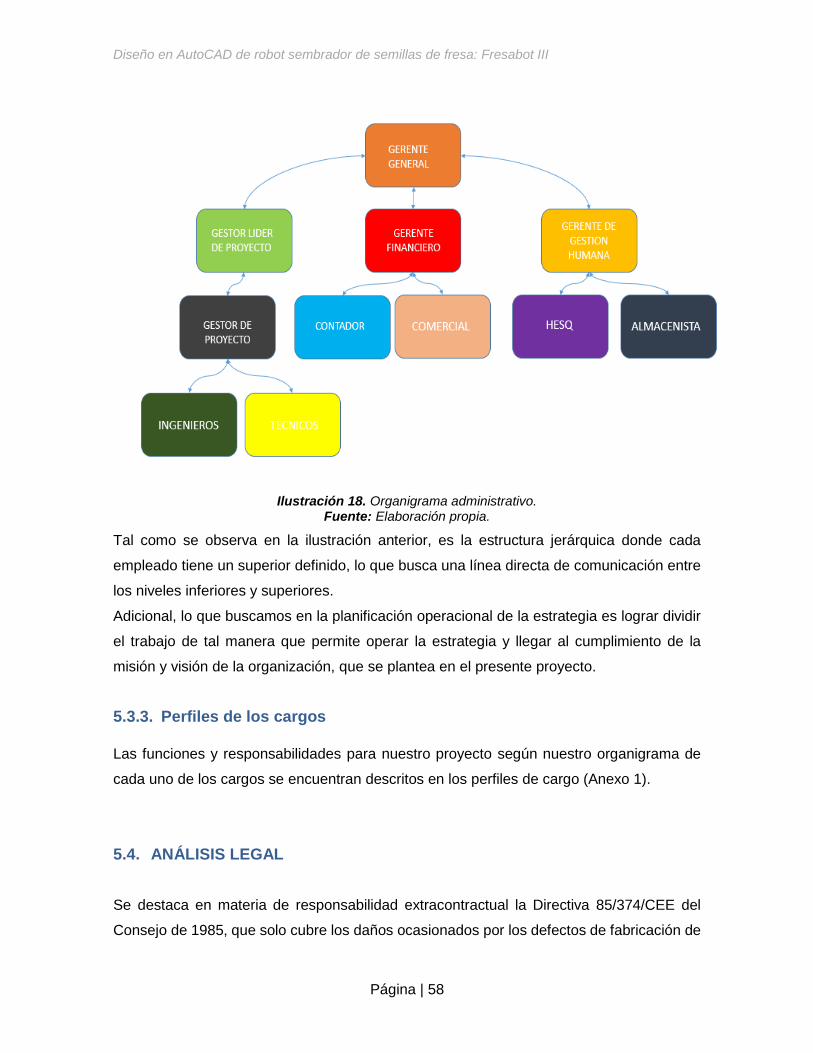
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 58
Ilustración 18. Organigrama administrativo. Fuente: Elaboración propia.
Tal como se observa en la ilustración anterior, es la estructura jerárquica donde cada
empleado tiene un superior definido, lo que busca una línea directa de comunicación entre
los niveles inferiores y superiores.
Adicional, lo que buscamos en la planificación operacional de la estrategia es lograr dividir
el trabajo de tal manera que permite operar la estrategia y llegar al cumplimiento de la
misión y visión de la organización, que se plantea en el presente proyecto.
5.3.3. Perfiles de los cargos
Las funciones y responsabilidades para nuestro proyecto según nuestro organigrama de
cada uno de los cargos se encuentran descritos en los perfiles de cargo (Anexo 1).
5.4. ANÁLISIS LEGAL
Se destaca en materia de responsabilidad extracontractual la Directiva 85/374/CEE del
Consejo de 1985, que solo cubre los daños ocasionados por los defectos de fabricación de

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 59
un robot, a condición de que el perjudicado pueda demostrar el daño real, el defecto del
producto y la relación de causa a efecto entre el defecto y el daño (responsabilidad objetiva
o responsabilidad sin culpa). Otros aspectos que son neurálgicamente afectados son, entre
otros, los relacionados con propiedad intelectual, protección de datos personales, garantía
sobre producto defectuoso, protección del consumidor.
Vale recordar que desde el 20 de enero del 2015, la Comisión creó un grupo de trabajo
sobre las cuestiones jurídicas relacionadas con la evolución de la robótica y la inteligencia
artificial en la Unión Europea. El pasado 12 de enero, concretó una primera aproximación
de normas de Derecho Civil aprobadas por los miembros del Comité del Parlamento
Europeo para Asuntos Legales, con una moción para garantizar estatus legal a los robots,
a los que se les otorga la condición de "personas electrónicas". La propuesta dispone que
"los robots autónomos más sofisticados podrían recibir el estatus de persona electrónica,
con derechos y obligaciones específicos", incluyendo la de subsanar los daños que causen.
Antes de esto, varios países, entre ellos EE UU, Japón, China y Corea del Sur, han estado
evaluando adoptar medidas reguladoras en el ámbito de la robótica y la inteligencia artificial,
reflexionando sobre cambios legislativos para enfrentar las nuevas aplicaciones de dichas
tecnologías; contrastando los riesgos relacionados con la vida y seguridad humana, la
intimidad, la integridad, la dignidad, la autonomía y la propiedad de los datos.
No hay norma expresa que se aplique específicamente a la robótica, pero las doctrinas y
los regímenes jurídicos vigentes pueden adaptarse fácilmente a esta, aunque algunos
aspectos, por supuesto, requerirán ajustes normativos. Por ello, la Comisión deberá
estudiar cómo sopesar los derechos de propiedad intelectual aplicados a las normas
sobre hardware y software, extensivos a la innovación, estimulando la misma; proponiendo
escenarios que contemplen temas como la creación intelectual autónoma y propia, y los
temas de autoría y titularidad de obras creadas o generadas a través, o con la intervención
de computadores y/o robots.
Un tema que suscita total controversia es el relacionado con la alta autonomía de los robots,
y su encuadramiento en una de las categorías jurídicas existentes, esto es, si deben
considerarse personas físicas, personas jurídicas, animales u objetos; o si definitivamente
debe crearse una nueva categoría de “persona electrónica, o ciudadano electrónico”, con
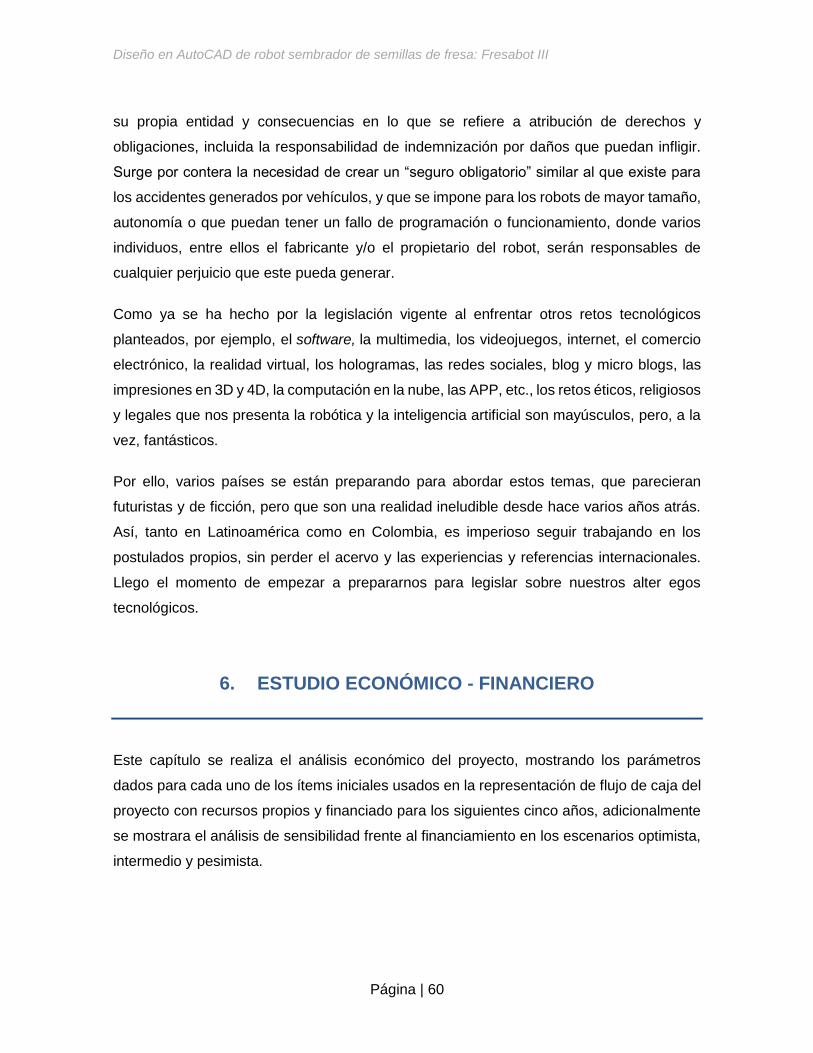
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 60
su propia entidad y consecuencias en lo que se refiere a atribución de derechos y
obligaciones, incluida la responsabilidad de indemnización por daños que puedan infligir.
Surge por contera la necesidad de crear un “seguro obligatorio” similar al que existe para
los accidentes generados por vehículos, y que se impone para los robots de mayor tamaño,
autonomía o que puedan tener un fallo de programación o funcionamiento, donde varios
individuos, entre ellos el fabricante y/o el propietario del robot, serán responsables de
cualquier perjuicio que este pueda generar.
Como ya se ha hecho por la legislación vigente al enfrentar otros retos tecnológicos
planteados, por ejemplo, el software, la multimedia, los videojuegos, internet, el comercio
electrónico, la realidad virtual, los hologramas, las redes sociales, blog y micro blogs, las
impresiones en 3D y 4D, la computación en la nube, las APP, etc., los retos éticos, religiosos
y legales que nos presenta la robótica y la inteligencia artificial son mayúsculos, pero, a la
vez, fantásticos.
Por ello, varios países se están preparando para abordar estos temas, que parecieran
futuristas y de ficción, pero que son una realidad ineludible desde hace varios años atrás.
Así, tanto en Latinoamérica como en Colombia, es imperioso seguir trabajando en los
postulados propios, sin perder el acervo y las experiencias y referencias internacionales.
Llego el momento de empezar a prepararnos para legislar sobre nuestros alter egos
tecnológicos.
6. ESTUDIO ECONÓMICO - FINANCIERO
Este capítulo se realiza el análisis económico del proyecto, mostrando los parámetros
dados para cada uno de los ítems iniciales usados en la representación de flujo de caja del
proyecto con recursos propios y financiado para los siguientes cinco años, adicionalmente
se mostrara el análisis de sensibilidad frente al financiamiento en los escenarios optimista,
intermedio y pesimista.
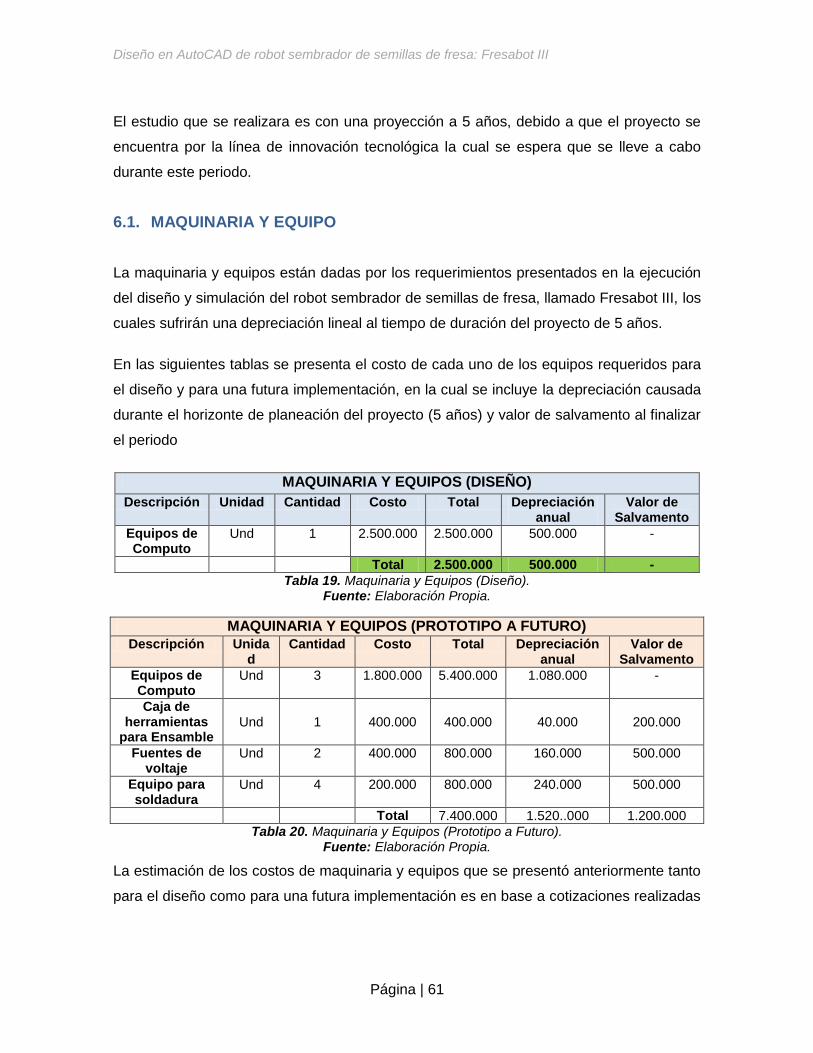
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 61
El estudio que se realizara es con una proyección a 5 años, debido a que el proyecto se
encuentra por la línea de innovación tecnológica la cual se espera que se lleve a cabo
durante este periodo.
6.1. MAQUINARIA Y EQUIPO
La maquinaria y equipos están dadas por los requerimientos presentados en la ejecución
del diseño y simulación del robot sembrador de semillas de fresa, llamado Fresabot III, los
cuales sufrirán una depreciación lineal al tiempo de duración del proyecto de 5 años.
En las siguientes tablas se presenta el costo de cada uno de los equipos requeridos para
el diseño y para una futura implementación, en la cual se incluye la depreciación causada
durante el horizonte de planeación del proyecto (5 años) y valor de salvamento al finalizar
el periodo
MAQUINARIA Y EQUIPOS (DISEÑO)
Descripción Unidad Cantidad Costo Total Depreciación anual
Valor de Salvamento
Equipos de Computo
Und 1 2.500.000 2.500.000 500.000 -
Total 2.500.000 500.000 -
Tabla 19. Maquinaria y Equipos (Diseño). Fuente: Elaboración Propia.
Tabla 20. Maquinaria y Equipos (Prototipo a Futuro). Fuente: Elaboración Propia.
La estimación de los costos de maquinaria y equipos que se presentó anteriormente tanto
para el diseño como para una futura implementación es en base a cotizaciones realizadas
MAQUINARIA Y EQUIPOS (PROTOTIPO A FUTURO)
Descripción Unidad
Cantidad Costo Total Depreciación anual
Valor de Salvamento
Equipos de Computo
Und 3 1.800.000 5.400.000 1.080.000 -
Caja de herramientas
para Ensamble
Und
1
400.000
400.000
40.000
200.000
Fuentes de voltaje
Und 2 400.000 800.000 160.000 500.000
Equipo para soldadura
Und 4 200.000 800.000 240.000 500.000
Total 7.400.000 1.520..000 1.200.000
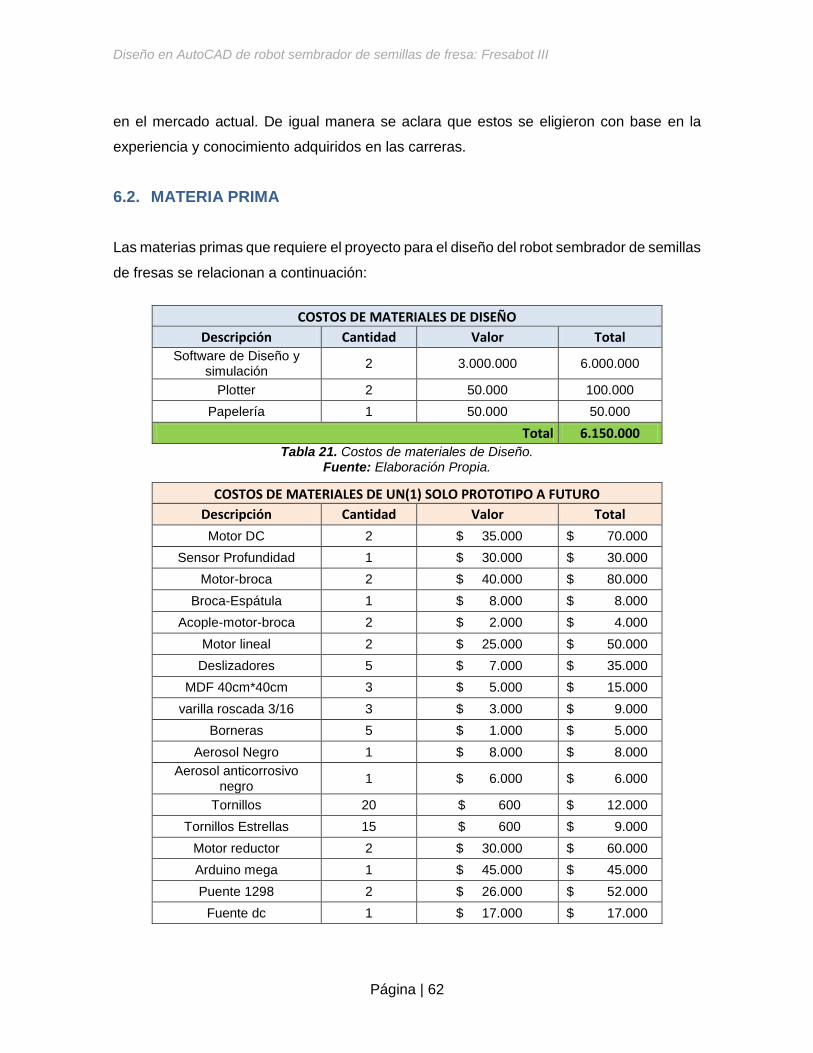
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 62
en el mercado actual. De igual manera se aclara que estos se eligieron con base en la
experiencia y conocimiento adquiridos en las carreras.
6.2. MATERIA PRIMA
Las materias primas que requiere el proyecto para el diseño del robot sembrador de semillas
de fresas se relacionan a continuación:
COSTOS DE MATERIALES DE DISEÑO
Descripción Cantidad Valor Total
Software de Diseño y simulación
2 3.000.000 6.000.000
Plotter 2 50.000 100.000
Papelería 1 50.000 50.000
Total 6.150.000 Tabla 21. Costos de materiales de Diseño.
Fuente: Elaboración Propia.
COSTOS DE MATERIALES DE UN(1) SOLO PROTOTIPO A FUTURO
Descripción Cantidad Valor Total
Motor DC 2 $ 35.000 $ 70.000
Sensor Profundidad 1 $ 30.000 $ 30.000
Motor-broca 2 $ 40.000 $ 80.000
Broca-Espátula 1 $ 8.000 $ 8.000
Acople-motor-broca 2 $ 2.000 $ 4.000
Motor lineal 2 $ 25.000 $ 50.000
Deslizadores 5 $ 7.000 $ 35.000
MDF 40cm*40cm 3 $ 5.000 $ 15.000
varilla roscada 3/16 3 $ 3.000 $ 9.000
Borneras 5 $ 1.000 $ 5.000
Aerosol Negro 1 $ 8.000 $ 8.000
Aerosol anticorrosivo negro
1 $ 6.000 $ 6.000
Tornillos 20 $ 600 $ 12.000
Tornillos Estrellas 15 $ 600 $ 9.000
Motor reductor 2 $ 30.000 $ 60.000
Arduino mega 1 $ 45.000 $ 45.000
Puente 1298 2 $ 26.000 $ 52.000
Fuente dc 1 $ 17.000 $ 17.000
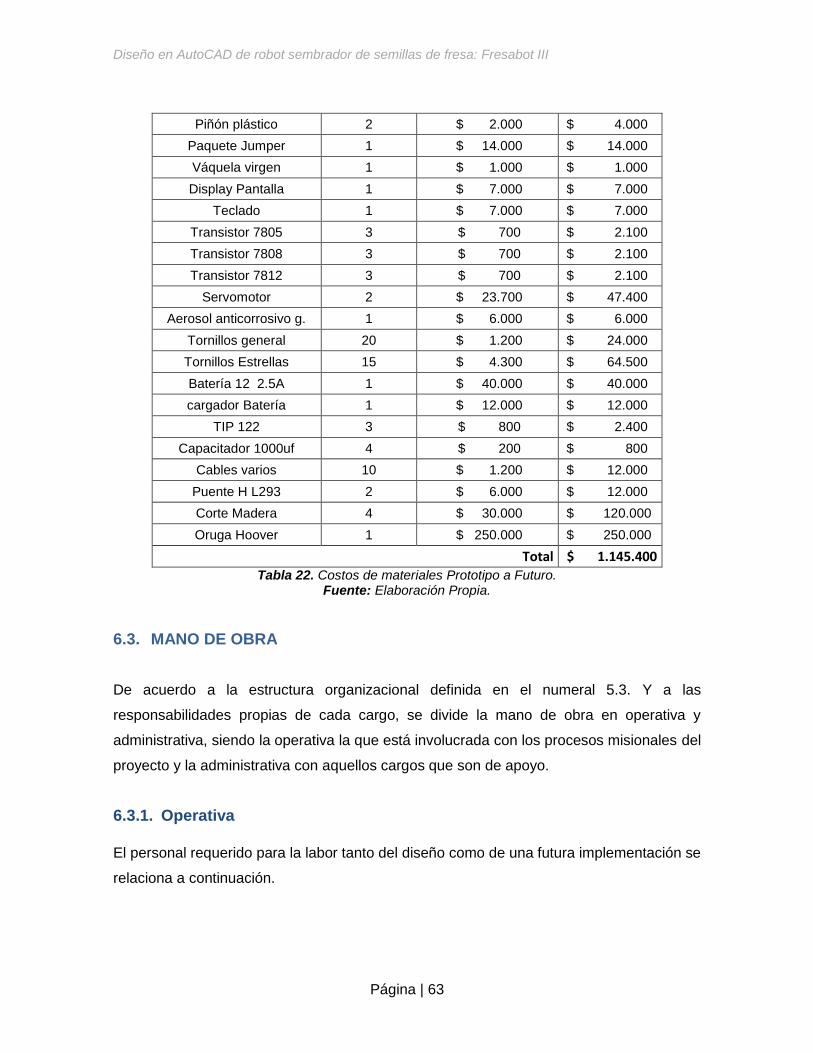
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 63
Piñón plástico 2 $ 2.000 $ 4.000
Paquete Jumper 1 $ 14.000 $ 14.000
Váquela virgen 1 $ 1.000 $ 1.000
Display Pantalla 1 $ 7.000 $ 7.000
Teclado 1 $ 7.000 $ 7.000
Transistor 7805 3 $ 700 $ 2.100
Transistor 7808 3 $ 700 $ 2.100
Transistor 7812 3 $ 700 $ 2.100
Servomotor 2 $ 23.700 $ 47.400
Aerosol anticorrosivo g. 1 $ 6.000 $ 6.000
Tornillos general 20 $ 1.200 $ 24.000
Tornillos Estrellas 15 $ 4.300 $ 64.500
Batería 12 2.5A 1 $ 40.000 $ 40.000
cargador Batería 1 $ 12.000 $ 12.000
TIP 122 3 $ 800 $ 2.400
Capacitador 1000uf 4 $ 200 $ 800
Cables varios 10 $ 1.200 $ 12.000
Puente H L293 2 $ 6.000 $ 12.000
Corte Madera 4 $ 30.000 $ 120.000
Oruga Hoover 1 $ 250.000 $ 250.000
Total $ 1.145.400
Tabla 22. Costos de materiales Prototipo a Futuro. Fuente: Elaboración Propia.
6.3. MANO DE OBRA
De acuerdo a la estructura organizacional definida en el numeral 5.3. Y a las
responsabilidades propias de cada cargo, se divide la mano de obra en operativa y
administrativa, siendo la operativa la que está involucrada con los procesos misionales del
proyecto y la administrativa con aquellos cargos que son de apoyo.
6.3.1. Operativa
El personal requerido para la labor tanto del diseño como de una futura implementación se
relaciona a continuación.
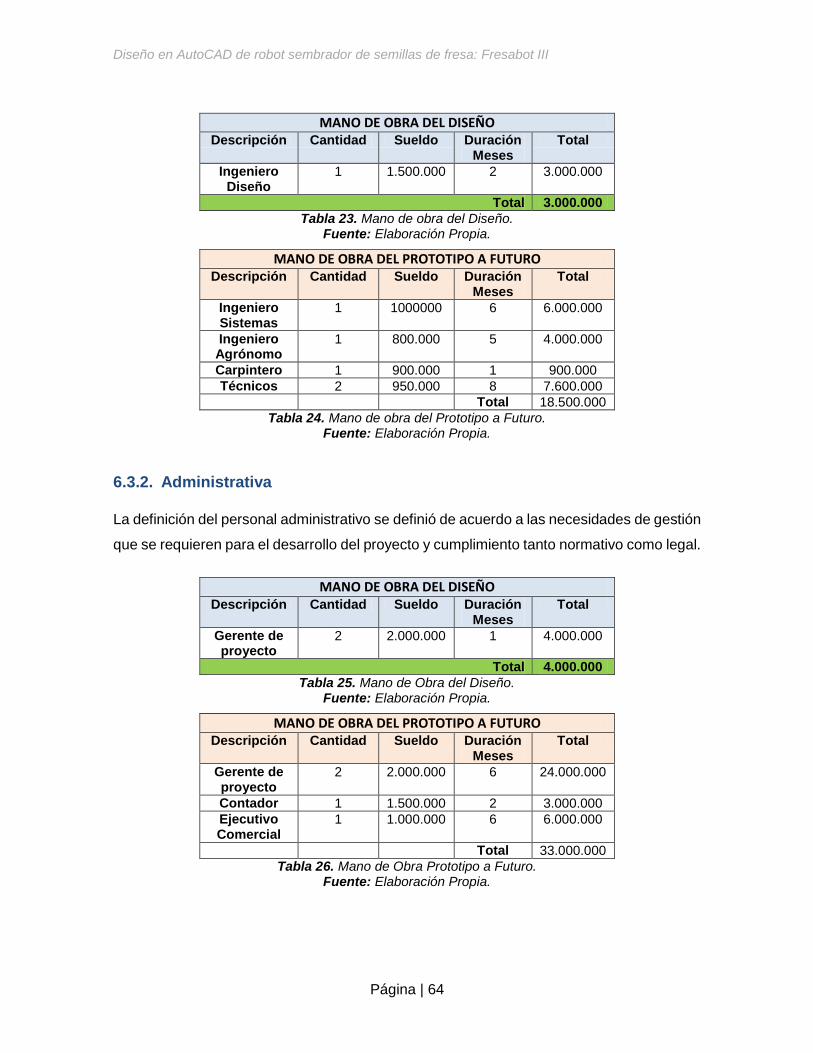
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 64
MANO DE OBRA DEL DISEÑO
Descripción Cantidad Sueldo Duración Meses
Total
Ingeniero Diseño
1 1.500.000 2 3.000.000
Total 3.000.000
Tabla 23. Mano de obra del Diseño. Fuente: Elaboración Propia.
MANO DE OBRA DEL PROTOTIPO A FUTURO
Descripción Cantidad Sueldo Duración Meses
Total
Ingeniero Sistemas
1 1000000 6 6.000.000
Ingeniero Agrónomo
1 800.000 5 4.000.000
Carpintero 1 900.000 1 900.000
Técnicos 2 950.000 8 7.600.000
Total 18.500.000
Tabla 24. Mano de obra del Prototipo a Futuro. Fuente: Elaboración Propia.
6.3.2. Administrativa
La definición del personal administrativo se definió de acuerdo a las necesidades de gestión
que se requieren para el desarrollo del proyecto y cumplimiento tanto normativo como legal.
MANO DE OBRA DEL DISEÑO
Descripción Cantidad Sueldo Duración Meses
Total
Gerente de proyecto
2 2.000.000 1 4.000.000
Total 4.000.000
Tabla 25. Mano de Obra del Diseño. Fuente: Elaboración Propia.
MANO DE OBRA DEL PROTOTIPO A FUTURO
Descripción Cantidad Sueldo Duración Meses
Total
Gerente de proyecto
2 2.000.000 6 24.000.000
Contador 1 1.500.000 2 3.000.000
Ejecutivo Comercial
1 1.000.000 6 6.000.000
Total 33.000.000
Tabla 26. Mano de Obra Prototipo a Futuro. Fuente: Elaboración Propia.
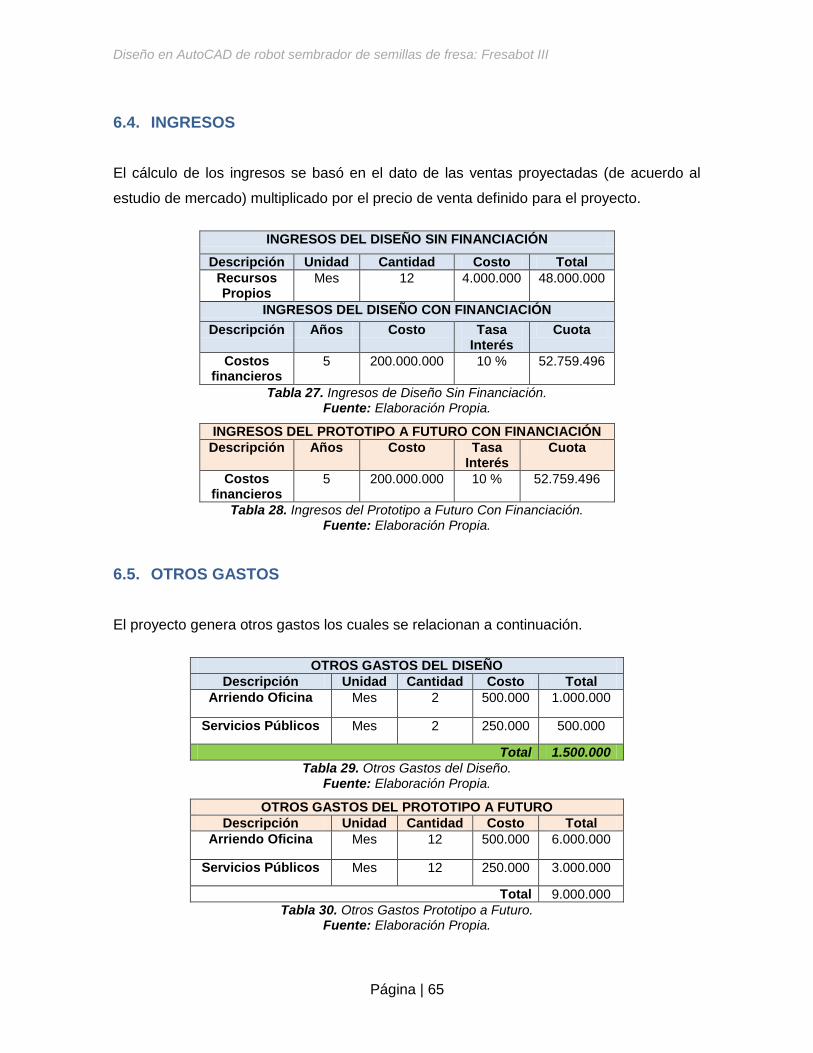
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 65
6.4. INGRESOS
El cálculo de los ingresos se basó en el dato de las ventas proyectadas (de acuerdo al
estudio de mercado) multiplicado por el precio de venta definido para el proyecto.
INGRESOS DEL DISEÑO SIN FINANCIACIÓN
Descripción Unidad Cantidad Costo Total
Recursos Propios
Mes 12 4.000.000 48.000.000
INGRESOS DEL DISEÑO CON FINANCIACIÓN
Descripción Años Costo Tasa Interés
Cuota
Costos financieros
5 200.000.000 10 % 52.759.496
Tabla 27. Ingresos de Diseño Sin Financiación. Fuente: Elaboración Propia.
INGRESOS DEL PROTOTIPO A FUTURO CON FINANCIACIÓN
Descripción Años Costo Tasa Interés
Cuota
Costos financieros
5 200.000.000 10 % 52.759.496
Tabla 28. Ingresos del Prototipo a Futuro Con Financiación. Fuente: Elaboración Propia.
6.5. OTROS GASTOS
El proyecto genera otros gastos los cuales se relacionan a continuación.
OTROS GASTOS DEL DISEÑO
Descripción Unidad Cantidad Costo Total
Arriendo Oficina Mes 2 500.000 1.000.000
Servicios Públicos Mes 2 250.000 500.000
Total 1.500.000
Tabla 29. Otros Gastos del Diseño. Fuente: Elaboración Propia.
OTROS GASTOS DEL PROTOTIPO A FUTURO
Descripción Unidad Cantidad Costo Total
Arriendo Oficina Mes 12 500.000 6.000.000
Servicios Públicos Mes 12 250.000 3.000.000
Total 9.000.000
Tabla 30. Otros Gastos Prototipo a Futuro. Fuente: Elaboración Propia.

6.6. FLUJOS DE CAJA
FLUJO DE CAJA ROBOT SEMBRADOR (Capital Propio)
AÑOS 0 1 2 3 4 5
Ingresos Anuales 35.000.000,00 35.000.000,00 35.000.000,00 35.000.000,00 35.000.000,00
Préstamo 35.000.000
Egresos 17.150.000,00 17.150.000,00 17.150.000,00 17.150.000,00 17.150.000,00
Maquinaria y Equipo 2.500.000,00 2.500.000,00 2.500.000,00 2.500.000,00 2.500.000,00
Materia Prima 6.150.000,00 6.150.000,00 6.150.000,00 6.150.000,00 6.150.000,00
Mano de Obra - Operativa 3.000.000,00 3.000.000,00 3.000.000,00 3.000.000,00 3.000.000,00
Mano de Obra - Administrativa 4.000.000,00 4.000.000,00 4.000.000,00 4.000.000,00 4.000.000,00
Gastos Directos
Gastos Indirectos 1.500.000,00 1.500.000,00 1.500.000,00 1.500.000,00 1.500.000,00
Depreciación 500.000,00 500.000,00 500.000,00 500.000,00 500.000,00
Gastos Financieros (Intereses) 1.400.000,00 1.170.683,53 918.435,41 640.962,47 335.742,25
Utilidad antes de impuestos 15.950.000,00 16.179.316,47 16.431.564,59 16.709.037,53 17.014.257,75
Impuestos 5.582.500,00 5.662.760,77 5.751.047,61 5.848.163,13 5.954.990,21
Utilidad después de impuestos 10.367.500,00 10.516.555,71 10.680.516,99 10.860.874,39 11.059.267,54
Depreciación 500.000,00 500.000,00 500.000,00 500.000,00 500.000,00
Amortización 2.293.164,73 2.522.481,20 2.774.729,32 3.052.202,26 3.357.422,48
Préstamo o Deuda 14.000.000
Recuperación Capital de Trabajo 2.700.000,00
Valor de Salvamento
Utilidad Neta - Flujo de Caja -35.000.000,00 8.574.335,27 8.494.074,50 8.405.787,66 8.308.672,13 10.901.845,06
Flujo de Accionistas -21.000.000,00 8.574.335,27 8.494.074,50 8.405.787,66 8.308.672,13 10.901.845,06
Tabla 31. Flujo de Caja Robot sembrador (Capital Propio) - Intermedio Fuente: Elaboración Propia.
Valor Presente Neto 9.312.406,09
TIO 14%
TIR 31%
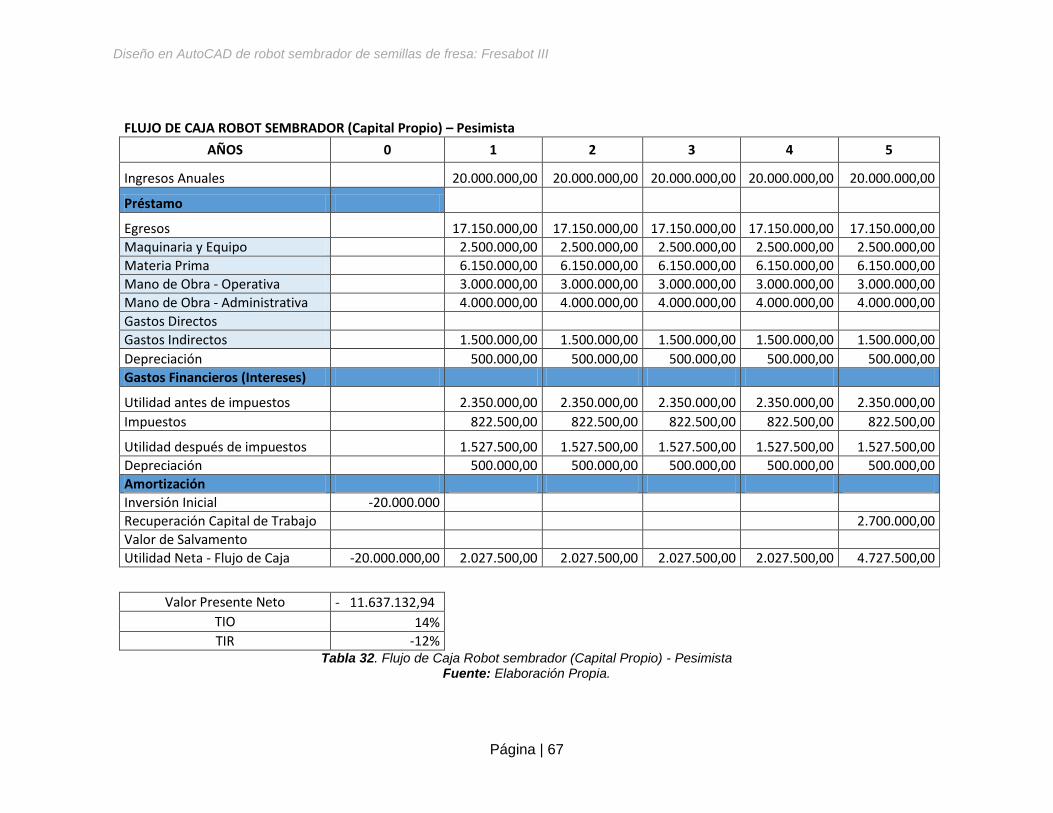
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 67
FLUJO DE CAJA ROBOT SEMBRADOR (Capital Propio) – Pesimista
AÑOS 0 1 2 3 4 5
Ingresos Anuales 20.000.000,00 20.000.000,00 20.000.000,00 20.000.000,00 20.000.000,00
Préstamo
Egresos 17.150.000,00 17.150.000,00 17.150.000,00 17.150.000,00 17.150.000,00
Maquinaria y Equipo 2.500.000,00 2.500.000,00 2.500.000,00 2.500.000,00 2.500.000,00
Materia Prima 6.150.000,00 6.150.000,00 6.150.000,00 6.150.000,00 6.150.000,00
Mano de Obra - Operativa 3.000.000,00 3.000.000,00 3.000.000,00 3.000.000,00 3.000.000,00
Mano de Obra - Administrativa 4.000.000,00 4.000.000,00 4.000.000,00 4.000.000,00 4.000.000,00
Gastos Directos
Gastos Indirectos 1.500.000,00 1.500.000,00 1.500.000,00 1.500.000,00 1.500.000,00
Depreciación 500.000,00 500.000,00 500.000,00 500.000,00 500.000,00
Gastos Financieros (Intereses)
Utilidad antes de impuestos 2.350.000,00 2.350.000,00 2.350.000,00 2.350.000,00 2.350.000,00
Impuestos 822.500,00 822.500,00 822.500,00 822.500,00 822.500,00
Utilidad después de impuestos 1.527.500,00 1.527.500,00 1.527.500,00 1.527.500,00 1.527.500,00
Depreciación 500.000,00 500.000,00 500.000,00 500.000,00 500.000,00
Amortización
Inversión Inicial -20.000.000
Recuperación Capital de Trabajo 2.700.000,00
Valor de Salvamento
Utilidad Neta - Flujo de Caja -20.000.000,00 2.027.500,00 2.027.500,00 2.027.500,00 2.027.500,00 4.727.500,00
Valor Presente Neto - 11.637.132,94
TIO 14%
TIR -12% Tabla 32. Flujo de Caja Robot sembrador (Capital Propio) - Pesimista
Fuente: Elaboración Propia.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 68
FLUJO DE CAJA ROBOT SEMBRADOR (Con Préstamo)
AÑOS 0 1 2 3 4 5
Ingresos Anuales 60.000.000,00 60.000.000,00 60.000.000,00 60.000.000,00 60.000.000,00
Préstamo 60.000.000
Egresos 17.150.000,00 17.150.000,00 17.150.000,00 17.150.000,00 17.150.000,00
Maquinaria y Equipo 2.500.000,00 2.500.000,00 2.500.000,00 2.500.000,00 2.500.000,00
Materia Prima 6.150.000,00 6.150.000,00 6.150.000,00 6.150.000,00 6.150.000,00
Mano de Obra - Operativa 3.000.000,00 3.000.000,00 3.000.000,00 3.000.000,00 3.000.000,00
Mano de Obra - Administrativa 4.000.000,00 4.000.000,00 4.000.000,00 4.000.000,00 4.000.000,00
Gastos Directos
Gastos Indirectos 1.500.000,00 1.500.000,00 1.500.000,00 1.500.000,00 1.500.000,00
Depreciación 500.000,00 500.000,00 500.000,00 500.000,00 500.000,00
Gastos Financieros (Intereses) 1.200.000,00 1.003.443,02 787.230,35 549.396,41 287.779,07
Utilidad antes de impuestos 41.150.000,00 41.346.556,98 41.562.769,65 41.800.603,59 42.062.220,93
Impuestos 14.402.500,00 14.471.294,94 14.546.969,38 14.630.211,26 14.721.777,33
Utilidad después de impuestos 26.747.500,00 26.875.262,04 27.015.800,27 27.170.392,34 27.340.443,60
Depreciación 500.000,00 500.000,00 500.000,00 500.000,00 500.000,00
Amortización 1.965.569,77 2.162.126,75 2.378.339,42 2.616.173,36 2.877.790,70
Préstamo o Deuda 12.000.000
Recuperación Capital de Trabajo 2.700.000,00
Valor de Salvamento
Utilidad Neta - Flujo de Caja -60.000.000,00 25.281.930,23 25.213.135,29 25.137.460,85 25.054.218,97 27.662.652,90
Flujo de Accionistas -48.000.000,00 25.281.930,23 25.213.135,29 25.137.460,85 25.054.218,97 27.662.652,90
Valor Presente Neto 39.746.114,75
TIO 14%
TIR 45%
Tabla 33. Flujo de Caja Robot sembrador (Con Financiación) - Optimista
Fuente: Elaboración Propia.

Una vez realizado el flujo de caja se estableció financiar el 40% de la inversión con
entidades financieras y el restante 60% será financiado con dinero de inversionistas
interesados en el proyecto para lograr el desarrollo y la viabilidad del proyecto.
6.7. VAN, TIR Y RELACIÓN BENEFICIO/COSTO
VAN 27.746.114,75
Valor Presente Flujos Positivos 87.746.114,75
Valor Presente Flujos Negativos 60.000.000,00
Razón Beneficio/Costo 1,46
Tabla 34. VAN, TIR y relación Beneficio/Costo. Fuente: Elaboración Propia.
De acuerdo con el VAN el proyecto es rentable respecto a la tasa de oportunidad del
inversionista. (TIO=14%)
El proyecto tiene una tasa interna de retorno alta debido a que la inversión es muy baja
comparada con el retorno. Los costos de inversión son aproximadamente el 60% de los
costos de operación.
La relación beneficio/costo ratifica que el proyecto tiene buena viabilidad para el
inversionista, dado que el beneficio costo es mayor al costo.
6.8. ANALISIS DE SENSIBILIDAD
Se realizó un análisis de sensibilidad para poder identificar el margen de utilidad mínimo
que puede definirse sobre los productos y observar el comportamiento de la TIR Y EL VPN
al modificar esta
ESCENARIO VPN TIR Relación Ben/Costo
Optimista 39.746.114,75 45% 1,46
Intermedio 9.312.406,09 31% 0,90
Pesimista - 11.637.132,94 -12% 0,84 Tabla 35. Análisis de Sensibilidad
Fuente: Elaboración Propia.
Se puede observar que en el escenario Optimista relación beneficio/costo es de 1,46 una
TIR aproximadamente de 45%, lo cual es importante para el inversionista si decide invertir

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 70
en el proyecto, en cambio en el escenario pesimista tenemos una TIR de -12% y una
relación beneficio/costo es de aproximadamente 0,84, lo que genera una perdida en el
proyecto y no sería bueno la inversión porque no tendría ganancias para el inversionista.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 71
7. CONCLUSIONES Y RECOMENDACIONES
7.1. CONCLUSIONES
La aplicación de conocimientos de la ingeniería para mejorar la productividad de la siembra
de semilla de fresa puede traer nuevos desarrollos en diferentes áreas agrícolas, debido a
que el deseo es aplicarlo a otros productos aunque hay que tener en cuenta que cada uno
de los productos tiene sus condiciones para su plantación, si es viable con las fresas se
puede aplicar a otros productos con las adecuaciones necesarias para cada uno de los
productos que se vayan a sembrar.
Es un gran reto en el país el desarrollo tecnológico aplicado a la agricultura, porque se está
tratando de modificar la forma en que se siembra, debido a que las personas involucradas
en el campo vienen con una tradición y cuando se les trata de demostrar que pueden tener
mejores desarrollos económicos y mayor demanda del producto son apáticos a la solución
que se les está brindando, se les debe demostrar que la solución está al alcance de sus
manos y que se desea es mejorar la productividad de las fresas en la parte agrícola.
Los países con mayor desarrollo tecnológico, lo están aplicando a la parte agrícola, porque
es uno de los grandes y graves problemas, cada día tiene más población en el mundo, lo
que se necesita es maximizar estos productos de siembra en el país para adquirir nuevos
y mejores mercados, no ser un país importador por el contrario ofrecer un valor agregado
a nuestro producto para hacerlo competitivo con países que son potencia en exportar fresas
a nivel internacional, por las ventajas que tiene nuestro país con respecto a los demás.
A través del estudio económico, se identificó que este proyecto presenta un mejor flujo de
caja en los cinco años proyectado si se cuenta con un crédito financiero y un apoyo de
inversionistas que se encuentren en pro de la nueva tecnología, lo que nos muestra unos
indicadores financieros atractivos al mercado.
La TIR del 79% demuestra que para los inversionistas es de gran utilidad realizar el
proyecto, ya que se supera de manera considerable la tasa interna de oportunidad del 14%.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 72
El diseño propuesto para el robot sembrador de semillas de fresa es novedoso, debido a
que cuenta con características que en la actualidad son de fácil implementación y
mantenimiento. Se espera que este diseño pueda ser aplicado a otras áreas de la
agricultura.
Los elementos electrónicos utilizados son los mejores en relación beneficio/costo, se
utilizaron elementos de fácil manejo para que cualquier persona con conocimiento en
electrónica pueda realizar su implementación a futuro.
7.2. RECOMENDACIONES
Para el éxito del proyecto es clave una exhaustiva investigación de los procesos de
negociación con los interesados en la implementación del diseño propuesto, por lo que se
debe contar con un profesional especializado en esta área.
Se debe considerar las condiciones propuestas en el diseño para la implementación del
prototipo a futuro, garantizando que este se realice de manera correcta y su funcionamiento
sea de alta calidad para el mercado.
Como bien se ha dicho este trabajo de grado está enfocado en la presentación del diseño
sembrador de fresas, por lo que el trabajo a futuro más cercano es la construcción del robot
de la manera como se planteó en este trabajo de grado.
En cuanto a los materiales y elementos que en este trabajo se plantean, se trató de realizar
la mejor elección basándose en el beneficio/costo de cada uno de los elementos, sin
embargo es totalmente claro que se puede mejorar el material a la hora de hacer su
prototipo que cuente con mejores características, resistencia y por ende podría aumentar
mucho más su costo, cabe aclarar que estos fueron propuesto para mantener que el
prototipo que se realice a futuro no ocupe mucho espacio y sea liviano, para el fácil manejo
en el área al que se desea implementar.
Con este diseño inicial y tomándolo como punto de partida se pueden hacer desarrollos
muchos mayores, inventando nuevas ideas tecnológicas en el área de la agricultura y/o
cualquier área que no cuente con tecnología, generando un aumento en la eficiencia de las

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 73
actividades que se planteen mejorar, de igual manera se desea que el tanto el mercado
nacional como internacional venga en aumento, para mejorar la economía de todos los
involucrados en la actividad intervenida.
Se requiere que el proyecto se dé a conocer a varios interesados en el área de la tecnología
para mejorar los procesos en las áreas a las cuales deseamos acércanos, el objetivo es
llegar a más productos y aumentar las ganancias de producción para hacer que Colombia
sea un país más competitivo en el mercado internacional.
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 74
8. REFERENCIAS
AGRONET, C. (En línea). Base de datos en línea. Recuperado el 12 de Febrero de 2019,
de http://www. agronet.gov.co/agronetweb1/Agromapas.aspx
Blacio, C. B. (Julio de 2016). Diseño, simulación, estudio de factibilidad de un robot
sembrador de maiz por surcos. Obtenido de Universidad Tecnologica Equinoccial:
http://repositorio.ute.edu.ec/bitstream/123456789/14628/1/67402_1.pdf
Bonilla Correa, C. (2011). Cartillas del Corredor Tecnológico Cultivando su Futuro,
Universidad Nacional de Colombia. Obtenido de Corredor Tecnológico
Agroindustrial; Bogotá.
Bragachini, M. (2016). La Maquinaria Agricola Argentina, una mirada prospectiva al 2025.
Obtenido de Ministerio de Agroindustria Presidencia de la Nación:
http://cosechaypostcosecha.org/data/articulos/maquinaria/LaMaquinariaAgricolaAr
gentinaMiradaProspectiva2025.asp
Cristián, M. (22 de Julio de 2017). Universidad Uniagraria. Obtenido de El Tiempo:
https://www.eltiempo.com/bogota/el-robot-que-siembra-papa-de-la-uniagraria-
111532
Dali, L. L., & Ignacio, H. A. (16 de Marzo de 2016). Diseñan Robot Sembrador de Maiz.
Obtenido de Ciencia MX Noticias:
http://www.cienciamx.com/index.php/tecnologia/robotica/6157-disenan-robot-
sembrador-de-maiz
DANE. (Departamento Administrativo Nacional de Estadística, CO). Base de Datos de
investigaciones agropecuarias. Boletín Semanal: Precios Mayoristas 21 de Junio de
2013. (En línea). Recuperado el 20 de Abril de 2019, de
https://www.dane.gov.co/files/investigaciones/agropecuario/sipsa/Semana_15jun_
21jun_2013.pdf.

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 75
E.M.Hoffman, Fassana, N., S.Mazzilli, & A.Berger. (Diciembre de 2016). La Necesidad de
Incrementar La Eficiencia de Uso del Nitrogeno en Cereales de Invierno. Obtenido
de http://www.ipni.net/publication/ia-
lahp.nsf/0/5D77B9E493D207D3852580E50073CAEE/$FILE/Art%201.pdf
FAOSTAT (Organización de las Naciones Unidas para la Agricultura y las Alimentación, IT).
Base de Datos. (En línea). Recuperado el 5 de Marzo de 2019, de
http://faostat3.fao.org/faostat-gateway/go/to/download/T/TP/S
Hernández, I. L. (Abril de 2013). Diseño y construcción de un Robot explorador de terreno.
Obtenido de Universidad Politécnica Salesiana Sede Guayaquil- Ecuador:
https://dspace.ups.edu.ec/bitstream/123456789/4498/1/UPS-GT000403.pdf
Ivan, A. F., Daniel, J. S., & Diego, V. C. (Mayo de 2013). Diseñor y Elaboración de Prototipo
de una Maquina Semilladora Semiautomica Para Charolas de Invernadero.
Obtenido de Instituto Politecnico Nacional:
https://tesis.ipn.mx/bitstream/handle/123456789/12174/dise%C3%B1oyelaboracio
n.pdf?sequence=1&isAllowed=y
Lia, G. P. (Diciembre de 2003). Navegación Autonoma de Robots en Agricultura: Un Modelo
de Agentes. Obtenido de Universidad Complutense de Madrid:
https://eprints.ucm.es/5277/1/T27198.pdf
Margaret, C. C. (6 de Junio de 2015). Sembradora de Quinua Semiauotmatica con
Aplicación en la Costa Peruana. Obtenido de Pontificia Universidad Catolica del
Peru: http://tesis.pucp.edu.pe/repositorio/handle/20.500.12404/6063
Secretaria de Desarrollo Agroeconómico. (En línea). Recuperado el 4 de Marzo de 2019,
de Cadena de la fresa 2017. Estudio de la Universidad Nacional:
https://sioc.minagricultura.gov.co/Fresa/Pages/default.aspx
TRADEMAP (INTERNATIONAL TRADE CENTER). Estadísticas de comercio para el
desarrollo Internacional. (En línea). Recuperado el 15 de Marzo de 2019, de
http://www.trademap.org/SelectionMenu.aspx

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 76
Villalba, H. (24 de Octubre de 2016). Evolución de la agricultura de precisión en el Paraguay.
Obtenido de Instituto Nacional de Tecnología Agropecuaria:
https://inta.gob.ar/sites/default/files/inta_-3-
evolucion_de_la_agricultura_de_precision_en_el_paraguay_-_hahn_e.pdf
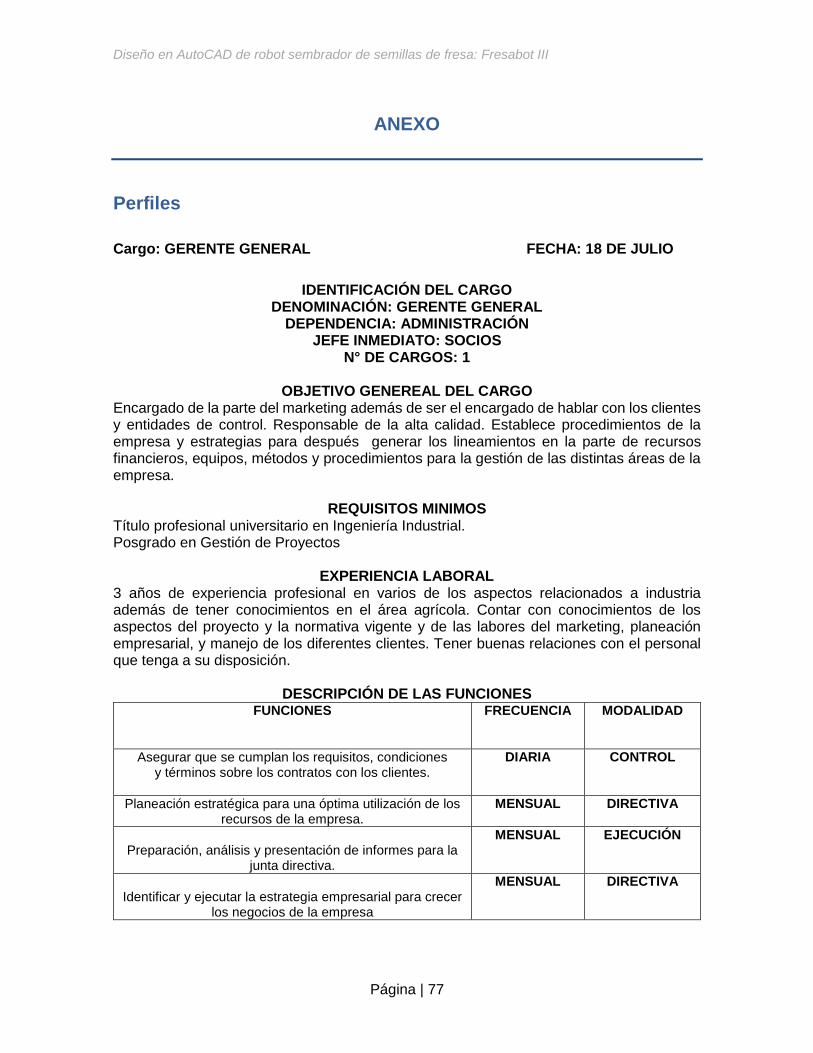
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 77
ANEXO
Perfiles
Cargo: GERENTE GENERAL FECHA: 18 DE JULIO
IDENTIFICACIÓN DEL CARGO DENOMINACIÓN: GERENTE GENERAL
DEPENDENCIA: ADMINISTRACIÓN JEFE INMEDIATO: SOCIOS
N° DE CARGOS: 1
OBJETIVO GENEREAL DEL CARGO Encargado de la parte del marketing además de ser el encargado de hablar con los clientes y entidades de control. Responsable de la alta calidad. Establece procedimientos de la empresa y estrategias para después generar los lineamientos en la parte de recursos financieros, equipos, métodos y procedimientos para la gestión de las distintas áreas de la empresa.
REQUISITOS MINIMOS Título profesional universitario en Ingeniería Industrial. Posgrado en Gestión de Proyectos
EXPERIENCIA LABORAL 3 años de experiencia profesional en varios de los aspectos relacionados a industria además de tener conocimientos en el área agrícola. Contar con conocimientos de los aspectos del proyecto y la normativa vigente y de las labores del marketing, planeación empresarial, y manejo de los diferentes clientes. Tener buenas relaciones con el personal que tenga a su disposición.
DESCRIPCIÓN DE LAS FUNCIONES FUNCIONES
FRECUENCIA
MODALIDAD
Asegurar que se cumplan los requisitos, condiciones y términos sobre los contratos con los clientes.
DIARIA CONTROL
Planeación estratégica para una óptima utilización de los recursos de la empresa.
MENSUAL DIRECTIVA
Preparación, análisis y presentación de informes para la
junta directiva.
MENSUAL EJECUCIÓN
Identificar y ejecutar la estrategia empresarial para crecer
los negocios de la empresa
MENSUAL DIRECTIVA
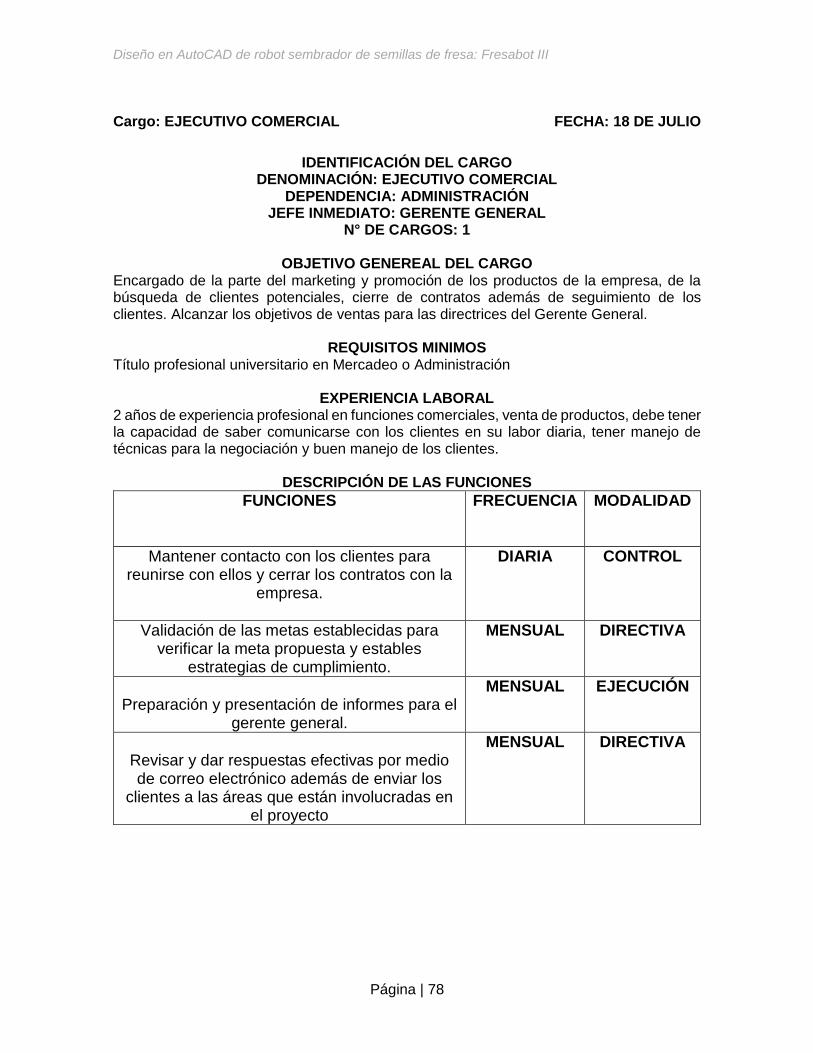
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 78
Cargo: EJECUTIVO COMERCIAL FECHA: 18 DE JULIO
IDENTIFICACIÓN DEL CARGO DENOMINACIÓN: EJECUTIVO COMERCIAL
DEPENDENCIA: ADMINISTRACIÓN JEFE INMEDIATO: GERENTE GENERAL
N° DE CARGOS: 1
OBJETIVO GENEREAL DEL CARGO Encargado de la parte del marketing y promoción de los productos de la empresa, de la búsqueda de clientes potenciales, cierre de contratos además de seguimiento de los clientes. Alcanzar los objetivos de ventas para las directrices del Gerente General.
REQUISITOS MINIMOS Título profesional universitario en Mercadeo o Administración
EXPERIENCIA LABORAL 2 años de experiencia profesional en funciones comerciales, venta de productos, debe tener la capacidad de saber comunicarse con los clientes en su labor diaria, tener manejo de técnicas para la negociación y buen manejo de los clientes.
DESCRIPCIÓN DE LAS FUNCIONES
FUNCIONES
FRECUENCIA
MODALIDAD
Mantener contacto con los clientes para reunirse con ellos y cerrar los contratos con la
empresa.
DIARIA CONTROL
Validación de las metas establecidas para verificar la meta propuesta y estables
estrategias de cumplimiento.
MENSUAL DIRECTIVA
Preparación y presentación de informes para el
gerente general.
MENSUAL EJECUCIÓN
Revisar y dar respuestas efectivas por medio de correo electrónico además de enviar los
clientes a las áreas que están involucradas en el proyecto
MENSUAL DIRECTIVA
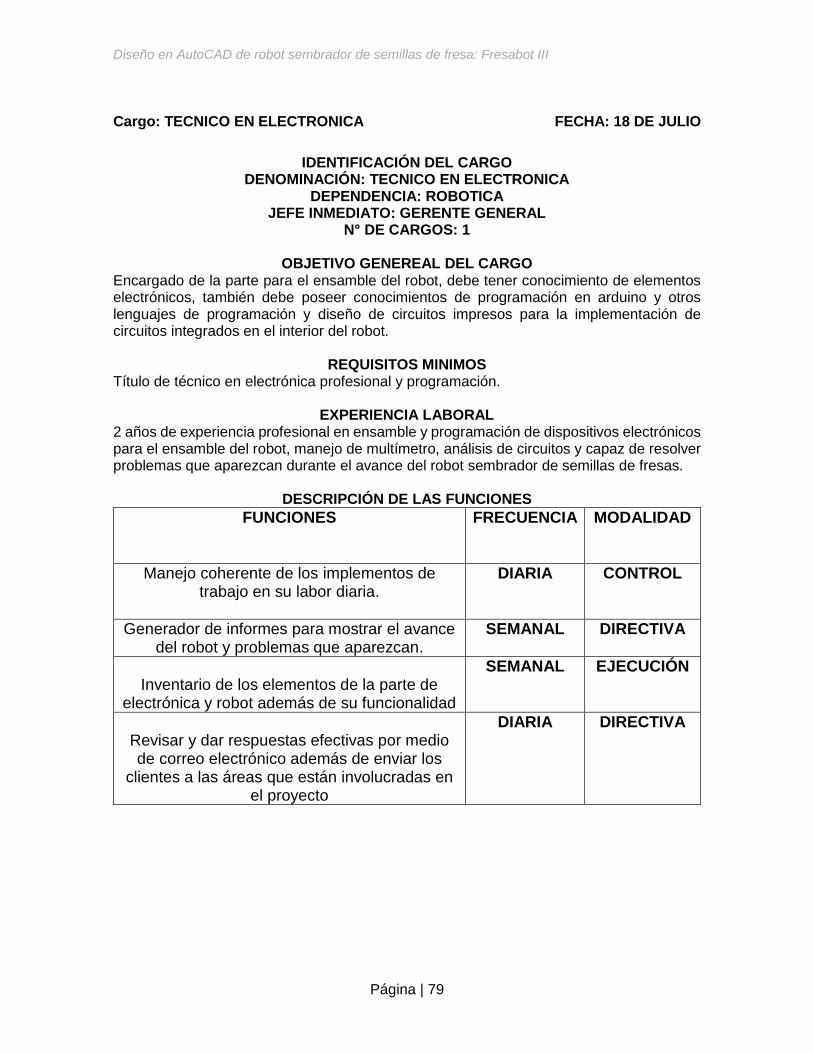
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 79
Cargo: TECNICO EN ELECTRONICA FECHA: 18 DE JULIO
IDENTIFICACIÓN DEL CARGO DENOMINACIÓN: TECNICO EN ELECTRONICA
DEPENDENCIA: ROBOTICA JEFE INMEDIATO: GERENTE GENERAL
N° DE CARGOS: 1
OBJETIVO GENEREAL DEL CARGO Encargado de la parte para el ensamble del robot, debe tener conocimiento de elementos electrónicos, también debe poseer conocimientos de programación en arduino y otros lenguajes de programación y diseño de circuitos impresos para la implementación de circuitos integrados en el interior del robot.
REQUISITOS MINIMOS Título de técnico en electrónica profesional y programación.
EXPERIENCIA LABORAL 2 años de experiencia profesional en ensamble y programación de dispositivos electrónicos para el ensamble del robot, manejo de multímetro, análisis de circuitos y capaz de resolver problemas que aparezcan durante el avance del robot sembrador de semillas de fresas.
DESCRIPCIÓN DE LAS FUNCIONES
FUNCIONES
FRECUENCIA
MODALIDAD
Manejo coherente de los implementos de trabajo en su labor diaria.
DIARIA CONTROL
Generador de informes para mostrar el avance del robot y problemas que aparezcan.
SEMANAL DIRECTIVA
Inventario de los elementos de la parte de
electrónica y robot además de su funcionalidad
SEMANAL EJECUCIÓN
Revisar y dar respuestas efectivas por medio de correo electrónico además de enviar los
clientes a las áreas que están involucradas en el proyecto
DIARIA DIRECTIVA
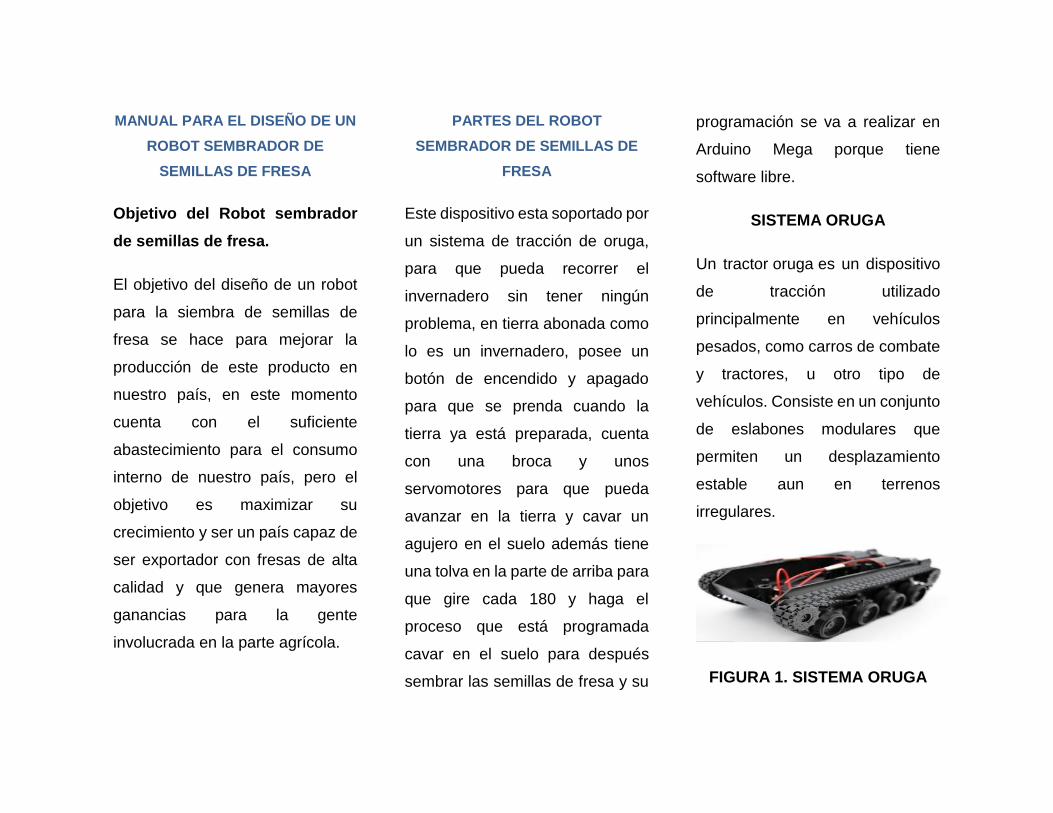
MANUAL PARA EL DISEÑO DE UN
ROBOT SEMBRADOR DE
SEMILLAS DE FRESA
Objetivo del Robot sembrador
de semillas de fresa.
El objetivo del diseño de un robot
para la siembra de semillas de
fresa se hace para mejorar la
producción de este producto en
nuestro país, en este momento
cuenta con el suficiente
abastecimiento para el consumo
interno de nuestro país, pero el
objetivo es maximizar su
crecimiento y ser un país capaz de
ser exportador con fresas de alta
calidad y que genera mayores
ganancias para la gente
involucrada en la parte agrícola.
PARTES DEL ROBOT
SEMBRADOR DE SEMILLAS DE
FRESA
Este dispositivo esta soportado por
un sistema de tracción de oruga,
para que pueda recorrer el
invernadero sin tener ningún
problema, en tierra abonada como
lo es un invernadero, posee un
botón de encendido y apagado
para que se prenda cuando la
tierra ya está preparada, cuenta
con una broca y unos
servomotores para que pueda
avanzar en la tierra y cavar un
agujero en el suelo además tiene
una tolva en la parte de arriba para
que gire cada 180 y haga el
proceso que está programada
cavar en el suelo para después
sembrar las semillas de fresa y su
programación se va a realizar en
Arduino Mega porque tiene
software libre.
SISTEMA ORUGA
Un tractor oruga es un dispositivo
de tracción utilizado
principalmente en vehículos
pesados, como carros de combate
y tractores, u otro tipo de
vehículos. Consiste en un conjunto
de eslabones modulares que
permiten un desplazamiento
estable aun en terrenos
irregulares.
FIGURA 1. SISTEMA ORUGA

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 81
TOLVA
Se denomina tolva a un dispositivo
similar a un embudo de gran tamaño
destinado al depósito y canalización
de materiales granulares o
pulverizados, entre otros. En
ocasiones, se monta sobre un chasis
que Permite el transporte.
FIGURA 2. TOLVA
BROCA PARA EXCAVAR
Las brocas de pala tienen un
diseño simple destinado a cortar
agujeros rápidos a través de
la madera y otros materiales
blandos.
La punta de la pala en el centro
ayuda a mantener la broca de pala
en el blanco, pero es la naturaleza
de estas brocas para astillar la
parte posterior del agujero cuando
cortan a través.
FIGURA 3. BROCA PARA EXCAVAR
ARDUINO MEGA
Arduino Mega 2560 es una tarjeta
de desarrollo de Hardware libre
construida con el micro
controlador Atmega 2560, que le
da sentido a su nombre. Forma
parte del proyecto Arduino que
involucra una comunidad
internacional dedicada al diseño y
manufactura de placas de
desarrollo de Hardware
FIGURA 4. ARDUINO MEGA
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 82
BATERÍA DE LITIO
Las propiedades de las baterías de Li-ion, como la ligereza de sus componentes, su elevada capacidad energética y resistencia a la descarga, junto con el poco efecto memoria que sufren o su capacidad para funcionar con un elevado número de ciclos de regeneración, han permitido diseñar acumuladores ligeros, de pequeño tamaño y variadas formas, con un alto rendimiento, especialmente adaptados a las aplicaciones de la industria electrónica de gran consumo.
FIGURA 6. BATERÍA DE LITIO
FUNCIONAMIENTO DEL ROBOT SEMBRADOR DE SEMILLAS DE
FRESA:
1. Encender el robot en la tierra previamente preparada, el avanzara en la tierra.
2. Avanza aproximadamente 30 cm y por medio de una instrucción en el Arduino, girara 180 grados para hacer el proceso de excavación en la tierra por medio de la broca y un servomotor.
3. Después de realizar dicha acción el gira nuevamente 180 grados y por medio de un motor DC y con ayuda la tolva sembrara las semillas de fresa.
4. Para finalizar el avanzara y tapa el hueco en la tierra haciendo el proceso de la siembra de semillas de fresa para mejorar la producción de las semillas de fresa.
BIBLIOGRAFIA:
https://www.electrontools.com/Ho
me/WP/2018/06/19/arduino-
mega-2560-caracteristicas/
https://taladros10.com/brocas/bro
ca-de-pala/
https://boletinagrario.com/ap-
6,tolva,739.html
http://www.agritotal.com/nota/orug
as-ventajas-de-todo-tipo/
https://tecnologia-facil.com/que-
es/bateria-de-litio/
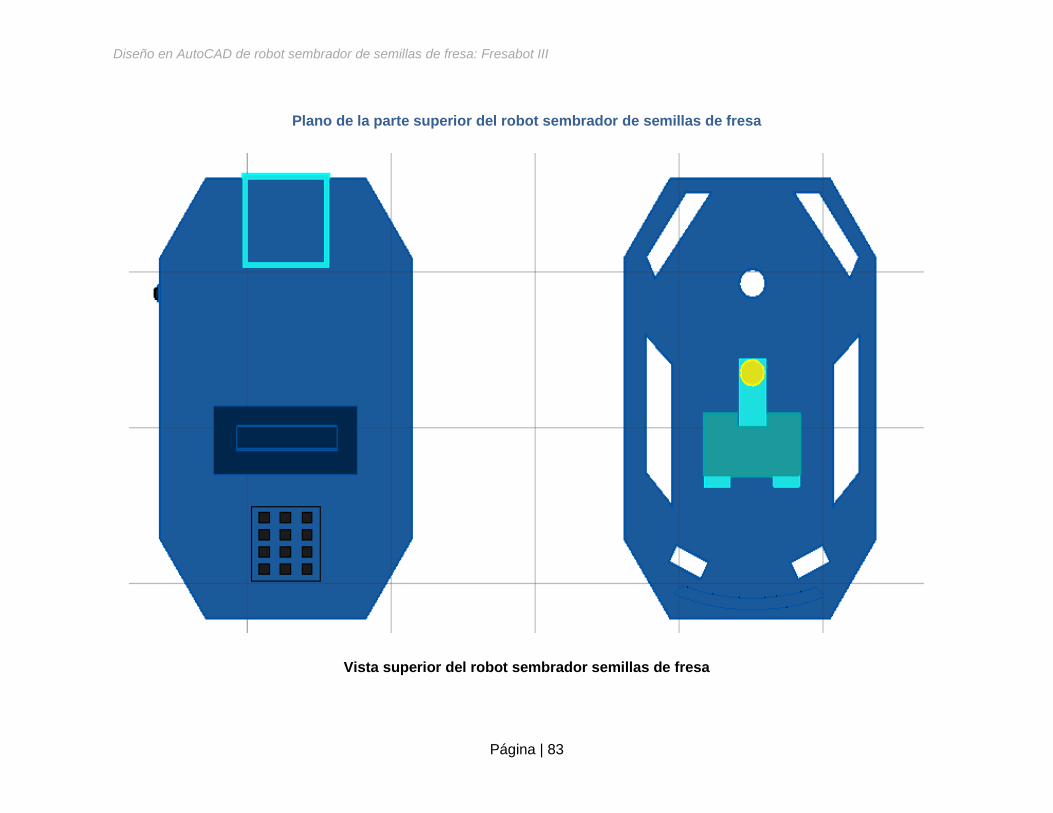
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 83
Plano de la parte superior del robot sembrador de semillas de fresa
Vista superior del robot sembrador semillas de fresa
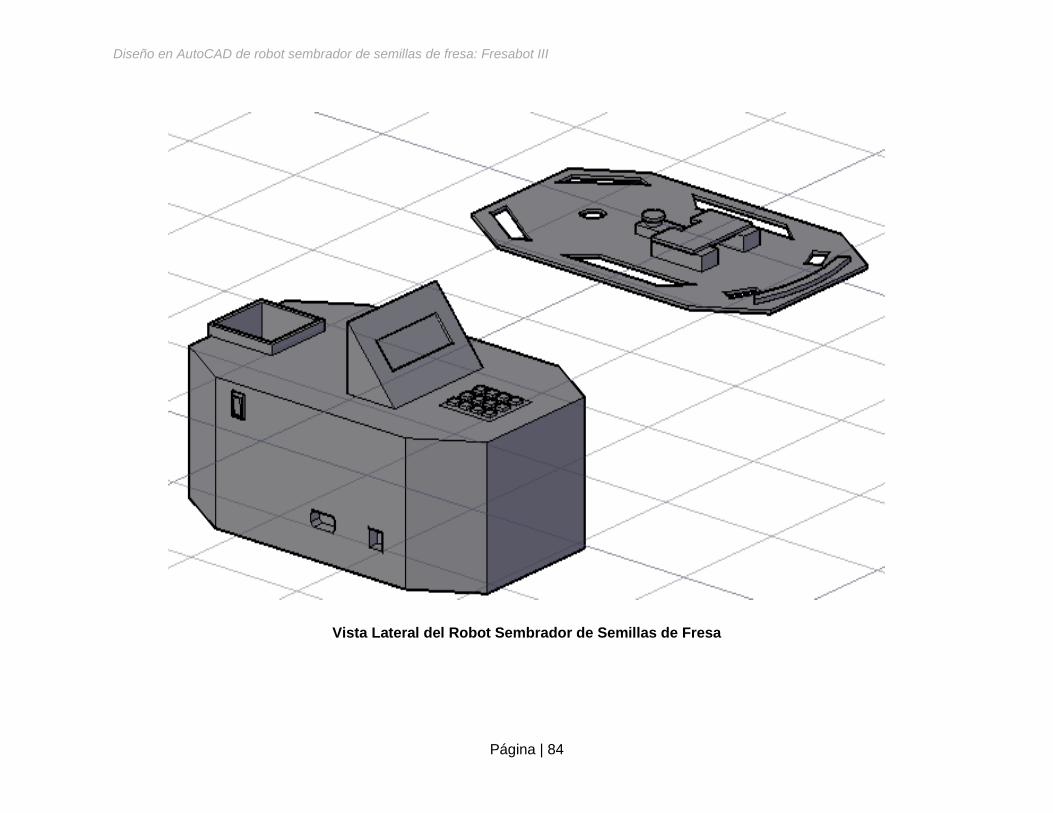
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 84
Vista Lateral del Robot Sembrador de Semillas de Fresa

Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 85
Vista Superior del Robot Sembrador de Semillas de Fresa
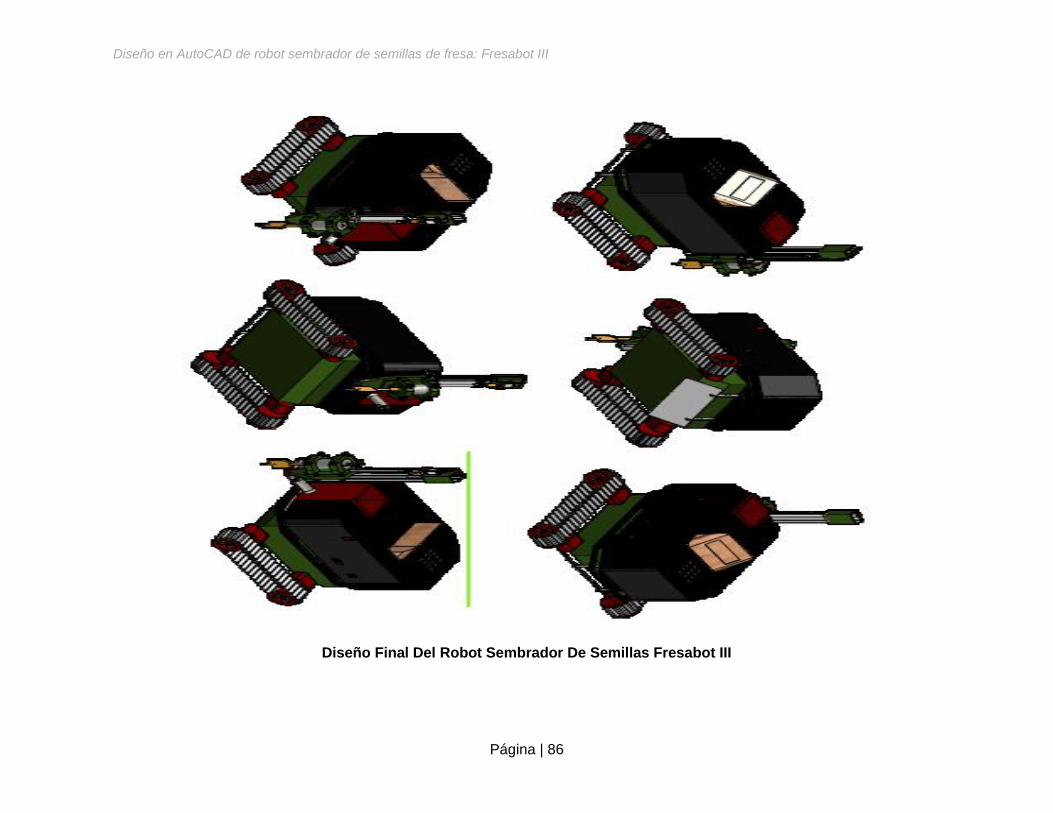
Diseño en AutoCAD de robot sembrador de semillas de fresa: Fresabot III
Página | 86
Diseño Final Del Robot Sembrador De Semillas Fresabot III