Control basado en modelo
38
Control basado en modelo
-
Upload
omar-sanchez -
Category
Technology
-
view
4.958 -
download
2
Transcript of Control basado en modelo

Control basado en modelo

Estructura general de un controlador
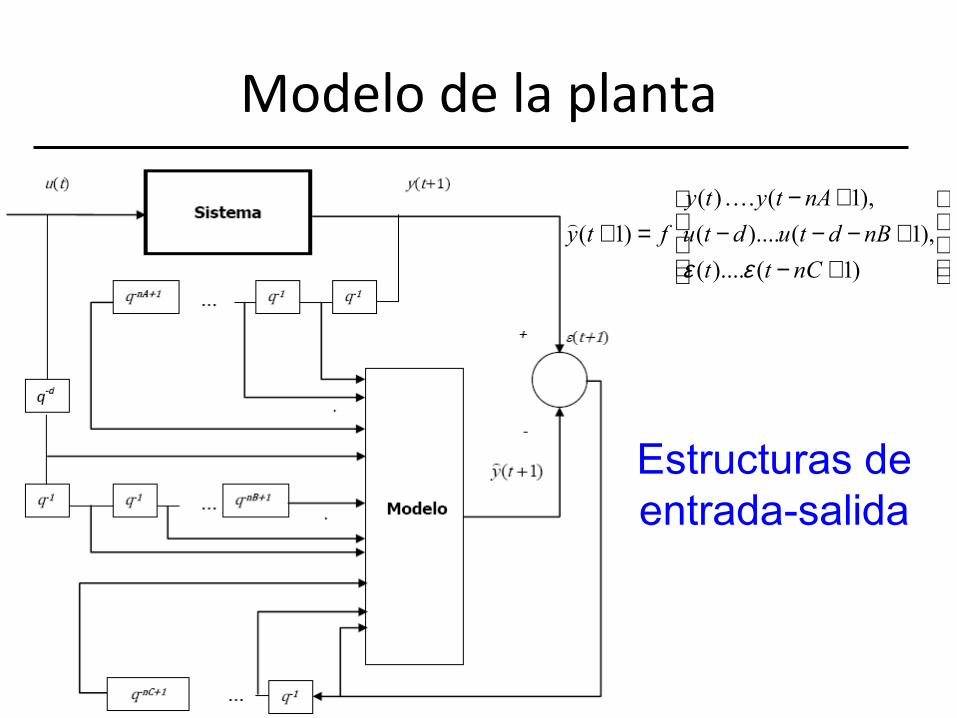
Modelo de la planta
Estructuras deentrada-salida
+−+−−−
+−=+
)1()....(
),1()....(
),1(. . . . )(
)1(
nCtt
nBdtudtu
nAtyty
fty
εε
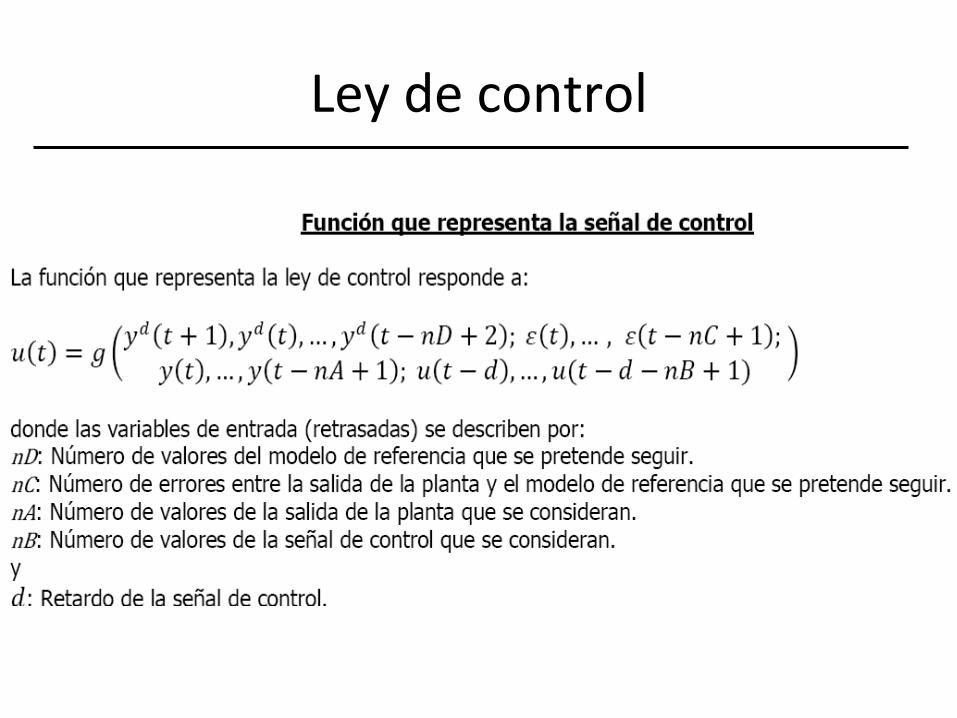
Ley de control
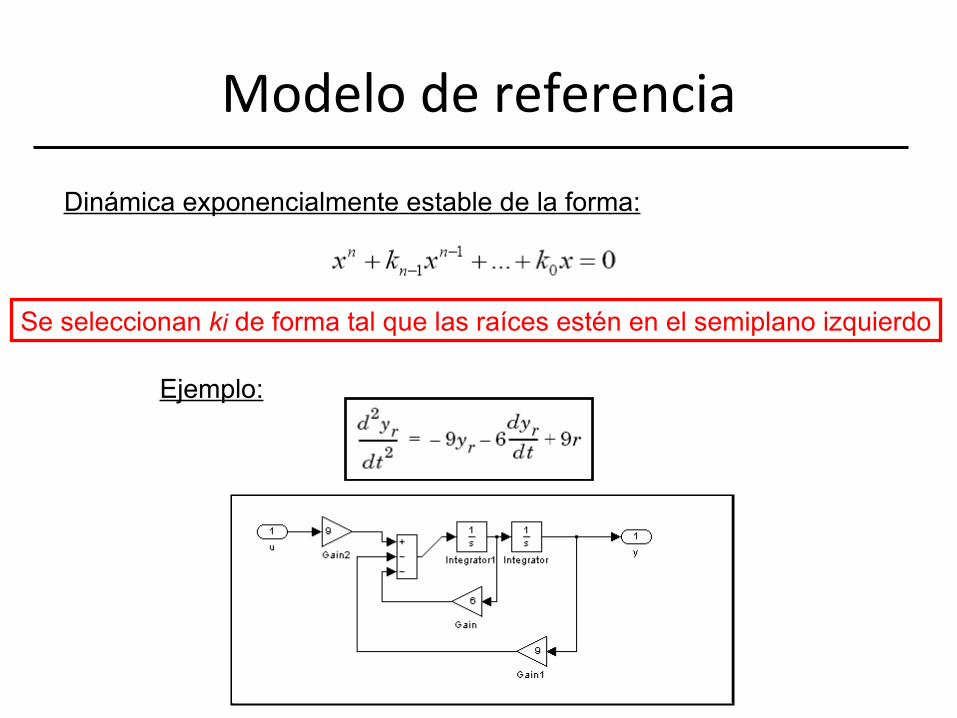
Modelo de referencia
Dinámica exponencialmente estable de la forma:
Se seleccionan ki de forma tal que las raíces estén en el semiplano izquierdo
Ejemplo:

Control reconfigurable
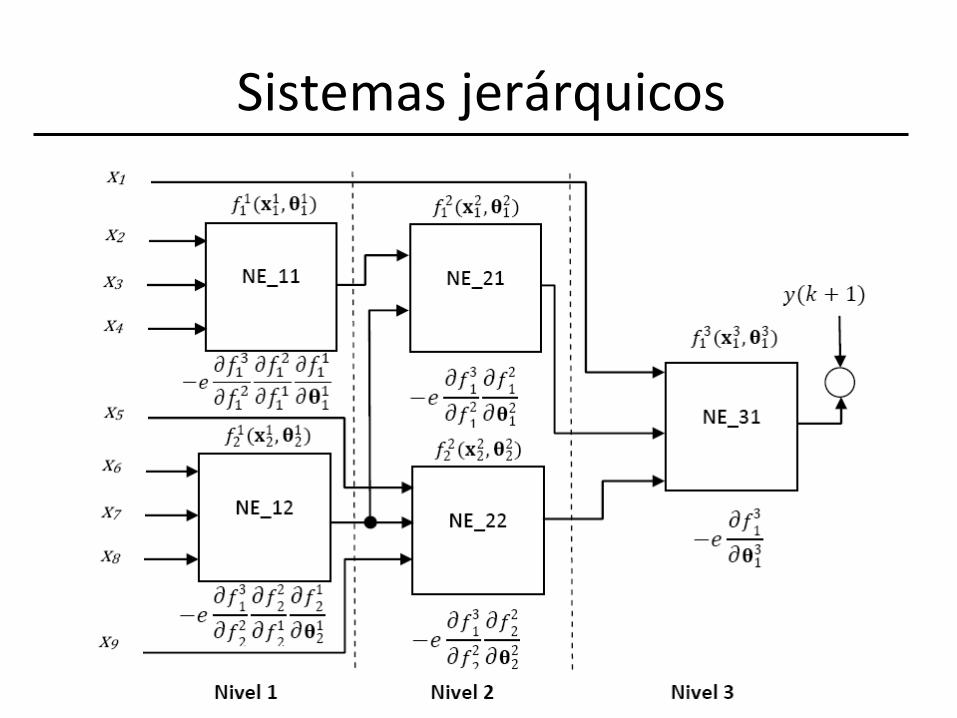
Sistemas jerárquicos
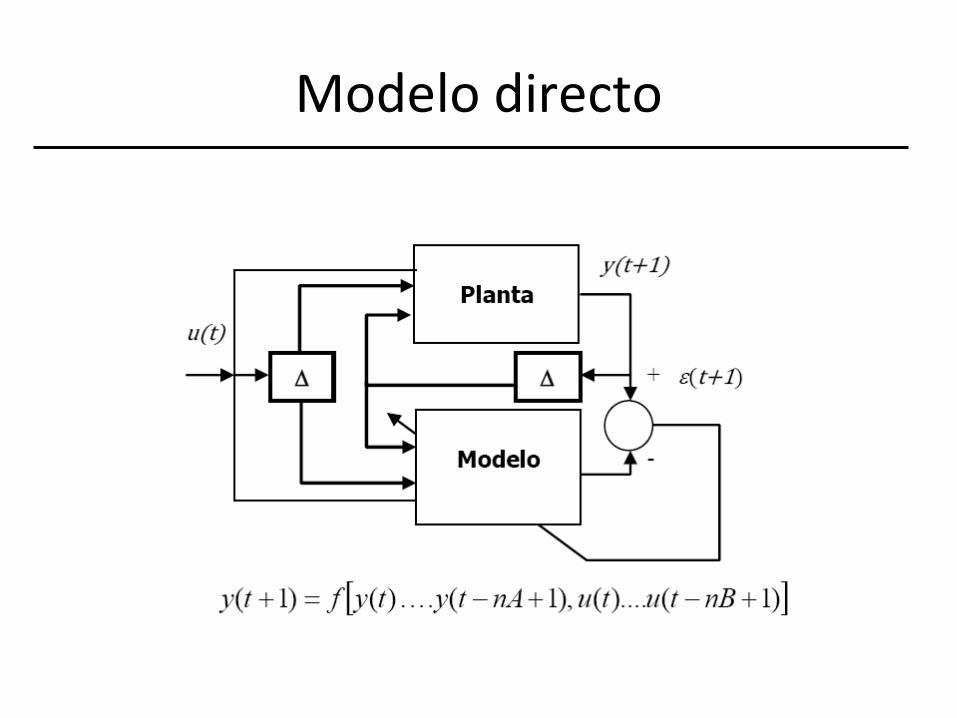
Modelo directo

Modelo inverso de una planta
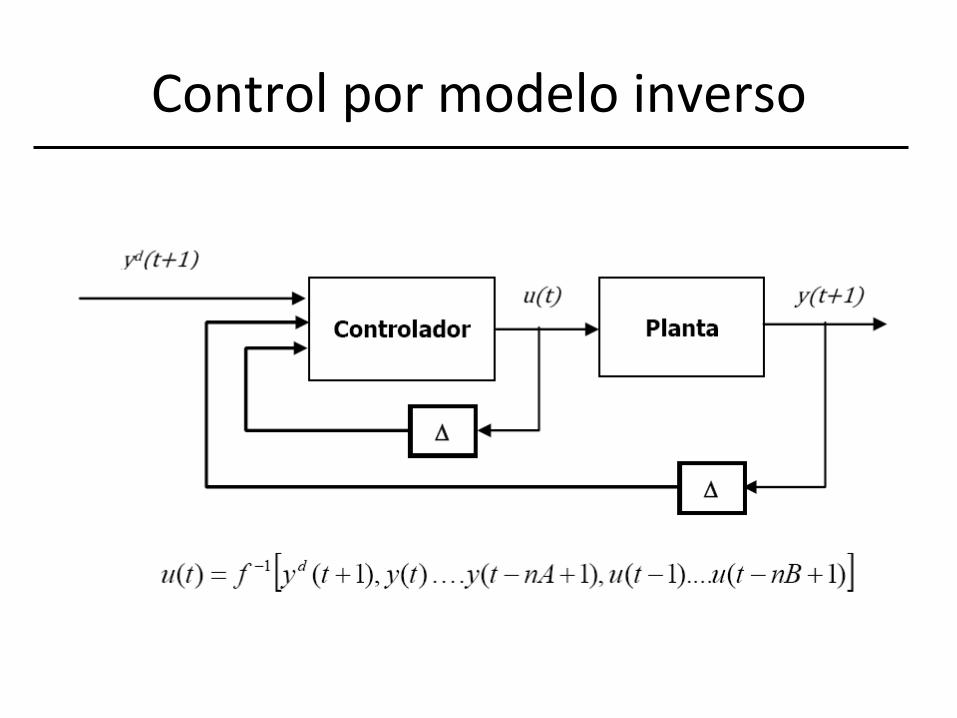
Control por modelo inverso

Control por modelo directo

Aproximación del diferencial
[ ] [ ]22 )1()1(2
1)1(
2
1 +−+=+= tytytJ dε
)(
)(
)(
)1(
)1()( t
tu
tu
ty
ty
J
t
J
θθ ∂∂
∂+∂
+∂∂=
∂∂
)1()(
)1()(
)(
)(
)(
)1(
−−−−=
∆∆≈
∂+∂
tutu
tyty
tu
ty
tu
ty
1 ó 1)(
)1( +−=∂
+∂tu
ty
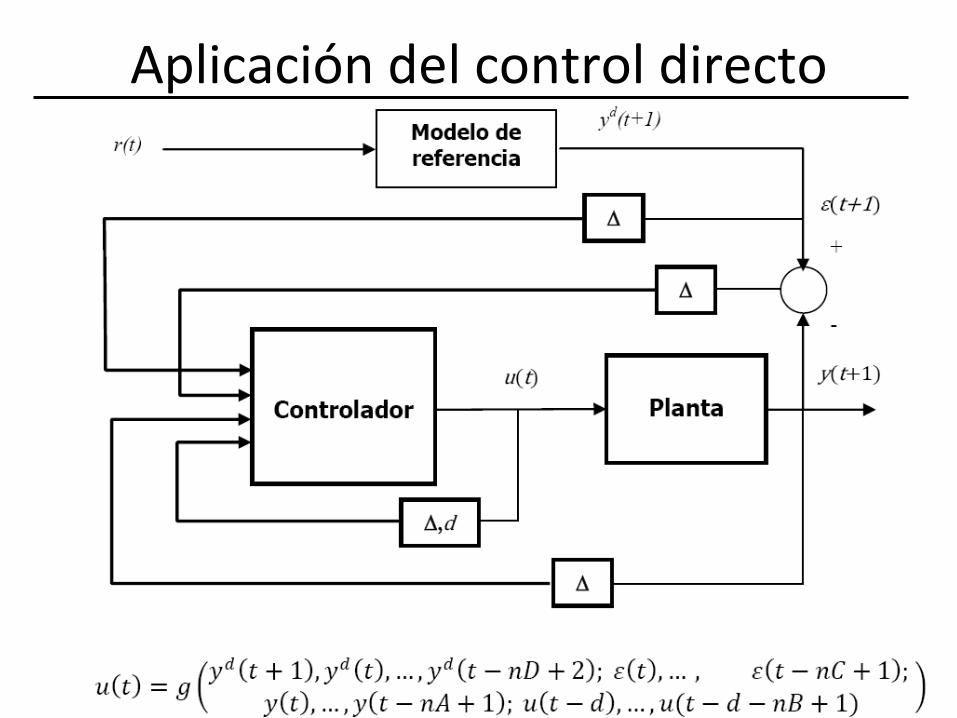
Aplicación del control directo

Control por modelo indirecto
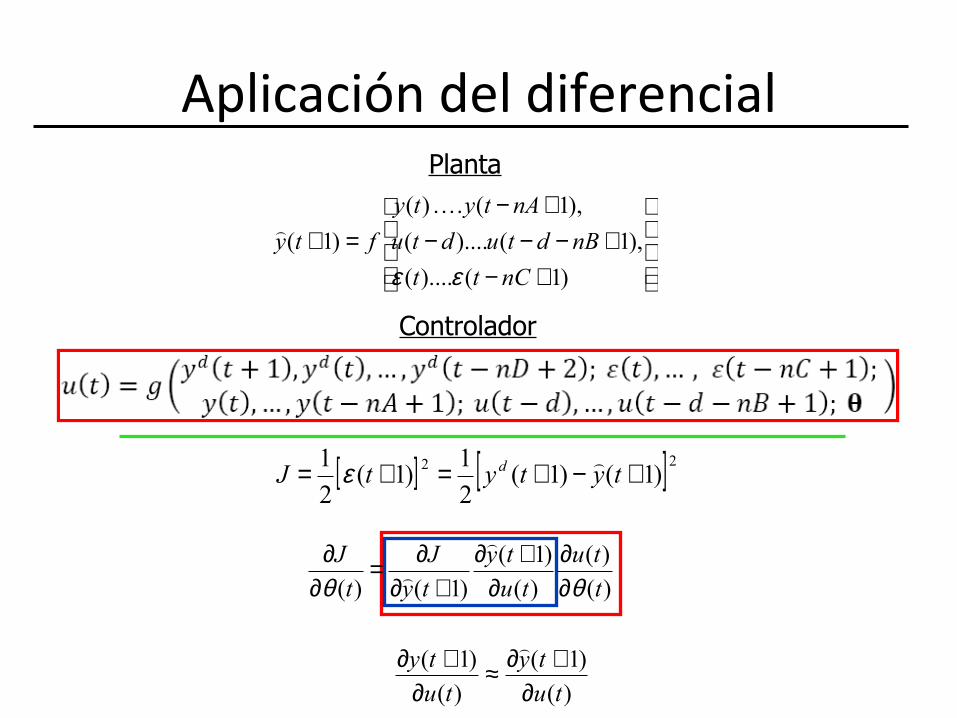
Aplicación del diferencial
[ ] [ ]22 )1()1(2
1)1(
2
1 +−+=+= tytytJ d ε
)(
)1(
)(
)1(
tu
ty
tu
ty
∂+∂≈
∂+∂
)(
)(
)(
)1(
)1()( t
tu
tu
ty
ty
J
t
J
θθ ∂∂
∂+∂
+∂∂=
∂∂
+−+−−−
+−=+
)1()....(
),1()....(
),1(. . . . )(
)1(
nCtt
nBdtudtu
nAtyty
fty
εε
Planta
Controlador

Aplicación del control indirecto
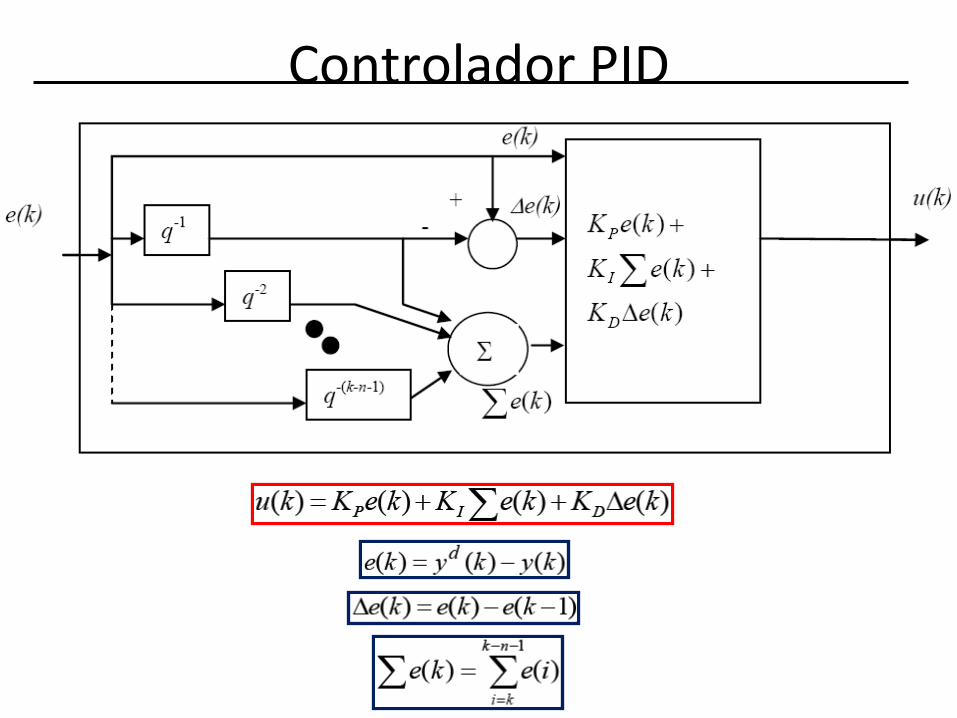
Controlador PID
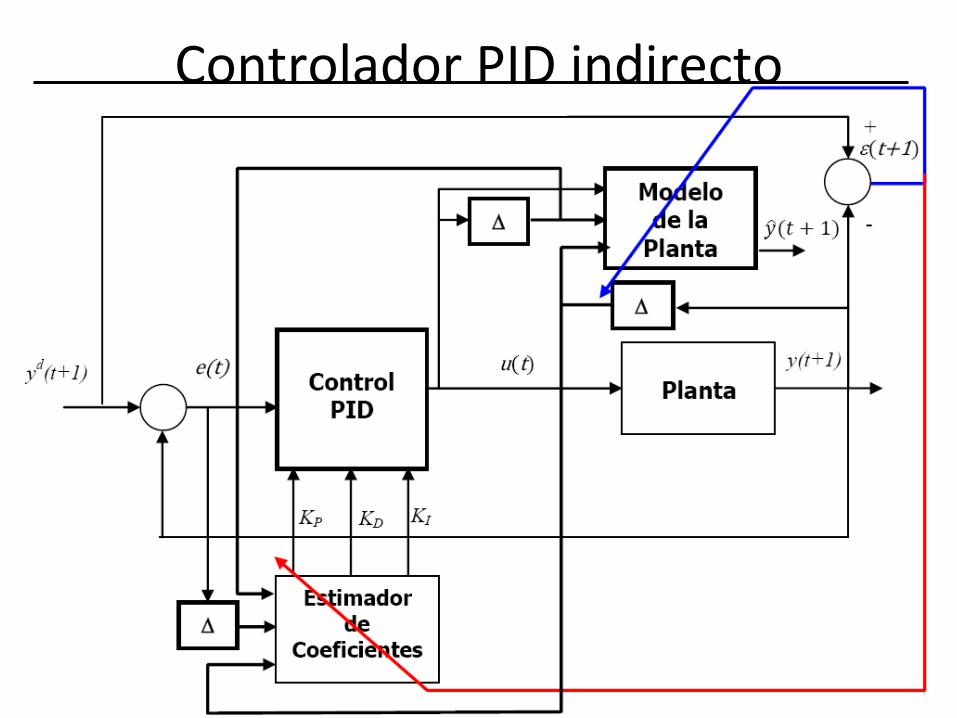
Controlador PID indirecto
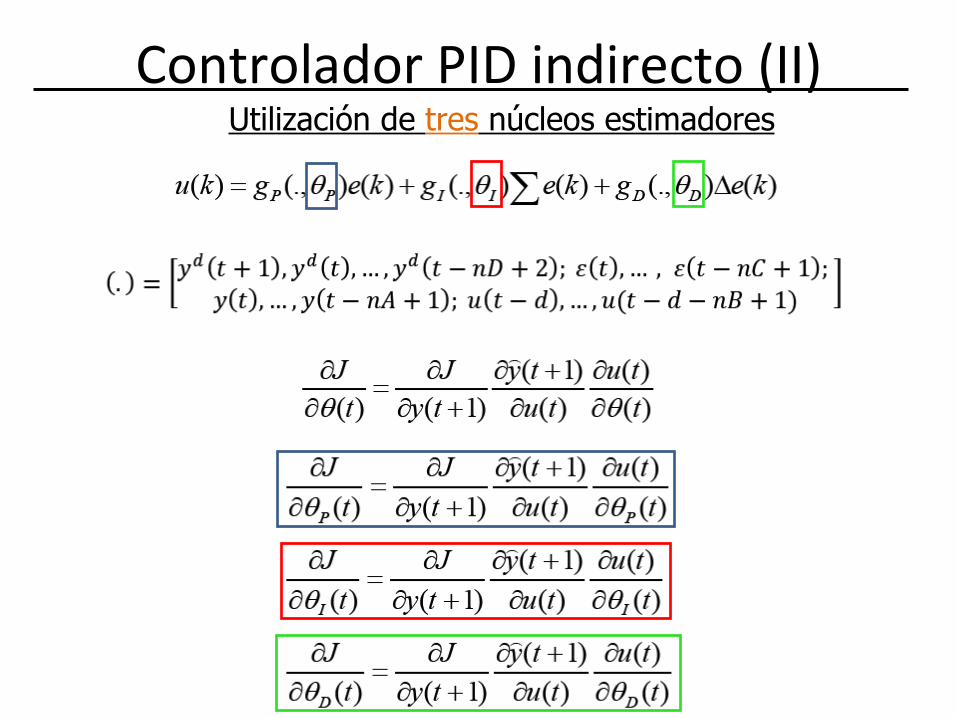
Controlador PID indirecto (II)Utilización de tres núcleos estimadores
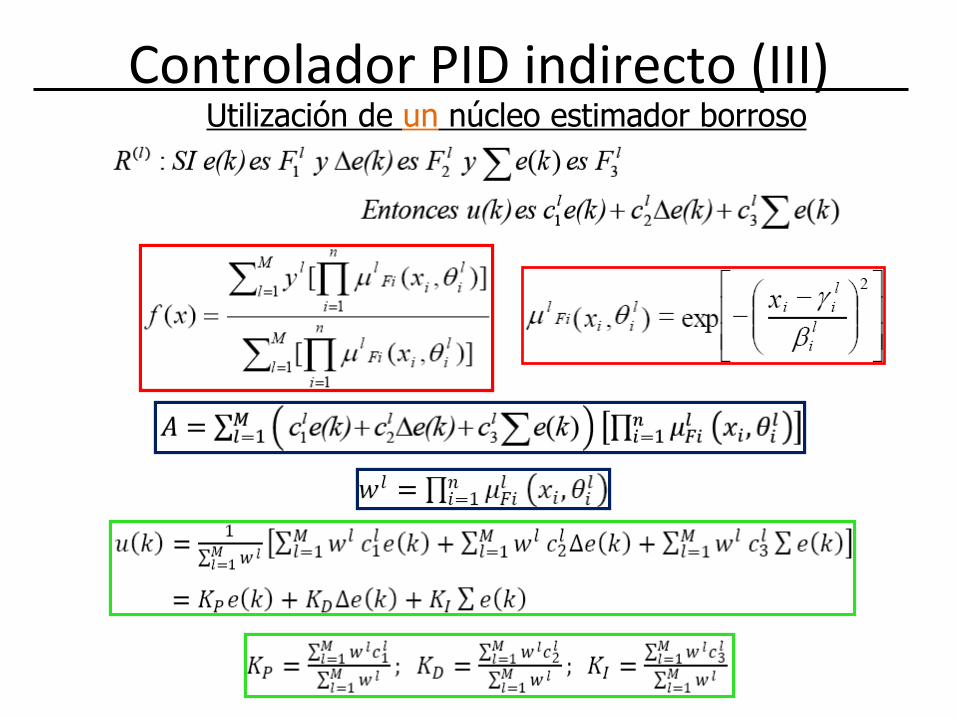
Controlador PID indirecto (III)Utilización de un núcleo estimador borroso
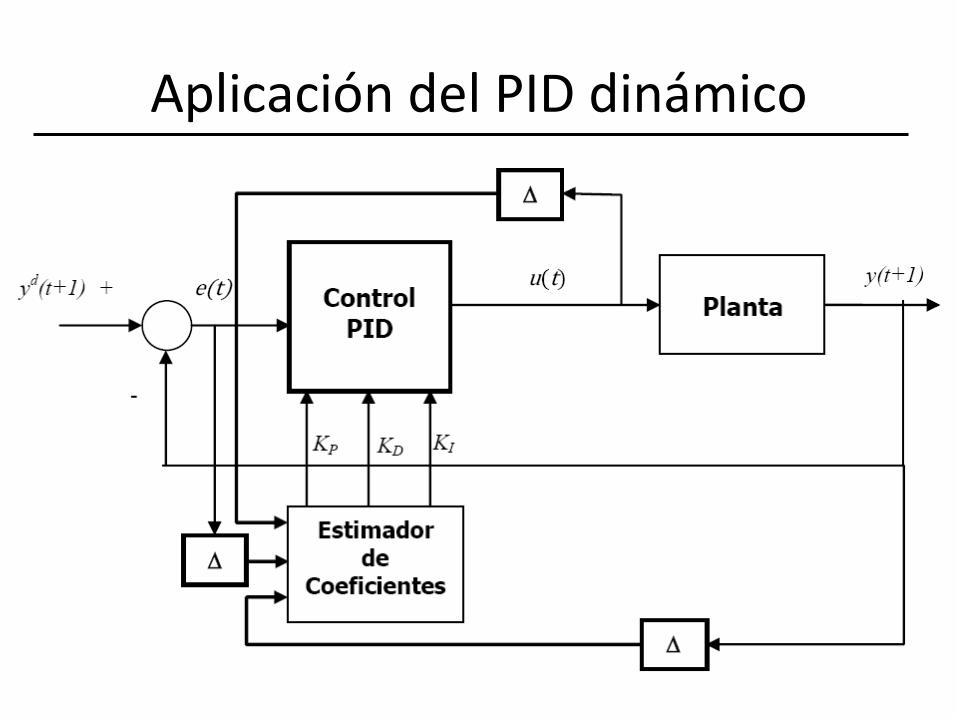
Aplicación del PID dinámico

Linealización por realimentación

Linealización por realimentación (II)
Ejemplo: Dos núcleos estimadores de la forma
Función de coste:
Adaptación de parámetros:
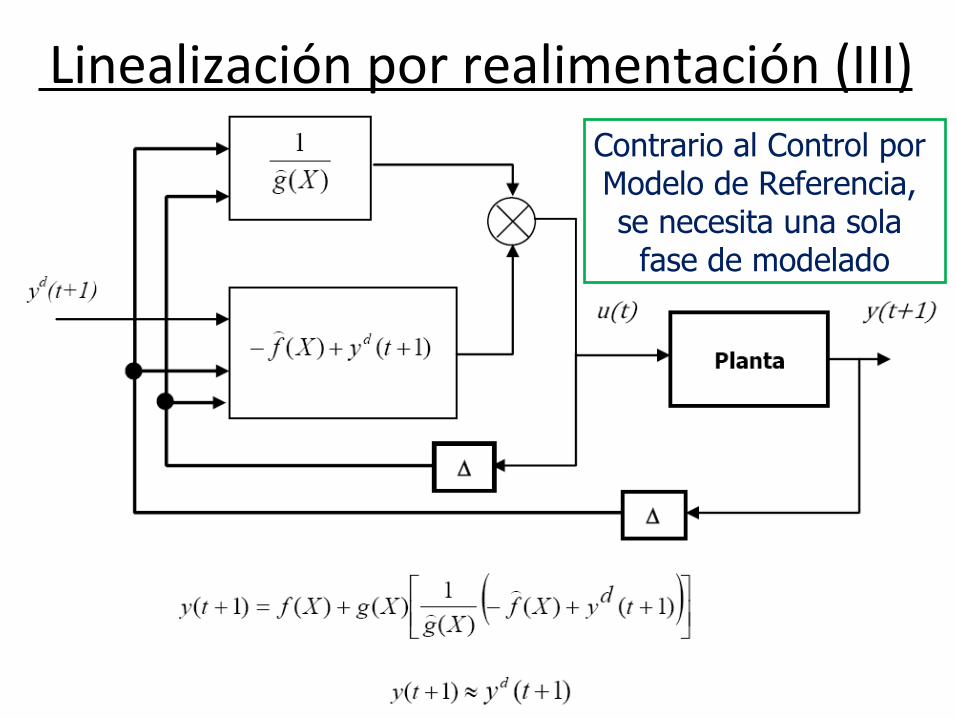
Linealización por realimentación (III)Contrario al Control por Modelo de Referencia, se necesita una sola
fase de modelado

Multivariable: Control por modelo inverso
Planta de una entrada-una salida:
Planta de múltiples entradas-múltiples salidas:
],...,[ 21 muuuu = ],...,[ 21 nyyyy = ],...,[ 21dn
ddd yyyy =

Multivariable: Control por modelo directo
Planta de una entrada-una salida:
Planta de múltiples entradas-múltiples salidas:
],...,[ 21 muuuu = ],...,[ 21 nyyyy = ],...,[ 21dn
ddd yyyy =

Multivariable: Control por modelo indirecto (I)
Sistema jerárquico
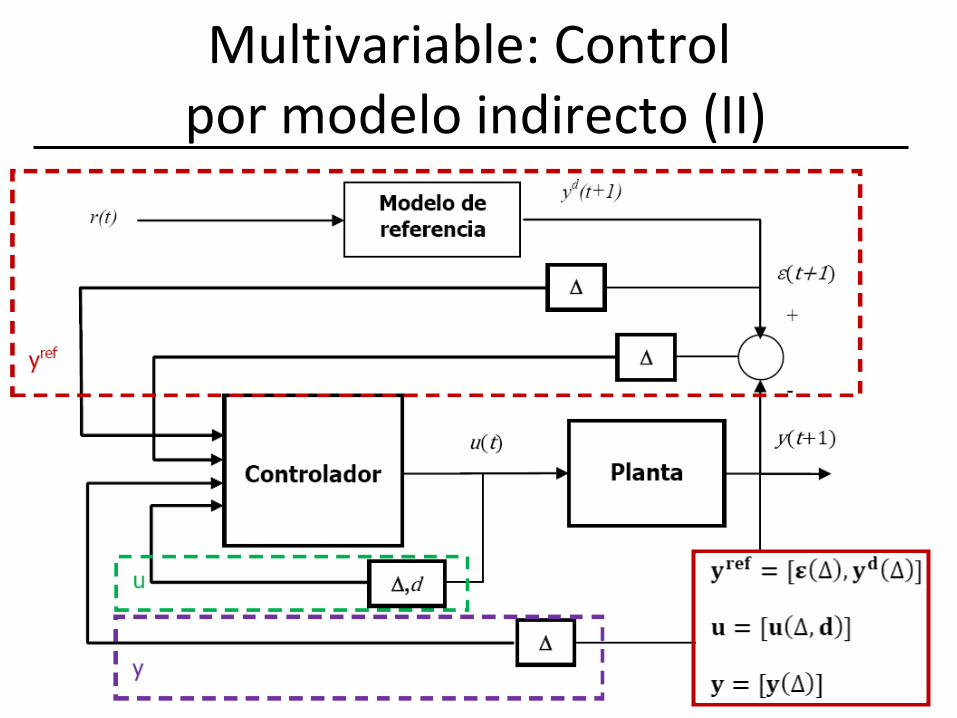
Multivariable: Control por modelo indirecto (II)
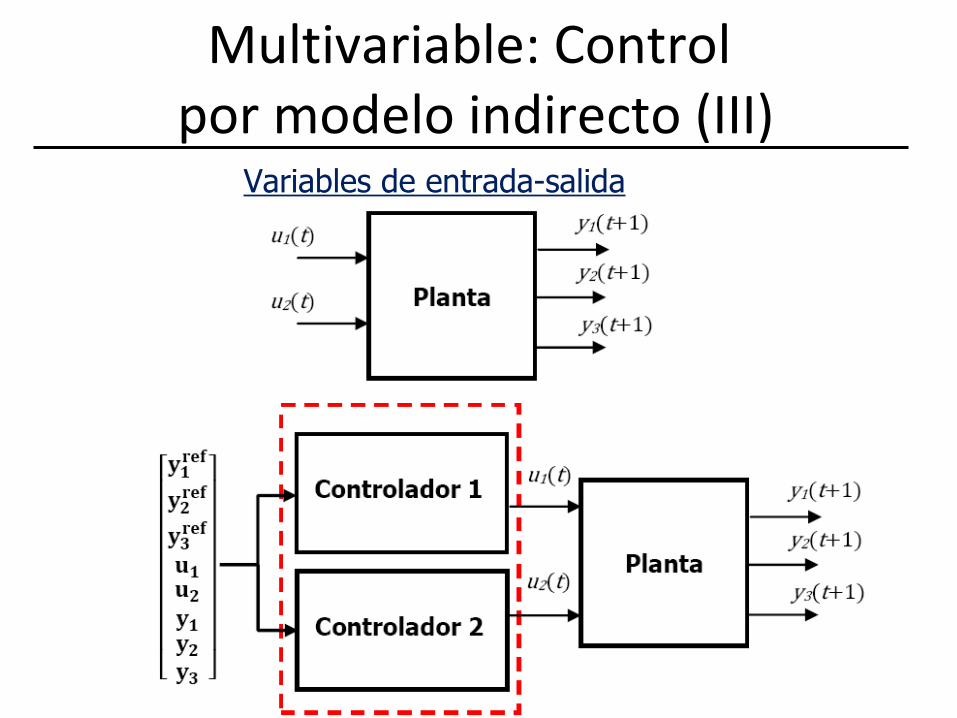
Multivariable: Control por modelo indirecto (III)
Variables de entrada-salida

Multivariable: Control por modelo indirecto (IV)
Sistema Jerárquico equivalente

Multivariable: Control PID dinámico
Caso particular del control por modelo indirecto
Resolver el Sistema Jerárquico equivalente

Multivariable: Linealización por realimentación
Planta de una entrada-una salida

Multivariable: Linealización por realimentación (I)
Planta de múltiples entradas-múltiples salidas
)()(...)(2)()(1)()()1(..
)()(2...)(2)(2)(1)(2)(2)1(2
)()(1...)(2)(1)(1)(1)(1)1(1
tnuXnZtuXnHtuXnGXnFtny
tnuXZtuXHtuXGXFty
tnuXZtuXHtuXGXFty
++++=+
++++=+++++=+
Serán necesarios: n+n*n núcleos estimadores
Se plantea como la solución de un sistema de ecuaciones lineales,donde las señales de control constituyen las incógnitas
Puede cumplirse: n(salidas de planta) ≠ n(señales de control

Multivariable: Linealización por realimentación (II)
Una ecuación

Multivariable: Linealización por realimentación (III)
Se adaptan los parámetros de tres núcleos estimadores
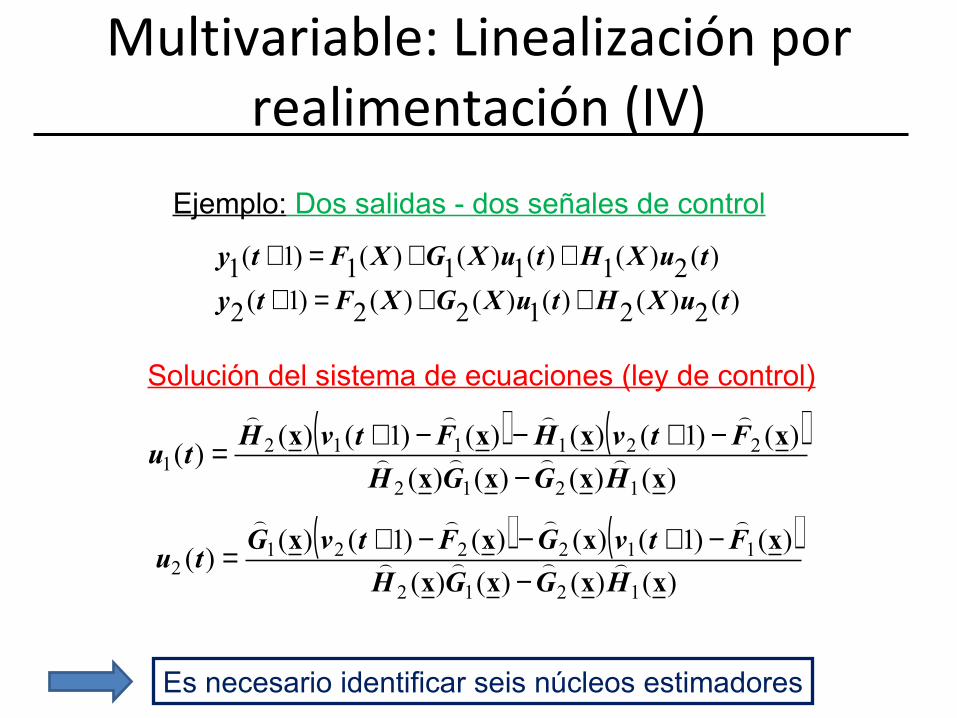
Multivariable: Linealización por realimentación (IV)
)(2)(2)(1)(2)(2)1(2
)(2)(1)(1)(1)(1)1(1tuXHtuXGXFty
tuXHtuXGXFty
++=+++=+
Ejemplo: Dos salidas - dos señales de control
Solución del sistema de ecuaciones (ley de control)
( ) ( ))()()()(
)()1()()()1()()(
1212
2211121
xxxx
xxxx
HGGH
FtvHFtvHtu
−−+−−+=
( ) ( ))()()()(
)()1()()()1()()(
1212
1122212
xxxx
xxxx
HGGH
FtvGFtvGtu
−−+−−+
=
Es necesario identificar seis núcleos estimadores
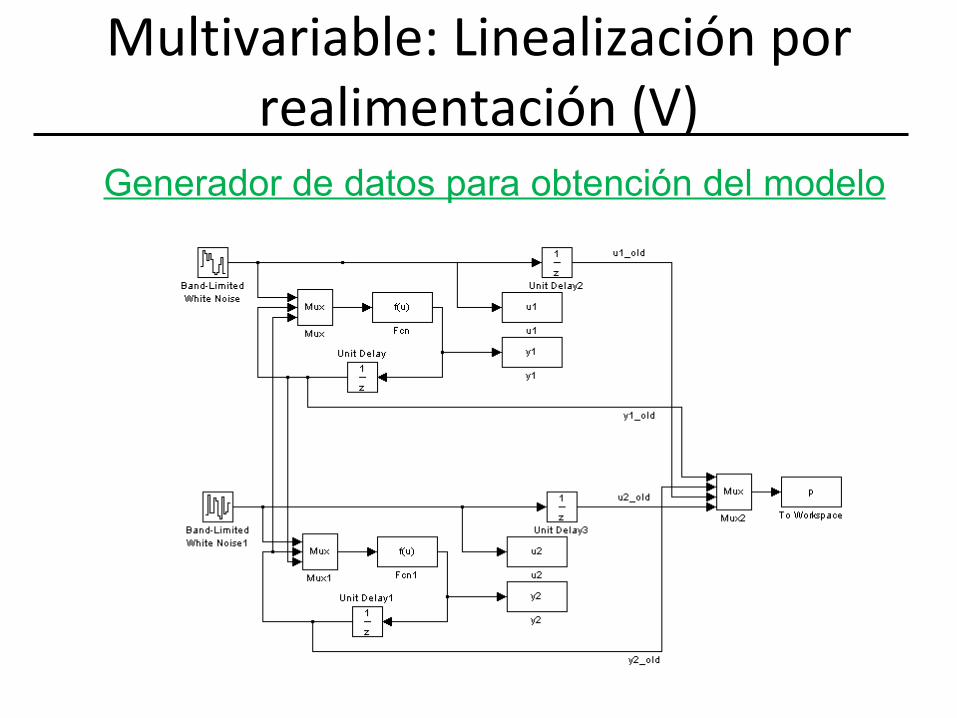
Multivariable: Linealización por realimentación (V)
Generador de datos para obtención del modelo

Multivariable: Linealización por realimentación (VI)