DESCRIPCION DE SISTEMAS - isa.uma.es de Clase (ppt)/Document Libr… · 22/11/2005 Ingenieria de...
55
22/11/2005 Ingenieria de Sistemas. J. Fdez de Cañete 2005 RESPUESTA DE SISTEMAS Tema 3
Transcript of DESCRIPCION DE SISTEMAS - isa.uma.es de Clase (ppt)/Document Libr… · 22/11/2005 Ingenieria de...

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
RESPUESTA DE SISTEMAS
Tema 3

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Indice
Respuesta Temporal de SistemasAnálisis de la Respuesta TransitoriaSistemas de Primer OrdenSistemas de Segundo OrdenSistemas de Orden SuperiorIdentificación de SistemasLugar de las RaícesEstabilidadAnálisis de la Respuesta Permanente

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Respuesta Temporal de Sistemas
Sistema continuo representado por la ecuación diferencial con salida y(t) y entrada u(t)
con un conjunto de cond. iniciales siendo nel orden del sistema.
La obtencion de la respuesta del sistema y(t) ante entrada u(t) se realiza por aplicación de la L
a y a y a y a y b u b u b unn
nn
mm) ) )' '+ + + + = + + +−
−1
11 0 1 0L L
y y yn( ), '( ), , ( ))0 0 01K −
a s Y s s y s y a s Y s s y a Y sb s U s s u b s U s s u b U s
nn n n
nn n
mm m
mm m
( ( ) ( ) ' ( ) ) ( ( ) ( ) ) ( )( ( ) ( ) ) ( ( ) ( ) ) ( )
− − − + − − + + =
− − + − − + +
− −−
− −
−−
− −
1 21
1 20
11
1 20
0 0 00 0
L L L
L L L

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Respuesta Temporal de Sistemas
Reagrupando términos
Con P(s) polinomio que depende de las cond. Iniciales
La transformada de la respuesta Y(s) de un sistema continuo se puede expresar
Y1(s) es la respuesta forzada y Y2(s) es la respuesta natural
( ) ( ) ( ) ( ) ( )a s a s a s a Y s b s b s b U s P snn
nn
mm+ + + + = + + + +−
−1
11 0 1 0L L
Y sb s b s b
a s a s a s aU s
P sa s a s a s a
Y s Y smm
nn
nn
nn
nn( ) ( )
( )( ) ( )=
+ + ++ + + +
++ + + +
= +−
−−
−
L
L L1 0
11
1 0 11
1 01 2

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Respuesta Temporal de Sistemas
Ambas respuestas vienen definidas por dos regímenes en el tiempo, transitorio y permanente.
Se analizará la respuesta transitoria ante sistemas de diferente orden ante entradas características, asi como el error permanente ante sistemas de diferente tipo.

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Análisis de la Respuesta Transitoria
Se particularizará el calculo de la respuesta transitoria para sistemas de orden 1, 2 y superior.
Sistema caracterizado por la respuesta forzada, asumiendo respuesta natural nula,
)()()( sUsGsY =
U(s)X
Y(s))(sG

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Primer Orden
Sistema de primer orden (SPO) queda descrito por una ecuación diferencial
con función de transferencia
La respuesta escalón de amplitud A será
)()()(' 00 tubtyaty =+
0
0)(as
bsG+
=
Y sb A
s s a( )
( )=
+0
0

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Primer Orden
Descomponiendo en fracciones simples
Aplicando la transformada inversa
respuesta de tipo exponencial para a0>0
Y sKs
Ks a
b Aa s
b Aa s a
( ) = ++
= −+
1 2
0
0
0
0
0 0
1 1
)()1()( 0
0
0 tuea
Abty eta−−=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Primer Orden
Se definen la ganancia , la constante de tiempo como parámetros especificos de un SPO.Forma estandar de SPO
0
0
abK =
0
1a
=τ
11
1)(
0
0
0
+=
+=
sk
asa
bsGτ

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Primer Orden
La respuesta impulso será
y aplicando transformada inversa1
)(+
=sKsY
τ
)()( / tueKty et τ
τ−=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
Sistema de segundo orden (SSO) queda descrito por una ecuación diferencial
con función de transferencia
La respuesta escalón de amplitud A será
y a y a y b u' ' '+ + =1 0 0
012
0)(asas
bsG++
=
)()(
012
0
asassAbsY++
=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
La respuesta depende de las raices del denominador
Caso 1: Raices reales distintas
Aplicando la L-1
Se denominan sistemas sobreamortiguados
))(()( 21012 sssssasass ++=++
Y sKs
Ks s
Ks s
( ) = ++
++
1 2
1
3
2
)()()( 21321 tueKeKKty e
tsts −− ++=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
La rapidez de respuesta depende de la colocación de los polos
Caso 2: Raices reales repetidas
Sistemas de Segundo Orden
Y sKs
Ks s
Ks s
( )( )
= ++
++
1 2
1
3
12

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
Aplicando la L-1
Se denominan sistemas critico-amortiguadosLa rapidez de respuesta depende de la colocación del polo doble
)()()( 11321 tuteKeKKty e
tsts −− ++=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
Caso 3: Raices complejas conjugadas
Reagrupando las dos fracciones comlejas, y sabiendo que
con y
))(())(( 21 dd jsjsssss ωσωσ −+++=++
dd jsK
jsK
sKsY
ωσωσ +++
−++= 321)(
*23 KK =
223
2221
)('
)()(')(
d
d
d sK
ssK
sKsY
ωσω
ωσσ
+++
+++
+=
K K' Re( )2 22= K K' Im( )3 32= −

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
Aplicando la L-1
Se denominan sistemas subamortiguadosLa forma de la respuesta depende de la colocación de los polos
)() ' cos'()( 321 tutseneKteKKty edt
dt ωω σσ −− ++=
)()) cos(()( 1 tutKeKty edt φωσ ++= −
),( dωσ

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
La respuesta de SSO admite otra representación alternativa en función de los parámetros
- Ganancia, K- Relación de amortiguamiento, ξ- Frecuencia natural no amortiguada, ωn
Las raices de la ecuación característica son
22
2
2)(
nn
n
ssKsG
ωξωω
++=
dnn jjss ωσξωξω ±−=−±−= 221 1,

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
Con parámetros constante de tiempo inversa y
frecuencia natural amortiguada
Se distinguen 3 casos: • ,sistema subamortiguado• ,sistema critico-amortiguado• ,sistema sobreamortiguado
nξωσ =2-1 ξωω nd =
0 1< <ξξ = 1ξ > 1

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
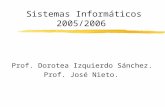
Existe un conjunto de curvas normalizadas de respuesta escalón de SSO para valores de
Para , el sistema responde con una oscilación mantenida
),( nωξ
0=ξ

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Segundo Orden
La respuesta impulso será
dándose los tres casos citados en función de
22
2
2)(
nn
n
ssKsY
ωξωω
++=
),( nωξ

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Orden Superior
Sistema de orden superior (SOS) queda descrito por función de transferencia
con zi y pj ceros y polos en general complejos
La respuesta escalón de amplitud A será
)())(()())(()(
21
21
n
m
pspspszszszsKsG
++++++
=L
L
∑= +
+==n
i i
i
psK
sK
sAsGsY
1
0)()(

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Orden Superior
Caso 1: Polos en general distintos
Aplicando la L-1
La contribución de cada polo pi en la respuesta transitoria depende la magnitud del residuo Ki y de su colocación relativaLa contribución de K0 es relativa al regimen estacionario.
Si Ki es bajo, su contribución es despreciable, y si Re(pi)<0 con |Re(pi)| alto entonces su contribución en el transitorio es despreciable
)()()(1
0 tueKKty etp
n
ii
i−
=∑+=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Orden Superior
• Forma de la respuesta no estandarizada

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Orden Superior
Caso 2: Polos en general multiples
La respuesta escalón de amplitud A será
y aplicando L-1
Se sigue el mismo razonamiento que el caso anterior en cuanto a
la contribución de cada polo.
LL ++
++
++
+==jr
j
j
psK
psK
psK
sK
sAsGsY
)()()(
2
2
1
10
)()!1
()( 1210
21 tuetrK
eKeKKty etpr
j
jtptp jj LL +−
++++= −−−−

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Sistemas de Orden Superior
Concepto de dominancia: Los polos más cercanos al eje imaginario jω prevalecen, y se denominan polos dominantes
De esta forma es posible transformar un SOS en un SPO (un unico polo dominante) o en un SSO (un par de polos dominantes)
Criterio de dominancia: Relacion Re(pi)/Re(pd) > 5 , suponiendo que no hay ceros en cercania de pd (efecto cancelación).

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
Identificación es proceso de determinación de un modelo a partir del conocimiento previo sobre el sistema y experiencias prácticas realizadas sobre él.
Durante el proceso de identificación el sistema es considerado como “caja negra”, realizandose experimentos que proporcionan pares E/S.
SISTEMADINAMICO
u1
um
y1
yn

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
Etapas del proceso de identificación:
1. Etapa de Análisis: Se tienen en cuenta las leyes físicas subyacentes para determinar la estructura del modelo
2. Etapa ExperimentalSe adoptan hipótesis de etapa anterior y en base a pares medidos E/S se ajusta el modelo

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
Gran variedad de métodos de identificación, particularmente los métodos de identificación paramétricos.
Obtención de coeficientes de G(s) o matrices A,B,C,D, bajo el supuesto de comportamiento linealizado o lineal
Método de Análisis Transitorio
Consiste en la aplicación de entradas tipo (escalón, impulso, senoidal,…) analizando la forma de la respuesta transitoria para determinar los parámetros del modelo del sistema.Asume comportamiento lineal

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
Para el caso de entrada escalón
se considerará identificación de SPO, SSO y SOS.
1. Identificación de SPO
Definidos por
u t( ) y t( )SISTEMA
1)(
+==
TsKsG

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
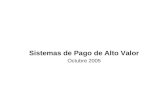
Identificación de Sistemas
Determinación de K por relación de amplitud salida-entrada en regimen estacionario.
Determinación de T por inspección sobre 0.63% de y(t)

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
2. Identificación de SSO
Definidos por 22
2
2)(
nn
n
ssKsG
ωξωω
++=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
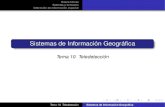
Identificación de Sistemas
Determinación de K por relación de amplitud entrada-salida en régimen estacionario.
Determinación de a través de los parámetros característicos de la respuesta transitoria de SSO:
1. tiempo de subida, de 10% al 90% del valor final
2. tiempo de pico, en el valor máximo de y(t)
nωξ y
( )∞y
drt ω
βπ −= )(tan 1
σωβ d−=
dpt
ωπ
=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
3. sobreoscilación, definida por
que viene dada por
4. tiempo de establecimiento, para alcanzar el régimen permanente (y(t) incluida en banda sobre )
%100)(
)()( ×
∞
∞−=
yyty
SO p
πωσ
deSO−
=
( )∞y
%)2(4 σ
=st %)5(3 σ
=st

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Identificación de Sistemas
A partir de un par de valores de parámetros característicos se determinan σ y ωd y de ahí ξ y ωn según
Para sistemas sobreamortiguados solo sera posible computar
3. Identificación de SOS
No hay un método de validez general, si bién hay métodos para el caso de sistemas con polos en situación específica (Método de Strejc, dominancia de primero o segundo orden,…)
nξωσ = 2-1 ξωω nd =
es tyt

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces
La ubicación de las raíces del denominador de G(s) determinan el comportamiento en régimen transitorio
Considerando el sistema en bucle cerrado añadiendo una ganancia K variable
con
K
)(sH
)(sG +
-
)()(1)()(
sHsKGsKGsGeq +
=
U(s)X
Y(s))(sG

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces
Al ser K variable la ubicación de las raíces del denominador de Geq(s) cambia.
El método del lugar de las raíces permite obtener el trazado de los polos o raíces del sistema en bucle cerrado en el plano s a medida que K es variable.
Este método permite predecir los efectos de la variación en la ganancia K o la adición de nuevos polos o ceros al sistema original G(s) (bucle abierto).

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces
La ecuación característica que define el lugar de las raices viene dada por
o bién
Al ser G(s)H(s) una magnitud compleja se establecen dos condiciones:1. condición de ángulo
0)()(1 =+ sHsKG
1)()( −=sHsKG
...2,1,0)12(180))()(arg( =+−= kksHsG

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces2. Condición de magnitud
Los valores de s que cumplan la condición de angulo para K varaible definen el lugar geométrico de las raíces o polos del sistema en bucle cerrado (LdR)
La aplicación de la condición de magnitud para una K determinado define los polos específicos del sistema en bucle cerrado.En general, para un sistema
1)()( =sHsG
0)())(()())((1)()(1
21
21 =++++++
+=+n
m
pspspszszszsKsHsG
L
L

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces
las condiciones de angulo y magnitud serán
......))()(arg( 2121 −−−++= θθφφsHsG
n
m
AAABBBKsHsG
K
K
21
21)()(⋅⋅
=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces
Efectos de la adición de polos en LdR
Efectos de la adición de ceros en LdR

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las RaícesReglas Generales para la Construcción del Lugar de las Raíces

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Lugar de las Raíces

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
EstabilidadLa estabilidad es una característica del sistema que asegura que ante cualquier entrada acotada el sistema responde con unas salida acotada
La estabilidad de un sistema lineal e invariante queda aseguradasi todas las raíces del polinomio característico del sistema se encuentran en el semiplano izquierdo del plano complejo .
En efecto, para un sistema definido por
las raíces (polos) son la solución de
G sP s
a s a s a s an nn n
( )( )
=+ + + +−
−0 11
1L
nnnnn sssasasasasQ ,,,0)( 211
110 KL ⇒=++++= −
−

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Estabilidad
Si se encuentra alguna raíz con el término correspondiente de la respuesta crecería con el tiempo, resultando por tanto el sistema inestable.
La estabilidad no depende de la función de entrada. Las raíces de la entrada contribuyen solamente en los términos de respuesta estacionaria en la solución.
0)Re( >= iis σt
iieK σ
σ
jω
0
x
x
x
s1
s1*
s2

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Estabilidad
Criterio de Routh-Hurwitz
Es un método para determinar la estabilidad de un sistema sin tener que factorizar el polinomio característico del sistema.
Este procedimiento no especifica la posición concreta de las raíces, sino el número de raíces existentes en el semiplano derecho (inestabilidad) y en el eje imaginario (estabilidad critica).
Pasos del criterio R-H:1. Escribir el polinomio característico (suponiendo )00 ≠a
0011
1 =++++ −− asasasa n
nn
n L

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Estabilidad
2. Si cualquier en presencia de por lo menos algún , entonces hay una raíz o raíces que son imaginarias o con una parte real positiva , siendo el sistema critico-estable o inestable.
3. Si todos los coeficientes , agrupar los coeficientes en el siguiente arreglo
ai ≤ 0 a j > 0
ai > 0
0
1
02
3
02
131
02
0
1
2
3
2
1 ......
gf
ee
cbb
aaaaaa
sss
ssss
n
n
nn
nn
n
n
n
n
LL
L
L
L
−
−
−−
−
−
−
−

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Estabilidad
donde los coeficientes son calculados según
De la misma forma se evalúan continuando el proceso hasta completar la última fila.
4. El criterio de estabilidad de Routh-Hurwitz establece que el número de raíces del polinomio característico con parte real positiva es igual al número de cambios de signo de los coeficientes de la primera columna del arreglo.
Hay casos especiales de ceros en la primera columna o ceros en una fila que producen sistemas bien inestables o critico-estables.
bi
1
3212
−
−−−−
−=
n
nnnnn a
aaaab1
5414
−
−−−−
−=
n
nnnnn a
aaaab
c d ei i i, , ,K

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Análisis de la Respuesta Permanente
Se considerarán sistemas en bucle cerrado donde la salida del sistema C(s) tiene que seguir una consigna o referencia R(s).
Se define el error en regimen permanente como
Aplicando la L
K
)(sH
)(sR )(sG
)(sB
)(sC +
-
)(sE
)()(lim)(lim tbtrteett
−==∞→∞→∞
)()()()()()( sCsHsRsBsRsE −=−=

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Análisis de la Respuesta Permanente
por tanto
El error en régimen permanente depende de la referencia r(t) y del “tipo” N de planta-sensor G(s)H(s), definido por
Aplicando teorema del valor final
))()(1
)()(1)(()(sHsG
sGsHsRsE+
−=
)()()(1
1)( sRsHsG
sE+
=
)1)...(1()1)...(1()()(
1
1
++++
=sssssKsHsG
nppN
mcc
ττττ
)()()(1
lim)(lim)(lim00
sRsHsG
sssEteesst +
===→→∞→∞

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Análisis de la Respuesta Permanente
1. Error Estacionario Escalón
Definiendo la constante de error escalón Kp
El error estacionario ante escalón será nulo cuando , lo cual se produce cuando el sistema es de tipo (presencia de al menos un integrador)
)0()0(11
HGe
+=∞
)0()0()()(lim0
HGsHsGKsp ==→
pKe
+=∞ 1
1
∞→pK1≥N

22/11/2005Ingenieria de Sistemas. J. Fdez de
Cañete 2005
Análisis de la Respuesta Permanente
1. Error Estacionario Rampa
Definiendo la constante de error rampa Kv
El error estacionario ante rampa será nulo cuando , lo cual se produce cuando el sistema es de tipo (presencia de al menos dos integradores).
)()(1lim1
)()(11lim
00 sHssGssHsGe
ss →→∞ =+
=
)()(lim0
sHssGKsv →
=
vKe 1
=∞
∞→vK2≥N