Diseño de un controlador de velocidad adaptativo para un ... fileEn la actualidad los MS؛P se...
14
ISSN 2007-9737 Diseno de un controlador de velocidad adaptat ؛vo para un MSIP utilizando inteligencia artificial Omar Aguilar-Mejía, Rubén Tapia-Olvera, ؛ván Rivas-Cambero, Hertwin Minor-Popocatl Un ؛vers ؛dad Politécnica de Tulancingo, División de posgrado, Tulancingo, Hidalgo, México {omar.aguilar, ruben.tapia, ivan.rivas, hertwin.minor}@upt.edu.mx networks exh ؛b ؛ts the best pe^ormance because ؛t can adapt to every condition, demanding low computational effo^ for an online operation and considering the system nonlinearities Keywords. PMSM, fuzzy logic, sliding mode, neural network. 1. Introducción ﻫﺎ$ nuevos desarrollos tecnológicos en materiales magnéticos, semiconductores de potencia, electrónica digital y teoría de control han permitido que los motores de corriente alterna (CA), sean capaces de hacer frente a los desafios de alta eficiencia y requerimientos de alto desempefio que demanda el sector industrial. En este sentido, los motores síncronos de imanes permanentes (MS ؛P) son una alternativa y serios competidores de las máquinas de inducción debido a que presentan alta eficiencia, alto factor de potencia, excelente robustez, alta relación torque/inercia y mantenimiento económico [1]. En la actualidad los MS ؛P se emplean en una amplia gama de aplicaciones industriales que van desde pequefios servomotores para máquinas herramientas, motores eléctricos de vehículos híbridos y propulsores en barcos y submarinos [2]. Estas aplicaciones demandan una respuesta rápida y precisa ante disturbios y perturbaciones. Para cumplir con estas exigencias se requieren complejos esquemas de control que permitan un desempefio dinámico seguro y confiable ante diferentes condiciones operativas [1, 3]. El control vectorial es un método eficiente para motores síncronos en aplicaciones de velocidad variable en amplios rangos de operación. Normalmente se usa en máquinas de CA para Resumen. Los motores síncronos de imanes permanentes se han utilizado ampliamente en aplicaciones de velocidad variable de alta precisión, sin embargo, el esquema de control debe cumplir con altas exigencias de desempefio dinámico. En este trabajo se realiza un análisis comparativo de la respuesta de un motor síncrono con cuatro estrategias de control: convencional proporcional integral, modos deslizantes, lógica difusa y redes neuronales. Se describe el modelo del motor, el regulador de corriente y se realiza el disefio del control. Además, se utiliza un observador no lineal para la estimación de la velocidad del rotor y el par de carga. El desempefio de cada controlador se analiza mediante simulaciones en el tiempo donde el motor se somete a diversas perturbaciones y cambios de referencia. La técnica de control propuesta mediante redes neuronales exhibe el mejor desempefio debido a que puede adaptarse a cada condición, demandando bajo costo computacional para una operación en línea y considerando las no linealidades del sistema. Palabras clave. MSIP, lógica difusa, modos deslizantes, redes neuronales. Design of a Speed Adaptive Controller for a PMSM using Artificial Intelligence Abstract. Permanent magnet synchronous motors have been widely used in variable speed drives; however, the control scheme must ensure high requirements of dynamic pe^ormance. In this work, a comparative analysis of a synchronous motor response with four control strategies—conventional propo^ional integral, sliding mode, fuzzy logic, and neural networks—is exposed. The motor model and the current controller are described; this allows the control laws design. In addition, a nonlinear observer for estimating the rotor speed and load torque is designed. The pe^ormance of each driver is analyzed using time simulations where the motor is subjected to disturbances and reference changes. The proposed control technique using neural Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54 doi: 10.13053/CyS-20-1-2361
Transcript of Diseño de un controlador de velocidad adaptativo para un ... fileEn la actualidad los MS؛P se...

ISSN 2007-9737
Diseno de un controlador de velocidad adaptat؛vo para un MSIPutilizando inteligencia artificial
Om ar Aguilar-Mejía, Rubén Tapia-O lvera, ؛ván Rivas-Cambero, Hertwin M inor-Popocatl
Un؛vers؛dad Politécnica de Tulancingo, División de posgrado, Tulancingo, Hidalgo,México
{omar.aguilar, ruben.tapia, ivan.rivas, hertw in.m inor}@ upt.edu.m x
networks exh؛b؛ts the best pe^ormance because ؛t can adapt to every condition, demanding low computational effo^ for an online operation and considering the system nonlinearities
Keywords. PMSM, fuzzy logic, sliding mode, neural network.
1. Introducción
ا ه $ nuevos desarrollos tecnológicos en materiales magnéticos, semiconductores de potencia, electrónica digital y teoría de control han permitido que los motores de corriente alterna (CA), sean capaces de hacer frente a los desafios de alta eficiencia y requerim ientos de alto desem pefio que demanda el sector industrial. En este sentido, los motores síncronos de imanes permanentes (M S؛P) son una alternativa y serios competidores de las máquinas de inducción debido a que presentan alta eficiencia, alto factor de potencia, excelente robustez, alta relación torque/inercia y mantenim iento económico [1].
En la actualidad los M S؛P se emplean en una amplia gam a de aplicaciones industriales que van desde pequefios servomotores para máquinas herramientas, motores eléctricos de vehículos híbridos y propulsores en barcos y submarinos [2]. Estas aplicaciones demandan una respuesta rápida y precisa ante disturbios y perturbaciones. Para cum plir con estas exigencias se requieren complejos esquemas de control que permitan un desem pefio dinám ico seguro y confiable ante diferentes condiciones operativas [1, 3].
El control vectorial es un método eficiente para motores síncronos en aplicaciones de velocidad variable en amplios rangos de operación. Normalmente se usa en máquinas de CA para
Resumen. Los motores síncronos de imanes permanentes se han utilizado ampliamente en aplicaciones de velocidad variable de alta precisión, sin embargo, el esquema de control debe cumplir con altas exigencias de desempefio dinámico. En este trabajo se realiza un análisis comparativo de la respuesta de un motor síncrono con cuatro estrategias de control: convencional proporcional integral, modos deslizantes, lógica difusa y redes neuronales. Se describe el modelo del motor, el regulador de corriente y se realiza el disefio del control. Además, se utiliza un observador no lineal para la estimación de la velocidad del rotor y el par de carga. El desempefio de cada controlador se analiza mediante simulaciones en el tiempo donde el motor se somete a diversas perturbaciones y cambios de referencia. La técnica de control propuesta mediante redes neuronales exhibe el mejor desempefio debido a que puede adaptarse a cada condición, demandando bajo costo computacional para una operación en línea y considerando las no linealidades del sistema.
Palabras clave. MSIP, lógica difusa, modos deslizantes, redes neuronales.
Design of a Speed Adaptive Controller for a PMSM using Artificial Intelligence
Abstract. Permanent magnet synchronous motors have been widely used in variable speed drives; however, the control scheme must ensure high requirements of dynamic pe^ormance. In this work, a comparative analysis of a synchronous motor response with four control strategies—conventional propo^ional integral, sliding mode, fuzzy logic, and neural networks—is exposed. The motor model and the current controller are described; this allows the control laws design. In addition, a nonlinear observer for estimating the rotor speed and load torque is designed. The pe^ormance of each driver is analyzed using time simulations where the motor is subjected to disturbances and reference changes. The proposed control technique using neural
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
42 Omar Aguilar-Mejía, Rubén Tapia-Olvera, Iván Rivas-Cambero, Hertwin Minor-Popocatl
En este trabajo se presenta un análisis comparativo de ؛a respuesta de un motor síncrono de imanes permanentes con cuatro controladores diferentes: Controlador PI convencional, esquema de control por modos deslizantes, redes neuronales y un regulador difuso. Los controladores se establecen sobre la técnica de control vectorial con desacoplo de las corrientes id e iq. La aplicabilidad se presenta mediante estudios de simulación del MSIP considerando diferentes condiciones operativas y diversas perturbaciones.
2. Modelo dinámico de) MSIP
El modelo matemático que describe el comportam iento dinám ico del MSIP en un marco de referencia estacionario dq se puede definir como:
L d ~ d d = - r s i d + L q i q w e + V d ·
L q ي = - r s i q - L d i d ω e - à ^ e - V q ·
donde Vd y Vq son los voltajes aplicados en el estator en un marco de referencia dq , respectivamente; id e iq son las corrientes en dq; rs es la resistencia en el estator; Ld y Lq son lasinductancias propias del estator en dq; We es lavelocidad angular eléctrica del rotor; Te es el par electromagnético del motor, np es el número de pares de polos y λ,m es el flu jo magnético constante producido por el imán permanente en el rotor.
La ecuación dinám ica de la velocidad y la posición del rotor son:
f = 1 (T - T ٠ · (2)
1 7 ~ " ’ r ·
y se tiene que
T e = ل - جق [ * J q + ( L d - L q ٠ i d i q ] · (3)
convertirlas en cuanto a su rendimiento, en máquinas de corriente directa (CD) con excitación separada, esto perm ite características de control altamente deseables [1].
El principio del control para el MSIP está basado en la orientación de campo, dónde las corrientes en dq juegan un papel determ inante para su desempefio. Para asegurar el control vectorial del MSIP, se define que la corriente en eje directo, id, sea igual a cero, con lo que se obtiene el torque máximo del motor [4, 5]. El esquem a convencional proporcional-integral (PI) es el regulador más utilizado para controlar las corrientes dq del MSIP. La implementación del control de campo orientado requiere controladores de corriente con respuesta rápida y alta precisión, con el fin de proporcionar servo accionam ientos de eficiencia óptima [5].
Convencionalmente los controladores PI se emplean en lazos de control por su simplicidad y amplia aceptación, sin embargo, se sabe que presentan algunas limitaciones, como su dependencia en el modelo completo y la exactitud de los parámetros. Por lo tanto, para hacer frente a las no linealidades y sensibilidad de parámetros se deben incorporar en la estructura del controlador m ecanismos de adaptabilidad, llevando a un escenario de disefio complejo. En la literatura se han propuesto diversos mecanismos de adaptación como control adaptativo, modos deslizantes, controlador de estructura variable, controlador PI auto-sintonizado, controlador predictivo, entre otros. Sin embargo, el mayor problema que presentan estos controladores es su alta dependencia de los modelos matemáticos y su dificultad para representar un sistema práctico [2, 4].
Por otro lado, el d isefio de controladores inteligentes no requiere de un modelo matemático exacto, debido a su capacidad para resolver problemas no lineales a través del aprendizaje, por ejemplo las redes neuronales artificiales son muy útiles en esta área [4, 6]. Otra herramienta de control es la lógica difusa, que se puede entender como una clase de inteligencia artificial, dónde el conocim iento y experiencia de un experto se pueden convertir en reglas de control lingüísticas reproduciendo la tom a de decisiones de una persona [2, 7].
Computación y Sistemas, Vol. 20, No. 1, 2016, p p . م1-5مdoi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
Diseno de un controlador de velocidad adaptativo para un MSIP utilizando in te ligencia a rtif ic ia l 43
ConvertidorCD-CA
ConvertidorCA-CD
220 VCA 60 Hz
i q > C o n ti de velcidad en marco de referencia dq
Fig. 1. Diagrama de bهاques de؛ sistema de control para regular la velocidad del rotor del MSIP
velocidad. El ángulo eléctrico se calcula multiplicando el ángulo mecánico del rotor por el número de polos.
3. Esquema de control de) MSIP
En la Fig. 1 se pueden observar que las entradas al sistema de control de velocidad son la velocidad de referencia, ω*, la corriente deseada en eje directo, id*, y la velocidad del rotor, ωτ. La corriente deseada iq* se determ ina a partir del par electromecánico, que es proporcional a la corriente en eje q.
3.1. Disefío del esquema de control del MSIP (control campo orientado)
El modelo del M S؛P, (1), (2) y (4), es un sistema dinám ico con dos entradas de control, Vd y Vq. Si se puede hacer que la componente de la corriente en eje directo sea igual a cero, se obtiene un comportam iento sim ilar al de un motor de corriente directa con excitación de flu jo constante [9]. Las ecuaciones indican que el MSIP es un sistema no lineal debido al acoplam iento que existe entre las diferentes variables de estado (corrientes y velocidad del rotor). También, se puede observar
donde ω Γ es la velocidad mecánica del rotor, j es el momento de inercia del rotor, θΓ es la posición del rotor y Tl es el par de carga aplicado al motor. En este trabajo se considera un MSIP de polos no salientes con los imanes montados en la superficie del rotor [8], por lo cual las inductancias en eje d y eje q , son iguales, en consecuencia el par electromagnético se calcula mediante
(4)J q* ل . ق Tي
Para d isefiar el regulador de velocidad se emplean tres lazos de control conretroalimentación negativa, esto permite obtener la velocidad deseada del rotor y m ejorar el desem pefio del motor en estado estable y transitorio. El sistema de regulación incluye un lazo para la velocidad del rotor, un lazo de control de corriente en eje d y otro en eje q.
El diagram a de bloques del sistema de control para regular la velocidad del rotor utilizando la técnica de control vectorial se muestra en la Fig. 1. El sistema de control consiste en una fuente rectificadora de voltaje CA-CD, un M S؛P, una fuente inversora de voltaje CD-CA, un control automático de corriente, un sensor de posición que determ ina la velocidad del rotor y un regulador de
Computación y Sistemas, Vol. 20, No. 1, 2016, p p . م1-5مdoi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
44 Ornar Aguilar-Mejía, Rubén Tapia-Olvera, Iván Rivas-Cambero, Hertwin Minor-Popocatl
rotor Gr, para compararla con la sefial portadora de alta frecuencia.
3.2. Cálculo de la corriente deseada, iq
La corriente deseada en eje q se determ ina sustituyendo (2) y (4) en la derivada de (5), con la d inám ica deseada del error. Despejando iq , se obtiene la corriente deseada, iq ' , para el controlador de corriente en eje de cuadratura,
iq ي* + (8 = ت ي )
donde c es la velocidad de convergencia del error de la velocidad. Se puede observar que el valor de la corriente deseada está en función de la derivada de la velocidad de referencia, el par de carga y la velocidad del rotor, por lo que es necesario medirlos o estimarlos.
3.3. Estimación del par de carga, Tl*
En la práctica el par de carga es desconocido, por lo cual es necesario d isefiar un estimador para conocer su valor y ca lcu lar la corriente deseada, i * . Las ecuaciones que describen al estimador no lineal son [13]:
12 = و- e . . رم1) donde ω es la estimación de la velocidad mecânica del rotor; f es el par mecánico estimado; es es el error velocidad, de la velocidad estimada; li y 2ا son las ganancias de las ecuaciones dinám icas del estimador y; kw=0.75npÃm.
Combinando las ecuaciones del estim ador (9) y (10) y la ecuación dinám ica de la velocidad del rotor, se puede obtener un conjunto de ecuaciones que describen el seguim iento dinám ico del error del estimador.
El conjunto de ecuaciones diferenciales (11) representa un sistema lineal autónomo,
que los parámetros dependen de las condiciones de operación, principalmente del par de carga y tem peratura de operación. La principal meta del controlador es regular la velocidad angular del rotor para que siga una trayectoria deseada ante diferentes perturbaciones paramétricas y variaciones del par de carga. Por lo tanto, la principal sefial de error se puede defin ir como,
β ω = ω * - ω τ , (5)
donde ω* es la velocidad deseada para el rotor. En (1) se tienen dos variables de control independientes, Vd y Vq, si la sefial de control Vq regula la velocidad del motor, se tiene un grado libertad disponible, Vd, y se puede tom ar ventaja de ello. Una ventaja es evitar la desm agnetización de los imanes permanentes, lo cual se logra haciendo que la corriente en eje directo sea igual a cero [912].
Si se cumple esta condición, la corriente del estator es igual a la corriente en eje q, entonces el par electromagnético del MSIP es proporcional a iq. Otra ventaja es que los enlaces de flujo constantes tienen una relación lineal con la corriente en el estator, con lo cual se pude fácilm ente estimar su valor. Definiendo el error de seguim iento de la corriente en eje d como
e d = i *d - i d , (6)
donde id' es la sefial de referencia para la corriente en eje d. En teoría el controlador propuesto obliga a la corriente id a tener un valor igual a cero en un tiempo finito y, que el par eléctrico sea proporcional a la corriente iq . Por lo tanto, se define el error para la corriente en eje q,
e q = i q — i q > (7)
donde iq* es la sefial de referencia para la corriente en eje q. El sistema de control propuesto se basa en un esquema sinusoidal por ancho de pulso (SPWM), donde las sefiales de modulación en el marco de referencia dq son md y mq, Fig. 1. La sefial de modulación se transform a al sistema abc utilizando la transform ada de Park y la posición del
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361
ISSN 2007-9737
Diseno de un controlador de velocidad adaptativo para un MSIP utilizando in te ligencia a rtif ic ia l 45
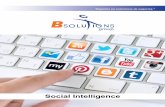
Fig. 2. Diagrama de bloques para regular la velocidad de un MSIP utilizando dos compensadores convencionales PI
- Diseno del controlador convencional PI para el MSIP
asintóticamente e$table con la elección adecuada de los parámetro$ h y 14] :[أ2
Para regular la velocidad del rotor del MSIP y mejorar $٧ de$empefio dinám ico primero se d i$efia un esquem a de control convencional PI, Fig. 2. Considerando (1) se definen las siguientes sefiales de control como en [15],
- ر أ أ‘ز - - , .
(12)أء> ،،مح=آمح-قوم
«م = +آآ4امحبم+ه,بم.
sustituyendo (12) en (1), se obtienen el siguiente sistema dinám ico de primer orden:
(13)+م-ا-,' ء' خ,
' 'م. ء' . مؤ
Para regular la velocidad del rotor de un MSIP utilizando dos controladores convencionales PI se pueden establecer dos sistemas de control a lazo cerrado uno para regular id y otro para iq. En la Fig.
4. Sintonización de controladores
El esquem a de regulación para el motor síncrono de imanes permanentes se ha definido en la sección tres, sin embargo, su correcta operación requiere de estrategias de control robustas 0 adaptativas que garanticen un desem pefio seguro y confiable, además, debe responder rápida y adecuadamente ante diversos escenarios a los que se pueda enfrentar.
En este trabajo se proponen tres form as de sintonización y aplicación del esquem a de control orientado de campo, comparando el desempefio con un controlador lineal PI.
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-l-2361

ISSN 2007-9737
Omar Aguilar-Mejía, Rubén Tapia-Olvera, Iván Rivas-Cambero, Hertwin Minor-Popocatl م6
(16)
donde \ei\=ei sign ei para i=d, q. Las derivadas de la funciones de Lyapunov son negativas si,
(17)
(18)
L„
para eq.- iq + ω #{uq[
L q
Por lo tanto, ed, eq y em son igual a cero después de un intervalo de tiem po finito
4.3. Control adaptativo mediante redes neuronales B-spline
Para el d isefio del neurocontrolador se emplea una red neuronal de entrenamiento instantâneo B- spline (BSNN) debido a que presentan mejores características comparadas con otras redes neuronales (RN) inteligentes, por ejemplo: la RN de retropropagación (RNBP) y la RN de función base radial (RNRBF). En este caso la BSNN se compone por tres capas, que son: 1) un espacio l- d imensional de entradas normalizado; 2) un conjunto de funciones base p; y 3) la función de salida de la red.
Uno de los elementos medulares a defin ir en la estructura de las BSNN son las funciones base, que pueden incorporar conocim iento previo de la planta por parte del d isefiador. Las funciones base B-Spline se obtienen utilizando una relación recurrente [17-18], las cuales son numéricamente estables, computacionalm ente eficientes, y pueden tratar con cualquier distribución estratégica de puntos de control.
La función de salida de la red neuronal adaptativa (RNA) es una combinación lineal de las salidas de las funciones base y en general es continua. Los coeficientes lineales son los pesos ajustables, Wi, y debido a que la salida es linealmente dependiente del conjunto de pesos, el entrenamiento es simplemente un problema de
2 se muestra que el controlador para id, permite calcular Ud■
De form a similar, el controlador de iq determ ina Uq. La magnitud de la corriente iq* la determ ina el lazo de control del par electromagnético que está en función de la velocidad de referencia Asum iendo que la función de transferencia a lazo cerrado entre ^d(s) y Ed(s), son de prim er grado y semejantes, los parâmetros del controlador P؛ se determ inan como kp = L /t y ki=kp(r/Ld).
El coeficiente τ es el retardo de tiempo de la respuesta del controlador. Las sefiales de control que entregan los controladores de corriente se transform an al marco de referencia abc, para compararlos con una sefial triangular. Los pulsos que genera la comparación de las dos sefiales se envían a los d ispositivos semiconductores de potencia de la fuente inversora de voltaje que alimenta al motor síncrono de imanes permanentes.
4.2. Control robusto por modos deslizantes
Utilizando (1), (5), (6) y (8) se d isefia la ley de conmutación del controlador no lineal por modos deslizantes [16],
(14)ud = ud 0 sign (ed )>
uq = uq0sign(eq )>
donde ud0 y uq0 son los valores máximos de las sefiales de control, respectivamente. El diagrama de bloques para regular la velocidad del MSIP utilizando la técnica de modos deslizantes se muestra en la Fig. 3.
La condición de existencia de modos deslizantes es equivalente a la condición de estabilidad, por lo tanto, se seleccionan dos funciones de Lyapunov definidas positivas de la siguiente forma:
(15)
Derivando respecto al tiempo sobre la trayectoria de (6) y (7), respectivamente, y sustituyendo se obtiene
Computación y Sistemas, Vol. 20, No. 1, 2016, p p . م1-5مdoi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
Diseno de un controlador de velocidad adaptativo para un MSIP utilizando in te ligencia a rtif ic ia l 47
Fig. 3. Diagrama de bloques para regular la velocidad del MSIP utilizando la técnica de modos deslizantes
donde γ es ؛a relación de aprendizaje, a es el vector que contiene las salidas de las funciones base, w es el vector de pesos y ءتة= m(t)-m (t), donde m(t) y m (t) son las salidas deseada de la red y la salida actual de la red B-spline, respectivamente. Para el entrenamiento de la red previo a su trabajo en línea, se consideraron diversos escenarios a los que se puede ver sometido el motor, Tabla 1. Se considera el desem pefio a lazo abierto del sistema modificando par de carga y velocidades del ro to r . ا ه $ valores finales de los parámetros de control del entrenamiento fuera de línea, que se utilizan como condiciones iniciales para su operación en línea, sección 5, £،•=1.1167 para id, £،=5.1526 para iq, kp=1.0784 para id, kp=2.4104 para iq. La relación de aprendizaje que se obtiene es γ=0.04, esto permite tener un control suave y robusto como se aprecia en la sección de resultados.
4.4 Control adaptativo mediante ■ógica difusa
Un sistema difuso emula la acción de un experto humano, está compuesto por cuatro etapas básicas que se muestran en el esquem a de la Fig. 4.
El mecanismo de inferencia es el núcleo de un controlador difuso, es dónde se generan las acciones de control en función del conjunto de reglas base usando los conectores lingüísticos S -؛
optim ización lineal [19]. Por lo cual la salida se puede escribir [20],
P
y = Σ aiwi = aT w , (19)
donde a es un vector ^-d im ensional que contiene las salidas de las funciones base, y w es el vector correspondiente de pesos. Para dism inuir el tiempo y esfuerzo computacional, en este caso se utilizan solamente dos factores de peso para cada RN.
En este trabajo el esquem a de control del MSIP utiliza un algoritmo de control que se basa en una RNA que se encarga de determ inar el valor de la salida teniendo como entradas: salidas pasadas y entradas actuales. Con base a esos valores se determ ina el valor óptimo de la entrada de control de tal form a que el error tienda a cero.
La regla de aprendizaje que se utiliza es de gradiente descendente, en vez de los algoritmos recursivos de mínimos cuadrados que son más complicados Para la actualización de los pesos
اك¥ى-ا ) se utiliza una regla de aprendizaje instantâneo de la form a [20],
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
48 Omar Aguilar-Mejía, Rubén Tapia-Olvera, Ivan Rivas-Cambero, Hertwin Minor-Popocatl
vo bajo؛ ,t؛vo bajo, Cero, Pos؛Negativo alto, Negat} vo Alto}. Entonces, las funciones de؛t؛Pos
:m embresía son
(21)
N a = {(٠ ٩ A '] م< } > N b = { [ B ', 0 ] , μ
C = { [ A ', A ] , μ α } ,
Pb = { [ 0, B ] , μ η } , Pa = { [ A. μ ΐ α ا
donde el grado de pertenencia para los grupos trapezoidales y triangulares se obtiene con
μΝα (£f ) = max
μ Μ ( £ f ) = ™ ax
μΝα
(22)
(23)
(24)
(25)
(26)
ón de؛ón, la acc؛cac؛f؛En la etapa de defus ca, se transform a؛ngüíst؛ta en form a l؛control descr
endo un nuevo valor para؛so def؛en un valor prec la salida de control s, el cual se obtiene por medio del centroide sobre la función de m embresía y se
:representa por
(27)paraΣ j μΒj (δ,) δ
Σ j μΒj (Sj )S =
j e {Να, Nb, C , Pb, Pa}.
donde μB j (δj ) es el grado de membresía.En las Fig. 6 y 7 se muestran las superficies de
control para la corriente iq y para la corriente id, respectivamente. Se usan los valores de 0.07 y 3 en A y B para desarrollar la fusificación del error en la corriente iq, en el caso de su derivada es 1 y 80.
as de؛vas prev؛ones operat؛c؛Tabla 1. Cond entrenamiento de la red fuera de línea
Par de cargaTl (Nm)
Velocidad del rotorων (rpm)
0.95 30
3.3 150
2.25 -20
3.03 85
0.32 33
1.75 -74
Na Nb c Pb Pa
XXXXB' A ' O A B e /d e
Fig. 5. Funciones de membresía para el error y su derivada
ENTONCES. Entonces, en este trabajo para el disefio del controlador difuso se emplea un esquem a de tipo Mamdani con 5 funciones de m embresía para el error e(t) y su derivada de(t)/dt.
Existen diversas form as para llevar a cabo la etapa de fusificación, como es el caso de [21] donde se emplea una técnica de razonamiento inductivo difuso, con funciones de membresía Gaussianas usando únicamente valores entre 0.5 y 1 para los grados de pertenencia.
En este trabajo se definen conjuntos difusos de otro tipo: trapezoidal y triangular, lo que permite usar todo el rango posible en el grado de pertenencia, Fig. 5 [22]. Se obtienen grupos:
Computación y Sistemas, Vol. 20, No. 1, 2016, p p . م1-5مdoi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
Diseno de un controlador de velocidad adaptativo para un MSIP utilizando in te ligencia a rtif ic ia l 49
Tabla 2. Parámetros del MSIP
Fig. 6. Superficie de control para la corriente iq
Fig. 7. Superficie de control para la corriente id
adores؛os cuatro contro؛ ementación de؛La im p ink, Fig. 1. Los؛ab/S im u؛iza en M at؛se rea
a؛P se asumen conocidos, Tab؛M S ؛parámetros de se em؛ea e؛ p ؛os 4 esquemas de contro2 ؛. En
par de carga y ؛mismo observador propuesto de os؛ ean؛ador de corriente, se em p؛contro ؛de =-880, Í2ا= :as ganancias؛ ores para؛siguientes va
ocidad؛a ve500 ؛. Las magnitudes de6.776 =ء y deseada de؛ rotor y e؛ par de carga ap؛icado a؛
tiempo es en ؛a 3, e؛a Tab؛ motor se indican en ación propuesto؛escenario de sim u ؛segundos. E
ocidad y؛demanda grandes variaciones de ve perturbaciones externas que representan
PLas Fig.؛M S ؛es de trabajo para e؛condiciones rea tados obtenidos mediante؛os resu11-8 ؛ resumen
sim؛ación de؛ contro؛ de ve؛ocidad de؛ rotor de؛ u de ؛P trifásico, que tiene una potencia nom ina؛M S
.ocidad de 3000 rpm1؛kW y una ve
Parâmetro Si'mbnln VaOr y unidades
Coeficiente de inercia j 3.5e-5 NmVoltaje nominal v 120 V
Resistencia del O c r\estator rs 2.6
Inductancia del ٢, 6.73 mHestator en eje d d
Inductancia del r 6.73 mHestator en eje q q
Inductancia de Lis ٢١ Η ٢dispersión del estator Lq ا .0
Flujo magnético del 0 319 Whimán permanente
Pares de polos P 2
Tabla 3. Condiciones operativas a las que se someteMSIP ؛e
Par de carga VeOcidad del rntnrTl (Nm) mrps
0 si t 0.10 ة 0 si t 0 ة 05
0.8 si 0.10 < t ة 3.19 150 si 0 05 < t ة 0.15
1.5 si 0.19 < t ة 0.29 220 si 015 < t ة 0.25
.9O
si 0.29 < t ة 0.38 60 si 0 25 < t ة 0 35
1.3 si 33 له t ١٨ 0 45 -120 si 0 35 < t ة 0.50
0 si t > 0.45 0 si t > 0.50
error ؛a fusificación de؛ a m isma form a para؛ De mente, para؛iza 0.1 y 4, fina؛a corriente id se u ti؛ de
.50 derivada e$ de 1 y ٧$
5 Resultados y análisis
tados de؛os resu؛ En esta sección se presentan izaron para verificar y؛aciones que se rea؛as s im u؛
os diferentes؛ desem pefio de ؛com parar e esquemas de contro؛ de ve؛ocidad de؛ rotor de؛
tados se utilizan para exam inar؛P. Estos resu؛M S a respuesta dinám؛ contro؛ adaptativo (P؛ ica de؛ NN) que se compara con tres esquemas de contro؛
ador por؛X), contro؛F ؛P) ؛ador P؛diferentes: contro ador difuso؛izantes (SM) y contro؛modos des
(.(FUZZY
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
50
Fig. 8. Desempefio dinámico de la velocidad del rotor del MSIP
Fig. 9. Evolución del error de la velocidad del rotor
؛ , S M _ i , PI N N . . . Í , PI F IX . . i , FUZZYa a a a
i P I NN i PI FIX i FUZZY i SM q q q q
-1000 0.05 0.1 0.15 0.2 0.25 0.tiemp© (seg)
0.35 0.4
Fig. 10. Desempefio dinámico de las corrientes en el marco de referencia dq del MSIP
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361
ISSN 2007-9737
51
tiempo (seg)
0.45).2 0.25 0tiempo (seg)
>.15.05
e SMq
e PI FIX e PIq q
e FUZZY 'q
إ
-
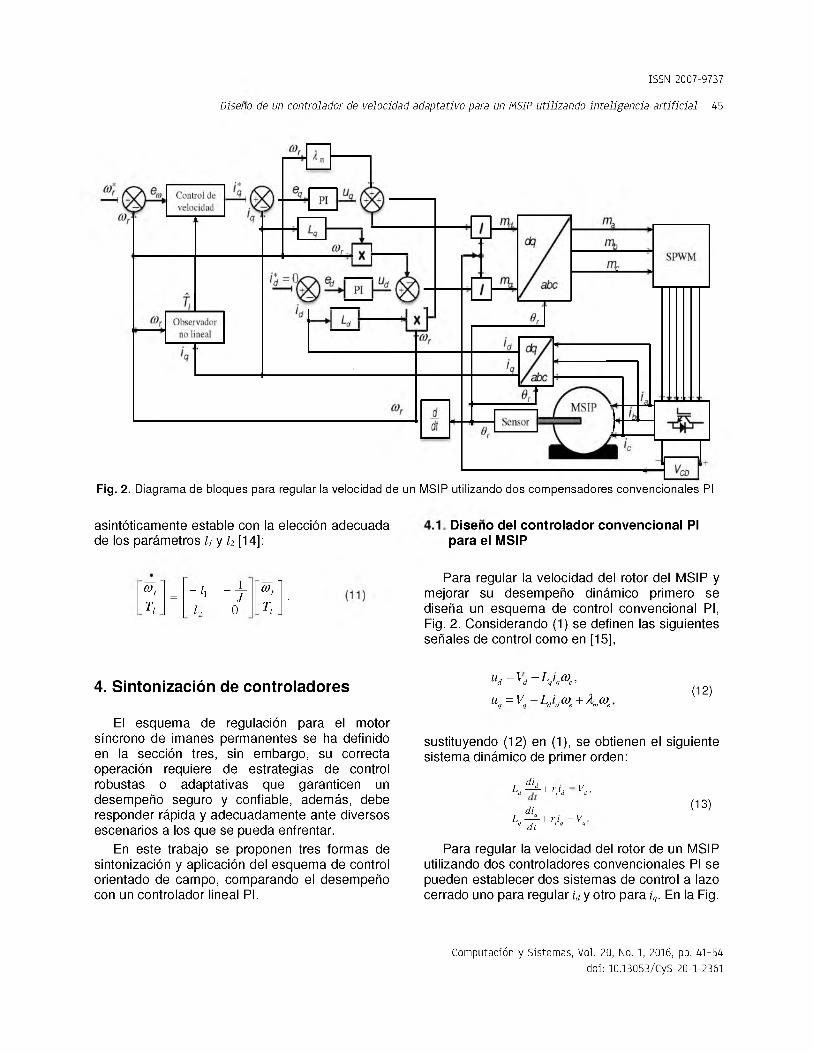
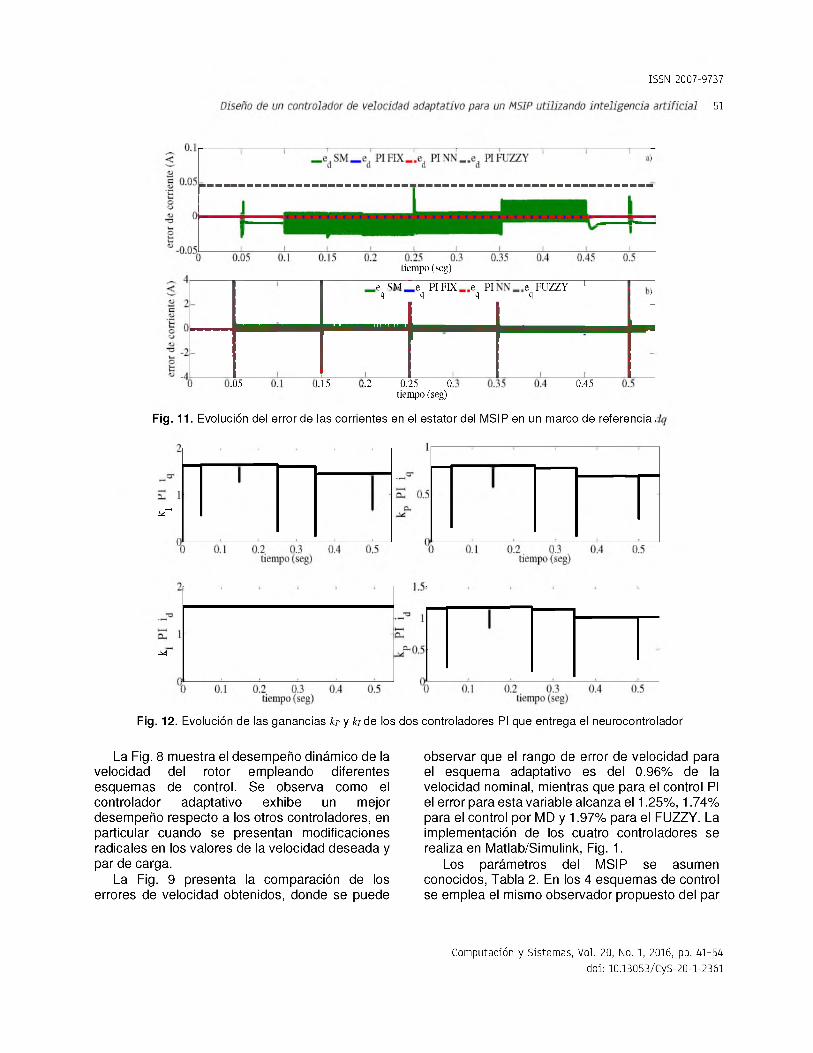
Fig. 11. Evolución del error de las corrientes en el estator del MSIP en un marco de referencia ,
ى
فد
Fig. 12. Evolución de las ganancias kp y kl de los dos controladores PI que entrega el neurocontrolador
observar que el rango de error de velocidad para el esquem a adaptativo es del 0.96% de la velocidad nominal, m ientras que para el control P؛ el error para esta variable alcanza el 1.25%, 1.74% para el control por MD y 1.97% para el FUZZY. La implementación de los cuatro controladores se realiza en Matlab/Simulink, Fig. 1.
Los parámetros del M S؛P se asumen conocidos, Tabla 2. En los 4 esquemas de control se emplea el m ismo observador propuesto del par
La Fig. 8 muestra el desem pefio dinám ico de la velocidad del rotor empleando diferentes esquemas de control. Se observa como el controlador adaptativo exhibe un mejor desem pefio respecto a los otros controladores, en particular cuando se presentan modificaciones radicales en los valores de la velocidad deseada y par de carga.
La Fig. 9 presenta la comparación de los errores de velocidad obtenidos, donde se puede
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
52
donde, la adaptación de los parâm etros se requiere en momentos críticos y el reajuste o calibración manual de las ganancias del controlador es imposible.
6. Conclusiones
En este trabajo se realiza el estudio comparativo de cuatro diferentes estrategias de control basadas en reguladores convencionales, inteligencia artificial, esquemas adaptativos y de estructura variable para regular la velocidad de un M S؛P. La$ estrategias de control se implementan en M atlab/S imulink para conocer su respuesta transitoria y desem pefio en estado estable cuando se presentan disturbios en el par de carga y diferentes requerim ientos de la velocidad deseada.
os resultados de las simulaciones muestran اque todos los controladores funcionan relativamente bien, pero el controlador adaptativo basado en redes neuronales artificiales presenta una excelente respuesta dinâm ica comparada con los otros esquemas de control. El anâlisis indica que los parâmetros del neurocontrolador se actualizan en línea de acuerdo a la ley de aprendizaje para obtener robustez y seguim iento preciso de la trayectoria deseada.
Agradecimientos
Este trabajo ha sido apoyado por:1. C iencia Básica CONACYT. Proyecto 258206.2. Estancia Sabática CONACYT. Proyecto266333.
Referencias
1. Ozturk, N. & Celik, E. (2012). Speed Control of Permanent Magnet Synchronous Motors using Fuzzy Controller base on Genetic Algorithms. Electrical Power and Energy Systems, Vol. 43, No. 1, pp. 889-898. D O .jepes.2012.06.013؛.j/؛: 10.1016
2. Iqbal, A., Abu-Rub, H., &Nounou, H. (2014). Adaptive Fuzzy Logic-Controlled Surface Mount Permanent Magnet Synchronous Motor Drive. Systems Science & Control Engineering, Vol. 2, No.1, pp 465-475. DO10.1080/21642583.2014 :؛. 915203
de carga y del controlador de corriente, se emplean los siguientes valores para las ganancias: / 6 . 7 7 6 - = ر=880, /ء y c=500.
La$ magnitudes de la velocidad deseada del rotor y el par de carga aplicado al motor se indican en la Tabla 3, el tiempo es en segundos. El escenario de simulación propuesto demanda grandes variaciones de velocidad y perturbaciones externas que representan condiciones reales de trabajo para el M S؛P.
La comparación de las corrientes del estator del motor en dq se muestra en la Fig. 10. En la Fig. 10.b se observa que en estado estacionario los esquemas de control demandan la m isma amplitud de corriente, iq, pero en la respuesta transitoria el controlador por modos deslizantes presenta menores sobreimpulsos.
En la Fig. 11 se aprecia que id=0, excepto en el controlador por modos deslizantes y difuso. Se puede observar que la respuesta de id que entrega el controlador por modos deslizantes oscila en un intervalo acotado entre 0.25 y -0.2 A. La Fig. 10 indica que en algunos periodos de la simulación el controlador convencional P requiere menor ؛amplitud de corriente para alcanzar satisfactoriamente la velocidad deseada del rotor Sin embargo, de acuerdo a los resultados mostrados, el controlador adaptativo basado en redes neuronales B-spline exhibe el mejor desem pefio tanto en respuesta transitoria como en estado estacionario, por lo que se presenta como una solución más atractiva para el problema de regulación de velocidad del rotor para un motor síncrono de imanes permanentes sujeto a altas demandas.
En la Fig. 12 se muestra la evolución de las ganancias kP y kl de los dos controladores P؛ que entrega la BSNN. Para las ganancias del controlador adaptativo que regula iq; al inicio de la simulación su magnitud cambia radicalmente de la condición inicial, hasta alcanzar un valor cercano a 1.5 y 0.71. Posteriormente, la red neuronal sigue aprendiendo y modificando las ganancias en función a los cambios de velocidad de referencia y del par de carga.
Es evidente que el neurocontrolador tiene la capacidad de aprender y adaptarse en línea, por lo cual puede utilizarse en aplicaciones como en robots manipuladores, máquinas de bordar, control de altitud y velocidad de una aeronave
Computación y Sistemas, Vol. 20, No. 1, 2016, p p . م1-5مdoi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
53
14. Alonge, F., D’Ippolito, F., Giardina, G., & Scaffidi, T. (2007). Design and low-cost implementation of an optimally robust reduced-order rotor flux observer for induction motor control. IEEE Transactions on Industrial Electronics, Vol. 54, No. 6, pp. 32053216. DOI: 10 1109/TIE 2007 905632
15. Ahmadi, A. Sedehi, M., Yazdani, A., & Haniff, M.(2012). Designing an Optimal Fuzzy-PID Controller for Speed Tracking of Stepper Motor. Proc. of IEEE Symposium on Industrial Electronics and Applications, pp. 193-198. DOI: 10.1109/ISIEA. 2012 6496627
16. Utkin, V., Guldner, J., & Shi, J. (2009). Sliding Mode Control in Electro-Mechanical Systems. CRC Press DOI: 10.1080/10241230306724.
17. Cox, M. (1972). The numerical evaluation of B- splines. Journal of Applied Mathematics, Vol. 10, No. 2, pp. 134-149. DOI: 10.1093/imamat/10.2.134.
18. DeBoor, C. (1972). On Calculating with B-splines. Journal of Approximation Theory, Vol. 6, No.1, pp. 50-62. DOI: 10.1016/0021-9045(72)90080-9.
19. Singiresu, R. (1996). Engineering Optimization: Theory and Practice. John Wiley & Sons.
20. Brown, M., & Harris, C. (1994). Neurofuzzy Adaptive Modeling and Control. Prentice Hall.
21. Cellier, F.E., Nebot, A., Mugica, F., & Albornoz. A.D. (1996). Combined qualitative/quantitative simulation models of continuous-time processes using fuzzy inductive reasoning techniques. International Journal of General System, Vol. 24, No. 1-2, pp. 95-116. DOI: 10.1080/03081079 608945108
22. Feng, G. (2010). Analysis and Synthesis of Fuzzy Control Systems: A Model-Based Approach. CRCPress
Omar Aguilar-Mejía recibió el título de Ingeniero Eléctrico en 1999 por el Instituto Tecnológico de Pachuca, el grado de Maestro en Ciencias en la especialidad de Ingeniería Eléctrica en 2002, por el C INVESTAV Unidad Guadalajara, en 2015 obtuvo el grado de Doctor en Ingeniería Industrial por la Universidad Autónom a del Estado deHidalgo. Actualm ente es profesor investigador de la Universidad Politécnica de Tulancingo. Sus áreas de interés son el control robusto demáquinas eléctricas y aplicaciones de redeseléctricas con energías renovables.
Rubén Tapia-Olvera recibió el título de Ingeniero Eléctrico en 1999 por el Instituto Tecnológico de Pachuca, el grado de Maestro y Doctor en
3. Lin, C.H. (2015). PMSM Servo Drive for V-Belt Continuously Variable Transmission System Using Hybrid Recurrent Chebyshev NN Control System. Journal of Electrical Engineering & Technology, Vol. 10, No. 1, pp. 408-421. DOI: 10.5370/JEET.2014. 9.6.742.
4. Xu, D., Zhang, S., & Liu, j . (2013). Very-low Speed Control of PMSM based on EKF Estimation with Closed Loop Optimized Parameters. ISA Transactions, Vol. 52, No. 6, pp. 835-843. DOI: 10.1016/j.isatra.2013.06.008.
5. Khanchoul, M., Hilairet, M., & Normand-Cyrot, D. (2014). A passivity-based controller under low sampling for speed control of PMSM. Control Engineering Practice, Vol. 26, pp. 20-27. DOI: 10.1016/j.conengprac.2013.12.013.
6. Jung, J.W., Choi, Y.S. Leu, V.Q., & Choi, H.H.(2011). Fuzzy PI-type current controllers for permanent magnet synchronous motors. Electric Power Applications (IET), Vol. 5, No. 1, pp. 143152. DOI: 10.1049/iet-epa.2010.0036.
7. Elmas, C., Ustun, O., & H.-Sayan, H. (2008). A neuro-fuzzy controller for speed control of a permanent magnet synchronous motor drive. Expert Systems with Applications, Vol. 34, No. 1, pp. 657-664. DOI: 10.1016/j.eswa.2006.10.002.
8. Omrane, I., Etien, E., & Bachelier, 2015) .ه). Modeling and Simulation of Soft Sensor Design for Real-Time Speed and Position Estimation of PMSM. ISA Transactions, Vol. 57, No. 1, pp. 329339. DOI: 10.1016/j.isatra.2014.06.004.
9. Zheng, S., Tang, X., Song, B., Lu, S., & Ye, B. (2013). Stable adaptive PI control for permanent magnet synchronous motor drive based on improved JITL· technique. ISA Transactions, Vol. 52, No. 4, pp. 539-549. DOI: 10.1016/j.isatra.2013. 03 002
10. Yazdani, A. & Iravani, R. (2010). Voltage-Sourced Converters in Power Systems Modeling, Control, and Applications. John Wiley & Sons.
11. Krishnan, R. (2009). Permanent Magnet Synchronous and Brushless DC Motor Drives. CRCPress
12. Accetta, A., Cirrincione, M., & Pucci, M. (2012).TLS EXIN based Neural Sensorless Control of a High Dynamic PMSM. Control Engineering Practice, Vol. 20, No. 7, pp. 725-732. DOI: 10.1016/j.conengprac.2012.03.012.
13. Moreno, J.A. & Osorio, M.A. (2008). Lyapunov Approach to Second-Order Sliding Mode Controllers and Observers. Proc. of 47th IEEE Conference on Decision and Control, pp. 28562861 DOI: 10 1109/CDC 2008 4739356
Computación y Sistemas, Vol. 20, No. 1, 2016, pp. 41-54
doi: 10.13053/CyS-20-1-2361

ISSN 2007-9737
Ornar Aguilar-Mejía, Rubén Tapia-Olvera, Iván Rivas-Cambero, Hertwin Minor-Popocatl م5
la Universidad Politécnica de Tulancingo. Su área de interés es el control de sistemas no lineales con lógica difusa.
Hertwin Minor-Popocatl recibió el título de Ingeniero Industrial por el Instituto Tecnológico de Apizaco, el grado de maestro en ciencias por la Universidad Autónoma de Tlaxcala en 2002 y el grado de doctor en Sistemas Integrados de M anufactura y Estrategias de Calidad por la UPAEP, en 2012. Desde 2002 es profesor investigador de la Universidad Politécnica de Tulancingo. Su área de interés es en la programación matemática, optim ización multi- objetivo y algoritmos meta heurísticos.
Artículo recibido 27/09/2015; aceptado 19/01/2016.Autor de correspondencia es Omar Aguilar-Mejia.
ngeniería Eléctrica؛ Ciencias en la especialidad de 2002 por el C INVESTAV Unidad Guadalajara en
y 2006, respectivamente. Actualmente es profesor investigador de la Universidad Politécnica de Tulancingo. Su área de interés es en la operación, control y planeación de redes eléctricas con energías renovables y técnicas de inteligenciacom putacional.
ngeniero؛ Iván Rivas-Cambero recibió el título de Electricista en 1998 por el Instituto Tecnológico de Tepic, el grado de Maestro en Ciencias en la
ngeniería Eléctrica por el؛ especialidad de .2002 C INVESTAV Unidad Guadalajara en
ndustrial؛ ngeniería؛ Obtuvo el grado de Doctor en por la Universidad Autónoma del Estado de Hidalgo. Desde 2002 es profesor investigador de
Computación y Sistemas, Vol. 20, No. 1, 2016, p p . م1-5مdoi: 10.13053/CyS-20-1-2361