Control Directo de Std
21
CONTROL DIRECTO DE SISTEMAS EN T. DISCRETO Tema 6
-
Upload
bruno-demmian-cabrera-letzkus -
Category
Documents
-
view
57 -
download
0
Transcript of Control Directo de Std
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 1/21
CONTROL DIRECTO DE
SISTEMAS EN T. DISCRETO
Tema 6
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 2/21
Indice
Control de Sistemas en Tiempo Discretoen el Lugar de las Raíces
Control de Sistemas en Tiempo Discretopor Respuesta Frecuencial
Control por Síntesis Directa. Método deTruxal-Ragazzini
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 3/21
Control de Sistemas en Tiempo
Discreto en el Lugar de las Raíces El método de compensación del lugar de las raíces en el plano z
es similar al caso continuo en el plano s, esto es, se
especificarán las ubicaciones de los polos dominantes en lazocerrado y se elegirá un tipo de compensador adecuado paracumplirlas.
Para ello se ubicará el lugar geométrico de las raíces de
1 0+ =GH z( )
1 01 2
1 2
+ ⋅ + ⋅ + ++ ⋅ + +
=K z z z z z z z p z p z p
m
n
( ) ( ) ( )( ) ( ) ( )
LL
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 4/21
Control de Sistemas en Tiempo
Discreto en el Lugar de las Raíces Al ser GH(z) una magnitud compleja se imponen 2 condiciones:
1. condición de ángulo
2. Condición de magnitud
Los valores de z que cumplan la condición de angulo para Kvaraible definen el lugar geométrico de las raíces o polos delsistema en bucle cerrado (LdR)
La aplicación de la condición de magnitud para una Kdeterminado define los polos específicos del sistema en buclecerrado.
...2,1,0)12(180))(arg( =+−= k k zGH 1)( = zGH
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 5/21
Control de Sistemas en Tiempo
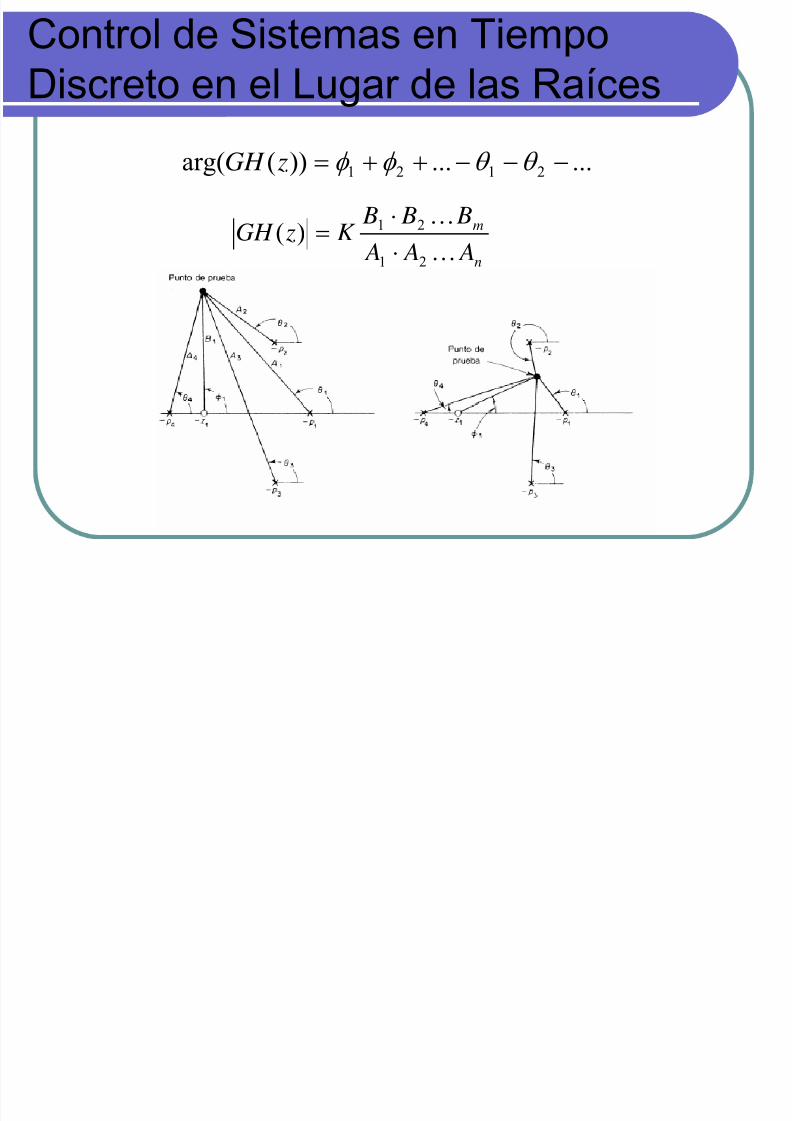
Discreto en el Lugar de las Raíces......))(arg( 2121 −−−++= θ θ φ φ zGH
n
m
A A A
B B BK zGH
K
K
21
21)(⋅⋅=

5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 6/21
Control de Sistemas en Tiempo
Discreto en el Lugar de las Raíces En general
Con objeto de determinar la ubicación de los polos y ceros el
controlador G c (z) digital se obtendrá la deficiencia angular en lospolos deseados z d
La condición de magnitud evaluada en z d permitirá ajustar laganancia del controlador K c .
)()()(
)()()()(
21
21
cncc
cmcccc p z p z p z
z z z z z zK zG ++⋅+
++⋅+⋅= L
L
d z z zGH
=−∠−= )(º180φ
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 7/21
Control de Sistemas en Tiempo
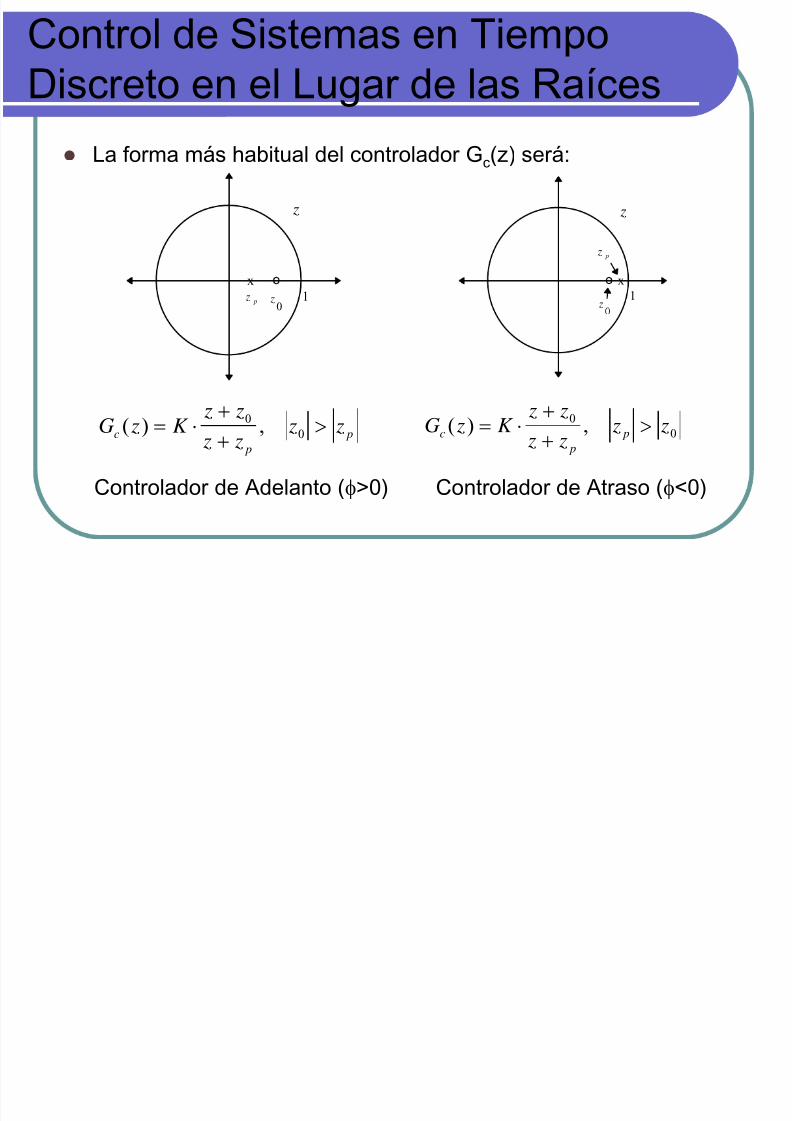
Discreto en el Lugar de las Raíces La forma más habitual del controlador G c (z) será:
1
z
x
z p z
0
1
z
x
z p
z
G z K z z z z
z zc
p
p( ) ,= ⋅ ++
>0
0G z K z z
z z z zc
p
p( ) ,= ⋅ ++
>0
0
Controlador de Adelanto (φ>0) Controlador de Atraso (φ<0)

5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 8/21
Control de Sistemas en Tiempo
Discreto en el Lugar de las Raíces
1
z
x
z p 2
z0 2
x
z p1
z 01
G z K z z
z z
z z
z zc
p
Ad
p
At
( ) = ⋅++
⋅++
01
1
02
2123 123
Controlador de Atraso-Adelanto
Los esquemas anteriores cubren a los controladores PID, en
concreto el control PD (Adelanto con zp = 0), el control PI (Atrasocon zp = 1) y el control PID (Atraso-Adelanto con zp1 = 0 , zp2 = -1),para el caso de discretizacion Euler hacia atrás.
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 9/21
Control de Sistemas en Tiempo
Discreto por Respuesta Frecuencial
El método de compensación basado en la respuesta en
frecuencia para sistemas en tiempo discreto es análogo al casocontinuo. No obstante, será necesario realizar previamente latransformación bilineal que obtenga a partir de la plantaG(z ) laplanta G(w).
A partir de G(w) se realizará el diseño del controlador G c (w),utilizando los procedimientos de diseño en continua, teniendo en
cuenta la distorsión del eje de frecuencia w = j ν respecto al ejes = j ω. Una vez obtenido G c (w) se aplicará nuevamente la
transformación bilineal para obtener G c (z).
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 10/21
Control de Sistemas en Tiempo
Discreto por Respuesta Frecuencial El procedimiento se resume en los siguientes pasos:
1. Obtener G(z) y hallar
2. Hacer w = j ν , y establecer la ganancia del controlador K para cumplir las especificaciones de error estático y develocidad en su caso.
3. Dibujar el diagrama Bode de KG( ν ), y determinar MF y MG.
4. En caso de no cumplirse las especificaciones de MF y MGse diseñará un compensador G c (w) por las técnicasconvencionales , desprovisto de ganancia.
5. Transformar G c (w) en G c (z) , según
G w G z z
T w
T w
( ) ( )= =+
−
12
12
1
12)()(
+
−=
= z
z
T
wcc wG zG
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 11/21
Control de Sistemas en Tiempo
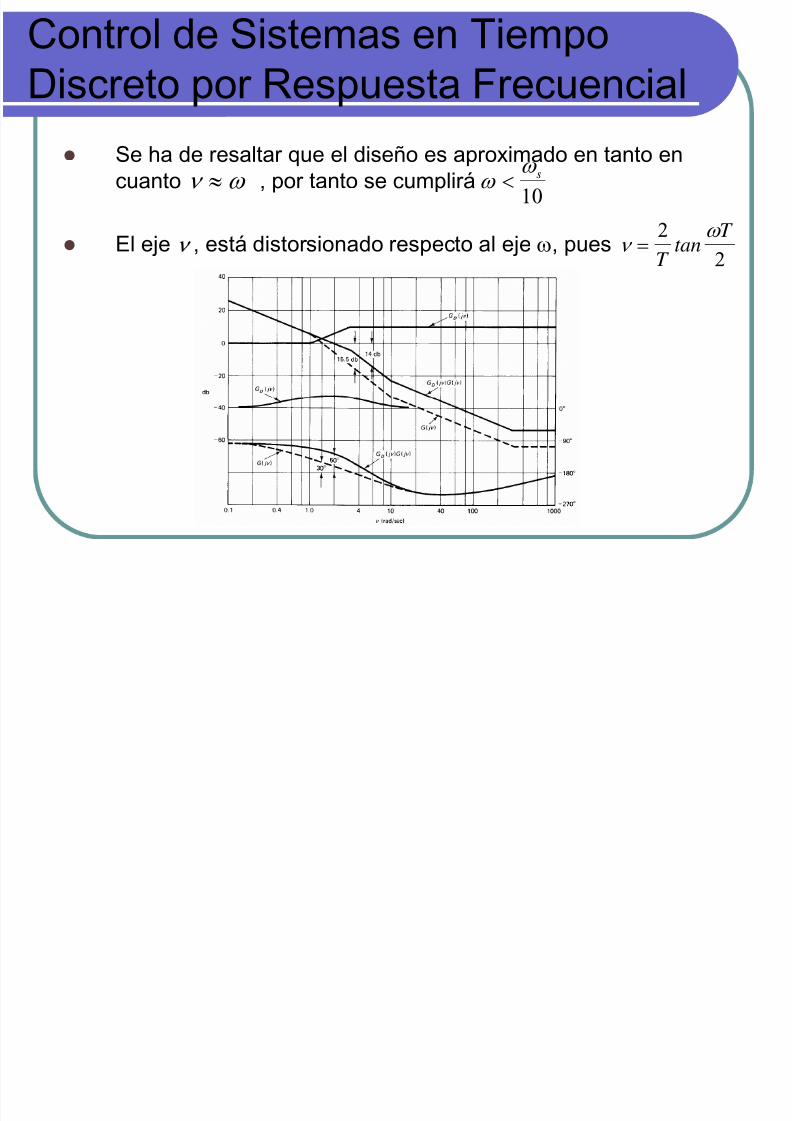
Discreto por Respuesta Frecuencial Se ha de resaltar que el diseño es aproximado en tanto en
cuanto , por tanto se cumplirá
El eje ν , está distorsionado respecto al eje ω, pues
ω ω
< s
10ν ω ≈
ν ω
=2
2T tan
T
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 12/21
Control por Síntesis Directa. Método
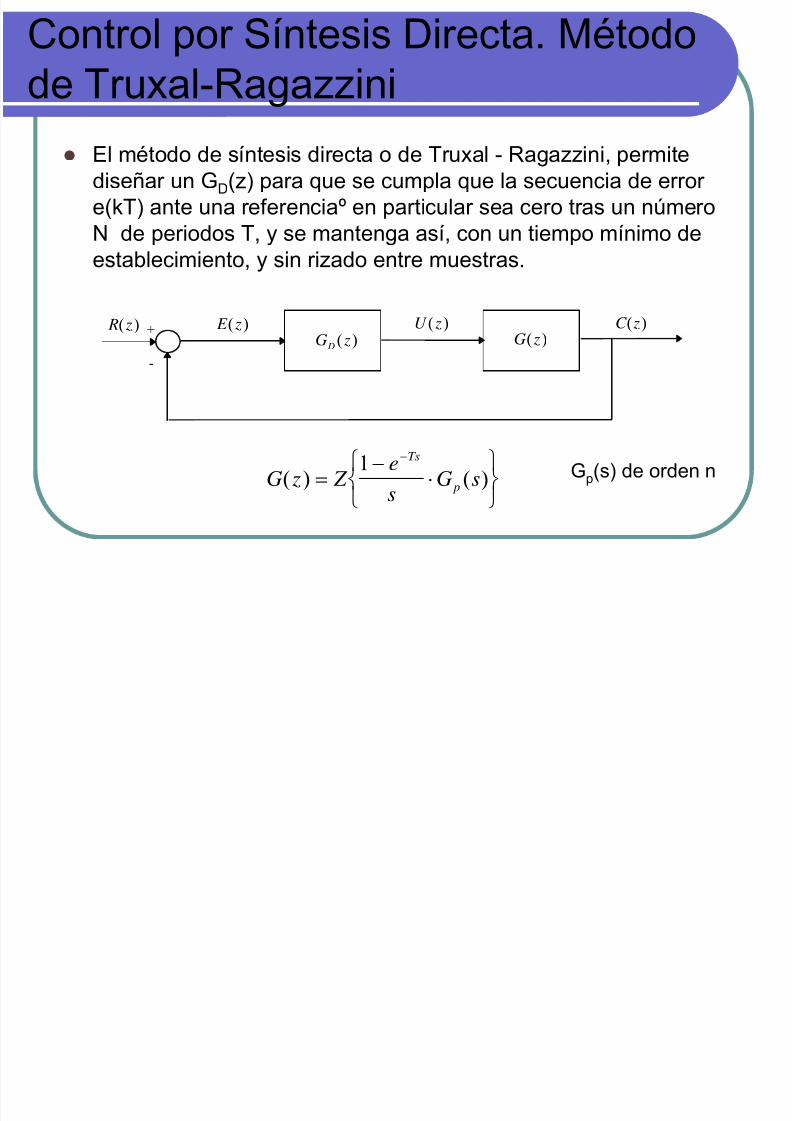
de Truxal-Ragazzini El método de síntesis directa o de Truxal - Ragazzini, permite
diseñar un G D (z) para que se cumpla que la secuencia de error
e(kT) ante una referenciaº en particular sea cero tras un númeroN de periodos T , y se mantenga así, con un tiempo mínimo deestablecimiento, y sin rizado entre muestras.
E z( ) R z( ) +
-
G z D ( ) G z( )C z( )U z( )
G z Z e
sG s
Ts
p( ) ( )=−
⋅⎧⎨⎩
⎫⎬⎭
−1 G p (s) de orden n
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 13/21
Control por Síntesis Directa. Método
de Truxal-Ragazzini Se tratará de diseñar G D (z), para cumplir las especificaciones de
error señaladas, e incluso una especificación sobre las
constantes de error estático.
La función de transferencia en lazo cerrado será
F(z) deberá tener un tiempo de establecimiento finito y error en
régimen permanente cero ante referencia de entrada impulso
)()(1)()(
)()()(
zG zG zG zG
z R zC zF
D
D
⋅+⋅==
N
N
N N
T pasosnum finitarespuesta
N
N z
a za za za zaa zF
++⋅+⋅=⋅++⋅+==
−−− K
4 4 4 4 34 4 4 4 21K
1
10
).(
1
10)( N n≥
C
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 14/21
Control por Síntesis Directa. Método
de Truxal-Ragazzini Despejando
El controlador así diseñado habrá de cumplir tres condiciones:
Condición de Realización física.
Condición de Estabilidad. Condición de Error en régimen permanente nulo
Condición de Rizado Nulo entre muestras.
1. Condición de Realización Física
El controlador G D (z) ha de ser físicamente realizable.
))(1()(
)()(
zF zG
zF zG D −⋅
=
C l Sí i Di Mé d
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 15/21
Control por Síntesis Directa. Método
de Truxal-Ragazzini a) Causalidad: grado num(G D (z)) grado den(G D (z)).
b) Si G(z) se expande en potencias de z -1, el término mássignificativo de F(z) en potencias de z -1 debe ser al menos tangrande como el de G(z), por ejemplo
2. Condición de Estabilidad.
Se deberá evitar la cancelación de polos inestables o críticosde G(z) , y ceros de G D (z),ya que no es exacta, y haydivergencias con el tiempo kT, dando lugar a inestabilidad
≤
0)()( 02211021 ≡⇒+++=⇒++= −−−− a za zaa zF z z zG KK
C l Sí i Di Mé d
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 16/21
Control por Síntesis Directa. Método
de Truxal-Ragazzini Tampoco el controlador G D (z) no tendrá polos inestables o
críticos que cancelen ceros de G(z) fuera del círculo unidad.
a) Para el primer caso suponiendo
polos inestables de G(z) serán incluidos como ceros en 1-F(z).
1 , )(
)( 1 ≥−
= α α z
zG zG
α
α
−⋅+
−
⋅
=
z
GG
z
GG
zF
D
D
1
1
1
)(
11 )()(1
1)(1GG z
z
z
zG zG
zF D
D
⋅+− −=
−⋅+
=− α α
α
C t l Sí t i Di t Mét d
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 17/21
Control por Síntesis Directa. Método
de Truxal-Ragazzini b) Para el segundo caso suponiendo
los ceros externos al circulo unidad de G(z), persistirán comoceros de F(z).
3. Condición de Error Permanente Nulo.
El error permanente será cero tras un número finito demuestras N y así se mantendrá,
1 , )(
)(2
≥−
= β β
zG
z zG
)(1
)(2
2
2
β
β
β
β
−⋅+−⋅=
−⋅+
−
⋅= zGG
zG
G
zG
G
z
G zF
D
D
D
D
finito ,0)(lim N kT e NT k
→→
C t l Sí t i Di t Mét d
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 18/21
Control por Síntesis Directa. Métodode Truxal-Ragazzini
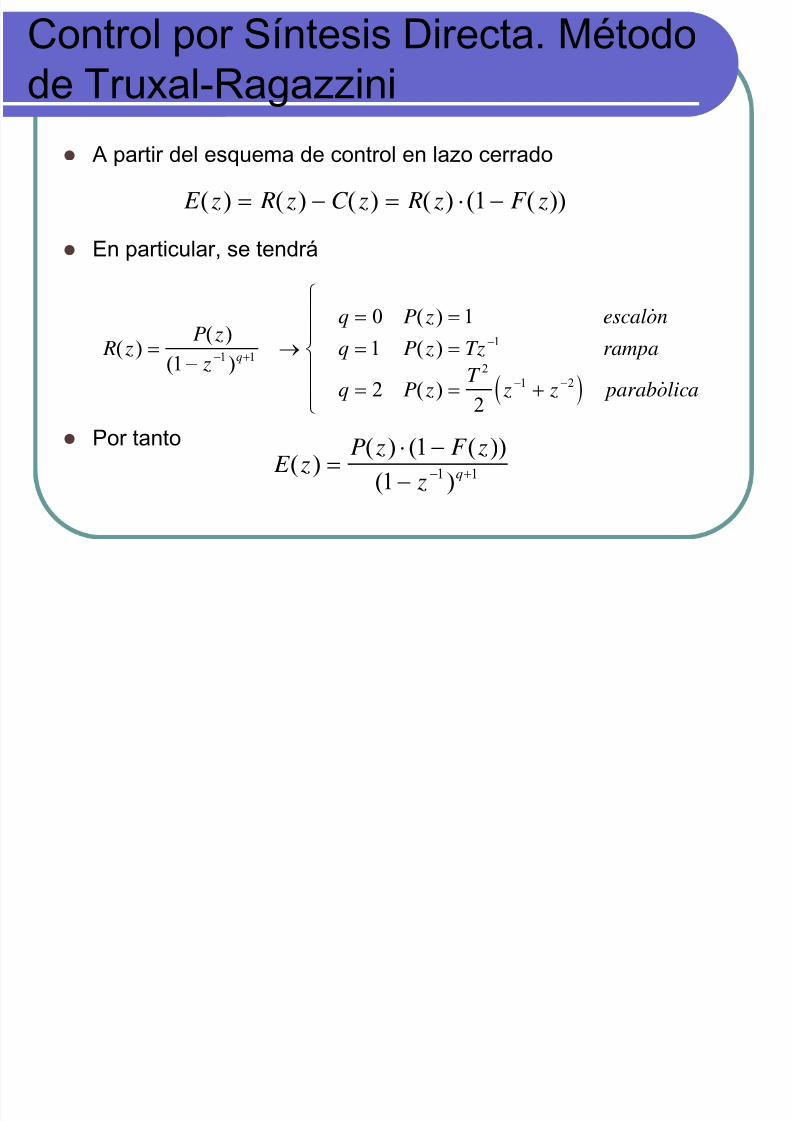
A partir del esquema de control en lazo cerrado
En particular, se tendrá
Por tanto
E z R z C z R z F z( ) ( ) ( ) ( ) ( ( ))= − = ⋅ −1
( )
R zP z
z
q P z escalon
q P z Tz rampa
q P zT
z z parabolica
q( )
( )
( )
( ) &
( )
( ) &
=−
→= == =
= = +
⎧
⎨⎪⎪
⎩
⎪⎪
− +−
− −1
0 1
1
22
1 1
1
2
1 2
E zP z F z
z q( )( ) ( ( ))
( )=
⋅ −− − +
1
1 1 1
C t l Sí t i Di t Mét d

5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 19/21
Control por Síntesis Directa. Métodode Truxal-Ragazzini
E(z) debe ser un polinomio en z -1, con un número finito detérminos , esto es,
Por tanto, se elige 1 – F(z) según,
con N(z) tambien finito al igual que F(z). De esta manera
Por ello, el controlador G D (z) de Truxal-Ragazzini será,
E z b b z b zm
N ( ) = + ⋅ + + ⋅− −0 1
1K
1 1 1 1− = − ⋅− +F z z N zq( ) ( ) ( )
E z P z N z b b z b z N
N ( ) ( ) ( )= ⋅ = + + +− −0 1
1K
)()1()(
)()(
11 z N z zG
zF zG
q D ⋅−⋅=
+−
Control por Síntesis Directa Método
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 20/21
Control por Síntesis Directa. Métodode Truxal-Ragazzini
4. Condición de Rizado Nulo
Para que el rizado del error e(t) sea nulo entre muestras, secumplirá para la salida c(t) que
, ante entrada escalón. , ante entrada rampa.
, ante entrada parabólica.
Estas condiciones serán establecidas sobre la señal de controlu(t), ya que la ausencia de rizado impone que u(t) sea constantepara referencias r(t) escalón, rampa y aceleración.
c t NT cte( )> =cte NT t c => )(&
cte NT t c => )(&&
Control por Síntesis Directa Método
5/16/2018 Control Directo de Std - slidepdf.com
http://slidepdf.com/reader/full/control-directo-de-std 21/21
Control por Síntesis Directa. Métodode Truxal-Ragazzini
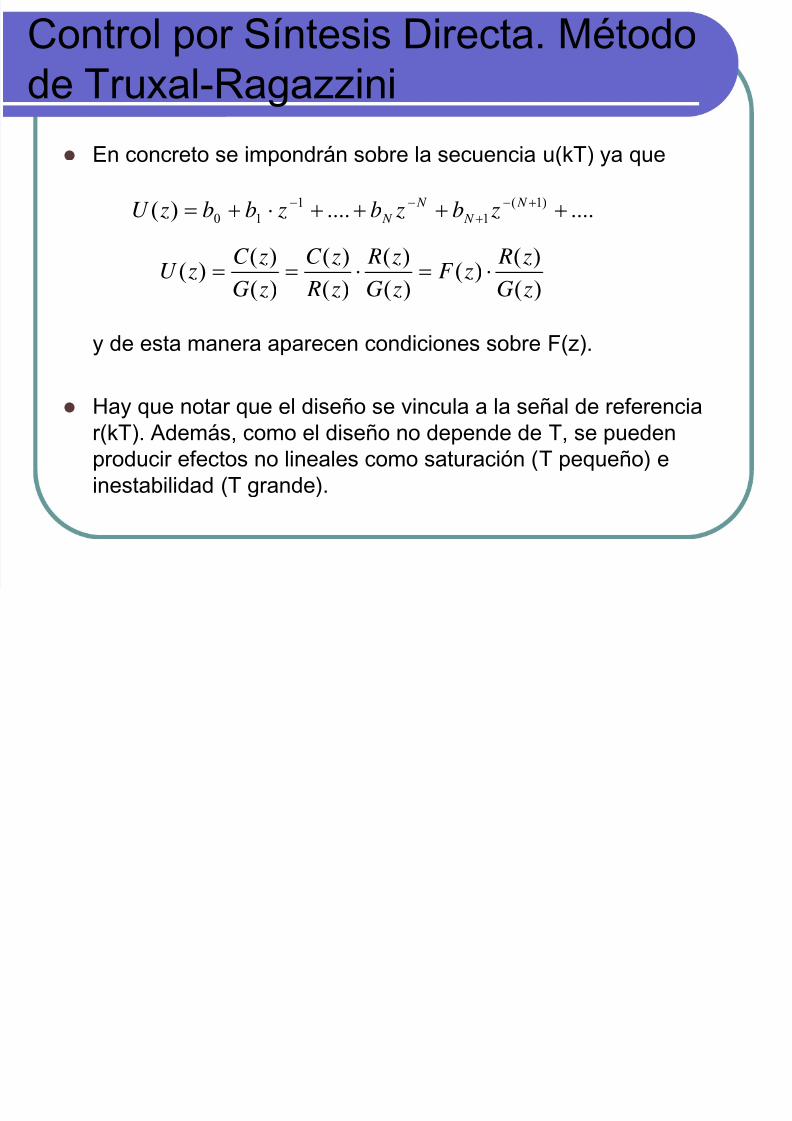
En concreto se impondrán sobre la secuencia u(kT) ya que
y de esta manera aparecen condiciones sobre F(z).
Hay que notar que el diseño se vincula a la señal de referenciar(kT). Además, como el diseño no depende de T , se puedenproducir efectos no lineales como saturación (T pequeño) einestabilidad (T grande).
........)()1(
1
1
10 ++++⋅+=+−
+−− N
N
N
N zb zb zbb zU
)(
)()(
)(
)(
)(
)(
)(
)()(
zG
z R zF
zG
z R
z R
zC
zG
zC zU ⋅=⋅==