Cap 1 Esfuerzo
51
Capítulo 1. Estad o de esfuerz o 1 CAPÍTULO 1 ESTADO DE ESFUERZO Introducción En este capítulo se establecen los conceptos de vector esfuerzo y de tensor esfuerzo asociados a un punto de un medi o continuo. Dado que e l número de vec tores esfuerz o que pasa por un punto de un medio continuo es infinito (uno para cada elemento de superficie que se hace pasar por dicho punto), por medio del concepto de tensor esfuerzo se demostrará que basta con conocer tres de los infinitos vectore s esfuerz o, asocia dos a tres planos m utuamen te ortogon ales, para calcular to dos los demá s. El resto del capítulo se dedicará al estudio del estado de esfuerzo en un punto del medio continuo y a desarrollar métodos analíticos y gráficos para calcular los esfuerzos asociados a un pla no de co rte im agin ario a través del med io con tinu o. Fin almente, se deri van la s ecuaciones de equilibrio de un medio continuo. 1.1 Fuer zas d e sup erfici e y fu erzas de cue rpo Los tipos de fuerzas que se aceptan en el estudio de los medios continuos son de superficie y de cuerpo. a) Fuerzas de superficie. Aquéllas aplicada s en las fr onteras d el medio c ontinuo po r la acció n de otros cuerpos que se encuentran en contacto con el medio. La fuerza resultante de todas las fuerzas de superficie, que actúan sobre un área A , de un medio continuo está dada por n k A tdA i = ∫ k A t d A ∫ (1.1) El subíndice k que aparec e en la ecua ción 1.1 se usa par a expre sar el mismo con cept o en notación indicial (Apéndice A). donde: n t : vector fuerza de superficie
Transcript of Cap 1 Esfuerzo

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 1/51
Capítulo 1. Estado de esfuerzo
1
CAPÍTULO 1
ESTADO DE ESFUERZO
Introducción
En este capítulo se establecen los conceptos de vector esfuerzo y de tensor esfuerzo asociadosa un punto de un medio continuo. Dado que el número de vectores esfuerzo que pasa por unpunto de un medio continuo es infinito (uno para cada elemento de superficie que se hacepasar por dicho punto), por medio del concepto de tensor esfuerzo se demostrará que basta conconocer tres de los infinitos vectores esfuerzo, asociados a tres planos mutuamenteortogonales, para calcular todos los demás.
El resto del capítulo se dedicará al estudio del estado de esfuerzo en un punto del mediocontinuo y a desarrollar métodos analíticos y gráficos para calcular los esfuerzos asociados aun plano de corte imaginario a través del medio continuo. Finalmente, se derivan lasecuaciones de equilibrio de un medio continuo.
1.1 Fuerzas de superficie y fuerzas de cuerpo
Los tipos de fuerzas que se aceptan en el estudio de los medios continuos son de superficie yde cuerpo.
a) Fuerzas de superficie. Aquéllas aplicadas en las fronteras del medio continuo por la acciónde otros cuerpos que se encuentran en contacto con el medio.
La fuerza resultante de todas las fuerzas de superficie, que actúan sobre un área A , de unmedio continuo está dada por
n k A
tdA i=∫ k A
t dA∫ (1.1)
El subíndice k que aparece en la ecuación 1.1 se usa para expresar el mismo concepto ennotación indicial (Apéndice A).donde:
nt : vector fuerza de superficie

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 2/51
2
dA: elemento diferencial de área
Adoptando un sistema de referencia cartesiano, la ecuación 1.1 queda como
n A
tdA i=∫ x At dA j+∫ y
At dA k +∫ z
At dA∫ (1.2)
siendo , , x y zt t t , las componentes del vector esfuerzo nt en las direcciones , , x y z
respectivamente.
Las unidades de , , x y zt t t son 2,F L
−
b) Fuerzas de cuerpo. Aquéllas provocadas por la acción de cuerpos distantes que generancampos gravitacionales, de temperatura y electromagnéticos.
La fuerza resultante de todas las fuerzas de cuerpo, actuantes en un volumen finito dV estádada por
k V
f dV i =∫ k V
f dV ∫ (1.3)
donde:
f : vector fuerza de cuerpodV : elemento diferencial de volumen : densidad del medio
En notación cartesiana la ecuación (1.3) se puede escribir como
V f dV i =∫ x
V f dV j +∫ y
V f dV k +∫ z
V f dV ∫ (1.4)
siendo , , x y zt t t las componentes del vector fuerza de cuerpo f
Las unidades de , , x y z f f f son [F, M− 1]
1.2 Teoría del estado de esfuerzo
Cuando un cuerpo deformable se somete a solicitaciones de cualquier tipo, éste se deforma
hasta cierto límite. Esto se debe a que las fuerzas cohesivas han entrado en juego, tomando unvalor tal que permiten equilibrar a las fuerzas externas aplicadas.
Para describir las acciones entre todas las partículas de un medio continuo, imaginemos unsistema de fuerzas aplicado a un medio continuo, tal como se ilustra en la figura (1.1).

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 3/51
3
FIGURA 1.1 Cuerpo deformable sometido a un sistema de fuerzas cualquiera
Al hacer un corte imaginario a través de un plano cualquiera, cuya normal está definida por elvector unitario ,n se obtienen los cuerpos I y II, mostrados en la figura (1.2).
FIGURA 1.2 Definición de vector esfuerzo en el entorno a un punto de un cuerpo deformable
La fuerza II I F representa la acción que el cuerpo II ejerce sobre el cuerpo I a través del área A para
mantener el equilibrio de esa parte del cuerpo.
Consideremos un punto P de dicha sección de corte y tomemos un entorno de área delmismo A∆ y sea F ∆ la parte de la acción que el cuerpo II comunica al cuerpo I, únicamentea través de A∆ .
DEFINICIÓN:
El vector esfuerzo nt en un punto P asociado a un plano de corte cualquiera, está dado por
III
2
1F
q2
1q
M1
2M
Plano de corte imaginario
cuya normal es n.
F3
F
I
II∆
∆
F
A
P
2M
F2
1F
q1
2
q
FI/II
II/IF
M1
F3

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 4/51
4
0limn A
F t
A∆ →
∆=
∆(1.5)
1.3 Componentes normal y tangencial del vector esfuerzo
El vector esfuerzo nt puede descomponerse en un vector esfuerzo normal n y en un vector
esfuerzo cortante n , tal como se muestra en la figura (1.3).
FIGURA 1.3 Componentes normal y tangencial del vector esfuerzo nt
De esta manera se obtiene:n n nt = +
El módulo del vector esfuerzo normal n se puede calcular como la proyección del vectoresfuerzo
nt sobre la dirección :n
n nn t n = = ⋅ (1.6)
El vector esfuerzo cortante n se puede calcular como la diferencia vectorial:
n n nt = − (1.7)
La normal n que define el plano donde actúa nt se puede expresar en función de sus cosenos
directores como:cos cos cosn i j k = + +
siendo , , los ángulos que forman los ejes de referencia cartesianos con la direcciónde dicha normal.Llamando a:
cos ; cos ; cos x y zn n n = = =
La normal n se puede expresar como
x y zn n i n j nk = + +
"P"
t n
σn
nτ
n
8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 5/51
5
El vector esfuerzo n es positivo si tiene la misma dirección que el vector n, en caso contrario
será negativo; n siempre será normal al plano de corte.
El vector esfuerzo cortante n siempre estará alojado en el plano de corte; n adopta
cualquier dirección.
En un marco de referencia cartesiano, es usual descomponer a n en dos componentes
paralelas a los ejes del marco de referencia.
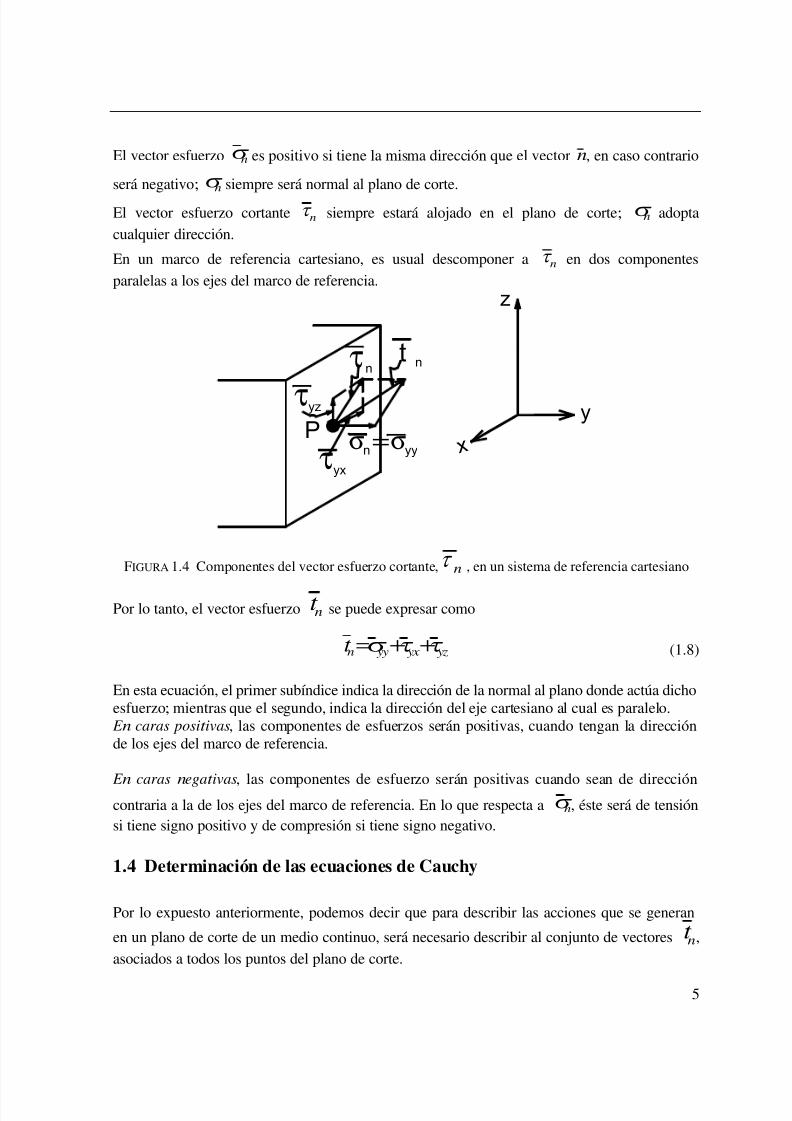
FIGURA 1.4 Componentes del vector esfuerzo cortante, n , en un sistema de referencia cartesiano
Por lo tanto, el vector esfuerzo nt se puede expresar como
n yy yx yzt = + + (1.8)
En esta ecuación, el primer subíndice indica la dirección de la normal al plano donde actúa dichoesfuerzo; mientras que el segundo, indica la dirección del eje cartesiano al cual es paralelo. En caras positivas, las componentes de esfuerzos serán positivas, cuando tengan la direcciónde los ejes del marco de referencia.
En caras negativas, las componentes de esfuerzo serán positivas cuando sean de direccióncontraria a la de los ejes del marco de referencia. En lo que respecta a n , éste será de tensiónsi tiene signo positivo y de compresión si tiene signo negativo.
1.4 Determinación de las ecuaciones de Cauchy
Por lo expuesto anteriormente, podemos decir que para describir las acciones que se generan
en un plano de corte de un medio continuo, será necesario describir al conjunto de vectores nt ,
asociados a todos los puntos del plano de corte.
P x
y
z
t n
σn=σyy
yxττyz
nτ

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 6/51
6
Ya que en un punto P del medio continuo se pueden establecer una infinidad de planos decorte, se puede afirmar que en cada punto del medio continuo se debe establecer a la infinidad
de vectores, nt asociados a todos los planos de corte que pasan por P. La envolvente de todos
los vectores nt debe ser una función continua.
Para describir a esa función, Cauchy propuso el siguiente procedimiento, basado enconsideraciones de equilibrio.
Consideremos un punto P de un medio continuo y supongamos conocido el esfuerzo en dichopunto, asociado a tres planos mutuamente ortogonales mismos que tomaremos comocoordenados. Supongamos ahora que se desea calcular el esfuerzo en P, asociado al plano
que pasa por él y que está definido mediante la normal n (figura 1.5a).
FIGURA 1.5 Determinación de las ecuaciones de Cauchy
Para encontrar el esfuerzo citado, se procede de la siguiente manera:
Se elige un plano' paralelo a y separado una distancia h del origen (figura 1.5b). En
estas condiciones analicemos el equilibrio estático del tetraedro así obtenido, utilizando como
esfuerzo actuante en la cara ,C B del tetraedro, al promedio de los realmente actuantes endicha cara. Al tomar límite cuando 0h → se obtiene:
a) El esfuerzo medio nt , se reduce al realmente actuante en P
b) El plano' coincidirá con
Analicemos el equilibrio del tetraedro que se muestra en la figura (1.6). En este análisis no seestán incluyendo fuerzas de cuerpo, causadas por efectos de campos inerciales,gravitacionales, magnéticos o eléctricos.
y
z
P
a)
P
h
b)
By
C
z
δ
δ ’ tn
plano δ
n
x

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 7/51
7
FIGURA 1.6 Equilibrio estático del tetraedro de Cauchy
Definiendo
AB C A A= = área comprendida entre A B C
= masa específica del medio; 3, M L −
el área A B C , al proyectarse en cada uno de los ejes coordenados, queda:
c o sP B C n
x
A A A = =
c o sP A C n y
A A A = =
cosP AB n z A A A = =
Estableciendo el equilibrio del tetraedro, se tiene:
Por 0 : x
F =∑1
0
3
xx P B C yx P A C zx P A B x A B C x A B C A A A t A f A h − − − + + = (1.9)
Por lo tanto,
10
3 xx x yx y zx z x x A n A n A n t A f A h − − − + + =
Tomando límite, cuando 0h → , se obtiene:
0 xx x yx y zx z x
An An An t A − − − + =
x xx x yx y zx zt n n n = + − (1.10)
A
B
C
P
nzt
tnx
nyt
σzz
yyσ
σxx
xyτ
τxz
yxτ
τyz
zyτ τzx
y
x
z

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 8/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 9/51
9
FIGURA 1.7 Vector esfuerzo asociado a un plano
dado que
n ijt T n =
a) Es necesario calcular la normal al plano B GE , para lo cual procedemos como sigue:
Coordenadas de los puntos:
B (0,0,4); 2 4 B G a i k = = −
G (2,0,0); 6 4 BE b j k = = −
E (0,6,0)
El producto cruz a b× resulta:
( ) ( )2 0 4 24 2 4 6
0 6 4
i j k
a b i j k
× = − = − − − −
24 8 12a b i j k × = + +
2 2 2
24 8 12 28a b× = + + =Por lo tanto, la normal al plano B GE es:
1 6 2 3(24 8 12 )
28 7 7 7
a bn i j k i j k
a b
×= = + + = + +
×
Operando para calcular el vector esfuerzo normal, tenemos:
x
y
B CD A
E
FG
6 cm
4 cm
2 cm
P
z

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 10/51
10
14 7 7
7 21 07 0 35
6
7
273
7
nt
−
=−
11 12 9nt i j k M P a= + +
b) Para el plano B GF C , procedemos de manera similar.
coordenadas de los puntos: B (0,0,4); G (2,0,0) 2 4 B G a i k = = −
C (0,6,4); 6 BC c j= =
( ) ( )2 0 4 24 2 6
0 6 0
i j k
a c i k × = − = + − −
2 4 1 2a c i k × = +
720 12 5a c× = =
la normal al plano B GF C resulta:1
(2 )5
a cn i k
a c
×= = +
×
214 7 7 57 21 0 0
7 0 35 1
5
nt
− = −
1 (21 14 21 )5nt i j k M P a= + +
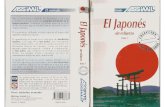
1.1.2) Determine las componentes normal y cortante del vector esfuerzo nt en el plano B GF C .
El esfuerzo normal se calcula como:
1 1(21,14, 21) (2, 0,1)
5 5n = ⋅

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 11/51
11
1 63(42 21)
5 5n = + =
63
5n M P a =
12 2 2
n n nt = −
2 2 2 21(21 14 21 ) 215.60
5nt = + + =
[ ]1
2215.60 158.76 7.54n = − =
7.54n
M P a =
1.5 Esfuerzos principales
Para determinar los valores máximo y mínimo del conjunto de vectores nt que definen el estado
de esfuerzos en el punto, es necesario encontrar el plano que pasa por el punto cuya normal
coincida con la dirección del vector nt (figura 1.8).
FIGURA 1.8 Esfuerzos principales
Si la normal al plano coincide con la dirección del vector esfuerzo nt , entonces 0
n = , por lo que
n n ijt T n = =
Por otra parte, el vector esfuerzo normal se puede expresar como:
n n n n = =
x
y"P"
n
nt
z

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 12/51
12
Por lo tanto:
n x y z ijn i n j n k T n = + + = desarrollando,
x xx x yx y zx zn n n n = + + (1.14)
y xy x yy y zy zn n n n = + + (1.15)
z xz x yz y zz zn n n n = + + (1.16)
en este sistema de ecuaciones, las incógnitas son: , , , x y z
n n n
Dado que se tienen tres ecuaciones y cuatro incógnitas, es necesario introducir una ecuaciónadicional:
2 2 2+ 1 x y zn n n+ = (1.17)
Las ecuaciones (1.14), (1.15) y (1.16) se pueden representar como:
( ) 0 xx x yx y zx z
n n n − + + = (1.18)
( ) 0 xy x yy y zy zn n n + − + = (1.19)
( ) 0 xz x yz y zz z
n n n + + − = (1.20)
Las ecuaciones (1.18), (1.19) y (1.20) tienen como modelo matemático:
ijT n n = (1.21)
siendo:
= valor característico
n = vector característico
Es decir, la solución de las ecuaciones (1.18), (1.19) y (1.20) es un problema de valores yvectores característicos, por lo tanto, la expresión (1.21) puede ser escrita como
0ijT I n − = (1.22)
siendo:
I = matriz identidad.

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 13/51
13
Para que exista una solución diferente a la trivial para , , x y z
n n n , esto es, 0n ≠ , es
necesario que el determinante de la matriz ijT I −
sea igual a cero. Por lo tanto:
0 xx yx zx
xy yy zy
xz yz zz
−− =
−
desarrollando el determinante, se obtiene la siguiente ecuación característica:
3 21 2 3 0 I I I − + − = (1.23)
donde los coeficientes de la ecuación (1.23) están dados por:
1 xx yy zz I = + + ; invariante lineal
2 xx xy yy yz zz zx
yx yy zy zz xz xx
I
= + + ;invariante cuadrático
3 ij I T = ; invariante cúbico
Resolviendo la ecuación característica (1.23), se obtienen los valores característicos, , ′ ′ ′ .
Se puede demostrar que las raíces de la ecuación cúbica son siempre reales si el tensor ijT es
simétrico, como es el caso, por lo que dichas raíces reciben el nombre de esfuerzos
principales, siendo 1 el mayor, 2 el intermedio y 3 el menor, de esta manera
1 2 3 ≥ ≥
donde los subíndices 1, 2, 3 nos indican tres ejes ortogonales que pasan por el punto, a loscuales se les pueden asociar tres planos ortogonales en los que únicamente existe esfuerzo
normal.
Sustituyendo los valores de 1 , 2 , y 3 en las ecuaciones (1.18), (1.19) y (1.20), en forma
sucesiva, y haciendo uso de la identidad fundamental 2 2 2+ 1 x y zn n n+ = , más dos de estas
ecuaciones así obtenidas, ya que sólo dos de ellas son linealmente independientes, se
determinan los vectores característicos respectivos 1 2 3, ,n n n , los cuales representan las
direcciones principales de los esfuerzos 1 , 2 , y 3 , respectivamente. Es claro que se debe

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 14/51
14
cumplir que los productos escalares 1 2 2 3 3 10 ; 0 ; 0,n n n n n n⋅ = ⋅ = ⋅ = lo cual demuestra la
ortogonalidad de las tres direcciones principales de esfuerzo.
Ya que los planos principales son ortogonales entre sí, sus normales pueden ser utilizadascomo ejes principales de referencia, el tensor referido a ese marco queda representado por
1
2
3
0 0
0 0
0 0ijT
=
Se dice que dos tensores representan el mismo estado de esfuerzos en un punto cuando susinvariantes son iguales. Puesto que lo que se está midiendo como respuesta del material es unacantidad física, en este caso esfuerzos, ésta debe ser independiente del sistema de referencia
adoptado.
PROBLEMA 1.2
En un punto de un medio continuo se establece el siguiente tensor de esfuerzo:
4 3 0
3 4 0
0 0 2ijT
= −
[ ] M Pa
Obtener:
1.2.1) El vector esfuerzo en el plano que pasa por el punto cuya normal queda definida por:
2 2 1
3 3 3n i j k
= + − +
1.2.2) Los esfuerzos principales 1 , 2 , 3
SOLUCIÓN:
a) Calculamos el vector esfuerzo:
n ijt T n =
2 2 1(4) (3) (0)
3 3 3nt i = + − +
2 2 1(3) ( 4) (0)
3 3 3 j
+ + − − +

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 15/51
15
2 2 1(0) (0) (2)
3 3 3 k
+ + − +
2 14 23 3 3nt i j k M Pa= + +
El esfuerzo normal quedará definido por
n nt n = ⋅
4 28 2
9 9 9n = − +
22
9n M Pa = −
El esfuerzo cortante se definirá como
n n nt = −
2 14 2 44 44 22
3 3 3 27 27 27n i j k i j k
= + + − − + −
2 44 14 44 2 22
3 27 3 27 3 27n i j k = + + − + +
62 82 40
27 27 27n i j k M P a = + +
b) Calculamos los esfuerzos principales 1 , 2 , 3 resolviendo la ecuación característica.
Evaluando los invariantes del tensor esfuerzo se tiene:
I1=2; I2=-25; I3=-50, por lo tanto la ecuación característica queda como:
3 22 25 50 0 − − + =Resolviendo la ecuación característica, obtenemos:
1 5 M Pa = ; 2 2 M Pa = ; 3 5 M Pa =−Por lo tanto, la matriz de esfuerzos principales queda:
5 0 0
0 2 0
0 0 5ijT
= −
[ ] M Pa
Dado que los invariantes del tensor esfuerzo en los sistemas de referencia Cartesiano y principal soniguales, entonces dichos tensores representan el mismo estado de esfuerzos en el punto P del mediocontinuo.

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 16/51
16
1.6 Elipsoide de Lamé
Cuando se seleccionan a los ejes principales como marco de referencia, en un plano cualquieraque pase por un punto del medio continuo, definido por su normal
1 2 3cos cos cosn e e e = + + ; las expresiones que definen a las componentes de nt en ese
plano, paralelas a las direcciones 1 2 3, ,n n n se pueden calcular de la siguiente manera (figura1.9).
Dado que
1
2
3
0 0 cos
0 0 cos
cos0 0
nt
=
1 1 2 2 3 3cos cos cosnt e e e = + +
Dado que 1 1 1 2 2 2 3 3 3; ;n n e n n e n n e= = = y que 1 2 3 1n n n= = =Entonces,
1 1 1cosn nt n t e ⋅ = = ⋅ (1.24)
2 2 2cosn nt n t e ⋅ = = ⋅ (1.25)
3 3 3cosn nt n t e ⋅ = = ⋅ (1.26)
FIGURA 1.9 Vector esfuerzo en un marco de referencia principal
Elevando al cuadrado las ecuaciones (1.24), (1.25) y (1.26), despejando 2 2 2cos , cos , cos
y sumando miembro a miembro, se obtiene:
( )2 2
1 1( cos )n
t e ⋅ =
1
3
"P"
n
1ee2
3e nt
n
n
n

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 17/51
17
( )2 2
2 2( cos )nt e ⋅ =
( )
2 2
3 3( cos )nt e ⋅ =
( )2
1 22
1
cosnt e
⋅= (1.27)
( )2
2 222
cosnt e
⋅= (1.28)
( )2
3 223
cosnt e
⋅= (1.29)
Sumando (1.27), (1.28) y (1.29), se llega a la ecuación
( ) ( ) ( )2 2 2
1 2 32 2 21 2 3
1n n nt e t e t e
⋅ ⋅ ⋅+ + = (1.30)
La ecuación (1.30) muestra que el conjunto de vectores nt , que describe el estado de esfuerzo
en un punto, queda envuelto por un elipsoide (Lamé), tal como se observa en la figura (1.10).
Por lo tanto, el máximo valor de nt debe ser 1 y el mínimo 3
FIGURA 1.10 Elipsoide de Lamé
1.7 Solución gráfica de Mohr
1
3
t n
21
3
2σ
σ
σ
n
n
n
0
0
o

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 18/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 19/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 20/51
20
Resolviendo el sistema de ecuaciones planteado para2 2 2cos ;cos ;cos , mediante el
método de Kramer, procedemos de la siguiente manera.
Cálculo del determinante de la matriz de coeficientes:
2 2 2
1 2 3
2 2 21 2 3 1 2 3 2 1 3 3 1 2
( ) ( ) ( )
1 1 1
= − − − + −
Para 2cos , se tiene:
2 2 2 2
2 32 2 2 2
2 3 2 3 2 3 3 2( )( ) ( ) ( )
1 1 1
nn
n nn n n
+ = + − − − + −
2 2 2 2 2 232 3 2 2 3 3 2
( )( )n nn n
= + − − + + −
2 22 3 2 3 2 3 2 32 3
( )( ) ( )( ) ( )n nn
= + − − + − + −
2 22 3 2 3 2 3 2 32 2 3
2 2 22 3 1 3 1 2
1 2 3
( )( ) ( )( ) ( )cos
( ) ( ) ( )n nn
+ − − + − + −=
− − − + −
2 22 3 2 3
2 21 3 1 22 2 3
12 3
( ) ( )
( ) ( )
( )
n nn
+ − + +=
− − + −+
−
El denominador se puede simplificar como sigue:
2 2 2 21 3 1 22 2 2 3 3
12 3( )
− + + −+ =
−
2 2 3 2 1 2 3 1 32 1 3 11
2 3
( )( ) ( )( )( )
− − + −+ = − −−
Por lo tanto:2 2
2 3 2 32
2 1 3 1
( ) ( )cos
( )( )n nn
+ − + +=
− −(1.41)
De la misma manera, se obtiene para 2c o s y 2c o s :

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 21/51
21
2 21 3 1 32
1 2 3 2
( ) ( )cos
( )( )n nn
+ − + +=
− −(1.42)
2 21 2 1 22
1 3 2 3
( ) ( )cos
( )( )n nn
+ − + +=
− −(1.43)
Procediendo por simple análisis de estas ecuaciones, podemos definir a la región buscada. Así en la ecuación (1.41), observamos lo siguiente:
Dado que
1 2 3 ≥ ≥
concluimos que:
2 1 3 1( ) ( ) 0 − − ≥
y como2cos 0 ≥
concluimos que:2 2
2 3 2 3( ) ( ) 0n nn
+ − + + ≥
Ecuación que puede ser escrita como
2 22 3 2 3( )
n nn − + + ≥ −
Completando el cuadrado del primer miembro,
2
2 22 32 3 2 3( )
2nn n
+ − + + + ≥ −
2
2 3
2
+ +
2 22 2 3 3 2 32 4
4
+ + −≥
22 22 2 3 3 2 32
4 2 − + − ≥ ≥
2 2
22 3 2 3
2 2n n
+ − − + ≥
(1.44)
Obsérvese que con el signo de igualdad la ecuación anterior define a un círculo de radio
2 3
2 R
−=
y centro en

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 22/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 23/51
23
FIGURA 1.12 Región de Mohr
PROBLEMA 1.3
El tensor esfuerzo principal en un punto de un medio continuo está dado por:
[ ]
10 0 0
0 6 0
0 0 3ijT M P a
= −
Determine:
1.3.1) Los esfuerzos n y n
, de manera analítica, asociados a un plano que contiene al punto cuya
normal está dada por:
1 1 1
2 2 2n i j k
= + +
1.3.2) Los esfuerzos n y n
, empleando el círculo de Mohr.
SOLUCIÓN:
Cálculo del vector esfuerzo nt :
[ ]
110 0 021 3
0 6 0 5 32 21
0 0 32
nt i j k M Pa
= = + − −
0
n
n
n
σ31
2σ −τ =máx
3σ2σ +2
σ31
2σ +
R =
3σ1σ −R =
22
2σ − 3σR =
σσ3 σ2 1σCCC
γ
γ γ
α
α
αβ
β
β

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 24/51
24
Cálculo del esfuerzo normal n :
n nt n = ⋅3 1 1 1 5 3 3
5,3, , ,2 2 2 2 22 2
n = − • = + −
[ ]5
2n M P a =
Cálculo del esfuerzo cortante n :
2 2
n n nt =± −
2 22 2 3 5
5 322
n
= ± + + − −
[ ]5.68n M Pa =±
1.8 Procedimiento gráfico de Mohr
Únicamente se enunciarán los pasos a seguir para obtener los esfuerzos n y n , asociados a
un plano, cuya normal es , por lo que está fuera del alcance de estas notas la demostraciónrigurosa del procedimiento.
Para obtener los esfuerzos n y n
, mediante el procedimiento gráfico de Mohr, se siguen
los siguientes pasos:
1) Una vez definida la región de Mohr, por 1 se traza una recta perpendicular al eje y a
partir de ella, pasando por 1 trazamos una recta que con la primera forme un ángulo
( )11 1 co s − .
2) Por 3 se traza una recta perpendicular al eje y a partir de ella, pasando por 3 se
traza una recta que con la primera forme un ángulo ( )13 3 co s
− .
3) Haciendo centro en C
, se traza el arco de círculo que pasa por los puntos donde la recta
A A′− intersecta a los círculos, cuyo centro es C y C .
n

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 25/51
25
4) Con centro en C , se traza el arco de círculo que pasa por los puntos donde la recta
B B ′− intersecta a los círculos, cuyo centro es C
y C .
5) El punto buscado viene dado por la intersección de los dos arcos de círculo anteriormente
trazados; las coordenadas del punto Q representan a los esfuerzos ( ),n n actuantes
en el plano cuya normal es .
Solución del problema (1.4) mediante el procedimiento gráfico de Mohr
Los ángulos 1 y 3 se calculan como:1
1 cos −= ,1
3 cos −=
FIGURA 1.13 Solución gráfica de Mohr
Siguiendo la construcción geométrica, indicada en la figura (1.13), se obtiene:
2.5
5.7n
n
M P a puntoQ
M P a
= =
1.9 Casos particulares de estados de esfuerzo
a) Estado de esfuerzo nulo. Es aquel en el cual 1 2 3 0 = = = , por lo tanto, el tensor
esfuerzo queda representado por
n
-3 -2 -10
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
AB
σ3 2
σ1
σn
σC C C
σ
τn
A’ B’
Qθ = 45 °3
1θ = 60 °
γ α β
6
7
9
8

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 26/51
26
0 0 0
0 0 0
0 0 0
ijT
=
En el espacio de Lamé y de Mohr el estado de esfuerzo nulo está representado por un punto,ubicado en el origen del sistema de referencia (figura 1.14).
FIGURA 1.14 Representación gráfica de un estado de esfuerzo nulo
c) Estado de esfuerzo uniaxial. Es aquel en el cual 1 0 ≠ ; 2 3 0 = =
En este caso, el tensor esfuerzo queda representado por
1
0 0
0 0 0
0 0 0ijT
=
Todos los vectores tienen la dirección del eje 1 (figura 1.15).
FIGURA 1.15 Estado de esfuerzo uniaxial, espacio de Lamé
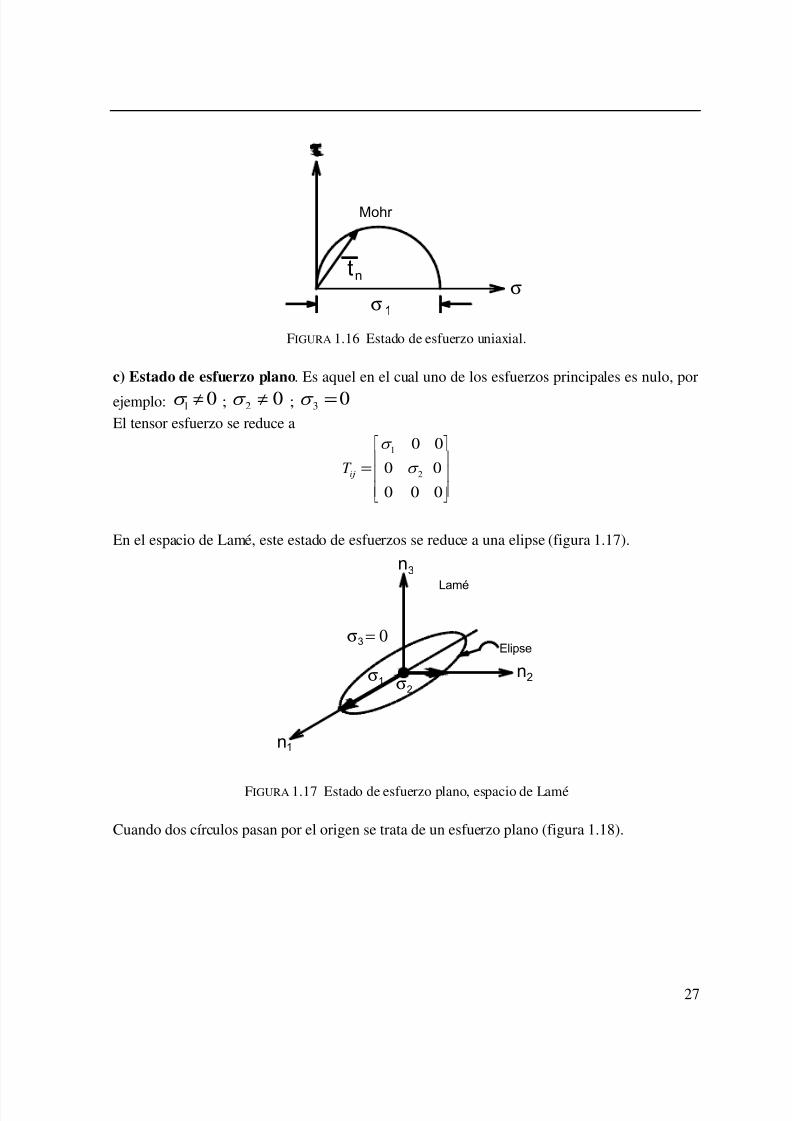
El estado de esfuerzo uniaxial en el plano de Mohr está representado por un círculo de diámetro
1 (figura 1.16).
Lamé
τ
σ
Mohr
1
3
2
n
n
n
nt
1σ
Lamé
1
3
2
n
n
n
8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 27/51
27
FIGURA 1.16 Estado de esfuerzo uniaxial.
c) Estado de esfuerzo plano. Es aquel en el cual uno de los esfuerzos principales es nulo, por
ejemplo: 1 0 ≠ ; 2 0 ≠ ; 3 0 =El tensor esfuerzo se reduce a
1
2
0 0
0 0
0 0 0ijT
=
En el espacio de Lamé, este estado de esfuerzos se reduce a una elipse (figura 1.17).
FIGURA 1.17 Estado de esfuerzo plano, espacio de Lamé
Cuando dos círculos pasan por el origen se trata de un esfuerzo plano (figura 1.18).
nt
σ 1
Mohr
σ
Elipse3σ = 0
2σ
Lamé
1σ
1
3
2
n
n
n

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 28/51
28
FIGURA 1.18 Estado de esfuerzo plano, región de Mohr, 3 0 =
d) Estado general de esfuerzos. Es aquel en el cual 1 0 ≠ ; 2 0 ≠ ; 3 0 ≠ , el tensoresfuerzo queda representado como
1
2
3
0 0
0 0
0 0ijT
=
El estado general de esfuerzo en el espacio de Lamé queda definido por un elipsoide.
La representación en el plano de Mohr quedará, como en el caso anterior, con la variante de
que 3 0 ≠ .
e) Estado de esfuerzo hidrostático. Es aquel en el cual 1 2 3 = = =
El tensor esfuerzo se reduce a
0 0
0 0
0 0ijT
=
El estado de esfuerzo hidrostático en el espacio de Lamé queda representado por una esfera,
mientras que en el plano de Mohr es un segmento de recta sobre el eje (figura 1.19)
t n
Mohr
σσ = 03
σ1σ2

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 29/51
29
FIGURA 1.19 Estado de esfuerzo hidrostático
1.10 Descomposición de un estado general de esfuerzos en sus componentes
volumétrica y desviadora
Supongamos que en un punto P de un medio continuo se establece el siguiente tensor esfuerzo.
xx yx zx
ij xy yy zy
xz yz zz
T
=
(1.47)
Sea n la normal a un plano que pasa por un punto P de un medio continuo, entonces:
n ijT n =
( cos cos cos )n xx yx zxt = + + i
+( cos cos cos ) xy yy zy
j + +
+( cos cos cos ) xz yz zz + + (148)
La ecuación (1.48) puede ser escrita en forma matricial como|
1
1
1
3
3
3
xx yx zx
n xy yy zy
xz yz zz
I
I t
I
T
− = − −
cos
cos
cos
1
1
1
0 03
0 03
0 03
I
I
I
T v
+
c o s
c o s
c o s
[ ] [ ]n o vt T n T n= + (1.49)
σ σ
Mohr

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 30/51
30
donde:
T componente desviadora del tensor
ijT
vT componente volumétrica del tensor
ijT
Obsérvese en la ecuación (1.49) que la componente volumétrica representa un estado de
esfuerzo hidrostático, cuyos esfuerzos principales son iguales a 1
3
I , es decir, el valor
promedio de los esfuerzos normales que aparecen eni j
T
La componente distorsional o desviadora de un estado general de esfuerzos siempre presenta
la siguiente propiedad:
[ ]
1
1
1
3
3
3
xx yx zx
o xy yy zy
xz yz zz
I
I T
I
− = − −
[ ]
0 0 0 0 0 0 0
0 0 0 0 0 0 00 00 0 0 0 0
yx zx
o xy zy
xz yz
T
= + +
1
1
0 03
0 03
0 0 0
xx
xx
I
I
−
+ − −
1
1
0 0 0
0 03
0 0 3
zz
zz
I
I
− −+
−
(1.50)
Obsérvese que:
1 1 12
3 3 3 xx zz xx zz
I I I
− − − − = − − +
1 12
3 3 xx zz yy yy yy
I I = − − − + + = −
Lo anterior indica que la componente distorsional o desviadora de un estado general deesfuerzos resulta siempre ser igual a la suma de cinco estados de esfuerzo plano.

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 31/51
31
A estos estados de esfuerzo plano algunos autores los llaman "estados de cortante puro", enlos cuales el máximo esfuerzo cortante es igual al valor de cualesquiera de los esfuerzosprincipales diferentes de cero.
Es común considerar que en la componente desviadora se manifiesta la acción del estado decortante puro, mientras que en la componente volumétrica se manifiesta la acción de losesfuerzos normales promedio en el punto en estudio.
En general, en todos los estados de esfuerzo se acostumbra asociar los cambios de volumen ala componente volumétrica, mientras que los cambios de forma se asocian a la componentedistorsional o desviadora.
1.11 Estado de esfuerzo plano
En la figura (1.20) se muestra un cuerpo deformable sometido a ciertas solicitaciones en suplano. Si el elemento es de espesor pequeño, los esfuerzos asociados a la dirección z se puedendespreciar, esto es:
0 ; 0 ; 0 zz xz yz
= = =
FIGURA 1.20 Estado de esfuerzo plano en un sistema de referencia cartesiano
Por lo que el tensor esfuerzoi jT se reduce a
00
0 0 0
xx yx
ij xy yyT
=
(1.51)
Este tensor representa un estado de esfuerzo plano.
Las componentes normal y cortante del vector esfuerzo nt para un estado de esfuerzo plano se
pueden deducir como a continuación se explica.
y
x
z
y
x
z
Fi
F1
2F
F3

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 32/51
32
FIGURA 1.21 Derivación de los esfuerzos n y n
, para un estado de esfuerzos plano
Tomando en cuenta la figura (1.21), los vectores unitarios n y m se pueden expresar como
(cos ) (sen )n i j = + (1.52)
(sen ) (cos )m i j = − (1.53)
En estas dos direcciones se pueden establecer las componentes normal y tangencial del vectoresfuerzo
nt , de la siguiente forma:
cossen
xx yx
n ij
xy yy
t T n
= =
( cos sen ) ( cos sen )n xx yx xy yy
t i j = + + + (1.54)
El esfuerzo normal se calcula como
n nt n = ⋅2 2( cos sen cos ) ( sen cos sen )
xx yx xy yy = + + + (1.55)
Si n es positivo, quiere decir que tiene la dirección de n
Para el esfuerzo cortante se tiene, de manera similar:
2 2( sen cos sen cos sen cos )n n xx yx xy yyt m = ⋅ = + − − (1.56)
Si n es positivo, esto quiere decir que tiene la dirección de m .
Haciendo simplificaciones, se tiene que
t n
nτ
y
x
σn
n
θ
m

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 33/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 34/51
34
Si se acepta que los ejes de referencia coincidan con las direcciones en que 0n
= , el tensor
que representa al estado de esfuerzos en un punto del medio continuo, para 2 0 = quedará
definido por
1
3
0
0ijT
=
Para este tensor, las ecuaciones (1.62) y (1.63) quedan:
( )1 31 3
1+ cos2
2 2n
+= − (1.65)
1 3 s e n 22n − = (1.66)
Estas últimas ecuaciones se pueden representar como sigue:
( )1 31 3
1= cos2
2 2n
+ − −
(1.67)
( )n 1 3
1= s e n 2
2 − (1.68)
Elevando al cuadrado las ecuaciones (1.67) y (1.68) y sumándolas, obtenemos:
2 221 3 1 3+ =
2 2n n
+ − −
(1.69)
La ecuación (1.69) nos muestra que el conjunto de vectores nt asociados a planos cuyos
vectores esfuerzo estén en el plano de esfuerzos deben tener sus extremos sobre lacircunferencia con centro en
1 3 , 02
C +
y radio en1 3
2 R
−
Para definir a un vector esfuerzo dado, asociado al plano cuya normal forma un ángulo con
el eje 1n , es necesario girar un ángulo 2 , en dirección contraria a para definir al
extremo del vector nt cuyas proyecciones son n
y n . Estos esfuerzos se pueden
determinar también de manera gráfica empleando lo que se conoce como método del, “Polo” yque se explica más adelante a través de un ejemplo.

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 35/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 36/51
36
Sustituyendo las ecuaciones (1.71) y (1.72) en la (1.62), obtenemos a los esfuerzos
principales 1 y 3 ,
22
1,3 +2 2
xx yy xx yy
xy
+ − = ±
(1.73)
Para el estado de esfuerzo plano, la ecuación característica se reduce a2
1 2 0 I I − + − = (1.74)
donde
1 xx yy I = +
2 d e t xx yx
xy yy
I
=
PROBLEMA 1.5
El estado de esfuerzo plano en un punto de un medio continuo está dado por
[ ]4 1
1 2ijT M Pa−
= − Usando los métodos analítico y gráfico del Mohr, determine:
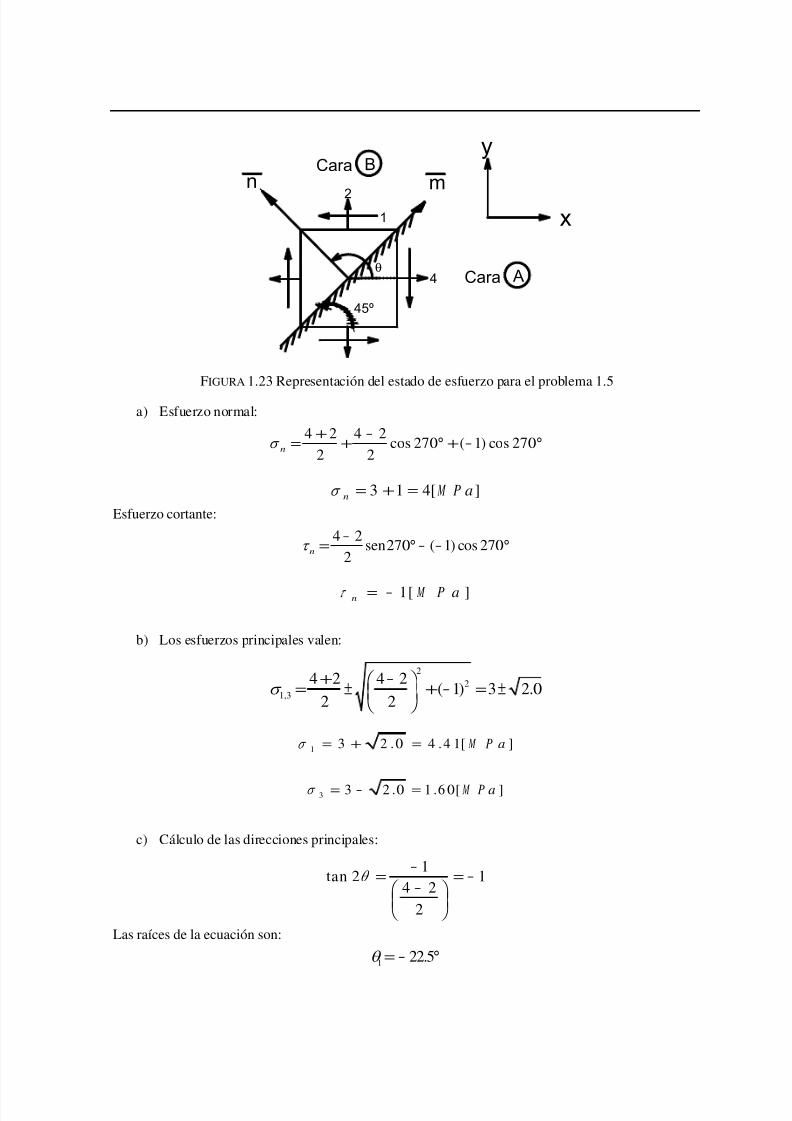
a) Los esfuerzos normal y cortante asociados al plano de corte indicado en la figura 1.23.b) Los esfuerzos principales.
c) Las direcciones principales de esfuerzo, referidas a los ejes , x y en que se define el tensoresfuerzo.
SOLUCIÓN:
Los elementos del tensor esfuerzo son:
4 ; 2 ; 1 xx yy xy M P a M P a M P a = = = −
El ángulo que permite calcular los esfuerzos n y n , mediante las ecuaciones (1.62) y
(1.63), vale: 135 =
8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 37/51
FIGURA 1.23 Representación del estado de esfuerzo para el problema 1.5
a) Esfuerzo normal:
4 2 4 2cos 270 ( 1) cos 270
2 2n + −
= + ° + − °
3 1 4[ ]n M P a = + =Esfuerzo cortante:
4 2sen270 ( 1) cos 270
2n
−= ° − − °
1[ ]n M P a = −
b) Los esfuerzos principales valen:
22
1,3
4 2 4 2( 1) 3 2.0
2 2
+ − = ± + − = ±
1 3 2 .0 4 .4 1[ ] M P a = + =
3 3 2 .0 1 .6 0[ ] M P a = − =
c) Cálculo de las direcciones principales:
1tan 2 1
4 2
2
−
= = −−
Las raíces de la ecuación son:
1 22.5 = − °
n
ACara
Cara
2
1
B
x
45º
4
y
m
θ

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 38/51
38
3 112.5 =− °
Para comprobar la dirección asociada a los esfuerzos 1 y 3 , se sustituyen las raíces obtenidas en la
ecuación (1.62).
Para 22.5 ′ = − °
( ) ( )4 2 4 2
cos 45 ( 1)sen 452 2n
+ −= + − ° + − − °
3 0.7071 0.7071 4.41[ ]n M P a = + + =
Por lo tanto, el ángulo22.5
′ = − ° está asociado a la dirección del esfuerzo principal mayor 1
obviamente el ángulo 112.5 ′ ′= − ° debe estar asociado al esfuerzo principal menor.
Método gráfico del “Polo”
El polo es un punto en el círculo de Mohr, el cual se puede ubicar como sigue (figura 1.24):
a) Se traza primeramente el círculo de Mohr a partir de los puntos conocidos A y B Para que el
signo del esfuerzo cortante n sea el correcto, es necesario cambiar el signo del esfuerzo
cortante xy asociado a la cara A antes de trazar el círculo de Mohr.
b) Por el punto A se traza un plano que sea paralelo a los esfuerzos asociados a la cara A
donde este plano corte el círculo, estará ubicado el polo.
c) Se realiza lo mismo con el punto B para verificar la posición del polo.
d) Una vez conocida la ubicación del polo, y a partir de éste, bastará con trazar una recta
que tenga la misma orientación del plano donde se desea calcular los esfuerzos n y
n .
e) El punto donde esta recta corte al círculo, determina los esfuerzos n y n
correspondientes.
En la figura (1.24) se muestra la aplicación del procedimiento seguido para el problema planteado.
Para este caso particular, el punto correspondiente al polo coincide con los esfuerzos n y n
buscados.

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 39/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 40/51
40
1
2
3
10 03
10 03
10 0
3
o ct t
=
1 2 3
1 1 1
3 3 3oct
t i j k = + + + (1.77)
El esfuerzo normal octaédrico es igual a
1 2 3
1 1
3 3oct oct oct
t n i j k i j k = ⋅ = + + ⋅ + +
[ ]1 2 3
1
3oct = + +
1
3oct
I = (1.78)
El esfuerzo cortante octaédrico puede calcularse como sigue:
oct oct oct t = −
(1.79)
1 1 11 2 3
1 1
3 3 33 3oct
I I I i j k i j k
= + + − + +
1 1 11 2 3
1
3 3 33oct
I I I i j k
= − + − + −
2 2 2
1 1 11 2 31
3 3 3 3oct oct I I I = = − + − + −
(1.80)
De los resultados obtenidos, se puede observar lo siguiente:
a) El esfuerzo normal octaédrico depende de la magnitud de la componente volumétricadel tensor esfuerzo.
b) El esfuerzo cortante octaédrico tiene como magnitud el valor medio cuadrático de loselementos de la diagonal principal de la componente distorsional.
8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 41/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 42/51
42
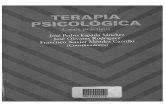
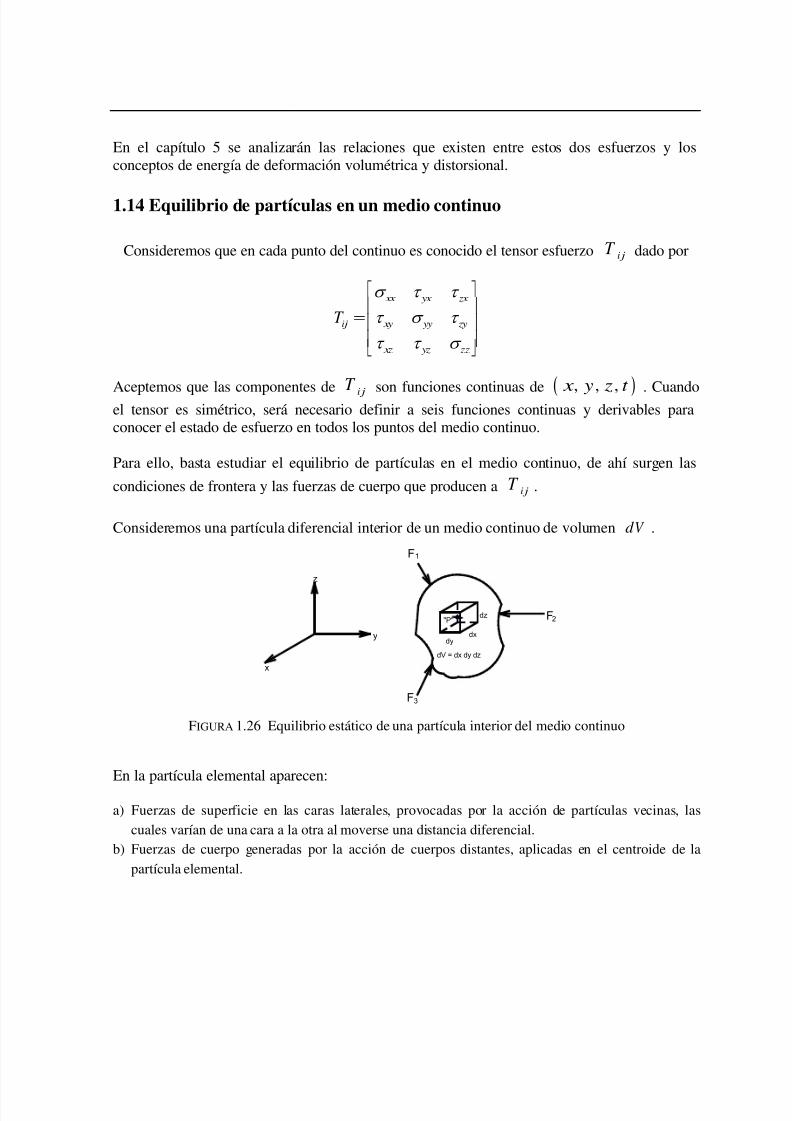
FIGURA 1.27 Fuerzas de cuerpo y de superficie en una partícula elemental de un medio continuo.
En el elemento diferencial, que se muestra en la figura (1.27), se indican las fuerzas de cuerpoy de superficie que actúan en una partícula elemental del medio continuo.
En cuanto al equilibrio de fuerzas, se tiene lo siguiente:
a) Por 0 xF =∑
( ) ( ) ( ) ( ) xx xx xx yx yx yxd dydz dydz d dxdz dxdz + − + + −
( ) ( ) 0 zx zx zx x
d dxdy dxdy f dxdydz + + − + =
0 xx yx zx xd dydz d dxdz d dxdy f dxdydz + + + =
0 yx xx zx x
dxdydz dxdydz dxdydz f dxdydz x y z
∂∂ ∂+ + + =
∂ ∂ ∂
0 yx xx zx x
dV dV dV f dV x y z
∂∂ ∂+ + + =∂ ∂ ∂ (1.81)
Si 0dV → ,
0 yx xx zx
x f
x y z
∂∂ ∂+ + + =
∂ ∂ ∂ (1.82)
b) De manera similar, por 0 y
F =∑ , se obtiene:
x
z
dV = dx dy dz
σ +zz z
σd
dτzyzy
τ +
τ + z x z x τ d
xzτ
τxy
xxσ
σyy
yxτ
τyz dτ
xzxzτ +
τ +xy xy
τd d σ
x
x x σ +
σ +yy y
σddτ
yzyzτ +
τ +
y x
y x τ d
zxτ
τzy
zzσ
dx
dy
dz
yf xf y
f z

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 43/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 44/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 45/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 46/51
46
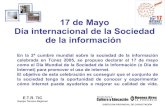
La distribución de esfuerzos normales en x L= se muestra en la figura 1.30.
FIGURA 1.30 Distribución de esfuerzos normales en el plano x L=
Dicha distribución genera un par interno que vale:
i M H d = ⋅
Siendo:
22
2
L cAc H c L A= =
el brazo de palanca del par vale:
4
3
d c=
Por lo tanto, el momento interno resulta igual a
( )2 34 4
3 3i M c L A c c A L= =
La distribución de esfuerzos cortantes produce una fuerza cortante igual a
34
3V c A=
Esta fuerza está en equilibrio con la que se produce en x o=
El momento de inercia centroidal de la sección se puede expresar como
32
3 I c= , por lo que
2i M
A IL
=
Por equilibrio, el momento interno que produce la distribución de esfuerzos normales en x L= debeser igual al momento que produce la distribución de esfuerzos cortantes en ambos extremos de la barra.
c
c
H
2/3 c
2LcA
-2LcA
VH
M
1

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 47/51

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 48/51
48
FIGURA 1.31 Ecuaciones de equilibrio de momentos de una partícula de un medio continuo
De las ecuaciones (1.85), (1.86) y (1.87) se pueden definir los valores de , , x y zm m m
debidos a la excentricidad de las acciones que se generan en la partícula respecto al centroide.
Para el problema (1.6), la aplicación de las ecuaciones de equilibrio de momentos conduce a losiguiente:
Por
( )
0, 0 0 2 0 0
0, 0 0 2 0 0
0, 0 2 2 0
x x x
y y y
z z z
M m m
M m m
M y Ady m m Aydy
= − + = ⇒ == − + = ⇒ == − − + = ⇒ =−
∑∑∑
donde:2
2
2 4 z
y F m A ydy A y
I = − = − =∫
Este resultado muestra que existirán tendencias al giro de las partículas alrededor del eje z ,dependiendo de su posición en el medio continuo.
La existencia de estos momentos implica que las partículas no se mueven como partículasrígidas, sino que deben presentarse distorsiones para garantizar la existencia de continuidad.Los pares de esfuerzo se autoequilibran con los correspondientes a las partículas simétricasrespecto al eje z , sin que exista la necesidad de aplicar momentos externos para equilibrarlas.Estos momentos se producen en el problema en estudio por la distribución no uniforme deesfuerzos en las caras de las partículas.
Normalmente en campos de esfuerzos no uniformes existen estos pares de esfuerzos que tratande provocar rotaciones y distorsiones en las partículas.
z
y
x
(τ +zy dτ )zy
dx
dz
dy
dydx
dxdzyz
τ )dyz(τ +
(τzy dxdy)
dxdz)yz(τ

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 49/51
Así, mediante las ecuaciones de equilibrio se pueden identificar las características del vector
fuerza de cuerpo f y del vector momento m , dados por,
x y z f f i f j f k = + +
x y zm m i m j m k = + +
Problemas propuestos del capítulo.
PROBLEMA 1.7
El tensor esfuerzo en un punto de un medio continuo está dado por:
−−−
−=
1120
1260005
jiT (MPa);
Si la normal a un plano que pasa por el punto vale:1 2 2
3 3 3n i j k = + + , calcule :
1.7.1 El vector esfuerzo total nt ; el vector esfuerzo normal n
y el vector esfuerzo
cortante n . Utilice las ecuaciones analíticas correspondientes.
1.7.2 Los esfuerzos principales y las direcciones principales correspondientes.
1.7.3 Compruebe la ortogonalidad de las direcciones principales.1.7.4 Resuelva el inciso (1.7.1) empleando el método gráfico de Mohr.
Solución:
1.7.1)5 22
123 3nt i j k = − − − ; ( )
1121 242 242
27n i j k = − + + + ;
76 82 44
27 27 27n i j k = − +
1.7.2) 1 2 310 ; 5 ; 15 M Pa M Pa M Pa = =− =−
1
3 40
5 5n i j k = − + ;
2 0 0n i j k = + + ;
3
4 30
5 5n i j k = + +

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 50/51
50
PROBLEMA 1.8
Demuestre que el esfuerzo cortante octaédrico dado por la ecuación
12 2 2 2
1 1 11 2 3
1
3 3 33oct
I I I
= − + − + −
; es equivalente a
( ) ( ) ( ){ }1
2 2 2 21 2 2 3 3 1
1
3oct = − + − + −
PROBLEMA 1.9
El estado de esfuerzos en un punto “P” de un medio continuo está dado por:4
7 2 ; :
2 4ij
b b
T b M Pa b cantidad desconocida
b
=
Si, 3 3 M Pa = y 1 22 = , determine:
1.9.1 El valor del esfuerzo principal mayor.1.9.2 El valor de b.
1.9.3 la dirección del esfuerzo principal 2 .
Solución
1.9.1) 1 22 8 M Pa = = ;
1.9.2) 0b M Pa= ;
1.9.3)2n i=
PROBLEMA 1.10
El tensor esfuerzo en un punto “ P ” de un medio continuo está dado por:
[ ]
0 1 2
1 1
2 1 0ij yyT M Pa
=
1.10.1) Determine el esfuerzo desconocido de forma tal que el vector esfuerzo nt en un plano
cualquiera que pase por el punto “ P ” sea igual a cero, es decir 0nt =
1.10.2) Determine también la normal al plano donde 0nt =

8/16/2019 Cap 1 Esfuerzo
http://slidepdf.com/reader/full/cap-1-esfuerzo 51/51
Solución
1.10.1) 1 yy
M Pa = ;
1.10.2) ( )2
6
i j k n
− +=