COMUNICACIÓN MODBUS TCP CON nanoLC - … · 6 Es importante para que la comunicación Modbus TCP...
8
1 COMUNICACIÓN MODBUS TCP CON nanoLC www.infoPLC.net
Transcript of COMUNICACIÓN MODBUS TCP CON nanoLC - … · 6 Es importante para que la comunicación Modbus TCP...

1
COMUNICACIÓN MODBUS TCP CON nanoLC
www.infoPLC.net

2
Índice 1 Introducción…………………………………………………………………………………….3 2 Asignación de la dirección IP…………………………………………………………………3 3 Modbus TCP con el nanoLC..............................................................................................6
www.infoPLC.net

3
1 Introducción En la actualidad la integración de controladores en redes Ethernet para su monitorización y manipulación es un gran valor añadido, de forma que se puedan aplicar las tecnologías de la información en el ámbito industrial. Esto es posible en el controlador nanoLC con el conexionado del módulo de expansión para comunicaciones NLC-COM-ENET-MB1, que se inserta en el lateral izquierdo de la unidad base del controlador a través del conector DB-9. La figura 1 muestra el aspecto de dicho módulo:
Figura 1
Al conectar el módulo de comunicaciones a la unidad base, el controlador pasa a trabajar como servidor Modbus TCP y puede ser accedido remotamente por un cliente Modbus TCP usando los comandos estándar del protocolo.
2 Asignación de la dirección IP El primer paso antes de iniciar cualquier comunicación es establecer las direcciones IP de
todas las partes implicadas en la misma. Para ello Phoenix Contact dispone del programa gratuito IPAssign que responde a las peticiones bootP que los dispositivos conectados a la red hacen al iniciarse, para asociarles una dirección IP a su respectiva dirección MAC. La figura 2, 3 y 4 ilustran cómo se usaría dicho programa
www.infoPLC.net

4
Primero es necesario conectar directamente al PC, o vía Switch, el controlador con su módulo de comunicaciones. Seguidamente encendemos el controlador dándole alimentación y cargamos el programa IPAssign.
Figura 2
Comprobando sobre el propio módulo de comunicaciones, nos aseguramos que la dirección MAC que realiza la petición de IP se corresponde con la del módulo que queremos direccionar. Seguidamente, mediante doble-click, hacemos la asignación de la IP:
Figura 3
www.infoPLC.net

5
Simplemente escribiendo la dirección IP y la máscara de subred en sus respectivos campos y pulsando Siguiente, se comenzará el proceso de asignación de IP y en un breve periodo aparecerá en pantalla el mensaje de la figura 4 indicando que el proceso se ha llevado a cabo con éxito:
Figura 4
Una vez hecho esto, sólo falta indicar en el proyecto del nanoNavigator la dirección IP como fija y ya no hará falta asignársela por bootP. Para ello hay que ir a “nanoLC Configuration..” y pulsar sobre “Configure” del módulo de comunicaciones, seguido aparecerá la ventana de la figura 5:
Figura 5
www.infoPLC.net

6
Es importante para que la comunicación Modbus TCP permita tanto comandos de lectura como escritura, seleccionar el modo Read/Write dentro de la configuración del módulo de comunicaciones tal y como se aprecia en la figura 5.
Al descargar el programa, se descargará también esta nueva configuración.
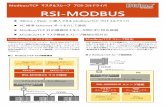
3 Modbus TCP con el nanoLC Como ya se ha mencionado en la introducción, el módulo de comunicaciones Ethernet del
nanoLC funciona en modo servidor Modbus TCP, es decir, no puede llevar la iniciativa en una comunicación, pero sí que puede recibir órdenes(comandos Modbus) de un cliente Modbus TCP para que muestre el valor de sus entradas y fije valores a sus salidas por ejemplo. En esta guía se hará uso del software Modbus Poll para simular los comandos del cliente o maestro de la comunicación. La tabla de la figura 6 muestra los posibles comandos Modbus que se pueden ejecutar sobre el controlador con sus respectivas direcciones de memoria donde aplicarlos:
Figura 6
www.infoPLC.net

7
Vamos a hacer dos ejemplos con el software Modbus Poll para por un lado leer las entradas del controlador y por otro fijar valores a algunas de sus salidas, ya que serán las operaciones más útiles y usadas con mayor frecuencia.
Para empezar, primero hay que conectarse al servidor Modbus TCP(el nanoLC en nuestro caso), para ello hay que seleccionar “Connection Connect..” y configurar una conexión TCP/IP indicando la dirección IP del servidor remoto y que coincide con la que hayamos asignado al PLC mediante el software IPAssign, tal y como se ha explicado previamente:
Figura 7
Una vez hecho esto, la conexión está establecida y se puede pasar a enviar comandos con
datos al controlador. Lectura de entradas del nLC Esta operación se corresponde con el comando Modbus “Read Discrete Inputs”, y
podemos verlo en la figura 6. La dirección de memoria empieza desde la 0001 a 0032, en nuestro caso vamos a leer 6 bits, ya que es el número de entradas que vienen por defecto en la unidad base.
www.infoPLC.net

8
Figura 8
La figura 8 muestra como se leen los 6 primeros bits de la entradas del PLC y se observa como las entradas I0 e I5 están activadas.
Escritura de salidas del nLC Nuevamente, acudiendo a la tabla de comandos de la figura 6, vemos que el
comando para escribir salidas al controlador es el Coils(en el ejemplo concreto se usa el comando “Write Multipe Coils”). En este caso vamos a actuar sobre una de las 4 salidas de las que dispone la unidad base, vemos como en la figura 9 se manda activar la segunda salida(Coil 2):
Figura 9
www.infoPLC.net