ARQUITECTURA ZACATENCO. - tesis.ipn.mxtesis.ipn.mx/jspui/bitstream/123456789/4937/1/409_SISTEMA...
134
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA ZACATENCO. SISTEMA DE POSICIONAMIENTO GLOBAL GPS APLICADO AL CONTROL DE MAQUINARIA PESADA. TESIS PARA OBTENER EL TITULO DE INGENIERO CIVIL PRESENTA: REYES ABONCE SAMUEL • AGRADECIMIENTOS.
Transcript of ARQUITECTURA ZACATENCO. - tesis.ipn.mxtesis.ipn.mx/jspui/bitstream/123456789/4937/1/409_SISTEMA...

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA ZACATENCO.
SISTEMA DE POSICIONAMIENTO GLOBAL GPS APLICADO AL CONTROL DE MAQUINARIA
PESADA.
T E S I S
PARA OBTENER EL TITULO DE
INGENIERO CIVIL
PRESENTA:
REYES ABONCE SAMUEL
• AGRADECIMIENTOS.

A DIOS:
Por darme la oportunidad de vivir, y por estar conmigo en todo momento.
A MIS PADRES:
Por haber depositado toda su confianza en mí, por haberme apoyado incondicionalmente en mi vida a base de sacrificios, amor, y esmero.
A MIS HERMANOS:
Por su amistad incondicional.
A MI ESPOSA:
Por su apoyo moral en todo momento, por su confianza y amor.
A MIS SUEGROS:
Por su apoyo y confianza.
AL ING. RICARDO LÓPEZ RAMÍREZ.
Por todo su apoyo sugerencias y opiniones, ya que eso sirvió para el desarrollo de este trabajo.
AL ING. RICARDO NUÑES VÁZQUEZ.
Por sus observaciones, comentarios, y su fina atención.
AL IPN Y A LA ESIA UNIDAD ZACATENCO.
Por darme la formación profesional y ética de mi persona, y a todos los profesores que con su esfuerzo y dedicación logran formar día con día técnicos profesionales con la más alta calidad.

PRÓLOGO.
El contenido de esta tesis responde a las expectativas del estudiante en la carrera de ingeniería civil y egresados de la misma, ya que fortalece y complementa los conocimientos y experiencias fundamentales de el ingeniero civil.
Esta tesis fue realizada con la intención de despertar el interés por conocer los avances tecnológicos aplicados en la topografía, logrando así una mejor infraestructura con mayor rapidez y precisión
“El éxito en la vida moderna se logra por medio de la comunicación y la cultura”.

SISTEMA DE POSICIONAMIENTO GLOBAL (GPS) APLICADO AL CONTROL DE
MAQUINARIA PESADA.

ÍNDICE
Prólogo.
UNIDAD 1 Evolución de los equipos topográficos. .......... 1
1.1 ¿Qué es la topografía? ............................................... 1 1.2 Equipos topográficos. .............................................. 2 1.2.1 Transito. ...................................................................... 2 1.2.2 Teodolito óptico. ....................................................... 3 1.2.3 Teodolito electrónico. ................................................. 4 1.2.4 Ocular acodado. ......................................................... 5 1.2.5 Distaciómetro. ............................................................ 6 1.2.6 Estación semitotal. .................................................... 9 1.2.7 Estación total. .............................................................10 1.2.8 Precisión. ...................................................................11 1.2.9 Navegadores GPS. ................................................... 12 1.2.9.1 Gps topográficos. ..................................................... 13 1.3 Histor ia de los satélites. ......................................... 15 1.3.1 Satélites de comunicaciones. .................................... 15 1.3.2 Cronología de los principales satélites de ...
Comunicaciones. ..................................................... 18 1.4 Bandas de fr ecuencia. ........................................... 20 1.4.1 La banda c. ............................................................. 20 1.4.2 La banda ku ............................................................ 20 1.4.3 La banda ka ............................................................ 21 1.4.4 Orbitas. ................................................................... 22 1.5 Componentes y aplicaciones VSAT. .................. 23 1.5.1 Para grandes compañías multinacionales. .............. 24 1.5.2 Para proveedores de Internet (ISP). ....................... 24

UNIDAD 2 ¿Qué es el sistema GPS? ................................. 25
2.1 NAVSTAR sistema GPS. ........................................ 27 2.2 Histor ia y cr onología del sistema GPS. ................. 30 2.2.1 Segmento espacial. ....................................................... 33 2.2.2 Planificación de las observaciones. .............................. 35 2.2.3 Segmento de control. ................................................... 36 2.2.4 Segmento utilitario. ..................................................... 37 2.3 Precisión del DGPS. .................................................. 38 2.3.1 Número de satélites visibles. ...................................... 38 2.3.2 Dilución de la precisión posicional (PDOP). .............. 39 2.3.3 Relación señal ruido. .................................................. 39 2.3.4 Elevación ..................................................................... 39 2.3.5 Factores ambientales. ................................................. 40 2.4 GPS y agr icultura de precisión. ............................. 41 2.4.1 Receptores geodésicos. .............................................. 42 2.4.2 Obtención de la información. ..................................... 42 2.4.3 Diferencias con los métodos tradicionales. ................ 43 2.4.4 Estático relativo. ......................................................... 43 2.4.5 Cinemático relativo. ................................................... 44 2.4.6 Pseudocinemático relativo. ........................................ 45
UNIDAD 3 Funcionamiento del sistema GPS. ............... 46
3.1 Geometr ía de la obser vación. ................................. 46 3.2 Sistemas de medida. ................................................ 50 3.2.1 Medición de la distancia. ............................................ 50 3.2.2 Pseudo distancia. ......................................................... 52 3.2.3 Otra forma de medir distancia a los satélites. ............. 53 3.2.4 Medidas de fase. ......................................................... 54 3.2.5 Principios de funcionamiento de gps. ........................ 55

UNIDAD 4 ¿Cómo funciona el sistema GPS en cinco pasos lógicos. ......................................................... 61
4.1 La tr iangulación desde los satélites. .................... 62 4.1.1 Midiendo las distancias a los satélites. ...................... 62 4.2 Un código aleator io. ................................................. 65 4.2.1 Control perfecto del tiempo. ...................................... 67 4.3 Una medición adicional remedia el desfase del
timing. ....................................................................... 68 4.4 Conocer donde están los satélites en el espacio. ........ 70 4.4.1 Un satélite a gran altura se mantiene estable. ............ 70 4.4.2 El control constante agrega precisión. ....................... 71 4.4.3 Corrigiendo el mensaje. ............................................. 72 4.4.4 Corrigiendo errores. ................................................... 73
UNIDAD 5 Fuentes de error.............................................. 74
5.1 Tiempo. ..................................................................... 74 5.2 Un rudo viaje a tr avés de la atmósfera. ................. 79 5.2.1 Ionosfera. ..................................................................... 79 5.2.2 Troposfera. ................................................................. 80 5.3 Relojes de los satélites. ............................................ 80 5.3.1 Errores de orbita. ......................................................... 80 5.3.2 Multitrayectoria . ......................................................... 81 5.3.3 Geometría satelital. ..................................................... 81 5.3.4 Receptores de gps. ...................................................... 82 5.3.5 Efemérides. ................................................................ 83 5.4 Problemas en el satélite. ........................................ 85 5.4.1 Algunos ángulos son mejores que otros..................... 85 5.4.2 Errores intencionales. ................................................ 86 5.5 Técnicas y precisiones. ............................................ 87 5.5.1 Posicionamiento autónomo. ...................................... 87 5.5.2 Corrección diferencial. .............................................. 87 5.5.3 La línea final. ............................................................ 91 5.5.4 Programación. ........................................................... 92 5.5.5 Resumen de las fuentes de error del sistema gps. ..... 95

UNIDAD 6 El sistema de referencia Datum WGS84 que rige el sistema Navstar de GPS................... 96
6.1 Sector usuar io. ...................................................... 99 6.2 Navstar y glonass. ................................................. 100 6.3 Posicionamiento global en tiempo real sobre una
carta topográfica. ................................................... 103
6.3.1 Ventajas del uso del GPS con el software apropiado.103
UNIDAD 7 Maquinaria de obra civil guiada por control remoto con técnicas de GPS cinemático en Tiempo real. ............................................... 108
7.1 Fuer te cooperación entre especialistas. ............. 109 7.2 Problemas prácticos. ........................................... 112 7.2.1 Simulación. ............................................................. 113 7.3 Pruebas reales. .................................................... 115 7.3.1 Perspectivas de negocio. ........................................ 116 7.4 Aplicaciones del sistema GPS. ........................... 116
Conclusiones. .................................................................... 120
Bibliografía. ....................................................................... 122

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA ZACATENCO.
SISTEMA DE POSICIONAMIENTO GLOBAL GPS APLICADO AL CONTROL DE MAQUINARIA
PESADA.
T E S I S
PARA OBTENER EL TITULO DE
INGENIERO CIVIL
PRESENTA:
REYES ABONCE SAMUEL


ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
1
UNIDAD 1 EVOLUCIÓN DE EQUIPOS TOPOGRÁFICOS.
1.1 ¿QUÉ ES LA TOPOGRAFÍA?
*La topografía se define del griego: (topos, lugar y graphein, describir) como la ciencia que trata de los principios y métodos empleados para determinar las posiciones relativas de los puntos de la superficie terrestre, por medio de las medidas, y usando los tres elementos del espacio, estos elementos pueden ser: dos distancias y una elevación, o una distancia una elevación y una dirección. (Ver figura n.1).
El conjunto de operaciones necesarias para determinar las posiciones de puntos en la superficie de la tierra, tanto en planta como en altura, los cálculos correspondientes y la representación en un plano (trabajo de campo + trabajo de oficina) es lo que comúnmente se llama “Levantamiento Topográfico” La topografía como ciencia que se encarga de las mediciones de la superficie de la tierra, se divide en tres ramas principales que son la geodesia, la fotogrametría y la topografía plana.
Figura n.1 * Fernando García Márquez, Curso básico de topografía, definición aplicaciones y división de la topografía, Primera edición, Editorial: Pax México, México, 2003, Pág. 1.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
2
1.2 EQUIPOS TOPOGRÁFICOS.
*Podemos clasificar al equipo en tres categorías: Para medir ángulos se encuentran la brújula, el transito y el teodolito, Para medir distancias. aquí se encuentra la cinta métrica, el odómetro, y el distanciometro; ( Ver figura n.2)
Figura n.2
Para medir pendiente se encuentran el nivel de mano, de riel, el fijo, basculante, automático.
1.2.1 TRANSITO.
Instrumento topográfico para medir ángulos verticales y horizontales, con una precisión de 1 minuto (1´ ) o 20 segundos (20"), los círculos de metal se leen con lupa, los modelos viejos tienen cuatro tornillos para nivelación, actualmente se siguen fabricando pero con solo tres tornillos niveladores.
* http://www.precisiontopografica.com/glosario.htm

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
3
Para diferencia un transito de un minuto y uno de 20 segundos, en los nonios los de 1 minuto tienen en el extremo el numero 30 y los de 20 segundos traen el numero 20; (Ver figura n.3)
Figura n.3
1.2.2 TEODOLITO ÓPTICO.
Es la evolución de el tránsito mecánico, en este caso, los círculos son de vidrio, y traen una serie de prismas para observar en un ocular adicional. La lectura del ángulo vertical y horizontal la precisión va desde 1 minuto hasta una décima de segundo. (Ver figura n.4)

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
4
Figura n.4
1.2.3 TEODOLITO ELECTRÓNICO.
Es la versión del teodolito óptico, con la incorporación de electrónica para hacer las lecturas del circulo vertical y horizontal, desplegando los ángulos en una pantalla eliminando errores de apreciación, es mas simple en su uso, y por requerir menos piezas es mas simple su fabricación y en algunos casos su calibración.
Las principales características que se deben observar para comparar estos equipos hay que tener en cuenta la precisión el numero de aumentos en la lente del objetivo y si tiene o no compensador electrónico; (Ver figura n.5).

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
5
Figura n.5
1.2.4 OCULAR ACODADO.
Este es un accesorio para teodolitos y estaciones.
*Cuando uno esta muy cerca de una estructura muy alta, requerimos apuntar el telescopio hacia arriba para poder ver la parte mas alta de la estructura, es común que ya no sea tan fácil poner el ojo en el ocular por como es el equipo; (Ver figura n.6), existe un accesorio que nos permite ver incluso al zenit, este es el ocular acodado, (Ver figura n.7) los hay muy sencillos, que puede ser simplemente un pequeño prisma, también hay otros que requieren que se retire el ocular y posteriormente poner esta extensión que junto con el prisma nos permite tener una excelente Visual.
* http://www.precisiontopografica.com/glosario.htm

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
6
El los teodolitos ópticos se requieren dos oculares, uno para ver el objeto y otro para hacer las lecturas del ángulo, en las estaciones totales y teodolitos electrónicos, solo se requiere uno.
Figura n.6 Figura n.7
1.2.5 DISTANCIOMETRO.
Dispositivo electrónico para medición de distancias, funciona emitiendo un haz luminoso ya sea infrarrojo o láser, este rebota en un prisma o directamente sobre la superficie, y dependiendo de el tiempo que tarda el haz en recorrer la distancia es como se determina esta.
En esencia un distanciometro solo puede medir la distancia inclinada, para medir la distancia horizontal y desnivel, algunos tienen un teclado para introducir el ángulo vertical y por senos y cosenos calcular las otras distancias, esto se puede realizar con una simple calculadora científica de igual manera, algunos distaciometros, poseen un puerto para recibir la información directamente de un teodolito electrónico para obtener el ángulo vertical.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
7
Hay varios tipos:
Montura en horquilla.
Estos se montan sobre la horquilla del transito o teodolito, el problema de estos es que es mas tardado trabajar, ya que se apunta primero el telescopio, y después el distanciometro.
Montura en el telescopio.
Es más fácil trabajar con estos, ya que solo es necesario apuntar el telescopio ligeramente debajo del prisma para hacer la medición, este tipo de montura es mas especializado, y no todos los distaciometros quedan en todos los teodolitos.
En general ajuste de la puntería, puede resultar un poco engorroso con estos equipos, ya que es muy fácil que se desajuste.
El alcance de estos equipos puede ser de hasta 5,000 metros
También existen distanciometros manuales, estos tienen un alcance de hasta 200 metros, son muy útiles para medir recintos y distancias cortas en general.
Por su funcionamiento existen de dos tipos:
Por ultrasonido.
Son los más económicos y su alcance no llega a los 50 metros, se debe tener cuidado con estos, ya que si la superficie no esta perpendicular al equipo, o es irregular, puede arrojar resultados incorrectos o no medir en absoluto, hay modelos mas sofisticados que tienen una mira láser, por lo que será importante no confundirlos con los siguientes.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
8
Por láser .
Son muy precisos y confiables, su alcance máximo es de 200 metros, aun cuando en exteriores y distancias de más de 50 metros se recomienda contar con mira, ya que a esas distancia o con la luz del día, resulta difícil saber donde esta apuntando el láser.
( Figura n.8). ( Figura n.9). ( Figura n.10).
La imagen de la izquierda es un distanciometro;( Ver figura n.8).
La imagen del centro es un telescopio; ( Ver figura n.9).
La imagen de la derecha es un distanciometro manual; ( Ver figura n.10)

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
9
1.2.6 ESTACIÓN SEMITOTAL.
En este aparato se integra el teodolito óptico y el distanciometro, ofreciendo la misma línea de vista para el teodolito y el distanciometro, se trabaja más rápido con este equipo, ya que se apunta al centro del prisma, a diferencia de un teodolito con distanciometro, en donde en algunos casos se apunta primero el teodolito y luego el distanciometro, o se apunta debajo del prisma, actualmente resulta más caro comprar el teodolito y el distanciometro por separado; ( Ver figura n.11).
En la estación semitotal, como en el teodolito óptico, las lecturas son analógicas, por lo que el uso de la libreta electrónica, no representa gran ventaja, se recomienda mejor una estación total.
Estos equipos siguen siendo muy útiles en control de obra, replanteo y aplicaciones que no requieren uso de cálculo de coordenadas, solo ángulos y distancias.
Figura n.11

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
10
1.2.7 ESTACIÓN TOTAL.
Es la integración del teodolito electrónico con un distanciometro; (Ver figura n.12).
Las hay con cálculo de coordenadas.
Al contar con la lectura de ángulos y distancias, al integrar algunos circuitos mas, la estación puede calcular coordenadas.
Las hay con memor ia.
Con algunos circuitos mas, podemos almacenar la información de las coordenadas en la memoria del aparato, sin necesidad de apuntarlas en una libreta con lápiz y papel, esto elimina errores de lápiz y agiliza el trabajo.
Las hay motorizadas.
Agregando dos servomotores, podemos hacer que la estación apunte directamente al prisma, sin ningún operador, esto en teoría representa la ventaja que un levantamiento lo puede hacer una sola persona.
Las hay sin pr isma.
Integran tecnología de medición láser, que permite hacer mediciones sin necesidad de un prisma, es decir pueden medir directamente sobre casi cualquier superficie, su alcance esta limitado hasta 100 metros, pero su alcance con prisma puede llegar a los 5,000 metros, es muy útil para lugares de difícil acceso o para mediciones precisas como alineación de máquinas o control de deformaciones.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
11
Las principales características que se deben observar para comparar estos equipos hay que tener en cuenta: la precisión, el número de aumentos en la lente del objetivo, si tiene o no compensador electrónico, alcance de medición de distancia con un prisma y si tiene memoria o no.
Figura n.12
1.2.8 PRECISIÓN.
Es importante a la hora de comparar diferentes equipos, diferenciar entre resolución en pantalla y precisión, pues resulta que la mayoría de las estaciones, despliegan un segundo de resolución en pantalla, pero la precisión certificada puede ser de 3 a 9 segundos, es lo que hace la diferencia entre un modelo y otro de la misma serie, por ejemplo: la Set 510 es de 5 segundos y la Set 310 es de 3 segundos.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
12
Es común que se piense que un topógrafo resuelve sus necesidades con triángulos, ya que puede dividir cualquier polígono en triángulos y a partir de ahí obtener por ejemplo el área, esto con la ayuda de senos, cosenos y el teorema de Pitágoras, para definir estos triángulos utiliza el teodolito, y es sabido que conociendo 3 datos de un triángulo sabemos todo de el, (por ejemplo 2 ángulos y una distancia, 3 distancias, etc. etc.), esta información es posteriormente procesada para obtener coordenadas y poder dibujar por ejemplo en autocad.
Actualmente existe otro grupo de instrumentos que permiten obtener coordenadas geográficas, estos son los GPS.
Sistema de posicionamiento global (Global Positioning System), hay dos tipos.
1.2.9 NAVEGADORES GPS.
*Estos son más para fines recreativos y aplicaciones que no requieren gran precisión, consta de un dispositivo que cabe en la palma de la mano, generalmente tienen la antena integrada, su precisión puede ser de ±15 mts, pero si incorpora el sistema WASS puede ser de ±3 mts, ( Ver figura n.13).
Además de proporcionar nuestra posición en el plano horizontal pueden indicar la elevación por medio de la misma señal de los satélites, algunos modelos tienen también barómetro para determinar la altura con la presión atmosférica.
* http://www.precisiontopografica.com/glosario.htm

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
13
Los modelos que no poseen brújula electrónica, pueden determinar la "dirección de movimiento" (rumbo), es decir es necesario estar en movimiento para que indique correctamente para donde esta el norte.
Figura n.13
1.2.9.1 GPS TOPOGRAFICOS
*Estos equipos tienen precisiones desde varios milímetros hasta menos de medio metro.
Existen GPS de una banda (L1) y de dos bandas (L1, L2), la diferencia es que para los GPS de una banda se garantiza la precisión milimétrica para distancias menores a 40km entre antenas, en los GPS de dos bandas es de hasta 300km, si bien se pueden realizar mediciones a distancias mayores, ya no se garantiza la precisión de las lecturas.
* http://www.precisiontopografica.com/glosario.htm

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
14
Los GPS topográficos requieren dos antenas, ya sea que el usuario tenga las dos, que solo tenga una y compre los datos a una institución como el INEGI o Omnistar (DGPS).
Se dice entonces que se esta trabajando en modo diferencial, (Ver figura n.14)
La diferencia en precio de un GPS de una banda contra uno de Dos bandas puede ser muy grande, y lo es mas cuando los GPS de dos bandas incorporan la función RTK (Real Time Kinematic)... normalmente la forma de trabajar con equipos que no incorporan la función RTK es: trasladar los equipos a campo, se hacen las lecturas, pero es solo hasta que se regresa a gabinete que se obtienen las mediciones, con un sistema RTK, los datos se obtienen directamente en campo y el alto precio de estos equipos es por que incorporan una computadora, y un sistema de radio comunicación entre las dos antenas.
Figura n.14

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
15
1.3 HISTORIA DE LOS SATELITES
1.3.1 SATELITES DE COMUNICACIONES.
*La idea primaria que sugirió el establecimiento de comunicaciones mediante un satélite puede situarse en 1945, cuando el escritor Arthur C. Clarke publicó un artículo que abordaba la posibilidad de enviar y recibir señales de un lugar a otro del planeta situando una estación en el espacio a nivel del Ecuador terrestre y a una distancia de aproximadamente 36.000 Km., de forma que esa estación apareciera como si estuviera fija respecto de la Tierra. A esta órbita se la llama órbita o cinturón de Clarke o, mas científicamente, órbita terrestre Geoestacionaria (GEO).
En la década de 1950 y al inicio de la de 1960, se hicieron intentos por establecer sistemas de comunicaciones rebotando señales en globos meteorológicos metalizados pero, desafortunadamente, las señales recibidas fueron muy débiles para tener un uso práctico.
Después, la Armada de Estados Unidos notó en el cielo una especie de globo meteorológico permanente la luna y construyó un sistema funcional de comunicaciones entre los barcos y tierra firme rebotando señales en ella.
El progreso en el campo de la comunicación satelital tuvo que esperar hasta el lanzamiento del primer satélite Telstar I en 1962, el cual se dañó al poco tiempo como consecuencia de las radiaciones del recién descubierto cinturón de van Allen.
*http://www.monografias.com/trabajos19/navegacionglobal/navegacionglobal.shtml top

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
16
Fue dos años después, en 1964, en que se lanzó un nuevo satélite, el Telstar II, a partir de donde se viene trabajando con transmisiones satelitales de telefonía, TV, fax y datos. La diferencia entre un satélite artificial y uno real es que el artificial puede ampliar las señales antes de devolverlas.
Los satélites de comunicaciones tienen algunas propiedades interesantes que los hacen atractivos para muchas aplicaciones, ya que se los puede ver como una gran repetidora de microondas en el cielo. Un satélite contiene varios transponders, cada uno de los cuales capta alguna porción del espectro, amplifica la señal de entrada y después la redifunde a otra frecuencia para evitar la interferencia con la señal original. Los haces retransmitidos pueden ser amplios y cubrir una fracción sustancial de la superficie de la Tierra, o estrechos y cubrir un área de sólo cientos de kilómetros de diámetro.
Los sistemas tradicionales de comunicaciones vía satélite se basan en la idea de A. Clarke, las señales se transmiten entre las diferentes estaciones terrestres mediante un satélite situado en una determinada órbita de la Tierra. Estas señales viajan sobre una onda portadora en el margen de microondas y permiten transportar grandes cantidades de información al mismo tiempo que pueden focalizarse en haces extremadamente estrechos, lo que las hace especialmente apropiadas para las comunicaciones.
Esta focalización se realiza, mediante una antena, en un haz muy estrecho que se dirige al satélite. Cuando el satélite recibe el haz, las señales son extremadamente débiles debido al camino recorrido, por lo que debe amplificarlas para compensar la pérdida de potencia sufrida durante la transmisión por el espacio.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
17
Tras amplificar el haz lo retransmite a la Tierra, en concreto, a las estaciones receptoras que deben recibir la señal. En este sentido, el satélite actúa como una estación repetidora en el espacio.
Cuando el satélite está diseñado únicamente para esta función de repetidor, es decir, para acoger la señal y retransmitirla otra vez a la tierra, se dice que el satélite es transparente. Los avances en la tecnología han permitido agregar a esta función básica inherente funciones de valor añadido en términos de control y comando de los circuitos de microondas del satélite, así como de procesamiento on board, entre otros.
*En el contexto de la transmisión se utilizan dos conceptos fundamentales: el enlace ascendente o uplink y el enlace descendente o downlink. El modo en que se utilizan estos enlaces es el siguiente. En la estación terrestre, la señal se superpone a la portadora a una determinada frecuencia y se envía al satélite (enlace ascendente); en el satélite, una vez que se ha amplificado la señal, se superpone a una portadora a una frecuencia diferente de la anterior y se envía a la Tierra (enlace descendente).
*http://www.monografias.com/trabajos19/navegacionglobal/navegacionglobal.shtml top

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
18
1.3.2 CRONOLOGIA DE LOS PRINCIPALES SATELITES DE COMUNICACIONES
(*FUENTE: NASA)
1945 Arthur C. Clarke Article: "ExtraTerrestrial Relays"
1955 John R. Pierce Article: "Orbital Radio Relays"
1956 First TransAtlantic Telephone Cable: TAT1
1957 Sputnik: Russia launches the first earth satellite.
1960 1st Successful DELTA Launch Vehicle
1960 AT&T applies to FCC for experimental satellite communications license
1961 Formal start of TELSTAR, RELAY, and SYNCOM Programs
1962 TELSTAR and RELAY launched
1962 Communications Satellite Act (U.S.)
1963 SYNCOM launched
1964 INTELSAT formed
1965 COMSAT's EARLY BIRD: 1st commercial communications satellite
1969 INTELSATIII series provides global coverage
1972 ANIK: 1st Domestic Communications Satellite (Canada)

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
19
1974 WESTAR: 1st U.S. Domestic Communications Satellite
1975 INTELSATIVA: 1st use of dualpolarization
1975 RCA SATCOM: 1st operational bodystabilized comm. satellite
1976 MARISAT: 1st mobile communications satellite.
1976 PALAPA: 3rd country (Indonesia) to launch domestic comm. satellite
1979 INMARSAT formed.
1988 TAT8: 1st FiberOptic TransAtlantic telephone cable.
Figura n.15 (Servicios móviles satelitales).
* http://nasa.gov/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
20
1.4 BANDAS DE FRECUENCIA.
*El espectro electromagnético es un problema con el que todos nos enfrentamos. Los nombres más comunes para ciertas bandas frecuenciales datan de antes de la Segunda Guerra Mundial.
Aunque el IEEE intente imponer una convención de nombres estándares fáciles de usar, lo cierto es que la mayoría de las personas del sector se refieren a los segmentos del espectro de radio por una clasificación de bandas basadas en letras (que en general son imprecisas). En la Segunda Guerra Mundial, los desarrolladores de radares de los Estados Unidos y Gran Bretaña nombraron partes del espectro con letras, tales como la Banda L, Banda C, Banda Ku o Banda Ka. Las letras fueron escogidas de forma aleatoria, para que el enemigo no pudiera saber sobre lo que estaban hablando. Durante los siguientes años hubo discrepancias sobre los nombres y sus inconsistencias.
1.4.1 La banda C fue la primera en destinarse al tráfico comercial por satélite; en ella se asignan dos intervalos de frecuencia, el más bajo para tráfico de enlaces descendentes (desde el satélite) y el superior para tráfico de enlaces ascendentes (hacia el satélite). Para una conexión dúplex se requiere un canal en cada sentido. Estas bandas ya están sobre pobladas porque también las usan las portadoras comunes para enlaces terrestres de microondas.
1.4.2 La banda Ku es la banda más alta disponible para las portadoras de telecomunicaciones comerciales. Esta banda no está congestionada aún y a estas frecuencias los satélites pueden estar espaciados tan cerca como 1 grado.
* http://nasa.gov/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
21
*Esta banda proporciona más potencia que la C y, en consecuencia, el plato de la antena receptora puede ser más pequeño, del orden de 1.22 metros de diámetro, aunque la cobertura es mayor. A la banda Ku, no le afectan las interferencias terrestres, pero sí las turbaciones meteorológicas, por ejemplo, la lluvia, que produce distorsiones y ruido en la transmisión. Las tormentas fuertes casi nunca abarcan áreas extensas, de modo que con usar varias estaciones terrestres ampliamente separadas en lugar de una sola se puede resolver el problema, a expensas de gastar más en antenas, cables y circuitos electrónicos para conmutar con rapidez entre estaciones.
1.4.3 La banda Ka se espera paliar la creciente saturación de las bandas C y Ku.
* http://nasa.gov/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
22
1.4.4 Orbitas
Las distintas órbitas a las que se pueden situar los satélites, y de las que depende, en cierta manera, el tipo de servicio prestado y el tamaño necesario de la antena del equipo receptor son:
LEO (Low Earth Orbit), ICO (Intermediate Circular Orbit). También denominado MEO (Medium Earth Orbit), HEO (Highly Elliptical Orbit)., GEO (Geosynchronous Earth Orbit).
( Nota: Ver figura n.16 )
Figura n.16

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
23
1.5 COMPONENTES Y APLICACIONES VSAT.
*Una vez fijado el satélite en su órbita, se envían las señales desde la estación terrena al satélite que actúa como retransmisor, de tal manera que pueda ser captada por los equipos de recepción (VSAT) situados en tierra o en aeronaves.
Los componentes de un sistema VSAT (Very Small Aperture Terminal) son la antena parabólica (reflector más iluminador) y el amplificador de bajo ruido (LNA) que constituyen la unidad exterior, y el receptor de señal o unidad interior que consta de los moduladores/ demoduladores, codificador y puerto de conexión.
La antena parabólica suele tener un diámetro comprendido entre 0,5 y 3 metros, dependiendo del nivel de señal recibido en el lugar, que está directamente ligado a la potencia de emisión del satélite, la banda de frecuencia a la que trabaje y a la órbita en la que se encuentre.
Los sistemas VSAT se han ido extendiendo conforme su precio ha disminuido, popularizándose de tal manera que son ya numerosos los hogares que disponen de uno de ellos para recibir señales de televisión, con los que se pueden captar más de 100 emisiones distintas, abiertas o codificadas, correspondientes a varios países, del mismo o distinto continente.
Los sistemas VSAT son un complemento de los sistemas terrenos, vía cable o radio, permitiendo una cobertura amplia y un despliegue inmediato, con lo que se presentan como muy adecuados para zonas con una pobre infraestructura y con un costo del servicio independiente de la distancia a la que se encuentren los usuarios.
* http://nasa.gov/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
24
*Un sistema de este tipo se puede emplear para múltiples aplicaciones, como puede ser el servicio telefónico, la radiodifusión de TV, transmisión de datos, servicios de emergencia y de localización GPS, meteorología, etc., aunque las más comunes suelen ser las unidireccionales (difusión puntomultipunto), ya que en este caso los terminales son más simples y económicos.
1.5.1 PARA GRANDES COMPAÑIAS MULTINACIONALES
Algunos ejemplos típicos del uso de los sistemas VSAT, además de los de difusión de televisión y telefonía, son:
• Intercambio de datos entre todas sus oficinas; • Correo electrónico instantáneo para todos sus empleados; • Nivel de seguridad mayor que la que ofrecen los sistemas terrenos;
• Videoconferencia de alta calidad para tele reuniones.
1.5.2 PARA LOS PROVEEDORES DE SERVICIO DE INTERNET (ISP).
• Acceso a alta velocidad a los grandes nodos de Internet; • Difusión con una cobertura instantánea para grandes áreas.
* http://nasa.gov/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
25
UNIDAD 2 ¿ QUÉ ES EL SISTEMA GPS ? *El sistema de posicionamiento global (GPS) es una tecnología que le permite al usuario obtener su posición las 24 hrs. del día en cualquier punto de la Tierra.
El sistema GPS o Sistema de Posicionamiento Global, nació en Estados Unidos con el objetivo de mejorar su anterior sistema militar de satélites de navegación, denominado TRANSIT disponible desde 1967 y muy usado en técnicas geodésicas en todo el mundo. De esta forma se pretendía conseguir una navegación en tiempo real, precisa y de forma continua en tierra, mar o aire, sin importar las condiciones meteorológicas y bajo un sistema unificado de cobertura global con precisiones de unos pocos metros en coordenadas.
El sistema debía cumplir los requisitos de globalidad, abarcando toda la superficie del globo; continuidad, funcionamiento continuo sin afectarle las condiciones atmosféricas; altamente dinámico, para posibilitar su uso en aviación y precisión.
* http://www.medicionesgps.com.ar/gpsexplica.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
26
Esto llevó a producir diferentes experimentos como el Timation y el sistema 621B en desiertos simulando diferentes comportamientos. El sistema TRANSIT estaba constituido por una constelación de seis satélites en órbita polar baja, a una altura de 1074 Km. Tal configuración conseguía una cobertura mundial pero no constante.
La posibilidad de posicionarse era intermitente, pudiéndose acceder a los satélites cada 1.5 h. El cálculo de la posición requería estar siguiendo al satélite durante quince minutos continuamente.
**Un sistema de posicionamiento, como el nombre lo sugiere, es un método para identificar y grabar, generalmente en forma electrónica, la ubicación de un objeto o persona. Este sistema puede ser usado para registrar el recorrido de un vehículo a través de la superficie terrestre, en el aire o en el espacio.
Estos sistemas pueden ser de gran utilidad en la agricultura moderna, de hecho, se lo puede considerar como la base de la agricultura de precisión, ya que cada dato tomado, como por ejemplo rendimiento, humedad, altimetría, materia orgánica, etc., va a estar exactamente localizado y de esta forma tenemos la posibilidad de volver a él, localizarlo, obrar en consecuencia, y poder grabar nuevamente el resultado.
** ACADEMIA POLITÉCNICA MILITAR (2001): "Lectura de Cartas Topográficas" (CD ROM). Academia Politécnica Militar. Santiago, Chile.
2.1 NAVSTAR. SISTEMA DE

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
27
POSICIONAMIENTO GLOBAL (GPS) TRANSIT tenía muchos problemas. La entonces URSS tenía un sistema igual que el TRANSIT, de nombre TSICADA. Había que dar un gran salto. La guerra fría fomentaba invertir unos cuantos billones de pesetas en un revolucionario sistema de navegación, que dejara a la URSS definitivamente atrás.
Se concibió un sistema formado por 24 satélites en órbita media, que diera cobertura global y continua. ROCKWELL (California) se llevó uno de los contratos más importantes de su época, con el encargo de 28 satélites.
El primer satélite se lanzó en 1978, y se planificó tener la constelación completa ocho años después. Unido a varios retrasos, el desastre de la lanzadera Challenger paró el proyecto durante tres años. Por fin, en diciembre de 1983 de declaró la fase operativa inicial del sistema GPS. El objetivo del sistema GPS era ofrecer a las fuerzas de los EEUU. la posibilidad de posicionarse (disponer de la posición geográfica) de forma autónoma o individual, de vehículos o de armamento, con un coste relativamente bajo, con disponibilidad global y sin restricciones temporales.
La iniciativa, financiación y explotación corrieron a cargo del Departamento de Defensa de los EEUU. (DoD), el GPS se concibió como un sistema militar bastante aceptable.
En 1984 un vuelo civil de Korea Airlines fue derribado por la Unión Soviética al invadir por error su espacio aéreo.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
28
Ello llevó a la administración Reagan a ofrecer a los usuarios civiles cierto nivel de uso de GPS, llegando finalmente a ceder el uso global y sin restricciones temporales, de esta forma se conseguía un retorno a la economía de los EEUU. inimaginables unos años atrás.
Además suponía un gran liderazgo tecnológico originando un vertiginoso mercado de infinitas aplicaciones. Desde 1984, con muy pocos satélites en órbita, aparecieron tímidamente fabricantes de receptores GPS destinados al mundo civil (Texas Instruments y Trimble Navigation).
Hoy en día el GPS supone un éxito para la administración y economía americana no interesando a nadie que se reduzca la inversión en el sistema, sino todo lo contrario.
La política de la administración de EEUU. es mantener coste 0 para el usuario el sistema GPS, potenciar sus aplicaciones civiles a la vez que se mantiene el carácter militar.
Las aplicaciones disponibles se orientan a principalmente a sistemas de navegación y aplicaciones cartográficas: topografía, cartografía, geodesia, sistema de información geográfica (GIS), mercado de recreo (deportes de montaña, náutica, expediciones de todo tipo, etc.), patrones de tiempo y sistemas de sincronización, aplicaciones diferenciales que requieran mayor precisión además de las aplicaciones militares y espaciales.
En cuanto al reparto del mercado los más importantes son la navegación marítima, la aérea y la terrestre.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
29
Pero el auténtico mercado del GPS en el mundo es la navegación terrestre. Con 435 millones de turismos y 135 millones de camiones es el más amplio mercado potencial de las aplicaciones comerciales del GPS. De hecho el crecimiento de equipamiento de GPS mundial es en torno a los 2.000 millones de dólares anuales, lo que lleva a una penetración del 4% en el año 2001.
Una vez consolidado militarmente dicho sistema, sus enormes aplicaciones no pasaron desapercibidas al sector comercial, que rápidamente y aprovechando que se obtiene un posicionamiento en tiempo real muy aceptable, inicio su uso y divulgación entre la comunidad científica.
El rango de precisión de una posición va de los 30 mts a unos pocos mm, dependiendo del equipamiento y las técnicas utilizadas.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
30
2.2 HISTORIA Y CRONOLOGÍA DEL SISTEMA GPS.
En los siguientes reglones estará descrita la historia y cronología del sistema GPS desde sus predecesores hasta su etapa de implementación total.
1920’s Orígenes de la radionavegación.
Principios de la II Guerra Mundial – LORAN, el primer sistema de navegación basado en la llegada diferenciada de señales de radio desarrollado por el laboratorio de Radiación de MIT. LORAN fue también el primer sistema de posicionamiento capaz de funcionar bajo cualquier condición climatológica pero es solamente bidimensional (latitud y longitud).
1959 TRANSIT, el primer sistema operacional basado en satélites, fue desarrollado por Johns Hopkins (Laboratorio de Física Aplicada) bajo el Dr. Richard Kirschner.
A pesar de que la intención de TRANSIT era dar soporte a la flotilla de la marina de Estados Unidos, las tecnologías empleadas para el sistema demostraron ser útiles para el sistema de posicionamiento global (GPS).
El primer satélite fue lanzado en 1959.
1960 El primer sistema de posicionamiento de tres dimensiones es sugerido por Raytheon Corporation en necesidad de la fuerza aérea.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
31
1963 La compañía aeroespacial lanzó un estudio en la utilización de un sistema espacial para el sistema de navegación para los vehículos en movimiento a gran velocidad y tres dimensiones; esto los llevó directamente al concepto de GPS. El concepto involucraba medir los tiempos de llegada de las señales de radio transmitidas por los satélites cuyas posiciones eran bien conocidas. Esto proporcionaba la distancia al satélite cuya posición era conocida que a la vez establecía la posición del usuario.
1963 La fuerza aérea da apoyo a este estudio bautizándolo Sistema 621B.
1964 Timation, un sistema satelital, Naval es desarrollado por Roger Easton en los laboratorios de investigación Naval para el desarrollo de relojes de alta estabilidad, capacidad de transferencia de tiempo y navegación en dos dimensiones.
1968 El departamento de defensa de los Estados Unidos establece un comité llamado NAVSEG (Navigation Satellite Executive Comité) para coordinar los esfuerzos de diversos grupos de navegación satelital.
1971 El sistema 621B es probado por la fuerza aérea dando resultados de una precisión de centésimas de milla.
1973 El secretario de la defensa decide que los diferentes sistemas de navegación que se estaban creando, se unificaran y crearon un solo y robusto sistema de navegación.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
32
1974 Junio. Rockwell international fue contratado como proveedor de los satélites GPS.
1974 Julio 14. El primer satélite de NAVSTAR fue lanzado
1978 El primer block de satélites fue lanzado. Un total de 11 satélites fueron lanzados entre 1978 y 1985. Un satélite fue perdido debido a una falla de lanzamiento.
1982 DoD decide reducir la constelación de satélites de 24 a 18.
1983 Después de la caída de una Unión Soviética, el gobierno de Estados Unidos informa que el sistema GPS podrá ser utilizado por las aeronaves civiles.
1988 El secretario de las Fuerzas Aéreas anuncia la expansión de la constelación de GPS de 18 a 21 satélites y tres repuestos.
1989 El primero del un block de 28 satélites es lanzado en Cabo Cañaveral, Florida
1990 Dod Activa SA – una degradación en la exactitud del Sistema de forma planeada. El sistema es probado en la guerra del Pérsico.
1991 El gobierno ofrece el sistema de GPS a la comunidad internacional sin costo durante los siguientes 10 años.
1993 El gobierno declara el sistema formalmente funcionado con sus 24 satélites en orbita. 1995 El gobierno de Estados Unidos, Bill Clinton se compromete mediante una carta a la ICAO a proveer las señales de GPS a la comunidad internacional.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
33
2.2.1 SEGMENTO ESPACIAL.
*Comprende la constelación de satélites denominada NAVSTAR (nombre que designa al conjunto y tipo de los satélites utilizados). Dicha constelación está formada por 24 Satélites, de los cuales por lo menos 4 serán visibles al mismo tiempo, a cualquier hora del día y desde cualquier punto de la superficie terrestre. Los satélites se distribuyen en 6 órbitas circulares con una inclinación de 55º respecto al plano ecuatorial terrestre y 60º con respecto a las órbitas adyacentes, a una altitud aproximada de 20200 km. y con un periodo orbital de 12 horas.
Los planos y se nombran como A, B, C, D, E y F. Cada órbita contiene al menos cuatro satélites, aunque pueden contener más. Los satélites se sitúan a una distancia de 20200 Km. respecto del geocentro, y completan una órbita en doce horas sidéreas. Estos satélites son puestos en funcionamiento por el Comando de las Fuerzas Aéreas Espaciales de U.S.A (AFSPC). Los Satélites de la constelación NAVSTAR, se identifican de diversos modos:
Por su número NAVSTAR (SVN). Por su código de ruido pseudo aleatorio (PRN). En los códigos de transmisión existen características de ruido pseudo aleatorio traducidas en bits que identifican a cada satélite de la constelación.
Por su número orbital. Un ejemplo sería el satélite 3D, que corresponde al satélite número tres del plano orbital D.
Así mismo, debemos añadir que los satélites disponen de Antenas emisoras de ondas de radio (banda L).

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
34
Con ellas transmiten la información al usuario (receptor de GPS).
Antenas emisorasreceptoras de ondas de radio (banda S). Sirven para actualizar su situación a través del sector de control.
Paneles solares para disponer de la energía necesaria para su funcionamiento.
Reflectores láser para el seguimiento desde el sector de control.
La vida de los satélites oscila entre los seis y diez años, y es de reseñar que el más antiguo aun operativo tiene una edad de ocho años y medio. El más duradero fue el SVN3 que duró trece años y medio; ( Ver figura n.17 ).
Figura n.17
*Ing. Ramiro Jesús Arispe, gerente financiero de la cadena de suministro Solectron de México. http://[email protected]/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
35
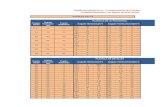
2.2.2 PLANIFICACION DE LAS OBSERVACIONES.
**El almanaque, que va incluido en el mensaje recibido por el receptor, nos da la información necesaria de las órbitas de toda la constelación de satélites, que nos permite predecir con la suficiente aproximación donde y cuando estará cada satélite. Todo ello nos permitirá optimizar las observaciones especialmente exigentes.
Disponemos de un software específico para, una vez introducido el almanaque, poder planificar nuestro trabajo en campo, este software nos proporciona entre otra, la siguiente información:
* Número de satélites observables desde nuestra posición para cada hora del día. * Valores del DOP, máximos y mínimos, en el momento del día seleccionado. * Posibilidad de poder introducir las posibles obstrucciones a la recepción de información y ver de que manera nos afectan
* Generación de diversas gráficas de posición de los satélites en el espacio. * Visualización instantánea de la operatividad de todos los satélites. * Edición y gestión de toda la información vista para sesiones de trabajo determinadas.
El receptor GPS calcula su posición, efectuando mediciones de distancia a cuatro (4) o más satélites. La distancia individual a un satélite es determinada en función del tiempo que tarda en viajar la señal desde el satélite al receptor y su velocidad de propagación.
** http://www.altop.com/al_top/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
36
2.2.3 SEGMENTO DE CONTROL.
*Está constituido por cinco estaciones de control repartidas alrededor del mundo y con coordenadas muy precisas. Todas ellas reciben continuamente las señales GPS con receptores de 2 frecuencias y provistos de osciladores de cesio, también se registran, de forma precisa, otra serie de parámetros como presión y temperatura que afectan de manera muy importante a la propagación de la información que se recibe de los satélites.
Estos relojes increíblemente precisos son un componente crítico que hacen posible el uso de satélites para navegación y mapeo. Cada satélite cuenta con cuatro relojes, 2 de cesio y 2 de rubidio, a pesar de que uno sería suficiente, de esta forma se evita el riesgo de rotura o pérdida de precisión por alguno de los relojes.
Todos estos datos se trasmiten a la estación principal situada en Colorado Spring (USA) en donde se procesa la información, obteniendo de esta manera todas las posiciones de los satélites en sus órbitas (sus EFEMÉRIDES) y los estados de los relojes que llevan cada uno de ellos para que con posterioridad los mismos satélites radiodifundan dicha información a los usuarios potenciales.
* http://www.altop.com/al_top/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
37
2.2.4 SEGMENTO UTILITARIO.
*Está formado por todos los equipos utilizados para la recepción de las señales emitidas por los satélites, así como por el software necesario para la comunicación del receptor con el ordenador y el postprocesado de la información para la obtención de los resultados. Podemos considerar el "equipo GPS" compuesto por tres unidades principales: el receptor propiamente dicho, la antena y los accesorios. La antena es el elemento al cual viene siempre referido nuestro posicionamiento, está conectada a través de un pre amplificador al receptor, directamente o mediante cable.
La misión de la antena es la de convertir la energía electromagnética que recibe en corriente eléctrica que a su vez pasa al receptor.
El receptor consta de una serie de elementos que se encargan de la recepción de las radiofrecuencias enviadas por los satélites.
Además suelen poseer diferentes canales para seguir simultáneamente a varios satélites, un procesador interno con su correspondiente soporte lógico, una unidad de memoria para el almacenamiento de la información, teclado de control, pantalla de comunicación con el usuario, diferentes conectores para funciones varias y una fuente de alimentación interna o externa.
Por último, también pueden emplearse trípodes, cables especiales, equipos de control meteorológico y diverso material auxiliar.
* http://www.altop.com/al_top/ (Agustín López Doval).

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
38
La posición del satélite es conocida para el receptor. Usando luego una geometría simple, este último determina las coordenadas del punto relevado.
2.3 PRECISIÓN DEL DGPS.
2.3.1 NÚMERO DE SATÉLITES VISIBLES.
*Como ya se explicó anteriormente cuantos mas satélites esté recibiendo un receptor más precisa será su posición ya que se disminuye el área de incertidumbre de su posición posible. El mínimo de satélites para ubicar un receptor en tres dimensiones es de 4, cada satélite que se agregue a las mediciones mejora la precisión. El máximo teórico de satélites que se pueden recibir es 12, pero generalmente los que se encuentran demasiado cerca del horizonte no se reciben. En la práctica se suele trabajar con un máximo de 8, lo que resulta en una muy buena precisión, se recomienda trabajar con por lo menos 5 o más.
*http://www.monografias.com/trabajos19/navegacionglobal/navegacionglobal.shtml top

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
39
2.3.2 DILUCIÓN DE LA PRECISIÓN POSICIONAL (PDOP)
PDOP es una medida sin unidades que indica cuando la geometría satelital provee los resultados mas precisos. Cuando los satélites están desparramados por el espacio, el valor PDOP es bajo y las posiciones computadas son más precisas. Cuando los satélites están agrupados el valor PDOP es alto y las posiciones imprecisas. Para obtener precisiones submétricas el PDOP debe ser de 4 o menos.
2.3.3 RELACIÓN SEÑAL RUIDO (S/N)
*La relación señal / ruido es una medida de la intensidad de la señal satelital. A medida que la intensidad aumenta la precisión también lo hace. A mayor señal y menor ruido la relación es mayor y la precisión aumenta. Para obtener posiciones con precisión esta relación (S/N) debe ser mayor de 6, con un ideal entre 12 y 15.
2.3.4 ELEVACIÓN.
Cuando un satélite está bajo en el horizonte, la señal que emite debe atravesar una gran distancia de atmósfera, demorando la llegada al receptor. Se pueden eliminar estos datos configurando los receptores para que eliminen las señales de los satélites que están debajo de cierto ángulo por sobre el horizonte. Los satélites que estén por debajo de este ángulo son excluidos del cómputo de la posición. Para la mayor precisión se recomienda utilizar un ángulo mínimo de 15°.
* http://www.altop.com/al_top/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
40
Al ser muy elevado este ángulo puede que se pierdan las señales de algunos satélites y no se obtenga operación continua. Por eso una solución de compromiso es configurar este ángulo en por lo menos 7,5°.
2.3.5 FACTORES AMBIENTALES.
Como ya se sabe la señal GPS es reflejada por objetos cercanos, particularmente por objetos metálicos, creando resultados falsos o erróneos. Este fenómeno es conocido como Multitrayectoria. La precisión óptima se obtiene recolectando datos lejos de superficies reflectoras, como edificios, galpones o árboles. Algunos receptores poseen distintas formas de minimizar el efecto de la multitrayectoria.
*Para lograr precisiones menores a 1 m + 1ppm de la distancia entre el receptor y la estación de referencia se deben cumplir las siguientes condiciones:
• Número de satélites usados: > 5 • PDOP: < 4 • Relación señal / ruido (S/N): > 6 • Elevación mínima: > 7,5° • Ambiente de reducida multitrayectoria .
* http://www.altop.com/al_top/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
41
2.4 GPS Y AGRICULTURA DE PRECISIÓN. Para los fines de la Agricultura de Precisión, no es necesario tener un conocimiento profundo del funcionamiento del GPS. Los conceptos básicos volcados en este capítulo ayudan a comprender las bases del sistema para poder diferenciar aquellos receptores que se adaptan a los requerimientos para el uso en la Agricultura de Precisión y además para entender los datos sobre precisión y funcionamiento que muestran los receptores en el display cuando están en uso.
A veces se presentan problemas con la correcta recepción de la señal y estos son atribuidos a una falla en el funcionamiento del sistema, sin embrago puede suceder que estas fallas se deban a problemas de conexión de los equipos o al mal estado de las fichas, enchufes o cables. Por lo tanto, cuando se presenten problemas de recepción de señal se debe inmediatamente verificar el estado de mantenimiento de toda la instalación.
Otro punto a tener en cuenta cuando se utiliza el GPS para el mapeo de rendimiento y sobre todo en banderilleros satelitales es colocar la antena en el centro de la máquina para que todas las pasadas contiguas se realicen a la misma distancia, y además ésta debe estar ubicada en la parte más alta de la máquina y lejos de toda fuente de ruido y vibración que puedan interferir con la recepción de la señal.
Frecuentemente se ubica la antena sobre el aire acondicionado y cuando este es conectado, las vibraciones del mismo provocan una sensible disminución del cociente S/N y por ende se degrada la precisión del equipo.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
42
2.4.1 RECEPTORES GEODÉSICOS.
Los receptores geodésicos permiten obtener precisiones que van del rango de los 3 cm a unos pocos mm tanto en planimetría como en altimetría. La distancia a los satélites, es calculada en función de la fase de la onda portadora que envían los satélites.
2.4.2 OBTENCION DE LA INFORMACIÓN.
**Una vez estacionados en el punto requerido y con el equipo completo en funcionamiento, el receptor puede ofrecer al operador, a través de la pantalla y con ayuda del teclado, una gran cantidad de información sobre la observación que estamos realizando, tal como: Número y nombre de los satélites localizados.
* Satélites en seguimiento. * Acimut de cada satélite en seguimiento. * Elevación de cada satélite en seguimiento. * Nuestra posición aproximada actual. (longitud, latitud Y altitud).
* Dirección y velocidad del movimiento, para navegación. * Bondad de la geometría de observación. * Bondad de la medida que puede hacerse sobre cada satélite * Edad o antigüedad de la información ofrecida.
* Progreso de la observación: satélites que se pierden y cap tan, y número de observaciones realizadas a cada uno. * Nombre y número de la sesión que damos a la estación de observación, así como la identificación del operador.
* Registros meteorológicos y datos locales introducidos. * Estado de la fuente de alimentación.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
43
2.4.3 DIFERENCIA CON LOS MÉTODOS TRADICIONALES.
*Ciertamente la medición con GPS tiene algunas ventajas sobre otras técnicas tradicionales.
No tiene requerimientos de visual entre la estación base y el receptor itinerante.
Permite realizar mediciones dinámicas ( por ejemplo, con un vehículo en movimiento).
Cada punto relevado es una medición independiente, por lo tanto no existe arrastre de errores.
El GPS puede utilizarse prácticamente bajo cualquier condición climática.
GPS es en este momento la forma más veloz, económica y precisa, que existe de medir.
2.4.4 ESTATICO RELATIVO.
Se trata del clásico posicionamiento en el que dos o más receptores se estacionan y observan durante un periodo mínimo de media hora (o más), según la redundancia y precisión necesarias, y en función de la configuración de la constelación local.
* http://www.altop.com/al_top/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
44
El único requisito importante, es el de que uno de los receptores deberá estar situado en un punto de coordenadas muy bien conocidas
Los resultados obtenidos pueden alcanzar precisiones muy altas, teóricamente hasta niveles milimétricos. Existe una variante denominada ESTATICO RAPIDO, pero es sólo utilizable con receptores de doble frecuencia L1y L2 y que puedan recibir información tanto del código C/A, como del código P. De esta forma se reducen los periodos de observación hasta 5 o 10 minutos por estación, manteniendo los mismos ordenes de precisión que para el método Estático
Los receptores utilizados para éste método son mucho mas caros que los normales de una sola frecuencia, además en tiempos de crisis se activa el sistema AS (antispoofing) por parte del Departamento de Defensa de los EEUU, que tiene por objetivo convertir el código P en otro Y, de las misma características pero secreto y no descifrable por los receptores comunes.
2.4.5 CINEMÁTICO RELATIVO.
Consiste en la determinación de tríos de coordenadas respecto al punto fijo de forma rápida, aunque menos precisa que con el método anterior. Es necesario elegir dos puntos fundamentales: el de referencia y el de cierre. Con los demás puntos se configura un itinerario o poligonal con inicio y final en el cierre. Es esencial en este método que, desde el inicio al final de la observación, ambos receptores realicen registros continuos de fase de la portadora sobre un mínimo de 4 satélites con común seguimiento y adecuadamente distribuidos.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
45
En ningún momento se puede perder la señal de los satélites, ni en los cambios de estación. El tiempo de observación por punto puede oscilar entre 1 y 2 minutos, y la precisión máxima a obtener estaría entorno a los 1020 cm.
2.4.6 PSEUDOCINEMATICO RELATIVO.
Requiere un receptor estacionado en un punto conocido y otro observando en otros puntos por al menos dos periodos de unos 5 minutos, separados por otro más largo del orden de 1 hora
*La variación de los satélites durante este periodo intermedio equivale, en parte, a haber utilizado una constelación de observación más nutrida, por lo que en 10 minutos de observación se alcanza la precisión de una observación única mucho más larga (entorno a los 10 cm.). Tiene la ventaja añadida de poner más fácil de manifiesto el efecto de fuentes de error de lenta evolución.
En la práctica, hoy en día los métodos de trabajo más utilizados son el estático y el estático relativo, principalmente por las altas precisiones y la fiabilidad obtenidas.
Todas las técnicas de medición con GPS son con posicionamiento relativo, es decir que requieren de dos receptores. Un receptor (la estación base) queda fija en un punto. El otro receptor (itinerante) es posicionado unos pocos segundos en cada uno de los puntos cuyas coordenadas se quieren determinar.
* http://www.altop.com/al_top/ (Agustín López Doval, altop, topografía).

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
46
UNIDAD 3
FUNCIONAMIENTO DEL SISTEMA GPS *El Sistema de Posicionamiento Global (GPS) es una tecnología que permite al usuario obtener su posición las 24 hrs. del día en cualquier punto de la tierra. Las coordenadas provistas por el GPS son latitud, longitud y altura sobre el elipsoide WGS84. Este elipsoide no es otra cosa que un modelo matemático de la forma de la tierra. Originalmente desarrollado por el Departamento de Defensa de los Estados Unidos, el uso del sistema GPS se ha extendido al ámbito civil.
3.1 GEOMETRIA DE LA OBSERVACIÓN.
Existen tres factores principales que condicionaran la precisión definitiva con la que observemos un punto con GPS:
A) Configuración geométrica de los satélites (DOP) B) Observable considerado (pseudodistancias o fase portadora. C) Grado de incertidumbre en la posición. (englobando todas
las fuentes de error vistas hasta este momento).
* http://www.medicionesgps.com.ar/gpsexplica.html ( Collvill Jones y Ojos ).

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
47
Vamos a ocuparnos del apartado:
O factor DOP (Dilution Of Precisión), se tratas del efecto de la con figuración geométrica de los satélites, que es el ratio entre la incertidumbre de precisión y la incertidumbre en distancia. Existen diferentes DOP´s dependiendo de posición que se esté tratando en cada momento, los mas comunes son:
* VDOP, Incertidumbre en altura (vertical). * HDOP, Incertidumbre 2D (horizontal). * PDOP, Incertidumbre 3D. * TDOP, Incertidumbre en tiempo. * HTDOP, Incertidumbre en horizontal y de tiempo. * GDOP, Incertidumbre 3D y de tiempo.
Utilizaremos el valor de GDOP como criterio más importante para poder realizar la observación con la geometría más favorable.
Tanto el satélite como el receptor generan un juego de códigos digitales que responden a un criterio binario. Ese juego de códigos digitales llevan el nombre de pseudorandom (pseudoaleatorios) y están diseñados de forma tal que puedan ser fácilmente comparados, en forma rápida y sin ambigüedades. La secuencia pseudorandom se repite en el orden de los milisegundos.
El sistema GPS está formado por una constelación de 24 satélites, que orbitan la Tierra a una altura de 20200 kilómetros, emitiendo constantemente ondas de radio. La posición de cada uno de los satélites es conocida a cada instante a través de sus efemérides.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
48
*Una característica importante de los satélites es que poseen un reloj atómico de extrema precisión. Los satélites emiten ondas en dos frecuencias : L1=1575,42 Mhz y L2=1227,60 Mhz. A su vez las ondas estan moduladas con un código binario. Esta misma onda codificada es generada internamente en los receptores.
Sobre estas dos portadoras se envía una información modulada compuesta por dos códigos y un mensaje, generados también a partir de la frecuencia fundamental correspondiente. El primer código denominado C/A (course /adquisition) o S (standard), es una moduladora con la frecuencia fundamental dividida por 10 o sea de 1,023 MHz.
El segundo código llamado P (precise) modula directamente con la frecuencia fundamental de 10,23 Mhz y por último el mensaje se envía con la bajísima frecuencia moduladora de 50 Hz.
Los códigos consisten en una secuencia de dígitos binarios o bits (ceros y unos). La modulación de las portadoras con éstos códigos general un ruido electrónico que, en principio, no sigue ninguna ley y parece aleatorio, pero en realidad sus secuencias están establecidas mediante unos desarrollos polinómicos, este fenómeno se conoce con el término ruido seudoaleatorio (Pseudo Random Noise, PRN), y tiene la característica de que puede corearse con una réplica generada por otro instrumento.
Cada uno de éstos códigos posee una configuración particular para cada uno de los satélites y constituye el denominado PRN característico, con el que se identifica a los satélites en el sistema GPS.
http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
49
Sobre la L1 se suelen modular los dos códigos vistos, el C/A y el P además del mensaje correspondiente. En la L2 sólo se modula el mensaje y el código P.
El sistema que se utiliza en GPS para modular los códigos binarios se denomina Modulación Binaria por Cambio de Fase o modulación binaria bifase.
El mensaje modulado sobre ambas portadoras tiene una duración de 12 m. y 30 s. debido principalmente a su longitud y su baja velocidad de transmisión
La información que contiene viene referida a:
Precisión y estado del satélite (salud, en terminología GPS), ya que los satélites pueden encontrarse "sanos" o "enfermos" (inoperantes).
* Antigüedad de la información y de las efemérides radiodifundidas. * Almanaque y el estado de los relojes. * Un modelo ionosférico, para el cálculo de los retardos. * Información UTC (tiempohora universal). * Dos claves: TLM, de telemetría, por si la órbita del satélite sufre alguna manipulación desde tierra. HOW, que da acceso, para los usuarios autorizados, al código P.
Para determinar su posición (latitud, longitud y altura) al receptor GPS le bastaría calcular la intersección de tres esferas cuyos centros son la posición de cada uno de los satélites observados y cuyos radios son las distancias entre receptor y satélite.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
50
La distancia individual a un satélite es determinada en función del tiempo (1) que tarda en viajar la onda desde el satélite al receptor y la velocidad (2) de propagación de dicha onda. Recordar Distancia = tiempo x velocidad.
3.2 SISTEMAS DE MEDIDA.
3.2.1 MEDICIÓN DE LA DISTANCIA.
*El principio básico de la medición de la distancia es el principio de "velocidad por tiempo". El sistema GPS funciona tomando el tiempo que tarda una señal de radio emitida por un satélite hasta llegar al receptor, y de esa forma calcular la distancia, sabiendo que las ondas de radio viajan a la velocidad de la luz (300.000.000 m/s).
Si se conoce el tiempo exacto en que salió la señal del emisor y el tiempo de llegada al receptor, se puede calcular por diferencia el tiempo de viaje de la señal y por ende la distancia. De aquí se deduce que los relojes deben ser bastante precisos en tiempos pequeños, porque la señal de un satélite que esté perpendicular al receptor sólo tarda 6/100 de segundo en llegar, ( Ver figura n.18 ).
http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
51
Figura n.18
*Para poder calcular el tiempo de viaje de la señal de radio, tanto el satélite como el receptor generan códigos sincronizados. Esto es que ambos generan el mismo código al mismo tiempo.
Entonces cuando llega una onda al receptor este determina el tiempo transcurrido desde que éste generó el mismo código. La diferencia de tiempo es lo que tardó la onda en llegar. El GPS es un sistema que permite hacer posicionamientos por medición o variación de distancias, entre las antenas emisoras de los satélites y la receptora del equipo. Existen dos posibilidades principales de funcionamiento, mediante Pseudo distancias o por medidas de fase.
*CHUVIECO,E (2000): “Fundamentos de Teledetección Espacial”. Ediciones Rialp S.A. Madrid, España.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
52
3.2.2 PSEUDODISTANCIA.
El método de Pseudo distancias es propio de la técnica GPS. Se trata de una auténtica trilateración tridimensional, que sitúa a la estación de observación, en la intersección de las esferas con centro en el satélite y radio correspondiente a la distancia entre las antenas de los satélites y el receptor, medida por este.
*La pseudodistancia se podría definir como el desplazamiento temporal necesario para correlar una réplica del código GPS, generado en el receptor, con la señal procedente del satélite y multiplicado por la velocidad de la luz. Por tanto el observable es un tiempo.
El satélite emite uno de los códigos, el receptor tiene en su memoria la estructura de dicho código y genera una réplica exacta, modulando la señal recibida con la réplica inversa del código. Si ambos códigos están precisamente sincronizados, el código desaparecerá dejando a la portadora limpia. Para sincronizar la réplica con el original recibido, el instrumento empieza a aplicar un retardo hasta que la anulación se produce. El tiempo del retardo nos permite calcular una distancia que no será precisamente la existente, ya que no conocemos el estado del reloj del receptor, de ahí que el valor hallado no sea una distancia sino una pseudo distancia.
La precisión de posicionamiento que nos ofrece este método es de aproximadamente un 1% del periodo entre sucesivas épocas de un código.
*CHUVIECO,E (2000): “Fundamentos de Teledetección Espacial”. Ediciones Rialp S.A. Madrid, España.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
53
Así para el código P cuyas épocas son de 0,1 microsegundo (por lo que la precisión de medida será de 1 nanosegundo), al multiplicar dicho factor por la velocidad de la luz, obtendremos una precisión de distancia de 30 cm. en tiempo real. Para el código C/A, cuya precisión es diez veces menor a la del código P, obtendremos unos errores de unos 3 m.
*La velocidad de propagación de la onda es la velocidad de la luz (300000km/seg.)
3.2.3 OTRA FORMA DE MEDIR DISTANCIAS A LOS SATÉLITES.
Existe una segunda forma de medir distancias entre receptor y satélite. Consiste en aprovechar una propiedad física de la onda. A diferencia de la metodología anterior, en donde lo que se medía era el corrimiento entre código recibido y código emitido, ahora lo que se mide es el corrimiento de fase entre la onda generada por el receptor y la onda recibida de cada uno de los satélites.
Se entiende que el corrimiento de fase se mide una vez sincronizados los relojes de receptor y satélite.
* CHUVIECO,E (2000): “Fundamentos de Teledetección Espacial”. Ediciones Rialp S.A. Madrid, España.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
54
3.2.4 MEDIDAS DE FASE.
*El método de medidas de fase es el que permite obtener mayor precisión. Su fundamento es el siguiente: partiendo de una frecuencia de referencia obtenida del oscilador que controla el receptor, se compara con la portadora demodulada que se ha conseguido tras la correlación, controlándose así, en fase, la emisión radioeléctrica realizada desde el satélite con frecuencia y posición conocidas. Cuando esta emisión llega a la antena, su recorrido corresponde a un número entero de longitudes de onda (denominado N o ambigüedad) mas una cierta parte de longitud de onda cuyo observable (o momento exacto de recepción por parte de la antena) puede variar entre 0 y 360º
Tenemos pues, una frecuencia y cierta parte de la longitud de onda conocidas, y la ambigüedad (Número entero de las longitudes de onda) por conocer.
La resolución de la ambigüedad se realiza en base a un extenso proceso de cálculo, que además nos resolverá el estado de los relojes y por supuesto los incrementos de coordenadas entre estaciones. Una vez obtenidos dichos valores, la resolución interna que nos proporcione el sistema será de orden sub milimétrico, aunque diversas fuentes de error limiten la precisión operativa a algún centímetro o incluso menos, siempre en función de las técnicas de observación empleadas.
*CHUVIECO,E (2000): “Fundamentos de Teledetección Espacial”. Ediciones Rialp S.A. Madrid, España.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
55
Debe destacarse que es fundamental en el sistema no perder el seguimiento de la fase para que la ambigüedad inicial no pueda variar. Si hay alguna pérdida de recepción por cualquier causa, la cuenta de ciclos se rompe (Cicle Slip), perdiendo este método toda su eficacia. Esta pérdida de ciclos puede ocurrir por muchas causas desde el paso de un avión, disturbios ionosféricos, u obstrucciones físicas importantes (edificios, etc.). Podremos comprender, entonces, la dificultad de trabajar en zonas próximas a arbolados, tendidos eléctricos, torres, edificios, etc., limitando las aplicaciones de éste método en tiempo real.
3.2.5 PRINCIPIOS DE FUNCIONAMIENTO DEL GPS
*El GPS se basa en las distancias entre el receptor y una serie de satélites para conocer su posición. El principio básico detrás del GPS es bastante simple, y lo vamos a ilustrar con un ejemplo: si se quiere ubicar un bote en el mapa de un lago, y se sabe que está ubicado a 10 minutos desde el puerto A, a 5 minutos desde el puerto B y a 15 minutos desde el puerto C, asumiendo una velocidad constante de 10 km/h. El primer paso es calcular la distancia que separa cada puerto del lugar a ubicar. Para hacer esto se multiplica la velocidad 10 km/h (166 m/minuto) por el tiempo desde el punto hasta cada puerto.
* Revista Siempre, Editorial Siempre, S. A, Abril 10, 2002, GPS: LocationTracking Technology.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
56
Distancia al puerto A
166 m/min. x 10 min. = 1660 metros Distancia al puerto B 166 m/min x 5 min. = 830 metros Distancia al puerto C 166 m/min x 15 min. = 2490 metros
*A continuación se debe dibujar un círculo con centro en el puerto A y un radio de 830 m. El punto a ubicar puede estar en cualquier parte sobre el perímetro de éste círculo. Luego se dibuja un segundo círculo con centro en el puerto B y un radio de 1660 m. Estos dos círculos se interceptan en solamente dos puntos, lo que indica que el punto a ubicar está en uno de esos dos puntos; ( Ver figura n.19 ).
Cuando se dibuja el tercer círculo con centro en el puerto C, con un radio de 2490 metros, los tres círculos se cruzan en un solo punto posible, y esa es la ubicación del bote, (Ver figura n.20).
• Revista Siempre, Editorial Siempre, S. A, Abril 10, 2002, GPS: LocationTracking Technology.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
57
Figura n. 19
Figura n. 20

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
58
Estos son esencialmente los mismos pasos que usa un receptor de GPS para determinar su posición. En el ejemplo se usó éste método para determinar una posición en dos dimensiones a través de tres distancias.
En un plano tres círculos interceptan en un único punto. Sin embargo el GPS provee la posición en tres dimensiones para lo que hace falta cuatro (o más) mediciones de distancia.
*En tres dimensiones 4 esferas coinciden en un único punto. Cuando un receptor quiere averiguar su posición se comunica con un satélite (A en el ejemplo) y deduce que la distancia que los separa es de 20400 Km. Esto significa que el receptor se encuentra en algún punto de la superficie de una esfera con centro en el satélite y un radio de 20400 Km.
* Revista Siempre, Editorial Siempre, S. A, Abril 10, 2002, GPS: LocationTracking Technology.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
59
Si simultáneamente se conoce la distancia a un segundo satélite (B), de por ejemplo 22200 Km. se reduce la localización del receptor a un círculo en la intersección de las 2 esferas. Si se realiza la medición de distancia desde un tercer satélite (C) se reduce la ubicación posible del receptor a 2 puntos en el espacio, dónde la tercer esfera intercepta el círculo formado por la primera con la segunda.( Ver figura n.21) Para decidir cuál de esos dos puntos es la ubicación correcta hay dos opciones: o hacer una cuarta medición desde otro satélite o hacer una suposición. Generalmente uno de los dos puntos es una ubicación ridícula, o no se encuentra sobre la superficie terrestre o tiene una velocidad imposiblemente alta.
Figura n.21
Los programas dentro de los receptores de GPS tienen varias técnicas para distinguir el punto correcto del que no lo es.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
60
*En sentido trigonométrico hacen falta cuatro distancias para determinar una posición en el espacio, pero en la práctica no es necesario por esta razón, pero si por otra razón técnica que se discutirá más adelante. Todo lo demás sobre el sistema son los detalles técnicos de cómo se lleva a cabo el proceso de medición o para hacerlo más preciso; (Ver figura n.22)
Figura n.22
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
61
UNIDAD 4
COMO FUNCIONA EL SISTEMA GPS, EN CINCO PASOS LÓGICOS.
Figura n.23
1 Triangulación desde satelites en lo basico del sistema
2 Para triangular, GPS mide distancias usando el tiempo que emplea la onda
3
Para medir el tiempo, GPS necesita relojes muy exactos.
Las señales del GPS que viajan a través de l a I o n ó s f e r a y Atmósfera sufren un retraso 5
Una vez conocida la distancia al satélite, es n ece s a r i o con oce r donde está ubicado en el espacio.
4

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
62
4.1 LA TRIANGULACIÓN DESDE LOS SATÉLITES.
PASO 1.
*Aunque pueda parecer improbable, la idea general detrás del GPS es utilizar los satélites en el espacio como puntos de referencia para ubicaciones aquí en la tierra.
Esto se logra mediante una muy, pero muy exacta, medición de nuestra distancia hacia al menos tres satélites, lo que nos permite "triangular" nuestra posición en cualquier parte de la tierra.
Olvidémonos por un instante sobre cómo mide nuestro GPS dicha distancia. Lo veremos mas adelante. Consideremos primero como la medición de esas distancias nos permiten ubicarnos en cualquier punto de la tierra.
4.1.1 MIDIENDO LAS DISTANCIAS A LOS SATÉLITES.
PASO 2.
Sabemos ahora que nuestra posición se calcula a partir de la medición de la distancia hasta por lo menos tres satélites. Pero, ¿cómo podemos medir la distancia hacia algo que está flotando en algún lugar en el espacio?. Lo hacemos midiendo el tiempo que tarda una señal emitida por el satélite en llegar hasta nuestro receptor de GPS.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
63
*La idea, Matemáticamente, es:
Recordemos que "Si un auto viaja a 60 kilómetros por hora durante dos horas, ¿qué distancia recorrió?
Velocidad (60 km/h) x Tiempo (2 horas) = Distancia (120km)
En el caso del GPS estamos midiendo una señal de radio, que sabemos que viaja a la velocidad de la luz, alrededor de 300.000 Km. por segundo.
Nos queda el problema de medir el tiempo de viaje de la señal (Que, obviamente, viene muy rápido)
El problema de la medición de ese tiempo es complicado. Los tiempos son extremadamente cortos. Si el satélite estuviera justo sobre nuestras cabezas, a unos 20.000 Km. de altura, el tiempo total de viaje de la señal hacia nosotros sería de algo mas de 0.06 segundos. Estamos necesitando relojes muy precisos. Ya veremos como lo resolvemos.
Pero, aún admitiendo que tenemos relojes con la suficiente precisión, ¿cómo medimos el tiempo de viaje de la señal?
Supongamos que nuestro GPS, por un lado, y el satélite, por otro, generan una señal auditiva en el mismo instante exacto.
Supongamos también que nosotros, parados al lado de nuestro receptor de GPS, podamos oír ambas señales (Obviamente es imposible "oír" esas señales porque el sonido no se propaga en el vacío).
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
64
Oiríamos dos versiones de la señal. Una de ellas inmediatamente, la generada por nuestro receptor GPS y la otra con cierto atraso, la proveniente del satélite, porque tuvo que recorrer alrededor de 20.000 km. para llegar hasta nosotros. Podemos decir que ambas señales no están sincronizadas.
Si quisiéramos saber cual es la magnitud de la demora de la señal proveniente del satélite podemos retardar la emisión de la señal de nuestro GPS hasta lograr la perfecta sincronización con la señal que viene del satélite.
El tiempo de retardo necesario para sincronizar ambas señales es igual al tiempo de viaje de la señal proveniente del satélite. Supongamos que sea de 0.06 segundos. Conociendo este tiempo, lo multiplicamos por la velocidad de la luz y ya obtenemos la distancia hasta el satélite.
Tiempo de retardo (0.06 seg.) x Vel. de la luz (300.000 km/seg.) = Dist. (18.000 Km.)
Así es, básicamente, como funciona el GPS.
La señal emitida por nuestro GPS y por el satélite es algo llamado "Código Pseudo Aleatorio" (Pseudo Random Code). La palabra "Aleatorio" significa algo generado por el azar.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
65
4.2 UN CÓDIGO ALEATORIO.
Este Código Pseudo Aleatorio es una parte fundamental del GPS. Físicamente solo se trata de una secuencia o código digital muy complicado.
O sea una señal que contiene una sucesión muy complicada de pulsos "on" y "off", como se pueden ver en la figura n.24
Figura n.24
La señal es tan complicada que casi parece un ruido eléctrico generado por el azar. De allí su denominación de "Pseudo Aleatorio".
Hay varias y muy buenas razones para tal complejidad. La complejidad del código ayuda a asegurarnos que el receptor de GPS no se sintonice accidentalmente con alguna otra señal. Siendo el modelo tan complejo es altamente improbable que una señal cualquiera pueda tener exactamente la misma secuencia.
Dado que cada uno de los satélites tiene su propio y único Código Pseudo Aleatorio, esta complejidad también garantiza que el receptor no se confunda accidentalmente de satélite. De esa manera, también es posible que todos los satélites trasmitan en la misma frecuencia sin interferirse mutuamente. Esto también complica a cualquiera que intente interferir el sistema desde el exterior al mismo.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
66
*El Código Pseudo Aleatorio le da la posibilidad al Departamento de Defensa de EEUU de controlar el acceso al sistema GPS.
El código permite el uso de la "teoría de la información" para amplificar las señales de GPS. Por esa razón las débiles señales emitidas por los satélites pueden ser captadas por los receptores de GPS sin el uso de grandes antenas.
En Resumen: Midiendo la distancia.
1. La distancia al satélite se determina midiendo el tiempo que tarda una señal de radio, emitida por el mismo, en alcanzar nuestro receptor de GPS.
2. Para efectuar dicha medición asumimos que ambos, nuestro receptor GPS y el satélite, están generando el mismo Código Pseudo Aleatorio en exactamente el mismo momento.
3. Comparando cuanto retardo existe entre la llegada del Código Pseudo Aleatorio proveniente del satélite y la generación del código de nuestro receptor de GPS, podemos determinar cuanto tiempo le llevó a dicha señal llegar hasta nosotros.
4. Multiplicamos dicho tiempo de viaje por la velocidad de la luz y obtenemos la distancia al satélite.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
67
4.2.1 CONTROL PERFECTO DEL TIEMPO.
PASO. 3
Si la medición del tiempo de viaje de una señal de radio es clave para el GPS, los relojes que empleamos deben ser exactísimos, dado que si miden con un desvío de un milésimo de segundo, a la velocidad de la luz, ello se traduce en un error de 300 Km.
Por el lado de los satélites, el timing es casi perfecto porque llevan a bordo relojes atómicos de increíble precisión.
Recordemos que ambos, el satélite y el receptor GPS, deben ser capaces de sincronizar sus Códigos Pseudo Aleatorios para que el sistema funcione.
Los diseñadores del sistema GPS encontraron una brillante solución que nos permite resolver el problema con relojes mucho menos precisos en nuestros GPS. Esta solución es uno de los elementos clave del sistema GPS y, como beneficio adicional, significa que cada receptor de GPS es en esencia un reloj atómico por su precisión.
El secreto para obtener un timing tan perfecto es efectuar una medición satelital adicional.
Resulta que si tres mediciones perfectas pueden posicionar un punto en un espacio tridimensional, cuatro mediciones imperfectas pueden lograr lo mismo.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
68
4.3 UNA MEDICIÓN ADICIONAL REMEDIA EL DESFASE DEL TIMING.
Si todo fuera perfecto (es decir que los relojes de nuestros receptores GPS lo fueran), entonces todos los rangos (distancias) a los satélites se interceptarían en un único punto (que indica nuestra posición). Pero con relojes imperfectos, una cuarta medición, efectuada como control cruzado, NO interceptará con los tres primeros.
De esa manera la computadora de nuestro GPS detectará la discrepancia y atribuirá la diferencia a una sincronización imperfecta con la hora universal.
Dado que cualquier discrepancia con la hora universal afectará a las cuatro mediciones, el receptor buscará un factor de corrección único que siendo aplicado a sus mediciones de tiempo hará que los rangos coincidan en un solo punto.
Dicha corrección permitirá al reloj del receptor ajustarse nuevamente a la hora universal y de esa manera tenemos un reloj atómico en la palma de nuestra mano.
Una vez que el receptor de GPS aplica dicha corrección al resto de sus mediciones, obtenemos un posicionamiento preciso.
Una consecuencia de este principio es que cualquier GPS decente debe ser capaz de sintonizar al menos cuatro satélites de manera simultánea.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
69
*En la práctica, casi todos los GPS en venta actualmente, acceden a mas de 6, y hasta a 12, satélites simultáneamente. Ahora bien, con el Código Pseudo Aleatorio como un pulso confiable para asegurar la medición correcta del tiempo de la señal y la medición adicional como elemento de sincronización con la hora universal, tenemos todo lo necesario para medir nuestra distancia a un satélite en el espacio. Pero, para que la triangulación funcione necesitamos conocer no sólo la distancia sino que debemos conocer dónde están los satélites con toda exactitud.
En Resumen: Obtener un Timing Perfecto.
1. Un timing muy preciso es clave para medir la distancia a los satélites
2. Los satélites son exactos porque llevan un reloj atómico a bordo.
3. Los relojes de los receptores GPS no necesitan ser tan exactos porque la medición de un rango a un satélite adicional permite corregir los errores de medición.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
70
4.4 CONOCER DÓNDE ESTÁN LOS SATÉLITES EN EL ESPACIO.
PASO 4
A lo largo de este trabajo hemos estado asumiendo que conocemos dónde están los satélites en sus órbitas y de esa manera podemos utilizarlos como puntos de referencia.
¿Pero, cómo podemos saber donde están exactamente? Todos ellos están flotando a unos 20.000 Km de altura en el espacio.
4.4.1 UN SATÉLITE A GRAN ALTURA SE MANTIENE ESTABLE.
La altura de 20.000 Km. es en realidad un gran beneficio para este caso, porque algo que está a esa altura está bien despejado de la atmósfera. Eso significa que orbitará de manera regular y predecible mediante ecuaciones matemáticas sencillas.
La Fuerza Aérea de los EEUU colocó cada satélite de GPS en una órbita muy precisa, de acuerdo al Plan Maestro de GPS.
En tierra, todos los receptores de GPS tienen un almanaque programado en sus computadoras que les informan donde está cada satélite en el espacio, en cada momento.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
71
4.4.2 EL CONTROL CONSTANTE AGREGA PRECISIÓN.
Las órbitas básicas son muy exactas pero con el fin de mantenerlas así, los satélites de GPS son moni toreados de manera constante por el Departamento de Defensa.
Figura n.25
El departamento de defensa de los EEUU utilizan radares muy precisos para controlar constantemente la altura exacta, posición y velocidad de cada satélite; (Ver figura n.25).
Los errores que ellos controlan son los llamados errores de efemérides, o sea evolución orbital de los satélites. Estos errores se generan por influencias gravitacionales del sol y de la luna y por la presión de la radiación solar sobre los satélites. Estos errores son generalmente muy sutiles pero si queremos una gran exactitud debemos tenerlos en cuenta.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
72
4.4.3 CORRIGIENDO EL MENSAJE.
Una vez que el Departamento de Defensa ha medido la posición exacta de un satélite, vuelven a enviar dicha información al propio satélite. De esa manera el satélite incluye su nueva posición corregida en la información que transmite a través de sus señales a los GPS; (Ver figura n.26).
Figura n.26
Esto significa que la señal que recibe un receptor de GPS no es solamente un Código Pseudo Aleatorio con fines de timing. También contiene un mensaje de navegación con información sobre la órbita exacta del satélite.
Con un timing perfecto y la posición exacta del satélite podríamos pensar que estamos en condiciones de efectuar cálculos perfectos de posicionamiento.
Sin embargo se deben resolver otros problemas.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
73
En Resumen: Posicionamiento de los Satélites.
1. Para utilizar los satélites como puntos de referencia debemos conocer exactamente donde están en cada momento.
2. Los satélites de GPS se ubican a tal altura que sus órbitas son muy predecibles.
3. El Departamento de Defensa controla y mide variaciones menores en sus órbitas.
4. La información sobre errores es enviada a los satélites para que estos a su vez retransmitan su posición corregida junto con sus señales de timing.
4.4.4 CORRIGIENDO ERRORES.
PASO 5
Se ha estado tratando los cálculos del sistema GPS de manera muy abstracta, como si todo el proceso ocurriera en el vacío. Pero en el mundo real hay muchas cosas que le pueden suceder a una señal de GPS para transformarla en algo menos que matemáticamente perfecta.
Para aprovechar al máximo las ventajas del sistema un buen receptor de GPS debe tener en cuenta una amplia variedad de errores posibles.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
74
UNIDAD 5 “FUENTES DE ERROR”
5.1 TIEMPO
*Dado que en la información que nos llega de los satélites, estos nos transmiten el tiempo exacto en el que empezaron a emitir su mensaje codificado, y que los receptores miden, también, el tiempo exacto en el que recibieron cada señal , podremos calcular una medida de distancia entre el receptor y el satélite, conociendo la velocidad de propagación de la onda y el tiempo transcurrido desde que se emitió la señal hasta que fue recibida. El problema surgirá cuando los relojes del satélite y el receptor no marquen el mismo tiempo, de tal manera que un microsegundo de desfase se traduce en un error de 300 metros en la medición de la distancia.
Como ya es sabido la luz viaja a 300.000.000 m/s, lo que implica que si los relojes del satélite y del receptor están desfasados tan solo 1/100 de segundo las medidas de distancia tendrían un error de 3000 Km. Los relojes atómicos de los satélites son extremadamente precisos, pero tienen un costo de 100.000 USS cada uno, que sería prohibitivo para un receptor de uso civil. Afortunadamente este problema se resolvió utilizando la medición desde un cuarto satélite.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
75
La trigonometría indica que se puede localizar un punto en el espacio mediante 3 medidas perfectas, y que cuatro medidas imperfectas pueden eliminar la desincronización del tiempo; (Ver figura n.27 y figura n.28)
Figura n.27
Figura n.28

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
76
El ejemplo posterior explicará como se resuelve la sincronización del tiempo, los diagramas están hechos en dos dimensiones a los fines explicativos, para entender como pasa en la realidad (tres dimensiones) solo hay que agregar una medida más, (Ver figura n. 29 ).
Figura n.29

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
77
Figura n.30
Normalmente se habla de la distancia a los satélites en kilómetros o millas, que son deducidas a partir del tiempo de viaje de las ondas, para simplificar la explicación nos referiremos a las distancias en segundos.
Supongamos que el reloj de un receptor adelanta 1 segundo, entonces si nos encontramos a una distancia real de dos satélites A y B de 4 y 6 segundos respectivamente (punto X), el receptor interpretará que está a 5 y 7 segundos de distancia de ambos satélites A y B respectivamente, lo que resulta en una posición distinta que llamaremos XX. (Ver figura n.30).

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
78
Esta posición sería incorrecta pero nada en el receptor haría sospechar que así fuera. Si agregamos un tercer satélite C (recuerde que el ejemplo es en dos dimensiones, sería el cuar to trabajando en tres dimensiones como es en la realidad), que se encuentra a una distancia real de 8 segundos, entonces el círculo con centro en el satélite y radio de 8 segundos pasa exactamente por el punto X.
pero el receptor cree que se encuentra a 9 segundos del satélite. Estas tres distancias a los satélites no tienen forma de coincidir en un punto, pero si definen un área posible.
Las computadoras en los receptores están programadas para que en el caso que obtengan una serie de medidas que no puedan interceptar en un único punto, reconozcan que hay algún error y asuman que su reloj interno está desfasado. Entonces las computadoras comienzan a sumar o a restar la misma cantidad de tiempo a cada medida hasta encontrar un punto en el que todas coincidan. En el ejemplo la computadora descubrirá que restando un segundo a cada medida está el único punto en que estas coinciden y asume que su reloj está un segundo adelantado. De hecho las computadoras no utilizan el método de prueba y error sino utilizan un sistema de cuatro ecuaciones con cuatro incógnitas, pero en esencia el proceso es el mismo.
La conclusión es que para obtener medidas precisas en tres dimensiones se necesitan cuatro satélites.
Esto afecta el diseño de los receptores ya que si se necesitan medidas de posición precisas, continuas y en tiempo real, como en la Agricultura de Precisión, los receptores deben tener por lo menos cuatro canales para poder recibir cuatro satélites simultáneamente.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
79
5.2 UN RUDO VIAJE A TRAVÉS DE LA ATMÓSFERA.
Hemos estado afirmando que podemos calcular la distancia a un satélite multiplicando el tiempo de viaje de su señal por la velocidad de la luz. Pero la velocidad de la luz sólo es constante en el vacío.
Una señal de GPS pasa a través de partículas cargadas en su paso por la ionosfera y luego al pasar a través de vapor de agua n la troposfera pierde algo de velocidad, creando el mismo efecto que un error de precisión en los relojes.
Veamos más a fondo estos fenómenos:
5.2.1 IONOSFERA
*La ionosfera es la región de la atmósfera que se sitúa entre 50 y 1000 km. aproximadamente sobre la superficie de la tierra.
Posee la particularidad de que los rayos ultravioletas procedentes del sol ionizan las moléculas de gas que allí se encuentran liberando electrones, produciendo de esta forma una dispersión no lineal en las ondas electromagnéticas enviadas por los satélites, de manera que cada onda se decelera en un ritmo inversamente proporcional al cuadrado de su frecuencia.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
80
5.2.2 TROPOSFERA.
Estos errores se cometen cuando se produce una refracción de las ondas según las distintas condiciones meteorológicas de temperatura, presión y humedad relativa del aire que encuentre a su paso.
Para eliminar dichos errores se aplican diversos modelos troposféricos ya establecidos.
5.3 RELOJES DE LOS SATÉLITES. Como se vio anteriormente los relojes atómicos de los satélites son unos de los más precisos, pero no son perfectos. Pequeños e insignificantes errores en el tiempo pueden crear grandes errores en las medidas de posición. Justamente la función del segmento de control terrestre es monitorear y ajustar los relojes para minimizar las pequeñas desviaciones
5.3.1 ERRORES DE ÓRBITA.
Las órbitas de los satélites son tan altas que la atmósfera terrestre no las afecta, sin embargo, algunos fenómenos naturales como las fuerzas gravitacionales de la luna y el sol, como así también la presión de la radiación solar, generan pequeños errores en la altitud, posición y velocidad de los satélites. Estos errores se acumulan acrecentando su efecto. Nuevamente el segmento de control terrestre ajusta las señales de los satélites para corregir los errores de órbita.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
81
5.3.2 MULTITRAYECTORIA.
Figura n.31
Los errores debido a la Multitrayectoria aparecen cuando la señal "rebota" antes de llegar al receptor, o sea que la señal llega a la antena del receptor por más de una trayectoria o camino. Parte de la onda llega en forma directa y parte realiza una trayectoria diferente, por ende causando diferencias en el tiempo de viaje, ( Ver figura n. 31).
Hoy en día hay algunas antenas diseñadas para minimizar este efecto.
5.3.3 GEOMETRÍA SATELITAL.
Con todos los errores mencionados anteriormente, se puede imaginar que el círculo que define la distancia a cada satélite no se tiene un perímetro bien marcado sino es una línea difusa (figura n. 32). Dónde coinciden las distancias de dos satélites, en vez de ser un punto es una pequeña área.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
82
Cuanto mas juntos estén los satélites mayor será el área de incertidumbre donde podemos estar ubicados y por ende aumenta el error.
Esto significa que cuanto mas desparramados estén los satélites sobre el receptor mayor será la precisión.
Figura n.32
5.3.4 RECEPTORES DE GPS.
El ruido debido a interferencias eléctricas o el redondeo de las operaciones matemáticas llevan a errores en la medición de la posición.
Los receptores de mayor calidad, y por lo tanto mas caros, están diseñados para disminuir el ruido interno y maximizar la precisión matemática.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
83
Otro elemento constitutivo importante de los receptores es el número de canales que poseen. Los hay de un solo canal hasta de 12.
Para el trabajo que se realiza en la agricultura de precisión son necesarios aquellos que tengan por lo menos 4 canales simultáneos, uno para cada uno de los cuatro satélites indispensables para tomar una posición en tres dimensiones, siendo ideales los de 12 canales.
Cuantos más satélites se estén recibiendo más precisa será la posición dada, debido a que el área de incertidumbre se disminuye sustancialmente y se minimiza el error. Esto está también ligado a la geometría satelital explicada anteriormente.
5.3.5 EFEMERIDES. Las efemérides de los satélites se pueden leer en cada uno de los mensajes de navegación de cada satélite de la constelación. Dicha lectura, se realiza en las estaciones del segmento de control, (Ver figura n.33).
En ellas viene incluida una extensa información entre la que cabe destacar:
* Influencia que sobre el satélite tiene el campo magnético terrestre.
* Parámetros sobre la presión de la radiación solar
* Posibles fallos de los relojes atómicos
* Operatividad de cada uno de los satélites
• Posición estimada para cada uno de los satélites dentro de la constelación global, etc.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
84
Los errores generados por las efemérides tienen un efecto relativamente pequeño, fácilmente compensable.
Figura n.33
*Hay maneras de minimizar este tipo de error. Por un lado, se podría predecir cual sería el error tipo de un día promedio.
A esto se le llama modelación y nos puede ayudar pero, por supuesto, las condiciones atmosféricas raramente se ajustan exactamente el promedio previsto.
Otra manera de manejar los errores inducidos por la atmósfera es comparar la velocidad relativa de dos señales diferentes. Esta medición de doble frecuencia es muy sofisticada y solo es posible en receptores GPS muy avanzados.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
85
5.4 PROBLEMAS EN EL SATÉLITE.
Aún siendo los satélites muy sofisticados no tienen en cuenta minúsculos errores en el sistema.
Los relojes atómicos que utilizan son muy, pero muy, precisos, pero no son perfectos. Pueden ocurrir minúsculas discrepancias que se transforman en errores de medición del tiempo de viaje de las señales.
Y, aunque la posición de los satélites es controlada permanentemente, tampoco pueden ser controlados a cada segundo.
De esa manera pequeñas variaciones de posición o de efemérides pueden ocurrir entre los tiempos de monitoreo.
5.4.1 ALGUNOS ÁNGULOS SON MEJORES QUE OTROS.
La geometría básica por si misma puede magnificar estos errores mediante un principio denominado "Dilación Geométrica de la Precisión", o DGDP
En la realidad suele haber mas satélites disponibles que los que el receptor GPS necesita para fijar una posición, de manera que el receptor toma algunos e ignora al resto.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
86
Si el receptor toma satélites que están muy juntos en el cielo, las circunferencias de intersección que definen la posición se cruzarán a ángulos con muy escasa diferencia entre sí. Esto incrementa el área gris o margen de error acerca de una posición.
Si el receptor toma satélites que están ampliamente separados, las circunferencias interceptan a ángulos prácticamente rectos y ello minimiza el margen de error.
Los buenos receptores son capaces de determinar cuales son los satélites que dan el menor error por Dilución Geométrica de la Precisión.
5.4.2 ERRORES INTENCIONALES.
*Aunque resulte difícil de creer, el mismo Gobierno que pudo gastar 12.000 Millones de dólares para desarrollar el sistema de navegación más exacto del mundo, está degradando intencionalmente su exactitud. Dicha política se denomina "Disponibilidad Selectiva" y pretende asegurar que ninguna fuerza hostil o grupo terrorista pueda utilizar el GPS para fabricar armas certeras.
Básicamente, el Departamento de Defensa introduce cierto "ruido" en los datos del reloj satelital, lo que a su vez se traduce en errores en los cálculos de posición.
El Departamento de Defensa también puede enviar datos orbítales ligeramente erróneos a los satélites que estos reenvían a los receptores GPS como parte de la señal que emiten.
* http://www.elgps.com/documentos.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
87
Estos errores en su conjunto son la mayor fuente unitaria de error del sistema GPS. Los receptores de uso militar utilizan una clave encriptada para eliminar la Disponibilidad Selectiva y son, por ello, mucho más exactos.
A par tir del 1° de Mayo de 2000, el gobierno estadounidense eliminó la disponibilidad selectiva, aumentando considerablemente la precisión de los receptores de uso común.
5.5 TÉCNICAS Y PRECISIONES.
5.5.1 POSICIONAMIENTO AUTÓNOMO.
El posicionamiento autónomo (con un solo receptor) tiene una precisión que oscila entre los 10 y los 30 m. Los receptores autónomos son de bajo costo y muy utilizados en la navegación deportiva.
5.5.2 CORRECCIÓN DIFERENCIAL.
Permite obtener las coordenadas de un punto por debajo de los 3 metros en planimetría y menor precisión en altimetría, mejorando ambas de acuerdo al tipo de receptor utilizado.
El método se basa en la corrección de todas las posiciones tomadas (calculadas con un receptor fijo en un punto conocido), que luego son aplicadas a un receptor itinerante. Esta técnica es la que usan las cosechadoras con monitores de rendimiento.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
88
Todos estos errores enunciados anteriormente reducen la precisión del GPS, resultando en un error de entre 5 y 20 m (previo a la eliminación de la disponibilidad selectiva el error ascendía hasta los 100 m). Ver figura n.34. Esto puede resultar útil para algunas actividades pero no para algunos usos en la agricultura por la precisión que se requiere en las posiciones. Por ende se requiere un método para mejorar sustancialmente la precisión.
El método más usado hoy en día es la corrección diferencial (DGPS Sistema de Posicionamiento Global Diferencial).
Figura n.34

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
89
El sistema funciona usando un receptor de referencia que puede ser una antena Beacon o un satélite geoestacionario. (Ver figura n.35) ubicado en un lugar de coordenadas exactamente conocidas. Esta estación de referencia recibe las mismas señales que los receptores comunes, pero al conocer su posición exacta puede calcular el error que transmite cada satélite en magnitud y sentido, en ese momento. La diferencia entre la distancia real desde el receptor de referencia y cada satélite se denomina distancia de corrección diferencial.
Este error es transmitido a través de señales de radio al móvil en tiempo real.
*Las señales de corrección diferencial pueden provenir de antenas Beacon o de satélites geoestacionarios (Omnistar y Racal). (Ver figura n.36). En nuestro país hay que pagar un abono para recibir estas señales. La señal Beacon proviene de antenas fijas de las cuales hay dos en nuestro país, cada una que cubre un área comprendida dentro de un radio de 450 Km. En cambio la corrección satelital está disponible en todo Sudamérica. Mediante este sistema de corrección se logran precisiones submétricas, que oscilan en los 30 cm. Esta precisión ya es suficiente para su aplicación en la Agricultura de Precisión.
En nuestro país el abono a pagar por la corrección Beacon es de 1300 dolares por tres años y para la señal satelital es de 2000 dolares por un año, aunque se estima que el valor irá disminuyendo en la medida que se generalice su utilización.
* http://geomatica.ing.unico.it/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
90
Señal correctora Beacon
Figura n.35
Señal correctora Omnistal y Racal
Figura n.36

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
91
5.5.3 LA LINEA FINAL.
Afortunadamente todos esos errores no suman demasiado error total. Existe una forma de GPS, denominada GPS Diferencial, que reduce significativamente estos problemas.
En Resumen: Cor rección de Er rores
• La ionosfera y la troposfera causan demoras en la señal de GPS que se traducen en errores de posicionamiento.
• Algunos errores se pueden corregir mediante modelación y correcciones matemáticas.
• La configuración de los satélites en el cielo puede magnificar otros errores.
El GPS Diferencial puede eliminar casi todos los errores.
5.5.4 PROGRAMACIÓN.
*Lo que es muy importante cuando se adquiere un equipo GPS, es como se mencionó anteriormente es la programación del DATUM correspondiente a la zona en la que se va a utilizar.
En el caso de los GPS de pantalla, en las opciones de programación se debe de seleccionar por ejemplo en el caso de México el DATUM NAD27MEXICO.
* http://geomatica.ing.unico.it/
Por lo que es muy importante que sepan cual es el DATUM del

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
92
lugar en donde se encuentran, pues no todos los DATUM, tienen la referencia como el de México que menciona el nombre del país. Si el el GPS no se programa correctamente o se deja en el DATUM por default que es el WGS84, todas las referencias que se tomen fuera de esa zona tendrán errores en la latitud, longitud y altitud, además de los parámetros correlativos de dirección, velocidad que se desprenden de la posición o ubicación.
Otro dato importante es el programar el NORTE MAGNETICO, el USO HORARIO y su formato en 12 ó 24 horas, la diferencia de la hora UTC (UTC OFFSET) y si hay horario de verano o no (daylight saving).
Es importante la parte de las unidades, que son vitales si se usan conjuntamente con algún mapa; siendo el formato más adecuado el que corresponde a: hdd°mm.mmm' que es en grados minutos y milésimas de segundo.
De igual forma se puede seleccionar el dato de GRIDS o cuadrículas que deberá ser seleccionado el de MAINDENHEAD; pero si se selecciona esta opción solo dará en la pantalla las cifras de la cuadrícula o Grid Locator en la que se encuentre uno y no se verán las coordenadas en grados minutos y segundos.
En el caso de programar alguna salida o puerto, para ser utilizado como interfase en computadora o sistemas como en APRS, los GPS tienen varios formatos, siendo el común el NMEA083.
Estos programaciones son las importantes, además de las que cada equipo tengan en función de mapas y cuestiones de rastreo.
Cuando se activa un GPS, hay que esperar a que capte el almanaque de satélites visibles, que serán mínimo 3 para que el GPS pueda

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
93
posicionarnos en un punto, (a mayor número de satélites, mayor será la exactitud), pues con solo 3 satélite tendremos en teoría una inexactitud de 20 metros o más, con 6 ó 7 satélites a la vista tendremos una inexactitud de 5 metros aproximadamente. De hecho, es difícil ver más de 6 ó 7 satélites juntos.
Las pantallas de los GPS muestran en una gráfica la cantidad de satélites visibles y la intensidad de la señal, teniendo generalmente la capacidad de poder recibir 12 satélites simultáneamente, que se conocen como canales (un canal por satélite).
*El GPS indicará el momento en que ya se encuentra lista la referencia dependiendo de la cantidad de satélites que reciba y además en un texto indicará también la exactitud que depende del número de señales de satélite que se reciban.
Esta operación puede tardar algunos minutos y dependerá de el lugar en donde nos encontremos, ya que los satélites tienen una señal muy tenue, es posible que cualquier objeto u edificio bloquee la señal. Desde luego los receptores GPS no reciben en interiores, túneles y puentes.
http://geomatica.ing.unico.it/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
94
5.5.5 RESUMEN DE LAS FUENTES DE ERROR DEL SISTEMA GPS.
*Errores típicos, en Metros (Por cada satélite)
Fuentes de Error GPS Standard GPS Diferencial Reloj del Satélite 1.5 0 Errores Orbítales 2.5 0 Ionosfera 5.0 0.4 Troposfera 0.5 0.2 Ruido en el Receptor 0.3 0.3 Señal Fantasma 0.6 0.6 Disponibilidad Selectiva 30 0
Exactitud Promedio de Posición Horizontal 50 1.3 Vertical 78 2.0 3D 93 2.8
http://geomatica.ing.unico.it/

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
95
UNIDAD 6 EL SISTEMA DE REFERENCIA. DATUM WGS84,
QUE RIGE EL SISTEMA NAVSTAR DE GPS.
Las coordenadas, tanto de los satélites como de los usuarios que se posicionan con el sistema GPS, están referidas al sistema de referencia WGS84 (Sistema Geodésico Mundial de 1984). Estas coordenadas pueden ser cartesianas en el espacio respecto al centro de masas de la Tierra (X, Y, Z) o geodésicas ( , , h). El sistema tiene las siguientes características:
Origen en el Centro de Masas de la Tierra.
El eje Z es paralelo al polo medio.
El eje X es la intersección del meridiano de Greenwich y el plano del ecuador.
El eje Y es perpendicular a los ejes Z y X, coincidente con ellos en el Centro de Masas terrestre.
Ahora bien, cada sitio o zona de la tierra, tiene un DATUM específico:
DATUM: Es la referencia de la elipse que define las coordenadas dentro del sistema, que nos permite la ubicación lo más exacto posible.
Para la parte de México existe el DATUM NAD (North America Datum) 27 MEXICO. Así es como hay que programarlo en los receptores.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
96
Ahora bien, se recomienda que por cada 800 Km. de desplazamiento, se vaya modificando el DATUM a cada zona específica. (si el Datum no es el correcto, la posición podrá dar errores entre 300 y 600 Metros.
GLONASS
Figura n.37
*El Sistema de Posicionamiento Global NAVSTAR no es el único Sistema de Posicionamiento existente. El Sistema Ruso GLONASS, (Ver figura n.37); es también operativo, y a pesar de que actualmente la constelación no está completada, proporciona a los usuarios civiles unas precisiones en el posicionamiento absoluto típicamente mejores que las que proporciona el Sistema GPS, debido a la aplicación de la degradación intencionada de la información denominada Disponibilidad Selectiva (SA).
http://www.glonasscenter.ru/satellitee.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
97
A principios de los 70s, quizá como una respuesta al desarrollo del Sistema GPS, el antiguo Ministro de Defensa Soviético desarrolló el Global’ naya Navigatsionnaya Sputnikova Sistema o Sistema Global de Navegación por Satélite (GLONASS).
*El Sistema GLONASS es similar al GPS en muchos aspectos, aunque como se verá también hay muchas diferencias.
En el año 1993, oficialmente el Gobierno Ruso colocó el programa GLONASS en manos de Fuerzas Espaciales Militares Rusas (RSF). Este organismo es el responsable del desarrollo de satélites GLONASS, de su mantenimiento y puesta en órbita, y certificación a los usuarios. Este organismo opera en colaboración con el CSIC (Coordinational Scientific Information Center), el cual publica la información sobre GLONASS.
Durante los 80s, la información acerca de GLONASS era escasa.
La constelación ha experimentado un gran progreso desde los años 1994 y 1995.
La Organización Internacional de Aviación Civil (ICAO) aceptó formalmente en Julio 1996, el uso de GLONASS/CSA para uso en aviación civil, como ya se hizo en 1994 con el GPS/SPS.
El Sistema GLONASS, al igual que el Sistema GPS, está formado por tres sectores fundamentales: el Sector de Control, el Sector Espacial y el Sector Usuario.
http://www.glonasscenter.ru/satellitee.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
98
6.1 SECTOR USUARIO.
El Sistema GLONASS es un sistema militar y civil. Todos los usuarios militares y civiles constituyen el Sector Usuario. El desarrollo y diseño de nuevos receptores por parte de los fabricantes está en continua evolución.
*Un equipo de recepción de señales GLONASS, al igual que uno de GPS, está formado por una antena y un receptor. La antena suele llevar un plano de tierra para evitar el efecto multipath, es decir, la recepción de señales reflejadas en el suelo u otros objetos, que empeoran la precisión. Los receptores disponen de un reloj para sincronizar las señales recibidas.
Existen dos generaciones de receptores GLONASS. La primera generación contenían 1,2 y 4 canales. La segunda generación son ya mucho más compactos y ligeros, incluyendo 5, 6 y 12 canales, usados para aplicaciones civiles y capaces de operar con las dos constelaciones GPS/GLONASS.
Fuera de Rusia, hay un número considerable de fabricantes e investigadores que han diseñado y construido receptores GLONASS o GPS/GLONASS incluyendo doble frecuencia y códigos C/A y P. Algunos de ellos eran prototipos desarrollados para ganar experiencia con GLONASS, y otros para aplicaciones específicas.
http://www.glonasscenter.ru/satellitee.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
99
Entre las pr incipales marcas de receptores GLONASS o GPS/GLONASS se encuentran:
GEOTRACER 2404: 12 canales GPS y 12 canales GLONASS.
Magnavox: 8 canales GLONASS.
3S Navigation: 12 canales GNSS para navegación.
GG24 Astech: 12 canales GPS y 12 canales GLONASS.
Sercel Scorpio 6001: 16 canales GPS/GLONASS.
6.2 NAVSTAR Y GLONASS (USO COMBINADO DE SISTEMAS GPS)
Los Sistemas GPS y GLONASS son sistemas autónomos, es decir, cada uno tiene su propio sistema de referencia y su propio sistema o escala de tiempo. Usan diferentes sistemas de referencia para expresar las posiciones de sus satélites, y por lo tanto, para determinar las posiciones de los usuarios. Para poder utilizar los dos Sistemas de Posicionamiento por Satélite, GPS y GLONASS, es decir, recibir señales de los satélites de la constelación GPS y de la constelación GLONASS, es necesario establecer la relación entre los sistemas de tiempo y sistemas de referencia utilizados en los dos sistemas.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
100
El Sistema GPS utiliza el sistema de referencia WGS84, mientras que el Sistema GLONASS utiliza el PZ90. Los parámetros que definen los dos sistemas de referencia son significativamente diferentes. El Laboratorio Lincoln de Massachusetts hizo un estudio de las precisiones que ofrecen ambos sistemas de posicionamiento y las precisiones de su uso combinado, analizando las precisiones obtenidas en posicionamiento absoluto usando en código C/A durante periodos de 24 h. La precisión con GLONASS, obtenida en estas pruebas es mejor que los niveles garantizados por el Gobierno Ruso. Además, la precisión con GLONASS es mejor que la obtenida con GPS debido a que la Disponibilidad Selectiva está activada. Sin embargo, si la SA estuviera desactivada, la precisión con GPS sería mejor que con GLONASS. Los siguientes valores muestran los resultados obtenidos por el Laboratorio Lincoln en una de las pruebas realizadas para la obtención de posiciones absolutas utilizando la constelación GLONASS, la constelación GPS y su uso combinado GPS/GLONASS: Con la disponibilidad de receptores GPS/GLONASS, el usuario puede tener acceso a un sistema combinado de hasta 48 satélites (con la dos constelaciones completas). Con todos estos satélites, los trabajos en desfiladeros y otras localizaciones de visibilidad restringida, tales como áreas boscosas, etc., es mejorada debido a la posibilidad de mayor información de más satélites. Además, una mayor constelación de satélites también mejora la ejecución del posicionamiento diferencial en tiempo real, ya que, el tiempo menor de toma de datos, con respecto a un posicionamiento diferencial calculado en postproceso, se ve compensado por la obtención de una mayor información de más satélites.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
101
Pero eso no es todo, además el tiempo de inicialización para alcanzar precisiones de nivel centimétrico mejora en un factor de 3 a 6 con una constelación de 48 satélites. El posicionamiento posee una integridad mayor. Para un nivel de confianza de 99.9% el posicionamiento con GPS requiere una recepción continua de 6 o mas satélites en sus constelación de 24 satélites.
*Para el mismo nivel de confianza, usando GPS/GLONASS se requiere una recepción continua de 7 satélites de los 48 de la combinación. Las operaciones de código diferencial vienen a ser más simples. Debido a que no existe una degradación deliberada de la precisión, el trabajo con GLONASS diferencial requiere mucha menor cantidad de correcciones. Es posible la detección del 100% de los fallos, tanto en disponibilidad de los satélites, como en la calidad de la información que transmiten, gracias a la existencia de los RAIM (Receiver Autonomous Integrity Monitoring), que son receptores autónomos de seguimiento íntegro que utilizan unos algoritmos que detectan anomalías en la transmisión de datos, aún figurando un buen estado de salud en los mensajes de navegación y almanaques.
Las principales ventajas del uso combinado GPS/GLONASS son la mejora en la geometría de los satélites y la mitigación de la Disponibilidad Selectiva. Las posiciones se estiman usando los parámetros de transformación entre el sistema PZ90 y el WGS84.
http://www.glonasscenter.ru/satellitee.html

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
102
6.3 POSICIONAMIENTO GLOBAL EN TIEMPO REAL SOBRE UNA CARTA
TOPOGRÁFICA.
VENTAJAS DEL USO DEL GPS CON EL SOFTWERE APROPIADO.
*La necesidad de las unidades, de la gran unidad de combate (GUC), de disponer de un sistema de información geográfica, motivó que la Compañía de Inteligencia 5 trabajara en un proyecto de integración de datos obtenidos por un navegador satelital y procesados por una computadora personal.
Si bien muchos GPS (Global Position System) vienen con su propio software para la bajada de datos, la necesidad estaba dirigida hacia algo más específico: la representación de esos mismos datos sobre una carta topográfica, brindando así la ubicación de la posición en tiempo real.
* Posicionamiento global en tiempo real sobre una carta topográfica, por el sargento ayudante César Walter Gabriel y el sargento primero Miguel Armando Ramírez.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
103
Figura n.38
Por medio de este software, denominado OziExplorer, se puede trabajar sobre una carta topográfica (Ver figura n.38), escaneada o imagen satelital, obteniendo de la misma una inmensa cantidad de datos, ya sea la determinación de puntos o bien la localización de los mismos, como así también la representación de símbolos y acceder desde la misma a una base de datos e incluso fotografías digitales.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
104
Figura n.39
*El OziExplorer es un programa interactivo que usa mapas de imágenes convencionales y algunos en formatos vectoriales. (Ver figura n.39).
El programa permite realizar diferentes tipos de funciones:
• Ser utilizado como "Mapa Móvil", es decir que permite conocer la ubicación en la cartografía en forma permanente, incluso durante los desplazamientos en el terreno. • Permite al usuario crear y añadir Waypoints (Puntos con coordenadas conocidas), Rutas (Diagrama de navegación) y Tracks (Conocer el itinerario realizado) con sólo hacer "clic" sobre el punto del terreno en la cartografía.
* Posicionamiento global en tiempo real sobre una carta topográfica, por el sargento ayudante César Walter Gabriel y el sargento primero Miguel Armando Ramírez.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
105
• Intercambiar este tipo de información con los receptores GPS y una computadora, es decir "bajar" y "levantar" "Waypoints". • Este intercambio de información puede ser realizado por usuarios que poseen diferentes marcas de receptores GPS. • Obtener perfiles del terreno desde el programa. •Determinar distancias. • Determinar ángulos de dirección y rumbos.
Figura n.40
Se obtiene el rumbo con la declinación magnética actualizada en forma automática ya que tanto el GPS como el programa trabajan con fechas, facilitando la diagramación de las rutas de navegación; (Ver figura n.40).
• Calibrar las imágenes de sus propios mapas obtenidas con un escáner con hasta 9 puntos de calibración que permiten corregir pequeños defectos en el mapa. • Emplear cartografía en varios formatos comercializados en forma digital, como las cartas del Instituto Geográfico Militar. • Soportar la carga y descarga de Eventos en los receptores GPS Lowrance/Eagle. • Crear elementos permanentes (símbolos, fotos, textos, etc) en la carta o imagen satelital. • Trabaja con más de 100 Datums (Campo Inchauspe, etc), inclusive 10 pueden ser creados por el usuario.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
106
• Es compatible con numerosos tipos de proyecciones (Gauss Krugger, UTM, etc). • Soporta numerosos sistemas de cuadrículas (UTM, otras) incluso pueden ser dibujadas en el mapa e impresas. • Imprimir Mapas, Listas de Waypoints, Rutas, etc.
Los requisitos para la instalación y empleo de este programa son:
• Una PC con Windows 95 / 98 / ME / NT4 / 2000. • Un receptor GARMIN, MAGELLAN, LOWRANCE/EAGLE o cualquier otro con similares características y que emita sentencias NMEA (National Marine Electronics Association) si pretende usar las funciones de "Mapa Móvil". Este tipo de sentencia a emitir se encuentra como opción en la configuración del GPS. • Cartografía a emplear obtenida con un escáner o mapa digital que se pueda adquirir.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
107
UNIDAD 7 MAQUINARIA DE OBRA CIVIL GUIADA POR CONTROL REMOTO CON TÉCNICAS DE GPS
CINEMÁTICO EN TIEMPO REAL.
El GPS se utiliza en ingeniería civil para replantear, en trabajos al aire libre, movimientos de tierras. La misma alta precisión de los equipos de GPS permiten un control remoto en tiempo real para movimientos de tierra y finalización de superficies. Los autores han estado involucrados en el desarrollo de un sistema cinemático GPS en tiempo real.
Una práctica implementación en un proyecto francés prueba que las máquinas de movimientos de tierra pueden ser perfectamente dirigidas por GPS. Como resultado, la necesidad del control y la mejora de la calidad final del trabajo puede ser drásticamente reducida
Hasta ahora el sistema para la guía de las máquinas moto niveladoras han sido de dos formas:
a) Mecánicamente, con la colocación de estacas.
b) Sistemas ópticos, utilizando láser.
En el primer caso, la preparación es extremadamente tediosa y de este modo relativamente cara. La segunda fórmula reduce las posibilidades de automatización, teniendo en cuenta que se necesita visual entre el sistema láser y la máquina.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
108
GPS ha estado considerado demasiado impreciso, especialmente cuando hablamos de la altura.
GPS ha estado utilizado previamente para el control de la posición de máquinas pesadas de movimientos de tierra, transporte de camiones y control planimétrico de motoniveladoras, controlando la altura mediante sistemas láser. El recelo de la aplicación del GPS no fue sin razón ya que la altura en cinemático tiempo real es mucho más susceptible de error en alta y media frecuencia de toma de datos.
7.1 FUERTE COOPERACIÓN ENTRE ESPECIALISTAS.
A principios de 1998, la División de Excavación de la empresa GTM llevó a cabo el análisis del cinemático en tiempo real de GPS. El resultado del análisis mostró la viabilidad del estudio.
Los resultados alentaron a la construcción de un prototipo para el control remoto automático de un ROTOGRADE, el cual es una motoniveladora de alta precisión diseñada para la División de Excavación de la empresa GTM. Para asegurar el éxito completo de la experiencia , GTM decidió cooperar con la empresa de programación INTEGRA, DSNP (DASSAULT SERCEL N.P.) como expertos GPS y RABAUD (fabricante de motoniveladoras) para los temas de mecánica y hidráulicas de los servo controles.
El objetivo de esta colaboración consistió en la fabricación de un sistema completamente automatizado utilizando GPS para la guía en las tres dimensiones de la ROTOGRADE.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
109
El calendario del proyecto era extremadamente corto ya que la finalización de la automatización de la máquina ROTOGRADE fue prevista para el final de junio de 1998. Así, el estudio completo y la finalización de este proyecto se realizó en tres meses (figura 41).
Figura n.41
Principios de operación
Figura n.42
El esquema del proyecto fue bastante simple dos censores GPS en este caso receptores DSNP (Figura n.42), los cuales fueron colocados con precisión a ambos lados de la máquina.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
110
Figura n.43
Recepción de información de correcciones a través de radioenlace desde una estación de referencia transmisora GPS, (Ver figura n.43) que provee una precisión de nivel centimétrico. Las coordenadas en tres dimensiones son inmediatamente transmitidas a la computadora para procesar la eliminación de ruidos y evitar los errores multi camino. El efecto ya antes mencionado está producido por la reflexión de las ondas GPS en superficies cercanas a la antena y esto provoca posiciones erróneas.
Las coordenadas refinadas son comparadas con la posición teórica del rotor.
Las diferencias son calculadas, procesadas, formateadas y enviadas a un convertidor analógico/ digital, ya que las válvulas hidráulicas sólo pueden aceptar señales analógicas. Un monitor de color en la cabina (figura 4) nos enseña a los parámetros propios de nuestro trabajo y la posición relativa de la máquina con respecto a la posición teórica.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
111
7.2 PROBLEMAS PRÁCTICOS. Muchos problemas prácticos han sido solucionados, empezando con la definición de algoritmos para la eliminación de las desviaciones de ruidos en corto y medio plazo (alta frecuencia en la obtención de la posición). Esta técnica es necesaria porque sin la eliminación previa de estos errores, el movimiento real de la máquina no puede ser distinguido por una medición imprecisa de GPS.
Los movimientos de la máquina son pequeños en condiciones normales y permite un análisis muy preciso de los resultados del GPS. El desafío fue poder controlar está velocidad normal de trabajo dentro de el período más corto y en la distancia más corta posible. Después de muchas pruebas de campo se registraron resultados satisfactorios, ajustando con mucha precisión los comandos de servocontrol de la máquina durante la fase de inicialización. Realmente, el control de los comandos de servo control requiere el ajuste más preciso.
El programa, desarrollado durante este difícil periodo, puede ser usado ahora por la mayoría de los diferentes tipos de máquinas.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
112
7.2.1 SIMULACIÓN. *Las pruebas fueron realizadas sobre un prototipo diseñado por la empresa RABAUD. Esta simulación, la cual nos muestra la exacta geometría de la máquina real, permitió la validación de los algoritmos desarrollados para la computadora.
La simulación la conforman dos ejes rotatorios aguantando un armazón con dos cuchillas que simulan los puntos extremos de la máquina. Dos mandos para el servocontrol permiten el ajuste de la altura de las cuchillas las cuales dan un juego a dos bandas laterales aproximadamente de un metro en un terreno poco nivelado. Las antenas de GPS están montadas, como en la ROTOGRADE, en los extremos de la máquina, suficientemente apartadas para evitar la reflexión de las señales de GPS desde la misma.
Para validar la exactitud y la capacidad de reacción del servo control, un proyecto ficticio fue diseñado y colocado en la memoria del proceso de cálculo de la unidad. Se proyectó una zona con 1,47% de inclinación a lo largo de cuarenta metros seguidos por una parábola muy pronunciada a lo largo de 8,8 metros.
* Escrito por Gaëtan HINTZY (GTM), JeanMarc NOURY (INTEGRA), Christophe PICHOT (Dassault Sercel N.P.) Traducido por Antonio Blanco (AlTop Topografía, S.A.). (Gim International Marzo 1999)

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
113
* Los resultados fueron comprobados con un nivel Leica NA2 cada medio metro. Un gráfico , correspondiente a la parte izquierda de la simulación, nos enseñan que los errores son menores de un centímetro en la superficie previamente calibrada.
A partir de este punto las condiciones de simulación ya no son relevantes para la máquina ya que el poco peso de la simulación hace que no sea posible compensar la importante irregularidad del terreno. Los resultados adquiridos en la parábola fueron interesantes (nos mostró que la máquina reseguía la parábola con un nivel aceptable), lo cual fue un factor decisivo en la decisión de la publicación de los resultados. (Ver figura n.44).
Las discrepancias entre las altitudes teóricas y la real nos muestran errores máximos de 7 milímetros en la primera parte del proyecto (superficie preajustada) seguido por la compensación de errores dados por el defecto del terreno de la zona parabólica del proyecto donde la precisión absoluta toma valores normales otra vez (comprendidos entre +/ 10 mm). Esto demostró que el proyecto era posible, con mediciones GPS solamente, para guiar una moto niveladora respetando las constantes específicas del sector.
Escrito por Gaëtan HINTZY (GTM), JeanMarc NOURY (INTEGRA), Christophe PICHOT (Dassault Sercel N.P.) Traducido por Antonio Blanco (AlTop Topografía, S.A.). (Gim International Marzo 1999)

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
114
Figura n.44
7.3 PRUEBAS REALES. El nuevo sistema es ahora operacional en zonas de construcción en las que trabaja la empresa GMT como la autopista A 85 en el centro y la A 89 en el sur de Francia. Allí los resultados operacionales han estado cuidadosamente comprobados. La comprobación de la superficie final con la teórica, otra vez controlada con un nivel Leica NA2, nos enseña un error medio de 0,6 centímetros con una desviación estándar de 0,7 centímetros. La desviación de la posición a corto plazo ha sido también comprobada ya que las mediciones han sido realizadas cada metro en una distancia de 200 metros.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
115
7.3.1 PERSPECTIVAS DE NEGOCIO. Las soluciones de los sistemas automáticos de control remoto en tiempo real abren interesantes perspectivas en los negocios de un sector donde las vías para incrementar la productividad son buscadas continuamente. Los primeros equipos de personal que han comprobado los sistemas anteriormente mencionados han descrito ahorros en el tiempo de ejecución de la obra entre 1 y 4 comparando los con técnicas estándar.
7.4 APLICACIONES DEL SISTEMA GPS
Es un sistema utilizado en la actualidad por muchos otros sistemas e inclusive ya es una herramienta de trabajo, por ejemplo es utilizado en aeronaves, para guiarse en el espacio, por los geólogos para la medición de movimientos telúricos, por ingenieros y guardia civil para monitoreo de monumentos o estructuras como puentes colgantes y evidentemente por la fuerza militar y secreta de los Estados Unidos de América.
El GPS, sistema de localización global por satélites surgió con fines bélicos. Algunos de los satélites que rodean la Tierra pueden detectar con precisión la presencia de ejércitos o de armamento en diferentes regiones del globo.
De la misma manera como esos sistemas son capaces de detectar movimientos con fines bélicos, también es posible utilizarlos para la supervisión de movimientos naturales de la Tierra, el tránsito en una ciudad o las oscilaciones de estructuras arquitectónicas como puentes colgantes y estatuas
.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
116
Ejemplos de su utilización:
La tecnología del sistema global por satélites (GPS por sus siglas en inglés) nos permite esos y muchos otros tipos de actividades relacionados con la vigilancia. Entre ellas podríamos citar la detección de la dilatación de magma de un volcán, la observación de los movimientos de un iceberg, determinar las finas vibraciones terrestres y, en fin, cualquier fenómeno natural o creado por el hombre que presente algún movimiento, por más imperceptible que parezca.
La vigilancia se realiza por medio de receptores que reciben una señal fija de un satélite. Cuando hay modificaciones, inmediatamente se detecta la anomalía. De esta manera, el puente colgante más largo del mundo, el Tsing Ma de Hong Kong, es estrechamente vigilado día y noche. Las señales de estos receptores se concentran en una computadora central la cual tiene la información general de los movimientos, esta siendo capaz de advertí el riesgo en caso de que existiese.
Usos no militares.
Los datos generados por el GPS también pueden ser utilizados para estudiar fenómenos que ocurren en otros mundos. Los investigadores Andrew Johnston y James Zimbelman precisaron los flujos de lava que suceden en Carrizozo, en el campo de prueba de misiles de White Sands, cerca de Alamogordo y en McCartys, al sur de Grants, los cuales se extienden hasta 50 kilómetros.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
117
Asimismo, el GPS puede servir para comprender mejor los cambios físicos que ocurren en nuestro planeta. Por ejemplo, los movimientos en loas profundas aguas de los océanos, el monitoreo de el estatus de la actividad volcánica en ciertas regiones.
Algunos otros usos no militares es la detección de los movimientos bajo la tierra también Los investigadores del Instituto de Mediciones Geográficas de Japón han recogido una serie de datos con Geonet, una red de más de mil censores GPS que cubre las zonas rurales del país, para con esto tratar de predecir el comportamiento de las capas subterráneas y por ende predecir cuando un sismo sucederá.
De esta y muchas formas más un sistema que surgió bajo necesidades bélicas podrá ser utilizado para propósitos benéficos para la humanidad.
Es empleado en la navegación marítima, terrestre y aérea. Donde el caso particular de la navegación aérea es en la actualidad muy dependiente de estos sistemas para su funcionamiento.
En el caso de los marítimos, antes las embarcaciones empleaban el sistema TRANSIT.
Se piensa que en poco tiempo toda la navegación marítima se basará en GPS. Actualmente también se emplean sistemas hiperbólicos, pero estos sistemas tienden a desaparecer.
También empieza a surgir en las calles de América, donde los carros tienen integrado sistemas de GPS y con esto es prácticamente imposible perderse.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
118
A continuación se indican una serie de aplicaciones del sistema que dejan claro el enorme potencial presente y futuro del GPS:
* Establecimiento y densificación de redes geodésicas. * Control de deformaciones terrestres. * Posicionamiento de cámaras de fotogrametría. * Establecimiento de bases y redes de replanteo. * Determinación y localización de cualquier tipo de obra. * Estudio de evolución de cuencas fluviales. * Levantamientos batimétricos. * Actualizaciones de Sistemas de Información Geográfica * Navegación en tiempo real con gran precisión. * Determinación de dirección, velocidad y aceleración de
cualquier vehículo. * Guiado de vehículos sobre trayectorias prefijadas. * Localización y control de flotas de vehículos. * Inventario de redes viales, etc.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
119
Ø CONCLUSIONES.
Cabe mencionar que este sistema de posicionamiento global, a pesar de haber sido inventado hace ya casi tres décadas para algunos resulta desconocido. Esto lo podemos atribuir a dos cosas, primero, que el sistema empezó a funcionar de forma pública en 1990, hace casi trece años. En segundo, el hecho de que en un comienzo era una tecnología pública pero no muy accesible para todos, pues tener un GPS era algo costoso y con el paso del tiempo ha cambiado.
Es importante recalcar como un descubrimiento o creación que surgió con fines bélicos, es también capaz de ser utilizado a favor del bienestar de la población, mediante seguridad aérea, marítima y prontamente terrestre entre otras.
Este sistema ha subsistido como el único en su categoría y es controlado por Estados Unidos. Pero en un futuro próximo quizá habrá otra red semejante creada y coordinada por los países europeos, el objetivo es acabar con el monopolio creando una red similar pero con mejoras sustanciales.
A pesar de los grandes logros de esta infraestructura satelital, quizá no vivamos para apreciar los alcances de esta tecnología en su pleno funcionamiento, la evolución tecnológica es tan impresionante que sería difícil predecir las capacidades de este sistema en otras tres décadas.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
120
En función de todo lo aquí visto, no parece descabellado el comentario de que cualquier empresa de nuestro ramo que no emplee la tecnología GPS en uno o dos años. No podrá ofrecer precios competitivos en los muchos trabajos en los que se pueda aplicar esta nueva técnica tan rápida y novedosa. Pero tampoco debemos caer en demagogias y creer que el GPS antes o después será una panacea. De hecho solo podremos realizar una navegación muy precisa o dar coordenadas de puntos con amplias posibilidades, pero supeditando siempre el grado de precisión a la duración de la observación el detenimiento y la entrega para desarrollarla. Por otro lado, las técnicas clásicas seguirán siendo vigentes , aunque siempre cada vez más apoyadas, y lo que es más interesante, homogeneizadas, al disponer siempre de un sistema de referencia tan estable y eficaz como el que ofrece el GPS en las aplicaciones Geográficas de tan magnifica exactitud y precisión, tiempo de ejecución.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
121
Ø BIBLIOGRAFÍA.
1) Fernando García Márquez, Curso básico de topografía, definición aplicaciones y división de la topografía, Primera edición, Editorial: Pax México, México, 2003, Pág. 1.
2) Revista América Economía Noticias Diarias, América Economía, Marzo 27, 2002
3) http://www.precisiontopografica.com/glosario.htm 4) Publication: Red, Editorial Red, S.A. de C.V., August 1, 2001 5) http://www.monografias.com/trabajos19/navegacion global/navegacionglobal.shtml top
6) http://nasa.gov/ 7) http://www.medicionesgps.com.ar/gpsexplica.html 8) http://www.altop.com/al_top/ 9) Global Positioning Sistems (GPS) 10) http://[email protected]/ 11) http://www.altop.com/al_top/ (Agustín López Doval). 12) http://www.monografias.com/trabajos19/navegacion
global/navegacionglobal.shtml top 13) http://www.altop.com/al_top/ 14) http://www.medicionesgps.com.ar/gpsexplica.html ( Collvill
Jones y Ojos ). 15) http://www.elgps.com/documentos.html 16) Gaetan Hintzy, JeanMarc, Noury, Integra,Traducido por
Antonio Blanco (AlTop Topografía, S.A.). (Gim International Marzo 1999).
17) CHUVIECO, E (2000): “Fundamentos de Teledetección Espacial”. Ediciones Rialp S.A. Madrid, España.

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
122
18) Revista Siempre, Editorial Siempre, S. A, Abril 10, 2002, GPS: LocationTracking Technology.
19) http://geomatica.ing.unico.it/ 20) http://www.glonasscenter.ru/satellitee.html 21) http://www.garmin.com 22) http://www.magellangps.com 23) http://www.detectoresderadar.com 24) http://www.geomatica.ing.unico.it 25) http://www.igm.cl/Edu_Agosto_2004.htm

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
123

ESCUELA SUPERIOR DE INGENIERIA Y ARQUITECTURA UNIDAD ZACATENCO.
124