Apuntes resistencia de materiales
55
TEMA 6: ESTÁTICA DE VIGAS Las vigas son elementos estructurales que resisten fuerzas aplicadas lateral o transversalmente a sus ejes. Los miembros principales que soportan pisos de edificios son vigas, igualmente el eje de un vehículo es también una viga. El objetivo principal de este capítulo es determinar el sistema de fuerzas internas necesarias para el equilibrio de cualquier segmento de viga. Para una viga con todas las fuerzas en el mismo plano (viga plana) puede desarrollarse un sistema de tres componentes de fuerzas internas en una sección, éstas son: 1. Las fuerzas axiales 2. Las fuerzas cortantes 3. El momento flector La determinación de sus magnitudes es el objetivo de este capítulo. Calculo de reacciones Convenciones de simbología para apoyos y cargas Al estudiar estructuras planas es necesario adoptar simbologías tanto para apoyos como para cargas, dado que son posibles varios tipos de apoyos y una gran variedad de cargas. El respetar tales convenciones evita confusión y reduce al mínimo las posibilidades de cometer errores. Existen tres tipos básicos de apoyos para estructuras planas, los cuales se caracterizan por los grados de libertad de movimiento que le permiten a la viga frente a fuerzas actuantes: Apoyo móvil o de rodillo: éste permite el desplazamiento a lo largo del eje longitudinal de la viga y el giro de ésta; el desplazamiento transversal es impedido mediante una reacción en ese sentido. V A A
-
Upload
patoo-lopez -
Category
Engineering
-
view
1.066 -
download
8
description
estructuras
Transcript of Apuntes resistencia de materiales
TEMA 6: ESTÁTICA DE VIGAS
Las vigas son elementos estructurales que resisten fuerzas aplicadas lateral o transversalmente a
sus ejes. Los miembros principales que soportan pisos de edificios son vigas, igualmente el eje de
un vehículo es también una viga. El objetivo principal de este capítulo es determinar el sistema de
fuerzas internas necesarias para el equilibrio de cualquier segmento de viga.
Para una viga con todas las fuerzas en el mismo plano (viga plana) puede desarrollarse un sistema
de tres componentes de fuerzas internas en una sección, éstas son:
1. Las fuerzas axiales
2. Las fuerzas cortantes
3. El momento flector
La determinación de sus magnitudes es el objetivo de este capítulo.
Calculo de reacciones
Convenciones de simbología para apoyos y cargas
Al estudiar estructuras planas es necesario adoptar simbologías tanto para apoyos como para
cargas, dado que son posibles varios tipos de apoyos y una gran variedad de cargas. El respetar
tales convenciones evita confusión y reduce al mínimo las posibilidades de cometer errores.
Existen tres tipos básicos de apoyos para estructuras planas, los cuales se caracterizan por los
grados de libertad de movimiento que le permiten a la viga frente a fuerzas actuantes:
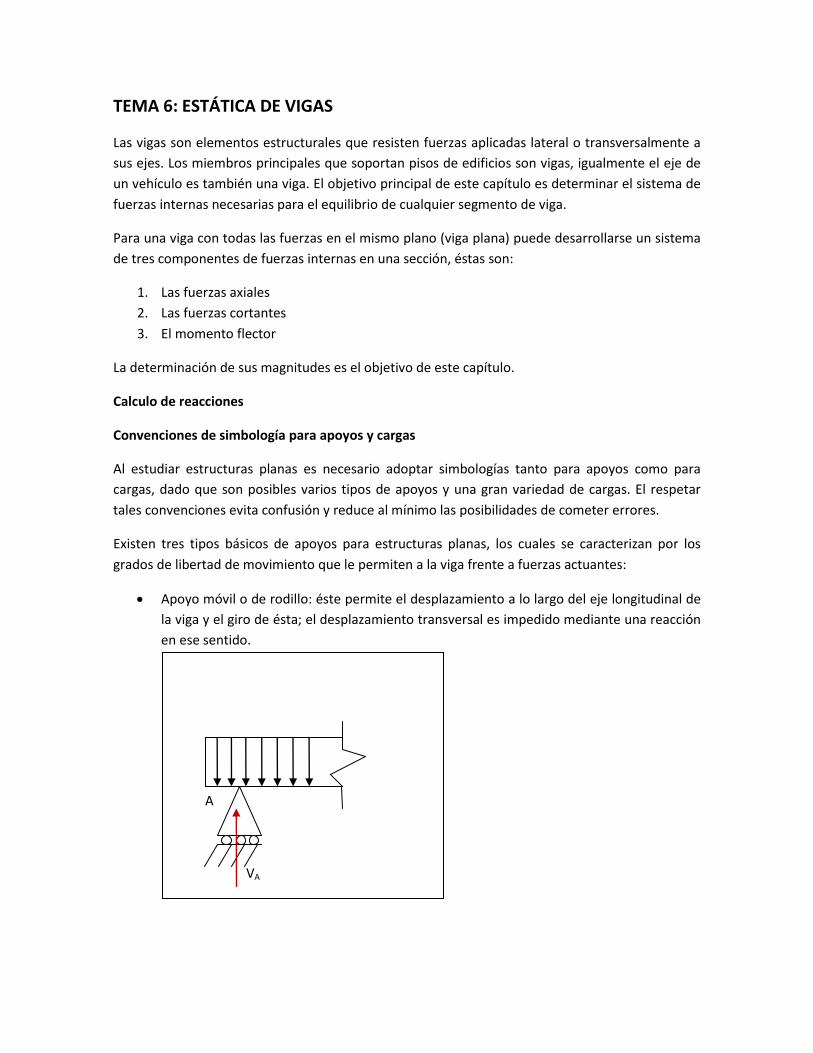
Apoyo móvil o de rodillo: éste permite el desplazamiento a lo largo del eje longitudinal de
la viga y el giro de ésta; el desplazamiento transversal es impedido mediante una reacción
en ese sentido.
VA
A

Apoyo fijo o pasador: Este tipo de apoyo permite el giro de la viga, pero impide el
desplazamiento en cualquier dirección mediante una reacción que se puede dividir en una
componente a lo largo del eje longitudinal de la viga y otra a lo largo del eje transversal.
Para determinar estas dos componentes es necesario hacer uso de dos ecuaciones de la
estática
Empotramiento: este tipo de apoyo impide el desplazamiento a lo largo de los ejes y el
giro de la viga mediante una reacción que se puede dividir en una componente
longitudinal, otra transversal y una reacción de momento.
Las cargas aplicadas consideradas en este capítulo, consisten en cargas puntuales, vale decir,
fuerzas concentradas mostradas en los esquemas como vectores, y las cagas distribuidas se
muestran como una secuencia de vectores.
Cálculos de reacciones de vigas
VA A
HA
MA
VA
A
HA
En este capítulo, todo el trabajo subsecuente con vigas comenzará con la detrminación de las
reacciones. Cuando todas las fuerzas se aplican en un plano, se dispone de tres ecuaciones de
equilibrio estático para el análisis. Estas son:
𝐹𝑥 = 0
𝐹𝑦 = 0
𝑀𝑍 = 0
La aplicación de estas ecuaciones a varios problemas de vigas se ilustra en los siguientes ejemplos,
los cuales sirven como repaso de este importante procedimiento.
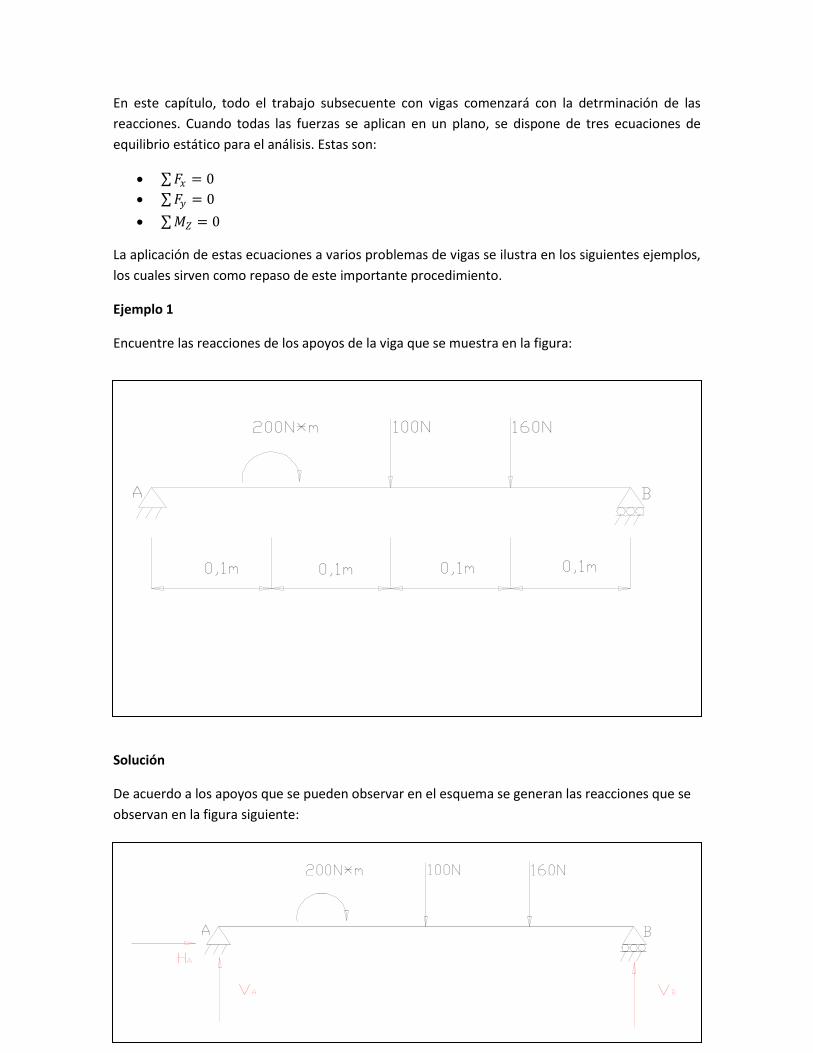
Ejemplo 1
Encuentre las reacciones de los apoyos de la viga que se muestra en la figura:
Solución
De acuerdo a los apoyos que se pueden observar en el esquema se generan las reacciones que se
observan en la figura siguiente:
A B
200N*m 100N 160N
VA
HA
VB
A B
0,1m 0,1m 0,1m 0,1m
200N*m 100N 160N

Ahora, aplicando las ecuaciones de la estática se tiene:
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 100 − 160 = 0
𝑉𝐴 + 𝑉𝐵 = 260 𝑁
𝑀𝐴 = 0 → −200 − 100 ∙ 0,2 − 160 ∙ 0,3 + 𝑉𝐵 ∙ 0,4 = 0
𝑉𝐵 = 670 𝑁
Ahora, como: 𝑉𝐴 + 𝑉𝐵 = 260 𝑁 𝑉𝐴 = 260 − 670 = −410 𝑁
El signo negativo en VA indica que tiene el sentido contrario al indicado en la figura.
Ejemplo 2
Encuentre las reacciones en la viga con carga uniformemente variable de la figura. Desprecie el
peso de la viga
A
B
10kN/m
VA
HA
VB
3 2

Solución:
Dados los tipos de apoyo que existen en la viga, se genera una componente horizontal y otra
vertical en el apoyo fijo o pasador A y una reacción vertical en el apoyo móvil o rodillo B. Ahora
aplicando las ecuaciones de la estática:
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 + 10 ∙ 1000 ∙3
2= 0
𝑉𝐴 + 𝑉𝐵 = −15.000 𝑁
𝑀𝐴 = 0 → 𝑉𝐴 ∙ 5 + 15.000 ∙2
3∙ 3 = 0
𝑉𝐴 = −6.000 𝑁
Luego,
𝑉𝐵 = −9.000 𝑁
Ejemplo 3
Determine las reacciones en A y B para la viga de la figura
A
5N
HA
VB
B
VA
45°
53°
3 9

Solución:
Usando las ecuaciones de la estática se tiene:
𝐹𝑥 = 0 → 𝐻𝐴 − 5 ∙ cos 53 − 𝑉𝐵 ∙ cos 45 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 ∙ 𝑠𝑒𝑛 45 − 5 ∙ 𝑠𝑒𝑛 53 = 0
𝑉𝐴 = 5 ∙ 𝑠𝑒𝑛 53 − 𝑉𝐵 ∙ 𝑠𝑒𝑛 45
𝑀𝐴 = 0 → −5 ∙ 𝑠𝑒𝑛 53 ∙ 3 + 𝑉𝐵 ∙ 𝑠𝑒𝑛 45 ∙ 12 = 0
𝑉𝐵 =15 ∙ 𝑠𝑒𝑛 53
12 ∙ 𝑠𝑒𝑛 45= 1,41 𝑁
Luego:
𝑉𝐴 = 5 ∙ 𝑠𝑒𝑛 53 − 1,41 ∙ 𝑠𝑒𝑛 45
𝑉𝐴 = 3 𝑁
𝐻𝐴 = 5 ∙ cos 53 + 3 ∙ cos 45
𝐻𝐴 = 5,13 𝑁
Algunas veces se insertan articulaciones o juntas con pasadores en las vigas o marcos. Una
articulación es capaz de transmitir sólo fuerzas horizontales y verticales. Ningún momento puede
ser transmitido por una articulación. Por tanto, el punto donde se localiza una articulación es
particularmente conveniente para “separar” una estructura en partes con el fin de calcular las
reacciones. Cada parte de la viga así separada se trata en forma independiente. Cada articulación
proporciona un eje adicional respecto al cual pueden analizarse los momentos para determinar las
reacciones. La introducción de una articulación o articulaciones convierte al sistema en muchos
casos, en estáticamente detrminado. La introducción de una articulación en una viga
estáticamente determinada convierte a esta en inestable. El proceso para calcular este tipo de
vigas es:
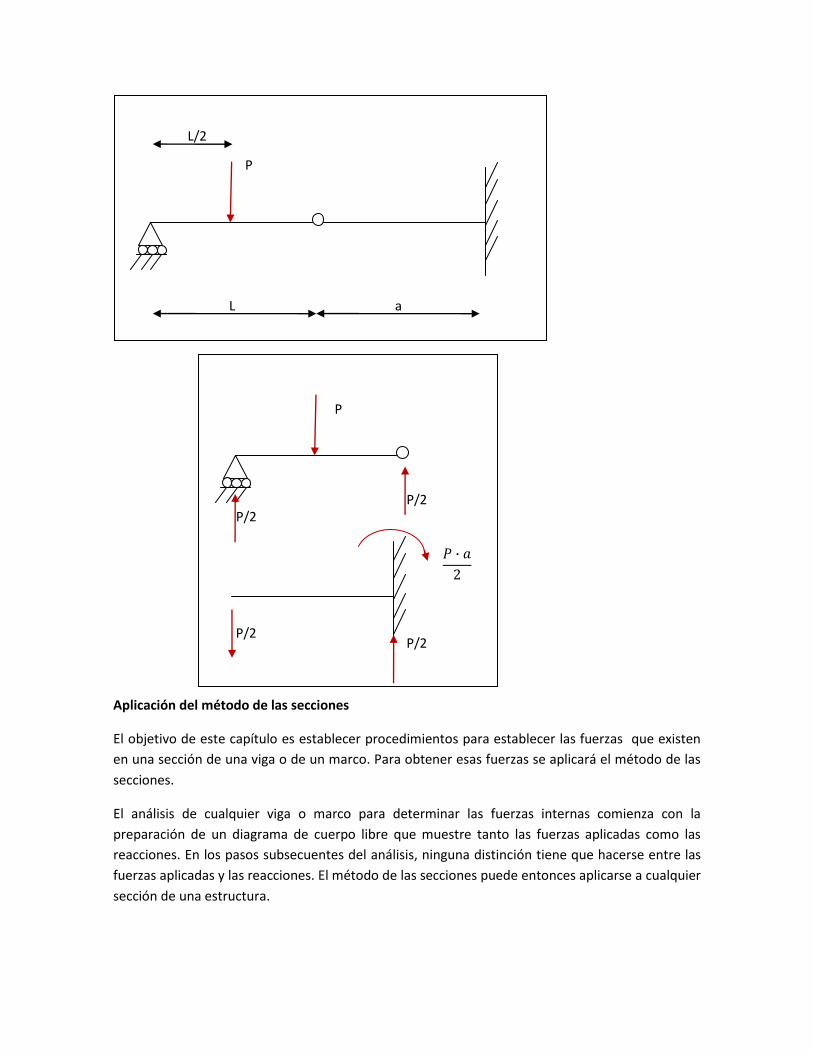
Aplicación del método de las secciones
El objetivo de este capítulo es establecer procedimientos para establecer las fuerzas que existen
en una sección de una viga o de un marco. Para obtener esas fuerzas se aplicará el método de las
secciones.
El análisis de cualquier viga o marco para determinar las fuerzas internas comienza con la
preparación de un diagrama de cuerpo libre que muestre tanto las fuerzas aplicadas como las
reacciones. En los pasos subsecuentes del análisis, ninguna distinción tiene que hacerse entre las
fuerzas aplicadas y las reacciones. El método de las secciones puede entonces aplicarse a cualquier
sección de una estructura.
L/2
L a
P
P
P/2 P/2
P/2 P/2
𝑃 ∙ 𝑎
2
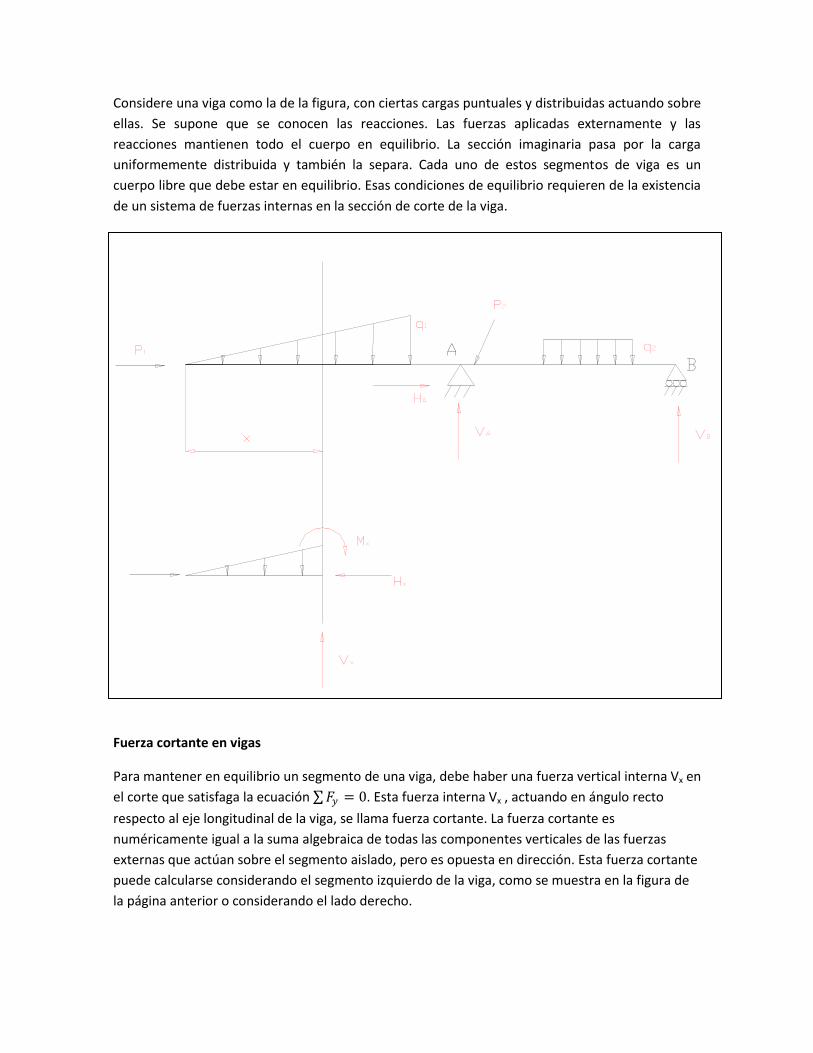
Considere una viga como la de la figura, con ciertas cargas puntuales y distribuidas actuando sobre
ellas. Se supone que se conocen las reacciones. Las fuerzas aplicadas externamente y las
reacciones mantienen todo el cuerpo en equilibrio. La sección imaginaria pasa por la carga
uniformemente distribuida y también la separa. Cada uno de estos segmentos de viga es un
cuerpo libre que debe estar en equilibrio. Esas condiciones de equilibrio requieren de la existencia
de un sistema de fuerzas internas en la sección de corte de la viga.
Fuerza cortante en vigas
Para mantener en equilibrio un segmento de una viga, debe haber una fuerza vertical interna Vx en
el corte que satisfaga la ecuación 𝐹𝑦 = 0. Esta fuerza interna Vx , actuando en ángulo recto
respecto al eje longitudinal de la viga, se llama fuerza cortante. La fuerza cortante es
numéricamente igual a la suma algebraica de todas las componentes verticales de las fuerzas
externas que actúan sobre el segmento aislado, pero es opuesta en dirección. Esta fuerza cortante
puede calcularse considerando el segmento izquierdo de la viga, como se muestra en la figura de
la página anterior o considerando el lado derecho.
A
VA
HA
VB
B
Hx
Vx
Mx
x
P1
P2
q1
q2
Momento flector en vigas
Las fuerzas internas axial y cortante en una sección de una viga, satisfacen sólo dos ecuaciones de
equilibrio: 𝐹𝑥 = 0 y 𝐹𝑦 = 0. La condición restante de equilibrio estático para un problema
plano es 𝑀𝑧 = 0. Ésta, en general, puede sólo satisfacerse si se desarrolla un par o un momento
interno resistente dentro del área de la sección transversal de contrarrestar el momento causado
por las fuerzas externas. El momento resistente interno debe actuar en sentido opuesto al
momento externo para satisfacer la ecuación gobernante 𝑀𝑧 = 0. Esos momentos tieneden a
flexionar una viga en el plano de las cargas y se denominan momentos flectores.
Para determinar un momento flector interno que mantiene en equilibrio un segmento de la viga,
se puede usar la parte izquierda o derecha del cuerpo libre de la viga. La magnitud del momento
flector se encuentra sumando los momentos causados por todas las fuerzas multiplicadas por sus
respectivos brazos. Las fuerzas internas Vx y Px así como los momentos aplicados deben incluirse
en la suma. Para excluir los momentos causados por éstas últimas fuerzas conviene seleccionar el
punto de intersección de esas dos fuerzas internas como el punto respecto al cual se suman los
momentos. Este punto se encuentra sobre el eje centroidal de la sección transversal de la viga. El
momento flector interno puede ser interpretado físicamente como compresión sobre las fibras
superiores de la viga y tracción sobre las inferiores (esta es la definición de un momento positivo).
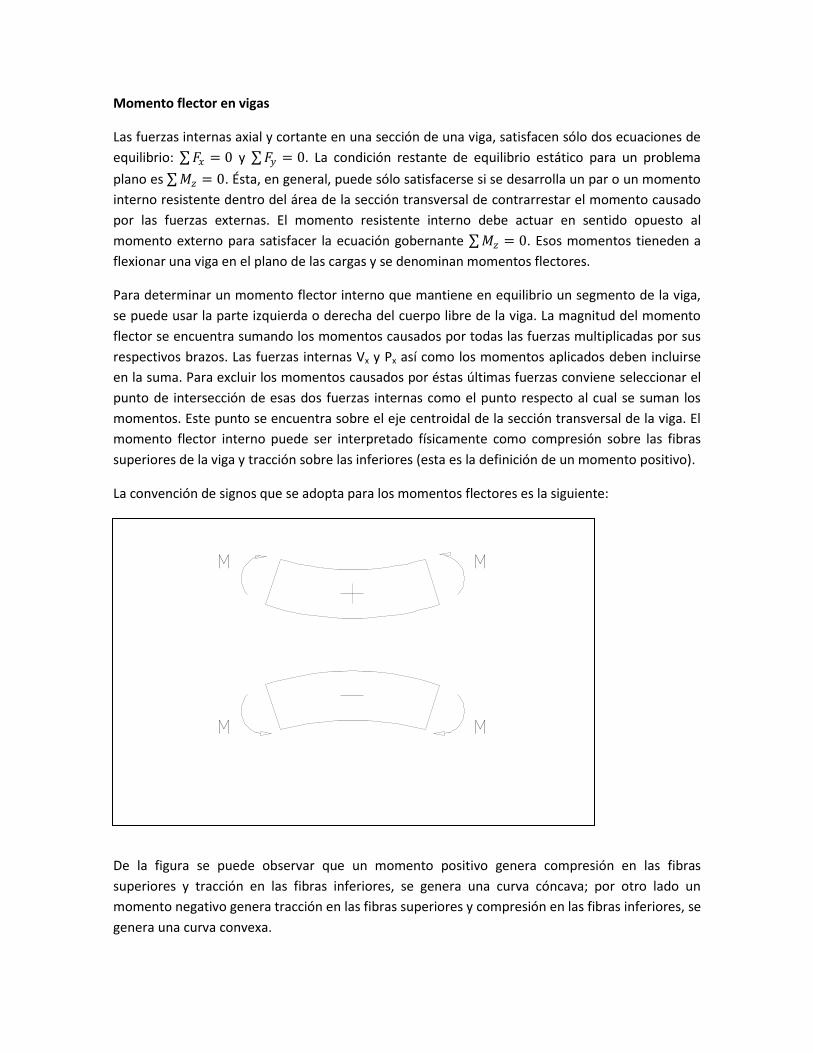
La convención de signos que se adopta para los momentos flectores es la siguiente:
De la figura se puede observar que un momento positivo genera compresión en las fibras
superiores y tracción en las fibras inferiores, se genera una curva cóncava; por otro lado un
momento negativo genera tracción en las fibras superiores y compresión en las fibras inferiores, se
genera una curva convexa.
MM
MM
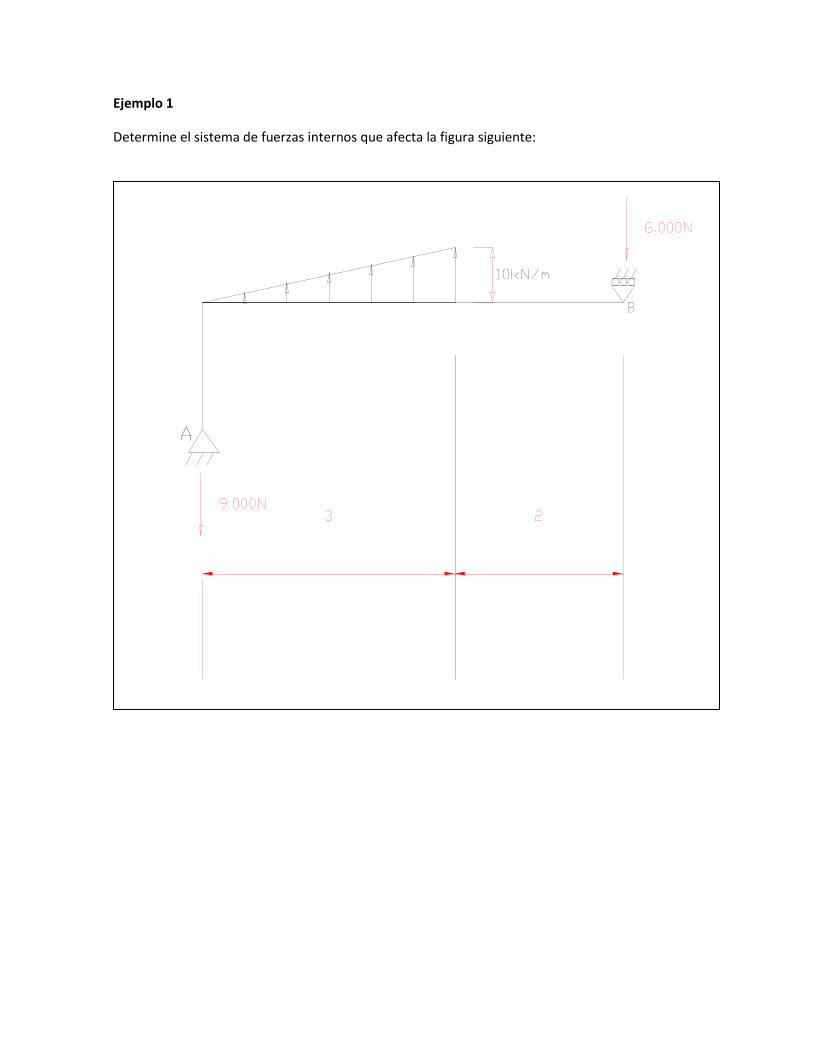
Ejemplo 1
Determine el sistema de fuerzas internos que afecta la figura siguiente:
A
B
10kN/m
9.000N
6.000N
3 2
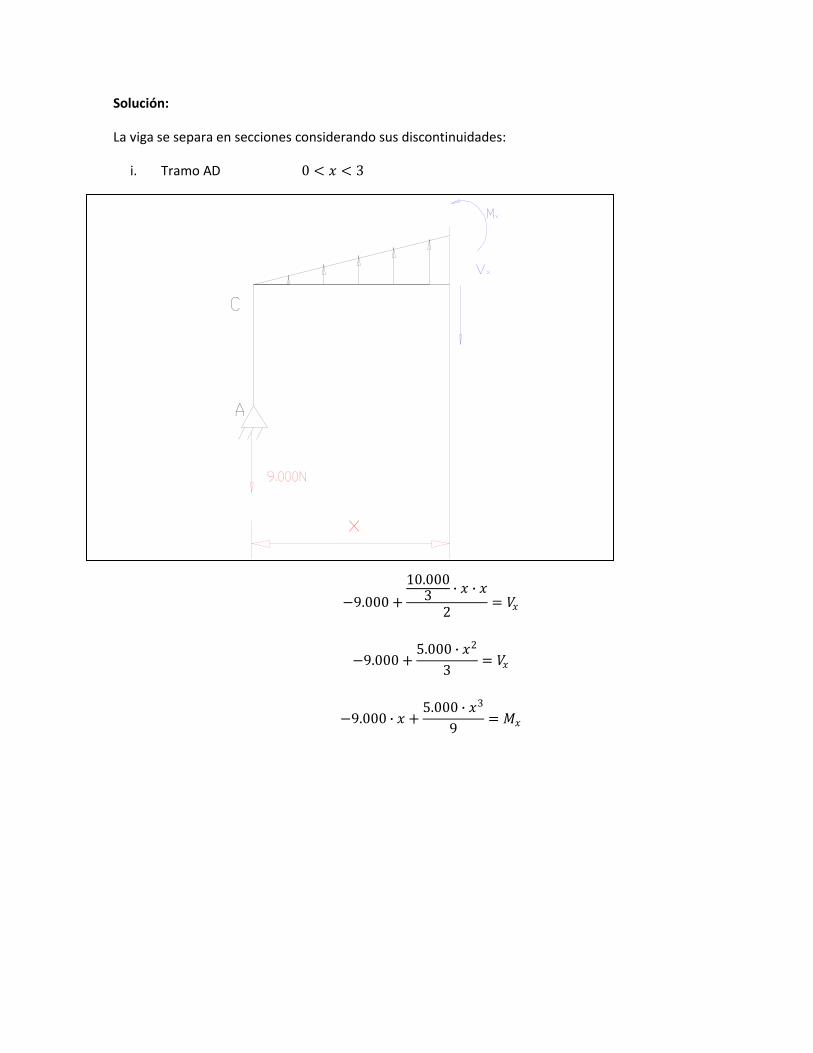
Solución:
La viga se separa en secciones considerando sus discontinuidades:
i. Tramo AD 0 < 𝑥 < 3
−9.000 +
10.0003
∙ 𝑥 ∙ 𝑥
2= 𝑉𝑥
−9.000 +5.000 ∙ 𝑥2
3= 𝑉𝑥
−9.000 ∙ 𝑥 +5.000 ∙ 𝑥3
9= 𝑀𝑥
A
9.000N
C
x
Vx
Mx
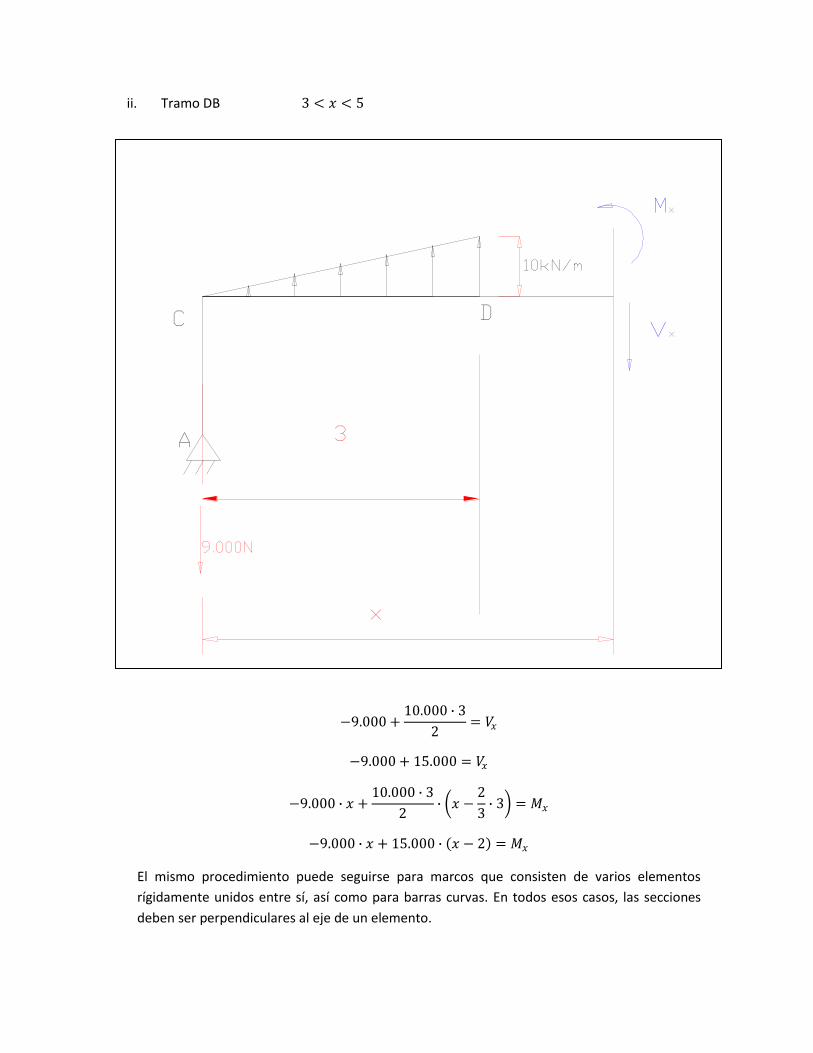
ii. Tramo DB 3 < 𝑥 < 5
−9.000 +10.000 ∙ 3
2= 𝑉𝑥
−9.000 + 15.000 = 𝑉𝑥
−9.000 ∙ 𝑥 +10.000 ∙ 3
2∙ 𝑥 −
2
3∙ 3 = 𝑀𝑥
−9.000 ∙ 𝑥 + 15.000 ∙ 𝑥 − 2 = 𝑀𝑥
El mismo procedimiento puede seguirse para marcos que consisten de varios elementos
rígidamente unidos entre sí, así como para barras curvas. En todos esos casos, las secciones
deben ser perpendiculares al eje de un elemento.
A
10kN/m
9.000N
3
C D
x
Vx
Mx
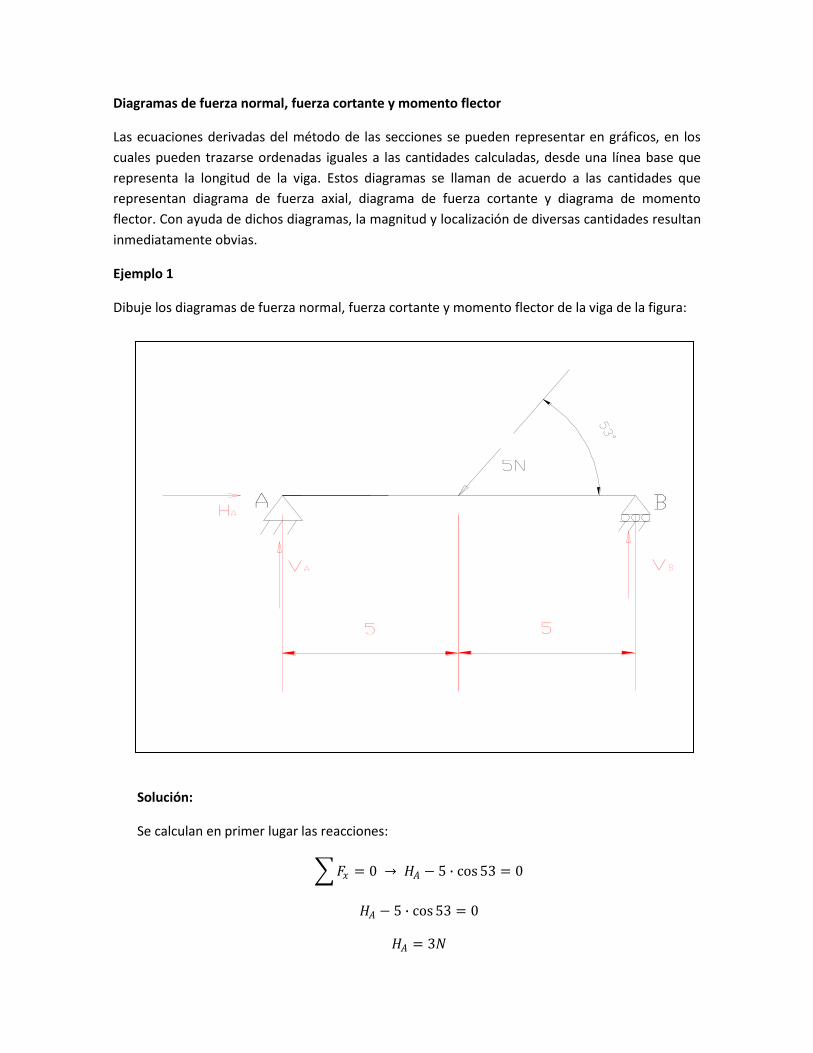
Diagramas de fuerza normal, fuerza cortante y momento flector
Las ecuaciones derivadas del método de las secciones se pueden representar en gráficos, en los
cuales pueden trazarse ordenadas iguales a las cantidades calculadas, desde una línea base que
representa la longitud de la viga. Estos diagramas se llaman de acuerdo a las cantidades que
representan diagrama de fuerza axial, diagrama de fuerza cortante y diagrama de momento
flector. Con ayuda de dichos diagramas, la magnitud y localización de diversas cantidades resultan
inmediatamente obvias.
Ejemplo 1
Dibuje los diagramas de fuerza normal, fuerza cortante y momento flector de la viga de la figura:
Solución:
Se calculan en primer lugar las reacciones:
𝐹𝑥 = 0 → 𝐻𝐴 − 5 ∙ cos 53 = 0
𝐻𝐴 − 5 ∙ cos 53 = 0
𝐻𝐴 = 3𝑁
A
5N
HA
VB
B
VA
53°
5 5

𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 5 ∙ sen 53 = 0
𝑉𝐴 + 𝑉𝐵 = 4𝑁
𝑀𝐴 = 0 → − 5 ∙ sen 53 ∙ 5 + 𝑉𝐵 ∙ 10 = 0
𝑉𝐵 = 2𝑁
𝑉𝐴 = 2𝑁
3N
DIAGRAMA DEFUERZA NORMAL
2N
2N
DIAGRAMA DEFUERZA CORTANTE
DIAGRAMA DEMOMENTO FLECTOR
10N*m

Ejemplo 2
Dibuje los diagramas de fuerza axial, fuerza cortante y momento flector para la viga en voladizo
cargada con una fuerza inclinada en su extremo libre de la figura siguiente:
Solución:
Haciendo equilibrio estático:
𝐹𝑥 = 0 → 𝐻𝐴 + 𝑃 = 0
𝐻𝐴 = −𝑃
𝐹𝑦 = 0 → 𝑉𝐴 − 𝑃 = 0
𝑉𝐴 = 𝑃
𝑀𝐴 = 0 → 𝑀𝐴 − 𝑃 ∙ 𝐿 = 0
𝑀𝐴 = 𝑃 ∙ 𝐿
Luego los diagramas son los siguientes:
A
HA
VA
45°
2Pcos 45
MA
L
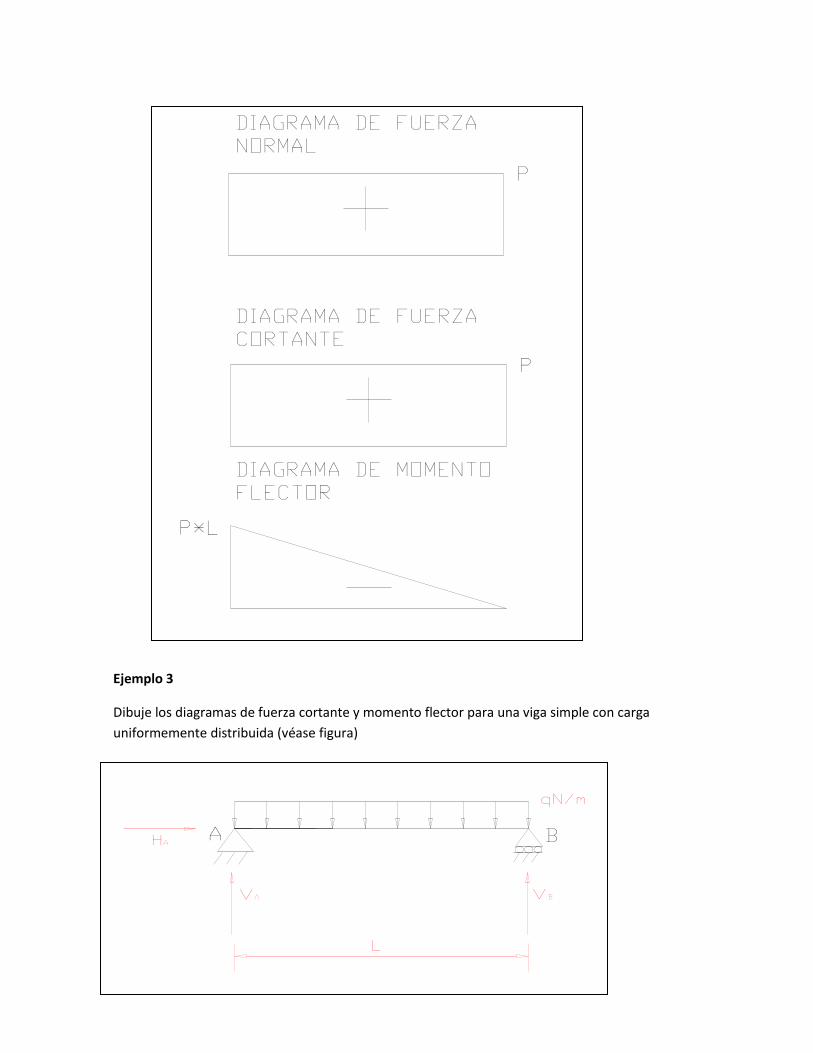
Ejemplo 3
Dibuje los diagramas de fuerza cortante y momento flector para una viga simple con carga
uniformemente distribuida (véase figura)
P
P
P*L
DIAGRAMA DE FUERZANORMAL
DIAGRAMA DE FUERZACORTANTE
DIAGRAMA DE MOMENTOFLECTOR
A B
VA
qN/m
HA
VB
L
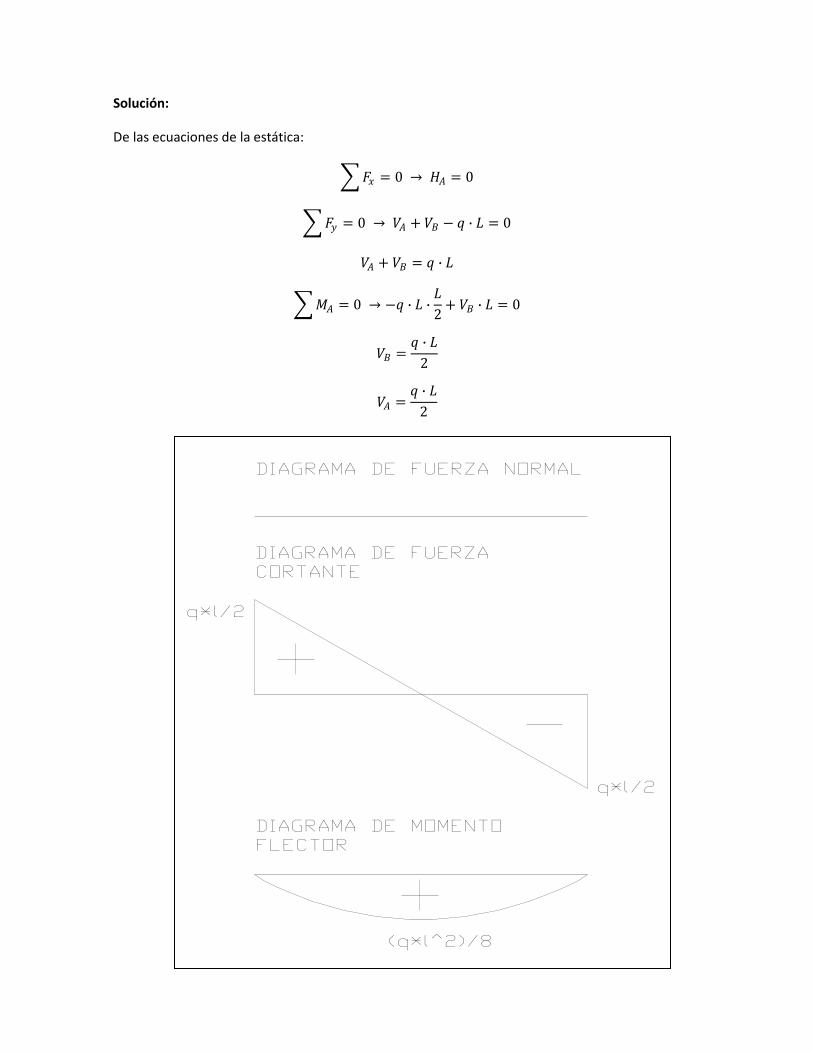
Solución:
De las ecuaciones de la estática:
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 𝑞 ∙ 𝐿 = 0
𝑉𝐴 + 𝑉𝐵 = 𝑞 ∙ 𝐿
𝑀𝐴 = 0 → −𝑞 ∙ 𝐿 ∙𝐿
2+ 𝑉𝐵 ∙ 𝐿 = 0
𝑉𝐵 =𝑞 ∙ 𝐿
2
𝑉𝐴 =𝑞 ∙ 𝐿
2
q*l/2
q*l/2
(q*l^2)/8
DIAGRAMA DE FUERZA NORMAL
DIAGRAMA DE FUERZACORTANTE
DIAGRAMA DE MOMENTOFLECTOR

Ejemplo 4
Para la viga de la figura, exprese la fuerza cortante Vx y el momento flector Mx en función de x.
Solución:
Esta es una viga estáticamente indeterminada de primer grado, pues se tienen cuatro incógnitas y
tres ecuaciones de la estática para determinarlas, el procedimiento que se sigue es dejar las
incógnitas en función de un parámetro.
Calculamos las reacciones en primer lugar:
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 𝑞 ∙ 𝐿 = 0
𝑉𝐴 = 𝑞 ∙ 𝐿 − 𝑉𝐵
𝑀𝐴 = 0 → 𝑀𝐴 − 𝑞 ∙ 𝐿 ∙𝐿
2+ 𝑉𝐵 ∙ 𝐿 = 0
𝑀𝐴 = 𝑞 ∙𝐿2
2− 𝑉𝐵 ∙ 𝐿
Ahora, se calculan las fuerzas internas que afectan al sistema utilizando el método de las
secciones.
A B
VA
qN/m
HA
VB
L
MA
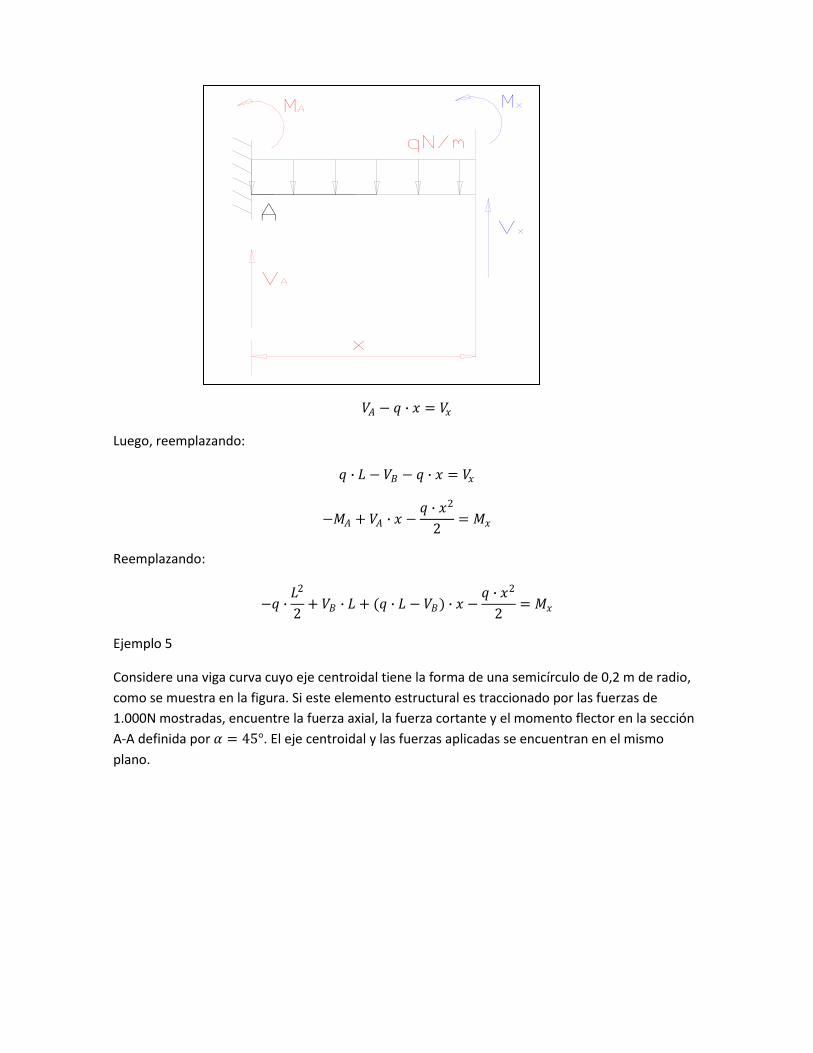
𝑉𝐴 − 𝑞 ∙ 𝑥 = 𝑉𝑥
Luego, reemplazando:
𝑞 ∙ 𝐿 − 𝑉𝐵 − 𝑞 ∙ 𝑥 = 𝑉𝑥
−𝑀𝐴 + 𝑉𝐴 ∙ 𝑥 −𝑞 ∙ 𝑥2
2= 𝑀𝑥
Reemplazando:
−𝑞 ∙𝐿2
2+ 𝑉𝐵 ∙ 𝐿 + (𝑞 ∙ 𝐿 − 𝑉𝐵) ∙ 𝑥 −
𝑞 ∙ 𝑥2
2= 𝑀𝑥
Ejemplo 5
Considere una viga curva cuyo eje centroidal tiene la forma de una semicírculo de 0,2 m de radio,
como se muestra en la figura. Si este elemento estructural es traccionado por las fuerzas de
1.000N mostradas, encuentre la fuerza axial, la fuerza cortante y el momento flector en la sección
A-A definida por 𝛼 = 45°. El eje centroidal y las fuerzas aplicadas se encuentran en el mismo
plano.
A
VA
qN/m
x
MA
Vx
Mx
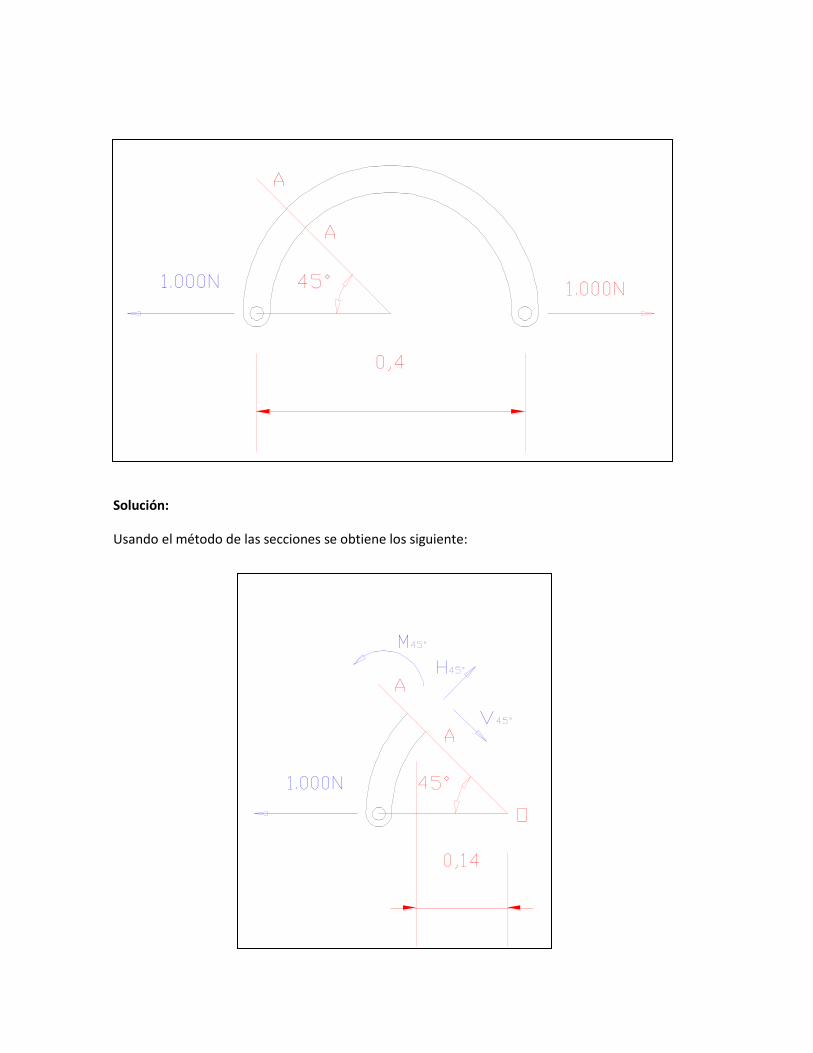
Solución:
Usando el método de las secciones se obtiene los siguiente:
45°
A
A
0,4
1.000N1.000N
45°
A
A
0,14
1.000N
V45°
H45°
M45°
O
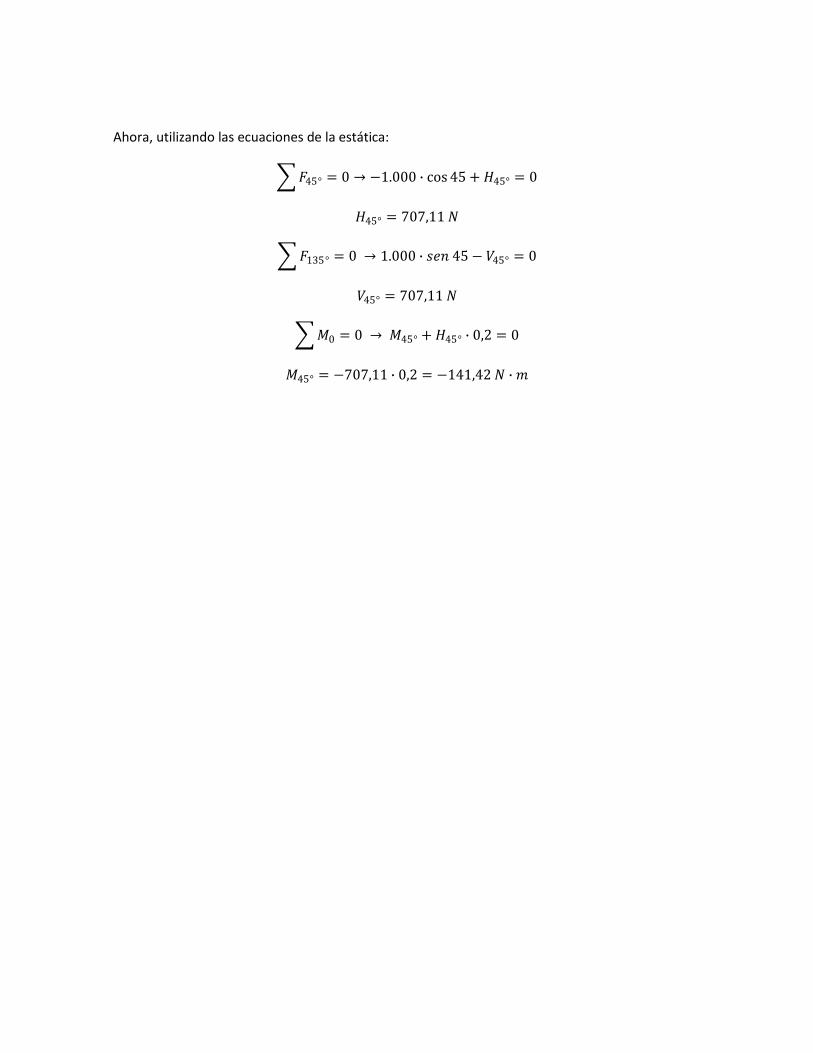
Ahora, utilizando las ecuaciones de la estática:
𝐹45° = 0 → −1.000 ∙ cos 45 + 𝐻45° = 0
𝐻45° = 707,11 𝑁
𝐹135° = 0 → 1.000 ∙ 𝑠𝑒𝑛 45 − 𝑉45° = 0
𝑉45° = 707,11 𝑁
𝑀0 = 0 → 𝑀45° + 𝐻45° ∙ 0,2 = 0
𝑀45° = −707,11 ∙ 0,2 = −141,42 𝑁 ∙ 𝑚
TEMA 7: FLEXIÓN
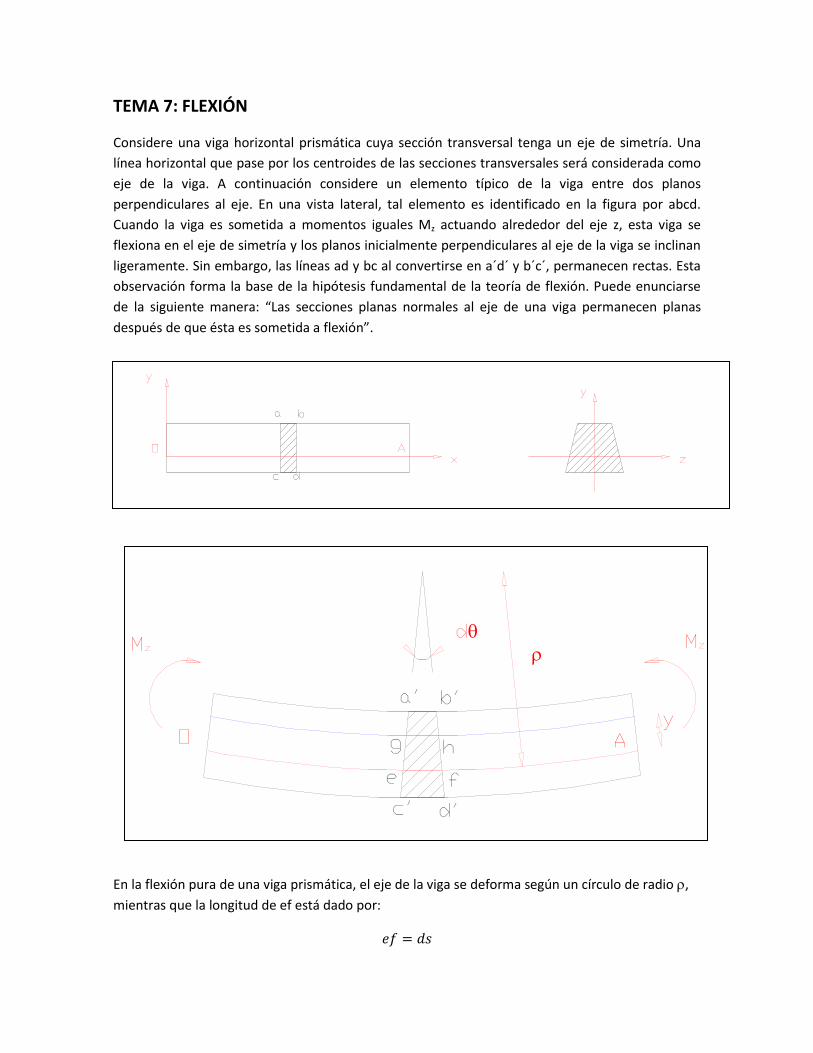
Considere una viga horizontal prismática cuya sección transversal tenga un eje de simetría. Una
línea horizontal que pase por los centroides de las secciones transversales será considerada como
eje de la viga. A continuación considere un elemento típico de la viga entre dos planos
perpendiculares al eje. En una vista lateral, tal elemento es identificado en la figura por abcd.
Cuando la viga es sometida a momentos iguales Mz actuando alrededor del eje z, esta viga se
flexiona en el eje de simetría y los planos inicialmente perpendiculares al eje de la viga se inclinan
ligeramente. Sin embargo, las líneas ad y bc al convertirse en a´d´ y b´c´, permanecen rectas. Esta
observación forma la base de la hipótesis fundamental de la teoría de flexión. Puede enunciarse
de la siguiente manera: “Las secciones planas normales al eje de una viga permanecen planas
después de que ésta es sometida a flexión”.
En la flexión pura de una viga prismática, el eje de la viga se deforma según un círculo de radio ,
mientras que la longitud de ef está dado por:
𝑒𝑓 = 𝑑𝑠
x
y
z
y
a
c
b
d
O A
a´ b´
c´ d´
e
g
f
h
Mz Mzd
yO A

𝑑𝑠 = 𝜌 ∙ 𝑑𝜃
Luego:
𝑑𝜃
𝑑𝑠=
1
𝜌= 𝑘
Donde k es la curvatura.
La longitud de la fibra gh está dada por:
𝑔 = 𝜌 − 𝑦 ∙ 𝑑𝜃
Y, por tanto la diferencia entre las longitudes de las fibras estará dada por:
𝑑𝑢 = 𝑔 − 𝑒𝑓 = 𝜌 − 𝑦 ∙ 𝑑𝜃 − 𝜌 ∙ 𝑑𝜃 = −𝑦 ∙ 𝑑𝜃
Dividiendo por ds:
𝑑𝑢
𝑑𝑠= −𝑦 ∙
𝑑𝜃
𝑑𝑠= −𝑘 ∙ 𝑦
Como las deflexiones y la rotación del eje de la viga son muy pequeños, los cosenos de los ángulos
implicados al formar las proyecciones de 𝑑𝑢 y 𝑑𝑠 sobre el eje horizontal son casi igual a la unidad,
luego, es posible reemplazar la deformación axial de la viga por du y reemplazar ds por dx, con lo
que queda:
𝜀𝑥 = −𝑘 ∙ 𝑦
Usando la Ley de Hooke:
𝜎𝑥 = 𝐸 ∙ 𝜀𝑥 = −𝐸 ∙ 𝑘 ∙ 𝑦
Por otro lado, se requiere que la suma de todas las fuerzas en una sección en la dirección x sea 0,
lo que implica:
𝐹𝑥 = 0 → 𝜎𝑥 ∙ 𝑑𝐴 = 0
−𝐸 ∙ 𝑘 ∙ 𝑦 ∙ 𝑑𝐴 = 0
k es constante en flexión pura, luego:
−𝐸 ∙ 𝑘 𝑦 ∙ 𝑑𝐴 = 0
Para satisfacer esta condición el eje z debe pasar por el centroide de área de la sección transversal
y como este eje z representa el origen del sistema implica que a lo largo de este eje tanto las
deformaciones como los esfuerzos normales son nulos. Este eje se llama fibra neutra.

Para completar la fórmula de flexión elástica, debemos considerar que la sumatoria de los
momentos externos debe ser igual a la suma de los momentos internos de la viga, vale decir:
𝑀0 = 0 → 𝑀𝑧 = 𝐸 ∙ 𝑘 ∙ 𝑦 ∙ 𝑑𝐴 ∙ 𝑦
𝑀𝑧 = 𝐸 ∙ 𝑘 ∙ 𝑦2 ∙ 𝑑𝐴
𝑀𝑧
𝐼𝑧𝑔= 𝐸 ∙ 𝑘
𝜎𝑥 = −𝑀𝑧
𝐼𝑧𝑔∙ 𝑦
Cabe destacar que el momento de inercia se calcula respecto de la fibra neutra de la figura, luego
es necesario primero establecer el centroide de área de la figura.
Debe notarse que en el caso de la flexión pura, el único esfuerzo que actúa es 𝜎𝑥 , luego el tensor
de esfuerzos estará dado por:
𝜎 = 𝜎𝑥 0 00 0 00 0 0
Y, como vimos en el capítulo este tensor de esfuerzos se puede hacer rotar y obtener el estado de
esfuerzos en cualquier sistema de eje coordenado.
Ejemplo 1
Una viga en voladizo de madera que pesa 0,75 N/m soporta una carga puntual hacia arriba de 20
kN en su extremo. Determine los esfuerzos máximos de flexión en una sección a 2 m desde el
extremo libre.
x z
y
a
c
b
d
O A
Mz
x=-Eky
y
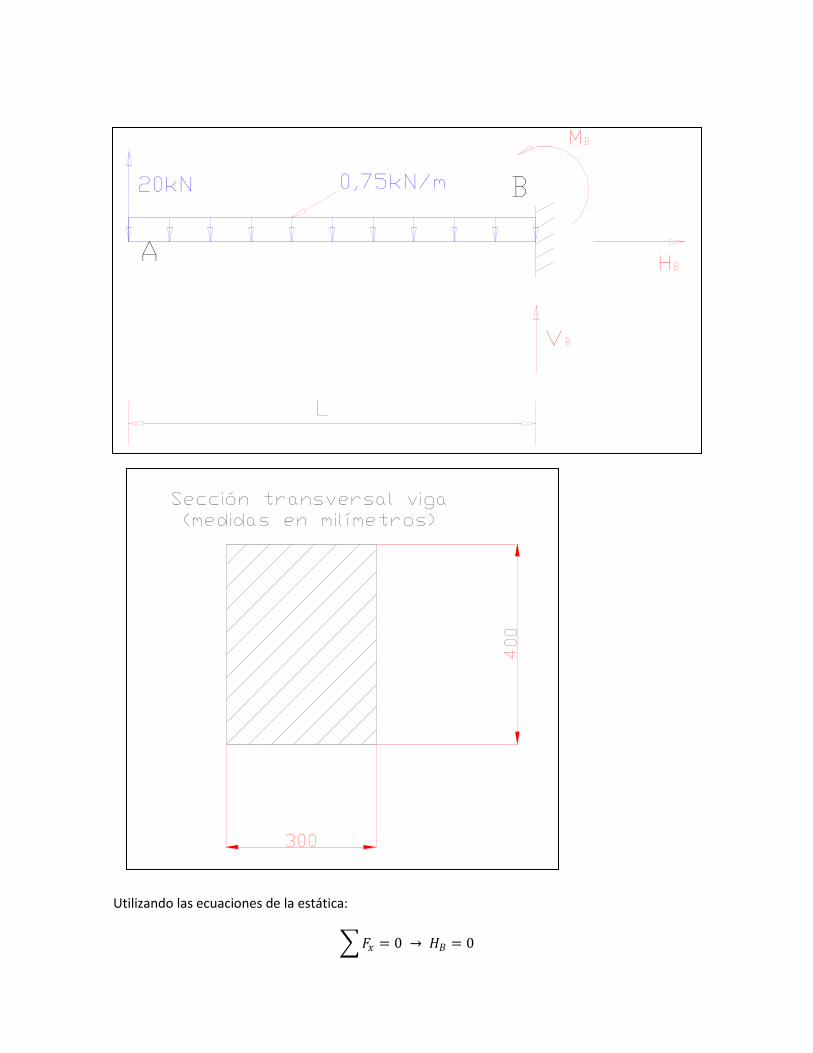
Utilizando las ecuaciones de la estática:
𝐹𝑥 = 0 → 𝐻𝐵 = 0
A HB
VB
B20kN
B
0,75kN/m
L
400
300
Sección transversal viga(medidas en milímetros)

𝐹𝑦 = 0 → 𝑉𝐵 − 0,75 ∙ 𝐿 + 20 = 0
𝑉𝐵 = −20 + 0,75 ∙ 𝐿
𝑀𝐵 = 0 → −20 ∙ 𝐿 + 0,75 ∙𝐿2
2− 𝑀𝐵 = 0
𝑀𝐵 = 20 ∙ 𝐿 − 0,75 ∙𝐿2
2
Ahora determinamos el sistema de fuerzas internas que afectan a la viga a 2 metros del extremo
(veáse figura):
20 ∙ 2 − 0.75 ∙ 2 ∙ 1 = 𝑀2𝑚
38,5 𝑘𝑁 ∙ 𝑚 = 𝑀2𝑚
El esfuerzo está dado por:
𝜎𝑥 =−𝑀 ∙ 𝑦
𝐼𝑧𝑔
Derivando el esfuerzo normal respecto a y e igualando a cero se encuentra el esfuerzo normal
máximo en la sección:
𝑑𝜎𝑥
𝑑𝑦= −
𝑀
𝐼𝑧𝑔≠ 0
A
V2m
20kN
M2m
0,75kN/m
2
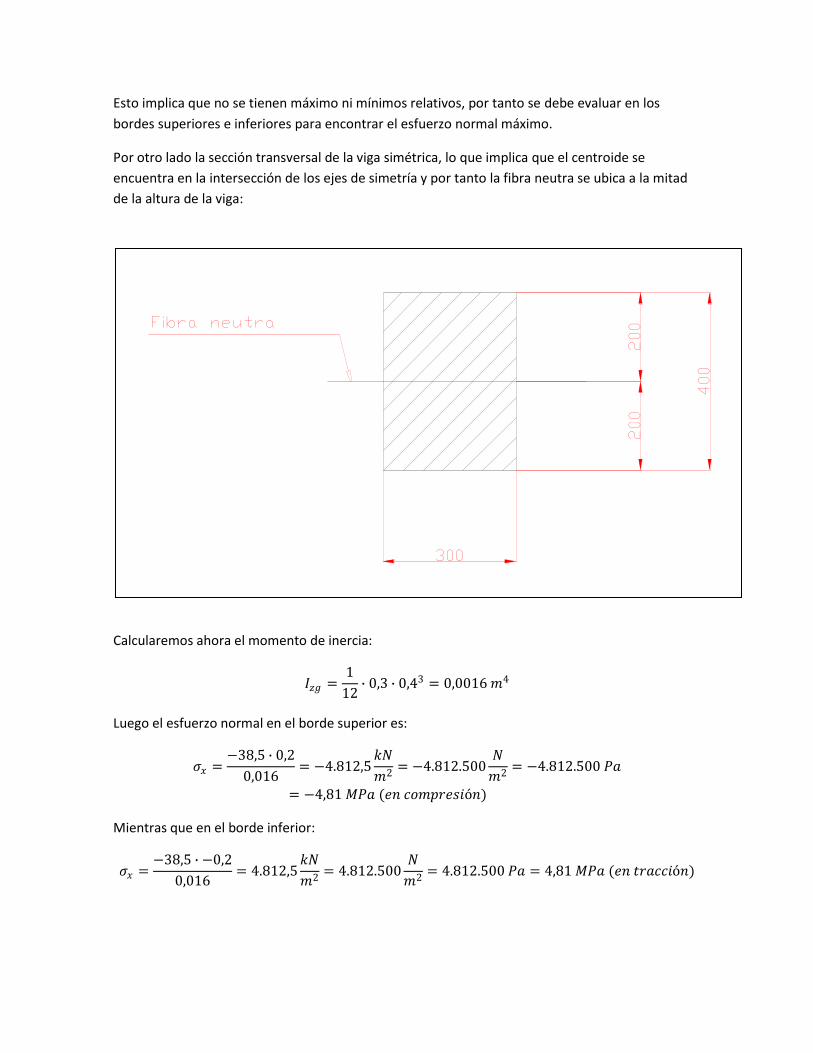
Esto implica que no se tienen máximo ni mínimos relativos, por tanto se debe evaluar en los
bordes superiores e inferiores para encontrar el esfuerzo normal máximo.
Por otro lado la sección transversal de la viga simétrica, lo que implica que el centroide se
encuentra en la intersección de los ejes de simetría y por tanto la fibra neutra se ubica a la mitad
de la altura de la viga:
Calcularemos ahora el momento de inercia:
𝐼𝑧𝑔 =1
12∙ 0,3 ∙ 0,43 = 0,0016 𝑚4
Luego el esfuerzo normal en el borde superior es:
𝜎𝑥 =−38,5 ∙ 0,2
0,016= −4.812,5
𝑘𝑁
𝑚2= −4.812.500
𝑁
𝑚2= −4.812.500 𝑃𝑎
= −4,81 𝑀𝑃𝑎 (𝑒𝑛 𝑐𝑜𝑚𝑝𝑟𝑒𝑠𝑖ó𝑛)
Mientras que en el borde inferior:
𝜎𝑥 =−38,5 ∙ −0,2
0,016= 4.812,5
𝑘𝑁
𝑚2= 4.812.500
𝑁
𝑚2= 4.812.500 𝑃𝑎 = 4,81 𝑀𝑃𝑎 (𝑒𝑛 𝑡𝑟𝑎𝑐𝑐𝑖ó𝑛)
400
300
Fibra neutra
200
200
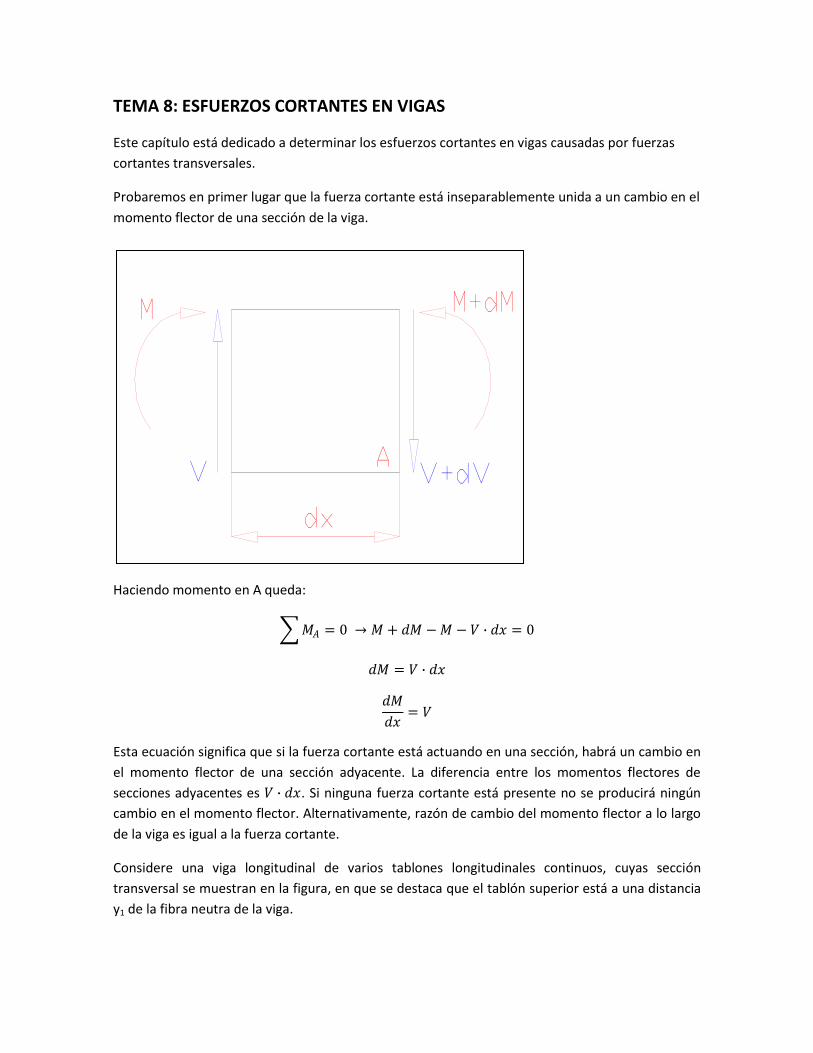
TEMA 8: ESFUERZOS CORTANTES EN VIGAS
Este capítulo está dedicado a determinar los esfuerzos cortantes en vigas causadas por fuerzas
cortantes transversales.
Probaremos en primer lugar que la fuerza cortante está inseparablemente unida a un cambio en el
momento flector de una sección de la viga.
Haciendo momento en A queda:
𝑀𝐴 = 0 → 𝑀 + 𝑑𝑀 − 𝑀 − 𝑉 ∙ 𝑑𝑥 = 0
𝑑𝑀 = 𝑉 ∙ 𝑑𝑥
𝑑𝑀
𝑑𝑥= 𝑉
Esta ecuación significa que si la fuerza cortante está actuando en una sección, habrá un cambio en
el momento flector de una sección adyacente. La diferencia entre los momentos flectores de
secciones adyacentes es 𝑉 ∙ 𝑑𝑥. Si ninguna fuerza cortante está presente no se producirá ningún
cambio en el momento flector. Alternativamente, razón de cambio del momento flector a lo largo
de la viga es igual a la fuerza cortante.
Considere una viga longitudinal de varios tablones longitudinales continuos, cuyas sección
transversal se muestran en la figura, en que se destaca que el tablón superior está a una distancia
y1 de la fibra neutra de la viga.
M+dMM
V V+dV
dx
A
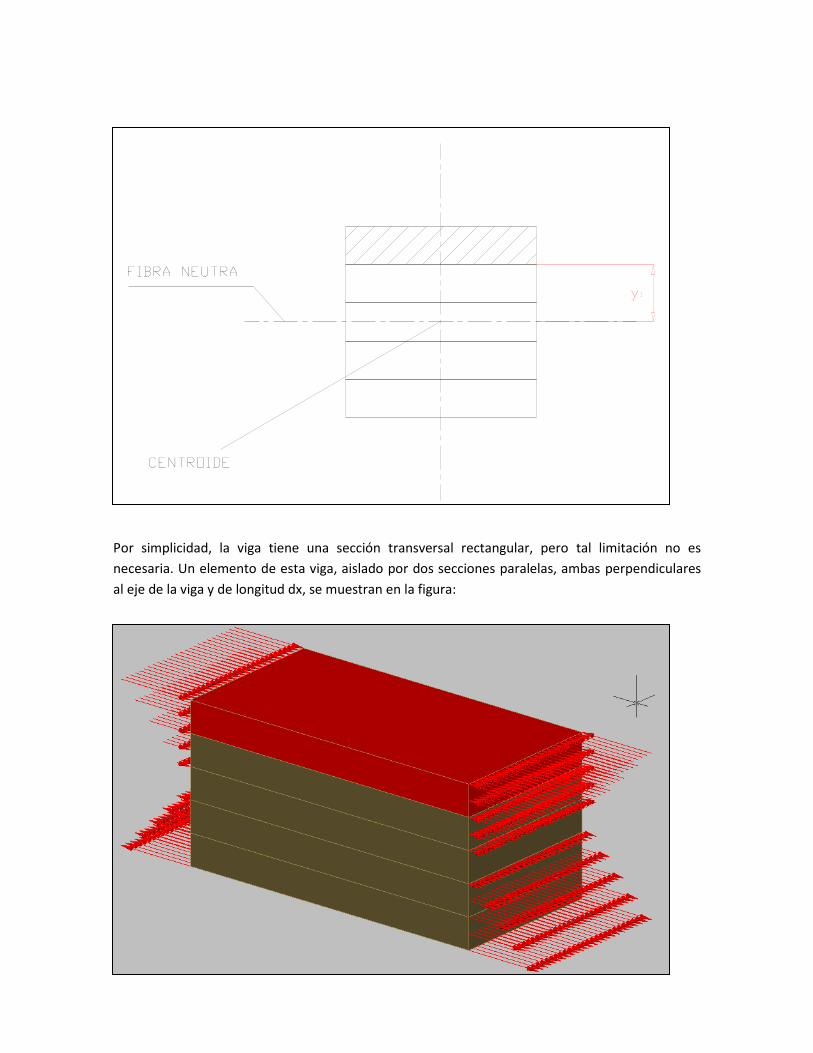
Por simplicidad, la viga tiene una sección transversal rectangular, pero tal limitación no es
necesaria. Un elemento de esta viga, aislado por dos secciones paralelas, ambas perpendiculares
al eje de la viga y de longitud dx, se muestran en la figura:
FIBRA NEUTRA
CENTROIDE
y1
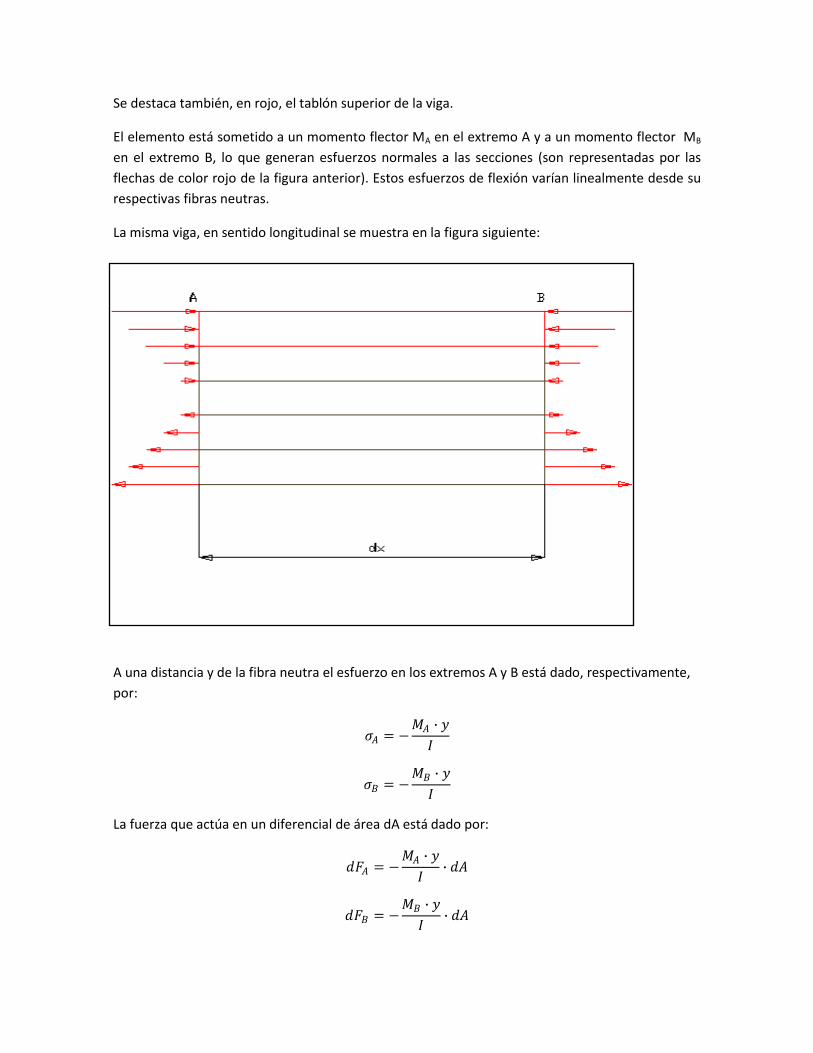
Se destaca también, en rojo, el tablón superior de la viga.
El elemento está sometido a un momento flector MA en el extremo A y a un momento flector MB
en el extremo B, lo que generan esfuerzos normales a las secciones (son representadas por las
flechas de color rojo de la figura anterior). Estos esfuerzos de flexión varían linealmente desde su
respectivas fibras neutras.
La misma viga, en sentido longitudinal se muestra en la figura siguiente:
A una distancia y de la fibra neutra el esfuerzo en los extremos A y B está dado, respectivamente,
por:
𝜎𝐴 = −𝑀𝐴 ∙ 𝑦
𝐼
𝜎𝐵 = −𝑀𝐵 ∙ 𝑦
𝐼
La fuerza que actúa en un diferencial de área dA está dado por:
𝑑𝐹𝐴 = −𝑀𝐴 ∙ 𝑦
𝐼∙ 𝑑𝐴
𝑑𝐹𝐵 = −𝑀𝐵 ∙ 𝑦
𝐼∙ 𝑑𝐴

La fuerza que actúa sobre el área del tablón de la sección transversal está dada por:
𝐹𝐴 = −𝑀𝐴 ∙ 𝑦
𝐼∙ 𝑑𝐴
𝐹𝐴 =−𝑀𝐴
𝐼 𝑦 ∙ 𝑑𝐴
𝐹𝐵 =−𝑀𝐵
𝐼 𝑦 ∙ 𝑑𝐴
Si 𝐹𝐴 ≠ 𝐹𝐵 , el tablón superior tiende a deslizar respecto del tablón inferior, por tanto para que
exista equilibrio de fuerzas se requiere que existe una fuerza horizontal resistente.
𝑑𝐹 = −𝑀𝐴
𝐼 𝑦 ∙ 𝑑𝐴 —−
𝑀𝐵
𝐼 𝑦 ∙ 𝑑𝐴
𝑑𝐹 =∆𝑀
𝐼 𝑦 ∙ 𝑑𝐴
Si dx es una cantidad diferencial, el momento cambia también una cantidad diferencial, luego
𝑑𝐹 =𝑑𝑀
𝐼 𝑦 ∙ 𝑑𝐴
En vez de trabajar con una fuerza dF que se desarrolla a lo largo de una longitud dx, es más
conveniente trabajar con una fuerza por unidad de longitud, esto se consigue dividiendo dF por dx,
con lo que se obtiene:
𝑞 =𝑑𝐹
𝑑𝑥=
𝑑𝑀
𝑑𝑥∙
1
𝐼 𝑦 ∙ 𝑑𝐴 =
𝑉
𝐼 𝑦 ∙ 𝑑𝐴
Donde q se llama flujo cortante.
Ahora, el esfuerzo de corte que se desarrolla en el plano longitudinal es:
𝜏 =𝑉
𝐼 ∙ 𝑡 𝑦 ∙ 𝑑𝐴
Donde t es el espesor de la sección transversal del plano considerado.
Ejemplo 1
Dos tablones largos de madera forman una sección T para una viga, como se muestra, en mm, en
la figura siguiente. Si esta viga transmite una fuerza cortante vertical constante de 3.000N,
encuentre la separación necesaria de los clavos entre los dos tablones para que la viga trabaje
como una unidad. Suponga que la fuerza cortante permisible por clavo es de 700N
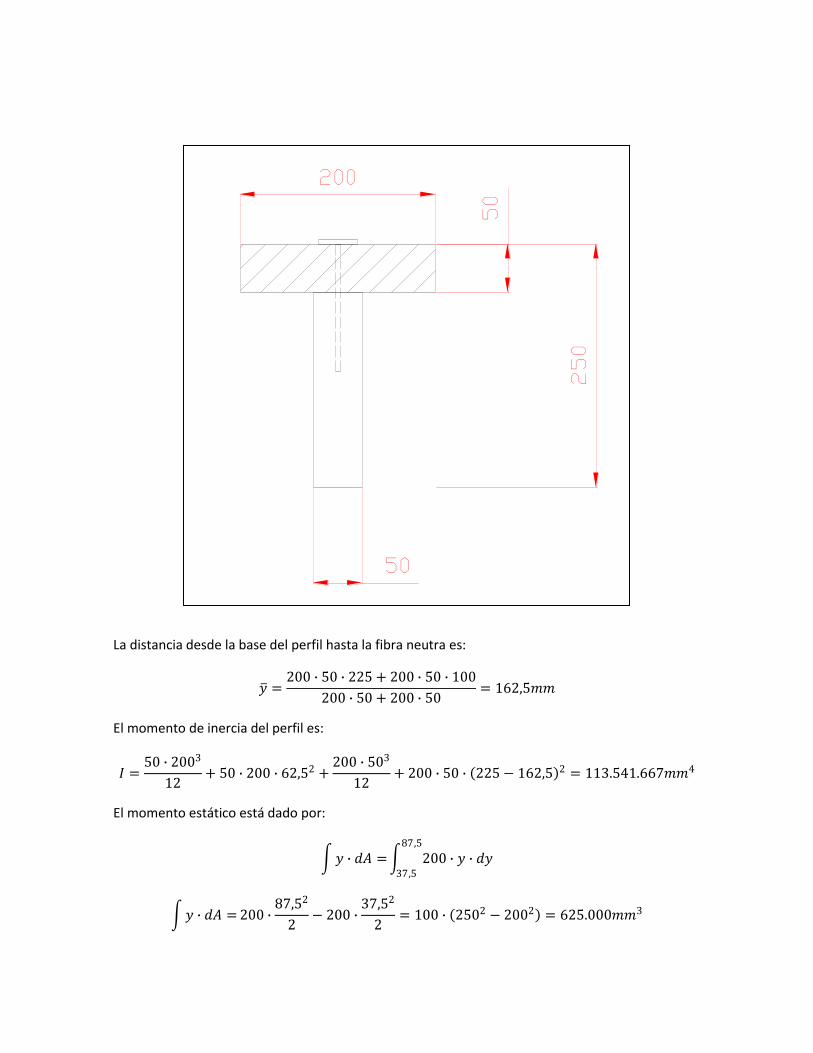
La distancia desde la base del perfil hasta la fibra neutra es:
𝑦 =200 ∙ 50 ∙ 225 + 200 ∙ 50 ∙ 100
200 ∙ 50 + 200 ∙ 50= 162,5𝑚𝑚
El momento de inercia del perfil es:
𝐼 =50 ∙ 2003
12+ 50 ∙ 200 ∙ 62,52 +
200 ∙ 503
12+ 200 ∙ 50 ∙ 225 − 162,5 2 = 113.541.667𝑚𝑚4
El momento estático está dado por:
𝑦 ∙ 𝑑𝐴 = 200 ∙ 𝑦 ∙ 𝑑𝑦87,5
37,5
𝑦 ∙ 𝑑𝐴 = 200 ∙87,52
2− 200 ∙
37,52
2= 100 ∙ 2502 − 2002 = 625.000𝑚𝑚3
200
50
250
50
Luego el flujo cortante está dado por:
𝑞 =3.000 ∙ 625.000
113.541.667= 16,51𝑁/𝑚𝑚
Finalmente la separación entre clavos es:
𝑑 =700
16,51= 42,4𝑚𝑚
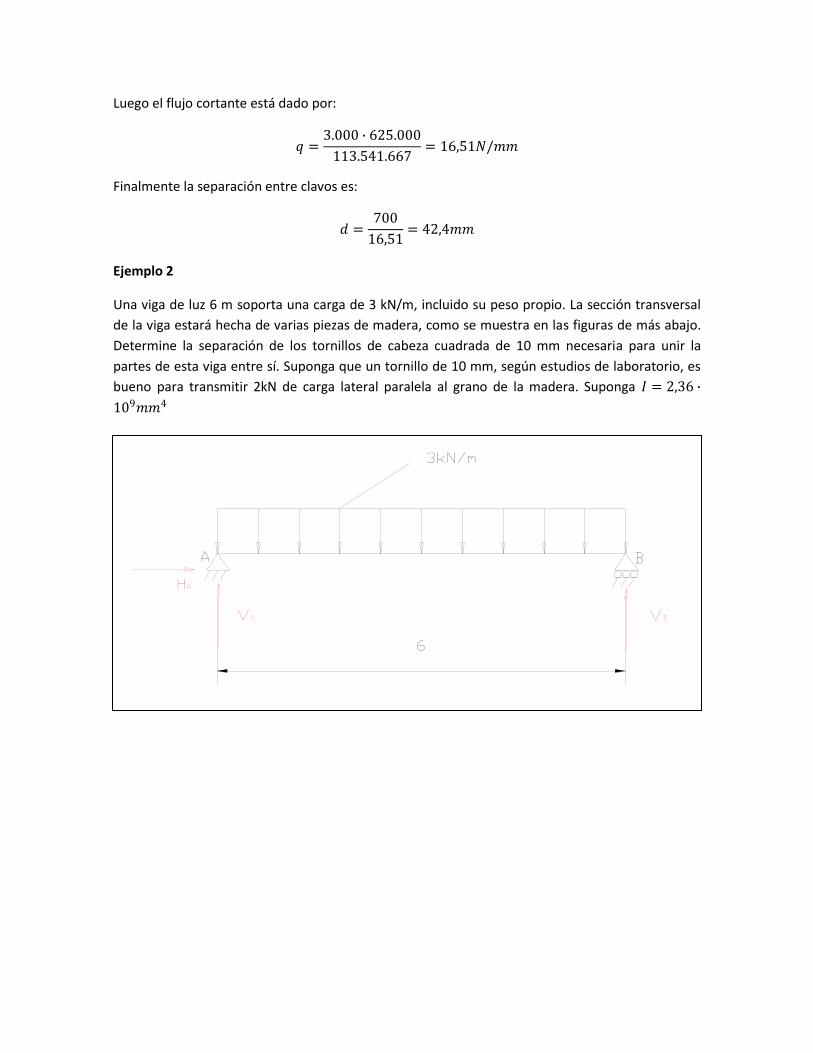
Ejemplo 2
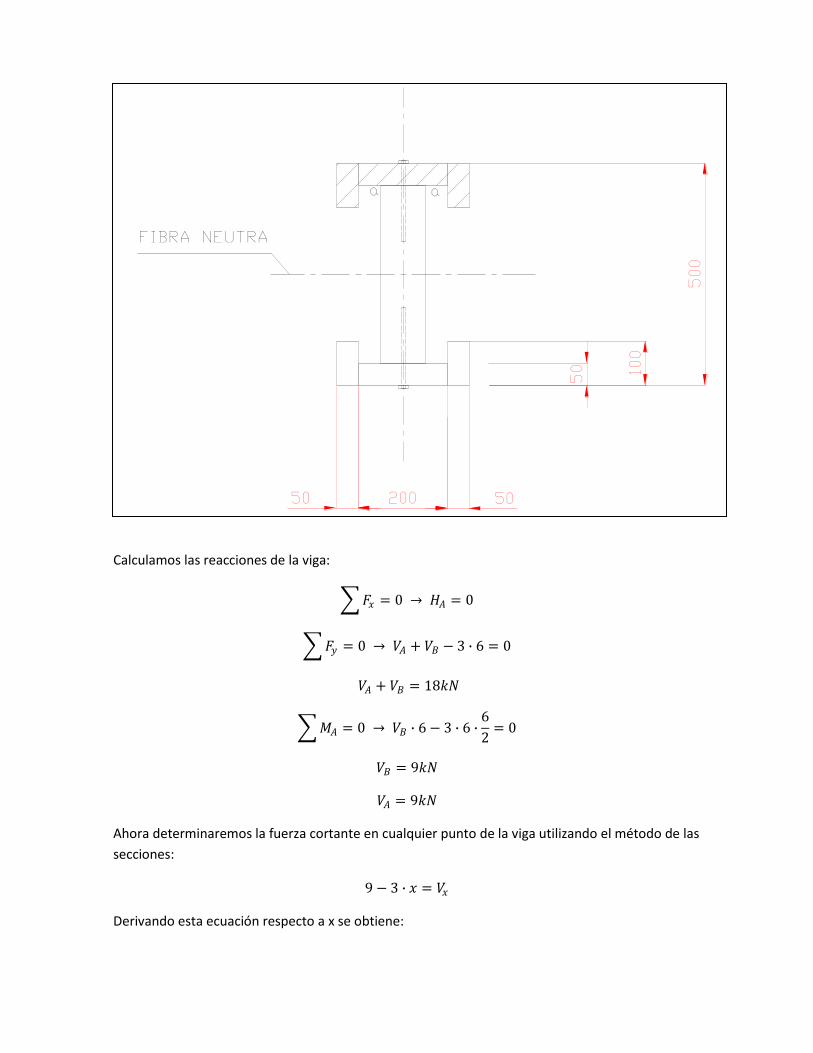
Una viga de luz 6 m soporta una carga de 3 kN/m, incluido su peso propio. La sección transversal
de la viga estará hecha de varias piezas de madera, como se muestra en las figuras de más abajo.
Determine la separación de los tornillos de cabeza cuadrada de 10 mm necesaria para unir la
partes de esta viga entre sí. Suponga que un tornillo de 10 mm, según estudios de laboratorio, es
bueno para transmitir 2kN de carga lateral paralela al grano de la madera. Suponga 𝐼 = 2,36 ∙
109𝑚𝑚4
A B
3kN/m
VA
HA
VB
6
Calculamos las reacciones de la viga:
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 3 ∙ 6 = 0
𝑉𝐴 + 𝑉𝐵 = 18𝑘𝑁
𝑀𝐴 = 0 → 𝑉𝐵 ∙ 6 − 3 ∙ 6 ∙6
2= 0
𝑉𝐵 = 9𝑘𝑁
𝑉𝐴 = 9𝑘𝑁
Ahora determinaremos la fuerza cortante en cualquier punto de la viga utilizando el método de las
secciones:
9 − 3 ∙ 𝑥 = 𝑉𝑥
Derivando esta ecuación respecto a x se obtiene:
200 5050
50 100
500
FIBRA NEUTRA
a a
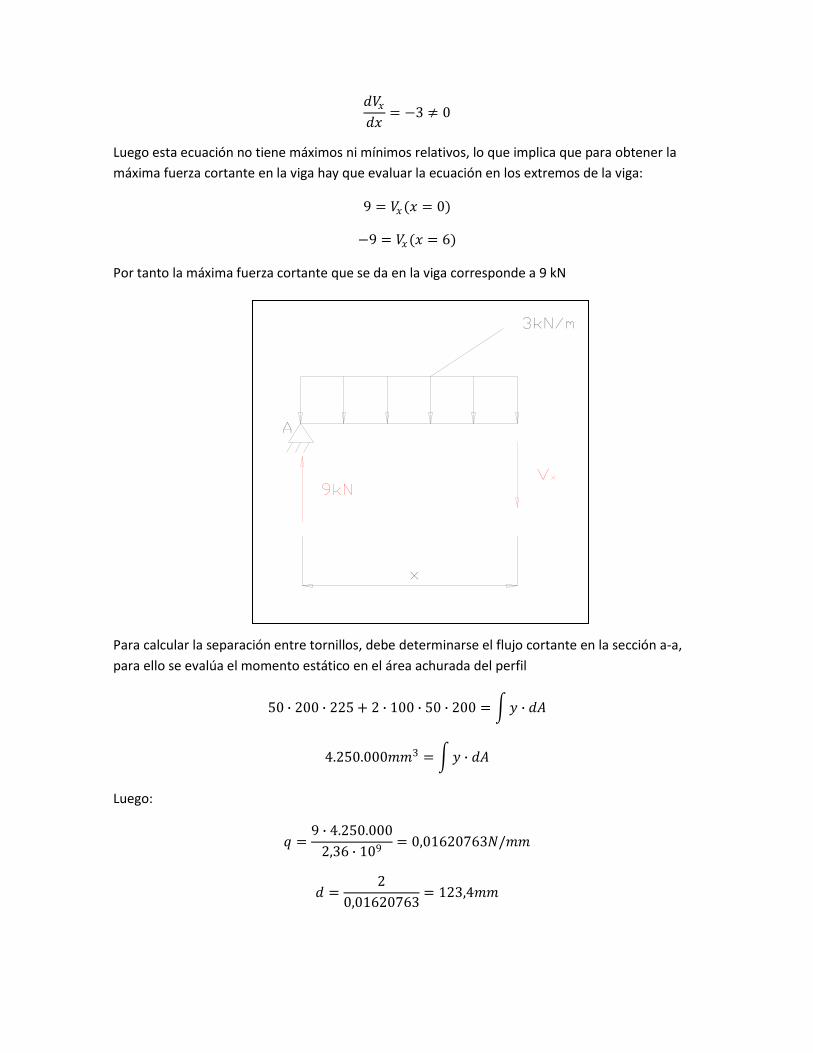
𝑑𝑉𝑥𝑑𝑥
= −3 ≠ 0
Luego esta ecuación no tiene máximos ni mínimos relativos, lo que implica que para obtener la
máxima fuerza cortante en la viga hay que evaluar la ecuación en los extremos de la viga:
9 = 𝑉𝑥(𝑥 = 0)
−9 = 𝑉𝑥(𝑥 = 6)
Por tanto la máxima fuerza cortante que se da en la viga corresponde a 9 kN
Para calcular la separación entre tornillos, debe determinarse el flujo cortante en la sección a-a,
para ello se evalúa el momento estático en el área achurada del perfil
50 ∙ 200 ∙ 225 + 2 ∙ 100 ∙ 50 ∙ 200 = 𝑦 ∙ 𝑑𝐴
4.250.000𝑚𝑚3 = 𝑦 ∙ 𝑑𝐴
Luego:
𝑞 =9 ∙ 4.250.000
2,36 ∙ 109= 0,01620763𝑁/𝑚𝑚
𝑑 =2
0,01620763= 123,4𝑚𝑚
A
3kN/m
9kN
x
Vx
En los apoyos el espaciamiento enytre tornillos debe ser de 123 mm. Este espaciamiento se aplica
sólo en una sección donde la fuerza cortante V es de 9kN.
Dado que la fuerza cortante no es constante en todo el tramo, es conveniente diferir la separación
entre tornillos con el fin de ahorrar material, así en las cercanías de los apoyos es necesario
colocar tornillos de 10 mm espaciados 120 mm a 1,5 m cerca de ambos apoyos y de 240 mm en la
parte central de la viga (debido a que la fuerza cortante desarrollada en esta parte es menor a la
mitad de la fuerza cortante máxima).
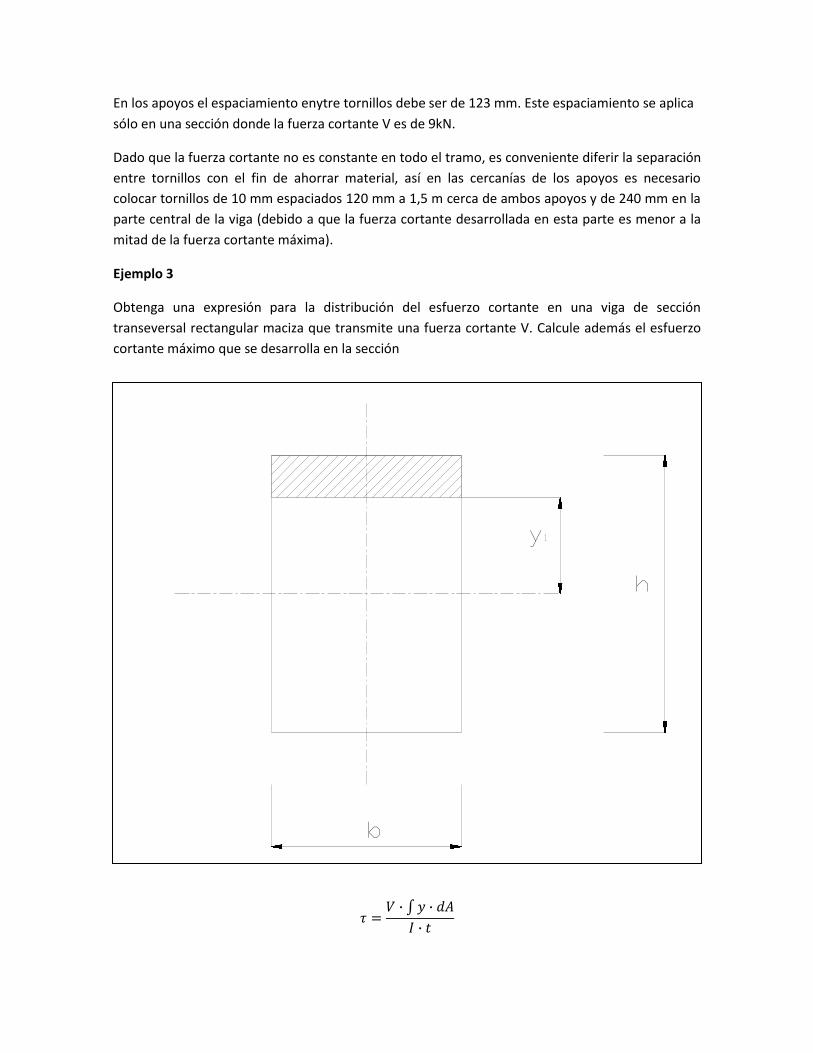
Ejemplo 3
Obtenga una expresión para la distribución del esfuerzo cortante en una viga de sección
transeversal rectangular maciza que transmite una fuerza cortante V. Calcule además el esfuerzo
cortante máximo que se desarrolla en la sección
𝜏 =𝑉 ∙ 𝑦 ∙ 𝑑𝐴
𝐼 ∙ 𝑡
h
b
y1

El momento de inercia está dado por:
𝐼 =𝑏 ∙ 3
12
Además
𝑡 = 𝑏
El momento estático está dado por:
𝑦 ∙ 𝑑𝐴 = 𝑦 ∙ 𝑏 ∙ 𝑑𝑦/2
𝑦1
𝑦 ∙ 𝑑𝐴 =𝑏
2∙
2
2
− 𝑦12
Luego el esfuerzo cortante está dado por:
𝜏 =
𝑉 ∙𝑏2
∙ 2
2
− 𝑦12
𝑏 ∙ 3
12∙ 𝑏
=
𝑉2
∙ 2
2
− 𝑦12
𝑏 ∙ 3
12
=6 ∙ 𝑉
𝑏 ∙ 3∙
2
2
− 𝑦12
Para encontrar el esfuerzo cortante máximo derivamos el esfuerzo cortante por y1 e igualamos
esta expresión a cero:
𝑑𝜏
𝑑𝑦1=
6 ∙ 𝑉
𝑏 ∙ 3∙ −2 ∙ 𝑦1 = 0 → 𝑦1 = 0
Luego:
𝜏𝑚á𝑥 =6 ∙ 𝑉
𝑏 ∙ 3∙2
4=
3 ∙ 𝑉
2 ∙ 𝑏 ∙ =
3 ∙ 𝑉
2 ∙ 𝐴
De los resultados obtenidos podemos deducir que el esfuerzo cortante en una viga de sección
rectangular varía parabólicamente y que el esfuerzo cortante máximo se obtiene cuando y1 es
igual a cero, a medida que nos vamos alejando de la fibra neutra el val,or del esfuerzo cortante va
haciéndose más bajo hasta llegar a ser nulo cuando 𝑦 = ±/2, vale decir, el esfuerzo de corte es
cero al llegar al borde superior e inferior de la viga.
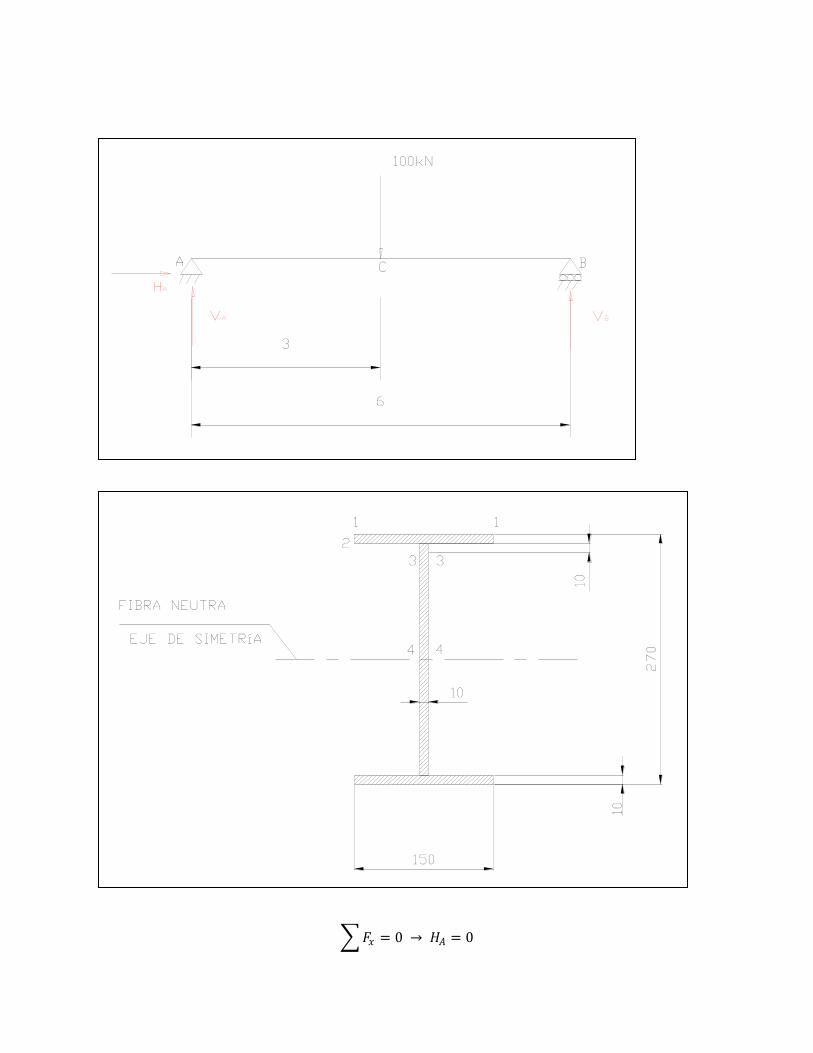
Ejemplo 4
El sistema de cargas y la sección transversal a que se ve afecta una viga I se muestra en las figuras
siguientes, determine los esfuerzos cortantes en los niveles indicados. Desprecie el peso de la viga.
𝐹𝑥 = 0 → 𝐻𝐴 = 0
A B
VA
HA
VB
6
100kN
3
C
150
FIBRA NEUTRA10
270
10
10
1 1
2
3 3
4 4EJE DE SIMETRÍA
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 100 = 0
𝑉𝐴 + 𝑉𝐵 = 100 𝑘𝑁
𝑀𝐴 = 0 → 𝑉𝐵 ∙ 6 − 100 ∙ 3 = 0
𝑉𝐵 = 50 𝑘𝑁
𝑉𝐴 = 50 𝑘𝑁
Ahora determinamos la fuerza cortante a lo largo de la viga:
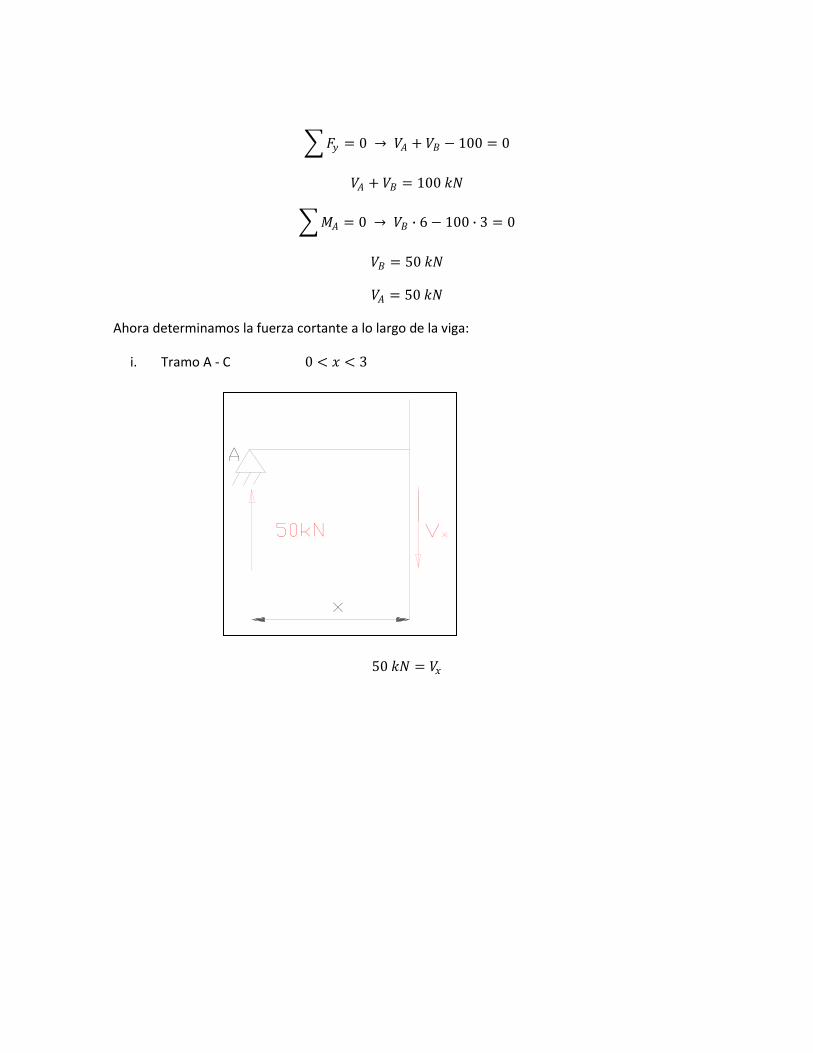
i. Tramo A - C 0 < 𝑥 < 3
50 𝑘𝑁 = 𝑉𝑥
A
50kN
x
Vx
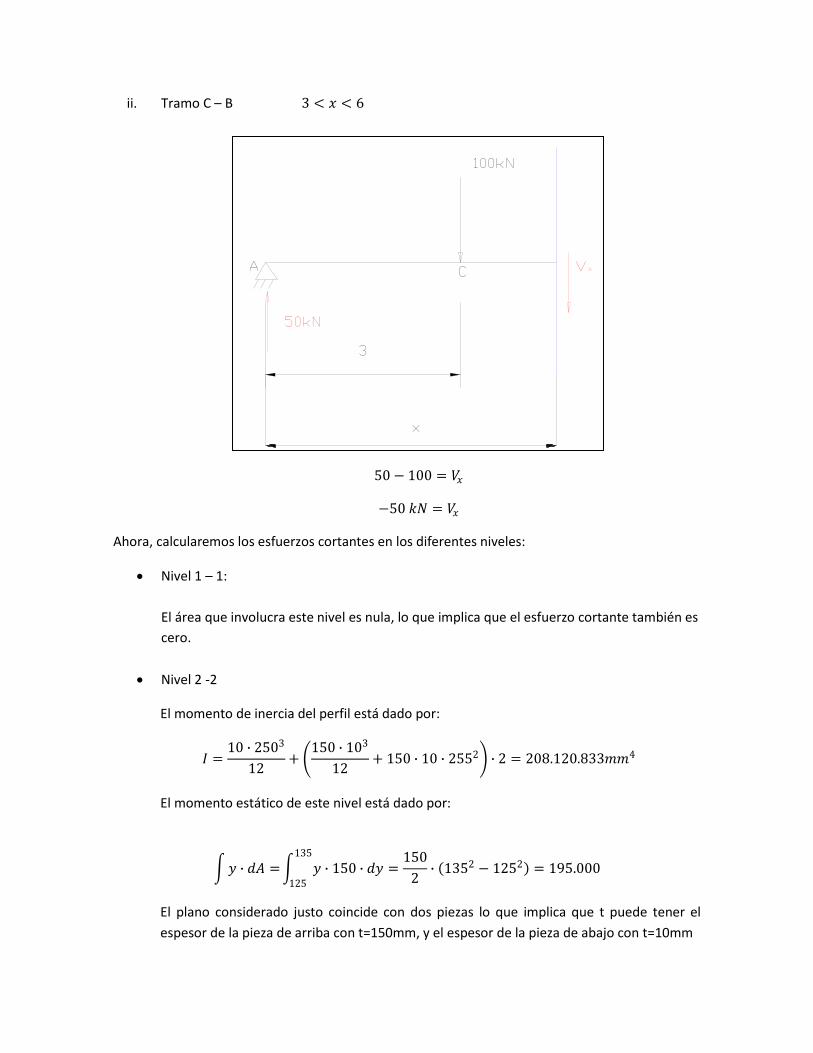
ii. Tramo C – B 3 < 𝑥 < 6
50 − 100 = 𝑉𝑥
−50 𝑘𝑁 = 𝑉𝑥
Ahora, calcularemos los esfuerzos cortantes en los diferentes niveles:
Nivel 1 – 1:
El área que involucra este nivel es nula, lo que implica que el esfuerzo cortante también es
cero.
Nivel 2 -2
El momento de inercia del perfil está dado por:
𝐼 =10 ∙ 2503
12+
150 ∙ 103
12+ 150 ∙ 10 ∙ 2552 ∙ 2 = 208.120.833𝑚𝑚4
El momento estático de este nivel está dado por:
𝑦 ∙ 𝑑𝐴 = 𝑦 ∙ 150 ∙ 𝑑𝑦135
125
=150
2∙ 1352 − 1252 = 195.000
El plano considerado justo coincide con dos piezas lo que implica que t puede tener el
espesor de la pieza de arriba con t=150mm, y el espesor de la pieza de abajo con t=10mm
A
50kN
100kN
3
C
x
Vx

Luego:
𝜏 =50 ∙ 195.000
208.120.833 ∙ 150= 0,000312318565 𝑘𝑁/𝑚𝑚2 = 312.318,565 𝑃𝑎 = 0,31 𝑀𝑃𝑎
𝜏 =50 ∙ 195.000
208.120.833 ∙ 10= 0,00468478 𝑘𝑁/𝑚𝑚2 = 4.684.780 𝑃𝑎 = 4,68 𝑀𝑃𝑎
Nivel 3 – 3:
El momento de inercia del perfil está dado por:
𝐼 =10 ∙ 2503
12+
150 ∙ 103
12+ 150 ∙ 10 ∙ 2552 ∙ 2 = 208.120.833𝑚𝑚4
El momento estático de este nivel está dado por:
𝑦 ∙ 𝑑𝐴 = 𝑦 ∙ 10 ∙ 𝑑𝑦125
115
+ 𝑦 ∙ 150 ∙ 𝑑𝑦135
125
=10
2∙ 1252 − 1152 +
150
2∙ 1352 − 1252
𝑦 ∙ 𝑑𝐴 = 207.000 𝑚𝑚3
El espesor de acuerdo al plano considerado es 𝑡 = 150 𝑚𝑚
Por tanto:
𝜏 =50 ∙ 207.000
208.120.833 ∙ 150= 0,00033154 𝑘𝑁/𝑚𝑚2 = 331.538 𝑃𝑎 = 0,33 𝑀𝑃𝑎
Nivel 4 – 4:
El momento de inercia del perfil está dado por:
𝐼 =10 ∙ 2503
12+
150 ∙ 103
12+ 150 ∙ 10 ∙ 2552 ∙ 2 = 208.120.833𝑚𝑚4
El momento estático de este nivel está dado por:
𝑦 ∙ 𝑑𝐴 = 𝑦 ∙ 10 ∙ 𝑑𝑦125
0
+ 𝑦 ∙ 150 ∙ 𝑑𝑦135
125
=10
2∙ 1252 +
150
2∙ 1352 − 1252
𝑦 ∙ 𝑑𝐴 = 273.125 𝑚𝑚3
El ancho t correspondiente al plano considerado es:
𝑡 = 10 𝑚𝑚
Por tanto:
𝜏 =50 ∙ 273.125
208.120.833 ∙ 10= 0,00656169 𝑘𝑁/𝑚𝑚2 = 6.561.690 𝑃𝑎 = 6,56 𝑀𝑃𝑎

TEMA 8: CÁLCULO DE LA ELÁSTICA (DEFLEXIONES)
En este capítulo se presenta uno de los métodos más importantes para calcular las deformaciones
que experimentan los sistemas estructurales frente a las acciones de cargas, posteriormente, en el
capitulos de vigas estáticamente indeterminadas, se verán otrois métodos. El cálculo de estas
deformaciones permite trazar la linea deformada de las estructuras, también llamada “elástica”
por corresponder a deformaciones que se producen dentro del rango elástico de estos sistemas.
Método de la doble integración
Utilizando algunos de las cosas vistas en el capítulo de flexión se tiene:
𝑑𝑠 = 𝜌 ∙ 𝑑𝜃
𝑑𝜃
𝑑𝑠=
1
𝜌
𝑑𝑢 = −𝑦 ∙ 𝑑𝜃
𝑑𝑢
𝑑𝑠= −𝑦 ∙
𝑑𝜃
𝑑𝑠=
−𝑦
𝜌
𝜀𝑥 =−𝑦
𝜌 → −
𝜀𝑥
𝑦=
1
𝜌
Utilizando la ley de Hooke
𝜎𝑥 = 𝐸 ∙ 𝜀𝑥 → 𝜀𝑥 =𝜎𝑥
𝐸
Y usando la fórmula de flexión para vigas:
𝜎𝑥 = −𝑀 ∙ 𝑦
𝐼
Se tiene:
𝜀𝑥 = −𝑀 ∙ 𝑦
𝐸 ∙ 𝐼
Luego:
1
𝜌=
𝑀
𝐸 ∙ 𝐼
De acuerdo al cálculo vectorial el radio de curvatura viene dado por:
𝜌 = 𝑟´(𝑡) 3
𝑟´ 𝑡 𝑥 𝑟´´(𝑡)

Sea 𝑟 𝑥 = (𝑥, 𝑦 𝑥 )
𝑟´ 𝑥 = (1,𝑑𝑦
𝑑𝑥)
𝑟´´ 𝑥 = (0,𝑑2𝑦
𝑑𝑥2)
Luego:
𝑟´ 𝑡 𝑥 𝑟´´ 𝑡 =
𝑖 𝑗 𝑘
1𝑑𝑦
𝑑𝑥0
0𝑑2𝑦
𝑑𝑥20
= 𝑘 ∙
𝑑2𝑦
𝑑𝑥2
Luego:
𝜌 =
1 +𝑑𝑦𝑑𝑥
2
3/2
𝑑2𝑦𝑑𝑥2
Si las deformaciones son muy pequeñas el término 𝑑𝑦
𝑑𝑥
2 se puede despreciar, con lo que queda:
𝜌 =1
𝑑2𝑦𝑑𝑥2
→ 1
𝜌=
𝑑2𝑦
𝑑𝑥2
Finalmente:
𝑑2𝑦
𝑑𝑥2=
𝑀
𝐸 ∙ 𝐼
Sea 𝐸 ∙ 𝐼 = , entonces:
∙ 𝑦´´ = 𝑀
Esta última expresión indica que un valor positivo del momento flector, esto es, que estira la fibra
inferior del elemento, implica curvatura positiva de la elástica (cóncava), y viceversa. Para integrar
esta ecuación diferencial se requiere detrminar dos constantes de integración, lo cual se consigue
al imponer dos condiciones de borde, para ello se utilizan valores conocidos de la elástcia o de la
tangente para ciertos valores de x. Las relaciones siguientes también pueden ser útiles para
determinar la expresión analítica de la elástica.
𝑀 = ∙𝑑𝜃
𝑑𝑥= ∙ 𝑦´´

𝑉 =𝑑𝑀
𝑑𝑥= ∙ 𝑦´´´
𝑞 =𝑑𝑉
𝑑𝑥= ∙ 𝑦´´´´
El uso de estas relaciones está restringido al caso de funciones 𝑦, 𝜃, 𝑀, 𝑉, 𝑞 que sean continuas en
el rango de integración. Por lo tanto la relevancia práctica de este método es limitada cuando se
tienen cargas concentradas o cargas que no se pueden representar por una función continua en la
longitud de la viga.
Condiciones de borde
Para la solución de problemas de deflexiones en vigas, además de la ecxuación diferencial deben
ser establecidas condiciones de borde o frontera. Varios tipos de condiciones homogéneas de
frontera son los siguientes:
a) Empotramiento: tanto la flecha como la pendiente deben ser nulas. Por consiguiente, en
el extremo donde existe el empotramiento 𝑥 = 0,
𝑦(𝑥 = 0) = 0
𝑦´ 𝑥 = 0 = 0
b) Apoyo móvil y apoyo fijo: en el extremo considerado no debe existir ni flecha ni momento
M
𝑦 𝑥 = 𝑎 = 0
𝑦´´ 𝑥 = 𝑎 = 0
c) Extremo libre: tal extremo está libre de momento y de fuerza cortante, por tanto:
𝑦´´ 𝑥 = 𝑎 = 0
𝑦´´´ 𝑥 = 𝑎 = 0
d) Articulación: en este caso se permite el desplazamiento vertical pero la rotación del
extremo está impedida. Este tipo de apoyo no es capaz de resistir ninguna fuerza cortante,
lo que implica:
𝑦´ 𝑥 = 𝑎 = 0
𝑦´´´ 𝑥 = 𝑎 = 0
En algunos problemas surgen discontinuidades en las funciones matemáticas de carga o rigidez del
elemento. Por ejemplo, tales discontinuidades ocurren bajo fuerzas o momentos puntuales y en
cambios bruscos de áreas transversales que afectan el valor de . En tales casos, las condiciones
de brode debn complementarse con los requisitos físicos de continuyidad de la curva elástica. Esto
significa que en cualquier unión de las dos zonas de una viga en que ocurre una discontinuidad, la
deflexión y la tangente a la curva elásticadeben ser las mismas independientemente de la
dirección con que se aproxime uno al punto común.
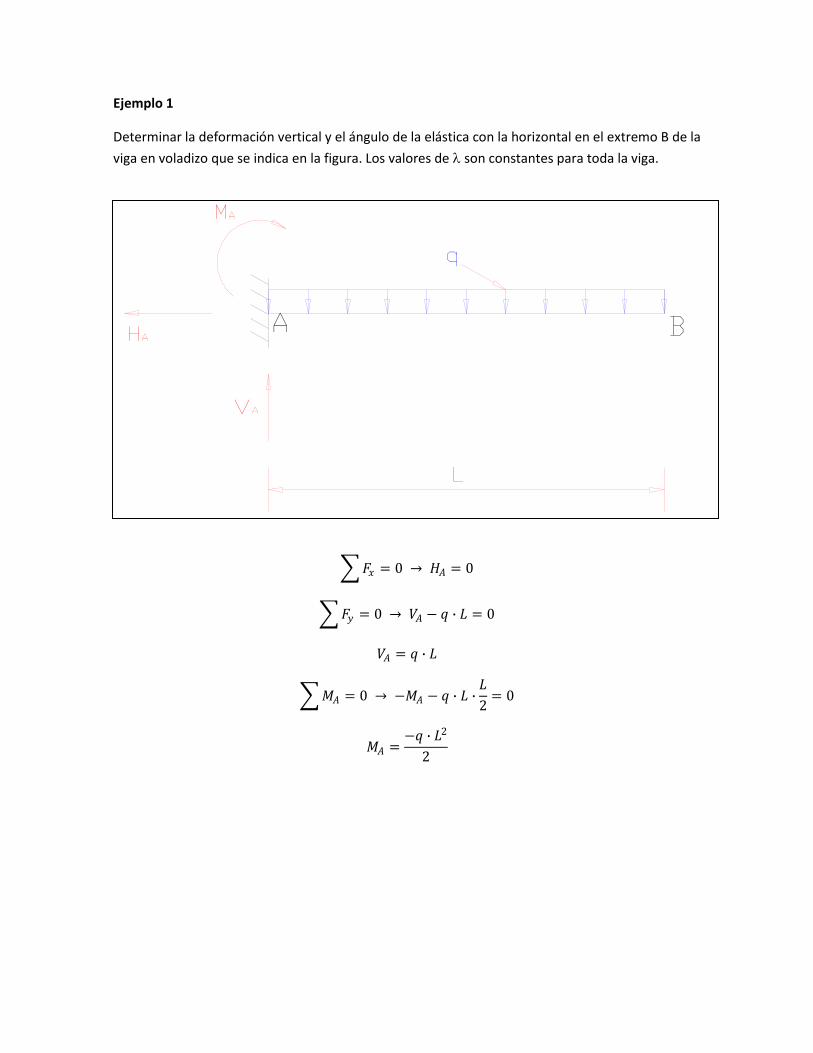
Ejemplo 1
Determinar la deformación vertical y el ángulo de la elástica con la horizontal en el extremo B de la
viga en voladizo que se indica en la figura. Los valores de son constantes para toda la viga.
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 − 𝑞 ∙ 𝐿 = 0
𝑉𝐴 = 𝑞 ∙ 𝐿
𝑀𝐴 = 0 → −𝑀𝐴 − 𝑞 ∙ 𝐿 ∙𝐿
2= 0
𝑀𝐴 =−𝑞 ∙ 𝐿2
2
L
AHA
VA
B
MA
q

−𝑞 ∙ 𝐿2
2+ 𝑞 ∙ 𝐿 ∙ 𝑥 − 𝑞 ∙ 𝑥 ∙
𝑥
2= 𝑀𝑥
∙ 𝑦´´ =−𝑞 ∙ 𝐿2
2+ 𝑞 ∙ 𝐿 ∙ 𝑥 − 𝑞 ∙
𝑥2
2
∙ 𝑦´ =−𝑞 ∙ 𝐿2
2∙ 𝑥 + 𝑞 ∙ 𝐿 ∙
𝑥2
2− 𝑞 ∙
𝑥3
6+ 𝐶1
∙ 𝑦 =−𝑞 ∙ 𝐿2
2∙𝑥2
2+ 𝑞 ∙ 𝐿 ∙
𝑥3
6− 𝑞 ∙
𝑥4
24+ 𝐶1 ∙ 𝑥 + 𝐶2
Las condiciones de borde son:
𝑦 0 = 0
𝑦´ 0 = 0
Lo que implica que:
Usando la primera condición de borde:
x
A
q*L
q
q*L2/2
Vx
Mx
𝐶2 = 0
Usando la segunda condición de borde:
𝐶1 = 0
Por tanto:
∙ 𝑦 =−𝑞 ∙ 𝐿2
2∙𝑥2
2+ 𝑞 ∙ 𝐿 ∙
𝑥3
6− 𝑞 ∙
𝑥4
24
Ahora, en el extremo B, 𝑥 = 𝐿, luego:
∙ 𝑦 =−𝑞 ∙ 𝐿4
4+
𝑞 ∙ 𝐿4
6−
𝑞 ∙ 𝐿4
24
𝑦 =−𝑞 ∙ 𝐿4
8 ∙
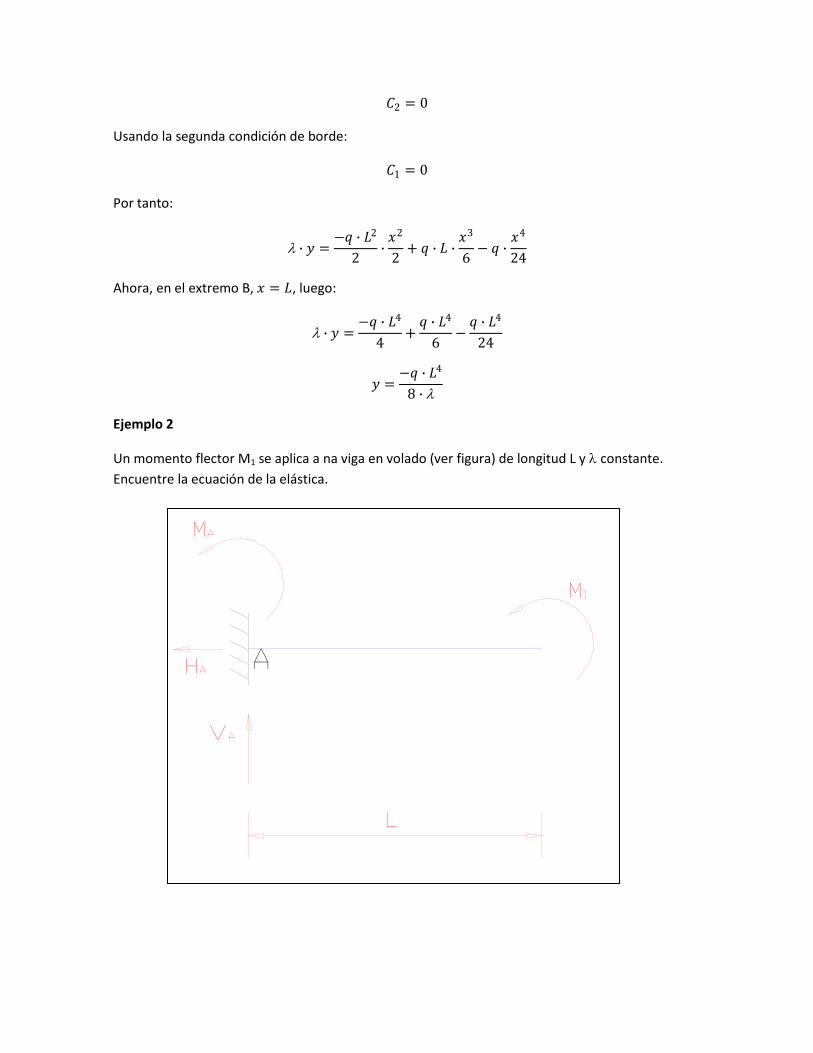
Ejemplo 2
Un momento flector M1 se aplica a na viga en volado (ver figura) de longitud L y constante.
Encuentre la ecuación de la elástica.
L
A
VA
M1
MA
HA
Solución
Usando las ecuaciones de la estática:
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 = 0
𝑀𝐴 = 0 → 𝑀𝐴 + 𝑀1 = 0
𝑀𝐴 = −𝑀1
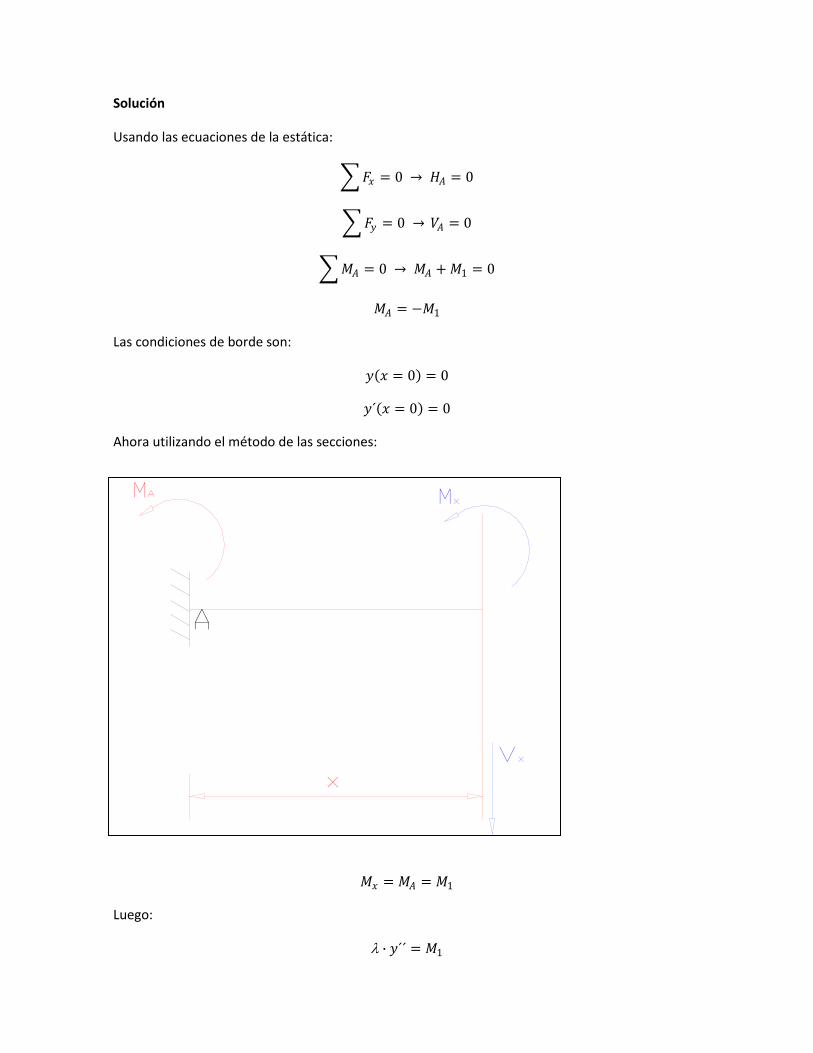
Las condiciones de borde son:
𝑦 𝑥 = 0 = 0
𝑦´ 𝑥 = 0 = 0
Ahora utilizando el método de las secciones:
𝑀𝑥 = 𝑀𝐴 = 𝑀1
Luego:
∙ 𝑦´´ = 𝑀1
x
A
MA Mx
Vx

∙ 𝑦´ = 𝑀1 ∙ 𝑥 + 𝐶1
Usando la segunda condición de borde:
∙ 𝑦´ 𝑥 = 0 = 𝐶1 = 0
Finalmente:
∙ 𝑦 = 𝑀1 ∙𝑥2
2+ 𝐶2
Usando la primera condición de borde:
∙ 𝑦 𝑥 = 0 = 𝐶2 = 0
Luego:
∙ 𝑦 = 𝑀1 ∙𝑥2
2
La ecuación de la curva elástica es:
𝑦 =𝑀1 ∙ 𝑥2
2 ∙
El signo positivo del resultado indica que la deflexión debida a M1 es hacia arriba, si derivamos esta
expresión y la igualamos a cero queda:
𝑀1 ∙ 𝑥
= 0
𝑥 = 0
Derivando nuevamente:
𝑀1
> 0
Lo que implica que la flecha mínima se da en x = 0 y coincide con la segunda condición de borde,
vale decir, que y = 0, ahora para encontrar el máximo valor de la flecha evaluamos en el extremo x
= L, con el fin de encontrar un máximo absoluto:
𝑦 =𝑀1 ∙ 𝐿2
2 ∙
Ejemplo 3
La viga de la figura recibe una carga uniformemente distribuida q en toda su extensión. La rigidez
es constante. Encuentre la ecuación de la elástica por los tres siguientes métodos:
a) Use la ecuación diferencial de segundo orden para obtener la deflexión de la viga
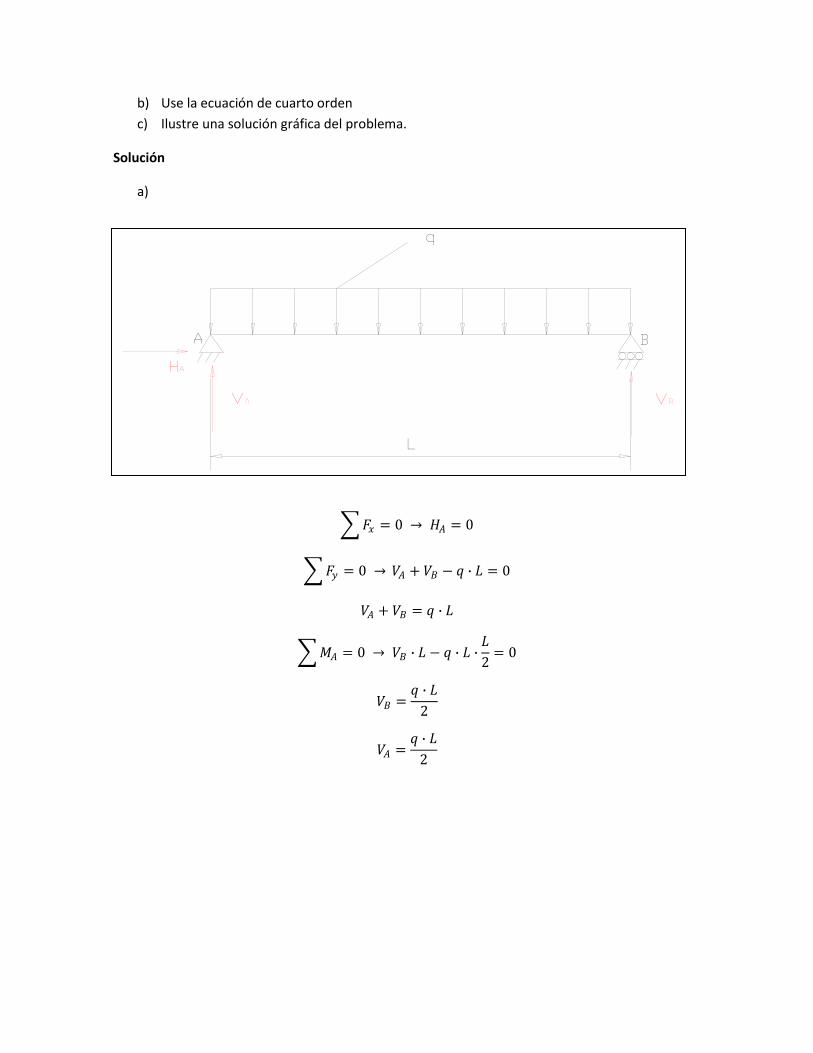
b) Use la ecuación de cuarto orden
c) Ilustre una solución gráfica del problema.
Solución
a)
𝐹𝑥 = 0 → 𝐻𝐴 = 0
𝐹𝑦 = 0 → 𝑉𝐴 + 𝑉𝐵 − 𝑞 ∙ 𝐿 = 0
𝑉𝐴 + 𝑉𝐵 = 𝑞 ∙ 𝐿
𝑀𝐴 = 0 → 𝑉𝐵 ∙ 𝐿 − 𝑞 ∙ 𝐿 ∙𝐿
2= 0
𝑉𝐵 =𝑞 ∙ 𝐿
2
𝑉𝐴 =𝑞 ∙ 𝐿
2
A B
q
VA
HA
VB
L
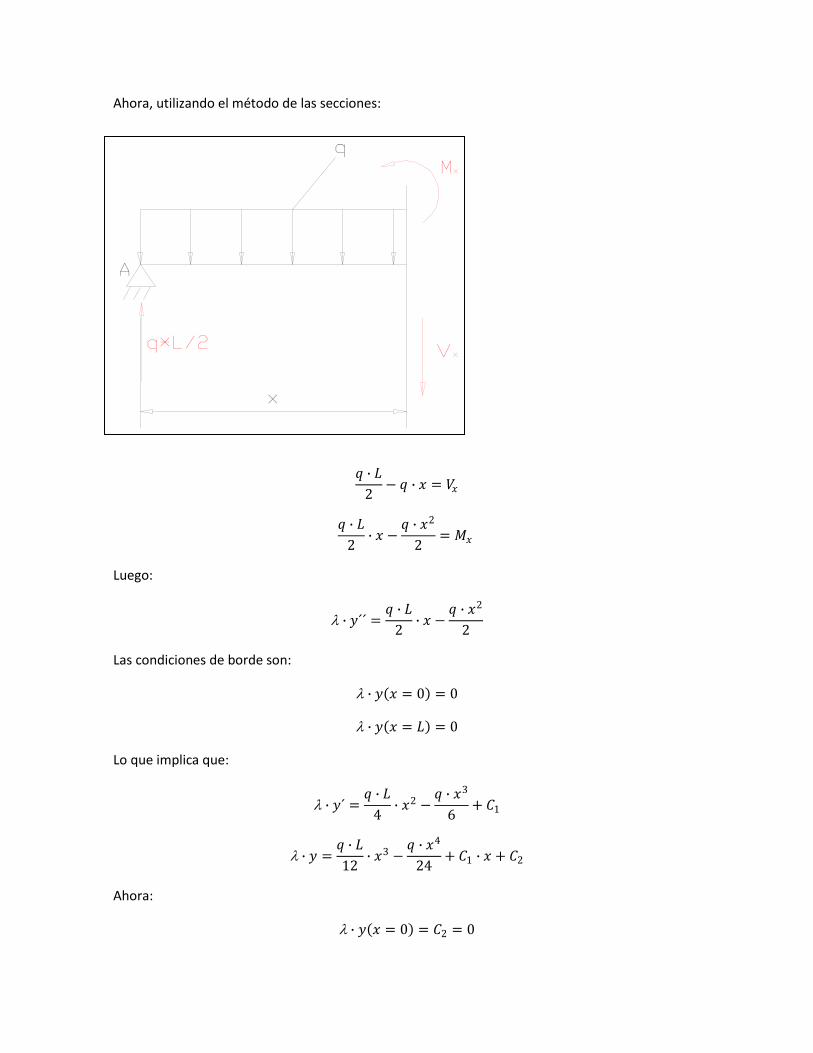
Ahora, utilizando el método de las secciones:
𝑞 ∙ 𝐿
2− 𝑞 ∙ 𝑥 = 𝑉𝑥
𝑞 ∙ 𝐿
2∙ 𝑥 −
𝑞 ∙ 𝑥2
2= 𝑀𝑥
Luego:
∙ 𝑦´´ =𝑞 ∙ 𝐿
2∙ 𝑥 −
𝑞 ∙ 𝑥2
2
Las condiciones de borde son:
∙ 𝑦 𝑥 = 0 = 0
∙ 𝑦 𝑥 = 𝐿 = 0
Lo que implica que:
∙ 𝑦´ =𝑞 ∙ 𝐿
4∙ 𝑥2 −
𝑞 ∙ 𝑥3
6+ 𝐶1
∙ 𝑦 =𝑞 ∙ 𝐿
12∙ 𝑥3 −
𝑞 ∙ 𝑥4
24+ 𝐶1 ∙ 𝑥 + 𝐶2
Ahora:
∙ 𝑦 𝑥 = 0 = 𝐶2 = 0
A
q
q*L/2 Vx
x
Mx
∙ 𝑦 𝑥 = 𝐿 =𝑞 ∙ 𝐿4
12−
𝑞 ∙ 𝐿4
24+ 𝐶1 ∙ 𝐿 = 0
𝑞 ∙ 𝐿3
24+ 𝐶1 = 0
𝐶1 = −𝑞 ∙ 𝐿3
24
Finalmente:
∙ 𝑦 =𝑞 ∙ 𝐿
12∙ 𝑥3 −
𝑞 ∙ 𝑥4
24−
𝑞 ∙ 𝐿3
24∙ 𝑥
Y las desangulaciones están dadas por:
∙ 𝑦´ =𝑞 ∙ 𝐿
4∙ 𝑥2 −
𝑞 ∙ 𝑥3
6−
𝑞 ∙ 𝐿3
24
b) La aplicación de este método es directa:
∙ 𝑦´´´´ = −𝑞
∙ 𝑦´´´ = −𝑞 ∙ 𝑥 + 𝐶1
∙ 𝑦´´ =−𝑞 ∙ 𝑥2
2+ 𝐶1 ∙ 𝑥 + 𝐶2
Pero el momento en el extremo x = 0 es nulo, luego:
∙ 𝑦´´ 𝑥 = 0 = 𝐶2 = 0
Pero el momento en el extremo x = L es nulo también, luego:
∙ 𝑦´´ 𝑥 = 𝐿 =−𝑞 ∙ 𝐿2
2+ 𝐶1 ∙ 𝐿 = 0
𝑞 ∙ 𝐿
2= 𝐶1
∙ 𝑦´´ =−𝑞 ∙ 𝑥2
2+
𝑞 ∙ 𝐿
2∙ 𝑥
El resto del problema es igual que en la parte a)
c) Los pasos para una solución gráfica se muestran en la página siguiente. Se pueden
observar los diagramas de fuerza cortante, momento flector y curvatura, y a partir de ellos
se calculan los diagramas de deflexión y las desangulaciones que sufre la viga.
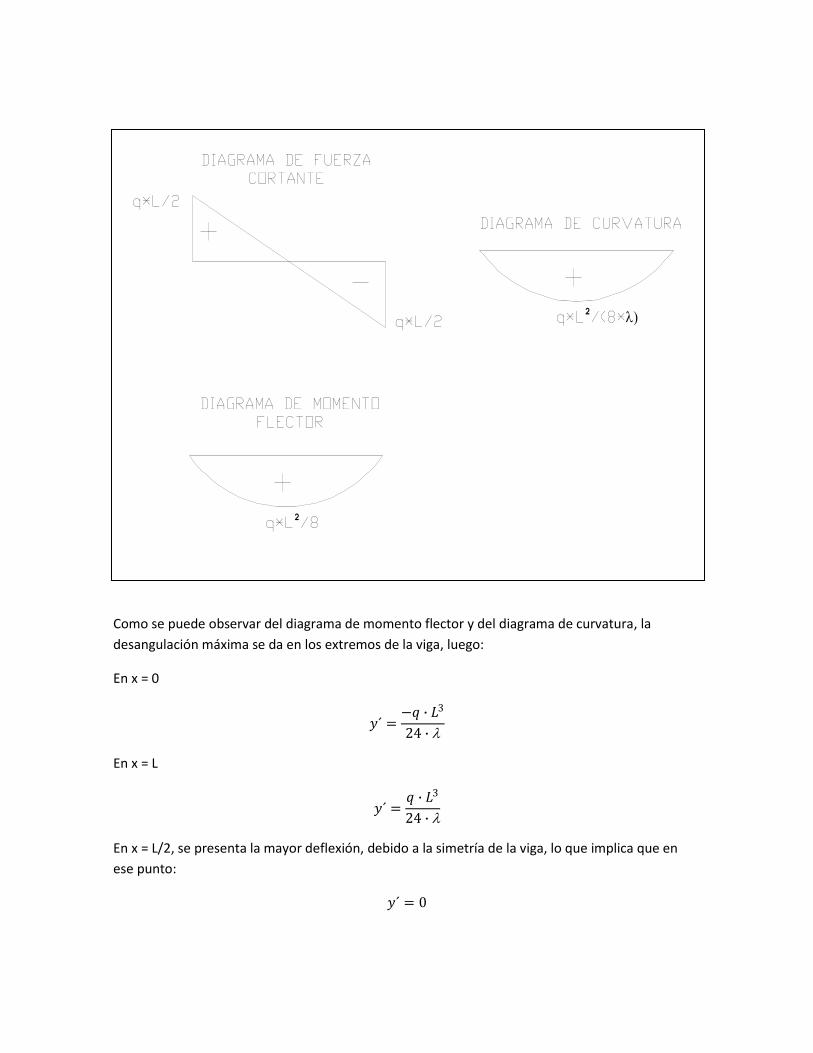
Como se puede observar del diagrama de momento flector y del diagrama de curvatura, la
desangulación máxima se da en los extremos de la viga, luego:
En x = 0
𝑦´ =−𝑞 ∙ 𝐿3
24 ∙
En x = L
𝑦´ =𝑞 ∙ 𝐿3
24 ∙
En x = L/2, se presenta la mayor deflexión, debido a la simetría de la viga, lo que implica que en
ese punto:
𝑦´ = 0
q*L/2
q*L/2
DIAGRAMA DE FUERZACORTANTE
q*L²/8
DIAGRAMA DE MOMENTOFLECTOR
q*L²/(8*
DIAGRAMA DE CURVATURA
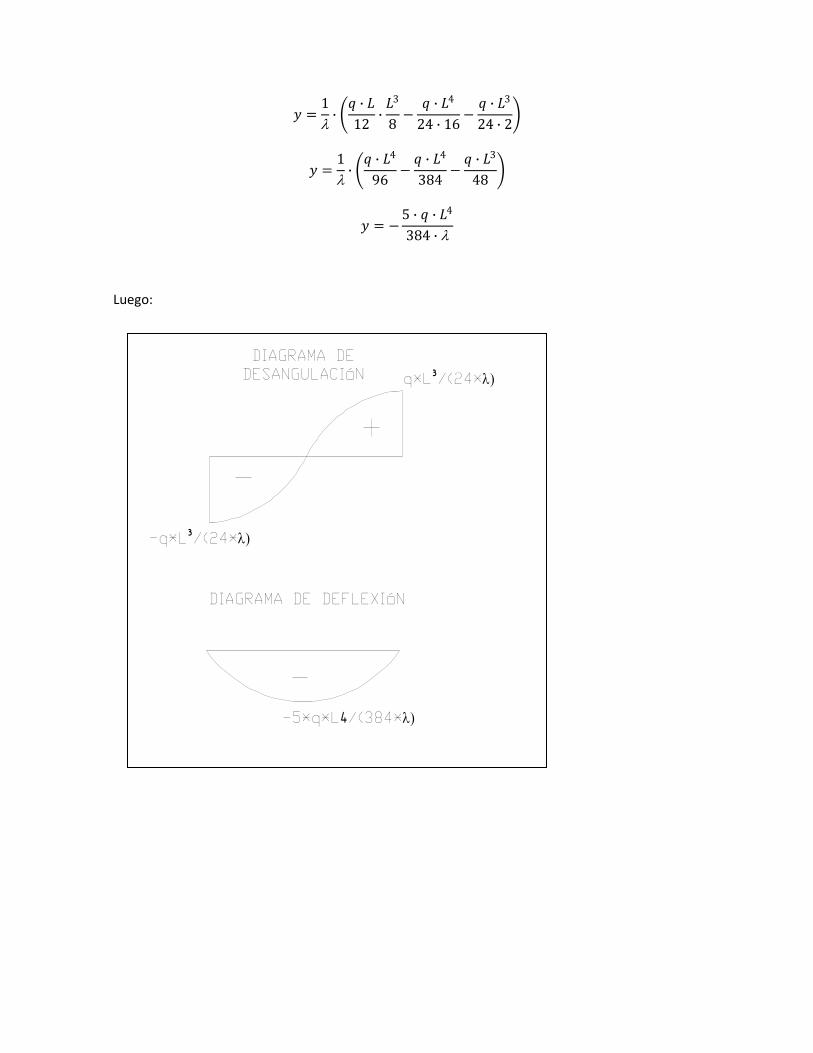
𝑦 =1
∙
𝑞 ∙ 𝐿
12∙𝐿3
8−
𝑞 ∙ 𝐿4
24 ∙ 16−
𝑞 ∙ 𝐿3
24 ∙ 2
𝑦 =1
∙
𝑞 ∙ 𝐿4
96−
𝑞 ∙ 𝐿4
384−
𝑞 ∙ 𝐿3
48
𝑦 = −5 ∙ 𝑞 ∙ 𝐿4
384 ∙
Luego:
-q*L³/(24*
DIAGRAMA DEDESANGULACIÓN
-5*q*L4/(384*
DIAGRAMA DE DEFLEXIÓN
q*L³/(24*