Construcció d’un robot a partir de residus electrónicsbauma.upc.es/pfc/iban/presentacio.pdf ·...
29
Construcció d’un robot a partir de residus electrónics Iban Moscoso Rubert Tutor: Jordi Sellarès Juny 2012 Eng. Tèc. Industrial, esp. Electrónica Industrial
Transcript of Construcció d’un robot a partir de residus electrónicsbauma.upc.es/pfc/iban/presentacio.pdf ·...

Construcció d’un
robot a partir
de residus
electrónics
Iban Moscoso Rubert
Tutor: Jordi Sellarès
Juny 2012
Eng. Tèc. Industrial, esp.
Electrónica Industrial
Introducció
Justificació del projecte
En la societat de consum que vivim avui
en dia es generen gran quantitat de
residus.
Aquests contenen diversos contaminants
altaments perjudicials per el medi
ambient i la salut.
Filosofia “d’usar i llençar” instaurada a la
societat que agreuja més el problema.

Antecedents
Videocàmera de visió nocturna: Videocàmera modificada per poder
grabar en la foscor.
Dixi: Robot rastrejador fet amb
elements reciclats.
PH-Bot: Robot seguidor de vigilància a
Distància per persones amb mobilitat
reduïda i malaltes.
Objectius
Reciclar i recuperar components
electrònics, preparar-los per
posteriorment poder utilitzar-los i trobar les
seves especificacions técniques.
Demostrar que amb la majoria d’aquests
components es possible construïr un
robot.
Descripció general
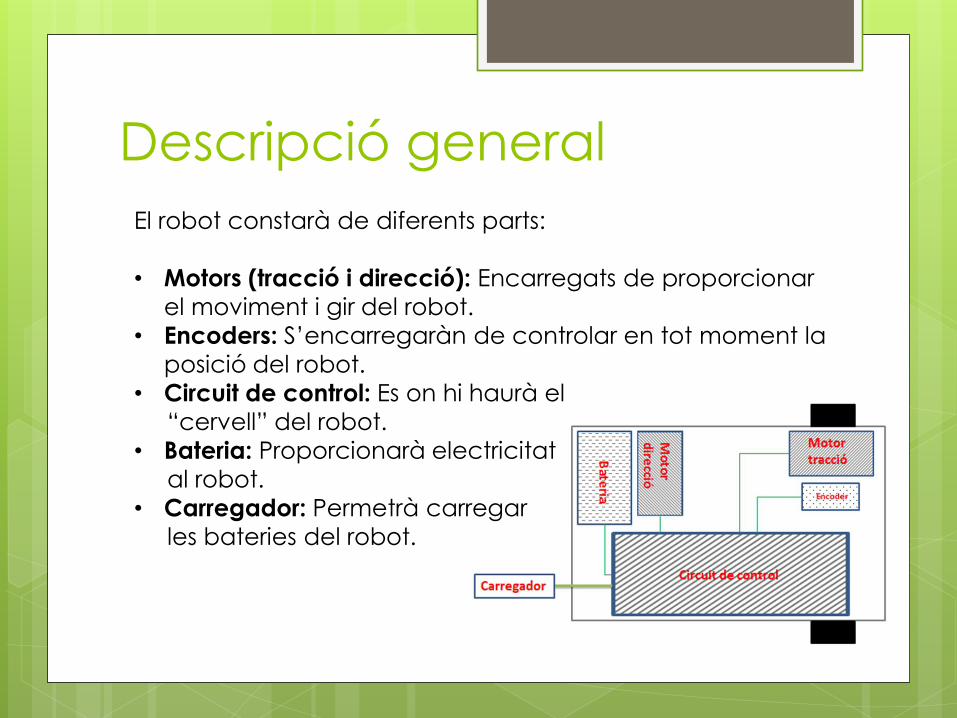
El robot constarà de diferents parts:
• Motors (tracció i direcció): Encarregats de proporcionar
el moviment i gir del robot.
• Encoders: S’encarregaràn de controlar en tot moment la
posició del robot.
• Circuit de control: Es on hi haurà el
“cervell” del robot.
• Bateria: Proporcionarà electricitat
al robot.
• Carregador: Permetrà carregar
les bateries del robot.

Elements que s’han recuperat
Característiques del robot
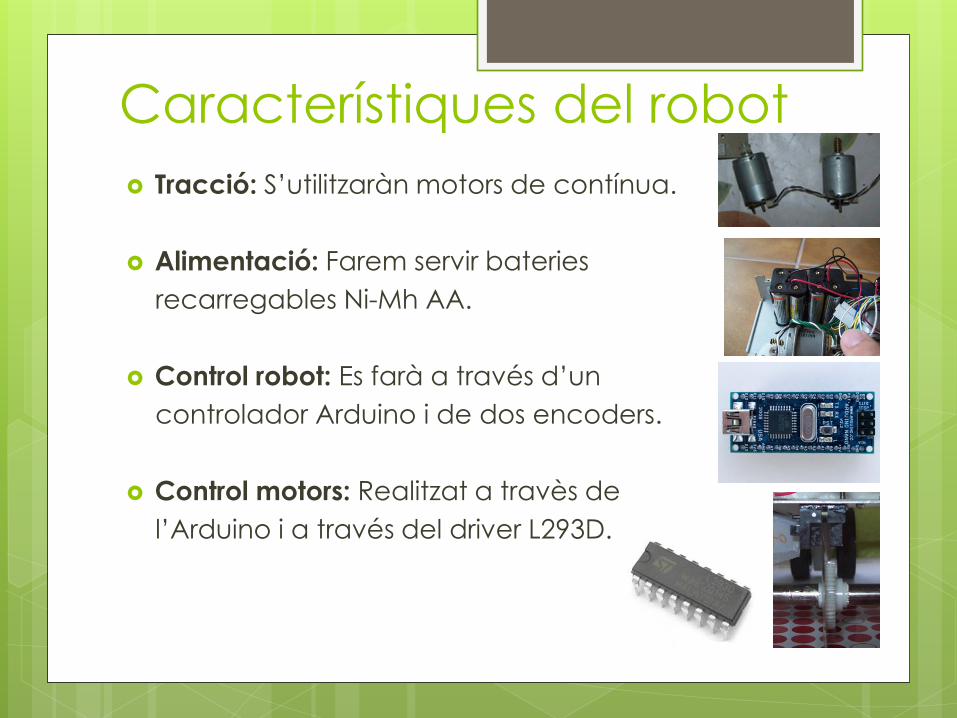
Tracció: S’utilitzaràn motors de contínua.
Alimentació: Farem servir bateries
recarregables Ni-Mh AA.
Control robot: Es farà a través d’un
controlador Arduino i de dos encoders.
Control motors: Realitzat a travès de
l’Arduino i a través del driver L293D.
Disseny del
robot
Part mecànica
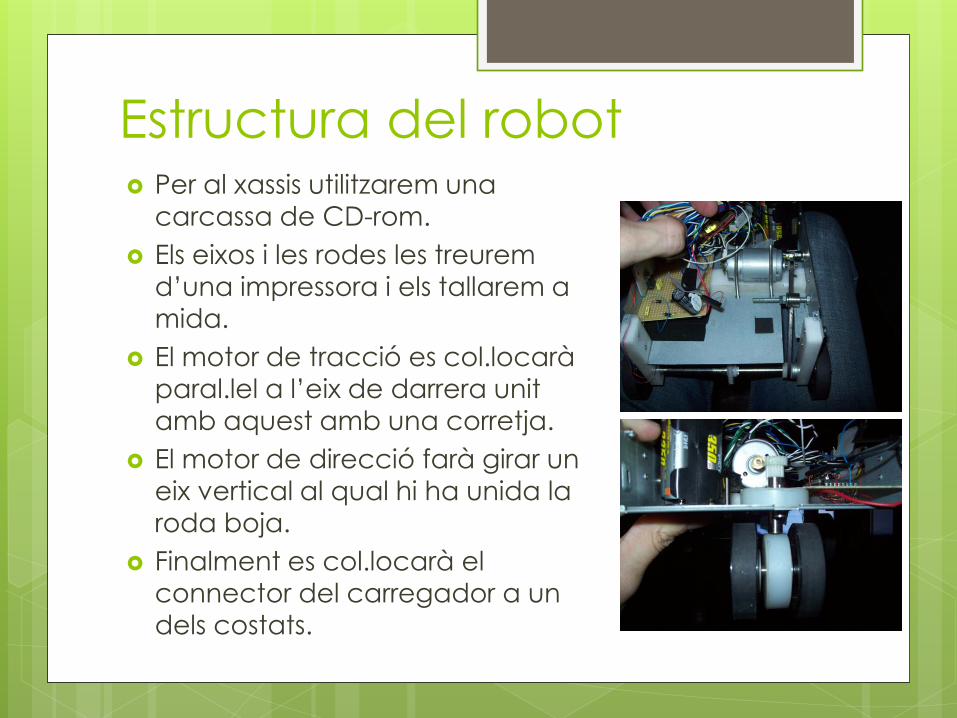
Estructura del robot Per al xassis utilitzarem una
carcassa de CD-rom.
Els eixos i les rodes les treurem d’una impressora i els tallarem a
mida.
El motor de tracció es col.locarà
paral.lel a l’eix de darrera unit amb aquest amb una corretja.
El motor de direcció farà girar un
eix vertical al qual hi ha unida la
roda boja.
Finalment es col.locarà el
connector del carregador a un
dels costats.
Disseny del
robot
Part elèctrica

Bateries AA Ni-Mh Cada bateria Ni-Mh té una
tensió d’1.2 V, i una capacitat de 2350 mAh.
Hem utilitzat 8 bateries Ni-Mh connectades en sèrie, el que dona un total de 9,6 V i 2350 mAh.
En el nostre cas, els motors consumeixen aproximadament 1 A, per tant la seva autonomia serà aproximadament de 2 hores, tal i com es pot veure a la gràfica de descàrrega.
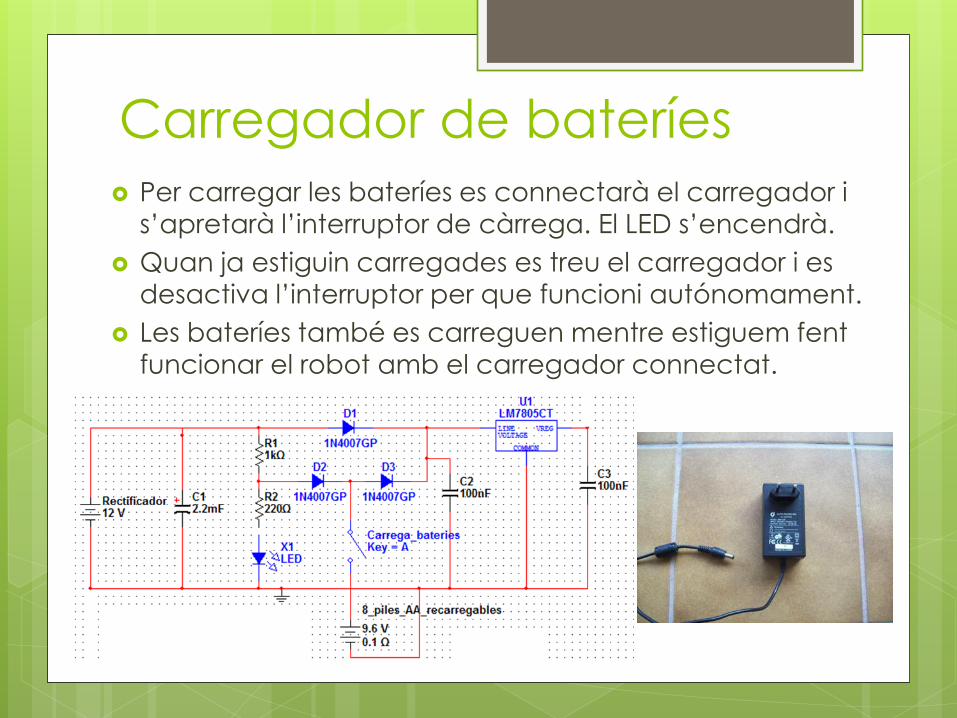
Carregador de bateríes Per carregar les bateríes es connectarà el carregador i
s’apretarà l’interruptor de càrrega. El LED s’encendrà.
Quan ja estiguin carregades es treu el carregador i es
desactiva l’interruptor per que funcioni autónomament.
Les bateríes també es carreguen mentre estiguem fent
funcionar el robot amb el carregador connectat.
Disseny del
robot
Part electrònica
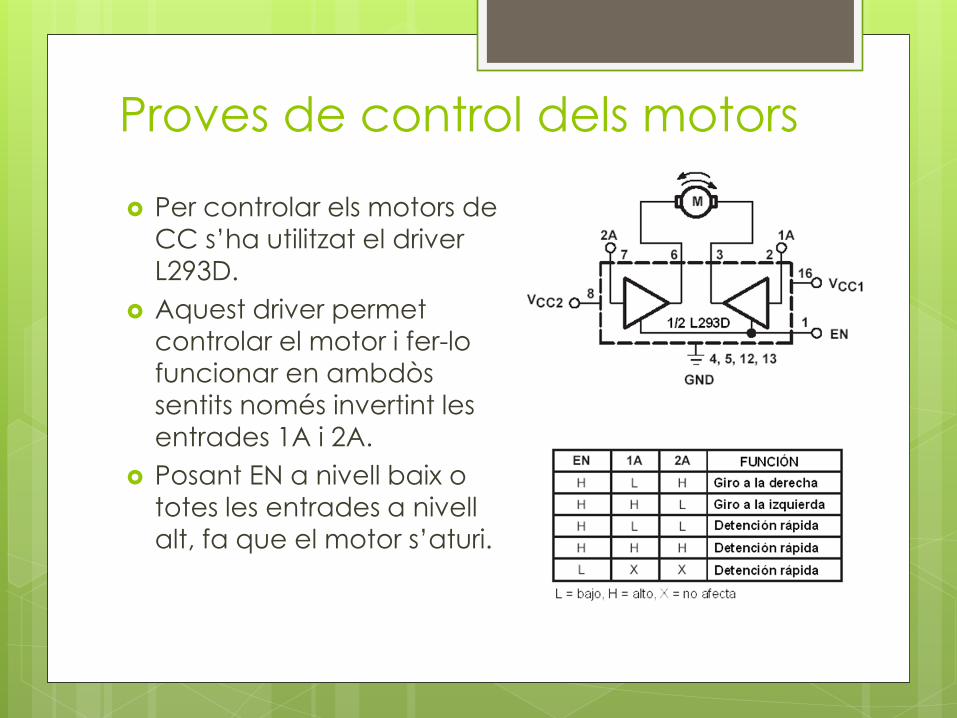
Proves de control dels motors
Per controlar els motors de
CC s’ha utilitzat el driver
L293D.
Aquest driver permet
controlar el motor i fer-lo
funcionar en ambdòs
sentits només invertint les
entrades 1A i 2A.
Posant EN a nivell baix o
totes les entrades a nivell
alt, fa que el motor s’aturi.
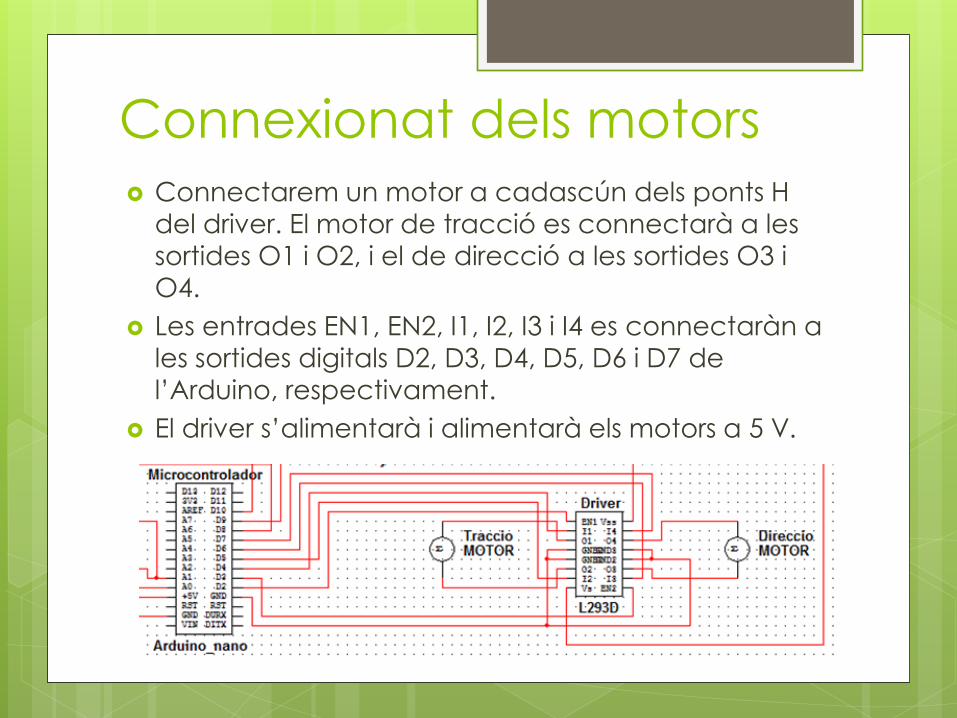
Connexionat dels motors Connectarem un motor a cadascún dels ponts H
del driver. El motor de tracció es connectarà a les sortides O1 i O2, i el de direcció a les sortides O3 i
O4.
Les entrades EN1, EN2, I1, I2, I3 i I4 es connectaràn a
les sortides digitals D2, D3, D4, D5, D6 i D7 de l’Arduino, respectivament.
El driver s’alimentarà i alimentarà els motors a 5 V.

Proves de funcionament dels
fotointerruptors
Els fotointerruptors consten d’un
emissor d’infrarrojos i un
fototransistor separats per una obertura on s’insertarà un element
mecánic que produïrà un tall del
feix de llum.
A la sortida s’obtenen 0 o 5 V, segons si passa llum o no.
Seràn els encarregats d’informar
l’Arduino de les voltes que aquests
han realitzat.
Connexionat dels fotointerruptors
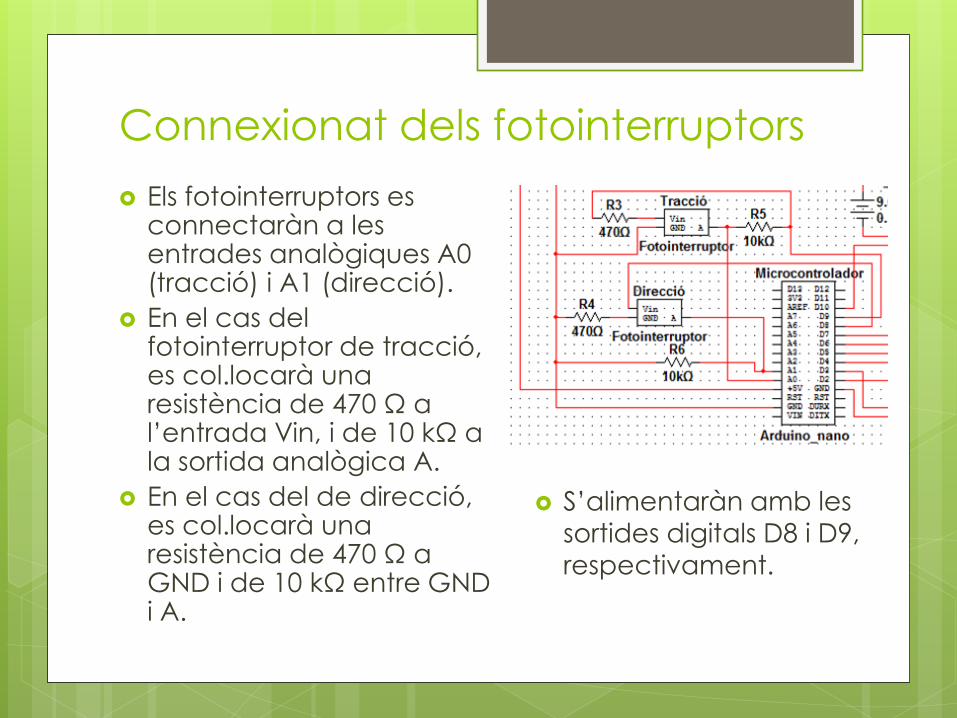
Els fotointerruptors es connectaràn a les entrades analògiques A0 (tracció) i A1 (direcció).
En el cas del fotointerruptor de tracció, es col.locarà una resistència de 470 Ω a l’entrada Vin, i de 10 kΩ a la sortida analògica A.
En el cas del de direcció, es col.locarà una resistència de 470 Ω a GND i de 10 kΩ entre GND i A.
S’alimentaràn amb les
sortides digitals D8 i D9,
respectivament.

Controlador Arduino
L’Arduino Nano és una placa
basada en el ATmega168
(Arduino Nano 2.x
Funciona amb un cable USB
Mini-B.
Es pot alimentar per USB o
amb una font externa de 6 a
20 V. Operen a 5 V.
Té 14 entrades/sortides digitals
i 8 entrades analògiques.
Mesuren entre 5 V i massa.
Utilitza un llenguatge de
programació anomenat
Wired, que es subconjunt de
C.
Connexionat de totes les parts
del circuit

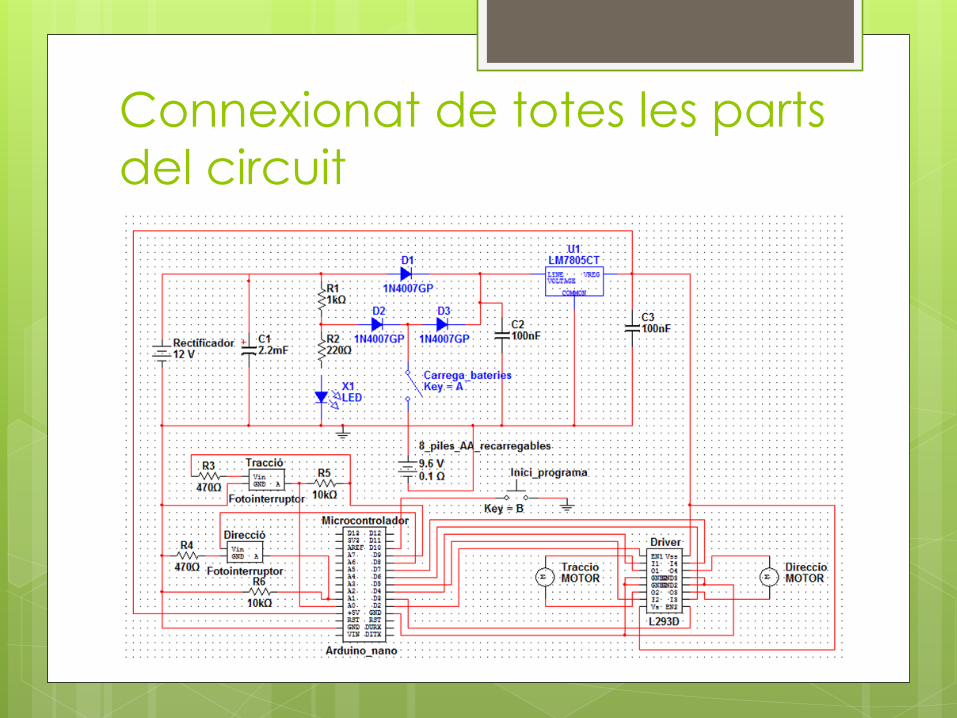
Connexionat del circuit Tots els components del circuit de
control es posaràn en una placa de topos, i per connectar-los
s’utilitzarà la tècnica del wire-wrap.
Aquesta tècnica consisteix en unir
dos components amb un cable enrotllat entre les potes que es
vulguin unir, mitjançant una eina
especial per aquesta tasca.
Resultats
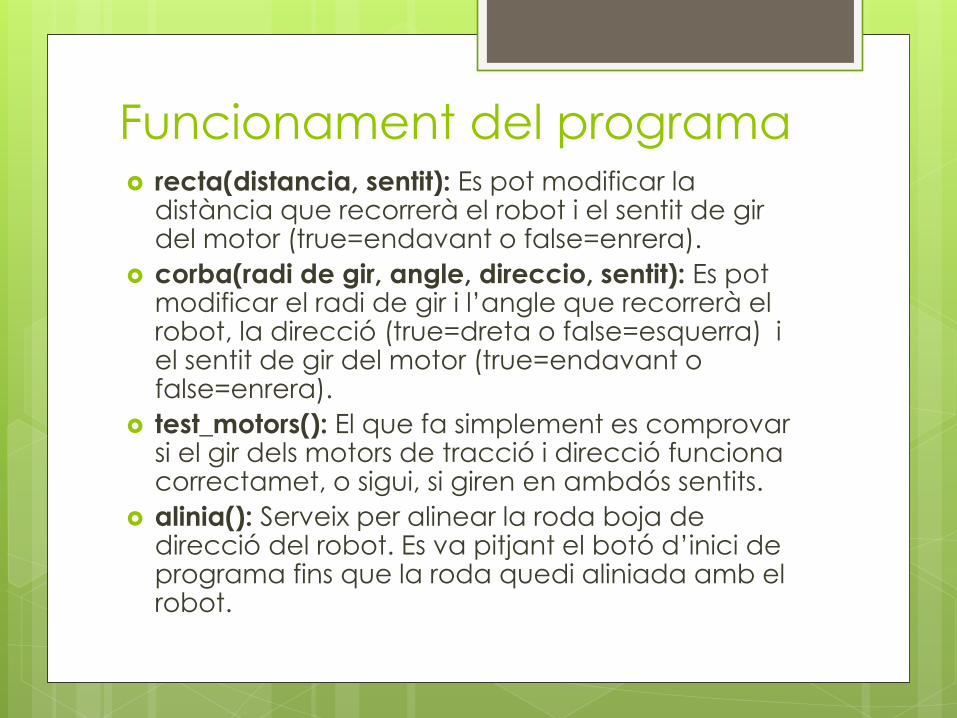
Funcionament del programa recta(distancia, sentit): Es pot modificar la
distància que recorrerà el robot i el sentit de gir del motor (true=endavant o false=enrera).
corba(radi de gir, angle, direccio, sentit): Es pot modificar el radi de gir i l’angle que recorrerà el robot, la direcció (true=dreta o false=esquerra) i el sentit de gir del motor (true=endavant o false=enrera).
test_motors(): El que fa simplement es comprovar si el gir dels motors de tracció i direcció funciona correctamet, o sigui, si giren en ambdós sentits.
alinia(): Serveix per alinear la roda boja de direcció del robot. Es va pitjant el botó d’inici de programa fins que la roda quedi aliniada amb el robot.
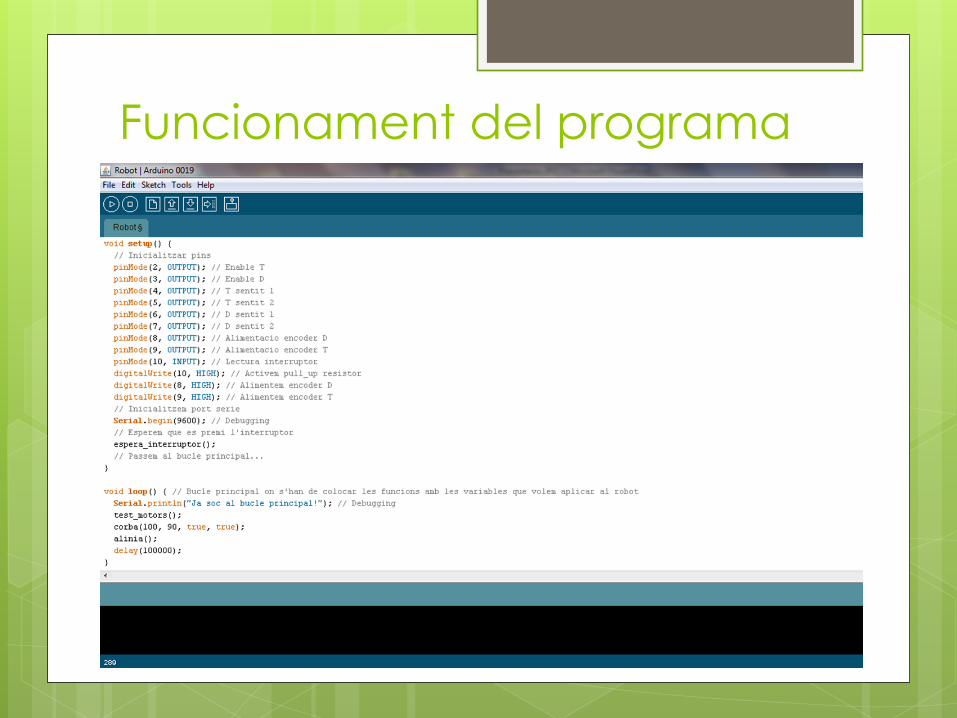
Funcionament del programa

Pressupost Electrónica Unitats Preu €/ unitat Total del nostre
robot € Total del robot sense haver reciclat res €
Driver motor L293D 1 3.42 3.42 3.42
Resisténcies 6 0.01 0.06
Condensadors 2 0.02 0.04
Condensadors electrolítics 1 0.21 0.21
Díodes 3 0.11 0.33
LED 1 0.12 0.12
Regulador 7805 1 0.50 0.50 Arduino nano 1 39.20 39.20
Carregador bateries 1 8.00 8.00
Components eléctrics
Interruptor ON/OFF 1 1.50 1.50
Polsador 1 0.93 0.93
Pack bateries Ni-Mh 1.2 V 2350 mAh, 4 unitats
2 11.00 22.00 22.00
Cable unifilar 3 0.73 2.19 2.19
Connector carregador bateries
1 1.00 1.00 1.00
Sensors
Fotointerruptors 1 2.30 2.30
Actuadors
Motor tracció 1 4.76 4.76
Motor direcció amb encoder incorporat
1 30.56 30.56
Varis
Xassis xapa ferro 1 70.00 70.00
Hubs alumini per eixos 2 5.95 11.90
Desoldador estany 1 5.39 5.39
Porta-piles de 4 unitats 2 1.25 2.50 2.50
Placa de topos 1 2.68 2.68 2.68
Tornavís 1 2.00 2.00 2.00
Total € 41.18 206.20
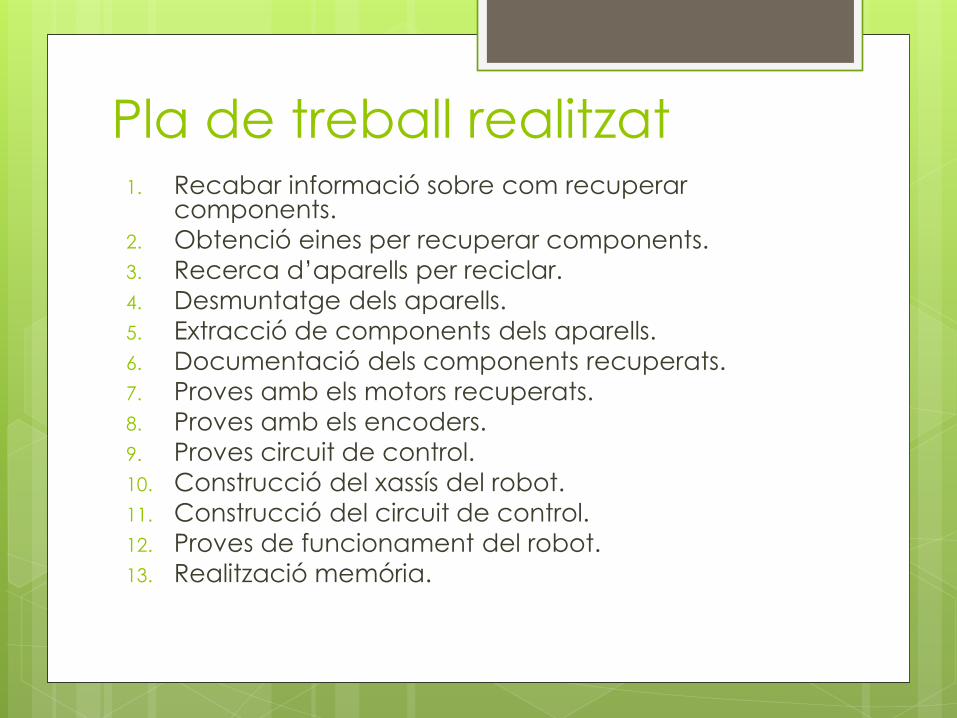
Pla de treball realitzat 1. Recabar informació sobre com recuperar
components.
2. Obtenció eines per recuperar components.
3. Recerca d’aparells per reciclar.
4. Desmuntatge dels aparells.
5. Extracció de components dels aparells.
6. Documentació dels components recuperats.
7. Proves amb els motors recuperats.
8. Proves amb els encoders.
9. Proves circuit de control.
10. Construcció del xassís del robot.
11. Construcció del circuit de control.
12. Proves de funcionament del robot.
13. Realització memória.
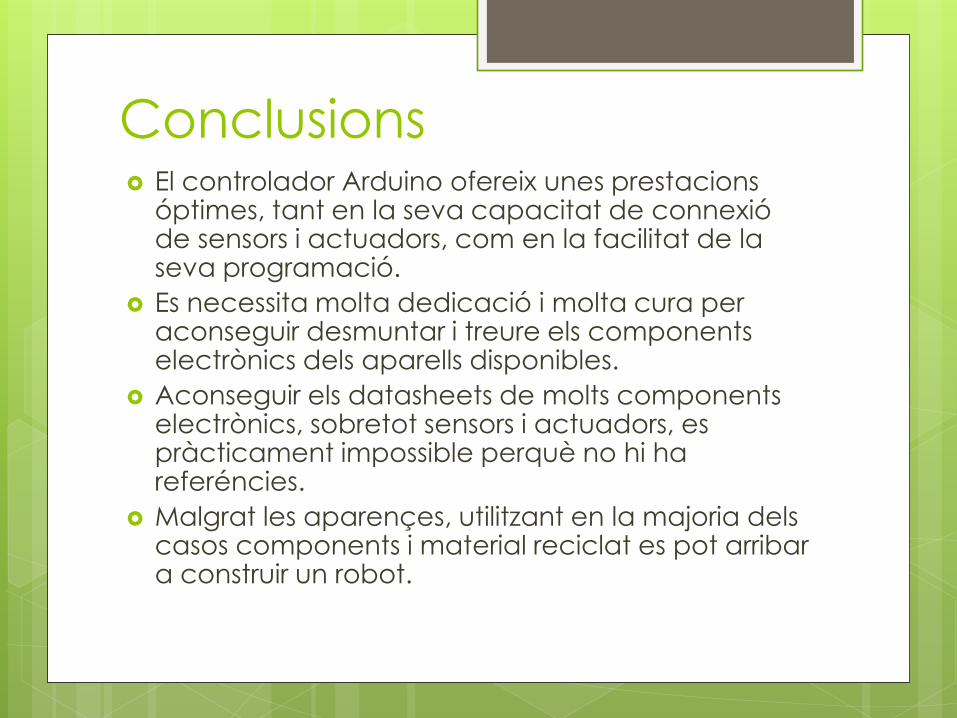
Conclusions El controlador Arduino ofereix unes prestacions
óptimes, tant en la seva capacitat de connexió de sensors i actuadors, com en la facilitat de la seva programació.
Es necessita molta dedicació i molta cura per aconseguir desmuntar i treure els components electrònics dels aparells disponibles.
Aconseguir els datasheets de molts components electrònics, sobretot sensors i actuadors, es pràcticament impossible perquè no hi ha referéncies.
Malgrat les aparençes, utilitzant en la majoria dels casos components i material reciclat es pot arribar a construir un robot.
Millores futures Utilitzar encara més elements reciclats o
recuperats en el disseny del robot, com per exemple, aprofitar una bateria d’un portàtil, construir el driver del motor amb transistors, etc...
Tambè seria possible controlar-lo inalàmbricament en comptes de amb el cable USB, afegint una comunicació vía infrarrojos, wifi, radiofreqüència, etc...
Tambè es podria dissenyar un programa que contes les voltes dels motors també quan estan parats i no sols quan estan en marxa.
Una altra millora consistiria en afegir més sensors. Per exemple, un seguidor de línia que anés resseguint aquesta, utilitzar motors pas a pas per moure la roda de direcció amb més precisió, etc
Gràcies per la seva atenció
Alguna pregunta?