Apunts Unitat 5
46
Què són les màquines elèctriques? Els processos de transformació d’energia ens permeten disposar de l’energia de la manera més convenient per a la seva utilització. Definim màquina elèctrica com el conjunt de mecanismes i dispositiuscapaços de produir, transformar o aprofitar l’energia elèctrica. Les màquines elèctriques es classifiquen en tres grans grups: Generadors: transformen l’energia mecànica en energia elèctrica. Motors: transformen l’energia elèctrica en mecànica. Transformadors: varien les característiques de l’energia elèctrica per facilitar-ne el transport i la utilització. Pèrdues d’energia a les màquines elèctriques Les pèrdues són relativament petites comparades amb la majoria de màquines motrius, com ara els motors tèrmics, i s’obtenen rendiments elevats, de prop del 90 % i, fi ns i tot, superiors al 99 % en el cas dels transformadors de potències elevades.
description
apunts unitat 5
Transcript of Apunts Unitat 5
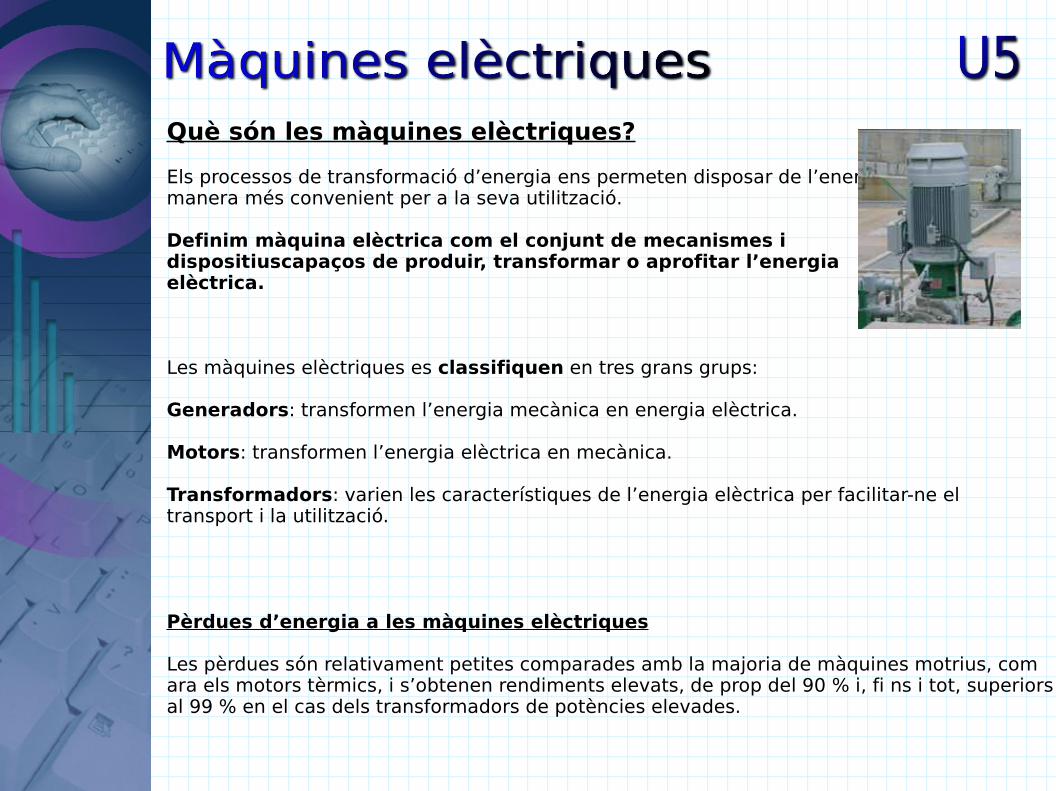
Què són les màquines elèctriques?
Els processos de transformació d’energia ens permeten disposar de l’energia de la manera més convenient per a la seva utilització.
Definim màquina elèctrica com el conjunt de mecanismes i dispositiuscapaços de produir, transformar o aprofitar l’energia elèctrica.
Les màquines elèctriques es classifiquen en tres grans grups:
Generadors: transformen l’energia mecànica en energia elèctrica.
Motors: transformen l’energia elèctrica en mecànica.
Transformadors: varien les característiques de l’energia elèctrica per facilitar-ne el transport i la utilització.
Pèrdues d’energia a les màquines elèctriques
Les pèrdues són relativament petites comparades amb la majoria de màquines motrius, com ara els motors tèrmics, i s’obtenen rendiments elevats, de prop del 90 % i, fi ns i tot, superiors al 99 % en el cas dels transformadors de potències elevades.
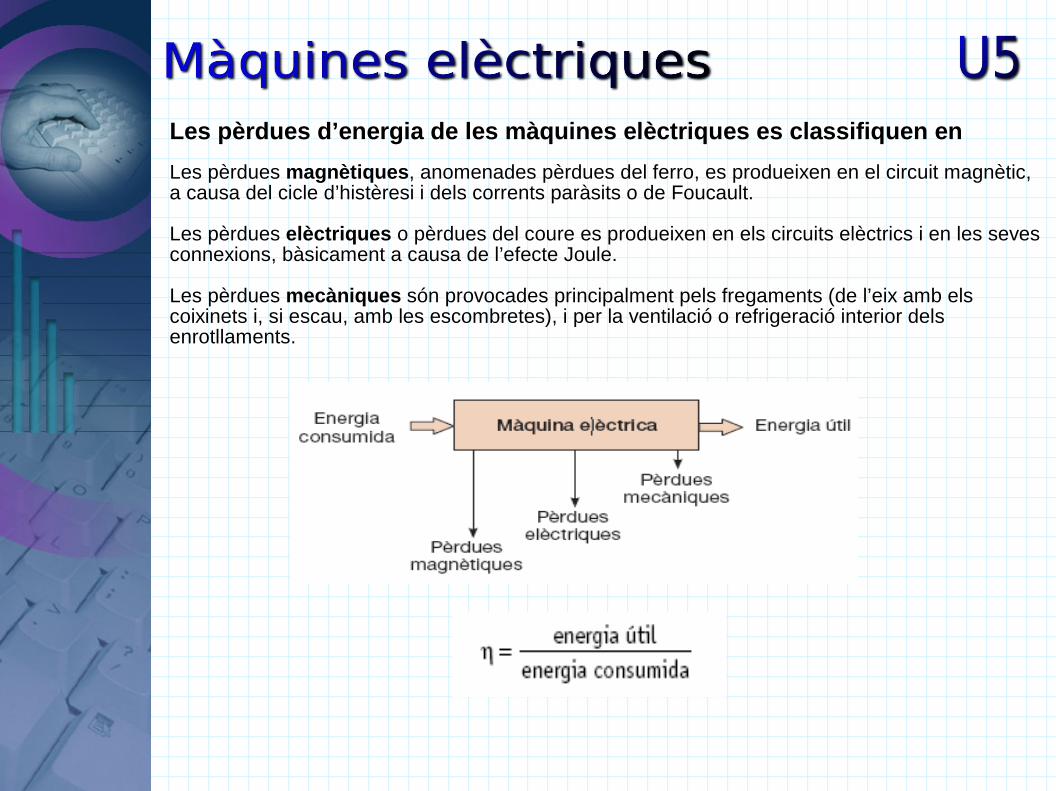
Les pèrdues d’energia de les màquines elèctriques es classifiquen en
Les pèrdues magnètiques, anomenades pèrdues del ferro, es produeixen en el circuit magnètic, a causa del cicle d’histèresi i dels corrents paràsits o de Foucault.
Les pèrdues elèctriques o pèrdues del coure es produeixen en els circuits elèctrics i en les seves connexions, bàsicament a causa de l’efecte Joule.
Les pèrdues mecàniques són provocades principalment pels fregaments (de l’eix amb els coixinets i, si escau, amb les escombretes), i per la ventilació o refrigeració interior dels enrotllaments.
Potència i règim de funcionament
La potència és el treball desenvolupat en la unitat de temps
Potència absorbida o consumida (Pabs). És la que se subministra a la màquina per al seu funcionamentPotència perduda (Pp). És la potència provocada per les pèrdues d’energia.
En els transformadors seran les pèrdues magnètiques més les elèctriques,i en els generadors i motors, com que són màquines rotatives, s’hi han de sumar, a més, les pèrdues mecàniques.
Potència útil (Pu). És la que subministra la màquina.
Potència nominal. És la màxima potència útil que pot proporcionar de manera permanentAquesta potència la determina el fabricant, i és la que fi gura a la placa de característiquesde la màquina
Quan la màquina treballa a potència nominal es diu que treballa a plena càrrega (PC)
Generadors elèctrics
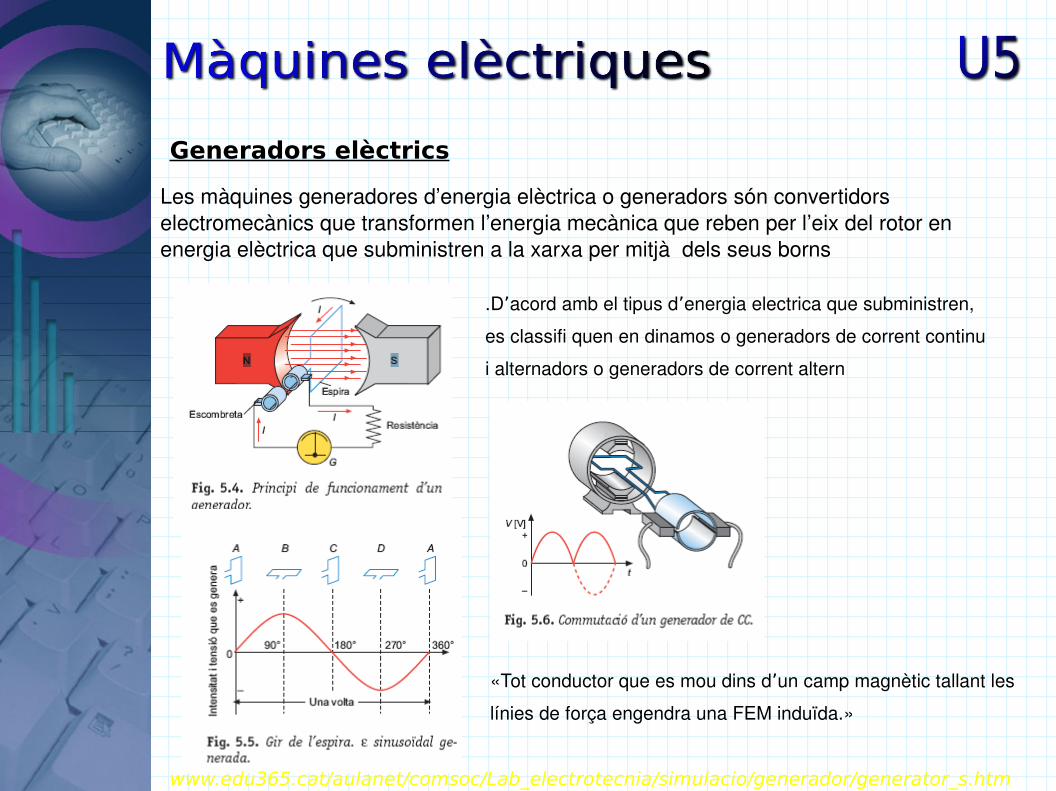
Les màquines generadores d’energia elèctrica o generadors són convertidors electromecànics que transformen l’energia mecànica que reben per l’eix del rotor en energia elèctrica que subministren a la xarxa per mitjà dels seus borns
.D acord amb el tipus d energia electrica que subministren, ’ ’
es classifi quen en dinamos o generadors de corrent continu i alternadors o generadors de corrent altern
«Tot conductor que es mou dins d un camp magnètic tallant les ’
línies de força engendra una FEM induïda.»
www.edu365.cat/aulanet/comsoc/Lab_electrotecnia/simulacio/generador/generator_s.htm
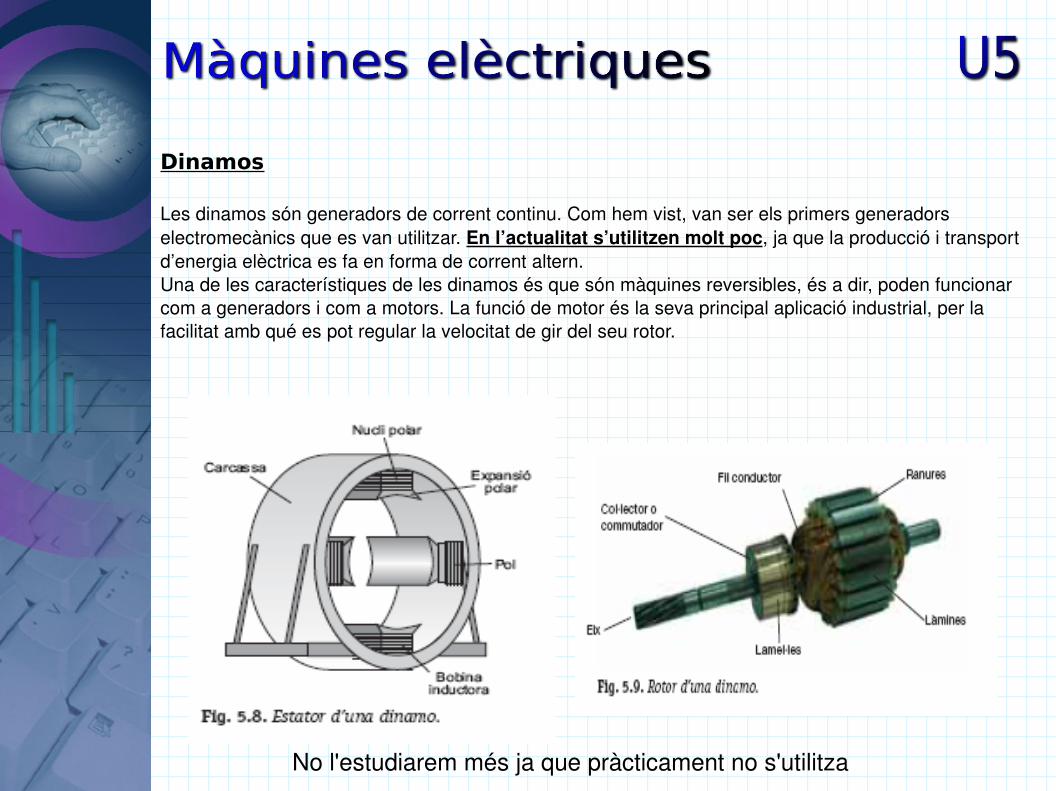
Dinamos
Les dinamos són generadors de corrent continu. Com hem vist, van ser els primers generadorselectromecànics que es van utilitzar. En l’actualitat s’utilitzen molt poc, ja que la producció i transport d’energia elèctrica es fa en forma de corrent altern.Una de les característiques de les dinamos és que són màquines reversibles, és a dir, poden funcionar com a generadors i com a motors. La funció de motor és la seva principal aplicació industrial, per la facilitat amb qué es pot regular la velocitat de gir del seu rotor.
No l'estudiarem més ja que pràcticament no s'utilitza
Alternadors
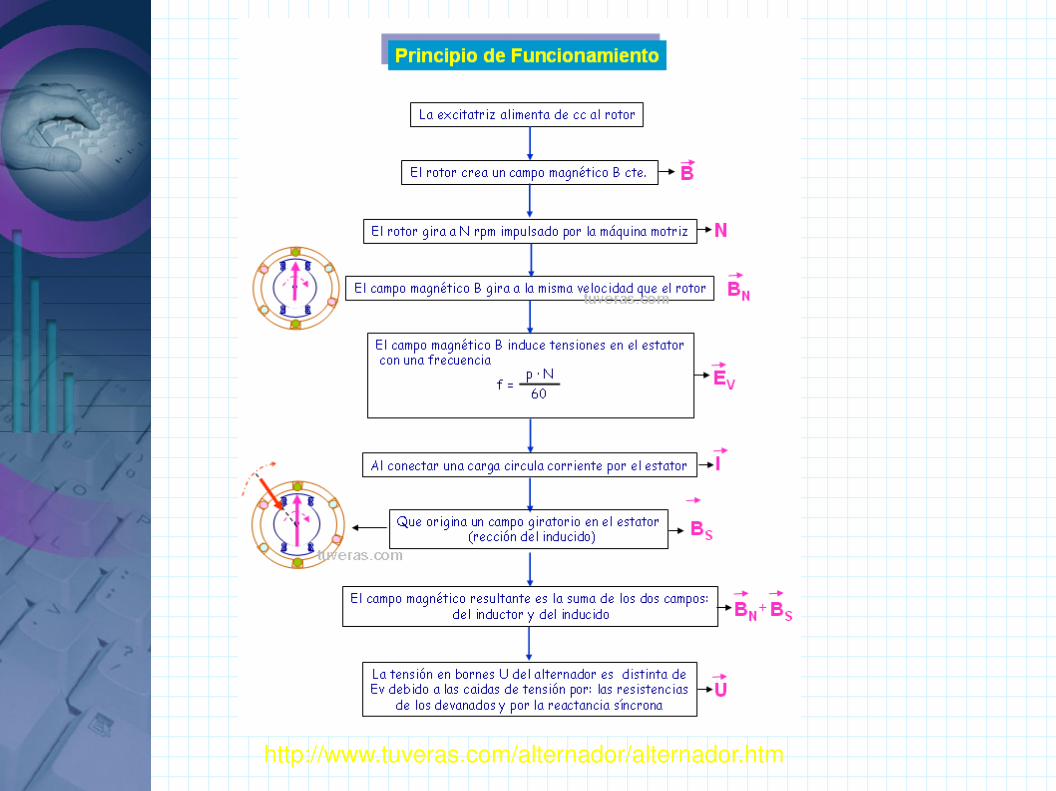
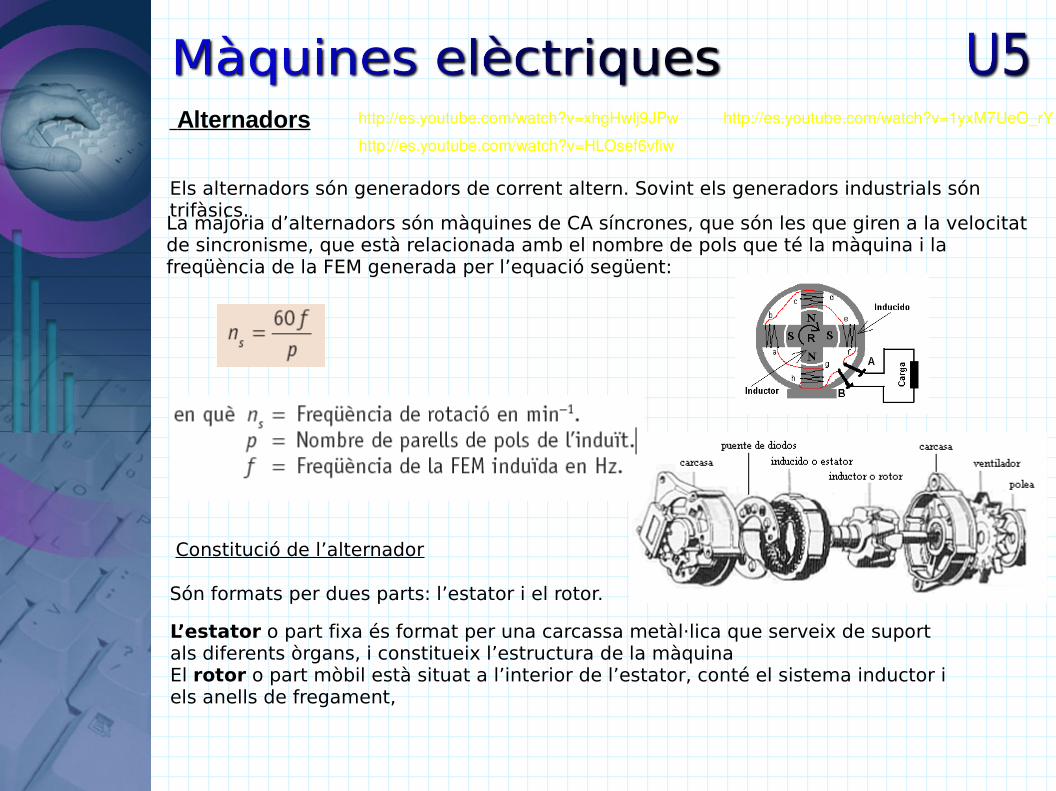
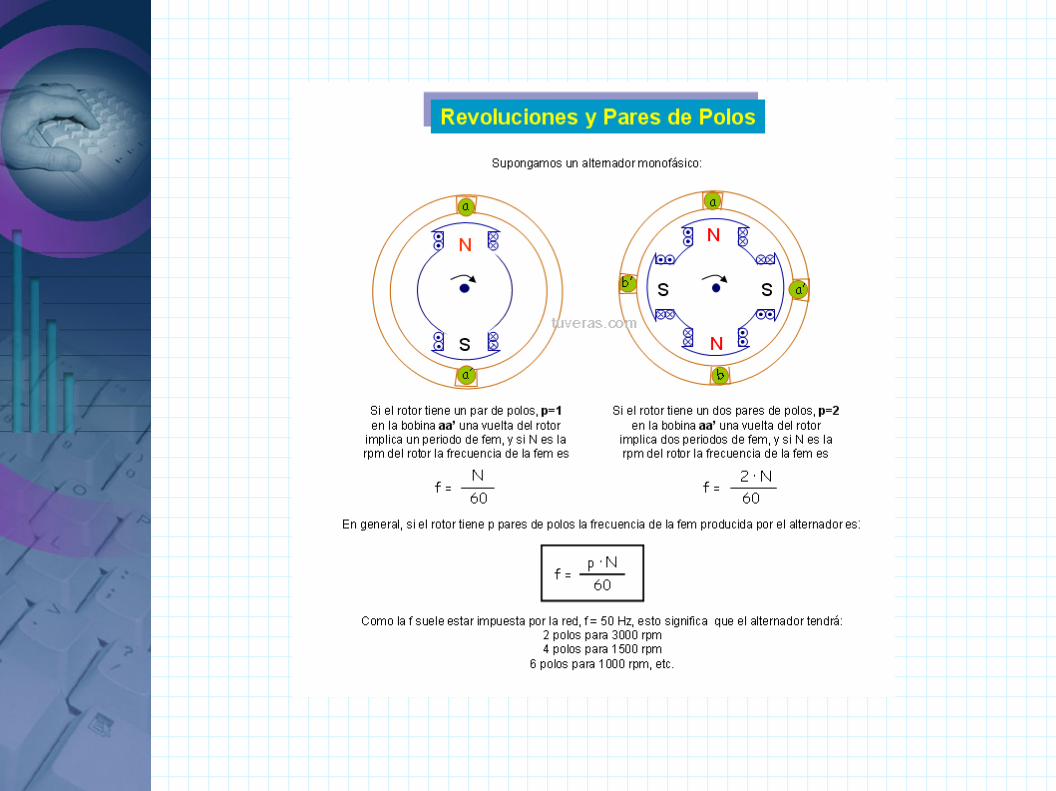
Els alternadors són generadors de corrent altern. Sovint els generadors industrials són trifàsics.La majoria d’alternadors són màquines de CA síncrones, que són les que giren a la velocitatde sincronisme, que està relacionada amb el nombre de pols que té la màquina i la freqüència de la FEM generada per l’equació següent:
Constitució de l’alternador
Són formats per dues parts: l’estator i el rotor.
L’estator o part fixa és format per una carcassa metàl·lica que serveix de suport als diferents òrgans, i constitueix l’estructura de la màquinaEl rotor o part mòbil està situat a l’interior de l’estator, conté el sistema inductor i els anells de fregament,
http://es.youtube.com/watch?v=xhgHwlj9JPw
http://es.youtube.com/watch?v=HLOsef6vfiw http://es.youtube.com/watch?v=1yxM7UeO_rY
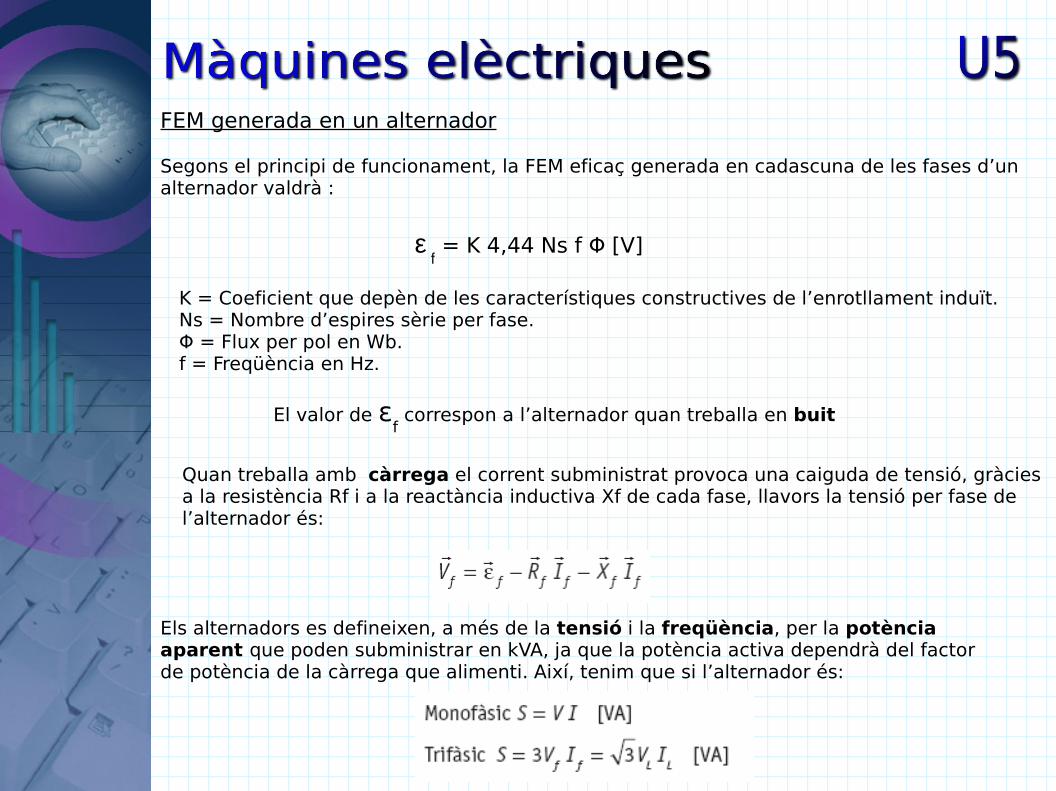
FEM generada en un alternador
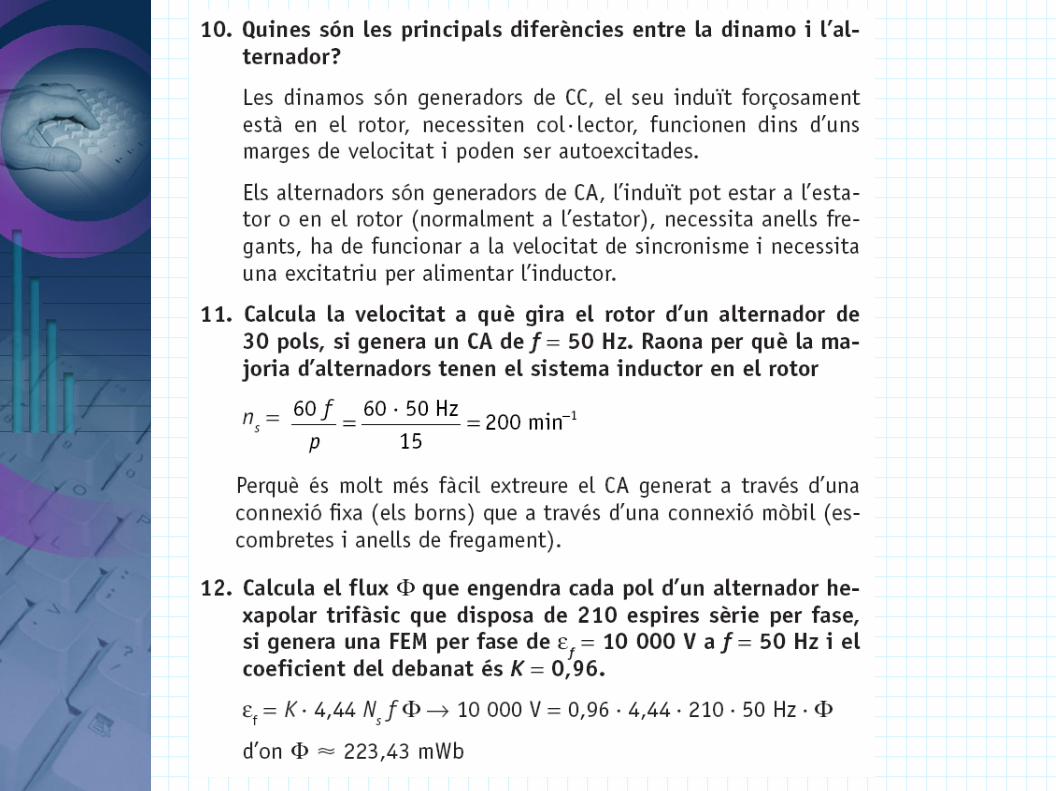
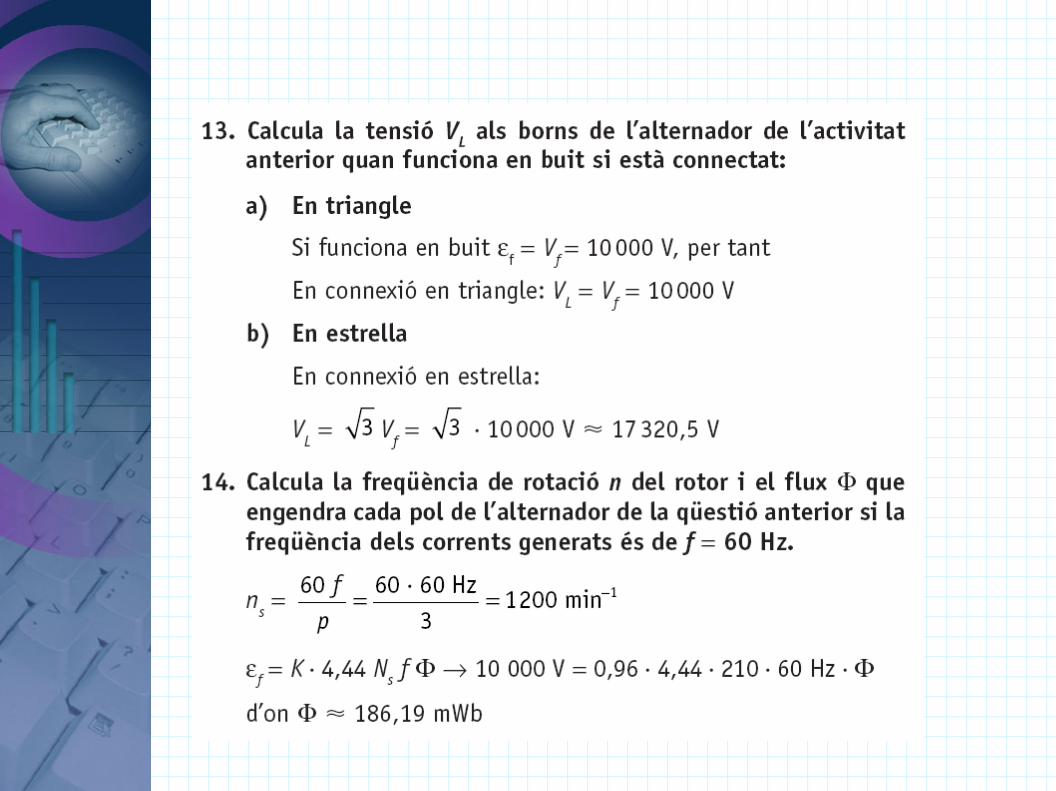
Segons el principi de funcionament, la FEM eficaç generada en cadascuna de les fases d’un alternador valdrà :
ε f = K 4,44 Ns f Φ [V]
K = Coeficient que depèn de les característiques constructives de l’enrotllament induït.Ns = Nombre d’espires sèrie per fase.Φ = Flux per pol en Wb.f = Freqüència en Hz.
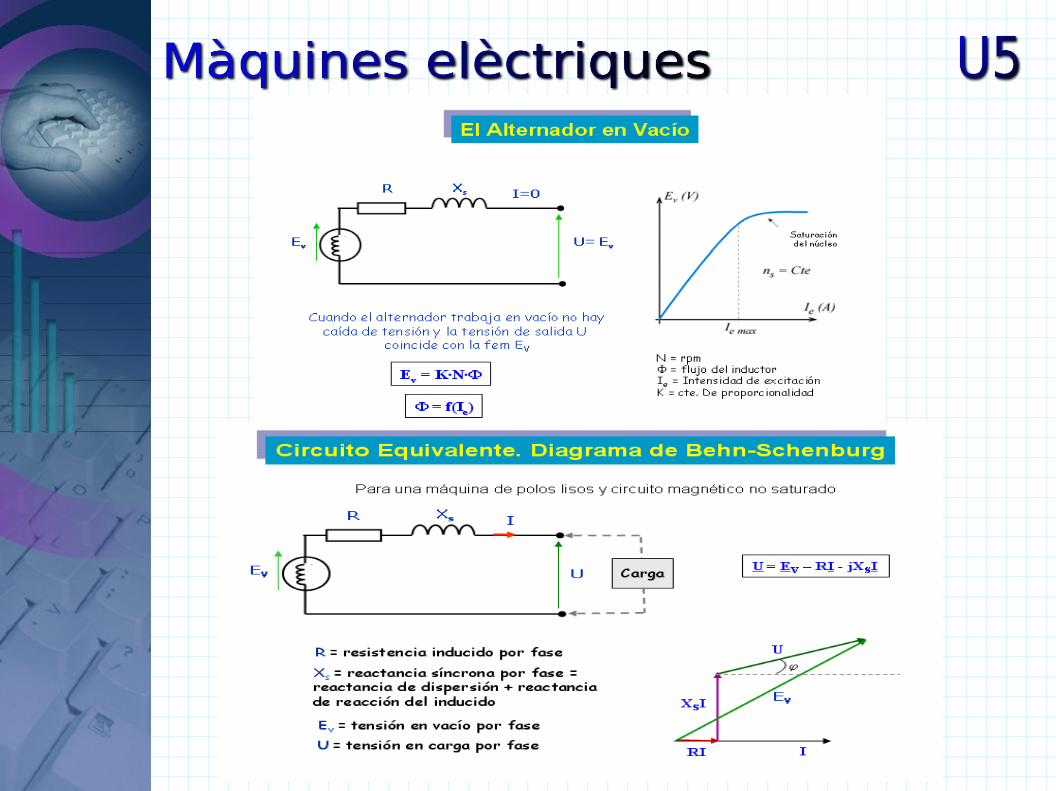
El valor de εf correspon a l’alternador quan treballa en buit
Quan treballa amb càrrega el corrent subministrat provoca una caiguda de tensió, gràcies a la resistència Rf i a la reactància inductiva Xf de cada fase, llavors la tensió per fase del’alternador és:
Els alternadors es defineixen, a més de la tensió i la freqüència, per la potència aparent que poden subministrar en kVA, ja que la potència activa dependrà del factor de potència de la càrrega que alimenti. Així, tenim que si l’alternador és:
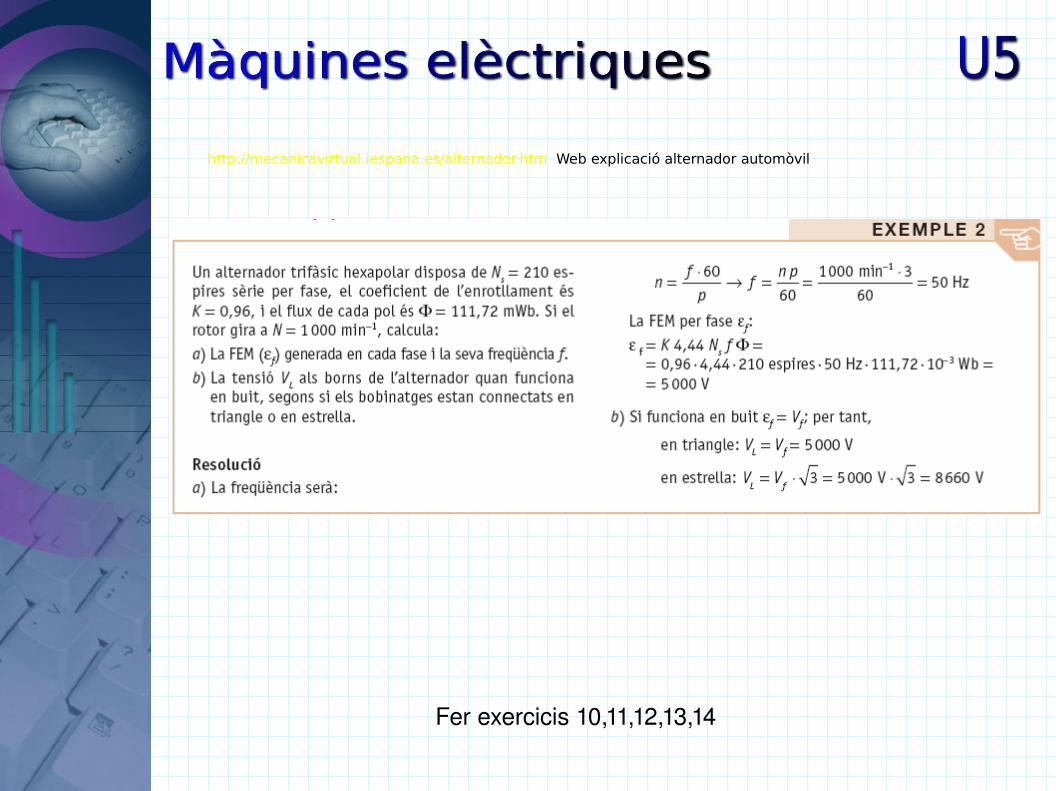
Fer exercicis 10,11,12,13,14
http://mecanicavirtual.iespana.es/alternador.htm Web explicació alternador automòvil
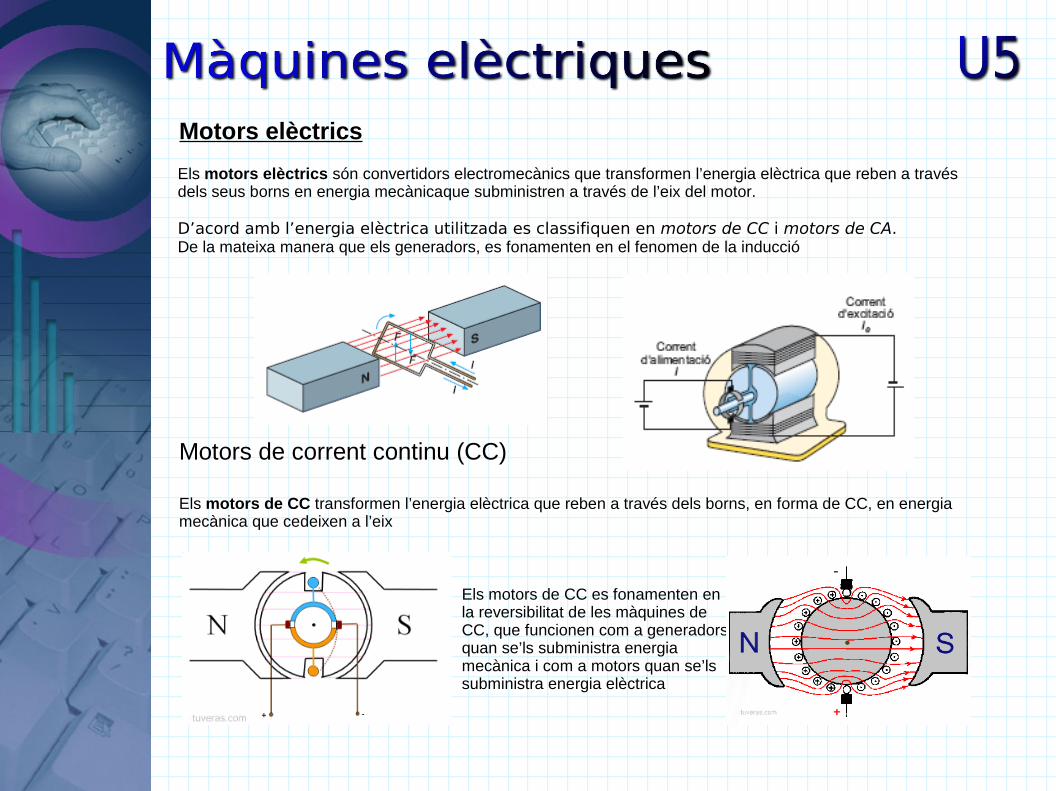
Motors elèctrics
Els motors elèctrics són convertidors electromecànics que transformen l’energia elèctrica que reben a través dels seus borns en energia mecànicaque subministren a través de l’eix del motor.
D’acord amb l’energia elèctrica utilitzada es classifiquen en motors de CC i motors de CA.De la mateixa manera que els generadors, es fonamenten en el fenomen de la inducció
Motors de corrent continu (CC)
Els motors de CC transformen l’energia elèctrica que reben a través dels borns, en forma de CC, en energia mecànica que cedeixen a l’eix
Els motors de CC es fonamenten enla reversibilitat de les màquines deCC, que funcionen com a generadorsquan se’ls subministra energia mecànica i com a motors quan se’ls subministra energia elèctrica
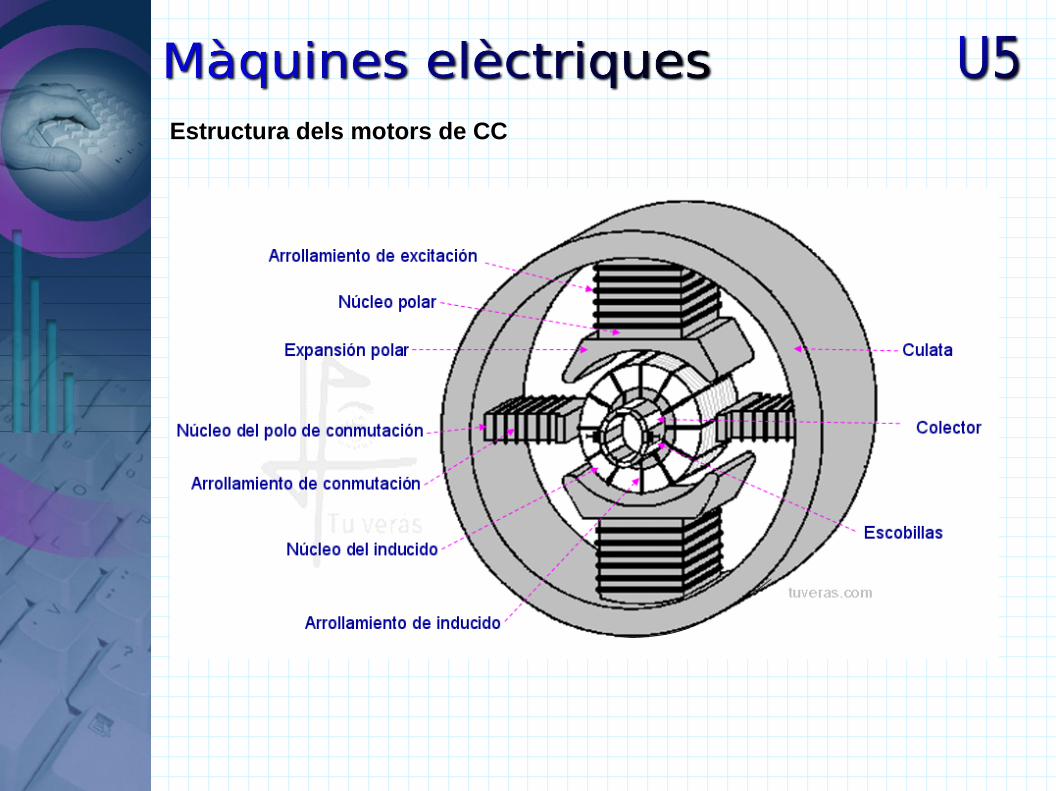
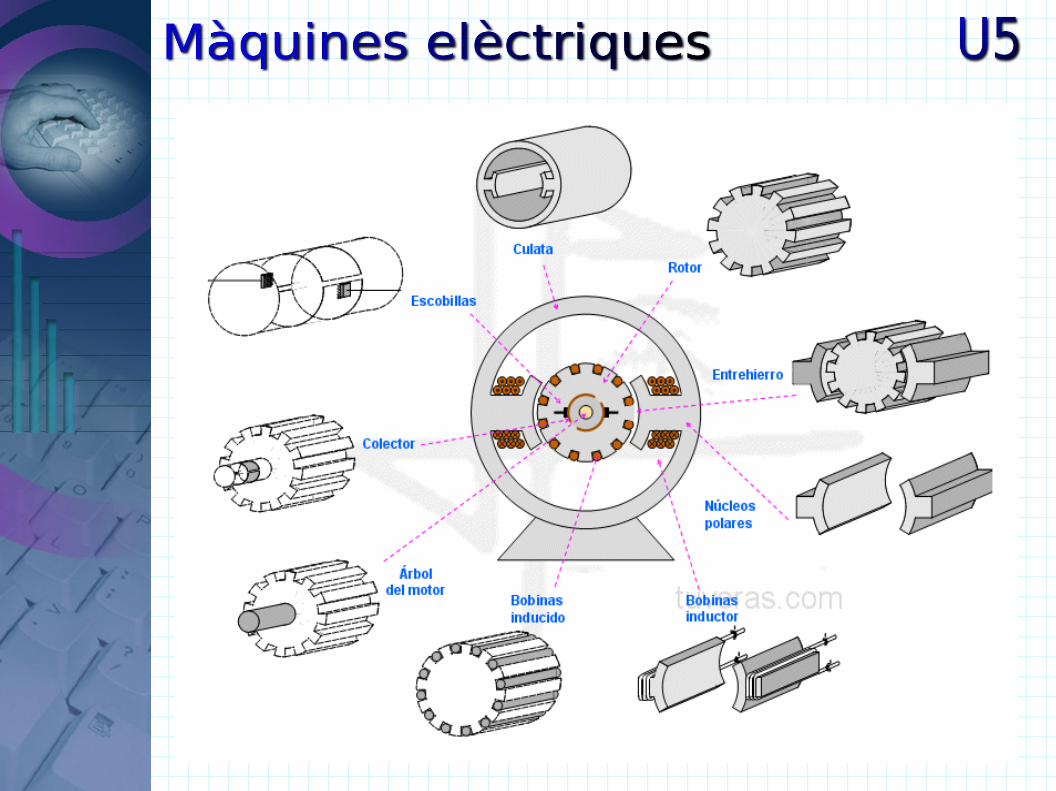
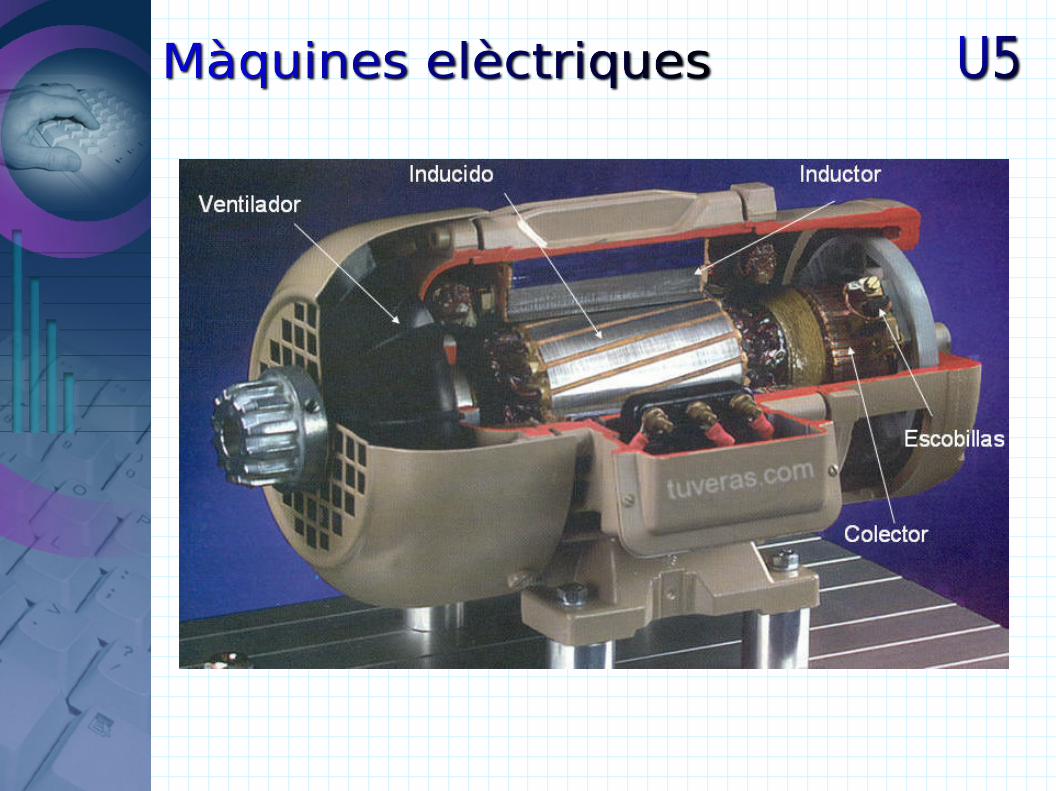
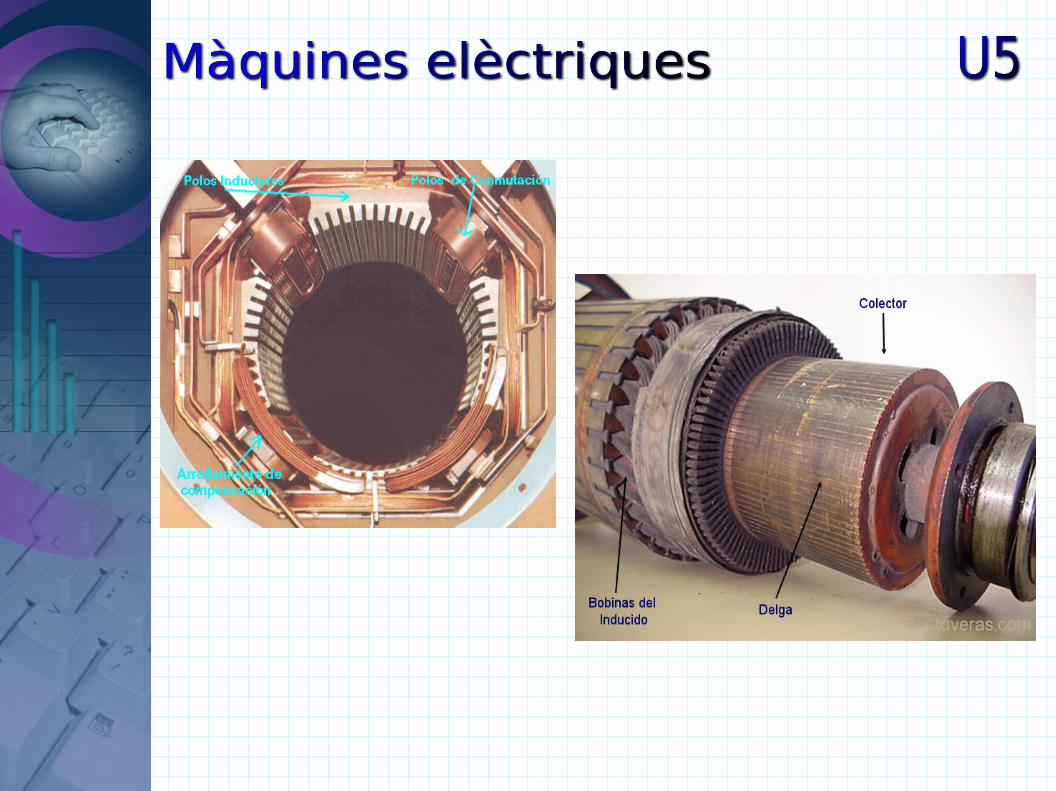
Estructura dels motors de CC
Comportament dels motors de CC
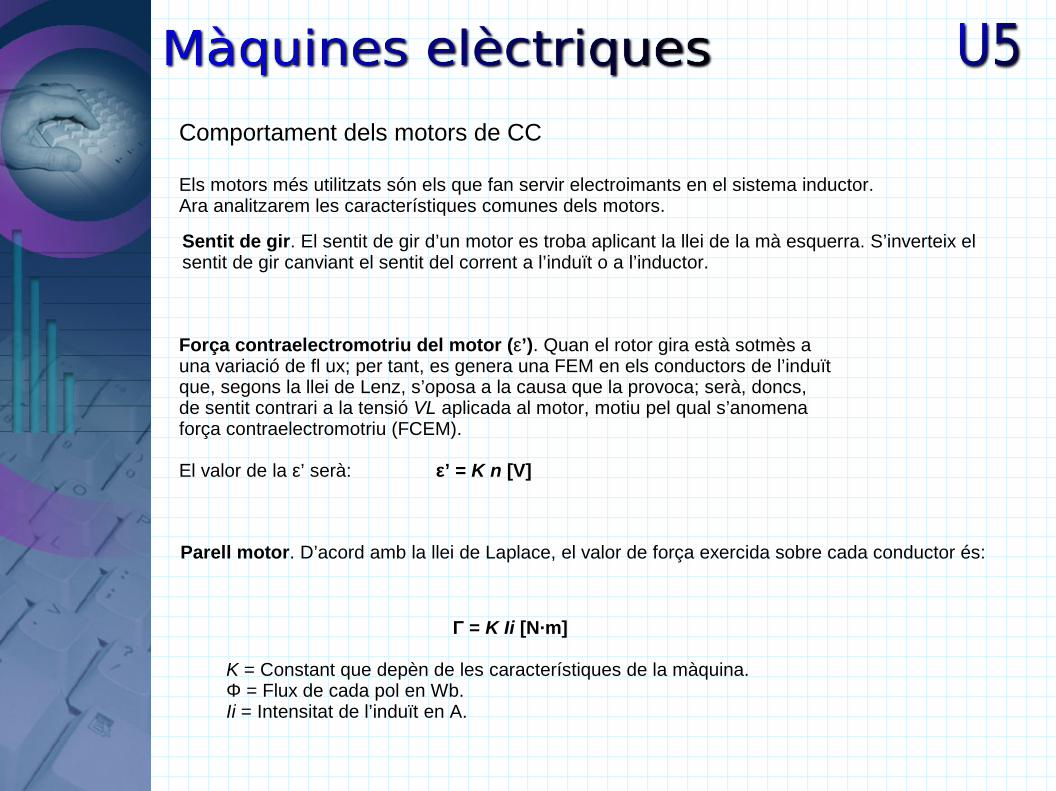
Els motors més utilitzats són els que fan servir electroimants en el sistema inductor. Ara analitzarem les característiques comunes dels motors.
Sentit de gir. El sentit de gir d’un motor es troba aplicant la llei de la mà esquerra. S’inverteix el sentit de gir canviant el sentit del corrent a l’induït o a l’inductor.
Força contraelectromotriu del motor (ε’). Quan el rotor gira està sotmès auna variació de fl ux; per tant, es genera una FEM en els conductors de l’induïtque, segons la llei de Lenz, s’oposa a la causa que la provoca; serà, doncs,de sentit contrari a la tensió VL aplicada al motor, motiu pel qual s’anomenaforça contraelectromotriu (FCEM).
El valor de la ε’ serà: ε’ = K n [V]
Parell motor. D’acord amb la llei de Laplace, el valor de força exercida sobre cada conductor és:
Γ = K Ii [N·m]
K = Constant que depèn de les característiques de la màquina.Φ = Flux de cada pol en Wb.Ii = Intensitat de l’induït en A.
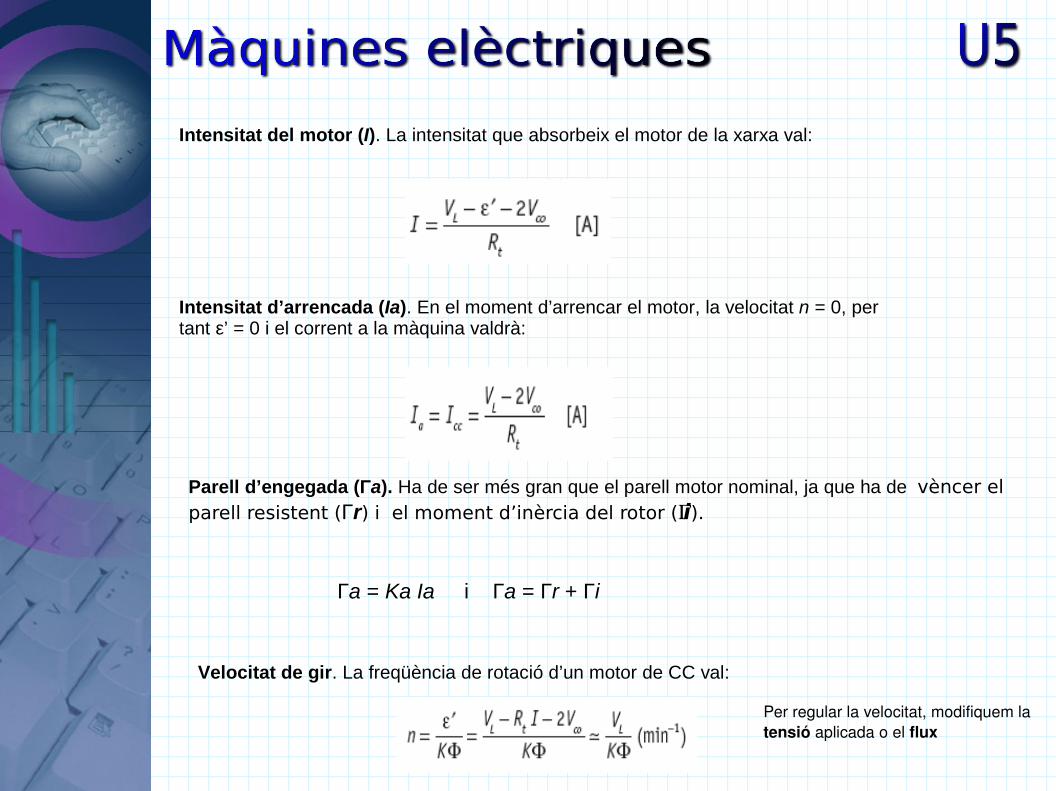
Intensitat d’arrencada (Ia). En el moment d’arrencar el motor, la velocitat n = 0, pertant ε’ = 0 i el corrent a la màquina valdrà:
Intensitat del motor (I). La intensitat que absorbeix el motor de la xarxa val:
Parell d’engegada (Γa). Ha de ser més gran que el parell motor nominal, ja que ha de vèncer el parell resistent (Γr) i el moment d’inèrcia del rotor (i).
Γa = Ka Ia i Γa = Γr + Γi
Velocitat de gir. La freqüència de rotació d’un motor de CC val:
Per regular la velocitat, modifiquem latensió aplicada o el flux
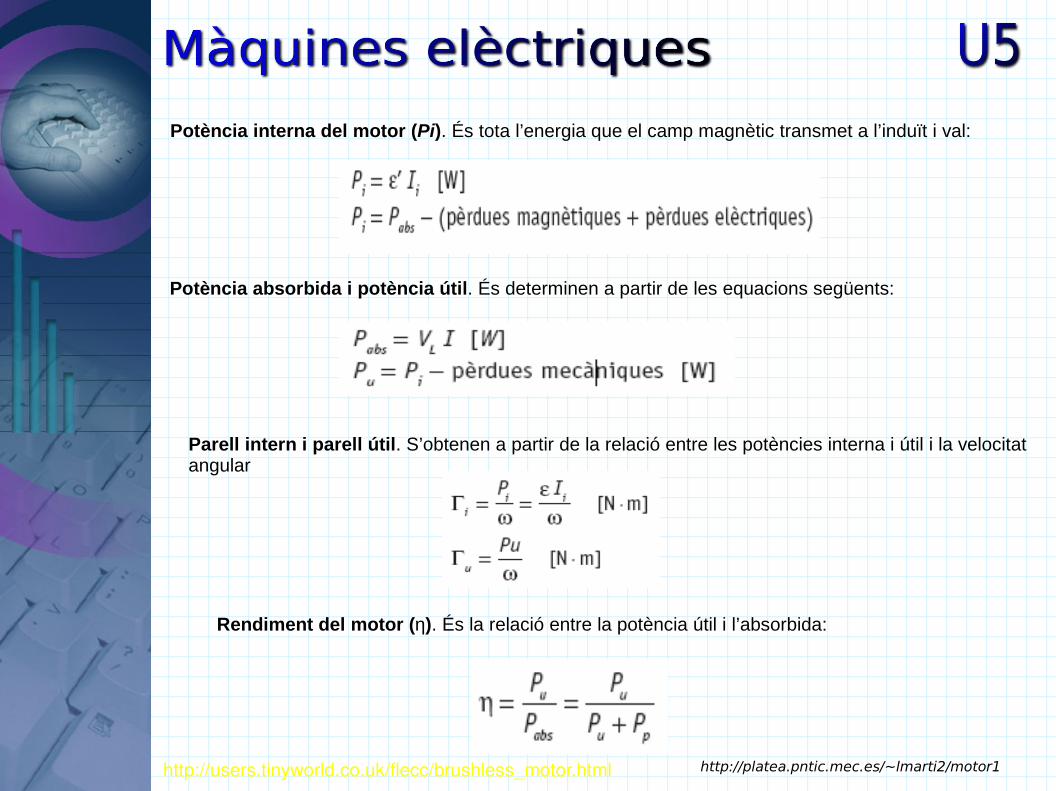
Potència interna del motor (Pi). És tota l’energia que el camp magnètic transmet a l’induït i val:
Potència absorbida i potència útil. És determinen a partir de les equacions següents:
Parell intern i parell útil. S’obtenen a partir de la relació entre les potències interna i útil i la velocitat angular
Rendiment del motor (η). És la relació entre la potència útil i l’absorbida:
http://users.tinyworld.co.uk/flecc/brushless_motor.html http://platea.pntic.mec.es/~lmarti2/motor1.htm
Corbes característiques
El funcionament d’un motor de CC depèn de cinc variables
La freqüència de rotació nEl corrent d’excitació Iex
La tensió en borns VL
El corrent induït Ii
El parell motor
K Ii i el és proporcional a la Iex podem eliminar la Iex
Com que el
En realitat només depend de f (VL, Ii, n, Γ)
Com que la VL és constant, només necessitem tres corbes per estudiar el comportament del motor
Característica de velocitat n = f (I) amb τ = ct
Característica del parell motor Γ = f (I) amb n = ct
Característica mecànica Γ = f (n) amb I = ct
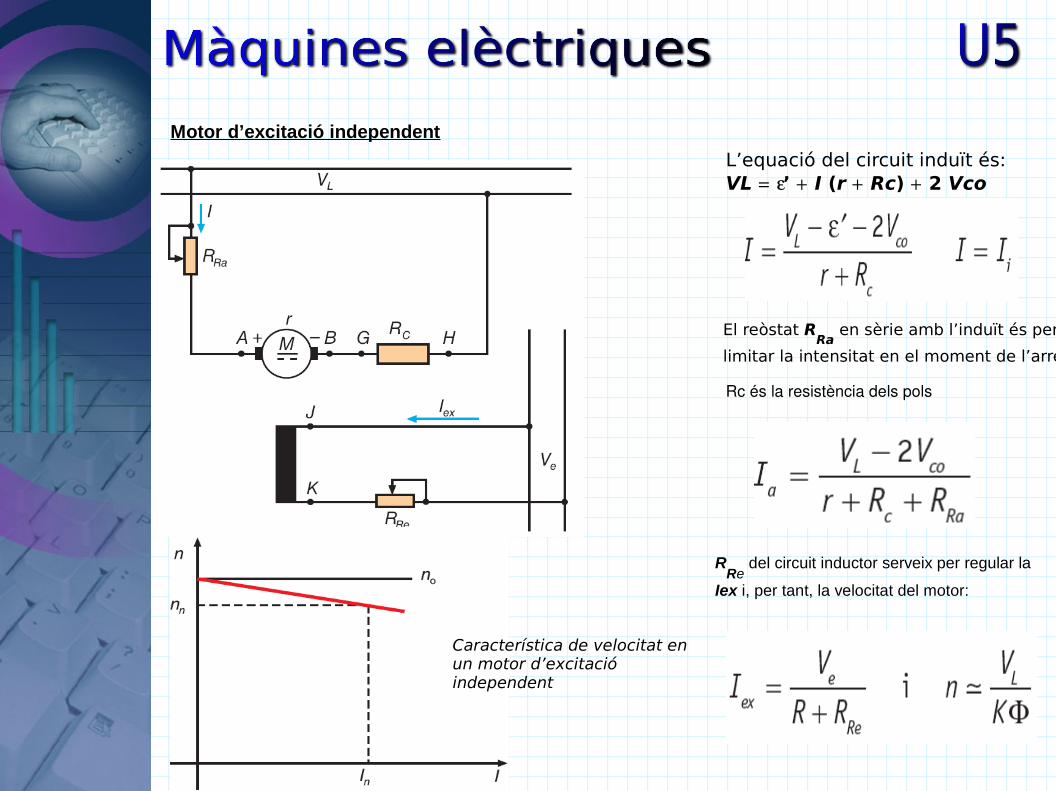
Motor d’excitació independent
L’equació del circuit induït és: VL ’ I (r Rc) 2 Vco
El reòstat RRa
en sèrie amb l’induït és per
limitar la intensitat en el moment de l’arrencada
Rc és la resistència dels pols
RRe
del circuit inductor serveix per regular la
Iex i, per tant, la velocitat del motor:
Característica de velocitat enun motor d’excitació independent
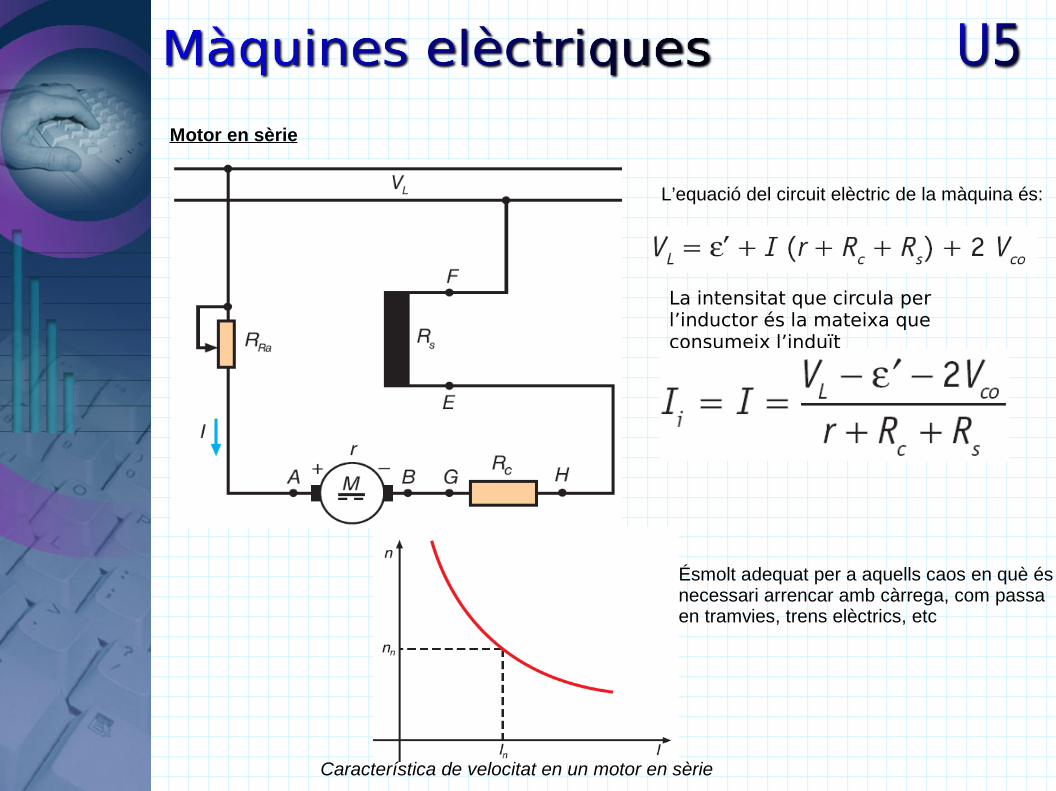
Motor en sèrie
L’equació del circuit elèctric de la màquina és:
La intensitat que circula per l’inductor és la mateixa que consumeix l’induït
Característica de velocitat en un motor en sèrie
Ésmolt adequat per a aquells caos en què és necessari arrencar amb càrrega, com passaen tramvies, trens elèctrics, etc
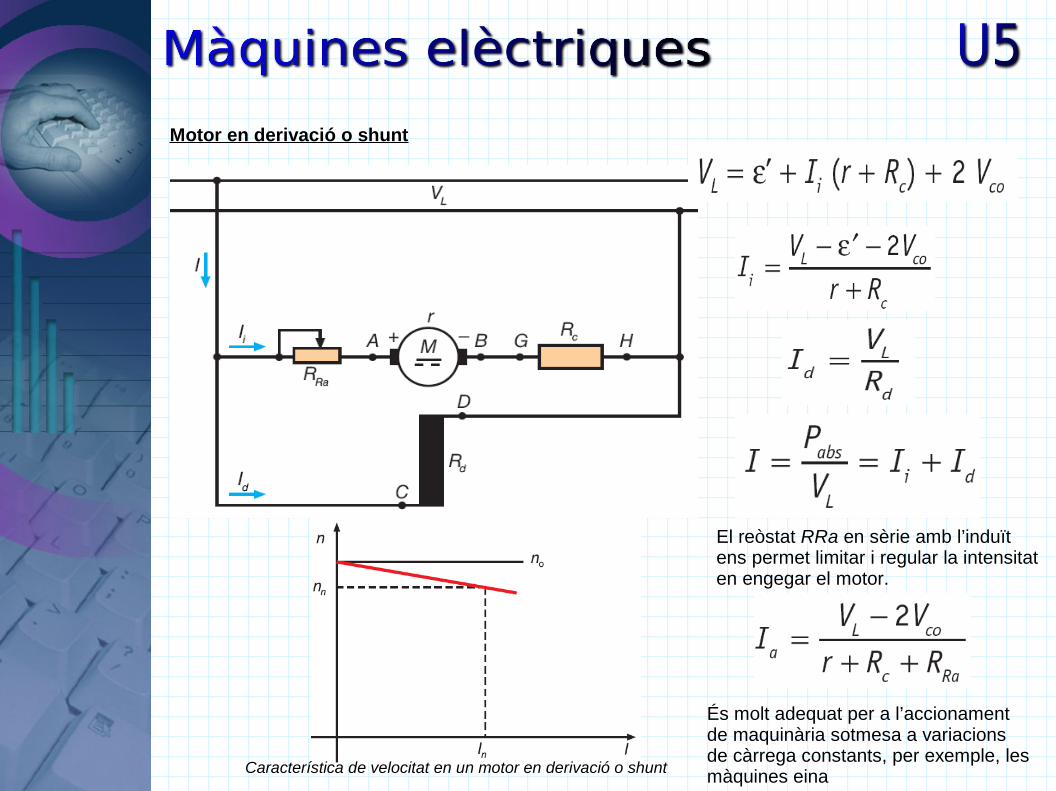
Motor en derivació o shunt
Característica de velocitat en un motor en derivació o shunt
El reòstat RRa en sèrie amb l’induït ens permet limitar i regular la intensitaten engegar el motor.
És molt adequat per a l’accionament de maquinària sotmesa a variacions de càrrega constants, per exemple, lesmàquines eina
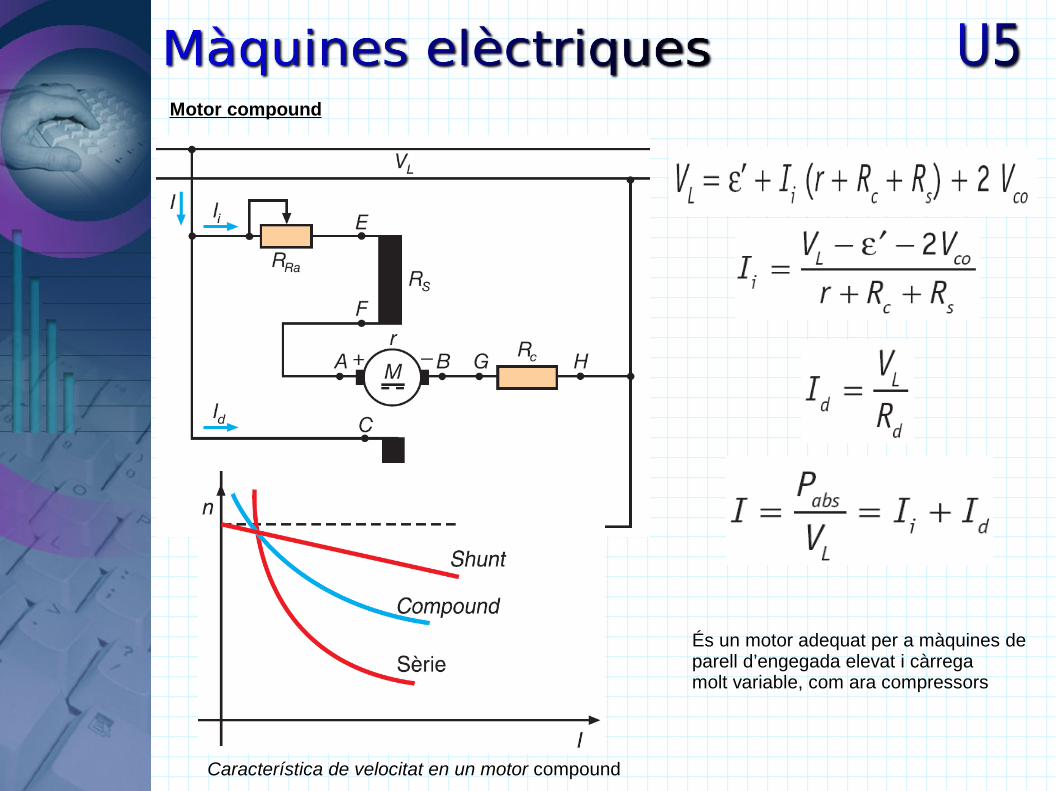
Motor compound
Característica de velocitat en un motor compound
És un motor adequat per a màquines de parell d’engegada elevat i càrregamolt variable, com ara compressors
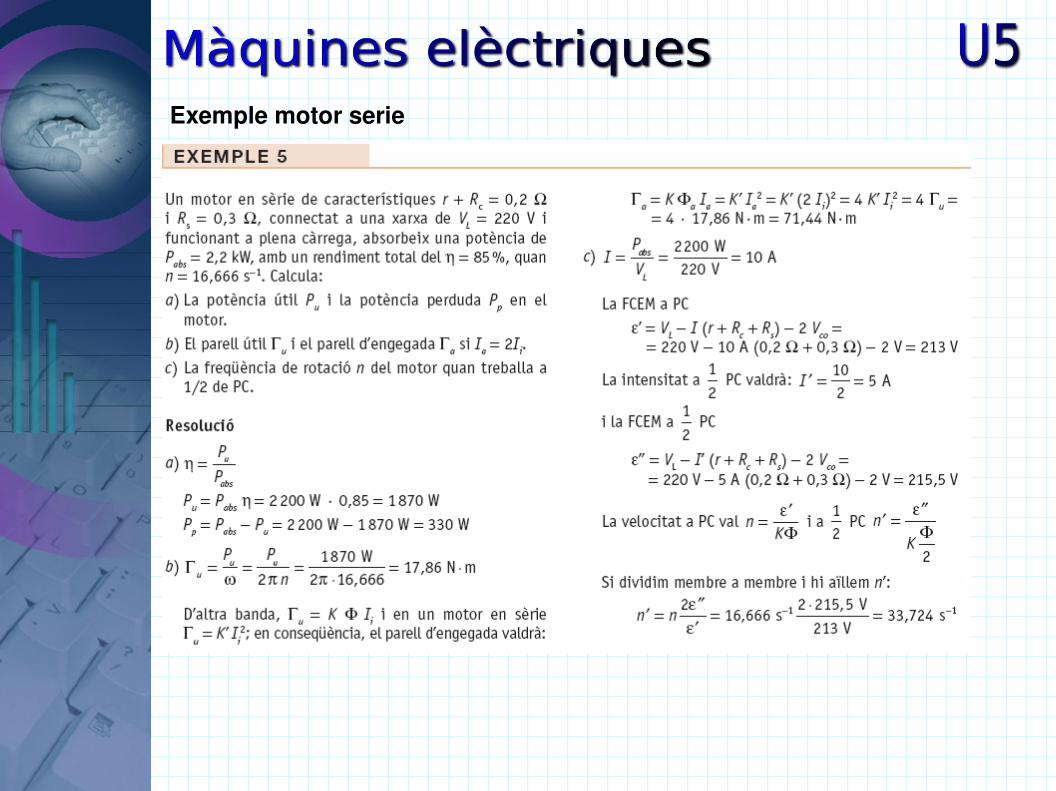
Exemple motor serie
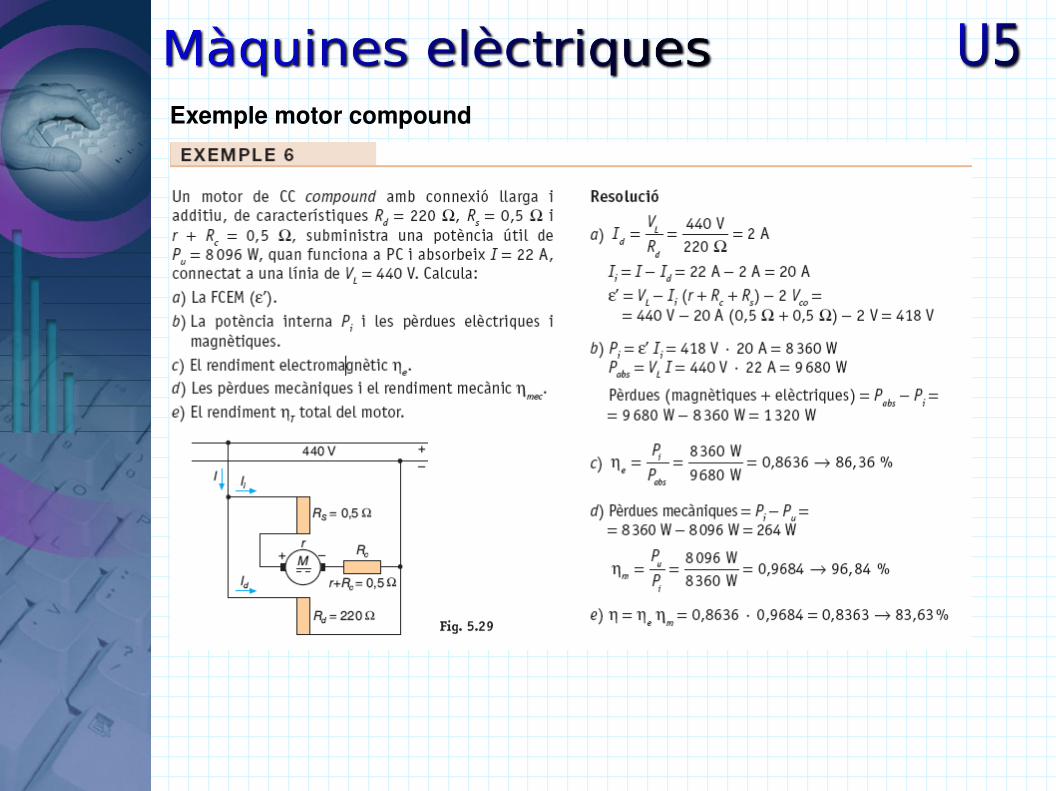
Exemple motor compound
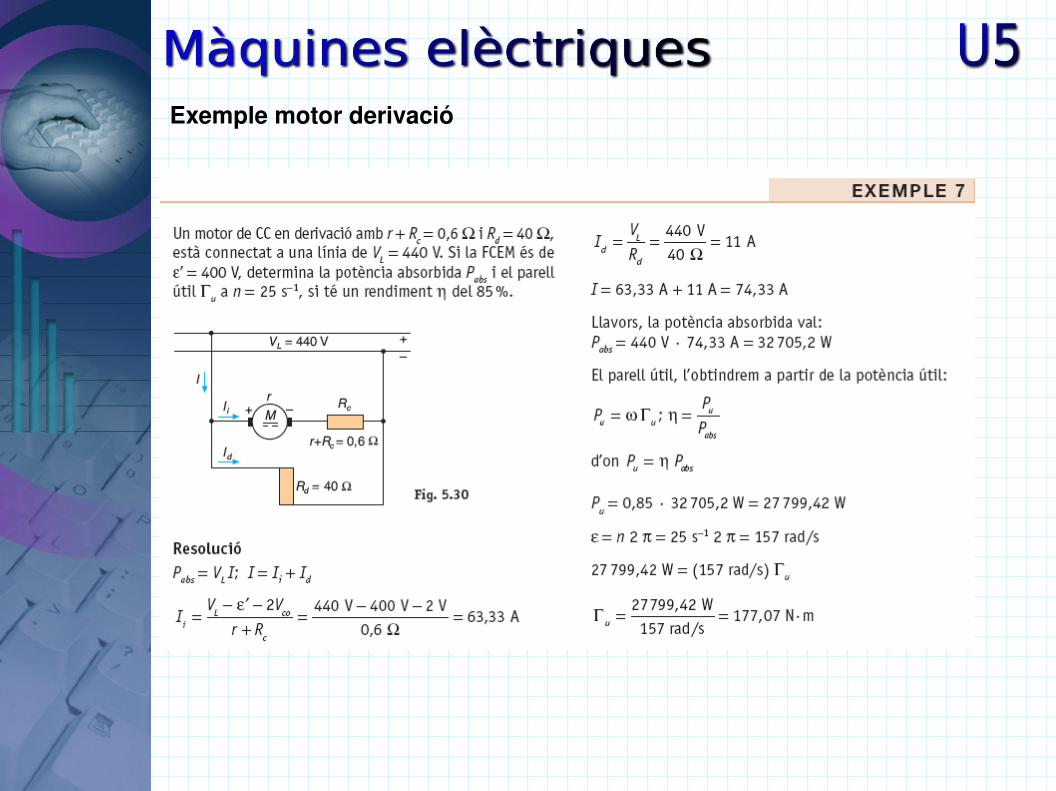
Exemple motor derivació
Activitats finals pàgina 149 . 1,2,3,4,5,6150 9,10,
Exercicis pàgina 150 2Exercicis pàgina 151 2, 4
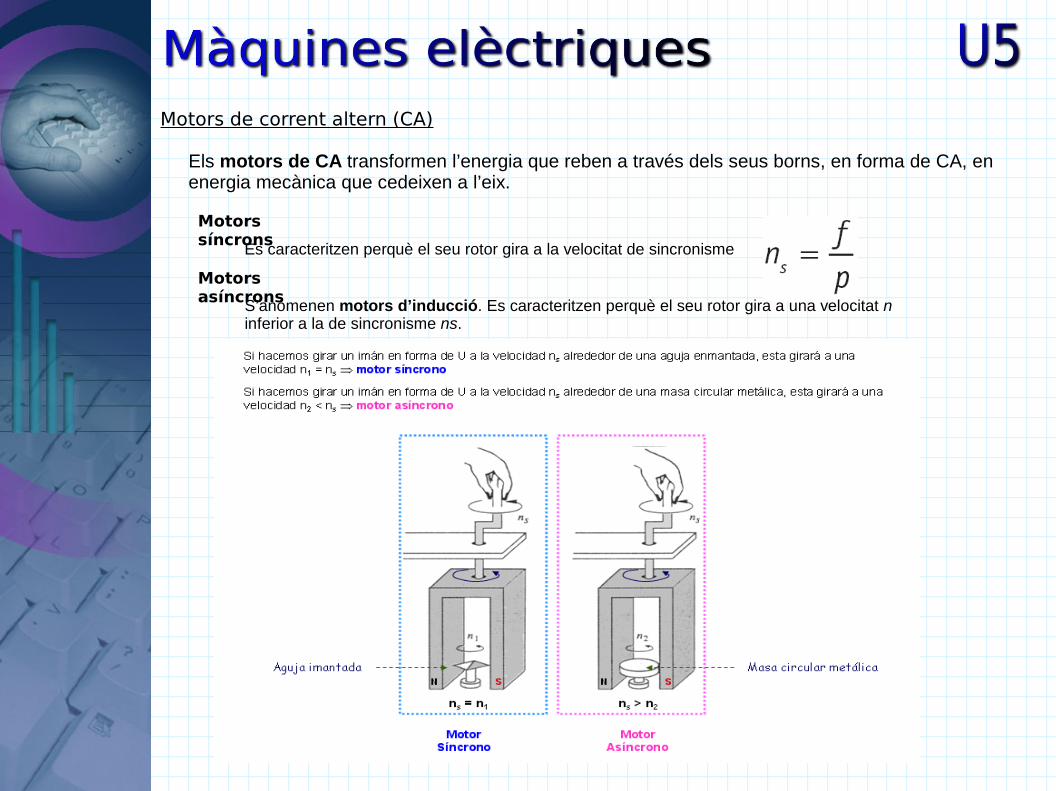
Motors de corrent altern (CA)
Els motors de CA transformen l’energia que reben a través dels seus borns, en forma de CA, en energia mecànica que cedeixen a l’eix.
Motors síncrons
Es caracteritzen perquè el seu rotor gira a la velocitat de sincronisme
Motors asíncronsS’anomenen motors d’inducció. Es caracteritzen perquè el seu rotor gira a una velocitat n
inferior a la de sincronisme ns.

Motors d’inducció trifàsics
Construcció senzilla i robusta
L’absència de col·lector
Adapta el seu funcionament a les variacions brusques de càrrega mantenint una velocitat pràcticament constant
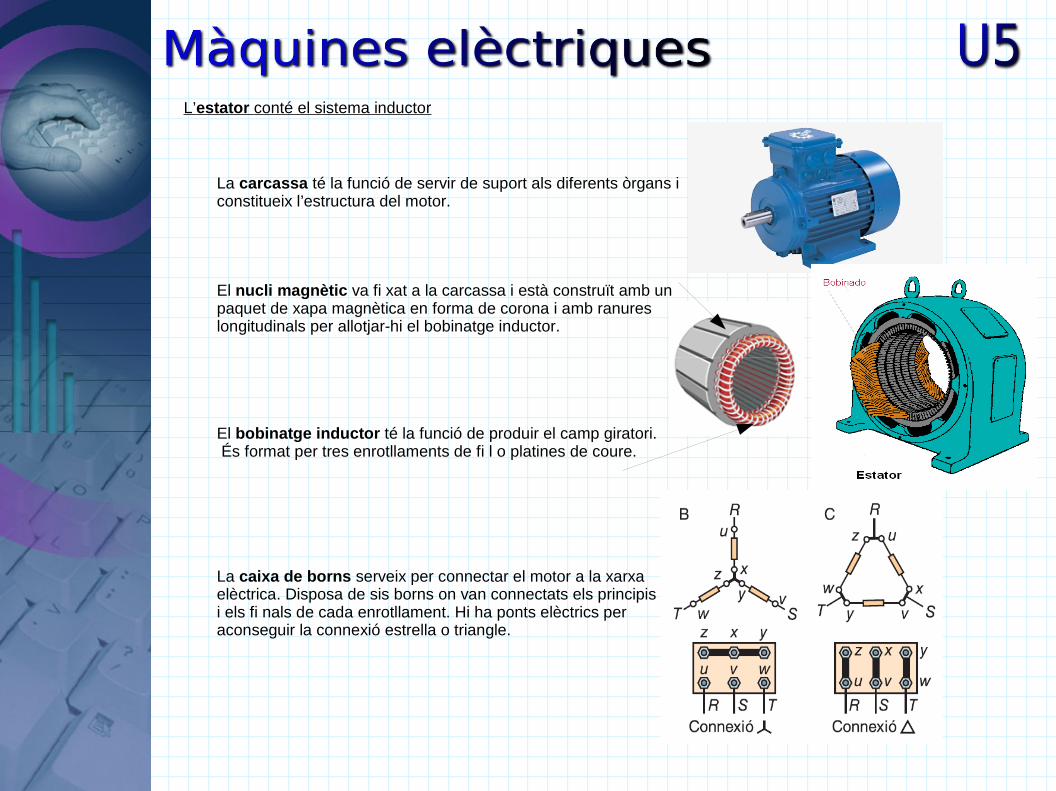
L’estator conté el sistema inductor
La carcassa té la funció de servir de suport als diferents òrgans i constitueix l’estructura del motor.
El nucli magnètic va fi xat a la carcassa i està construït amb un paquet de xapa magnètica en forma de corona i amb ranures longitudinals per allotjar-hi el bobinatge inductor.
El bobinatge inductor té la funció de produir el camp giratori. És format per tres enrotllaments de fi l o platines de coure.
La caixa de borns serveix per connectar el motor a la xarxa elèctrica. Disposa de sis borns on van connectats els principis i els fi nals de cada enrotllament. Hi ha ponts elèctrics per aconseguir la connexió estrella o triangle.
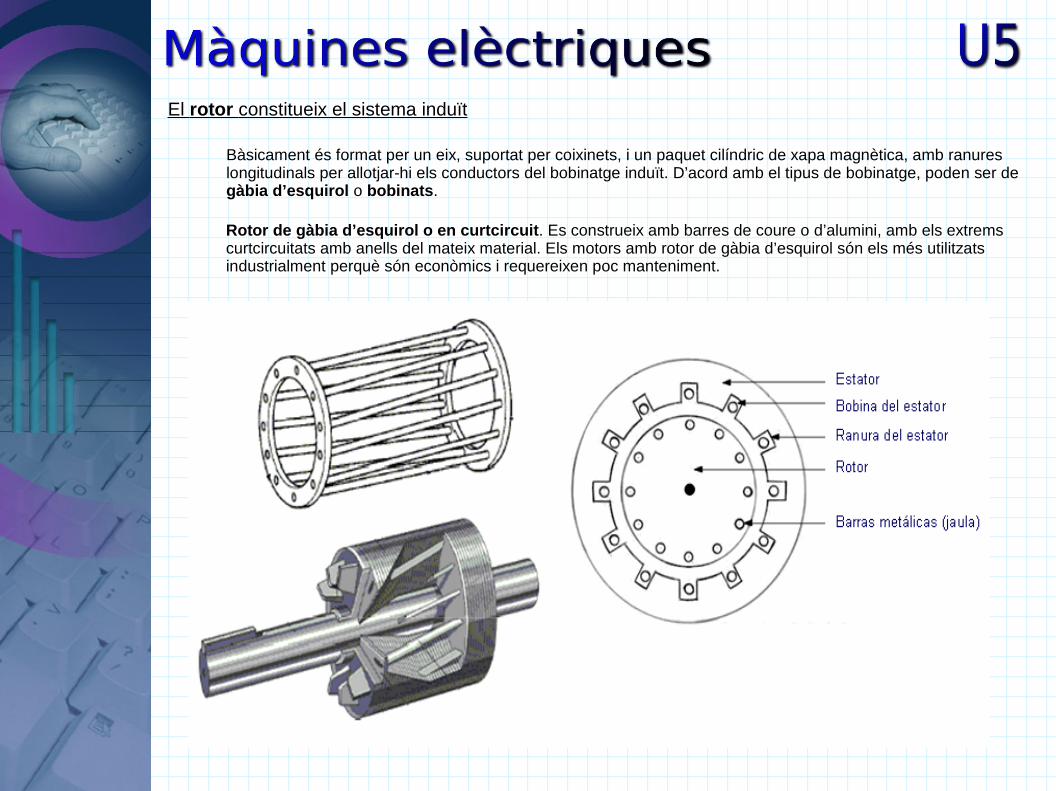
El rotor constitueix el sistema induït
Bàsicament és format per un eix, suportat per coixinets, i un paquet cilíndric de xapa magnètica, amb ranures longitudinals per allotjar-hi els conductors del bobinatge induït. D’acord amb el tipus de bobinatge, poden ser de gàbia d’esquirol o bobinats.
Rotor de gàbia d’esquirol o en curtcircuit. Es construeix amb barres de coure o d’alumini, amb els extrems curtcircuitats amb anells del mateix material. Els motors amb rotor de gàbia d’esquirol són els més utilitzats industrialment perquè són econòmics i requereixen poc manteniment.
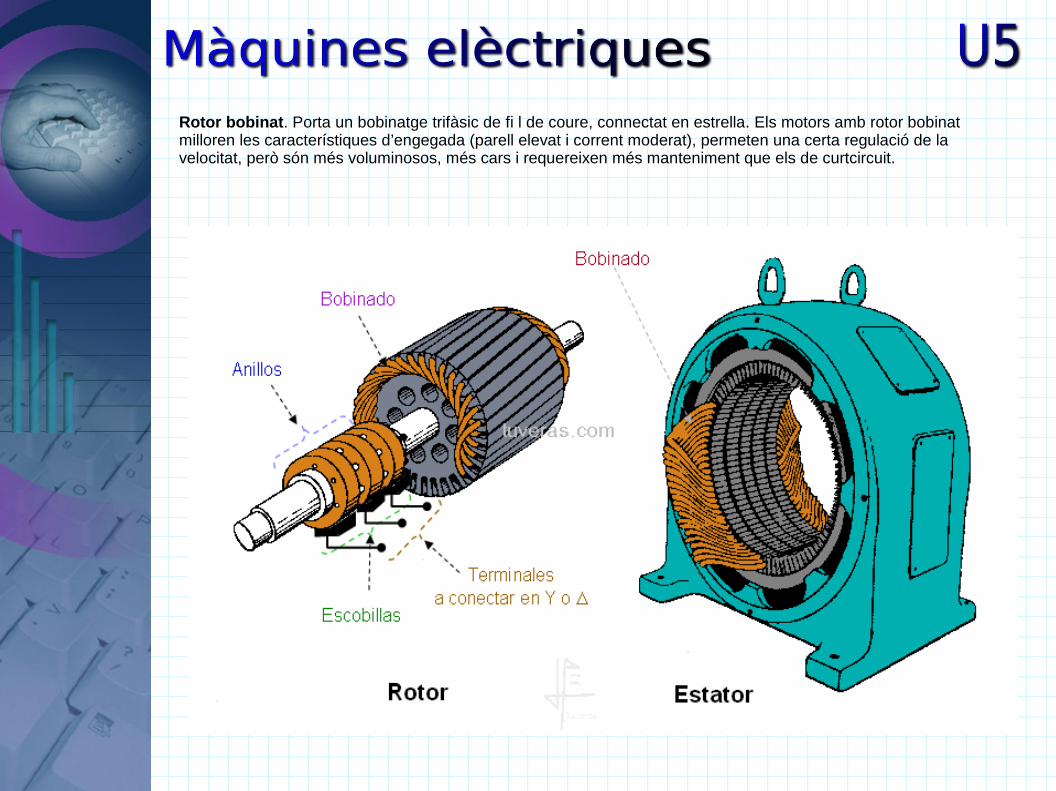
Rotor bobinat. Porta un bobinatge trifàsic de fi l de coure, connectat en estrella. Els motors amb rotor bobinatmilloren les característiques d’engegada (parell elevat i corrent moderat), permeten una certa regulació de la velocitat, però són més voluminosos, més cars i requereixen més manteniment que els de curtcircuit.
Principi de funcionament
Video 1
Video 2
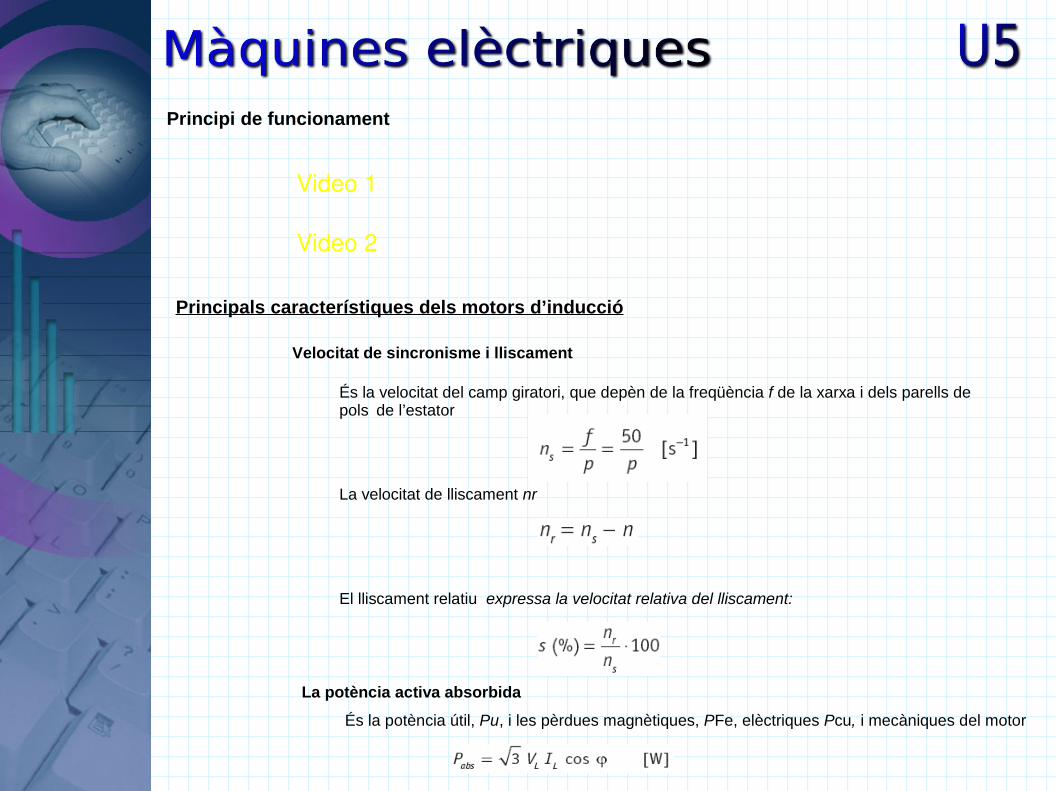
Principals característiques dels motors d’inducció
Velocitat de sincronisme i lliscament
És la velocitat del camp giratori, que depèn de la freqüència f de la xarxa i dels parells de pols de l’estator
La velocitat de lliscament nr
El lliscament relatiu expressa la velocitat relativa del lliscament:
La potència activa absorbida
És la potència útil, Pu, i les pèrdues magnètiques, PFe, elèctriques Pcu, i mecàniques del motor
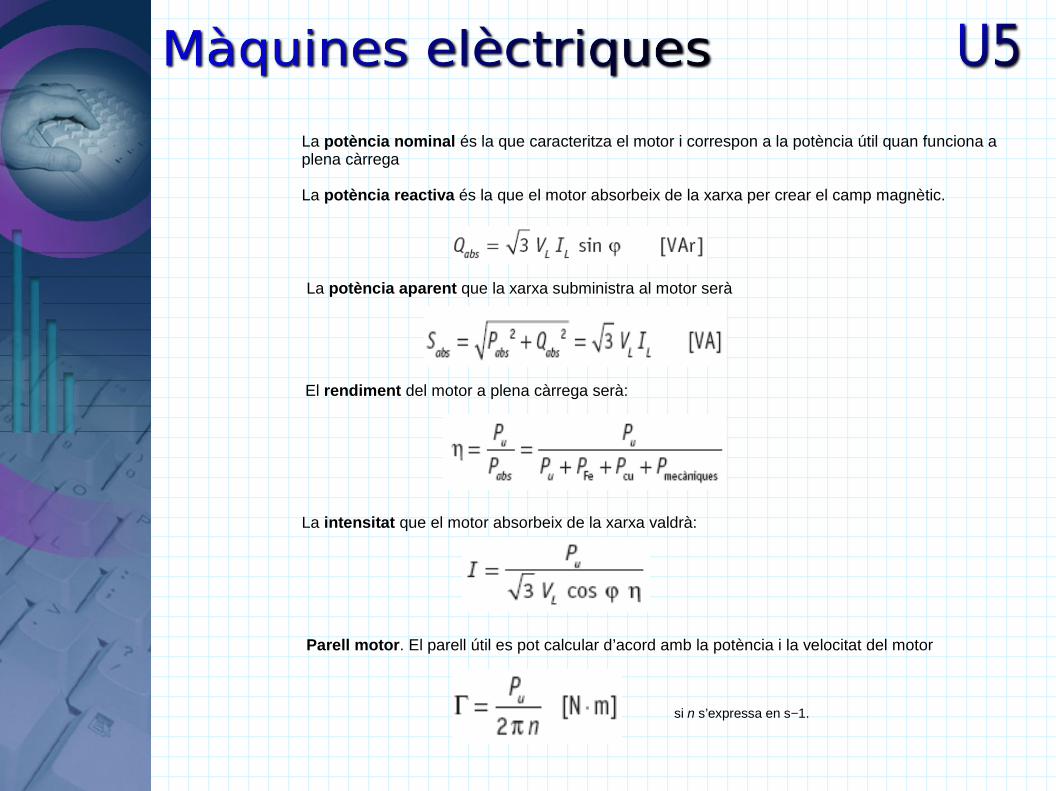
La potència nominal és la que caracteritza el motor i correspon a la potència útil quan funciona a plena càrrega
La potència reactiva és la que el motor absorbeix de la xarxa per crear el camp magnètic.
La potència aparent que la xarxa subministra al motor serà
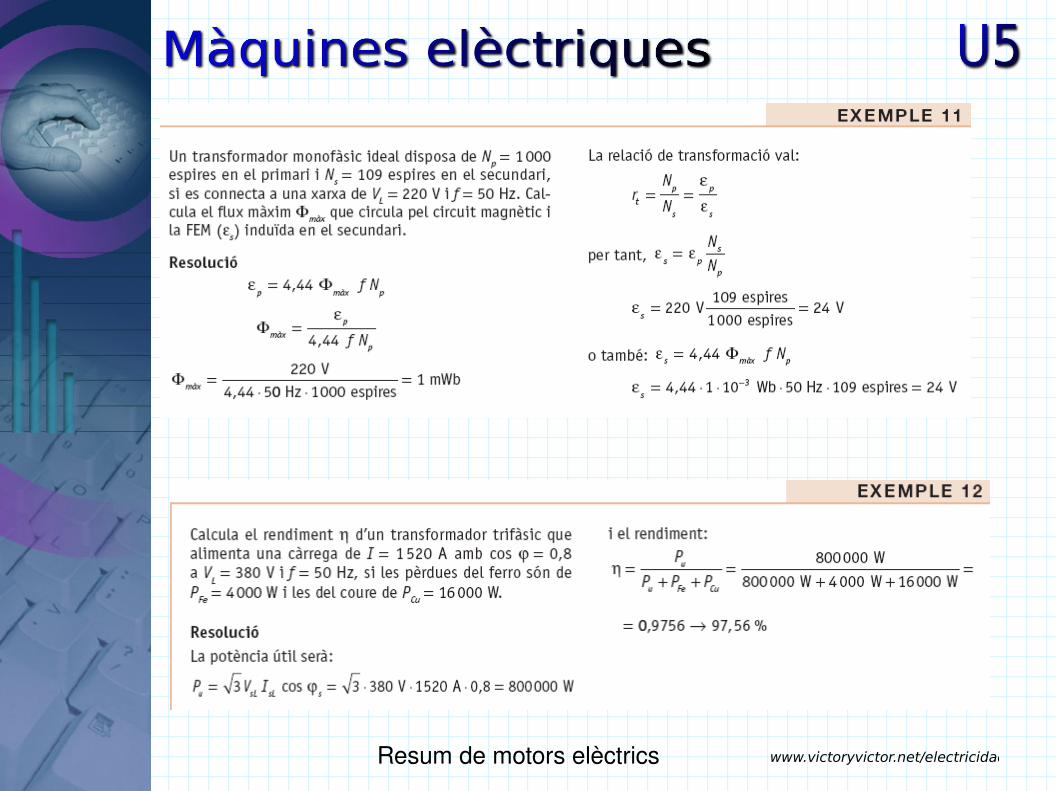
El rendiment del motor a plena càrrega serà:
La intensitat que el motor absorbeix de la xarxa valdrà:
Parell motor. El parell útil es pot calcular d’acord amb la potència i la velocitat del motor
si n s’expressa en s−1.
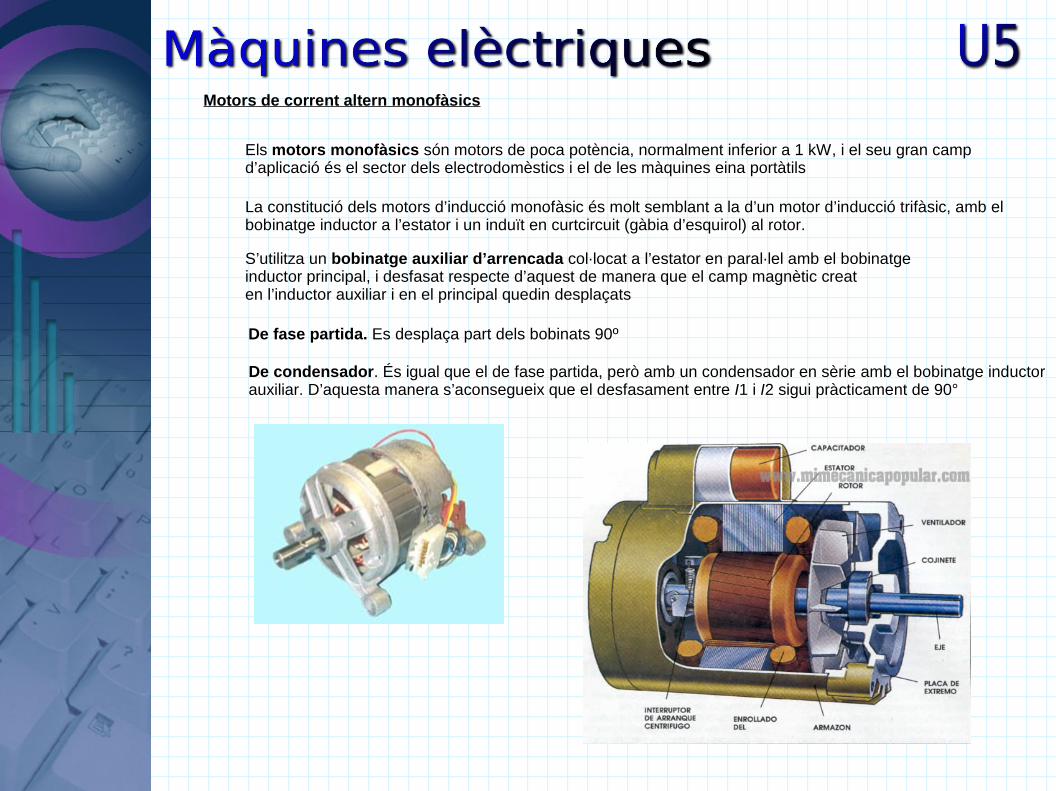
Motors de corrent altern monofàsics
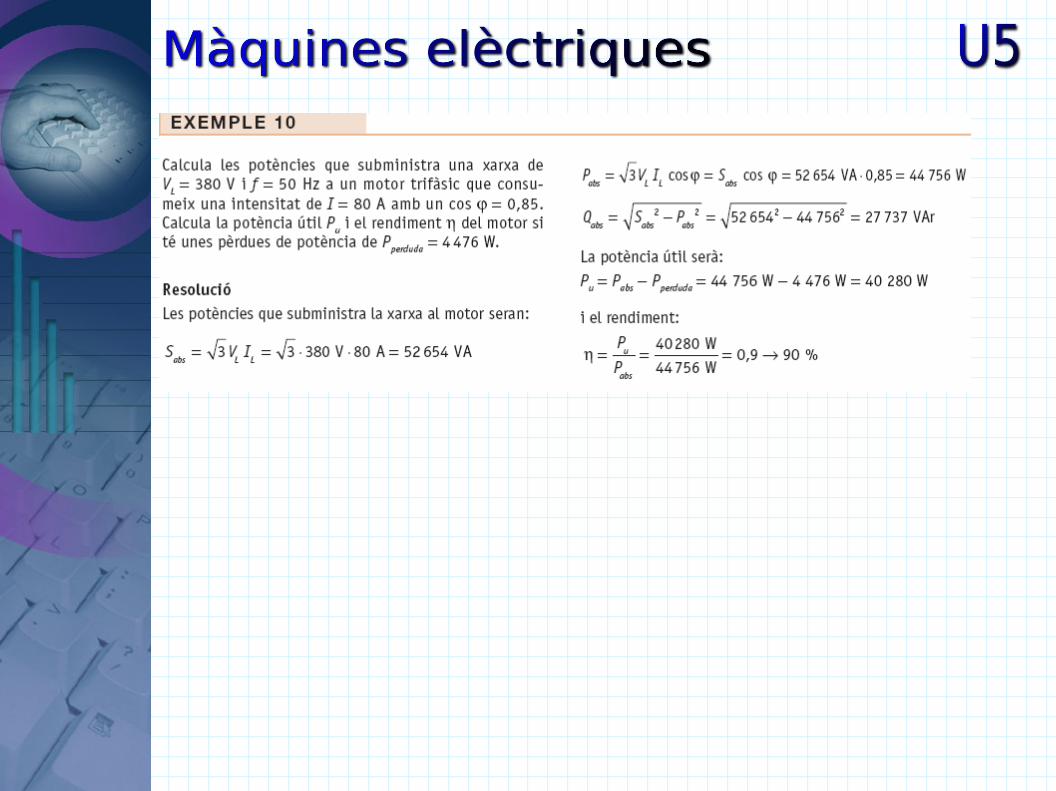
Els motors monofàsics són motors de poca potència, normalment inferior a 1 kW, i el seu gran camp d’aplicació és el sector dels electrodomèstics i el de les màquines eina portàtils
La constitució dels motors d’inducció monofàsic és molt semblant a la d’un motor d’inducció trifàsic, amb el bobinatge inductor a l’estator i un induït en curtcircuit (gàbia d’esquirol) al rotor.
S’utilitza un bobinatge auxiliar d’arrencada col·locat a l’estator en paral·lel amb el bobinatgeinductor principal, i desfasat respecte d’aquest de manera que el camp magnètic createn l’inductor auxiliar i en el principal quedin desplaçats
De fase partida. Es desplaça part dels bobinats 90º
De condensador. És igual que el de fase partida, però amb un condensador en sèrie amb el bobinatge inductor auxiliar. D’aquesta manera s’aconsegueix que el desfasament entre I1 i I2 sigui pràcticament de 90°
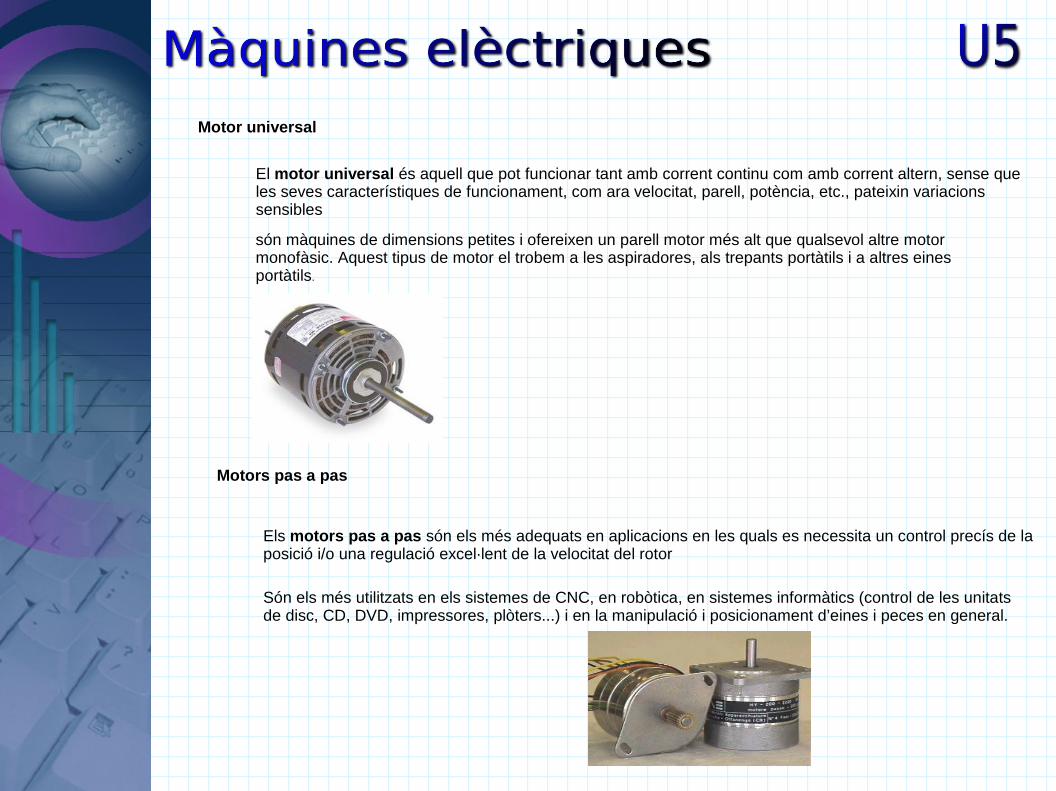
Motors pas a pas
Els motors pas a pas són els més adequats en aplicacions en les quals es necessita un control precís de la posició i/o una regulació excel·lent de la velocitat del rotor
Són els més utilitzats en els sistemes de CNC, en robòtica, en sistemes informàtics (control de les unitats de disc, CD, DVD, impressores, plòters...) i en la manipulació i posicionament d’eines i peces en general.
Motor universal
El motor universal és aquell que pot funcionar tant amb corrent continu com amb corrent altern, sense que les seves característiques de funcionament, com ara velocitat, parell, potència, etc., pateixin variacions sensibles
són màquines de dimensions petites i ofereixen un parell motor més alt que qualsevol altre motor monofàsic. Aquest tipus de motor el trobem a les aspiradores, als trepants portàtils i a altres eines portàtils.

El transformador és una màquina estàtica que permet variar el voltatge i la intensitat del corrent altern, mantenint-ne la freqüència.
Transformadors
Constitució del transformador
El circuit magnètic és l’encarregat d’acoblar magnèticament els enrotllaments. És format per columnes o nuclis on es col·loquen els enrotllaments i les culates que tanquen el circuit magnètic.Els enrotllaments es fan amb fi ls i platines de coure, d’acord amb la intensitat que han de suportar.
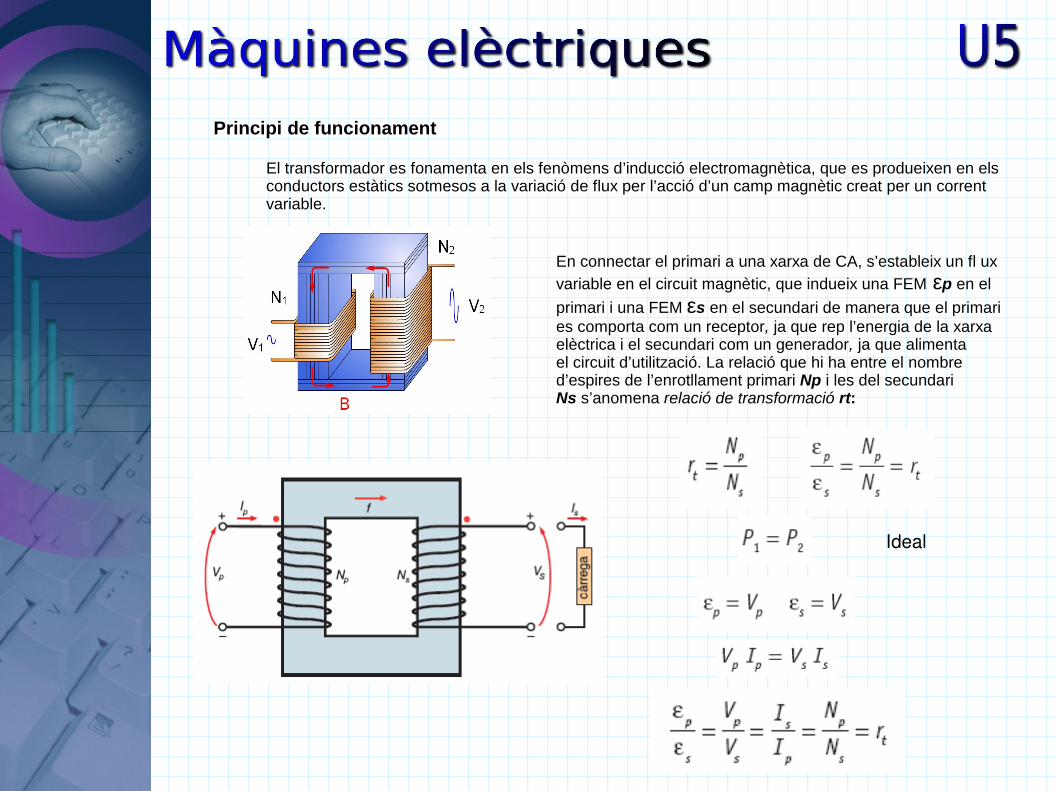
Principi de funcionament
El transformador es fonamenta en els fenòmens d’inducció electromagnètica, que es produeixen en els conductors estàtics sotmesos a la variació de flux per l’acció d’un camp magnètic creat per un corrent variable.
En connectar el primari a una xarxa de CA, s’estableix un fl ux
variable en el circuit magnètic, que indueix una FEM εp en el
primari i una FEM εs en el secundari de manera que el primari es comporta com un receptor, ja que rep l’energia de la xarxa elèctrica i el secundari com un generador, ja que alimentael circuit d’utilització. La relació que hi ha entre el nombre d’espires de l’enrotllament primari Np i les del secundariNs s’anomena relació de transformació rt:
Ideal
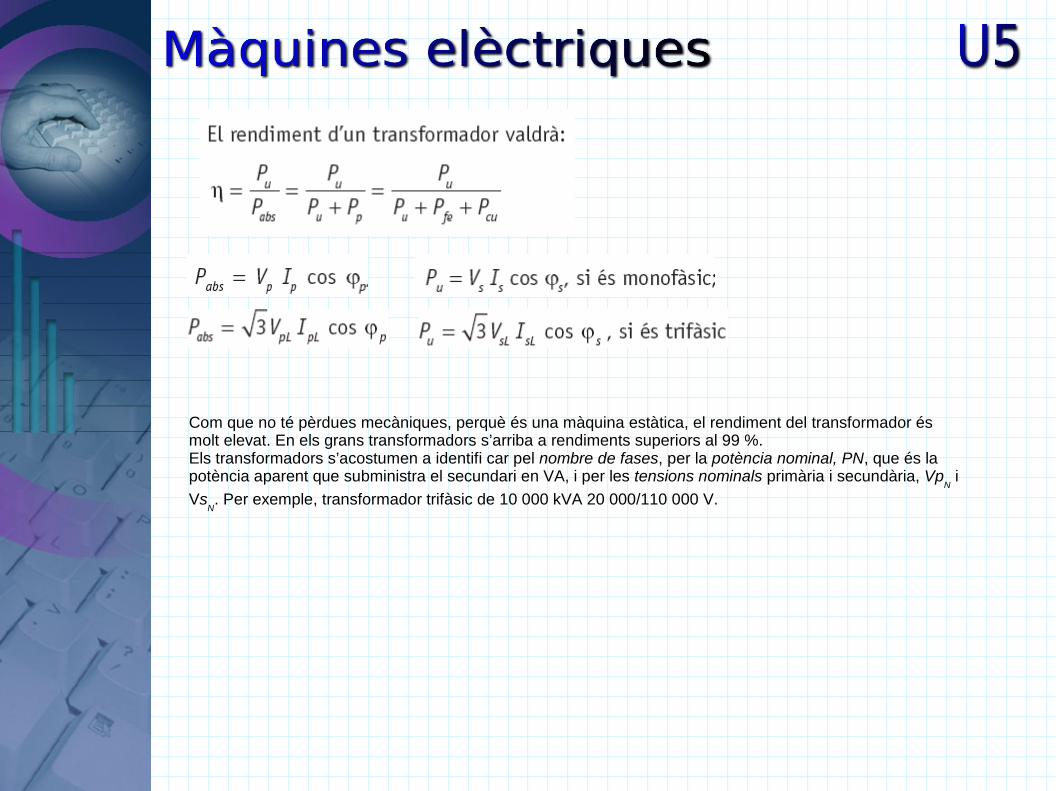
Com que no té pèrdues mecàniques, perquè és una màquina estàtica, el rendiment del transformador és molt elevat. En els grans transformadors s’arriba a rendiments superiors al 99 %.Els transformadors s’acostumen a identifi car pel nombre de fases, per la potència nominal, PN, que és la potència aparent que subministra el secundari en VA, i per les tensions nominals primària i secundària, Vp
N i
VsN. Per exemple, transformador trifàsic de 10 000 kVA 20 000/110 000 V.
www.victoryvictor.net/electricidad.htmResum de motors elèctrics