Biomec_muñeca_inf1-2-3 (1)
36
Biomecánica de la muñeca 1 Biomecánica de la muñeca
-
Upload
miguel-javier -
Category
Documents
-
view
228 -
download
3
description
Proyecto estudiantil
Transcript of Biomec_muñeca_inf1-2-3 (1)

Biomecánica de la muñeca
1
Biomecánica de la muñeca

Biomecánica de la muñeca
2
Fundamentos teóricos, problemática y Estado
del Arte
La muñeca
La muñeca está compuesta por la unión de los huesos del antebrazo (cúbito y radio) con los
huesos que conforman el carpo.
El carpo está formado por ocho huesos pequeños que se disponen en dos filas:
una proximal (la más cercana al cuerpo): El escafoides, semilunar, piramidal y pisiforme
una fila distal (la más cercana a los dedos): El trapecio, trapezoide, grande y ganchoso.

Biomecánica de la muñeca
3
Ligamentos de la muñeca
Los ligamentos conforman una estructura anatómica en forma de bandas fibrosas que conectan
los tejidos que unen a los huesos en las articulaciones, además estos les otorgan estabilidad a las
articulaciones y es fundamental para el movimiento de los huesos. Estos se dividen en dos
secciones:
Ligamentos extrínsecos: Unen carpo con radio o
cubito. Estos son más potentes y resistentes a
traumatismos.
Ligamentos intrínsecos: Unen los huesos del carpo
entre sí. Estos son menos potentes.

Biomecánica de la muñeca
4
Biomecánica, rango de movilidad articular
Al ser la muñeca un complejo pluriarticular, todo movimiento de ésta se debe considerar como el
resultado de la interacción de los movimientos que ocurren en las distintas articulaciones que
componen la muñeca.
Las dos principales articulaciones que le proporciona a la muñeca una mayor libertad de
movimiento son:
Articulación mediocarpiana
Articulación radiocarpiana
Biomecánica de la muñeca
5
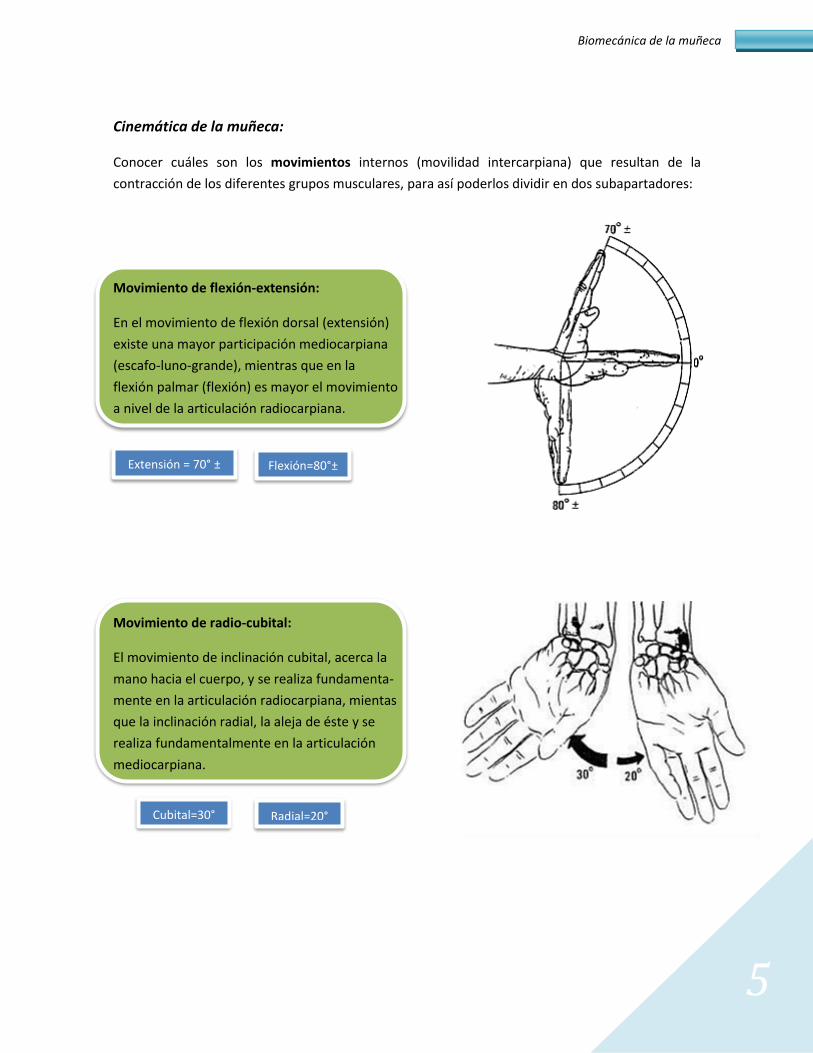
Cinemática de la muñeca:
Conocer cuáles son los movimientos internos (movilidad intercarpiana) que resultan de la
contracción de los diferentes grupos musculares, para así poderlos dividir en dos subapartadores:
Movimiento de flexión-extensión:
En el movimiento de flexión dorsal (extensión)
existe una mayor participación mediocarpiana
(escafo-luno-grande), mientras que en la
flexión palmar (flexión) es mayor el movimiento
a nivel de la articulación radiocarpiana.
Movimiento de radio-cubital:
El movimiento de inclinación cubital, acerca la
mano hacia el cuerpo, y se realiza fundamenta-
mente en la articulación radiocarpiana, mientas
que la inclinación radial, la aleja de éste y se
realiza fundamentalmente en la articulación
mediocarpiana.
Extensión = 70° ± Flexión=80°±
Cubital=30° Radial=20°
Biomecánica de la muñeca
6
Lesiones frecuentes en la muñeca
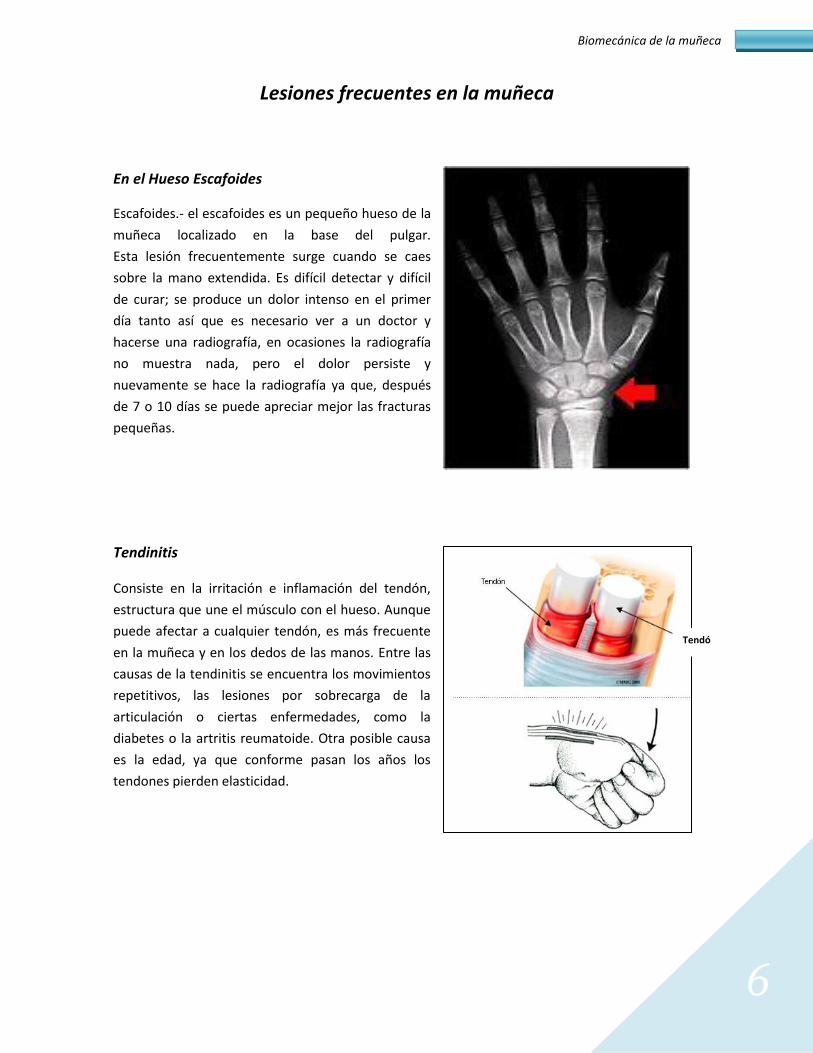
En el Hueso Escafoides
Escafoides.- el escafoides es un pequeño hueso de la
muñeca localizado en la base del pulgar.
Esta lesión frecuentemente surge cuando se caes
sobre la mano extendida. Es difícil detectar y difícil
de curar; se produce un dolor intenso en el primer
día tanto así que es necesario ver a un doctor y
hacerse una radiografía, en ocasiones la radiografía
no muestra nada, pero el dolor persiste y
nuevamente se hace la radiografía ya que, después
de 7 o 10 días se puede apreciar mejor las fracturas
pequeñas.
Tendinitis
Consiste en la irritación e inflamación del tendón,
estructura que une el músculo con el hueso. Aunque
puede afectar a cualquier tendón, es más frecuente
en la muñeca y en los dedos de las manos. Entre las
causas de la tendinitis se encuentra los movimientos
repetitivos, las lesiones por sobrecarga de la
articulación o ciertas enfermedades, como la
diabetes o la artritis reumatoide. Otra posible causa
es la edad, ya que conforme pasan los años los
tendones pierden elasticidad.
Tendó
n
Biomecánica de la muñeca
7
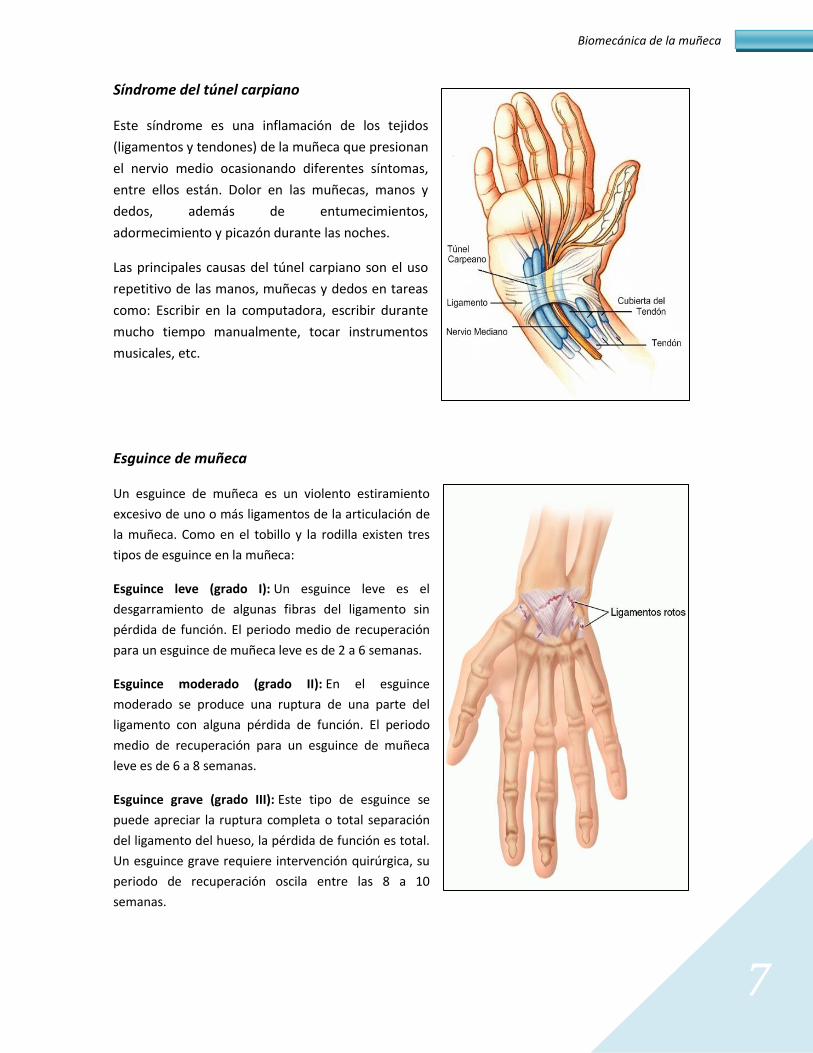
Síndrome del túnel carpiano
Este síndrome es una inflamación de los tejidos
(ligamentos y tendones) de la muñeca que presionan
el nervio medio ocasionando diferentes síntomas,
entre ellos están. Dolor en las muñecas, manos y
dedos, además de entumecimientos,
adormecimiento y picazón durante las noches.
Las principales causas del túnel carpiano son el uso
repetitivo de las manos, muñecas y dedos en tareas
como: Escribir en la computadora, escribir durante
mucho tiempo manualmente, tocar instrumentos
musicales, etc.
Esguince de muñeca
Un esguince de muñeca es un violento estiramiento
excesivo de uno o más ligamentos de la articulación de
la muñeca. Como en el tobillo y la rodilla existen tres
tipos de esguince en la muñeca:
Esguince leve (grado I): Un esguince leve es el
desgarramiento de algunas fibras del ligamento sin
pérdida de función. El periodo medio de recuperación
para un esguince de muñeca leve es de 2 a 6 semanas.
Esguince moderado (grado II): En el esguince
moderado se produce una ruptura de una parte del
ligamento con alguna pérdida de función. El periodo
medio de recuperación para un esguince de muñeca
leve es de 6 a 8 semanas.
Esguince grave (grado III): Este tipo de esguince se
puede apreciar la ruptura completa o total separación
del ligamento del hueso, la pérdida de función es total.
Un esguince grave requiere intervención quirúrgica, su
periodo de recuperación oscila entre las 8 a 10
semanas.

Biomecánica de la muñeca
8
Última Tecnología en fisioterapia de la muñeca
Robot de rehabilitación de muñeca después de un accidente cerebrovascular
El objetivo de este trabajo es extender la terapia robótica a las rotaciones de muñeca con una
novela, de 3 grados de libertad dispositivo de terapia robótica para la muñeca. Este robot es capaz
de rastrear, guiar, y perturbar rotaciones de la muñeca de una persona, mientras que él / ella
realiza un conjunto de tareas virtuales. La primera etapa de este proyecto consiste en establecer
una base cuantitativa del movimiento de la muñeca en sujetos sin discapacidad mediante el
examen de los patrones estereotipados cinemáticas, estrategias coordinativas, y el efecto de las
perturbaciones aleatorias. Con esta base, vamos a probar si (y cómo) un programa de formación
de rotación de la muñeca robótica beneficia a víctimas de accidentes cerebrovasculares.

Biomecánica de la muñeca
9
Extensión de la muñeca Sistema Dynasplint ®
Dynasplint ® Systems, fabricante líder de férulas dinámicas, ofrece la extensión y flexión de
tablillas tratamiento para la muñeca para ayudar en la rehabilitación y la recuperación de varias
lesiones, cirugía y trauma en la muñeca y el área circundante.
W2 muñeca CPM
El dispositivo de muñeca portátil líder, de peso ligero, diseñado para ofrecer la máxima movilidad
de la articulación de la muñeca en flexión / extensión y cubital / desviación radial, o una
combinación de ambos. El tratamiento se ve reforzada por su diseño anatómico libre vinculación.
Biomecánica de la muñeca
10
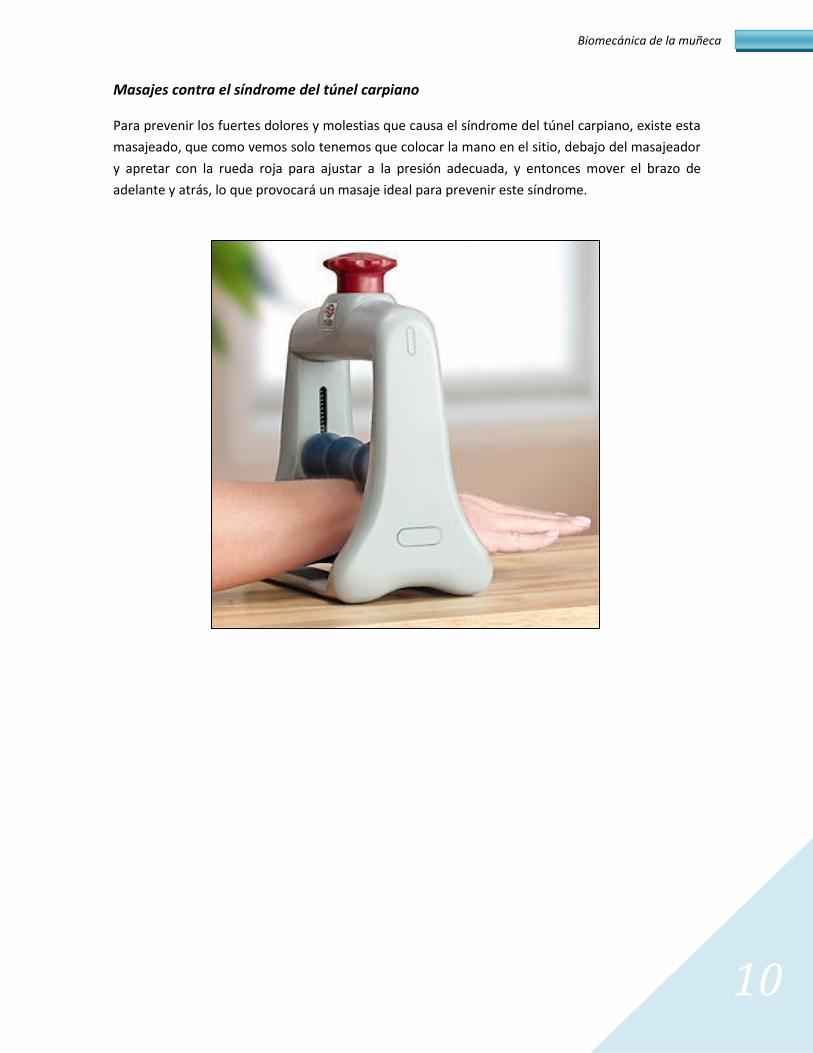
Masajes contra el síndrome del túnel carpiano
Para prevenir los fuertes dolores y molestias que causa el síndrome del túnel carpiano, existe esta
masajeado, que como vemos solo tenemos que colocar la mano en el sitio, debajo del masajeador
y apretar con la rueda roja para ajustar a la presión adecuada, y entonces mover el brazo de
adelante y atrás, lo que provocará un masaje ideal para prevenir este síndrome.

Biomecánica de la muñeca
11
Ortesis
Es todo equipo que se incorpora al cuerpo en forma externa y que proporciona contención,
corrección postural o de una desviación, según corresponda. Mantiene los miembros en su
posición más fisiológica, es decir alineados, y a la vez permite un control de los movimientos
involuntarios del paciente.
Ortesis pediátrica para muñeca
Esta ortesis de fácil diseño, fabricado con neopreno, proporciona la ayuda, el calor, la compresión
y la protección para la muñeca con síndrome de túnel carpiano, tendinitis o esguinces de la
muñeca
El neopreno es una goma sintética se utiliza en gran cantidad de entornos, como trajes húmedos de
submarinismo, aislamiento eléctrico, etc. Y sus propiedades son: el aislamiento acústico, eléctrico y térmico, buena
flexibilidad y maleabilidad.

Biomecánica de la muñeca
12
Muñequera
La guarnición de la tela COOLMAX proporciona la característica de mantener fresco y cómodo la
muñeca y el abrigo del neopreno se aplica fácilmente a la muñeca dañada, dando estabilidad e
inmovilización para daños como los esguinces.

Biomecánica de la muñeca
13
Bibliografía
BOWERS W.H. The distal Radioulnar joint. Green's Operative Hand Surgery, 4ª
Edición. Green O.P., Hotchkiss R.N., Pederson W.C. Churchill Livingstone, New York, 1999: 986-1032.
DAUTEL G. Diagnóstico de las lesiones ligamentarias recientes de la muñeca.
En mano traumática, cirugía secundaria, muñeca traumática. Merle M., Dautel G., Lada G. Masson, S.A. Barcelona, 1996: 363-379
http://news.medicalexpo.es/press/united-surgical/muneca-universal-lacer-70417-159644.html
Biomecánica de la muñeca
14
Alternativas y Concepto Solución
Evaluación del problema
Exigencias del Diseño
Nuestro dispositivo mecánico tendrá las funciones de rehabilitación de la muñeca del
paciente, para poder llegar a describir las funciones y/o características, tendremos que tener
una noción básica de conceptos de lesiones frecuentes, sistemas o dispositivos mecánicos que
se utilizan en la rehabilitación. Una vez investigado, podremos fabricar un producto
económicamente rentable y eficaz, aplicando propiedades mecánicas nuestro proyecto
buscará mejorar su fácil manipulación y a la vez, que no sea de gran tamaño.
Estado de tecnología actual
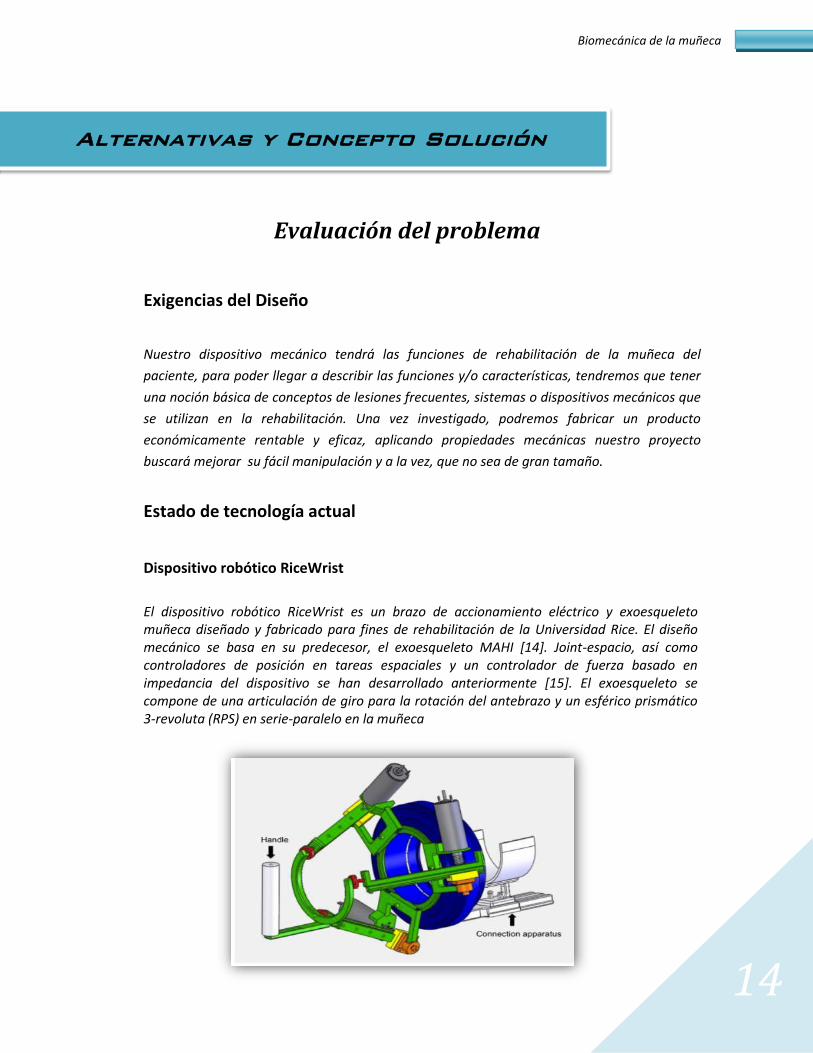
Dispositivo robótico RiceWrist
El dispositivo robótico RiceWrist es un brazo de accionamiento eléctrico y exoesqueleto muñeca diseñado y fabricado para fines de rehabilitación de la Universidad Rice. El diseño mecánico se basa en su predecesor, el exoesqueleto MAHI [14]. Joint-espacio, así como controladores de posición en tareas espaciales y un controlador de fuerza basado en impedancia del dispositivo se han desarrollado anteriormente [15]. El exoesqueleto se compone de una articulación de giro para la rotación del antebrazo y un esférico prismático 3-revoluta (RPS) en serie-paralelo en la muñeca
Biomecánica de la muñeca
15
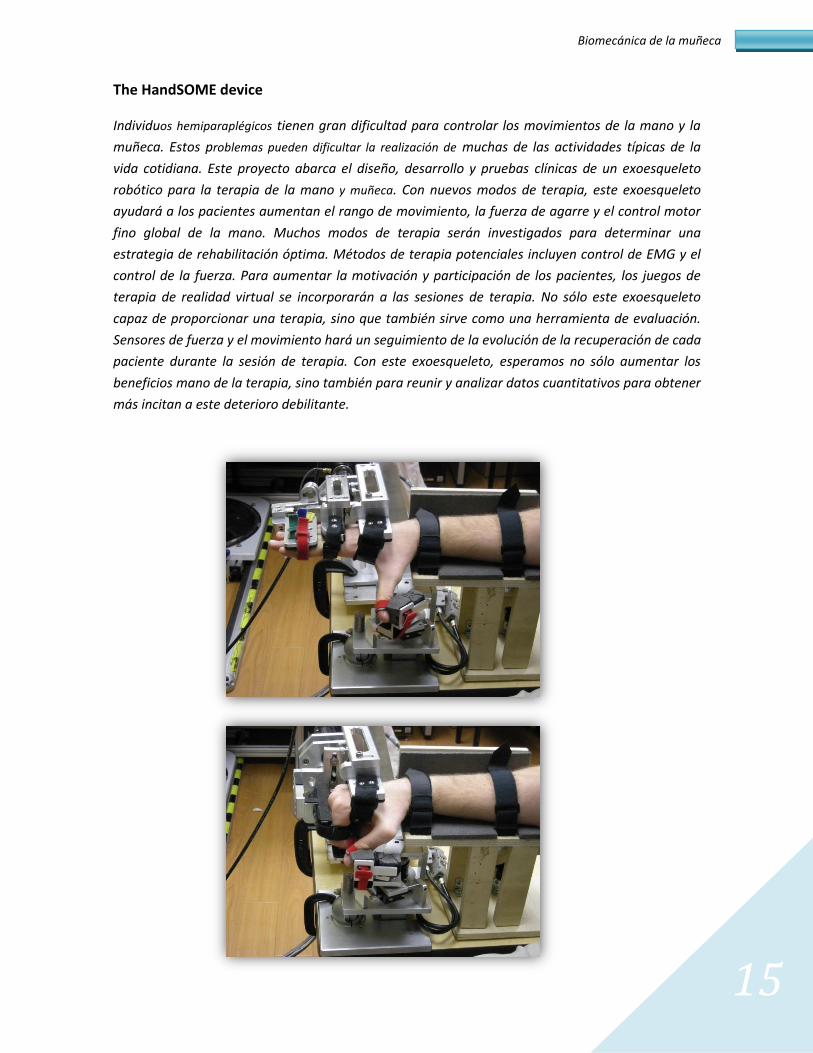
The HandSOME device
Individuos hemiparaplégicos tienen gran dificultad para controlar los movimientos de la mano y la
muñeca. Estos problemas pueden dificultar la realización de muchas de las actividades típicas de la
vida cotidiana. Este proyecto abarca el diseño, desarrollo y pruebas clínicas de un exoesqueleto
robótico para la terapia de la mano y muñeca. Con nuevos modos de terapia, este exoesqueleto
ayudará a los pacientes aumentan el rango de movimiento, la fuerza de agarre y el control motor
fino global de la mano. Muchos modos de terapia serán investigados para determinar una
estrategia de rehabilitación óptima. Métodos de terapia potenciales incluyen control de EMG y el
control de la fuerza. Para aumentar la motivación y participación de los pacientes, los juegos de
terapia de realidad virtual se incorporarán a las sesiones de terapia. No sólo este exoesqueleto
capaz de proporcionar una terapia, sino que también sirve como una herramienta de evaluación.
Sensores de fuerza y el movimiento hará un seguimiento de la evolución de la recuperación de cada
paciente durante la sesión de terapia. Con este exoesqueleto, esperamos no sólo aumentar los
beneficios mano de la terapia, sino también para reunir y analizar datos cuantitativos para obtener
más incitan a este deterioro debilitante.
Biomecánica de la muñeca
16
Fatiga muscular
leve
Brazo con muñeca
lesionada
Energía mecánica
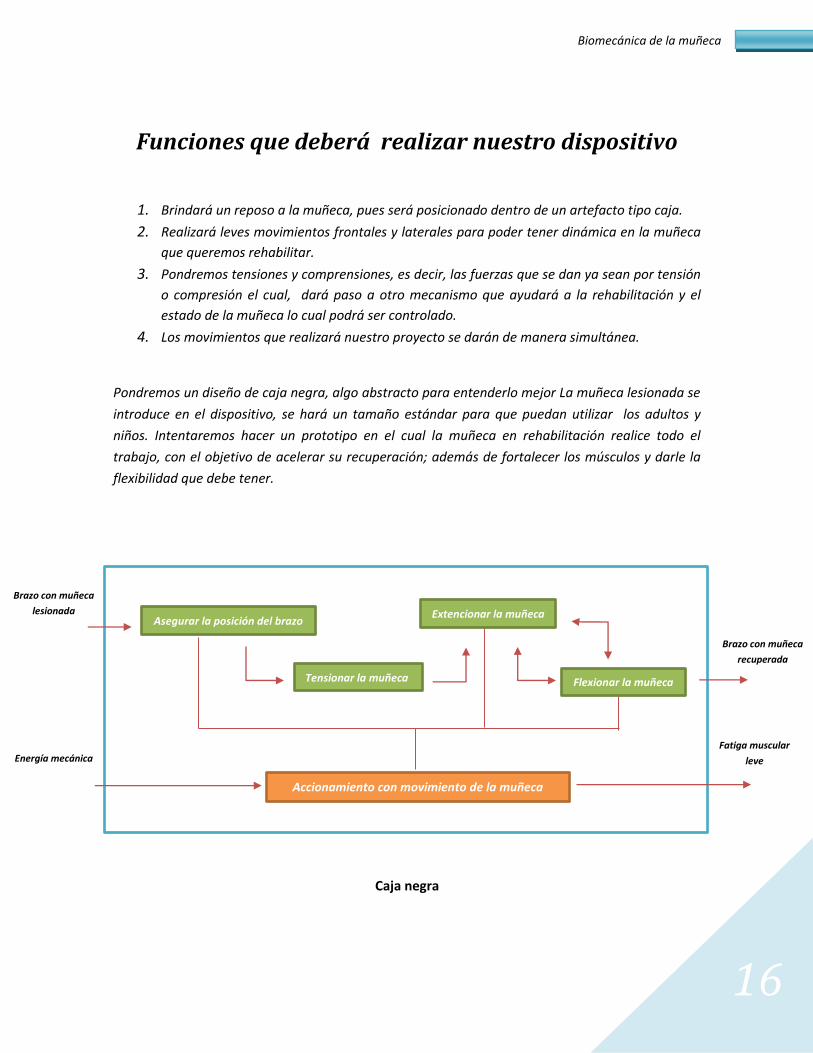
Funciones que deberá realizar nuestro dispositivo
1. Brindará un reposo a la muñeca, pues será posicionado dentro de un artefacto tipo caja.
2. Realizará leves movimientos frontales y laterales para poder tener dinámica en la muñeca
que queremos rehabilitar.
3. Pondremos tensiones y comprensiones, es decir, las fuerzas que se dan ya sean por tensión
o compresión el cual, dará paso a otro mecanismo que ayudará a la rehabilitación y el
estado de la muñeca lo cual podrá ser controlado.
4. Los movimientos que realizará nuestro proyecto se darán de manera simultánea.
Pondremos un diseño de caja negra, algo abstracto para entenderlo mejor La muñeca lesionada se
introduce en el dispositivo, se hará un tamaño estándar para que puedan utilizar los adultos y
niños. Intentaremos hacer un prototipo en el cual la muñeca en rehabilitación realice todo el
trabajo, con el objetivo de acelerar su recuperación; además de fortalecer los músculos y darle la
flexibilidad que debe tener.
Caja negra
Asegurar la posición del brazo
Tensionar la muñeca
Extencionar la muñeca
Flexionar la muñeca
Accionamiento con movimiento de la muñeca
Brazo con muñeca
recuperada
Biomecánica de la muñeca
17
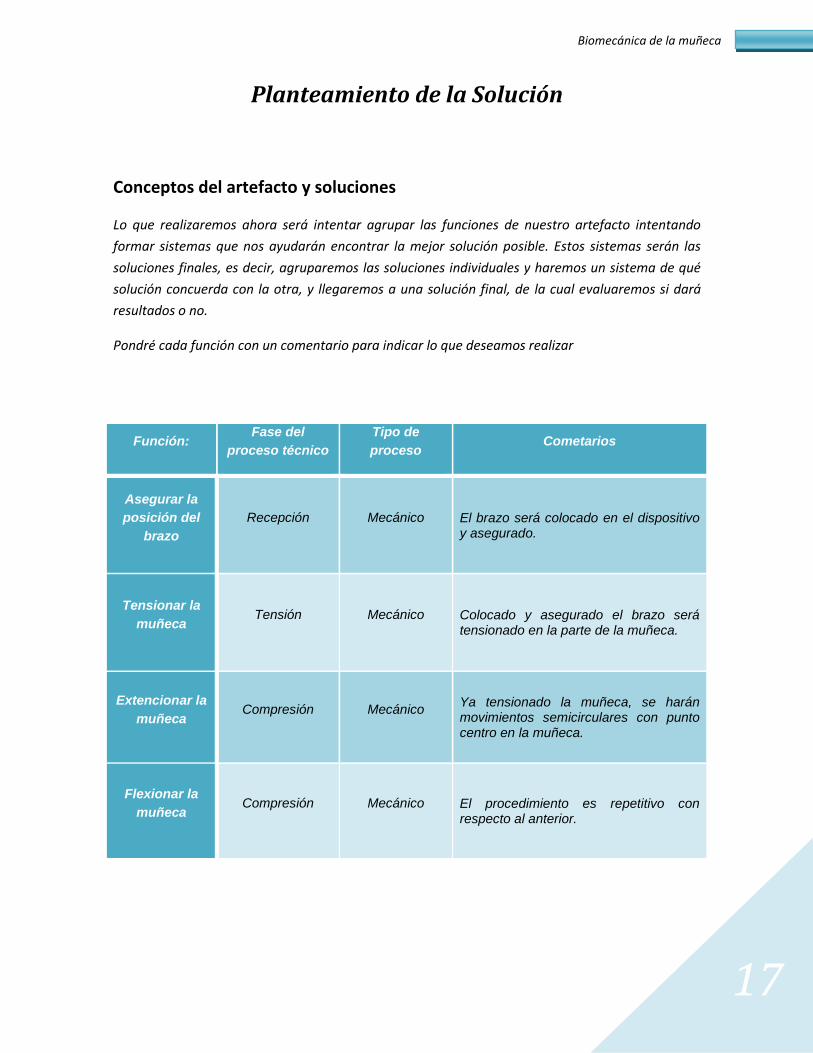
Planteamiento de la Solución
Conceptos del artefacto y soluciones
Lo que realizaremos ahora será intentar agrupar las funciones de nuestro artefacto intentando
formar sistemas que nos ayudarán encontrar la mejor solución posible. Estos sistemas serán las
soluciones finales, es decir, agruparemos las soluciones individuales y haremos un sistema de qué
solución concuerda con la otra, y llegaremos a una solución final, de la cual evaluaremos si dará
resultados o no.
Pondré cada función con un comentario para indicar lo que deseamos realizar
Función: Fase del
proceso técnico
Tipo de
proceso Cometarios
Asegurar la
posición del
brazo
Recepción Mecánico El brazo será colocado en el dispositivo y asegurado.
Tensionar la
muñeca Tensión Mecánico Colocado y asegurado el brazo será
tensionado en la parte de la muñeca.
Extencionar la
muñeca Compresión Mecánico
Ya tensionado la muñeca, se harán movimientos semicirculares con punto centro en la muñeca.
Flexionar la
muñeca Compresión Mecánico El procedimiento es repetitivo con
respecto al anterior.
Biomecánica de la muñeca
18
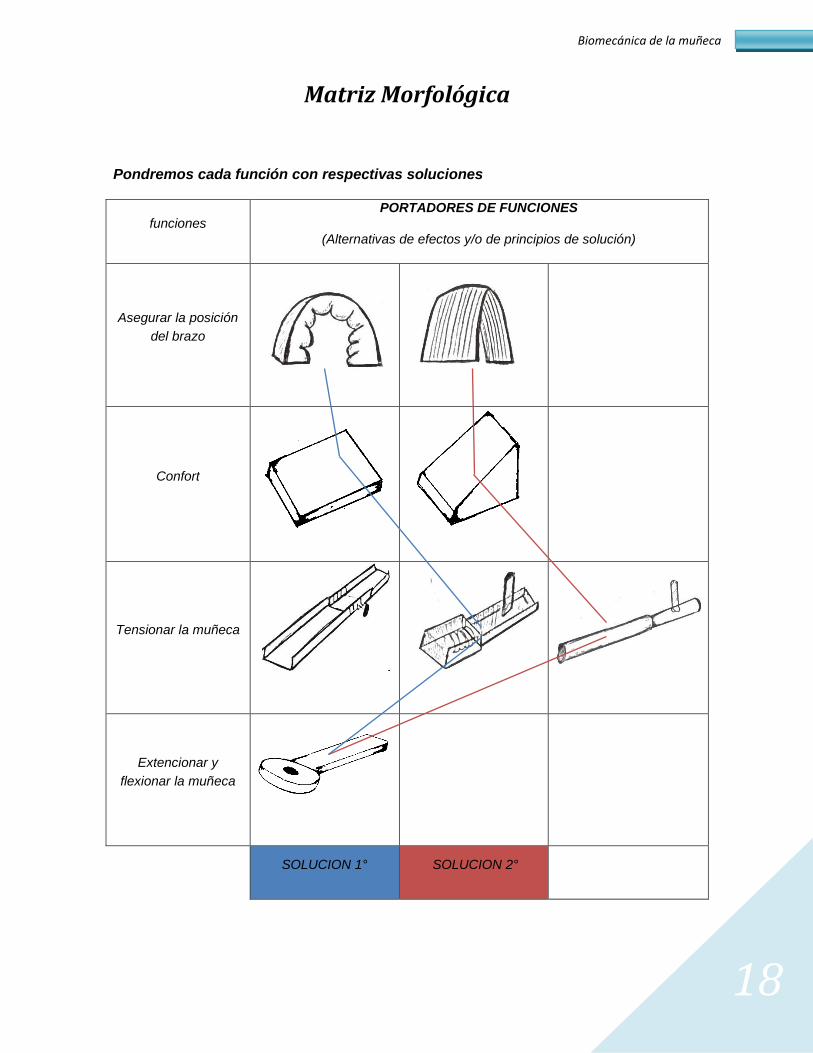
Matriz Morfológica
Pondremos cada función con respectivas soluciones
funciones
PORTADORES DE FUNCIONES
(Alternativas de efectos y/o de principios de solución)
Asegurar la posición
del brazo
Confort
Tensionar la muñeca
Extencionar y
flexionar la muñeca
SOLUCION 1° SOLUCION 2°
Biomecánica de la muñeca
19
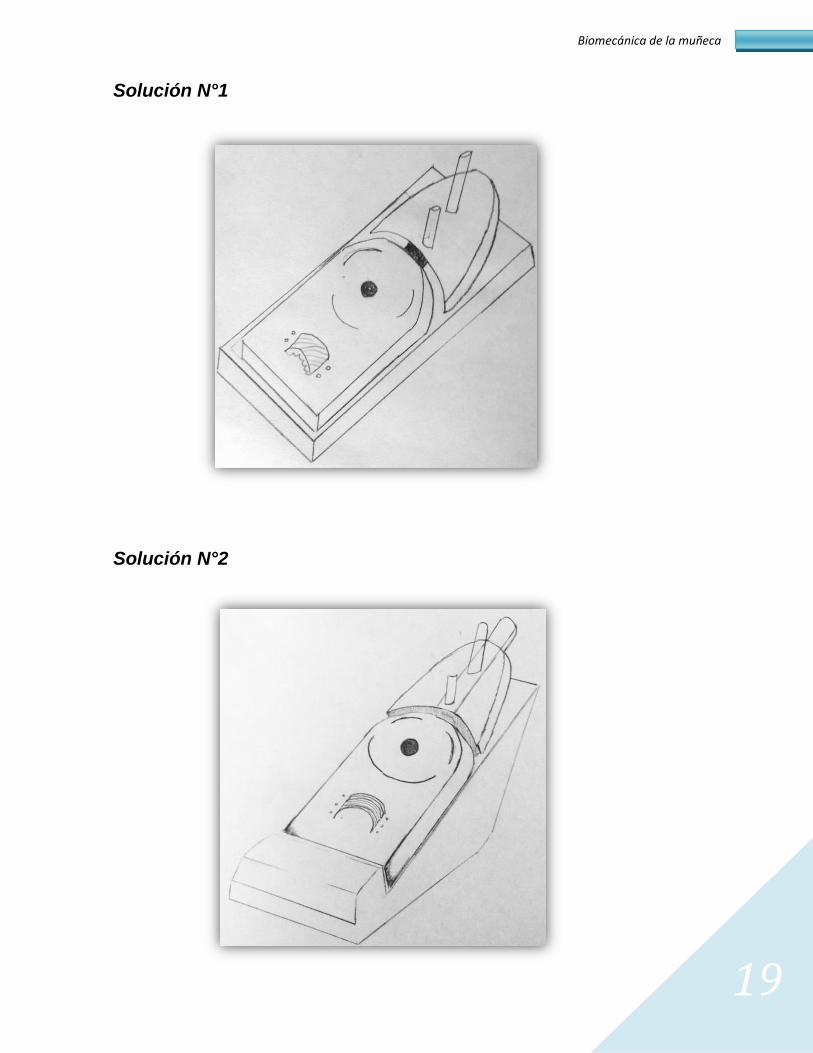
Solución N°1
Solución N°2

Biomecánica de la muñeca
20
Evaluación de las soluciones dadas
Puntajes para calificar cada criterio
0 = No satisface con los requerimientos
1 = Aceptable pero de forma justa
2 = Suficiente
3 = Bien
4 = Muy bien (Puntaje asignado solo para “Solución Ideal”)
Criterio Económico S. Preliminar 1 S. Preliminar 2 Solución ideal
Costo de Material 3 2 4
Costo de
Fabricación
3 3 4
Costo de Mano de
Obra
2 2 4
Total 8 7 12
Criterios técnicos S. Preliminar 1 S. Preliminar 2 Solución ideal
Función 3 3 4
Forma 2 3 4
Diseño 2 3 4
Seguridad 2 2 4
Ergonomía 2 4 4
Fabricación 3 2 4
Montaje 3 2 4
Uso 2 3 4
Mantenimiento 3 2 4
Total 22 24 36
Biomecánica de la muñeca
21
Según nuestra evaluación técnica y Económica la solución dos es la más factible; Ya que, el diseño
con un ángulo inclinado le proporciona mayor confort a la muñeca lesionada o muñeca en proceso
de rehabilitación, además que los componentes del dispositivo son más sencillos de diseñar y
ensamblar, por tales motivos hemos escogido la solución dos que se asemeja más a nuestras
necesidades.
Solución N° 2
Biomecánica de la muñeca
22
Diseño del concepto Solución
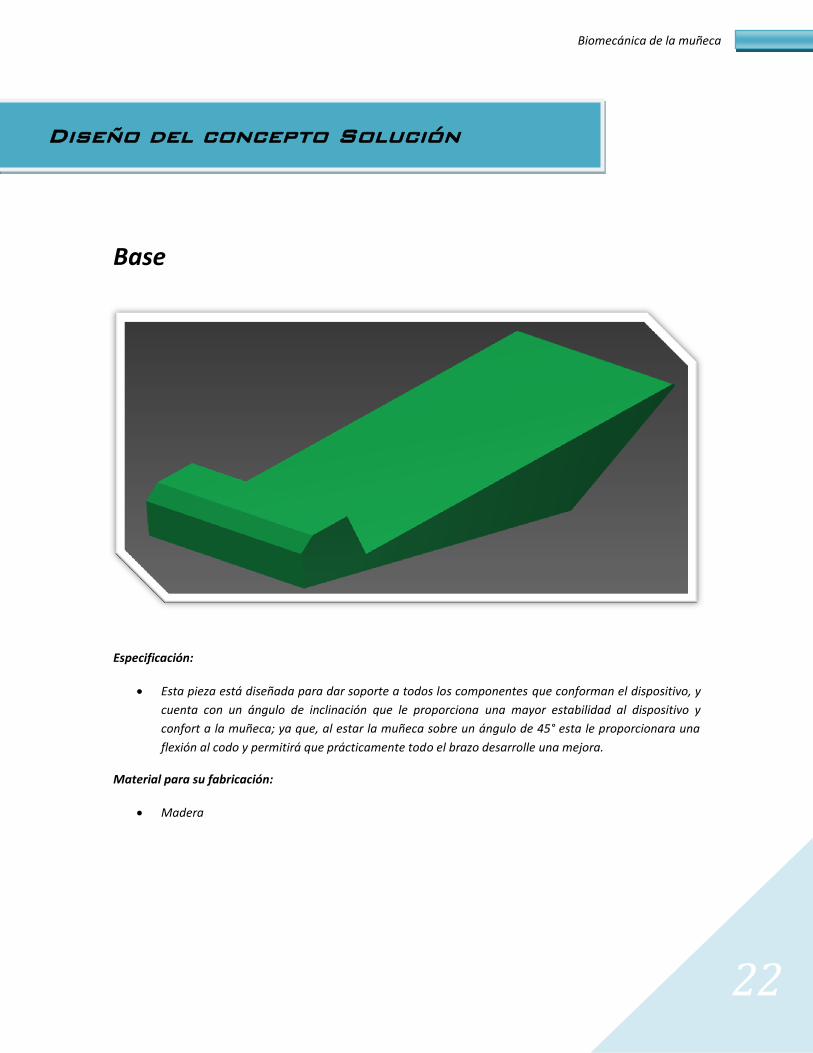
Base
Especificación:
Esta pieza está diseñada para dar soporte a todos los componentes que conforman el dispositivo, y
cuenta con un ángulo de inclinación que le proporciona una mayor estabilidad al dispositivo y
confort a la muñeca; ya que, al estar la muñeca sobre un ángulo de 45° esta le proporcionara una
flexión al codo y permitirá que prácticamente todo el brazo desarrolle una mejora.
Material para su fabricación:
Madera

Biomecánica de la muñeca
23
Funda protectora y apoyo
Especificación:
La funda protector y apoyo, está diseñada para albergar al cilindro y para dar soporte y confort a la
muñeca, además cumple un papel principalmente estético.
Material:
Espuma Eva

Biomecánica de la muñeca
24
Funda protectora
Especificación:
La funda protectora, está diseñada para albergar y proteger al bastón de compresión y al tubo de
encaje; cumple un papel principalmente de protección y estética.
Material:
Espuma Eva
Biomecánica de la muñeca
25
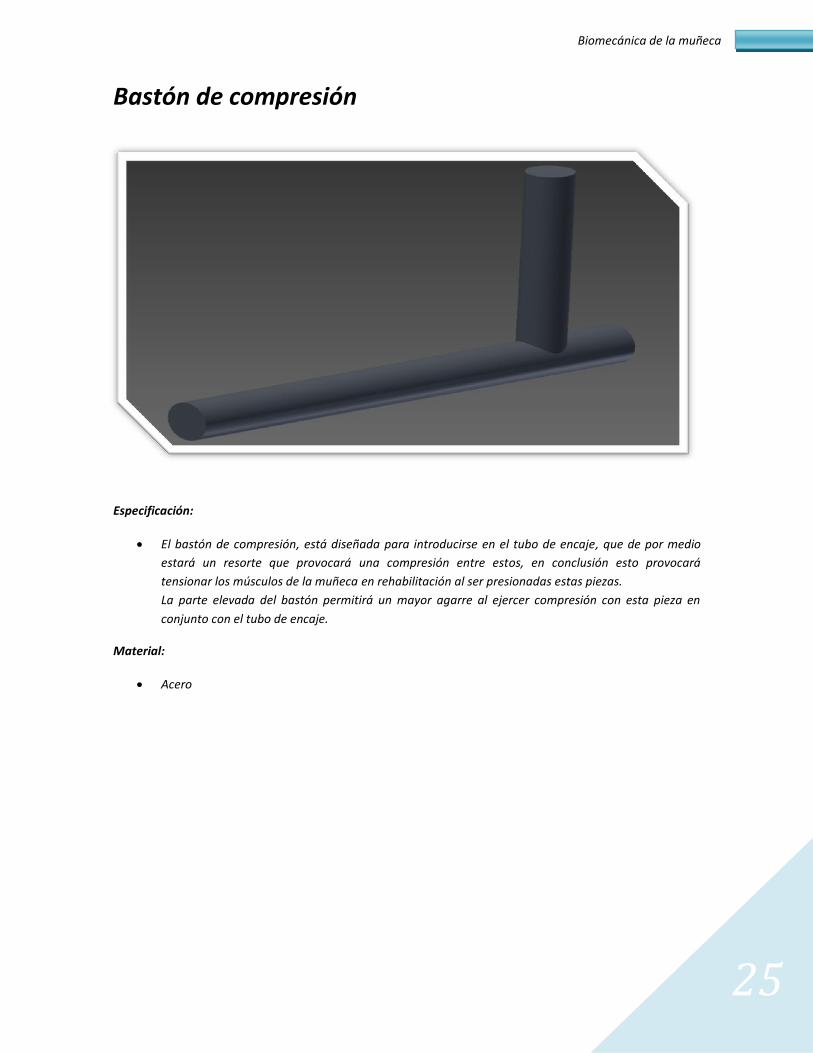
Bastón de compresión
Especificación:
El bastón de compresión, está diseñada para introducirse en el tubo de encaje, que de por medio
estará un resorte que provocará una compresión entre estos, en conclusión esto provocará
tensionar los músculos de la muñeca en rehabilitación al ser presionadas estas piezas.
La parte elevada del bastón permitirá un mayor agarre al ejercer compresión con esta pieza en
conjunto con el tubo de encaje.
Material:
Acero

Biomecánica de la muñeca
26
Tubo de encaje
Especificación:
El tubo de encaje está diseñada para cumplir prácticamente todas las funciones del dispositivo, la de
estiramiento, extensión y flexión. La función de estiramiento la realiza con el bastón de compresión
en conjunto y la función de extensión y flexión la realiza con el cilindro que mediante su eje de
rotación gira alrededor de 180 grados, que está a la ves mediante los resortes provoca una
compresión en sus laterales lo que le dará una compresión tanto a la derecha como a la izquierda y
esto generará rehabilitar y fortalecer los músculos de la muñeca.
Material:
Acero

Biomecánica de la muñeca
27
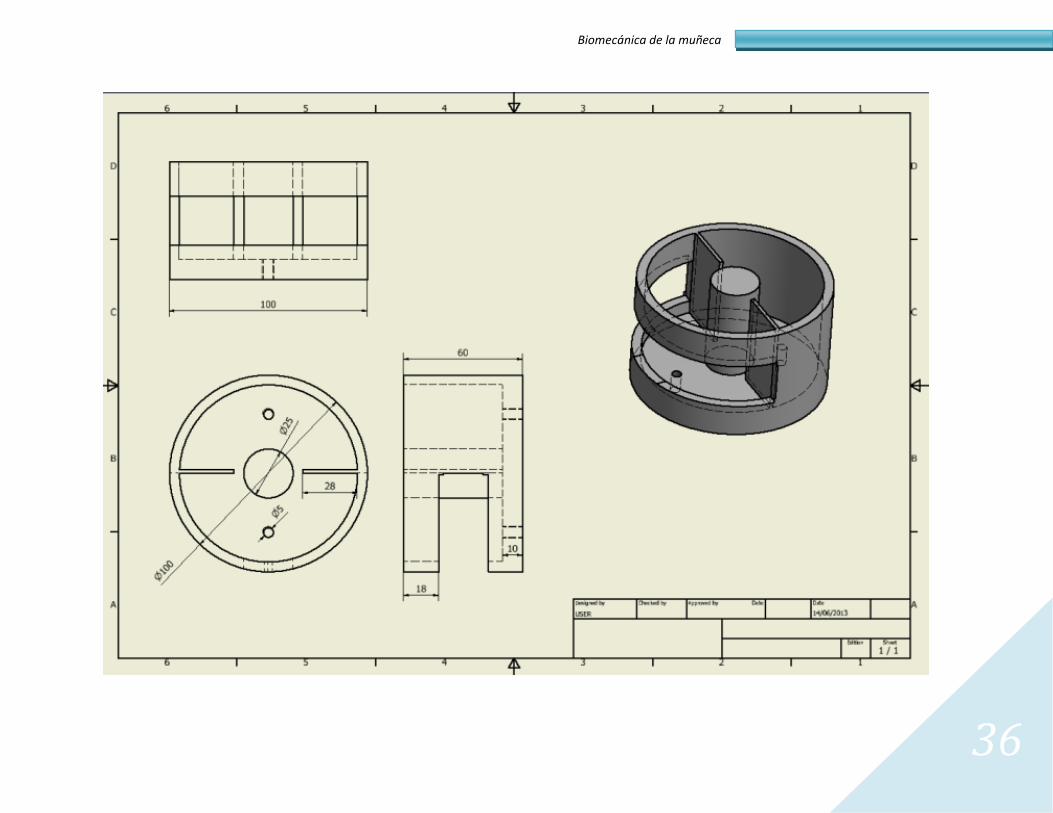
Cilindro
Especificación:
El cilindro, está diseñada para ser la parte fundamental del diseño del dispositivo; ya que, de aquí
partes todas las funciones que desarrollara el dispositivo; además da soporte al tubo de encaje que
cumplirá con esta la función de extensión y flexión mediante unos resortes laterales.
Material:
Aluminio
Resortes
Especificación:
Complementos de las piezas 4, 5 y 6, que
trabajaran Principalmente en compresión
Material:
Acero

Biomecánica de la muñeca
28
Ensambles
El cilindro irá atornillado a la base
El bastón de compresión y el tubo de encaje trabajan en conjunto (en medio un resorte)

Biomecánica de la muñeca
29
El bastón de compresión, tubo de encaje y cilindro trabajan en simultaneo
El bastón de compresión, tubo de encaje y cilindro
RESORTES

Biomecánica de la muñeca
30
Dispositivo Final

Biomecánica de la muñeca
31
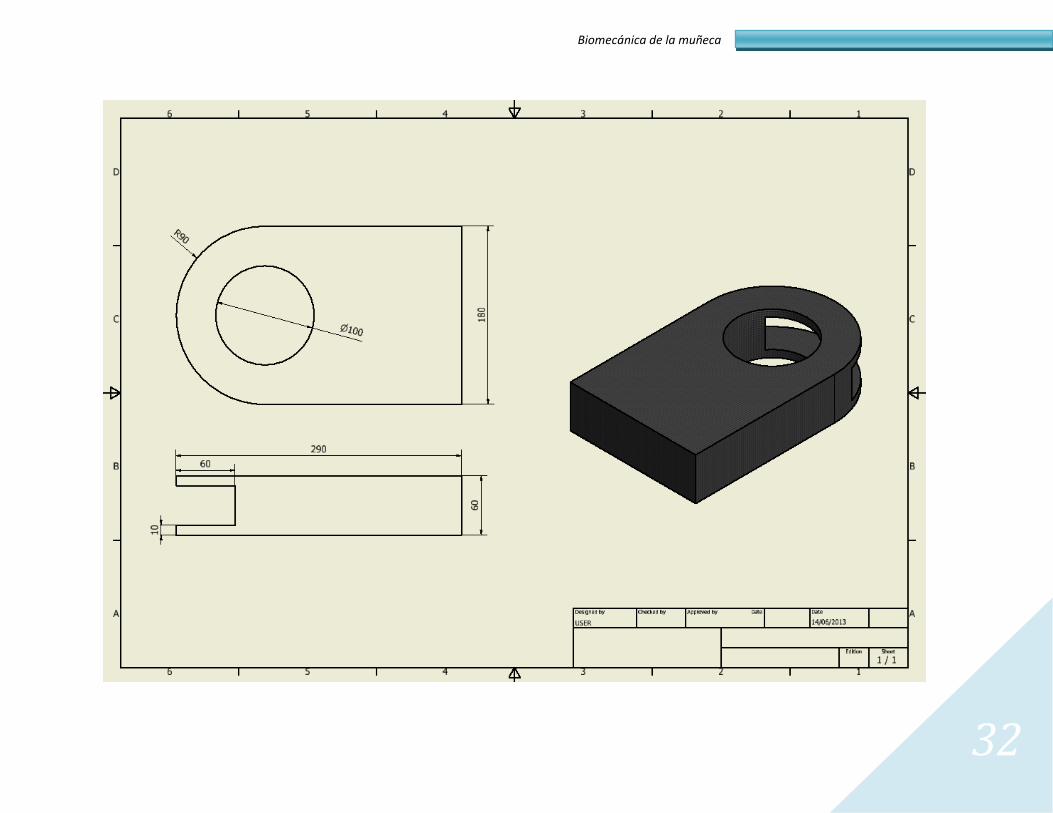
Planos y vista
Biomecánica de la muñeca
32

Biomecánica de la muñeca
33

Biomecánica de la muñeca
34

Biomecánica de la muñeca
35
Biomecánica de la muñeca
36