
Automatización de Un Invernadero Con El PLC S7-200 (1b)
131
1 PROYECTOS MECATRÓNICOS II SISTEMA AUTOMATICO PARA CULTIVOS CARRERA: INGENIERIA MECATRÓNICA DOCENTE: MANUEL ALVARADO ANDRADE ALUMNOS: CRUZ ARIAS, Wilder PEBES REYES, Christian
-
Upload
willy-cruz-arias -
Category
Documents
-
view
240 -
download
17
description
Proyecto de Tesis para automatizar un invernadero haciendo uso de un PLC
Transcript of Automatización de Un Invernadero Con El PLC S7-200 (1b)

1
PROYECTOS MECATRÓNICOS II
SISTEMA AUTOMATICO PARA CULTIVOS
CARRERA: INGENIERIA MECATRÓNICA
DOCENTE: MANUEL ALVARADO ANDRADE
ALUMNOS:
CRUZ ARIAS, Wilder
PEBES REYES, Christian
2014 – II

2
RESUMEN
El presente trabajo de tesis tiene como principio automatizar los sistemas de temperatura, humedad relativa, riego y humedad del suelo de un invernadero. Para éste se diseñó un prototipo a escala del invernadero, para realizar pruebas para el mejoramiento de los sistemas y del sensado de las diferentes variables que los conforman.
Uno de los principales objetivos de este trabajo fue el dar una solución práctica a los problemas que presentan los invernaderos semi-automatizados. Específicamente se centró en los problemas que agravian el invernadero de agronomía, como el excesivo consumo de energía eléctrica, el mal sensado de las principales variables así como el desperdicio de agua.
En esta tesis se utilizó el PLC s7-200, ya que con este se puede tener el control de todas las variables de manera simultánea, además de que tiene un fácil manejo. Con este PLC se puede controlar de manera precisa los sistemas ya que al utilizar sensores estos mandarán señales cuando se haya alterado alguna de las variables.
Se utilizaron sensores adecuados para la medición de cada variable para el mejor desempeño del invernadero automatizado. Estos serán el medio por el cual el PLC tomará las decisiones para activar los sistemas de acuerdo a las necesidades requeridas.
Para el control de temperatura y humedad relativa se utilizó la teoría del Razonamiento Aproximado, la cual es una parte introductoria del control difuso. Esto permite que estas dos variables interactúen en un solo control, ya que una está en función de otra.

3
INDICE
Pág.
Resumen iv
Lista de figuras xiii
1 Introducción 11.1 Descripción del Documento 41.2 Antecedentes 5
1.2.1 El primer invernadero 61.3 Justificación 71.4 Preguntas de investigación 8
1.4.1 ¿Es posible controlar el funcionamiento del invernadero
con un sistema de bajo costo y poco mantenimiento? 8
1.4.2 ¿Es posible controlar el riego con el PLC? 91.4.3 ¿Es posible controlar el clima con el PLC? 91.4.4 ¿Es posible controlar la temperatura y humedad con el PLC? 10
1.5 Hipótesis 101.6 Objetivos 11
1.5.1 Objetivo general 131.5.2 Objetivos específicos 13
2 Marco Teórico 132.1 Tipos de Controladores 14
2.1.1 Controlador Lógico Programable PLC 142.1.2 Procesador Digital de señales DSP 152.1.3 Microprocesadores 152.1.4 Microcontrolador PIC 16
2.2 Tipos de Invernadero 162.2.1 Invernadero Plano o Tipo Parral 182.2.2 Invernadero en Raspa y Amagado 212.2.3 Invernadero Asimétrico o Inacral 232.2.4 Invernadero de Capilla 252.2.5 Invernadero de Doble Capilla 262.2.6 Invernadero Túnel o Semicilíndrico 262.2.7 Invernaderos de Cristal o Tipo Venlo 28
2.3 Descripción de los Sistemas 302.3.1 Riego 302.3.2 Fertirrigación 312.3.3 Hidroponia 31
2.3.3.1 Sustrato 312.3.4 Calefacción 332.3.5 Humidificación 342.3.6 Iluminación 352.3.7 CO2 36
2.4 Investigaciones Previas 37
3 Características del Invernadero a Utilizar 413.1 Características Generales 41
3.1.1 Planos del invernadero 42

4
3.1.2 Características del último cultivo 473.1.3 Parámetros de calidad 483.1.4 Sistemas de control del invernadero 51
3.2 Sistemas a controlar 533.2.1 Riego 533.2.2 Fertilización 543.2.3 Sistema de control de temperatura 553.2.4 Humidificación 57
3.3 Prototipo 583.4 Controlador 60
4 Control del clima 634.1 Modelado climático y su historia 634.2. ¿Qué es control difuso? 65
4.2.1 Introducción 664.2.2 ¿Por qué lógica difusa? 674.2.3 Control difuso en sistemas con retroalimentación 684.2.4 Lógica difusa en el invernadero 69
4.2.4.1 Clasificación difusa o fuzzificación 704.2.4.2 Diseñando reglas de control difuso (Defuzzificación) 76
5 Circuitería del sistema 805.1 Activación del sistema de temperatura 81
5.1.1 Sensor de temperature 815.1.2 Etapa de enfriamiento 825.1.3 Etapa de calefacción 83
5.2 Sistema de Humedad Relativa 845.2.1 Sensor de humedad relativa 845.2.2 Etapa de humidifación 85
5.3 Activación del sistema de riego 865.3.1 Cultivo en suelo 86
5.3.1.1 Sensor de humedad del suelo 87
5.3.1.2 Calibración del sensor de humedad del suelo 88
5.3.1.3 Activación de la bomba para el riego 89
5.3.2 Hidroponia 89
5.3.2.1 Activación de la bomba 90
6 Programación 916.1 Diagramas de flujo 92
6.1.1 Temperatura y HR 926.1.2 Riego 93
6.1.2.1 Riego en suelo 93
6.1.2.2 Riego en el sistema hidropónico 95
6.2 Diagrama esquemático 966.3 Programación en el PLC 97
6.3.1 Programa 98
7 Pruebas y Resultados 877.1 Resultados 88
7.1.1 Potencia utilizada 89Conclusiones 90Trabajos a futuro 92

5
ApéndicesApéndice A: Hoja de Datos del PLC S7-200
93Apéndice B: Hoja de datos del LM35 94Apéndice C: Hoja de Datos del Sensor de Humedad WATERMARK 95Apéndice D: Hoja de datos del MAC15A8 96Apéndice E: Hoja de datos del MOC3011 97Apéndice F: Hoja de datos del TIP41C 98Apéndice G: Hoja de datos del LM324 99
Bibliografía 100

6
LISTA DE FIGURAS
Figura Pag.
1.1 Grabado del jardín botánico de Papua, Italia 62.1 Invernadero tipo Plano o Parral 192.2 Invernadero del tipo Raspa y Amagado 222.3 Invernadero tipo Asimétrico o Inacral 232.4 Invernadero de Capilla 252.5 Invernadero tipo Doble Capilla 262.6 Invernadero de Túnel o Semicilíndrico 282.7 Invernadero del tipo Cristal o Tipo Venlo 293.1 Parte frontal del invernadero 423.2 Maqueta virtual del invernadero con una panorámica superior 463.3 Maqueta virtual con una panorámica frontal 463.4 Tomates producidos en el ciclo Agosto-Diciembre de 2007 503.5 Cultivo de tomates 503.6 Interior del invernadero después de la cosecha 523.7 Riego por goteo 543.8 Gotero 543.9 Fertilización usada en el sistema de riego 543.10 Etapa de calefacción por medio de calefactor de gas 553.11 Etapa de enfriamiento por medio de extractores 563.12 Etapa de enfriamiento por medio de extractores 563.13 Pared húmeda 573.14 Calefactor 573.15 Vista lateral del prototipo 593.16 Vista frontal del prototipo 603.17 PLC s7-200 Siemens 603.18 Componentes para el PLC s7-200 614.1 Sistema de invernadero 654.2 Sistema de tanques acoplados 684.3 a) Función de membresía para la temperatura optima 724.3 b) Funciones de membresía para 40°C 724.4 Funciones de membresía para la temperatura 734.5 Funciones de membresía para la Humedad Relativa 734.6 Funciones de membresía para la Humedad Relativa en un sólo eje 744.7 Rangos de pertenencia para la temperatura 744.8 Rangos de pertenencia para la HR 754.9 Sistema defuzzificado 785.1 Sensor de temperatura acondicionado 815.2 Etapa de potencia para los extractores 825.3 a) Etapa de potencia para el calefactor 1 835.3 b) Etapa de potencia para el calefactor 2 835.4 Circuito para la bomba de agua 855.5 Amplificador de voltaje para ventilador 865.6 Sensor de humedad Watermark 875.7 Circuito divisor de tensión para el sensor de humead del suelo 885.8 Etapa de potencia para la bomba de riego 895.9 Etapa de potencia de la bomba 906.1 Diagrama de flujo temperatura y HR 926.2 Diagrama de flujo para el riego en el suelo 946.3 Diagrama de flujo para el riego en hidroponía 956.4 Diagrama esquemático del sistema 96
7
Capítulo 1
IntroducciónEn la presente Proyecto de Tesis se busca una solución práctica ante las grandes necesidades de optimizar los recursos agrícolas en nuestro estado y país. Este tema es interesante ya que se interactúa con las diferentes áreas de la ingeniería como son: comunicaciones y electrónica, agronomía, hidráulica entre otras.
En este trabajo se pretende mejorar de una manera más eficiente los sistemas del invernadero ya existentes, además de sugerirle al agricultor una mejor opción de cultivo, ya que puede optimizar al máximo sus recursos.
“En las décadas siguientes, la agricultura deberá afrontar, por una parte, una demanda creciente en alimentos y materias primas básicas, y a la necesidad de utilizar los recursos sin causar degradación o agotamiento del ambiente. Las civilizaciones generalmente han prosperado durante los periodos de clima benigno, incluso muchas fueron incapaces de optimizar sus prácticas agrícolas para ayudar al control del sistema natural; por ello la historia documenta la caída de los sistemas socioeconómicos que no tuvieron capacidad para responder a los cambios del clima o en los recursos de agua y suelo.”
Un invernadero es toda aquella estructura cerrada cubierta por materiales transparentes, dentro de la cual es posible obtener condiciones artificiales de microclima, y con ello cultivar plantas fuera de estación en condiciones óptimas. Como lo dice su etimología In-dentro y ver primavera, que conjugado significa primavera dentro.
“La característica distintiva del invernadero, si se compara con la producción a campo abierto, es la presencia de una barrera entre el cultivo y el ambiente externo. Esta barrera crea un microclima en el interior (temperatura, humedad relativa, CO2, cantidad y calidad de luz, etcétera) que protege contra viento, lluvia, plagas, enfermedades y animales; además permite aplicar efectivamente el control biológico para proteger el cultivo. Todas estas características hacen que la producción en ambiente protegido tenga rendimientos más altos que a campo abierto.”
El cultivo bajo invernadero siempre ha permitido obtener producciones de primera calidad y mayores rendimientos, en cualquier época del año, a la vez que permiten alargar el ciclo de cultivo, permitiendo producir en las épocas del año más difíciles y obteniéndose mejores precios. Este incremento del valor de los productos permite que el agricultor pueda invertir tecnológicamente en su explotación mejorando la estructura del invernadero, los sistemas de riego y fertilización, los sistemas de gestión del clima, etc., que se reflejan posteriormente en una mejora de los rendimientos y de la calidad del producto final.
El invernadero, su cultivo, y su administración forman un sistema. Un modelo es una representación simplificada de estos sistemas. El conjunto de expresiones matemáticas que describen el comportamiento del invernadero constituyen lo que se llama un modelo climático. La utilidad de los modelos es múltiple en el diseño de herramientas de ingeniería, permiten comprender cómo se produce el ambiente protegido en función de las condiciones meteorológicas exteriores, sirven para interpretar las observaciones del

8
clima y del comportamiento de los cultivos, proveen información para el diseño de invernaderos y sistemas de control automático. En este trabajo se presenta el sistema de control automático del invernadero, que se basa en la modelación climática en ambiente controlado, la transferencia de masa y energía por conducción y radiación y el sistema de riego por goteo.
“Durante las últimas dos décadas, una gran cantidad de conocimiento científico ha sido acumulado y expresado en modelos matemáticos para invernaderos. Estos modelos que describen el proceso de producción se pueden usar para diseñar herramientas de ingeniería en invernaderos (análisis y diseño de invernaderos, análisis y diseño de nuevos algoritmos y métodos de control, etcétera).”
“La formulación de modelos climáticos permite predecir el comportamiento de las diferentes variables que integran el agrosistema del invernadero, para condiciones climáticas específicas de cada región; y sus interacciones.” Sin embargo, la modelación matemática del ambiente físico en nuestro país es muy escasa, debido a que la tecnología de producción en invernadero es relativamente nueva, por lo que hay una gran necesidad de generarla.
Para el mejoramiento de los sistemas y una automatización más eficiente se requiere de un buen controlador. En este caso se utilizará el controlador lógico programable en sus cifras en inglés PLC que es un dispositivo electrónico diseñado para controlar y automatizar procesos industriales, esto quiere decir que tiene una aplicación más ruda que otros dispositivos. Este dispositivo satisface las necesidades requeridas para la automatización del invernadero teniendo un control más preciso del clima.
9
1.1 Descripción del documento
Este trabajo se desarrolló en varios capítulos los cuales describiremos a continuación:
Capítulo 1: Se refiere a la introducción al tema de los invernaderos y también se plantean los objetivos a lograr, la justificación del tema y las preguntas de investigación con su hipótesis. Dando unas reseñas históricas del inicio de los invernaderos y su evolución, así como sus características. Además se da una breve explicación del contenido de la tesis.
Capítulo 2: Se describen los diferentes tipos de invernaderos que existen, así como las variables y los sistemas que conforman a estos. También se aborda brevemente los diferentes controladores que se pueden usar en los invernaderos automatizados.
Capítulo 3: Se enfoca al invernadero que se utilizó, el historial de su última cosecha, la descripción de los sistemas existentes, sus ventajas y desventajas así como el planteamiento de mejoras que presenta este trabajo.
Capítulo 4: Se da una breve introducción a lo que se refiere al modelado climático, y las diferentes formas de controlar el clima, se abordó el tema del control difuso, y del cómo se implementó en esta tesis.
Capítulo 5: Se describen los diferentes circuitos implementados en el prototipo con una breve explicación de su funcionamiento
Capítulo 6: Se describen los diagramas de flujo y esquemático, así como la programación del PLC.
Capítulo 7: Se dan conocer los resultados que se obtuvieron de esta tesis. Así como las conclusiones a las que condujo este trabajo.
1.2 Antecedentes
En referencias históricas del uso de plantas de interior, dos cosas son obvias: en primer lugar la introducción de plantas en macetas y en segundo lugar de la colocación de estas plantas en el interior. Mientras que las plantas nativas pueden crecer en macetas al aire libre, las plantas exóticas tienen requisitos climáticos especiales y se deben cultivar dentro.
Hacia finales del siglo IV A.C., las macetas eran ya una cosa normal y los jardines de azotea no eran tomados ya como algo fuera de lo común. Los egipcios ya sentían un gran amor por las plantas y las flores. No obstante las pruebas escritas que demuestran la utilización de las plantas de interior data del siglo III A.C. Las plantas estaban en recipientes de arcilla y fueron colocadas en los patios de los palacios con propósitos ornamentales.
Las plantas de interior incluso existieron en Pompeya donde los resultados arqueológicos de las ruinas demuestran que los romanos también han utilizados el cultivo en maceta para uso de interior. Hay prueba que los atrios fueron adornados con numerosas plantas en flor y cestas que colgaban. El emperador Tiberius construyó invernaderos

10
usando Lapis specularis (Piedras de espejo) que permitió dar una luz tenue en vez del sol directo. El utilizó el calor del sol para calentar el abono que era utilizado para abonar las plantas exóticas que Tiberius había recolectado en sus campañas.
1.2.1 El primer invernadero
Muchas de las plantas exóticas que fueron llevadas a Gran Bretaña no habrían sobrevivido a no ser por la existencia de los invernaderos. En 1545 se fundó el jardín botánico de Padua en Italia con fines académicos, para facilitar el aprendizaje y el conocimiento de las plantas medicinales (figura 1.1). Este sufrió modificaciones en su estructura alrededor en 1550 para introducir algunas partes de cristal y poder adaptar así las plantas más delicadas, aunque no fue hasta el siglo XVII que se utilizó ese material como técnica común para el cultivo de invernadero. Este invernadero se empleó sólo para el cultivo de plantas medicinales.
Figura 1.1 Grabado del jardín botánico de Padua, Italia
Estas son las bases fundamentales de los invernaderos modernos, siempre teniendo como objetivo la producción de plantas de distintos tipos de clima.
1.3 Justificación
La agricultura es una actividad de gran importancia estratégica como base fundamental para el desarrollo autosuficiente y riqueza de las naciones. Todas las actividades económicas que abarca la agricultura, tienen su fundamento en la explotación del suelo o de los recursos que este origina en forma natural o por la acción del hombre.
El clima terrestre es caótico y complejo. Se debe a una multiplicidad de factores en los que el Hombre no tiene influencia sustancial alguna. Esto afecta de manera directa a los diferentes tipos de cultivos.
“En las décadas siguientes, la agricultura deberá afrontar, por una parte, una demanda creciente en alimentos y materias primas básicas, y a la necesidad de utilizar los recursos sin causar degradación o agotamiento del ambiente. Las civilizaciones generalmente han prosperado durante los periodos de clima benigno, incluso muchas fueron incapaces de optimizar sus prácticas agrícolas para ayudar al control del sistema natural; por ello la historia documenta la caída de los sistemas socioeconómicos que no tuvieron capacidad para responder a los cambios del clima o en los recursos de agua y suelo.”
Se tiene muchas ventajas al tener cultivos bajo invernadero, esto evita los cambios bruscos del clima como la variación de temperatura, la escasez o exceso de humedad.

11
También se puede producir cultivos en las épocas del año más difíciles teniendo cosechas fuera de temporal, sustituyendo el clima de otras regiones y alargando el ciclo del cultivo. Otra de las ventajas es el de obtener productos de mejor calidad y una mayor producción en la cosecha, y así incrementar la economía.
Este incremento del valor de los productos permite que el agricultor pueda invertir tecnológicamente en su explotación mejorando la estructura del invernadero.
Al optimizar los recursos al máximo con la ayuda de la ingeniería se tiene un ahorro considerable de energía eléctrica y agua. Este último es un problema grave en nuestro estado “el 78% del agua a nivel nacional es para uso agrícola con una eficiencia de riego del 45%”. Por eso es importante invertir en investigación y desarrollo de tecnologías. Es por eso que para el desarrollo económico de este país la inversión de invernaderos no es un lujo sino una necesidad.
1.4 Preguntas de investigación
1.4.1 ¿Es posible controlar el funcionamiento del invernadero con un
sistema de bajo costo y poco mantenimiento utilizando un PLC?
Como todo proyecto bien estructurado se requiere de una inversión inicial, que relativamente es costoso, pero con un buen funcionamiento y una buena administración se llega retribuir la inversión inicial en un lapso no muy extenso de tiempo.
Con la ayuda de las diferentes áreas de la ingeniería es posible controlar el clima interno del invernadero, el cual es la base fundamental del funcionamiento de éste. Con estas bases podemos llegar a la automatización, la cual nos permite tener una reducción de mano de obra, y utilizar los recursos necesarios sin desperdiciarlos.
Para poder automatizar el invernadero se requiere tener un control preciso de las variables que en este caso son: humedad relativa (HR), temperatura, riego y fertilización, observando el comportamiento de estas por medio de sensores o estableciendo tiempos para el caso de riego y fertilización. Ya obtenido el sensado sólo resta regular las variables a valores deseados o trayectorias definidas.
Para llegar a los valores deseados se cuenta con sistemas mecánicos y eléctricos los cuales se pretenden manipular para obtener un clima estable y benéfico para la planta.
1.4.2 ¿Es posible controlar el riego con el PLC?
El PLC puede controlar el riego de dos maneras: proporcionando tiempos (temporizadores), con lo cual se pretende establecer períodos apropiados de riego para el cultivo en hidroponía, con estrategias que proporcionará el agrónomo. O bien sensando la humedad del suelo administrando solamente el agua que requiera el cultivo, dado el caso que no se tenga hidroponía y se desarrolle el cultivo en el suelo.

12
1.4.3 ¿Es posible controlar el clima con el PLC?
Para el control del clima requerimos un monitoreo continuo de las variables y un funcionamiento preciso de los sistemas mecánicos y eléctricos.
Con la ayuda del PLC se puede tener un mejor control del clima dentro del invernadero, ya que éste tiene una reacción inmediata después de que una de las variables de la climatización se vea alterada. Por tal motivo el invernadero siempre tendrá una climatización con rangos seguros, incrementando la eficiencia para el cultivo.
Con el monitoreo continuo y el control preciso del PLC, el sistema llegará a tener un mayor ahorro de agua y electricidad. Esto porque al sobrepasar los valores de los rangos seguros el PLC activará los sistemas para la climatización, y se apagarán al llegar nuevamente al estado seguro. Así evitando el desperdicio desde estas fuentes.
1.4.4 ¿Es posible controlar la temperatura y humedad con el PLC?
El PLC es capaz de controlar estas variables estableciendo rangos seguros y flexibles para los distintos tipos de cultivos, contando límites máximos y mínimos teniendo en cuenta los rangos de calidad del ambiente.
1.5 Hipótesis
Las hipótesis en las que se basa esta investigación son:
Es posible controlar y mejorar el funcionamiento de un invernadero teniendo un sistema de bajo costo y poco mantenimiento con la ayuda del PLC, ya que los controladores que actualmente se utilizan en los invernaderos son muy costosos y foráneos, y su reparación necesita de especialistas extranjeros, además de que estos están adecuados a las condiciones de clima y de desarrollo tecnológico de los países de donde provienen y muchas veces no encajan con las exigencias de los invernaderos mexicanos.
Con la ayuda del PLC es posible tener un control de las variables del invernadero (Temperatura, Humedad relativa, Humedad del suelo y Riego), ya que éste con ayuda de los sensores adecuados tiene una rápida reacción y además de que puede controlar grandes cargas debido a su aplicación industrial.
1.6 Objetivos
1.6.1 Objetivo General
Diseñar un sistema de control de las principales variables de un invernadero que en este caso son: Temperatura, Humedad Relativa, Humedad del suelo y del riego. Manteniendo los valores de estas variables en los rangos recomendados. Teniendo un sistema de bajo costo y que requiera poco mantenimiento con la ayuda de un PLC.
Para lograr un menor costo se busca un mayor ahorro de agua y energía eléctrica. Se conseguirá un mayor ahorro de agua al utilizar sensores para los sistemas de humedad y de riego y tener bien definido el tiempo de este último. Todo esto lo lograremos con la ayuda del PLC, además de que el de riego será por medio del sistema

13
por goteo, el cual proporciona a la planta el agua requerida y la humedad del suelo constante sin llegar a desperdiciarla causando deficiencia de oxígeno y las consecuencias nocivas que conlleva.
Un problema que tienen los invernaderos que no están automatizados es el desperdicio de energía eléctrica, al no tener una estrategia de control de los rangos superiores e inferiores de las variables. Este trabajo se encargará de establecer los rangos para el encendido y el apagado de los sistemas.
1.6.2 Objetivos Específicos
En esta tesis se pretenden controlar las principales variables en un invernadero que son: temperatura, humedad relativa y riego.
Diseñar el sistema de automatización por medio del PLC s7-200 siemens. Construir el sistema de control con materiales de bajo costo. Mejorar los sistemas existentes. Obtener un mejor control en los rangos de las variables para tener un
rendimiento óptimo. Lograr un ahorro considerable de agua y electricidad.
Capítulo 2
Marco TeóricoUna perspectiva limitada del control se concibe como la verificación “a posteriori” de los resultados conseguidos en el segmento de los objetivos planteados, mejorando el desempeño dinámico y “regulando las variables a valores deseados o trayectorias definidas realizando trabajos repetitivos.”
La rama principal del control a utilizar es la automatización. Ésta es la tecnología que trata de la aplicación de sistemas mecánicos y electrónicos y de bases computacionales para operar y controlar la producción. Esto nos trae como beneficios el incremento a la productividad, mayor seguridad para el obrero, y una mano de obra escasa. Mejora la calidad del producto y la reducción del tiempo de producción.
2.1 Tipos de Controladores
Existen varios tipos de controladores, con los cuales se puede automatizar un sistema. Algunos de los controladores son: Controlador lógico programable (PLC), Procesador digital de señales (DSP), Microprocesador, Circuitos integrados programables (PIC), etc.
2.1.1 Controlador Lógico Programable (PLC)
EL PLC es un aparato electrónico operado digitalmente que usa una memoria programable para el almacenamiento interno de instrucciones, las cuales implementan funciones específicas, tales como lógicas, secuenciales, temporización, conteo y aritméticas, para controlar a través de módulos de entrada /salida digitales y analógicas, varios tipos de máquinas o procesos. Una computadora digital que es usada para
14
ejecutar las funciones de un controlador programable, se puede considerar bajo este rubro. Se excluyen los controles secuenciales mecánicos. De una manera general podemos definir al controlador lógico programable a toda máquina electrónica, diseñada para controlar en tiempo real y en medio industrial procesos secuenciales de control. Su programación y manejo puede ser realizado por personal con conocimientos electrónicos, sin previos conocimientos sobre informática.
También se le puede definir como una "caja negra" en la que existen unas terminales de entrada a los que se conectarán pulsadores, finales de carrera, foto celdas, detectores, etc. Unas terminales de salida a las que se les conectarán bobinas de contactores, electro-válvulas, lámparas; de tal forma que la actuación de estos últimos están en función de las señales de entrada que estén activadas en cada momento, según el programa almacenado. Esto quiere decir que los relés de encallamiento, temporizadores y contadores son internos. La tarea del usuario se reduce a realizar el "programa” que no es más que la relación entre las señales de entrada que se tienen que cumplir para activar cada salida.
2.1.2 Procesador Digital de Señales DSP
DSP es el acrónimo de Digital Signal Processor, que significa Procesador Digital de Señal. Un DSP es un sistema basado en un procesador o microprocesador que posee un juego de instrucciones, un hardware y un software optimizados para aplicaciones que requieran operaciones numéricas a muy alta velocidad. Debido a esto es especialmente útil para el procesado y representación de señales analógicas en tiempo real: en un sistema que trabaje de esta forma (tiempo real) se reciben muestras (samples en inglés), normalmente provenientes de un conversor analógico/digital (ADC).
2.1.3 Microprocesadores
Un microprocesador es un circuito de alta escala de integración (chip programable), compuesto por miles de circuitos más simples como: flip flops, contadores, registros, decodificadores, comparadores, etc.; todos ellos distribuidos internamente en varios bloques funcionales. También es conocido como Unidad Central de Procesamiento o CPU.
La programabilidad de un microprocesador se refiere a la capacidad que éste tiene para que su función sea definida a través de un programa. El programa consta de una serie de instrucciones relacionadas, ejecutadas secuencialmente (una a la vez) por el microprocesador y que pueden implicar operaciones, por ejemplo: suministrar señales para los demás elementos del sistema, buscar y traer datos desde la memoria, transferir datos desde y hacia los dispositivos de entrada y salida, decodificar instrucciones, realizar operaciones lógicas o aritméticas, etc.
2.1.4 Microcontrolador PIC’s
Es un circuito integrado programable que contiene todos los componentes de una computadora. Se emplea para controlar el funcionamiento de una tarea determinada y, debido a su reducido tamaño, suele ir incorporado en el propio dispositivo que gobierna. Esta última característica es la que le confiere la denominación de consola incrustada.
El microcontrolador es un computador dedicado. En su memoria sólo reside un programa

•
•
•
• 15
destinado a gobernar una aplicación determinada; sus líneas de entrada/salida soportan la conexión de los sensores y actuadores de dispositivo a controlar y todos los recursos complementarios disponibles tienen como única finalidad atender a sus requerimientos. Una vez programado y configurado el microcontrolador solamente sirve para gobernar la tarea asignada.
2.2 Tipos de Invernadero
Un invernadero es toda aquella estructura que protege al cultivo de las condiciones climatológicas externas, permitiendo su crecimiento y la realización de las labores culturales en el interior del mismo, durante todo su ciclo. Dentro de la cual es posible obtener unas condiciones artificiales de microclima, y con ello cultivar plantas fuera de estación en condiciones óptimas.En la construcción de un invernadero hay que tomar en consideración al menos los siguientes factores:
Los materiales que configuran la estructura deben resistir los esfuerzos mecánicos a los que van a ser sometidos y no deformarse con el paso del tiempo. El peso de la propia estructura, el empuje del viento y la sobrecarga de nieve son los efectos más importantes que hay que tener en cuenta a la hora de diseñar e instalar un invernadero.
Los materiales de cobertura o recubrimiento han de ser resistentes a los factores climáticos adversos (lluvia, viento, nieve y granizo) y permitir la mayor transmisión posible de la radiación solar que reciben.
La superficie y el volumen del invernadero tienen que ser lo suficientemente grandes como para permitir una mecanización que resulte utilizable rápida y cómodamente.
La orientación y el diseño del invernadero han de reunir características tales que le permitan recibir la mayor radiación solar posible y que se produzca una renovación del aire satisfactoria, especialmente durante las épocas del año en que estos aspectos son más necesarios: solar en invierno y ventilación en verano.
Los invernaderos se pueden clasificar de distintas formas, según se atienda a determinadas características de sus elementos constructivos (por ejemplo: por su perfil externo, según su fijación o movilidad, por el material de cubierta, según el material de la estructura, etc.).
La elección de un tipo de invernadero está en función de una serie de factores o aspectos técnicos:
Tipo de suelo. Se deben elegir suelos con buen drenaje y de alta calidad; aunque con los sistemas modernos de fertirriego es posible utilizar suelos pobres con buen drenaje o sustratos artificiales.
Topografía. Son preferibles lugares con pequeña pendiente orientados de norte a sur.
Vientos. Se tomarán en cuenta la dirección, intensidad y velocidad de los vientos dominantes.
Exigencias bioclimáticas de la especie en cultivo Características climáticas de la zona o del área geográfica donde vaya a
construirse el invernadero

•
16
Disponibilidad de mano de obra (factor humano) Imperativos económicos locales (mercado y comercialización).
2.2.1 Invernadero Plano o Tipo Parral
Este tipo de invernadero se utiliza en zonas poco lluviosas. La estructura de estos invernaderos se encuentra constituida por dos partes claramente diferenciadas, una estructura vertical y otra horizontal.
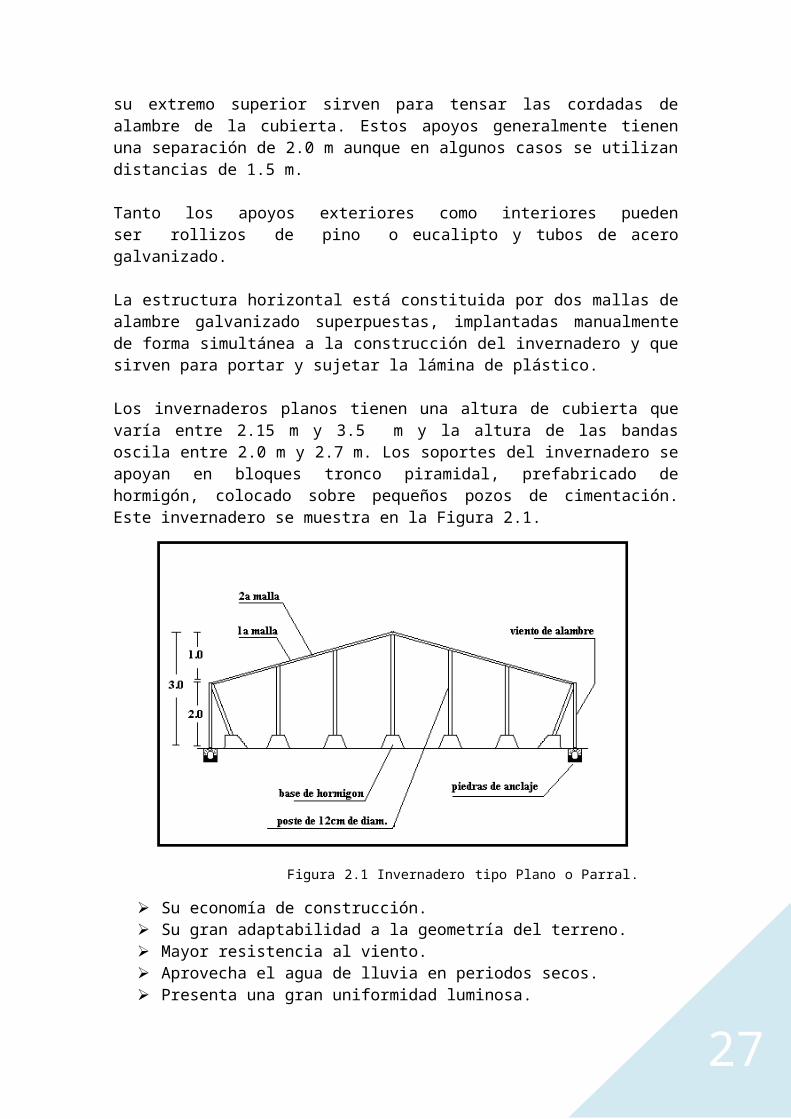
La estructura vertical está constituida por soportes rígidos que se pueden diferenciar según sean perimetrales (soportes de cerco situados en las bandas y los esquineros) o interiores (pies derechos). Los pies derechos intermedios suelen estar separados unos 2.0 m en sentido longitudinal y 4.0 m en dirección transversal, aunque también se presentan separaciones de 2.0 m x 2.0 m y 3.0 m x 4.0 m. Los soportes perimetrales tienen una inclinación hacia el exterior de aproximadamente 30° con respecto a la vertical y junto con los postes que sujetan su extremo superior sirven para tensar las cordadas de alambre de la cubierta. Estos apoyos generalmente tienen una separación de 2.0 m aunque en algunos casos se utilizan distancias de 1.5 m.
Tanto los apoyos exteriores como interiores pueden ser rollizos de pino o eucalipto y tubos de acero galvanizado.
La estructura horizontal está constituida por dos mallas de alambre galvanizado superpuestas, implantadas manualmente de forma simultánea a la construcción del invernadero y que sirven para portar y sujetar la lámina de plástico.
Los invernaderos planos tienen una altura de cubierta que varía entre 2.15 m y 3.5 m y la altura de las bandas oscila entre 2.0 m y 2.7 m. Los soportes del invernadero se apoyan en bloques tronco piramidal, prefabricado de hormigón, colocado sobre pequeños pozos de cimentación. Este invernadero se muestra en la Figura 2.1.
Figura 2.1 Invernadero tipo Plano o Parral.

17
Su economía de construcción. Su gran adaptabilidad a la geometría del terreno. Mayor resistencia al viento. Aprovecha el agua de lluvia en periodos secos. Presenta una gran uniformidad luminosa.
Mientras que sus desventajas son:
Poco volumen de aire. Mala ventilación. La instalación de ventanas cenitales es bastante difícil. Demasiada especialización en su construcción y conservación. Rápido envejecimiento de la instalación. Poco o nada aconsejable en los lugares lluviosos. Peligro de hundimiento por las bolsas de agua de lluvia que se forman en la
lámina de plástico. Difícil mecanización y dificultad en las labores de cultivo por el excesivo número
de postes, alambre de los vientos, piedras de anclaje, etc. Poco estanco al goteo del agua de lluvia y al aire ya que es preciso hacer orificios
en el plástico para la unión de las dos mallas con alambre, lo que favorece la proliferación de enfermedades fúngicas.
2.2.2 Invernadero en Raspa y Amagado
Su estructura es muy similar al tipo parral, pero varía la forma de la cubierta. Se aumenta la altura máxima del invernadero en la cumbrera, que oscila entre 3.0 m y 4.2 m, formando lo que se conoce como “raspa”. En la parte más baja, conocida como “amagado”, se unen las mallas de la cubierta al suelo mediante postes y horquillas de hierro que permite colocar los canalones para el desagüe de las aguas pluviales. La altura del amagado oscila de 2.0 m a 2.8 m, la de las bandas entre 2.0 m y 2. m.
La separación entre apoyos y los postes del amagado es de 2.0 m x 4.0 m y el ángulo de la cubierta oscila entre 6° y 20°, siendo este último el valor óptimo. La orientación recomendada es en dirección este-oeste. Este invernadero se ilustra en la Figura 2.2.
Sus principales ventajas son:
Su economía. Tiene mayor volumen unitario y por tanto una mayor inercia térmica que
aumenta la temperatura nocturna con respecto a los invernaderos planos. Presenta buena estanqueidad a la lluvia y al aire, lo que disminuye la humedad
interior en periodos de lluvia. Presenta una mayor superficie libre de obstáculos. Permite la instalación de ventilación cenital situada a sotavento, junto a la arista
de la cumbrera.
Mientras sus principales desventajas son:
Diferencias de luminosidad entre la vertiente sur y la norte del invernadero. No aprovecha las aguas pluviales. Se dificulta el cambio del plástico de la cubierta. Al tener mayor superficie desarrollada se aumentan las pérdidas de calor a través
de la cubierta.
18
Figura 2.2 Invernadero del tipo Raspa y Amagado
2.2.3 Invernadero Asimétrico o Inacral
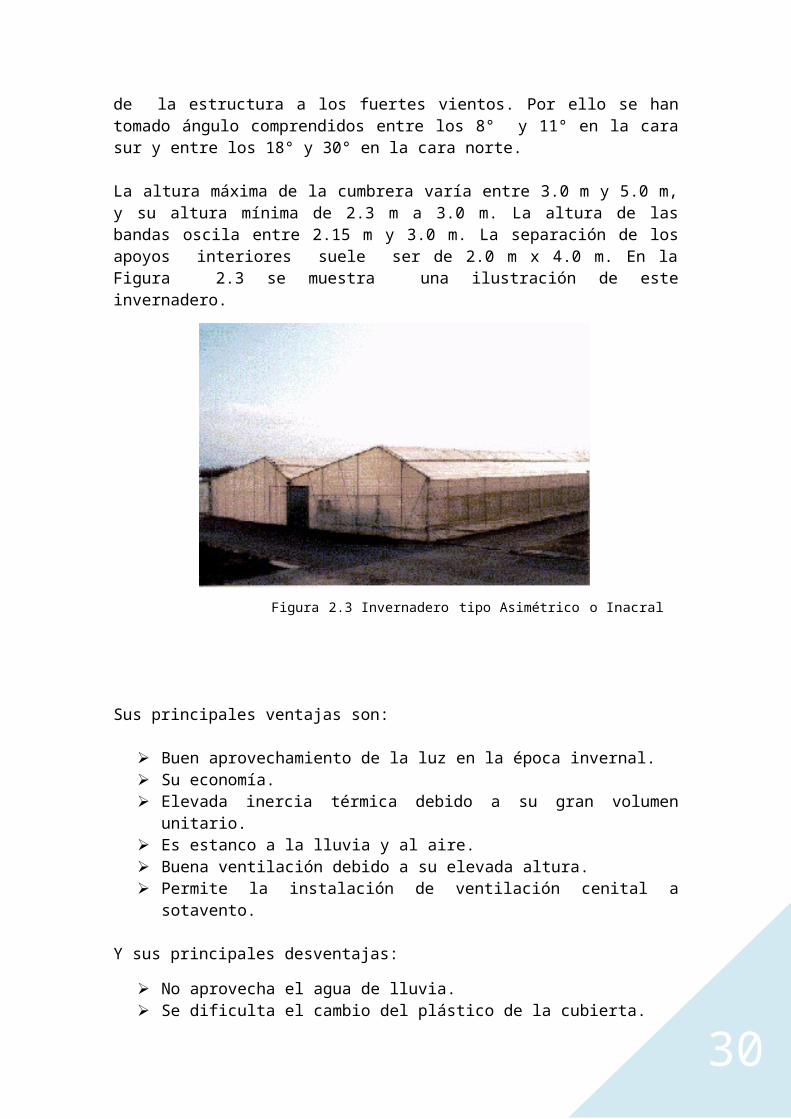
Difiere de los tipo raspa y amagado en el aumento de la superficie en la cara expuesta al sur, con objeto de aumentar su capacidad de captación de la radiación solar. Para ello el invernadero se orienta en sentido este-oeste, paralelo al recorrido aparente del sol.
La inclinación de la cubierta debe ser aquella que permita que la radiación solar incida perpendicularmente sobre la cubierta al mediodía solar durante el solsticio de invierno, época en la que el sol alcanza su punto más bajo. Este ángulo deberá ser próximo a 60°, pero ocasiona grandes inconvenientes por la inestabilidad de la estructura a los fuertes vientos. Por ello se han tomado ángulo comprendidos entre los 8° y 11° en la cara sur y entre los 18° y 30° en la cara norte.
La altura máxima de la cumbrera varía entre 3.0 m y 5.0 m, y su altura mínima de 2.3 m a 3.0 m. La altura de las bandas oscila entre 2.15 m y 3.0 m. La separación de los apoyos interiores suele ser de 2.0 m x 4.0 m. En la Figura 2.3 se muestra una ilustración de este invernadero.
Figura 2.3 Invernadero tipo Asimétrico o Inacral

19
Sus principales ventajas son:
Buen aprovechamiento de la luz en la época invernal. Su economía. Elevada inercia térmica debido a su gran volumen unitario. Es estanco a la lluvia y al aire. Buena ventilación debido a su elevada altura. Permite la instalación de ventilación cenital a sotavento.
Y sus principales desventajas:
No aprovecha el agua de lluvia. Se dificulta el cambio del plástico de la cubierta. Tiene más pérdidas de calor a través de la cubierta debido a su mayor superficie
desarrollada en comparación con el tipo plano.
2.2.4 Invernadero de Capilla
Los invernaderos de capilla simple tienen la techumbre formando uno o dos planos inclinados, según sea a un agua o a dos aguas. En la Figura 2.4 se muestra este tipo de invernadero.
Figura 2.4 Invernadero de Capilla
Sus principales ventajas son:
Es de fácil construcción y de fácil conservación. Es muy aceptable para la colocación de todo tipo de plástico en la cubierta. La ventilación vertical en paredes es muy fácil y se puede hacer de
grandes superficies, con mecanización sencilla. También resulta fácil la instalación de ventanas cenitales.
Tiene grandes facilidades para evacuar el agua de lluvia.

20
2.2.5 Invernadero de Doble Capilla
Los invernaderos de doble capilla están formados por dos naves yuxtapuestas. Su ventilación es mejor que en otros tipos de invernadero, debido a la ventilación cenital que tienen en cumbrera de los dos escalones que forma la yuxtaposición de las dos naves; estas aberturas de ventilación suelen permanecer abiertas constantemente y suele ponerse en ellas malla mosquitera. Además también poseen ventilación vertical en las paredes frontales y laterales. En la Figura 2.5 se ilustra este tipo de invernaderos.
Figura 2.5 Invernadero tipo Doble Capilla
2.2.6 Invernadero Túnel o Semicilíndrico
Se caracteriza por la forma de su cubierta y por su estructura totalmente metálica. El empleo de este tipo de invernadero se está extendiendo por su mayor capacidad para el control de los factores climáticos, su gran resistencia a fuertes vientos y su rapidez de instalación al ser estructuras prefabricadas. Los soportes son de tubos de hierro galvanizado y tienen una separación interior de 5.0 m x 8.0 m ó 3.0 m x 5.0 m. La altura máxima de este tipo de invernaderos oscila entre 3.5m y 5.0m. En las bandas laterales se adoptan alturas de 2.5 m a 4.0 m.
El ancho de estas naves está comprendido entre 6.0 m y 9.0 m y permiten el adosamiento de varias naves en batería. La ventilación es mediante ventanas cenitales que se abren hacia el exterior del invernadero. En la Figura 2.6 se muestra una imagen de este tipo de invernadero.
Sus principales ventajas son:
Estructuras con pocos obstáculos en su diseño. Buena ventilación. Buena estanqueidad a la lluvia y al aire. Permite la instalación de ventilación cenital a sotavento y facilita su
accionamiento mecanizado. Buen reparto de la luminosidad en el interior del invernadero. Fácil instalación.
Mientras que sus principales desventajas son:
Elevado costo. No aprovecha el agua de lluvia.

21
Figura 2.6 Invernadero de Túnel o Semicilíndrico
2.2.7 Invernaderos de Cristal o Tipo Venlo
Este tipo de invernadero, también llamado “Venlo”, es de estructura metálica prefabricada con cubierta de vidrio y se emplean generalmente en el Norte de Europa.
El techo de este invernadero industrial está formado por paneles de vidrio que descansan sobre los canales de recogida de pluviales y sobre un conjunto de barras transversales. La anchura de cada módulo es de 3.2 m. Desde los canales hasta la cumbrera hay un solo panel de vidrio de una longitud de 1.65 m, y anchura que varía desde 0.75 m hasta 1.6 m. La separación entre columnas en la dirección paralela a las canales es de 3.0 m.
En sentido transversal está separadas 3.2 m si hay una línea de columnas debajo de cada canal, ó 6.4 m si se construye algún tipo de viga en celosía. En la Figura 2.7 se muestra este tipo de invernadero.
Su principal ventaja es que tiene una buena estanqueidad lo que facilita una mejor climatización de los invernaderos.
Sus inconvenientes son:
La abundancia de elementos estructurales implica una menor transmisión de luz. Su elevado costo. Naves muy pequeñas debido a la complejidad de su estructura.
Figura 2.7 Invernadero del tipo Cristal o Tipo Venlo
22
2.3 Descripción de los Sistemas
2.3.1 Riego
El agua en las plantas es necesaria, ya que los tres átomos que constituyen su molécula, con la consiguiente polaridad de sus cargas eléctricas, facilitan mucho la disolución en agua de otras sustancias, y con esta pueden producir la fotosíntesis la cual es un proceso en el que la planta fabrica sustancias necesarias para su nutrición y desarrollo.
El riego consiste en aportar agua al suelo para que los vegetales tengan el suministro que necesitan (alimento) favoreciendo así su crecimiento, mientras que el fertilizante es una sustancia o mezcla química natural o sintética utilizada para enriquecer el suelo y favorecer el crecimiento vegetal. Se busca tener un equilibrio en el riego y la fertilización para que haya un ahorro de agua y la planta tenga un crecimiento óptimo.
En la mayor parte de los cultivos hortícolas se utiliza el riego como técnica habitual para conseguir la máxima producción. Existen varios sistemas de riego: el riego tradicional por gravedad, ya sea por desbordamiento, por inundación (a manta) o por surcos; el riego por aspersión, mediante sistemas fijos, semifijos y móviles, y el riego localizado (por goteo).
Existen varios sistemas de riego, entre los cuales sobresalen:
Aspersión Puente móvil Goteo
2.3.2 Fertirrigación
El término fertirrigación se usa desde 1983, referido a la técnica de aplicar fertilizantes con el agua del riego o, en concreto, el riego con soluciones nutritivas. Según algunos autores, la fertirrigación es el método más racional de que disponen ciertos países para realizar una fertilización automatizada respetando el medio ambiente. Su aplicación destaca en los cultivos hortícolas.
Fertilizante es una sustancia o mezcla química natural o sintética utilizada para nutrir el suelo y favorecer el crecimiento de la planta de forma natural.
2.3.3 Hidroponia
La palabra Hidroponia deriva del griego Hydro (agua) y Ponos (labor o trabajo) lo cual significa literalmente trabajo en agua. La Hidroponia es una ciencia que estudia los cultivos sin tierra.
2.3.3.1 Sustrato
Se denomina sustrato a un medio sólido inerte que cumple dos funciones esenciales:
Anclar y aferrar las raíces protegiéndolas de la luz y permitiéndoles respirar. Contener el agua y los nutrientes que las plantas necesitan.
Los gránulos componentes del sustrato deben permitir la circulación del aire y de la solución nutritiva. Se consideran buenos aquellos que permiten la presencia entre 15% y 35% de aire y entre 20% y 60% de agua en relación con el volumen total.

23
Muchas veces es útil mezclar sustratos buscando que unos aporten lo que les falta a otros, teniendo en cuenta los aspectos siguientes:
Retención de humedad. Alto porcentaje de aireación. Físicamente estable. Químicamente inerte. Biológicamente inerte. Excelente drenaje. Poseer capilaridad. Liviano. De bajo costo. Alta disponibilidad.
2.3.4 Calefacción
La temperatura es la principal variable a tener en cuenta en el manejo del ambiente dentro de un invernadero, ya que es la que más influye en el crecimiento y desarrollo de las plantas; por tal motivo se desea tener la temperatura en un rango óptimo.
Existen varios sistemas de calefacción según el método a utilizar:
Por agua caliente. Este sistema se basa en la transferencia de calor que se produce al circular un caudal de agua caliente por una tubería que recorre el interior del invernadero
Por vapor de agua. Es una variante del caso anterior; aquí el fluido que circula por una gran parte del circuito de calefacción es vapor de agua a media presión. Éste tiene peor uniformidad en la distribución del calor y humedece el ambiente.
Por aire caliente. En este sistema el fluido circulante es una masa de aire previamente calentada en un generador de combustión directa o en un intercambiador de calor. En la combustión directa el aire es arrastrado hacia el interior del invernadero que contiene los gases de la combustión; éstos pueden resultar tóxicos para el cultivo, en especial si son portadores de etileno y óxidos de azufre o nitrógeno. Cuando se emplean combustibles libres de contaminantes, como son el gas natural o el gas licuado de petróleo, las emanaciones que resultan de la combustión, ricas en anhídrido carbónico y vapor de agua, pueden utilizarse a modo de fertilización carbónica.
Mediante electricidad. La energía eléctrica puede utilizarse de distintas formas para generar calor. La más simple (termoventilador) consiste en calentar mediante resistencias eléctricas una masa refractaria que actúa como acumulador
de calor, mientras un ventilador se encarga de distribuir el aire caliente por el interior del invernadero. Otra modalidad es la del cable radiante, que consiste en extender sobre una capa de material aislante un conductor eléctrico que, debido a su resistencia, transforma la energía eléctrica en energía calorífica.
Mediante instalación solar. Una serie de colectores planos u ondulados, formados por dos láminas de cristal o de material plástico, por los que circula agua o diversas soluciones; captan la energía solar y la transfieren mediante una bomba de circulación o un acumulador de calor.
Otras fuentes de energía. Se pueden emplear la energía geotérmica y la eólica para calentar invernaderos.
24
2.3.5 Humidificación
Humedad relativa (HR) es la cantidad de agua contenida en el aire, en relación con la máxima que sería capaz de contener a la misma temperatura. Existe una relación inversa de la temperatura con la humedad, por lo que a elevadas temperaturas aumenta la capacidad de contener vapor de agua y disminuye la HR. Con temperaturas bajas la HR aumenta. Cuando la HR es excesiva las plantas reducen la transpiración y disminuyen su crecimiento, cuando la HR es mínima las plantas transpiran en exceso y se deshidratan.
Este sistema depende del lugar en el que se encuentra el invernadero, ya que en muchos ambientes no se requiere proporcionarle vapor, para elevar la HR. Uno de los sistemas más relevantes es el llamado “pared húmeda”, el cual se basa en una pared formada por fibras de cera que se encargan de distribuir agua por las celdas en esta pared. En el lado contrario de este dispositivo se ubica un extractor de aire, el cual succionara el agua en forma de rocío, la cual se distribuirá dentro del invernadero.
2.3.6 Iluminación
A mayor luminosidad en el interior del invernadero se debe aumentar la temperatura, la HR y el CO2, para que la fotosíntesis sea máxima; por el contrario, si hay poca luz pueden descender las necesidades de otros factores. Para mejorar la luminosidad natural se usan los siguientes medios:
Materiales de cubierta con buena transparencia. Orientación adecuada del invernadero. Materiales que reduzcan al mínimo las sombras interiores. Aumento del ángulo de incidencia de las radiaciones sobre las cubiertas. Acolchado del suelo con plástico blanco.
Es interesante destacar el uso del blanqueo, el cual tiene la función de filtro para evitar algunos tipos de rayos solares, tales como los rayos UV; ya que esta labor está en función del desarrollo del cultivo y de las temperaturas, y tiene efectos contradictorios que hay que conocer para hacer un correcto uso. Hay que saber que la planta sombreada se ahíla y se producen abortos de flores en determinadas especies sensibles a la luz (especialmente tomate, pimiento y berenjena), por lo que el manejo del riego y de la solución nutritiva tiene que ir unida al efecto que produce el blanqueo. Los plásticos sucios o envejecidos provocan el mismo efecto que el blanqueo.
2.3.7 CO2
El anhídrido carbónico de la atmósfera es la materia prima imprescindible de la función clorofílica de las plantas. El enriquecimiento de la atmósfera del invernadero con CO2, es muy interesante en muchos cultivos.
La concentración normal de CO2 en la atmósfera es del 0,03%. Este índice debe aumentarse a límites de 0,1-0,2%, cuando los demás factores de la producción vegetal sean óptimos, si se desea el aprovechamiento al máximo de la actividad fotosintética de las plantas. Las concentraciones superiores al 0,3% resultan tóxicas para los cultivos.
En los invernaderos en los que no se aplica anhídrido carbónico, la concentración de este gas es muy variable a lo largo del día. Alcanza el máximo de la concentración al final de la noche y el mínimo a las horas de máxima luz que coinciden con el mediodía. En un

25
invernadero cerrado por la noche, antes de que se inicie la ventilación por la mañana, la concentración de CO2 puede llegar a límites mínimos de 0,005-0,01%, que los vegetales no pueden tomarlo y la fotosíntesis es nula. En el caso de que el invernadero esté cerrado durante todo el día, en épocas demasiado frías, esa concentración mínima sigue disminuyendo y los vegetales se encuentran en situación de extrema necesidad en CO2 para poder realizar la fotosíntesis.
Los niveles aconsejados de CO2 dependen de: la especie o variedad cultivada, la radiación solar, la ventilación, la temperatura y de la humedad. El óptimo de asimilación está entre los 18 y 23º C de temperatura, descendiendo por encima de los 23-24º C. Respecto a la luminosidad y humedad, cada especie vegetal tiene un óptimo distinto.
El efecto que produce la fertilización con CO2 sobre los cultivos hortícolas, es el de aumento de la precocidad de aproximadamente un 20% y aumento de los rendimientos en un 25-30%; mejora la calidad del cultivo así como la de su cosecha.
Sin embargo, no se puede hablar de una buena actividad fotosintética sin una óptima luminosidad. La luz es factor limitante, y así, la tasa de absorción de CO2 es proporcional a la cantidad de luz recibida, además de depender también de la propia concentración de CO2 disponible en la atmósfera de la planta. Se puede decir que el periodo más importante para el enriquecimiento carbónico es el mediodía, ya que es la parte del día en que se dan las máximas condiciones de luminosidad.
2.4 Investigaciones Previas
En el 2002 se realizó una tesis de Carrillo, Márquez y Zúñiga. La cual trata acerca del control de un invernadero, además de su monitoreo en Internet. Esta tesis trata de los sensores de humedad y temperatura, teniendo un control de la humedad del suelo, pero de la temperatura nada más el monitoreo, sin tener el control.
El monitoreo por Internet sí funcionó, mientras que el control por medio de éste falló, debido a que les faltó un componente del software LabView. El sistema del monitoreo del invernadero está hecho por medio del LabView.
Con esa tesis se pretendió tener un sistema controlado del invernadero, mientras que con esta tesis automatizar el sistema y tener un mejor control de los factores variables de éste.
También se encontró en el 2007 una tesis de Pacheco, la cual trata acerca del control de un sistema de riego por medio de un PLC. Este sistema se activa por medio de sensores de humedad, el cual indicará cuándo el suelo esté o no húmedo. Además de que el sistema de riego está controlado y automatizado respecto al tiempo.
Con esta tesis se pretendió contribuir de manera sobresaliente a mejorar la calidad de los cultivos regados en forma eficiente. Además al implementar este sistema se derivaran beneficios, dado que un gran porcentaje de agua es desperdiciada en las áreas de riego, así como la energía en sistemas donde el riego utiliza la técnica de bombeo.
En el mismo año se presentó la tesis de Camarena Rodríguez y la cual lleva por título

26
“Automatización del Fertirriego con VisSim y PDS TMS320LF2407”. Este trabajo se basa en unificar el sistema de riego por goteo con el sistema de fertilización haciendo el sistema de fertirriego.
Esta tesis toma como ventajas del fertirriego que sólo se aplicarán los nutrientes de forma exacta y uniforme. Además el fertirriego permite adecuar la cantidad y concentración de los nutrientes de acuerdo a la demanda durante el ciclo de crecimiento del cultivo.
Para esta tesis se utilizó un sensor de humedad Watermark del tipo granular matricial, el cual ofrece un método indirecto de medición de humedad del suelo a partir de la succión del agua en el terreno y cuantificada en centibares.
Por último los objetivos de esta tesis son:
Diseñar y calibrar un sistema automático para el control de aplicación de fertirriego, utilizando las herramientas de electrónica y programación.
Diseñar el sistema automático bajo el lenguaje de programación vissim, y el Procesador Digital de Señales (PDS) TMS320L2407.
Construir el sistema de control utilizando material de la región. Calibrar el sistema de control para detectar posibles fallas de funcionamiento.
Las conclusiones de esta tesis es que el fertirriego se puede utilizar tanto en agricultura de invernadero como en agricultura sin ninguna protección, además de que ayuda a mejorar el uso eficiente del agua.
Se encontró el libro Invernadero: Proyecto-Construcción. El cual habla de cómo hacer una maqueta de un invernadero, además de que indica cómo controlar la iluminación, temperatura, humedad y riego.
Este libro se basa en cómo hacer un invernadero para un proyecto de educación media superior, utilizando material muy fácil de conseguir. Da una breve información de lo bueno de las energías alternativas, explica componentes electrónicos. Da una forma muy sencilla de automatizar el invernadero.
También tiene algunas deficiencias tales como la definición y los tipos de invernaderos, poca información de los circuitos que están utilizando (hojas de datos) y cómo tener un control más preciso de sus sistemas.
Los objetivos de este libro son:
Saber interpretar los croquis de piezas simples. Manejar correctamente instrumentos de medida. Manejo correcto de herramientas y máquinas elementales. Conocimiento de materiales básicos. Conocimiento de distintos elementos prefabricados disponibles en el mercado. Conocimiento de circuitos básicos de electricidad y electrónica. Adquisición de ideas elementales sobre biomasa. Introducción en el campo de las energías alternativas. Creación de puntos de conexión de distintas áreas.
27
Capítulo 3
Características del Invernadero a Utilizar
3.1 Características Generales
Cabe mencionar que la mayoría de los sistemas se simularán en maqueta, tales como la temperatura, humedad relativa riego en Hidroponia y riego por medio de sensor.
El invernadero en el que se trabajará (Figura 3.1) pertenece a la Unidad Académica de Agronomía de la Universidad Autónoma de Zacatecas. Su ubicación es Carretera 54, Zacatecas - Villanueva km. 15.5. Coordenadas geográficas 102º 41º 10.4º longitud oeste, y 22º 43º 28.4º latitud norte, a una altitud de 2234 m. Orientación sureste-noroeste. Las características más importantes de este invernadero son: es de tipo túnel, sus dimensiones son de una longitud de 30 m x 8.64 m de ancho, con una altura que varía de 3.6m a 3.45m; También cuenta con los sistemas de calefacción, enfriamiento, humidificación y fertirriego. Además que se emplea el método de hidroponía.
Figura 3.1 Parte frontal del invernadero
3.1.1 Planos del invernadero
En las siguientes páginas se mostrarán los planos de cómo está constituido el invernadero de forma externa. La cual está formada por sus caras frontal oeste, frontal este, lateral sur y lateral norte. Así como una maqueta virtual de este, que se mostrarán en las Figuras 3.2 y 3. 3.

28

29
30

31
Figura 3.2 Maqueta virtual del invernadero con una panorámica superior.
Figura 3.3 Maqueta virtual con una panorámica frontal.
3.1.2 Características del último cultivo
El ciclo del último cultivo fue del 22 de junio de 2007 al 28 de enero de 2008. En éste se cultivó tomate con una cantidad de 198 plantas de las cuales 120 se les aplicó el sistema fertirriego por goteo, mientras que las plantas restantes el fertirriego fue por gravedad, mediante el flujo de la solución nutritiva a través de canales, con recirculación manual de la solución. A cada planta se le aplicó aproximadamente de 3.2 a 3.5 litros de agua aunque varió dependiendo de la etapa de crecimiento de la planta.Aproximadamente se utilizó la cantidad 615 litros de gas LP para el sistema de

32
calefacción aunque se tuvieron problemas en la última etapa del cultivo (del 12 al 28 de enero) por la falta de gas produciendo una maduración dispareja.
Durante este ciclo se pretendió no utilizar plaguicidas sintéticos, sólo extractos de orégano y de ajo, debido a que presentó un problema fuerte con una plaga de mosca blanca (Bemisia tabasi) por la falta de malla en el muro húmedo por el cual se tuvo que emplear un plaguicida químico Diazinon 25% CE.
En el sistema de fertirriego los sustratos utilizados fueron: tezontles, perlitas, zeolitas, fibra de coco y lona de roca. Los fertilizantes usados se presentan en la tabla 3.1
Tabla 3.1 Fertilizantes utilizados
Nombre del sustrato Cantidad
Ácido fosfórico 16 lt
Nitrato de Calcio 48 kg
Sulfato de magnesio 27 kg
Fosfato monoamónico 5 kg
Nitrato de magnesio 5 kg
Ácido sulfúrico 3 lt
Sulfato de potasio 12 kg
Nitrato de potasio 20 kg
También se emplearon los siguientes micronutrientes con un total de 12 kg:
Hierro Manganeso Cobre en forma de quelatos Zinc Boro – acido bórico Bolideno –modilato de sodio
3.1.3 Parámetros de calidad
Se tuvo una calidad muy buena del producto, la cual se midió con los siguientes parámetros de calidad del tomate: grados Brix (°Bx), consistencia y acidez titulable.
Los °Bx representan el contenido de sólidos totales disueltos, principalmente azúcares y ácidos orgánicos. Comercialmente los tomates se encuentran entre 3°Bx y 5°Bx. Los tomates dentro de este invernadero resultaron entre 5°Bx y 8°Bx. Por lo cual nos indica que tuvo una muy buena calidad.
La acidez titulable cuantifica la cantidad de ácidos orgánicos que contiene una fruta, la cual es neutralizada por una base fuerte (hidróxido de sodio 0.01 normal) con ésta se mide la acidez determinada por el equilibrio entre los componentes ácidos del tomate. El rango más común es de 3.5 (comercialmente) y en esta cosecha resultó de 3.5 lo cual es un rango muy bueno ya que comercialmente se encuentra entre 2.5 y 3.5.

33
La consistencia del fruto se manifiesta por medio de la persistencia en el tiempo, de la apariencia física externa e interna, la forma, la textura y la rigidez. Este parámetro se determina con el penetrómetro, el cual mide la resistencia del fruto a la penetración, para este caso no se tuvo el aparato para medir esta propiedad, por lo que se recurrió a observar el tiempo de vida en el anaquel, que son los días que dura un fruto en el cual no manifiesta cambios en su apariencia para que mantenga sus cualidades comerciales. Normalmente los tomates empiezan a presentar síntomas de deshidratación y/o descomposición a los 36 días mientras que los del invernadero duraron 2 meses. En las Figuras 3.4 y 3.5 se muestran los tomates antes de ser cosechados y se muestra la apariencia saludable que estos presentan.
Figura 3.4 Tomates producidos en el ciclo Agosto-Diciembre de 2007
Figura 3.5 Cultivo de tomates

34
3.1.4 Sistemas de control del invernadero
Actualmente el invernadero cuenta con un sistema de control simple y presenta fallas en sus sistemas, tanto en los dispositivos de tiempo del riego como en el sistema de control de temperatura, ya que este último se apaga y prende demasiado debido a que no tiene una histéresis adecuada dentro de los rangos seguros de temperatura mientras que en el riego se han tenido que cambiar dos veces los timers debido a que se han presentado descomposturas. Debido al simple control de temperatura se tiene un desperdicio considerable de energía eléctrica y gas mientras que por el del riego se tiene que operar de una manera manual.
Este invernadero cuenta con los siguientes componentes:
2 extractores de aire que trabajan con 220 Vac., 60 Hz, 3 fases y 5.2 A. Bomba centrifuga para agua, de 1 ½ HP que opera con 120 Vac. a 60 Hz, 3400
r/min. La cual es utilizada para el sistema de riego. Sistema de riego por goteo con 240 goteros equivalente a 55 m. de longitud. Bomba para agua que trabaja con 220 Vac. La cual se utiliza para humedecer la
pared húmeda. Pared húmeda de 6 m x 1.5 m. Calefactor automático de gas. Sistema de fertirriego con tres salidas conectado a la línea por goteo.
Se propone un sistema control más seguro y eficiente que el ya utilizado, para poder tener una mejor calidad en el cultivo y proporcionar un ahorro de energía eléctrica y gas. Para esto explicaremos cada uno de los sistemas.Para una mejor apreciación del invernadero se muestra la Figura 3.6 donde se observa el interior del invernadero ya cosechado el cultivo.
Figura 3.6 Interior del invernadero después de la cosecha
35
3.2 Sistemas a controlar
3.2.1 Riego
Uno de los sistemas más utilizados en horticultura es el riego por goteo, en el que el agua se distribuye a baja presión en zonas muy concretas del terreno (bulbo húmedo), donde se desarrolla un sistema radicular del cultivo, con una frecuencia tal que en todo momento quede garantizada una alta humedad en la zona que se riega. Resulta muy útil cuando se tienen problemas de salinidad o fitosanitarios del suelo o alto contenido de sales en el agua utilizada para el riego.
Lo que comúnmente se conoce como riego por goteo es, de hecho una combinación de varios tipos de sistemas de distribución de agua de bajo volumen y alta frecuencia. El término correcto para estos sistemas es microirrigación. Cada sistema de microirrigación se distingue por un tipo diferente de emisor (la parte que descarga el agua). Estos sistemas de microirrigación son los requeridos por los agricultores. Debido a que su necesidad de conservar el agua es cada vez mayor.
Algunos de estos sistemas literalmente distribuyen el agua gota por gota. Lejos de ser una tortura con agua, este tipo de sistema es la mejor forma de aprovechar el agua para las plantas. Manteniendo húmedas las raíces de las plantas (pero no al punto de saturación).
Se busca proporcionarle de 3 a 3.5 litros de agua cada 24 horas. Lo ideal para este invernadero es que tenga riegos muy frecuentes por hora, como unos 3 riegos por hora, entonces se tendrán riegos de 0.093 litros entre las 8:00 A.M.y las 8:00 P.M. (12 horas al día). Es así que se aplicaran sólo las cantidades requeridas de fertilizantes y agua al cultivo, sin tener que desperdiciar estos elementos. En las figuras 3.7 y 3.8 se pueden apreciar más detalladamente el uso de los goteros.
Figura 3.7 Parte del sistema de riego Figura 3.8
Gotero Figuras 3.7 y 3.8 Riego por goteo
3.2.2 Fertilización
Es el suministro de nutrimentos que se le proporcionará a la planta por medio del sistema de riego diluyéndolo en el agua para una mejor distribución y no desperdiciando fertilizante.

36
Para llevar a cabo la fertilización se utiliza el fertirriego, el cual se basa en aplicar fertilizante soluble en agua, y distribuyéndolo a la planta a través del sistema de riego. En la Figura 3.9 se puede apreciar el sistema de inyección de fertilizantes disueltos en soluciones para ser diluidos a la concentración que los requieren las plantas de tomate.
Figura 3.9 Sistema de inyección de soluciones con fertilizantes tipo ventari, al sistema de riego.
3.2.3 Sistema de control de temperatura
El sistema cuenta con las etapas que son: de enfriamiento y calefacción. La calefacción depende del tipo de invernaderos, en este caso de túnel, el cual cuenta con calefactores y con ventiladores para dispersar el calor uniformemente en todo el invernadero.
Para el control de temperatura se cuenta con dos etapas, la primera de calefacción la cual prende un calefactor de gas el cual funciona por medio de una bujía la cual emite una chispa para que se lleve a cabo la combustión del gas y un ventilador que se encarga de distribuir el calor cuando se tengan temperaturas bajas dentro del invernadero, la cual se puede mostrar en la Figura 3.10.
La segunda etapa es de enfriamiento, en la cual se prenderán dos extractores los cuales sacarán el calor excesivo del invernadero cuando en éste se presenten temperaturas altas, tal como se muestra en las figuras 3.11 y 3.12.
Figura 3.10 Etapa de calefacción por medio de calefactor de gas.

37
Figura 3.11 Figura 3.12Figuras 3.11 y 3.12 Etapa de enfriamiento por medio de extractores
El invernadero tendrá un rango seguro de 12 °C a 32 °C, dependiendo del tipo de cultivo en este caso es el tomate. Para esto, cuando se presenten temperaturas más bajas de 12 °C que es el límite inferior, se activará la etapa de calefacción que nos transferirá el calor por medio de convección, a través del fluido que en este caso es el aire. La etapa de enfriamiento se activará cuando la temperatura rebase el límite superior de 32 °C, sustrayendo el calor excesivo.
La temperatura será censada utilizando el circuito integrado (CI) lm35, el cual es un sensor de temperatura. Este le mandará una señal eléctrica equivalente a la temperatura al PLC, el cual estará registrando la temperatura. El PLC encenderá el sistema cuando se tengan medidas de que el rango seguro de temperatura está alterado.
3.2.4 Humidificación
Este sistema se implementará por medio de una pared húmeda y extractores, para el caso de necesidad de humedad. El exceso de humedad en el aire de Zacatecas no se presenta, aunque en las noches frías el calefactor permite reducir la HR. Esto será debido a que la humedad relativa es proporcional a la temperatura, entre menor sea la temperatura mayor humedad y mientras mayor temperatura habrá menor humedad. Con este sistema se busca tener la humedad en un rango seguro para el cultivo, para esto se medirá la humedad relativa con un comparador el cual entrega la diferencia entre dos sensores de temperatura lm35, uno en estado seco y otro en estado de humedad máxima.
Este sistema también será controlado por medio del PLC s7-200. Al igual que el sistema anterior se busca tener un rango seguro, que cuando éste se vea afectado encienda. Será igual al sistema anterior pero con medidas de porcentaje de humedad relativa (HR). En las Figuras 3.13 y 3.14 se muestra este sistema.
38
Figura 3.13 Pared húmeda Figura 3.14 Calefactor
Es así, que lo que se busca es proporcionarle al invernadero una mejor optimización en el control de las variables, ahorro de energía y agua.
3.3 Prototipo
Para hacer las pruebas de los sistemas de forma más práctica y rápida se llevó a cabo la construcción de una maqueta. Simulando todos los sistemas reales del invernadero.
Su principal material es el policarbonato, el cual es un material que pertenece a un grupo particular de termoplásticos, además de que pueden ser moldeados muy fácilmente con calor y tienen amplia durabilidad. Entre sus características principales se encuentran la resistencia a la temperatura, amorfo y transparente, presenta estabilidad en el agua, los ácidos, no es biodegradable, y tiene una alta protección a los rayos UV. Por consecuente se utilizó en el techo y en los lados frontales de la maqueta, pero también se puede utilizar en invernaderos reales. Para una mejor apreciación del interior de la maqueta se le instaló en las paredes laterales vidrio.
Se prototipo cuenta con dos extractores de aire de 6.5 pl y 4.5 pl., los cuales operan a 12 Vcd. Para la etapa de calefacción se recurrió a una resistencia de alambre de tuxteno que va ser el sustituto del calefactor de gas. Se instaló un filtro de fibra el cual hará la función de la pared húmeda. Se utiliza una bomba de agua para el sistema de humidificación de 120 Vca. de salida 92 litros por hora. Para los sistemas de riego se utilizaron dos bombas de aire con salidas de 1500 m3 por minuto que opera a 120 Vca.
Según los datos obtenidos los tiempos de riego se definieron de 3 segundos cada 20 minutos durante 12 horas cada 24 horas. Estos cálculos fueron adquiridos mediante mediciones que se realizaron en el mismo prototipo para dar una mayor aproximación al invernadero real.
Para el caso del sensado de la humedad del suelo se tuvo que calibrar el sensor watermark MR realizando pruebas de 100% húmedo y 0% húmedo, introduciéndolo en agua y posteriormente dejándolo secar hasta su valor estable, este sensor se acondicionó

39
para que entregue como salida un voltaje dependiendo de la humedad existente. Este sensor tiene una respuesta lineal, sin embargo, la humedad del suelo se representa de forma logarítmica debido a que las moléculas más lejanas del agua son las más fáciles de sustraer, en cambio las más cercanas a las moléculas de la tierra son las más difíciles de extraer.
En las Figuras 3.15 y 3.16 se puede ver el prototipo hecho.
Figura 3.15 Vista lateral del prototipo.
Figura 3.16 Vista frontal del prototipo.
3.4 Controlador
El controlador utilizado para este trabajo es el PLC s7-200 trabajando con un CPU 224 de la marca Siemens. Este controlador es capaz de realizar diversas tareas, su diseño es compacto, tiene bajo costo y un amplio juego de operaciones. El software de programación basado en Windows ofrece una flexibilidad necesaria para solucionar tareas de automatización. En la Figura 3.17 se puede mostrar el PLC s7-200.

40
Figura 3.17 PLC s7-200 siemens.
Entre sus principales características sobresalen las siguientes:
14 entradas digitales. 10 salidas digitales. 2 salidas de impulsos a 20 kHz de frecuencia cada una. 2 potenciómetros analógicos con resolución de 8 bits. 256 temporizadores. 256 contadores.
La Figura 3.18 muestra los componentes básicos de un sistema PLC S7-200, incluyendo una CPU S7-200, un PC, el software de programación STEP 7-Micro/WIN 32 (versión 3.1) y un cable de comunicación.
Figura 3.18 Componentes para el PLC s7-200.
Al trabajar con este PLC se podrán controlar todas sus variables, ya que cuenta con las entradas necesarias para su sensado y las salidas suficientes para activar los sistemas.

41
Capítulo 4
Control del clima4.1 Modelado climático y su historia
Lo que se refiere en materia de investigación del modelado climático, es muy escasa en México. Castañeda Miranda R. Propuso los primeros modelos climáticos de un invernadero en las condiciones climáticas de la región Centro de México. Esos modelos simulan la dinámica del clima de un invernadero con cultivo de jitomate. Así, se propusieron obtener herramientas de apoyo para el análisis de las condiciones necesarias para la producción de hortalizas en la región Centro de México, que permiten entender de una manera cuantitativa cómo se produce el clima del invernadero en función de las condiciones meteorológicas exteriores, para generar conocimiento como base para el diseño y desarrollo de herramientas de ingeniería en el área de invernaderos en el país. Para la obtención de estos modelos fueron examinados los procesos responsables de la transferencia de energía y masa.
En la literatura varios modelos del clima han sido presentados. Este tipo de modelos entregan una descripción detallada del clima en un invernadero con relación a las condiciones externas, las propiedades físicas de sus materiales y su equipamiento, por consiguiente, son de un alto orden, como por ejemplo los de Bot (1983) y de Zwart (1996).
Bot (1983) estudió el clima en un invernadero como el conjunto de condiciones ambientales y la manera en que afectan el crecimiento y desarrollo del cultivo. Tal conjunto fue definido en términos de temperaturas y presiones de vapor. Además, indicó los procesos físicos que contribuían en el invernadero: la ventilación natural a través de las aperturas de las ventanas (la ventilación debida al efecto de la temperatura y el viento), la interacción de la cubierta de un invernadero multicapa con la radiación de onda corta directa y difusa, la interacción con la radiación de onda larga del cielo, así como la mayoría de los procesos de intercambios por convección que afectan el clima en su interior.
De Zwart (1996) propuso un nuevo modelo apoyándose en una base de tiempo de un minuto que describe la dinámica del clima en un invernadero, los componentes del sistema de calefacción y los controles. También incluye la actividad sintética del follaje. La información se tomó con mediciones de un cultivo de rosas. Con tal modelo se evaluaron nueve opciones posibles de ahorro de energía. El consumo de energía la producción de biomasa fueron comparados contra mediciones realizadas en un invernadero con producción de jitomate.
Los modelos climáticos se pueden caracterizar como un conjunto de ecuaciones basadas en leyes físicas que explican el proceso de transferencia de energía y masa (propiedades termodinámicas). Debido a la complicidad de éstos, algunos modelados se basan solo en comportamientos dirigidos por objetivos y se formulan en términos de metas, sacando conclusiones a partir de los hechos observados, forzando a que las variables de un sistema se comporten como trayectorias definidas a las necesidades requeridas. Con este tipo de modelados es posible involucrar más de dos variables en un sólo control,
42
modelando funciones no lineales convirtiendo las entradas en salidas acordes con los planteamientos lógicos.
Para un desempeño óptimo de los conjuntos que conforman el sistema del invernadero (Figura 4.1) y para tener una mejor interacción entre las dos principales variables del sistema se propuso desarrollar control basado en la lógica difusa, está nos permite tomar decisiones dependiendo de las necesidades que se requiera al momento el mismo control del clima, para poder tener ésta en condiciones óptimas.
Figura 4.1 Sistema de invernadero.
4.2 ¿Qué es control difuso?
Un sistema difuso es una clase de objetos con una serie de grados de pertenencia o membresía. Tal rango es caracterizado por una función de pertenencia (Característica) la cual asigna a cada objeto un grado de pertenencia que se encuentra entre 0 y 1. Las nociones de inclusión, unión, intersección, complemento, relación, convección, etc., se amplían a cada nivel, y varias propiedades de estas nociones son establecidas en el contexto del sistema difuso. En particular, un teorema de separación para los sistemas difusos convexos es probado sin requerir que los sistemas difusos sean independientes.
A menudo las clases de objetos encontrados en el mundo físico real no tienen definido un criterio de pertenencia, por ejemplo, las clases de animales incluye claramente perros, caballos, pájaros, etc., como sus miembros, y claramente son excluidos objetos como rocas, fluidos, plantas, etc. Sin embargo, los objetos tales como estrella de mar, las bacterias, etc., tiene un estado ambiguo respecto a la clase de animales. El mismo tipo de ambigüedad se presenta en el caso del número 10 en relación a la clase de todos los números reales que son más grandes que 1.
Claramente, la “clase de todos los números reales que son mayores que 1,” o “las clases de mujeres bellas,” o “las clases de hombres altos,” no son clases constituidas o sistemas establecidos en la matemática usual. Todavía, el factor sigue siendo definido imprecisamente “clases”, tomando un importante rol en el pensamiento humano, particularmente en el denominado reconocimiento de patrones, comunicación de información y abstracción.

43
El propósito de esta nota es explorar de forma preliminar algunas de las propiedades básicas y las implicaciones de un concepto que puede ser de utilidad en el tratamiento de “clases” por citar por encima del tipo. El concepto en cuestión de un sistema difuso, que es, una continuidad de grados de pertenencia. Al igual que puede verse en el desenlace, la noción de un sistema difuso proporciona un punto conveniente de partida para la construcción de un marco conceptual en el que son paralelos en muchos aspectos, el marco utilizado en el caso de los sistemas ordinarios, pero es más general que este último y potencialmente puede resultar un enlace mucho más amplio de aplicabilidad, particularmente en los campos de clasificación de patrones y procesamiento de información. Esencialmente, por ejemplo, un marco proporciona una forma natural de hacer frente a problemas en los que la fuente de imprecisión es la ausencia de criterios definidos de la clase de pertenencia en lugar de la presencia de variables aleatorias.
Normalmente en la lógica convencional tenemos un conjunto de enunciados que pueden ser verdaderos o falsos, si o no, 0 o 1. En el contexto de la lógica difusa, el enunciado de “la temperatura es 25 grados centígrados” puede ser verdadero o falso. Sin embargo, en muchas situaciones la respuesta puede ser más de un simple “…este, no estoy seguro”, “quizás”, “bueno, depende…” y algunas otras. Por ejemplo, en un día veraniego la frase “la temperatura está muy alta” no es ni verdadera ni falsa, ya que es una idea cualitativa que representa una opinión más que un hecho objetivo. Otro ejemplo es la frase “yo requiero un día totalmente soleado en la playa para poder sentir calor “, pero existen otras personas que pueden sentir calor en medio de una tormenta de nieve o en el clima de una montaña. No existe certeza en estas situaciones, depende del contexto.
Un bloque tradicional produce una salida basada en la lógica binaria. Una afirmación positiva o negativa resulta como salida de un bloque típico de decisión. Sin embargo, el inventor de la lógica difusa, el Dr. Lofti Zadeh encontró que en la manera como los humanos toman decisiones existen algunas sombras de significado para las cuales el SI/NO clásico puede ser remplazado por ejemplo con:
Definitivamente
SI, Probablemente
SI, Quizás,
Probablemente
NO,
Definitivamente
NO.
4.2.2 ¿Por qué lógica difusa?
La lógica difusa copia este patrón usando niveles de posibilidad en un número de categorías inciertas o difusas. Por ejemplo, piensa en el sistema de tanques acoplados. El objeto a ajustar es el voltaje de entrada (u) hacia el motor de la bomba que se muestra en la Figura 4.2. De tal modo que el nivel del tanque 2 se conserva en el estado estable. La salida medida está en el nivel del segundo tanque y se denota por la señal y2. Normalmente se aplicaría un control PI a este sistema. Pero si el nivel exacto no es tan importante entonces ¿Por qué no usar un controlador más simple? Digamos que un

44
controlador siguiendo nuestro sentido común podría conformarse con las siguientes reglas difusas:
SI {nivel muy alto} entonces {reducir el voltaje de la bomba}
SI {nivel muy bajo} entonces {incrementar el voltaje de la bomba} SI {nivel correcto} entonces {fijar el voltaje de la bomba en cero}.
Figura 4.2 Sistema de tanques acoplados.
4.2.3 Control difuso en sistemas con retroalimentación.
Las aplicaciones de control difuso más adecuadas son aquellas donde existen requerimientos cualitativos para una acción de control satisfactoria y dichos requerimientos pueden ser enunciados fácilmente como reglas difusas. Por esta razón, los controladores con lógica difusa son usados para operar funciones automáticas en lavadoras, sistemas de aire acondicionado, cámaras y productos similares. También es posible encontrar lógica difusa en controladores de retroalimentación industriales que han sido implementados normalmente por operadores humanos expertos que tiene el control manual de procesos complejos. El procedimiento que se sigue es sintetizar las habilidades humanas del operador en una base de reglas difusas y desarrollar así un sistema de control difuso. El diseñador del sistema difuso copia las acciones heurísticas del operador humano mientras controla el proceso y escribe las correspondientes reglas difusas. Mediante observaciones detalladas de un operador habilidoso, es posible obtener un conjunto completo de reglas difusas que puede reproducir el mejor rendimiento del operador humano. Por esta razón hubo un gran entusiasmo en las décadas de 1970 y 1980 por esta técnica, pero se ha encontrado que el operador humano no puede ser fácilmente reemplazado y ahora esos sistemas difusos son usados como “consejeros” del operador. La idea es mejorar la seguridad en lugar de reemplazar al operador.
4.2.4 Lógica difusa en el invernadero
En esta investigación se usará la llamada teoría del Razonamiento aproximado, la cual es una parte básica de la introducción al control difuso. Esta teoría fue introducida por Zadeh, la cual provee un potente mecanismo para razonar con información imprecisa o incierta.
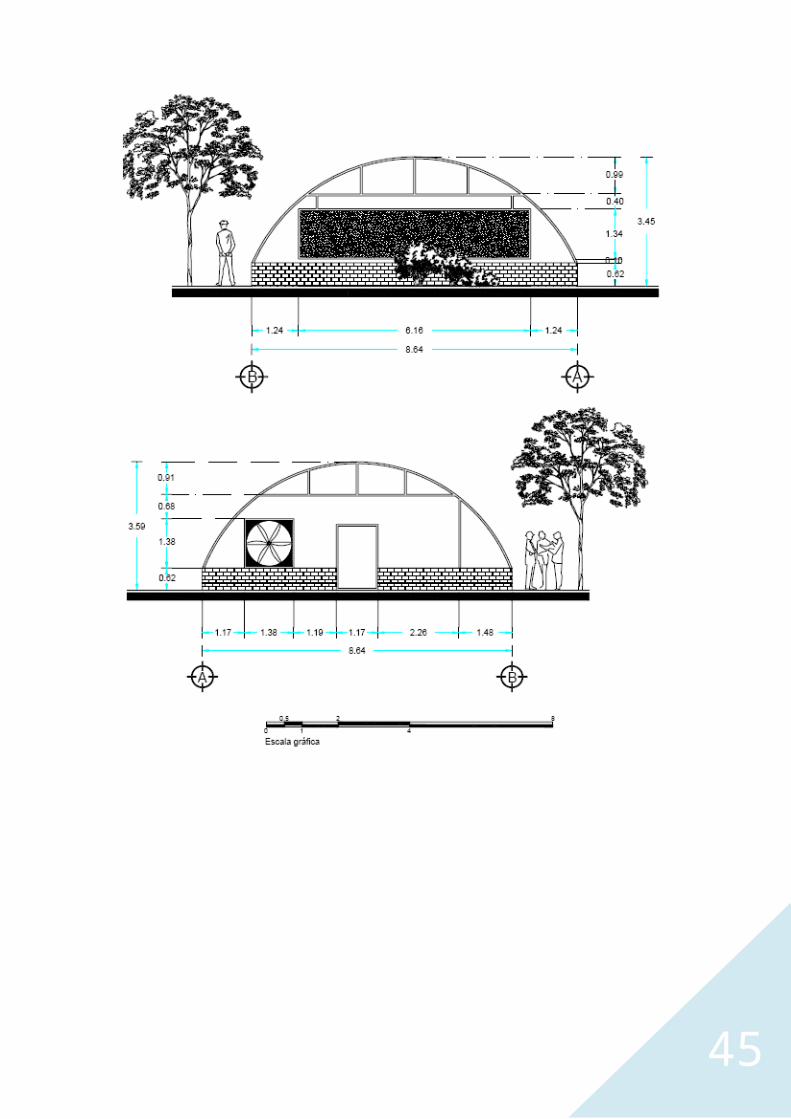
45
Para las variables del invernadero, que en este caso son la temperatura y la humedad relativa y sabiendo que una está en función de la otra, la lógica difusa nos facilita el modo en que estas deben de interactuar, no se requiere un control exacto de estas, ya que como se sabe la temperatura es muy difícil de controlar debido a muchos factores. Un ejemplo más concreto nos facilitará el comprender como ayuda la lógica difusa en este tipo de situaciones:
Supongamos que tenemos una temperatura de 5°C, y una HR de 98%, si tuviéramos independientes las dos variables con un controlador PI o PID, lo que sucedería es que, encenderían al máximo los extractores para poder disminuir la HR y los calefactores encenderían al máximo para poder elevar la temperatura, lo cual es totalmente erróneo, porque nunca se estabilizaría ninguna variable, es ilógico que tengan que estar encendidos calefactores y extractores al mismo tiempo, el sistema entra en un tipo de círculo vicioso tratando de estabilizar las dos variables, mas sin embargo con la lógica difusa se puede jugar con las variables involucradas, para este caso sólo se tendría que encender el calefactor al máximo para elevar la temperatura a un rango más seguro, teniendo está en un rango óptimo solo restaría estabilizar la HR que prácticamente ya estaría en rangos óptimos. En este sistema se dan muchos casos similares y no sólo con estas variables, sino con muchas otras que afectan el mismo clima del invernadero, y sería aún mejor buscar como involucrar más variables en este controlador.
4.2.4.1 Clasificación difusa o fuzzificación
Este es el primer paso que consiste en convertir la señal x en un conjunto de variables difusas. Se asignan valores a partir de un conjunto de funciones de pertenencia o membresía. Los valores de cada función de pertenencia se etiquetan como Temp para el caso de la temperatura y HR para el de la humedad relativa y son determinados por el valor de cada señal. Un clasificador difuso divide los rangos posibles en los cuales puede clasificarse el valor de la señal:
Para la temperatura
a) Temp Mínima letalb) Temp Mínima biológicac) Temp Óptimad) Temp Máxima biológicae) Temp Máxima letal
Para la humedad relativa
a) HR Bajab) HR Regularc) HR óptimad) HR Regular altae) HR Alta
Las funciones de pertenencia de la temperatura se determina a través de la siguiente formula teniendo en cuenta que el número 23 es el valor óptimo de la temperatura en
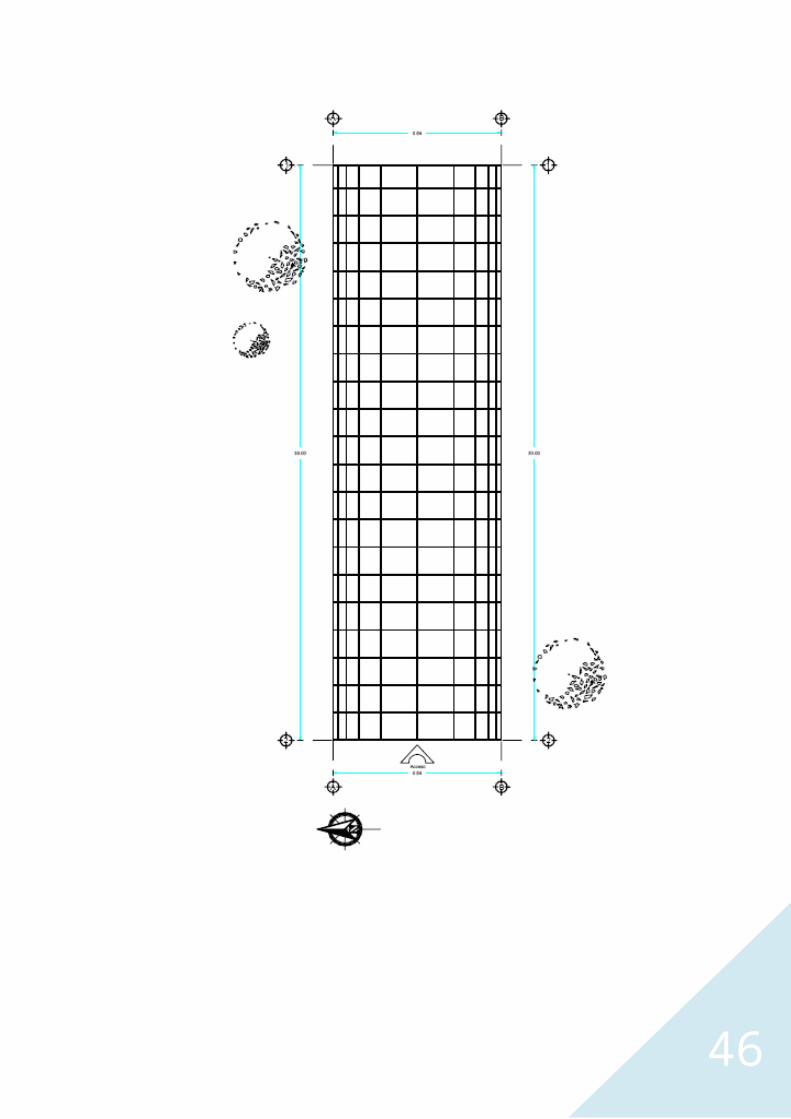
46
°C:Temp/23 = rango de pertenencia (4.1)
Cuando la temperatura tiene un valor por arriba de 23°C se determina a través de esta fórmula:
2 - (Temp/23) = Rango de pertenencia (4.2)
En el caso de la Humedad relativa es parecido a la de temperatura sólo que valor óptimo de HR es el 56% como se muestra en la siguiente fórmula:
HR/56 = Rango de pertenencia (4.3)
Cuando el porcentaje de humedad rebasa el 56% se obtiene por medio de esta
fórmula:
2 - (HR/56) = Rango de pertenencia (4.4)
El elemento “fuzzificador” tendrá una señal medida por medio de un sensor como entrada y provee como salida los valores de pertenencia de las variables difusas. La forma de las funciones de pertenencia en las Figuras 4.3 a) y b) se conoce como triangular que es una de las muchas opciones para implementar dichas funciones de pertenecía. Son ampliamente usadas y tienen una implementación simple y ofrecen buenos resultados. En estas figuras se muestran 2 de los 5 niveles difusos y en la Figura se muestran todas las fusiones de membresía para la temperatura en el mismo eje, para el caso de la HR serian parecidas sólo cambian los limites del % de humedad, se muestran en las Figuras 4.5 y 4.6.
Figura 4.3 a) Función de membresía para la temperatura óptima.
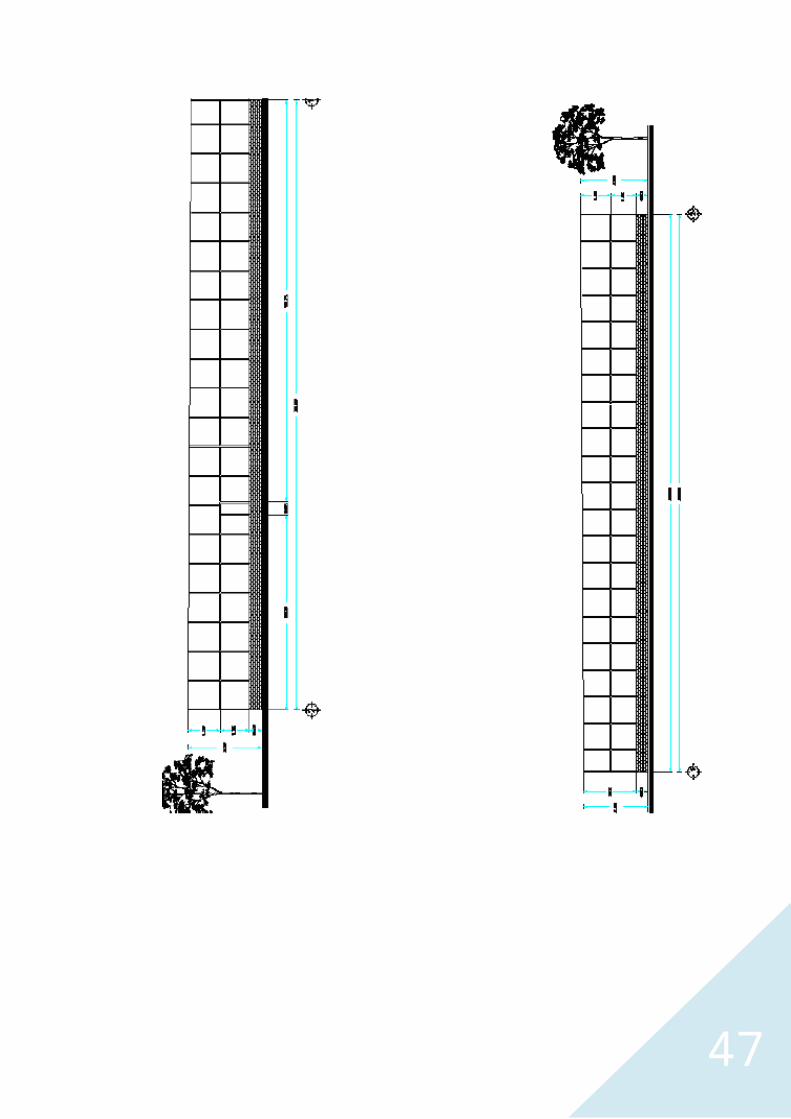
47
Figura 4.3 b) Funciones de membresía para 40°C
Figura 4.4 Funciones de membresía para la temperatura
gura 4.5 Funciones de membresía para la Humedad Relativa

48
Figura 4.6 Funciones de membresía para la Humedad Relativa en un solo eje.
En las Figuras 4.7 y 4.8 se muestran las funciones de pertenencia de la HR y la temperatura pero en un diagrama y el cómo se obtienen los niveles fuzzificador.
Figura 4.7 Rangos de pertenencia para la temperatura.
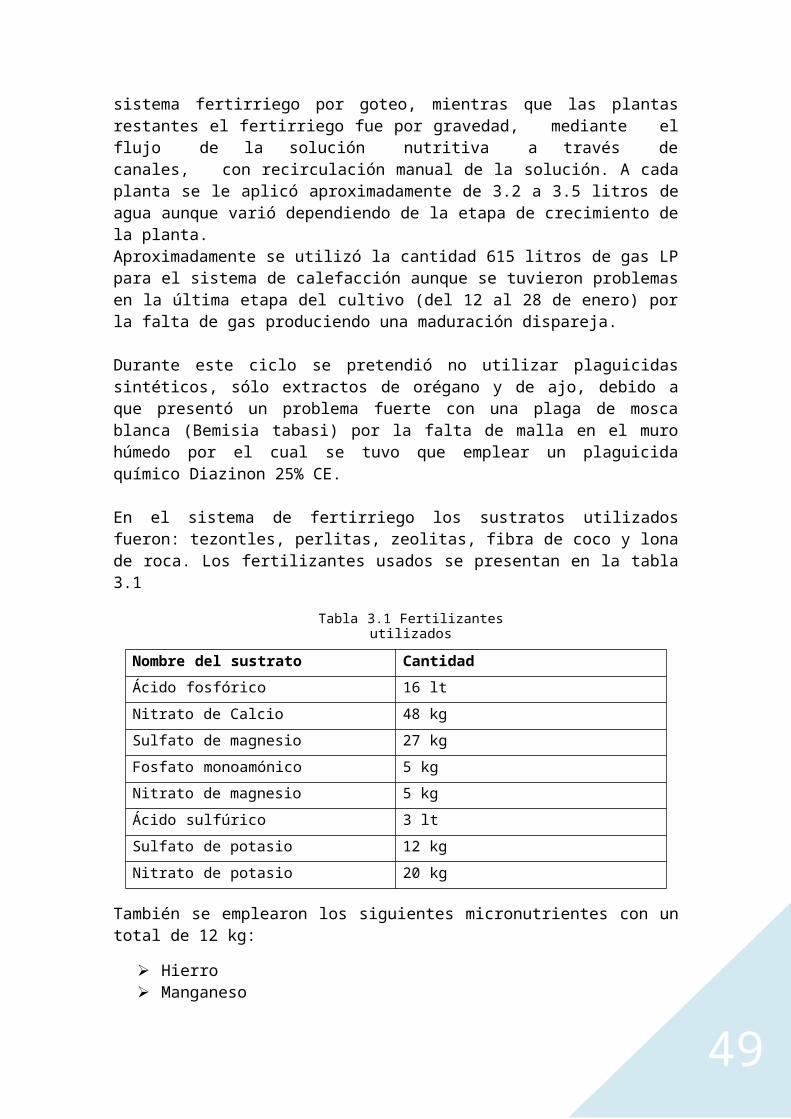
49
Figura 4.8 Rangos de pertenencia para la HR.
Función de pertenencia para la temperatura:
a) Mínima letal: 0.2173b) Mínima biológica: 0.5217c) Óptima: 1d) Máxima biológica: 0.6086e) Máxima letal: 0.3478
Función de pertenencia para la humedad relativa:
a) Baja: 0.5357b) Regular baja: 0.8928c) Óptima: 1d) Regular alta: 0.91e) Alta: 0.5535
En un controlador el clasificador difuso o “fuzzificador” se utiliza para determinar el nivel de membresía conectando una señal obtenida del sistema a su entrada.
4.2.4.2 Diseñando reglas de control difuso (Defuzzificación).
Muchos artículos de investigación acerca de cómo crear un conjunto de reglas difusas han sido escritos. La mayoría de estos métodos son matemáticos y requieren conocimiento analítico para entenderlos. Para muchos especialistas, este hecho derrota el propósito de la lógica difusa. La principal motivación para utilizar lógica difusa es la facilidad para escribir reglas del sentido común de tal manera que sea posible construir una estrategia de control razonable, sin olvidar un conocimiento teórico profundo sobre control. Esto quiere decir que no se tendrá conocimiento de las propiedades de estabilidad del controlador. También el alcance de las aplicaciones no se restringe a aplicaciones de control simple lo cual es bueno porque existen problemas de control sencillos que solamente requieren una solución sencilla.

50
Un sistema de control difuso se construye a través de una base de reglas de la forma:
SI {situación} ENTONCES {acción}
El procedimiento empieza por escribir las reglas básicas y luego refinarlas basadas en la experiencia. En la mayoría de los sistemas de control difuso, el conjunto de acciones difusas es una lista simple de reglas en una secuencia simple de lazo abierto o lazo cerrado.
El último paso en la construcción de un sistema de lógica difusa es convertir de nuevo las variables difusas generadas por la base de reglas en valores con interpretación real. El proceso se denomina “defuzzificación” porque combina las variables difusas para generar el valor real de la señal, el cual puede ser usado posteriormente para generar acciones de control.
Para construir las reglas del control difuso, éste utiliza equivalentes difusos de los operadores lógicos AND, OR, y NOT. Esto ayuda a determinar las reglas del control dependiendo de las funciones de pertenencia de las dos variables. A continuación se muestra cómo se conjugan las dos variables por medio de operaciones AND y OR, determinando la salida según las operaciones y los valores de membresía de cada variable.
[Óptima T] AND [(Óptima HR) OR (Regular baja) OR (Regular alta)] = sistema apagado.
[Mínima biológica] AND [(Baja) OR (Regular baja) OR (Óptima) OR (Regular alta) OR (Alta)] = Calefactores a media potencia.
[Mínima letal] AND [(Baja) OR (Regular baja) OR (Óptima) OR (Regular alta) OR (Alta)] = Calefactores a máxima potencia.
[Máxima biológica] AND [Baja] = Pared húmeda al máximo y extractores a media potencia.
[Máxima biológica] AND [Regular baja] = Pared húmeda y extractores a media potencia.
[Máxima biológica] AND [(Óptima) OR (Regular alta)] = Extractores a media potencia.
[Máxima biológica] AND [Alta] = Extractores al máximo.
[Máxima letal] AND [Baja] = Pared húmeda y extractores al máximo.
[Máxima letal] AND [Regular baja] = Pared húmeda a media potencia y extractores al máximo.
[Máximo letal] AND [(Óptima) OR (Regular alta) OR (Alta)] = Extractores al máximo.
Para una mejor visualización de las sentencias se diseñó un diagrama de estas operaciones que se muestra en la Figura 4.9.

51
Figura 4.9 Sistema defuzzificado.

52
Capítulo 5
Circuitería del sistemaUna etapa importante en la automatización de los sistemas, es la circuitería, ya que ésta es el vínculo entre el controlador y las diferentes herramientas para el control del clima. La aplicación de los diferentes circuitos como etapas de potencia, etapas de acoplamiento para los sensores, y las etapas de control, nos dará una mayor optimización de los sistemas teniendo como resultado un mejor sensado y llegar a los valores deseados.
Se pretendió dar una aproximación real al prototipo (maqueta), tomando en cuenta las necesidades del invernadero real, utilizando las herramientas con las que este trabaja: ventilador, extractores de aire, calefactores, pared húmeda y bombas de agua. La función de los circuitos es activar estas cargas cuando el controlador lo mande según las necesidades del sistema. A continuación se dará una explicación de cada uno de los circuitos utilizados.
5.1 Activación del sistema de temperatura
5.1.1 Sensor de temperatura
Para este sistema se armó un sensor de temperatura con el circuito integrado de precisión LM35. Las principales características de este se describen a continuación: entrega un voltaje de salida lineal proporcional a los grados centígrados, opera desde los-55° C hasta los 150° C, da lecturas de 0.01v por cada 1° C y opera de los 4Vcd a los 30 Vcd.
Para la etapa de acondicionamiento se buscó tener una amplificación de 10 veces la señal de salida para que el PLC tenga una lectura más precisa. En la Figura 5.1 se muestra el sensor de humedad ya acondicionado para su uso con el PLC.

53
Para el sistema de temperatura se cuentan con dos etapas de salida, una para el enfriamiento y otro para el calentamiento.
5.1.2 Etapa de enfriamiento
La etapa de enfriamiento se basa en la activación de dos extractores, los cuales sacaran el aire caliente o húmedo dentro del invernadero regulando la temperatura a valores deseados. En este caso el PLC nos entregara una señal que varía de 0 Vcd a 10 Vcd según sea la necesidad del controlador para llegar a los valores deseados. El circuito nos amplificará 1.5 veces la señal de entrada, esto quiere decir que cuando el controlador nos mande 10 Vcd el amplificador nos dará de salida 15 Vcd. El circuito se compone de un amplificador operacional LM324, un TIP 41C, y juego de resistencias para la amplificación adecuada, este circuito se muestra en la Figura 5.2
Figura 5.2 Etapa de potencia para los extractores
5.1.3 Etapa de calefacción
En esta etapa se remplazó el calefactor de gas por dos calefactores eléctricos, en este caso son unas resistencias térmicas de tuxteno que trabajan a 120 VCA. Con esto se pretende que cuando los dos calefactores estén encendidos signifique que la etapa de calefacción está a su máximo y que cuando prenda sólo un calefactor este a media potencia. Estas resistencias trabajan con alto voltaje y alterno, su etapa de potencia se basa en un TRIAC MAC 15A8, y como protección para el PLC se le agregó un optoacoplador MOC3011 los cuales se muestran en la Figura 5.3 a) y b).

54
5.2 Sistema de humedad relativa
5.2.1 Sensor de humedad relativa
En este sistema se utilizará la técnica del bulbo húmedo la cual consiste en comparar dos sensores de temperatura, uno en temperatura ambiente y el otro en estado 100% húmedo que se colocará en un recipiente con un algodón húmedo. Teniendo así una diferencia de temperatura, con la cual se calcula la HR con la siguiente fórmula:
HR= Pvs (húmedo)/ Pvs (seco) (5.1)
Donde:
HR es la humedad relativa. Pvs (húmedo) es la presión vapor de saturación del sensor húmedo. Pvs (seco) es la presión de vapor de saturación del sensor seco. La presión de vapor de saturación de ambos sensores se calcula con la siguiente
Fórmula:
(5.2)

55
Donde:
T1 es la temperatura del bulbo seco T2 es la temperatura del bulbo húmedo
Para el sensado del esta variable sólo basta tener dos sensores de temperatura como los que se muestran en el tema del sensor de temperatura, la circuitería es la misma, la pequeña diferencia es que el sensor húmedo tiene que estar sumergido en agua con algodón y estar humedeciéndolo constantemente.
5.2.2 Etapa de humidificación
Esta etapa consiste en activar una bomba que tendrá la función de dispersar el agua a través de la pared húmeda, originalmente en el invernadero real los extractores son los que cumplen con la función de succionar el aire húmedo debido a su potencia, en el caso del prototipo los extractores de aire no son suficientemente potentes para succionar el aire, por lo que se tuvo que implementar un ventilador que empuje el aire húmedo. La circuitería de ambos dispositivos no varía mucho de los otros circuitos. Para el encendido de la bomba se usó un TRIAC MAC15A8 y un optoacoplador MOC 3011, y se muestran en la Figura 5.4. El encendido del ventilador es igual al de los extractores se basa sólo en un LM324 y un TIP 41C y se muestra en la Figura 5.5.
Figura 5.5 Amplificador de voltaje para ventilador.

56
5.3 Activación del sistema de riego
Para este sistema se contará con dos métodos: cultivo en el suelo utilizando sensores e hidroponía por medio de timers.
5.3.1 Cultivo en suelo
Para este caso se utilizará tierra para maceta, éste está compuesto por materiales orgánicos y minerales de diversas composiciones químicas. Esto permite aireación y retención de la humedad, permitiendo tener un sensado optimo a diferencia del cultivo en hidroponía.
5.3.1.1 Sensor de humedad del suelo
El sensor que se utilizará para medir la humedad de la tierra es el sensor de humedad del suelo “Watermark MR”, está formado por dos electrodos concéntricos incrustados en un conglomerado especial sujetado por una membrana sintética y encapsulada en una funda de acero inoxidable. Incorpora un disco amortiguador para reducir la influencia de la salinidad en las lecturas. Correctamente instalado responde rápidamente a los cambios de la humedad del suelo. Este sensor se muestra en la Figura 5.6.
Figura 5.6 Sensor de humedad Watermark MR
El sensor “Watermark MR” (del tipo granular matricial), ofrece un método indirecto de medición de la humedad del suelo, a partir de la medida de la succión del agua en el terreno en centibares, con un rango aceptable lineal entre 0 y 200 [cb]. Cada valor de resistencia del sensor corresponde linealmente a un valor de humedad del suelo. Tiene la ventaja de ser un sensor económico, robusto, de rápido tiempo de respuesta y de no necesitar mantenimiento ni calibraciones, pero no es de tanta precisión como un sensor tensiométrico y se degrada con el tiempo (vida útil de algunos años). Para el diseño del circuito de acoplamiento del sensor se obtuvo la siguiente información por parte del fabricante:
La resistencia del sensor es inversamente proporcional a la temperatura del suelo. Ajustar un 1% por grado Fahrenheit de variación tomando como referencia inicial 75°F.
No es recomendable aplicar al sensor una tensión continua, ya que los electrodos se pueden dañar por efecto electrolítico.
No debería dejarse el sensor continuamente excitado, ni la corriente a través del mismo debería superar 1mA, esto es para que tenga una mayor vida útil.
Para la medición de éste se requiere de un circuito divisor de tensiones, que consta de un juego de resistencias él cual al aplicarle un voltaje conocido nos muestra el voltaje en

57
el sensor, este varía según la humedad en la en que se encuentre. El circuito aplicado se muestra en la Figura 5.7.
Figura 5.7 Circuito divisor de tensión para el sensor de humead del suelo.
5.3.1.2 Calibración del sensor de humedad del suelo
Para poder determinar la humedad del suelo, se realizó un experimento que consta de medir el voltaje que nos entrega el sensor, cuando se introduce en un recipiente con tierra para cultivo y se le humedece con valores conocidos. A tres recipientes se les tomo el peso de la tierra totalmente seca, después se calculó la cantidad de agua que requerían para tener la humedad deseada, al introducir el sensor se medía el voltaje y la humedad que este representaba y por último los valores adquiridos sólo se introdujeron al PLC para poder determinar los rangos de humedad deseados.
5.3.1.3 Activación de la bomba para el riego
Una vez instalado el sensor, lo que resta es activar la bomba que se encargara de humedecer la tierra. Esta trabaja a 120 Vca., tiene dos salidas de 1500 cm3. Para activar esta carga se requiere de una etapa de potencia pero anteriormente se utilizará un optoacoplador que se encargará de proteger al PLC de sobrecargas, en este caso el MOC 3011. En la Figura 5.8 se muestra la circuitería respectiva para esta etapa:

58
5.3.2 Hidroponia
En este caso no se requerirá de sensor, ya que los sustratos no nos permiten tener mediciones correctas de la humedad debido a que presenta un estado de texturas irregulares y la humedad no es uniforme. La estrategia que se utilizó es por medio de temporizadores el cual será programado en el controlador según los tiempos indicados por el agrónomo.
5.3.2.1 Activación de la bomba
Para activar la bomba de aire que empuja el agua para regar, sólo se necesitó un optoacoplador MOC 3011 y un TRIAC MAC 15A8 y se muestra en la Figura 5.9
Capítulo 6
ProgramaciónEste capítulo abarca lo que es la parte de la programación en el PLC s7-200 de siemens, así como un análisis de la estructura de la activación de los sistemas. La programación se realizará a partir del software STEP 7-Micro/WIN 32 versión 3.1, el cual nos ofrece una programación más sencilla y la comodidad de trabajar en una PC.
Para la estructura de la activación de los sistemas se tomó como objetivo principal las necesidades del cultivo y después las del invernadero teniendo en cuenta las herramientas que se tiene para el control de los sistemas. Cabe destacar que los sistemas simulados aún no se aproximan tanto a la realidad, pero la parte fundamental es la programación con el PLC, y permite ser más objetivo en el control del clima. Para la programación se tomó como referencia la información de la Figura 4.9.
6.1 Diagramas de flujo
6.1.1 Temperatura y HR
En este caso, como anteriormente se había mencionado se utilizó la parte básica del control difuso, fuzzificación y defuzzificación así como las funciones de pertenencia de cada rango. El diagrama de flujo correspondiente a este control se muestra en la Figura
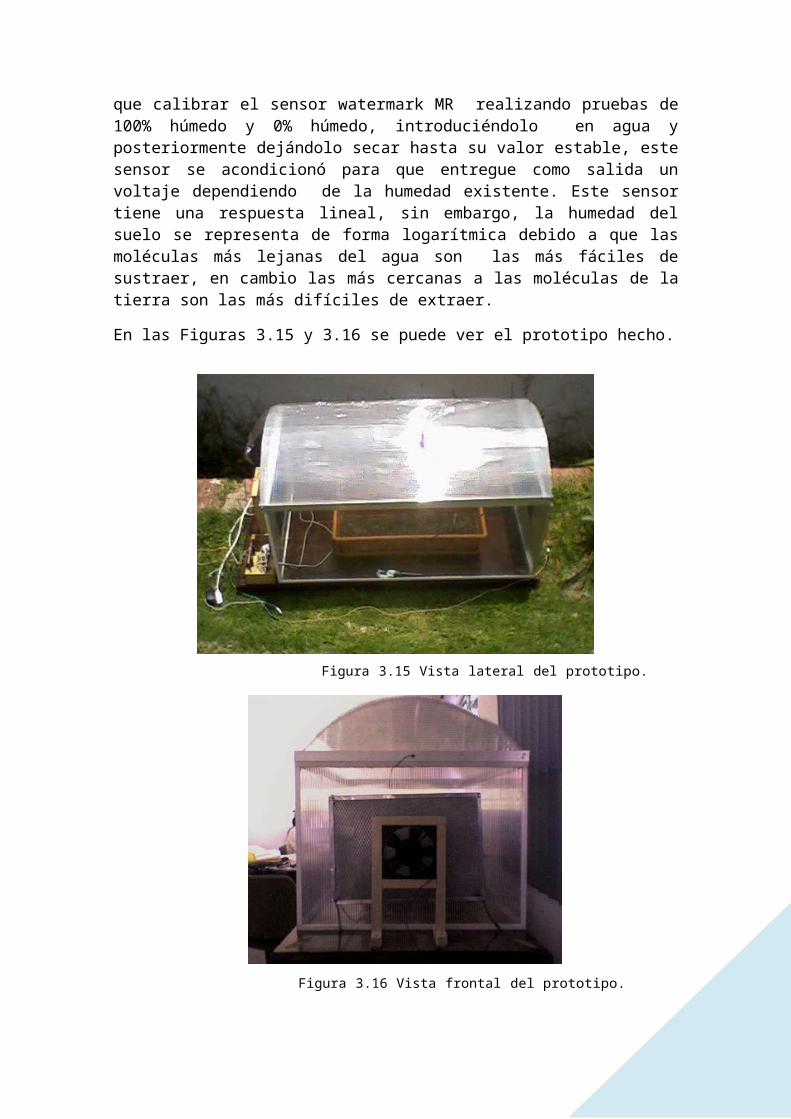
59
6.1 en el cual se muestra de manera simplificada la estructura y orden del controlador.
Figura 6.1 Diagrama de flujo temperatura y HR.
6.1.2 Riego
Para este sistema se utilizaran 2 métodos, el primero se basó en el invernadero de la escuela de Agronomía en donde se utiliza la técnica de cultivo en hidroponía, lo más importante en esta técnica es que se debe de tener un riego preciso por el mismo riesgo que se corre al tener que inyectarle directamente los nutrientes a la planta. La segunda técnica se basará en el sensado de la humedad del suelo esta será medida por medio del sensor de humedad watermark. Para este caso sólo bastará que el sensor nos indique la cantidad de agua que se necesita para tener en un rango óptimo la humedad del suelo.
6.1.2.1 Riego en suelo
En la Figura 6.2 se muestran los pasos a seguir del sistema de riego en el suelo, teniendo en cuenta las lecturas que nos da el sensor de humedad del suelo.

60
Figura 6.2 Diagrama de flujo para el riego en el suelo.
6.1.2.2 Riego en el sistema hidropónico
En la Figura 6.3 se muestra el diagrama de flujo de la activación de los timers para el riego en hidroponía, en el PLC se programó que activara la bomba 3 segundos cada 20 minutos durante 12 horas y durante las siguientes 12 horas permanezca apagada.

61
Figura 6.3 Diagrama de flujo para el riego en hidroponia
6.2 Diagrama esquemático
A continuación en la Figura 6.4 se da una síntesis del vínculo entre los sistemas, el controlador y etapas intermedias.
62
Figura 6.4 Diagrama esquemático del sistema
6.3 Programación en el PLC
Para la programación en el PLC S7-200, se usó el método llamado tipo Escalera, en el cual se le dan las instrucciones requeridas para el funcionamiento adecuado de cada sistema.
Los segmentos utilizados en la programación son los siguientes:
1. Inicio del programa.2. Dar el retardo.3. Tomar lectura de los sensores de temperatura y del bulbo húmedo.4. Sacar el promedio de la temperatura5. Calcular la presión de vapor saturado (PVS), de los sensores de temperatura.6. Calcular la presión de vapor saturado (PVS), del bulbo húmedo.7. Calcular la HR.8. Calcular la pertenencia de la temperatura.9. Calcular la pertenencia de la HR.10. Calcular el porcentaje de pertenencia de la temperatura.11. Calcular el porcentaje de pertenencia de la HR.12. Determinar nivel de HR13. Determinar nivel de temperatura14. Suma de niveles de Temperatura y HR15. al 19. Sentencias.16. Fin de proceso17. al 24. Tiempos para el riego con temporizadores.18. Determinar riego por sensado.19. Nivel de humedad del suelo.20. Rangos de humedad para la activación del riego y fin del programa.
6.3.1 Programa
A continuación se mostrará el programa de forma simplificada.
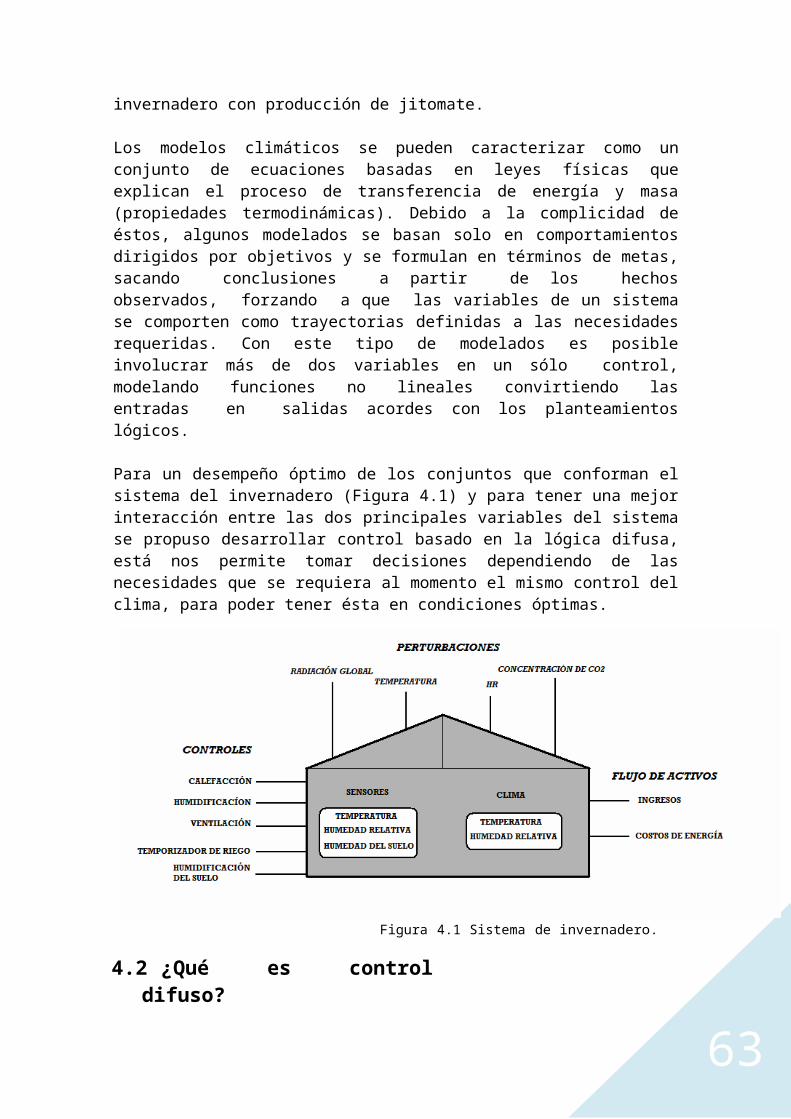
63
64

65

66

67

68

69

70

71

72

73

74

75

76
Capítulo 7
Pruebas y resultadosEn este capítulo se dan a conocer los resultados obtenidos de las pruebas realizadas, así como las conclusiones que se obtuvieron a partir de estas.
7.1 Resultados
A continuación se dan a conocer los resultados obtenidas por el PLC mediante gráficas hechas en MatLab. Las pruebas se realizaron en las instalaciones de la Unidad Académica de Ingeniería Eléctrica de la UAZ. A partir de estas pruebas se obtuvieron los resultados lo que permitió obtener las conclusiones de esta tesis.
Para dar inicio al comienzo de las pruebas, se obtuvieron datos del sistema sin controlar ni automatizar. Cabe destacar que para dicha pruebas sólo se tomó lecturas de temperatura y de HR sin contar con el riego. Tales resultados se muestran en las Gráficas 7.1 y 7.2.
Gráfica 7.1 Lecturas de temperatura
Gráfica 7.2 Lecturas de HR

77
Las pruebas realizadas para el sistema sin controlar y automatizar, en un día despejado. Iniciando las pruebas a las 13:00 hrs. y terminando a las 13:20 hrs. Para un total de 20 minutos.
Los resultados de esta prueba indican que el comportamiento del sistema es de mal desempeño, ya que se sobrepasa los valores del rango óptimo de la temperatura. Mientras que el HR se mantiene en un rango aceptable.
Pasando a los resultados obtenidos con el sistema controlado y automatizado, contando, para este caso, ya con los 2 tipos de aplicación de riego. Dichos resultados se muestran en las siguientes gráficas.
Las gráficas 7.3, 7.4, 7.5, 7.6 y 7.7 muestran el comportamiento de la temperatura. Cabe destacar que las pruebas iniciaron a las 13:00 hrs. y terminaron a las 13:00hrs. Del día siguiente, es decir duraron 24 horas.
Gráfica 7.3 Lecturas de temperatura primera medición
Gráfica 7.4 Lecturas de temperatura segunda medición

78
Gráfica 7.5 Lecturas de temperatura tercera medición
Gráfica 7.6 Lecturas de temperatura cuarta medición
Gráfica 7.7 Lecturas de temperatura quinta medición
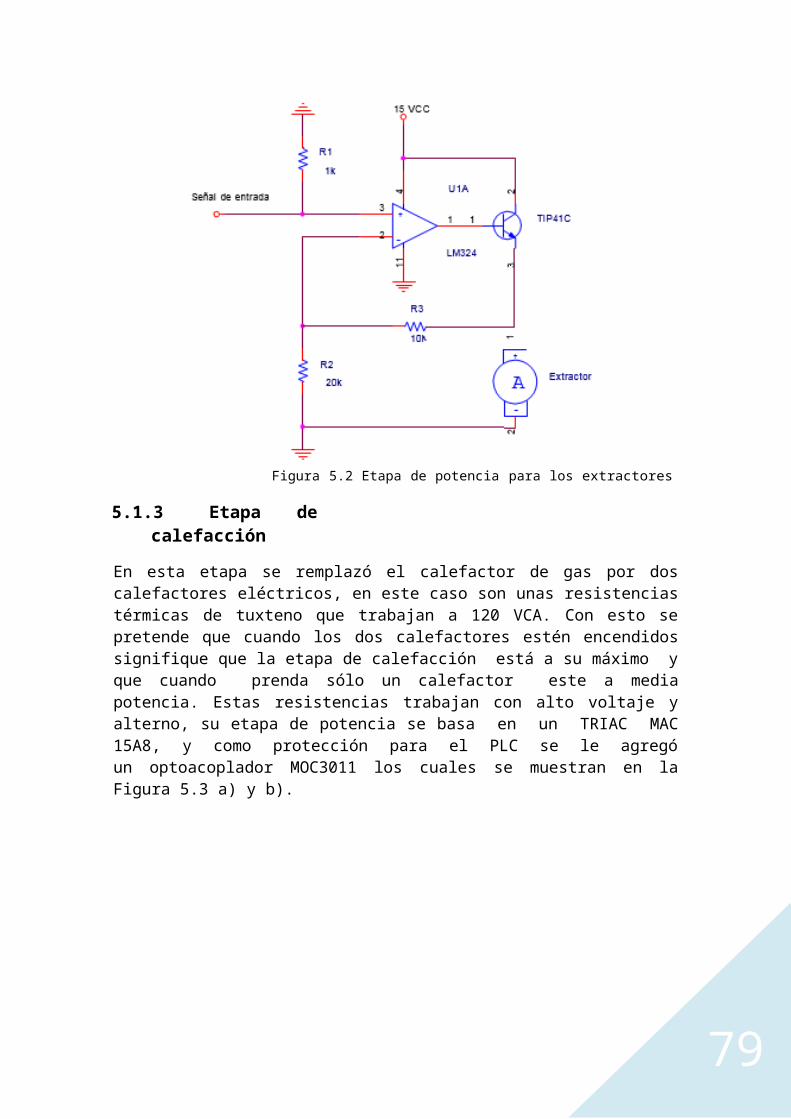
79
Como se puede observar el comportamiento de la temperatura se mantuvo en los rangos establecidos, esto quiere decir que el sistema funciono adecuadamente. También es de suma importancia mencionar que para el caso de la temperatura se utilizaron 2 sensores de temperatura ubicados en lugares distintos dentro del prototipo, de donde se saca una temperatura promedio del interior.
A continuación se mostrará las muestras obtenidas de la HR, estas muestras fueron obtenidas los mismos días que se realizaron las pruebas de temperatura. Estas muestras están en las Gráficas 7.8, 79, 7.10, 7.11 y 7.12.
Gráfica 7.8 Lecturas de HR primera medición.
Gráfica 7.9 Lecturas de HR segunda medición.

80
Gráfica 7.10 Lecturas de HR tercera medición.
Gráfica 7.11 Lecturas de HR cuarta medición
Gráfica 7.12 Lecturas de HR quinta medición
81
En estas gráficas se puede mostrar que en la mayoría de las muestras la HR se mantiene en el rango óptimo, sin embargo a diferencia de la temperatura ésta se sale de este rango, debido a que depende también a un tercer sensor de temperatura ubicado afuera del prototipo, con el cual se hace una comparación con los otros sensores y se calcula la HR dentro del invernadero.
Por último se dan a conocer las muestras obtenidas de la humedad del suelo, las cuales dieron el comportamiento siguiente, como se muestra en las Gráficas 7.13,7.14, 7.15, 7.16 y 7.17.
Gráfica 7.13 Lecturas de humedad del suelo primera medición
Gráfica 7.14 Lecturas de humedad del suelo segunda medición

82
Gráfica 7.15 Lecturas de humedad del suelo tercera medición
Gráfica 7.16 Lecturas de humedad del suelo cuarta medición
Gráfica 7.17 Lecturas de humedad del suelo quinta medición
willy, 25/11/14,

83
7.1.1 Potencia Utilizada
Una de las pruebas que se realizó a la par del funcionamiento del sistema, fue el consumo de potencia utilizado. Esta prueba se pudo realizar por medio de un medidor de potencia doméstico.
Los resultados que se obtuvieron fueron los siguientes:
Primera medición= 2 kWh aprox. Segunda medición= 1.8 kWh aprox. Tercera medición= 2.1 kWh aprox.
Se puede decir que se obtuvo un promedio aproximado de 2 kWh, no es muy precisa la medición ya que el medidor no tiene rangos intermedios entre los enteros.

84
ConclusionesEn la actualidad el ambiente se ha visto afectado por el cambio brusco de temperaturas y del clima, por tal motivo es necesario enfocarnos a utilizar sistemas ya existentes y mejorarlos como es el caso de los invernaderos.
Durante las investigaciones de campo que se realizaron en el presente trabajo, se observó el gran problema que tienen los invernaderos de Zacatecas. Aunque primordialmente se enfocó en los problemas del invernadero de la escuela de Agronomía, sin embargo, no se hicieron a un lado los factores que afectan a los demás invernaderos.
En este trabajo se demostró que sí es posible tener un funcionamiento adecuado del sistema del invernadero por medio del PLC y con sensores accesibles. Además que este sistema se puede implementar en el invernadero de la escuela de Agronomía, ya que cumple con las especificaciones y rangos establecidos por éste mismo. Los principales problemas que este último presentaba fueron resueltos mediante propuestas basadas en la experiencia de los cultivos predecesores.
La automatización jugó un papel importante en el control del clima, ya que con el sistema automático se llegó a tener un mejor desempeño al actuar de manera precisa e inmediata cuando alguna de las variables se vio afectada.
Las gráficas obtenidas muestran el comportamiento de las variables y reflejan la dificultad de controlar el clima en un espacio reducido. Como se sabe el clima es fácil de controlar en espacios de mucho volumen a diferencia de los espacios pequeños, en donde el clima presenta más alteraciones y menor estabilidad.
Como se mostró en las gráficas de temperatura y HR, éstas se mantuvieron en los rangos establecidos con una forma oscilatoria dentro de éstos, por lo cual el sistema funcionó correctamente. Cabe mencionar que la temperatura y la HR están dentro de un rango óptimo por tal motivo nunca se buscó llegar a valores determinados como es en el caso del control clásico. Una de las herramientas importantes en este trabajo fue la aplicación de la Teoría del Razonamiento Aproximado, que es una breve introducción al control difuso, ya que a partir de éste se obtuvieron buenos resultados al involucrar las 2 principales variables en un sólo control, basándose en estrategias capaces de resolver las distintas alteraciones que se presentaban. Para este caso los sensores LM35 además de ser económicos y sencillos dieron un buen desempeño mostrando resultados aceptables.
Las gráficas del riego muestran que se mantuvo sobre el rango óptimo aunque se tuvieron algunas alteraciones, ya que el sensor no tiene una respuesta inmediata. La calibración de este no fue óptima, debido a que se requiere de un estudio más profundo de su funcionamiento y del comportamiento de la humedad del suelo. El sensorWatermarkMR además de ser poco accesible y tener un elevado costo, su robusta y nada práctica estructura obstaculiza su objetivo principal, que es proporcionar un sensado de humedad inmediato y estable.
Por último una de las principales fallas que se obtuvo en este trabajo fue que se presentó la misma plaga que se había presentado en el invernadero de la escuela de Agronomía que es la llamada “mosca blanca”. Y esto sirve para que se tomen precauciones en próximas investigaciones.

85
Trabajos a futuro Desarrollar el sistema con un control difuso más completo. Aplicar el sistema automatizado en condiciones reales (en el invernadero de la
Unidad Académica de Agronomía). Perfeccionar la calibración del sensor de humedad WatermarkMR. Implementar energías renovables a los sistemas (calentadores solares, energía
eólica, etc.). Llevar a cabo investigaciones más profundas sobre las variables que influyen en el
crecimiento de las plantas. Implementar este control para otro tipo de cultivo. Realizar lecturas en el invernadero real para su verificación de ahorro de energía y
agua. Poner una malla en las ventilas y limitar el acceso de personas al invernadero para
impedir el ingreso de plagas y enfermedades de las plantas.

86
Apéndice A: Hoja de Datos del PLC S7-200
Introducción a los Micro-PLCs S7-200

87

88

89

90

91
Apéndice B: Hoja de datos del LM35

92
Apéndice C: Hoja de Datos del Sensor de
Humedad WATERMARK

93

94

95
Apéndice D: Hoja de datos del MAC15A8

96
Apéndice E: Hoja de datos del MOC3011

97
Apéndice F: Hoja de datos del TIP41C

98
Apéndice G: Hoja de datos del LM324
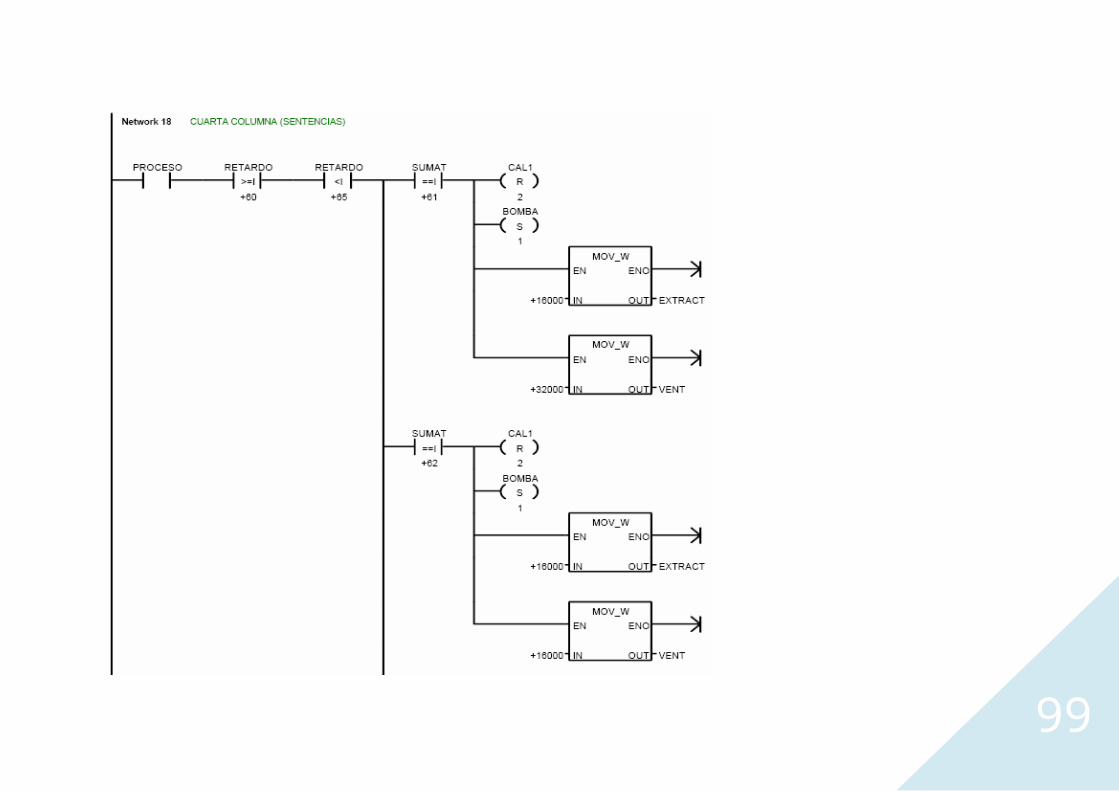
99
Bibliografía
Campos Daniel “Agroclimatología: Cuantitativa de Cultivos”. Editorial Trillas
Primera Edición. México (2005).
J. Bakker Greenhouse Climate Control: An Integrated Approach.
Castañeda Rodrigo, “Elementos de instrumentación y control para la simulación
del balance de energía en un invernadero”. Tesis de Maestría en Ciencias.
Universidad Autónoma de Querétaro. Querétaro, Qro., México (2002).
Apuntes de Ingeniería de control I. “Ingeniería de Control I (Notas)”.
Impartido por el M. en C. Miguel Eduardo González en la UAIE de la UAZ en el
6º semestre de 2006. Zacatecas, México.
http://html.rincondelvago.com/pcl.html, Fecha de consulta 16 de abril de 2008.
http://es.wikipedia.org/wiki/Procesador_digital_de_se%C3%B1al, Fecha de
consulta 16 de abril de 2008.
http://proton.ucting.udg.mx/temas/ava/taz/MICRO.htm, Fecha de consulta 16 de
abril de 2008.
http://www.infoagro.com/industria_auxiliar/tipo_invernaderos.htm, Fecha
de consulta 7 de abril de 2008.
Carrillo Víctor, Márquez Juan & Zúñiga Eduardo “Sistema de control y monitoreo de un invernadero utilizando el PLC S7-200” Tesis para obtener el titulo de ingeniero en Comunicaciones y Electrónica. UAZ (2002). Zacatecas, Zac.
Pacheco Ernesto “Control de un sistema de riego con el PLC S7-200”, Tesis para
obtener el titulo de ingeniero en Comunicaciones y Electrónica. UAZ (2007).
Zacatecas, Zac., México.
Camarena Javier “Automatización del fertiriego con VISSIM y PDS tesis
TMS320lf2407” Tesis para obtener el titulo de ingeniero en Comunicaciones y
Electrónica. UAZ (2007). Zacatecas, Zac., México.
Castañeda Rodrigo, Lara Alfredo, Herrera Gilberto “Modelación del Clima en
Invernaderos”. UAQ, UAZ. México.
Zadeh Lofti “Fuzzy sets” Departament of Electrical Engineering and Computer
Sciences University of California. Berkley, CA (1965).
Pérez Marco, Vernon James “Sistemas de lógica difusa” División de Electrónica y
Computación, CUCEI. Universidad de Guadalajara, México.


















