CONTROL DE FRECUENCIA -...
16
1 CONTROL DE FRECUENCIA Y POTENCIA ACTIVA Índice 1.- Introducción 2.- Control de frecuencia y Potencia 3.- Regulación de Frecuencia 4.- Modelo del Control de Frecuencia 5.- Control Automático de Generación 6.- Esquema de Alivio de Carga 7.- Esquema de Alivio de Generación
Transcript of CONTROL DE FRECUENCIA -...

1
CONTROL DE FRECUENCIA Y
POTENCIA ACTIVA
Índice
1.- Introducción
2.- Control de frecuencia y Potencia
3.- Regulación de Frecuencia
4.- Modelo del Control de Frecuencia
5.- Control Automático de Generación
6.- Esquema de Alivio de Carga
7.- Esquema de Alivio de Generación

2
Índice
1.- Introducción
2.- Control de frecuencia y Potencia
3.- Regulación de Frecuencia
4.- Modelo del Control de Frecuencia
5.- Control Automático de Generación
6.- Esquema de Alivio de Carga
7.- Esquema de Alivio de Generación
Introducción
� La frecuencia del sistema de potencia depende del balance de lapotencia activa. Los cambios en la frecuencia ocurren porque varíaaleatoriamente la carga del sistema a lo largo del día de manera que nose puede asegurar una predicción exacta de la demanda real depotencia.
0
100
200
300
400
500
600
700
800
900
00 02 04 07 09 12 14 16 19 21 00
Po
ten
cia
(M
W)
Horas
Viernes
Bloques
Bloque Medio
Bloque Alto
Curva de Carga del SIN – Abril 2008

3
Índice
1.- Introducción
2.- Control de frecuencia y Potencia
3.- Regulación de Frecuencia
4.- Modelo del Control de Frecuencia
5.- Control Automático de Generación
6.- Esquema de Alivio de Carga
7.- Esquema de Alivio de Generación
Causas de las fluctuaciones de la Frecuencia
� La frecuencia del SEP se determina en el punto de generación y estásincronizada a la velocidad mecánica de rotación del generador.
� Donde:
� f, es la frecuencia eléctrica en Hz
� P, es el número de polos del generador
� N, s la velocidad del rotor en r.p.m.
HzNP
f120
⋅=

4
Causas de las fluctuaciones de la Frecuencia
� Un par generador-turbina se puede representar como una gran masaque rota con dos torques que se oponen. El par mecánico actúapara aumentar la velocidad rotacional mientras que el par eléctricoactúa para disminuirla. Cuando ambos pares son iguales en magnitud,la velocidad rotacional es constante.
� Si la carga eléctrica aumenta, el par eléctrico es mayor que el mecánicoy se reduce la velocidad de rotación. Lo contrario ocurrirá si la cargaeléctrica disminuye.
� La frecuencia generada es dependiente de la potencia mecánica querecibe, la cual es controlable, y de la potencia eléctrica que entrega,que no es controlable pues el consumo de un sistema de potenciavaría de forma aleatoria pues el sistema alimenta a grandespoblaciones.
Índice
1.- Introducción
2.- Control de frecuencia y Potencia
3.- Regulación de Frecuencia
4.- Modelo del Control de Frecuencia
5.- Control Automático de Generación
6.- Esquema de Alivio de Carga
7.- Esquema de Alivio de Generación

5
Regulación Primaria
� Corresponde al regulador develocidad (gobernador), quedetecta la variación en lavelocidad de giro de losalternadores, que se dan pordesequilibrios instantáneos entregeneración y consumo. Elregulador de velocidad al detectarestas variaciones actúa de formaautomática sobre lacorrespondiente válvula (agua,gas, vapor) para regresar auna situación equilibrada. Losgobernadores son dispositivosextremadamente sensibles ypueden detectar cambios dehasta un 0.02% en la velocidaddel generador.
0 5 10 15 20 25 30 35 40 4549.9
50
50.1
50.2
50.3
50.4
50.5
50.6
50.7
50.8
50.9
tiempo [s]f [H
z]
Frecuencia del sistema
Error en Estado Estable
Regulación Secundaria
� Consiste en un segundo lazo de control que suele ser automático,denominado Control Automático de Generación (AGC). El AGC seencarga de restablecer la frecuencia a su valor nominal y ajustar elintercambio neto de potencia entre áreas interconectadas a su valorprogramado. En esta regulación solo participan los generadoreslocales, los cuales incrementan su producción para restablecer a suvalor programado cuanto antes los flujos de potencia con lossistemas vecinos. También se regenera la llamada reserva primaria.
6
Índice
1.- Introducción
2.- Control de frecuencia y Potencia
3.- Regulación de Frecuencia
4.- Modelo del Control de Frecuencia
5.- Control Automático de Generación
6.- Esquema de Alivio de Carga
7.- Esquema de Alivio de Generación
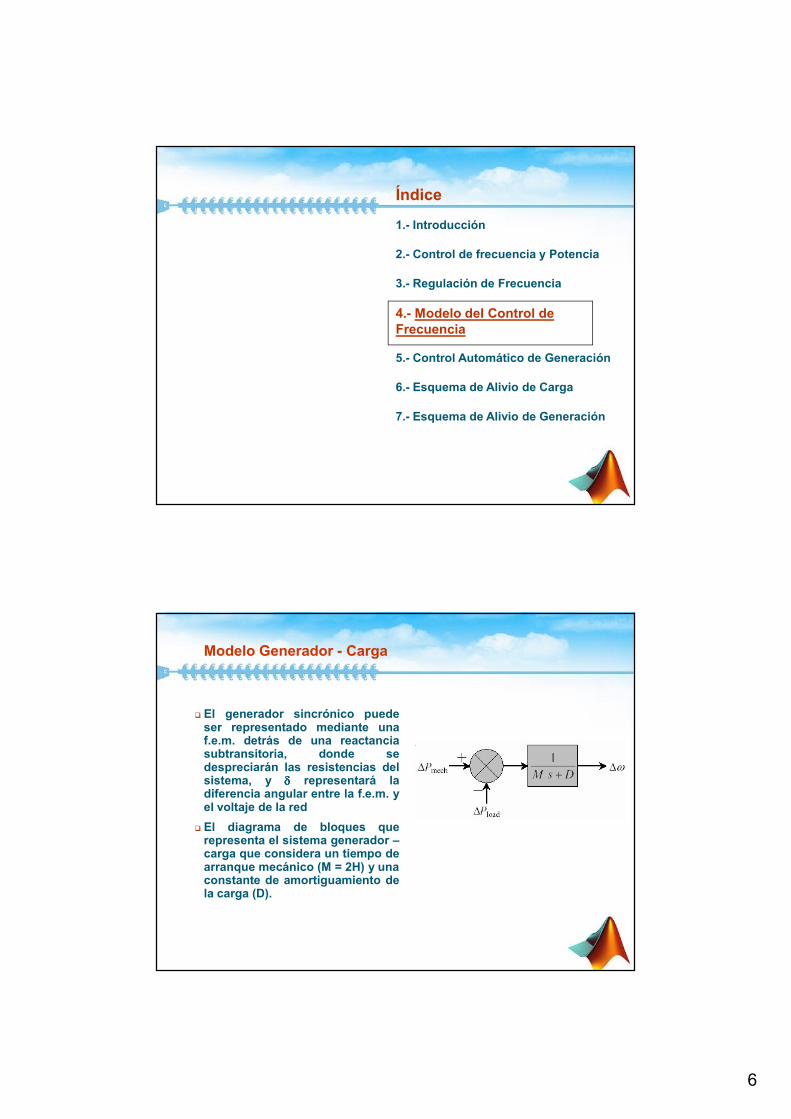
Modelo Generador - Carga
� El generador sincrónico puedeser representado mediante unaf.e.m. detrás de una reactanciasubtransitoria, donde sedespreciarán las resistencias delsistema, y δδδδ representará ladiferencia angular entre la f.e.m. yel voltaje de la red
� El diagrama de bloques querepresenta el sistema generador –carga que considera un tiempo dearranque mecánico (M = 2H) y unaconstante de amortiguamiento dela carga (D).

7
Modelo del Primotor
� El primotor que impulsa un generador puede ser una turbina de vaporo una hidroturbina. El modelo del primotor debe relacionar la posiciónde la válvula que regula el flujo de vapor o agua y la potencia mecánicade salida de la turbina.
� Central térmica de vapor sin recalentamiento
� Central térmica de vapor con varias etapas
� Central hidroeléctrica - Turbina hidráulica
M
válvulaprimotor
P
PsG
∆
∆=)(
1
1)(
+⋅=
ssG
T
T τ
1
1
1
1)(
+⋅
+⋅⋅⋅
+⋅=
s
s
ssG
RC
RC
T
T τ
τα
τ
1
21)(
+⋅
⋅⋅−=
s
ssG
H
HT τ
τ
Modelo del Gobernador Isocronico
� El gobernador debe actuar cuando existe un error entre la frecuenciaeléctrica generada y la frecuencia de referencia. Si el error es positivoquiere decir que se debe cerrar la válvula, por lo tanto el error se debeinvertir (multiplicar por -1) y para minimizar el error permanente en lafrecuencia eléctrica se debe integrar el error.

8
Modelo del Gobernador en Paralelo
� Para poner a trabajar generadores en paralelo se debe introducir unanueva señal para asegurarse que ambos operen a la misma frecuenciay que compartan los cambios de carga que se den de acuerdo a lacapacidad de generación de cada uno. Esto se logra colocando un lazode realimentación que toma la diferencia entre la posición de la válvularespecto a una posición de referencia para una carga determinada y lamultiplica por el parámetro R (estatismo permanente) del gobernador.
Estatismo Permanente (R)
Potencia Velocidad FrecuenciaRegulación
• El estatismo permanente (R) sedetermina de la siguientemanera:
• Característica Velocidad-Estatismo del
Gobernador
P
f
PR
∆
∆=
∆
∆=
%
%
%
%%
ω
100% ×
−=
o
FLNLRω
ωω

9
Generadores en Paralelo
� Si dos ó mas generadores que cuentan con estatismo permanente ensus gobernadores son conectados a un SEP, ellos tendrán una únicafrecuencia y compartirán la responsabilidad de estabilizar el sistemaante una variación en la carga . Para garantizar un comportamientoigual de la demanda en proporciones de las especificacionesnominales de las maquinas, es evidente que la característica develocidad-estatismo deben ser idénticas.
Respuesta del sistema Gobernador - Turbina
� Determinar la respuesta de las siguientes unidades hidroeléctricas aun incremento escalón unitario en la demanda.
TG = 1/kS = 0.05 s TP = 0.04 s RP = 0.04 M = 4.35 s TW =0.536 s
Operación Interconectada: RT = 0.1 TR = 0.5 s
Operación aislada: RT = 0.29 TR = 2.8 s
Diagrama de bloques de la unidad hidroeléctrica BOT-03
ω

10
Respuesta del sistema Gobernador - Turbina
TREG = 2 s RP = -0.04 TA = 0.1 s TB = 0.05 s TW = 0.4 s M = TM = 2H = 5.3 s
Operación Interconectada: KP = 1.33 Ki = 2.75 Kd = 0
Operación aislada: KP = 5.56 Ki = 2.62 Kd = 0
Diagrama de bloques de la unidad hidroeléctrica HUA-01
Pref
1
(1+sTA)
s
(1+sTB)s
Servomotor
y valvula pilotoKP
KI
s
sKD
2
1-sTW
1+s0.5TW
PL
1
Ms+D
RP
1+sTREG
PL
Turbina Rotor/Carga
Análisis de la desviación de la Frecuencia en Régimen Permanente
� La desviación de la frecuencia en régimen permanente se determina enbase a la aplicación del teorema de valor final a la función detransferencia del sistema Gobernador – Turbina.
� Generalizando la expresión anterior para n generadores en paralelo,
� A partir de este desarrollo se define el parámetro β llamadocaracterística de respuesta en frecuencia del área (AFCR) o respuestaestática en frecuencia del área.

11
Modelo de las líneas de interconexión de áreas
� Las líneas de interconexión de áreas transmiten potencia de un área aotra (Ptie) según un programa previamente determinado. En caso decontingencias (aumento considerable de la carga o pérdida degeneración) se introduce una variación ∆Ptie en el flujo de potenciaentre áreas, determinada por.
� La variación del flujo de potencia, en el dominio de la frecuencia tienela siguiente relación
Modelo de general del sistema Generador – Turbina para dos áreas interconectadas
Diagrama de bloques del SEP conformado por dos áreas interconectadas

12
Respuesta del sistema Generador – Turbina para dos áreas interconectadas
� Considere el SEP conformado por las áreas norte y centralinterconectadas, por medio de la línea Mazo Cruz – Vinto, donde sucoeficiente de par sincronizante (T) es 4. El escenario analizado es:
� Determine la respuesta de la frecuencia para una disminución del10% en la carga del área norte, utilice los modelos del generador-turbina analizados anteriormente y considere la constante de tiempomecánico equivalente M1 = 10 y M2 = 5, respectivamente.
ESCENARIO DE ANALISIS
Caracteristicas del SEP Area Norte Area Central
DEMANDA 105 130GENERACIÓN 196 40RESERVA ROTANTE 46 9BLOQUE BAJO 19% 19%TRANSFERENCIA 90 90ESTADO Exportación Importación
Análisis de la desviación del flujo de potencia en sistemas interconectados en Régimen Permanente
� El error de flujo de potencia entre áreas en régimen permanente es:

13
Índice
1.- Introducción
2.- Control de frecuencia y Potencia
3.- Regulación de Frecuencia
4.- Modelo del Control de Frecuencia
5.- Control Automático de Generación
6.- Esquema de Alivio de Carga
7.- Esquema de Alivio de Generación
Introducción
� Los objetivos principales delcontrol automático de lageneración (Automatic generationcontrol / AGC) son la regulaciónde la frecuencia al valor nominalespecificado y mantener elintercambio de potencia entre lasáreas al valor programado,mediante el ajuste de la potenciade salida de los generadoresseleccionados.
Controlador P-f
∆fi
Vapor ∆Pci
Válvula Mecanismo
de de control de
admisión la válvula
Generador
Máquina motriz ∆PGi+j∆QGi
∆fi Sensor de frecuencia Barras del Generador RED

14
Objetivos del Control Automático de Generación
• Operación económica del sistema
• Seguridad operativa
• Calidad de frecuencia y voltajeEstaciones deTrabajo deSistema SCADAy de aplicativos.
Sistemas de comunicación pública,red privada y celulares.
Bases de datospara aplicativos ySCADA
Servidores principalesy de respaldo
28
� La Ley N° 1604 de 21 de diciembre de 1994, definió lasresponsabilidades de los diferentes agentes:
Operación Integrada recursos del SINOperación segura, confiable y económica
Supervisión activos propios o delegadosEjecución de maniobras
Operación de sus plantas generadoras
Planeación y operación activos propios o delegados
Frecuencia del SINTensión STI
Calidad STIDisponibilidad de
activos
Cumplir despacho
Calidad servicio
CENTRO NACIONAL DE DESPACHO
TRANSMISORES
GENERADORES
DISTRIBUIDORES
Centro Nacional de Despacho de Carga

15
29 de 47
29
Reportes Maniobras F, V Análisis Elec.
Supervisión y ControlRedespacho Supervisión y ControlSupervisión y ControlRedespachoRedespacho
Análisis Elec.Análisis Elec.Maniobras F, VManiobras F, VReportesReportes
Centro de Despacho de Carga (CDC)
Análisis del Control Automático de Generación
� Para hacer el error de la frecuencia igual a cero se debe incluir uncontrol integral al gobernador que ajuste el valor de la potencia deentrada del generador.
� El Error de Área de Control (ACE) que tiene una componenteproporcional al error en la frecuencia del área y otra componenteproporcional al error de los intercambios de potencia comprometidoscon esa área. Esta señal de error se introduce después a un integradorpara garantizar que se van a variar las potencias de entrada a losgeneradores hasta que el error del área sea cero. El ACE se definecomo

16
Sistema Troncal de Interconexión (STI)
Sistema Interconectado Nacional
Región Central
Región Sur
Mazo Cruz Urubo
Sucre
Karachipampa
Vinto
Guaracachi
Carrasco Punutuma
130 MW 130 MW
20 MW
140 MW Potosi
Región
Norte
Región
Oriental Región
Sucre
Aranjuez
Región Oruro
Sud
San José Santivañez
10 MW