Controlador de movimiento NextMove ES - …€¦ · Mint™ es marca comercial registrada de...
138
Controlador de movimiento NextMove ES
-
Upload
truongduong -
Category
Documents
-
view
216 -
download
0
Transcript of Controlador de movimiento NextMove ES - …€¦ · Mint™ es marca comercial registrada de...

Controlador de movimiento NextMove ES


ContenidosContenidos
1 Información general
2 Introducción2.1 Características del NextMove ES . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.2 Recepción e inspección. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-32.2.1 Identificación del número de catálogo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
2.3 Unidades y abreviaturas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
3 Instalación básica3.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
3.1.1 Requisitos de ubicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13.1.2 Instalación de la tarjeta NextMove ES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23.1.3 Dimensiones y posiciones de los agujeros . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33.1.4 Otros requisitos para la instalación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
4 Entrada/Salida4.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4.2 Conector de 96 terminales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14.2.1 Asignación de terminales para conector de 96 terminales - firmware
estándar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24.2.2 Asignación de terminales para conector de 96 terminales - 6 ejes
paso a paso solo para firmware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4.3 E/S analógica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-44.3.1 Entradas analógicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-44.3.2 Salidas analógicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
4.4 Entrada/Salida (I/O) digital. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-84.4.1 Entradas digitales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-84.4.2 Salidas digitales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-124.4.3 Salida de error - Salida error. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
4.5 Otras E/S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-154.5.1 Salidas de control gradual. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-154.5.2 Entradas de encoderes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-164.5.3 Puerto USB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-174.5.4 Puerto en serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-184.5.5 Uso de RS232. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-184.5.6 Multipunto con RS485 / RS422. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-204.5.7 Conexión de los paneles de operador HMI de Baldor en serie. . . . . . . . . . 4-21
MN1928WES Contenidos i
4.6 CAN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-224.6.1 Conector CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-224.6.2 Cableado de CAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-234.6.3 CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-244.6.4 CAN de Baldor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-25
4.7 Resumen de conexiones - cableado mínimo del sistema . . . . . . .4-27
5 Placas posteriores5.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.1.1 Conexión de puesta a tierra/masa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.2 BPL010-501 toma posterior no aislada . . . . . . . . . . . . . . . . . . . . . .5-25.2.1 Entradas analógicas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-45.2.2 Salidas analógicas (demandas) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-55.2.3 Entradas digitales 0-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-65.2.4 Entradas digitales 8-15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-65.2.5 Entradas digitales 16-19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-75.2.6 Salidas digitales, 0-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-75.2.7 Salidas digitales 8-11 (solo NES002-501 / NES002-502) . . . . . . . . . . . . . . .5-85.2.8 Salidas de ejes paso a paso 0-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-95.2.9 Salidas de ejes paso a paso 2-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-105.2.10 Salidas de ejes paso a paso 4-5 (solo firmware 6 ejes paso a paso) . . . . .5-125.2.11 Entradas de alimentación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-125.2.12 Entrada de encoder 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-135.2.13 Entrada de encoder 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-135.2.14 Puerto serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-14
5.3 Toma posterior BPL010-502/503 con tarjeta optoaisladora . . . . .5-155.3.1 Entradas analógicas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-175.3.2 Salidas analógicas (demandas) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-195.3.3 Entradas digitales 0-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-205.3.4 Entradas digitales 8-15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-215.3.5 Entradas digitales 16-19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-225.3.6 Salidas digitales, 0-7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-265.3.7 Salidas digitales 8-11 (solo NES002-501 / NES002-502) . . . . . . . . . . . . . .5-285.3.8 Salidas de ejes paso a paso 0-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-295.3.9 Salidas de ejes paso a paso 2-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-305.3.10 Salidas de ejes paso a paso 4-5 (solo firmware 6 ejes paso a paso) . . . . .5-325.3.11 Entradas de alimentación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-335.3.12 Entrada de encoder 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-335.3.13 Entrada de encoder 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-345.3.14 Puerto serie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-34
ii Contenidos MN1928WES

6 Funcionamiento6.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.1.1 Conexión del NextMove ES al PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-16.1.2 Instalación de Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-16.1.3 Puesta en marcha del NextMove ES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-16.1.4 Comprobaciones preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.1.5 Comprobaciones de encendido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-26.1.6 Instalación del driver de USB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
6.2 Mint Machine Center . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-36.2.1 Inicio del MMC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
6.3 Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-56.3.1 Archivo de ayuda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-66.3.2 Inicio del Mint WorkBench. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
6.4 Configuración de un eje. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-96.4.1 Selección del tipo de eje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-96.4.2 Seleccionar una escala . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-106.4.3 Ajuste de la salida de habilitación del accionamiento . . . . . . . . . . . . . . . . . 6-116.4.4 Probar la salida de habilitación del accionamiento . . . . . . . . . . . . . . . . . . . 6-12
6.5 Servoeje - prueba y ajuste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-136.5.1 Probar la salida de demanda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-136.5.2 Una introducción al control de bucle cerrado . . . . . . . . . . . . . . . . . . . . . . . 6-15
6.6 Servoeje - ajuste para el control de corriente . . . . . . . . . . . . . . . 6-186.6.1 Seleccionar ganancias de servobucle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-186.6.2 Respuesta subamortiguada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-206.6.3 Respuesta sobreamortiguada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-216.6.4 Respuesta amortiguada críticamente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-22
6.7 Servoeje - eliminación de errores de estado estable. . . . . . . . . . 6-23
6.8 Servoeje - ajuste para el control de velocidad. . . . . . . . . . . . . . . 6-246.8.1 Calcular KVELFF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-246.8.2 Ajustar KPROP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-27
6.9 Prueba del eje de motor paso a paso . . . . . . . . . . . . . . . . . . . . . 6-296.9.1 Probar la salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-29
6.10 Configuración de la entrada/salida digital . . . . . . . . . . . . . . . . . . 6-306.10.1 Configuración de la entrada digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-306.10.2 Configuración de salida digital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-31
6.11 Grabar información de configuración. . . . . . . . . . . . . . . . . . . . . . 6-326.11.1 Cargar la información guardada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-33
MN1928WES Contenidos iii

7 Resolución de problemas7.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-1
7.1.1 Diagnóstico de problemas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-17.1.2 Función SupportMe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-1
7.2 Indicadores del NextMove ES . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-27.2.1 Pantalla de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-27.2.2 LEDs de montaje en superficie D3, D4, D16 y D20 . . . . . . . . . . . . . . . . . . . .7-47.2.3 Comunicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-47.2.4 Control del motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-57.2.5 Mint WorkBench . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-77.2.6 CANopen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-77.2.7 CAN de Baldor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7-9
8 Especificaciones8.1 Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-1
8.1.1 Alimentación de entrada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-18.1.2 Entradas analógicas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-18.1.3 Salidas analógicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-18.1.4 Entradas digitales (no-aisladas). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-28.1.5 Entradas digitales (optoaisladas) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-28.1.6 Salidas digitales - propósito general (no aisladas). . . . . . . . . . . . . . . . . . . . .8-38.1.7 Salidas digitales - propósito general (optoaisladas). . . . . . . . . . . . . . . . . . . .8-38.1.8 Salida digital - salida de error (no aislada). . . . . . . . . . . . . . . . . . . . . . . . . . .8-38.1.9 Relé de error (tomas posteriores optoaisladas) . . . . . . . . . . . . . . . . . . . . . . .8-48.1.10 Entradas de encoderes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-48.1.11 Salidas de control gradual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-48.1.12 Puerto serie RS232/RS485 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-48.1.13 Interfaz CAN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-58.1.14 Ambiental . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-58.1.15 Pesos y medidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-5
Apéndices
A AccesoriosA.1 Cables de realimentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
iv Contenidos MN1928WES

Información general1 Información general
LT0202A05ES Copyright ABB (c) 2012. Todos los derechos reservados.
Este manual está protegido por los derechos de autor y todos los derechos están reservados. Nieste documento ni el software adjunto pueden, ni en parte ni en su totalidad, ser copiados oreproducidos de ninguna manera sin el consentimiento previo por escrito de ABB.ABB no representa ni garantiza los contenidos aquí presentados y declina la responsabilidad decualquier garantía de adecuación implícita para cualquier propósito. La información en estedocumento está sujeta a cambios sin previo aviso. ABB no se hace responsable de ningún error quepudiera aparecer en este documento.
Mint™ es marca comercial registrada de Baldor, miembro del grupo ABB.Windows XP, Windows Vista y Windows 7 son marcas registradas de Microsoft Corporation.
ABB LtdControl de movimiento6 Bristol Distribution ParkHawkley DriveBristol, BS32 0BFTeléfono: +44 (0) 1454 850000Fax: +44 (0) 1454 859001E-mail: [email protected] Web: www.abbmotion.com
Ver al dorso para otras oficinas internacionales.
1
MN1928WES Información general 1-1

Advertencia de seguridadSolo el personal cualificado debe poner en marcha, programar o reparar este equipo. Este equipo sepuede conectar a otras máquinas que tengan piezas en rotación o piezas controladas por esteequipo. El uso inapropiado puede provocar lesiones graves o la muerte.
Precauciones
No toque ninguna placa de circuito, dispositivo de alimentación o conexión eléctricaantes de asegurarse de que no haya voltaje presente en este equipo u otro equipo alque está conectado. La descarga eléctrica puede provocar lesiones graves o la muerte.Solo el personal cualificado debe poner en marcha, programar o reparar este equipo.
Asegúrese de estar completamente familiarizado con el funcionamiento y laprogramación seguros de este equipo. Este equipo se puede conectar a otras máquinasque tengan piezas en rotación o piezas controladas por este equipo. El uso inapropiadopuede provocar lesiones graves o la muerte.
PELIGROS RELACIONADOS CON EL USO DE DISPOSITIVOS MÉDICOS/MARCAPASOS: Los campos magnéticos y electromagnéticos generados en lasproximidades de conductores activos conduciendo electricidad y de motores industrialespueden representar riesgos serios sobre la salud de las personas que utilizanmarcapasos cardíacos, desfibriladores cardíacos internos, implantes de metal, implantescocleares, dispositivos de audición, u otros dispositivos médicos. Para evitar riesgos,permanezca alejado del área de influencia alrededor de un motor y de sus conductoresde transporte de corriente.
La entrada de parada de este equipo no se debe utilizar como método único paragenerar una parada vital de seguridad. Se deben utilizar según corresponda lainhabilitación del accionamiento, la desconexión del motor, el freno del motor y otrosmedios.
El funcionamiento o la programación inapropiados pueden ocasionar movimientosviolentos del eje del motor y del equipo accionado. Asegúrese de que el movimientoinesperado del eje del motor no provoque lesiones al personal o daños al equipo.Durante un fallo del control, se puede generar un pico de torsión varias veces porencima del par de torsión clasificado del motor.
La integración segura de este equipo a un sistema de máquinas es responsabilidad deldiseñador de la máquina. Asegúrese de cumplir con los requisitos de seguridad localesen el lugar donde se utilizará la máquina. En Europa, se debe seguir la Directiva deMaquinaria, la Directiva de Compatibilidad Electromagnética y la Directiva de BajoVoltaje. En Estados Unidos, rigen el Código Eléctrico Nacional y los códigos locales.
Los componentes eléctricos se pueden dañar debido a la electricidad estática. Utiliceprocedimientos de ESD (descarga electrostática) al manipular este controlador.
!WARNING
!WARNING
!WARNING
!CAUTION
!CAUTION
NOTICEi
NOTICEi
1-2 Información general MN1928WES

Introducción2 Introducción
2.1 Características del NextMove ESEl NextMove ES es un controlador inteligente multieje de alto rendimiento paraservomotores y motores paso a paso.
El NextMove ES incluye el idioma de control de movimientos Mint. Mint es una formaestructurada de Basic, diseñada específicamente para aplicaciones de control demovimientos servoasistidos o de motores paso a paso. Le permite empezar muyrápidamente con programas de control de movimiento simples. Además, Mint incluye unamplio rango de comandos potentes para aplicaciones complejas.
Entre las funciones estándar se incluyen:
Control de 2 servoejes y también de 4 o 6 ejes paso a paso (dependiendo del modelo).
Movimientos punto a punto, levas y engranajes por software.
20 entradas digitales con función general y software programable para una activaciónpor nivel o por cambio de nivel.
12 salidas digitales con función general y una salida de error.
2 entradas analógicas diferenciales con resolución de 12 bits.
2 salidas analógicas de un solo extremo con resolución de 12 bits.
Puerto serie USB 1.1 (compatible con USB 2.0 y USB 3.0).
Puerto serie RS232 o RS485 (dependiendo del modelo).
Protocolo CANopen o CAN Baldor registrado para la comunicación con controladoresMint y otros dispositivos de terceros.
Programable en Mint.
2
MN1928WES Introducción 2-1
El propósito de este manual es guiarle a través de la instalación del NextMove ES.
Los capítulos se deben leer en orden.
La sección Instalación básica describe la instalación mecánica del NextMove ES.Las siguientes secciones requieren el conocimiento de los requisitos de entrada/salida debajo nivel de la instalación y cierta comprensión de la instalación de software informático. Sino está cualificado en estas áreas, debe pedir asistencia antes de proceder.
Nota: Puede verificar si dispone de las últimas versiones de firmware y de MintWorkBench visitando el sitio web www.abbmotion.com.
2-2 Introducción MN1928WES

2.2 Recepción e inspecciónAl recibir su NextMove ES, debe hacer varias cosas inmediatamente:
1. Verifique el estado del paquete y notifique cualquier daño inmediatamente altransportista que le suministró su NextMove ES.
2. Extraiga el NextMove ES de la caja donde lo recibió pero no lo extraiga de la bolsaantiestática hasta el momento en que tenga todo listo para la instalación. Conserve losmateriales de embalaje para un futuro reenvío.
3. Verifique que el número de catálogo del NextMove ES que ha recibido es el mismo queel número de catálogo que se encuentra en su orden de compra. El número de catálogoo número de pieza se describen en la siguiente sección.
4. Inspeccione el NextMove ES en busca de daños superficiales que se pudieran haberocasionado durante el transporte y de existir, notifíquelos al transportista que se loentregó.
5. Si el NextMove ES debe ser almacenado durante algunas semanas antes de serutilizado, asegúrese de que se guarde en un sitio que cumpla con las especificacionesde humedad y temperatura para almacenamiento previstas en la sección 3.1.1.
2.2.1 Identificación del número de catálogo
Se encuentran disponibles tarjetas NextMove ES con un determinado número de tarjetasopcionales con conector para placa posterior. Como recordatorio de los productos quehayan sido instalados, es una buena idea escribir los números de catálogo en el espacioprevisto a continuación.
En la siguiente tabla, se muestra una descripción de los números de catálogo:
* El firmware opcional proporciona 2 ejes paso a paso más mediante la reasignación decuatro de las salidas digitales. Ver secciones 4.2.2 y 4.5.1. Firmware disponible enwww.abbmotion.com.
Número decatálogo
Descripción
NES002-501 Tarjeta de controlador NextMove ES:4 ejes paso a paso*, 2 servoejes. conexiones serie USB y RS232.
NES002-502 Tarjeta de controlador NextMove ES:4 ejes paso a paso*, 2 servoejes. conexiones serie USB y RS485.
BPL010-501 Tarjeta de placa posterior: Entradas y salidas digitales no aisladas
BPL010-502 Tarjeta de placa posterior: Salidas digitales optoaisladas 'PNP' (fuente de corriente) y entradas digitales 'activa nivel alto'.
BPL010-503 Tarjeta de placa posterior: Salidas digitales optoaisladas 'NPN' (sumidero de corriente) y entradas digitales 'activa nivel bajo'.
Número de catálogo de NextMove ES: NES002-50 ______________
Número de catálogo en placa posterior: BPL010-50 _________________
Instalado en: ______________________________________ Fecha: _____________
MN1928WES Introducción 2-3
2.3 Unidades y abreviaturasLas siguientes unidades y abreviaturas se utilizan en este manual:
V. . . . . . . . . . . . . . . . Voltios (también V AC -corriente alterna- y V DC -corriente continua-)W . . . . . . . . . . . . . . . WatiosA. . . . . . . . . . . . . . . . AmperiosΩ . . . . . . . . . . . . . . . OhmmΩ . . . . . . . . . . . . . . miliohmiosµF. . . . . . . . . . . . . . . microfaradiospF. . . . . . . . . . . . . . . picofaradiosmH . . . . . . . . . . . . . . millihenrys
Φ . . . . . . . . . . . . . . . fasems . . . . . . . . . . . . . . milisegundosµs . . . . . . . . . . . . . . . microsegundosns . . . . . . . . . . . . . . . nanosegundos
mm. . . . . . . . . . . . . . milímetrom . . . . . . . . . . . . . . . metroin . . . . . . . . . . . . . . . pulgadaft . . . . . . . . . . . . . . . . pielbf-in . . . . . . . . . . . . . libra-fuerza por pulgada (par)N·m . . . . . . . . . . . . . Newton-metro (par)
ADC . . . . . . . . . . . . . Convertidor analógico-digitalASCII . . . . . . . . . . . . American Standard Code for Information Interchange (Código
estándar americano para el intercambio de información)AWG . . . . . . . . . . . . Tabla de grosores de conductores eléctricos según la AWG (American
Wire Gauge)CAL . . . . . . . . . . . . . Capa de aplicación CANCAN . . . . . . . . . . . . . Red de área de controladoresCDROM . . . . . . . . . . Disco compacto de memoria de solo lecturaCiA . . . . . . . . . . . . . . CAN en el Grupo de usuarios y fabricantes internacionales de
automoción e.V.CTRL+E . . . . . . . . . . en el teclado del PC, presione Ctrl y E al mismo tiempo.DAC . . . . . . . . . . . . . Convertidor digital-analógicoDS301 . . . . . . . . . . . Capa de aplicación CANopen y perfil de comunicaciones para CiADS401 . . . . . . . . . . . Perfil de dispositivo CiA para dispositivos con E/S genéricos DS403 . . . . . . . . . . . Perfil de dispositivo CiA para HMIs EDS . . . . . . . . . . . . . Hoja de datos electrónica EMC. . . . . . . . . . . . . Compatibilidad Electromagnética HMI . . . . . . . . . . . . . Interfaz hombre-máquinaISO. . . . . . . . . . . . . . Organización internacional de normalizaciónKbaud. . . . . . . . . . . . kilobaudio (lo mismo que los Kbit por segundo en la mayoría de las
aplicaciones)LCD . . . . . . . . . . . . . Pantalla de cristal líquidoMbps . . . . . . . . . . . . megabits/s MB . . . . . . . . . . . . . . megabytes (NC) . . . . . . . . . . . . . No ConectadoRF . . . . . . . . . . . . . . Radiofrecuencia
2-4 Introducción MN1928WES
Instalación básica3 Instalación básica
3.1 IntroducciónDeben leerse todas las secciones de la Instalación básica.Es importante que se sigan los pasos correctos al instalar el NextMove ES. Esta seccióndescribe la instalación mecánica del NextMove ES.
3.1.1 Requisitos de ubicaciónDebe leer y comprender esta sección antes de comenzar con la instalación.
Para evitar daños en el equipo, asegúrese de que las señales de entrada ysalida estén conectadas y activadas correctamente.
Para garantizar el rendimiento fiable de este equipo, asegúrese de que todas lasseñales desde y hacia el NextMove ES estén correctamente apantalladas.
Evite colocar el NextMove ES inmediatamente encima o junto a un equipo quegenere calor o directamente debajo de tuberías de vapor de agua.
Evite colocar el NextMove ES cerca de sustancias corrosivas o vapores,partículas de metal y polvo.
El funcionamiento seguro de este equipo depende de su uso en un entorno apropiado. Sedeben tener en cuenta los siguientes puntos:
NextMove ES ha sido diseñado para su montaje sobre un rack IEC297 / DIN41494 conbastidores para tarjetas y guías para alojar las tarjetas.
El NextMove ES se debe instalar bajo una temperatura ambiente de entre 0 °C a 40 °C(32 °F a 104 °F).
El NextMove ES debe instalarse en lugares donde el nivel de humedad relativa seainferior al 80% para temperaturas de hasta 31 °C (87 °F), disminuyendo linealmentehasta el 50% de humedad relativa a 40 °C (104 °F), sin condensación.
El NextMove ES debe instalarse en lugares donde el nivel de contaminación según lanorma IEC664 no supere el grado 2.
No deben existir niveles anormales de radiación nuclear o rayos X.
!CAUTION
!CAUTION
!CAUTION
!CAUTION
3
MN1928WES Instalación básica 3-1

3.1.2 Instalación de la tarjeta NextMove ESAntes de tocar la tarjeta, asegúrese de descargar la electricidad estática de sucuerpo y vestimenta tocando una superficie de metal en contacto con el suelo.Como alternativa, utilizar una correa antiestática puesta a tierra mientras semanipulan estos elementos.
NextMove ES ha sido diseñado para su montaje sobre un rack IEC297 / DIN41494 conbastidores para tarjetas y guías para alojar las tarjetas. Se recomienda una tarjeta adicionalpara toma posterior (ver sección 5).
1. Montar la tarjeta del conector de la placa posterior (opcional) en la parte posterior delsistema de bastidor.
2. Deslizar la tarjeta NextMove ES en los raíles guía, asegurándose de que quedaenchufada correctamente en el conector de la placa posterior.
3. Confirmar que no hay ninguna tarjeta o equipo cercanos en contacto directo con latarjeta NextMove ES.
!CAUTION
3-2 Instalación básica MN1928WES

3.1.3 Dimensiones y posiciones de los agujeros5 mm (0,2 pulgadas) 5 mm
(0,2 pulgadas)
5 mm (0,2 pulgadas)
100 mm (3,94 pulgadas)
30,9 mm(1,22 pulgadas)
52
,6 m
m (
2,1
pu
lga
das)
10
5 m
m (
4,1
3 p
ulg
ad
as)
3,7
5 m
m
(0,1
5 p
ulg
ad
as)
16
0 m
m (
6,3
pu
lga
da
s)
71,7
5 m
m (
2,8
2 pu
lga
das)
35
mm
(1
,38
p
ulg
ada
s)53
,25
mm
(2,
1 p
ulg
ad
as)
MN1928WES Instalación básica 3-3

3.1.4 Otros requisitos para la instalaciónLos componentes necesarios para completar la instalación básica son:
El NextMove ES requiere suministros de alimentación de +5 V y ±12 V. Los requisitostotales de alimentación (excluyendo cualquier tarjeta opcional) son de +5 V a 1 A, +12 Va 50 mA y -12 V a 50 mA. Si se utilizan las salidas digitales, será necesario unsuministro que las accione. Ver la sección 4.4.2.
Un PC que cuente con las siguientes especificaciones:
La instalación del software se describirá posteriormente, en la sección 6.
Un cable USB o serie conectado tal como se muestra en la sección 4.5.4.
El manual del usuario del sistema operativo de su PC puede ser útil si no estáfamiliarizado con Windows.
Especificación mínima
Procesador 1 GHz
RAM 512 MB
Espacio en eldisco duro
2 GB
CD-ROM Una unidad de CD-ROM
Puerto en serie Puerto USBo
Puerto serie RS232 o RS485 (dependiendo del modelo de NextMove ES)
Pantalla 1024 × 768, a color de 16 bits
Ratón Un ratón o un dispositivo de puntero similar
Sistemaoperativo
Windows XP o superior, 32-bit o 64-bit
3-4 Instalación básica MN1928WES
Entrada/Salida4 Entrada/Salida
4.1 IntroducciónEsta sección describe las capacidades de entrada y salida del NextMove ES.
Se utilizarán las siguientes convenciones para referirse a las entradas y salidas:
I/O . . . . . . . . . . . . . . Input / Output (Entrada/Salida)DIN . . . . . . . . . . . . . Entrada digitalDOUT . . . . . . . . . . . Salida digitalAIN . . . . . . . . . . . . . Entrada analógicaAOUT . . . . . . . . . . . Salida analógica
La mayoría de las conexiones externas a la tarjeta del NextMove ES se realizanutilizando una tarjeta opcional a la toma posterior, descrita en la sección 5.
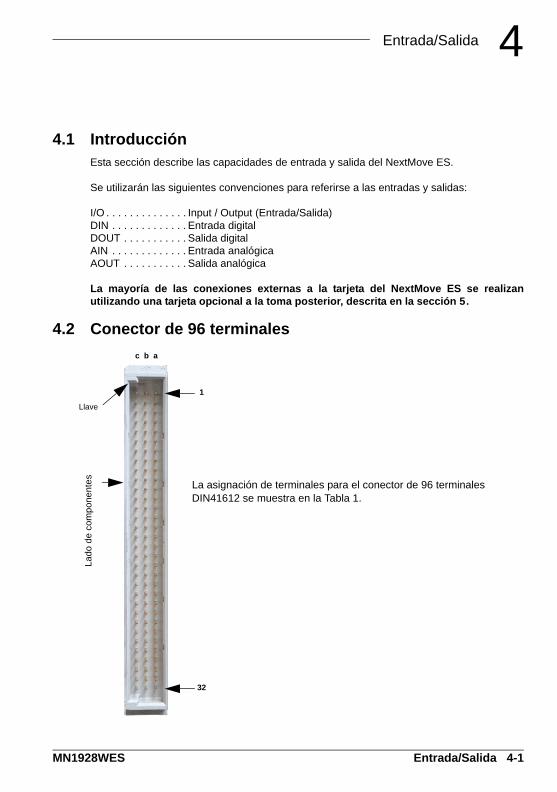
4.2 Conector de 96 terminales
La asignación de terminales para el conector de 96 terminales DIN41612 se muestra en la Tabla 1.
Llave
La
do
de
com
pon
en
tes
c b a
1
32
4
MN1928WES Entrada/Salida 4-1

4.2.1 Asignación de terminales para conector de 96 terminales - firmware estándar
Fila
Terminal c b a
1 +5 V CC +5 V CC +5 V CC
2 +5 V CC +5 V CC +5 V CC
3 DGND DGND DGND
4 DOUT6 DOUT7 OUT COM
5 DOUT3 DOUT4 DOUT5
6 DOUT0 DOUT1 DOUT2
7 Encoder 1 CHB+ Encoder 0 CHA+ Encoder 0 CHB+
8 Encoder 1 CHZ+ Encoder 0 CHZ+ Encoder 1 CHA+
9 Encoder 1 CHA- Encoder 0 CHZ- Encoder 1 CHZ-
10 Encoder 0 CHB- Encoder 0 CHA- Encoder 1 CHB-
11 DIN16 Error salida DGND
12 (NC) DGND DGND
13 DGND DOUT9 DOUT8
14 STEP2 STEP1 STEP0
15 DIR2 DIR1 DIR0
16 DOUT10 DGND (NC)
17 DGND AOUT2 (NC)
18 DIN4 DIN15 DIN2
19 DIN3 DIN5 DIN7
20 DIN6 DIN1 RXD (RX- con RS485)
21 DIN0 RTS (TX+ con RS485) TXD (TX- con RS485)
22 DOUT11 AOUT3 CTS (RX+ con RS485)
23 DIN14 STEP3 DIR3
24 DIN17 DIN13 DIN10
25 DIN18 DIN9 DIN11
26 DIN12 DIN19 DIN8
27 Demanda0 (AOUT0) Demanda1 (AOUT1) AIN1-
28 AIN1+ AIN0+ AIN0-
29 +12 V CC +12 V CC +12 V CC
30 AGND AGND AGND
31 -12 V CC -12 V CC -12 V CC
32 Pantalla Pantalla Pantalla
Tabla 1: Asignación de terminales del conector de 96 terminales para modelos 4 paso-paso + 2 servos
4-2 Entrada/Salida MN1928WES

4.2.2 Asignación de terminales para conector de 96 terminales - 6 ejes paso a paso solo para firmware
Fila
Terminal c b a
1 +5 V CC +5 V CC +5 V CC
2 +5 V CC +5 V CC +5 V CC
3 DGND DGND DGND
4 DOUT6 DOUT7 OUT COM
5 DOUT3 DOUT4 DOUT5
6 DOUT0 DOUT1 DOUT2
7 Encoder 1 CHB+ Encoder 0 CHA+ Encoder 0 CHB+
8 Encoder 1 CHZ+ Encoder 0 CHZ+ Encoder 1 CHA+
9 Encoder 1 CHA-+ Encoder 0 CHZ- Encoder 1 CHZ-
10 Encoder 0 CHB- Encoder 0 CHA- Encoder 1 CHB-
11 DIN16 Error salida DGND
12 (NC) DGND DGND
13 DGND DOUT9 DIR4 DOUT8 STEP4
14 STEP2 STEP1 STEP0
15 DIR2 DIR1 DIR0
16 DOUT10 STEP5 DGND (NC)
17 DGND AOUT2 (NC)
18 DIN4 DIN15 DIN2
19 DIN3 DIN5 DIN7
20 DIN6 DIN1 RXD (RX- con RS485)
21 DIN0 RTS (TX+ con RS485) TXD (TX- con RS485)
22 DOUT11 DIR5 AOUT3 CTS (RX+ con RS485)
23 DIN14 STEP3 DIR3
24 DIN17 DIN13 DIN10
25 DIN18 DIN9 DIN11
26 DIN12 DIN19 DIN8
27 Demanda0 (AOUT0) Demanda1 (AOUT1) AIN1-
28 AIN1+ AIN0+ AIN0-
29 +12 V CC +12 V CC +12 V CC
30 AGND AGND AGND
31 -12 V CC -12 V CC -12 V CC
32 Pantalla Pantalla Pantalla
Tabla 2: Asignación de terminales del conector de 96 terminales cuando se emplea firmware opcional 6 paso a paso + 2 servos
MN1928WES Entrada/Salida 4-3

4.3 E/S analógicaEl NextMove ES proporciona:
Dos entradas analógicas con 12 bits de resolución.
Cuatro salidas analógicas con 12 bits de resolución.
4.3.1 Entradas analógicasLas entradas analógicas están disponibles en los terminales a28 & b28 (AIN0) y a27 & c28(AIN1).
Entradas diferenciales.
Rango de voltaje: ±10 V.
Resolución: 12 bits con signo.
Impedancia de entrada: 120 kΩ.
Frecuencia de muestreo: 4 kHz máximo, 2 kHz con ambas entradas habilitadas.
Las entradas analógicas pasan a través de un buffer diferencial y de un filtro de paso bajo ysegundo orden con una frecuencia de corte de aproximadamente 1 kHz.
Ambas entradas tendrán un muestreo normal de 2 kHz. Sin embargo, se puede inhabilitaruna entrada estableciendo el ADCMODE en 4 (_acOFF). Con una entrada inhabilitada, laentrada restante tendrá un muestreo de 4 kHz. En Mint, las entradas analógicas se puedenleer utilizando la palabra clave ADC. Consulte el archivo de ayuda de Mint para todos losdetalles de ADC, ADCMODE y otras palabras clave relacionadas con ADC.
Figura 1: Entrada analógica, se muestra AIN0
Para las entradas diferenciales, conecte las líneas de entrada a AIN+ y AIN-. Deje AGND sinconectar.
NextMove ES
-
+AIN0+
AIN0-
AGND
-
+
120 k
120 k
a28
a30
b28
+12 V
-12 V
MintADC(0)
4-4 Entrada/Salida MN1928WES

Figura 2: Cableado de entrada analógica AIN0
Figura 3: Circuito de entrada típico para entregar 0-10 V (aprox.) de entrada desde una fuente de 24 V
b28
a28
a30
AIN0-
AIN0+ AIN0+
GND
b28
a28
a30
AIN0ADC.(0)
AIN0ADC.(0)
Conexión diferencial Conexión de un solo extremo
0 V
+24 V DC
b28
a28
a30
AIN0(ADC.0)
1,5 kΩ, 0,25 W
1 kΩ, 0,25 Wpotenciómetro
MN1928WES Entrada/Salida 4-5

4.3.2 Salidas analógicasLas cuatro salidas analógicas están disponibles en un determinado número de terminales,tal como se muestra en la sección 4.2.1.
Cuatro salidas analógicas independientes (dependiendo del modelo).
Rango de salida: ±10 V DC (±0.1%).
Resolución: 12 bits.
Corriente de salida: 10 mA máximo.
Frecuencia de actualización: 10 kHz máximo (ajustable utilizando la palabra claveLOOPTIME, ajustada de fábrica a 1 kHz).
La Biblioteca de Mint y Mint Motion utilizan las salidas analógicas Demand0 a Demand1para controlar los amplificadores de accionamiento. Las salidas de demanda 0 y 1 se utilizancon ejes configurados de manera servoasistida (ver la sección 6.4.1). Las salidas Demand2y Demand3 pueden ser utilizadas como salidas analógicas de propósito general. Ver lapalabra clave DAC en el archivo de ayuda de Mint.
Las salidas analógicas pueden usarse para accionar cargas de 1 kΩ o superiores. Se debeutilizar un cable de par trenzado y blindado. La conexión blindada solo debe realizarse enun extremo.
Figura 4: Salida analógica, se muestra Demand0
NextMove ES
-
+TL084
47Rc27
a30
+12V
-12V
Demanda±100%
AGND
Demand0
4-6 Entrada/Salida MN1928WES

Figura 5: Salida analógica - conexión típica a un MicroFlex de ABB
Figura 6: Salida analógica - conexión típica a un Baldor FlexDriveII, Flex+DriveII, MintDriveII
NextMove ES
12
AIN0+
AIN0-
a32
-
+c27
a30
13
‘X3’
AGND
Demand0
PantallaConecte todo el blindado
en un solo extremo
Entrada de demanda ±10 VCC del amplificador de accionamiento
MicroFlex/amplificador de accionamiento
NextMove ES
2
AIN0+
AIN0-
a32
-
+c27
a30
1
‘X1’
AGND
Demand0
PantallaConecte todo el blindado
en un solo extremo
Entrada de demanda ±10 VCC del amplificador de accionamiento
FlexDriveII/amplificador de accionamiento
MN1928WES Entrada/Salida 4-7

4.4 Entrada/Salida (I/O) digitalEl NextMove ES proporciona:
20 entradas digitales para uso general.
12 salidas digitales para uso general.
4.4.1 Entradas digitalesLas entradas digitales están disponibles en un determinado número de terminales, tal comose muestra en la sección 4.2.1. Todas las entradas digitales poseen una especificacióncomún:
5 V, entradas digitales con resistencias de polarización internas. También pueden serasignadas a funciones de propósito especial como entradas de paso a Inicio, Límite,Paro y Error.
Frecuencia de muestreo: 1 kHz.
Figura 7: Entrada digital de uso general - Se muestra DIN0
No conectar señales de 24 V a las entradas digitales.
Estas entradas no protegidas se conectan directamente a dispositivos TTL compatibles74AHCT14. Si se configura una entrada con activación por cambios de nivel, el pulso deactivación debe durar al menos 1 ms (un escáner de software) para garantizar la aceptaciónde Mint. Se recomienda utilizar cable blindado para las entradas.
DGND
DIN0
GND
+5V
NextMove ES
74AHCT14c21
a3
MintINX(0)
!CAUTION
4-8 Entrada/Salida MN1928WES

4.4.1.1 Entradas de propósito general
Las entradas digitales de uso general DIN0 - DIN19 se pueden compartir entre ejes y sonprogramables en Mint (utilizando un rango de palabras clave que empiece con las letrasINPUT... ) para determinar su nivel activo y si se deben activar por cambios de nivel. Elestado de las entradas individuales se puede leer directamente utilizando la palabra claveINX. Ver el archivo de ayuda de Mint.
Una entrada digital de uso general puede asignarse una función especial como la deentrada de inicio, entrada límite, entrada de parada o entrada de error. Ver las palabrasclave HOMEINPUT, LIMITFORWARDINPUT, LIMITREVERSEINPUT, STOPINPUT yERRORINPUT en el archivo de ayuda de Mint.
4.4.1.2 Entradas rápidas DIN0 - DIN3
Las entradas digitales de DIN0 a DIN3 pueden asignarse como interrupciones rápidas.Estas se utilizan como cierres de posición de alta velocidad, que permiten que cualquiercombinación de los ejes sea capturada por el hardware. La latencia entre el disparo deentrada y la captura es de 1 µs. Las palabras clave Mint especiales (que empiezan con lasletras FAST...) permiten realizar funciones específicas como resultado de que las entradasde posición rápida pasan a encontrarse activas. Ver el archivo de ayuda de Mint para másdetalles. No conectar interruptores mecánicos, contactos de relé ni otras fuentes quepuedan enviar señales de 'rebote' directamente a las entradas que hayan sido configuradascomo entradas rápidas. Esto podría causar activaciones múltiples no deseadas.
4.4.1.3 Entradas auxiliares de encoder - DIN17 (STEP), DIN18 (DIR), DIN19 (Z)
DIN17 a DIN19 también pueden utilizarse como una entrada auxiliar del encoder(entrada 0). DIN17 acepta señales de paso (pulso) y DIN18 acepta señales de dirección,permitiendo que una fuente externa proporcione la referencia para la velocidad y la direcciónde un eje. La frecuencia de paso (20 MHz máximo) determina la velocidad, y la entrada dedirección determina la dirección del movimiento. Tanto los flancos ascendentes comodescendentes de la señal en DIN17 originan el cambio en el contador interno. Si se aplican5 V a DIN18 (o si se deja sin conectar) el contador se incrementará. Si DIN18 se pone atierra el contador disminuirá. Se requiere un período mínimo entre transiciones de 500 µs enla entrada de paso y de dirección para garantizar que el cambio de dirección haya sidoreconocido.
Típicamente, se utiliza un canal de una señal de encoder (ya sea A o B) para proporcionar laseñal de paso en DIN17, permitiendo que la entrada se utilice como entrada de encoder(maestra) auxiliar. La entrada puede utilizarse como referencia de posición maestra para lostipos de movimiento de leva, volante y de seguimiento. Para ello, debe utilizarse la palabraclave MASTERSOURCE para configurar la entrada de paso como entrada del encoder(auxiliar) maestra. La referencia de posición maestra puede leerse entonces utilizando lapalabra clave AUXENCODER.
Dado que no se utiliza un canal secundario del encoder, DIN18 permite determinar ladirección del movimiento. La señal Z en DIN19 puede suministrarse a partir de la señal deíndice del encoder, y puede leerse utilizando la palabra clave AUXENCODERZLATCH.
MN1928WES Entrada/Salida 4-9

Ver el archivo de ayuda de Mint para obtener todos los detalles de cada palabra clave.
Figura 8: Entrada auxiliar de encoder 0 (DIN17/18) - conteo por flanco
4.4.1.4 Cableado de entrada digital típico
Figura 9: Entrada digital - conexiones típicas de un MicroFlex de ABB
500 µs mín.
DIN17 (PASO)
DIN18 (DIR)
Conteo devuelto porAUXENCODER(0)
DGND
DIN0
GND
+5V
NextMove ES
74AHCT14c21
a3NEC PS2562L-1
‘X3’
3
2
Status+
Status-
MicroFlex/salida de equipo
MintINX(0)
4-10 Entrada/Salida MN1928WES
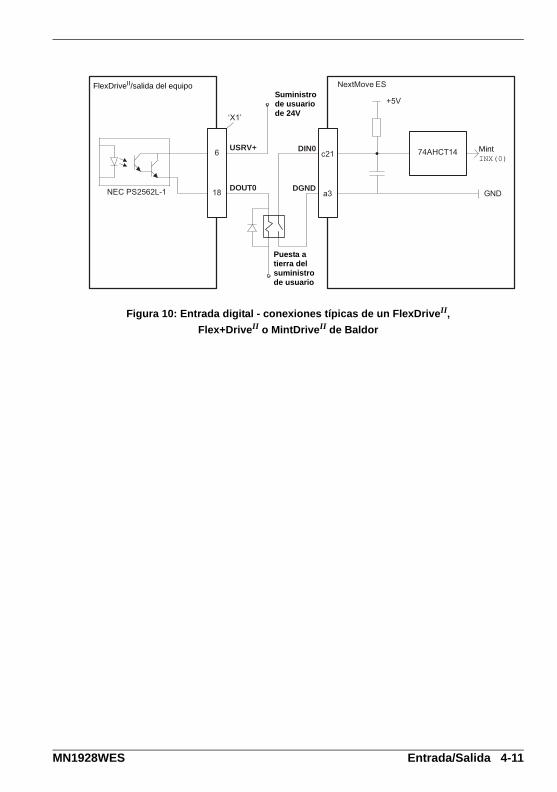
Figura 10: Entrada digital - conexiones típicas de un FlexDriveII,
Flex+DriveII o MintDriveII de Baldor
DGND
DIN0
GND
+5V
NextMove ES
74AHCT14USRV+
DOUT0NEC PS2562L-1
‘X1’
6
18
c21
a3
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
FlexDriveII/salida del equipo
MintINX(0)
MN1928WES Entrada/Salida 4-11
4.4.2 Salidas digitales Las salidas digitales están disponibles en un determinado número de terminales, tal comose muestra en la sección 4.2.1.
12 o 8 salidas digitales de propósito general (dependiendo del modelo).
Una salida de error, configurable como salida digital de propósito general.
Frecuencia de actualización: Inmediato.
Hay 12 salidas digitales de propósito general cuando se utiliza el firmware estándar.
Hay 8 salidas digitales de propósito general cuando se utiliza el firmware opcional de 6 ejespara motor paso a paso, dado que DOUT8 - DOUT11 se reasignan para proporcionar lasseñales de salida de eje STEP4/5 y DIR4/5 (ver la sección 4.2.2).
Puede configurarse una salida digital en Mint como salida con función general, como salidade habilitación de accionamiento o como salida de error global. Las salidas pueden sercompartidas entre ejes y pueden configurarse utilizando el Mint WorkBench (o la palabraclave OUTPUTACTIVELEVEL) para determinar su nivel activo.
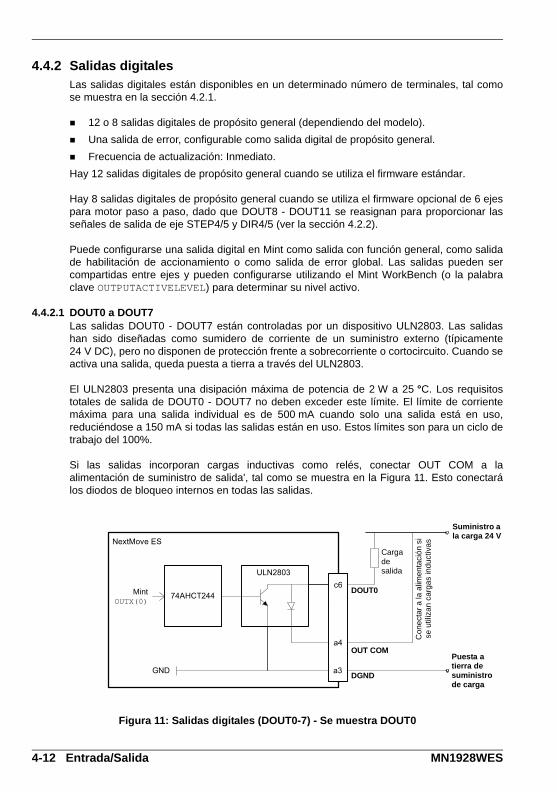
4.4.2.1 DOUT0 a DOUT7Las salidas DOUT0 - DOUT7 están controladas por un dispositivo ULN2803. Las salidashan sido diseñadas como sumidero de corriente de un suministro externo (típicamente24 V DC), pero no disponen de protección frente a sobrecorriente o cortocircuito. Cuando seactiva una salida, queda puesta a tierra a través del ULN2803.
El ULN2803 presenta una disipación máxima de potencia de 2 W a 25 °C. Los requisitostotales de salida de DOUT0 - DOUT7 no deben exceder este límite. El límite de corrientemáxima para una salida individual es de 500 mA cuando solo una salida está en uso,reduciéndose a 150 mA si todas las salidas están en uso. Estos límites son para un ciclo detrabajo del 100%.
Si las salidas incorporan cargas inductivas como relés, conectar OUT COM a laalimentación de suministro de salida', tal como se muestra en la Figura 11. Esto conectarálos diodos de bloqueo internos en todas las salidas.
Figura 11: Salidas digitales (DOUT0-7) - Se muestra DOUT0
DOUT0
NextMove ES
ULN2803
74AHCT244
DGNDGND
OUT COM
c6
a3
a4
Suministro a la carga 24 V
Puesta a tierra de suministro de carga
Carga de salida
MintOUTX(0)
Con
ecta
r a
la a
limen
taci
ón
si
se u
tiliz
an c
arg
as
ind
uctiv
as
4-12 Entrada/Salida MN1928WES

4.4.2.2 DOUT8 a DOUT11
Nota: Cuando se utiliza el firmware opcional de 6 ejes para motor paso a paso, DOUT8 -DOUT11 no están disponibles como salidas digitales de propósito general. Lassalidas se utilizan para proporcionar las salidas adicionales STEP4/5 y DIR4/5 deejes paso a paso (ver sección 4.5.1).
Las salidas DOUT8 - DOUT11 están controladas por un dispositivo ULN2003. Las salidashan sido diseñadas como sumidero de corriente de un suministro externo (típicamente24 V DC), pero no disponen de protección frente a sobrecorriente o cortocircuito. Cuando seactiva una salida, queda puesta a tierra a través del ULN2003.
El ULN2003 presenta una disipación máxima de potencia de 900 mW a 25 °C. Losrequisitos totales de salida de DOUT8 - DOUT11 no deben exceder este límite. El límite decorriente máxima para una salida individual es de 400 mA cuando solo una salida está enuso, reduciéndose a 50 mA si todas las salidas están en uso. Estos límites son para un ciclode trabajo del 100%.
DOUT8 - DOUT11 se pueden alimentar del mismo dispositivo ULN2003 al igual que lassalidas DIR3 y STEP3 (ver sección 4.5.1), de forma que las demandas de corriente de estasseñales deben también ser consideradas.
Si una salida acciona una carga inductiva como un relé, se debe colocar un diodo declasificación apropiada a lo largo de la bobina de relé, observando la polaridad correcta. Conello se protege la salida del campo electromagnético de retorno generado por la bobina delrelé cuando queda desexcitada.
Figura 12: Salidas digitales (DOUT8-11) - Se muestra DOUT8
DOUT8
NextMove ES
ULN2003
74AHCT244
DGNDGND
a13
a3
Suministro a la carga 24 V
Puesta a tierra de suministro de carga
Carga de salida (se muestra relé con diodo)
MintOUTX(8)
MN1928WES Entrada/Salida 4-13

4.4.3 Salida de error - Salida errorLa salida de error está disponible en el pin b11.Esta salida de 100 mA puede ser utilizada paraparar equipos externos en el caso de un error.Puede controlarse el nivel de salida utilizandolos puentes JP3, JP4 y JP5, que se encuentransituados en el borde superior de la tarjeta.Conectar la carga tal como se muestra en laFigura 13.
Figura 13: Configuración de nivel de salida de error
Existen varios métodos para controlar la salida de error:
4.4.3.1 palabra clave GLOBALERROROUTPUT Por defecto, la salida de error se utiliza como la salida de error global. En el caso de un erroren cualquiera de los ejes, se desactivará la salida de error global. Esta acción anula elestado de la salida de error definida por otros métodos, como el de la palabra clave RELAY oel estado de habilitación de accionamiento. Como alternativa, puede utilizarse la palabraclave GLOBALERROROUTPUT para configurar una salida digital de propósito general como lasalida de error global.
4.4.3.2 Palabra clave RELAYSi se conecta el NextMove ES a una toma posterior optoaislada (opcional) la salida controladirectamente el relé (ver sección 5.3.1.1). Por este motivo, puede controlarse la salida deerror mediante la palabra clave RELAY. El comando RELAY(0)=1 habilitará la salida deerror; el comando RELAY(0)=0 la inhabilitará. Estos comandos son válidosindependientemente de si se encuentra conectada una toma posterior optoaislante.
4.4.3.3 Palabra clave DRIVEENABLEOUTPUTLa palabra clave DRIVEENABLEOUTPUT puede ser utilizada para configurar la salida deerror como la salida de habilitación del accionamiento. Por ejemplo, el comandoDRIVEENABLEOUTPUT(1)=_RELAY0 significará que la salida de error será la salida dehabilitación de accionamiento para el eje 1. Cuando se habilite el eje 1, se activará la salidade error y el eje quedará habilitado. Si se configuran múltiples ejes para utilizar la salida deerror como su salida de habilitación de accionamiento, al habilitar uno de los ejes quedaránhabilitados todos los demás. De forma similar, si se inhabilita uno de los ejes, todosquedarán inhabilitados. La palabra clave RELAY no puede controlar la salida de error si seencuentra configurada como salida de habilitación de accionamiento.
Ver el archivo de ayuda de Mint para obtener todos los detalles de cada palabra clave.
Estado inactivo
(sin error)
Puentes (interruptores) Estado inactivo (error)
Colector abiertoColector abierto
12 V0 V
12 V0 V
Colector abiertoColector abierto
* JP5 invierte el estado activo
JP3 JP4 JP5
JP3
JP4
+12 V
+5 V
GND
NextMove ES
b11
JP3
JP4
JP3
JP4GND
+12 V
b11
b11100R
Error salida
Carga de salida
GNDde salidade errorde Mint +5V
Carga de salida
4-14 Entrada/Salida MN1928WES

4.5 Otras E/S
4.5.1 Salidas de control gradualLas salidas de control gradual están disponibles en un determinado número de terminales,tal como se muestra en la sección 4.2.1.
Existen cuatro o seis juegos de salidas de control demotor paso a paso (dependiendo del firmware), quetrabajan en un rango de 0 Hz a 500 kHz. Cada una de lasseñales de paso (pulso) y dirección del NextMove ES esaccionada por un dispositivo de salida ULN2003 decolector abierto en conexión Darlington.
El ULN2003 presenta una disipación máxima de potenciade 900 mW a 25 °C. Los requisitos totales combinados desalida de STEP0 - STEP2 y DIR0 - DIR2 no debenexceder este límite. El límite de corriente máxima parauna salida individual es de 400 mA cuando solo unasalida está en uso, reduciéndose a 50 mA si todas lassalidas están en uso. Estos límites son para un ciclo detrabajo del 100%.
Cuando se utilice firmware estándar, STEP3 y DIR3 sepueden alimentar del mismo dispositivo ULN2003 al igualque las salidas digitales DOUT8 - DOUT11 (ver sección4.4.2.2), de forma que las demandas de corriente deestas salidas digitales deben también ser consideradas.
Cuando se utilice el firmware opcional de 6 ejes paso apaso, STEP3 y DIR3 se alimentan del mismo dispositivo ULN2003 utilizado para las salidasadicionales STEP4 - STEP5 y DIR4 - DIR5 de ejes paso a paso. En este caso el dispositivoULN2003 proporciona tres juegos de salidas STEP y DIR, de forma que las especificacionesson idénticas a las detalladas arriba para STEP0 - STEP2 y DIR0 - DIR2.
Se recomienda utilizar cables blindados separados para las salidas graduales. El blindadosolo se debe conectar en un extremo. En situaciones donde el ruido inducido afecta a unasalida gradual o de dirección, puede ser necesario conectar una resistencia de polarización de470 Ω entre la salida y el suministro.
Los accionadores ULN2003 son dispositivos estáticos sensibles. Tome lasprecauciones ESD apropiadas al manipular el NextMove ES.
Figura 14: Salida paso a paso - se muestra salida STEP0
STEP0 DIR0
STEP1 DIR1
STEP2 DIR2
STEP3 DIR3
DOUT8 DOUT9
DOUT10 DOUT11
STEP0 DIR0
STEP1 DIR2
STEP2 DIR2
STEP3 DIR3
STEP4 DIR4
STEP5 DIR5
Estándar 4 ejes paso paso firmware
Estándar 6 ejes paso paso firmware
UL
N2
003
dis
po
siti
vo 1
UL
N2
003
dis
po
siti
vo 2
UL
N20
03
dis
po
siti
vo 1
UL
N2
003
dis
po
siti
vo 2
!CAUTION
NextMove ES
STEP0
DGNDa3
a14ULN2003
74AHCT244
GND
Salidagradual
MN1928WES Entrada/Salida 4-15

4.5.2 Entradas de encoderesLas entradas de encoder están disponibles en los terminales a7-a10, b7-b10 y c7-c10. Versección 4.2.1.
Se pueden conectar hasta dos encoderes incrementales al NextMove ES, cada uno conentradas de canal complementarias A, B y Z. Cada canal de entrada utiliza un receptor delínea diferencial MAX3095 con terminadores y resistores pull-up. Los encoderes debenproporcionar señales diferenciales de RS422. Se recomienda utilizar un cable de partrenzado y blindado con un blindado exterior conjunto trenzado. Si es posible, poner a tierra/masa el blindado exterior utilizando bridas a 360° en ambos extremos. Ver la sección 8.1.10para los detalles relativos a la fuente de alimentación del encoder.
Figura 15: Entrada 0 de encoder - conexión típica de un amplificador de accionamiento
(por ejemplo MicroFlex de ABB, FlexDriveII, Flex+DriveII o MintDriveII)
CHA-
CHA+
Vcc
NextMove ES
MAX3095120R
10k
b7
b10
a32
a11 DGND
CHA-
CHA+ 1
6
‘X7’
CHB-
CHB+
MAX3095120R
a7
c10CHB-
CHB+ 2
7
CHZ-
CHZ+
MAX3095120R
b8
b9CHZ-
CHZ+ 3
8
Vcc
10k
Vcc
10k
Par trenzado
Par trenzado
Par trenzado
a la CPU
a la CPU
a la CPU
MicroFlex
FlexDriveII
Flex+DriveII
MintDriveII
salida del encoder
Conecte el blindado general a los blindados traseros del conector/
conexiones apantalladas
Pantalla
Conecte el blindado interno a DGND. No conecte el otro extremo
4-16 Entrada/Salida MN1928WES

4.5.2.1 Frecuencia de entrada del encoder
La frecuencia de entrada máxima del encoder se ve afectada por la longitud de los cablesdel encoder. La frecuencia máxima es, en teoría, de 20 millones de conteos por cuadraturapor segundo. Esto equivale a una frecuencia máxima de 5 MHz para las señales A y B. Sinembargo, el efecto de la longitud del cable se muestra en la Tabla 3:
4.5.3 Puerto USB
El conector USB puede utilizarse como método alternativo para la conexión del NextMoveES a un PC que funcione con Mint WorkBench. El NextMove ES es un dispositivoautoalimentado compatible con USB 1.1 (12 Mbps). Si se conecta a un PC anfitrión conUSB 1.0 más lento o a un nudo de red, la velocidad de comunicación estará limitada a laespecificación USB 1.0 (1,5 Mbps). Si se conecta a un PC anfitrión con USB 2.0 (480 Mbps)o USB 3.0 (5 Gbps) más rápido o a un nudo de red, la velocidad de comunicaciónpermanecerá bajo la especificación del USB 1.1 del NextMove ES.
Lo mejor es conectar directamente el NextMove ES a un puerto USB en el PC anfitrión. Si seconecta a un nudo de red compartido con otros dispositivos de USB, la comunicación sepuede ver afectada por la actividad de los otros dispositivos. La longitud máximarecomendada del cable es de 5 m (16,4 ft).
Frecuencia dela señal A y B
Longitud máxima del cable
metros pies
1.3 MHz 2 6.56
500 kHz 10 32.8
250 kHz 20 65.6
100 kHz 50 164.0
50 kHz 100 328.1
20 kHz 300 984.2
10 kHz 700 2296.6
7 kHz 1000 3280.8
Tabla 3: Efecto de la longitud del cable sobre la frecuencia máxima del encoder
UbicaciónUSBConector para acoplamiento: Conector USB tipo “B” (descendente)
Terminal Nombre Descripción
1 VBUS USB +5 V
2 D- Datos-
3 D+ Datos+
4 GND Puesta a tierra
1
4
2
3
MN1928WES Entrada/Salida 4-17

4.5.4 Puerto en serie
El conector serie duplica las señales presentes en el conector de 96 terminales. Se utilizapara conectar el NextMove ES al PC que funciona con Mint WorkBench, o a otrocontrolador. Si se está utilizando una toma posterior opcional, su conector serie (sección5.2.14 o 5.3.14) transportará las mismas señales. No intentar utilizar más de un juego deconectores serie al mismo tiempo.El NextMove ES se encuentra disponible con puerto serie RS232 o RS485 (ver sección2.2.1). El puerto dispone de protección completa ESD, según IEC 1000-4-2 (15 kV). Cuandoel NextMove ES se conecta a Mint WorkBench, puede utilizar el elemento de menúOpciones, Herramientas, para configurar el puerto en serie. La configuración también sepuede cambiar utilizando la palabra clave Mint SERIALBAUD (ver el archivo de ayuda deMint para más detalles). Se almacena en memoria EEPROM y se restaura con el encendido.El puerto puede funcionar hasta a 115,2 Kbaud con RS232.
4.5.5 Uso de RS232El NextMove ES tiene un puerto serie RS232 con sistema de transmisión bidireccional conla siguiente configuración preestablecida:
57,6 Kbaud 1 bit de inicio 8 bits de datos 1 bit de parada Sin paridad Las líneas de toma de contacto del hardware (RS232) RTS y CTS deben estar
conectadas.
UbicaciónSerieConector para acoplamiento: Hembra tipo “D” de 9 terminales
TerminalNombre RS232 Nombre RS485 /
RS422Conector de 96 terminales
1 Pantalla (NC) a32
2 RXD RX- (entrada) a20
3 TXD TX- (salida) a21
4 (NC) (NC) a16*
5 DGND 0 V DGND a3
6 (NC) (NC) a17*
7 RTS TX+ (salida) b21
8 CTS RX+ (entrada) a22
9 DGND (NC) a3
* Los terminales a16 y a17 están vinculados en el NextMove ES.
5
61
9
4-18 Entrada/Salida MN1928WES

Figura 16: Conexiones de puerto serie RS232
El puerto RS232 se configura como una unidad DCE (equipo de comunicación de datos), demanera que sea posible operar el controlador con cualquier DCE o DTE (equipo de terminalde datos). Es compatible la transmisión bidireccional con toma de contacto del hardware.Solo se necesitan las conexiones TXD, RXD y GND de 0 V para la comunicación, pero,como muchos dispositivos comprobarán las líneas RTS y CTS, estas también deben estarconectadas. Los terminales 4 y 6 están vinculados en el NextMove ES.
La longitud máxima de cable recomendada es de 3 m (10 pies) a 57,6 Kbaud. Si utiliza unavelocidad en baudios inferior, la longitud máxima del cable puede ser de 15 m (49 ft) a 9600baudios. Existe un cable adecuado de ABB disponible, número de pieza CBL001-501.
RXD 2
TXD 3
GND 5
2 RXD
3 TXD
5 GND
RTS 7
CTS 8
7 RTS
8 CTS
NextMove ES(DCE)
Puerto COM de ordenador de 9
terminales(DCE/DTE)
Conexión del blindado general al blindado posterior
del conector.
Serie COM
MN1928WES Entrada/Salida 4-19

4.5.6 Multipunto con RS485 / RS422Los sistemas multipunto permiten que un dispositivo actúe como “maestro de la red”,controlando e interactuando con los otros dispositivos (esclavos) en la red. El maestro dered puede ser un controlador como el NextMove ES, una aplicación anfitrión como el MintWorkBench (u otra aplicación personalizada) o un controlador lógico programable (PLC). ElRS422 se puede utilizar para aplicaciones multipunto tal como se muestra en la Figura 17.El RS485 de cuatro hilos se puede utilizar para aplicaciones punto a punto simples queimpliquen un solo controlador. Si el firmware se actualiza en para RS485/RS422, solo sepuede descargar al controlador que se escogió en la ventana de diálogo Seleccionarcontrolador del Mint WorkBench.
Figura 17: Conexiones multipunto RS422 de 4 hilos
Cada red de transmisión y recepción (TX/RX) requiere de un resistor de terminación en laconexión RX final, pero los dispositivos intermedios no deben contar con resistores determinación. Una excepción se da cuando se utilizan los repetidores, que pueden contenercorrectamente resistores de terminación. Los resistores de terminación se utilizan paraigualar la impedancia de la carga a la impedancia de la línea de transmisión (cable) utilizada.La impedancia sin igualar provoca que la señal transmitida no sea completamente absorbidapor la carga. Esto provoca que una parte de la señal se refleje de vuelta en la línea detransmisión en forma de ruido. Si la impedancia de la fuente, de la línea de transmisión y dela carga son iguales entre sí, las reflexiones (ruido) se eliminan. Los resistores determinación aumentan la corriente de carga y a veces cambian los requisitos de polarizacióny aumentan la complejidad del sistema.
TR
RX-
DGND
RX+
TX+-XR-XT
DGND
RX+
TX+
TX-
RX-
DGND
RX+
TX+
TX-
TR
Maestro de red Esclavo de la red
Esclavo de la red
Conexión del blindado general al blindado posterior del conector.
El maestro y el esclavo final se muestran con las resistencias terminales TR, con un valor típico de 120 Ω.
El puente JP2 conecta una resistencia interna terminal de 120 Ω. JP2 se encuentra situado justo detrás del conector serie de la tarjeta NextMove ES.
Pares trenzados
4-20 Entrada/Salida MN1928WES
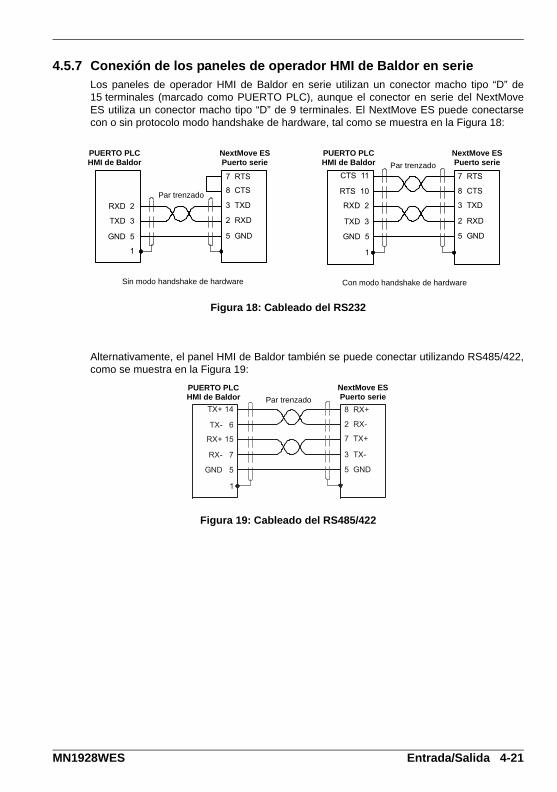
4.5.7 Conexión de los paneles de operador HMI de Baldor en serieLos paneles de operador HMI de Baldor en serie utilizan un conector macho tipo “D” de15 terminales (marcado como PUERTO PLC), aunque el conector en serie del NextMoveES utiliza un conector macho tipo “D” de 9 terminales. El NextMove ES puede conectarsecon o sin protocolo modo handshake de hardware, tal como se muestra en la Figura 18:
Figura 18: Cableado del RS232
Alternativamente, el panel HMI de Baldor también se puede conectar utilizando RS485/422,como se muestra en la Figura 19:
Figura 19: Cableado del RS485/422
7 RTS
8 CTS
3 TXD
2 RXD
5 GND
1
RXD 2
TXD 3
GND 5
7 RTS
8 CTS
3 TXD
2 RXD
5 GND
1
RXD 2
TXD 3
GND 5
CTS 11
RTS 10
NextMove ESPuerto serie
PUERTO PLC HMI de Baldor
Par trenzado
NextMove ESPuerto serie
PUERTO PLC HMI de Baldor Par trenzado
Sin modo handshake de hardware Con modo handshake de hardware
8 RX+
2 RX-
7 TX+
3 TX-
5 GND
1
RX+ 15
RX- 7
GND 5
TX+ 14
TX- 6
NextMove ESPuerto serie
PUERTO PLC HMI de Baldor Par trenzado
MN1928WES Entrada/Salida 4-21

4.6 CANEl bus CAN es una red con base en serie que se desarrolló originalmente para aplicacionesde automoción, pero que ahora se utiliza para una gran diversidad de aplicacionesindustriales. Ofrece comunicaciones en serie de bajo coste con una muy alta fiabilidad en elentorno industrial, siendo la probabilidad de un error no detectado de 4,7x10-11. Óptimo parala transmisión de pequeños paquetes de datos y, por tanto, ofrece una rápida actualizaciónde los dispositivos de entrada/salida (dispositivos periféricos) conectados al bus.
El protocolo CAN solo define los atributos físicos de la red, esto es, los parámetroseléctricos, mecánicos, funcionales y procedimentales de la conexión física entredispositivos. La funcionalidad de red de mayor nivel viene definida por un determinadonúmero de estándares y protocolos registrados; CANopen es uno de los estándares másutilizados para control de máquinas en el ámbito de las industrias como las de máquinas deembalaje e impresión.
Además de soportar CANopen, Baldor ha desarrollado un protocolo registrado denominadoCAN Baldor. Ambos protocolos son soportados por el NextMove ES, pero a diferencia deotros dispositivos Baldor, ambos pueden ser soportados a la vez. Esto es porque elNextMove ES solo dispone de un único canal de hardware CAN. Se encuentran disponiblesestructuras de firmware por separado para soportar cada uno de los protocolos.
Para determinar qué firmware se encuentra instalado actualmente, arrancar MintWorkBench y conectar el NextMove ES (ver sección 6). En la parte inferior de la ventana deMint WorkBench la barra de estado mostrará el nombre del controlador, seguido de‘CANopen’ o ‘Baldor CAN’. Si no se muestra la opción correcta, será necesario descargarfirmware alternativo empleando el archivo de instalación del sistema y/o los elementos delmenú de firmware de descarga de Mint WorkBench. El archivo de firmware puedeencontrarse en el CD de herramientas de Mint Motion (OPT-SW-001), o descargarse desdewww.abbmotion.com. Ver el archivo de ayuda de Mint para más detalles acerca de ladescarga de firmware.
4.6.1 Conector CANLa conexión CAN se realiza utilizando el conector RJ45 de la tarjeta NextMove ES:
La máxima velocidad (por defecto) de transmisión del NextMove ES es de 500 Kbit/s.
Ubicación Tarjeta NextMove ES
Terminal Nombre Descripción
1 CAN+ Canal positivo de CAN
2 CAN- Canal negativo de CAN
3 - (NC)
4 CAN 0V Referencia tierra/masa para señales CAN
5 CAN V+ Potencia de CAN V+ (12-24V)
6 - (NC)
7 - (NC)
8 - (NC)
DescripciónInterfaz CAN opto-aislada empleando un conector RJ45.
1
8
4-22 Entrada/Salida MN1928WES

4.6.2 Cableado de CANSolo se puede alcanzar una velocidad de transmisión de bits por CAN con muy pocoserrores utilizando un esquema de cableado en el que se tengan en cuenta los siguientespuntos: La línea de bus de datos de dos hilos se puede enrutar de manera paralela, trenzada y/
o blindada, dependiendo de los requisitos EMC. ABB recomienda un cable de partrenzado con el blindado/pantalla conectado al blindado trasero del conector, parareducir las emisiones de RF y proporcionar inmunidad para posibles interferenciasconducidas.
El bus debe estar conectado solo en ambos extremos (no enpuntos intermedios) con resistencias de valor nominal 120 Ω. Deesta manera se reducen las reflexiones de las señales eléctricasdel bus, lo que ayuda a un nodo a interpretar correctamente losniveles de tensión del bus. Si el NextMove ES se encuentra al finalde la red, asegurarse entonces de que el interruptor (puente) JP1,situado justo tras la pantalla de estado, se encuentra en laposición correcta. Esto conectará un resistor terminal interno.
Todos los cables y conectores deberán tener una impedancianominal de 120 Ω. Los cables deberán tener una resistencia linealde 70 mΩ/m y un retardo nominal de línea de 5 ns/m. ABB puede suministrar toda unagama de cables CAN adecuados, con los números de componente empezando porCBL004-5...
La longitud máxima del bus depende de la configuraciónde sincronización de bits (velocidad de transmisión debaudios). La tabla contigua muestra la longitud máxima debus aproximada (en el peor caso), asumiendo un retardode propagación de 5 ns/m y un retardo total de entrada ysalida de dispositivo efectivo de 210 ns a 1 Mbit/s, 300 nsa 500 - 250 Kbit/s, 450 ns a 125 Kbit/s y 1,5 ms a 50 -10 Kbit/s.(1) velocidad de transmisión CAN no soportada por
Baldor CAN.(2) Para longitudes de bus superiores a aproximada-
mente 1000 m, se necesitarán dispositivos repetidores o puentes. El compromiso entre la longitud del bus y la velocidad de transmisión de baudios de
CAN se debe determinar para cada aplicación. La velocidad de transmisión de baudiosde CAN se puede establecer utilizando la palabra clave BUSBAUD. Es fundamental quetodos los nodos en la red estén configurados para ejecutarse con la misma velocidad detransmisión de baudios.
La topología del cableado de una red CAN debe ser lo más parecida posible a laestructura de una línea o bus únicos. Sin embargo, se permiten líneas auxiliares si semantienen a una longitud mínima (<0,3 m a 1 Mbit/s).
La conexión de 0 V de todos los nodos en la red debe estar unida a través de uncableado CAN. Esto garantiza que los niveles de señal CAN transmitidos por elNextMove ES o dispositivos CAN periféricos se encuentren dentro del rango de modocomún del circuito receptor de otros nodos en la red.
4.6.2.1 Requisitos de alimentación de optoaislamientoEn el NextMove ES, el canal CAN se encuentra opto-aislado. Debe aplicarse una tensión enel rango de 12-24 V al terminal 5 del conector CAN. A partir de este suministro, un reguladorde tensión interno proporciona los 5 V a 100 mA necesarios para el circuito CAN aislado.Los cables CAN provistos por ABB son de 'categoría 5' y tienen una clasificación decorriente máxima de 1 A, de manera que el número máximo de unidades de NextMove ESque se pueden utilizar en una red se limita a diez. En la práctica el funcionamiento del canalCAN se limita a 500 Kbit/s debido al retardo en la propagación de los optoaisladores.
JP1
CAN Velocidad
MáximaLongitud
1 Mbit/s500 Kbit/s250 Kbit/s125 Kbit/s100 Kbit/s(1)
50 Kbit/s20 Kbit/s10 Kbit/s
25 m100 m250 m500 m600 m1000 m2500 m(2)
5000 m(2)
de transmisión de baudios del bus
MN1928WES Entrada/Salida 4-23

4.6.3 CANopenEl NextMove ES debe tener el firmware CANopen cargado para utilizar este protocolo.
Baldor ha implementado un protocolo de CANopen en Mint (según el 'Perfil decomunicación' CiA DS-301) que es compatible con ambos accesos directos para parámetrosde dispositivos y comunicación de datos de proceso de tiempo crítico. El diseño delNextMove ES no satisface un perfil de dispositivo CANopen específico (DS4xx), aunque escapaz de soportar y establecer comunicación con los siguientes dispositivos:
Cualquier dispositivo de E/S digital y analógico de terceros que cumpla con el 'Perfil dedispositivos para módulos genéricos de E/S' (CiA DS-401).
Los paneles de operador HMI (interfaz máquina hombre) de Baldor, basados en el 'Perfilde dispositivo para interfaces máquina hombre' (DS403).
Otros controladores ABB con CANopen para acceso peer-to-peer, utilizandoextensiones a las especificaciones CiA (DS301 y DS302).
La funcionalidad y las características de todos los dispositivos CANopen de Baldor estándefinidas en las Hojas de datos electrónicos (EDS) con estándares individuales (formatoASCII), que se pueden encontrar en el CD de herramientas de Mint Motion (OPT-SW-001) opueden descargarse de www.abbmotion.com/supportme.
La Figura 20 muestra una red CANopen típica con dos unidades de NextMove ES y unpanel de operador HMI de Baldor.
Figura 20: Conexiones de red típica CANopen
Nota: El canal CAN de NextMove ES está optoaislado, de forma que debe aplicarseuna tensión de entre 12-24 V al terminal 5 del conector CAN. Es posible que serequieran un adaptador opcional (por ejemplo de RS Components, pieza 186-3105) o modificaciones al cable para facilitar la conexión de la alimentación.
La configuración y la administración de una red CANopen la debe llevar a cabo un nodoúnico que actúe como master de la red. Esta función la puede realizar el NextMove EScuando está configurado para ser el nodo Administrador de red (ID 1 de nodo) o por undispositivo maestro CANopen de terceros.
Se pueden añadir hasta 126 nodos CANopen (ID de nodos 2 a 127) a la red mediante unnodo administrador del NextMove ES, utilizando la palabra clave de Mint NODESCAN. Si estofunciona, los nodos podrán luego conectarse utilizando la palabra clave de Mint CONNECT.Cualquier evento relacionado con la red y el nodo se puede supervisar utilizando el eventode Mint BUS1.
1
2
4
5
7
2TR TR
1
2
4
5
1
2
4
524V
0V6
5
1
2
24V
0V
CAN+
CAN-
NextMove ESRJ45
NextMove ESRJ45
Nodo de extremo
Pares trenzadosPares
trenzados
Panel de operador HMI de Baldor
Bloque de terminales
de fuente de suministro
CANopen tipo “D”
4-24 Entrada/Salida MN1928WES

Nota: Todas las palabras clave de Mint relacionadas con CAN tienen referencia conCANopen o Baldor CAN mediante el parámetro 'bus'. A pesar de que elNextMove ES posee un único canal físico de bus CAN que puede ser utilizadopara soportar cualquier protocolo, Mint distingue entre los protocolos con elparámetro 'bus'. Para CANopen, el parámetro de punto 'bus' debe establecerseen 1.
Consulte el archivo de ayuda de Mint para más detalles sobre CANopen, palabras clave deMint y parámetros.
4.6.4 CAN de BaldorEl NextMove ES debe tener el firmware CAN de Baldor cargado para utilizar este protocolo.
El CAN de Baldor es un protocolo CAN registrado basado en CAL. Soporta únicamente lasiguiente gama de nodos de entrada/salida específicos y paneles de operador de CAN deBaldor:
Nodo de entrada 8 (pieza ION001-503) - un nodo CAN de entrada digital x 8.
Nodo de salida 8 (pieza ION003-503) - un nodo CAN de salida digital x 8.
Nodo de relé 8 (pieza ION002-503) - un nodo CAN de relé x 8.
Nodo Io 24/24 (pieza ION004-503) - nodo de CAN de entrada digital x 24 y salidadigital x 24.
Nodo de teclado (pieza KPD002-501) - nodo CAN de panel de operador con pantallaLCD 4 x 20 y 27 teclas de membrana etiquetadas para control de 3 ejes (X, Y, Z).
Nodo de teclado 4 (pieza KPD002-505) - nodo CAN de panel de operador con pantallaLCD 4 x 20 y 41 teclas de membrana etiquetadas para control de 4 ejes (1, 2, 3, 4).
Una red CAN Baldor típica con un NextMove ES y un panel de operador CAN Baldor semuestra en la Figura 18.
Figura 21: Conexiones del panel de operador CAN de Baldor
El canal CAN de NextMove ES está optoaislado, de forma que debe aplicarse una tensiónde entre 12-24 V al terminal 5 del conector CAN. A partir de este suministro, un regulador detensión interno proporciona los 5 V necesarios para el circuito CAN aislado. Los 12-24 Vrequeridos pueden obtenerse del nodo de Entrada/Salida del CAN de Baldor o delsuministro del panel de operador', que se encuentra conectado internamente al conectorCAN como se muestra en la Figura 21.
RJ45J1 / J2
24 V
0 VTR
24 V
0 V
J3
CAN-
CAN+1
2
4
5
4
3
2
1
NextMove ES
1
2
4
5
JP3 TR JP1
Par trenzado
Panel de operador CAN de Baldor
Suministrode panel de
operador
MN1928WES Entrada/Salida 4-25

En los nodos de Entrada/Salida de CAN de Baldor y paneles de operador, los interruptoresJP1 y JP2 deben colocarse en la posición '1' (la posición inferior) para que la red funcionecorrectamente. Esto configura el canal CAN del nodo' para operar con los terminales 1 y 2de los conectores RJ45. En el nodo CAN de Baldor, el interruptor JP3 puede utilizarse paraconectar una resistencia terminal interna de 120 Ω, suponiendo que el nodo se encuentra alfinal de la red. Los interruptores JP4y JP5 pueden utilizarse para configurar la ID del nodo yla velocidad en baudios.
Pueden añadirse hasta 63 nodos de Entrada/Salida de Baldor (incluyendo no más de4 paneles de operador) a la red a través del NextMove ES empleando la palabra clave deMint NODETYPE. Cualquier evento relacionado con la red y el nodo se puede supervisarutilizando el evento de Mint BUS2.
Nota: Todas las palabras clave de Mint relacionadas con CAN tienen referencia conCANopen o Baldor CAN mediante el parámetro 'bus'. A pesar de que elNextMove ES posee un único canal físico de bus CAN que puede ser utilizadopara soportar cualquier protocolo, Mint distingue entre los protocolos con elparámetro 'bus'. Para el CAN de Baldor, el parámetro de punto 'bus' debeestablecerse en 2.
Consulte el archivo de ayuda de Mint para más detalles sobre CAN de Baldor, palabrasclave de Mint y parámetros.
4-26 Entrada/Salida MN1928WES

4.7 Resumen de conexiones - cableado mínimo del sistemaComo guía, la Figura 22 muestra un ejemplo del cableado mínimo típico, necesario parapermitir que el NextMove ES y un amplificador de accionamiento de un solo eje funcionenconjuntamente. Se muestra la tarjeta BPL010-502 opcional optoaislada de la toma posterior.Los datos de los terminales del conector se muestran en la Tabla 4.
Figura 22: Ejemplo de cableado mínimo del sistema
X1
Encoder 0 Encoder 1
Serial
X4
X2 X3
X7
X5
X8
X9
X10
X11
X12
X13X6
Nex
tMov
eES
Amplificador de accionamiento (eje 0)Toma posterior
suministro de usuario +24 V
PC anfitrión
±12 V suministro
suministro +5 V
Puesta a tierra/masa común
Pulse+Pulse-Dirección+Dirección-Relé de falloGndHabilitaciónGnd
Notas:
En este ejemplo, los contactos de relé de la toma posterior' se utilizan para aplicar el suministro de usuario de 24 V a la entrada de habilitación del amplificador de accionamiento'.
El relé de la toma posterior' es accionado por la señal de salida de error del NextMove ES. Esta señal puede ser controlada por las palabras clave DRIVEENABLEOUTPUT, GLOVALERROROUTPUT o RELAY.
Se muestran las conexiones del relé de fallo del amplificador' de accionamiento conectadas a la entrada digital 0. Si se produce un error, podrá detectarse utilizando el evento de Mint Event IN0.
La palabra clave INPUTACTIVELEVEL puede ser utilizada para modificar el estado activo de la entrada digital.
MN1928WES Entrada/Salida 4-27
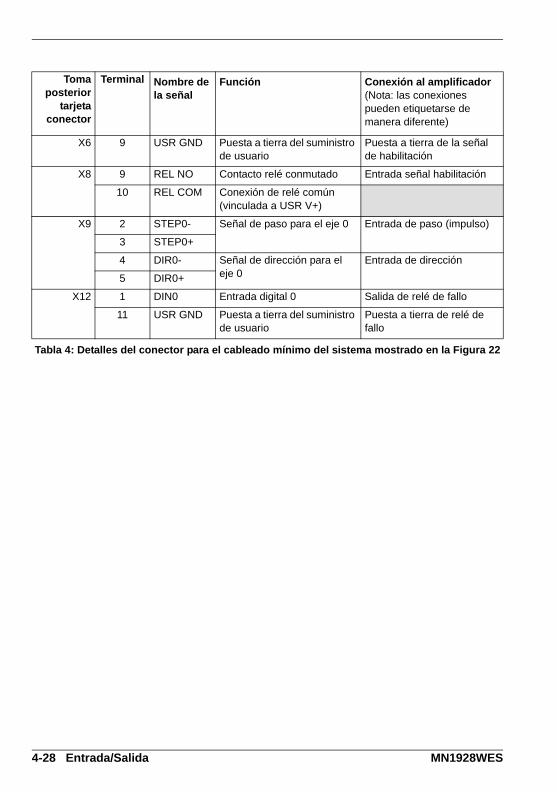
Tomaposterior
tarjetaconector
Terminal Nombre de la señal
Función Conexión al amplificador(Nota: las conexiones pueden etiquetarse de manera diferente)
X6 9 USR GND Puesta a tierra del suministro de usuario
Puesta a tierra de la señal de habilitación
X8 9 REL NO Contacto relé conmutado Entrada señal habilitación
10 REL COM Conexión de relé común(vinculada a USR V+)
X9 2 STEP0- Señal de paso para el eje 0 Entrada de paso (impulso)
3 STEP0+
4 DIR0- Señal de dirección para el eje 0
Entrada de dirección
5 DIR0+
X12 1 DIN0 Entrada digital 0 Salida de relé de fallo
11 USR GND Puesta a tierra del suministro de usuario
Puesta a tierra de relé de fallo
Tabla 4: Detalles del conector para el cableado mínimo del sistema mostrado en la Figura 22
4-28 Entrada/Salida MN1928WES

Placas posteriores5 Placas posteriores
5.1 IntroducciónEsta sección describe las tarjetas de toma posterior opcionales disponibles para su empleocon el NextMove ES. Todas estas tarjetas proporcionan conexiones estándar de cableado alNextMove ES, pero hay un cierto número de variantes disponibles:
BPL010-501: Toma posterior no aislada.
BPL010-502: Toma posterior aislada PNP.
BPL010-503: Toma posterior aislada NPN.
Se recomienda utilizar una de estas tomas posteriores dedicadas con su NextMove ES.
Cada tabla muestra el conector de acoplamiento requerido y el terminal asociado en elconector de 96 terminales del NextMove ES. En los casos en que existan diferentesterminales con la misma función, por ejemplo AGND, se muestra un terminal de ejemplo,pero cualquier otro terminal con idéntico nombre representa la misma conexión eléctrica.
Ver la sección 4.2 para obtener más detalles sobre el conector de 96 terminales.
5.1.1 Conexión de puesta a tierra/masaPara la mejora de la inmunidad al ruido, conectar siempre el espárrago depuesta a tierra/masa de la toma posterior' al punto de tierra del chasis utilizandouna trenza de puesta a tierra adecuada.
5
MN1928WES Placas posteriores 5-1

5.2 BPL010-501 toma posterior no aisladaEsta toma posterior facilita la conexión directa con las señales de NextMove ES sinaislamiento. Las especificaciones eléctricas de todas las señales son, por tanto, las mismasque las descritas en la sección 4.
En las siguientes secciones, las señales AGND, DGND y Pantalla se encuentran listadascon los terminales correspondientes nominales del conector de 96 terminales, a pesar deque se encuentran conectadas eléctricamente a la toma posterior. El terminal OUT COM delconector X11 no está conectado a tierra.
Algunas señales se encuentran duplicadas en múltiples terminales con idéntico nombre enel conector de 96 terminales.En estos casos, solo se lista el pin de numeración inferior.
Algunos componentes son dispositivos sensibles a la electricidad estática. Tomelas precauciones ESD apropiadas al manipular la toma posterior.!
CAUTION
5-2 Placas posteriores MN1928WES

Figura 23: Distribución y dimensiones del conector de la toma posterior BPL010-501
X2 X3
X4
X6
X7
X8
X9
X10
X11
X12
X13
X5
Shield
DG
ND
DIN
15
DIN
14
DIN
13
DIN
12
DIN
11
DIN
10
DIN
9
DIN
8
Shield
DG
ND
DIN
7
DIN
6
DIN
5
DIN
4
DIN
3
DIN
2
DIN
1
DIN
0
DG
ND
OU
TCO
M
DO
UT7
DO
UT6
DO
UT5
DO
UT4
DO
UT3
DO
UT2
DO
UT1
DO
UT0
Shield
DIR
3+
DIR
3-
STE
P3+
STE
P3
-
DG
ND
Shield
DIR
2+
DIR
2-
STE
P2+
STE
P2
-
DG
ND
Shield
DIR
1+
DIR
1-
STE
P1+
STE
P1
-
DG
ND
Shield
DIR
0+
DIR
0-
STE
P0+
STE
P0
-
DG
ND
Shield
DG
ND
!RS
TIN
ER
RO
R
AG
ND
AIN
1-
AIN
1+
AG
ND
AIN
0-
AIN
0+
Shield
AG
ND
DE
M.3
Shield
AG
ND
DE
M.2
Shield
AG
ND
DE
M.1
Shield
AG
ND
DE
M.0D
GN
D
DG
ND
+5V
-12V
+12V
DG
ND
DO
UT11
DO
UT10
DO
UT9
DO
UT8
DG
ND
DIN
19
DIN
18
DIN
17
DIN
16
Encoder1 Encoder0
Serial
X1
110 mm (4,43 pulgadas)
98 mm (3,86 pulgadas)
37 mm (1,46 pulgadas)
57,5 mm (2,26 pulgadas)
77,5 mm (3,05 pulgadas)
11,8
mm
(0
,46
pu
lga
das
)
130
mm
(5
,12
pul
ga
das
)
16,5 mm (0,65 pulgadas)
MN1928WES Placas posteriores 5-3

5.2.1 Entradas analógicas
Ver sección 4.3.1 en relación a las especificaciones eléctricas de las entradas analógicas.
Ubicación X8Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción Conector de 96 terminales
10 Pantalla Conexión blindada a32
9 DGND Puesta a tierra digital a3
8 - (NC) c12
7 ERROR Salida de error b11
6 AGND Puesta a tierra analógica a30
5 AIN1- Entrada analógica AIN1- a27
4 AIN1+ Entrada analógica AIN1+ c28
3 AGND Puesta a tierra analógica a30
2 AIN0- Entrada analógica AIN0- a28
1 AIN0+ Entrada analógica AIN0+ b28
1
10
5-4 Placas posteriores MN1928WES

5.2.2 Salidas analógicas (demandas)
Ver sección 4.3.2 en relación a las especificaciones eléctricas de las salidas analógicas.
Ubicación X7Conector para acoplamiento: Weidmüller Omnimate BL 3.5/12
Terminal Nombre Descripción Conector de 96 terminales
12 Pantalla Conexión blindada a32
11 AGND Puesta a tierra analógica a30
10 DEMAND3 Salida analógica AOUT3 b22
9 Pantalla Conexión blindada a32
8 AGND Puesta a tierra analógica a30
7 DEMAND2 Salida analógica AOUT2 b17
6 Pantalla Conexión blindada a32
5 AGND Puesta a tierra analógica a30
4 DEMAND1 Salida Demanda 1 (AOUT1) b27
3 Pantalla Conexión blindada a32
2 AGND Puesta a tierra analógica a30
1 DEMAND0 Salida Demanda 0 (AOUT0) c27
1
12
MN1928WES Placas posteriores 5-5

5.2.3 Entradas digitales 0-7
Ver sección 4.4.1 en relación a las especificaciones eléctricas de las entradas digitales.
5.2.4 Entradas digitales 8-15
Ver sección 4.4.1 en relación a las especificaciones eléctricas de las entradas digitales.
Ubicación X12Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción Conector de 96 terminales
10 Pantalla Conexión blindada a32
9 DGND Puesta a tierra digital a3
8 DIN7 Entrada digital DIN7 a19
7 DIN6 Entrada digital DIN6 c20
6 DIN5 Entrada digital DIN5 b19
5 DIN4 Entrada digital DIN4 c18
4 DIN3 Entrada digital DIN3 c19
3 DIN2 Entrada digital DIN2 a18
2 DIN1 Entrada digital DIN1 b20
1 DIN0 Entrada digital DIN0 c21
Ubicación X13Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción Conector de 96 terminales
10 Pantalla Conexión blindada a32
9 DGND Puesta a tierra digital a3
8 DIN15 Entrada digital DIN15 b18
7 DIN14 Entrada digital DIN14 c23
6 DIN13 Entrada digital DIN13 b24
5 DIN12 Entrada digital DIN12 c26
4 DIN11 Entrada digital DIN11 a25
3 DIN10 Entrada digital DIN10 a24
2 DIN9 Entrada digital DIN9 b25
1 DIN8 Entrada digital DIN8 a26
1
10
1
10
5-6 Placas posteriores MN1928WES
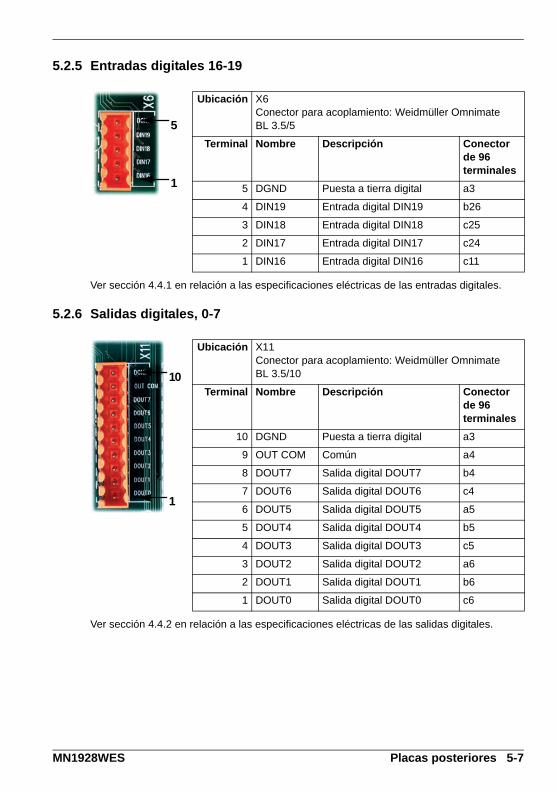
5.2.5 Entradas digitales 16-19
Ver sección 4.4.1 en relación a las especificaciones eléctricas de las entradas digitales.
5.2.6 Salidas digitales, 0-7
Ver sección 4.4.2 en relación a las especificaciones eléctricas de las salidas digitales.
Ubicación X6Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción Conector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DIN19 Entrada digital DIN19 b26
3 DIN18 Entrada digital DIN18 c25
2 DIN17 Entrada digital DIN17 c24
1 DIN16 Entrada digital DIN16 c11
Ubicación X11Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción Conector de 96 terminales
10 DGND Puesta a tierra digital a3
9 OUT COM Común a4
8 DOUT7 Salida digital DOUT7 b4
7 DOUT6 Salida digital DOUT6 c4
6 DOUT5 Salida digital DOUT5 a5
5 DOUT4 Salida digital DOUT4 b5
4 DOUT3 Salida digital DOUT3 c5
3 DOUT2 Salida digital DOUT2 a6
2 DOUT1 Salida digital DOUT1 b6
1 DOUT0 Salida digital DOUT0 c6
1
5
1
10
MN1928WES Placas posteriores 5-7
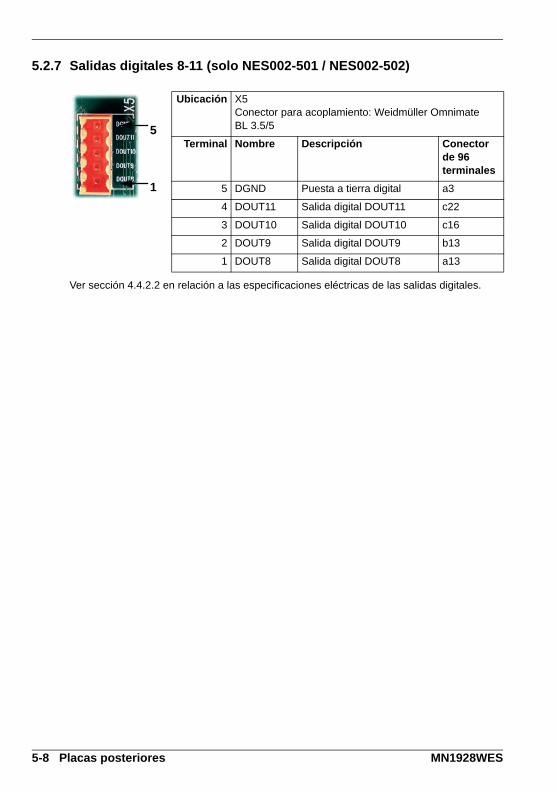
5.2.7 Salidas digitales 8-11 (solo NES002-501 / NES002-502)
Ver sección 4.4.2.2 en relación a las especificaciones eléctricas de las salidas digitales.
Ubicación X5Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción Conector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DOUT11 Salida digital DOUT11 c22
3 DOUT10 Salida digital DOUT10 c16
2 DOUT9 Salida digital DOUT9 b13
1 DOUT8 Salida digital DOUT8 a13
1
5
5-8 Placas posteriores MN1928WES

5.2.8 Salidas de ejes paso a paso 0-1
Las salidas 0-1 de los ejes paso a paso de la toma posterior están accionadas por loscontroladores de línea DS26LS31, que proporcionan salidas diferenciales RS422. Vertambién Figuras 26 y 27.
Los controladores DS26LS31 son dispositivos estáticos sensibles. Tome lasprecauciones ESD apropiadas al manipular la toma posterior. Al conectar lassalidas a entradas de un solo extremo tal como se muestra en las Figuras 26 y27, no conecte las salidas STEPx- o DIRx- a tierra, déjelas desconectadas.
Figura 24: Salida paso a paso - se muestra salida STEP0
Ubicación X9Conector para acoplamiento: Weidmüller Omnimate BL 3.5/12
Terminal Nombre Descripción Conector de 96 terminales
12 Pantalla Conexión blindada a32
11 DIR1+ Salida de dirección 1+ b15
10 DIR1- Salida de dirección 1-
9 STEP1+ Salida paso (pulso) 1+ b14
8 STEP1- Salida paso (pulso) 1-
7 DGND Puesta a tierra digital a3
6 Pantalla Conexión blindada a32
5 DIR0+ Salida de dirección 0+ a15
4 DIR0- Salida de dirección 0-
3 STEP0+ Salida paso (pulso) 0+ a14
2 STEP0- Salida paso (pulso) 0-
1 DGND Puesta a tierra digital a3
1
12
!CAUTION
NextMove ES
STEP0-
DGND1
2
‘X9’
74AHCT244
GND
DS26LS31
STEP0+3
ULN2003
Salidagradual
Toma posterior
Conector de 96
terminales
MN1928WES Placas posteriores 5-9

5.2.9 Salidas de ejes paso a paso 2-3
Las salidas 2-3 de los ejes paso a paso de la toma posterior están accionadas por loscontroladores de línea DS26LS31, que proporcionan salidas diferenciales RS422.
Los controladores DS26LS31 son dispositivos estáticos sensibles. Tome lasprecauciones ESD apropiadas al manipular la toma posterior. Al conectar lassalidas a entradas de un solo extremo tal como se muestra en las Figuras 26 y27, no conecte las salidas STEPx- o DIRx- a tierra, déjelas desconectadas.
Figura 25: Salida paso a paso - se muestra salida STEP2
Ubicación X10Conector para acoplamiento: Weidmüller Omnimate BL 3.5/12
Terminal Nombre Descripción Conector de 96 terminales
12 Pantalla Conexión blindada a32
11 DIR3+ Salida de dirección 3+ a23
10 DIR3- Salida de dirección 3-
9 STEP3+ Salida paso (pulso) 3+ b23
8 STEP3- Salida paso (pulso) 3-
7 DGND Puesta a tierra digital a3
6 Pantalla Conexión blindada a32
5 DIR2+ Salida de dirección 2+ c15
4 DIR2- Salida de dirección 2-
3 STEP2+ Salida paso (pulso) 2+ c14
2 STEP2- Salida paso (pulso) 2-
1 DGND Puesta a tierra digital a3
1
12
!CAUTION
NextMove ES
STEP2-
DGND1
2
‘X10’
74AHCT244
GND
DS26LS31
STEP2+3
ULN2003
Salidagradual
Toma posterior
Conector de 96
terminales
5-10 Placas posteriores MN1928WES
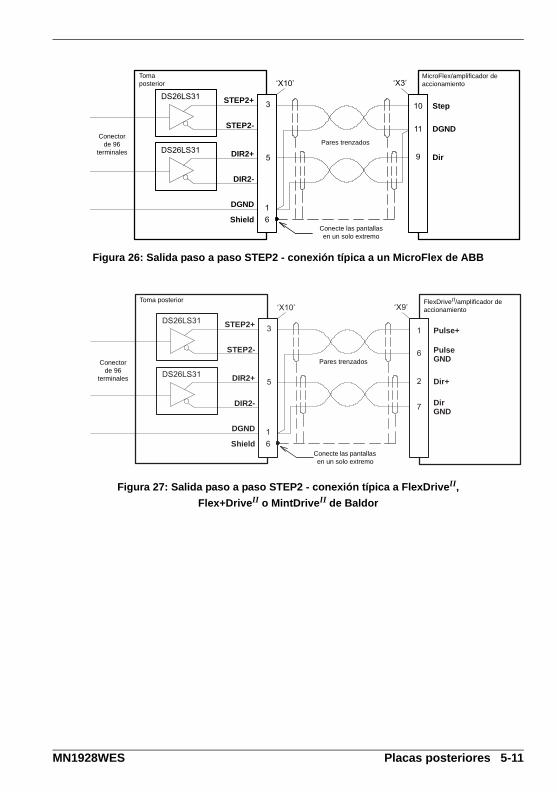
Figura 26: Salida paso a paso STEP2 - conexión típica a un MicroFlex de ABB
Figura 27: Salida paso a paso STEP2 - conexión típica a FlexDriveII,
Flex+DriveII o MintDriveII de Baldor
STEP2+
DGND 1
DS26LS31
STEP2-
3
DGND
Step
6Shield
‘X3’‘X10’
10
11
DIR2+DS26LS31
DIR2-
5 Dir9
Toma posterior
Conector de 96
terminales
Pares trenzados
Conecte las pantallas en un solo extremo
MicroFlex/amplificador de accionamiento
STEP2+
DGND 1
DS26LS31
STEP2-
3
6Shield
‘X10’
DIR2+DS26LS31
DIR2-
5
PulseGND
Pulse+
‘X9’
1
6
Dir+2
DirGND7
Toma posterior
Conector de 96
terminales
Pares trenzados
Conecte las pantallas en un solo extremo
FlexDriveII/amplificador de accionamiento
MN1928WES Placas posteriores 5-11

5.2.10Salidas de ejes paso a paso 4-5 (solo firmware 6 ejes paso a paso)
Las salidas 4-5 de ejes paso a paso solo están disponibles cuando se utiliza el firmwareopcional de 6 ejes paso a paso. Las salidas no son aisladas ni accionadas por la tomaposterior. Ver la sección 4.4.2.2 en relación a las especificaciones eléctricas de las salidasde paso y dirección 4 y 5.
5.2.11Entradas de alimentación
Ver sección 3.1.4 para los requisitos de alimentación.
Ubicación X5Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción Conector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DOUT11 Salida de dirección 5 c22
3 DOUT10 Salida paso (pulso) 5- c16
2 DOUT9 Salida de dirección 4 b13
1 DOUT8 Salida paso (pulso) 4- a13
Ubicación X1Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción Conector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DGND Puesta a tierra digital a3
3 +5V +5 V, entrada a1
2 -12V -12 V, entrada a31
1 +12V +12 V, entrada a29
1
5
1
5
5-12 Placas posteriores MN1928WES

5.2.12Entrada de encoder 0
5.2.13Entrada de encoder 1
Ver sección 4.5.2 en relación a las especificaciones de las entradas de encoder.
Ubicación Encoder0 X3 Conector para acoplamiento: Macho tipo “D” de 9 terminales
Terminal Nombre Descripción Conector de 96 terminales
1 CHA+ Señal de canal A b7
2 CHB+ Señal de canal B a7
3 CHZ+ Señal de canal de índice b8
4 Pantalla Conexión blindada a32
5 DGND Puesta a tierra digital a3
6 CHA- Complemento de señal de canal A b10
7 CHB- Complemento de señal de canal B c10
8 CHZ- Complemento de señal de canal de índice
b9
9 +5 V out (Tensión de salida)
Suministro de energía al encoder a1
Ubicación Encoder1 X2 Conector para acoplamiento: Macho tipo “D” de 9 terminales
Terminal Nombre Descripción Conector de 96 terminales
1 CHA+ Señal de canal A a8
2 CHB+ Señal de canal B c7
3 CHZ+ Señal de canal de índice c8
4 Pantalla Conexión blindada a32
5 DGND Puesta a tierra digital a1
6 CHA- Complemento de señal de canal A c9
7 CHB- Complemento de señal de canal B a10
8 CHZ- Complemento de señal de canal de índice
a9
9 +5V de salida
Suministro de energía al encoder a1
1
5
6
9
1
5
6
9
MN1928WES Placas posteriores 5-13
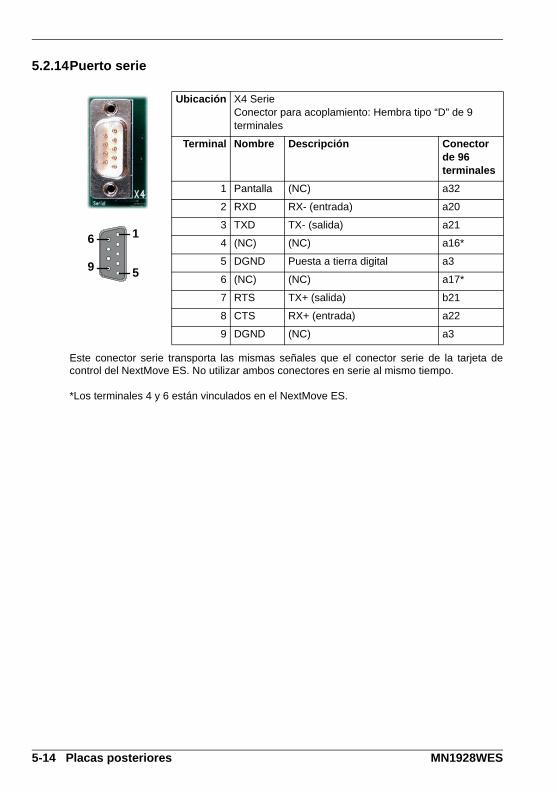
5.2.14Puerto serie
Este conector serie transporta las mismas señales que el conector serie de la tarjeta decontrol del NextMove ES. No utilizar ambos conectores en serie al mismo tiempo.
*Los terminales 4 y 6 están vinculados en el NextMove ES.
Ubicación X4 SerieConector para acoplamiento: Hembra tipo “D” de 9 terminales
Terminal Nombre Descripción Conector de 96 terminales
1 Pantalla (NC) a32
2 RXD RX- (entrada) a20
3 TXD TX- (salida) a21
4 (NC) (NC) a16*
5 DGND Puesta a tierra digital a3
6 (NC) (NC) a17*
7 RTS TX+ (salida) b21
8 CTS RX+ (entrada) a22
9 DGND (NC) a3
1
5
6
9
5-14 Placas posteriores MN1928WES
5.3 Toma posterior BPL010-502/503 con tarjeta optoaisladoraEstas tomas posteriores incorporan una tarjeta enchufable adicional que facilita eloptoaislamiento para muchas de las señales del NextMove ES.
En el BPL010-502, las salidas digitales de propósito general son salidas PNP (fuente decorriente).Las entradas digitales de propósito general se activan cuando se aplica un voltaje positivo.
En el BPL010-503, las salidas digitales de propósito general son salidas NPN (sumidero decorriente).Las entradas digitales de propósito general se activan con su puesta a tierra.
Hay dos conectores presentes de 96 terminales en la toma posterior optoaisladora. Elconector macho acepta la tarjeta opto-aisladora. El conector hembra de 96 terminales máscercano al borde de la toma posterior acepta la tarjeta NextMove ES. La toma posterior nofuncionará sin la tarjeta opto-aisladora.
En las siguientes secciones, las señales AGND, DGND y Pantalla se encuentran listadascon los terminales correspondientes nominales del conector de 96 terminales, a pesar deque se encuentran conectadas eléctricamente a la toma posterior. El terminal OUT COM delconector X11 no está conectado a tierra.
Todos los terminales etiquetados USR GND están eléctricamente conectados a la tomaposterior, pero no están conectados a los terminales AGND, DGND o Pantalla. USR GNDconstituye una conexión común independiente del lado de 0 V en la fuente de suministroexterna utilizada para las entradas y salidas digitales. Es necesario vincular los terminalesOUT COM o USR COM a USR GND para permitir el funcionamiento de las salidas digitales.Sin embargo, los conectores OUT COM y USR COM tienen diferentes propósitosdependiendo del modelo - ver secciones 5.3.6.1 y 5.3.6.2.
Algunas señales se encuentran duplicadas en múltiples terminales con idéntico nombre enel conector de 96 terminales.En estos casos, solo se lista el pin de numeración inferior.
Algunos componentes son dispositivos sensibles a la electricidad estática. Tomelas precauciones ESD apropiadas al manipular la toma posterior.!
CAUTION
MN1928WES Placas posteriores 5-15

Figura 28: Distribución y dimensiones del conector de la toma posterior BPL010-502/503
Shield
US
RG
ND
US
RG
ND
US
RV
+
US
RV
+
!RS
TIN
DIN
19
DIN
18
DIN
17
DIN
16
X2 X3
X4
X6
X7
X8
X9
X10
X11
X12
X13
X5
Shield
US
RG
ND
DIN
15
DIN
14
DIN
13
DIN
12
DIN
11
DIN
10
DIN
9
DIN
8
Shield
US
RG
ND
DIN
7
DIN
6
DIN
5
DIN
4
DIN
3
DIN
2
DIN
1
DIN
0
US
RC
OM
OU
TCO
M
DO
UT7
DO
UT6
DO
UT5
DO
UT4
DO
UT3
DO
UT2
DO
UT1
DO
UT0
Shield
DIR
3+
DIR
3-
STE
P3+
STE
P3
-
DG
ND
Shield
DIR
2+
DIR
2-
STE
P2+
STE
P2
-
DG
ND
Shield
DIR
1+
DIR
1-
STE
P1+
STE
P1
-
DG
ND
Shield
DIR
0+
DIR
0-
STE
P0+
STE
P0
-
DG
ND
RE
LCO
M
RE
LN
O
RE
LN
C
RE
LCO
M
Shield
AIN
1-
AIN
1+
AG
ND
AIN
0-
AIN
0+
Shield
AG
ND
DE
M.3
Shield
AG
ND
DE
M.2
Shield
AG
ND
DE
M.1
Shield
AG
ND
DE
M.0D
GN
D
DG
ND
+5V
-12V
+12V
DG
ND
DO
UT11
DO
UT10
DO
UT9
DO
UT8
DOUT8 to 11 areNON-ISOLATED
Encoder1 Encoder0
Serial
X1
130 mm (5,12 pulgadas)
113 mm (4,45 pulgadas)
52 mm (2,05 pulgadas)
72,5 mm (2,85 pulgadas)
92,5 mm (3,64 pulgadas)
12
,5 m
m (
0,4
9 p
ulg
ada
s)130
mm
(5
,12
pul
ga
das)
11 mm (0,43 pulgadas)
31,5 mm (1,24 pulgadas)
7 mm (0,28 pulgadas)
5-16 Placas posteriores MN1928WES

5.3.1 Entradas analógicas
Las entradas analógicas de la toma posterior están conectadas directamente al NextMoveES y no pasan a través de ninguna circuitería de la tarjeta optoaisladora. Ver sección 4.3.1en relación a las especificaciones eléctricas de las entradas analógicas.
Figura 29: Entrada analógica, se muestra AIN0
Ubicación X8Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción NextMove ESConector de 96 terminales
10 REL COM Contacto de relé común
9 REL NO Contacto de relé normalmente abierto
8 REL NC Contacto de relé normalmente cerrado
7 REL COM Contacto de relé común
6 Pantalla Conexión blindada a32
5 AIN1- Entrada analógica AIN1- a27
4 AIN1+ Entrada analógica AIN1+ c28
3 AGND Puesta a tierra analógica a30
2 AIN0- Entrada analógica AIN0- a28
1 AIN0+ Entrada analógica AIN0+ b28
1
10
NextMove ES
-
+AIN0+
AIN0-
AGND
2
3
1
-
+
‘X8’
120k
120k
+12 V
-12 V
MintADC(0)
Toma posterior
Conector de 96
terminales
MN1928WES Placas posteriores 5-17

5.3.1.1 Conexiones de relé de error
El relé de doble polaridad de la tarjeta del optoaislador está controlado directamente por laseñal de salida de error (sección 4.4.3), tal como se muestra en la Figura 30.
Figura 30: Conexiones de relé
La salida de error puede ser controlada mediante la palabra clave RELAY, y puedeconfigurarse como salida global de error fijando GLOBALERROROUTPUT a 1000 (_RELAY0).Ver el archivo de ayuda de Mint.
Mientras no exista error, el relé queda excitado, y REL COM está conectado a REL NO.Cuando se produce un error, el relé queda desexcitado, y REL COM está conectado a RELNC.
Es importante que la configuración de los puentes del NextMove ES seacorrecta para que pueda controlar el relé de la toma posterior. JP4 y JP5 debencolocarse. El puente JP3 debe quitarse. Ver la sección 4.4.3 en cuanto a laubicación de los puentes.
NextMove ES
REL COM
REL NC
REL NO
7
9
‘X8’
8
+5 V Toma posterior
Conector de 96
terminales
Relé
Circuitería de control
Salida de error
MintGLOBALERROROUTPUT
oDRIVEENABLEOUTPUT
!CAUTION
5-18 Placas posteriores MN1928WES

5.3.2 Salidas analógicas (demandas)
Las salidas de la toma posterior están conectadas directamente al NextMove ES y no pasana través de ninguna circuitería de la tarjeta optoaisladora. Ver la sección 4.3.2 en relación alas especificaciones eléctricas y a cómo conectar una salida a un amplificador deaccionamiento típico.
Figura 31: Salida analógica, se muestra DEMAND0
Ubicación X7Conector para acoplamiento: Weidmüller Omnimate BL 3.5/12
Terminal Nombre Descripción NextMove ESConector de 96 terminales
12 Pantalla Conexión blindada a32
11 AGND Puesta a tierra analógica a30
10 DEMAND3 Salida analógica AOUT3 b22
9 Pantalla Conexión blindada a32
8 AGND Puesta a tierra analógica a30
7 DEMAND2 Salida analógica AOUT2 b17
6 Pantalla Conexión blindada a32
5 AGND Puesta a tierra analógica a30
4 DEMAND1 Salida Demanda 1 (AOUT1)
b27
3 Pantalla Conexión blindada a32
2 AGND Puesta a tierra analógica a30
1 DEMAND0 Salida Demanda 0 (AOUT0)
c27
1
12
1
2
‘X7’NextMove ES
-
+TL084
47RDEMAND0
AGND
+12 V
-12 V
Toma posterior
Conector de 96
terminales
Demanda ±100%
MN1928WES Placas posteriores 5-19
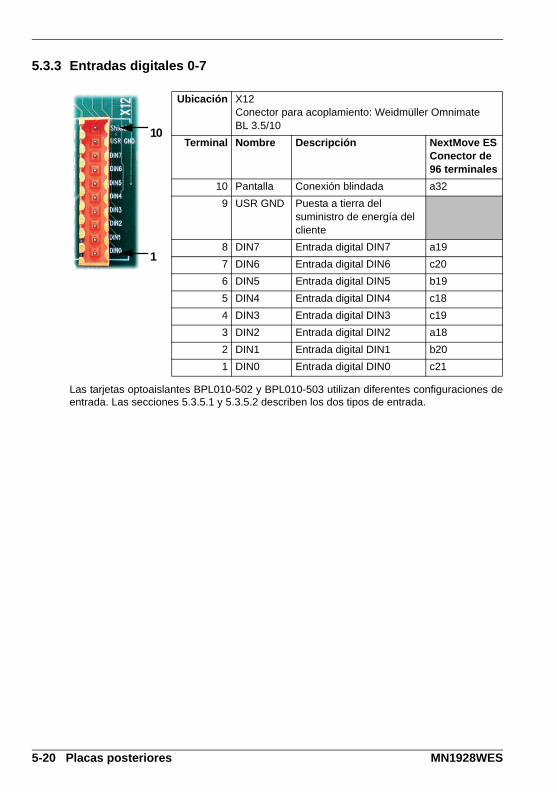
5.3.3 Entradas digitales 0-7
Las tarjetas optoaislantes BPL010-502 y BPL010-503 utilizan diferentes configuraciones deentrada. Las secciones 5.3.5.1 y 5.3.5.2 describen los dos tipos de entrada.
Ubicación X12Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción NextMove ESConector de 96 terminales
10 Pantalla Conexión blindada a32
9 USR GND Puesta a tierra del suministro de energía del cliente
8 DIN7 Entrada digital DIN7 a19
7 DIN6 Entrada digital DIN6 c20
6 DIN5 Entrada digital DIN5 b19
5 DIN4 Entrada digital DIN4 c18
4 DIN3 Entrada digital DIN3 c19
3 DIN2 Entrada digital DIN2 a18
2 DIN1 Entrada digital DIN1 b20
1 DIN0 Entrada digital DIN0 c21
1
10
5-20 Placas posteriores MN1928WES

5.3.4 Entradas digitales 8-15
Las tarjetas optoaislantes BPL010-502 y BPL010-503 utilizan diferentes configuraciones deentrada. Las secciones 5.3.5.1 y 5.3.5.2 describen los dos tipos de entrada.
Ubicación X13Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción NextMove ESConector de 96 terminales
10 Pantalla Conexión blindada a32
9 USR GND Puesta a tierra del suministro de energía del cliente
8 DIN15 Entrada digital DIN15 b18
7 DIN14 Entrada digital DIN14 c23
6 DIN13 Entrada digital DIN13 b24
5 DIN12 Entrada digital DIN12 c26
4 DIN11 Entrada digital DIN11 a25
3 DIN10 Entrada digital DIN10 a24
2 DIN9 Entrada digital DIN9 b25
1 DIN8 Entrada digital DIN8 a26
1
10
MN1928WES Placas posteriores 5-21
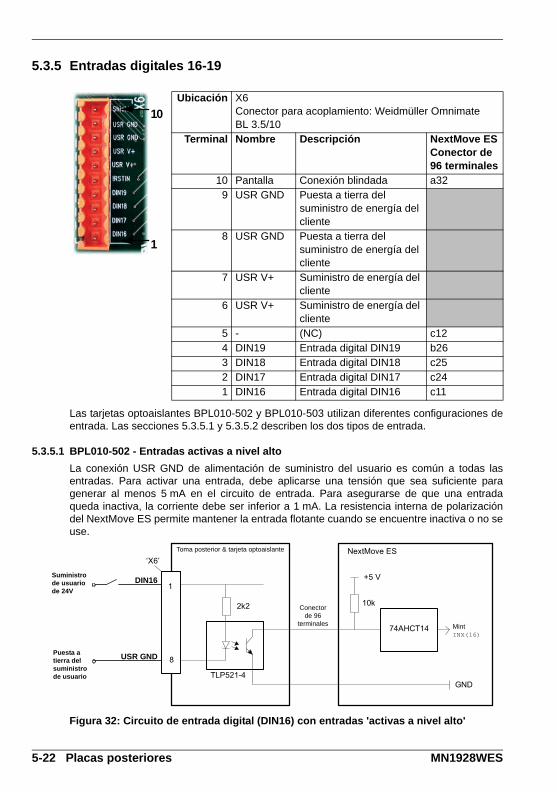
5.3.5 Entradas digitales 16-19
Las tarjetas optoaislantes BPL010-502 y BPL010-503 utilizan diferentes configuraciones deentrada. Las secciones 5.3.5.1 y 5.3.5.2 describen los dos tipos de entrada.
5.3.5.1 BPL010-502 - Entradas activas a nivel alto
La conexión USR GND de alimentación de suministro del usuario es común a todas lasentradas. Para activar una entrada, debe aplicarse una tensión que sea suficiente paragenerar al menos 5 mA en el circuito de entrada. Para asegurarse de que una entradaqueda inactiva, la corriente debe ser inferior a 1 mA. La resistencia interna de polarizacióndel NextMove ES permite mantener la entrada flotante cuando se encuentre inactiva o no seuse.
Figura 32: Circuito de entrada digital (DIN16) con entradas 'activas a nivel alto'
Ubicación X6Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción NextMove ESConector de 96 terminales
10 Pantalla Conexión blindada a329 USR GND Puesta a tierra del
suministro de energía del cliente
8 USR GND Puesta a tierra del suministro de energía del cliente
7 USR V+ Suministro de energía del cliente
6 USR V+ Suministro de energía del cliente
5 - (NC) c124 DIN19 Entrada digital DIN19 b263 DIN18 Entrada digital DIN18 c252 DIN17 Entrada digital DIN17 c241 DIN16 Entrada digital DIN16 c11
1
10
GND
+5 V
NextMove ES
10k
74AHCT14
2k2
TLP521-4
DIN161
USR GND
‘X6’
8
Toma posterior & tarjeta optoaislante
Conector de 96
terminales MintINX(16)
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
5-22 Placas posteriores MN1928WES

Figura 33: Entrada digital - conexiones típicas de un MicroFlex de ABB
Figura 34: Entrada digital - conexiones típicas de un FlexDriveII,
Flex+DriveII o MintDriveII de Baldor
NEC PS2562L-1
2k2
TLP521-4
‘X3’ ‘X6’
3
2
1
8
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
MicroFlex/salida de equipo Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Status+
Status-
DIN16
USR GND
6
18NEC PS2562L-1
2k2
TLP521-4
‘X1’ ‘X6’
1
8
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
FlexDriveII/salida del equipo Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
USRV+
DOUT0
DIN16
USR GND
MN1928WES Placas posteriores 5-23

5.3.5.2 BPL010-503 - Entradas activas a nivel bajo
La conexión USR V+ de alimentación de suministro del usuario es común a todas lasentradas. Para activar una entrada, esta debe ser puesta a tierra del lado de 0 V de laalimentación de suministro del usuario (USR GND). La resistencia interna de polarizacióndel NextMove ES permite mantener la entrada flotante cuando se encuentre inactiva o no seuse.
Figura 35: Circuito de entrada digital (DIN16) con entradas 'activas a nivel bajo'
Figura 36: Entrada digital - conexiones típicas de un MicroFlex de ABB
GND
+5 V
NextMove ES
10k
74AHCT14
2k2
TLP521-4
‘X6’
6
1
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
MintINX(16)
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario DIN16
USR V+
NEC PS2562L-1
2k2
TLP521-4
‘X3’ ‘X6’
3
2
6
1
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
MicroFlex/salida de equipo Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Status+
Status-DIN16
USR V+
5-24 Placas posteriores MN1928WES

Figura 37: Entrada digital - conexiones típicas de un FlexDriveII,
Flex+DriveII o MintDriveII de Baldor
USRV+
DOUT0NEC PS2562L-1
2k2
TLP521-4
USR V+
DIN16
‘X1’ ‘X6’
6
18
6
1
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
FlexDriveII/salida del equipoSuministro de usuario de 24V
Puesta a tierra del suministro de usuario
MN1928WES Placas posteriores 5-25

5.3.6 Salidas digitales, 0-7
Las salidas digitales DOUT0 - DOUT7 disponen de una función buffer mediante la tarjetaoptoaislante.
* Las tarjetas optoaislantes BPL010-502 y BPL010-503 utilizan diferentes circuitosintegrados (CI) de controlador de salida, tal como se muestra en las Figuras 38 y 39. Debidoa la configuración de terminales de estos CI, las funciones de los terminales USR COM yOUT COM del conector' X11 son diferentes en las tarjetas PNP y NPN. Las secciones5.3.6.1 y 5.3.6.2 describen los dos tipos de salida.
Ubicación X11Conector para acoplamiento: Weidmüller Omnimate BL 3.5/10
Terminal Nombre Descripción NextMove ESConector de 96 terminales
10 USR COM Conexión de suministro común*
a3
9 OUT COM Común* a4
8 DOUT7 Salida digital DOUT7 b4
7 DOUT6 Salida digital DOUT6 c4
6 DOUT5 Salida digital DOUT5 a5
5 DOUT4 Salida digital DOUT4 b5
4 DOUT3 Salida digital DOUT3 c5
3 DOUT2 Salida digital DOUT2 a6
2 DOUT1 Salida digital DOUT1 b6
1 DOUT0 Salida digital DOUT0 c6
1
10
5-26 Placas posteriores MN1928WES

5.3.6.1 BPL010-502 - Salidas PNP
Se utiliza un suministro externo (típicamente 24 V CC) para alimentar los dispositivos de salidaUDN2982, tal como se muestra en la Figura 38. Cuando se activa una salida, la corriente seobtiene del suministro del usuario a través del UDN2982, que puede obtener hasta 75 mA porsalida (todas las salidas activas, ciclo de trabajo del 100%). Conectar OUT COM a la puesta atierra del suministro de usuario (GND). Con ello se conectarán los diodos internos supresoresde transitorios en todas las salidas. Si se utiliza una salida para accionar un relé, se debecolocar un diodo de clasificación apropiada a lo largo de la bobina de relé, observando lapolaridad correcta (ver Figura 40). Se recomienda utilizar cable blindado.
Figura 38: Circuito de salida digital (DOUT0-7) con módulo fuente de corriente 'PNP' - se muestra DOUT0
5.3.6.2 BPL010-503 - Salidas NPN
Se utiliza un suministro externo (típicamente 24 V CC) para alimentar los dispositivos de salidaUDN2803 y accionar la carga, tal como se muestra en la Figura 39. Cuando se activa unasalida, queda conectada a USR COM a través del ULN2803, que puede actuar comosumidero de hasta 150 mA por salida (todas las salidas activas, ciclo de trabajo del 100%).Conectar OUT COM al suministro de usuario de 24 V. Con ello se conectarán los diodosinternos supresores de transitorios en todas las salidas. Si se utiliza una salida para accionarun relé, se debe colocar un diodo de clasificación apropiada a lo largo de la bobina de relé,observando la polaridad correcta (ver Figura 40). Se recomienda utilizar cable blindado.
Figura 39: Circuito de salida digital (DOUT0-7) con módulo sumidero de corriente 'NPN' - se muestra DOUT0
OUTX(0)
DOUT0
OUT COM
6
1
9
‘X6’NextMove ES
+5 V
‘X11’2k2
UDN2982
TLP521-4
USR V+
USR COM10
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Circuitería de control
Carga de salida
OUTX(0)USR V+
DOUT0
USR COM
6
1
10
‘X6’NextMove ES+5 V
‘X11’
2k2
ULN2803
TLP521-4
OUT COM9
Toma posterior & tarjeta optoaislante
Conector de 96
terminales
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Circuitería de control
Carga de salida
MN1928WES Placas posteriores 5-27
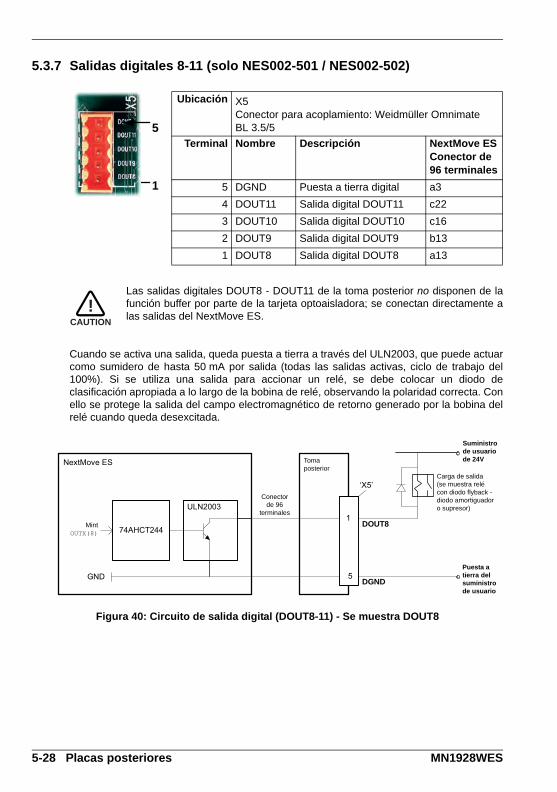
5.3.7 Salidas digitales 8-11 (solo NES002-501 / NES002-502)
Las salidas digitales DOUT8 - DOUT11 de la toma posterior no disponen de lafunción buffer por parte de la tarjeta optoaisladora; se conectan directamente alas salidas del NextMove ES.
Cuando se activa una salida, queda puesta a tierra a través del ULN2003, que puede actuarcomo sumidero de hasta 50 mA por salida (todas las salidas activas, ciclo de trabajo del100%). Si se utiliza una salida para accionar un relé, se debe colocar un diodo declasificación apropiada a lo largo de la bobina de relé, observando la polaridad correcta. Conello se protege la salida del campo electromagnético de retorno generado por la bobina delrelé cuando queda desexcitada.
Figura 40: Circuito de salida digital (DOUT8-11) - Se muestra DOUT8
Ubicación X5Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción NextMove ESConector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DOUT11 Salida digital DOUT11 c22
3 DOUT10 Salida digital DOUT10 c16
2 DOUT9 Salida digital DOUT9 b13
1 DOUT8 Salida digital DOUT8 a13
1
5
!CAUTION
DOUT8
NextMove ES
ULN2003
74AHCT244
DGNDGND
1
‘X5’
5
Toma posterior
Conector de 96
terminales
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
MintOUTX(8)
Carga de salida (se muestra relé con diodo flyback -diodo amortiguador o supresor)
5-28 Placas posteriores MN1928WES
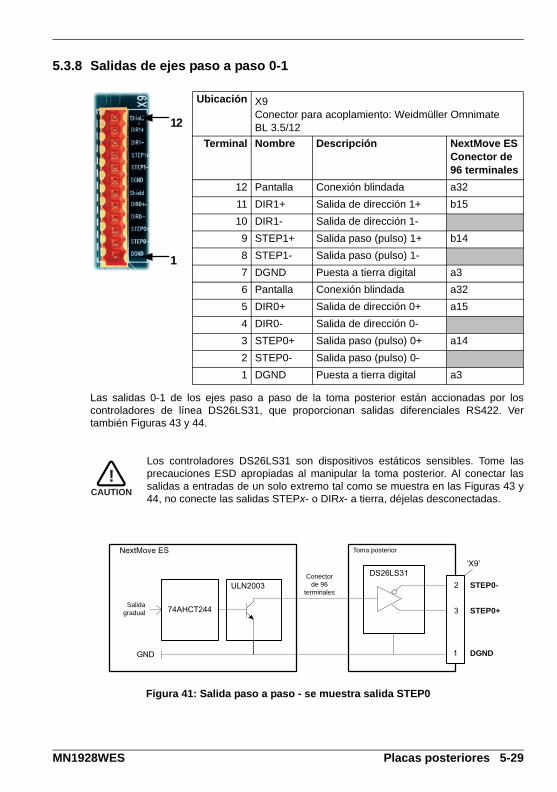
5.3.8 Salidas de ejes paso a paso 0-1
Las salidas 0-1 de los ejes paso a paso de la toma posterior están accionadas por loscontroladores de línea DS26LS31, que proporcionan salidas diferenciales RS422. Vertambién Figuras 43 y 44.
Los controladores DS26LS31 son dispositivos estáticos sensibles. Tome lasprecauciones ESD apropiadas al manipular la toma posterior. Al conectar lassalidas a entradas de un solo extremo tal como se muestra en las Figuras 43 y44, no conecte las salidas STEPx- o DIRx- a tierra, déjelas desconectadas.
Figura 41: Salida paso a paso - se muestra salida STEP0
Ubicación X9Conector para acoplamiento: Weidmüller Omnimate BL 3.5/12
Terminal Nombre Descripción NextMove ESConector de 96 terminales
12 Pantalla Conexión blindada a32
11 DIR1+ Salida de dirección 1+ b15
10 DIR1- Salida de dirección 1-
9 STEP1+ Salida paso (pulso) 1+ b14
8 STEP1- Salida paso (pulso) 1-
7 DGND Puesta a tierra digital a3
6 Pantalla Conexión blindada a32
5 DIR0+ Salida de dirección 0+ a15
4 DIR0- Salida de dirección 0-
3 STEP0+ Salida paso (pulso) 0+ a14
2 STEP0- Salida paso (pulso) 0-
1 DGND Puesta a tierra digital a3
1
12
!CAUTION
NextMove ES
STEP0-
DGND1
2
‘X9’
74AHCT244
GND
DS26LS31
STEP0+3
ULN2003
Toma posterior
Conector de 96
terminales
Salidagradual
MN1928WES Placas posteriores 5-29

5.3.9 Salidas de ejes paso a paso 2-3
Las salidas 2-3 de los ejes paso a paso de la toma posterior están accionadas por loscontroladores de línea DS26LS31, que proporcionan salidas diferenciales RS422.
Los controladores DS26LS31 son dispositivos estáticos sensibles. Tome lasprecauciones ESD apropiadas al manipular la toma posterior. Al conectar lassalidas a entradas de un solo extremo tal como se muestra en las Figuras 43 y44, no conecte las salidas STEPx- o DIRx- a tierra, déjelas desconectadas.
Figura 42: Salida paso a paso - se muestra salida STEP2
Ubicación X10Conector para acoplamiento: Weidmüller Omnimate BL 3.5/12
Terminal Nombre Descripción NextMove ESConector de 96 terminales
12 Pantalla Conexión blindada a32
11 DIR3+ Salida de dirección 3+ a23
10 DIR3- Salida de dirección 3-
9 STEP3+ Salida paso (pulso) 3+ b23
8 STEP3- Salida paso (pulso) 3-
7 DGND Puesta a tierra digital a3
6 Pantalla Conexión blindada a32
5 DIR2+ Salida de dirección 2+ c15
4 DIR2- Salida de dirección 2-
3 STEP2+ Salida paso (pulso) 2+ c14
2 STEP2- Salida paso (pulso) 2-
1 DGND Puesta a tierra digital a3
1
12
!CAUTION
NextMove ES
STEP2-
DGND1
2
‘X10’
74AHCT244
GND
DS26LS31
STEP2+3
ULN2003
Toma posterior
Conector de 96
terminales
Salidagradual
5-30 Placas posteriores MN1928WES

Figura 43: Salida paso a paso STEP2 - conexión típica a un MicroFlex de ABB
Figura 44: Salida paso a paso STEP2 - conexión típica a FlexDriveII,
Flex+DriveII o MintDriveII de Baldor
STEP2+
DGND 1
DS26LS31
STEP2-
3
DGND
Step
6Shield
‘X3’‘X10’
10
11
DIR2+DS26LS31
DIR2-
5 Dir9
Toma posterior
Conector de 96
terminales
Pares trenzados
Conecte las pantallas en un solo extremo
MicroFlex/amplificador de accionamiento
STEP2+
DGND 1
DS26LS31
STEP2-
3
6Shield
‘X10’
DIR2+DS26LS31
DIR2-
5
PulseGND
Pulse+
‘X9’
1
6
Dir+2
DirGND7
Toma posterior
Conector de 96
terminales
Pares trenzados
Conecte las pantallas en un solo extremo
FlexDriveII/salida del equipo
MN1928WES Placas posteriores 5-31

5.3.10 Salidas de ejes paso a paso 4-5 (solo firmware 6 ejes paso a paso)
Las salidas 4-5 de ejes paso a paso solo están disponibles cuando se utiliza el firmwareopcional de 6 ejes paso a paso.
Las salidas de los ejes paso a paso 4-5 de la toma posterior no disponen de lafunción buffer por parte de la tarjeta optoaisladora; se conectan directamente alas salidas del NextMove ES.
Cuando se activa una salida, queda puesta a tierra a través del ULN2003, que puede actuarcomo sumidero de hasta 50 mA por salida (todas las salidas activas, ciclo de trabajo del100%). Si se utiliza una salida para accionar un relé, se debe colocar un diodo declasificación apropiada a lo largo de la bobina de relé, observando la polaridad correcta. Conello se protege la salida del campo electromagnético de retorno generado por la bobina delrelé cuando queda desexcitada.
Figura 45: Salida paso a paso - se muestra salida STEP4
Ubicación X5Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción NextMove ESConector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DOUT11 Salida de dirección 5 c22
3 DOUT10 Salida paso (pulso) 5- c16
2 DOUT9 Salida de dirección 4 b13
1 DOUT8 Salida paso (pulso) 4- a13
1
5
!CAUTION
STEP4
NextMove ES
ULN2003
MintSTEP4 74AHCT244
DGNDGND
1
‘X5’
5
Toma posterior
Conector de 96
terminales
Suministro de usuario de 24V
Puesta a tierra del suministro de usuario
Carga de salida
5-32 Placas posteriores MN1928WES
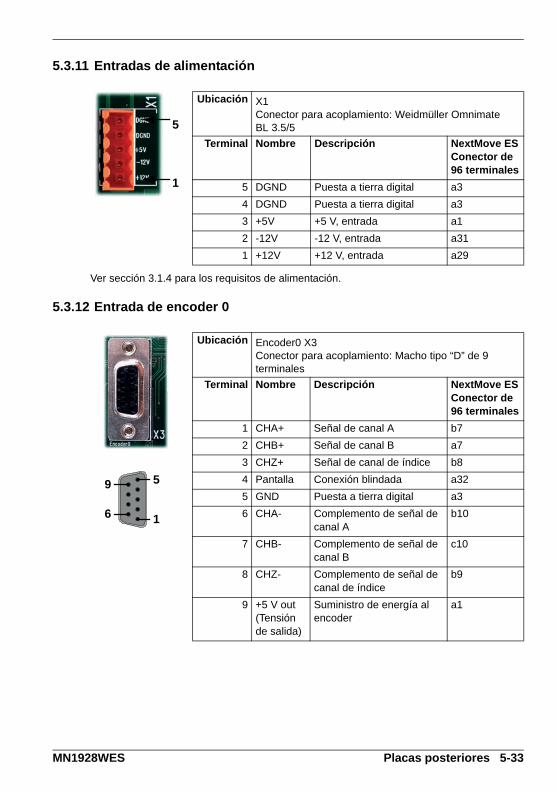
5.3.11 Entradas de alimentación
Ver sección 3.1.4 para los requisitos de alimentación.
5.3.12 Entrada de encoder 0
Ubicación X1Conector para acoplamiento: Weidmüller Omnimate BL 3.5/5
Terminal Nombre Descripción NextMove ESConector de 96 terminales
5 DGND Puesta a tierra digital a3
4 DGND Puesta a tierra digital a3
3 +5V +5 V, entrada a1
2 -12V -12 V, entrada a31
1 +12V +12 V, entrada a29
Ubicación Encoder0 X3 Conector para acoplamiento: Macho tipo “D” de 9 terminales
Terminal Nombre Descripción NextMove ESConector de 96 terminales
1 CHA+ Señal de canal A b7
2 CHB+ Señal de canal B a7
3 CHZ+ Señal de canal de índice b8
4 Pantalla Conexión blindada a32
5 GND Puesta a tierra digital a3
6 CHA- Complemento de señal de canal A
b10
7 CHB- Complemento de señal de canal B
c10
8 CHZ- Complemento de señal de canal de índice
b9
9 +5 V out (Tensión de salida)
Suministro de energía al encoder
a1
1
5
1
5
6
9
MN1928WES Placas posteriores 5-33

5.3.13 Entrada de encoder 1
Ver sección 4.5.2 en relación a las especificaciones de las entradas de encoder.
5.3.14 Puerto serie
Este conector serie transporta las mismas señales que el conector serie de la tarjeta decontrol del NextMove ES. No utilizar ambos conectores en serie al mismo tiempo.
*Los terminales 4 y 6 están vinculados en el NextMove ES.
Ubicación Encoder1 X2 Conector para acoplamiento: Macho tipo “D” de 9 terminales
Terminal Nombre Descripción NextMove ESConector de 96 terminales
1 CHA+ Señal de canal A a82 CHB+ Señal de canal B c73 CHZ+ Señal de canal de índice c84 Pantalla Conexión blindada a325 GND Puesta a tierra digital a16 CHA- Complemento de señal de
canal Ac9
7 CHB- Complemento de señal de canal B
a10
8 CHZ- Complemento de señal de canal de índice
a9
9 +5 V out (Tensión de salida)
Suministro de energía al encoder
a1
Ubicación X4 SerieConector para acoplamiento: Hembra tipo “D” de 9 terminales
Terminal Nombre Descripción NextMove ESConector de 96 terminales
1 Pantalla (NC) a322 RXD RX- (entrada) a203 TXD TX- (salida) a214 (NC) (NC) a16*5 DGND Puesta a tierra digital a36 (NC) (NC) a17*7 RTS TX+ (salida) b218 CTS RX+ (entrada) a229 DGND (NC) a3
1
5
6
9
1
5
6
9
5-34 Placas posteriores MN1928WES

Funcionamiento6 Funcionamiento
6.1 IntroducciónAntes de conectar el NextMove ES, necesitará conectarlo al PC utilizando un cable serie oUSB e instalar el software Mint WorkBench. Este software incluye varias aplicaciones yutilidades que le permiten configurar, ajustar y programar el NextMove ES. Puedeencontrarse Mint WorkBench y otras utilidades en el CD Mint Motion Toolkit (OPT-SW-001),o descargarse desde www.abbmotion.com
6.1.1 Conexión del NextMove ES al PCEl NextMove ES puede conectarse al PC utilizando bien RS232 o RS485 (dependiendo delmodelo), o USB (para todos los modelos).
Para utilizar RS232 o RS485, conectar un cable serie adecuado entre un puerto serie del PC(normalmente etiquetados como "COM") y el conector serie de NextMove ES. Si estáutilizando un convertidor intermedio de RS232 a RS485, conéctelo tal como indica sufabricante. El Mint WorkBench puede identificar todos los puertos COM del PC, por lo quepuede utilizar cualquiera de ellos. Si no utiliza el cable serie CBL001-501, su cable debeconectarse de acuerdo con la Figura 16 en la sección 4.5.5.
Para el empleo de USB, conectar un cable USB entre un puerto USB del PC y el conectorUSB de NextMove ES. Su PC debe funcionar con Windows XP o versión de Windowssuperior.
6.1.2 Instalación de Mint WorkBenchLa cuenta de usuario de Windows requiere derechos administrativos de usuario para lainstalación de Mint WorkBench.
6.1.2.1 Para la instalación de Mint WorkBench desde el CD (OPT-SW-001)1. Introduzca el CD en la unidad.
2. El asistente de configuración se iniciará automáticamente unos segundos después. Si elasistente de configuración no aparece, seleccionar Ejecutar en el menú de inicio deWindows y escribir
d:\start
donde d representa la letra correspondiente a la unidad del dispositivo CD.
Siga las instrucciones de la pantalla para instalar el Mint WorkBench.
6.1.2.2 Para la instalación del Mint WorkBench desde el sitio web
Para la instalación del Mint WorkBench desde www.abbmotion.com, descartar la aplicacióny ejecutarla.
6.1.3 Puesta en marcha del NextMove ESSi siguió las instrucciones de las secciones anteriores, ya debería haber conectado lasfuentes de alimentación, las entradas y salidas de su elección y la conexión de cable serie oUSB para conectar el PC al NextMove ES.
6
MN1928WES Funcionamiento 6-1

6.1.4 Comprobaciones preliminaresAntes de conectar el equipo por primera vez, es muy importante verificar lo siguiente:
Desconectar la carga del motor hasta que se indique que aplique una carga. Inspeccionar todas las conexiones de energía y verificar la precisión, la fabricación y la
solidez. Verificar que todo el cableado cumple con los códigos correspondientes. Verificar que el NextMove ES esté correctamente puesto a tierra/masa. Verificar la precisión de todo el cableado de señales.
6.1.5 Comprobaciones de encendido1. Conectar las alimentaciones de 5 V y ±12 V.
2. Tras una breve secuencia ( seguido de ), la pantalla de estado deberá mostrar el
número de nodo, por ejemplo , el valor de fábrica por defecto. Si la pantalla no seenciende, vuelva a verificar las conexiones de suministro de energía. Un LED verdeSMD (D16) situado cerca del centro del NextMove ES deberá estar tambiénparpadeando una vez cada dos segundos. El NextMove ES está ya ahora listo para serconfigurado utilizando Mint WorkBench.
Nota: Si el LED rojo (D4) situado cerca del centro del NextMove ES permaneceiluminado, significa que la tensión de alimentación es demasiado baja. Ver lasección 7.2.2 en cuanto a la ubicación de los LED. Si la pantalla de estadomuestra uno de los dígitos 0 - 7 con un punto decimal parpadeando, significaque el NextMove ES ha detectado un fallo y no puede ponerse en marcha. Eneste caso improbable, contactar con el servicio de asistencia técnica de ABB.
6.1.6 Instalación del driver de USBCuando se encienda el NextMove ES, Windows detectará automáticamente el controlador ysolicitará el driver.
1. Windows solicitará el driver. Bajo Windows XP, haga clic en Siguiente en los diálogosque aparecen y Windows localizará e instalará el driver. Para Windows Vista ysuperiores, no será necesaria interacción alguna.
2. Una vez finalizada la instalación, aparecerá una nueva categoría de control demovimiento en el gestor de dispositivos de Windows.
El NextMove ES está ya ahora listo para ser configurado utilizando Mint WorkBench.
Nota: Si más adelante el NextMove ES se conecta a otro puerto USB en el ordenadoranfitrión, Windows puede notificar que ha encontrado nuevo hardware. Instalelos archivos del driver nuevamente para el nuevo puerto USB o conecte elNextMove ES al puerto USB original, donde será reconocido de la maneranormal.
6-2 Funcionamiento MN1928WES

6.2 Mint Machine CenterEl Mint Machine Center (MMC) se instala como parte del software Mint WorkBench. Seutiliza para visualizar la red de controladores conectados en un sistema. Los controladores yaccionamientos individuales se configuran utilizando el Mint WorkBench.
Nota: Si únicamente posee un único NextMove ES conectado a su PC, entoncesprobablemente no requerirá el MMC. Utilice el Mint WorkBench (ver la sección6.3) para configurar el NextMove ES.
Figura 46: El software Mint Machine Center
El Mint Machine Center (MMC) proporciona una descripción general de la red decontroladores a la que el PC puede acceder en ese momento. El MMC contiene un cuadrode controladores a la izquierda y otro de información a la derecha. En el cuadro decontroladores seleccione el elemento Anfitrión y luego haga clic en Buscar en el cuadro deinformación. Esta acción hará que el MMC busque todos los controladores conectados. Sihace clic en el nombre de un controlador podrá ver varias opciones en el cuadro deinformación. Si hace doble clic en el nombre de un controlador, se ejecutará una petición deMint WorkBench que será vinculada automáticamente al controlador.
La Vista de aplicación permite que la pantalla modele y describa el diseño y la organizaciónde los controladores en su máquina. Los controladores se pueden arrastrar al icono Vista deaplicación, para darles un nuevo nombre más descriptivo, por ejemplo, “Cintatransportador 1, Controlador de empaquetado”. Los accionamientos controlados por otroproducto, como el NextMove ES, pueden ser arrastrados al icono mismo de NextMove ES,creando una representación visible de la máquina. Se puede agregar un texto de descripcióndel sistema, así como también archivos asociados y el diseño resultante guardado como“Espacio de trabajo del MMC”. En el futuro, cuando necesite administrar el sistema, basta concargar el espacio de trabajo para conectarse automáticamente con todos los controladoresnecesarios. Ver el archivo de ayuda de Mint para obtener todos los detalles del MMC.
Barras de herramientas
Cuadro de controladores
Sistema de menús
Cuadro de información
MN1928WES Funcionamiento 6-3

6.2.1 Inicio del MMC1. En el menú Inicio de Windows, seleccione Programas, Mint WorkBench, Mint Machine
Center.
2. En el cuadro de controladores, asegúrese de queesté seleccionado Anfitrión. En el cuadro deinformación, haga clic en Buscar.
3. Cuando la búsqueda haya finalizado, haga clic unavez en “NextMove ES” en el cuadro decontroladores para seleccionarlo y luego doble clicpara abrir el Mint WorkBench. El NextMove ES yaestará vinculado a la petición de Mint WorkBench yestará listo para configurarse.
6-4 Funcionamiento MN1928WES
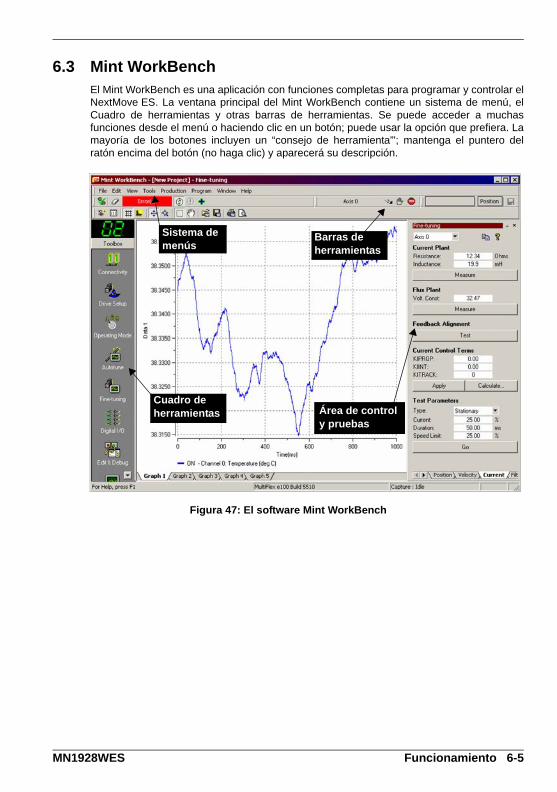
6.3 Mint WorkBenchEl Mint WorkBench es una aplicación con funciones completas para programar y controlar elNextMove ES. La ventana principal del Mint WorkBench contiene un sistema de menú, elCuadro de herramientas y otras barras de herramientas. Se puede acceder a muchasfunciones desde el menú o haciendo clic en un botón; puede usar la opción que prefiera. Lamayoría de los botones incluyen un “consejo de herramienta”'; mantenga el puntero delratón encima del botón (no haga clic) y aparecerá su descripción.
Figura 47: El software Mint WorkBench
Barras de herramientas
Sistema de menús
Cuadro de herramientas Área de control
y pruebas
MN1928WES Funcionamiento 6-5

6.3.1 Archivo de ayudaEl Mint WorkBench incluye un archivo de ayuda completo que contiene información sobretodas las palabras clave de Mint, cómo usar el Mint WorkBench y la informacióncomplementaria sobre temas de control de movimientos. Este archivo de ayuda se puedevisualizar en cualquier momento pulsando F1. A la izquierda de la ventana de ayuda, la
pestaña Contenido muestra una estructura de árbol del archivo de ayuda; cada libro
contiene varios temas . La pestaña Índice proporciona una lista alfabética de todos lostemas en el archivo y permite buscarlos por nombre. La pestaña Buscar permite buscarpalabras o frases que aparezcan en cualquier parte del archivo de ayuda. Muchas palabrasy frases se encuentran subrayadas y resaltadas con un color (normalmente azul) paraindicar que son vínculos. Haga clic en el vínculo para ir a una palabra clave asociada. Lamayoría de los temas de palabras clave comienzan con una lista de vínculos relevantes através de Ver también.
Figura 48: Mint WorkBench archivo de ayuda
Para obtener ayuda sobre cómo usar el Mint WorkBench, haga clic en la pestaña Contenido
y luego en el signo de adición pequeño junto al icono del libro del Mint WorkBench &
Mint Machine Center. Haga doble clic en el nombre de un tema para visualizarlo.
6-6 Funcionamiento MN1928WES

6.3.2 Inicio del Mint WorkBench
Nota: Si ya ha utilizado el MMC para instalar firmware e iniciar una petición del MintWorkBench, vaya directamente a la sección 6.4 para continuar la configuración.
1. En el menú Inicio de Windows, seleccione Programas, Mint WorkBench, MintWorkBench.
2. En el cuadro de diálogo que se abra, haga clic en Iniciar nuevo proyecto... .
MN1928WES Funcionamiento 6-7

3. En el diálogo de selección de controlador, dirigirse al cuadro desplegable cerca de laparte superior y seleccionar No buscar puertos serie.
Haga clic en Buscar para localizar el NextMove ES.
Cuando la búsqueda se haya completado, haga clic en "NextMove ES"' en la lista paraseleccionarlo y luego haga clic en Seleccionar.
Nota: Si el NextMove ES no se encuentra en la lista, verifique el cable USB o en serieque conecta al NextMove ES y el PC. Compruebe que el NextMove ES estéencendido correctamente y que haya completado su proceso de inicio (que seindica cuando la pantalla de estado muestra el número de nodo). Haga clic enBuscar para volver a buscar en los puertos.
4. Se puede visualizar un cuadro de diálogo que le dirá que el Mint WorkBench hadetectado un nuevo firmware.
Haga clic en Aceptar para continuar. El Mint WorkBench volverá a leer los datosprovenientes del NextMove ES. Una vez que esto se haya completado, se mostrará elmodo Editar y depurar. Con esto se completa la instalación del software.
6-8 Funcionamiento MN1928WES

6.4 Configuración de un ejeEl NextMove ES es capaz de controlar 2 ejes servoasistidos y 4 ejes paso a paso. Estasección describe cómo configurar ambos tipos de ejes.
6.4.1 Selección del tipo de ejePuede configurarse un eje bien como servoeje o bien como eje para el motor paso a paso.La configuración preestablecida de fábrica define todos los ejes como “no asignados”(desactivados). Por lo tanto, es necesario configurar un eje, como para motor paso a paso oservoeje antes de que se pueda utilizar. El número de canales de hardware de servo y delmotor paso a paso define cuántos ejes de cada tipo se pueden configurar. En el siguienteejemplo, el Asistente de configuración de ejes del Mint WorkBench se utilizará para asignarlos ejes:
1. En el cuadro de herramientas, haga clicen el icono Configuración de ejes.
2. Para cada eje requerido, haga clic en lacolumna de configuración y seleccioneServo o Gradual del cuadro desplegable.
El asistente de configuración de ejesasignará automáticamente un canal dehardware al eje. Por ejemplo, el canalservo 0 indica que el servoeje utilizará lasalida Demand0 del controlador; el canal1 de velocidad gradual indica que el ejepara el motor paso a paso utilizará las salidas STEP1 y DIR1 del controlador. De formaopcional, la asignación del canal de hardware por defecto puede alterarse haciendo clicen la columna de canal de hardware y escogiendo un canal alternativo. Esto significaque el eje no utilizará más las salidas físicas numeradas correspondientes (Demandx oSTEPx & DIRx), de forma que debe prestarse un cuidado especial en la conexión delNextMove ES a los amplificadores de accionamiento.
3. Haga clic en Acabar para completar el asistentede configuración de ejes. La configuración de ejesse descargará en el NextMove ES.
Nota: Si se visualiza un mensaje de error "elcanal de hardware requerido está siendoutilizado" o "hardware no disponible", la configuración no se descargará. Esprobable que el número de ejes servo o paso a paso seleccionados supere elnúmero de ejes físicos de ese tipo disponibles en el NextMove ES. Tambiénpuede ser causa de un error que se haya seleccionado el mismo canal dehardware para más de un servoeje, o para más de un eje paso a paso.
Se recomienda que los ejes sin utilizar permanezcan siempre en la posición dedesconectados (OFF), ya que ello provee más tiempo de procesamiento para los ejes queestán siendo utilizados. Establecer un eje virtual significa que puede utilizarse para simularmovimiento dentro del controlador, pero no utilizar salidas físicas (canal de hardware).
Ver el fichero de ayuda de Mint en cuanto a los detalles de las palabras clave CONFIG yAXISCHANNEL.
MN1928WES Funcionamiento 6-9

6.4.2 Seleccionar una escalaMint define todas las palabras clave de movimiento relacionadas con la posición y lavelocidad en términos de conteos por cuadratura (para servomotores) o pasos para motorespaso a paso. El número de conteos por cuadratura (o pasos) está dividido porSCALEFACTOR, lo que permite utilizar unidades más adecuadas para su aplicación. Launidad definida por el ajuste de un valor se denomina unidad de usuario (uu).
Por ejemplo, un servomotor con un encoder de 1000 líneas. Esto provee 4000 conteos porcuadratura por cada revolución. Si el SCALEFACTOR no está establecido, un comando deMint que involucra distancia, velocidad o aceleración, quizá deba utilizar un número mayorpara especificar un movimiento significativo. Por ejemplo, MOVER(0)=16000 (MovimientoRelativo) rotaría el motor en 16 000 conteos por cuadratura - solo cuatro revoluciones. Alestablecer un SCALEFACTOR de 4000, la unidad de usuario se convierte en revoluciones. Elcomando más comprensible MOVER(0)=4 se podría usar ahora para mover el motor cuatrorevoluciones (vueltas).
El mismo concepto se aplica a motores paso a paso, donde la escala se puede establecersegún el número de pasos por revolución. Generalmente, esto sería 200 para un motor conun ángulo de paso de 1,8° o 400 si se transmite en el modo de medio paso. Al establecer unSCALEFACTOR de 200 (o 400 si se transmite en el modo de medio paso), la unidad deusuario se convierte en revoluciones.
En aplicaciones con movimiento lineal, un valor adecuado para el SCALEFACTOR permitiríaque los comandos expresaran valores en distancia lineal, por ejemplo , pulgadas, pies omilímetros.
1. En el Cuadro de herramientas, haga clic en el iconoParámetros.
2. Haga clic en la pestaña Escala.
3. Haga clic en el cuadro desplegable de Ejes paraseleccionar el eje. Cada eje puede tener, si serequiere, una escala diferente.
4. Hacer clic en el cuadro de escalado y escribir unvalor.
5. Hacer clic en Aplicar.
Esto define inmediatamente el factor deescalamiento para el eje seleccionado, quepermanecerá en el NextMove ES hasta que sedefina otra escala o hasta que se desconecte laenergía del NextMove ES. Ver la sección 6.11 encuanto a los detalles relativos a guardar losparámetros de configuración.
6-10 Funcionamiento MN1928WES

6.4.3 Ajuste de la salida de habilitación del accionamientoUna salida de habilitación de accionamiento permite al NextMove ES habilitar el amplificadorde accionamiento externo para producir el movimiento o para deshabilitarlo en caso de unerror. Cada eje se puede configurar con su salida de habilitación de accionamiento propia opuede compartir una salida con otros ejes. Si la salida se comparte, un error en cualquierade los ejes que esté compartiendo la salida hará que se deshabiliten todos.
La salida de habilitación de accionamiento puede ser bien una salida digital o bien la salidade error (ver sección 4.4.3). Si el NextMove ES está conectado a una toma posterior ABBcon tarjeta de optoaislamiento, la salida de error controla el relé.
1. En el Cuadro de herramientas, haga clic en elicono E/S.
2. En la parte inferior de la pantalla de E/S digital,haga clic en la pestaña Salidas digitales.
La parte izquierda de la pantalla muestra dosiconos amarillos, Alto y Bajo. Estos describenel comportamiento de la salida cuando estáactivada (para habilitar el eje).
3. Si se va a utilizar el relé, ignore este paso ypasar directamente al paso 4.
Si se va a utilizar una salida digital, arrastre elicono amarillo correspondiente hasta el iconogris de SALIDA (OUT) que se utilizará comosalida de habilitación del accionamiento. Eneste ejemplo, se utiliza OUT1. El color delicono' cambiará a azul brillante.
4. Si utiliza el relé, arrastre elicono Relay0 hasta elicono gris Drive Enable OPen la parte derecha de lapantalla.
Nota: La salida de error se representa mediante el icono Relay0. Esto es así porque lasalida de error controla siempre un relé cuando el NextMove ES se utilizaconjuntamente con una toma posterior optoaislante. Cuando el NextMove ES nose utiliza con una toma posterior optoaislante, el icono Relay0 siguerepresentando la salida de error.
Para configurar múltiples ejes y usar la salida de error, repita este paso en los otros ejes.
MN1928WES Funcionamiento 6-11

Si utiliza una salida digital,arrastre el icono azul brillanteOUT hasta el icono gris de ejeDrive Enable OP en la partederecha de la pantalla.
Para configurar múltiples ejes con la misma salida de habilitación de accionamiento, repitaeste paso en los otros ejes.
5. Haga clic en Aplicar en la parte inferior dela pantalla. Esto envía la configuración desalida al NextMove ES.
Ver la sección 6.11 en cuanto a los detallesrelativos a guardar los parámetros deconfiguración.
6.4.4 Probar la salida de habilitación del accionamiento1. En la barra de herramientas principal de Mint
WorkBench, haga clic sobre el botón del Eje0-5. En el cuadro de diálogo Seleccionar ejespredeterminados, seleccione los ejes que secontrolarán. Haga clic en Aceptar (OK) paracerrar el diálogo.
2. En la barra de herramientas principal del MintWorkBench, haga clic en el botón Habilitaciónde accionamiento Haga clic en el botónnuevamente. Cada vez que haga clic en elbotón, se activarán las salidas de habilitaciónde accionamiento para los ejes seleccionados. Cuando el botón se encuentra pulsado en laposición (hacia abajo), el amplificador deaccionamiento debe estar activado. Cuando elbotón se encuentra elevado en la posición (hacia arriba), el amplificador deaccionamiento debe estar desactivado.
Si no funciona, o la acción del botón es la inversa, compruebe las conexiones eléctricasentre la toma posterior y el amplificador de accionamiento.
Si está utilizando el relé, compruebe que esté utilizando las conexiones normalmenteabierta (REL NO) o normalmente cerrada (REL NC) correctas.
Si está utilizando una salida digital, compruebe que esté utilizando el método deactivación alto o bajo esperado por el amplificador de accionamiento.
6-12 Funcionamiento MN1928WES
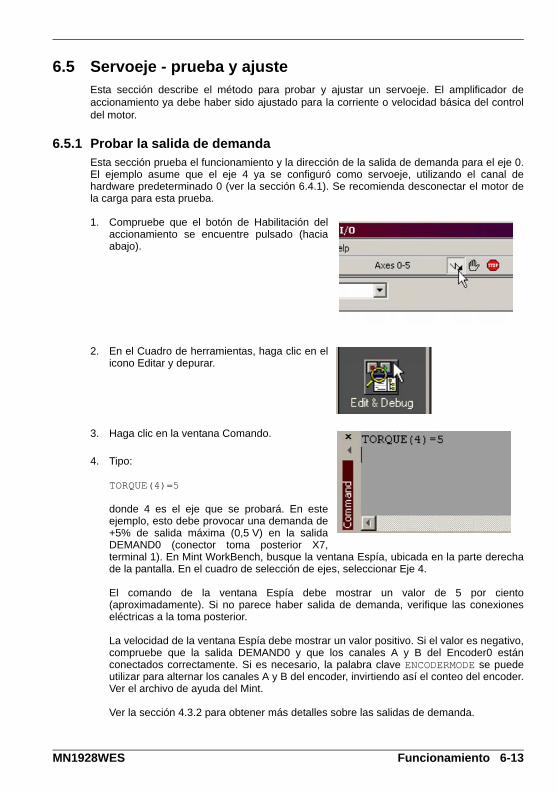
6.5 Servoeje - prueba y ajusteEsta sección describe el método para probar y ajustar un servoeje. El amplificador deaccionamiento ya debe haber sido ajustado para la corriente o velocidad básica del controldel motor.
6.5.1 Probar la salida de demandaEsta sección prueba el funcionamiento y la dirección de la salida de demanda para el eje 0.El ejemplo asume que el eje 4 ya se configuró como servoeje, utilizando el canal dehardware predeterminado 0 (ver la sección 6.4.1). Se recomienda desconectar el motor dela carga para esta prueba.
1. Compruebe que el botón de Habilitación delaccionamiento se encuentre pulsado (haciaabajo).
2. En el Cuadro de herramientas, haga clic en elicono Editar y depurar.
3. Haga clic en la ventana Comando.
4. Tipo: TORQUE(4)=5
donde 4 es el eje que se probará. En esteejemplo, esto debe provocar una demanda de+5% de salida máxima (0,5 V) en la salidaDEMAND0 (conector toma posterior X7,terminal 1). En Mint WorkBench, busque la ventana Espía, ubicada en la parte derechade la pantalla. En el cuadro de selección de ejes, seleccionar Eje 4.
El comando de la ventana Espía debe mostrar un valor de 5 por ciento(aproximadamente). Si no parece haber salida de demanda, verifique las conexioneseléctricas a la toma posterior.
La velocidad de la ventana Espía debe mostrar un valor positivo. Si el valor es negativo,compruebe que la salida DEMAND0 y que los canales A y B del Encoder0 estánconectados correctamente. Si es necesario, la palabra clave ENCODERMODE se puedeutilizar para alternar los canales A y B del encoder, invirtiendo así el conteo del encoder.Ver el archivo de ayuda del Mint.
Ver la sección 4.3.2 para obtener más detalles sobre las salidas de demanda.
MN1928WES Funcionamiento 6-13

5. Para repetir las pruebas para demandas negativas (inversas), escriba:
TORQUE(4)=-5
6. Esto hará que se produzca una demanda de salida máxima de -5% (-0,5 V) en la salidaDEMAND0. De la misma manera, la Velocidad de la ventana Espía debe mostrar unvalor negativo.
7. Para eliminar la demanda y detener la prueba,escriba:
STOP(4)
Esto debe provocar que la demandaproducida en la salida DEMAND0 se vuelva de0 V.
Si es necesario que se gire el motor en la dirección opuesta para una demanda positiva, sedeben utilizar las palabras clave DACMODE y ENCODERMODE. La palabra clave DACMODE sepuede utilizar para invertir el voltaje de salida de la demanda. La palabra claveENCODERMODEse debe usar entonces para invertir la señal de realimentación entrante, paracorresponder con la salida de demanda invertida. Tenga en cuenta que si el ENCODERMODEya se utilizó para compensar un conteo inverso de encoder (como se describió en el paso 4.anteriormente), será necesario volver a cambiarlo a su configuración original para que secorresponda con la salida de demanda invertida establecida utilizando DACMODE. Ver elarchivo de ayuda de Mint para obtener todos los detalles de cada palabra clave.
6-14 Funcionamiento MN1928WES
6.5.2 Una introducción al control de bucle cerradoEsta sección describe los principios básicos del control de bucle cerrado. Si ya estáfamiliarizado con el control de bucle cerrado, pase directamente a la sección 6.6.1.
Cuando haya un requerimiento para mover un eje, el software de control NextMove EStraduce el mismo en un voltaje de salida de demanda. Esto se utiliza para controlar elamplificador de accionamiento que provee energía al motor. Se utiliza un encoder o unresolver en el motor para medir la posición del motor' Cada 1 ms* (ajustable utilizando lapalabra clave LOOPTIME), el NextMove ES compara las posiciones de demanda y medida.Después, calcula la demanda necesaria para minimizar la diferencia entre ellas, conocidacomo error de seguimiento.
Este sistema de medición y corrección constantes se conoce como control de bucle cerrado. [ Como analogía, imagine que se encuentra en su coche esperando en una intersección. Vaa seguir en la misma dirección cuando el semáforo cambie, igual que el coche que estádelante suyo, llamado Demanda. No va a hacer una carrera con Demanda, su trabajo comocontrolador (NextMove ES) es mantenerse al mismo nivel que Demanda, mirando por laventana para medir su posición].
El término principal que utiliza el NextMove ES para corregir el error se denomina Gananciaproporcional (KPROP). Un controlador proporcional muy simple solo multiplicaría lacantidad de errores por la ganancia proporcional y aplicaría el resultado al motor [cuantomás se aleja Demanda, hacia adelante o hacia atrás, más presiona o suelta el acelerador].
Si la Ganancia proporcional se define como muy alta, se superará el nivel de la demanda,que hará que el motor vibre y se mueva alrededor de la posición deseada antes deasentarse [presiona el acelerador tan fuerte que pasa a Demanda. Para mantenerse a nivel,suelta el acelerador, pero termina quedándose un poco por detrás. Continúe repitiendo estoy tras un par de intentos termina al mismo nivel que Demanda, viajando a una velocidaduniforme. Esto era lo que quería hacer, pero le llevó bastante tiempo].Si la Ganancia proporcional se aumenta aún más, el sistema se vuelve inestable [continúapresionando y luego soltando el acelerador tan fuerte que nunca viaja a una velocidaduniforme].
Para reducir el comienzo de la inestabilidad, se utiliza un término denominado Ganancia derealimentación de velocidad (KVEL). Esto resiste al movimiento rápido del motor y permiteque la Ganancia proporcional se defina más alta antes de que comience la vibración. Otrotérmino llamado Ganancia derivativa (KDERIV) también se puede usar para dar un efectosimilar.
Con la Ganancia proporcional y la Ganancia realimentación de velocidad (o Gananciaderivativa) es posible que un motor se detenga con un pequeño error de seguimiento[Demanda se detuvo, por eso usted también se detuvo, pero no al mismo nivel]. ElNextMove ES intenta corregir el error, pero como el error es muy pequeño la torsiónnecesaria quizá no sea suficiente para superar la fricción.
Este problema se resuelve utilizando un término llamado Ganancia integral (KINT). Estosuma el error con el paso del tiempo, de manera que la torsión del motor se aumentegradualmente hasta que el error posicional se reduce a cero [como si una persona empujaragradualmente cada vez más fuerte su coche hasta ponerlo al mismo nivel que Demanda].
MN1928WES Funcionamiento 6-15

Sin embargo, si existe una carga grande en el motor (si sostiene una carga pesadasuspendida, por ejemplo), es posible que la salida aumente su demanda en un 100%. Esteefecto se puede limitar utilizando la palabra clave KINTLIMIT, que limita el efecto de KINT aun determinado porcentaje de la salida de demanda. Otra palabra clave denominadaKINTMODE puede incluso desactivar la acción integral cuando no es necesaria.
* El intervalo de muestreo de 1 ms puede modificarse utilizando la palabra clave LOOPTIMEa 2 ms, 500 µs, 200 µs o 100 µs.
Los términos de ganancia restantes son el Avance de velocidad (KVELFF) y el Avance dela aceleración (KACCEL), que se describen a continuación.
Para resumir, se pueden utilizar las siguientes reglas como guía.
KPROP: Aumentar el KPROP acelerará la respuesta y reducirá el efecto deperturbaciones y variaciones en la carga. El efecto secundario de aumentar el KPROPes que también se aumenta la sobretensión y si se define muy alto, hará que el sistemase vuelva inestable. El objetivo es definir la Ganancia proporcional lo más alta posiblesin provocar una sobretensión, inestabilidad u oscilaciones pendulares en el borde deun encoder cuando se encuentra en posición estacionaria (el motor zumbará).
KVEL: Esta ganancia tiene un efecto de atenuación en toda la respuesta y puedeaumentarse para reducir cualquier sobretensión. Si el KVEL se vuelve muy grandeamplificará cualquier ruido en la medición de velocidad y provocará oscilaciones.
KINT: Esta ganancia tiene un efecto desestabilizador, pero una pequeña cantidad sepuede utilizar para reducir errores de estado de equilibrio. Por defecto, KINTMODE seencuentra siempre encendido (modo 1).
KINTLIMIT: El límite de integración determina el valor máximo del efecto de acciónintegral. Esto se especifica como porcentaje de la demanda de escala completa.
KDERIV: Esta ganancia tiene un efecto de atenuación que depende del índice decambio de error y por lo tanto es especialmente útil para eliminar la sobretensión.
KVELFF: Este es un término de avance y como tal tiene un efecto en el servosistemadiferente al de las ganancias anteriores. KVELFF se encuentra fuera del bucle cerrado ypor lo tanto no tiene un efecto sobre la estabilidad del sistema. Esta ganancia permiteuna respuesta más rápida para exigir cambios de velocidad con errores menores deseguimiento; por ejemplo, aumentaría el KVELFF para reducir el siguiente error deseguimiento durante la sección de giro horizontal de un movimiento trapezoidal. Elmovimiento de prueba trapezoidal se puede utilizar para ajustar más finamente estaganancia. Este término es especialmente útil con servos controlados por velocidad
KACCEL: Este término está diseñado para reducir sobretensiones de velocidad enmovimientos de aceleración alta.
6-16 Funcionamiento MN1928WES
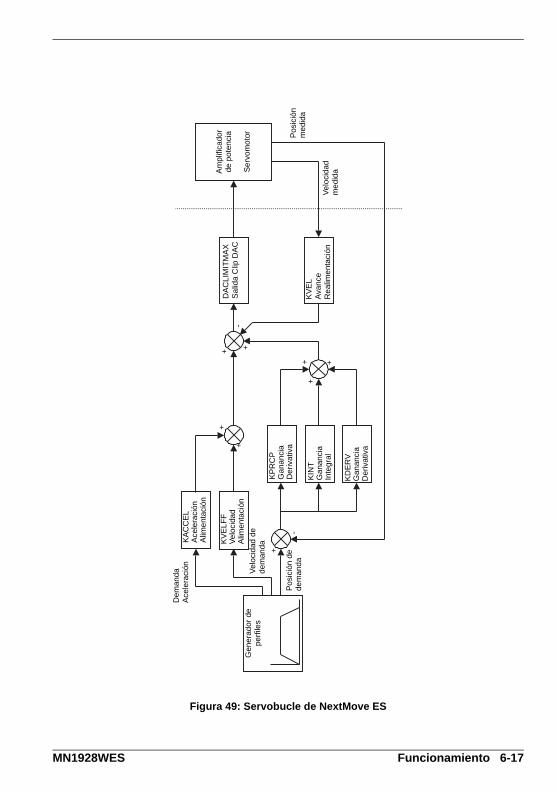
Figura 49: Servobucle de NextMove ES
+
-
-
+
++ +
+
++
Dem
anda
Ace
lera
ción Vel
oci
dad
de
d
em
anda
Po
sici
ón d
e de
ma
nda
Ve
loci
dad
m
ed
ida
Pos
ició
n m
edi
da
Gen
era
do
r de
p
erf
iles
KA
CC
EL
Ace
lera
ción
Alim
ent
ació
n
KV
EL
FF
Ve
loci
dad
Alim
enta
ción
KP
RC
PG
ana
nci
aD
eriv
ativ
a
KIN
TG
ana
ncia
In
teg
ral
KD
ER
VG
anan
cia
Der
ivat
iva
DA
CLI
MIT
MA
XS
alid
a C
lip D
AC
KV
EL
Ava
nce
Re
alim
ent
aci
ón
Am
plif
ica
dor
de p
ote
nci
a
Se
rvo
mo
tor
MN1928WES Funcionamiento 6-17

6.6 Servoeje - ajuste para el control de corriente
6.6.1 Seleccionar ganancias de servobucleTodos los parámetros del servobucle tienen como predeterminado el valor cero, lo quesignifica que la salida de demanda será cero al encender el equipo. La mayoría de losamplificadores de accionamiento se pueden establecer en el modo de control de corriente(torsión) o en el modo de control de velocidad. Verifique que el amplificador deaccionamiento funcione en el modo correcto. El procedimiento para configurar las gananciasdel sistema difiere ligeramente para cada una. Para ajustar el control de velocidad de un eje,vaya directamente a la sección 6.8. Se recomienda que el sistema se pruebe y ajusteinicialmente con el eje del motor desconectado del resto de la maquinaria. Confirme que lasseñales de realimentación del encoder del amplificador de motor o accionamiento hayansido conectadas y que una demanda positiva genere una señal de realimentación positiva.
Nota: El método explicado en esta sección debería permitirle obtener un buen controldel motor, pero no le proveerá necesariamente la respuesta óptima sin un ajustefino posterior. Es necesario comprender bien el efecto de los términos deganancia.
1. En el Cuadro de herramientas, haga clic enel icono de ajuste fino.
La ventana de Ajuste fino se muestra en laderecha de la pantalla. El área principal dela ventana del Mint WorkBench muestra laventana de Captura. Cuando se hayanrealizado las pruebas de ajuste, semostrará un gráfico que representa larespuesta.
2. En la ventana de Ajuste fino, haga clic enel cuadro de selección Eje en la partesuperior y seleccione el eje 4 (asumiendoque el eje 4 ya se ha configurado comoservoeje; ver la sección 6.4.1).
Haga clic en el cuadro KDERIV eintroduzca un valor inicial de 1.
Haga clic en Aplicar y a continuación gireel eje del motor a mano. Repita esteproceso, aumentando lentamente el valorde KDERIV hasta que comience a sentiralgo de resistencia en el eje del motor. Elvalor exacto de KDERIV no es crítico enesta etapa.
6-18 Funcionamiento MN1928WES

3. Haga clic en el cuadro KPROP eintroduzca un valor que sea aproximada-mente un cuarto del valor de KDERIV. Si elmotor comienza a vibrar, disminuya el valorde KPROP o aumente el valor de KDERIVhasta que la vibración se detenga. Lo únicoque se puede necesitar son algunospequeños cambios.
4. En el cuadro desplegable Tipo demovimiento, compruebe que el tipo demovimiento esté definido como Paso.
5. Haga clic en el cuadro Distancia eintroduzca una distancia para elmovimiento de paso. Se recomienda definirun valor que haga girar el motor unapequeña distancia, por ejemplo unarevolución.
Nota: La distancia depende de la escala ajustada en la sección 6.4.2. Si se fija unaescala de forma que las unidades puedan ser expresadas en revoluciones (o enotra unidad de su elección), esas son entonces las unidades que se emplearánaquí. Si no estableció una escala, la cantidad que introducirá será en conteos deencoder.
6. Haga clic en el cuadro Duración eintroduzca una duración para elmovimiento, en segundos. Debe ser unaduración corta, por ejemplo 0,15 segundos.
7. Haga clic en Ir.
El NextMove ES realizará el movimiento y el motor girará. Una vez que el movimiento sehaya completado, el Mint WorkBench cargará los datos capturados del NextMove ES.Después, los datos se mostrarán en la ventana de Captura como un gráfico.
Nota: Los gráficos que ve no serán exactamente iguales a los que se muestran aquí.Recuerde que cada motor tiene una respuesta diferente.
8. Utilice los cuadros de verificacióndebajo del gráfico, seleccione lostrazos que requiera, por ejemplo dePosición medida y Posición dedemanda.
ON - Eje 4: Posición medida (uu/s)
ON - Eje 4: Velocidad de demanda (uu/s)
MN1928WES Funcionamiento 6-19

6.6.2 Respuesta subamortiguadaSi el gráfico muestra que la respuesta está subamortiguada (se supera la demanda, comose muestra en la Figura 50), entonces el valor de KDERIV debe aumentarse para añadirmayor amortiguación al movimiento. Si la sobretensión es excesiva o se produjo unaoscilación, puede ser necesario reducir el valor de KPROP.
Figura 50: Respuesta subamortiguada
9. Haga clic en los cuadros KDERVI y/oKPROP y realice los cambios necesarios.La respuesta ideal se muestra en lasección 6.6.4.
Posición medida
Tiempo (ms)
Posición de demanda
6-20 Funcionamiento MN1928WES

6.6.3 Respuesta sobreamortiguadaSi el gráfico muestra que la respuesta está sobreamortiguada (llega a la demanda muylentamente, como se muestra en la Figura 51), entonces el valor de KDERIV debedisminuirse para reducir la amortiguación del movimiento. Si la sobreamortiguación esexcesiva, puede que sea necesario aumentar el valor de KPROP.
Figura 51: Respuesta sobreamortiguada
10. Haga clic en los cuadros KDERVI y/oKPROP y realice los cambios necesarios.La respuesta ideal se muestra en lasección 6.6.4.
Tiempo (ms)
Posición de demanda
Posición medida
MN1928WES Funcionamiento 6-21

6.6.4 Respuesta amortiguada críticamenteSi el gráfico muestra que la respuesta alcanza la demanda rápidamente y solo supera lademanda en una pequeña medida, esto se puede considerar una respuesta ideal para lamayoría de los sistemas. Ver Figura 52.
Figura 52: Respuesta (ideal) amortiguada críticamente
Tiempo (ms)
Posición de demanda
Posición medida
6-22 Funcionamiento MN1928WES

6.7 Servoeje - eliminación de errores de estado estableEn los sistemas donde se necesita un posicionamiento preciso y exacto, generalmente sedebe posicionar dentro de un conteo de encoder. La ganancia proporcional, KPROP, nopuede lograr esto normalmente debido a que un pequeño error de seguimiento soloproducirá una demanda pequeña para el amplificador de accionamiento y no es suficientepara superar la fricción mecánica (esto se da mayormente en sistemas controlados decorriente). Este error se puede corregir aplicando una ganancia integral. La gananciaintegral, KINT, funciona acumulando errores consiguientes con el tiempo para producir unademanda suficiente para mover el motor a la posición requerida sin errores de seguimiento. Por lo tanto, KIN puede corregir errores causados por efectos gravitacionales como los ejeslineales con movimiento vertical. Con los amplificadores de accionamiento controlados decorriente se necesita una demanda de salida mayor a cero para conservar la carga en laposición correcta y obtener un error de seguimiento cero.
Se debe tener cuidado al configurar KINT ya que un valor alto provocará inestabilidaddurante los movimientos. Un valor típico para KINT es 0,1. El efecto de KINT también debeestar limitado por la configuración del límite de integración, KINTLIMIT, por el valor máspequeño posible suficiente para superar la fricción o las cargas estáticas, como 5. Estolimitará la contribución del término integral de 5% del rango de salida de demanda completa.
1. Haga clic en el cuadro KINT e introduzcaun valor inicial pequeño, por ejemplo 0,1.
2. Haga clic en el cuadro KINTLIMIT eintroduzca un valor inicial de 5.
Con el NextMove ES, la acción de KINT y KINTLIMIT se puede ajustar para que funcione endiversos modos:
Nunca: el término KINT no se aplica nunca.
Siempre: el término KINT se aplica siempre.
Inteligente: el término KINT solo se aplica cuando la velocidad de demanda es cero oconstante.
Estado estable: el término KINT solo se aplica cuando la velocidad de demanda es cero.
Esta función se puede seleccionar utilizando el cuadro desplegable KINTMODE.
MN1928WES Funcionamiento 6-23

6.8 Servoeje - ajuste para el control de velocidadLos amplificadores de accionamiento diseñados para el control de velocidad incorporan supropio término de realimentación de velocidad para proveer amortiguación al sistema. Poresta razón, KDERIV (y KVEL) a veces se definen en cero.
Es importante ajustar correctamente la ganancia de avance de alimentación de la velocidadKVELFF para obtener la respuesta óptima del sistema. El término de avance dealimentación de velocidad toma la demanda de velocidad instantánea del generador deperfiles y la añade al bloque de salida (ver la Figura 49). KVELFF se encuentra fuera delbucle cerrado y por lo tanto no tiene un efecto sobre la estabilidad del sistema. Esto significaque el término se puede aumentar al máximo sin provocar que el motor oscile, siempre ycuando los otros términos hayan sido configurados correctamente.
Si está configurado correctamente, KVELFF hará que el motor se mueva a la velocidad querequiere el generador de perfiles. Esto tiene lugar sin que los otros términos en el buclecerrado hagan nada, excepto compensar los pequeños errores en la posición del motor.Esto genera una respuesta más rápida a los cambios en la velocidad de demanda, conmenos errores de seguimiento.
Antes de proceder, confirme que las señales de realimentación del encoder del amplificadorde motor o accionamiento hayan sido conectadas y que una demanda positiva genere unaseñal de realimentación positiva.
6.8.1 Calcular KVELFFPara calcular el valor correcto de KVELFF, deberá saber:
La velocidad, en revoluciones por minuto, producida por el motor cuando se aplica unademanda máxima (+10 V) al amplificador de accionamiento.
El ajuste para LOOPTIME. El ajuste preestablecido en fábrica es de 1 ms.
La resolución de la entrada del encoder.
La fórmula del servobucle utiliza valores de velocidad expresados en conteos por cuadraturapor servobucle. Para calcular esta cifra:
1. Primero, divida la velocidad del motor, en revoluciones por minuto, por 60 para obtenerel número de revoluciones por segundo. Por ejemplo, si la velocidad del motor es3000 rpm cuando se aplica la demanda máxima (+10 V) al amplificador deaccionamiento:
Revoluciones por segundo = 3000/60
= 502. Después, calcule cuántas revoluciones se producirán durante un servobucle. El tiempo
de servobucle predeterminado de fábrica es de 1 ms (0,001 segundos), por lo tanto:
Revoluciones por servobucle = 50 x 0,001 segundos
= 0.053. Ahora, calcule cuántos conteos por cuadratura del encoder hay por revolución. El
NextMove ES cuenta los flancos de ambos trenes de impulso (CHA y CHB)provenientes del encoder; por lo tanto, por cada línea de encoder existen 4 "conteos porcuadratura"'. Con un encoder de 1000 líneas:
Conteos de cuadratura por revolución = 1000 x 4
= 4000
6-24 Funcionamiento MN1928WES
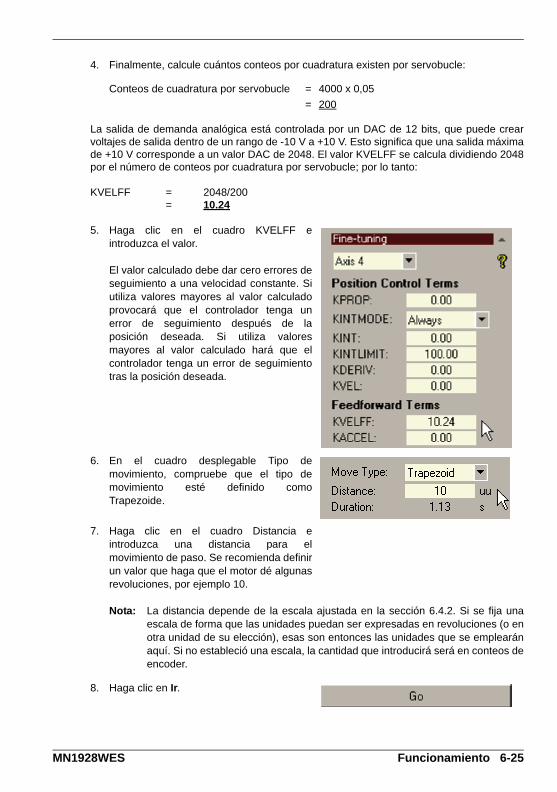
4. Finalmente, calcule cuántos conteos por cuadratura existen por servobucle:
Conteos de cuadratura por servobucle = 4000 x 0,05
= 200
La salida de demanda analógica está controlada por un DAC de 12 bits, que puede crearvoltajes de salida dentro de un rango de -10 V a +10 V. Esto significa que una salida máximade +10 V corresponde a un valor DAC de 2048. El valor KVELFF se calcula dividiendo 2048por el número de conteos por cuadratura por servobucle; por lo tanto:
KVELFF = 2048/200= 10.24
5. Haga clic en el cuadro KVELFF eintroduzca el valor.
El valor calculado debe dar cero errores deseguimiento a una velocidad constante. Siutiliza valores mayores al valor calculadoprovocará que el controlador tenga unerror de seguimiento después de laposición deseada. Si utiliza valoresmayores al valor calculado hará que elcontrolador tenga un error de seguimientotras la posición deseada.
6. En el cuadro desplegable Tipo demovimiento, compruebe que el tipo demovimiento esté definido comoTrapezoide.
7. Haga clic en el cuadro Distancia eintroduzca una distancia para elmovimiento de paso. Se recomienda definirun valor que haga que el motor dé algunasrevoluciones, por ejemplo 10.
Nota: La distancia depende de la escala ajustada en la sección 6.4.2. Si se fija unaescala de forma que las unidades puedan ser expresadas en revoluciones (o enotra unidad de su elección), esas son entonces las unidades que se emplearánaquí. Si no estableció una escala, la cantidad que introducirá será en conteos deencoder.
8. Haga clic en Ir.
MN1928WES Funcionamiento 6-25

El NextMove ES realizará el movimiento y el motor girará. Una vez que el movimiento sehaya completado, el Mint WorkBench cargará los datos capturados del NextMove ES.Después, los datos se mostrarán en la ventana de Captura como un gráfico.
Nota: El gráfico que ve no será exactamente igual al que se muestra aquí. Recuerdeque cada motor tiene una respuesta diferente.
9. Utilice los cuadros de verificacióndebajo del gráfico, seleccione lostrazos de Velocidad medida yVelocidad de demanda.
Figura 53: Valor correcto de KVELFF
Puede ser necesario hacer cambios en el valor calculado de KVELFF. Si el trazo deVelocidad medida aparece sobre el trazo de Velocidad de demanda, reduzca el valor deKVELFF. Si el trazo de Velocidad medida aparece por debajo del trazo de Velocidad dedemanda, aumente el valor de KVELFF. Repita la prueba después de cada cambio. Cuandolos dos trazos aparecen uno encima del otro (aproximadamente), el valor correcto paraKVELFF se ha encontrado, tal como se muestra en la Figura 53.
ON - Eje 4: Velocidad medida (uu/s)
ON - Eje 4: Velocidad de demanda (uu/s)
Tiempo (ms)
Velocidad medida
Velocidad de demanda
6-26 Funcionamiento MN1928WES

6.8.2 Ajustar KPROPEl término KPROP se puede utilizar para reducir errores de seguimiento. Su valor serágeneralmente mucho menor que el valor utilizado por un sistema controlado de corrienteequivalente. Un valor fraccional, por ejemplo 0,1, será probablemente una buena cifra inicialque luego se puede aumentar lentamente.
1. Haga clic en el cuadro KPROP e introduzcaun valor inicial de 0,1.
2. Haga clic en Ir.
El NextMove ES realizará el movimiento y el motor girará. Una vez que el movimiento sehaya completado, el Mint WorkBench cargará los datos capturados del NextMove ES.Después, los datos se mostrarán en la ventana de Captura como un gráfico.
Nota: El gráfico que ve no será exactamente igual al que se muestra aquí. Recuerdeque cada motor tiene una respuesta diferente.
3. Utilice los cuadros de verificación debajodel gráfico, seleccione los trazos dePosición medida y Posición de demanda.
ON - Eje 4: Posición medida (uu)ON - Eje 4: Posición de demanda (uu)
MN1928WES Funcionamiento 6-27

Figura 54: Valor correcto de KPROP
Los dos trazos probablemente aparezcan con un ligero desplazamiento el uno del otro, querepresenta un error de seguimiento. Ajuste el KPROP en pequeñas medidas hasta que losdos trazos se ubiquen uno encima del otro (aproximadamente), tal como se muestra en laFigura 54.
Nota: Puede ser práctico utilizar la función de zoom para ampliar el punto extremo delmovimiento. En el área de gráficos, haga clic y arrastre un rectángulo alrededordel punto extremo de los trazos. Para alejarse, haga clic en el área de gráfico yelija Deshacer zoom.
Tiempo (ms)
Posición medida
Posición de demanda
6-28 Funcionamiento MN1928WES

6.9 Prueba del eje de motor paso a pasoEsta sección describe el método para probar un eje de motor paso a paso. El control demotor paso a paso es un sistema de bucle abierto, de manera que no es necesario unajuste.
6.9.1 Probar la salidaEsta sección prueba el funcionamiento y la dirección de la salida. Se recomienda que elsistema se pruebe inicialmente con el eje del motor desconectado del resto de lamaquinaria.
1. Compruebe que el botón de Habilitación delaccionamiento se encuentre pulsado (haciaabajo).
2. En el Cuadro de herramientas, haga clic en elicono Editar y depurar.
3. Haga clic en la ventana Comando.
4. Tipo:JOG(0)=2
donde 0 es el eje que se probará (salida pasoa paso) y 2 es la velocidad.
El comando JOG especifica la velocidad enunidades de usuario por segundo. Por lo tanto,la velocidad se ve afectada por el SCALEFACTOR (sección 6.4.2). Si no seleccionó unaescala, el comando JOG(0)=2 provocará una rotación a solo dos medios pasos porsegundo, de manera que puede ser necesario aumentar este númerosignificativamente, a 200 por ejemplo. Si seleccionó una escala que provee unidades deusuario de revoluciones (como se describe en la sección 6.4.2), JOG(0)=2 provocaráuna rotación de 2 revoluciones por segundo. Si no parece haber salida de paso odirección, compruebe las conexiones eléctricas a las salidas asignadas STEPx y DIRx.
5. Para repetir las pruebas para movimientosinversos, escriba:JOG(0)=-2
6. Para eliminar la demanda y detener la prueba,escriba:STOP(0)
MN1928WES Funcionamiento 6-29

6.10 Configuración de la entrada/salida digitalLa ventana de Entrada/Salida digital puede ser utilizada para ajustar otras entradas y salidasdigitales.
6.10.1Configuración de la entrada digitalLa pestaña Entradas digitales permite definir cómo se activará cada entrada digital y si sedebe asignar a una función especial, como Entrada de inicio o Entrada límite. En elsiguiente ejemplo, la entrada digital 1 se ajustará para la activación de una entrada activabaja, situándose en la entrada límite de avance del eje 0:
1. En el Cuadro de herramientas, haga clic enel icono E/S.
2. En la parte inferior de la pantalla de E/Sdigital, haga clic en la pestaña Entradasdigitales.
La parte izquierda de la pantalla muestrauna columna de iconos amarillos: Alto,Bajo, Elevando, Descendiendo y Elevar/Descender. Estos describen la manera enla que se activará la entrada.
3. Arrastrar el icono Bajo sobre el icono
IN1 . Esto configurará IN1 para que responda a una entrada baja.
6-30 Funcionamiento MN1928WES

4. Ahora arrastre el icono IN1 sobre el icono Límite de Avance .
Esto configurará IN1 como la entrada de Límite de avance para el eje 0.
5. Haga clic en Aplicar para enviar los cambios alNextMove ES.
Nota: Si es necesario, puede configurar las entradas múltiples antes de hacer clic enAplicar.
6.10.2Configuración de salida digitalLa pestaña de Salidas digitales permite definir cómo funcionará cada salida digital y si sedeben configurar como salidas de habilitación de accionamiento (ver la sección 6.4.3). Hagaclic en Aplicar para enviar los cambios al NextMove ES.
MN1928WES Funcionamiento 6-31

6.11 Grabar información de configuraciónCuando se desconecta la alimentación del NextMove ES, todos los datos, incluyendo losparámetros de configuración y ajuste, se pierden. Deberá por tanto guardar esta informaciónen un archivo, que podrá ser cargado cuando se use la unidad la próxima vez.
1. En el Cuadro de herramientas, haga clic enel icono Editar y depurar.
2. En el menú principal, elija Archivo, NuevoArchivo.
Aparecerá una nueva ventana de ediciónde programas.
3. En el menú principal, elija Programa,Generar bloque de inicio Mint.
Mint WorkBench leerá toda lainformación de configuración delNextMove ES y la colocará en elbloque de inicio. Para los detallesrelativos al bloque de inicio, ver elarchivo de ayuda de Mint.
6-32 Funcionamiento MN1928WES

4. En el menú principal, elija Archivo, Guardar Archivo. Escoja una carpeta, introduzcaun nombre de archivo y haga clic en Guardar.
6.11.1Cargar la información guardada1. En el Cuadro de herramientas, haga clic en el icono
Editar y depurar.
2. En el menú principal, elija Archivo, Abrir Archivo... .Localice el archivo y haga clic en Abrir.
Deberá incluirse un bloque de inicio en cada programa Mint, de forma que siempre queun programa se cargue y se ejecute, el NextMove ES quede configurado correctamente.Recuerde que cada combinación de accionamiento/motor tiene una respuesta diferente.Si se utiliza el mismo programa en una instalación NextMove ES diferente, necesitarámodificarse el bloque de inicio.
MN1928WES Funcionamiento 6-33

6-34 Funcionamiento MN1928WES

Resolución de problemas7 Resolución de problemas
7.1 IntroducciónEsta sección describe los problemas comunes y sus soluciones. Si desea saber elsignificado de los indicadores LED, vea la sección 7.2.
7.1.1 Diagnóstico de problemasSi siguió todas las instrucciones de este manual en orden, no debería tener problemas parainstalar el NextMove ES. Si tiene un problema, lea primero esta sección. En MintWorkBench, utilice la herramienta de Registro de errores para los errores recientes y luegocompruebe el archivo de ayuda. Si no puede resolver el problema o el problema continúa,puede utilizar la función SupportMe.
7.1.2 Función SupportMeLa función SupportMe está disponible a través del menú Ayuda o haciendo clic en el
botón , en la barra de herramientas de movimiento. SupportMe se puede utilizar parareunir información que luego puede enviarse por correo electrónico, guardada como unarchivo de texto; también se puede copiar a otra aplicación. El PC debe tener programas decorreo electrónico para usar la función de correo electrónico. Si prefiere contactarse con elservicio técnico por teléfono o fax, los detalles de contacto se facilitan en la portada de estemanual. Tenga la siguiente información preparada:
El número de serie de su NextMove ES (si lo sabe).
Utilice el elemento de menú Ayuda, SupportMe en Mint WorkBench para ver los detallessobre su sistema.
El tipo de amplificador de accionamiento y el motor que está usando.
Una descripción clara de lo que intenta hacer, por ejemplo, realizar un ajuste fino.
Una descripción clara de los síntomas que observe, por ejemplo los mensajes de errorvisualizados en Mint WorkBench, o el valor en curso de cualquiera de las palabras clavede error de Mint: AXISERROR, AXISSTATUS, INITERROR, y MISCERROR.
El tipo de movimiento generado en el eje del motor.
Proporcione una lista de cualquier parámetro que haya configurado, por ejemplo laconfiguración de ganancia que introdujo.
7
MN1928WES Resolución de problemas 7-1

7.2 Indicadores del NextMove ES
7.2.1 Pantalla de estadoEl LED de estado muestra normalmente el número de nodo de la unidad. Paravisualizar información relativa a un eje específico, utilice la palabra clave LED (verel archivo de ayuda de Mint). Cuando se seleccione un eje específico, sevisualizarán los siguientes símbolos por parte del LED de estado. Algunoscaracteres parpadearán para indicar la existencia de un error.
Spline (Interpolación). Se ejecuta un movimiento de spline (interpolación). Ver la palabra clave SPLINE y sus comandos relacionados.
Eje habilitado.
Modo de par. El NextMove ES se encuentra en modo de par. Ver la palabra clave TORQUE y sus comandos relacionados.
Mantener modo analógico. El eje mantiene el modo analógico. Ver la palabra clave HTA y sus comandos relacionados.
Seguimiento y desplazamiento (offset). Cuando un eje sigue una señal de demanda puede ser necesario avanzar o retrasar el esclavo en relación al maestro. Para ello se ejecuta un movimiento de desplazamiento en paralelo con el de seguimiento. Ver las palabras clave FOLLOW y OFFSET.
Círculo. Se ejecuta un movimiento en círculo. Ver las palabras clave CIRCLEA o CIRCLER.
Leva. Se sigue el perfil de una leva. Ver la palabra clave CAM.
Error general. Ver la palabra clave AXISERROR. La barra de herramientas de movimiento presenta el estado de AXISERROR (Error de eje), que constituye un patrón de bits de todos los errores retenidos. Ver también el tema de Registro de errores en el archivo de ayuda.
Entrada de error. Se ha activado ERRORINPUT y se ha generado un error.
Cizalla móvil (oscilante). Se sigue el perfil de un cizallado móvil. Ver la palabra clave FLY.
Error de seguimiento de posición. Se ha producido un error de seguimiento. Ver la palabra clave AXISERROR y las palabras clave asociadas. Los errores de seguimiento pueden ser causados por un accionamiento/motor indebidamente ajustado. A velocidades de aceleración y desaceleración mayores, el error de seguimiento será típicamente mayor. Asegurarse de que el accionamiento/motor está ajustado correctamente para adaptarse a estas velocidades de aceleración. Puede ajustarse el límite del error de seguimiento para adaptarse a su aplicación (ver las palabras clave FOLERRORFATAL y VELFATAL). El error de seguimiento puede también ser la causa de la pérdida del encoder/resolver (ver también la palabra clave FEEDBACKFAULTENABLE).
Modo seguimiento. El eje se encuentra en modo de seguimiento. Ver la palabra clave FOLLOW.
7-2 Resolución de problemas MN1928WES

Cuando se muestre un número de nodo entre 1 y 15, se mostrará en formato hexadecimal(1 - F). Para números de nodo superiores a 15, se visualizarán tres barras horizontales.Pueden hacerse aparecer símbolos definidos por el usuario utilizando las palabras claveLED y LEDDISPLAY. Ver el archivo de ayuda de Mint para obtener todos los detalles decada palabra clave.
A Inicio. El eje se dirige ahora a posición de inicio. Ver la palabra clave HOME.
Movimiento incremental. Se está siguiendo el perfil de un movimiento incremental. Ver las palabras clave INCA y INCR.
Salto. El eje se desplaza salto a salto. En el archivo de ayuda de Mint, ver los temas JOG, JOGCOMMAND y el modo de salto (Jog).
Movimiento de desplazamiento. El eje realiza un movimiento de desplazamiento.
Movimiento posicional. El eje realiza un movimiento lineal. Ver las palabras clave MOVEA y MOVER.
Stop (Parar). Se ha emitido un comando STOP o la entrada Parar está activa.
Eje inhabilitado. El eje/accionamiento debe ser habilitado antes de que la operación pueda continuar. Ver sección 6.4.4. Hacer clic en el botón de habilitar accionamiento en Mint WorkBench.
Suspender. Se ha emitido el comando SUSPEND y está activo. El movimiento se adaptará a demanda cero mientras el comando esté activo.
Límite inverso de software o hardware. Se ha activado un límite inverso de software.Ver AXISERROR y/o AXISSTATUS para determinar cuál aplica.
Límite directo de software o hardware. Se ha activado un límite directo de software.Ver AXISERROR y/o AXISSTATUS para determinar cuál aplica.
Actualización de firmware (aparecen barras horizontales de forma secuencial). Se está descargando nuevo firmware al NextMove ES.
Error en la inicialización. Se ha producido un error de inicialización en la conexión. Ver también el tema de Registro de Errores o el apartado INITERROR en el archivo de ayuda. Normalmente no deberán producirse errores de inicialización.
MN1928WES Resolución de problemas 7-3

7.2.2 LEDs de montaje en superficie D3, D4, D16 y D20La tarjeta NextMove ES contiene un determinado número de LEDs SMD que indican elestado del hardware:
D3 (amarillo):Indica que se está inicializando el FPGA durante la puestaen marcha. Si este LED permanece iluminado tras elencendido, indica descarga de un archivo de sistema (loque incluye firmware de FPGA) de Mint WorkBench.
D4 (rojo):Indica que la tarjeta se encuentra en proceso dereinicialización de hardware. Si este LED permaneceiluminado tras el encendido, significa que la tensión desuministro es demasiado baja. Verificar las conexiones dealimentación.
D16 (parpadeo verde):Parpadea a 0,5 Hz para indicar el funcionamiento normal.Si este LED deja de parpadear, el firmware ha dejado defuncionar. Apagar y reencender la tarjeta para originar unreinicialización.
D20 (parpadeo naranja durante la comunicación en serie)Indica que la tarjeta está ejecutando comunicación enserie. Si este LED no se ilumina tras el encendido, indicadescarga de un archivo de sistema (lo que incluyefirmware de comunicaciones) de Mint WorkBench.
7.2.3 ComunicaciónSi el problema no se describe a continuación, contacte con el servicio técnico.
Síntoma Verificar
No se detecta NextMove ES
Verificar que el NextMove ES está conectado.
Para las conexiones en serie, compruebe que el cable en serie esté conectado correctamente. Verificar que ninguna otra aplicación del PC está intentando utilizar el mismo puerto serie.
Para las conexiones USB, compruebe que el cable esté conectado adecuadamente. Verifique que los terminales del enchufe del conector USB no estén dañados ni agarrotados. Compruebe que el driver del dispositivo USB haya sido instalado; el Administrador de dispositivos de Windows debe incluir un dispositivo "Controlador de movimientos USB" (USB Motion Controller).
No se puede comunicar con el controlador.
Verifique que el Mint WorkBench esté cargado y que el NextMove ES sea el controlador seleccionado actualmente.
No se puede comunicar con el controlador tras descargar el firmware.
Tras descargar el firmware, siempre reinicie el controlador (desconecte la alimentación de 24 V y vuelva a conectarla).
D3
D4
D16
D20
7-4 Resolución de problemas MN1928WES

7.2.4 Control del motorSi el problema no se describe a continuación, contacte con el servicio técnico.
Síntoma Verificar
El controlador parece estar funcionando pero no hará que el motor gire.
Compruebe que las conexiones entre el motor y el accionador sean correctas. Utilice el Mint WorkBench para realizar las pruebas de sistema básicas (ver la sección 6.5 o 6.9).
Confirme que la salida de habilitación de accionamiento ha sido configurada (ver la sección 6.4.3).
Asegúrese de que mientras el NextMove ES no está en error, el accionamiento está habilitado y funciona. La primera vez que encienda el NextMove ES, el accionamiento debe estar inhabilitado si no hay ningún programa en ejecución (generalmente en la parte frontal del accionamiento hay un LED que indica el estado).
(Solo servosalidas) Compruebe que las ganancias del servobucle estén configuradas correctamente; compruebe la ventana de Ajuste fino. Ver secciones 6.5.2 a 6.7.
El motor funciona de manera incontrolable cuando el controlador está encendido.
Verifique que el NextMove ES y el accionador están correctamente puestos a tierra en un lugar común.
(Solo servosalidas) Compruebe que la señal de realimentación del encoder conectada a la entrada del encoder sea la correcta, que el encoder tenga energía (si es necesario, vea la sección 5.2.12) y que esté funcionando correctamente.
Compruebe que el accionamiento esté conectado correctamente al NextMove ES y que cuando la demanda sea cero haya 0 V en la entrada de demanda del accionador. Ver sección 6.5.1.
El motor funciona de manera incontrolable cuando el controlador está encendido y se aplican las ganancias del servobucle o cuando un movimiento se encuentra en progreso. El motor se detiene después de poco tiempo.
(Solo servosalidas) Compruebe que las señales de realimentación del encoder están conectadas a las entradas del encoder correctas. Verifique que la demanda hacia el accionamiento esté conectada a la polaridad correcta.
Compruebe que se vea un aumento positivo en la posición de eje cuando exista una señal de demanda positiva. La palabra clave ENCODERMODE se puede utilizar para cambiar la dirección de la entrada del encoder. La palabra clave DACMODE se puede utilizar para revertir la polaridad de salida del DAC.
Compruebe que el error de seguimiento máximo esté definido en un valor razonable. Por motivos de configuración, la detección de errores de seguimiento se puede inhabilitar con el valor FOLERRORMODE igual a cero.
El motor se encuentra bajo control, pero vibra o se sobretensiona durante un movimiento.
(Solo servosalidas). De nuevo el servobucle puede encontrarse ajustado incorrectamente. Ver secciones 6.5.2 a 6.7.
MN1928WES Resolución de problemas 7-5

El motor se encuentra bajo control, pero cuando se mueve a una posición y luego vuelve al inicio, no regresa a la misma posición.
Verifique que la placa posterior y el accionamiento están correctamente puestos a tierra en un lugar común.
(Solo servosalidas) Empleando un osciloscopio en los conectores de la placa posterior, verificar: que todos los canales del encoder están libres de ruido
eléctrico; que están correctamente cableados con el controlador; que cuando el motor gire, las dos señales de onda cuadrada
se encuentran defasadas 90 grados. También, verifique las señales complementarias.
Asegúrese de que el cable del encoder utiliza un cable de par trenzado, con el blindado externo conectado en ambos extremos y los blindados internos conectados solo en el extremo del NextMove ES.
(Solo salidas graduales) El motor no mantiene la sincronización con las señales graduales del accionamiento del NextMove ES debido a la aceleración, velocidad o demandas de carga excesivas en el motor.
Compruebe que la aceleración, la velocidad y la carga se encuentren dentro de las capacidades del motor.
Síntoma Verificar
7-6 Resolución de problemas MN1928WES

7.2.5 Mint WorkBench
7.2.6 CANopen
Síntoma Verificar
La ventana Espía no se actualiza
La actualización de sistema ha sido desactivada. Vaya al elemento del menú Herramientas, Opciones, seleccione la pestaña Sistema y luego elija el Índice de actualización de sistema (se recomienda 500 ms).
La descarga del firmware falla
Confirme que tiene la versión correcta del firmware. El intento de descarga de determinadas versiones antiguas de firmware (destinadas a modelos sin USB) originarán el fallo de la descarga. Descargar la última versión de firmware.
No se puede comunicar con el controlador tras descargar el firmware.
Tras descargar el firmware, siempre reinicie el controlador (desconecte la alimentación de 24 V y vuelva a conectarla).
Mint WorkBench pierde contacto con el NextMove ES al estar conectado mediante USB
Verificar que el NextMove ES está conectado. Verifique que el Administrador de dispositivos de Windows muestre un dispositivo "Controlador de movimientos USB" (USB Motion Controller). Si no es así, podría haber un problema con la interfaz USB del PC.
Síntoma Verificar
El bus CANopen se encuentra en estado 'pasivo'
Esto significa que el controlador CAN interno en el NextMove ES experimenta varios errores Tx y/o Rx, mayores que el umbral pasivo de 127.
Verificar: 12-24 Qué V se aplican al terminal 5 del conector CAN RJ45,
para alimentar los opto-aisladores. Que haya al menos otro nodo CANopen en la red. Que la red esté terminada solo en los extremos, no en los
nodos intermedios. Que todos los nodos de la red estén funcionando a la misma
velocidad de transmisión en baudios. Que todos los nodos tengan asignados un ID de nodo único. Que los cables CAN estén íntegros.
El NextMove ES debería recuperarse del estado 'pasivo' una vez que el problema haya sido corregido (esto puede llevar algunos segundos).
MN1928WES Resolución de problemas 7-7

El bus CANopen se encuentra en estado 'desconectado'
Esto significa que el controlador CAN interno en el NextMove ES experimenta varios errores Tx y/o Rx, mayores que el umbral pasivo de 255.En este punto el nodo habrá pasado por sí mismo a un estado en el que no puede influenciar al bus.
Verificar: 12-24 Qué V se aplican al terminal 5 del conector CAN RJ45
para alimentar los opto-aisladores. Que haya al menos otro nodo CANopen en la red. Que la red esté terminada solo en los extremos, no en los
nodos intermedios. Que todos los nodos de la red estén funcionando a la misma
velocidad de transmisión en baudios. Que todos los nodos tengan asignados un ID de nodo único. Que los cables CAN estén íntegros.
Para recuperarse del estado 'desactivado', debe reiniciarse el bus. Esto se puede llevar a cabo con la palabra clave de Mint BUSRESET o reiniciando el NextMove ES.
El nodo administrador no puede buscar/reconocer un nodo en la red utilizando la palabra clave de Mint NODESCAN.
Asumiendo que la red funciona correctamente (ver los síntomas previos) y que el bus se encuentra en estado 'operativo', compruebe que:
La palabra clave de Mint NODESCAN solo reconoce los nodos que cumplan con DS401, DS403 y otros nodos CANopen de Baldor.
Verifique que al nodo en cuestión se le haya asignado un ID de nodo único.
El nodo debe ser compatible con el proceso de guarda de nodo. El NextMove ES no es compatible con el proceso de latido.
Intente apagar y volver a encender el nodo en cuestión.
Si el nodo no cumple con DS401 o DS403 y no es un nodo CANopen ABB, aún puede establecer la comunicación utilizando un conjunto de palabras clave de Mint de función general. Vea el archivo de ayuda de Mint para más detalles.
El nodo administrador encontró/reconoció con éxito el nodo, pero la comunicación aún no es posible.
Para permitir la comunicación, se debe realizar una conexión a un nodo después de que se haya encontrado.
Los nodos del controlador ABB se conectan automáticamente después de haber sido encontrados.
A los nodos que cumplen con DS401 y DS403 se les debe realizar las conexiones manualmente, utilizando la palabra de Mint CONNECT.
Si un intento de conexión utilizando CONNECT falla, puede deberse a que el nodo que se intenta conectar no es compatible con un objeto al que es necesario acceder para configurar la conexión.
Síntoma Verificar
7-8 Resolución de problemas MN1928WES

7.2.7 CAN de Baldor
Síntoma Verificar
El bus CAN Baldor se encuentra en estado 'pasivo'
Esto significa que el controlador CAN interno en el NextMove ES experimenta varios errores Tx y/o Rx, mayores que el umbral pasivo de 127.
Verificar: 12-24 Qué V se aplican al terminal 5 del conector CAN RJ45,
para alimentar los opto-aisladores. Que existe al menos otro nodo CAN Baldor en la red, con los
puentes JP1 y JP2 en la posición "1" (bajo). Que la red esté terminada solo en los extremos, no en los
nodos intermedios. Que todos los nodos de la red estén funcionando a la misma
velocidad de transmisión en baudios. Que todos los nodos tengan asignados un ID de nodo único. Que los cables CAN estén íntegros.
El NextMove ES debería recuperarse del estado 'pasivo' una vez que el problema haya sido corregido.
El bus CAN Baldor se encuentra en estado 'desconectado'
Esto significa que el controlador CAN interno en el NextMove ES experimenta varios errores Tx y/o Rx, mayores que el umbral pasivo de 255.En este punto el nodo habrá pasado por sí mismo a un estado en el que no puede influenciar al bus.
Verificar: 12-24 Qué V se aplican al terminal 5 del conector CAN RJ45,
para alimentar los opto-aisladores. Que existe al menos otro nodo CAN Baldor en la red, con los
puentes JP1 y JP2 en la posición "1" (bajo). Que la red esté terminada solo en los extremos, no en los
nodos intermedios. Que todos los nodos de la red estén funcionando a la misma
velocidad de transmisión en baudios. Que todos los nodos tengan asignados un ID de nodo único. Que los cables CAN estén íntegros.
Para recuperarse del estado 'desactivado', debe reiniciarse el bus. Esto se puede llevar a cabo con la palabra clave de Mint BUSRESET o reiniciando el NextMove ES.
MN1928WES Resolución de problemas 7-9

7-10 Resolución de problemas MN1928WES

Especificaciones8 Especificaciones
8.1 IntroducciónEsta sección incluye las especificaciones técnicas de la tarjeta NextMove ES. En los casosque sea necesario se mostrarán las especificaciones por separado de las tomas posterioresopcionales opto-aislantes.
8.1.1 Alimentación de entrada
8.1.2 Entradas analógicas
8.1.3 Salidas analógicas
Descripción Valor
Alimentación de entrada +5 V (±2,5%), 1 A+12 V (±5%), 50 mA-12 V (±5%), 50 mA
Descripción Unidad Valor
Tipo Diferencial
Rango de voltaje de modo común V CC ±10
Impedancia de entrada kΩ. 120
Resolución de entrada ADC (Convertidor analógico-digital)
bits 12 (incluye el símbolo de bit)
Resolución equivalente (±10 V entrada) mV ±4,9
Intervalo de muestreo µs 500 (ambas entradas habilitadas)250 (una entrada inhabilitada)
Descripción Unidad Valor
Tipo Bipolar
Rango de voltaje de salida V CC ±10
Corriente de salida (por salida) mA 2.5
Resolución de salida DAC bits 12
Resolución equivalente mV ±4,9
Intervalo de actualización µs 100 - 2000(igual que LOOPTIME; por defecto = 1000)
8
MN1928WES Especificaciones 8-1

8.1.4 Entradas digitales (no-aisladas)
8.1.5 Entradas digitales (optoaisladas)Esta especificación hace referencia a las tomas posteriores opcionales optoaislantesBPL010-502 o BPL010-503, cuando se usan conjuntamente con la tarjeta NextMove ES.
Descripción Unidad Valor
Tipo +5 V, entradas no aisladas
Voltaje de entradaMáximoMínimo
AltoBajo
V CC5.50
>3,5 V<1,5 V
Corriente de entrada (aproximada, por entrada)
mA 0.5
Intervalo de muestreo ms 1
Descripción Unidad Valor
Tipo Opto-aislada
Voltaje de suministro USR V+MáximaMínimo
V CC3012
Voltaje de entradaEntradas BPL010-502 'activa nivel alto'
Entradas BPL010-503 'activa nivel bajo'
V CCActivo: >12 VInactivo: <2 V
Activo: 0 VInactivo: No conectado
Corriente de entrada (Máximo por entrada, USR V+ = 24 V)
mA 10
8-2 Especificaciones MN1928WES

8.1.6 Salidas digitales - propósito general (no aisladas)Esta especificación hace referencia a la tarjeta NextMove ES cuando se utiliza por separadoo conjuntamente con la toma posterior opcional no aislante BPL010-501:
8.1.7 Salidas digitales - propósito general (optoaisladas)Esta especificación hace referencia a las tomas posteriores opcionales optoaislantesBPL010-502 o BPL010-503, cuando se usan conjuntamente con la tarjeta NextMove ES.
8.1.8 Salida digital - salida de error (no aislada)Esta especificación hace referencia a la tarjeta NextMove ES cuando se utiliza por separadoo conjuntamente con la toma posterior opcional no aislante BPL010-501:
Descripción Unidad Valor
Tensión de suministro a la carga(máxima)
V 50
Corriente de salidaSumidero máximo por salida, una salida
activadaSumidero máximo por salida, todas las
salidas activadas
mA DOUT0-7 DOUT8-11500 500
150 50
Intervalo de actualización Inmediato
Descripción Unidad Valor
Voltaje de suministro USR V+MáximoMínimo
V CC 30 V12 V
Corriente de salida (BPL010-502)Fuente máxima por salida, una salida
activadaFuente máxima por salida, todas las
salidas activadas
mA
DOUT0-7 DOUT8-11350 400
75 50
Corriente de salida (BPL010-503)Sumidero máximo por salida, una salida
activadaSumidero máximo por salida, todas las
salidas activadas
mA
DOUT0-7 DOUT8-11500 400
150 50
Intervalo de actualización Inmediato
Tiempo de conmutaciónSalida sin carga
Con 7 mA o carga mayor100 ms10 µs
Descripción Unidad Valor
Voltaje de salida V 5
Corriente de salida(máxima)
mA 100
Intervalo de actualización Inmediato
MN1928WES Especificaciones 8-3

8.1.9 Relé de error (tomas posteriores optoaisladas)Esta especificación hace referencia a las tomas posteriores opcionales optoaislantesBPL010-502 o BPL010-503, cuando se usan conjuntamente con la tarjeta NextMove ES. Versecciones 4.4.3 y 5.3.1.1.
8.1.10Entradas de encoderes
8.1.11Salidas de control gradual
8.1.12Puerto serie RS232/RS485
Todos los modelos Unidad Todos los modelos
Clasificación del contacto (resistivo) 2 A @ 28 V CCo
0,5 A @ 125 V CA
Tiempo de funcionamiento (máximo) ms 6
Descripción Unidad Valor
Entrada del encoder Diferencial RS422 A/B, índice Z
Frecuencia de entrada máxima(cuadratura)
MHz 20
Suministro de energía de salida a los encoderes
5 V, 500 mA máx.(total para ambos encoderes)
Longitud máxima del cable recomendada
30.5 m (100 ft)
Descripción Unidad Valor
Tipo de salida Paso (pulso) y dirección RS422
Frecuencia de salida máxima kHz 500
Corriente de salida (corriente de sumidero máxima, por salida)
mA100
Descripción Unidad Valor
Señal RS232 no aislado CTS/RTS o RS485 no aislado (dependiendo
del modelo)
Velocidad de transmisión de bits baudio 9600, 19200, 38400,57600 (por defecto), 115200 (solo
RS232)
8-4 Especificaciones MN1928WES

8.1.13Interfaz CAN
8.1.14Ambiental
Ver también la sección 3.1.1.
8.1.15Pesos y medidas
Descripción Unidad Valor
Señal 2 hilos, aislados
Canales 1
Protocolos CANopen o CAN de Baldor(selección en función del firmware
elegido)
Velocidad de transmisión de bitsCANopen
CAN de Baldor
Kbit/s10, 20, 50, 100, 125, 250, 500, 1000
10, 20, 50, 125, 250, 500, 1000
Descripción Unidad Valor
Rango de temperatura de funcionamiento
Mín Máx
°C
°F
0 +45
+32 +113
Humedad máxima % 80% para temperaturas de hasta 31 °C (87 °F) con una disminución lineal hasta
el 50% de humedad relativa a 45 °C (113 °F), sin condensación(según DIN40 040/IEC144)
Altitud de instalación máxima(por encima del nivel del mar medio)
m
ft
2000
6560
Descarga 10 G de acuerdo conDIN IEC 68-2-6/29 o equivalente
Vibración 1 G, 10-150 Hz de acuerdo conDIN IEC 68-2-6/29 o equivalente
Descripción Unidad Valor
Peso Aproximadamente 140 g (0.3 lb)
Medidas generales nominales 160 mm x 100 mm(6.3 pulgadas x 3,937 pulgadas)
MN1928WES Especificaciones 8-5

8-6 Especificaciones MN1928WES

AccesoriosA Accesorios
A.1 Cables de realimentaciónLos cables incluidos en la Tabla 5 conectan la señal de 'Salida de encoder' de un
amplificador de accionamiento (por ejemplo MicroFlex, FlexDriveII, Flex+DriveII o
MintDriveII) al conector de entrada 'Entrada de encoder' de la placa posterior del NextMoveES. Se necesita un cable para cada servoeje. Ver las secciones 5.2.12, 5.2.13, 5.3.12 y5.3.13 para la configuración de los terminales del conector.
Si no está utilizando un cable ABB, asegúrese de obtener un cable de par trenzado blindado
de 0,34 mm2 (22 AWG) como mínimo, con apantallado exterior. Como longitud ideal, elcable no deberá exceder de los 30,5 m (100 pies). La capacitancia máxima cable-cable ocable-pantalla es desde 50 pF por 300 mm (1 pie) de longitud, hasta un máximo de 5000 pFpara 30,5 m (100 pies).
Descripción del conjunto de cables
PiezaLongitud
m ft
Cable de realimentación de amplificador de accionamiento a NextMove ESB, con conectores macho tipo D de 9 terminales en
ambos extremos (uno macho, uno hembra)
CBL005MF-E3BCBL010MF-E3BCBL015MF-E3BCBL020MF-E3BCBL030MF-E3BCBL040MF-E3BCBL050MF-E3B
0,51
1,52,03,04,05,0
1,63,35
6,69,8
13,116,4
Tabla 5: Cables de realimentación de amplificador de accionamiento a NextMove ES
A
MN1928WES Accesorios A-1

A-2 Accesorios MN1928WES
ÍndiceIndex
AAbreviaturas, 2-4
Advertencia de seguridad, 1-2
Ajuste Ver Configuración
Ambiental, 8-5
Archivo de ayuda, 6-6
CCables de
realimentación, A-1
Cables de encoder, A-1
Calcular KVELFF, 6-24
Características, 2-1
Cargar la información guardada, 6-33
Conector serie X4toma posterior no aislada., 5-14Tomas posteriores optoaisladas, 5-34
Conector tipo D Encoder0 X3toma posterior no aislada., 5-13Tomas posteriores optoaisladas, 5-33
Conector tipo D Encoder1 X2toma posterior no aislada., 5-13Tomas posteriores optoaisladas, 5-34
ConectoresCAN, 4-22Conector de 96 terminales, 4-1serie, 4-18USB, 4-17
Configuraciónajustar KPROP, 6-27ajuste de la salida de habilitación del
accionamiento, 6-11calcular KVELFF, 6-24eje, 6-9eje para el control de velocidad, 6-24eliminar errores de estado estable, 6-23entradas digitales, 6-30prueba de la salida de habilitación del
accionamiento, 6-11, 6-12
prueba de un eje de motor paso a paso, 6-29prueba y ajuste de un servoeje, 6-13respuesta amortiguada críticamente, 6-22respuesta sobreamortiguada, 6-21respuesta subamortiguada, 6-20salidas digitales, 6-31selección del tipo de eje, 6-9seleccionar ganancias de servobucle, 6-18seleccionar una escala, 6-10
Control de bucle cerrado, introducción, 6-15
DDimensiones
de instalación, 3-3de instalación básica, 3-3
EE/S analógica, 4-4
entradas analógicas, 4-4salidas analógicas, 4-6
Eje de motor paso a paso, 6-29Probar la salida, 6-29salidas de control, 4-15
Entrada/Salida, 4-1Conector de 96 terminales, 4-1conexión CAN, 4-22entradas analógicas, 8-1entradas de encoderes, 8-4entradas digitales, 4-8, 8-2puerto en serie, 4-18
multipunto con RS485/422, 4-20Uso de RS232, 4-18
Puerto USB, 4-17Resumen de la conexión, 4-27salida de error, 4-14salidas analógicas, 8-1salidas de control gradual, 4-15, 8-4salidas digitales, 4-8, 4-12, 8-3
Entrada/Salida (I/O) digital, 4-8
MN1928WES Índice

configuración, 6-30entradas auxiliares del encoder, 4-9entradas de propósito general, 4-9entradas digitales, 4-8salida de error, 4-14salidas digitales, 4-12
Entradas auxiliares del encoder, 4-9
Entradas de encoderes, 4-16
Escala, selección, 6-10
Especificaciones, 8-1alimentación, 8-1ambientales, 8-5entradas analógicas, 8-1entradas de encoderes, 8-4entradas digitales, 8-2Interfaz CAN, 8-5pesos y medidas, 8-5puerto en serie, 8-4relé, 8-4salida de error, 8-3, 8-4salidas analógicas (demandas), 8-1salidas digitales, 8-3salidas graduales, 8-4
Especificaciones ambientales, 3-1
FFuentes de energía, 3-4, 8-1
Funcionamiento, 6-1comprobaciones de encendido, 6-2comprobaciones preliminares, 6-2conexión al PC, 6-1Instalación de Mint WorkBench, 6-1instalación del driver de USB, 6-2Instalación del Mint Machine Center, 6-1puesta en marcha, 6-1
GGrabar información de configuración, 6-32
IIdentificación del número de catálogo, 2-3
Indicadores, 7-2LEds de montaje en superficie, 7-4pantalla de estado, 7-2
Indicadores LED
de montaje en superficie, 7-4pantalla de estado, 7-2
Instalación, 3-1Mint Machine Center, 6-1Mint WorkBench, 6-1
Instalación básica, 3-1dimensiones (toma posterior), 5-3, 5-16requisitos de ubicación, 3-1Tarjeta NextMove ES, 3-2
Interfaz CANcableado, 4-23CAN de Baldor, 4-25CANopen, 4-24conector, 4-22especificaciones, 8-5Introducción, 4-22opto-aislamiento, 4-23terminador, 4-23
Introducción al control de bucle cerrado, 6-15
MMint Machine Center (MMC), 6-3
puesta en marcha, 6-4
Mint WorkBencharchivo de ayuda, 6-6cargar la información guardada, 6-33Configuración de la entrada/salida
digital, 6-30grabar información de configuración, 6-32puesta en marcha, 6-7
PPaneles de operador, paneles de operadorHMI, 4-21
Pantalla de estado, 7-2
Pesos y medidas, 8-5
Precauciones, 1-2
PruebaEje de motor paso a paso, 6-29servoeje, 6-13
Puerto en serie, 4-18conexión de los paneles HMI de Baldor en
serie, 4-21
Índice MN1928WES

RRealimentación, 4-16, 5-13, 5-33, 8-4
Recepción e inspección, 2-3
ReléPalabra clave
DRIVEENABLEOUTPUT, 4-14palabra clave
GLOBALERROROUTPUT, 4-14Palabra clave RELAY, 4-14Tomas posteriores optoaisladas, 5-18
Requisitos de hardware, 3-4
Resolución de problemas, 7-1archivo de ayuda, 6-6CAN de Baldor, 7-9CANopen, 7-7comunicación, 7-4control del motor, 7-5diagnóstico de problemas, 7-1Mint WorkBench, 7-7pantalla de estado, 7-2SupportMe (Asistencia), 7-1
Respuesta amortiguada críticamente, 6-22
Respuesta sobreamortiguada, 6-21
Respuesta subamortiguada, 6-20
RS232especificaciones, 8-4
RS485, 4-20especificaciones, 8-4multipunto con RS485 / RS422, 4-20
SSalida de error, 4-14, 8-3, 8-4
Salida de habilitación de accionamientoajuste, 6-11Palabra clave
DRIVEENABLEOUTPUT, 4-14prueba, 6-11, 6-12
Salidas de comando. Ver Salidas de demanda
Salidas de demanda, 6-13
Servoeje, 6-13Ajustar KPROP, 6-27ajuste para el control de corriente, 6-18ajuste para el control de velocidad, 6-24eliminar errores de estado estable, 6-23probar la salida de demanda, 6-13
TToma posterior no aislada., 5-2
Conector tipo D Encoder0 X3, 5-13Conector tipo D Encoder1 X2, 5-13Conector tipo D serie X4, 5-14Tornillo bloque de terminales X1, 5-12Tornillo bloque de terminales X5, 5-8, 5-12Tornillo bloque de terminales X6, 5-7Tornillo bloque de terminales X7, 5-5Tornillo bloque de terminales X8, 5-4Tornillo bloque de terminales X9, 5-9Tornillo bloque de terminales X10, 5-10Tornillo bloque de terminales X11, 5-7Tornillo bloque de terminales X12, 5-6Tornillo bloque de terminales X13, 5-6
Tomas posterioresVer también Toma posterior no aislada;
Tomas posteriores optoaisladasBPL010-501 no aislada, 5-2BPL010-502/503 optoaislada, 5-15Introducción, 5-1números de catálogo, 5-1
Tomas posteriores aisladas, 5-15
Tomas posteriores optoaisladas, 5-15Conector tipo D Encoder0 X3, 5-33Conector tipo D Encoder1 X2, 5-34Conector tipo D serie X4, 5-34Conexiones de relé, 5-18entradas activas a nivel alto, 5-22entradas activas a nivel bajo, 5-24Salidas NPN, 5-27Salidas PNP, 5-27Tornillo bloque de terminales X1, 5-33Tornillo bloque de terminales X5, 5-28, 5-32Tornillo bloque de terminales X6, 5-22Tornillo bloque de terminales X7, 5-19Tornillo bloque de terminales X8, 5-17Tornillo bloque de terminales X9, 5-29Tornillo bloque de terminales X10, 5-30Tornillo bloque de terminales X11, 5-26Tornillo bloque de terminales X12, 5-20Tornillo bloque de terminales X13, 5-21
Tornillo bloque de terminales X1toma posterior no aislada., 5-12Tomas posteriores optoaisladas, 5-33
MN1928WES Índice

Tornillo bloque de terminales X5toma posterior no aislada., 5-8, 5-12Tomas posteriores optoaisladas, 5-28, 5-32
Tornillo bloque de terminales X6toma posterior no aislada., 5-7Tomas posteriores optoaisladas, 5-22
Tornillo bloque de terminales X7toma posterior no aislada., 5-5Tomas posteriores optoaisladas, 5-19
Tornillo bloque de terminales X8toma posterior no aislada., 5-4Tomas posteriores optoaisladas, 5-17
Tornillo bloque de terminales X9toma posterior no aislada., 5-9Tomas posteriores optoaisladas, 5-29
Tornillo bloque de terminales X10toma posterior no aislada., 5-10Tomas posteriores optoaisladas, 5-30
Tornillo bloque de terminales X11toma posterior no aislada., 5-7Tomas posteriores optoaisladas, 5-26
Tornillo bloque de terminales X12toma posterior no aislada., 5-6Tomas posteriores optoaisladas, 5-20
Tornillo bloque de terminales X13toma posterior no aislada., 5-6Tomas posteriores optoaisladas, 5-21
UUnidades y abreviaturas, 2-4
USBinstalación del driver, 6-2puerto, 4-17
WWorkBench Ver Mint WorkBench
Índice MN1928WES

Comentarios
Si tiene alguna sugerencia para mejorar este manual, comuníquese con nosotros. Escribasus comentarios en el espacio provisto a continuación, separe esta página del manual yenvíela por correo a:
ManualesABB LtdControl de movimiento6 Bristol Distribution ParkHawkley DriveBristolBS32 0BFReino Unido.
También puede enviarnos sus comentarios por correo electrónico a:
Comentario:
continuación...
MN1928WES Comentarios

Gracias por dedicar su tiempo para ayudarnos.
Comentarios MN1928WES


Contacte con nosotros
ABB OyAccionamientosP.O. Box 184FI-00381 HELSINKIFINLANDIATeléfono +358 10 22 11Fax +358 10 22 22681www.abb.com/drives
ABB Inc.Tecnologías de automatizaciónAccionamientos y motores16250 West Glendale DriveNew Berlin, WI 53151USATeléfono 262 785-3200
1-800-HELP-365Fax 262 780-5135www.abb.com/drives
ABB Beijing Drive Systems Co. Ltd.N.º 1, bloque D, A-10 Jiuxianqiao BeiluDistrito Chaoyang Beijing, P.R. China, 100015Teléfono +86 10 5821 7788Fax +86 10 5821 7618www.abb.com/drives
ABB LtdControl de movimiento6 Bristol Distribution ParkHawkley DriveBristol, BS32 0BFReino UnidoTeléfono +44 (0) 1454 850000Fax +44 (0) 1454 859001www.abb.com/drives