Carro de transferencia
47
Universidad Nacional de Misiones Facultad de Ingeniería Ingeniería Electrónica Técnicas Digitales 2 Control de carro de transferencia Autores: SCHERF, Pablo Jonathan TIMEZ, Francisco Gabriel Docentes Responsables: Ing. Juan Carlos Kairiyama Ing. FERNÁNDEZ, Guillermo A. Fecha de entrega: 27 de noviembre de 2014. Oberá, Misiones 2014
-
Upload
pablo-scherf -
Category
Engineering
-
view
69 -
download
3
Transcript of Carro de transferencia

Universidad Nacional de Misiones
Facultad de Ingeniería
Ingeniería Electrónica
Técnicas Digitales 2
Control de carro de transferencia
Autores:
SCHERF, Pablo Jonathan
TIMEZ, Francisco Gabriel
Docentes Responsables:
Ing. Juan Carlos Kairiyama
Ing. FERNÁNDEZ, Guillermo A.
Fecha de entrega: 27 de noviembre de 2014.
Oberá, Misiones
2014


Introducción Como trabajo final de la cátedra Técnicas Digitales se plantea el diseño de un circuito
electrónico que requiera la aplicación de los conceptos adquiridos durante el cursado.
Como grupo se plantea realizar la automatización de un proceso industrial en una línea de
producción de ladrillos cerámicos.
En la línea de producción los adobes (ladrillos en verde) y ladrillos propiamente dicho, se
trasladan por medio de estantes y vagonetas que circulan sobre rieles. Estos rieles circulan en línea
recta de un lado al otro de un tinglado existiendo en cada extremo un carro de transferencia sobre el
cual son cargados los estantes y vagonetas a fin de ser transferidos de un riel a otro.
El circuito electrónico es diseñado para automatizar los procesos realizados por el carro de
transferencia. En el presente trabajo se procede a diseñar y construir solamente el circuito de control
dejando como tarea pendiente la implementación de dicha automatización.


Desarrollo
Detalles del proceso de la línea de producción A continuación se muestra un esquema de la línea de producción para así dar una perspectiva
del proyecto.
Barrera Infrarroja Sensor de distancia
1234567
EstanteVagonetaVagoneta Estante Estante Estante Estante
Referencia de posición Sensor inductivo
1
Estante
234567
EstanteVagonetaVagoneta
Estante Estante Estante
EstanteEstanteEstanteVagoneta
Vagoneta
1
2

Figura 1. Diagrama completo
En la Figura 1 se aprecia el proceso completo de la línea de producción. Entre los dos carros
de transferencia se encuentra el presecado (rieles “1” y “2”), secadero (rieles “3” y “4”), retorno (riel
“5”), horneado (riel “6”) y embalado (riel “7”).
Comenzamos la secuencia de la línea de producción mencionando que los ladrillos en verde
(salidos del proceso de extrusión) se encuentran cargados en los estantes que se ubican en el riel “1”
circulando en el sentido indicado por la flecha hasta el extremo donde se encuentra el carro “1”, este
tiene que trasladar dichos estantes de “1” a “2” para que retornen al otro extremo del tinglado, donde
son transferidos (con el carro “2”) a los rieles “3” y “4”. Una vez que los estantes atraviesan el
secadero el carro “1” los traslada al riel “5”. Luego en el otro extremo se transfieren los adobes
(ladrillos en verde) de un estante a una vagoneta y estas ingresan al horno. Cuando las vagonetas
atraviesan el horno deben nuevamente ser trasladadas, siendo movidas por el carro “1” del riel “6” al
riel “7”, donde aguarda el proceso de embalado.
A fin de contextualizar mejor la tarea que deberá controlar el circuito implementado se muestra
en la Figura 2 un diagrama que especifica los sentidos de circulación, rieles existentes, ubicación de
sensores, referencias de ubicación y carro de transferencia utilizado.
Barrera Infrarroja Sensor de distancia
1234567
EstanteVagonetaVagoneta Estante Estante Estante Estante
Referencia de posición Sensor inductivo
1
Figura 2. Diagrama representativo del proceso.
Sensores utilizados
Sensores de proximidad
Se considera la utilización de sensores inductivos de proximidad de la marca Schneider
Electric y modelo XS230SAPAL2 (Hoja de datos en el Anexo 4) los cuales tienen las características
básicas de trabajar con corriente continua, tensión entre 12 V y 24 V, protección contra tensión
inversa, salida discreta del tipo PNP y distancia de detección máxima de 22mm.

En el sistema de control se requerirán 7 sensores de este tipo. En detalle su utilización será, 4
sensores para la detección de estantes y vagonetas en las vías 1, 3, 4 y 6, 2 sensores para el brazo de
carga/descarga y un sensor más para testear el estado del electroimán.
Sensor de distancia
Se prevé la utilización de dos sensores de distancia de la marca Schneider Electric modelo
XUE5AA2NM12 el cual se alimenta con corriente continua de 24 V y entrega una salida de 4-20 mA
proporcional a la distancia medida, el mismo tiene una distancia de medición nominal de 6m. (Hoja
de datos del componente en el Anexo 5).
Los sensores son utilizados para la detección de la posición del carro (tomando la referencia
respecto a chapas fijas ubicadas a un lado de los rieles, se explica detalladamente en el funcionamiento
del código implementado) y para la medición de distancia del estante o vagoneta en los procesos de
carga y/o descarga.
Sensor tipo barrera
Se utiliza un sensor de este tipo para determinar la posición del carro a medida que este se
desplaza. Básicamente cuando el haz de la barrera es cortado genera una interrupción en el
microcontrolador aumentando un contador.
El sensor comercial considerado es 1A57HR el cual está compuesto por un diodo infrarrojo y
un fototransistor. (Hoja de datos reducida Anexo 6)
Variador de velocidad YASKAWA J7mini El mismo puede ser controlado mediante un lazo de corriente de 4 a 20mA, entre otras
opciones, pero esta fue la elegida por su practicidad, por otro lado permite la inversión de marcha
mediante dos entradas digitales que fueron implementadas mediante un opto acoplador que se
acciona con el microcontrolador directamente sin necesidad de acoplar al mismo una etapa de
potencia.
Este variador de velocidad posee varias funciones de las cuales se utiliza principalmente,
encendido y apagado en rampa y bloqueo temporal de rotor el cual es utilizado para posicionar el
carro en su correcta posición.
Hoja de datos y manual de instrucciones puede descargarse de la siguiente página web
https://www.yaskawa.com/pycprd/download/home#tab1.
Montaje del circuito Cabe mencionar que el circuito de control está compuesto por dos placas, en una se encuentra
la pantalla y los botones de configuración y en la otra el microcontrolador con las entradas y salidas
de control. Ambas placas han sido diseñadas con ayuda del software Eagle.
Los pasos para la construcción de la placa fueron:
Diseño del circuito esquemático.
Diseño del circuito en PCB.
Impresión en papel fotográfico.
Planchado sobre la placa.
Remoción del papel y restos de todo tipo.
Revisión de pistas (las pistas con defectos fueron remarcadas o trazadas con marcador
permanente).

Quemado, colocando la placa en ácido (Cloruro Férrico).
Perforación de los orificios.
Pintado con flux.
Secado.
Montaje y soldado de componentes.
Placa de pantalla
Figura 3. Layout de la pantalla y botonera.
En la Figura 3 se muestra un Layout del circuito. Se utiliza una pantalla de 2x16 con 5 botones
que tienen una conexión con una entrada analógica del microcontrolador, con las distintas resistencias
se dan las distintas tensiones a la que responde la entrada mencionada. La placa cuenta con un sexto
botón que se comunica con el pin RB1 del microcontrolador generando una interrupción. Además de
aprecia un resistor variable utilizado para regular el contraste de la pantalla.
Bajo la pantalla se encuentran los pines de conexión del circuito.
En cuanto al proceso de construcción de la misma, no se presentaron mayores inconvenientes
ya que es una placa sencilla en la Figura 4 y ¡Error! No se encuentra el origen de la referencia. se
aprecian fotos de la misma. En el Anexo 1 se puede encontrar el circuito esquemático de dicha placa.
Figura 4. Frente de la placa.

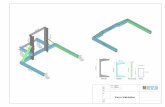
Placa de microcontrolador
Figura 5. Layout de la placa principal.
En la placa de la Figura 5 se aprecia el Layout de los componentes. En términos generales se
aprecia en la parte superior, la entrada de alimentación del sistema; a la derecha las salidas (relés); en
la parte inferior las entradas de los sensores digitales; y a la izquierda, en la parte superior se
encuentran las entradas analógicas (4-20mA), en la mitad de la placa se encuentran los pines de
conexión con la pantalla y en la parte inferior las salidas de control del variador. El microcontrolador
está ubicado cercano al centro del circuito.
En cuanto al proceso de construcción destacamos los siguientes ítems:

El planchado sobre la placa se debió realizar dos veces debido a que se detectaron muchos
defectos. A pesar de ello se debió retocar manualmente todos los bordes de la placa, incluyendo
dos pistas casi completas.
Las distancias entre los relés fueron insuficientes en algunos lugares de modo que se tuvo que
forzar para su colocación.
La distancia entre las borneras y leds en la parte inferior de la placa también fueron
insuficientes, por lo que se tuvo que doblar los pines de los leds.
En el diseño en PCB de la placa principal no se incluyeron los pines de alimentación de la
placa de la pantalla, los cuales se colocaron al momento de realizar las pruebas.
El circuito de la pantalla con cuenta con un capacitor en la alimentación para eliminar o
disminuir el ruido.
El resultado de la construcción del circuito se aprecia en las dos fotos siguientes
Figura 6. Frente de la placa.

Figura 7. Vista trasera de la placa.
Cálculos
Filtro pasa bajo
1 110,6
2 2 1,5 10f Hz
RC k F
(1)
Entrada de 4 a 20mA
La entrada es sobre una resistencia de 100ohm, por lo tanto se tienen tensiones de 0,4 y 2V.
Entonces se tienen las siguientes ecuaciones de un amplificador de diferencia.

2
1
o
RV V V
R (2)
21
1 11 2
2 22
1
2
5 5 1
0,4
o
oo o
oo
RV
R VV V V V
R VV
R
(3)
Entonces
22 1 1 2
1
52,5 2,5 3,3 8, 2
2
R VR R R k R k
R V
(4)
Salida de 4 a 20mA
La tensión de salida máxima será de 5V por lo tanto la resistencia para el lazo de corriente
será:
5250
0,02
VR
A
(5)
Resistencia de los leds
La corriente se calculó baja por que se pensaba utilizar leds de alta luminosidad.
5 23
1
V VR mA
k
(6)
Para leds convencionales será.
5 29
330
V VR mA
(7)
Programación del microcontrolador En lo que respecta a la programación del micro se realizó la misma sobre un PIC18F4550, el
cual no se pudo cumplimentar dado que el mismo no respondía adecuadamente, específicamente
ignoraba las entradas en los pines RC4 y RC5, como un intento de solucionar el inconveniente se
grabó el programa ya realizado bajo este micro en un PIC18F4585 que se tenía a disposición y el
mismo funciono correctamente, analizando un poco más se vio que el 4550 en esos pines posee la
comunicación USB y por más que la misma se deshabilite no solucionaba el inconveniente, el 4585
no posee comunicación USB por lo tanto no presento estos problemas.
Entrando en detalle con la lógica del programa se detallan presentan los siguientes diagramas
de flujo.

Figura 8. Diagrama de flujo del programa.
En el caso de la función principal, vemos que en la misma se testean los sensores que indican
la presencia de estantes/vagonetas en los carriles, se necesita testear con un orden de prioridad que
está en evidencia en el diagrama de flujo, la mayor prioridad se encuentra a la salida del horno, por
lo tanto este es el primero en atenderse, luego el carril 1 que es la salida del pre secado y por último
los carriles del secadero dado que estos pueden ser de mayor espera, por otro lado no es difícil
cambiar el orden de prioridad en el caso de que el régimen de prioridades no funcione.
Como se puede ver además los registros de origen y destino son registros globales que
contienen justamente la dirección de origen y destino de los estantes; luego se invoca a la función
tarea que se detalla a continuación.

Figura 9. Diagrama de flujo de la función tarea.
La función tarea determina que tarea debe realizarse, si el carro debe moverse, quedarse en la
posición actual o volver a alguna posición en particular, y para esto se vale de las funciones
movimiento y carga/descarga, que se detallaran en a continuación.
La función movimiento realiza el justamente movimiento del carro a la posición deseada,
teniendo en cuenta todas las cuestiones pertinentes, como ser el accionamiento del electroimán,
control de velocidad, frenado del carro, corroboración de posición, realiza las operaciones necesarias
para que el carro quede posicionado en el lugar correcto. Para esto se vale da funciones de frenado,
determinar posición, electroimán, reubicar; cada una con una función específica.
Otra función importante es carga/descarga; la misma tiene la tarea de realizar la carga o
descarga de un estante o vagoneta, teniendo en cuenta el accionamiento del brazo, lectura de los
sensores de distancia del carro al estante, y los tiempos máximos de funcionamiento del sistema de
carga/descarga.

Figura 10. Diagrama de flujo de la función movimiento.
Figura 11. Diagrama de flujo de la función carga/descarga.
Movimiento(accion)
Accion==0
Retorno
Electroiman(0)
Accion=accion*3-1Marcha=1
Ninterrup<accion Cutil=100%
Frenado
Detectar_posicon
Electroiman(1)
Retorno
Carga/Descarga
Posicion==2||==5||==7
Distancia < 270
Descarga
Posicion==1||==3||==4||==6
Distancia > 700
Descarga
Retorno

Puesta en funcionamiento Para la puesta en funcionamiento del sistema es necesario setear el preset que regula la
mínima corriente por el lazo de corriente en mismo se setea cerrando el lazo con un amperímetro y
regulando el mismo hasta llegar a los 4 mA con una entrada PWM con ciclo útil de 0%.
Además en necesario setear las distancias que medirá el sensor que establece la posición del
carro, el mismo se realiza entrando al menú de configuración, luego posicionando el carro en el
lugar correspondiente y presionando un botón en el menú para guardar los valores.
Por ultimo para poner en funcionamiento es necesario poner el registro tarea en OK y setear
la posición actual del carro, para el correcto funcionamiento.
Conclusiones El desarrollo del proyecto nos da una experiencia más que nada de aprendizaje en cuanto al
diseño y construcción de circuitos de control de un proceso industrial, considerando las protecciones
y métodos de comunicación entre los sensores de uso industrial.
El variador de frecuencia utilizado nos trajo algunos inconvenientes en el control debido a
sus configuraciones, luego de resetear las configuraciones de fábrica y volver a configurarlo
respecto al método de control utilizado el mismo respondió correctamente.
Mejoras a implementar en el código
Determinar en qué proceso se produce un error y mostrar en pantalla. Actualmente solo se
visualiza el mensaje de error pero no se conoce de donde proviene el mismo.
En el reseteo del programa hay que introducir algunas mejoras para el reinicio de la tarea como
ser el testeo de existencia de carga en el carro y realizar la acción correspondiente.
Incluir en la configuración la selección de tipo de entrada analógica, esta puede ser de 0-20mA
o de 4-20mA.
Autocalibración del PWM cuando se cambia la salida de 4-20mA a 0-20mA.
Mejoras a implementar en la placa
Dos cosas muy importantes
Aislar las tierras de los relés y optoacopladores del resto del circuito. Colocando
alimentaciones independientes.
Colocar una etapa de amplificación de a la salida de los optoacopladores.
Otros aspectos a tener en cuenta
Revisar correctamente las dimensiones de los elementos utilizados.
Utilizar torres hembra para la programación en circuito. Las torres tipo macho facilitan la
entrada de ruido, generalmente por contacto.
Dejar espacio para colocar los nombres de los bornes de entrada y de salida.
Colocar protecciones para las entradas analógicas.

Anexo 1 Esquema circuital utilizado
Esquema de conexión del microcontrolador con sus correspondientes entradas y salidas,
alimentación del sistema, capacitores de estabilización de tensión, botón de reset, pines de salida
del LCD, pines de programación en circuito y conexión del cristal externo.
Entradas de sensores al sistema
Conversión corriente a tensión. Entrada analógica.

Entradas digitales del sistema.

Etapa de conversión PWM a salida de corriente. Con el jumper que se aprecia el la figura se
puede elegir el tipo de salida 4-20mA o 0-20mA.
Salidas digitales a reles.
Conexiones entre el micro y las salidas conectadas al variador de frecuencia.

Esquematico de la placa en donde se encuentra la pantalla

Anexo 2 Componentes utilizados
Elemento Valor Componente Encapsulado Librería Cantidad
Placa microcontrolador
C1 10u C2.5/5 C2.5-5 capacitor-wima 1
C2, C4, C6,
C9
100n C2.5/5 C2.5-5 capacitor-wima 4
C3, C5 27p C-EU025-025X050 C025-
025X050
rcl 2
C7, C8 470u CPOL-EUE3.5-10 E3,5-10 resistor 2
D1, D2 5.1 ZENER-
DIODEZD-5
ZDIO-5 diode 2
D3, D19-D25 1N4004 1N4004 DO41-10 diode 8
D4-D18 HLMP6 HLMP6 HLMP6 Diode 15
IC1, IC2 LM358N LM358N DIL08 linear 2
IC3 PIC18F4550_40 PIC18F4550_40 DIL40 microchip 1
JP1, JP5 JP1E JP1 jumper 2
JP2, JP3 JP4E JP4 jumper 2
JP4 JP2E JP2 jumper 1
K1-K7 G5L G5L G5LE relay 7
OK1 ILD610 ILD610 DIL08 optocoupler 1
OK2-OK5 ILQ1 ILQ1 DIL16 optocoupler 4
Q1 8M CRYSTALHC49S HC49/S crystal 1
R1 1k5 R-EU_0207/7 0207/7 rcl 1
R2, R17, R26-
R30, R53-R56
10k TRIM_EU-RJ9W RJ9W pot 11
R3, R4, R7,
R8
3k3 R-EU_0207/7 0207/7 rcl 4
R5, R6, R12 100 R-EU_0207/7 0207/7 rcl 3
R9-R11, R15 8k2 R-EU_0207/7 0207/7 rcl 4
R13, R14,
R46-R52
330 R0204/7 0204/7 eagle-ltspice 9
R16 150 R-EU_0207/7 0207/7 rcl 1
R18-R38 1k R-EU_0207/7 0207/7 rcl 16
R39-R45 470 R-EU_0207/7 0207/7 rcl 7
S1 PVA1R PVA1R PVA1R switch-misc 1
T1 BC337 BC337 TO92 transistor 1
X1 W237-04P W237-4P con-wago-508 1
X2-X8, X10-
X13
W237-02P W237-132 con-wago-508 11
X9, X14-X20 W237-3E W237-3E con-wago-508 8
Placa pantalla
BUTTON PVA1R PVA1R PVA1R switch-misc 6
R1, R6, R7 10k R-TRIMM64W RTRIM64W rcl 3

R2 2K7 R-EU_0207/7 0207/7 rcl 1
R3 3K9 R-EU_0207/7 0207/7 rcl 1
R4, R5 8k2 R-EU_0207/7 0207/7 rcl 2
DIS1 TUXGR_16X2_
R2
TUXGR_16X2_R2 TUXGR_16X
2_R2
display-lcd 1
JP1, JP2 JP4E JP4 jumper 2
JP3 JP1Q JP1 jumper 1

Anexo 3 El código es el siguiente:
#include <18F4550.h>
#device adc=10
#FUSES NOWDT //No Watch Dog Timer
#FUSES WDT128 //Watch Dog Timer uses 1:128 Postscale
#FUSES HS //High speed Osc (> 4mhz for PCM/PCH) (>10mhz for
PCD)
#FUSES NOBROWNOUT //No brownout reset
#FUSES NOLVP //No low voltage prgming, B3(PIC16) or B5(PIC18)
used for I/O
#FUSES NOXINST //Extended set extension and Indexed Addressing
mode disabled (Legacy mode)
#use delay(clock=8000000)
#use fast_io(A)
#use fast_io(B)
#use fast_io(C)
#use fast_io(D)
#use fast_io(E)
// Conversor ADC -----------------------------------------------------------
#byte ADCON0 = 0xFC2 // Registro de config. del ADC.
#byte ADCON1 = 0xFC1 // Registro de config. del ADC.
#byte ADCON2 = 0xFC0 // Registro de config. del ADC.
// Puertos -----------------------------------------------------------------
// Puerto A -----------------------------------------------------------
#byte TRISA = 0xF92 // Registro de config. del puerto A.
#byte LATA = 0xF89
#byte PORTA = 0xF80 // Registro de acceso al puerto A.
#bit Test_posicion = PORTA.0 // Entrada analogica. (Ubicacion del carro)
#bit Test_distancia = PORTA.1 // Entrada analogica. (Distancia del
estante/vagoneta)
#bit Botones = PORTA.2 // Entrada analogica. (Botones de comando)
//#bit LCD = PORTA.3
//#bit LCD = PORTA.4
//#bit LCD = PORTA.5
//6 y 7 para XTAL.
// Puerto B ------------------------------------------------------------
#byte TRISB = 0xF93 // Registro de config. del puerto B.
#byte LATB = 0xF8A
#byte PORTB = 0xF81 // Registro de acceso al puerto B.
#bit Barrera = PORTB.0 // Entrada. Interrupcion.
#bit menu = PORTB.1 // Entrada. Interrupcion.
#bit Puerta3 = PORTB.2 // Salida (Extiende el brazo de carga/descarga)
#bit A_electroiman = PORTB.3 // Salida (Contrae el brazo de carga/descarga)
#bit ext_brazo = PORTB.4 // Entrada (Sensor mas alejado de las vias) (Alto
cuando el haz se corta)
#bit enc_brazo = PORTB.5 // Entrada (Sensor mas cercano a la via.) (Alto
cuando el haz se corta)
//#bit = PORTB.6 // Entrada (Evalua el estado del electroiman)
//#bit = PORTB.7 // Salida (Acciona el electroiman)
// Puerto C ---------------------------------------------------------
#byte TRISC = 0xF94 // Registro de config. del puerto C.
#byte LATC = 0xF8B
#byte PORTC = 0xF82 // Registro de acceso al puerto C.
#bit derecha = PORTC.0 // Salida. (Encendido/apagado del motor)

#bit reversa = PORTC.1 // Salida. (Sentido de giro del motor)
//#bit CCP = PORTC.2 //CCP
//#bit VUSB = PORTC.3 //USB?????
#bit Carril4 = PORTC.4 // Entrada magnetico Carril 4.
#bit Carril6 = PORTC.5 // Entrada magnetico Carril 5.
#bit Test_electroiman = PORTC.6
#bit sensor1 = PORTC.7
// Puerto D ----------------------------------------------------------
#byte TRISD = 0xF95 // Registro de config. del puerto D.
#byte LATD = 0xF8C
#byte PORTD = 0xF83 // Registro de acceso al puerto D.
//#bit Libre = PORTD.0
//#bit Libre = PORTD.1
#bit Carril1 = PORTD.2 // Entrada magnetico Carril 1.
#bit Carril3 = PORTD.3 // Entrada magnetico Carril 3.
#bit sensor2 = PORTD.4
#bit Alarma = PORTD.5 // Salida Señal puerta 1.
#bit Puerta1 = PORTD.6 // Salida Señal puerta 2.
#bit Puerta2 = PORTD.7 // Salida Señal puerta 3.
// Puerto E -----------------------------------------------------------
#byte TRISE = 0xF96 // Registro de config. del puerto E.
#byte LATE = 0xFD
#byte PORTE = 0xF84 // Registro de acceso al puerto E.
//#bit LCD = PORTE.0 //
//#bit LCD = PORTE.1 //
//#bit LCD = PORTE.2 //
//#bit MCLR = PORTE.3 //Master clear.
#byte UCON = 0xF6D
#bit USBEN = 0xF6D.3
#define LCD_RS PIN_A3
#define LCD_E PIN_A4
#define LCD_DB4 PIN_A5
#define LCD_DB5 PIN_E0
#define LCD_DB6 PIN_E1
#define LCD_DB7 PIN_E2
// Flex_lcd.c
//#define LCD_DB4 PIN_B4
//#define LCD_DB5 PIN_B5
//#define LCD_DB6 PIN_B6
//#define LCD_DB7 PIN_B7
//#define LCD_RS PIN_C0
//#define LCD_RW PIN_C1
//#define LCD_E PIN_C2
// If you only want a 6-pin interface to your LCD, then
// connect the R/W pin on the LCD to ground, and comment
// out the following line.
//#define USE_LCD_RW 1
//========================================
#define lcd_type 2 // 0=5x7, 1=5x10, 2=2 lines (Cantidad de líneas del
Display)
#define lcd_line_two 0x40 // LCD RAM address for the 2nd line
byte const LCD_INIT_STRING[4]={0x20 | (lcd_type << 2), 0xc, 1,6};
// Func set: 4-bit, 2 lines, 5x8 dots // Display on // Clear display //
Increment cursor
//-------------------------------------

void lcd_send_nibble(int8 nibble)
{
// Note: !! converts an integer expression
// to a boolean (1 or 0).
output_bit(LCD_DB4, !!(nibble & 1));
output_bit(LCD_DB5, !!(nibble & 2));
output_bit(LCD_DB6, !!(nibble & 4));
output_bit(LCD_DB7, !!(nibble & 8));
delay_cycles(1);
output_high(LCD_E);
delay_us(2);
output_low(LCD_E);
}
//----------------------------------------
// Send a byte to the LCD.
void lcd_send_byte(int8 address, int8 n)
{
output_low(LCD_RS);
if(address)
output_high(LCD_RS);
else
output_low(LCD_RS);
delay_cycles(1);
output_low(LCD_E);
lcd_send_nibble(n >> 4);
lcd_send_nibble(n & 0xf);
}
//----------------------------
void lcd_init(void)
{
int8 i;
output_low(LCD_RS);
output_low(LCD_E);
delay_ms(15);
for(i=0 ;i < 3; i++)
{
lcd_send_nibble(0x03);
delay_ms(5);
}
lcd_send_nibble(0x02);
for(i=0; i < sizeof(LCD_INIT_STRING); i++)
{
lcd_send_byte(0, LCD_INIT_STRING[i]);
}
}
//----------------------------
void lcd_gotoxy(int8 x, int8 y)
{
int8 address;
if(y != 1)
address = lcd_line_two;
else
address=0;

address += x-1;
lcd_send_byte(0, 0x80 | address);
}
//-----------------------------
void lcd_putc(char c)
{
switch(c)
{
case '\h':
lcd_send_byte(0,2);
delay_ms(2);
break;
case '\f':
lcd_send_byte(0,1);
delay_ms(2);
break;
case '\n':
lcd_gotoxy(1,2);
break;
case '\b':
lcd_send_byte(0,0x10);
break;
default:
lcd_send_byte(1,c);
break;
}
}
//------------------------------
void lcd_setcursor_vb(short visible, short blink) {
lcd_send_byte(0, 0xC|(visible<<1)|blink);
}
//FIN Flex_LCD
//Constantes del programa.
#define cutilmax 500
#define T_out_brazo 2000
#define T_blink 100
#define T_sensado 300
#define T_puerta 0
#define EEPROM_pos 0xF00020
#rom int16 EEPROM_pos={000,279,310,350,400,471,573,729}
#define tol_pos 50
// INICIALIZACION DE VARIABLES ----------------------------------------------------
--------
int giro=0;
int16 cutil, Lectura;
int16 Lectura_adc[10]={0,0,0,0,0,0,0,0,0,0};
int* info;
char donde[30];
int Ninterrupts = 0;
int informacion[9]={0,0,0,0,0,0,0,0,0};
int16 Set_pos2[8];
/*
informacion[0] = Resultado de la tarea: erronea "0", correcta "1".
informacion[1] = Estado: sin carga "0", movimiento de 1 a 2 "1", movimiento de 3 a
5 "2", movimiento de 4 a 5 "3", movimiento de 6 a 7 "4"

informacion[2] = Pocicion actual: 1, 2, 3, 4, 5, 6 y 7.
informacion[3] = Origen: 1, 2, 3, 4, 5, 6 y 7.
informacion[4] = Destino: 1, 2, 3, 4, 5, 6 y 7.
informacion[5] = Menu: 0 y 1.
informacion[6] = Alarma: 0 1. Encendido 0 y Apagado 1
informacion[7] = Calibracion de frenado: 0 - 100; Ver funcion frenado.
informacion[8] = Frecuencia minima. 0 - 60.
*/
// INICIALIZACION DE FUNCIONES ----------------------------------------------------
--
void menu_config(void); //Listo.
void set_pos(void);
char leer_pulsadores(void); //Listo.
void guardar_EEPROM (void); //Listo.
void tarea(void);
void movimiento (int);
void SecCD (void);
void descargar (void);
void cargar (void);
void contraer (void);
void extender (void);
int DetPosicion (void);
void reubicar_en (int);
void electroiman (int);
void calibrar (void);
void frenado (void);
int16 read_adc_prom(int cant);
#INT_EXT
void EXT_isr(void)
{
delay_ms(30);
if(Barrera==1)
Ninterrupts = Ninterrupts+1;
if (Ninterrupts != 0 && (Ninterrupts%3)==0) // Actualizacion de la
posicion actual.
{
if(giro==0)
*(info+2)=*(info+2)+1;
else
*(info+2)=*(info+2)-1;
guardar_EEPROM();
}
return;
}
#int_EXT1
void EXT1_isr(void)
{
delay_ms(30);
if(menu==0)
*(info+5)=1;
return;
}
// PRORAMA PRINCIPAL --------------------------------------------------------------
--------
void main()
{
USBEN=0;
setup_adc(ADC_CLOCK_DIV_64|ADC_TAD_MUL_16);
setup_adc_ports(AN0_TO_AN2|VSS_VDD);
set_tris_a(0b00000111); // Configuracion: Puerto A
PORTA = 0x00; // Inicializacion: puerto A.
set_tris_b(0b11000011); // Configuracion: Puerto B

PORTB = 0x00; // Inicializacion: puerto B.
set_tris_c(0b11110000); // Configuracion: Puerto C
PORTC = 0x00; // Inicializacion: puerto C.
set_tris_d(0b00011111); // Configuracion: Puerto D
PORTD = 0x00; // Inicializacion: puerto D.
set_tris_e(0b00001000); // Configuracion: Puerto E
PORTE = 0x00; // Inicializacion: puerto E.
lcd_init();
//Cargar el vector pos de la EEPROM.
for(int i=0;i<8;i++)
{
Set_pos2[i] = read_eeprom(EEPROM_pos+2*i+1);
Set_pos2[i]*=256;
Set_pos2[i] |= read_eeprom(EEPROM_pos+2*i);
}
// CONFIGURACION DE LA INTERRUPCION
enable_interrupts(int_EXT);
ext_int_edge( 0, L_TO_H);
enable_interrupts(int_EXT1);
ext_int_edge( 1, H_TO_L);
enable_interrupts(global);
// DIRECCIONAMIENTO DEL PUNTERO
info = &informacion;
*(info+7)=13;
// CCP1 en modo PWM
setup_ccp1(CCP_PWM);
set_pwm1_duty(0);
derecha=0;
reversa=0;
setup_timer_2(T2_DIV_BY_16,125,1); //1008Hz
printf(lcd_putc,"\fBienvenido a \n CarroMatic 2014");
delay_ms(2000); //2000
menu_config();
while(TRUE)
{
lcd_setcursor_vb(0,0);
if(*info==2)
*info=1;
if(*(info+5)==1)
menu_config();
printf(lcd_putc,"\hTesteando Vias... ");
lcd_gotoxy(1,2);
printf(lcd_putc," 1 2 3 4 5 6 7 ");
//Testeo de las vias, Hay/No Hay Estante.
lcd_setcursor_vb(0,1);
lcd_gotoxy(2,2);
delay_ms(T_blink);
if(*info==0)
printf(lcd_putc,"\fERROR!!!!! ");
lcd_gotoxy(12,2);
delay_ms(T_blink);
if(Carril6==1 && *info==1)
{
delay_ms(T_sensado);
if(Carril6==1)
{
*(info+3)=6;
*(info+4)=7;
tarea();
*info=2;
}
}
if(Carril1==1 && *info==1)
{
delay_ms(T_sensado);

if(Carril1==1)
{
*(info+3)=1;
*(info+4)=2;
tarea();
*info=2;
}
}
lcd_gotoxy(6,2);
delay_ms(T_blink);
if(Carril3==1 && *info==1)
{
delay_ms(T_sensado);
if(Carril3==1)
{
*(info+3)=3;
*(info+4)=5;
tarea();
*info=2;
}
}
lcd_gotoxy(8,2);
delay_ms(T_blink);
if(Carril4==1 && *info==1)
{
delay_ms(T_sensado);
if(Carril4==1)
{
*(info+3)=4;
*(info+4)=5;
tarea();
*info=2;
}
}
}
}
// DECLARACION DE FUNCIONES--------------------------------------------------------
--------------
//Menu de configuracion del vector informacion.
void menu_config(void)
{
disable_interrupts(int_EXT1);
char botone;
int caso=0;
int informacion_gost[8];
int* infog;
infog = &informacion_gost;
for(int i=0;i<8;i++)
informacion_gost[i]=informacion[i];
while(menu==0)delay_ms(20);
while(menu==1)
{
printf(lcd_putc,"\hConfiguracion ");
botone = leer_pulsadores();
delay_ms(50);
if(botone==leer_pulsadores());
{
if(botone=='R')
caso++;
else if(botone=='L')
caso--;
switch(caso)
{

case 0: //informacion[0] = Resultado de la tarea: erronea "0",
correcta "1".
{
lcd_gotoxy(1,2);
if(botone=='U'||botone=='D')
if(*infog==0) *infog=1;
else *infog=0;
if(*infog==0)
printf(lcd_putc,"Tarea: Error ");
else
printf(lcd_putc,"Tarea: OK ");
delay_ms(50); break;
}
case 1: //informacion[1] = Estado: sin carga "0", movimiento de
1 a 2 "1",de 3 a 5 "2",de 4 a 5 "3",de 6 a 7 "4"
{
lcd_gotoxy(1,2);
if(botone=='U')
*(infog+1) = *(infog+1)+1;
else if(botone=='D')
*(infog+1) = *(infog+1)-1;
switch(*(infog+1))
{
case 0:
{printf(lcd_putc,"Estado:Sin Carga"); break;}
case 1:
{printf(lcd_putc,"Estado: 1 a 2 "); break;}
case 2:
{printf(lcd_putc,"Estado: 3 a 5 "); break;}
case 3:
{printf(lcd_putc,"Estado: 4 a 5 "); break;}
case 4:
{printf(lcd_putc,"Estado: 6 a 7 "); break;}
case -1:
{*(infog+1)=4; break;}
case 5:
{*(infog+1)=0; break;}
};
delay_ms(50); break;
}
case 2: //informacion[2] = Posicion actual: 1, 2, 3, 4, 5, 6 y
7.
{
lcd_gotoxy(1,2);
if(botone=='U') *(infog+2) = *(infog+2)+1;
else if(botone=='D') *(infog+2) = *(infog+2)-1;
switch(*(infog+2))
{
case 0:
{*(infog+2)=7; break;}
case 8:
{*(infog+2)=1; break;}
default:
{printf(lcd_putc,"Pos Actual: %d ",*(infog+2));
break;}
};
delay_ms(50); break;
}
case 3: //informacion[3] = Origen: 1, 2, 3, 4, 5, 6 y 7.
{
lcd_gotoxy(1,2);
if(botone=='U') *(infog+3) = *(infog+3)+1;
else if(botone=='D') *(infog+3) = *(infog+3)-1;
switch(*(infog+3))
{

case 0:
{*(infog+3)=7; break;}
case 8:
{*(infog+3)=1; break;}
default:
{printf(lcd_putc,"Origen: %d ",*(infog+3));
break;}
};
delay_ms(50); break;
}
case 4: //informacion[4] = Destino: 1, 2, 3, 4, 5, 6 y 7.
{
lcd_gotoxy(1,2);
if(botone=='U') *(infog+4) = *(infog+4)+1;
else if(botone=='D') *(infog+4) = *(infog+4)-1;
switch(*(infog+4))
{
case 0:
{*(infog+4)=7; break;}
case 8:
{*(infog+4)=1; break;}
default:
{printf(lcd_putc,"Destino: %d ",*(infog+4));
break;}
};
delay_ms(50); break;
}
case 6: //informacion[6] = Alarma: 0 y 1. Encendido 0 y
Apagado 1
{
lcd_gotoxy(1,2);
if(botone=='U'||botone=='D')
if(*(infog+6)==0)
*(infog+6)=1;
else
*(infog+6)=0;
if(*(infog+6)==0)
printf(lcd_putc,"Alarma: Apagada ");
else
printf(lcd_putc,"Alarma:Encendida");
delay_ms(50); break;
}
case 7: //informacion[7] = Calibracion de frenado: 0 - 100;
Ver funcion frenado.
{
lcd_gotoxy(1,2);
if(botone=='U') *(infog+7) = *(infog+7)+1;
else if(botone=='D') *(infog+7) = *(infog+7)-1;
switch(*(infog+7))
{
case -1:
{*(infog+7)=101; break;}
case 101:
{*(infog+7)=0; break;}
default:
{printf(lcd_putc,"Frenado: %d ",*(infog+7));
break;}
};
delay_ms(50); break;
}
case 8: //informacion[8] = Frecuencia minima. 0 - 60.
{
lcd_gotoxy(1,2);
if(botone=='U') *(infog+8) = *(infog+8)+1;
else if(botone=='D') *(infog+8) = *(infog+8)-1;

switch(*(infog+8))
{
case -1:
{*(infog+8)=60; break;}
case 61:
{*(infog+8)=0; break;}
default:
{printf(lcd_putc,"Frec Min: %d ",*(infog+8));
break;}
};
delay_ms(50); break;
}
case 9: //Set_pos[2] = Posicion actual: 1, 2, 3, 4, 5, 6 y 7.
{
lcd_gotoxy(1,2);
printf(lcd_putc,"Set_pos ");
if(botone=='S')
set_pos();
delay_ms(50); break;
}
case -1:
{caso = 9; break;}
case 10:
{caso = 0; break;}
};
}
}
for(i=0;i<sizeof(informacion);i++)
informacion[i]=informacion_gost[i];
guardar_EEPROM();
*(info+5)=0;
clear_interrupt(int_EXT1);
do delay_ms(20);while(menu==0);
enable_interrupts(int_EXT1);
}
//Menu capa Set_pos.
void set_pos(void)
{
int po=0;
char botone2;
int16 value;
while(leer_pulsadores()!='S')
{
set_adc_channel(0);
delay_ms(30);
value = read_adc_prom(10);
lcd_gotoxy(1,1);
printf(lcd_putc,"\hPos %d viejo %li \nActual: %li
",po,Set_pos2[po],value);
botone2=leer_pulsadores();
delay_ms(50);
if(botone2==leer_pulsadores());
{
switch(botone2)
{
case 'R':
{
po++;
if(po==8)
po=0;
break;
}
case 'L':
{

po--;
if(po==-1)
po=8;
break;
}
case 'U':
{
Set_pos2[po]=value;
break;
}
case 'D':
{
Set_pos2[po] = read_eeprom(EEPROM_pos+2*po+1);
Set_pos2[po]*=256;
Set_pos2[po] |= read_eeprom(EEPROM_pos+2*po);
break;
}
}
}
}
for(int j=0;j<8;j++)
{
write_eeprom(EEPROM_pos+2*j,Set_pos2[j]);
Set_pos2[j]/=256;
write_eeprom(EEPROM_pos+2*j+1,Set_pos2[j]);
Set_pos2[j] = read_eeprom(EEPROM_pos+2*j+1);
Set_pos2[j]*=256;
Set_pos2[j] |= read_eeprom(EEPROM_pos+2*j);
}
return;
}
//Lee los pulsadores.
char leer_pulsadores(void)
{
int16 val;
set_adc_channel(2);
delay_ms(10);
val = read_adc();
if(val>900)
return 'N';
else if(val>700)
return 'S';
else if(val>500)
return 'L';
else if(val>300)
return 'D';
else if(val>100)
return 'U';
else
return 'R';
}
//Realiza la copia del vector información a la memoria EEPROM del micro.
void guardar_EEPROM (void)
{
for(int i=0;i<sizeof(informacion);i++)
write_eeprom(i,informacion[i]);
}
// REALIZA UNA TAREA COMPLETA. MOVIMIENTO-CARGA-MOVIMIENTO-DESCARGA.
// Analiza la posicion del carro y con respecto al destino que tiene en el vector
de informacion.
// Si son diferentes, evalua el sentido de movimiento y procede a llamar a la
funcion que lleva a

// cabo el desplazamiento.
// Estados afectados: Resultado de la tarea. Posicion actual.
void tarea (void) //Listo
{
int accion;
lcd_setcursor_vb(0,0);
//Determinacion de sentido de giro.
if(*(info+3) > *(info+2))
{
giro=0;
accion = *(info+3) - *(info+2); // accion = origen - posicion
}
else
{
giro=1;
accion = *(info+2) - *(info+3); // accion = origen - posicion
}
sprintf(donde,"Origen: Via %d ",*(info+3));
movimiento(accion);
if(*info==0)
{*(info+6)==0;return;}
else
SecCD(); //Depurar
//Determinacion de sentido de giro.
if(*(info+4) > *(info+2))
{
giro=0;
accion = *(info+4) - *(info+2); // accion = origen - posicion
}
else
{
giro=1;
accion = *(info+2) - *(info+4); // accion = origen - posicion
}
sprintf(donde,"Destino: Via %d ",*(info+4));
movimiento(accion);
if(*info==0)
{*(info+6)==0;return;}
else
SecCD();
lcd_setcursor_vb(0,1);
return;
}
// EVALUA NECESIDAD DE MOVIMIENTO Y SENTIDO DE AVANCE
// Analiza la posicion del carro y con respecto al destino que tiene en el vector
de informacion.
// Si son diferentes, evalua el sentido de movimiento y procede a llamar a la
funcion que lleva a
// cabo el desplazamiento.
// Estados afectados: Resultado de la tarea. Posicion actual.
void movimiento (int accion)
{
if(accion==0)
return;
//Desplazamiento.
electroiman(0); //Contraer electroiman.
if(*info == 0)
return;
Ninterrupts=0;
accion = accion*3 - 1; // Determinacion de cantidad de interrupciones a
realizarse
if(giro==1)
derecha = 1;
else

reversa=1;
while (Ninterrupts<accion) // Bucle de movimiento, continuo control
sobre la cantidad de interuupciones que se llevan a cabo.
{
cutil=cutilmax;
set_pwm1_duty(cutil);
printf(lcd_putc,"\hPos actual: %d \n%s",*(info+2),donde);
}
frenado(); // Proceso de frenado y detencion.
if(DetPosicion()==0)
{
reubicar_en(*(info+2)); // Intento de
reubicacion.
if (*(info)==0)
return;
}
for (int j=0; j<3; j++)
{
electroiman(1);
if(*info==0)
calibrar(); // Intento de calibracion.
else
j = 5;
}
printf(lcd_putc,"\hElectroiman \nActivado ");
derecha=0;
reversa=0;
if (*info==0)
return;
*info=1; // Actualizacion del resultado de la
tarea.
return;
}
// SECUENCIA DE CARGA O DESCARGA
// Segun la posicion y la distancia a la que se encuentra realiza el proceso de
carga o de descarga.
// inicia la secuencias de procesos que realice dicha tarea.
// Estados afectados: Resultado de la tarea.
void SecCD (void)
{
int intento = 0;
set_adc_channel(1);
delay_ms(10);
while (intento<3)
{
intento++;
if (Test_electroiman == 1)
{
while(leer_pulsadores()!='S')
{
set_adc_channel(1);
delay_ms(20);
printf(lcd_putc,"\fDistancia \n%li
",read_adc_prom(10));
delay_ms(50);
}
set_adc_channel(1);
delay_ms(20);
if (read_adc_prom(10)<270) // Verificar los valores
de conversion y colocar adecuadamente.
{
if (*(info+2)==2)
{
printf(lcd_putc,"\fDescargando\nEstante en via
2");

Puerta1 = 1;
delay_ms(T_puerta);
descargar();
if(*info==0)
return;
delay_ms(T_puerta);
Puerta1 = 0;
}
else if (*(info+2)==5)
{
printf(lcd_putc,"\fDescargando\nEstante en via
5");
Puerta2 = 1;
delay_ms(T_puerta);
descargar();
if(*info==0)
return;
delay_ms(T_puerta);
Puerta2 = 0;
}
else if (*(info+2)==7)
{
printf(lcd_putc,"\fDescargando\nVagon en via 7");
Puerta3 = 1;
delay_ms(T_puerta);
descargar();
if(*info==0)
return;
delay_ms(T_puerta);
Puerta3 = 0;
}
return;
}
else if (read_adc_prom(10)>700) // Verificar los
valores de conversion y colocar adecuadamente.
{
printf(lcd_putc,"\fCargando\nEstante en via 2");
if (*(info+2)==1 || *(info+2)==3 || *(info+2)==4 ||
*(info+2)==6)
cargar();
if(*info==0)
return;
return;
}
else
{
*info = 0;
return;
}
}
else
{
*info = 0;
electroiman(1);
}
delay_ms(200);
}
*info = 0;
return;
}
// PROCESO DE DESCARGA
// Controla y acciona el brazo de descarga. Empuja el elemento una determinada
cantidad de veces y si el mismo
// no alcanza la distancia esperada arroja un error.
// Estados afectados: Resultado de la tarea.

void descargar (void)
{
int I=0;
int T_out = 0;
//Extension "controlada"
while(read_adc_prom(10)<700 && I<3 && T_out < 2*T_out_brazo)
{
T_out++;
set_adc_channel(1); // Lectura de distancia
delay_ms(115);
printf(lcd_putc,"\hExtendiendo ");
printf(lcd_putc,"\nDistancia: %li ",read_adc_prom(10));
if(sensor2==1)
{
ext_brazo = 1;
delay_ms(30);
enc_brazo = 1;
}
else
{
I++;
enc_brazo = 0;
delay_ms(500);
contraer();
if(*info==0)
return;
}
delay_ms(100);
}
//Contraer
contraer();
if(read_adc_prom(10)<700)
{*info=0;return;}
if(T_out>=2*T_out_brazo)
{*info=0;return;}
if(*info==0)
return;
if(I<4)
*info = 1;
else
*info = 0;
return;
}
// PROCESO DE CARGA
// Activa y controla el brazo de descarga. Retorna un error cuando intenta
repetitivamente cargar el elemento
// y no se produce un acercamiento del mismo.
// Estados afectados: Resultado de la tarea.
void cargar (void)
{
int T_out = 0;
int I=0;
//extender
set_adc_channel(1); // Lectura de distancia
delay_ms(20);
if(read_adc_prom(10)>270)
extender();
if(*info==0)
return;
//Contraccion "controlada"
while(read_adc_prom(10)>270 && I<3 && T_out < 2*T_out_brazo)
{
T_out++;
set_adc_channel(1); // Lectura de distancia
delay_ms(115);

printf(lcd_putc,"\hContraendo ");
printf(lcd_putc,"\nDistancia: %li ",read_adc_prom(10));
if(sensor1==0)
{
ext_brazo = 0;
delay_ms(30);
enc_brazo = 1;
}
else
{
I++;
enc_brazo = 0;
delay_ms(500);
extender();
if(*info==0)
return;
}
delay_ms(100);
}
contraer();
if(read_adc_prom(10)>270)
{*info=0;return;}
if(T_out>=2*T_out_brazo)
{*info=0;return;}
if(*info==0)
return;
if(I<4)
*info = 1;
return;
}
// Extender
// Activa y controla el brazo de descarga. Retorna un error cuando intenta
repetitivamente cargar el elemento
// y no se produce un acercamiento del mismo.
// Estados afectados: Resultado de la tarea.
void extender (void)
{
int T_out = 0;
enc_brazo = 0;
ext_brazo = 0;
if(sensor2==1)
{
printf(lcd_putc,"\fExtendiendo\nBrazo");
ext_brazo = 1;
delay_ms(30);
enc_brazo = 1;
while(sensor2==1 && T_out<T_out_brazo)
{
delay_ms(500);
T_out++;
}
enc_brazo = 0;
}
delay_ms(500);
if(T_out<T_out_brazo)
{*info=1;return;}
else
{*info=0;return;}
}
//Contraer
void contraer (void)
{
int T_out = 0;
int I=0;

enc_brazo = 0;
ext_brazo = 0;
if(sensor1==0)
{
printf(lcd_putc,"\fContraendo\nBrazo");
ext_brazo = 0;
delay_ms(30);
enc_brazo = 1;
while(sensor1==0 && T_out<T_out_brazo)
{
delay_ms(500);
T_out++;
}
enc_brazo = 0;
}
delay_ms(500);
if(T_out<T_out_brazo)
{*info=1;return;}
else
{*info=0;return;}
}
// DETERMINACION DE LA POSICION CON SENSOR DE DISTANCIA
// Determina la posicion en la que se encuentra el carro y compara con el dato que
se tiene en el
// vector de infrmacion.
// Estados afectados: Resultado de la tarea.
int DetPosicion (void)
{
int16 dist=0;
printf(lcd_putc,"\hDeterminando \nPosicion ");
delay_ms(500);
while(leer_pulsadores()!='S')
{
set_adc_channel(0);
delay_ms(20);
printf(lcd_putc,"\fDistancia \n%li
",read_adc_prom(10));
delay_ms(50);
}
for (int i=0; i<3; i++)
{
set_adc_channel(0);
delay_ms(20);
dist = read_adc_prom(10);
// El sensor entrega 4-20mA.
// La tension maxima soportada por el micro es 5V por lo tanto se utiliza una
resistencia de 250 Ohhm en serie.
if (dist<Set_pos2[0]+tol_pos)
return 0;
else if (dist < Set_pos2[1]+tol_pos && dist > Set_pos2[1]-tol_pos)
return 1;
else if (dist < Set_pos2[2]+tol_pos && dist > Set_pos2[2]-tol_pos)
return 2;
else if (dist < Set_pos2[3]+tol_pos && dist > Set_pos2[3]-tol_pos)
return 3;
else if (dist < Set_pos2[4]+tol_pos && dist > Set_pos2[4]-tol_pos)
return 4;
else if (dist < Set_pos2[5]+tol_pos && dist > Set_pos2[5]-tol_pos)
return 5;
else if (dist < Set_pos2[6]+tol_pos && dist > Set_pos2[6]-tol_pos)
return 6;
else if (dist < Set_pos2[7]+tol_pos && dist > Set_pos2[7]-tol_pos)
return 7;

else
return 0;
}
}
// REUBICACION
// Recupera la ubicacion del carro en caso de no poder realizar las tareas de carga
y descarga.
// Estados afectados: Resultado de la tarea. Alarma.
void reubicar_en (int en_pos)
{
int conta_cero=0;
int posiciones_temp[6];
Ninterrupts=0;
if(*(info+2)>4)
giro=1;
if(*(info+2)<=4)
giro=0;
if(giro==1)
derecha = 1;
else
reversa=1;
printf(lcd_putc,"\hReubicando... ");
for(int k=0;k<6;k++)
{
frenado();
posiciones_temp[k] = DetPosicion();
if(posiciones_temp[k]==0)
conta_cero++;
}
if(conta_cero==4)
{
if(giro==1)
giro = 0;
else
giro=1;
if(giro==1)
derecha = 1;
else
reversa=1;
if(posiciones_temp[5]!=0)
*(info+2)=posiciones_temp[5];
else if(posiciones_temp[4]!=0)
{
frenado();
if(posiciones_temp[4]==DetPosicion())
*(info+2)=posiciones_temp[4];
}
else if(posiciones_temp[3]!=0)
{
frenado();
if(posiciones_temp[3]==DetPosicion())
*(info+2)=posiciones_temp[3];
}
else
*info=0;
*info=1;
return;
}
else
*info=0;
return;
}
// ELECTROIMAN
// Funcion destinada a activar el seguro (electroiman) y controlar su estado.

// Con un estado alto de Test_electroian se asegura que el electroiman esta
extendido, de lo contrario el estado es bajo.
// Estados afectados: Resultado de la tarea.
void electroiman (int activ)
{
int i=0;
derecha = 0;
reversa = 0;
if(activ==1)
{
i=0;
printf(lcd_putc,"\hActivando \nElectroiman... ");
while (Test_electroiman==0 && i<5)
{
A_electroiman = 0;
delay_ms(500);
i++;
A_electroiman = 1;
delay_ms(1000);
}
}
else
{
i=0;
printf(lcd_putc,"\hDesactivando \nElectroiman... ");
while (Test_electroiman==1 && i<5)
{
A_electroiman = 1;
delay_ms(500);
i++;
A_electroiman = 0;
delay_ms(1000);
}
}
if(i==5)
*info = 0;
else
*info = 1;
return;
}
// CALIBRACION DE LA POSICION
// Esta funcion hace un reajuste para alinear correctamente el carro y electroiman
pueda ser activado.
// Estados afectados: Ninguno.
void calibrar (void)
{
cutil = cutilmax;
printf(lcd_putc,"\hCalibrando...... ");
A_electroiman = 0;
if(*(info+2)>4)
giro=1;
if(*(info+2)<=4)
giro=0;
set_pwm1_duty(cutil);
if(giro==1)
derecha = 1;
else
reversa=1;
delay_ms(1000);
cutil = 500;
set_pwm1_duty(cutil);
delay_ms(500);
cutil = 100;
set_pwm1_duty(cutil);
derecha=0;

reversa=0;
delay_ms(50);
giro = !giro;
delay_ms(50);
if(giro==1)
derecha = 1;
else
reversa=1;
cutil = 1;
Ninterrupts=0;
while(Ninterrupts==0);
set_pwm1_duty(cutil);
*info = 1;
return;
}
// FRENADO
// Desaceleracion lenta del carro
// Estados afectados: Ninguno.
void frenado (void)
{
cutil = cutilmax;
if(giro==1)
derecha = 1;
else
reversa=1;
Ninterrupts=2;
printf(lcd_putc,"\hFrenando en \n%s",donde);
while (Ninterrupts==2)
{
if(cutil>250)
cutil = cutil - 15;
else
cutil = *(info+8)*17;
set_pwm1_duty(cutil);
delay_ms(50);
}
giro=!giro;
delay_ms(*(info+7)); // Calibacion de inversion para frenado.
set_pwm1_duty(0);
Ninterrupts=0;
printf(lcd_putc,"\hParado en via de \n%s",donde);
delay_ms(1000);
derecha=0;
reversa=0;
return;
}
//Leer analogico con 10 muestras promediadas.
int16 read_adc_prom(int cant)
{
for(int f=0;f<cant;f++)
Lectura+=read_adc();
Lectura/=cant;
}

Anexo 4


Anexo 5


Anexo 6