Cálculo de Sistemas Ópticos - dfisica.ubi.pthgil/CSO/Guia-Labs-CSO.pdf · Computadores no...
28
Cálculo de Sistemas Ópticos D D e e p p a a r r t t a a m m e e n n t t o o d d e e F F í í s s i i c c a a U U N N I I V V E E R R S S I I D D A A D D E E D D A A B B E E I I R R A A I I N N T T E E R R I I O O R R Mário Pereira, Sandra Mogo, Alexandre Smirno v v UBI 200 4 4
Transcript of Cálculo de Sistemas Ópticos - dfisica.ubi.pthgil/CSO/Guia-Labs-CSO.pdf · Computadores no...
RR
UUNNIIVVEERRSSIIDDAADDEE DDAA BBEEIIRRAA IINNTTEERRIIOOCálcu
a
DDeeppaarrttaammeennttoo ddee FFííssiiccalo de Sistemas Ópticos
MMáárriioo PPeerreeiirraa,, SSaannddrraa MMooggoo,, AAlleexxaannddrree SSmmiirrnnoovvUUBBII 22000044
(
Cálculo de Sistemas Ópticos
GUIA DE TRABALHOS DE LABORATÓRIO)
MÁRIO PEREIRA, SANDRA MOGO E ALEXANDRE SMIRNOV
UBI - 2004
2
PROGRAMA WINLENS 1. Computadores no cálculo de sistemas ópticos O cálculo de sistemas ópticos, incluindo sistemas de formação de imagens, está geralmente baseado no traçado de raios. No caso mais simples só os raios paraxiais são considerados (Óptica Gaussiana ou de primeira ordem). Nesta aproximação todas as superfícies são consideradas planas ou esféricas, todos os sistemas são considerados como estando centrados e todos os ângulos de inclinação de raios relativamente ao eixo óptico do sistemas são considerados pequenos. Nas equações aproximadas é utilizada a aproximação ( ) ( ) 1cos e sin ≅≅ aaa . Se for necessário
obter um resultado mais exacto, têm que ser levados em consideração mais termos de aproximação, isto é,
( ) !7-!5!3sin 753 L++−≅ aaaaa
( ) L++−≅ !6-!4!21cos 642 aaaa
Cálculos com termos até !66a , !77a , são hoje realizados por métodos computacionais. Os
programas de traçado de raios, além de lentes e espelhos esféricos e prismas, asseguram cálculos de lentes e espelhos asféricos e lentes GRIN com índice de refracção variado. Programas mais complicados executam a optimização de parâmetros do sistema de acordo com critérios de qualidade (figuras de mérito). Os criadores destes programas prestam atenção à interface do usuário final. Os métodos de desenho assistido por computador (CAD) permitem obter representações gráficas bidimensionais e tridimensionais de sistemas ópticos enquanto algumas janelas de diálogo permitem a elaboração de sistemas ópticos complexos por especialistas de óptica aplicada que não são programadores profissionais. O programa WINLENS realiza cálculos dentro da óptica de terceira ordem, isto é, tem em conta dois termos na expansão da função seno e da função coseno:
( ) !3sin 3aaa −≅ .
( ) !21cos 2aa −≅
3
2. Traçado de raios
2.1. Executando o programa WINLENS Nos trabalhos de laboratório que vão ser realizados, o programa WINLENS pode estar a ser executado a partir do “PROGRAM MANAGER” do WINDOWS através do “FILE MANAGER” ou através do icon “Winlens4.3” criado no WINDOWS. Inicialmente, a janela WINLENS vai preencher o monitor surgindo 2 janelas: “System Data Editor” e “System Parameter Editor”. A janela do “System Data Editor” é utilizada para se introduzirem os códigos das lentes (da SPINDLER & HOYLER) onde se especifica a sua orientação, a sua separação e a posição do diafragma de abertura. A janela do “System Parameter Editor” é utilizada para se especificarem quantidades como a distância objecto, abertura numérica, campo de visão, etc. Quando se especifica o código de uma lente surge uma outra janela (“Lens Drawing”). Todas as janelas podem ser movimentadas dentro da janela principal do programa winlens4.3 bastando para isso arrastar a barra de título. Algumas podem ser redimensionadas arrastando o seu canto inferior direito ou esquerdo. Se a janela está parcialmente coberta por outra, para a colocar em primeiro plano basta clicar com o rato em qualquer ponto da área visível dessa janela. De todas as vezes que se alterar dados ou parâmetros do sistema, o Winlens actualiza automaticamente todas as janelas que estejam visíveis. Nos trabalhos com o Winlens vão ser usadas as seguintes funções do menu principal: “DATABASE” “GRAPHS” “TABLES” “EDIT” “FILE” “OPTIONS”
4
cada uma destas funções pode ser seleccionada clicando o seu nome na barra de menu ou título da sua janela.
2.2. “DATABASE” Na base de dados do Winlens está armazenada toda a informação sobre todas as lentes SPINDLER&HOYLER, incluindo as plano-convexas e biconvexas, as plano-côncavas e as bicôncavas, os meniscos, as lentes acromatas e as lentes cilíndricas, sendo as lentes fabricadas em três variantes: “NO MOUNT”, “MICRO BENCH” e “MOUNTED”. Cada lente tem um código de 6 dígitos, que deve ser usado no “System Data Editor”. No modo “FULL DATABASE” aparece a lista de lentes em stock e pode-se escolher qualquer lente clicando sobre o seu código. Depois de clicar aparece, na parte superior da janela, a informação básica sobre a lente (distância focal efectiva – Efl e o diâmetro da lente φ) No modo “QUERY DATABASE” pode-se escolher o tipo de lente, a opção de montagem, a distância focal efectiva máxima e mínima e a abertura máxima e mínima, que é igual a φ/2 para lentes NO-MOUNT. A opção “GLASS DATABASE”, apresenta todos os tipos de vidro disponíveis na base de dados do programa Winlens, os valores do número V de cada vidro, o valor do índice de refracção e o código de cada lente. No modo “COATINGS DATABASE”, encontra-se toda a informação relativa ao revestimento das lentes utilizadas. No modo “ALTERNATIVE GLASS FINDER”, existe a possibilidade de se realizar a procura de uma lente ou tipo de lente em alternativa à lente utilizada.
2.3. “GRAPHS” A função GRAPHS tem as seguintes opções: “LENS DRAWING”, “OPD ABERRATIONS”, “TRANSVERSE RAY ABERRATIONS”, “LONGITUDINAL ABERRATIONS”, “FIELD ABERRATIONS”, “SPOT DIAGRAMS”, “GEOMETRIC MTF”, “CHROMATIC ABERRATION”.
5
Depois da janela “LENS DRAWING “ estar activa (com os objectos pretendidos), clicar com o botão direito do rato sobre a janela e seleccionar “SELECT LOCAL OPTIONS FOR THIS DRAWING” e clicar novamente em “OK”. Deve-se seleccionar “OBJECT PLANE”, “IMAGE PLANE”, “ENTRANCE PUPIL”, “EXIT PUPIL”, “FRONT FOCUS”, “REAR FOCUS”, “PRINCIPAL PLANE 1” e “PRINCIPAL PLANE 2”. Como resultado vai aparecer o esquema com a lente escolhida apresentando os planos focais, os planos principais, o plano objecto e o plano imagem. Existem duas hipóteses de orientação de uma lente simples. A posição inicial para o programa é “NOMINAL”, na janela “SYSTEM DATA EDITOR” está o identificador “NOM”. Para inverter a orientação da lente, deve-se clicar em cima da célula “NOM” e a mudança de posição da lente vai ser acompanhada pela mudança do indicador para “VER”. Para devolver a lente à sua orientação original deve-se clicar mais uma vez na mesma célula. As opções que estão relacionadas com as aberrações de Seidel, têm toda a informação sobre os vários tipos de aberrações existentes.
2.4. “TABLES” Nesta função quando se clicar na opção “SURFACE DATA” vai aparecer uma tabela com as informações sobre todas as superfícies do sistema. A tabela inclui o material da lente, o fabricante da lente, o número V do vidro e as dimensões da abertura (Ap/2). Na opção “PICKUPS” aparece uma tabela com informações sobre os componentes do sistema nomeadamente lentes utilizadas, separação entre lentes (GAPS - Sepn), espessura das lentes (SPACES - Sepn) e raios de curvatura das superfícies (SURFACES - Radius). Na opção “PARAXIAL INFORMATION: SYSTEM” encontram-se todos os dados relativos ao espaço objecto e imagem, isto é, sobre os planos focais, planos principais, planos nodais, pupilas de entrada e de saída. Na opção “PARAXIAL INFORMATION: COMPONENTS” encontram-se todas as distâncias relativas às distâncias objecto e imagem, distâncias focais e planos principais. Na opção “SEIDELS” encontram-se todos os dados relativos às aberrações de Seidel (esférica, coma, astigmatismo, curvatura e distorção).
6
2.5. “EDIT” Na função “EDIT”, pode ser usado o comando “UNDO” para desfazer a última acção, ou para comparar entre dois estados (duas lentes). Pode ainda dentro da função EDIT copiar, cortar, colar e inserir componentes no sistema.
2.6. “FILE” Na função “FILE”, podem ser usadas as opções abrir ficheiro (OPEN), guardar ficheiro (SAVE), imprimir ficheiro (PRINT SCREEN) e sair (EXIT).
2.7. “OPTIONS” Nesta função existem várias opções disponíveis para realizar alterações no sistema, número de pontos objecto, número de raios a traçar, etc.
3. Representação de Aberrações No programa Winlens existem várias técnicas de representação das aberrações de Seidel (aberração esférica, coma, astigmatismo, distorção, curvatura de campo e aberração cromática). Na função “TABLES” existe a opção “SEIDELS”. No quadro “SEIDEL ABERRATIONS” está representada a tabela de coeficientes de Seidel. A primeira linha da tabela apresenta um sumário das aberrações; nas linhas que se seguem estão representadas superfície a superfície as contribuições dessas aberrações. A opção “SUMMARY”, apresenta os mesmos dados numéricos mas sob outra forma: como os verdadeiros valores das aberrações de esquema óptico dado. Na função “GRAPHS”, existem as opções “TRANSVERSE RAY ABERRATIONS”, “LONGITUDINAL ABERRATIONS”, “FIELD ABERRATIONS”, “SPOT DIAGRAMS”.
• Os “SPOT DIAGRAMS” são ferramentas muito úteis para visualizar a performance do sistema óptico. Imaginem-se vários cones concêntricos formados por raios a partir de um ponto objecto. Se a intersecção desses raios com a superfície da imagem é desenhada como uma série de manchas (spots), o resultado é conhecido como diagrama de manchas
7
(spot diagram). Aberrações diferentes têm efeitos característicos na forma do diagrama de manchas. Nos gráficos “WINLENS” existe um conjunto de caixas (5 à largura por N de fundo, onde N é o número de pontos que formam o objecto (posição de campo) que tenham sido seleccionadas na opção “LENS DRAWING” e depois “GLOBAL PARAMETERS”, cada uma das quais mostra um padrão de mancha para um ângulo de campo específico. É possível alterar-se a escala dos diagramas e a separação entre os planos. O “SPOT DIAGRAM SUMMARY” representa o tamanho da mancha na caixa central (a superfície da imagem) para cada uma das posições do objecto. As aberrações transversas de cada raio podem ser separadas em duas componentes ortogonais (dx para fora do monitor, dy no plano do monitor). Para cada posição do campo tem-se: - ângulo do campo - RSS (root mean of squares – raiz da soma dos quadrados) de dx para todos os raios
vindos do objecto. - RSS de dy - RSS de dr (total) • As aberrações transversas de um feixe de raios são os deslocamentos laterais de um
raio, medidos a partir do seu raio principal, na superfície da imagem. Essas aberrações para cada ponto (campo) objecto são representadas em dois gráficos colocados um ao lado do outro, mostrando os feixes meridional e sagital. Para alterar o número de campos analisados, na janela “LENS DRAWING” com o botão direito do rato selecionar “GLOBAL PARAMETERS” e escolher o número de pontos objecto.
• A opção “FIELD ABERNS” mostra as alterações no astigmatismo, distorção e aberração cromática transversa do campo. Essas aberrações são mostradas em três gráficos, com escala automática, de modo que a escala de cada um corresponde valor máximo da aberração.
O eixo vertical de cada um dos três gráficos representa o tamanho do campo, com um objecto axial ao fundo, e um objecto com o tamanho máximo permitido no cimo. Os dados são obtidos traçando 10 raios principais com incrementos de ângulo iguais para cima do tamanho do campo escificado. Astigmatismo é uma aberração onde o feixe meridional tem um foco diferente do feixe sagital. No gráfico do astigmatismo os dados respeitantes ao feixe transverso são representados com uma linha a tracejado.
8
A distorção é a diferença entre a altura da imagem real e paraxial. Em vez de ser representada como um valor absoluto, a distorção é representada como uma percentagem da altura da imagem. A aberração cromática transversa (cor lateral) é a diferença entre a altura da imagem para os raios principais traçados para o maior e para o menor comprimento de onda. O gráfico apenas estará completo quando se escolherem 3 comprimentos de onda na “GLOBAL PARAMETER” e depois “NUMBER OF WAVELENGHTS”.
4. Função de Transferência de Modulação A função de transferência de modulação (MTF) é uma representação da variação do contraste com o tamanho do detalhe para uma posição dada do objecto. Esta função é representada através da opção “GEOMETRIC MTF”, sendo apresentados dois gráficos. À esquerda está representada a função MTF meridional (tangencial) e sagital (transversa), com frequência espacial na horizontal e contraste na vertical. À direita está a representação da variação do contraste com o foco para uma única frequência espacial. A caixa de texto apresenta o máximo actual de frequência espacial da MTF transversa. Pode ser seleccionada e alterada para qualquer valor positivo, menor que a frequência de corte. O valor numérico apresentado para a frequência de corte corresponde ao raio da mancha de difracção (disco de Airy) para um diafragma de abertura dado.
9
5. TRABALHO N.º 1 Base de dados e convenção de sinais do Winlens Objectivo do Trabalho
- Comparar as posições dos planos principais e dos planos focais de diversas lentes; - Traçar um gráfico que estabeleça a relação entre o índice de refracção e o número de
Abbe para vários vidros ópticos; - Estabelecer a convenção de sinais utilizada no programa Winlens.
Conceitos Teóricos Lente – sistema óptico constituído por dois ou mais dióptros em que pelo menos um deles é
curvo. Os parâmetros ópticos básicos de uma lente são as dimensões e as posições dos seus planos focais e dos seus planos principais, o índice de refracção do vidro e o número de Abbe. Plano focal – plano normal ao eixo visual e que passa pelo ponto focal. Plano focal frontal (F) – contém o foco objecto. Plano focal imagem (F’) – contém o foco imagem. Plano principal – plano formado pelo conjunto de todos os pontos que se obtém pela intersecção
do prolongamento dos raios incidentes e emergentes a partir do foco objecto para o infinito (ou a partir do infinito para o foco imagem).
Plano principal Objecto (P) – ponto em que o plano principal objecto intersecta o eixo óptico. Plano principal Imagem (P’) – ponto em que o plano principal imagem intersecta o eixo óptico. O vidro utilizado para produção de lentes e outros elementos de sistemas ópticos é caracterizado por dois parâmetros ópticos que são o índice de refracção, nd, e o número de Abbe, Vd. O subscrito d corresponde à risca amarela de Fraunhofer (λ = 587,6 nm). Para além da risca amarela de Fraunhofer também se utilizam as riscas vermelha (c com λ = 656,3 nm) e azul (F com λ = 486,1 nm) para caracterizar o vidro. Número de Abbe – é a característica de dispersão do vidro. cFdd nnnV −−= 1
10
Os vidros com Vd ≥ 55 denominam-se crown, enquanto que os vidros com Vd ≤ 50 denominam-se Flint. A representação gráfica das relações entre o índice de refracção nF e o número de Abbe Vd, chama-se “Cartão do vidro”. O material usado para fabrico das lentes é normalmente SILICA (dióxido de silício amorfo), BK7 (crown borosilicato), BAK (crown bário) e LaSF (flint lantânio denso). A convenção de sinais utilizada no programa Winlens está baseada no facto de que distâncias medidas na direcção de incidência da luz são positivas, sendo negativas no caso contrário. Todas as distâncias são medidas a partir das superfícies da lente ou do eixo óptico no caso de alturas e dos ângulos. Alturas medidas para cima do eixo óptico são positivas e ângulos medidos a partir do eixo óptico e na direcção contrária à dos ponteiros do relógio são positivos. Procedimento Experimental
1. Usando as funções “DATABASE”, “COMPONENT DATABASE” e “LENS DRAWING”, escolher alguns exemplos das seguintes lentes: bi- e plano-convexas, bi- e plano-concava, menisco, par acromata separado e par acromata colado.
2. Compare as variantes “MOUNTED”, “NO MOUNT” e “MICROBENCH”. 3. Examine as posições dos planos focais F, F’ e dos planos principais P e P’. 4. Imprimir esquemas e tabelas de parâmetros das lentes. 5. Através do modo “GLASS DATABASE” escolher 20 vidros ópticos, tendo em atenção
os seus parâmetros nd e Vd. Construa o cartão do vidro indicando os limites entre os vidros crown e flint (utilize o programa Microsoft EXEL).
6. Verifique a convenção de sinais utilizada. 7. Escreva um relatório contendo esquemas e tabelas, comentários sobre a posição dos
planos focais, dos planos principais para as diversas lentes e sobre o cartão do vidro.
11
6. TRABALHO N.º 2 Traçado de raios em Lentes Objectivo do Trabalho
- Observar as características da imagem formada por diferente tipo de lentes dependendo da posição do objecto em relação às referidas lentes;
- Observar e registar as diferenças entre o traçado de raios para lentes finas e espessas. Conceitos Teóricos Traçado de raios – esboço do sistema óptico com os seus componentes e características, através
do qual se simula a passagem de raios luminosos para avaliar o seu funcionamento.
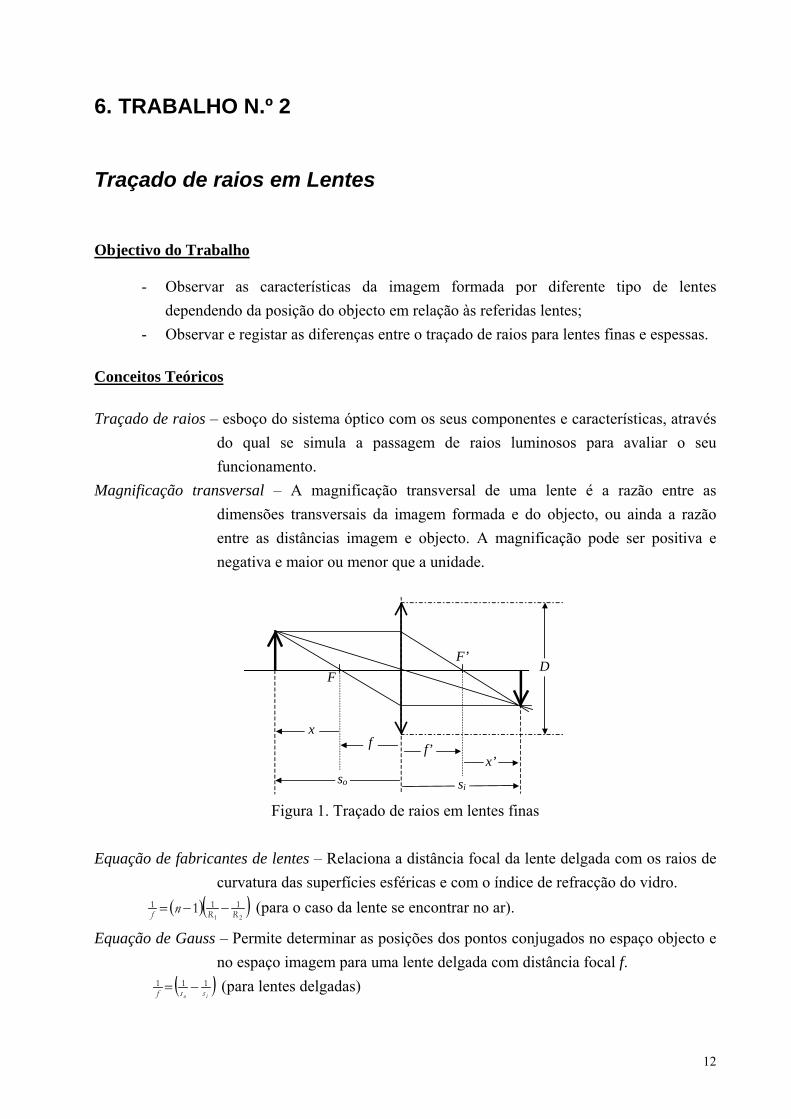
Magnificação transversal – A magnificação transversal de uma lente é a razão entre as dimensões transversais da imagem formada e do objecto, ou ainda a razão entre as distâncias imagem e objecto. A magnificação pode ser positiva e negativa e maior ou menor que a unidade.
FF’
D
f’f
so si
x’
x
Figura 1. Traçado de raios em lentes finas
Equação de fabricantes de lentes – Relaciona a distância focal da lente delgada com os raios de
curvatura das superfícies esféricas e com o índice de refracção do vidro. ( )( )
21
111 1 RRf n −−= (para o caso da lente se encontrar no ar).
Equação de Gauss – Permite determinar as posições dos pontos conjugados no espaço objecto e no espaço imagem para uma lente delgada com distância focal f.
( )io ssf111 −= (para lentes delgadas)
12
Equação de Newton – Determina as posições dos pontos conjugados para distâncias extra-focais.
(apenas válida para lentes delgadas). io xxf =2
Lente Delgada – lente para a qual a espessura é reduzida em comparação com os raios de curvatura das faces da lente.
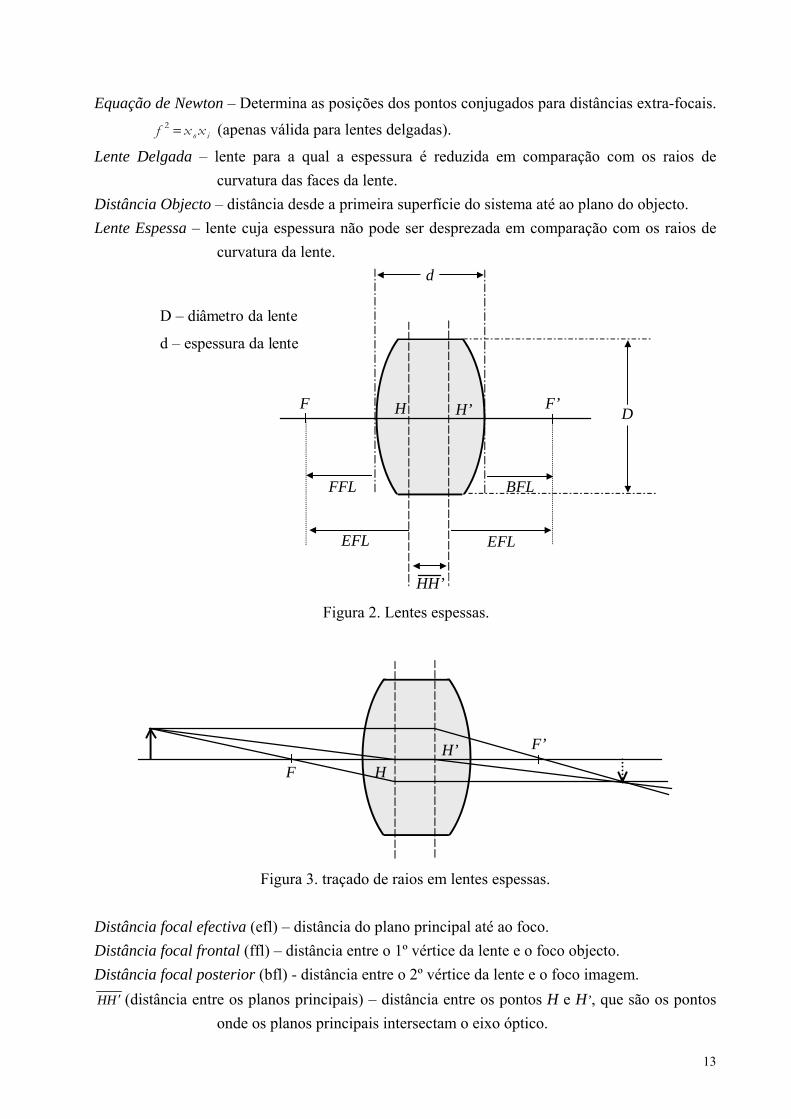
Distância Objecto – distância desde a primeira superfície do sistema até ao plano do objecto. Lente Espessa – lente cuja espessura não pode ser desprezada em comparação com os raios de
curvatura da lente.
F F’
d
H H’ D
HH’
FFL
EFL
BFL
EFL
D – diâmetro da lente
d – espessura da lente
Figura 2. Lentes espessas.
F
F’
HH’
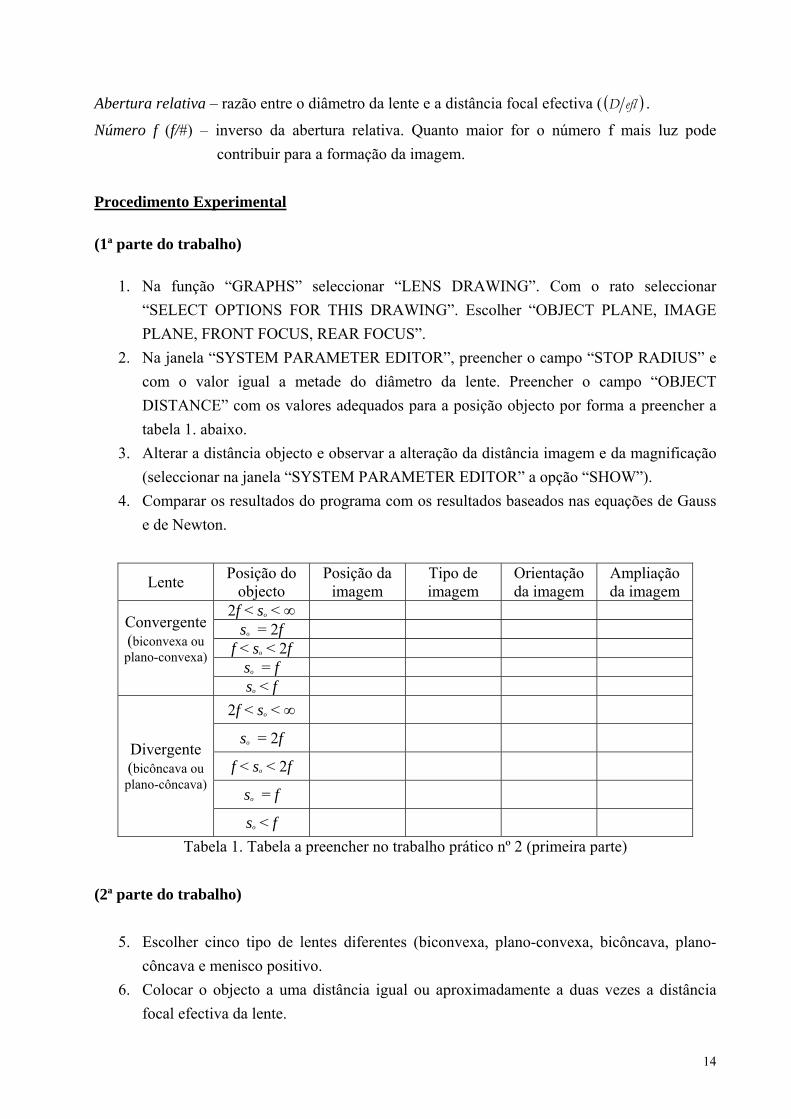
Figura 3. traçado de raios em lentes espessas.
Distância focal efectiva (efl) – distância do plano principal até ao foco. Distância focal frontal (ffl) – distância entre o 1º vértice da lente e o foco objecto. Distância focal posterior (bfl) - distância entre o 2º vértice da lente e o foco imagem.
HH ′ (distância entre os planos principais) – distância entre os pontos H e H’, que são os pontos onde os planos principais intersectam o eixo óptico.
13
Abertura relativa – razão entre o diâmetro da lente e a distância focal efectiva ( ( )eflD .
Número f (f/#) – inverso da abertura relativa. Quanto maior for o número f mais luz pode contribuir para a formação da imagem.
Procedimento Experimental (1ª parte do trabalho)
1. Na função “GRAPHS” seleccionar “LENS DRAWING”. Com o rato seleccionar “SELECT OPTIONS FOR THIS DRAWING”. Escolher “OBJECT PLANE, IMAGE PLANE, FRONT FOCUS, REAR FOCUS”.
2. Na janela “SYSTEM PARAMETER EDITOR”, preencher o campo “STOP RADIUS” e com o valor igual a metade do diâmetro da lente. Preencher o campo “OBJECT DISTANCE” com os valores adequados para a posição objecto por forma a preencher a tabela 1. abaixo.
3. Alterar a distância objecto e observar a alteração da distância imagem e da magnificação (seleccionar na janela “SYSTEM PARAMETER EDITOR” a opção “SHOW”).
4. Comparar os resultados do programa com os resultados baseados nas equações de Gauss e de Newton.
Lente Posição do objecto
Posição da imagem
Tipo de imagem
Orientação da imagem
Ampliação da imagem
2f < so < ∞ so = 2f
f < so < 2f so = f
Convergente (biconvexa ou plano-convexa)
so < f
2f < so < ∞
so = 2f
f < so < 2f
so = f
Divergente (bicôncava ou plano-côncava)
so < f Tabela 1. Tabela a preencher no trabalho prático nº 2 (primeira parte)
(2ª parte do trabalho)
5. Escolher cinco tipo de lentes diferentes (biconvexa, plano-convexa, bicôncava, plano-côncava e menisco positivo.
6. Colocar o objecto a uma distância igual ou aproximadamente a duas vezes a distância focal efectiva da lente.
14
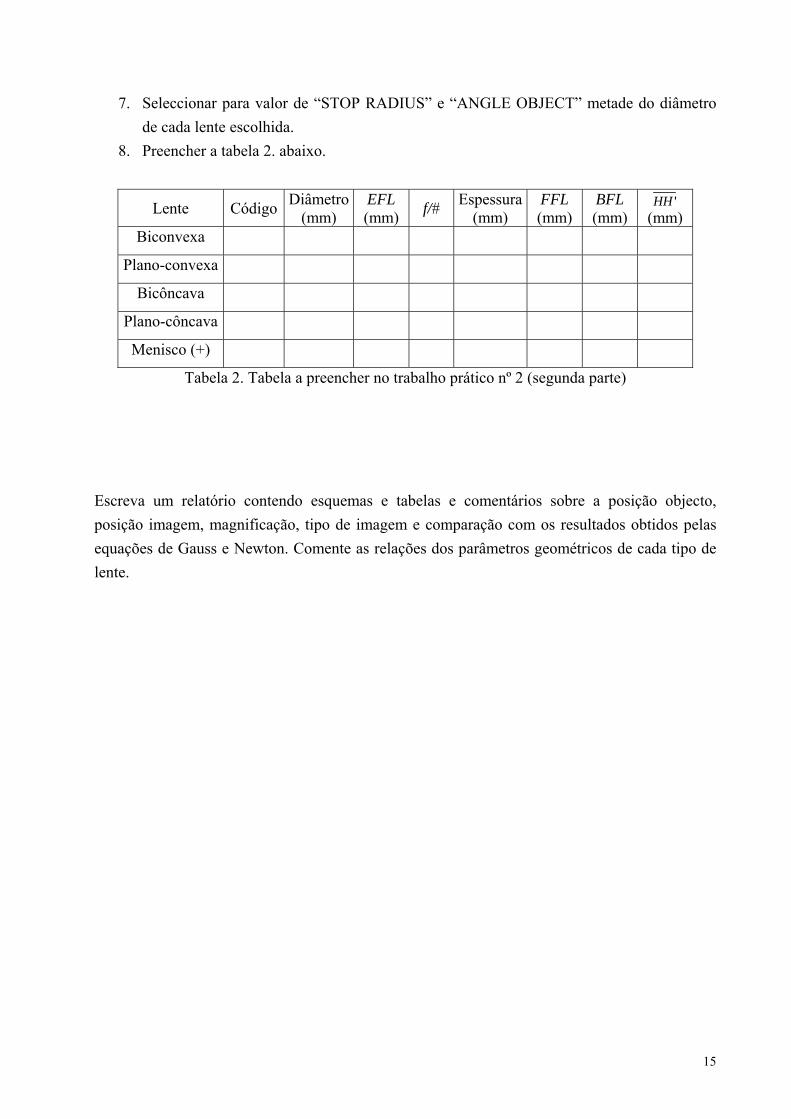
7. Seleccionar para valor de “STOP RADIUS” e “ANGLE OBJECT” metade do diâmetro de cada lente escolhida.
8. Preencher a tabela 2. abaixo.
Lente Código Diâmetro (mm)
EFL (mm) f/# Espessura
(mm) FFL (mm)
BFL (mm)
'HH (mm)
Biconvexa
Plano-convexa
Bicôncava
Plano-côncava
Menisco (+)
Tabela 2. Tabela a preencher no trabalho prático nº 2 (segunda parte)
Escreva um relatório contendo esquemas e tabelas e comentários sobre a posição objecto, posição imagem, magnificação, tipo de imagem e comparação com os resultados obtidos pelas equações de Gauss e Newton. Comente as relações dos parâmetros geométricos de cada tipo de lente.
15
7. TRABALHO N.º 3 Diafragmas, pupilas e janelas do sistema óptico Objectivo do Trabalho Estudar a posição e o tamanho das pupilas, diafragmas e janelas de entrada e de saída quando se varia a posição do diafragma de abertura do sistema óptico. Conceitos Teóricos Abertura numérica (AN) – é definida como sendo o seno de metade do ângulo (ϕ) do maior feixe
de raios que consegue entrar num sistema óptico, multiplicado pelo índice de refracção do meio através do qual o feixe de raios passa, ϕsinnAN = .
Diafragma – é qualquer elemento de um sistema óptico que determine a quantidade de energia luminosa que contribui para a formação da imagem.
Diafragma de abertura (“aperture stop”) – é um diafragma que limita a luz que passa dentro do sistema e forma a imagem, isto é, determina o número de raios provenientes de cada ponto objecto que podem atingir o plano imagem.
Diafragma de campo (“field stop”) – elemento que limita as dimensões angulares máximas do objecto do qual se pretende construir a imagem, isto é, limita o ângulo de visão do sistema.
Pupila de entrada – é a imagem do diafragma de abertura no espaço objecto, isto é, é a imagem do diafragma de abertura dada pelos elementos do sistema que o precedem. Se não existir nenhuma lente nestas condições, a pupila de entrada coincide com o próprio diafragma.
Pupila de saída - é a imagem do diafragma de abertura no espaço imagem, isto é, é a imagem do diafragma de abertura dada pelos elementos do sistema que estão depois dele. Se não existir nenhuma lente nestas condições, a pupila de saída coincide com o próprio diafragma.
Janela de entrada – é a imagem do diafragma de campo no espaço objecto. Janela de saída – é a imagem do diafragma de campo no espaço imagem.
16
Procedimento Experimental
1. Da base de dados do programa Winlens seleccionar uma lente positiva e depois uma lente negativa.
2. Colocar um objecto em frente da lente positiva de modo a conseguir uma imagem real e invertida.
3. Colocar um diafragma de abertura com diâmetro aproximadamente igual a metade do diâmetro da lente.
4. Variar a distância do diafragma relativamente à lente (para ambos lados da lente). 5. Observar as alterações das pupilas de entrada e de saída. 6. Determinar a abertura do campo. 7. Comparar os resultados obtidos experimentalmente com os cálculos para as posições da
pupilas de entrada e de saída.
17
8. TRABALHO N.º 4 Traçado de raios em lentes compostas Objectivo do Trabalho
- Realizar o traçado de raios para um sistema de duas lentes. - Observar a variação da posição dos planos principais H e H’ quando se altera a
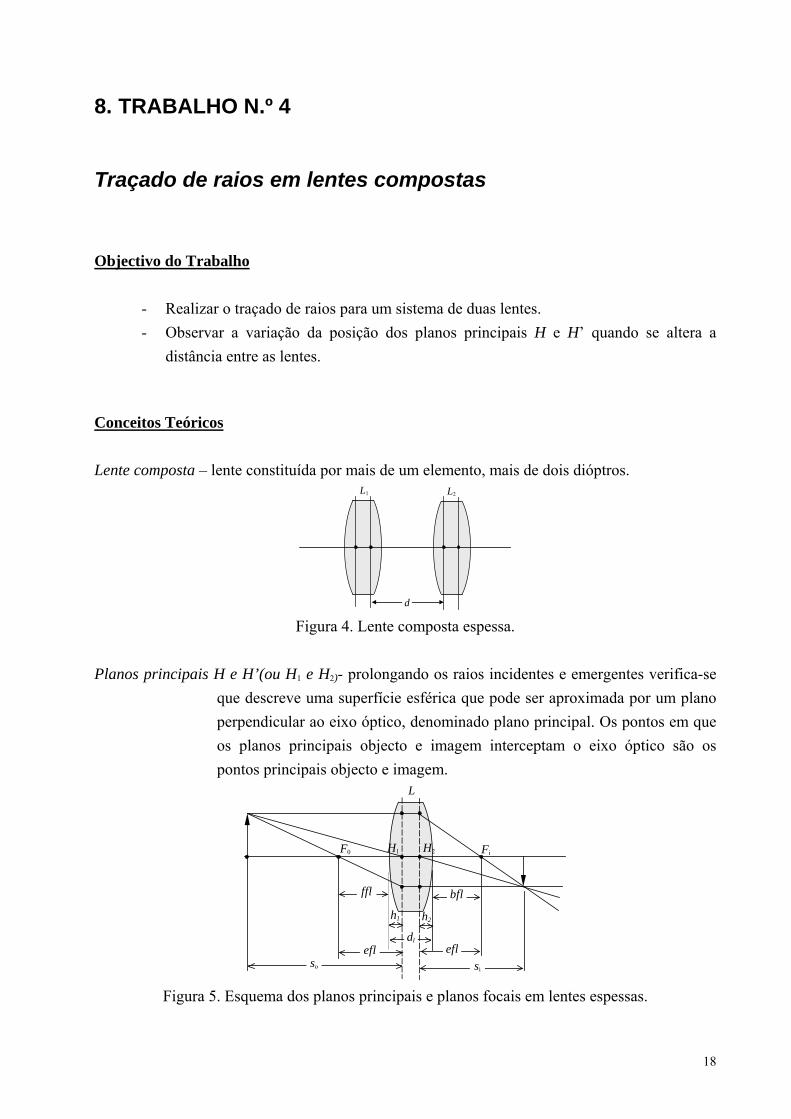
distância entre as lentes. Conceitos Teóricos Lente composta – lente constituída por mais de um elemento, mais de dois dióptros.
L1 L2
d Figura 4. Lente composta espessa.
Planos principais H e H’(ou H1 e H2)- prolongando os raios incidentes e emergentes verifica-se
que descreve uma superfície esférica que pode ser aproximada por um plano perpendicular ao eixo óptico, denominado plano principal. Os pontos em que os planos principais objecto e imagem interceptam o eixo óptico são os pontos principais objecto e imagem.
L
F0 Fi
efl efl
H1 H2
ffl bfl
dl
h1 h2
so si Figura 5. Esquema dos planos principais e planos focais em lentes espessas.
18
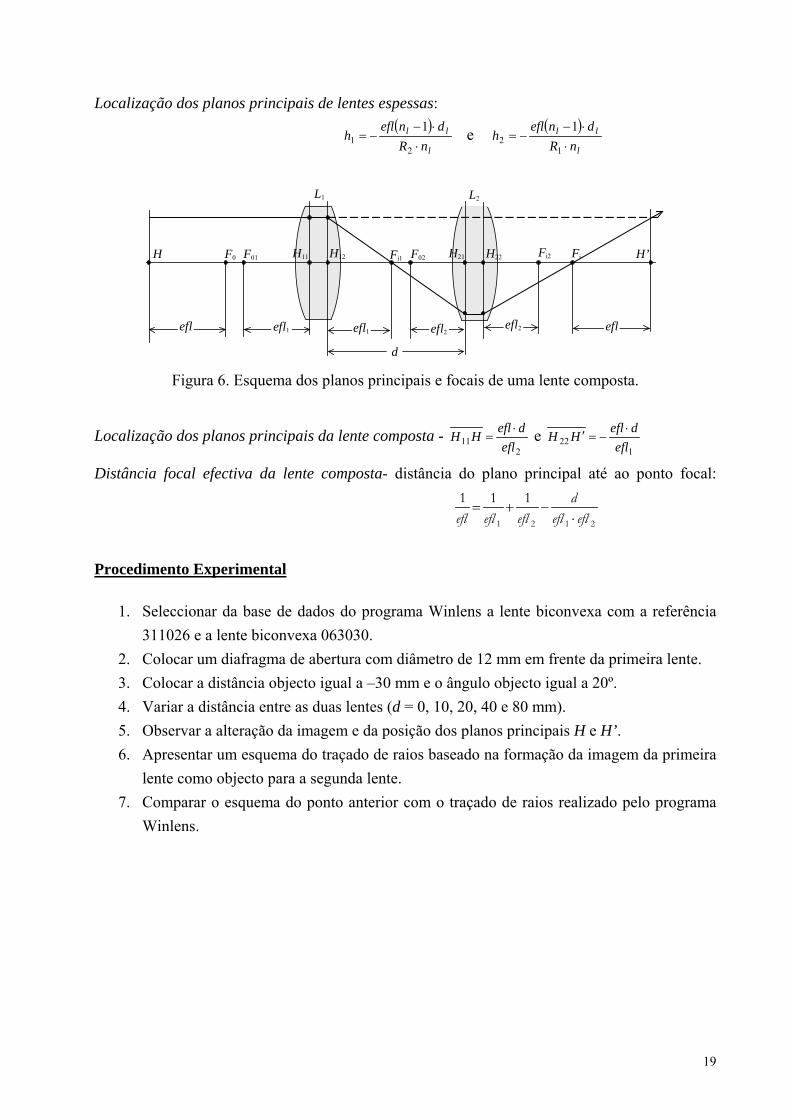
Localização dos planos principais de lentes espessas:
( )l
ll
nRdnefl
h⋅
⋅−−=
21
1 e ( )l
ll
nRdnefl
h⋅
⋅−−=
12
1
L1 L2
H H’ F01 F02Fi1F0 Fi Fi2
d
efl1 efl2efl1efl2 efl efl
H11 H12 H21 H22
Figura 6. Esquema dos planos principais e focais de uma lente composta.
Localização dos planos principais da lente composta - 2
11 efldeflHH ⋅
= e 1
22 efldeflHH ⋅
−=′
Distância focal efectiva da lente composta- distância do plano principal até ao ponto focal:
2121
111eflefld
efleflefl ⋅−+=
Procedimento Experimental
1. Seleccionar da base de dados do programa Winlens a lente biconvexa com a referência 311026 e a lente biconvexa 063030.
2. Colocar um diafragma de abertura com diâmetro de 12 mm em frente da primeira lente. 3. Colocar a distância objecto igual a –30 mm e o ângulo objecto igual a 20º. 4. Variar a distância entre as duas lentes (d = 0, 10, 20, 40 e 80 mm). 5. Observar a alteração da imagem e da posição dos planos principais H e H’. 6. Apresentar um esquema do traçado de raios baseado na formação da imagem da primeira
lente como objecto para a segunda lente. 7. Comparar o esquema do ponto anterior com o traçado de raios realizado pelo programa
Winlens.
19
9. TRABALHO N.º 5 Aberrações Objectivo do Trabalho
- Estudar a aberração esférica em lentes positivas em função do diâmetro do diafragma de abertura e da orientação da lente.
- Estudar as aberrações monocromáticas de terceira ordem (Seidel): o coma, o astigmatismo e a distorção em função do diâmetro do diafragma de abertura e do ângulo do objecto.
- Estudar a aberração cromática em lentes positivas e em pares acromáticos colados e separados.
Conceitos Teóricos Aberrações – podem ser definidas como sendo desvios da óptica gaussiana em relação às
condições ideais. Na prática as aberrações são medidas como distâncias entre o ponto focal e o ponto de intersecção de um raio com o eixo óptico ou com o plano da imagem.
Aberrações de terceira ordem – podem ser cromáticas e monocromáticas Aberrações monocromáticas – existe a aberração esférica, o coma, o astigmatismo, a curvatura
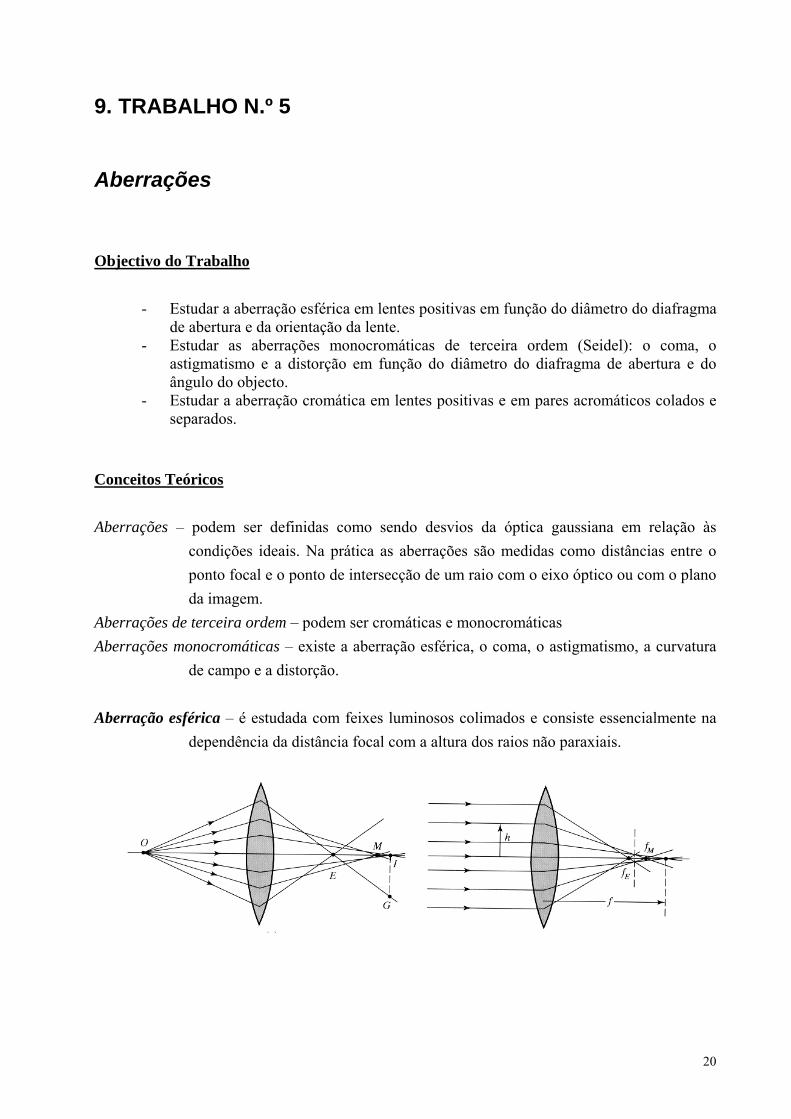
de campo e a distorção. Aberração esférica – é estudada com feixes luminosos colimados e consiste essencialmente na
dependência da distância focal com a altura dos raios não paraxiais.
20
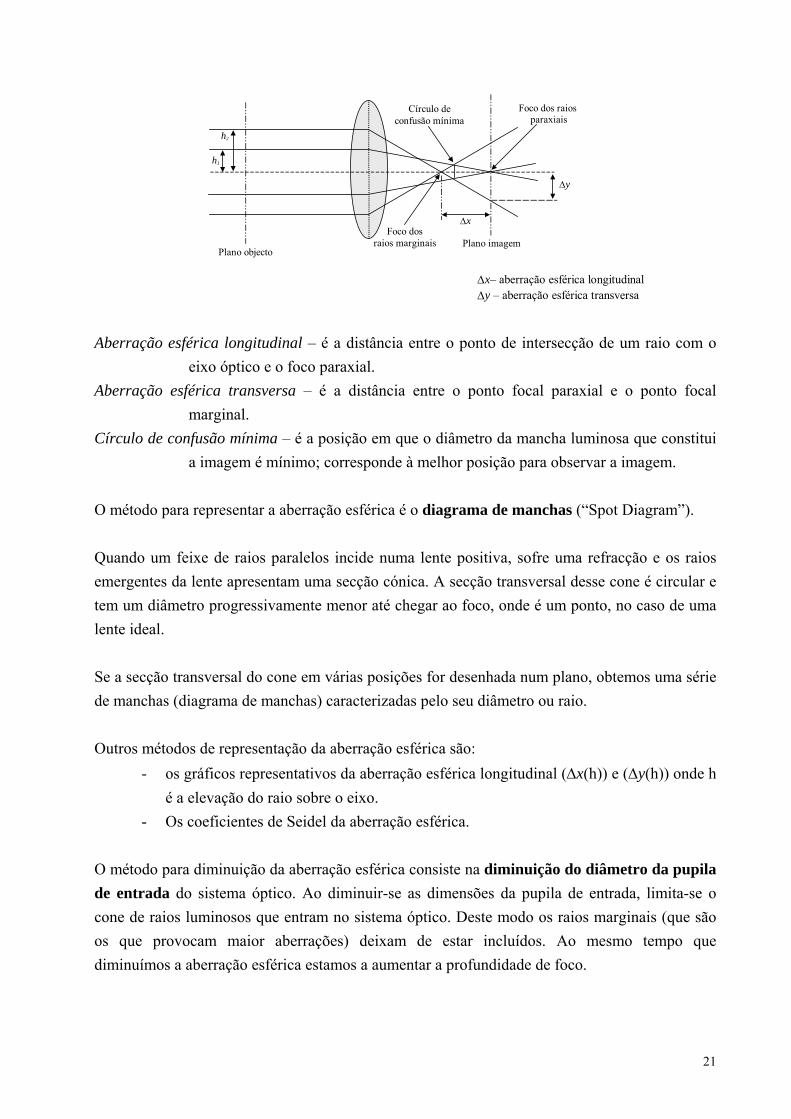
Foco dos raios marginais
Foco dos raios paraxiais
Círculo de confusão mínima
Plano objecto
∆y
∆x
Plano imagem
h2
h1
∆y – aberração esférica transversa ∆x– aberração esférica longitudinal
Aberração esférica longitudinal – é a distância entre o ponto de intersecção de um raio com o eixo óptico e o foco paraxial.
Aberração esférica transversa – é a distância entre o ponto focal paraxial e o ponto focal marginal.
Círculo de confusão mínima – é a posição em que o diâmetro da mancha luminosa que constitui a imagem é mínimo; corresponde à melhor posição para observar a imagem.
O método para representar a aberração esférica é o diagrama de manchas (“Spot Diagram”). Quando um feixe de raios paralelos incide numa lente positiva, sofre uma refracção e os raios emergentes da lente apresentam uma secção cónica. A secção transversal desse cone é circular e tem um diâmetro progressivamente menor até chegar ao foco, onde é um ponto, no caso de uma lente ideal. Se a secção transversal do cone em várias posições for desenhada num plano, obtemos uma série de manchas (diagrama de manchas) caracterizadas pelo seu diâmetro ou raio. Outros métodos de representação da aberração esférica são:
- os gráficos representativos da aberração esférica longitudinal (∆x(h)) e (∆y(h)) onde h é a elevação do raio sobre o eixo.
- Os coeficientes de Seidel da aberração esférica. O método para diminuição da aberração esférica consiste na diminuição do diâmetro da pupila de entrada do sistema óptico. Ao diminuir-se as dimensões da pupila de entrada, limita-se o cone de raios luminosos que entram no sistema óptico. Deste modo os raios marginais (que são os que provocam maior aberrações) deixam de estar incluídos. Ao mesmo tempo que diminuímos a aberração esférica estamos a aumentar a profundidade de foco.
21
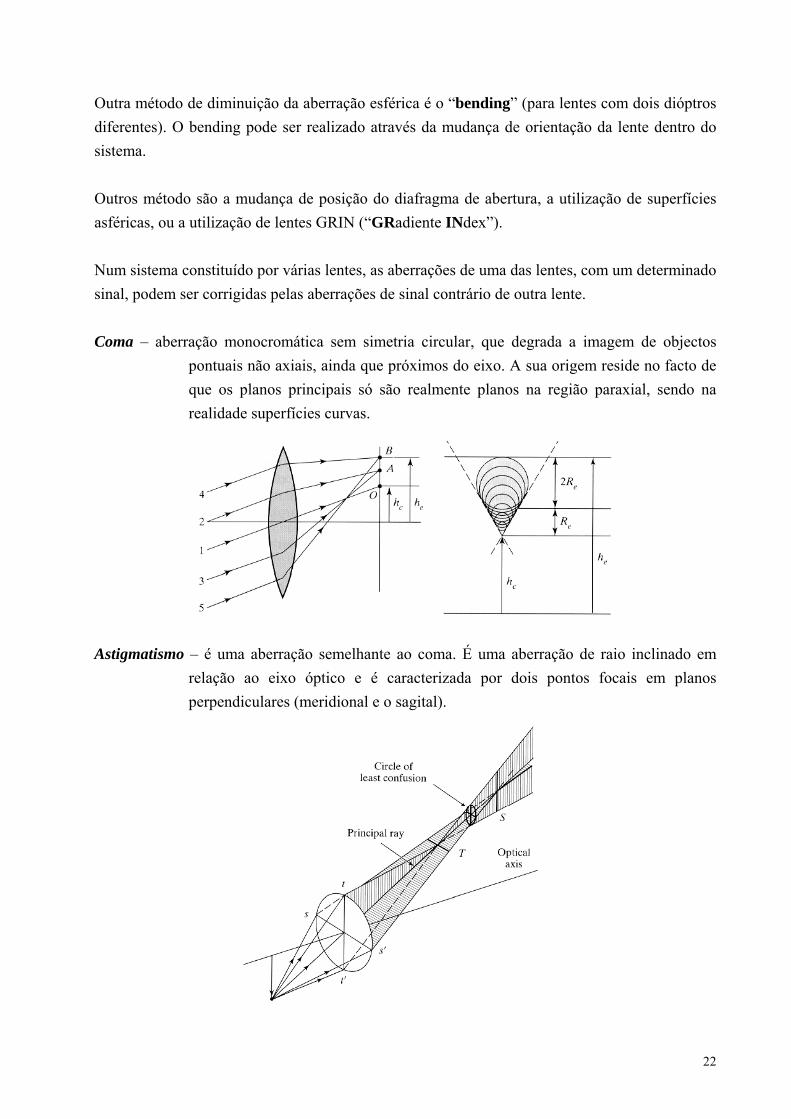
Outra método de diminuição da aberração esférica é o “bending” (para lentes com dois dióptros diferentes). O bending pode ser realizado através da mudança de orientação da lente dentro do sistema. Outros método são a mudança de posição do diafragma de abertura, a utilização de superfícies asféricas, ou a utilização de lentes GRIN (“GRadiente INdex”). Num sistema constituído por várias lentes, as aberrações de uma das lentes, com um determinado sinal, podem ser corrigidas pelas aberrações de sinal contrário de outra lente. Coma – aberração monocromática sem simetria circular, que degrada a imagem de objectos
pontuais não axiais, ainda que próximos do eixo. A sua origem reside no facto de que os planos principais só são realmente planos na região paraxial, sendo na realidade superfícies curvas.
Astigmatismo – é uma aberração semelhante ao coma. É uma aberração de raio inclinado em relação ao eixo óptico e é caracterizada por dois pontos focais em planos perpendiculares (meridional e o sagital).
22
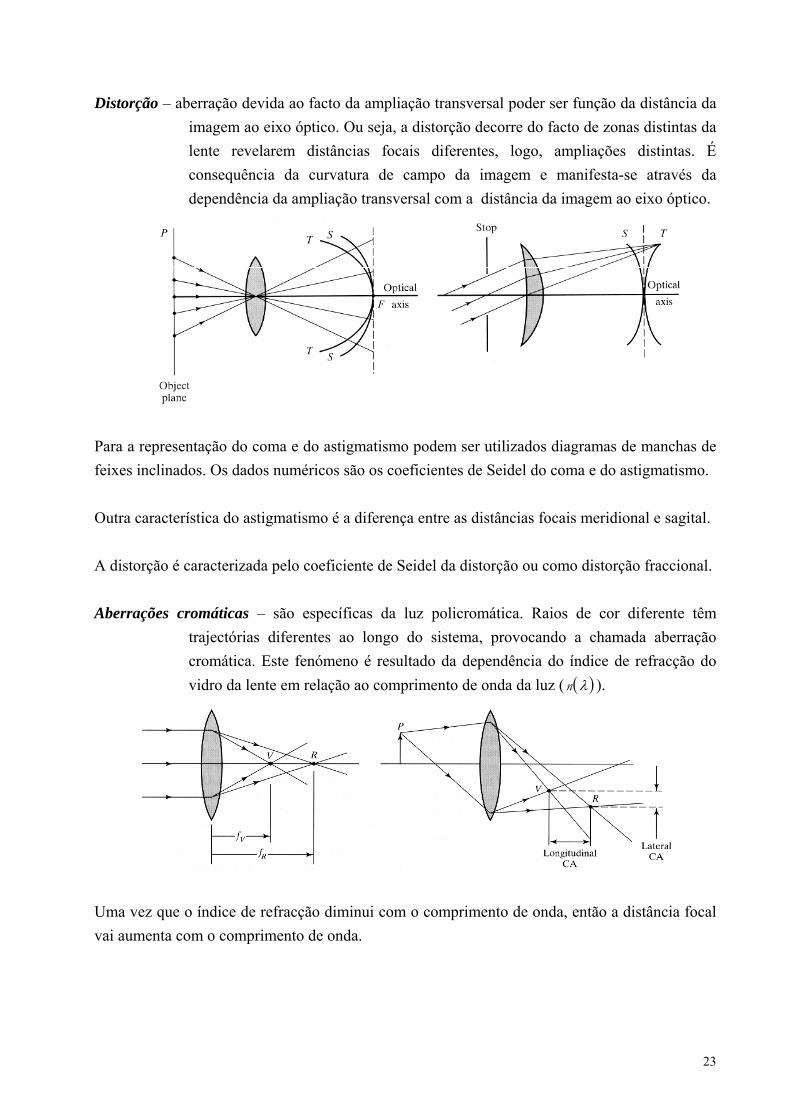
Distorção – aberração devida ao facto da ampliação transversal poder ser função da distância da imagem ao eixo óptico. Ou seja, a distorção decorre do facto de zonas distintas da lente revelarem distâncias focais diferentes, logo, ampliações distintas. É consequência da curvatura de campo da imagem e manifesta-se através da dependência da ampliação transversal com a distância da imagem ao eixo óptico.
Para a representação do coma e do astigmatismo podem ser utilizados diagramas de manchas de feixes inclinados. Os dados numéricos são os coeficientes de Seidel do coma e do astigmatismo. Outra característica do astigmatismo é a diferença entre as distâncias focais meridional e sagital. A distorção é caracterizada pelo coeficiente de Seidel da distorção ou como distorção fraccional. Aberrações cromáticas – são específicas da luz policromática. Raios de cor diferente têm
trajectórias diferentes ao longo do sistema, provocando a chamada aberração cromática. Este fenómeno é resultado da dependência do índice de refracção do vidro da lente em relação ao comprimento de onda da luz ( ( )λn ).
Uma vez que o índice de refracção diminui com o comprimento de onda, então a distância focal vai aumenta com o comprimento de onda.
23
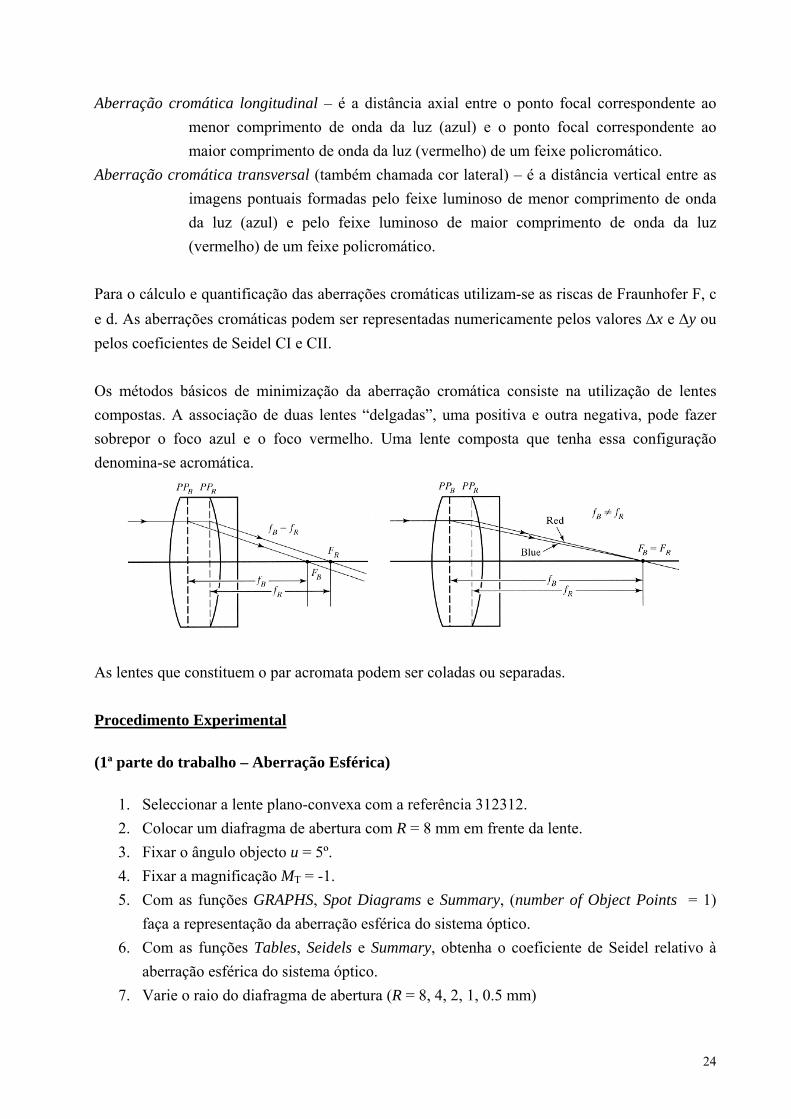
Aberração cromática longitudinal – é a distância axial entre o ponto focal correspondente ao menor comprimento de onda da luz (azul) e o ponto focal correspondente ao maior comprimento de onda da luz (vermelho) de um feixe policromático.
Aberração cromática transversal (também chamada cor lateral) – é a distância vertical entre as imagens pontuais formadas pelo feixe luminoso de menor comprimento de onda da luz (azul) e pelo feixe luminoso de maior comprimento de onda da luz (vermelho) de um feixe policromático.
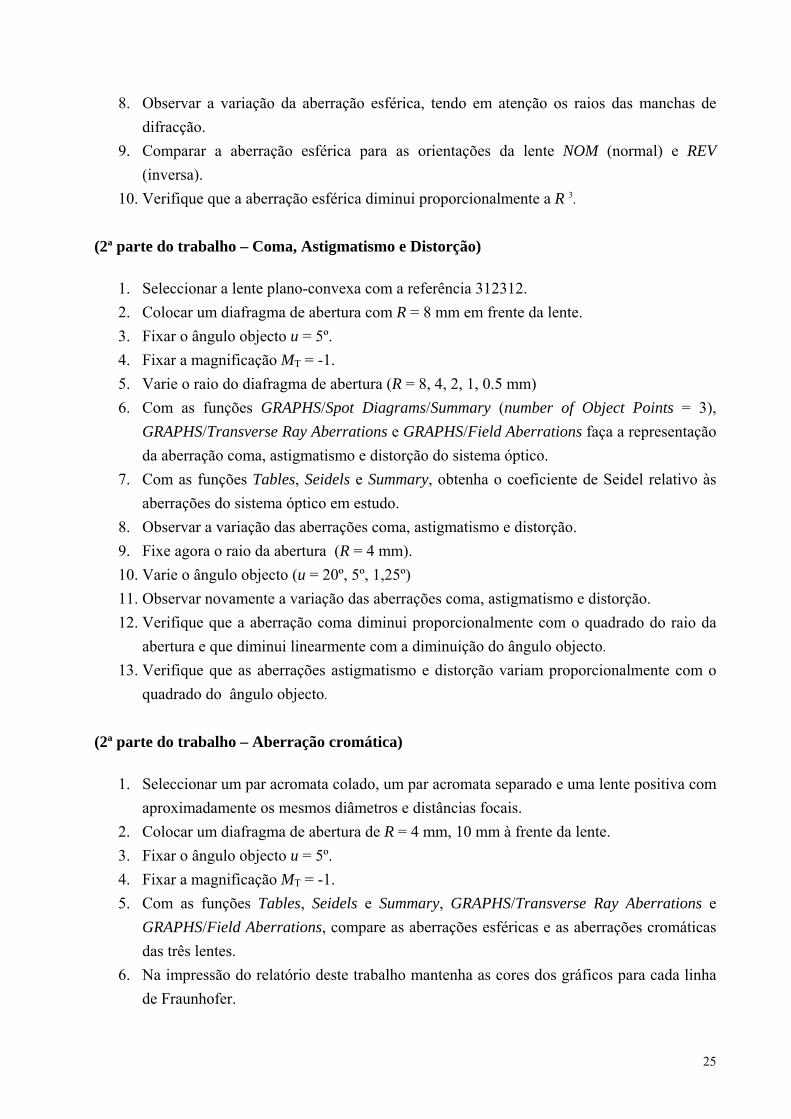
Para o cálculo e quantificação das aberrações cromáticas utilizam-se as riscas de Fraunhofer F, c e d. As aberrações cromáticas podem ser representadas numericamente pelos valores ∆x e ∆y ou pelos coeficientes de Seidel CI e CII. Os métodos básicos de minimização da aberração cromática consiste na utilização de lentes compostas. A associação de duas lentes “delgadas”, uma positiva e outra negativa, pode fazer sobrepor o foco azul e o foco vermelho. Uma lente composta que tenha essa configuração denomina-se acromática.
As lentes que constituem o par acromata podem ser coladas ou separadas.
Procedimento Experimental (1ª parte do trabalho – Aberração Esférica)
1. Seleccionar a lente plano-convexa com a referência 312312. 2. Colocar um diafragma de abertura com R = 8 mm em frente da lente. 3. Fixar o ângulo objecto u = 5º. 4. Fixar a magnificação MT = -1. 5. Com as funções GRAPHS, Spot Diagrams e Summary, (number of Object Points = 1)
faça a representação da aberração esférica do sistema óptico. 6. Com as funções Tables, Seidels e Summary, obtenha o coeficiente de Seidel relativo à
aberração esférica do sistema óptico. 7. Varie o raio do diafragma de abertura (R = 8, 4, 2, 1, 0.5 mm)
24
8. Observar a variação da aberração esférica, tendo em atenção os raios das manchas de difracção.
9. Comparar a aberração esférica para as orientações da lente NOM (normal) e REV (inversa).
10. Verifique que a aberração esférica diminui proporcionalmente a R 3.
(2ª parte do trabalho – Coma, Astigmatismo e Distorção)
1. Seleccionar a lente plano-convexa com a referência 312312. 2. Colocar um diafragma de abertura com R = 8 mm em frente da lente. 3. Fixar o ângulo objecto u = 5º. 4. Fixar a magnificação MT = -1. 5. Varie o raio do diafragma de abertura (R = 8, 4, 2, 1, 0.5 mm) 6. Com as funções GRAPHS/Spot Diagrams/Summary (number of Object Points = 3),
GRAPHS/Transverse Ray Aberrations e GRAPHS/Field Aberrations faça a representação da aberração coma, astigmatismo e distorção do sistema óptico.
7. Com as funções Tables, Seidels e Summary, obtenha o coeficiente de Seidel relativo às aberrações do sistema óptico em estudo.
8. Observar a variação das aberrações coma, astigmatismo e distorção. 9. Fixe agora o raio da abertura (R = 4 mm). 10. Varie o ângulo objecto (u = 20º, 5º, 1,25º) 11. Observar novamente a variação das aberrações coma, astigmatismo e distorção. 12. Verifique que a aberração coma diminui proporcionalmente com o quadrado do raio da
abertura e que diminui linearmente com a diminuição do ângulo objecto. 13. Verifique que as aberrações astigmatismo e distorção variam proporcionalmente com o
quadrado do ângulo objecto.
(2ª parte do trabalho – Aberração cromática)
1. Seleccionar um par acromata colado, um par acromata separado e uma lente positiva com aproximadamente os mesmos diâmetros e distâncias focais.
2. Colocar um diafragma de abertura de R = 4 mm, 10 mm à frente da lente. 3. Fixar o ângulo objecto u = 5º. 4. Fixar a magnificação MT = -1. 5. Com as funções Tables, Seidels e Summary, GRAPHS/Transverse Ray Aberrations e
GRAPHS/Field Aberrations, compare as aberrações esféricas e as aberrações cromáticas das três lentes.
6. Na impressão do relatório deste trabalho mantenha as cores dos gráficos para cada linha de Fraunhofer.
25
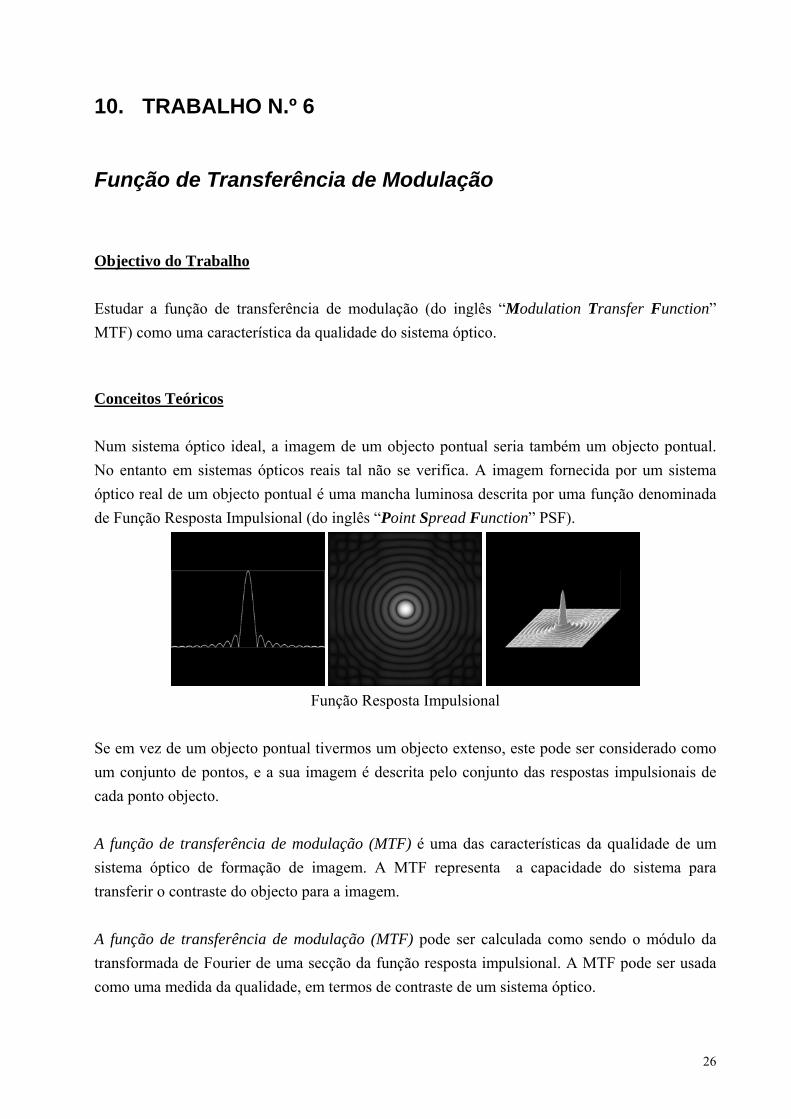
10. TRABALHO N.º 6 Função de Transferência de Modulação Objectivo do Trabalho Estudar a função de transferência de modulação (do inglês “Modulation Transfer Function” MTF) como uma característica da qualidade do sistema óptico. Conceitos Teóricos Num sistema óptico ideal, a imagem de um objecto pontual seria também um objecto pontual. No entanto em sistemas ópticos reais tal não se verifica. A imagem fornecida por um sistema óptico real de um objecto pontual é uma mancha luminosa descrita por uma função denominada de Função Resposta Impulsional (do inglês “Point Spread Function” PSF).
Função Resposta Impulsional
Se em vez de um objecto pontual tivermos um objecto extenso, este pode ser considerado como um conjunto de pontos, e a sua imagem é descrita pelo conjunto das respostas impulsionais de cada ponto objecto. A função de transferência de modulação (MTF) é uma das características da qualidade de um sistema óptico de formação de imagem. A MTF representa a capacidade do sistema para transferir o contraste do objecto para a imagem. A função de transferência de modulação (MTF) pode ser calculada como sendo o módulo da transformada de Fourier de uma secção da função resposta impulsional. A MTF pode ser usada como uma medida da qualidade, em termos de contraste de um sistema óptico.
26

Se tivermos uma fonte de ondas sinusoidais, podemos descreve-la através do contraste ou modulação. O gráfico do contraste, K, é construído com base na expressão
minmax
minmax
TTTT
K e +−
=
onde Tmax e Tmin são as transmitâncias máxima e mínima da fonte. O sistema óptico investigado forma uma imagem real sendo o seu contraste dado por
minmax
minmax
IIII
Ki +−
=
onde Imax e Imin são as Irradiâncias máxima e mínima da imagem. A MTF é então definida como a razão entre o contraste da imagem e o contraste do objecto para todas as frequências espaciais:
e
i
KK
MTF =
Existe uma ligação entre a MTF e a resposta impulsional do sistema óptico (h(x,y)). Se h(x,y) é
uma função que apresenta simetria rotacional (h(x,y) = h(r), onde ( )21
22 yxr = ) então
( ) ( ) ( )
( ) ( ) ( )⎪⎪
⎩
⎪⎪
⎨
⎧
=ℑ=
=ℑ=
−∞+
∞−
−
−+∞
∞−
∫
∫
ννν
ν
πν
πν
deMTFKMTFKrh
drerhKrhKMTF
ri
ri
22
12
211
211 ,,, KK−ℑℑ são operadores da transformada de Fourier directa e inversa e os coeficientes
positivos, respectivamente. O principal parâmetro da função h(r) é o seu diâmetro D, que pode ser representado pelo diâmetro do diagrama de manchas do feixe de raios luminosos. O principal parâmetro da função MTF é a sua frequência de corte, νmax. A frequência de corte pode definir-se como a frequência a partir da qual os detalhes do objecto já não podem ser distinguidos ma imagem. O poder de resolução do sistema óptico é então igual à frequência de corte, isto é maxν=R , onde
R é poder de resolução e νmax é a frequência de corte. Num sistema óptico são consideradas várias respostas impulsionais e as correspondentes MTF. Uma delas é determinada no centro do plano da imagem e caracteriza a aberração esférica do
27
sistema. Outras são determinadas nos lados e nos cantos do plano imagem e caracterizam a aberração coma e o astigmatismo. Assim, a minimização da aberração esférica, coma e astigmatismo resulta num aumento da frequência de corte das MTF mencionadas. Esta dependência é usada em alguns métodos de optimização de sistemas ópticos, sendo o critério de qualidade (“figure-of-merit”) definido pela função ( nppp L,, 21max )ν , onde pi são parâmetros variáveis do sistema.
Procedimento Experimental
1. Seleccionar a lente plano-convexa com a referência 312312. 2. Colocar um diafragma de abertura com R = 8 mm em frente da lente. 3. Fixar o ângulo objecto u = 5º. 4. Fixar a magnificação MT = -1. 5. Utilizar as funções GRAPHS/Spot diagrams/Summary (number of Object Points = 1) e
GRAPHS/Geometric MTF. 6. Variar o raio do diafragma de abertura (R = 8, 4, 2, 1, 0.5 mm). 7. Observar a mudança nos digramas de manchas e nos gráficos da MTF. 8. Para cada valor de R comparar o raio do disco de Airy (raio da mancha de difracção)
através de GRAPHS/Spot diagrams/Summary e a frequência de corte através de GRAPHS/Geometric MTF(cut-off frequency).
28