CS sistemas control regimen permanente - Bienvenida · Si el sistema se deja en x(0) = xe, entonces...
34
Universidad de Santiago de Chile Facultad de Ingeniería Departamento de Ingeniería Eléctrica SISTEMAS DE CONTROL EN RÉGIMEN PERMANENTE Profesor Oscar Páez Rivera SISTEMAS DE CONTROL EN RÉGIMEN PERMANENTE Propósitos :
-
Upload
truongthuan -
Category
Documents
-
view
214 -
download
0
Transcript of CS sistemas control regimen permanente - Bienvenida · Si el sistema se deja en x(0) = xe, entonces...

Universidad de Santiago de Chile Facultad de Ingeniería
Departamento de Ingeniería Eléctrica
S I S T E M A S D E
C O N T R O L E N
R É G I M E N P E R M A N E N T E
P r o f e s o r
Oscar Páez Rivera
S I S T E M A S D E C O N T R O L E N R É G I M E N P E R M A N E N T E
Propósitos :

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 2
El interés de este texto es el comportamiento en régimen permanente de los sistemas
bajo control, lo que en primer lugar depende de la estabilidad del conjunto que forma la
planta y el sistema de control y luego de la configuración que se tenga.
Es necesario revisar la estabilidad para lograr definir el régimen permanente, a
continuación, se debe precisar como medir la exactitud del conjunto y mas adelante ver
como se comporta el sistema bajo control, frente a cambios de parámetros o efecto de
las perturbaciones.
Finalmente se debe desarrollar el concepto de diseño de un sistema de control en
régimen permanente.
Definiciones de estabilidad:
Existen muchos criterios para estudiar la estabilidad de un sistema, en este caso
se considera a Lyapunov, cuya formulación se basa en la descripción de variable s de
estado.
Sea un sistema descrito por:
x : estado; u : entrada; y : Salida
El sistema tiene una evolución autónoma cuando la entrada es nula (la trayectoria es
originada esencialmente por la condición inicial X0). Sea F(x) = f(x,0), entonces, se dirá
que el sistema tiene un estado de equilibrio xe si se cumple :
F(xe) = 0
Si el sistema se deja en x(0) = xe, entonces el sistema no evoluciona.
La estabilidad en el sentido de Lyapunov se refiere al comportamiento del sistema
autónomo cuando su condición esta en un entorno del estado de equilibrio xe. Para
)u,x(gy
)u,x(fx.
=
=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 3
ilustrar eso considérese un sistema de una sola dimensión en el estado y trácese las
trayectorias posibles a partir de x0 cercano a xe.
En la trayectoria de línea gruesa, el sistema se aleja del punto de equilibrio, tal
comportamiento define un estado de equilibrio inestable en xe
Si la trayectoria que se origina a partir de x0 fuera como la punteada, de modo que se
mantiene cerca de xe, entonces el sistema presenta un punto de equilibrio estable en xe
Finalmente si resultara que la trayectoria que se origina a partir de x0 converge hacia xe,
entonces, el punto de equilibrio resulta ser asintóticamente estable.
La generalización de estos conceptos a sistemas n-dimensionales en su estado,
requiere el concepto de vecindades en el espacio de estado.
Vecindad de origen
Sea Ni (δ) una vecindad de radio δ, centrada en el punto de equilibrio xe, en dicha
vecindad se originarán las trayectorias que se requieren para probar la estabilidad al
rededor
Vecindad final
Sea Nf (ε) una vecindad de radio ε , centrada en el punto de equilibrio xe.
Fig esc.1: Trayectorias a partir de X0
Xe
Inestabilidad
Estabilidad
Estabilidad Asintótica t
X0

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 4
Dicha vecindad se define de modo que contenga en su interior las trayectorias que se
originan en Ni(δ).
Punto de equilibrio estable
El punto de equilibrio xe del sistema descrito por x = F(x), se dirá estable, si para
cualquier ε>0 ( no importando cuan pequeño sea), existe un δ>0 tal que todas las
trayectorias que nacen en Ni(δ) no abandonan Nf(ε)
Estabilidad Asintótica
Un punto de equilibrio se dirá asintóticamente estable si además para todas las
trayectorias que nacen Ni(δ) en se cumple:
Punto de equilibrio inestable
El punto de equilibrio xe se dice inestable, si para algún ε0 y para cualquier δ no importa
cuan pequeño sea siempre existe un x0 en Ni(δ) tal que la trayectoria que se origina en x0
abandona Nf(ε).
Comentario a las definiciones de estabilidad:
En el sentido de Lyapunov, la estabilidad es una propiedad del sistema, algo que no
depende de la entrada.
Esta propiedad es la manera de como se comporta el sistema alrededor de los puntos
de equilibrio, es por tanto una propiedad de carácter local validado en las cercanías de
los puntos de equilibrio.
El sentido profundo de la estabilidad, reside en una suerte de docilidad del sistema, es
estable si se logra reducir la amplitud de la evolución con el hecho de reducir el radio de
la vecindad de condiciones iniciales.
.
∞→= txe)t(xlim

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 5
Estabilidad y energía
La estabilidad o inestabilidad se manifiesta en “movimiento”, “fluctuaciones” o cambio en
el sistema. Estos cambios no son posibles sin un consumo o liberación de energía. Las
condiciones iniciales definen un cierto nivel de energía, esta energía puede mantenerse,
disminuir hasta un mínimo o incrementar indefinidamente. El siguiente ejemplo ilustra
esta situación
En el circuito serie de la figura, al cerrarse el interruptor en t=0, el condensador se
encuentra con una carga q0 y por la bobina circula una corriente i0.
Las ecuaciones de estado para el sistema son:
La energía del sistema está dada por E:
q R
L t=0
C
i
Fig. esc2: Circuito RLC autónomo
Ridtdi
LCq
idtdq
+=
−=
22
i2L
C2q
E +=
dtdi
Lidtdq
Cq
dtdE
+=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 6
y reemplazando el valor de las derivadas se tiene:
En este sistema mientras existe corriente, la energía está disminuyendo ya que es
disipada en la resistencia R. Sea cual sea el valor del estado inicial (q0,i0), la energía
disminuye hasta el punto de equilibrio (0,0).
En los puntos de equilibrio asintóticamente estables, la energía del sistema disminuye
hasta un mínimo relativo. En los puntos de equilibrio inestables la energía se incrementa
indefinidamente cuando el sistema es sacado de su equilibrio esto a expensas de alguna
fuente de energía.
En los procesos industriales la energía proviene de las redes de alimentación, por ello es
muy importante la capacidad de interrumpir el flujo de energía en el caso de
inestabilidad.
Estabilidad de sistemas lineales
Un sistema lineal puede ser descrito a través de su ecuación diferencial o a través
de su función de transferencia.
Ecuación de Estado
Ecuación Diferencial
Función de transferencia
Las dos primeras expresiones se prestan mas para visualizar la estabilidad (haciendo
u=0).
DuCxyBuAx.x +=+=
dtd
pu)p(My)p(L ==
)s(L)s(M
)s(H)s(U)s(Y
==
2RidtdE
−=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 7
En la ecuación de estado, para el sistema autónomo se tiene que:
En la forma diferencial, la respuesta autónoma queda dada por
son las raíces simples de la ecuación algebraica dada por:
Si x1 tiene multiplicidad l, entonces:
Lo importante resulta ser que, la respuesta autónoma del sistema lineal es una
combinación lineal de funciones exponenciales complejas (ki,exp( λit)), los λ i pueden
ser reales y/o complejos), de donde pueden originarse las siguientes funciones reales.
Las funciones del tipo F1 corresponden a raíces simples de la ecuación característica y
la exponencial será decreciente si λ<0 o creciente si λ>0. El caso λ=0 genera una
función del tipo constante de tiempo.
{ }nn
At
At
xc...xcxc)t(y
)AsI(L)t(e
)(xe)t(x
+++=−==
=−−
2211
11
0
φ
ntn
tt ek...ekek)t(y λλλ +++= 22
11
n,...,λλ1
ntn
tll
tl
tltl ek...ekek...etketk)t(y λλλλλ ++++++= ++
−− 11
1122
111
0=)(L λ
)wtcos(eKtF
)wtcos(KeF
)wtcos(KtF
)wtcos(KFeKtF
KeF
tn
t
n
tn
t
ϕ
ϕ
ϕ
ϕ
λ
λ
λ
λ
+=
+=
+=
+==
=
6
5
4
3
2
1
=exponencial =(exponencial)*(potencia) =sinusoide =(sinusoide)*(potencia) =(exponencial)*(sinusoide) =(potencia)*(exponencial)* (sinusoide)

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 8
• Las funciones del tipo F2 corresponden a raíces reales de la ecuación característica,
estas funciones se atenúan si λ<0 y son crecientes si λ>0.
• Las funciones del tipo F3 se obtienen a partir de raíces imaginarias puras.
• Las funciones del tipo F4 corresponden a raíces imaginarias puras múltiples, estas
funciones toman valores cada vez mayores (invirtiendo su polaridad) a medida que
transcurre el tiempo.
• Las funciones del tipo F5 se obtienen a partir de raíces complejas conjugadas
simples, y se atenúan solo si λ<0.
• Las funciones del tipo F6 corresponden a raíces complejas conjugadas múltiples, y se
atenúan solo si λ<0.
Un resultado interesante de la teoría de variables de estado es el siguiente.
Si un sistema lineal en su forma diferencial:
Se expresa en variables de estado en la forma:
Entonces, en el caso autónomo el estado de X(t) resulta ser:
La matriz φ(t) llamada matriz de transición de estado contiene funciones que a su vez
pueden expresar como una combinación de las que genera la ecuación característica.
Es decir funciones del tipo F1; F2; F6; así a partir de L(λ) = 0, se genera un conjunto de
funciones que permiten describir el comportamiento autónomo (o propio) del sistema.
dtd
pu)p(My)p(L ==
DuCxyBuAx.x +=+=
)(x)t()t(x 0φ=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 9
Para un mismo sistema lineal, su respuesta autónoma depende de los valores propios o
las raíces de la ecuación característica o los polos de la función de transferencia,
dependiendo si se encuentra expresado en variables de estado, ecuación diferencial o
función de transferencia, así la solución de las siguientes ecuaciones.
Dan los mismos resultados para un mismo sistema. A estos resultados se les llama las
raíces del sistema.
Las condiciones de estabilidad para un sistema lineal puede enunciarse así:
Estabilidad asintótica
Un sistema lineal tiene un comportamiento asintóticamente estable en torno del estado
cero si todas sus raíces se encuentran en el semiplano izquierdo abierto.
Inestabilidad :
Un sistema lineal tiene un comportamiento inestable en torno del estado en torno del
estado cero si se da cualquiera de las siguientes condiciones.
1. Alguna de sus raíces está en el semiplano derecho abierto
2. Alguna de sus raíces está en el eje jw y es múltiple
Estabilidad :
Un sistema lineal tiene un comportamiento estable en torno del estado cero si se
cumplen las dos siguientes condiciones :
No es inestable.
Algunas de sus raíces están en el eje jw y no son múltiples.
[ ]
00
0
==
=−
)s(L)(L
AIdetλ
λ
= valores propios
= ecuación característica.
=polos del sistema.

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 10
Estabilidad y el criterio de routh
El criterio de routh permite saber la ubicación en los semiplanos de las raíces de la
ecuación polinomial
Este criterio se aplica al denominador de la función de transferencia en estudio
Las condiciones de estabilidad se establecen según la ecuación ER 1, y el arreglo que
genera el algoritmo de routh ; en especial la primera columna
Para que el sistema sea asintóticamente estable es necesario que:
• Todos los coeficientes p i de (1) sean positivos y no nulos
• Para que el sistema sea asintóticamente estable es necesario y suficiente que todos
los coeficientes de la 1ª columna sean positivos y no nulos
• El nº de polos en el semiplano derecho es igual al nº de cambios de signo de la
primera columna
0012
21
1 =+++++ −− PsPsP...sPsP n
nn
n
ER 1

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 11
Algoritmo de Routh
Los coeficientes del polinomio se “reparte” en las dos primeras filas de la tabla
siguiente. Después se obtienen, a partir de éstos los demás coeficientes.
sn a1 a2 a3 a4 a5 a6
sn-1 b1 b2 b3 b4 b5 b6
sn-2 c1 c2 c3 c4 c5 c6
sn-3 d1 d2 d3 d4 d5 d6
sn-4 e1 e2 e3 e4 e5 e6
s j1
1 k1
Teorema: Es posible multiplicar una línea por un coeficiente positivo sin afectar las
conclusiones relativas a la primera columna.
0011
1 =++++ −− PsP...sPsP n
nn
n
...pbpbpb
...papapa
nnn
nnn
533211
43221
−−−
−−
===
===
)bcbc(c
d)abab(b
c
)bcbc(c
d)abab(b
c
)bcbc(c
d)abab(b
c
14411
314411
3
13311
213311
2
12211
112211
1
11
11
11
−=−=
−=−=
−=−=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 12
Algoritmo de Routh: Casos especiales.
1. Valor cero en la primera columna
• Se interrumpe el algoritmo
• Multiplíquese P(s) por (s+a) con a>0
• Aplicar de nuevo el algoritmo
2. Toda la fila toma el valor cero. Significa que existen:
• Raíces reales de signo opuesto
• Raíces imaginarias puras conjugadas
• Juego de raíces complejas conjugadas y de signos opuestos (formando un cuadrado)
Para resolver esta situación, formular la ecuación auxiliar considerando los
coeficientes de la fila inmediatamente superior a la fila nula. Después, reemplazar
los ceros por los coeficientes correspondientes a la derivada de la ecuación auxiliar.
Ejemplo:
01
00
022
011
231
023
2
3
4
234
s
s
s
s
ssss
−
−
−
=+−−+
Ecuación auxiliar: 4
222
−=
=+−
ds)s(dEC
)s(ECs
21
04
022
011
231
023
2
3
4
234
−
−
−
−
=+−−+
s
s
s
s
ssss
Dos cambios de signo ⇒ 2 raíces en el S.P.D.
( de la ecuación auxiliar s=±1)

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 13
Estabilidad y Realimentación
La estabilidad del sistema bajo realiimentación está dada por la ubicación de los polos
definidos por :
Aplicando routh es posible determinar los rangos de estabilidad asintótica en los que
puede operar el sistema bajo control.
Ejemplos :
1)
Resolviendo para determinar polinomio de los polos de realimentación:
Condiciones
)s(NK)s(D)s(NK
)s(r)s(c
c
c
+= c
)s(D)s(N
Kr c →→→
+
-
0 1 0 1 0= + + + + + +a s a s a K b s b s bnn
c mm... ( . .. )
)s)(s()s(
K)s(D)s(N
K cc 531++
+=
01582 =++++= cc Ks)K(s)s(P
01508>+
>+
c
c
KK
El sistema es asintóticamente estable para todo kc>0

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 14
2)
Condiciones
El sistema es asintóticamente estable si
Ejemplos
1)
2)
2401
008322102405870
08862
240721
152101
02401527210
2
3
4
5
2345
.s.s
s
s
s
sssss
−−
=+++++
Inestable : dos raíces en el semiplano derecho
)ss)(s(s)s(
Kc 5252
2 ++++
0225157 234 =+++++= cc Ks)K(sss)s(P
014
080
982580080
>
>−
−−−>−
c
c
ccc
c
K
KK)K)(K(
K
1280 .KC <<
1010436
0107
051
1032
010532
2
3
4
234
.ss
s
s
ssss
−
=++++
Inestable : dos raíces en el semiplano derecho

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 15
3)
Régimen Permanente y Transitorio
Considerese un sistema lineal asintóticamente estable definido por su función de
transferencia :
A este sistema se le aplica una entrada regular y determinista, es decir una señal tal que
se pueda predecir su valor en un tiempo futuro.
Tal entrada tendrá una transformada de Laplace del tipo
Este tipo de funciones incluye las señales estándar de prueba (escalón, rampa,
sinusoide) y otras formas posibles tales como parábolas exponenciales decrecientes,
etc.
La respuesta del sistema ante condiciones iniciales nulas queda dada por:
00061
000
004
0064
0000
0431
0431
4721
044732
350
232
3
3
4
5
6
23456
−
−
−−
−
−−
−−
−−−
=−−−−−+
s
s
s
s
s
s
s
ssssss
ss
)s(Qss
64
0433
24
−
==−−
Un cambio de signo ∴ una raíz en s.p.d. ∴ inestable
jss ±=±= 2
Satisfacen P(s) y Q(s)
)s(U)s(Y
)s(D)s(N
)s(H ==
)s(Q)s(P
)s(U =

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 16
Por simplicidad, supóngase que los polinomios D(s), Q(s) se factorizan de la siguiente
manera:
Separando las fracciones parciales y reordenando los términos, las salida puede
escribirse como :
En la primera sumatoria están contenidas las funciones bases del sistema, y como este
es asintóticamente estable, al invertir en el sentido de Laplace las funciones resultantes
se atenúan con el tiempo.
En la segunda sumatoria están presentes “modos” generados por la entrada, al ser
invertidos en el sentido de Laplace pueden dar origen a respuestas sostenidas en el
tiempo ( esto ocurre cuando la entrada se mantiene en el tiempo sin anularse).
En resumen, en un sistema asintóticamente estable solo persiste la respuesta generada
por la entrada ya que la respuesta autónoma del sistema se torna despreciable después
de cierto tiempo tr (que se llamara tiempo de respuesta).
Se llamará régimen transitorio al intervalo de tiempo (0, tr), en este lapso es significativa
la contribución de la respuesta propia del sistema a la respuesta total.
Llamaremos régimen permanente al intervalo de tiempo que parte en tr el valor de la
salida en este intervalo genera la respuesta sostenida del sistema ante la entrada cuya
función de transferencia es la citada anteriormente.
)s(Q)s(P
)s(D)s(N
)s(Y =
∏
∏
=
=
+=
+=
m
i
i
n
i
i
)bs()s(Q
)as()s(D
1
1
∑∑== +
++
=m
i i
in
i i
i
bsB
asA
)s(y11

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 17
Tiempo de respuesta
Como se definió anteriormente, el tiempo de respuesta define hasta donde es
significativa la respuesta propia del sistema cuando se le somete una entrada regular y
determinista. Para la determinación considérese el siguiente procedimiento.
El sistema se somete a señales estándar de prueba (escalón, rampa o sinusoide).
Se determina la respuesta sostenida del sistema ante la entrada en cuestión.
Se construye un tubo alrededor de esta función, si yp(t) representa la respuesta
sostenida, entonces el tubo en el conjunto siguiente de puntos en el plano (t,y).
Se determina el tiempo en que la respuesta total entra a ese tub o y no vuelve a salir, ese
instante es el tiempo de respuesta
Algunas respuestas sostenidas de sistemas asintóticamente estables
Sea H(s) la función de transferencia de un sistema asintóticamente estable, interesa ver
que respuesta presenta ante las señales estándar escalón y rampa.
Considérese una entrada en escalón cuya expresión en Laplace es:
La salida resulta ser:
{ })t(y)()t(y~)t(y)()y~,t(F pp εε +≤≤−= 11
)s(D)s(N
sa...sasaasb...sbsbb)s(H
nn
mm =
++++++++=
2210
2210
sM
)s(U0
=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 18
)s(D)s(N
sA
)s(Y
)s(Hs
M)s(Y
'
+=
=0
N’(s) es un nuevo polinomio que se genera al separar en fracciones parciales. El
coeficiente A resulta ser:
La cantidad b0/a0 se acostumbra a llamar ganancia estática de posición, y se designa por
el símbolo Kp
Puesto que se trata de un sistema asintóticamente estable, el polinomio D(s) genera
funciones que se atenúan en el tiempo, de modo que:
“La respuesta sostenida de un sistema asintóticamente estable ante un escalón de
entrada de monto M0, es otro escalón de monto M0, siendo Kp la ganancia estática de
posición del sistema”.
Considérese ahora la entrada en rampa con pendiente P0
La salida queda dada por :
2
0
sP
)s(U =
==
→ 0
00
0 ab
M)s(sYlimAs
))s(Ys(dsd
limB
)s(YslimA
)s(D)s('N
sB
sA
)s(Y
)s(D)s(N
sP
)s(Y
s
s
2
0
2
0
2
2
0
→
→
=
=
++=
=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 19
Donde resulta que:
El término genera funciones que se atenúan con
el tiempo debido a la estabilidad asintótica del sistema, por lo tanto, debido a la acción
de la entrada se produce como respuesta permanente una rampa superpuesta a un
escalón de altura B.
Indices de error
Lo que se espera de los sistemas de control es obediencia, se desea que la salida siga
a la entrada; la clase de sistemas que se presta para esto es la de los sistemas
asintóticamente estables, así la ley de diseño es:
“Un buen sistema de control es asintóticamente estable”
Aparte de estabilidad asintótica (AE) los sistemas de control cumplen con presentar una
salida de la misma naturaleza de la entrada y de la misma escala.
En los sistemas industriales el controlador trabaja en base a las señales de referencia y
variable controlada, ambas señales están realizadas físicamente en corriente
(controladores electrónicos) en el rango de 4 a 20 mA, o bien en presión (
instrumentación neumática) en el rango de 3 a 15 psi.
Pero en realidad lo que interesa controlar es una variable física dentro de un rango
definido, por tanto hay un problema de diseño previo en el que es necesario hacer
corresponder el rango de salida del sensor con el rango de la variable a ser controlada.
20
0110
0
ababa
B
MKA p
−=
=
)s(D)s('N

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 20
En lo que sigue del curso se supone que este problema está resuelto, así se trabaja con
las variables r como entrada y c como salida del sistema de control.
Se ha visto que la respuesta sostenida ante un escalón r0 en la entrada es otro escalón
de monto c0 en la salida, se define el índice epp error permanente de posición como la
diferencia sostenida en tanto por uno que presenta el sistema en régimen permanente.
Este índice puede ser positivo o negativo, salvo otra indicación específica se acepta que
epp asuma el valor de ± 0.05 (5% de error sostenido).
Por otra parte, la respuesta es un sistema AE ante una rampa en la entrada resulta ser
otra rampa superpuesta a un escalón, en tal caso tiene sentido comparar las pendientes.
Se define epv error permanente de velocidad como el error en tanto por uno de las
pendientes de entrada y salida (Pe, Ps)
En el caso muy particular en que la salida presenta la misma pendiente que en la
entrada, entonces tiene sentido definir un error en paralaje ep*, dado simplemente por la
diferencia entre las dos señales en régimen permanente.
Una clasificación de los sistemas para el análisis de exactitud.
Lo que se pretende es desarrollar es una clasificación de los subsistemas que
intervienen en los sistemas de control, basada en la forma de la función de transferencia.
0
00
rcr
epp−
=
e
sepv
PPP
e−
=
)t(c)t(re *p −=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 21
Uno de los subsistemas más importante en las exactitud es el integrador cuya función de
transferencia es :
La respuesta al escalón de entrada es una rampa; en otras palabras, si la entrada pasa
de ser nula a una posición constante M0, entonces, la salida cambia con la velocidad
constante dada por KvM0. Por tal razón la constante Kv se llama ganancia estática de
velocidad.
También son importantes los sistemas AE dados por:
Tal como se vio anteriormente, la respuesta en régimen permanente a un escalón
de monto Mo en la entrada es otro escalón de monto
La posición de entrada es transformada en otra posición con una ganancia igual a la
anterior pero dividida por la constante M0, por tal razón, en el régimen permanente, lo
único interesante de un sistema AE es lo que se llama su ganancia estática de posición
Kp.
Se define como sistema tipo cero a uno que sea AE y se representa por
Se esta ahora en condiciones de definir una clase de sistemas dados por la
interconexión en cascada de un sistema tipo cero y n integradores ; a tales sistemas se
les llamara sistemas tipo n y se representan por :
Tratamiento en régimen permanente de sistemas oscilatorios o inestables.
0
00
ab
M
1)0(H;)s(HK)s(H p0 ==
1)0(H;)s(Hs
K)s(H 0
n
nn ==
sK
)s(Iv
=
nn
mm
sa...sasaasb...sbsbb)s(H
++++++++= 2
210
2210
0

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 22
Un sistema de tipo cero es AE por definición, un sistema de tipo uno es solamente
estable, a partir de n=2 estos
sistemas son inestables, en este párrafo nos interesa considerar que ocurre en régimen
permanente con sis temas de control que incluye subsistemas oscilatorios o claramente
inestables en su estructura como el sistema de la figura
En tal caso H(s) representa un sistema inestable que satisface la siguiente ecuación
diferencial.
¿Como se comporta el sistema total?. Esa es una pregunta interesante ya que al menos
una de las partes es inestable por si sola.
La respuesta viene en el sentido de que ahora se ha estructurado un nuevo sistema
cuya función de transferencia es:
Este nuevo sistema es asintóticamente estable si kc>a, supongase que se cumple esta
condición.
Cuando la referencia toma un valor constante, entonces, en el régimen permanente la
salida también debe ser constante, la señal de error y la salida del amplificador también
lo son, luego se encuentra que en el sistema inestable debe darse que tanto su entrada
como su salida son fijas; ¿que ha ocurrido entonces con la dinámica del sistema
inestable?
+ - Kc
r
c
as −1
x e
H(s)
Fig. esc 3: Sistemas de control con componente inestable
xacdtdc =−
aksk
)s(r)s(c
c
c
−+=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 23
En la ecuación diferencial anterior, se tiene la siguiente respuesta cuando su entrada es
constante y de monto X0.
De modo inestable se anula si es decir si la condición inicial es igual a
la respuesta particular de la DE.
Se establece el siguiente principio que incluye componentes inestables u oscilatorios en
los sistemas de control.
Si todo el conjunto es AE, entonces un subsistema H(S) que no contenga integraciones
se comporta como un amplificador de ganancia H(0) cuando la entrada es un escalón.
Este comportamiento es válido en el régimen permanente ya asegurado por la condición
de estabilidad asintótica del conjunto.
Exactitud de los sistemas de control en lazo abierto.
Sea H(s) la función de transferencia de un sistema de control en lazo abierto. La única
posibilidad aceptable para H(s) es que sea AE; en consecuencia presenta una ganancia
estática de posición kp, luego los índices epp, epv valen
Aparentemente basta hacer kp=1 para tener la mejor exactitud posible, pero esto no es
simple de lograr y mantener;
el valor de kp es en general un producto de las ganancias de todos los componentes del
sistema (programador, actuador, planta, sensor), por una parte hay un problema de
calibración y por otra las múltiples posibilidades de variación de ganancias ( en cada
bloque ) con el funcionamiento del sistema.
ax
eax
)(c)t(c at 000 −
+=
cxa
( )00
= −
ppvpp kee −== 1

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 24
El problema de calibración se hace patente cuando es necesario ajustar kp=1 ya sea
moviendo un potenciómetro o una perilla de ajuste, es muy difícil ajustar un valor
determinado.
Exactitud de los sistemas de control realimentados.
Para el análisis considérese el sistema de la figura esc 4
KcH(s) es la función de transferencia del conjunto actuador-planta-sensor y además del
controlador. En el controlador existe una ganancia ajustable que se designa por Kc este
parámetro es suficientemente importante como para declararlo explícitamente.
La función de transferencia del conjunto es:
Como se recordará, la estabilidad del sistema depende de la ubicación de los polos, en
este caso la estabilidad depende de las soluciones de la ecuación algebraica.
De modo que kc juega un papel muy importante en la estabilidad del sistema.
Cuando el sistema ha sido bien diseñado existe por lo menos un rango de valores para
kc que asegura la estabilidad asintótica del conjunto, por esto se efectúa la siguiente
suposición para todos los desarrollos que siguen.
)s(Hk)s(Hk
)s(r)s(c
c
c
+=
1
01 =+ )s(Hkc
- KcH(s) r
c
Fig esc 4 Sistema de control realimentado

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 25
Suposición : Kc es tal que el sistema realimentado es AE
La exactitud del sistema depende también de la naturaleza de H(s), por ello considera
los casos cuando H(s) es de tipo cero, tipo uno y de mejor orden.
H(s) tipo cero
En tal caso función de transferencia puede escribirse:
Como kc esta dentro del rango que asegura la estabilidad asintótica entonces es
también de tipo cero.
Al aplicar un escalón r0 en la referencia, en el régimen permanente la salida se estabiliza
también en un valor constante c0. El error e0 resultante de la comparación es
amplificado kckp veces para dar la salida c0, luego es inmediato que:
Por otra parte, cuando a este tipo de sistemas se aplica una rampa de pendiente Pe en
la entrada, por la estabilidad asintótica del conjunto, en régimen permanente también
aparece una rampa de pendiente Ps. La señal de error es otra rampa ; como H(s) es de
tipo cero, la pendiente de la rampa en el error es amplificada KpKc veces luego es
inmediato que:
Como un comentario general podemos decir que estos sistemas trabajen con un error
sostenido en régimen permanente, es por su construcción que se tiene este
comportamiento.
10 == )(G;)s(Gk)s(H p
pcpp
kke
+=
11
pcpv
kke
+=
11

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 26
H(s) de tipo uno
Esto supone la presencia de un integrador en el lazo directo, la función de transferencia
H(s) puede escribirse
Recordemos que todo el conjunto se comporta como un sistema tipo cero, luego cuando
la referencia es de valor constante ro, en el régimen permanente la salida también es
constante, supongase que es de valor C0. Se tiene por tanto un error constante de valor:
Si el error e0 es distinto de cero, entonces el integrador presente en el lazo genera una
rampa, esto contradice el hecho de que el conjunto se comporta como un sistema tipo
cero, luego se tiene el importante resultado
Siguiendo un razonamiento análogo se puede concluir que:
En este último caso:
Siendo Pe la pendiente de la rampa de entrada
H(s) tipo n, para n ≥ 2
En tal situación el problema mas difícil es lograr la estabilidad asintóticamente ya que los
índices de error epp, epv, ep* son todos nulos.
Sensibilidad en los sistemas de control
10 == )(G;)s(Gsk
)s(Hv
000 cre −=
0≡ppe
0≡pve
vc
*p
kkPe
e =

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 27
Entenderemos por parámetro de un sistema a un atributo de él que permanece sin
cambios apreciables en el tiempo. En ingeniería el concepto de parámetro se enriquece
con la noción de condición de diseño, así en los sistemas de control, los parámetros son
magnitudes que están fijas o son seleccionables por el operador pero que una vez se
han definido permanecen constantes durante la operación del sistema.
La invariación en el tiempo es una condición deseada pero que no se puede asegurar en
un cien por cien, todos los equipos son susceptibles de fallas. Estas fallas se traducen
en cambios en los parámetros que se definen.
Un concepto útil para estudiar el efecto de cambios en los parámetros es el de
sensibilidad.
Sea T una variable de un sistema y sean (a1, a2,...,an) el conjunto de parámetros que
tienen incidencia sobre T. Sea el valor T0 el valor de T antes del cambio en el
parámetro a1 y
sea (a10, a20,...,an0) el conjunto de valores que presentan los parámetros antes del
cambio.
Supóngase que el parámetro a se incremente en ∆a, y que como consecuencia de ello la
variable T presenta una variación ∆T; definimos la sensibilidad de T respecto de ai
alrededor del punto de trabajo 0 como el siguiente límite.
En esta definición los cuocientes ;
representan los cambios siginficativos de ai también significan cambios en la estructura
del sistema. Esto puede verse en los casos extremos (ai llevado a cero o ai llevado al
infinito).
0
0
0
0
Ta
aT
limi
iai
T
as i ∆∆
=→∆
0i
i
aa∆
0TT∆

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 28
Este análisis de sensibilidad busca inferir el efecto que tendrá en la variable T un
pequeño cambio en el parámetro ai, para ello se usa la siguiente aproximación.
Esta expresión es semejante a la utilizada en la linealización de funciones.
La validez de la aproximación depende naturalmente de la suavidad de la curva, la
sensibilidad al igual que la derivada tiene una validez local.
Si el valor de la sensibilidad resulta próximo a cero, entonces, en ese punto de trabajo, la
variable es “insensible” al parámetro.
Si el valor de la sensibilidad (su magnitud) es del orden de la unidad o superior,
entonces, la variable resulta “sensibles” al parámetro.
El análisis de sensibilidad es importante para la evaluación de diseño y dispositivo de la
ingeniería. En general los diseños consideran condiciones ideales de funcionamiento.
Un estudio de su sensibilidad puede arrojar luz acerca de los componentes que
requieren un mayor control en su calidad.
Por otra parte cuando se requiere influir sobre la variable, se busca una gran
sensibilidad. Tal es la situación en la calibración de equipos.
Aplicaciones al control automático.
Veremos algunos casos y su interpretación desde el punto de vista del control
automático
a) Sea
Entonces
na...aaaT 321=
1==Ta
aT i
i
T
as i ∂∂
( )0
0
0 i
iT
a aa
TT
s i
∆=∆
x)x(dxdf
y ∆=∆ 0

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 29
Si se considera un sistema de control en lazo abierto, entonces la salida en régimen
permanente para una entrada fija es.
Así la sensibilidad de la salida respecto a cualquiera de las ganancias toma el valor
unitario. Cualquier variación de una ganancia rebota en el mismo porcentaje de la
salida.
b) Consideremos la salida de un sistema realimentado, sea K1 la ganancia total del
lazo directo y sea K2 la ganancia del sensor en el lazo de realimentación entonces para
un entrada constante ro la expresión de salida es:
Esta expresión valida en el régimen permanente no contiene al tiempo de modo que la
sensibilidad puede calcularse a través de la derivada parcial de C’ respecto de K1 o
Kesc Se pueden encontrar los siguientes resultados.
El primer resultado nos dice que la sensibilidad de la salida respecto de una ganancia
cualquiera del lazo directo es igual al error permanente de posición del sistema. Si el
sistema tiene un buen desempeño entonces epp es pequeño y por lo tanto las pequeñas
variaciones de alguna de las ganancias en lazo directo no rebotan en la salida.
El segundo resultado dice que la sensibilidad de la salida respecto a la ganancia es igual
a -(c/r). Si el sistema tiene buen desempeño en su exactitud entonces (c/r) tiende al
valor uno.
Los sistemas de control, explícitamente las salidas de ellos son extraordinariamente
sensibles respecto de la ganancia del sensor. Los controladores creen ciegamente en la
onrk...kkk'c 321=
021
1
1r
kkk
'c+
=
21
21
21 111
21 kkkk
kk SS'c
k
'c
k +−=
+=

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 30
salida del sensor, por ello es importante seleccionar cuidadosamente estos dispositivos
en un proyecto de instrumentación.
Regulación de los sistemas de Control
El problema que abordaremos se refiere al efecto que puede tener en una variable Y del
sistema la aparición de otra variable P que se suma a una variable X. Esto se entiende
mas con la figura anterior.
Este análisis se efectúa en régimen permanente (supone la estabilidad asintótica) y
considera una situación de antes y otra de después de la aparición de la perturbación de
un escalón de perturbación P=∆x. Por efecto de ∆x se genera una ∆y en la variable de
interés.
Definimos la regulación de y frente a ∆x de la siguiente manera.
En esta expresión X0 es el valor de la variable x antes de ser perturbada; y0 es el valor
de la variable de nuestro interés antes de la perturbación.
El valor ∆x es el monto de la perturbación. El valor ∆y representa el cambio sostenido
en la variable y..
Claramente, las situaciones de antes y después suponen la existencia de régimen
permanente.
X0
r0 y0
Antes
r0 y0+∆y
Después
P=∆x
+
+
Fig. esc5: Efecto de una perturbación aditiva en un sistema
0
0
0 yx
xy
limR ai
y
ai ∆∆=
→∆

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 31
La definición de regulación es muy semejante a la dada para la sensibilidad, también
mide una razón entre cambios. Estos cambios también se expresan en tanto por unidad
referidos a los valores anteriores al efecto de la perturbación. Hay una diferencia
notable en ambos casos: los incrementos ∆x no requieren ser diferenciales y no es
necesario llevar a un límite la relación de cambios. La causa de estos reside en que una
perturbación aditiva no cambia la estructura del sistema en si misma.
Una situación que es conveniente de considerar es la de la existencia de saturaciones
en las variables del sistema; en tal caso, es posible perder la condición de linealidad y
los cálculos deben realizarse en base a los valores de saturación que se hayan
alcanzado.
Vemos la aplicación de este concepto a un sistema de control en lazo abierto y luego a
uno en lazo cerrado.
La situación antes de la perturbación se caracteriza por
Después que ocurre el cambios se tiene que
Efectuando el cuociente entre ambas igualdades se concluye que
r0 k2 k1
C’0
X0
Antes
r0 k2 k1 C’0
∆X
Después
+ +
Fig esc6: Lazo Abierto
020 kk'c =
xk'c ∆=∆ 2
1=∆R
'c
x
Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 32
En este resultado puede ser considerado como malo, en efecto, si se calcula el
porcentaje de cambio en la salida debido a la perturbación según la expresión
Se concluye que la salida sigue a la perturbación en el mismo porcentaje.
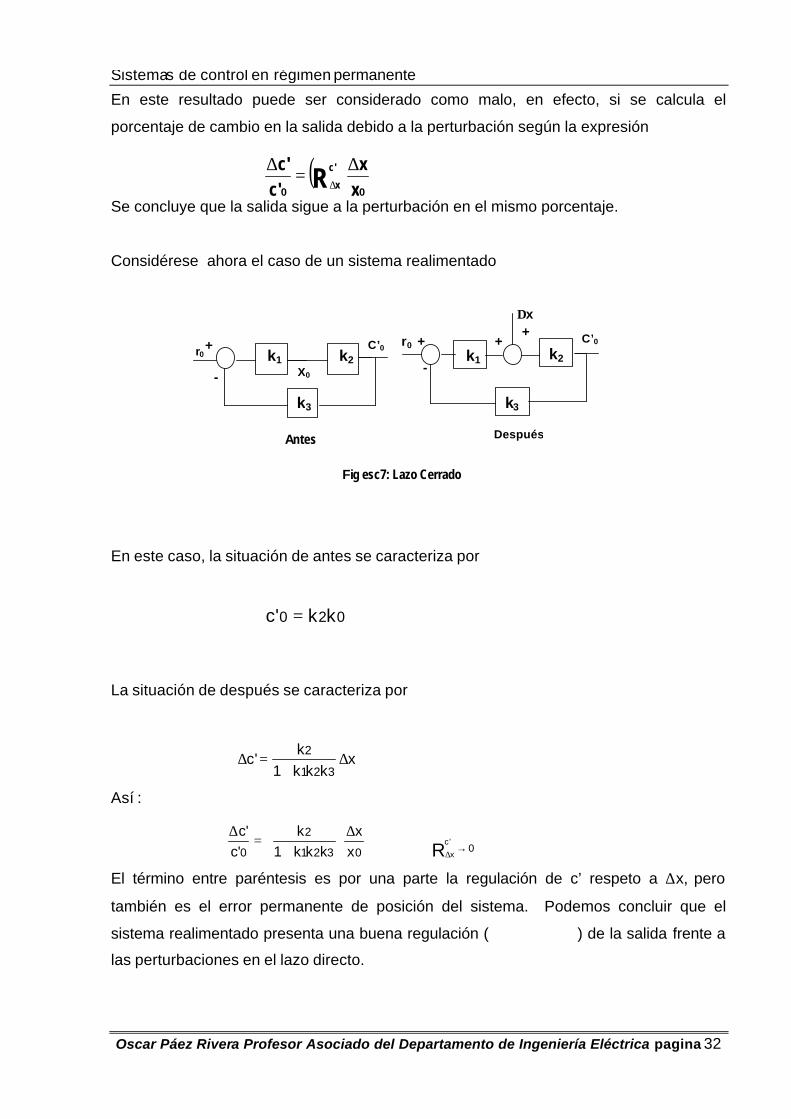
Considérese ahora el caso de un sistema realimentado
En este caso, la situación de antes se caracteriza por
La situación de después se caracteriza por
Así :
El término entre paréntesis es por una parte la regulación de c’ respeto a ∆x, pero
también es el error permanente de posición del sistema. Podemos concluir que el
sistema realimentado presenta una buena regulación ( ) de la salida frente a
las perturbaciones en el lazo directo.
( )00 xx
'c'c
R'c
x
∆=
∆∆
020 kk'c =
xkkk1
k'c
321
2∆
+=∆
Fig esc7: Lazo Cerrado
r0 k2 k1 C’0
X0
Antes
-
+
k3
r0 k2
k1
C’0
∆x
Después
+ +
k3
-
+
0321
2
0 xx
kkk1k
'c'c ∆
+
=∆
0R'c
x→
∆

Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 33
Diseño estático de controladores
Este párrafo se dedica al diseño en régimen permanente de un lazo de control
realimentado. Se supone que el sistema se mantiene en una condición de equilibrio
asintóticamente estable, aunque esto debe comprobarse con las ecuaciones del
sistema.
El procedimiento seguido es uno de los posibles métodos válidos para cumplir con las
especificaciones de régimen permanente.
Revisaremos algunos de estos conceptos necesarios para establecer el método.
• Rango de la referencia (r): en cualquier realización física existe un mínimo y un
máximo para la referencia, esto define su rango constituyendo un dato de entrada
para el diseño.
• Rango de la variable controlada (c): Se refiere al intervalo de la salida del sensor,
debe coincidir con el rango de la referencia.
• Rango de control (c’): Se refiere al rango deseado para la salida de la planta;
constituye un dato de entrada al proceso de diseño.
• Rango de la planta (z): Está definido por los valores que permiten alcanzar el rango
de control. Este rango se calcula.
• Rango de la perturbación o carga (L): Es un rango definido por los valores más
probables de la perturbación o bien por los valores extremos que asume la carga.
También puede entenderse como el intervalo para la perturbación o carga tal que
puede asegurarse un comportamiento razonable del sistema de control. Es un dato
de entrada.
• Rango de salida del actuador (x): El valor superior de este rango determina en
algún sentido la cap acidad o potencia instalada para manejar la planta. Es usual que
en el cálculo del rango del actuador se considere lo necesario para llevar la planta
desde su salida mínima hasta su salida máxima aun en presencia de los valores
extremos de perturbación. Este rango se calcula.
• Rango de la variable manipulada (m): La salida del controlador usualmente se
satura por arriba y por debajo. Es una dato de entrada al diseño.
• Bias: Con esta palabra los ingleses designan una señal constante inyectada en
algún punto del sistema. Se refiere naturalmente a una señal débil que podemos
manejar totalmente. Para efectos de este diseño pueden ser consideradas como una
Sistemas de control en régimen permanente
Oscar Páez Rivera Profesor Asociado del Departamento de Ingeniería Eléctrica pagina 34
señal base que se suma a la referencia, a la variable controlada o a la variable
manipulada.
Confieren grados de libertad al diseño y se requieren para alcanzar puntos de trabajo o
para compatibilizar rangos.
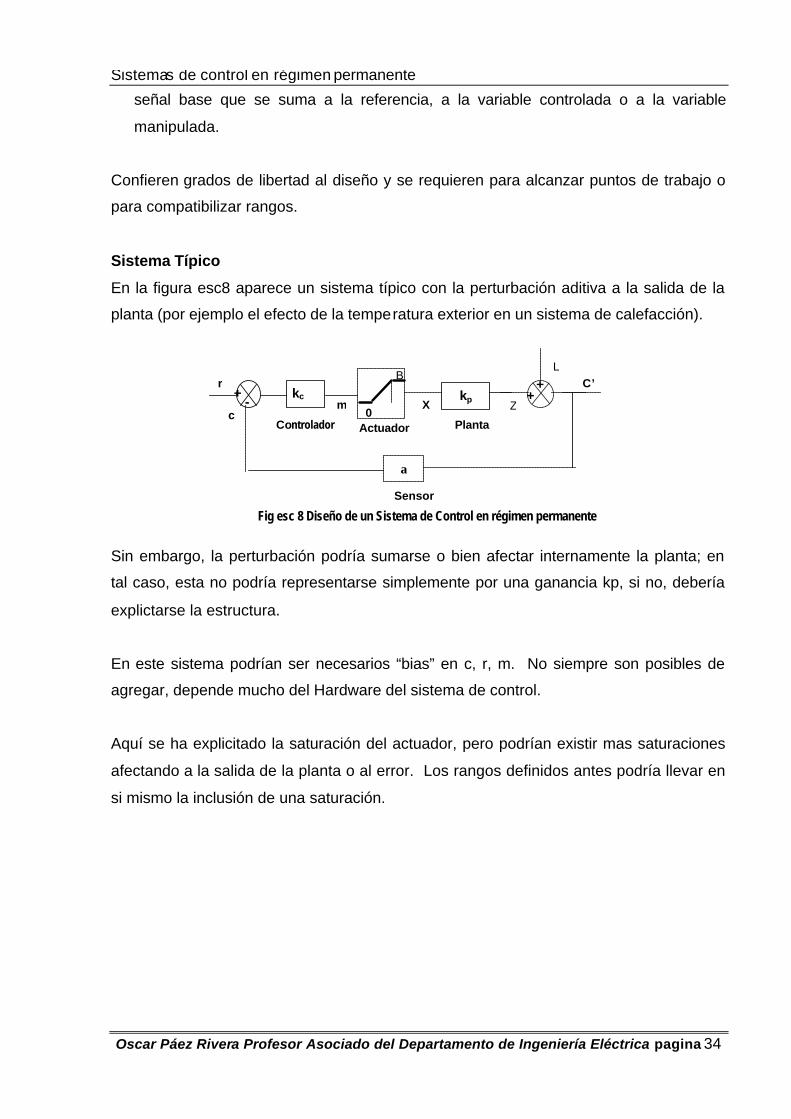
Sistema Típico
En la figura esc8 aparece un sistema típico con la perturbación aditiva a la salida de la
planta (por ejemplo el efecto de la temperatura exterior en un sistema de calefacción).
Sin embargo, la perturbación podría sumarse o bien afectar internamente la planta; en
tal caso, esta no podría representarse simplemente por una ganancia kp, si no, debería
explictarse la estructura.
En este sistema podrían ser necesarios “bias” en c, r, m. No siempre son posibles de
agregar, depende mucho del Hardware del sistema de control.
Aquí se ha explicitado la saturación del actuador, pero podrían existir mas saturaciones
afectando a la salida de la planta o al error. Los rangos definidos antes podría llevar en
si mismo la inclusión de una saturación.
Fig esc 8 Diseño de un Sistema de Control en régimen permanente
+ -
kc kp r
c
B
0
α
+ +
Z
L C’
m X Controlador Actuador Planta
Sensor