
AUTOEVALUACIÓN DEL DEPARTAMENTO DE …portal.uc3m.es/.../Au_Sistemas%20y%20Autom%E1tica.pdf · 4...
93
Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática AUTOEVALUACIÓN DEL DEPARTAMENTO DE INGENIERIA DE SISTEMAS Y AUTOMÁTICA Junio de 2004
Transcript of AUTOEVALUACIÓN DEL DEPARTAMENTO DE …portal.uc3m.es/.../Au_Sistemas%20y%20Autom%E1tica.pdf · 4...

Universidad Carlos III de Madrid
Departamento de Ingeniería de Sistemas y Automática
AUTOEVALUACIÓN DEL DEPARTAMENTO DE INGENIERIA
DE SISTEMAS Y AUTOMÁTICA
Junio de 2004

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 2
Composición del Comité de Autoevaluación del Departamento 1 Presidente: Prof. Dr. D. Carlos Balaguer Bernardo de Quirós, Catedrático de
Universidad y Subdirector del Departamento de Ingeniería de Sistemas y
Automática.
2 Prof. Dr. D. José María Armingol Moreno, Profesor Titular de Universidad y
Secretario del Departamento de Ingeniería de Sistemas y Automática.
3 Prof. Dr. D. Luis E. Moreno Lorente, Profesor Titula r de Universidad.
4 Prof. Dra. Dª. M. Dolores Blanco Rojas, Profesora Ayudante Doctor.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 3
1. PERFIL DEL DEPARTAMENTO
1.1 Consideraciones generales sobre la Escuela Politécnica Superior.
La Universidad Carlos III de Madrid (UC3M) nace en el año 1989 con el
propósito de contribuir al desarrollo de la zona sur de Madrid, ofreciendo un modelo de
educación integral y poniendo énfasis desde el comienzo, en la calidad de sus
actividades tanto docentes como investigadoras. La Universidad Carlos III comenzó sus
actividades en el campus de Getafe con la Licenciatura en Derecho. Actualmente la
Universidad tiene tres recintos universitarios, en Getafe, donde se encuentran la
Facultad de Ciencias Sociales y Jurídicas, y la Facultad de Humanidades; Leganés,
donde está la Escuela Politécnica Superior (EPS), y el nuevo campus de Colmenarejo.
La oferta de la EPS abarca en la actualidad tres de las ramas de la ingeniería con
mayor proyección de futuro en el mercado laboral español y europeo: Industrial,
Telecomunicaciones e Informática. En la EPS se forman actualmente ingenieros en
todos los niveles previstos en el ámbito universitario: de primer, segundo y tercer ciclos,
cada uno de ellos con titulaciones específicas. La Universidad cuenta actualmente con
más de 16.000 estudiantes, de los cuales casi 6.000 están en la EPS. Por otro lado, la
Universidad tiene más de 1.500 profesores (659 pertenecen a la EPS).
La organización docente de la Universidad Carlos III de Madrid, a diferencia de
las Universidades tradicionales en las que las titulaciones se organizan exclusivamente
por centros independientes, se basa en la estructura departamental. Los Departamentos
son únicos para toda la Universidad e imparten clases en diferentes titulaciones. Por
ejemplo, en el caso del Departamento de Matemáticas su docencia en la EPS abarca
todas las titulaciones técnicas, tanto para ingeniería superior como para la técnica. El
mismo Departamento imparte también clases en el campus de Getafe y Colmenarejo en
titulaciones no técnicas. Esta organización permite obtener una gran sinergia, una
optimización de recursos, una uniformidad de los indicadores de calidad y una visión
global de las matemáticas en la Universidad.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 4
Por ello, el objetivo docente del Departamento de Ingeniería de Sistemas y
Automática es organizar, desarrollar, coordinar y evaluar la docencia de las disciplinas
de las que sean responsables dentro de cada titulación, en el marco general de la
programación de las enseñanzas de primer, segundo y tercer ciclos y de otros cursos de
especialización que la Universidad imparta.
1.2 Consideraciones generales sobre del Departamento de Ingeniería de Sistemas y
Automática.
El actual Departamento de Ingeniería de Sistemas y Automática (DISA) se crea
el 1 de Enero de 2002 como escisión del anterior Departamento de Ingeniería Eléctrica,
Electrónica y Automática (DIEEA) constituido en 1998 por tres áreas de conocimiento:
Ingeniería Eléctrica, Tecnología Electrónica e Ingeniería de Sistemas y Automática. El
DIEEA, a su vez, se creo como escisión del Departamento de Ingeniería (DI), núcleo
inicial de la Escuela Politécnica Superior de la Universidad.
La razón principal que originó la escisión del DIEEA fue el excesivo tamaño
que había alcanzado (más de 120 profesores) que lo hacía inmanejable en la práctica y
suponía graves problemas de tipo organizativo. Desde un principio el DIEEA (similar al
DI) adoptó el principio de funcionamiento de la autonomía total de las áreas en
materias exclusivas de su competencia a efectos docentes (incluyendo, por tanto, la
política de personal asociada a los mismos) y de investigación, mediante la designación
de Coordinadores de áreas de conocimiento en cada una de ellas. La gestión conjunta
del Departamento se limitó a aspectos y actividades comunes tales como el programa de
Doctorado o la defensa de una postura común en política de personal e investigación en
la interlocución del Departamento con las demás instancias universitarias.
Sin duda alguna la experiencia de la división del DIEEA ha sido positiva,
debiendo destacar lo acertado de la decisión de separación funcional total entre las tres
áreas del anterior departamento DIEEA, que ha evitado posibles interferencias o
tensiones entre áreas.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 5
Por ello, a la hora de proceder a la evaluación del actual Departamento de
Ingeniería de Sistemas y Automática, no se puede dejar de tener en cuenta la actividad
desarrollada en años anteriores bajo la denominación del DIEEA, como área de
conocimiento de Ingeniería de Sistemas y Automática, que es realmente la unidad
funcional que debe ser evaluada al ostentar las competencias y responsabilidades que,
de manera oficiosa desde 1998 y de manera oficial desde 2001, la Universidad Carlos
III atribuye a los Departamentos en sus Estatutos.
El área de Ingeniería de Sistemas y Automática empezó a impartir docencia en
el curso 1990-91 en diversas titulaciones de Ingeniería e Informática en el campus de
Leganés. Dada la naturaleza de la Escuela Politécnica Superior la docencia se imparte
tanto en las titulaciones superiores y de segundo ciclo como en las técnicas.
En Diciembre del año 2002 el DISA firmó con la Universidad el Protocolo
Programa Concentrado. Dicho documento representa el plan estratégico de desarrollo
del DISA hasta el año 2006. En él, el Departamento, con los medios proporcionados por
la Universidad, se compromete a alcanzar unas metas de calidad docente e
investigadora. El seguimiento periódico de dicho Programa Marco permite corregir y, si
es necesario, reorientar, las actividad del DISA. En esta autoevaluación se hará
referencia a dicho Programa Marco pues el Protocolo incluye los compromisos del
Departamento y sus aspiraciones hacia el futuro.
1.3 Características generales del área de Ingeniería de Sistemas y Automática.
Los objetivos generales del Departamento de Ingeniería de Sistemas y
Automática se encuadran en las líneas generales de los Departamentos análogos dentro
de este área de conocimiento en España. Estas líneas y su papel en la Universidad
española quedan reflejadas en el informe del Comité Español de Automática (CEA), en
las últimas XXIV Jornadas de Automática celebradas en 2003 en León:
“A comienzos de siglo se impuso una organización vertical de las escuelas de
ingeniería, que aún perdura en nuestro actual sistema educativo. Lo sustantivo de esta

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 6
estructura era una compartimentación vertical en función del sector al que se trataba
de dar respuesta: eléctrico, mecánico, químico, naval, aeronáutico, civil, etc.
Posiblemente fuese la única solución razonable al problema en el momento que se
produjo. Lo que sí parece evidente en la actualidad es que esta situación ha cambiado
muy significativamente con la aparición de disciplinas de carácter horizontal, como la
Automática, que traspasan de forma clara las fronteras de los Departamentos
tradicionales. …La evolución del campo desde entonces ha sido muy dinámica. La
Automática es la primera disciplina técnica que trasciende las fronteras de las
ingenierías tradicionales. …Su desarrollo estuvo fuertemente estimulado por los
equipos multidisciplinares que se formaron.”
Los distintos campos de estudio que tienen cabida dentro del área de
conocimiento de Ingeniería de Sistemas y Automática fueron enumerados en la Jornadas
de Automática de Valencia en el año 1988:
• Automatización de procesos industriales.
• Teoría de autómatas y lenguajes formales.
• Autómatas programables.
• Diseño y fabricación asistidos por computador.
• Sistemas integrados de fabricación.
• Automatización de la producción.
• Robótica.
• Modelado, programación y control de robots.
• Descripción matemática de sistemas. Técnicas de modelado.
• Identificación y estimación de parámetros.
• Lenguajes y técnicas de simulación de sistemas continuos y discretos.
• Teoría de control.
• Sistemas de regulación automática. Servosistemas.
• Control de procesos por computador.
• Control no lineal, multivariable y jerárquico. Control adaptativo.
• Métodos de optimización y control óptimo.
• Sistemas de percepción. Integración sensorial.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 7
No obstante, la organización actual del CEA en grupos temáticos sintetiza y reduce
las líneas de actuación a las siguientes:
• Bioingeniería y Automática
• Control inteligente
• Educación en Automática
• Modelado y simulación de sistemas dinámicos
• Robótica
• Sistemas de tiempo real
• Visión por computador
En cuanto al papel docente del área hay que señalar que está presente en
numerosas titulaciones de Ingeniería (Industrial, Telecomunicaciones, etc.) y de
Licenciaturas (Ciencias físicas, Informática, etc.). Así mismo, el área está presente
tanto en titulaciones superiores como técnicas.
Debido al nuevo espacio europeo, según el acuerdo de Bolonia, es urgente la
reorganización de la docencia que imparte el área. En las conclusiones de las últimas
Jornadas de Automática en León, se expone la necesidad de regulación del futuro Título
de Grado en “Automática y Electrónica Industrial” en el que “se han de incorporar los
conocimientos de diferentes áreas, junto con los de control automático, que permitan
formar un profesional, capaz de integrarse en el mercado laboral europeo y que pueda
abordar la automatización de cualquier proceso industrial”.
Si bien la docencia ha venido impuesta por el natural desarrollo de los Planes de
Estudio y por las sucesivas decisiones adoptadas por los órganos de gobierno de la
Universidad, las actividades de investigación han venido fijadas exclusivamente por la
iniciativa de los profesores del Departamento, que en este sentido, han tenido total
libertad para fijar sus objetivos de investigación. A pesar de la gran extensión
conceptual que tiene el área de Ingeniería de Sistemas y Automática como ámbito de
conocimiento, las líneas de trabajo emprendidas, que se analizarán en detalle en otro
apartado, mantienen una notable coherencia, con conexiones y solapes que le s confiere

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 8
en algunos casos un hilo conductor común, y les permite beneficiarse de ciertas
sinergias en su desarrollo.
Resulta casi innecesario, por su carácter general y por el hecho de ser
unánimemente compartidos, el poner por escrito objetivos generales como la búsqueda
de la excelencia y la calidad en la docencia y la investigación, la búsqueda de la
relevancia científica nacional e internacional, la permanente conexión con los
problemas reales de la industria o el liderazgo científico en el área de conocimiento.
1.4 Profesorado
En sus orígenes, el profesorado del área de Ingeniería de Sistemas y Automática
provenía en su totalidad del Departamento de Automática, Ingeniería Electrónica e
Informática Industrial (DISAM) de la ETSII de la Universidad Politécnica de Madrid,
con el cual se mantienen estrechas relaciones de colaboración hasta hoy en día. Pero con
el tiempo, y al haber finalizado las primeras promociones, se empezaron a incorporar
nuevos profesores formados en la propia Universidad Carlos III de Madrid. También
hay que señalar que con el lanzamiento del programa de Doctorado, se incorporaron
varios profesores formados en otras Universidades. De la misma forma, y debido a la
escasez de candidatos nacionales, desde hace unos años se fueron incorporando como
profesores personas formadas fuera de España (Sudamérica, este de Europa, norte de
África, etc.).
De esta forma, el DISA está formado por un colectivo multinacional (en la
actualidad 8 nacionalidades) y multidisciplinar. Las formaciones de los miembros de
DISA van desde la clásica de Ingeniero Industrial hasta las de Ciencia Físicas, Ciencias
Matemáticas, Ingenieros Mecánicos, Informáticos, etc. Esta estructura permite sin duda
obtener una importante sinergia a la hora de abordar los retos docentes y de
investigación del Departamento.
Por otro lado, la estructura del profesorado de la Universidad Carlos III de
Madrid se basa en la organización de los Departamentos según el esquema 1:3:3:1.5.
Este esquema significa que un Departamento en régimen permanente tiene por un
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 9
Catedrático de Universidad tres Titulares de Universidad, tres Ayudantes, y uno y
medio Asociados. Esta estructura permite que la composición del Departamento no sea
estática tal y como ocurre en la mayoría de los Departamentos de nuestro país. Las
figuras de Profesores Ayudantes y Asociados no son permanentes y por tanto son
renovables con lo que se garantiza la incorporación de personas nuevas y el desarrollo
permanente de un buen número de Tesis Doctorales. Esta composición forma un
“pack” de 8,5 profesores (1+3+3+1,5 = 8,5).
A diferencia de lo que ocurre en numerosas Universidades españolas, en la
UC3M la figura del Profesor Asociado es la definida estrictamente en la ley, es decir,
profesor a tiempo parcial cuyo trabajo principal está fuera de la Universidad. De esta
forma, el Departamento cuenta con un personal que continuamente aporta sus
conocimientos industriales y empresariales en beneficio de la formación de nuestros
estudiantes.
Otra peculiaridad del Departamento es que cuenta con un número elevado de
Profesores Visitantes Doctores procedentes de otras Universidades o empresas. Estos
están asimilados en categoría a Profesores Titulares de Universidad, e incluso, en
función de su experiencia, pueden ser asimilados a Catedráticos de Universidad. La
duración del contrato de estos profesores es de un año improrrogable, con lo que
también se garantiza la incorporación al Departamento de nuevos profesores con
experiencia. En el curso académico 2003-04 el número de estos profesores fue de 2,
mientras para el curso 2004-05 este número crece hasta 5.
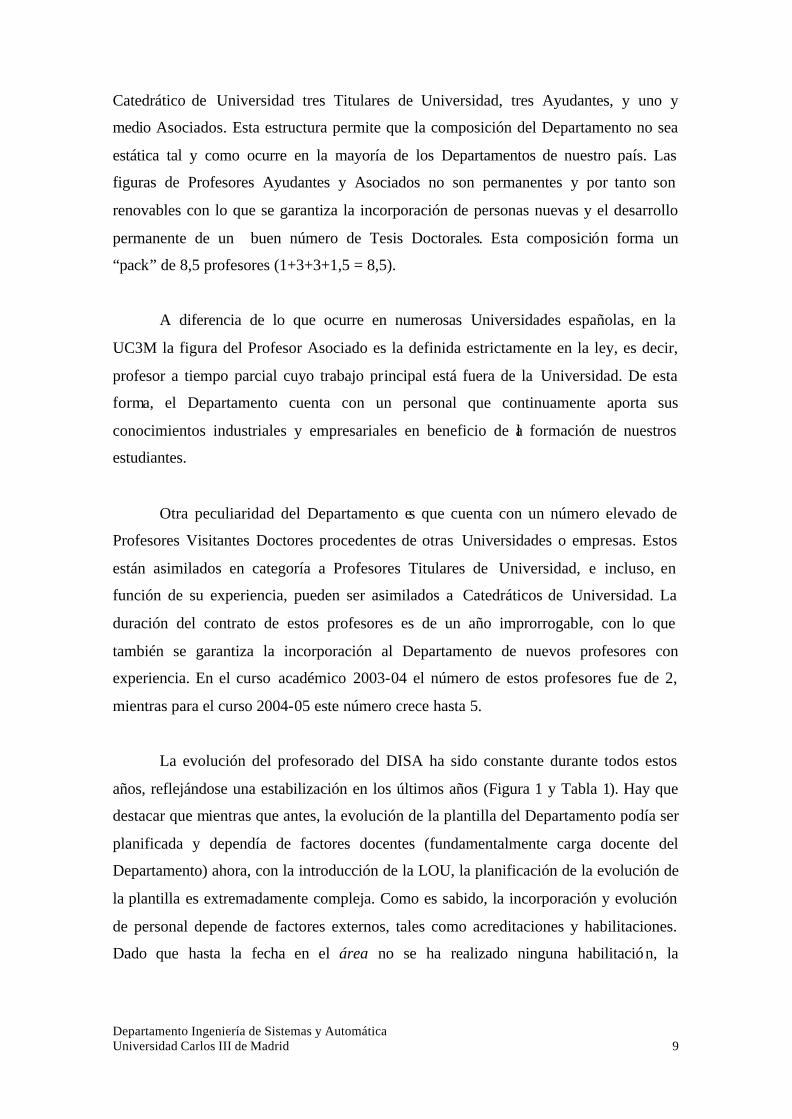
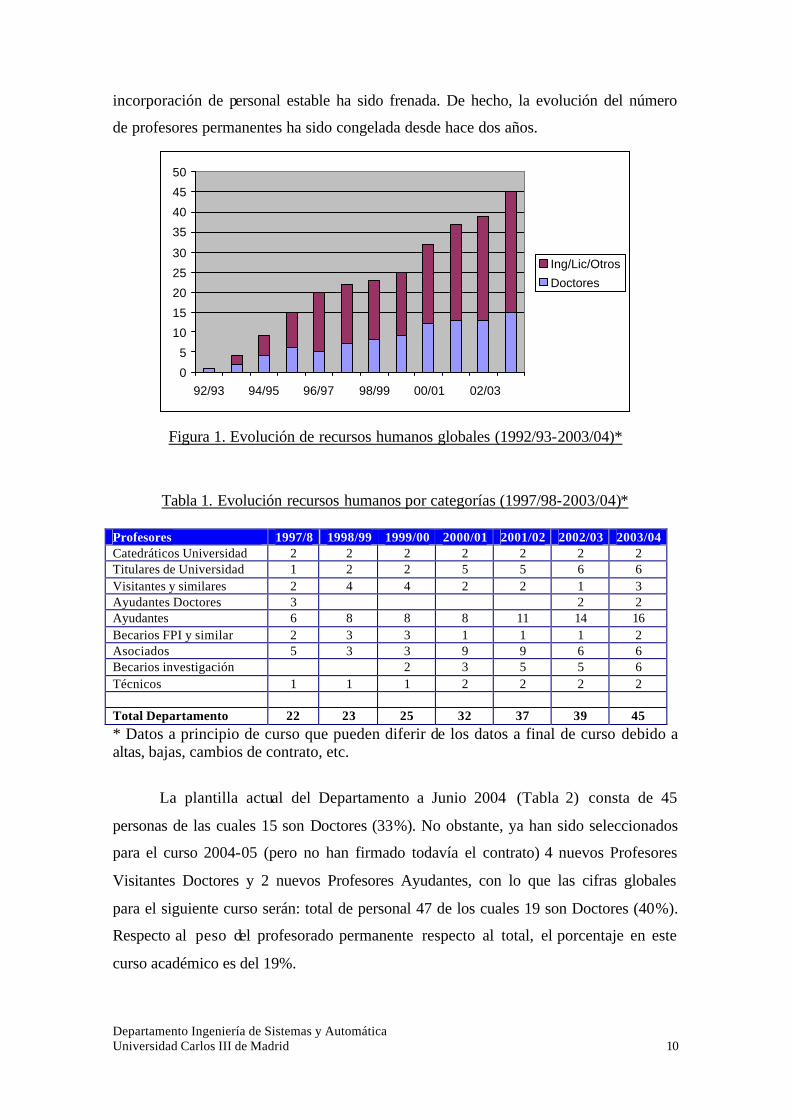
La evolución del profesorado del DISA ha sido constante durante todos estos
años, reflejándose una estabilización en los últimos años (Figura 1 y Tabla 1). Hay que
destacar que mientras que antes, la evolución de la plantilla del Departamento podía ser
planificada y dependía de factores docentes (fundamentalmente carga docente del
Departamento) ahora, con la introducción de la LOU, la planificación de la evolución de
la plantilla es extremadamente compleja. Como es sabido, la incorporación y evolución
de personal depende de factores externos, tales como acreditaciones y habilitaciones.
Dado que hasta la fecha en el área no se ha realizado ninguna habilitación, la
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 10
incorporación de personal estable ha sido frenada. De hecho, la evolución del número
de profesores permanentes ha sido congelada desde hace dos años.
0
5
10
15
20
25
30
35
40
45
50
92/93 94/95 96/97 98/99 00/01 02/03
Ing/Lic/Otros
Doctores
Figura 1. Evolución de recursos humanos globales (1992/93-2003/04)*
Tabla 1. Evolución recursos humanos por categorías (1997/98-2003/04)*
Profesores 1997/8 1998/99 1999/00 2000/01 2001/02 2002/03 2003/04 Catedráticos Universidad 2 2 2 2 2 2 2 Titulares de Universidad 1 2 2 5 5 6 6 Visitantes y similares 2 4 4 2 2 1 3 Ayudantes Doctores 3 2 2 Ayudantes 6 8 8 8 11 14 16 Becarios FPI y similar 2 3 3 1 1 1 2 Asociados 5 3 3 9 9 6 6 Becarios investigación 2 3 5 5 6 Técnicos 1 1 1 2 2 2 2 Total Departamento 22 23 25 32 37 39 45 * Datos a principio de curso que pueden diferir de los datos a final de curso debido a altas, bajas, cambios de contrato, etc.
La plantilla actual del Departamento a Junio 2004 (Tabla 2) consta de 45
personas de las cuales 15 son Doctores (33%). No obstante, ya han sido seleccionados
para el curso 2004-05 (pero no han firmado todavía el contrato) 4 nuevos Profesores
Visitantes Doctores y 2 nuevos Profesores Ayudantes, con lo que las cifras globales
para el siguiente curso serán: total de personal 47 de los cuales 19 son Doctores (40%).
Respecto al peso del profesorado permanente respecto al total, el porcentaje en este
curso académico es del 19%.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 11
La composición actual del Departamento según categorías es (Tabla 2): 2
Catedráticos de Universidad, 6 Titulares de Universidad (8 profesores permanentes), 2
Profesores Visitantes Doctores, 1 becario Doctor “Ramón y Cajal”, 2 Profesores
Ayudantes Doctores, habiendo leído sus Tesis Doctorales después de la entrada en vigor
de la LOU, 12 profesores Ayudantes o equivalentes, tipo becarios de investigación
según la LOU, 3 Becarios de FPI, 6 Profesores Asociados, 6 becarios de investigación
becados con proyectos y 2 Técnicos de Laboratorio. Hay que desatacar, que todos los
profesores, excepto los Profesores Asociados, tiene dedicación exclusiva al
Departamento.
Tabla 2. Composición del Departamento (Junio 2004) Catedráticos de Universidad (2)
Dr. Miguel Ángel Salichs Sánchez-Caballero, Director del Departamento
Dr. Carlos Balaguer Bernaldo de Quirós, Subdirector del Departamento
Profesores Titulares de Universidad (6)
Dr. Luis Moreno Lorente
Dr. Francisco José Rodríguez Urbano
Dr. Arturo de la Escalera Hueso
Dr. José María Armingol Moreno, Secretario del Departamento
Dr. José Manuel Pastor García.
Dr. Antonio Giménez Fernández
Profesores Visitantes Doctores (2)
Dr. Ramón Barber Castaño (permanente)
Dr. Claudio Rossi
Becario “Ramón y Cajal” (1)
Dr. Mohamed Abderrahim
Profesores Ayudantes Doctores (2)
Dr. Ramiro Díez Zarea

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 12
Dra. Dolores Blanco Rojas
Profesores Ayudantes o equivalente (12)
Ing. Dulce Milagros Rivero
Ing. Cristina Hilario Gómez
Ldo. Pavel Staroverov
Ing. Alberto Jardón Huete
Ing. Juan Manuel Collado Hernáiz
Lda. María de los Ángeles Malfaz
Ing. Ramiro Cabás Ormaeche
Ing. Julio Cesar Díaz
Ing. Mario Arbulú Saavedra
Ing. Dimitri Kaynov
Ing. Felipe Zottola Diz
Ing. Javier Fernández de Gorostiza
Becario de FPI o similar (3)
Ing. Luis Maria Cabas Ormaechea
Ing. Raquel Pacheco Goñi
Ing. Elena Kaynova
Profesores Asociados (6)
Dr. Santiago Garrido Bullón
Ing. Alberto Pedro Martínez Borja
Ing. José Miguel Barcala Riveira
Ing. Daniel Martín Ruano
Ing. José Manuel Pérez
Ing. Juan Carlos Hernández
Becarios de Investigación (6)
Dr. Alaa M. Khamis
Ing. Salah H. Kadhim
Ing. Carlos Pérez Martínez

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 13
Ing. Rafael Rivas Estrada
Ing. Javier Garrido Ruiz
Ing. Raúl Correal Tezanos
Técnicos de Laboratorio (2)
Ing. Tec. Ángela Nombela Piqueras
Carlos Palazuelos Cano
Según el citado Protocolo Programa Concertado, la plantilla del Departamento
está lejos de estar en régimen permanente. Teniendo en cuenta que se desea tener una
plantilla formada por 2/3 de Profesores Permanentes y 1/3 de Profesores No
Permanentes, y que la carga docente estable del Departamento permitirá tener 4 “packs”
de profesores (según el esquema 1:3:3:1,5 de la Tabla 3), la plantilla en régimen
permanente de DISA será según la Tabla 4 (sin becarios de FPI y de investigación).
Tabla 3. Composición de un “pack” de profesores de DISA
Categorías Profesores Pack Horas/semana Horas Total horas
Catedrático 1 6 6
Titular
Profesores
Permanentes Visitante
3
6
18
24 (2/3)
Ayudante
Becario
3
2
6
Profesores No
Permanentes Asociado 1.5 4 6
12 (1/3)
Tabla 4. Composición platilla actual y en régimen permanente
Categorías Profesores Situación actual Régimen permanente
Catedrático 2 4
Titular 6
Profesores
Permanentes Visitante 3
12
Ayudante
Becario
16
12
Profesores No
Permanentes Asociado 6 6

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 14
El análisis de la Tabla 4 indica que el crecimiento futuro del Departamento será
por parte de Catedráticos (+2) y Titulares (+3) con una ligera disminución del número
de Ayudantes y Becarios (-4), manteniéndose el número de Asociados. De esta forma,
se conseguirá tener un balance entre una plantilla, por una parte, consolidada y, por otra
parte, con una presencia permanente de Ayudantes que realizan sus Tesis Doctorales.
Especial atención merece el mecanismo del DISA de selección de personal. La
selección del profesorado de nueva incorporación, contratación de profesores visitantes
y ayudantes, se somete a la consideración y aprobación del Consejo de Departamento.
Los criterios de selección están basados exclusivamente en la calidad y excelencia de
los candidatos: notas del expediente académico, titulaciones, Universidad de
procedencia, experiencia docente, investigadora y laboral, conocimiento de informática
e idiomas, etc.
En general, se puede resumir que la composición actual de la plantilla del
Departamento de Ingeniería de Sistemas y Automática presenta las siguientes
características:
• Un crecimiento notable en los últimos años, como consecuencia del aumento de
la carga docente del departamento.
• Un aumento considerable en el número de Doctores en los últimos 5 años, como
consecuencia de la actividad formativa del Departamento.
• Todos miembros del Departamento, excepto lógicamente los Profesores
Asociados, lo son a tiempo completo.
• El importante número de Profesores Ayudantes y asimilados (becarios) presente
en el Departamento, la totalidad de los cuales realizan su Tesis Doctoral, pone
de manifiesto la gran capacidad formativa del mismo.
La Universidad realiza una evaluación del profesorado por parte de los alumnos
por medio de encuestas de evaluación. Aunque los resultados de la encuesta son
confidenciales, se conoce que la evaluación de nuestros los profesores ha sido, en
general, muy positiva.
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 15
1.5 Personal de administración y servicios
Aunque la Universidad Carlos III de Madrid ha invertido muchos medios en la
informatización de gran número de tareas administrativas (contabilidad, biblioteca,
trámite de expedientes, actas, algunos pedidos, etc.), el apoyo recibido de la
Universidad en términos de Personal de Administración y Servicios (PAS) es
claramente insuficiente. En el momento actual el Departamento comparte la misma
estructura de apoyo administrativo (una funcionaria de nivel 18 y dos funcionarios de
nivel 16) con los Departamentos de Tecnología Electrónica y de Ingeniería Eléctrica. Es
decir, tres administrativos para unas 140 personas, que se encargan de gestionar no sólo
toda la documentación oficial de los tres Departamentos, sino la tramitación de las
facturas de los proyectos de investigación y de los contratos externos con empresas,
además de gestionar los viajes, hoteles e inscripciones en congresos de un colectivo
excesivamente amplio.
Esta situación, que sólo se puede calificar de insuficiente, se ha mantenido en los
últimos años a pesar de las numerosas quejas y peticiones en este sentido para reforzar
la plantilla de PAS. Se da además la circunstancia de que buena parte de las tareas que
se podrían encargar al personal administrativo, requiere su disponibilidad en horario de
mañana y tarde, y conocimientos de idiomas extranjeros (como mínimo inglés). Esta
última característica o no se da o se cubre sobre la base de la buena voluntad de las
personas encargadas de ello, acerca de cuya competencia y buena disposición la opinión
del Departamento no puede ser mejor.
Como Departamento independiente de la Universidad, se necesitaría disponer lo
antes posible de una persona de Secretaría fija en exclusiva y no compartida con otros
Departamentos. Además, dada la importante actividad investigadora y proyección
internacional es urgente la incorporación de una segunda persona de apoyo, con perfil
más de gestión y contabilidad. En la medida en que los contactos internacionales son
crecientes, tanto en lo relativo a la asistencia a congresos internacionales de los
miembros del Departamento como en los proyectos internacionales en curso, sería
lógico esperar que ambas personas tuvieran cierto nivel de inglés.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 16
1.6 Formación de personal
La política de formación de personal en el Departamento ha sido
fundamentalmente la relativa a la formación del profesorado más joven por medio de la
realización de los Cursos de Doctorado y la Tesis Doctoral. Esta formación básica a
nivel científico ha ido acompañada, en los últimos años, de una participación limitada
en las prácticas de laboratorio o en las clases de problemas, y se ha acompañado con
otras actividades como son las estancias temporales en centros de investigación
extranjeros o la asistencia y participación activa en congresos nacionales e
internacionales. Nótese que la normativa de la Universidad prohíbe que profesores no
Doctores impartan clases de teoría.
Igualmente se ha potenciado la presencia de los Profesores Ayudantes,
especialmente en sus primeros años de formación, en los cursos impartidos por la propia
Universidad orientados a la mejora de sus capacidades docentes. Los cursos ofrecidos
por la Universidad son de dos tipos:
• Los que tienen por objetivo familiarizarse con instrumentos de los distintos
servicios de la Universidad. Gran parte de los profesores del Departamento
han asistido a los cursos sobre Aula Global (aplicación informática que
gestiona la docencia y la investigación de la Universidad) y a los cursos para
gestión de bases de datos de la Biblioteca.
• Los destinados a la formación docente (presentación, habla, postura, etc.). La
asistencia de miembros del Departamento a estos cursos ha sido menor.
Hay que destacar, que aunque en el pasado se han realizado numerosos cursos de
formación investigadora impartidos por profesores invitados de reconocido prestigio, en
la actualidad no existe un plan de formación concreto. La lista de los profesores que han
visitado el Departamento recientemente y han impartido cursillos y charlas se encuentra
en la Tabla 5. El problema fundamental es que la Universidad dedica muy pocos
recursos a la actualización científica del profesorado permanente y en formación.
Solamente existen planes de formación permanente de Personal de Administración y
Servicios organizados desde la Gerencia de la Universidad.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 17
Tabla 5. Lista de profesores externos que han impartidos cursos de investigación
Prof. Vladimir Alejandrov, Universidad Estatal de Moscú (Rusia).
Prof. Kimon Valavnis, University of South Florida (USA).
Prof. Sebastián Dormido, UNED (España).
Prof. Miroslav Skibniewski, Purdue University (USA).
Prof. Rafael Zaks, Technion (Israel).
Prof. Hajime Asama, University of Tokyo (Japón).
1.7 Funcionamiento del Departamento
El funcionamiento del Departamento está regido por los Estatutos de la
Universidad Carlos III de Madrid. No obstante, su desarrollo final ha sido definido por
el Consejo del Departamento. Su composición actual es de 22 miembros. Los miembros
natos son todos los Doctores (15) y por parte de los estamentos de no Doctores la
distribución de miembros es de la siguiente forma: 3 representantes de los Profesores
Ayudantes, Asociados y Becarios de investigación, 1 representante de los alumnos de
tercer ciclo, 1 representante de los Técnicos de Laboratorio, 1 representante del PAS y 1
representante de los alumnos.
El Departamento está dirigido desde su fundación por el Director, Prof. Miguel
Ángel Salichs, y asistido por el sub-Director, Prof. Carlos Balaguer y el Secretario,
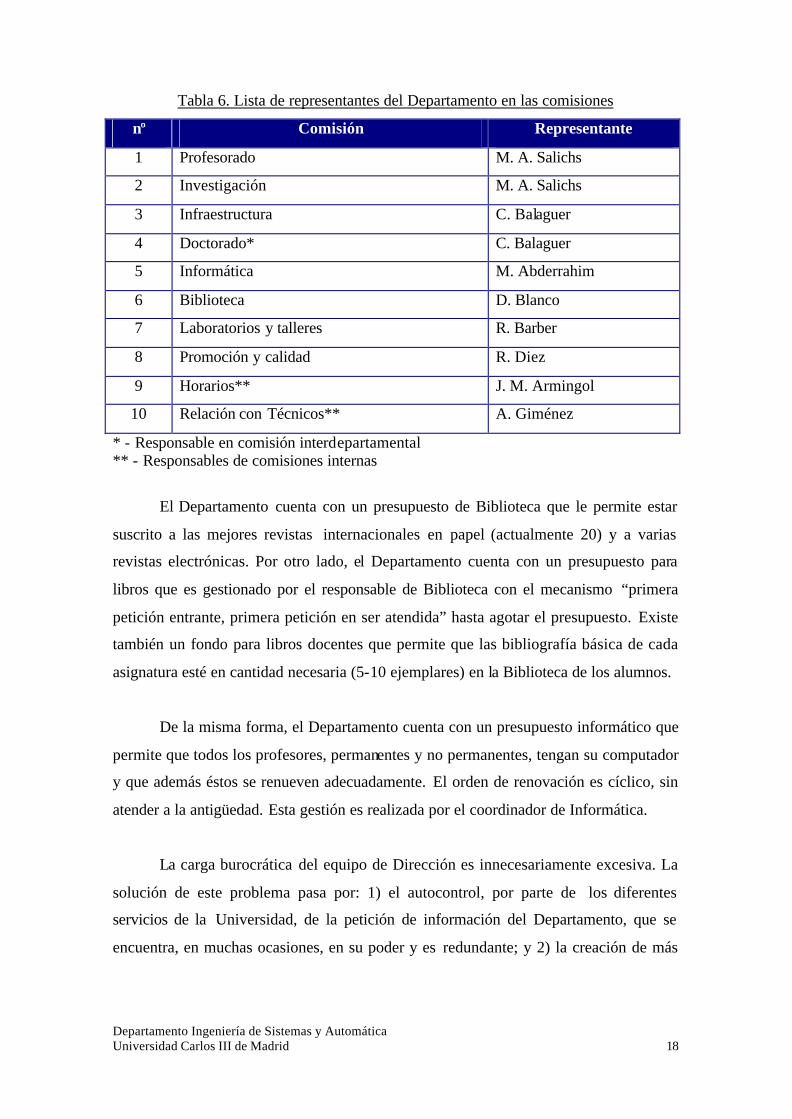
Prof. José María Armingol. Dado que en la Universidad existen numerosas comisiones
de trabajo, el Departamento ha designado sus representantes según la Tabla 6. Así
mismo, el Departamento está continuamente elaborando procedimientos de actuación
interna tales como selección de profesorado, asignación de docencia, asignación de
espacios, renovación de equipo informático, compra de libros y revistas, aprobación de
proyectos de investigación, aprobación de informes personales, etc.
El Departamento cuenta con dos representantes en la Junta de Escuela, el Prof.
M. A. Salichs, como miembro nato al ser Director del Departamento, y el Prof. C.
Balaguer, como miembro electo por su circunscripción.
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 18
Tabla 6. Lista de representantes del Departamento en las comisiones
nº Comisión Representante
1 Profesorado M. A. Salichs
2 Investigación M. A. Salichs
3 Infraestructura C. Balaguer
4 Doctorado* C. Balaguer
5 Informática M. Abderrahim
6 Biblioteca D. Blanco
7 Laboratorios y talleres R. Barber
8 Promoción y calidad R. Diez
9 Horarios** J. M. Armingol
10 Relación con Técnicos** A. Giménez
* - Responsable en comisión interdepartamental ** - Responsables de comisiones internas
El Departamento cuenta con un presupuesto de Biblioteca que le permite estar
suscrito a las mejores revistas internacionales en papel (actualmente 20) y a varias
revistas electrónicas. Por otro lado, el Departamento cuenta con un presupuesto para
libros que es gestionado por el responsable de Biblioteca con el mecanismo “primera
petición entrante, primera petición en ser atendida” hasta agotar el presupuesto. Existe
también un fondo para libros docentes que permite que las bibliografía básica de cada
asignatura esté en cantidad necesaria (5-10 ejemplares) en la Biblioteca de los alumnos.
De la misma forma, el Departamento cuenta con un presupuesto informático que
permite que todos los profesores, permanentes y no permanentes, tengan su computador
y que además éstos se renueven adecuadamente. El orden de renovación es cíclico, sin
atender a la antigüedad. Esta gestión es realizada por el coordinador de Informática.
La carga burocrática del equipo de Dirección es innecesariamente excesiva. La
solución de este problema pasa por: 1) el autocontrol, por parte de los diferentes
servicios de la Universidad, de la petición de información del Departamento, que se
encuentra, en muchas ocasiones, en su poder y es redundante; y 2) la creación de más

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 19
filtros administrativos, para lo que sería imprescindible personal de apoyo en la
secretaría del Departamento.
Como regla general la distribución de la docencia entre los miembros del
Departamento se realiza atendiendo a su perfil docente e investigador, y se tienen en
cuenta las preferencias de los profesores. No obstante, siempre existen un cierto número
de asignaturas que se han de distribuir en función de las necesidades del Departamento.
Esta labor es realizada por el Secretario del Departamento.
Probablemente, no todos los miembros del Departamento perciben y son
conscientes de la carga de gestión del Departamento. Éstos se deben concienciar más
que el equipo de Dirección está realizando una labor importante cuyos resultados, en lo
general, han beneficiado al Departamento, en general, y a sus miembros en particular.
Las innumerables negociaciones del Director con los servicios de la Universidad han
permitido sin duda mejorar y fortalecer la composición y los fondos asignados al
Departamento.
El funcionamiento de la Secretaría del Departamento recae sobre un “pool” de
tres secretarias/ios para tres Departamentos (Tecnología Electrónica, Ingeniería
Eléctrica e ISA). Esto implica que DISA cuenta con una/un secretaria/o. Aunque la
labor realizada por las personas que llevan toda la gestión administrativa es muy
satisfactoria, la carga burocrática es excesiva. Esto lleva a que en muchos casos los
profesores del DISA deben realizar por sí mismos algunas de las tareas administrativas
que no pueden delegar en otra persona, con la consiguiente pérdida de tiempo en sus
tareas docentes e investigadoras. Esto provoca desánimo general basado en la
consideración de que emplean “demasiado tiempo en la burocracia y tareas propias de
administración”.
Entre las tareas del personal administrativo están los objetivos fijos que hay que
cumplir regularmente cada año, como la elaboración de la memoria del Departamento,
la preparación de los libros de titulación, la organización del plan docente, la gestión de
las plazas de profesorado, la coordinación física de los programas de asignaturas, la
atención a los requerimientos cotidianos derivados de los acuerdos departamentales, los

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 20
encargos de la dirección y la burocracia cotidiana. Son muchas las tareas que surgen día
a día. A ello hay que añadir el hecho de que regularmente, se ponen en funcionamiento
nuevos entornos informáticos como SINAI (Gestión de proyectos de investigación),
REINA (Información sobre asignaturas), SOROLLA (Gestión de presupuestos) ó BOA
(Bases de datos de información académica), en los que se solicita y requiere la ayuda
del personal administrativo para recabar información, grabación de datos y muchas
otras tareas que suponen, además, una constante renovación en el conocimiento y
aplicaciones del personal administrativo. Desgraciadamente, ese tremendo esfuerzo no
se ha visto de ningún modo compensado.
En consecuencia, debería haber al menos otra persona de apoyo para el
Departamento cuyas funciones fueran menos “clásicas” con mayor orientación a tareas
tipo contable, relación con la agencia de viajes, búsqueda de personal, elaboración de
informes, recopilación de información, etc. Así mismo, en igual que en los centros de
mayor prestigio y calidad, el Departamento debería compartir a un Asesor de inglés que
mejorara, revisara y editara la información en lengua anglo-sajona.
1. 8 Ubicación e instalaciones
El Departamento está ubicado en el edificio Agustín de Betancourt del campus
de Leganés y su espacio se divide en dos partes: a) zonas B y C de la 3ª planta,
dedicadas a despachos y laboratorios de investigación y b) la parte L de la nave grande,
dedicada la planta baja a investigación y dolencia, y la 1º planta a docencia. Todas las
dependencias se encuentran muy próximas, lo que lleva a una gran interacción entre los
miembros del Departamento.
En la actualidad la mayor parte de los profesores a tiempo completo del
Departamento disponen de un despacho ind ividual. En concreto todos los Catedráticos,
Profesores Titulares, Visitantes y Ayudantes Doctores, así como los Profesores
Ayudantes de más antigüedad, un Profesor Asociado Doctor y un becario “Ramón y
Cajal” disponen de despachos propios. Los demás profesores comparten despachos. El
resumen de despachos se encuentra en la Tabla 7. Se prevé que los cursos venideros, al

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 21
iniciarse la docencia en el campus de Colmenarejo, el Departamento cuente con algún
despacho propio.
Respecto a los laboratorios docentes (Tabla 8), se dispone de dos en la 1ª planta
del edificio Agustín de Betancourt (1.1.L01 y 1.1.L02), así como uno en la nave de la
planta baja (1.0B06). Los laboratorios de investigación (Tabla 9) están distribuidos en
la 3º planta, zonas B y C, y en la nave. Todos los laboratorios cuentan con instalación de
aire comprimido. El Departamento cuenta con espacios de uso común (Tabla 10). El
resumen de todo el espacio disponible se encuentra en la Tabla 11.
Tabla 7. Distribución de despachos del Departamento (3ª planta)
Tipo despacho nº Superficie (m2) Comentarios
Despachos individuales grandes 3 22,5 x 3 = 67,50 Catedráticos y Secretaría
Despachos individuales 19 10,75x19=204,25 Titulares y Ayudantes
Despacho individual 1 10,5 x 1 = 10,50 Titular
Despacho compartido (14 person.) 1 77,50 Ayudantes y Asociados
Despacho compartido ( 4 personas) 1 21,00 Ayudantes
Despacho compartido (2 personas) 1 22,00 Visitantes
Despacho compartido (2 personas) 1 31,00 Técnicos laboratorio
Total despachos 27 433,75 Máximo personas = 45
m2/persona = 9,64
Tabla 8. Distribución de laboratorios docentes (planta baja + 1ª planta)
Tipo laboratorio nº Superficie (m2) Comentarios
Laboratorio robots y automatización 1/2 175,25 3/6 puestos
Laboratorio de neumática y visión 1 33,00 8 puestos
Laboratorio de señales y sistemas 1 54,50 12 puestos
Laboratorio de autómatas 1 38,25 12 puestos
Total laboratorios docentes 3,5 301,00 Máximo 120 alumnos

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 22
Tabla 9. Distribución de laboratorios de investigación (planta baja + 3ª planta)
Tipo laboratorio nº Superficie (m2) Comentarios
Laboratorio RL + SI (nave) 1/2 175,25 Equipamiento pesado
Laboratorio RL + MM (1.3B14) 1 77,50 Robots
Laboratorio RL (1.3C12) 1 75,75 Robots
Laboratorio SI (1.3C13) 1 62,00 Sistemas inteligentes
Laboratorio RL (1.3C14) 1 21,00 Robots
Total laboratorios investigación 4,5 411,50
*- Los grupos de investigación son: RL – Laboratorio de Robótica (RoboticsLab), SI – Sistemas Inteligentes, MM – Manipuladores Móviles.
Tabla 10. Distribución del espacio auxiliar (planta baja + 3ª planta)
Tipo sala nº Superficie (m2) Comentarios
Sala de seminarios (1.3B15) 1 60,25 Máximo 45 personas
Almacén (nave) 1 25,0
Total salas 2 85,25
Tabla 11. Distribución total del espacio del Departamento
Tipo espacio nº Superficie (m2) Comentarios
Despachos 27 433,75
Laboratorios docentes (prácticas) 3,5 301,00
Laboratorios de investigación 4,5 411,50
Espacio auxiliar 2 82,25
Se pretende tener un
equilibrio entre los
espacios dedicados a
docencia e investigación
Total laboratorios 3,5 1.228,50
El Departamento cuenta también con laboratorios docentes comunes de la
Universidad tales como aulas informáticas. En el campus de Leganés existen a día de
hoy 55 aulas informáticas con 349 computadores. El Departamento suele usar las 21
aulas del edifico Agustín de Betancourt para clases y laboratorios que requieren
paquetes software tales como Matlab, Simulink, etc.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 23
Si bien hasta ahora las instalaciones disponibles han sido suficientes, en este
último curso el Departamento se ha visto en la necesidad de efectuar ciertas
“economías” en el espacio dado el incremento del número de profesores e
investigadores que se han incorporado al mismo y a la necesidad de usar más equipos de
investigación voluminosos. En la situación actual, por tanto, puede decirse que el
crecimiento de la actividad del Departamento puede verse ligeramente limitado y
condicionado, ya que dicho incremento deberá necesariamente ir acompañado de
nuevas necesidades de espacio.
1.9 Equipamiento docente y de investigación
Tal y como se ha señalado anteriormente el Departamento cuenta con cuatro
laboratorios docentes: 1) Laboratorio de robótica y automatización, 2) Laboratorio de
neumática y visión, 3) Laboratorio de señales y sistemas, 4) Laboratorio de autómatas.
Aunque los usos de los laboratorios están muy definidos algunos de ellos pueden ser
reconfigurados para otros usos. Por ejemplo, el Laboratorio de señales y sistemas puede
ser reconfigurado para realizar prácticas de autómatas y viceversa. El equipamiento de
estos laboratorios docentes está resumido en el Tabla 12.
Tabla 12. Equipamiento de laboratorios docentes
Tipo laboratorio Equipamiento
Laboratorio robots y automatización 8 PCs, 6 PLCs Siemens S7 300, 6 PLCs Siemens
S6-95, 3 robots ABB IRb, 1 robot Bosch, 1
torno CNC Fagor, 1 fresadora CNC Fagor, 1
cinta transportadora, 1 almacen.
Laboratorio de neumática y visión 12 PCs, 8 equipos E/S profiBus Berghoff, 12
puestos de visión con cámara y digitalizador
cada uno, 8 puestos de neumática con numerosos
elementos (cilindros, válvulas, sensores, etc.).
Laboratorio de señales y sistemas 12 PCs, 12 PLCs Telemecanique, 12 maquetas
de motores servocontrolados, 12 maquetas de
control de temperatura, 12 osciloscopios, 12

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 24
generadores de señales.
Laboratorio de autómatas 12 PCs, 12 PLCs Telemecanique, 12 maquetas
de trenes, 12 maquetas de ascensores, 12
osciloscopios, 12 generadores de señales.
Respecto a los despachos de los profesores e investigadores del Departamento,
éstos están equipados con PC con conexión de red. En total el Departamento cuenta con
35 PCs, 10 PCs portátiles y 14 impresoras de diferente tipo.
Las instalaciones de investigación son muy diversas y varían rápidamente en el
tiempo. Además, es difícil de inventariar todo el software y hardware, muchos de los
cuales son desarrollos de nuestro Departamento. La Tabla 13 resume los equipamientos
más importantes de los laboratorios de investigación.
Tabla 13. Equipamiento de laboratorios de investigación
Tipo laboratorio Equipamiento
Laboratorio RoboticsLab + Sistemas
Inteligentes (nave)
3 PCs, 2 robots escaladores (ROMA I y II), 1
robot móvil de exteriores (ROCA), 1 grúa de
pórtico automatizada, 1 sistema de inspección
de carrocerías de coches, 1 maqueta de
edificios modulares, 1 automóvil de
conducción automática.
Laboratorio RoboticsLab +
Manipuladores Móviles (1.3B14)
10 PCs, 1 estación Silicon Graphics, 1 Sistema
de Visión, 1 láser SICK, 2 manipuladores
móviles (Otilio y Manfred), 1 robot de
rehabilitación (MATS), 1 robot humanoide de
tamaño natural (Rh-cero), 2 sensores fuerza-
par 6D.
Laboratorio RoboticsLab (1.3C12) 9 PCs, 3 robots móviles RWI (Zipi, Zape y
PA), 2 sistemas de visión, 3 lásers SICK.
Laboratorio Sistemas Inteligentes
(1.3C13)
6 PCs, 2 sistemas de visión, 1 estación Sun,
varios mini-robots móviles.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 25
Laboratorio RoboticsLab (1.3C14) 3 PCs, 1 robot Mitsubishi PA-10, 3 sistemas
de visión, 1 plataforma de simulación de
satélites.
1.10 Fortalezas, debilidades y propuestas de mejora
Las principales fortalezas del Departamento se pueden resumir en:
• Coherencia científica. Es un Departamento “monoárea” y por tanto todos sus
miembros comparten una misma cultura común. En general, no hay dispersión
de actividades. Los “solapes” entre ellas son lo suficientemente pequeños para
que no haya conflictos. El intercambio de resultados y tecnologías es bueno y
ayuda a un progreso rápido.
• Juventud y experiencia. La edad media del profesorado es muy joven, alrededor
de 32 años, y en buena parte está compuesto por personas en su época de
máxima creatividad científica. Conjuntamente con ello, el Departamento cuenta
con personas muy experimentadas en la temática del área (robótica, visón,
automatización, control, etc.), teniendo algunos de ellos más de 20 años de
experiencia.
• Proceso de incorporación progresivo. Todos los profesores del Departamento,
aun procediendo algunos de ellos de orígenes relativamente dispersos, se han
incorporado de forma progresiva mediante un proceso de adaptación a la cultura
del área, lo que ha reforzado la cohesión del mismo. La inmensa mayoría de los
profesores han realizado ó están realizando su tesis Doctoral en el
Departamento.
• Buenas instalaciones y equipamiento. Las dotaciones del Departamento son muy
buenas tanto en calidad como en cantidad. Por un lado, el equipamiento de
investigación es moderno y, por otro, los alumnos realizan prácticas docentes
con sistema reales la mayoría de los cuales se encuentran en funcionamiento en

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 26
entornos fabriles. En general, las instalaciones y el equipamiento son
comparables a los mejores laboratorios a nivel mundial.
Las principales debilidades del Departamento se pueden resumir en:
• Plantilla no estabilizada. Aunque el tamaño total del Departamento no es
pequeño, es uno de los más pequeños de la Universidad por tamaño de su
docencia. Este hecho, unido a la reciente introducción de la LOU, han frenado el
ritmo normal de estabilización del profesorado. La situación se agrava con el
hecho de que el ritmo de lectura de las Tesis Doctorales del Departamento es
muy alto. La incertidumbre del futuro es otro de los factores negativos.
• Presión del mercado. El Departamento ha sufrido esta presión en varias
ocasiones y siempre con consecuencia de pérdida de profesorado ya formado.
Una de las claves está en la gran diferencia de salarios entre la Universidad y el
mercado de trabajo, así como con otras Universidades privadas.
• Espacio para el profesorado limitado. Los despachos de profesorado y becarios
están saturados o próximos a estarlo. Este hecho hace más difícil el desarrollo de
nuevos proyectos y la contratación de nuevo personal.
• Carencias en materia de seguridad. En algunos casos se detectan en las
instalaciones de los laboratorios robos de material personal y del departamento.
Este hecho trastorna el desarrollo de la labor docente e investigadora.
• Escaso persona l de administración y servicios. El apoyo de la Universidad, tanto
en secretarias como en Técnicos de laboratorio para el Departamento, ha sido
escaso. Esto implica una sobrecarga de tareas administrativas por parte de los
profesores. Además, la supervisión de las actividades de algunas personas de
este grupo es totalmente imposible.
Las propuestas de mejora se resumen en:

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 27
• Elaboración de un plan realista de estabilización del profesorado no permanente.
Esto permitiría, por un lado, definir mejor la estruc tura definitiva del
Departamento y, por otro, despejar el futuro de los profesores más jóvenes. El
Departamento debería ser responsable de esta mejora con un plan de actuación.
• Incorporación de más personal de administración y servicios al Departamento.
Este factor permitiría mejorar la calidad de las actividades docente e
investigadora que realiza el Departamento y descargar a los profesores de sus
importantes cargas burocráticas. La Universidad debería ser responsable de esta
mejora con más personal.
• Incorporación de un nuevo Técnicos de laboratorio. Debido a la alta componente
práctica de la docencia del DISA con un elevado número de prácticas y
laboratorios es necesaria la incorporación del tercer Técnico de laboratorio. La
Universidad debería ser responsable de esta mejora con más personal.
• Renovar algunos equipos de laboratorio (docentes) que se han ido quedando
obsoletos. Aunque el Departamento está haciendo esfuerzos de renovación de
material práctico, es necesaria una inversión en equipos más costosos cuya “vida
útil” está cerca de su fin. La Universidad debería ser responsable de esta mejora
con más medios.
• Elaboración de un plan de seguridad en la seguridad de los laboratorios y
despachos. El constante peligro de robos y hurtos hacen difícil el normal
funcionamiento el Departamento. La Universidad debería ser responsable de
esta mejora con un plan estratégico.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 28
2. DOCENCIA DEL DEPARTAMENTO
2.1 Aspectos generales
En la Universidad española el tamaño de un Departamento universitario lo fija
exclusivamente su peso docente. Atendiendo a este índice el Departamento de
Ingeniería de Sistemas y Automática (DISA) es un Departamento de tamaño
relativamente pequeño. Entre los 26 Departamentos que constituyen la Universidad
Carlos III de Madrid en 2004, el DISA está entre los seis más pequeños. Su
participación en la carga lectiva de la Universidad es solamente del 1,3 %. La
peculiaridad de la Universidad Carlos III de Madrid hace que el tamaño del
Departamento sea directamente proporcional a la carga lectiva. No obstante, dada la
importante labor investigadora del Departamento y la participación en él de numerosos
becarios de investigación y contratados, su tamaño es de 3,1%, bastante mayor del que
le corresponde según la carga lectiva.
Además, hay que señalar que debido a la importancia que presta el
Departamento a la docencia práctica y de laboratorio, su carga lectiva se incrementa
sustancialmente, lo que lleva a que éste tenga asignado un coeficiente de
experimentalidad de 1,45. Este coeficiente, que refleja el número de grupos de prácticas
y de laboratorios por grupo de teoría, es relativamente más pequeño del que le
correspondería al Departamento. Comprándolo con los coeficientes de experimentalidad
de otros Departamentos del campus de Leganés, el DISA debería incrementar el suyo.
La situación docente actual del Departamento está cerca del régimen
permanente. Los posibles crecimientos de la carga lectiva y, por tanto de la carga
docente, pueden venir de: a) desdoblamiento de grupos en algunas asignaturas, b)
lanzamiento de nuevas asignaturas optativas y de libre elección, c) consolidación de la
docencia en el campus de Colmenarejo, d) lanzamiento de grupos en inglés y e)
lanzamiento de nuevas titulaciones de 2º ciclo. Respecto a la docencia en el campus de
Colmenarejo el Departamento tiene una clara vocación de participación en el mismo.
De la misma forma, y pese a la oposición de algunos Departamentos, el DISA está
dispuesto a lanzar grupos en inglés, sobre todo en la titulación de Ingeniería Industria l.
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 29
Finalmente, hay que señalar que el Departamento tiene aprobado desde hace años el
titulo de “Automática y Electrónica” de 2º ciclo, el que dada la peculiaridad de la EPS
que integra tanto las titulaciones superiores como las técnicas, no se puso en marcha.
2.2 Actividades docentes de 1er y 2º ciclos
El Departamento de Ingeniería de Sistemas y Automática imparte en la
actualidad docencia en la mayoría de las titulaciones del campus de Leganés. En
concreto, DISA participa en:
• Ingeniería Industrial
• Ingeniería Técnica Industrial (Electrónica)
• Ingeniería Técnica industrial (Electricidad)
• Ingeniería Técnica Industrial (Mecánica)
• Ingeniería de Telecomunicación
• Ingeniería Informática
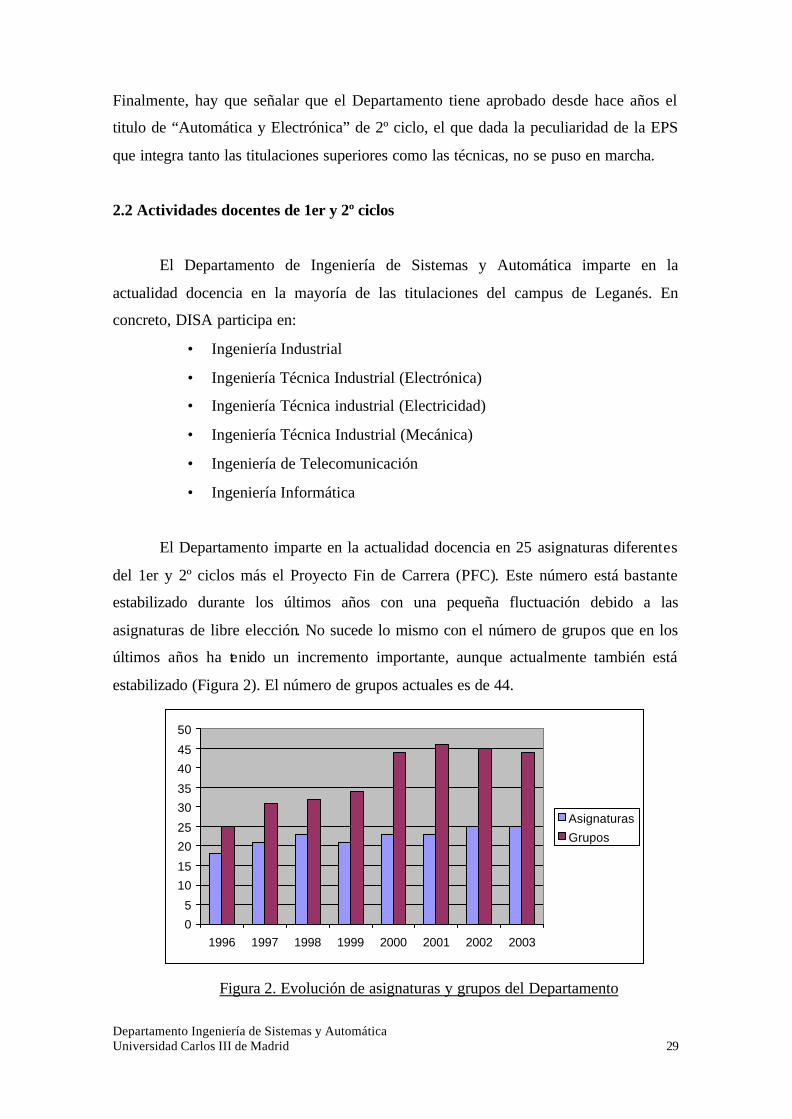
El Departamento imparte en la actualidad docencia en 25 asignaturas diferentes
del 1er y 2º ciclos más el Proyecto Fin de Carrera (PFC). Este número está bastante
estabilizado durante los últimos años con una pequeña fluctuación debido a las
asignaturas de libre elección. No sucede lo mismo con el número de grupos que en los
últimos años ha tenido un incremento importante, aunque actualmente también está
estabilizado (Figura 2). El número de grupos actuales es de 44.
0
5
10
15
20
25
30
35
40
45
50
1996 1997 1998 1999 2000 2001 2002 2003
Asignaturas
Grupos
Figura 2. Evolución de asignaturas y grupos del Departamento
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 30
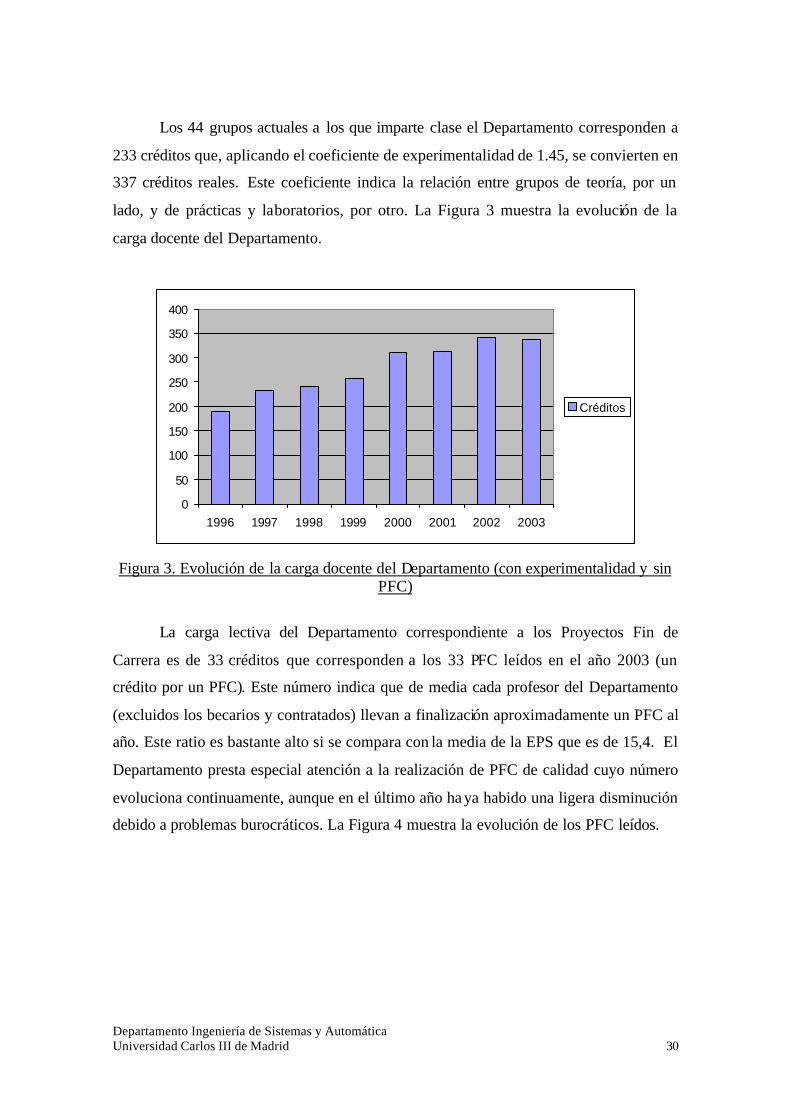
Los 44 grupos actuales a los que imparte clase el Departamento corresponden a
233 créditos que, aplicando el coeficiente de experimentalidad de 1.45, se convierten en
337 créditos reales. Este coeficiente indica la relación entre grupos de teoría, por un
lado, y de prácticas y laboratorios, por otro. La Figura 3 muestra la evolución de la
carga docente del Departamento.
0
50
100
150
200
250
300
350
400
1996 1997 1998 1999 2000 2001 2002 2003
Créditos
Figura 3. Evolución de la carga docente del Departamento (con experimentalidad y sin
PFC)
La carga lectiva del Departamento correspondiente a los Proyectos Fin de
Carrera es de 33 créditos que corresponden a los 33 PFC leídos en el año 2003 (un
crédito por un PFC). Este número indica que de media cada profesor del Departamento
(excluidos los becarios y contratados) llevan a finalización aproximadamente un PFC al
año. Este ratio es bastante alto si se compara con la media de la EPS que es de 15,4. El
Departamento presta especial atención a la realización de PFC de calidad cuyo número
evoluciona continuamente, aunque en el último año haya habido una ligera disminución
debido a problemas burocráticos. La Figura 4 muestra la evolución de los PFC leídos.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 31
0
5
10
15
20
25
30
35
40
45
1996 1997 1998 1999 2000 2001 2002 2003
Nú
mer
o d
e P
FC
leid
os
Figura 4. Evolución de los Proyectos Fin de Carrera leídos en el Departamento
En resumen, los créditos totales que imparte el departamento, que se obtiene
sumando la carga docente lectiva y los PFC, multiplicados por la experimentalidad es
de 386. Sin embargo, la capacidad docente (número de horas lectivas que puede
impartir la plantilla) del Departamento es de solo 372, inferior en 14 créditos a la carga
docente. Este hecho indica que los profesores del Departamento están realizando un
extra esfuerzo al dar más horas de clase de las que les corresponde. En el siguiente
curso 2004-05 esta situación pretende que se corrija: 434 créditos carga lectiva frente a
426 de la capacidad docente.
Tal y como se ha señalado cada Proyecto Fin de Carrera leído en el
Departamento (y en la EPS) se computa con 1 crédito. No obstante, el citado Contrato
Programa prevé la evolución de este índice hasta 1,2, valor bastante más realista dada la
gran dedicación de los profesores del Departamento a los alumnos de PFC. Los PFC
realizados en el Departamento no se limitan a trabajos clásicos y rutinarios de cálculo
de instalaciones o similar, si no que está enfocado a la investigación. En nuestra
Universidad, a diferencia de la mayoría de las Universidades, no existe el Departamento
genérico de proyectos y por tanto todos los alumnos deben realizar sus PFC en los
Departamentos específicos.
Durante la realización de su PFC el alumno aprende a trabajar en equipo, a
descubrir nuevas técnicas y procedimientos, a cumplir los plazos del desarrollo y a
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 32
generar iniciativas propias. El PFC tiene una duración mínima de un año. El alumno
está obligado a realizar informes periódicos de seguimiento y si tiene más de dos faltas
injustificadas se le obliga a abandonar la realización del PFC en el Departamento.
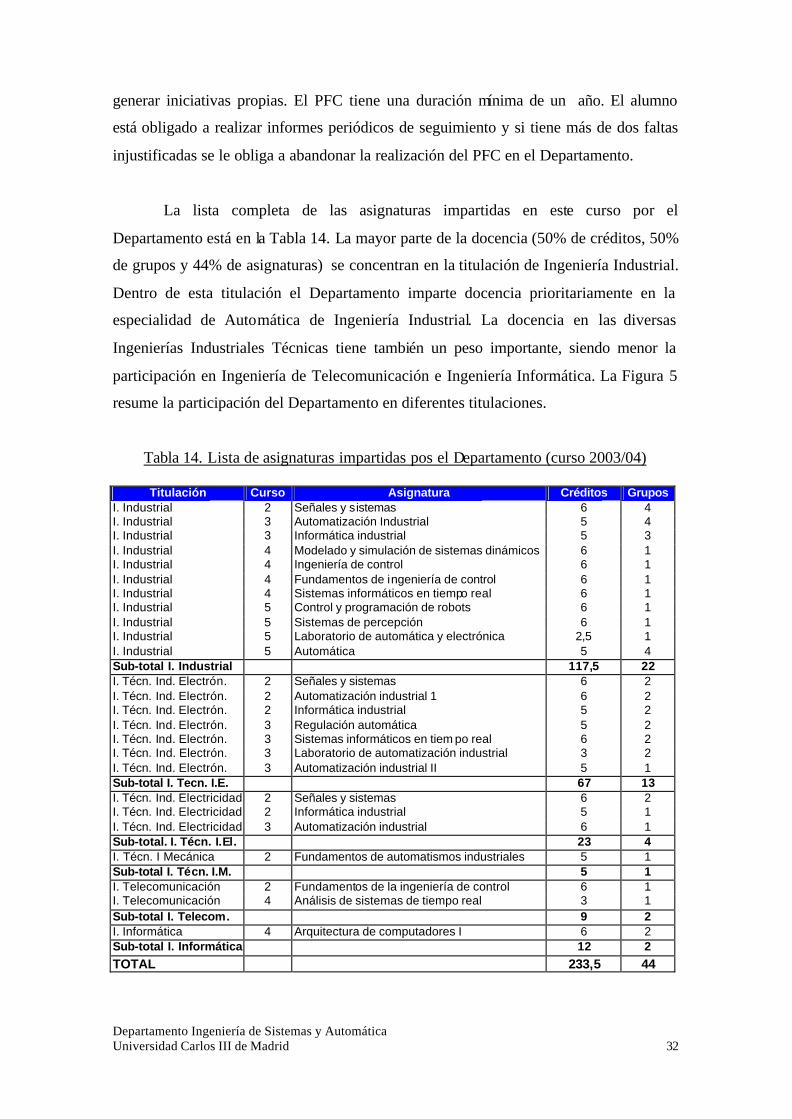
La lista completa de las asignaturas impartidas en este curso por el
Departamento está en la Tabla 14. La mayor parte de la docencia (50% de créditos, 50%
de grupos y 44% de asignaturas) se concentran en la titulación de Ingeniería Industrial.
Dentro de esta titulación el Departamento imparte docencia prioritariamente en la
especialidad de Automática de Ingeniería Industrial. La docencia en las diversas
Ingenierías Industriales Técnicas tiene también un peso importante, siendo menor la
participación en Ingeniería de Telecomunicación e Ingeniería Informática. La Figura 5
resume la participación del Departamento en diferentes titulaciones.
Tabla 14. Lista de asignaturas impartidas pos el Departamento (curso 2003/04)
Titulación Curso Asignatura Créditos Grupos I. Industrial 2 Señales y sistemas 6 4 I. Industrial 3 Automatización Industrial 5 4 I. Industrial 3 Informática industrial 5 3 I. Industrial 4 Modelado y simulación de sistemas dinámicos 6 1 I. Industrial 4 Ingeniería de control 6 1 I. Industrial 4 Fundamentos de ingeniería de control 6 1 I. Industrial 4 Sistemas informáticos en tiempo real 6 1 I. Industrial 5 Control y programación de robots 6 1 I. Industrial 5 Sistemas de percepción 6 1 I. Industrial 5 Laboratorio de automática y electrónica 2,5 1 I. Industrial 5 Automática 5 4 Sub-total I. Industrial 117,5 22 I. Técn. Ind. Electrón. 2 Señales y sistemas 6 2 I. Técn. Ind. Electrón. 2 Automatización industrial 1 6 2 I. Técn. Ind. Electrón. 2 Informática industrial 5 2 I. Técn. Ind. Electrón. 3 Regulación automática 5 2 I. Técn. Ind. Electrón. 3 Sistemas informáticos en tiem po real 6 2 I. Técn. Ind. Electrón. 3 Laboratorio de automatización industrial 3 2 I. Técn. Ind. Electrón. 3 Automatización industrial II 5 1 Sub-total I. Tecn. I.E. 67 13 I. Técn. Ind. Electricidad 2 Señales y sistemas 6 2 I. Técn. Ind. Electricidad 2 Informática industrial 5 1 I. Técn. Ind. Electricidad 3 Automatización industrial 6 1 Sub-total. I. Técn. I.El. 23 4 I. Técn. I Mecánica 2 Fundamentos de automatismos industriales 5 1 Sub-total I. Técn. I.M. 5 1 I. Telecomunicación 2 Fundamentos de la ingeniería de control 6 1 I. Telecomunicación 4 Análisis de sistemas de tiempo real 3 1 Sub-total I. Telecom. 9 2 I. Informática 4 Arquitectura de computadores I 6 2 Sub-total I. Informática 12 2 TOTAL 233,5 44

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 33
020406080
100120140
I. Indu
strial
I. Téc
n. Ind
. Elec
trónic
a
I. Téc
n. Ind
. Elec
tricida
d
I. Téc
n. Ind
. Mec
ánica
I. Tele
comun
icació
n
I. Infor
mática
CréditosGrupos
Figura 5. Distribución de la docencia del Departamento por titulaciones
Los indicadores docentes del Departamento respecto a los de la Universidad
están representados en la Tabla 15. Se puede apreciar que mientras hace 4-5 años los
indicadores del Departamento (asignaturas diferentes, créditos y número de grupos)
tenia una tendencia creciente, en los últimos años esta tendencia se ha invertido. Este
hecho está relacionado básicamente con la creación de nuevas titulaciones y
especializaciones tanto en el campus de Leganés como, sobre todo, en los campus “no
técnicos” de Getafe y Colmenarejo. Esta tendencia preocupa al Departamento ya que
puede llevar a frenar la consolidación de los Departamentos con buenos resultados
docentes e investigadores, y con un mercado profesional consolidado.
Tabla 15. Los indicadores docentes del Departamento en la Universidad
Curso Asignaturas diferentes Créditos* Grupos
DISA UC3M % DISA UC3M % DISA UC3M %
1999/00 21 1.171 1,79 177 11.880 1,49 34 1.951 1,74
2000/01 23 1.341 1,72 214 13.350 1,60 44 2.208 1,99
2001/02 23 1.481 1,55 215 14.794 1,45 46 2.452 1,88
2002/03 25 1.457 1,72 235 16.412 1,43 45 2.900 1,55
2003/04 25 1.784 1,40 233 17.729 1,31 44 3.128 1,41
* -Sin experimentalidad ni PFC

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 34
El DISA desde su nacimiento ha dado una especial atención a la docencia,
atención comparable a la labor investigadora. Mientras que en otros Departamentos de
la Universidad se ha primado solamente la investigación, en DISA se ha procurado
mantener un equilibrio entre ambas facetas de la labor universitaria. En DISA ambas
actividades se consideran en estricto plano de igualdad, sin que haya la más mínima
prevalencia de la una sobre la otra.
La organización decente del Departamento incluye responsables de todas las
asignaturas. En los casos de asignaturas que no sean de la misma titulación pero tengan
el mismo contenido, también se designa un responsable. Por ejemplo, el responsable de
“Señales y sistemas” es el mismo para las tres titulaciones en donde se imparte. Esta
estructura ayuda a una mejor coordinación de los temarios, profesores y medios. De la
misma forma, cada asignatura cuenta con un responsable de prácticas que se encarga de
que los laboratorios estén en condiciones, la teoría se de antes de las prácticas y que los
profesores de prácticas tengan el conocimiento óptimo.
En la mayoría de las clases de teoría se usan medios audiovisuales, tales como
proyectores de diapositivas y cañones de proyección para PCs, estando muchas de las
mismas conectadas a la red informática lo que permite la ejecución en vivo de
programas y ejemplos. Algunas clases teóricas se desarrollan directamente en las aulas
informáticas lo que facilita la asimilación del alumno de entornos de programación
como, por ejemplo, Matlab y Simulink.
Respecto a las prácticas de laboratorio, el Departamento siempre ha mantenido
una línea de potenciación, desarrollo y actualización constante. Se ha optado por tener
equipos de prácticas “reales” frente a dispositivos didácticos. Tanto los robots, como los
autómatas, sensores, actuadores y software de control que el alumno usa en prácticas
son industriales. Los alumnos podrán encontrar los mismos equipos en las empresas
más avanzadas, hecho que ocurre frecuentemente al realizar visitas a instalaciones
fabriles.
El Departamento hace un gran esfuerzo en renovación del equipamiento de
laboratorio. Esto permite que el alumnado cuente con una tecnología actualizada cuya

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 35
vigencia es hoy en día bastante corta. La actualización de los anticuados autómatas
Telemecanique por los nuevos Siemens 7, la incorporación de buses de campo tipo
ProfiBus, la integración de las entradas/salidas mediante equipos Berghoff y la
renovación de los PCs por otros más potentes, han permitido actualizar los equipos y
prácticas de automatización industrial. De una forma similar, se han actualizado los
equipos de neumática (cilindros, electrová lvulas), sensores (ópticos, inductivos), control
de células automatizadas de producción (cinta, almacén) y de visión. El desarrollo de
nuevas maquetas de prácticas (visión, control) han permitido también mejorar las clases
de laboratorio.
En este continuado esfuerzo de mejora y actualización no ha tenido el apoyo
esperado por parte del Rectorado. Las ayudas a equipamiento y laboratorio que gestiona
el Vicerrectorado de Infraestructura son totalmente insuficientes. En los últimos años
estas inversiones se han mantenido con cantidades más bien bajas, sin haber tenido los
mismos incrementos que la carga lectiva de laboratorio.
2.3 Actividades docentes de 3er ciclo
El Departamento de Ingeniería de Sistemas y Automática ha participado en los
programas de Doctorado desde la creación de la Escuela Politécnica Superior (EPS).
Estos programas reflejaban, cada uno en su momento, la estructura de Departamentos
de la EPS. Cronológicamente los programas en los que DISA ha participado han sido:
• Doctorado en Ingeniería Mecatrónica (1990-1996), junto con los actuales
Departamentos de Ingeniería Mecánica y de Ciencia de Materiales e
Ingeniería Metalúrgica.
• Doctorado en Tecnologías Industriales (1996-2001), junto con los actuales
Departamentos de Ingeniería Mecánica y de Ciencia de Materiales e
Ingeniería Metalúrgica. Este Doctorado ha merecido subvenciones dentro
del Programa Nacional de Movilidad y Calidad en los cursos 2000/01 y
2001/02.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 36
En 2001 el programa en Tecnología Industriales se dividió en tres programas: 1)
Ingeniería Mecánica y Organización Industrial, 2) Ciencia de Materiales e 3) Ingeniería
Eléctrica, Electrónica y Automática. El DISA participa en el programa de Doctorado en
que, como su nombre indica, comparte con los Departamentos de Ingeniería Eléctrica y
Tecnología Electrónica. Las razones que motivaron la división de los programas
primitivos en los actuales están vinculadas al desarrollo de la Universidad Carlos III de
Madrid y de los propios Departamentos implicados en el doctorado. Algunas de estas
razones fueron:
• El aumento de personal de los Departamentos, tanto de aquellos que podían
impartir asignaturas de Doctorado, como del personal en formación que podía
cursar los programas.
• La consolidación y el aumento de las líneas de investigación de los
Departamentos participantes, y en particular del Departamento de Ingeniería de
Sistemas y Automática, que ha dado lugar a resultados muy estimables.
Los tres citados programas de Doctorado han sido dirigidos desde su creación
hasta hace dos años por el Prof. Carlos Balaguer. El director del programa tiene las
siguientes responsabilidades:
• Elaboración detallada de los contenidos de los programas, su normativa y
funcionamiento.
• La admisión de alumnos al programa.
• El reparto y administración del presupuesto de Doctorado.
• La organización de exámenes del Diploma de Estudios Avanzados (DEA).
• La asistencia a la Comisión de Doctorado de la Universidad y el informar de
ella a los distintos Consejos de Departamentos.
• Elaboración de solicitudes para la movilidad y mención de calidad
El Departamento, como ya se ha indicado, participa en un programa de
Doctorado interdepartamental con los Departamentos de Tecnología Electrónica y de
Ingeniería Eléctrica. La interdisciplinariedad del programa permite una mejor formación

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 37
de lo alumnos. Para la superación del programa es necesario superar 32 créditos, 21 en
la fase de docencia (7 asignaturas de 3 créditos cada una) y 12 en la fase de
investigación (3 por el trabajo de investigación y 9 por la lectura y defensa de la pre-
Tesis). De esta forma, el alumno con un mínimo número de créditos puede centrarse en
su formación específica y en el desarrollo de su Tesis Doctoral.
En nuestra Universidad a diferencia de la carga docente en el 1er y 2º ciclos, en
el Doctorado no se computan los créditos impartidos realmente si no los créditos
obligatorios del programa. Esta anomalía, que ha sido señalada durante varios años
persiste hasta hoy día. El DISA, que a diferencia de otros Departamentos de la
Universidad, da clase en 7 asignaturas de 3 créditos cada una (21 en total), tiene
reconocido como carga lectiva solamente 11 créditos (32/3+10% = 11) y sin coeficiente
de experimentalidad. Esto hace que la financiación de profesorado que recibe el
departamento por la docencia que imparte es inferior a la que correspondería de tener un
doctorado monodepartamental.
El programa de Doctorado cuenta con diferentes especializaciones que los
alumnos intercambian en un porcentaje adecuado. Además, los alumnos pueden
completar hasta un máximo de 5 créditos fuera del presente programa, previa
autorización del tutor del alumno. Una vez finalizados los dos periodos el alumno puede
realizar el examen del Diploma de Estudios Avanzados (DEA). El DISA cuenta con 7
asignaturas en el programa (Tabla 16).
Tabla 16. Lista de asignaturas de Doctorado del Departamento
1. Robots autónomos inteligentes (M.A. Salichs, R. Barber)
2. Planificación de tareas y movimientos de robots (C. Balaguer)
3. Procesamiento de imágenes por computador (A. de la Escalera, J. M. Armengol)
4. Control inteligente (L. Moreno, C. Balaguer)
5. Teleoperación y telepresencia en robótica (A. Jiménez, C. Balaguer)
6. Modelización y simulación de sistemas dinámicos (F.J. Rodríguez, J.M. Pastor)
7. Trabajo de investigación en Ingeniería de Sistemas y Automática (C. Balaguer)

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 38
El desarrollo de Tesis Doctorales en el Departamento está encaminado a la
formación y a la investigación de alta calidad. Desde la creación de la EPS el DISA ha
leído 15 Tesis Doctorales que se citan en la Tabla 16. La distribución de las tesis leídas
por años se presenta en la Figura 6 a). En la actualidad en el Departamento se están
desarrollando 17 Tesis, cuya previsión de lecturas se presenta en la Figura 6 b). Se
puede observar que la evolución de las Tesis tiene una ciclicidad de 4 años, periodo
medio de desarrollo de una Tesis en el Departamento.
Tabla 16. Lista de las Tesis Doctorales leídas
nº Año Nombre Título Directores
1 1999 Ricardo
Valverde
Control de Sistemas Mediante Redes Neuronales M.A. Salichs
D. Gatchet
2 1999 Santiago Garrido
Bullón
Identificación, estimación y control de sistemas
no-lineales mediante RGO
L. Moreno
C. Balaguer
3 2000 Antonio Jiménez
Fernández
Metodología de diseño y control de robots
escaladores. Aplicaciones a las tareas de
inspección.
C. Balaguer
J.M. Pastor
4 2000 Vicente
Fernández
García
Control coordinado de manipuladores móviles no
holonómicos. Aplicación a la cooperación activa
hombre-robot
C. Balaguer
M.A. Salichs
5 2000 Ramón Barber
Castaño
Desarrollo de una arquitectura para robots móviles
autónomos. Aplicación a un sistema de navegación
topológica.
M.A. Salichs
L. Moreno
6 2000 Víctor Manuel
Padrón Nápoles
Herramientas de planificación de movimientos con
restricciones para robots escaladores en estructuras
tridimensionales complejas
C. Balaguer
7 2002 Dolores Blanco
Rojas
Planificación local basada en sensores para un
manipulador móvil en tareas de cooperación con
humanos
L. Moreno
C. Balaguer
8 2002 Eladio Dapena
Gonzáles
Planificación de caminos con incertidumbre para
robots móviles
L. Moreno
9 2002 Cristina Castejón
Sisamón
Modelado de zonas cruzables en entornos
exteriores para robots móviles
L. Moreno
10 2002 Beatriz López
Boada
Construcción de un mapa topo-geométrico del
entorno y localización de manera simultánea
L. Moreno
11 2002 María Jesús
López Boada
Sistema de control para robots móviles autónomos
basado en habilidades reactivas
M.A. Salichs

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 39
12 2002 Mario Mata
Ortega
Sistema de reconocimiento visual de objetos
orientado a la navegación topológica de robots
móviles autónomos
J.M. Armingol
M.A. Salichs
13 2003 Ramiro Diez
Zaera
Automatización del diseño de edificios modulares
para su construcción robotizada
C. Balaguer
14 2003 Alaa Mohamed
Khamis
Interacción remota con robots móviles basada en
Internet
F.J. Rodríguez
M.A. Salichs
15 2003 Verónica Egido
García
Sistema de navegación topológica para robots
móviles autónomos
R. Barber
M.A. Salichs
0
1
2
3
4
5
6
7
1999 2000 2001 2002 2003
Tesis Doctorales leidas
a)
0
2
4
6
8
10
12
2004 2005 2006 2007
Previsión lecturas TesisDoctorales
b)
Figura 6. Evolución de las Tesis: a) leídas y b) previsión

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 40
El alumnado del doctorado es uno de los factores más importantes del programa.
Las asignaturas del Departamento tienen bastante éxito y son unas de las más demandas
en los programas de la EPS. Mientras la media de los alumnos matriculados en las
asignaturas de DISA en este curso académico es de 9, la media de alumnos en las
restantes asignaturas del programa pertenecientes a otros Departamentos es de 8. Las
asignaturas más demandadas cuentan con 14 alumnos. En la Figura 7 se muestran los
alumnos matriculados en las 7 asignaturas correspondientes al Departamento, siendo CI
– Control Inteligente, MSSD – Modelado y simulación de sistemas dinámicos, PIC –
Procesamiento de imágenes por computador, PTMR – Planificación de tareas y
movimientos de robots, RAI – Robots autónomos inteligentes, TTR – Teleoperación y
telepresencia en robótica.
0
2
4
6
8
10
12
14
16
CI MSSD PIC PTMR RAI Trabajoinv.
TTR
Total
Figura 7. Alumnos matriculados en las asignaturas de Doctorado del Departamento
La procedencia, formación y la situación laboral del alumnado influyen en gran
medida en el diseño del programa. Mientras al inicio de la Universidad (finales de los
90) el alumnado era casi en su totalidad personal de la Universidad (ayudantes,
becarios, etc.) que realizaban su Tesis Doctoral en el departamento, actualmente esta
situación ha cambiado. El Departamento ha sido capaz de atraer alumnos de fuera del
Departamento, siendo una parte de estos alumnos de la industria. La Figura 8 presenta
la distribución del alumnado del Doctorado de nuestro Departamento en este curso
académico: DISA – alumnos del Departamento, UC3M – alumnos de otros
Departamentos de la Universidad, Otras Universidades e Industria.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 41
0123456789
10
CI MSSD PIC PTMR RAI Trabajoinv.
TTR
DISA
UC3M
Otras Univ.Industrial
Figura 8. Procedencia de alumnos de las asignaturas de Doctorado del Departamento
La admisión de alumnos se realiza por los profesores responsables del programa
coordinados por el Director del mismo, y está basada en: la titulación y el curriculum de
los aspirantes, su Universidad de procedencia, sus intereses investigadores, y su
capacidad científica y personal. Cada aspirante, si es posible, mantiene una entrevista
personal con los responsables del programa. Para la admisión cada alumno debe contar
con un tutor que se encarga del seguimiento y orientación de las actividades
relacionadas con el programa, tales como: la elección de las asignaturas a cursar, la
elección de la línea de investigación para los trabajos de Investigación y el anteproyecto
de Tesis Doctoral, la autorización para la realización de asignaturas fuera del programa,
y la emisión de informes sobre el grado de suficiencia alcanzado por el alumno.
El interés de alumnos de otros países por realizar el Doctorado en este
Departamento es muy alto. De hecho la mayoría de las solicitudes de este año provienen
fundamentalmente de los países de Sudamérica. Este hecho, plantea un reto dada la gran
dispersión de niveles formativos y de las “culturas” técnicas. La adaptación es
inevitable, y si no existen problemas lingüísticos, como es el caso de los alumnos de los
países del Este de Europa, la adaptación suele durar de media un año. Durante este
tiempo los doctorandos conocen la Escuela, la titulación de Ingeniería Industrial, el
funcionamiento del sistema educativo y el modo de funcionamiento del Departamento.
De hecho, el primer año se les carga con menor trabajo para que esta adaptación pueda
ser lo mejor y más rápida posible.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 42
El objetivo del programa de Doctorado en Ingeniería Eléctrica, Electrónica y
Automática es la formación de personal investigador, tanto para la Universidad como
para la industria. No obstante, hasta hace unos años el Doctorado ha formado
principalmente personal interno, por lo que la demanda social ha tenido una importancia
secundaria y no había necesidad de buscar salida profesional para los doctorandos. La
estabilización paulatina de las plantillas de nuestra Universidad lleva a que esta
situación se invierta. En la actualidad solamente una pequeña parte de los alumnos de
doctorado que acaban la realización de su Tesis podrán quedarse en el Departamento.
Los datos de la Figura 9 muestran que solamente 5 doctorandos que finalizaron su
Tesis de los 15 han podido quedarse en el Departamento desde 1999. Se observa el bajo
índice de alumnos que hemos “transferido” a la industria. Esta situación está
relacionada con la deficiencia endémica de las empresas españolas que no valoran a los
Doctores. Siguen pensando que es una formación teórica sin ninguna utilidad para la
industria. Solamente los sectores más avanzados, como por ejemplo, la aeronáutica,
reconocen y contratan a Doctores.
0123456
Profes
ores D
ISA
Otras u
nivers
idade
s
Profes
ores o
tros D
ptos.
Indus
tria
Regres
o a su
país
Doctorandos
Figura 9. Destino de los alumnos de Doctorado del Departamento
La movilidad de nuestros estudiantes es, en general, escasa, aunque ha habido
algunos casos de estancias más o menos prolongadas de estudiantes en otras
Universidades, sobre todo en el extranjero. Este es uno de los aspectos que el
Departamento quiere potenciar mediante intercambio de alumnos de Doctorado para
periodos entre 2 y 4 semanas. Para ello, se cuenta con becas pre-doctorales de la
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 43
Universidad. Por otro lado, se está fomentando la asistencia de los doctorandos a las
diferentes escuelas de verano internacionales que se organizan periódicamente por
diversos organismos ó redes internacionales.
El presupuesto del 3er ciclo que tiene el Departamento proviene de dos fuentes:
a) por carga lectiva, que como anteriormente se ha señalado, solo se contabiliza parte de
los créditos impartidos, y b) por resultados, donde se ponderan el número de créditos
reales, el número de alumnos en las asignaturas (con menos de 3 no se “paga” la
asignatura), el número de Tesis leídas, etc. Mientras en el primer aspecto, el presupuesto
se encuentra en la parte media de la Universidad, en el apartado de resultados el
programa de Doctorado ha tenido muy buenos indicadores, siendo de los mejores de
nuestra Universidad. Este hecho ha permitido tener una financiación, aunque
insuficiente en algunos aspectos, pero si adecuada sobre todo para material fungible e
invitación de profesorado externo.
Los aspectos administrativos de 3er ciclo los realiza el Centro de Es tudios
Avanzados (CEAES) de la Universidad. La gestión de este centro es de gran
importancia, pero insuficiente en algunos aspectos. El Departamento achaca estas
dificultades a la falta de personal del CEAES. Algunos de los problemas de gestión que
se pueden citar son los relacionados con la gestión de presupuesto, la comunicación con
los alumnos, la gestión de la co-tutela de las Tesis Doctorales.
Como en el resto de las Universidades españolas, nuestra Universidad concede
anualmente los premios extraordinarios de Doctorado. El número de premios es
múltiplo de seis Tesis candidatas al premio. La Comisión encargada de fallar el premio
está presidida por el Rector (o en quien delegue) y está compuesta por tres profesores
del programa que no tuvieran vinculación con alguna de las Tesis candidatas. Los
premios extraordinarios que nuestro Departamento ha obtenido son tres, número alto si
atendemos a la relativa “juventud” del Departamento:
1997 – Dr. José María Armingol Moreno (Tesis de la UC3M pero defendida en la UPM)
2000 – Dr. Antonio Giménez Fernández
2002 - Dra. María Jesús López Boada

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 44
2.4 Actividad docente y formativa no reglada
El Departamento está inmerso en numerosas acciones formativas no regladas. La
mayoría de estas formaciones se llevan a cabo a medida dependiendo de las necesidades
formativas. Se pueden distinguir cuatro grandes actuaciones del Departamento: a)
cursos del Fondo Social Europeo (FSE), b) cursos para empresas, y c) cursos de verano
de nuestra y otras Universidades.
Los cursos del FSE, que se iniciaron en nuestra Universidad a mediados de los
años 90 con una participación muy activa del Departamento, permitieron el
equipamiento docente del área de conocimiento ISA. Estos cursos, orientados a parados
y a personal sin primer empleo, están orientados a la formación práctica en materias
tales como Robótica, Automatización industrial, Visión por computador, etc. Fueron
numerosos los cursos que se impartieron con un considerable esfuerzo en preparación
de los temarios, guiones, documentación y prácticas de laboratorio. No obstante, debido
a la cambiante situación del FSE, el número de estos cursos ha ido disminuyendo y en
este último año académico el Departamento no ha impartido ninguno.
Respecto a los cursos formativos para las empresas, la actividad del
Departamento es también muy notoria. En los últimos años han sido numerosos los
cursos a medida que se han confeccionado y se han impartido. En este sentido, hay que
destacar la colaboración del Departamento con la compañía Peugeout-Citroen España
(grupo PSA), con la cual el Departamento tiene suscrito un acuerdo de formación desde
1998. Este convenio incluye la formación de todos sus técnicos de líneas (operadores,
conductores, etc.) de sus diversos Departamentos: chapa, pintura, ensamblado, etc. Los
cursos para PSA que ha llevado a cabo el Departamento en los últimos años ha
permitido la formación de más de 200 personas. El coordinador de estos cursos ha sido
el Prof. Carlos Balaguer. Los cursos impartidos hasta la fecha son los siguientes (de 40
horas cada uno):
• Robótica básica
• Robótica avanzada ABB
• Autómatas programables Telemecanique (básico)

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 45
• Autómatas programables Telemecanique (avanzado)
• Autómatas programables Siemens (básico)
• Autómatas programables Siemens (avanzado)
• Automatización industrial (básico)
• Automatización industrial (avanzado)
Respecto a otras acciones formativas para empresas hay que destacar los cursos
para la empresa General Motors, Detroit (EE.UU). Las necesidades de formación de
personal hispanohablante de las diversas factorías de la compañía la llevaron hace unos
años a la creación de un nuevo concepto de educación a distancia: “Video Tape Delay
Education”. El sistema consiste en la grabación de nuestras clases presenciales en aula
y la generación de una cinta de video con 4 horas por semana. Posteriormente esta cinta
es enviada, sin post-edición, es decir, “en vivo”, a Estados Unidos donde se distribuye
entre las factorías del grupo. Al finalizar el curso, se realiza un examen, también a
distancia, que permite a los alumnos obtener el correspondiente diploma. Durante la
grabación de estas cintas, que están también disponibles para nuestros alumnos en la
biblioteca, se están utilizando los medios audiovisuales más avanzados tales como
pizarras electrónicas, proyección de ordenador, video, etc. El coordinador de estos
cursos ha sido el Prof. Miguel Angel Salichs. Las asignaturas impartidas hasta la fecha
se centran en Robótica.
Respecto a los cursos de verano son numerosas las formaciones llevadas a cabo.
Durante los últimos años el Departamento ha participado tanto en los cursos propios
como en los cursos de otras Universidades tales como la UNED, Universidad de
Alicante, Universidad de Sevilla, Universidad de Zaragoza, etc. El temario de los cursos
ha sido muy amplio y abarca los temas de Robots móviles, Robots escaladores,
Robótica en la construcción, Robots humanoides, etc. Esta docencia orientada sobre
todo a alumnos de otras Universidades permite tener un continuo intercambio de
experiencias docentes e investigadoras con otras Universidades.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 46
2.5 Fortalezas, debilidades y propuestas de mejora
Las principales fortalezas del Departamento en materia docente se pueden resumir
en:
• Poca dispersión de la docencia. La docencia de las numerosas asignaturas y en
numerosas titulaciones está concentrada en cuatro áreas estratégicas (control,
automatización, robótica/visión e informática) lo que permite tener grandes
sinergias docentes.
• Enseñanza práctica. Las enseñanzas tanto en 1er y 2º ciclos como en 3er ciclo
tienen una importante componente práctica basada en buenas instalaciones de
laboratorio y en una organización coordinada.
• Gran importancia del Doctorado. Los estudios de tercer ciclo forman una parte
muy importante de la formación e investigación del Departamento. Las
asignaturas están vinculadas con las líneas de investigación soportadas por
proyectos.
• Gran número de Tesis Doctorales. Considerando los pocos años de
funcionamiento regular del Departamento y el escaso número de Doctores
permanentes, el número de Tesis Doctorales leídas y en curso de realización es
muy elevado.
Las principales debilidades del Departamento en materia docente se pueden resumir
en:
• Poca movilidad. La falta de movilidad de los alumnos, sobre todo del 3er ciclo,
y del profesorado, en general, hacen difícil la incorporación de nuevas
tendencias, enfoques y planteamientos docentes. Se debería potenciar más el
intercambio con otras Universidades.
• Falta formación del profesorado nuevo. No se dispone de mecanismos ni de
medios de formación de profesorado nuevo, sobre todo si su titulación no es afín
al Departamento ó si se realizó en el extranjero. Así mismo, faltan criterios y
procedimientos de evaluación de la actividad docente de estos profesores.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 47
• Falta de sendas definidas del Doctorado. Las asignaturas de Doctorado están
relacionadas con las líneas de investigación pero falta la definición de sendas (o
itinerarios) que permitan una formación integrada y multidisciplinar del alumno.
El programa debe formar un conjunto coherente de asignaturas
complementarias.
• Falta de criterios objetivos de Tesis Doctorales. No existen criterios objetivos de
calidad de las Tesis. La inmensa mayoría de las Tesis obtienen la máxima nota
posible sin poder realizar algún tipo de ordenación ó comparación. Este hecho
perjudica seriamente a Departamentos con alta calidad de sus Tesis.
Las propuestas de mejora docente se resumen en:
• Plan de formación y reciclado de profesorado. Se necesita un plan coordinado de
formación de profesorado nuevo, tanto en las técnicas de presentación y
expresión, como en el conocimiento técnico. Este plan debería ampliarse
también para el profesorado permanente. La Universidad y Departamento
deberían ser responsables de esta mejora con un plan estratégico conjunto.
• Cooperación con otros grupos con el fin de formar un Doctorado
interuniversitario. Esta actuación permitirá aumentar la movilidad de alumnos y
profesores con el objetivo de una formación más multidisciplinar y
“multicultural”. La Universidad, por un lado, debería ser responsable de esta
mejora con fondos para el desplazamiento y el Departamento, por otro lado,
debería definir este nuevo Doctorado.
• Mejora de la gestión docente del Departamento. Es necesario la introducción de
procedimientos más ágiles y la incorporación de más personal de administración
y servicios para mejorar la gestión de la docencia (horarios, actas, memorias,
informes, etc.). La Universidad debería ser responsable de esta mejora con más
personal.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 48
3. INVESTIGACION DEL DEPARTAMENTO
3.1 Estructura de investigación en la Universidad
La investigación en la Universidad está coordinada y gestionada por el
Vicerrectorado de Investigación. Éste, entre otras, promueve la diseminación de las
convocatorias locales, autonómicas, nacionales e internacionales; la convocatoria de
becas propias tipo post- ó pre-doctoral; las estancias cortas en otros centros; la
asignación de los años sabáticos; las ayudas para la realización de congresos y demás
reuniones científicas; la co-financiación (en pequeña medida) de los proyectos europeos
y su preparación; etc. Así mismo, del Vicerrectorado depende la Oficina de
Transferencia de Resultados de Investigación (OTRI).
Los objetivos de la OTRI de nuestra Universidad son muy amplios, entre los
cuales se pueden destacar:
• Incentivación de la investigación en la Universidad mediante la difusión de las
ayudas y convocatorias, el apoyo a jóvenes investigadores y grupos de
investigación y el mantenimiento de grupos consolidados.
• Ayuda a la preparación y seguimiento de proyectos mediante la elaboración de
los contratos, convenios y Cátedras, la renovación de los mismos y el
seguimiento de los hitos y documentación necesaria.
• Promoción de la universidad como centro de investigación de excelencia
mediante la elaboración de información sobre sus conocimientos y resultados
obtenidos, organización de seminarios, mesas redondas y reuniones de trabajo
con representantes empresariales, locales y nacionales.
• La gestión de la contabilidad de los proyectos de investigación, la preparación
de propuestas económicas, la contabilización de las compras, de los viajes, y
demás gastos.
• La gestión de las patentes generadas como resultados de la investigación llevada
a cabo en la Universidad mediante su preparación, seguimiento y pago.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 49
En general, se puede afirmar que el funcionamiento de la OTRI de nuestra
Universidad es muy bueno. Comparándolo con el funcionamiento de otras oficinas
similares (OTT, OTRI) de las universidades españolas más representativas, la OTRI de
la Universidad Carlos III de Madrid es una de las más eficaces. Esta Oficina se encarga
con gran eficacia de la elaboración de los contratos y convenios. Para el seguimiento de
los proyectos, se designan personas permanentes que lo gestionan durante toda su vida.
Además, el sistema informático SAVIA que contiene toda la contabilidad de los
proyectos es actualizado diariamente y permite efectuar consultas remotas. No obstante,
el importante incremento del número y tipo de proyectos de la Universidad hace que la
OTRI empiece a estar saturada y con falta de personal en algunos servicios.
Como conclusión, se puede afirmar que la OTRI ha tenido una relación muy
estrecha y eficaz con los miembros del DISA que llevan proyectos de investigación. Los
únicos puntos negativos son: a) el excesivo papeleo en las gestiones de proyectos a
través de formularios repetitivos y liosos (aspecto, que a decir verdad, no depende del
todo directamente de la OTRI), y b) el excesivo formalismo en temas relacionados con
la gestión de los proyectos que ocasiones necesita respuestas inmediatas y mucho más
flexibles.
El Vicerrectorado de Investigación cuenta con fondos propios que permiten la
potenciación de la misma en la Universidad. Estos fondos se utilizan para co-financiar
la organización de congresos y reuniones científicas, para la ayuada a la preparación de
proyectos Europeos, para lanzar proyectos de equipos junior, etc. Así mismo, se utilizan
para estancias cortas pre- ó post-doctorales, para años sabáticos, etc. No obstante, la
cuantía que maneja el Vicerrectorado para estos temas es totalmente insuficiente,
necesitándose una seria reflexión de nuestra Universidad, que pretende tener una
excelente investigación, de cómo pretende potenciar la investigación y cuales son sus
prioridades en este campo.
Uno de los servicios más importantes que participa activamente en la
investigación es el Servicio de Compras. Este se encarga de los trámites necesarios para
la adquisición y, en muchos casos, la importación de material investigador. No obstante,
este servicio es excesivamente burocrático, poco flexible y lento. En muchas ocasiones
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 50
para la compra de un componente o equipo los investigadores del DISA tienen que
adelantar su propio dinero o poner sus propias tarjetas de crédito. La devolución de
estas cantidades es lenta y complicada. En este aspecto, se recomienda una mejora
mediante tarjeta de crédito corporativo o similar. Otro aspecto negativo de este servicio
es el afán de inventariar el resultado del ensamblado de varios dispositivos
independientes. Por ejemplo, los robots experimentales desarrollados en DISA y que
cuentan con centenas e inclusive miles de piezas (mecánicas, eléctricas, electrónicas,
etc.) se pretenden inventariar como un único equipo. Si embargo, al desplazar el robot a
otro lugar e inclusive a otro país para su experimentación, el servicio se niega a emitir
cartas de pertenencia del equipo a la universidad. Por otro lado, este servicio no
entiende el concepto de material fungible que está claramente definido en los proyectos
Europeos como equipo que no se utilizará con posterioridad a la finalización del mismo.
El servicio se fija únicamente en el precio del material fungible, lo que crea muchas
dificultades en los proyectos Europeos. En definitiva, el Servicio de Compras debe
mejorar mucho y adaptarse a las necesidades de los investigadores y no al revés.
Por otro lado, es digna de encomio la contribución de la Biblioteca a la actividad
investigadora. Ésta permite el acceso electrónico a numerosas revistas, a las bases de
datos, a la búsqueda de artículos y de libros por préstamo interbibliotecario. La
Biblioteca de la Universidad está centralizada lo que permite agrupar esfuerzos y
financiación, siendo una de las más grandes de las universidades madrileñas. Todos los
libros y revistas comprados con cualquier fondo de la Universidad están centralizados
en la Biblioteca con un estricto control de préstamos. Respecto al DISA la Biblioteca
cuenta con las mejores revistas internacionales en Robótica y Automatización, Visión
Artificial y Control. No obstante, el presupuesto para este apartado es un poco escaso,
habiendo años que el Departamento tuvo que descartar algunas revistas. Así mismo, el
DISA cuenta con un importante presupuesto para libros de investigación que se ejecuta
por el procedimiento “primero en pedir primero en adjudicar”. El presupuesto de libros
es, en general, suficiente.
Desde el punto de vista técnico, la Universidad dispone de dos talleres,
mecánico y electrónico, de prototipos a los que DISA solicita permanentemente apoyo.
Los talleres no tienen vinculación administrativa con los Departamentos siendo un ente

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 51
independiente. De esta forma, se pretende profesiona lizar los servicios de los talleres.
La calidad del taller mecánico es muy buena mientras la del electrónico, que diseña y
produce placas de circuitos integrados, es bastante regular. De hecho, la mayoría de la
electrónica del DISA se subcontrata.
El Servicio de Informática también presta una contribución importante a la
investigación del Departamento. Por un lado, el sistema de atención al cliente funciona
en términos generales muy bien y es rápido. La solución de las incidencias informáticas
se efectúa de forma escalonada, siendo, en primer lugar, los becarios los que intentan
solucionar el problema y posteriormente, si el problema persiste, el personal del Centro
de Cálculo centralizado del campus de Leganés es el que recoge la incidencia. El único
aspecto mejorable es la formación de los becarios que en muchas ocasiones deja mucho
que desear.
Por otro lado, no solamente los computadores de los miembros del DISA son
atendidos por el Servicio Informático sino también los computadores de investigación.
En este caso, la atención es más complicada ya que cada uno de estos tiene sus
peculiaridades y no responde a una configuración estándar (sistemas operativos, drivers,
programas, etc.). No obstante, el Centro de Cálculo hace un gran esfuerzo por adaptarse
y asesorar a los miembros del DISA en todos estos temas.
Respecto a la participación del Vicerrectorado de Infraestructuras en la
investigación del Departamento es escasa, ya que la mayoría de sus fondos se destinan a
las infraestructuras académicas: obras, material, becarios prácticas, etc. No obstante,
siempre que ha tenido oportunidad ha colaborado con el DISA en temas de
investigación.
La agencia de viajes de la Universidad, que está situada en el campus de Getafe
y pertenece a una conocida empresa española, es de gran utilidad en todo lo relacionado
con los desplazamientos por motivos de actividad investigadora. El DISA es uno de los
Departamentos de la Universidad que más viajes efectúa y el que más invierte en viajes
para personal en formación. El trato y el funcionamiento de la agencia son muy buenos
aunque en muchos casos los precios no son los óptimos. Lo que es inexplicable es la

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 52
ubicación de la agencia en Getafe cuando es bien conocido que el campus de Leganés es
el que más con diferencia usa sus servicios. Es de extrema necesidad que en Leganés
haya una agencia de viajes dado el gran volumen de los mismos y, en algunos casos, el
carácter urgente, de un día para otro, de los desplazamientos. Así mismo, la agencia
debería adaptarse al sistema de compra electrónica de billetes mediante una tarjeta
corporativa o similar. Es intolerable que los profesores, y en algunos casos los becarios,
deban de adelantar continuamente su propio dinero en la compra de billetes baratos.
Otro servicio de la Universidad que debería estar relacionado con la
investigación y la diseminación de sus resultados es el Gabinete de Prensa. Este,
ubicado en el campus de Getafe, no responde en absoluto a tal objetivo. El Gabinete
carece de los contactos necesarios con los medios de comunicación y no potencia su
difusión en prensa, radio y televisión. Los miembros del DISA tiene que llevar a cabo
contactos personales para la difusión de su investigación. Más aun, la revista de la
Universidad no refleja la importancia, en muchos casos a nivel mundial, y el esfuerzo
de investigación que llevan a cabo los departamentos tecnológicos. Por todo ello, es
urgente que el campus de Leganés cuente con su propia Oficina de Prensa orientada a
temas tecnológicos y con un personal con contactos y conocedor de los medios de
difusión.
3.2 La investigación en el Departamento
La investigación tiene una gran importancia y tradición en el Departamento de
Ingeniería de Sistemas y Automática. Aunque el Departamento es relativamente nuevo,
varios de sus miembros son pioneros de la investigación en el área, llevando más de 20
años de actividad investigadora al más alto nivel. A diferencia de otros Departamentos
de la Universidad, el equilibrio entre investigación y docencia es uno de los pilares del
DISA. El continuo afán de superación, de planteamiento de nuevos retos, de búsqueda
de nuevas tendencias, técnicas y herramientas, permiten al DISA realimentar su labor
docente con los resultados de la investigación.
La actividad investigadora del DISA se centra fundamentalmente en
investigación aplicada desde el punto de vista ingenieril aunque también existen

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 53
proyectos y líneas de trabajo más básicas. Dentro del amplio espectro de líneas de
investigación del área de conocimiento, el DISA se ha centrado fundamentalmente en
tres líneas: Robótica, Visión y sistemas sensoriales, y Control de sistemas.
Hasta hace unos años, la investigación en el DISA se llevaba de forma
coordinada y centralizada. El trabajo era en equipo, distribuyéndose tanto las tareas
como los resultados de las mismas. Se llevaba a cabo una política de incentivación de
los jóvenes investigadores y un reparto equitativo de los ingresos económicos. Así
mismo, se tenía un equilibrio entre proyectos de investigación y proyectos para
empresas. Este hecho, permitió un rápido desarrollo de las actividades, la consecución
de numerosos proyectos de investigación y el lanzamiento del DISA tanto a nivel
nacional como internacional. El 100% de sus proyectos eran aprobados y
subvencionados, se organizaron numerosos eventos internacionales al más alto nivel y
sus líneas de investigación eran de las más innovadoras. Fruto de esta labor, hoy día el
DISA de la Universidad Carlos III de Madrid es sinónimo de calidad, profesionalidad y
seriedad, siendo uno de los centros de investigación más prestigiosos de nuestro país.
El crecimiento del Departamento, el marco legal de la LOU y la iniciativa de
varios de sus miembros de crear grupos de investigación independientes, ha llevado que
actualmente el Departamento cuente con tres grupos de investigación independientes:
• RoboticsLab (dirigido por M.A. Salichs y C. Balaguer)
• Laboratorio de Sistemas Inteligentes (dirigido por F.J. Rodríguez)
• Laboratorio de Manipuladotes Móviles (dirigido por L. Moreno)
Según lo aprobado en el Consejo del Departamento, cada uno de los grupos
cuenta con sus propios medios de investigación y sus propios laboratorios (ver Tabla 9
y 13). Cada uno de los grupos lleva acabo, de forma independiente, la gestión de la
investigación, la selección de las líneas de investigación, la distribución de los recursos
materiales y financieros, la forma de trabajar y la organización interna. De la misma
forma, la captación de personal, tanto con fondos del Departamento como con fondos
propios, se lleva acabo de forma independiente.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 54
3.3 Recursos
El volumen de recursos para la investigación captados por la Universidad Carlos
III de Madrid en el año 2003 ha crecido un 44% respecto al año 2002, alcanzando los
19,6 M€, de los cuales 12,7 M€ son de financiación competitiva. De esta financiación el
72% pertenece a áreas Científicas y Tecnológicas.
Respecto al Departamento de Ingeniería de Sistemas y Automática, siendo uno
de los más pequeños de la Universidad, se encuentra entre los 42 Departamentos en el
quinto lugar por número de proyectos pedidos. En concreto, el DISA ha pedido 23
proyectos de investigación en el 2003, superado solamente por dos Departamentos de
Telecomunicación, el de Informática y el de Economía. De los 23 proyectos pedidos
fueron adjudicados 19 con una financiación de 539,3 K€ anuales. En términos de
recursos por Doctor y año la ratio se sitúa en 87 k€/año.Doctor, según datos oficiales de
la Universidad que contabiliza la dedicación de los Doctores implicados en proyectos de
investigación. Según el número de profesores permanentes, la ratio es de 67,4
K€/año.funcionario. Estas ratio, demuestran un buen nivel de captación de financiación
del DISA, teniendo en cuenta el gran número de profesores en formación. Máxime,
cuando la política científica del DISA hasta hace unos años era centrarse en proyectos
de investigación básica y aplicada y no en proyectos para empresas.
La distribución de la financiación captada para investigación en los tres últimos
años por el Departamento esta representada en la Tabla 17. En ésta se observa la
disminución de la financiación captada por el Departamento. En 2003 la financiación
disminuyo un 20% respecto a 2001. No obstante, en 2003 la financiación subió respecto
al 2002.
En la Tabla 18 se muestra el resumen de las macrocifras de la investigación del
DISA. Se observa que con el aumentar el número de Doctores y el número de grupos de
investigación del Departamento, fueron aumentando los proyectos pero el valor medio
por proyecto disminuyo alarmantemente, pasando de 133,9 K€/proyecto en 2001 a 28,4
K€/proyecto. Está claro que los proyectos, en media, son más pequeños aunque el
número de Doctores ha aumentado.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 55
La Figura 10 muestra la distribución de las fuentes de financiación que en 2003
está aproximadamente equilibrada: 36% del Plan Nacional de I+D, 29% de las
Empresas y 28% de la Unión Europea. Este hecho permite afrontar con mayor garantía
la investigación futura ante un hipotético fallo de financiación de alguna de las fuentes.
Tabla 17. Financiación captada en investigación por el DISA (en K€)
Fuente 2001 2002 2003
AAPP 1,6 7,3
Empresas 45,0 47,0 155,0
CAM 14,7
PN I+D 428,5 244,1 196,1
UE 195,9 133,7 151,6
Otros 1,2 14,7
Total 669,4 427,6 539,3
Tabla 18. Doctores, financiación, número de proyectos y valor medio proyecto
2001 2002 2003
Doctores 10 12 14
Número de proyectos 5 9 19
Financiación (K€) 669,4 427,6 539,3
Valor medio (K€/proyecto) 133,9 47,5 28,4
1%
29%
3%
36%
28%
3%AAPPEMPRESASCAMPNI+DUEOTROS
Figura 10. Fuentes de la financiación captada en investigación por el DISA en 2003

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 56
Respecto a datos globales, en los últimos cinco años (1999-2004) la financiación
captada por el Departamento ha sido muy importante alcanzando la suma de 2,7 M€
correspondiente a 37 proyectos de investigación. El promedio de financiación por
proyecto ha sido de 73,2 K€/proyecto y los ratios anuales por miembro de DISA, por
Doctor y por profesor funcionario son respectivamente 12 K€/año.miembro, 38,6
K€/año.Doctor y 67,5 k€/año.funcionario. Respecto a la distribución de los fondos éstos
se distribuyen en 1.5 M€ (55,6%) para proyectos del Plan Nacional de I+D, 0.7 M€
(26,0%) para proyectos de la Unión Europea y 0.5 M€ (18,4%) para proyectos con
Empresas. Estas cifras demuestran una continuidad en la captación de recursos lo que
permite llevar a cabo líneas de investigación a largo plazo.
3.4 Perfil de la investigación
El Departamento de Ingeniería de Sistemas y Automática ha tenido desde su
creación una inequívoca vocación investigadora. Aunque en los primeros años fue
necesario invertir casi la totalidad de los esfuerzos, tiempo y personal en la creación de
las infraestructuras docente, se puede afirmar que en la actualidad el DISA ha superado,
en gran medida, este periodo y esta volcado en tareas investigadoras. El alto número de
Proyectos Fin de Carrera y de Tesis Doctorales (Figuras 4 y 6) son unos buenos
indicadores de tal actividad.
Otro importante indicador de la calidad de la actividad investigadora de los
miembros del DISA es el número de tramos concedidos de suficiencia investigadora
(Tabla 19). Dado que esta información es confidencial y no se conoce el número de
tramos que potencialmente se podrían haber pedido y el número de tramos denegados
(si los hubiese), la información de esta Tabla solo se puede cuantificar de forma global.
En la actualidad el DISA cuenta con 8 profesores permanentes (funcionarios que son los
únicos que tienen derecho a solicitar los mencionados tramos) teniendo todos ellos
algún tramo concedido. Se puede afirmar que comparativamente (tal y como se vera en
el siguiente capítulo) el número de tramos es alto. La distribución del número de tramos
(2-2-4) parece lógica y corresponde, en general, a la antigüedad de sus miembros.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 57
Tabla 19. Tramos de suficiencia investigadora del Departamento
Tramos Personas 3 2 2 2 1 4
Total 8
Una referencia de la producción científica se suele recoger en las memorias
anuales de investigación que elabora la OTRI de la Universidad a través del
Departamento. Pensamos que la utilidad de estas memorias escritas es reducida y no
reflejan la realidad investigadora del DISA. Más aun, cuando no existe un apoyo
administrativo para su elaboración, la mayoría de los profesores se limitan a cumplir el
trámite sin reflejar la realidad. El Departamento también dispone de una página web
(www.uc3m.es/dept04.html) donde se recogen la mayoría de las líneas y trabajos de
investigación, las publicaciones más recientes, así como las páginas web personalizadas
de los grupos de investigación y de los miembros del DISA.
Tal y como se ha señalado anteriormente, en el Departamento existen desde el
año 2000 tres grupos de investigación. En la actualidad la relación entre los grupos es
dispar. En algunos casos, las líneas de investigación y los modelos organizativos son tan
diferentes que no cabe una relación de cooperación. En otros casos, sin embargo,
existen relaciones de cooperación y se comparten equipos, espacios y experiencias. No
obstante, como es bien sabido, la cooperación en la universidad española se basa más en
relaciones personales que en profesionales, sin tener en cuenta los objetivos y resultados
de la investigación.
La productividad global investigadora del DISA, medida en número de
publicaciones, está reflejada en la Tabla 20. En ésta se han sumado todas las
publicaciones de los tres grupos de investigación y se han contabilizado solamente los
artículos en revista y en congresos internacionales, y libros. En las estadísticas de los
grupos existen numerosas publicaciones repetidas dado que han sido fruto de
colaboraciones actuales y anteriores. Respecto a los congresos y simposia
internacionales solo se han contabilizado los que cuentan con procesos de revisión, que

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 58
en nuestra área de conocimiento son muy estrictos llegan, en algunos casos, al 60% de
rechazo de los artículos presentados.
Tabla 20. Publicaciones del Departamento de Ingeniería de Sistemas y Automática
1999 2000 2001 2002 2003 Total
Revistas internacionales 2 3 1 8 6 20
Números espec. revistas intern. 2 3 1 6
Congresos intern. con revisión 10 7 20 16 22 75
Sesiones plenarias invitadas 1 2 2 2 7
Libros completos 1 1 1 3
Libros completos Editores 2 2
A continuación se va a describir de forma detallada la actividad y los resultados
de la investigadora de los tres grupos que forman el DISA.
3.4.1 RoboticsLab
El Laboratorio de Robótica (RoboticsLab) es uno de los pioneros de la Robótica
y Automatización, tanto a nivel nacional como internacional. Desde principios de los
años 80 los miembros del grupo investigador llevan abordando de forma ininterrumpida
proyectos de investigación y desarrollo en colaboración con empresas e instituciones
nacionales y Europeas. Estas acciones se han caracterizado por un alto nivel científico-
tecnológico y muestran una importante proyección internacional del grupo.
El RoboticsLab está formado por un amplio y consolidado equipo de ingenieros
y licenciados, expertos en la automatización de sistemas y procesos mediante
tecnologías de robótica avanzada con un alto contenido en innovación tecnológica. El
equipo tiene una estructura multidisciplinar integrando investigadores con
conocimientos y culturas complementarias que van desde el control de procesos hasta la
automatización industrial, la robótica, la mecatrónica, el procesamiento de sensores, la
inteligencia artificial y la informática industrial. Sus principales líneas de investigación
son:

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 59
1. Diseño, desarrollo y control de robots. Han sido desarrollados numerosos prototipos
de robots tanto desde el punto de vista mecánico como de control, hardware,
software, sensorización e inteligencia. Entre estos robots destacan robots móviles de
interiores y exteriores, robots escaladores, manipuladores móviles y manipuladores
de grandes dimensiones. Además actualmente se están desarrollando robots bípedos
y humanoides de dimensiones naturales.
2. Automatización y robotización de procesos industriales. El grupo es experto en el
desarrollo de sistemas de producción y control de calidad para diversos sectores
industriales tales como la construcción y el automóvil. La mayoría de estos
desarrollos han sido implementados en factorías y obras en forma de células
flexibles de producción y factorías móviles.
3. Desarrollo de sistemas de percepción sensorial. La obtención y procesamiento de la
información sensorial conjuntamente con la posterior toma de decisión (basada en la
fusión sensorial) es una de las líneas de experimentación del grupo. Se trabaja con
sistemas de visión tanto 2D como 3D para procesamiento de imágenes, con
telémetros láser y GPS diferencial para la navegación de robots, con sensores de
fuerza/par y tacto para la realimentación de esfuerzos, etc.
4. Diseño de soluciones para la Teleeducación y Teleoperación. La experiencia del
grupo se centra en el desarrollo de laboratorios remotos de robots móviles así como
de sistemas de teleoperación de procesos industriales a través de la red y mediante
sistema de telepresencia activa.
Los resultados de los proyectos de investigación y desarrollo en los que el
RoboticsLab ha participado han dado lugar a sistemas, programas, procedimientos y
prototipos que muestran la aplicabilidad del conocimiento, del know-how y de las
tecnologías. La mayoría de estos desarrollos han sido financiados tanto con fondos
nacionales como europeos y a nivel mundial, mientras algunos proyectos de
investigación más básica han tenido financiación propia. Los resultados más
innovadores son:

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 60
1. Sistema de inspección automática de las carrocerías de coches (para el grupo
Peugeot-Citroen). El sistema permite inspeccionar mediante visión artificial y láser
la calidad de la chapa de las carrocerías de los automóviles. El sistema está
actualmente en fase de instalación en una de las factorías francesas del grupo PSA.
2. Robot de grandes dimensiones para la construcción (para el grupo Dragados). Este
sistema robotizado permite transportar y ensamblar grandes y pesadas estructuras
metálicas (o de otro material) para una ágil edificación modular de edificios de
viviendas y oficinas. Esta tecnología ha permitido ensamblar una casa unifamiliar en
Holanda.
3. Sistema automatizado de pre-fabricación para la construcción (para la empresa
Drace). Una de las factorías de la empresa de paneles de material compuesto para
las fachas y cerramientos exteriores, ha sido totalmente remodelada y automatizada.
4. Sistema de diseño y modularización automática de edificios (proyecto IMS Unión
Europea – Japón denominado FutureHome). El paquete software desarrollado se
centra en el diseño arquitectónico, pre-fabricación, ensamblado, construcción y
mantenimiento de edificios modulares.
5. Plataforma para la identificación y recuperación de satélites (para la empresa
GMV). La plataforma experimental a escala permite el reconocimiento e inspección
de satélites en orbita mediante sistemas de visión artificial situados en otros
satélites.
6. Robot de asistencia a personas discapacitadas (proyecto de la Unión Europea IST).
Para aumentar la calidad de vida de los discapacitados en entornos domésticos se ha
desarrollado un robot escalador autónomo, que permite dar de comer, lavar y
maquillar al paciente. El robot ha sido probado con éxito con pacientes en el centro
de rehabilitación del Reino Unido.
7. Robot de asistencia personal (proyecto de la CICYT). Para asistencia a adultos,
niños y ancianos en su actividad diaria se está desarrollando un robot móvil

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 61
multisensorial con capacidad de interaccionar de forma inteligente con los humanos
y su entorno.
8. Robots bípedos y humanoide (proyecto CICYT). Se están desarrollando una
plataforma bípeda y un robot humanoide de 21 GDL a escala humana para
diferentes aplicaciones tanto en sectores industriales como de servicio.
9. Robots escaladores de inspección de infraestructuras (dos proyectos CICYT). La
inspección de infraestructuras tales como puentes, cubiertas y esqueletos de
edificios se ha implementado con robots escaladores autónomos equipados con
sensores.
10. Robots móviles de interiores (dos proyectos CICYT). Son vehículos automatizados
para naves industriales, servicios de mensajería interna, transporte en procesos de
ensamblado, sistemas de selección de pedidos y almacenes automatizados.
11. Robots móviles de exteriores (proyecto CICYT). Este tipo de sistemas tiene su
aplicación en sectores como agricultura, medioambiente, militar, minería o
aeroespacial. La navegación y planificación, así como sus sistemas de propulsión
son autónomos.
12. Teleoperación y telepresencia para robots móviles (proyecto IECAT Unión Europea
- USA). Este sistema permite a través de la red monitorizar, comunicarse y controlar
robots móviles de interiores con posibilidad de una inmersión del operador remoto.
13. Manipuladores móviles (proyecto propio). La plataforma Otilio permite de forma
coordinada la movilidad en un entorno cerrado y la manipulabilidad mediante un
brazo equipado con sensores de fuerza/par para la realimentación de esfuerzos en
tareas de servicios.
El RoboticsLab es miembro de las más prestigiosas redes Europeas de
investigación tales como EURON (European Robotic Network) y CLAWAR (Climbing
and Walking Robots). En estas redes el grupo colabora con decenas de centros de

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 62
investigación y universidades. Respecto a empresas el RoboticsLab colabora de forma
contractual con las siguientes empresas españolas: ACS, Apteca, Casa-EADS,
Dragados, Drace, GMV, Idom, Megacal, Menasa, PSA Peugeot-Citroen, Recreativos
Franco; y extranjeras: Corus (UK-NL), Hitachi Zosen (J), PSA (F), Rautaruukki (SF),
RehabRobotics (UK), Shimizu (J), Slavenburg (NL).
La Tabla 21 muestra la composición del RoboticsLab a Junio de 2004 y la Tabla
22 el resumen de su plantilla. La Tabla 23 presenta el listado de los proyectos de
investigación del RoboticsLab de los últimos 5 años. La Tabla 24 resume los proyectos
de investigación del grupo. La financiación total de los últimos 5 años ha sido de 2,2
M€. La financiación media por año (desde 1999 hasta 2004) ha sido de 362,5 K€. La
financiación media por año y miembro del grupo de investigación ha sido de 15,76 K€,
mientras por miembro permanente (funcionario) ha sido de 120,8 K€. El reparto de la
financiación por fuentes es la siguiente: PN I+D: 49,5%, UE: 30,2%, Empresas: 18,8%,
y Otros: 1,5%. La Figura 11 muestra la distribución de las fuentes de financiación de la
investigación del RoboticsLab.
Tabla 21. Composición del RoboticsLab (Junio 2004) Catedráticos de Universidad (2)
Dr. Miguel Ángel Salichs Sánchez-Caballero, Director del Departamento
Dr. Carlos Balaguer Bernaldo de Quirós, Subdirector del Departamento
Profesores Titulares de Universidad (1)
Dr. Antonio Giménez Fernández
Profesores Visitantes Doctores (1)
Dr. Ramón Barber Castaño (permanente)
Becario “Ramón y Cajal” (1)
Dr. Mohamed Abderrahim
Profesores Ayudantes Doctores (1)
Dr. Ramiro Díez Zarea
Profesores Ayudantes o equivalente (9)
Ing. Dulce Milagros Rivero
Ldo. Pavel Staroverov

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 63
Ing. Alberto Jardón Huete
Lda. María de los Ángeles Malfaz
Ing. Ramiro Cabás Ormaeche
Ing. Julio Cesar Díaz
Ing. Mario Arbulú Saavedra
Ing. Dimitri Kaynov
Ing. Javier Fernández de Gorostiza
Becario de FPI o similar (3)
Ing. Luis Maria Cabas Ormaechea
Ing. Raquel Pacheco Goñi
Ing. Elena Kaynova
Profesores Asociados (2)
Ing. Alberto Pedro Martínez Borja
Ing. Juan Carlos Hernández
Becarios de Investigación (5)
Dr. Alaa M. Khamis
Ing. Carlos Pérez Martínez
Ing. Rafael Rivas Estrada
Ing. Javier Garrido Ruiz
Ing. Raúl Correal Tezanos
Tabla 22. Resumen de la composición del RoboticsLab (Junio 2004)
Doctores No Doctores Profesores
Permanentes Profesores No Permanentes
Profesores Ayud.+Asoc.
Becarios
3 4 10 5 7 15
22
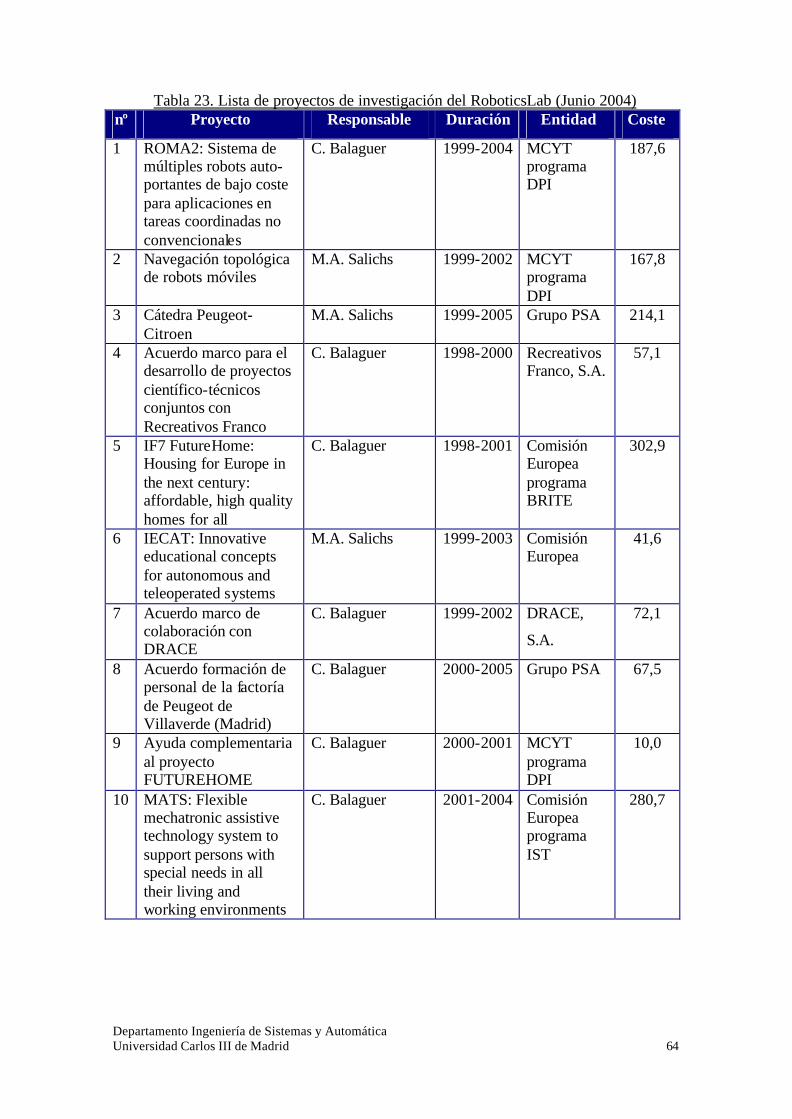
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 64
Tabla 23. Lista de proyectos de investigación del RoboticsLab (Junio 2004) nº Proyecto Responsable Duración Entidad Coste
1 ROMA2: Sistema de múltiples robots auto-portantes de bajo coste para aplicaciones en tareas coordinadas no convencionales
C. Balaguer 1999-2004 MCYT programa DPI
187,6
2 Navegación topológica de robots móviles
M.A. Salichs 1999-2002 MCYT programa DPI
167,8
3 Cátedra Peugeot-Citroen
M.A. Salichs 1999-2005 Grupo PSA 214,1
4 Acuerdo marco para el desarrollo de proyectos científico-técnicos conjuntos con Recreativos Franco
C. Balaguer 1998-2000 Recreativos Franco, S.A.
57,1
5 IF7 FutureHome: Housing for Europe in the next century: affordable, high quality homes for all
C. Balaguer 1998-2001 Comisión Europea programa BRITE
302,9
6 IECAT: Innovative educational concepts for autonomous and teleoperated systems
M.A. Salichs 1999-2003 Comisión Europea
41,6
7 Acuerdo marco de colaboración con DRACE
C. Balaguer 1999-2002 DRACE,
S.A.
72,1
8 Acuerdo formación de personal de la factoría de Peugeot de Villaverde (Madrid)
C. Balaguer 2000-2005 Grupo PSA 67,5
9 Ayuda complementaria al proyecto FUTUREHOME
C. Balaguer 2000-2001 MCYT programa DPI
10,0
10 MATS: Flexible mechatronic assistive technology system to support persons with special needs in all their living and working environments
C. Balaguer 2001-2004 Comisión Europea programa IST
280,7
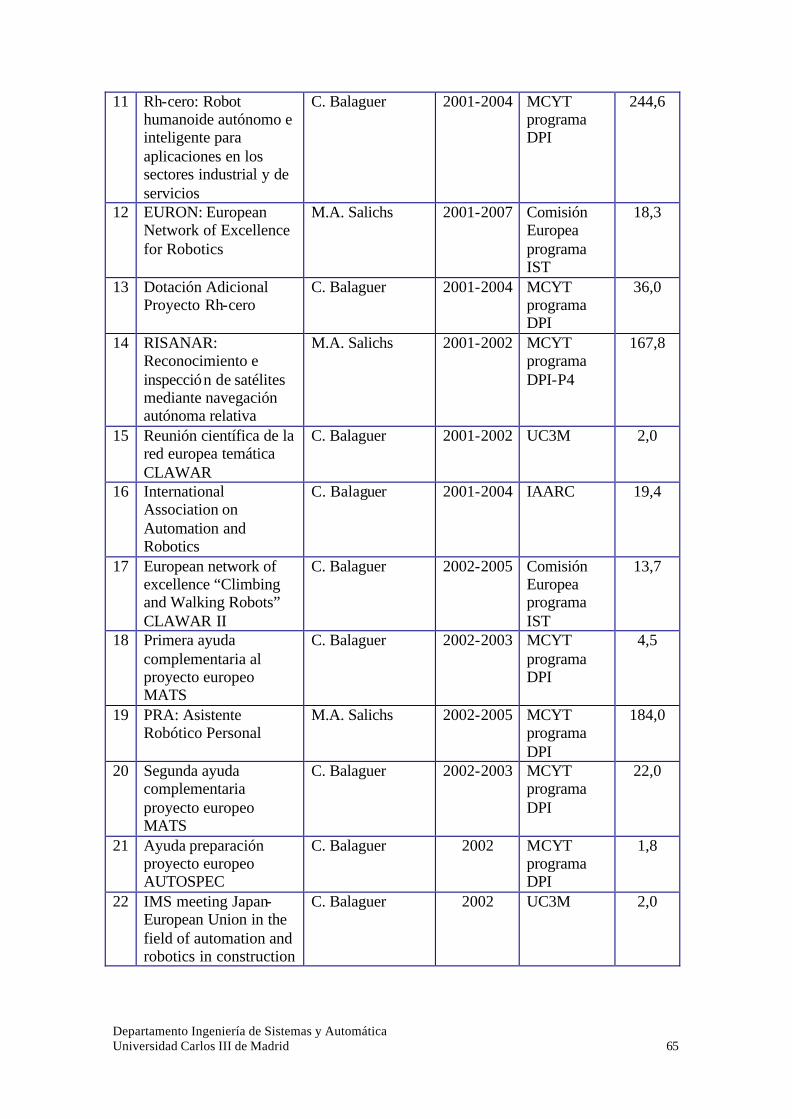
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 65
11 Rh-cero: Robot humanoide autónomo e inteligente para aplicaciones en los sectores industrial y de servicios
C. Balaguer 2001-2004 MCYT programa DPI
244,6
12 EURON: European Network of Excellence for Robotics
M.A. Salichs 2001-2007 Comisión Europea programa IST
18,3
13 Dotación Adicional Proyecto Rh-cero
C. Balaguer 2001-2004 MCYT programa DPI
36,0
14 RISANAR: Reconocimiento e inspección de satélites mediante navegación autónoma relativa
M.A. Salichs 2001-2002 MCYT programa DPI-P4
167,8
15 Reunión científica de la red europea temática CLAWAR
C. Balaguer 2001-2002 UC3M 2,0
16 International Association on Automation and Robotics
C. Balaguer 2001-2004 IAARC 19,4
17 European network of excellence “Climbing and Walking Robots” CLAWAR II
C. Balaguer 2002-2005 Comisión Europea programa IST
13,7
18 Primera ayuda complementaria al proyecto europeo MATS
C. Balaguer 2002-2003 MCYT programa DPI
4,5
19 PRA: Asistente Robótico Personal
M.A. Salichs 2002-2005 MCYT programa DPI
184,0
20 Segunda ayuda complementaria proyecto europeo MATS
C. Balaguer 2002-2003 MCYT programa DPI
22,0
21 Ayuda preparación proyecto europeo AUTOSPEC
C. Balaguer 2002 MCYT programa DPI
1,8
22 IMS meeting Japan-European Union in the field of automation and robotics in construction
C. Balaguer 2002 UC3M 2,0
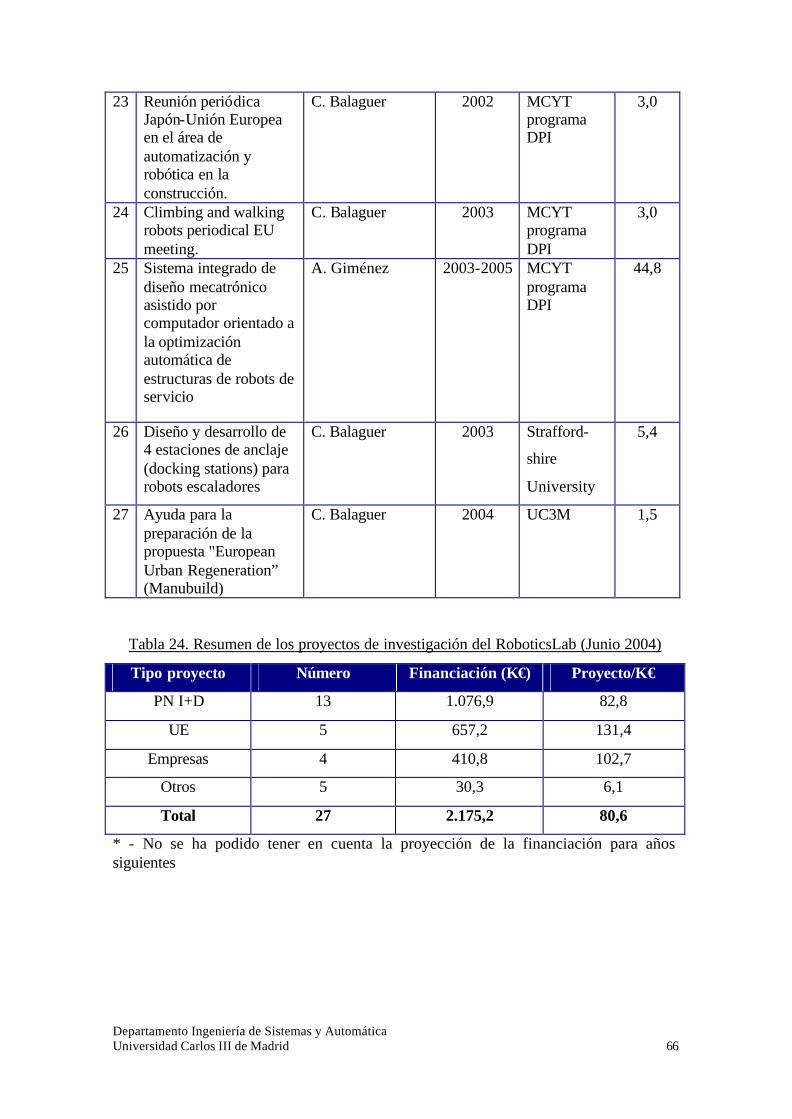
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 66
23 Reunión periódica Japón-Unión Europea en el área de automatización y robótica en la construcción.
C. Balaguer 2002 MCYT programa DPI
3,0
24 Climbing and walking robots periodical EU meeting.
C. Balaguer 2003 MCYT programa DPI
3,0
25 Sistema integrado de diseño mecatrónico asistido por computador orientado a la optimización automática de estructuras de robots de servicio
A. Giménez 2003-2005 MCYT programa DPI
44,8
26 Diseño y desarrollo de 4 estaciones de anclaje (docking stations) para robots escaladores
C. Balaguer 2003 Strafford-
shire
University
5,4
27 Ayuda para la preparación de la propuesta "European Urban Regeneration” (Manubuild)
C. Balaguer 2004 UC3M 1,5
Tabla 24. Resumen de los proyectos de investigación del RoboticsLab (Junio 2004)
Tipo proyecto Número Financiación (K€) Proyecto/K€
PN I+D 13 1.076,9 82,8
UE 5 657,2 131,4
Empresas 4 410,8 102,7
Otros 5 30,3 6,1
Total 27 2.175,2 80,6
* - No se ha podido tener en cuenta la proyección de la financiación para años siguientes

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 67
49,50%
30,20%
18,80%1,50%
PN I+DUEEmpresasOtros
Figura 11. Fuentes de la financiación captada en investigación por el RoboticsLab
Las publicaciones, los nombramientos y los premios de los miembros del
Roboticslab están representadas a continuación. En los últimos 5 años (1999-2004) el
promedio de artículos en revistas internacionales ha sido de 3,4 artículos/año y el
promedio según el número de profesores permanentes ha sido de 1,1
artículos/año.profesor. La Tabla 25 resume la temática de los artículos en revistas
internacionales. La Tabla 26 muestra el número de ponencias en congresos
internacionales según los años.
Artículos en revistas.
1. Schilling, K.; Irwin, D.; Halme, A.; Fullmer, F.; Salichs, M.A.; Schmidt, D., Roth
H., “The Virtual Laboratories on Control Engineering Realized in the IECAT
project”, International Journal of Engineering Education, vol. 36, 2004.
2. Khamis, A.M., Rodríguez, F.J., Salichs, M.A., “Remote Interaction with Mobile
Robots”, Autonomous Robots”, nº 3, vol. 15, 2003.
3. Khamis, A.M., Rodríguez, F.J., Salichs, M.A., “Software Architecture for Internet
Mobile Robotics”, Robotics and Machine Perception, nº 1, vol. 12, 2003.
4. E. Gambao, C. Balaguer, “Robotics and Automation in Construction”, IEEE
Robotics and Automation Magazine, vol. 9, nº 1, 2002.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 68
5. C. Balaguer, M. Abderrahim, J. M. Navarro, S. Boudjaber, P. Aromma,
“FutureHome: An Integrated Construction Automation Approach”, IEEE Robotics
and Automation Magazine, vol. 9, nº 1, 2002.
6. C. Balaguer, “Towards European humanoid robotics program”, Clawar News,
Climbing and Walking Robots, vol. 9, 2002.
7. Armingol, J.M., de -la-Escalera, A., Moreno, L.E., Salichs, M.A., “Mobile Robot
Localisation using a Non-linear Evolutionary Filter”, Advanced Robotics, vol. 16,
2002.
8. C. Balaguer, A. Giménez, M. Abderrahim, “Climbing robots for inspection of
steel based infrastructures”, Industrial Robot: An International Journal, vol. 29, nº,
3, 2002.
9. Boada, M.J.L.; Barber, R. y Salichs, M.A., “Visual Approach Skill for a Mobile
Robot Using Learning and Fusion of Simple Skills”, Robotics and Autonomous
Systems. vol. 38, nº 3-4, 2002.
10. Moreno, L., Armingol J.M., Garrido, S., de -la-Escalera, A., Salichs, M. A., “A
genetic algorithm for mobile robot localization using ultrasonic sensor”, Journal of
Intelligent and Robotics Systems , vol . 34, 2002.
11. J.M. Pastor, C. Balaguer, F.J. Rodríguez, R. Diez, “Computer Aided
Architectural Design Oriented to Robotized Facade Panels Architecture”,
Computer-Aided Civil and Infrastructure Engineering, vol.16, 2001.
12. C. Balaguer, A. Giménez, J.M. Pastor, V.M. Padrón, M. Abderrahim, ”Climbing
Autonomous Robot for Inspection Applications in 3D Complex Environments”,
Robotica, vol. 18, 2000.
13. E. Gambao, C. Balague, F. Gebhard, “Robot assembly system for computer-
integrated construction”, Automation in Construction an Internationa l Research
Journal, vol. 9, nº. 5-6, 2000.
14. Salichs, M.A, Moreno, L, “Navigation of Mobile Robots: Open Questions”,
Robotica, vol. 18, nº 3, 2000.
15. L. Moreno, C. Balaguer, “Automation and Robotics in Construction,
ISARC’1999”, Automation in Construction, nº 5-6, vol.9, 2000.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 69
16. Salichs, M. A., Armingol, J.M., Moreno, L., de -la-Escalera, A., “Localization
system for mobile robots in indoor environments”, Integrated Computer-Aided
Engineering, vol. 6, 1999.
17. C. Balaguer, A. Giménez, V. M. Padrón, “ROMA: Multifunctional Autonomous
Climbing Robot for Inspection Applications”, Clawar News, Climbing and Walking
Robots, vol. 2, 1999.
Tabla 25. Resumen de artículos en revistas internacionales del RoboticsLab
Temática Número artículos
Robots móviles 8 Robots construcción 5 Robots escaladores 3 Robots humanoides 1 Total 17
Números especiales de revistas internacionales como Editores invitados
1. E. Gambao, C. Balaguer, special issue on “Robotics and Automation in
construction”, IEEE Robotics and Automation magazine, vol. 9, nº 1, 2003.
2. C. Balaguer, special issue on “Automation and Robotics in Construction”,
Computer-Aided Civil Engineering and Infrastructures, vol. 16, nº 3, 2000.
3. M.A. Salichs, C. Balaguer, special issue on “Autonomous Intelligent vehicles
1998”, Robotica, vol. 18, nº 3, 2000.
4. C. Balaguer, L. Moreno, special issue on “Automation and Robotics in
Construction 1999”, International Journal on Automation in Construction, vol. 9, nº
5-6, 2000.
5. M.A. Salichs, special issue on “Autonomous Intelligent Vehicles”, Integrated
Computer-Aided Engineering”, vol. 6, nº 4, 1999.
6. M.A. Salichs, special issue on “Autonomous Intelligent Vehicles”, Control
Engineering in Practice, vol. 7, nº 6, 1999.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 70
Congresos internacionales
Respecto a los congresos internacionales, el número de ponencias publicadas por
el grupo es de 66, distribuidas en los años de la siguiente forma: 1999 – 10 ponencias,
2000 – 7, 2001 – 17, 2002 – 13, 2003 – 19. La ratio de artículos por año y por profesor
son 13,2 ponencias/año y 4,4 ponencias/año.profesor.
Tabla 26. Resumen de las ponencias en congresos internacionales del RoboticsLab
1999 2000 2001 2002 2003 Total
Congresos internacionales 10 7 17 13 19 66
Entre los congresos más importantes que a publicado el grupo están el
ICAR’2003, Coimbra (Portugal); IROS’2003, Las Vegas (USA); ICRA’2003, Taipei
(Taiwán); ISARC’2003, Eindhoven (Holanda); FSR’2003, Yamanaka Lake (Japón);
CLAWAR’2003, Catania (Italia); IARP workshop 2003, Madrid (España); ICAR’03,
Coimbra (Portugal); IFAC’2002 World Congreso, Barcelona (España); ICRA’2002,
Washington (USA); ISARC’2002, Washington (USA); CLAWAR’2002 Paris
(Francia); IARP workshop 2001, Madrid (España); IAV’2001, Sapporo (Japón);
ICRA’2001, Seúl (Corea); FSR’2001, Espoo (Finlandia); CLAWAR’2001, Karlsruhe
(Alemania); ISARC’2001, Cracovia (Polonia); ISAR’2000, Taipei (Taiwán);
CLAWAR’2000, Madrid (España); ICAR’1999, Tokio (Japón); ICRA’1999, Detroit
(USA); ISARC’1999, Madrid (España).
Sesiones plenarias invitadas
1. C. Balaguer, “EU FutureHome project results”, Plenary session in the 20th
International symposium on Automation and Robotics in Construction
(ISARC’2003), Eindhoven (Holanda), 2003.
2. C. Balaguer, “Robotics and automation in construction industry: From hard to soft
automation.”, Plenary session in the 3rd IARP Workshop on Service, assistive and
Personal Robots, 2003.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 71
3. C. Balaguer, “Humans-humanoid robots interaction”, Plenary session in the
CLAWAR Workshop on Education, Training, Working Conditions and Safety,
Madrid (España), 2002.
4. C. Balaguer, “EU humanoid robots. What is the next step?”, Plenary session in the
5th International symposium on Climbing and Walking Robots (CLAWAR’2002),
Paris (Francia ), 2002.
5. M.A. Salichs, “Navigation of Mobile Robots: Learning from Human Beings”,
Plenary sssion in the IFAC Workshop on Mobile Robot Tecnology, Jejudo Island
(Corea), 2001.
6. C. Balaguer, “The design and development the an automatic construction crane”,
Plenary session in the 18th International symposium on Automation and Robotics in
Construction (ISARC’2001), Cracovia (Polonia), 2001.
7. C. Balaguer, “Open issues and future possibilities in the EU construction”, Plenary
session in the 17th International symposium on Automation and Robotics in
Construction (ISARC’2000), Taipei (Taiwan), 2000.
Libros completes
1. L. Moreno, S. Garrido, C. Balaguer, “Ingeniería de control: Modelado y control
de sistemas dinámicos”, Editorial Ariel (España), 2003.
2. C. Balaguer, “Robótica y Automatización”, Informe anual COTEC (España), 2004.
Libros como Editores
1. M.A. Salichs, A, Halme, Editores de “Intelligent Autonomous Vehicles
(IAV’1998), Pergamon (Elsevier), 1999.
2. C. Balguer, Editor de “16th Internacional Sysmposium on Automation and
Robotics in Construction (ISARC’1999)”, TresColor, Madrid (España), 1999.
Editores permanentes de revistas internacionales
1. M.A. Salichs, International journal on Integrated Computer-Aided Engineering.
2. C. Balaguer, IEEE Robotics and Automation magazine.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 72
Nombramientos y posiciones
1. C. Balguer, Presidente de la International Association on Automation and Robotics
(IAARC), 2001-2004.
2. M.A. Salichs, Miembro del Comité Estratégico de la International Federation on
Automatic Control (IFAC), 2002-.
3. M.A. Salichs, Presidente del Technical Committee on Intelligent Autonomous
Vehicles de la IFAC, 1996-2002.
4. C. Balaguer, Miembro permanente del IEEE-RAS Comité técnico en Service
Robots, 2000-
5. M.A. Salichs, Revisor de proyectos Europeos del 5º Programa Marco de la UE,
2002-.
6. M.A. Salichs, Representante español en la Red Europea de Excelencia Robotic
Network (EURON), 2003-.
7. M.A. Salich, Coordinador del área Diseño y Producción Industrial (DPI) de la
Comisión Interministerial de Ciencia y Tecnología (CICYT), 2004-.
8. M.A. Salichs, Vice-Presidente del Comité Español de Automática (CEA), 2004-.
9. M.A. Salichs, Vicerrector de Infraestructuras Académicas de la Universidad Carlos
III de Madrid, 1996-2000.
10. M.A. Salichs, Vicerrector de Informática y Biblioteca de la Universidad Carlos III
de Madrid, 1995-1996.
11. C. Balaguer, Director del programa de Doctorado en Tecnologías Industriales,
1995-2003.
Premios
1. M. Abderrahim, R. Diez, C. Balaguer, Best paper award del 20th International
Symposium on Automation and Robotics in Construction (ISARC’2003), Eindhoven
(Holanda), 2003.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 73
Miembros de Comités de programa de congresos internacionales
1. C. Balaguer, miembro de los Comités de programa de ICRA’2005, Barcelona
(España); ICRA’2004, Nuevo Orleans (USA); IROS’2004, Sendai (Japón);
IAV’2004, Lisboa (Portugal); ISRAC’2004, Jeju Island (Corea); CLAWAR’2004,
Madrid (España), IROS’2003, Las Vegas (USA); ISARC’2003, Eindhoven
(Holanda); CLAWAR’2003, Catania (Italia); FSR’2003, Yamanaka lake (Japón),
etc.
2. M.A. Salichs, miembro de los Comités de programa de ICRA’2005, Barcelona
(España); IAV’2004, Lisboa (Portugal); ISARC’2003, Eindhoven (Holanda);
CLAWAR’2003, Catania (Italia); etc.
3.4.2 Laboratorio de Sistemas Inteligentes
El laboratorio de Sistemas Inteligentes fue creado en el año 2000. El grupo está
constituido por profesores y estudiantes de la Escuela Politécnica Superior. Actualmente
el grupo trabaja en temas relacionados con la robótica, el control inteligente, la visión
por computador, los sistemas inteligentes de transporte, etc. Sus principales líneas de
investigación se centran en:
• Sistemas inteligentes de transporte. El objetivo de un sistema inteligente de
transporte es la asistencia al conductor en varias tareas para concentrar su atención
en la conducción. Ejemplos de estos sistemas de ayuda al conductor es la detección
de las líneas de separación de las carreteras, el reconocimiento de obstáculos tales
como otros vehículos y peatones, ó el reconocimiento de las señales de tráfico.
Aunque estos sistemas serán parte de los futuros vehículos automáticos, en la
actualidad pondrán controlar automáticamente la velocidad de rodaje mediante
indicaciones específicas al conductor, etc. La investigación del grupo se centra en la
detección de los bordes de las carreteras.
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 74
• Visión por computador. La visión por computador, el análisis automático de
imágenes mediante ordenadores, está recibiendo un interés creciente, tanto desde el
punto de vista académico como industrial, dado el rango, cada vez mayor, de
problemas que es capaz de solucionar. Estos sistemas de percepción se están
implantando en la industria con dos fines: lograr una mayor interacción entre las
máquinas y el entorno que las rodea, y conseguir un control de calidad total de los
productos fabricados. La investigación del grupo se centra en:
o Modelado Tridimensional. La obtención de información tridimensional se
realiza con el uso conjunto de dos sensores: un láser y una cámara de vídeo.
Su utilidad va desde la detección de obstáculos situados frente a un vehículo,
como al control de calidad en el dimensionado de los objetos.
o Robótica. Los trabajos realizados se han centrado en la identificación de
marcas artificiales y naturales, que ayudan en las tareas de navegación y
localización del robot.
o Análisis de texturas. Así ya no es necesario que la intensidad tenga que ser
uniforme, por lo que, en productos como madera, telas, baldosas, pueden
detectarse defectos o ser clasificados por categorías dependiendo de la
variación espacial de sus propiedades.
o Sistemas de seguridad. El sistema de visión transmite las imágenes
solamente cuando alguna persona entra en una zona no autorizada. Con ello
se descarga al operador humano de una tarea tediosa, al mismo tiempo que
puede supervisar varias cámaras al mismo tiempo.
o Control de calidad. Se ha desarrollado un sistema de control de calidad para
superficies metálicas, aplicado al sector del automóvil, con la finalidad de
detectar imperfecciones en las carrocerías antes de ser pintadas.
• Fabricación integrada por computador. En el área de los sistemas integrados de
fabricación las investigaciones se centran en: modelado y simulación, supervisión y
control, sistemas de fabricación flexible. En el área de robótica los temas son: robots
de servicios, diseño de robots, y aplicaciones industriales no-convencionales. En el
área de automatización y robótica en la construcción los trabajos realizados se han

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 75
desarrollado en el sector de prefabricados de GRC (cemento con fibra de vidrio) y
hormigón arquitectónico.
• Modelado y simulación de sistemas. La investigación se centra en: lenguajes y
herramientas de modelado de sistemas complejos, simulación de sistemas de
eventos discretos, modelado orientado a objetos de sistemas dinámicos, y
formalismos de especificación de sistemas híbridos.
• Micro-robots.. Este nombre comienza a acuñarse en la década de los noventa y
define a ingenios automáticos de pequeño tamaño, diseñados para realizar una tarea
repetitiva y que en el mismo entorno de trabajo son capaces de colaborar entre ellos
para llevar a cabo una tarea global. La estructura habitual de un micro-robot está
formada por varios niveles: plataforma (nivel físico), sistema de percepción del
entorno, sistema de control, y nivel de inteligencia y cooperación. En el Laboratorio
de Sistemas Inteligentes se han desarrollado micro-robots que han participado en el
concurso Hispabot en su edición del año 2004.
Los proyectos de investigación más representativos en los que el grupo de Sistema
Inteligentes participa son los siguientes:
1. Sistema de Seguridad Activa en Vehículos basado en Visión Artificial (SAVVA). Al
vehículo propuesto en este proyecto, se le dotará de capacidades sensoriales para
percibir otros vehículos, obstáculos, y la carretera. Los módulos así obtenidos serán:
anti-colisión y asistente ante adelantamientos. Estos sistemas se implementarán
sobre un vehículo real en un sistema integrado ya que los sistemas actuales pecan de
una falta de experimentación en condiciones reales o de una ausencia de integración
de las diversas informaciones complementarias que se pueden obtener. Para la
realización de los objetivos formulados se propone equipar un vehículo comercial
con tres sistemas: un sistema de visión estéreo para la percepción; un sistema de
procesamiento compuesto por varios ordenadores trabajando en red; un sistema de
interfase con el conductor que le avisará sobre la información recogida sobre la
carretera y la conveniencia o no de las maniobras que esté realizando.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 76
2. Estudio de viabilidad de aplicación de técnicas de visión por computador para la
detección de sobreanchos e Imperfecciones en la vía. El presente trabajo de
investigación pretende considerar la introducción de técnicas basadas en análisis de
imágenes por computador para medir el ancho de vía y detectar posibles
sobreanchos inadmisibles. El objetivo es estudiar la posibilidad de diseñar un
sistema portátil, que pueda ser embarcado en cualquier tren, con la finalidad de
realizar el proceso de medición aprovechando su viaje comercial planificado.
Además se plantea la posibilidad de analizar posibles imperfecciones en la banda de
rodadura de la vía de forma simultánea.
3. Controlador de Arquitectura Reconfigurable para Aplicaciones de Teleoperación
(CARATE). Un controlador reconfigurable permitiría simplificar el proceso de
adición de nuevas tareas a un sistema ya existente permitiendo su reutilización de
forma sencilla. El primer paso a seguir sería la definición de los requisitos de la
tarea a realizar de una manera formal. A partir de los requisitos se procedería a la
definición de una arquitectura específica apropiada para dicha tarea. Una vez
definida la arquitectura, se procede a la implementación informática utilizando
tecnología de componentes. Posteriormente se utilizarán diversas métricas para
comprobar la idoneidad de la arquitectura propuesta para la realización de la nueva
tarea que se pretende incorporar al sistema.
La Tabla 27 muestra la composición del Laboratorio de Sistemas Inteligentes a
Junio de 2004 y la Tabla 28 el resumen de su plantilla. La Tabla 29 presenta el listado
de los proyectos de investigación del Laboratorio de Sistemas Inteligentes de los
últimos 5 años. La Tabla 30 resume los proyectos de investigación del grupo. La
financiación media por año (desde 2002 hasta 2004) ha sido de 55,8 K€. La
financiación media por año y miembro del grupo de investigación ha sido de 5,6 K€,
mientras por miembro permanente (funcionario) ha sido de 13,9 K€. El reparto de la
financiación por fuentes es la siguiente: PN I+D: 22,8 %, UE: 0%, Empresas: 68,4%, y
Otros: 8,8%. La Figura 12 muestra la distribución de las fuentes de financiación de la
investigación del Laboratorio de Sistemas Inteligentes.
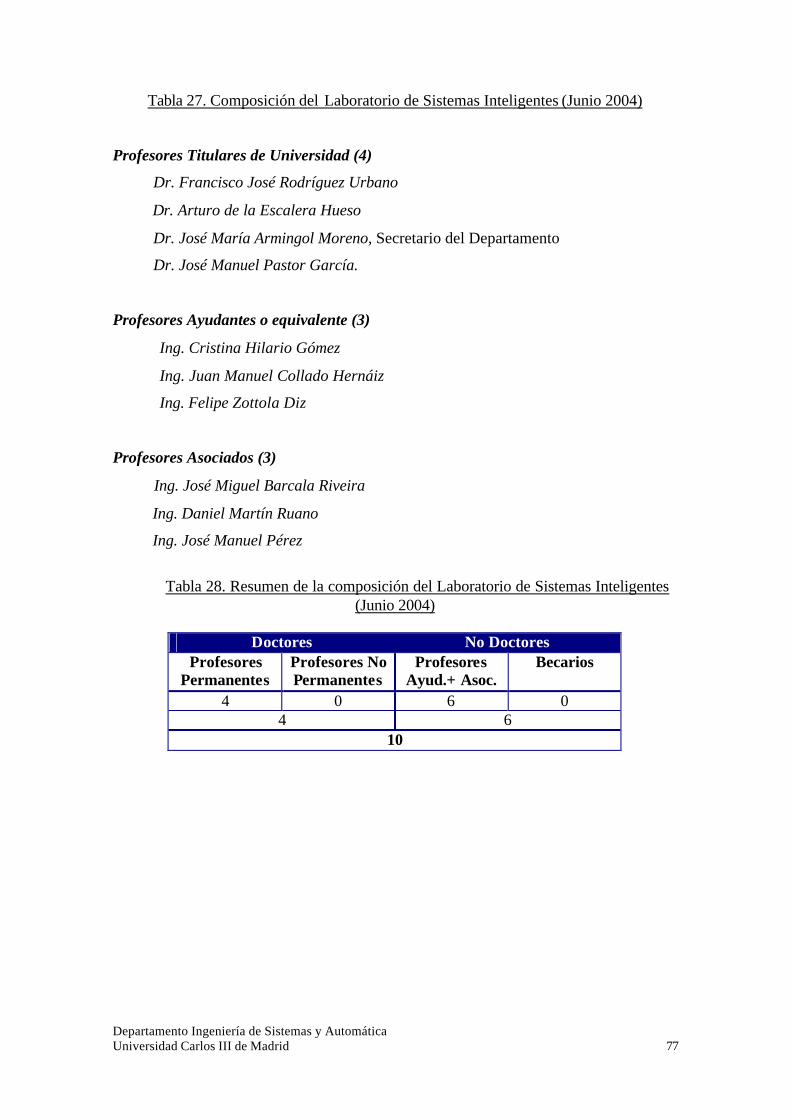
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 77
Tabla 27. Composición del Laboratorio de Sistemas Inteligentes (Junio 2004)
Profesores Titulares de Universidad (4)
Dr. Francisco José Rodríguez Urbano
Dr. Arturo de la Escalera Hueso
Dr. José María Armingol Moreno, Secretario del Departamento
Dr. José Manuel Pastor García.
Profesores Ayudantes o equivalente (3)
Ing. Cristina Hilario Gómez
Ing. Juan Manuel Collado Hernáiz
Ing. Felipe Zottola Diz
Profesores Asociados (3)
Ing. José Miguel Barcala Riveira
Ing. Daniel Martín Ruano
Ing. José Manuel Pérez
Tabla 28. Resumen de la composición del Laboratorio de Sistemas Inteligentes
(Junio 2004)
Doctores No Doctores Profesores
Permanentes Profesores No Permanentes
Profesores Ayud.+ Asoc.
Becarios
4 0 6 0 4 6
10

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 78
Tabla 29. Lista de proyectos de investigación del Laboratorio de Sistema Inteligentes (Junio 2004)
nº Proyecto Responsable Duración Entidad Coste
1 Asesoramiento en proyectos basados en la visión por computador
A. de la Escalera 2002 BCB Informática y Control
1,9
2 Estudio de viabilidad de aplicación de técnicas de visión por computador para la detección de sobreanchos e imperfecciones en la vía
J. M. Armingol 2003 Fundación de los Ferrocarriles Española y Gestor de Infraestructuras Ferroviarias
18,0
3 Sistema de seguridad activa en vehículos basado en visión artificial (SAVVA)
A. de la Escalera 2003 Comunidad de Madrid
14,7
4 Controlador de arquitectura reconfigurable para aplicaciones de teleoperación (CARATE)
F. J. Rodríguez 2003 MCYT programa TIC
38,2
5 Acuerdo marco de colaboración con John Deere Ibérica S.A.
J.M. Pastor 2003-2007 John Deere Iberica S.A.
0,0
6 Automatización del montaje y reglaje de cajas de transmisión
J.M. Pastor 2003-2007 John Deere Iberica S.A.
91,7
7 Curso de Visión por Computador
A. de la Escalera 2004 Lilly España
2,9
Tabla 30. Resumen de los proyectos de investigación del Laboratorio de Sistemas
Inteligentes (Junio 2004) Tipo proyecto Número Financiación (K€) Proyecto/K€
PN I+D 1 38,2 38,2
UE 0 0 0
Empresas 5 114,5 22,9
Otros 1 14,7 1
Total 7 167,4 23,9
* - No se ha podido tener en cuenta la proyección de la financiación para años siguientes

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 79
22,8
0
68,4
8,8
PN I+D
UE
EmpresasOtros
Figura 12. Fuentes de la financiación captada en investigación por el Laboratorio de
Sistema Inteligentes
Las publicaciones de los miembros del Laboratorio de Sistemas Inteligentes
están representadas a continuación. En los últimos 5 años (1999-2004) el promedio de
artículos en revistas internacionales ha sido de 2,6 artículos/año y el promedio según el
número de profesores permanentes ha sido de 0,65 artículos/año.profesor. La Tabla 31
resume la temática de los artículos en revistas internacionales. La Tabla 32 muestra el
número de ponencias en congresos internacionales según los años.
Artículos en revistas.
1. J.M. Barcala, J.L. Fernández, J. Alberdi, J. Jiménez, J.C. Lázaro, J.J. Navarrete y
J.C. Oller, “Identification of plastics using wavelets and quaternion numbers”,
Measurement Science and Technology, vol. 15, 2004.
2. Khamis, A.M., Rodríguez, F.J., Salichs, M.A., “Remote Interaction with Mobile
Robots”, Autonomous Robots”, nº 3, vol. 15, 2003.
3. Khamis, A.M., Rodríguez, F.J., Salichs, M.A., “Software Architecture for Internet
Mobile Robotics”, Robotics and Machine Perception, nº 1, vol. 12, 2003.
4. Armingol, J.M., de -la-Escalera, A., Pastor, J.M., Rodríguez, F.J., Otamendi, J.,
“Statistical Pattern Modeling in Vision-based Quality Control Systems”, Journal of
Intelligent and Robotics Systems, vol 37, 2003.
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 80
5. de-la-Escalera, A., Armingol, J.M., Mata, M., “Traffic Sign Recognition and
Analysis for Intelligent Vehicles”, Image and Vision Computing, vol. 11, 2003.
6. A.L. Virto, I. Vila, T. Rodrigo, F. Matorras, C.F. Figueroa, E. Calvo, A. Calderón,
P. Arce, J.C. Oller, A. Molinero, M.I. Josa, J. Fuentes, A. Ferrando, M.G.
Fernández, J.M. Barcala, “Study of CMOS image sensors for laser beam position
detection”, Nuclear Instruments and Methods in Physics Research, vol. 497, 2003.
7. Armingol, J.M., de -la-Escalera, A., Moreno, L.E., Salichs, M.A., “Mobile Robot
Localisation using a Non-linear Evolutionary Filter”, Advanced Robotics, vol. 16,
2002.
8. Moreno, L., Armingol J.M., Garrido, S., de -la-Escalera, A., Salichs, M. A., “A
genetic algorithm for mobile robot localization using ultrasonic sensor”, Journal of
Intelligent and Robotics Systems , vol . 34, 2002.
9. P. Arce, E. Calvo, C.F. Figueroa, N. García, T. Rodrigo, I. Vila, A.L. Virto, J.M.
Barcala, M.G. Fernández, A. Ferrando, M.I. Josa, A. Molinero, J.C. Oller,
“Performance test of the CMS link alignment system”, Nuclear Instruments and
Methods in Physics Research, vol. 492, 2002.
10. J.M. Beigveder, I. Génova, G. Pérez, J.A. Ruiz, P. Arce, J.M. Barcala, M.G.
Fernández, A. Ferrando, J. Fuentes, M.I. Josa, A. Molinero, J.C. Oller, E. Calvo,
C.F. Figueroa, T. Rodrigo, I. Vila, A.L. Virto, A. Fenyvesi, J. Molnar, D. Sohler,
“Effect of neutron and gamma-ray irradiation on the transmittance power of glasses
and glues”, Nuclear Instruments and Methods in Physics Research, vol. 493, 2002.
11. J.M. Pastor, C. Balaguer, F.J. Rodríguez, R. Diez, “Computer Aided
Architectural Design Oriented to Robotized Facade Panels Architecture”,
Computer-Aided Civil and Infrastructure Engineering, vol. 16, 2001.
12. C. Balaguer, A. Giménez, J.M. Pastor, V.M. Padrón, M. Abderrahim, ”Climbing
Autonomous Robot for Inspection Applications in 3D Complex Environments”,
Robotica, vol. 18, 2000.
13. Salichs, M. A., Armingol, J.M., Moreno, L., de-la-Escalera, A., “Localization
system for mobile robots in indoor environments”, Integrated Computer-Aided
Engineering, vol 6, 1999.
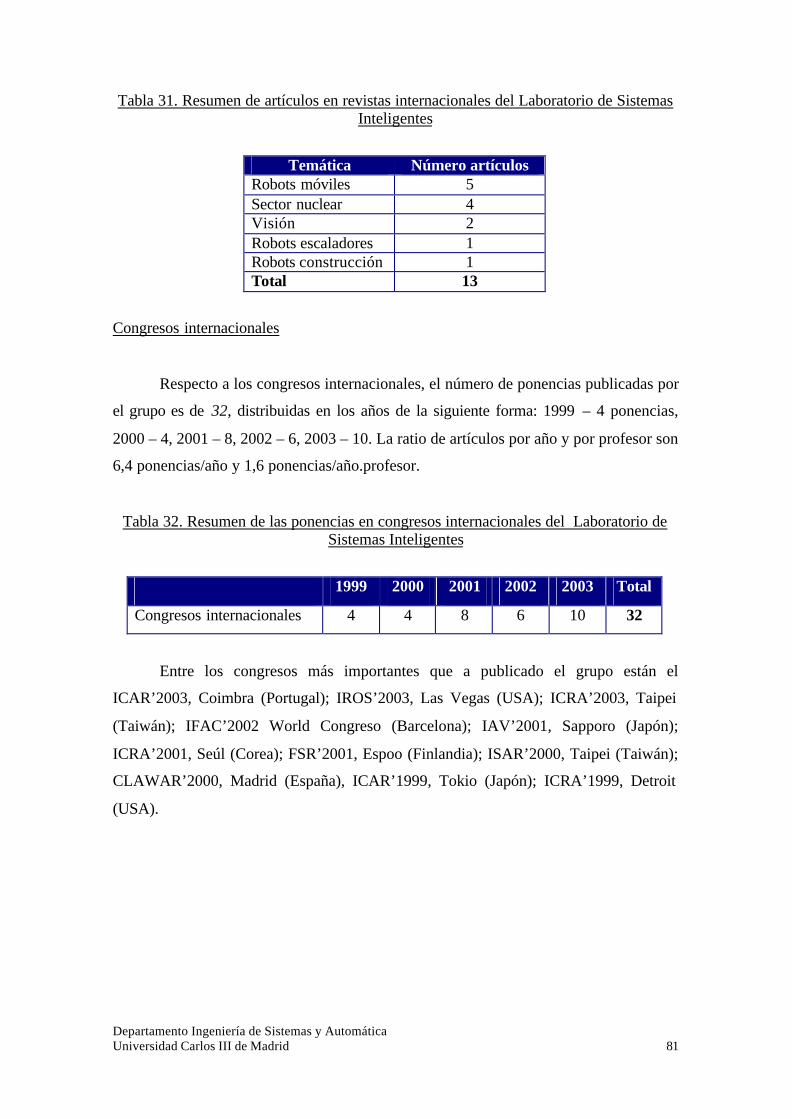
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 81
Tabla 31. Resumen de artículos en revistas internacionales del Laboratorio de Sistemas Inteligentes
Temática Número artículos Robots móviles 5 Sector nuclear 4 Visión 2 Robots escaladores 1 Robots construcción 1 Total 13
Congresos internacionales
Respecto a los congresos internacionales, el número de ponencias publicadas por
el grupo es de 32, distribuidas en los años de la siguiente forma: 1999 – 4 ponencias,
2000 – 4, 2001 – 8, 2002 – 6, 2003 – 10. La ratio de artículos por año y por profesor son
6,4 ponencias/año y 1,6 ponencias/año.profesor.
Tabla 32. Resumen de las ponencias en congresos internacionales del Laboratorio de Sistemas Inteligentes
1999 2000 2001 2002 2003 Total
Congresos internacionales 4 4 8 6 10 32
Entre los congresos más importantes que a publicado el grupo están el
ICAR’2003, Coimbra (Portugal); IROS’2003, Las Vegas (USA); ICRA’2003, Taipei
(Taiwán); IFAC’2002 World Congreso (Barcelona); IAV’2001, Sapporo (Japón);
ICRA’2001, Seúl (Corea); FSR’2001, Espoo (Finlandia); ISAR’2000, Taipei (Taiwán);
CLAWAR’2000, Madrid (España), ICAR’1999, Tokio (Japón); ICRA’1999, Detroit
(USA).
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 82
Libros completos
1. de-la-Escalera, A., “Visión por computador: Fundamentos y métodos,”, Prentice
Hall (España), 2001.
2. J.C. Oller, J. Marín, J.M. Barcala, J.L. de Pablos, A. Molinero, J.J. Navarrete,
“Instrumentación electrónica de medida”, Editorial Ciemat (España), 2000.
3.4.3 Laboratorio de Manipuladores Móviles
El interés de la comunidad científica por las aplicaciones de cooperación entre
robots y humanos se ha incrementado de forma notable en las últimas décadas. Un paso
hacia esta integración del robot en la vida cotidiana son los manipuladores móviles. En
un manipulador móvil se intentan integrar sobre una misma plataforma las dos
capacidades básicas de los robots: movilidad y manipulación. El siguiente paso es
conseguir que estos sistemas sean capaces de desarrollar tareas complejas en un entorno
diseñado típicamente para seres humanos y de forma segura para las personas con las
que comparten el espacio de trabajo.
La línea de investigación en el campo de los manipuladores móviles es
relativamente reciente en el departamento. El primer paso ha sido el desarrollo del
manipulador móvil Otilio (conjuntamente con el RoboticsLab), trabajando
principalmente en control cinemático coordinado y navegación. Actualmente se trabaja
sobre el manipulador móvil Manfred, un robot antropomórfico de servicios. Las dos
líneas principales de investigación son: 1) manipuladores móviles, y 2) músculos
artificiales.
1. Manipuladores móviles. En esta línea de investigación hay que destacar dos
proyectos de investigación: Otilio y Manfred:
• El robot Otilio. Es un manipulador móvil autónomo (MMA). Puede navegar en
entornos interiores evitando los obstáculos que su sistema sensorial pueda
detectar. Mientras se desplaza, puede utilizar su brazo para manipular objetos,

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 83
bien por sí mismo o cooperando con otros robots o con personas. La filosofía
que ha inspirado el diseño de este primer manipulador móvil, es la de ofrecer
múltiples posibilidades de desarrollo y experimentación de distintas técnicas de
control.
El sistema presenta 8 grados de libertad. La movilidad de Otilio reside en la base
móvil RWI B21. La misma base aporta el sistema básico de percepción que
consta de un anillo de sensores de infrarrojos y otro de sensores de ultrasonidos.
Sobre la base se ha montado una estructura que aloja el controlador del
manipulador CRS A465 y dos computadores Pentium conectados a una red
ethernet. Esta red de computadores de abordo está enlazada a una estación
remota a través de un bridge sin hilos Aironet ARLAN 640-2400. Para realizar
tareas complejas de manipulación, habitualmente en modo semi-autónomo, el
brazo de Otilio porta en su extremo de un sensor de fuerza-par JR3, una garra
servocontrolada y una cámara CCD. Las baterías de abordo aseguran un tiempo
de operación sin hilos de 1 hora aproximadamente.
• El robot Manfred. Está siendo desarrollado dentro de los proyectos
"Manipulador Móvil Autónomo para Desarrollo de Operaciones en Entornos
Difíciles (Manfred)" DPI 2000-0425 y "Robot de Servicio Antropomórfico,
Fiable y Seguro para operar en Entornos Humanos" DPI2003-01170 de la
CICYT. Manfred es el primer paso hacia el desarrollo de un manipulador móvil
antropomórfico de servicios avanzado. El objetivo a largo plazo es que el robot
sea capaz de operar de forma robusta y segura para las personas que le rodean,
en entornos de operación típicamente humanos. En el proyecto Manfred, se ha
desarrollado una base de tipo diferencial y un manipulador ligero de 6 grados de
libertad, LWR-UC3M-1. El sistema sensorial está constituido por telemetría
láser 3D y visión artificial.
La arquitectura software del robot se basa en el uso Diagramas de Voronoi
(locales y globales) como modelos topo-geométricos del entorno, que podrán ser
utilizados por los diferentes módulos funcionales de la arquitectura de control
(planificación local, navegación, modelado y localización). Algunas
características de Manfred. son:

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 84
a. Base móvil. Dentro del proyecto Manfred se ha diseñado y construido
una base móvil de tipo diferencial, que integra una controladora de 8
ejes PMAC, de forma que se controlan conjuntamente los grados de
libertad correspondientes a la base y al brazo manipulador. En la base
se sitúan las baterías que dotan de autonomía a todo el sistema.
b. Brazo manipulador LWR-UC3M-1. Sus características principales
son: grados de libertad: 6; fabricado en aluminio y fibra de carbono;
peso total aproximado: 18 Kg.; carga máxima: 6 Kg.; longitud total:
1205 mm (sin pinza); alcance: 955 mm (sin pinza); motores: DC
brushless; reductores: Harmonic drive.
c. Telémetro láser 3D. El telémetro láser 3D está formado por un
escaner láser bidimensional PLS de SICK y un motor de corriente
continua más una reductora que se encarga del barrido vertical. Se ha
implementado un nuevo sistema motorizado para el barrido vertical
incluyendo un conjunto integrado motor-reductor de Minimotor de
peso y dimensiones reducidos y un controlador MCDC 2805.
d. Desarrollos software. Los tres desarrollos más importanes son: 1)
Diagrama de Voronoi local, representación del entorno local que se
obtiene directamente de los datos del sensor láser; 2) Mapas topo-
geométricos y localización simultánea, que modela el entorno como
un grafo construido a partir de los diagramas de Voronoi locales.
La fusión de mapas locales da lugar a la construcción de un mapa
global topo-geométrico del entorno; y 3) Modelado de Regiones de
cruzabilidad .
2. Músculos artificiales. Los esfuerzos de investigación se centran en el desarrollo de
un nuevo tipo de actuadotes controlados eléctricamente basados en polímeros. Para
ello, se están analizando los existentes polímeros electroactivos, y sus propiedades y
limitaciones con el objetivo de su futura integración en el actuador. Dadas las

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 85
propiedades de los polímeros se espera desarrollar con un actuador extremadamente
ligero, silencioso, flexible y muy eficiente, similar al músculo humano.
Las investigaciones actuales se centran en materiales de Ionic Electroactive
Polymers Composites (IEPC). El mecanismo de activación del material se basa en
los iones de la estructura que cambian la carga eléctrica. Actualmente se esta
investigando con dos tipos de actuadores de materiales IEPC: a) actuador
Conducting Polymers, desarrollado por el CIDETEC, y b) actuador Ionic Polymer
Metal Composite desarrollado por la UC3M. Las aplicaciones de estos músculos
artíllales pueden ser:
• Aplicaciones médicas. Las aplicaciones se centran en el desarrollo de prótesis,
sistemas de masaje médico, sistemas artificiales urinarios, actuadotes
cardiovasculares, etc.
• Aplicaciones aeronáuticas. Por su ligero peso este tipo de actuadotes podrían
sustituir los pesados sistemas actuales. Además, su flexibilidad permitirá
integrarlos en las estructuras de las naves creando los denominados smart
structures.
• Aplicaciones de robótica. Los robots reducirán drásticamente su peso pudiendo
desarrollar humanoides y otras iniciativas biomiméticas con mucho mejores
prestaciones que las actuales.
• Aplicaciones en productos de consumo. Debido que el material en estudio
cuenta con un bajo precio, del orden de 1 €/Kg., puede ser empleado en el
juguete, cosmética, higiene dental, etc.
• Aplicaciones navales. La posibilidad de obtener actuadores que emulen el nado
de los peces es extremadamente beneficiosa. Los músculos artificiales pueden
trabajar en cooperación con estructuras metálicas que soportan grandes cargas.
La Tabla 33 muestra la composición del Laboratorio de Manipuladores Móviles
a Junio de 2004 y la Tabla 34 el resumen de su plantilla. La Tabla 35 presenta el listado
de los proyectos de investigación del Laboratorio Manipuladores Móviles de los últimos
5 años. La Tabla 36 resume los proyectos de investigación del grupo. La financiación
media por año (desde 1998 hasta 2004) ha sido de 17,4 K€. La financiación media por
año y miembro del grupo de investigación ha sido de 5,8 K€, mientras por miembro
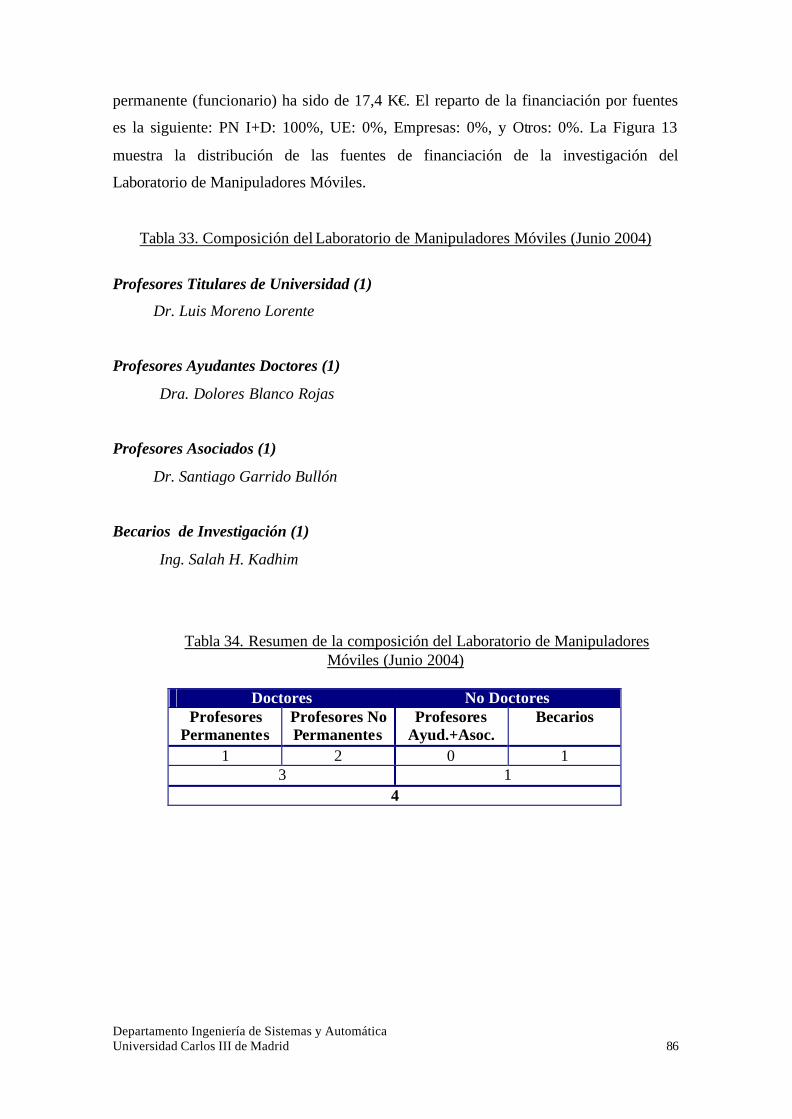
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 86
permanente (funcionario) ha sido de 17,4 K€. El reparto de la financiación por fuentes
es la siguiente: PN I+D: 100%, UE: 0%, Empresas: 0%, y Otros: 0%. La Figura 13
muestra la distribución de las fuentes de financiación de la investigación del
Laboratorio de Manipuladores Móviles.
Tabla 33. Composición del Laboratorio de Manipuladores Móviles (Junio 2004)
Profesores Titulares de Universidad (1)
Dr. Luis Moreno Lorente
Profesores Ayudantes Doctores (1)
Dra. Dolores Blanco Rojas
Profesores Asociados (1)
Dr. Santiago Garrido Bullón
Becarios de Investigación (1)
Ing. Salah H. Kadhim
Tabla 34. Resumen de la composición del Laboratorio de Manipuladores Móviles (Junio 2004)
Doctores No Doctores
Profesores Permanentes
Profesores No Permanentes
Profesores Ayud.+Asoc.
Becarios
1 2 0 1 3 1
4

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 87
Tabla 35. Lista de proyectos de investigación del Laboratorio de Manipuladores Móviles (Junio 2004)
nº Proyecto Responsable Duración Entidad Coste
1 Sistema de Percepción y Modelado del Entorno para Vehículos Autónomos en Entornos Exteriores (PYMEV)
L. Moreno 1998-2001 MCYT programa DPI
150,7
2 Manipulador móvil autónomo para desarrollo de operaciones en entornos difíciles (Manfred)
L. Moreno 2001-2003 MCYT programa DPI
167,8
3 Robot de servicio antropomórfico fiable y seguro para operar en entornos humanos
L. Moreno 2003-2004 MCYT programa DPI
47,9
Tabla 36. Resumen de los proyectos de investigación del Laboratorio de Manipuladores Móviles (Junio 2004)
Tipo proyecto Número Financiación (K€) Proyecto/K€
PN I+D 3 366,4 122,1
UE 0 0 0
Empresas 0 0 0
Otros 0 0 0
Total 3 366,4 122,1
* - No se ha podido tener en cuenta la proyección de la financiación para años siguientes

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 88
100
000
PN I+DUEEmpresasOtros
Figura 13. Fuentes de la financiación captada en investigación por el Laboratorio de
Manipuladores Móviles
Las publicaciones de los miembros del Laboratorio de Manipuladores Móviles
están representadas a continuación. En los últimos 5 años (1999-2004) el promedio de
artículos en revistas internacionales ha sido de 1,4 artículos/año y el promedio según el
número de profesores permanentes ha sido de 1,4 artículos/año.profesor. La Tabla 37
resume la temática de los artículos en revistas internacionales. La Tabla 38 muestra el
número de ponencias en congresos internacionales según los años.
Artículos en revistas.
1. Boada, B.L., Blanco, D., Moreno, L., “Symbolic Place Recognition in Voronoi-
Based Maps by Using Hidden Markov Models”, Journal of Intelligent and Robotic
Systems, vol. 39, 2004.
2. Moreno, L.E.; Dapena, E., ”Path quality measures for sensor-based motion
planning”, Robotics and Autonomous Systems, vol. 44 , 2003.
3. Armingol, J.M.; Escalera, A; Moreno, L., Salichs, M.A., “Mobile Robot
Localization Using a Non-linear Evolutionary Filter”, Advanced Robotics, vol. 16,
nº 7, 2002.
4. Moreno, L; Armingol, J.M.; Garrido, S.; Escalera, A., Salichs, M.A., “A
Genetic Algorithm for Mobile Robot Localization Using Ultrasonic Sensors”,
Journal of Intelligent and Robotic Systems, nº 34, 2002.

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 89
5. Salichs, M.A., Moreno, L, “Navigation of Mobile Robots: Open Questions”,
Robotica, vol. 18, nº 3, 2000.
6. L. Moreno, C. Balaguer, “Automation and Robotics in Construction,
ISARC’1999”, Automation in Construction, nº 5-6, vol.9, 2000.
7. Salichs, M.A.; Armingol, J.M.; Moreno, L; Escalera, A, “Localization System
for Mobile Robots in Indoor Environments”, Integrated Computer-Aided
Engineering, vol 6, nº 4, 1999.
Tabla 37. Resumen de artículos en revistas internacionales del Laboratorio de Manipuladores Móviles
Temática Número artículos
Robots móviles 6 Robots construcción 1 Total 7
Congresos internacionales
Respecto a los congresos internacionales, el número de ponencias publicadas por
el grupo es de 23, distribuidas en los años de la siguiente forma: 1999 – 2 ponencias,
2000 – 2, 2001 – 5, 2002 – 8, 2003 – 6. La ratio de artículos por año y por profesor son
4,6 ponencias/año y 4,6 ponencias/año.profesor.
Tabla 38. Resumen de las ponencias en congresos internacionales del
Laboratorio de Manipuladores Móviles
1999 2000 2001 2002 2003 Total
Congresos internacionales 2 2 5 8 6 23
Entre los congresos más importantes que a publicado el grupo están el
ICAR’2003, ICRA’2003, Taipei (Taiwán); Coimbra (Portugal); IROS’2002 Zurich
(Suiza), IFAC’2002 World Congreso (Barcelona); IROS’2000, Takamatsu (Japón),
ICRA’1999, Detroit (USA).
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 90
Libros completos
1. L. Moreno, S. Garrido, C. Balaguer, “Ingeniería de control: Modelado y control
de sistemas dinámicos”, Editorial Ariel (España), 2003.
3.5 Fortalezas, debilidades y propuestas de mejora
Aunque existe una indudable diversidad de planteamientos y modelos
organizativos de la investigación en cada grupo de investigación, es posible definir
indicadores globales que son los que se exponen en este apartado. Las principales
fortalezas del Departamento se pueden resumir en:
• Definidas líneas de investigación. El Departamento cuenta, en general, con unas
definidas líneas de investigación que se centran en torno a la Robótica, Visión y
sistemas sensoriales, y Control de sistemas. Las líneas, sin contar algunas
excepciones, están definidas a largo plazo lo que permite una buena
planificación de los recursos, del personal y del tiempo. Las líneas, en general,
no están sujetas a las modas u oportunismos, representando una investigación
sería y meditada.
• Equilibrio entre las fuentes de financiación. Los datos globales de recursos
conseguidos demuestran un buen equilibrio entre las diferentes fuentes de
financiación: Plan Nacional de I+D, Unión Europea y Empresas. Este hecho
hace que el Departamento no esté a merced de los vaivenes de la financiación
que cada vez es más difícil de conseguir. Además, permite combinar y coordinar
las diferentes partidas de financiación para conseguir un aprovechamiento
óptimo.
• Infraestructuras de investigación. El Departamento cuenta con unas excelentes
instalaciones de investigación fruto de varios años de planificación, inversión y
esfuerzo de sus miembros. Tanto las infraestructuras, el número de laboratorios,
sus dimensiones y ubicación como el equipamiento científico, los medios

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 91
computacionales y el mantenimiento son muy buenos. Esto permite a los
investigadores centrarse en sus tareas en condiciones óptimas.
• Presencia internacional. El Departamento tiene una presencia internacional de
gran importancia. Sus miembros forman parte de los comités directivos y
técnicos de las asociaciones científicas internacionales más importantes de
nuestra área, llegando, en algunos casos, a definir sus objetivos científicos. La
participación en los comités de programa de los simposia más prestigiosos así
como en las revistas más representativas, hace que los investigadores tengan un
claro conocimiento del actual estado-del-arte y de las líneas futuras.
• Excelencia investigadora. El Departamento pese a tener una dimensión pequeña
en recursos humanos genera gran cantidad de recursos financieros y
contribuciones científicas. Los recursos han sido conseguidos en convocatorias
competitivas nacionales e internacionales con un alto nivel de rechazos que en
algunos casos lleva hasta el 90%. El número de tramos de investigación
conseguidos por el Departamento, pese a su juventud, es también muy alto.
Las principales debilidades del Departamento se pueden resumir en:
• Fuga del know-how. La actividad formativa de investigadores, que se expresa en
el número de Tesis Doctorales leídas, es de gran importancia en el
Departamento. No obstante, la incertidumbre del futuro profesional generada por
la LOU y la presión salarial de las empresas y universidades privadas, hace que
muchos de los profesores Doctores deban abandonar el Departamento. Este
hecho, siendo beneficioso para la industrial nacional, es negativo para el DISA
ya que conlleva a una importante perdida del conocimiento.
• Asimetrías entre grupos. Los tres grupos de investigación del Departamento
tienen una clara asimetría. Mientras algunos grupos son pequeños y tienen falta
de personal estable otros cuentan con una plantilla equilibrada. Las expectativas
de crecimiento de algunos grupos son escasas por lo que su futuro desarrollo es
incierto. También existen algunos grupos que tienen una financiación

Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 92
monofuente que los hacen más vulnerables a los vaivenes de las convocatorias o
de los contratos con empresas.
• Gran dedicación a tareas docentes y burocráticas. La dedicación a las tares
burocráticas (formularios, peticiones, informes, cartas, etc.) de los profesores
permanentes y, más aun, de los que coordinan proyectos de investigación, es
muy grande. A pesar de contar con un buen apoyo de la OTRI, el tiempo que se
pierde en duplicar y, en algunos casos, triplicar la información y la excesiva
rigidez de algunos servicios de la Universidad, hace ineficaz muchos de los
procedimientos. Por otro lado, la estructura docente de la Universidad hace que
los profesores más jóvenes, que son los están en formación realizando sus Tesis
Doctorales, tengan un carga docente excesiva para su nivel lo que les deja muy
poco tiempo para la investigación
Las propuestas de mejora se resumen en:
• Mecanismos de medida de la calidad de los grupos. Es necesario crear, tanto a
nivel nacional como a nivel de nuestra Universidad, mecanismos objetivos de
medición de la calidad de los grupos de investigación. Este índice debe contar
con objetivos a corto y largo plazo, controlando su coherencia y su
cumplimiento. De esta forma, los grupos con excelentes resultados, por un lado,
podrán contar con más ayudas estables a largo plazo, y, por otro lado, los grupos
jóvenes, tener acceso a las ayudas para el inicio de sus planes investigadores. El
objetivo se centra en estabilizar la excelencia investigadora de los grupos
excelentes creando programas a largo plazo.
• Creación de un importante plan de I+D de la Universidad. Es pertinente
aumentar los fondos que destina la Universidad a la investigación, que a todas
luces son insuficientes. Se debe potenciar sobre todo el número de becas pre- y
post-Doctoral, las becas de estancia de profesores extranjeros en nuestra
Universidad, la ayuda a profesores que ocupan puestos relevantes en
organizaciones científicas internacionales, las ayudas para viajes y asistencia a
Departamento Ingeniería de Sistemas y Automática Universidad Carlos III de Madrid 93
congresos, etc. Por oto lado, hay que intentar que los indicadores de excelencia
se vean reflejados en el presupuesto del Departamento.
• Plan de promoción del profesorado con excelencia investigadora. Este plan debe
establecer las bases y requisitos para la estabilización de los profesores con
excelencia investigadora. El plan debe ser dirigido sobre todo a profesores
jóvenes que permitiría su estabilización. Pero el plan también debe aplicarse a
profesores numerarios que, en algunos casos, han perdido la ilusión por la
excesiva carga burocrática.
• Planificación del espacio fututo. Aunque en la actualidad los espacios para la
investigación de los que dispone el Departamento son suficientes, la inminente
incorporación de nuevos Doctores y la posible consecución de importantes
proyectos de investigación que requerirán voluminosos equipamientos, hace
necesario crear un plan de ampliación de los laboratorios del Departamento. Así
mismo, el número de despachos para miembros investigadores del
Departamento es insuficiente por lo que se debe resolver esta saturación
mediante nuevos espacios.
• Reducción de la actividad de gestión. Basándose en la alta calidad investigadora
del Departamento y de sus grupos se hace imprescindible la incorporación de
más personal de administración y servicios. El apoyo debe centrarse en el apoyo
de los investigadores a los temas de compras, viajes, contabilidad, informes, etc.
De esta forma, los esfuerzos y el tiempo dedicado a la gestión será transferido a
la investigación.






![Bienestar%20y%20madurez%20 fetal[1]](https://static.fdocuments.ec/doc/165x107/55a1a1381a28ab465c8b4820/bienestar20y20madurez20-fetal1.jpg)






![Virus%2c%20 gusanos%20y%20troyanos[2]](https://static.fdocuments.ec/doc/165x107/55a48cb21a28ab7e6b8b4809/virus2c20-gusanos20y20troyanos2.jpg)


![Codigo 20Genetico 20y 20Traduccià n 20de 20Proteinas[1]](https://static.fdocuments.ec/doc/165x107/563dba3e550346aa9aa3eae0/codigo-20genetico-20y-20traduccia-n-20de-20proteinas1.jpg)