Cuerpo Rigido
26
CUERPO RÍGIDO CINEMÁTICA DEL CUERPO RÍGIDO o TRASLACIÓN o ROTACIÓN o ROTOTRASLACIÓN o EJE Y CENTRO INSTANTÁNEO DE ROTACIÓN DINÁMICA DEL CUERPO RÍGIDO o PRIMERA ECUACIÓN DE NEWTON PARA UN CUERPO RÍGIDO o SEGUNDA ECUACIÓN DE NEWTON PARA UN CUERPO RÍGIDO o MOMENTO DE INERCIA DE UN C.R. o RADIO DE GIRO DE UNA MASA o TEOREMA DE STEINER o ENERGÍA CINÉTICA DE UN C.R. o PERCUSIÓN GIRÓSCOPOS Y TROMPOS o MOVIMIENTOS GIROSCÓPICOS o TROMPOS EJERCICIOS Ing. JOSÉ TORRES SAYAR
-
Upload
joacodasssssssssss -
Category
Documents
-
view
50 -
download
1
Transcript of Cuerpo Rigido

CUERPO RÍGIDO
� CINEMÁTICA DEL CUERPO RÍGIDO o TRASLACIÓN o ROTACIÓN o ROTOTRASLACIÓN o EJE Y CENTRO INSTANTÁNEO DE ROTACIÓN
� DINÁMICA DEL CUERPO RÍGIDO o PRIMERA ECUACIÓN DE NEWTON PARA UN CUERPO RÍGIDO o SEGUNDA ECUACIÓN DE NEWTON PARA UN CUERPO RÍGIDO o MOMENTO DE INERCIA DE UN C.R. o RADIO DE GIRO DE UNA MASA o TEOREMA DE STEINER o ENERGÍA CINÉTICA DE UN C.R. o PERCUSIÓN
� GIRÓSCOPOS Y TROMPOS o MOVIMIENTOS GIROSCÓPICOS o TROMPOS
� EJERCICIOS
Ing. JOSÉ TORRES SAYAR


UNIVERSIDAD TECNOLÓGICA NACIONAL FACULTAD REGIONAL AVELLANEDA
Ing. José Torres Sayar FISICA I (12 CUERPO RÍGIDO) PAGINA 1 DE 24
CUERPO RÍGIDO
Se define el sólido rígido como un cuerpo indeformable, de modo que las posiciones relati-
vas de las partículas que lo constituyen se mantienen invariables.
De este modo cualquiera sea el sistema de fuerzas sobre él aplicado, la distancia entre un par
de partículas arbitrario del mismo es siempre constante. Si esto no sucede el cuerpo dejará de com-
portarse como rígido esto significa que el concepto de rigidez de un cuerpo es un concepto relativo,
así un cuerpo bajo un sistema de fuerzas actuante sobre él se comporta como rígido y en otra situa-
ción deja de satisfacer la condición de rigidez.
Describiremos el movimiento del sólido rígido como la composición de dos tipos de movi-
miento, traslación del centro de masas y rotación en torno a un eje que pasa por dicho punto. Como
caso particular, examinaremos el movimiento de rodar sin deslizar.
Como el sólido rígido es un caso particular de sistema de partículas, podemos aplicar para su
estudio los teoremas vistos en dicho capítulo.
Este estudio, nos permitirá describir las interacciones por fuerzas, plantear las ecuaciones
del movimiento, aplicar el principio de conservación del momento angular, el balance energético de
una situación dinámica identificando los cambios energéticos y calculándolos empleando la fórmula
apropiada.
En los problemas en que intervengan las relaciones instantáneas entre fuerza, masa, acelera-
ción y/o cantidad de movimiento se definirá el cuerpo o sistema aislándolo con su diagrama de
cuerpo libre. No deberá intentarse la solución de un problema sin definir el contorno exterior del
cuerpo e identificar todas las fuerzas que se ejercen sobre él.
CINEMÁTICA DEL CUERPO RÍGIDO
Un cuerpo rígido puede estar animado de un movimiento de traslación pura, rotación o roto
traslación, pudiendo considerarse en general que todo movimiento es una combinación de ellos.
TRASLACIÓN
Un cuerpo rígido se mueve con un movimiento de traslación pura o simplemente traslación,
cuando todos los puntos que lo definen tienen el mismo vector velocidad.

PAGINA 2 DE 24
CMi VVrr
=
Si derivamos esta expresión con respecto al tiempo
obtendremos la aceleración de todos los puntos, es decir
CMi aarr =
El movimiento de traslación pura puede estudiarse
aplicando las leyes de la mecánica de la partícula.
ROTACIÓN
Un cuerpo rígido se mueve con movimiento de rotación pura cuando todos sus puntos están
en movimiento con excepción de aquellos ubicados en una recta que recibe el nombre de eje de
rotación. El vector velocidad de todos los puntos del C.R. tiene dirección perpendicular al eje de
rotación y su módulo es proporcional a la distancia al citado eje.
Dado que cada punto del cuerpo en movimiento de
rotación describe una trayectoria circular analogamente
para el centro de masa podemos escribir
En ambos casos ωr es constante ya que la condición
de rigidez del C.R. impone que todos los puntos giren el
mismo ángulo en igual tiempo.
Consecuentemente, en el C.R. existe una única velocidad angular y que es igual a la veloci-
dad angular de cualquier punto con respecto al eje de rotación.
El vector rr
no tiene porque unir el centro de la circunferencia que el punto describe, basta
con que lo una con un punto cualquiera del eje de rotación.
En la figura se ha tomado una trayectoria circular que describe un punto del C.R. Se ha
indicado con Vr
el vector velocidad instantánea en el punto P.
Sea 0’ el centro de la circunferencia que describe el punto, 0 un punto cualquiera del eje de
rotación, observando la figura vemos que se cumple que:
V1 VCM V2 CM V3
ω V1
r1 VCM rCM CM r2 V2
11 rVrrr
×= ω
CMCM rVrrr
×= ω

Ing. José Torres Sayar PAGINA 3 DE 24
r = 0’0 + P0’
La velocidad del punto P será
V = ω ω ω ω x r
V = ω ω ω ω x ( ( ( ( 00’ + 0P )
V = ω ω ω ω x 00’ + ω ω ω ω x 0P )
Puesto que ω ω ω ω y 0’0 son vectores paralelos su producto vectorial es nulo en consecuencia
nos queda
VP = ω ω ω ω x rP
Para completar el estudio del movimiento de rotación pura determinaremos la aceleración
total de un punto del C.R. teniendo en cuenta la ecuación anterior para un punto i cualquiera del
C.R. la velocidad será
Vi = ω ω ω ω x r i
Si derivamos esta expresión con respecto al tiempo resulta
dt
rdrdt
d
dt
Vda ii
ii
rrr
rr
×+×== ωω
De donde resulta
iiiVrarrrr
×+×= ωγ
Si relacionamos esta expresión con las componentes intrínsecas de la aceleración
obtenemos:
ntiaaarr +=
ROTOTRASLACIÓN
Si al movimiento de traslación de un C.R. le superponemos una traslación, cada punto del
cuerpo va a tener una velocidad compuesta, una de ellas debida a la rotación pura o sea ω ω ω ω x r i , la
otra V0 debido a traslación impuesta al eje de rotación, y por consiguiente será la misma para todos
los puntos del cuerpo.
Sumando estos dos movimientos tendremos la velocidad total del punto P cuyo vector
ωωωω V 0’ P r 0

PAGINA 4 DE 24
posición respecto del punto 0 es r
rVVPrrrr
×+= ω0
La expresión anterior constituye la ecuación vectorial del movimiento rototraslatorio del
C.R. siendo las componentes de la velocidad las siguientes tres expresiones escalares.
YZVV ZYXX ωω ++= 0
ZXVV XZYY ωω ++= 0
XYVV YXZZ ωω ++= 0
Si nos referimos a un sistema de referencia que pasa por el CM podemos escribir
iCMi rVVrrrr
×+= ω
Derivando esta expresión con respecto al tiempo obtenemos la aceleración total del punto
del cuerpo considerado
iiCM
i Vrdt
d
dt
Vda
rrrrr
r ∧+∧+= ωω
Resulta en consecuencia
iiCMi Vraarrrrrr
×+×+= ωγ
Si relacionamos esta expresión con las componentes intrínsecas de la aceleración obtenemos
ntCMi aaaarrrr ++=
EJE INSTANTÁNEO DE ROTACIÓN
Si en cuerpo rígido se desplaza con un movimiento rototraslatorio existe y se demuestra la
existencia de una recta denominada EJE INSTANTÁNEO DE ROTACIÓN tal que todo punto
perteneciente a ese eje se encuentra instantáneamente con velocidad cero, dicho eje puede o no
pertenecer al cuerpo, es decir
iCMCIR rVOVrrrr
×+== ω
Es decir que podemos considerar el movimiento rototraslatorio como una rotación instantá-
nea alrededor del eje instantáneo de rotación
CIRii rV −×=rrr
ω
La traza del eje instantáneo de rotación en su encuentro con el plano del movimiento se de-
nomina CENTRO INSTANTÁNEO DE ROTACIÓN (CIR)

Ing. José Torres Sayar PAGINA 5 DE 24
iii vmprr ⋅=
∑∑=
⋅==n
iiii vmpp
1
rrr
iCMi rVVrrrr
×+= ω
x
yz
mi
CM
ω
ri
VCMVi
fi
DINÁMICA DEL CUERPO RÍGIDO
PRIMERA ECUACIÓN DE NEWTON PARA UN C.R
Un cuerpo rígido de masa “M” se encuentra con un movimiento de roto traslación con una
velocidad de traslación VCM y de rotación ω , interactuando con otros cuerpos externos al sistema
en estudio.
Como vimos todo Cuerpo Rígido (CR) es en definitiva un sistema de partículas de masa mi
con velocidad Vi , que mantiene constante en el tiempo su posición relativa con respecto al resto de
partículas que forman el cuerpo, de este modo para una partícula “ i” la cantidad de movimiento
será:
Para el CR
La condición de rigidez la introducimos con la ecuación cinemática
VCM V1 1 VR1 V2 VCM VR2 CM VCM 2 CIR

PAGINA 6 DE 24
∑=
×+⋅=n
iiCMi rVmp
1
)(rrrr ω
i
n
ii
n
iiCM rmmVp
rrrr ⋅×+⋅= ∑∑== 11
ω
01
=⋅=× ∑=
i
n
iiCM rmrMrr
001
=⋅= ∑=
i
n
iiCM rmrrr
CMVMprr ⋅=
dt
VdM
dt
pd CM
rr
⋅=
CMCM
ext adt
VdF
dt
pd rr
rr
=Σ= y .
CMextCM
ext VdMdtFdt
VdMF
rrr
r⋅=⋅Σ→⋅=Σ ..
∫∫ ⋅=⋅Σ CMext VdMdtFrr
.
IMPULSOJdtFext
rr=⋅Σ∫ . ∫ −=⋅ )( CMiCMfCM VVMVdM
rrr
)( CMiCMf VVMJrrr
−=
CMext aFrr
⋅=Σ M.
Reemplazando
Como VCM y ω son magnitudes constantes para todos los puntos del CR tenemos
Recordando que
Dado que nuestro sistema de coordenadas coincide con en CM del CR
La cantidad e movimiento P del CR será
Derivando con respecto al tiempo y teniendo en cuenta que la masa total del cuerpo permanece
constante en el tiempo (V<<C) M = cte ⇒ dm/dt = 0 obtenemos
Donde
Finalmente obtenemos PRIMERA ECUACIÓN DE NEWTON PARA UN C.R
Siendo la misma la primera ecuación de Newton para un cuerpo rígido y nos expresa que la
fuerza neta aplicada a un CR produce una aceleración de su CM que es independiente del punto
del CR en el cuál se encuentre aplicada la fuerza.
SEGUNDA ECUACIÓN DE NEWTON PARA UN CUERPO RÍGIDO
Podemos escribir la primera ecuación de la siguiente manera
Integrando
Donde
En consecuencia

Ing. José Torres Sayar PAGINA 7 DE 24
)( iiiii VmrprLrrrrr
⋅×=×=
)( iCMi rVVrrrr
×+= ω
)(()(
)]([2
iiCMii
iCMiii
rmVrm
rVmrL
⋅⋅+×⋅=
×+⋅×=
ωωrrr
rrrrr
)()( 2iiCMiiiCM rmVrmLL ⋅Σ⋅+×⋅Σ=Σ= ωr
rrrr
01
=⋅=× ∑=
i
n
iiCM rmrMrr
mdrIrmI CMiiCM ∫ ⋅=⋅Σ= 22 )( integral formaen
)( ifCMCMCMCM ILIL ωωω rrrrr−=∆⋅=
dt
dI
dt
LdCM
CM ωrr
⋅=
αω rr
r
rrrrrrrr
⋅=⋅=ΜΣ
ΜΣ×=⋅×=×= =∫
CMCMCM
CMiiiiiCM
Idt
dI
ifd
irVmr
dt
dpr
dt
d
dt
Ld)()()(
αr
CMΜΣr
CMI
αrr
⋅=ΜΣCMCM
I
El momento cinético de la partícula “mi” respecto al centro de masa (CM) del cuerpo está
dado por la ecuación
Teniendo en consideración la ecuación cinemática de rigidez del CR
Reemplazando
El momento cinético del CR será
Recordando que
Definiendo la sumatoria del segundo término como el momento de inercia o momento de se-
gundo orden para un cuerpo rígido con respecto a un eje simetría que pasa por en CM alrededor del
cual esta rotando
En consecuencia
Su variación en el tiempo será
Donde
� Es el momento de las fuerzas externas que actúan sobre el cuerpo rígido respecto a un
eje normal al plano del movimiento que pasa por el CM. Las fuerzas internas por pre-
sentarse de a pares (acción-reacción) producen momento resultante nulo.
� La aceleración angular del cuerpo rígido.
� Momento de inercia del cuerpo rígido respecto a un eje de rotación normal al plano del
movimiento que pasa por el CM.
SEGUNDA ECUACIÓN DE NEWTON PARA UN CUERPO RÍGIDO

PAGINA 8 DE 24
m1 m2 r1
z r2 z r3 m3
M
Ii CMCM =
MOMENTO DE INERCIA DE UN CUERPO RÍGIDO RESPECTO DE UN EJE
El momento de inercia ( I ) respecto de un eje de rotación ZZ´ para un cuerpo rígido con un
número discreto de partículas estará dado por la siguiente suma:
I zz = ∑∑∑∑mi ri2 = m1 r1
2 + m1 r12 +..........
Si el CR tiene una distribución continua de masa la anterior será
I zz = ∫∫∫∫ r2 dm
Si definimos la densidad del cuerpo como el cociente ρρρρ = dm/dv (masa/volumen) nos queda
I zz = ∫∫∫∫ r2 ρρρρ dv
Esta integral representa una importante propiedad del cuerpo e interviene en el análisis de
fuerzas de todo cuerpo que tenga una aceleración de su rotación en torno de un eje dado. Al igual
que la masa “ m” de un cuerpo es una medida de la resistencia a la aceleración en un movimiento de
traslación, el momento de inercia “I” es una medida de la resistencia del cuerpo a modificar su mo-
vimiento de rotación.
RADIO DE GIRO DE UNA MASA
El radio de giro de una masa con respecto a un eje particular es igual a la raíz cuadrada del
cociente del momento de inercia respecto del eje considerado dividido por la masa total del cuerpo.
Su valor numérico es dado por la siguiente expresión:
Donde iCM es el radio de giro, I CM es el momento de inercia y M es la masa del objeto.
Es una medida del alejamiento promedio de la masa respecto del centro de gravedad, dadas
dos secciones de la misma área la de mayor radio de giro presentará mayor resistencia a la modifi-
cación de su velocidad de rotación, es decir mayor inercia frente a los cambios en su movimiento de

Ing. José Torres Sayar PAGINA 9 DE 24
Z
Rz dm
αααα ri CM x y Z
rotación.
TEOREMA DE STEINER
Supongamos conocido el momento de inercia respecto de un eje baricéntrico y deseamos co-
nocer el momento de inercia respecto de un eje paralelo a éste, en la figura vemos que
R = r + r0
Dado que Z0 coincide con el C.M. del C.R.
Obtenemos
I zz = ICM + ( r 2 M ) EXPRESIÓN DEL TEOREMA DE STEINER
ENERGÍA CINÉTICA DE UN CUERPO RÍGIDO
Si analizamos la energía del elemento de masa dm del cuerpo rígido, su valor estará dado
por la expresión
Teniendo en cuenta la condición de rigidez la velocidad Vi del elemento considerado, la
misma será
La energía total del cuerpo rígido será
Z Z0
R r dm CM r0
dmrdmrrdmrI ZZ2
002 )(2
r
∫∫∫ ++=
dmrrdmRI ZZ2
0)(2 rr +== ∫∫
CMIdmrydmr == ∫∫ 200 )(0r
iCMI rVVrrrr
×+= ω
222 )()(2 iiCMCMi rrVVV ×+×+= ωωrr
2
2
1iiC VdmdE =

PAGINA 10 DE 24
Analizando cada término obtenemos:
Dado que la integral
Reemplazando la energía cinética total del cuerpo rígido será
Es decir que la energía total de un cuerpo rígido animado de un movimiento de rotación y
traslación estará dada por la suma de la energía cinética de traslación más la energía cinética debido
a la rotación
PERCUSIÓN
Supongamos que a un cuerpo rígido se le aplica un impulso instantáneo o PERCUSIÓN en
lugar de una fuerza constante en un tiempo prolongado.
Sea Fr
la fuerza actuante el impulso será
Si llamamos rr
al radio vector entre el CM del cuerpo rígido y el centro de percusión, y mul-
tiplicamos ambos miembros por este vector tenemos
Donde el primer término representa el impulso angular del cuerpo rígido recibido por la ac-
×+×+= ∫ 222
2
1)r(ω)rω(V(VdmE iiCMCMC
rr
×+
×+
= ∫∫∫ dm)rω(2
1dm)rω(VdmV
2
1E 2
iiCM2
CMC
rrrrr
2CM
2CM VM
2
1dmV
2
1 =∫
0dmrω(Vdm)rω(V iCMiCM =×=× ∫∫rrrr
0=⋅∫ dmri
r
2CM
2CMC ωI
2
1VM
2
1E +=
ff VmVmdtFJrrrv
−== ∫
∫ ×==−×=× dt)Fr(L)VmVm(rJr if
rrrrrr ∆
Zi Rωsenαrω)rω( =× rr
CM22
Z2 Iω
2
1dmRω
2
1 =∫
2Z
22i Rω)rω( =× rr

Ing. José Torres Sayar PAGINA 11 DE 24
ción de la fuerza Fr
actuando en un intervalo de tiempo muy pequeño dt
GIRÓSCOPO Y TROMPO
MOVIMIENTOS GIROSCÓPICOS
Estudiaremos el movimiento de un cuerpo rígido en el cuál un punto del mismo permanece
fijo, tomaremos como punto fijo el centro de masas del mismo, esto lo podemos lograr a través de
un sistema de suspensión denominado cardánico.
Los tres ejes alrededor de los cuales puede girar el dispositivo de suspensión el cuerpo rígido
se cruzan en el centro de masa, el cual en consecuencia permanece fijo. Suponemos que la masa de
los soportes que son rígidos es despreciable frente a la del cuerpo en rotación y no hay rozamiento
en los ejes, mediante la suspensión descripta no es posible transmitir momentos al cuerpo rígido con
lo cual su impulso angular ��� permanece constante.
El dispositivo descripto se conoce con el nombre de Giróscopo y fue inventado en 1852 por
Léon Foucault, quien también le dio el nombre, montando una masa rotatoria en un soporte de
Cardánico para un experimento de demostración de la rotación de la tierra. Foucault también se dio
cuenta de que su aparato podía servir para indicar
el Norte si se impiden ciertos movimientos del so-
porte del giróscopo, este se alinea con el meridia-
no. Esto llevo a la invención del girocompás. Los
giróscopos se han utilizado en girocompases y gi-
ropilotos. Los giroscopios también se han utilizado
para disminuir el balanceo de navíos, para estabili-
zar plataformas de tiro y para estabilizar platafor-
mas inerciales sobre las cuales están fijados capta-
dores de aceleración para la navegación inercial en
aviones y misiles construidos antes de la aparición
del GPS. El efecto giroscópico es la base del fun-
cionamiento de los juguetes trompo o peonza.
La rigidez en el espacio de un giróscopo es explicada a través de la primera ley del movi-
)ωω(IdLJr ifCM
L
Lo
rrrr−==× ∫
yG
x
z

PAGINA 12 DE 24
miento de Newton, que afirma que un cuerpo tiende a continuar en su estado de reposo o movimien-
to uniforme si no está sometido a fuerzas externas, fenómeno conocido como Inercia giroscópica.
Así, el volante de un giróscopo, una vez que comienza su movimiento de rotación, tiende a seguir
rotando en el mismo plano en torno al mismo eje espacial.
Como ejemplos de esta tendencia podemos citar un trompo en rotación, que tiene libertad
para moverse en torno a dos ejes además del eje de giro, una bala de fusil, que al girar en torno a su
eje durante el vuelo presenta inercia giroscópica, y tiende a mantener una trayectoria más recta que
si no girara. La mejor forma de mostrar la rigidez en el espacio es mediante un modelo de giróscopo
formado por un volante montado sobre anillos de forma que el eje del volante pueda adoptar cual-
quier ángulo en el espacio. Por mucho que se mueva, incline o ladee el giróscopo, el volante man-
tendrá su plano de rotación original mientras siga girando con suficiente velocidad para superar el
rozamiento de los rodamientos sobre los que va montado.
Los giróscopos constituyen una parte importante de los sistemas de navegación automática o
guiado inercial en aviones, naves espaciales, misiles teledirigidos, cohetes, barcos y submarinos.
Los instrumentos de guiado inercial de esos sistemas incluyen giróscopos y acelerómetros que cal-
culan de forma continua la velocidad y dirección exactas del vehículo en movimiento. Estas señales
son suministradas a un ordenador o computadora, que registra las desviaciones de la trayectoria y
las compensa. Los vehículos de investigación y misiles más avanzados también se guían mediante
los llamados giróscopos láser, que no son realmente dispositivos inerciales, sino que emplean haces
de luz láser que giran en sentido opuesto y experimentan modificaciones cuando el vehículo cambia
de dirección.
Para estudiar el movimiento en forma cualitativa estos movimientos tomaremos un cuerpo
en rotación alrededor de su eje de simetría, constituido por un disco montado sobre una suspensión
cardánica sin roce y de masa despreciable frente al cuerpo en rotación. Dado que no se pueden
transmitir momentos a través de la suspensión, que las fuerzas disipativas actuantes en el sistema
son despreciables, lo que hace que el vector velocidad angular ���� permanezca invariable en el
tiempo en estas condiciones el vector momento cinético ��� en estas condiciones y considerando que
el eje de rotación es un eje de simetría del cuerpo (principal de inercia) los vectores mencionados
tienen igual dirección y sentido y difieren entre sí en un escalar que es el momento de inercia de la
masa respecto al eje en rotación, es decir
��� = � ∙ ����
El eje de rotación apuntará siempre en la misma dirección independientemente del movi-
miento que se le aplique al soporte AB. Tomemos ahora el giróscopo con su eje horizontal e inten-
temos inclinarlo suspendiendo por ejemplo una pesa de masa m en su extremo como se indica en la
siguiente figura.

Ing. José Torres Sayar PAGINA 13 DE 24
La fuerza de módulo m.g producirá un momento ���� según el eje PQ este momento produ-
cirá una variación en el tiempo del vector Impulso Angular ó Momento Cinético.
�
����= � �����. El vector ��� habrá variado en ��� = ����. �
Siendo ���� y con ello ��� perpendiculares a ��� , teniendo la dirección PQ. Esto significa que
el vector momento cinético Impulso Angular ��� y con ello el vector velocidad ���� habrá girado un
ángulo dϕ en el plano que contiene a OO´ y PQ es decir que en lugar de inclinarse en la dirección
de la fuerza como se esperaría intuitivamente, el giróscopo comienza a girar alrededor del eje verti-
cal AB. Si se mantiene la acción de la fuerza el eje del giróscopo girará alrededor del eje vertical
AB con una velocidad angular uniforme
����� =�
�=
�=
�
=
�
�∙�
Este movimiento de giro del giróscopo se denomina movimiento de precesión. Todo lo ex-
presado tiene validez dentro de ciertos límites, durante el movimiento de de precesión en realidad el
giróscopo tiene una velocidad de rotación total dado por la superposición de los vectores rotación
inicial ���� y de rotación de precesión ����� es decir
����� ≪ ���� + �����
Este vector velocidad de rotación instantánea total no tendrá la dirección del eje principal de
inercia que previo a la aplicación del momento era la dirección de ��� y de ���� a menos que
����� ≪ ���� o sea ���� ≪ � ���� . Si esta condición no se cumple el vector rotación total y el vector
impulso angular estarán “desenganchados”, este último vector seguirá un movimiento de precesión
yx
zd ϕ
L
dL=M d ϕ
MωP
yx
z
ωP ωT
ω
GL
M
O
P
Q
O´
m.g
m

PAGINA 14 DE 24
puro gobernado por el momento exterior y el vector rotación total y con ello el eje del giróscopo,
tendrán un movimiento impuesto muy complicado llamado movimiento de nutación
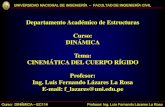
TROMPO
El movimiento de un trompo es otro ejemplo característico del movimiento de un cuerpo
rígido con un punto fijo, en este caso el punto fijo no es el centro de masa sino el extremo O del eje
de simetría del trompo.
Como vemos la fuerza peso actuando en el centro de
masa del trompo produce un momento exterior al sistema en
rotación respecto del punto fijo O lo que causará una varia-
ción del vector impulso angular perpendicular al plano de-
terminado por el peso y el punto O.
Ello significa que el vector ��� girará en precesión
alrededor de un eje vertical que pasa por el punto O , es
decir que el trompo no “cae” sino que inicia su movimiento
de precesión, con una velocidad angular dada por
�� = �
� ∙ ���� ∙ � =
� ∙ �
� ∙ �
Aclarando nuevamente que sólo si ωP << ω habrá un movimiento de precesión puro, si esta
condición no se cumple el eje del trompo efectuará un complejo movimiento combinado de prece-
sión y nutación, podemos observar que la velocidad de precesión es independiente del ángulo que el
eje de rotación forma con la vertical.
Bibliografía 1.- Marcelo Alonso, Edward J. Finn “Física” .- 2.- RESNICK Y HOLLIDAY, Física .- 3.-SEARS, Física .-4.-TIPLER, Física .-5.- FEYNMAN, Física. -6.- FRISH Y TIMOREVA, Física General. - 7.-Juan G. Roederer “Mecánica elemental” Eudeba -8.- Santiago Burbano Física General. 9. –Meriam. Dinámica
G
d ϕ
R
dL=M dt
LL cos a
a
ωP
ωP
ωN

Ing. José Torres Sayar PAGINA 15 DE 24
EJERCICOS
1. Calcular el momento de inercia de una barra delgada homogénea de sección uniforme con res-
pecto a un eje baricéntrico normal a la misma, siendo M la masa total de la varilla.
VSMydvSdm
dxSdvydvdm
ρρρρρρρρρρρρ
====
∫∫∫ === dxxSdvxdmxI 222yy ρρ
Integrando entre los límites + L/2 y -L/2
∫∫+
−
+
−==
2/L
2/L
22/L
2/L
2yy dxxSdxxSI ρρ
Resolviendo obtenemos 12
LLS
12
SLI
23
yy ρρ ==
Finalmente 12
LMI
2
yy =
2. Determinar el momento de inercia de un cilindro homogéneo de masa M y radio R, con respecto
a su eje baricéntrico longitudinal y con respecto a un eje paralelo ubicado a una distancia R
hRMyhdrrdm
hdrrdvydvdm222
2
ππππρρρρππππρρρρππππρρρρ
====
∫∫∫ === hdrr2hdrr2rdmrI 322yy πρπρ
Integrando entre r = 0 y r = R
∫=R
0
3yy drrh2I ρπ
Resolviendo 2
RM
4
RRh2
4
Rh2I
222
4
yy === ρπρπ
Para un eje paralelo a la distancia R, aplicando el teorema de Steiner obtenemos
222
yy RM2
3MR
2
RMI =+=
3. Un cilindro uniforme de 64kg de masa y 1,2m de diámetro gira libremente en torno a su eje, que

PAGINA 16 DE 24
se mantiene horizontal. Una masa suspendida de un cordón arrollado al cilindro desciende
4,80m en 3 seg. Partiendo del reposo. Determinar
a) El peso de la masa suspendida.
b) La tensión del cordón.
c) La cupla que actúa sobre el cilindro.
d) La velocidad angulas del cilindro al cabo de 2 seg.
Ecuaciones generales
R
a
I
amF
ext
CMext
=
⋅=
⋅=
∑∑
γ
γτcordón del ntodeslizamie no decondición
.
.
rr
rr
Esquema de cuerpo libre Ecuaciones particulares
Ra
IRT
amTgm
/==
=−
γγ
Cálculo de la aceleración Cálculo de la tensión en el cordón Calculo de la masa suspendida Calculo de la cupla que actúa sobre el cilindro Velocidad angular al cabo de 2 seg.
N
Mg mgT
T
R +a
2
222
17,1
06,12
2
1
sR
as
m
t
hatah
==
==⇒=
γ
NMR
TMR
RT 13,3422
2
==⇒= γγ
NmgPkgag
Tm 26,389,3 ==⇒=
−=
NmRT 48,20. ==τ
st
140.30 =+= γωω

Ing. José Torres Sayar PAGINA 17 DE 24
4. El cilindro de la figura se deja caer suspendido de dos cuerdas arrolladas sobre su perímetro,
determinar
a) La tensión en cada uno de los hilos
b) La aceleración del CM del cilindro.
c) Para un instante cualquiera la velocidad del CM y de los puntos A y B
Ecuaciones generales
R
a
I
amF
CM
ext
CMext
=
⋅=
⋅=
∑∑
γ
γτcordón del ntodeslizamie no decondición
.
.
rr
rr
Esquema de cuerpo libre Ecuaciones particulares
R
a
IRT
aMTgM
CM
CM
CM
=
==−
γγ2
De la resolución del sistema de ecuaciones obtenemos
Para un tiempo “t” la velocidad del centro de masa es
Para el mismo instante la velocidad de rotación es
TRASLACIÓN ROTACIÓN
ABO
+
m g
2T
R
aCM
R
gga
MgT CM 3
2
3
2
6=== γ
gtvtgtavv CMCMf 3
2
3
200 =→+=+=
R
tg
R
tgtf 3
2
3
200 =→+=+= ωωω γ
+ = A O B

PAGINA 18 DE 24
Velocidad en el punto “B” Velocidad en el punto “A” 5. Una esfera un cilindro y un aro todos del mismo radio, ruedan hacia abajo sobre un plano incli-
nado partiendo de una altura y0 . Encontrar en cada caso la velocidad con que llegan a la base
del plano.
Planteando el teorema de conservación de la energía mecánica
Teniendo en consideración que
Obtenemos
ESFERA DISCO
ARO
La esfera es la más veloz, la velocidad no depende de la masa o las dimensiones del cuerpo,
sino exclusivamente de su forma.
CIRtgtgRvv CMB 03
2
3
2 =−=⋅−= ω
tgtgtgRvv CMA 3
4
3
2
3
2 =+=⋅+= ω
N
Fr
vCM
m.gho
Ep 0=
⊄
⊄⊄
=−+−+−
=−→=∆
LhhgmIvvm
LEELE
ififif
mimfm
)()(21
)(21 2222 ωω
rabajo)realizan t no rozamiento de fuerza la como normal la (tanto0L
plano) del base laen 0E adopto se(0h
reposo) delparten (00
pf
⊄=
==== ii yv ω
co)baricéntri giro de radio(
1
22
02 =
+= i
R
i
ygv
02
222
02
222
02
222
1
34
21
21
7
10
5
2
5
2
ygvR
iRmim
ygvR
iRmim
ygvR
iRmim
==
=
==
=
==
=

Ing. José Torres Sayar PAGINA 19 DE 24
6. Una varilla de longitud “L” y masa “M” puede rotar libremente alrededor de un eje A. Un pro-
yectil de masa “m” golpea con una velocidad “v” la varilla a una distancia “a” del punto A y se
incrusta en ella. Determinar
a) el momento angular del sistema antes y después de la colisión.
b) la cantidad de movimiento antes y después de la colisión.
a) Momento cinético respecto del punto A
Antes de la colisión (vector perpendicular y saliente del plano del papel)
Después de la colisión
Dado que las fuerzas exteriores que actúan en el sistema no producen momento respecto del punto “A” tenemos
b) Cantidad de movimiento antes de la colisión Después de la colisión
Obsérvese que no existe conservación de la cantidad de movimiento del sistema (m+M) debi-
do a las reacciones en el vínculo “A”. Para que la cantidad de movimiento momento se conserve, la
bala debe impactar a una distancia “d” tal que
A
B
L
a
V
avml
prl
bala
bala
=×=
rr
ωω )3
(2
2 LMamIl AmM +==+
3
)3
(
0
22
22
LMam
avmMLamavm
l
+=→+=
=∆
ωω
vmpi =
ωωω )2
(2
MLamM
Lamp f +=+=
Ldoresolviend
LMdm
dvmM
LmdM
Lmdvm
pp fi
32
3
)2
()2
( 22
=
++=+=
=
ω

PAGINA 20 DE 24
7. En el siguiente dispositivo se le imprime a la plataforma una aceleración a = 2g hacia la dere-
cha. Determinar la aceleración angular del cilindro si el coeficiente de rozamiento vale a) 0,8 y
b) 0,5
Diagrama de cuerpo libre
Si suponemos que el cuerpo rueda sin deslizar determinamos el
coeficiente de roce mínimo para este supuesto. Tomando momen-
tos respecto del CM del rodillo, obtenemos:
Resolviendo el sistema
Determinación del coeficiente de roce mínimo para la condición de rodadura
Si µ µ µ µ = 0,5 es menor que el mínimo necesario para que ruede sin deslizar, entonces en este caso el rodillo se desliza sobre el carro y la aceleración angular es.
y´
y x´
x
o´
o
a 2g=
terna inercial
y
xoN
m.gFr
aCM
γ
CMR amf =
gRa
aaa
IRf
CM
ARRASTRERELATIVACM
CMR
2)( +⋅−=+=
⋅=⋅
γ
γ
R
g
RRg
RmRam CM
⋅=
⋅⋅=⋅−
⋅⋅=⋅⋅
3
42
12
)2
1()( 2
γ
γγ
γ
deslizarsin rueda cilindro el 0,8 para que implica 8,066.0)2
34
(=⟨=
+⋅−==
⋅⋅==
µµ
µ
)
g
gRR
g
g
a
gmamf
CM
CMR
R
g
RmgmIRf
gmf
CMR
R
=
⋅⋅=⋅⋅=⋅
⋅⋅=
γ
γγ 2
2
15,0
5,0

Ing. José Torres Sayar PAGINA 21 DE 24
8. A la esfera de la figura se le aplica un impulso J a una distancia “d” del centro de masa, deter-minar la velocidad angular después de aplicado el impulso y a que distancia se deberá aplicar para que ruede sin deslizar.
Para d=0 : la esfera saldrá sin rotar, aparece la fuerza de roce que frenará el movimiento del centro
de masa a cambio del inicio de un movimiento de rotación, la velocidad del punto Q pa-ra el instante inicial será:
Para que ruede sin deslizar vQ = 0 es decir que el punto Q es el Centro Instantáneo de Rotación, en consecuencia: 9. Una rueda de 100 kg y radio de giro i = 0,9m es tirada por una fuerza horizontal F. Determinar
la aCM si esta fuerza vale a) F = 250 N y b) F = 300 N Vamos a asumir que para el punto a) el cuerpo rueda sin deslizar. Esquema de cuerpo libre (1) (2) (3)
r
R
F
+
N
m.g
F
Fr
γ
aCM
J
c d
Q 225
)(
)(
rm
dJ
I
dJ
IIdJm
Jv
vmvvmJ
if
f
fif
⋅⋅=⋅=
⋅=−=⋅
=
⋅=−=
ω
ωωω
)25
1(r
d
m
Jrvv CQ −=⋅−= ω
rdrm
dJ
m
J
rvC
52
25 =⇒
⋅⋅=
⋅= ω
rodadura decondición
2
R
a
imrFRf
IrFRf
amfF
CM
R
R
CMR
=
⋅⋅=⋅−⋅
⋅=⋅−⋅⋅=−
γ
γγ

PAGINA 22 DE 24
R/2 R F
Resolviendo el sistema (1), (2) y (3) obtenemos Dado que la fuerza de rozamiento necesaria para que el cuerpo ruede sin deslizar es menor que la máxima disponible es correcta la premisa del planteo. b) Resolviendo el sistema (1), (2) y (3) para una fuerza externa F= 300 N obtenemos Consecuentemente el cuerpo desliza y se debe plantear el problema con esta hipótesis. 10. Un cilindro macizo de M = 5 kg y R = 20cm rueda sin resbalar sobre una superficie horizontal
cuando actúa una fuerza F = 75N según el esquema de la figura. Calcular la aceleración del cen-tro de masa, indicar el sentido y valor de la fuerza de rozamiento y determinar el coeficiente de rozamiento mínimo para la condición de rodarura. (Adoptar g = 10m/seg2)
Planteo del problema a) Esquema de cuerpo libre Ecuaciones generales
Nf
sma
R
CM
170
/8,0 2
== [ ]
Nf
NNf
R
eR
196
8,91002,0 es roce de fuerza la de máximo valor El
max
max
=××=⋅= µ
Nf
sma
R
CM
204
/96,0 2
== )204196( es roce de fuerza la de máximo valor El max NNff RR ⟨⟨
22
max
max
22
max
/169.0
/04.1/100
196300
sim
rFRf
IrFRf
smsma
amfF
R
R
CM
CMR
=⋅
⋅−⋅=
⋅=⋅−⋅
=−=
⋅=−
γ
γ
==
⋅=⋅+−⋅=Σ
=⋅−⋅−=→⋅=−
⋅=Σ
(rodarura)R
aRMI
IRfR
FIM
gmN
amFfamfFamF
CMCM
CMR
CMCM
CMRCCMRCM
γ
γγ
2
2
0
2
r
r N F = 75N fR
M.g
+ γγγγ
aCM

Ing. José Torres Sayar PAGINA 23 DE 24
2 rad/s A 60cm B o 60cm 60 cm C 80cm D
b) Aceleración del centro de masa c) El sentido de la fR es el indicado en el diagrama de cuerpo libre y su valor (4/10) 11. Un cubo posee una rotación “z” tal que su eje coincide con una de sus aristas. La arista del cubo
mide 0,6 m y la velocidad angular vale 2 s-1. hallar la componente de la velocidad en cada una de las aristas del cubo.
12. Si el la vértice coincidente con el origen de coordenadas del cubo del ejercicio anterior se des-
plaza con una velocidad cuya componente en el eje “x” es de 2m/seg. y en el eje “y” de 1,5 m/seg. determinar la velocidad en cada uno de los vértices.
13. Una escalera de 4m de longitud se encuentra apoyada sobre un muro vertical, si el extremo apo-
yado sobre el piso se desliza, cuando la misma forma un ángulo de 60º, con una velocidad constante de 0,4 m/seg. cual será la velocidad y aceleración del extremo que se desplaza apoya-do en el muro vertical.
14. Un disco circular de 10 cm de diámetro rueda sin deslizar entre dos placas A y B que se mueven
paralelamente en sentidos opuestos, si la velocidad de la placa A es de 4m/s y la de la placa B de 6m/s, localizar el centro instantáneo de rotación y determinar las velocidades y aceleraciones de los puntos O y D.
15. En el instante representado el centro instantáneo de rotación para el movimiento plano de la
placa triangular esta localizado en D, si la placa tiene una velocidad angular en el sentido hora-rio de 2 rad/s determinar en ese instante la velocidad del punto O de la placa.
A VA
O D
VB B
==
⋅=⋅+−
=⋅−⋅−=→⋅=−
2CM
CMR
CMRCCMR
s
m5
3M
Fa
IRfR
F
gmN
amFfamfF
γ2
0
=⋅
==
=⋅−=⋅−=
1/105
50
50/5575
2
2
smkg
N
N
f
NsmkgNamFf
RCMIN
CMRC
µ

PAGINA 24 DE 24
r m
16. Un alumno de sentado en un taburete giratorio, esta girando con una velocidad de 0,2 rad/seg sosteniendo en sus manos dos pesas de 2kg a una distancia de su eje de rotación de 0,60m, ex-tiende sus brazos de manera que la distancia entre las pesas es de 1,60m y su velocidad angular pasa a ser de 0,08 rad/seg. Determinar el momento de inercia del alumno y la velocidad de rota-ción si con los brazos extendidos suelta las pesas.
17. Determinar a que altura de una bola de billar de radio R debe aplicarse un impulso horizontal a
los efectos de ruede sin deslizar a partir de que recibe el golpe del taco. 18. Un cuerpo de masa m está atado a una cuerda ligera arrollada sobre el eje de un volante de radio
r y se apoya en rodamientos de fricción despreciable. Cuando se la libera partiendo del reposo en cuerpo desciende 180cm en 8 seg. Hallar el momento de inercia del conjunto, la tensión en la cuerda, aceleración lineal de m y aceleración angular del conjunto polea eje, en función de m y r
19.