Control PID
45
1 Controladors PID Controladors PID
-
Upload
francesc-delis -
Category
Documents
-
view
256 -
download
1
description
Controladors PID
Transcript of Control PID
1Controladors PID
Controladors PID
2Controladors PID
IntroduccióLes accions bàsiques de controlEl controlador PIDSistemes amb PIDSintonia del PID
Índex
3Controladors PID
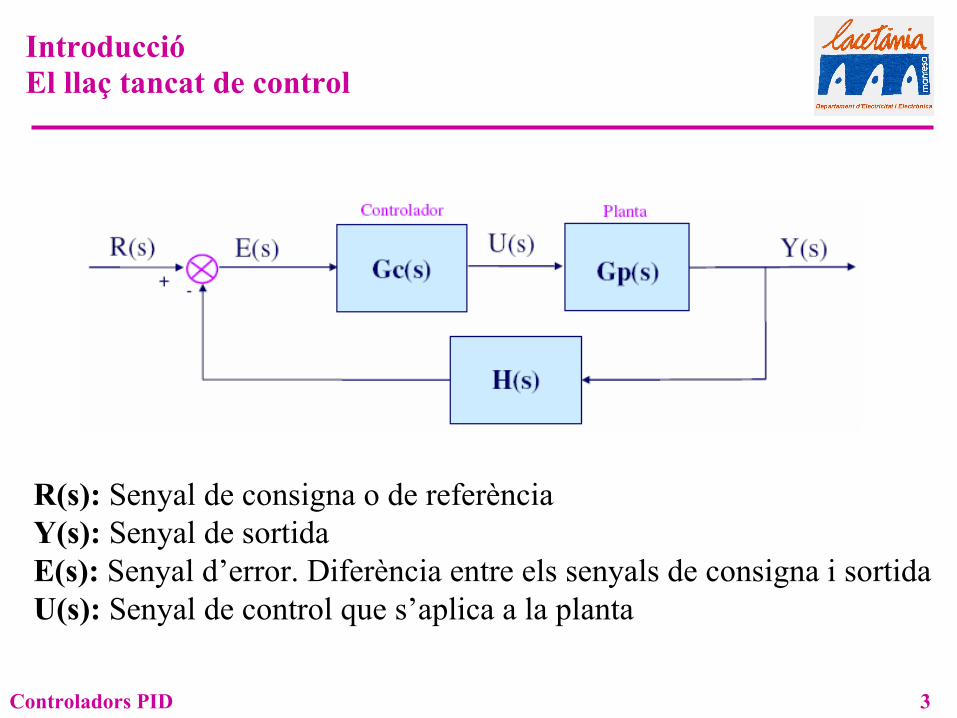
IntroduccióEl llaç tancat de control
R(s): Senyal de consigna o de referènciaY(s): Senyal de sortidaE(s): Senyal d’error. Diferència entre els senyals de consigna i sortidaU(s): Senyal de control que s’aplica a la planta
4Controladors PID
Les accions bàsiques de control es poden clasificar en:
Acció proporcional: P
Acció integral: I
Acció derivativa: D
Acció proporcional-integral-derivativa: PID
Les accions bàsiques de control
5Controladors PID
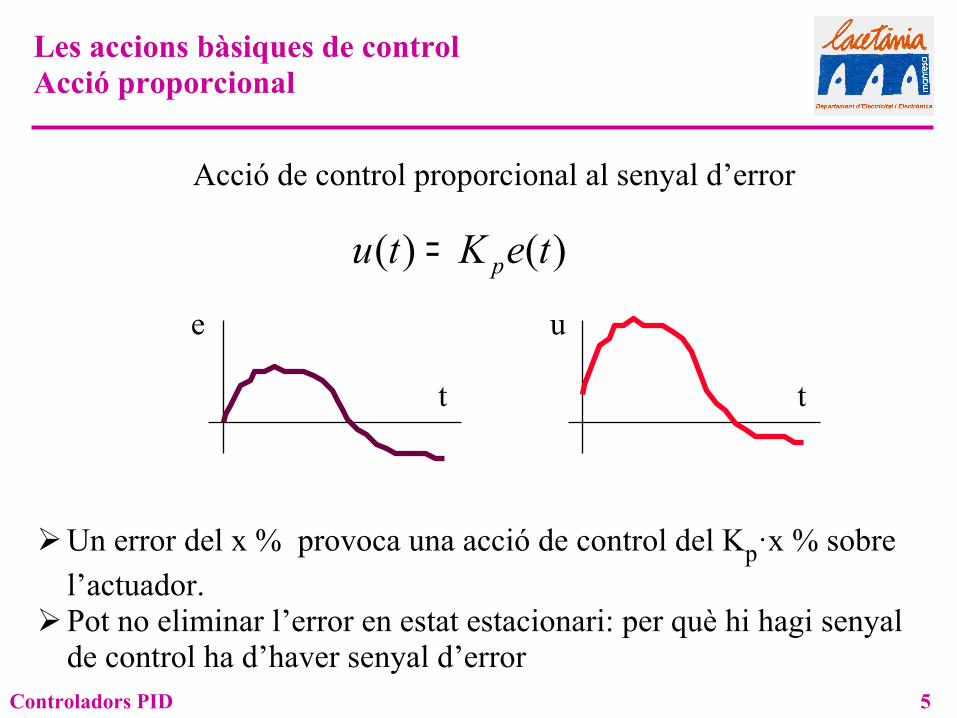
)()( teKtu p=
e
t
u
t
Un error del x % provoca una acció de control del Kp·x % sobre l’actuador.
Pot no eliminar l’error en estat estacionari: per què hi hagi senyal de control ha d’haver senyal d’error
Les accions bàsiques de controlAcció proporcional
Acció de control proporcional al senyal d’error
6Controladors PID
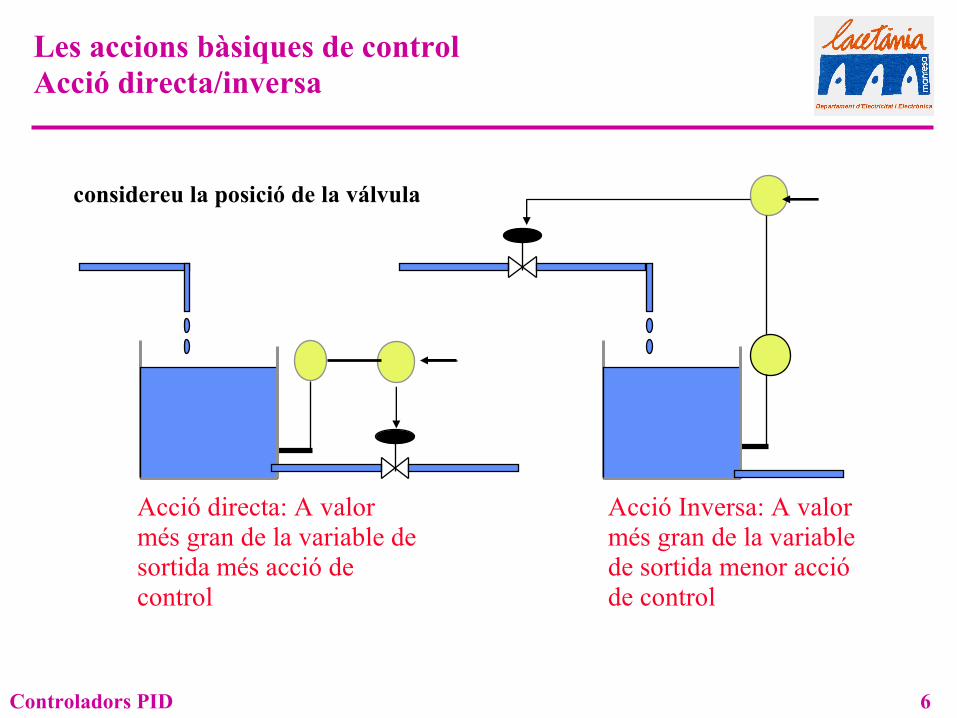
Acció directa: A valor més gran de la variable de sortida més acció de control
Acció Inversa: A valor més gran de la variable de sortida menor acció de control
considereu la posició de la válvula
Les accions bàsiques de controlAcció directa/inversa
7Controladors PID
y yw w
t t
u
t
u
t
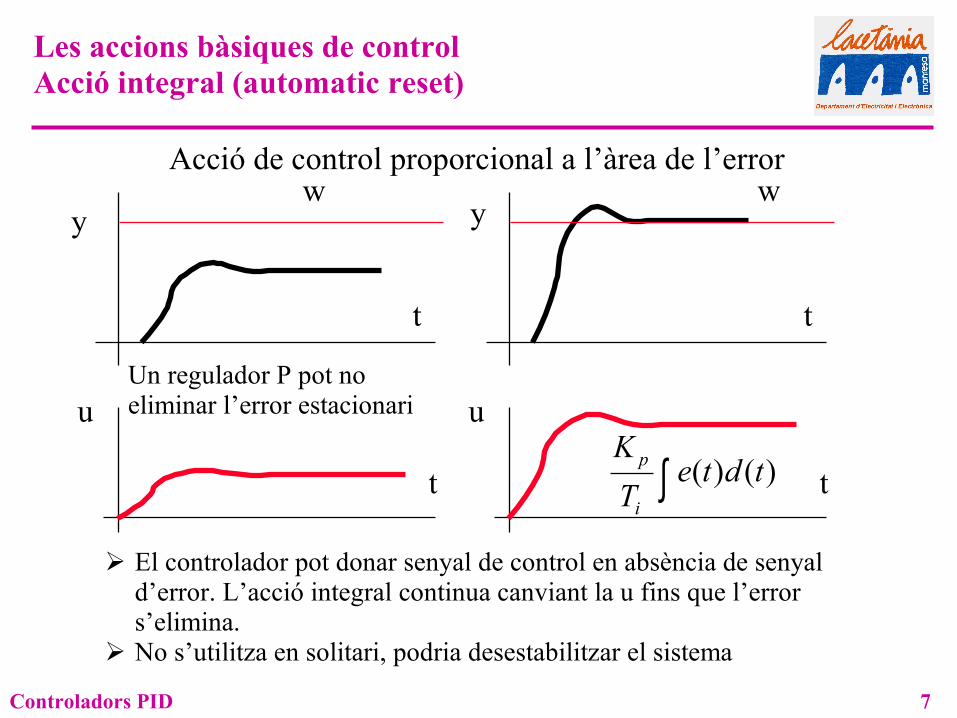
Un regulador P pot no eliminar l’error estacionari
El controlador pot donar senyal de control en absència de senyal d’error. L’acció integral continua canviant la u fins que l’error s’elimina.
No s’utilitza en solitari, podria desestabilitzar el sistema
∫ )()( tdteTK
i
p
Les accions bàsiques de controlAcció integral (automatic reset)
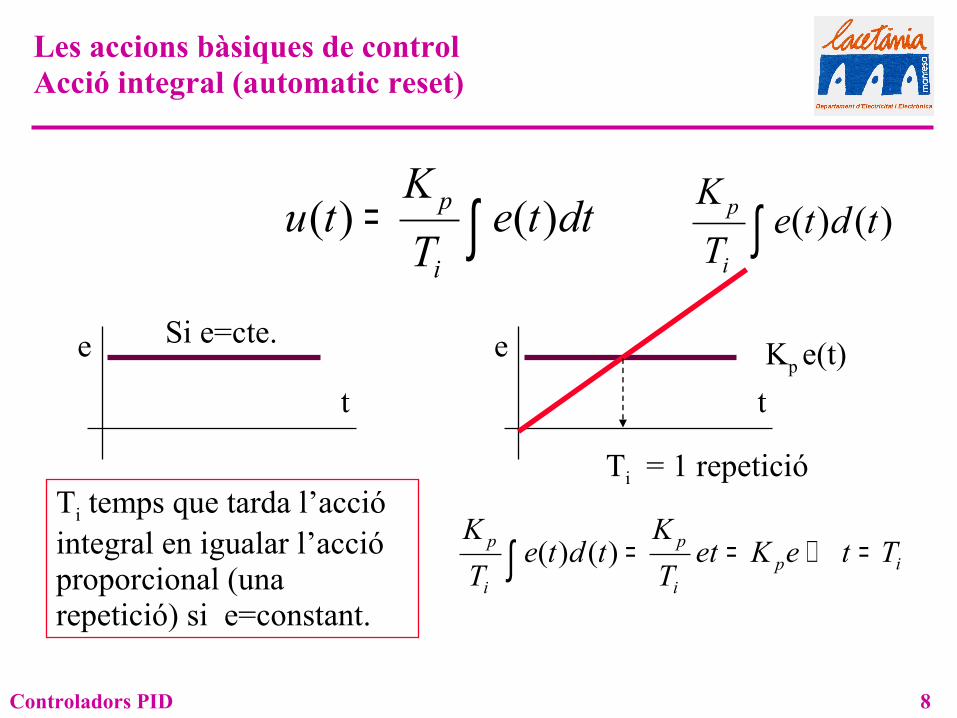
Acció de control proporcional a l’àrea de l’error
8Controladors PID
e
t
e
tKp e(t)
Si e=cte.
∫ )()( tdteTK
i
p
Ti = 1 repetició
ipi
p
i
p TteKetTK
tdteTK
=⇒==∫ )()(Ti temps que tarda l’acció integral en igualar l’acció proporcional (una repetició) si e=constant.
∫= dtteTK
tui
p )()(
Les accions bàsiques de controlAcció integral (automatic reset)
9Controladors PID
y yw w
t t
u
t
u
t
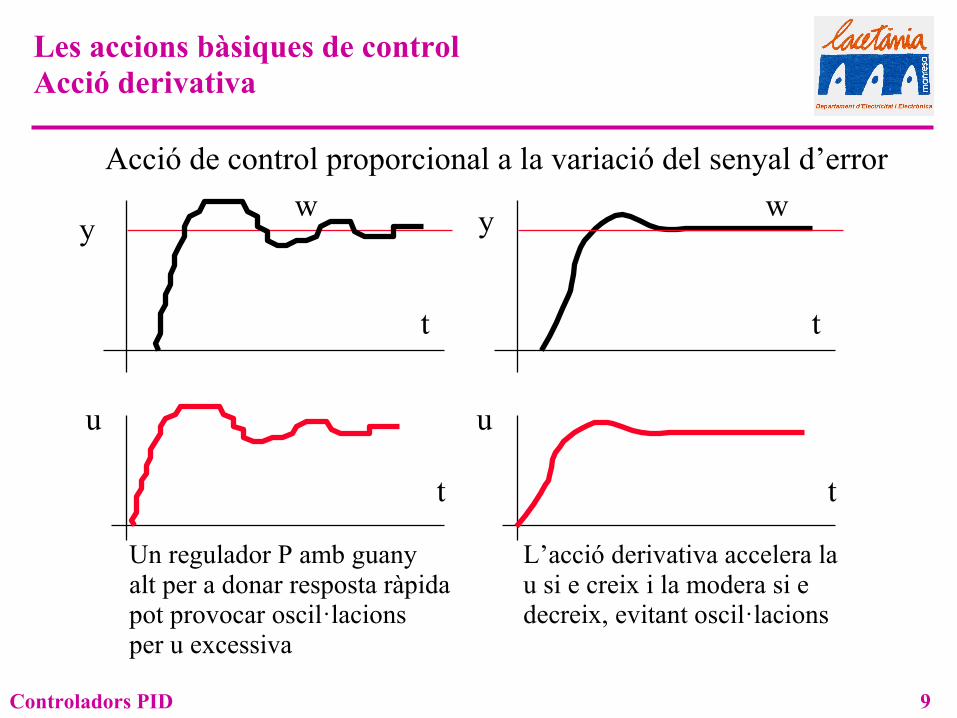
Un regulador P amb guanyalt per a donar resposta ràpidapot provocar oscil·lacions per u excessiva
L’acció derivativa accelera lau si e creix i la modera si e decreix, evitant oscil·lacions
Les accions bàsiques de controlAcció derivativa
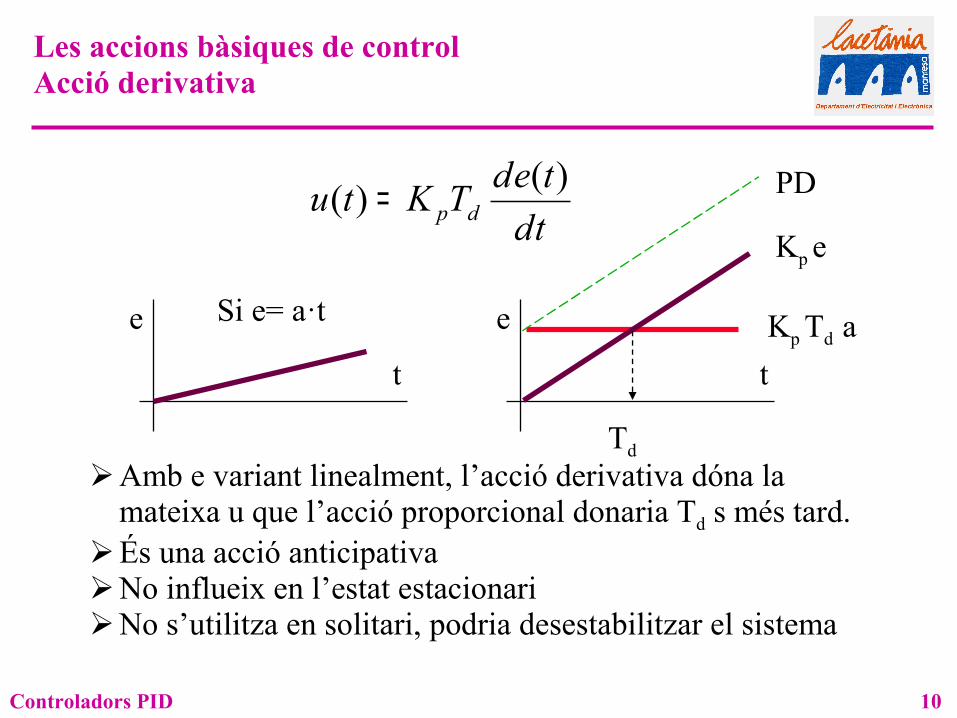
Acció de control proporcional a la variació del senyal d’error
10Controladors PID
tdtedTKtu dp)()( =
e
t
e
tKp Td a
Si e= a·t
Td
Kp e
Amb e variant linealment, l’acció derivativa dóna la mateixa u que l’acció proporcional donaria Td s més tard.
És una acció anticipativaNo influeix en l’estat estacionariNo s’utilitza en solitari, podria desestabilitzar el sistema
PD
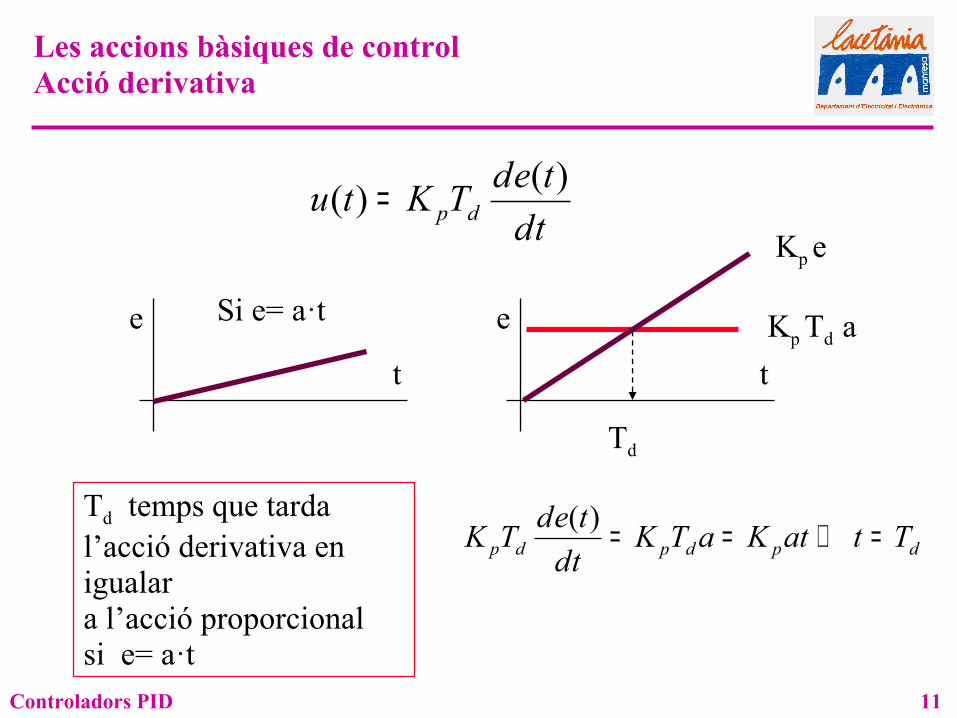
Les accions bàsiques de controlAcció derivativa
11Controladors PID
e
t
e
t
Si e= a·t
Td
dpdpdp TtatKaTKtdtedTK =⇒==)(Td temps que tarda
l’acció derivativa en igualara l’acció proporcionalsi e= a·t
Les accions bàsiques de controlAcció derivativa
tdtedTKtu dp)()( =
Kp e
Kp Td a
12Controladors PID
y yww
t t
u
t
u
t
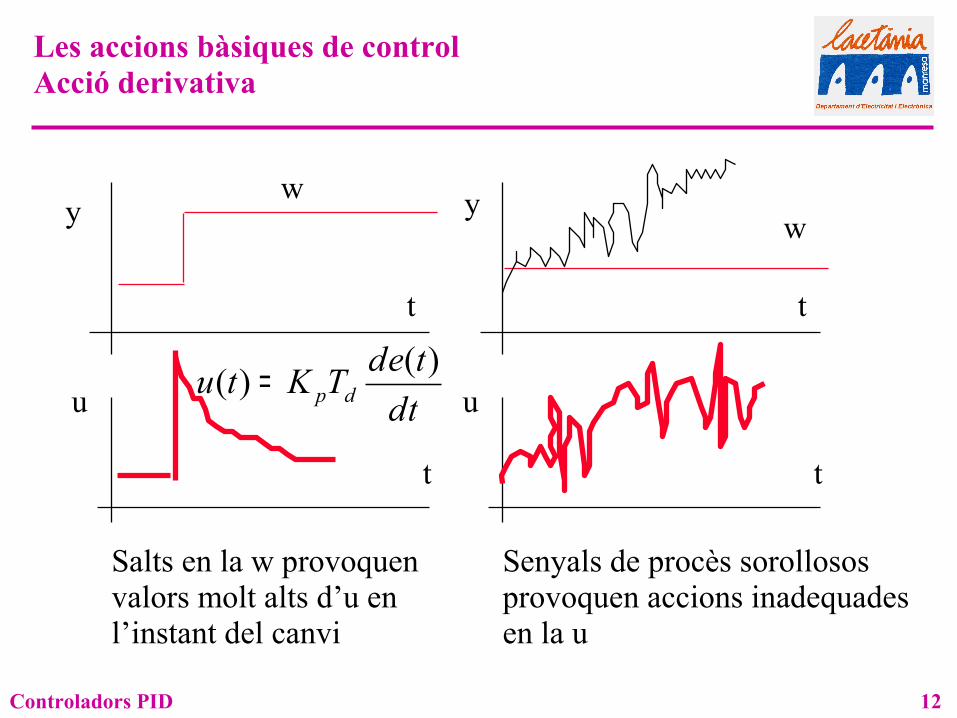
tdtedTKtu dp)()( =
Salts en la w provoquenvalors molt alts d’u enl’instant del canvi
Senyals de procès sorollososprovoquen accions inadequadesen la u
Les accions bàsiques de controlAcció derivativa
13Controladors PID
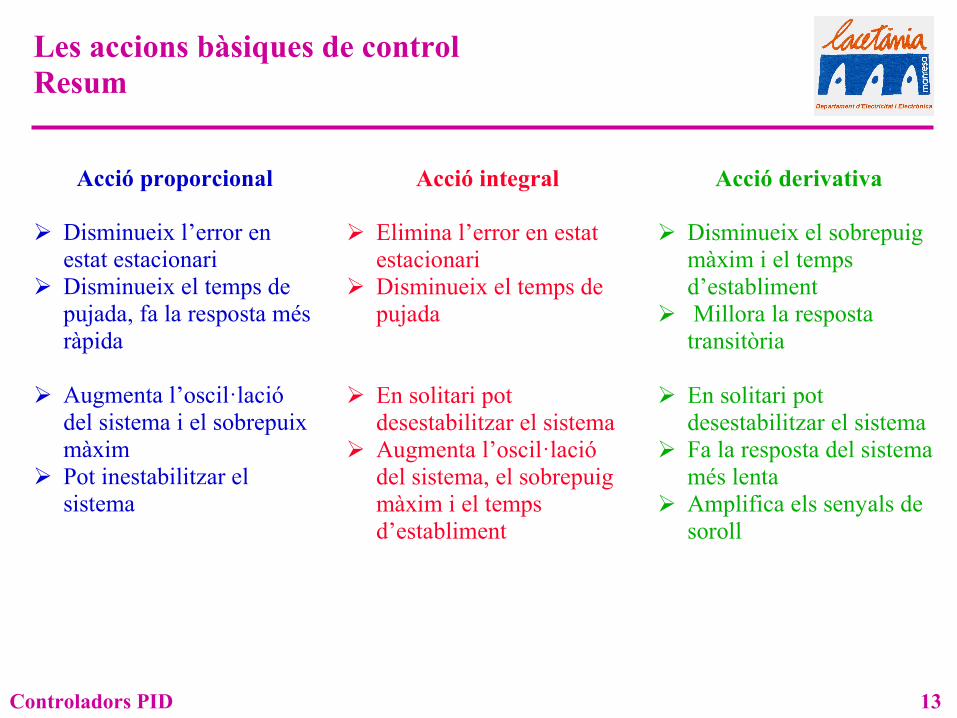
Acció proporcional
Disminueix l’error en estat estacionari
Disminueix el temps de pujada, fa la resposta més ràpida
Augmenta l’oscil·lació del sistema i el sobrepuix màxim
Pot inestabilitzar el sistema
Acció integral
Elimina l’error en estat estacionari
Disminueix el temps de pujada
En solitari pot desestabilitzar el sistema
Augmenta l’oscil·lació del sistema, el sobrepuig màxim i el temps d’establiment
Acció derivativa
Disminueix el sobrepuig màxim i el temps d’establiment
Millora la resposta transitòria
En solitari pot desestabilitzar el sistema
Fa la resposta del sistema més lenta
Amplifica els senyals de soroll
Les accions bàsiques de controlResum
14Controladors PID
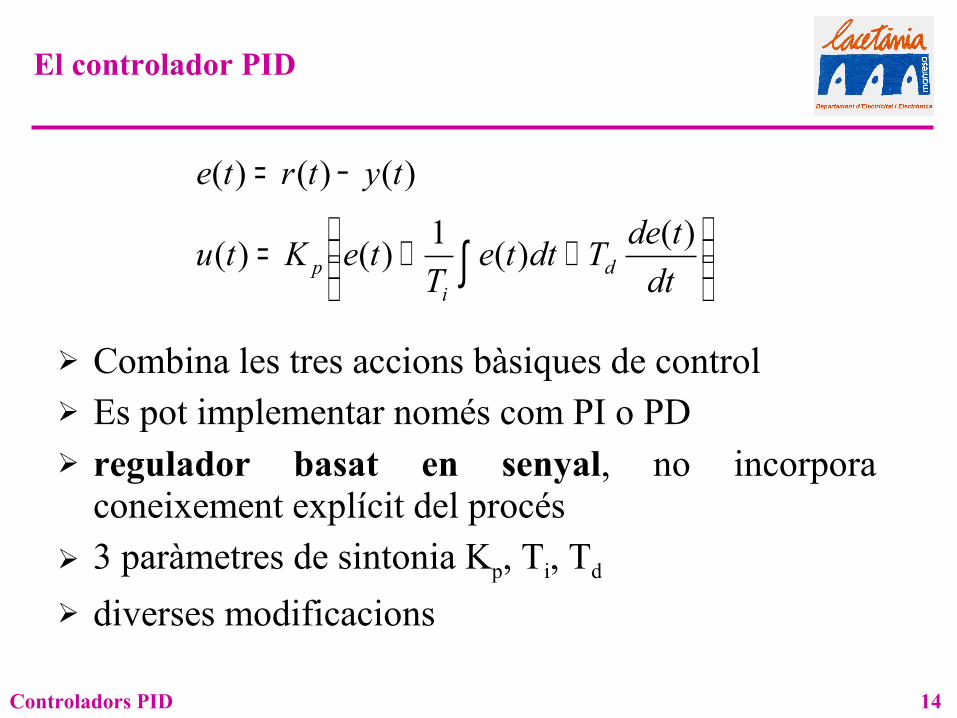
Combina les tres accions bàsiques de control Es pot implementar només com PI o PD regulador basat en senyal, no incorpora
coneixement explícit del procés 3 paràmetres de sintonia Kp, Ti, Td
diverses modificacions
++=
−=
∫ dttdeTdtte
TteKtu
tytrte
di
p)()(1)()(
)()()(
El controlador PID
15Controladors PID
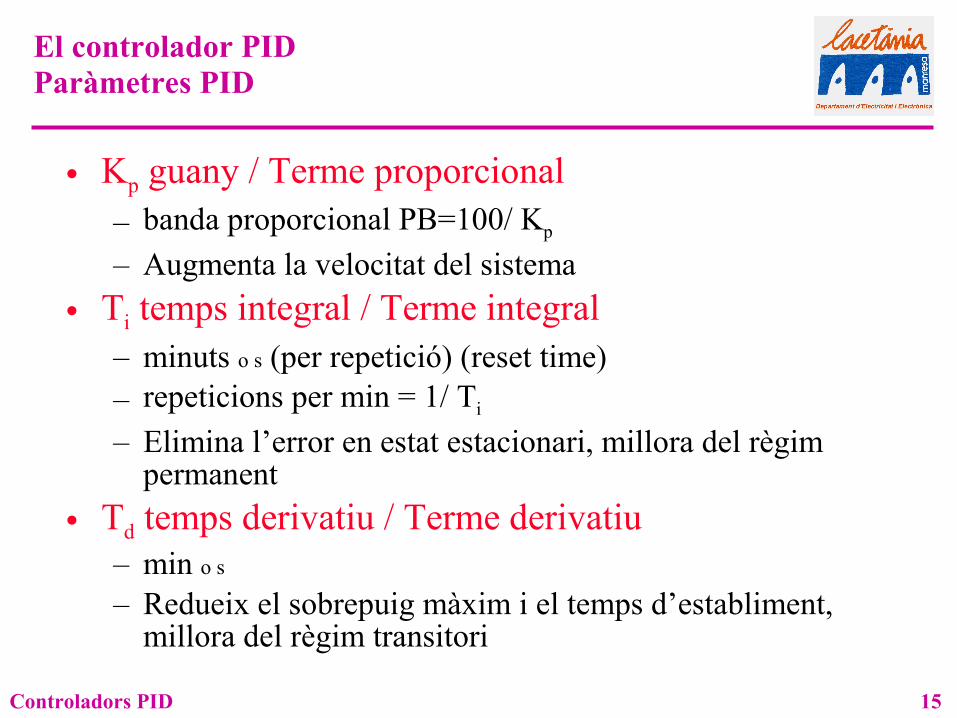
• Kp guany / Terme proporcional– banda proporcional PB=100/ Kp – Augmenta la velocitat del sistema
• Ti temps integral / Terme integral– minuts o s (per repetició) (reset time)– repeticions per min = 1/ Ti
– Elimina l’error en estat estacionari, millora del règim permanent
• Td temps derivatiu / Terme derivatiu– min o s
– Redueix el sobrepuig màxim i el temps d’establiment, millora del règim transitori
El controlador PIDParàmetres PID
16Controladors PID
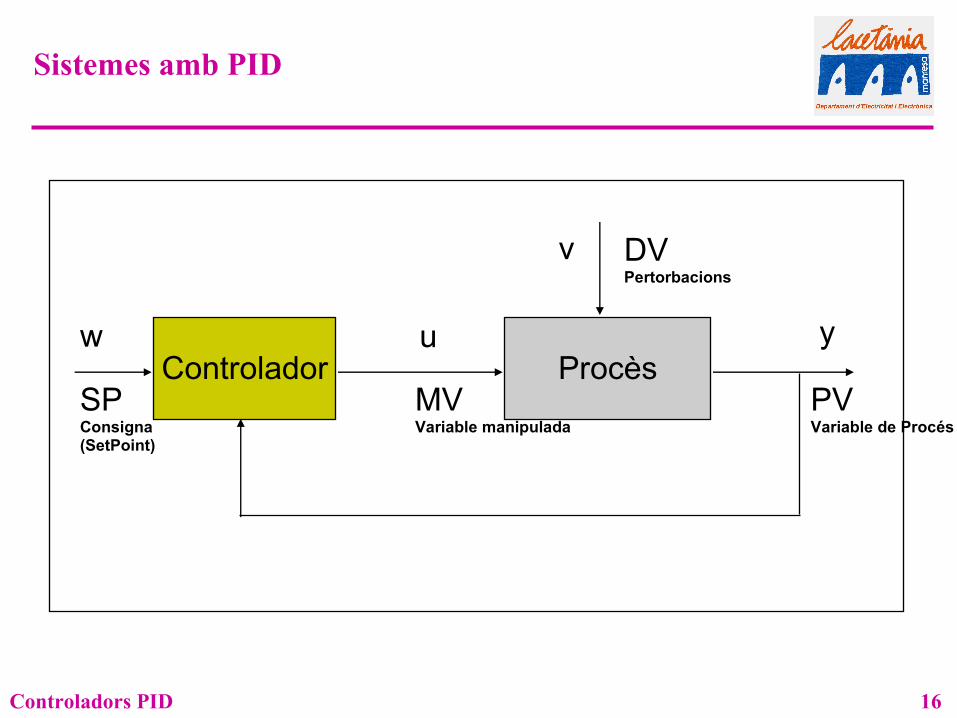
ProcèsControladoruw y
SPConsigna(SetPoint)
PVVariable de Procés
v
MVVariable manipulada
DVPertorbacions
Sistemes amb PID
17Controladors PID
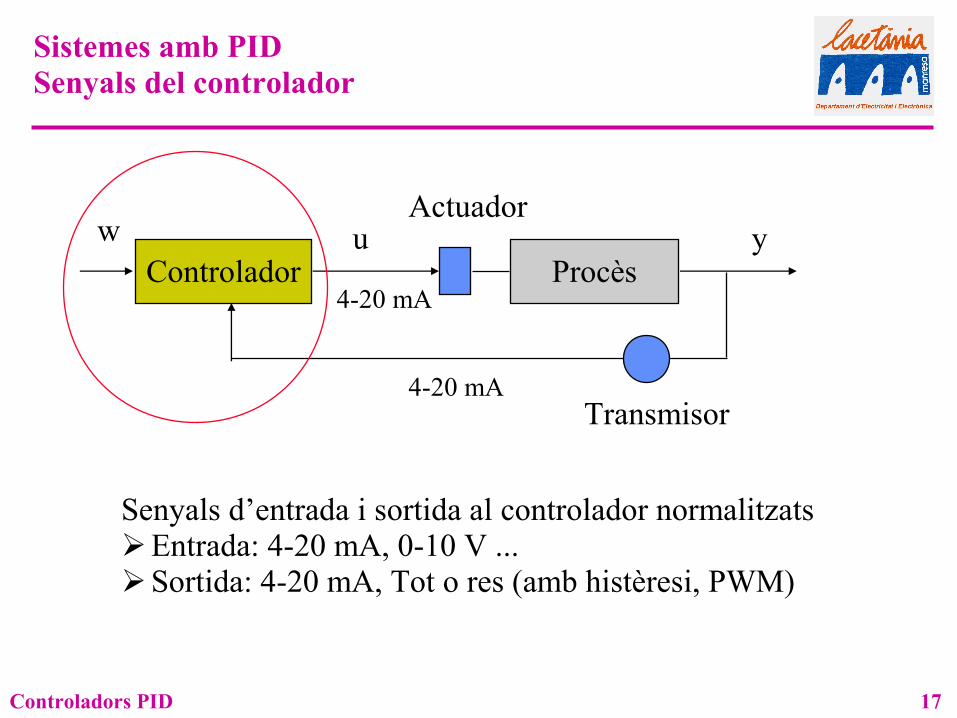
ProcèsControlador
Transmisor
Actuadorw
Senyals d’entrada i sortida al controlador normalitzatsEntrada: 4-20 mA, 0-10 V ...Sortida: 4-20 mA, Tot o res (amb histèresi, PWM)
u y
4-20 mA
4-20 mA
Sistemes amb PIDSenyals del controlador
18Controladors PID
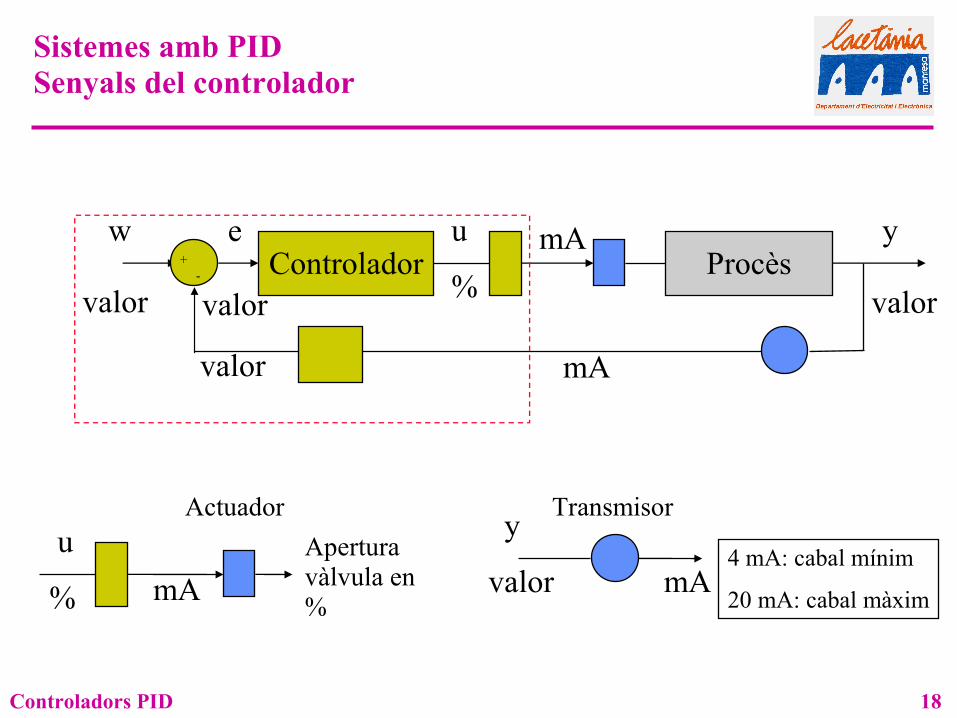
Sistemes amb PIDSenyals del controlador
ProcèsControladorw u
valor
mAvalor
valor
e mA%
+-
umA%
Apertura vàlvula en %
Actuador
valor
y
mAvalor
Transmisor
y
4 mA: cabal mínim
20 mA: cabal màxim
19Controladors PID
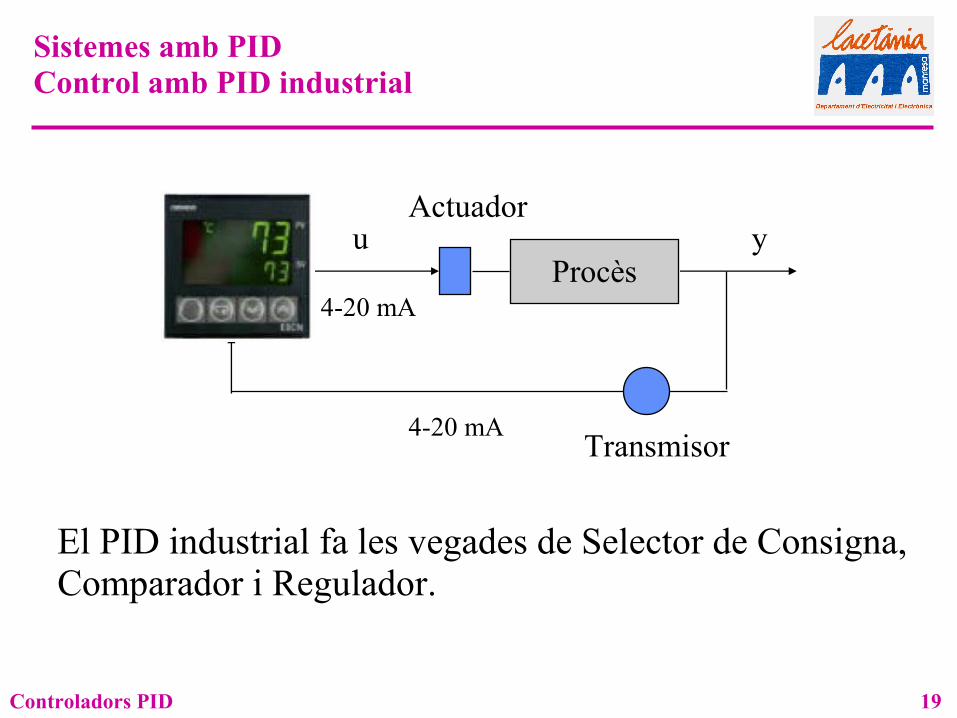
Procès
Transmisor
Actuador
El PID industrial fa les vegades de Selector de Consigna,Comparador i Regulador.
u y
4-20 mA
4-20 mA
Sistemes amb PIDControl amb PID industrial
20Controladors PID
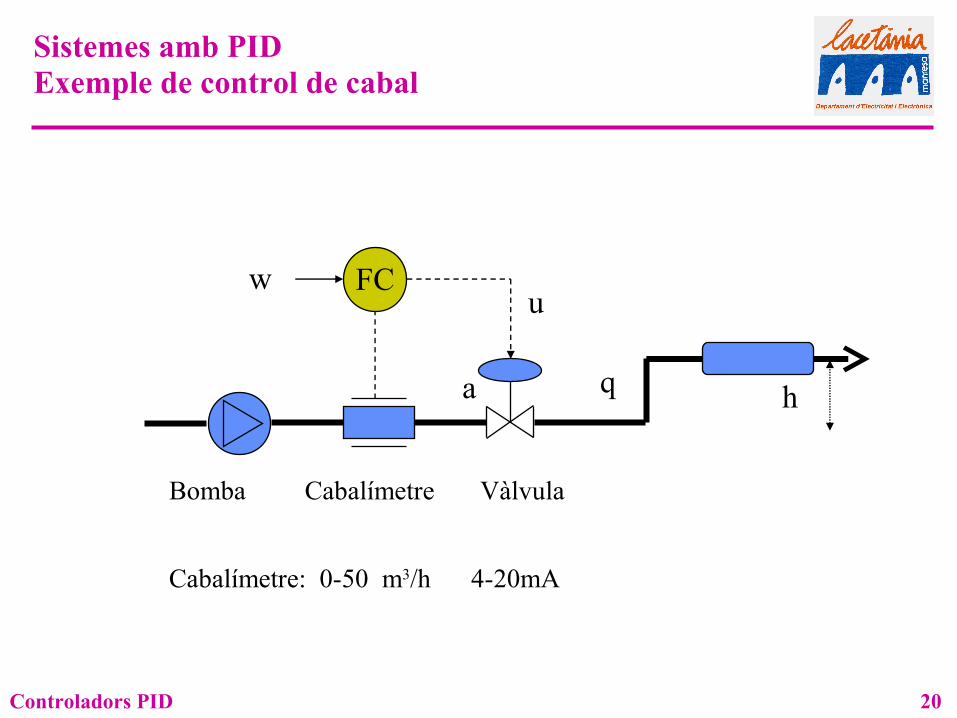
qa h
FCwu
Bomba Cabalímetre Vàlvula
Cabalímetre: 0-50 m3/h 4-20mA
Sistemes amb PIDExemple de control de cabal
21Controladors PID
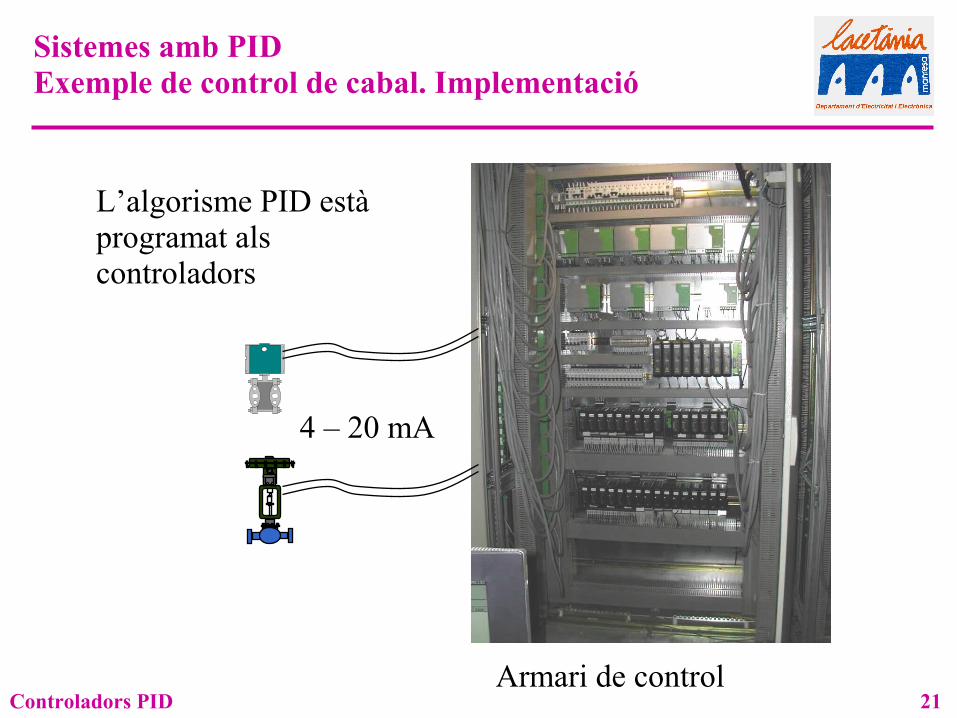
L’algorisme PID està programat als controladors
4 – 20 mA
Armari de control
Sistemes amb PIDExemple de control de cabal. Implementació
22Controladors PID
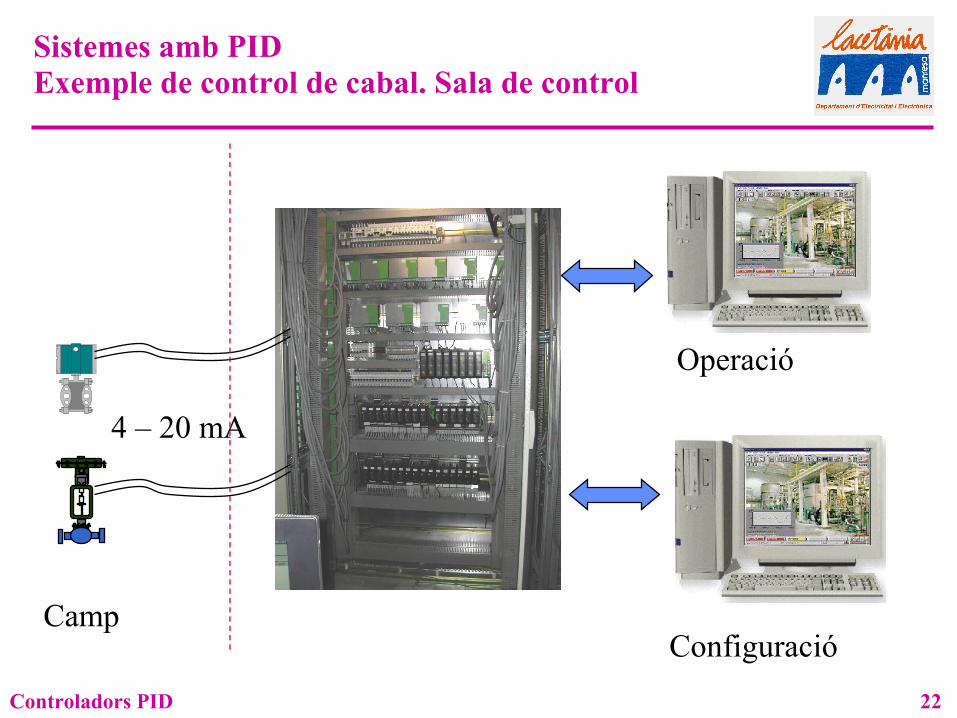
4 – 20 mA
Camp
Operació
Configuració
Sistemes amb PIDExemple de control de cabal. Sala de control
23Controladors PID
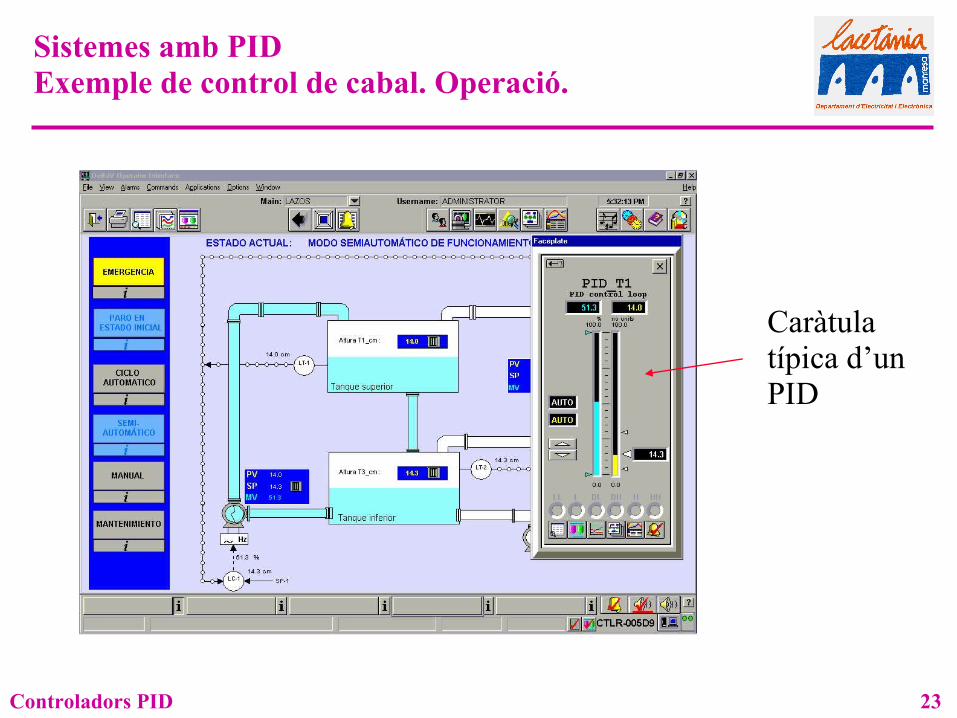
Caràtula típica d’un PID
Sistemes amb PIDExemple de control de cabal. Operació.
24Controladors PID
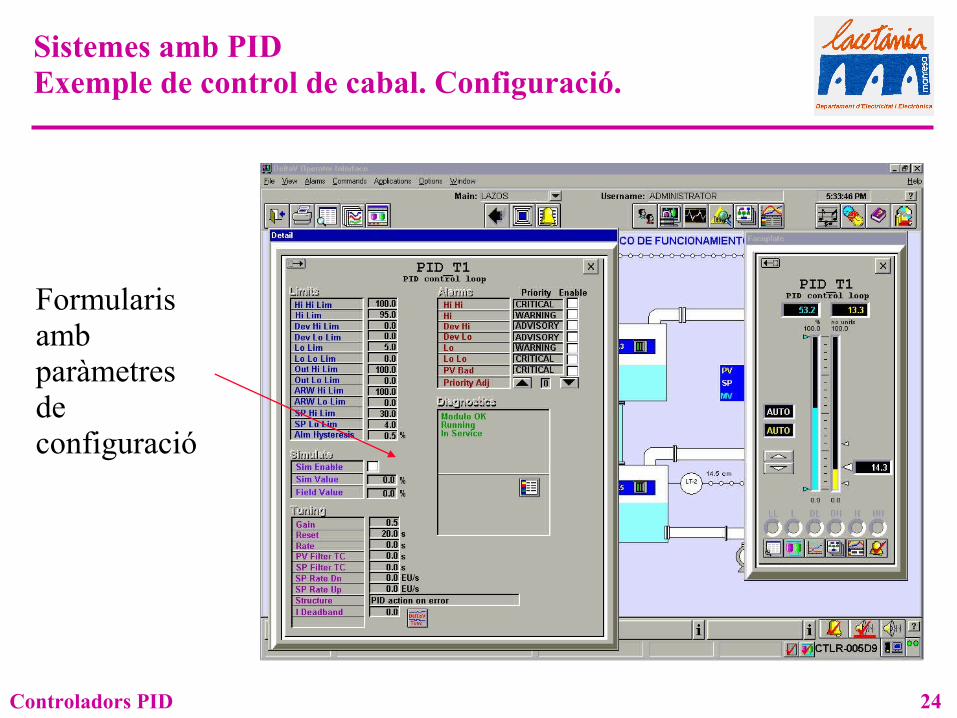
Formularis amb paràmetres de configuració
Sistemes amb PIDExemple de control de cabal. Configuració.
25Controladors PID
4-20 mA
Sistemes amb PIDSaturació de la sortida del PID
Quan es connecta el controlador, mentre l’error no és nul, l’acció integral pot arribar a saturar el senyal de control i, en aquest cas, romandre en aquesta situació fins que esprodueixi un canvi de signe en l’error.
En estar saturat, la resposta del controlador davant variacions es torna més lenta i amb més sobreoscil·lació.
Per evitar-ho es fan servir sistemes antisaturació (Anti-Windup).
26Controladors PID
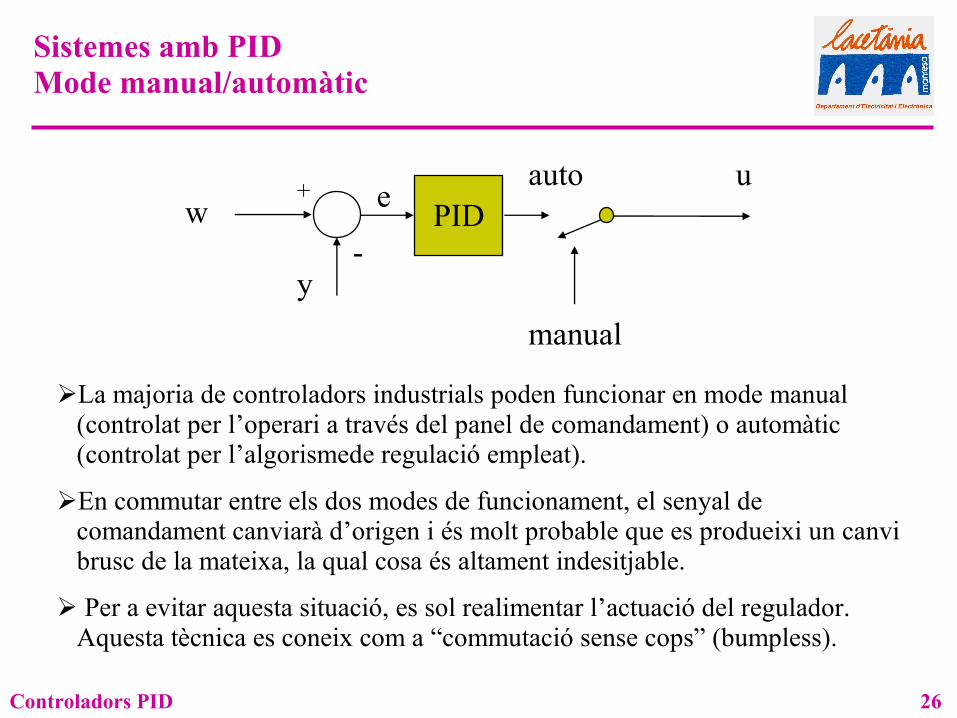
La majoria de controladors industrials poden funcionar en mode manual (controlat per l’operari a través del panel de comandament) o automàtic (controlat per l’algorismede regulació empleat).
En commutar entre els dos modes de funcionament, el senyal de comandament canviarà d’origen i és molt probable que es produeixi un canvi brusc de la mateixa, la qual cosa és altament indesitjable.
Per a evitar aquesta situació, es sol realimentar l’actuació del regulador. Aquesta tècnica es coneix com a “commutació sense cops” (bumpless).
Sistemes amb PIDMode manual/automàtic
w
y
eu+
-PID
manual
auto
27Controladors PID
La sintonia (tuning) és el procés que es porta a terme per a ajustar els paràmetres del regulador
Es seleccionen els paràmetres del PID per a obtenir una resposta adequada
Kp, Ti, Td
Hi ha mètodes analítics (a partir del model matemàtic de la planta) i empírics (aplicables sense conèixer el model de la planta)
Sintonia de PID
28Controladors PID
• Paràmetres inicials• Mètodes d’assaig i error• Mètodes basats en experiments
– Estimar certes característiques dinàmiques del procès mitjançant un experiment
– Calcular els paràmetres del controlador mitjançant taules o fòrmules deduïdes en funció de les característiques dinàmicas estimades
• Mètodes de sintonia automàtica
Sintonia de PIDMètodes empírics de sintonia
29Controladors PID
Sintonia de PIDMètodes empírics de sintonia. Paràmetres inicials
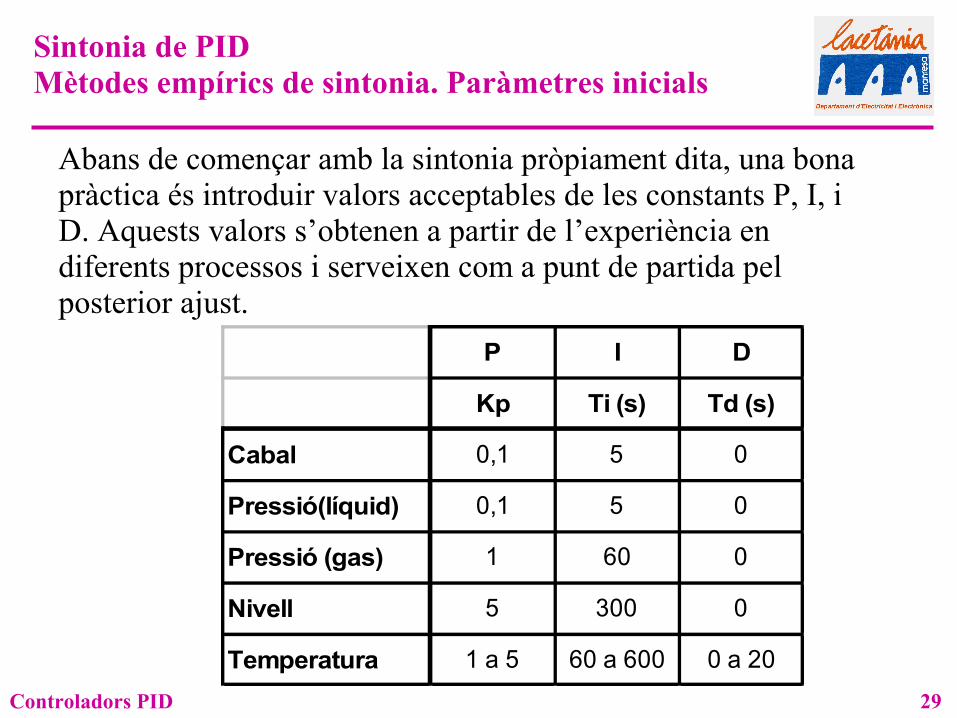
Abans de començar amb la sintonia pròpiament dita, una bona pràctica és introduir valors acceptables de les constants P, I, i D. Aquests valors s’obtenen a partir de l’experiència en diferents processos i serveixen com a punt de partida pel posterior ajust.
P I D
Kp Ti (s) Td (s)
Cabal 0,1 5 0
Pressió(líquid) 0,1 5 0
Pressió (gas) 1 60 0
Nivell 5 300 0
Temperatura 1 a 5 60 a 600 0 a 20
30Controladors PID
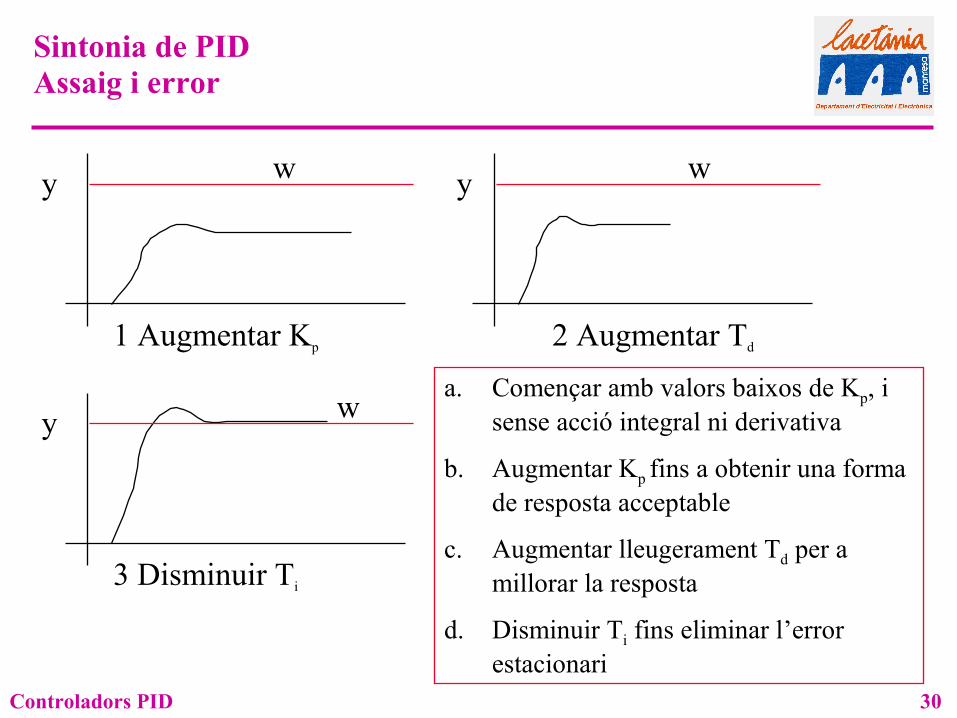
a. Començar amb valors baixos de Kp, i sense acció integral ni derivativa
b. Augmentar Kp fins a obtenir una forma de resposta acceptable
c. Augmentar lleugerament Td per a millorar la resposta
d. Disminuir Ti fins eliminar l’error estacionari
1 Augmentar Kp 2 Augmentar Td
3 Disminuir Ti
y y
y
w w
w
Sintonia de PIDAssaig i error
31Controladors PID
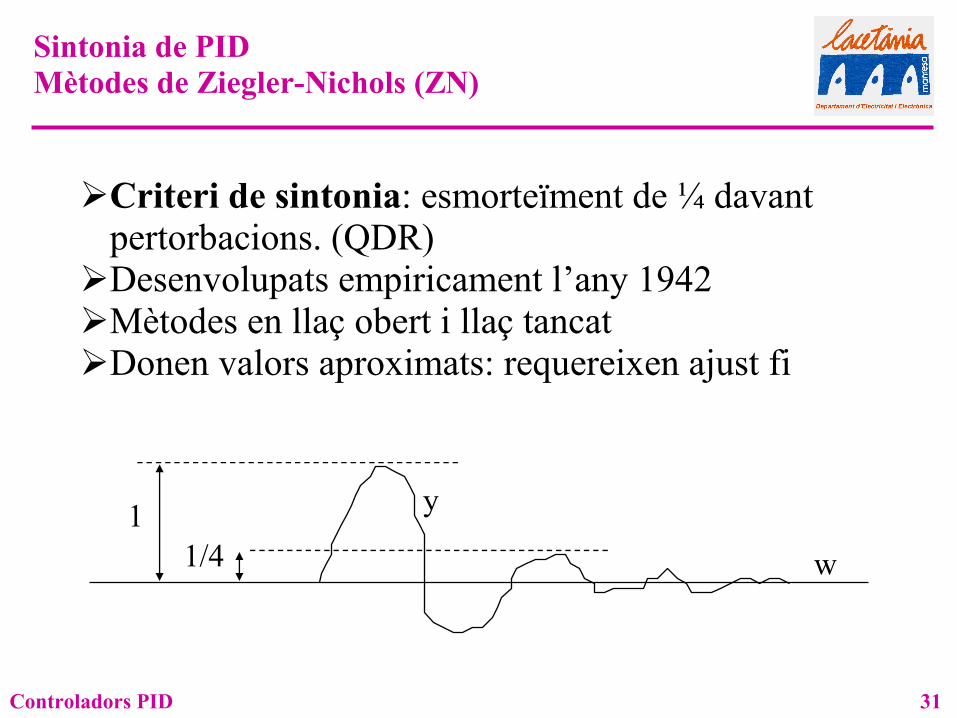
Criteri de sintonia: esmorteïment de ¼ davant pertorbacions. (QDR)
Desenvolupats empiricament l’any 1942Mètodes en llaç obert i llaç tancatDonen valors aproximats: requereixen ajust fi
11/4
y
w
Sintonia de PIDMètodes de Ziegler-Nichols (ZN)
32Controladors PID
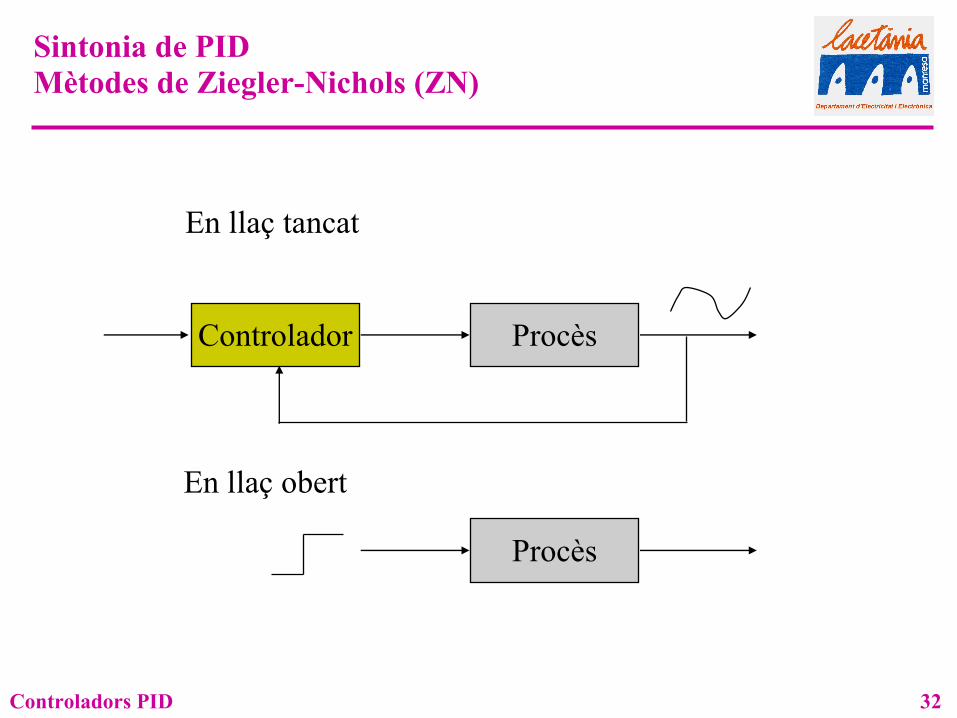
En llaç tancat
ProcèsControlador
En llaç obert
Procès
Sintonia de PIDMètodes de Ziegler-Nichols (ZN)
33Controladors PID
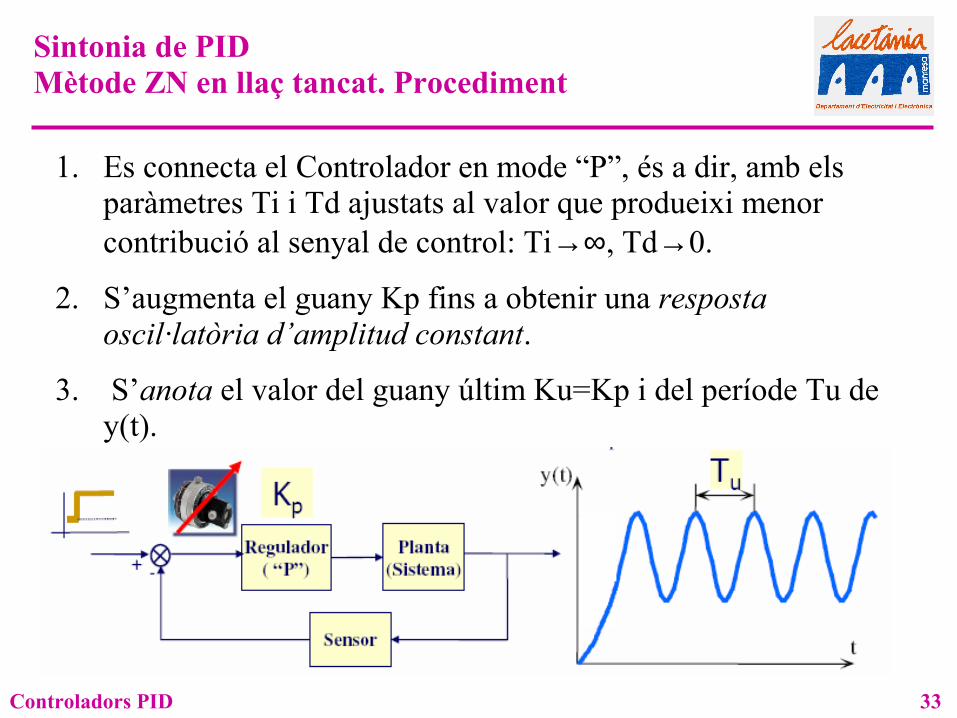
Sintonia de PIDMètode ZN en llaç tancat. Procediment
1. Es connecta el Controlador en mode “P”, és a dir, amb els paràmetres Ti i Td ajustats al valor que produeixi menor contribució al senyal de control: Ti→∞, Td→0.
2. S’augmenta el guany Kp fins a obtenir una resposta oscil·latòria d’amplitud constant.
3. S’anota el valor del guany últim Ku=Kp i del període Tu de y(t).
34Controladors PID
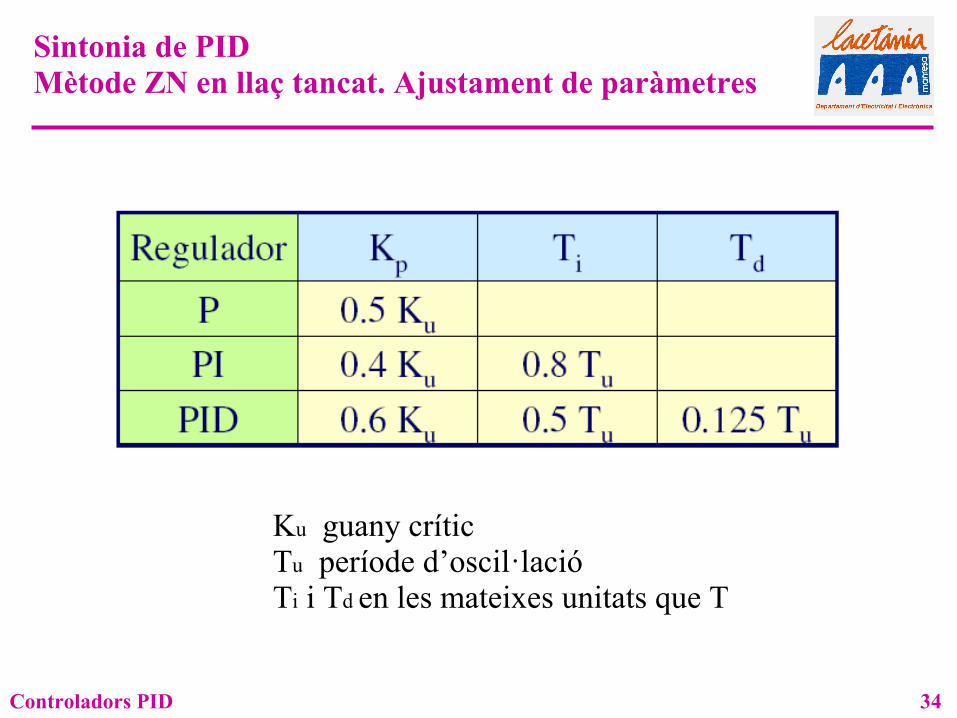
Ku guany críticTu període d’oscil·lacióTi i Td en les mateixes unitats que T
Sintonia de PIDMètode ZN en llaç tancat. Ajustament de paràmetres
35Controladors PID
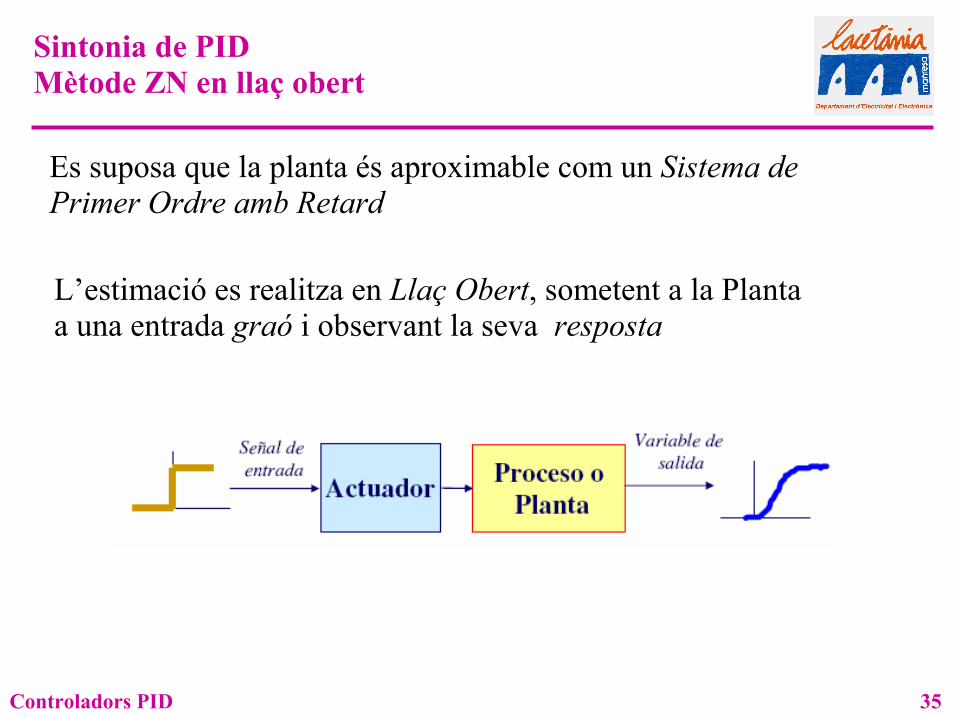
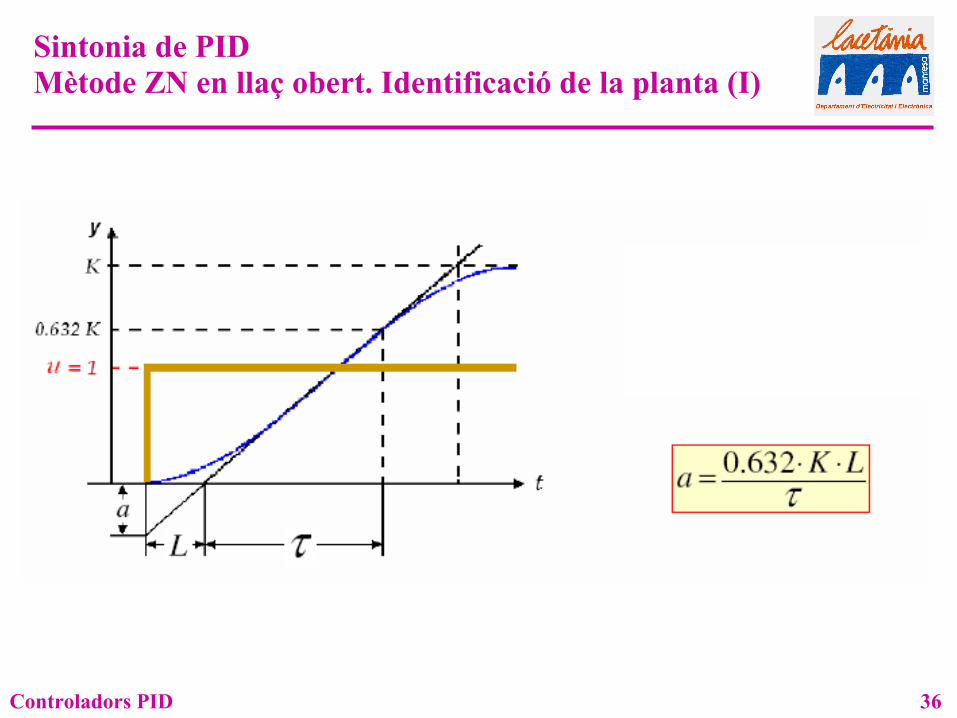
Sintonia de PIDMètode ZN en llaç obert
Es suposa que la planta és aproximable com un Sistema dePrimer Ordre amb Retard
L’estimació es realitza en Llaç Obert, sometent a la Planta a una entrada graó i observant la seva resposta
36Controladors PID
Sintonia de PIDMètode ZN en llaç obert. Identificació de la planta (I)
37Controladors PID
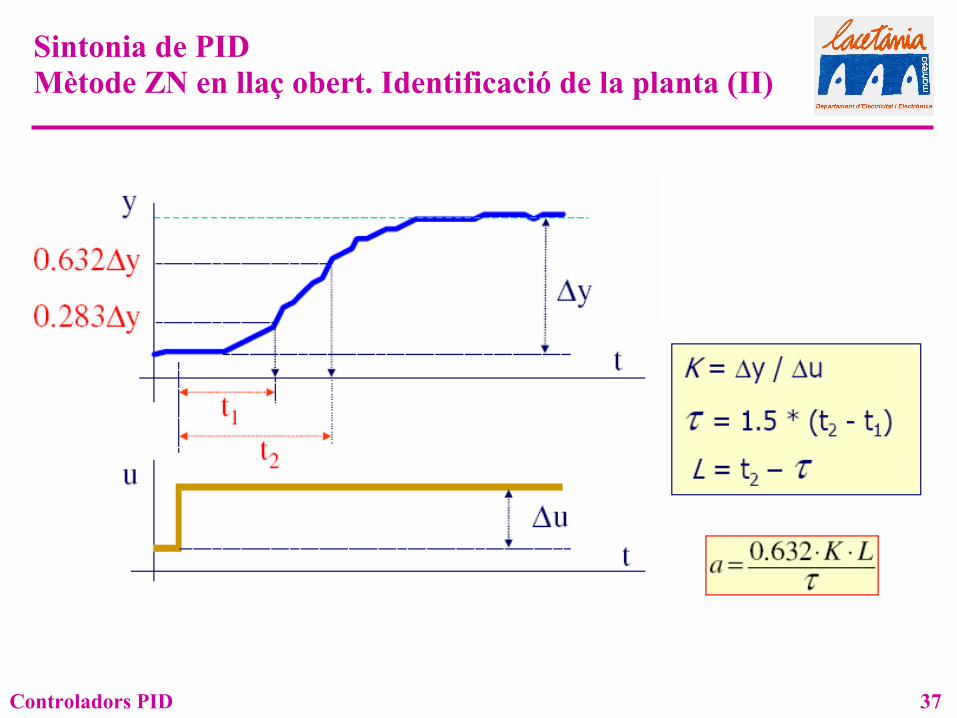
Sintonia de PIDMètode ZN en llaç obert. Identificació de la planta (II)
38Controladors PID
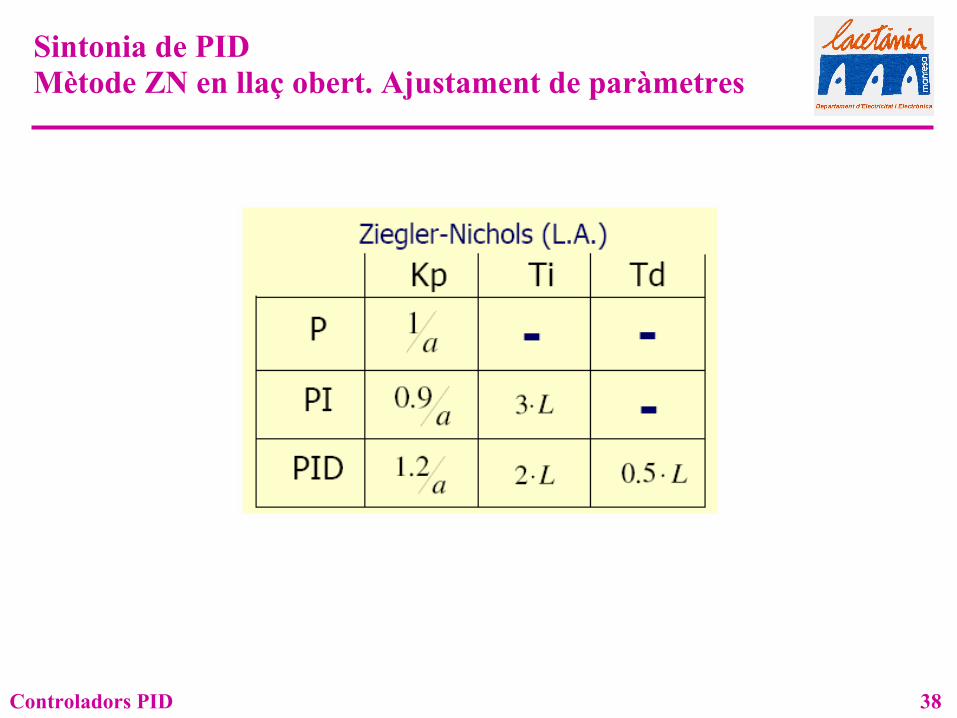
Sintonia de PIDMètode ZN en llaç obert. Ajustament de paràmetres
39Controladors PID
Resposta saltMètodo del reléIdentificació de la resposta en llaç tancat (Exact)Control AdaptatiuGuany planificat
El mètode ZN és un bon mètode de sintonia de controladors però no és fàcil d’automatitzar donat que pot portar el sistema a la inestabilitat.
Quasi tots els controladors comercials incorporen algun mètode de sintonia automàtica (autotuning)
Sintonia de PIDMètodes de sintonia automàtics
40Controladors PID
ProcèsPIDue
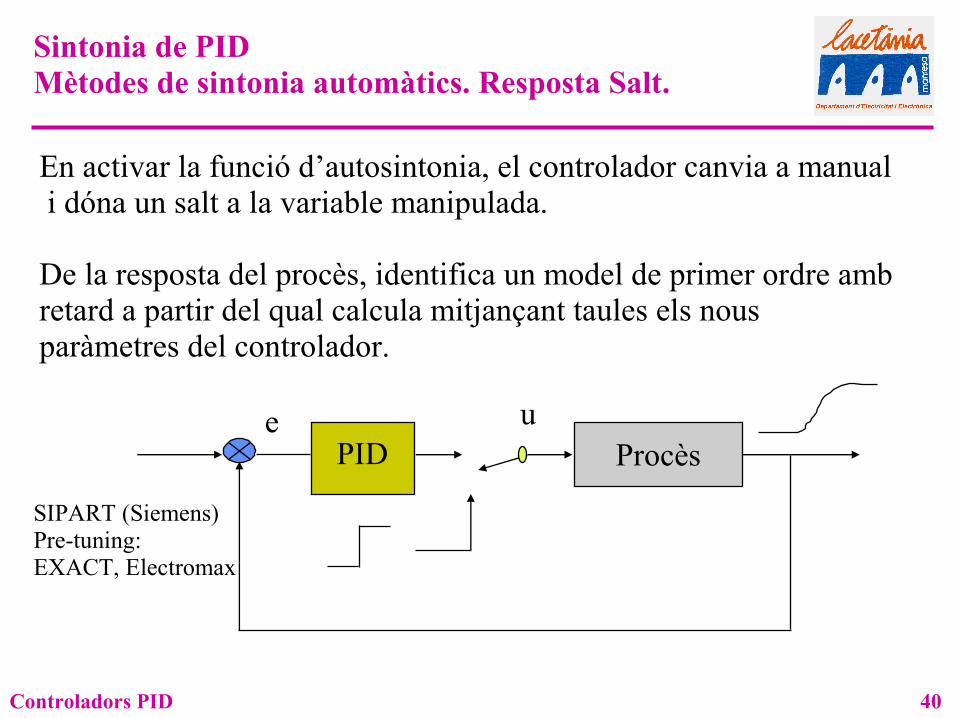
En activar la funció d’autosintonia, el controlador canvia a manual i dóna un salt a la variable manipulada.
De la resposta del procès, identifica un model de primer ordre amb retard a partir del qual calcula mitjançant taules els nous paràmetres del controlador.
SIPART (Siemens)Pre-tuning:EXACT, Electromax
Sintonia de PIDMètodes de sintonia automàtics. Resposta Salt.
41Controladors PID
ProcèsPIDue
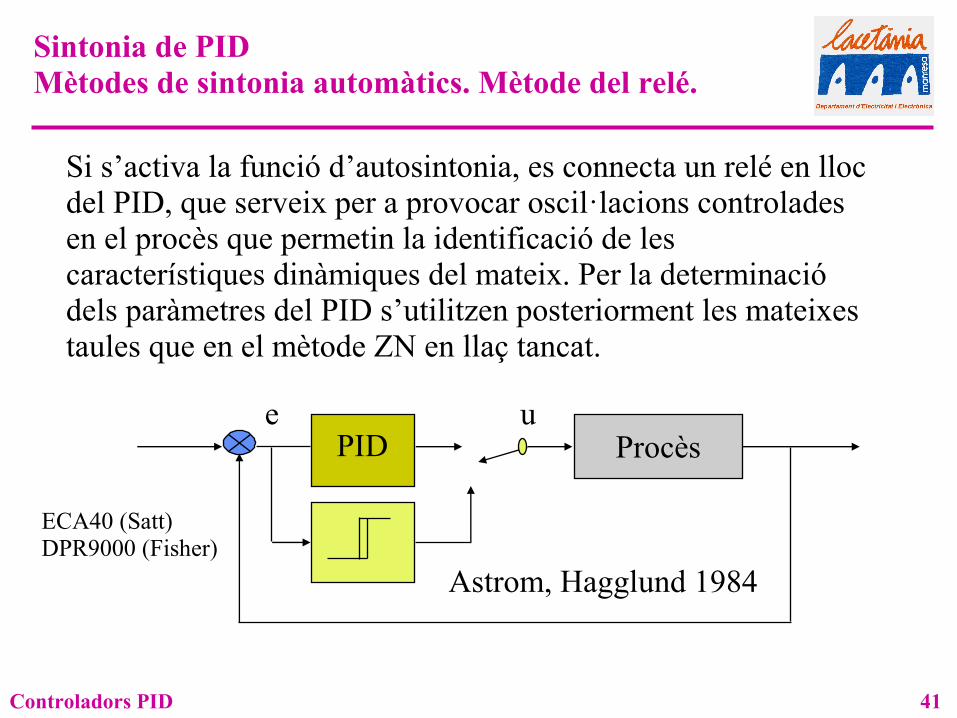
Si s’activa la funció d’autosintonia, es connecta un relé en lloc del PID, que serveix per a provocar oscil·lacions controlades en el procès que permetin la identificació de les característiques dinàmiques del mateix. Per la determinació dels paràmetres del PID s’utilitzen posteriorment les mateixes taules que en el mètode ZN en llaç tancat.
Astrom, Hagglund 1984
ECA40 (Satt) DPR9000 (Fisher)
Sintonia de PIDMètodes de sintonia automàtics. Mètode del relé.
42Controladors PID
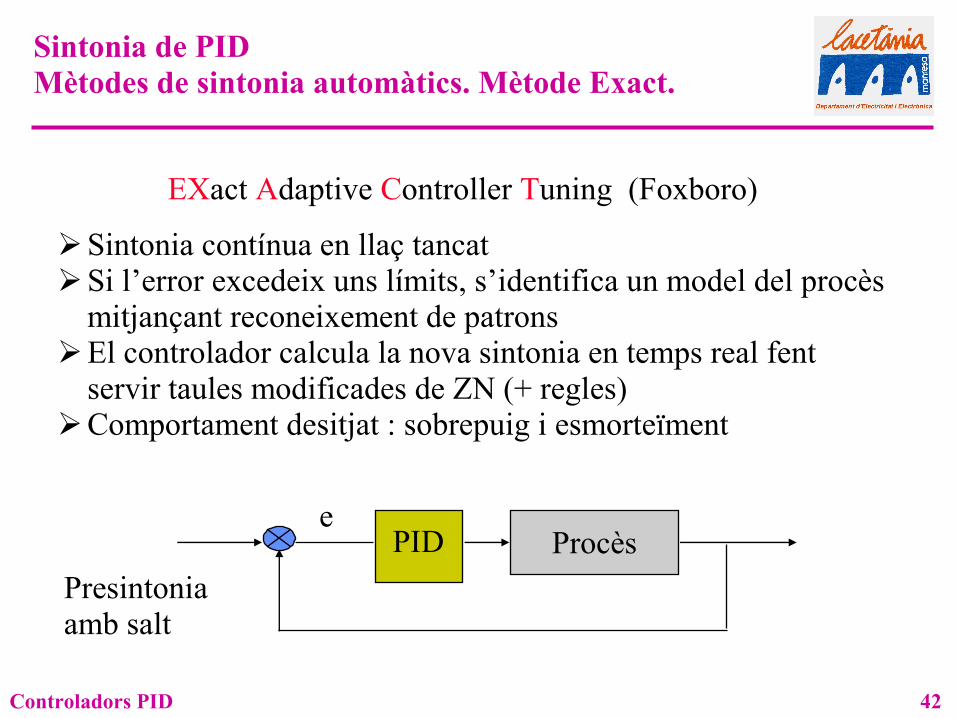
EXact Adaptive Controller Tuning (Foxboro)
Sintonia contínua en llaç tancatSi l’error excedeix uns límits, s’identifica un model del procès
mitjançant reconeixement de patronsEl controlador calcula la nova sintonia en temps real fent
servir taules modificades de ZN (+ regles)Comportament desitjat : sobrepuig i esmorteïment
ProcèsPIDe
Presintoniaamb salt
Sintonia de PIDMètodes de sintonia automàtics. Mètode Exact.
43Controladors PID
ProcèsPID
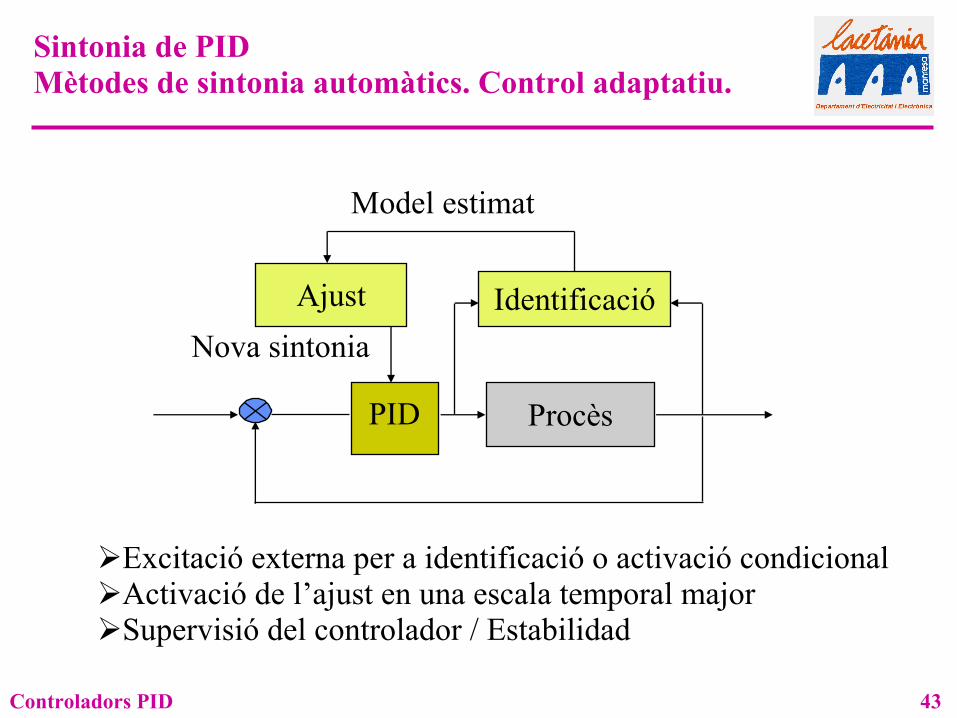
IdentificacióAjust
Model estimat
Nova sintonia
Excitació externa per a identificació o activació condicionalActivació de l’ajust en una escala temporal majorSupervisió del controlador / Estabilidad
Sintonia de PIDMètodes de sintonia automàtics. Control adaptatiu.
44Controladors PID
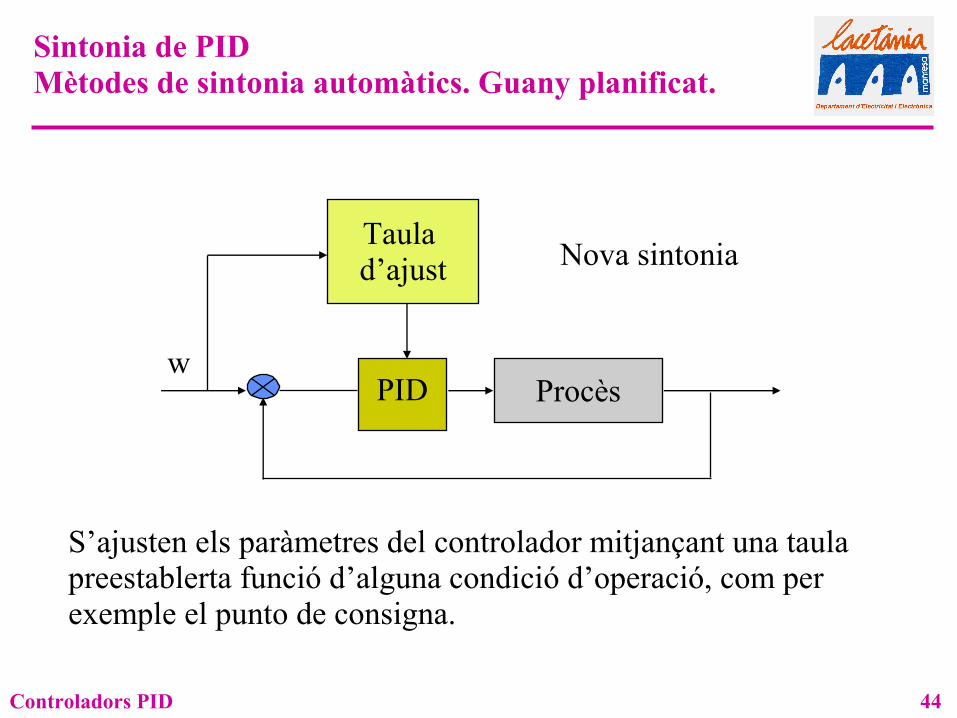
ProcèsPID
Taula d’ajust Nova sintonia
w
S’ajusten els paràmetres del controlador mitjançant una taula preestablerta funció d’alguna condició d’operació, com per exemple el punto de consigna.
Sintonia de PIDMètodes de sintonia automàtics. Guany planificat.
45Controladors PID
Referències
Documentació generada a partir de l’original de
Prof. Cesar de PradaDpt. Ingenieria de Sistemas y AutomáticaFacultad de CienciasUniversidad de Valladolidhttp://www.isa.cie.uva.es/~prada/ => Control e Instrumentación de Procesos Químicos => documentación => PID.zip
Celso Fernández Silva.José Ignacio Armesto Quiroga.Universidad de VigoDepartamento de Ingeniería de Sistemas y Automáticahttp://www.disa.uvigo.es/ => docencia => Sistemas Automáticos