Diseño de Túneles Basado en Visco- hipoplasticidad para ...
100
MIC 2006-II-2 Diseño de Túneles Basado en Visco- hipoplasticidad para los Suelos Blandos de Bogotá por FERNANDO ACOSTA URREA Tesis presentada a La Universidad de los Andes Como requisito parcial de grado Programa de Maestría En Ingeniería Civil Bogotá, Colombia, 2007 ©(Fernando Acosta), 2007
Transcript of Diseño de Túneles Basado en Visco- hipoplasticidad para ...
MIC 2006-II-2
Diseño de Túneles Basado en Visco-
hipoplasticidad para los Suelos Blandos de
Bogotá
por
FERNANDO ACOSTA URREA
Tesis presentada a
La Universidad de los Andes
Como requisito parcial de grado
Programa de Maestría
En Ingeniería Civil
Bogotá, Colombia, 2007
©(Fernando Acosta), 2007
MIC 2006-II-2
ii
Página del lector
La Universidad de los Andes requiere la firma de todas las personas que utilicen o fotocopien esta tesis. Favor firmar debajo dando nombre y dirección.
MIC 2006-II-2
iii
Agradecimientos
Deseo agradecer a las siguientes personas que me brindaron su apoyo para la realización de este trabajo de tesis.
A mis padres y hermanos por el apoyo que me prestaron durante todo este tiempo.
A mi asesor Prof. Arcesio Lizcano, por su colaboración y seguimiento a todo el proceso.

MIC 2006-II-2
iv
Resumen
Utilizando la plataforma ABAQUS, para simulación con elementos finitos, y a través de una
subrutina UMAT, para simular el comportamiento de la arcilla como un material definido por el
usuario que obedece a la ley visco-hipoplástica, se realizaron una serie de simulaciones para abarcar
el comportamiento de túneles desde 0.8 hasta 2.0 metros de radio y profundidades a cota clave de
entre 4.0 y 12.0 metros. Se presentan los resultados de dichas simulaciones en diferentes gráficos que
pueden ser utilizados como base para el diseño de túneles en al ciudad de Bogotá.
MIC 2006-II-2
v
Tabla de Contenido INTRODUCCIÓN.................................................................................................................................. 1 OBJETIVOS........................................................................................................................................... 2 Capítulo 3 ESTADO DEL CONOCIMIENTO..................................................................................... 3
3.1 Introducción.................................................................................................................................. 3 3.2 Estabilidad del Túnel en Sección Transversal .............................................................................. 4
3.2.1 Método de Terzaghi............................................................................................................... 4 3.2.2 Método de Bierbäumer .......................................................................................................... 6 3.2.3 Método de Balla .................................................................................................................... 7 3.2.4 Método de Protodiakonov ..................................................................................................... 9 3.2.5 Mecanismos de Falla de Davis ............................................................................................ 11 3.2.6 Método de Caquot ............................................................................................................... 20
3.3 Estabilidad del Frente de Excavación......................................................................................... 26 3.3.1 Método de Proctor y White ................................................................................................. 26 3.3.2 Método de Ellstein............................................................................................................... 28 3.3.3 Método de Anagnostou y Kovári ........................................................................................ 30 3.3.4 Método de Murayama.......................................................................................................... 33
3.4 Asentamiento Superficial ........................................................................................................... 34 3.4.1 Aproximaciones Empíricas ................................................................................................. 35 3.4.2 Aproximaciones Teóricas .................................................................................................... 39
Capítulo 4 MODELOS CONSTITUTIVOS ....................................................................................... 42 4.1 Hipoplasticidad........................................................................................................................... 42 4.2 Visco-hipoplasticidad ................................................................................................................. 48 4.3 Deformación Intergranular ......................................................................................................... 55
Capítulo 5 SOLUCIÓN POR ELEMENTOS FINITOS ..................................................................... 57 5.1 Modelo Básico............................................................................................................................ 57
5.1.1 Geometría y enmallado........................................................................................................ 57 5.1.2 Condiciones de Borde.......................................................................................................... 60 5.1.3 Material ............................................................................................................................... 60
5.2 Pasos de Análisis ........................................................................................................................ 60 5.2.1 Paso Geostático ................................................................................................................... 61 5.2.2 Paso de Excavación ............................................................................................................. 61
MIC 2006-II-2
vi
5.2.3 Paso de Reducción de Carga............................................................................................... 62 5.3 Presentación de Resultados........................................................................................................ 63
Capítulo 6 CONCLUSIONES ............................................................................................................. 69 Anexo A CÓDIGO DEL PROGRAMA ENMALLADOR ................................................................. 71 Anexo B ARCHIVO DE ENTRADA TÍPICO.................................................................................... 78 Bibliografía .......................................................................................................................................... 89
MIC 2006-II-2
vii
Lista de Figuras y Gráficas
Titulo Página
Figura 3.1 Superficies de falla según Terzaghi 4
Figura 3.2 Hipótesis del Método de Terzaghi 5
Figura 3.3 Hipótesis del Método de Balla 7
Figura 3.4 Hipótesis del Método de Protodyakonov 9
Figura 3.5 Figura esquemática del Mecanismo A 12
Figura 3.6 Figura esquemática del Mecanismo B 14
Figura 3.7 Figura esquemática del Mecanismo C 17
Figura 3.8 Zona de falla Método de Caquot 20
Figura 3.9 Equilibrio sobre el radio bisector 21
Figura 3.10 Modelo Elasto-perfectamente plástico y Mohr Coulomb 22
Figura 3.11 Influencia del nivel freático 26
Figura 3.12 Hipótesis del Método de Proctor y White 27
Figura 3.13 Cuña supuesta por el Método de Ellstein 28
Figura 3.14 Hipótesis del Método de Anagnostou y Kovári 30
Figura 3.15 Cuña de distribución de esfuerzos según DIN-4126 32
Figura 3.16 Hipótesis del Método de Murayama 33
Figura 3.17 Causas constructivas del asentamiento superficial 35
Figura 3.18 Esquema de los asentamientos a diferentes profundidades 37
Figura 3.19 Resultados de curvas de asentamiento según diferentes autores 39
Figura 4.1 Fronteras de la relación de vacíos para diferentes densidades 45
Figura 4.2 Ajustes en la relación de vacíos 46
Figura 4.3 Definición del vector M perpendicular a la línea ed en el plano e-p
47
Figura 4.4 Elipse de esfuerzos en el diagrama p - q 52
Figura 4.5 D11/Dr y Ko en función del ángulo crítico para diferentes λ/κ a partir de un ensayo bajo condiciones de esfuerzo isotrópico
53
Figura 4.6 D11/Dr y Ko en función del ángulo crítico para diferentes λ/κ a partir de un ensayo bajo condiciones de esfuerzo edométrico
54
Figura 4.7 Valor superior de K0 en función del ángulo crítico 55
Figura 5.1 Esquema geométrico de los modelos 57
MIC 2006-II-2
viii
Figura 5.2 Malla Típica 58
Figura 5.3 Distribución geostática de esfuerzos 61
Figura 5.4 Excavación y aplicación de cargas 62
Figura 5.5 Reducción de cargas hasta el colapso 63
Gráfico 5.1 Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 4 m.
64
Gráfico 5.2 Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 6 m.
64
Gráfico 5.3 Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 8 m.
65
Gráfico 5.4 Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 10 m.
65
Gráfico 5.5 Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 12 m.
66
Gráfico 5.6 Gráfico polar de esfuerzo radial en el perímetro del túnel para una profundidad de 4 m.
66
Gráfico 5.7 Gráfico polar de esfuerzo radial en el perímetro del túnel para una profundidad de 6 m.
67
Gráfico 5.8 Gráfico polar de esfuerzo radial en el perímetro del túnel para una profundidad de 8 m.
67
Gráfico 5.9 Gráfico polar de esfuerzo radial en el perímetro del túnel para una profundidad de 10 m.
68
Gráfico 5.10 Gráfico polar de esfuerzo radial en el perímetro del túnel para una profundidad de 12 m.
68
MIC 2006-II-2
ix
Lista deTablas Inserte la lista de tabla en este sitio.
Titulo Página
Tabla 3.1 Tabla de coeficientes para el Método de Balla 8
Tabla 3.2 Tabla de factores f 11
Tabla 3.3 Soluciones empíricas de asentamientos mediante i 36
Tabla 3.4 Valores de asentamiento máximo para diferentes valores de i 38
Tabla 5.1 Dimensiones de los modelos 58
Tabla 5.2 Características geométricas de los modelos analizados 59
Tabla 5.3 Parámetros Visco-hipoplásticos 60

MIC 2006-II-2
1
Capítulo 1
INTRODUCCIÓN
El diseño de túneles en suelos blandos, abarca tres aspectos fundamentales; cálculo de la presión de
sostenimiento para un corte transversal, estabilidad del frente de excavación, y predicción de los
asentamientos en superficie causados por la construcción del túnel. Desde el punto de vista práctico, se
dispone para el cálculo de las presiones de sostenimiento y los asentamientos en superficies de varios
métodos que carecen en muchos casos de justificaciones teóricas y entregan resultados muy dispersos, a
menudo difíciles de interpretar y aplicar.
La creciente necesidad de construcción de túneles en la ciudad de Bogotá, principalmente para tendido de
redes de acueducto y alcantarillado (diámetros inferiores a 4 m) junto con la diversidad de métodos
constructivos que utilizan los constructores proponentes, ha generado la inquietud de proponer un método
de diseño, capaz de predecir el comportamiento mecánico del suelo basado en el método constructivo,
mediante el criterio de volumen sobre excavado, Vloss.
Sería imposible cubrir todos los aspectos del diseño en un solo trabajo de investigación, por lo tanto, este
documento se limita a presentar los resultados del cálculo de la presión de sostenimiento en sección
transversal, basados en modelos de elementos finitos, representando el material arcilloso mediante una ley
constitutiva visco-hipoplástica.
MIC 2006-II-2
2
Capítulo 2
OBJETIVOS
Se pretende orientar la investigación de los suelos propios de nuestras ciudades, en este caso de Bogotá a
casos de aplicación como lo son el diseño de túneles. Utilizando modelos constitutivos capaces de prever
el comportamiento del suelo tales como la visco-hipoplasticidad de una mejor manera que los
tradicionales.
Se pretende evaluar el comportamiento de la teoría visco-hipoplástica en el diseño de túneles, aplicando a
su vez el método de elementos finitos como puente entre el método constitutivo y la obtención de
resultados.
Se busca proponer un método de diseño de túneles que tenga en cuenta el método constructivo basándose
en la teoría visco-hipoplástica y una serie de simulaciones de elementos finitos.
MIC 2006-II-2
3
Capítulo 3
ESTADO DEL CONOCIMIENTO
3.1 Introducción
El diseño del soporte de los túneles es considerado de alta complejidad, por esto, un análisis estrictamente
cuantitativo no se empleaba, manteniéndose por mucho años técnicas empíricas las cuales han sido
satisfactorias bajo condiciones geotécnicas similares. Éstas técnicas se basan en factores cualitativos que
no están bien definidos ni se logran interpretar de manera consistente.
Los métodos analíticos comunes no entregan resultados lo suficientemente confiables para el diseño del
soporte de los túneles, lo cual obliga al uso de diferentes factores de seguridad para los diseños.
Para llegar a un adecuado diseño del soporte para túneles, se debe principalmente vencer las siguientes
dificultades:
• Conocimiento inadecuado del comportamiento del terreno bajo las condiciones asociadas a la
construcción de túneles.
• Datos insuficientes del estado natural de esfuerzos del suelo
• El hecho de que el problema es tridimensional, principalmente al analizar la interacción entre el
terreno y el soporte cerca a la cara del túnel
• La respuesta del suelo a través del tiempo, dependiente de las características reológicas del suelo
En los métodos comunes de diseño al simular interacción suelo/soporte se trabajan separadamente las
cargas sobre la estructura de los esfuerzos y deformaciones que la estructura sufre, siendo esto la razón
principal para que éstos métodos no sean suficientemente confiables.
Existen diversos métodos analíticos que permiten calcular de una manera aproximada las cargas que
deben resistir los refuerzos metálicos, estos métodos se basan en consideraciones puramente estáticas,
donde se propone una zona de falla y se determina la reacción que debe ejercer el soporte para mantener
MIC 2006-II-2
4
la zona de falla estable. Para encontrar la solución en algunos de estos métodos se requiere de iteraciones
numéricas que permitan llegar a una solución óptima.
3.2 Estabilidad del Túnel en Sección Transversal
La estabilidad de la sección transversal analíticamente se calcula a través de los métodos de equilibrio
límite. Este tipo de cálculos buscan encontrar las presiones de sostenimiento que deben aplicarse en un
túnel, de tal modo que garanticen su estabilidad. Se basan en una hipótesis de mecanismo de ruptura,
donde a priori se definen superficies de deslizamiento, y se realiza un análisis de la estabilidad del suelo
delimitado por las superficies de ruptura.
Sin embargo estos métodos pueden conducir a soluciones que son superiores a las cargas límites reales
además de resultados muy dispersos entre los métodos. Esta dispersión parece proceder de las hipótesis
hechas, por una parte, en las líneas de deslizamiento, que a menudo se alejan mucho de las observadas
experimentalmente, y, por otra parte, sobre el estado de esfuerzos en el suelo, que es normalmente muy
difícil de caracterizar.
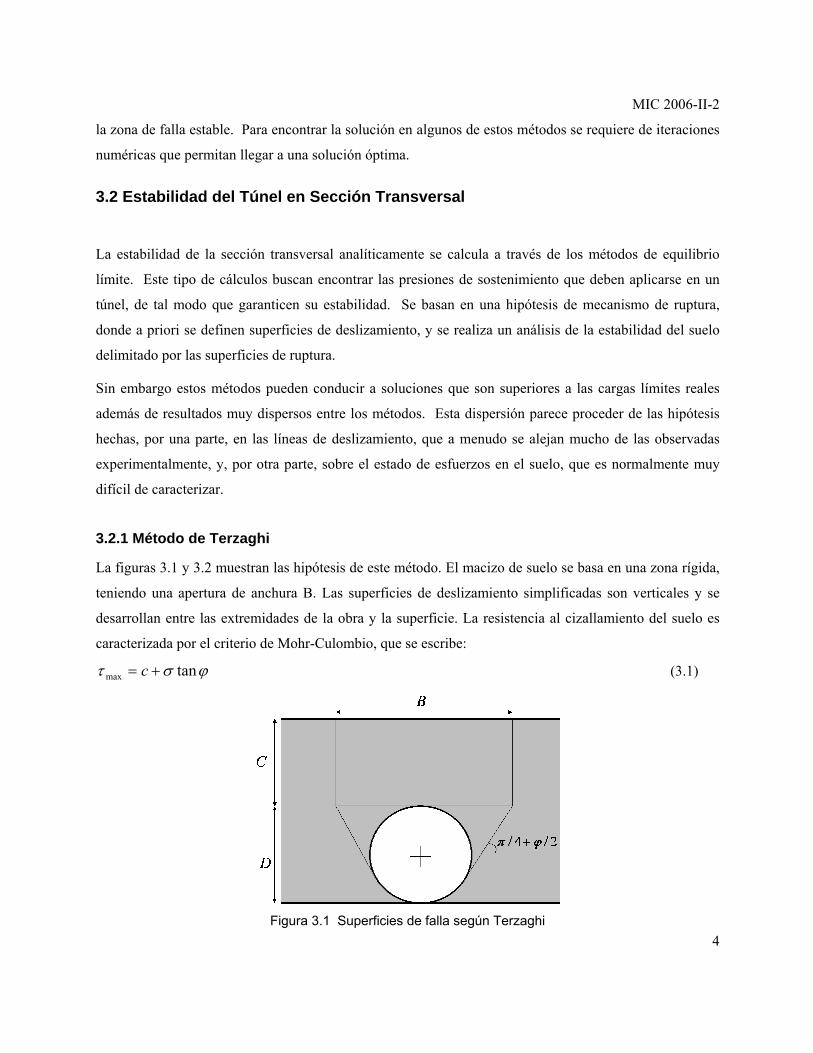
3.2.1 Método de Terzaghi
La figuras 3.1 y 3.2 muestran las hipótesis de este método. El macizo de suelo se basa en una zona rígida,
teniendo una apertura de anchura B. Las superficies de deslizamiento simplificadas son verticales y se
desarrollan entre las extremidades de la obra y la superficie. La resistencia al cizallamiento del suelo es
caracterizada por el criterio de Mohr-Culombio, que se escribe:
ϕστ tanmax += c (3.1)
Figura 3.1 Superficies de falla según Terzaghi
MIC 2006-II-2
5
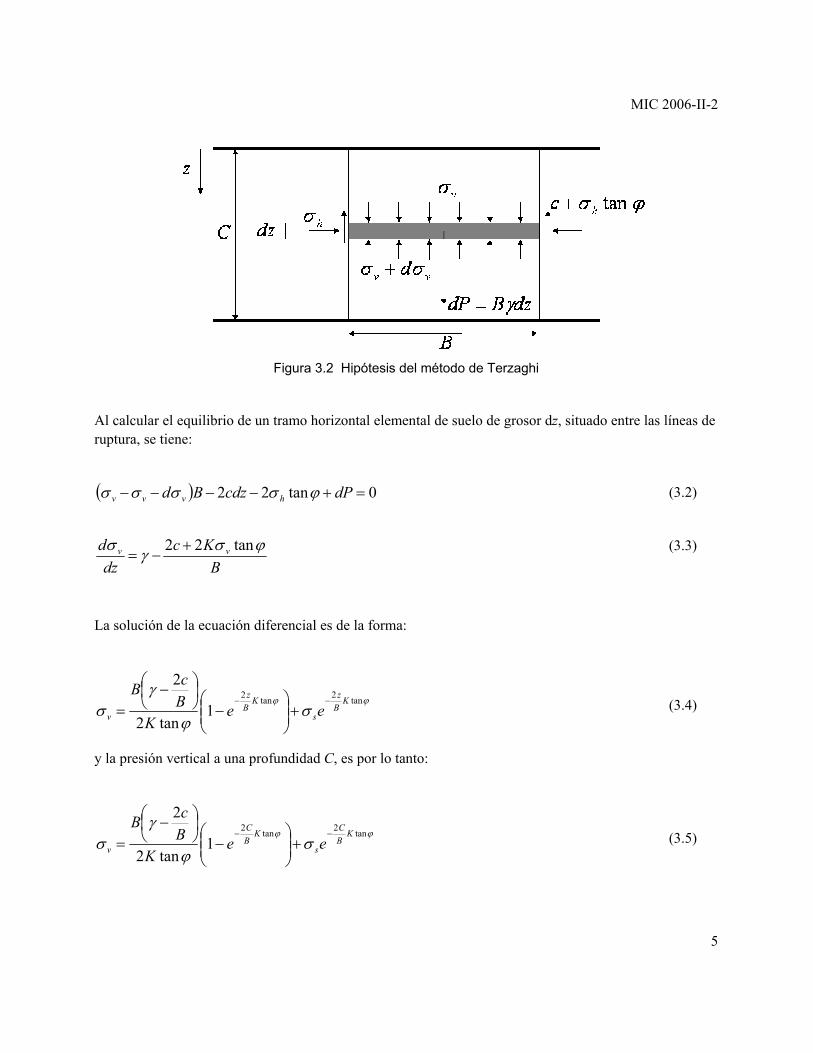
Figura 3.2 Hipótesis del método de Terzaghi
Al calcular el equilibrio de un tramo horizontal elemental de suelo de grosor dz, situado entre las líneas de ruptura, se tiene:
(3.2)
(3.3)
La solución de la ecuación diferencial es de la forma:
(3.4)
y la presión vertical a una profundidad C, es por lo tanto:
(3.5)
( ) 0tan22 =+−−−− dPcdzBd hvvv ϕσσσσ
BKc
dzd vv ϕσγσ tan22 +
−=
ϕϕσ
ϕ
γσ
tan2tan2
1tan2
2K
Bz
s
KBz
v eeK
BcB
−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
⎟⎠⎞
⎜⎝⎛ −
=
ϕϕσ
ϕ
γσ
tan2tan2
1tan2
2K
BC
s
KBC
v eeK
BcB
−−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
⎟⎠⎞
⎜⎝⎛ −
=

MIC 2006-II-2
6
La expresión supone que el suelo es homogéneo. Cuando las propiedades mecánicas cambian con la
profundidad, los cálculos deben efectuarse sustituyendo, en cada capa, a la presión σS por el valor de la
presión obtenida para la capa subyacente.
El valor de K desempeña un papel importante en el comportamiento del enfoque de Terzaghi (1951).
Terzaghi y Jelinek (1954) propusieron el valor de K=1
Galczynski y Wojaszek (1989) utilizan K=(1+sinφ)/(1-sinφ)
Anagnostou y Kovári (1994) utilizan un valores entre 0,8 y 0,4.
Estos valores parecen sin embargo difíciles de justificar desde el punto de vista teórico.
3.2.2 Método de Bierbäumer
Se describe en la disertación de Sczéchy (1966) , supone la existencia de líneas de corte similares a las
tenidas en cuenta por Terzaghi. El valor de la resistencia al corte a lo largo de las superficies de
deslizamiento se toma igual a:
(3.6)
El peso del bloque situado sobre el túnel es igual a:
(3.7)
La presión que actúa efectivamente en la clave del túnel puede obtenerse tomando la diferencia entre (3.6)
y (3.7) y dividiendo el resultado por B1:
(3.8)
Para el caso de una material cohesivo, se puede replantear el razonamiento, cambiando la ecuación (3.6)
de la siguiente manera:
(3.9)
( )2
24tantan22
2 γϕπϕ CRc −=
( )[ ]24tan2 ϕπγ −+= HBCP
( )( ) ⎥
⎦
⎤⎢⎣
⎡−+
−−=
24tan224tantan1
2
ϕπϕπϕγσ
HBCCT
( )2
24tantan222
2 γϕπϕ CcCRc −+=
MIC 2006-II-2
7
Según Sczéchy (1966), este método da mejores resultados para valores elevados de C/B. No obstante, la
hipótesis de que la presión horizontal es igual a la presión activa parece contradictoria con la movilización
de la resistencia al corte, en la medida en que implica que las direcciones verticales y horizontales sean
direcciones principales.
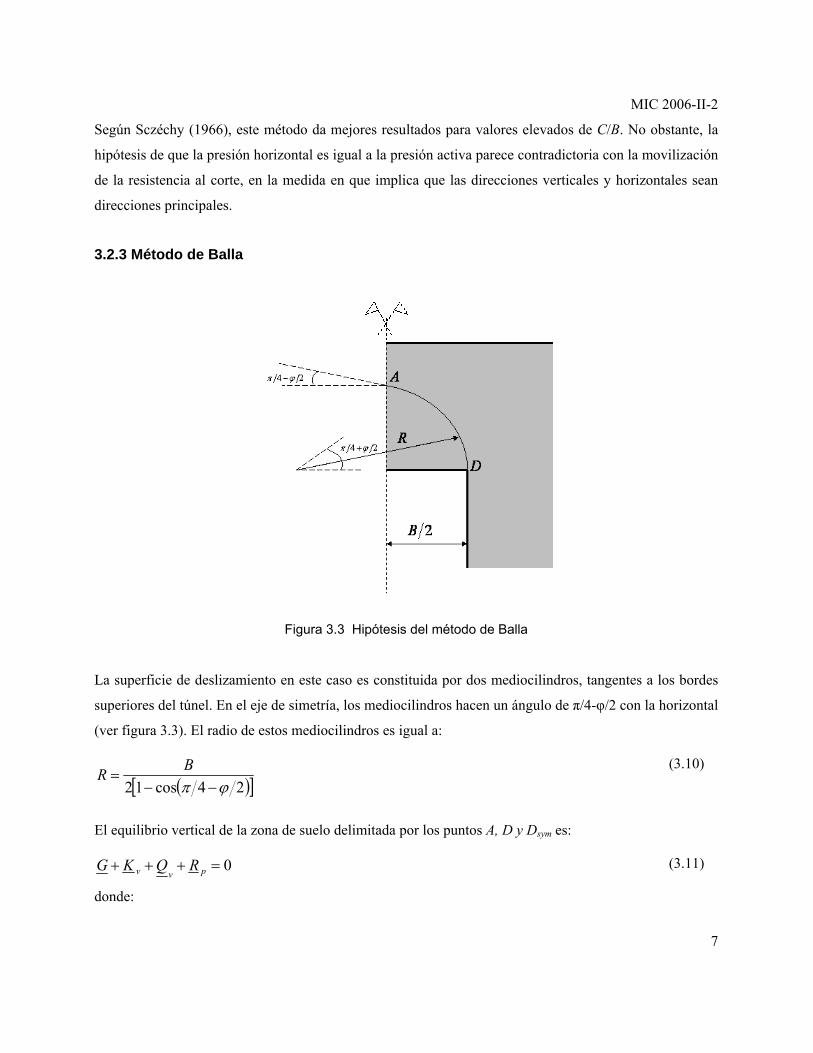
3.2.3 Método de Balla
Figura 3.3 Hipótesis del método de Balla
La superficie de deslizamiento en este caso es constituida por dos mediocilindros, tangentes a los bordes
superiores del túnel. En el eje de simetría, los mediocilindros hacen un ángulo de π/4-φ/2 con la horizontal
(ver figura 3.3). El radio de estos mediocilindros es igual a:
(3.10)
El equilibrio vertical de la zona de suelo delimitada por los puntos A, D y Dsym es:
(3.11)
donde:
( )[ ]24cos12 ϕπ −−=
BR
0=+++ pvv RQKG

MIC 2006-II-2
8
peso del bloque ADDsymA
componente vertical de la fuerza de cohesión que actúa sobre la superficie de deslizamiento
componente vertical de la fuerza de fricción móvil sobre la superficie de deslizamiento
resultado de la presión que actúa sobre el techo del túnel
La expresión de la presión que permite garantizar el equilibrio del macizo es:
(3.12)
donde:
K1, K2 y K3 son coeficientes ponderadores que dependen del ángulo de rozamiento del suelo, los valores
según el autor, para diferentes ángulos de fricción se presentan en la tabla 3.1.
TABLA 3.1. TABLA DE COEFICIENTES PARA EL MÉTODO DE BALLA
φ(°) K1 K2 K3
10 0.6814 0.1502 1.8066
20 0.4145 0.2577 1.6084
30 0.2109 0.3277 1.3667
40 0.0757 0.3671 1.1016
45 0.0333 0.3774 0.9667
La superficie de deslizamiento debe incluirse en el suelo, es decir, que la altura de la zona en ruptura debe
ser inferior a C:
(3.13)
Este método presenta el inconveniente de no tener en cuenta una posible presión de superficie
G
vK
vQ
pR
⎟⎟⎠
⎞⎜⎜⎝
⎛−+= 321 K
CcK
CBKCPT γ
γ
( )( ) CBh <
+−+
=24cos124cos
ϕπϕπ

MIC 2006-II-2
9
3.2.4 Método de Protodiakonov
Se basa en el análisis del efecto de arco. Este efecto es modelado por el equilibrio de una línea AB donde
los esfuerzos debidos a la carga vertical que actúa a lo largo de esta línea corresponden a esfuerzos de
compresión.
A partir del equilibrio de momentos con respecto a un punto D se deduce la ecuación del arco AB.
(3.14)
En el punto A, H, es tal que los desplazamientos horizontales en este punto son impedidos por el
componente de fricción en el plano AAsym asociado al esfuerzo vertical V:
(3.15)
Figura 3.4 Hipótesis del método de Protodyakonov
con:
(3.16)
(3.17)
H se puede escribir de la forma:
(3.18)
2
2pxTy =
VfH =
2pBV =
ϕtan=f
τhfpBH −= 2

MIC 2006-II-2
10
Al sustituir a estos valores en la ecuación general de la parábola (3.14), para x=B/2 y y=h, se obtiene:
(3.19)
La altura h de la parábola puede obtenerse derivando (3.19) con relación a h, lo que permite encontrar el
valor máximo de τ .
(3.20)
Utilizando esta expresión en (3.18), (3.19) y en la ecuación de la parábola, se obtiene la expresión del área
de la parábola:
(3.21)
El método supone que el bloque delimitado por la parábola debe ser soportado por el túnel, es decir, que
la presión uniforme que debe ejercerse en el túnel es igual a:
(3.22)
Lo anterior aplica para materiales puramente friccionantes, para el caso de materiales también cohesivos,
se debe sustituir el valor de f por:
(3.23)
dónde σc es la resistencia a la compresión simple. Los valores de este coeficiente se dan en la tabla 3.2
para distintos tipos de suelos.
( )28
4h
BfhpB −=τ
fBh
2=
BhS p 32
=
fBhT 33
2 γγσ ==
c
cfσ
ϕ += tan
MIC 2006-II-2
11
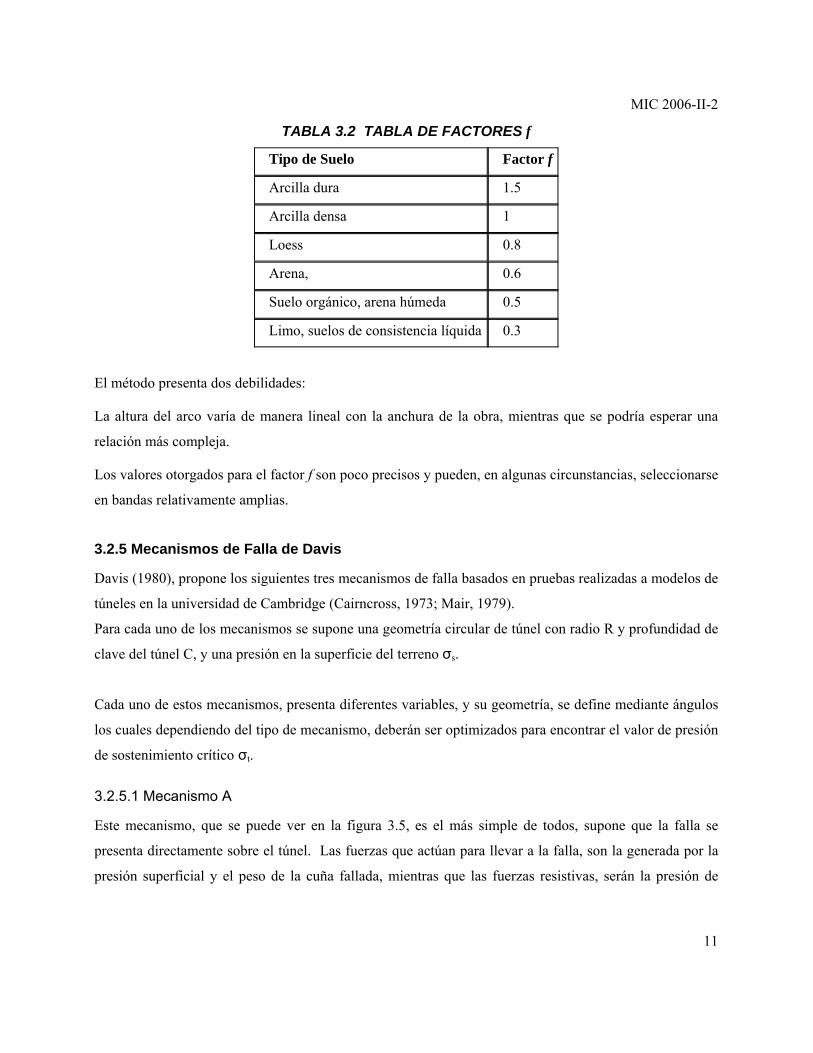
TABLA 3.2 TABLA DE FACTORES f
Tipo de Suelo Factor f
Arcilla dura 1.5
Arcilla densa 1
Loess 0.8
Arena, 0.6
Suelo orgánico, arena húmeda 0.5
Limo, suelos de consistencia líquida 0.3
El método presenta dos debilidades:
La altura del arco varía de manera lineal con la anchura de la obra, mientras que se podría esperar una
relación más compleja.
Los valores otorgados para el factor f son poco precisos y pueden, en algunas circunstancias, seleccionarse
en bandas relativamente amplias.
3.2.5 Mecanismos de Falla de Davis
Davis (1980), propone los siguientes tres mecanismos de falla basados en pruebas realizadas a modelos de
túneles en la universidad de Cambridge (Cairncross, 1973; Mair, 1979).
Para cada uno de los mecanismos se supone una geometría circular de túnel con radio R y profundidad de
clave del túnel C, y una presión en la superficie del terreno σs.
Cada uno de estos mecanismos, presenta diferentes variables, y su geometría, se define mediante ángulos
los cuales dependiendo del tipo de mecanismo, deberán ser optimizados para encontrar el valor de presión
de sostenimiento crítico σt.
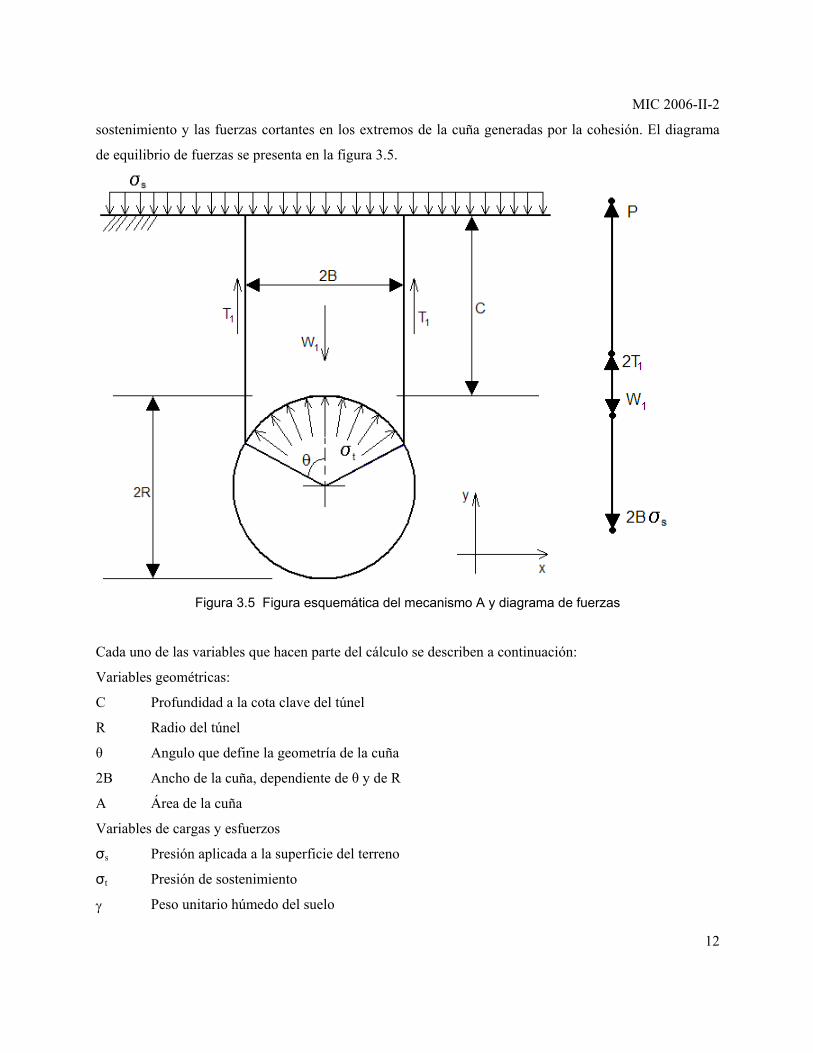
3.2.5.1 Mecanismo A
Este mecanismo, que se puede ver en la figura 3.5, es el más simple de todos, supone que la falla se
presenta directamente sobre el túnel. Las fuerzas que actúan para llevar a la falla, son la generada por la
presión superficial y el peso de la cuña fallada, mientras que las fuerzas resistivas, serán la presión de
MIC 2006-II-2
12
sostenimiento y las fuerzas cortantes en los extremos de la cuña generadas por la cohesión. El diagrama
de equilibrio de fuerzas se presenta en la figura 3.5.
Figura 3.5 Figura esquemática del mecanismo A y diagrama de fuerzas
Cada uno de las variables que hacen parte del cálculo se describen a continuación:
Variables geométricas:
C Profundidad a la cota clave del túnel
R Radio del túnel
θ Angulo que define la geometría de la cuña
2B Ancho de la cuña, dependiente de θ y de R
A Área de la cuña
Variables de cargas y esfuerzos
σs Presión aplicada a la superficie del terreno
σt Presión de sostenimiento
γ Peso unitario húmedo del suelo

MIC 2006-II-2
13
Cu Cohesión no drenada del suelo
W1 Peso de la cuña de suelo
2Bσs Fuerza generada por la presión de superficie
T1 Fuerza cortante generada por la cohesión
P Fuerza resultante generada por la presión de sostenimiento
Los cálculos para obtener una solución del mecanismo de falla se basan en un equilibrio simple de fuerzas
y se presentan a continuación.
∑ = 0yF
022 11 =−−+ PTBW sσ (3.24)
Donde:
γ⋅= AW1 (3.25)
θsin⋅= RB (3.26)
( )[ ] uCRCT θcos11 −+= (3.27)
( )θθθθθ −−+= cossinsin2sin2 2RCRA (3.28)
Al despejar P de (3.24) se tiene:
( )[ ] ( )[ ] us CRCRRCRP θθσθθθθθγ cos12sin2cossinsin2sin2 2 −+−+−−+= (3.29)
Luego, la presión de sostenimiento σt se calcula a partir de la fuerza resultante P.
θσ
sin2RP
t = (3.30)
ust CR
CRC ⎟⎠⎞
⎜⎝⎛ −+−+⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −−+=
θθθσ
θθθγσ
tan1
sin1
sinsin21cos
211 (3.31)
MIC 2006-II-2
14
Para encontrar una solución óptima, de la función (3.31), debe encontrarse el valor de θ que maximice a σt
para una configuración determinada de carga, resistencia y geometría.
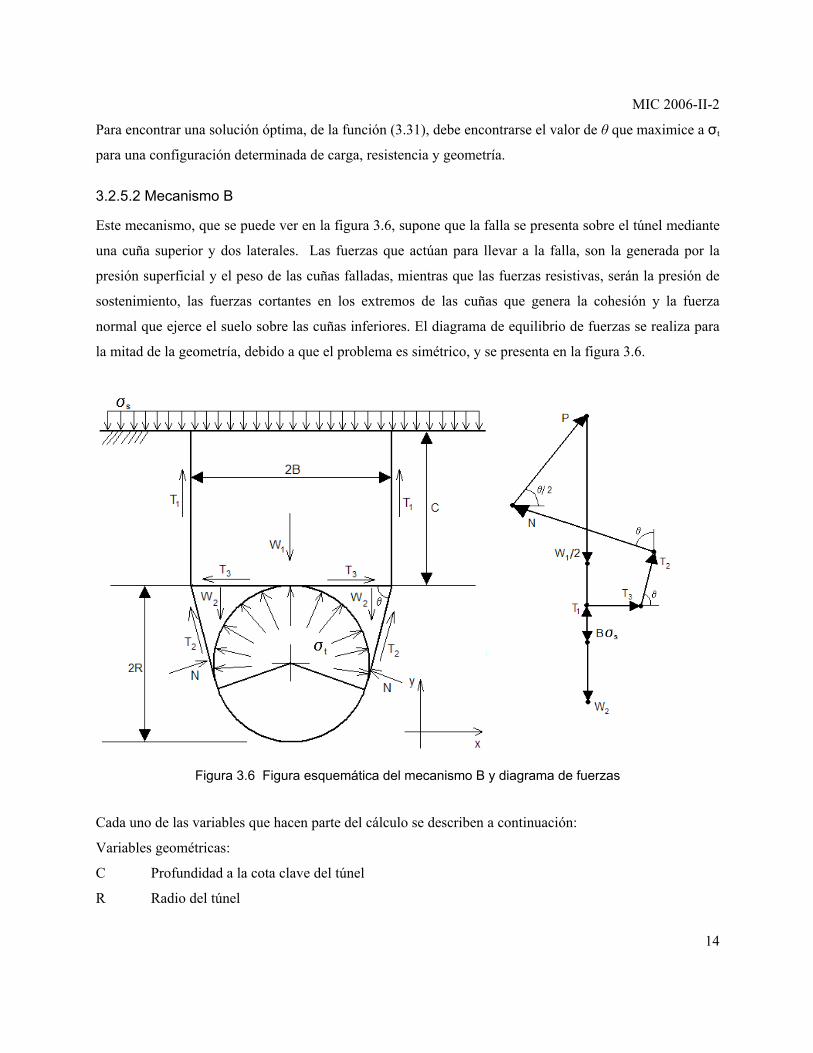
3.2.5.2 Mecanismo B
Este mecanismo, que se puede ver en la figura 3.6, supone que la falla se presenta sobre el túnel mediante
una cuña superior y dos laterales. Las fuerzas que actúan para llevar a la falla, son la generada por la
presión superficial y el peso de las cuñas falladas, mientras que las fuerzas resistivas, serán la presión de
sostenimiento, las fuerzas cortantes en los extremos de las cuñas que genera la cohesión y la fuerza
normal que ejerce el suelo sobre las cuñas inferiores. El diagrama de equilibrio de fuerzas se realiza para
la mitad de la geometría, debido a que el problema es simétrico, y se presenta en la figura 3.6.
Figura 3.6 Figura esquemática del mecanismo B y diagrama de fuerzas
Cada uno de las variables que hacen parte del cálculo se describen a continuación:
Variables geométricas:
C Profundidad a la cota clave del túnel
R Radio del túnel

MIC 2006-II-2
15
θ Angulo que define la geometría de las cuñas
2B Ancho de la cuña superior, dependiente de θ y de R
A2 Área de cada una de las cuñas inferiores
Variables de cargas y esfuerzos
σs Presión aplicada a la superficie del terreno
σt Presión de sostenimiento
γ Peso unitario húmedo del suelo
Cu Cohesión no drenada del suelo
W1 Peso de la cuña superior
W2 Peso de cada una de las cuñas inferiores
2Bσs Fuerza generada por la presión de superficie
T1 Fuerza cortante generada por la cohesión
T2 Fuerza cortante generada por la cohesión
T3 Fuerza cortante generada por la cohesión
P Fuerza resultante generada por la presión de sostenimiento para mitad del túnel
Los cálculos para obtener una solución del mecanismo de falla se basan en un equilibrio simple de fuerzas
y se presentan a continuación.
∑ = 0xF
( ) 02cossincos 32 =++− TPNT θθθ (3.32)
∑ = 0yF
( )2sincossin2 212
1 θθθσ PNTTWBW
s −−−−++ (3.33)
Donde:
γBCW 21 = (3.34)
( )θ
θsin
cos1 +=
RB (3.35)

MIC 2006-II-2
16
γ⋅= 22 AW (3.36)
⎟⎠⎞
⎜⎝⎛ +−
+= 22sin
cos122
θπθ
θRA (3.37)
uCCT ⋅=1 (3.38)
uCBTT ⋅== 32 (3.39)
Al despejar para P de (3.32) y (3.33) se tiene:
( )( ) ( ) θθθθ
θθθσθ
sin2sincos2cos
cos1sinsinsin2 21
1
+
+−−+=
TTBW
Ps
(3.40)
Luego, la presión de sostenimiento σt se calcula a partir de la fuerza resultante P.
( )2cos2 θσ
RP
t = (3.41)
Para encontrar una solución óptima, de la función (3.41), debe encontrarse el valor de θ que maximice a σt
para una configuración determinada de carga, resistencia y geometría.
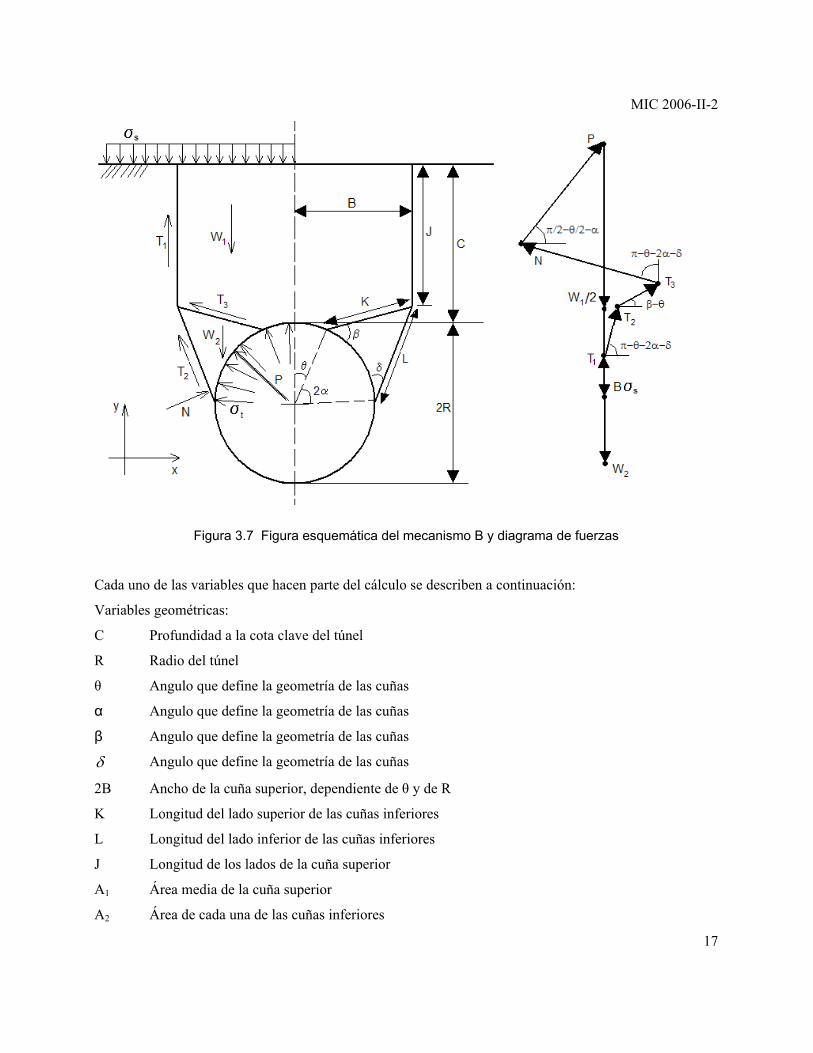
3.2.5.3 Mecanismo C
La figura 3.7 muestra el mecanismo, presentando las variables de carga a la izquierda, y las variables
geométricas a la derecha. Al igual que en el caso del mecanismo B, supone que la falla se presenta sobre
el túnel mediante una cuña superior y dos laterales, sin embargo se hace más complejo, al permitir que la
geometría varíe considerablemente a partir de cuatro ángulos. Las fuerzas que actúan son las mismas
presentadas en el mecanismo B, sin embargo la dirección de las fuerzas puede variar dependiendo de los
ángulos. El diagrama de equilibrio de fuerzas igualmente se realiza para la mitad de la geometría, y se
presenta en la figura 3.7.
MIC 2006-II-2
17
Figura 3.7 Figura esquemática del mecanismo B y diagrama de fuerzas
Cada uno de las variables que hacen parte del cálculo se describen a continuación:
Variables geométricas:
C Profundidad a la cota clave del túnel
R Radio del túnel
θ Angulo que define la geometría de las cuñas
α Angulo que define la geometría de las cuñas
β Angulo que define la geometría de las cuñas
δ Angulo que define la geometría de las cuñas
2B Ancho de la cuña superior, dependiente de θ y de R
K Longitud del lado superior de las cuñas inferiores
L Longitud del lado inferior de las cuñas inferiores
J Longitud de los lados de la cuña superior
A1 Área media de la cuña superior
A2 Área de cada una de las cuñas inferiores

MIC 2006-II-2
18
Variables de cargas y esfuerzos
σs Presión aplicada a la superficie del terreno
σt Presión de sostenimiento
γ Peso unitario húmedo del suelo
Cu Cohesión no drenada del suelo
W1 Peso de la cuña superior
W2 Peso de cada una de las cuñas inferiores
2Bσs Fuerza generada por la presión de superficie
T1 Fuerza cortante generada por la cohesión
T2 Fuerza cortante generada por la cohesión
T3 Fuerza cortante generada por la cohesión
P Fuerza resultante generada por la presión de sostenimiento para mitad del túnel
Para obtener la solución, se debe primero encontrar algunos valores geométricos que serán dependientes
de los ángulos, el radio y la profundidad de la cota clave, tales como K, L, B y J. Geométricamente se
puede llegar a las siguientes ecuaciones para cada una de estas longitudes.
( ) ( ) ( ) ( )[ ]( ) ( ) ( ) ( )δαθπθβδαθπθβ
θδαθππαθδαθπθπαθ−−−−−−−−−
+−−−−++−−−−−+=
2cossin2tancoscos2tan22cos2tansin22sinRK (3.42)
( )( ) ( ) ( ) ( )[ ]
( ) ( ) ( ) ( )( ) ( ) ( ) ( )[ ]
( ) ( ) ( ) ( )( )
( )δαθππαθ
δαθπθβδαθπθβθβθθβδαθππαθ
δαθπθβδαθπθβθβδαθπθθβπαθ
δαθπθ
−−−−+
−−−−−−−−−−
−+−−−−−++
−−−−−−−−−−−−−−−−+
+−−−
=
2cos22cos
2cossin2sincoscoscoscos2tan22cos
2cossin2sincoscos2tansincos22sin
2cossin
RR
RRL (3.43)
( )θβθ −+= cossin KRB (3.44)
( )[ ]θβθ −+−+= sincos KRRCJ (3.45)
Los cálculos para obtener una solución del mecanismo de falla se basan en un equilibrio simple de fuerzas
y se presentan a continuación.
∑ = 0xF
( ) ( ) ( )( ) 022cos
2sincos2cos 32
=−−+−−−−−+−−−
αθπδαθπθβδαθπ
PNTT
(3.46)

MIC 2006-II-2
19
∑ = 0yF
( ) ( )
( ) ( ) 022sin2cos
sin2sin2 3212
1
=−−−−−−−
−−−−−−−++
αθπδαθπ
θβδαθπσ
PN
TTTWBW
s (3.47)
Donde:
( ) ( )δαθππαθ −−−+−+= 2cos22cos LRB (3.48)
γ11 2AW =
( ) θθθθθ 221 2
1cossin21cos
2sin RRRJRCRBJBA −+−−+
++= (3.49)
γ⋅= 22 AW (3.50)
( ) ααβααα 222 sinsincossin RKRRA −++= (3.51)
uCJT ⋅=1 (3.52)
uCLT ⋅=2 (3.53)
uCKT ⋅=3 (3.54)
Al despejar para P de (3.46) y (3.47) se tiene:
( ) ( ) ( )( ) ( )
( )( ) ( )αθπ
δαθπαθπ
δαθπθβ
δαθπδαθπθβδαθπσ
−−+−−−−−
−−−−
−−−−
−−−−−−−−−−−++
=22sin
2tan22cos
2tan)cos(
2tan2cossin2sin
232
32121 TTTTTWBW
Ps (3.55)
Luego, la presión de sostenimiento σt se calcula a partir de la fuerza resultante P.
( )αθσ
+=
2sin2RP
t (3.56)
Para encontrar una solución óptima, de la función (3.56), debe encontrarse los valores de θ, α, β y δ que
maximicen a σt para una configuración determinada de carga, resistencia y geometría.
MIC 2006-II-2
20
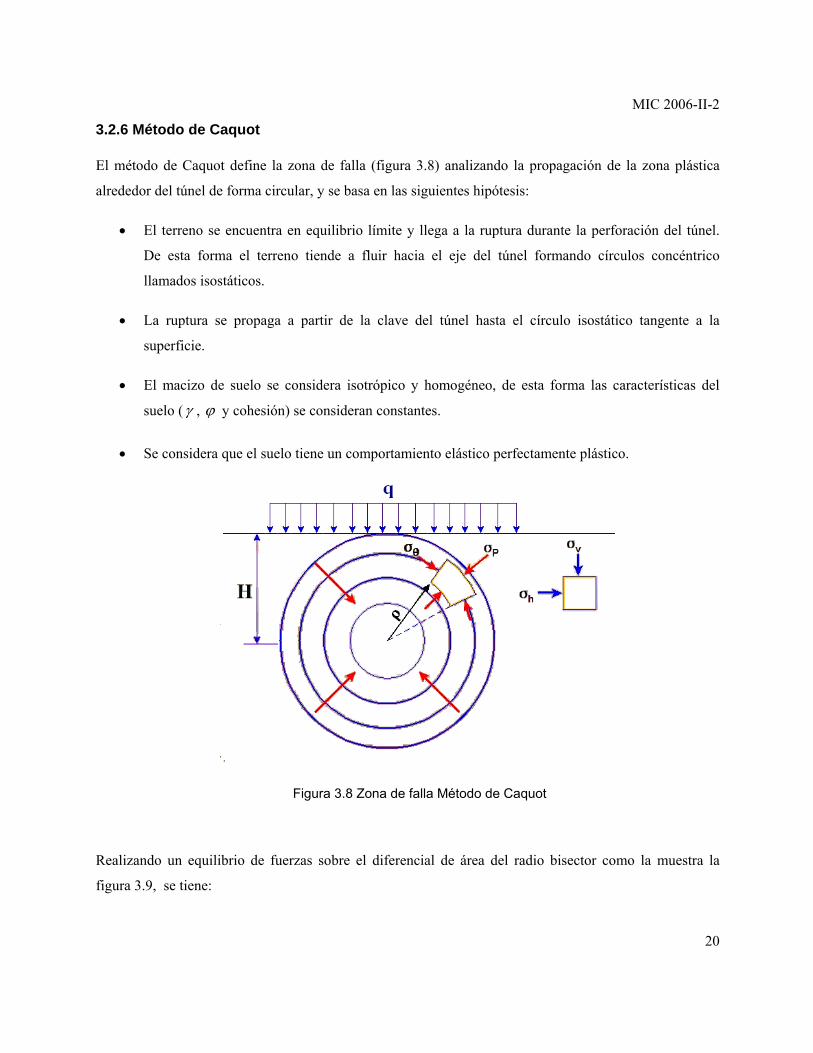
3.2.6 Método de Caquot
El método de Caquot define la zona de falla (figura 3.8) analizando la propagación de la zona plástica
alrededor del túnel de forma circular, y se basa en las siguientes hipótesis:
• El terreno se encuentra en equilibrio límite y llega a la ruptura durante la perforación del túnel.
De esta forma el terreno tiende a fluir hacia el eje del túnel formando círculos concéntrico
llamados isostáticos.
• La ruptura se propaga a partir de la clave del túnel hasta el círculo isostático tangente a la
superficie.
• El macizo de suelo se considera isotrópico y homogéneo, de esta forma las características del
suelo (γ , ϕ y cohesión) se consideran constantes.
• Se considera que el suelo tiene un comportamiento elástico perfectamente plástico.
Figura 3.8 Zona de falla Método de Caquot
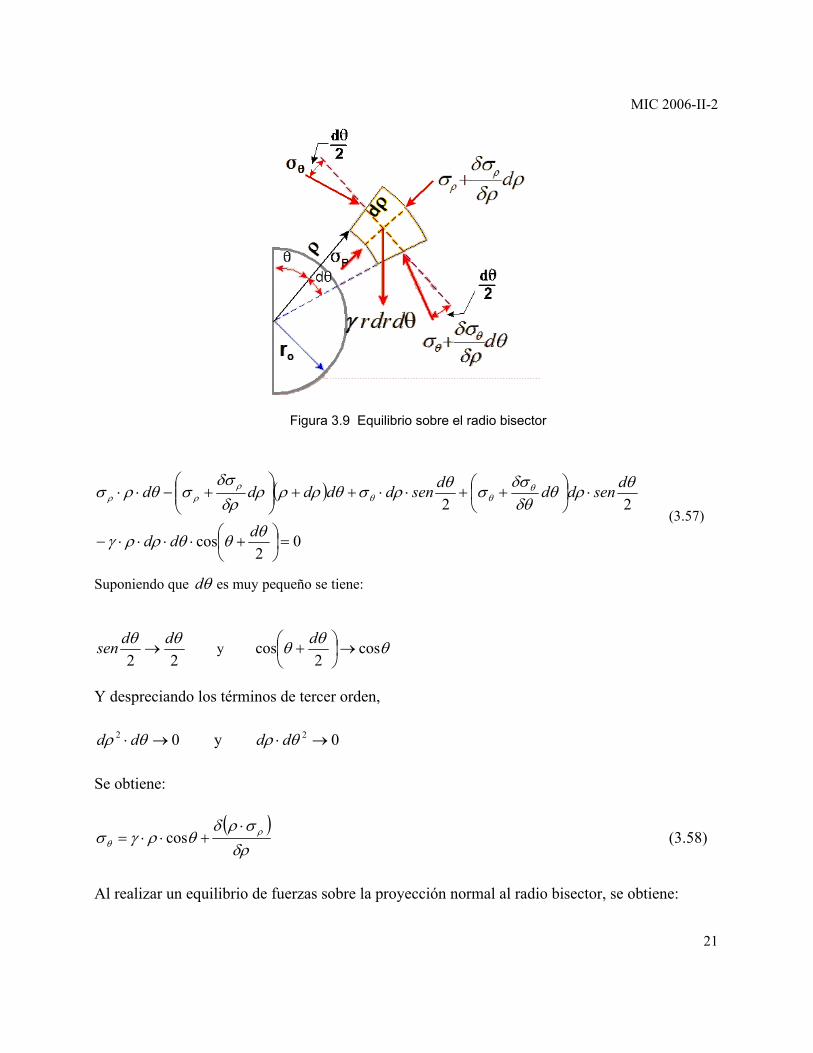
Realizando un equilibrio de fuerzas sobre el diferencial de área del radio bisector como la muestra la
figura 3.9, se tiene:
MIC 2006-II-2
21
Figura 3.9 Equilibrio sobre el radio bisector
( )
02
cos
22
=⎟⎠⎞
⎜⎝⎛ +⋅⋅⋅⋅−
⋅⎟⎠⎞
⎜⎝⎛ ++⋅⋅++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−⋅⋅
θθθρργ
θρθδθ
δσσθρσθρρρ
δρδσ
σθρσ θθθ
ρρρ
ddd
dsendddsenddddd (3.57)
Suponiendo que θd es muy pequeño se tiene:
22θθ ddsen → y θθθ cos
2cos →⎟
⎠⎞
⎜⎝⎛ +
d
Y despreciando los términos de tercer orden,
02 →⋅ θρ dd y 02 →⋅ θρ dd
Se obtiene:
( )δρ
σρδθργσ ρ
θ
⋅+⋅⋅= cos (3.58)
Al realizar un equilibrio de fuerzas sobre la proyección normal al radio bisector, se obtiene:
MIC 2006-II-2
22
0cos2
cos2
cos =⋅⋅⋅⋅+⋅⋅⎟⎠⎞
⎜⎝⎛ +−⋅⋅ θθρργθρθ
δθδσ
σθρσ θθθ ddddddd (3.59)
Simplificando cuando θd es muy pequeño:
12
cos →θd
y θθθ sendsen →⎟⎠⎞
⎜⎝⎛ +
2
Se obtiene:
θργδθ
δσθ sen⋅⋅= (3.60)
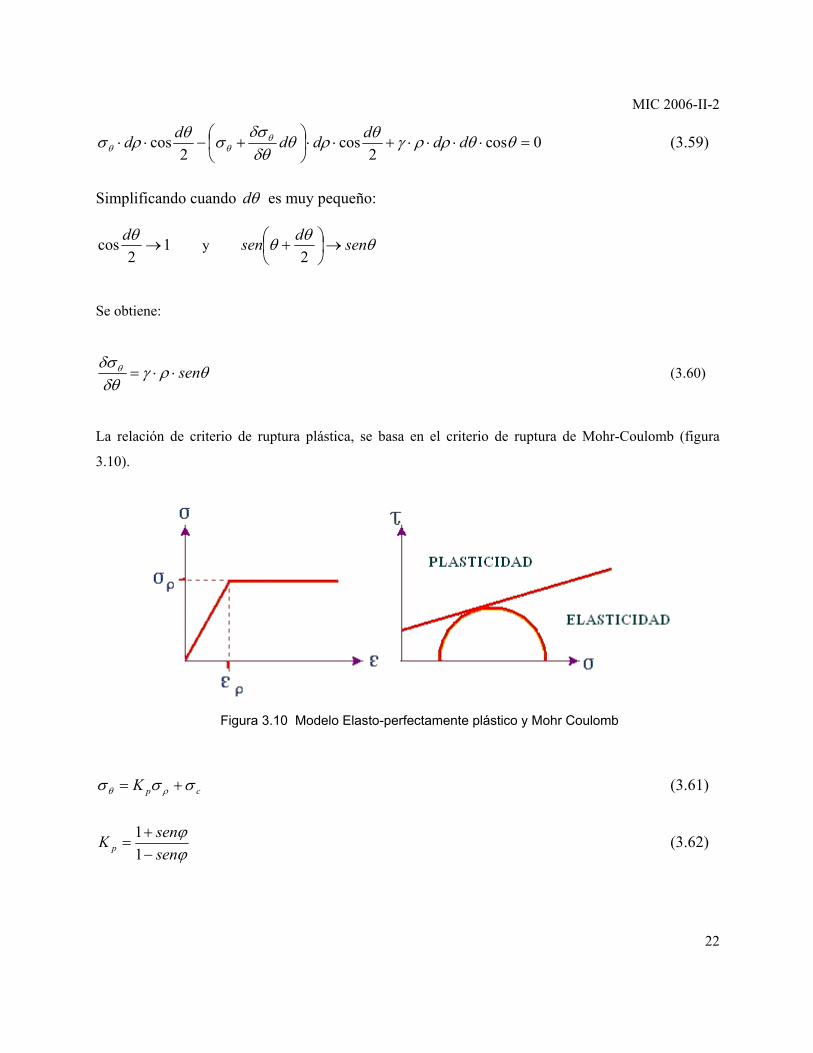
La relación de criterio de ruptura plástica, se basa en el criterio de ruptura de Mohr-Coulomb (figura
3.10).
Figura 3.10 Modelo Elasto-perfectamente plástico y Mohr Coulomb
cpK σσσ ρθ += (3.61)
ϕϕ
sensenK p −
+=
11 (3.62)
MIC 2006-II-2
23
ϕϕσ
senc
c −⋅⋅
=1
cos2 (3.63)
Al integrar la ecuación (3.60) se tiene:
∫∫ ⋅⋅⋅= δθθργδσθ sen (3.64)
cte+⋅⋅−= θργσθ cos (3.65)
Para las condiciones de frontera 0=θ , se tiene:
( ) 00, θθ σθρσ == (3.66)
ργσθ ⋅+= 0cte (3.67)
Sumando las expresiones anteriores, se tiene:
( )θργσσ θθ cos10 −⋅⋅+= (3.68)
Deducción de 0ρσ y 0θσ
A lo largo de la vertical, se tiene un equilibrio plástico
cpK σσσ ρθ += (3.69)
Reemplazando en (3.58) para 0=θ
( )00
0 =⋅−⋅
−+⋅ ργδρ
σρδσσ ρ
ρ cpK (3.70)
Ordenando la expresión:
( ) ( ) ργσσρρδρ
σρδρ
ρ ⋅−=⋅−⋅
cpK
00 (3.71)

MIC 2006-II-2
24
Que es una ecuación diferencial de tipo ( ) ( )xQyxPdydx
=⋅+ , cuya solución es:
( ) ( ) ( )∫ +∫⋅=∫⋅ ctedxexQey
dxxPdxxP (3.72)
Para éste caso:
ρ=x (3.73)
( ) 0ρσρ ⋅=xy (3.74)
( )ρ
pKxP −= (3.75)
( ) ργσ ⋅−= cxQ (3.76)
Con lo que se tiene la solución general:
( )( )
( )( )
( ) cteKK
ppp K
p
K
p
cK +⋅−
−⋅−
=⋅ −−− 210
1
21ργρ
σσρ ρ (3.77)
Con las condiciones límites ( ) qH ==ρσ ρ 0 , donde q es la sobrecarga en la superficie, se tiene
entonces:
( )( )
( )( )
( )ppp K
p
K
p
cK HK
HK
qHcte −−− ⋅−
+⋅−
−⋅= 211
21γσ (3.78)
Reemplazando y agregando términos se tiene:
( )( )
( )( ) ( )111
0 112
−−−
⎟⎠⎞
⎜⎝⎛+
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛⋅
−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛⋅
−⋅
=ppp KK
p
cK
p Hq
HKHHKH ρρσρργσ ρ (3.79)
y
cpK σσσ ρθ += 00 (3.80)

MIC 2006-II-2
25
Expresiones para ρσ
( ) ( )θργσσδρ
σρδρ
ρ cos2100 −⋅⋅++⋅=
⋅cpK (3.81)
Reemplazando con la expresión para 0ρσ , integrando y aplicando las condiciones de frontera
para encontrar la constante ( 0=cte ) se encuentra la expresión para ρσ :
( )( )
( )( ) ( )
θργργρρσρργσ ρ cos112
111
⋅⋅−⋅+⎟⎠⎞
⎜⎝⎛⋅+
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟
⎠⎞
⎜⎝⎛⋅
−+
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−⎟
⎠⎞
⎜⎝⎛⋅
−⋅
=−−− ppp KK
p
cK
p Hq
HKHHKH
(3.82)
Que es equivalente a:
( )θργσσ ρρ cos10 −⋅⋅+= (3.83)
Para el caso de un medio sin fricción, donde 0=ϕ , Kp = 1, y 0ρσ tiende a infinito.
Retomando la ecuación
( )δρ
σρδθργσ ρ
θ
⋅+⋅⋅= cos (3.84)
Realizando el mismo análisis que para medio con fricción Kp = 1 se tiene:
( ) ( ) ργσσρρδρ
σρδρ
ρ ⋅−=⋅−⋅
c00 1 (3.85)
Al integrar y evaluar la constante de integración con los valores de frontera, se encuentra:
( ) qHH
Lnc +−⋅+⎟⎠⎞
⎜⎝⎛⋅= ργρσσ ρ 0 (3.86)
Para tener en cuenta la influencia del nivel freático, se propone utilizar un peso volumétrico
equivalente, tomando en cuenta el promedio ponderado de los pesos volumétricos, como lo
muestra la figura 3.11.

MIC 2006-II-2
26
Figura 3.11 Influencia del nivel freático
( )H
HHH wwe
'γγγ
−+⋅= (3.87)
3.3 Estabilidad del Frente de Excavación
Se describen a continuación los métodos utilizados para considerar la presión de sostenimiento que debe
ejercerse sobre el frente de excavación para poder garantizar su estabilidad. Los dos primeros métodos
corresponden a materiales que obedecen a un criterio de Tresca, mientras que los siguientes consideran un
material de tipo Mohr-Coulomb.
3.3.1 Método de Proctor y White
Se puede calcular la presión del suelo sobre la superficie GEFHG como la diferencia entre el peso del
bloque subyacente y la resistencia móvil por fricción en la superficie obtenida por proyección vertical de
la línea GEFH. La presión debida al peso del suelo es entonces:
(3.88)
La resistencia móvil es para un suelo puramente cohesivo:
(3.89)
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
2
2HBHCP πγγ
( )BHCcR u += π
MIC 2006-II-2
27
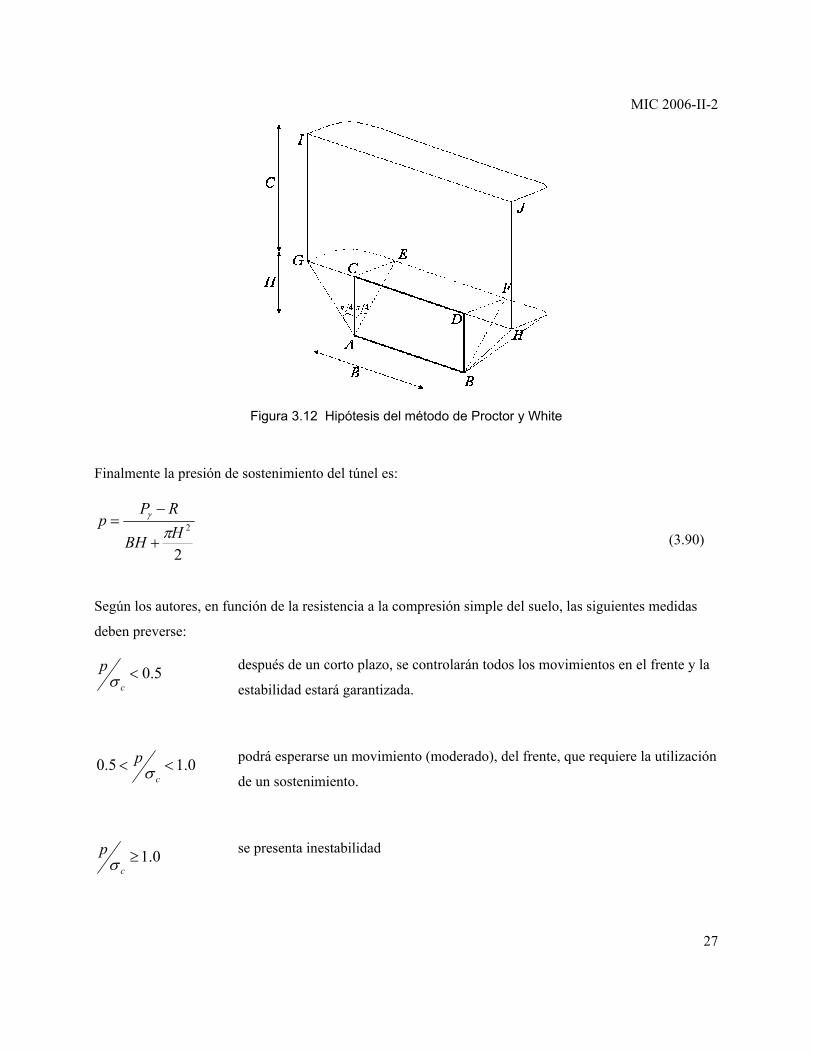
Figura 3.12 Hipótesis del método de Proctor y White
Finalmente la presión de sostenimiento del túnel es:
(3.90)
Según los autores, en función de la resistencia a la compresión simple del suelo, las siguientes medidas
deben preverse:
después de un corto plazo, se controlarán todos los movimientos en el frente y la
estabilidad estará garantizada.
podrá esperarse un movimiento (moderado), del frente, que requiere la utilización
de un sostenimiento.
se presenta inestabilidad
2
2HBH
RPp
πγ
+
−=
5.0<c
pσ
0.15.0 <<c
pσ
0.1≥c
pσ
MIC 2006-II-2
28
Siempre que el valor de de p/σc no sea satisfactorio, una presión de sostenimiento σT debe emplearse para
evitar los problemas de inestabilidad del frente de excavación, de tal forma que:
(3.91)
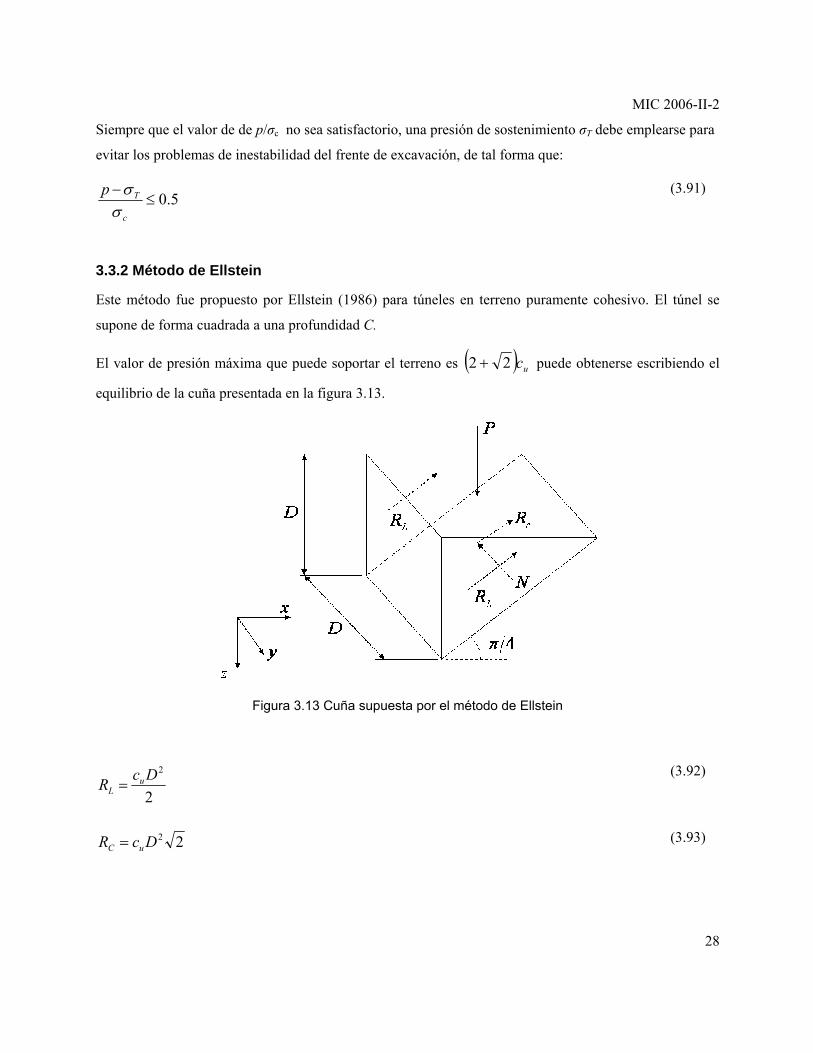
3.3.2 Método de Ellstein
Este método fue propuesto por Ellstein (1986) para túneles en terreno puramente cohesivo. El túnel se
supone de forma cuadrada a una profundidad C.
El valor de presión máxima que puede soportar el terreno es ( ) uc22 + puede obtenerse escribiendo el
equilibrio de la cuña presentada en la figura 3.13.
Figura 3.13 Cuña supuesta por el método de Ellstein
(3.92)
(3.93)
5.0≤−
c
Tpσ
σ
2
2DcR uL =
22DcR uC =

MIC 2006-II-2
29
Según el enfoque anterior, el esfuerzo vertical máximo en la clave del túnel disminuye hasta el valor
( ) uc22 + utilizando la expresión del criterio de ruptura de Tresca, se puede escribir:
(3.94)
(3.95)
Ellstein (1986) considera también otros dos términos: el primero tiene en cuenta el peso de la esquina de
terreno situada delante del túnel, el segundo tiene en cuenta el efecto de una masa de terreno de forma
piramidal subyacente a la esquina. El equilibrio de la esquina proporciona la expresión de la presión
admisible en la clave, que es igual a:
(3.96)
Lo que lleva a reescribir la ecuación (3.95) de la forma:
(3.97)
Así pues, el valor mínimo de la cohesión necesaria para garantizar la estabilidad de la obra es igual a:
(3.98)
Si se introduce una presión de sostenimiento uniforme en la cara del túnel , aumenta la presión vertical
máxima permitida en parte superior de la obra hasta
(3.99)
Si se tiene en cuenta este último valor en la ecuación (3.94), se obtiene:
(3.100)
El criterio de Tresca sólo puede aplicarse a esfuerzos verticales y horizontales si estos últimos
corresponden a los esfuerzos principales.
uvh c2=−σσ
( ) uu ccCK 2220 =+−γ
( ) 6222 DDcu γγ −−+
( )[ ] uu cDDcCK 262220 =−−+− γγγ
2432
0
+
+=
DCKcu
γγ
( ) Tuc σ++ 22
( )2432
0 +−+= uT cDCK γγσ
MIC 2006-II-2
30
Por otra parte, sustituir hσ por 0CKγ en la ecuación (3.94) equivale a decir que el esfuerzo vertical es
igual a Cγ , mientras que este esfuerzo se coloca igual a ( ) uc22 + en la misma ecuación.
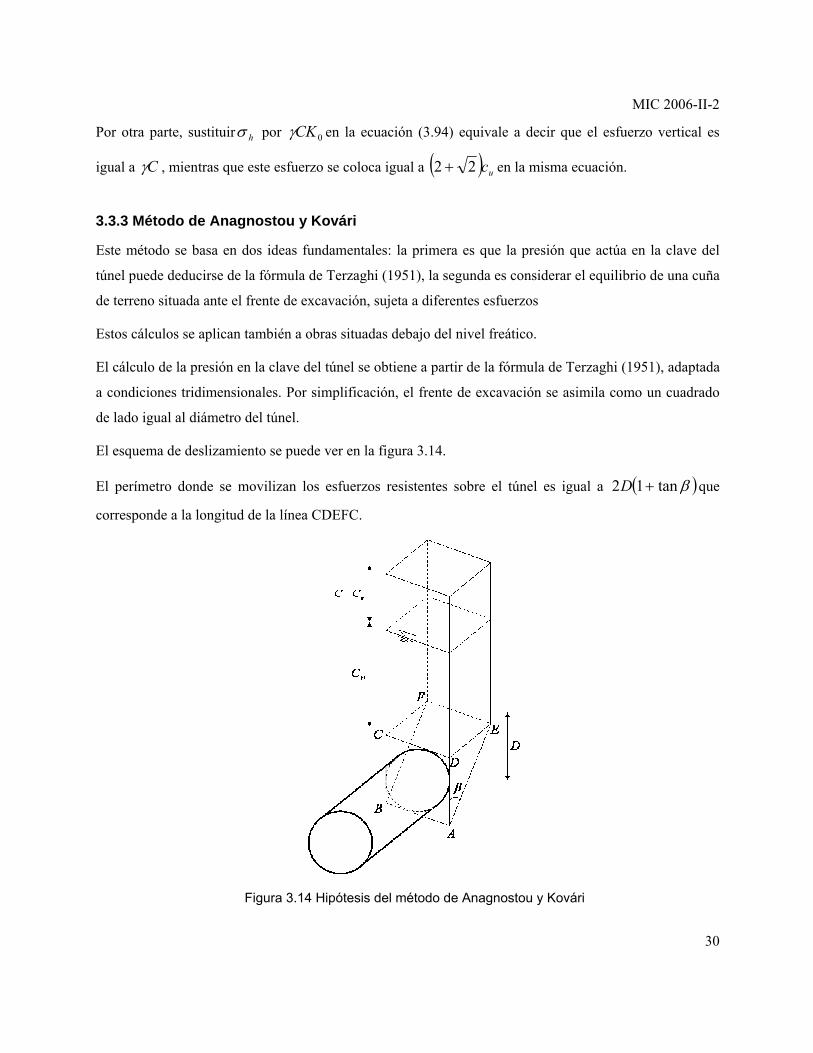
3.3.3 Método de Anagnostou y Kovári
Este método se basa en dos ideas fundamentales: la primera es que la presión que actúa en la clave del
túnel puede deducirse de la fórmula de Terzaghi (1951), la segunda es considerar el equilibrio de una cuña
de terreno situada ante el frente de excavación, sujeta a diferentes esfuerzos
Estos cálculos se aplican también a obras situadas debajo del nivel freático.
El cálculo de la presión en la clave del túnel se obtiene a partir de la fórmula de Terzaghi (1951), adaptada
a condiciones tridimensionales. Por simplificación, el frente de excavación se asimila como un cuadrado
de lado igual al diámetro del túnel.
El esquema de deslizamiento se puede ver en la figura 3.14.
El perímetro donde se movilizan los esfuerzos resistentes sobre el túnel es igual a ( )βtan12 +D que
corresponde a la longitud de la línea CDEFC.
Figura 3.14 Hipótesis del método de Anagnostou y Kovári

MIC 2006-II-2
31
El esfuerzo vertical se ejerce sobre una superficie igual a βtan2D correspondiente a la superficie del
cuadrilátero CDEF.
La ecuación (3.5) se reescribe por lo tanto de la siguiente manera:
(3.101)
Con
(3.102)
Cuando el túnel se excava debajo del nivel freático, la presión en esta capa se calcula a partir de la
expresión:
(3.103)
y la presión en la cota clave del túnel es entonces:
(3.104)
dónde C corresponde a la cobertura total del túnel, CW la cobertura bajo el nivel freático, K y Kw la
relación entre los esfuerzos horizontales y verticales en el terreno situado sobre y debajo del nivel freático
respectivamente.
El equilibrio de la cuña se basa en las hipótesis de distribución de los esfuerzos definida por la norma
alemana DIN-4126 (1986). Donde:
ϕϕσ
ϕγσ
tantan1
tanK
RC
s
KRC
v eeK
cR −−+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
−=
( )ββ
tan12tan
+=
DR
ϕϕσ
ϕγσ
tantan1
tanK
RCC
s
KRCC
dNF
ww
eeK
cR −−
−−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
ϕϕσ
ϕγσ
tan
1
tan1
tan' w
ww
w KR
CKR
C
wCT ee
KcR −−
+⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=
MIC 2006-II-2
32
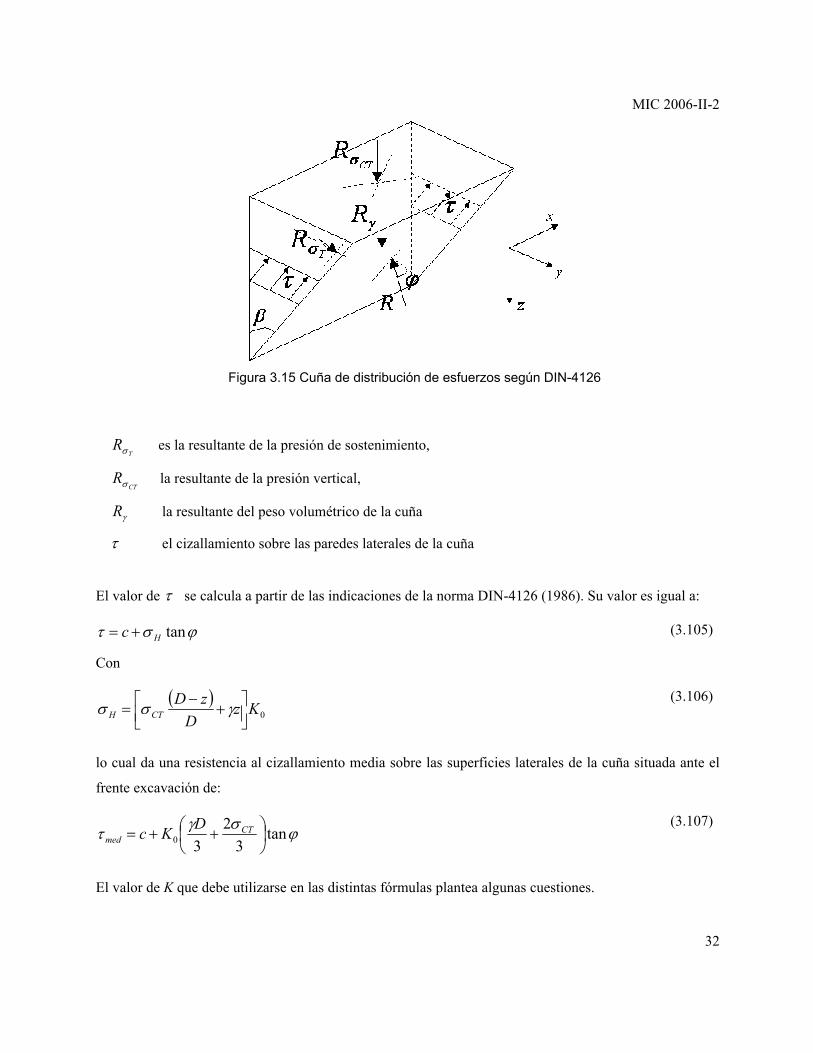
Figura 3.15 Cuña de distribución de esfuerzos según DIN-4126
TRσ es la resultante de la presión de sostenimiento,
CTRσ la resultante de la presión vertical,
γR la resultante del peso volumétrico de la cuña
τ el cizallamiento sobre las paredes laterales de la cuña
El valor de τ se calcula a partir de las indicaciones de la norma DIN-4126 (1986). Su valor es igual a:
(3.105)
Con
(3.106)
lo cual da una resistencia al cizallamiento media sobre las superficies laterales de la cuña situada ante el
frente excavación de:
(3.107)
El valor de K que debe utilizarse en las distintas fórmulas plantea algunas cuestiones.
ϕστ tanHc +=
( )0Kz
DzD
CTH ⎥⎦⎤
⎢⎣⎡ +
−= γσσ
ϕσγτ tan3
230 ⎟
⎠⎞
⎜⎝⎛ ++= CT
medDKc
MIC 2006-II-2
33
A partir de los resultados de pruebas realizados por Gudehus y Melix (1986) y Melix (1987), Anagnostou
y Kovári (1994) preconizan un valor de K igual a 0,8 en los terrenos situados sobre la capa freática. Para
los terrenos debajo de la capa, el valor de K se toma igual a la mitad del valor anterior, es decir, 0,4.
El planteamiento descrito anteriormente estima la presión de sostenimiento que equilibra el sistema, para
un ángulo β dado. La presión de sostenimiento que debe aplicarse es igual a la máxima de las presiones
obtenidas haciendo variar el ángulo β .
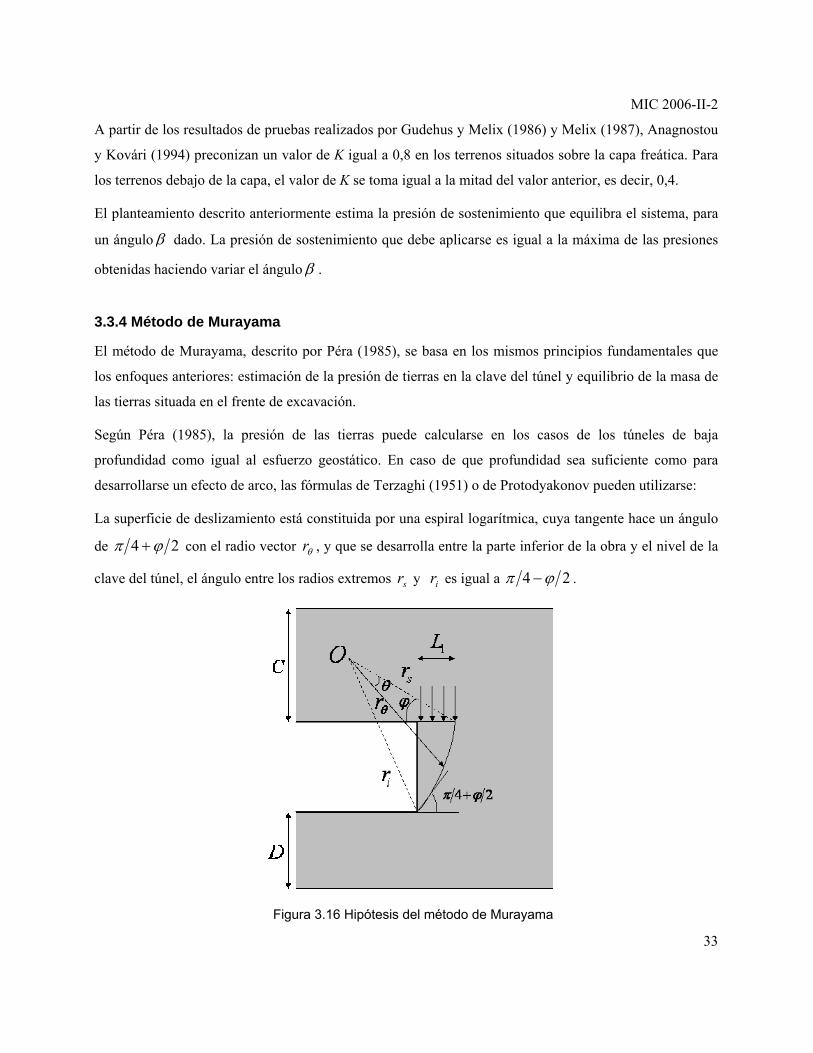
3.3.4 Método de Murayama
El método de Murayama, descrito por Péra (1985), se basa en los mismos principios fundamentales que
los enfoques anteriores: estimación de la presión de tierras en la clave del túnel y equilibrio de la masa de
las tierras situada en el frente de excavación.
Según Péra (1985), la presión de las tierras puede calcularse en los casos de los túneles de baja
profundidad como igual al esfuerzo geostático. En caso de que profundidad sea suficiente como para
desarrollarse un efecto de arco, las fórmulas de Terzaghi (1951) o de Protodyakonov pueden utilizarse:
La superficie de deslizamiento está constituida por una espiral logarítmica, cuya tangente hace un ángulo
de 24 ϕπ + con el radio vector θr , y que se desarrolla entre la parte inferior de la obra y el nivel de la
clave del túnel, el ángulo entre los radios extremos sr y ir es igual a 24 ϕπ − .
Figura 3.16 Hipótesis del método de Murayama

MIC 2006-II-2
34
Los parámetros geométricos del espiral se deducen de la expresión del espiral
(3.108)
Se tiene entonces:
(3.109)
(3.110)
La presión de sostenimiento en el frente de excavación se obtiene escribiendo el equilibrio de los
momentos con relación al punto O. El equilibrio de los momentos se escribe de la siguiente manera:
(3.111)
dónde T
Lσ , CT
Lσ , γL son los brazos de palanca de las distintas resultantes. La solución de la ecuación
(3.111) conduce a la estimación de la presión a aplicarse sobre el frente de excavación. Este método
combina a la vez dos tipos de enfoques bidimensionales, en dos direcciones perpendiculares.
Para el cálculo de la presión en la clave del túnel utiliza las fórmulas de Terzaghi (1951) o de
Protodyakonov, y al escribir el equilibrio de la espiral, supone que se pueden tomar condiciones de
deformación plana en la dirección perpendicular al eje del túnel.
3.4 Asentamiento Superficial
Predecir el asentamiento superficial causado por la construcción de los túneles es de gran importancia, no
se puede esperar que estos asentamientos sean controlados totalmente, sin embargo, los diseños deben
enfocarse en limitarlos de tal forma que no sean causales de daños a estructuras vecinas.
Pocos se han dedicado a estudiar los aspectos teóricos de la deformación causada por los túneles, la
mayoría de los métodos para estimar los asentamientos son de naturaleza empírica y basados en
observaciones de campo.
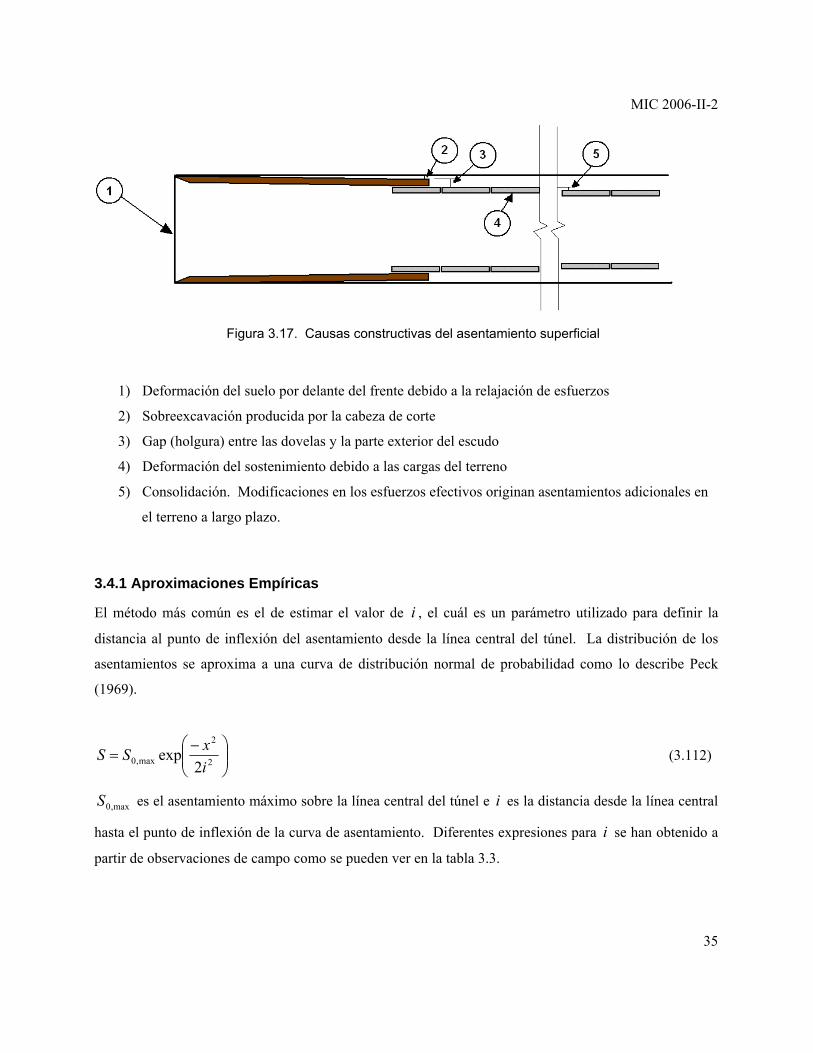
Estos asentamientos se presentan debido a las causas presentadas a continuación e ilustradas en la figura
3.17.
( )ϕθθ tanexpsrr =
( )24coscos1 ϕπϕ +−= is rrL
( ) ( )[ ]ϕϕπ ϕπϕ sin24sin 24tan −+= +erD s
ϕσσγγσσ tan2
22si rrcLRLRLR
CTCTTT
−−+=
MIC 2006-II-2
35
Figura 3.17. Causas constructivas del asentamiento superficial
1) Deformación del suelo por delante del frente debido a la relajación de esfuerzos
2) Sobreexcavación producida por la cabeza de corte
3) Gap (holgura) entre las dovelas y la parte exterior del escudo
4) Deformación del sostenimiento debido a las cargas del terreno
5) Consolidación. Modificaciones en los esfuerzos efectivos originan asentamientos adicionales en
el terreno a largo plazo.
3.4.1 Aproximaciones Empíricas
El método más común es el de estimar el valor de i , el cuál es un parámetro utilizado para definir la
distancia al punto de inflexión del asentamiento desde la línea central del túnel. La distribución de los
asentamientos se aproxima a una curva de distribución normal de probabilidad como lo describe Peck
(1969).
⎟⎟⎠
⎞⎜⎜⎝
⎛ −= 2
2
max,0 2exp
ixSS (3.112)
max,0S es el asentamiento máximo sobre la línea central del túnel e i es la distancia desde la línea central
hasta el punto de inflexión de la curva de asentamiento. Diferentes expresiones para i se han obtenido a
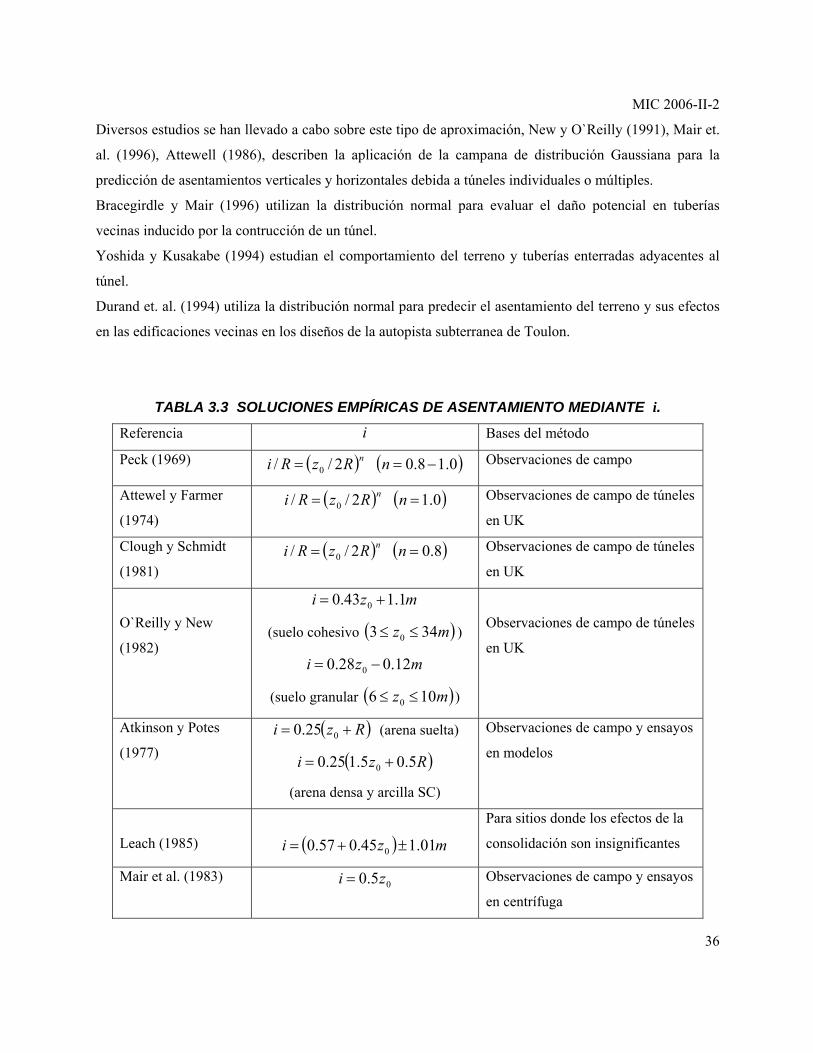
partir de observaciones de campo como se pueden ver en la tabla 3.3.
MIC 2006-II-2
36
Diversos estudios se han llevado a cabo sobre este tipo de aproximación, New y O`Reilly (1991), Mair et.
al. (1996), Attewell (1986), describen la aplicación de la campana de distribución Gaussiana para la
predicción de asentamientos verticales y horizontales debida a túneles individuales o múltiples.
Bracegirdle y Mair (1996) utilizan la distribución normal para evaluar el daño potencial en tuberías
vecinas inducido por la contrucción de un túnel.
Yoshida y Kusakabe (1994) estudian el comportamiento del terreno y tuberías enterradas adyacentes al
túnel.
Durand et. al. (1994) utiliza la distribución normal para predecir el asentamiento del terreno y sus efectos
en las edificaciones vecinas en los diseños de la autopista subterranea de Toulon.
TABLA 3.3 SOLUCIONES EMPÍRICAS DE ASENTAMIENTO MEDIANTE i.
Referencia i Bases del método
Peck (1969) ( )nRzRi 2// 0= ( )0.18.0 −=n Observaciones de campo
Attewel y Farmer
(1974) ( )nRzRi 2// 0= ( )0.1=n Observaciones de campo de túneles
en UK
Clough y Schmidt
(1981) ( )nRzRi 2// 0= ( )8.0=n Observaciones de campo de túneles
en UK
O`Reilly y New
(1982)
mzi 1.143.0 0 +=
(suelo cohesivo ( )mz 343 0 ≤≤ )
mzi 12.028.0 0 −=
(suelo granular ( )mz 106 0 ≤≤ )
Observaciones de campo de túneles
en UK
Atkinson y Potes
(1977) ( )Rzi += 025.0 (arena suelta)
( )Rzi 5.05.125.0 0 +=
(arena densa y arcilla SC)
Observaciones de campo y ensayos
en modelos
Leach (1985)
( ) mzi 01.145.057.0 0 ±+=
Para sitios donde los efectos de la
consolidación son insignificantes
Mair et al. (1983) 05.0 zi = Observaciones de campo y ensayos
en centrífuga
MIC 2006-II-2
37
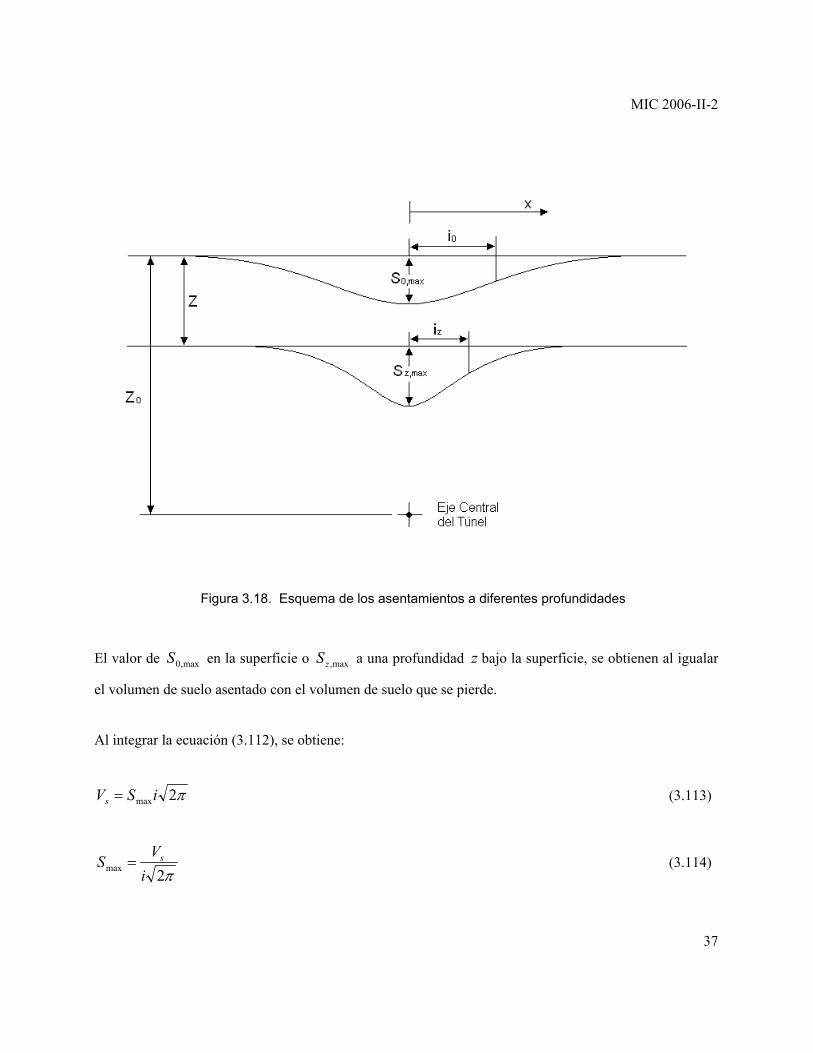
Figura 3.18. Esquema de los asentamientos a diferentes profundidades
El valor de max,0S en la superficie o max,zS a una profundidad z bajo la superficie, se obtienen al igualar
el volumen de suelo asentado con el volumen de suelo que se pierde.
Al integrar la ecuación (3.112), se obtiene:
π2maxiSVs = (3.113)
π2max iVS s= (3.114)
MIC 2006-II-2
38
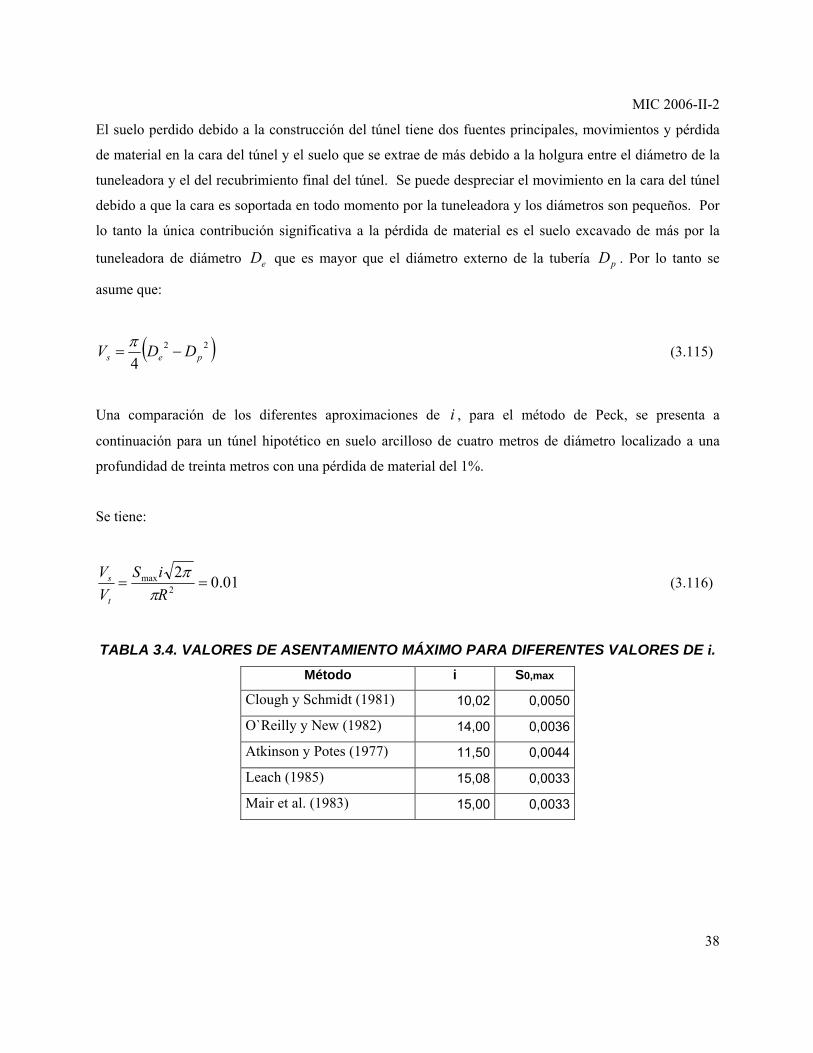
El suelo perdido debido a la construcción del túnel tiene dos fuentes principales, movimientos y pérdida
de material en la cara del túnel y el suelo que se extrae de más debido a la holgura entre el diámetro de la
tuneleadora y el del recubrimiento final del túnel. Se puede despreciar el movimiento en la cara del túnel
debido a que la cara es soportada en todo momento por la tuneleadora y los diámetros son pequeños. Por
lo tanto la única contribución significativa a la pérdida de material es el suelo excavado de más por la
tuneleadora de diámetro eD que es mayor que el diámetro externo de la tubería pD . Por lo tanto se
asume que:
( )22
4 pes DDV −=π
(3.115)
Una comparación de los diferentes aproximaciones de i , para el método de Peck, se presenta a
continuación para un túnel hipotético en suelo arcilloso de cuatro metros de diámetro localizado a una
profundidad de treinta metros con una pérdida de material del 1%.
Se tiene:
01.022
max ==RiS
VV
t
s
ππ
(3.116)
TABLA 3.4. VALORES DE ASENTAMIENTO MÁXIMO PARA DIFERENTES VALORES DE i. Método i S0,max
Clough y Schmidt (1981) 10,02 0,0050
O`Reilly y New (1982) 14,00 0,0036
Atkinson y Potes (1977) 11,50 0,0044
Leach (1985) 15,08 0,0033
Mair et al. (1983) 15,00 0,0033
MIC 2006-II-2
39
0
1
2
3
4
5
6
-50 -40 -30 -20 -10 0 10 20 30 40 50
Distancia al centro del túnel (m)
Ase
ntam
ient
o (m
m)
Clough y Schmidt O`Reilly y NewAtkinson y Potes LeachMair et al., Attewel y Farmer
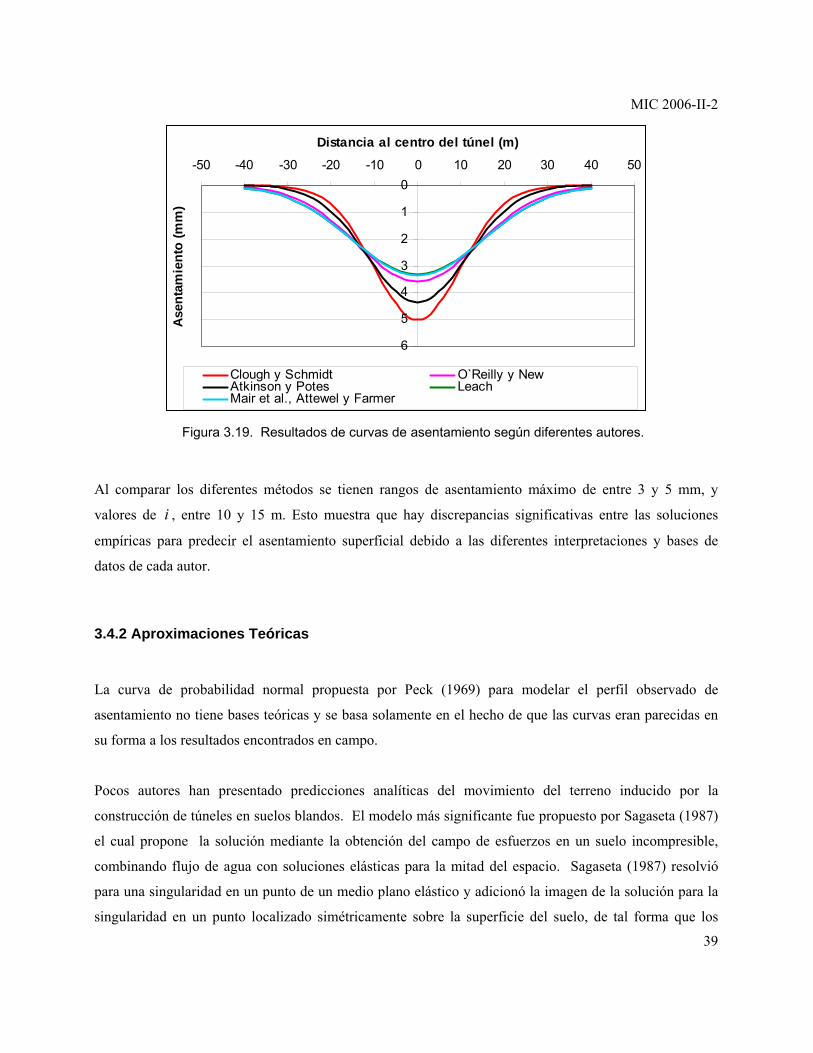
Figura 3.19. Resultados de curvas de asentamiento según diferentes autores.
Al comparar los diferentes métodos se tienen rangos de asentamiento máximo de entre 3 y 5 mm, y
valores de i , entre 10 y 15 m. Esto muestra que hay discrepancias significativas entre las soluciones
empíricas para predecir el asentamiento superficial debido a las diferentes interpretaciones y bases de
datos de cada autor.
3.4.2 Aproximaciones Teóricas
La curva de probabilidad normal propuesta por Peck (1969) para modelar el perfil observado de
asentamiento no tiene bases teóricas y se basa solamente en el hecho de que las curvas eran parecidas en
su forma a los resultados encontrados en campo.
Pocos autores han presentado predicciones analíticas del movimiento del terreno inducido por la
construcción de túneles en suelos blandos. El modelo más significante fue propuesto por Sagaseta (1987)
el cual propone la solución mediante la obtención del campo de esfuerzos en un suelo incompresible,
combinando flujo de agua con soluciones elásticas para la mitad del espacio. Sagaseta (1987) resolvió
para una singularidad en un punto de un medio plano elástico y adicionó la imagen de la solución para la
singularidad en un punto localizado simétricamente sobre la superficie del suelo, de tal forma que los

MIC 2006-II-2
40
esfuerzos normales o de corte se neutralizan. Una imagen espejo negativa del punto con respecto al punto
en la superficie produce esfuerzos normales opuestos y esfuerzos de corte iguales al punto real.
Inversamente, una imagen negativa produce el mismo esfuerzo normal y esfuerzos de corte inversos. Sin
embargo, estas soluciones elásticas no son efectivas en suelos blandos debido a que las soluciones
elásticas son más aplicables en rocas. Verruijt y Booker (1996) modificaron las soluciones elásticas de
Sagaseta (1987) y aplicaron varios valores de relación de Poisson e indujeron el efecto de la ovalización
de la abertura del túnel. Sin embargo, las soluciones condujeron a perfiles levemente más amplios de
deformaciones laterales que los realmente inducidos por la construcción de un túnel.
Por lo tanto, Loganathan y Poulos (1998) redefinieron el parámetro de pérdida de tierra con respecto al
parámetro de holgura y lo utilizaron en las soluciones propuestas por Verruijt y Booker (1996). Sus
resultados rindieron perfiles más exactos de la superficie, las deformaciones superficiales y laterales
secundarias según lo ilustrado en cinco estudios proporcionados por Loganathan y Poulos (1998).
El parámetro de holgura puede ser estimado basado en el método teórico desarrollado por Lee et al.
(1992) como se muestra a continuación:
SUGg Dp ++= *3 (3.117)
Donde:
pG = holgura física = diferencia entre el diámetro máximo externo de la tuneleadora y
el diámetro externo del soporte, para un túnel circular δ+∆= 2
∆ = ancho de las salientes del soporte
δ = separación para insertar el soporte *
3DU = deformación elastoplástica en la cara del túnel = ( ) xk δ2/
k = resistencia al cortador del suelo ( 9.07.0 −=k para suelo arcilloso rígido, 0.1=k para suelo
arcilloso muy blando)
xδ = intrusión de suelo en la cara del túnel = ERP /0Ω
Ω = factor de desplazamiento adimensional (Lee et al. 1992)
0P = iwv PPPK ++0
0K = coeficiente de presión de tierras en reposo

MIC 2006-II-2
41
vP = esfuerzo vertical efectivo en la línea media de túnel
wP = presión de poros en la línea media de túnel
iP = presión en el soporte del túnel
w = factor de ejecución = menor que pG6.0 y iU , donde iU se define como el desplazamiento debido
a la deformación del plano elastoplástico en la corona del túnel (Lo et al. 1984).
Las ecuaciones analíticas generales modificadas y basadas en Verruijt y Booker (1996) para estimar el
asentamiento superficial ( 0=zU ), el asentamiento sub superficial ( zU ) y la deformación lateral ( xU ) son:
( )( ) ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡
+−⎥⎦
⎤⎢⎣⎡
+−
== 2
2
222
00 cot38.1exp14
RHx
xHHRU z β
υε (3.118)
( )( )[ ]
( )( )( )[ ]
( )[ ]( )[ ] ( ) ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡+
+−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++
+−−
+++−
+−+
−−= 2
2
2
2
222
22
22222
069.0
cot38.1exp243
Hz
RHx
Hzx
HzxzHzx
HzHzx
HzRU z βυε
(3.119)
( )[ ]( )
( )[ ]( )( )[ ] ( ) ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡+
+−
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++
+−
++−
+−+
−= 2
2
2
2
22222222
069.0
cot38.1exp4431
Hz
RHx
zHx
HzzzHxzHx
RU x βυε
(3.120)
Donde:
R = radio del túnel
z = profundidad bajo la superficie del terreno
H = profundidad hasta el eje del túnel
υ = relación de Poisson del suelo
0ε = relación promedio de pérdida de material
x = distancia lateral desde la línea central de túnel
β = ,2/º45 ϕ+ donde ϕ es el ángulo de fricción
MIC 2006-II-2
42
Capítulo 4
MODELOS CONSTITUTIVOS
4.1 Hipoplasticidad
La ley constitutiva hipoplástica es una relación tensorial, incremental, no lineal que describe el
comportamiento de esfuerzo-deformación de un medio granular. Los esfuerzos utilizados son siempre
efectivos, por lo tanto en las expresiones siguientes, éstos no llevan una simbología especial.
Bauer, 1996 y Wolfferdsdorff, 1996, mediante una modificación a una versión anterior de la ecuación
hypoplastica lograron que ésta incluyera la superficie de fluencia de Matsuoka Nakai dando como
resultado la siguiente forma a la ecuación.
( ) ( ) DeNDeL ,:, Τ+Τ=Τo
(4.1)
con
⎟⎠⎞
⎜⎝⎛ ΤΤ+Ι
⎟⎠⎞
⎜⎝⎛ ΤΤ
=∧∧
∧∧22
:
1 aFffL eb
def (4.2)
⎟⎟⎠
⎞⎜⎜⎝
⎛Τ+Τ
⎟⎠⎞
⎜⎝⎛ ΤΤ
=∧∧
∧∧
*
:
FaffN ds
def (4.3)
con ( )jkiljlikijklI δδδδ +==Ι 21 y ∧∧∧∧
ΤΤ=⎟⎠⎞
⎜⎝⎛ ΤΤ klij
ijkl
MIC 2006-II-2
43
De esto se tiene
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛Τ+Τ+⎟
⎠⎞
⎜⎝⎛ ⋅ΤΤ+
⎟⎠⎞
⎜⎝⎛ ΤΤ
=Τ∧∧∧∧
∧∧DaFfDtraDFf ds
*22
:
1o
(4.4)
Por lo tanto, por definición
ΤΤ=Τ∧
trdef
, Idef
31*
−Τ=Τ∧∧
La constante del material a depende del ángulo de fricción crítica cϕ :
( )c
cdef
aϕϕ
sin22sin33 −
= (4.5)
El factor escalar F dependiente de la presión, viene del criterio de Matsuoka Nakai.
ψθψ
ψψ tan22
13costan22
tan2tan81 2
2 −+
−+=
defF (4.6)
con
*
3tan∧
Τ=def
ψ (4.7) y, 23**
***
:
63cos
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛ΤΤ
⎟⎟⎠
⎞⎜⎜⎝
⎛Τ⋅Τ⋅Τ
−=∧∧
∧∧∧
trdef
θ (4.8)
Los factores escalares df , ef y bf , que consideran la dependencia en la presión, y densidad del material,
se definen de la siguiente manera:

MIC 2006-II-2
44
α
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=dc
ddef
d eeee
f (4.9)
β
⎟⎠⎞
⎜⎝⎛=
ee
f cdef
c (4.10)
1
00
0021
0
0 3331
−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−+⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟⎠
⎞⎜⎜⎝
⎛=
αβ
dc
di
n
s
s
i
i
c
isdef
b eeee
aahp
ee
ee
nh
f (4.11)
La siguiente función matemática, describe la dependencia de las fronteras de la relación de vacíos con la
presión isotrópica:
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−===
n
s
s
d
d
c
c
i
i
hp
ee
ee
ee 3
exp000
(4.12)
Donde de es la relación de vacíos mínima, ce la relación de vacíos crítica y ie la relación de vacíos
máxima para una condición de esfuerzo isotrópico determinada. El subíndice 0 , corresponde a la
relación de vacíos para un esfuerzo isotrópico nulo. sp es la presión media, sh la dureza granular y el
exponente n . El proceso de caída de relación de vacíos desde la máxima hasta la mínima se puede ver
representada en la figura 4.1. El achurado representa valores de relación de vacíos que no son físicamente
posibles mientras exista un esqueleto granular.
MIC 2006-II-2
45
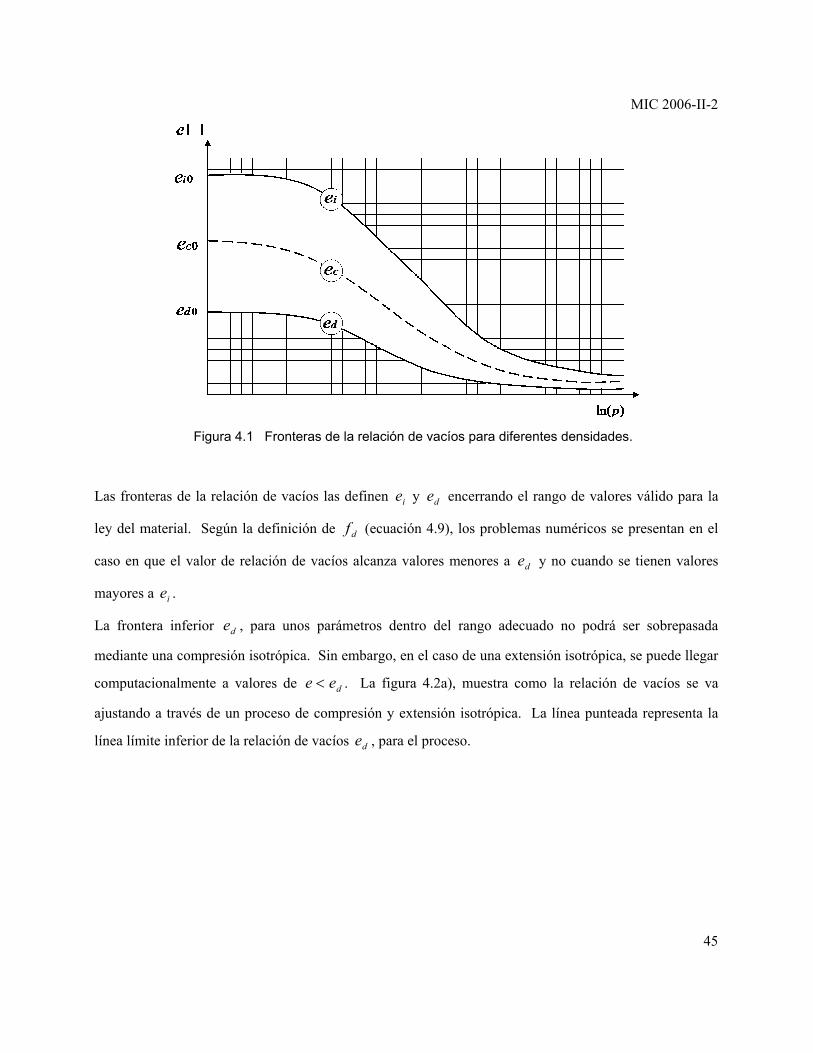
Figura 4.1 Fronteras de la relación de vacíos para diferentes densidades.
Las fronteras de la relación de vacíos las definen ie y de encerrando el rango de valores válido para la
ley del material. Según la definición de df (ecuación 4.9), los problemas numéricos se presentan en el
caso en que el valor de relación de vacíos alcanza valores menores a de y no cuando se tienen valores
mayores a ie .
La frontera inferior de , para unos parámetros dentro del rango adecuado no podrá ser sobrepasada
mediante una compresión isotrópica. Sin embargo, en el caso de una extensión isotrópica, se puede llegar
computacionalmente a valores de dee < . La figura 4.2a), muestra como la relación de vacíos se va
ajustando a través de un proceso de compresión y extensión isotrópica. La línea punteada representa la
línea límite inferior de la relación de vacíos de , para el proceso.

MIC 2006-II-2
46
a) b)
Figura 4.2. Ajustes en la relación de vacíos a): Frontera inferior de la relación de vacíos es sobrepasada mediante extension isotrópica sin modificar fd. b): Frontera inferior de la relación de vacíos no es sobrepasada mediante extension isotrópica al modificar fd.
Cuando la relación de vacíos alcanza valores por debajo de la línea de , el factor df toma valores
complejos y el cálculo computacional se cae. Al utilizar un número considerable de elementos durante
una simulación, la posibilidad de que esto suceda es cada vez mayor. Al ser esto algo indeseable para el
usuario, Niemunis et al. 1996, sugiere una condición consistente, la cual modificando la definición de df
previene que se llegue a valores de relación de vacíos menores a de . La línea de frontera inferior de
relación de vacíos, se describe entonces de la siguiente manera.
( ) 03
exp. 0 =⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−=Τ
n
s
sdd h
peetreF (4.13)
Un vector perpendicular a la línea de frontera con sus componentes en la dirección e y p , se presenta en
la figura 4.3.
( )( ) ( ) ( )[ ] ⎥⎦⎤
⎢⎣⎡
Τ∂∂
∂∂
==ΤtrF
eF
MMetrM dddT
de
d ,,, (4.14)
MIC 2006-II-2
47
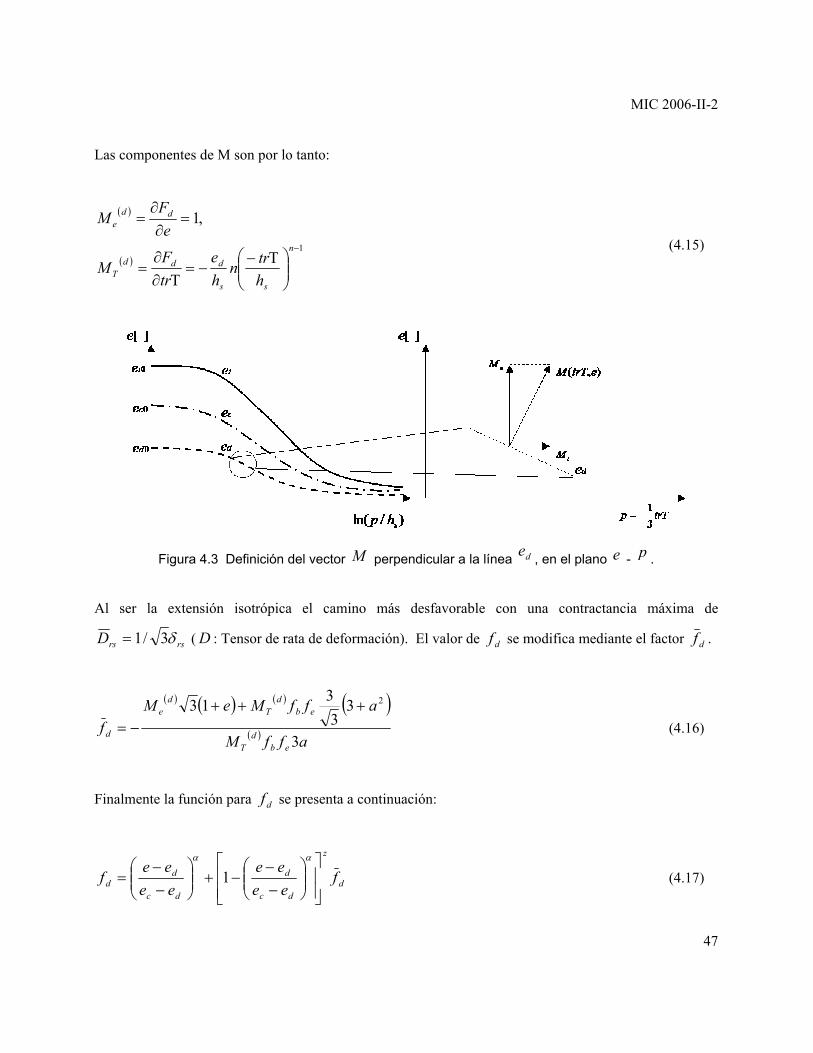
Las componentes de M son por lo tanto:
( )
( )1
,1
−
⎟⎟⎠
⎞⎜⎜⎝
⎛ Τ−−=
Τ∂∂
=
=∂
∂=
n
ss
dddT
dde
htrn
he
trF
M
eF
M
(4.15)
Figura 4.3 Definición del vector M perpendicular a la línea de , en el plano e - p .
Al ser la extensión isotrópica el camino más desfavorable con una contractancia máxima de
rsrsD δ3/1= ( D : Tensor de rata de deformación). El valor de df se modifica mediante el factor df .
( ) ( ) ( ) ( )( ) affM
affMeMf
ebd
T
ebd
Td
e
d 3
33
313 2+++−= (4.16)
Finalmente la función para df se presenta a continuación:
d
z
dc
d
dc
dd f
eeee
eeee
f⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−+⎟⎟⎠
⎞⎜⎜⎝
⎛−−
=αα
1 (4.17)

MIC 2006-II-2
48
Para mantener el signo, se debe utilizar un número impar para z .
El efecto causado por la modificación a df , se representa en la figura 4.3b).
Esta modificación, evita que se presenten valores de relación de vacíos menores a la frontera de , sin
embargo, causa problemas para cuando se trabajan deformaciones cíclicas.
4.2 Visco-hipoplasticidad
Para describir el comportamiento de los suelos blandos se requiere de una ley constitutiva capaz de tener
en cuenta las características viscosas de éste tipo de materiales. La ley constitutiva visco-hipoplástica
puede describir comportamientos de creep, relajación y dependencia de la velocidad. Fue desarrollada
por Niemunis, mediante una modificación de la ley hipoplástica.
La diferencia substancial que presenta la visco-hipoplasticidad con respecto a la hipoplasticidad se debe a
que se cambia el término no lineal de la hipoplasticidad por un termino de relajación. El factor de
picnotropía y de densidad, se reemplazan por un factor dependiente del grado de sobreconsolidación
OCR. Adicionalmente, el factor de barotropía bf , se modifica y utiliza en lugar de la deformación lineal
logarítmica.
La primera versión de la ley visco-hipoplástica se publicó en 1996 por Niemunis. La extensión para casos
tridimesionales, se publicó el mismo año y se describe en Niemunis, 1996b. La implementación de la ley
visco-hipoplástica con deformación intergranular en un programa de Fortran, la realizó Niemunis en 1996.
Una descripción detallada puede verse en Niemunis, 2002. Debido a que la tendencia al creep del
material presenta gran sensitividad al grado de sobre consolidación, un algoritmo numérico especial fue
desarrollado por Niemunis 1996b.
La parte lineal y la no lineal de la ecuación (4.1) puede ser escrita de la siguiente manera:
∧∧∧
ΤΤ+= 22 aIFL y ⎟⎟⎠
⎞⎜⎜⎝
⎛Τ+Τ=∧∧∧ *
FaN
MIC 2006-II-2
49
La parte lineal de la ecuación principal de la hipoplasticidad (ecuación 4.1) queda entonces de la siguiente
manera:
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛+=Τ
∧−∧∧
||||::1
DNLDLfb
o
(4.18)
El inverso de la parte lineal es:
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
ΤΤ+⎟⎠⎞
⎜⎝⎛
ΤΤ−=
∧∧
∧∧−∧
:
122
1
aF
IF
L (4.19)
El término de la ecuación 4.18 ||||:1
DNL∧−∧
− se reemplaza por un término viscoso visD , de tal forma
que la ecuación principal de la visco-hipoplasticidad queda:
( )visb DDLf −=Τ
∧
:o
(4.20)
El factor de barotropía bf considera la influencia de la presión media en el comportamiento mecánico.
En suelos no cohesivos, esta influencia es considerada como un comportamiento hipoplástico en la
ecuación 4.11. Para suelos cohesivos, en el caso visco-hipoplástico el comportamiento con bf se
considera diferente durante la carga y la descarga, de la siguiente manera:
⎥⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣⎡
++
0
0 ln11
lnpp
ee
λ (carga) (4.21)

MIC 2006-II-2
50
⎥⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣⎡
++
0
0 ln11
lnppk
ee
(recarga) (4.22)
Donde, λ corresponde a la pendiente de la línea de carga, y k a la de recarga o descarga. p
corresponde a la presión media y los subíndices 0 se refieren a los valores de referencia.
La función de barotropía para la ley visco-hipoplástica se presenta en la ecuación 4.23, para el caso de
condiciones isotróícas, y mediante la ecuación 4.24, para el caso de condiciones edométricas con
coeficiente de presión de tierras constante.
Τ−=+
Τ−= tr
katrf bb β
]3/1[ 2 (4.23)
Τ−=++Τ
−= trkKa
trf bb β00
2 )]21/(1[ (4.24)
k y 0k , son los gradientes de la línea de descarga en el diagrama doble logarítmico de relación de vacíos
vs. presión. La diferencia corresponde a que k se obtiene mediante un ensayo de compresión isotrópica,
y 0k , mediante compresión edométrica. Debido a que se determina más fácilmente en el laboratorio,
mediante un ensayo de compresión edométrica el valor de 0k , de las ecuaciones del factor bf , para trT
constantes se puede encontrar una relación entre k y 0k , presentada en la ecuación 4.25.
( ) ( )[ ] 00
22 2111
311
kKakab ++=
+=β (4.25)
La intensidad del creep depende en la ley visco-hipoplástica de la relación de vacíos y el grado de
esfuerzos. La deformación por creep descrita por Norton, que se puede ver en Niemunis, 2002, queda de
la siguiente manera.
vI
rvis
OCRbDD
11⎟⎠⎞
⎜⎝⎛= (4.26)

MIC 2006-II-2
51
En la formula, el tensor normal ∧−∧
⋅= NLb1
determina la dirección del creep. rD es la rata de
deformación de referencia. vI es el índice de viscosidad de Leinenkugel, 1976. La expresión del OCR,
corresponde a la definida por Horslev basada en la presión equivalente ep . La dependencia de la
velocidad hace necesaria una relación de referencia entre la presión para una determinada relación de
vacíos y una velocidad de deformación. Adicionalmente la ecuación para compresión isotrópica en la ley
visco-hiplástica queda de la forma:
⎥⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣⎡
++
0
0
11
lne
ee
pp
ee
λ (4.27)
0ee y 0ep son valores de referencia para una velocidad de deformación constante. Todos los valore de
p y e quedan ubicados dentro de una línea recta (isotaca de referencia), para la cual se cumple que
1=OCR . En casos de estados de esfuerzo no isotrópicos, se utiliza la condición de la teoría del Cam
Clay modificado. En el diagrama p vs. q resultan por lo tanto elipses tal como se puede ver en la figura
4.4, la línea punteada corresponde a un suelo normalmente consolidado 1=OCR .
( ) ( ) ( )ccTFTM ϕϕ sin3sin6 −= , es el gradiente superior de la línea del estado crítico (Critical State
Line = CSL) y depende junto con F (ecuación 4.6) del ángulo de Lode. Sobre la línea del estado crítico
es posible que se presente un flujo viscoso ante deformación y esfuerzo constante. Para una velocidad de
deformación el tamaño de la elipse depende de la relación de vacíos y aunque la velocidad se varíe, la
forma sin embargo se mantiene constante. En relación a la elipse de referencia, aquellas elipses que
contengan un menor diámetro corresponden a suelos sobre-consolidados, ( )1>OCR .

MIC 2006-II-2
52
Figura 4.4 Elipse de esfuerzos en el diagrama p - q .
En general, el grado de sobre-consolidación se define:
+= ee ppOCR (4.28)
ep resulta de la ecuación 4.27. Para +ep se tiene:
( )[ ]1111
22 −−+−
=+ βηββ
ppe para 1<η y (4.29)
( )2
11 βη ++=+ ppe para 1>η (4.30)
( )10 << ββ es un parámetro del material, que especifica la forma de la elipse. Para η se aplica
( )Mpq=η .
La rata de deformación de referencia rD se obtiene de la velocidad de deformación, con la cual se
realizaron los ensayos de laboratorio. La ecuación 4.31 describe la relación entre la velocidad de
deformación y la deformación viscosa bajo condiciones de esfuerzo isotrópico y .1=OCR
MIC 2006-II-2
53
visr DDD =
−−=
31
κλλ
(4.31)
Esto significa que la velocidad del creep en cada punto de la curva es la misma. En Niemunis, 2002, se
prueba que la ecuación 4.31 también aplica para suelos sobre-consolidados 1>OCR .
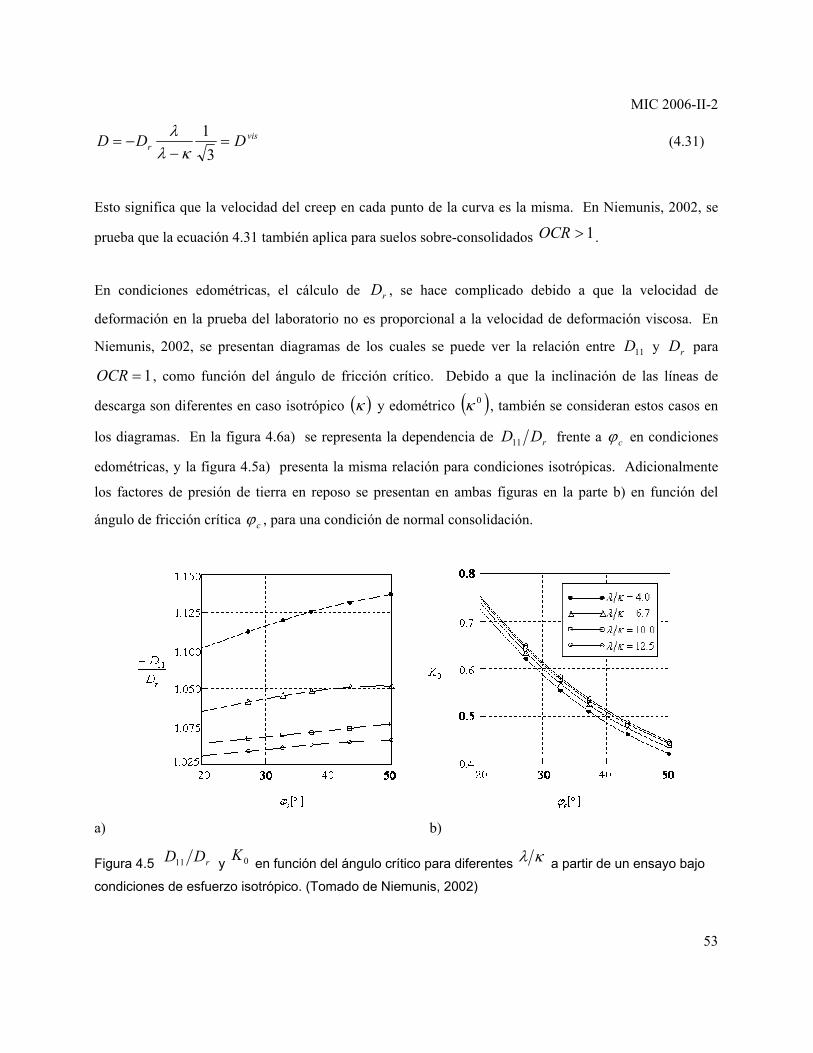
En condiciones edométricas, el cálculo de rD , se hace complicado debido a que la velocidad de
deformación en la prueba del laboratorio no es proporcional a la velocidad de deformación viscosa. En
Niemunis, 2002, se presentan diagramas de los cuales se puede ver la relación entre 11D y rD para
1=OCR , como función del ángulo de fricción crítico. Debido a que la inclinación de las líneas de
descarga son diferentes en caso isotrópico ( )κ y edométrico ( )0κ , también se consideran estos casos en
los diagramas. En la figura 4.6a) se representa la dependencia de rDD11 frente a cϕ en condiciones
edométricas, y la figura 4.5a) presenta la misma relación para condiciones isotrópicas. Adicionalmente
los factores de presión de tierra en reposo se presentan en ambas figuras en la parte b) en función del
ángulo de fricción crítica cϕ , para una condición de normal consolidación.
a) b)
Figura 4.5 rDD11 y 0K en función del ángulo crítico para diferentes κλ a partir de un ensayo bajo
condiciones de esfuerzo isotrópico. (Tomado de Niemunis, 2002)

MIC 2006-II-2
54
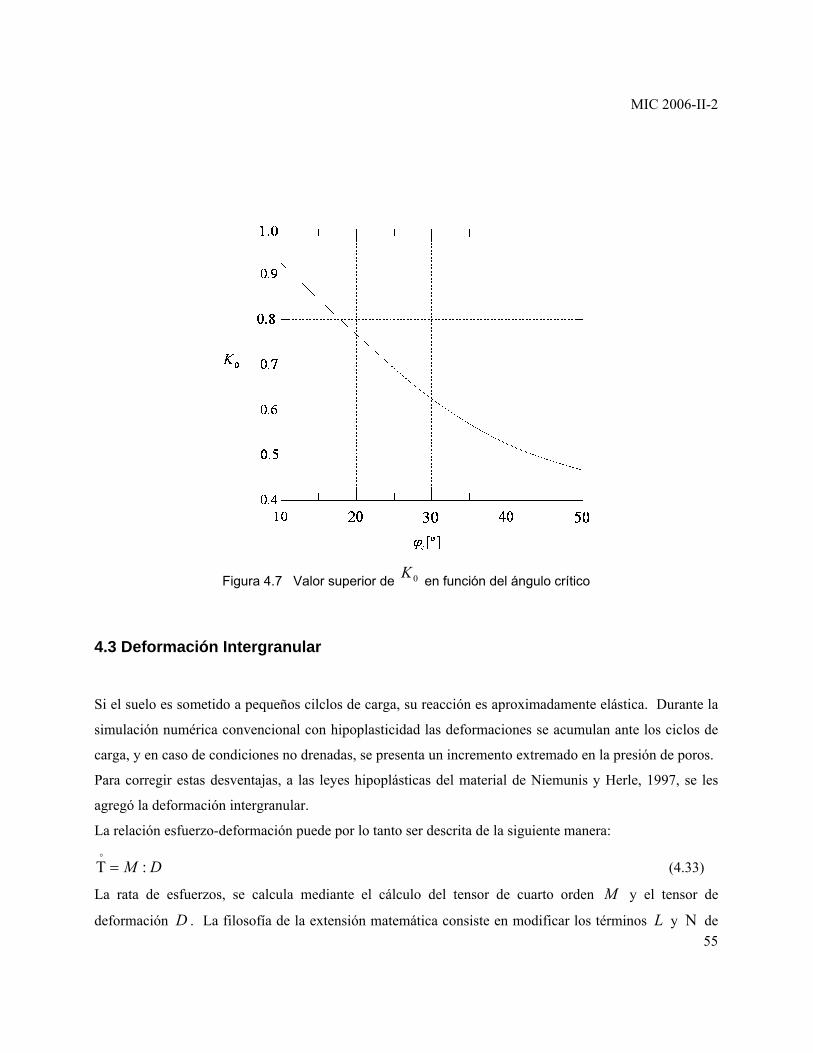
La ecuación 4.32 corresponde al valor de frontera superior de 0K en función de cϕ para el caso en que
∞→κλ , la gráfica 4.7, muestra gráficamente la ecuación. (el parámetro a viene de la ecuación 4.5).
1636362 422
sup0
aaaK +++−−= (4.32)
a) b)
Figura 4.6 rDD11 y 0K en función del ángulo crítico para diferentes κλ a partir de un ensayo bajo
condiciones de esfuerzo edométrico. (Tomado de Niemunis, 2002)
El parámetro vI considera el grado de viscosidad del material, y puede ser determinado de una de las
siguientes maneras: compresión isotrópica con diferentes velocidades de deformación, compresión
edométrica con diferentes velocidades de deformación, ensayos de corte no drenado a diferentes
velocidades de deformación, ensayos de creep bajo condiciones isotrópicas, ensayos de creep bajo
condiciones edométricas, y ensayos de relajación.
En [10] se presentan las relaciones matemáticas para determinar vI en cada tipo de ensayo nombrado.
MIC 2006-II-2
55
Figura 4.7 Valor superior de 0K en función del ángulo crítico
4.3 Deformación Intergranular
Si el suelo es sometido a pequeños cilclos de carga, su reacción es aproximadamente elástica. Durante la
simulación numérica convencional con hipoplasticidad las deformaciones se acumulan ante los ciclos de
carga, y en caso de condiciones no drenadas, se presenta un incremento extremado en la presión de poros.
Para corregir estas desventajas, a las leyes hipoplásticas del material de Niemunis y Herle, 1997, se les
agregó la deformación intergranular.
La relación esfuerzo-deformación puede por lo tanto ser descrita de la siguiente manera:
DM :=Τo
(4.33)
La rata de esfuerzos, se calcula mediante el cálculo del tensor de cuarto orden M y el tensor de
deformación D . La filosofía de la extensión matemática consiste en modificar los términos L y Ν de

MIC 2006-II-2
56
tal forma que se escale la rigidez, cuando las direcciones de aplicación de carga varían. Esto se hace a
través de los multiplicadores escalares Tm y Rm , dependientes del ángulo entre la dirección de la
deformación intergranular h y la rata de deformación D .
La rigidez se define según la deformación intergranular de la siguiente manera:
( )[ ] ( )( )⎪⎩
⎪⎨⎧
−
Ν+−+−+= ∧∧
∧∧∧
hhLmm
hhhLmLmmMTR
TRT
:
:11χ
χχχχ
ρ
ρρρρ parapara
0:0:
≤>
∧
∧
DhDh (4.34)
Los parámetros χ y R son constantes del material. La dirección de las deformaciones intergranulares
presenta cambios dependientes de la historia de carga. La velocidad de deformación intergranular se
describe como:
⎪⎩
⎪⎨⎧
⎟⎠⎞
⎜⎝⎛ −=
∧∧
D
DhhIhr :βρo
parapara
0:0:
≤>
∧
∧
DhDh (4.35)
El parámetro rβ dirige el desarrollo de o
h para 0: >∧
Dh . Con la ley visco-hipoplástica se considera que
se desarrolla la deformación intergranular únicamente para D y no para visD .
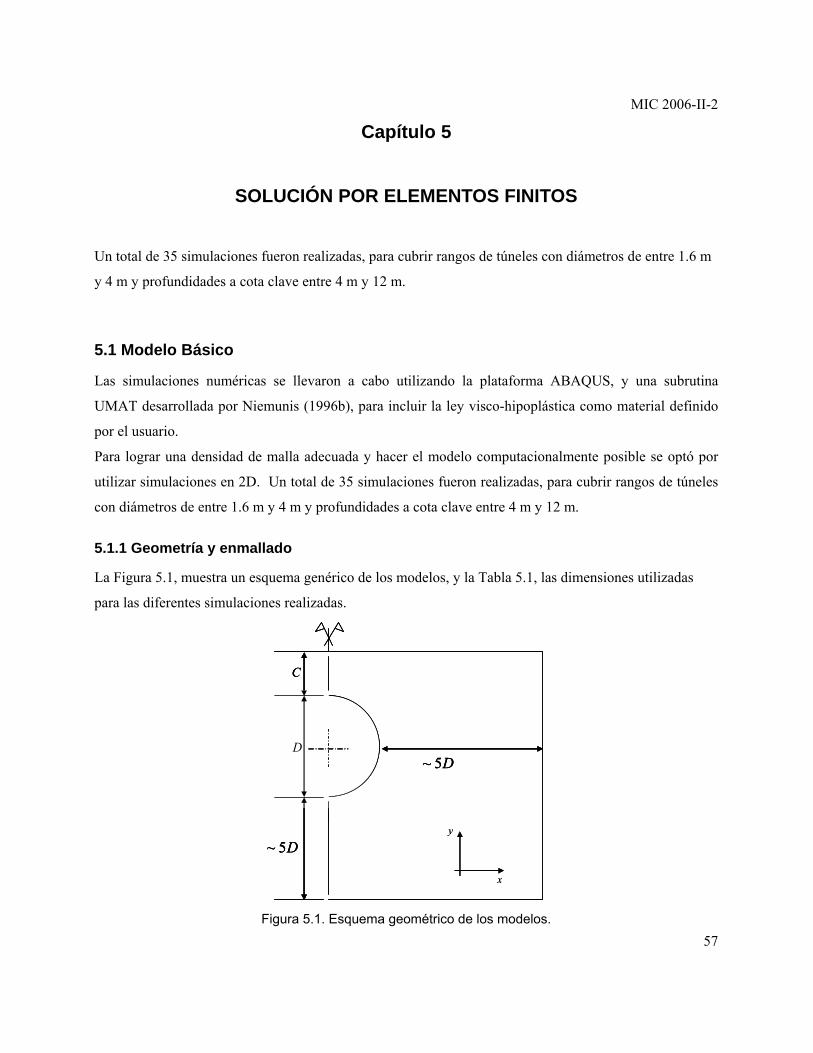
MIC 2006-II-2
57
Capítulo 5
SOLUCIÓN POR ELEMENTOS FINITOS
Un total de 35 simulaciones fueron realizadas, para cubrir rangos de túneles con diámetros de entre 1.6 m
y 4 m y profundidades a cota clave entre 4 m y 12 m.
5.1 Modelo Básico
Las simulaciones numéricas se llevaron a cabo utilizando la plataforma ABAQUS, y una subrutina
UMAT desarrollada por Niemunis (1996b), para incluir la ley visco-hipoplástica como material definido
por el usuario.
Para lograr una densidad de malla adecuada y hacer el modelo computacionalmente posible se optó por
utilizar simulaciones en 2D. Un total de 35 simulaciones fueron realizadas, para cubrir rangos de túneles
con diámetros de entre 1.6 m y 4 m y profundidades a cota clave entre 4 m y 12 m.
5.1.1 Geometría y enmallado
La Figura 5.1, muestra un esquema genérico de los modelos, y la Tabla 5.1, las dimensiones utilizadas
para las diferentes simulaciones realizadas.
Figura 5.1. Esquema geométrico de los modelos.
C
DD5~
D5~
x
y
C
DD5~
D5~
C
DD5~
D5~
x
y
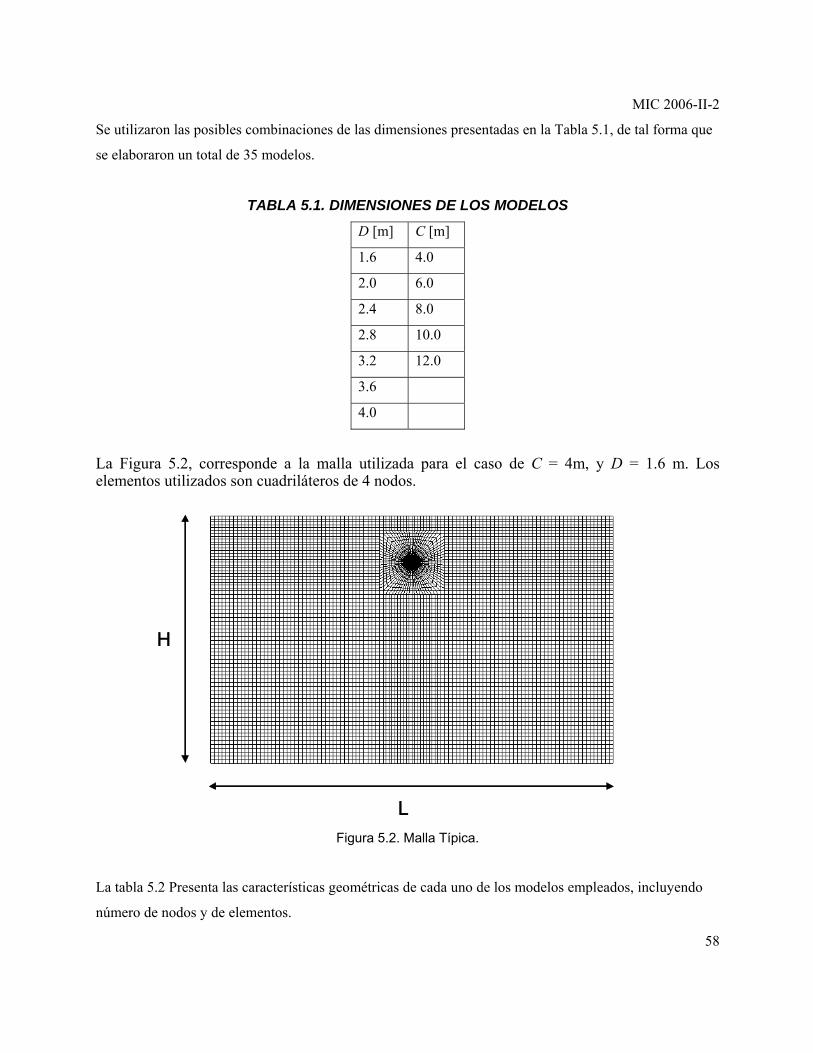
MIC 2006-II-2
58
Se utilizaron las posibles combinaciones de las dimensiones presentadas en la Tabla 5.1, de tal forma que
se elaboraron un total de 35 modelos.
TABLA 5.1. DIMENSIONES DE LOS MODELOS
D [m] C [m]
1.6 4.0
2.0 6.0
2.4 8.0
2.8 10.0
3.2 12.0
3.6
4.0
La Figura 5.2, corresponde a la malla utilizada para el caso de C = 4m, y D = 1.6 m. Los elementos utilizados son cuadriláteros de 4 nodos.
Figura 5.2. Malla Típica.
La tabla 5.2 Presenta las características geométricas de cada uno de los modelos empleados, incluyendo
número de nodos y de elementos.
H
L
H
L
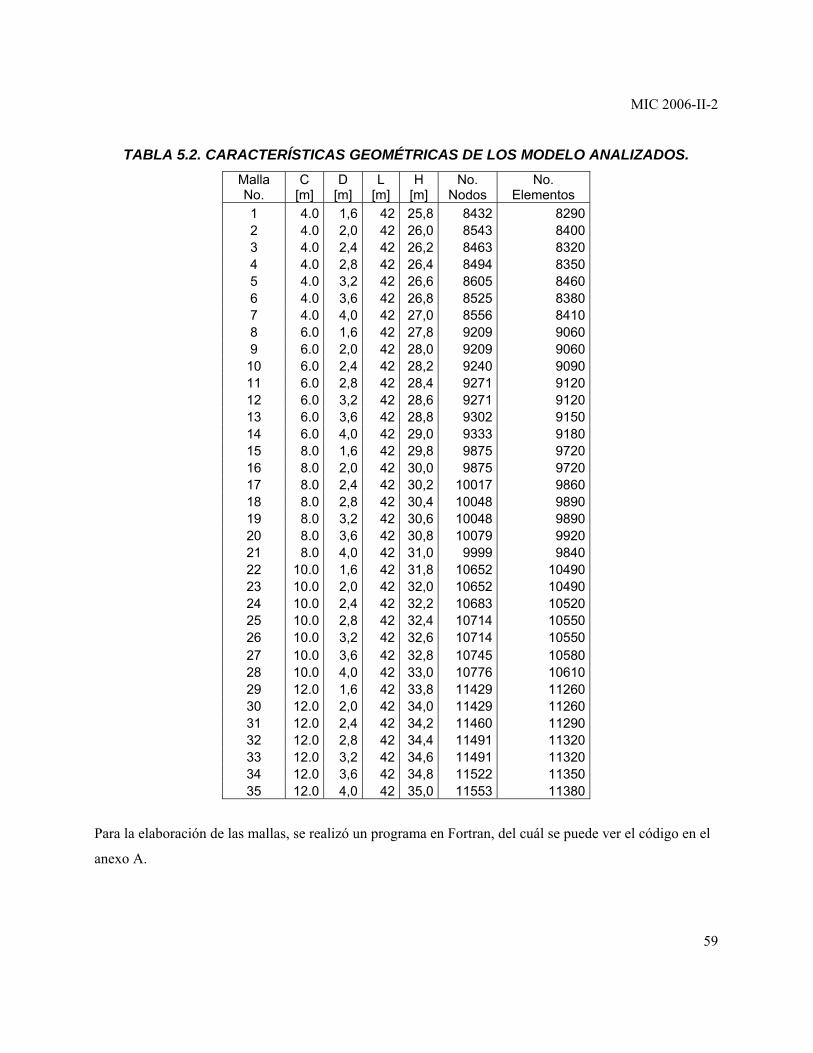
MIC 2006-II-2
59
TABLA 5.2. CARACTERÍSTICAS GEOMÉTRICAS DE LOS MODELO ANALIZADOS. Malla No.
C [m]
D [m]
L [m]
H [m]
No. Nodos
No. Elementos
1 4.0 1,6 42 25,8 8432 8290 2 4.0 2,0 42 26,0 8543 8400 3 4.0 2,4 42 26,2 8463 8320 4 4.0 2,8 42 26,4 8494 8350 5 4.0 3,2 42 26,6 8605 8460 6 4.0 3,6 42 26,8 8525 8380 7 4.0 4,0 42 27,0 8556 8410 8 6.0 1,6 42 27,8 9209 9060 9 6.0 2,0 42 28,0 9209 9060
10 6.0 2,4 42 28,2 9240 9090 11 6.0 2,8 42 28,4 9271 9120 12 6.0 3,2 42 28,6 9271 9120 13 6.0 3,6 42 28,8 9302 9150 14 6.0 4,0 42 29,0 9333 9180 15 8.0 1,6 42 29,8 9875 9720 16 8.0 2,0 42 30,0 9875 9720 17 8.0 2,4 42 30,2 10017 9860 18 8.0 2,8 42 30,4 10048 9890 19 8.0 3,2 42 30,6 10048 9890 20 8.0 3,6 42 30,8 10079 9920 21 8.0 4,0 42 31,0 9999 9840 22 10.0 1,6 42 31,8 10652 10490 23 10.0 2,0 42 32,0 10652 10490 24 10.0 2,4 42 32,2 10683 10520 25 10.0 2,8 42 32,4 10714 10550 26 10.0 3,2 42 32,6 10714 10550 27 10.0 3,6 42 32,8 10745 10580 28 10.0 4,0 42 33,0 10776 10610 29 12.0 1,6 42 33,8 11429 11260 30 12.0 2,0 42 34,0 11429 11260 31 12.0 2,4 42 34,2 11460 11290 32 12.0 2,8 42 34,4 11491 11320 33 12.0 3,2 42 34,6 11491 11320 34 12.0 3,6 42 34,8 11522 11350 35 12.0 4,0 42 35,0 11553 11380
Para la elaboración de las mallas, se realizó un programa en Fortran, del cuál se puede ver el código en el
anexo A.

MIC 2006-II-2
60
5.1.2 Condiciones de Borde
El modelo es simétrico con respecto al eje vertical que pasa por el centro del túnel, como se puede ver en
la Figura 5.1. Para evitar cualquier tipo de influencia de las fronteras en los resultados de las
simulaciones, éstas se ubicaron aproximadamente a 5 diámetros del túnel, con algunas variaciones
dependiendo de las dimensiones empleadas (ver tabla 5.2).
En las fronteras laterales, se restringió el movimiento en la dirección horizontal, y en la frontera inferior
se restringió el movimiento tanto horizontal como verticalmente
5.1.3 Material
Los siguientes parámetros visco-hipoplásticos fueron estimados a través de diferentes ensayos de
laboratorio, realizados a muestras de suelo, con profundidades de entre 4 y 12 metros en la ciudad de
Bogotá y se presentan en la tabla siguiente.
TABLA 5.3. PARÁMETROS VISCO-HIPOPLÁSTICOS
λ = 0.288
κ = 0.052
e100 = 3.00
β = 0.95
Iv = 0.062
Dr = 1E-5 [-/s]
OCR = 1
ϕc = 22º
mR = 5.0
mT = 2.0
χ = 1.0
βχ = 0.05
Rmax = 1.0E-4
γ = 12.7 kN/m3
5.2 Pasos de Análisis
El modelo pretende simular el efecto que tiene la construcción del túnel en el suelo, utilizando fuerzas
puntuales alrededor del perímetro del túnel, para representar el trabajo del recubrimiento.
El modelo consta de 3 pasos fundamentales que se describen a continuación.
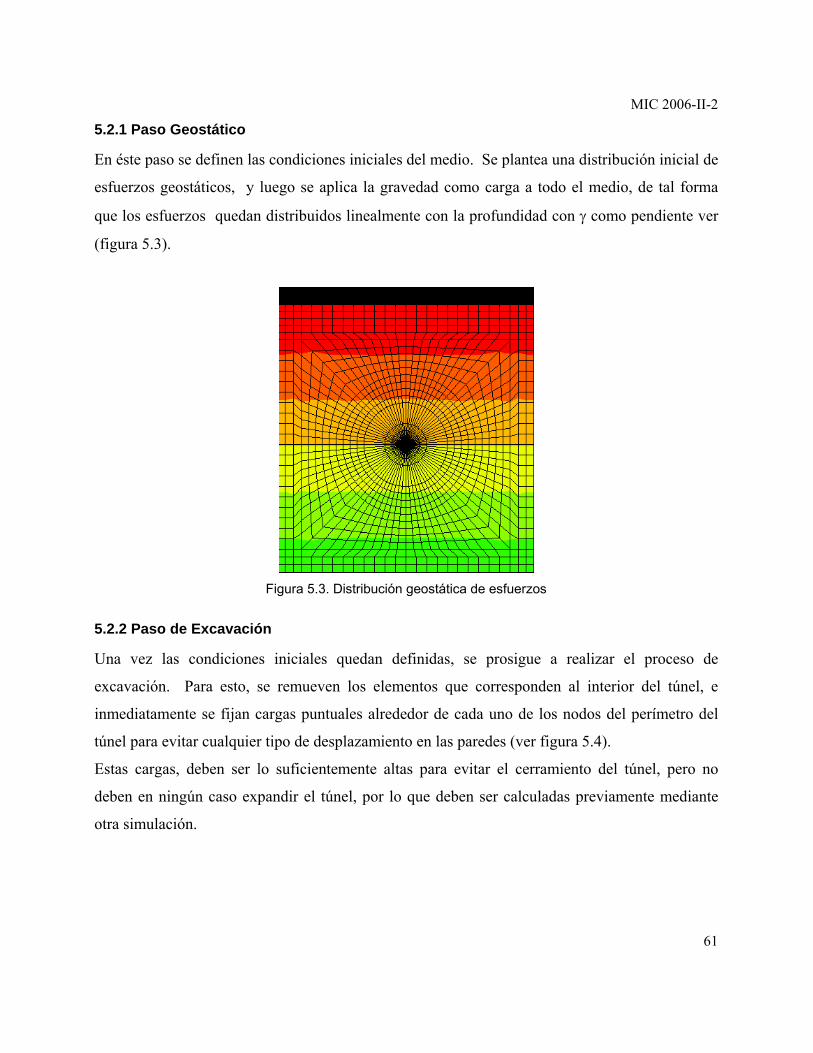
MIC 2006-II-2
61
5.2.1 Paso Geostático
En éste paso se definen las condiciones iniciales del medio. Se plantea una distribución inicial de
esfuerzos geostáticos, y luego se aplica la gravedad como carga a todo el medio, de tal forma
que los esfuerzos quedan distribuidos linealmente con la profundidad con γ como pendiente ver
(figura 5.3).
Figura 5.3. Distribución geostática de esfuerzos
5.2.2 Paso de Excavación
Una vez las condiciones iniciales quedan definidas, se prosigue a realizar el proceso de
excavación. Para esto, se remueven los elementos que corresponden al interior del túnel, e
inmediatamente se fijan cargas puntuales alrededor de cada uno de los nodos del perímetro del
túnel para evitar cualquier tipo de desplazamiento en las paredes (ver figura 5.4).
Estas cargas, deben ser lo suficientemente altas para evitar el cerramiento del túnel, pero no
deben en ningún caso expandir el túnel, por lo que deben ser calculadas previamente mediante
otra simulación.
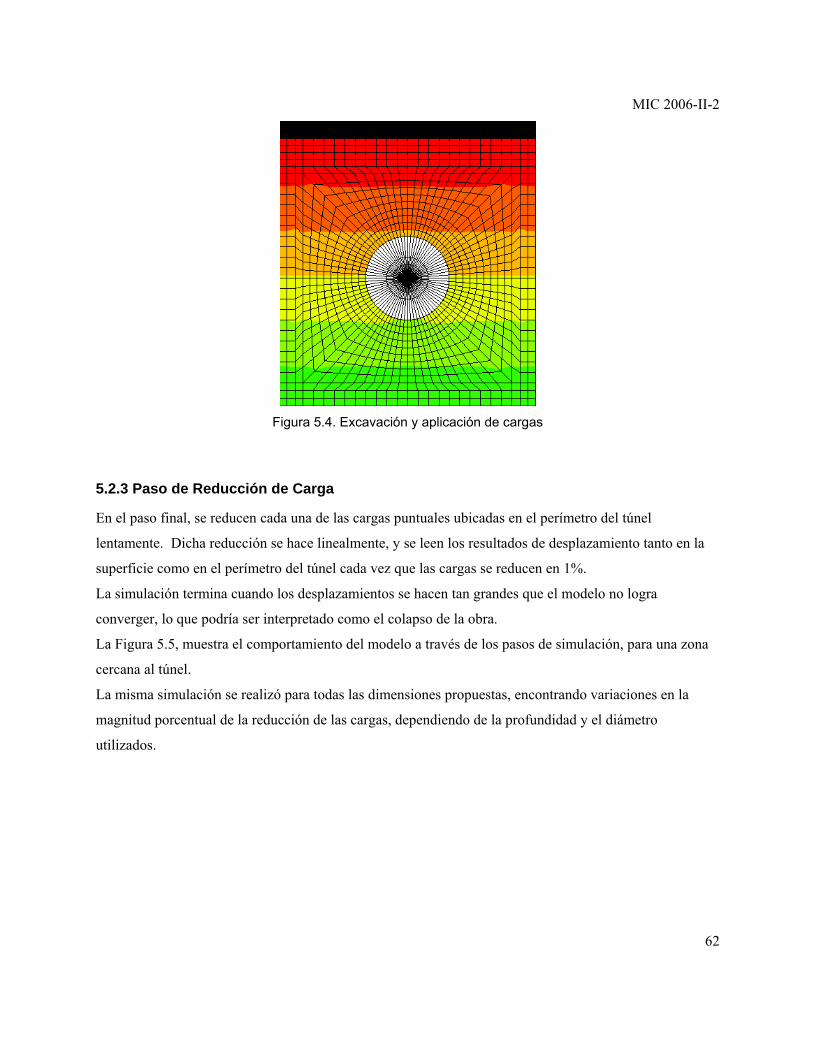
MIC 2006-II-2
62
Figura 5.4. Excavación y aplicación de cargas
5.2.3 Paso de Reducción de Carga
En el paso final, se reducen cada una de las cargas puntuales ubicadas en el perímetro del túnel
lentamente. Dicha reducción se hace linealmente, y se leen los resultados de desplazamiento tanto en la
superficie como en el perímetro del túnel cada vez que las cargas se reducen en 1%.
La simulación termina cuando los desplazamientos se hacen tan grandes que el modelo no logra
converger, lo que podría ser interpretado como el colapso de la obra.
La Figura 5.5, muestra el comportamiento del modelo a través de los pasos de simulación, para una zona
cercana al túnel.
La misma simulación se realizó para todas las dimensiones propuestas, encontrando variaciones en la
magnitud porcentual de la reducción de las cargas, dependiendo de la profundidad y el diámetro
utilizados.
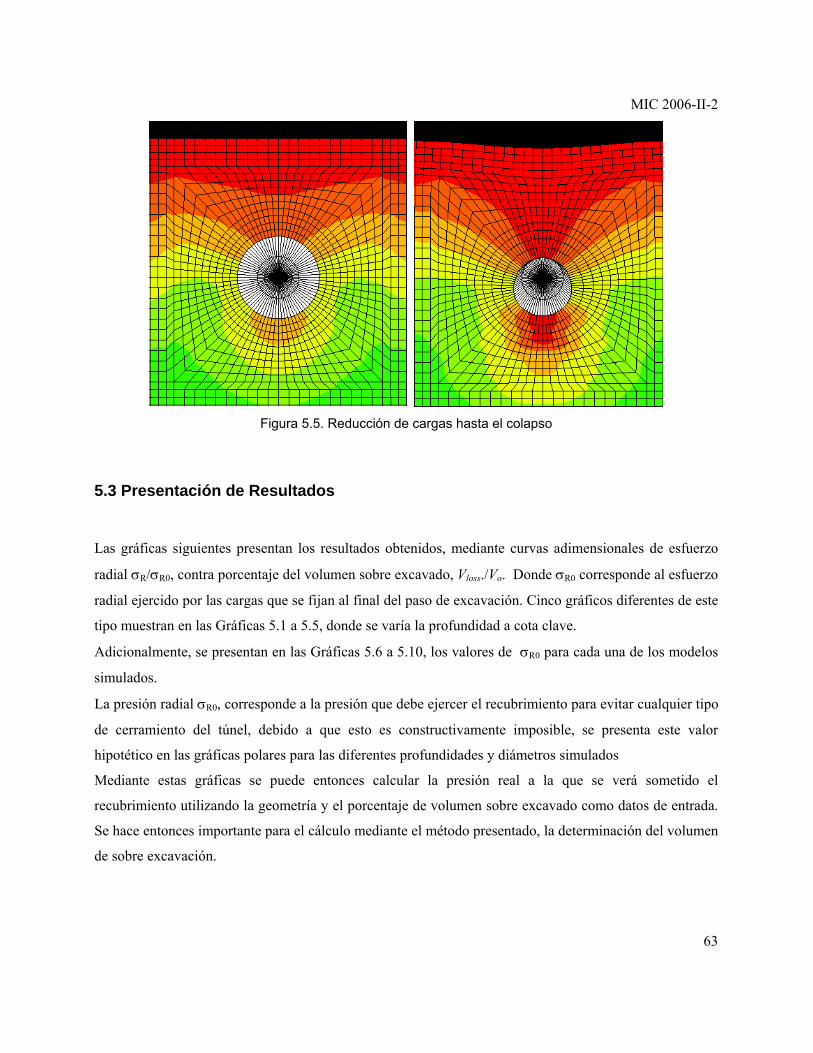
MIC 2006-II-2
63
Figura 5.5. Reducción de cargas hasta el colapso
5.3 Presentación de Resultados
Las gráficas siguientes presentan los resultados obtenidos, mediante curvas adimensionales de esfuerzo
radial σR/σR0, contra porcentaje del volumen sobre excavado, Vloss./Vo. Donde σR0 corresponde al esfuerzo
radial ejercido por las cargas que se fijan al final del paso de excavación. Cinco gráficos diferentes de este
tipo muestran en las Gráficas 5.1 a 5.5, donde se varía la profundidad a cota clave.
Adicionalmente, se presentan en las Gráficas 5.6 a 5.10, los valores de σR0 para cada una de los modelos
simulados.
La presión radial σR0, corresponde a la presión que debe ejercer el recubrimiento para evitar cualquier tipo
de cerramiento del túnel, debido a que esto es constructivamente imposible, se presenta este valor
hipotético en las gráficas polares para las diferentes profundidades y diámetros simulados
Mediante estas gráficas se puede entonces calcular la presión real a la que se verá sometido el
recubrimiento utilizando la geometría y el porcentaje de volumen sobre excavado como datos de entrada.
Se hace entonces importante para el cálculo mediante el método presentado, la determinación del volumen
de sobre excavación.
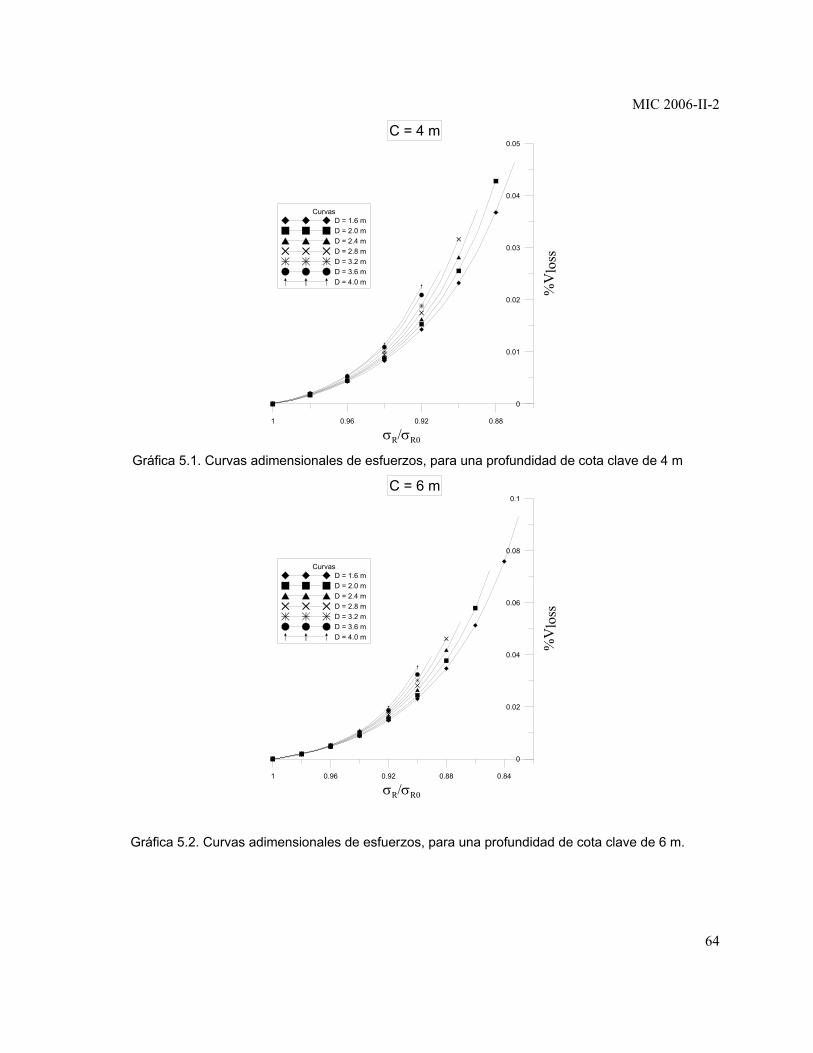
MIC 2006-II-2
64
Gráfica 5.1. Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 4 m
Gráfica 5.2. Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 6 m.
1 0.96 0.92 0.88 0.84
σR/σR0
0
0.02
0.04
0.06
0.08
0.1
%V
loss
CurvasD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 6 m
1 0.96 0.92 0.88
σR/σR0
0
0.01
0.02
0.03
0.04
0.05
%V
loss
CurvasD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 4 m
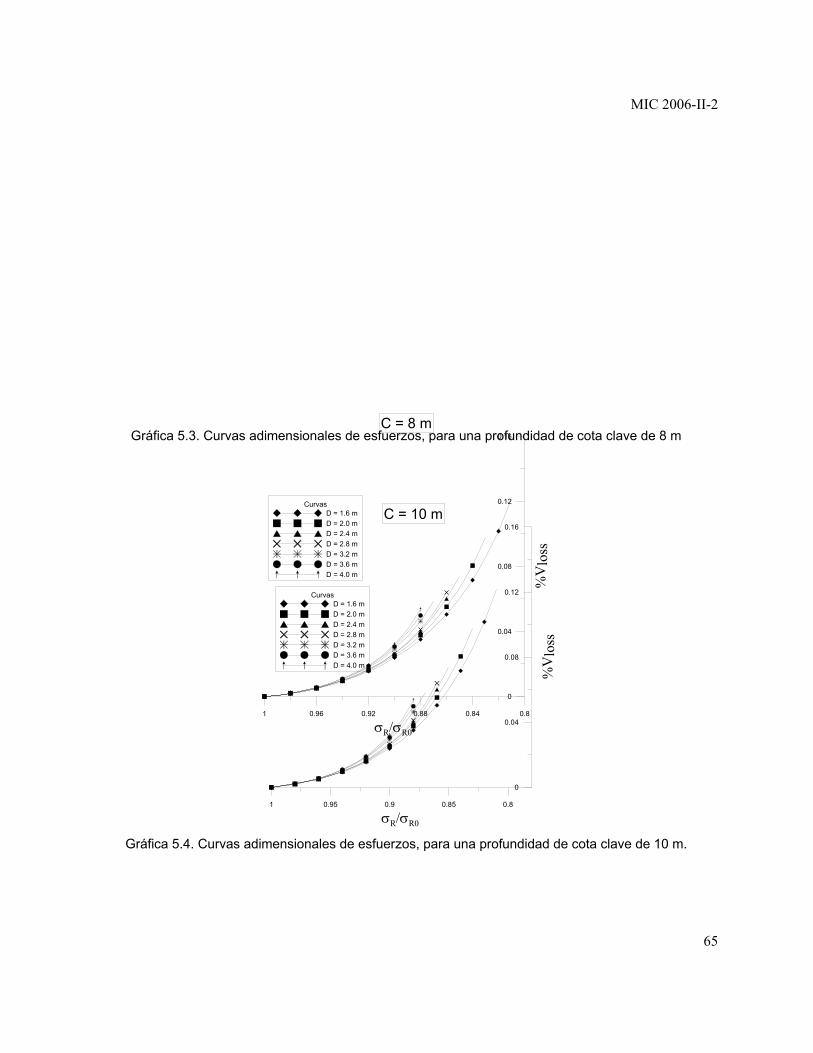
MIC 2006-II-2
65
Gráfica 5.3. Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 8 m
Gráfica 5.4. Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 10 m.
1 0.95 0.9 0.85 0.8
σR/σR0
0
0.04
0.08
0.12
0.16
%V
loss
CurvasD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 10 m
1 0.96 0.92 0.88 0.84 0.8
σR/σR0
0
0.04
0.08
0.12
0.16
%V
loss
CurvasD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 8 m
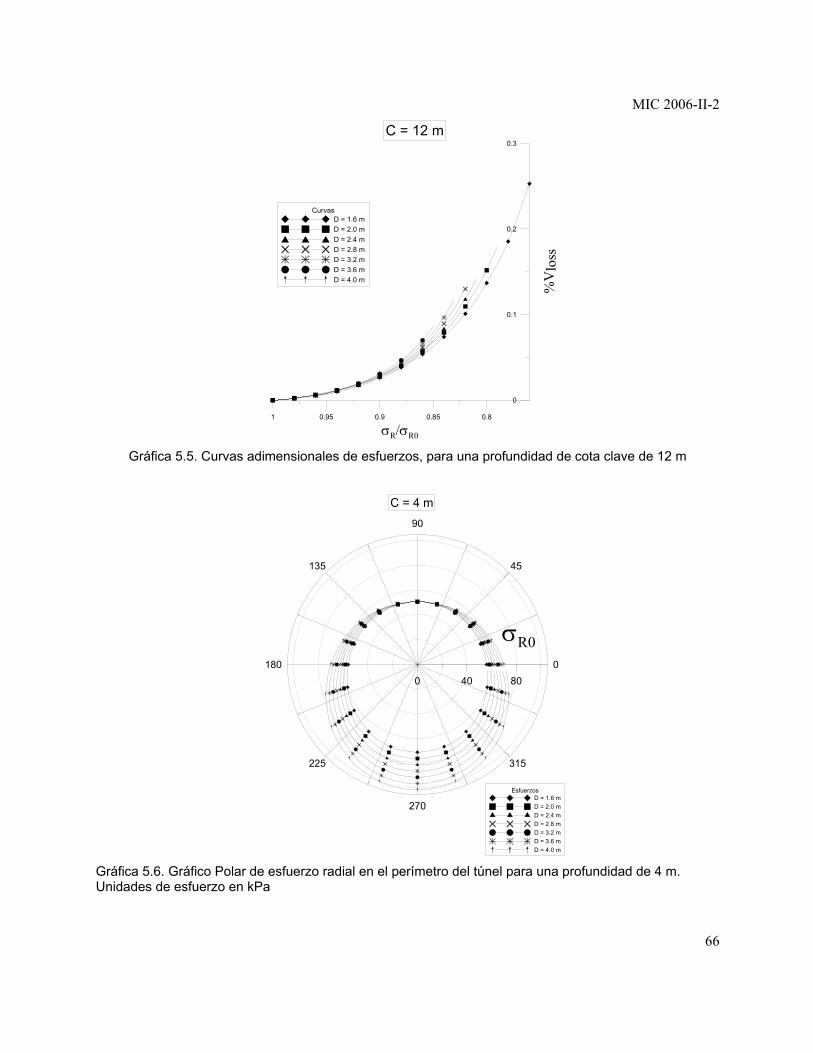
MIC 2006-II-2
66
Gráfica 5.5. Curvas adimensionales de esfuerzos, para una profundidad de cota clave de 12 m
Gráfica 5.6. Gráfico Polar de esfuerzo radial en el perímetro del túnel para una profundidad de 4 m. Unidades de esfuerzo en kPa
0
45
90
135
180
225
270
315
σR0
0 40 80
EsfuerzosD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 4 m
1 0.95 0.9 0.85 0.8
σR/σR0
0
0.1
0.2
0.3
%V
loss
CurvasD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 12 m
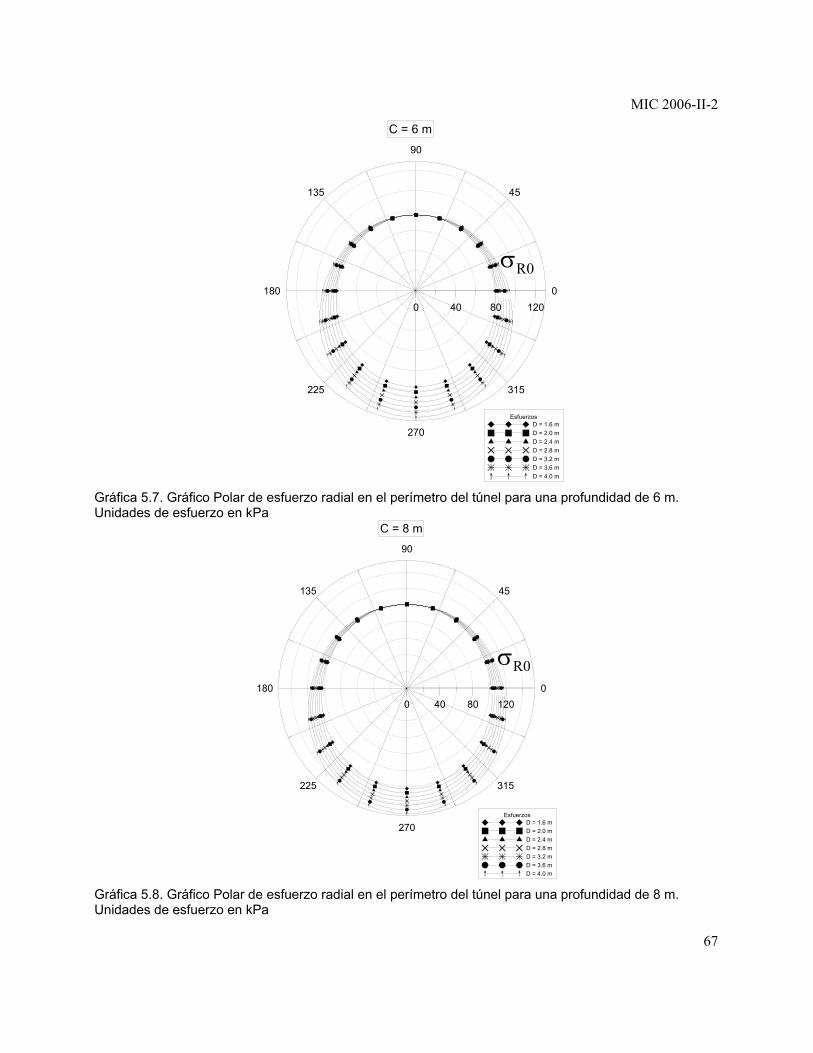
MIC 2006-II-2
67
Gráfica 5.7. Gráfico Polar de esfuerzo radial en el perímetro del túnel para una profundidad de 6 m. Unidades de esfuerzo en kPa
Gráfica 5.8. Gráfico Polar de esfuerzo radial en el perímetro del túnel para una profundidad de 8 m. Unidades de esfuerzo en kPa
0
45
90
135
180
225
270
315
σR0
0 40 80 120
EsfuerzosD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 8 m
0
45
90
135
180
225
270
315
σR0
0 40 80 120
EsfuerzosD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 6 m
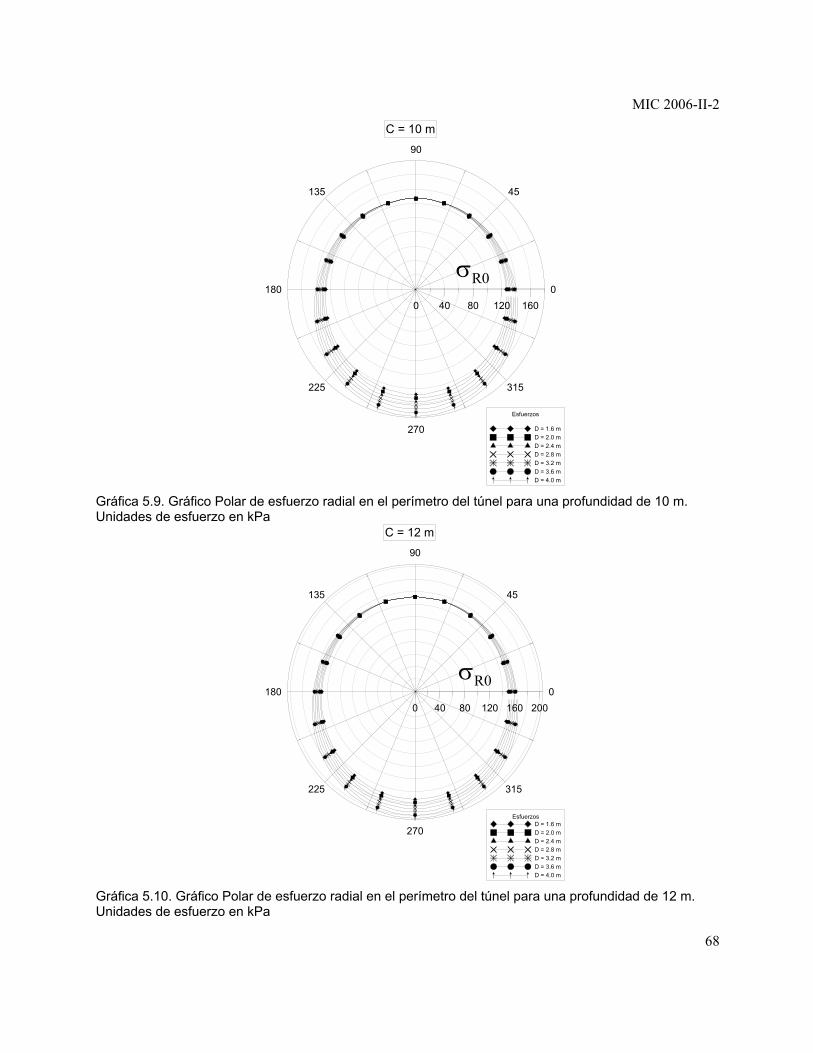
MIC 2006-II-2
68
Gráfica 5.9. Gráfico Polar de esfuerzo radial en el perímetro del túnel para una profundidad de 10 m. Unidades de esfuerzo en kPa
Gráfica 5.10. Gráfico Polar de esfuerzo radial en el perímetro del túnel para una profundidad de 12 m. Unidades de esfuerzo en kPa
0
45
90
135
180
225
270
315
σR0
0 40 80 120 160 200
EsfuerzosD = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 12 m
0
45
90
135
180
225
270
315
σR0
0 40 80 120 160
Esfuerzos
D = 1.6 mD = 2.0 mD = 2.4 mD = 2.8 mD = 3.2 mD = 3.6 mD = 4.0 m
C = 10 m
MIC 2006-II-2
69
Capítulo 6
CONCLUSIONES
Se presentaron los resultados de diferentes simulaciones numéricas para ser aplicables al diseño de túneles
de manera sencilla.
El material utilizado limita los resultados a un solo tipo de suelo, con una capa única, sin embargo al
utilizar un modelo visco-hipoplástico, la resistencia y comportamiento del material dependen del estado
inicial de esfuerzos, por lo cual se tienen diferentes valores de esfuerzo dependiendo de la profundidad a
la que se encuentre el material.
Las gráficas 6 a 10, muestran los esfuerzos radiales iniciales, dichos esfuerzos al impedir completamente
el cerramiento de la sección, son dependientes de las condiciones iniciales, por lo tanto corresponden a los
esfuerzos geostáticos. Las fórmulas tradicionales analíticas para calcular el esfuerzo que debe resistir el
refuerzo para garantizar la estabilidad del túnel, tienen en cuenta un efecto de arco el cual lleva a valores
menores de esfuerzo.
Mediante el método de elementos finitos, al simular el medio como un continuo, no es posible generar
dicho efecto de arco o relajación de los esfuerzos sin permitir algún tipo de desplazamiento del medio. Es
por eso que se hace importante tener en cuenta el volumen sobre-excavado para permitir que en la
simulación, el túnel se cierre en cierta medida, antes de instalar el refuerzo de tal manera que se hace una
mejor representación de lo que realmente ocurre durante el proceso de construcción.
En las gráficas adimensionales de esfuerzo vs. %Vloss (Gráf. 1 a 5), se puede observar un comportamiento
no lineal entre la relajación de los esfuerzos y el cerramiento de túnel. Dicho comportamiento se debe a la
plastificación que sufren los elementos cercanos al perímetro del túnel. En un principio las curvas
muestran un comportamiento lineal, pero a medida que el cerramiento se hace mayor, dicha linealidad se
pierde.
Los puntos de máximo cerramiento que se presentan en las gráficas 1 a 5, corresponden en todos los casos
al valor del colapso. Se puede concluir entonces, que para cerramientos mayores, los esfuerzos que debe
resistir el refuerzo serán de nuevo σR0, ya que luego del colapso, la relajación que puede ser interpretada
como una ayuda que ofrece el suelo al refuerzo, se pierde.
Un siguiente paso en la investigación presentada correspondería en validar los resultados mediante datos
medidos en campo o mediante simulaciones de modelos a escala.

MIC 2006-II-2
70
Aunque los parámetros visco-hipoplásticos utilizados son representativos del suelo de Bogotá, para una
utilización determinante en diseño del método presentado, debe hacerse una investigación de campo y
laboratorio que entregue los parámetros exactos en el lugar donde se realizará la obra.
MIC 2006-II-2
71
Anexo A
CÓDIGO DEL PROGRAMA ENMALLADOR C ****************************************************************** C * * C * * C * ENMALLADOR PARA TUNELES ABAQUS * C * * C * * C ****************************************************************** PARAMETER (IPO=2500000,JPO=2500000) C C DIMENSION DE COMMON C C JPO=(NUANILL+1)*NUDIV C IPO=2*NUANILL*NUDIV C ****************************************************************** C COMMON/LIST1/NELEM,NPOINT,DIAM,NANILL,NUDIV,ANG,CUALONG,NDIVRAY, 1 ZQUIERDA,ARRIBA,ABAJO,DERECHA,DIVIZQ,DIVARR,DIVABA,DIVDER COMMON/LIST2/X(IPO),Y(IPO),ESP(IPO),DIA(IPO),LAC(IPO),LEC(IPO), 1 LIC(IPO),ELX(IPO),ELY(IPO),RAYDIV(IPO),LUC(IPO),DIMEN(5) C ================================================================= C C DIMENSION FX(IPO),FY(IPO),DEPTX(IPO),DEPTY(IPO) C C ================================================================= IP=5 IW=6 NPOINT=0 NELEM=0 C ************************************************************** C C DATOS DE ENTRADA C C ************************************************************** WRITE(*,260) OPEN(IW,FILE='MALLA.TXT') WRITE(*,*)'RADIO INTERNO_:' READ(*,*)DIAM WRITE(*,*)'NUMERO DE ANILLOS_:' READ(*,*)NANILL DIA(1)=DIAM DO 10 J=1,NANILL WRITE(*,219)J 219 FORMAT('ESPESOR ANILLO:=',I5) READ(*,*)ESP(J) DIA(J+1)=DIA(J)+ESP(J)
MIC 2006-II-2
72
10 CONTINUE WRITE(*,*)'DIVISIONES DE CADA RAYO_:' READ(*,*)NDIVRAY WRITE(*,*)'LONGITUD DEL CUADRO_:' READ(*,*)CUALONG WRITE(*,*)'NUMERO DE DIVISIONES DE LA CIRCUNFERENCIA_:' READ(*,*)NUDIV WRITE(*,*)'HACIA LA DERECHA_:' READ(*,*)DERECHA WRITE(*,*)'DIVISIONES A LA DERECHA_:' READ(*,*)DIVDER WRITE(*,*)'HACIA LA IZQUIERDA_:' READ(*,*)ZQUIERDA WRITE(*,*)'DIVISIONES A LA IZQUIERDA_:' READ(*,*)DIVIZQ WRITE(*,*)'HACIA ARRIBA_:' READ(*,*)ARRIBA WRITE(*,*)'DIVISIONES ARRIBA_:' READ(*,*)DIVARR WRITE(*,*)'HACIA A ABAJO_:' READ(*,*)ABAJO WRITE(*,*)'DIVISIONES ABAJO_:' READ(*,*)DIVABA C ************************************************************** C C COORDENADAS X,Y DE LOS NODOS C C ************************************************************** ANG=360./NUDIV ANG=ANG*3.1416/180. L=1 DO 20 I=1,NANILL+1 ANGUL=0.0 DO 30 J=1,NUDIV X(L)=DIA(I)*COS(ANGUL) Y(L)=DIA(I)*SIN(ANGUL) WRITE(IW,101)L,X(L),Y(L) 101 FORMAT(I7,',',F15.8,',',F15.8) L=L+1 ANGUL=ANGUL+ANG 30 CONTINUE 20 CONTINUE C ANGUL=0.0 CLO=COS(ANGUL) DO 60 J=1,NUDIV/4 RAYDIV(J)=ABS(((CUALONG/2.)/CLO-DIA(NANILL+1))/NDIVRAY) ANGUL=ANGUL+ANG CLO=COS(ANGUL) IF(ANGUL.GT.3.1417/4.) CLO=SIN(ANGUL) K=J 60 CONTINUE C
MIC 2006-II-2
73
K=K+1 DO 70 J=1,3 DO 80 I=1,NUDIV/4 RAYDIV(K)=RAYDIV(K-NUDIV/4) K=K+1 80 CONTINUE 70 CONTINUE C C C ANGUL=0.0 DO 40 I=1,NDIVRAY DO 50 J=1,NUDIV X(L)=(DIA(NANILL+1)+RAYDIV(J)*I)*COS(ANGUL) Y(L)=(DIA(NANILL+1)+RAYDIV(J)*I)*SIN(ANGUL) WRITE(IW,101)L,X(L),Y(L) ANGUL=ANGUL+ANG L=L+1 50 CONTINUE 40 CONTINUE C DIMEN(1)=DERECHA/DIVDER DIMEN(2)=ARRIBA/DIVARR DIMEN(3)=ZQUIERDA/DIVIZQ DIMEN(4)=ABAJO/DIVABA DIMEN(5)=CUALONG/(NUDIV/4.) NMAS=(NUDIV/4.+1.)*(DIVDER+DIVARR+DIVIZQ+DIVABA) NMAS=NMAS+DIVDER*DIVARR+DIVARR*DIVIZQ+DIVIZQ*DIVABA NMAS=NMAS+DIVABA*DIVDER ELMAS=(NUDIV/4.)*(DIVDER+DIVARR+DIVIZQ+DIVABA) ELMAS=ELMAS+DIVDER*DIVARR+DIVARR*DIVIZQ+DIVIZQ*DIVABA ELMAS=ELMAS+DIVABA*DIVDER I=L K=NUDIV/4+DIVDER+DIVIZQ+1 DO 5 M=1,DIVARR X(I)=-1.*CUALONG/2.-ZQUIERDA Y(I)=CUALONG/2.+ARRIBA-(M-1)*DIMEN(2) DO 15 J=1,K X(I+1)=X(I)+DIMEN(3) Y(I+1)=Y(I) IF(J+1.GT.DIVIZQ+1) X(I+1)=X(I)+DIMEN(5) IF(J+1.GT.DIVIZQ+NUDIV/4+1) X(I+1)=X(I)+DIMEN(1) WRITE(IW,101)I,X(I),Y(I) I=I+1 15 CONTINUE 5 CONTINUE C K=DIVDER+DIVIZQ DO 25 M=1,NUDIV/4+1 X(I)=-1.*CUALONG/2.-ZQUIERDA Y(I)=CUALONG/2.-(M-1)*DIMEN(5) DO 35 J=1,K X(I+1)=X(I)+DIMEN(3)
MIC 2006-II-2
74
Y(I+1)=Y(I) IF(J+1.GT.DIVIZQ) X(I+1)=X(I)+DIMEN(3)+CUALONG+DIMEN(1) IF(J+1.GT.DIVIZQ+1) X(I+1)=X(I)+DIMEN(1) WRITE(IW,101)I,X(I),Y(I) I=I+1 35 CONTINUE 25 CONTINUE C K=NUDIV/4+DIVDER+DIVIZQ+1 DO 45 M=1,DIVABA X(I)=-1.*CUALONG/2.-ZQUIERDA Y(I)=-CUALONG/2.-(M)*DIMEN(4) DO 55 J=1,K X(I+1)=X(I)+DIMEN(3) Y(I+1)=Y(I) IF(J+1.GT.DIVIZQ+1) X(I+1)=X(I)+DIMEN(5) IF(J+1.GT.DIVIZQ+NUDIV/4+1) X(I+1)=X(I)+DIMEN(1) WRITE(IW,101)I,X(I),Y(I) I=I+1 55 CONTINUE 45 CONTINUE C NODTOT=I-1 C ANG=360./NUDIV ANG=ANG*3.1416/180. DO 21 K=1,2 ANGUL=0.0 DO 31 J=1,NUDIV X(I)=(DIAM/(K+1))*COS(ANGUL) Y(I)=(DIAM/(K+1))*SIN(ANGUL) WRITE(IW,101)I,X(I),Y(I) I=I+1 ANGUL=ANGUL+ANG 31 CONTINUE 21 CONTINUE C X(I)=0.0 Y(I)=0.0 WRITE(IW,101)I,X(I),Y(I) C C ************************************************************** C C CONFIGURACION DE LOS ELEMENTOS C C ************************************************************** C C 102 FORMAT(I7,',',I7,','I7,','I7,','I7) 103 FORMAT(I7,',',I7,','I7,','I7) LOL=(NANILL+NDIVRAY)*NUDIV I=1
MIC 2006-II-2
75
DO 100 N=1,NANILL+NDIVRAY DO 110 J=1,NUDIV LAC(I)=I LEC(I)=LAC(I)+NUDIV LIC(I)=LEC(I)+1 LUC(I)=LAC(I)+1 IF(J.EQ.NUDIV) LIC(I)=LIC(I)-NUDIV IF(J.EQ.NUDIV) LUC(I)=LUC(I)-NUDIV LIC(1)=NUDIV+2 LUC(1)=2 WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 110 CONTINUE 100 CONTINUE C K=I+NUDIV-1 DO 105 L=1,DIVARR-1 K=K+1 DO 115 J=1,DIVDER+DIVIZQ+NUDIV/4 LAC(I)=K+DIVDER+DIVIZQ+NUDIV/4+1 LEC(I)=LAC(I)+1 LIC(I)=K+1 LUC(I)=K WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 K=K+1 115 CONTINUE 105 CONTINUE C K=K+1 DO 125 J=1,DIVIZQ+NUDIV/4+DIVDER LAC(I)=K+DIVDER+DIVIZQ+NUDIV/4+1 LEC(I)=LAC(I)+1 LIC(I)=K+1 LUC(I)=K IF(J.EQ.DIVIZQ) LEC(I)=(NANILL+NDIVRAY)*NUDIV+NUDIV*3/8+1 IF(J.GT.DIVIZQ) LEC(I)=LEC(I-1)-1 IF(J.GT.DIVIZQ) LAC(I)=LEC(I)+1 IF(J.EQ.DIVIZQ) L=LAC(I) IF(J.EQ.DIVIZQ+NUDIV/4+1) LEC(I)=L+1 IF(J.GT.DIVIZQ+NUDIV/4+1) LEC(I)=LEC(I-1)+1 IF(J.GT.DIVIZQ+NUDIV/4+1) LAC(I)=LEC(I-1) WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 K=K+1 125 CONTINUE C KOL=(NANILL+NDIVRAY+1)*NUDIV DO 135 J=1,NUDIV/4 K=K+1 DO 145 L=1,DIVDER+DIVIZQ IF(L.EQ.DIVIZQ+1) K=K-1 LAC(I)=K+DIVDER+DIVIZQ
MIC 2006-II-2
76
LEC(I)=K+DIVDER+DIVIZQ+1 LIC(I)=K+1 LUC(I)=K IF(L.EQ.DIVIZQ) LEC(I)=(NANILL+NDIVRAY)*NUDIV+NUDIV*3/8+1+J IF(L.EQ.DIVIZQ) LIC(I)=LEC(I)-1 IF(L.EQ.DIVIZQ+1) LAC(I)=LEC(I-1)-NUDIV/4-2*J IF(L.EQ.DIVIZQ+1) LUC(I)=LAC(I)+1 IF(L.EQ.DIVIZQ+1.AND.J.EQ.NUDIV/8+1) LAC(I)=KOL IF(L.EQ.DIVIZQ+1.AND.J.GT.NUDIV/8+1) LAC(I)=KOL-(J-NUDIV/8-1) IF(L.EQ.DIVIZQ+1.AND.J.GT.NUDIV/8+1) LUC(I)=LAC(I)+1 WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 K=K+1 145 CONTINUE 135 CONTINUE C K=K+1 DO 155 J=1,DIVIZQ+NUDIV/4+DIVDER LAC(I)=K+DIVDER+DIVIZQ LEC(I)=LAC(I)+1 LIC(I)=K+1 LUC(I)=K IF(J.EQ.DIVIZQ) LIC(I)=(NANILL+NDIVRAY)*NUDIV+NUDIV*5/8+1 IF(J.GT.DIVIZQ) LIC(I)=LIC(I-1)+1 IF(J.GT.DIVIZQ) LUC(I)=LIC(I)-1 IF(J.EQ.DIVIZQ) L=LUC(I) IF(J.EQ.DIVIZQ+NUDIV/4+1) LIC(I)=L+1 IF(J.GT.DIVIZQ+NUDIV/4+1) LIC(I)=LIC(I-1)+1 IF(J.GT.DIVIZQ+NUDIV/4+1) LUC(I)=LIC(I-1) WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 K=K+1 155 CONTINUE C K=K-NUDIV/4-1 DO 165 L=1,DIVABA-1 K=K+1 DO 175 J=1,DIVDER+DIVIZQ+NUDIV/4 LAC(I)=K+DIVDER+DIVIZQ+NUDIV/4+1 LEC(I)=LAC(I)+1 LIC(I)=K+1 LUC(I)=K WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 K=K+1 175 CONTINUE 165 CONTINUE C WRITE(IW,262) C WRITE(IW,265) DO 112 L=1,NUDIV LAC(I)=NODTOT+L
MIC 2006-II-2
77
LEC(I)=L LIC(I)=LEC(I)+1 LUC(I)=LAC(I)+1 IF(L.EQ.NUDIV) LIC(I)=1 IF(L.EQ.NUDIV) LUC(I)=NODTOT+1 WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 112 CONTINUE C DO 114 L=1,NUDIV LAC(I)=NODTOT+L+NUDIV LEC(I)=NODTOT+L LIC(I)=LEC(I)+1 LUC(I)=LAC(I)+1 IF(L.EQ.NUDIV) LIC(I)=NODTOT+1 IF(L.EQ.NUDIV) LUC(I)=NODTOT+1+NUDIV WRITE(IW,102)I,LAC(I),LEC(I),LIC(I),LUC(I) I=I+1 114 CONTINUE C WRITE(IW,266) C DO 119 L=1,NUDIV LAC(I)=NODTOT+(NUDIV*2)+1 LEC(I)=NODTOT+L+NUDIV LIC(I)=LEC(I)+1 IF(L.EQ.NUDIV) LIC(I)=NODTOT+1+NUDIV WRITE(IW,103)I,LAC(I),LEC(I),LIC(I) I=I+1 119 CONTINUE C 266 FORMAT(//10X,'**********************************************' 1 ,/25X,'RELLENO INTERIOR TRIANGULOS' 2 ,/10X,'**********************************************',//) 265 FORMAT(//10X,'**********************************************' 1 ,/25X,'RELLENO INTERIOR CUADRADOS' 2 ,/10X,'**********************************************',//) 262 FORMAT(//10X,'**********************************************' 1 ,/25X,'CENTRO DEL TUNEL' 2 ,/10X,'**********************************************',//) 260 FORMAT(10X,'**********************************************' 1 ,/10X,'* *' 2 ,/10X,'* E N M A L L A D O R *' 3 ,/10X,'* *' 4 ,/10X,'* ENMALLADOR PARA TUNELES EN ABAQUS *' 5 ,/10X,'* *' 6 ,/10X,'* ELEMENTOS CUADRADOS *' 7 ,/10X,'* *' 8 ,/10X,'**********************************************',//) C STOP END
MIC 2006-II-2
78
Anexo B
ARCHIVO DE ENTRADA TÍPICO
A continuación se presenta el archivo de entrada para una simulación típica de las realizadas en Abaqus.
Las listas de nodos y elementos se omiten, para hacer posible la presentación del input en este documento.
*HEADING
TUNEL
*********************************************************************************
** I. NODE: -------------------------------------------------------------------**
*********************************************************************************
*NODE
1, 0.80000001, 0.00000000
2, 0.79753387, 0.06276742
3, 0.79015064, 0.12514786
**___ lista completa de nodos
**---------------------------------------
*NSET, NSET=TODO, GENERATE
1,8432, 1
*NSET, NSET=IZQ, GENERATE
721, 1387, 111
1477, 3277, 90
3388, 8161, 111
*NSET, NSET=DER, GENERATE
831, 1386, 111
1476, 3276, 90
3387, 8271, 111
*NSET, NSET=ARR, GENERATE
721, 831, 1
*NSET, NSET=ABA, GENERATE
8161, 8271, 1
*NSET, NSET=INTERIOR, GENERATE
MIC 2006-II-2
79
1, 80, 1
*NSET, NSET=POROS, GENERATE
795, 906, 111
1440, 3240, 90
3351, 8235, 111
*NSET, NSET=GRAF, GENERATE
1,8271,1
*********************************************************************************
** II. ELEMENTS ---------------------------------------------------------------**
*********************************************************************************
** EL-CUERPO_TUNEL: ----------------------------------------------------ELEMENT**
*ELEMENT, TYPE= CPE4
1, 1, 81, 82, 2
2, 2, 82, 83, 3
3, 3, 83, 84, 4
4, 4, 84, 85, 5
**___ lista completa de elementos externos
**---------------------------------------
**-----------------------------------------------------------------------------**
** EL-RELL_CUADRA: -----------------------------------------------------ELEMENT**
*ELEMENT, TYPE= CPE4
8051, 8272, 1, 2, 8273
8052, 8273, 2, 3, 8274
8053, 8274, 3, 4, 8275
**___ lista completa de elementos internos
**---------------------------------------
**-----------------------------------------------------------------------------**
** EL-RELL_TRIANG: -----------------------------------------------------ELEMENT**
*ELEMENT, TYPE= CPE3
8211, 8432, 8352, 8353
8212, 8432, 8353, 8354
8213, 8432, 8354, 8355
8214, 8432, 8355, 8356
8215, 8432, 8356, 8357
**___ lista completa de elementos triangulares
MIC 2006-II-2
80
**---------------------------------------
**-----------------------------------------------------------------------------**
** SET DE ELEMENTOS:
*ELSET, ELSET=SUELO, GENERATE
1, 8050, 1
*ELSET, ELSET=EXCAV, GENERATE
8051, 8290, 1
*ELSET, ELSET=TODO, GENERATE
1, 8290, 1
*ELSET, ELSET=POROS, GENERATE
720,1270,110
1360,3070,90
3180,8020,110
**-----------------------------------------------------------------------------**
*********************************************************************************
** III. MATERIAL: -------------------------------------------------------------**
*********************************************************************************
*SOLID SECTION, ELSET=TODO, MATERIAL=NE2-SUELO
**-----------------------------------------------------------------------------**
** PROPIEDADES DEL MATERIAL:
*Material, NAME=NE2-SUELO
*Density
1.27
*DEPVAR
100
*USER MATERIAL,CONSTANTS=15
3.00, 0.0, 0.288, 0.052, 0.95, 0.062, 1.10E-5, 0.384
1.0, 2.0, 5.0, 1E-4, 0.05, 1.0,2000000
********************** With the characteristic values: ************************
** epor_100, kapill_u, C_c, C_s, beta, I_v, gamma [--/sec], phi_c
** ocr, m_2, m_5, R_max, beta_x, Chi, K_water
**-----------------------------------------------------------------------------**
**-----------------------------------------------------------------------------**
*********************************************************************************
***************
MIC 2006-II-2
81
** V. BOUNDARY: ---------------------------------------------------------------**
*********************************************************************************
**-----------------------------------------------------------------------------**
** 1. BOUNDARY FIXED:
**
**---------------------------------------------------------------------BOUNDARY**
*BOUNDARY
IZQ, 1
DER, 1
ABA, 1, 2
**-----------------------------------------------------------------------------**
*********************************************************************************
*********************************************************************************
** VI. INITIAL CONDITIONS -----------------------------------------------------**
*********************************************************************************
*********************************************************************************
*INITIAL CONDITIONS,TYPE=STRESS,GEOSTATIC
TODO,-.01,4.8,-69.66,-21,.6254
**INITIAL CONDITIONS,TYPE=SOLUTION,USER
*AMPLITUDE,NAME=RELAX,TIME=TOTAL TIME
1.0, 1.0, 2.0, 1.0, 82.0, .2
*********************************************************************************
** ------------------- BEGIN ANALYSIS -----------------------------------------**
*********************************************************************************
**-----------------------------------------------------------------------------**
*********************************************************************************
** STEP 1 ---------------------------------------------------------------------**
** GEOSTATIC STEP -------------------------------------------------------------**
*********************************************************************************
** Step 1.-------------------------------------------------------------- Step 1**
** ------------------------------------------------------------ Geostatic Step **
*STEP,UNSYMM=YES,INC=30000000
GEOSTATIC STEP
*GEOSTATIC
*DLOAD, OP=NEW
MIC 2006-II-2
82
TODO, GRAV,10,0,-1
**-----------------------------------------------------------------------------**
** --------------------------------------------------------------------------- **
*OUTPUT,FIELD, FREQUENCY=1000
*NODE OUTPUT,NSET=TODO
U
*ELEMENT OUTPUT,ELSET=TODO
S
**EL PRINT,ELSET=POROS,FREQ=5000
**,,POSITION=CENTROIDAL
**COORD,SDV77
*OUTPUT,HISTORY,FREQUENCY=10
*NODE PRINT,FREQUENCY=1000,NSET=ARR
COORD, U
*END STEP
*********************************************************************************
** STEP 2 ---------------------------------------------------------------------**
** REMOCION DE MATERIAL--------------------------------------------------------**
*********************************************************************************
** Step 2.-------------------------------------------------------------- Step 2**
** ------------------------------------------------------------ Remocion ------**
*STEP,UNSYMM=YES,INC=30000000
REMOVIENDO PARA INICIAR-CARGA 100%
*STATIC
**.5,1,.5,.5
*MODEL CHANGE, REMOVE
EXCAV
*CLOAD,AMPLITUDE=RELAX
1 , 1 , 3.521
2 , 1 , 3.466
3 , 1 , 3.39
4 , 1 , 3.294
5 , 1 , 3.181
6 , 1 , 3.051
7 , 1 , 2.907
MIC 2006-II-2
83
8 , 1 , 2.748
9 , 1 , 2.577
10 , 1 , 2.398
11 , 1 , 2.206
12 , 1 , 2.004
13 , 1 , 1.802
14 , 1 , 1.586
15 , 1 , 1.369
16 , 1 , 1.147
17 , 1 , 0.9214
18 , 1 , 0.6931
19 , 1 , 0.4631
20 , 1 , 0.2319
21 , 1 , -9.71E-06
22 , 1 , -0.2319
23 , 1 , -0.4632
24 , 1 , -0.6932
25 , 1 , -0.9214
26 , 1 , -1.147
27 , 1 , -1.369
28 , 1 , -1.586
29 , 1 , -1.802
30 , 1 , -2.004
31 , 1 , -2.206
32 , 1 , -2.398
33 , 1 , -2.577
34 , 1 , -2.748
35 , 1 , -2.907
36 , 1 , -3.051
37 , 1 , -3.181
38 , 1 , -3.294
39 , 1 , -3.39
40 , 1 , -3.466
41 , 1 , -3.522
42 , 1 , -3.556
MIC 2006-II-2
84
43 , 1 , -3.567
44 , 1 , -3.555
45 , 1 , -3.517
46 , 1 , -3.456
47 , 1 , -3.369
48 , 1 , -3.258
49 , 1 , -3.121
50 , 1 , -2.958
51 , 1 , -2.776
52 , 1 , -2.569
53 , 1 , -2.34
54 , 1 , -2.093
55 , 1 , -1.831
56 , 1 , -1.548
57 , 1 , -1.256
58 , 1 , -0.9509
59 , 1 , -0.6393
60 , 1 , -0.3207
61 , 1 , 5.41E-05
62 , 1 , 0.3208
63 , 1 , 0.6395
64 , 1 , 0.951
65 , 1 , 1.257
66 , 1 , 1.548
67 , 1 , 1.831
68 , 1 , 2.093
69 , 1 , 2.34
70 , 1 , 2.569
71 , 1 , 2.776
72 , 1 , 2.958
73 , 1 , 3.121
74 , 1 , 3.258
75 , 1 , 3.369
76 , 1 , 3.456
77 , 1 , 3.517
MIC 2006-II-2
85
78 , 1 , 3.555
79 , 1 , 3.567
80 , 1 , 3.555
1 , 2 , -1.04E-02
2 , 2 , 0.2876
3 , 2 , 0.5735
4 , 2 , 0.8514
5 , 2 , 1.114
6 , 2 , 1.366
7 , 2 , 1.601
8 , 2 , 1.824
9 , 2 , 2.031
10 , 2 , 2.217
11 , 2 , 2.388
12 , 2 , 2.548
13 , 2 , 2.683
14 , 2 , 2.805
15 , 2 , 2.91
16 , 2 , 2.998
17 , 2 , 3.069
18 , 2 , 3.124
19 , 2 , 3.164
20 , 2 , 3.187
21 , 2 , 3.195
22 , 2 , 3.187
23 , 2 , 3.164
24 , 2 , 3.124
25 , 2 , 3.069
26 , 2 , 2.998
27 , 2 , 2.91
28 , 2 , 2.805
29 , 2 , 2.683
30 , 2 , 2.548
31 , 2 , 2.388
32 , 2 , 2.217
MIC 2006-II-2
86
33 , 2 , 2.031
34 , 2 , 1.824
35 , 2 , 1.601
36 , 2 , 1.366
37 , 2 , 1.114
38 , 2 , 0.8514
39 , 2 , 0.5735
40 , 2 , 0.2875
41 , 2 , -1.05E-02
42 , 2 , -0.3131
43 , 2 , -0.6241
44 , 2 , -0.9357
45 , 2 , -1.251
46 , 2 , -1.563
47 , 2 , -1.874
48 , 2 , -2.176
49 , 2 , -2.469
50 , 2 , -2.755
51 , 2 , -3.023
52 , 2 , -3.275
53 , 2 , -3.509
54 , 2 , -3.723
55 , 2 , -3.911
56 , 2 , -4.075
57 , 2 , -4.212
58 , 2 , -4.32
59 , 2 , -4.398
60 , 2 , -4.445
61 , 2 , -4.461
62 , 2 , -4.445
63 , 2 , -4.398
64 , 2 , -4.32
65 , 2 , -4.212
66 , 2 , -4.075
67 , 2 , -3.911
MIC 2006-II-2
87
68 , 2 , -3.723
69 , 2 , -3.509
70 , 2 , -3.275
71 , 2 , -3.023
72 , 2 , -2.755
73 , 2 , -2.469
74 , 2 , -2.176
75 , 2 , -1.874
76 , 2 , -1.563
77 , 2 , -1.251
78 , 2 , -0.9356
79 , 2 , -0.624
80 , 2 , -0.313
*OUTPUT, FIELD, FREQUENCY=1
*NODE OUTPUT
U
**ELEMENT OUTPUT
**SDV,E
*ELEMENT OUTPUT
S
*NODE PRINT, FREQUENCY=500,NSET=ARR
COORD, U
*NODE PRINT, FREQUENCY=500,NSET=INTERIOR
COORD, U
*END STEP
***************************************************
******************************************************
** STEP 3 --------------------------------------------
** DISMINUCION DE CARGA 20% ----------------------
******************************************************
*STEP, UNSYMM=YES, INC=30000000
DISMINUCION DE CARGA 20%
*STATIC
1,80,1,1
*OUTPUT, FIELD, FREQUENCY=1
MIC 2006-II-2
88
*NODE OUTPUT
U
*ELEMENT OUTPUT
S
*OUTPUT, HISTORY, FREQUENCY=100
*NODE OUTPUT, NSET=ARR
U2
*NODE OUTPUT, NSET=INTERIOR
U2
*NODE PRINT, FREQUENCY=1,NSET=ARR
COORD, U
*NODE PRINT, FREQUENCY=1,NSET=INTERIOR
COORD, U
*END STEP
MIC 2006-II-2
89
Bibliografía
Alonso, E., Josa, A., and Ledesma, A. (1984). Negative skin frinction on piles: a simplified analysis and prediction procedure. Geotechnique 34(3): 341-357
Atkinson, J.H. and Potts, D. M., 1977. Subsidence above shallow circular tunnels in soft ground. Journal
of Geotechnical Engineering Division. ASCE, Vol 103, G.T.4, P. 301-325. Bauer, E. 1996. Calibration of a comprehensive hypoplastic model for granular materials. Soils and
Foundations 36, Nr. 1, P. 13 – 26. Bauer, E. : Conditions for embedding Casagrande`s critical states into hypoplasticity. Mechanics of
Cohesive-Frictional Materials 5 Davis E. Gunn M. Mair R. and Seneviratne. H. (1980). The stability of shallow tunnels and underground
openings in cohesive material. Geotechnique 30(4): 394-419 Gunn M. (1981). Dicussion on Pender. (Geotechnique, 1980. 216-222), Geotechnique 31(3): 434-438 Harrs, D. Mair, R. Love. J. Taylor R. and Henderson T. (1993). Observations of ground and structure
movements for compensation grouting during tunnel construction at Waterloo station. Geotechnique 44(4): 691-713
Jardine, R. J., Potts, D.M., Fourie, A.B. and Burland, J.B. (1986). Studies of the influence of non-linear
stress-strain characteristics in soil-structure interaction, Geotechnique, 36(3): 377-396. Kerisel. J. (1975) Old structures in relation to soil conditions. Geotechnique 25(3): 433-483 Leca, E. and Dormieux, L., (1990). Upper and lower bounds solutions for the face stability of shallow
circular tunnels in frictional material. Geotechnique 40(4): 581-606 Lee. K. and Rowe. R. (1989a). Deformations caused by surface loading and tunnelling: the role of elastic
anisotropy. Geotechnique 39(1): 125-140 Lee. K. and Rowe. R (1990a). Finite element modelling of the three-dimensional ground deformations
due to tunnelling in soft cohesive soils: part I – method of analysis. Computers and Geotechnics 10: 87-109.
Lee. K. and Rowe. R (1990b). Finite element modelling of the three-dimensional ground deformations
due to tunnelling in soft cohesive soils: part II – results. Computers and Geotechnics 10: 87-109. Leinenkugel, H. J., 1976, Deformations- und Festigkeitsverhalten bindiger Erdstoffe, Experimentelle
Ergebnisse und ihre physikalische Deutung. Geotechnique, Vol.37, pp.301-320. Mair. R. Taylor. R. and Bracegirdle. A. (1993). Subsurface settlements above tunnels in clays.
Geotechnique 43(2): 315-320 Muir Wood. A. (1975). The circular tunnel in elastic ground. Geotechnique 25(1): 115-127 Niemunis, A. & Krieg, S. 1996. Viscous Behavior of Soil Under Oedometric Conditions. Canadian
Geotechnical Journal 33, P. 159 – 168.
MIC 2006-II-2
90
Niemunis, A. 1996b. A visco – plastic model for clays and its FE implementation. Resultats recents en mechanique de sols et des roches XI Colloque Franco-Polonais. Gdansk.
Niemunis, Nübel K. Karcher C.: The consistency conditions for density limits of hypoplastic constitutive
law. Niemunis, A. Herle, I., 1997, Hypoplastic model for cohesionless soils with elastic strain range. Mech.
Cohes. Frict. Mater. 4 Nr. 2. Niemunis, A. Habilitation in preparation. (2002). Ng. C. Lings. M. Simpson. B. and Nash. D. (1995). An approximate analysis of the three-dimensional
effects of diaphragm wall installation. Geotechnique 45(3): 497-507 Pender. M. (1980). Elastic solutions for a circular tunnel. Geotechnique 30: 216-222 Sagaseta, C., 1987, Analysis of undrained soil deformation due to ground loss. Geotechnique, Vol.37,
pp.301-320. Simpson, B. O’Riordan. N. and Croft. D. (1979). A computer model for the analysis of ground
movements in London Clay. Geotechnique 29(2): 149-175 Simpson. B. (1968). Retaining structures: displacement and design. 32nd Rankine Lecture. Geotechnique
18(1): 56-66 Schofield, A.N., (1980). Cambridge Geotechnical centrifuge operations. Geotechnique 30(3): 227-268 Tedd, P., Chard, B.M., Charlwes, J.A. and Symons, I.F. (1984). Behaviour of a propped embedded
retaining wall in stiff clay at Bell Common Tunnel. Geotechnique 34(4): 513-532 Verruijt, A. and Booker, J.R., (1996). Surface settlement due to deformation of a tunnel in an elastic half
plane. Geotechnique 46: 753-756 Wolffersdorff, P.A 1996 A hypoplastic relation for granular materials with a predefined limit state
surface. Mech. Cohes.-Frict. Mater. 1, P. 251-271