Bloques Funcionales
8
UABC MODELADO DE SISTEMAS DINAMICOS M.C Laura Jiménez Beristáin Pag. 1 SISTEMAS ELÉCTRICOS Ecuación de equilibrio Ley de corrientes de Kirchhoff (LCK) ∑ = = = m j j j k n k i a 1 ,..., 2 , 1 ; 0 Ley de voltajes de Kirchhoff (LVK) ∑ = = = m j j j k l k v b 1 ,..., 2 , 1 ; 0 Variables, símbolo y unidad. V Voltaje a través del elemento eléctrico [V] I Corriente que fluye a través del elemento eléctrico [A] R Valor de la resistencia eléctrica [Ω] L Valor de la inductancia eléctrica [H] C Valor del capacitor o capacitancia eléctrica [F] Elementos de los sistemas traslacionales R + - v R i R Resistencia eléctrica : R R RI V = L + - v L i L Inductancia eléctrica : dt di L V L L = ∫ = t L L dt v L i 0 1 C + - v C i C Capacitancia eléctrica : dt dv C i C C = ∫ = t C C dt i C v 0 1
-
Upload
jesus-enrique-colina-reyes -
Category
Documents
-
view
10 -
download
0
description
Descripción de los bloques funcionales
Transcript of Bloques Funcionales

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 1
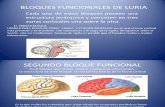
SISTEMAS ELÉCTRICOS
Ecuación de equilibrio Ley de corrientes de Kirchhoff (LCK)
∑=
==m
jjjk nkia
1
,...,2,1;0
Ley de voltajes de Kirchhoff (LVK)
∑=
==m
jjjk lkvb
1
,...,2,1;0
Variables, símbolo y unidad. V Voltaje a través del elemento eléctrico [V]
I Corriente que fluye a través del elemento eléctrico [A] R Valor de la resistencia eléctrica [Ω] L Valor de la inductancia eléctrica [H]
C Valor del capacitor o capacitancia eléctrica [F] Elementos de los sistemas traslacionales
R
+ -vR
iR
Resistencia eléctrica: RR RIV =
L
+ -vL
iL
Inductancia eléctrica:
dtdi
LV LL =
∫=t
LL dtvL
i0
1
C
+ -vC
iC
Capacitancia eléctrica:
dtdv
Ci CC =
∫=t
CC dtiC
v0
1

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 2
SISTEMAS MECÁNICOS TRASLACIONALES ROTACIONALES Ecuación de equilibrio Ecuación de equilibrio
∑ = 0if FMa Σ=
∑ = 0iT TJ Σ=α
Variables, símbolo y unidad. Variables, símbolo y unidad. x Desplazamiento [m] θ Desplazamiento angular [rad.]
.xv = Velocidad [m/s]
.θω = Velocidad angular [rad./s]
...xva == Aceleración [m/s2]
...θωα == Aceleración ang. [rad./s2]
F fuerza [N], [Kg.m/s2] T Par torsor [N.m] B Coeficiente de fricción viscosa [N.s/m] Bθ Valor o constante del amortiguador
rotacional [N.m/rad./s] K Coeficiente de rigidez del resorte [N/m] Kθ Valor o constante del resorte [N.m/rad]
M Masa [Kg.] J Momento de inercia [Kg.m2/rad] Elementos de los sistemas traslacionales Elementos de los sistemas rotacionales
fB
x
Amortiguador traslacional o fricción viscosa:
dtxd
Bf B =
−= 1
.
2
.xxbF
F Fb
x1 x2. .
b = Coeficiente de fricción viscosa
Bθ
θ T
Amortiguador rotacional o torsional:
dtdBTBθ
θθ =
.12 θ
θθ bdtd
dtdbT =
−=
fK
x También se representa
como f
K
x
Resorte traslacional: xKf K =
(Ley de Hooke) ( )12 xxKF −=
F FK
x1 x2
k = Coeficiente del resorte
θ TKθ
También se
representa como θ TKθ
Resorte rotacional o torsional:
θθθKTK = ( ) θθθ kkT =−= 12
f
M
x
Masa:
2
2
dtxd
MfM =
(Ley de Newton)
MF x
..
2
2
xMdtxdMF ==
J
θ T
Momento de inercia:
2
2
dtdJTJ
θ= αθ JJ ==
..

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 3
SISTEMAS HIDRÁULICO Ecuación de equilibrio
∑ = 0iP
∑ ∑ =−dtdvqq se
Variables, símbolo y unidad. P Presión a través del elemento hidráulico [Pa], [N/m2]
h Altura de la columna del fluido [m] q Gasto que fluye a través del elemento hidráulico [m3/s]
RH Valor de la resistencia hidráulica que presentan las paredes de la tubería [Pa.s/m3] I Inductancia hidráulica o inercia fluídica [Pa.s2/m3]
CH Valor que tiene la capacitancia hidráulica [m3/Pa] Elementos de los sistemas hidráulicos
P2
P1
RH
q
Resistencia hidráulica: qRPPP H=−=∆ 21
No hay representación simbólica
Inductancia hidráulica o inertancia fluídica:
dtdqIP =
P q
CH
Capacitancia hidráulica:
qCdt
dP
H
1=

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 4
SISTEMAS TERMICOS
Ecuación de equilibrio dWdQdU −=
Variables, símbolo y unidad. T Temperatura del elemento [K]
Q Flujo de calor a través del elemento térmico [W] RT Valor de la resistencia térmica o la posición que presenta el material al paso del
flujo de calor [K/W] CT Valor de la capacitancia térmica [W.s/K]
Elementos de los sistemas térmicos
Q
T1
RT
T2
Resistencia térmica: QRTTT T=−=∆ 21
-- Inductancia térmica: --
Q T
CT
Capacitancia térmica:
QCdt
dT
T
1=

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 5
ECUACIONES DE EQUILIBRIO
TIPO DE SISTEMA VARIABLE DE INTERES
SÍMBOLO Y UNIDAD
PRINCIPIOS Y LEYES FÍSICAS
FUNDAMENTALES PARA PLANTEAR LAS
ECUACIONES DE EQUILIBRIO
ENUNCIADO DE LA LEY
VOLTAJE
v [V]
Cualquier circuito eléctrico con n número de nodos y m número de ramas, la suma algebraica de corrientes en
cualquiera de sus nodos es igual a cero.
∑=
==m
jjjk nkia
1
,...,2,1;0
ELECTRICO
CORRIENTE
i [A]
LEY DE CORRIENTES
DE KIRCHHOFF
LEY DE VOLTAJES DE KIRCHHOFF
Cualquier circuito eléctrico con m número de ramas y l
número de mallas, la suma algebraica de voltajes en cualquiera de sus mallas es igual a cero.
∑=
==m
jjjk lkvb
1
,...,2,1;0
FUERZA
f [N]
DESPLAZAMIENTO
x [m]
Si un elemento A ejerce una fuerza sobre otro elemento,
éste ejercerá una fuerza de igual magnitud pero en sentido contrario al elemento A.
VELOCIDAD
v [m/s]
TRASLACIONAL
ACELERACIÓN
a [m/s2]
TERCERA LEY DE
NEWTON APLICADA A SISTEMAS MECÁNICOS
ROTACIONALES.
PRINCIPIO DE D’ALEMBERT APLICADO A
SISTEMAS MECÁNICOS
ROTACIONALES.
∑ = 0if
TORQUE
T [N⋅m]
DESPLAZAMIENTO
ANGULAR
θ [rad]
Si un elemento A ejerce un par sobre otro elemento,
éste ejercerá un par de igual magnitud pero en sentido contrario al elemento A.
VELOCIDAD ANGULAR
ω [rad/s]
ME C Á N I C O
ROTACIONAL
ACELERACIÓN
ANGULAR
α [rad/s2]
TERCERA LEY DE
NEWTON APLICADA A SISTEMAS MECÁNICOS
ROTACIONALES.
PRINCIPIO DE D’ALEMBERT APLICADO A
SISTEMAS MECÁNICOS
ROTACIONALES.
∑ = 0iT
ALTURA DE LA COLUMNA DEL
FLUIDO
h
[m]
PRESION
P [Pa]
HIDRÁULICO
GASTO
q [m3/s]
LEY DE BALANCE DE
PRESIONES.
LEY DE
CONSERVACIÓN DE LA MASA.
La suma de las caídas de presión alrededor de una malla es igual a cero.
∑ = 0iP
La suma algebraica de gastos en un nodo es igual a cero, o las variaciones de volumen con respecto al tiempo es igual a la suma de los gastos de entrada menos la suma
de los gastos de salida. ∑ ∑ =−dtdvqq se
TEMPERATURA
T [K]
TERMICO
FLUJO DE CALOR
Q [W]
PRIMERA LEY DE LA TERMODINÁMICA.
(conservación de la energía)
Relaciona temperatura y flujo de calor, las cuales son las
variables de interés en los sistemas térmicos. dWdQdU −=

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 6
ELEMENTOS RESISTIVOS
TIPO DE SISTEMA
SIMBOLO ECUACION UNIDAD RELACION CARACTERÍSTICA
ELECTRICO R
+ -vR
iR
RR RIV =
Ω
vR
iR
R1
TRASLACIONAL
fB
x
dtxd
Bf B =
msN ⋅
B1
fB
dtxd
M E C Á N I C O
ROTACIONAL
Bθ
θ T
dtdBTBθ
θθ =
segrad
mN ⋅ B
1
TB
dtdθ
θθ
HIDRÁULICO
P2
P1
RH
q
qRPPP H=−=∆ 21
3msPa ⋅
R1
Η
P∆
q
TERMICO
Q
T1
RT
T2
QRTTT T=−=∆ 21
WK
R1
Τ
T∆
Q

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 7
ELEMENTOS INDUCTIVOS
TIPO DE SISTEMA
SIMBOLO ECUACION UNIDAD RELACION CARACTERÍSTICA
ELECTRICO L
+ -vL
iL
dtdi
LV LL =
∫=t
LL dtvL
i0
1
H
vL1L
dtdiL
TRASLACIONAL
fK
x También se representa como
fK
x
xKf K =
mN
K1
fK
x
M E C Á N I C O
ROTACIONAL θ TKθ
También se representa como
θ TKθ
θθθ
KTK =
radmN ⋅
K1
TK
θ
θθ
HIDRÁULICO
No hay representación
simbólica
dtdqIP =
3
2
msPa ⋅
IP
dtdq
1
TERMICO
--
--
--
--

UABC MODELADO DE SISTEMAS DINAMICOS
M.C Laura Jiménez Beristáin Pag. 8
ELEMENTOS CAPACITIVOS
TIPO DE SISTEMA
SIMBOLO ECUACION UNIDAD RELACION CARACTERÍSTICA
ELECTRICO C
+ -vC
iC
dtdv
Ci CC =
∫=t
CC dtiC
v0
1
F
vC 1C
∫ Ci
TRASLACIONAL
f
M
x
2
2
dtxd
MfM =
Kg M
1
fM
2
2
dtxd
M E C Á N I C O
ROTACIONAL
J
θ T
2
2
dtdJTJ
θ=
radmKg 2⋅
J1
TJ
2
2
dtd θ
HIDRÁULICO
P q
CH
qCdt
dP
H
1=
Pam3
1
q
dtdP
CΗ
TERMICO
Q T
CT
QCdt
dT
T
1=
KsW ⋅
1
Q
dtdT
CΤ