Càlcul de Diverses Variables
115
7/23/2019 Càlcul de Diverses Variables http://slidepdf.com/reader/full/calcul-de-diverses-variables 1/115 Ll. Garrido Barcelona, 2010 C ` ALCUL DE DIVERSES VARIABLES Versi´ o 1.3
-
Upload
adria-meca -
Category
Documents
-
view
250 -
download
0
Transcript of Càlcul de Diverses Variables
-
7/23/2019 Clcul de Diverses Variables
1/115
Ll. Garrido
Barcelona, 2010
CALCUL DE DIVERSESVARIABLES
Versio 1.3
-
7/23/2019 Clcul de Diverses Variables
2/115
Objectius daprenentage
Referits a coneixements:
Comprendre el signicat de les diferents derivades duna funcio de diverses variables, de la
seva diferenciabilitat, i del seu desenvolupament de Taylor.
Estendre el concepte dintegral de Riemann a dues i tres dimensions.
Referits a habilitats, destreses:
Adquirir practica en lanalisi de funcions de diverses variables, especialment de la sevacontinutat.
Resoldre problemes de funcions inverses i implcites.
Aprendre a analitzar els maxims i mnims duna funcio amb condicions i sense. Adquirir practica en el calcul dintegrals dobles i triples.
Autor:
Llus Garrido ([email protected])
Departament dEstructura i Constituents de la Materia &
Institut de Ciencies del CosmosFacultat de Fsiques
Universitat de Barcelona
Agraments:
Voldria agrair al meu company Joan Martorell lacurada deteccio derrors, que han estat corregits
en aquesta versio, aix com les seves suggerencies sobre aquest text.
-
7/23/2019 Clcul de Diverses Variables
3/115
Index
1 Funcions de diverses variables. 1
1.1 El conjunt Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Lespai vectorialRn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Espai Vectorial Euclidia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.3 Espai Vectorial Normat . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.4 Espai Metric. Nocions de topologia . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Funcions de diverses variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.1 Camps escalars i vectorials. . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2.2 Domini i Imatge duna funcio . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.3 Espai vectorial de les funcions . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Lmit, lmits iterats i continutat. . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.1 Propietats dels lmits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3.2 Lmits reiterats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.3 Lmits direccionals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.4 Funcions contnues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 CALCUL DIFERENCIAL EN DIVERSES VARIABLES. 17
2.1 Derivada parcial i derivada direccional. . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Diferencial duna funcio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.1 Diferencial per funcions deR a R . . . . . . . . . . . . . . . . . . . . . . . 19
2.2.2 Diferencial per funcions deRn a Rm . . . . . . . . . . . . . . . . . . . . . 21
2.2.3 Expressio del diferencial per funcions escalars de Rn R. Gradient . . . 232.2.4 Expressio del diferencial per funcions vectorials de Rn Rm. Matriu
Jacobiana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.2.5 Condicions de diferenciabilitat . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3 Teorema del valor mitja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4 Regla de la cadena. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.5 Derivades successives. Derivades creuades . . . . . . . . . . . . . . . . . . . . . . 32
2.5.1 Igualtat entre les derivades creuades . . . . . . . . . . . . . . . . . . . . . 33
2.6 Formula de Taylor. Matriu hessiana. . . . . . . . . . . . . . . . . . . . . . . . . 34
2.7 Gradient. Rotacional. Divergencia . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.7.1 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.7.2 Rotacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
-
7/23/2019 Clcul de Diverses Variables
4/115
ii INDEX
2.7.3 Divergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.7.4 Laplaciana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3 APLICACIONS del CALCUL DIFERENCIAL 39
3.1 Funcio inversa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.1 Teorema de la funcio inversa. . . . . . . . . . . . . . . . . . . . . . . . . . 403.1.2 Canvi de coordenades enR2 i R3. . . . . . . . . . . . . . . . . . . . . . . 42
3.2 Funcio implcita. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.2.1 Teorema de la funcio implcita. . . . . . . . . . . . . . . . . . . . . . . . 47
3.2.2 Equacio del pla tangent per funcions definides implcitament . . . . . . . 51
3.3 Maxims i mnims. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3.1 Maxims i mnims absoluts . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3.2 Extrems: maxims i mnims relatius . . . . . . . . . . . . . . . . . . . . . . 52
3.3.3 Condicio necessaria per ser extrem en una funcio diferenciable . . . . . . 53
3.4 Extrems condicionats. Multiplicadors de Lagrange. . . . . . . . . . . . . . . . . 573.4.1 Extrems condicionats per funcions escalars de dues variables . . . . . . . 57
3.4.2 Teorema de Lagrange per trobar els extrems condicionats de funcions escalars 60
4 INTEGRACIO DE FUNCIONS DE DIVERSES VARIABLES 65
4.1 Recordatori: integracio en R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2 Integrals dependents dun parametre. . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.3 Integrals Multiples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.3.1 Integral doble sobre un rectangle . . . . . . . . . . . . . . . . . . . . . . . 68
4.3.2 Integrals dobles en regions generals . . . . . . . . . . . . . . . . . . . . . . 724.4 Integrals triples. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.4.1 Integral triple en una capsa . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.5 Canvi de variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5 SUCCESSIONS i SERIES 87
5.1 Successions numeriques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.1.1 Convergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.1.2 Successions de Cauchy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.1.3 Successions reals divergents cap a
. . . . . . . . . . . . . . . . . . . . 88
5.1.4 Lmits superior i inferior . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.1.5 Successions monotones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.2 Series numeriques. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.2.1 Condicio de Cauchy per a la convergencia de series . . . . . . . . . . . . . 90
5.2.2 Serie alternada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.2.3 Criteris de convergencia. . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Apendix 97
A Canvi de coordenades: bases i operadors 99
-
7/23/2019 Clcul de Diverses Variables
5/115
INDEX iii
B Corbes i superfcies aR3 105
Bibliografia 109
-
7/23/2019 Clcul de Diverses Variables
6/115
iv INDEX
-
7/23/2019 Clcul de Diverses Variables
7/115
Captol 1
Funcions de diverses variables.
1.1 El conjunt Rn
Rn es conjunt delements, anomenats punts, de la forma
Rn = {(a1, a2,....,an) =a | ai R} (1.1)
per exemple R2 es el conjunt de punts de la forma (x, y), on x i y son nombres reals i que
representa el conjunt dels punts en el pla.
En aquests conjunts es poden definir operacions que els doten destructures utilitzades en
lestudi del mon fsic. Passem doncs ara, en les seguents seccions, a veure algunes daquestes
estructures.
1.1.1 Lespai vectorial Rn
Al conjunt Rn sel pot dotar destructura despai vectorial gracies a la introduccio de dues
operacions, una interna i una altra externa i que verifiquen les propietats requerides per a ser
un espai vectorial.
Loperacio interna, que designarem per +, es defineix com
Rn Rn Rn (1.2)a,b
c =a + b= (a1+ b1,...,an+ bn) (1.3)
i que dota aRn destructura de grup abelia doncs de la definicio i utilitzant les propietats de la
suma en el reals, es facil comprovar que compleix:
associativa: (a + b) +c =a + (b +c )
existeix lelement neutre 0 = (0, ..., 0), tal quea + 0 = 0 +a =a .
a Rn a = (a1,..., an), anomenat element oposat, tal que a +a =a +a = 0
commutativa: a + b= b +a
-
7/23/2019 Clcul de Diverses Variables
8/115
2 Chapter 1. Funcions de diverses variables.
Per altra banda definim loperacio externa com
R Rn Rn (1.4),a a = (a1,...,an) (1.5)
(on es un escalar) amb les propietats: ( + )a = a + a
(a + b) =a + b
()a = (a )
existeix lelement neutre de loperacio externa (1) tal que: 1a =a
aquestes propietats juntament amb lestructura de grup abans esmentada, doten aRn destruc-
tura despai vectorial.
Base de lespai vectorial Rn
Direm que un conjunt de vectors de Rn,{x i} i = 1,...,k son linealment dependents si podemtrobar un conjunt de valors reals{i} i = 1,...,k, amb algun diferent de 0, tal que
ki=1
ix i = 0 (1.6)
per exemple en R2 els vectors (1, 0) i (2, 0) son linealment dependents
Direm que un conjunt de vectors de Rn,
{x i
}i = 1,...,k
n son linealment independents si
ki=1
ix i = 0 (1.7)
nomes es pot verificar si i = 0i. Per exemple en R2 els vectors (1, 0) i (0, 1) son linealmentindependents.
Un conjunt de n vectors linealment independents a Rn {e i} i = 1,...,n direm que son unabase de lespai vectorial Rn. Qualsevol vector de Rn es pot expressar com una combinacio dels
vectors de la base:x R podem escriure
x =
ni=1
ie i (1.8)
on les i sanomenen components del vector x en la base{e i}
Canvi de base
En un mateix espai vectorial podem agafar diferents bases i aleshores un mateix vector te
components diferents en les diferents bases.
Per exemple en R2 podem agafar com a bases:
base1= {e 1= (1, 0),e 2= (0, 1)}
-
7/23/2019 Clcul de Diverses Variables
9/115
1.1 El conjunt Rn 3
base2= {e 1= (1, 0),e 2= (1/
2, 1/
2)}i aleshores el vector x = 1e 1+ 1e 2 =
2e 2, te components 1, 1 en la base1, mentre que en la
base2 les seves components son 0,
2.
NOTA. Com que les components dun mateix vector canvien al canviar de base, quant donem
un vector donant les seves components, sempre hem despecificar la base en la que treballem.
Aleshores quan escrivim un vector de Rn com x = (x1,...,xn), si no especifiquem el contrari,
voldra dir que estem treballant en la base cartesiana:
x = (x1,....,xn) =x1(1, 0...0) + ... + xn(0,.., 1) (1.9)
1.1.2 Espai Vectorial Euclidia
Un espai vectorial euclidia es un espai vectorial (V) on tenim definit un producte escalar:
V V R (1.10)
x,y x y (1.11)que satisfa:
x y = y x
x (y+z ) = x y+x z
c(x y) = (cx ) y
x x > 0 si x = 0 i x x = 0 si x = 0En un espai vectorial euclidia es compleix la desigualtat de Cauchy-Schwarz:
|x y| x x
y y (1.12)En efecte, si x o y son 0 la igualtat es compleix. Assumim doncs que els dos vectors son diferents
de 0, ens construm el vector z = ax +by on a i b son dos nombres reals arbitraris. Aleshores
z z 0a, b.z z = (ax + by) (ax + by ) =a2x x + 2abx y + b2y y 0 (1.13)
si agafema = y yy y x x + 2bx y + b2 0 (1.14)
i si ara agafem b = x yy y x x (x y )2 (1.15)
Espai Vectorial Euclidia Rn
En el cas de lespai vectorial Rn el producte escalar es defineix com
x y =n
i=1
xiyi (1.16)
es facil demostrar que aquesta definicio compleix les quatre propietats esmentades abans que ha
de complir tot producte escalar. Amb aquesta operacio Rn
es un espai vectorial euclidi.
-
7/23/2019 Clcul de Diverses Variables
10/115
4 Chapter 1. Funcions de diverses variables.
1.1.3 Espai Vectorial Normat
Un Espai Vectorial V es un espai vectorial Normat si esta dotat duna funcio anomenadanorma
:V R (1.17)x x (1.18)
que satisfa
x = 0 si x = 0
x >0 si x = 0
cx =| c |x
x +y x + y (desigualtat triangular)Un espai vectorial euclidia (on tenim definit un producte escalar) es tambe un espai vectorial
normat si definim la norma dun vector com
x =x x (1.19)
doncs compleix les propietats exigides a una norma. Les tres primeres propietats tenen una
demostracio trivial a partir de les propietats del producte escalar, mentre que la darrera es pot
demostrar utilitzant la desigualtat de Cauchy-Schwarz:
x +y 2 = (x +y ) (x +y ) = x x + 2x y + y yx 2 + y2 +2 |x y| x 2 + y 2 +2 x y = (x + y)2 (1.20)
Espai vectorial normat Rn
Prenent la deficinicio de producte escalar en Rn donada en 1.16, podem dotar a Rn destructura
despai vectorial normat, on la norma dun vector en aquest espai ve donada per:
x =x x =
ni=1
x2i (1.21)
EXEMPLE. En R2 considerem els vectors
x = (x1, x2) = (x cos x, x sin x)
y = (y1, y2) = (y cos y, y sin y)el seu producte escalar ve donat per
x y = x1y1+ x2y2 = x y cos xcos y+ x y sin xsin y= x y cos(y x) =x y cos (1.22)
De fet en qualsevol espai euclidia es defineix langle entre dos vectors com aquell que
cos = x yx y (1.23)
NOTA.|x y|=|x y cos |x y
-
7/23/2019 Clcul de Diverses Variables
11/115
1.1 El conjunt Rn 5
1.1.4 Espai Metric. Nocions de topologia
Un Espai Metric es un conjunt M, no buit, dobjectes x,y,z,... que anomenarem punts i que
esta dotat duna funcio d anomenada metrica
d: M
M
R (1.24)
x, y d(x, y) (1.25)
que satisfa
d(x, x) = 0
d(x, y)> 0 si x =y
d(x, y) =d(y, x)
d(x, y) d(x, z) + d(z, y)
tot espai vectorial euclidi es tambe un espai metric si definim
d(x,y ) =x y (1.26)
Les tres primeres propietas de metrica es dedueixen trivialment de les propietats del producte
escalar, mentre la darrera es consequencia de la desigualtat triangular
x + yx + y d(x +y, 0) d(x,0) + d(y, 0)
si ara prenem x x z i y z y , aleshores la darrera expressio es pot escriure com
d(x
y, 0)
d(x
z, 0) + d(z
y, 0)
x
y
x
z
+
z
y
d(x,y )
d(x,z ) + d(z, y)
(1.27)
Espai Metric Rn
Com ja hem vist, Rn es un espai vectorial euclidia. Per tant, es tambe un espai metric si definim
la distancia entre dos punts com
d(x,y ) =x y = n
i=1
(xi yi)2 (1.28)
EXEMPLE. En R
2
, d (x,y ) =
(x1 y1)2
+ (x2 y2)2
La introduccio de distancia permet tota una riquesa topologica, part de la qual anirem
esbrinant a continuacio .
Bola o entorn
En Rn definim bola Bn(a ; r) de centre en el punt a i de radi r >0, com el conjunt de punts
Bn(a ; r) = {x Rn; d(x,a )< r} (1.29)
EXEMPLE. En R, B1(a; r) = (a r, a + r)
EXEMPLE. En R2
, B2(a, r ) = {(x, y) | (x a1)2 + (y a2)2 < r}
-
7/23/2019 Clcul de Diverses Variables
12/115
6 Chapter 1. Funcions de diverses variables.
Punt interior
Un punt a S Rn sanomena punt interior de S, si existeix alguna bola Bn(a ; r) tal queBn(a ; r) S
Interior de S (int S)
Es el conjunt format per tots els seus punts interiors
Conjunt obert
S Rn es obert si tots els seus punt son interiors. ClaramentRn es obert. El conjunt tambees obert (per conveni o per complir gratutament la definicio).
Conjunt tancat
S Rn es tancat si Rn S es obert.EXEMPLE. [1, 2] es tancat, pero (1, 2] no es ni tancat ni obert.
Punt exterior
Un punt a Rn sanomena punt exterior de S Rn, si existeix alguna bola Bn(a ; r) tal queBn(a ; r) S=
Conjunt exterior de S (ext S)
Es el conjunt format per tots els seus punts exteriors .
Punt frontera
Un punt a Rn sanomena punt frontera si no es interior ni exterior.EXEMPLE. S= (0, 2], intS= (0, 2), extS= (, 0) (2, +), punts frontera: 0 i 2.
Conjunt frontera de S ( S)
Es el conjunt format per tots els seus punts frontera. En lexemple anterior S= {0, 2}
Punt adherent
Un punta Rn sanomena punt adherent deS Rn, si bolaBn(a ; r) tenim queBn(a ; r)S=. Tots els punt de S son adherents (+ algun altre).
Conjunt clausura de S (S )
Es el conjunt format per tots els seus punts adherents.
-
7/23/2019 Clcul de Diverses Variables
13/115
1.1 El conjunt Rn 7
Punt dacumulacio
Un punta Rn sanomena punt dacumulacio de S Rn, si bolaBn(a ; r) tenim queBn(a ; r)(Sa ) =
Conjunt derivat de S (S )
Es el conjunt format per tots els seus punts dacumulacio.
EXEMPLE. en R tenim S= [a, b) {c}.
S= [a, b] {c}
S= [a, b]
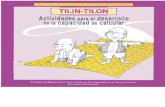
En lexemple de la figura 1.1, on el conjunt S est a format pels punts de la figura blava
(incloent-hi els de la lnia frontera contnua, pero no els de la discontnua) i el punt aillat f3,
tenim que el punti es interior, el punt e es exterior, els punts fi, i = 1, 2, 3 son frontera, els
punts i,f1,f2,f3 son adherents i els punts i,f1,f2 son dacumulacio.
Figura 1.1: Diferents tipus de punts del conjunt S.
TEOREMA
Les seguents afirmacions son equivalents en Rn
S es tancat
S conte tots els seus punts dacumulacio
S conte tots els seus punts adherents
Conjunt fitat o acotat
S Rn es fitat siBn(a ; r) tal que S Bn(a ; r)
En Rn
un conjunt tancat i fitat tambe es sanomena com conjunt compacte.
-
7/23/2019 Clcul de Diverses Variables
14/115
8 Chapter 1. Funcions de diverses variables.
EXEMPLE (en R2). S ={( 1n , 1m)|n, m N}. No es obert doncs els seus punts no soninteriors. No es tancat doncs no conte tots els seus punts dacumulacio (el (0,0)). Es acotat,
pero no compacte.
EXEMPLE (enR2). S= {(x, y) | x2 + y2 =r2}. Es acotat i tancat doncs conte tots els seuspunts dacumulacio. Aleshores es compacte.
Teorema de Bolzano-Weierstrass
Si S Rn es fitat i conte infinits punts, aleshores existeix com a mnim un punt dacumulacio.EXEMPLE (en R). S= { 1n |n N} te un punt dacumulacio que es el 0.
Reunions i interseccions doberts i tancats
La reunio duna colleccio arbitraria (finita o infinita) de conjunts oberts es oberta
S= AFA (1.30)
on A son oberts duna famlia F. Si x S aleshores x pertany a algun A de la familia i com xes interior a naquest A, tambe ho es de S.
La reunio dun nombre arbitrari de tancats, no sempre es tancada. Per exemple, si agafem
la colleccio de tancats: Tk = [1k , 2], aleshoreskTk = (0, 2]
La interseccio duna colleccio arbitraria (finita o infinita) de conjunts tancats es tancada.La interseccio dun nombre arbitrari doberts, no sempre es un obert, per exemple n( 1n , 1n)
donara el tancat{0}.
1.2 Funcions de diverses variables.
Les funcions que estudiarem relacionen punts de Rn amb punts de Rm. De forma general:
f :D Rn Rm (1.31)
x = (x1,...,xn)
y =
y1= f1(x )
y2= f2(x )
.
.
ym= fm(x )
(1.32)
1.2.1 Camps escalars i vectorials.
En el cas anterior si
m= 1 parlarem duna funcio escalar
m >1 parlarem duna funcio vectorial (composta de m funcions escalars)
-
7/23/2019 Clcul de Diverses Variables
15/115
1.2 Funcions de diverses variables. 9
Figura 1.2: Exemple de funcio de f :D R2 R, z= f(x, y).
Exemples
Temperatura als punts de lespai. Es una funcio escalar de 3 variables:
T :R3 R (1.33)x = (x,y ,z) T(x,y ,z) (1.34)
Trajectoria dun objecte en funcio del temps. Es una funcio vectorial duna variable:
r : R R3 (1.35)
t r (t) =
x(t)
y(t)
z(t)
(1.36)
Camp electric als punts de lespai. Es una funcio vectorial de 3 variables:E: R3 R3 (1.37)
x = (x,y ,z) E(x ) =
Ex(x )
Ey (x )
Ez (x )
(1.38)
1.2.2 Domini i Imatge duna funcio
Donada una funcio f :D Rn Rm definim:
Domini de f(x ): conjuntD Rn de punts x Rn on la funcio esta definida
Imatge de f(x ): conjuntI Rm de punts y Rm que son imatges dels punts de D.
1.2.3 Espai vectorial de les funcions
Com en el cas de les funcions deR R, el conjunt de les funcions definides en D Rn Rm
forma un espai vectorial respecte a les operacions:
-
7/23/2019 Clcul de Diverses Variables
16/115
10 Chapter 1. Funcions de diverses variables.
suma de funcions: ( f+g )(x ) = f(x ) +g (x )
multiplicacio per un escalar: ( f)(x ) = f(x )
1.3 Lmit, lmits iterats i continutat.
Sigui f : D Rn Rm i a un punt dacumulacio de D. Direm que l Rm es lmit de fen el punt a si > 0, tal que si x a < f(x ) l< , ( on x D {a })). Hoexpressarem com:
l= limx af(x ) (1.39)
Una altre forma dexpressar-ho seria > 0, | x Bn(a, ) D f(x )Bm(l, ) (on Bvol indicar que el punt central a no es considera en aquesta bola) i que es pot veure graficament
en la figura 1.3
Figura 1.3: Lmit de fen el punt a .
Exemple. Sigui f(x, y) = 2x2(y+1)+y2
2x2+y2 que te lmit 1 quant (x, y) (0, 0). Per demostrar-ho
hem de comprovar que
> 0, () |
x2 + y2 < ?| f(x, y) 1 |<
|f(x, y)
1
| =
|2x2(y+ 1) + y2
2x2
+ y2
1
|=
| 2x2y+ 2x2 + y2 2x2 y2
2x2
+ y2
|= | 2x
2y
2x2 + y2|= 2x
2 | y|2x2 + y2
| y|
x2 + y2 (1.40)
per tant prenent() = es satisfa la definicio de lmit (veure figura 1.4).
1.3.1 Propietats dels lmits
El lmit, si existeix, es unic
Siguin b =c dos lmits de limx af(x ), aleshores
b c = b f(x ) c + f(x ) b f(x ) + f(x ) c (1.41)
-
7/23/2019 Clcul de Diverses Variables
17/115
1.3 Lmit, lmits iterats i continutat. 11
Figura 1.4: f(x, y) = 2x2(y+1)+y2
2x2+y2 a lentorn del (0, 0)
Com els lmits existeixen, >0, 1, 2 tal que
six a < 1 f(x ) b < /2
six a < 2 f(x ) c < /2
Ara si prenem = min(1, 2) aleshores
b f(x ) + f(x ) c < b c < (1.42)
i com aixo pasa, aleshores els dos lmits han de ser iguals.
Suma de lmits
Si limx af(x ) = b i limx ag (x ) =c , aleshoreslimx a ( f(x ) +g (x )) = b +c .Demostracio. >0, 1, 2 tal que
six a < 1 f(x ) b < /2
six a < 2g (x ) c < /2
Ara si prenem = min(1, 2) aleshores f(x ) +g (x ) b c f(x ) b+g (x ) c 0, tal que si x a < f(x ) b 0 hem trobat un tal que six a < tenim
f(x )
b
=
|
| f(x )
b
0, tal que six a < f(x ) f(a ) < (x D {a }).Una funcio sera discontinua ena si no esta definida, no existeix el lmit o el lmit no coincideix
amb el valor de la funcio. Si el lmit existeix i es discontinua, aquesta discontinutat es evitable.
La suma de dos funcions contnues es contnua
Per a la seva demostracio es procedeix de forma similar a la de suma de lmits
-
7/23/2019 Clcul de Diverses Variables
20/115
14 Chapter 1. Funcions de diverses variables.
-1-0.8
-0.6-0.4
-0.20
0.20.4
0.60.8
1
-1-0.8
-0.6-0.4
-0.20
0.20.4
0.60.81
-1
-0.5
0
0.5
1
2*x*y^2/(x^2+y^4)
- 1 - 0 .8 - 0.6 - 0.4 - 0.2 0 0 .2 0 .4 0 .6 0 .8 1-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
2*x*y^2/(x^2+y^4)
Figura 1.6: Funcio de lequaio 1.45 (representacio en 3D i en contorns )
Una funcio vectorial es contnua si i tan sols si totes les seves components son
contnues
Sigui f(x ) contnua en a . Aleshores limx a fk (x ) =limx af(x ) ek = f(a ) ek =fk (a ) doncs fes contnua.
Siguin les fk contnues, aleshores limx af(x ) =limxa fk (x ) ek = fk(a ) ek = f(a )NOTA. Les funcions lineals de Rn Rm son contnues. Efectivament
f(x ) f(a ) = f(a + h) f(a ) = f(h) = f(
hiei) =
hi f(ei)
| hi| f(ei) h
f(ei) h nk nk (1.49)
on k max{ f(ei) , i= 1,...,n} i agafant= /nk queda demostrat.
Continutat de funcions compostes
Considerem les funcions: f :A Rn Rm i g : B Rm Rs tals que f(A) B.Si f es contnua en a i g es contnua en b= f(a )B , aleshores la funcio composta go f es
tambe contnua en a .
Com es veu en la figura 1.7
A Rn f B Rm g Rs
af b= f(a ) gc = g ( f(a ))
Efectivament, com que g es contnua en el puntb aleshores >0, tal que siz b < g (z ) g (b)< , pero com que f es contnua el punt a aleshores > 0, tal que si
x a < f(x ) f(a ) < .
-
7/23/2019 Clcul de Diverses Variables
21/115
1.3 Lmit, lmits iterats i continutat. 15
Figura 1.7: Composicio de funcions
Per tant concloem que >0, tal que six a < f(x ) f(a ) < z b < g ( f(x )) g ( f(a )) < .
Per tant, si f es contnua en a i g es contnua en b= f(a ) D, aleshores
limx ag f(x ) =limx ag ( f(x )) =g ( f(a )) (1.50)
-
7/23/2019 Clcul de Diverses Variables
22/115
16 Chapter 1. Funcions de diverses variables.
-
7/23/2019 Clcul de Diverses Variables
23/115
Captol 2
CALCUL DIFERENCIAL EN
DIVERSES VARIABLES.
2.1 Derivada parcial i derivada direccional.
Considerem les funcions f : R2 R. Esta clar que el concepte de derivada en un punt quetenem per a funcions de R en R sha de generalitzar i evidentment dependra de la direccio en
que ens apropem al punt (el pendent en una muntanya depen en la direccio en que caminem).
Per aixo definim la derivada direccional en a i segons la direccio u (vector unitari) com:
f(a ; u) =limh0f(a + hu) f(a )
h (2.1)
sempre i quan el lmit existeixi.En la figura 2.1 es poden veure algunes derivades direccionals duna funci o de f :R2 R ,
en aquest cas concret es mostren les paralleles als eixos (u= (1, 0), v= (0, 1)). La interpretacioes com abans: ens dona la tangent del angle de la recta tangent.
Figura 2.1: Derivades parcials
En els cas que la direccio u sigui alguna de les direccions de la base canonica u = ei, i =
-
7/23/2019 Clcul de Diverses Variables
24/115
18 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
1,...,n, aquestes derivades direccionals sanomenen derivades parcials i tambe sexpressen com:
f(a ; ei) =i f(a ) =Di f(a ) = f
xi(a ) (2.2)
o igualment
i fa = Di f
a =
f
xia
(2.3)
Com que per calcular-les hem de fer
f
xi(a ) =limh0
f(a + hei) f(a )h
=limh0f(a1, . . ,ai+ h,...,an) f(a1, . . ,ai,...,an)
h (2.4)
aleshores, ho podem fer com si la funcio f fos nomes funcio de la variable i-essima, mantenint
la resta constants.
EXEMPLE. Calcular les derivades direccionals en el punt (1,1) de la funcio
f :R2
R, f(x, y) =x2 + y2 (2.5)
f((1, 1); u) = limh0f((1, 1) + hu) f(1, 1)
h =limh0
f(1 + hu1, 1 + hu2) 2h
= limh0
((1 + hu1)
2 + (1 + hu2)2 2
h = 2u1+ 2u2 (2.6)
Si ara volem calcular la derivada parcial respecte a x ho podem fer
fx(1,1)
=f ((1, 1); u= (1, 0)) = 2
fx (1,1)=limh0
f(1+h,1)f(1,1)h =limh0
((1+h)2+12)2h = 2
Calculant fx , fent la derivada respecte a x i manteninty constant , i despres mirar el seuvalor en el punt (1,1): fx = 2x que existeix en tot R
2 i que en el punt (1,1) val 2 com ja
hem calculat.
EXEMPLE. Calcular les derivades direccionals de la funcio
f :R2 R, f(x, y) =
2xy2
x2+y2 en(x, y) = (0, 0)
0 en(x, y) = (0, 0) (2.7)
que es contnua en el 0 doncs
2xy2
x2 + y2 0 | 2x | 2x2 + y2 (2.8)
i per tant veiem que podem agafar = /2 tal que si x 0= x2 + y2 < aleshores 2xy2x2+y2 f(0, 0) < .
Les derivades direccionals son
f(0; u) =limh0f(0 + hu) f(0)
h =limh0
f(hu1, hu2) 0h
=limh0
2h3u1u22h2(u21+u
22) 0
h = 2u1u
22
(2.9)
doncs u21+u22 = 1 al ser u un vector unitari. Si ara volem calcular la derivada parcial respecte
a x ho podem fer
-
7/23/2019 Clcul de Diverses Variables
25/115
2.2 Diferencial duna funcio. 19
fx (0) =f(0; u= (1, 0)) = 0
fx (0) =limh0 f(h,0)f(0,0)h =limh00h20h = 0
Tambe podem calcular fx en qualsevol punt= 0, fent la derivada respecte a x i mantenint yconstant:
fx
= 2y2(x2 + y2) 2xy22x(x2 + y2)2
= 2y2(y2 x2)(x2 + y2)2
(2.10)
que existeix en tot R2 {0}. En el punt (0,0) no te lmit ( doncs limy0 fx (my,y) = 2(1m2)
(m2+1)2)
pero ja hem calculat la derivada fx (0) i hem vist que val 0.
NOTA. La derivada direccional duna funcio vectorial f(x ) =
i fi(x )ei tambe es un vector:
f(a ; u) =i
fi (a ; u)ei
EXEMPLE. Sigui f :R2 R2 definida per
f(x, y) =
x2 + y2
e(x2+y2) cos x
(2.11)
aleshores les derivades direccionals son vectors. Per exemple la derivada parcial respecte a y es
f
y =
y/
x2 + y2
2ye(x2+y2) cos x
(2.12)
NOTA. En funcions deR a R la existencia de la derivada en un punt garanteix que la funcio
es contnua en aquell punt. En funcions de varies variables poden existir totes les derivades
direccionals i que la funcio no sigui contnua. Per exemple, considerem la funcio:
f(x, y) =
2xy2
x2+y4 en (x, y) = (0, 0)
0 en (x, y) = (0, 0) (2.13)
Les seves derivades direccionals en (0,0) existeixen i valen:
f(0; u) =limh0f(0 + hu) f(0)
h =limh0
f(hu1, hu2) 0h
=limh0
2h3u1u22h2(u21+h
2u42) 0
h (2.14)
si u1= 0 aquest lmit val 2u22/u1 i si u1 = 0 aquest lmit val 0. Per tan les derivades existeixenen qualsevol direccio, pero la funcio no es contnua com hem vist en 1.45
2.2 Diferencial duna funcio.
2.2.1 Diferencial per funcions de R a R
Laproximacio lineal de lincrement duna funcio en un punt lhi direm diferencial. En el cas de
funcions deR a R (veure figura 2.2) tenim
la funcio:
f :R R
x f(x) (2.15)
-
7/23/2019 Clcul de Diverses Variables
26/115
20 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
lincrement de la funcio respecte el punt a
fa: R Rx fa(x) =f(a + x) f(a) (2.16)
el diferencial de la funcio en el punt a (si te derivada en aquest punt)dfa: R R
dx dfa(dx) =f(a)dx (2.17)
Tan dx com x representen la variacio de les x respecta al punta considerat, com es veu en la
figura 2.2, pero quant usem diferencials utilitzarem generalmentdx.
Veiem que el diferencial tal com esta definit es linial: dfa(dx1 + dx2) = f(a)(dx1 +
dx2) =dfa(dx1) + dfa(dx2)
Figura 2.2: Diferencial
Per que laproximacio lineal df sigui veritablement un diferencial, hem de demanar que la
diferencia entre el diferencial (df) i lincrement de la funcio (f) sigui dordre mes gran que el
propi increment de la variable (x)
f=df+ O(x) (2.18)
on O(x) vol indicar que va mes rapid cap 0 que x (per exemple com (x)2 o qualsevol
potencia superior).
EXEMPLE. Considerem la funcio f(x) =x2 en el punt x = 1. En aquest punt
f1(x) = f(1 + x) f(1) = (1 + x)2 12 = x2 + 2xdf1(x) = f
(1)x= 2x (2.19)
i la diferencia entre el diferencial (df1) i lincrement de la funcio (f1) val
f1(x) df1(x) = x2
(2.20)
-
7/23/2019 Clcul de Diverses Variables
27/115
2.2 Diferencial duna funcio. 21
que es dordre mes gran que el propi increment de la variable (x)
La relacio 2.18 tambe la podem expressar com
f(a + h) =f(a) + dfa(h) + 0(h) =f(a) + C h + h E(a; h) (2.21)
on C es una constant (doncs dfa(h) ha de ser lineal i per tant ha de ser de la forma C
h) i
E(a; h) ha de ser una funcio dh tal que limh0E(a; h) = 0 (doncs O(h) es com a mnim depotencia h2)
Per tant, direm que una funcio deR a R es diferenciable en el punta si en lentorn daquest
punt la podem expressar com
f(a + h) =f(a) + C h + h E(a; h) (2.22)
on C es una constant i E(a; h) una funcio dh tal que limh0E(a; h) = 0.De la definicio anterior esta clar que si una funcio de R a R es diferenciable en a, tambe es
derivable i la seva derivada es precisament igual a la constantC
f(a) =limh0f(a + h) f(a)
h =C+ limh0E(a; h) =C (2.23)
Per altra banda si considerem una funcio de R aR que tingui derivada en un punt a:
f(a) =limh0f(a + h) f(a)
h (2.24)
aleshores podem definir
E(a; h)
f(a + h) f(a)
h f(a), h
= 0 (2.25)
i comlimh0E(a; h) = 0 tambe definim E(a; 0) = 0. AleshoresE(a; h) sera una funcio contnuade h i podem escriure
f(a + h) =f(a) + f(a)h + hE(a; h),h (2.26)que juntament amb el fet de que limh0E(a; h) = 0, ens indica que si una funcio de R a R esderivable en el punt a, tambe es diferenciable en aquest punt. Una altra forma de veure-ho es
observant que la diferencia entre lincrement de la funcio en el punta i el diferencial en el mateix
punt
fa dfa= f(a + h) f(a) f(a)h= hE(a; h) (2.27)es un infinitessim dordre superior a h (doncs quant h 0 tenim que E(a; h) 0 i per tanthE(a; h) es un infiniessim dordre superior a h, es a dir O(h))
Anem ara a generalitzar aquests conceptes a Rn.
2.2.2 Diferencial per funcions de Rn a Rm
Direm que la funcio f :D Rn Rm es diferenciable en el punt a Int(D) si existeix
una transformacio lineal Ta : Rn Rm
i una funcio vector E(a,h) :Rn
Rm
-
7/23/2019 Clcul de Diverses Variables
28/115
22 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
tal que:f(a + h) = f(a ) + Ta (h)+ h E(a ; h) (2.28)
amb limh0E(a,h) = 0. Com a es interior al Domini existeix Bn(a ; r) D, aleshores nomes
consideremh tals que a + h Bn(a ; r) on la funcio f esta ben definida.Ta (h) sanomena diferencial total de la funcio ena . Tambe es denota per:
Ta (h) =d f(a )(h) = (D f)(a )(h) (2.29)
o tambe
d fa (h) = (D f)a (h) (2.30)
Si en funcions de R a R ,
y= df(dx) + f(a) =f(a)dx + f(a) (2.31)
representava lequacio de la recta tangent en el punt a de la funci o f(x), ara
z = d fa (dx ) + f(a ) = Ta (dx ) + f(a ) (2.32)
representara lequacio del pla tangent en el punt a de la funcio f(x )
NOTA. Lexpressio
z = f(a ) + Ta (x a ) (2.33)sanomena formula de Taylor de 1er ordre de la funcio fal voltan del punt a.
EXEMPLE. La funcio f : R2 R on f(x, y) = ex+y + 2 sin(2x y) es diferenciable en elpunt (0,0) i, com veurem mes endavant, la diferencial val:
df(0,0)(x, y) = 5x y (2.34)
Per a comprovar-ho hem de veure que laplicacio sigui linial (ho es) i que
limx 0E(0;x ) =limx0f(x, y) f(0, 0) df(0,0)(x, y)
x = 0 (2.35)Expandint les funcions exponencial i sinus per valors petits:
limx0E(0;x ) =lim(x,y)(0,0)ex+y + 2 sin(2x y) 1 (5x y)
x2 + y2
= lim(x,y)(0,0)1 + (x + y) + (x + y)2/2 + ... + 2((2x y) (2x y)3/3! + ...) 1 5x + y
x2 + y2= lim(x,y)(0,0) (x + y)
2/2 2(2x y)3/3! + ...x2 + y2
= 0 (2.36)
Si f(x ) es diferenciable en a aleshores Ta (u) = f(a ; u)
.
En efecte, agafem h= hu ( h =| h |), si f(x ) es diferenciable en a
f(a ; u) = limh0f(a + hu) f(a )
h =limh0
Ta (hu)+ hu E(a ; h)h
= limh0h Ta (u)+
|h
| E(a ; h)
h =Ta (u) 1 limh0E(a ;
h) =Ta (u) (2.37)
-
7/23/2019 Clcul de Diverses Variables
29/115
2.2 Diferencial duna funcio. 23
que ens dona una manera de trobar la funci o diferencial a traves de calcular la derivada direc-
cional. De totes maneres la existencia de totes les derivades direccionals no garanteix que la
funcio sigui diferenciable. Per exemple, en 1.45 hem vist un cas de funcio on existeixen totes
les derivades direccionals en el (0, 0), pero com aquestes no son una aplicacio lineal, ja podem
afirmar que la funcio NO es diferenciable en aquest punt (de fet hem vist que no es ni contnua).
EXEMPLE. Anem a calcular el diferencial en el (0,0) de la funciof(x, y) =ex+y + 2 sin(2xy). Com ja hem demostrat en 2.36 que es diferenciable en aquell punt, podem utilitzar el fet de
que el diferencial T0(u) es igual a f(0; u)
T0(u) = f(0; u) =limh0
f(0 + hu) f(0)h
=limh0f(0 + hu1, 0 + hu2) f(0, 0)
h
= limh0ehu1+hu2 + 2 sin(2hu1 hu2) 1
h
= limh01 + (hu1+ hu2) + (hu1+ hu2)
2/2 + ... + 2((2hu1 hu2) (2hu1 hu2)3/3! + ...)h
= = 1 + (u1+ u2) + 2(2u1 u2) = 5u1 u2 (2.38)
2.2.3 Expressio del diferencial per funcions escalars de Rn R. GradientSigui{ei}la base canonica de Rn i f(x ) una funcio escalar diferenciable de Rn R. Aleshoresel seu diferencial (que sera una funcio lineal i escalar) es pot escriure com:
Ta (h) =Ta (n
i=1
hiei) =n
i=1
hiTa (ei) =n
i=1
hif(a ; ei) =
ni=1
hif
xi
a
= fa h (2.39)
on
fa
( fx
1a
,.., fxn a
) i sanomena gradient de la funcio f en el punt a .
Si f es diferenciable ena , aleshores acabem de veure quef(a + dx ) =f(a ) + fa dx + O(dx ). Per tant, la direcciodx de creixement mes gran de la funcio en el punta sera precisamentla direccio del gradient (doncs el producte escalar entre el gradient i la direccio es maxim).
EXEMPLE. Sigui la funcio f(x, y) =x2 +y2 anem a veure de es diferenciable en el (1, 1) i
quin es el seu diferencial. Si fos diferenciable, el diferencial hauria de ser
df(1,1)(h) = h f(1,1) = h (f
x
(1,1)
,f
y
(1,1)
) = h ( 2x|(1,1) ,2y|(1,1)) = h (2, 2) = 2h1+ 2h2(2.40)
que es una aplicacio lineal. Per acabar de comprovar que es diferenciable hem de veure que la
diferencia entre el diferencial i el increment de la funcio es dordre O( h ). Efectivament:
limh(0,0)E((1, 1);h) =limh(0,0)
f((1, 1) + (h1, h2)) f(1, 1) df(1,1)(h) h
= limh(0,0)(1 + h1)
2 + (1 + h2)2 2 2h1 2h2
h21+ h22
= 0 (2.41)
EXEMPLE. Anem a calcular el diferencial en el (0,0) de la funciof(x, y) =ex+y + 2 sin(2xy). Com ja hem demostrat en 2.36 que es diferenciable en aquell punt, podem utilitzar el fet de
que el diferencial T0(u) es igual a f0 h
-
7/23/2019 Clcul de Diverses Variables
30/115
24 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
El gradient es:
f(0,0)= (f
x
(0,0)
,f
y
(0,0)
) = ((ex+y + 4 cos(2x y))(0,0) ,(ex+y 2 cos(2x y))(0,0)) = (5, 1)(2.42)
i per tant
T0(h1, h2) = f(0,0) (h1, h2) = (5, 1) (h1, h2) = 5h1 h2 (2.43)
Pla tangent
Sigui una funciof :D R2 Rque es pot representar en 3 dimensions com es veu en la figura2.3. Segons el que hem vist, lequacio del pla tangent a la superfcie en el punt (a, f (a )) sera:
z = f(a ) + df(a )(x ) =f(a ) + f(a ) (x a ) =f(a1, a2) +f
x
a
(xax) + fy
a
(y ay) (2.44)
Figura 2.3: Pla tangent
EXEMPLE. El pla tangent de la funcio f(x, y) =x2 + y2 en el punt (1, 1), com coneixem el
diferencial (eq. 2.40), sera
z= f(1, 1) + df(1,1)((x, y) (1, 1)) = 2 + 2(x 1) + 2(y 1) (2.45)
2.2.4 Expressio del diferencial per funcions vectorials de Rn
R
m. Matriu
Jacobiana
Sigui{ei}({ej}) la base canonica de Rn(Rm) i f(x ) una funcio vectorial de Rn Rm:
f(x ) =m
k=1
fk (x )ek (2.46)
on fk (x ) son les m funcions escalars que defineixen les components de f. Aleshores, les seves
derivades direccionals es poden expressar com:
f(a ; u) =limh
0
f(a + hu) f(a )h
=m
k=1
limh
0fk(a + hu) fk (a )
h
ek =m
k=1
fk (a ; u)ek (2.47)
-
7/23/2019 Clcul de Diverses Variables
31/115
2.2 Diferencial duna funcio. 25
Si f es diferenciable en a el seu diferencial (que sera una funcio lineal i vectorial) es pot
escriure com:
Ta (h) = Ta (n
i=1
hiei) =n
i=1
hi Ta (ei) =n
i=1
hi f(a ; ei) =
n
i=1
hi
m
k=1
fk(a ; ei)ek
=n
i=1
hi
mk=1
fkxi
(a )
ek =m
k=1
ni=1
hifkxi
(a )
ek =
mk=1
( fk )a h
ek (2.48)
pero com Ta (h) =m
k=1
Ta (h)
k
ek ( on
Ta (h)k
representa la componentk del vector Ta (h)),
podem identificar Ta (h)
k
=
( fk )a h
=n
i=1
(Difk )a hi (2.49)
i que es pot representar en forma matricial:
Ta (h) =
Ta (h)1
Ta (h)
2
.
.Ta (h)
n
=
(D1f1)a (D2f1)a ... (Dnf1)a
(D1f2)a (D2f2)a ... (Dnf2)a
.
.
(D1fm)a (D2fm)a ... (Dnfm)a
h1
h2
.
.
hn
(2.50)
Com Ta (h) = (D f)a (h), lexpressio anterior defineix clarament la matriu (D f)a que sanomena
la matriu jacobiana de f en el punt a . Noteu que les files daquesta matriu son els gradients
dels diferents components fk de la funcio vectorial f.
EXEMPLE. Sigui la funcio f : R3 R2 definida per f(x,y ,z) = (zex, yez). Aquestafuncio es diferenciable a tot R3 i la matriu jacobiana en el punt (x,y ,z) sera:
(D f)x =
(D1f1)x (D2f1)x (D3f1)x
(D1f2)x (D2f2)x (D3f2)x
=
zex 0 ex
0 ez yez
= (2.51)
i la diferencial en el punt (x,y ,z) sera una funcio vectorial
d fx (h) = (D f)xh=
zex 0 ex
0 ez yez
h1
h2
h3
(2.52)
2.2.5 Condicions de diferenciabilitatAlgunes condicions necessaries
Continutat.Si una funcio f es diferenciable en un punt a , aleshores es contnua en aquest punt.
limx af(x ) =limh0f(a + h) =limh0
f(a ) + Ta (h)+ h E(a ; h)
= f(a ) (2.53)
aixo implica que la continutat es una condicio necessaria per a que una funcio pugui ser
diferenciable, pero no es suficient: podem tenir funcions contnues que no siguin diferenci-
ables.
-
7/23/2019 Clcul de Diverses Variables
32/115
26 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
EXEMPLE. Exemple de funcio contnua no diferenciable:
f(x, y) =
xyx2+y2
si (x, y) = (0, 0)
0 si (x, y) = (0, 0)(2.54)
per veure si es contnua en (0, 0) prenem primerament els lmits direccionals:
lim(x,y)(0,0),y=mx= limx0xmx
x2 + m2x2 =limx0
mx1 + m2
= 0 (2.55)
Aix si el lmit existeix aquest ha de ser 0. Ho podem comprovar amb la deficinio de lmit
observant que
| f(x, y) 0 |=| xyx2 + y2
|= | x | | y|x2 + y2
0 podem agafar= tal que si x 0 = x2 + y2 < aleshores veiem que| f(x, y) 0|< i per tant el lmit existeix i val 0. Aleshores aquesta funcio es contnuadoncs el lmit coincideix amb el valor de la funcio.
Comprovem ara si es diferenciable en (0, 0). Com les derivades direccionals valen
f(0; u) = limh0
f(0 + hu) f(0, 0)h
= limh0
f(hu1, hu2) f(0, 0)h
=limh0hu1hu2
h2 =u1u2
(2.57)
les derivades parcials valen 0. Aleshores el diferencial en (0, 0), si existeix, valdra 0 pero
com el lmit
limh(0,0)E((0, 0);h) =limh(0,0)
f((0, 0) + (h1, h2)) f(0, 0) df(0,0)(h) h
= limh(0,0)h1h2/
h21+ h
22
h21+ h22
=limh(0,0)h1h2
h21+ h22
(2.58)
no existeix (depen del cam), la funcio no es diferenciable en (0, 0).
Existencia de les derivades parcials.Tambe hem vist que si una funcio es diferenciable en un punt aleshores existeixen les seves
derivades direccionals. Per tant lexistencia de les derivades direccionals es una condicio
necessaria per a que una funcio sigui diferenciable, pero com veurem en el seguent exemple
no es suficient.
EXEMPLE. Exemple de funcio amb totes les derivades direccionals i no diferenciable.
Hem vist en 2.14 que la funcio f(x, y) = 2xy2
x2+y4 per x = 0 i que val 0 en el punt 0, tenia
derivades direccionals en (0,0): f(0; u) = 2u22/u1 siu1= 0 i 0 siu1= 0. En canvi aquestafuncio no es diferenciable. Un motiu ve de que les seves derivades direccionals no son
lineals en u , un altre ve de que ja hem vist en 1.45 que no es contnua.
-
7/23/2019 Clcul de Diverses Variables
33/115
2.3 Teorema del valor mitja 27
Condicio suficient de diferenciabilitat
Sigui un funcio f : D Rn Rm, si existeix una de les derivades parcials D1 f,...,Dn f en elpunta i la resta n-1 daquestes derivades existeixen en un entorn de a i son contnues en el punt
a , aleshores la funcio es diferenciable en el punt a .
NOTA. Aquesta es una condicio suficient pero no es una condicio necessaria de diferenciabi-litat: podem tenir funcions diferenciables on mes duna de les seves derivades parcials no siguin
contnues. Exemple:
f(x, y) =
(x2 + y2)sin 1
x2+y2 si (x, y) = (0, 0)
0 si (x, y) = (0, 0) (2.59)
Aquesta funcio admet derivades parcials en tots els punts. Per (x, y) = (0, 0) tenim
f
x = 2x sin
1
x2 + y2 2x
x2 + y2cos
1
x2 + y2
f
y = 2y sin 1
x2 + y2 2y
x2 + y2cos 1
x2 + y2 (2.60)
mentre que en (x, y) = (0, 0) tenim:
f
x
(0,0)
=limh0h2 sin 1
h2 0
h = 0
f
y
(0,0)
=limh0h2 sin 1
h2 0
h = 0 (2.61)
Les parcials existeixen en tots els punt pero no son contnues en el (x, y) = (0, 0) doncs
limy0(limx0)fx
= limy0(0) = 0
limx0(limy0)f
x = limx0(2x sin
1
x2 2x
x2cos
1
x2) (2.62)
i el darrer no existeix. Igualment fy tampoc es contnua en el (x, y) = (0, 0).
Per contra la funcio es diferenciable en el (x, y) = (0, 0) doncs
limh0E(0;h) = limh0
f0(h) df0(h) h =limh0
f(0 + h) f(0) f0 h h
= limh0 f(h1, h2) 0 0 h =limh0(h
2
1+ h
2
2)sin
1
h21+h22h21+ h
22
= 0 (2.63)
2.3 Teorema del valor mitja
Recordem que en funcions f :D R R el teorema del valor mitja ens diu que si la funcio esdiferenciable en el interval [a, b]D aleshores existeix com a mnim un puntc(a, b) tal que(veure figura 2.4):
f(c) =
f(b)
f(a)
b a , o be f(b) f(a) =f(c)(b a) (2.64)
-
7/23/2019 Clcul de Diverses Variables
34/115
28 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
Figura 2.4: Teorema del valor mitja
En el cas duna funcio f : D R2 R si agafem dos punts a b de D on la funcio esdiferenciable en tots el punts de la recta que els uneix, podem aplicar el teorema del valor mitja
de R a R restringint-nos al estudi de la funcio en aquesta recta. Aleshores com a mnim ha
dexistir un punt c de la recta (amb vector unitari u= (b a )/ b a ) tal que
f(c ; u) =f(b) f(a )
b a (2.65)
per tantf(b) f(a ) = fc u b a = fc (b a )
Teorema del valor mitja per funcions f :D
Rn
R
Es pot generalitzar el que acabem de veure per funcions f : D R2 R. En el cas dunafuncio f : D Rn R si agafem dos punts a b de D on la funcio es diferenciable en tots elpunts de la recta que els uneix, aleshores com a mnim ha dexistir un puntc de la recta que els
uneix tal que
f(b) f(a ) = fc (b a ) (2.66)
Teorema del valor mitja per funcions f :D Rn Rm
Per funcions vectorials f :D Rn Rm, es pot aplicar el teorema anterior a cada una de lescomponents, pero no hi ha cap rao per la qual tots els punts c i trobats per cada component i,siguin el mateix.
El mes proper al teorema del valor mitja en aquest cas es que z Rmc que depen de z talque:
z ( f(b) f(a )) = z
(D f)c (b a )
(2.67)
i que es facilment demostrable si apliquem el teorema anterior a la funciog = fz : D Rn R.Efectivament, com existeix un c tal que g (a ) g(b) = gc (b a ), aleshores
z ( f(a ) f(b)) =n
i=1
g
xi c (bi ai) =n
i=1
m
k=1
zkfkxi c (bi ai) = z (D
f)c (b a ) (2.68)
-
7/23/2019 Clcul de Diverses Variables
35/115
2.4 Regla de la cadena. 29
2.4 Regla de la cadena.
Siguin les funcions de la figura 2.5 on
A Rn f B Rm g Rs
af b= f(a ) gc = g ( f(a ))
Figura 2.5: Composicio de funcions
Si f es diferenciable en a , amb jacobiana (D f)a i g es diferenciable en b = f(a ) B, ambjacobiana (Dg )b aleshores la funcio composta
h= go f es tambe diferenciable en a amb matriu
jacobiana
(Dh)a = (Dg ) f(a )(Df)a (2.69)
Efectivament
h(a + y) h(a ) =g ( f(a +y )) g ( f(a )) =g (b +v ) g (b) (2.70)
on hem utilitzat b = f(a ) i hem anomenat b+v = f(a + y ). Aleshores com f es diferenciable
ena :
v = f(a +y ) f(a ) = (D f)a (y )+ y Ef(a ; y) (2.71)
on limy0Ef(a ;y ) = 0. Com g es diferenciable enb
g (b +v ) g(b) = (Dg )b(v )+ v Eg (b;v ) (2.72)
on limv 0Eg (b;v ) = 0. Aleshores podem escriure
h(a +y ) h(a ) = g (b +v ) g (b) = (Dg )b
(D f)a (y )+ y Ef(a ; y)
+ v Eg (b;v )= (Dg )b(D
f)a (y )+ y (Dg )bEf(a ; y)+ v Eg (b;v )
= (Dg )b
(D f)a (y )+y
(Dg )b(Ef(a ; y) +v y
Eg (b;v ) (2.73)
-
7/23/2019 Clcul de Diverses Variables
36/115
30 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
Aleshores si h es diferenciable en el punt a , voldra dir que
h(a +y ) h(a ) = (Dh)a (y )+ y Eh(a ;y ) (2.74)
on limy 0Eh(a ;y ) = 0. Comparant aquest requeriment amb lequacio 2.73 veiem que si de-mostrem que el lmit del que es troba entre els claudators va cap a 0 quant y
0 haurem
demostrat que h es diferenciable en el punt a i a mes a mes que la seva matriu jacobiana es:
(Dh)a = (Dg )b(Df)a .
Anem a demostrar ara que el que es troba entre els claudators de lequacio 2.73 va cap a 0
quant y 0. Com f es diferenciable v 0 quant y 0. Aleshores Ef i Eg aniran cap a zero(noteu que (Dg )b es una constant). Lunic problema podria venir si
v y no estigues fitat, pero
anem a veure que si que ho esta.
v = (D f)a (y )+ y Ef(a ;y ) (D f)a (y ) + y Ef(a ; y)
m
i=1 |
(
fi)a
y|
+y
Ef
(a ; y)
mi=1
( fi)a y + y Ef(a ;y ) (2.75)
Per tantv y
mi=1
( fk )a + Ef(a ;y ) (2.76)
que esta acotat com volem demostrar.
Considerem el cas general
A Rnf B Rm g Rs
xf f(x ) =u gg (u ) =g ( f(x )) = h(x )
Si les funcions son diferenciables, acabem de veure que (Dh)x = (Dg )u (D f)x :
h1x1
... h1xn. ... .
. ... .hsx1
... hsxn
=
g1u1
... g1um. ... .
. ... .gsu1
... gsum
f1x1
... f1xn. ... .
. ... .fmx1
... fmxn
(2.77)
i que podem reescriure comhjxi
=m
k=1
gjuk
fkxi
=m
k=1
gjuk
ukxi
(2.78)
on hem utilitzat que u = f(x ) per escriure la segona igualtat de forma que es mes facil de
recordar .
EXEMPLE. Per funcions de R a R,
A R f B R g R
x
f
f(x) =u g
g(u) =g(f(x)) =h(x)
-
7/23/2019 Clcul de Diverses Variables
37/115
2.4 Regla de la cadena. 31
aleshoresdh
dx =
dg
du
du
dx (2.79)
Si agafem f(x) =x2 =u i g (u) = sin u, aleshores h(x) =g(f(x)) =g(x2) = sin x2 i per tant
dh
dx
= dg
du
du
dx
= cos(u)2x= cos(x2)2x (2.80)
EXEMPLE. Considerem
A R2 f B R2 g R(x, y)
f(x,y) (u= f1(x, y), v= f2(x, y)) g(u,v) g(u(x, y), v(x, y)) =h(x, y)
( hxhy ) = (
gu
gv )
ux
uy
vx
vy
(2.81)
que podem reescriure
h
x =
g
u
u
x+
g
v
v
x
hy
= gu
uy
+gv
vy
(2.82)
com esperarem.
Si agafem f(x, y) = (xy, x + y) = (u, v) ig(u, v) =u2 + v2, aleshoresh(x, y) =g(f(x, y)) =g(x y, x + y) = (x y)2 + (x + y)2. De forma directa
h
x= 4x,
h
y = 4y (2.83)
De forma indirecta
g
u = 2u,
g
v = 2v,u
x = 1,
u
y = 1,
v
x = 1,
v
y = 1 (2.84)
per tant aplicant 2.82h
x= 2u + 2v= 4x,
h
y = 2u + 2v= 4y (2.85)
EXEMPLE. Considerem
A
R2
f
B
R
g
R3
(x, y)f(x,y) t= f(x, y) g (t) (g1(t(x, y)), g2(t(x, y)), g3(t(x, y))) = (h1(x, y), h2(x, y), h3(x, y))
h1x
h1y
h2x
h2y
h3x
h3y
=
g1tg2tg3t
( tx ty ) (2.86)
que podem reescriure com
hix
= gi
t
t
xhi
y =
gi
t
t
y (2.87)
-
7/23/2019 Clcul de Diverses Variables
38/115
32 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
com esperarem.
Si agafem f(x, y) =x2+y2 =t ig (t) = (sin t, et, t2) aleshores h(x, y) = (sin(x2+y2), ex2+y2 , (x2+
y2)2).
De forma directa la matriu jacobiana de h:
h1
x
h1
yh2x
h2y
h3x
h3y
= 2x cos(x2
+ y
2
) 2y cos(x
2
+ y
2
)2xex
2+y2 2yex2+y2
4x(x2 + y2) 4y(x2 + y2)
(2.88)
de forma indirecta
h1x
h1y
h2x
h2y
h3x
h3y
=
g1tg2tg3t
( tx ty ) =
cos t
et
2t
( 2x 2y ) =
2x cos(x2 + y2) 2y cos(x2 + y2)
2xex2+y2 2yex
2+y2
4x(x2 + y2) 4y(x2 + y2)
(2.89)
2.5 Derivades successives. Derivades creuades
Sigui una funcio f : D Rn Rm. Les seves derivades parcials Di f = fxi son, a la vega-da, tambe funcions de Rn Rm. Aleshores podem calcular les derivades parcials daquestesfuncions i que sanomenen derivades parcials de segon ordre:
Dj(Di f)) =
xj
f
xi
(2.90)
i tambe es fa servir la notacio:
Dj(Di f)) =Di,j f = 2 f
xjxi(2.91)
Igualment es defineixen les derivades parcials dordre superior
Di,j,...k f= k f
xi...xk(2.92)
Un fet interessant es en quines circunstanties les derivades poden commutar, per exemple
si es equivalent fer 2 f
xjxique
2 fxixj
EXEMPLE. Agafem la funcio
f(x, y) =
xy(x2y2)x2+y2
si (x, y) = (0, 0)
0 si (x, y) = (0, 0) (2.93)
per a x = 0 tenimf
x =
y(x4 + 4x2y2 y4)(x2 + y2)2
(2.94)
mentre que per x = 0 tenim
f
x(0,0)
=limh
0f(h, 0) f(0, 0)
h
=limh
00 0
h
= 0 (2.95)
-
7/23/2019 Clcul de Diverses Variables
39/115
2.5 Derivades successives. Derivades creuades 33
ara podem calcular la derivada de segon ordre en el punt (0,0):
y
f
x
(0,0)
=limh0fx (0, h) fx (0, 0)
h =limh0
h5/h4 0h
= 1 (2.96)
igualment podem calcular per a x
= 0 tenim
f
y =
x(x4 4x2y2 y4)(x2 + y2)2
(2.97)
mentre que per x = 0 tenim
f
y
(0,0)
=limh0f(0, h) f(0, 0)
h =limh0
0 0h
= 0 (2.98)
ara podem calcular la derivada de segon ordre en el punt (0,0):
x
fy
(0,0)
=limh0f
y (h, 0) f
y (0, 0)h
=limh0 h5
/h4
0h
= 1 (2.99)
veiem que en aquest cas les derivades creuades no son iguals.
2.5.1 Igualtat entre les derivades creuades
Existeixen diversos teoremes que donen condicions suficients per a que una funcio de f :Rn Rm tingui les derivades creuades iguals en la seva k-component, es a dir:
2fk
xixj=
2fk
xjxk(2.100)
Per simplicitat ens restringirem a funcions de f :R2 R, pero la seva generalitzacio es obvia.
Teorema de Bonnet
Si f :R2 R es de la classe C2 en el punt (x, y) aleshores les derivades parcials creuades soniguals.
NOTA. Una funcio f : Rn R es diu que es de classe C1 en el punt x si es un copdiferenciable en x (recordem que si totes les seves derivades parcials existeixen i son contnues
aixo implica que es diferenciable, no al inreves). Aleshores C2
vol dir que la funcio es duguesvegades diferenciable (ella i les seves primeres derivades parcials). Un funcio on les derivades
fins a segon ordre existeixen i siguin contnues en el punt x , sera de classe C2. Per simplicitat
nomes demostrarem el teorema per aquest tipus de funcions de C2.
Sigui doncs f(x, y) una funcio on les derivades fins a segon ordre existeixen i son contnues
en el punt (x, y). En lentorn del punt x on definim:
(h, k) f(x + h, y+ k) f(x + h, y) f(x, y+ k) + f(x, y)G(x) f(x, y+ k) f(x, y)
H(y) f(x + h, y) f(x, y) (2.101)
-
7/23/2019 Clcul de Diverses Variables
40/115
34 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
Comf es diferenciable en un entorn de (x, y), tambe ho seran G en x i H en y . Aleshores
(h, k) = G(x + h) G(x) =G(a)h=
f
x
(a,y+k)
fx
(a,y)
h=
2f
yx
(a,b)
hk
(h, k) = H(y+ k)
H(y) =H(d)k=
f
y(x+h,d)
f
y(x,d)
k= 2f
xy(c,d)
hk
(2.102)
on a(x, x+h), b(y, y+k), c(x, x+h) i d(y, y+k). Per tant, existeixen un puntsa,b,ci d en els entorns esmentats, tals que
2f
yx
(a,b)
= 2f
xy
(c,d)
(2.103)
Si ara femh, k 0, aleshoresa, c xi b, d y. Com estem assumint que les derivades segonesson contnues en (x, y) aleshores
limh,k02f
yx
(a,b)
= 2f
yx
(x,y)
=limh,k02f
xy
(c,d)
= 2f
xy
(x,y)
(2.104)
com volem demostrar.
Existeixen condicions suficients encara menys restrictives, com ho demostra el seguent teo-
rema.
Teorema de Schwarz
Sigui f(x, y) un funcio definida en un entorn S de (x, y). Si existeixen les derivades fx ,fy i
2f
yx en S i 2f
yx es continua en (x, y), aleshores les derivades creuades en (x, y) son iguals.Efectivament,
2f
xy
(x,y)
= limh0
fy
(x+h,y)
fy(x,y)
h
= limh0limk0f(x+h,y+k)f(x+h,y)
k f(x,y+k)f(x,y)kh
= limh0limk0f(x + h, y+ k) f(x + h, y) f(x, y+ k) + f(x, y)
kh
= limh0
limk0
(h, k)
hk =lim
h,k02f
yx(a,b)
= 2f
yx(x,y)
(2.105)
on en el darrer pas hem utilitzat el fet que 2f
yx es continua en (x, y).
2.6 Formula de Taylor. Matriu hessiana.
Recordem que per funcions de R en R amb derivades dordre < m diferenciables en [a, x], la
formula de Taylor permet escriure
f(x) =f(a) +m1
k=1
1
k!
f(k)(a)(x
a)k +
1
m!
f(m)(z)(x
a)m (2.106)
-
7/23/2019 Clcul de Diverses Variables
41/115
2.6 Formula de Taylor. Matriu hessiana. 35
on z (a, x). Aquesta expressio te la seva generalitzacio per funcions escalars de diversesvariables.
Sigui una funcio escalar f :D Rn R amb derivades parcials dordre < m diferenciablesen D, aleshores donats dos punts a i x tals que la lnea que els uneix L(a,x )D , existeix unpunt z
L(a,x ) tal que
f(x ) =f(a ) +m1k=1
1
k!f(k)(a ;x a ) + 1
m!f(m)(z ;x a ) (2.107)
que es la formula de Taylor per funcions de varies variables i on
f(1)(a ;x a ) = ni=1 fxia
(xi ai)
f(2)(a ;x a ) = ni=1nj=1 2fxixja
(xi ai)(xj aj)
en general f(k)(a ;x a ) = ni1=1 ...
nik=1
kfxi1...xik a (xi1 ai1)...(xik aik)
Donada una funcio escalar f : D Rn R de la classe C2 o superior, definim la matriuHessiana com una matriu de n n on els seus elements son
(Ha )i,j = (Ha )j,i 2f
xixj
a
(2.108)
i ara la formula de Taylor fins a segon ordre es pot escriure de forma compacta com
f(x ) = f(a ) +n
i=1
f
xi
a
(xi ai) + 12!
ni=1
nj=1
2f
xixj
a
(xi ai)(xj aj) + 13!
f(3)(z ;x a )
= f(a ) + fa
(x a ) + 12!
(x a )Ha (x a ) + 13! f(3)(z ;x a ) (2.109)
Com el darrer terme 13!f(3)(z ;x a ) es dordreo(x a 2) podem expressar-lo com 13!f(3)(z ;x
a ) = x a 2 E2(a ;x a ) i on lim(x a )0E2(a ;x a ) = 0. Estudiant aquest terme podemdonar una cota a lerror que cometem al calcular f(x ) si nomes utilitzem en el seu calcul els
termes del gradient i la Hessiana.
EXEMPLE. Desenvoluparf(x, y) =ln(1 + x + y)ey fins a segon ordre al voltant del (0,0)
f(x ) =f(0) + f0
(x 0) + 12!
(x 0)H0(x 0) + 1
3!f(3)(z ;x a ) (2.110)
on z =a + (x a ) amb 0<
-
7/23/2019 Clcul de Diverses Variables
42/115
36 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
que en el punt (0,0) donen:
f
x
0
= 1, f
y
0
= 1, 2f
x2
0
= 1, 2f
yx
0
= 0, 2f
xy
0
= 0, 2f
y2
0
= 1 (2.112)
i per tant la Hessiana val
H0=
2fx2
0
2fxy
0
2fyx
0
2fy2
0
=
1 00 1
(2.113)
aleshores
f(x ) = 0 + (1, 1) (x, y) + 12!
(x, y)
1 00 1
x
y
+ O(x a 2)
= x + y+1
2(x, y)
xy
+ O(x a 2)
= x + y+12
(x2 + y2) + O(x a 2) (2.114)
addicionalment podrem calcular les derivades dordre 3 i donar una cota a lerror, pero aixo ho
farem en el seguent exemple.
El mateix resultat daquest desenvolupament fins a potencies en xy dordre dos, el podem
haver obtingut utilitzant
ln(1 + x + y) = (x + y) (x + y)2
2 + O((x + y)2)
ey = 1 + y+ y
2
2! + O(y2) (2.115)
i per tant
ln(1 + x + y)ey = ((x + y) (x + y)2
2 + ...)(1 + y+
y2
2! + ...)
= (x + y) + (x + y)y (x + y)2
2 + ....= x + y+
1
2(x2 + y2) + ...(2.116)
EXEMPLE. Desenvoluparf(x, y) = sin(x + y) fins a segon ordre al voltant del (0,0)
f(x ) =f(0) + f0
(x 0) + 12!
(x 0)H0(x 0) + 13! f(3)(z ;x a ) (2.117)
on z = 0 + (x 0) = (x, y) amb 0<
-
7/23/2019 Clcul de Diverses Variables
43/115
2.7 Gradient. Rotacional. Divergencia 37
Aleshores
f(x ) = 0 + (1, 1) (x, y) + 0 + 13!
2i=1
2j=1
2k=1
3f
xixjxk
z
(xi 0)...(xj 0)(xk 0)
= x + y
1
3!
cos(x + y)2
i=1
2
j=1
2
k=1
xixjxk
= x + y 13!
cos(x + y)(x3 + 3x2y+ 3xy2 + y3)
= x + y 16
cos(x + y)(x + y)3 (2.119)
Si ens quedem nomes fins a segon ordre de potencies sin(x + y) x + y i el error que cometemesta fitat per
E max| 16
cos(x + y)(x + y)3 | 16| (x + y)3 | (2.120)
Per exemple podem escriure que sin(0.1 + 0.1) = 0.2 160.23 = 0.200000 0.0013333, mentreque lexacte es sin(0.1 + 0.1) = 0.1986693308.... Evidentment la diferencia entre el valor exacte i
el valor aproximat (0.2) es menor que la cota trobada per lerror, concretament aquesta diferencia
es 0.0013306....
2.7 Gradient. Rotacional. Divergencia
2.7.1 Gradient
En la seccio 2.2.3 ja hem introdut el gradient duna funcio escalar de n variables com
f= (
f
x1, ...,
f
xn) (2.121)
i que dona un vector de Rn. Aixo ens permet utilitzar una notacio forca addient per recordar el
que es el gradient. Definim loperador gradient que actua sobre funcions escalars com
( x1
,...,
xn) (2.122)
i entenem fcom esta definit en 2.121
2.7.2 Rotacional
Per funcions vectorials deR3
R3 definim el rotacional en un punt x com
rot f= f
i j kx
y
z
fx fy fz
= (fzy
fyz
,fx
z fz
x,
fyx
fxy
) (2.123)
PROPIETATS:
si : R3 R es diferenciable i tambe ho son les seves derivades parcials ( igualtat dederivades creuades), aleshores
( ) =
i j kx
y
z
x y z
= 0 (2.124)
-
7/23/2019 Clcul de Diverses Variables
44/115
38 Chapter 2. CALCUL DIFERENCIAL EN DIVERSES VARIABLES.
es a dir rot(gradient ) = 0
si : R3 R i f :R3 R3 aleshores podeu demostrar que
( f) =( f) + ( ) f (2.125)
2.7.3 Divergencia
Per funcions vectorials deRn Rn definim la divergencia en un punt x com
div f= fn
i=1
xifi =
ni=1
fixi
(2.126)
PROPIETATS.
Per funcions vectorials f :R3 R3 tenim
( f) = 0 (2.127)es a dir div(rot f) = 0
si : R3 R i f :R3 R3 aleshores podeu demostrar que
( f) =( f) + ( ) f (2.128)
2.7.4 Laplaciana
Es defineix la Laplaciana duna funcio escalar de variables (x,y ,z) com
=3
i=1
2
x2i(2.129)
-
7/23/2019 Clcul de Diverses Variables
45/115
Captol 3
APLICACIONS del CALCUL
DIFERENCIAL
En aquest captol tractarem dos problemes fonamentals de lanalisi: la funcio inversa i la funcioimplcita, com tambe alguna de les seves aplicacions, com el canvi de coordenades, calcul de
maxim i mnim,...
3.1 Funcio inversa.
Sigui la funciof :D R Rde la figura 3.1, diferenciable en els punts a, M,m i b. Veiem quela funcio es localment invertible en el punt a, no invertible en el maxim local Mni en el mnim
localm, pero tambe es invertible en el punt dinflexiob. Veiem dons que si la funcio te derivada
no nulla en un punt, aleshores es localment invertible en aquell punt, pero si la seva derivadasanulla hem de fer un estudi mes profund per decidir si es invertible o no en lentorn daquellpunt.
Figura 3.1: Exemple de funcio
Com exemple la funciof(x) =x3 es localment invertible en tots els seus punts del domini i a
mes a mes, es globalment invertible doncs no tenim dos punts del domini que vagin a la mateixa
-
7/23/2019 Clcul de Diverses Variables
46/115
40 Chapter 3. APLICACIONS del CALCUL DIFERENCIAL
imatge.
Lextensio a funcions vectorials de diverses variables ens diu que una funcio diferenciable en
a es localment invertible al voltant daquest punt si el determinat de la seva matriu jacobiana
en aquest punt es diferent de zero. Aquest determinat es diu la jacobiana i juga el mateix paper
que la derivada al demanar que una funcio de R
R sigui invertible en el punt a. Igualment,
si la jacobiana es zero no podem assegurar res sobre la invertibilitat de la funcio.
Per funcions vectorials de varies variables la igualtat de les dimensions dels espais del domini
i la imatge es un requeriment per a que pugui ser invertible. Aixo es degut a que , si aquest no
fos el cas, laplicacio o la seva inversa anirien dun espai de dimensio inferior a un altre de mes
dimensions i aleshores nomes podria generar un subespai.
3.1.1 Teorema de la funcio inversa.
Sigui f :D Rn Rn diferenciable en un obert S ( f C1 en S). Sigui T = f(S). Definim eljacobia daquesta funcio en el punt x
S com
Jf(x ) (f1,...,fn)
(x1, ...xn)| (D f)x |=
f1x1
... f1xn. ... .
. ... .fnx1
... fnxn
(3.1)
El teorema ens diu que si Jf(a ) = 0 aleshores existeixen dues boles obertes X S, Y T iuna funcio g unvocament determinada tal que
a X i f(a ) Y
Y = f(X) f es bijectiva de X a Y
g esta definida en Y i verifica:
g (Y) =X
g es diferenciable en Y (g C1) g = f1 es la funcio inversa de fen X.g ( f(x )) = x, x X
Les condicions daquest teorema son suficients pero no necessaries (com passa en funcions
de R a R).
Veiem un argument plausible per entendre la demanda Jf(a ) =| (D f)x |= 0. Com la funcioes diferenciable en a podem escriure
f(a + x ) f(a ) + (D f)a (x ) (3.2)
per tant
y = f(a ) + (D f)a (x ) (D f)a (a ) y f(a ) + (D f)a (a ) = (D f)a (x ) (3.3)i per poder expressar x en funcio de y el determinant de la matriu jacobiana (D f)a ha de ser
diferent de zero.
-
7/23/2019 Clcul de Diverses Variables
47/115
3.1 Funcio inversa. 41
La matriu jacobiana de la funcio inversa
Recordem que si h= g faleshores (Dh)x = (Dg ) f(x )(D f)x . Com x = f1( f(x )), ara podemaplicar la darrera relacio entre matrius jacobianes prenen hcom la identitat ig = f1. Aleshores
I= (D f1) f(x )(Df)x
(D f1) f(x )= (D
f)1x (3.4)
es a dir, la matriu jacobiana de la funcio inversa es la inversa de la matriu jacobiana de la funcio
original.
Com el determinant de la matriu inversa es el invers del determinant de la matriu original,
el jacobia de la funcio inversa es el invers del jacobia de la funcio original:
Jf1 = 1
Jf(3.5)
EXEMPLE. Considerem la funcio vectorial de R2 R2:
f :S R2 R2(x, y) (u, v) = f(x, y) = (f1(x, y), f2(x, y)) = (ex, sin(x + y)) (3.6)
Aquesta es localment invertible en el (0,0) doncs, com veurem, el seu jacobia no es nul. La
matriu jacobiana en qualsevol punt es
(D f)x =
D1f1 D2f1
D1f2 D2f2
=
ex 0
cos(x + y) cos(x + y)
(3.7)
i per tant el jacobia en qualsevol punt val
Jf(x ) =| (D f)x |= ex 0cos(x + y) cos(x + y)
=ex cos(x + y) (3.8)Aleshores lel jacobia en el punt (0,0) val
Jf(0) = 1 (3.9)
que com es diferent de 0, la funcio es localment invertible en (0,0).
Aquesta funcio sera localment invertible en tots els punts (x0, y0) on cos(x0+ y0) = 0.
En els punts on x+y = 2 +n, n Z y =x+ 2 +n la funcio resulta que no esinvertible doncs en aquests punts f2(x, y) = sin(x+ y) = sin(
2
+n) =
1 i per tant te un
maxim o un mnim.
Aquesta funcio NO es globalment invertible doncs tots els punts de la forma (x0, y0 +
2n), n Zdonen la mateixa imatge (ex0 , sin(x0+ y0))EXEMPLE. Considerem la funcio vectorial de R2 R2:
f(x, y) = (u(x, y), v(x, y)) = (ex + ey, ex ey) (3.10)
Com el jacobia en qualsevol punt val
Jf
(x ) =
|(D f)x
|= e
x ey
ex ey = 2exey
= 0
x
R2 (3.11)
-
7/23/2019 Clcul de Diverses Variables
48/115
42 Chapter 3. APLICACIONS del CALCUL DIFERENCIAL
la funcio es localment invertible en un entorn de cada punt de R2. Anem a veure que a mes a
mes es globalment invertible.u= ex + ey
v= ex ey
u + v= 2ex
u v= 2ey
x= ln u+v2y= ln uv2
(3.12)
com u+v >0 i u v >0 la regio de la imatge de fes la que es mostra en la figura 3.2 i quees on esta definida la funcio inversa. Per a cada punt (u, v), 3.12 determina unvocament (x, y).
la funcio f es globalment invertible
f1 :A R2 R2(u, v) (ln u + v
2 , ln
u v2
) (3.13)
Figura 3.2: regio de la imatge de f
Finalment calculem les matrius jacobianes tan de f i f1 i comproven que una es la inversade laltre.
(D f)x =
ux
uy
vx
vy
=
ex ey
ex ey
(D f1)u =
xu
xv
y
u
y
v
=
1u+v
1u+v
1
uv1
uv
(D f1)u= f(x )
(D f)x =
ex/2 ex/2ey/2 ey/2
ex ey
ex ey
=
1 0
0 1
=I (3.14)
Igualment
Jf(x ) = | (D f)x |= 2exey
Jf1 (u ) = | (D f1)u|= 1/(2exey) = 1/Jf(x ) (3.15)
3.1.2 Canvi de coordenades en R2 i R3.
Una de les aplicacions de la funcio inversa es en el canvi de coordenades.
-
7/23/2019 Clcul de Diverses Variables
49/115
3.1 Funcio inversa. 43
Coordenades polars en el pla
f :S R2 R2(r, ) (x= r cos , y= r sin ) (3.16)
on S= {(r, ); r >0, 0
-
7/23/2019 Clcul de Diverses Variables
50/115
44 Chapter 3. APLICACIONS del CALCUL DIFERENCIAL
Coordenades esferiques en R3
f :S R3 R3(r,,) (x= r sin cos , y= r sin sin , z = r cos ) (3.26)
on S= {(r,,); r >0, 0 , 0
-
7/23/2019 Clcul de Diverses Variables
51/115
3.2 Funcio implcita. 45
Per exemple
(D f1)11= r
x =
1
Jf
r cos sin r sin r sin cos 0 = sin cos = xx2 + y2 + z2 (3.33)
o tambe
(D f1)12= ry
= 1Jf
r cos sin r sin r sin sin 0 = sin sin = yx2 + y2 + z2 (3.34)
Finalment
(D f1)(x,y,z)=
rx
ry
rz
x
y
z
x
y
z
=
sin cos sin sin cos 1rcos cos
1rcos sin sin r
sinr cos cosr sin 0
(3.35)
i que tambe podem expressar en funcio de x, y ,z.
El fet de tenir un canvi de coordenades ens permet definir noves bases amb les que treballar
en lloc de la base canonica i expressar operadors com el gradient, rotacional,.. en aquestes noves
bases. Veure Apendix A per mes detalls.
3.2 Funcio implcita.
Un problema molt habitual es donar una corba en el pla de la forma implcita F(x, y) = 0 en
comptes de forma explcita y = f(x) ( si coneixem y = f(x) sempre podem reescriure com
F(x, y) =y f(x) = 0).La pregunta que ens fem es en quines condicions, donat F(x, y) = 0, podem trobar y en
funcio de x.
EXEMPLE. Sigui la funcio de la figura 3.3 F(x, y) =x2 + y2 1 = 0La solucioen aquest cas es y =1 x2 si x2 < 1 i localment sempre podrem decidir
en quina branca de les dos ens trobem. Per exemple si estem en el punt (1/
2, 1/
2) ens
trobem localment en la branca +, mentre que si estem en el punt (1 /
2, 1/2) ens trobemlocalment en la branca -. El problema el tenim en els punts (1, 0) doncs a lentorn daquestspunts puc decidir anar a qualsevol de les dues branques i per tant no estem davant duna funci o
(esta bivaluada).
Si z = F(x, y) el seu gradient F dona la direccio en el pla (x, y) de maxim creixementde la funcio, mentre que les direccions perpendiculars donaran les direccions on Fes mante l-
localmentestable: si dibuixem les corbes de nivell de F(x, y) el gradient sempre es perpendicular
a aquestes corbes. Si ara agafem la corba de nivellF(x, y) = 0 la relacio local y(x) ve donada
per direccio perpendicular al gradient: els unics punts on podem tenir problemes seran aquells
on la direccio de la corba de nivell segueixi j, es a dir on F j= Fy = 0.Una altre forma de veure-ho es observant que els punts problematics son aquells on y es fa
infinit. Com el vectorv = (Fy , Fx ) es perpendicular a Fi per tanty Fx /Fy , els possiblespunts problematics seran quant Fy = 0. Alternativament podem definirg (x) =F(x, y(x)) = 0
i aleshores
0 = dg
dx
=F
x
+ F
y
y
y=
FxFy
(3.36)
-
7/23/2019 Clcul de Diverses Variables
52/115
46 Chapter 3. APLICACIONS del CALCUL DIFERENCIAL
Figura 3.3: F(x, y) =x2 + y2 1 = 0
i per tant tornem a veure que els punts problematics seran aquells on Fy = 0
En resum, si F(x, y) = 0, es pot trobar y = y(x) localment en tots els punts on Fy = 0.Si Fy = 0 ho haurem destudiar mes detingudament. Per exemple F(x, y) =y
3 x = 0 teFy
(0,0)
= 0 pero no te cap problema en (0, 0), de fet y = x1/3 esta definida en tot R.
EXEMPLE. SiguiF(x,y ,z) =x2 + y2 + z2 1 = 0 i volem determinarz(x, y). Les solucionsl.localsson z = 1 x2 y2 en el cerclex2 + y2
-
7/23/2019 Clcul de Diverses Variables
53/115
3.2 Funcio implcita. 47
EXEMPLE. Sigui
F :R3 R2(x,y ,t) (F1(x,y ,t), F2(x,y ,t)) = (0, 0) (3.39)
Com tenim 3 variables i dues restriccions, nomes hi haura una variable independent. En quines
condicions podem trobar y =y(t) i x= x(t) al voltant de t0? ( amb F(x0, y0, t0) = (0, 0)) Per
tal de que les darreres funcions estiguin ben definides
x(t) x(t0) + dxdt
t0
(t t0)
y(t) y(t0) + dydt
t0
(t t0) (3.40)
les derivades dx/dt i dy/dt han dexistir. Aleshores si definimg (t) = (F1(x(t), y(t), t), F2(x(t), y(t), t)) =
(0, 0) tenim
0 =
dg1dt =
F1x
dx
dt +
F1y
dy
dt +
F1t 1
0 = dg2
dt =
F2x
dx
dt +
F2y
dy
dt +
F2t
1 (3.41)
que ens permet escriureF1x
F1y
F2x
F2y
(x0,y0,t0)
dxdtdydt
t0
=
F1tF2t
(x0,y0,t0)
(3.42)
Com veiem, per tal de que x(t) i y (t) estiguin ben definides, o sigui que existeixin les derivades
dx/dt i dy/dt en t0, cal que puguem invertir la darrera equacio i aixo nomes es pot fer si el
jacobia de Frespecte a les variables dependents(en aquest cas x, y) es diferent de zero.
(F1, F2)
(x, y) =
F1x
F1y
F2x
F2y
= 0 (3.43)3.2.1 Teorema de la funcio implcita.
Sigui
F :S Rn+k Rn
(x, t) F(x,t) amb x Rn , t Rk (3.44)
de classeC1 (diferenciable) enS(les x (t) les anomenarem variables dependents (independents).Sigui (x 0 , t0) un punt de Stal que F(x 0, t0) = 0 i sigui el jacobian n
det[DxF](x 0 ,t0)= ( F)
(x )
(x 0 ,t0)
= 0 (3.45)
aleshores existeix un obertk-dimensional T tal que t0 T i una funcio vectorialh: T Rk Rn
t x = h(t) (3.46)
tal que
-
7/23/2019 Clcul de Diverses Variables
54/115
48 Chapter 3. APLICACIONS del CALCUL DIFERENCIAL
h esC1 en T
h(t0) = x 0 F(h(t), t) = 0 per cada t T
A mes a mes hi ha una relacio entre matrius jacobianes
(Dth)t0 = (DxF)1(x 0 ,t0)(DtF)(x 0 ,t0) (3.47)
DEMOSTRACIO. A partir de la funcio diferenciable
F :S Rn+k Rn
(x, t) F(x,t) amb x Rn , t Rk (3.48)
definim la nova funcio diferenciable
H :S R
n+k
Rn+k
(x, t) y = ( F , t) (3.49)
que sera invertible en (x, t) si
0 = H
(x,t)=
x1F1 xnF1 t1F1 tkF1...
. . . ...
... . . .
...
x1Fn xnFn t1Fn tkFn0 0 1 0...
. . . ...
... . . .
...
0 0 0 1
=
x1F1 xnF1
... . . .
...
x1Fn xnFn
=F
x (3.50)
Veiem doncs que si es invertible podrem expressar (x,t) en funcio de ( F , t). En el cas dun punt
(x 0 , t0) de S tal que F(x 0 , t0) = 0 on el jacobia anterior sigui no nul, aleshores podrem expressar
(x, t) en funcio de ( F , t) en lentorn de (0, t0) (veure figura 3.4). Si ara en aquest entorn nomes
considerem el punts on F =0 (imposicio donada per la funcio implcita) aleshores x queda en
funcio nomes de t com volem (x = h(t)).
A mes a mes si definim g (t) = F(h(t), t) = 0 tenim
0 =gitj
=
kFixk
hktj
+ Fitj
(3.51)
que en forma matricial es pot expressar evidentment com
0 =Dtg = DxF Dt
h + DtF (3.52)
i per tant
Dth= (Dx F)1DtF (3.53)
EXEMPLE. Sigui la funcio
F :S R5 R2
(u, v; x,y ,z) (u + v+ x2
y2
+ z2
, u2
+ v2
+ u 2xyz) (3.54)
-
7/23/2019 Clcul de Diverses Variables
55/115
3.2 Funcio implcita. 49
Figura 3.4: Funcio implcita
Aquesta funcio es diferenciable en qualsevol punt de R5. Si ara definim la funcio implcitaF(u, v; x,y ,z) = 0 , com tenim 5 variables i dues restriccions, tindrem nomes 3 variables inde-
pendents (podem expressar dues variables en funcio de les altres 3); podem expressar u, v en
funcio de x, y, z (noteu que en aquest exemple, comparat amb lenunciat del teorema, u juga el
paper de les x i x el paper de les t).
Si considerem el punt a = (1/2, 1/2, 0, 0, 0) com F(a ) = 0 i
(Du,v F) = F1u F1v
F2u
F2v
= 1 1
2u + 1 2v
(F1, F2)
(u, v)a =
1 1212 + 1 212 = 1 = 0 (3.55)es compleixen les hipotesis de teorema de la funcio implcita en aquest punt.
Calculem ara la matriu jacobiana de la funcio implcitaDxu . Per aixo podem intentar trobar
lexpresio explcita de u, v en funcio de x,y , z, fet que no sempre es possible, o be utilitzar la
regla de la cadena don hem obtingut que (Dxu )a = (DuF)1a (DxF)a . Per tant
(Dxu )a =
ux
uy
uz
vx
vy
vz
a
=
F1u
F1v
F2u
F2v
1a
F1x
F1y
F1y
F2x
F2y
F2z
a
= 1 12u + 1 2v 1
a
2x 2y 2z2yx 2xz 2xy a
=
1 1
212 + 1 212
10 0 0
0 0 0
=
0 0 0
0 0 0
(3.56)
Tambe podem ampliar aquesta formulacio per trobar derivades dordre superior per a funci-
ons de les quals no coneixem la seva expressio explcita.
EXEMPLE. Sigui la funcio
F :R3 R
(x,y ,z) y2
+ xz+ z2
ez
3 (3.57)
-
7/23/2019 Clcul de Diverses Variables
56/115
50 Chapter 3. APLICACIONS del CALCUL DIFERENCIAL
Aquesta funcio es diferenciable en qualsevol punt de R3. Si ara definim la funcio implcita
F(x,y ,z) = 0 , com tenim 3 variables i una restriccio, tindrem nomes 2 variables independents
(podem expressar una variable en funcio de la resta) ; podem expressar z en funcio de x = (x, y)
(noteu que en aquest exemple, comparat amb lenunciat del teorema, z juga el paper de les x i
x el paper de lest).
Si considerem el punt a = (2, 2, 0) com F(a ) = 0 i el jacobia
F
z
a
=x + 2z ez = 2 + 0 1 = 1 = 0 (3.58)
es compleixen les hipotesis de teorema de la funcio implcita en aquest punt.
Si ara volem trobar lexpressio de la serie de Taylor fins a segon ordre de la funcioz = h(x, y)
necessitarem les parcials daquesta funcio en el punt a , de la qual no tenim la seva expressio
explcita, fins a segon ordre. Per primer ordre podem utilitzar la regla de la cadena don hem
obtingut que (Dx h)a = (DzF)1a (Dx F)a i per tant
( zx zy ) = (F
z )1 ( Fx Fy ) = 1
x + 2z ez ( z 2y ) ( zx zy )a = (0, 4) (3.59)o tambe ho podem fer derivant F(x,y ,z(x, y)) = 0
0 = F
x +
F
z
z
x z
x =
FxFz
= zx + 2z ez
z
x
a
= 0
0 = F
y +
F
z
z
y z
y =
FyFz
= 2yx + 2z ez
z
y
a
= 4 (3.60)
Per calcular les derivades parcials de segon ordre, ara que ja tenim la forma explcita de les de
primer ordre i podem utilitzar-les:
2z
x2 =
zx (x + 2z ez) z(1 + 2z zx ezzx )
(x + 2z ez)2 2z
x2
a
= 0
2z
yx =
zy (x + 2z ez) z(2zy ezzy )
(x + 2z ez)2 2z
x2
a
= 4
2z
y2 =
2(x + 2z ez) 2y(2zy ezzy )(x + 2z ez)2
2z
x2
a
= 18 (3.61)
Tambe podrem haver fet
0 =
y (
F
x +
F
z
z
x ) =
2F
yx+
2F
zx
z
y + 2F
yz +
2F
z2
z
y z
x +
F
z
2z
yx
2z
yx=
2Fyx+
2Fzx
zy +
2Fyz +
2Fz2
zy
zx
Fz
2z
yx
a
= 4 (3.62)
Per tant podem escriure el desenvolupament de Taylor al voltant de (2 , 2) i fins a segon ordre
com
z(x, y) = 0 + (0,
4)
(x
2, y
2) +
1
2
(x
2, y
2) 0 4
4 18x 2y 2
-
7/23/2019 Clcul de Diverses Variables
57/115
3.2 Funcio implcita. 51
= 4(y 2) +12
(x 2, y 2)
4(y 2)4(x 2) 18(y 2)
= 4(y 2) + 4(x 2)(y 2) 9(y 2)2 (3.63)
3.2.2 Equacio del pla tangent per funcions definides implcitament
Si tenim una funcio escalarz = f(x, y) diferenciable en el punt (x0, y0), lequacio del pla tangent
en aquest punt ve donada per
z(x, y) =f(x0, y0)+ f(x0,y0)
(xx0, yy0) =z0+fx
(x0,y0)
(xx0)+fy
(x0,y0)
(yy0) (3.64)
Veiem ara com donar aquesta equacio en el cas de que la funcio ens vingui donada de
forma implcita F(x,y ,z) = 0. Un exemple molt habitual