Capítulo 2. Teoría de Las Probabilidades y Estadísticas
43
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO 1 CAPÍTULO 2. TEORÍA DE LAS PROBABILIDADES Y ESTADÍSTICAS Lección 6: Generación De Tráfico Y Reacción De Los Abonados Si el abonado A desea hablar con el abonado B se producirá una llamada satisfactoria o bien una tentativa de llamada fracasada. En el último caso, A puede repetir más tarde la intención de llamada e iniciar así una serie de tentativas de llamada sin éxito. Las estadísticas de llamada se presentan generalmente como se muestra en el cuadro 2.1, donde los errores se han agrupado en varias clases típicas. Se observa que los únicos errores que pueden ser influenciados directamente por el operador son los errores técnicos y bloqueo. Esta clase usualmente es pequeña pues representa un escaso porcentaje durante la hora cargada. Asimismo, se observa que la cantidad de llamadas que experimentan B ocupado dependen del número de errores de A y errores técnicos y bloqueo. Por consiguiente, las estadísticas que figuran en el cuadro 2.1 no son apropiadas. Para obtener las probabilidades pertinentes, que se muestran en la figura 2.8, sólo se considerarán las llamadas que llegan a la etapa considerada cuando se calculan probabilidades. Aplicando la notación en la figura 2.8 se hallan las siguientes probabilidades para un intento de llamada (suponiendo independencia): p{error de A} = p e (2.5) p{congestión y errores técnicos} = (1 − p e ) . p s (2.6) p{B no contesta} = (1 − p e ) . (1 − p s ) . p n (2.7) Cuadro 2.1 − Resultado típico de un gran número de tentativas de llamada durante la hora cargada para países industrializados o países en desarrollo. Resultado País I País D Error de A: Errores técnicos y bloqueo: B no contesta antes de que A cuelgue: B ocupado: B contesta = conversación 15 5% 10% 10% 60% 20% 35% 5% 20% 20% Sin conversación 40% 80% Figura 2.8 − Probabilidades condicionales de eventos .
-
Upload
nora-delgado -
Category
Documents
-
view
24 -
download
0
description
teletrafico
Transcript of Capítulo 2. Teoría de Las Probabilidades y Estadísticas

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
1
CAPÍTULO 2. TEORÍA DE LAS PROBABILIDADES Y ESTADÍSTICAS
Lección 6: Generación De Tráfico Y Reacción De Los Abonados
Si el abonado A desea hablar con el abonado B se producirá una llamada satisfactoria o bien una
tentativa de llamada fracasada. En el último caso, A puede repetir más tarde la intención de
llamada e iniciar así una serie de tentativas de llamada sin éxito. Las estadísticas de llamada se
presentan generalmente como se muestra en el cuadro 2.1, donde los errores se han agrupado en
varias clases típicas. Se observa que los únicos errores que pueden ser influenciados
directamente por el operador son los errores técnicos y bloqueo. Esta clase usualmente es
pequeña pues representa un escaso porcentaje durante la hora cargada. Asimismo, se observa
que la cantidad de llamadas que experimentan B ocupado dependen del número de errores de A y
errores técnicos y bloqueo. Por consiguiente, las estadísticas que figuran en el cuadro 2.1 no son
apropiadas. Para obtener las probabilidades pertinentes, que se muestran en la figura 2.8, sólo se
considerarán las llamadas que llegan a la etapa considerada cuando se calculan probabilidades.
Aplicando la notación en la figura 2.8 se hallan las siguientes probabilidades para un intento de
llamada (suponiendo independencia):
p{error de A} = pe (2.5)
p{congestión y errores técnicos} = (1 − pe) . ps (2.6)
p{B no contesta} = (1 − pe) . (1 − ps) . pn (2.7)
Cuadro 2.1 − Resultado típico de un gran número de tentativas de llamada durante la hora
cargada para países industrializados o países en desarrollo.
Resultado País I País D
Error de A:
Errores técnicos y bloqueo:
B no contesta antes de que A cuelgue:
B ocupado:
B contesta = conversación
15
5%
10%
10%
60%
20%
35%
5%
20%
20%
Sin conversación 40% 80%
Figura 2.8 − Probabilidades condicionales de eventos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
2
Cuadro 2.2 – Las probabilidades de las tentativas de llamada calculadas para el cuadro 2.1.
p{B ocupado} = (1 − pe) . (1 − ps) . pb (2.8)
p{B contesta} = (1 − pe) . (1 − ps) . pa (2.9)
Utilizando los valores del cuadro 2.1 se hallan las cifras que se muestran en el cuadro 2.2.
Conforme a esta información se puede observar que aun si el abonado A se comporta
correctamente y el sistema telefónico es perfecto, sólo el 75% de los intentos de llamada en los
países I, y el 45% en los países D, respectivamente, dan por resultado una conversación.
Se puede distinguir entre el tiempo de servicio, que incluye el tiempo desde el instante en que se
ocupa un servidor hasta que éste se desocupa nuevamente (por ejemplo, establecimiento de la
llamada, duración de la conversación y terminación de la llamada), y duración de la conversación,
que es el periodo de tiempo en el que A conversa con B. En razón de las tentativas de llamada
fracasadas el tiempo de servicio medio es a menudo menor que la duración media de la llamada si
se incluyen todas las tentativas de llamada. En la figura 29 se muestra un ejemplo con tiempos de
ocupación observados.
Ejemplo 2.4.1: Tiempo medio de ocupación: Se supone que el tiempo medio de ocupación de
las llamadas que son interrumpidas antes que B conteste (error de A, congestión, errores técnicos)
es de 20 segundos y que el tiempo medio de ocupación de llamadas que llegan al abonado B (no
contesta, ocupado, contesta) es de 180 segundos. El tiempo medio de ocupación del abonado A
se calcula utilizando los valores que figuran en el cuadro 2.1:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
3
Se puede observar que el tiempo medio de ocupación aumenta de 148 s (92 s, respectivamente)
en el abonado A a 180 s en el abonado B. Si una tentativa de llamada implica más intenciones de
llamada repetidos (véase también el ejemplo 2.4), el tráfico transportado puede ser mayor que el
tráfico ofrecido.
Si se conoce el tiempo medio de servicio de las fases individuales de una tentativa de llamada, se
puede calcular la proporción de las intenciones de llamada que se pierden durante las fases
individuales. Esto se puede aprovechar para analizar sistemas electromecánicos utilizando
sistemas SPC para recopilar datos.
Cada tentativa de llamada carga los grupos de control en la central (por ejemplo, una computadora
o una unidad de control) con una carga casi constante mientras que la carga de la red es
proporcional a la duración de la llamada. Por esta razón muchas tentativas de llamada fracasados
pueden sobrecargar los dispositivos de control mientras que la red aún dispone de capacidad libre.
Las tentativas de llamada repetidas no son necesariamente motivadas por errores en el sistema
telefónico, sino que también pueden ser causadas, por ejemplo, por un abonado B ocupado. Este
problema fue tratado por primera vez por Fr. Johannsen en su libro "Busy" (ocupado) publicado en
1908 (Johannsen, 1908 [52]. En las figuras 2.10 y 2.11 se muestran algunos ejemplos de
mediciones del comportamiento del abonado.
Los estudios de la respuesta de los abonados con relación, por ejemplo, al tono de ocupado, es de
vital importancia para el dimensionamiento del sistema telefónico. En realidad, los factores
humanos ( = comportamiento del abonado) constituyen una parte de la teoría de teletráfico que es
de gran interés.
Durante la hora cargada α = 10 a 16% de los abonados están ocupados utilizando las líneas para
llamadas entrantes o salientes. Por consiguiente, se supondría que el α% de las tentativas de
llamada indicarían que el abonado B está ocupado. Sin embargo, esto es erróneo pues los
abonados tienen diferentes niveles de tráfico. Algunos abonados no reciben tentativas de llamada
entrantes, mientras que otros reciben mayor cantidad de tentativas de llamadas que la media. Los
abonados A tienen inclinación en elegir los abonados B más ocupados, y en la práctica se observa
que la probabilidad que el abonado B esté ocupado es de unos 4 · α, si no se toman medidas.
Para abonados residenciales es difícil mejorar la situación, pero para grandes abonados
comerciales que tienen una central automática privada (PABX) con un grupo de números, la
cantidad suficiente de líneas eliminará la condición de ocupado de B. Por consiguiente, en países
industrializados la probabilidad total de abonado B ocupado toma el mismo orden de magnitud de
α (véase el cuadro 2.1). Para países en desarrollo el tráfico se centra más sobre números
individuales y a menudo los abonados comerciales no disponen de numeración de grupo y, por
tanto, se observa una alta probabilidad de abonado B ocupado (40 a 50%).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
4
Conforme a las mediciones de Ordrup el 4% aproximadamente de las llamadas eran tentativas de
llamadas repetidas. Si un abonado presenta una indicación bloqueo u ocupado, hay un 70% de
probabilidad que la llamada se repita dentro de una hora. Véase el cuadro 2.3.
Un clásico ejemplo de la importancia de la reacción de los abonados se observó cuando la fábrica
de gas industrial de Valby (en Copenhague) explotó a mediados de la década de los 60. Los
abonados en Copenhague generaron una gran cantidad de tentativas de llamada y ocuparon los
dispositivos de control en las centrales de la zona de Copenhague. Los abonados de Esbjerg
(parte occidental de Dinamarca) que llamaban a Copenhague tenían que esperar debido a que los
números no podían ser transferidos inmediatamente a Copenhague. Por tanto, el equipo en
Esbjerg se mantuvo ocupado en espera, y los abonados que efectuaban llamadas locales en
Esbjerg no pudieron completar las tentativas de llamada.
Esto es un ejemplo de cómo se propaga una situación de sobrecarga con una reacción en cadena
por toda la red. Cuando más ajustada se ha dimensionado una red, habrá más posibilidad que se
produzca una reacción en cadena. Una central siempre ha de ser construida de modo que
mantenga su capacidad total de funcionamiento durante situaciones de sobrecarga.
Figura 2.9 − Función de frecuencia para tiempos de ocupación de enlaces
en un centro de conmutación local

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
5
Cuadro 2.3 − Secuencia observada de tentativas de llamada repetidas (llamadas
nacionales, "mediciones de Ordrup").
Número de observaciones
Tentativa N° Satisfactorio Continua Desiste p{éxito} Persistencia
1
2
3
4
5
>5
56,935
3,252
925
293
139
134
75,389
7,512
2,378
951
476
248
10,942
1,882
502
182
89
114
0,76
0,43
0,39
0,31
0,29
0,41
0,56
0,66
0,72
0,74
Total 61,678 13,711
La probabilidad de éxito disminuye con la cantidad de tentativas de llamada, mientras que la
persistencia aumenta. Aquí un intento de llamada repetido es una llamada repetida al mismo
abonado B dentro de una hora
En una central moderna se tiene la posibilidad de dar prioridad a un grupo de abonados en una
situación de emergencia, por ejemplo, médicos y policía (tráfico preferencial).
En sistemas informáticos similares condiciones influenciarán la calidad de funcionamiento. Por
ejemplo, si es difícil obtener libre ingreso a un sistema terminal, el usuario dispone no
desconectarse sino mantener conectado el terminal, es decir aumentar el tiempo de servicio. Si un
sistema funciona como sistema de tiempo de espera, el tiempo de espera medio aumentará
entonces con el tercer orden del tiempo de medio servicio (véase el Capítulo 13). En esas
condiciones el sistema se saturará muy rápido, es decir estará sobrecargado. En países con redes
de telecomunicación sobrecargadas (por ejemplo, países en desarrollo) un gran porcentaje de
intentos de llamadas serán tentativas de llamadas repetidas.
Ejemplo 2.4.2: Tentativa de llamada repetida: Este es un ejemplo de un modelo simple de
tentativa de llamada repetida. Sea la siguiente notación:
b = persistencia (2.10)
B = p {no completada} (2.11)
La persistencia b es la probabilidad que se repita una tentativa de llamada infructuosa, y
p{completada} = {1 − B} es la probabilidad que el abonado (parte llamada) responda. Para una
tentativa de llamada se obtiene la siguiente reseña:
Las siguientes probabilidades se obtienen para una tentativa de llamada:
(2.12)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
6
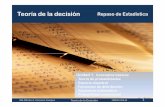
Figura 2.10 − Histograma para el intervalo de tiempo desde la ocupación del registro (tono de marcar) a la respuesta de B para llamadas completadas.El valor medio es
13,60 s
Cuadro 2.4 − Distribución de la cantidad de tentativas de llamadas.
Tentativa Nº
p{B responde}
p{continúa}
p{desiste}
0
1 (1 − B)
B . b B . (1 − b)
2 (1 − B) . (B . b) (B . b)2 B . (1 − b) . (B . b)
3 (1 − B) . (B . b)2 (B . b)
3 B . (1 − b) . (B . b)
2
4 (1 − B) . (B . b)3 (B . b)
4 B . (1 − b) . (B . b)
3
...
…
…
…
Total (1− B) (1
− B ⋅b)
1
(1− B ⋅b)
B ⋅(1− b)
(1− B ⋅b)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
7
p{no completada}=
Número de tentativas de llamada por intención de llamada =
Sean los tiempos medios de ocupación siguientes:
B ⋅(1− b)
(1− B ⋅b)
1
(1− B ⋅b)
(2.13)
(2.14)
sc = tiempo medio de ocupación de llamadas completadas
sn = 0 = tiempo medio de ocupación de llamadas no completadas
Se obtienen entonces las siguientes relaciones entre el tráfico transportado Y y el tráfico ofrecido A:
Y = A ⋅ 1 − B
1 − B ⋅ b
(2.15)
A = Y ⋅ 1 − B ⋅ b
1 − B
Esto es similar al resultado que figura en la Recomendación UIT-T E.502.
(2.16)
En la práctica, la persistencia b y la probabilidad de compleción 1 – B dependerá del número de
veces que la llamada ha sido repetida (consúltese el cuadro 2.3). Si las llamadas infructuosas
tienen un tiempo medio de ocupación positivo, el tráfico transportado puede ser mayor que el
tráfico ofrecido.
Lección 7: Introducción al grado de servicio
La siguiente sección tiene como base la publicación: Proposed grade of service chapter for
handbook. ITU-T Study Group, Veirø, B. (2001) [100]. El operador de la red debe decidir qué
servicios ha de prestar ésta al usuario final y el nivel de calidad de servicio que el usuario debe
experimentar. Esto es así para toda red de telecomunicaciones sea con conmutación de circuitos
o con conmutación de paquetes, alámbrica o inalámbrica, óptica o de alambre de cobre, y es
independiente de la tecnología de transmisión aplicada. Otras decisiones que se han de efectuar
pueden incluir el tipo e instalación de la infraestructura de la red para soportar los servicios, y la
elección de las técnicas que se han de utilizar para tratar el transporte de la información. Estas
decisiones ulteriores pueden ser diferentes, según si el operador ya está presente en el mercado
o si comienza a prestar servicios en una situación de nuevo concurrente (es decir, una situación
donde no hay una red heredada para considerar).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
8
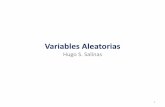
Figura 2.11 − Histograma para todas las tentativas de llamada repetidas
en el término de 5 minutos, cuando la parte llamada está ocupada.
En la Recomendación UIT-T E.800 se define el concepto de calidad de servicio (QoS) como: el
efecto colectivo de calidad de funcionamiento del servicio que determina el grado de satisfacción
de un usuario del servicio. La QoS comprende un conjunto de parámetros que pertenece a la
calidad de funcionamiento del tráfico de la red, pero además de esto, la QoS también incluye una
serie de otros conceptos, que se resumen como sigue:
logística del servicio;
facilidad de utilización del servicio;
servibilidad del servicio; y
seguridad del servicio.
Las definiciones detalladas de esos términos figuran en la Recomendación E.800. Cuanto mejor
calidad de servicio ofrece un operador al usuario final, mayor será la posibilidad de obtener
nuevos clientes y mantener los clientes actuales. Pero una mejor calidad de servicio significa
también que la instalación de la red sea más costosa y esto, normalmente, tendrá relación con el
precio del servicio. La selección de una determinada calidad de servicio dependerá, por tanto, de
las decisiones políticas tomadas por el operador y esto no será tratado en el presente estudio.
Cuando se establece la decisión de calidad se puede iniciar la planificación de la red pertinente.
Esto incluye la decisión de una tecnología de red de transporte y su topología, así como los

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
9
aspectos de fiabilidad en el caso en que uno o más elementos de red tengan mal funcionamiento.
Es también en ese momento que se determina la estrategia de encaminamiento.
Éste es el instante en que es necesario considerar el grado de servicio (GoS). Esto se define en la
Recomendación UIT-T E.600 como: un conjunto de variables de ingeniería de tráfico utilizadas
para tener una medida de aptitud de un grupo de órganos en condiciones especificadas. Estas
variables del grado de servicio pueden expresarse como la probabilidad de pérdida, la demora del
tono de invitación a marcar, etc. A esta definición la Recomendación proporciona además las
siguientes notas:
Los valores de parámetro asignados como objetivos para el grado de servicio se denominan normas de grado de servicio.
Los valores de los parámetros de grado de servicio obtenidos en condiciones reales se denominan resultados del grado de servicio.
El punto básico para resolver en la determinación de las normas de GoS es aplicar los valores a
cada elemento de red de modo tal que se obtenga el objetivo de QoS de extremo a extremo.
7.1 Comparación de GoS y QoS
No es tarea sencilla encontrar las normas de GoS necesarias para soportar una determinada
QoS. Esto se debe al hecho de que los conceptos de GoS y QoS tienen distintos puntos de vista.
Mientras que la QoS considera la situación desde el punto de vista del cliente, el GoS tiene en
consideración la red. Esto se ilustra con los siguientes ejemplos:
Ejemplo 2.5.1:Supóngase que se desea fijar la probabilidad de bloqueo de llamada de extremo a
extremo al 1% en una red telefónica. Un cliente puede interpretar que esta cantidad significa que
podrá alcanzar el destino deseado en un promedio de 99 sobre 100 casos. Al fijar este objetivo de
diseño, el operador aplicó una determinada probabilidad de bloqueo a cada uno de los elementos
de red que una llamada de referencia podría satisfacer. Para asegurar que este objetivo se cumpla
se debe supervisar la red. Pero esta supervisión normalmente tiene lugar en toda la red y sólo se
puede asegurar que la red puede satisfacer, en promedio, los valores objetivo. Si se considera una
determinada línea de acceso, su GoS objetivo puede bien ser superado, pero el promedio para
todas las líneas de acceso debe por cierto satisfacer el objetivo.
El GoS está referido a parámetros que se pueden verificar mediante la calidad de funcionamiento
de la red (aptitud de una red o parte de la red para ofrecer las funciones correspondientes a las
comunicaciones entre usuarios) y los parámetros sólo se aplican en promedio para la red. Aún si
sólo se limita a considerar la parte de la QoS que está relacionada con el tráfico, el ejemplo ilustra
que si bien el objetivo de GoS se satisface esto no es el caso para la QoS.
7.2 Características especiales de la QoS
Como consecuencia de todas las dificultades mencionadas anteriormente en la comparación de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
10
GoS y QoS, y en la definición de lo que realmente es la percepción del usuario, se ha formado un
grupo para tratar estos problemas. Se denomina Grupo de Desarrollo sobre Calidad de Servicio y
trabaja conjuntamente con el Grupo de Estudio 2 del UIT-T. Sus temas de estudio incluyen nuevas
definiciones y mejoramiento de la Recomendación UIT-T E.800.
Debido a los diferentes criterios para definir el GoS y la QoS, el Grupo de Desarrollo sobre Calidad
de Servicio propuso una solución para resolver el problema. Esta solución se denomina acuerdo a
nivel de servicio (SLA, service level agreement). Esto es en realidad un contrato entre el usuario y
el operador de la red. En el mismo se define el significado real de los parámetros en cuestión. Se
supone que las definiciones están dadas de modo tal que sean interpretadas de la misma manera
por el cliente y por el operador de la red. Asimismo, el SLA define qué sucede en el caso de la
violación de los términos del contrato. Algunos operadores han decidido emitir un SLA para todas
las relaciones que tienen (al menos en principio) con el cliente, mientras que otros sólo lo hacen
con grandes clientes que conocen lo que realmente significan los términos del SLA.
7.3 Calidad de funcionamiento de la red
Como se mencionó anteriormente la calidad de funcionamiento de la red se refiere a la aptitud de
una red o parte de la misma para ofrecer las funciones correspondientes a las comunicaciones
entre usuarios. Para establecer cómo funciona una determinada red, es necesario realizar
mediciones que abarquen todos los aspectos de los parámetros de comportamiento funcional (es
decir capacidad de tráfico, seguridad de funcionamiento, transmisión y tarificación).
Asimismo, los aspectos de calidad de funcionamiento de la red en el concepto de GoS sólo
corresponden a los factores relacionados con el rendimiento funcional de la capacidad de tráfico
en la terminología de QoS. Asimismo, en el marco de la calidad de servicio el término "Calidad de
funcionamiento de la red" también incluye los siguientes conceptos:
seguridad de funcionamiento,
calidad de transmisión, y
precisión de la tasación.
No es suficiente efectuar sólo mediciones, sino que es también necesario tener una organización
que pueda proporcionar la supervisión adecuada y tomar las medidas que correspondan cuando
surjan los problemas. A medida que aumenta la complejidad de la red el número de parámetros
que será necesario tener en cuenta será mayor. Esto significa que se requerirán medios
automáticos para que el panorama general de los parámetros más importantes que se deben
examinar sea más sencillo.
7.4 Configuraciones de referencia
Para obtener una visión general de la red en estudio es a menudo conveniente presentar un

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
11
diagrama denominado configuración de referencia. Este diagrama comprende uno o más
esquemas simplificados del trayecto que una llamada (o conexión) puede tomar en la red incluido
los puntos de referencia apropiados, donde se definen las interfaces entre las entidades. En
algunos casos los puntos de referencia definen una interfaz entre dos operadores y es, por tanto,
importante observar cuidadosamente qué sucede en ese punto. En lo que se refiere al grado de
servicio la importancia de la configuración de referencia es la segmentación del GoS como se
describe a continuación. Considérese una red telefónica con terminales, conmutadores de
abonado y conmutadores de tránsito. En el ejemplo se ignora la red de señalización. Supóngase
que las llamadas se pueden encaminar por unas de las tres disposiciones siguientes:
1) terminal → conmutador de abonado → terminal. Esto se puede representar como la
configuración de referencia que se muestra en la figura 2.12.
2) terminal → conmutador de abonado → conmutador de tránsito → conmutador
de abonado → terminal. Esto se puede representar como la configuración de referencia que
se muestra en la figura 2.13
3) terminal → conmutador de abonado → conmutador de tránsito → conmutador de tránsito →
conmutador de abonado → terminal. Esto se puede representar como la configuración de
referencia que se muestra en la figura 2.14.
Figura 2.12 − Configuración de referencia para el caso 1
Figura 2.13 − Configuración de referencia para el caso 2
Figura 2.14 − Configuración de referencia para el caso 3
Basado en un determinado conjunto de requisitos de QoS, se selecciona y define un conjunto de
parámetros de GoS de una base de extremo a extremo dentro de la frontera de red, para cada
categoría de servicio principal proporcionadas por la red. Los parámetros de GoS seleccionados

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
12
se especifican de modo tal que el GoS se puede obtener en puntos de referencia bien definidos,
es decir puntos de tráfico importantes. Este procedimiento se utiliza para permitir la segmentación
de los objetivos de GoS de extremo a extremo para que sea posible obtenerlos en cada etapa o
componente de red, sobre la base de algunas conexiones de referencia bien definidas.
Como se define la Recomendación E.600, referente a los términos de ingeniería de tráfico, una
conexión es una asociación de órganos que proporciona los medios para una comunicación entre
dos o más dispositivos pertenecientes a una red de telecomunicaciones, o acoplados a ella.
Puede haber diferentes tipos de conexiones pues el número y los tipos de recursos en las mismas
pueden variar. Por tanto, el concepto de conexión de referencia se utiliza para identificar casos
representativos de distintos tipos de conexiones sin incluir los detalles de sus realizaciones reales
por diferentes medios físicos.
En el trayecto de una conexión intervienen, por lo general, diversos segmentos de red. Por
ejemplo, una conexión puede ser local, nacional o internacional. Las conexiones de referencia se
utilizan para aclarar y especificar asuntos de calidad de funcionamiento del tráfico en diversas
interfaces entre distintos dominios de red. Cada dominio puede estar constituido por una o más
redes del proveedor del servicio. La Recomendación I.380/Y.1540 define los parámetros de
calidad de funcionamiento para la transferencia de paquetes de protocolo de Internet; el proyecto
de Recomendación Y.1541 especifica las atribuciones y objetivos de calidad de funcionamiento
correspondientes. La Recomendación E.651 especifica las conexiones de referencia para redes
de acceso con protocolo Internet. Se van a elaborar otras conexiones de referencia.
De los objetivos de QoS, se obtiene un conjunto de parámetros GoS de extremo a extremo y sus
objetivos para distintas conexiones de referencia. Por ejemplo, la probabilidad de bloqueo de la
conexión de extremo a extremo y el retardo de transferencia de paquete de extremo a extremo
pueden ser parámetros de GoS pertinentes. Los objetivos de GoS se deben especificar con
referencia a las condiciones de carga del tráfico, tal como en condiciones de carga normal y
elevada. Los objetivos de GoS de extremo a extremo se asignan entonces a componentes de
recursos de las conexiones de referencia para fines de dimensionamiento. En una red
operacional, se requieren mediciones y supervisión de la calidad de funcionamiento para asegurar
que los objetivos de GoS se hayan cumplido.
En redes basadas en el protocolo Internet, la asignación de calidad de funcionamiento se efectúa
generalmente en una nube, es decir el conjunto de encaminadores y enlaces bajo una
responsabilidad jurisdiccional única (o en colaboración), tal como una ISP. Una nube se conecta a
otra nube mediante un enlace, es decir un encaminador de pasarela en una nube se conecta a
través de un enlace a un encaminador de pasarela en otra nube. La comunicación de extremo a
extremo entre sistemas centrales se conduce por un trayecto que comprende una secuencia de
nubes y enlaces de interconexión. Esta secuencia se conoce como trayecto ficticio de referencia
para fines de asignación de calidad de funcionamiento.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
13
Lección 8: Funciones de distribución
Todos los intervalos de tiempo que se consideran en este Modulo no son negativos y, por tanto,
pueden ser expresados por variables estocásticas no negativas.
Los intervalos de tiempo de interés son, por ejemplo, tiempos de servicio, duración de la
congestión (periodos de bloqueo, periodos de ocupado), tiempos de espera, tiempos de
ocupación, tiempos de CPU ocupado, periodos entre las llegadas a destino de las llamadas, etc.
En este Capítulo se examinan la teoría básica de las probabilidades y las estadísticas en lo que
respecta a la teoría del teletráfico.
Un intervalo de tiempo puede ser descrito por una variable estocástica T, que se caracteriza por
una función de distribución F(t):
En la ecuación (3. 1) se integra desde 0 – para mantener el registro de una posible discontinuidad
en t = 0. Cuando se consideran los sistemas de tiempo de espera, hay siempre una probabilidad
positiva de tener tiempos de espera iguales a cero, es decir F(0) ≠ 0. Por otra p arte cuando se
observan los periodos entre las llegadas a destino de las llamadas, se supone generalmente que
F(0) = 0.
La probabilidad que la duración de un intervalo de tiempo sea menor o igual a t resulta:
p(T ≤ t) = F(t).
A veces es más sencillo considerar la función de distribución complementaria.
Fc(t) = 1 – F(t). Esto también se denomina función de distribución de supervivencia. Se supone a menudo que F(t) es diferenciable y que existe la siguiente función de densidad f(t):
dF(t) = f(t) . dt = p{t < T ≤ t + dt}, t ≥ 0. (3.2)
Normalmente, se supone que el tiempo de servicio es independiente del proceso de llegada, y
que un tiempo de servicio es independiente de otros tiempos de servicio. En forma analítica, se
pueden efectuar muchos cálculos para cualquier distribución de tiempo. En general, siempre se
supone que existe el valor medio.
8.1 Caracterización de las distribuciones
Las distribuciones temporales que sólo suponen argumentos positivos poseen algunas propiedades ventajosas. Para el i-ésimo momento no central, que generalmente indica i-ésimo momento, se puede indicar que la identidad de Palm es válida:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
14
La identidad de Palm (Ec. 3.3), que es válida para las distribuciones de tiempo de vida (sólo definidas para argumentos no negativos), se aprobó por primera vez en (Palm, 1943,[81]) como sigue:
El orden de integración se puede invertir pues el integrando no es negativo. Así, se puede comprobar (Ec. 3.3) lo siguiente:
La siguiente prueba simplificada es correcta pues se supone que los momentos existen:
Ejemplo 3.1.1: Distribución exponencial: Para la distribución exponencial se tiene:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
15
Sería muy sorprendente que las dos integrales sean idénticas. Los dos integrandos pueden,
aparte de ser constantes, ser transformados en una función de densidad Erlang-3 o Erlang-2,
respectivamente, que tiene la masa de probabilidad total:
En especial, se tienen los primeros dos momentos bajo la hipótesis que existen:
El valor medio (expectativa) es el primer momento:
El i-ésimo momento central se define como:
La varianza es idéntica al segundo momento central:
Por lo general una distribución viene definida unívocamente por todos sus momentos. Una medida
normalizada para la (dispersión de) irregularidad de una distribución es el coeficiente de variación.
Se define como la relación entre la desviación normalizada y el valor medio:
CV = coeficiente de variación = σ (3.9)
m Esta cantidad no tiene dimensión y luego se aplicará para caracterizar las distribuciones discretas
(probabilidades de estado). Otra medición de irregularidad es el factor de forma de Palm ε, que
se expresa como sigue:
(3.10)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
16
El factor de forma ε así como σ/m son independientes de la elección de la escala de tiempo, y
aparecerá en muchas fórmulas en los textos siguientes.
Cuando mayor sea el factor de forma, más irregular es la distribución temporal, y mayor será, por
ejemplo, el tiempo de espera medio en un sistema de tiempo de espera. El factor de forma toma el
valor mínimo igual a uno para intervalos de tiempo constantes (σ = 0).
Para estimar una distribución a partir de las observaciones, se está a menudo satisfecho al
conocer los primeros dos momentos (m y σ o ε) pues los momentos de orden superior requieren
gran cantidad de observaciones para obtener estimaciones fiables. Las distribuciones temporales
también se pueden caracterizar de otras maneras, cuyas más importantes se analizarán más
adelante.
8.2 Tiempo de vida residual
Se desea hallar la distribución del tiempo de vida residual, dado que ya ha sido obtenida una
determinada edad x ≥ 0.
La distribución condicional F(t+xIx) se define como sigue (suponiendo que p{T > x} > 0 y t ≥ 0:
y así
La figura 3.1 ilustra los cálculos gráficamente.
El valor medio m1,r del tiempo de vida residual se puede expresar como (3.4):

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
17
El índice de mortalidad en el tiempo x, es decir la probabilidad de que la vida útil considerada
termina dentro de un intervalo (x,x + dx), bajo la condición que la edad x haya sido alcanzada, se
obtiene con la expresión (3.11) en la condición t = dx:
La función de densidad condicional μ(x) también se denomina función obstáculo. Si se da esta
función, se puede obtener entonces F(x) como solución a la siguiente ecuación diferencial:
Figura 3.1 − Función densidad del tiempo de vida residual condicionada para
una edad x dada (3.11). El ejemplo se basa en una distribución de
Weibull We(2,5) donde x = 3 y F(3) = 0,3023.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
18
que tiene la siguiente solución (suponiendo F(0) = 0):
El índice de mortalidad μ(t) es constante si, y solo sí, la vida útil se distribuye en forma
exponencial. Esto es una característica fundamental de la distribución exponencial que se
denomina propiedad de Markovian (falta de memoria (edad)): La probabilidad de terminación es
independiente de la edad real (historia).
Cabría esperar que la vida útil residual media m1,r(x) disminuya cuando aumenta x, así como la
vida útil residual esperada disminuya cuando la edad x aumenta. Esto no siempre es el caso. Para
una distribución exponencial con factor de forma ε = 2, se tiene m1,r = m. Para distribuciones
pronunciadas (1 ≤ ε ≤ 2) se tiene m1,r < m, mientras que para distribuciones planas (2 < ε < ∞), se
tiene m1,r ≥ m.
Ejemplo 3.1.2: Distribución del tiempo de espera
La distribución del tiempo de espera Ws(t) para un cliente aleatorio tiene usualmente una masa
(atómica) de probabilidad positiva en t = 0, en razón que algunos de los clientes toman el servicio
inmediatamente sin espera. Se tiene así Ws(0) > 0. Aplicando la ecuación (3.11) la distribución del
tiempo de espera W+(t) para clientes que tienen tiempos de espera positivos será:
o si se indica la probabilidad de un tiempo de espera positivo {1 – Ws(0)} por D (probabilidad de demora):
Para la función de densidad, aplicando la ecuación (3.11), se tiene: Para valores medios se
obtiene:
donde el valor medio para todos los clientes viene indicado por W y el valor medio para los
clientes demorados se indica con w. Ejemplo 3.2.1: Distribución binomial y ensayo de Bernoulli. Supóngase que la probabilidad de
éxito en una prueba (por ejemplo tirar un dado) sea igual a p y la probabilidad de fracaso sea igual
1 − p. El número de éxitos en una sola prueba estará entonces dada por la distribución de

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
19
Bernoulli:
Si se efectúa un total de S pruebas, la distribución de la cantidad de éxitos tiene distribución binomial:
la que se obtiene, por tanto, mediante la convolución de S distribuciones de Bernoulli. Si se
ejecuta una prueba adicional, la distribución del número total de éxitos se obtiene mediante la
convolución de la distribución binomial (3.35) y la distribución de Bernoulli (3.34):
Lección 9: Procesos de llegada Los procesos de llegada, tal como llamadas telefónicas que llegan a una central, se describen
matemáticamente como procesos estocásticos puntuales. Para un proceso puntual, se pueden
distinguir dos llegadas entre sí. Las informaciones concernientes a una llegada (tiempo de
servicio, número de cliente) se ignoran. De modo que la información sólo se puede utilizar para
determinar si una llegada pertenece al proceso o no.
La teoría matemática para el proceso puntual fue presentada y desarrollada por el sueco Conny
Palm en el decenio de 1940. Esta teoría ha sido ampliamente aplicada en diversos temas. Fue
matemáticamente perfeccionada por Khintchine (1968, [63]), y se ha aplicado considerablemente
en muchos libros de textos.
9.1 Descripción de procesos puntuales En el texto siguiente sólo se considerarán procesos puntuales regulares, es decir se excluyen las
llegadas dobles. Para llamadas telefónicas esto se puede realizar utilizando una escala temporal
suficientemente detallada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
20
Considérense tiempos de llegada en los que la i-ésima llamada llega en el tiempo Ti:
0 = T0 < T1 < T2 < . . . < Ti < Ti+1 < . . . . (5.1) La primera observación tiene lugar en el tiempo T0 = 0. El número de llamadas en el semiintervalo abierto [0, t] se indica como Nt. El valor Nt es una
variable aleatoria con parámetros de tiempo continuo y espacio discreto. Cuando t aumenta, Nt
nunca disminuye.
Figura 4.1 − Proceso de llegada de la llamada en las líneas de entrada de una central de
tránsito La distancia temporal entre dos llegadas es:
Xi = Ti – Ti–1, i = 1, 2; . . . . (5.2) Esto se denomina tiempo entre llegadas y la distribución de este proceso es la distribución del tiempo entre llegadas. Correspondiente a las dos variables aleatorias Nt y Xi, los dos procesos se pueden caracterizar de dos maneras:
1) Representación del número Nt: el intervalo de tiempo t se mantiene constante y se observa la variable aleatoria Nt para el número de llamadas en t.
2) Representación del intervalo Ti: el número de llamadas entrantes se mantiene constante y se observa la variable aleatoria Ti para el intervalo de tiempo hasta que se hayan producido n llegadas (en especial T1 = X1).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
21
La reacción fundamental entre las dos representaciones viene dada por la siguiente relación simple: si y sólo si Esto se expresa por la identidad de Feller-Jensen:
El análisis del proceso puntual se puede basar en ambas representaciones. En principio estas
representaciones son equivalentes. La representación de intervalos corresponde a los análisis
usuales en serie del tiempo (si, por ejemplo i = 1), se obtienen promedios de llamada, es decir
estadísticas basadas en las llamadas entrantes.
La representación del número de llamadas no tiene comparación en el análisis en serie del
tiempo. Las estadísticas están calculadas por unidad de tiempo y se obtienen promedios de
tiempo. (Confróntese la diferencia entre congestión de llamadas y congestión temporal.)
Las estadísticas de interés cuando se estudian procesos puntuales, se pueden dividir conforme a
las dos representaciones.
9.1.1 Propiedades básicas de la representación del número Hay dos propiedades que son de interés teórico: 1) El número de llamadas entrantes total en el intervalo [t1, t2] es igual a Nt2 - Nt1. El número de llamadas promedio en el mismo intervalo se denomina función de renovación H:
H (t1, t2) = E{Nt2 – Nt1} (5.5) 2) La densidad de las llamadas entrantes en el tiempo t (valor medio del tiempo) es:
Se supone que λt existe y es un valor finito. Se puede interpretar que λt es la intensidad, con la
que se producen las llegadas en el tiempo t.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
22
Para procesos puntuales regulares, se tiene:
p {Nt+Δt – Nt ≥ 2} = o(Δt), (5.7)
p {Nt+Δt – Nt = 1} = λtΔt + o(Δt), (5.8)
p {Nt+Δt – Nt = 0} = 1 – λtΔt + o(Δt), (5.9)
donde, por definición:
3) Índice de dispersión para conteo Para describir propiedades de segundo orden de la representación del número de llamadas se
utiliza el índice de dispersión para conteo (IDC, index of dispersion for counts). Este índice
describe las variaciones de los procesos de llegada durante un intervalo de tiempo t y se define
como:
Mediante la división del intervalo de tiempo t en x intervalos de duración t/x y observando el número de eventos durante esos intervalos se obtiene una estimación del IDC(t). Para el proceso de Poisson IDC se pone igual a uno. IDC es igual al "grado de curtosis", que se tratará más adelante para caracterizar el número de canales ocupados en un proceso de tráfico. 9.1.2 Propiedades básicas de la representación del intervalo
4) La distribución f(t) de intervalos de tiempo Xi (5.2) (y por convolución la distribución en sí i–1
veces la distribución del tiempo hasta la i-ésima llegada).
Fi(t) = p {Xi ≤ t}, (5.12)
E {Xi} = m1,i. (5.13)
El valor medio es el promedio de llamadas entrantes que se obtiene para cada llamada. Un
proceso de renovación es un proceso puntual en el que los tiempos entre llamadas son
estocásticos independientes entre sí y tienen la misma distribución (excepto para X1), es decir mi
= m. (IID = Idéntica e independientemente distribuidas).
5) La distribución V(t) del intervalo de tiempo desde un periodo aleatorio hasta que se produzca la
primera llegada. El valor medio de V(t) es un promedio de tiempos que se calcula por unidad de
tiempo.
6) Índice de dispersión por intervalos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
23
Para describir propiedades de segundo orden para la representación de intervalos se utiliza el
índice de dispersión para intervalos (IDI, index of dispersion for intervals). Esto se define:
donde Xi es el tiempo entre llegadas. Para el proceso de Poisson que tiene tiempos de servicio
distribuidos exponencialmente, el IDI se pone igual a uno. El IDI es igual al factor de forma de
Palm menos uno (3.10). En general, el IDI es más difícil de obtener por observación que el IDC, y
es más sensible a la exactitud de medición y regularización del proceso de tráfico. La tecnología
digital es más adecuada para la observación del IDC, mientras que complica la observación del
IDI.
Cuál de las dos representaciones se debe utilizar en la práctica depende realmente del caso
particular. Esto se puede ilustrar con los siguientes ejemplos.
Ejemplo 5.1.1: Principios de medición. Las medidas del comportamiento del teletráfico se llevan
a cabo por uno de los dos principios básicos siguientes:
1) Medidas pasivas. El equipo de medición registra en intervalos de tiempo regulares el número
de llegadas desde la última registrada. Equivale al método de exploración, que es apropiado
para computadoras. Y corresponde a la representación del número cuando el intervalo de
tiempo es fijo.
2) Medidas activas. El equipo de medición registra un evento en el instante que se produce. Se
mantiene el número de evento fijo y se observa el intervalo de medición. Un ejemplo de esto
está dado por los instrumentos de registro. Esto corresponde a la representación del intervalo
donde se obtienen estadísticas para cada llamada simple.
Ejemplo 5.1.2: Llamadas de prueba. Investigación de la calidad de tráfico. En la práctica esto se
efectúa de dos maneras:
1) La calidad de tráfico se estima recopilando estadísticas de los resultados de las llamadas de
prueba efectuadas a abonados específicos o ficticios. Las llamadas se generan durante la hora
cargada independientemente del tráfico real. El equipo de prueba registra el número de las
llamadas bloqueadas, etc. Las estadísticas obtenidas corresponden a los promedios de tiempo
de la medida de rendimiento. Lamentablemente, este método aumenta la carga ofrecida en el
sistema. Teóricamente, las medidas de rendimiento obtenidas deferirán de los valores
correctos.
2) Los datos recopilados de los equipos de prueba a partir del número de llamada N, 2N, 3N, . . . ,
por ejemplo N = 1 000. El proceso de tráfico no cambia y la estadística de rendimiento es un
promedio de llamada.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
24
Ejemplo 5.1.3: Estadísticas de llamadas. Un abonado evalúa la calidad por una fracción de
llamadas que están bloqueadas, por ejemplo promedio de llamadas.
El operador evalúa la calidad mediante la proporción de tiempo cuando todas las líneas de enlace
están ocupadas, es decir promedio de tiempo.
Los dos tipos de valores promedio (tiempo/llamada) están a menudo mezclados, causando
aparentes estados contrarios.
Ejemplo 5.1.4: Parte llamada ocupada (B ocupado). En una central telefónica el 10% de los
abonados está ocupado, pero el 20% de las tentativas de llamada están bloqueadas debido a que
B está ocupado (parte llamada ocupada). Este fenómeno se puede explicar por el hecho que la
mitad de los abonados están en estado pasivo (es decir no efectúan ni reciben llamadas), mientras
que el 20% de los abonados restantes están ocupados. G. Lind (1976 [74]) analizó el problema
bajo la hipótesis de que cada abonado en promedio tiene el mismo número de llamadas entrantes
y salientes. Si el valor medio y el factor de forma de la distribución de tráfico por abonado es b y ε,
respectivamente, la probabilidad que una tentativa de llamada encuentre al abonado B ocupado es
b . ε.
9.2 Características del proceso puntual
Se ha tratado anteriormente una estructura muy general para procesos puntuales. Para
aplicaciones específicas habrá que examinar otras propiedades. Sólo se considerará la
representación del número pero se podría hacer lo mismo basado en la representación del
intervalo.
9.2.1 Condición de estacionario (Homogeneidad del tiempo)
Esta propiedad se puede describir sin considerar la posición en el eje del tiempo. Las
distribuciones de probabilidad que describen el proceso puntual son entonces independientes del
instante de tiempo. La siguiente definición es útil en la práctica:
Definición: Para una relación t2 > 0 arbitraria y toda κ ≥ 0, la probabilidad que haya κ llegadas en [t1, t1 + t2] es independiente de t1, es decir para todos los t, κ se tiene:
Hay muchas otras definiciones de la condición de estacionario, algunas más estrictas y otras más amplias. La condición de estacionario también se puede definir por representación de intervalos requiriendo que todas las Xi sean independientes e idénticamente distribuidas. Una definición amplia es aquella que todos los momentos de primero y segundo orden (por ejemplo el valor medio y la

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
25
varianza) de un proceso puntual deben ser constantes con respecto a desplazamientos en el tiempo. Erlang introdujo el concepto de equilibrio estadístico, que requiere que las derivadas del proceso con respecto al tiempo sean cero. 9.2.2 Independencia Esta propiedad se puede expresar como la necesidad que la evolución futura del proceso sólo
dependa del estado presente.
Definición: La probabilidad que los eventos k (k es entero y ≥ 0) se produzcan en [t1, t1 + t2] es
independiente de los eventos antes del tiempo t1:
Si esto es válido para todos los tiempos t, se tendrá un proceso Markov en el que la evolución
futura sólo depende del estado presente pero es independiente de cómo ha sido obtenida. Esta es
la propiedad denominada falta de memoria. Si esta propiedad sólo es válida para determinados
puntos en el tiempo (por ejemplo, tiempos de llegada), estos puntos se denominan puntos de
equilibrio o puntos de regeneración. El proceso entonces tiene una memoria limitada y sólo es
necesario mantener el registro de los últimos puntos de regeneración.
Ejemplo 5.2.1: Puntos de equilibrio = puntos de regeneración Ejemplos de procesos puntuales con puntos de equilibrio.
a) El proceso de Poisson (como se verá en el Capítulo siguiente) no tiene memoria, y todos los
puntos de los ejes de tiempo son puntos de equilibrio.
b) Un proceso de exploración, en el que las exploraciones se producen en un ciclo regular, tiene
memoria limitada. El último instante de exploración tiene plena información sobre el proceso
explorador y, por tanto, todos los puntos de exploración son puntos de equilibrio.
c) Si se superponen el proceso de Poisson y el proceso de exploración (por ejemplo, mediante la
investigación de los procesos de llegada en un sistema informático), los únicos puntos de
equilibrio en el proceso compuesto son los instantes de exploración.
d) Considérese un sistema de puesta en fila con procesos de llegada de Poisson, tiempo de
servicio constante y servidor único. El número de posiciones en la fila puede ser finito o infinito.
Defínase un proceso puntual por los instantes de tiempo cuando comienza el servicio. Todos los
intervalos de tiempo cuando el sistema está en reposo, serán puntos de equilibrio. Durante los
periodos en que el sistema está ocupado los puntos en el tiempo para aceptar nuevas llamadas
de servicio dependen del instante en que la primera llamada del periodo ocupado inicia el
servicio.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
26
9.2.3 Regularidad
Se ha indicado ya que se excluyen los procesos con múltiples llegadas.
Definición: Se dice que un proceso puntual es regular, si la probabilidad que haya más de un
evento en un punto dado es cero:
Con la representación del intervalo, la distribución del tiempo entre llegadas a destino de las
llamadas no debe tener una probabilidad de masa (atómica) en cero, es decir, la distribución es
continua en cero (3.1):
F (0+) = 0 (5.18)
Ejemplo 5.2.2: Eventos múltiples. Los puntos temporales de accidentes de tráfico formarán un
proceso regular. La cantidad de vehículos dañados o personas fallecidas será un proceso puntual
y regular con eventos múltiples.
Lección 10: Teorema de Little
Este es el único resultado general que es válido para todos los sistemas de puesta en fila y fue
publicado por primera vez por Little (1961 [76]). La prueba se muestra por aplicación de la teoría
del proceso estocástico en (Eilon, 1969 [25]).Se considera un sistema de puesta en fila donde los
clientes llegan conforme a un proceso estocástico. Los clientes ingresan al sistema en un tiempo
aleatorio y esperan hasta obtener el servicio; una vez servidos dejan el sistema.
En la figura 5.3 los procesos de llegada y salida se consideran como procesos estocásticos con el
número de clientes acumulado en ordenadas.
Considérese un tiempo T y supóngase que el sistema está en equilibrio estadístico en el tiempo
inicial t = 0. Se tienen las siguientes notaciones (véase la figura 5.3):
N(T) = número de llegadas en el periodo T.
A(T) = tiempo de servicio total de todos los clientes en el periodo T.
A(T)= zona sombreada entre curvas.
A(T)= volumen de tráfico transportado.
λ(T) = N(T) = intensidad promedio de la llamada en el periodo T.
T

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
27
W(T) = A(T) = tiempo de ocupación medio en sistemas por llamada en el periodo T.
N(T)
L(T) = A(T) = número de llamadas promedio en el sistema en el periodo T.
T
Se tiene la relación importante entre esas variables:
Si los límites de λ = limT→∞ λ(T) y W = limTT→∞ W(T) existen, existirá también el valor limitado de
L(T) y
L = λ . W (Teorema de Little) (5.20)
Esta fórmula simple es válida para todos los sistemas generales de puesta en fila. La prueba ha
sido perfeccionada durante varios años. La fórmula, que se ha probado aquí por una consideración
muy simple del proceso estocástico, es más útil de lo que parece.
Ejemplo 5.3.1: Fórmula de Little. Sólo se considerarán las posiciones de espera, la fórmula
muestra "la longitud media de la fila es igual a la intensidad de la llamada multiplicado por el
tiempo de espera medio." Considérense ahora los lugares del servicio, la fórmula muestra "el
tráfico transportado es igual a la intensidad de llegada multiplicado por el tiempo del servicio medio
(A = y . s = λ/μ.)".
Figura 4.2 − Sistema de puesta en fila con llegada y salida de clientes.
La distancia vertical entre las dos curvas es igual al número real de clientes que están servidos.
Los clientes en general no salen en el mismo orden en que llegan, de modo tal que la distancia
horizontal entre las curvas no describe el tiempo real en el sistema de un cliente.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
28
CAPITULO 3: DISTRIBUCIONES DE LOS INTERVALOS DE TIEMPO La distribución exponencial es la distribución temporal más importante de la teoría del teletráfico.
Al combinar en serie intervalos temporales distribuidos exponencialmente, se obtiene una clase de
distribuciones denominadas distribuciones de Erlang. Al combinarlos en paralelo, se obtiene una
distribución hiperexponencial. Al combinar las distribuciones exponenciales en serie y en paralelo,
posiblemente con retroalimentación, se obtienen distribuciones de tipo fase, lo que constituye una
clase muy general de distribuciones. Las distribuciones de Cox son una sub categoría importante
de las distribuciones de tipo fase. Se observa que una distribución arbitraria se puede expresar
mediante una distribución Cox, lo que puede utilizarse en modelos analíticos en forma
relativamente sencilla. Por último, también se estudian otras distribuciones temporales que se
emplean en la teoría del teletráfico. Se ofrecen algunos ejemplos de observaciones de tiempos de
vida.
Lección 11: Distribución exponencial En la teoría de teletráfico esta distribución también se denomina distribución exponencial negativa.
En principio, se puede utilizar cualquier función de distribución con valores no negativos para
modelar un tiempo de vida. Sin embargo, la distribución exponencial tiene algunas características
propias que hacen que esta distribución se califique para utilización analítica y práctica. La
distribución exponencial desempeña un papel fundamental entre todas las distribuciones de tiempo
de vida.
Esta distribución se caracteriza por un parámetro único, la intensidad o régimen λ:
La función gamma viene defina por:
Si se reemplaza t por λt y se obtiene el ν-ésimo momento, se tiene:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
29
Figura 5.1 − En diagramas de fase todo intervalo de tiempo distribuido exponencialmente se
ilustra como una casilla con la intensidad. La casilla significa así que uncliente que llega a
la misma sufre el retardo de un intervalo de tiempo distribuido exponencialmente antes de
dejar la casilla La distribución exponencial es muy apropiada para describir intervalos de tiempo físicos (véase la
figura 6.2). La característica más importante de la distribución exponencial es su falta de memoria.
La distribución del tiempo residual de una conversación telefónica es independiente de la duración
real de la conversación, y es igual a la distribución del tiempo de vida total (3.11):
Si se quita la masa de probabilidad del intervalo (0, x) a partir de la función densidad y se
normaliza la masa residual en (x, ∞) a la unidad, la nueva función de densidad se hace congruente
con la función de densidad original. La única función de distribución continua que tiene esta
propiedad es la distribución exponencial, mientras que la distribución geométrica es la única
distribución discreta que tiene esta propiedad. En la figura 3.1 se muestra un ejemplo con la
distribución de Weibull en la que esta propiedad no es válida. Para k = 1 la distribución de Weibull
se hace idéntica a que la distribución exponencial. Por tanto, el valor medio del tiempo de vida
residual es m1,r = m y la probabilidad de observar un tiempo de vida en el intervalo (t,t + dt),
teniendo en cuenta que se produzca después de t, viene dado por:
es decir es independiente del tiempo real t.
11.1 Mínimo de k variables aleatorias distribuidas exponencialmente
Se supone que dos variables aleatorias X1 y X2 son mutuamente independientes y están
distribuidas exponencialmente con intensidades λ1 y λ2, respectivamente. Una nueva variable
aleatoria X se define como:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
30
La función de distribución de X es:
Esta función de distribución propiamente dicha es también una distribución exponencial con
intensidad (λ1 y λ2).
Con la hipótesis que el primer evento (más pequeño) sucede en el tiempo t, la probabilidad que
la variable aleatoria X1 se realice primero viene dada por:
es decir independiente de t. (No es necesario integrar todos los valores de t.)
Esos resultados pueden ser generalizados a k variables e integrar el principio básico de la
simulación técnica denominada método de la ruleta, una metodología de simulación de Monte
Carlo.
11.1.2 Combinación de distribuciones exponenciales
Si una distribución exponencial (es decir, un parámetro) no puede describir los intervalos de
tiempo con detalle suficiente, se ha de tener que utilizar entonces una combinación de dos o más
distribuciones exponenciales. Conny Palm introdujo dos clases de distribuciones: pronunciada y
plana. Una distribución pronunciada corresponde a un conjunto de distribuciones estocásticas con
exponencial independiente dispuestos en serie (véase la figura 5.2), y una distribución plana
corresponde a distribuciones exponenciales dispuestas en paralelo (véase la figura 5.4). Esta
estructura corresponde naturalmente a la configuración de procesos de tráfico en redes de
telecomunicación y datos.
Mediante la combinación de distribuciones pronunciada y planas se obtiene una aproximación
arbitrariamente buena para cualquier función de distribución (véase la figura 5.7). Los diagramas
de las figuras 5.2 y 5.4 se denominan diagramas de fase.
Figura 5.2 - Mediante la combinación de k distribuciones exponenciales en serie se obtiene
una distribución pronunciada (ε ≤ 2). Si todas las distribuciones k son idénticas (λ1 = λ), se
obtiene entonces una distribución Erlang-k

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
31
Figura 5.3 − Distribuciones Erlang-k con valor medio igual a uno. El caso k = 1 corresponde
a una distribución exponencial (funciones de densidad)
Lección 12: Distribuciones pronunciadas
Las distribuciones pronunciadas también se denominan distribuciones hiperexponenciales o
distribuciones Erlang generalizadas con un factor de forma en el intervalo 1 < ε ≤ 2. Esta función de
distribución generalizada se obtiene convolucionando distribuciones exponenciales k (véase la
figura 5.2). Aquí sólo se considera el caso en el que todas las distribuciones exponenciales k son
idénticas. Se obtiene entonces la siguiente función de densidad que se denomina distribución
Erlang-k.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
32
(4.10) Mediante las ecuaciones (3.31) y (3.32) se pueden obtener los momentos siguientes;
El i-ésimo momento no central es:
La función de densidad se calcula en el § 6.2.2. El tiempo de vida residual medio m1,r(x) para x ≥ 0 será menor que el valor medio:
Con esta distribución se tiene dos parámetros (λ , k) disponibles para ser estimados por
observación. El valor medio se mantiene a menudo fijo. Para estudiar la influencia del parámetro k
en la función de distribución, se normalizan todas las distribuciones Erlang-k al mismo valor medio
como la distribución Erlang-1, es decir la distribución exponencial con 1/λ medio, reemplazando t
por kt o λ por kλ:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
33
Se observa que el factor de forma es independiente de la escala de tiempos. La función de
densidad (4.15) se ilustra en la figura 5.3 para diferentes valores de k con λ = 1. El caso k = 1
corresponde a la distribución exponencial. Cuando k → ∞ se obtiene en un intervalo de tiempo
constante (ε = 1).
Resolviendo la ecuación f' (t) se halla el valor máximo con la siguiente expresión:
Las distribuciones pronunciadas se denominan así debido a que las funciones de distribución aumenta de 0 a 1 más rápidamente que la distribución exponencial. En teoría de teletráfico se utiliza a veces el nombre distribución de Erlang para la distribución de Poisson truncada.
Lección 13: Distribuciones planas La función de distribución general es en este caso una suma ponderada de distribuciones
exponenciales (distribución compuesta) con un factor de forma ε ≥ 2:
donde la función de ponderación puede ser discreta o continua (integral de Stieltjes). Esta clase de
distribución corresponde a una combinación en paralelo de las distribuciones exponenciales
(véase la figura 5.4). La función de densidad se denomina función monótona completa debido a los
signos alternados (Palm, 1957 [84]).

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
34
Figura 5.4 − Mediante la combinación de distribuciones exponenciales k en paralelo y
seleccionando la derivación número i con la probabilidad pi, se obtendrá una distribución
hiperexponencial, que es una distribución plana (ε ≥ 2)
El tiempo de vida residual medio m1,r(x) para toda x ≥ 0 es mayor que el valor medio:
13.1 Distribución hiperexponencial
En este caso, W(λ) es un valor discreto. Supóngase que se tengan los siguientes valores dados:
λ1, λ2, ... , λk,
y que W(λ) tenga incrementos positivos:
p1, p2, ... , pk donde
Para cualquier otro valor, W(λ) es constante. En este caso (4.20) resulta:
Los valores medio y el factor de forma se pueden hallar con las ecuaciones (3.36) y (3.37) (σi =
m1,i = 1/λi):

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
35
Si n = 1 o todas las λi son iguales, se tendrá una distribución exponencial.
Esta clase de distribución se denomina distribución hiperexponencial y se puede obtener
combinando n distribuciones exponenciales en paralelo, donde la probabilidad de elegir la i-ésima
distribución viene dada por pi. La distribución se denomina plana pues su función de distribución
de 0 a 1 aumenta más lentamente que la distribución exponencial.
En la práctica, es difícil estimar más que uno o dos parámetros.
El caso más importante es para n = 2 (p1 = p, p2 = 1 – p):
Los problemas estadísticos surgen aun cuando se tratan tres parámetros. Por consiguiente, para
aplicaciones prácticas se escoge usualmente λi= 2λpi y se reduce así la cantidad de parámetros a
sólo dos:
El valor medio y el factor de forma resultan:
Para esta elección de parámetros las dos derivaciones tiene la misma contribución para el valor
medio. En la figura 5.5 se ilustra un ejemplo.
Lección 14: Distribuciones de Cox
Mediante la combinación de distribuciones planas y pronunciadas se obtiene una clase de
distribución general (distribuciones de tipo de fase) que se pueden describir con fase exponencial
tanto en serie como en paralelo (por ejemplo una matriz k × l). Para analizar un modelo con esta
clase de distribuciones, se puede aplicar la teoría de los procesos de Markov, de la que se tienen
herramientas eficaces como el método de fase. En el caso más general se puede permitir la
realimentación entre las fases.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
36
Sólo se considerarán distribuciones de Cox como las que se muestran en la figura 5.6 (Cox, 1955
[18]). Estas distribuciones también aparecen con el nombre de distribución de Erlang con
derivaciones.
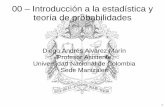
Figura 5.5 − Función de la (frecuencia de) densidad para tiempos de ocupación
observándose líneas en una central local durante las horas cargadas. (Central 0163, 27/5-6/6 1975.)

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
37
Figura 5.6 − Distribución de Cox en una distribución Erlang generaliza que tiene
distribuciones exponenciales tanto en serie como en paralelo. El diagrama de fase es equivalente a la figura 5.7
Figura 5.7 − Diagrama de fase de una distribución de Cox (véase la figura 5.6)
El valor medio y la varianza de esta distribución de Cox (véase la figura 5.7) se encuentran en las fórmulas:
donde:
El término qi(1 – ai) es la probabilidad de salir después de alcanzar la i-ésima fase. El valor medio
se puede calcular con la simple expresión siguiente:
donde m1,i = qi/λi, es el i-ésimo valor medio relacionado con la fase. La varianza es:

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
38
que se puede expresar así:
La adición de dos variables aleatorias con distribución Cox produce otra variable con distribución
Cox, es decir esta clase es cerrada de acuerdo con la operación de adición.
La función de una distribución de Cox se puede expresar como la suma de funciones
exponenciales:
donde
y
14.1 Prueba polinomial Las siguientes propiedades tienen importancia para aplicaciones posteriores. Si se considera un
punto en el tiempo escogido al azar dentro de un intervalo de tiempo con distribución de Cox, la
probabilidad que este punto esté dentro de la fase i viene dada por:
Si este experimento se repite y veces (independientemente), la probabilidad que la fase i se
observa yi veces está dada por la distribución multinomial ( = distribución polinomial):
donde

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
39
y
Estas expresiones (4.38) se denominan coeficientes multinomiales. Por la propiedad de "falta de
memoria" de las distribuciones (fases) exponenciales se tiene plena información acerca del tiempo
de vida residual, cuando se conoce el número de la fase real. 14.2 Principios de descomposición
Figura 5.8 − Una distribución exponencial con intensidad λ es equivalente a la distribución
de Cox mostrada (Teorema 4.1) Los diagramas de fase constituyen una herramienta útil para analizar las distribuciones de Cox. La
siguiente es una característica fundamental de la distribución exponencial (Iversen y Nielsen, 1985
[43]):
Teorema 4.1 Una distribución exponencial con intensidad λ se puede descomponer en una
distribución Cox de dos fases, donde la primera tiene una intensidad m > λ y la segunda una
intensidad λ (véase la figura 5.8).
El Teorema 4.1 muestra que una distribución exponencial es equivalente a una distribución de
Cox homogénea (homogénea significa que tiene iguales intensidades en todas las fases) con
intensidad m y un número infinito de fases (véase la figura 5.8). Se observa que las probabilidades
de derivaciones son constantes. La figura 5.9 corresponde a una suma ponderada de
distribuciones Erlang-k donde los factores de ponderación están geométricamente distribuidos.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
40
Figura 5.9 − Una distribución exponencial con régimen λ se transforma por descomposición
sucesiva en una distribución compuesta de distribuciones Erlang-k homogéneas con los
parámetros μ > λ, donde los factores de ponderación siguen una distribución geométrica
(cociente p = λ/m).
Figura 5.10 − Con una distribución hiperexponencial con dos fases λ1 > λ2 puede ser
transformada a una distribución de Cox-2. Conforme al Teorema 4.1 una distribución hiperexponencial con l fases es equivalente a una
distribución de Cox con el mismo número de fases. El caso l = 2 se muestra en la figura 5.10.
Se tiene otra propiedad de las distribuciones de Cox (Iversen y Nielsen, 1985 [43]):
Teorema 4.2 En cualquier distribución de Cox se pueden ordenar las fases, tal como λi ≥ λi+1.
Mediante el empleo de los diagramas de fase es sencillo ver que cualquier intervalo de tiempo
exponencial (λ) se puede descomponer en distribuciones de tipo de fase (λi), donde λi ≥ λ.
Referente a la figura 5.11 se observa que el régimen fuera de los estados macro (rectángulo en
línea de trazos) es independiente de λ del estado micro. Cuando el número de fase k es finito y no
hay realimentación la fase final debe tener régimen λ.

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
41
Figura 5.11 − Esta distribución de tipo de fase es equivalente a un exponente único cuando
pi . λi = λ. Así λi ≥ λ como 0 < pi ≤ 1
14.3 Importancia de la distribución de Cox
Las distribuciones de Cox han atraído la atención durante los últimos años pues son de gran
importancia debido a las siguientes propiedades:
a. La distribución de Cox se puede analizar utilizando el método de fases.
b. Se puede tener una distribución arbitraria aproximadamente bien con una distribución de Cox.
Si una propiedad es válida para una distribución de Cox será también válida para cualquier
distribución de interés práctico.
Con las distribuciones de Cox se pueden obtener resultados con métodos elementales que
previamente requerían matemáticas muy avanzadas.
En la conexión con aplicaciones prácticas de la teoría, se han utilizado los métodos para estimar
los parámetros de la distribución de Cox. En general, hay 2k parámetros en un problema
estadístico sin resolver. Normalmente, se puede elegir una distribución de Cox especial (por
ejemplo, distribución Erlang-k o hiperexponencial) y aproximarse al primer momento.
Por simulación numérica en computadoras utilizando el método de la ruleta, se obtienen
automáticamente las observaciones de los intervalos de tiempo como distribución de Cox con las
mismas intensidades en todas las fases.
Lección 15: Otras distribuciones temporales En principio, cada distribución que tiene valores no negativos, se puede utilizar como distribución
temporal para describir los intervalos de tiempo. Pero en la práctica, se trabaja principalmente con
las distribuciones mencionadas anteriormente.
Se supone que el parámetro k en la distribución de Erlang-k (Ec. 4.8) toma valores reales no

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
42
negativos y obtiene la distribución gamma:
El valor medio y la varianza vienen dados por las ecuaciones (4.11) y (4.12). Otro ejemplo de una distribución también conocida en la teoría de teletráfico es la distribución de Weibull:
Con esta distribución se puede, por ejemplo, obtener la intensidad de fin de vida dependiente del tiempo (3.14):
Esta distribución tiene su origen en la teoría de la fiabilidad. Para k = 1 se tiene la distribución
exponencial.
Más adelante, se tratará un conjunto de distribuciones discretas que también describe el tiempo de
vida, tal como la distribución geométrica, distribución de Pascal, distribución binomial, distribución
de Westerberg, etc. En la práctica, los parámetros de distribuciones no son siempre constantes.
Los tiempos (de ocupación) del servicio se pueden relacionar físicamente con el estado del
sistema. En sistemas hombre-máquina el tiempo del servicio cambia en razón de la actividad
(disminuye) o inactividad (aumenta). De la misma manera, los sistemas electromecánicos
funcionan más lentamente durante periodos de carga elevada en razón que la tensión diminuye.
Para algunas distribuciones que se aplican ampliamente en la teoría de puesta en fila, se utilizan
las siguientes notaciones abreviadas:
M ~ Distribución exponencial (Markov),
Ek ~ Distribución de Erlang-k,
Hn ~ Distribución hiperexponencial de orden n, D ~ Constante (Determinística),
Cox ~ Distribución de Cox,
G ~ General = atribución arbitraria.
15.1 Observaciones de la distribución de tiempo de vida
En la figura 5.5 se muestra un ejemplo de los tiempos de ocupación observados desde una central
telefónica local. El tiempo de ocupación comprende el tiempo de señalización y, si la llamada se

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍAS E INGENIERÍAS
CONTENIDO DIDÁCTICO DEL CURSO: 208022-TELETRAFICO
43
responde, el tiempo de conversación. En la figura 6.2 se muestra la observación y los periodos
entre llegadas de llamadas a una central telefónica de tránsito durante una hora.
Desde sus comienzos, la teoría de teletráfico ha sido caracterizada por una fuerte interacción entre
teoría y práctica, y han habido excelentes posibilidades para efectuar mediciones.
Erlang [12] presentó en 1920 un informe sobre los resultados de una medición en las que se
registraron 2 461 tiempos de conversación en una central telefónica de Copenhague (1916). Palm
(1943 [81]) analizó el campo de mediciones de tráfico, de manera teórica y práctica, y efectuó
amplias mediciones en Suecia.
Se han llevado a cabo numerosas mediciones en sistemas de computación. Mientras que en
sistemas telefónicos rara vez se tiene un factor de forma mayor que 6, en tráfico de datos se
observan factores de forma mayores que 100. Este es el caso, por ejemplo para transmisión de
datos, donde se envían algunos caracteres o bien una gran cantidad de datos. Las mediciones
extensas más recientes han sido efectuadas y modeladas utilizando modelos de tráfico similares
(Jerkins y otros, 1999 [51]).