Corte y Relleno Ascendente
10
Número de Registro Asignado: TT-029 Título del documento: Optimización de Diseño de Minas que Emplean el Método de Minado por Corte y Relleno Ascendente Comité al que va dirigido: Investigación Minera Nombre del autor: Ricardo Arrarte Grau Nombre de la empresa: Consorcio Minero Horizonte Cargo: Gerente de Planeamiento Dirección: Jr Crane 102, San Borja Número de teléfono: 618 1026 Números de fax: Correo electrónico: [email protected]
-
Upload
richard-se -
Category
Documents
-
view
269 -
download
6
Transcript of Corte y Relleno Ascendente

Número de Registro Asignado: TT-029
Título del documento: Optimización de Diseño de Minas que Emplean el Método deMinado por Corte y Relleno Ascendente
Comité al que va dirigido: Investigación Minera
Nombre del autor: Ricardo Arrarte Grau
Nombre de la empresa: Consorcio Minero Horizonte
Cargo: Gerente de Planeamiento
Dirección: Jr Crane 102, San Borja
Número de teléfono: 618 1026
Números de fax:
Correo electrónico: [email protected]

Optimización de Diseño de Minas que Emplean el Método de Minado por Corte yRelleno Ascendente
1 Resumen
Luego de estudiar la morfología y características de un yacimiento mineral en
particular y habiendo evaluado económicamente otros métodos de minado
alternativos, en muchos casos llegamos a determinar que el método de corte y relleno
ascendente es el método de minado óptimo para dicho yacimiento. Por su
selectividad, por su bajo costo de infraestructura y por otros motivos, el método de
corte y relleno ascendente es el método más común en la minería peruana. Hay tres
alternativas principales que deben ser estudiadas económicamente antes de aplicar el
método de corte y relleno ascendente: usando winche, usando scoop cautivo y
usando scoop no cautivo. Una vez estudiadas estas tres alternativas y habiendo
determinado que el uso de scoop no cautivo es la alternativa económicamente óptima,
se debe diseñar el conjunto de rampas, accesos, chimeneas de mineral y otras obras
que permitan la eficiente explotación del mineral.
Las dimensiones y características geométricas del yacimiento y de los equipos
seleccionados para la explotación permiten construir un modelo matemático que
minimiza los volúmenes de roca usando la programación lineal, y entrega como
resultado las distancias de ubicación de las rampas, pendientes de las mismas,
número de cortes a realizar en el tajeo, radios de curvatura, y otros parámetros
adicionales. Al ser el volumen de roca directamente proporcional al consumo de
explosivos y de aceros de perforación, podemos concluir que el resultado que obtenga
el menor volumen de roca será el resultado de menor costo, y por lo tanto aquel que
ofrece el mayor margen operativo.
2 Objetivos
El presente trabajo tiene como objetivo principal permitir la optimización del diseño
para la explotación de una mina subterránea tomando como base el modelo geológico
del yacimiento al cual se le aplicará el método de minado corte y relleno ascendente
mecanizado usando rampas basculantes. Se trata de un modelo de optimización de
las dimensiones y radios de curvatura de los túneles de desarrollo, preparación y
obras de infraestructura necesarios para permitir la explotación mecanizada de las
reservas de una mina subterránea usando el método de corte y relleno ascendente.
La optimización se hace usando la programación lineal y tiene como objetivo reducir el
volumen de desmonte a extraer, permitiendo la reducción del costo total. Las

restricciones del modelo están dadas por el yacimiento, por las características
geomecánicas y por las dimensiones de los equipos seleccionados para la
explotación.
3 Recolección de Datos
La recolección de la información que ha permitido desarrollar los modelos ha sido
obtenida de las siguientes minas subterráneas peruanas: Caudalosa (polimetálica Zn-
Pb-Cu-Ag), Selene (argentífera Ag-Au), Arcata (argentífera Ag-Au), Ares (aurífera Au-
Ag), Pallancata (argentífera Ag-Au), y Parcoy (aurífera Au). Los ingenieros que
laboran en estas unidades mineras han contribuido al presente trabajo, y han
compartido sus experiencias recogidas de estas y otras minas con el suscrito para
darle mayor valor y realismo a este modelo matemático. Lo que se busca con este
trabajo es proporcionar una herramienta adicional a los ingenieros, para la mejor toma
de decisiones, elevando los estándares de seguridad, controlando la dilución del
mineral y los costos de minado, que finalmente permiten mejorar la rentabilidad de los
yacimientos explotados.
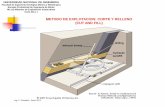
4 Aplicación
Corte y Relleno Mecanizado con Rampas Basculantes
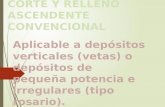
Este tipo de método es aplicado luego de analizar económicamente la conveniencia en
relación al i) método con winche o al ii) método de corte y relleno ascendente con
RP-Aux.+15
RP-Basculante -15%
RP-Basculante +15%
CH-Echadero de mineral
Nivel inferior
Nivel superior
Veta
RP-Aux.+15
RP-Basculante -15%
RP-Basculante +15%
CH-Echadero de mineral
Veta
Nivel superior
Nivel inferior

scoop cautivo. Habiendo concluido que si se justifica este método, podemos
esquematizar la sección del método según la Diagrama 2:
buz
alfa
a
h
d
alfa
a
h
pot
d
buz
alfa
a
h
d
c
Normalmente las rampas basculantes (esquematizadas en colores en el Diagrama 2)
se ejecutan en la caja piso de la estructura. Estas rampas tienen sección transversal
en bóveda (ancho b, y altura h) y parten de una rampa auxiliar ejecutada en la caja
piso, también con sección transversal en bóveda (ancho a, y altura h). La pendiente
de la rampa basculante (alfa) y de la rampa auxiliar (incl) está limitada por la
pendiente máxima que permita el equipo que circula por estas.
Desde la rampa auxiliar se ejecutan las rampas basculantes hasta cortar la veta, y una
vez cortada la veta se explota la veta en esa cota en toda la longitud (L) del tajo, a la
altura de corte (c) preestablecida. Es preferible que la primera rampa basculante sea
ejecutada con pendiente negativa, para aprovechar el máximo número de cortes
desde una misma rampa basculante.
En esta etapa se desarrollarán las fórmulas que permiten elaborar el modelo
matemático para realizar las simulaciones que permitan optimizar el modelo usando la
programación lineal.
Digamos que como resultado de las labores exploratorias, se determina que la
mineralización inicia en la cota superior (h sup), y profundiza hasta la cota
inferior (h inf). La cota del punto de impacto con la labor exploratoria (h llegada)
se tomará como base para la ejecución de las labores adicionales. Por lo tanto:
Altura mineralizada = h sup – h inf ---------- (1)
Altura mineralizada sobre la cota h llegada = h sup – h llegada ---------- (2)
Altura mineralizada debajo de la cota h llegada = h llegada – h inf ---------- (3)
RAMPA BASCULANTE(4 cortes)
RAMPAAUXILIAR
VETA

El buzamiento (buz) determina el ángulo que forma el eje de la rampa auxiliar con la
vertical, ya que debe seguir este mismo ángulo para no alejarse ni acercarse a la veta.
El Angulo de Inmersión o Plunge (plu) o la orientación de la mineralización sobre el
buzamiento determina el segundo ángulo que forma el eje de la rampa auxiliar con la
vertical, y debe ser tomado en cuenta para que la rampa basculante quede siempre al
centro del tajo en esa cota. Si la potencia (pot) aparente es mayor a la longitud de
autosoporte para el tiempo que el tajo estará sin rellenar, será necesario hacer más de
una “calle” o “fila”. Se debe definir si es preferible hacer la primera “calle” o “fila” más
pegada a la caja techo o piso, en función de las características geomecánicas de las
cajas.
Cuando la roca de la veta permite la perforación en realce, normalmente se trabaja
con un ala en extracción y la otra en relleno, para ciclar debidamente el tajo, y tener
aporte permanente de mineral del tajo. Cuando la perforación es en breasting, debido
a que la roca es geomecánicamente pobre, se tendrá que hacer una sub-rampa
basculante para poder rellenar un ala y no dejar de obtener mineral de la otra ala del
tajo.
La densidad del mineral (dminer) y la densidad del desmonte (ddesmon) son
parámetros necesarios para los cálculos a continuación. Es posible determinar el
volumen y peso de mineral por corte, en todo el tajo:
W corte = dminer x (pot / sen buz) x L x c ---------- (4)
El tonelaje sobre la cota de llegada se determina mediante la fórmula:
W superior= dminer x (pot / sen buz) x L x (h sup – h llegada) ---------- (5)
El tonelaje por debajo de la cota de llegada se determina mediante la fórmula:
W inferior = dminer x (pot / sen buz) x L x (h llegada – h inf) ---------- (6)
El tonelaje total se determina mediante la fórmula:
W total = dminer x (pot / sen buz) x L x (h sup – h inf) ---------- (7)
Las formas de curvas para la rampa auxiliar, proyectadas en el plano horizontal, son
dos: la elipse o el ocho. Se debe elegir la curva que tiene un menor desarrollo por
vuelta de la rampa auxiliar, lo cual permitirá minimizar el costo de excavación en
desmonte. No siempre lo determinante es la forma de la rampa en curva sino la
longitud de la rampa, lo que depende de la pendiente máxima (incl) que es capaz
de soportar el equipo que circulará por dicha rampa. Usando las expresiones (1), (2) y
(3), podemos obtener la distancia inclinada de rampa que se debe ejecutar.
Hacia arriba de la cota de llegada:
(h sup – h llegada) / sen (arctan incl) ---------- (8)
Por debajo de la cota de llegada:
(h llegada – h inf) / sen (arctan incl) ---------- (9)

Y la longitud total de la rampa:
(h sup – h inf) / sen (arctan incl) ---------- (10)
Otro factor determinante es el radio de curvatura (R) que limita al equipo.
Lo que busca el modelo matemático es determinar la distancia horizontal “d” entre el
inicio de la rampa basculante en la rampa auxiliar y la estructura mineralizada. Esta
distancia está relacionada con:
a) la pendiente de la rampa basculante (alfa),
b) el buzamiento de la veta (buz),
c) la altura de cada corte en la estructura (c) y
d) el número de cortes (n) a realizar desde una misma rampa basculante.
Se reduce a un problema netamente geométrico, donde podemos determinar “d” en
función de los parámetros antes mencionados. Gráficamente:DIAGRAMA 3: CALCULO DE DISTANCIAS
buz
alfa
a
h
c
pot
d
pot / sen (buz)
Z1
alfa
d - x(n - 1) c
x
Z2(n - 1) c / tan (buz)
(n - 1) c - 2 (x tan buz)
(n - 1) c - 2 (x tan buz)
(n - 1) c / tan (buz)= tan alfa
(n - 1) c [1 - tan alfa / tan buz]
2 tan buzx =
(d - x) tan alfa
x tan buz
d = x [ 1 + tan buz / tan alfa ]
(n - 1) c2
d =tan² buz - tan² alfa
tan² buz . tan alfa
Z2 = (d - x)/cos alfa
Z2 = [x tan buz / tan alfa ]/cos alfa
Z2 = (n - 1) c [tan buz - tan alfa]2 sen alfa tan buz
Z1 = (n - 1) c [tan buz + tan alfa]
2 sen alfa tan buz
a) la pendiente de la rampa basculante (alfa): es una restricción del equipo que
va a circular por esta rampa;
b) el buzamiento de la veta (buz) : es una restricción del yacimiento;
c) la altura de cada corte (c) en la estructura:
a. es una restricción de los elementos de sostenimiento que se emplearán
b. es una restricción de la longitud de perforación establecida, según lo
máximo determinado para ese tipo de roca
d) el número de cortes (n) que se quieran realizar desde una misma rampa
basculante, para poder empalmar, con precisión, con la siguiente rampa
basculante: es una variable que podemos modificar para minimizar el volumen
de desmonte a romper.

e) Finalmente, podemos determinar la distancia horizontal d, y las distancias
inclinadas Z1 (descendente) y Z2 (ascendente) en función de las variables
antes mencionadas. Las fórmulas para son las siguientes:
d = [(n-1)c/2] (tan2buz – tan2alfa)/( tan2buz . tan alfa) ---------- (11)
Z1 = [(n-1)c/2] (tan buz + tan alfa)/( tan buz . sen alfa) ---------- (12)
Z2 = [(n-1)c/2] (tan buz – tan alfa)/( tan buz . sen alfa) ---------- (13)
Seleccionando la forma de rampa auxiliar en “ocho” obtenemos las fórmulas siguientes
para llegar a obtener los ángulos necesarios, según el Diagrama 4B. El Diagrama 4B
es la descomposición geométrica del Diagrama 4A:
El ángulo de despegue (ang) es aquel que cumple con la siguiente condición:
2R(π-ang) + 2Rtan ang – (nxc)/(tan buz x cos ang) – (nxc)/(tan incl) = 0 --------- (14)
Para el caso de una veta con buzamiento y con Angulo de Inmersión o Plunge, que es
el caso general se tiene el siguiente Diagrama 4B:
Θ3
Θ1
R
c
d
e
f
g
A Bn x c / tan buz
n x c / tan plu
Θ3
Θ3
Θ1
R
c
d
e
f
g
A Bn x c / tan buz
n x c / tan plu
Θ3n x c
n x c / tan buz
buz
n x c
n x c / tan plu
plu

El objetivo es resolver por los ángulos Θ3 y Θ1 usando las expresiones siguientes:
LAB = R / cos Θ1 + n x c / tan plu = R / cos Θ3 – n x c tan Θ3 / tan buz --------- (15)
nxc/tan incl = R/tanΘ1 + R(2π–Θ1–Θ3) + (Rsen Θ3–nxc/tan buz)/cos Θ3 ------ (16)
Distancia Horizontal = 2R + 2R/cos Θ1 + a ---------- (17)
Para el cálculo del volumen de la rampa basculante, es necesario revisar el Diagrama
5 a continuación, representando cada forma por un color:
Area 1: Triángulo Azul
Area 2: Triángulo Azul Oscuro
Area 3: Paralelogramo Celeste
El área de un triángulo, donde s = 0,5 (a + b +c), queda determinada por la expresión:
Area = [s (s – a) (s – b) (s – c)]^0.5 ---------- (18)
Para Area 1: Los lados son Z1, Z2 y (n – 1)c/sen buz
Para Area 2: Los lados son c/sen buz, c(1+tan alfa)/tan buz y c/(tan buz . cos alfa)
La expresión para hallar el área del paralelogramo es
Area = 0.5 (B1 + B2) alt ---------- (19)
Las tres áreas están determinadas, al ser todas las magnitudes conocidas.
Al ser el ancho de la rampa basculante igual a b, y como las tres áreas tienen los
mismos anchos, multiplicando por el ancho (b) podemos determinar el volumen de los
n cortes de la rampa basculante. Este volumen es el la cantidad de desmonte
necesaria a extraer por cada vuelta de la rampa auxiliar. Multiplicando por la densidad
del desmonte (ddesm), obtenemos el peso de material por vuelta de la rampa auxiliar.
Diagrama 5:
buz
alfa a
h
c
pot
d
pot / sen (buz)
Z1
alfa
d - x(n - 1) c
buz x tan buz
x
buz
h
(n - 1) c
n x c
Z2

Para el cálculo del volumen de la rampa auxiliar se debe encontrar la longitud por
vuelta de la rampa auxiliar y multiplicar por el área de la sección transversal de esta
rampa (ancho a y altura h). El caso de la curva en forma de ocho es particular ya que
cada media vuelta del ocho es que se llega al punto de inicio de un juego de rampas
basculantes.
Longitud de media vuelta del Ocho = n x c / sen (arctan incl) ---------- (20)
Volumen de media vuelta del Ocho = a x h x n x c / sen (arctan incl) ---------- (21)
Peso de media vuelta del Ocho = ddesm x a x h x n x c/sen (arctan incl) ------ (22)
# de medias vueltas ascendentes = (h sup – h llegada)/ (n x c) ---------- (23)
# de medias vueltas descendentes = (h llegada – h inf)/ (n x c) ---------- (24)
# de medias vueltas totales = (h sup – h inf)/ (n x c) ---------- (25)
Otro factor determinante es el radio de curvatura (R) que limita al equipo.
Normalmente los equipos que circulan por las rampas y labores mineras en general
son caracterizados por el radio de giro interior (r giro int), y por su ancho mínimo
de trabajo (a mínimo). Por lo tanto, es necesario tomar en cuenta las tablas de los
fabricantes de los equipos y seleccionar adecuadamente los mismos o validar las
dimensiones y radios de giro de los equipos que se usarán si estos ya son parte de la
flota de equipos de la mina.
5 Desarrollo
Procederemos a optimizar el modelo de rampas basculantes, empleando los
conceptos y resultados obtenidos en el capítulo 5, y sometiéndolos a Programación
Lineal. Estos cálculos se desarrollarán usando el Solver de Microsoft Excel.
Un modelo de Programación Lineal (PL) cuenta con tres tipos de dato:
1) Una Función Objetivo, que es un resultado matémático, dependiente de
varias fórmulas. Esta Función Objetivo es lo que se desea maximizar,
minimizar o asignar un valor específico.
2) Un Conjunto de Variables, que es lo que estamos dispuestos a variar
para lograr que la Función Objetivo llegue al resultado deseado.
3) Una Serie de Restricciones, que es lo que limita a la Función Objetivo,
para que se obtenga un resultado válido para las expectativas del
modelo planteado.
En el caso del modelo de PL que vamos a desarrollar, tenemos que:
1) La Función Objetivo es el volumen de desmonte que se va a extraer de la
ejecución de las labores de desarrollo (rampa auxiliar) y preparación (rampas
basculantes).

2) La Variable es el número de cortes (n) que se tiene que hacer por vuelta de la
rampa auxiliar, o lo que es lo mismo, el número de cortes (n) que se tiene que
hacer desde una misma rampa basculante.
3) Las restricciones son:
a. Que el desarrollo de la rampa auxiliar no sea menor a la longitud
determinada por la máxima pendiente de la rampa auxiliar.
b. Todas las fórmulas establecidas son restricciones incorporadas en la
Función Objetivo
6 Conclusiones
1.- El modelo matemático planteado permite establecer una metodología genéricaaplicable a la explotación mecanizada usando el corte y relleno ascendente
2.- Usando la programación lineal se obtiene el resultado que minimiza los costos depreparación y explotación del block de mineral
3.- Se deben tomar en cuenta las restricciones geológicas, geomecánicas ygeométricas del yacimiento, para reducir los riesgos de ejecutar labores muy cercanasentre sí que puedan generar inestabilidad en el macizo rocoso.
4.- Debe trabajarse con las características geométricas y técnicas de los equipos parasu selección y garantizar que permitan una operación eficiente de los mismos.