Comp Let A

of 179
Transcript of Comp Let A
El Problema de Sitnikov con 4-CuerposTesis para obtener el grado de
Doctor en Ciencias (Matemticas) aPresentado por el
Mat. Hugo Jimnez Prez e eMircoles 13 de enero de 2010 eDirector de tesis:
Dr. Ernesto Alejandro Lacomba Zamora.
Miembros del jurado:Dr. Dr. Dr. Dr. Dr. Arturo Olvera Chvez a Ernesto Alejandro Lacomba Zamora Ernesto Prez Chavela e Jess Mucio Raymundo u n Antonio Hernndez Garduo a n Presidente. Secretario. Vocal. Vocal. Vocal.
UNIVERSIDAD AUTONOMA METROPOLITANAUNIDAD IZTAPALAPA Divisin de Ciencias Bsicas e Ingenier o a a
..
A mi esposa Diane y a mi hija Iris. En la eternidad de nuestros suenos seguiremos juntos toda la vida...
Indice general
Introduccin o Agradecimientos Cap tulo 1. Antecedentes 1.1 Espacios simplcticos. e 1.2 Variedades simplcticas. e 1.3 Sistemas Hamiltonianos. 1.4 Acciones Hamiltonianas y la aplicacin momento. o 1.5 Reduccin de sistemas Hamiltonianos con simetr o a. 1.6 Funciones generatrices. 1.7 Sistemas mecnicos. a 1.8 El problema de los N cuerpos. 1.9 Singularidades en el problema de N -cuerpos. 1.10 Reduccin simplctica del problema de N cuerpos. o e Cap tulo 2. El problema de Sitnikov con 2+2 cuerpos 2.1 El problema de Sitnikov. 2.2 El problema de Sitnikov con 2+2 cuerpos. 2.3 Regularizacin de colisiones. o 2.4 La transformacin de Euler. o 2.5 Regularizacin del problema circular 2+2 de Sitnikov o Cap tulo 3. Estudio del caso restringido 3.1 El problema circular restringido de Sitnikov con 2+2 cuerpos. 57 3.2 Solucin anal o tica del caso circular restringido. 3.3 Hiper-supercies de energ constante. a 3.4 El conjunto de colisin. o 3.5 Transferencia de momento. 3.6 Soluciones peridicas en el problema circular: m3 = m4 . o
v xi 1 1 5 12 16 19 20 24 27 28 31 37 37 40 43 46 49 57
58 66 72 82 87
iv Cap tulo 4. Continuacin de rbitas peridicas o o o 4.1 Continuacin de orbitas simtricas o e 4.2 Cadenas de orden 1 en el problema 2+2 4.3 Cadenas de orden mayor y relacin n:m o Cap tulo 5. Conclusiones y perspectivas. 5.1 Regularizacin de colisiones. o 5.2 Coordenadas accin-ngulo y solucin anal o a o tica. 5.3 Transferencia de momento. 5.4 Foliacin del espacio fase. o 5.5 Continuacin de obitas peridicas. o o 5.6 Nuevas posibilidades de investigacin. o
Indice general 95 95 100 110 113 113 114 115 116 116 117 123 123 125 127 128 129 133 133 134 141 141 144 145 147 148 148 149 154 157
Apndice A. Grupos y lgebras de Lie e a A.1 Grupos de Lie. A.2 Algebras de Lie. A.3 Algebras de Lie de grupos de Lie. A.4 Subgrupos a un parmetro y la aplicacin exponencial. a o A.5 Derivada de Lie. Apndice B. Formas diferenciales e B.1 Aplicaciones multilineales alternadas. B.2 Formas diferenciales. Apndice C. Funciones e integrales el e pticas C.1 Integrales el pticas. C.2 Funciones el pticas. C.3 Funciones el pticas de Jacobi. C.4 Argumento imaginario. C.5 Derivadas de las funciones el pticas de Jacobi. C.6 Teorema de la adicin. o C.7 Periodicidad y polos. C.8 Transformaciones del mdulo. o Bibliograf a
Introduccion
La mecnica celeste es un tema que tiene una larga y diversa historia. a A travs de muchos aos, tanto lsofos como cient e n o cos han tratado de responder a una serie de preguntas acerca de la dinmica del sistema solar a y particularmente de su estabilidad. De manera simple podemos decir que la mecnica celeste es el estudio de la solucin de un sistema de ecuacioa o nes diferenciales, conocido como el problema de N -cuerpos. Este problema est relacionado con el movimiento de N masas puntuales que se atraen a unas a otras bajo las fuerzas gravitacionales Newtonianas, en el espacio f sico tridimensional. En este trabajo se presenta un problema restringido de 4 cuerpos en una conguracin original que presenta muchas simetr La conguracin con o as. o 4-cuerpos es la siguiente: dos cuerpos de masas m1 = m2 = 1/2 evolucionan en el plano horizontal XY describiendo rbitas Keplerianas y dos cuerpos o innitesimales m3 m4 0 movindose en el eje Z sin ejercer atraccin e o sobre los primarios. Esta conguracin es una generalizacin del problema o o de Sitnikov que se obtiene al agregar un segundo cuerpo innitesimal en la recta vertical de dicho problema. De esta forma, el problema ser llamado a el Problema de Sitnikov con 2+2 cuerpos. Las aportaciones de este trabajo de investigacin son las siguientes: o
Presentacin de un problema restringido de 4 cuerpos que permite o un estudio detallado de la interaccin entre los cuerpos innitesio males. Estudio del proceso de regularizacin para colisiones binarias colio neales en un sistema que presenta fuerzas externas. Obtencin de las coordenadas accin-ngulo para el problema ciro o a cular restringido de Sitnikov con 2+2 cuerpos. Mtodo alternativo e para encontrar las soluciones anal ticas. Aplicacin de tcnicas de la transferencia de momento en un proo e blema de mecnica celeste. Es de gran importancia notar que la a existencia de colisiones binarias en un sistema con fuerzas ajenas a los cuerpos que colisionan no permite un cambio de coordenadas
vi
Introduccion donde el conjunto de colisiones se reduzca al centro de masa del sistema. Uso de la transferencia de momento para continuacin de rbitas o o peridicas cuando no existe simetr en las supercies de energ o a a constante de un sistema mecnico. a Clasicacin de la dinmica del problema circular restringido de o a Sitnikov de 2+2 cuerpos.
Resena historica. El problema de Sitnikov es un caso particular del problema restringido de tres cuerpos, cuyas soluciones muestran una dinmica muy diversa. De hecho, en un estudio realizado por el astrnomo a o francs J. Chazy sobre las evoluciones nales del problema restringido de tres e cuerpos (1922-1931 [20]), incluy en su clasicacin un tipo de movimientos o o que llam oscilatorios, sin tener conocimiento de alguna conguracin que o o pudiera presentar estos movimientos. En 1954, Kolmogorov propuso una conguracin del problema de tres o cuerpos en la cual se ten dos cuerpos de masas iguales m1 = m2 en el an plano XY , situados de manera simtrica con respecto del eje vertical Z y un e tercer cuerpo de masa m3 sobre la recta vertical con velocidad en direccin o vertical tambin. Los cuerpos de masas m1 y m2 tendr as una evolucin e an o en rbitas simtricas (no cerradas en general) y el tercer cuerpo permanecer o e a sobre la vertical debido a la simetr del problema [2]. Esta conguracin, a o con la restriccin que m3 = 0, le permiti a Sitnikov demostrar la existencia o o de rbitas oscilatorias en el problema restringido de tres cuerpos [94, 1960]. o Cuando las rbitas de los cuerpos masivos son circulares, las ecuacioo nes que describen el movimiento del cuerpos innitesimal no dependen del tiempo f sico expl citamente. Esto reduce las dimensiones del sistema de ecuaciones y permite su integracin expl o cita. Este caso, ya se hab estua diado por Pavinini en 1907 y tambin por Macmillan en 1911 [65], quien e present la solucin en trminos de funciones e integrales el o o e pticas y su aproximacin mediante series de funciones trigonomtricas. Esto permiti hacer o e o clculos expl a citos y durante muchos aos se conoci como el problema de n o MacMillan. Actualmente se conoce como el problema circular de Sitnikov. En la decada de los 60s, el problema adquiri mucho inters entre f o e sicos, astrnomos y matemticos. Alekseev present un estudio detallado sobre o a o sistemas dinmicos, ecuaciones diferenciales y dinmicas simblicas y utia a o liz como principal ejemplo la conguracin de Sitnikov [2]. Una armacin o o o importante en dicho trabajo (en el segundo y tercer art culo) es que en el caso en que la masa del tercer cuerpo es positiva m3 > 0, la dinmica del a problema es equivalente al caso m3 = 0, en el sentido que se presenta un conjunto hiperblico invariante donde se puede sumergir un corrimiento de o Bernoulli. En 1973, Moser presenta una obra donde simplica los trabajos de Alekseev utilizando dinmicas simblicas [77] y demuestra la no integrabilia o dad del problema de Sitnikov en general. A partir de ese momento, decenas de cient cos han trabajado sobre este problema, entre los que podemos
vii mencionar (sin un orden en particular) a Llibre, Sim, Xia, Dankowicz, Holo mes, Belbruno, Oll, Garc e a-Rodr guez, Prez-Chavela, Chesley, Lacomba, e Corbera, Jie Liu, Yi-Sui Sun, Robinson, Dvorak, Fernndez-Hevia, Raada, a n Jalali, Pourtakdoust, entre muchos otros. Algunas generalizaciones de este problema incluyen las siguientes: El problema de Sitnikov con tres masas iguales propuesto por Dvorak [30, 1993]. El problema de Sitnikov en R4 propuesto por Lacomba, Llibre y Prez-Chavela [57, 2002]. e El problema circular de Sitnikov con 4-cuerpos en una conguracin o 3+1 propuesto por Soulis, Papadakis y Bountis [95, 2008]. El problema circular de Sitnikov con 2+2 cuerpos propuesto en este trabajo de investigacin [49, 2009]. o Acerca del presente documento. Este trabajo detalla el problema de Sitnikov con 2+2 cuerpos en el caso restringido circular y explora el caso en que las masas de los secundarios tienden a cero con una razn lineal o m4 = c m3 para 0 < c 1. En particular se puso mucha atencin al o estudio del problema con intercambio de momento que sufren los cuerpos secundarios durante una colisin. Este caso llega a ser de mucho inters en o e mecnica celeste y astrodinmica para aplicaciones inmediatas a problemas a a de satelites y asteroides. Cuando se tienen masas iguales en los secundarios (c = 1) no existe transferencia de momento durante las colisiones. En este caso se encuentran las condiciones bajo las cuales se tienen rbitas peridicas y posteriormente o o se buscan las condiciones para generar familias de rbitas peridicas que o o se puedan extender al caso c = 1 considerando el intercambio de momento durante la colisin. o Cuando se tienen masas diferentes en los secundarios (0 < c < 1) el comportamiento cambia. Para continuar una solucin despus de una colio e sin, si esta se presenta fuera del origen de coordenadas, la transferencia de o momento genera una discontinuidad en el espacio fase. Esto se debe a que la proyeccin de las supercies de nivel y de los conjuntos de colisin en el o o espacio de momentos son elipses en lugar de circunferencias y la simetr a con respecto de las rectas (diagonales) que determinan el intercambio de momento se ha perdido. Otra dicultad es que el proceso de regularizacin reduce la dimensin o o del conjunto de colisiones creando una transformacin cuyo rango no es o completo en dicho conjunto. Al revertir el proceso debemos determinar la forma de pegar las soluciones y esto se deber hacer solucin a solucin. a o o Este comportamiento se utiliza en este trabajo para hacer la continuacin o de rbitas peridicas. o o A continuacin se da un bosquejo general del documento: En el Cap o tulo 1, se presentan los antecedentes relacionados con la geometr simplctica, a e sistemas Hamiltonianos, y sus aplicaciones al problema de N -cuerpos. El
viii
Introduccion
Cap tulo 2 est dedicado a la descripcin de nuestro problema. Se inicia con a o la exposicin del problema de Sitnikov clsico y posteriormente se presenta o a el Problema de Sitnikov con 2+2 cuerpos, sus ecuaciones de movimiento y una clasicacin basada en los valores de los parmetros que aparecen en o a las ecuaciones. En el mismo cap tulo se presenta la regularizacin de las o colisiones del problema y nalizamos con un caso particular con condiciones iniciales simtricas que llamamos el problema circular simtrico de Sitnikov e e con 2+2 cuerpos; se demuestra que este caso es integrable por cuadraturas y se determina la dinmica de los cuerpos secundarios. a En el Cap tulo 3 se hace un estudio del problema circular cuando no existe interaccin entre los secundarios. Este caso lo llamaremos el problema o circular restringido de Sitnikov con 2+2 cuerpos. Al ser un caso restringido, las ecuaciones de movimiento se desacoplan y obtenemos un problema integrable de 2 grados de libertad. Posteriormente se obtienen las coordenadas accin-ngulo, las soluciones anal o a ticas y la foliacin del espacio fase o por subvariedades Lagrangianas. Tambin se hace un estudio del conjunto e de colisiones que resulta ser una 3-variedad foliada por esferas S2 y cilindros S1 R. (Esta variedad de colisin no coincide con el concepto clsico denido o a por McGehee [70] y otros autores.) Se inicia un estudio sobre la transferencia de momento y se caracteriza la forma de pegar las soluciones despus e de una colisin. Finalizamos con la caracterizacin de las rbitas peridicas o o o o sobre toros Lagrangianos resonantes para el caso m3 = m4 . El Cap tulo 4 est dedicado a extender las rbitas peridicas simtricas a o o e que se encuentran en el caso con m3 = m4 a rbitas peridicas para peo o queas variaciones de las masas m3 = m4 . Este mtodo de continuacin es n e o equivalente al mtodo de continuacin de Poincar para orbitas peridicas e o e o de segunda especie, sin embargo, aqu se utiliza la transferencia de momento y el rebote elstico para obtener las nuevas rbitas peridicas. El Cap a o o tulo 5 est reservado para algunos problemas abiertos que han surgido durante a la investigacin y para establecer nuestras conclusiones. Adicionalmente se o tienen tres Apndices: el primero da antecedentes de Formas diferenciales e que se utiliza para algunos resultados sobre simplectomorsmos. El segundo apndice da los antecedentes de Grupos y lgebras de Lie que se necesitan e a para entender otros conceptos adicionales sobre reduccin simplctica, aco e ciones Hamiltonianas y del mapeo momento. El tercer y ultimo apndice e es una breve intoduccin a la teor de funciones e integrales el o a pticas de Jacobi. El problema se aborda como un problema integrable y se utiliza la teor a de sistemas Hamiltonianos completamente integrables para comprender la geometr y la topolog de las subvariedades donde se encuentran las soa a luciones. El caso integrable corresponde al problema circular restringido de Sitnikov con 2+2 cuerpos. En particular, se utiliza herramienta de la geometr simplctica y teor de Lie, espec a e a camente de lgebras de Lie y a acciones Hamiltonianas sobre variedades simplcticas. e
ix Algunos resultados son generales, como la regularizacin de las ecuacioo nes del problema. Bajo la misma tcnica se puede regularizar toda cone guracin de n+2 cuerpos con n primarios en el plano en equilibrio relativo o poligonal y los secundarios evolucionan en la recta perpendicular que pasa por el centro del pol gono. Asimismo, se puede utilizar para los problemas de 2n+2 cuerpos donde se tienen 2 pol gonos regulares anidados con n cuerpos en sus vrtices y los secundarios que se mueven en la recta perpendicular e que pasa por el centro de masas del sistema primario.
Agradecimientos
O Agradezco al CoNaCyT por el apoyo ecnomico para realizar mis estuo dios doctorales a travs de la beca nmero 184728, incluyendo la estancia e u de investigacin en el Observatorio de Paris. Agradezco tambin al Institut o e de Mcanique Cleste et Calcul des Ephmerides (IMCCE) del Observatorio e e e de Paris por acogerme como investigador visitante durante ma investigacin o doctoral. Agradezco a mi asesor, Ernesto Lacomba, por iniciarme en el estudio del problema de Sitnikov y por la sugerencia del problema con 4 cuerpos que di origen a este proyecto doctoral. Tambin le agradezco su conano e za, su ayuda y por acercarme al estudio de la mecnica celeste desde una a perspectiva geomtrica. e Agradezco a mis sinodales del examen doctoral: Arturo Olvera, Ernesto Prez Chavela, Jess Mucio y Antonio Hernndez por su ayuda y el tiempo e u n a dedicado a revisar y mejorar este trabajo. Agradezco a mis sinodales del examen predoctoral: Manuel Falconi, Lidia Jimnez y Antonio Garc por las ideas aportadas en el planteamiento de e a este proyecto. O Esta seccin es de mucha ayuda moral ya que me permiti hacer un o o pequeo ashback y comparar lo que sab antes de iniciar la tesis con lo n a que s al momento de terminarla. El aspecto ms importante es resaltar e a toda la ayuda que he recibido durante estos dif ciles aos y la capacidad que n tienen mis colegas para compartir sus ideas y su conocimiento. Primero quiero agradecer a mi familia por todo el tiempo que me han dado para hacer mis estudios, mi investigacin y las asistencias a congresos y o conferencias, para mi hija Iris y mi esposa Diane con todo mi corazn. Tamo bin deseo agradecer a mi madre Carmen, a Blanca Rosa Prez, a Rosendo e e Castillo Prez y Armando Castillo Animas por su apoyo incondicional. e La siguiente lista no tiene un orden y no es exhaustiva, pero si olvido a alguien, espero que no se tome de manera personal. Deseo agradecer a Santiago Lpez de Medrano por la conanza con la que siempre me ha o
xii
Agradecimientos
recibido, la ayuda y las sesiones informales. Asimismo deseo agradecer a Laurent Niederman por haberme acogido en el observatorio de Paris y haber fungido como asesor externo en mi estancia en el IMCCE. Al equipo de mecnica celeste de la UAM-I que me apoyaron durante toda esta aventura: a Martha Alvarez (primero las damas ), Joaqu Delgado, Ernesto Prezn e Chavela, Antonio Garc Luis Aguirre, Mario Medina y a mis compaeros a, n de estudios Luis Franco por todos los dolores de cabeza que pas escuchando o mis locas ideas, a Jos Luis Cosme por todas las vueltas a la divisin de CBI e o para hacer mi papeleo y a Ismael Velzquez por su conanza. a Quiero agredecer particularmente a las personas que aportaron ideas en relacin a la investigacin que se realiz... algunos de ellos creo que no o o o sabrn siquiera que tuvieron algo que ver. Inicio con Jess Mucio, que a u n me pidi apropiarme de mi trabajo de tesis, a Gerardo Hernndez que o a aport preguntas valiosas, a Claudio Vidal por las sesiones y consejos soo bre teorema de Arenstorf, a Alexander Bruno por sus comentarios sobre el estudio del problema con cadenas a travs de colisiones, a J-P Marco por e ideas sobre la importancia de hacer continuacin a rbitas sin colisiones, o o a Federiqua Pasquotto por explicarme su trabajo sobre rbitas peridicas o o en sistemas mecnicos, a Jaume Llibre por las sesiones que dedic a escua o char mi trabajo, sus comentarios e ideas sobre rbitas de segunda especie, a o Jacques Fejoz por la sencillez de sus conversaciones y algunas ideas simples pero efectivas, a Alain Chenciner por las palabras de aliento y por darme los primeros textos de teor de Ramis-Morales y de su trabajo con Emmanuea lle Tossier, a Primitivo Acosta porque me dijo que no lo olvidara al escribir mis agradecimientos (y por supuesto por los cursillos del algoritmo de Kovacic en la teor de Ramis-Morales), a Carlos Signoret por los seminarios de a lgebra homolgica, Andrs Pedroza por iniciarme en la teor de acciones a o e a Hamiltonianas. A mis colegas y compaeros de posgrado que siempre me escuchaban n sufriendo porque muchas veces no entend lo que yo tampoco entend an a, pero al platicrselo empezaba a tomar forma en mi cabeza. A los profesoa res que me dieron cursos y tambin a aquellos que no lo hicieron pero me e dedicaron algn tiempo para explicar detalles valiosos: Rogelio Fernndez, u a Laura Hidalgo, Horacio Tapia, Guadalupe Reyes. Y para todos los dems que aportaron algn elemento adicional en este a u trabajo pero que ahora no recuerdo, tambin les doy mi agradecimiento... e Ah! faltan tambin Oscar Palmas por detalles sobre lgebras de Lie y Guie a llermo Gmez por discusiones sobre billares y colisiones. o
CAP ITULO 1
Antecedentes
El objetivo de este cap tulo es presentar los fundamentos de los sistemas Hamiltonianos y de la geometr simplctica que son necesarios para coma e prender el contenido de este trabajo. Slo se incluirn los resultados ms o a a relevantes de dicha teor con la nalidad de que el trabajo sea autocontea nido. Para una introduccin ms detallada a la dinmica de los sistemas Hao a a miltonianos y la geometr simplctica, recomendamos al lector consultar a e los textos de Abraham y Marsden [1] y el excelente libro de Arnold [4] que son dos de las referencias ms completas. Tambin se recomienda el texto a e de Meyer [74] para sistemas Hamiltonianos y su aplicacin al problema de o N-cuerpos, Cannas da Silva[15], Audin [5], y por supuesto Hoer y Zender [43] para geometr Hamiltoniana y geometr simplctica y el libro de Maca a e Du [69] para topolog simplctica. Para la seccin de reducin simplctica a e o o e se pueden revisar los textos de Berndt [9], Perelomov [83] y Mircea Puta [87]. En particular, el ultimo es un texto excelente que cubre muchos de los casos que se presentan en los sistemas mecnicos. a
1.1
Espacios simplecticos.
Iniciemos este cap tulo con un punto de vista geomtrico y que consiste e en obtener los sistemas Hamiltonianos como funciones denidas sobre variedades simplcticas exactas y donde el campo vectorial se obtiene de manera e natural mediante la 2-forma diferencial que le da la estructura simplctica e a la variedad. 1.1.1. Espacios vectoriales simplcticos. La nocin de espacio e o vectorial simplctico se basa en proveer a un espacio vectorial lineal con una e
2
Antecedentes
estructura simplctica, proporcionada por una 2-forma diferencial conocida e como forma simplctica. e Definicion 1.1. Sea E un espacio vectorial lineal sobre el campo R. Una forma simplctica 0 sobre el espacio E es una forma diferencial que e cumple las condiciones es bilineal, antisimtrica, e y no degenerada. Definicion 1.2. Sea E un espacio vectorial de dimensin nita sobre o R y sea : E E R una forma bilineal antisimtrica no degenerada. A e la pareja (E, ) se le llama un espacio vectorial simplctico sobre R. e Definicion 1.3. La 2-forma diferencial 0 =i
dpi dqi ,
se denomina la forma simplctica cannica del espacio vectorial E. e o Visto como un producto interno, la forma simplctica cannica se puede e o escribir de la siguiente manera 0 (u, v) = u, Jv , 0n In In 0n donde J es la matriz simplctica cannica de dimensin 2n denida por e o o J = , u, v E,
donde 0n , In Mnn son las matrices cero e identidad respectivamente. El operador , es el producto interno usual en el espacio vectorial E. Es evidente que J es una matriz antisimtrica, pero tambin es una e e matriz ortogonal, i.e., JJ T = I2n . Por ejemplo, en el caso n = 1 tenemos J = 0 1 1 0 ,
que corresponde a una rotacin por /2 del espacio T R. o Del hecho que JJ T = I2n se desprende inmediatamente que J 1 = J T adems, J 2 = I por lo tanto J T = J. a 1.1.2. Subespacios de un espacio simplctico. e Definicion 1.4. Un subespacio vectorial W de un espacio simplctico e E, es un subconjunto W E tal que W es un espacio vectorial. Aunque la denicin de subespacio vectorial es equivalente a la de los o espacios vectoriales comunes, en un espacio vectorial simplctico existen e distintos tipos de subespacios y para ello se requiere el concepto de ortogonalidad simplctica e
1.1 Espacios simplcticos. e
3
Definicion 1.5. Sean u, v E dos vectores en un espacio simplctico. e Diremos que u es -ortogonal1 a v o que u y v son -ortogonales si se cumple que (u, v) = 0. Cuando haya riesgo de confusin, utilizaremos la notacin u v para o o denotar dos vectores -ortogonales u ortogonales con respecto de la forma simplctica . e Definicion 1.6. Sea W E un subespacio vectorial del espacio simplctie co E. El subespacio -ortogonal a W es el conjunto W es claramente un subespacio vectorial. Como u v es equivalente a v u, vemos que (W ) = W . Tomando en cuenta que la forma es no degenerada, tenemos la siguiente propiedad Proposicion 1.1. Sea W E un subespacio vectorial del espacio simplctie co E entonces se cumple dim W + dim W = dim E. Demostracion. Consideremos el espacio (E, 0 ) con la forma simplctie ca cannica o 0 (v, w) = en R2n . v, Jw , W = {x E|0 (x, y) = 0, y W }.
Si v W y w W , entonces v, Jw = 0, por lo tanto, v es ortogonal a Jw en el sentido clsico de la ortogonalidad denida por , . El conjunto a {Jw|w W } nos genera un subespacio de dimensin 2n dim W . Si aplio camos J 1 = J T para obtener W , la dimensin del nuevo subespacio es o tambin 2n dim W . Esto nos indica nalmente que e dim W = 2n dim W.
A diferencia de los subespacios ortogonales bajo el producto interno usual , donde W W = {0}, la ortogonalidad con respecto a una forma simplctica genera un subespacio vectorial W que no siempre es complee mentario al subespacio W y por lo tanto se puede dar que la interseccin o W W = V sea otro subespacio vectorial. Los subespacios vectoriales de un espacio simplctico se clasican de la siguiente manera e Definicion 1.7. Sea W E un subespacio vectorial del espacio simplctie el subespacio -ortogonal a W , entonces W se dice co E y sea W 1. isotrpico si W W , o1En diversos textos se utiliza el trmino antiortogonal haciendo referencia a la termie
nolog inglesa skew-orthogonal a
4 2. coisotrpico si W W , o 3. lagrangiano si W = W , 4. simplctico si W W = {0}. e
Antecedentes
Proposicion 1.2. Los subespacios vectoriales de un espacio simplctico e cumplen las siguientes propiedades 1. W es isotrpico si y slo si W es coisotrpico. o o o es isotrpico. 2. W es coisotrpico si y slo si W o o o 3. Si dim W = n y W es isotrpico, entonces W es lagrangiano. o Nota 1.1. Ntese que un subespacio lagrangiano es isotrpico y coisotrpio o o co al mismo tiempo. Los subespacios lagrangianos cumplen con ser subespacios isotrpicos o maximales y subespacios coisotrpicos minimales, en el sentido que la dio mensin de un espacio isotrpico est acotado por 0 dim W n y la de o o a un espacio coisotrpico cumple con n dim W 2n. o Es posible restringir la forma bilineal (, ) a un subespacio W E pero la restriccin en general va a ser degenerada. La restriccin es no degenerada o o = {0}. Esto es equivalente a decir que si y slo si W W o y tambin a decir que W es un subespacio simplctico e e Proposicion 1.3. Las siguientes armaciones son equivalentes 1. W W = {0}, 2. W W = E, 3. W es un subespacio simplctico, e 4. |W es inyectiva. 1.1.3. Los fibrados tangente y cotangente. Los espacios naturales donde se trabajan los sistemas mecnicos han sido muy importantes a para el nacimiento y desarrollo de la geometr simplctica y Hamiltoniana. a e De hecho, el primer ejemplo de espacio vectorial simplctico es el espacio e fase de un sistema Hamiltoniano que corresponde a un objeto geomtrico e conocido como el brado cotangente. Por otra parte, los sistemas Lagrangianos2 utilizan como espacio fase el brado tangente y aunque se le puede dotar de una estructura simplctica, dicha estructura no es natural. e Definicion 1.8. El brado tangente o haz tangente de un espacio vectorial W es el conjunto denido por (1.1) donde q es un punto del espacio vectorial y v es un vector sobre el plano tangente Tq W en el punto q.2Reciben ese nombre porque las ecuaciones de movimiento cumplen con las ecuaciones
W W = E
T W = {(q, v); q W, v Tq W },
de Euler-Lagrange y no tiene relacin con la denicin de subespacios Lagrangianos o o
1.2 Variedades simplcticas. e
5
Es importante notar que en la denicin anterior, Tx W W , sin emo = bargo, esta denicin se utiliza en general cuando W es una variedad difeo renciable. Si W = Rn entonces T Rn Rn Rn R2n . Este es el espacio = = simplctico para los campos vectoriales que utilizan posiciones y velocidades e (x, x) T Rn . Definicion 1.9. El brado cotangente o haz cotangente de un espacio vectorial W es el conjunto denido por (1.2) donde p es una 1-forma diferencial en W . T W = {(q, p); q W, p W },
T W tiene una estructura simplctica natural que podemos ver de la e siguiente manera: consideremos dos puntos x1 , x2 T W con coordenadas x1 = (q1 , p1 ) y x2 = (q2 , p2 ), donde qi W y pi W . Denimos la forma simplctica natural del brado cotangente por e De manera directa podemos ver que es una forma bilineal, y antisimtrica. e Adems, es fcil vericar que es no degenerada. a a Definicion 1.10. Sean (E, ) y (E , ) dos espacios vectoriales simplctie cos. Un simplectomorsmo : E E es un isomorsmo lineal tal que preserva la estructura simplctica entre los espacios, es decir e = , donde (u, v) = ((u), (v)). Si existe un simplectomorsmo entre dos espacios vectoriales, se dice que son simplectomorfos.
(x1 , x2 ) = p2 (q1 ) p1 (q2 ) R.
1.2
Variedades simplcticas. e
Definicion 1.11. Una 2-forma diferencial denida sobre una variedad diferencial M se dice que es de de Rham si para cada x M , la aplicacin o es bilineal y antisimtrica sobre el espacio tangente a M en x, y x vara de e manera lisa en x. Se dice que es cerrada si satisface la ecuacin diferencial o d = 0, donde d es la derivada exterior o diferencial de de Rham. Definicion 1.12. Una 2-forma denida sobre la variedad M , se dice simplctica si es cerrada y si x es simplctica sobre Tx M para todo x M . e e Una estructura simplctica sobre una variedad diferencial M es una 2e forma diferencial que es una forma simplctica sobre M . e Definicion 1.13. Una variedad simplctica es una pareja (M, ) donde e M es una variedad diferencial y es una forma simplctica. e Es importante notar que una variedad simplctica tiene dimensin par, e o ya que una forma antisimtrica sobre un espacio de dimensin impar es e o degenerada. x : Tx M Tx M R,
6
Antecedentes
Teorema 1.1 (Darboux). Sea (M, ) una variedad simplctica de die mensin 2n y sea x M un punto cualquiera sobre la variedad. Entonces o existe una carta coordenada (U, q1 , , qn , p1 , , pn ) centrada en el punto x tal que sobre U se tiene = dpi dqi .
Demostracion. Consideremos una base simplctica para Tx M y conse truyamos las coordenadas (q1 , , qn , p , , p ) centradas en x y que son n 1 vlidas para una vecindad U , as tenemos a x = dp dqi i x
.
Existen dos formas simplcticas sobre U : la que se obtiene por 0 = e y 1 = dp dqi . Entonces existen vecindades U0 y U1 de x, y un i difeomorsmo : U0 U1 tal que (x) = x, y dp dqi = . i Como ( dp dqi ) = d(p ) d(qi ) solo falta denir las i i y p = p . nuevas coordenadas como qi = qi i i
Definicion 1.14. Una carta denida por (U, q1 , , qn , p1 , , pn ) se conoce como una carta de Darboux. 1.2.1. El fibrado cotangente a una variedad. De manera equivalente a los espacios vectoriales donde se tiene una estructura simplctica e natural para su brado cotangente, el brado cotangente a una variedad M = T Q tiene una estructura natural de variedad simplctica, para Q una e variedad diferenciable de dimensin n. o Definicion 1.15. Sean Q1 y Q2 dos variedades de dimensin n con o brados cotangentes M1 = T Q1 y M2 = T Q2 y 1-formas 1 y 2 . Suponga que se tiene un difeomorsmo f : Q1 Q2 . El levantamiento cotangente3 de f es el difeomorsmo natural (1.3) entre los brados cotangentes. F := T f : M1 M2 ,
Para ser precisos, tenemos que si x1 = (q1 , 1 ) M1 con q1 Q1 y 1 Tq1 Q1 , entonces se dene F (x1 ) = x2 , donde x2 = (q2 , 2 ) M2 con q2 = f (q1 ) Q2 y (dfq1 ) 2 = 1 , y adems se a tiene que de tal forma que la restriccin de F |Tq es la aplicacin inversa de (dfq1 ) . o o 1
(dfq1 ) : Tq2 Q2 Tq1 Q1 ,
3El autor utiliza este trmino como traduccin del original: cotangent lift e o
1.2 Variedades simplcticas. e
7
Proposicion 1.4. El levantamiento cotangente F = T f de un difeomorsmo f : Q1 Q2 lleva una 1-forma de Liouville sobre T Q2 en una 1-forma cannica o de Liouville sobre T Q1 , es decir o (F ) 2 = 1 . Se debe notar que el diagrama M1 OT F
/ M2 OT
Q1 conmuta.
f
/ Q2
Corolario 1. El levantamiento F de un difeomorsmo f : Q1 Q2 es un simplectomorsmo, es decir (F ) 2 = 1 , donde 1 y 2 son las formas simplcticas cannicas sobre los brados coe o tangentes. En resumen, un difeomorsmo de variedades induce un simplectomorsmo cannico entre los brados cotangentes: o T Q1 OT T f
/ T Q2 OT
Q1
f
/ Q2 .
En trminos del grupo de difeomorsmos Dif(N ) y del grupo Sp(M, ) de e simplectomorsmos, decimos que la aplicacin o T : Dif(N ) Sp(M, ) f F = T f, es un homomorsmo de grupos. Definicion 1.16. sea X X(M ) un campo vectorial sobre la variedad simplctica M y 2 (M ) una 2-forma diferenciable, el producto interno e de X y , denotado por i(X) , est denido por a i(X) (Y ) = (X, Y ), para Y X(M ).
Si es no degenerada, esta aplicacin genera un isomorsmo o X(M ) 1 (M ).
8
Antecedentes
En coordenadas simplcticas cannicas x = (q, p) sobre M tenemos entonces e o que = n dpj dqj y por lo tanto = iX es una 1-forma j=1n
=j=1
(a dqj + a dpj ) 1 (M ), j j
el campo vectorial
() X =
= X X(M ) corresponde an
(a jj=1
a ) X(M ). j qj pj
1.2.2. Transformaciones simplcticas. Veamos ahora como se reae liza la equivalencia entre dos variedades que posean una estructura simplctie ca. De hecho, bajo el Teorema de Darboux se tiene que para cada n N, todas las variedades simplcticas de dimensin 2n, son localmente difeomore o fas al haz cotangente M 2n T Rn . = Sea (M1 , 1 ) y (M2 , 2 ) dos variedades simplcticas de dimensin 2n. e o Definicion 1.17. Un difeomorsmo simplctico o simplectomorsmo e entre las variedades (M1 , 1 ) y (M2 , 2 ) es un difeomorsmo : M1 M2 , tal que bajo se preserva la estructura simplctica, es decir que el pullback e cumple 2 = 1 . Por denicin si u, v Tp M2 se tiene que o ( 2 )p (u, v) = (2 )(p) (dp (u), dp (v)).
Se puede clasicar las variedades simplcticas mdulo simplectomorse o mos. El teorema de Darboux considera esta clasicacin de manera local: la o dimensin es el unico invariante local de una variedad simplctica mdulo o e o simplectomorsmos. De la misma forma en que una variedad diferencial de dimensin n se ve localmente como Rn , cualquier variedad simplctica de o e Rn , ). dimensin 2n se ve localmente como (T o 0 Definicion 1.18. Dos variedades (M1 , 1 ) y (M2 , 2 ) se dicen simplectomorfas si existe un difeomorsmo : M1 M2 tal que 2 = 1 . Definicion 1.19. (M1 , 1 ) y (M2 , 2 ) se dicen isotpicas si existe una o isotopa t : M1 M2 tal que 2 = 1 y una familia suave t := 2 de t 1 formas simplcticas que unen a 1 y 2 que son independientes de t. e Cuando se trabajan con la familia de simplectomorsmos sobre una misma variedad se tiene que : (M, ) (M, ) debe preservar la estructura simplctica, y por lo tanto e = .
1.2 Variedades simplcticas. e
9
Podemos ver que si 1 y 2 son dos simplectomorsmos entonces 1 2 cumple (vase la seccin B.2) e o (1 2 ) = . Definicion 1.20. La familia de simplectomorsmos forman un grupo conocido como el grupo simplctico de la variedad M y se designa por e Sp(M ). Por denicin se puede considerar que o x (u, v) = (x) ((u), (v)), u, v Tx M.
y entonces podemos identicar al grupo simplctico, con el grupo de isoe metr sobre Tx M bajo la forma x para todo x M . as 1.2.3. Transformaciones simplcticas con multiplicador. Exise te otro tipo de transformaciones que preserva la estructura simplctica de e una variedad, pero a diferencia de las transformaciones simplcticas cannie o cas, el elemento de rea (el volumen en general) de la variedad se transforma a mediante un multiplicador constante R (o C, y ms generalmente K). a Definicion 1.21. Un transformacin : (M, ) (M, ) que pertenece o a los difeomorsmos de la variedad Dif(M ) se dice que es simplctica con e multiplicador si se cumple = para = 0. Este tipo de transformaciones se utilizan para normalizar la atraccin o gravitacional, las unidades de masa o la velocidad angular de los sistemas de N cuerpos de la mecnica celeste y trabajar con sistemas adimensionales a preferentemente. En los casos en los que los sistemas Hamiltonianos son autnomos, al realizar una transformacin simplctica con multiplicador, la o o e funcin Hamiltoniana solo se multiplicar por el factor (como se ver ms o a a a adelante). Proposicion 1.5. Sea : (M, ) (M, ) una transformacin simplctio e ca con multiplicador = 0 sobre una variedad de dimensin 2n. Considereo mos que M est parametrizada en coordenadas simplcticas x = (q, p) con a e q, p Rn . Entonces se cumple J = donde x
1 ,
x
t
J
x
,
es la matriz Jacobiana de la transformacin. o
10
Antecedentes
1.2.4. Subvariedades. En esta seccin solo vamos a considerar subvao riedades que estn sumergidas de manera apropiada en la variedad simplctia e ca y de la cual heredan su topolog a. Definicion 1.22. Sea (M, ) una variedad simplctica de dimensin e o 2n. Una subvariedad W M es una subvariedad simplctica ( isotrpica o e o coisotrpica) si, en cada punto x W se tiene que Tx W es un subespacio o simplctico (isotrpico o coisotrpico respectivamente) de Tx M . e o o Nosotros estaremos interesados particularmente en las subvariedades Lagrangianas que se encuentran en los sistemas completamente integrables y en las subvariedades coisotrpicas de codimensin 1 que corresponden a los o o niveles de energ de un sistema Hamiltoniano. a Definicion 1.23. Sea (M, ) una variedad simplctica de dimensin 2n. e o Una subvariedad L M se dice Lagrangiana si, en cada punto x L se tiene que Tx L es un subespacio Lagrangiano de Tx M , es decir, x |Tx L 0 1 y dim Tx L = 2 dim Tx M . De manera equivalente, si se tiene la aplicacin inclusin o o entonces L es una subvariedad Lagrangiana si y solo si = 0 y dim L = 1 2 dim M . Si consideramos una variedad Q de dimensin n con M = T Q su brado o cotangente y designamos por (q1 , , qn ) U Q sus coordenadas con las coordenadas cotangentes (q1 , , qn , p1 , , pn ) T U M , entonces la 1-forma de Liouville sobre M es =i
: L M,
pi dqi ,
y la 2-forma cannica4 es o = d =i
dpi dqi .
Definicion 1.24. Se dene la seccin cero de un brado cotangente o Q como el conjunto de puntos M =T La seccin cero forma una subvariedad Q0 T Q de dimensin n y cuya o o interseccin con T U de un abierto U Q est dada por las ecuaciones o a 1 = = n = 0. Evidentemente se tiene que la 1-forma de Liouville =i Q0 := {(q, ) T Q| = 0, Tq Q}.
i dqi 0,
4Algunos autores consideran la forma simplctica cannica como = d = P dq e o i i
dpi .
1.2 Variedades simplcticas. e
11
se cancela sobre Q0 T U . En particular, si 0 : Q0 T Q es la aplicacin o inclusin, tenemos que = 0. Consecuentemente = d = 0 y por lo o 0 0 0 tanto la seccin cero Q0 es una subvariedad Lagrangiana. o Se puede construir toda una familia de subvariedades Lagrangianas que sean secciones caracterizadas por Q = {(q, q )|q Q, q Tq Q},
donde el covector q depende de manera suave de q y : Q T Q es una 1-forma de de Rham. No es dif probar que existe una correspondencia cil biun voca entre el conjunto de subvariedades Lagrangianas de T Q denidas como secciones Q y el conjunto de 1-formas sobre Q. Definicion 1.25. Sea (M, ) una variedad simplctica de dimensin 2n, e o es decir, es una forma bilineal, antisimtrica cerrada (d = 0). Un campo e vectorial X sobre M se dice que es campo vectorial de Liouville si se cumple LX = , donde LX denota la derivada de Lie de la forma simplctica a lo e largo del campo vectorial X (ver Apndice A). e Con la ayuda de la frmula de Cartan o LX = d iX + iX d, se puede reescribir la condicin para un campo vectorial de Liouville como o d(iX ) = . Entonces la 1-forma = iX dene una forma de contacto sobre cualquier hipersupercie M transversal al campo X. De hecho (d)n1 = iX (d(iX ))n1 = iX n1 = 1 iX ( n ) n
es una forma de volumen sobre M indicando que el campo X es transversal a la hipersupercie . Proposicion 1.6. Toda supercie de nivel correspondiente a un valor regular de una funcin Hamiltoniana H sobre la variedad simplctica (M, ) o e es una variedad de contacto. 1.2.5. Reduccion simplctica. En esta seccin enunciaremos un ree o sultado que nos permite analizar los detalles ms interesantes de un campo a vectorial (Hamiltoniano) sobre una variedad simplctica considerando el coe ciente de la variedad M entre algn grupo de simetr G. Para tal efecto, u as se requiere que G sea un grupo de Lie y que acte de manera Hamiltoniau na sobre la variedad M , esto generar una foliacin de la variedad M por a o subvariedades determinadas por G. Los resultados siguientes estn escritos en trminos de geometr simplctia e a e ca en una forma abstracta como se describe en [6]. Sin embargo, utilizaremos la reduccin simplctica para la reduccin de sistemas Hamiltonianos en la o e o Seccin 1.5 de una forma ms concreta como se detalla en [83]. o a
12
Antecedentes
Proposicion 1.7. Consideremos un espacio vectorial simplctico (E, ). e Sea L E un subespacio Lagrangiano y W E un subespacio coisotrpio co de E de tal forma que W + L = E. Consideremos el espacio vectorial cociente N = W/W . Entonces N es un subespacio vectorial simplctico, e |N es inyectiva, la imagen de la proyeccin de L W en N es un subespacio Lao grangiano. Demostracion. Primero veremos que la forma simplctica induce una e forma no degenerada sobre N , ya que W es el kernel de la restriccin de o |W al subespacio W . Al ser W un subespacio coisotrpico entonces W W y por lo tanto o ) = L W . Ahora, L = L pues es un subespacio Lagrangiano L (W W y tendr amos sucesivamente L W = (L + W ) = (L + W ) = E = 0. Entonces el kernel de la proyeccin o L W N, es trivial y la proyeccin es inyectiva. De manera inmediata tenemos que la o restriccin = |N es no degenerada y por lo tanto (N, ) es un espacio o simplctico y por lo tanto un subespacio simplctico de E. e e Ahora debemos probar que L W es un subespacio Lagrangiano de (N, ). Como W es coisotrpico y L + W = E entonces L W es un subes o pacio isotrpico de E, y tiene dimensin o o dim L W = dim L + dim W dim(L + W ) = dim W n, adems la dimensin de N es a o dim N = dim W (2n dim W ) = 2(dim W n). Entonces L W N es un subespacio que tiene la mitad de la dimensin o del superespacio. Tambin debemos ver que L W L y |LW = 0 por e ser lagrangiano. De manera directa tenemos que |LW = 0, lo que indica que es un subespacio Lagrangiano.
1.3
Sistemas Hamiltonianos.
1.3.1. Campos vectoriales simplcticos y Hamiltonianos. Las e principales familias de campos vectoriales que se encuentran sobre las variedades simplcticas son los campos vectoriales simplcticos y Hamiltonianos. e e En el primer caso, se encuentran estos campos como el lgebra de Lie del a grupo de simplectomorsmos Sp(M ), es decir el espacio de campos vectoriales cuyo ujo preserva la forma simplctica. En el segundo caso, se considera e
1.3 Sistemas Hamiltonianos.
13
aquellos campos vectoriales que corresponden a las 1-formas exactas sobre M bajo el isomorsmo := (iX ) : 1 (M ) X(M ). Definicion 1.26. Sea (M, ) una variedad simplctica. Un campo vece torial X sobre M se dice que es un campo vectorial simplctico si e LX = 0, es decir, que la forma simplctica es invariante bajo el ujo del campo vece torial. El conjunto de campos vectoriales simplcticos sobre M se denotar por e a sp(M ). Es fcil ver que los campos vectoriales simplcticos forman un lgebra a e a de Lie, para ello seleccionemos dos campos arbitrarios X, Y sp(M ) y veamos que Adicionalmente, los campos vectoriales simplcticos se encuentran como e el lgebra de Lie del grupo de simplctomorsmos sobre la variedad. a e Ahora utilicemos la identidad de Cartan para determinar quienes son los campos Hamiltonianos, como subconjunto de los campos simplcticos e LX = diX + iX d = 0, y como se tiene que d = 0 se tiene realmente que LX = diX as que los campos simplcticos son aquellos donde iX es una 1-forma cerrada. Ahora e se debe caracterizar a aquellos campos que cumplen que la 1-forma iX sea exacta. Definicion 1.27. Dada una funcin H F(M ) sobre la variedad simplctio e ca (M, ), el campo vectorial XH = (dH), es llamado un campo vectorial Hamiltoniano asociado a H. El conjunto de los campos vectoriales Hamiltonianos se denotar por ham(M ) sp(M ). a Se puede mostrar que si consideramos X, Y sp(M ) y Z X(M ) bajo el producto interno i[X,Y ] (Z) := w([X, Y ], Z) se obtiene (1.4) i[X,Y ] = d((Y, X)), ([88], pag 13). Es decir, que la inclusin del campo [X, Y ] con la forma o simplctica equivale a considerar la diferencial de una funcin f : M R, e o lo que indica que la forma es exacta y por lo tanto el campo [X, Y ] es un campo Hamiltoniano es decir que Como sp(M ) es un lgebra de Lie entonces ham(M ) hereda la estructura a de lgebra de Lie y adicionalmente es un ideal de sp(M ). a [sp(M ), sp(M )] ham(M ). L[X,Y ] = [LX , LY ] = LX (LY ) LY (LX ) = 0.
14
Antecedentes
1 Finalmente, podemos considerar el cociente sp(M )/ham(M ) := HdR (M ) que tendr una estructura inducida de lgebra de Lie que generar la sucea a a sin exacta o 1 0 ham(M ) sp(M ) HdR (M ) 0.
1 as HdR (M ) se conoce como el primer grupo de Homolog de de Rham de M y en este caso se considera como un lgebra de Lie conmutativa. a
Definicion 1.28. Sea (M, ) una variedad simplctica y sea H F(M ) e una funcin sobre M con campo vectorial Hamiltoniano XH . A la terna o (M, , XH ) se le llama un sistema Hamiltoniano. Se debe notar que las condiciones i(XH ) = dH, XH = (dH), son equivalentes. Para vericar las ecuaciones del campo vectorial en coordenadas locales, se debe determinar un conjunto de cartas (U, ) para la variedad M de tal forma que : U V con V R2n con regla de correspondencia (q) = x para q = (q1 , . . . , qn , p1 , . . . , pn ) M y x = (x1 , . . . , xn , y1 , . . . , yn ) R2n . Por lo tanto, como i(XH ) = dH entonces obtenemos q = JH(q). Si consideramos q = (q, p) el sistema se puede escribir de la forma (1.5) H , pi H , pi = qi para i = 1, 2, . . . , n. Estas son las ecuaciones de Hamilton. En la teor de ecuaciones diferenciales son utiles los siguientes conceptos a qi = Definicion 1.29. Si un sistema Hamiltoniano est denido sobre una a variedad simplctica de dimensin 2n, entonces al valor n se le conoce como e o el nmero de grados de libertad del sistema. u Definicion 1.30. Decimos que un sistema Hamiltoniano (1.5) es autnoo mo si H no depende explcitamente de t. En este caso H es una constante de movimiento y se dice que es una integral primera. 1.3.2. Sistemas completamente integrables. La relacin (1.4) se o puede esribir de manera alternativa como [X, Y ] = Xw(Y,X) , para X, Y sp(M ). Si consideramos funciones f, g F(M ) y sus correspondientes campos vectoriales simplcticos Xf , Xg , podemos escribir e [Xf , Xg ] = Xw(Xg ,Xf ) ,
1.3 Sistemas Hamiltonianos.
15
que es un campo vectorial Hamiltoniano. Esta campo esta denido por dos funciones suaves f, g sobre la variedad simplctica M , entonces tenemos la e siguiente Definicion 1.31. Denimos el corchete de Poisson de dos funciones f, g F(M ) como la funcin o {f, g} = w(Xf , Xg ). Proposicion 1.8. Sean f, g F(M ) funciones suaves sobre la variedad M entonces se cumple 1. {f, g} = Xf (g), 2. [Xf , Xg ] = X{g,f } . Demostracion. 1. Aplicamos directamente la denicin o {f, g} = (iXg )(Xf ), = (dg)(Xf ), = Xf g. 2. De la expresin (1.4) tenemos o [Xf , Xg ] = Xw(Xg ,Xf ) , = X{g,f } . Teorema 1.2. El corchete de Poisson es una estructura de algebra de Lie sobre F(M ) y la aplicacin o j : F(M ) ham(M, ), f Xf .
es un homomorsmo de algebras de Lie.
El kernel del homomorsmo j corresponde a todas las funciones tales que df = 0. Si M es conexo entonces el kernel corresponde a todas las funciones constantes y se puede identicar una copia de R F(M ) como el subconjunto de funciones constantes sobre M . De aqu se puede obtener otra sucesin exacta o 0 R F(M ) ham(M, ) 0. Definicion 1.32. Consideremos una variedad simplctica (M, ) de die mensin 2n y un conjunto de m n funciones F1 , , Fm F(M ). Decimos o que las funciones {Fi }m estn en involucin si se cumple a o i=1 y sus diferenciales son linealmente independientes punto a punto en un conjunto abierto U M . {Fi , Fj } = 0, i, j = 1, , m, j
16
Antecedentes
Definicion 1.33. Sea (M, , XH ) un sistema Hamiltoniano y F F(M ) una funcin lisa sobre la variedad M . F se dice que es una integral primera o si est en involucin con la funcin Hamiltoniana H. a o o Definicion 1.34. Un sistema Hamiltoniano (M, , XH ) con n grados de libertad 5 se dice que es completamente integrable si existen n funciones F1 , , Fn que estn en involucin para toda i = 1, , n y se tiene F1 = H. a o Ntese que la condicin de independencia lineal sobre los puntos de un o o abierto de U M se ha considerado dentro de la denicin de involucin. o o Esto se debe a que deseamos realizar diversos procesos como la reduccin o simplctica de sistemas Hamiltonianos mediante foliaciones no degeneradas. e Teorema 1.3. Sea (M, , XH ) un sistema Hamiltoniano completamente integrable entonces el ujo del campo vectorial XH corresponde a lineas rectas sobre cilindros de la forma Rk Tnk para alguna 1 k n. 1.3.3. Hamiltonianos no-autonomos. A menudo es util considerar funciones Hamiltonianas que dependen del tiempo H : M [0, 1] R, que denotaremos por H(p, t) = Ht (p). El campo vectorial se dene de manera anloga al caso original XHt y entonces se tiene una familia de difeoa morsmos H , tal que H = id que al tiempo t son tangentes a XHt , es t 0 decir d H ( (p)) = XHt (H (p)), p M, t [0, 1]. t dt t Dicha familia de difeomorsmos preserva la estructura simplctica y de hee cho forman una familia de simplectomorsmos llamada una isotopa Hamil toniana.
1.4
Acciones Hamiltonianas y la aplicacion momento.
Toda funcin suave F F(M ) denida sobre una variedad simplctica o e con un sistema Hamiltoniano H = (M, , XH ) genera una familia de simplectomorsmos y si adems {F, H} = 0, entonces los valores de la funcin a o F se conservan a lo largo del campo vectorial XH y por lo tanto, los simplectomorsmos sern una familia de transformaciones simtricas. Un sistema a e Hamiltoniano H puede tener diversas cantidades conservadas Fi . Si la variedad simplctica tiene dimensin 2n y existen n cantidades conservadas e o independientes funcionalmente Fi , con H = F1 , y que estn en involucin a o (i.e., {Fi , Fj } = 0), entonces el sistema Hamiltoniano es integrable en el sentido de Liouville.5Es decir, la variedad simplctica M tiene dimensin 2n. e o
1.4 Acciones Hamiltonianas y la aplicacion momento.
17
Definicion 1.35. Una accin de un grupo de Lie G sobre una variedad o M es un homomorsmo de grupos (1.6) : G Dif(M ), g g ,
donde Dif(M ) es el grupo de difeomorsmos sobre M . Es conveniente pensar en el ujo t = (t) de un campo vectorial como la accin de un grupo de Lie sobre la variedad M . Entonces la evaluacin o o de la accin del grupo ser o a eval : G M M, (g, p) g (p). Ahora consideremos una variedad simplctica (M, ) y un grupo de Lie e G con la accin (1.6). o Definicion 1.36. Decimos que la accin es una accin simplctica si o o e sta acta por simplectomorsmos, e u : G Sp(M ),
es decir, para cada g G se tiene que () = . g Si adems consideramos el lgebra de Lie g = Lie(G) y su espacio vectoa a rial dual g , podemos denir una accin hamiltoniana de la siguiente manera o Definicion 1.37. Decimos que una accin es una accin hamiltoniana o o si existe una aplicacin o : M g , que satisface las condiciones siguientes: Para cada X g caracterizamos a la componente de a lo largo de X como X : M R, p (p), X ,
y designamos X el campo vectorial sobre M generado por el subgrupo de un parmetro {exp(tX)|t R} G. Entonces a dX = iX , es decir, la funcin X es una funcin Hamiltoniana para el campo o o vectorial X. La aplicacin es equivariante con respecto de la accin de G o o de G sobre g cumple sobre M y la accin coadjunta Ad o g = Ad , g g G,
18 es decir, el siguiente diagrama conmuta M
Antecedentes
/M .
g
Ad
/ g
De esta forma (M, , G, ) es llamado un G-espacio hamiltoniano y es llamada la aplicacin momento. A la conguracin (M, , G, ) tambin se le o o e conoce como un sistema Hamiltoniano con G-simetra, aunque este trmino e es ms conocido cuando la variedad tiene una estructura de Poisson. a Teorema 1.4. Si la funcin Hamiltoniana H : M R de un sistema o mecnico es invariante bajo la accin Hamiltoniana del grupo de Lie G sobre a o la variedad M , la aplicacin momento correspondiente : M g es una o primera integral del sistema. Si restringimos esta situacin al toro Tk = S1 S1 entonces el grupo o de Lie G = Tk = (S1 )k que acta sobre una variedad simplctica (M, ) u e tiene la caracter stica de que tanto el lgebra de Lie g como su dual g se a identican con el espacio euclidiano Rk . Como la accin coadjunta del toro es o trivial entonces la aplicacin momento : M Rk slo necesita satisfacer o o que para la proyeccin X : M Rk sobre cada campo X g Rk se o = cumpla dX = iX , y que sea invariante bajo la accin del toro. Cada campo fundamental Xi o de un sistema Hamiltoniano integrable es generado por una integral primera Fi , 1 i n. La aplicacin o = (H = F1 , . . . , Fk ) : M g Rk , = es precisamente una aplicacin momento como fue denido en la seccin o o anterior. Si k < n el sistema es parcialmente integrable, por otro lado si k = n el sistema se dice Liouville integrable o completamente integrable. Tambin se debe notar que para una accin Hamiltoniana de un toro e o Tk , la condicin de equivariancia se convierte en invariancia. o Es un dato conocido que la imagen inversa 1 (x) de cada x Img() es una subvariedad Lagrangiana de (M, ). En el caso ms general cuando a la variedad simplctica donde se dene el sistema Hamiltoniano es no come pacta, la imagen de la aplicacin momento se puede separar en regiones, que o determinan la topolog de cada bra 1 (x). Si la bra dene una variedad a compacta, entonces ser isomorfa a un toro. En otros casos, ser isomorfa a a a cilindros o planos de acuerdo de la regin donde se encuentre x. Ms adelante o a se ver esta correspondencia en el problema circular doble de Sitnikov. a
1.5 Reduccion de sistemas Hamiltonianos con simetr a.
19
1.5 Reduccion de sistemas Hamiltonianos con simetr a.En esta seccin retomamos el concepto de reduccin simplctica que ya o o e se ha estudiado para espacios vectoriales lineales, y lo generalizaremos para ser aplicado a variedades simplctias. e Supongamos que se tiene una accin Hamiltoniana de un grupo de Lie o G sobre una variedad simplctica (M, ) y consideremos la aplicacin moe o correspondiente. Consideremos el conjunto de nivel de mento : M g la aplicacin, es decir, la imagen inversa de un punto regular x g bajo o y denotemos a este conjunto por Mx = 1 (x). Como x es un valor regular de se tiene que la diferencial d en todo punto c Mx env a o en otro caso Mx = . Mx es una variedad suave y de hecho es una subva1 a riedad coisotrpica de M . Si dim G = 2 dim M entonces Mx ser una subo variedad Lagrangiana. En el ultimo caso se cumple que la forma simplctica e de la variedad restringida al conjunto de nivel es |Mx 0. Tc M g ,
Definicion 1.38. El subgrupo de isotrop 6 de x relativo a la accin a o coadjunta del grupo de Lie G est dado por a Gx = {g G|Ad x = x}. g
Definicion 1.39. La rbita de un punto m M bajo la accin del grupo o o G es el conjunto Gm = {g m|g G}. Lema 1.1. El subgrupo de isotropa de x deja invariante a Mx . Se asume que Gx es un grupo compacto y que acta sobre Mx de manera u efectiva y sin puntos jos (en realidad basta con que la accin de Gx sobre o Mx sea propia y no se requiere la compacidad del grupo). El espacio Mx se descompone en rbitas de la accin de Gx y bajo estas hiptesis el espacio o o o de las rbitas Ox = Mx /Gx es una variedad suave llamada el espacio fase o reducido. Teorema 1.5. Sea (M, , G, ) un G-espacio Hamiltoniano con una aplicacin momento equivariante que satisface las condiciones anterioo res. Entonces Ox = 1 (x)/Gx tiene una forma simplctica x denida de e manera unica con (1.7) x x = i , x
donde x : 1 (x) Ox es la proyeccin cannica e ix : 1 (x) M es la o o inclusin. o La prueba del teorema requiere de un resultado previo6A este subgrupo tambin se le conoce como subgrupo estabilizador. e
20
Antecedentes
Lema 1.2. Sea m 1 (x), entonces las siguientes propiedades se cumplen 1. Gx m 1 (x), 2. Tm Gx m = Tm (Gm) Tm (1 (x)), 3. Tm (1 (x)) y Tm (Gm) son espacios -ortogonales. Bsicamente, este lema establece las relaciones entre los espacios tana gentes a m en las dimensiones adecuadas de forma que se pueda utilizar la Proposicin 1.7 para reduccin simplctica en espacios vectoriales (lineales). o o e Las pruebas de estos resultados pueden consultarse en [1, 9, 83, 87]. Con la forma x , Ox hereda una estructura simplctica de forma natural e y entonces la pareja (Ox , x ) ser una variedad simplctica. a e Sea (M, , XH , G) un sistema Hamiltoniano con una G-simetr Como a. sabemos, XH es G-invariante y tangente a Mx = 1 (x). Entonces se ob tiene un campo vectorial XH = XH |Ox sobre Ox llamado el campo vectorial reducido. Teorema 1.6. El campo vectorial reducido sobre el espacio fase reducido es Hamiltoniano. La funcin Hamiltoniana correspondiente H coincide con o la funcin Hamiltoniana original restringida a Ox . o De hecho, la funcin Hamiltoniana original es invariante bajo la accin o o del grupo G, lo que implica que H(m) = H(gm) para m = (q, p) M y para toda g G.
1.6
Funciones generatrices.
Como ya vimos anteriormente, la condicin para tener un simplectomoro smo entre dos variedades simplcticas : (M1 , 1 ) (M2 , 2 ) es que el e pullback de la forma simplctica de la imagen de sea la forma simplctica e e del dominio, es decir 2 = 1 , al menos localmente. Uno de los mtodos que se utilizan para denir simplectomorsmos es el e que utiliza funciones generatrices y que aprovecha diversas propiedades de las variedades simplcticas y de sus simplectomorsmos. Necesitaremos los e siguientes resultados: Proposicion 1.9. Sean (M1 , 1 ) y (M2 , 2 ) dos variedades simplcticas. e Consideremos el producto cartesiano de las variedades M = M1 M2 y las proyecciones cannicas i : M1 M2 Mi , i = 1, 2, sobre cada componente. o Entonces la variedad (M1 M2 , ) con = 1 1 2 2 ,
es una veriedad simplctica. e
1.6 Funciones generatrices. Proposicion 1.10. La grca de un simplectomorsmo a : M1 M2 , es una subvariedad Lagrangiana de M = M1 M2 .
21
Demostracion. Probaremos que el pullback de la inclusin es idntio e camente cero i = 0 en M . Primero veamos que induce un difeomorsmo de M1 , as que podemos escribir T(x,(x)) = {(v, T (v))|v Tx M1 }. Ahora, por la denicin de tenemos o i ((v1 , T (v1 )), (v2 , T (v2 ))) = 1 (v1 , v2 ) 2 (T (v1 ), T (v2 )), = 1 (v1 , v2 ) 2 (v1 , v2 ), = (1 2 )(v1 , v2 ),
o y por lo tanto i 0 si y slo si 2 = 1 .
Ahora veamos como funciona el proceso para generar simplectomorsmos con funciones generadoras: Primero se considera la variedad producto de dos variedades simplcticas e de la misma dimensin (M1 M2 , ) con una forma simplctica adecuada. A o e continuacin se considera una subvariedad Lagrangiana L (M1 M2 , ) y o se considera una involucin : M2 M2 que deniremos ms adelante. Eso a ta involucin torcer 7 a la subvariedad Lagrangiana y a la forma simplctica o a e por lo que tendremos la subvariedad torcida L (M1 M2 , ). Posteriormente vericamos si L es la grca de un difeomorsmo : M1 M2 a en caso armativo, entonces : M1 M2 es un simplectomorsmo. Para toda f F(N1 N2 ), df es una 1-forma cerrada sobre (N1 N2 ). La subvariedad Lagrangiana generada por f es Lf := {((x, y), (df )(x,y) )|(x, y) N1 N2 }. Adoptaremos la notacin o dx f dy f := y (df )(x,y) : Tx N1 Ty N2 {0} Ty N2 , Lf = {(x, y, dx f, dy f )|(x, y) N1 N2 } y a Cuando L es de hecho la grca de un difeomorsmo : M1 M2 , f llamaremos a el simplectomorsmo generado por f , y llamaremos a f la funcin generadora de : M1 M2 . o7Traduccin literal del autor para el trmino twist o e
:= x (df )(x,y) : Tx N1 Ty N2 Tx N1 {0},
que nos permite escribir
L = {(x, y, dx f, dy f )|(x, y) N1 N2 }. f
22
Antecedentes
a Pero cuando sabremos que L es la grca de un difeomorsmo? Sea f (U1 , x1 , , xn ), (U2 , y1 , , yn ) cartas coordenadas para N1 y N2 , con las cartas asociadas (T U1 , x1 , , xn , 1 , , n ), (T U2 , y1 , , yn , 1 , , n ) para M1 y M2 . El conjunto L = {(x, y, dx f, dy f )|(x, y) N1 N2 }, f es la grca de : M1 M2 si y slo si, para cualquier (x, ) M1 y a o (y, ) M2 se tiene (x, ) = (y, ), y esto se da si y slo si o = dx f y = dy f.
Por lo tanto, dado un punto (x, ) M1 , para encontrar su imagen (y, ) = (x, ), debemos resolver las ecuaciones Hamiltonianas i = i f (x, y), xi f = (x, y). yi
Si existe una solucin y = 1 (x, ), debemos revisar la otra ecuacin para o o obtener = 2 (x, ), de tal forma que (x, ) = (1 (x, ), 2 (x, )). Ahora por el teorema de la funcin impl o cita, para resolver la primera ecuacin de manera local para y en trminos de x y , necesitamos la o e condicin o det yj f xin
= 0.i,j=1
Esta es una condicin local necesaria y suciente para que f pueda o generar un simplectomorsmo . Sin embargo, globalmente se requiere biyectividad. 1.6.1. Coordenadas accion-angulo. Las coordenadas accin-nguo a lo, se utilizan en los sistemas Hamiltonianos completamente integrables cuando el lgebra de Lie g asociada a la imagen de la aplicacin momento es a o conmutativa. En este caso, cada campo vectorial fundamental Y Img() permite reconstruir localmente, a travs de la aplicacin exponencial, un e o campo vectorial Hamiltoniano en una subvariedad de dimensin 2. Esto o permite considerar la accin Hamiltoniana de S1 o de R sobre la restriccin o o del campo a N = (qi , pi ) para 1 i n. Si (M, ) es una variedad simplctica compacta de dimensin 2n, ene o tonces existe una 1-forma tal que = d. Para todo simplectomorsmo
1.6 Funciones generatrices. Sp(M ), la 1-forma es cerrada ya que d( ) = = = =
23
d , d, , 0.
Aplicando el Lemma de Poincar (vase la seccin B.2.5) sabemos que loe e o calmente existe f : M R tal que df = . Integremos sobre una curva simple cerrada para obtener f=
=
y nalmente veremos que (1.8)
=()
.
M TJ 3 3 (t) 4 (t) J 4
M
p q J h4
111111 000000 2 1
111111 000000 111111 000000 h3 111111 000000 111111 000000 111111 000000 111111 000000 1 111111 000000 111111 000000 111111 000000 111111 000000 111111 000000 111111 0000002
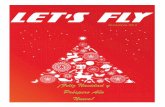
Figura 1.1. Coordenadas accin-ngulo. o a Denimos la accin sobre una curva simple cerrada como J() = . o Una consecuencia inmediata de la expresin (1.8) es que la accin sobre una o o curva cerrada simple es invariante bajo simplectomorsmos Por lo tanto es posible construir un simplectomorsmo para cada sistema Hamiltoniano integrable (M, , XH ) con rbitas peridicas que slo depeno o o da de los valores de la aplicacin momento. Sea x M un punto regular y o tomemos la imagen bajo la aplicacin momento y = (x) g . Ahora consio deremos la bra 1 (y) y supongamos que es una subvariedad compacta, es decir, es un toro Lagrangiano de M . Entonces, existe un simplectomorsmo : M M donde el sistema Hamiltoniano transformado slo depende de la o accin de las curvas integrales (simples cerradas). Las coordenadas obtenio das bajo el isomorsmo se conocen como coordenadas accin-ngulo y estn o a a
24 denidas por J(hi ) = 1 2 hi
Antecedentes
y
(hi ) =
1 t + 0 , (hi )
J donde (hi ) = hi . En particular, si se tiene un sistema Hamiltoniano separable, la 1-forma de Liouville = pi dqi permitir obtener las coordenadas a de accin de manera directa como n sistemas Hamiltonianos de un grado de o libertad.
1.7
Sistemas mecanicos.
Los primeros ejemplos de sistemas Hamiltonianos surgen en los sistemas mecnicos. Aunque en general, estos sistemas se determinan como sistemas a Hamiltonianos sobre variedades pre-simplcticas [4, 45], su estudio est ms e a a difundido como sistemas Hamiltonianos sobre variedades simplcticas y de e Poisson que corresponden a sistemas mecnicos conservativos. a 1.7.1. Sistemas mecanicos conservativos. Los sistemas mecnicos a conservativos estn dados por una ecuacin de la forma a o (1.9) donde V : Rn \ R es una funcin diferenciable y Rn es el conjunto o de singularidades de V . V es llamada la funcin potencial y la funcin Hamiltoniana denida o o de tal forma que el sistema de segundo orden (1.9), se convierta en uno de primer orden, est dada por a 1 2 (1.10) |p| V (q). H(q, p) = 2 Considerando al espacio de conguracin Q := (Rn \ ) como una varieo dad abierta con frontera, denimos la variedad simplctica (M := T Q, ) e para ser el espacio (co)fase del sistema Hamiltoniano (M, , XH ) donde el campo vectorial Hamiltoniano XH corresponde a la funcin (1.10). En este o caso, el isomorsmo que manda Tq Q Tq Q tiene como matriz asociada a In que es el elemento identidad en Mnn (R). De esta forma tenemos una identicacin natural de T Q T Q dada o = por p = q. Como la funcin Hamiltoniana H : M R es una primera integral para o el campo vectorial Hamiltoniano XH , sta dene un conjunto invariante e (nivel de energ a) para cada valor jo de h Img(H) R. Si h es un valor regular para la funcin H, el conjunto h = H 1 (h) o corresponde a una subvariedad diferenciable de codimensin 1 en M . Esta o variedad se conoce como la supercie de energa constante o simplemente h = {(q, p) M |H(q, p) = h} , q = V (q),
1.7 Sistemas mecanicos.
25
supercie de energa que son variedades de contacto dentro de la variedad M. Consideremos la proyeccin natural en la base o 1 : M Q (q, p) q, que corresponde a las secciones del espacio cotangente. La imagen de cada supercie de energ bajo la proyeccin 1 (h ) se le conoce como la regin a o o de Hill con energ h. a Hillh := 1 (h ). Esto implica que si (t) h es una solucin del sistema Hamiltoniano o con energ h, entonces 1 ((t0 )) Hillh para todo tiempo t0 I R. a La frontera de esta regin Hillh corresponde a la seccin cero y se o o le conoce como la supercie de velocidad cero, o curva de velocidad cero dependiendo de la dimensin del sistema Hamiltoniano. o En general se llamar conjunto de velocidad cero, y se obtiene cuando a V (q) = h. Las bras de M restringidas a h forman conjuntos convexos, topolgicao n1 con radio 2(h + V (q)), que se obtienen mente equivalentes a esferas S a partir de la relacin o 1 0 |p|2 = h + V (q). 2 Teorema 1.7. Las soluciones de equilibrio del sistema mecnico a q = p, p = V (q) estn dadas por (q0 , p0 ) = (0, 0), y corresponden a los puntos crticos de la a funcin potencial V . o Demostracion. Debemos notar que si 1 2 |p| V (q), H = 2 entonces su gradiente es Para que h R sea un valor regular de H, se debe vericar que dH(x) = 0 para cada x h . por lo tanto, dH(q, p) = 0 si, y slo si las siguientes o igualdades se cumplen simultneamente a V (q) = 0, p = 0, por consecuencia, si y slo si (q, p) es un punto de equilibrio para el campo o vectorial Hamiltoniano. H = (V (q), p) .
26
Antecedentes
Proposicion 1.11. El nivel de energa h corresponde a un valor regular para H si y slo si h no contiene puntos de equilibrio del campo vectorial o hamiltoniano asociado a H. La demostracin de esta proposicin puede revisarse en [78]. o o Todo sistema mecnico es reversible, en el sentido de que la transformaa cin lineal o R : Rn Rn Rn Rn (q, p) (q, p), deja invariante al sistema. Es claro que R es un isomorsmo cuya inversa es ella misma, a este tipo de isomorsmos se les llama involucin, R2 = R R = Id. o En efecto XH R(q, p) = XH (q, p) = (Hp (q, p), Hq (q, p)) = (p, V (q)) . Por otro lado se tiene que R XH (q, p) = R (Hp (q, p), Hq (q, p)) = (Hp (q, p), Hq (q, p)) = (p, V (q)) . De las identidades anteriores podemos ver que XH R = R XH , donde se ha sustituido t t, y por lo tanto se tiene la simetr (q, p, t) a (q, p, t). Teorema 1.8. Todo sistema mecnico es reversible y admite la involua cin o (q, p; t) (q, p; t). En particular, si una curva solucin (q(t), p(t)) es tal que q(t) tiene dos o puntos de interseccin con el conjunto de velocidad cero, entonces (q(t), p(t)) o es necesariamente peridica. o Enunciamos una variacin de una proposicin encontrada en [58] que o o nos permitir reducir el estudio del espacio fase de sistemas mecnicos a los a a casos mas relevantes cuando se tiene h > 0, h < 0 y h = 0. Proposicion 1.12 (Lacomba). Dado un sistema mecnico con potencial a homogneo de grado , e b V (q) = V (bq),
1.8 El problema de los N cuerpos.
27
para cada > 0 existe una transformacin simplctica con multiplicador o e que lleva la supercie de energa h h , para cualquier h R. Un cam bio en la escala de tiempo lleva soluciones del sistema original en soluciones del nuevo sistema. 1.7.2. Sistemas generales Newtonianos. Los sistemas generales Hamiltonianos tienen la forma donde x Q := \ ) con el conjunto de singularidades de V (x) y M es una matriz simtrica no singular de orden n n, V : Q R y g es una e funcin vectorial de la variable real (t) denida en un intervalo t I R. o Denamos la variedad M := T Q con la forma simplctica natural = e dpi dqi , de tal forma que (M, ) es una variedad simplctica. El sistema e i Hamiltoniano asociado est dado por (M, , XH ) donde XH = (dH), es a decir iXH = dH y H : M R est denida por a H = con p Tq Q.
(Rn
M + V (x) = g(t), x
1 T 1 p M p + V (x) xT g(t), 2
1.8
El problema de los N cuerpos.
El problema de los N cuerpos es un problema mecnico con 3N ecuaa ciones de movimiento de segundo grado de la formaN
(1.11)
mi q i = i,j=1,i 0 son las masas de cada cuerpo, qi R3 son las posiciones, qi R3 son sus aceleraciones, rij = qi qj son las distancias entre los cuerpos mi y mj con i, j {1, , N }, y G es la constante de gravitacin o universal. Este sistema est denido en (R3N \ ) donde el es el conjunto de a singularidades dado por (1.12) = {(q1 , , qN ) R3N |qi = qj , i = j, i, j = 1, , N }. Este conjunto contiene a todas las singularidades por colisin que se pueo den presentar en la ecuacin (1.11). Adicionalmente, las singularidades que o corresponden a escapes de alguno de los cuerpos en tiempo nito tambin e se encuentran en . Esto es consecuencia de un teorema probado por Painlev en 1895 y que se incluye en [81]. En la siguiente seccin ofreceremos e o una breve discusin de las singularidades del problema de N -cuerpos. o Consideremos el vector q = (q1 , , qN ) R3N , que corresponde a las posiciones de los N cuerpos y denamos la variedad Q := (R3N \ ) abierta, no compacta, con frontera como el espacio de conguracin de este sistema. o
28
Antecedentes
El problema de los N cuerpos admite una formulacin como sistema o Hamiltoniano (M, , XH ) sobre la variedad simplctica con frontera (M, ) e donde M := T Q, = i dpi dqi y XH es el campo vectorial Hamiltoniano asociado a la funcin o 1 T 1 H(q, p) = (1.13) p M p U (q), 2 donde p Tq Q, (1.14) y M M3N 3N (R+ ) U (q) =i=j
Gmi mj , rij
con 0, I M33 (R+ ) las matrices nula e identidad respectivamente.
es la matriz de masas dada por m1 I 0 0 0 m2 I 0 M= . . , .. . . . . . 0 0 mN I
1.9
Singularidades en el problema de N -cuerpos.
Seguiremos el tratamiento establecido por Boccaletti y Pucacco en [10]. Definicion 1.40. El momento de inercia del problema de N -cuerpos, es la distribucin de los cuerpos con respecto de su centro de masa (o centro o de rotacin) y se determina por la expresin o oN
(1.15)
I=i=1
2 mi ri ,
donde ri es la distancia del i-simo cuerpo al centro de masa del sistema. e Denotemos por (1.16) r=1i 0. Es importante notar que cuando 0 entonces la franja que se encuentra entre 2(1 + ) < h < 2(1 ) desaparece y los casos extremos se unen en uno slo. De esta forma, la foliacin para el caso = 0 es un poco ms o o a simple: Si h = 4 este nivel de energ no existe en el problema real ya que a se encuentra en el conjunto de singularidades (los secundarios estn en el origen en el mismo tiempo: imposible) a
3.3 Hiper-superficies de energ constante. a
71
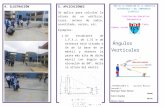
Si 4 < h < 2 los niveles de energ corresponden topolgicamena o te a esferas S3 foliadas por toros T2 y contienen dos curvas cerradas singulares en los extremos. Si h = 2 la supercie de energ es una esfera S3 agujereada en 4 a puntos. Si 2 < h < 0 las supercies de energ son esferas S3 con 4 discos a D2 como frontera. Si h = 0 la foliacin contiene cilindros disjuntos que contienen a o cuatro planos en el punto medio (cuando h3 = h4 = 0). Si h > 0 la foliacin contiene cilindros y planos unicamente. o Algunas de estas foliaciones se muestran en la gura 3.3.
Figura 3.3. Foliacin de los niveles de energ constante, o a = 0.
Por supuesto, los niveles de energ ms interesantes son h = 2(1 + ), a a h = 2(1 ) y h = 0 ya que estos son valores de bifurcacin para la o topolog de las supercies de nivel. Otros valores interesantes para la energ a a son 4 < h < 2(1 + ) ya que las supercies de energ son equivalentes a a esferas S3 foliadas por toros de dimensin 2 y tienen todas sus soluciones o acotadas. Muchas de ellas ofrecen la posibilidad de encontrar soluciones peridicas interesantes que se preservarn bajo pequeas perturbaciones del o a n sistema; ya sea a travs de perturbaciones a la excentricidad e de las rbitas e o keplerianas o de perturbaciones en el parmetro . a
72
Estudio del caso restringido
3.4
El conjunto de colision.
El conjunto de las colisiones para el problema de Sitnikov con 2+2 cuerpos es el hiperplano . Este conjunto es una variedad, aunque no corresponde con el concepto de variedad de colisin denida por McGehee en o [71]. Cuando se considera el problema con atraccin entre los secundarios, se o debe utilizar el sistema regularizado dado en las expresiones (2.33) y (2.35). En este caso, la interseccin de una supercie de energ constante con el o a conjunto corresponde a subvariedades no compactas equivalentes a esferas bidimensionales con 2, 4 o 6 nales cil ndricos, dependiendo del valor de la energ y de las masas innitesimales. a Si las masas de los cuerpos innitesimales son diferentes m3 = m4 , entonces ellos deben experimentar un intercambio de momento al pasar por la colisin. Sin embargo, la regularizacin reduce el conjunto de colisiones en 1 o o dimensin y es d o cil determinar la continuacin de las soluciones de manera o unica. Para comprender mejor la forma de hacer esa continuacin haremos o un estudio detallado del caso sin atraccin entre los cuerpos innitesimales. o Esto nos lleva al caso integrable donde el conjunto de colisiones tiene codimensin 1 y la interseccin con lo niveles de energ ja h son variedades o o a compactas cuando h < 0. Proposicion 3.19 (Jimnez-Prez). El conjunto de colisiones para una e e supercie de energa ja H(q, p) = h es topolgicamente equivalente a: o una esfera S2 de dimensin 2 si h (4, 0), o una esfera S2 \ {x+ , x } de dimensin 2 sin dos puntos para h = 0, o un cilindro C S1 R de dimensin 2 si h > 0 o = Demostracion. Fijemos un nivel de energ H(q, p) = h y considerea mos la interseccin de la supercie de nivel con el conjunto de colisiones o (3.23) h . 1 1 p2 + p2 3 2(1 + ) 2(1 ) 4 2 q2 + 1/4 2 q2 + 1/4
La funcin Hamiltoniana para q se convierte en o (3.24) h= ,
de donde obtenemos la relacin o (3.25) 0h+ = 1 1 p2 + p2 . 2(1 + ) 3 2(1 ) 4
Si pi = 0 para i = 3 o i = 4 se tiene la proyeccin de curvas equivalentes o a las curvas de nivel del problema de Sitnikov clsico. Por otro lado, para a cada q = q0 ja se tienen como secciones elipses con semiejes a y b dados
3.4 El conjunto de colision. por (3.26) (3.27) a = b =2 2(1 + ) h + 2/ q0 + 1/4 ,
73
2 2(1 ) h + 2/ q0 + 1/4 .
Esto nos indica que para ciertos valores de h se tienen supercies topolgicamente equivalentes a esferas y para otros las supercies son equivao lentes a cilindros. Determinemos los valores de h para los cuales se tienen se tiene cada una de las equivalencias anteriores. La relacin (3.25) determina el intervalo vlido para q. Los extremos de o a y este intervalo se encuentran al considerar la igualdad 0 = h + 22q +1/4
obtener q como funcin de h. o Expl citamente los extremos son q(h) = 1 4 2 h 4
y los valores de q estn en el intervalo a 1 4 q 2 h 4 1 4 . 2 h 4
Inmediatamente vemos los siguientes casos: Si h < 4 el intervalo es vacio y no existe conjunto de colisiones. Si h = 4 se tiene un punto y el conjunto de colisin es un punto o tambin. e Si 4 < h < 0 el intervalo es acotado y por lo tanto los conjuntos de colisiones son supercies compactas, cerradas y simplemente conexas. Es decir (h ) S2 . = Si h = 0 el intervalo corresponde a todo el eje de las qs y las proyeccines en pi = 0, i = 3, 4, corresponden a las rbitas parablicas o o o del problema de Sitnikov clsico. Entonces a (h ) (S2 \ {x , x }). = donde x = (, 0, 0) y x = (, 0, 0). Si h > 0 el intervalo corresponde a todo el eje de las qs y las proyeccines en pi = 0, i = 3, 4, corresponden a las rbitas hiperblicas o o o del problema de Sitnikov clsico. Entonces a (h ) S1 R. =
74
Estudio del caso restringido
Para estudiar el comportamiento del sistema al pasar a travs de una e colisin, estudiaremos con ms detalle cmo se descompone el conjunto de o a o colisiones en curvas asociadas a los toros invariantes Lagrangianos. Esta descomposicin se puede ver como una foliacin por curvas obtenidas por la o o interseccin de cada bra de la aplicacin momento 1 (x) con el conjunto o o de colisiones. Estaremos interesados en los valores de la funcin Hamiltoo niana H(q, p) = h tal que h < 0 dado que en esa regin existen rbitas o o peridicas y el conjunto de colisiones es un conjunto acotado difeomorfo a o S2 , como se estableci en la seccin 3.3.2 y en la Proposicin 3.19. o o o
h4
2
U
h3
2Figura 3.4. El subconjunto de Im() que cumple h < 0. Sea U Im() un sunconjunto abierto en la imagen de la aplicacin o momento (3.22), determinado por las condiciones h3 > 2(1 + ), h4 > 2(1 ) y h3 < h4 ,
como se muestra en la Figura 3.4. Para cada x U , donde x = (h3 , h4 ) la bra Tx = 1 (x) corresponde a un toro o a un cilindro invariante en R4 donde se encuentran las soluciones del problema integrable con energ as relativas h3 y h4 . Designemos por Cx = Tx al conjunto formado por la interseccin de la bra Tx con el conjunto de colisiones. Entonces se tienen o los siguientes resultados Lema 3.8. La proyeccin del conjunto Cx sobre el subespacio de momeno tos (p3 , p4 ) corresponde a segmentos de 1. dos rectas transversales en el origen con pendientes p4 = 1 p3 1+ cuando h3 = h4 , 2. las dos hojas de una hiprbola asinttica a las rectas del punto e o anterior cuando h3 = h4 . Demostracion. A partir de la funcin Hamiltoniana separable (3.1) o vemos que la interseccin de la bra Tx con el conjunto de colisiones o
3.4 El conjunto de colision. est determinado por las ecuaciones a h3 = (3.28) h4 =1 2 2(1+) p3 1 2 2(1) p4
75
1 , q 2 +1/4 1 2 . q +1/4
donde q . Restando las 2 ecuaciones para eliminar la variable q obtenemos 1 1 (3.29) p2 p2 . h3 h4 = 2(1 + ) 3 2(1 ) 4 La ecuacin (3.29) corresponde a la proyeccin del conjunto Cx sobre el plano o o (p3 , p4 ). Ahora obtenemos los siguientes casos 1. si h3 = h4 entonces la expresin (3.29) se descompone en las ecuao ciones 1 1 p3 p4 = 0, 2(1 + ) 2(1 ) 1 1 p3 + p4 = 0, 2(1 + ) 2(1 ) que corresponde a las dos rectas transversales p4 = 1 p3 . 1+ 2. si h3 = h4 la ecuacin (3.29) es una hiprbola asinttica a las rectas o e o del punto anterior.
2 p4 1 0 1 2
K2
K1
K1 K2
p3
Figura 3.5. Proyeccin del conjunto de colisiones de los too ros invariantes sobre (p3 , p4 ) con =0.1.
76
Estudio del caso restringido Las curvas anteriores estn sujetas a la condicin a o 1 1 4 + (h3 + h4 ) p2 + p2 , 2(1 + ) 3 2(1 ) 4
que es el interior de la elipse con semiejes a y b, dados en (3.26) y (3.27) respectivamente, y donde h = h3 + h4 . En la Figura 3.5 se muestran las hiprbolas obtenidas mediante la proyeccin del conjunto Cx para diversos e o valores de x = (h3 , h4 ) sobre el mismo nivel de energ h = h3 + h4 . a Definicion 3.2. La proyeccin cannica del espacio fase del problema o o circular de Sitnikov en el subespacio simplctico Si = (qi , pi ) est dada por e a i : M Si , (q3 , p3 , q4 , p4 ) (qi , pi ), i = 3, 4.
Nota 3.7. El lector debe considerar en los siguientes resultados que la proyeccin i (h ) Si tiene coordenadas (q3 , p3 , 0, 0) o (0, 0, q4 , p4 ). Por o lo tanto el subndice i aparece en la variable qi en casi todas las expresiones de lo que resta de la seccin. Cuando el subndice no aparezca en q, entonces o se trata de un subconjunto de h .
El siguiente resultado determina cmo es la proyeccin del conjunto de o o colisiones Cx en cada subespacio simplctico. e Lema 3.9. La proyeccin i (Cx ) del conjunto Cx en el subespacio simplctio e co Si , i = 3, 4, corresponde a uno de los dos casos siguientes: 1. Si hi hj , j = 3, 4, y i = j, entonces i (Cx ) corresponde a una curva de nivel completa del espacio fase del problema circular de Sitnikov clsico. a 2. Si hi > hj , entonces i (Cx ) corresponder a dos segmentos de una a curva de nivel del problema de Sitnikov clsico determinados por la a condicin o
(3.30)
1 1 2 4 qi hj
1 1 2 4. hj
Demostracion. Consideremos el conjunto de colisiones para un nivel de energ H = h < 0, dado por la ecuacin (3.24) y el conjunto Cx asociado a o a la bra Tx para x = (h3 , h4 ) tal que h = h3 +h4 . A partir de las expresiones (3.28) vemos directamente que i (Cx ) corresponde a una curva de nivel del problema circular de Sitnikov clsico. Designemos por i = i (hi ) a la curva a de nivel del problema circular de Sitnikov clsico con energ hi , para i = a a 3, 4. Dicha curva de nivel puede o no estar completamente contenida en la proyeccin i (h ) del conjunto de colisin. Una curva sobre h o o alcanza la frontera en i (h ) Si cuando pj = 0, j = 3, 4 e i = j. Por lo tanto, la frontera de i (h ) est dada por la curva a 2 1 p2 (3.31) , h= i 2(1 + i ) q 2 + 1/4i
3.4 El conjunto de colision.
77
donde i = (1)i+1 . Dicha curva servir como frontera de la proyeccin del a o conjunto Cx para cualquier bra Tx dada. Considerando que 2 1 0h+ p2 , = 2(1 + i ) i 2 + 1/4 qi
entonces la variable qi est restringida a a (3.32) 1hi +hj 2 2
1 qi 4
1hi +hj 2 2
1 . 4
Veamos ahora cada caso independiente. 1. Supongamos que hi hj , directamente tenemos hi que implica h2 i 2 i qi estan acotados por |qi | h +hj 2 hi +hj 2
< 0
. Entonces los valores que puede tomar 1hi +hj 2 2
(3.33)
1 1 2 4 hi
1 . 4
2
p3 1
K2
K1
0
1
q3
2
K1
K2
Figura 3.6. Proyeccin del conjunto de colisiones Cx sobre o (q3 , p3 ). Su frontera es la curva (3.31). Adems, de las expresiones (3.28) en el conjunto de colisiones, a tenemos la desigualdad 1 1 . p2 = hi + i 2(1 + i ) q 2 + 1/4 derecho obtenemos 1 p2 h + 2(1 + i ) i Sumando el trmino 0 hj + e1 q 2 +1/4
(3.34)
en el miembro del lado .
2 q2 + 1/4
78
Estudio del caso restringido La proyeccin i del conjunto anterior unicamente env q qi , es o a decir que nalmente tenemos la restriccin o 1 2 p2 h + . i 2(1 + i ) q 2 + 1/4i
(3.35)
Las expresiones (3.33) y (3.35) indican que la curva de nivel i est contenida en la regin delimitada por la curva (3.31), y por lo a o tanto i (Cx ) = i . Lo que prueba el primer punto del lema. 2. Supongamos ahora que hj < hi . Por el punto anterior con desigualdad estricta, tenemos que h2 > j (3.36) |qi | 1 1 2 4 < hj 1hi +hj 2 2 hi +hj 2 2
de donde se obtiene 1 1 2 4. hi
1 4
Las expresiones (3.28) deben cumplirse simultneamente para i y a j por lo que qi no alcanza sus valores mximo ni m a nimo (considerada como una solucin del problema de Sitnikov clsico) bajo la o a condicin o (3.37) 1 1 qi h2 4 j 1 1 . h2 4 j i (Cx ). Despejando pi de 12 qi + 1/4
Esto indica que i (Cx ) i pero i (3.34) y proyectando en Si obtenemos pi = 2(1 + i ) hi +
,
y i (Cx ) corresponder a dos segmentos de i uno para la ra a z positiva de pi y otro para la ra negativa bajo la condicin (3.37). z o En la Figura 3.6 se pueden ver las proyecciones i (Cx ) para distintos valores de x = (h3 , h4 ) sobre el mismo nivel de energ h = h3 + h4 . a Teorema 3.21 (Jimnez-Prez). El conjunto de colisiones Cx para cada e e bra Tx = 1 (x) corresponde a curvas parametrizadas por q = k sn(,k)dn(,k) 2dn2 (,k)1 (3.38) pj = 2k 2(1 + j ) cn(, k) pi = 2(1 + i ) hi hj + 4k2 cn2 (, k) donde i = (1)i+1 , k = 2 + hj /2, hj hi para i, j = 3, 4 i = j. Demostracion. El conjunto Cx est determinado por las ecuaciones a (3.28). Por el Lema 3.9 sabemos que el valor de q(= qi = qj ) estar acotado a
3.4 El conjunto de colision.
79
por la condicin (3.37), donde hj = m o n{h3 , h4 }. Trabajemos con la ecuacin o correspondiente al sub ndice j 1 1 (3.39) . p2 = h + j 2 + 1/4 2(1 + j ) q Como nuestro objetivo es parametrizar el conjunto, utilizaremos el cambio 1 de variable q = 2 tan y despejaremos pj del resultado obtenido. Esto nos dar a 1 tan , q = 2 pj = 2(1 + i ) hj + 2 cos , Considerando ahora = 2 y utilizando identidades trigonomtricas obtee nemos sin cos q = , 2 cos2 1 pj = = 2(1 + j ) 2(1 + j ) hj + 2(1 2 sin2 ), hj + 2 2 1 4 sin2 . hj + 2 hj + 2 , 2
Finalmente, mediante el cambio de variable sin = se obtiene (3.40) (3.41) q = k sn(, k) dn(, k) , 2dn2 (, k) 1 2(1 + j ) cn(, k). hj + 2 sn(, k), 2 k=
pj = 2k
Esta es la solucin al problema circular de Sitnikov si consideramos q = q(t) o para t = t() dada en el Lema 3.7. Ahora encontremos la expresin para el momento pi . Por el Lemma 3.8 o y dado que hj hi se cumple 1 1 0 hi hj = p2 p2 . i 2(1 + i ) 2(1 + j ) j Despejando pi obtenemos pi = 2(1 + i ) hi hj + 1 p2 . 2(1 + j ) j
Sustituyendo pj en la expresin anterior tenemos o (3.42) pi = 2(1 + i ) hi hj + 4k2 cn2 (, k).
La parametrizacin est dada por (3.40), (3.41) y (3.42) o a
80
Estudio del caso restringido
h=3
h=1.5
h=1
Figura 3.7. Interseccin de las bras Tx con el conjunto o para los niveles de energ h = 3, h = 1,5 y h = 1. a Un conjunto de estas curvas sobre las variedades de colisin para distino tos valores de H = h se pueden ver en la Figura 3.7.
Figura 3.8. Proyecciones de las bras Tx sobre los planos simplcticos S3 , S4 y sobre el espacio de momentos (p3 , p4 ). e Corolario 1. El conjunto de colisiones Cx para cada toro invariante Tx = 1 (x) corresponde a dos curvas simples cerradas, ajenas y simtricas e si h3 = h4 . Para el caso h3 = h4 este conjunto corresponde a dos curvas planas transversales que pertenecen a los planos p4 = 1 p3 . 1+ Demostracion. Cuando h3 = h4 , consideramos hj = m n{h3 , h4 } y tendremos hj < hi . Consideremos nuevamente a j = (qj , pj ) como una
3.4 El conjunto de colision.
81
curva de nivel del problema circular de Sitnikov clsico con energ hj sobre a a el subespacio simplctico Sj . Por el Lemma 3.9 se tiene que j (Cx ) = j e 1 y por lo tanto Cx = j (j ) corresponde a un levantamiento de j en la variedad de colisin con coordenadas o 1 p2 . , 2(1 + j ) j
(qj , pj )
q j , pj , q j ,
2(1 + i )
hi hj +
Denamos las curvas + , : I R mediante + () = (q, pj , p+ ) i () = (q, pj , p ) i
donde p+ corresponde a la ra positiva de pi y p corresponde a la ra z z i i negativa. Entonces + es simtrica a con respecto del plano pi = 0. Las e parametrizaciones (3.40) y (3.41) nos indican que las curvas + y son suaves, y sern cerradas si el denominador de (3.40) no se anula. a El m nimo valor que puede tomar la funcin dn(, k) con argumento o real es cuando = K (vase el Apndice C). Utilizando la identidad (C.33) e e tenemos sucesivamente que 2dn2 (K, k) 1 = 2(k )2 1 = 2(1 k2 ) 1 2 + hj = 1 2 = hj /2 > 0
Finalmente, el radicando de (3.42) siempre es positivo ya que hj < hi , esto indica que p+ > 0 y p < 0 para toda R, y podemos concluir que las i i curvas son ajenas. En el caso en que hi = hj la expresin para pi se reduce a o pi = 2k 2(1 + i )cn(, k).
La primera parte del Lema 3.8 nos arma que la imagen de las curvas + y debe satisfacer 1 2(1 + ) p3 1 2(1 ) p4 1 2(1 + ) p3 + 1 2(1 ) p4 =0
y por lo tanto estar sobre los planos p4 = a
1 1+ p3 .
Corolario 2. Consideremos que i = 4 y j = 3, es decir que h3 < h4 . Entonces la curva cerrada simple + corresponde a colisiones mientras que la curva corresponde expulsiones. Cuando h4 < h3 el comportamiento de + y se invierte.
82
Estudio del caso restringido Demostracion. Sea h3 < h4 , entonces se obtiene que 1 1 0 < h4 h3 = p2 p2 , 2(1 ) 4 2(1 + ) 3
de donde p4 >
1 1+ |p3 |.
+ corr