Autor: Jorge Enrique Hernández Amaya Director: Ph.D. Cesar Augusto Peña Cortes ROBOT HUMANOIDE...
17
Autor: Jorge Enrique Hernández Amaya Director: Ph.D. Cesar Augusto Peña Cortes ROBOT HUMANOIDE TELEOPERADO
-
Upload
tomas-fidalgo-salinas -
Category
Documents
-
view
222 -
download
0
Transcript of Autor: Jorge Enrique Hernández Amaya Director: Ph.D. Cesar Augusto Peña Cortes ROBOT HUMANOIDE...

Autor: Jorge Enrique Hernández AmayaDirector: Ph.D. Cesar Augusto Peña Cortes
ROBOT HUMANOIDE TELEOPERADO

Robot Humanoide
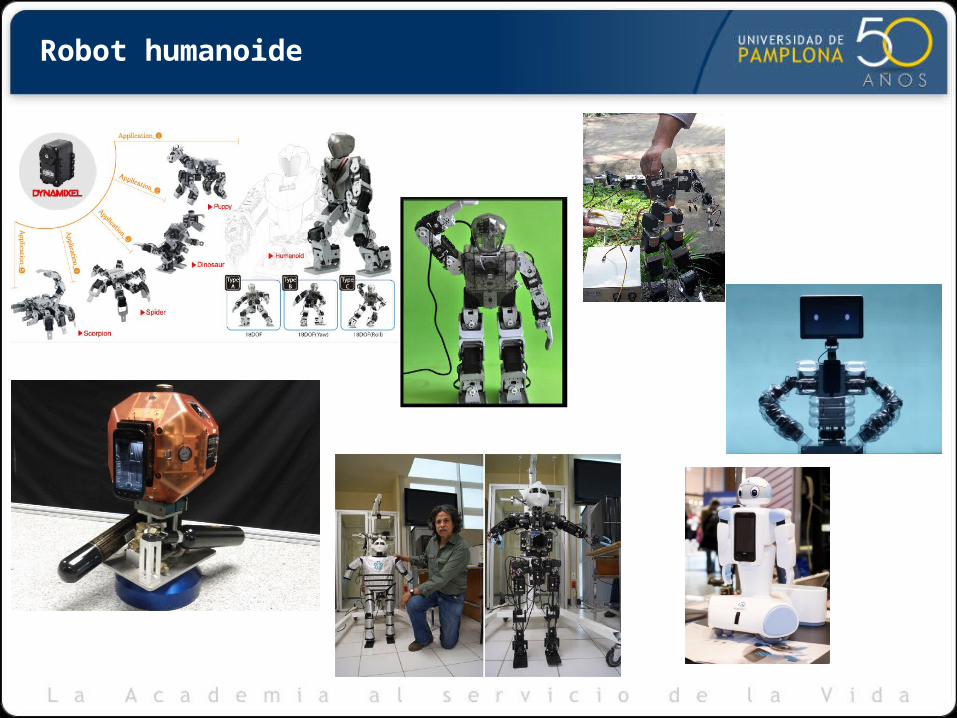
Robot humanoide

Objetivos
Objetivo General.
Construir un robot humanoide teleoperado.
Objetivos Específicos.
1.Efectuar el análisis cinemático de un robot humanoide.2.Realizar el diseño del prototipo del robot.3.Diseñar los algoritmos de teleoperacion del robot.4.Realizar el diseño de la interfaz de usuario.5.Llevar a cabo la puesta en marcha del robot y las pruebas de verificación.
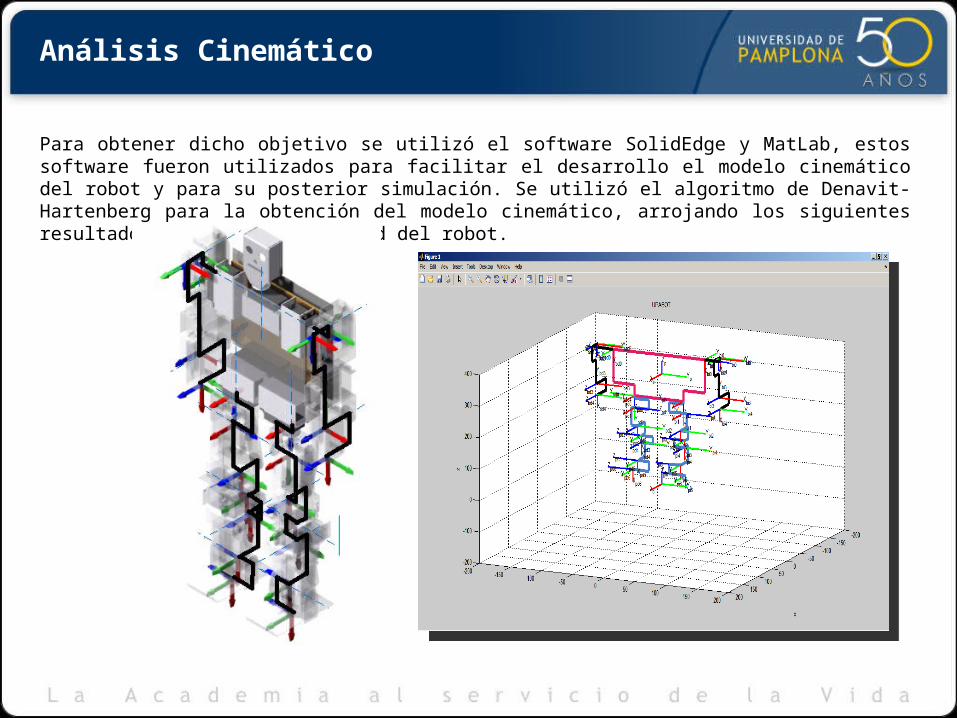
Análisis Cinemático
Para obtener dicho objetivo se utilizó el software SolidEdge y MatLab, estos software fueron utilizados para facilitar el desarrollo el modelo cinemático del robot y para su posterior simulación. Se utilizó el algoritmo de Denavit-Hartenberg para la obtención del modelo cinemático, arrojando los siguientes resultados para cada extremidad del robot.
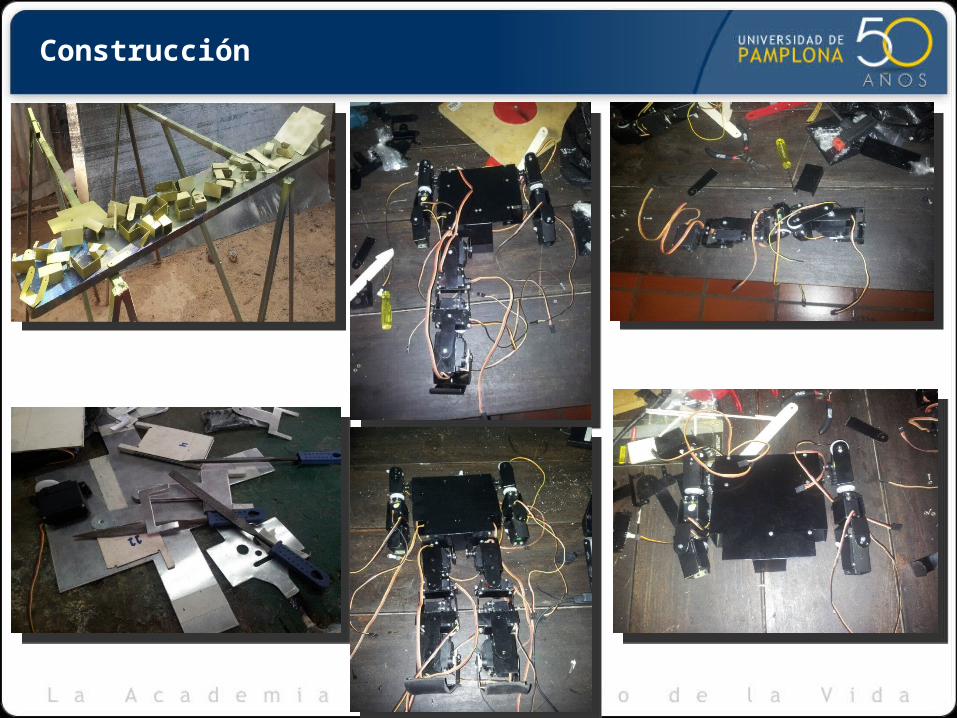
Construcción

Desarrollo

Centro de gravedad
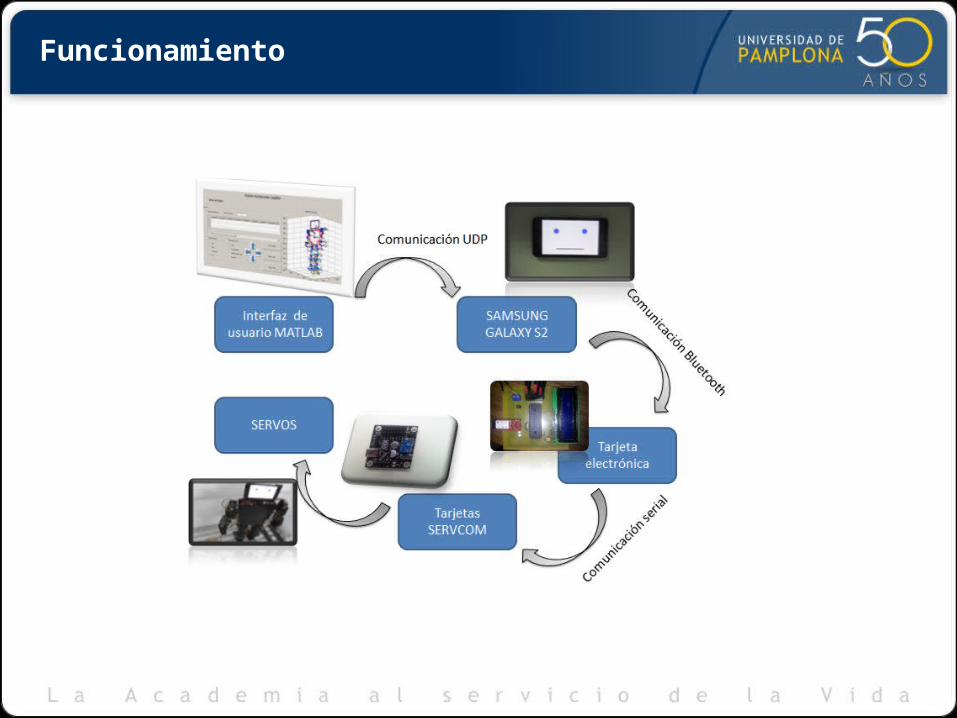
Funcionamiento
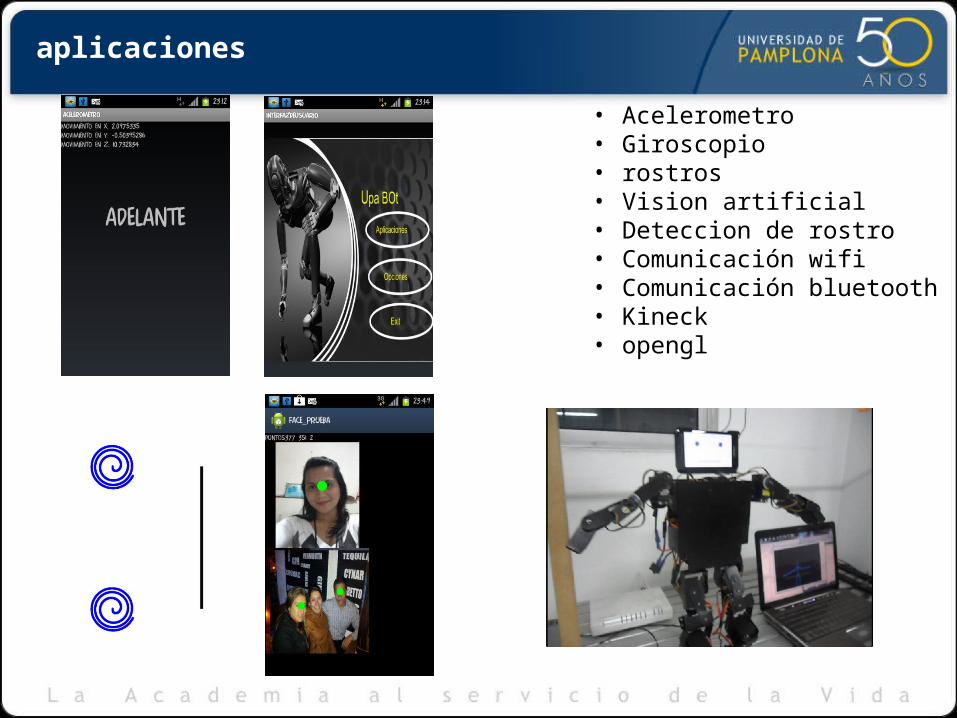
aplicaciones
• Acelerometro• Giroscopio• rostros• Vision artificial• Deteccion de rostro• Comunicación wifi• Comunicación bluetooth • Kineck• opengl
Gracias

Teleoperación del robot humanoide UPABOTAutor:Diego Andrés López DuranDirector:Ph.D. César Augusto Peña Cortés
1ra Jornada Técnica de Ingenierías

LA ACADEMIA AL SERVICIO DE LA VIDALA ACADEMIA AL SERVICIO DE LA VIDA
Introducción
http://www.microsoft.com/en-us/kinectforwindows/Hernández A. Jorge, Robot humanoide teleoperado UPABOT. Pamplona: Universidad de Pamplona, 2012.
UNIVERSIDAD UNIVERSIDAD DEDEPAMPLONAPAMPLONA

LA ACADEMIA AL SERVICIO DE LA VIDALA ACADEMIA AL SERVICIO DE LA VIDA
Proyectos recientes UNIVERSIDAD UNIVERSIDAD DEDEPAMPLONAPAMPLONA
Kinecthesia : producto que sirva para discapacitados de la visión.Universidad de Pennsylvania
Con la ayuda de Kinect será más fácil detectar signos de autismo en los niñosUniversidad de Minnesota
El objetivo de tener Kinect a las cabinas de los helicópteros y observar sus movimientos.
LA ACADEMIA AL SERVICIO DE LA VIDALA ACADEMIA AL SERVICIO DE LA VIDA
Resumen UNIVERSIDAD UNIVERSIDAD DEDEPAMPLONAPAMPLONA
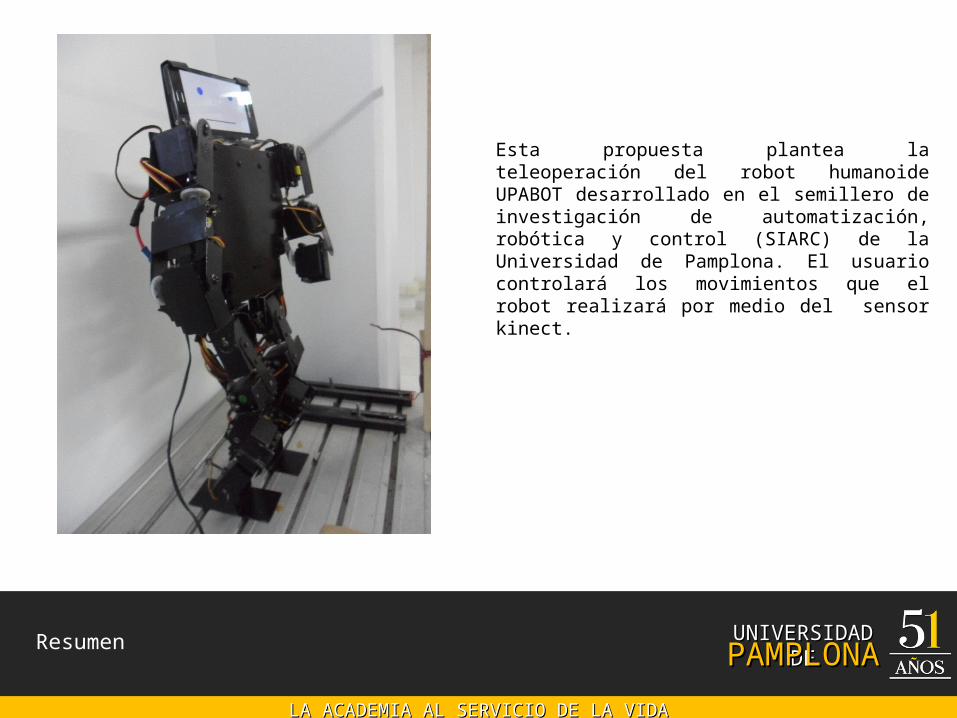
Esta propuesta plantea la teleoperación del robot humanoide UPABOT desarrollado en el semillero de investigación de automatización, robótica y control (SIARC) de la Universidad de Pamplona. El usuario controlará los movimientos que el robot realizará por medio del sensor kinect.
LA ACADEMIA AL SERVICIO DE LA VIDALA ACADEMIA AL SERVICIO DE LA VIDA
Objetivos UNIVERSIDAD UNIVERSIDAD DEDEPAMPLONAPAMPLONA
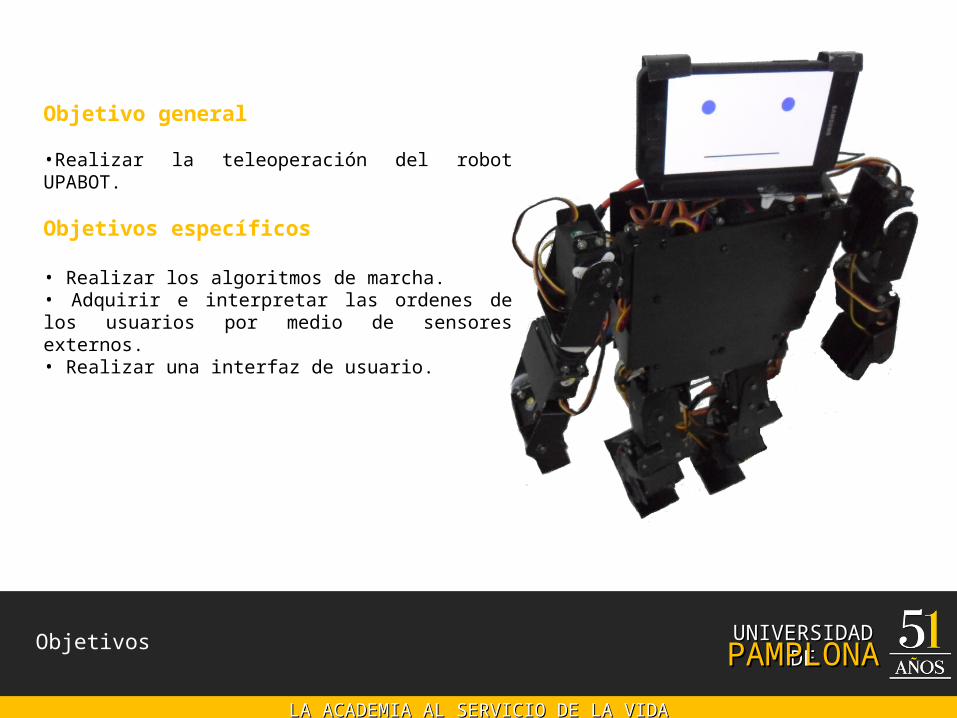
Objetivo general •Realizar la teleoperación del robot UPABOT. Objetivos específicos
• Realizar los algoritmos de marcha.• Adquirir e interpretar las ordenes de los usuarios por medio de sensores externos.• Realizar una interfaz de usuario.