Control Escalar De Maquinas Asíncronas · (Td) por el rotor es proporcional al cuadrado de la...
28
CONTROL DE MAQUINAS ELECTRICAS ELT – 3790 Control Escalar De Maquinas Asíncronas
Transcript of Control Escalar De Maquinas Asíncronas · (Td) por el rotor es proporcional al cuadrado de la...

CONTROL DE MAQUINAS ELECTRICASELT – 3790
Control EscalarDe
Maquinas Asíncronas

• Conocer que es un control escalar.• Conocer el principio de funcionamiento
del control escalar.• Ventajas y desventajas.
Objetivo

Por medio del control de motores hacemosque este desarrolle en todo momento eltorque y la velocidad necesaria para realizaruna tarea específica, aun cuando lascondiciones de carga y alimentación varíen.El control se concreta en estas dosvariables mecánicas la velocidad y eltorque, en la practica solo se controla una yla otra viene determinada por la carga.
Control de Motores

Por qué controlar un motor?
• Porque los equipos utilizados en la industriamoderna funcionan a velocidades variables.
• Porque conlleva al ahorro de energía, a lareducción de ruido, al incremento de la vida delmotor y a la posibilidad de diagnostico de fallas.
• Para lograr una adecuada productividad, lograruna buena terminación del producto elaborado.
• Para garantizar la seguridad de personas ybienes.
Ventaja de usar un controlador
• 65% de la energía eléctrica es consumidapor motores.
• El control produce un incremento en laeficiencia de un 15 a 27%.
• Requiere un costo inicial que tiene unatasa de retorno a corto y mediano plazo.

Ventajas de los motores deinducción
• Su construcción robusta y más simple, menorcosto, tamaño y peso para la misma potenciaen el eje, fácil de instalar y no requiere muchomantenimiento.
• El aprovechamiento del desempeño en losdispositivos de conmutación electrónicos depotencia y su bajo costo.
• La posibilidad de llevar a cabo algoritmoscomplejos en los nuevos microprocesadores.

Inconvenientes de los motores deinducción
• La corriente de arranque es mucho mayorque la corriente de funcionamiento nominal.Entre 3 y 6 veces mayor. En mucho casos esnecesario disponer procedimientosespeciales de limitación de la corriente dearranque.
• La variación de su velocidad implica lavariación de la frecuencia de la alimentación:es necesario disponer de un convertidorelectrónico que convierta la tensión de red enuna tensión de frecuencia variable.

Aplicaciones de los motores deinducción
Transportadoras BombasVentiladores ElevadoresCompresores TrituradorasMolinos Maquinas HerramientasExtrusoras PrensasElectrodomésticos Vehículos Eléctricos

Técnicas de control utilizadasen los motores de inducción
Técnicas de control utilizadasen los motores de inducción
• Para controlar el motor de inducción, éstedebe alimentarse con tres voltajes o corrientesde fase de frecuencia y amplitud variable.
• Para obtener las condiciones de alimentaciónanteriores, las técnicas de control puedenclasificarse en tres grandes categorías:– Control escalar– Control vectorial– Control directo del par

Ventajas del control escalar
• Está basado en el modelo estático del motorde inducción.
• Consiste en mantener la relación V/Fconstante.
• También es llamado control V/F.• Es simple de implementar y económico.• Se requiere muy poco conocimiento del
motor para el control de la frecuencia.

• Su desempeño es bajo debido a que regulapobremente el flujo del campo magnético avelocidades bajas y además no permitecontrolar el par electromagnético del motor.
• Una desventaja de control escalar (v / f) esque el par desarrollado depende de la carga,ya que no se controla directamente. Además,la respuesta transitoria de tal control no esrápido debido al patrón de conmutaciónpredefinidos del inversor.
Desventajas del control escalar

Motor de inducción o asíncrono
Circuito Equivalente simplificado
Par del circuito simplificado

Con la ecuación se ve que el Par desarrollado(Td) por el rotor es proporcional al cuadrado de latensión aplicad Vs.Para una carga con una cupla resistente fija comola indicada, la variación máxima posible del voltajees de Vs a Vs/2 y la variación de velocidad estálimitada entre los puntos C y C’ de dicha curva.En cambio logra toda la gama, desde velocidadnominal hasta cerca de cero con cargas norígidas.
Control del voltaje aplicado

Control del voltaje aplicado
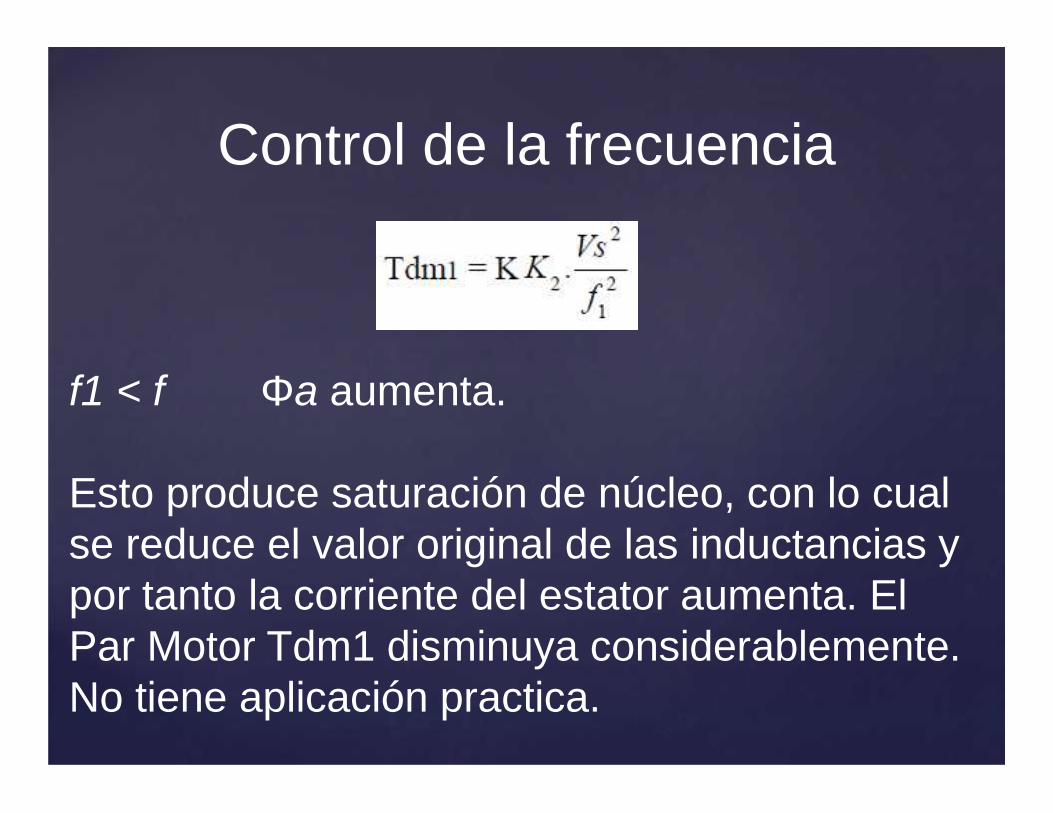
Control de la frecuencia
f1 < f Φa aumenta.
Esto produce saturación de núcleo, con lo cualse reduce el valor original de las inductancias ypor tanto la corriente del estator aumenta. ElPar Motor Tdm1 disminuya considerablemente.No tiene aplicación practica.

Control de la frecuencia
f1 > f Φa disminuye.
Las reactancias correspondientes a Ls y Lraumentan su valor proporcionalmente alaumento de la frecuencia y por tanto laresistencia del estator Rs puede llegar adespreciarse.

Control de la frecuencia
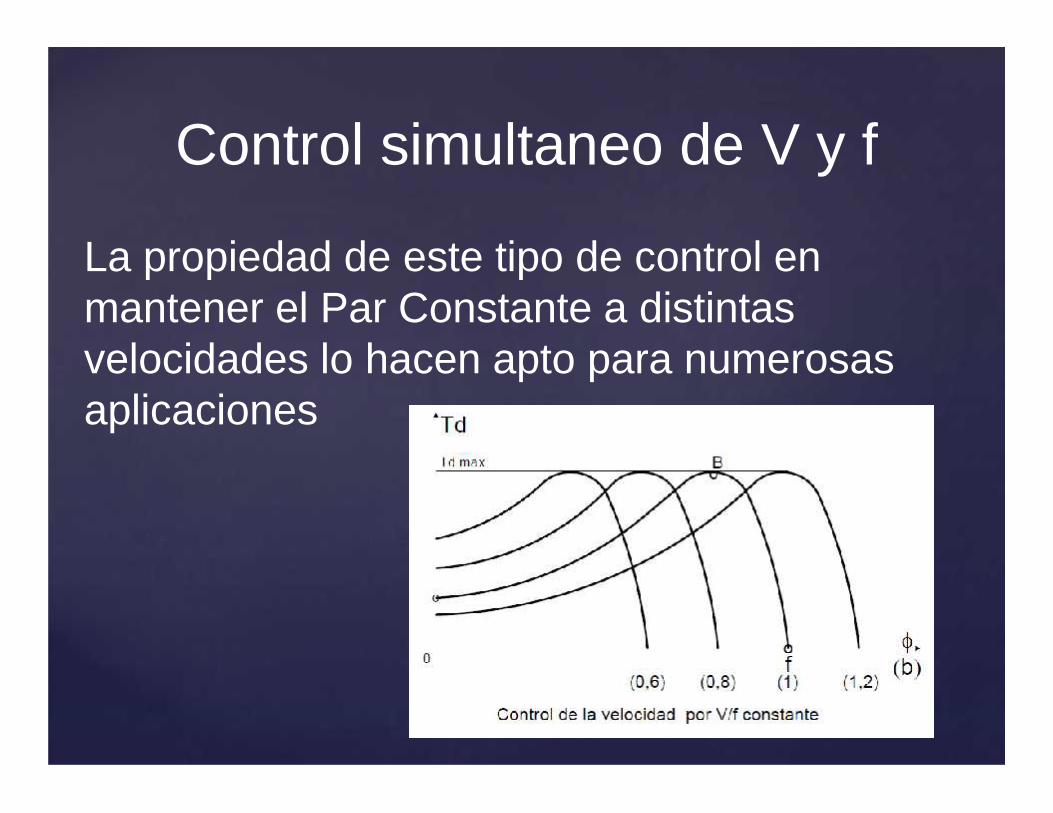
Control simultaneo de V y f
La propiedad de este tipo de control enmantener el Par Constante a distintasvelocidades lo hacen apto para numerosasaplicaciones

Características del controlescalar
Rango de regulación de velocidad 1:25 sinrealimentación.Precisión: +/- 1% de la Vn sin realimentación.Robusto frente a los cambios de carga.
El control escalar puede realizarse de dosformas:
• Lazo Abierto• Lazo Cerrado

Control escalar de Lazo Abierto• Sencillo y económico.• Aplicaciones industriales que toleran
pequeñas variaciones de velocidad o flujopor la carga o tensión y no precisen unarespuesta rápida.

Control escalar de LazoCerrado
• Se requiere al menos dos lazos de control.• Si se requiere un sistema mas estable
generalmente se introduce un tercer lazopara controlar el par.

Control por PWM trifásicoControl por Modulación del ancho de pulso.Circuito de potencia similar a un converso CA/CC/CA
Rectificador Filtro Inversorautónomocontroladopor PWM

• Compara una onda triangular única con unsistema de ondas de referencia senoidal trifásica.
• Las frecuencias posible de la portadora deber sermúltiplos de 3 para asegurar la simetría.
• Cuanto mayor es la f de la portadora, mejor serála tensión de salida del inversor, comercialmentese tiene f de 12,150 Hz para 50 Hz nominales.
• La variación de la f de salida se logra variando elperiodo de la senoide.
• El valor de tensión de salida se logra variando laamplitud de la onda triangular.
Señales de Excitación

Señales de referencia y pulsos de excitación para los transistores M1 y M4
Señales de Excitación

La señal de excitación VG1 (fig 2-b) para el transistor M1surge de la comparación entre la senoide Vra y la ondatriangular, dando un pulso positivo toda vez que susvalores instantáneos sean mayores o más positivos que latriangular.Para el transistor M4 ubicado en la misma rama de M1, laseñal * VG4 (fig 2-c) debe ser idéntica y desfasada 180ºde VG1. Luego resulta ser la misma señal VG1 invertida.* Los dos transistores de una misma rama nuncaconducen en forma simultanea y para asegurar que noexista superposición de conducción durante cadaconmutación, existe un tiempo muerto de no conducción(mayor al toff de los transistores).
Señales de Excitación

Tensiones salida del inversor

Corriente de Carga