
Capítulo 4. Técnicas de control aplicadas a...
34
Capítulo 4. Técnicas de control aplicadas a aeronaves Pág. 45 4.1 Introducción En la aviación actual, el empleo de los sistemas de control es un elemento crucial. Es evidente que en el caso de los UASs es imprescindible disponer de un sistema de control de capaz de seguir un plan de vuelo, pero la necesidad de los sistemas de control va más allá. Por un lado, ha de tenerse en cuenta que la envolvente de vuelo de un avión es típicamente muy amplia, cubriendo grandes rangos de presión dinámica. Esto hace que, aunque se diseñe una aeronave para poseer ciertas propiedades de estabilidad (absoluta y relativa), ésta puede degradarse e incluso perderse en puntos de la envolvente, siendo necesario ayudar al piloto mediante un controlador. Existen además otros casos en que el Sistema de Control de vuelo (FCS) es fundamental, como en el diseño de aviones de combate modernos que, para mejorar su maniobrabilidad, son diseñados de forma inestable siendo únicamente pilotables mediante un sistema de control adecuado. Los autopilotos también pueden emplearse para elementos menos críticos, como reducir la carga de trabajo de las tripulaciones (como en el caso de aviones comerciales de larga autonomía) o para mejorar la eficiencia del vuelo (consumo de combustible, reducción de ruidos...). En este capítulo se expondrán las características generales de las diferentes estrategias de control para posteriormente aplicar las más potentes de ellas en aplicaciones concretas. En concreto se intentará controlar la dinámica del navion, una aeronave que, si bien es tripulada, es vastamente empleada en el mundo del control por ser bien conocida su dinámica y por poseer características representativas de un amplio segmento de aeronaves. 4.2 Características del control de aeronaves Desde un punto de pista de la Teoría de Control las aeronaves son sistemas multivariables, no lineales y sujetos a restricciones con una dinámica rápida. La no linealidad suele afrontarse mediante linealización que depende del punto de operación, obteniéndose diferentes modelos en cada uno de ellos. Cada avión posee una zona de operación amplia denominada envolvente de vuelo (Fig. 4-1). Esta envolvente depende de muchos parámetros, tales como geometría (por ejemplo empleo de flaps o variación de la flecha del ala), másicos (combustible, carga de pago), condiciones meteorológicas… En Capítulo 4. Técnicas de control aplicadas a aeronaves
Transcript of Capítulo 4. Técnicas de control aplicadas a...

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 45
4.1 Introducción
En la aviación actual, el empleo de los sistemas de control es un elemento crucial. Es evidente
que en el caso de los UASs es imprescindible disponer de un sistema de control de capaz de
seguir un plan de vuelo, pero la necesidad de los sistemas de control va más allá.
Por un lado, ha de tenerse en cuenta que la envolvente de vuelo de un avión es típicamente
muy amplia, cubriendo grandes rangos de presión dinámica. Esto hace que, aunque se diseñe
una aeronave para poseer ciertas propiedades de estabilidad (absoluta y relativa), ésta puede
degradarse e incluso perderse en puntos de la envolvente, siendo necesario ayudar al piloto
mediante un controlador.
Existen además otros casos en que el Sistema de Control de vuelo (FCS) es fundamental, como
en el diseño de aviones de combate modernos que, para mejorar su maniobrabilidad, son
diseñados de forma inestable siendo únicamente pilotables mediante un sistema de control
adecuado.
Los autopilotos también pueden emplearse para elementos menos críticos, como reducir la
carga de trabajo de las tripulaciones (como en el caso de aviones comerciales de larga
autonomía) o para mejorar la eficiencia del vuelo (consumo de combustible, reducción de
ruidos...).
En este capítulo se expondrán las características generales de las diferentes estrategias de
control para posteriormente aplicar las más potentes de ellas en aplicaciones concretas. En
concreto se intentará controlar la dinámica del navion, una aeronave que, si bien es tripulada,
es vastamente empleada en el mundo del control por ser bien conocida su dinámica y por
poseer características representativas de un amplio segmento de aeronaves.
4.2 Características del control de aeronaves
Desde un punto de pista de la Teoría de Control las aeronaves son sistemas multivariables, no
lineales y sujetos a restricciones con una dinámica rápida.
La no linealidad suele afrontarse mediante linealización que depende del punto de operación,
obteniéndose diferentes modelos en cada uno de ellos. Cada avión posee una zona de
operación amplia denominada envolvente de vuelo (Fig. 4-1). Esta envolvente depende de
muchos parámetros, tales como geometría (por ejemplo empleo de flaps o variación de la
flecha del ala), másicos (combustible, carga de pago), condiciones meteorológicas… En
Capítulo 4. Técnicas de control
aplicadas a aeronaves

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 46
cualquier caso, el rango de operación para una configuración dada puede expresarse mediante
diferentes variables, siendo las más comunes la velocidad y el factor de carga. Sin embargo, en
nuestro caso es más representativo emplear el Mach y la altura.
Fig. 4-1: Ejemplo envolvente de vuelo de una aeronave
Donde cada línea representa una restricción que no puede ser físicamente sobrepasada y
por tanto el movimiento de la aeronave se constriñe al área delimitada por estas limitaciones.
4.3 Control basado en PID
Las técnicas clásicas de control se basan en realimentar la señal a controlar, compararla con la
referencia a seguir y generar una señal del control que depende del error obtenido. La opción
más extendida en el mundo del control es emplear una relación del tipo proporcional,
derivativa e integral, es decir:
El ajuste de las ganancias K permite modificar la dinámica del sistema, aunque ha de tenerse
en cuenta que un controlador PID sólo posee tres grados de libertad y puede ser insuficiente
para estabilizar sistemas lineales de orden mayor a dos o no lineales.
El control PID se ha empleado con gran éxito al mundo de las aeronaves (Pamadi 2004).
Existen tres aspectos clave para su empleo:

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 47
- Ajuste de los parámetros: puede realizarse de dos formas: según el análisis entrada-salida
o en base a modelo. El primer planteamiento consiste en ir probando diferentes entradas y
analizar la respuesta. A raíz de aquí se modifican las ganancias de los controladores
- Planificación de ganancias (Gain Scheduling): el ajuste de los controladores depende del
punto de operación de la aeronave. Como se mostró en 4.2, la envolvente de operaciones
de la aeronave es amplia y da lugar a múltiples dinámicas. Por tanto, será necesario ajustar
diferentes valores de las ganancias para diferentes puntos de operación, estableciéndose
un compromiso entre número de puntos calculados y robustez de los mismos. En cualquier
caso en necesario definir una lógica, tal como una máquina de estados, que sea capaz de
gestionar las transiciones entre diferentes puntos.
- Tratamiento multivariable: la implementación de controladores PID en sistemas MIMO
puede producir algunas dificultades a la hora de plantear el control. Existen dos
metodologías para resolver este problema. La primera se basa en emplear un controlador
desacoplante de modo que el sistema final sea equivalente a un conjunto de sistemas
SISO. El otro enfoque consiste en realizar asignaciones entrada-salida de modo que cada
salida sea controlada por una sola señal de control. Como existen interacciones internas, el
controlador de cada sistema SISO debe ser capaz de cancelar esos efectos cruzados como
se tratasen de perturbaciones.
4.4 Otras técnicas de control
Las limitaciones del control clásico, control multivariable, tratamiento de restricción y carácter
subóptimo llevaron a desarrollar algoritmos más potentes de control. En esta sección se
comentarán, a grandes rasgos, algunas de ellas
- LQR
- Control Predictivo
- Control Robusto
4.4.1 Control LQR El diseño de un controlador lineal cuadrático (Gopal 1984) (LQR de sus siglas en inglés) es un
procedimiento de optimización de asignación de polos. Se basa en realimentar el sistema con
estado con un matriz de ganancia K tal que minimice una función de coste cuadrática definida,
en tiempo discreto, como:
∑( ( ) ( ) ( ) ( ))
Donde Q y R son las matrices de coste del estado y de control respectivamente.
El mínimo de la función de coste J viene dado por la ecuación de Ricatti:
Donde S es la solución a obtener.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 48
Con esto la ley de control LQR viene dada por
( ) ( )
El LQR presenta la ventaja frente al PID de tratar de forma directa el aspecto multivariable y de
poseer un carácter óptimo
4.4.2 Control predictivo El control predictivo tiene como objetivo resolver de forma óptima, problemas de control y
automatización de procesos industriales que se caractericen por presentar un comportamiento
dinámico complicado, multivariable, y/o inestable (Díaz 2006). La estrategia de control en que
se basa este tipo de control, utiliza el modelo matemático del proceso a controlar para
predecir el comportamiento futuro de dicho sistema, y en base a este comportamiento futuro
puede predecir la señal de control futura.
Puede definirse como una estrategia de control que se basa en la utilización de forma explícita
de un modelo matemático interno del proceso a controlar (modelo de predicción), el cual se
utiliza para predecir la evolución de las variables a controlar a lo largo de un horizonte
temporal de predicción especificado por el operador, de este modo se puede calcular las
variables manipuladas futuras (señal de control futura) para lograr que en dicho horizonte, las
variables controladas converjan en sus respectivos valores de referencia.
El MPC se enmarca dentro de los controladores óptimos, es decir, aquellos en los que las
actuaciones responden a la optimización de un criterio. El criterio a optimizar, o función de
coste, está relacionado con el comportamiento futuro del sistema, que se predice gracias a un
modelo dinámico del mismo, denominado modelo de predicción.
El intervalo de tiempo futuro que se considera en la optimización se denomina horizonte de
predicción. Dado que el comportamiento futuro del sistema depende de las actuaciones que
se aplican a lo largo del horizonte de predicción, son éstas las variables de decisión respecto a
las que se optimiza el sistema. La aplicación de estas actuaciones sobre el sistema conduce a
un control en bucle abierto.
La posible discrepancia entre el comportamiento predicho y el comportamiento real del
sistema crean la necesidad de imponer cierta robustez al sistema incorporando realimentación
del mismo. Esta realimentación se consigue gracias a la técnica del horizonte deslizante que
consiste en aplicar las actuaciones obtenidas durante un periodo de tiempo, tras el cual se
muestrea el estado del sistema y se resuelve un nuevo problema de optimización. De esta
manera, el horizonte de predicción se va deslizando a lo largo del tiempo.
Una de las propiedades más atractivas del MPC es su formulación abierta, que permite la
incorporación de distintos tipos de modelos de predicción, sean lineales o no lineales,
monovariables o multivariables, y la consideración de restricciones sobre las señales del
sistema. Esto hace que sea una estrategia muy utilizada en diversas áreas del control. El CPBM

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 49
es una de las pocas técnicas que permiten controlar sistemas con restricciones incorporando
éstas en el propio diseño del controlador (Bordons 1995).
Estas características han hecho del control predictivo una de las escasas estrategias de control
avanzado con un impacto importante en problemas de ámbito industrial Por tal motivo es
importante resaltar que el control predictivo se ha desarrollado en el mundo de la industria, y
ha sido la comunidad investigadora la que se ha esforzado en dar un soporte teórico a los
resultados prácticos obtenidos.
Merece la pena destacar que el control predictivo es una técnica muy potente que permite
formular controladores para sistemas complejos y con restricciones. Esta potencia tiene un
precio asociado: el coste computacional y la sintonización del controlador. Recientes avances
en el campo del MPC proveen un conocimiento más profundo de estos controladores,
obteniéndose resultados que permiten relajar estos requerimientos. Así por ejemplo, se han
establecido condiciones generales para garantizar la estabilidad (Mayne 2001), condiciones
bajo las cuales se puede relajar el carácter optimal del controlador garantizando su estabilidad
(Scokaert & Mayne 1998).
Entre las ventajas se pueden citar:
- Formulación en el dominio del tiempo, lo cual le permite ser una técnica flexible,
abierta e intuitiva.
- Permite tratar con sistemas lineales y no lineales, mono y multivariables utilizando la
misma formulación para los algoritmos del controlador.
- La ley de control responde a criterios de optimización.
- Permite la incorporación de restricciones en la síntesis o implementación del
controlador.
- Brinda la posibilidad de incorporar restricciones en el cálculo de las actuaciones
Sus principales limitaciones son
- Requiere el conocimiento de un modelo dinámico del sistema suficientemente preciso.
- Requiere un algoritmo de optimización, por lo que solo se podría implementarse por
medio de una computadora.
- Requiere un alto coste computacional, lo que hace difícil su aplicación a sistemas
rápidos.
- Hasta hace relativamente poco, no se podía garantizar la estabilidad de los
controladores, especialmente en el caso con restricciones. Esto hacía que el ajuste de
estos controladores fuese heurístico y sin un conocimiento de cómo podían influir los
parámetros en la estabilidad del sistema.
El control predictivo puede entenderse como una generalización del control LQR en el que
ahora la función de coste no se establece entre el instante presente y un tiempo indefinido,
sino que se optimiza el seguimiento en un tiempo específico.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 50
Matemáticamente, esto se impone modificando la funcional a optimizar J de la siguiente forma
(Camacho 1999)
( ) ∑ ( )[ ( | ) ( )] ∑ ( )[ ( )]
Donde N1 y N2 mínimo y máximo horizonte de coste y ( ) y ( )pesos de ponderación y ω la
referencia a seguir.
La resolución de esta ecuación puede abordarse de forma analítica en el caso de ausencia de
restricciones o de forma numérica de forma general.
4.4.3 Control Robusto Las técnicas de control robusto permiten, dada una planta nominal y una serie de
incertidumbres sobre la misma, garantizar ciertas características de comportamiento de la
familia de plantas asociadas mediante el empleo de un único controlador. Es decir, el control
robusto tiene una doble vertiente: contra la incertidumbre como frente a los distintos
comportamientos en diferentes puntos de operación (Stengel 1991).
Uno de los algoritmos de control robusto más extendido es el , que dada una planta
generalizada P(s), busca calcular un controlador K(s) que atenúe la relación entre la energía del
vector objetivo, z, y la del vector de perturbaciones, ω, siendo γ la atenuación conseguida
(Corchero 2004).
Fig. 4-2: Planta generalizada en la nomenclatura del problema Hoo
La elección del vector objetivo determina el tipo de problema y los parámetros que se tienen
en cuenta. Del estudio de las ecuaciones habituales de los sistemas dinámicos puede
expresarse la respuesta de un sistema en función de una serie de funciones denominadas de
sensibilidad S, y de sensibilidad complementaria T.
Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 51
( )
( )
( )
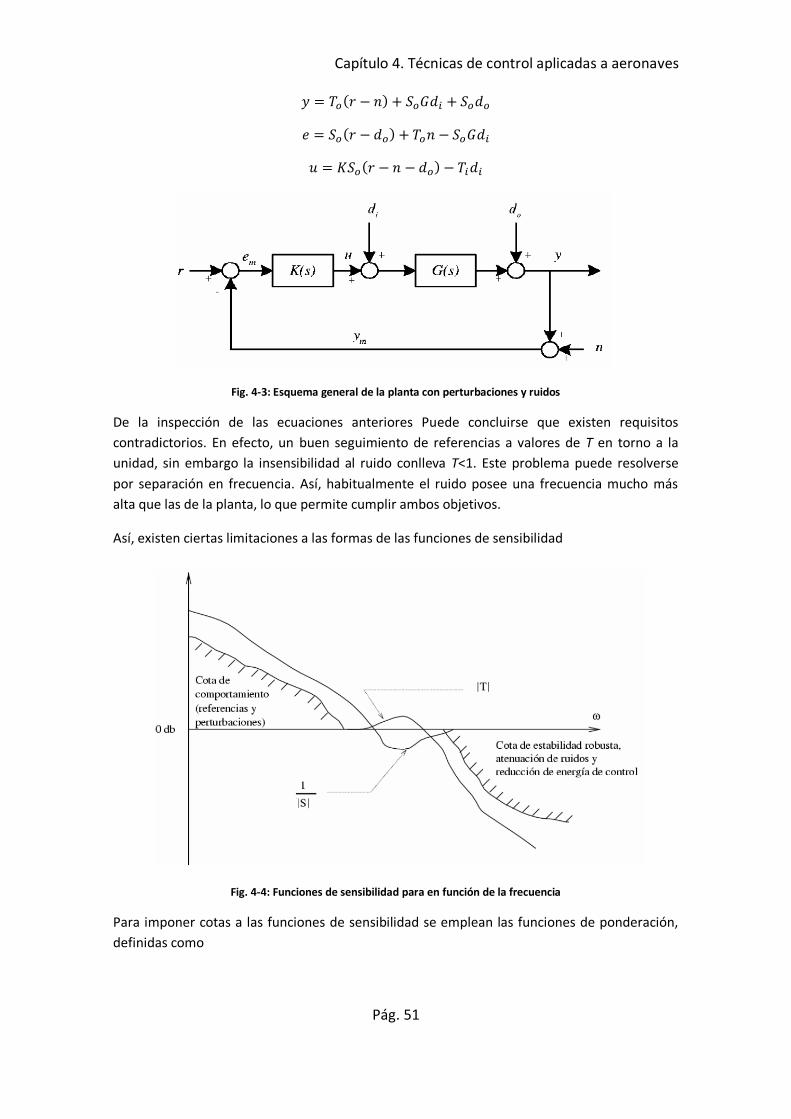
Fig. 4-3: Esquema general de la planta con perturbaciones y ruidos
De la inspección de las ecuaciones anteriores Puede concluirse que existen requisitos
contradictorios. En efecto, un buen seguimiento de referencias a valores de T en torno a la
unidad, sin embargo la insensibilidad al ruido conlleva T<1. Este problema puede resolverse
por separación en frecuencia. Así, habitualmente el ruido posee una frecuencia mucho más
alta que las de la planta, lo que permite cumplir ambos objetivos.
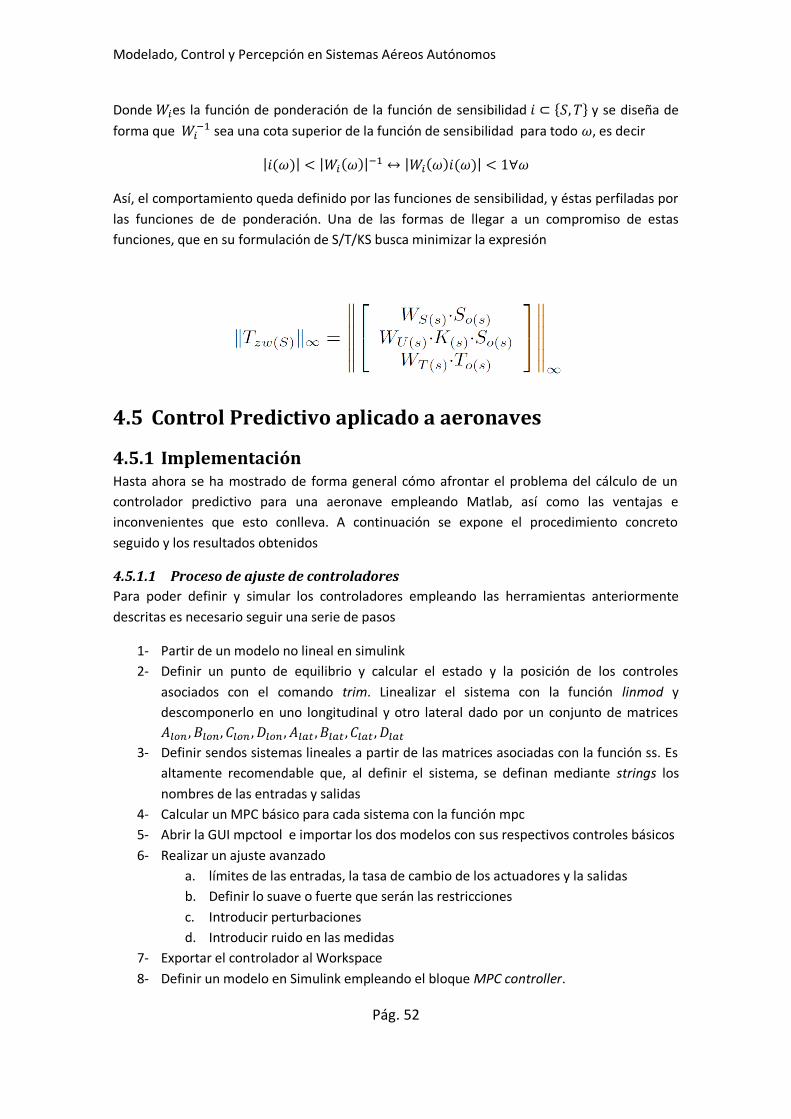
Así, existen ciertas limitaciones a las formas de las funciones de sensibilidad
Fig. 4-4: Funciones de sensibilidad para en función de la frecuencia
Para imponer cotas a las funciones de sensibilidad se emplean las funciones de ponderación,
definidas como
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 52
Donde es la función de ponderación de la función de sensibilidad { } y se diseña de
forma que sea una cota superior de la función de sensibilidad para todo , es decir
| ( )| | ( )| | ( ) ( )|
Así, el comportamiento queda definido por las funciones de sensibilidad, y éstas perfiladas por
las funciones de de ponderación. Una de las formas de llegar a un compromiso de estas
funciones, que en su formulación de S/T/KS busca minimizar la expresión
4.5 Control Predictivo aplicado a aeronaves
4.5.1 Implementación Hasta ahora se ha mostrado de forma general cómo afrontar el problema del cálculo de un
controlador predictivo para una aeronave empleando Matlab, así como las ventajas e
inconvenientes que esto conlleva. A continuación se expone el procedimiento concreto
seguido y los resultados obtenidos
4.5.1.1 Proceso de ajuste de controladores
Para poder definir y simular los controladores empleando las herramientas anteriormente
descritas es necesario seguir una serie de pasos
1- Partir de un modelo no lineal en simulink
2- Definir un punto de equilibrio y calcular el estado y la posición de los controles
asociados con el comando trim. Linealizar el sistema con la función linmod y
descomponerlo en uno longitudinal y otro lateral dado por un conjunto de matrices
3- Definir sendos sistemas lineales a partir de las matrices asociadas con la función ss. Es
altamente recomendable que, al definir el sistema, se definan mediante strings los
nombres de las entradas y salidas
4- Calcular un MPC básico para cada sistema con la función mpc
5- Abrir la GUI mpctool e importar los dos modelos con sus respectivos controles básicos
6- Realizar un ajuste avanzado
a. límites de las entradas, la tasa de cambio de los actuadores y la salidas
b. Definir lo suave o fuerte que serán las restricciones
c. Introducir perturbaciones
d. Introducir ruido en las medidas
7- Exportar el controlador al Workspace
8- Definir un modelo en Simulink empleando el bloque MPC controller.

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 53
9- Simular los controladores con sus respectivos modelos y una referencia a seguir.
4.5.1.2 Parámetros de los controladores
En cuanto a los ajustes específicos del controlador, se especifican a continuación:
4.5.2 Restricciones Existen dos tipos de restricciones, las de los actuadores, y la de la salida. Las primeras son
límites físicos de los actuadores, ya sea de su posición como de su tasa de cambio. La segunda
se refiere a la señal de salida, que ha de garantizarse que esté dentro de unos límites.
Las limitaciones de los actuadores habitualmente se afrontan mediante saturaciones de los
controles, pero esto supone que la solución es subóptima e incluso puede convertir el sistema
en inestable. El control predictivo permite tratar directamente con las restricciones para
afrontar estos problemas
Las limitaciones a la salida son muy importantes, ya que permiten acotar el comportamiento
dentro de unos límites deseables o incluso de seguridad (por ejemplo la altura de vuelo ha de
ser superior a la del terreno o la velocidad debe de ser superior a la de entrada en pérdida).
Existen otras formas de imponer restricciones, como forzar una respuesta transitoria de la
señal (por ejemplo para asegurar que la salida sigue de forma monótona a la referencia) o para
garantizar que la aeronave se mueve dentro de la región de validez del la linealización, a partir
de la cual se ha obtenido el controlador.
Dejando a un lado los valores de las restricciones de las salidas, que se especificarán más
adelante, las asociadas a las actuadores son:
- Superficies de control ( ) están limitadas por efectos de desprendimiento de
la corriente. Un valor conservador puede ser el valor de 0.3 rad ( ). Respecto a la
tasa de cambio, se ha supuesto que cada instante (0.1s) puede cambiar hasta 0.05 rad
( ).
- Control de potencia (δT) está escalado a la unidad. Por tanto el valor máximo es 1 y el
mínimo cero, pero ha de terse en cuenta que se expresa respecto al lineal, de forma
que lo extremos dependen del punto de operación
4.5.3 Ajuste del controlador Dejando a un lado las restricciones, que vienen dadas por las limitaciones físicas o de
seguridad del sistema, los parámetros a ajustar desde el punto de vista del control son los
horizontes de control y las funciones de peso.
Puesto que el valor de los coeficientes es relativo a los otros, inicialmente, se decide poner
para las salidas las funciones de peso igual a la unidad. Respecto a los actuadores, para todas
las señales de control se penaliza con un 0.1 el cambio del actuador (se prima la respuesta a la
energía de control). El peso de la señal de control, y no de su incremento, se penaliza con un
0.1 para el motor, pero es nulo para las superficies aerodinámicas (mantener el servo en una
posición no consume energía).

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 54
A continuación se detalla el proceso de ajuste para ambos modos
4.5.3.1 Modo longitudinal
Imponiendo una referencia de 2 m/s a la velocidad y 10 m de altura, con unas restricciones de
(0,3), (0,12) respectivamente, se realizan simulaciones para distintos horizontes de predicción
(p) y control (m).
4.5.3.2 Caso 1: p=m=10
Fig. 4-5. Control Predictivo. Variables longitudinales. Caso 1

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 55
4.5.3.3 Caso 2: p=m=15
Fig. 4-6. Control Predictivo. Variables longitudinales. Caso 2

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 56
4.5.3.4 Caso 3: p=m=20
Fig. 4-7. Control Predictivo. Variables longitudinales. Caso 3

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 57
4.5.3.5 Caso 4: p=m=25
Fig. 4-8. Control Predictivo. Variables longitudinales. Caso 4

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 58
4.5.3.6 Caso 5: p=m=30
Fig. 4-9. Control Predictivo. Variables longitudinales. Caso 5
A la vista de esto resultados se ve cómo aumentando el horizonte de control va mejorando la
respuesta del sistema, con el consiguiente costo computacional. La mejora es evidente hasta
un horizonte de 25, siendo la mejora aumentando a 30 muy pequeña. La mejora relativa de 20
a 25, aunque significativa es pequeña y la elección de una de las dos depende de la potencia
de cálculo disponible y las especificaciones de performances de la aeronave. En nuestro caso
tomaremos 25.
Una vez fijados los horizontes, ha de tenerse en cuenta que el comportamiento anterior es un
poco ficticio, ya que los constrains se han ajustado para la referencia elegida. Es decir, puesto
que se deseaba que el avión aumentase su altura y su velocidad se ha impuesto como mínimo
el 0 y como máximo un valor algo superior para evitar la sobreoscilación. Un caso más realista

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 59
debería permitir valores positivos y negativos y mayores márgenes de operación en términos
absolutos.
Para unas restricciones de (-5,5) para la velocidad y (-100,100) para la altura, con horizontes
de 25 instantes, se obtiene:
Fig. 4-10. Control Predictivo. Variables longitudinales. Ajuste de pesos
Aunque la altura presenta una respuesta adecuada, puede apreciarse un comportamiento
claramente indeseable de la velocidad, que disminuye hasta su valor mínimo para cambiar
posteriormente al máximo. La razón de esta respuesta inadecuada radica en los pesos de la
función de coste. En efecto, inicialmente ambos poseían el mismo cote unidad, pero las
variaciones de altitud son mucho mayores que la de velocidad, por lo que el controlador tiende
a penalizar mucho la altura, ignorando la velocidad. Para evitar este efecto se definen unos

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 60
nuevos pesos de 11 y 1 para la velocidad y la altura3 (un incremento de 10 m/s se penaliza
tanto como 110 m de altura).
Fig. 4-11. Control Predictivo. Variables longitudinales. Selección pesos ponderación
4.5.4 Modo lateral-direccional Siguiendo un razonamiento similar al del caso anterior, se eligen unos horizontes de 25 y unos
valores de ponderación de 20 y 10 para la guiñada y el alabeo (se toman de orden 10 porque
típicamente los ángulos en radianes son pequeños y la salida ha de primar frente al control).
3 Estos valores se obtienen tras un proceso de ajuste para conseguir minimizar el efecto de no monoticidad de la respuesta.

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 61
Como se referencia se impone seguir unos ángulos de 0.3 radianes (unos 17 ). Este tipo de
excitación se correspondería con un viraje coordinado, en el que para mantener la condición
de vuelo simétrico el avión se alabea a la vez que guiña.
4.5.4.1 Caso 1: p=m=25
Fig. 4-12. Control Predictivo. Variables laterales. Caso 1

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 62
4.5.4.2 Caso 2: p=m=10
Fig. 4-13. Control Predictivo. Variables laterales. Caso 2
Puesto que arenas puede apreciarse diferencia entre ambas, se reduce el horizonte de control
a 10, lo que supone ahorro de tiempo de cálculo. Reducir más aún el horizonte puede ser
excesivo para otro topo de excitaciones.
4.5.5 Simulaciones Con los ajustes anteriores se llevaron a cabo una serie de simulaciones. Un aspecto clave a la
hora de realizar las simulaciones es que ha de tenerse en cuenta que aunque los controladores
se hayan ajustado mediante modelos lineales, la planta real es un sistema no lineal. Por tanto
los MPCs han de ser lo suficientemente robustos para hacer frente a las incertidumbres.

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 63
Con este fin de creó un modelo de simulink que contuviese tanto el sistema no lineal con sus
controladores longitudinales y laterales como los sistemas linealizados con sus respectivos
MPCs. El esquema de modelo puede apreciarse en la Fig. 4-14.
Fig. 4-14. Diagrama de simulink para comparar la respuesta del sistema completo frente a los linealizados
Para facilitar la comprensión del modelo, se ha asignado un código de colores.
- Bloques azules contienen controladores predictivos
- Bloques en naranja contienen modelos de sistemas
- Bloques en verdes contienen referencias
- Bloques en amarillo son simplemente para exportar señales al worspace
- Bloques en blanco son bloques auxiliares que hacen operaciones intermedias
Con estas claves, el diagrama consta de tres partes diferentes que se corresponden con tres
modelos distintos (bloques naranjas). En de la esquina superior izquierda es el modelo no
lineal. El de la parte inferior izquierda es el modelo linealizado longitudinal y el ubicado en la
parte inferior derecha representa la dinámica lateral direccional. Los modos linealizados tienen
cada uno su propio controlador, el modo no lineal necesita ambos.
Los bloques intermedios en blanco se emplean para transformar la salida del sistema de
valores absolutos a valores incrementales respecto a la posición de equilibrio, que son los que
se emplean en los sistemas linealizados y, por tanto, en los MPCs.
Por último indicar que los bloques de referencias contienen un prefiltro para suavizar las
respuestas. Este prefiltro se ajustó como un sistema de primer orden de ganancia unitaria y
constante de tiempo de cinco segundos.
A continuación se muestran los resultados obtenidos al simular este sistema. Para las variables
a controlar se incluye la referencia original, la señal suavizada mediante el prefiltro, la
respuesta del sistema linalizado y la del no lineal.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 64
4.5.6 Dinámica longitudinal La respuesta de la salida longitudinal sigue fielmente a la referencia, tanto para el sistema
lineal como para el no lineal. El error en régimen permanente es inapreciable y sólo una
pequeña sobreoscilación que empeora la actuación del control en el sistema no lineal (Fig.
4-15 y Fig. 4-16).
Las señales de control, representadas en Fig. 4-17 y Fig. 4-18, muestran cómo el control no
lineal produce una salida mucho más oscilante para el timón de profundidad y un una energía
de control mayor para la señal del motor.
4.5.6.1 Variables controladas
Fig. 4-15. Simulaciones con modelo no lineal. Velocidad
Fig. 4-16. Simulaciones con modelo no lineal. Altitud

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 65
4.5.6.2 Variables Manipulables
Fig. 4-17. Simulaciones con modelo no lineal. Timón de profundidad
Fig. 4-18. Simulaciones con modelo no lineal. Control de potencia
4.5.7 Dinámica lateral-direccional En la Fig. 4-19 y Fig. 4-20 puede apreciarse cómo tanto el sistema lineal como el no lineal
siguen de forma precisa la referencia. Asimismo se pone de manifiesto que aunque el sistema
no lineal siga la referencia adecuadamente, posee una respuesta más lenta que el lineal y,
principalmente, muestra un error en régimen permanente inferiores al 5%.

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 66
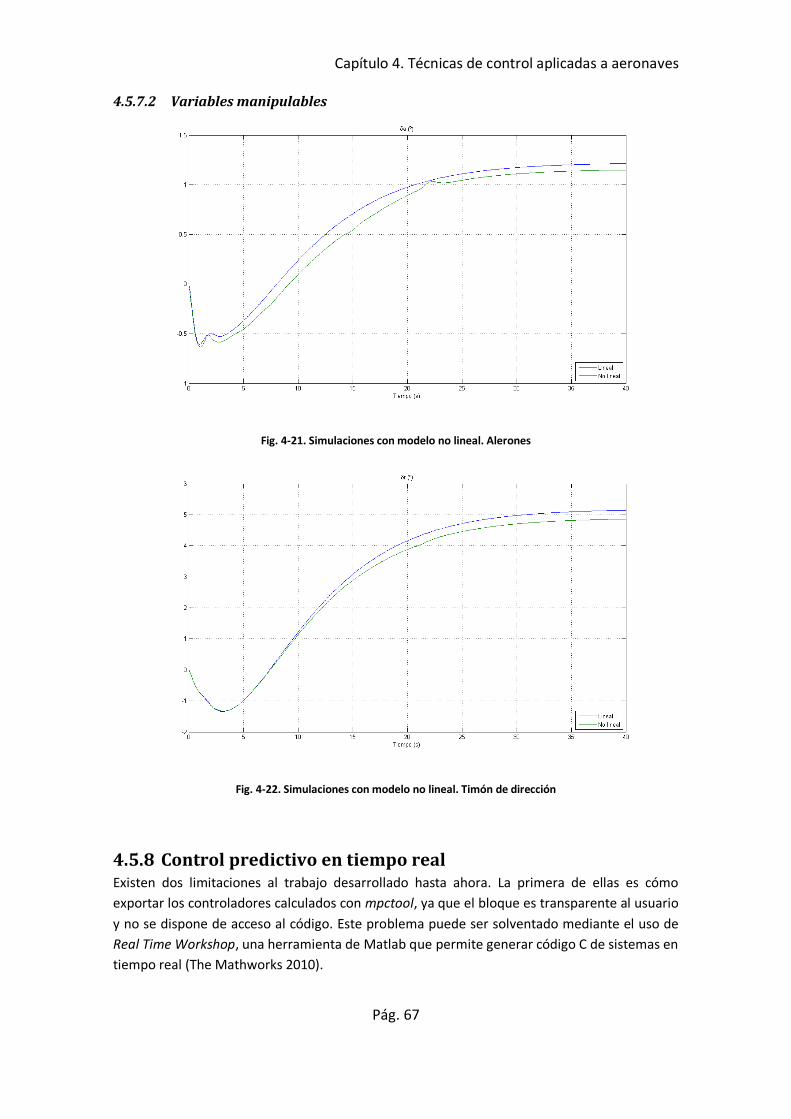
La Fig. 4-21 y Fig. 4-22 muestran que las señales de control muestran una evolución similar,
siendo las no lineales ligeramente inferiores.
4.5.7.1 Variables controladas
Fig. 4-19. Simulaciones con modelo no lineal. Alabeo
Fig. 4-20. Simulaciones con modelo no lineal. Guiñada
Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 67
4.5.7.2 Variables manipulables
Fig. 4-21. Simulaciones con modelo no lineal. Alerones
Fig. 4-22. Simulaciones con modelo no lineal. Timón de dirección
4.5.8 Control predictivo en tiempo real Existen dos limitaciones al trabajo desarrollado hasta ahora. La primera de ellas es cómo
exportar los controladores calculados con mpctool, ya que el bloque es transparente al usuario
y no se dispone de acceso al código. Este problema puede ser solventado mediante el uso de
Real Time Workshop, una herramienta de Matlab que permite generar código C de sistemas en
tiempo real (The Mathworks 2010).

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 68
La otra gran limitación, que en realidad es la gran cortapisa de los controladores predictivos, es
el costo computacional. Sin embargo el incremento de la potencia de cálculo de los sistemas
embarcados, unido a los bajos requisitos de los controladores sintonizados (muestreo de 0.1 s,
horizontes de 10 y 25 instantes), la ejecución en tiempo real no debería ser un problema.
4.6 Control aplicado a aeronaves
Se mostrará la capacidad de este algoritmo para garantizar, para toda la envolvente de vuelo,
ciertas características de estabilidad mediante un único controlador. Para el caso del Navion, la
envolvente de vuelo viene determinada por:
Como representación de estos rangos de comportamiento se toman tres puntos característicos
Fig. 4-23. Envolvente de vuelo del Navion y puntos seleccionados
4.6.1 Análisis de control Como punto de partida tomemos un modelo de la dinámica lateral-direccional de la aeronave
en variables de estado
Donde y es el vector de salida, x, el vector de estado y u el vector de control
( ) x=( ) ( )

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 69
La elección de estas variables requiere cierta discusión. Como se indica en apartados
anteriores, el avión es un sistema subactuado que requiere decidir que variables emplear.
Por actuaciones del avión, son especialmente de interés
- el ángulo de resbalamiento β, que determina la alineación de la corriente incidente
con el plano de simetría del avión.
- el ángulo de alabeo , que determina la inclinación del plano de punta de alas
respecto al horizonte.
Sin embargo, la función de transferencia del ángulo de alabeo presenta un polo nulo con las
consecuentes dificultades (no cumple estabilidad MIMO, problema mal condicionado…). Por
ello se toma como variable la velocidad angular de alabeo, p, que por simple integración
proporciona
Es bien conocido que el sistema puede cambiarse a notación de funciones de transferencia,
que, si bien contiene menos información del sistema por omitir el estado completo, presenta
ciertas ventajas de manipulación y de comprensión de la planta. La matriz de funciones de
transferencia sería
[ ] [
] [ ]
En nuestro caso, sustituyendo los valores numéricos
G=
Al tener un sistema multivariable caben dos estrategias de control:
- Tratarlo como dos sistemas monovariables independientes, cada uno con su
controlador. Los efectos cruzados serían tratados por cada controlador como
perturbaciones a compensar. Esto presenta la ventaja de simplificar la síntesis del
controlador, pero ha de garantizarse una cota para los efectos cruzados que permita la
viabilidad.
- Tratarlo como un sistema completo, contemplando las dinámicas cruzadas. Esto da
lugar a controladores más potentes pero más costosos de calcular.
Como criterio para la elección de uno u otro suele emplearse la matriz de ganancias relativas,
definida como
( ) ( ) ( ( ))
Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 70
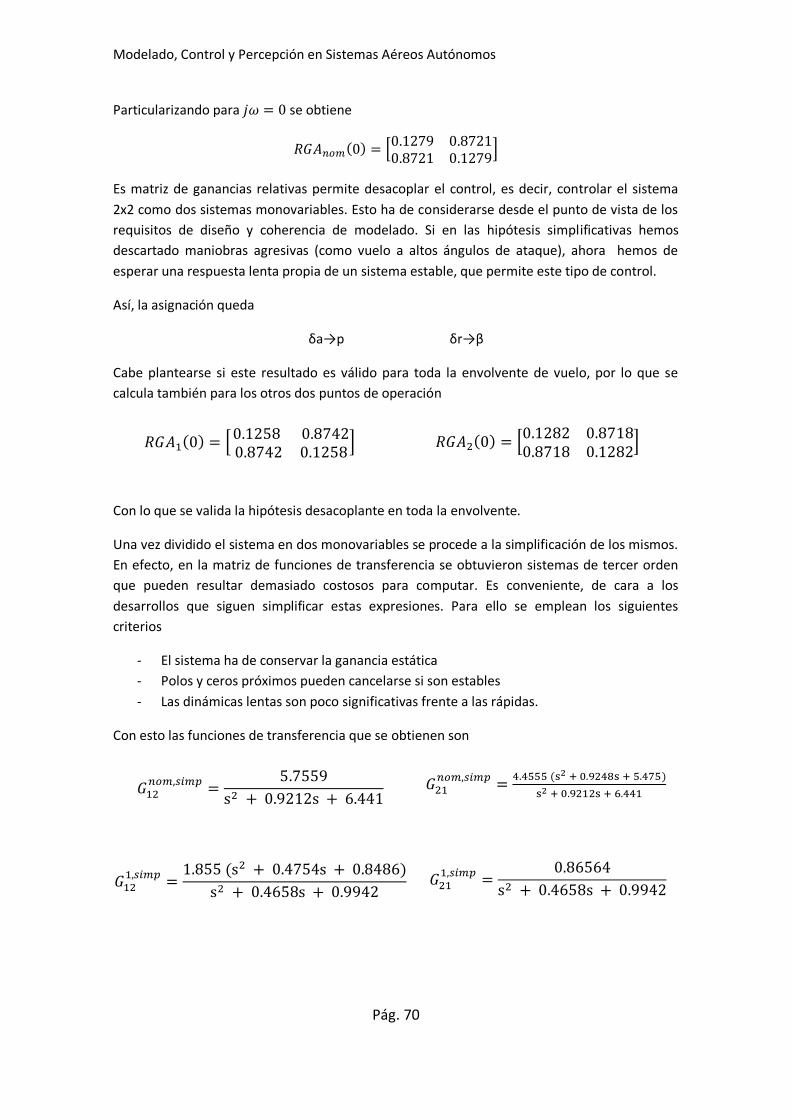
Particularizando para se obtiene
( ) [
]
Es matriz de ganancias relativas permite desacoplar el control, es decir, controlar el sistema
2x2 como dos sistemas monovariables. Esto ha de considerarse desde el punto de vista de los
requisitos de diseño y coherencia de modelado. Si en las hipótesis simplificativas hemos
descartado maniobras agresivas (como vuelo a altos ángulos de ataque), ahora hemos de
esperar una respuesta lenta propia de un sistema estable, que permite este tipo de control.
Así, la asignación queda
δa→p δr→β
Cabe plantearse si este resultado es válido para toda la envolvente de vuelo, por lo que se
calcula también para los otros dos puntos de operación
( ) [
] ( ) [
]
Con lo que se valida la hipótesis desacoplante en toda la envolvente.
Una vez dividido el sistema en dos monovariables se procede a la simplificación de los mismos.
En efecto, en la matriz de funciones de transferencia se obtuvieron sistemas de tercer orden
que pueden resultar demasiado costosos para computar. Es conveniente, de cara a los
desarrollos que siguen simplificar estas expresiones. Para ello se emplean los siguientes
criterios
- El sistema ha de conservar la ganancia estática
- Polos y ceros próximos pueden cancelarse si son estables
- Las dinámicas lentas son poco significativas frente a las rápidas.
Con esto las funciones de transferencia que se obtienen son
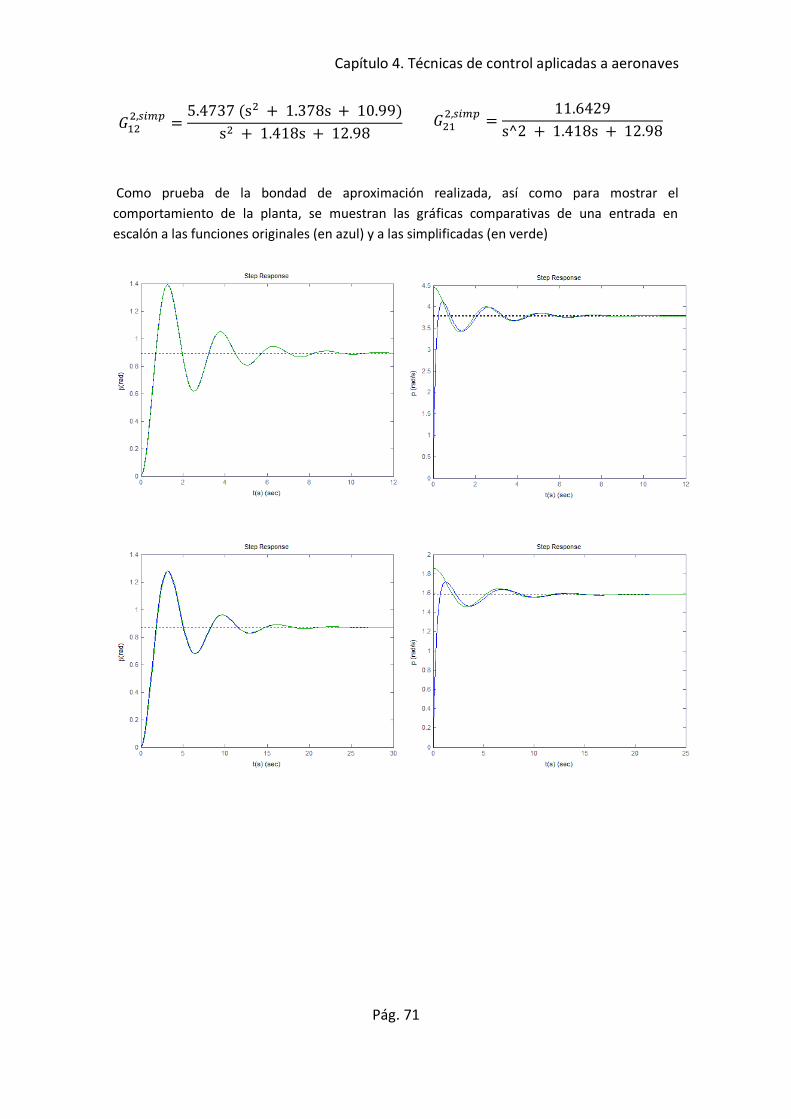
( )
( )
Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 71
( )
Como prueba de la bondad de aproximación realizada, así como para mostrar el
comportamiento de la planta, se muestran las gráficas comparativas de una entrada en
escalón a las funciones originales (en azul) y a las simplificadas (en verde)

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 72
Fig. 4-24: Modelo simplificado frente a original
4.6.2 Cálculo de controladores y simulaciones
4.6.2.1 Control de alabeo
El primer paso es calcular las incertidumbres y definir una función de ponderación que las
acote
Fig. 4-25: Incertidumbre y función de ponderación para p

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 73
Fig. 4-26: Función de transferencia del sistema completo para p
Fig. 4-27: Función de sensibilidad y su ponderación para p

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 74
Fig. 4-28: Función de sensibilidad complementaria y su ponderación para p
El algoritmo con estas funciones de sensibilidad proporciona el controlador
Con factor de atenuación
Fig. 4-29: Simulación en bucle cerrado para p
4.6.2.2 Control de resbalamiento
Se calcula las incertidumbres y se escoge la función de ponderación de sensibilidad
complementaria de forma que sea cota superior de éstas

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 75
Fig. 4-30: Incertidumbre y función de ponderación para beta
Fig. 4-31: Función de transferencia del sistema completo para

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 76
Fig. 4-32: Función de sensibilidad y su ponderación para beta
Fig. 4-33: Función de sensibilidad complementaria y su ponderación para beta
El algoritmo computa estas funciones y calcula, iterativamente el controlador
Que proporciona un factor de atenuación

Capítulo 4. Técnicas de control aplicadas a aeronaves
Pág. 77
Y la simulación en bucle cerrado es
Fig. 4-34: Simulación en bucle cerrado para beta
Puede apreciarse una lenta respuesta del sistema. Tras intentar mejorarla se alcanzó el límite
que impone incertidumbre. En efecto, la respuesta del sistema viene determinada por
frecuencia de corte de , que se ha maximizado con las restricciones anteriores.
4.6.3 Simulación sistema completo Los controladores anteriores, calculados para los sistemas simplificados monovariables, han de
ser testados para el caso de planta completa. La Fig. 4-35 muestra la simulación del sistema
completa con el controlador, donde se muestra la referencia (en azul) y el seguimiento (en
verde).
Fig. 4-35: Simulación del sistema completo en bucle cerrado

Modelado, Control y Percepción en Sistemas Aéreos Autónomos
Pág. 78
Puede apreciarse como hasta que el valor de β no se estabiliza, no es capaz de hacerlo el
alabeo. El problema radica que precisamente el primer sistema posee una dinámica lenta,
como se comentó en el apartado correspondiente.
4.7 Análisis de las técnicas de control empleadas
En este capítulo se han aplicado técnicas modernas de control para superar las limitaciones
tradicionales del control clásico, a saber, carácter multivariable, optimal, restringido y robusto.
Si bien es cierto que no se ha resuelto el problema completo de realiza la implementación de
un control que reúna todas estas características en tiempo real, el trabajo realizado debe
entenderse como un demostrador de las capacidades de estas técnicas y un primer paso para
su aplicación en sistemas embarcados.
El control predictivo ha mostrado la posibilidad de controlar de forma efectiva la dinámica
completa de un avión mediante sendos controladores linealizados para los modos longitudinal
y lateral-direccional.
Empleando herramientas de diseño de Matlab, se han ajustado los parámetros del controlador
a partir de una combinación de fenomenología física y simulaciones iterativas, obteniendo una
respuesta suficientemente precisa y poco costosa computacionalmente.
Por último, se indican los pasos para generar código C en tiempo real que permita la
implementación de sistemas en tiempo real.
El control robusto ha demostrado cómo es posible, mediante un único controlador, controlar
una aeronave de ala fija en toda su envolvente de vuelo. Aunque la incertidumbre, que es
como el sistema trata las diferencias asociadas al punto de linealización, sea muy acusada el
método es capaz de proporcionar controladores robustos monovariables. Sin embargo, las
prestaciones de la planta en bucle cerrada son mejorables y requieren de otras estrategias que
permita solventar las limitaciones impuestas por las grandes incertidumbres garantizando una
dinámica lo suficientemente rápida.
Quizás, la mejor forma de aunar la facilidad del tratamiento multivariable y el carácter óptimo
y restrictivo del control predictivo con la naturalidad del tratamiento de la robustez del es
mediante el control predictivo robusto. Sin embargo dado los tiempos característicos de la
dinámica de las aeronaves y el costo computacional asociado, requeriría de una potencia de
cálculo que escapa a las capacidades de la mayoría de los sistemas embarcados actuales.
Finalmente, cabe destacar que todos los desarrollos expuestos han sido programados de
forma que sean directamente aplicables a cualquier aeronave sin más que ajustar los
parámetros correspondientes.


















