Cinemática de Translación - Informe
21
CINEMÁTICA DE LA TRASLACIÓN Katherin J. Mosquera Idrobo 100414020573 Mikel Muñoz 10491501110 Jose !r"ando Morillo #nriquez 104914020917 $!%&'!(&'I& )# *+,I-! M#-/I-! Ineniera -iil !" biental /I#',I)!) )#$ -!-! 1. OBJETIVOS ● Obtener una relaci ón de proporcionalidad entre la distancia recorrida y el tiempo transcurrido para un deslizador que se mueve libremente sobre un riel de aire horizontal. Calcular el valor de la velocidad. [1] ● Ide nti fca r el val or cuant itativ o de la velocida d pr oporcionado por el riel encontrando analiticamente y !rafcamente la variación estandar de los datos. "#$ ● %stablecer al!ebraicamente la relación entre las leyes de velocidad tiempo y distancia. "#$ ● Comprobar las leyes que ri!en el estudio del &ovimiento rectil'neo uni(ormemente acelerado o variado.[)] 2. INTRODUCCIÓN *ntes de entrar en materia hay que recordar los tipos de movimientos que se e+ercen nuestra ('sica teórica nos dice que el movimiento es proceso de cambiar en espacio y tiempo de lu!ar o posición con respecto a al!,n punto de re(erencia. ante esta consideración se tienen los si!uientes movimientos- Figura Nº 1- ormas de movimiento
-
Upload
josemorillo -
Category
Documents
-
view
231 -
download
0
Transcript of Cinemática de Translación - Informe
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 1/21
CINEMÁTICA DE LA TRASLACIÓN
Katherin J. Mosquera Idrobo 100414020573
Mikel Muñoz 10491501110
Jose !r"ando Morillo #nriquez 104914020917
$!%&'!(&'I& )# *+,I-! M#-/I-!
Ineniera -iil !"biental
/I#',I)!) )#$ -!-!
1. OBJETIVOS
● Obtener una relación de proporcionalidad entre la distanciarecorrida y el tiempo transcurrido para un deslizador que se muevelibremente sobre un riel de aire horizontal. Calcular el valor de lavelocidad. [1]
● Identifcar el valor cuantitativo de la velocidad proporcionadopor el riel encontrando analiticamente y !rafcamente la variaciónestandar de los datos. "#$
● %stablecer al!ebraicamente la relación entre las leyes develocidad tiempo y distancia. "#$
● Comprobar las leyes que ri!en el estudio del &ovimientorectil'neo uni(ormemente acelerado o variado.[)]
2. INTRODUCCIÓN
*ntes de entrar en materia hay que recordar los tipos de movimientos quese e+ercen nuestra ('sica teórica nos dice que el movimiento es proceso decambiar en espacio y tiempo de lu!ar o posición con respecto a al!,n puntode re(erencia.ante esta consideración se tienen los si!uientes movimientos-
Figura Nº 1- ormas de movimiento
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 2/21
Movimieno re!aivo- %s la relación del movimiento al ob+eto o puntoespec'fco de re(erencia.Movimieno "inem#i"o$ el cual se dividen en dos- cinem/tica linealcinem/tica an!ular para e(ectos del presente in(orme se tomar/ conmayor relevancia los conceptos de cinem/tica. 0a cinem/tica es la rama de la ('sica que estudia las leyes del movimientode los cuerpos sin considerar las causas que lo ori!inan y se limitaesencialmente al estudio de la trayectoria en (unción del tiempo. 0aaceleración es el ritmo con el que cambia la velocidad. 0a velocidad y la
aceleración son las dos principales ma!nitudes que describen cómo cambiala posición en (unción del tiempo. [1]
0os primeros en intentar describir el movimiento (ueron los astrónomos ylos flóso(os !rie!os. acia 1234 5alileo 5alilei hizo sus (amosos estudiosdel movimiento de ca'da libre y de es(eras en planos inclinados a fn decomprender aspectos del movimiento relevantes en su tiempo como elmovimiento de los planetas y de las balas de ca6ón. 0ue!o las aportacionesde 7icol/s Cop8rnico 9ycho :rache y ;ohannes <epler e=pandieron loshorizontes en la descripción del movimiento durante el si!lo >?I. %n 12@Acon la publicación de la obra titulada Principia Isaac 7eBton hizo la mayoraportación conocida al estudio sistem/tico del movimiento. Isaac 7eBton
"12# D 1A#A$ (ue un ('sico y matem/tico in!l8s considerado una de lasmentes m/s brillantes en la historia de la ciencia. [1]
Eara la realización de este laboratorio se tuvieron en cuenta las si!uientesdefniciones-
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 3/21
D %ar&"u!a$ Fepresentación ideal de un cuerpo mediante unpunto que ten!a las mismas caracter'sticas del cuerpo representadoque se comporte como un todo.
D %o'i"i(n$ %n ('sica la posición de una part'cula indica sulocalización en el espacio. Ge representa mediante sistemas decoordenadas.
) De'*!a+amieno$ %n ('sica es la lon!itud de la trayectoriacomprendida entre la posición lineal y la posición fnal de un puntomaterial.
) Tiem*o$ %s la ma!nitud ('sica que mide la duración decualquier acontecimiento o acción.
) Ve!o"i,a,$ %s una ma!nitud ('sica de car/cter vectorial quee=presa el cambio de posición en un intervalo de tiempo.
) -"e!era"i(n$ %s una ma!nitud vectorial que nos indica lavariación de velocidad ya sea en dirección o módulo por unidad detiempo. [1]
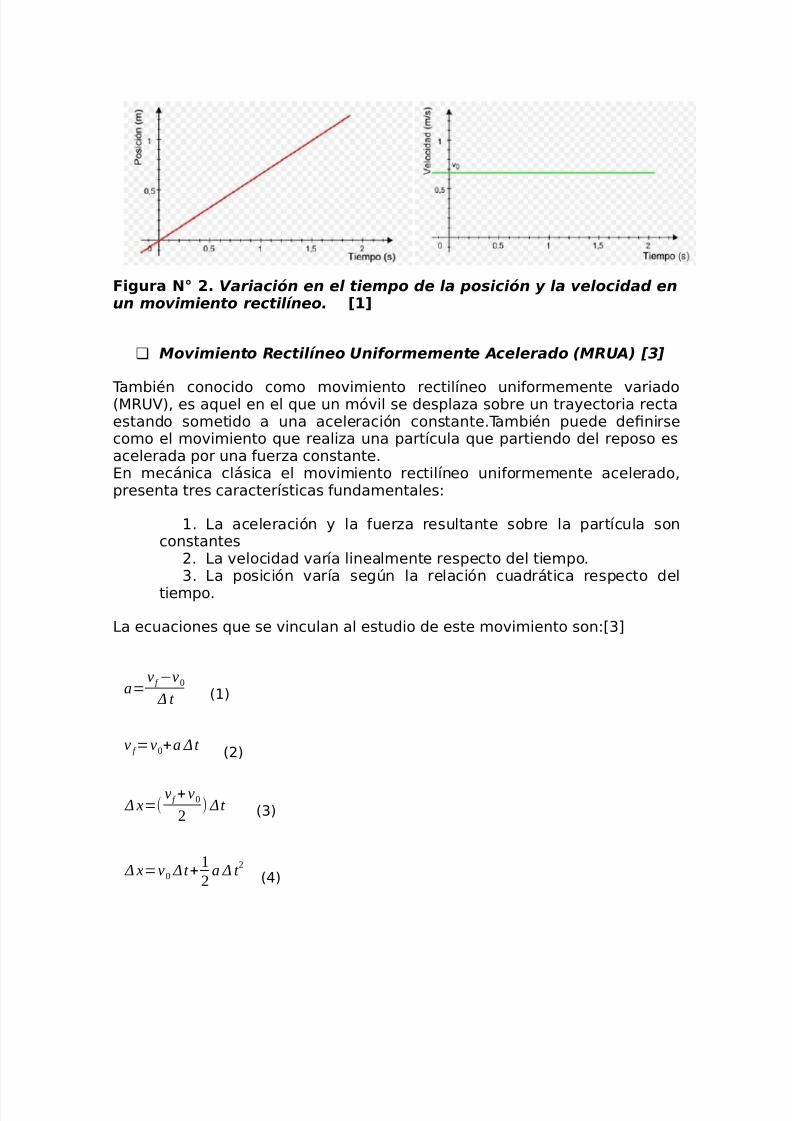
%l movimiento rectil'neo es aquel en el que un cuerpo describe unatrayectoria en l'nea recta. Eara nuestra pr/ctica vamos a considerar elmovimiento rectil'neo uni(orme "&FH$ y el movimiento rectil'neouni(ormemente acelerado "&FH*$. [1]
❏ Movimiento Rectilíneo Uniforme (MRU)%n este movimiento la velocidad "v$ permanece constante por lo que nohay una variación de la aceleración "a$ en el transcurso del tiempo. %stocorresponde al movimiento de un ob+eto que se desliza sin (ricción por unasuperfcie describiendo una trayectoria recta.
%ste movimiento se caracteriza por-D &ovimiento que se realiza sobre una l'nea recta.D ?elocidad constante implica ma!nitud y dirección constantes.D 0a ma!nitud de la velocidad recibe el nombre de celeridad o
rapidez.D *celeración nula. [1]
0as ecuaciones para el movimiento rectil'neo uni(orme son-
Δ x=v∗ Δ t ⇒ xf = x0+v∗t
v= Δ x Δt
⇒v= xf − x0
Δ t
Jonde- Δ x=Variaciónde laposición xf = Posición final
x
0= Posicióninicial
v=velocidad Δ t =intervalodetiempo [1]
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 4/21
Figura N 2. Variación en el tiempo de la posición y la velocidad enun movimiento rectilíneo. /10
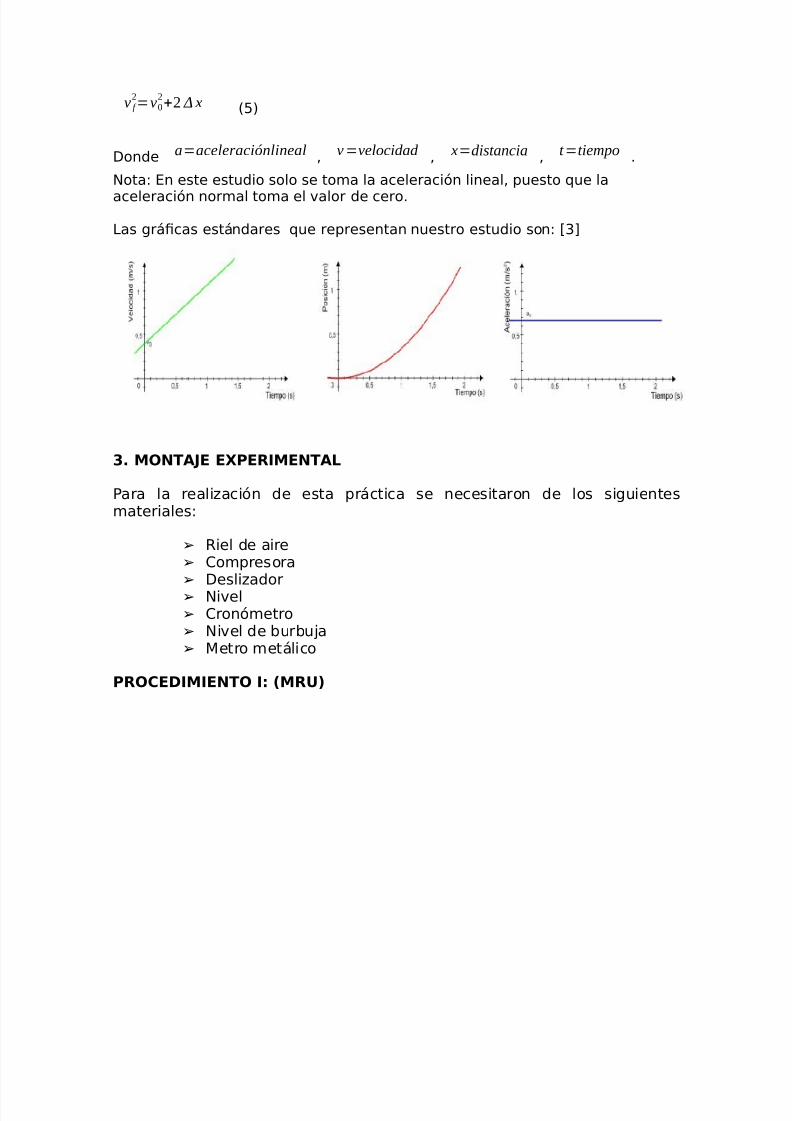
❏ Movimiento Rectilíneo Uniformemente Acelerado (MRUA) [3
9ambi8n conocido como movimiento rectil'neo uni(ormemente variado"&FH?$ es aquel en el que un móvil se desplaza sobre un trayectoria rectaestando sometido a una aceleración constante.9ambi8n puede defnirsecomo el movimiento que realiza una part'cula que partiendo del reposo esacelerada por una (uerza constante.%n mec/nica cl/sica el movimiento rectil'neo uni(ormemente aceleradopresenta tres caracter'sticas (undamentales-
1. 0a aceleración y la (uerza resultante sobre la part'cula sonconstantes
#. 0a velocidad var'a linealmente respecto del tiempo.). 0a posición var'a se!,n la relación cuadr/tica respecto del
tiempo.
0a ecuaciones que se vinculan al estudio de este movimiento son-[)]
a=v f −v
0
Δ t "1$
v f =v0+a Δ t "#$
Δ x=(vf +v
0
2) Δt ")$
Δ x=v0 Δ t +
1
2a Δ t
2
"$
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 5/21
v f 2=v0
2+2 Δ x "4$
Jonde a=aceleraciónlineal v=velocidad x=distancia t =tiempo .
7ota- %n este estudio solo se toma la aceleración lineal puesto que la
aceleración normal toma el valor de cero.
0as !r/fcas est/ndares que representan nuestro estudio son- [)]
. MONT-JE E%ERIMENT-3
Eara la realización de esta pr/ctica se necesitaron de los si!uientesmateriales-
K Fiel de aireK CompresoraK JeslizadorK 7ivelK CronómetroK 7ivel de burbu+aK &etro met/lico
%ROCEDIMIENTO I$ 4MRU5
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 6/21
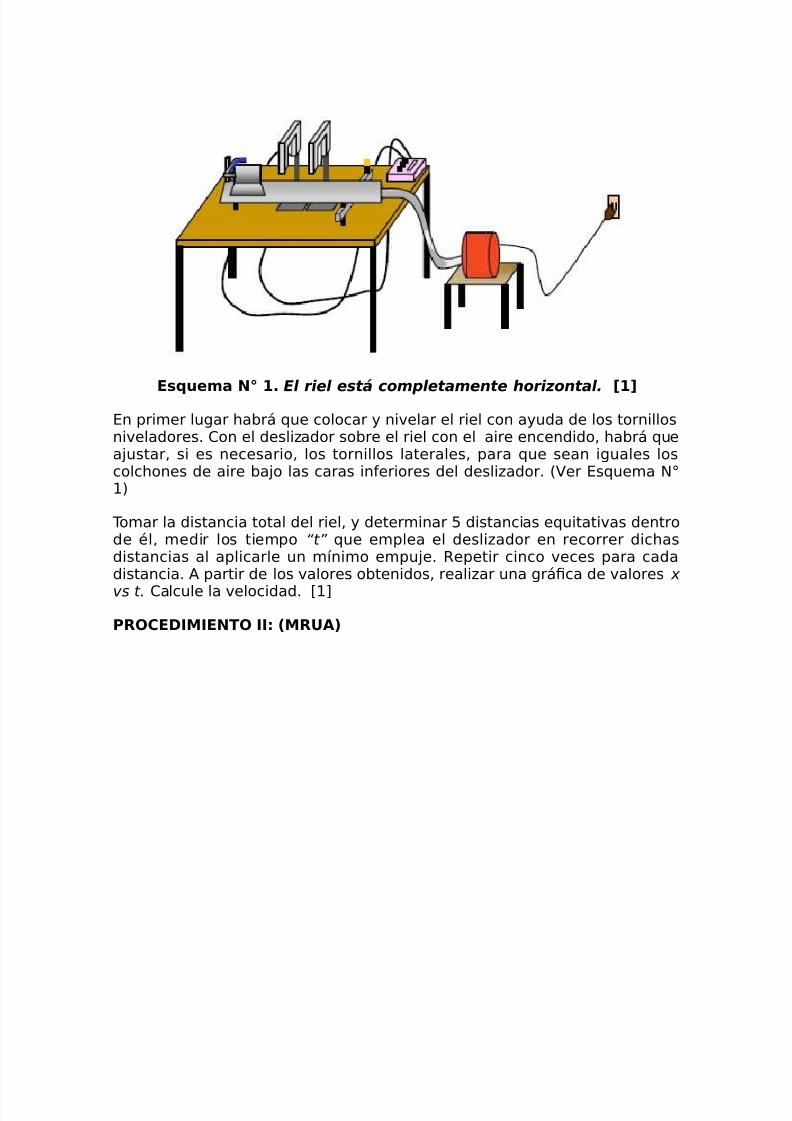
E'6uema N 1. !l riel est" completamente #ori$ontal. /10%n primer lu!ar habr/ que colocar y nivelar el riel con ayuda de los tornillosniveladores. Con el deslizador sobre el riel con el aire encendido habr/ quea+ustar si es necesario los tornillos laterales para que sean i!uales loscolchones de aire ba+o las caras in(eriores del deslizador. "?er %squema 7L1$
9omar la distancia total del riel y determinar 4 distancias equitativas dentrode 8l medir los tiempo “t” que emplea el deslizador en recorrer dichasdistancias al aplicarle un m'nimo empu+e. Fepetir cinco veces para cadadistancia. * partir de los valores obtenidos realizar una !r/fca de valores x
vs t. Calcule la velocidad. [1]
%ROCEDIMIENTO II$ 4MRU-5
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 7/21
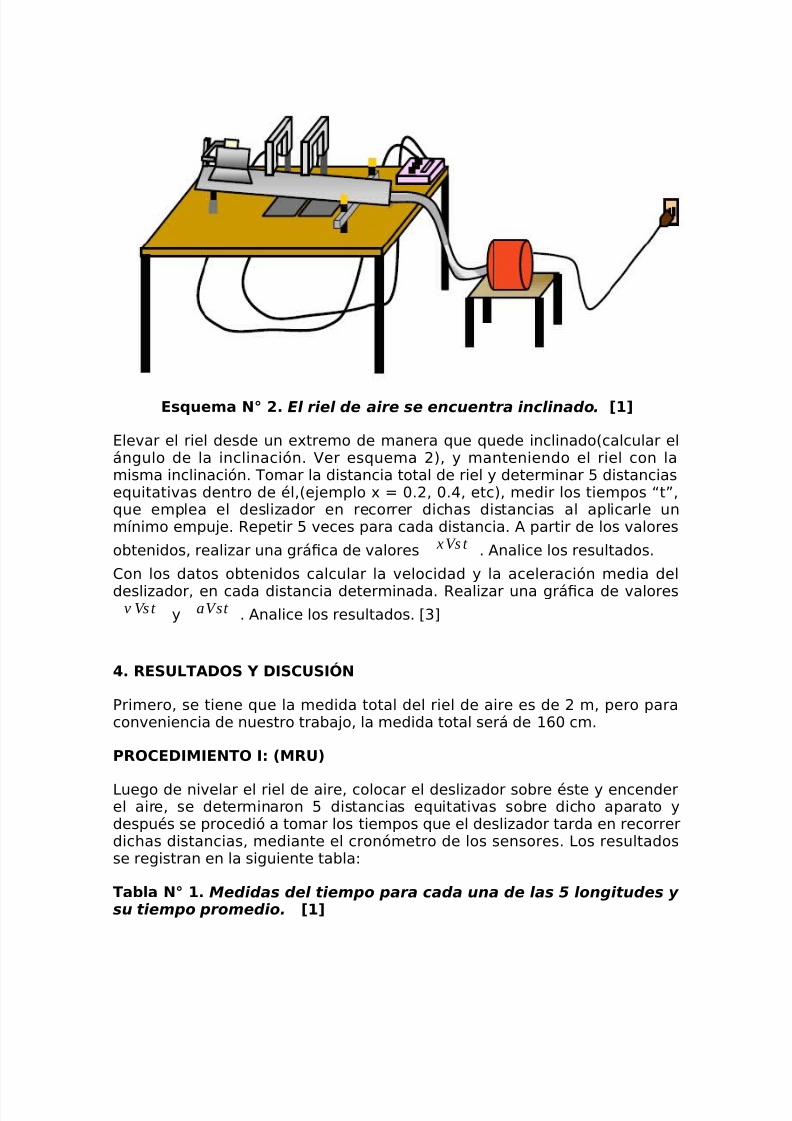
E'6uema N 2. !l riel de aire se encuentra inclinado. /10
%levar el riel desde un e=tremo de manera que quede inclinado"calcular el/n!ulo de la inclinación. ?er esquema #$ y manteniendo el riel con lamisma inclinación. 9omar la distancia total de riel y determinar 4 distanciasequitativas dentro de 8l"e+emplo = M 3.# 3. etc$ medir los tiempos Ntque emplea el deslizador en recorrer dichas distancias al aplicarle unm'nimo empu+e. Fepetir 4 veces para cada distancia. * partir de los valores
obtenidos realizar una !r/fca de valores xVs t . *nalice los resultados.
Con los datos obtenidos calcular la velocidad y la aceleración media del
deslizador en cada distancia determinada. Fealizar una !r/fca de valoresv Vs t y aVst . *nalice los resultados. [)]
7. RESU3T-DOS 8 DISCUSIÓN
Erimero se tiene que la medida total del riel de aire es de # m pero paraconveniencia de nuestro traba+o la medida total ser/ de 123 cm.
%ROCEDIMIENTO I$ 4MRU5
0ue!o de nivelar el riel de aire colocar el deslizador sobre 8ste y encenderel aire se determinaron 4 distancias equitativas sobre dicho aparato ydespu8s se procedió a tomar los tiempos que el deslizador tarda en recorrerdichas distancias mediante el cronómetro de los sensores. 0os resultadosse re!istran en la si!uiente tabla-
Ta9!a N 1. Medidas del tiempo para cada una de las % lon&itudes y su tiempo promedio. /10
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 8/21
N,eO9'
Di'an"ia 4"m5
T14'5
T24'5
T4'5
T74'5
T:4'5
TIEM%O%ROMEDI
O 4'5
1 )# 3.A#P 3.A)3 3.A4P 3.AA) 3.A24 3.A41
2 2 1.)P3 1.)P@ 1.)A3 1.1P 1.1 1.3
P2 #.331 #.1)3 #.143 #.144 #.3P3 #.134
7 1#@ #.22# #.2P4 #.2P2 #.A4P #.A23 #.A1
: 123 ).#P) ).1P2 ).1@P ).3A@ ).111 ).1A)
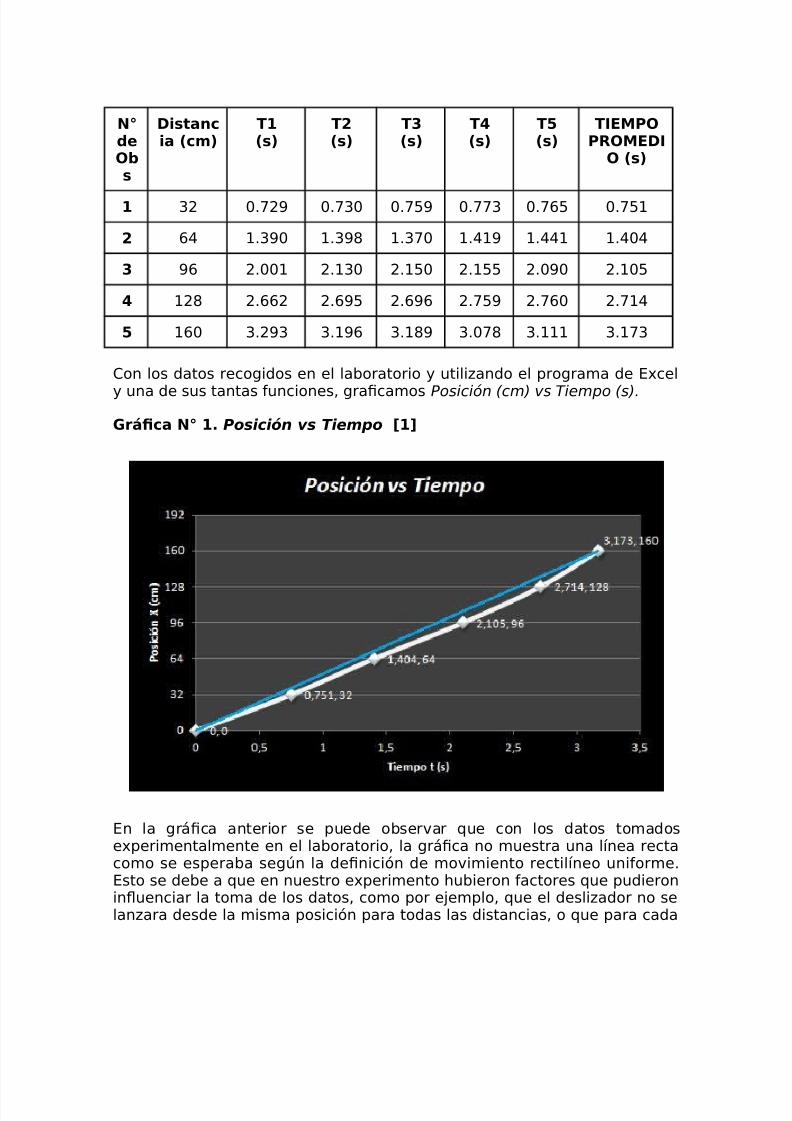
Con los datos reco!idos en el laboratorio y utilizando el pro!rama de %=cel
y una de sus tantas (unciones !rafcamos Posición (cm) vs Tiempo (s).
;r#<"a N 1. 'osición vs iempo /10
%n la !r/fca anterior se puede observar que con los datos tomadose=perimentalmente en el laboratorio la !r/fca no muestra una l'nea rectacomo se esperaba se!,n la defnición de movimiento rectil'neo uni(orme.%sto se debe a que en nuestro e=perimento hubieron (actores que pudieroninQuenciar la toma de los datos como por e+emplo que el deslizador no selanzara desde la misma posición para todas las distancias o que para cada
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 9/21
distancia el peque6o empu+ón que se le daba al inicio al deslizador (uesedi(erente para cada caso. [1]
Eara calcular la velocidad con la que el deslizador recorre cada una de las 4distancias tenemos la si!uiente ecuación-
v= Δ x
t =
x f − x0
t
*hora se reemplazan los datos re!istrados en la tabla 7L 1 en la ecuaciónanterior. 0os resultados se muestran en la si!uiente tabla-
Ta9!a N 2. Dao' *ara !a gr#<"a ,e Ve!o"i,a, v' Tiem*o
Ve!o"i,a, v
4"m='5
#.213 4.4@ 4.232 A.12) 43.#4Ve!o"i,a,%rome,io
4"m='52.#A@
Tiem*o4'5
3.A41 1.3 #.134 #.A1 ).1A)
Je la tabla anterior tenemos que la velocidad con la que se realizó esteprocedimiento en el laboratorio (ue apro=imadamente de 2.#A@ cmRs.
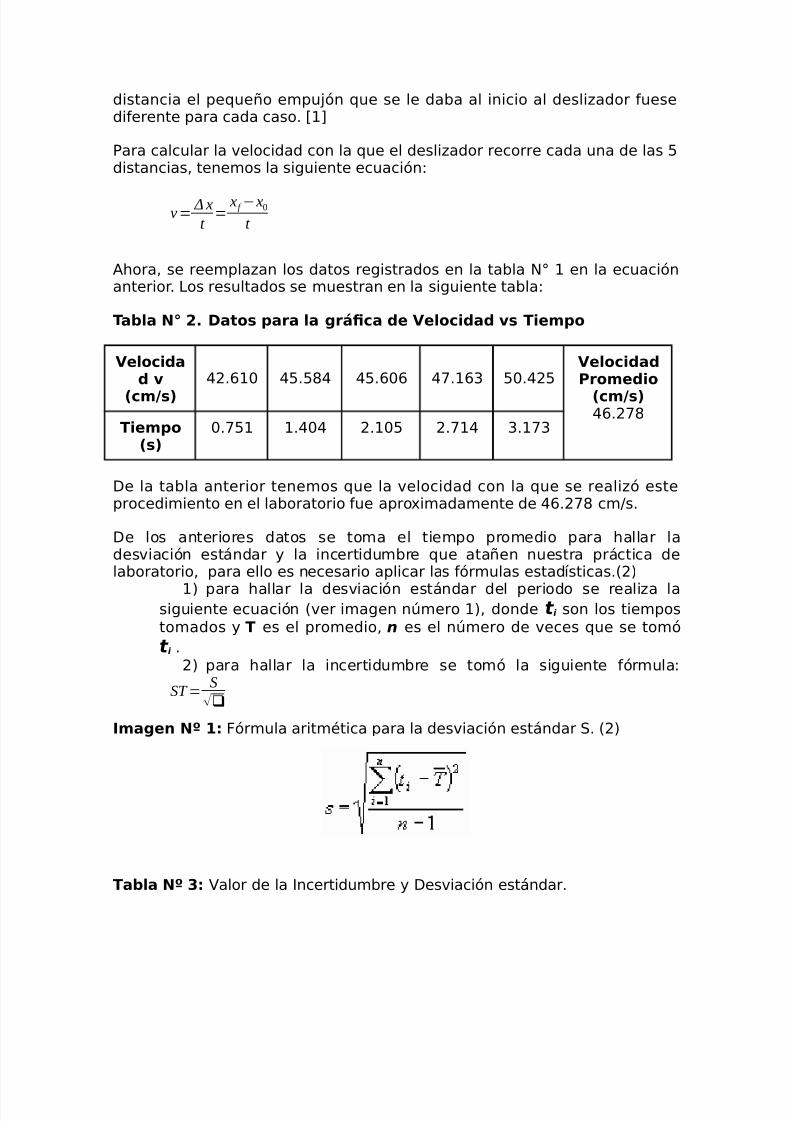
Je los anteriores datos se toma el tiempo promedio para hallar ladesviación est/ndar y la incertidumbre que ata6en nuestra pr/ctica delaboratorio para ello es necesario aplicar las (órmulas estad'sticas."#$
1$ para hallar la desviación est/ndar del periodo se realiza lasi!uiente ecuación "ver ima!en n,mero 1$ donde t i son los tiempostomados y T es el promedio n es el n,mero de veces que se tomó
t i .#$ para hallar la incertidumbre se tomó la si!uiente (órmula-
ST = S
√ ❑
Imagen Nº 1$ órmula aritm8tica para la desviación est/ndar G. "#$
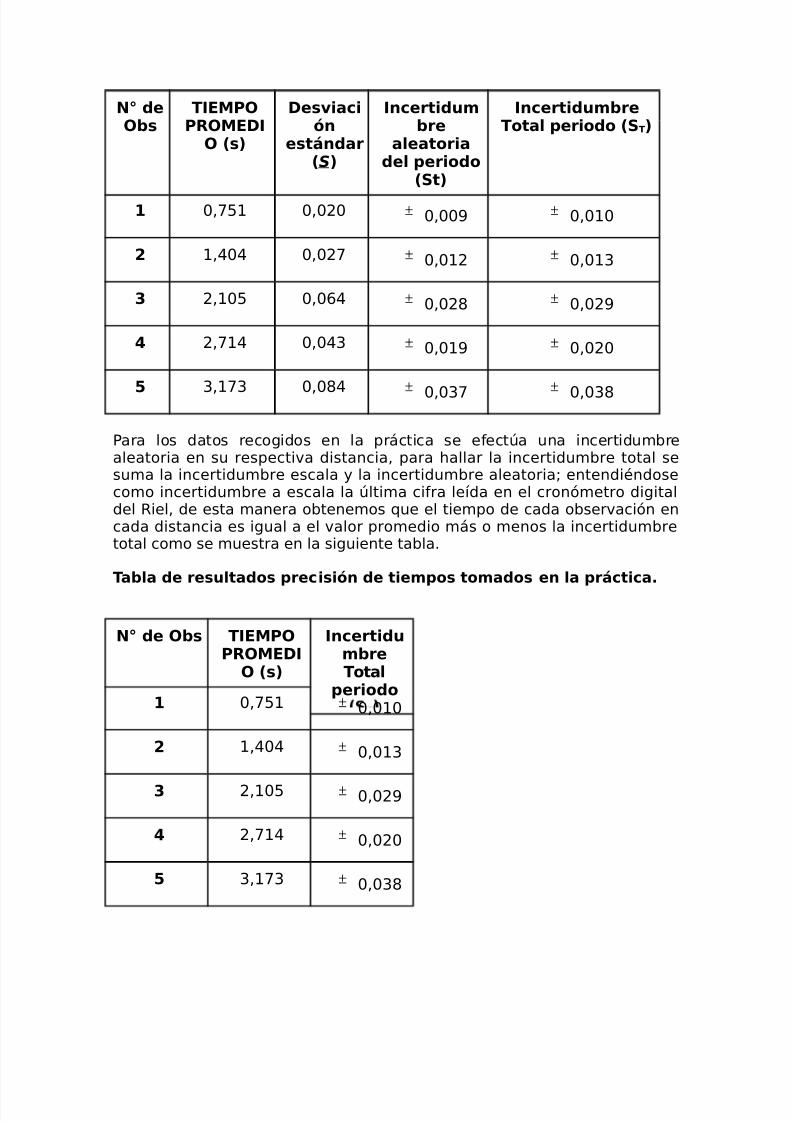
Ta9!a Nº $ ?alor de la Incertidumbre y Jesviación est/ndar.
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 10/21
N ,eO9'
TIEM%O%ROMEDI
O 4'5
De'via"i(n
e'#n,ar45
In"eri,um9re
a!eaoria,e! *erio,o
4S5
In"eri,um9reToa! *erio,o 4ST5
1 3A41 33#3 ± 333P ± 3313
2 13 33#A ± 331# ± 331)
#134 332 ± 33#@ ± 33#P
7 #A1 33) ± 331P ± 33#3
: )1A) 33@ ± 33)A ± 33)@
Eara los datos reco!idos en la pr/ctica se e(ect,a una incertidumbrealeatoria en su respectiva distancia para hallar la incertidumbre total sesuma la incertidumbre escala y la incertidumbre aleatoria entendi8ndosecomo incertidumbre a escala la ,ltima ci(ra le'da en el cronómetro di!italdel Fiel de esta manera obtenemos que el tiempo de cada observación encada distancia es i!ual a el valor promedio m/s o menos la incertidumbretotal como se muestra en la si!uiente tabla.
Ta9!a ,e re'u!a,o' *re"i'i(n ,e iem*o' oma,o' en !a *r#"i"a.
N ,e O9' TIEM%O%ROMEDI
O 4'5
In"eri,um9reToa!
*erio,o1 3A41 ± 3313
2 13 ± 331)
#134 ± 33#P
7 #A1 ± 33#3
: )1A) ± 33)@
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 11/21
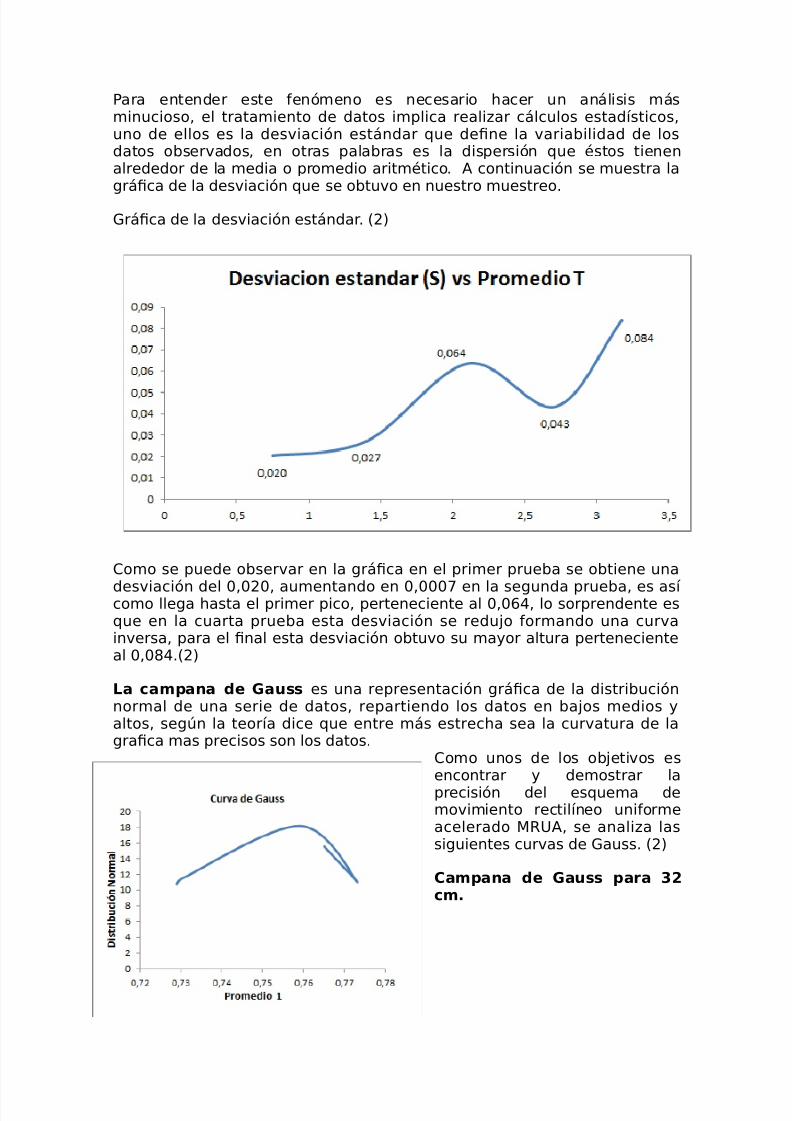
Eara entender este (enómeno es necesario hacer un an/lisis m/sminucioso el tratamiento de datos implica realizar c/lculos estad'sticosuno de ellos es la desviación est/ndar que defne la variabilidad de losdatos observados en otras palabras es la dispersión que 8stos tienenalrededor de la media o promedio aritm8tico. * continuación se muestra la!r/fca de la desviación que se obtuvo en nuestro muestreo.
5r/fca de la desviación est/ndar. "#$
Como se puede observar en la !r/fca en el primer prueba se obtiene una
desviación del 33#3 aumentando en 3333A en la se!unda prueba es as' como lle!a hasta el primer pico perteneciente al 332 lo sorprendente esque en la cuarta prueba esta desviación se redu+o (ormando una curvainversa para el fnal esta desviación obtuvo su mayor altura pertenecienteal 33@."#$
3a "am*ana ,e ;au'' es una representación !r/fca de la distribuciónnormal de una serie de datos repartiendo los datos en ba+os medios yaltos se!,n la teor'a dice que entre m/s estrecha sea la curvatura de la!rafca mas precisos son los datos.
Como unos de los ob+etivos esencontrar y demostrar laprecisión del esquema demovimiento rectil'neo uni(ormeacelerado &FH* se analiza lassi!uientes curvas de 5auss. "#$
Cam*ana ,e ;au'' *ara 2"m.
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 12/21
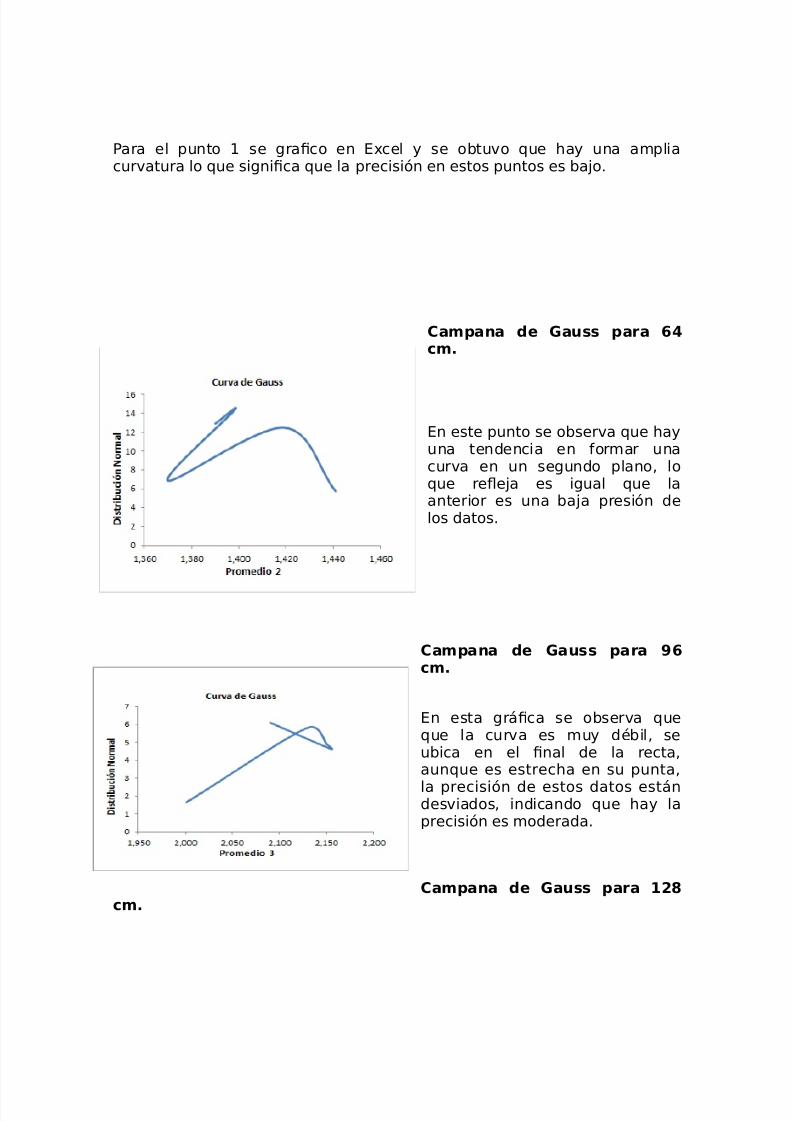
Eara el punto 1 se !rafco en %=cel y se obtuvo que hay una ampliacurvatura lo que si!nifca que la precisión en estos puntos es ba+o.
Cam*ana ,e ;au'' *ara >7"m.
%n este punto se observa que hayuna tendencia en (ormar unacurva en un se!undo plano loque reQe+a es i!ual que laanterior es una ba+a presión delos datos.
Cam*ana ,e ;au'' *ara ?>"m.
%n esta !r/fca se observa queque la curva es muy d8bil seubica en el fnal de la rectaaunque es estrecha en su punta
la precisión de estos datos est/ndesviados indicando que hay laprecisión es moderada.
Cam*ana ,e ;au'' *ara 12@"m.
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 13/21
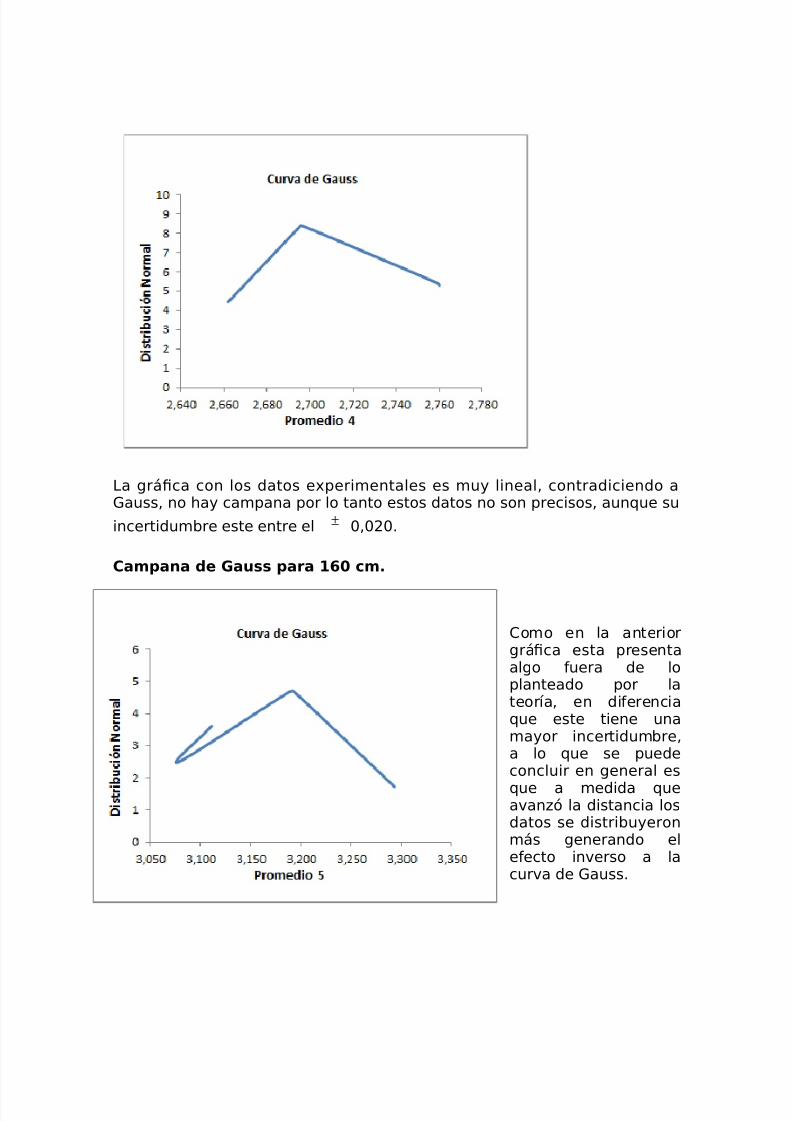
0a !r/fca con los datos e=perimentales es muy lineal contradiciendo a5auss no hay campana por lo tanto estos datos no son precisos aunque su
incertidumbre este entre el ± 33#3.
Cam*ana ,e ;au'' *ara 1>A "m.
Como en la anterior!r/fca esta presentaal!o (uera de loplanteado por lateor'a en di(erenciaque este tiene unamayor incertidumbrea lo que se puedeconcluir en !eneral es
que a medida queavanzó la distancia losdatos se distribuyeronm/s !enerando ele(ecto inverso a lacurva de 5auss.
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 14/21
%ROCEDIMIENTO II$ 4MRU-5
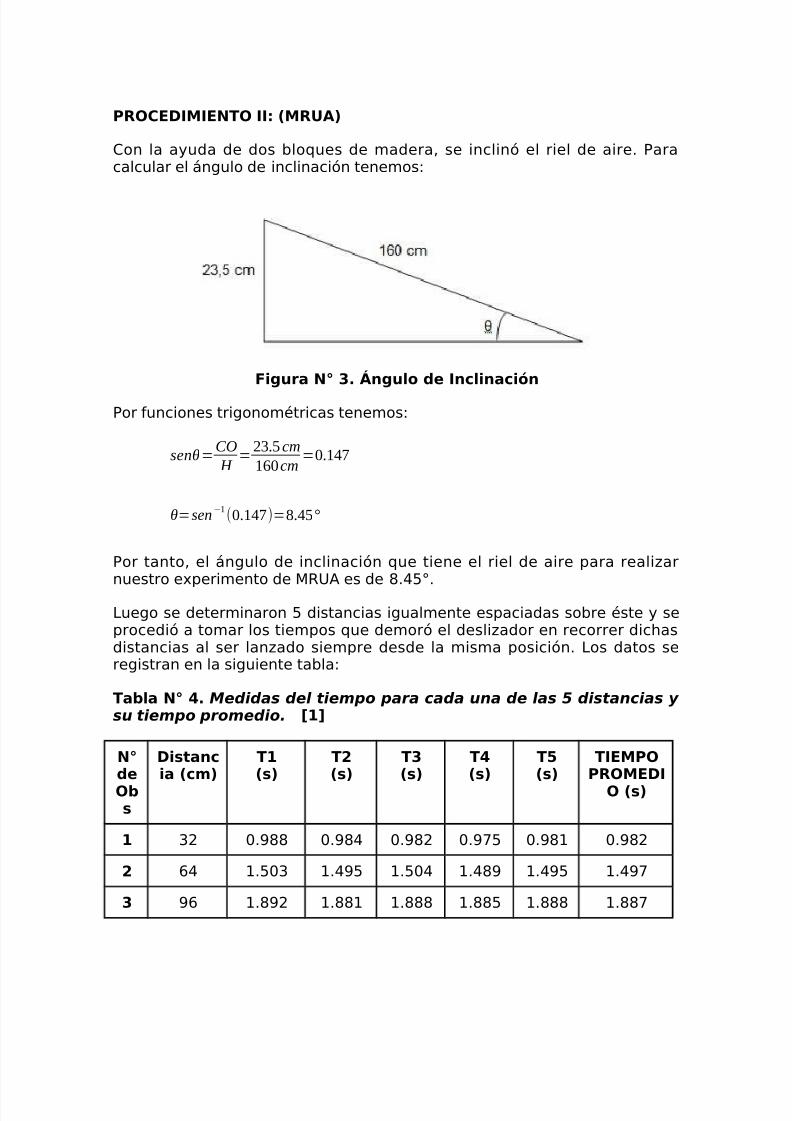
Con la ayuda de dos bloques de madera se inclinó el riel de aire. Earacalcular el /n!ulo de inclinación tenemos-
Figura N . ngu!o ,e In"!ina"i(n
Eor (unciones tri!onom8tricas tenemos-
senθ=CO
H =
23.5 cm
160cm =0.147
θ=sen−1(0.147)=8.45°
Eor tanto el /n!ulo de inclinación que tiene el riel de aire para realizarnuestro e=perimento de &FH* es de @.4L.
0ue!o se determinaron 4 distancias i!ualmente espaciadas sobre 8ste y seprocedió a tomar los tiempos que demoró el deslizador en recorrer dichasdistancias al ser lanzado siempre desde la misma posición. 0os datos sere!istran en la si!uiente tabla-
Ta9!a N 7. Medidas del tiempo para cada una de las % distancias y su tiempo promedio. /10
N,eO9'
Di'an"ia 4"m5
T14'5
T24'5
T4'5
T74'5
T:4'5
TIEM%O%ROMEDI
O 4'5
1 )# 3.P@@ 3.P@ 3.P@# 3.PA4 3.P@1 3.P@#
2 2 1.43) 1.P4 1.43 1.@P 1.P4 1.PA
P2 1.@P# 1.@@1 1.@@@ 1.@@4 1.@@@ 1.@@A
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 15/21
7 1#@ #.## #.## #.##2 #.##A #.##4 #.##4
: 123 #.4)) #.4#P #.4#1 #.4#4 #.4)1 #.4#@
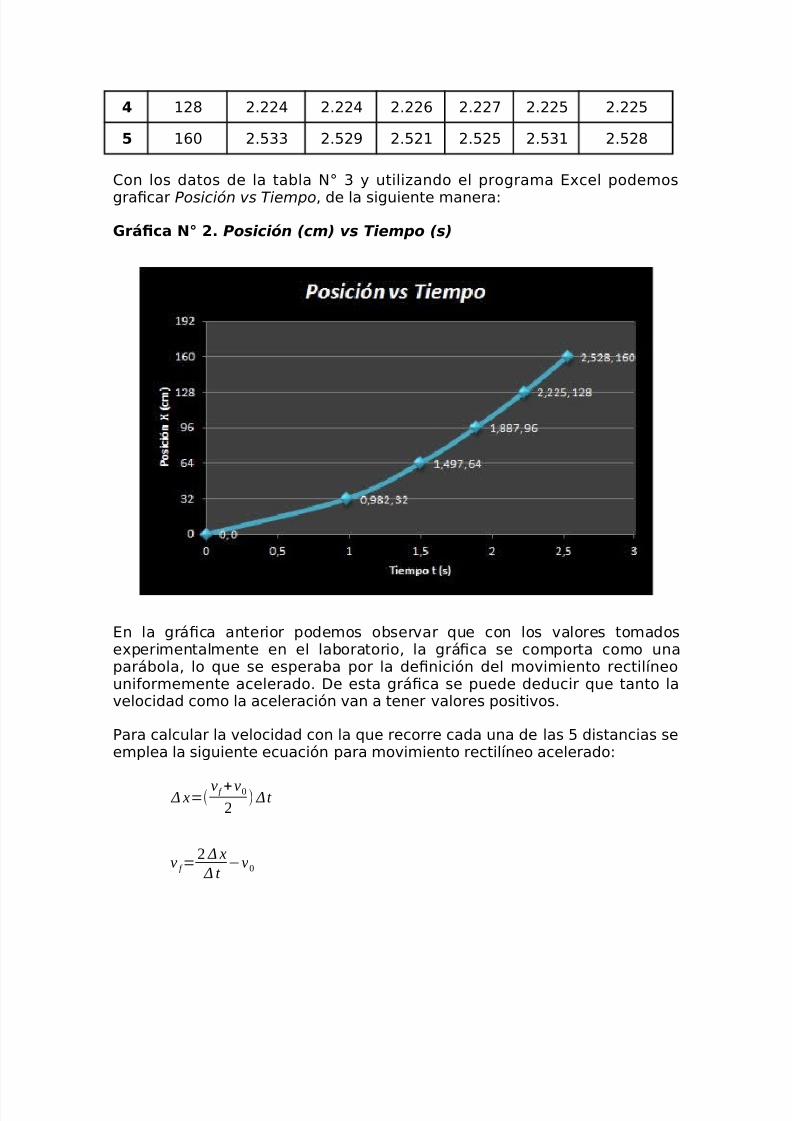
Con los datos de la tabla 7L ) y utilizando el pro!rama %=cel podemos
!rafcar Posición vs Tiempo de la si!uiente manera-
;r#<"a N 2. 'osición (cm) vs iempo (s)
%n la !r/fca anterior podemos observar que con los valores tomadose=perimentalmente en el laboratorio la !r/fca se comporta como unapar/bola lo que se esperaba por la defnición del movimiento rectil'neouni(ormemente acelerado. Je esta !r/fca se puede deducir que tanto lavelocidad como la aceleración van a tener valores positivos.
Eara calcular la velocidad con la que recorre cada una de las 4 distancias seemplea la si!uiente ecuación para movimiento rectil'neo acelerado-
Δ x=( vf +v0
2) Δ t
v f =2 Δ x
Δ t −v
0
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 16/21
Je donde se sabe quev0=0 porque parte desde el reposo.
Feemplazando los datos obtenidos e=perimentalmente "distancia y tiempo$calculamos la velocidad y los resultados se muestran en la si!uiente tabla-[)]
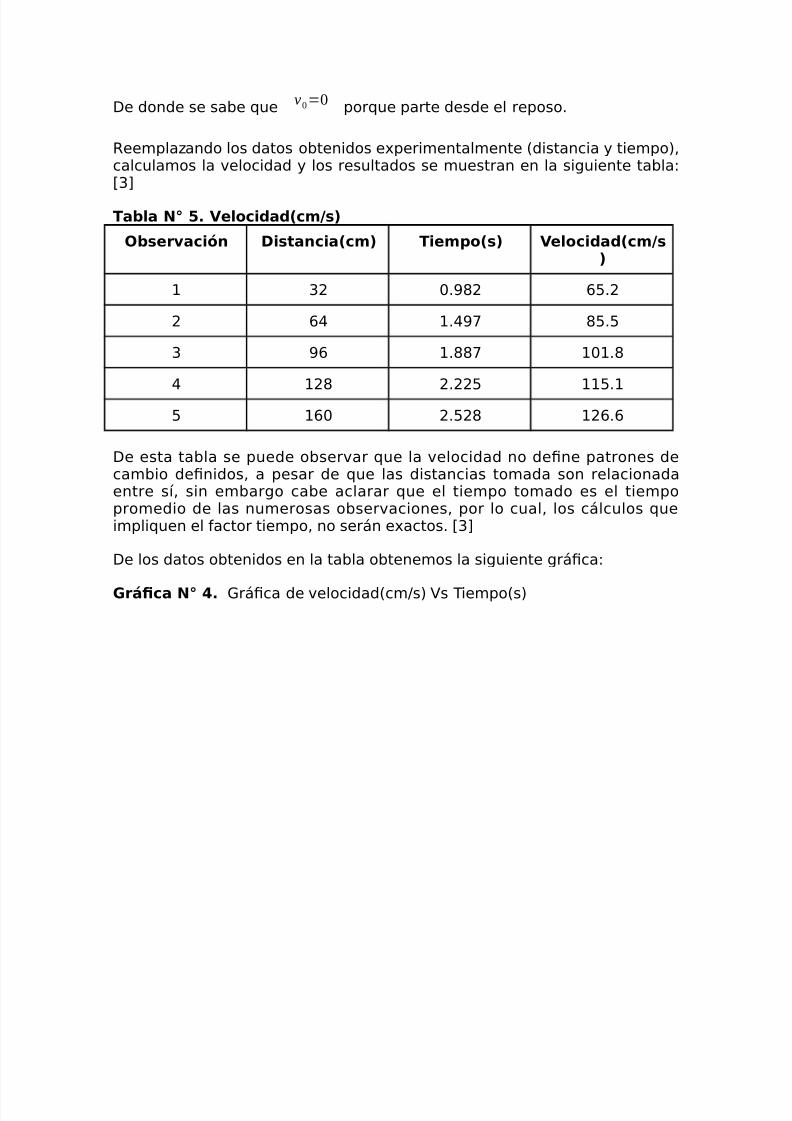
Ta9!a N :. Ve!o"i,a,4"m='5
O9'erva"i(n Di'an"ia4"m5 Tiem*o4'5 Ve!o"i,a,4"m='5
1 )# 3.P@# 24.#
# 2 1.PA @4.4
) P2 1.@@A 131.@
1#@ #.##4 114.1
4 123 #.4#@ 1#2.2
Je esta tabla se puede observar que la velocidad no defne patrones decambio defnidos a pesar de que las distancias tomada son relacionadaentre s' sin embar!o cabe aclarar que el tiempo tomado es el tiempopromedio de las numerosas observaciones por lo cual los c/lculos queimpliquen el (actor tiempo no ser/n e=actos. [)]
Je los datos obtenidos en la tabla obtenemos la si!uiente !r/fca-
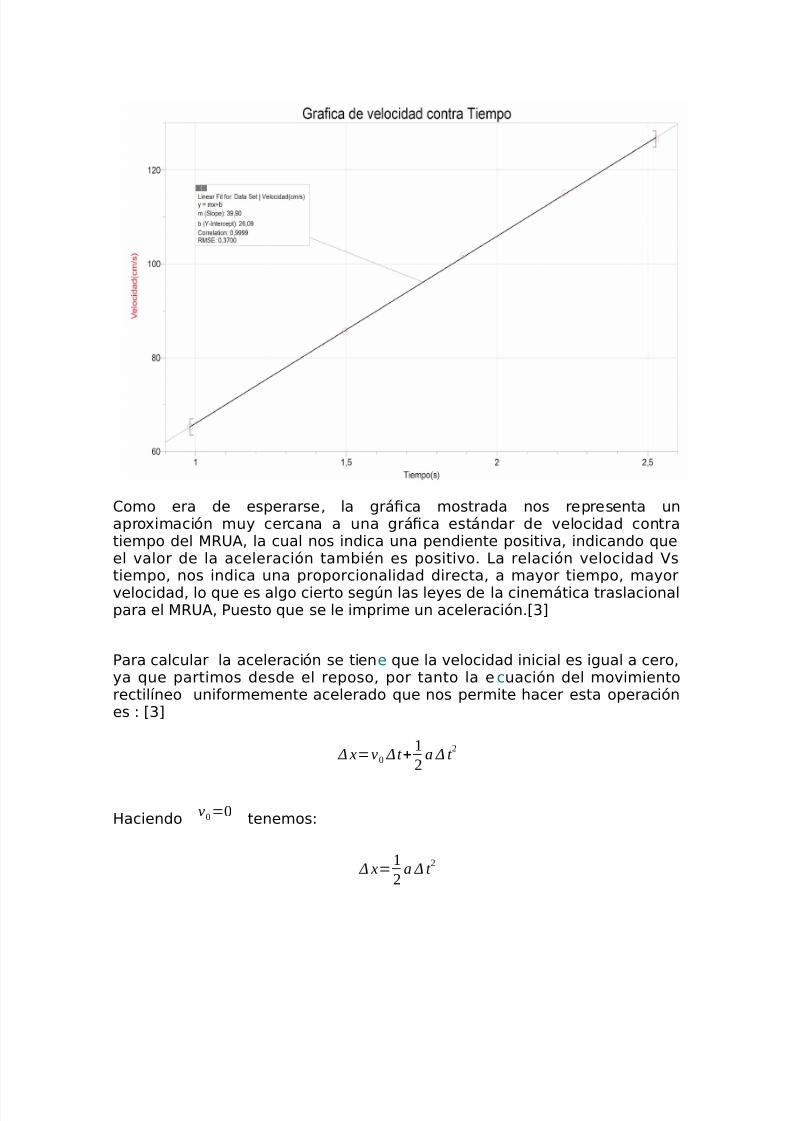
;r#<"a N 7. 5r/fca de velocidad"cmRs$ ?s 9iempo"s$
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 17/21
Como era de esperarse la !r/fca mostrada nos representa unapro=imación muy cercana a una !r/fca est/ndar de velocidad contratiempo del &FH* la cual nos indica una pendiente positiva indicando queel valor de la aceleración tambi8n es positivo. 0a relación velocidad ?stiempo nos indica una proporcionalidad directa a mayor tiempo mayor
velocidad lo que es al!o cierto se!,n las leyes de la cinem/tica traslacionalpara el &FH* Euesto que se le imprime un aceleración.[)]
Eara calcular la aceleración se tiene que la velocidad inicial es i!ual a ceroya que partimos desde el reposo por tanto la ecuación del movimientorectil'neo uni(ormemente acelerado que nos permite hacer esta operaciónes - [)]
Δ x=v0 Δ t +
1
2a Δ t
2
aciendov0=0 tenemos-
Δ x=1
2a Δ t
2
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 18/21
Eor tanto-
a= 2 x
Δ t 2
Feemplazando los datos obtenidos en la e=perimentación los resultados seordenan en la si!uiente tabla- [)]
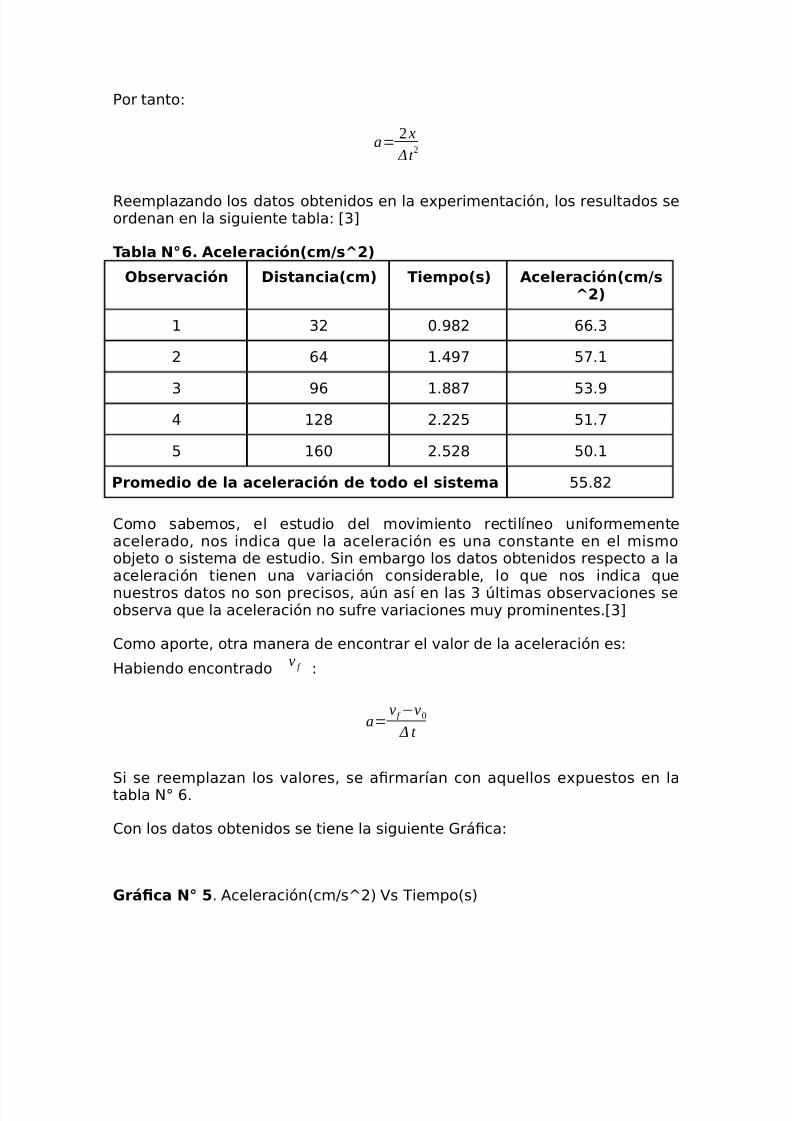
Ta9!a N>. -"e!era"i(n4"m='25
O9'erva"i(n Di'an"ia4"m5 Tiem*o4'5 -"e!era"i(n4"m='25
1 )# 3.P@# 22.)
# 2 1.PA 4A.1
) P2 1.@@A 4).P
1#@ #.##4 41.A
4 123 #.4#@ 43.1
%rome,io ,e !a a"e!era"i(n ,e o,o e! 'i'ema 44.@#
Como sabemos el estudio del movimiento rectil'neo uni(ormementeacelerado nos indica que la aceleración es una constante en el mismoob+eto o sistema de estudio. Gin embar!o los datos obtenidos respecto a laaceleración tienen una variación considerable lo que nos indica que
nuestros datos no son precisos a,n as' en las ) ,ltimas observaciones seobserva que la aceleración no su(re variaciones muy prominentes.[)]
Como aporte otra manera de encontrar el valor de la aceleración es-
abiendo encontradov f -
a=v f −v
0
Δ t
Gi se reemplazan los valores se afrmar'an con aquellos e=puestos en latabla 7L 2.
Con los datos obtenidos se tiene la si!uiente 5r/fca-
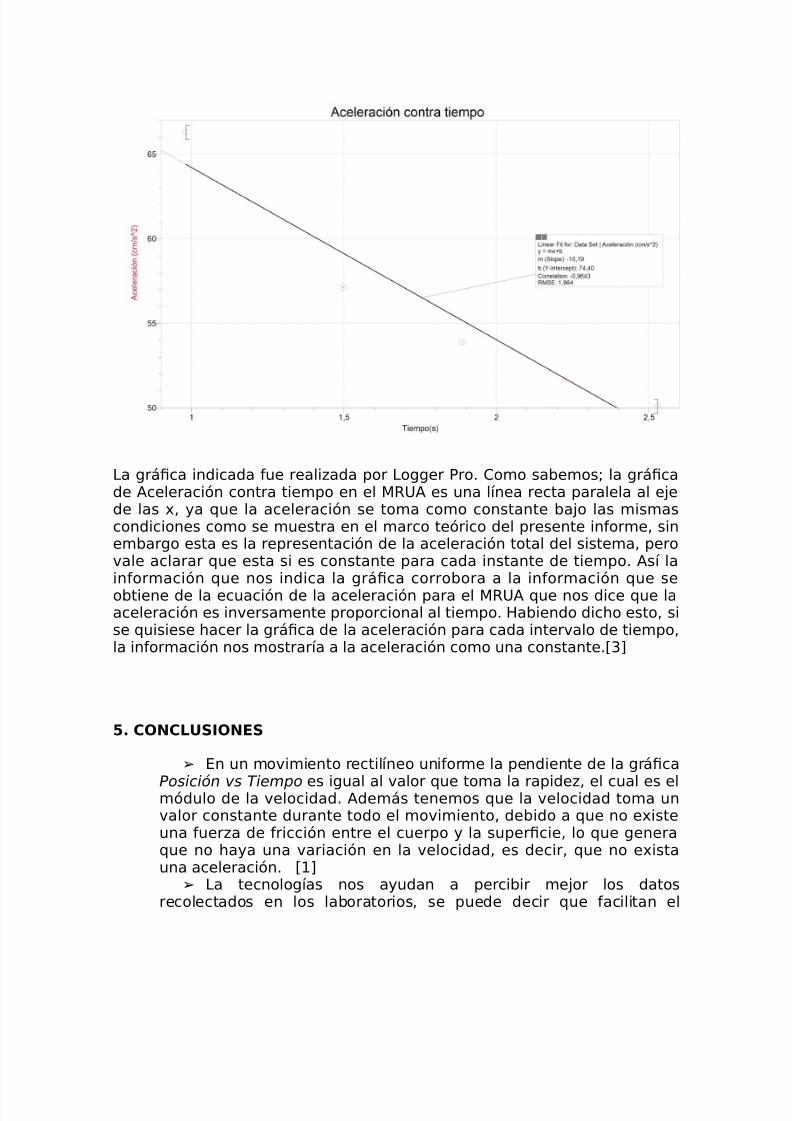
;r#<"a N :. *celeración"cmRsS#$ ?s 9iempo"s$
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 19/21
0a !r/fca indicada (ue realizada por 0o!!er Ero. Como sabemos la !r/fcade *celeración contra tiempo en el &FH* es una l'nea recta paralela al e+ede las = ya que la aceleración se toma como constante ba+o las mismascondiciones como se muestra en el marco teórico del presente in(orme sinembar!o esta es la representación de la aceleración total del sistema perovale aclarar que esta si es constante para cada instante de tiempo. *s' lain(ormación que nos indica la !r/fca corrobora a la in(ormación que seobtiene de la ecuación de la aceleración para el &FH* que nos dice que laaceleración es inversamente proporcional al tiempo. abiendo dicho esto sise quisiese hacer la !r/fca de la aceleración para cada intervalo de tiempola in(ormación nos mostrar'a a la aceleración como una constante.[)]
:. CONC3USIONES
K %n un movimiento rectil'neo uni(orme la pendiente de la !r/fca
Posición vs Tiempo es i!ual al valor que toma la rapidez el cual es elmódulo de la velocidad. *dem/s tenemos que la velocidad toma unvalor constante durante todo el movimiento debido a que no e=isteuna (uerza de (ricción entre el cuerpo y la superfcie lo que !eneraque no haya una variación en la velocidad es decir que no e=istauna aceleración. [1]
K 0a tecnolo!'as nos ayudan a percibir me+or los datosrecolectados en los laboratorios se puede decir que (acilitan el
7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 20/21
traba+o pero tambi8n queda demostrado que por mas que seapreciso siempre hay impresión val!a la redundancia dentro de laspruebas se obtuvo que los sensores tambi8n tienen incertidumbreaunque se evaluó todo el sistema la desviación de datos data que no(ueron condescendientes con lo teórico. "#$
K 0a relación que !uarda la velocidad con respecto al tiempo enel &FH* es directamente proporcional. [)]
K %l valor de la aceleración es una constante en el &FH* ya quepor defnición la aceleración es el cambio de velocidad de un cuerpoen un instante de tiempo as' si tenemos una velocidad inicial i!ual acero el delta velocidad en ese intervalo de tiempo tambi8n ser/ unaconstante.[)]
>. BIB3IO;R-F-
● Bue"e F. J. G He" E. Física General Pna. edición.%ditorial &c5F*TDI00. &8=ico #333. Citado @ de 7oviembre de #314.
"#$● Ca'a' Ree' J.V. Muo+ Kueve,o J. G Kuiroga
Ca*arro J. Física: Cinemática-Dinámica !ner"ía. %ditorial 0imusa&8=ico 1PPA. Citado @ de 7oviembre de #314. "#$
● https-RRes.BiUipedia.or!RBiUiRCinemVC)V*1tica 3A11#314 [1]● 5u'a de laboratorio de ('sica D NCinem/tica de la 9raslación
Jepartamento de 'sica Hniversidad del Cauca. [1]● 5r/fcas del &ovimiento rectil'neo acelerado. &ovimiento
rectil'neo uni(ormemente acelerado. [%n l'nea].Whttps-RRBBB.fsicalab.comRapartadoRmruaD!rafcasXcontenidosY.[citado en 13 de noviembre de #314][)]
● &ovimiento rectil'neo uni(ormemente acelerado. Cinem/tica.[%n l'nea]. Whttps-RRes.BiUipedia.or!RBiUiR&ovimientoZrectilVC)V*JneoZuni(ormementeZaceleradoY. [citado en 11 denoviembre de #314] [)]
● Cao!a E,uar,o. “cinemática” . &ec/nica cl/sica. Hniversidaddel cauca. [septiembre de #314]. [)]
T-B3- RESUMEN DE -%ORTES -3 INFORME
NUM
NOMBRE OBJ4L5
INTRO
4L5
MONT
E%
4L5
RES 8 DISC4L5
CONC34L5
OTROS 4L5
/10 aerin J. Mo'6ueraI,ro9o
/20 Mie! Muo+
/0 Jo'e -rman,o Mori!!o

7/24/2019 Cinemática de Translación - Informe
http://slidepdf.com/reader/full/cinematica-de-translacion-informe 21/21
Enri6ue+


















