
CALCULO´ I TEOR´IA Y PROBLEMAS Amparo Delgado … · 2.3.8 Tabla de Derivadas ... 3.4.2 Funciones...
182
C ´ ALCULO I T EOR ´ IA Y P ROBLEMAS Roberto S. Costas Santos Amparo Delgado Delgado Alberto Lastra Sedano Departmento de F´ ısica y Matem ´ aticas University of Alcal´ a 2017
Transcript of CALCULO´ I TEOR´IA Y PROBLEMAS Amparo Delgado … · 2.3.8 Tabla de Derivadas ... 3.4.2 Funciones...

CALCULO I
TEORIA Y PROBLEMAS
Roberto S. Costas Santos
Amparo Delgado Delgado
Alberto Lastra Sedano
Departmento de Fısica y MatematicasUniversity of Alcala
2017

Contents
I Teorıa 1
1 Sucesiones y series numericas 3
1.1 Sucesiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Series numericas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Senales. Funciones y derivadas 17
2.1 Operaciones con funciones y tipos de funciones . . . . . . . . . . . . . . . . . . 18
2.2 Senales en tiempo continuo y tiempo discreto . . . . . . . . . . . . . . . . . . . 25
2.2.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2.2 transformacion de senales . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2.3 Senales especiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.4 Senales periodicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.5 Trigonometrıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.2.6 Relacion de Calculo I - Teorıa de Circuitos . . . . . . . . . . . . . . . . 37
2.3 Derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3.1 ¿Que es y para que sirve una recta tangente?. El metodo de Newton . . . 40
2.3.2 Optimizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.3.3 Aproximacion local y la definicion de derivada . . . . . . . . . . . . . . 42
2.3.4 Definicion de derivada y recta tangente . . . . . . . . . . . . . . . . . . 42
2.3.5 Otra visita a la idea de velocidad/tasa instantanea . . . . . . . . . . . . . 44
2.3.6 Metodos de calculo de derivadas . . . . . . . . . . . . . . . . . . . . . . 44
2.3.7 Regla de la cadena . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.3.8 Tabla de Derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.3.9 Aplicaciones de la derivada (Incompleto) . . . . . . . . . . . . . . . . . 53
2.3.10 Calculo de la derivada de y = arctan(x) . . . . . . . . . . . . . . . . . 53
3 Calculo Integral. Aplicaciones 55
3.1 Introducion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.2 Primitivas de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3.2.1 Caracterizacion de primitivas . . . . . . . . . . . . . . . . . . . . . . . . 58
3.2.2 Propiedades de la integral indefinida . . . . . . . . . . . . . . . . . . . . 58
3.2.3 Tabla de primitivas de funciones elementales (Incompleto) . . . . . . . . 59
3.3 Integracion por substitucion (cambios de variable) . . . . . . . . . . . . . . . . . 60
3.3.1 Integracion de funciones racionales . . . . . . . . . . . . . . . . . . . . 60
3.3.2 Q(x) tiene raıces reales simples . . . . . . . . . . . . . . . . . . . . . . 61
3.3.3 Q(x) tiene una raız multiple . . . . . . . . . . . . . . . . . . . . . . . . 61
ii CONTENTS
3.3.4 Q(x) tiene dos raıces complejas conjugadas . . . . . . . . . . . . . . . . 61
3.4 Integracion de algunas funciones irracionales . . . . . . . . . . . . . . . . . . . 64
3.4.1 Funciones Irracionales en x . . . . . . . . . . . . . . . . . . . . . . . . 64
3.4.2 Funciones irracionales en x y ax+bcx+d . . . . . . . . . . . . . . . . . . . . 64
3.4.3 Irracionales cuadraticas . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.4.4 Integracion de ciertas funciones trascendentes . . . . . . . . . . . . . . . 66
3.5 Integracion por partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.5.1 Producto de polinomios por funciones trigonometricas inversas . . . . . 67
3.5.2 Producto de polinomios por logaritmos . . . . . . . . . . . . . . . . . . 69
3.5.3 Producto de exponenciales por funciones seno o coseno . . . . . . . . . 70
3.5.4 Producto de polinomios por exponenciales . . . . . . . . . . . . . . . . 71
3.5.5 Producto de polinomios por funciones seno o coseno . . . . . . . . . . . 71
3.5.6 Algunas funciones irracionales u otras . . . . . . . . . . . . . . . . . . . 71
3.6 La integral definida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.6.1 Particiones de un intervalo . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.6.2 Sumas de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.6.3 Propiedades de las sumas de Riemann . . . . . . . . . . . . . . . . . . . 73
3.6.4 Aplicaciones de la Integral de Riemann . . . . . . . . . . . . . . . . . . 76
3.7 Calculo de la integral de eax cos(bx) usando numeros complejos. . . . . . . . . . 77
4 La transformada de Laplace Unilateral 79
4.1 Introduccion. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2 Region de convergencia (ROC) . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.2.1 Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.3 Transformada Unilateral de Laplace: Existencia . . . . . . . . . . . . . . . . . . 81
4.3.1 Consecuencias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.3.2 Linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.3.3 Transformada de la derivada de una funcion . . . . . . . . . . . . . . . 82
4.3.4 Transformada de la integral de una funcion . . . . . . . . . . . . . . . . 83
4.3.5 Propiedades de traslacion . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.3.6 Propiedades de cambio de escala . . . . . . . . . . . . . . . . . . . . . 83
4.3.7 Transformada de ciertas funciones elementales . . . . . . . . . . . . . . 84
4.3.8 Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.3.9 Propiedades de la convolucion (Incompleto) . . . . . . . . . . . . . . . . 85
4.3.10 Calculo de la Transformada inversa unilateral . . . . . . . . . . . . . . . 87
4.3.11 Integrales impropias con integrando de la forma f(x)/x . . . . . . . . . 88
4.3.12 La distribucion δ y su Transformada de Laplace . . . . . . . . . . . . . . 88
5 La serie de Fourier 93
5.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.2 Serie de Fourier en forma exponencial compleja . . . . . . . . . . . . . . . . . 93
5.3 Serie de Fourier en forma trigonometrica . . . . . . . . . . . . . . . . . . . . . 94
5.3.1 Casos particulares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.4 Ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.5 Ejercicios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103

CONTENTS iii
II Hojas de problemas 111Hoja 1.Tema1. Sucesiones y Series numericas . . . . . . . . . . . . . . . . . . . . . . 113
Hoja 1.1.Tema1. Ej. Complementarios. Sucesiones y Series numericas . . . . . . . . . 115
Hoja 2.Tema2. Senales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Hoja 3.Tema2. Derivadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
Hoja 4.Tema2. Aplicaciones de derivadas . . . . . . . . . . . . . . . . . . . . . . . . 133
Hoja 5.Tema3. Primitivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Hoja 6.Tema3. Integrales indefinidas . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Hoja 7.Tema3. Integrales definidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Hoja 8.Tema3. Aplicaciones de la Integral . . . . . . . . . . . . . . . . . . . . . . . . 145
Hoja 9.Tema3. Convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
Hoja 10.Tema4. Transformada de Laplace. Propiedades . . . . . . . . . . . . . . . . . 161
Hoja 11.Tema4. Laplace.Ecuaciones.Diferenciales . . . . . . . . . . . . . . . . . . . 167
Hoja 12.Tema5. Series de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176


Teorıa


Sucesiones y series numericas
1.1 Sucesiones
La teorıa de series numericas es una rama del calculo, ademas de la del calculo integral y diferen-
cial. Las series numericas le dan una nueva perspectiva interesante tanto al concepto de funciones
como al de numero.
Mostraremos dos ejemplos. El primero ejemplo tiene que ver con la funcion exponencial:
ex = 1 + x+x2
2!+x3
3!+x4
4!+ · · ·
y el segundo tiene que ver con la serie de Gregory-Leibniz
π = 1− 1
3+
1
5− 1
7+
1
9− · · ·
En el primer ejemplo vemos como la funcion exponencial puede expresarse como un “poli-
nomio infinito”, y el segundo revela que el numero π se relaciona con los recıprocos de los
numeros enteros impares de un modo inesperado.
Para entender las series numericas, tenemos que definir exactamente lo que significa sumar
infinitamente muchos terminos. Para ello, los lımites desempenan un papel fundamental aquı,
como lo hacen en el calculo integral y diferencial.
Las sucesiones de numeros aparecen en situaciones muy diversas. Por ejemplo, si partimos
una tarta por la mitad, y luego partimos por la mitad la mitad restante y segimos partiendo por
la mitad indefinidamente (pizarra), entonces la fraccion de pastel restante en cada paso forma la
secuencia
1,1
2,
1
4,
1
8, . . .
Esta es la secuencia de valores de la funcion f(n) = 12n para n = 0, 1, 2, . . . .
Definicion 1.1.1. Formalmente, una sucesion es una coleccion de numeros definidos a traves
de una funcion f(n) sobre un conjunto de numeros enteros.

4 Sucesiones y series numericas
Los valores
an = f(n)
se llaman los terminos de la sucesion, y n se llama el ındice.
Informalmente, vemos a la sucesion (an) como una lista de numeros:
a1, a2, a3, a4, . . .
Ademas cuando an viene dada por una formula, llamaremos a an el termino general o
n-esimo de la sucesion.
Evidentemente al ser una secuencia infinita, nos podemos plantear si dicha sucesion de nume-
ros converge o diverge (no converge).
Definicion 1.1.2. Se dice que una sucesion (an) es convergente (y decimos que converge a L)
si podemos acercar tanto como queramos los terminos an a L sin mas que elegir n suficientemente
grande.
Al numero L se le denomina lımite de la sucesion.
Si la sucesion (an) no es convergente se dice que es divergente.
Observacion 1.1.1. La notacion matematica es la siguiente:
limn→∞
an = L.
Un tipo de lımite que necesitaremos conocer es el lımite comunmente denominado lımite tipo
numero E:
prop:numE Resultado 1.1.1. Sean (an) y (bn) don secuencias numericas tales que an → 1, y bn → ∞,
entones si existe el lımite
limn→∞
(an − 1)bn = L
podemos decir que
limn→∞
(an)bn = eL.
A continuacion indicaremos una serie de propiedades que cumplen las series de numeros
reales convergentes:
1. El lımite de una sucesion convergente es unico.
2. Toda sucesion monotona creciente y acotada superiormente es convergente, i.e.
an < an+1, y an < S para todo n ⇒ an → L.
3. Toda sucesion monotona decreciente y acotada inferiormente es convergente, i.e.
an > an+1, y I < an para todo n ⇒ an → L.
4. Toda sucesion convergente esta acotada.
5. Algebra de lımites: Si (an) y (bn) son convergentes, con an → L1 y bn → L2, entonces
an + bn → L1 + L2, an − bn → L1 − L2, anbn → L1L2,anbn
→ L1
L2.
Observacion 1.1.2. Este ultimo es posible solo si L2 6= 0.

1.1 Sucesiones 5
6. Regla del sandwitch: Si (an) y (bn) son convergentes al mismo lımite L, entonces si ten-
emos otra sucesion (cn) tal que
an ≤ cn ≤ bn ⇒ cn → L.
A continuacion mostramos una serie de ejemplos que pueden ayudar a entender el concepto.
Ejemplo 1.1.1. La secuencia
1, 2, 3, 4, · · ·es una sucesion numerica donde, por ejemplo, a9 = 9, y en general podemos decir que el termino
general es an = n. Esta sucesion es divergente pues si tomamos un n grande, an es grande. Por
tanto, an → ∞ es divergente.
Ejemplo 1.1.2. La secuencia
4, 8, 16, 32, · · ·es una sucesion numerica donde sabemos como debe continuar, multiplicando por dos el ultimo
elemento, y continuar sucesivamente. Hacer este proceso es, basicamente, definir los terminos
de la sucesion de forma recurrence, de hecho, en este caso obtener a9 es algo mas complicado,
pero serıa a9 = 210, y en general podemos decir que el termino general es an = 2 · 2n = 2n+1.
Esta sucesion es divergente pues si tomamos un n grande, an es grande. Por tanto, an → ∞ es
divergente.
Ejemplo 1.1.3. La secuencia
1,−1, 1,−1, · · ·es una sucesion numerica donde sabemos como debe continuar, cambiando de signo el ultimo
elemento, y continuar sucesivamente. En este caso obtener a9 = 1. Obtener el ternmino an puede
ser algo complicado, es an = (−1)n. Esta sucesion es divergente pues no converge. En este caso
an no tiende a infinito, pero tampoco podemos decir que tienda a un valor especıfico. Por tanto,
an es divergente.
Ejemplo 1.1.4. La sucesion
an =(−1)n
n2, → −1,
1
4,−1
9,
1
16, . . .
es convergente, es sencillo ver numericamente que an → 0. Por tanto, an → 0.
Observacion 1.1.3. En clase tambien hemos hablado sobre los lımites que dan lugar a indeter-
minaciones, a continuacion mostramos los casos mas relevantes:
• Suma y lımites infinitos: Si tenemos que limx→a
f(x) = A y limx→a
g(x) = B son L, +∞ o −∞entonces lim
x→a(f + g)(x) = C.
B\A L +∞ −∞+∞ +∞ +∞ IND.
−∞ −∞ IND. −∞
• Producto y lımites infinitos: limx→a
f(x) = A y limx→a
g(x) = B son L, +∞ o −∞ entonces
limx→a
(f g)(x) = C.
B\A 0 L 6= 0 +∞ −∞+∞ IND. signo(L)∞ +∞ −∞−∞ IND. −signo(L)∞ −∞ +∞

6 Sucesiones y series numericas
• Cociente y lımites infinitos: limx→a
f(x) = A y limx→a
g(x) = B son L, +∞ o −∞ entonces
limx→a
f(x)
g(x)= C.
B\A L +∞ −∞+∞ 0 IND. IND.
−∞ 0 IND. IND.
Otro resultado que podemos utilizar cuando aparezca en las expresiones matematicas el sım-
bolo n! que se define como
0! = 1, n! = 1 · 2 · 3 · · ·n,al que llamaremos n factorial, o factorial de n, es la formula de Stirling.
prop:Stir Resultado 1.1.2. Cuando n es grande, podemos reemplazar
n! ∼√2πnnn e−n.
1.2 Series numericas 7
1.2 Series numericas
El calculo se divide fundamentalmente, en parte por motivos historicos, en dos ramas, diferencial
e integral. Este crecio sobre todo en el siglo XVII tratando de resolver dos problemas geometricos
importantes: El primero el descubrimiento de las lıneas tangente a curvas (calculo diferencial) y
el de calcular el area que encierra una curva (integral).
Sin embargo, el calculo en si mismo no tiene unos lımites claros. Incluye entre otros temas, la
teorıa de la series infinitas, y tiene una amplia gama de aplicaciones extraordinarias.
Veremos como los lımites permiten que se puedan realizar determinados calculos y uno pueda
resolver problemas que no se pueden resolver usando unicamente el algebra lineal.
En este capıtulo se introduce el concepto de series numericas con coeficientes reales y posi-
tivos.
Definicion 1.2.1. Dada una sucesion de numeros reales y positivos (an), i.e. una sucesion
numerica de termino general an ≥ 0. Generamos una nueva sucesion de valores
sm =m∑
n=1
an.
Es decir, que
s1 = a1
s2 = a1 + s2
s3 = a1 + a2 + a3
. . . . . .
A sn lo llamaremos suma parcial m-esima de la serie
S =∞∑
n=1
an.
Observacion 1.2.1. Por definicion se tiene que sm es una sucesion de numeros reales creciente.
Esta expresion formal tomada en sentido estricto nos “anima” a calcular la suma de los infinitos
terminos, tarea imposible si consideramos todos para luego obtener la suma. De ahı que este
proceso se evite en la mayorıa de los casos en este curso.
Ex:1.2.1 Ejemplo 1.2.1. Un ejemplo de serie que si que podemos, y debemos saber, sumar es la serie
geomerica cuyo termino general es de la forma an = crn, conde c es una constante, y r se
denomina razon.
Dicha serie se escribe de la forma∞∑
n=0
crn.
Convergencia: Solo cuando −1 < r < 1 esta se puede sumar siendo
∞∑
n=0
crn =c
1− r.
Cuando r ≤ −1 o r ≥ 1 dicha serie diverge.

8 Sucesiones y series numericas
Observacion 1.2.2. En este curso solo se consideraran series cuyos terminos generales sean
positivos, es decir, an ≥ 0. Teniendo esto presente, la serie geometrica es convergente para
0 ≤ r < 1.
Ademas hay que tener especial cuidado a la hora de calcular dichas series pues en ocasiones
sumaremos mas o menos terminos. Por ejemplo si 0 ≤ r < 1, entonces
∞∑
n=1
crn = cr + cr2 + cr3 + · · · = c r
1− c,
∞∑
n=7
crn = cr7 + cr8 + cr9 + · · · = c r7
1− c.
Observacion 1.2.3. Como se puede ver en estos casos comenzamos a sumar desde el termino
cr = a1 y en el segundo sumamos a partir del termino a7 = cr7.
El primer resultado importante que debemos tener en cuenta es el siguiente:
Resultado 1.2.1. Si la serie que consideremos es convergente, i.e.
∞∑
n=1
an <∞
entonces
limn→∞
an = 0.
Observacion 1.2.4. Este resultado suele utilizarse en la siguiente forma:
Si limn→∞
an 6= 0 entonces
∞∑
n=1
an = ∞.
De hecho, que el lımite sea cero no quiere decir que la serie considerada converja, o no.
El siguiente resultado es de la misma forma que en analogo al de sucesiones, muy intuitivo.
Resultado 1.2.2. Si tenemos dos series convergentes, digamos que
∞∑
n=1
an = A,∞∑
n=1
bn = B,
y c es un numero real no nula, entonces
∞∑
n=1
c an = cA,∞∑
n=1
c (an + bn) = A+B, y
∞∑
n=1
c (an − bn) = A−B.
Otra serie muy importante que necesitamos para poder demostrar la convergencia o divergen-
cia de una gran variedad de series numericas son las series armonicas de ındice p
∞∑
n=1
1
np,
de la cuales sabemos que es convergente para p > 1, y divergente para p ≤ 1.
De hecho algunos ejemplos son muy evidentes.
1.2 Series numericas 9
Ejemplo 1.2.2. Los casos p < 0 son muy claros. Por ejemplo, si p = −1 tenemos la serie
∞∑
n=1
1
n−1=
∞∑
n=1
n,
de hecho
sm =m∑
n=1
n =m(m+ 1)
2→ ∞ m→ ∞.
Y si p = −2 tenemos la serie∞∑
n=1
1
n−2=
∞∑
n=1
n2,
de hecho
sm =m∑
n=1
n2 =m(m+ 1)(2m+ 1)
6→ ∞ m→ ∞.
Definicion 1.2.2. La serie de ındice p = 1 se llama serie armonica
∞∑
n=1
1
n= 1 +
1
2+
1
3+ · · · .
Teniendo este resultado en mente, vamos a considerar dos resultados que nos permiten deducir
la convergencia de cierto tipo de series empleando las series armonicas.
Resultado 1.2.3. (Criterio de comparacion)
Si tenemos dos series numericas de terminos positivos
∞∑
n=1
an,∞∑
n=1
bn,
tales que para cada n, an ≤ bn, entonces
• Si
∞∑
n=1
an diverge, entonces
∞∑
n=1
bn diverge.
• Si
∞∑
n=1
bn converge, entonces
∞∑
n=1
an converge.
Resultado 1.2.4. (Criterio de comparacion por paso al lımite)
Si tenemos dos series numericas de terminos positivos
∞∑
n=1
an,∞∑
n=1
bn,
tales que
limn→∞
anbn
= c ∈ (0,∞).
Entonces
• Si
∞∑
n=1
an diverge, entonces
∞∑
n=1
bn diverge.

10 Sucesiones y series numericas
• Si
∞∑
n=1
bn converge, entonces
∞∑
n=1
an converge.
Ejemplo 1.2.3. Queremos saber si la serie
∞∑
n=1
3√n− 4
√n
n2 +√n
es convergente o divergente.
En este caso, es sencillo ver que el termino dominante del termino general es
an =3√n− 4
√n
n2 +√n
∼3√n
n2=
1
n2−1/3= bn.
A dicho factor dominante generalmente lo tomaremos como bn, y dado que
limn→∞
anbn
= 1,
y la serie con termino general bn es una serie armonica de ındice p = 2− 1/3 > 1, entonces
∞∑
n=1
bn <∞ entonces
∞∑
n=1
3√n− 4
√n
n2 +√n<∞.
De hecho hay un criterio que nos permite saber cuando las series numericas similares a las del
ejemplo son o no convergentes, dicho criterio es el siguiente:
Resultado 1.2.5. (Criterio de Prinsgheim)
Dada una serie numerica de terminos positivos
∞∑
n=1
an,
Si podemos encontrar un valor p tal que
• Si p ≤ 1 y limn→∞
npan <∞, entonces la serie
∞∑
n=1
an diverge.
• Si p > 1 y limn→∞
npan <∞, entonces la serie
∞∑
n=1
an converge.
Pero hay series numericas que no se pueden clasificar facilmente y necesitamos dar criterios
lo mas generales posibles que nos permitan saber si dichas series son o no convergentes. Demos
algunos de ellos.
Resultado 1.2.6. (Criterio del cociente)
Dada una serie numerica de terminos positivos
∞∑
n=1
an,
tal que
limn→∞
an+1
an= c.
Entonces

1.2 Series numericas 11
• Si c < 1, entonces
∞∑
n=1
an converge.
• Si c > 1, entonces
∞∑
n=1
an diverge.
• Si c = 1, entonces el criterio no decide.
Resultado 1.2.7. (Criterio de la raız)
Dada una serie numerica de terminos positivos
∞∑
n=1
an,
tal que
limn→∞
n√an = c.
Entonces
• Si c < 1, entonces
∞∑
n=1
an converge.
• Si c > 1, entonces
∞∑
n=1
an diverge.
• Si c = 1, entonces el criterio no decide.
Observacion 1.2.5. Si aplicamos uno de estos criterios y no decide, no debemos aplicar el otro
pues para cantidades positivas ambos lımites siempre coinciden.
Resultado 1.2.8. (Criterio de Raabe)
Dada una serie numerica de terminos positivos
∞∑
n=1
an,
tal que
limn→∞
n
(
1− an+1
an
)
= c.
Entonces
• Si c > 1, entonces
∞∑
n=1
an converge.
• Si c < 1, entonces
∞∑
n=1
an diverge.
• Si c = 1, entonces el criterio no decide.

12 Sucesiones y series numericas
Resultado 1.2.9. (Criterio del logaritmo)
Dada una serie numerica de terminos positivos
∞∑
n=1
an,
tal que
limn→∞
log(1/an)
log n= c.
Entonces
• Si c > 1, entonces
∞∑
n=1
an converge.
• Si c < 1, entonces
∞∑
n=1
an diverge.
• Si c = 1, entonces el criterio no decide.
Aun nos queda el criterio de la integral que mencionaremos cuando tratemos el tema del
calculo integral.
Con todo lo visto hasta el momento, podemos establecer el siguiente esquema para estudiar la
convergencia de una serie numerica arbitraria.
1. ¿ limn→∞
an = 0? Si no es ası, la serie es divergente.
2. ¿Es una serie de terminos positivos? Si lo es:
i. ¿Es una serie geometrica o una serie armonica de ındice p? Si lo es, se aplica el
resultado de convergencia/divergencia correspondiente.
ii. ¿Es una serie comparable directamente o en el lımite con una geometrica o una serie
armonica de ındice p? Si lo es, se aplica el criterio correspondiente.
3. ¿Se le puede aplicar el criterio del cociente, de la raız? Si alguno es concluyente se aplica.
4. ¿Se le puede aplicar el criterio de Raabe o del logaritmo? Si alguno es concluyente se aplica.
Observacion 1.2.6. Generalmente si se aplica este esquema y no se llega a una conclusion suele
deberse a que nuestra serie numerica es comparable con una serie armonica y deberıamos aplicar
el criterio de Pringsheim.
A continuacion consideraremos 4 ejemplos que consideramos interesantes y recomendamos
que se traten de seguir en detalle.
Ejemplo 1.2.4. Analizar la convergencia de la serie
∞∑
n=1
nn
n!.
En este caso dado que
an =nn
n!=n · n · n · · ·n1 · 2 · 3 . . . n → ∞,

1.2 Series numericas 13
por tanto la serie no converge pues el termino general no tiende a 0.
A pesar de que sabemos que no converge, apliquemos el metodo del cociente y veamos que
obtenemos el mismo resultado:
an+1
an=
(n+1)n+1
(n+1)!nn
n!
=(n+ 1)n+1n!
nn(n+ 1)!=
(n+ 1)n+1
nn(n+ 1)=
(n+ 1)n
nn=
(
n+ 1
n
)n
→ e > 1
por tanto, segun el criterio del cociente la serie es divergente.
Tambien podrıamos aplicar el criterio de la raız pero para ello necesitamos utilizar el Resul-
tadoprop:Stir1.1.2. Solo si eres experimentado o no has sido capaz de entender los criterios anteriores se
recomienda realizar el problema de esta manera. Consulta a tu profesor si tienes mucho interes
en entender este caso.
Ejemplo 1.2.5. Estudiamos la convergencia de la serie numerica
∞∑
n=1
(2n− 1)n
(n2 + 4)n2 .
En este caso el lımite de an es algo mas complejo. Vamos a centrarnos en los factores dominantes
de las bases de las potencias que nos encontramos
an =(2n− 1)n
(n2 + 4)n2 ∼ (2n)n
(n2)n2 → 0,
por tanto no podemos deducir que converga o no.
A continuacion aplicamos el criterio del cociente:
an+1
an=
(2(n+1)−1)(n+1)
((n+1)2+4)(n+1)2
(2n−1)n
(n2+4)n2
=(2(n+ 1)− 1)(n+1)(n2 + 4)n
2
(2n− 1)n((n+ 1)2 + 4)(n+1)2,
desarrollamos y nos queda
an+1
an=
(2n+ 1)n+1(n2 + 4)n2
(2n− 1)n(n2 + 2n+ 5)n2+2n+1.
De nuevo observamos la parte dominante, solo centrandonos en las bases, los exponentes no los
cambiamos,
an+1
an∼ (2n)n+1(n2)n
2
(2n)n(n2)n2+2n+1=
2n
(n2)2n+1→ 0 < 1
por tanto dicha serie numerica converge.
Observacion 1.2.7. Recordad que podeis utilizar la herramienta de Wolfram alpha para obtener
el resultado de muchos de los problemas, en este caso habrıa que indicar
sum ((2n-1)ˆn)/((nˆ2+4)ˆ(nˆ2))
Ejemplo 1.2.6. Analizar la convergencia de la serie
∞∑
n=1
n!
nn.

14 Sucesiones y series numericas
En este caso dado que
an =n!
nn=
1 · 2 · 3 . . . nn · n · n · · ·n → 0,
por tanto no podemos decidir si la serie converge o no.
Apliquemos el metodo del cociente:
an+1
an=
(n+1)!(n+1)n+1
n!nn
=nn(n+ 1)!
(n+ 1)n+1n!=
nn(n+ 1)
(n+ 1)n+1=
nn
(n+ 1)n=
(
n
n+ 1
)n
→ e−1 < 1
por tanto, segun el criterio del cociente la serie es convergente.
Observacion 1.2.8. Para ver que dicho lımite es e−1 se ha utilizado el Resultadoprop:numE1.1.1 y, en
general, operar con cuidado.
El ultimo ejemplo planteamos una serie que no se puede decidir empleando el criterio del
cociente, pero si por el de Raabe. Esto es poco frecuente.
Ejemplo 1.2.7. Dados dos numeros positivos a y b, se quiere saber bajo que condiciones de a y bla serie numerica converge o diverge:
∞∑
n=1
a(a+ 1)(a+ 2) · · · (a+ n)
b(b+ 1)(b+ 2) · · · (b+ n).
En primer lugar comprobar si an tiende a 0 o no cuando n tiende a infinito es bastante complejo
y se evitara.
Si aplicamos el criterio del cociente obtenemos
an+1
an=
a(a+1)(a+2)···(a+n)(a+n+1)b(b+1)(b+2)···(b+n)(b+n+1)
a(a+1)(a+2)···(a+n)b(b+1)(b+2)···(b+n)
=a+ n+ 1
b+ n+ 1≈ 1,
por tanto no decide.
Mientras que si aplicamos el criterio de Raabe, se tiene que
n
(
1− an+1
an
)
= n
(
1− a+ n+ 1
b+ n+ 1
)
= nb− a
b+ n+ 1→ b− a,
por tanto podemos deducir que
• Si b− a > 1 entonces la serie es convergente,
• Si b− a < 1 entonces la serie es divergente,
• Si b− a = 1 (i.e. b = a+1), en principio el criterio no decide. Pero, si pasa esto, entonces
∞∑
n=1
a(a+ 1)(a+ 2) · · · (a+ n)
b(b+ 1)(b+ 2) · · · (b+ n)
b=a+1=
∞∑
n=1
a
a+ n+ 1= ∞,
ya que dicha serie es comparable con la serie armonica de ındice p = 1, que sabemos que
es divergente.
Los ultimos dos ejemplos estan asociados a los numeros factoriales:

1.2 Series numericas 15
Ejemplo 1.2.8. Estudia la convergencia o no de la serie numerica
∞∑
n=1
(2n)!
n2.
En este caso el comprobar si an tiende o no a cero es algo complejo, por eso nos vamos al criterio
del cociente:
an+1
an=
(2(n+1))!(n+1)2
(2n)!n2
=(2n+ 2)!n2
(2n)!(n+ 1)2=
(2n+ 2)(2n+ 1)n2
(n+ 1)2≈ 2n · 2n · n2
n2→ ∞ > 1,
por tanto la serie diverge.
Ejemplo 1.2.9. Estudia la convergencia o no de la serie numerica
∞∑
n=1
82n
(3n)!.
De nuevo, en este caso el comprobar si an tiende o no a cero es algo complejo, por eso nos vamos
al criterio del cociente:
an+1
an=
82(n+1)
(3(n+1))!
82n
(3n)!
=82n+2(3n)!
(3n+ 3)!82n=
82
(3n+ 3)(3n+ 2)(3n+ 1)≈ 82
3n · 3n · 3n → 0 < 1,
por tanto la serie converge.
Para finalizar el tema consideraremos otro tipo de series que, generalmente, son comparables
con series armonicas y que son sumables cuando son convergentes.
Series Telescopicas
Lo vamos a ver con un ejemplo ilustrativo. Queremos analizar la convergencia de la serie
∞∑
n=1
3n
(n+ 1)(n+ 2)(n+ 3).
Para ello, lo primero que es evidente es que an → 0, de hecho vemos que, fijandonos en los
terminos dominantes,
an =3n
(n+ 1)(n+ 2)(n+ 3)∼ 3n
n3=
3
n2= bn.
Por tanto llamando bn a dicho factor dominante vemos que si aplicamos el criterio de comparacion
por paso al lımite, se tiene que
limn→∞
anbn
= 1,
y dado que la serie asociada a bn es la serie armonica de ındice p = 2 que es convergente, tenemos
que la serie que nos dan es convergente tambien. Pero la sorpresa es que dicha serie es sumable.
Veamoslo:
Primero tomaremos an y al ser una funcion racional en n vamos a descomponerla en
fracciones simples. Esto es, expresarla como suma de fracciones mas sencillas, de hecho,
an =3n
(n+ 1)(n+ 2)(n+ 3)=
A
n+ 1+
B
n+ 2+
C
n+ 3.

16 Sucesiones y series numericas
Podemos ademas calcular A, B y C comparando ambas fracciones, y obtenemos que
A = −3
2, B = 6, C = −9
2,
y no es una casualidad que A + B + C = 0, de hecho es gracias a que esto sucede que dicha
serie puede sumarse. Si utilizamos dicha descomposicion y comenzamos a escribir los primeros
terminos veremos que se dan unas cancelaciones
∞∑
n=1
3n
(n+ 1)(n+ 2)(n+ 3)=
∞∑
n=1
(
− 3
2(n+ 1)+
6
n+ 2− 9
2(n+ 3)
)
=
(
−3
4+
6
3−9
8
)
+
(
−3
6+
6
4− 9
10
)
+
(
−3
8+
6
5− 9
12
)
+
(
− 3
10+
6
6− 9
14
)
+
(
− 3
12+
6
7− 9
16
)
+ · · ·
De forma que los elementos coloreados del mismo color se van cancelando de forma indefinida,
siendo el resultado de la serie los primeros terminos que no se cancelan, en este caso
∞∑
n=1
3n
(n+ 1)(n+ 2)(n+ 3)= −3
4+
6
3− 3
6=
3
4.
Se pueden encontrar mas ejemplos de este tipo en la web de Khan academy (version
inglesa) en la seccion de calculus.

Senales. Funciones y derivadas
Comenzaremos introduciendo conceptos generales de funciones que es probable que se conozcan
del bachillerato.
En caso contrario se recomienda acudir a la bibliografıa recomendada en la guıa docente de la
asignatura o hablar con tu profesor de la asignatura.
Una funcion, llamemosla f , sobre un dominio D ⊂ R es una correspondencia por la que
a cada numero real x de D se le asocia uno unico de R. Una funcion suele representarse de la
forma
f : D → R,
donde y = f(x) suele denominarse imagen de x bajo la accion de f .
De hecho, denominaremos por dominio de la funcion f al conjunto:
Domf = x ∈ R tal que existe y ∈ R con y = f(x).
Por otro lado, llamaremos rango, o imagen, de la funccion f al conjunto:
Imf = y ∈ R tal que existe x ∈ R con y = f(x).
La grafica de la funcion f se define como el conjunto de R2:
G(f) = (x, y) ∈ R2 tal que y = f(x).
Observacion 2.0.1. • Si tenemos una curva en el plano, esta puede ser la grafica de una
funcion si y solo si cada recta vertical (paralela al eje y) corta a la curva, como mucho, en
un punto.
• El dominio de una funcion es la proyeccion ortogonal de su grafica sobre el eje x.
• El rango de una funcion es la proyeccion ortogonal de su grafica sobre el eje y.
• Las coordenadas cartesianas se usan por ejemplo para definir un sistema carte-
siano o sistema de referencia respecto uno, o mas ejes, perpendiculares entre sı (plano y

18 Senales. Funciones y derivadas
espacio), que se cortan en un punto llamado origen de coordenadas. En el plano,
las coordenadas cartesianas se denominan abscisa y ordenada.
La abscisa es la coordenada horizontal y se representa habitualmente por la letra x, mien-
tras que la ordenada es la coordenada vertical y se representa por la y.
2.1 Operaciones con funciones y tipos de funciones
Dadas dos funciones f, g : R → R, definimos las siguientes funciones:
• Suma de funciones: (f + g)(x) = f(x) + g(x).El dominio de la funcion f + g es la interseccion de los dominios de f y de g, i.e.
Dom(f + g) = Dom(f) ∩ Dom(g).
• Producto de dos funciones: (fg)(x) = f(x)g(x).El dominio de la funcion f × g es la interseccion de los dominios de f y de g, i.e.
Dom(f + g) = Dom(f) ∩ Dom(g).
• Composicion de dos funciones: (g f)(x) = g(f(x)).Dicha funcion existe para los valores de x ∈Dom(f) para los que f(x) ∈Dom (g).
A continuacion describiremos los tipos de funciones que consideraremos.
• Dada una funcion f : R → R, diremos que una funcion es par si
f(−x) = f(x), para todo x ∈ Dom(f),
y se denomina impar si
f(−x) = −f(x), para todo x ∈ Dom(f).
Observacion 2.1.1. Desde el punto matematico dichas definiciones son claras pero para
el perfil de la ingenierıa conviene indicar que dichos tipos pueden observarse de forma
sencilla. Digamos que una funcion es par si la grafica es simetrica con respecto al eje
vertical (y). Y una funcion es impar si al girar la grafica 180 grados, la grafica que
resulta es la misma.
Ejemplo 2.1.1. La funcion sen(x) es una funcion es impar, y la funcion cos(x) es par.
• Dada una funcion f : R → R, diremos que es periodica si podemos encontrar un valor real
T (al que denominaremos periodo) tal que
f(x+ T ) = f(x), para todo x ∈ Dom(f).
El menor valor T que satisface la condicion anterior se denomina periodo fundamental de
la funcion.
Dichos tipos de funciones se utilizaran muy a menudo durante el grado. Ademas debemos conocer
el concepto de funcion elemental, entre las que hay describamos algunas de estas:
• Una funcion constante es de la forma f(x) = c, donde c es un numero real. Su dominio
es R y su imagen es c.

2.1 Operaciones con funciones y tipos de funciones 19
• Una funcion lineal es de la forma f(x) = mx, donde m 6= 0 es una constant real.
Dicha funcion tiene como dominio y rango R, y su grafica es una recta que pasa por el
origen y tiene pendiente m. Ademas, si m > 0 la funcion es estrictamente creciente y si
m < 0 la funcion es estrictamente decreciente.
• Las funciones polinomicas son de la forma
f(x) = anxn + an−1x
n−1 + · · ·+ a2x2 + a1x+ a0,
donde n es un numero natural y denota el grado del polinomio. El dominio de los poli-
nomios es R, y el rango depende de cada caso. Ademas llamaremos cero del polinomio a
los valores x0 tales que f(x0) = 0, i.e. los puntos de la grafica que cortan al eje horizontal.
Observacion 2.1.2. Cualquier polinomio de grado n tiene n ceros donde algunos son reales
y otros son complejos. De hecho, si el grado del polinomio es impar como mınimo tiene un
cero real.
• Una funcion racional se define mediante el cociente de dos funciones polinomiales
p(x) y q(x), i.e.,
f(x) =p(x)
q(x).
El dominio de f es R excepto en los ceros de q(x), i.e. donde q(x) = 0. Los ceros del
polinomio denominador suelen llamarse polos de f .
• La funcion signo se define de la forma:
sgn(x) =
1 si x > 0,0 si x = 0,−1 si x < 0.
(2.1)
donde el dominio es R, y su imagen es el conjunto 0, 1,−1.
• La funcion valor absoluto se define de la forma:
|x| =
x si x > 0,−x si x < 0.
(2.2)
De hecho, en general, la funcion valor absoluto se define como
x(t) = |f(t)| =
f(t) si f(t) > 0,−f(t) si f(t) < 0.
(2.3)
Observacion 2.1.3. Esta funcion aparece a menudo y debemos saber cuando es positiva o nega-
tiva, viendo cuando vale 0, y analizando el signo de la funcion en las distintas zonas del eje de
abscisas donde f(t) = 0.
Ex:2.1.2 Ejemplo 2.1.2. Representar la funcion x(t) = |t2 − 2t| y expresarla como funcion definida a
trozos. Representaremos en azul la parabola, en rojo la funcion x(t).

20 Senales. Funciones y derivadas
t
x(t)
−2 −1 1 2 3 4
2
−1
4
6
8
Como vemos en la zona amarilla la funcion t2 − 2t es negativa, por eso x(t) se ha cambiado de
signo en esa zona, ası
x(t) =
t2 − 2t, si t < 0−t2 + 2t, si 0 < t < 2t2 − 2t, si t > 2
Un conjunto de funciones elementales muy relevantes qur todo ingeniero deberıa
conocer exhaustivamente son las funciones trigonometricas.
• La funcion seno: f(t) = sen t tiene como dominio R y su rango es [−1, 1]. Ademas,
es una funcion impar, f(−x) = −f(x). La grafica es simetrica respecto del origen, y es
una funcion periodica de periodo fundamental 2π, es decir, f(t+ 2π) = f(t) para todo t.
Su funcion inversa es y = arcsen (t), su dominio es [−1, 1] y su imagen es [−π2 ,
π2 ]. De
hecho,
arcsen(sen(t)) = t, sen(arcsen(t)) = t.
t
sen t
−1.5π −π −0.5π 0.5π π 1.5π 2π 2.5π
1
−1
t
arcsen t
−1 1
−π
2
π
2
• la funcion coseno: f(t) = cos t tiene como dominio R y su rango es [−1, 1]. Ademas,
es una funcion par, f(−x) = f(x), es decir, si giramos la grafica 180 grados, la grafica
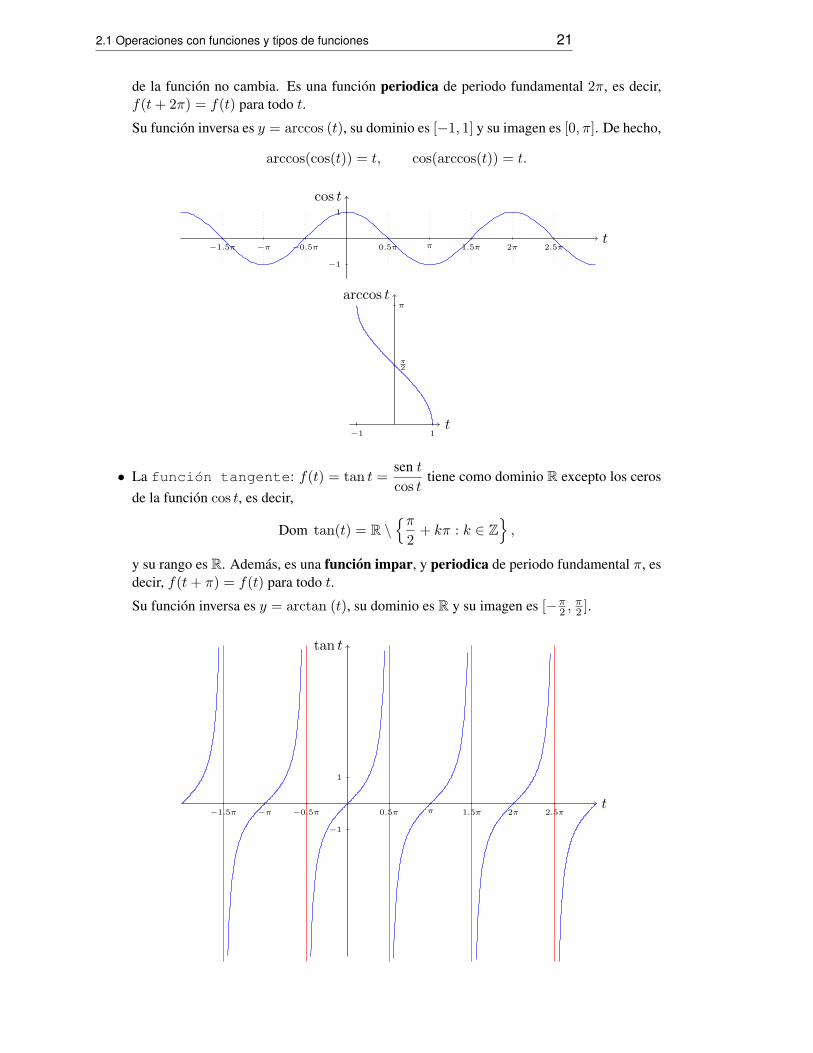
2.1 Operaciones con funciones y tipos de funciones 21
de la funcion no cambia. Es una funcion periodica de periodo fundamental 2π, es decir,
f(t+ 2π) = f(t) para todo t.
Su funcion inversa es y = arccos (t), su dominio es [−1, 1] y su imagen es [0, π]. De hecho,
arccos(cos(t)) = t, cos(arccos(t)) = t.
t
cos t
−1.5π −π −0.5π 0.5π π 1.5π 2π 2.5π
1
−1
t
arccos t
−1 1
π
2
π
• La funcion tangente: f(t) = tan t =sen t
cos ttiene como dominio R excepto los ceros
de la funcion cos t, es decir,
Dom tan(t) = R \π
2+ kπ : k ∈ Z
,
y su rango es R. Ademas, es una funcion impar, y periodica de periodo fundamental π, es
decir, f(t+ π) = f(t) para todo t.
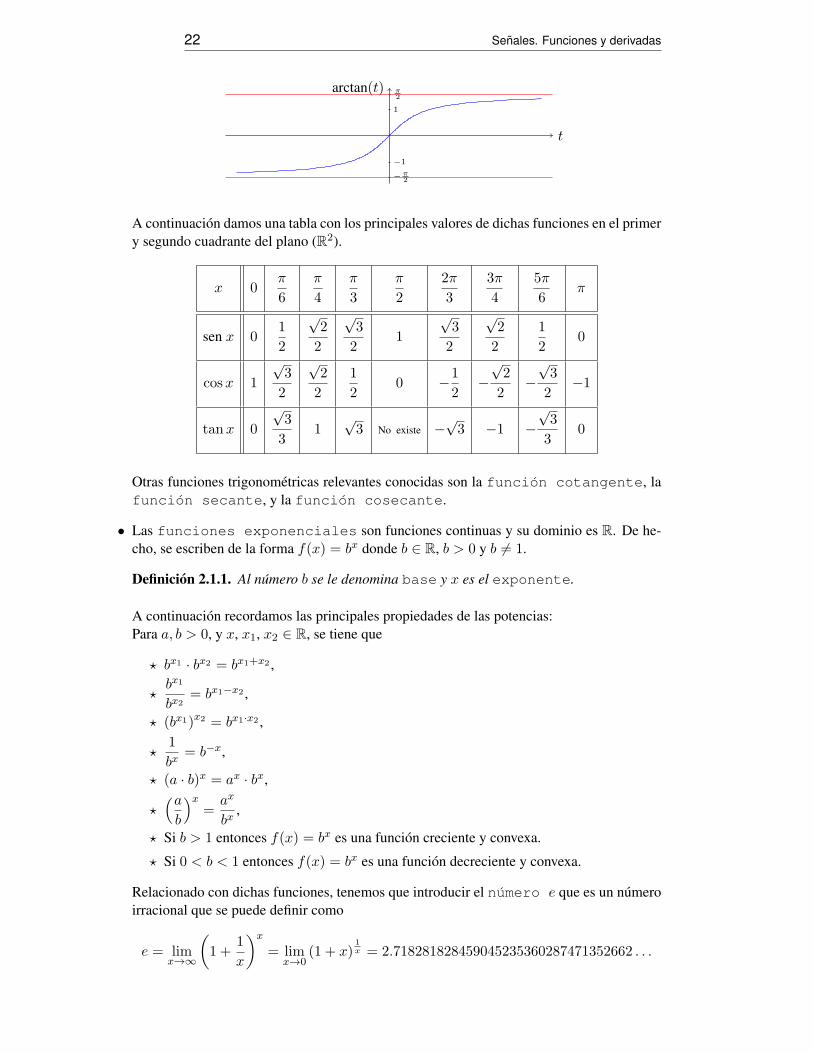
Su funcion inversa es y = arctan (t), su dominio es R y su imagen es [−π2 ,
π2 ].
t
tan t
−1.5π −π −0.5π 0.5π π 1.5π 2π 2.5π
1
−1
22 Senales. Funciones y derivadas
t
arctan(t)
1
−1
−π
2
π
2
A continuacion damos una tabla con los principales valores de dichas funciones en el primer
y segundo cuadrante del plano (R2).
x 0π
6
π
4
π
3
π
2
2π
3
3π
4
5π
6π
sen x 01
2
√2
2
√3
21
√3
2
√2
2
1
20
cosx 1
√3
2
√2
2
1
20 −1
2−√2
2−√3
2−1
tanx 0
√3
31
√3 No existe −
√3 −1 −
√3
30
Otras funciones trigonometricas relevantes conocidas son la funcion cotangente, la
funcion secante, y la funcion cosecante.
• Las funciones exponenciales son funciones continuas y su dominio es R. De he-
cho, se escriben de la forma f(x) = bx donde b ∈ R, b > 0 y b 6= 1.
Definicion 2.1.1. Al numero b se le denomina base y x es el exponente.
A continuacion recordamos las principales propiedades de las potencias:
Para a, b > 0, y x, x1, x2 ∈ R, se tiene que
⋆ bx1 · bx2 = bx1+x2 ,
⋆bx1
bx2= bx1−x2 ,
⋆ (bx1)x2 = bx1·x2 ,
⋆1
bx= b−x,
⋆ (a · b)x = ax · bx,
⋆(a
b
)x=ax
bx,
⋆ Si b > 1 entonces f(x) = bx es una funcion creciente y convexa.
⋆ Si 0 < b < 1 entonces f(x) = bx es una funcion decreciente y convexa.
Relacionado con dichas funciones, tenemos que introducir el numero e que es un numero
irracional que se puede definir como
e = limx→∞
(
1 +1
x
)x
= limx→0
(1 + x)1x = 2.718281828459045235360287471352662 . . .
2.1 Operaciones con funciones y tipos de funciones 23
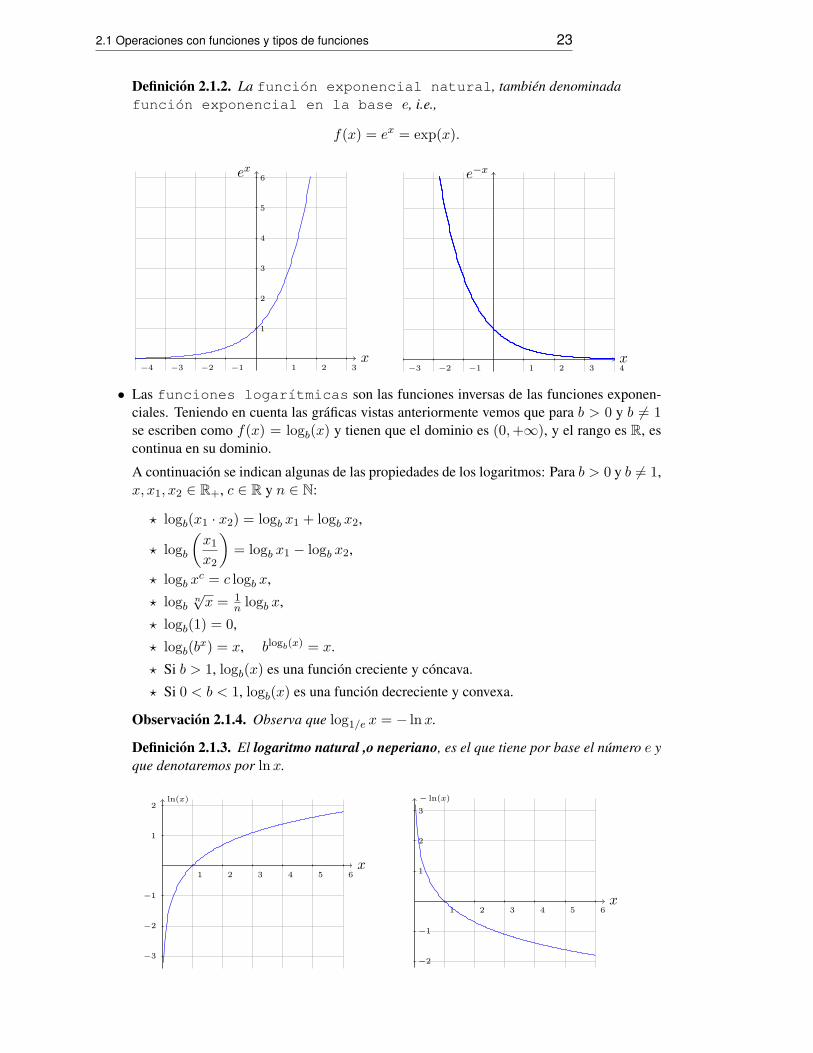
Definicion 2.1.2. La funcion exponencial natural, tambien denominada
funcion exponencial en la base e, i.e.,
f(x) = ex = exp(x).
x
ex
1−1 2 3−4 −2−3
1
2
3
4
5
6
x
e−x
1−1 2 3 4−2−3
• Las funciones logarıtmicas son las funciones inversas de las funciones exponen-
ciales. Teniendo en cuenta las graficas vistas anteriormente vemos que para b > 0 y b 6= 1se escriben como f(x) = logb(x) y tienen que el dominio es (0,+∞), y el rango es R, es
continua en su dominio.
A continuacion se indican algunas de las propiedades de los logaritmos: Para b > 0 y b 6= 1,
x, x1, x2 ∈ R+, c ∈ R y n ∈ N:
⋆ logb(x1 · x2) = logb x1 + logb x2,
⋆ logb
(
x1x2
)
= logb x1 − logb x2,
⋆ logb xc = c logb x,
⋆ logbn√x = 1
n logb x,
⋆ logb(1) = 0,
⋆ logb(bx) = x, blogb(x) = x.
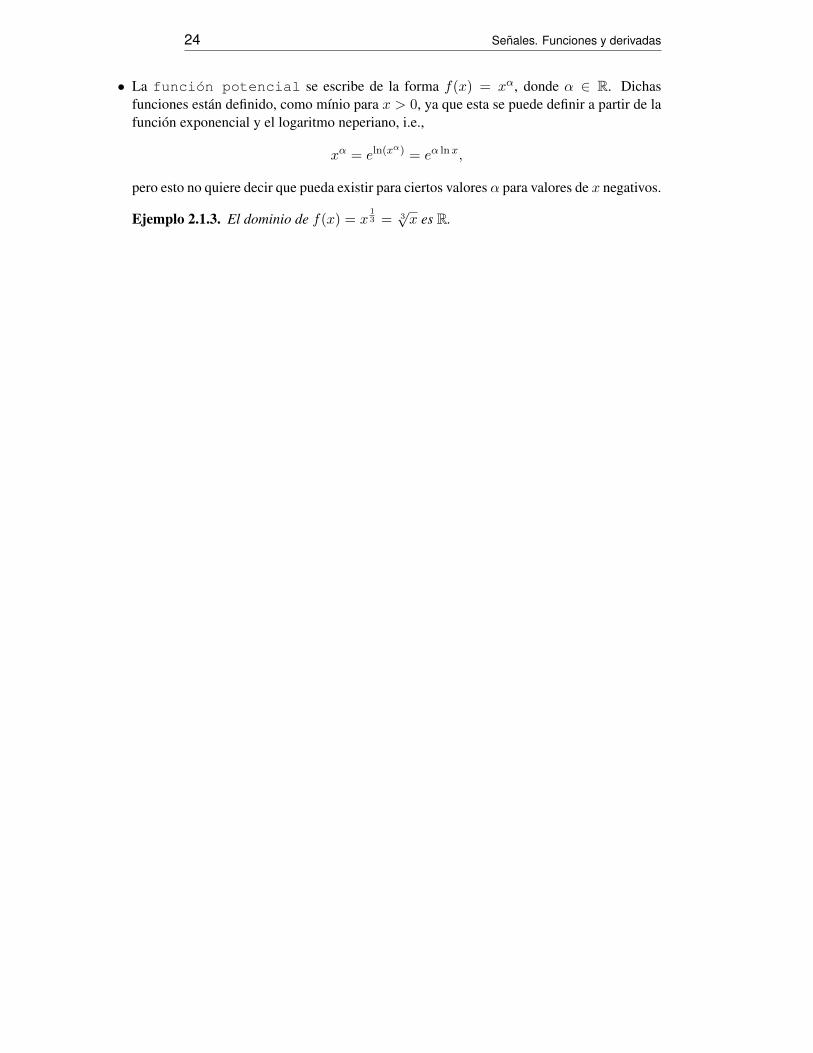
⋆ Si b > 1, logb(x) es una funcion creciente y concava.
⋆ Si 0 < b < 1, logb(x) es una funcion decreciente y convexa.
Observacion 2.1.4. Observa que log1/e x = − lnx.
Definicion 2.1.3. El logaritmo natural ,o neperiano, es el que tiene por base el numero e y
que denotaremos por lnx.
x
ln(x)
1 2 3 4 5 6
1
2
−1
−2
−3
x
− ln(x)
1 2 3 4 5 6
1
2
3
−1
−2
24 Senales. Funciones y derivadas
• La funcion potencial se escribe de la forma f(x) = xα, donde α ∈ R. Dichas
funciones estan definido, como mınio para x > 0, ya que esta se puede definir a partir de la
funcion exponencial y el logaritmo neperiano, i.e.,
xα = eln(xα) = eα lnx,
pero esto no quiere decir que pueda existir para ciertos valores α para valores de x negativos.
Ejemplo 2.1.3. El dominio de f(x) = x13 = 3
√x es R.
2.2 Senales en tiempo continuo y tiempo discreto 25
2.2 Senales en tiempo continuo y tiempo discreto
2.2.1 Introduccion
Una parte esencial del trabajo de los cientıficos e ingenieros es la obtencion y procesamiento de
informacion sobre los objetos que estudian. Esa informacion se codifica en muchos casos en forma
numerica o en alguna otra clase de representacion simbolica (una funcion, un algoritmo, etc.), para
poder aplicar las matematicas al proceso de manipulacion de esa informacion.
En cualquier caso, la representacion de la informacion mediante numeros plantea el problema
de escoger el sistema de numeros mas conveniente dentro de los que nos ofrecen las matematicas.
Para nuestros fines en este curso hay tres sistemas de numeros que resultan especialmente
importantes:
1. los numeros enteros, Z; es decir 0, ±1, ±2, · · ·
2. los numeros reales, R.
3. los numeros complejos, C.
Una magnitud se considera discreta cuando la forma mas adecuada de representar sus
posibles valores es usando los numeros enteros. Por ejemplo, la temperatura.
Por el contrario, una magnitud se considera continua cuando la forma mas adecuada de
representarla es empleando los numeros reales.
Puesto que los numeros reales incluyen a los enteros, i.e., Z ⊆ R, podrıa pensarse que es mas
sencillo pensar en todas las variables como continuas. Pero en muchos casos lo unico que se con-
sigue ası es complicar las cosas. Por ejemplo, una de las magnitudes que aparecen constantemente
en nuestros problemas es el tiempo (emplearemos la variable t para denominar a esta magnitud).
En muchos problemas de la fısica se representa el tiempo mediante una variable t de tipo con-
tinuo, que puede tomar cualquier valor real. Pero hay otros casos en los que las magnitudes que
intervienen se describen mejor pensando solo en valores enteros del tiempo. La variable tiempo se
considera por tanto continua en aquellos problemas en los que en principio se necesita (o se puede
y es conveniente) considerar intervalos de tiempo arbitrariamente pequenos. Por el contrario, en
muchos otros problemas (en especial en el ambito de los sistemas digitales) existe una unidad
basica e indivisible de tiempo, que caracteriza al sistema, y no se necesita (o no se puede) consid-
erar otros valores de la variable tiempo que no sean los instantes t = · · · ,−3,−2,−1, 0, 1, 2, . . .En este ultimo caso hablamos de problemas en tiempo discreto.
En este curso vamos a concentrarnos en los problemas en tiempo continuo. Trataremos, eso sı,
de proporcionar informacion sobre los problemas en tiempo discreto para que se pueda apreciar
los paralelismos entre ambas teorıas.
Por ejemplo, las matematicas que se utilizan en ambas teorıas son distintas, pero tienen simil-
itudes en cuanto al papel que juega cada herramienta. Ası en tiempo discreto aparecen las suce-
siones, series, ecuaciones en diferencias, transformada Z, · · · mientras que en tiempo continuo
aparecen las funciones, integrales, ecuaciones diferenciales, transformada de Laplace. Se iran
conociendo estas herramientas en las pr’oximas sesiones.
Pero, ¿Que es una senal?
Una senal es una funcion de la variable tiempo. En matematicas es habitual usar la notacion
y = f(x)
para las funciones y sus variables. Pero en teorıa de la senal es mas comun la notacion x = f(t) o
incluso
x = x(t).

26 Senales. Funciones y derivadas
En este curso usaremos habitualmente sobre todo esta ultima notacion, pero a veces aparecera la
otra. Ası que hay que tener cuidado para no confundirse, aunque normalmente el contexto nos
ayudara a identificar las variables dependientes e independientes.
Segun que el tiempo se considere continuo o discreto hablaremos de senales en tiempo
continuo o senales en tiempo discreto. De momento trabajaremos con senales en
tiempo continuo.
A continuacion mostramos la notacion que se suele emplear en los diferentes grados para las
senales:
(1) x : A ⊆ R → R
t→ x(t)
(2) x : A ⊆ Z → R
n→ x[n]
t
x(t)
1 2 3 4 5
n
x[n]
1 2 3 4 5
En el caso (1) la senal se dice que es
de tiempo contınuo y en el caso (2)
es de tiempo discreto.
Se suelen denotar las funciones con
letras minusculas: x, y, z, f , g, . . .
La variable independiente sera t.
2.2.2 transformacion de senales
• Transformaciones que afectan al tiempo: Se producen sobre la variable independiente y
por tanto cambian la base de la senal, pero nunca su ‘altura’. Estas parecen ir “al contrario”
de lo que resultarıa intuitivo, ası que es necesario analizarlas y aprenderlas con detenimiento:
1. Desplazamiento o traslacion (en el tiempo)
Antes de calcular el resultado de la senal, sumamos a t una constante (a la que lla-
maremos t0):
y(t) = x(t+ t0).
Resultando que:
– Si t0 > 0 se desplaza hacia la izquierda, pues como −t0 cumple que
x(−t0 + t0) = x(0),
−t0 es el valor para el que la nueva senal vale lo que valıa la senal original en el
punto 0.
– Si t0 = 0 no ocurre nada.
– Si t0 < 0 entonces se desplaza hacia la derecha.
Observacion 2.2.1. El resultado del desplazamiento le resulta contraintuitivo a
mucha gente, porque piensa que si t0 es positivo (esta a la derecha del 0), la
grafica deberıa moverse hacia la derecha. Para solucionarlo basta con usar un
signo menos: la senal x(t − t0) se desplaza hacia t0 tanto cuando es positivo
como cuando es negativo.
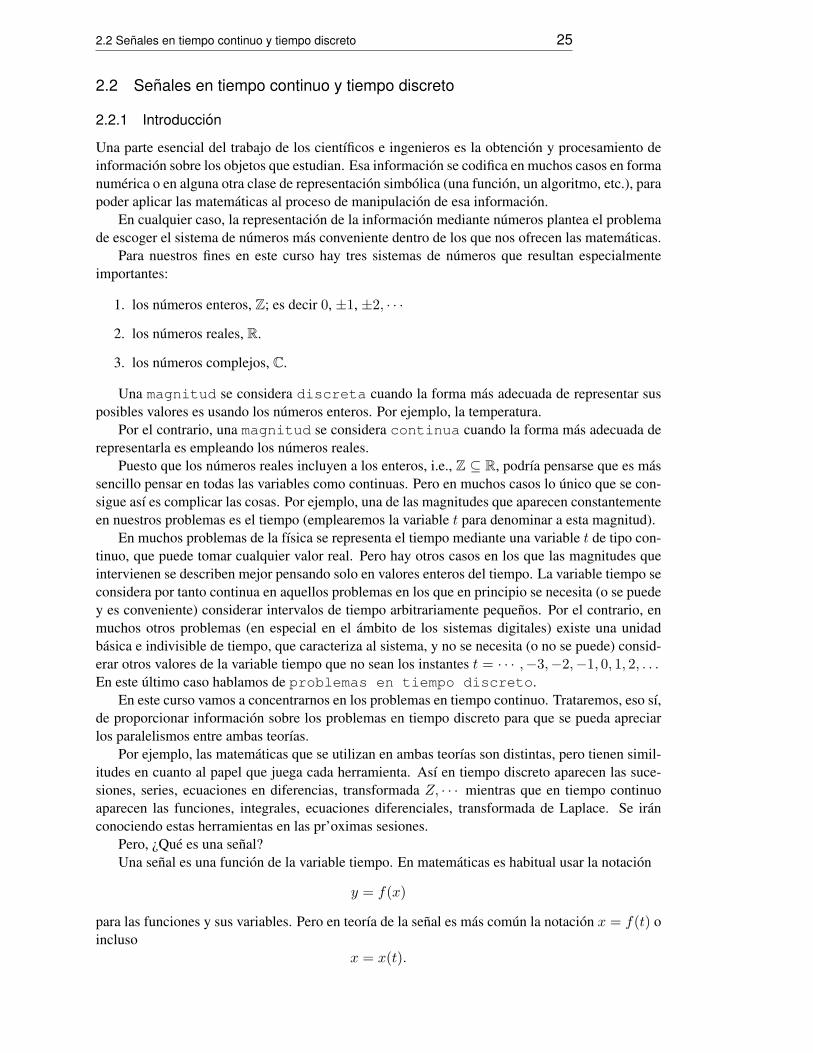
Ejemplo 2.2.1. Consideremos la senal x(t) = t, 0 < t < 1. Nos piden representar la
senal y(t) = x(t− 1) = t− 1.
Lo primero es que ahora el dominio sera 1 < t < 2, ademas las graficas de las senales
consideras son
2.2 Senales en tiempo continuo y tiempo discreto 27
t
x(t) = t
1
1
t
y(t) = t− 1
1 2
1
2. Escalado (en el tiempo):
Antes de calcular el resultado de la senal, multiplicamos t por una constante positiva
(llamemosla k), i.e.,
y(t) = x(kt).
El resultado sera el siguiente:
– Si k > 1 la senal se hace mas estrecha manteniendo la altura, es decir, la senal se
comprime.
Esto se debe a que x(t) = y(t/k), por lo que si x tiene su dominio entre a y b,entonces y tiene su dominio entre a/k y b/k, y al ser k > 1 dicho dominio se
reduce.
– Si k = 1 no ocurre nada.
– Si 0 < k < 1 la senal se hace mas ancha manteniendo la altura, es decir, se
expande.
Se puede pensar en k como en un factor que afecta directamente a la frecuencia.
Por ejemplo, x(2t) es una senal “dos veces mas rapida” que x(t).
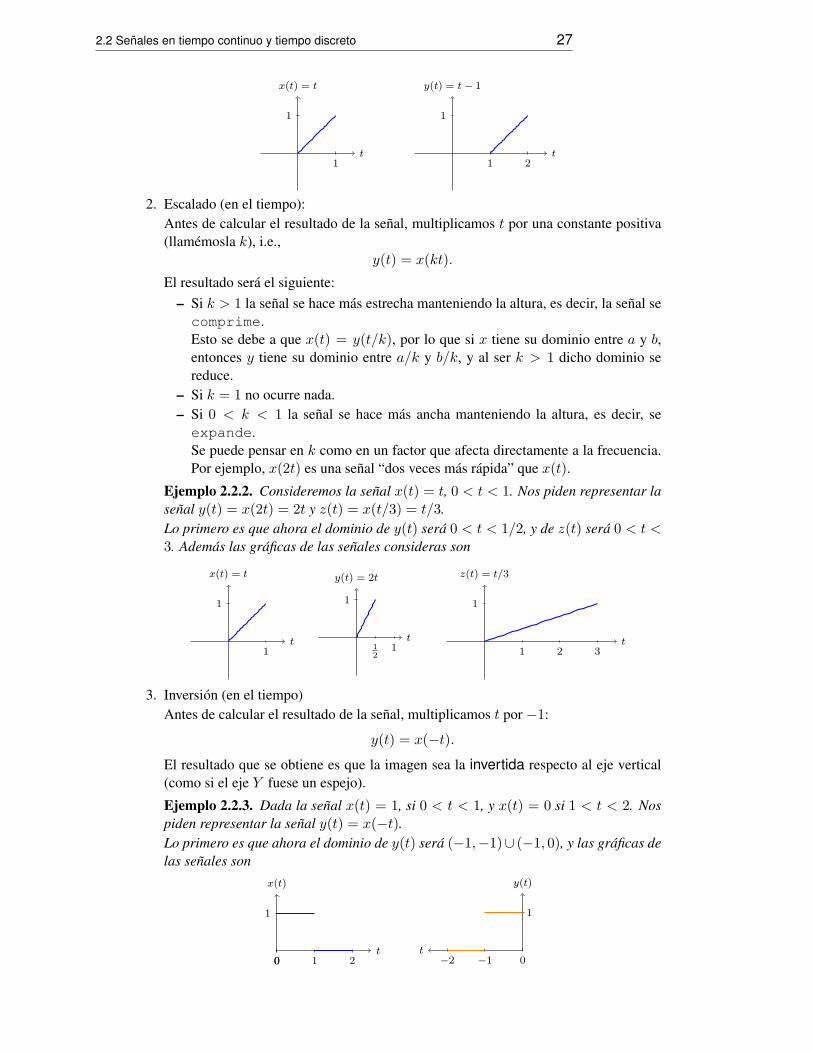
Ejemplo 2.2.2. Consideremos la senal x(t) = t, 0 < t < 1. Nos piden representar la
senal y(t) = x(2t) = 2t y z(t) = x(t/3) = t/3.
Lo primero es que ahora el dominio de y(t) sera 0 < t < 1/2, y de z(t) sera 0 < t <3. Ademas las graficas de las senales consideras son
t
x(t) = t
1
1
t
y(t) = 2t
112
1
t
z(t) = t/3
1 2 3
1
3. Inversion (en el tiempo)
Antes de calcular el resultado de la senal, multiplicamos t por −1:
y(t) = x(−t).El resultado que se obtiene es que la imagen sea la invertida respecto al eje vertical
(como si el eje Y fuese un espejo).
Ejemplo 2.2.3. Dada la senal x(t) = 1, si 0 < t < 1, y x(t) = 0 si 1 < t < 2. Nos
piden representar la senal y(t) = x(−t).Lo primero es que ahora el dominio de y(t) sera (−1,−1)∪ (−1, 0), y las graficas de
las senales son
t
x(t)
00 1 2
1
t
y(t)
0−1−2
1
28 Senales. Funciones y derivadas
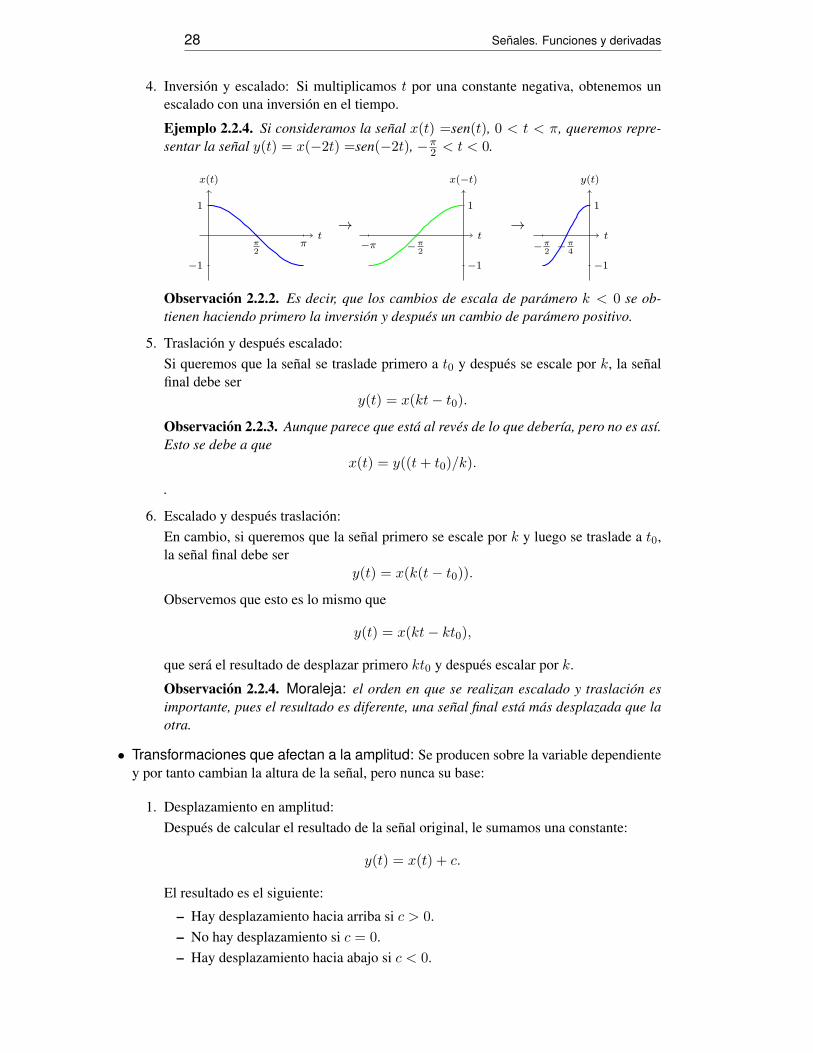
4. Inversion y escalado: Si multiplicamos t por una constante negativa, obtenemos un
escalado con una inversion en el tiempo.
Ejemplo 2.2.4. Si consideramos la senal x(t) =sen(t), 0 < t < π, queremos repre-
sentar la senal y(t) = x(−2t) =sen(−2t), −π2 < t < 0.
t
x(t)
ππ2
1
−1
→t
x(−t)
−π −π2
1
−1
→t
y(t)
−π2
−π4
1
−1
Observacion 2.2.2. Es decir, que los cambios de escala de paramero k < 0 se ob-
tienen haciendo primero la inversion y despues un cambio de paramero positivo.
5. Traslacion y despues escalado:
Si queremos que la senal se traslade primero a t0 y despues se escale por k, la senal
final debe ser
y(t) = x(kt− t0).
Observacion 2.2.3. Aunque parece que esta al reves de lo que deberıa, pero no es ası.
Esto se debe a que
x(t) = y((t+ t0)/k).
.
6. Escalado y despues traslacion:
En cambio, si queremos que la senal primero se escale por k y luego se traslade a t0,
la senal final debe ser
y(t) = x(k(t− t0)).
Observemos que esto es lo mismo que
y(t) = x(kt− kt0),
que sera el resultado de desplazar primero kt0 y despues escalar por k.
Observacion 2.2.4. Moraleja: el orden en que se realizan escalado y traslacion es
importante, pues el resultado es diferente, una senal final esta mas desplazada que la
otra.
• Transformaciones que afectan a la amplitud: Se producen sobre la variable dependiente
y por tanto cambian la altura de la senal, pero nunca su base:
1. Desplazamiento en amplitud:
Despues de calcular el resultado de la senal original, le sumamos una constante:
y(t) = x(t) + c.
El resultado es el siguiente:
– Hay desplazamiento hacia arriba si c > 0.
– No hay desplazamiento si c = 0.
– Hay desplazamiento hacia abajo si c < 0.

2.2 Senales en tiempo continuo y tiempo discreto 29
Por tanto, si y = x(t)− c, entonces el desplazamiento es hacia abajo si c > 0 y hacia
arriba si c < 0.
2. Amplificacion o atenuacion:
Tras calcular el resultado de la senal original, lo multiplicamos por una constante pos-
itiva k:
y(t) = kx(t)
. El resultado es el siguiente:
– Aumento de la altura (tamano) si k > 1 (amplificacion).
– Sin cambio si k = 1.
– Disminucion de la altura si k < 1 (atenuacion).
Cuando se envıa una senal a distancia mediante ondas (por ejemplo, en telefonıa movil
o en radio) o mediante cables, se atenua de manera natural debido a la distancia y a los
obstaculos que atraviesa.
Observacion 2.2.5. Es importante amplificar las senales en envıo, en el camino y/o
en recepcion, para que puedan ser detectadas con un mınimo de calidad.
3. Inversion en amplitud:
Tras calcular el resultado de la senal original, lo multiplicamos por −1:
y(t) = −x(t).
Ası el resultado que se consigue es la imagen invertida con respecto al eje horizontal
(como si el eje X fuese un espejo).
4. Amplificacion o atenuacion con inversion:
Despues de calcular el resultado de la senal original, lo multiplicamos por una con-
stante negativa. Como esto es lo mismo que multiplicarla primero por una constante
positiva y luego cambiarle el signo, se produce primero una amplificacion, o aten-
uacion, y luego una inversion en amplitud (o viceversa; en este caso da lo mismo, pero
para otras transformaciones el orden es importante).
2.2.3 Senales especiales
• Escalon unidad o funcion heaviside: u(t) Es una funcion que vale 0 para val-
ores de t < 0, y 1 para valores de t > 0, es decir:
u(t) =
0,, si t < 0
1,, si t > 0t
u(t)
1
• Escalon trasladado: u(t − t0) Es una funcion que vale 0 para valores de t < t0, y
1 para valores de t > t0, es decir:
u(t− t0) =
0, t < t0
1, t > t0 tt0
x(t)
1

30 Senales. Funciones y derivadas
• senal pulso: Si tomamos dos valores t0 < t1, se define el pulso de intervalo [t0, t1] a
la senal:
u(t− t0)− u(t− t1) =
0, t < t0
1, t0 < t < t1
0, t1 < t.t
x(t)
t0 t1
1
• Parte par de una senal: Dada una senal x(t), se define la parte par de x(t) como
Parx(t) =x(t) + x(−t)
2.
Esta funcion nueva es par, es decir, simetrica respecto al eje vertical.
• Parte impar de una senal: Dada una senal x(t), se define la parte impar de x(t)como
Imparx(t) =x(t)− x(−t)
2.
Esta funcion nueva es impar, es decir, al girarla 180 grados, se obtiene la misma funcion.
Es importante destacar que
Parx(t)+ Imparx(t) = x(t),
es decir es una forma de descomponer una senal en dos donde cada una tiene un tipo de simetrıa.
Se realizaran diversos ejercicios en los que se trabajaran todos estos tipos de transformaciones.
Algunas de las consecuencias de todo lo visto antes en este capıtulo es la siguiente:
1. x(t) = f(t)u(t− t0) senal definida a la derecha de t0, i.e.
x(t) =
0, t < t0f(t), t > t0
Una senal de la forma x(t) = f(t)u(t) se denomina senal causal.
2. x(t) = f(t)u(t0 − t) senal definida a la izquierda de t0, i.e.
x(t) =
f(t), t < t00, t > t0
3. x(t) = f(t) (u(t− t0)− u(t− t1)) senal definida entre t0 y t1, i.e.
x(t) =
f(t), t0 < t < t10, fuera de (t0, t1)
Observacion 2.2.6. Toda senal definida a trozos se puede escribir como suma de estas senales
elementales.
Este tipo de expresiones nos ayudan a expresar de una forma “cerrada” funciones a trozos en
terminos de funciones escalon.
De hecho, cualquier senal definida a trozos puede escribirse, en lugar de mediante llaves, medi-
ante multiplicaciones por senales escalon, que llevan implıcita la informacion sobre los intervalos
que definen los trozos.
2.2 Senales en tiempo continuo y tiempo discreto 31
Observacion 2.2.7. Si recordamos el EjemploEx:2.1.22.1.2 en este caso para escribir x(t) = |t2 − 2t|
como suma de funciones salto, se tiene que
x(t) = (t2 − 2t)u(−t)− (t2 − 2t)(
u(t)− u(t− 2))
+ (t2 − 2t)u(t− 2).
Si lo queremos todo como suma de saltos a la derecha, entonces dado que
u(−t) = 1− u(t),
entonces
x(t) = t2 − 2t− 2(t2 − 2t)u(t) + 2(t2 − 2t)u(t− 2).
Este tipo de descomposicion se desarrollara de forma intensa en las sesiones de problemas.
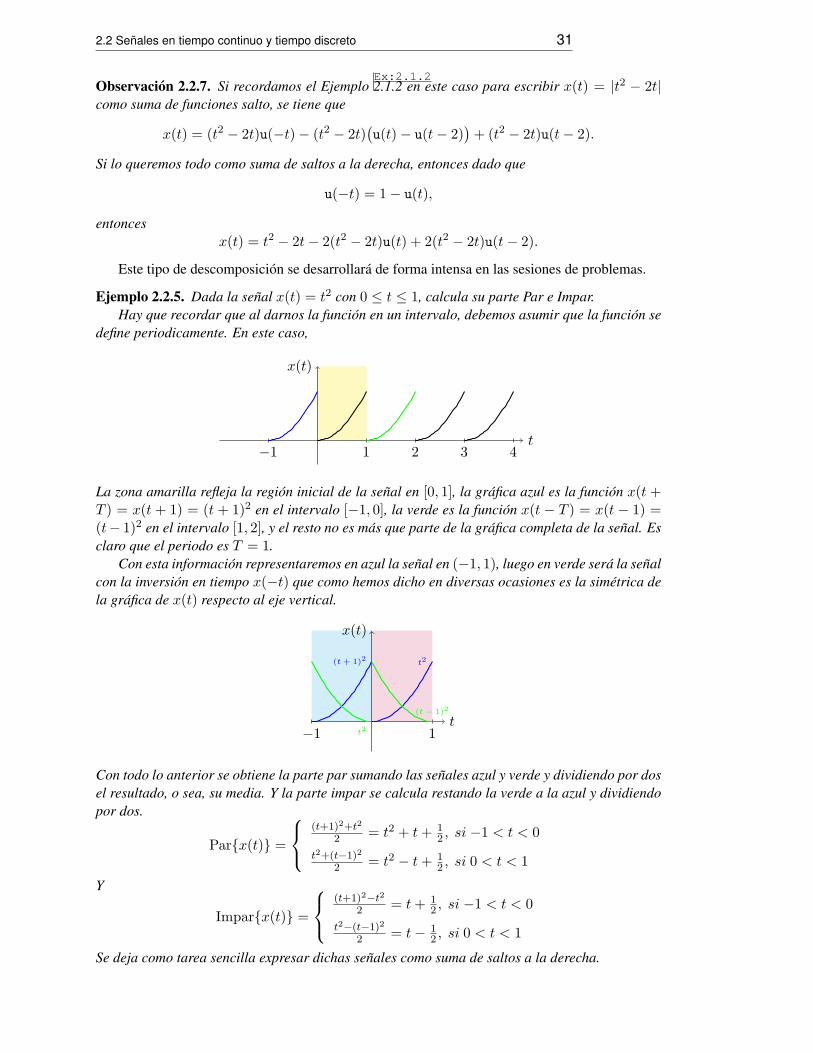
Ejemplo 2.2.5. Dada la senal x(t) = t2 con 0 ≤ t ≤ 1, calcula su parte Par e Impar.
Hay que recordar que al darnos la funcion en un intervalo, debemos asumir que la funcion se
define periodicamente. En este caso,
t
x(t)
−1 1 2 3 4
La zona amarilla refleja la region inicial de la senal en [0, 1], la grafica azul es la funcion x(t +T ) = x(t + 1) = (t + 1)2 en el intervalo [−1, 0], la verde es la funcion x(t − T ) = x(t − 1) =(t− 1)2 en el intervalo [1, 2], y el resto no es mas que parte de la grafica completa de la senal. Es
claro que el periodo es T = 1.
Con esta informacion representaremos en azul la senal en (−1, 1), luego en verde sera la senal
con la inversion en tiempo x(−t) que como hemos dicho en diversas ocasiones es la simetrica de
la grafica de x(t) respecto al eje vertical.
t
x(t)
−1 1
(t + 1)2 t2
t2
(t − 1)2
Con todo lo anterior se obtiene la parte par sumando las senales azul y verde y dividiendo por dos
el resultado, o sea, su media. Y la parte impar se calcula restando la verde a la azul y dividiendo
por dos.
Parx(t) =
(t+1)2+t2
2 = t2 + t+ 12 , si −1 < t < 0
t2+(t−1)2
2 = t2 − t+ 12 , si 0 < t < 1
Y
Imparx(t) =
(t+1)2−t2
2 = t+ 12 , si −1 < t < 0
t2−(t−1)2
2 = t− 12 , si 0 < t < 1
Se deja como tarea sencilla expresar dichas senales como suma de saltos a la derecha.

32 Senales. Funciones y derivadas
Ejemplo 2.2.6. Expresar como suma de senales salto la senal
x(t) = Impar|t+ 1|, 0 < t < 4.
Observacion 2.2.8. Tenemos que tener presente que esta senal es la ‘semilla‘ de la senal completa
que consiste en repetir periodicamente esta semilla.
Primero vamos a representarla de una forma similar a la anterior (en gris fina representare-
mos t + 1, que coincide con la azul). Viendo el dibujo queda claro que la senal tiene periodo
T = 4.
t
x(t)
−1 1−2−3−4 2 3 4
−1
1
−2
2
3
4
5t + 5 t + 1−t + 5−t + 1
t + 2 t − 2
La ventana de color ‘cyan’ refleja donde se pide la senal en ciertas ocasiones, es decir en
(−T/2, T/2). En morado aparece la senal impar que se pide, que es
x(t) =
(t+ 1)− (−t+ 5)
2= t− 2, si 0 < t < 2
(t+ 5)− (−t+ 1)
2= t+ 2, si −2 < t < 0
Expresar la senal como suma de senales salto a la derecha se deja como tarea.

2.2 Senales en tiempo continuo y tiempo discreto 33
2.2.4 Senales periodicas
Un tipo de senales con el que se van a utilizar a menudo son los senales periodicas.
Definicion 2.2.1. Una senal x(t) se dira que es periodica si existe un numero T (al cual llamare-
mos periodo) tal que:
x(t) = x(t+ T )
para todos los valores de la variable t.Al menor valor positivo T con esta propiedad se llama periodo fundamental de la
senal y se indica a menudo con T0.
t
f(t)
t1 t1 + Tt1 − Tt1 − 2T
T
Donde observamos que los parametros fundamentales son:
• Ciclo: patron que se retipe a lo largo del tiempo.
• Periodo T : tiempo que tarda en repetirse el patron.
• Periodo fundamental T0: tiempo mınimo que tarda en repetirse el patron (funda-
mental). De hecho, por ejemplo, si T0 es el fundamental, tambien es un periodo T = 3T0pero este nuevo periodo no es el mınimo. De hecho, hay que tener en cuenta que las unidades
de tiempo se miden en s (segundos).
• Frecuencia: f = 1/T , que es el numero de veces que se repite el patron en un segundo.
Las unidades de la frecuencia tiene como unidades 1/s =Hz (hertzios).
Resultado 2.2.1. (Periodo de la suma de senales periodicas)
Si tenemos dos senales periodicas x1(t) y x2(t) con periodos T1 y T2 entonces, si x1(t) + x2(t)es una senal periodica, y se tiene que
T1T2
=m
n∈ Q irreducible,
se tiene que x1 + x2 tiene periodo T = nT1 = mT2.
Vamos a construir senales periodicas cada vez mas complicadas y para hacerlo partiremos de
algunos bloques fundamentales y los iremos manipulando para combinarlos.
Fundamentalmente es necesario conocer las funciones sinuosidales. Dichas funciones son
• y(t) = A0sen(ωt+ φ),
• y(t) = A0 cos(ωt+ φ),
donde los parametros son el valor de pico (A0), la pulsacion (ω), cuyas unidades son
rad/s, y la fase inicial (φ), cuyas unidades son rad.
A continuacion representemos ambas funciones simultaneamente:

34 Senales. Funciones y derivadas
y(t) = A0 sen ωt t
y(t) = A0 cosωt t
Por tanto, podemos decir que las funciones seno y coseno son funciones periodicas, que su
periodo satisface la identidad:
ωT = 2π −→ T =2π
ω.
y que, viendo dichas graficas, tras una aplicacion de una fase inicial ambas funciones son esen-
cialmente la misma. De hecho,
• sen(ωt) = cos(
ωt+ π2
)
,
• cos(ωt) = sen(
ωt− π2
)
.
Veamos cual es el efecto de la fase inicial en ambas senales:
y(t) = A0 sen(
ωt+ π4
)
t
y(t) = A0 sen(
ωt− π4
)
t
y(t) = A0 sen ωt t
Por tanto, si φ < 0, la senal se retrasa; mientras que si φ > 0, la senal se adelanta.
Teniendo en cuenta lo anterior, si nos dan una senal (seno) con cierta fase inicial, ¿como
calcularla?
t
y(t) = A0 sen(ωt+ φ)
φ
T
4
T
2
3T
4T
y(t) = A0 sen ωt
t0

2.2 Senales en tiempo continuo y tiempo discreto 35
Luego si t0 es la posicion del cruce con el eje t en sentido ascendente, es decir, es el primer
cero negativo de la funcion, entonces.
φ = −2πt0T[rad].
De la misma forma podemos hacer con las funciones coseno:
t
y(t) = A0 sen(ωt+ φ)
φ
T
4
T
2
3T
4T
y(t) = A0 cosωt
t0
Luego si t0 es la posicion deprimer maximo, entonces.
φ = −2πt0T[rad].
2.2.5 Trigonometrıa
Una funcion muy relevante en los grados de ingenierıas es la funcion exponencial compleja. De
hecho, una identidad muy importante que se utilizara en diversas asignaturas por su conexion con
la trigonometrıa es es la identidad de Euler:
ejt = cos(t) + jsen(t), t ∈ C, j2 = −1.
De hecho, teniendo en cuenta esta identidad se tiene que si tomamos t = A+B, entonces
(cos(A+B)+jsen(A+B) = ej(A+B) = ejAejB =(
(cos(A)+jsen(A))(
(cos(B)+jsen(B))
.
Igualando las parte real e imaginaria obtenemos
cos(A+B) = cos(A) cos(B)− sen(A)sen(B),
sen(A+B) = sen(A) cos(B) + cos(A)sen(B).
Con estas dos formulas tenemos que
tan(A+B) =sen(A+B)
cos(A+B)=
tan(A) + tan(B)
1− tan(A) tan(B).
Ahora bien, teniendo en cuenta que la funcion seno es impar, y que la funcion coseno es par,
entonces obtenemos formulas algo mas generales:
cos(A±B) = cos(A) cos(B)∓ sen(A)sen(B),
sen(A±B) = sen(A) cos(B)± cos(A)sen(B).
y
tan(A±B) =tan(A)± tan(B)
1∓ tan(A) tan(B).

36 Senales. Funciones y derivadas
Teniendo en cuenta estas ultimas podemos obtener las formulas trigonometricas del angulo doble
tomando A = B, siendo
cos(2A) = cos2(A)− sen2(A) = 1− 2sen2(A) = 2 cos2(A)− 1,
sen(2A) = 2sen(A) cos(A),
tan(2A) =2 tan(A)
1− tan2(A).
Y apartir de estas las formuas trigonometricas del angulo mitad:
cos(A/2) =
√
1 + cos(A)
2,
sen(A/2) =
√
1− cos(A)
2,
tan(A/2) =tan(A)
1 +√
1 + tan2(A).
Otras identidades que pueden ser utiles son:
sen(A)sen(B) =1
2
(
cos(A−B)− cos(A+B))
,
sen(A) cos(B) =1
2
(
sen(A+B) + sen(A−B))
,
cos(A) cos(B) =1
2
(
cos(A+B) + cos(A−B))
.
Para concluir deberıamos conocer los infinitesimos equivalentes de las funciones seno y cose-
no, esto es, como se comportan esas funciones cuando t es pequeno.
Para ello utilizaremos el polinomio de Taylor de estas funciones:
sen(t) = 0 +1t
1!− 0t2
2!− 1t3
3!+
0t4
4!+
1t5
5!− 0t6
6!− 1t7
7!+ · · ·
cos(t) = 1− 0t
1!− 1t2
2!+
0t3
3!+
1t4
4!− 0t5
5!− 1t6
6!+
0t7
7!+ · · ·
Por lo tanto cuando t es pequeno, entonces
sen(t) ≈ t, cos(t) ≈ 1− t2
2,
Observacion 2.2.9. Cuando el Polinomio de Taylor se hace alrededor del 0, se suele
llamar desarrollo (o polinomio) de McLaurin.
Tambien sera necesario en Algebra Lineal el desarrollo de Taylor de la funcion
exponencial en t = 0:
et = 1 + t+t2
2!+t3
3!+t4
4!+ · · · . (2.4) PT:exp
Si se quiere mas precision se pueden tomar mas terminos de dicha aproximacion. Si se desea
mas informa pregunta a tu profesor.
2.2 Senales en tiempo continuo y tiempo discreto 37
Observacion 2.2.10. Otra falsa creencia es que las funciones trigonometricas no pueden tomar
valores fuera del intervalo [−1, 1]. Para ver que esto es falso, resolvamos la ecuacion
sen(t) = 5 → ejt − e−jt
2j= 5, ejt = X,
tras sustituir nos queda la ecuacion
X −X−1 = 10j ⇒ X = 5j±√24j ≈ 5j± 5j ⇒ t = −j log(5j± 2j
√6) ∈ C.
De hecho el logaritmo complejo tiene una definicion novedosa para vosotros y probablemente se
use en otras asignaturas del grado. De hecho
log(10j) = ln(10) +π
2j.
2.2.6 Relacion de Calculo I - Teorıa de Circuitos
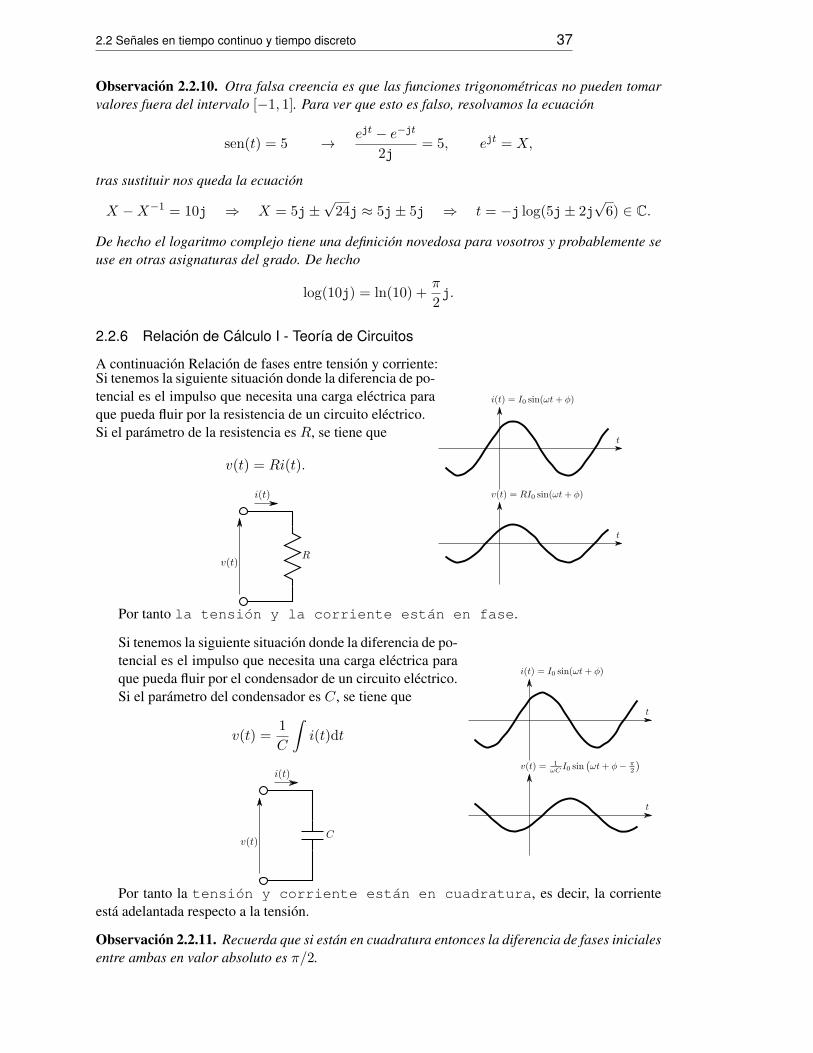
A continuacion Relacion de fases entre tension y corriente:Si tenemos la siguiente situacion donde la diferencia de po-
tencial es el impulso que necesita una carga electrica para
que pueda fluir por la resistencia de un circuito electrico.
Si el parametro de la resistencia es R, se tiene que
v(t) = Ri(t).
Por tanto la tension y la corriente estan en fase.
Si tenemos la siguiente situacion donde la diferencia de po-
tencial es el impulso que necesita una carga electrica para
que pueda fluir por el condensador de un circuito electrico.
Si el parametro del condensador es C, se tiene que
v(t) =1
C
∫
i(t)dt
Por tanto la tension y corriente estan en cuadratura, es decir, la corriente
esta adelantada respecto a la tension.
Observacion 2.2.11. Recuerda que si estan en cuadratura entonces la diferencia de fases iniciales
entre ambas en valor absoluto es π/2.
38 Senales. Funciones y derivadas
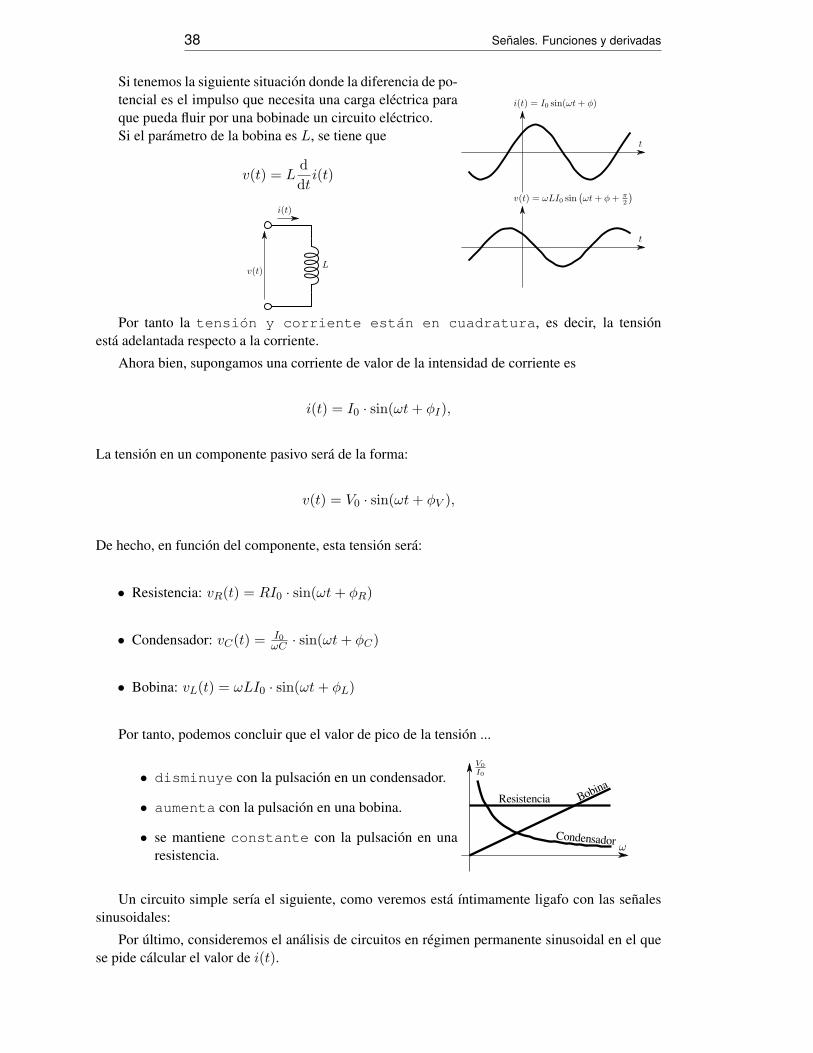
Si tenemos la siguiente situacion donde la diferencia de po-
tencial es el impulso que necesita una carga electrica para
que pueda fluir por una bobinade un circuito electrico.
Si el parametro de la bobina es L, se tiene que
v(t) = Ld
dti(t)
Por tanto la tension y corriente estan en cuadratura, es decir, la tension
esta adelantada respecto a la corriente.
Ahora bien, supongamos una corriente de valor de la intensidad de corriente es
i(t) = I0 · sin(ωt+ φI),
La tension en un componente pasivo sera de la forma:
v(t) = V0 · sin(ωt+ φV ),
De hecho, en funcion del componente, esta tension sera:
• Resistencia: vR(t) = RI0 · sin(ωt+ φR)
• Condensador: vC(t) =I0ωC · sin(ωt+ φC)
• Bobina: vL(t) = ωLI0 · sin(ωt+ φL)
Por tanto, podemos concluir que el valor de pico de la tension ...
• disminuye con la pulsacion en un condensador.
• aumenta con la pulsacion en una bobina.
• se mantiene constante con la pulsacion en una
resistencia.
Resistencia
Condensador
Bobina
Un circuito simple serıa el siguiente, como veremos esta ıntimamente ligafo con las senales
sinusoidales:
Por ultimo, consideremos el analisis de circuitos en regimen permanente sinusoidal en el que
se pide calcular el valor de i(t).

2.2 Senales en tiempo continuo y tiempo discreto 39
• Aplicando segunda ley de Kirchhoff:
e(t) = vR(t) + vL(t) + vC(t).
• Donde:
vR(t) = Ri(t)
vL(t) = Ld
dti(t)
vC(t) =1
C
∫
i(t)dt
e(t) = Ri(t) + Ld
dti(t) +
1
C
∫
i(t)dt.
Esta expresion da lugar a lo que se denomina ecuacion diferencial ya que en ellas apare-
cen las derivadas de funciones desconocidas, de hecho, se denomina ecuacion diferencial con
coeficientes constantes.
Si se desea mas informacion relativa a dicha relacion entre asignaturas podeis contactar con el
coordinador de la asignatura.
40 Senales. Funciones y derivadas
2.3 Derivadas
Uno deberıa comenzar planteandose estas preguntas:
• ¿Cual es la motivacion del concepto de derivada?
• ¿Por que nos interesa calcularla/estudiarla?
Debemos tener en cuenta que el universo no es estatico; si lo fuera, por definicion no ocurrirıa
nada (no se desarrollarıa ningun proceso). Es la posibilidad de cambio en el universo la que lo dota
de interes. Por tanto el ingeniero/cientıfico debe saber entender el cambio. Matematicamente el
cambio de unas magnitudes cuando se modifican otras se modela mediante funciones (por ejemplo,
si un objeto se encuentra en caıda libre, su altura h cambia con el tiempo como
h(t) = h0 −1
2gt2.
Pero a veces no nos basta con conocer el cambio, sino que nos interesa conocer tambien el ritmo
del cambio: ¿se esta produciendo el cambio lenta o rapidamente?
Esto es precisamente lo que responde la derivada, que expresa la tasa de cambio de una
funcion, o de una magnitud con respecto a otra.
Ejemplo 2.3.1. Velocidad v(t) de un cuerpo que se mueve en el tiempo t y posee una posicion
x(t):v(t) = (x(t))′.
Ejemplo 2.3.2. Corriente electrica I sobre un conductor como cambio en la cantidad de carga
Q(t) con respecto al tiempo:
I(t) = (Q(t))′.
Ejemplo 2.3.3. Cambio de la temperatura T (x) con respecto a la posicion x en una barra con
un mechero en un extremo, (T (x))′.
Antes de comenzar a dar conceptos, hablemos tambien del concepto de recta tangente.
2.3.1 ¿Que es y para que sirve una recta tangente?. El metodo de Newton
Otra forma habitual de introducir la idea de derivada es hablando de rectas tangentes. Pero creemos
conveniente motivar primero nuestro interes por esas rectas. Para ello vamos a plantear varios
problemas en los que quedara claro por que es importante pensar en rectas tangentes.
Metodo de Newton. Los griegos descubrieron, en la epoca del filosofo Pitagoras, que no
existe ninguna fraccion m/n cuyo cuadrado fuese igual a 2. Es decir, que
•√2 es irracional.
• Por lo tanto su desarrollo decimal no es periodico. Prueba a escribir en Wolfram Alpha
first 1000 digits of sqrt(2)
para convencerte.
Eso plantea inmediatamente la pregunta de como calcular los terminos de ese desarrollo decimal,
para obtener valores aproximados de√2. Se puede hacer por tanteo, pero ese metodo es muy
lento y laborioso.
Newton descubrio una forma mucho mas eficiente de obtener esas aproximaciones decimales.
La idea se ilustra en esta construccion en la siguiente figura:

2.3 Derivadas 41
x
f(x) = x2 − 2
−1−2−2−3−4−5 1 2 3 4 5 6
5
10
15
20
20
La idea empieza observando que√2 es una raız (punto de corte con el eje x) de la funcion
f(x) = x2 − 2,
cuya grafica es una parabola como la de la figura. Entonces el metodo de Newton propone seguir
estos pasos:
• Tomar un valor inicial x0, que podemos obtener por tanteo.
• ‘Subir’ (flecha azul) hasta el punto (x0, f(x0)) de la grafica y trazar la recta tangente a f(x)en ese punto.
• ‘Bajar’ (flecha roja) por la recta tangente hasta el corte con el eje x. Llamamos x1 a ese
punto de corte.
• Cambiar x0 por x1 y repetir los pasos anteriores.
Podeis tratar de programarlo en Matlab y vereis que en seis iteraciones tenemos mas cifras
de√2 de las que razonablemente usaras en cualquier aplicacion.
Como habras observado, el metodo de Newton requiere que seamos capaces de obtener la
recta tangente a f(x) en un punto dado. Una vez que aprendamos a hacer esto, el metodo es una
de las mejores formas que se conocen para buscar soluciones (raıces) de ecuaciones de la forma
f(x) = 0.
Naturalmente, el metodo tiene limitaciones: no funciona para todas las funciones e, incluso cuando
funciona, el resultado puede depender del punto inicial x0 (dando lugar, por ejemplo, a fenomenos
tan interesantes como el caos determinista). En cualquier caso, el metodo de Newton nos ensena
que la recta tangente puede ser una calculadora.
Un inciso sobre la ecuacion de la recta
Ya que vamos a interesarnos por la recta tangente a f(x) en el punto (x0, f(x0)), conviene
dedicar unos momentos a pensar en la ecuacion de esa recta. Podemos escribirla de muchas
maneras, pero una de las mas utiles para nosotros es esta forma que llamamos punto-pendiente:
y − f(x0) = m(x− x0)
donde el numero m es la pendiente de la recta. Recuerda la interpretacion geometrica
de la pendiente. Especialmente, recuerda cual es la interpretacion del signo de la pendiente.

42 Senales. Funciones y derivadas
2.3.2 Optimizacion
Muchos problemas cientıficos o tecnicos se pueden formular como problemas de optimizacion.
En particular, muchos de ellos se reducen a encontrar el valor maximo o mınimo de una funcion.
En la version mas elemental de este tipo de problemas empezamos con una funcion y = f(x) y
nos preguntamos cuales son los valores de x que producen valores extremos (maximos o mınimos)
de y. Y la primera observacion es que en una funcioon tıpica la recta tangente en un punto
extremo es horizontal.
La conclusion a la que podemos llegar es que existe una relacion evidente entre el crecimiento
de la funcion y el signo de la pendiente de la recta tangente.
Observacion 2.3.1. Este contenido puede que no sea tratado por todos los profesores de la asig-
natura pero creemos que es un punto muy importante, de ahı que aparezca en este documento. Si
quieres saber mas pregunta a tu profesor.
2.3.3 Aproximacion local y la definicion de derivada
Hasta ahora hemos trabajado con una nocion intuitiva de recta tangente y hemos esquivado el
asunto, mas o menos espinoso, de su definicion. Pero para seguir adelante necesitamos mas pre-
cision. Nuestra propuesta inicial, para acercarnos a una definicion rigurosa es esta:
Definicion 2.3.1. La recta tangente a la funcion f(x) en x0 es, de entre todas las rectas que pasan
por el punto (x0, f(x0)), la que mas se parece a f(x) cerca de x0.
Para convertir esta intuicion en una idea rigurosa, que sirva para hacer cuentas, empezamos
por pensar en como son todas las rectas que pasan por ese punto. Ya sabemos que se pueden
escribir ası:
y − f(x0) = m(x− x0).
En la siguiente figura: ¿cual es, de todas las rectas que hemos dibujado, la que mas se parece a
f(x) cerca de x0?
t
y
−1 1 2 3
1
2
2.3.4 Definicion de derivada y recta tangente
Es importante tener claro que el concepto de derivada es un concepto local. Es decir, im-
portan lo que pasa alrededor del punto en el que buscamos dicha recta tangente, o la derivada de
la funcion que nos den.

2.3 Derivadas 43
Definicion 2.3.2. La derivada de f(x) en x = x0 es el numero:
f ′(x0) = limx→x0
f(x)− f(x0)
x− x0= lim
h→0
f(x0 + h)− f(x0)
h.
si existe el lımite.
Tambien lo representaremos comodf
dx(x0).
Cuando existe la derivada, la recta tangente a f(x) cuando x = x0 es:
y = f(x0) + f ′(x0)(x− x0).
Ejemplo 2.3.4. Ejemplos de funciones sin derivada Antes de lanzarnos a usar la derivada para
resolver problemas, es necesario ser conscientes de que no siempre existe la derivada (y por tanto
la recta tangente). El ejemplo mas sencillo es el valor absoluto f(x) = |x| en el punto x0 = 0.
Como sabemos la grafica de dicha funcion tiene forma de V (valle), de modo que justo en ese
punto, la rect tangente no existe.
t
|t|
−1 1 2 3−2 3
1
2
3
Observacion 2.3.2. Fıjate en que la recta tangente a esta grafica es evidente en cualquier otro
punto salvo el origen.
144
Ejemplo 2.3.5. Otro ejemplo interesante, en el que ocurre un fenomeno diferente, es el de la
funcion
f(x) = 3√x− 1 = (x− 1)1/3.
La siguiente figura muestra la tangente a esta grafica en dos puntos: mas a la derecha un punto
cualquiera, en el que la tangente no presenta ninguna peculiaridad especial y a la izquierda el
punto de coordenada x0 = 1.
t
x(t)
1 2 33 4
1
−1

44 Senales. Funciones y derivadas
En el punto x0 = 1 existe una tangente geometrica bien definida. El problema es que se trata
de una recta vertical. Y las rectas verticales no se pueden describir con una ecuacion de la forma
y = a+ bx. Sus ecuaciones son siempre de la forma x = cte (la variable y no aparece).
Observacion 2.3.3. Hemos trasladado la funcion raız cubica al punto x0 = 1 para que el ejemplo
fuera mas facil de visualizar. Pero sucederıa lo mismo con la raız cubica sin trasladar f(x) = 3√x
en el punto x0 = 0.
.
2.3.5 Otra visita a la idea de velocidad/tasa instantanea
Ahora que hemos visto la definicion de derivada podemos volver sobre la nocion de velocidad
instantanea.
Ejemplo 2.3.6. Supongamos que un coche parte por una carretera en el instante t = 0. Y sea
f(t) una funcion que nos dice en que punto kilometrico de la carretera se encuentra cuando ha
transcurrido un tiempo t. Si queremos calcular la velocidad media en el periodo del viaje que va
desde ta a tb, en la escuela nos ensenan a calcular esa velocidad media como el cociente:
v =espacio
tiempo=
Kms recorridos
tiempo invertido=f(tb)− f(ta)
tb − ta.
El problema viene cuando queremos definir la velocidad instantanea en un momento concreto t0del viaje. En ese caso la idea natural es tomar un valor t cercano a t0 y considerar los valores del
cociente:f(t)− f(t0)
t− t0cuando t se acerca cada vez mas (tiende) a t0.
Las similitudes de este resultado con el que hemos obtenido en el problema de la tangente
se hicieron evidentes en la epoca de Newton. Los fısico-matematicos de aquella epoca com-
prendieron que este tipo de lımites, las derivadas, eran la clave para muchos de los problemas mas
importantes tanto de la Fısica como de las Matematicas.
Este tipo de cocientes aparecen cada vez que una variable depende de otra y queremos definir
una tasa de cambio en un punto. Si la variable independiente es el tiempo estaremos ante un prob-
lema de velocidad instantanea. Pero hay muchos otros contextos en los que las tasas de cambio
juegan un papel parecido al de la velocidad. Usaremos los ejercicios del curso para explorar estas
ideas.
2.3.6 Metodos de calculo de derivadas
Observacion 2.3.4. Lo que no vamos a hacer: calculo directo con lımites.
Ejemplo 2.3.7. Vamos a calcular la recta tangente a f(x) = x2 − 2 en x0 = 2.
Para ello usamos:
f ′(x0) = limx→x0
f(x)− f(x0)
x− x0= lim
x→2
f(x)− f(2)
x− 2= lim
x→2
(x2 − 2)− (22 − 2)
x− 2= lim
x→2x+2 = 4.
Como era de esperar, hemos llegado a una indeterminacion de la forma 0/0 pero en exte caso
podemos resolver el problema simplificando la expresion.
Ası que ya sabemos que la pendiente de la recta tangente a f(x) = x2 − 2 en x0 = 2 es 4 y
por tanto la recta tangente en ese punto es:
y = f(x0) + f ′(x0)(x− x0) = 2 + 4(x− 2) → y = −6 + 4x.

2.3 Derivadas 45
Observacion 2.3.5. • Se puede repetir la misma cuenta con un punto generico x0 (sin fijar
un valor concreto) y se obtiene la formula
f ′(x0) = 2x0
que permite calcular la recta tangente en cualquier punto. Este resultado es especialmente
util para, por ejemplo, aplicar el metodo de Newton o para analizar el crecimiento de la
funcion.
• En este ejemplo hemos podido usar la factorizacion para resolver la indeterminacion y
calcular el valor de la derivada. Pero en cuanto tratemos con funciones mas complicadas
los lımites resultaran mucho mas difıciles. Por ejemplo, la derivada de
f(x) =1
1 + x2, en x0 = 5
nos llevarıa a calcular
f ′(5) = limx→5
f(x)− f(5)
x− 5= lim
x→5
1x2+1
− 152+1
x− 5=
0
0.
que se puede resolver tambien por factorizacion, pero de manera mucho mas laboriosa.
Lo hicimos en clase y obtuvimos f(x0) = 1/26 y la recta tangente en exe punto es
y − 1
26= − 5
338(x− 5).
Y si pensamos en f(x) = sen(x) en x0 = 0 entonces tenemos que calcular:
f ′(0) = limx→0
f(x)− f(0)
x= lim
x→0
sen(x)− sen(0)
x= lim
x→0
sin(x)
x=
0
0.
Este lımite resulta ser igual a 1, pero para obtenerlo hay que hacer un trabajo mas elabo-
rado, usando desigualdades y propiedades trigonometricas de la funcion seno.
Estas observaciones deberıan servir para convencernos de que el calculo de derivadas mediante
lımites resulta poco practico. Lo que vamos a hacer, en lugar de esto, es pensar en las funciones
como formulas construidas pieza a pieza a partir de bloques mas sencillos.
Por ejemplo, la funcion
f(x) =1
1 + x2
se puede pensar como un proceso en el que partimos de x y calculamos ası:
x→ x2 → 1 + x2 → 1
1 + x2.
La formula final puede parecer mas o menos complicada, pero cada uno de los pasos es una op-
eracion muy simple. Nuestro plan es aprender a calcular las derivadas de esas operaciones sencillas
y encontrar reglas que nos permitan combinar esas derivadas sencillas para calcular derivadas mas
complicadas.
Ese es el trabajo que vamos a comenzar a hacer a continuacion.
• Derivada de rectas y funciones constantes:
Supongamos que la funcion que queremos derivar es ella misma una recta, con pendiente
igual a b. Es decir, supongamos que
f(x) = a+ bx −→ f ′(x0) = b para todo x0.

46 Senales. Funciones y derivadas
Observacion 2.3.6. Si la recta es horizontal, entonces b = 0, y es el caso de funcion
constante, ası La derivada de una funcion constante es 0 (en todos los puntos). Ms adelante
veremos una especie de recıproco: si la derivada de una funcion es 0 en todos los puntos,
entonces la funcion es constante.
• Derivada de la suma:
La derivada de una suma es la suma de las derivadas. Por supuesto, se sobreentiende que las
dos derivadas que sumamos existen.
Resultado 2.3.1. Si f y g son derivables en un punto x0 se tiene que
(f + g)′(x0) = f ′(x0) + g′(x0).
• Derivada del producto. Derivadas de polinomios: La derivada del producto es mas
interesante, aunque solo fuese porque el resultado no es trivial ni evidente. Y nos brinda
nuestra primera oportunidad de poner a trabajar el concepto de aproximacion local.
Aunque el resultado final se puede utilizar sin entender su origen, creemos instructivo que
el lector se esfuerce en comprender como se descubre una formula como esta.
Supongamos que las funciones f y g son derivables en x0. Entonces podemos escribir estas
aproximaciones locales, es decir, como es la funcion en torno al punto x0:
f(x) = f(x0) + f ′(x0)(x− x0) + Ef (x)
g(x) = g(x0) + g′(x0)(x− x0) + Eg(x)
donde Ef y Eg son respectivamente los terminos de error de f y g que cumplen:
limx→x0
Ef (x)
x− x0= lim
x→x0
Eg(x)
x− x0= 0.
Cuando pensamos en la funcion producto h(x) = f(x)g(x) podemos simplemente multi-
plicar las aproximaciones locales de f y g para obtener:
h(x) = f(x)g(x) = (f(x0)+ f′(x0)(x−x0)+Ef (x))(g(x0)+ g
′(x0)(x−x0)+Eg(x)).
Nuestro objetivo aquı es operar y agrupar terminos obtener una expresion de la forma
h(x) = h(x0) + h′(x0)(x− x0) + Eh(x),
de manera que se cumpla:
limx→x0
Eh(x)
x− x0= 0.
Lo que obtenemos al multiplicar las dos aproximaciones locales es:
h(x) = f(x)g(x) = f(x0)g(x0) +(
f ′(x0)g(x0) + f(x0)g′(x0)
)
(x− x0) + Eh(x),
donde hemos llegado
Eh(x) =f(x0)Eg(x) + f ′(x0)(x− x0)Eg(x) + g(x0)Ef (x) + g′(x0)(x− x0)Ef (x)
+ f ′(x0)g′(x0)(x− x0)
2 + Ef (x)Eg(x),
a la parte que agrupa todos los terminos de error. Dejamos como ejercicio interesante el
comprobar que estos terminos de error cumplen la propiedad que necesitamos:
limx→x0
Eh(x)
x− x0= 0.
El resultado, entonces, es este:

2.3 Derivadas 47
Resultado 2.3.2. Derivada del producto (Regla de Leibnitz).
Si f y g son derivables en x0 entonces la derivada del producto existe y se cumple:
(fg)′(x0) = f ′(x0)g(x0) + f(x0)g′(x0).
De hecho podemos emplear este resultado para calcular la derivada de Polinomios.
Supongamos que y = p(x) es una funcion polinomica, definida ası:
p(x) = a0 + a1x+ a2x2 + · · ·+ anx
n.
Los numeros ai con i = 1, 2, . . . , n son los coeficientes del polinomio. Esta
funcion es un buen ejemplo de la estrategia de construccion modular de funciones: el
polinomio se puede construir a partir de funciones constantes y de la funcion identidad
f(x) = x, usando solo sumas y multiplicaciones. Puesto que sabemos como se calculan las
derivadas de todos esos ingredientes, no es difıcil combinar esos metodos para obtener una
receta general sobre la derivada de los polinomios. Un paso previo son las potencias de x:
Derivada de una potencia natural de x.
Si f(x) = xn para n = 1, 2, 3, . . . , entonces
f ′(x0) = nxn−10 .
Volviendo al caso general de los polinomios, se obtiene este resultado.
Resultado 2.3.3. Derivada de un polinomio.
Si es una funcion polinomica, entonces su derivada p′(x0) existe sea cual sea el valor x0 y
se cumple:
p′(x0) = a1 + 2a2x0 + 3a3x20 + 4a4x
30 + · · ·+ nanx
n−10 .
• Funcion derivada: En los ejemplos de derivadas de polinomios nos hemos encontrado
ya con frases como “entonces la derivada existe sea cual sea x0” seguidas de una formula
para el valor de la derivada en x0. A medida que los ejemplos se acumulan esta forma de
trabajar, refiriendose una y otra vez a un punto x0 generico, se hace mas y mas incomoda y
artificiosa. En realidad, lo que vamos a hacer es simplemente decir que, por ejemplo, si
f(x) = 3− 2x− 12x2 + 8x3,
entonces:
f ′(x) = −2− 24x+ 24x2.
Y al escribir esta formula estamos diciendo que si quieres calcular la derivada f ′(x0), por
ejemplo con x0 = 2, basta con sustituir ese valor en la ultima formula calculada.
Observacion 2.3.7. Parece una diferencia sutil con lo que hacıamos antes, pero es im-
portante. Porque nos permite pensar en esta formula de la derivada como una funcion,
la funcion derivada de f y, por lo tanto, pensar en la relacion que existe entre esas dos
funciones f y f ′
En proximas secciones volveremos a menudo sobre este tema. Por el momento nos confor-
mamos con la comodidad que supone esta notacion para las derivadas.

48 Senales. Funciones y derivadas
• Derivada del cociente: Nuestro objetivo es aprender derivar expresiones de tipo cociente
comou(x)
v(x),
donde u y v son funciones que sabemos derivar por separado. Para llegar hasta ahı vamos a
empezar por un caso mas sencillo.
Derivada de 1/f(x): Vamos a pensar en una funcion g(x) definida como:
g(x) =1
f(x),
donde f(x) es una funcion que sabemos derivar.
Observacion 2.3.8. De nuevo, creemos que es bueno que conozcas el tipo de metodos que se
usan en Matematicas para descubrir una formula como esta cuando se ignora el resultado
final.
Una cuestion es demostrar la validez de una formula y otra bien distinta es encontrar esa
formula, para empezar. El problema que tenemos entre manos es muy adecuado para enten-
der como se hacen esos descubrimientos. La idea, en este caso, es partir de la expresion y
razonar que entonces g(x) tiene que cumplir.
Dado que g(x)f(x) = 1, derivamos esta expresion con lo visto hasta el momento y obten-
emos que
f ′(x)g(x) + f(x)g′(x) = 0.
Por tanto
g′(x) =
(
1
f(x)
)′= − f ′(x)
f2(x).
Observacion 2.3.9. Un comentario, para evitar posibles confusiones: lo que hemos he-
cho no se puede considerar de ninguna manera una demostracion de que esa formula es
correcta (ese es un trabajo que queda para los matematicos). Lo que nos dice este resul-
tado es que esa es la unica formula posible para la derivada. Ota cosa es que funcione.
Afortunadamente, en este caso es posible demostrar que el resultado es valido.
Resultado 2.3.4. Derivada del cociente.
Si f(x) y g(x) son ambas derivables en x0 y g(x0) 6= 0 entonces
(
f(x)
g(x)
)′(x0) =
f ′(x0)g(x0)− f(x0)g′(x0)
g2(x0).
Ejemplo 2.3.8. Calcular la derivada de
q(x) =2x2 + 1
3x2 − x+ 1.
La derivada es:
q′(x) =(2x2 + 1)′(3x2− x+ 1)− (2x2 + 1)(3x2 − x+ 1)′
(3x2 − x+ 1)2,
y simplificando, con un poco de trabajo se obtiene:
q′(x) =−2x2 − 2x+ 1
9x4 − 6x3 + 7x2 − 2x+ 1.

2.3 Derivadas 49
A parit de este resultado obtenemos que
f(x) = x−1 =1
x→ f ′(x) = − 1
x2.
De hecho, para un a numero natural arbitrario positivo, se tiene el siguiente resultado:
Resultado 2.3.5. Derivada de una potencia natural de x Sea a ∈ R, entonces
(xa)′ = axa−1.
A partir de aquıpueden calcularse todo tipo de potencias tales como
Ejemplo 2.3.9. Calcular la derivada de
f(x) =√x, f(x) =
1√x, f(x) = x−9/5.
Teniendo en cuenta este ultimo resultado
f ′(x) =1
2x−1/2 =
1
2√x, f ′(x) =
−1
2x−3/2 =
−1
2√x3, f ′(x) =
−9
5x−9/5−1 =
−9
55√x14
.
Derivadas usando el ordenador.
Aunque es bueno adquirir un cierto grado de destreza calculando derivadas a mano, recuerda
en cualquier caso que derivaciones como estas y otras mas complicadas son procedimientos
completamente mecanizables y mecanizados.
Por ejemplo, en Matlab usarıamos estos comandos (suponiendo que el Symbolic Math
Toolbox esta instalado, como suele suceder): clear; clc;
syms x
f(x) = (2*xˆ2 + 1)/(3*xˆ2 - x + 1);
df = simplify(diff(f,x))
En Octave puedes usar el mismo codigo, pero debes ejecutar previamente:
pkg load symbolic
• Derivada de funciones exponenciales y logarıtmicas:
Comencemos calculando la derivada de la funcion exponencial f(x) = ex. Lo veremos
realizandolo a traves del lımite
f ′(x0) = limx→x0
ex − ex0
x− x0= ex0 lim
x→x0
ex−x0 − 1
x− x0
Si usamos ahora el desarrollo de Taylor que vimos hace unos dıas (PT:exp2.4), es decir,
ex−x0 = 1 + (x− x0) +(x− x0)
2
2+
(x− x0)3
6+ · · ·
entonces
limx→x0
ex−x0 − 1
x− x0= lim
x→x0
(
1 +x− x0
2+
(x− x0)2
6+ · · ·
)
= 1,
por tanto (ex)′ = ex.
A partir de esta derivada, si tomamos un numero a > 0 cualquiera, entonces
(ax)′ = (elog(a)x)′ = log(a)elog(a)x = log(a)ax.

50 Senales. Funciones y derivadas
Resultado 2.3.6. (Derivada de las funciones exponenciales ax y ex)
Sea un a real y positivo, se tiene
(ex)′ = ex, (ax)′ = log(a)ax.
Ademas si llamamos g(x) = log(x), entonces
x = log(ex) = g(ex) ⇒ g′(ex)ex = 1,
por tanto dado que ex es una funcion biyectiva, se tiene que
(log(x))′ =1
x.
Con los resultados anteriores estamos empezando a hacer realidad el plan que nos habıamos
trazado. Ese plan tiene dos ingredientes basicos:
1. Un catalogo relativamente amplio de funciones elementales cuyas derivadas conoce-
mos.
2. Un conjunto de reglas de derivacion que nos permiten calcular las derivadas de com-
binaciones relativamente complicadas de esas funciones, obtenidas mediante sumas,
productos, y otras operaciones.
Para subir a un nivel superior, no obstante, necesitamos aumentar tanto el repertorio de
funciones elementales que sabemos derivar como el conjunto de reglas de derivacion dispo-
nibles.
Ahora vamos a aprender a derivar funciones trigonometricas. Hay una pauta comun a todos
los casos: las derivadas que necesitamos se obtienen usando la definicion que conocemos,
pero los lımites correspondientes no son sencillos de obtener.
Aquı nos vamos a limitar a hacer una lista de los resultados que daremos por conocidos en
el resto del curso, sin tratar de justificarlos rigurosamente.
• Funciones trigonometricas:
Para el seno y el coseno se tiene,
(cos(x))′ = −sen(x), (sen(x))′ = cos(x).
Con la notacion de Leibnitz escribirıamos:
d
dx(sen(x)) = cos(x)
d
dx(cos(x)) = −sen(x).
El seno y el coseno forman una pareja interesante en estas formulas porque sus derivadas se
expresan sin necesidad de hacer intervenir otras funciones aparte de esas dos.
Vamos a ver otros dos ejemplos de parejas trigonometricas similares. Para empezar, puesto
que
tan(x) =sen(x)
cos(x)

2.3 Derivadas 51
la formula de la derivada del cociente permite obtener
(tan(x))′ = sec2(x) = 1 + tan2(x) =1
cos2(x).
Las expresiones de la derecha son simplemente formas distintas de expresar el mismo resul-
tado. La tangente y la secante forman la formula de la derivada del cociente permite obtener
otra pareja trigonometrica, porque a partir de
sec(x) =1
cos(x),
es facil obtener:
(sec(x))′ = sec(x) tan(x).
La secante y la tangente no estan definidas para todos los valores de x y eso se refleja
tambien en sus derivadas. Es recomendable que se analicen las graficas de las funciones con
esta idea en mente, tratando de entender que ocurre.
Del mismo modo existe una pareja similar formada por la cotangente y la cosecante:
(cot(x))′ = − csc(x) = −(1 + cot2(x))
(csc(x))′ = − csc(x) cot(x).
Para poder aprovechar este resultado necesitamos aprender otra regla de derivacion que va
a ampliar mucho el catalogo de funciones que somos capaces de derivar.
2.3.7 Regla de la cadena
Para entender lo que vamos a hacer es bueno empezar on algunos ejemplos. Ahora ya sabemos
que (sen(x))′ = cos(x). Pero si nos preguntan cual es la derivada de (sen(3x)), o mas en general,
la derivada de (sen(x2)); todavıa no hemos aprendido a responder.
Observa que en la ultima de estas formulas se han obtenido aplicando dos funciones, una tras
otra, ası:
xf1−→ u = x2
f2−→ sen(u) = sen(x2).
A veces es util pensar en las funciones como teclas de una calculadora. Hemos empezado con xy hemos pulsado la tecla de una funcion f1(x) = x2. Al resultado que aparece en la pantalla le
hemos llamado u. Y a continuacion hemos pulsado la tecla de una funcion f2(u) = sen(u).A esta operacion que consiste en aplicar una funcion tras otra los matematicos la llaman com-
posicion de funciones. En nuestro caso tenemos:
f(x) = (f2 f1)(x) = f2(f1(x)) = f2(x2) = sen(x2).
Observacion 2.3.10. El sımbolo (f2 f1) se lee (atencion al orden) “f1 compuesta con f2”. En
el contexto de una composicion hablaremos a veces de la funcion interior para referirnos a f1 (la
primera tecla que pulsamos) y de la funcion exterior para referirnos a f2 (la segunda tecla).
¿Como se calcula la derivada de una composicion?
Resultado 2.3.7. Regla de la cadena (derivada de una composicion)
Si f1(x) es derivable en x0 y f2(u) es derivable en u0 = f1(x0), entonces la composicion
f(x) = (f2 f1)(x) = f2(f1(x)) es derivable en x0 y se tiene:
(f2 f1)′(x0) = f ′2(u0)f′1(x0) = f ′2(f1(x0))f
′1(x0).

52 Senales. Funciones y derivadas
Ejemplo 2.3.10. Calcular la derivada de sen(x2).
Empezamos tomando f1(x) = x2, y f2(u) = sen(u). Entonces, puesto que ambas funciones
son derivables en todo R, la regla de la cadena se aplica para dar, sea cual sea x este resultado:
(f2 f1)′(x) = f ′2(u)f′1(x) = (cosu) · (2x),
y recordando que es u = f1(x) = x2, se tiene que
(
sen(x2))′= (cos(x2)) · (2x) = 2x cos(x2).
Ejemplo 2.3.11. Calcular la derivada de ex3.
Si mantenemos f1(x) = x3 pero ahora tomamos f2(u) = eu tendremos la composicion que
nos interesa.
Aplicando la regla de la cadena de la misma forma se obtiene
(f2 f1)′(x) = f ′2(u)f′1(x) = (eu) · (3x2) = ex
3 · (3x2).
Observaciones sobre la forma de aplicar la regla de la cadena:
Como muestran estos ejemplos, la regla de la cadena procede “de fuera hacia dentro”. Es
decir, que al encontrarnos con una expresion como esta:
f(x) =√
algo aquı dentro de la raız
empezamos por derivar la funcion externa, la raız, escribiendo:
f ′(x) =1
2√
lo de dentro sin modificar· la derivada de lo de dentro.
Y de la misma forma. ante una expresion como esta,
f(x) = ln(algo aquı dentro del logaritmo),
empezamos por derivar la funcion externa, en este caso el logaritmo y tendremos:
f ′(x) =1
lo de dentro sin modificar· la derivada de lo de dentro.
Esta manera de trabajar es la que nos permite abordar, paso a paso, de fuera hacia dentro, y en
combinacion con el resto de las tecnicas de derivacion, la derivacion de funciones compuestas
complicadas, como las que veremos en los ejercicios del curso.

2.3 Derivadas 53
2.3.8 Tabla de Derivadas
En esta tabla puede considerarse indistintamente log y ln pero dependiendode los libros que se
empleen pueden usar una notacion u otra. Aquı nos decantamos por la primera:
f f ′ f f ′
f + g f ′ + g′ f − g f ′ − g′
fg f ′g + dg′f
g
f ′g − fg′
g2
x 1 C 0
un nun−1u′1
um− mu′
um+1
√u
u′
2√u
m√u
u′
mm√um−1
ua aua−1u′ au au log(a)u′
eu euu′ log(u)u′
u
sen(u) cos(u)u′ cos(u) −sen(u)u′
tan(u) sec2(u)u′ cot(u) − csc2(u)u′
sec(u) sec(u) tan(u)u′ csc(u) − csc(u) cot(u)u′
arctan(u)u′
1 + u2arcsen(u)
u′√1− u2
arccos(u)−u′√1− u2
argtanh(u)u′
1− u2
2.3.9 Aplicaciones de la derivada (Incompleto)
line -- SECCION EN CONSTRUCCION --
2.3.10 Calculo de la derivada de y = arctan(x)
Para ello primero tenemos en cuenta la derivada de la tangente. En este caso
y = tan(x) → y′ = 1 + tan2(x) =1
cos2(x).
Si tenemos en cuenta que
arctan(tanx) = x, tan(arctanx) = x,
llamaremos g(x) = arctan(x), y por tanto aplicando la regla de la cadena obtenemos
g(tan(x)) = x ⇒ g′(tan(x))(1 + tan2(x)) = 1 ⇒ g′(x) =1
1 + x2.
Teniendo en cuenta esto, podemos afirmar que
Resultado 2.3.8. (Derivada de la arctan(u))La siguiente identidad se tiene
(
arctan(u))′=
u′
1 + u2.

54 Senales. Funciones y derivadas

Calculo Integral. Aplicaciones
Advertencia: En el tema anterior, al hablar de derivadas, hemos usado habitualmente de forma
casi exclusiva la notacion y = f(x) para las funciones. En este capıtulo vamos a seguir usando a
veces esa notacion, pero tambien vamos a ir volviendo a la notacion y = x(t) que hemos usado
en el tema de senales. Trataremos de evitar las posibles confusiones que esta doble sistema de
notacion pueda causar, pero te pedimos que prestes atencion a los sımbolos que se usan en el
contexto de cada problema.
3.1 Introducion
Vamos a empezar nuestro trabajo en este tema con un ejemplo que proviene de la Fısica mas
elemental. Gracias a los trabajos de Galileo Galilei se establecio que la gravedad en la superficie
terrestre produce una aceleracion constante en caıda libre, aproximadamente igual a
g0 = 9′8m/s2.
En la caıda de un objeto en situaciones cotidianas intervienen otros muchos factores y en particular,
la resistencia del aire. En lo que sigue vamos a simplificar nuestro trabajo ignorando esa resistencia
del aire.
Vamos a usar la variable x para representar los valores de la altura a la que esta situado un
objeto, de manera que x = 0 corresponde al suelo y cuanto mayor sea x mas alto esta el objeto.
Supongamos que un objeto cae desde una altura inicial igual a x0 = 100m y que inicialmente esta
en reposo. Es decir, que su velocidad inicial v0 es 0 cuando t = 0. ¿Cual es la posicion del objeto
en cada instante de tiempo? Y en particular ¿cuanto tarda en caer hasta el suelo?
Si pensamos en la funcion x(t) que describe la altura x en cada instante del tiempo t que dura
la caıda, entonces en el tema anterior hemos visto que la velocidad instantanea de caıda viene dada
por la derivada primera de esta funcion.
v(t) = x(t).
Observacion 3.1.1. Cuando derivemos la variable tiempo t, emplearemos esa notacion pues es
habitual que se haga de este modo, aunque en ocasiones se utilice la vista en bachillerato, i.e.,
x′(t).

56 Calculo Integral. Aplicaciones
(Fıjate en que en este ejemplo nuestra notacion es como la del tema senales). Por su parte la
aceleracion instantanea a(t) es la tasa de cambio instantanea (la derivada) de la velocidad. Por
tanto, coincide con la derivada segunda de x(t), es decir,
a(t) = v(t) = x(t).
Ademas en la epoca de Galileo se establecio que en la superficie terrestre podıamos considerar
que la aceleracion es una funcion constante dada por
a(t) = −9′8m/s2.
Observacion 3.1.2. Observa que debemos tomar un valor negativo por nuestra eleccion de la
direccion del eje de coordenadas en este problema.
La primera pregunta que nos hacemos, y que inaugura uno de los problemas tıpicos de este
tema, es esta: ¿cual es entonces la velocidad v(t)? En terminos matematicos, si sabemos que
v(t) = g
donde g es una constante (−9′8 en el problema de la caıda libre) ¿cual es entonces la funcion v(t)?
A riesgo de parecer pesados nos queremeos detener a subrayar la naturaleza de esta pregunta:
en el capıtulo anterior nos daban una funcion y nos pedıa que calcularamos la derivada. Aquı
tenemos la derivada y queremos calcular la funcion.
En este primer ejemplo las cosas son relativamente sencillas: si repasas las reglas de derivacion
del tema anterior no cuesta mucho ver que tomando v(t) = gt se obtiene que v(t) = g como
queriamos.
Enseguida encontramos la primera dificultad. Alguien puede darse cuenta de que si pro-
ponemos:
v(t) = gt+ c
donde c es una constante arbitraria, es decir, un numero cualquiera, entonces sigue siendo cierto
que v(t) = g sea cual sea el valor de c que hallamos elegido. Por ejemplo las dos funciones
v1(t) = gt+ 5, v2(t) = gt− 6
tienen la misma derivada gt. Y eso nos obliga a preguntarnos esta pregunta: ¿puede haber mas
funciones, mas “raras”, tales que al derivarlas se obtenga la misma derivada? En principio podrıas
pensar en que a lo mejor es posible encontrar una formula mucho mas complicada que las de v1y v2 pero que, al derivarla y simplificar la derivada produjera este mismo resultado. El primer
resultado de la teorıa nos tranquiliza:
La derivada determina f salvo constantes.
Resultado 3.1.1. Si dos funciones f1(t) y f2(t) son derivables en un intervalo (a, b) y tienen la
misma derivada en todos los puntos de ese intervalo, i.e.,
f1(t) = f2(t), para todo a < t < b
entonces existe una constante c tal que:
f1(t) = f2(t) + c.

3.2 Primitivas de funciones 57
Volviendo al ejemplo de la caıda libre este resultado nos dice que todas las soluciones del
problema:
v(t) = g ⇒ v(t) =??
son de la forma:
v(t) = gt+ c,
para alguna constante c. Ademas si sustituyes t = 0 en esta expresion veras que
v(0) = c
ası que en el ejemplo con el que estamos trabajando c = v0, la velocidad inicial del
objeto. Y como habıamos dicho que v0 = 0 ahora podemos afirmar que la velocidad del objeto en
cada instante es:
v(t) = gt.
El siguiente paso es tratar de averiguar cual es la funcion x(t) sabiendo que:
x(t) = v(t) = gt.
El esquema es muy parecido al que acabamos de seguir. Repasando las reglas de derivacion nos
damos cuenta, con un poco mas de trabajo en este caso, de que si tomamos:
x(t) = gt2
2,
entonces x(t) = gt. Y el resultado que hemos visto nos garantiza entonces que todas las soluciones
del problema:
x(t) = gt ⇒ x(t) =??
son de la forma:
x(t) = gt2
2+ c
para alguna constante c. De nuevo, sustituyendo la variable t pot el tiempo inicial t0 descubrimos
que la constante c debe cumplir: x(0) = c y por tanto en este problema el valor de c es la
posicion inicial del objeto, que en el ejemplo era x0 = 100m. Ahora ya estamos en
condiciones de escribir la funcion x(t) completa:
x(t) = −9′8t2
2+ 100.
Y usarla para estudiar el movimiento de caıda del cuerpo. Por ejemplo la llegada al suelo se
produce cuando:
x(t) = −9′8t2
2+ 100 = 0
y a partir de aquı es posible despejar el valor de t correspondiente a ese instante.
3.2 Primitivas de funciones
Una vez considerado dicho ejemplo, donde ademas hemos resuelto una ecuacion diferencial
x(t) = g,
comenzaremos con algo de lenguaje formal e introduciendo algunos conceptos basicos necesarios
para entender adecuadamente todos los conceptos y resultados de este capıtulo.

58 Calculo Integral. Aplicaciones
Definicion 3.2.1. Sea f : [a, b] → R una funcion continua en el intervalo [a, b]. se dice que una
funcion F es una primitiva de f en [a, b] cuando F is derivable y
F ′(x) = f(x) para todo x ∈ [a, b],
o cuando
dF (x) = f(x)dx.
3.2.1 Caracterizacion de primitivas
Si F es una primitiva de f en [a, b], entonces una primitiva arbitraria de f en [a, b] es de la forma
F (x) + C, donde C es una constante arbitraria.
Definicion 3.2.2. El conjunto de las primitivas de f en un intervalo [a, b] se llama integral
indefinida de f y se escribe de la forma
∫
f(x)dx
y si F (x) es una primitiva, entonces
∫
f(x)dx = F (x) + C.
Observacion 3.2.1. Los sımbolos∫
f(x)dx y∫ ba f(x)dx no se deberıan confundir. El primero es
un conjunto (infinito) de funciones, mientras que el segundo es un numero real.
Observacion 3.2.2. Es importante decir que no toda funcion tiene primitiva que pueda expresarse
mediante funciones elementales.
Se pueden relacionar los conceptos de derivadas y primitivas de la siguiente forma:
d
dx
(∫
f(x)dx
)
=
(∫
f(x)dx
)′= f(x) ⇒
∫
f ′(x)dx = f(x) + C.
3.2.2 Propiedades de la integral indefinida
• La integral de la suma de funciones es la suma de integrales de funciones, i.e.∫
(f(x) + g(x)) dx =
∫
f(x)dx+
∫
g(x)dx,
• Las constantes multiplicativas no se integran, i.e.∫
kf(x)dx = k
∫
f(x)dx.
Es decir, la integral indefinida es un operador lineal.
Observacion 3.2.3. Llegados a este punto es importante decir un par de cosas, una buena y otra
mala:
La mala noticia es que el calculo de primitivas es, en general, mucho mas difıcil que el calculo
de derivadas. Enseguida entraremos en detalles y veras justificada esta valoracion. La buena
noticia es que en los ultimos anos se ha avanzado mucho en la automatizacion de ese problema y
ahora los ordenadores nos pueden servir de gran ayuda. Los programas que vamos a usar aquı
son los mismos que ya conoces: Wolfram Alpha, y Matlab.
3.2 Primitivas de funciones 59
Veamos por ejemplo como usar cada uno de esos programas para calcular una primitiva de la
funcion:
En Wolfram Alpha basta usar el comando:
primitive of v(t) = g t
Tambien puedes usar:
integral of v(t) = g t
En Matlab/Octave es un poco mas elaborado:
clear; clc;
syms t g;
int(g * t, t)t
Recuerda que en Octave debes ejecutar primero pkg load symbolic.
3.2.3 Tabla de primitivas de funciones elementales (Incompleto)
-- EN CONSTRUCCION --

60 Calculo Integral. Aplicaciones
3.3 Integracion por substitucion (cambios de variable)
Comenzamos con el resultado matematico que esta detras de los resultados de este apartado.
Resultado 3.3.1. Sean [a, b] y [c, d] dos intervalos, g una funccion con derivada continua en [a, b]con
g([a, b]) ⊂ [c, d],
y f una funcion continua en [c, d], entonces
∫
f(x)dx =
∫
f(
g(t))
g′(t)dt = F (t) + C = F(
g−1(x))
+ C.
3.3.1 Integracion de funciones racionales
En este caso consideraremos integrales de la forma
∫
P (x)
Q(x)dx
donde P (x), Q(x) son dos polinomios con coeficientes reales.
Llegados aquı debemos considerar dos casos, el primero es que el grado del numerador, P (x)sea mayor o igual que el grado del denominador, Q(x), y el segundo caso que degP (x) <degQ(x).
En el primer caso debemos dividir los polinomios primero, es decir,
P (x) = C(x) ·Q(x) +R(x)
donde C(x) es el cociente, y R(x) es el resto el cual cumple que degR(x) < degQ(x). Ası
podemos decir que
P (x)
Q(x)= C(x) +
R(x)
Q(x).
Y dado la integral de C(x) es inmediata, solo nos queda calcular la integral de
R(x)
Q(x).
Para calcular debemos obtener la descomposicion en fracciones simples de dicha expresion.
Resultado 3.3.2. Descomposicion en fracciones simples de fracciones.
Cualquier fraccion
R(x)
Q(x),
con el grado deR(x) menor que el grado deQ(x) puede expresarse como una suma de fracciones
cuyos denominadores esta formado por expresiones relacionadas con los ceros de Q(x).
Distinguiremos tres casos fundamentales:

3.3 Integracion por substitucion (cambios de variable) 61
3.3.2 Q(x) tiene raıces reales simples
Llamemos a1, a2, a3 a las raıces reales de Q(x). En este caso la descomposicion sera de la forma
R(x)
Q(x)=
A1
x− a1+
A2
x− a2+ ...+
An
x− an,
por lo tanto
∫
R(x)
Q(x)dx = A1
∫
dx
x− a1+A2
∫
dx
x− a2+ · · ·+An
∫
dx
x− an= A1 ln |x− a1|+A2 ln |x− a2|+ · · ·+An ln |x− an|+ C.
Observacion 3.3.1. Todas las constantes Ak pueden calcularse facilmente
Ak =R(ai)
Q′(xi), i = 1, 2, . . . , n.
3.3.3 Q(x) tiene una raız multiple
Sea a una raız de Q(x) con multiplicidad n. En este case, la descomposicion es de la forma
R(x)
Q(x)=
R(x)
(x− a)n=
B1
x− a+
B2
(x− a)2+ · · ·+ Bn
(x− a)n.
Ası vemos que la primer integral resulta un logaritmo, mientras que el resto dan lugar a fracciones
cuyo denominador contiene potencias de x− a:
∫
Bk
(x− a)kdx = Bk
∫
(x− a−k)dx = Ak(x− a)−k+1
−k + 1+ C, k = 2, 3, . . . , n.
Es decir, que
∫
R(x)
Q(x)dx = B1 ln |x− a| − B2
x− a− B3
2(x− a)2− · · · − Bn
(n− 1)(x− a)n−1+ C.
3.3.4 Q(x) tiene dos raıces complejas conjugadas
Si Q(x) tiene una raız compleja de la forma p + qj, entonces tambien tiene como raız a p − qj.
En este caso, se puede expresar dicha fraccion de la forma
M(x− p) +N
(x− p− qi)(x− p+ qi)=M(x− p) +N
(x− p)2 + q2.
Cuya integral puede calcularse de una forma sencilla y contiene un logaritmo (asociado a la M ) y
una arcotangente (asociada a la N ).
Observacion 3.3.2. Conviene saber las siguientes identidades
∫
x− p
(x− p)2 + q2dx =
1
2ln |(x− p)2 + q2|+ C
∫
1
(x− p)2 + q2dx =
1
qarctan
(
x− p
q
)
+ C

62 Calculo Integral. Aplicaciones
Hay que tener en cuenta que todas las funciones racionales que se consideraran son una com-
binacion de estos tres tipos. Es decir, no se consideraran situaciones tales como ceros complejos
multiples.
Ejemplo 3.3.1. Calcular la integral
∫
x
(x− 1)(x− 2)dx.
Lo primero que tenemos es que el numerador tiene grado degP = 1 que es menor que el grado
del denominador degQ = 2. De hecho, los polos de la funcion son x = 1 y x = 2 y son simples.
Ası la descomposicion en fracciones simples de la funcion es
x
(x− 1)(x− 2)=
A1
x− 1+
A2
x− 2.
De hecho
A1 =P (1)
Q′(1)= lim
x→1(x− 1)
x
(x− 1)(x− 2)= −1.
y
A2 =P (2)
Q′(2)= lim
x→2(x− 2)
x
(x− 1)(x− 2)= 2.
Por tanto∫
x
(x− 1)(x− 2)dx = − ln |x− 1|+ 2 ln |x− 2|+ C.
Ejemplo 3.3.2. Calcular la integral
∫
2x+ 1
(x− 1)(x2 + x+ 1)dx.
Lo primero que tenemos es que el numerador tiene grado degP = 1 que es menor que el grado
del denominador degQ = 3. De hecho, los polos de la funcion son x = 1 simple y tiene dos
complejos conjugados −1/2±√3/2j. Ası la descomposicion en fracciones simples de la funcion
queda
2x+ 1
(x− 1)(x2 + x+ 1)=
A1
x− 1+M(x+ 1
2) +N
x2 + x+ 1.
Ya que
x2 + x+ 1 =
(
x+1
2
)2
+
(√3
2
)2
.
Ademas en este caso
A1 =P (1)
Q′(1)= 1,
por lo tanto
∫
2x+ 1
(x− 1)(x2 + x+ 1)dx = ln |x− 1|+ M
2ln |x2 + x+ 1|+ N√
3/2arctan
(
x+ 1/2√3/2
)
+ C
= ln |x− 1|+ M
2ln |x2 + x+ 1|+ 2N√
3arctan
(
2x+ 1√3
)
+ C.

3.3 Integracion por substitucion (cambios de variable) 63
Ejemplo 3.3.3. Calcular la integral
∫
x2 + 3
(x− 1)(x+ 2)2dx.
Lo primero que tenemos es que el numerador tiene grado degP = 2 que es menor que el grado
del denominador degQ = 3. De hecho, los polos de la funcion son x = 1 simple y x = −2 doble.
Ası la descomposicion en fracciones simples de la funcion queda
x2 + 3
(x− 1)(x+ 2)2=
A1
x− 1+
B1
x+ 2+
B2
(x+ 2)2.
En este caso
A1 =P (1)
Q′(1)=
4
9,
B2 = limx→2
(x+ 2)2x2 + 3
(x− 1)(x+ 2)2= −7
3,
y si tomamos el valor x = 0 nos queda −3/4 = −4/9 − B12 − 7/12, luego B1 = 5/9. Con todo
lo anterior se tiene que
∫
x2 + 3
(x− 1)(x+ 2)2dx =
4
9ln |x− 1|+B1 ln |x+ 2|+ 7
3
1
x+ 2+ C.
Ejemplo 3.3.4. Calcular la integral
∫
x2 − 2
x3(x2 + 1)dx.
Lo primero que tenemos es que el numerador tiene grado degP = 2 que es menor que el grado
del denominador degQ = 5. De hecho, los polos de la funcion son x = 0 triple y dos complejos
conjugados. Ası la descomposicion en fracciones simples de la funcion queda
x2 − 2
x3(x2 + 1)=B1
x+B2
x2+B3
x3+Mx+N
x2 + 1,
donde en este caso
B3 = limx→0
x3x2 − 2
x3(x2 + 1)= −2.
Por tanto la integral es igual a
∫
x2 − 2
x3(x2 + 1)dx = B1 ln |x| −
B2
x+
1
x2+M
2ln |x2 + 1|+N arctan(x) + C.
Observacion 3.3.3. Las constantes que faltan son B1 = 3, B2 = 0, M = −3, y N = 0.
Ejemplo 3.3.5. Calcular la integral
∫
x2 − x
(x+ 3)2dx.
Lo primero que tenemos es que el numerador tiene grado degP = 2 que es igual que el grado del
denominador degQ = 2. Ası tenemos que dividirlos:
x2 − x = (x+ 3)2(1) + (−7x− 9), C(x) = 1, R(x) = −7x− 9.

64 Calculo Integral. Aplicaciones
De hecho, los polos de la funcion son x = −3 dobles. Ası la funcion puede escribirse como
x2 − x
(x+ 3)2= 1 +
−7x− 9
(x+ 3)2= 1 +
B1
x+ 3+
B2
(x+ 3)2,
de hecho,
B2 = limx→−3
(x+ 3)2−7x− 9
(x+ 3)2= 12.
Luego la integral es igual a
∫
x2 − x
(x+ 3)2dx = x+B1 ln |x+ 3| − 12
x+ 3+ C.
Observacion 3.3.4. En este caso B1 = −7.
Este problema se hizo en clase tambien calculando el polinomio de Taylor en x0 = −3 siendo
en este caso
x2 − x = 12− 7(x+ 3) + (x+ 3)2,
por tanto, aplicando dicha identidad en la integral, queda
∫
x2 − x
(x+ 3)2dx =
∫(
12
(x+ 3)2− 7
x+ 3+ 1
)
dx = − 12
x+ 3x− 7 ln |x+ 3|+ x+ C.
3.4 Integracion de algunas funciones irracionales
A continuacion consideraremos diferentes funciones a las cuales deberemos de aplicar algun tipo
de variable para poder obtener otra integral que suele ser racional que ya sabemos que en general
siempre puede integrarse.
3.4.1 Funciones Irracionales en x
Son de la forma∫
R[
xp1q1 , x
p2q2 , . . .
]
dx,
donde R es una funcion racional y los numeros p1/q1, p2/q2, . . . son racionales. Estas integrales
se reducen a racionales si aplicamos el cambio de variable,
x1m = t, es decir x = tm ⇒ dx = mtm−1 dt.
Donde m es el mınimo comun multiplo de los denominadores, m = m.c.m.q1, q2, . . . .
3.4.2 Funciones irracionales en x y ax+bcx+d
Estas integrales son de la forma
∫
R
[
x,
(
ax+ b
cx+ d
)
p1q1
(
ax+ b
cx+ d
)
p2q2
, . . .
]
, dx
dondeR es una funcion racional, los numeros a, b, c, d son reales, y p1/q1, p2/q2, . . . son numeros
racionales. Estas integrales de reducen a integrales racionales aplicando el cambio de variable
ax+ b
cx+ d= tm,
donde m = m.c.m.q1, q2, . . . .

3.4 Integracion de algunas funciones irracionales 65
3.4.3 Irracionales cuadraticas
Son de la forma:∫
R[
x,√
ax2 + bx+ c]
dx,
donde R es una funcion racional, a, b, c son numeros reales y a 6= 0.
Estas integrales pueden reducirse a racionales mediante los siguientes cambios de variable que
se describen a continuacion:
A. Si a > 0, entonces
√
ax2 + bx+ c =√ax+ t ⇒ dx√
ax2 + bx+ c=
2dt
b− 2√at.
B. Si c > 0, entonces
√
ax2 + bx+ c = tx+√c ⇒ dx√
ax2 + bx+ c=
2dt
a− t2.
C. Si a < 0 y c < 0, entonces
ax2 + bx+ c = a(x− r1)(x− r2), y√
ax2 + bx+ c = t(x− r1).
Ademas pueden aplicarse los siguientes cambios de variables trigonometricos en los sigu-
ientes casos:
D. Si la integral es de la forma∫
R[
x,√
a2 − x2]
dx,
entonces aplicamos los cambios
x = asen(t) o x = a cos(t).
E. Si la integral es de la forma∫
R[
x,√
a2 + x2]
dx,
entonces aplicaremos el cambio de variable
x = a tan(t).
F. Si la integral es de la forma∫
R[
x,√
x2 − a2]
dx,
entonces aplicaremos el cambio de variable
x =a
cos(t).

66 Calculo Integral. Aplicaciones
3.4.4 Integracion de ciertas funciones trascendentes
• Exponenciales:
Son integrales de la forma∫
R [ax] dx.
Mediante el cambio ax = t se reducen a integrales racionales.
• Funciones racionales en sen(x) y cos(x)
Son de la forma∫
R [sin(x), cos(x)] dx.
Se pueden reducir a funciones racionales, o polinomicas, a traves de los siguientes cambios
de variable:
A. Si R [sin(x), cos(x)]es impar en cos(x), entonces debemos aplicar el cambio
sen(x) = t.
B. Si R [sin(x), cos(x)] es impar en sen(x), entonces debemos aplicar el cambio
cos(x) = t.
C. If R [sin(x), cos(x)] is even in sin(x), cos(x), then we change
tan(x) = t.
D. Un cambio generico que puede aplicarse es el siguiente
tan(x
2
)
= t.
Observacion 3.4.1. El case D. solo debe emplearse si ninguno de los otros metodos no son
posibles de aplicar. En tal caso
sen(x) =sen(x)
1=
2sen(x2 ) cos(x2 )
cos2(x2 ) + sen2(x2 )=
2 tan(x2 )
1 + tan2(x2 )=
2t
1 + t2,
cos(x) =cos(x)
1=
cos2(x2 )− sen2(x2 )
cos2(x2 ) + sen2(x2 )=
1− tan2(x2 )
1 + tan2(x2 )=
1− t2
1 + t2.
Y dado que x = 2arctan(t) entonces
dx =2dt
1 + t2.
Cuando tenemos potencias en las funciones sen(x) y cos(x):∫
senm(x) cosn(x)dx
con m, n numeros enteros, entonces tenemos que usar los cambios A., B., y C..
• Producto de sen(mx) y cos(nx)
Son de la forma∫
sen(mx) cos(nx)dx,
∫
cos(mx) cos(nx)dx,
∫
sen(mx)sen(nx)dx,
dondem,n ∈ N. Todas las de este tipo son elementales aplicando las identidades trigonometricas.

3.5 Integracion por partes 67
3.5 Integracion por partes
Resultado 3.5.1. Sean u y v dos funciones con derivadas continuas en un intervalo I , entonces
∫
udv = uv −∫
vdu.
Esta formula puede verse tambien de la forma
∫
u(x)dx = u(x)v(x)−∫
u′(x)v(x)dx.
Observacion 3.5.1. Una forma sencilla para saber como tomar u, consiste en emplear la regla
de los A.L.P.E.S. en ese orden, es decir, tomar u como inversa de funciones trigonometricas
(empiezan por A), como Logaritmos, como Polinomios, como Exponenciales, o como Seno o
coseno.
Usaremos este resultado, entre otras, para el calculo de integrales de la forma
3.5.1 Producto de polinomios por funciones trigonometricas inversas
Ejemplo 3.5.1. Calcular la integral
∫
xarcsen(x) dx.
Aplicamos integracion por partes y aplicando la regla de los ALPES tomando u = arcsen(x) y
dv = xdx, por tanto du = 1/√1− x2 dx y v = x2/2, luego
∫
xarcsen(x) dxIPP=
1
2x2arcsen(x)− 1
2
∫
x2√1− x2
dx.
Ahora la integral que ha quedado es irracional cuadratica donde hay expresion de la forma√a2 − x2 que tiene como cambio asignado es x =sen(t), luego dx = cos(t)dt, por tanto queda
∫
x2√1− x2
dx =
∫
sen2(t)
cos(t)cos(t) dt =
∫
sen2(t)dt =t
2− sen(2t)
4+ C,
Deshaciendo el cambio y teniendo en cuenta que
sen(2arcsen(x)) = 2x√
1− x2,
queda∫
x2√1− x2
dx =1
2arcsen(x)− 1
2x√
1− x2 + C,
Ası∫
xarcsen(x) dx =1
2x2arcsen(x)− 1
4arcsen(x) +
1
4x√
1− x2 + C.
Y aunque no sea exactamente del tipo que se propone en este apartado
Ejemplo 3.5.2. Calcular la integral
∫
arctan(x) ln(x) dx.

68 Calculo Integral. Aplicaciones
Vamos a resolverlo aplicando integracion por partes tomando u = arctan(x), y dv = ln(x) dx,
luego du = 1/(1 + x2)dx, y v = x ln(x)− x, por tanto
∫
arctan(x) ln(x) dxIPP= x(ln(x)− 1) arctan(x)−
∫
x log(x)
1 + x2dx+
∫
x
1 + x2dx.
Y dado que
∫
x log(x)
1 + x2dx
IPP=
1
2log(x) log(1 + x2)− 1
2
∫
log(1 + x2)
xdx,
y esta integral no se puede resolver.
Sin embargo
Ejemplo 3.5.3. Calcular la integral∫
arcsen(x) ln(x) dx.
Aplicamos de nuevo integracion por partes, quedando
∫
arcsen(x) ln(x) dxIPP= x(ln |x| − 1)arcsen(x)−
∫
x(ln |x| − 1)√1− x2
dx.
Ahora aplicamos de nuevo integracion por partes tomando u = log(x)− 1, y nos queda
∫
x(log(x)− 1)√1− x2
dxIPP= (ln |x| − 1)
√
1− x2 +
∫
√1− x2
xdx.
Esta ultima integral es irracional cuadratica y aplicaremos el cambio x =sen(t), y nos queda
∫
√1− x2
xdx =
∫
cos2(t)
sen(t)dt = ln | tan(t/2)|+ cos(t) + C.
Deshacemos el cambio quedando
∫
√1− x2
xdx = ln
∣
∣
∣
∣
x
1 +√1− x2
∣
∣
∣
∣
+√
1− x2 + C.
Con todo lo anterior se tiene∫
arcsen(x) ln(x) dx = (ln |x| − 1)√
1− x2 + ln
∣
∣
∣
∣
x
1 +√1− x2
∣
∣
∣
∣
+√
1− x2 + C.
Estas ultimas integrales son algo complejos pero es importante que sepamos que hay integrales
que para resolverlas tenemos que manejar muy bien la trigonometrıa.
Ejemplo 3.5.4. Calculo de la integral de argsenh(x).Aplicaremos interacion por partes tomando u = argsenh(x), y nos queda∫
argsenh(x)dx = x argsenh(x)−∫
x√1 + x2
dx = x argsenh(x)−√
1 + x2 + C.
Y ademas se tiene que
Ejemplo 3.5.5. Calculo de la integral de arctan(x).Aplicaremos interacion por partes tomando u = arctan(x), y nos queda∫
arctan(x)dx = x arctan(x)−∫
x
1 + x2dx = x arctan(x)− 1
2ln |1 + x2|+ C.

3.5 Integracion por partes 69
3.5.2 Producto de polinomios por logaritmos
Ejemplo 3.5.6. Calcular la integral∫
ln(x) dx.
Aplicamos integracion por partes tomando u = ln(x) y dv = dx, por tanto du = 1/x dx y v = x,
luego∫
ln(x) dxIPP= x ln(x)− x+ C.
Ejemplo 3.5.7. Calcular la integral
∫
x2 ln(x) dx.
Aplicamos integracion por partes usando la regla de ALPES tomando u = ln(x) y dv = x2 dx,
por tanto du = 1/x dx y v = x3/3, luego
∫
x2 ln(x) dxIPP=
1
3x2 ln(x)− 1
3
∫
x2 dx =1
3x3 ln(x)− 1
9x3 + C.
Pero podemos resolver integrales algo mas elaboradas.
Ejemplo 3.5.8. Calcular la integral
∫
(x+ 1) ln2(x− 1) dx.
Aplicamos integracion por partes usando la regla de ALPES tomando u = ln2(x − 1) y dv =(x+ 1)dx, por tanto du = 2 ln(x− 1)/(x− 1) dx y v = x2/2 + x, luego
∫
(x+ 1) ln2(x− 1) dxIPP=
1
2(x2 + 2x) ln2(x− 1)−
∫
x2 + 2x
x− 1ln(x− 1) dx.
Ante situaciones ası conviene primero desarrollar la parte racional y luego si es necesario integrar
por partes, es decir, dado que
x2 + 2x = (x− 1)(x+ 3) + 3,
entonces
∫
x2 + 2x
x− 1ln(x− 1) dx =
∫
(x+ 3) ln(x− 1) dx+
∫
3
x− 1ln(x− 1)dx.
Donde la primera se hace por partes tomando u = ln(x − 1), dv = (x + 3) dx, por tanto
du = 1/(x− 1)dx y v = x2/2 + 3x, luego
∫
(x+ 3) ln(x− 1) dxIPP=
1
2(x2 + 6x) ln(x− 1)− 1
2
∫
x2 + 6x
x− 1dx
=1
2(x2 + 6x) ln(x− 1)− 1
2
(
x2
2+ 7x+ 7 ln |x− 1|
)
+ C,
y la segunda es inmediata
∫
3
x− 1ln(x− 1)dx =
3
2ln2 |x− 1|+ C.

70 Calculo Integral. Aplicaciones
Resumiendo la integral pedida es
∫
(x+ 1) ln2(x− 1) dx =1
2(x2 + 2x− 3) ln2(x− 1)− 1
2(x2 + 6x) ln(x− 1)
+1
4
(
x2 + 14x+ 14 log |x− 1|)
+ C.
Y por ultimo dejamos el siguiente ejercicio para clase
Ejemplo 3.5.9. Calcular la integral
∫
(x+ 1) ln(x) ln(x+ 1) dx.
En este caso aplicamos la regla de los ALPES tomando u = ln(x) ln(x + 1) y dv = (x + 1) dx,
por tanto du =(
ln(x+ 1)/x+ ln(x)/(x+ 1))
dx, y v = x2/2 + x, luego
∫
(x+ 1) ln(x) ln(x+ 1) dx =1
2(x2 + 2x) ln(x) ln(x+ 1)− 1
2
∫
(x+ 2) ln(x+ 1) dx
− 1
2
∫
x2 + 2x
x+ 1ln(x) dx.
Donde cada una de las integrales que aparecen ahora solo contienen un logaritmo luego pueden
hacerse por partes, de hecho,
∫
(x+ 2) ln(x+ 1) dxIPP= −x
2
4+
1
2x2 ln |x+ 1| − 3x
2+ 2x log |x+ 1|+ 3
2ln |x+ 1|+ C,
y la segunda integral no se puede completar pues la integral
∫
ln(x)
x+ 1dx
no se puede resolver.
3.5.3 Producto de exponenciales por funciones seno o coseno
Observacion 3.5.2. Este tipo de integrales son consideradas de las mas complicadas a las que se
le aplica este metodo debido al caracter cıclico de la forma de calcularse.
Ia,b =
∫
eatsen(bt) dtIPP= − d
1
beat cos(bt) +
a
b
∫
eat cos(bt) dt
IPP= − 1
beat cos(bt) +
a
b2eatsen(bt)− a2
b2
∫
eatsen(bt) dt
Dado que a la derecha aparece de nuevo Ia,b entonces
Ia,b =
∫
eatsen(bt) dt =−beat cos(bt) + aeatsen(bt)
a2 + b2+ C.
De una forma similar, se tiene que
∫
eat cos(bt) dt =aeat cos(bt) + beatsen(bt)
a2 + b2+ C.

3.5 Integracion por partes 71
3.5.4 Producto de polinomios por exponenciales
Ejemplo 3.5.10. Calcular la integral
∫
x2e3x dx.
En este caso aplicando la regla de ALPES, tomamos u = x2, e3xdx = dv, ası sera du = 2x dx y
v = 1/3e3x por tanto∫
x2e3x dxIPP=
1
3x2e3x − 2
3
∫
xe3x dx.
De nuevo aplicaremos integracion por partes a la ultima integral llamando u = x y e3xdx = dv,
ası sera du = dx y v = 1/3e3x por tanto
∫
x2e3x dxIPP=
1
3x2e3x − 2
3
(
1
3xe3x − 1
9e3x)
+ C.
Por tanto∫
x2e3x dx =1
27(9x2 − 6x+ 2)e3x + C.
Observacion 3.5.3. En general como se puede intuir se tiene que
∫
p(x)eax dxIPP= Q(x)eax + C
donde C es constante y Q y p son polinomios del mismo grado.
3.5.5 Producto de polinomios por funciones seno o coseno
Ejemplo 3.5.11. Calcular la integral
∫
x tan2(x) dx.
En este caso aplicando la regla de ALPES, tomamos u = x, tan2(x)dx = dv, ası sera du = dx y
v = tan(x)− x por tanto
∫
x tan2(x) dxIPP= x(tan(x)− x)−
∫
(tan(x)− x) dx = −x2
2+ x tan(x) + ln | cos(x)|+C.
3.5.6 Algunas funciones irracionales u otras
El metodo de integracion por partes puede servir para resolver otro tipo de integrales para las
cuales no tengamos claro que metodo emplear. De todos modos debemos recordar que hay fun-
ciones que no podemos integrar de ningun modo.

72 Calculo Integral. Aplicaciones
3.6 La integral definida
3.6.1 Particiones de un intervalo
Sean a, b ∈ R, con a < b. Llamaremos particion del intervalo [a, b] a un conjunto de puntos
pertenecientes al intervalo [a, b],
P = x0, x1, x2, ..., xn.
que verifican
a = x0 < x1 < · · · < xn = b.
Representaremos al conjunto de todas las posibles particiones del intervalo [a, b] de la forma
P([a, b]).
x
f(x)
−1
1
2
3
x0 x1 x2 x3 x4 x5 x6 x7 x8
Observacion 3.6.1. Como se ve en el ejemplo, los puntos estan distribuidos por el intervalo sobre
el cual queremos integrar. Dichos puntos indican por donde vamos a cortar la figura a la hora de
hacer las sumas parciales de Riemann.
Dadas dos particiones P1, y P2 ∈ P([a, b]), diremos que P1 es mas fina que P2 y lo
representaremos por P1 ≥ P2 si P1 contiene a P2.
3.6.2 Sumas de Riemann
Definicion 3.6.1. Llamamos diametro de parcition P = x0, x1, x2, ..., xn y se representa por
d(P ) al numerto:
d(P ) = max|xi − xi−1| : i = 1, 2, 3, ..., n.Observacion 3.6.2. Observa como en el ejemplo anterior se ve que que d(P ) = |x5 − x4|.Definicion 3.6.2. Sea f una funcion acotada en [a, b] y sea P una particion de [a, b]. Llamaremos
suma de Riemann superior correspondiente a f y P tal numero,
S(f, P ) =n∑
i=1
Mi(xi−xi−1) =M1(x1−x0)+M2(x2−x1)+M3(x3−x2)+· · ·+Mn(xn−xn−1),
donde
Mi = supf(x), x ∈ [xi−1, xi].Llamaremos suma de Riemann inferior al numero,
S¯(f, P ) =
n∑
i=1
mi(xi−xi−1) = m1(x1−x0)+m2(x2−x1)+m3(x2−x1)+· · ·+mn(xn−xn−1),
donde
mi = inff(x), x ∈ [xi−1, xi].

3.6 La integral definida 73
Observacion 3.6.3. Coloreamos de las sumas superiores de morado, y las inferiores de rojo.
x
f(x)
−1
1
2
3
x0 x1 x2 x3 x4 x5 x6 x7 x8
x
f(x)
−1
1
2
3
x0 x1 x2 x3 x4 x5 x6 x7 x8
Observa que la zona naranja da como resultado negativo, es decir, es toman los rectangulos
pero el signo de su area lo determina su posicion respecto al eje x, es decir, si la funcion esta
sobre el eje x su area es positiva y si esta por debajo de el, es negativa.
3.6.3 Propiedades de las sumas de Riemann
Las sumas de Riemann verifican que para todas (su sımbolo matematico es ∀) P,P1,P2 ∈P([a, b]) las siguientes propiedades:
• 1-. S(f,P) ≥ S¯(f,P).
Observacion 3.6.4. La igualdad solo se dara para funciones constantes. Y en general,
como se ve en la figura es mayor estricto
x
f(x)
1
2
3
x0 x1 x2 x3 x4 x5 x6 x7
• 2-. If P1 > P2, then
a) S(f,P1) ≤ S(f,P2).
b) S¯(f,P1) ≥ S
¯(f,P2)
• 3-. S(f,P1) ≥ S¯(f,P2).
Observacion 3.6.5. Basta ver que sucede si metemos un punto nuevo en nuestra particion, de ese
modo la hacemos mas fina:
x3 x4 x3 x9 x4 x3 x9 x10 x4 x3 x9x10 x4 x3 x4 x3 x9 x4 x3 x9x10 x4
Ahora consideremos el conjunto de numeros
S(f, P )P∈P([a,b]).

74 Calculo Integral. Aplicaciones
Este conjunto tiene siempre un mınimo si tenemos en cuenta la propiedad 3. Por tanto existe el
infimo de este conjunto al que llamaremos integral de Riemann superior de f en
[a, b] y lo representaremos por
∫ b
af(x) dx = infS(f, P )P∈P([a,b]).
Del mismo modo, el conjunto
S¯(f, P )P∈P([a,b])
tiene tt supremo al que llamaremos integral de Riemann inferior,
∫ b
af(x) dx = supS(f, P )P∈P([a,b]).
Con todo lo anterior, sea f : [a, b] → R una funcion acotada, se dira que f es integrable
Riemann en [a, b] si∫ b
af(x) dx =
∫ b
af(x) dx.
Y llamaremos a este valor la integral de f in [a, b]y la representaremos como
∫ b
af(x) dx =
∫ b
af(x) dx =
∫ b
af(x) dx.
Entre sus propiedad tenemos las siguientes:
•∫ a
af(x) dx = 0.
• Si a < b, entonces∫ a
bf(x) dx = −
∫ b
af(x) dx.
• ∀c ∈ [a, b], si f es intgrable en [a, b], [a, c] y [c, b], entonces
∫ b
af(x) dx =
∫ c
af(x) dx+
∫ b
cf(x) dx.
• Si f y g son integrables en [a, b], entonces la suma f + g es integrable en [a, b] y
∫ a
b(f + g)(x) dx =
∫ a
bf(x) dx+
∫ a
bg(x) dx.
• Si f es integrable en [a, b] y c ∈ R entonces cf es integrable en [a, b] y
∫ b
acf(x) dx = c
∫ a
bf(x) dx.
Observacion 3.6.6. Estas dos ultimas propiedades nos indican que el operador “integral
definida de” es lineal, i.e.
∫ a
b(c1f + c2g)(x) dx = c1
∫ a
bf(x) dx+ c2
∫ a
bg(x) dx.

3.6 La integral definida 75
• Si f es integrable en [a, b] y f(x) > 0, ∀x ∈ [a, b], entonces
∫ b
af(x) dx ≥ 0.
• Si f y g son dos funciones integrables en [a, b] tal que f(x) ≤ g(x), ∀x ∈ [a, b], entonces
∫ b
af(x) dx ≤
∫ b
ag(x) dx.
x
f(x)
1
2
3
• Si f es integrable en [a, b] entonces |f | es integrable en [a, b] y
∣
∣
∣
∣
∫ b
af(x) dx
∣
∣
∣
∣
≤∫ b
a|f(x)| dx.
y∫ b
af dx ≤
∣
∣
∣
∣
∫ b
af(x)
∣
∣
∣
∣
dx ≤∫ b
a|f(x)| dx.
−1
−2
1
2
x
f(x)
Definicion 3.6.3. Sea f : [a, b] → R una funcion integrable y acotada en [a, b]. El numero
1
b− a
∫ b
af(x) dx
se denomina valor medio de f en el intervalo [a, b].
Con todo lo anterior es importante destacar la primera aplicacion clara de la integral definida:
El Area de una funcion.
Definicion 3.6.4. Sif(x) ≥ 0, ∀x ∈ [a, b] y f(x) es integrable en [a, b], el numero∫ ba f(x) dx
representa el area de funcion f delimitada por la grafica de la funcion f(x), por las rectas
x = a, x = b, y el eje x.

76 Calculo Integral. Aplicaciones
Resultado 3.6.1. (Criterio of integrabilidad)
Si f es continua en el intervalo [a, b] entonces f es integrable en [a, b].
Resultado 3.6.2. La regla de Barrow
Sea f : [a, b] → R integrable en [a, b] y sea G una primitive of f , tal que G′(x) = f(x), ∀x ∈[a, b], entonces
∫ b
af(x)dx =
(
G(x)∣
∣
∣
x=b
x=a=(
G(x)∣
∣
∣
b
a= G(b)−G(a).
Una consecuencia clara de la Regla de Barrow tiene que ver con el metodo de integracion
por partes:∫ b
au dv = uv(x)
∣
∣
∣
x=b
x=a−∫ b
av du = u(b)v(b)− u(a)v(a)−
∫ b
av du.
3.6.4 Aplicaciones de la Integral de Riemann
Area de figuras planas
Sea f(x) una funcion acotada e integrable en [a, b] tal que f(x) ≥ 0 para todo x ∈ [a, b]. Entonces,
su area sera el numero∫ b
af(x)dx.
el cual representa el area de la region encerrada por las rectas verticales x = a, x = b, el eje x y
la grafica de la funion f(x).
Observacion 3.6.7. (Area de funcion dada em coordenadas polares)
Si la funcion viene dada en coordenadas polares ρ = ρ(φ), entonces el area entre los valores
de rho, φ1, φ2 viene dada por
A =1
2
∫ φ2
φ1
ρ2(φ)dφ.
Longitud de una curva
Si la funcion f(x) es derivable y su derivada es continua en [a, b], la longitud de arco viene
dada por la expresion
L =
∫ b
a
√
1 + [f ′(x)]2dx.
Volumen de Revolucion
Sea y = f(x) una funcion continua en [a, b]. El Volumen de revolucion de la figura
que representa el giro de la funcion f alrededor del eje X viene dado
por la expresion
VOX = π
∫ b
a[f(x)]2dx.
Mientras que si la funcion f gira alrededor del eje y, la expresion se transforma en,
VOY = π
∫ d
c[f(y)]2dy.
Este ultimo volumen tambien puede calcularse mediante el metodo de los cilindros, siendo
VOY = 2π
∫ b
axf(x)dy.

3.7 Calculo de la integral de eax cos(bx) usando numeros complejos. 77
Area lateral de Revolucion
Sea y = f(x) una funcion continua en [a, b], que gira en torno al eje x. El Area lateral de
revolucion viene dada por la expresion
A = 2π
∫ b
af(x)
√
1 + [f ′(x)]2dx.
Si la funcion gira respecto al eje y, la expresion anterior se escribe de la forma
A = 2π
∫ d
cf(y)
√
1 + [f ′(y)]2dy.
3.7 Calculo de la integral de eax cos(bx) usando numeros complejos.
Una forma ‘simple’, incluso elegante de calcular la integral
∫
eax cos(bx) dx
es la siguiente:
dado que
senX =ejX − e−jX
2j, y cosX =
ejX + e−jX
2.
entonces∫
eax cos(bx) dx =1
2
∫
(
eax+jbx + eax−jbx)
dx =1
2
1
a+ jbeax+jbx +
1
2
1
a− jbeax−jbx
=eax
2(a2 + b2)
(
(a− jb)ejbx + (a+ jb)e−jbx)
=eax
a2 + b2(a cos(bx) + bsen(bx)) + C.
Aquı se han usado las siguientes identidades: (a+ jb)(a− jb) = a2 + b2, y que −j = 1/j.

78 Calculo Integral. Aplicaciones

La transformada de Laplace Unilateral
4.1 Introduccion. Definiciones
Las transformaciones integrales son de la forma
∫ b
ag(s, t)f(t) dt
donde g(s, t) es el nucleo y f(t) es la funcion sometida a dicha transformcion. Si esta integral
existe, sera una fincion ϕ(s) que sera la transformada de f(t).
Definicion 4.1.1. Llamamos transformada de Laplace unilateral de una funcion
f(t) y la notaremos por L f(t)(s) a la funcion
Ψ(s) =
∫ ∞
0f(t)e−st dt,
cuando esta integral exista, donde s ∈ C.
Definicion 4.1.2. Llamamos transformada de Fourier de una funcion f(t) y la notare-
mos por Ff(t)(α) a la funcion
β(α) =
∫ ∞
−∞f(t)e−iαt dt,
cuando esta integral exista, donde α ∈ R.
Observacion 4.1.1. 1. Dos funciones diferentes para t < 0 pero identicas para t > 0 tendran
identicas transformadas unilaterales.
2. La transformada de Fourier existe o no existe para una determinada funcion mientras que
la transformada de Laplace existe para determinados valores de la variable (s) y para otros
no existe.

80 La transformada de Laplace Unilateral
Ejemplo 4.1.1. Calcula la transformada unilateral de Laplace de la funcion f(t) = eat.
L f(s) =∫ ∞
0eate−stdt =
∫ ∞
0e(a−s)tdt
=
(
limt→∞
e(a−s)t
a− s
)
− e0 · sa− s
=1
s− a.
Aquı hay que tener cuidado pues dado que a y s son complejos, mientras que t es real, luego
entonces
e(a−s)t = eℜ(a−s)t+jℑ(a−s)t = eℜ(a−s)tejℑ(a−s)t = eℜ(a−s)t (cos(ℑ(a− s)t) + jsen(ℑ(a− s)t)) ,
luego e(a−s)t → 0 solo si ℜ(a − s) < 0, donde ℜ(z) e ℑ(z) representan las partes real e
imaginaria del numero complejo z. Y de hecho si ℜ(a − s) < 0 ⇒ ℜ(s) > ℜ(a). Por tanto
la ROC (Region de convergencia) de dicha transformada es ℜ(s) > ℜ(a), o sea, un
semiplano complejo hacia la derecha desde ℜ(a) (ver dibujo).
Ejemplo 4.1.2. Calcula la transformada unilateral de Laplace de la funcion f(t) = e−t + e−2t.
L f(s) =∫ ∞
0(e−t + e−2t)e−stdt =
∫ ∞
0e(−1−s)tdt+
∫ ∞
0e(−2−s)tdt =
1
s+ 1+
1
s+ 2,
siendo ℜ(s) > −1, ℜ(s) > −2. Por tanto converge si ℜ(s) > −1.
Viendo estos ejemplos la region de convergencia son semiplanos hacia la derecha de la forma
(ejemplo para a = −3)
t
x(t)
−∞
+∞
−6 −3 3 6
4.2 Region de convergencia (ROC)
Hemos visto que especificar la transformada de Laplace requiere ademas de la expresion alge-
braica, la region de convergencia asociada (ver los ejemplos).

4.3 Transformada Unilateral de Laplace: Existencia 81
4.2.1 Propiedades
1. La ROC de la transformada de Laplace de una funcion f(t) es un semiplano hacia la derecha
como se menciono antes.
2. Para transformadas de Laplacecuya expresion es racional, la ROC no contiene
ningun polo.
Si
L f(t)(s) = P (s)
Q(s),
P yQ polinomios en s. Es evidente que si a es un polo de dicha fraccion, es decirQ(a) = 0entonces P (s)/Q(s) no converge para s = a y por lo tanto la ROC no puede contener el
valor a.
3. Si f(t) = 0 para t < T1 (f(t) es una funcion a la derecha) y si la recta x = ℜ(s) = σ0 esta
en la ROC entonces los valores de s tales que ℜ(s) > σ0 tambien estan en la ROC.
Si la transformada de Laplace de f(t) converge para valor σ0. Entonces
∫ ∞
0f(t)e−σ0t dt <∞ ⇒
∫ ∞
T1
f(t)e−σ0t dt <∞
luego para σ1 > σ0 entonces
∫ ∞
T1
f(t)e−σ1t dt =
∫ ∞
T1
f(t)e−(σ1−σ0)t eσ0t dt ≤ e−(σ1−σ0)T1
∫ ∞
T1
f(t)eσ0tdt ≤ ∞.
4.3 Transformada Unilateral de Laplace: Existencia
La importancia que tiene la parte real al determinar la ROC nos lleva a estudiar de forma particular
la transformada de Laplace cuando s ∈ R.
Definicion 4.3.1. Decimos que una funcion real de variable real de orden exponencial si
existen M,m ∈ R tales que |f(x)| < Memx para todo x ≥ x0(M).
4.3.1 Consecuencias
1. Toda funcion acotada es de orden exponencial.
2. Si f(t) es integrable y de orden exponencial, entonces
∫ t
0f(x) dx
es de orden exponencial.
3. Si f(t) es de orden exponencial, entonces
limt→∞
e−stf(t) = 0, para todo s > m
Teorema 4.1. (de existencia)
Si f(t) es continua (o continua a trozos) con t1 ≤ t ≤ t2, t1 > 0. Si f(t) es de
orden exponencial y limt→0+
f(t) es finito, entonces existe la transformada
unilateral de Laplace de f(t).

82 La transformada de Laplace Unilateral
Teorema 4.2. (del valor final)
Si f(t) cumple las condiciones para la existencia de su transformada y
L f(t)(s) = F (s), entonces
lims→∞
F (s) = 0.
Teorema 4.3. (del valor inicial)
Si f(t) es derivable en (0, t), es de orden exponencial y tiene lımite finito cuando
t → 0+. Entonces f ′ es continua o continua a trozos en todo el intervalo (0, t), es de orden
exponencial y ademas:
lims→∞
sF (s) = limt→0+
f(t) = f(0+),
y si f es continua en t = 0 entonces f(0+) = f(0).
4.3.2 Linealidad
La transformada de Laplace es un operador lineal.
L K1f1(t) +K2f2(t)(s) = K1L f1(t)(s) +K2L f2(t)(s).
Esta propiedad se deduce de la linealidad de la integral y por tanto tambien se verifica para valores
complejos.
4.3.3 Transformada de la derivada de una funcion
Si f(t) verifica las condiciones del Teorema de existencia y es sucesivamente derivable, entonces
L f (n)(t)(s) = snL f(t))(s)− sn−1f(0+)− sn−2f ′(0+)− · · · − f (n−1)(0+).
Como casos particulares estan las de la derivada primera:
L f ′(t)(s) = sL f(t))(s)− sf(0+),
y a de la derivada segunda:
L f ′′(t)(s) = s2L f(t))(s)− s(0+)− f ′(0+).
Esta propiedad se verifica si s ∈ C (s toma valores complejos).
Derivada de la Transformada de Laplace
Si F (s) = L f(t))(s) es derivable, entonces
F ′(s) = −L tf(t)(s),
y en general
F (n)(s) = (−1)nL tnf(t)(s),donde ROC de L tf(t)(s) ⊃ ROC de L f(t)(s). De nuevo esta propiedad es valida para scomplejo.
Se deja como ejercicio que se vea que
L tn(s) = n!
sn+1, n = 0, 1, 2, . . .
Por la propiedad de la linealidad con esto podemos calcular la transformada de Laplace unilateral
de cualquier polinomio.

4.3 Transformada Unilateral de Laplace: Existencia 83
4.3.4 Transformada de la integral de una funcion
Si f(t) cumple las condiciones del teorema de existencia, la integral
∫ t
0f(x) dx
es de orden exponencial y
L
∫ t
0f(x) dx
(s) =1
sL f(t)(s).
Esta identidad es un caso particular de una mas general: Sea a ≥ 0, entonces
L
∫ t
af(x) dx
(s) =1
sL f(t)(s)− 1
s
∫ a
0f(x)dx.
Esta propiedad se verifica si s ∈ C (s toma valores complejos).
Integral de la Transformada de Laplace (si toma valores reales)
Si F (s) = L f(t))(s), y f(t)/t tiene transformada de Laplace, entonces
L
f(t)
t
(s) =
∫ ∞
sF (z) dz.
Ejemplo 4.3.1. Calcular la transformada de Laplace unilateral de la funcion sentt .
L
sent
t
(s) =
∫ ∞
sL sent(z) dz =
∫ ∞
s
1
z2 + 1dz = arctan z
∣
∣
∣
∞
s=π
2− arctan s.
4.3.5 Propiedades de traslacion
1) Sea s0 ≥ 0, entonces
L es0tf(t)(s) = F (s− s0).
En este caso, si ROC F (s) = (a, b) entonces ROC L es0tf(t)(s) es (a+ ℜ(s0), b+ ℜ(s0)).2) Esta propiedad es mas importante y compleja: Sea t0 ≥ 0, entonces
L f(t− t0)u(t− t0)(s) = e−st0L f(t))(s).
4.3.6 Propiedades de cambio de escala
Sea k > 0, entonces
L f(kt)(s) = 1
kF (s/k).
Ejemplo 4.3.2. Calcular L senh2t(s).Dado que 2senht = et − e−t, entonces
L senht(s) = 1
2(s− 1)− 1
2(s+ 1),
siendo ROC F (z) = z : ℜ(s) > 1. Por tanto
L senh2t(s) = 1
2
(
1
2(s/2− 1)− 1
2(s/2 + 1)
)
=2
s2 − 4,
ası la ROC ahora sera z : ℜ(z) > 2.

84 La transformada de Laplace Unilateral
4.3.7 Transformada de ciertas funciones elementales
Transformada de f(t) = eat, a ≥ 0
L eat(s) = 1
s− a, s > a.
Transformada de las funciones seno y coseno
Podemos obtenerlas empleado diferentes identidades previas empleando la transformada de la
segunda derivada. Integrando por partes y aplicando la regla de Barrow se tiene
L sen(bt)(t) =∫ ∞
0sen(bt)e−st dt = −1
be−st cos(bt)
∣
∣
∣
∞
0− s
b
∫ ∞
0cos(bt)e−st dt,
por tanto
bL sen(bt)(s) = 1− sL cos(bt)(s).
Por otro lado empleando la misma tecnica
L cos(bt)(t) =∫ ∞
0cos(bt)e−st dt =
1
be−stsen(bt)
∣
∣
∣
∞
0+s
b
∫ ∞
0sen(bt)e−st dt,
ası
bL cos(bt)(s) = sL sen(bt)(s).
Combinando las dos se deduce que
L sen(bt)(s) = b
s2 + b2, y L cos(bt)(s) = s
s2 + b2.
Transformada de una poligonal rectilınea
Una poligonal rectilınea tiene una expresion de la forma:
f(t) =n∑
j=1
bj |t− aj |+ b|t|.
Por la linealidad es suficiente obtener la transformada de |t− a|, |t+ a| (a > 0) y |t|. De hecho,
L |t−a|(s) =∫ ∞
0|t−a|e−st dt = −
∫ a
0(t−a)e−st dt+
∫ ∞
a(t−a)e−st dt =
e−sa
s2+a
s− 1
s2+e−sa
s2,
valido para s > 0, y
L |t+ a|(s) =∫ ∞
0|t+ a|e−st dt =
∫ ∞
0(t− a)e−st dt =
a
s+
1
s2, s > 0.
Por tanto para a = 0 resulta
L |t|(s) = 1
s2, s > 0.
De nuevo, esta propiedad es valida en el plano complejo para ℜ(s) > 0.

4.3 Transformada Unilateral de Laplace: Existencia 85
Transformada de una funcion periodica
Sea f una funcion periodica de perıodo mınimo 2T . Supongamos que f es continua o continua a
trozos en (nT, n+ 2T ) y tiene lımites finitos en ambos extremos de dicho intervalo. Entonces
L f(t)(s) =∫ ∞
0f(t)e−st dt =
∞∑
n=0
∫ 2nT+2T
2nTf(t)e−st dt.
Como la funcion es periodica en esos intervalos haciendo el cambio de variable adecuado, se sigue
que
L f(t)(s) =∫ ∞
0f(t)e−st dt =
∞∑
n=0
e−2nsT
∫ 2T
0f(t)e−st dt =
1
1− e−sTs
∫ 2T
0f(t)e−st dt.
Ejemplo 4.3.3. Calcular la transformada de Laplace unilateral de la funcion
f(t) =|sent|sent
.
Dicha funcion es peri’odica de perıodo 2π, por tanto
L f(t)(s) = 1
1− e−2πs
∫ 2π
0
|sent|sent
e−st dt =1
1− e−2πs
(∫ π
0e−st dt−
∫ 2π
πe−st dt
)
,
integramos y resuta
L f(t)(s) = (1− e−sπ)2
s(1− e−2πs).
4.3.8 Convolucion
Sean f(t) y g(t) funciones. Si g(t) es la respuesta de un sistema en tiempo
continuo LTI, a la funcion impulso, para una entrada arbitraria f(t). La
respuesta del sistema viene dada por f ∗ g que denominamos convolucion de f y g.
(f ∗ g)(t) =∫ ∞
−∞f(τ)g(t− τ) dτ.
Si f y g son las funciones consideradas son causales, es decir, f(t) = f(t) u(t) y g(t) = g(t) u(t),entonces
f(t) ∗ g(t) =(∫ t
0f(τ)g(t− τ) dτ
)
u(t).
4.3.9 Propiedades de la convolucion (Incompleto)
Resultado 4.3.1. El producto de las transformadas de Laplace de dos funciones f y gcoincide con la transformada de la convolucion f ∗ g, esto es,
Lf(s) · Lg(s) = Lf(t) ∗ g(t)(s).
APLICACIONES: 1) Obtener una funcion h(t) cuya transformada ψ(s) se puede
descomponer como producto de dos funciones ψ(s) = α(s)β(s) con α(s) y β(s)transformadas de funciones conocidas f y g respectivamente, entonces
Lh(t)(s) = ψ(s) = α(s)β(s) = Lf(t)(s)× Lg(t)(s) = L(f ∗ g)(t)(s).
Por tanto, h(t) = (f ∗ g)(t).

86 La transformada de Laplace Unilateral
Ejemplo 4.3.4. Si h(t) es una funcion tal que
ψ(s) = Lh(t)(s) = s
s3 − s2 + s− 1=
s
(s− 1)(s2 + 1)=
1
s− 1× s
s2 + 1,
entonces
ψ(s) = Let ∗ cos(t)(s) ⇒ h(t) =
∫ t
0et−x cos(x) dx =
1
2
(
et + sen (t)− cos (t))
.

4.3 Transformada Unilateral de Laplace: Existencia 87
4.3.10 Calculo de la Transformada inversa unilateral
Definicion: Si Lf(t)(s) = ψ(s), la transformada inversa de Laplace es un operador que ac-
tuando sobre ψ(s) nos da f(t). Lo notaremos por
L−sψ(s)(t) = f(t),
Se trata pues de resolver la ecuacion∫ ∞
0f(t)e−st dt = ψ(s).
Se calculan por convolucion, tablas de transformadas y descomposicion de una funcion racional
en suma de fracciones simples.
Unicidad de la transformada inversa
La teorıa de la transformada de Laplace nos dice que si la transformada de una funcion es iden-
ticamente 0, entonces la funcion de la que partimos ha de ser cero salvo en un numero finito de
puntos o infinito pero numerable. Por tanto, si
Lf(t)(s) = Lg(t)(s) ⇒ Lf(t)− g(t)(s) = 0 ⇒ f(t) = g(t)
salvo en un conjunto de puntos aislados (que despreciaremos).
Transformadas inversas de funciones racionales algebraicas
Sea ψ(t) = Lf(t)(s) donde ψ(t) = p(s)/q(s) donde p(s) y q(s) son polinomios en s sin ceros
comunes y con grado de q(s) mayor que el grado de p(s) ya que sabemos que
lims→∞
ψ(s) = 0.
Para calcular la antitransformada descomopoenos la fraccion como suma de fracciones simples,
segun el tipo de raıces de la ecuacion q(s) = 0.
Puede ocurrir que q tenga
• CASO A: raıces reales simples.
A
s− a= LAeat(s).
• CASO B: raıces reales multiples.
A
(s− a)m, (m > 1) = L
tm−1
(m− 1)!eat
(s)
• CASO C: raıces complejas simples.
Ms+N
(s− a)2 + b2= L
Meat cos(bt) +N +Ma
beatsen(bt)
(s)
• CASO D: raıces complejas multiples.
Ms+N(
(s− a)2 + b2)m , m > 1.
En estos casos tendremos que aplicar la convolucion.
88 La transformada de Laplace Unilateral
4.3.11 Integrales impropias con integrando de la forma f(x)/x
En esta seccion vamos a analizar la transformada de Laplace Unilateral de funciones se expresan
como Integrales de la forma∫ ∞
0
f(x)
xdx.
Supongamos que
ψ(s) =
∫ ∞
0f(t)e−st dt = Lf(t)(s).
Si integramos respecto a s, tenemos que
∫ ∞
0f(t)
∫ ∞
0e−st ds dt =
∫ ∞
0ψ(s) ds,
si ahora cambiamos el orden de integracion, que asumimos que puede hacerse formalmente, obten-
emos para s > 0, x > 0, que
∫ ∞
0
∫ ∞
0f(t)e−st dt ds =
∫ ∞
0
f(t)
tdt =
∫ ∞
0ψ(s) ds.
Para que esta igualdad tenga sentido es necesario que ambas integrales convergan.
Ejemplo 4.3.5.
(1)
∫ ∞
0
senx
xdx =
∫ ∞
0Lsen t(s) ds =
∫ ∞
0
1
s2 + 1ds = arctan (s)
∣
∣
∣
∞
0=π
2.
(2)
∫ ∞
0
e−2x − e−x
xdx =
∫ ∞
0Le−2t−e−t(s) ds =
∫ ∞
0
(
1
s+ 2− 1
s+ 1
)
ds = log
(
s+ 2
s+ 1
)∣
∣
∣
∣
∞
0
,
que es igual a − log 2.
En general podemos decir que
∫ ∞
0
f(t)
tndt = Ψ(0), Ψ(s) = L
f(t)
tn
(s),
y si podemos resolver la ecuacion
dn
dsnΨ(s) = (−1)nψ(s),
tendremos resuelta la integral.
4.3.12 La distribucion δ y su Transformada de Laplace
Sea u(t− a) la funcion escalon unidad o funcion Heaviside definida
u(t−a) =
0, t < a,
1, t > a t
u(t)
−2 −1 2 4
1

4.3 Transformada Unilateral de Laplace: Existencia 89
distribucion de Dirac (funcion impulso)
Sea
δ(t) =d
dtu(t) =
0 si t < 0,
0 si t > 0
Sin embargo en el punto t = 0 u(t) no es continua y por tanto no es diferenciable y no existe su
derivada. A pesar de eso podemos considerar u(t) como el lımite de una sucesion de funciones
continuas. De hecho,
µn(t) =
0 si t ≤ 0,
nt si 0 < t < 1/n
1 si 1/n < t
t
x(t)
0 1n
2 4grafica de u(t)
Por tanto
dµn(t)
dt= δn(t) =
0 si t ≤ 0,
n si 0 < t < 1/n
0 si 1/n < t
Si ahora tomamos lımite n → ∞, dado que el area de δn(t) es 1, y es nula salvo en el intervalo
(0, 1/n) en el que toma el valor n, entonces δ(t) tiene area 1 y vale 0 en todo punto salvo en 0 en
el que toma el valor infinito. Matematicamente no es una funcion, sino lo que se denomina una
distribucion. De hecho, si
µ(t) =
∫ t
−∞δ(u) du = u = t− s =
∫ 0
∞δ(t− s) (−ds) =
∫ ∞
0δ(t− s) ds,
dado que el area de δ(t− s) esta concentrada en t− s.* Producto de impulso por una funcion: Sea fn(t) = f(t)× δn(t), entonces
fn(t) = f(t)]× δn(t) → f(t)δ(t),
y dado que f(t) vale 0 fuera de (0, 1/n) para todo n, entonces f(t) = f(0) por eso,
f(t)× δ(t) = f(0)× δ(t).
De la misma forma para un impulso en t = t0 se tiene que
f(t)× δ(t− t0) = f(t0)× δ(t− t0).
Y un calculo algo mas complejo nos lleva a la siguiente identidad
Lu(t− a)(s) = e−sa
s, s > 0.
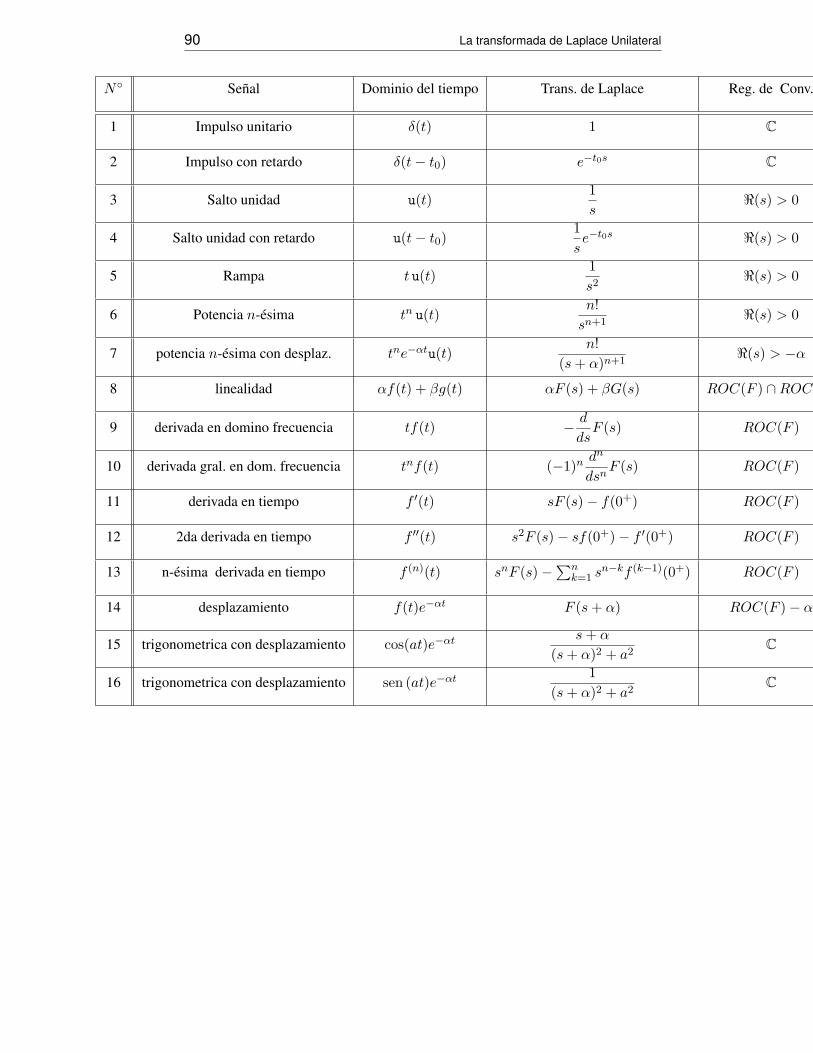
90 La transformada de Laplace Unilateral
N Senal Dominio del tiempo Trans. de Laplace Reg. de Conv.
1 Impulso unitario δ(t) 1 C
2 Impulso con retardo δ(t− t0) e−t0s C
3 Salto unidad u(t)1
sℜ(s) > 0
4 Salto unidad con retardo u(t− t0)1
se−t0s ℜ(s) > 0
5 Rampa t u(t)1
s2ℜ(s) > 0
6 Potencia n-esima tn u(t)n!
sn+1ℜ(s) > 0
7 potencia n-esima con desplaz. tne−αtu(t)n!
(s+ α)n+1ℜ(s) > −α
8 linealidad αf(t) + βg(t) αF (s) + βG(s) ROC(F ) ∩ROC(
9 derivada en domino frecuencia tf(t) − d
dsF (s) ROC(F )
10 derivada gral. en dom. frecuencia tnf(t) (−1)ndn
dsnF (s) ROC(F )
11 derivada en tiempo f ′(t) sF (s)− f(0+) ROC(F )
12 2da derivada en tiempo f ′′(t) s2F (s)− sf(0+)− f ′(0+) ROC(F )
13 n-esima derivada en tiempo f (n)(t) snF (s)−∑nk=1 s
n−kf (k−1)(0+) ROC(F )
14 desplazamiento f(t)e−αt F (s+ α) ROC(F )− α
15 trigonometrica con desplazamiento cos(at)e−αt s+ α
(s+ α)2 + a2C
16 trigonometrica con desplazamiento sen (at)e−αt 1
(s+ α)2 + a2C

4.3 Transformada Unilateral de Laplace: Existencia 91
L∫ t
0f(x) dx
(s) =1
sF (s) L
∫ t
af(x) dx
(s) =1
s
(
F (s)−∫ a
0f(x) dx
)
.
L
eat
(s) =1
s− a, s > a L
bat
(s) =1
s− a log b, s > a log b
Lcos (at) (s) = s
s2 + a2, s > a Lsen (at) (s) = a
s2 + a2, s > a
L
eat f(t)
(s) = F (s− a)
Lu(t− a) f(t− a) (s) = e−saF (s)
L
eat cos (bt)
(s) =s− a
(s− a)2 + b2
L
eat sen (bt)
(s) =b
(s− a)2 + b2
Lf(kt) (s) = 1
kF (s/k), k > 0 Lf(kt− r) (s) = 1
ke−
rsk F (s/k), k > 0
L
f(t)
t
(s) =
∫ ∞
sF (x) dx lim
s→∞F (s) = 0.

92 La transformada de Laplace Unilateral
Problemas adicionales
1. Si
f(t) =
1
a, 0 ≤ t ≤ a,
0, t > a
Calcular
lima→∞
L f(t)(s)
2. Si
f(t) =
1
a, 0 ≤ t ≤ a,
0, t > ag(t) =
a
,0 ≤ t ≤ a,
0, t > a
Calcular
(a) L (f ∗ g)(t)(s), (b) (f ∗ g)(t)
3. En la ecuacion y′ + y = t f(t) hay una solucion particular
y(t) = e−tL
−1
1
s3 − 6s2 + 9s
.
Hallar f(t).
La serie de Fourier
5.1 Introduccion
5.2 Serie de Fourier en forma exponencial compleja
Durante este capıtulo analizaremos el comportamiento de la serie1
∞∑
k=−∞Cke
j k ω0 t; ω0 > 0.
Si tenemos en cuenta la identidad de Euler
eja = cos a+ j sin a, a ∈ R,
esta claro que si dicha serie es convergente pues define cierta funcion en el plano complejo C.
Ademas sabemos que las funciones trigonometricas implicadas en
esta serie son periodicas por lo tanto se espera que si una funcion admite
dicho desarrollo entonces esta sera periodica donde sabemos que el periodo T y la frecuencia ω0
estan vinculados a traves de la identidad
ω0T = 2π.
Con lo mencionado anteriormente podemos pasar a la primera definicion:
Definicion 5.2.1. (Serie de Fourier en la forma exponencial compleja)
Sea x(t) una senal periodica de periodo T tal que:
• es continua salvo en un conjunto numerable de puntos con discontinuidad de salto finito (o
sea, es continua, o continua a trozos).
• tiene una cantidad numerable de maximos o mınimos.
1j representara la unidad imaginaria, esto es j=√
−1, o j2 = −1.

94 La serie de Fourier
Entonces, se llama serie de Fourier asociada a x(t) a
Fx(t) =∞∑
k=−∞Cke
j k ω0 t,
donde
Ck =1
T
∫ T2
−T2
x(t) e−j k ω0 t dt.
5.3 Serie de Fourier en forma trigonometrica
Si tenemos en cuenta la identidad de Euler descrita anteriormente eta claro cual
va a ser dicha definicion.
Definicion 5.3.1. (Serie de Fourier en la forma trigonometrica)
Sea x(t) una senal periodica de periodo T tal que cumpla las condiciones antes
mencionadas, se llama
tt serie de Fourier trigonometrica asociada a x(t) a
Fx(t) =a02
+∞∑
k=1
ak cos(k ω0 t) +∞∑
k=1
bk sin(k ω0 t), (5.1) 3.1
donde
a0 =2
T
∫ T/2
−T/2x(t)dt, ak =
2
T
∫ T/2
−T/2x(t) cos(k ω0 t)dt, bk =
2
T
∫ T/2
−T/2x(t) sin(k ω0 t)dt.
Teniendo en cuenta la forma en como se ha construido dicha serie se tiene el
siguiente resultado que sera fundamental para el calculo puntual de la serie de
Fourier en cada punto.
Resultado 5.3.1. (Teorema de Dirichlet) Dada una senal x(t)
• Si x(t) es continua en t = c, entonces
Fx(t)∣
∣
∣
t=c=(
x(t))∣
∣
∣
t=c= x(c). (5.2) 3.2
Es decir, si es continua en el punto c entonces la serie de Fourier vale lo mismo.
• Si x(t) es discontinua en t = d, entonces
Fx(t)∣
∣
∣
t=d=
limt→d−
x(t) + limt→d+
x(t)
2. (5.3) 3.3
Es decir, si la senal no es continua en el punto d, entonces el valor de la serie de Fourier en
ese punto es la media de lo que vale a la izquierda y de lo que vale a la derecha de d.
n3.3 Observacion 5.3.1. Es importante decir que el calculo de los coeficientes de dicha serie de
Fourier admite diferentes expresiones dado que la senal es periodica, a
continuacion indicamos dos de ellas:
ak =2
T
∫ T
0x(t) cos(k ω0 t)dt, ak =
2
T
∫ a+T
ax(t) cos(k ω0 t)dt, a ∈ R.
Y esto puede aplicars al resto de coeficientes de la expresion trigonometrica.

5.4 Ejemplos 95
5.3.1 Casos particulares
• Si la senal es par entonces bk = 0 para todo k, y
a0 =4
T
∫ T/2
0x(t) dt, ak =
4
T
∫ T/2
0x(t) cos(k ω0 t)dt.
Diremos en este caso que tenemos la serie de Fourier en cosenos de la senal
que coincide con la serie de Fourier de la parte par de dicha senal:
Fx(t) =a02
+∞∑
k=1
ak cos(k ω0 t).
• Si la senal es impar entonces a0 = 0, y ak = 0 para todo k, con
bk =4
T
∫ T/2
0x(t) sin(k ω0 t)dt.
Diremos en este caso que tenemos la serie de Fourier en senos de la senal
que coincide con la serie de Fourier de la parte impar de dicha senal:
Fx(t) =∞∑
k=1
bk sin(k ω0 t).
5.4 Ejemplos
Veamos cual es la apariencia que tiene dicho desarrollo si truncamos la serie
asociada a la aproximacion de nuestra senal: (Suma de 5 y 15 terminos)
t
x(t)
−π π−2π−1
1
t
x(t)
−π π−2π−1
1
La senal considerada es la del ejemplo 3 como puede intuirse.
1. Calcular la serie de Fourier de la senal periodica x(t) = u(t), −1 < t < 1.

96 La serie de Fourier
t
x(t)
−1 1 2 3 4
−1
1
Es claro que x(t) es continua en todo los reales menos en los enteros, esto es, en R \Z; que
es periodica con T = 2, luego ω0 = π; que no es ni par ni impar, siendo
a0 =2
T
∫ 1
−1x(t) dt =
∫ 0
−10 dt+
∫ 1
01 dt = 1,
ak =
∫ 0
−10 cos(k π t) dt+
∫ 1
01 cos(k π t) dt =
(
sin(k π t)
kπ
∣
∣
∣
∣
t=1
t=0
= 0,
bk =
∫ 0
−10 sin(k π t) dt+
∫ 1
01 sin(k π t) dt =
(− cos(k π t)
kπ
∣
∣
∣
∣
t=1
t=0
=1− (−1)k
kπ.
Con todo esto se tiene que
Fx(t) =1
2+
1
π
∞∑
k=1
1− (−1)k
ksin(k π t).
De hecho, en cualquier punto real que no sea racional se tiene por el Teorema de Di-
richlet que
x(t) =1
2+
1
π
∞∑
k=1
1− (−1)k
ksin(k π t),
mientras que para los puntos enteros, llamemoslo t = ǫ, se tiene y es facil de verificar que
1
2+
1
π
∞∑
k=1
1− (−1)k
ksin(k π ǫ) =
1
2.
2. Obtener la serie de Fourier de la senal periodica x(t) = | sin t|, −π2 ≤ t ≤ π
2 .
t
x(t)
−π2
π2
π
1

5.4 Ejemplos 97
En este caso x(t) es continua en R, su periodo es T = π luego ω0 = 2 y por el Teorema
de Dirichlet se tiene que Fx(t) = x(t) para todo t real. Viendo la grafica se ve
claramente que la senal es par pues que ademas el intervalo es simetrico, aunque la prueba
formal serıa:
x(−t) = | sin(−t)| = | − sin t| = | sin t| = x(t).
Por tanto bk = 0 para todo k, y
a0 =4
π
∫ π/2
0sin t dt =
(
−4 cos t
π
∣
∣
∣
∣
t=π/2
t=0
=4
π,
ak =4
π
∫ π/2
0sin t cos(2 k t)dt =
2
π
∫ π/2
0(sin((2k + 1) t)− sin((2k − 1) t)) dt,
ak =2
π
(
1
2k + 1− 1
2k − 1
)
=−4
π(4k2 − 1).
Ası
Fx(t) =2
π− 4
π
∞∑
k=1
1
4k2 − 1cos(2 k t).
Ejemplo de calculo de series numericas: Fx(t)∣
∣
t=0= x(0) = 0, luego
0 =2
π− 4
π
∞∑
k=1
1
4k2 − 1⇒ 4
π
∞∑
k=1
1
4k2 − 1=
2
π⇒
∞∑
k=1
1
4k2 − 1=
1
2.
Ası la serie es convergente e incluso podemos obtener su valor exacto. Se recomienda
experimentar con este tipo de ejercicios.
3. Calcular la serie de Fourier de la senal periodica x(t) = sin t, −π2 < t < π
2 .
t
x(t)
−π2
π2
π
−1
1
En este caso x(t) es continua en R excepto en los los enteros impares por π/2, su periodo
es T = π luego ω0 = 2. Viendo la grafica se ve que la senal es impar. Por tanto a0 = 0,
ak = 0 para todo k, y
bk =4
π
∫ π/2
0sin t sin(2 k t)dt =
2
π
∫ π/2
0(cos((2k − 1) t)− cos((2k + 1) t)) dt,
bk =2
π
(−(−1)k
2k − 1− (−1)k
2k − 1
)
=8(−1)k+1 k
π(4k2 − 1).

98 La serie de Fourier
Siendo entonces su desarrollo en serie de Fourier trigonometrica
Fx(t) =8
π
∞∑
k=1
(−1)k+1 k
4k2 − 1sin(2 k t).
Como aplicacion del Teorema de Dirichlet se tiene que
Fx(t)∣
∣
t=π2=
limt→π/2−
x(t) + limt→π/2+
x(t)
2= 0.
Se deja como ejercicio de calculo de series numericas el comprobar que
∞∑
k=1
(−1)k+1 k
4k2 − 1sin(k π
2 ) =π
8√2.
4. Calcular la serie de Fourier de la senal periodica x(t) = sin t, 0 < t < π2 .
t
x(t)
−π2
π2
π
−1
1
En este caso x(t) es continua en R excepto en los multiplos de π/2, su periodo es T = π/2luego ω0 = 4. La senal no tiene simetrıa y se define en (−T/2, T/2) como sigue:
x(t) =
sin(t+ π/2) = cos t,, si −π/4 < t < 0,sin t,, si 0 < t < π/4.
Por tanto
a0 =4
π
∫ 0
−π4
cos t dt+4
π
∫ π4
0sin t dt =
4
π,
ak =4
π
∫ 0
−π4
cos t cos(4 k t)dt+4
π
∫ π4
0sin t cos t cos(4 k t)dt =
4
π(1− 16k2),
y
bk =4
π
∫ 0
−π4
cos t sin(4 k t)dt+4
π
∫ π4
0sin t cos t sin(4 k t)dt =
16 k
π(1− 16k2).
Siendo entonces su desarrollo en serie de Fourier trigonometrica
Fx(t) =2
π+
4
π
∞∑
k=1
1
1− 16k2cos(4 k t) +
16
π
∞∑
k=1
k
1− 16k2sin(4 k t).

5.4 Ejemplos 99
5. Calcular la serie de Fourier de la senal periodica:
x(t) = sin t(
u(t− π
2)− u(t− π)
)
,π
2< t <
3π
2.
t
x(t)
−π −π2
π2
π 3π2
−1
1
En este caso x(t) es continua en R excepto en los multiplos impares de π/2,
su periodo es T = π luego ω0 = 2, y no tiene simetrıa. Si definimos x(t) en (−T/2, T/2):
x(t) =
− sin t,, si −π/2 < t < 0,0,, si 0 < t < π/2.
Se tiene que
a0 = − 2
π
∫ 0
−π2
sin t dt =2
π,
ak = − 2
π
∫ 0
−π2
sin t cos(2 k t)dt =2
π(1− 4k2),
y
bk = − 2
π
∫ 0
−π2
sin t sin(2 k t)dt =4(−1)k+1 k
π(1− 4k2),
y su desarrollo en serie de Fourier trigonometrica es
Fx(t) =1
π+
2
π
∞∑
k=1
1
1− 4k2cos(2 k t) +
4
π
∞∑
k=1
(−1)k+1k
1− 4k2sin(2 k t).
6. Calcular la serie de Fourier de la senal periodica x(t) = t− 18, 18 < t < 20.
t
x(t)
−5 −4 −2 −1 1 2 3 4 6 7
−1
1
2

100 La serie de Fourier
En este caso x(t) es continua en R excepto en los numeros pares, su periodo
es T = 2 luego ω0 = π, y no tiene simetrıa. Dado que x(t) en (−T/2, T/2) se
define como:
x(t) =
t+ 2,, si −1/2 < t < 0,t,, si 0 < t < 1.
Se tiene que2
a0 =
∫ 0
−1(t+ 2) dt+
∫ 1
0t dt
(∗)=
∫ 2
0t dt = 2,
ak(∗)=
∫ 2
0t cos(k π t)dt = 0,
y
bk(∗)=
∫ 2
0t sin(k π t)dt = − 2
kπ.
Ası su desarrollo en serie de Fourier trigonometrica es
Fx(t) = 1− 2
π
∞∑
k=1
1
ksin(k π t).
7. Calcular la serie de Fourier de la senal periodica x(t) = − cos t, 5π2 < t < 7π
2 .
t
x(t)
−3π2
−π −π2
3π2
ππ2
−1
1
2
En este caso x(t) es continua en R, su periodo es T = π luego ω0 = 2, y es
par. Por tanto x(t) en (−T/2, T/2) se define como:
x(t) = cos t − π/2 < t < π/2.
Se tiene bk = 0 para k = 1, 2, . . . , y
a0 =4
π
∫ π/2
0cos tdt =
4
π,
ak =4
π
∫ π/2
0cos t cos(2 k t)dt =
4(−1)k
π(1− 4k2).
Ası su desarrollo en serie de Fourier trigonometrica es
Fx(t) =2
π+
4
π
∞∑
k=1
(−1)k
1− 4k2cos(2 k t).
2aquı usararemos en (*) las propiedades mencionadas en la notan3.35.3.1.

5.4 Ejemplos 101
8. Calcular la serie de Fourier de x(t) = sin π2 t− 2 cos π
3 t.
Sabemos que la senal x1(t) = sin π2 t es periodica de periodo T1 = 4 y la senal
x2(t) = 2 cos π3 t es periodica de periodo T2 = 6. Dado que x(t) = x1(t)+x2(t) su periodo
es T = m.c.m.(4, 6) = 12. Ası ω0 = π/6, y es claro que x(t) es continua en R; por tanto
a0 = 0, a2 = −2 y b3 = 1, siendo los demas coeficientes nulos,
y su desarrollo en serie de Fourier trigonometrica
Fx(t) = sin 3π
6t− 2 cos 2
π
6t.
9. Calcular la serie de Fourier de x(t) = sin2 t2 .
Al igual que en el anterior, dado que sin2 t2 = 1
2 − 12 cos t, se tiene que el
periodo es T = 2π, y ω0 = 1, y su desarrollo en serie es el mismo, es decir
Fx(t) =1
2− 1
2cos t, (a0 = 1, a1 = −1/2, resto cero).
10. Calcular la serie de Fourier de x(t) = sin 2t, π < t < 3π.
t
x(t)
−π2
π2
−1
1
2
En este caso x(t) es continua en R, su periodo es T = π luego ω0 = 2, y es
impar. De hecho su desarrollo en serie de Fourier trigonometrica es
Fx(t) = sin(2t), b1 = 1, resto cero.
11. Calcular la serie de Fourier en cosenos de x(t) = sin t, 0 < t < π.
t
x(t)
−π −π2
3π2
ππ2
−1
1
2
En este caso x(t) es continua en R, su periodo es T = π luego ω0 = 2, y es
par. Su expresion en (−T/2, T/2) es
x(t) =
− sin t,, si −π/2 < t < 0,sin t,, si 0 < t < π/2.
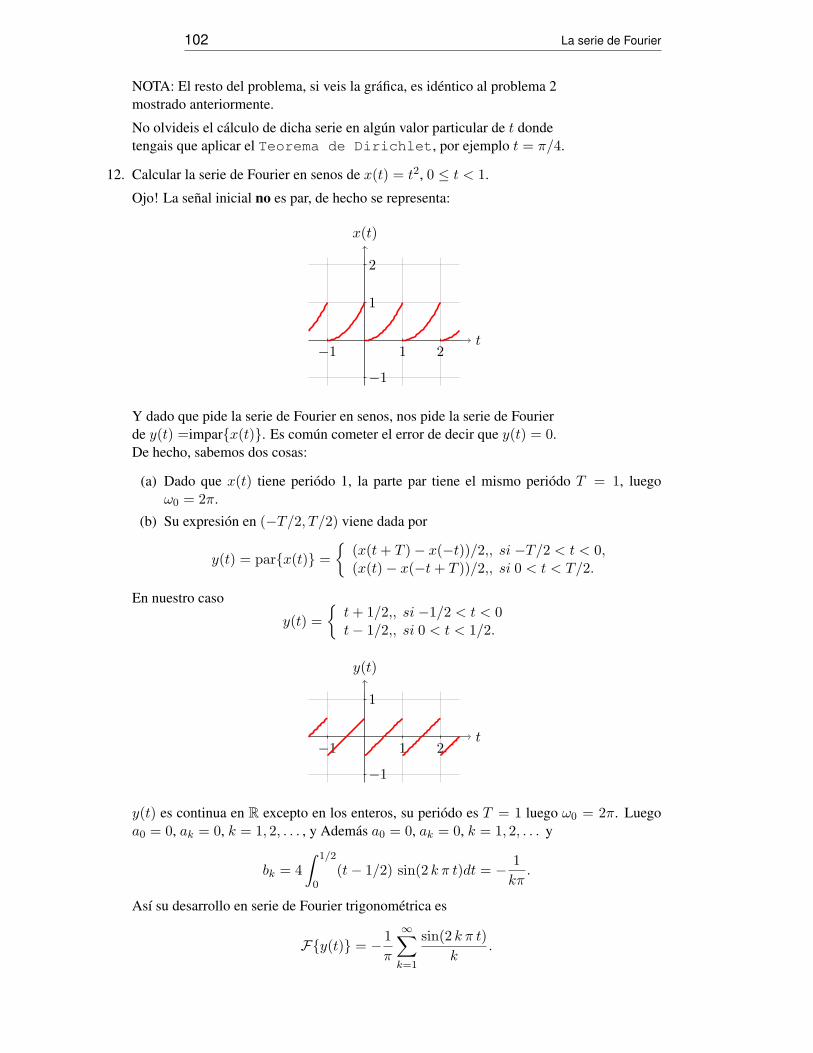
102 La serie de Fourier
NOTA: El resto del problema, si veis la grafica, es identico al problema 2
mostrado anteriormente.
No olvideis el calculo de dicha serie en algun valor particular de t donde
tengais que aplicar el Teorema de Dirichlet, por ejemplo t = π/4.
12. Calcular la serie de Fourier en senos de x(t) = t2, 0 ≤ t < 1.
Ojo! La senal inicial no es par, de hecho se representa:
t
x(t)
−1 1 2
−1
1
2
Y dado que pide la serie de Fourier en senos, nos pide la serie de Fourier
de y(t) =imparx(t). Es comun cometer el error de decir que y(t) = 0.
De hecho, sabemos dos cosas:
(a) Dado que x(t) tiene periodo 1, la parte par tiene el mismo periodo T = 1, luego
ω0 = 2π.
(b) Su expresion en (−T/2, T/2) viene dada por
y(t) = parx(t) =
(x(t+ T )− x(−t))/2,, si −T/2 < t < 0,(x(t)− x(−t+ T ))/2,, si 0 < t < T/2.
En nuestro caso
y(t) =
t+ 1/2,, si −1/2 < t < 0t− 1/2,, si 0 < t < 1/2.
t
y(t)
−1 1 2
−1
1
y(t) es continua en R excepto en los enteros, su periodo es T = 1 luego ω0 = 2π. Luego
a0 = 0, ak = 0, k = 1, 2, . . . , y Ademas a0 = 0, ak = 0, k = 1, 2, . . . y
bk = 4
∫ 1/2
0(t− 1/2) sin(2 k π t)dt = − 1
kπ.
Ası su desarrollo en serie de Fourier trigonometrica es
Fy(t) = − 1
π
∞∑
k=1
sin(2 k π t)
k.
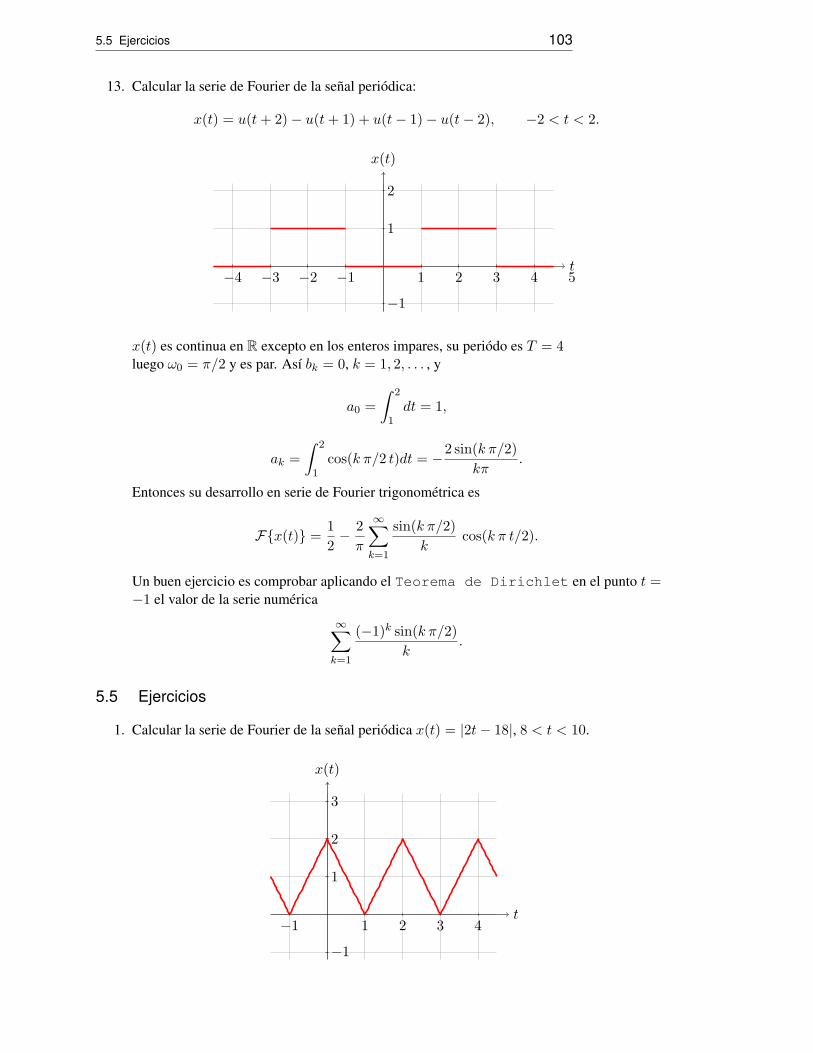
5.5 Ejercicios 103
13. Calcular la serie de Fourier de la senal periodica:
x(t) = u(t+ 2)− u(t+ 1) + u(t− 1)− u(t− 2), −2 < t < 2.
t
x(t)
−4 −3 −2 −1 1 2 3 4 5
−1
1
2
x(t) es continua en R excepto en los enteros impares, su periodo es T = 4luego ω0 = π/2 y es par. Ası bk = 0, k = 1, 2, . . . , y
a0 =
∫ 2
1dt = 1,
ak =
∫ 2
1cos(k π/2 t)dt = −2 sin(k π/2)
kπ.
Entonces su desarrollo en serie de Fourier trigonometrica es
Fx(t) =1
2− 2
π
∞∑
k=1
sin(k π/2)
kcos(k π t/2).
Un buen ejercicio es comprobar aplicando el Teorema de Dirichlet en el punto t =−1 el valor de la serie numerica
∞∑
k=1
(−1)k sin(k π/2)
k.
5.5 Ejercicios
1. Calcular la serie de Fourier de la senal periodica x(t) = |2t− 18|, 8 < t < 10.
t
x(t)
−1 1 2 3 4
−1
1
2
3

104 La serie de Fourier
x(t) es continua en R, su periodo es T = 2 luego ω0 = π y es par. Su
expresion en (−T/2, T/2) es
x(t) =
2t+ 2,, si −1 < t < 0−2t+ 2,, si 0 < t < 1.
Ası bk = 0, k = 1, 2, . . . , y
a0 = 2
∫ 1
0(−2t+ 2)dt = 2,
ak = 2
∫ 1
0(−2t+ 2) cos(k π/2 t)dt =
4(1− (−1)k)
k2π2,
por tanto si k es par (k = 2λ) entonces a2λ = 0 mientras que si k es impar
(k = 2λ− 1) entonces a2λ−1 = 8/(π2(2λ− 1)2). Y con todo lo anterior el
desarrollo en serie de Fourier trigonometrica es
Fx(t) = 1 +8
π2
∞∑
k=1
sin((2k − 1)π t)
(2k − 1)2.
2. Calcular la serie de Fourier de la senal periodica
x(t) =
(
cos2π
3t+ 2 cos
16π
3t
)
sinπt.
Aplicando las identidades trigonometricas:
cos(a± b) = cos a cos b∓ sin a sin b, sin(a± b) = sin a cos b± cos a sin b,
se tienen la identidad que necesitamos:
2 cos a sin b = sin(b+ a) + sin(b− a).
Con lo que podemos decir
x(t) =1
2sin
π
3t+
1
2sin
5π
3t− sin
13π
3t+ sin
19π
3t.
Es decir que tenemos 4 expresiones trigonometricas, y aunque cası es
evidente que ω0 = π/3 veamoslo poco a poco.
La primera tiene periodo T1 = 2π/(5π/3) = 6/5, la segunda T2 = 2π/(π/3) = 6, la
tercera T3 = 2π/(19π/3) = 6/19, la cuarta T4 = 2π/(13π/3) = 6/13. Y la menor
relacion posible simultanea es
5T1 = T2 = 19T3 = 13T4 = 6 ⇒ T = 6 ⇒ ω0 =π
3.
Ademas la senal es continua por definicion luego coincide con Fx(t) en todo
punto por el teorema de Dirichlet, y podemos obtener los coeficientes del
desarrollo de una forma inmediata que se deja como ejercicio.
3. Calcular la serie de Fourier asociada a la senal periodica x(t) = 2 + 3 sin 2t.
En este caso dado que el periodo de sin 2t es π, se tiene que T = π, luego
ω0 = 2 y por tanto dado que la senal es continua
Fx(t) = x(t) = 2 + 3 sin 2t (a0 = 4, b1 = 3, resto cero).

5.5 Ejercicios 105
4. Calcular la serie de Fourier asociada a la senal periodica x(t) = 3 + 2 cos 3t.
Este caso es similar al anterior, dado que el periodo de cos 3t es T = 2π/3, se tiene ω0 = 3y por tanto dado que la senal es continua
Fx(t) = x(t) = 3 + 2 cos 3t (a0 = 6, a1 = 2, resto cero).
5. Calcular la serie de Fourier asociada a la senal periodica
x(t) = Par
(
t− π
2
)
(
u(t)− u(t− π
2))
, −π < t < π.
Para empezar debemos tener claro como definir dicha senal, primero representemos la senal
y(t) =(
t− π
2
)
(
u(t)− u(t− π
2))
, −π < t < π.
t
y(t)
−3π2
−π −π2
ππ2
3π2
2π
−3
−π2
1
x(t) es continua en R excepto en ciertos multiplos de π/2 como se ve en la grafica, su
periodo es T = 2π luego ω0 = 1 y no tiene simetrıa. Ası la expresion de la senal x(t) sera
en (−T/2, T/2)
x(t) =
0,, si −π < t < −π/2−t/2− π/4,, si −π/2 < t < 0t/2− π/4,, si 0 < t < π/2
0,, si π/2 < t < π.
y su grafica entonces es
t
x(t)
−3π2
−π −π2
ππ2
3π2
2π−π
4
−π2
1
Ası bk = 0, k = 1, 2, . . . , y
a0 =2
π
∫ π
0x(t) dt = −π
8,
ak =2
π
∫ π
0x(t) cos(k t)dt =
cos(kπ/2)− 1
k2π,

106 La serie de Fourier
por tanto, con todo lo anterior, el desarrollo en serie de Fourier
trigonometrica es
Fx(t) = − π
16+
1
π
∞∑
k=1
cos(kπ/2)− 1
k2cos(k t).
6. Calcular la serie de Fourier asociada a la senal periodica
x(t) = Par
(t− π)(
u(t)− u(t− π))
, −2π < t < 2π.
Realizando un proceso analogo al anterior se tiene que T = 4π, ω0 = 1/2, la senal es par,
continua, y su expresion en (−T/2, T/2) es
x(t) =
0,, si −2π < t < −π−t/2− π/2,, si −π < t < 0t/2− π/2,, si 0 < t < π
0,, si π < t < 2π.
y su grafica entonces es
t
x(t)
−3π −2π −π π 2π 3π 4π−π
2
1
Ası bk = 0, k = 1, 2, . . . , y
a0 =1
π
∫ 2π
0x(t) dt = −π
4,
ak =1
π
∫ 2π
0x(t) cos(k t/2)dt =
2(cos(kπ/2)− 1)
k2π,
por tanto el desarrollo en serie de Fourier trigonometrica es
Fx(t) = −π8+
2
π
∞∑
k=1
cos(kπ/2)− 1
k2cos(k t
2).
7. Calcular la serie de Fourier, en sus formas trigonometrica y exponencial compleja, asociada
a la extension periodica de la senal
x(t) = Par|t− 1|, −2 < t < 2.
Teniendo en cuenta algunos ejercicios anteriores, se tiene que el periodo es T = 4, ası
ω0 = π/2 y su expresion en (−T/2, T/2) es
x(t) =
t, si −2 < t < −11, si −1 < t < 1
−t,, si 1 < t < 2.
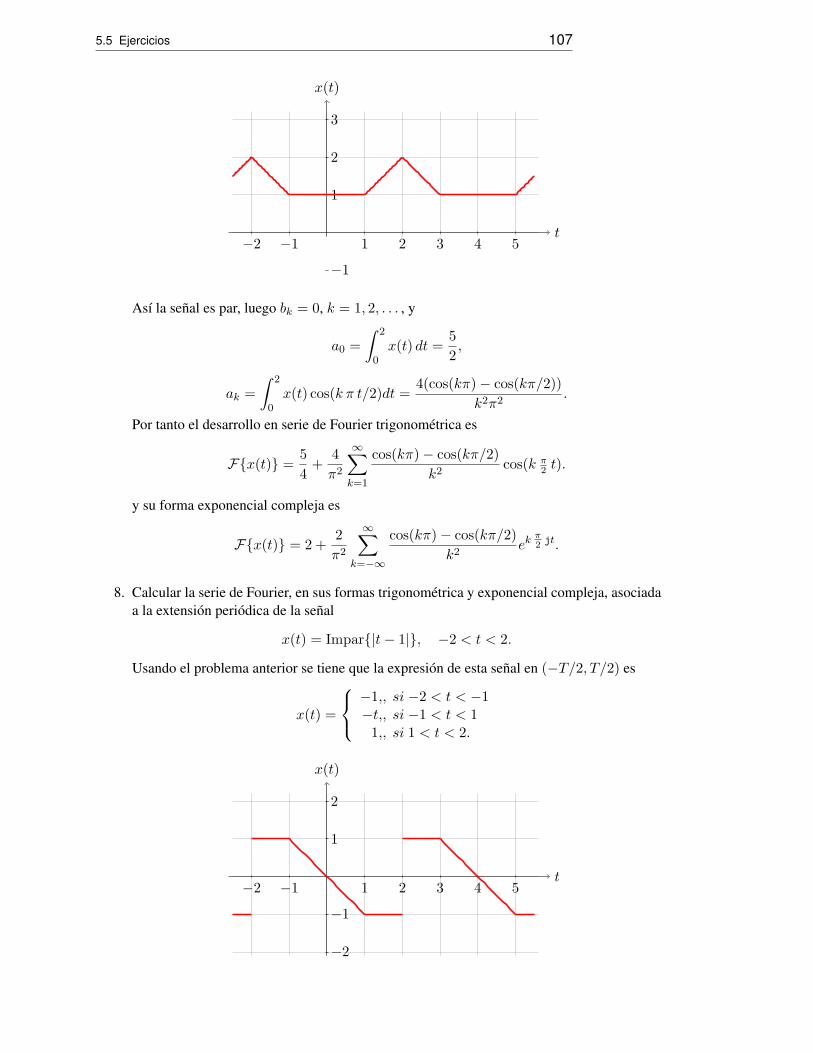
5.5 Ejercicios 107
t
x(t)
−2 −1 1 2 3 4 5
3
2
−1
1
Ası la senal es par, luego bk = 0, k = 1, 2, . . . , y
a0 =
∫ 2
0x(t) dt =
5
2,
ak =
∫ 2
0x(t) cos(k π t/2)dt =
4(cos(kπ)− cos(kπ/2))
k2π2.
Por tanto el desarrollo en serie de Fourier trigonometrica es
Fx(t) =5
4+
4
π2
∞∑
k=1
cos(kπ)− cos(kπ/2)
k2cos(k π
2t).
y su forma exponencial compleja es
Fx(t) = 2 +2
π2
∞∑
k=−∞
cos(kπ)− cos(kπ/2)
k2ek
π
2jt.
8. Calcular la serie de Fourier, en sus formas trigonometrica y exponencial compleja, asociada
a la extension periodica de la senal
x(t) = Impar|t− 1|, −2 < t < 2.
Usando el problema anterior se tiene que la expresion de esta senal en (−T/2, T/2) es
x(t) =
−1,, si −2 < t < −1−t,, si −1 < t < 11,, si 1 < t < 2.
t
x(t)
−2 −1 1 2 3 4 5
2
−1
1
−2

108 La serie de Fourier
Ası la senal es impar, luego a0 = 0, ak = 0, k = 1, 2, . . . , y
bk =
∫ 2
0x(t) sin(k π t/2)dt =
2(kπ cos(kπ)− 2 sin(kπ/2))
k2π2.
Por tanto el desarrollo en serie de Fourier trigonometrica es
Fx(t) =2
π2
∞∑
k=1
kπ cos(kπ)− 2 sin(kπ/2)
k2sin(k π
2t),
y su forma exponencial compleja es
Fx(t) =1
π2
∞∑
k=−∞
2 sin(kπ/2)j− kπ cos(kπ)j
k2ek
π
2jt.
9. Calcular la serie de Fourier, en sus formas trigonometrica y exponencial
compleja, asociada a la extension periodica de la senal x(t) = | cos 3t|.Dado que es una senal sencilla sbemos que t = π/3, luego ω0 = 6, y la expresion de esta
senal en (−T/2, T/2) es x(t) = cos(3t), ası su representacion es
t
x(t)
−π6
π6
π2
2
−1
1
La senal es par, luego bk = 0, k = 1, 2, . . . , y
a0 =12
π
∫ π6
0x(t)dt =
4
π,
ak =12
π
∫ π6
0x(t) cos(6 k t)dt =
4(−1)k
π(1− 4k2).
Por tanto el desarrollo en serie de Fourier trigonometrica es
Fx(t) =2
π+
4
π
∞∑
k=1
(−1)k
1− 4k2cos(6 k t),
y su forma exponencial compleja es
Fx(t) =2
π
∞∑
k=−∞
(−1)k
1− 4k2cos(6 j k t).
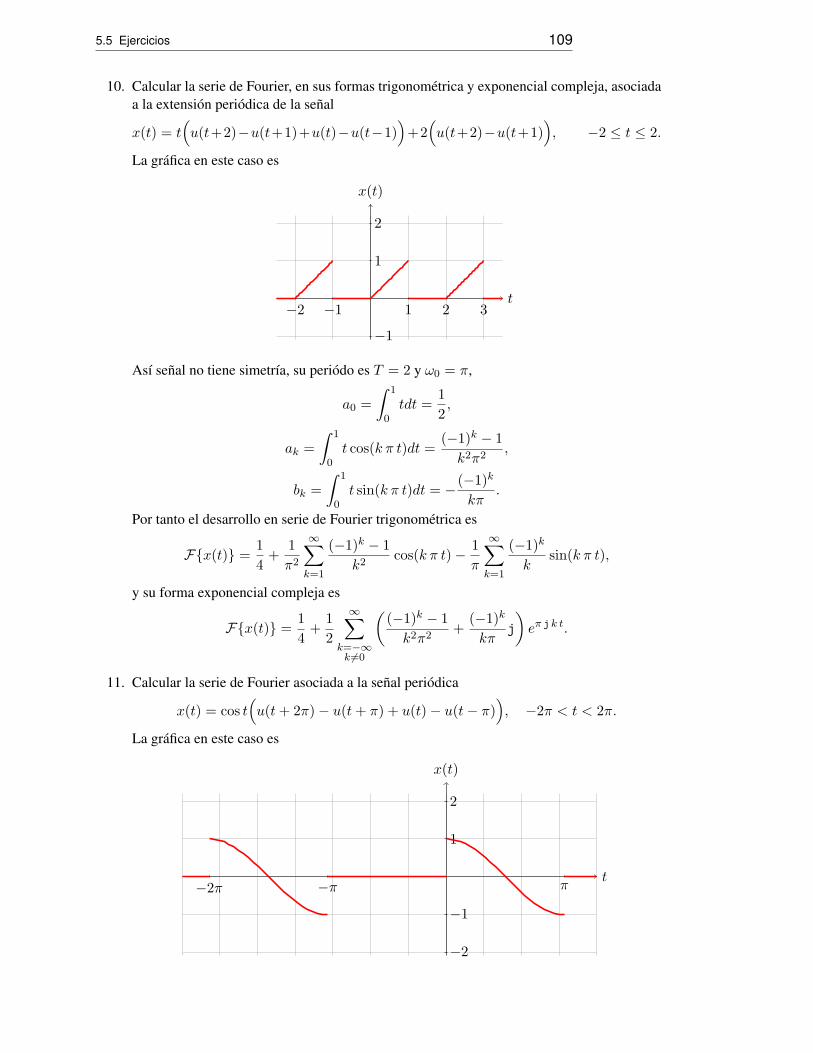
5.5 Ejercicios 109
10. Calcular la serie de Fourier, en sus formas trigonometrica y exponencial compleja, asociada
a la extension periodica de la senal
x(t) = t(
u(t+2)−u(t+1)+u(t)−u(t−1))
+2(
u(t+2)−u(t+1))
, −2 ≤ t ≤ 2.
La grafica en este caso es
t
x(t)
−2 −1 1 2 3
2
−1
1
Ası senal no tiene simetrıa, su periodo es T = 2 y ω0 = π,
a0 =
∫ 1
0tdt =
1
2,
ak =
∫ 1
0t cos(k π t)dt =
(−1)k − 1
k2π2,
bk =
∫ 1
0t sin(k π t)dt = −(−1)k
kπ.
Por tanto el desarrollo en serie de Fourier trigonometrica es
Fx(t) =1
4+
1
π2
∞∑
k=1
(−1)k − 1
k2cos(k π t)− 1
π
∞∑
k=1
(−1)k
ksin(k π t),
y su forma exponencial compleja es
Fx(t) =1
4+
1
2
∞∑
k=−∞k 6=0
(
(−1)k − 1
k2π2+
(−1)k
kπj
)
eπ j k t.
11. Calcular la serie de Fourier asociada a la senal periodica
x(t) = cos t(
u(t+ 2π)− u(t+ π) + u(t)− u(t− π))
, −2π < t < 2π.
La grafica en este caso es
t
x(t)
−2π −π π
2
−1
1
−2

110 La serie de Fourier
Ası senal no tiene simetrıa, su periodo es T = 2π y ω0 = 1,
a0 =1
π
∫ π
0cos tdt = 0,
ak =1
π
∫ π
0cos t cos(k t) dt =
k sin(k π)
π(1− k2),
luego debemos considerar por separado el caso k = 1, de hecho,
a1 =1
π
∫ π
0cos t cos t dt =
1
2π
∫ π
0(1 + cos(2t)) dt =
1
2,
bk =1
π
∫ π
0cos t sin(k t)dt =
((−1)k + 1)k
π(k2 − 1),
donde, de nuevo, debemos distinguir el caso k = 1, siendo
b1 =1
π
∫ π
0cos t sin tdt =
1
2π
∫ π
0sin(2t)dt = 0.
Por tanto el desarrollo en serie de Fourier trigonometrica es
Fx(t) =1
2cos t+
1
π
∞∑
k=2
((−1)k + 1)k
k2 − 1sin(k t) =
1
2cos t+
2
π
∞∑
n=1
n
4n2 − 1sin(2n t).
12. Calcular la serie de Fourier asociada a la senal periodica x(t) = cos3 9t.
Aplicando las identidades basicas trigonometricas se tiene
x(t) =1
2cos(9t) +
1
4(cos(27t) + cos(9t)) =
3
4cos(9t) +
1
4cos(27t).
Esta serıa la serie de Fourier trigonometrica de la senal donde T = 2π/9, y
ω0 = 9; mientras que utilizando la identidad de Euler se tendrıa que su serie de Fourier en
forma exponencial compleja serıa
Fx(t) =1
8e−27j t +
3
8e−9j t +
3
8e9j t +
1
8e27j t.

Hojas de problemas


Calculo I (Grados TICS UAH) Sucesiones y Series numericas Curso 2017/18
1. Calcule los siguientes lımites:
(a) limn→∞
(√n2 + 1 +
√n+ 1√
n2 + 1−√n+ 1
)
√n+1
(b) limn→∞
n3 + 3n2 − 2n+ 2√n7 + 2n5 + n4 + 3n2 + 1
(c) limn→∞
√3n2 + 1−
√2n2 − 1
2n+ 1
Solucion:
(a) Es un lımite del tipo 1∞, usaremos el Resultadoprop:numE1.1.1 de teorıa, y obtenemos e2.
(b) Vemos que el factor dominante de cada termino de la fraccion es n3 y n3.5 por tanto el
lımite es 0.
(c) De nuevo vemos que los factores dominantes son del mismo grado, y que por tanto el
lımite es (√3−
√2)/2.
2. Estudie la convergencia de las siguientes series empleando los diferentes criterios vistos en
clase:
(a)
∞∑
n=1
(
n+ 1
n
)n
,
(b)
∞∑
n=1
(
n2
n2 + 1
)n
,
(c)
∞∑
n=1
(
n2
n2 + 1
)n2
,
(d)
∞∑
n=1
n2 − 1
n2 + 1cos
1
n2,
(e)
∞∑
n=1
1
(n+ 1)!,
(f)
∞∑
n=1
(
2
n+ 1
)2
,
(g)
∞∑
n=1
n+ 2√n
,
(h)
∞∑
n=1
3n
(n+ 1)(n+ 2)(n+ 3),
(i)
∞∑
n=1
(
2n2 + 1
3n2 + n
)n
,
(j)
∞∑
n=1
2n+ 1
2n2(n+ 1)2.
Solucion:
(a) Divergente pues an → e 6= 0.
(b) Divergente pues an → e0 = 1 6= 0,
(c) Divergente pues an → e−1 6= 0,
(d) Divergente pues an → 1 6= 0,
(e) Convergente, ya que por el criterio del cociente:
limn→∞
an+1
an= 0 < 1.

114
(f) Convergente, ya que por el criterio de comparacion por paso al lımite, dado que
(
2
n+ 1
)2
≈ 4
n2,
y la serie armonica de ındice p = 2 > 1 es convergente, entonces la nuestra tambien
converge.
(g) Divergente pues an → ∞ 6= 0,
(h) Convergente pues por el criterio de comparacion por paso al lımite, dado que
3n
(n+ 1)(n+ 2)(n+ 3)≈ 3
n2,
y la serie armonica de ındice p = 2 > 1 es convergente, entonces la nuestra tambien
converge.
(i) Convergente pues por el criterio de la raiz,
n√an =
2n2 + 1
3n2 + n≈ 2
3< 1.
(j) Convergente pues por el criterio de comparacion por paso al lımite, dado que
2n+ 1
2n2(n+ 1)2≈ 1
n3,
y la serie armonica de ındice p = 3 > 1 es convergente, entonces la nuestra tambien
converge.
3. Sea α un numero real, α ≥ 1. Estudie, segun los valores de α, el caracter de la serie
∞∑
n=1
(
αn− 1
3n+ 1
)n2
.
Solucion: Para 1 ≤ α ≤ 3 converge. Basta aplicar el criterio de la raiz, y para el caso α = 3debemos usar de nuevo el Resultado
prop:numE1.1.1. Obteniendo como lımite e−2/3 < 1, por tanto
dicho caso es tambien convergente.
4. Analıce, segun los valores del parametro real a, el caracter de la serie
∞∑
n=1
2n + an
3n.
Solucion: Dado que es la suma de dos series geometricas y asumimos que a ≥ 0, se tiene
que la serie converge para 0 ≤ a < 3.
5. Indique si la siguiente igualdad es correcta o no lo es:
∞∑
n=1
2πn + 3en
5n= 3
π
5− π+ 2
e
5− e.
Solucion: No es correcta, si la sumamos usando la teorıa (ver ejemploEx:1.2.11.2.1), entonces, lo
correcto serıa ∞∑
n=1
2πn + 3en
5n= 2
π
5− π+ 3
e
5− e.

Calculo I (Grados TICS UAH) Ej. complementarios: Sucesiones y Series Numericas
1. Obtener el termino general (an) de las siguientes sucesiones:
(a) 2, 4, 6, 8, 10, . . .
(b) 4, 8, 16, 32, 64, . . .
(c) 1, -1, 1, -1, 1, . . .
(d) 3, -9, 27, -81, 243, . . .
Solucion: a) Son los numeros pares, es decir an = 2n. Comprobar que efectivamente es
esta dando valores. b) Son potencias de 2 pero empezando por 4, es decir an = 2n+1.
Yo aquı considerarıa la sucesion bn = 2n y verıa que an = 2bn. c) Tiene como solucion
an = −(−1)n. Aquı, al igual que en el apartado b), resolverıa primero la bn = (−1)n y
verıa la conexion con an. d) Tiene como solucion an = −(−3)n. Tambien puede plantearse
esta sucesion como producto de dos sucesiones con expresion general conocida.
2. Comprobar si las siguientes sucesiones estan o no acotadas superiormente (resp. inferior-
mente) y analizar su crecimiento.
(a) an =2n− 1
2n+ 1
(b) an =n2 − 1
n3 + 1
(c) an =n3 − 1
n2 + 1
(d) an =1
3n
Solucion: La primera sucesion toma valores: n = 1 → a1 = 1/3 ≈ 0.333, n = 2 → a2 =3/5 = 0.6, n = 3 → a3 = 5/7 ≈ 0.714, n = 4 → a4 = 7/9 ≈ 0.777, . . . Ası vemos que es
una sucesion creciente acotada inferiormente por 0 (pues es positiva) y superiormente por 1
(aquı se puede apreciar que el lımite es 1, nada formal).
La segunda sucesion toma los valores iniciales: n = 1 → a1 = 0, n = 2 → a2 = 3/9 =1/3 ≈ 0.333, n = 3 → a3 = 8/28 = 2/7 ≈ 0.285, n = 4 → a4 = 15/65 = 3/13 ≈0.230, . . . Luego vemos que es decreciente acotada superiormente por 1, e inferiormente por
0 (igual que el apartado anterior).
La tercera sucesion tiene los valores iniciales: n = 1 → a1 = 0, n = 2 → a2 = 7/5 ≈ 1.4,
n = 3 → a3 = 26/10 = 2.6, n = 4 → a4 = 63/17 ≈ 3.705, . . . Claramente es creciente,
es positiva luego esta acotada inferiormente por 0, y no lo esta superiormente (se puede
decir que su lımite es infinito como vimos en clase).
La ultima sucesion toma los valores iniciales: n = 1 → a1 = 1/3 ≈ 0.333, n = 2 → a2 =1/9 ≈ 0.111, n = 1 → a3 = 1/27 ≈ 0.037, n = 4 → a4 = 1/81 ≈ 0.012, . . . Claramente
es decreciente, y esta acotada inferiormente por 0 porque es positiva y superiormente por 1.
3. Estudiar la convergencia de las siguientes sucesiones y calcular, en caso de que haya con-
vergencia, el lımite de tales sucesiones:
(a) an =2n− n3 + 1
2n2 + 3
(b) an =2n2 + 3
2n− n3 + 1
(c) an = (−1)nn
(d) an =2n
5n
Solucion: Este ejercicio se puede resolver como el anterior calculando los primeros valores
y analizando si es creciente o decreciente, y si esta acotada o no. Y en caso de ser conver-
gente calcular el lımite (yo solo dare una breve indicacion del lımite).

116
a) Decreciente, y diverge a −∞. b) Creciente, acotada superiormente por 0. Converge a 0.
c) No acotada, no creciente. Divergente (pues oscila). d) Convergente pues es decreciente,
acotada inferiormente por 0. Su lımite es 0.
4. Deducir las siguientes sucesiones (dn) son convergentes y calcular el lımite en caso de que
converga, siendo:
an = 1− 1
n+
1
n2, bn = 1 +
1
n− 1
n2, cn = (−1)nn.
(a) dn = an + bn
(b) dn = ancn
(c) dn =anbn
(d) dn =c2nanbn
Solucion: Sucesion a): dado que dn = 2 dicha sucesion converge a 2.
Sucesion b): en este caso dn = (−1)n(n− 1+ 1/n) que oscila hacia el infinito, y por tanto
diverge.
Sucesion c): En este caso dn = (n2 − n+ 1)/(n2 + n− 1), que converge por ser creciente
y esta acotada superiormente por 1 (probarlo es sencillo). Por tanto converge, y lo hace a 1.
Sucesion d): En este caso se tiene que dn = n6/(n4 − n2 + 2n− 1) que diverge a ∞.
5. Obtener la expresion del termino general de la sucesion:
3
4,
5
16,
7
64,
9
256,
11
1024, . . .
Solucion: Hay que hacerlo para el numerador por un lado y el denominador por otro, resul-
tando:
an =2n+ 1
4n.
6. Calcular las primeras 10 sumas parciales de las series
∞∑
n=2
2n
n2 − 1y
∞∑
n=2
2
n2 − 1.
Solucion: Este ejercicio es simplemente de calculo.
7. Obtener la expresion de la suma de los primeros N terminos, SN , de la serie
∞∑
n=1
6
(n+ 1)(n+ 3).
Ayuda: tratar de expresarla como suma de fracciones simples
Solucion: Dado que
∞∑
n=1
6
(n+ 1)(n+ 3)=
∞∑
n=1
(
3
n+ 1− 3
n+ 3
)
Por tanto es una serie telescopica, cuya suma es muy sencilla. Basta obtener la expresion de
las 4 primeras sumas parciales.

117
8. Calcular la suma de las siguientes series
∞∑
n=1
an siempre que sea convergente, siendo:
(a) an = 1
(b) an =3n+ 2
n(n+ 1)(n+ 2)
(c) an = 3−n
(d) an =2n
(n+ 1)(n+ 3)
Solucion: La primera serie es divergente. La segunda es telescopica pconverge a 2. La
tercera es una serie cuyo termino general es una sucesion geometrica luego su suma es
1
3/
(
1− 1
3
)
=1
2.
Por ultimo, la cuarta serie es divergente, para verlo basta compararla con la serie armonica
∑
n≥1
1
n.
9. Estudiar la convergencia de la serie
∞∑
n=1
an, siendo:
(a) an =n2 − 1
n3 + 1
(b) an =n− 1
n5 − n3 + 4
(c) an =log(n+ 1)
n
(d) an = sin(1/n)
Solucion: a) Es divergente y para verlo basta compararla con la serie armonica
∑
n≥1
1
n.
b) es convergente y para verlo basta compararla con la serie armonica
∑
n≥1
1
n4.
c) es divergente, y para ello se puede utilizar el criterio de condensacion de Cauchy, y el
criterio del cociente. Por ultimo, d) an = sen(1/n) es divergente usando el criterio de
comparacion y luego hay que compararla con la serie armonica
∑
n≥1
1
n.
10. Estudiar la convergencia de las series numericas∑
an y sumarlas cuando sea posible:
(a)
∞∑
n=1
1
n2 + 3n+ 2
(b)
∞∑
n=1
1
4n2 − 1
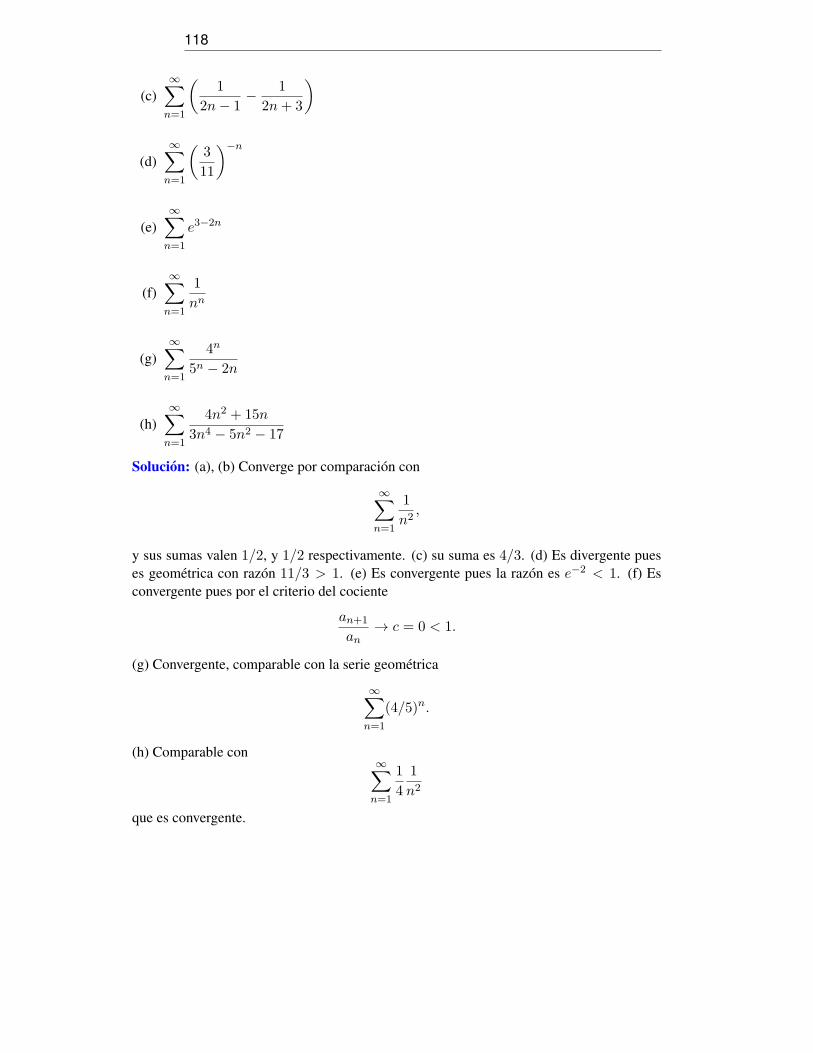
118
(c)
∞∑
n=1
(
1
2n− 1− 1
2n+ 3
)
(d)
∞∑
n=1
(
3
11
)−n
(e)
∞∑
n=1
e3−2n
(f)
∞∑
n=1
1
nn
(g)
∞∑
n=1
4n
5n − 2n
(h)
∞∑
n=1
4n2 + 15n
3n4 − 5n2 − 17
Solucion: (a), (b) Converge por comparacion con
∞∑
n=1
1
n2,
y sus sumas valen 1/2, y 1/2 respectivamente. (c) su suma es 4/3. (d) Es divergente pues
es geometrica con razon 11/3 > 1. (e) Es convergente pues la razon es e−2 < 1. (f) Es
convergente pues por el criterio del cociente
an+1
an→ c = 0 < 1.
(g) Convergente, comparable con la serie geometrica
∞∑
n=1
(4/5)n.
(h) Comparable con∞∑
n=1
1
4
1
n2
que es convergente.
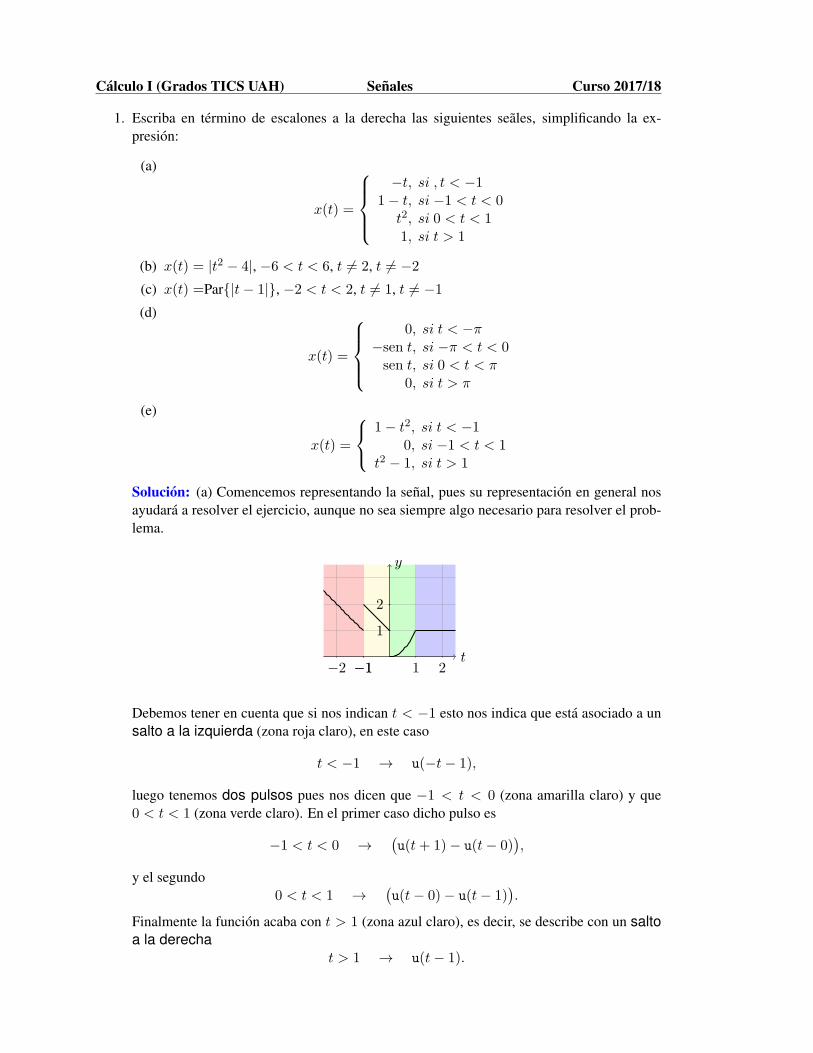
Calculo I (Grados TICS UAH) Senales Curso 2017/18
1. Escriba en termino de escalones a la derecha las siguientes seales, simplificando la ex-
presion:
(a)
x(t) =
−t, si , t < −11− t, si −1 < t < 0t2, si 0 < t < 11, si t > 1
(b) x(t) = |t2 − 4|, −6 < t < 6, t 6= 2, t 6= −2
(c) x(t) =Par|t− 1|, −2 < t < 2, t 6= 1, t 6= −1
(d)
x(t) =
0, si t < −π−sen t, si −π < t < 0sen t, si 0 < t < π
0, si t > π
(e)
x(t) =
1− t2, si t < −10, si −1 < t < 1
t2 − 1, si t > 1
Solucion: (a) Comencemos representando la senal, pues su representacion en general nos
ayudara a resolver el ejercicio, aunque no sea siempre algo necesario para resolver el prob-
lema.
t
y
−1 1 2−1−2
1
2
Debemos tener en cuenta que si nos indican t < −1 esto nos indica que esta asociado a un
salto a la izquierda (zona roja claro), en este caso
t < −1 → u(−t− 1),
luego tenemos dos pulsos pues nos dicen que −1 < t < 0 (zona amarilla claro) y que
0 < t < 1 (zona verde claro). En el primer caso dicho pulso es
−1 < t < 0 →(
u(t+ 1)− u(t− 0))
,
y el segundo
0 < t < 1 →(
u(t− 0)− u(t− 1))
.
Finalmente la funcion acaba con t > 1 (zona azul claro), es decir, se describe con un salto
a la derecha
t > 1 → u(t− 1).

120
Ademas el salto a la izquierda u(−t− 1) hemos visto en teorıa que se puede escribir como
salto a la derecha como u(−t− 1) = 1− u(t+ 1).
Con todo esto, se tiene que
x(t) = −t+ u(t+ 1) + (t2 + t− 1)u(t) + (1− t2)u(t− 1).
(b) En este caso debemos expresar el valor absoluto como funciones elementales. Dado que
t2 − 4 es una parabola concava.
Es sencillo ver que
x(t) =
t2 − 4, si −6 < t < −24− t2, si −2 < t < 2t2 − 4, si 6 > t > 2
Dado que tenemos tres pulsos, entonces los indicamos y simplificamos quedando
x(t) = (t2 − 4)u(t+ 6) + (8− 2t2)u(t+ 2) + (2t2 − 8)u(t− 2) + (4− t2)u(t− 6).
(c) En este caso lo haremos poco a poco, primero pintaremos t − 1 (gris), luego |t − 1|(azul), luego la funcion con la inversion en tiempo (t → −t.. verde), y finalmente la parte
par (morado) que sera la suma de las utimas:
t
y
−1 1 2−1−2
1
2
|t− 1|
| − t− 1|
Par|t− 1|
Ası la funcion morada se puede escribir como funcion a trozos de la forma
x(t) =
−t, si −2 < t < −11, si −1 < t < 1t, si 1 < t < 2
Observa que la zona amarilla es simetrica respecto al eje vertical. Estas separaciones hay
que tenerlas en cuenta cuando nos piden calcular la parte par o impar de una funcion. Ası el
resultado es:
x(t) = (−t)u(t+ 2) + (1 + t)u(t+ 1) + (t− 1)u(t− 1) + (−t)u(t− 2).
Los ultimos dos apartados son mas sencillos.
(d)
x(t) = −sen t u(t+ π) + 2sen t u(t)− sen t u(t− π).
(e)
x(t) = (1− t2) + (t2 − 1)u(t+ 1) + (t2 − 1)u(t− 1).

121
2. Escriba x(t) en forma explıcita:
(a) x(t) = −t u(−t) + (t− 1)u(t− 1) + u(t− 2)
(b) x(t) = u(−1− t)− t u(t+ 1) + u(t− 1)
(c) x(t) =Par(
t− π2
) (
u(t)− u(t− π2 ))
, −π < t < π
(d) x(t)=cos(t) (u(t+ 2π)− u(t+ π) + u(t)− u(t− π)), −2π < t < 2π
Solucion: Este tipo de ejercicios es sencillo, solo debemos hacer un esquema sobre que
funcion va en cada tramo.
(a) En este caso tenemos saltos en los puntos 0, 1 y 2. Ası en funcion del tipo de salto
indicamos las flechas
t
y
−1 1 2−1−2
1
2
−t t − 1 t − 1
1
0
Como vemos en la zona naranja no hay flechas, por tanto en esa zona la funcion vale 0. En
el resto de zonas sumaremos las funciones que indiquemos que hay en estas. Por tanto
x(t) =
−t, si t < 00, si 0 < t < 1
t− 1, si 1 < t < 2t, si 2 < t
Los casos (b), y (d) son parecidos. (b)
x(t) =
1, si t < −1−t, si 1 < t < 1
1− t, si 1 < t
(c) En este caso tenemos que hacer algo similar al apartado (c) del ejercicio primero.
Primero pintaremos t − π/2 (azul), luego la funcion con la inversion en tiempo (t → −t..verde), y finalmente la parte par (morado punteado) que sera la suma de las ultimas:
t
y
−π2
−π π2
π−π
4
−π2
x(t) =
0, si −π < t < −π2
− t2 − π
4 , si −π2 < t < 0
t2 − π
4 , si 0 < t < π2
0, si π2 < t < π
(d) En este caso
x(t) =
cos(t), si −2π < t < −π0, si −π < t < 0
cos(t), si 0 < t < π
0, si π < t < 2π

122
3. Calcule el perıodo de las senales periodicas:
(a) x(t) = sen2(
2t
3
)
− 2 cos
(
6t
5
)
(b) x(t) = 1− cos3 t
(c) x(t) = 3 cos(2t) cos2(3t)
Solucion: (a) Dado que la funcion sen(ωt) tiene periodo T = 2π/ω. Entonces el periodo
de x1(t) = sen(
2t3
)
es T1 = 3π, por tanto el periodo de x2(t) = sen2(
2t3
)
sera la mitad, es
decir T2 = 3π2 . El periodo de x3(t) = cos
(
6t5
)
es T3 = 5π3 . Y por lo visto en teorıa, dado
que
T3T2
=5π33π2
=10
9⇒ 9T3 = 10T2.
Por lo tanto x(t) = x2(t)− 2x3(t) es periodica de periodo T = 9T3 = 15π.
(b) El periodo de x1(t) = cos(t) es T1 = 2π, por tanto el periodo de x2(t) = cos3 (t) sera
T2 = T1 = 2π. Luego x(t) = 1− x2(t) tiene periodo T = 2π.
El apartado (c) es analogo al (a), siendo en este caso T = π.
4. Halle la expresion de las siguientes senales en el intervalo (−T/2, T/2) teniendo en cuenta
que son senales periodias de perıodo fundamental T :
(a) x(t) = |2t− 18|, 8 < t < 10
(b) x(t) =(
cos(
2π3 t)
+ 2 cos(
16π3 t))
sen(πt).
(c) x(t) = 2 + 3sen(2t), −3π2 < t < 2π
(d) x(t) = 3 + 2 cos(3t), −π2 < t < π
(e) x(t) =Par
(t− π2 )(u(t)− u(t− π
2 )
, −π < t < π
(f) x(t) =Par(t− π)(u(t)− u(t− π), −2π < t < 2π
(g) x(t) =Par|t− 1|, −2 < t < 2
(h) x(t) =Impar|t− 1|, −2 < t < 2
(i) x(t) = | cos(3t)|, −π2 < t < π
(j) x(t) = cos t (u(t+ 2π)− u(t+ π) + u(t)− u(t− π)), −2π < t < 2π
(k) x(t) = cos3(9t), −3π2 < t < 2π
(l) x(t) = u(t), −1 < t < 1
(m) x(t) = |sen t|, −π2 < t < π
2
(n) x(t) = sen t, −π2 < t < π
2
(o) x(t) = sen t, 0 < t < π2
(p) x(t) = sen t(
u(t− π2 )− u(t− π)
)
, π2 < t < 3π
2
(q) x(t) = sen t, 4π < t < 12π.
(r) x(t) =Impar|t2 + 2t|, −4 < t < −1.
Solucion: (a)

123
t
x(t)
−1 1 2 3 4 5 6 7 8 9 10
1
2
Dado que T = 2, se tiene que el intervalo pedido es (−1, 1).
Para ver cuantas veces hemos trasladado la senal hacia la izquierda en este caso, decimos
(T es el periodo y k es numero de veces desplazada)
−1 = 8− Tk → −1 = 8− 2k ⇒ k = 4′5
luego la senal que nos piden esta incluida entre las copias 4ta y 5ta desplazadas hacia la
izquierda, de hecho, la parte en (−1, 0) es parte de la 5ta copia, es decir, debemos usar
(x + 5T ) ahı, y la parte en (0,1) es parte de la 4ta copia, es decir, debemos usar (x + 4T )ahı. De hecho, la senal en ese intervalo es
x(t) =
x(t+ 8), si 8 < t+ 8 < 10x(t+ 10), si 8 < t+ 10 < 10
⇒ x(t) =
2 + 2t, si −1 < t < 02− 2t, si 0 < t < 1
[hemos quitado la parte que no esta en (−1, 1)]que es equivalente a escribir
x(t) = (2− 2t)(u(t)− u(t− 1)) + (2 + 2t)(u(t+ 1)− u(t)), t ∈ (−T/2, T/2).
(b) Dado que cos(2πx/3) tiene perıodo 3, la funcion cos(16πx/3) tiene perıodo 3/8 y la
funcion sen(πx) tiene periodo 2. Por eso, esta funcion tiene perıodo 6. Con todo eso su
grafica es:
t
x(t)
−3 3
1
2
−1
−2
Dado que T = 6, se tiene que el intervalo pedido es (−3, 3) y la senal en ese intervalo viene
dada por
x(t) = (cos(2π3 t) + 2 cos(16π3 t))sen(πt), −3 < t < 3.
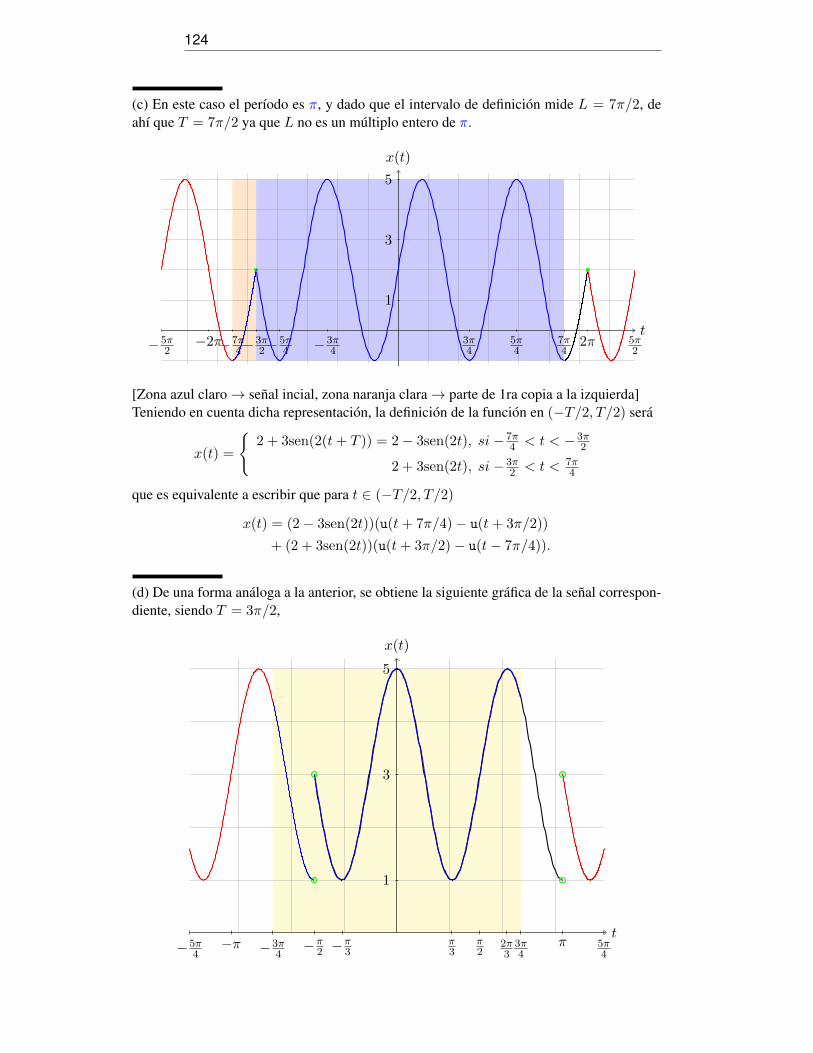
124
(c) En este caso el perıodo es π, y dado que el intervalo de definicion mide L = 7π/2, de
ahı que T = 7π/2 ya que L no es un multiplo entero de π.
t
x(t)
2π−2π 5π2−5π
27π4−7π
4 −3π4
3π4−5π
45π4−3π
2
1
3
5
[Zona azul claro → senal incial, zona naranja clara → parte de 1ra copia a la izquierda]
Teniendo en cuenta dicha representacion, la definicion de la funcion en (−T/2, T/2) sera
x(t) =
2 + 3sen(2(t+ T )) = 2− 3sen(2t), si −7π4 < t < −3π
2
2 + 3sen(2t), si −3π2 < t < 7π
4
que es equivalente a escribir que para t ∈ (−T/2, T/2)
x(t) = (2− 3sen(2t))(u(t+ 7π/4)− u(t+ 3π/2))
+ (2 + 3sen(2t))(u(t+ 3π/2)− u(t− 7π/4)).
(d) De una forma analoga a la anterior, se obtiene la siguiente grafica de la senal correspon-
diente, siendo T = 3π/2,
t
x(t)
−π −π2 −π
3ππ
2π3
2π3−3π
43π4−5π
45π4
1
3
5

125
Teniendo en cuenta dicha representacion, la definicion de la funcion en (−T/2, T/2) sera
x(t) =
3 + 2 cos(3(t+ T )) = 3− 2sen(3t), si −3π4 < t < −π
2
3 + 2 cos(3t), si −π2 < t < 3π
4
que es equivalente a escribir que para t ∈ (−T/2, T/2)
x(t) = (3− 2sen(3t))(u(t+ 3π/4)− u(t+ π/2))
+ (3 + 2 cos(3t))(u(t+ π/2)− u(t− 3π/4)).
(e) Este es el problema 2 (c) que tiene perıodo T = 2π.
(f) Es analogo al anterior, que tiene T = 4π, y resulta que en (−T/2, T/2) es:
x(t) =
0, si −2π < t < π
12(t+ π), si −π < t < 0
12(t− π), si 0 < t < π
0, si π < t < 2π.
que es equivalente a escribir que para t ∈ (−T/2, T/2)
x(t) = (t+ π)/2 u(t+ π)− πu(t) + (π − t)/2 u(t− π).
(g) Es el problema 1(c), siendo T = 4 y en (-T /2,T /2) se tiene:
x(t) =
−t, si −2 < t < −1
1, si −1 < t < 1
t, si 1 < t < 2.
(h) Siguiendo las ideas del problema 4 (g), se tiene que T = 4 y la solucion es:
x(t) =
1, si −2 < t < −1
−t, si −1 < t < 1
−1, si 1 < t < 2.
(i) Se obtiene la siguiente grafica de la senal correspondiente, siendo T = π/3, pero dado
que la longitud del intervalo es L = 3π/2 (no es multiplo de T) se tiene que el perıodo de
la senal es 3π/2.
t
x(t)
−π2
ππ2−5π
45π4
π6−π
6−3π4
3π4
1

126
La linea punteada es la funcion cos(3t) por si sirve de ayuda.
Teniendo en cuenta dicha representacion, la definicion de la funcion en (−T/2, T/2) sera
x(t) =
−sen(3t), si −3π4 < t < −2π
3
sen(3t), si −2π3 < t < −π
2
− cos(3t), si −π2 < t < −π
6
cos(3t), si −π6 < t < π
6
− cos(3t), si π6 < t < π
2
cos(3t), si π2 < t < 3π
4
El resto de problemas se daran solo las respuesta como funcion definida a trozos.
(j) En este caso el perıodo es T = 2π. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) =
0, si −π < t < 0
cos t, si 0 < t < π
(k) En este caso el perıodo es T = 7π/2. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) =
34sen(9t)− 1
4sen(27t), si −7π4 < t < −3π
2
34 cos 9t+
14 cos 27t, si −3π
2 < t < 7π4
(l) En este caso el perıodo es T = 2. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) =
0, si −1 < t < 0
1, si 0 < t < 1
(m) En este caso el perıodo es T = π. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) =
−sen t, si −π2 < t < 0
sen t, si 0 < t < π2
(n) En este caso el perıodo es T = π. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) = sen t; −π2< t <
π
2.
(o) En este caso el perıodo es T = π/2. Lo cual se deduce como anteriormente, realizando
el dibujo de la grafica
t
x(t)
−π
2
π
2
π−
π
4
π
4
1cos(t) sen(t)

127
Ası, la definicion de la funcion en (−T/2, T/2) sera
x(t) =
cos t, si −π4 < t < 0
sen t, si 0 < t < π4
(p) En este caso el perıodo es T = π. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) =
−sen t −π2 < t < 0, si
0 0 < t < π2 , si
(q) En este caso el perıodo es T = 2π. Y la definicion de la funcion en (−T/2, T/2) sera
x(t) = sen t; −π < t < π.
(r) Este caso es relevante tambien porque los desplazamientos de la senal hay que realizarlos
a la derecha, no como el resto, se resuelve con la intencion de lo hacer pensar que siempre
los desplazamientos se realizan a la izquierda.
En primer lugar representaremos la senal inicial (azul), la invertida en tiempo (verde) y
la morada que es la impar en este caso. Ademas la zona naranja es la zona inicial del
problema, la roja es la asociada a la 1ra copia desplazada a la derecha, y la verde la 2da
copia desplazada a la derecha. Conviene ir con mucho cuidado a la hora de resolverlo.
t
y
−1 1−2 2 3 4 5−3−4−5
−2
8
−4
2
6
4
x(t − T ) x(t)
x(t)
x(t + T ) x(t + 2T )
x(−t + 2T ) x(−t + T ) x(−t)
x(−t − T )
Las expresiones en negro son de las funciones en verde. El marco de color ‘cyan‘ es la zona
donde nos piden el resultado, ası que teniendo en cuenta el signo del valor absoluto en cada
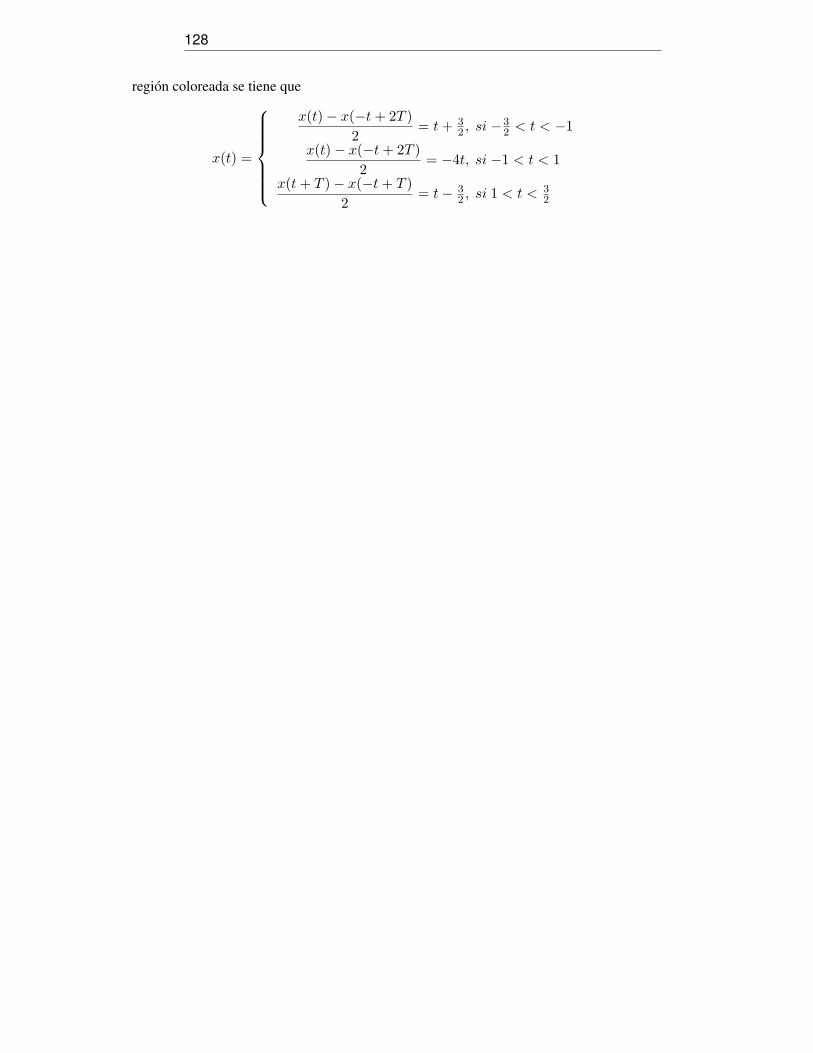
128
region coloreada se tiene que
x(t) =
x(t)− x(−t+ 2T )
2= t+ 3
2 , si −32 < t < −1
x(t)− x(−t+ 2T )
2= −4t, si −1 < t < 1
x(t+ T )− x(−t+ T )
2= t− 3
2 , si 1 < t < 32

129
Calculo I (Grados TICS UAH) Derivadas Curso 2017/18
1. Determinar las tangentes de los angulos que forman con el eje positivo del eje x las lıneas
tangentes a la curva y = x3 cuando x = 1/2 y x = −1, construir la grafica y representar
las lıneas tangentes.
Solucion: Dado que la derivada es y′ = 3x2, entonces
t
y
−1 1
1
2
−1
−2
Ası a) 3/4, y b) 3.
2. Determinar las tangentes de los angulos que forman con el eje positivo del eje x las lıneas
tangentes a la curva y = 1/x cuando x = 1/2 y x = −1, construir la grafica y representar
las lıneas tangentes.
Solucion: Dado que la derivada es y′ = −1/x2, entonces
t
y
−1 1
1
2
−1
−2
3
4
−3
−4
Ası a) −4, b) −1.

130
3. Hallar la derivada de las siguientes funciones:
i. y = x4 + 3x2 − 6.
ii. y = 6x3 − x2.
iii. y =x5
a+ b− x2
a− b.
iv. y =x3 − x2 + 1
5
v. y = 2ax3 − x2
b + c.
vi. y = 6x7/2 + 4x5/2 + 2x.
vii. y =√3x+ 3
√x+
1
x.
viii. y =(x+ 1)3
x3/2.
ix. y =3√x22
√x+ 5.
x. y =ax2
3√x+
b
x√x−
3√x√x
.
xi. y = (1 + 4x3)(1 + 2x2).
xii. y = x(2x− 1)(3x+ 2).
xiii. y = (2x− 1)(x2 − 6x+ 3).
xiv. y =2x4
b2 − x2.
xv. y =a− x
a+ x.
xvi. f(t) =t3
1 + t2.
xvii. f(s) =(s+ 4)2
s+ 3.
xviii. y =x3 + 1
x2 − x− 2.
xix. y = (2x2 − 3)2.
xx. y = (x2 + a2)5.
xxi. y =√x2 + a2.
xxii. y = (a+ x)√a− x.
xxiii. y =
√
1 + x
1− x.
xxiv. y =2x2 − 1
x√1 + x2
.
xxv. y = 3√x2 + x+ 1.
xxvi. y = (1 + 3√x)3.
xxvii. y = sen2(x).
xxviii. y = 2sen(x) + cos(3x).
xxix. y = tan(ax+ b).
xxx. y =sen(x)
1 + cos(x).
xxxi. y = sen(2x) cos(3x).
xxxii. y = cot2(5x).
xxxiii. f(t) = tsen(t) + cos(t).
xxxiv. f(t) = sen3(t) cos(t).
xxxv. y = a√
cos(2x).
xxxvi. y = 12 tan
2(x).
xxxvii. y = ln(cos(x)).
xxxviii. y = ln(tan(x)).
xxxix. y = ln(sen2(x)).
xl. y =tan(x)− 1
sec(x).
xli. y = ln
√
1 + sen(x)
1− sen(x).
xlii. y = sen(lnx).
xliii. f(x) = tan(lnx).
xliv. f(x) = sen(cos(x)).
xlv. y = ln1 + x
1− x.
xlvi. y = log3(x2 − sen(x)).
xlvii. y = ln1 + x2
1− x2.
xlviii. y = ln(x2 + x).
xlix. y = ln(x3 − 2x+ 5).
l. y = x lnx.
li. y = ln3 x.
lii. y = ln(x+√1 + x2).
liii. y = ln(lnx).
liv. y = e4x+5.
lv. y = ax2.
lvi. y = 7x2+2x.
lvii. y = ex(1− x2).
lviii. y =ex − 1
ex + 1.
lix. y = esen(x).
lx. y = atan(nx).
lxi. y = ecos(x)sen(x).
lxii. y = ex ln(sen(x)).
lxiii. y = x1/x.

131
lxiv. y = xlnx.
lxv. y = xx.
lxvi. y = exx.
lxvii. y = arcsin(x/a).
lxviii. y = (arcsinx)2.
lxix. y = arctan(x2 + 1).
lxx. y = arctan
(
2x
1− x2
)
.
lxxi. y =arccos(x)
x.
lxxii. y = xarcsen(x).
Solucion:
i. y′ = 4x3 + 6x.
ii. y′ = 18x2 − 2x.
iii. y′ =5x4
a+ b− 2x
a− b.
iv. y′ =3x2 − 2x
5.
v. y′ = 6ax2 − 2xb .
vi. y′ = 21x5/2 + 10x3/2 + 2.
vii. y′ =
√3
2√x+
1
33√x2
− 1
x2.
viii. y′ =3(x+ 1)2(x− 1)
2x5/2.
ix. y′ =2
3
13√x− 1√
x.
x. y′ =5ax2/3
3− 3b
2x5/2+
1
6x7/6.
xi. y′ = 4x+ 12x2 + 40x4.
xii. y′ = 18x2 + 2x− 2.
xiii. y′ = 6x2 − 26x+ 12.
xiv. y′ =4x3(2b2 − x2
(b2 − x2)2
xv. y′ =−2a
(a+ x)2.
xvi. f(t) =t2(3 + t2)
(1 + t2)2.
xvii. f ′(s) =(s+ 4)(s+ 2)
(s+ 3)2.
xviii. y′ =x4 − 2x3 − 6x2 − 2x+ 1
(x2 − x− 2)2.
xix. y′ = 8x(2x2 − 3).
xx. y′ = 10x(x2 + a2)4.
xxi. y′ =x√
x2 + a2.
xxii. y′ =a− 3x
2√a− x
.
xxiii. y′ =1
(1− x)√1− x2
.
xxiv. y′ =4x2 + 1
x2(1 + x2)3/2.
xxv. y′ =2x+ 1
3 3√
(x2 + x+ 1)2.
xxvi. y′ =
(
1 +13√x
)2
.
xxvii. y′ = 2sen(x) cos(x) = sen(2x).
xxviii. y′ = 2 cos(x)− 3sen(3x).
xxix. y′ =a
cos2(ax+ b).
xxx. y′ =1
1 + cos(x).
xxxi. y′=2 cos(2x) cos(3x)−3sen(2x)sen(3x).
xxxii. y′ = −10 cot(5x) csc2(5x).
xxxiii. f(t) = t cos(t).
xxxiv. f(t) = sen2(t)(
3 cos2(t)− sen2(t))
.
xxxv. y′ = − asen(2x)√
cos(2x).
xxxvi. y′ = tan(x) sec2(x).
xxxvii. y′ = − tan(x).
xxxviii. y′ =2
sen(2x).

132
xxxix. y′ = 2 cot(x).
xl. y′ = sen(x) + cos(x).
xli. y′ =1
cos(x).
xlii. f ′(x) =cos(lnx)
x.
xliii. f ′(x) =sec2(lnx)
x.
xliv. f ′(x) = −sen(x) cos(cos(x)).
xlv. y′ =2
1− x2.
xlvi. y′ =2x− cos(x)
(x2 − sen(x)) ln 3.
xlvii. y′ =4x
1− x4.
xlviii. y′ =2x+ 1
x2 + x.
xlix. y′ =3x2 − 2
x3 − 2x+ 5.
l. y′ = 1 + lnx.
li. y′ =3 ln2 x
x.
lii. y′ =1√
1 + x2.
liii. y′ =1
x lnx.
liv. y′ = 4e4x+5.
lv. y′ = 2xax2ln a.
lvi. y′ = 2(x+ 1)7x2+2x ln 7.
lvii. y′ = ex(1− 2x− x2).
lviii. y′ =2ex
(ex + 1)2.
lix. y′ = esen(x) cos(x).
lx. y′ = natan(nx) sec2(nx) ln a.
lxi. y′ = ecos(x)(cos(x)− sen2(x)).
lxii. y′ = ex(cot(x) + ln(sen(x)).
lxiii. y′ = x1/x(
1− lnx
x2
)
.
lxiv. y′ = 2xlnx−1 lnx.
lxv. y′ = xx(1 + lnx).
lxvi. y′ = exx(1 + lnx)xx.
lxvii. y′ =1√
a2 − x2.
lxviii. y′ =2arcsen(x)√
1− x2.
lxix. y′ =2x
1 + (x2 + 1)2.
lxx. y′ =2
1 + x2.
lxxi. y′ = −x+√1 + x2 arccos(x)
x2√1− x2
.
lxxii. y′ = arcsen(x) +x√
1− x2.

133
Descargar la hoja de aquı. Hoja 4.Tema2. Aplicaciones de derivadas

Calculo I (Grados TICS UAH) Calculo de primitivas Curso 2017/18
1. Calcular una primitiva general de de las siguientes funciones y compruebe la respuesta
derivando:
(a) f(x) = 18x2
(b) f(x) = x−3/5
(c) f(x) = 9x+ 15x−2
(d) f(x) = 2 cosx− 9sen x
(e) f(x) = sen(4− 9x)
(f) f(x) = tan(2x+ 3)
Solucion:
(a) 6x3 + C
(b)5
2x2/5 + C
(c)9
2x2 − 15x−1 + C
(d) 2sen(x) + 9 cosx+ C
(e)1
9cos(4− 9x) + C
(f) −1
2ln | cos(2x+ 3)|+ C
2. Calcular la integral indefinida de de las siguientes funciones:
(a) f(x) = 4− 18x
(b) f(t) = t−6/11
(c) f(s) = 14s9/5
(d) f(x) =1
x4/3
Solucion:
(a) 4x− 9x2 + C
(b)11
5t5/11 + C
(c) 5s14/5 + C
(d) −3x−1/3 + C = − 3
x1/3+ C
3. Calcular la integral indefinida de de las siguientes funciones:
(a) f(z) =12− z√
z
(b) f(z) = 25 sec2(3z + 1)
(c) f(θ) = θ + sec2 θ
(d) f(x)=sec(x+5) tan(x+5)
(e) f(t) = (t1/2 + 1)(t+ 1)
(f) f(x)=3 cos(4x) + sen(3x)
Solucion:
(a) 24√z − 2
3z3/2 + C
(b)25
3tan(3z + 1) + C
(c)1
2θ2 + tan(θ) + C

135
(d) sec(z + 1) + C
(e)2
5t5/2 +
1
2t2 +
2
3t3/2 + t+ C
(f)3
4sen(4x)− 1
3cos(3x) + C
4. Calcular la integral indefinida de de las siguientes funciones:
(a) f(θ) = θ − cos θ
(b) f(y) = (y + 2)4(c) f(x) = x2
√x+ 1
Solucion:
(a)1
2θ2 − sen(θ) + C
(b)1
5(y + 2)5 + C
(c)2
7(x+ 1)7/2 − 4
5(x+ 1)5/2 +
2
3(x+ 1)3/2 + C
5. Calcular la integral indefinida de de las siguientes funciones:
(a) f(z) = x sec2(x2)
(b) f(t) =t3
(4− 2t4)11
(c) f(z)=(z5+4z2)(z3+1)12
(d) f(x) =sen x cosx√sen x+ 1
(e) f(x) =1
(1 +√x)3
(f) f(x) =2x3 + 3x
(3x4 + 9x2)5
Solucion:
(a)1
2tan(x2) + C
(b)1
80(4− 2t)10+ C
(c)1
42(z3 + 1)14 +
1
13(z3 + 1)13 + C
(d)2
3(senx+ 1)3/2 − 2(senx+ 1)1/2 + C (C.V. t = sen(x))
(e) − 2
1 +√x+
1
(1 +√x)2
+ C (C.V. t =√x)
(f) − 1
24(3x4 + 9x2)−4 + C
6. Calcular la integral indefinida de de las siguientes funciones:
(a) f(x) =x
(x+ 1)(x− 2)
(b) f(x) =x2 + 3
(x− 1)(x+ 2)2
(c) f(x) =2x+ 1
(x− 1)(x2 + x+ 1)
(d) f(x) =x2 − 2
x3(x2 + 1)
(e) f(x) =x2 − x
(x+ 3)2
(f) f(x) =x4
(x2 − 1)2

136
Solucion:
(a)1
3ln |x+ 1|+ 2
3ln |x− 2|+ C + C
(b)4
9ln |x− 1| − 7
3ln |x+ 2| − 5
9(x+ 2)+ C
(c) ln |x− 1| − 1
2ln |x2 + x+ 1| − 1√
3arctan
(
2x+ 1√3
)
+ C
(
Se ha usado que x2 + x+ 1 = (x+ 1
2)2 + (
√
3
2)2)
(d) 3 ln |x|+ 1
x2− 3
2ln |x2 + 1|+ C
(e) x− 12
x+ 3− 7 ln |x+ 3|+ C
(f) x− 1
4(x− 1)+
3
4ln |x− 1| − 1
4(x+ 1)− 3
4ln |x+ 1|+ C
7. Calcular la integral indefinida de de las siguientes funciones:
(a) f(x) =1
(1 + x)√1 + x+ x2
(b) f(x) =1√
4 + x2
(c) f(x) =x
3√
(x+ 2)2 −√x+ 2
(d) f(x) =1
3√x+
√x
Solucion:
(a) log(x+ 1)− log(
−x+ 2√x2 + x+ 1 + 1
)
+ C (C.V√x2 + x+ 1 = x+ t)
(b) ln |t+√t2 + 4|+ C
(c)3
4(x+ 2)4/3 +
6
7(x+ 2)7/6 +
6
5(x+ 2)5/6 +
3
2(x+ 2)2/3 + 2
√x+ 2− 3 3
√x+ 2−
6 6√x+ 2 + x− ln |x+ 2|+ C (C.V. x+ 2 = t6)
(d) 2√x− 3 3
√x+ 6 6
√x− 6 ln | 6
√x+ 1|+ C (x = t6)
8. Calcular la integral indefinida de de las siguientes funciones:
(a) f(x) =cosx
sen3x+ 2 cos2 xsen x
(b) f(x) =ex + 3e2x
1 + ex
(c) f(x) =1 + sen x
sen x cos2 x
(d) f(x) =e√x
√x
(e) f(x) =x+ 1
x2 − 3x+ 3
(f) f(x) =1
x4 − 2x3 + 2x2 − 2x+ 1
Solucion:
(a)1
2ln |sen x+
1
4ln |sen x−
√2| − 1
4ln |sen x+
√2|+ C (C.V. t = senx)
(b) 3ex − 2 ln |ex + 1|+ C (C.V. t = ex)
(c) sec(x) +1
2ln | cos(x)− 1| − 1
2ln | cos(x) + 1|+ tan(x) +C (C.V. t = cos(x))
(d) 2e√x + C

137
(e)1
2ln |x2 − 3x+ 3|+ 5√
3arctan
(
2x− 3√3
)
+ C
(
Se ha usado que x2 − 3x+ 3 = (x− 3
2)2 + (
√
3
2)2)
(f) −1
2ln |x− 1| − 1
2(x− 1)+
1
4ln |x2 + 1|+ C

138
Calculo I (Grados TICS UAH) Integral indefinida Curso 2017/18
Hallar la integral indefinida de las siguientes funciones:
1.∫
x tan2(x) dx
2.∫
tan3(x) sec4(x) dx
3.∫ √
x+ 1
x+ 3dx
4.
∫
(x+ 1)3√
1− (x+ 1)2dx
5.∫
x2
(x− 1)3dx
6.∫
x2 + 1√x2 − 1
dx
7.
∫
sen2(x) cos5(x)
tan3(x)dx
8.∫
sen(x)− cos(x)
sen(x) + cos(x)dx
9.∫
exsen(πx) dx
10.∫
1
cos4(x)dx
11.
sen2x dx
12.
sen4x dx
13.∫
cos2 x dx
14.∫
cos6 x dx
15.∫
sen2x cos2 x dx
16.∫
dx
3 +√2x+ 5
17.∫
√
x− 1
x+ 1dx
18.∫
arctan 3√x dx
19.∫√√
x+ 1 dx
20.
∫
√x+ 2
1 +√x+ 2
dx
21.∫ √
2 + ex dx
22.∫
esenx cos2 x dx
23.∫
sen5 x dx
24.∫
cos3 xsen2 x dx
25.∫
tan2 x dx
26.∫
tan3 x dx
27.∫
x3√
1− x2 dx
28.∫
senx+ 3 cosx
senx cosx+ 2senxdx
29.∫
senx+ 3 cosx
senx+ 2 cosxdx
30.∫
tan2(3x) sec3(3x) dx
31.
∫
4x3 − x3 − 46x2 − 20x+ 153
x3 − 2x2 − 9x+ 18dx
32.∫
cos(log x) dx
33.
∫
e4x
e2x + ex + 2dx
34.∫
35.∫
36.∫
37.∫
139
38.∫
39.∫
40.∫
41.∫
42.∫
Soluciones:
1.
∫
x tan2(x) dxIPP=
u = x
dv = tan2(x)dx→
du = dx
v = tan(2x)/2− x
=x
2(tan(2x)− 2x)− 1
2
∫
(
tan(2x)− 2x)
dx
=x
2tan(2x) +
1
4ln | cos(2x)| − x2
2+ C.
2.
∫
tan3(x) sec4(x) dxCV=
z = tan(x)
dz = sec2(x)dx
=
∫
z3(1 + z2) dz
=z4
4+z6
6+ C =
tan4(x)
4+
tan6(x)
6+ C.
3.
∫ √x+ 1
x+ 3dx
CV=
x = t2
dx = 2tdt
=
∫
t+ 1
t2 + 32t dt =
∫
2dt+
∫
2t− 6
t2 + 3dt
=2t+ ln |t2 + 3| − 6√3arctan(x/
√3) + C.
4.
∫
(x+ 1)3√
1− (x+ 1)2dx
CV=
x+ 1 = sen(t)
dx = cos(t)dt
=
∫
sen3(t)dt
=
∫
sen(t)(1− cos2(t))dt = − cos(t) +1
3cos3(t) + C.
Deshacemos los cambios quedando
∫
(x+ 1)3√
1− (x+ 1)2dx = −
√
1− (x+ 1)2 +1
3
√
(1− (x+ 1)2)3 + C.
5.∫
x2
(x− 1)3dx =
∫
B1
x− 1dx+
∫
B2
(x− 1)2dx+
∫
1
(x− 1)3dx
=B1 ln |x− 1| − B2
x− 1− 1
2(x− 1)2+ C.

140
Observacion 5.5.1. Para calcular las constantes les doy dos valores a x y planteo los dos
sistemas, pero puede resolverse de otras formas. En este caso B1 = 1 y B2 = 2.
6.
∫
x2 + 1√x2 − 1
dxCV=
x = sec(t)
dx = tan(t) sec(t)dt
=
∫
(
sec2(t) + 1)
sec(t) dt
=
∫
1 + cos2(t)
cos3(t)dt
(∗)=
sen(t) = y
cos(t)dt = dy
=
∫
2− y2
(y2 − 1)2dy
=
∫
B1
y − 1dy +
1
4
∫
1
(y − 1)2dy +
∫
B3
y + 1dy +
1
4
∫
1
(y + 1)2dy.
Deshacemos el cambio quedando∫
x2 + 1√x2 − 1
dx=B1 ln |sen(t)−1|− 1
4(sen(t)− 1)+B3 ln |sen(t)+1|− 1
4(sen(t) + 1)+C.
Y dado que
sen(z) =√
1− cos2(z) =
√
1− 1
x2=
√x2 − 1
x,
se aplica sobre la expresion anterior se tiene el resultado final.
Observacion 5.5.2. En este caso las constantes son B1 = −3/4, B3 = 3/4. Tengamos en
cuenta que es una integral algo compleja.
(*) La funcion es impar en coseno.
7.
∫
sen2(x) cos5(x)
tan3(x)dx =
∫
cos8(x)
sen(x)dx
CV=
t = cos(x)
dt = −sen (x)dx
=
∫
t8
t2 − 1dt
Dividimos y deshacemos el cambio, quedando∫
sen2(x) cos5(x)
tan3(x)dx =
93 cos(x)
64+
37
192cos(3x) +
9
320cos(5x) +
1
448cos(7x)
− log(cot(x) + csc(x)) + C.
8.∫
sen(x)− cos(x)
sen(x) + cos(x)dx = − ln |sen(x) + cos(x)|+ C.
9. Por las tablas vistas en clase∫
exsen(πx) dx =ex
1 + π2(
sen (πx)− π cos(πx))
+ C.
10.∫
1
cos4(x)dx
CV=
z = tan(x)
dz =dx
cos2(x)
=
∫
(1 + z2) dz = z +z3
3+ C
deshacemos el cambio y obtenemos∫
1
cos4(x)dx = tan(x) +
tan3(x)
3+ C

141
11.∫
sen2x dx =1
2
∫
(1− cos(2x)) dx =x
2− sen(2x)
4+ C
12.∫
sen4x dx =1
4
∫
(1− cos(2x))2 dx =x
4− sen(2x)
4+
1
4
∫
cos2(2x) dx
13.∫
cos2 x dx =1
2
∫
(
1 + cos(2x))
dx =x
2+
sen (2x)
4+ C
14.
∫
cos6 x dx =1
8
∫
(
1 + cos(2x))3dx =
1
8
∫
(
1 + 3 cos(2x) + 3 cos2(2x) + cos3(2x))
dx
=x
8+
3sen (2x)
16+
1
8
∫
cos2(2x) dx+1
8
∫
cos3(2x) dx
=5x
16+
15
64sen (2x) +
3
64sen (4x) +
1
192sen (6x) + C
15.
∫
sen2x cos2 x dx =
∫
sen2 (2x)
4dx =
∫
1− cos(4x)
8dx =
x
8− sen (4x)
32+ C
16.
∫
dx
3 +√2x+ 5
C.V.= 2x+ 5 = t2 =
∫
t
3 + tdt = t− 3 ln |t+ 3|+ C
=√2x+ 5− 3 ln |
√2x+ 5 + 3|+ C
17.
∫
√
x− 1
x+ 1dx
C.V.= x− 1
x+ 1= t2 =
∫
4t2
(1− t2)2dt
=
∫
1
(t− 1)2dt+
∫
1
(t+ 1)2dt+
∫
1
t− 1dt−
∫
1
t+ 1dt
= ln |t− 1| − ln |t+ 1| − 1
t− 1− 1
t+ 1+ C
= ln
∣
∣
∣
∣
√x− 1−
√x+ 1√
x− 1 +√x+ 1
∣
∣
∣
∣
+√
x2 − 1 + C
El calculo realizado para deshacer la variable no es inmediato, se debe hacer teniendo en cuenta
las propiedades basicas de las funciones involucradas en el calculo.
142
18.∫
arctan 3√x dx
C.V.= x = t3 = 3
∫
t2 arctan(t) dxI.P.P.=
u = arctan(t)dv = 3t2 dt
=t3 arctan(t)−∫
t3
t2 + 1dt = t3 arctan(t)−
∫
t dt+
∫
t
t2 + 1dt
=t3 arctan(t)− t2
2+
1
2ln |1 + t2|+ C
=x arctan 3√x−
3√x2
2+
1
2ln |1 + 3
√x2|+ C
19.∫√√
x+ 1 dxC.V.=
√x+ 1 = t2 = 4
∫
(
t4 − t2)
dt =4t5
5− 4t3
3+ C
=4
√
(√x+ 1)
5
5−
4
√
(√x+ 1)
3
3+ C
20.∫
√x+ 2
1 +√x+ 2
dxC.V.= x+ 2 = t2 =
∫
2t2
1 + tdt = t2 − 2t+ 2 ln |t+ 1|+ C
=x+ 2− 2√x+ 2 + 2 ln |
√x+ 2 + 1|+ C
21.∫ √
2 + ex dxC.V.=
√2 + ex = t2 =
∫
2t2
t2 − 2dt
= t+
∫
4
t2 − 2dt = t+
√2(
log(√
2− t)
− log(
t+√2))
+ C
=√2 + ex+
22.∫
23.∫
24.∫
25.∫
26.∫
143
27.∫
28.∫
29.∫
30.∫
31.∫
32.∫
33.∫
34.∫
35.∫
36.∫
37.∫
38.∫
39.∫
40.∫
41.∫
144
42.∫
43.∫
44.∫
45.∫
46.∫
47.∫
48.∫
49.∫
50.∫

145
Descargar la hoja de ........

Calculo I (Grados TICS UAH) Aplicaciones del caculo integral Curso 2017/18
Longitudes
1. Calcular la longitud de las siguientes funciones:
(a) y = log
(
1
t
)
, para√3 ≤ t ≤
√8.
(b) y =x3
6+
1
2x, para 1 ≤ x ≤ 3.
(c) y = x2, para 0 ≤ x ≤ 1.
(d) y =x2
4− 1
2log x, para 1 ≤ x ≤ 5.
(e) y = log(secx), para 0 ≤ x ≤ π4 .
(f) y = log(sen x), para π6 ≤ x ≤ π
2 .
Soluciones
(a) En este caso la grafica de la curva entre los puntos marcados es
xy
1 2 3 4
−1
−2
L
Dado que y′(t) = −1t , entonces
L =
∫ b
a
√
1 +(
f ′(x))2dx =
∫
√8
√3
√
1 + (−1/t)2 dt =
∫
√8
√3
√t2 + 1
tdt.
Tomando t2 + 1 = u2, la integral resulta inmediata
L =1
2
∫ 3
2
2u
u2 − 1du =
1
2log(u2 − 1)
∣
∣
∣
u=3
u=2=
1
2log(8/3).
(b) Para este ejercicio la curva es de la forma
x
y
1 2 3
1
2
3
4
5
6
L

147
Como y′ =x2
2− 1
2x2, luego
L =
∫ 3
1
√
1 +x4
4+
1
4x4− 1
2dx =
∫ 3
1
√
x4
4+
1
4x4+
1
2dx
=
∫ 3
1
√
(
x2
2+
1
2x2
)2
dx
∫ 3
1
x2
2+
1
2x2dx
=
(
x3
6− 1
2x
∣
∣
∣
∣
3
1
=14
3.
(c) Para este ejercicio la curva es de la forma
x
y
1
1L
Sabemos que y′ = 2x, luego
L =
∫ 1
0
√
1 + 4x2 dx = √
1 + 4x2 = 2x+ z = −∫
√5−2
1
(1 + z2)2
8z3dz
=
(
− 1
8z3− 1
4z− z
8
)
∣
∣
∣
z=√5−2
z=1=
√5
2+
1
4ln(2 +
√5).
OJO! este calculo es algo complicado.
(d) Para este ejercicio la curva es de la forma
x
y
1
1
L
Como y′ = x2 − 1
2x se tiene que
L =
∫ 5
1
√
1 +
(
x
2− 1
2x
)2
dx =
∫ 5
1
√
(
x
2+
1
2x
)2
dx =
∫ 5
1
(
x
2+
1
2x
)
dx
=
(
x2
4+
1
2ln |x|
∣
∣
∣
∣
x=5
x=1
= 46 +1
2ln(5).

148
(e) Para este ejercicio la curva es de la forma
x
y
π41
1
L
Como y′ = sen xcosx se tiene que
L =
∫ π4
0
√
1 + tan2 x dx =
∫ π4
0
1
cosxdx
=− ln(
tan(π
4− x
2
))∣
∣
∣
x=π4
x=0= − ln(tan(π/8)) = − ln(−1 +
√2).
(f) Para este ejercicio la curva es de la forma
x
y
1π2
π6
−1
L
Dado que en este caso y′ = cosxsen x , luego
L =
∫ π2
π6
√
1 +( cosx
sen x
)2dx =
∫ π2
π6
1
sen xdx = ln
(
tan(x
2
))∣
∣
∣
x=π2
x=π6
es decir, que
L = ln(
tan( π
12
))
− ln(
tan(π
4
))
= ln(
tan( π
12
))
= ln(2−√3).
Volumenes y Areas laterales:
2. Dibujar la region R limitada por las curvas dadas y hallar el volumen del solido engendrado
al girar R alrededor del eje X .
(a)
y = sen xy = 0x = π
4x = π
2
(b)
y =√4− x2
y = 0
(c)
y = 1− |x|y = 0
Soluciones:
(a) En el primer caso R resulta:

149
x
y
2π4
π2
1R
Ası, el volumen se resuelve mediante la integral
VX = π
∫ π2
π4
sen2x dx =π
2
∫ π2
π4
(1− cos(2x)) dx =π
8(π + 2).
(b) En este caso R resulta
x
f(x)
1 2−1−2
1
2
R
Ası, el volumen se resuelve mediante la integral
VX = π
∫ 2
−2(4− x2) dx =
32π
3.
(c) Y por ultimo, debido a la simetrıa de la funcion (llamaremos R1 a la region que inte-
graremos usando la simetria)
x
f(x)
1 2−1−2
1
−1
R1
Ası
VX = π
∫ 0
−1(1 + x)2 dx+ π
∫ 1
0(1− x)2 dx = 2π
∫ 1
0(1− x)2 dx =
2π
3.
3. Dibujar la region R limitada por las curvas dadas y hallar el volumen del solido engendrado
al girar R alrededor del eje Y .
(a)
x =√
9− y2
x = 0
(b)
x+ y = 32x+ y = 6x = 0
Soluciones:

150
(a) El area R que debe girar es
x
y
1 2 3
1
2
−1
−2
3
−3
R
Por tanto
VY =
∫ 3
−3π(9− y2) dy = 36π.
Por el metodo de los cilindros se tiene, dado que hay que usar dos ramas de la esfera,
que
VY =
∫ 3
02πx
√
9− x2 dx−∫ 0
−32πx
√
9− x2 dx = 36π.
(b) El area R que debe girar es
x
y
1 2 3
2
4
3
6
R
Por tanto
VY =
∫ 3
0π
(
(y − 6)2
4− (3− y)2
)
dy +
∫ 6
3π
(
(y − 6)2
4
)
dy = 9π.
Por el metodo de los cilindros se tiene, dado que hay que usar dos ramas de la esfera,
que
VY =
∫ 3
02πx ((6− 2x)− (3− x)) dx = 9π.
4. Calcular:
(a) El area lateral de la esfera de radio R.

151
(b) El area lateral del cono generado al girar y = x alrededor del eje x entre x = 0 y
x = 2.
(c) El area lateral de la superficie engendrada al girar alrededor del eje x la curva y = cosxpara 0 ≤ x ≤ π
2 .
Soluciones:
(a) Por la simetrıa de la esfera x2+y2+z2 = R2, puede utilizarse el dibujo del ejercicio 3
(a), donde la funcion superior es y+ =√R2 − x2 y la inferior es y− = −
√R2 − x2.
Ası, su area lateral es
Alat = 2 · 2π∫ R
0
√
R2 − x2
√
1 +x2
R2 − x2dx = 4π
∫ R
0Rdx = 4πR2.
(b) Fijamos una altura hasta la que gira por comodidad, digamos hasta y = H ,
x
y
1 2 3H
1
2
H
R
como y = x entonces
Alat = 2π
∫ H
0(H − x)
√
1 + (−1)2 dx =√2H2π.
(c) Por la definicion se tiene que R es
x
y
1 π
22
1
R
Ası el area lateral sera
Alat =2π
∫ π2
0cos(x)
√
1 + sen2 x) dxCV= senx = t = 2π
∫ 1
0
√
1 + t2 dt
CV=
√
1 + t2 = t+ z
= −2π
∫
√2−1
1
(1 + z2)2
4z3dz
=− π
4
(
− 1
2z2+z2
2+ 2 ln |z|
∣
∣
∣
∣
z=√2−1
z=1
=−1
(√2− 1)2
+(√2− 1)2
2+ 2 ln(
√2− 1).
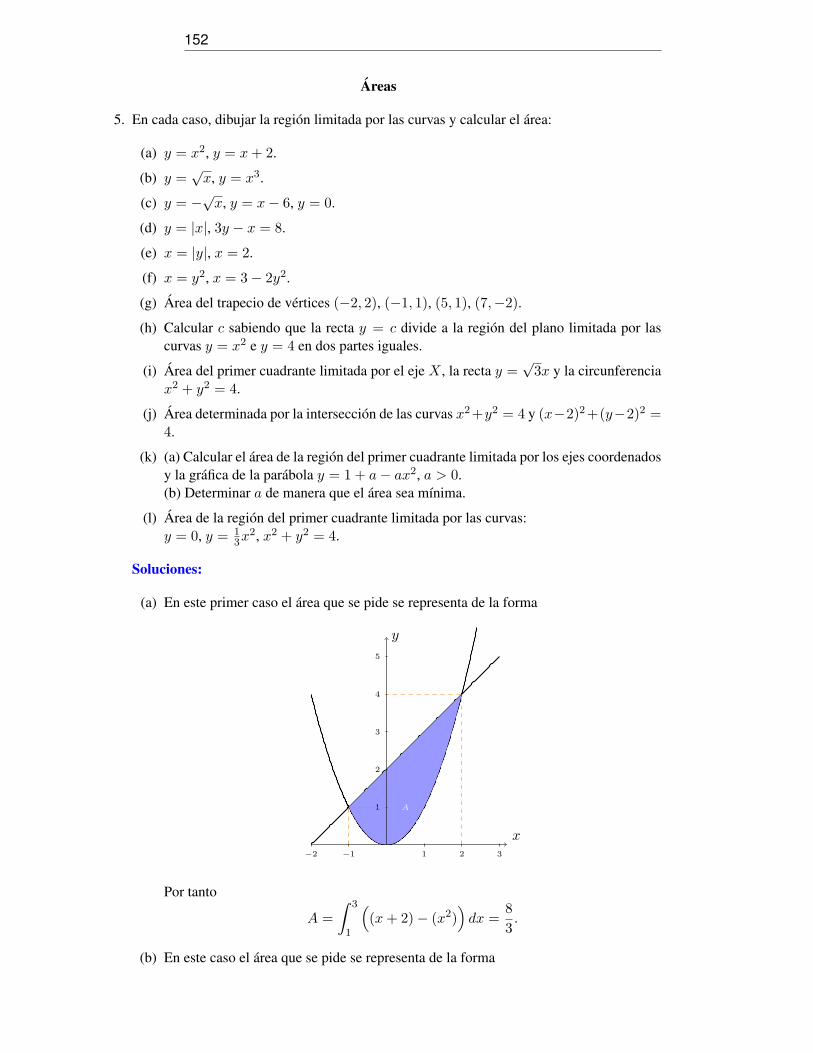
152
Areas
5. En cada caso, dibujar la region limitada por las curvas y calcular el area:
(a) y = x2, y = x+ 2.
(b) y =√x, y = x3.
(c) y = −√x, y = x− 6, y = 0.
(d) y = |x|, 3y − x = 8.
(e) x = |y|, x = 2.
(f) x = y2, x = 3− 2y2.
(g) Area del trapecio de vertices (−2, 2), (−1, 1), (5, 1), (7,−2).
(h) Calcular c sabiendo que la recta y = c divide a la region del plano limitada por las
curvas y = x2 e y = 4 en dos partes iguales.
(i) Area del primer cuadrante limitada por el eje X , la recta y =√3x y la circunferencia
x2 + y2 = 4.
(j) Area determinada por la interseccion de las curvas x2+y2 = 4 y (x−2)2+(y−2)2 =4.
(k) (a) Calcular el area de la region del primer cuadrante limitada por los ejes coordenados
y la grafica de la parabola y = 1 + a− ax2, a > 0.
(b) Determinar a de manera que el area sea mınima.
(l) Area de la region del primer cuadrante limitada por las curvas:
y = 0, y = 13x
2, x2 + y2 = 4.
Soluciones:
(a) En este primer caso el area que se pide se representa de la forma
x
y
1 2 3−1−2
1
2
3
4
5
A
Por tanto
A =
∫ 3
1
(
(x+ 2)− (x2))
dx =8
3.
(b) En este caso el area que se pide se representa de la forma
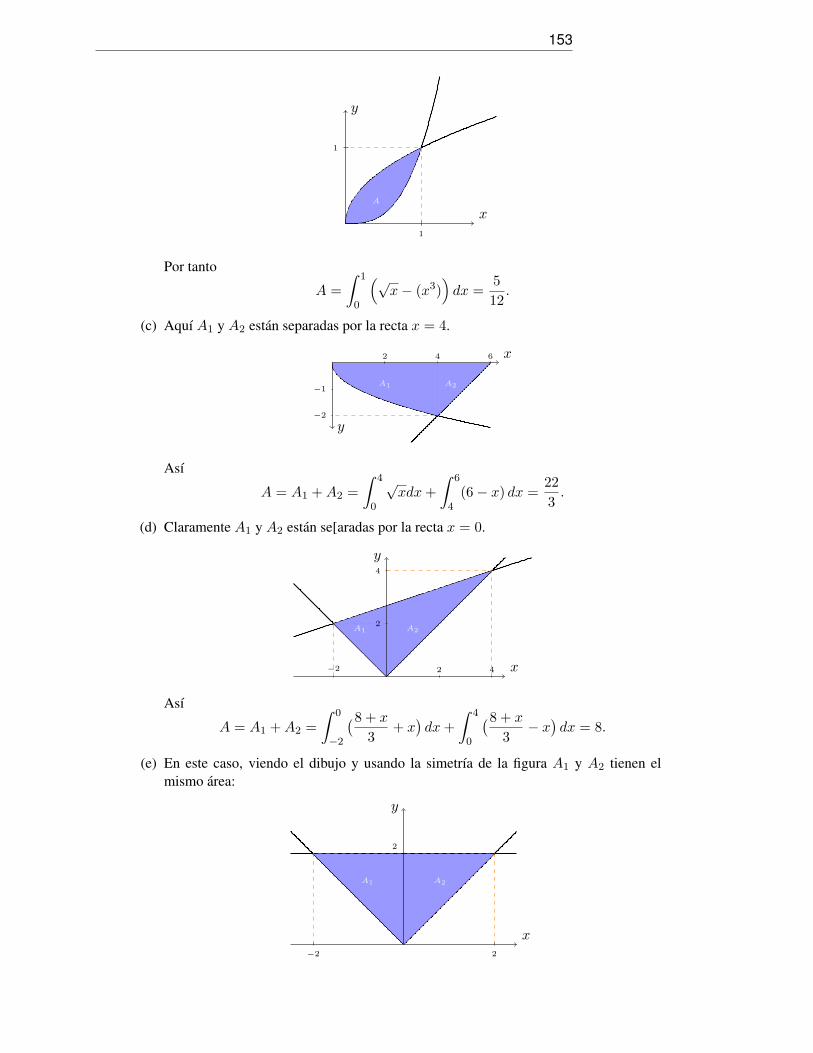
153
x
y
1
1
A
Por tanto
A =
∫ 1
0
(√x− (x3)
)
dx =5
12.
(c) Aquı A1 y A2 estan separadas por la recta x = 4.
x
y
2 4 6
−1
−2
A1 A2
Ası
A = A1 +A2 =
∫ 4
0
√xdx+
∫ 6
4(6− x) dx =
22
3.
(d) Claramente A1 y A2 estan se[aradas por la recta x = 0.
x
y
2 4−2
4
2A1 A2
Ası
A = A1 +A2 =
∫ 0
−2
(8 + x
3+ x)
dx+
∫ 4
0
(8 + x
3− x)
dx = 8.
(e) En este caso, viendo el dibujo y usando la simetrıa de la figura A1 y A2 tienen el
mismo area:
x
y
2−2
2
A1 A2

154
A = 2
∫ 2
0(2− x) dx = 4.
(f) En este caso, viendo el dibujo se tienen que calcular dicha area separandola en dos A1
y A2:
x
y
1 3
1
−1
A1 A2
Luego,
A = A1 +A2 = 2
∫ 1
0
√x dx+ 2
∫ 3
1
√
3/2− x/2 dx = 4.
Se ha usado que el area bajo el eje x es negativo y su area, por simetrıa, es igual que
la que esta en la parte positiva del eje y.
(g) En este caso nos dan un trapecio, y sabemos que el area de un trapecio de base mayor
B, base menor b, y altura h es igual a
Atrapecio =B + b
2h.
En este caso el trapecio tiene la forma
x
y
1 2 3 4 5 6 7−1−2
1
−1
2
−2
P1
P2 P3
P4
Dado que el trapecio se puede expresar como la suma de dos triangulos, en este caso
el triangulo de vertices P2, P3 y P4 tiene area
A1 =(5− (−1)) · (1− (−2))
2= 9,
y el trangulo de vertices P1, P2 y P3 tiene area
(5− (−1)) · (2− 1)
2= 3.
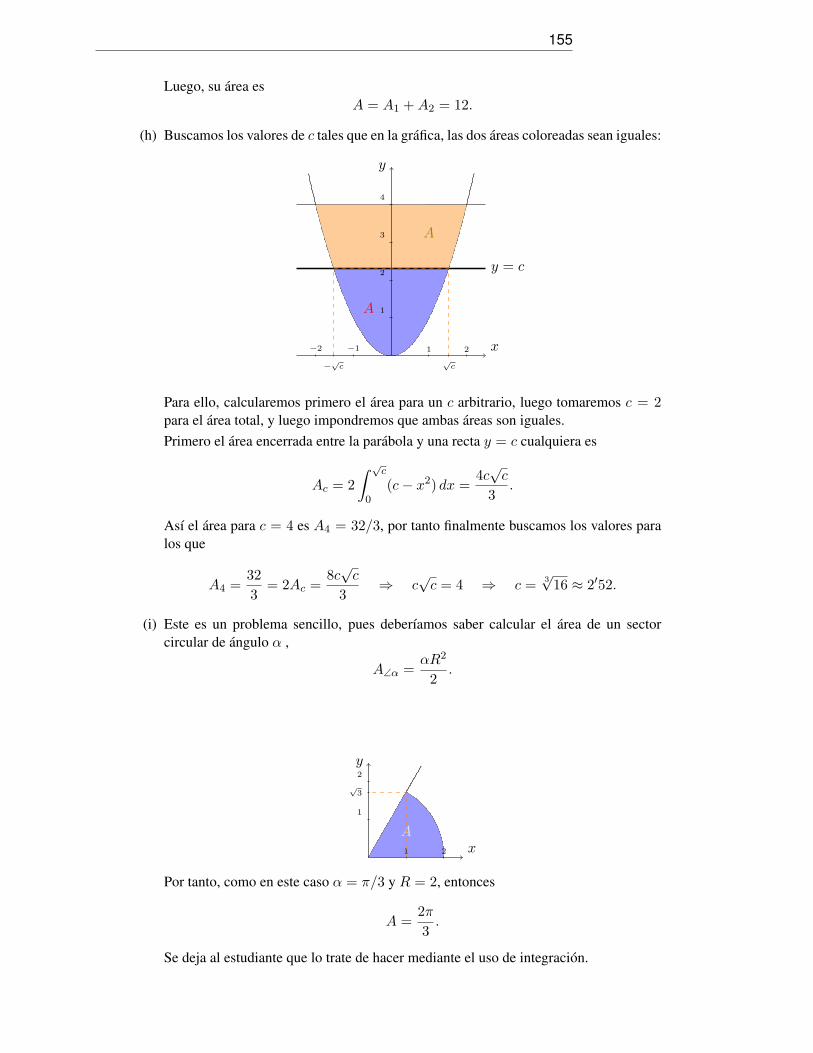
155
Luego, su area es
A = A1 +A2 = 12.
(h) Buscamos los valores de c tales que en la grafica, las dos areas coloreadas sean iguales:
y = c
x
y
1 2−1−2
√
c−
√
c
1
2
3
4
A
A
Para ello, calcularemos primero el area para un c arbitrario, luego tomaremos c = 2para el area total, y luego impondremos que ambas areas son iguales.
Primero el area encerrada entre la parabola y una recta y = c cualquiera es
Ac = 2
∫
√c
0(c− x2) dx =
4c√c
3.
Ası el area para c = 4 es A4 = 32/3, por tanto finalmente buscamos los valores para
los que
A4 =32
3= 2Ac =
8c√c
3⇒ c
√c = 4 ⇒ c =
3√16 ≈ 2′52.
(i) Este es un problema sencillo, pues deberıamos saber calcular el area de un sector
circular de angulo α ,
A∠α =αR2
2.
x
y
1 2
1
2
√
3
A
Por tanto, como en este caso α = π/3 y R = 2, entonces
A =2π
3.
Se deja al estudiante que lo trate de hacer mediante el uso de integracion.

156
(j) En este caso tenemos dos circunferencias del mismo radio, de hecho
x
y
2
2
A
por tanto
A=
∫ 2
0
(
√
4− x2 − (2−√
4− (x− 2)2))
dx=
∫ 2
0
√
4− x2dx−∫ 2
0(2−
√
4− (x− 2)2)dx
En el primer caso (CV: x = 2sen(z))
∫ 2
0
√
4− x2 dxCV= 4
∫ π2
0cos2(z) dz = 2
∫ π2
0(1 + cos(2z)) dz = π,
y en el segundo caso (CV: x− 2 = 2sen(z))
∫ 2
0(2−
√
4− (x− 2)2)dx = 4−∫ 2
0
√
4− (x− 2)2dxCV= 4(1−
∫ π2
0cos2(z) dz) = 4−π.
Es decir, que A = 2π − 4.
(k) Este es un problema simbolico, tenemos que representar una parabola generica asum-
iendo dicho parametro a ≥ 0, por tanto corta al eje OY en los puntos ±√
1 + 1/a y
al eje OX en el punto 1 + a, es decir
x
y
1 2√
1+aa−1
1
2
1 + a
A
Ası el area es, en funcion del parametro a, igual a
Aa =
∫
√
1+aa
0(1 + a− ax2) dx =
2
3
√
1
a+ 1(a+ 1).
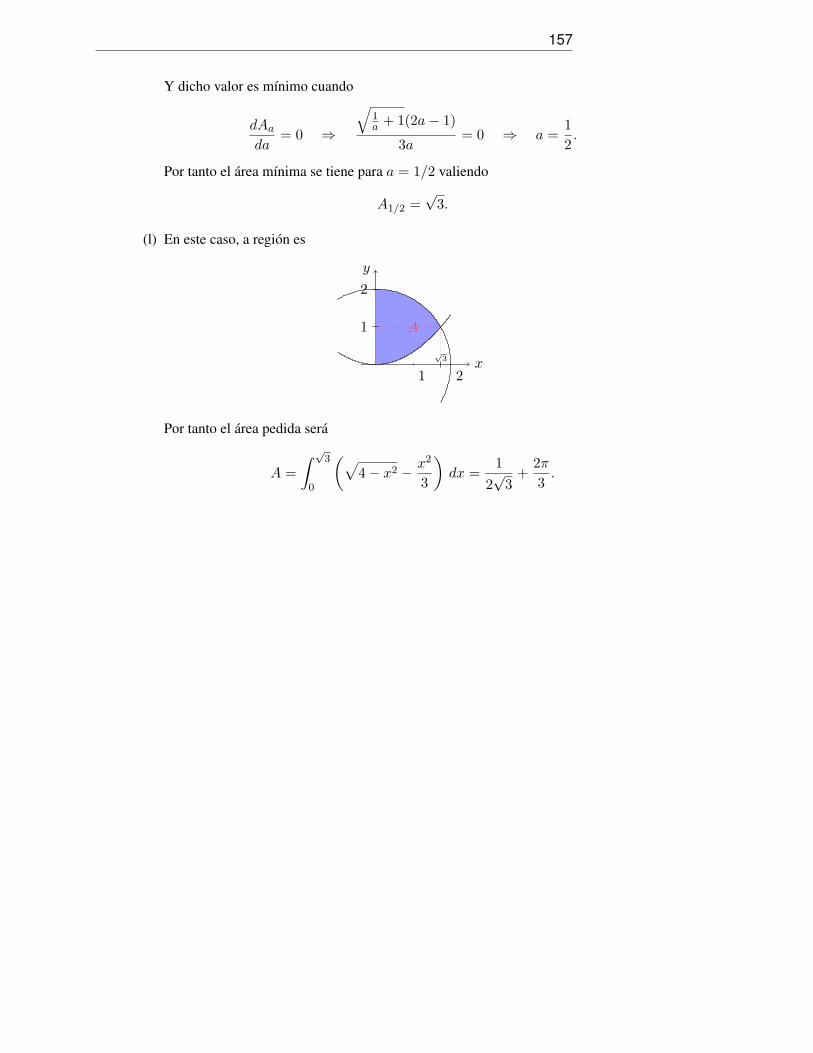
157
Y dicho valor es mınimo cuando
dAa
da= 0 ⇒
√
1a + 1(2a− 1)
3a= 0 ⇒ a =
1
2.
Por tanto el area mınima se tiene para a = 1/2 valiendo
A1/2 =√3.
(l) En este caso, a region es
x
y
1 2
√
3
1
2
A
Por tanto el area pedida sera
A =
∫
√3
0
(
√
4− x2 − x2
3
)
dx =1
2√3+
2π
3.

158
Calculo I (Grados TICS UAH) Convolucion Curso 2017/18
Calcular convolucion de cada uno de los siguientes pares de senales.
1. tet ∗ u(t), siendo u(t) el escalon unidad.
Solucion: Si x(t) = tet entonces x(t − τ) = (t − τ)et−τ (hay que verla como funcion
en la variable τ , y no en t). Y si y(t) = u(t) entonces y(τ) = u(τ) que es un salto a la
derecha comenzando en 0. Por tanto
tet ∗ u(t) =x(t) ∗ y(t) =∫ ∞
−∞x(t− τ)y(τ) dτ =
∫ ∞
−∞(t− τ)et−τu(τ) dτ
=
∫ −∞
0(t− τ)et−τ dτ
IPP=(
(−t+ τ + 1)et−τ∣
∣
∣
τ=∞
τ=0
=0− (−t+ 0 + 1)et−0 = (t− 1)et.
2. tet ∗ u(t− π)
Solucion: Si x(t) = tet entonces x(t − τ) = (t − τ)et−τ (hay que verla como funcion
en la variable τ , y no en t). Y si y(t) = u(t − π) entonces y(τ) = u(τ − π) que es un
salto a la derecha comenzando en π. Por tanto
(tet ∗ u(t− π)) =
∫ ∞
−∞x(t− τ)y(τ) dτ =
∫
(t− τ)et−τu(τ − π) dτ
=
∫ ∞
π(t− τ)et−τ dt
IPP=(
− t+ τ + 1)et−τ∣
∣
∣
τ=∞
τ=π
= 0− (1− t+ π)et−π = (t− 1− π)et−π.
3. u(t) ∗ u(t)
Solucion: Si x(t) = u(t) entonces x(t − τ) = u(t − τ). Y si y(t) = u(t) entonces
y(τ) = u(τ). Dado que tenemos dos saltos y uno de ellos depende del parametro t, tenemos
que distinguir dos casos:
(a) que t ≤ 0, y (b) que t > 0. En el primer caso
t
y
−2 21t−2 0
1
x(t − τ) y(τ)0
y en el segundo
t
y
−2 21t−2 0
1
x(t − τ) y(τ)

159
Teniendo en cuenta los esquemas, es claro que en el caso (a) (t ≤ 0) como no hay inter-
seccion entre los dominios de los saltos, entonces
u(t) ∗ u(t) = 0.
y en el segundo caso (b) (t > 0), vemos que la interseccion es la zona azul claro, por tanto
u(t) ∗ u(t) =∫ t
01 dt = t.
Ası, la solucion puede escribirse como una funcion definida a trozos de la forma, que a su
vez puede expresarse como suma de saltos a la derecha:
x(t) ∗ y(t) =
0, si t ≤ 0t, si t > 0
= t u(t).
4. u(t+ d) ∗ u(t+ d), siendo d una constante
5. e−(t−2) u(t− 2) ∗(
u(t+ 1)− u(t− 3))
6. sen(t) u(t) ∗ cos(t) u(t)
7. (1− t) u(t) ∗ et u(t)
Solucion: Si x(t) = (1 − t) u(t) entonces x(t − τ) = (1 − t + τ) u(t − τ). Y si y(t) =et u(t) entonces y(τ) = eτ u(τ). Dado que tenemos dos saltos y uno de ellos depende del
parametro t, tenemos que distinguir dos casos:
(a) que t < 0, y (b) que t > 0. En el primer caso
t
y
−2 21t−2 0
1
x(t − τ) y(τ)0
y en el segundo
t
y
−2 21t−2 0
1
x(t − τ) y(τ)
Teniendo en cuenta los esquemas, es claro que en el caso (a) (t ≤ 0) como no hay inter-
seccion entre los dominios de los saltos, entonces
x(t) ∗ y(t) = 0.

160
y en el segundo caso (b) (t > 0), vemos que la interseccion es la zona azul claro, por tanto
x(t) ∗ y(t) =∫ t
0(1− t+ τ)eτ dt =
(
(−t+ τ)eτ∣
∣
∣
τ=t
τ=0
=0et − (−t)e0 = t.
Ası, la solucion puede escribirse como una funcion definida a trozos de la forma, que a su
vez puede expresarse como suma de saltos a la derecha:
x(t) ∗ y(t) =
0, si t ≤ 0t, si t > 0
= t u(t).
8. et u(t) ∗ et u(t)
9. te−2t u(t) ∗ e−4t u(t)
10. te−2t u(t) ∗ te−4t u(t)
11. e−t u(t) ∗ et u(−t)
12. u(t) e−t ∗ u(1− t)
13. u(t− π) sen(t) ∗ u(t)
14. u(t− π/2) cos(t) ∗ u(t)
15. u(−t) et ∗ u(−t)
16. u(−t) sen(t) ∗ u(π − t)
17. u(−t) et ∗ u(t− 1)
18. u(t− π/2) sen(t) ∗ u(t+ π)
19. u(t− π/2) sen(t) ∗ u(t)
20. u(−t) cos t ∗ u(π − t)
21. u(−t) t ∗ u(2− t) t
22. u(t− 1) (t− 1) ∗ u(t+ 2) (t+ 2)
23. u(t) sen(t) ∗ u(t) sen(t)
24. u(π − t) sen(t) ∗ u(−t)
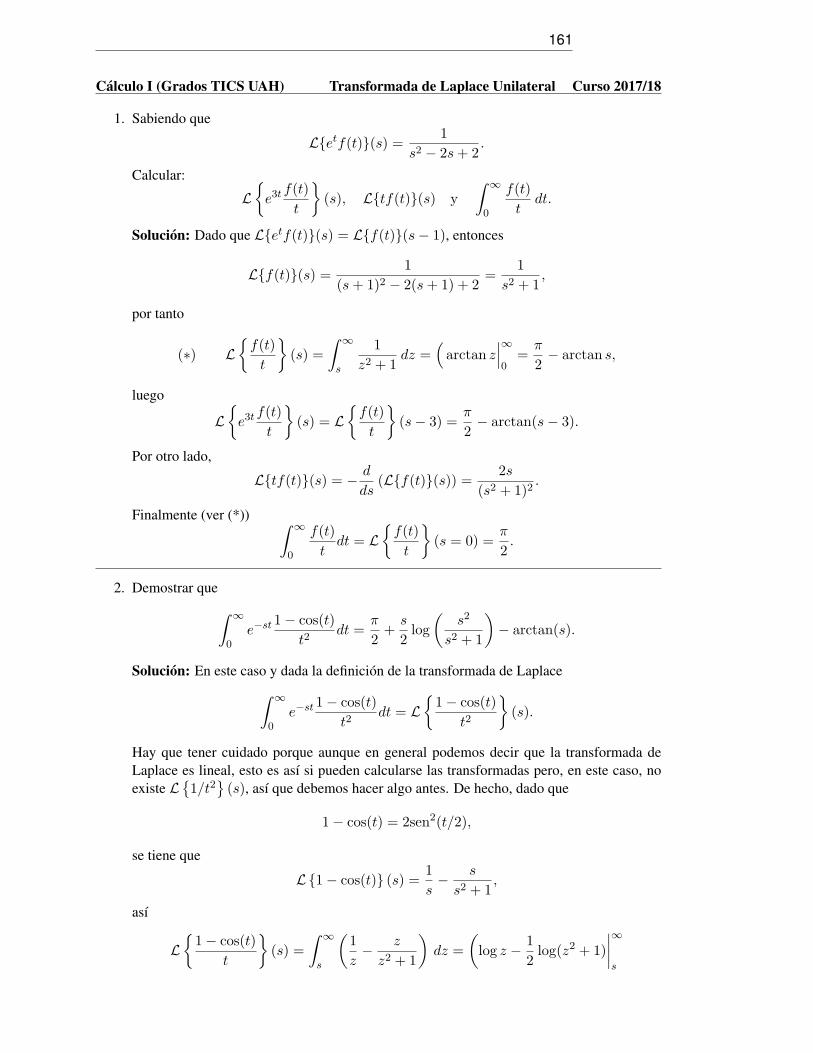
161
Calculo I (Grados TICS UAH) Transformada de Laplace Unilateral Curso 2017/18
1. Sabiendo que
Letf(t)(s) = 1
s2 − 2s+ 2.
Calcular:
L
e3tf(t)
t
(s), Ltf(t)(s) y
∫ ∞
0
f(t)
tdt.
Solucion: Dado que Letf(t)(s) = Lf(t)(s− 1), entonces
Lf(t)(s) = 1
(s+ 1)2 − 2(s+ 1) + 2=
1
s2 + 1,
por tanto
(∗) L
f(t)
t
(s) =
∫ ∞
s
1
z2 + 1dz =
(
arctan z∣
∣
∣
∞
0=π
2− arctan s,
luego
L
e3tf(t)
t
(s) = L
f(t)
t
(s− 3) =π
2− arctan(s− 3).
Por otro lado,
Ltf(t)(s) = − d
ds(Lf(t)(s)) = 2s
(s2 + 1)2.
Finalmente (ver (*))∫ ∞
0
f(t)
tdt = L
f(t)
t
(s = 0) =π
2.
2. Demostrar que
∫ ∞
0e−st 1− cos(t)
t2dt =
π
2+s
2log
(
s2
s2 + 1
)
− arctan(s).
Solucion: En este caso y dada la definicion de la transformada de Laplace
∫ ∞
0e−st 1− cos(t)
t2dt = L
1− cos(t)
t2
(s).
Hay que tener cuidado porque aunque en general podemos decir que la transformada de
Laplace es lineal, esto es ası si pueden calcularse las transformadas pero, en este caso, no
existe L
1/t2
(s), ası que debemos hacer algo antes. De hecho, dado que
1− cos(t) = 2sen2(t/2),
se tiene que
L1− cos(t) (s) = 1
s− s
s2 + 1,
ası
L
1− cos(t)
t
(s) =
∫ ∞
s
(
1
z− z
z2 + 1
)
dz =
(
log z − 1
2log(z2 + 1)
∣
∣
∣
∣
∞
s
162
es decir,
L
1− cos(t)
t
(s) =1
2log
(
z2
z2 + 1
)∣
∣
∣
∣
∞
s
=1
2log
(
s2 + 1
s2
)
.
Y, por ultimo,
L
1− cos(t)
t2
(s) =1
2
∫ ∞
slog
(
z2 + 1
z2
)
dz =
∫ ∞
s
(
1
2log(
z2 + 1)
− log z
)
dz,
ası, integrando por partes se obtiene lo que se pide, es decir,
L
1− cos(t)
t2
(s) =
(
−z2log
(
z2
z2 + 1
)
+ arctan z
∣
∣
∣
∣
∞
s
=π
2+s
2log
(
s2
s2 + 1
)
− arctan s.
3. Demostrar que
L
sen2(t)
t
=1
4log
(
s2 + 4
s2
)
.
Solucion: Dado que 1− cos(2t) = 2sen2(t), entonces
L
sen2(t)
t
= L
1− cos(2t)
2t
(s) =
∫ ∞
sL(1− cos(2t))/2 (z) dz
=1
2
∫ ∞
s
(
1
z− z
z2 + 4
)
dz,
ası
L
sen2(t)
t
=1
4log
(
z2
z2 + 4
)∣
∣
∣
∣
∞
s
=1
4log
(
s2 + 4
s2
)
.
4. Sabiendo que
Letf(t)(s) = s+ 1
s2 − 2s+ 1.
Se pide L
f(3t)t
(s) y f(3t).
Solucion: Usando la propiedad Letf(t)(s) = Lf(t)(s− 1), por tanto
Lf(t)(s− 1) =s+ 1
s2 − 2s+ 1.
Con esto podemos decir que
Lf(t)(s) = (s+ 1) + 1
(s+ 1)2 − 2(s+ 1) + 1=s+ 2
s2=
1
s+
2
s2,
ası
Lf(3t) (s) = 1
3Lf(t)(s/3) = 1
s+
6
s2,
por tanto
L
f(3t)
t
(s) =
∫ ∞
s
(
1
z+
6
z2
)
dz = log z − 6
z
∣
∣
∣
∣
∞
s
= ∞.

163
Luego podemos decir que no existe dicha transformada.
Por otro lado, dado que
Lf(3t) (s) = 1
3Lf(t)(s/3) = 1
s− 6
s2= L1 + 6t (s) ⇒ f(3t) = 1 + 6t.
5. Sabiendo que
Letf(t) = log
(
s+ 1
s− 1
)
.
Hallar Ltf(2t) y f(2t).
Solucion: Usando la propiedad Letf(t)(s) = Lf(t)(s− 1), por tanto
Lf(t)(s− 1) = log
(
s+ 1
s− 1
)
⇒ Lf(t)(s) = log
(
(s+ 1) + 1
(s+ 1)− 1
)
= log
(
s+ 2
s
)
,
ası
Ltf(2t) (s) = − d
ds
(
1
2Lf(t)(s/2)
)
=1
2s− 1
2(s+ 4),
por tanto
tf(2t) =1
2− 1
2e−4t ⇒ f(2t) =
1− e−4t
2t.
6. Calcular Le−tf(2t) sabiendo que
Ltf(t) =1
s(s2 + 1).
Calcular tambien f(t).
Solucion: En este caso
Lf(t) (s) = L
1
t
(
tf(t))
(s) =
∫ ∞
s
1
z(z2 + 1)dz =
∫ ∞
s
(
1
z− z
z2 + 1
)
dz,
ası
Lf(t) (s) =(
log z − 1
2log(z2 + 1)
∣
∣
∣
∣
∞
s
=1
2log
(
s2
s2 + 1
)
.
Con esto se deduce que
Lf(2t) (s) = 1
2Lf(t) (s/2) = 1
4log
(
s2
s2 + 4
)
.
Y
L
e−tf(2t)
(s) =1
4log
(
(s+ 1)2
(s+ 1)2 + 4
)
.
Teniendo en cuenta el enunciado se sigue que
tf(t) = L1− cos (t)(s) ⇒ f(t) =1− cos (t)
t.

164
7. Calcular
L−1arctan(1/s), y L
sen (t) cos (t)
t
.
Solucion: Si llamamos X(s) = Lx(t)(s) = arctan(1/s), entonces
Ltx(t) (s) = −X ′(s) = −−1s2
1s2
+ 1=
1
s2 + 1= Lsen (t)(s),
por tanto
tx(t) = sen (t) ⇒ x(t) =sen (t)
t.
Por otro lado
L
sen (t) cos (t)
t
= L
sen(2t)
2t
= Lx(2t)(s) = 1
2Lx(t)(s/2) = 1
2X(s/2)
luego
L
sen (t) cos (t)
t
=1
2arctan(2/s).
8. Probar que
L−1
1
(s2 + a2)2
=1
2a3sen(at)− 1
2a2t cos(at).
Solucion: Lo resolveremos aplicando la relacion enre la transformada de Laplace y la con-
volucion, en este caso
1
(s2 + a2)2=
1
a2a
(s2 + a2).
a
(s2 + a2)=
1
a2Lsen (at) ∗ sen (at)(s).
De hecho, (asumiremos que son causales)
sen (at) ∗ sen (at)(σ) =∫ σ
0sen (at)sen (aσ − at) dt =
sen(aσ)− aσ cos(aσ)
2a,
de ahı que se tenga el resultado pues
1
(s2 + a2)2= L
sen(at)− a t cos(at)
2a3
(s).
9. Sabiendo que Lsen(at) = as2+a2
, demostrar que
∫ ∞
0
e−√2tsenh(t)sen(t)
tdt =
π
8
Recordar que
arctan
(
A−B
1 +AB
)
= arctan(A)− arctan(B).
Solucion: Dado que
∫ ∞
0
e−√2tsenhs(t)sen(t)
tdt = L
senh (t)sen (t)
t
(s =√2).

165
Calcularemos dicha transformada por partes, primero dado que
senh (t) =et − e−t
2,
entonces
Lsenh (t)sen (t) (s) = 1
2L
etsen (t)
(s)− 1
2L
e−tsen (t)
(s),
es decir,
Lsenh (t)sen (t) (s) = 1/2
(s− 1)2 + 1− 1/2
(s+ 1)2 + 1=
2s
s4 + 4.
Luego,
L
senh (t)sen (t)
t
(s) =
∫ ∞
s
2z
z4 + 4dz =
(
1
2arctan(z − 1)− 1
2arctan(z + 1)
∣
∣
∣
∣
∞
s
.
Usando la identidad que nos dan, tomando A = s+ 1, y B = s− 1, se tiene que
L
senh (t)sen (t)
t
(s) =1
2arctan
(
2
s2
)
ası tomando s =√2 se alcanza la identidad que nos piden
∫ ∞
0
e−√2tsenh(t)sen(t)
tdt =
1
2arctan (1) =
π
8.
10. Utilizando la convolucion, hallar
L−1
s+ 1
s4 + s2
.
Solucion: La descomposicion en fracciones simples de la expresion racional que tenemos
es
s+ 1
s4 + s2=
1
s+
1
s2+
−s− 1
s2 + 1= L1(s) + Lt(s) + L−sen(t) + cos(t)(s),
por tanto la solucion es
L−1
s+ 1
s4 + s2
= 1 + t− sen(t)− cos(t)
11. Calcular Lf(t)(s), siendo
f(t) =cos(at)− cos(bt)
t.
Solucion: Dado que
L
f(t)
t
(s) =
∫ ∞
sLf(t)(z) dz
se tiene que
L
cos(at)− cos(bt)
t
(s) =
∫ ∞
s
(
z
z2 + a2− z
z2 + b2
)
dz
=
(
1
2log(u2 + a2)− 1
2log(u2 + b2)
∣
∣
∣
∣
u→∞
u=s
= log
√
u2 + a2
u2 + b2
∣
∣
∣
∣
∣
∞
s
=1
2log
s2 + b2
s2 + a2.

166
12. Calcular L−1
log(
2s−12s+1
)
Solucion: Buscamos una funcion cuya transformada sea dicho logaritmo, pero sabemos que
la derivada de dicho logaritmo es
g(s) = log
(
2s− 1
2s+ 1
)
, g′(s) =2
2s− 1− 2
2s+ 1=
1
s− 1/2− 1
s+ 1/2.
Luego si
F (s) = Lf(t)(s) = g(s)
entonces se tiene que
Ltf(t)(s) = −F ′(s) = −g′(s) = Le− t2 (s)− Le t
2 (s).
Por tanto se tiene que
f(t) =e−
t2 − e
t2
t.
13. Sabiendo que
Le−tf(t)(s) = log
(
s− 1
s+ 1
)
.
Calcular Lf(t)(s), Ltf(2t)(s), y f(2t).
Solucion: Usando la propiedad Leatf(t)(s) = Lf(t)(s− a) se tiene que
Lf(t)(s+1) = log
(
s− 1
s+ 1
)
⇒ Lf(t)(s) = log
(
(s− 1)− 1
(s− 1) + 1
)
= log
(
s− 2
s
)
,
ası
Ltf(2t) (s) = − d
ds
(
1
2Lf(t)(s/2)
)
=1
2s− 1
2(s− 4),
por tanto
tf(2t) =1
2− 1
2e4t ⇒ f(2t) =
1− e4t
2t.
14. Sabiendo que
Le2tf(t)(s) = log
(
s+ 2
s− 2
)
.
Calcular Lf(t)(s), Ltf(t/3)(s), y f(t/3).
Solucion: Usando la propiedad Leatf(t)(s) = Lf(t)(s− a) se tiene que
Lf(t)(s− 2) = log
(
s+ 2
s− 2
)
⇒ Lf(t)(s) = log
(
(s+ 2) + 2
(s+ 2)− 2
)
= log
(
s+ 4
s
)
,
ası
Ltf(t/3) (s) = − d
ds(3Lf(t)(3s)) = 3
s− 9
3s+ 4,
por tanto
tf(t/3) = 3− 3e−4t/3 ⇒ f(t/3) =3− 3e−4t/3
t.
167
Calculo I (Grados TICS UAH) Ecuaciones Diferenciales Curso 2017/18
Determinar la solucion contınua de la ecuacion diferencial con valores iniciales:
1.
x′′ − 2x′ + x = sen(t) u(t− π/2),
x(0) = 0, x′(0) = 0
2.
x′′ − 2x′ + x = cos(t) u(t− π/2),
x(0) = 0, x′(0) = 0
3.
x′′ + 2x′ + x = sen(t) u(t− π/2),
x(0) = 0, x′(0) = 0
4.
x′′ + 2x′ + x = cos(t) u(t− π/2),
x(0) = 0, x′(0) = 0
5.
x′′ + x = sen(t),
x(0) = 0, x′(0) = 0
6.
x′′ − 2x′ + x = et u(t− 1),
x(0) = 0, x′(0) = 1
7. tx′(t) + x(t) = sen(t)
8. tx′(t) + x(t) = sen(2t)
9.
x′′ + x = u(t− π),
x(0) = 0, x′(0) = 1
10.
x′′ − x = e−t u(t− 1),
x(0) = 0, x′(0) = 1
11.
x′′ + x = cos(t),
x(0) = 0, x′(0) = 0
12.
x′′ − x = t u(t− 1),
x(0) = 0, x′(0) = 2
13.
x′′ + 4x = sen(2t),
x(0) = 0, x′(0) = 0
14.
x′′ + 3y′ + 3y = 0,
x′′ + 3y = te−t,
x(0) = 0, y(0) = 0,
x′(0) = 2
Sistema de Ecuaciones diferenciales con circuitos.
Dado el circuito RLC con E(t) = 60U , L = 1H , R = 50Ω, C = 10−4F , siendo las intensidades
iniciales i1(0) = 0, i2(0) = 0, resolver el sistema de ecuaciones diferenciales:
+
−E
i1
R
i3
i2
C
L
Ldi1dt
+Ri2 = E(t),
RCdi2dt
+ i2 − i1 = 0
Soluciones:
1.
x′′ − 2x′ + x = sen(t) u(t− π/2),
x(0) = 0, x′(0) = 0

168
Si llamamos X(s) = Lx(t)(s), entonces aplicando las propiedades
Lx′(t)(s) = sX(s)− x(0+), Lx′′(t)(s) = s2X(s)− sx(0+)− x′(0+),
dado que la transformada es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s), Lx′′(t)(s) = s2X(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 − 2s+ 1)X(s) = Lsen(t) u(t− π/2)(s)
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = π/2 y h(t− π/2) = sen t, entonces h(t) = sen (t+ π/2) = cos t,luego
(s− 1)2X(s) = e−sπ2
s
s2 + 1,
es decir,
(∗) X(s) = e−sπ2
s
(s− 1)2(s2 + 1).
Dado ques
(s− 1)2(s2 + 1)=
1
2(s− 1)2− 1
2 (s2 + 1).
Entonces, podemos decir que
s
(s− 1)2(s2 + 1)= L
t
2et − 1
2sen t
(s) = Lg(t)(s).
Aplicando de nuevo la propiedad anterior, se tiene que
X(s) = Lx(t)(s) = e−sπ2 Lg(t)(s) = Lg(t− π/2)u(t− π/2)(s),
es decir, x(t) =
((
t
2− π
4
)
et−π2 +
1
2cos t
)
u(t− π/2) .
2.
x′′ − 2x′ + x = cos(t) u(t− π/2),
x(0) = 0, x′(0) = 0
Si llamamos X(s) = Lx(t)(s), entonces aplicando las propiedades Lx′(t)(s) =sX(s) − x(0+), Lx′′(t)(s) = s2X(s) − sx(0+) − x′(0+), dado que la transformada
es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s), Lx′′(t)(s) = s2X(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 − 2s+ 1)X(s) = Lcos(t) u(t− π/2)(s)
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).

169
Dado que este caso t0 = π/2 y h(t−π/2) = cos t, entonces h(t) = cos (t+π/2) = −sen t,luego
(s− 1)2X(s) = −e−sπ2
1
s2 + 1,
es decir,
(∗) X(s) = −e−sπ2
1
(s− 1)2(s2 + 1).
Dado que−1
(s− 1)2(s2 + 1)= − s
2 (s2 + 1)+
1
2(s− 1)− 1
2(s− 1)2.
es decir
−1
(s− 1)2(s2 + 1)= L
− t
2et +
1
2et − 1
2cos t
(s) = Lg(t)(s).
Aplicando de nuevo la propiedad anterior, se tiene que
X(s) = Lx(t)(s) = e−sπ2 Lg(t)(s) = Lg(t− π/2)u(t− π/2)(s),
es decir, x(t) =
((
π
4− t
2+
1
2
)
et−π2 − 1
2sen t
)
u(t− π/2) .
3.
x′′ + 2x′ + x = sen(t) u(t− π/2),
x(0) = 0, x′(0) = 0
Si llamamos X(s) = Lx(t)(s), entonces aplicando las propiedades Lx′(t)(s) =sX(s) − x(0+), Lx′′(t)(s) = s2X(s) − sx(0+) − x′(0+), dado que la transformada
es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s), Lx′′(t)(s) = s2X(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 + 2s+ 1)X(s) = Lsen(t) u(t− π/2)(s)
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = π/2 y h(t−π/2) = sen(t), entonces h(t) = sen(t+π/2) = cos(t),luego
(s+ 1)2X(s) = e−sπ2
s
s2 + 1,
es decir,
(∗) X(s) = e−sπ2
s
(s+ 1)2(s2 + 1).
Dado que−1
(s− 1)2(s2 + 1)=
1
2 (s2 + 1)− 1
2(s+ 1)2,
entonces
−1
(s− 1)2(s2 + 1)= L
− t
2e−t +
1
2sen(t)
(s) = Lg(t)(s).

170
Aplicando de nuevo la propiedad anterior, se tiene que
X(s) = Lx(t)(s) = e−sπ2 Lg(t)(s) = Lg(t− π/2)u(t− π/2)(s),
es decir, x(t) =
((
π
4− t
2
)
e−t+π2 − 1
2cos(t)
)
u(t− π/2) .
4.
x′′ + 2x′ + x = cos(t) u(t− π/2),
x(0) = 0, x′(0) = 0
Si llamamos X(s) = Lx(t)(s), entonces aplicando las propiedades Lx′(t)(s) =sX(s) − x(0+), Lx′′(t)(s) = s2X(s) − sx(0+) − x′(0+), dado que la transformada
es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s), Lx′′(t)(s) = s2X(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 + 2s+ 1)X(s) = Lsen(t) u(t− π/2)(s)
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = π/2 y h(t − π/2) = cos(t), entonces h(t) = cos(t + π/2) =−sin(t), luego
(s+ 1)2X(s) = −e−sπ2
1
s2 + 1,
es decir,
(∗) X(s) = −e−sπ2
1
(s+ 1)2(s2 + 1).
Dado que−1
(s− 1)2(s2 + 1)=
s
2 (s2 + 1)− 1
2(s+ 1)− 1
2(s+ 1)2,
entonces se sigue que
−1
(s− 1)2(s2 + 1)= L
−1
2e−t − t
2e−t +
1
2cos(t)
(s) = Lg(t)(s).
Aplicando de nuevo la propiedad anterior, se obtiene
X(s) = Lx(t)(s) = e−sπ2 Lg(t)(s) = Lg(t− π/2)u(t− π/2)(s),
es decir, x(t) =
((
π
4− t
2− 1
2
)
e−t+π2 +
1
2sin(t)
)
u(t− π/2) .
5.
x′′ + x = sen(t),
x(0) = 0, x′(0) = 0

171
Si llamamos X(s) = Lx(t)(s), entonces aplicando las propiedades Lx′(t)(s) =sX(s) − x(0+), Lx′′(t)(s) = s2X(s) − sx(0+) − x′(0+), dado que la transformada
es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s), Lx′′(t)(s) = s2X(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 + 1)X(s) =1
s2 + 1.
Ası
(∗) Lx(t)(s) = X(s) =1
(s2 + 1)2= Lsen(t) ∗ sen(t)(s).
Y dado que (asumimos que ambas son causales), se tiene que
x(t) = (sen(t) ∗ sen(t))(t) = 1
2(sin(t)− t cos(t)),
es decir, x(t) =1
2(sin(t)− t cos(t)) .
6.
x′′ − 2x′ + x = et u(t− 1),
x(0) = 0, x′(0) = 1
Si llamamos X(s) = Lx(t)(s), entonces aplicando las propiedades Lx′(t)(s) =sX(s) − x(0+), Lx′′(t)(s) = s2X(s) − sx(0+) − x′(0+), dado que la transformada
es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s), Lx′′(t)(s) = s2X(s)− 1,
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 − 2s+ 1)X(s)− 1 = Let u(t− 1)(s)
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = 1 y h(t− 1) = et, entonces h(t) = et+1 = e et, luego
(s− 1)2X(s) = 1 + e−s e
s− 1,
es decir,
(∗) X(s) =1
(s− 1)2+ e−s e
(s− 1)3.
En este caso, tomaremos g(t) = e t2et/2. Aplicando de nuevo la propiedad anterior, se
tiene que
Lx(t)(s) = Ltet(s) + e−sLg(t)(s) = Ltet + g(t− 1)u(t− 1)(s),
es decir, x(t) = tet +(t− 1)2
2et u(t− 1) .

172
7. tx′(t) + x(t) = sen(t)
Si llamamos X(s) = Lx(t)(s), entonces aplicando la propiedad
Lx′(t)(s) = sX(s)− x(0+),
dado que la transformada es lineal en estos casos, se sigue que
Lx′(t)(s) = sX(s)− x(0+)
por tanto
Ltx′(t)(s) = −(Lx′(t)(s))′ = −X(s)− sX ′(s).
Ası, la ecuacion diferencial al aplicarle la transformada de Laplace resulta
−sX ′(s) =1
s2 + 1⇒ X ′(s) =
−1
s(s2 + 1)=
−1
s+
s
s2 + 1= Lcos (t)− 1(s),
Por tanto, dado que
Ltx(t)(s) = −X ′(s) = L1− cos (t)(s),
se deduce que, x(t) =1− cos (t)
t.
8. tx′(t) + x(t) = sen(2t)
Si llamamosX(s) = Lx(t)(s), entonces aplicando la propiedad Lx′(t)(s) = sX(s)−x(0+), dado que la transformada es lineal en estos casos, se sigue
Lx′(t)(s) = sX(s)− x(0+) ⇒ Ltx′(t)(s) = −(Lx′(t)(s))′ = −X(s)− sX ′(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
−sX ′(s) =2
s2 + 4
luego
X ′(s) =−2
s(s2 + 4)=
s
2 (s2 + 4)− 1
2s= L
cos (2t)
2− 1
2
(s).
Por tanto, dado que
Ltx(t)(s) = −X ′(s) = L
−cos (2t)
2+
1
2
(s),
se deduce que, x(t) =1− cos (2t)
2t.
9.
x′′ + x = u(t− π),
x(0) = 0, x′(0) = 1
Si llamamos X(s) = Lx(t)(s), entonces aplicando la propiedad
Lx′′(t)(s) = s2X(s)− sx(0+)− x′(0+) = s2X(s)− 1.

173
Ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 + 1)X(s)− 1 = Lu(t− π)(s).
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = π y h(t− π) = 1, entonces h(t) = 1, luego
(s2 + 1)X(s) = 1 + e−πs 1
s,
es decir,
(∗) X(s) =1
s2 + 1+ e−πs 1
s(s2 + 1).
En este caso, dado que
1
s(s2 + 1)=
1
s− s
s2 + 1= L1− cos(t)(s) = Lg(t)(s).
Aplicando de nuevo la propiedad anterior, se tiene que
Lx(t)(s)=Lsen(t)(s) + e−πsLg(t)(s)=Lsen(t) + g(t− π)u(t− π)(s),
es decir, x(t) = sen(t) + (1 + cos(t)) u(t− π) .
10.
x′′ − x = e−t u(t− 1),
x(0) = 0, x′(0) = 1
Si llamamos X(s) = Lx(t)(s), entonces aplicando la propiedad
Lx′′(t)(s) = s2X(s)− sx(0+)− x′(0+) = s2X(s)− 1.
Ası, la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 − 1)X(s)− 1 = Le−t u(t− 1)(s)
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = 1 y h(t− 1) = e−t, entonces h(t) = e−1−t = e−1 e−t, luego
(s− 1)(s+ 1)X(s) = 1 + e−s e−1
s+ 1,
es decir,
(∗) X(s) =1
(s− 1)(s+ 1)+ e−s e−1
(s− 1)(s+ 1)2.
En este caso, dado que
e−1
s(s2 + 1)=− e−1
4(s+ 1)− e−1
2(s+ 1)2+
e−1
4(s− 1),

174
es decir,
e−1
s(s2 + 1)= L
−1
4e−t−1 − t
2e−t−1 +
1
4et−1
(s) = Lg(t)(s).
y que1
(s− 1)(s+ 1)=
1
2(s− 1)− 1
2(s+ 1)= L
1
2et − 1
2e−t
(s).
Aplicando de nuevo la propiedad anterior, se tiene que
Lx(t)(s) =L
1
2et − 1
2e−t
(s) + e−sLg(t)(s)
=L
et − e−t
2+ g(t− 1)u(t− 1)
(s).
Con todo esto, la solucion es x(t) =et − e−t
2+
((
1
4− t
2
)
e−t +1
4et−2
)
u(t− 1) .
11.
x′′ + x = cos(t),
x(0) = 0, x′(0) = 0
Si llamamos X(s) = Lx(t)(s), entonces aplicando la propiedad
Lx′′(t)(s) = s2X(s)− sx(0+)− x′(0+) = s2X(s),
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 + 1)X(s) =s
s2 + 1,
luego
(∗) X(s) =s
(s2 + 1)2= Lsen(t) ∗ cos(t)(t),
y dado que (se asumen las senales causales)
(sen(t) ∗ cos(t))(σ) = σ
2sen(σ).
Por tanto, x(t) =t
2sen(t) .
12.
x′′ − x = t u(t− 1),
x(0) = 0, x′(0) = 2
Si llamamos X(s) = Lx(t)(s), entonces aplicando la propiedad
Lx′′(t)(s) = s2X(s)− sx(0+)− x′(0+) = s2X(s)− 2,
ası la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 − 1)X(s)− 2 = Lt u(t− 1)(s)

175
Ahora aplicamos la propiedad
Lh(t− t0)u(t− t0)(s) = e−st0Lh(t)(s).
Dado que este caso t0 = 1 y h(t− 1) = t, entonces h(t) = t+ 1, luego
(s− 1)(s+ 1)X(s) = 2 + e−s
(
1
s2+
1
s
)
,
es decir,
(∗) X(s) =2
(s− 1)(s+ 1)+ e−s 2(s+ 1)
(s− 1)(s+ 1)s2=
2
(s− 1)(s+ 1)+ e−s 2
(s− 1)s2.
En este caso, dado que
2
(s− 1)s2= − 1
s2− 1
s+
1
s− 1= L
−t− 1 + et
(s) = Lg(t)(s).
y que2
(s− 1)(s+ 1)=
1
2(s− 1)− 1
2(s+ 1)=L
et − e−t
(s).
Aplicando de nuevo la propiedad anterior, se tiene que
Lx(t)(s) = L
et − e−t
(s) + e−sLg(t)(s),
Es decir,
Lx(t)(s) = L
et − e−t + g(t− 1)u(t− 1)
(s),
Por tanto, la solcuion es x(t) = et − e−t +(
−t+ et−1)
u(t− 1) .
13.
x′′ + 4x = sen(2t),
x(0) = 0, x′(0) = 0
Si llamamos X(s) = Lx(t)(s), entonces aplicando la propiedad
Lx′′(t)(s) = s2X(s)− sx(0+)− x′(0+) = s2X(s).
Ası, la ecuacion diferencial al aplicarle la transformada de Laplace resulta
(s2 + 4)X(s) =2
s2 + 4,
luego
(∗) X(s) =2
(s2 + 4)2=
1
2Lsen(2t) ∗ cos(2t)(t),
y dado que (se asumen las senales causales)
(sen(2t) ∗ sen(2t))(σ) = 1
4(sen(2σ)− 2σ cos(2σ)).
Por tanto, x(t) =1
8(sen(2t)− 2t cos(2t)) .

176
Calculo I (Grados TICS UAH) Series de Fourier Curso 2017/18
1. Calcular el desarrollo en serie de Fourier de x(t) = |2t− 18|, 8 < t < 10.
2. Calcular el desarrollo en serie de Fourier de
x(t) =
(
cos
(
2π
3t
)
+ 2 cos
(
16π
3t
))
sen(πt).
3. Calcular el desarrollo en serie de Fourier de x(t) = 2 + 3sen(2t).
4. Calcular el desarrollo en serie de Fourier de x(t) = 3 + 2 cos(3t).
5. Calcular el desarrollo en serie de Fourier de
x(t) = Par
(t− π
2)(u(t)− u(t− π
2))
, π < t < π.
6. Calcular el desarrollo en serie de Fourier de
x(t) = Par (t− π)(u(t)− u(t− π)) , 2π < t < 2π.
7. Calcular la transformada exponencial y trigonometrica de
x(t) = Par |t− 1| , −2 < t < 2.
8. Calcular la transformada exponencial y trigonometrica de
x(t) = Impar |t− 1| , −2 < t < 2.
9. Calcular la transformada exponencial y trigonometrica de x(t) = | cos(3t)|.
10. Calcular la transformada exponencial y trigonometrica de
x(t) = t(u(t+ 2)− u(t+ 1) + u(t)− u(t− 1)) + 2(u(t+ 2)− u(t+ 1)), −2 < t < 2.
11. Calcular el desarrollo en serie de Fourier de
x(t) = (cos t)(u(t+ 2π)− u(t+ π) + u(t)− u(t− π)), −2π < t < 2π.
12. Calcular el desarrollo en serie de Fourier de x(t) = cos3(9t).
13. Calcular el periodo y el desarrollo en serie de Fourier de la senal periodica:
x(t) = sen(9t) + cos(12t)− sen3(9t).
14. Calcular la serie de Fourier en forma trigonometrica de la senal periodica:
x(t) = |sent|(
u(t− π)− u(t− 3π))
, 0 < t < 2π.
15. Obtener el desarrollo en serie de Fourier en las formas trigonometrica de la extension
periodica de la parte impar de la senal:
x(t) = t2, 0 ≤ t < 1.


















