Control i monitorització d’un motor elèctric auxiliar d’un...
104
Control i monitorització d’un motor elèctric auxiliar d’un vehicle Enginyeria Tècnica Industrial especialitat Electrònica Industrial AUTOR: Aleix Maixé Sas DIRECTOR: Enric Vidal Idiarte
Transcript of Control i monitorització d’un motor elèctric auxiliar d’un...

Control i monitorització d’un motor elèctric auxiliar d’un
vehicle
Enginyeria Tècnica Industrial especialitat Electrònica Industrial
AUTOR: Aleix Maixé Sas DIRECTOR: Enric Vidal Idiarte

3/104
ÍNDEX GENERAL 1. Memòria Descriptiva.......................................................................................5
1.1 Objecte del Projecte.......................................................................................................6 1.2 Titular del Projecte........................................................................................................6 1.3 Antecedents ....................................................................................................................6
1.3.1 Accionaments Elèctrics de Baixa Tensió per a Automòbils....................................8 1.3.2 Sistemes de Comunicació a l’Automòbil ................................................................9
1.4 Possibles Solucions i Solució Adoptada .....................................................................12 1.4.1 Filosofia a l’Hora del Disseny...............................................................................12 1.4.2 Motor Auxiliar Elèctric .........................................................................................12
1.4.2.1 Motors Síncrons.................................................................................................13 1.4.2.2 Motors Asíncrons...............................................................................................13
1.4.3 Microcontrolador ...................................................................................................14 1.4.4 Sensor de Velocitat................................................................................................15
1.4.4.1 Encoder..............................................................................................................15 1.4.4.2 Efecte Hall .........................................................................................................17
1.4.5 Tipus de Control ....................................................................................................18 1.4.5.1 Control Escalar .................................................................................................18 1.4.5.2 Control Vectorial...............................................................................................20
1.4.6 Protocols de Comunicació .....................................................................................20 1.4.6.1 CAN ...................................................................................................................20 1.4.6.2 LIN.....................................................................................................................21 1.4.6.3 RS232.................................................................................................................22
1.4.7 Mòdul de Potència .................................................................................................22 1.4.7.1 Inversor Trifàsic ................................................................................................22
1.4.8 Resum de les Solucions Adoptades .......................................................................24 1.5 Especificacions Tècniques...........................................................................................26
1.5.1 Hardware ...............................................................................................................26 1.5.2 Software.................................................................................................................26 1.5.3 Comunicacions ......................................................................................................26
1.6 Posada en Funcionament ............................................................................................28 1.7 Planificació i Programació..........................................................................................29 1.8 Resum del Pressupost..................................................................................................30
2. Memòria de Càlcul. .......................................................................................31
2.1 Descripció General ......................................................................................................32 2.2 Control del Motor........................................................................................................33
2.2.1 Accionament del Motor .........................................................................................33 2.2.2 Mesura de Velocitat...............................................................................................42 2.2.3 Control Escalar en Llaç Tancat .............................................................................45
2.3 Comunicacions .............................................................................................................49 2.3.1 CAN.......................................................................................................................49 2.3.2 RS-232...................................................................................................................54
2.4 Diagrama de Flux del Control del Motor..................................................................57

4/104
2.4.1 Generació del PWM ..............................................................................................57 2.4.2 Control del Motor ..................................................................................................58 2.4.3 Gestió del Mòdul CAN i QEI ................................................................................59 2.4.4 Diagrama de Flux del Node de Control.................................................................60 2.4.5 Diagrama de Flux del Programa en Labview ........................................................61
2.5 Treball Futur ...............................................................................................................62 Annexos ....................................................................................................................................64
Annex 1. Codis font...............................................................................................................65 Annex 1. Mesures del sistema ...............................................................................................77
3. Plànols. ...........................................................................................................80 4. Pressupost. .....................................................................................................93
4.1 Preus Unitaris. .............................................................................................................94 4.2 Quadres Descomposts. ................................................................................................96
4.2.1 Mòdul de Control del Motor..................................................................................96 4.2.2 Mòdul de Comunicació .........................................................................................97
4.3 Pressupost.....................................................................................................................98 4.3.1 Mòdul de Control del Motor..................................................................................98 4.3.2 Mòdul de Comunicació .........................................................................................98
4.4 Resum de Pressupost. ..................................................................................................99 5. Plec de Condicions.......................................................................................100
5.1 Reunits ........................................................................................................................101 5.2 Exposen.......................................................................................................................101
5.2.1 Primer ..................................................................................................................101 5.2.2 Segon ..................................................................................................................101
5.3 Clàusules.....................................................................................................................101 5.3.1 Primera.- OBJECTIUS ........................................................................................101 5.3.2 Segona.- OBJECTE DE L’ACORD....................................................................101 5.3.3 Tercera.- CONDICIONS D’ACCEPTACIÓ DEL TREBALL...........................102 5.3.4 Quarta.- EXTENSIÓ DE LA COL·LABORACIÓ .............................................102 5.3.5 Cinquena.- CONTINGUT DELS PROGRAMES ESPECÍFICS........................102 5.3.6 Sisena.- COORDINADORS / RESPONSABLES ..............................................103 5.3.7 Setena.- EMISSIÓ D’INFORMES......................................................................103 5.3.8 Vuitena.- DURADA ............................................................................................103 5.3.9 Tretzena.- PRINCIPIS D’ACTUACIÓ ...............................................................103 5.3.10 Catorzena.- RESOLUCIÓ DE CONFLICTES....................................................104
Memòria Descriptiva
1. Memòria Descriptiva.

Memòria Descriptiva
6/104
1.1 Objecte del Projecte
Disseny i implementació d’un control d’un motor elèctric auxiliar situat en un automòbil i monitoritzar les variables del sistema i efectuar la plataforma de control en un entorn Labview mitjançant una comunicació amb bus CAN.
1.2 Titular del Projecte
Grup d’Automàtica i Electrònica Industrial de l’Escola Tècnica Superior d’Enginyeria situat en l’Avinguda dels Països Catalans núm. 26, Campus Sescelades 43007 de Tarragona. Com a representant del grup el Dr. Enric Vidal Idiarte professor titular d’universitat.
1.3 Antecedents
En els últims anys la indústria automobilística està vivint una gran revolució. Fa 15 anys es va plantejar un gran canvi amb la proposta de substituir el sistema elèctric de 12 V per un altre compost de dos valors de tensió, 12 i 42 V respectivament (Dual-Voltage). Inicialment aquest canvi havia sigut motivat per les següents circumstàncies:
• Les regulacions mediambientals que cada vegada amb més força estaven imposant els governs
• La demanda d’increment del confort, la funcionalitat i la seguretat de l’usuari de l’automòbil.
• El creixement de la potència elèctrica requerida, degut a la substitució de molts dels accionaments que fins aleshores es realitzaven de manera mecànica i/o hidràulica
Malgrat tot, la iniciativa del Dual-Voltage no va acabar de prosperar degut a
precisament a les directives cada vegada més estrictes sobre la reducció de contaminació, que ha propiciat un pas més en l’evolució de l’automòbil. Aquesta evolució es produeix en aquests moments en el sentit de potenciar el desenvolupament de l’automòbil híbrid, es a dir, un automòbil on coexisteixen el motor d’explosió i motors elèctrics per a realitzar la tracció del vehicle. Per a l’alimentació de la potència elèctrica per a la tracció s’estan utilitzant tensions entre 300 V i 500 V (el darrer valor de tensió es perfila com a l’utilitzable en un futur proper). Tot i així, per a l’alimentació de motors auxiliars s’està apostant per tensions de l’ordre dels 42 V.
Lo anteriorment indicat, imposa un dràstic increment en el rendiment en el processat de
la potència al vehicle. Les primeres accions es dirigeixen a substituir las transmissions mecàniques de potència per accionaments elèctrics, quedant com única transmissió mecànica la de l’arbre del motor al generador elèctric. El sistema generador - motor d’arrencada ha sigut el primer en implementar-se, i en l’actualitat ja comença a haver-hi solucions molt eficients basades en màquines sense escombretes d’imants permanents. A partir d’ara els esforços

Memòria Descriptiva
7/104
d’investigació es centren en substituir adequadament els altres motors de corrent continu que existeixen als vehicles.
Els sistemes electrònics a l’automòbil, s’utilitzen fins ara quasi exclusivament en funcions de confort i protecció. Tot i així, existeix una demanda creixent per incrementar la seguretat introduint sistemes d’assistència intel·ligents, que ajudin al conductor a solucionar situacions crítiques. Els citats sistemes d’assistència estan distribuïts en el vehicle i per tant, necessiten un bus de comunicacions que garantitzi una comunicació segura i que es pugui predir. En aquests moments el sistema de comunicacions més estès en els vehicles és el CAN (Controled Area Network).
Amb tot, un aspecte a tenir en compte en l’evolució històrica de l’automòbil fins fa
pocs anys és la dèbil penetració de l’electrònica de potència. No obstant, en l’actualitat aquesta branca de l’electrònica s’està fent cada vegada més important, i en un futur es preveu un fort increment en la seva implantació degut a les noves arquitectures del sistema d’alimentació que s’ha apuntat anteriorment.
En aquests moment, els comitès tècnics de les principals societats que agrupen a les
diferents indústries del sector automobilístic ja han fet un esbós de les prestacions que d’una manera gradual, s’anirà incorporant en els automòbils en els pròxims deu anys. Un dels eixos del canvi, es augmentar el consum elèctric per a poder elevar el nivell de confort i seguretat. Un altre àmbit de millora és la disminució del consum de combustible per cada quilòmetre recorregut.
Així doncs, per a poder compatibilitzar aquests aspectes, s’ha d’utilitzar un sistema
d’alimentació que compleixi un d’aquests tres requisits generals: • Permetre una transformació òptima de l’energia mecànica en elèctrica. • Distribuir la potència amb les mínimes pèrdues. • Els serveis que hagin de ser alimentats (càrregues) ho facin de manera que el rendiment
sigui màxim.
En aquesta línia, les opcions que es dibuixen per al futur són:
• Només l’alternador tindrà connexió mecànica amb el motor d’explosió. Tots els motors, des del compressor de l’aire condicionat fins a la bomba de l’aigua de refrigeració, seran accionats elèctricament.
• Per a llums de llarg abast, cada cop s’utilitzaran més les làmpades d’alt rendiment com les HID de xenó. Per las de senyalització, s’utilitzaran làmpades de neó o leds, i per il·luminar l’interior, llums fluorescents. En un futur a curt termini, es perfila com a bona alternativa per a les llums davanteres l’ús de leds d’alta intensitat lluminosa.
• Respecte als motors, s’intentarà introduir motor de corrent altern, amb o sense regulació, on sigui possible.
Tot aquest conjunt d’iniciatives explicades anteriorment, tenen una concreció
normativa a partir de l’any 1997 que és quan el “SICAM GMBH” té el seu primer “Fòrum Bordnetz” (fòrum pel sistema elèctric de l’automòbil) a Hannover en que participen fabricants

Memòria Descriptiva
8/104
i subministradors europeus acordant el març del 1998 el “Spezifikationsenwurf für das Zwei-Spannungsbordnets 42V/12V” (especificació del sistema d’energia elèctrica amb una tensió dual de 42V/12V).
1.3.1 Accionaments Elèctrics de Baixa Tensió per a Automòbils
Convencionalment, els motors utilitzats en l’automòbil han sigut de corrent continu excepte en unes poques aplicacions com és el cas de l’alternador. Enfront els reptes actuals, les prestacions del motor DC s’han manifestat insuficients. Es per aquesta raó per la que es tendeix a implantar, d’una manera accelerada, els motors sense escombretes (brushless).
Algunes aplicacions en la que els motors brushless presenten significatives avantatges
són en la direcció assistida, els sistemes d’injecció, generador/motor d’arrencada, suspensió activa... En el cas de la direcció assistida, ja des de 1999, el sistema hidràulic tradicional va ser substituït per un sistema amb motor elèctric. Entre d’altres avantatges, aquest canvi implica una reducció del consum de combustible. En la pròxima generació de direcció assistida, que serà la de direcció assistida sense transmissió mecànica, coneguda com “steer by wire”, el motor haurà de tenir una alta densitat de potència i una elevada controlabilitat.
La implantació dels nous motors, la podríem presentar per ordre de prioritat segons
l’aplicació a que es destina segons:
• Generador – motor d’arrencada. • Sistema d’injecció. • Suspensió activa • Aire condicionat (compressor + ventilador). • Ventilador de refrigeració. • Bomba d’aigua. • Sostre solar. • Neteja parabrises. • Elevalunes. • Altres motors de menor potencia.
Els diferents tipus de motor que segons es pot apreciar en el desenvolupament
d’accionaments elèctrics tenen més possibilitats de ser implantats com a motors auxiliars de l’automòbil destaquem els motors d’inducció, el motors “brushless” d’imants permanents i els motors de reluctància commutada, els quals tenen les següents característiques:
• Motors d’inducció: es tracta del motor més estès en el mercat, ja que es podria afirma que el 80 % (aproximadament) dels motors elèctrics industrials són d’aquest tipus. La seva principal avantatge és la seva simplicitat i robustesa, tenint un gran rendiment amb circumstàncies adverses, requerint-se molt poc manteniment. Presenta problemes a l’hora de controlar-lo, ja que la seva velocitat ve marcada per la freqüència de la xarxa on s’alimenta, però l’espectacular creixement de l’electrònica, especialment en els convertidors de potència que permeten obtenir una tensió i freqüència variable, són

Memòria Descriptiva
9/104
un dels tipus de motor que podrien ser usats com a motors elèctrics auxiliars en l’àmbit de l’automòbil.
• Motors d’imants permanents amb f.c.e.m. trapezoïdal: són motors amb control relativament senzill, si es compara amb altres tecnologies. En una situació propera a la ideal, es pot considerar que el seu parell és constant en el temps. El funcionament d’aquest tipus de motor necessita informació de la posició del rotor amb una resolució de 60º elèctrics. Sempre i quan el parell no es pogués considerar constant, el soroll acústic generat podria ser inacceptable per als ocupants del vehicle.
• Motor d’imants permanents amb f.c.e.m. sinusoïdal: són motors que tenen arrissat de parell i petit soroll acústic. Aquestes màquines permeten treballar en mode d’avançament de fase o bé en mode de control de camp. Per aconseguir nivells d’arrissat de parell inferiors al 0,1 % es requereix una cura especial en el disseny del motor i del controlador. Aquestes màquines exigeixen una distribució sinusoïdal del flux magnètic; en el cas de que aquesta distribució no sigui perfecta, és inevitable que existeixin harmònics i conseqüentment, arrissat de parell. Tot i això, hi ha documentades unes quantes solucions a aquest i d’altres problemes. Aquestes màquines poden ser controlades tan en mode corrent com en mode tensió.
• Motors de reluctància commutada: els motors de reluctància commutada (SRM) estan sent considerats especialment atractius per aplicacions de l’automòbil, degut a la seva elevada fiabilitat i a la senzillesa de la seva construcció, la qual cosa repercuteix directament en el seu baix preu. Els SRM eviten els problemes associats amb el confinament del flux magnètic, la corrosió i la desmagnetització. Afegir també, que aquest motor és el que millor pot oferir, d’una manera conjunta, els avantatges de baix cost, mida reduïda i elevada fiabilitat. Malgrat totes aquests avantatges, presenta greus inconvenients com són el soroll acústic i un elevat arrissat de parell. És en aquests dos últims aspectes en que la investigació haurà de profunditzar més.
1.3.2 Sistemes de Comunicació a l’Automòbil
Com una xarxa LAN connecta els ordinadors, els busos de comunicació en el vehicle connecten l’equipament electrònic, facilitant l’intercanvi d’informació i recursos entre les diferents aplicacions distribuïdes.
En el passat, el cablejat punt a punt era la forma estàndard de connexió d’un element electrònic amb un altre, però com el context electrònic augmentava, va arribar un moment en què va topar amb un mur tecnològic. Afegir cable augmenta el pes del vehicle, disminuint-ne el rendiment, i dificultant així la consecució de l’adherència que exigeix l’estàndard. De mitjana, un vehicle per cada 50 quilograms de cable (o l’equivalent a l’addicció de 100 watts de potència), augmenta el consum de combustible 0,2 litres per cada 100 quilometres recorreguts. A més, aquests feixos voluminosos de cables augmenten el volum del vehicle. Per tot això els feixos de cables són els components més cars i complicats en el disseny de tot el sistema elèctric/electrònic del vehicle.

Memòria Descriptiva
10/104
Avui en dia, les xarxes de control fonamentades en protocols sèrie solucionen tots aquests problemes. Ja el 1998 Motorola va demostrar que canviant els feixos de cables per un bus de comunicacions en les quatre portes d’un BMW, reduïa 15 quilograms el pes d’aquest i n’augmentava les prestacions en les portes. La Figura x mostra l’augment del nombre de sistemes i aplicacions electròniques reflectides en l’augment de cablejat. Amb la quantitat d’accionaments elèctrics que en l’apartat anterior s’han previst que s’implementaran en un futur, cal pensar que aquestes dades s’incrementaran de manera exponencial.
Figura 1.3.1. Evolució històrica del cablejat en el vehicle
A més, s’ha comprovat que la principal causa de fallada en l’electrònica d’un vehicle té l’origen en el cablejat entre les unitats de control i els sensors i actuadors: les estadístiques parlen de més d’un 50% d’avaries d’aquest tipus. Per estrany que sembli, el problema no es troba en la qualitat de les connexions, sinó en l’elevat nombre d’aquestes que fa que la confiança total disminueixi. Així, doncs, una reducció en el cablejat i una millor distribució d’aquest, ens permetria disminuir els temps de muntatge, milloraria la seguretat dels sistemes electrònics (tenint menys connexions), facilitaria el manteniment i afegiria flexibilitat. Tot això influiria positivament sobre els costs de producció.
Els bussos multiplexats són sistemes de comunicació digital de baix cost, en què els
elements connectats comparteixen una mateixa línia (bus) per la qual intercanvien dades i senyals de control. Aquest fet evita la instal·lació redundant de sensors (per exemple de temperatura), ja que poden ésser compartits els valors proporcionats per aquests en vàries unitats de control mitjançant el bus. A més, aquests sensors i actuadors es poden cablejar fins la unitat de control més propera, podent accedir-hi les restants mitjançant el bus. S’obté així un estalvi significatiu en el cablejat i es possibilita la coordinació i cooperació entre unitats de control.

Memòria Descriptiva
11/104
Aquest fet permet la coordinació i sincronització dels diferents llaços de control i, per tant, s’evita conflictes en les operacions de diverses unitats de control sobre un mateix paràmetre.
La configuració típica en un vehicle, tal com mostra la Figura 1.3.2. consta d’una unitat central, dotada d’un pannell i un teclat, a tall de consola. En aquesta unitat aniran connectats diversos busos, amb unes característiques de velocitat, segons les necessitats de resposta en temps real dels elements que hi estan connectats. Així, els elements electrònics de confort i habitacle aniran connectats a busos de menor velocitat; per altra banda, els elements que actuen directament sobre la conducció (tracció i seguretat) així com d’altres d’informació i comunicacions, aniran connectats a busos d’alta velocitat, en ésser aquests més exigents en els temps de resposta.
Figura 1.3.2. Esquema d’una xarxa dins un vehicle.
Memòria Descriptiva
12/104
1.4 Possibles Solucions i Solució Adoptada
1.4.1 Filosofia a l’Hora del Disseny En el desenvolupament del projecte, s’ha partit d’unes premisses que permeten aconseguir els objectius marcats anteriorment, afegint una sèrie de condicions que tenen com a objectiu clarificar l’aplicabilitat del conjunt.
En resum, es pretén dissenyar un sistema de control per a un motor de CA auxiliar d’un automòbil utilitzant com a tensió d’alimentació per aquest un valor de 42 V, coincidint amb un dels valors estàndard en l’automòbil (almenys segons el sistema Dual-Voltage). Un altre decisió que s’ha pres a l’hora de direccionar el projecte cap a una utilitat industrial, és que el disseny definitiu ha de ésser escalable per a potències de 2 kW, es a dir, que la plataforma creada (formada per la part de control i la part de comunicació) ha de poder-se configurar de tal manera que qualsevol motor del mateix tipus que l’utilitzat, pugui funcionar i simular quin seria el seu comportament dins de l’automòbil, independentment de la potència del motor (fins al límit establert, és clar). L’acompliment d’aquesta condició serà la que li doni al conjunt una homogeneïtat que resultarà útil per a futurs desenvolupaments que es vulguin dur a terme en l’àmbit del motors auxiliars de l’automòbil. En el mateix sentit, es pretén que el disseny definitiu sigui compacte, ja que aquest fet el farà adaptable per a diferents aplicacions.
Un altre objectiu que caldrà satisfer, i per tan tenir en compte a l’hora d’escollir i
decidir entre les diverses opcions, és que el conjunt s’ha de poder verificar com funciona mitjançant un prototip de baixa potència i gestionar-ne el funcionament mitjançant la comunicació per mitjà de bussos de comunicació.
1.4.2 Motor Auxiliar Elèctric Tal i com s’ha fixat en l’apartat anterior, es planteja el disseny a partir d’un motor auxiliar elèctric de corrent altern, en comptes d’una màquina de corrent continua. Aquesta tria es justifica pel fet de que cada vegada més les màquines de corrent continu estan sent substituïdes dins de l’automòbil per màquines de corrent altern per diverses raons:
• Les màquines elèctriques de corrent continu convencionals, tot i tenir un preu i unes dimensions bastant reduïdes, tenen dos inconvenients que a l’hora d’utilitzar-les en aplicacions auxiliars en l’automòbil degut a que el tipus de contactes (col·lector de delgues) provoquen que aquests tipus de motor tinguin un rendiment mecànic reduït.
• Relacionat també amb la morfologia de les màquines de corrent continu, és que precisament aquests contactes fregants produeixen una sèrie de guspires que en l’ambient en que cal ubicar un motor auxiliar no garanteixen una seguretat admissible.

Memòria Descriptiva
13/104
Malgrat tot, en moltes aplicacions s’han substituït els motors de corrent continu
clàssics per altres tipus de motors de corrent continu d’imants permanents (motors brushless). Així doncs, un cop s’ha decidit l’ús de màquines de corrent altern, cal tenir en compte
les diferents alternatives que existeixen de màquines d’aquest tipus:
1.4.2.1 Motors Síncrons En les màquines elèctriques anomenades màquines síncrones, tot i que com qualsevol màquina elèctrica són recíproques (es a dir, que tan poden funcionar com a motor que com a generador), el seu ús més estès en la indústria és quan treballen com a generadors, els anomenats alternadors. La característica principal d’aquest tipus de motor, es que la seva velocitat de funcionament està vinculada rígidament amb la freqüència de la xarxa de corrent altern a la qual treballa. Aquest fet li permet ser útil per a aplicacions en que la velocitat sigui constant, com per exemple en el cas de les indústries del ciment o metal·lúrgiques. Això s’aconsegueix perquè es bobina l’estator i s’alimenta amb un corrent continu per a crear un camp magnètic fix, la qual cosa precisa d’un circuit exitatriu extern al motor. Tot seguit es connecta el rotor bobinat a la xarxa elèctrica. Llavors el camp magnètic giratori provocat per aquest corrent altern trifàsic talla les seves línies de força amb el camp magnètic creat al estator, provocant un parell de forces que fa girar el motor, anant a la velocitat imposada pel camp creat pel rotor. Constructivament, es poden separar les màquines elèctriques síncrones segons com estigui format el seu rotor: amb pols sortints o amb pols llisos (o rotor cilíndric). En el primer cas els debanats són concentrats, mentre que en el rotor cilíndric el debanat que es col·loca en els pols està constituït per ranures, cobrint la totalitat del perímetre del rotor (veure figura 1.4.2.1).
1.4.2.2 Motors Asíncrons
El motor asíncron, o també anomenat d’inducció, és el més utilitzat en les aplicacions industrials, com ja s’ha comentat anteriorment.
La principal característica d’aquest tipus de motor és que només existeix corrent
conduïda (es a dir, aportada de la font d’energia) en un dels dos debanats. Aquesta circula per l’estator (en el cas general) i el camp magnètic produït per aquest debanat, fa que s’indueixi una força electromotriu (d’ara endavant f.e.m.) al debanat o conjunt de conductors situats al rotor de la màquina. És per aquest fet que es denomina motor d’inducció. Aquesta f.e.m al rotor, produeix un corrent que a la seva vegada provoca un camp magnètic. Com que hi ha una diferència entre les línies de força d’ambdós fluxos, es genera un parell de forces que provoca el gir en el rotor. Cal afegir que el fet de que (tal i com s’enuncia a la llei de Lenz-Faraday) per
Memòria Descriptiva
14/104
a que el parell de forces sigui no nul, l’angle dels dos camps han de ser diferents, el rotor mai podrà assolir la velocitat de camp de l’estator (lliscament), i per tant, té ben guanyat el motor el nom de motor asíncron.
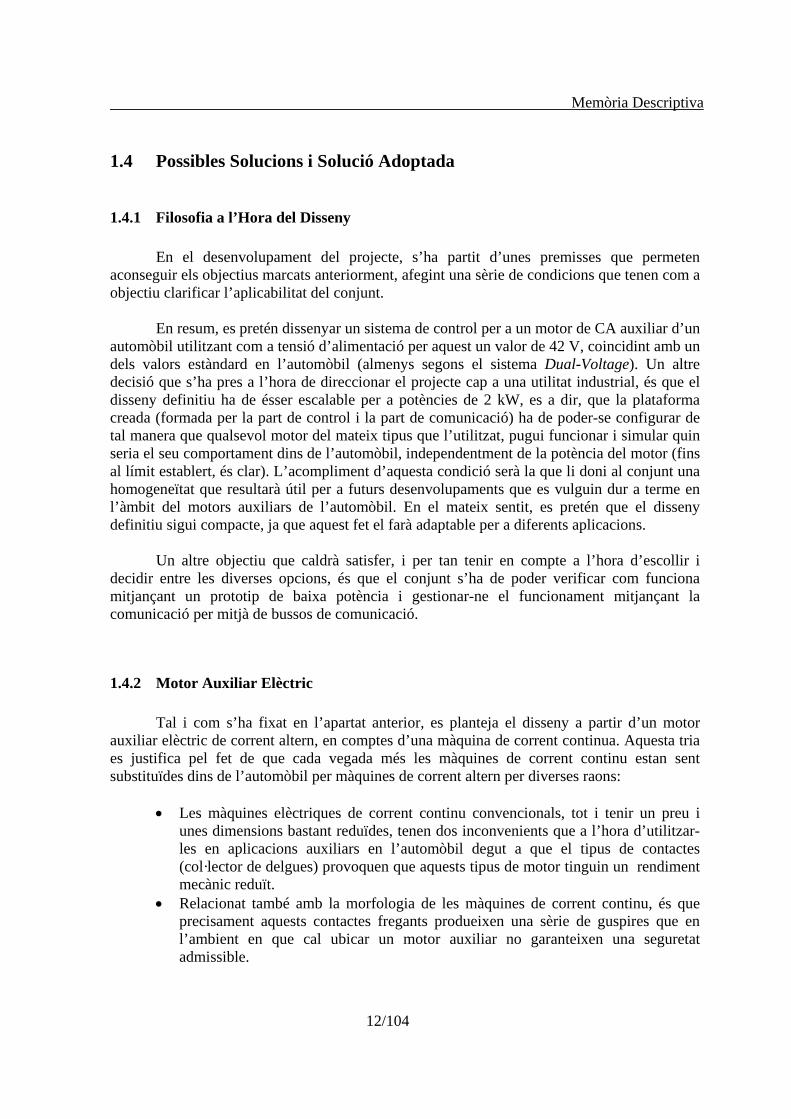
Per a que el camp creat per l’estator sigui giratori, i per tant, que el rotor pugui girar
correctament, cal que les bobines estatòriques estiguin alimentades a una tensió trifàsica i estiguin desfasades en l’espai 120º, ja que d’aquesta manera el camp magnètic resultant gira 360º per període (o múltiple de període segons el parell de pols). Per il·lustrar aquesta necessitat, a la figura 1.4.3.2.1 es mostra el camp magnètic resultant amb aquesta distribució:
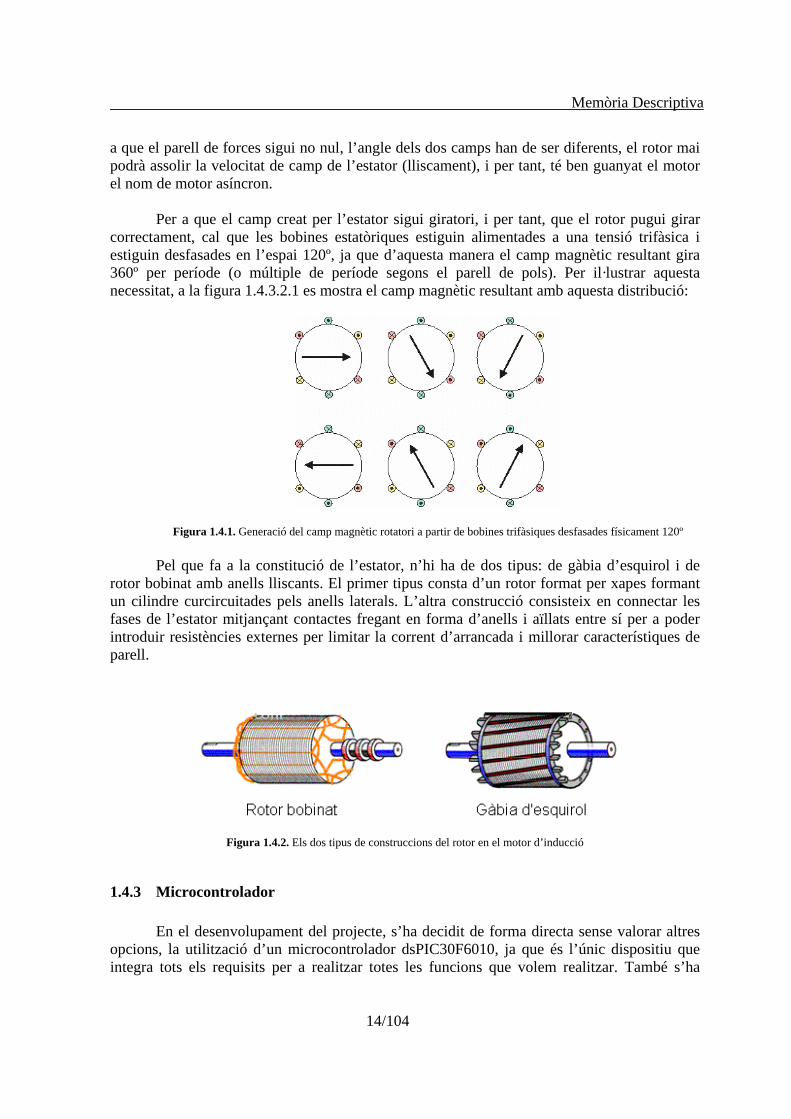
Figura 1.4.1. Generació del camp magnètic rotatori a partir de bobines trifàsiques desfasades físicament 120º Pel que fa a la constitució de l’estator, n’hi ha de dos tipus: de gàbia d’esquirol i de
rotor bobinat amb anells lliscants. El primer tipus consta d’un rotor format per xapes formant un cilindre curcircuitades pels anells laterals. L’altra construcció consisteix en connectar les fases de l’estator mitjançant contactes fregant en forma d’anells i aïllats entre sí per a poder introduir resistències externes per limitar la corrent d’arrancada i millorar característiques de parell.
Figura 1.4.2. Els dos tipus de construccions del rotor en el motor d’inducció
1.4.3 Microcontrolador En el desenvolupament del projecte, s’ha decidit de forma directa sense valorar altres opcions, la utilització d’un microcontrolador dsPIC30F6010, ja que és l’únic dispositiu que integra tots els requisits per a realitzar totes les funcions que volem realitzar. També s’ha
Memòria Descriptiva
15/104
decantat per aquest dispositiu perquè el fabricant Microchip (distribuïdor d’aquests dispositius) té una targeta especialment dedicada per al control de motors. Un altre aspecte que s’ha tingut en compte és l’entorn en que es pot desenvolupar el software, ja que Microchip proporciona junt amb les targetes de desenvolupament un programador i depurador ICD-2, que a part de depurar, permet programar el chip, i el programari Mplab, el qual et permet d’una manera visual i amena realitzar un codi elaborat que pugui executar-se i compilar-se fàcilment, permeten també realitzar l’execució pas a pas.
1.4.4 Sensor de Velocitat
Com que el control que es pretén fer és de velocitat, cal acoblar al motor un sensor que permeti captar la posició del rotor del motor, i d’aquesta manera se’n pot deduir la velocitat, bàsic per a poder tancar el llaç de control. S’analitzen les diferents solucions tenint en compte el seu preu, la seva facilitat d’instal·lació, la seva disponibilitat, la seva resolució i la facilitat d’adaptar-lo a la part de control del sistema
1.4.4.1 Encoder
L’encoder es un dispositiu electromecànic utilitzat per a convertir la posició angular d’un eix a un codi digital (normalment codificat en codi Gray). Aquest transductor està format (en una de les múltiples maneres de construir-lo) per un disc que està fixat a l’eix sobre el que es vol captar la posició. Aquest disc conté una sèrie de línies en la seva part radial. Quan hi incideix un feix de llum generat per un emissor, aquest pot rebotar (es a dir que la part del disc que s’encara a la llum és de color blanc o semblant) i generar un senyal al receptor que es troba al costat del llum (generalment un fotodíode o un fototransistor). Quan la llum incideix sobre un del trams pintats de color negre, la llum reflexada és gairebé nul·la i no s’activa el receptor, podent crear un tren de polsos en que es pot detectar quan hi ha el canvi d’una finestreta a l'altra.
El principal problema d’aquests tipus de sensors és que a priori, és impossible detectar
el sentit de gir de l’eix en el qual giren solidàriament. Per a solucionar-ho, els encoders disposen d’un altre sensor òptic encarat a la part superior de la corona del transductor, que conté també les diferents finestretes, amb la diferència que aquesta segona corona té els seus motius radials desfasats 90º respecte la corona interior. D’aquesta manera es generen dos senyals en quadratura, com els que es mostren a la figura 1.4.3.2:

Memòria Descriptiva
16/104
Figura 1.4.3. Senyals de quadratura de l’encoder
D’aquesta manera es generen diferents estats de quadratura dels dos senyals:
• Estat 00: senyal A i senyal B tenen el nivell lògic 0. • Estat 01: senyal A té el nivell lògic 1 i senyal B té el nivell lògic 0. • Estat 10: senyal A té el nivell lògic 0 i senyal B té el nivell lògic 1. • Estat 11: senyal A té el nivell lògic 1 i senyal B té el nivell lògic 1.
Es pot observar que la seqüència dels estats de l’encoder segueixen la codificació Grey,
i segons l’evolució de les diferents posicions del sensor, se’n pot determinar el sentit. Per a completar la lectura de la posició de l’encoder, s’ha de generar un tren de polsos que determini quan hi ha un canvi d’estat de quadratura. Per fer-ho, s’ha de implementar externament aquest circuit:
Figura 1.4.4. Esquema del circuit que genera els polsos de canvi d’estat de quadratura en l’encoder
Aquest fet és el principal inconvenient de l’encoder, ja que la necessitat de disposar
d’un circuit extern per processar el senyal fa augmentar-ne el preu i n’empitjora la fiabilitat. D’altra banda, aquest captador de posició ofereix molt bones prestacions, és robust i senzill, tot i havent-hi d’afegir l’esmentat circuit.
Memòria Descriptiva
17/104
1.4.4.2 Efecte Hall
Els sensors per efecte Hall tenen la missió (de la mateixa manera que els encoders) de detectar la posició d’un determinat element rotatiu. Una característica important, és que les dades que subministren aquest tipus de sensors són més fàcil d’obtenir independentment del règim de revolucions. Per contra, és molt més complex que altres tipus de sensors i té un preu més elevat.
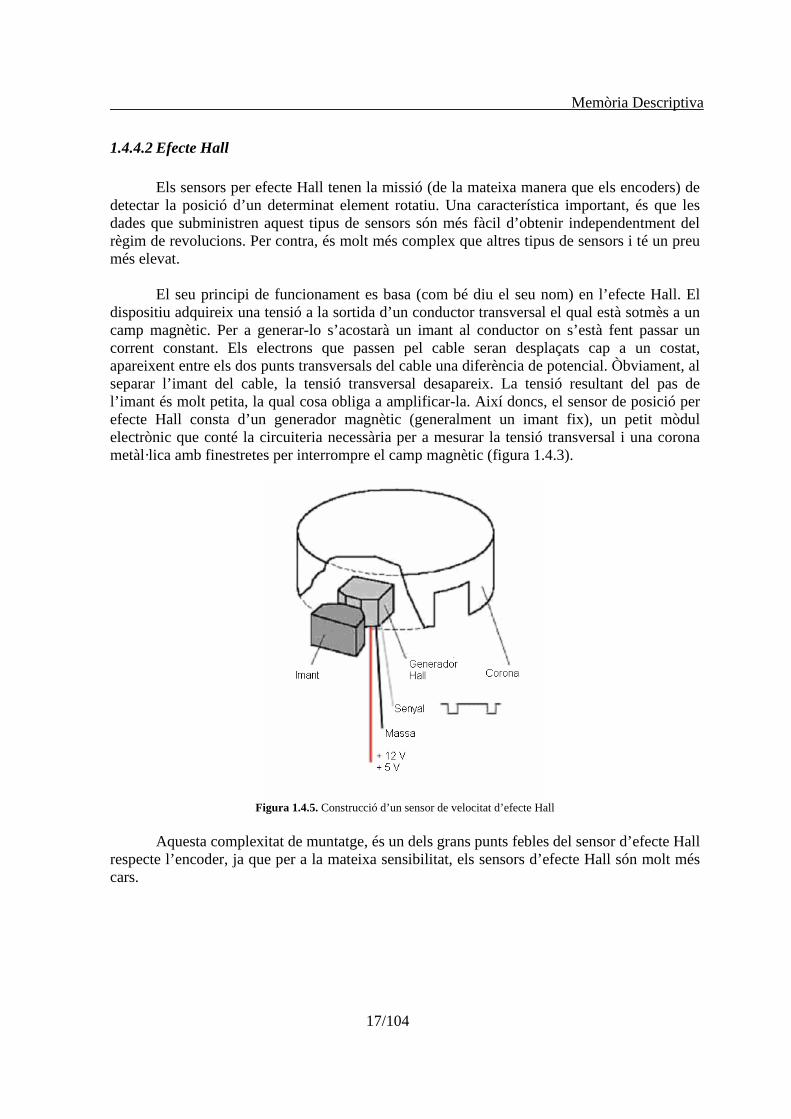
El seu principi de funcionament es basa (com bé diu el seu nom) en l’efecte Hall. El dispositiu adquireix una tensió a la sortida d’un conductor transversal el qual està sotmès a un camp magnètic. Per a generar-lo s’acostarà un imant al conductor on s’està fent passar un corrent constant. Els electrons que passen pel cable seran desplaçats cap a un costat, apareixent entre els dos punts transversals del cable una diferència de potencial. Òbviament, al separar l’imant del cable, la tensió transversal desapareix. La tensió resultant del pas de l’imant és molt petita, la qual cosa obliga a amplificar-la. Així doncs, el sensor de posició per efecte Hall consta d’un generador magnètic (generalment un imant fix), un petit mòdul electrònic que conté la circuiteria necessària per a mesurar la tensió transversal i una corona metàl·lica amb finestretes per interrompre el camp magnètic (figura 1.4.3).
Figura 1.4.5. Construcció d’un sensor de velocitat d’efecte Hall
Aquesta complexitat de muntatge, és un dels grans punts febles del sensor d’efecte Hall
respecte l’encoder, ja que per a la mateixa sensibilitat, els sensors d’efecte Hall són molt més cars.
Memòria Descriptiva
18/104
1.4.5 Tipus de Control Com que ja s’ha decidit que el motor auxiliar elèctric que farem servir serà de corrent altern, cal plantejar-se com s’actuarà sobre el motor per a poder variar de manera arbitrària la velocitat del motor, ja que només s’ha plantejat controlar aquesta variable. En el cas dels motors de corrent alterna (i en especial del motor d’inducció, sobre el qual es planegen les diverses solucions), no n’hi ha prou en actuar sobre la tensió d’alimentació del motor per a variar la velocitat, com succeeix en el cas dels motors de corrent continu. Cal tenir en compte que per a realitzar qualsevol tipus de control en una màquina asíncrona (que serà la que s’utilitzarà finalment) s’haurà de fer servir algun tipus de convertidor de potència per a poder realitzar el control. Per a modificar la velocitat d’un motor de corrent altern (ja sigui síncron o asíncron) cal tenir en compte que aquests estan lligats a la equació (1.4), on f és la freqüència (en Hz) de la xarxa en que s’alimenta el motor, n la velocitat angular expressada en revolucions per minut (rpm) i p el parell de pols que té la màquina elèctrica.
pfns
·60= (1.4)
1.4.5.1 Control Escalar
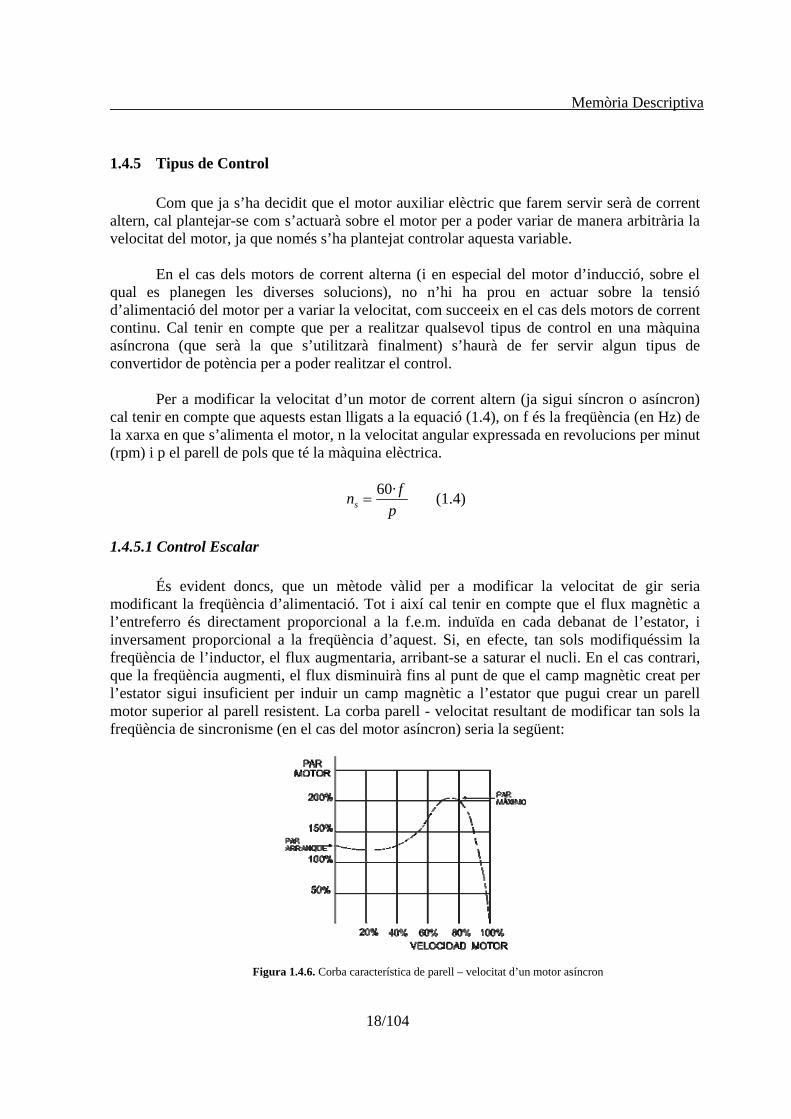
És evident doncs, que un mètode vàlid per a modificar la velocitat de gir seria modificant la freqüència d’alimentació. Tot i així cal tenir en compte que el flux magnètic a l’entreferro és directament proporcional a la f.e.m. induïda en cada debanat de l’estator, i inversament proporcional a la freqüència d’aquest. Si, en efecte, tan sols modifiquéssim la freqüència de l’inductor, el flux augmentaria, arribant-se a saturar el nucli. En el cas contrari, que la freqüència augmenti, el flux disminuirà fins al punt de que el camp magnètic creat per l’estator sigui insuficient per induir un camp magnètic a l’estator que pugui crear un parell motor superior al parell resistent. La corba parell - velocitat resultant de modificar tan sols la freqüència de sincronisme (en el cas del motor asíncron) seria la següent:
Figura 1.4.6. Corba característica de parell – velocitat d’un motor asíncron
Memòria Descriptiva
19/104
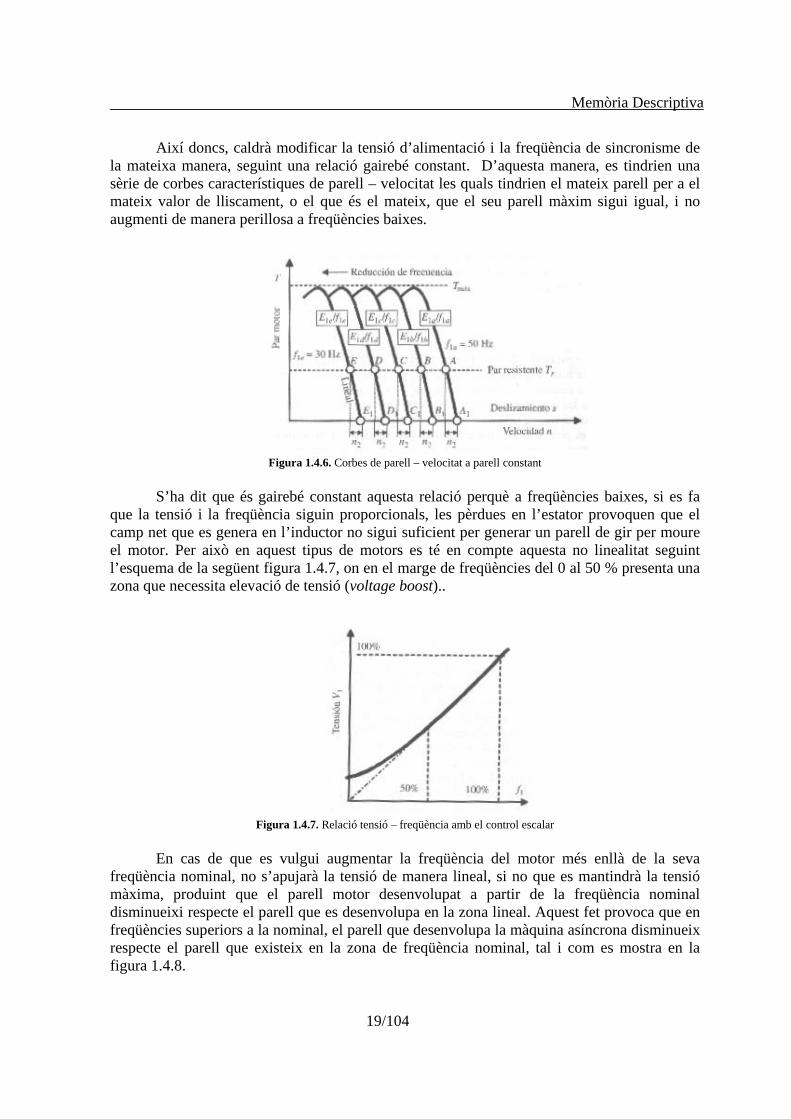
Així doncs, caldrà modificar la tensió d’alimentació i la freqüència de sincronisme de la mateixa manera, seguint una relació gairebé constant. D’aquesta manera, es tindrien una sèrie de corbes característiques de parell – velocitat les quals tindrien el mateix parell per a el mateix valor de lliscament, o el que és el mateix, que el seu parell màxim sigui igual, i no augmenti de manera perillosa a freqüències baixes.
Figura 1.4.6. Corbes de parell – velocitat a parell constant
S’ha dit que és gairebé constant aquesta relació perquè a freqüències baixes, si es fa
que la tensió i la freqüència siguin proporcionals, les pèrdues en l’estator provoquen que el camp net que es genera en l’inductor no sigui suficient per generar un parell de gir per moure el motor. Per això en aquest tipus de motors es té en compte aquesta no linealitat seguint l’esquema de la següent figura 1.4.7, on en el marge de freqüències del 0 al 50 % presenta una zona que necessita elevació de tensió (voltage boost)..
Figura 1.4.7. Relació tensió – freqüència amb el control escalar
En cas de que es vulgui augmentar la freqüència del motor més enllà de la seva
freqüència nominal, no s’apujarà la tensió de manera lineal, si no que es mantindrà la tensió màxima, produint que el parell motor desenvolupat a partir de la freqüència nominal disminueixi respecte el parell que es desenvolupa en la zona lineal. Aquest fet provoca que en freqüències superiors a la nominal, el parell que desenvolupa la màquina asíncrona disminueix respecte el parell que existeix en la zona de freqüència nominal, tal i com es mostra en la figura 1.4.8.

Memòria Descriptiva
20/104
Figura 1.4.8. Corbes de parell – velocitat a diferents freqüències de sincronisme amb el control escalar
1.4.5.2 Control Vectorial El control vectorial o denominat també control d’orientació de camp, constitueix un mètode de regulació de velocitat més sofisticat i modern dels motors asíncrons. La base d’aquest mètode de regulació es controlar tant la magnitud com la fase del flux magnètic del motor asíncron per aconseguir un funcionament semblant al que tenen els motors de corrent continu. Aquest mètode és bastant complex, tot i que assegura un comportament per als motors d’inducció que ofereix moltes prestacions. Cal apuntar que és necessari tenir en compte quines són les especificacions de funcionament del motor, ja que si no són molt exigents, el millor és no realitzar aquest tipus de control.
1.4.6 Protocols de Comunicació Per a fer front a l’exponencial augment de la quantitat de cablejat que ha experimentat l’automòbil en els últims anys, des de la indústria automobilística s’ha anat incorporant en els vehicles un sistema de bussos a fi de multiplexar els senyals de control per als diferents dispositius. D’aquesta manera, en un mateix parell de conductors, s’envien i es reben els senyals que controlen tots els elements del cotxe que estan controlats electrònicament, reduint de manera dràstica la quantitat (i conseqüentment el pes) de conductors que cal distribuir en un cotxe. Així doncs, l’objectiu del protocol de comunicació és semblant al del semàfor, aconseguir que tota la informació (o vehicles en el cas del semàfor) arribi al seu destí per la mateixa via de comunicació, amb la millor fluïdesa possible i evitant col·lisions.
1.4.6.1 CAN
És el protocol més estès avui en dia en Europa en l’àmbit de l’automòbil. Existeixen dues versions bàsiques, CAN 1.0 i CAN 2.0.
Memòria Descriptiva
21/104
Des del punt de vista del node esclau permet diversos accessos al mateix temps, amb anul·lació de col·lisions. El procés d’adquisició del bus (arbitratge) és no destructiu ja que utilitza identificadors en les trames per realitzar-lo. Permet un nombre de nodes il·limitat segons les especificacions; tanmateix, aquest està restringit pel temps màxim de resposta requerit i la potència dels drivers (dispositius encarregats d’adaptar els nivells de transmissió).
És un bus de gran flexibilitat ja que afegir un nou node és molt fàcil. Tan sols es
veuran afectats els nodes amb una prioritat menor. Aquest protocol és adient per aplicacions com el control de sistemes, confort del vehicle i aplicacions de temps real no crítiques. Un altre característica que cal destacar és que si un dels nodes deixa de funcionar, el sistema no s’atura, i es pot detectar quin dels nodes ha deixat de funcionar correctament.
L’eficiència del bus depèn de la càrrega d’aquest (tenint en compte no sobrepassar el 70% per evitar la saturació del bus).
En el mercat existeix una àmplia varietat de dispositius a un baix cost així com microcontroladors amb el controlador CAN integrat com el PIC18F258 de la casa Microchip o els processdors digitals de senyals (Digital Signal Processors) del tipus dsPIC30F (també de la casa Microchip). Pel que fa al control d’errors, aquest tan sols pot ésser solucionat amb una retransmissió del missatge. En els dispositius tolerants a fallades es pot passar es fan servir dos fils, essent dins d’un marge immune tot el sistema quasi bé a les fallades. Cap la possibilitat d’utilitzar un sol fil per a comunicar-se, tot i que perd la immunitat a les emissions electromagnètiques.
Les taxes de transferència poden anar de 41.6 Kbit/s per al CAN d’un sol fil,125 Kbit/s
en el tolerant a fallades i fins 1Mbit/s en el CAN d’alta velocitat.
1.4.6.2 LIN
Es tracta d’un protocol de classe A que permet una transferència de fins a 20 Kbit/s. En aquest bus sèrie no poden existir col·lisions ja que es tracta d’una unió d’un sol fil, punt a punt entre els esclaus i un únic mestre. Per tant, afegir un node no suposa cap problema a causa de la simplicitat de la topologia del bus, cosa que permetent fins a 16 nodes en un bus d’uns 40 metres.
La trama que s’utilitza està orientada a caràcter, per tant, es pot realitzar amb un senzill microcontrolador i una UART implementada per programa. Es pot utilitzar un rellotge RC per a la sincronització ja que permet fins a un 15% de tolerància en el rellotge de l’esclau.
És adient per a aplicacions de molt poca complexitat com poden ésser la lectura de l’estat d’un interruptor.
Memòria Descriptiva
22/104
1.4.6.3 RS232
El protocol de comunicacions RS-232 (amb les seves variants) és el tipus de comunicació sèrie més utilitzat a l’hora de comunicar el PC amb altres PC’s o perifèrics. Està dissenyat específicament per a distàncies curtes, de menys de 15 metres i per a velocitats de comunicació inferiors a 20 kbps. La interfície pot treballar en comunicació síncrona o asíncrona i tipus de canal simplex (les dades sempre viatgen en una mateixa direcció), half duplex (les dades són bidireccionals però només en un determinat periode de temps) o full duplex (les dades viatgen en ambdós sentits de manera simultània). També se sol utilitzar per connectar pantalles LCD que estan a una certa distància dels seus respectius microcontroladors, millorant d’aquesta manera la fiabilitat de la visualització de les dades.
1.4.7 Mòdul de Potència És fàcil deduir, que si ens disposem a accionar un motor de corrent altern a partir d’una tensió contínua de 42 V, haurem de disposar d’algun tipus d’etapa de potència que a part de transformar les ordres de control en accions del motor, permeti transformar l’energia elèctrica contínua de la font d’energia en energia elèctrica alterna per a alimentar el motor.
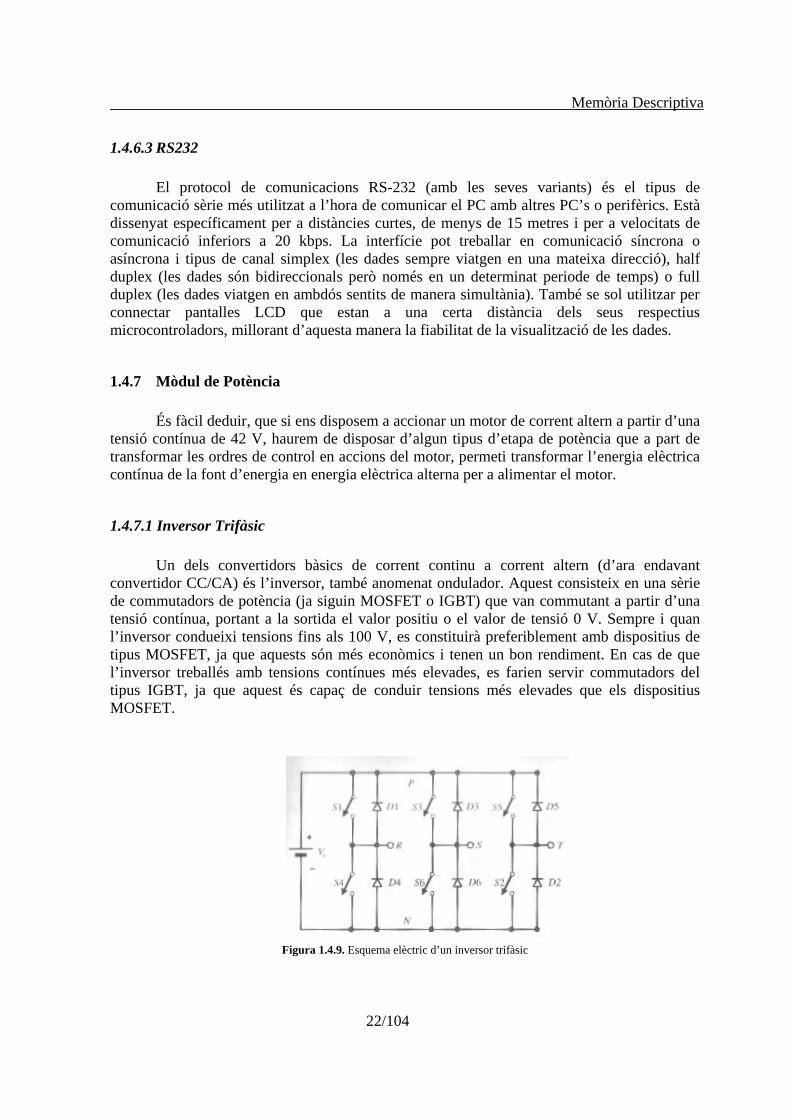
1.4.7.1 Inversor Trifàsic
Un dels convertidors bàsics de corrent continu a corrent altern (d’ara endavant convertidor CC/CA) és l’inversor, també anomenat ondulador. Aquest consisteix en una sèrie de commutadors de potència (ja siguin MOSFET o IGBT) que van commutant a partir d’una tensió contínua, portant a la sortida el valor positiu o el valor de tensió 0 V. Sempre i quan l’inversor condueixi tensions fins als 100 V, es constituirà preferiblement amb dispositius de tipus MOSFET, ja que aquests són més econòmics i tenen un bon rendiment. En cas de que l’inversor treballés amb tensions contínues més elevades, es farien servir commutadors del tipus IGBT, ja que aquest és capaç de conduir tensions més elevades que els dispositius MOSFET.
Figura 1.4.9. Esquema elèctric d’un inversor trifàsic

Memòria Descriptiva
23/104
Si es fa commutar el conjunt de transistors de manera que la tensió mitjana a la sortida
segueixi una forma sinusoïdal, s’haurà aconseguit que a partir d’una tensió contínua s’obté una tensió alterna sinusoïdal. D’entre diferents estratègies per a generar aquestes commutacions, la més estesa és la modulació per amplada de polsos (o PWM, Pulse Width Modulation), fàcilment generable per un microcontrolador.

Memòria Descriptiva
24/104
1.4.8 Resum de les Solucions Adoptades
Un cop revisades les opcions per a solucionar els diferents punts que formen part del projecte arribem a les següents conclusions:
Es farà servir un motor asíncron d’inducció de gàbia d’esquirol de potencia nominal
0,25 CV, i una tensió nominal de 48 Vrms quan es connecta en triangle i de 78 Vrms quan es connecta en estrella, ambdós funcionant a una freqüència de 50 Hz, ja que és el més comú i el més econòmic i amb aquests paràmetres es podrà fer funcionar amb una tensió d’alimentació de 42 Vdc, tot i que no funcionarà amb el màxim parell, ja que per fer-ho, hauria d’estar alimentat a una tensió superior. Tot i així s’ha seguit endavant amb aquesta decisió ja que era el motor que estava disponible, la qual cosa per al propòsit d’aquest projecte ja s’hi adaptava suficientment.
Per a efectuar el control, es farà servir la targeta dsPIC30F Motor Control
Development System subministrada per la casa Microchip ja que aquesta ens ofereix una plataforma ràpida i segura per a desenvolupar sistemes de control de motor, complint de llarg les necessitats de perifèrics del controlador (sortides PWM, comunicació CAN, interfície de lectura de l’encoder, capacitat de càlcul etc.).
Per efectuar el càlcul de la velocitat s’ha preferit utilitzar l’encoder incremental HEDM
550 de 1024 polsos per revolució degut a que a la seva disponibilitat, ja que al laboratori se’n disponía d’una dotzena, i també degut a que la targeta de desenvolupament del control té un mòdul específic per a capturar la lectura de l’encoder. Una altre punt a favor per a l’utilització d’aquest element, es que es tracta d’un encoder amb una bona resolució, la qual cosa permet una lectura de la velocitat més precisa. Cal afegir, que si es volgués optimitzar el preu del conjunt, seria recomanable substituir aquest sensor per un d’efecte Hall, al ser el més utilitzat en l’automòbil degut al seu preu reduït. D’altra banda, el tipus de control escollit ha sigut el control escalar ja que és el més fàcil d’implementar i per a les especificacions i les necessitats de l’aplicació que es pretén aconseguir n’hi ha més que suficient. El control serà exercit a través d’una etapa de potència formada per un inversor trifàsic, ja que és molt més econòmic que un variador de freqüències, i justament Microchip disposa d’un mòdul d’aquestes característiques que s’adapta perfectament a la targeta de desenvolupament, la qual cosa permet un disseny compacte, tal i com s’ha fixat com a objectiu de disseny. Per últim la comunicació del sistema físic amb el node de control es fa servir el protocol CAN (integrat en la targeta de desenvolupament) degut a la seva alta taxa de transferència i a que es tracta del protocol més utilitzat en l’automòbil, la qual cosa permet que el model dissenyat s’assembli molt a un sistema que està integrat en un vehicle. Tot i així, s’ha considerat que la visualització final es farà amb l’ordinador mitjançant el protocol RS-232, ja que s’ha tingut en compte que els dispositius físics que en l’automòbil exerciran la monitorització (pantalla LCD o d’altres) acostumen a tenir una comunicació sèrie RS-232 en comptes de CAN. Així doncs, es disposarà d’una segona targeta de control dsPIC30F Motor Control Development System per a comunicar el node CAN amb el visualitzador final. Per

Memòria Descriptiva
25/104
tenir-ne una idea més clara, a la figura 1.4.10 es mostra com queda enllaçat el conjunt del sistema de comunicacions:
Figura 1.4.10. Quadre resum de la comunicació de tot el sistema

Memòria Descriptiva
26/104
1.5 Especificacions Tècniques
Les prescripcions tècniques han estat fixades pel titular del projecte, les quals s’intenten adaptar a la realitat dels motors auxiliars en l’automòbil.
1.5.1 Hardware
• Temperatura màxima de funcionament: 110 ºC. • El motor tindrà les següents característiques:
Paràmetre Valor nominal Tensió d’alimentació de línia 48/83 Vrms (triangle / estrella) Freqüència nominal de funcionament 50 Hz Velocitat nominal en condicions nominals 1380 r.p.m. Potència nominal 0,25 CV (184 W) Corrent nominal 6,4 / 3,7 A (triangle / estrella) Factor de potència (cos ϕ) 0,85 Parell de pols 2 Lliscament en condicions nominals 8 %
• Tensió d’alimentació de 42 V. • Tensió d’alimentació disponible a la sortida de l’inversor: 24 Vrms. • Proteccions de sobrecorrent, sobretensió i sobretemperatura. • Marge de funcionament del motor: de 1Hz a 100 Hz, ja que el fabricant no
recomana que es faci funcionar a una freqüència més gran del doble de la nominal. • Sensibilitat de l’encoder: 1024 polsos per revolució
1.5.2 Software
• Freqüència de funcionament del microcontrolador que controla el motor: 58,9824 MHz (multiplicador XT PLL x8).
• Freqüència de funcionament del microcontrolador que controla les comunicacions: 7,3728 MHz (font d’oscil·lació cristall extern o XT).
• Ha de permetre sensar la velocitat cada 10 ms. • El període del PWM és de 16 kHz.
1.5.3 Comunicacions
Comunicació CAN: • Utilització de CAN v 2.0B (o full CAN) amb identificador estàndard de 11 bits. • Velocitat de transmissió de 115200 bps. • Identificador del node de control del motor auxiliar: id=8. • Identificador del node de control de les comunicacions amb la visualització: id=4.

Memòria Descriptiva
27/104
• Utilització del cable amb connector DB 9 subministrat per National Instruments amb la impedància de línia necessària per a la comunicació CAN.
Comunicació RS-232: • Velocitat de transmissió de 9600 bps. • Utilització del cable amb connector DB 9 en configuració null-modem.
Memòria Descriptiva
28/104
1.6 Posada en Funcionament
Abans d’utilitzar el conjunt de mòduls que formen el control i monitorització d’un motor auxiliar elèctric d’un vehicle, cal tenir en compte una sèrie d’aspectes:
• S’han de connectar a l’alimentació correctament les dues plaques de desenvolupament. Per adonar-se que estan alimentades correctament, s’encendrà una llumeta verda.
• Connectar correctament les comunicacions, es a dir el connector J9 que està més a prop de la pantalleta LCD és el corresponent a la comunicació CAN. El connector J9 del costat del connector CAN es tracta del connector de la comunicació RS-232.
• Assegurar-se que el cable CAN i el cable RS-232 no s’han confós, ja que el cable de la comunicació CAN és de connexió full modem i cada terminal conté la impedància característica necessària, diferent a la del cable sèrie universal.
• Comprovar que la font d’alimentació està limitada segons les característiques del motor i de l’inversor, per evitar danys en qualsevol dels dos.
• Connectar correctament (en estrella o en triangle) els terminals del motor, ja que una mala connexió de les diferents bobines podria ser fatal.
• Si es fa servir el cable característic del CAN, assegurar-se que en ambdues plaques s’ha tret el jumper (LK8 veure al plànol 6) que permet o no la connexió d’una resistència de 120 Ω. En cas de que no s’utilitzi el citat cable, la presència d’aquests elements (jumpers) serà imprescindible per a que en el bus CAN la comunicació es dugui a terme sense errors.

Memòria Descriptiva
29/104
1.7 Planificació i Programació
• Tasca 1: Estudi comparatiu de les diferents alternatives de control. • Tasca 2: Cerca dels components més idonis en el mercat, que amb el menor preu
possible assegurin les especificacions sol·licitades. • Tasca 3: Acoblament i muntatge de l’encoder al motor • Tasca 4: Disseny i implementació d’un accionament per al motor. • Tasca 5: Proves del motor en llaç obert. • Tasca 6: Disseny i implementació del sensat de velocitat. • Tasca 7: Disseny i implementació del sistema de comunicació. • Tasca 8: Disseny i implementació del control del motor • Tasca 9: Posada en marxa del sistema complet i ajusts necessaris. • Tasca 10: Mesures i prestacions del mòdul final. • Tasca 11. Redacció del informe final.
S1 S2 S3 S4 S5 S6 S7 S8 S9 S10 T1 T2 T3 T4 T5 T6 S11 S12 S13 S14 S15 S16 S17 S18 S19 S20 T7 T8 T9 T10 T11
Memòria Descriptiva
30/104
1.8 Resum del Pressupost Mòdul del control del motor 2.969,50 Mòdul de comunicacions 1.920,80 Pressupost d'execució material 4.890,30 IVA 16 % 782,45 Pressupost de licitació 5.672,75 PRESSUPOST GENERAL 5.672,75 El pressupost general puja a la quantitat de CINC MIL SIS-CENTS SETANTA-DOS EUROS amb SETANTA-CINC CÈNTIMS Tarragona, 25 de maig de 2008
L’ENGINYER TÈCNIC INDUSTRIAL ALEIX MAIXÉ SAS

Memoria de Càlcul
31/104
2. Memòria de Càlcul.
Memòria de Càlcul
32/104
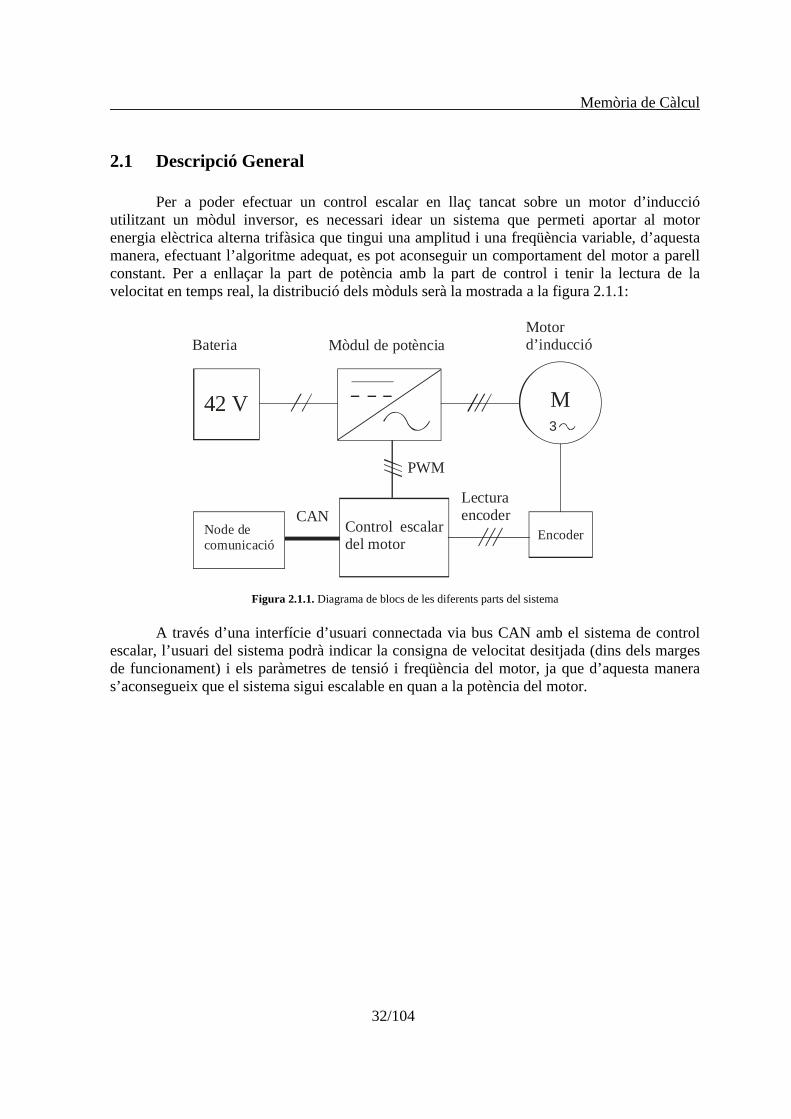
2.1 Descripció General Per a poder efectuar un control escalar en llaç tancat sobre un motor d’inducció utilitzant un mòdul inversor, es necessari idear un sistema que permeti aportar al motor energia elèctrica alterna trifàsica que tingui una amplitud i una freqüència variable, d’aquesta manera, efectuant l’algoritme adequat, es pot aconseguir un comportament del motor a parell constant. Per a enllaçar la part de potència amb la part de control i tenir la lectura de la velocitat en temps real, la distribució dels mòduls serà la mostrada a la figura 2.1.1:
M3
42 V
EncoderControl escalar del motor
Node de comunicació
Bateria Mòdul de potènciaMotor d’inducció
PWM
CANLectura encoder
Figura 2.1.1. Diagrama de blocs de les diferents parts del sistema A través d’una interfície d’usuari connectada via bus CAN amb el sistema de control escalar, l’usuari del sistema podrà indicar la consigna de velocitat desitjada (dins dels marges de funcionament) i els paràmetres de tensió i freqüència del motor, ja que d’aquesta manera s’aconsegueix que el sistema sigui escalable en quan a la potència del motor.
Memòria de Càlcul
33/104
2.2 Control del Motor
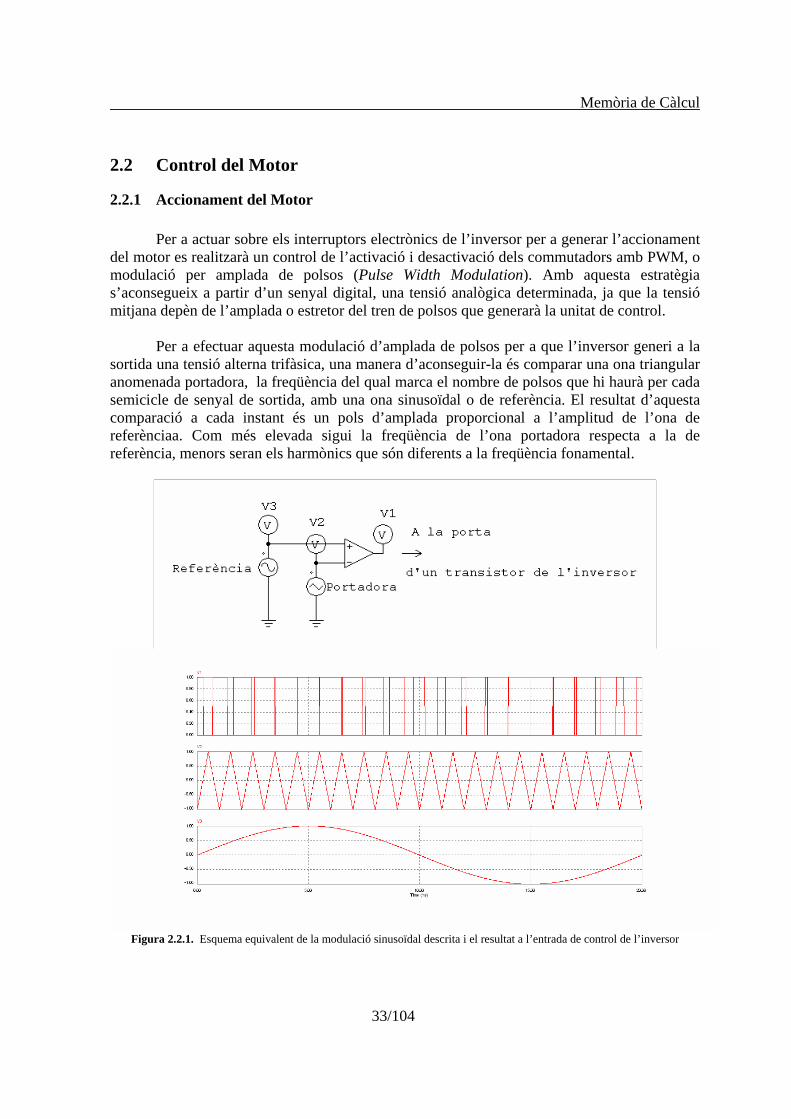
2.2.1 Accionament del Motor Per a actuar sobre els interruptors electrònics de l’inversor per a generar l’accionament del motor es realitzarà un control de l’activació i desactivació dels commutadors amb PWM, o modulació per amplada de polsos (Pulse Width Modulation). Amb aquesta estratègia s’aconsegueix a partir d’un senyal digital, una tensió analògica determinada, ja que la tensió mitjana depèn de l’amplada o estretor del tren de polsos que generarà la unitat de control. Per a efectuar aquesta modulació d’amplada de polsos per a que l’inversor generi a la sortida una tensió alterna trifàsica, una manera d’aconseguir-la és comparar una ona triangular anomenada portadora, la freqüència del qual marca el nombre de polsos que hi haurà per cada semicicle de senyal de sortida, amb una ona sinusoïdal o de referència. El resultat d’aquesta comparació a cada instant és un pols d’amplada proporcional a l’amplitud de l’ona de referènciaa. Com més elevada sigui la freqüència de l’ona portadora respecta a la de referència, menors seran els harmònics que són diferents a la freqüència fonamental.
Figura 2.2.1. Esquema equivalent de la modulació sinusoïdal descrita i el resultat a l’entrada de control de l’inversor

Memòria de Càlcul
34/104
Per tant l’accionament que es farà servir seguirà la mateixa filosofia, generar uns polsos que amb l’amplada adequada, siguin capaços d’activar els commutadors de l’inversor trifàsic i generar a la sortida una tensió alterna trifàsica. Per dur-ho a terme, es fa servir el mòdul generador de PWM del dsPIC, connectant el microcontrolador al inversor de la següent manera:
PWM1 H
PWM2 HPWM3 H
PWM1 L
PWM2 LPWM3 L
DsPIC30F
Figura 2.2.2 . Esquema d’interconnexió del dsPIC amb l’inversor
El dispositiu dsPIC30F posseeix un mòdul de PWM de 8 sortides en 4 canals diferents. D’aquestes 8 sortides només se’n faran servir 6, ja que per a cada fase de tensió que alimenta el motor, s’han d’activar 2 commutadors. El gran avantatge que suposa el disposar d’aquest mòdul, es estalviar una gran quantitat de càlculs, ja que el tren de polsos es genera internament, tal i com s’explicarà a continuació. El diagrama general del mòdul és el següent:
Figura 2.2.3. Esquema del mòdul PWM d’un dsPIC

Memòria de Càlcul
35/104
El mòdul disposa de 4 generadors de PWM i cadascun d’aquests disposa de dues potes per a la sortida del senyal PWM variable. També disposa de dues potes de fallada i dos generadors de temps mort. El PWM es genera a partir del funcionament d’una base de temps que genera el mateix mòdul. Aquesta base de temps estableix els instants en que finalitzen els cicles de treball, així com els instants de començament d’un nou període per a la senyal de sortida desitjada.
La base de temps establint el període i el cicle de treball desitjat es configura en els
registres PTPER i PDCx (on x és el número de la sortida PWM que s’escull). En el cas del control de motors, es fa servir de manera genèrica una freqüència de 16 kHz de PWM. La placa de desenvolupament de control de motors on està integrat el dispositiu dsPIC conté un critall extern de 7,3728 MHz (Y1 al plànol 4). Tot i així, el microcontrolador també disposa d’un multiplicador de freqüències per 4, 8 i 16 (XT PLL/x4,x8 i x16) que permet multiplicar per aquests factors la freqüència del rellotge extern. En el projecte actual s’ha decidit utilitzar en la part de control del motor una freqüència de 58,9824 MHz, resultat d’aplicar un multiplicador per 8.Segons l’expressió de l’equació 2.1, i tenint en compte la freqüència del rellotge i del PWM desitjat el valor que caldrà carregar al PTPER en la inicialització del dispositiu serà:
9211Pr
1·Pr·4
==
−=
PTPEReescaler
eescalerFFPTPER
PWM
clk
(2.1)
Així doncs, un cop s’ha inicialitzat la base de temps, un temporitzador associat
comença a incrementar el registre PTMR de 15 bits a cada pols de senyal de rellotge (que serà múltiple del cicle d’instrucció, ja que com s’ha vist, se li pot aplicar un preescaler) que li arriba i anirà comparant el valor d’aquest (PTMR) amb el valor de PTPER, que serà on es carregarà el valor del període desitjat per al mòdul de PWM. En el moment que el valor del temporitzador coincideixi amb el valor carregat a PTPER, començarà un nou període. Al mateix temps, el valor del temporitzador es compara cada mig cicle d’intrucció amb el valor introduït al registre PDCx. En el moment que el valor carregat al registre PDCx coincideixi amb el registre temporitzador PTMR, la sortida canviarà d’estat, es a dir, si estava a nivell alt passarà a nivell baix i viceversa.
També hi ha diferents opcions de funcionament de la base de temps, que es poden configurar modificant els bits PTMOD del registre de control PTCON. Aquests poden ser:
• Mode normal: en aquest mode, la base de temps del PWM compta ascendentment fins que assoleix el valor del període carregat al registre PTPER, tal i com s’ha explicat per defecte.
• Mode esdeveniment únic: en aquest mode el temporitzador comença el seu comptatge ascendent en el moment en que el bit PTEN del registre PTCON es posat a 1. Just en l’instant en que el temporitzador de període assoleix el valor del període, es reseteja, es genera una interrupció i el bit PTEN es posat a 0, amb la

Memòria de Càlcul
36/104
qual cosa la base de temps queda deshabilitada. El postescaler no té cap efecte quan es treballa en aquest mode.
• Mode ascendent / descendent: en aquest mode la base de temps compta en sentit ascendent fins que el període contingut en el registre PTPER s’iguala al temporitzador. En aquest moment el temporitzador començar a comptar en sentit descendent. Quan el valor del registre PTMR assoleix el valor 0 es genera una interrupció i comença a comptar novament en sentit ascendent. Per saber si el comptador s’està incrementant o decrementant, el mòdul consulta el bit PTDIR del registre PTMR, que només és de lectura, i aquest indica la direcció en la qual s’està comptant.
• Mode ascendent / descendent amb doble interrupció: el funcionament d’aquest mode és idèntic a l’anterior amb la diferència que es genera una interrupció cada vagada que el temporitzador assoleix el valor de PTPER i cada vegada que el temporitzador assoleix el valor 0.
Per a implementar l’accionament del motor, s’ha decidit utilitzar el mode normal,
generant una interrupció cada vegada que es genera un periode de PWM. Per tant, els registres de configuració de la base de temps tindran els següents valors:
• PTPER=921. S’aconsegueix una freqüència de PWM de 16 kHz. • PTCON=0x8002. Després d’habilitar la base de temps, es configuren les sortides
del mòdul PWM en mode ascendent descendent, amb un pre-escalat i post-escalat de 1:1 i en cas de portar el microcontrolador a estat de baix consum, la base de temps torna a funcionar.
• OVDCON=0x3F00. Amb aquest registre, les sortides de PWM estan controlades pel mateix mòdul PWM.
Per acabar, el mòdul disposa d’una sèrie de modes de sortida, ja que com s’ha vist en
l’esquema general del mòdul, cada canal de PWM consta de dues sortides, les quals poden treballar en mode complementari o independent.
• Mode independent: les dos sortides del mateix canal són iguals, i per seleccionar
quina de les sortides (o les dues) estaran actives es selecciona mitjançant el bit PMODx corresponent al registre PWMCON1. Els registres de temps mort (se’n parlarà a continuació) resten inactius en aquest mode de funcionament.
• Mode complementari: en aquest mode la sortida PWMxL és la inversa de PWMxH. Per escollir aquest mode cal posar un ‘0’ al bit PMODx corresponent del regitre PWMCON1. Quan el dispositiu dsPIC treballa en aquest mode es poden introduir a la senyal temps morts, que són curts períodes de temps durant els quals ambdues sortides estaran inactives.
Com que l’etapa de potència que farem servir disposa d’uns circuits a l’entrada
d’activació dels commutadors de l’inversor (IR21125, veure al plànol 11) que ja generen aquest temps mort i la inversió de les entrades, s’ha optat per escollir un mode de sortida independent. La configuració inicial serà la següent (tot i que PWMCON1 canviarà durant l’execució del programa, tal i com explicarem a continuació):
Memòria de Càlcul
37/104
• PWM1CON1=0x0F34. D’aquesta manera es configuren les sortides PWM 1,2 i 3
en mode independent i s’habiliten les sortides altes (PWMxH) dels canals 1 i 2 i la sortida baixa (PWMxL) del canal 3.
Havent descrit el funcionament i havent decidit quins paràmetres fixarem en el mòdul
PWM del dsPIC, cal buscar una estratègia per a generar una ona sinusoïdal trifàsica de tensió i freqüència variable.
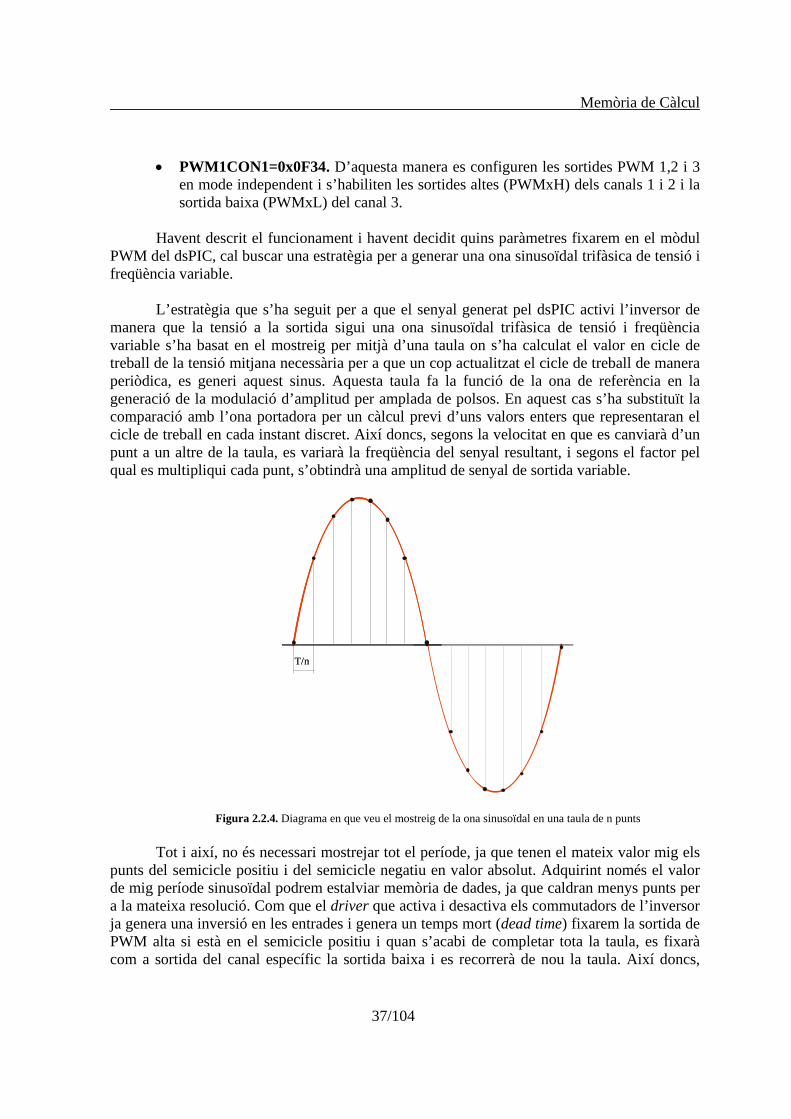
L’estratègia que s’ha seguit per a que el senyal generat pel dsPIC activi l’inversor de manera que la tensió a la sortida sigui una ona sinusoïdal trifàsica de tensió i freqüència variable s’ha basat en el mostreig per mitjà d’una taula on s’ha calculat el valor en cicle de treball de la tensió mitjana necessària per a que un cop actualitzat el cicle de treball de manera periòdica, es generi aquest sinus. Aquesta taula fa la funció de la ona de referència en la generació de la modulació d’amplitud per amplada de polsos. En aquest cas s’ha substituït la comparació amb l’ona portadora per un càlcul previ d’uns valors enters que representaran el cicle de treball en cada instant discret. Així doncs, segons la velocitat en que es canviarà d’un punt a un altre de la taula, es variarà la freqüència del senyal resultant, i segons el factor pel qual es multipliqui cada punt, s’obtindrà una amplitud de senyal de sortida variable.
T/nT/n
Figura 2.2.4. Diagrama en que veu el mostreig de la ona sinusoïdal en una taula de n punts Tot i així, no és necessari mostrejar tot el període, ja que tenen el mateix valor mig els punts del semicicle positiu i del semicicle negatiu en valor absolut. Adquirint només el valor de mig període sinusoïdal podrem estalviar memòria de dades, ja que caldran menys punts per a la mateixa resolució. Com que el driver que activa i desactiva els commutadors de l’inversor ja genera una inversió en les entrades i genera un temps mort (dead time) fixarem la sortida de PWM alta si està en el semicicle positiu i quan s’acabi de completar tota la taula, es fixarà com a sortida del canal específic la sortida baixa i es recorrerà de nou la taula. Així doncs,
Memòria de Càlcul
38/104
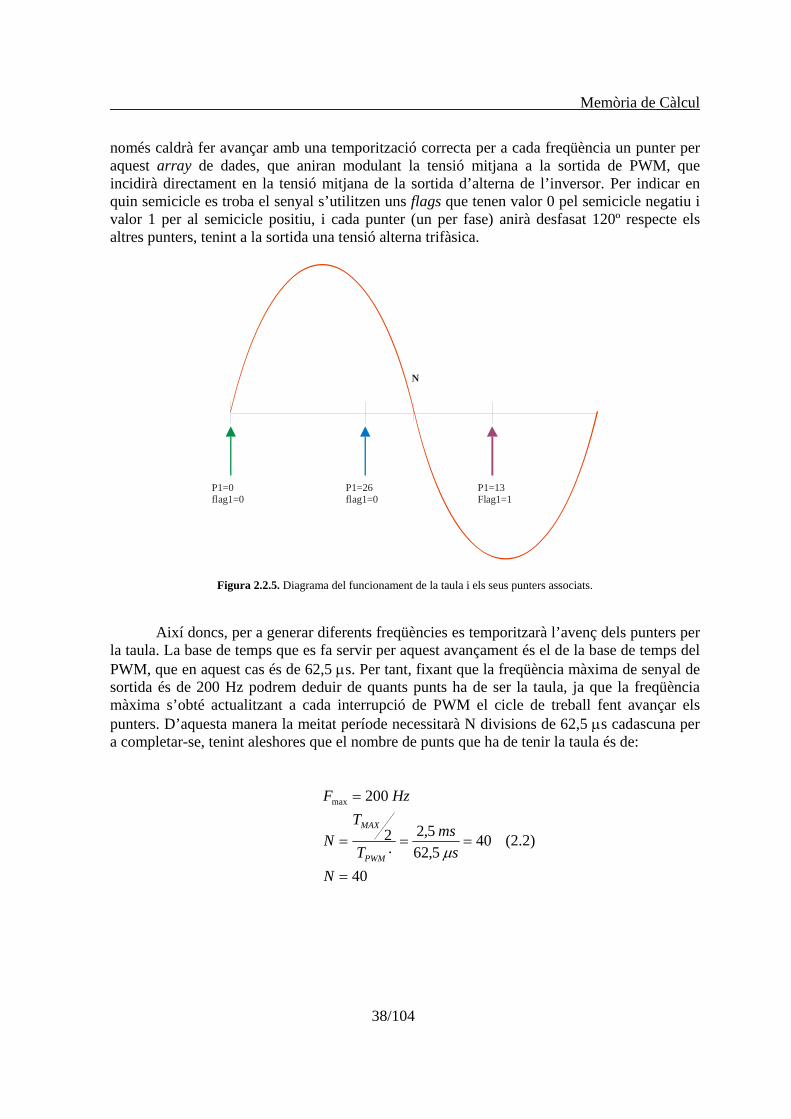
només caldrà fer avançar amb una temporització correcta per a cada freqüència un punter per aquest array de dades, que aniran modulant la tensió mitjana a la sortida de PWM, que incidirà directament en la tensió mitjana de la sortida d’alterna de l’inversor. Per indicar en quin semicicle es troba el senyal s’utilitzen uns flags que tenen valor 0 pel semicicle negatiu i valor 1 per al semicicle positiu, i cada punter (un per fase) anirà desfasat 120º respecte els altres punters, tenint a la sortida una tensió alterna trifàsica.
P1=0flag1=0
P1=26flag1=0
P1=13Flag1=1
N
Figura 2.2.5. Diagrama del funcionament de la taula i els seus punters associats.
Així doncs, per a generar diferents freqüències es temporitzarà l’avenç dels punters per
la taula. La base de temps que es fa servir per aquest avançament és el de la base de temps del PWM, que en aquest cas és de 62,5 μs. Per tant, fixant que la freqüència màxima de senyal de sortida és de 200 Hz podrem deduir de quants punts ha de ser la taula, ja que la freqüència màxima s’obté actualitzant a cada interrupció de PWM el cicle de treball fent avançar els punters. D’aquesta manera la meitat període necessitarà N divisions de 62,5 μs cadascuna per a completar-se, tenint aleshores que el nombre de punts que ha de tenir la taula és de:
40
405,62
5,2·2
200max
=
===
=
Ns
msT
TN
HzF
PWM
MAX
μ (2.2)

Memòria de Càlcul
39/104
D’aquesta manera, fent avançar els punters un nombre múltiple de vegades TPWM més
gran o més petit, s’aconsegueix una freqüència de senyal variable, tal i com es mostra en la figura 2.2.4, en la que es comparen dos senyals, un (el de l’esquerra) de freqüència més elevada que l’altre:
Senyal amb freqüència f1/2Senyal amb freqüència f1TpwmTpwm
Figura 2.2.5. Exemple de la generació dels senyals de diferents freqüències
Un cop se saben quants punts formaran la taula, cal trobar la manera de calcular el nombre de vegades que caldrà executar-se la rutina d’atenció a la interrupció del PWM per a generar una ona de sortida a una freqüència determinada pel sistema de control. Per a calcular aquest paràmetre es fa servir la següent expressió:
NF
F
cont
NF
F
FNF
TNTcont
TcontNTdesitjadafreqüèncialaFixant
puntcadaTcontampladadpuntsNsTcompletaraPer
puntcadaTampladadpuntsNsTcompletaraPer
PWM
PWM
PWM
PWM
PWM
PWM
PWMMAX
·2
·2··2··2
··2
:
·'2
'2
⎟⎠⎞
⎜⎝⎛
=
⎟⎠⎞
⎜⎝⎛
===
=
⇒
⇒
(2.3)
Tot i així, per a acabar de perfilar l’accionament final del motor, cal aconseguir que els senyals de sortida puguin ser de tensió variable. Per a assolir aquest objectiu hi ha dos possibles solucions. Una d’elles és carregar el valor màxim del senyal sinusoïdal al buffer que

Memòria de Càlcul
40/104
s’omple al iniciar el sistema i per a aconseguir un valor diferent al màxim, per tant més petit, cada valor de la taula caldrà multiplicar-lo per un factor menor que 1. Aquesta estratègia suposa haver de realitzar una sèrie d’operacions en coma flotant en una rutina d’atenció a la interrupció, la qual cosa pot suposar (tot i la elevada freqüència de funcionament del dsPIC) que es perdin peticions d’interrupció, fent que el senyal de la sortida no estigui degudament temporitzat. L’altra alternativa és fer l’operació inversa, carregar en la taula el valor més petit possible de cicle sinusoïdal, i per a aconseguir una amplitud més gran, tan sols caldrà multiplicar el valor de cicle de treball corresponent per un enter. Com que el dsPIC disposa d’un multiplicador ràpid, que és capaç de realitzar multiplicacions d’enters amb un sol cicle d’instrucció, el fet de multiplicar per un nombre enter agilitarà l’execució de la rutina d’atenció a la interrupció del PWM, fent possible que la freqüència a la sortida sigui la desitjada. Com és lògic, s’ha escollit aquesta segona estratègia. L’únic factor que s’ha de tenir en compte, és que s’ha de calcular quin serà el mínim semicicle que es podrà carregar al vector que conté els cicles de treball. Per fer-ho es té en compte l’expressió 2.4, que és la que s’ha fet servir per calcular genèricament el cicle de treball per cada punt de la taula:
[ ] ( ) MAXPWM treballdecicleTiitaula __··sin= (2.4)
El valor de l’increment del paràmetre angle, s’obté de dividir el semicicle del PWM (π)
entre el número de punts que conté el vector (equació 2.5). Per tant, per a saber quin cicle de treball farem servir com a paràmetre que multiplica el sinus, es parteix de la base que en l’angle mínim, el valor de taula [i] sigui 1. Aïllant de l’expressió “cicle de treball” es troba el valor de PDCx que representarà l’amplitud del senyal mínim que es podrà generar:
[ ]( ) 1374,12
0078539,01
sin1__
0078539,040
min
min
≈===
===
angletaulatreballdecicle
radpunts
angle ππ
(2.5)
El valor màxim de cicle de treball màxim serà:
18422·9212·max === PTPERPDCx (2.6)
Així doncs per a facilitar els càlculs a l’hora de modificar l’amplitud de l’alimentació del motor, s’agafa com a cicle de treball més petit el 18, ja que partint de la base que el cicle de treball més gran serà 1800, es té una sensibilitat d’1% de la tensió total, la qual provoca que es pugui variar la tensió en 100 valors diferents.
Memòria de Càlcul
41/104
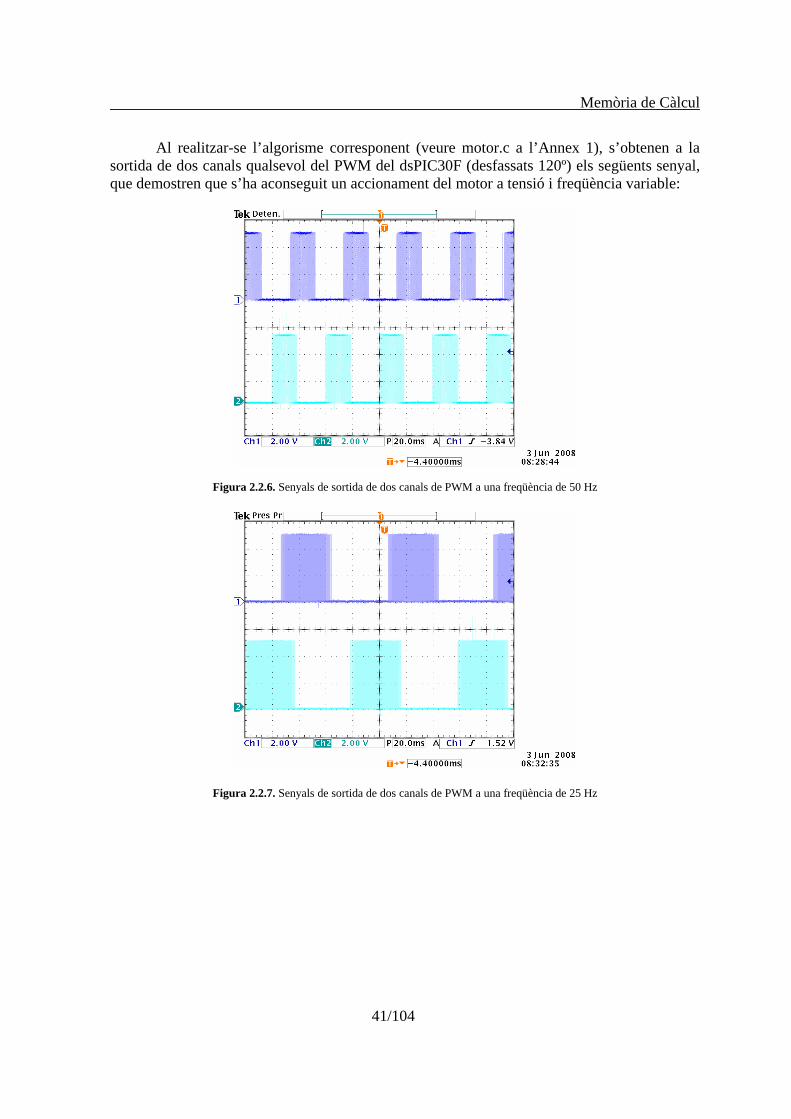
Al realitzar-se l’algorisme corresponent (veure motor.c a l’Annex 1), s’obtenen a la sortida de dos canals qualsevol del PWM del dsPIC30F (desfassats 120º) els següents senyal, que demostren que s’ha aconseguit un accionament del motor a tensió i freqüència variable:
Figura 2.2.6. Senyals de sortida de dos canals de PWM a una freqüència de 50 Hz
Figura 2.2.7. Senyals de sortida de dos canals de PWM a una freqüència de 25 Hz
Memòria de Càlcul
42/104
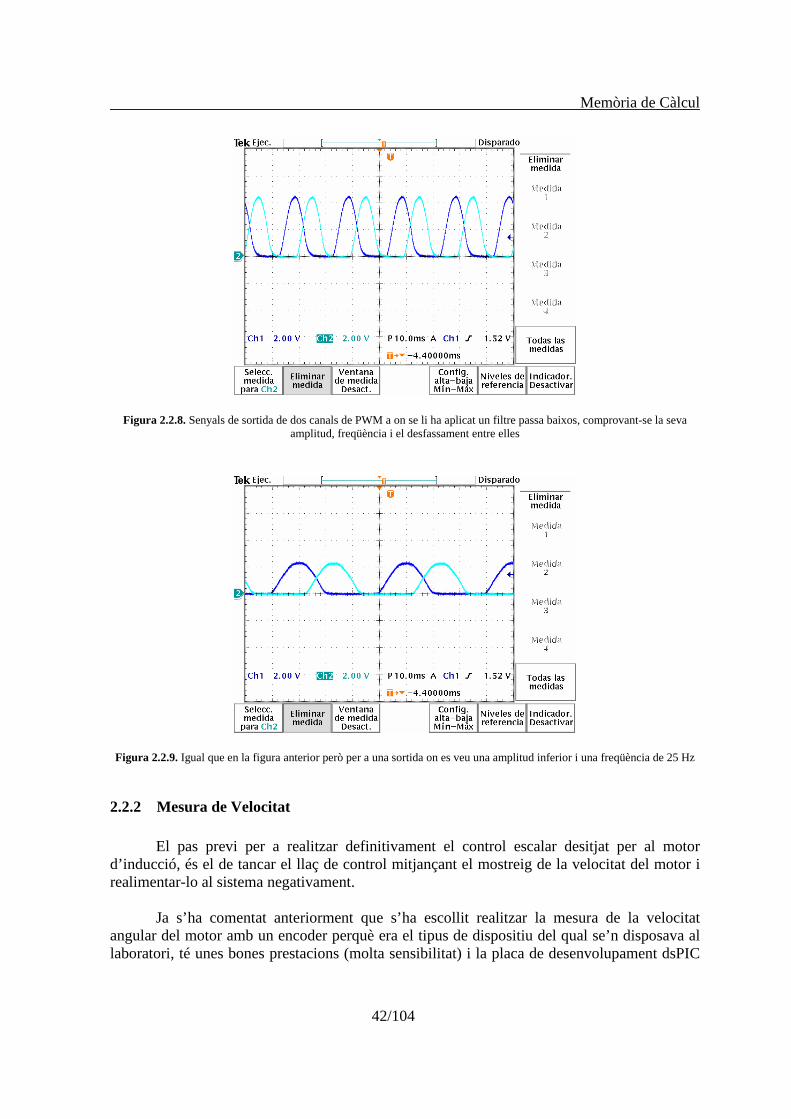
Figura 2.2.8. Senyals de sortida de dos canals de PWM a on se li ha aplicat un filtre passa baixos, comprovant-se la seva amplitud, freqüència i el desfassament entre elles
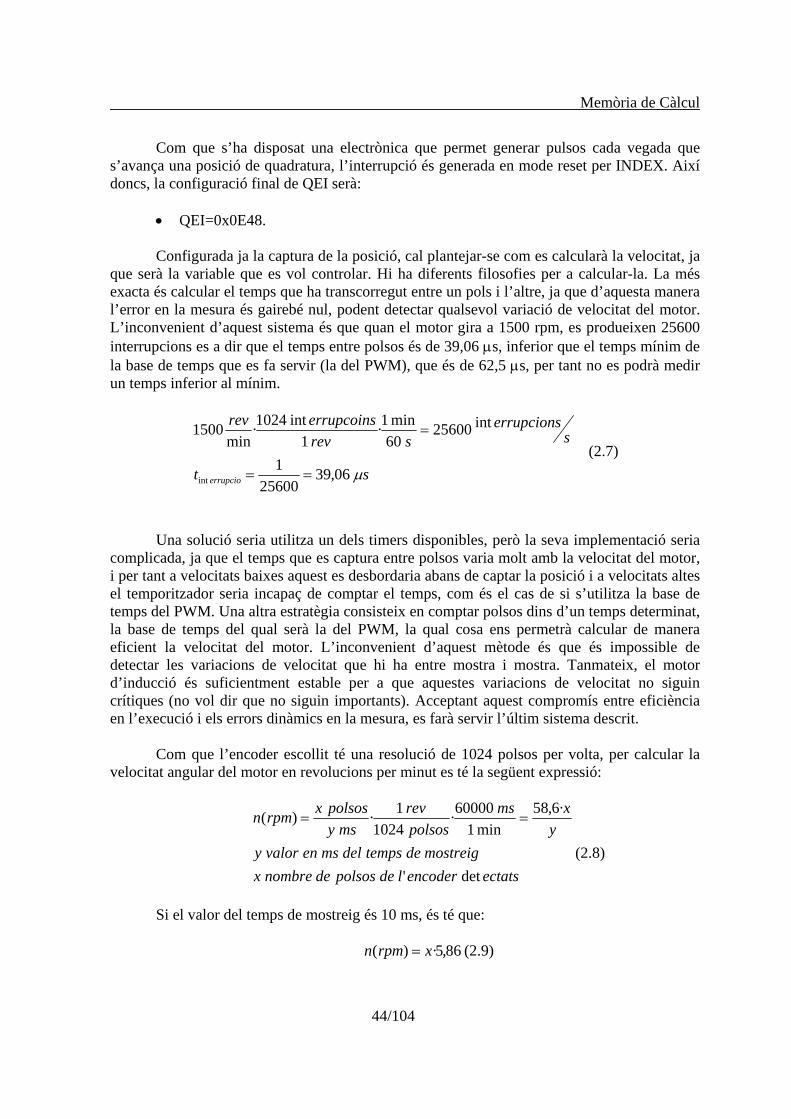
Figura 2.2.9. Igual que en la figura anterior però per a una sortida on es veu una amplitud inferior i una freqüència de 25 Hz
2.2.2 Mesura de Velocitat
El pas previ per a realitzar definitivament el control escalar desitjat per al motor d’inducció, és el de tancar el llaç de control mitjançant el mostreig de la velocitat del motor i realimentar-lo al sistema negativament.
Ja s’ha comentat anteriorment que s’ha escollit realitzar la mesura de la velocitat
angular del motor amb un encoder perquè era el tipus de dispositiu del qual se’n disposava al laboratori, té unes bones prestacions (molta sensibilitat) i la placa de desenvolupament dsPIC

Memòria de Càlcul
43/104
disposa d’un mòdul que, un cop s’han adequat els senyals de quadratura del sensor, permeten una lectura ràpida (estalvi en temps d’execució) de la posició del motor i és capaç de detectar la inversió de gir del motor sense haver de utilitzar recursos de software.
Aquest mòdul del dsPIC és l’anomenat QEI (Quadrature Encoder Interface). Aquest disposa de 3 entrades i una sortida (les tres entrades de l’encoder, es a dir senyal A, senyal B i senyal de polsos o índex i com a sortida la indicació del sentit UPDN) segons estigui configurat el mòdul, aquest és capaç de detectar l’estat de quadratura actual i mitjançant un decodificador lògic intern i per tan saber si la posició ha augmentat (sentit positiu) o a disminuït (sentit invers). Aquest mòdul també té associats una sèrie de registres, QEICON, de configuració del mòdul; DFLTCON, de configuració del filtre digital, que s’encarrega d’assegurar-se que els senyal a l’entrada són correctes; POSCNT, que segons com s’hagi configurat el QEI s’actualitza depenent de la posició actual de l’encoder i MAXCNT, que en és un valor màxim de comptatge que pot adquirir POSCNT.
Així doncs, el QEI pot tenir diferents modes d’operacions, els quals són seleccionats
modificant el registre QEICON. Aquest registre de control també ho és d’estat, ja que té bits que indiquen alguna circumstància del senyal llegit ha ocorregut, com és el cas de detectar una inversió de sentit de gir o un error. Aquest últim es genera quan es rep un estat de quadratura no esperat. El comptador de posició pot medir-se de dues maneres diferents:
• X2: en aquest mode (activat quan el bit QEIM és 0), la lògica interna del QEI
només detecta flancs de pujada i de baixada de la fase A per l’increment o decrement del comptador de posició, fent servir el senyal de fase B per determinar el sentit de gir.
• X4: aquest mode seleccionat quan QEIM és 1, el comptador de posició s’incrementa o es decrementa en ambdós flancs ascendents de la fase A i B, augmentant d’aquesta manera la resolució de la posició.
Com que s’ha escollit aquest encoder, entre d’altres motius, per la seva alta resolució
que permet una lectura precisa de la posició, s’ha configurat el mòdul del QEI per a que funcioni en mode X4.
Per determinar quina és la direcció directa per defecte, es configura el bit SWAPF del registre QEICON, com també es pot configurar les interrupcions del mode, ja que aquestes tenen lloc segons algun dels següents esdeveniments:
• Treballant en mode de reset per coincidència, es a dir que quan es supera un cert valor preestablert, es produeix una interrupció.
• Treballant en mode de reset per INDEX, es produeix una interrupció per la detecció d’un pols en aquesta entrada.
• Treballant en mode temporitzador/comptador, ja que el QEI es pot utilitzar com un comptador de 16 bits ascendent/descendent, el rellotge del qual són els senyals A i B.
Memòria de Càlcul
44/104
Com que s’ha disposat una electrònica que permet generar pulsos cada vegada que s’avança una posició de quadratura, l’interrupció és generada en mode reset per INDEX. Així doncs, la configuració final de QEI serà:
• QEI=0x0E48. Configurada ja la captura de la posició, cal plantejar-se com es calcularà la velocitat, ja
que serà la variable que es vol controlar. Hi ha diferents filosofies per a calcular-la. La més exacta és calcular el temps que ha transcorregut entre un pols i l’altre, ja que d’aquesta manera l’error en la mesura és gairebé nul, podent detectar qualsevol variació de velocitat del motor. L’inconvenient d’aquest sistema és que quan el motor gira a 1500 rpm, es produeixen 25600 interrupcions es a dir que el temps entre polsos és de 39,06 μs, inferior que el temps mínim de la base de temps que es fa servir (la del PWM), que és de 62,5 μs, per tant no es podrà medir un temps inferior al mínim.
st
serrupcions
sreverrupcoinsrev
errupcio μ06,3925600
1
int2560060min1·
1int1024·
min1500
int ==
= (2.7)
Una solució seria utilitza un dels timers disponibles, però la seva implementació seria
complicada, ja que el temps que es captura entre polsos varia molt amb la velocitat del motor, i per tant a velocitats baixes aquest es desbordaria abans de captar la posició i a velocitats altes el temporitzador seria incapaç de comptar el temps, com és el cas de si s’utilitza la base de temps del PWM. Una altra estratègia consisteix en comptar polsos dins d’un temps determinat, la base de temps del qual serà la del PWM, la qual cosa ens permetrà calcular de manera eficient la velocitat del motor. L’inconvenient d’aquest mètode és que és impossible de detectar les variacions de velocitat que hi ha entre mostra i mostra. Tanmateix, el motor d’inducció és suficientment estable per a que aquestes variacions de velocitat no siguin crítiques (no vol dir que no siguin importants). Acceptant aquest compromís entre eficiència en l’execució i els errors dinàmics en la mesura, es farà servir l’últim sistema descrit.
Com que l’encoder escollit té una resolució de 1024 polsos per volta, per calcular la
velocitat angular del motor en revolucions per minut es té la següent expressió:
ectatsencoderldepolsosdenombrexmostreigdetempsdelmsenvalory
yxms
polsosrev
msypolsosxrpmn
det'
·6,58min1
60000·1024
1·)( ==
(2.8)
Si el valor del temps de mostreig és 10 ms, és té que:
86,5·)( xrpmn = (2.9)
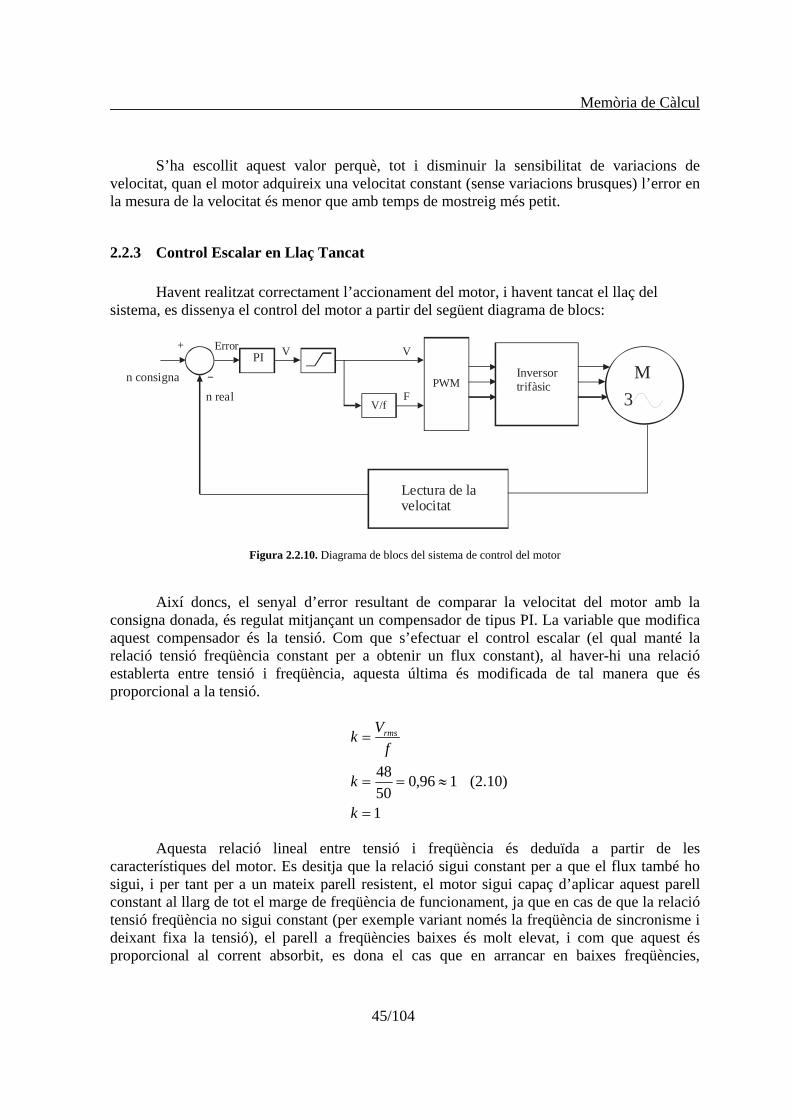
Memòria de Càlcul
45/104
S’ha escollit aquest valor perquè, tot i disminuir la sensibilitat de variacions de
velocitat, quan el motor adquireix una velocitat constant (sense variacions brusques) l’error en la mesura de la velocitat és menor que amb temps de mostreig més petit.
2.2.3 Control Escalar en Llaç Tancat Havent realitzat correctament l’accionament del motor, i havent tancat el llaç del sistema, es dissenya el control del motor a partir del següent diagrama de blocs:
PIError V
V/f
V
FPWM
Inversor trifàsic
+
- M3
Lectura de la velocitat
n realn consigna
Figura 2.2.10. Diagrama de blocs del sistema de control del motor
Així doncs, el senyal d’error resultant de comparar la velocitat del motor amb la
consigna donada, és regulat mitjançant un compensador de tipus PI. La variable que modifica aquest compensador és la tensió. Com que s’efectuar el control escalar (el qual manté la relació tensió freqüència constant per a obtenir un flux constant), al haver-hi una relació establerta entre tensió i freqüència, aquesta última és modificada de tal manera que és proporcional a la tensió.
1
196,05048
=
≈==
=
k
k
fVk rms
(2.10)
Aquesta relació lineal entre tensió i freqüència és deduïda a partir de les
característiques del motor. Es desitja que la relació sigui constant per a que el flux també ho sigui, i per tant per a un mateix parell resistent, el motor sigui capaç d’aplicar aquest parell constant al llarg de tot el marge de freqüència de funcionament, ja que en cas de que la relació tensió freqüència no sigui constant (per exemple variant només la freqüència de sincronisme i deixant fixa la tensió), el parell a freqüències baixes és molt elevat, i com que aquest és proporcional al corrent absorbit, es dona el cas que en arrancar en baixes freqüències,

Memòria de Càlcul
46/104
s’absorbeixi un corrent desmesurat i per contra a freqüències elevades el parell desenvolupat pot no ser suficient per a vèncer el parell resistiu.
Aquesta constant del motor és configurada a través de la interfície de Lab View, la
qual cosa ajuda a que el sistema pugui adaptar-se a motor de diferent potència. Tot i així, cal tenir en compte que si el motor que es vol controlar té una tensió de funcionament molt elevada, caldrà modificar l’etapa de potència, ja sigui elevant la tensió contínua d’entrada del nou inversor, o de l’elevació de la tensió trifàsica mitjançant un transformador a la sortida de l’inversor.
Tot i que la relació teòrica entre tensió i freqüència és constant, en la realitat això està
lluny de complir-se, ja que en el marge de funcionament del motor se’n distingeixen 3 zones, les quals tenen unes característiques pròpies:
• Zona de baixa freqüència: en aquesta zona de funcionament, la tensió segons indica el control escalar ha de ser baixa. Com que el circuit equivalent del motor és el mostrat en la figura 2.2.11, es pot comprovar que hi ha un divisor de tensió entre l’entrada i el flux magnètic efectiu, que serà el que permetrà moure el motor. Així doncs a baixes freqüències l‘impedància del debanat inductor augmenta, la qual cosa fa que proporcionalment caigui més tensió en les bobines de l’estator que tensió efectiva de camp hi ha. Per tant, pot ser que la tensió aplicada a l’entrada sigui insuficient per a proporcionar un flux màxim o ,en el pitjor dels casos, que aquest flux resultant no sigui capaç de moure el motor. Per tant, es recomana que quan es treballa a freqüències inferiors de fins a un 50 % de la freqüència nominal, s’augmenti la tensió d’alimentació entre un 10 i un 20 % de la tensió que en teoria la correspondria en aquesta freqüència. En el cas del motor que es fa servir, s’ha comprovat empíricament que augmentant la tensió un 18 % en les freqüències de funcionament d’entre 1 i 20 Hz, s’aconsegueix que el parell que aporta la màquina s’assembli equivalgui al que s’aporta en cas de flux màxim.
Figura 2.2.11. Esquema elèctric equivalent del motor d’inducció
Memòria de Càlcul
47/104
• Zona lineal de funcionament: comprèn el marge de freqüències de funcionament establert entre el 50 % de la freqüència nominal i la freqüència nominal. En aquesta zona de funcionament el motor funciona segons la relació constant k, independentment de la velocitat de funcionament, el motor manté el mateix flux de camp.
• Zona de freqüències elevades: tot i que en segons quins motors no és recomanable, ja que la constitució de les bobines del motor han estat fabricades per treballar a una certa freqüència, es pot treballar a una freqüència superior a la nominal. En aquest cas, no es seguirà augmentant la tensió d’alimentació del motor tal i com indicaria el control escalar, ja que no es podrà augmentar més la tensió d’alimentació als debanat, ja que s’haurà arribat a la tensió nominal indicada del motor, si es sobrepassa aquest valor hi ha el perill de que es faci malbé el motor. Per tant a mesura que s’augmenta la freqüència del motor el flux disminueix, ja que la tensió es manté constant al valor nominal. Aquest fet provoca que el parell que pot aportar la màquina asíncrona disminueixi paulatinament, fins al punt de que pot arribar a aturar-se, ja que pot ser que no sigui capaç de superar el parell resistent.
Amb tot, s’han de tenir en compte aquestes zones de funcionament per a realitzar
l’algorisme de control, que en aquest cas es tracta d’un PI incremental. Aquest tipus de control consta de dues parts, una part proporcional (P) i una part integral (I) que defineixen com cal augmentar o disminuir la variable a controlar segons el senyal d’error resultat de comparar la consigna amb la lectura de velocitat del motor. La part proporcional del control s’encarrega de donar una acció de regulació directament relacionada amb el valor actual de l’error. Tot i així, el simple fet d’aplicar-hi una correcció proporcional no n’hi ha prou, ja que serà incapaç d’assolir la velocitat marcada per la consigna. Per a pal·liar aquest efecte, se li aplica una correcció integral, que té en compte la suma de tots els errors acumulat fins a l’instant d’aplicació del llaç de control i permet assolir el valor de la consigna amb el menor error en estat estacionari possible. En definitiva l’algoritme que es fa servir és el següent, on kp representa la constant proporcional, ki la constant integral i d el tant per cent de tensió que es subministra al motor:
( ) ( ) kiierrorkpterrortd i
ti
··0
∑=
=
+=ΔΔ (2.11)
Es fàcil deduir que si aquest algoritme es duu a terme de manera digital sorgeix un problema. Al efectuar un error acumulat que sigui la suma dels infinits errors anteriors, pot donar-se el cas que la variable que emmagatzema el valor de l’error acumulat es desbordi, donant lloc a errors en l’implementació de l’algorisme. Per tant es fixa una saturació integral, que consisteix en evitar que el valor de la variable que conté l’error acumulat adquireixi un valor més elevat que dues vegades la consigna.
Per a trobar uns valors de kp i ki de manera sistemàtica cal tenir modelat el motor d’inducció i saber-ne el seu model, la qual cosa no s’ha pogut fer ja que el motor que s’ha fet servir no conté prou informació per a deduir-ne el model, i tanmateix és tracta d’un procediment tant complex que escapa de l’abast de l’actual projecte. Per tant, s’han escollit els paràmetres de forma empírica, es a dir, primer provant valors de kp per a que el motor deixés

Memòria de Càlcul
48/104
d’oscil·lar i després provar valors de ki a fi de reduir l’error del sistema. Aquests valors han sigut els següents:
• Kp=0,12 i ki=0,001
El sistema realitzat físicament té el següent aspecte:
Figura 2.2.12. Vista del diferents elements que formen el control del motor

Memòria de Càlcul
49/104
2.3 Comunicacions L’enllaç que es realitzarà entre el sistema de control del motor i la seva visualització es farà mitjançant els protocols de comunicació CAN i RS-232, tal i com s’ha enunciat anteriorment. Els controladors de la comunicació estan integrats en el microcontrolador (en el cas dels mòduls que funcionen amb les plaques dsPIC) o en la targeta perifèrica corresponent. Així doncs, segons les característiques del hardware i de les necessitats de transferència del sistema, per ambdós protocols de comunicació serà necessari fixar una taxa de transferència, sincronitzar emissor i receptor, configurar les diferents parts en que consta el mòdul i tenir en compte les peculiaritats de cada protocol.
2.3.1 CAN
Per a poder configurar correctament el controlador de CAN que té el microcontrolador dsPIC, cal primer tenir una idea de com funciona aquest protocol i quines característiques té.
La principal característica del bus que el diferencia d’altres protocols sèrie, és que cada
node que està connectat al bus no té una direcció predefinida, ja que l’adreça està continguda en el missatge en el camp de l’identificador, junt amb la prioritat d’aquest. Una altra característica és que el bus té dos estats, anomenats dominant i recessiu. La lògica del bus utilitza una operació lògica AND del valor posat pel dispositiu i el cablejat del bus, tenint amb aquest mecanisme que un bit dominant és equivalent al nivell lògic ‘0’, que prevaldrà per damunt d’un bit a nivell lògic ‘1’ o recessiu.
El format de la trama de dades és la mostrada a la figura següent:
• Inici de trama (1 bit): Un únic bit dominant de principi de trama (SOF) per a la
sincronització de tots els nodes. • Camp d’arbitratge (12 bits): Està format per l’identificador d’11 bits (en el cas de
la trama estàndard) i del bit de solicitud de petició (RTR) el qual distingeix si la trama és de tipus dada (‘0’) o de petició (‘1’).
• Camp de control (6 bits): El primer bit (IDE) és l’identificador el qual està a ‘0’ per especificar que la trama és estàndard. El segon bit té un valor reservat ‘0’. Els quatre bits restants (DLC) indiquen la longitud del camp de dades en nombre de bytes.
• Camp de dades (de 0 a 8 bytes): conté les dades que s’envien. En el cas d’una trama de petició aquest camp esta buit.
• Seqüència de detecció d’errors (16 bits): La detecció d’errors es realitza mitjançant CRC (codi de redundància cíclica). Aquest camp conté 15 bits pel CRC i un bit recessiu pel delimitador del CRC.
• Camp ACK: Està format per dos bits. El primer d’ells indica si l’estació a rebut correctament el missatge i el segon és el delimitador del camp ACK. Ambdós camps són transmesos com a recessius, però el primer d’ells és modificat a dominant quan almenys un node rep el missatge correctament.
Memòria de Càlcul
50/104
Figura 2.3.1. Exemple d’una trama CAN enviant un byte.
Un cop vist com es forma el missatge en aquest protocol, és necessari saber com es sincronitzen al bus els diferents nodes que formen part d’un sistema multiplexat amb CAN, ja que és indispensable per a que es dugui a terme la comunicació. S’han de sincronitzar bàsicament perquè no existeix cap rellotge al bus que marqui el temps de transferència dels diversos components del bus i cadascun d’ells disposa del seu propi rellotge de funcionament. La codificació que fa servir el CAN per a sincronitzar-se s’anomena Non Return to Zero (NZR).
Així doncs, al haver-hi variacions d’oscil·lacdors i temps de transmissió d’un node a un
altre, no n’hi ha prou amb sincronitzar els elements amb el bit d’inici de trama (SOF), sinó que són necessàries diverses resincronitzacions durant la transmissió d’una trama. Aquestes resincronitzacions es realitzen amb els flancs que provoquen els canvies d’estat dels bits a la trama, la qual cosa obliga a incluir bits de farciment per provocar aquest flanc com a mínim cada sis bits, mantenint així la sincronització entre emissor i receptor. Aquesta estratègia rep el nom de Digital Phase Lock Loop (DPLL). Per a realitzar-ho, es divideix cada temps de bit en quatre segmetns de temps no sobreposats i alhora aquests estan composats per períodes de temps mínim anomenats Time Quanta (TQ). Els segments són els següents:
• Synchronization Segment: aquesta part del temps de bit és utilitzada per a la 'sincronització de la resta dels nodes del bus. La seva duració és d’un TQ.
• Propagation Time Segment: aquest segment s’utilitza per a compensar els temps de retard existents dintre de la xarxa. A seva duració pot ser programable entre 1 TQ i 8 TQ.
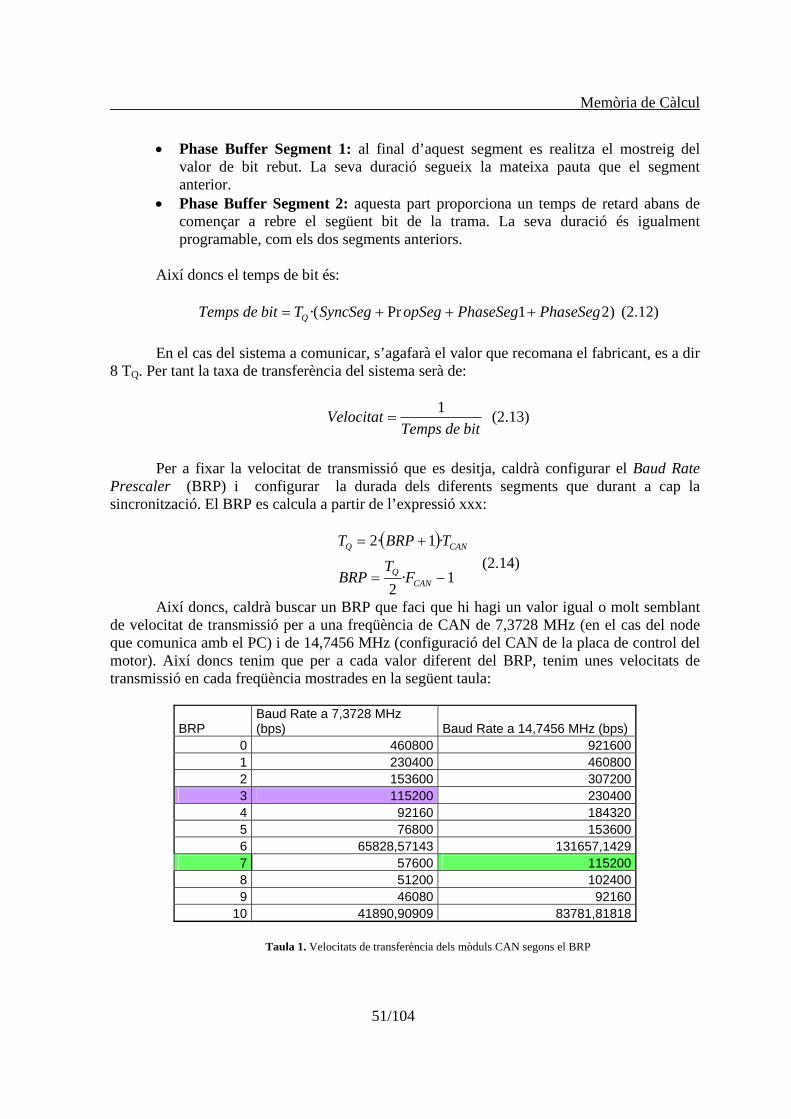
Memòria de Càlcul
51/104
• Phase Buffer Segment 1: al final d’aquest segment es realitza el mostreig del valor de bit rebut. La seva duració segueix la mateixa pauta que el segment anterior.
• Phase Buffer Segment 2: aquesta part proporciona un temps de retard abans de començar a rebre el següent bit de la trama. La seva duració és igualment programable, com els dos segments anteriors.
Així doncs el temps de bit és:
)21Pr·( PhaseSegPhaseSegopSegSyncSegTbitdeTemps Q +++= (2.12) En el cas del sistema a comunicar, s’agafarà el valor que recomana el fabricant, es a dir
8 TQ. Per tant la taxa de transferència del sistema serà de:
bitdeTempsVelocitat 1
= (2.13)
Per a fixar la velocitat de transmissió que es desitja, caldrà configurar el Baud Rate
Prescaler (BRP) i configurar la durada dels diferents segments que durant a cap la sincronització. El BRP es calcula a partir de l’expressió xxx:
( )
1·2
·1·2
−=
+=
CANQ
CANQ
FT
BRP
TBRPT (2.14)
Així doncs, caldrà buscar un BRP que faci que hi hagi un valor igual o molt semblant de velocitat de transmissió per a una freqüència de CAN de 7,3728 MHz (en el cas del node que comunica amb el PC) i de 14,7456 MHz (configuració del CAN de la placa de control del motor). Així doncs tenim que per a cada valor diferent del BRP, tenim unes velocitats de transmissió en cada freqüència mostrades en la següent taula:
BRP Baud Rate a 7,3728 MHz (bps) Baud Rate a 14,7456 MHz (bps)
0 460800 921600 1 230400 460800 2 153600 307200 3 115200 230400 4 92160 184320 5 76800 153600 6 65828,57143 131657,1429 7 57600 115200 8 51200 102400 9 46080 92160
10 41890,90909 83781,81818
Taula 1. Velocitats de transferència dels mòduls CAN segons el BRP

Memòria de Càlcul
52/104
Com que les especificacions de les comunicacions s’ha fixat que la velocitat de transferència sigui de 125 kbps, la que més se li acosta en ambdues freqüències és la velocitat de 115,2 kbps. Per aconseguir aquesta taxa de transferència, cal configurar el BRP del node del motor amb un 7 i ficar un 3 de BRP en el cas del node de control de les comunicacions entre el control i el motor. En definitiva, les configuracions de sicronització han de ser les següent
• C1CFG1=0x0047 i C1CFG2=0x42D2, per al node del motor. • C1CFG1=0x0043 i C1CFG2=0x42D2, per al node de comunicació amb el PC.
La configuració del temps de bit i les altres configuracions s’han de realitzar mentre el
mòdul de comunicacions CAN del dsPIC treballa en mode de configuració, ja que aquest pot operar en diferents modes. Aquests són:
• Mode normal: es selecciona posant un 0 als bits REQOP del registre C1CTRL. Quan funciona en aquest mode, estan activades les entrades i les sortides, per tant el mòdul podrà enviar i rebre.
• Mode deshabilitat: es selecciona quan REQOP és igual a 1. En aquest mode d’operació el mòdul no transmet ni rep res. Les interrupcions pendents i els comptadors d’errors retenen els seus valors. Si el mòdul està en mode actiu, espera 11 bits recessius del bus CAN i s’activa com a mode deshabilitat, de la mateixa manera que al rebre 11 bits recessius consecutius abans d’entrar en transmissió.
• Mode realimentació: les entrades i sortides tornen a ser suportades pel seu port E/S. El transmissor rep un justificant de rebut pels seus missatges enviats. El valor de REQOP per a configurar-lo en aquest mòdul és 2.
• Mode d’escolta d’un missatge: els modes de realimentació i d’escolta d’un missatge són casos especials del mode normal d’operació. Si està activat només el mode d’escolta d’un missatge, el bus CAN es comporta com a passiu, estant desactivats els comptadors d’errors. Aquest mode d’operació s’utilitza per detectar la taxa de transferència al bus CAN. Per a això es necessita com a mínim que dos nodes s’estiguin comunicant entre ells.
• Mode de configuració: en aquest mode d’operació el mòdul no podrà transmetre ni rebre. Els comptadors d’errors són resetejats a zero i els flancs d’interrupció es mantenen. El programador té accés als registres de configuració que en altres modes de funcionament no s’hi pot accedir. El valor de REQOP per a entrar en mode configuració és 4.
• Mode d’escolta de tots els missatges: aquest mode és un cas especial del mode d’operació normal. Quan aquest mode està activat, el mòdul CAN està passiu. El buffer de transmissió adquireix les funcions del port d’E/S. Els comptadors d’error i els filtres es desactiven en aquest mode, de manera que el node configurat d’aquesta manera, rebrà qualsevol trama que s’hagi escrit en el bus. Es configura amb REQOP igual a 7.
Abans d’iniciar la comunicació en mode normal, durant la configuració del mòdul
CAN s’han d’iniciar els buffers de transmissió i recepció de missatges, ja que segons estiguin configurats aquestes “bústies”, la comunicació es durà a terme amb èxit o no.
Memòria de Càlcul
53/104
En el cas de la recepció de missatges cal tenir en compte quines comprovacions fa el
mòdul CAN per a validar un missatge llegit del bus i quants buffers hi ha. En el cas del dsPIC30F, el mòdul CAN consta de tres buffers d’entrada, tot i que un d’ells sempre és l’encarregat dels missatges que provenen del bus. Aquest buffer és denominat MAB. Hi ha dos buffers d’entrada visibles, RXB0 i RXB1, que poden rebre un missatge. La CPU pot operar amb un d’ells mentre l’altre està en espera o rebent un missatge.
El MAB manté la trama de dades o de petició del bus per permetre l’accés en paral·lel
dels buffers d’entrada i el test d’aprovació. Aquest mateix buffer reuneix també tots els missatges rebuts, els quals són transmesos al buffer RXBn en el cas d’haver passat els filtres d’acceptació del missatge. Aquests comparen el camp d’identificació del missatge rebut amb el número de l’identificador que es vol filtrar. Si el node que ha enviat el missatge és igual al filtre, el missatge és descartat. En qualsevol altre cas, s’accepta el missatge i es provoca una interrupció de recepció (si s’ha habilitat). Si es vol impedir que més d’un node sigui filtrat, caldrà configurar una màscara pel filtre, que seleccionen quins bits de l’identificador són examinats pel filtre. Com que en el cas del sistema de control i monitorització que s’està tractant, només hi hauran dos nodes connectats al bus, per a cada node s’haurà de fixar un filtre amb la prioritat del propi node, per evitar que aquest rebi un missatge que ell mateix estigui enviant. Per tant la configuració del buffer d’entrada és el següent:
• C1RX0CON=0, C1RXF0SIDbits.SID=8, C1RXM0SIDbits.SID=8 i per al node del
motor. • C1RX0CON=0, C1RXF0SIDbits.SID=4 i C1RXM0SIDbits.SID=4 per al node de
comunicació amb el PC. Si el missatge ha passat el filtre d’acceptació, s’activa la interrupció de recepció i el
fica a 1 el bit RXFUL del registre C1RX0CON per indicar que hi ha un missatge rebut vàlid al buffer de recepció determinar.
Per a transmetre missatges, es disposa de tres buffers de transmissió (TXB0, TXB1 i
TXB2). Cadascun dels tres ocupa 14 bytes (7 words de 16 bits), tot i que un sol missatge tan sols pot tenir com a màxim 8 bytes. L’arbitratge del node de comunicació es fixa configurant el registre C1TX0SID. S’ha de tenir en compte que l’identificador que s’esculli, serà el que s’escriurà quan el node transmeti un missatge. Un altre aspecte que s’ha de determinar abans d’enviar una trama, és la longitud de les dades que s’enviarà, ja quan el controlador de les comunicacions generi el missatge, en el camp de control s’hi ficarà quants bits envia aquesta estació remota. Malgrat tot, es poden omplir més buffers que la longitud de dades que s’ha configurat que el node pot enviar, amb el resultat que el mòdul CAN enviarà tants missatges com siguin necessaris per a que totes les dades s’enviïn. També es configuren les prioritats del buffer, ja que en cas de col·lisió, aquesta configuració és la que permetrà l’arbitratge. Per tant, per a complir les especificacions marcades en lo relatiu als identificadors dels nodes de comunicacions i a la prioritat dels missatges configurem els diferents buffers de transmissió de la següent manera:
Memòria de Càlcul
54/104
• En el dsPIC que controla el motor configurem els següents registres: C1TX0CON=0x0003 C1TX0SID=0x0020 i C1TX0DLC=0x0190.
• En el dsPIC que enllaça el motor amb el PC configurem els següents registres: C1TX0CON=0x0002 C1TX0SID=0x0020 i C1TX0DLC=0x0190.
2.3.2 RS-232
En el dsPIC30F, l’encarregat d’establir una comunicació sèrie és el mòdul transmissor receptor universal asíncron o UART, que funciona com un sistema de comunicació full-duplex o bidireccional asíncron, que pot adaptar-se a multitud de perifèrics, ja sigui via RS-485 o RS-232.
Les característiques principals del mòdul són les següents:
• Funcionament en mode full-duplex amb una longitud de dades de 8 a 9 bits. • Possibilitat de treballar amb paritat parell, senar o sense paritat. • Un o dos bits de STOP. • Conté un generador de bauds amb un prescaler de 16 bits que s’encarrega de
generar la freqüència de treball del mòdul. • Buffer de transmissió amb capacitat per a 4 caràcters. • Buffer de recepció amb capacitat per a 4 caràcters. • Possibilitat d’utilitzar interrupcions per indicar la finalització de la transmissió de
la recepció. • Terminals específics TX i RX per a transmetre i rebre.
Les transferències d’informació es realitzen sobre dues línies, UTX (transmissió) i
URX (recepció), sortint i entrant bits per aquestes línies al ritme de la freqüència que s’ha configurat en el generador de baudis.
Cada paraula o dada d’informació s’envia independentment de les demés. El format de
la trama en RS-232 és més senzilla que en el cas de la comunicació CAN, ja que tan sols consta de 8 o 9 bits que van precedits per un bit de START (inici) i acabats amb un bit de STOP (parada), d’acord amb les normes de l’estàndard NRZ. Els bits són transmesos a una freqüència fixa i normalitzada.
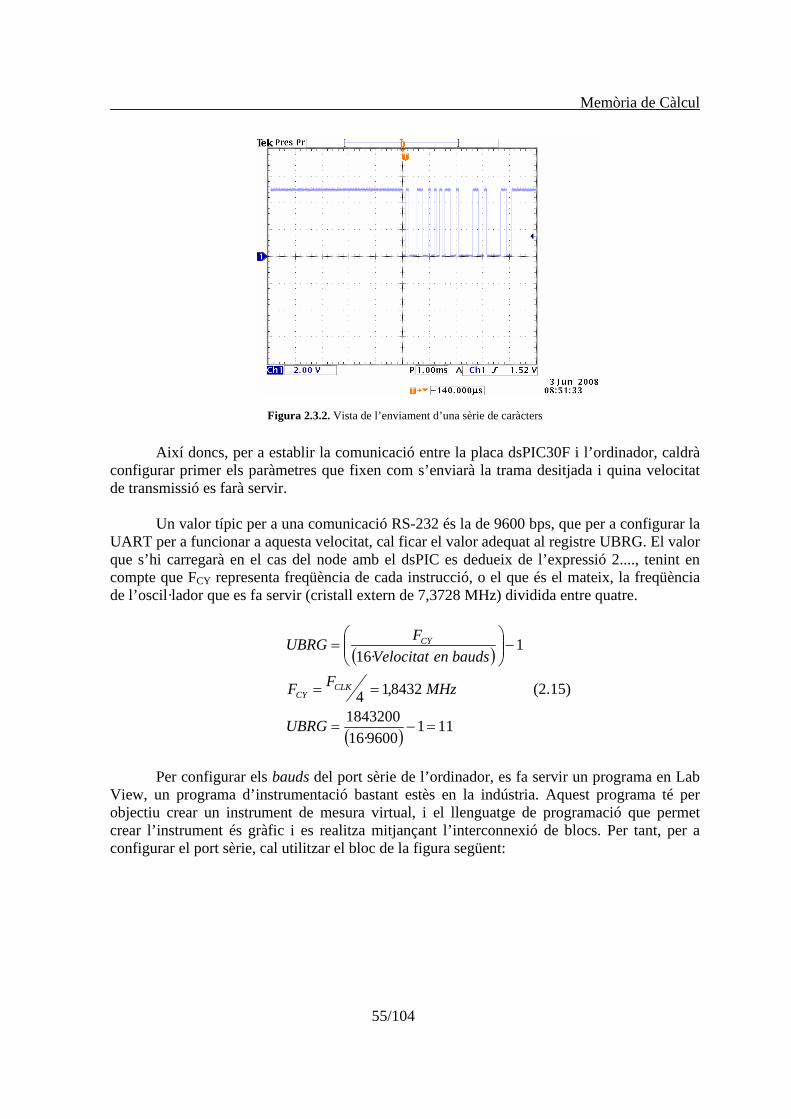
Memòria de Càlcul
55/104
Figura 2.3.2. Vista de l’enviament d’una sèrie de caràcters
Així doncs, per a establir la comunicació entre la placa dsPIC30F i l’ordinador, caldrà configurar primer els paràmetres que fixen com s’enviarà la trama desitjada i quina velocitat de transmissió es farà servir.
Un valor típic per a una comunicació RS-232 és la de 9600 bps, que per a configurar la UART per a funcionar a aquesta velocitat, cal ficar el valor adequat al registre UBRG. El valor que s’hi carregarà en el cas del node amb el dsPIC es dedueix de l’expressió 2...., tenint en compte que FCY representa freqüència de cada instrucció, o el que és el mateix, la freqüència de l’oscil·lador que es fa servir (cristall extern de 7,3728 MHz) dividida entre quatre.
( )
( ) 1119600·16
1843200
8432,14
1·16
=−=
==
−⎟⎟⎠
⎞⎜⎜⎝
⎛=
UBRG
MHzFF
baudsenVelocitatFUBRG
CLKCY
CY
(2.15)
Per configurar els bauds del port sèrie de l’ordinador, es fa servir un programa en Lab
View, un programa d’instrumentació bastant estès en la indústria. Aquest programa té per objectiu crear un instrument de mesura virtual, i el llenguatge de programació que permet crear l’instrument és gràfic i es realitza mitjançant l’interconnexió de blocs. Per tant, per a configurar el port sèrie, cal utilitzar el bloc de la figura següent:
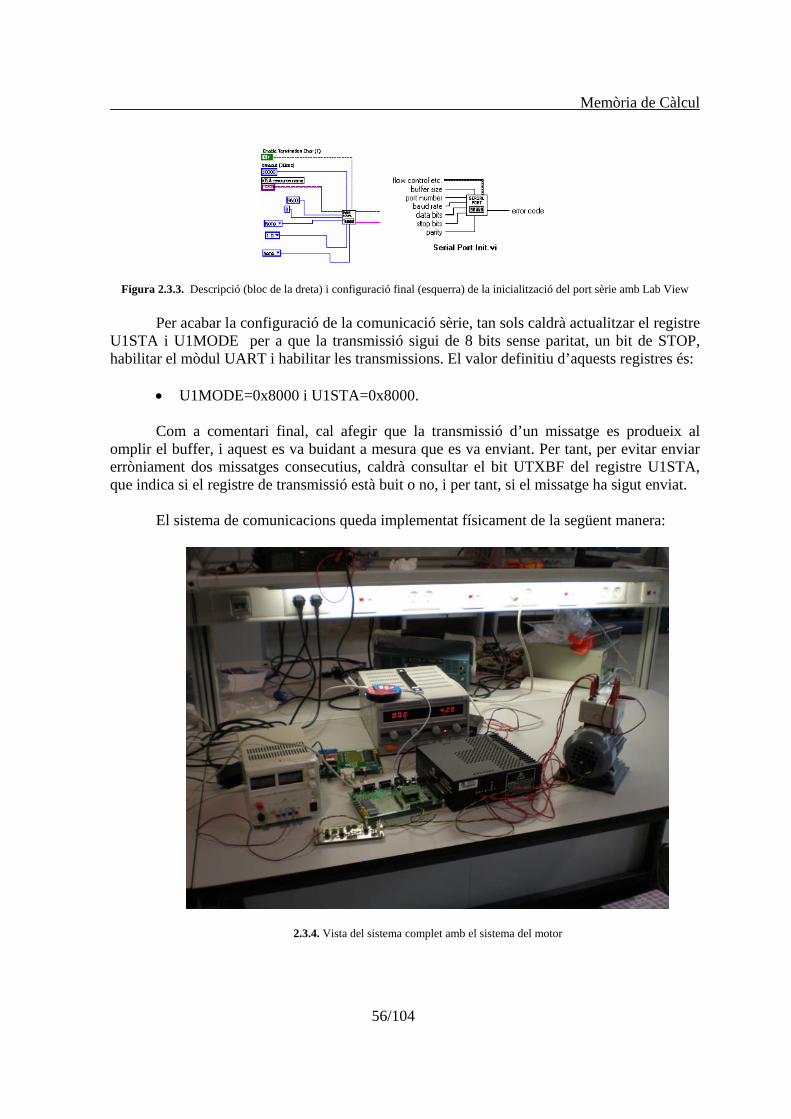
Memòria de Càlcul
56/104
Figura 2.3.3. Descripció (bloc de la dreta) i configuració final (esquerra) de la inicialització del port sèrie amb Lab View Per acabar la configuració de la comunicació sèrie, tan sols caldrà actualitzar el registre U1STA i U1MODE per a que la transmissió sigui de 8 bits sense paritat, un bit de STOP, habilitar el mòdul UART i habilitar les transmissions. El valor definitiu d’aquests registres és:
• U1MODE=0x8000 i U1STA=0x8000.
Com a comentari final, cal afegir que la transmissió d’un missatge es produeix al omplir el buffer, i aquest es va buidant a mesura que es va enviant. Per tant, per evitar enviar erròniament dos missatges consecutius, caldrà consultar el bit UTXBF del registre U1STA, que indica si el registre de transmissió està buit o no, i per tant, si el missatge ha sigut enviat.
El sistema de comunicacions queda implementat físicament de la següent manera:
2.3.4. Vista del sistema complet amb el sistema del motor
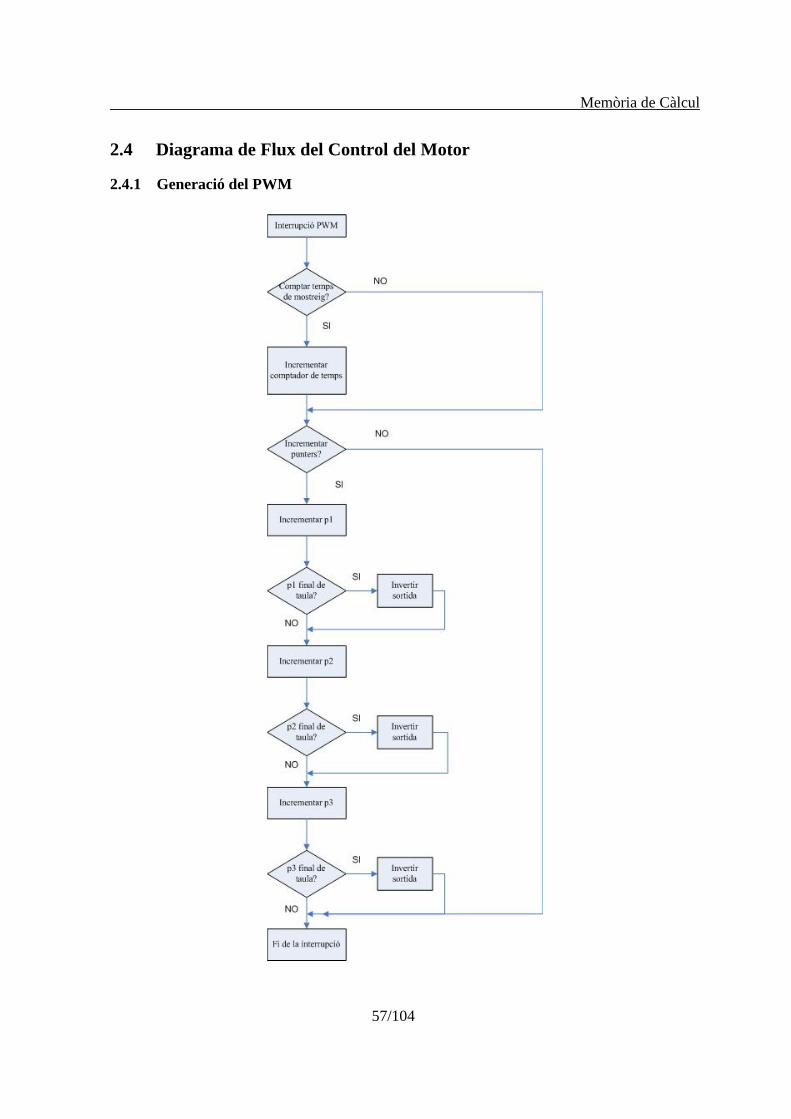
Memòria de Càlcul
57/104
2.4 Diagrama de Flux del Control del Motor
2.4.1 Generació del PWM
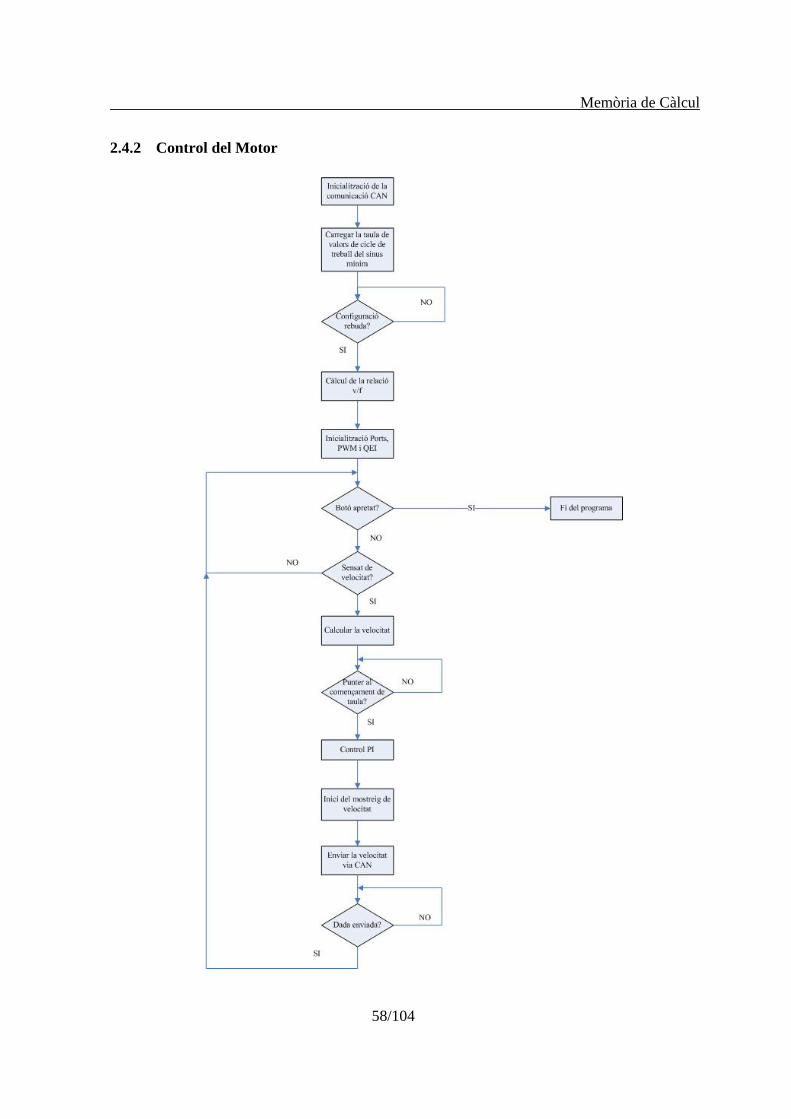
Memòria de Càlcul
58/104
2.4.2 Control del Motor

Memòria de Càlcul
59/104
2.4.3 Gestió del Mòdul CAN i QEI

Memòria de Càlcul
60/104
2.4.4 Diagrama de Flux del Node de Control

Memòria de Càlcul
61/104
2.4.5 Diagrama de Flux del Programa en Labview
Memòria de Càlcul
62/104
2.5 Treball Futur
Per limitacions a l’hora de treballar al laboratori, s’ha hagut de treballar amb un motor de tensió superior a l’alimentació disponible. Per això, els resultats obtinguts no són del tot òptims. Per tan com a treball futur a partir del present projecte, seria el adequar l’alimentació del sistema per al motor escollit o viceversa.
També com a possible continuació del projecte, i lligat en part a la millora en qüestió,
és el fet de que per a realitzar un millor control de velocitat, es modeli el comportament del motor i extreure les constants de control del motor de manera sistemàtica i no empírica com ha sigut en aquest cas.
Si es volgués anar més enllà i es volgués adaptar el present projecte en l’automòbil, seria bo que s’evités de fer servir plaques de desenvolupament per a efectuar el control del motor, i caldria escollir un microcontrolador que s’adaptés a les especificacions del sistema, no com en el present projecte en el qual el microcontrolador tenia moltes més prestacions que les estrictament necessària.
En la part de comunicacions el treball futur podria estar dirigit cap a la interconnexió del sistema en un bus CAN real d’un autommòbil i verificar que aquest es comporta de la manera correcta. Si no fos així, seria bo com a treball futur d’adaptar el mòdul de control a les necessitats d’una xarxa multiplexada CAN real.

Memòria de Càlcul
63/104
2.6 Bibliografia J. M. Angulo Usategui, B. García Zapirain, I. Angula Martínez i J. Vicente Sáez. “Microcontroladores avanzados dsPIC. Controladores Digitales de Señales. Arquitectura, programación y aplicaciones” – Paraninfo cop 2006. J. Fraile Mora “Máquinas eléctricas” – Editorial Mc Graw Hill quinta edición 2003. Ali Emadi “Handbook of Automotive Power Electronics and Motor Drives” – Taylor&Francis 2005 M. H. Rashid “Electrónica de potencia. Circuitos dispositivos i aplicaciones” – Pearson 2003 A.M. Làzaro i J. del Rio Fernàndez. “Labview 7.1. Programación gráfica para el control de instrumentación” – Thomson 2005 “dsPIC30F6010 Data Sheet” – http://www.microchip.com “AN984 An Introduction to AC Induction Motor Control Using eht dsPIC30F MCU” – http://www.microchip.com
Memòria de Càlcul
64/104
Annexos

Memòria de Càlcul
65/104
Annex 1. Codis font #include <p30f6010.h> #include <math.h> #define RESET_PWM PORTEbits.RE9 #define PWM_DES PORTDbits.RD11 #define PI 3.14151926 #define PWMf 16000 int error_old=0; int dada=0; int canvi=0; int enviat=0; int a=0; int p1=0; int p2=26; int p3=13; int rpm=0; int flag=0; int flag1=0; int flag2=0; int flag3=1; int d=30; int pols=0; int cont=0; int error=0; int f=0; int consigna=1000; int mostreig=0; int fnom=0; int vnom=0; int k=0; unsigned int taula[40]; void invertir(int fase){ switch(fase){ case 1: if(flag1==0){ flag1=1; PWMCON1bits.PEN1L=1; PWMCON1bits.PEN1H=0; } else{ flag1=0; PWMCON1bits.PEN1L=0; PWMCON1bits.PEN1H=1; } break; case 2: if(flag2==0){ flag2=1; PWMCON1bits.PEN2L=1; PWMCON1bits.PEN2H=0; } else{
Memòria de Càlcul
66/104
flag2=0; PWMCON1bits.PEN2L=0; PWMCON1bits.PEN2H=1; } break; case 3: if(flag3==0){ flag3=1; PWMCON1bits.PEN3L=1; PWMCON1bits.PEN3H=0; } else{ flag3=0; PWMCON1bits.PEN3L=0; PWMCON1bits.PEN3H=1; } break; } } void omplir_taula(int punts,int freq){ int prova; int i=0; double radian,inc; cont=(PWMf/freq)/(2*punts); radian=0; inc=((PI)/punts); for(i=0;i<punts;i++){ taula[i]=(sin(radian)*18); prova=taula[i]; radian+=inc; } } void inici(void){ PORTA=0; PORTB=0; PORTC=0; PORTD=0; PORTE=0; PORTF=0; PORTG=0; TRISA=0x39FF; TRISB=0xFFFF; TRISC=0xFFF5; TRISD=0xD7C0; TRISE=0xFDFF; TRISG=0xFFFF; TRISF=0xFFFD; //Inicialització del mòdul PWM PTCON=0x8000; PWMCON1bits.PMOD1=1; PWMCON1bits.PEN1H=1;

Memòria de Càlcul
67/104
PWMCON1bits.PMOD2=1; PWMCON1bits.PEN2H=1; PWMCON1bits.PMOD3=1; PWMCON1bits.PEN3L=1; PWMCON2bits.UDIS=0; OVDCON=0x3F00; PTPER=920; //Fpwm=16 kHz PDC1=0; PDC2=0; PDC3=0; QEICON=0x0E48; //Configuració del QEI //Habilitació d'interrupcions QEI i PWM IFS2bits.QEIIF=0; IEC2bits.QEIIE=1; IFS2bits.PWMIF=0; IEC2bits.PWMIE=1; RESET_PWM=1; Nop(); Nop(); Nop(); RESET_PWM=0; PWM_DES=0; } void inici_CAN(void){ //INICI REGISTRES CAN C1CTRLbits.CANCAP=0; C1CTRLbits.CSIDL=0; C1CTRLbits.ABAT=0; C1CTRLbits.CANCKS=1; C1CTRLbits.REQOP=4; while(C1CTRLbits.OPMODE<=3); C1CFG1=0x0047; //temps de bit Baud Rate = 115 200 bps Fcan=14,75 MHz aprox C1CFG2=0x42D2; //Buffer de transmissió C1TX0CON=0x0003; //misstge d'altra prioritat C1TX0SID=0x0020; //Arbitration id=8 C1TX0DLC=0x0190; //Buffer d'entrada C1RX0CON=0x0000; C1RXF0SIDbits.SID=4; //filtre d'acceptació C1RXF0SIDbits.EXIDE=0;
Memòria de Càlcul
68/104
C1RXM0SIDbits.SID=4; //mascara d'acceptació C1RXM0SIDbits.MIDE=0; IFS1bits.C1IF=0; //habilitació d'interrupció IEC1bits.C1IE=1; C1INTF=0; C1INTE=1; //Posada en marxa del mòdul CAN C1CTRLbits.CANCAP=1; C1CTRLbits.CSIDL=0; C1CTRLbits.ABAT=0; C1CTRLbits.CANCKS=1; C1CTRLbits.REQOP=0; while(C1CTRLbits.OPMODE!=0); } void control_PI(int consigna,int lectura){ int sat=0; error=consigna-lectura; d=d+0.12*error+0.001*error_old; error_old+=error; if(error_old>(consigna*2)) error_old=2*consigna; if(d>90){ //Valor mèxim de d=80 d=90; f=d/(2); sat=1; } else f=d/(2); if((sat==1)&&(f<150)) f++; if(f<20) d+=18; cont=(PWMf/f)/80; } void _ISR _QEIInterrupt(void){ if(canvi==0){ pols++; } IFS2bits.QEIIF=0; } void _ISR _C1Interrupt(void){ if(C1RX0CONbits.RXFUL){ if(enviat==0){ enviat=1; consigna=C1RX0B1; vnom=C1RX0B2; fnom=C1RX0B3; }

Memòria de Càlcul
69/104
else consigna=C1RX0B1; C1RX0CONbits.RXFUL=0; PORTAbits.RA9=1; } C1INTF=0; IFS1bits.C1IF=0; } void _ISR _PWMInterrupt(void){ if(canvi==0){ mostreig++; if(mostreig==160) canvi=1; } if(++a==cont){ p1++; if(p1==40){ p1=0; invertir(1); PDC1=0; } PDC1=taula[p1]*d; p2++; if(p2==40){ p2=0; invertir(2); PDC2=0; } PDC2=taula[p2]*d; p3++; if(p3==40){ p3=0; invertir(3); PDC3=0; } PDC3=taula[p3]*d; a=0; } IFS2bits.PWMIF=0; } int main(){ int windows=0; int b=0; int num; num=40; f=1; omplir_taula(num,f); inici_CAN(); while(enviat==0); k=(vnom/fnom)+1;

Memòria de Càlcul
70/104
inici(); while(PORTGbits.RG6){ if(canvi==1){ windows=pols; rpm=(windows*5.86); b++; if(b>0){ b=0; while(p1!=0); control_PI(consigna,rpm); } pols=0; windows=0; mostreig=0; canvi=0; C1TX0B1=rpm; C1TX0CONbits.TXREQ=1; while(C1TX0CONbits.TXREQ); } } return(0); } Codi 1. motor.c
Memòria de Càlcul
71/104
#include <p30f6010.h> #include <stdlib.h> int dada=0; int v2=0x00; int v1=0; int f2=0x00; int f1=0; int i=0; int v=0; int f=0; int j=0; int unitats=0; int desenes=0; int centenes=0; int mils=0; int rpm[4]; int rebut=0; int can=0; int con=0; int rs=0; int num=0; int conf=0; void crear_ascii(int num){ if(num<1000){ mils=0; centenes=num/100; } else mils=(num/1000); if(num<100){ centenes=0; desenes=num/10; } else centenes=(num-1000*mils)/100; if(num<10){ desenes=0; num=unitats; } else desenes=(num-mils*1000-centenes*100)/10; unitats=(num-mils*1000-centenes*100-desenes*10)+48; desenes+=48; centenes+=48; mils+=48; } void inici_CAN(void){ PORTA=0; PORTF=0; PORTG=0;
Memòria de Càlcul
72/104
TRISA=0x0000; TRISF=2; TRISG=0xFFFF; //INICI REGISTRES CAN C1CTRLbits.CANCAP=0; C1CTRLbits.CSIDL=0; C1CTRLbits.ABAT=0; C1CTRLbits.CANCKS=0; C1CTRLbits.REQOP=4; while(C1CTRLbits.OPMODE<=3); C1CFG1=0x0043; //temps de bit Baud Rate = 125000 bps Fcan=120 MHz aprox C1CFG2=0x42D2; //Buffer de transmissió C1TX0CON=0x0003; //misstge d'altra prioritat C1TX0SID=0x0010; //Arbitration id=4 C1TX0DLC=0x01B0; //Buffer d'entrada C1RX0CON=0x0000; C1RXF0SIDbits.SID=4; //filtre d'acceptació C1RXF0SIDbits.EXIDE=0; C1RXM0SIDbits.SID=4; //mascara d'acceptació C1RXM0SIDbits.MIDE=0; IFS1bits.C1IF=0; //habilitació d'interrupció IEC1bits.C1IE=1; C1INTF=0; C1INTE=1; C1CTRLbits.CANCAP=1; C1CTRLbits.CSIDL=0; C1CTRLbits.ABAT=0; C1CTRLbits.CANCKS=0; C1CTRLbits.REQOP=0; while(C1CTRLbits.OPMODE!=0); } void _ISR _C1Interrupt(void){ if(C1RX0CONbits.RXFUL){ dada=C1RX0B1; C1RX0CONbits.RXFUL=0; }

Memòria de Càlcul
73/104
can=1; C1INTF=0; IFS1bits.C1IF=0; } void inici_UART(void){ PORTA=0; PORTF=0; PORTG=0; TRISA=0x0000; TRISF=4; TRISG=0xFFFF; U1MODE=0x8000; //configurem enviament de 8-bits sense paritat, 1 bit stop U1BRG=11; //Baud Rate=9600 U1STA=0x8000; U1RXREG=0; U1TXREG=0; //Habilitació d'interrupcions de la UART1 //Habilitació de la UART1 U1MODEbits.UARTEN=1; IFS0bits.U1RXIF=0; IEC0bits.U1RXIE=1; U1STAbits.UTXEN=1; } void envia_RS232 (int dada){ while(U1STAbits.UTXBF); //Espera a que el buffer estigui buit U1TXREG=dada; } void _ISR _U1RXInterrupt(void){ PORTAbits.RA15=1; while(!U1STAbits.URXDA); dada=U1RXREG; if(rebut==0){ i++; dada=dada-48; if (i==1) v1=dada; if (i==2) v2=dada; if (i==3) f1=dada; if (i==4){ f2=dada; rebut=1; } } if(conf==1){ if(U1RXREG==97){ rs=1;

Memòria de Càlcul
74/104
num=j+1; j=0; } else{ rpm[j++]=dada-48; } } IFS0bits.U1RXIF=0; //Interrupció servida } int main(void){ int envio=0; for(j=0;j<4;j++) rpm[j]=0; j=0; inici_CAN(); inici_UART(); while(!rebut); v=v1*10+v2; f=f1*10+f2; conf=1; while(!rs); switch(num){ case 1: con=rpm[0]; break; case 2: con=rpm[0]+rpm[1]*10; break; case 3: con=rpm[0]+rpm[1]*10+rpm[2]*100; break; case 4: con=rpm[0]+rpm[1]*10+rpm[2]*100+rpm[3]*1000; break; } rs=0; C1TX0B1=1000; C1TX0B2=f; C1TX0B3=v; C1TX0CONbits.TXREQ=1; while(C1TX0CONbits.TXREQ); while(1){ if(can){ crear_ascii(dada); envia_RS232(mils); envia_RS232(centenes); envia_RS232(desenes); envia_RS232(unitats); can=0; } if(rs){ switch(num){ case 1: con=rpm[0]; break; case 2:
Memòria de Càlcul
75/104
con=rpm[0]+rpm[1]*10; break; case 3: con=rpm[0]+rpm[1]*10+rpm[2]*100; break; case 4: con=rpm[0]+rpm[1]*10+rpm[2]*100+rpm[3]*1000; break; } C1TX0B1=con; C1TX0CONbits.TXREQ=1; while(C1TX0CONbits.TXREQ); } return 0; } Codi 2. rs.c
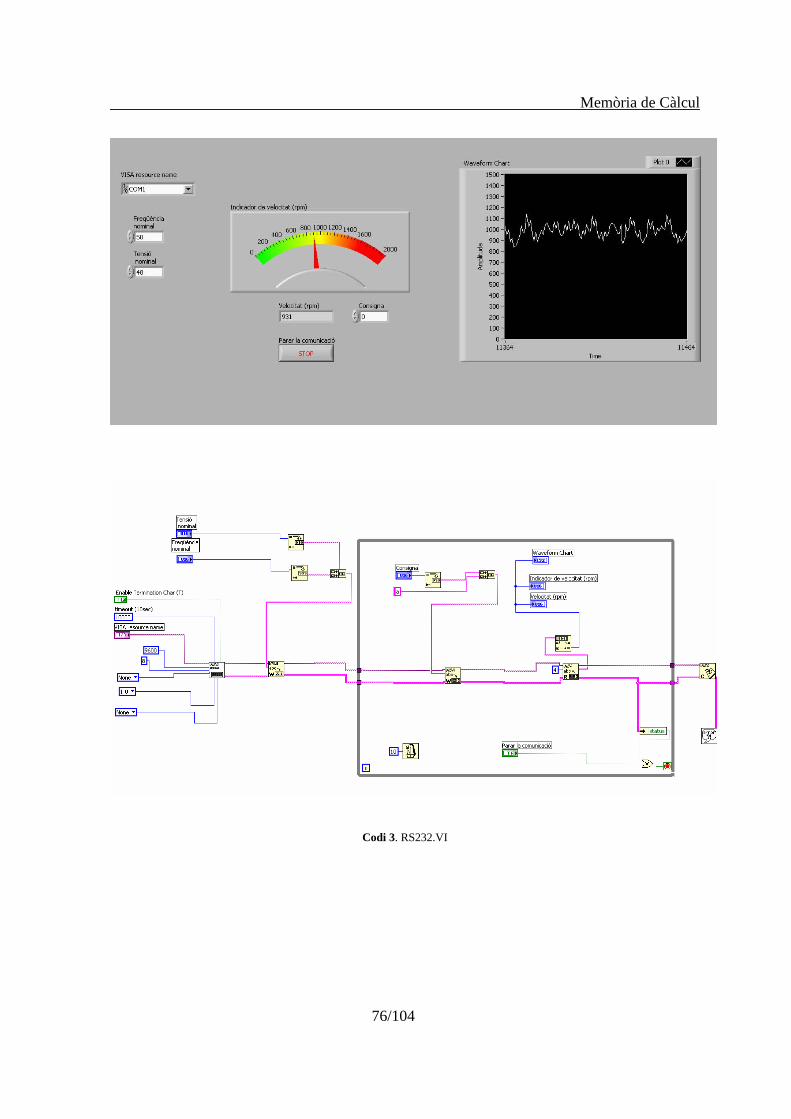
Memòria de Càlcul
76/104
Codi 3. RS232.VI
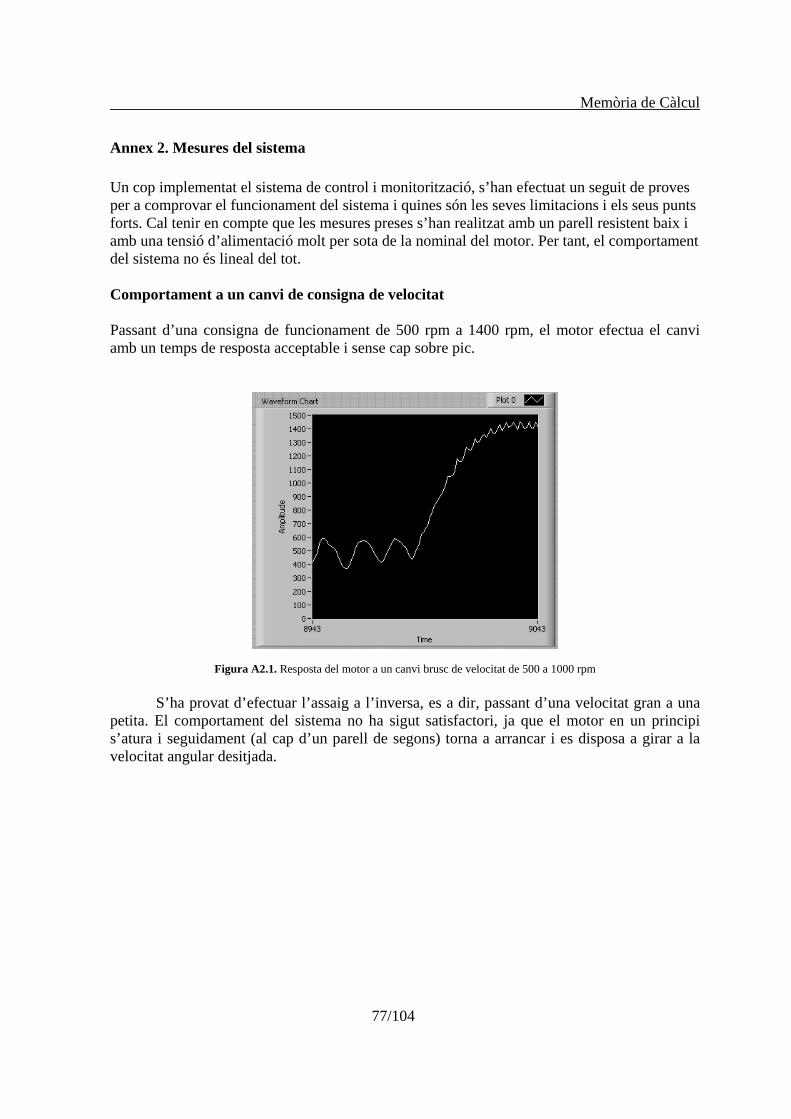
Memòria de Càlcul
77/104
Annex 2. Mesures del sistema
Un cop implementat el sistema de control i monitorització, s’han efectuat un seguit de proves per a comprovar el funcionament del sistema i quines són les seves limitacions i els seus punts forts. Cal tenir en compte que les mesures preses s’han realitzat amb un parell resistent baix i amb una tensió d’alimentació molt per sota de la nominal del motor. Per tant, el comportament del sistema no és lineal del tot. Comportament a un canvi de consigna de velocitat Passant d’una consigna de funcionament de 500 rpm a 1400 rpm, el motor efectua el canvi amb un temps de resposta acceptable i sense cap sobre pic.
Figura A2.1. Resposta del motor a un canvi brusc de velocitat de 500 a 1000 rpm
S’ha provat d’efectuar l’assaig a l’inversa, es a dir, passant d’una velocitat gran a una petita. El comportament del sistema no ha sigut satisfactori, ja que el motor en un principi s’atura i seguidament (al cap d’un parell de segons) torna a arrancar i es disposa a girar a la velocitat angular desitjada.

Memòria de Càlcul
78/104
Resposta a l’esglaó
La resposta del motor des del moment en que s’engega és la mostrada en la figura següent:
Figura A2.2. Resposta temporal del motor a un esglaó de 0 a 1000 rpm
Com es pot observar, el sistema no pateix cap sobrepic en la seva resposta temporal i l’error en estat estacionari no és del tot dolent. Tot i així, es pot apreciar que el control PI no està ajustat del tot, ja que presenta una sèrie d’oscil·lacions en estat estacionaris que no haurien de ser-hi. Tot i estar mal ajustat els paràmetres de control, aquest comportament és causat per el poc parell resistiu el qual es sotmet al motor, ja que d’aquesta manera el motor pateix canvis més bruscos en la seva velocitat que si estigués en càrrega. Velocitat constant a freqüències elevades
Figura A2.3. Lectura velocitat del motor amb una consigna de 1500 rpm
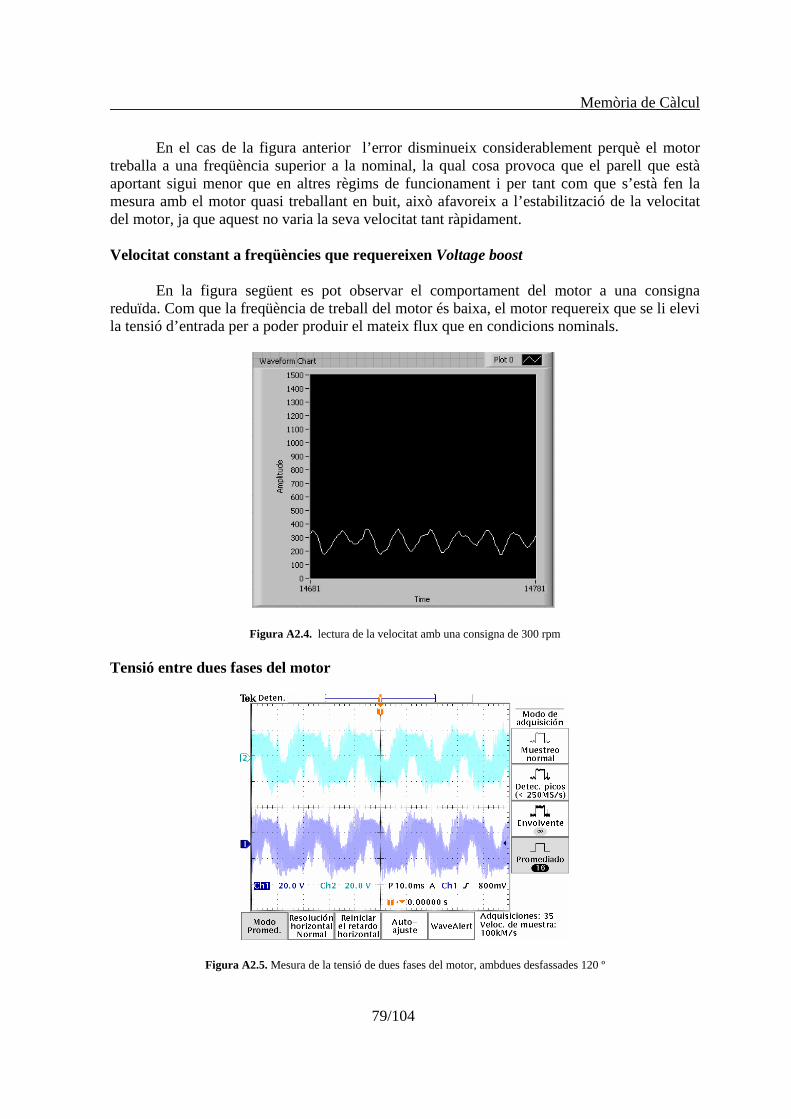
Memòria de Càlcul
79/104
En el cas de la figura anterior l’error disminueix considerablement perquè el motor treballa a una freqüència superior a la nominal, la qual cosa provoca que el parell que està aportant sigui menor que en altres règims de funcionament i per tant com que s’està fen la mesura amb el motor quasi treballant en buit, això afavoreix a l’estabilització de la velocitat del motor, ja que aquest no varia la seva velocitat tant ràpidament.
Velocitat constant a freqüències que requereixen Voltage boost
En la figura següent es pot observar el comportament del motor a una consigna reduïda. Com que la freqüència de treball del motor és baixa, el motor requereix que se li elevi la tensió d’entrada per a poder produir el mateix flux que en condicions nominals.
Figura A2.4. lectura de la velocitat amb una consigna de 300 rpm
Tensió entre dues fases del motor
Figura A2.5. Mesura de la tensió de dues fases del motor, ambdues desfassades 120 º

Plànols
80/104
3. Plànols.

81/104
0
0
0
0
VCC
GND
VCC
VCC
GND
GND
VCC
0 0 0
VCC VCC
U1B
74HC14
3 4
U2A
74HC14
1 2
U1D
74HC14
9 8
X1CONNECTOR2
1
2
.
.
X2
CONNECTOR2
1
2
.
.U1E
74HC14
11 10
X3CONNECTOR21
2.
.
X4
CONNECTOR3
1
2
3
.
.
.
U2B
74HC14
3 4U2C
74HC14
5 6
X5
CONNECTOR2
1
2
.
.
C5100n
1
2
C6100n
1
2
C7100n
1
2
U2E
74HC14
11 10
R1
5k6
21
R2
12k
2
1
R3
5k6
21
R4
12k
2
1
R5
1k
21
R6
1k
2
1
R7
1k
21
U1C
74HC14
5 6
R8
1k
2
1
C1
1n
1 2
C2
1n
1 2
C3
1n
1 2
C4
1n
1 2
U1A
74HC14
1 2
U2D
74HC14
9 8
U3C
74HC08
9
108
U3A
74HC08
1
23
U3B
74HC08
4
56
pin13
pin12
pin11
pin10
pin19
ch. B
ch. A
alim_VCC
alim_GND

82/104
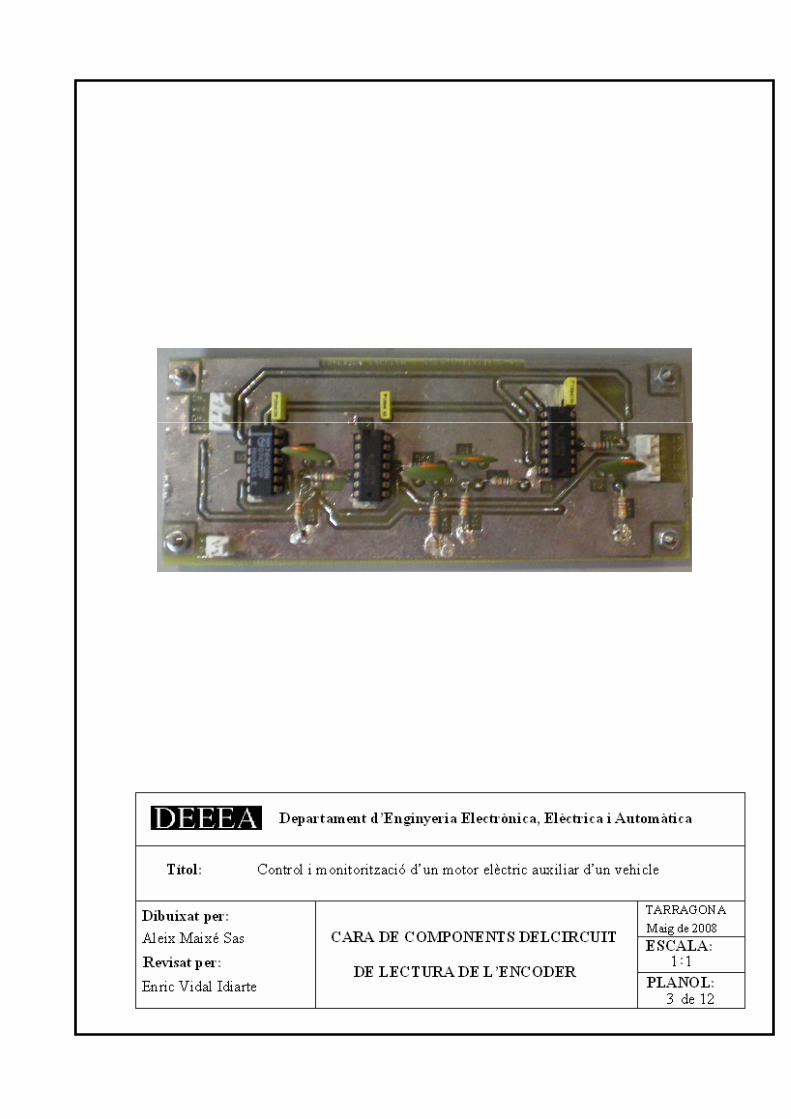
83/104

84/104
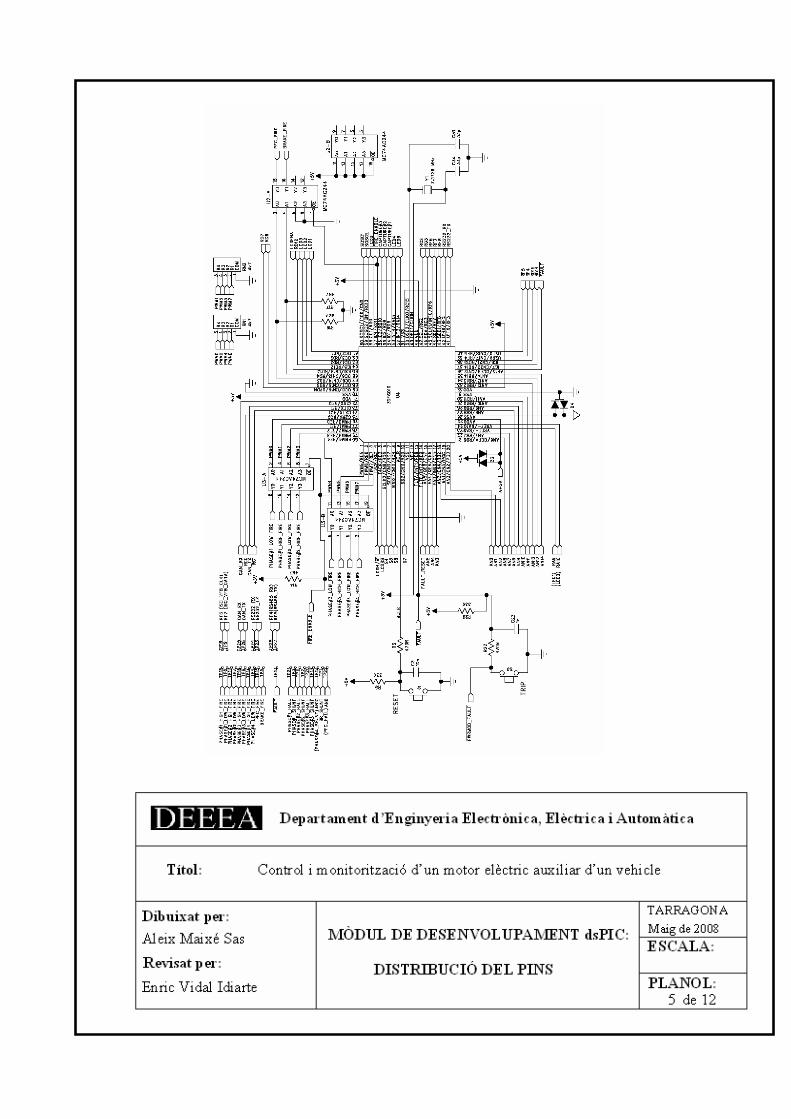
85/104

86/104
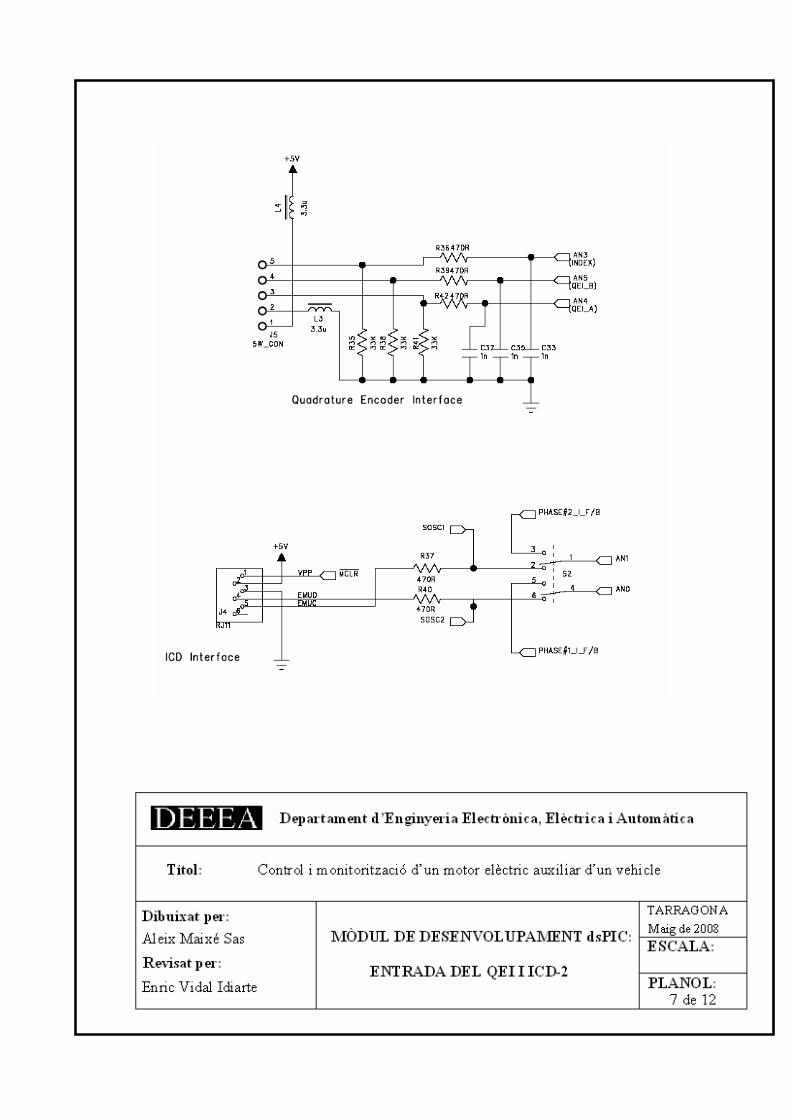
87/104

88/104

89/104
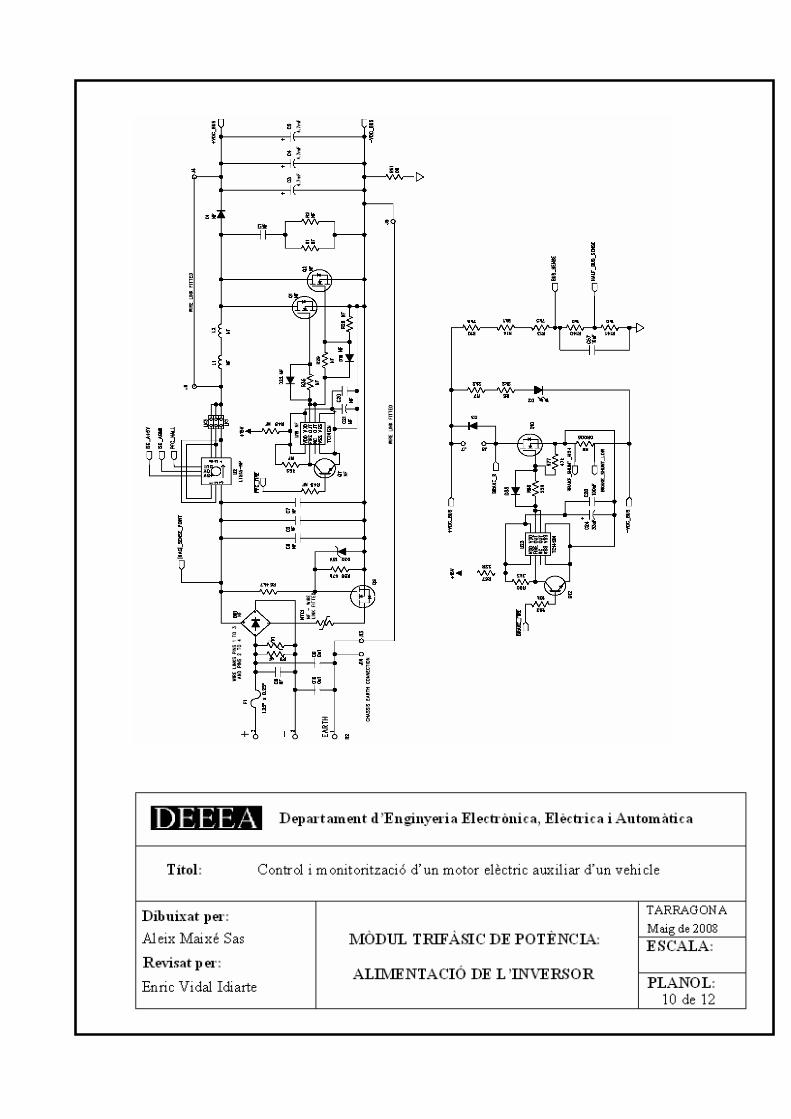
90/104
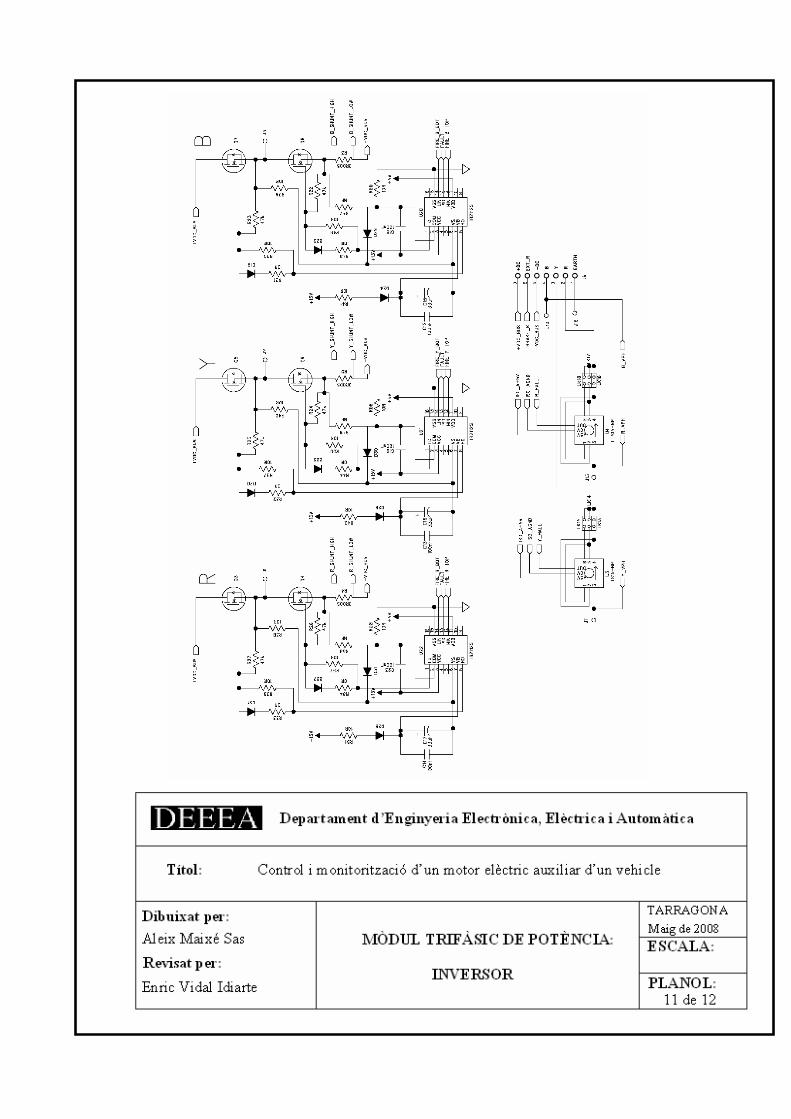
91/104
92/104
Pressupost
93/104
4. Pressupost.
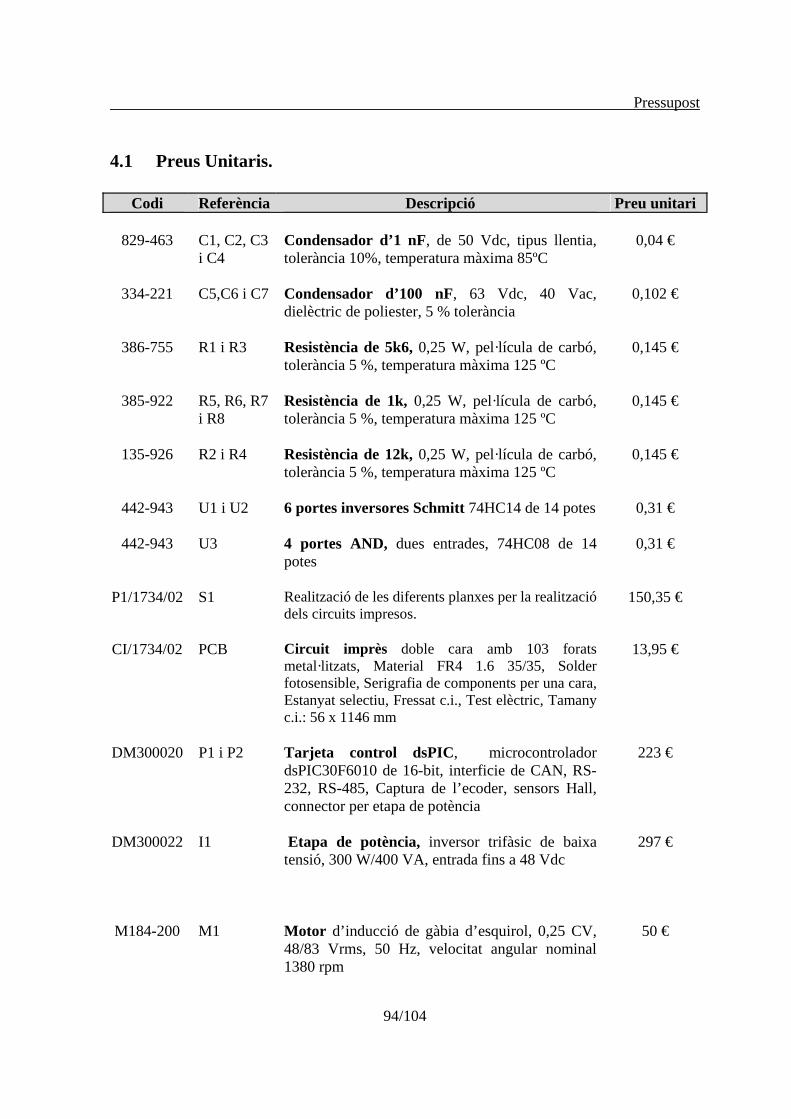
Pressupost
94/104
4.1 Preus Unitaris.
Codi Referència Descripció Preu unitari
829-463 C1, C2, C3 i C4
Condensador d’1 nF, de 50 Vdc, tipus llentia, tolerància 10%, temperatura màxima 85ºC
0,04 €
334-221 C5,C6 i C7 Condensador d’100 nF, 63 Vdc, 40 Vac, dielèctric de poliester, 5 % tolerància
0,102 €
386-755 R1 i R3 Resistència de 5k6, 0,25 W, pel·lícula de carbó, tolerància 5 %, temperatura màxima 125 ºC
0,145 €
385-922 R5, R6, R7 i R8
Resistència de 1k, 0,25 W, pel·lícula de carbó, tolerància 5 %, temperatura màxima 125 ºC
0,145 €
135-926 R2 i R4 Resistència de 12k, 0,25 W, pel·lícula de carbó, tolerància 5 %, temperatura màxima 125 ºC
0,145 €
442-943 U1 i U2 6 portes inversores Schmitt 74HC14 de 14 potes
0,31 €
442-943 U3 4 portes AND, dues entrades, 74HC08 de 14 potes
0,31 €
P1/1734/02 S1 Realització de les diferents planxes per la realització dels circuits impresos.
150,35 €
CI/1734/02 PCB Circuit imprès doble cara amb 103 forats metal·litzats, Material FR4 1.6 35/35, Solder fotosensible, Serigrafia de components per una cara, Estanyat selectiu, Fressat c.i., Test elèctric, Tamany c.i.: 56 x 1146 mm
13,95 €
DM300020 P1 i P2 Tarjeta control dsPIC, microcontrolador dsPIC30F6010 de 16-bit, interficie de CAN, RS-232, RS-485, Captura de l’ecoder, sensors Hall, connector per etapa de potència
223 €
DM300022 I1 Etapa de potència, inversor trifàsic de baixa tensió, 300 W/400 VA, entrada fins a 48 Vdc
297 €
M184-200
M1
Motor d’inducció de gàbia d’esquirol, 0,25 CV, 48/83 Vrms, 50 Hz, velocitat angular nominal 1380 rpm
50 €

Pressupost
95/104
HEDM 550
E1 Encoder incremental, 1024 punts per revolució,
compatible TTL, temperatura màxima de treball 100ºC
37 €
DV64005 PG-DBG ICD-2, programador i depurador ICSP
118 €
5310177 CS Cable sèrie, null mòdem, DB9
2,8 €
4405 12506 CAN-CB Cable CAN, impedància característica entre emissió i recepció 120 Ω
28 €
04003140 RS-TRJ Tarjeta port sèrie PCI, DB9
67 €
000.005 2730-04 Muntatge de circuit imprès, test elèctric i comprovació del funcionament
7,5 €
000.005 2730-05 Muntatge de l’encoder, test mecànic, comprovació del a diferents velocitats i acoblament amb el circuit de quadratura
5 €
000.005 2730-06 Desenvolupament del software 12,35 €

Pressupost
96/104
4.2 Quadres Descomposts.
4.2.1 Mòdul de Control del Motor
Puja el preu total de la partida a l'esmentada quantitat de DOS MIL NOU-CENTS SEIXANTA-NOU EUROSA amb CINQUANTA CÈNTIMS.
Codi Ud Descripció Unitats Subtotal Import C1 Control escalar d’un motor d’inducció
Conjunt de desenvolupament del sistema de control d’un motor d’inducció elèctric, tenint en compte el sensat de velocitat que permet tancar el llaç
000.004 h Disseny i muntatge del circuit imprès 20 7,5 150 000.005 h Muntatge de l’encoder 15 5 75 000.006 h Desenvolupament del software 150 12,35 1852,5 DM300022 U Etapa de potència 1 297 297 DM300020 U Targeta de control dsPIC 1 223 223 M184-200 U Motor 1 50 50 DV64005 U ICD-2 1 118 118 HEDM 5005 U Encoder incremental 1 37 37 CI/1734/02 U Circuit imprès 1 13,95 13,95 P1/1734/02 U Realització de les planxes per al CI 1 150,35 150,35 217-5566 U 4 portes AND 1 0,31 0,31 442-943 U 6 portes inversores Schmitt 2 0,31 0,62 135-926 U Resistència de 12 kΩ 2 0,145 0,29 385-922 U Resistència d’1 kΩ 4 0,145 0,58 386-755 U Resistència de 5,6 kΩ 3 0,145 0,435 334-221 U Condensador de 100 nF 3 0,102 0,306 829-463 U Condensador d’1 nF 4 0,04 0,16 Suma de la partida 2969,50 TOTAL PARTIDA 2969,50
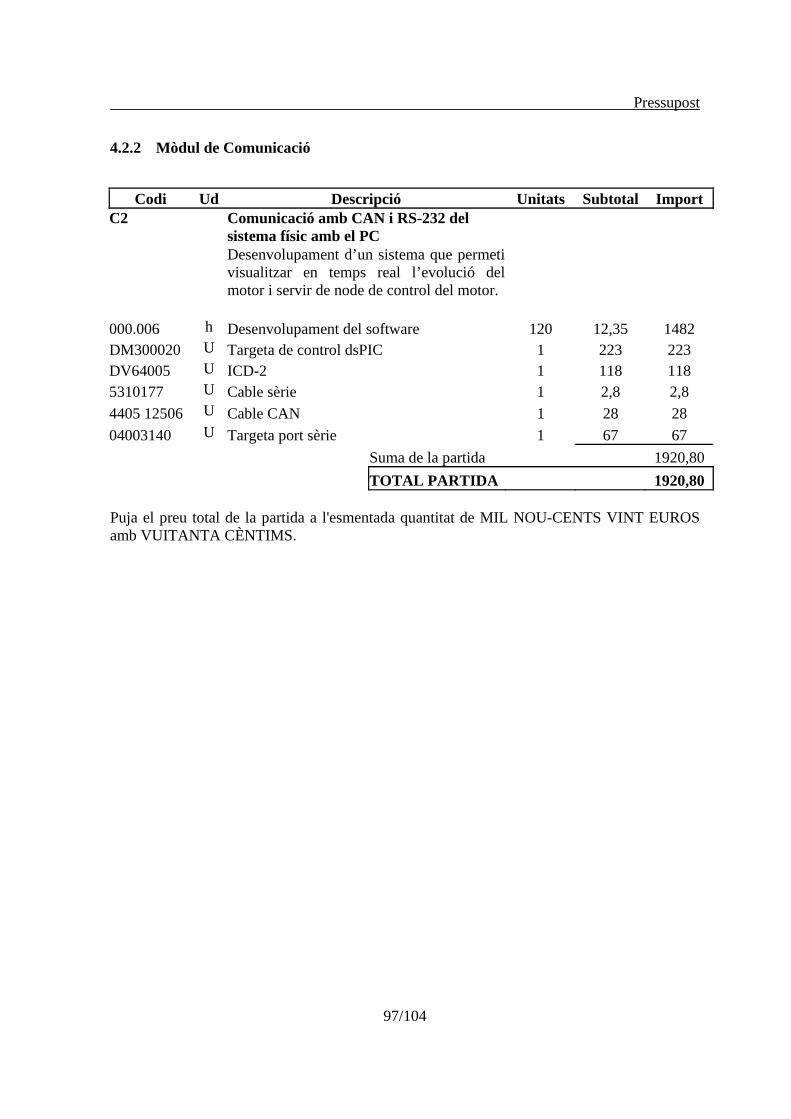
Pressupost
97/104
4.2.2 Mòdul de Comunicació
Puja el preu total de la partida a l'esmentada quantitat de MIL NOU-CENTS VINT EUROS amb VUITANTA CÈNTIMS.
Codi Ud Descripció Unitats Subtotal Import C2
Comunicació amb CAN i RS-232 del sistema físic amb el PC
Desenvolupament d’un sistema que permeti visualitzar en temps real l’evolució del motor i servir de node de control del motor.
000.006 h Desenvolupament del software 120 12,35 1482 DM300020 U Targeta de control dsPIC 1 223 223 DV64005 U ICD-2 1 118 118 5310177 U Cable sèrie 1 2,8 2,8 4405 12506 U Cable CAN 1 28 28 04003140 U Targeta port sèrie 1 67 67 Suma de la partida 1920,80 TOTAL PARTIDA 1920,80
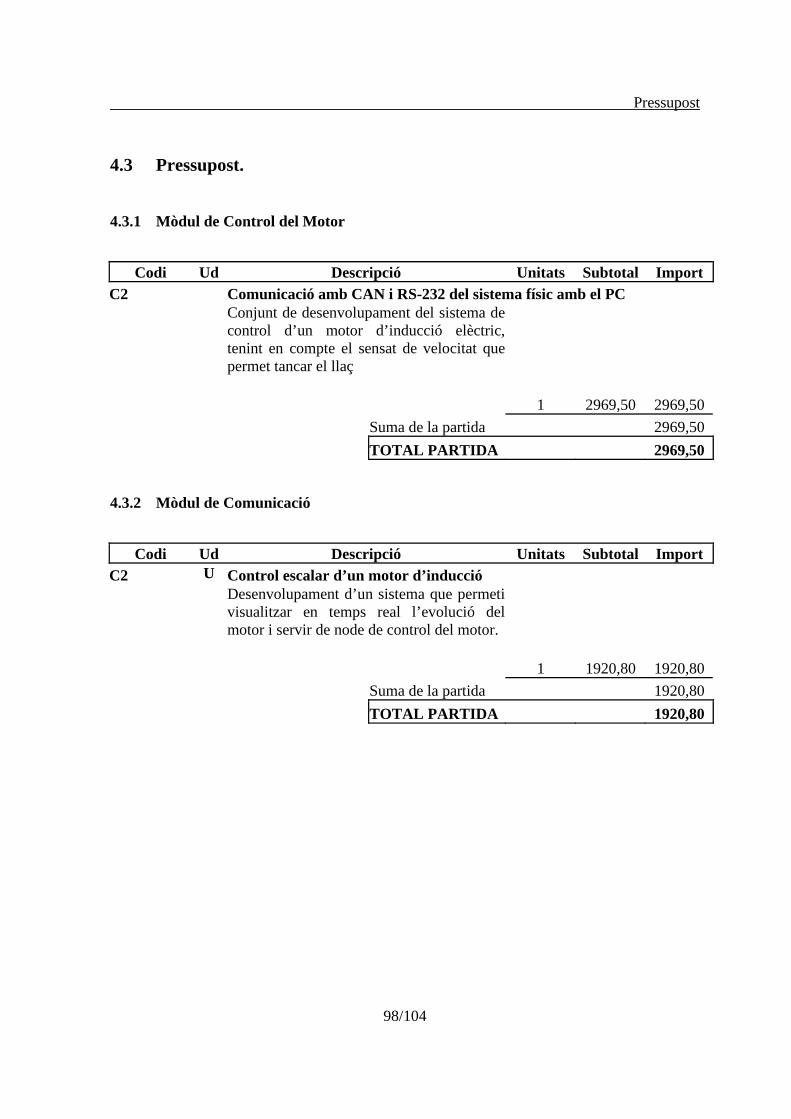
Pressupost
98/104
4.3 Pressupost.
4.3.1 Mòdul de Control del Motor
4.3.2 Mòdul de Comunicació
Codi Ud Descripció Unitats Subtotal Import C2 Comunicació amb CAN i RS-232 del sistema físic amb el PC
Conjunt de desenvolupament del sistema de control d’un motor d’inducció elèctric, tenint en compte el sensat de velocitat que permet tancar el llaç
1 2969,50 2969,50 Suma de la partida 2969,50 TOTAL PARTIDA 2969,50
Codi Ud Descripció Unitats Subtotal Import C2 U Control escalar d’un motor d’inducció
Desenvolupament d’un sistema que permeti visualitzar en temps real l’evolució del motor i servir de node de control del motor.
1 1920,80 1920,80 Suma de la partida 1920,80 TOTAL PARTIDA 1920,80

Pressupost
99/104
4.4 Resum de Pressupost. Mòdul del control del motor 2.969,50 Mòdul de comunicacions 1.920,80 Pressupost d'execució material 4.890,30 IVA 16 % 782,45 Pressupost de licitació 5.672,75 PRESSUPOST GENERAL 5.672,75 El pressupost general puja a la quantitat de CINC MIL SIS-CENTS SETANTA-DOS EUROS amb SETANTA-CINC CÈNTIMS Tarragona, 25 de maig de 2008
L’ENGINYER TÈCNIC INDUSTRIAL ALEIX MAIXÉ SAS

Plec de condicions
100/104
5. Plec de Condicions.
Plec de condicions
101/104
5.1 Reunits
El Dr. ENRIC VIDAL IDIARTE professor titulat universitari, del Departament d’Enginyeria Electrònica, Elèctrica i Automàtica (en endavant DEEEA) de la Universitat Rovira i Virgili, (en endavant URV), amb domicili a efectes de notificacions a l’Avinguda dels Països Catalans, 26, de 43007 Tarragona. i
El Sr. ALEIX MAIXÉ SAS, com a enginyer tècnic industrial, amb domicili a efectes de notificacions al Carrer Comte de Rius núm.16 4t 4a de 43003 Tarragona. Reconeixent-se mútuament la capacitat jurídica necessària per obligar a les respectives entitats mitjançant el present document.
5.2 Exposen
5.2.1 Primer
Que l’enginyer tècnic industrial Aleix Maixé Sas té experiència demostrada en l’àrea d’electrònica de potència i en el Disseny de Sistemes de Distribució Elèctrica i Electrònica (EEDS) per a vehicles automòbils. Per aquest motiu el DEEEA està interessat a contractar els seus serveis.
5.2.2 Segon
Que la URV com a institució sense ànim de lucre, i que té com a finalitats principals, entre d’altres, les de formació i docència, les d’investigació i recerca i, a la vegada, les d’afavorir i recolzar els convenis de col·laboració entre les empreses i els Departaments Universitaris, està interessada a col·laborar amb Aleix Maixé Sas en les tasques de recerca i desenvolupament referides al món de l’automòbil.
5.3 Clàusules
5.3.1 Primera.- OBJECTIUS
El DEEA i Aleix Maixé Sas col·laboraran en activitats científiques d’investigació i desenvolupament tecnològic desenvolupades per aquest departament o amb d’altres unitats de recerca amb la condició de tercers en relació al present acord.
5.3.2 Segona.- OBJECTE DE L’ACORD

Plec de condicions
102/104
L’objecte d’aquest contracte és que el Sr. Aleix Maixé Sas realitzi el projecte titulat Control i monitorització d’un motor auxiliar elèctric d’un vehicle per al Departament d’Enginyeria Electrònica, Elèctrica i Automàtica de la Universitat Rovira i Virgili i a sol·licitud seva.
5.3.3 Tercera.- CONDICIONS D’ACCEPTACIÓ DEL TREBALL
El Sr. Aleix Maixé Sas accepta realitzar el treball sol·licitat, d’acord amb el programa de treball que figura en la Memòria descriptiva.
5.3.4 Quarta.- EXTENSIÓ DE LA COL·LABORACIÓ
La col·laboració s’entén en el sentit més ampli, tanmateix es veuen com a programes que necessàriament s’hauran de desenvolupar, els següents:
• Execució de programes de recerca i desenvolupament.
• Conveni a per la utilització d’equipament i de suport en la realització i certificació d’assajos.
• Establiment de vies de comunicació sobre vigilància tecnològica i assessorament en
l’evolució de la tecnologia dins el sector de l’automòbil. Per cada programa dels esmentats es definiran les línies mestres a seguir pel que fa a descripció detallada dels tipus d’accions, sistemàtica a seguir, impresos a complimentar, especialitats tècniques disponibles o qualsevol altre tipus d’informació de caire general i de procediment que faciliti la formalització dels futurs acords específics de col·laboració.
5.3.5 Cinquena.- CONTINGUT DELS PROGRAMES ESPECÍFICS Cada projecte realitzat a l’empara d’aquest acord serà objecte d’un contracte específic, el qual haurà d’incloure, entre d’altres, els següents aspectes:
a) Definició d’objectius específics. b) Descripció del projecte i les diferents tasques a realitzar. c) Planificació de mitjans materials i humans necessaris i cronograma corresponent. d) Pressupost i el seu pla de finançament. e) Determinació de l’aplicabilitat directa del present acord en tot el que no estigui determinat de forma específica al contracte del projecte.
Plec de condicions
103/104
f) Designació de responsables directes del projecte per ambdues parts.
5.3.6 Sisena.- COORDINADORS / RESPONSABLES
El DEEA designa el Dr. Enric Vidal Idiarte com a coordinador de l’acord signat amb Aleix Maixé Sas.
Per l’altra part, el coordinador que figurarà és Aleix Maixé Sas. Aquest es podrà actualitzar durant la vigència de l’acord segons convingui, comunicant-ho per escrit a l’altra part. La persona designada serà l’interlocutor i coordinador del programa de col·laboració i la persona a la que serà adreçada tota consulta, correspondència o comunicació general.
5.3.7 Setena.- EMISSIÓ D’INFORMES
El responsable del projecte informarà regularment al DEEEA sobre la marxa dels treballs que segons la memòria li correspongui desenvolupar. Aquestes persones seran responsables de regir i impulsar les diferents tasques assignades a cada part. A la vegada seran les responsables d’emetre l’informe final de tancament del projecte amb les conclusions a què ha conduït el treball.
5.3.8 Vuitena.- DURADA
La durada del present acord és de 31 setmanes, comptades a partir de la data de signatura d’aquest acord. En qualsevol cas, ambdues parts contemplen la possibilitat de fer unes sessions de seguiment per tal de revisar els resultats de les diverses activitats de col·laboració, proposar-ne de noves, i definir possibles accions de millora.
5.3.9 Tretzena.- PRINCIPIS D’ACTUACIÓ
El DEEA i el Sr. Aleix Maixé Sas col·laboraran en tot moment sota els principis de bona fe i eficàcia per assolir amb el millor èxit els projectes que es subscriguin.
Plec de condicions
104/104
5.3.10 Catorzena.- RESOLUCIÓ DE CONFLICTES
Després d’esgotar la via de l’acord privat i donada la impossibilitat manifesta d’arribar a una pacte acceptable per les parts davant d’un hipotètic conflicte, ambdues parts acorden que per a la resolució de qualsevol qüestió litigiosa que es plantegi a l’empara del present acord o dels contractes específics que se subscriguin en el futur, les parts se sotmetran a l’arbitratge institucional del Tribunal Arbitral de Barcelona de l’Associació Catalana per a l’Arbitratge, encarregant-li la designació d’àrbitres i administració de l’arbitratge d’acord amb el seu reglament, i sent d’obligat compliment la seva decisió arbitral. S’exceptuen d’aquesta submissió aquelles qüestions que no siguin de lliure disposició.
Abans d’emprendre cap acció contra el DEEA i/o la URV s’haurà d’haver formulat la reclamació administrativa prèvia tal com ho estableixen els articles 120 i següents de la Llei de Procediment Administratiu.
I en prova de conformitat, ambdues parts signen el present pacte, a la ciutat i en la data esmentada.
Pel DEPARTAMENT d’ENGINYERIA L’ENGINYER TÈCNIC INDUSTRIAL ELECTRÒNICA, ELÈCTRICA I AUTOMÀTICA Dr. ENRIC VIDAL IDIARTE ALEIX MAIXÉ SAS Tarragona, 10 de gener de 2008