
Control Analog 299005 24 (2)
31
Compendio_evaluaciones_Control_Analógico__299005_24 Act.1_Revisión_de_Presaberes_Control_Analógico_299005_24 1. Según la lectura anterior, ¿cómo se define la función de transferencia de un sistema? Es la relación en el dominio de la frecuencia entre salida y entrada con condiciones iniciales nulas. Se define como el cociente entre la transformada de Laplace de la entrada sobre la transformada de Laplace de la salida con condiciones iniciales en cero. Se define como el cociente entre la transformada de Laplace de la entrada sobre la transformada de Laplace de la salida sin condiciones iniciales. Es una expresión que especifica características físicas de la planta a controlar. Seleccione una respuesta Su respuesta: Es la relación en el dominio de la frecuencia entre salida y entrada con condiciones iniciales nulas. Respuesta correcta 2. Según lo mencionado previamente, ¿cómo podríamos definir una trayectoria directa? Conjunto de caminos que parten de un punto y llegan al mismo punto, sin repetir ningún otro nodo. Conjunto de caminos que llevan de la entrada a la salida, sin repetir subsistema. Conjunto de caminos que parten de un punto y llegan al mismo punto. Conjunto de caminos que llevan de la entrada a la salida. Seleccione una respuesta Su respuesta: Conjunto de caminos que llevan de la entrada a la salida, sin repetir subsistema. Respuesta correcta 3. Cuando se tiene un sistema con una única trayectoria directa, la función de transferencia es el producto de las funciones de transferencia de los subsistemas de la trayectoria. De este tipo de sistemas podríamos afirmar que: Estos sistemas no toman ninguna muestra de la salida para hacer el control. La función de transferencia de estos sistemas es la suma de las funciones de transferencia de los subsistemas de la trayectoria.
-
Upload
wilsontellez -
Category
Documents
-
view
29 -
download
1
description
Resumen de actividades y evaluacionesControl Analogico
Transcript of Control Analog 299005 24 (2)
Compendio_evaluaciones_Control_Analógico__299005_24
Act.1_Revisión_de_Presaberes_Control_Analógico_299005_24
1. Según la lectura anterior, ¿cómo se define la función de transferencia de un sistema?
Es la relación en el dominio de la frecuencia entre salida y entrada con condiciones
iniciales nulas.
Se define como el cociente entre la transformada de Laplace de la entrada sobre la
transformada de Laplace de la salida con condiciones iniciales en cero.
Se define como el cociente entre la transformada de Laplace de la entrada sobre la
transformada de Laplace de la salida sin condiciones iniciales.
Es una expresión que especifica características físicas de la planta a controlar.
Seleccione una respuesta
Su respuesta:
Es la relación en el dominio de la frecuencia entre salida y entrada con condiciones iniciales nulas.
Respuesta correcta
2. Según lo mencionado previamente, ¿cómo podríamos definir una trayectoria directa?
Conjunto de caminos que parten de un punto y llegan al mismo punto, sin repetir ningún otro
nodo.
Conjunto de caminos que llevan de la entrada a la salida, sin repetir subsistema.
Conjunto de caminos que parten de un punto y llegan al mismo punto.
Conjunto de caminos que llevan de la entrada a la salida.
Seleccione una respuesta
Su respuesta:
Conjunto de caminos que llevan de la entrada a la salida, sin repetir subsistema.
Respuesta correcta
3. Cuando se tiene un sistema con una única trayectoria directa, la función de transferencia es el
producto de las funciones de transferencia de los subsistemas de la trayectoria. De este tipo de
sistemas podríamos afirmar que:
Estos sistemas no toman ninguna muestra de la salida para hacer el control.
La función de transferencia de estos sistemas es la suma de las funciones de transferencia
de los subsistemas de la trayectoria.
La función de transferencia de estos sistemas es la suma de las funciones de transferencia
de las diferentes trayectorias del sistema.
Estos sistemas toman muestra de la salida para hacer el control.
Seleccione una respuesta
Su respuesta:
Estos sistemas no toman ninguna muestra de la salida para hacer el control.
Correcto, basta hacer una pequeña observación para darnos cuenta que no hay un proceso de realimentación.
Respuesta correcta
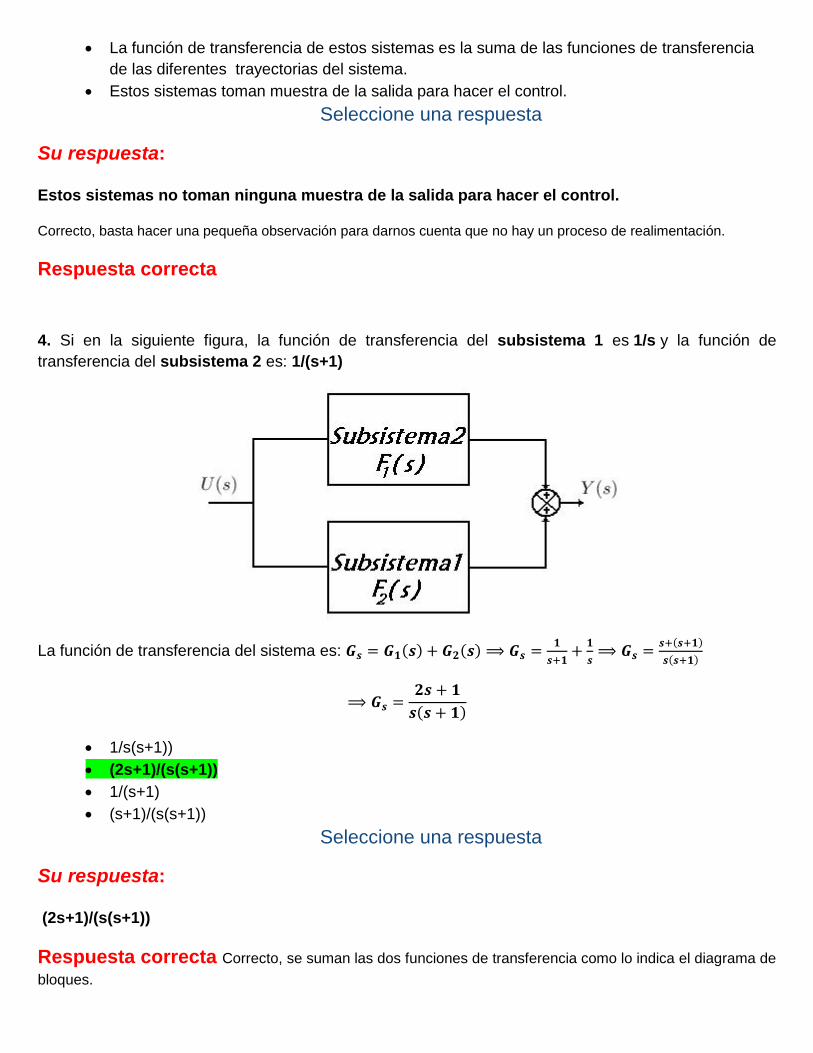
4. Si en la siguiente figura, la función de transferencia del subsistema 1 es 1/s y la función de
transferencia del subsistema 2 es: 1/(s+1)
La función de transferencia del sistema es: ( ) ( )
( )
( )
( )
1/s(s+1))
(2s+1)/(s(s+1))
1/(s+1)
(s+1)/(s(s+1))
Seleccione una respuesta
Su respuesta:
(2s+1)/(s(s+1))
Respuesta correcta Correcto, se suman las dos funciones de transferencia como lo indica el diagrama de
bloques.
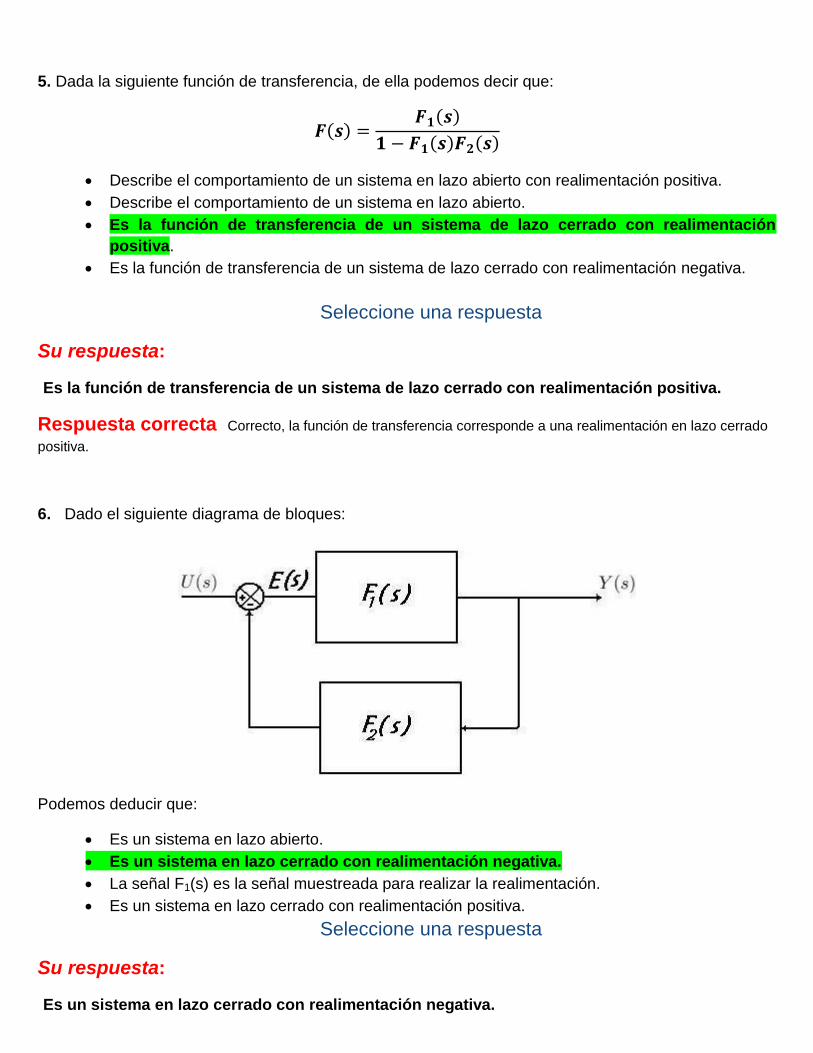
5. Dada la siguiente función de transferencia, de ella podemos decir que:
( ) ( )
( ) ( )
Describe el comportamiento de un sistema en lazo abierto con realimentación positiva.
Describe el comportamiento de un sistema en lazo abierto.
Es la función de transferencia de un sistema de lazo cerrado con realimentación
positiva.
Es la función de transferencia de un sistema de lazo cerrado con realimentación negativa.
Seleccione una respuesta
Su respuesta:
Es la función de transferencia de un sistema de lazo cerrado con realimentación positiva.
Respuesta correcta Correcto, la función de transferencia corresponde a una realimentación en lazo cerrado
positiva.
6. Dado el siguiente diagrama de bloques:
Podemos deducir que:
Es un sistema en lazo abierto.
Es un sistema en lazo cerrado con realimentación negativa.
La señal F1(s) es la señal muestreada para realizar la realimentación.
Es un sistema en lazo cerrado con realimentación positiva.
Seleccione una respuesta
Su respuesta:
Es un sistema en lazo cerrado con realimentación negativa.
Respuesta correcta
7. Normalmente en muchos procesos de control se busca mantener una variable dentro de cierto
margen, a este punto de referencia se le llama set point.
Para llevar a cabo el proceso mencionado previamente se requiere:
Un sistema de control en lazo abierto.
Es indiferente, podría ser un sistema de control en lazo cerrado o abierto.
Un sistema de control en lazo cerrado con realimentación positiva siempre.
Un sistema de control en lazo cerrado con realimentación negativa.
Seleccione una respuesta
Su respuesta:
Un sistema de control en lazo cerrado con realimentación negativa.
Respuesta correcta, esto es lo más indicado
8. "En la realimentación positiva, la magnitud de la señal de entrada siempre es más pequeña que la
magnitud de la señal de salida, por lo tanto éste no es el caso mas común en los procesos reales de
control.
De lo anterior se puede deducir que:
La realimentación positiva, solo se presenta en casos excepcionales.
La realimentación positiva, es el caso más común de control.
La señal de error es una señal de magnitud mayor que la magnitud de la señal de salida.
El set point es el punto de referencia en el cual debo mantener una variable.
Seleccione una respuesta
Su respuesta:
La realimentación positiva, sólo se presenta en casos excepcionales.
Respuesta correcta, normalmente este tipo de realimentación no se da en los procesos reales de control.
9. Para el siguiente diagrama de bloques si ( ) y ( ) ⁄ , ¿cual es la función de
transferencia?
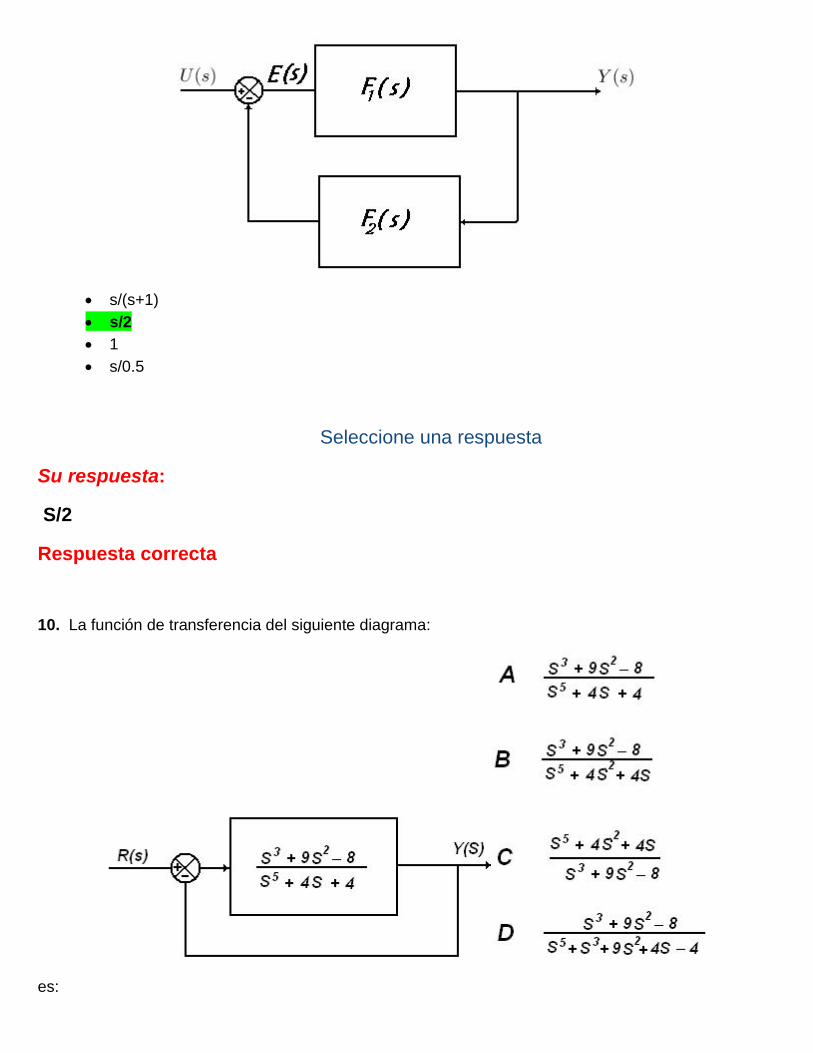
s/(s+1)
s/2
1
s/0.5
Seleccione una respuesta
Su respuesta:
S/2
Respuesta correcta
10. La función de transferencia del siguiente diagrama:
es:
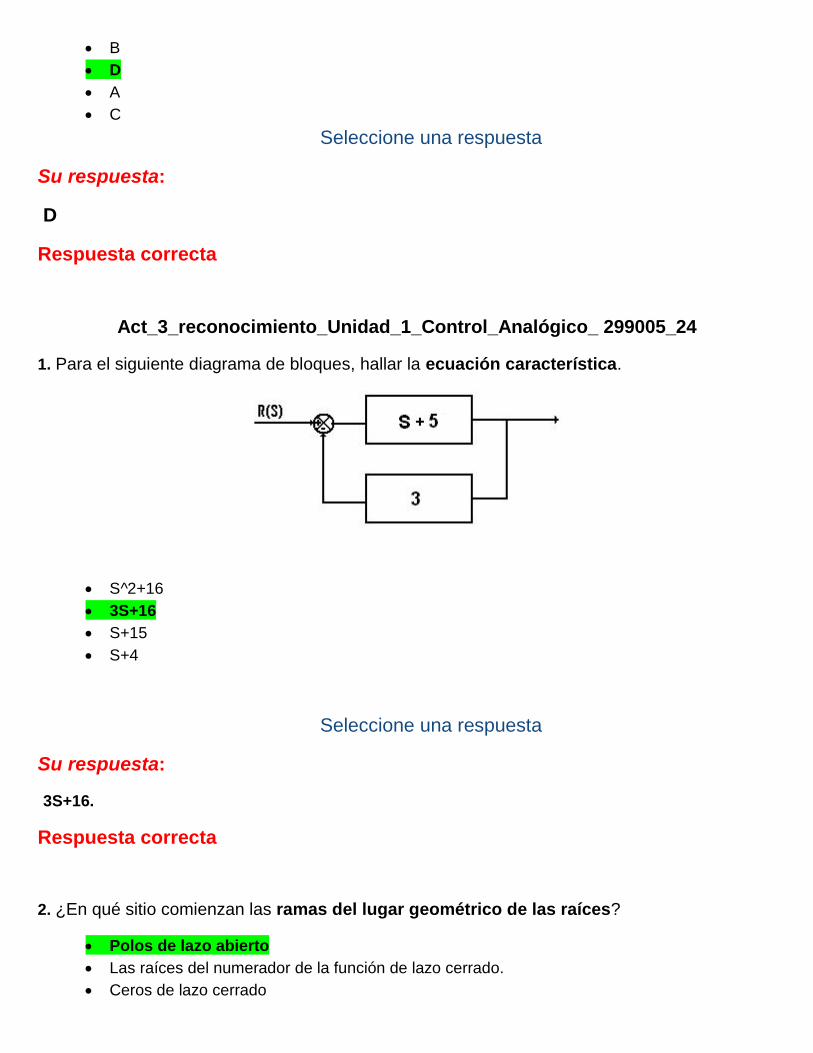
B
D
A
C
Seleccione una respuesta
Su respuesta:
D
Respuesta correcta
Act_3_reconocimiento_Unidad_1_Control_Analógico_ 299005_24
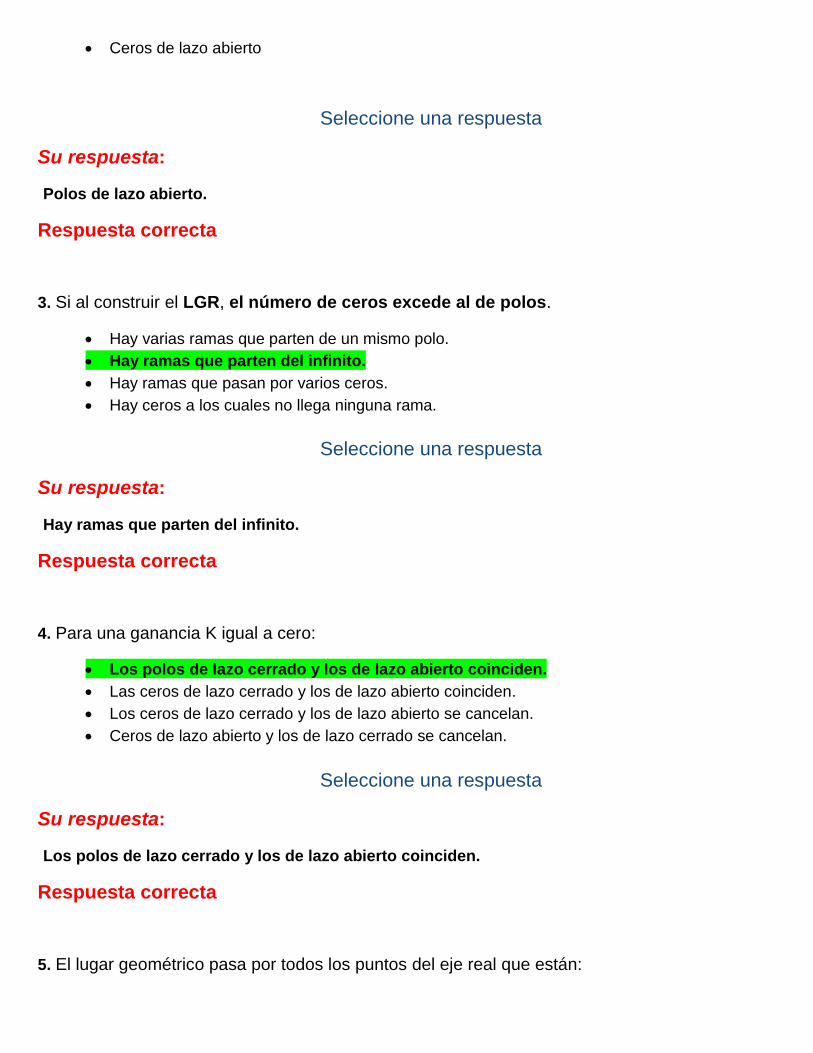
1. Para el siguiente diagrama de bloques, hallar la ecuación característica.
S^2+16
3S+16
S+15
S+4
Seleccione una respuesta
Su respuesta:
3S+16.
Respuesta correcta
2. ¿En qué sitio comienzan las ramas del lugar geométrico de las raíces?
Polos de lazo abierto
Las raíces del numerador de la función de lazo cerrado.
Ceros de lazo cerrado
Ceros de lazo abierto
Seleccione una respuesta
Su respuesta:
Polos de lazo abierto.
Respuesta correcta
3. Si al construir el LGR, el número de ceros excede al de polos.
Hay varias ramas que parten de un mismo polo.
Hay ramas que parten del infinito.
Hay ramas que pasan por varios ceros.
Hay ceros a los cuales no llega ninguna rama.
Seleccione una respuesta
Su respuesta:
Hay ramas que parten del infinito.
Respuesta correcta
4. Para una ganancia K igual a cero:
Los polos de lazo cerrado y los de lazo abierto coinciden.
Las ceros de lazo cerrado y los de lazo abierto coinciden.
Los ceros de lazo cerrado y los de lazo abierto se cancelan.
Ceros de lazo abierto y los de lazo cerrado se cancelan.
Seleccione una respuesta
Su respuesta:
Los polos de lazo cerrado y los de lazo abierto coinciden.
Respuesta correcta
5. El lugar geométrico pasa por todos los puntos del eje real que están:
A la derecha de un número par de polos y ceros.
A la izquierda de un número impar de polos y ceros.
Hay ramas que pasan por varios ceros.
Hay ceros a los cuales no llega ninguna rama.
Seleccione una respuesta
Su respuesta:
A la izquierda de un número impar de polos y ceros.
Respuesta correcta
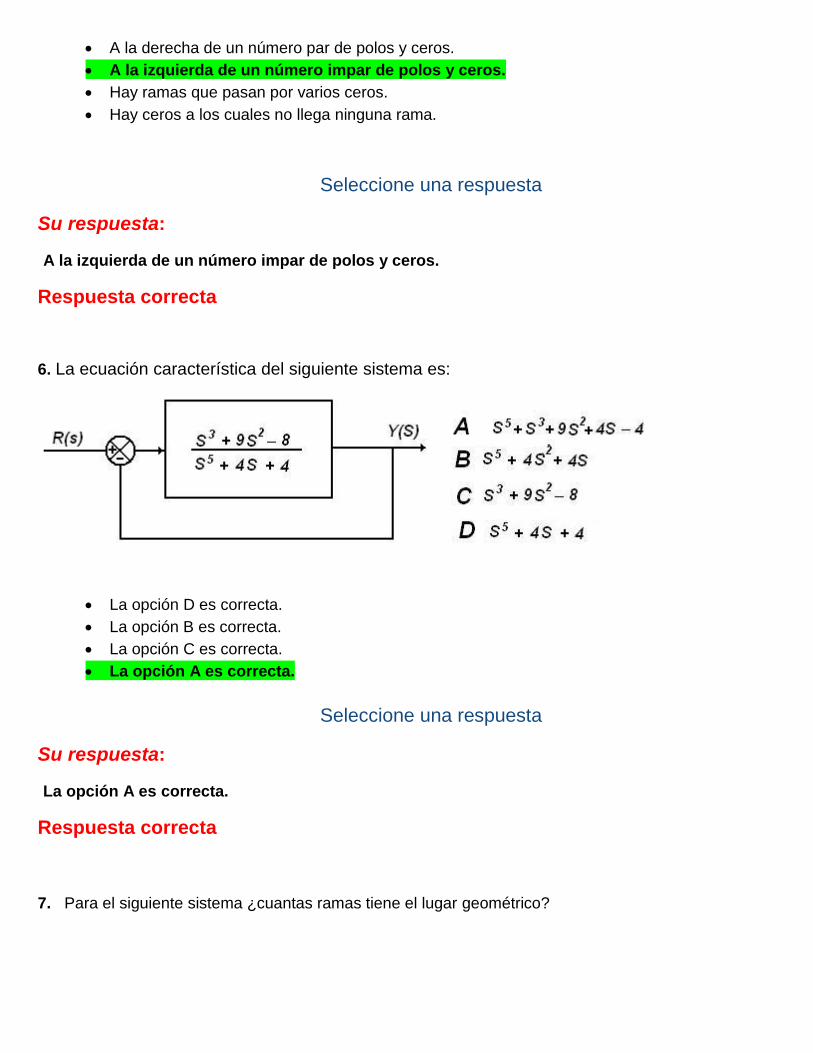
6. La ecuación característica del siguiente sistema es:
La opción D es correcta.
La opción B es correcta.
La opción C es correcta.
La opción A es correcta.
Seleccione una respuesta
Su respuesta:
La opción A es correcta.
Respuesta correcta
7. Para el siguiente sistema ¿cuantas ramas tiene el lugar geométrico?
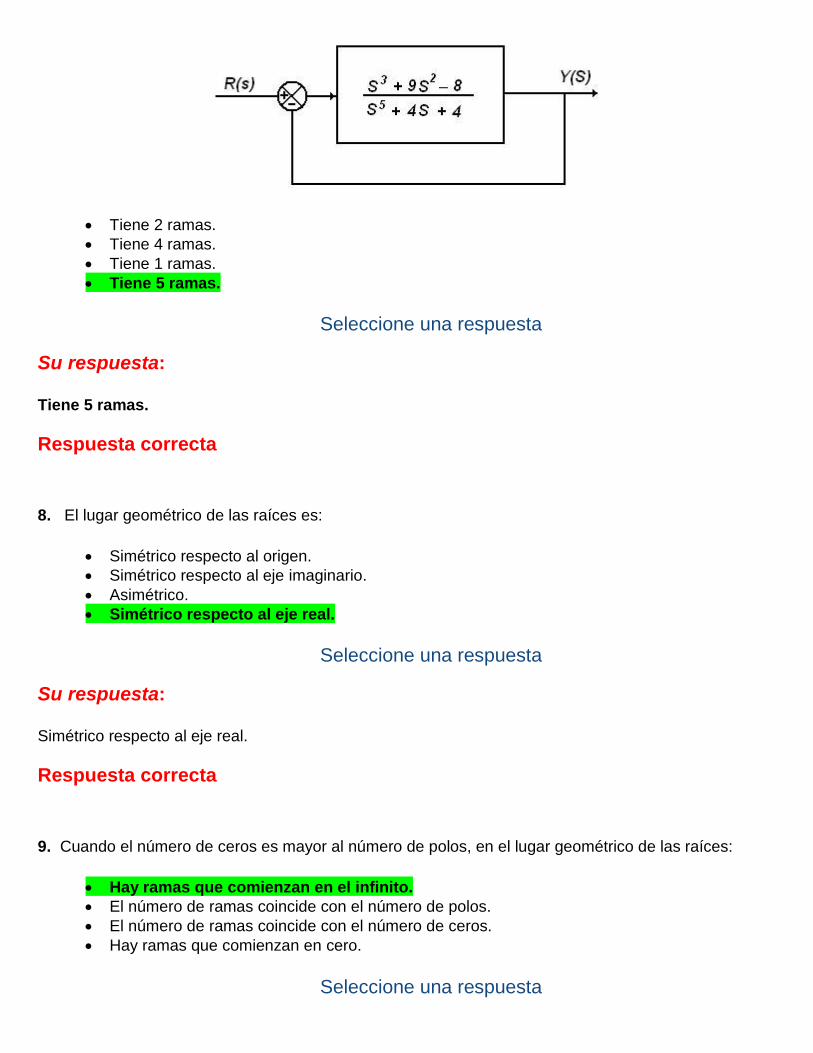
Tiene 2 ramas.
Tiene 4 ramas.
Tiene 1 ramas.
Tiene 5 ramas.
Seleccione una respuesta
Su respuesta:
Tiene 5 ramas.
Respuesta correcta
8. El lugar geométrico de las raíces es:
Simétrico respecto al origen.
Simétrico respecto al eje imaginario.
Asimétrico.
Simétrico respecto al eje real.
Seleccione una respuesta
Su respuesta:
Simétrico respecto al eje real.
Respuesta correcta
9. Cuando el número de ceros es mayor al número de polos, en el lugar geométrico de las raíces:
Hay ramas que comienzan en el infinito.
El número de ramas coincide con el número de polos.
El número de ramas coincide con el número de ceros.
Hay ramas que comienzan en cero.
Seleccione una respuesta
Su respuesta:
Hay ramas que comienzan en el infinito.
Respuesta correcta
10. El lugar geométrico de las raíces LGR es una gráfica que:
Muestra la variación de los ceros de la ecuación característica del sistema a lazo cerrado cuando la ganancia del sistema retroalimentado varía desde cero hasta infinito.
Muestra la variación de los ceros y los polos de la ecuación característica del sistema a lazo cerrado cuando la ganancia del sistema retroalimentado varía desde cero hasta infinito.
Muestra la variación de los polos de la ecuación característica del sistema a lazo cerrado cuando la ganancia del sistema retroalimentado varía desde cero hasta infinito.
Muestra la variación de las raíces de la ecuación característica del sistema a lazo cerrado cuando la ganancia del sistema retroalimentado varía desde cero hasta infinito.
Seleccione una respuesta
Su respuesta:
Muestra la variación de las raíces de la ecuación característica del sistema a lazo cerrado cuando la ganancia del sistema retroalimentado varía desde cero hasta infinito.
Respuesta correcta
Act_4_Lecc_Eval_1_Control_Analog__299005_249
1. Al desplazar el lugar de las raíces a la izquierda, el sistema:
Aumenta su estabilidad relativa.
Disminuye su estabilidad relativa.
No altera la estabilidad del sistema.
Disminuye la estabilidad absoluta.
Seleccione una respuesta
Su respuesta:
Aumenta su estabilidad relativa.
Respuesta correcta
2. Para correr el lugar geométrico de las raíces a la derecha, se debe:
Agregar un cero de lazo abierto.
Agregar un polo de lazo abierto.
Añadir un cero en el origen del plano S.
Añadir un cero de lazo cerrado.
Seleccione una respuesta
Su respuesta:
Agregar un polo de lazo abierto.
Respuesta correcta
3. El compensador en atraso se usa cuando:
Se requiere mejorar el sobreimpulso.
Se requiere mejorar las características en estado estacionario.
Se requiere mejorar las características en transitorio.
Se requiere mejorar la velocidad de respuesta.
Seleccione una respuesta
Su respuesta:
Se requiere mejorar las características en estado estacionario.
Respuesta correcta
4. La diferencia entre la función de transferencia de un compensador de adelanto y uno de
atraso es:
Para el compensador de adelanto alfa está entre cero y uno, mientras que para el compensador en atraso beta es mayor de uno.
Para el compensador de adelanto alfa es mayor de uno, mientras que para el compensador en atraso beta está entre cero y uno.
Para el compensador de adelanto alfa es positivo, mientras que para el compensador en atraso beta es negativo.
Para el compensador de adelanto alfa es mayor de cero, mientras que para el compensador en atraso beta está entre cero y uno.
Seleccione una respuesta
Su respuesta:
Para el compensador de adelanto alfa está entre cero y uno mientras que para el compensador en atraso beta es mayor de uno.
Respuesta correcta
5. El siguiente polinomio es el denominador de la función de transferencia de un sistema de control:
S5- 4S
4+3S
3+2S
2+5S+2
De acuerdo a Routh-Hurwitz, éste sistema, por simple análisis de inspección:
Es un sistema inestable.
Es un sistema estable.
No podríamos realizar ninguna apreciación de estabilidad.
Es un sistema críticamente estable.
Seleccione una respuesta
Su respuesta:
Es un sistema inestable.
Respuesta correcta Hay un término negativo en la ecuación característica.
6. Un sistema de control está dado por la siguiente función de transferencia:
( )
De este sistema podríamos afirmar que:
El sistema con toda seguridad es inestable.
El sistema con toda seguridad es estable.
El sistema es críticamente estable.
El sistema podría ser estable.
Seleccione una respuesta
Su respuesta:
El sistema podría ser estable.
Respuesta correcta Correcto. Ya que todos los términos del denominador son positivos.
7. El denominador de la función de transferencia de un sistema está dado por:
S3+4S
2+8S+K
Cual debe ser el rango de valores de K, para que el sistema sea estable?
El rango de K debe estar entre 8 y 32.
El rango de K debe estar entre 0 y 16.
El rango de K debe estar entre 0 y 32.
El rango de K debe estar entre 0 y 8.
Seleccione una respuesta
Su respuesta:
El rango de K debe estar entre 0 y 32.
Respuesta correcta
8. Un sistema de Control tiene la siguiente ecuación característica:
S3+2S
2+4S+K
¿Que valores de K garantizan la estabilidad del sistema?.
Con K entre 0 y 4.
Con K entre 0 y 2.
Con K entre 0 y 8.
Con K entre 2 y 4.
Seleccione una respuesta
Su respuesta:
Con K entre 0 y 8.
Respuesta correcta
9. Un sistema está dado por la siguiente función de transferencia:
G(s)=[4(s-1)]/[s2+4s+5]
Se podría entonces asegurar que sus polos y ceros se ubican:
Polos en (-2+1j), (-2-1j) y cero en +4.
Polos en (-2+2j), (-2-2j) y cero en +1.
Polos en (-2+1j), (-2-1j) y cero en +1.
Polos en (-2+3j), (-2-3j) y cero en +1.
Seleccione una respuesta
Su respuesta:
Polos en (-2+1j), (-2-1j) y cero en +1.
Respuesta correcta
10. la función de transferencia de un sistema es:
G(s)= 3/(s2+3s+2)
entonces este sistema lo podríamos describir como:
Un sistema con polos en -1 y -2 y cero en -3.
Un sistema con polos en -1 y -2 y cero -4.
Un sistema con polos en -1 y -2 y sin ceros.
Un sistema con polos en -3 y -2 y sin ceros.
Seleccione una respuesta
Su respuesta:
Un sistema con polos en -1 y -2 y sin ceros.
Respuesta correcta
Act 5 : Quiz 1 Control Analógico 299005_24
1. Un sistema de control en lazo cerrado tiene un primer subsistema con una función de transferencia
de la trayectoria directa de 15 y un segundo subsistema con una función de transferencia de trayectoria
directa de 5. La función de transferencia de la trayectoria de realimentación para que el error en estado
estable sea cero es:
Seleccione una respuesta.
a. 0.89
b. 0.98
c. 0.93
d. 0.91
Correcto
Puntos para este envío: 1/1.
2. La adición de un polo a la función de transferencia en lazo abierto tiene efecto de desplazar el lugar
de las raíces a la derecha, esto genera como consecuencia que:
Seleccione una respuesta.
a. No varíe la estabilidad relativa del sistema.
b. Aumente la estabilidad relativa del sistema y el tiempo de asentamiento de la respuesta
disminuya
c. Aumente la estabilidad relativa del sistema y el tiempo de asentamiento de la respuesta.
d. Disminuya la estabilidad relativa del sistema y el tiempo de asentamiento de la respuesta.
Correcto
Puntos para este envío: 1/1.
3. De los siguientes componentes, ¿cuál NO corresponde a un sistema general de control en lazo cerrado? Seleccione una respuesta.
a. Amplificador
b. Elemento de comparación
c. Actuador
d. Planta o proceso
Correcto
Puntos para este envío: 1/1.
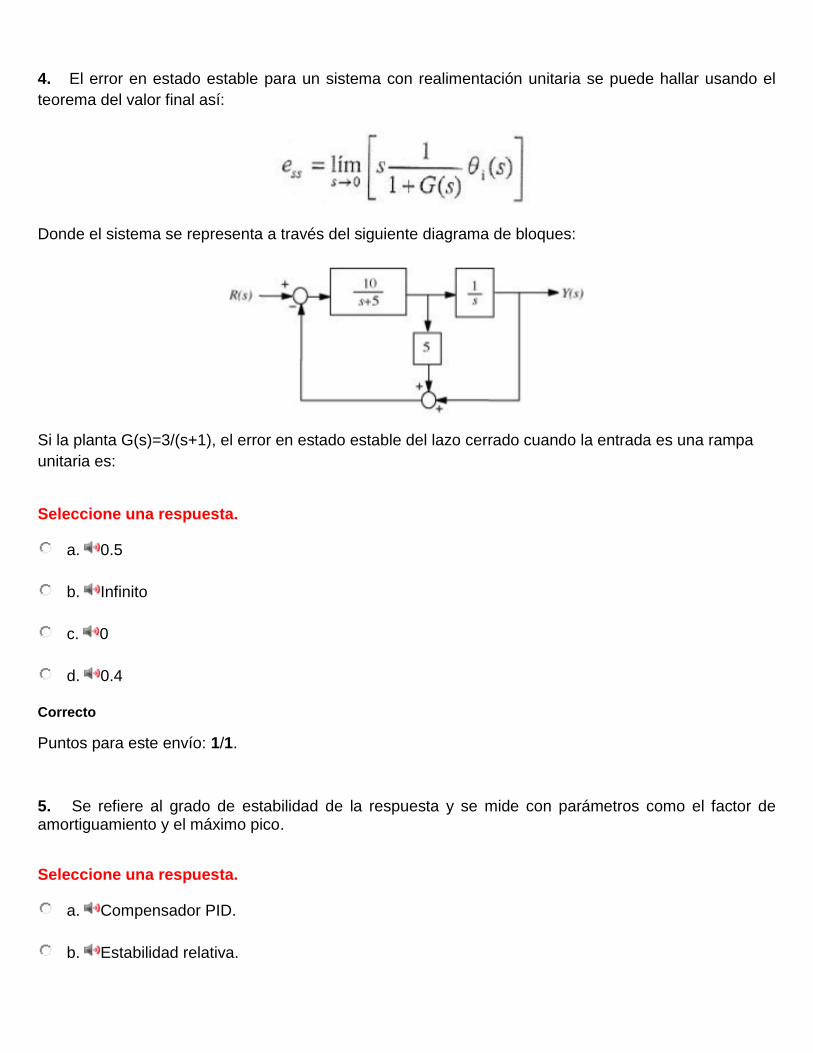
4. El error en estado estable para un sistema con realimentación unitaria se puede hallar usando el
teorema del valor final así:
Donde el sistema se representa a través del siguiente diagrama de bloques:
Si la planta G(s)=3/(s+1), el error en estado estable del lazo cerrado cuando la entrada es una rampa
unitaria es:
Seleccione una respuesta.
a. 0.5
b. Infinito
c. 0
d. 0.4
Correcto
Puntos para este envío: 1/1.
5. Se refiere al grado de estabilidad de la respuesta y se mide con parámetros como el factor de amortiguamiento y el máximo pico.
Seleccione una respuesta.
a. Compensador PID.
b. Estabilidad relativa.
c. Compesador de Retardo.
d. Estabilidad absoluta
Correcto
Puntos para este envío: 1/1.
6. Se define como error en estado estacionario a:
Seleccione una respuesta.
a. La diferencia entre el valor de referencia y el valor medido en un lazo cerrado
b. El error que genera el controlador de un sistema en estado transitorio
c. Toda señal de entrada a un sistema en lazo abierto
d. La diferencia entre la salida y la entrada de un sistema en condiciones estables.
Correcto
Puntos para este envío: 1/1.
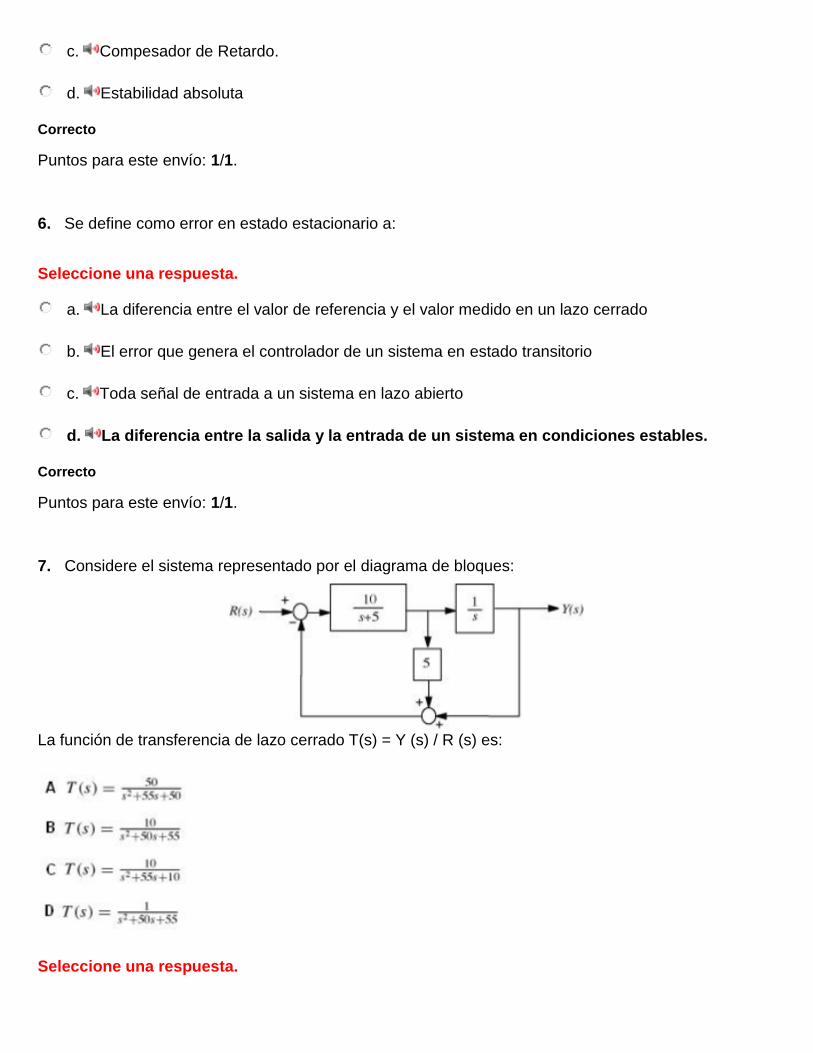
7. Considere el sistema representado por el diagrama de bloques:
La función de transferencia de lazo cerrado T(s) = Y (s) / R (s) es:
Seleccione una respuesta.
a. C.
b. D.
c. B.
d. A.
Correcto
Puntos para este envío: 1/1.
8. ¿Qué es una perturbación exógena?
Seleccione una respuesta.
a. Aquella que proviene del exterior del sistema.
b. Aquella que proviene del interior del sistema.
c. Cualquier ruido eléctrico del sistema
d. Una perturbación que no altera la salida de un sistema.
Correcto
Puntos para este envío: 1/1.
9. El siguiente polinomio es el denominador de la función de transferencia de un sistema de control.
S3-2S2+S+3
Se puede asegurar que este sistema es:
Seleccione una respuesta.
a. Inestable.
b. Estable.
c. Puede ser estable.
d. Críticamente estable.
Correcto
Puntos para este envío: 1/1.
10. Los sistemas reales donde se debe controlar alguna o algunas variables deben ser modelados
matemáticamente para poder aplicar un tipo y estrategia de control que garantice mantener la variable
controlada dentro de los márgenes deseados, teniendo en cuenta que la relación entre variables del
mismo sistema puede ser lineal o no.
De lo anterior podemos inferir que:
Seleccione una respuesta.
a. Un modelo matemático representa el comportamiento de una variable.
b. Los modelos matemáticos no son necesarios cuando se desea implementar un sistema de
control.
c. Un modelo matemático representa el comportamiento de todo un sistema.
d. Las variables dentro de un mismo sistema tienen una relación no lineal.
Correcto
Puntos para este envío: 1/1.
11. Un sistema de control es aquél en el que la salida del sistema se controla para tener un valor
específico o cambiarlo, según lo determina la entrada al sistema. De este modo, un sistema de control
de temperatura, por ejemplo, un sistema de calefacción central en una casa, puede tener en su entrada
un termostato o panel de control en el que se fija la temperatura requerida y su salida es la temperatura
real producida. Esta temperatura se ajusta mediante el sistema de control, de modo que se obtenga el
valor fijado por la entrada al sistema.
De lo anterior se puede inferir que:
Seleccione una respuesta.
a. En la vida real no tiene mayor importancia los sistemas de control.
b. La variable manipulada en un sistema de control es la temperatura.
c. En un sistema de control no es necesario conocer las características de la señal de salida.
d. Un sistema de control garantiza un margen de comportamiento dinámico de una
variable.
Correcto
Puntos para este envío: 1/1.
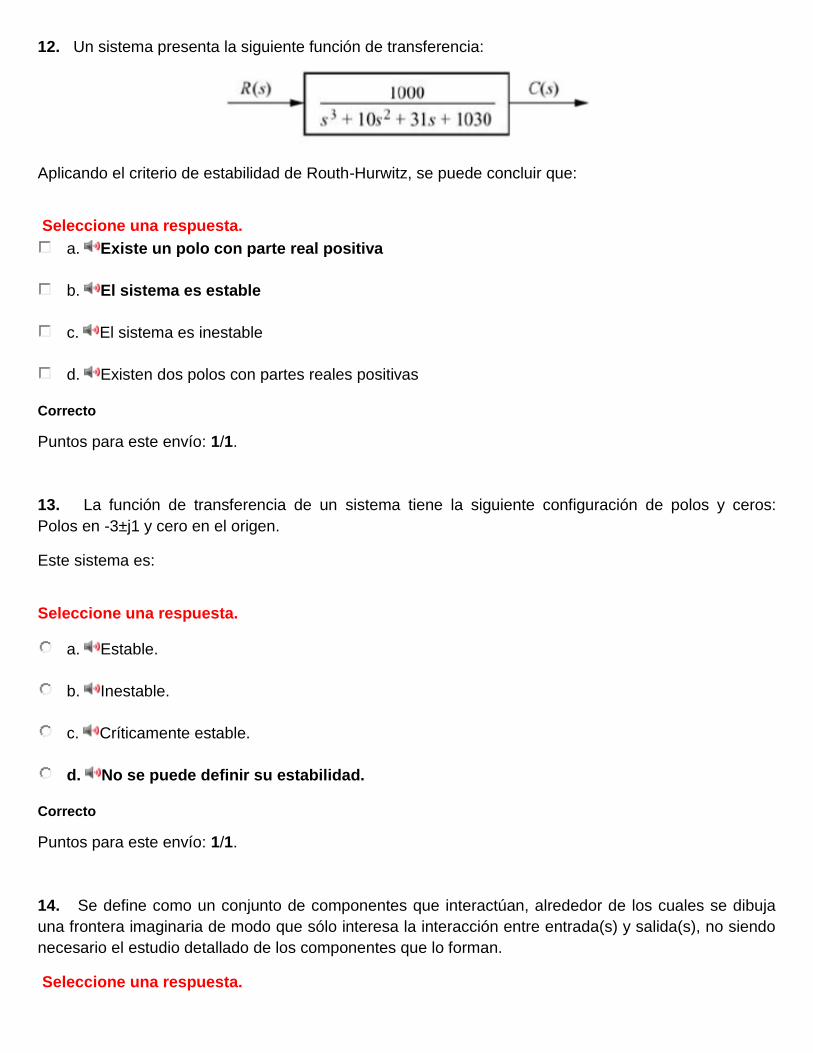
12. Un sistema presenta la siguiente función de transferencia:
Aplicando el criterio de estabilidad de Routh-Hurwitz, se puede concluir que:
Seleccione una respuesta.
a. Existe un polo con parte real positiva
b. El sistema es estable
c. El sistema es inestable
d. Existen dos polos con partes reales positivas
Correcto
Puntos para este envío: 1/1.
13. La función de transferencia de un sistema tiene la siguiente configuración de polos y ceros:
Polos en -3±j1 y cero en el origen.
Este sistema es:
Seleccione una respuesta.
a. Estable.
b. Inestable.
c. Críticamente estable.
d. No se puede definir su estabilidad.
Correcto
Puntos para este envío: 1/1.
14. Se define como un conjunto de componentes que interactúan, alrededor de los cuales se dibuja
una frontera imaginaria de modo que sólo interesa la interacción entre entrada(s) y salida(s), no siendo
necesario el estudio detallado de los componentes que lo forman.
Seleccione una respuesta.
a. Trayectoria directa
b. Lazo cerrado
c. Función compleja
d. Sistema
Correcto
Puntos para este envío: 1/1.
15. En una planta industrial se requiere mantener el nivel de un líquido en un margen específico. Para
tal propósito se implementa un Sistema de control de nivel con una electroválvula, la cual, cuando está
activa (energizada) se abre y cuando está inactiva se cierra. Podríamos entonces afirmar que la
estrategia de control utilizada en este caso es:
Seleccione una respuesta.
a. Integral.
b. Derivativa.
c. Proporcional.
d. On-off.
Correcto
Puntos para este envío: 1/1.
Act_7_Rec_Un_2__Control_Analog__299005_24
1. Analizando lo mencionado anteriormente, podríamos afirmar de la matriz de transmisión directa
que constituye parte de la señal de salida del sistema en espacio de estados.
Lo mencionado previamente según el texto leído es una afirmación Falsa.
Lo mencionado previamente es una afirmación incoherente, no tiene sentido en lo mencionado en el
texto leido.
Lo mencionado no lo podemos deducir del texto leido previamente.
Lo mencionado previamente según el texto leído es una afirmación Verdadera.
Seleccione una respuesta
Su respuesta:
Lo mencionado previamente según el texto leído es una afirmación Verdadera.
Respuesta correcta
Continuar
2. Al realizar un análisis detallado de lo mencionado previamente, encontramos que una
representación en espacio de estados es una manera de analizar el comportamiento dinámico de
un sistema. De igual forma podríamos asegurar lo siguiente.
La representación en espacio de estados no sirve como herramienta para modelar los
sitemas reales (de la vida diaria)que se deben automatizar.
Cuando el sistema contiene derivadores de la función de entrada, la única fila que me
relaciona más de una variable de estado es la última (correspondiente a la derivada de la n -ésima variable de estado).
La representación en espacio de estados permite reescribir una ecuación de n-ésimo
orden como n ecuaciones diferenciales de primer orden.
Las ecuaciones diferenciales no tienen nada que ver con la representación en espacio de
estados.
Seleccione una respuesta
Su respuesta:
La representación en espacio de estados permite reescribir una ecuación de n-ésimo orden
como n ecuaciones diferenciales de primer orden.
Respuesta correcta
Continuar
3. Cuando se tiene un sistema en el cual no hay derivadas de la variable de entrada, se puede afirmar que:
La matriz de transmisión es uno.
La matriz de estado es uno.
La matriz de estado es cero.
La matriz de transmisión es cero.
Seleccione una respuesta
Su respuesta:
La matriz de transmisión es cero.
Respuesta correcta
Continuar
4. Los sistemas reales que se deben automatizar deben ser modelados matemáticamente, para
poder controlar el comportamiento de una variable; de ahí que el texto anterior sea un pequeño
análisis matemático. De la siguiente expresión "La representación en espacio de estados es una
herramienta matemática muy propicia para representar la dinámica de un sistema con
múltiples entradas y múltiples salidas", teniendo en cuenta las lecturas anteriores, podríamos
afirmar que:
Es una expresión correcta, pero no la puedo deducir del texto leído previamente.
Es una expresión incorrecta.
Es una expresión incoherente, que no tiene sentido, con respecto al análisis realizado en el
texto anterior.
Es una expresión correcta que se puede deducir del texto leído previamente.
Seleccione una respuesta
Su respuesta:
Es una expresión correcta que se puede deducir del texto leído previamente.
Respuesta correcta
Continuar
5. Cuando la función tiene derivadas de la variable de entrada, no se puede usar el método directo
que utilizamos cuando no contenía derivadas de la función de excitación porque:
n ecuaciones diferenciales de primer orden en donde x1= y, pueden no conducir a una
solución única.
n ecuaciones diferenciales de primer orden en donde x1= y, no tienen las suficientes
variables de estado.
n ecuaciones diferenciales de primer orden en donde x1= y, tiene muchas variables de
estado.
n ecuaciones diferenciales de primer orden en donde x1=y, no tiene solución.
Seleccione una respuesta
Su respuesta:
n ecuaciones diferenciales de primer orden en donde x1= y, pueden no conducir a una solución única.
Respuesta correcta
Continuar
6. Las variables que se usan en la representación en el espacio de estados son: Variable de
entrada, Variable de estado y
Variable controlable.
Variable observable.
Variable de transición.
Variable de salida.
Seleccione una respuesta
Su respuesta:
Variable de salida.
Respuesta correcta
Continuar
7. El conjunto más pequeño de variables que determinan el estado del sistema dinámico se
denomina:
Variable de entrada.
Variable de salida.
Variable de estado.
Variable transitoria.
Seleccione una respuesta
Su respuesta:
Variable de estado.
Respuesta correcta
Continuar
8. Es el conjunto más pequeño de variables de modo que el conocimiento de estas variables en t=t0, junto con el conocimiento de la entrada para t>=t0, determina por completo el comportamiento del sistema para cualquier tiempo t>=t0.
Desde el contexto del control, el anterior concepto define:
Variable transitoria.
Latencia.
Estado.
Variable de estado.
Seleccione una respuesta
Su respuesta:
Estado
Respuesta correcta
Continuar
9. Cuando necesitamos modelar matemáticamente un sistema hacemos uso de las variables de
estado, estas nos permiten:
Realizar la representación en diagramas de bloques del sistema.
Hacer un reconocimiento más dinámico del comportamiento del sistema.
Realizar un sistema de control en lazo cerrado.
Realizar una prueba de excitación con el escalón unitario.
Seleccione una respuesta
Su respuesta:
Hacer un reconocimiento más dinámico del comportamiento del sistema.
Respuesta correcta
Continuar
10. La representación en el espacio de estados permite:
Verificar la afectación del ruido en el sistema.
Verificar la salida del sistema.
Verificar el comportamiento estático del sistema.
Conocer el comportamiento dinámico de un sistema.
Seleccione una respuesta
Su respuesta:
Conocer el comportamiento dinámico de un sistema.
Respuesta correcta
Continuar
Conclusión.
Respetado estudiante hemos llegado al final de la lección. Es muy importante tener
claro que los sistemas de control normalmente controlan más de una variable, desde
esa perspectiva el análisis en espacio de estados es una herramienta muy útil, ya que
permite hacer el modelamiento matemático del sistema de forma óptima y un poco mas
sencilla.
Act_8_Lec_Eval_2__Control_Analog__299005_24
1. Para el sistema representado por las siguientes matrices del espacio de estados:
[
]
[ ]
¿Cual es el rango de la matriz de controlabilidad?
1
Rango completo.
4
Seleccione una respuesta
Su respuesta:
1
Respuesta correcta
2. Un sistema es completamente Observable si:
Cada variable de estado del sistema es afectada por alguna perturbación.
Cada variable de estado del sistema es afectada por alguna de las entradas.
Cada variable de estado del sistema afecta alguna de las salidas.
Cada variable de estado del sistema es afectada por alguna de las salidas.
Seleccione una respuesta
Su respuesta:
Cada variable de estado del sistema afecta alguna de las salidas.
Respuesta correcta
3. Ejemplo:
Consideremos un sistema de control descrito por la siguiente ecuación de estados y ecuación de
salida respectivamente:
[
] [ ]
De este sistema podríamos afirmar que:
No es completamente Observable pero si es completamente Controlable.
Es completamente Observable.
Es Controlable y Observable.
Es completamente Controlable.
Seleccione una respuesta
Su respuesta:
Es completamente Observable.
Respuesta correcta
4. En un sistema donde el intervalo [t0,tf] , existe una entrada u(t) de tal manera que
cualquier estado inicial x(t0) se puede transformar a cualquier estado arbitrario x(tf) en un
intervalo finito tf - t0> 0; se puede afirmar que:
Es observable.
Es Inestable.
Es estable.
Es controlable.
Seleccione una respuesta
Su respuesta:
Es controlable.
Respuesta correcta
5. Para calcular la matriz de observabilidad es necesario conocer:
La matriz de salida y la matriz de entrada del sistema.
La matriz de estados y la matriz de entrada del sistema.
La matriz de estados y la matriz de transmitancia directa del sistema.
La matriz de estados y la matriz de salida del sistema.
Seleccione una respuesta
Su respuesta:
La matriz de estados y la matriz de salida del sistema.
Respuesta correcta
6. Si en un sistema de control la matriz de controlabilidad es de 2x2 y el determinante de esa matriz es cero, se dice que el sistema:
No se puede hacer ningún tipo de apreciación frente a la controlabilidad de ese sistema.
El sistema no es completamente controlable.
El sistema es completamente Observable.
Es completamente controlable.
Seleccione una respuesta
Su respuesta:
El sistema no es completamente controlable.
Respuesta correcta
7. Para calcular la matriz de controlabilidad es necesario conocer:
La matriz de entrada y la matriz de salida.
Es suficiente con tener la matriz de estados.
La matriz de estados y la matriz de salida.
La matriz de estados y la matriz de entrada.
Seleccione una respuesta
Su respuesta:
La matriz de estados y la matriz de entrada.
Respuesta correcta
8. El control derivativo hace que se responda más rápido a la señal de error, por ello se
usa cuando:
Se requiere de una respuesta rápida y se coloca el controlador derivativo en cascada
con la planta.
Se requiere de una respuesta en tiempo real y se coloca el controlador derivativo en paralelo
con la planta.
Se requiere de una respuesta rápida y se coloca el controlador derivativo en paralelo con la
planta.
Se requiere de una respuesta lenta y se coloca un controlador derivativo en paralelo con la
planta.
Seleccione una respuesta
Su respuesta:
Se requiere de una respuesta rápida y se coloca el controlador derivativo en cascada con la
planta.
Respuesta correcta
9. "El control integral elimina el error de estado estacionario pero hace más lenta la respuesta del
sistema al error".
Del anterior texto se deduce que:
Define de forma concreta el concepto de control Integral.
Esta afirmación sería correcta si habláramos de un control proporcional.
Esta afirmación sería correcta si habláramos de un control derivativo.
No define en lo absoluto las características del Control Integral.
Seleccione una respuesta
Su respuesta:
Define de forma concreta el concepto de control Integral.
Respuesta correcta
10. En el proceso de sintonía de los controladores PID, para aplicar el segundo método de
Ziegler-Nichols, se debe garantizar:
Establecer Ti=0, Td=0; usando sólo la acción del control proporcional se debe buscar un Kp
que garantice permanentemente oscilaciones sostenidas a la salida.
Establecer Ti=infinito, Td=0; usando sólo la acción del control proporcional se debe
buscar un Kp que garantice permanentemente oscilaciones sostenidas a la salida.
Establecer Ti=infinito, Td=0; usando sólo la acción del control proporcional se debe buscar
un Kp que garantice permanentemente una salida estable.
Establecer Ti=infinito, Td=infinito; usando sólo la acción del control proporcional se debe
buscar un Kp que garantice permanentemente oscilaciones sostenidas a la salida.
Seleccione una respuesta
Su respuesta:
Establecer Ti=infinito, Td=0; usando sólo la acción del control proporcional se debe buscar un Kp que garantice permanentemente oscilaciones sostenidas a la salida.
Respuesta correcta
Conclusión.
Respetado estudiante, hemos llegado al final de la lección. Es muy importante que tengas claro
que en el análisis, diseño e implemetación de sistemas de control, la Observabilidad y
Controlabilidad son dos aspectos que describen de forma muy pertinente la Dinámica del sistema;
a partir de alli se pueden realizar los respectivos ajustes para llevar a punto el set -point del
sistema.



















