Apuntes Gps Version 5.0
170
0 INDICE DE CONTENIDOS PRIMERA PARTE ASPECTOS CONCEPTUALES PARA LA MEDICION GNSS EN TOPOGRAFIA Y GEODESIA SEGUNDA PARTE PROCESAMIENTO DE DATOS CON SOFTWARE PINNACLE DE JAVAD: UNA VISION DE LOS ELEMENTOS MAS IMPORTANTES PARA EL CALCULO D E MEDICIONES GNSS EN TOPOGRAFIA Y GEODESIA BIBLIOGRAFÍA.
Transcript of Apuntes Gps Version 5.0
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 1/170
0
INDICE DE CONTENIDOS
PRIMERA PARTE
ASPECTOS CONCEPTUALES PARA LA MEDICION GNSS ENTOPOGRAFIA Y GEODESIA
SEGUNDA PARTE
PROCESAMIENTO DE DATOS CON SOFTWARE PINNACLE DEJAVAD: UNA VISION DE LOS ELEMENTOS MASIMPORTANTES PARA EL CALCULO DE MEDICIONES GNSS
EN TOPOGRAFIA Y GEODESIA
BIBLIOGRAFÍA.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 2/170
1
PRIMERA PARTE
ASPECTOS CONCEPTUALES PARA LA MEDICION GNSS ENTOPOGRAFIA Y GEODESIA
INTRODUCCION
Los sistemas Satelitales para mediciones Geodésicas y Topográficas tienen una largahistoria. Siendo Instituciones ligadas a la Investigación y construcción de Cartografíalas primeras en emplear dichas técnicas e instrumentales, en Chile. Con el tiempo los
proyectos de Ingeniería fueron tomando protagonismo y haciendo cada vez mascotidiano el uso de Instrumental y técnicas de medición Satelital. Para la década delNoventa, se empleaban instrumentos denominados ―GPS Geodésicos‖, con los cuales serealizaban mediciones por prolongados periodos, rápidamente en la siguiente década seextendieron las aplicaciones, todo ello de la mano de la liberación de la señal para usoCivil. Hoy en día, existe una normativa que regula su uso. Existen cursos formales enUniversidades e instituciones de educación superior, en donde se forma a profesionalesen el uso y aplicación de estas técnicas. Debido a este avance hemos querido, recopilaren este documento, los aspectos teóricos y prácticos más relevantes, para la aplicaciónde técnicas GPS. Agradecemos la colaboración de todos quienes contribuyeron tanto en
la entrega de material como en la revisión de los textos y graficas expuestos en eldocumento. La ciencia de la medición del terreno aun tiene nuevos espacios porcuantificar.
Chile ha tomado desde hace algún Tiempo el camino de implementar tecnología GPS enProyectos de Ingeniería, Minería, Hidrografía y otros Campos. Sin embargo elestablecimiento de Normas adecuadas para la revisión de trabajos se hace cada vez másnecesaria, el trabajo a presentar comprende variados aspectos relacionados con lapresentación de trabajos realizados con tecnología satelital de tipo Geodésico, conreceptores GPS. Uno de los objetivos fundamentales es generar un espacio de discusiónpara hacer converger criterios respecto a este tema.
Para comprender las mediciones GPS / GLONASS debemos tener en cuenta tresaspectos fundamentales, los cuales veremos desde la configuración del sistema, luegodesde la óptica del usuario y finalmente como parte de la aplicación, a lo largo de estedocumento. Los aspectos fundamentales son:
1. Coordenadas2. Precisiones

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 3/170
2
3. Datos de Origen
1. Las Coordenadas pueden encontrarse en un sistema Cartográfico Conveniente, o bienpueden ser Coordenadas en el plano Topográfico, También pueden ser Coordenadas
Geográficas, en fin, pueden estar representadas del modo más conveniente según sea elobjetivo y los alcances del trabajo. Su sistema de referencia será del mismo modo unfactor determinante, puede ser un Datum Geodésico (PSAD56, SAD 69 u otro) o bienun sistema de referencia local. Con todo, se podrá obtener precisiones relativas entreuna u otra medición, sea una red o poligonal de control o simplemente un modelo 3Dque será controlado por algún método conveniente, sin embargo, nos referiremos a lascaracterísticas de las coordenadas y su aplicación.
2. Las Precisiones en una medición GPS pueden entenderse de un modo simple a partirde la configuración de un Vector de posición, el cual esta compuesto por un modulo o
largo de línea base, un sentido que estará referido a un punto base y uno móvil odesconocido y por ultimo a una dirección que corresponderá a un Norte Verdadero oNorte Geográfico. La precisión de este vector la podremos reflejar en su modulo ydiremos que tendrá un milímetro en una parte por millón, esto significa un centímetro endiez kilómetros por ejemplo. Luego esta medición la pondremos a disposición denuestro Sistema de Coordenadas y podrá ser sujeto de calculo de acuerdo a lascaracterísticas de las coordenadas y su aplicación
3. Datos de Origen o datos Crudos (Raw data) en una medición GPS, se refieren a losdatos proporcionados por los satélites sean de Observables o Navegación losencontraremos por lo general en formato Binario (que permite un mejor
aprovechamiento de las unidades de almacenamiento de datos de los equipos GPS.
Considerando estos tres aspectos se ha realizado un análisis de un formato adecuado deentrega de datos GPS.
Por último es importante destacar que existen cuatro sistemas en operación o prontos a operar anivel global, de ellos veremos en detalle en este documento a GPS y GLONASS pero nodebemos olvidarnos de COMPASS ni GALILEO.
Denominado Beidou/Compass, el sistema chino fue presentado en el evento Toulouse SpaceShow. Los directivos del proyecto, del cual te comentamos algunas cosas cuando estabainiciando, afirmaron que su puesta en marcha está planificada para el año 2010, e informaronque cuentan ya con cuatro satélites en órbita.
Beidou/Compass será así el cuarto sistema satelital, luego del original GPS norteamericano, deleuropeo Galileo (que cuenta con aporte chino) y del ruso GLONASS, y de todos te hemoshablado aquí en TecnoMaps.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 4/170
3
Chengqi Ran, vicedirector del China Satellite Navigation Project Center, afirmó a la prensa queBeidou/Compass será un sistema altamente confiable, aún en las situaciones meteorológicasmás extremas, y que su uso será libre y gratuito. Habrá, sin embargo, un canal encriptado queserá dedicado únicamente al uso gubernamental.
CAPÍTULO I. INTRODUCCIÓN AL SISTEMA GPS.
1. INTRODUCCIÓN.
El Sistema GPS (Sistema de Posicionamiento Global) fue creado por el Departamentode Defensa de los Estados Unidos (DoD) para constituir un sistema de navegación preciso confines militares que sustituyeran al antiguo sistema utilizado, que no era otro que las medicionesDoppler sobre la constelación Transit. En el año 2000 se produce una gran revolucion con laliberacion de la disponibilidad selectiva. Que era un dispositivo que aumentabaintencionalmente el error en la señal GPS, con lo cual se amplian las aplicaciones del Sitema.
El GPS está evolucionando hacia un sistema más sólido (GPS III), con una mayor
disponibilidad y que reduzca la complejidad de las aumentaciones GPS. Algunas de las mejorasprevistas comprenden:
* Incorporación de una nueva señal en L2 para uso civil.* Adición de una tercera señal civil (L5): 1176,45 MHz* Protección y disponibilidad de una de las dos nuevas señales para servicios de Seguridad
Para la Vida (SOL).* Mejora en la estructura de señales.* Incremento en la potencia de señal (L5 tendrá un nivel de potencia de -154 dB).* Mejora en la precisión (1 – 5 m).* Aumento en el número de estaciones monitorizadas: 12 (el doble)* Permitir mejor interoperabilidad con la frecuencia L1 de Galileo
El programa GPS III persigue el objetivo de garantizar que el GPS satisfará requisitos militaresy civiles previstos para los próximos 30 años. Este programa se está desarrollando para utilizarun enfoque en 3 etapas (una de las etapas de transición es el GPS II); muy flexible, permitecambios futuros y reduce riesgos. El desarrollo de satélites GPS II comenzó en 2005, y elprimero de ellos estará disponible para su lanzamiento en 2012, con el objetivo de lograr latransición completa de GPS III en 2017. Los desafíos son los siguientes:
1. Representar los requisitos de usuarios, tanto civiles como militares, en cuanto a GPS.2. Limitar los requisitos GPS III dentro de los objetivos operacionales.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 5/170
4
3. Proporcionar flexibilidad que permita cambios futuros para satisfacer requisitos de losusuarios hasta 2030.
4. Proporcionar solidez para la creciente dependencia en la determinación de posición y dehora precisa como servicio internacional.
El sistema aprovecha las condiciones de la propagación de las ondas de radio de labanda L en el espacio, así como la posibilidad de modular las ondas para que en ellas se puedaincluir la información necesaria que permita posicionar un objeto en el sistema de referenciaapropiado.
Este proyecto se hizo realidad entre los meses de febrero y diciembre de 1978, cuandose lanzaron los cuatro primeros satélites de la constelación NAVSTAR, que hacían posible elsistema que resolvería la incógnita de nuestra posición en la Tierra.
A continuación vamos a describir las generalidades del sistema GPS y suscaracterísticas más importantes. Para ello, debemos dividir el sistema en tres sectores
fundamentales y dependientes entre sí, el sector espacial, el sector de control y el sector deusuarios.
2. DESCRIPCIÓN DEL SISTEMA.
2.1. EL SECTOR ESPACIAL.
Este sector lo forman los satélites de la constelación NAVSTAR (Navegación porsatélite en tiempo y distancia). La constelación está formada por seis planos orbitales, y en cadauno de ellos existe una órbita elíptica casi circular donde se alojan los satélites regularmentedistribuidos. Los planos tienen una inclinación de 55º respecto al plano del ecuador, y se
nombran como A, B, C, D, E y F. Cada órbita contiene al menos cuatro satélites, aunquepueden contener más. Los satélites se sitúan a una distancia de 20200 Km respecto delgeocentro, y completan una órbita en doce horas sidéreas. Estos satélites son puestos enfuncionamiento por el Comando de las Fuerzas Aéreas Espaciales de U.S.A (AFSPC).
Con estos fundamentos, se garantiza la presencia de al menos cuatro satélites sobre elhorizonte en todos los lugares de la superficie de la Tierra.
2.1.1. CARACTERÍSTICAS DE LOS SATÉLITES.
Los satélites de la constelación NAVSTAR son identificados de diversos modos:
- Por su número NAVSTAR (SVN).- Por su código de ruido pseudoaleatorio (PRN). En los códigos de transmisión existen
características de ruido pseudoaleatorio traducidas en bits que identifican a cada satélite de laconstelación.
- Por su número orbital. Un ejemplo sería el satélite 3D, que corresponde al satélitenúmero tres del plano orbital D.
En la actualidad, a fecha Enero-98, existe un número de veintisiete satélites operativos,pertenecientes a los bloques IIA y IIR. Se disponen:
- Cinco en los planos A, E y F.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 6/170
5
- Cuatro en los planos B, C y D.
Todos disponen de osciladores atómicos de cesio, salvo los SVN 24, 27 y 31 que lotienen de rubidio. En el caso de los primeros la precisión es de 10-13 s, mientras que los de
rubidio es de 10
-12
s. La frecuencia fundamental de emisión de estos osciladores es de 10,23MHz.
El tiempo utilizado por el sistema GPS es un tiempo universal coordinado denominadoUTC(USNO) que define el Observatorio Naval de los Estados Unidos mediante relojesatómicos de hidrógeno. La unidad del tiempo GPS es el segundo atómico internacional y tienesu origen coincidente con el UTC a las cero horas del 6 de enero de 1980.
Así mismo, debemos añadir que los satélites disponen además de:
- Antenas emisoras de ondas de radio (banda L). Con ellas transmiten la información alusuario.
- Antenas emisoras-receptoras de ondas de radio (banda S). Sirven para actualizar susituación a través del sector de control.- Paneles solares para disponer de la energía necesaria para su funcionamiento.- Reflectores láser para el seguimiento desde el sector de control.
La vida de los satélites oscila entre los seis y diez años, y es de reseñar que el másantiguo aun operativo tiene una edad de ocho años y medio. El más duradero fue el SVN-3 queduró trece años y medio.
2.1.2. SEÑAL DE LOS SATÉLITES.
Los satélites de la constelación NAVSTAR constan de un oscilador antes mencionadoque genera una frecuencia fundamental v0 de 10,23 MHz. A partir de esta frecuenciafundamental se generan dos portadoras en la banda L de radiofrecuencia, denominadas L1 y L2.
Además, existen dos formas de código pseudoaleatorio que se modulan sobre estasportadoras, son los códigos C/A y P, además de un mensaje, que da la información de losparámetros orbitales del satélite y del estado del reloj. Los códigos son una secuencia de +1 y -1, correspondientes a los valores binarios de 0 y 1 respectivamente.
Los componentes de la señal y sus frecuencias son:
COMPONENTE FRECUENCIA(MHz) Frecuencia Fundamental v0 10,23
Portadora L1 154·v0 1.575,42
Portadora L2 120· v0 1.227,60
Código P v0 10,23
Código C/A v0 /10 1,023
Código W v0 /20 0,5115
Mensaje de Navegación v0 /204.600 50 ·10-6
El código C/A (clear/access) se repite cada milisegundo, dando como resultado uncódigo de 1023 chips, siendo la longitud aproximada de cada chip de unos 300 m. Este códigoestá declarado de uso civil para todos los usuarios.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 7/170
6
El código preciso P se compone de 2,3547·1014 bits y se repite aproximadamente cada266,4 días. Este código lleva una palabra denominada HOW que indica en que momento delcódigo está cuando el receptor empieza a recibirlo, de este modo el receptor engancha el código
y empieza a medir. El código P es secreto y de uso militar. Se origina a partir de la combinaciónde dos secuencias de bits, generados a partir de dos registros. La longitud de cada chip es de 30m. Con el fin de proteger el código P, éste se encripta usando un código W, dando lugar alcódigo Y. Si el código W está en curso se habla de que está conectado el A/S (Anti-Spoofing).
El mensaje de navegación es mandado por los satélites, y consta esencialmente deinformación sobre el reloj de los satélites, parámetros orbitales (efemérides), estado de salud delos satélites y otros datos de corrección. El mensaje consta de 25 grupos de 1500 bits cada unoy divididos en cinco celdas. Cada grupo se transmite con una frecuencia de 50 Hz y tarda 30 s.Esto supone que el mensaje modulado completo sobre ambas portadoras tiene una duración de12 min. 30 s. Por razones de índole militar, se introduce un error intencionado en las efeméridesradiodifundidas de los satélites, denominado Disponibilidad Selectiva (SA). Esto repercute en
el posicionamiento sobre el sistema de referencia WGS84, ya que si la posición de los satélitesque nos sirven de referencia está alterada nuestro posicionamiento no se va a realizar en dichosistema, sino que se va a efectuar en un sistema arbitrario, con un error mayor o menor enfunción de la cantidad de SA que exista en ese instante. Este problema es importante enposicionamientos absolutos, ya que no podemos saber la posición correcta. Sin embargo, enposicionamientos diferenciales nos afecta en posición pero no en precisión, ya que la posiciónrelativa de un punto respecto a una referencia (sus incrementos de coordenadas) no estáafectada de este error.
2.1.3. EL SISTEMA DE REFERENCIA. DATUM WGS-84.
Las coordenadas, tanto de los satélites como de los usuarios que se posicionan con elsistema GPS, están referidas al sistema de referencia WGS84 (Sistema Geodésico Mundial de1984). Estas coordenadas pueden ser cartesianas en el espacio respecto al centro de masas de laTierra (X, Y, Z) o geodésicas ( , , h). El sistema tiene las siguientes características:
- Origen en el Centro de Masas de la Tierra.- El eje Z es paralelo al polo medio.- El eje X es la intersección del meridiano de Greenwich y el plano del ecuador.- El eje Y es perpendicular a los ejes Z y X, y coincidente con ellos en el Centro deMasas terrestre.- Las coordenadas geodésicas están referidas a un elipsoide de revolución con lassiguientes características:
* Semieje mayor (a) : 6.378.137 m.* Inversa del aplanamiento (1 / ) : 298,257223563* Velocidad angular de rotación ( ) : 7.292.115 · 10 -11 rad / s.
La transformación de las coordenadas WGS84 a otro sistema de referencia, y viceversa,es posible con transformaciones tridimensionales de siete parámetros, ya sean calculadas(donde deberemos conocer al menos las coordenadas de tres puntos en ambos sistemas) oestablecidas por algún organismo con una gran base de datos. Para realizar una transformacióncorrecta debemos definir el elipsoide al que queremos referir nuestras coordenadas, laproyección y la zona. A modo de ejemplo, si queremos transformar puntos con coordenadas
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 8/170
7
WGS84 a coordenadas en el Datum oficial español, deberemos especificar que se trata delelipsoide Internacional de Hayford, proyección UTM_ED50 y zona 28,29, 30 ó 31 (según elhuso donde se encuentren los puntos).
Existen otros tipos de transformaciones, como las bidimensionales, las de coordenadasplanas y altura, y aquellas en que se introducen modelos del Geoide (globales o zonales) con elfin de obtener alturas ortométricas.
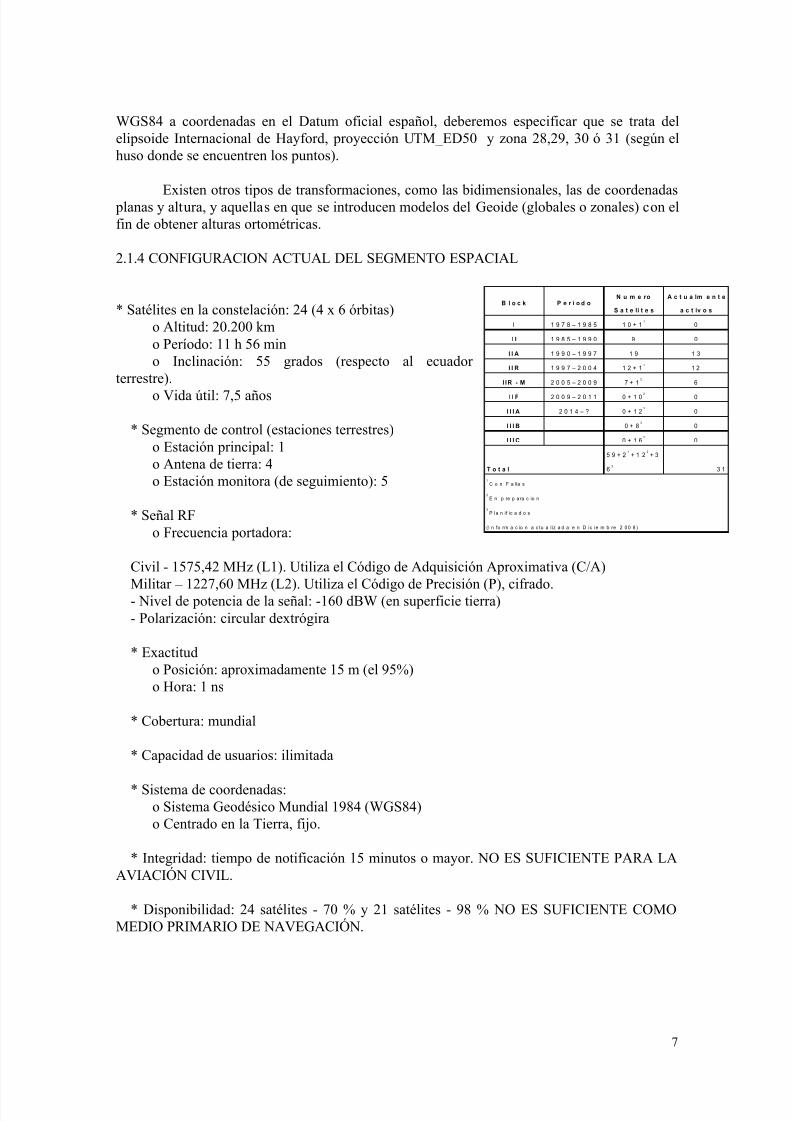
2.1.4 CONFIGURACION ACTUAL DEL SEGMENTO ESPACIAL
* Satélites en la constelación: 24 (4 x 6 órbitas)o Altitud: 20.200 kmo Período: 11 h 56 mino Inclinación: 55 grados (respecto al ecuador
terrestre).
o Vida útil: 7,5 años
* Segmento de control (estaciones terrestres)o Estación principal: 1o Antena de tierra: 4o Estación monitora (de seguimiento): 5
* Señal RFo Frecuencia portadora:
Civil - 1575,42 MHz (L1). Utiliza el Código de Adquisición Aproximativa (C/A)
Militar – 1227,60 MHz (L2). Utiliza el Código de Precisión (P), cifrado.- Nivel de potencia de la señal: -160 dBW (en superficie tierra)- Polarización: circular dextrógira
* Exactitudo Posición: aproximadamente 15 m (el 95%)o Hora: 1 ns
* Cobertura: mundial
* Capacidad de usuarios: ilimitada
* Sistema de coordenadas:o Sistema Geodésico Mundial 1984 (WGS84)o Centrado en la Tierra, fijo.
* Integridad: tiempo de notificación 15 minutos o mayor. NO ES SUFICIENTE PARA LAAVIACIÓN CIVIL.
* Disponibilidad: 24 satélites - 70 % y 21 satélites - 98 % NO ES SUFICIENTE COMOMEDIO PRIMARIO DE NAVEGACIÓN.
B l o c k P e r io d o
N u m e ro
S a t e li t e s
A c t u a lm e n t e
a c t iv o s
I 1 9 7 8 – 1 9 8 5 1 0 + 11
0
I I 1 9 8 5 – 1 9 9 0 9 0
I I A 1 9 9 0 – 1 9 9 7 1 9 1 3
I I R 1 9 9 7 – 2 0 0 4 1 2 + 11
1 2
I IR - M 2 0 0 5 – 2 0 0 9 7 + 12
6
I I F 2 0 0 9 – 2 0 1 1 0 + 1 02
0
I I I A 2 0 1 4 – ? 0 + 1 23
0
I I I B 0 + 83
0
I I I C 0 + 1 63
0
5 9 + 21
+ 1 22
+ 3
63
3 1
(I n fo rm a c io n a c tu a liz a d a e n D ic ie m b re 2 0 0 8 )
T o t a l
1
C o n F a lla s
2
E n p re p a ra c io n
3
P la n if i c a d o s

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 9/170
8
2.2. EL SECTOR DE CONTROL.
Este sector tiene como misión el seguimiento continuo de todos los satélites de la
constelación NAVSTAR para los siguientes fines:- Establecer la órbita de cada satélite, así como determinar el estado de sus osciladores.- Hallados los parámetros anteriores, emitirlos a los satélites para que éstos puedandifundirlos a los usuarios.
De este modo, el usuario recibe la información de las efemérides de posición de lossatélites y el error que se está produciendo en su reloj, todo ello incluido en el mensaje denavegación.
Las Estaciones de Control de la constelación son fundamentalmente:
- Colorado Springs (U.S.A.). Central de cálculo y operaciones.- Ascensión (Atlántico Sur).- Hawai (Pacífico Oriental).- Kwajalein (Pacífico Occidental).- Diego García (Indico).
Existen además otras estaciones de seguimiento (láser, radar y ópticas), cuyo fin es laobtención de efemérides que no estén afectadas por la disponibilidad selectiva, denominadasprecisas, y que están al alcance del usuario a través de organismos científicos como el IGS(International Geodinamic Service) o el NGS (National Geodetic Survey). Con ellas, tenemos laseguridad de posicionarnos en el sistema WGS84 con los errores típicos del sistema.
2.3. EL SECTOR DE USUARIOS.
Este sector lo compone el instrumental que deben utilizar los usuarios para larecepción, lectura, tratamiento y configuración de las señales, con el fin de alcanzar losobjetivos de su trabajo. Los elementos son el equipo de observación y el software de cálculo,que puede ser objeto de uso tras la campaña de observación, o bien realizable en tiempo real,donde se obtienen los resultados in situ.
Equipo de observación. Lo componen la antena, el sensor y la unidad de control ocontrolador.
- La antena de recepción tiene la misión de recibir las radiaciones electromagnéticasque emiten los satélites y transformarlas en impulsos eléctricos, los cuales conservan lainformación modulada en las portadoras. Se denomina centro radioeléctrico de la antena alpunto que se posiciona en nuestra observación. Dado que éste no suele coincidir con el centrofísico, es conveniente orientar todas las antenas de una misma observación en la mismadirección con el fin de que el error se elimine.
- El sensor recibe los impulsos de la antena receptora, y reconstruye e interpreta loscomponentes de la señal, es decir, las portadoras, los códigos y el mensaje de navegación. Endefinitiva, lo que hace es demodular la señal original.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 10/170
9
El proceso es el siguiente, el sensor correla los códigos, es decir, lo compara con unaréplica que él mismo genera, y de este modo halla el tiempo que ha tardado en llegar la señal alreceptor, obteniendo la distancia al satélite multiplicando esa diferencia de tiempos por el valorde la velocidad de propagación de las ondas en el vacío (aproximadamente unos 300.000
Km/s). Como estas distancias están afectadas de errores, se las denomina seudodistancias.Para obtener medidas de seudodistancia mediante diferencia de fase de las portadoras,
el sensor reconstruye éstas por modulación bifase-binaria de los códigos modulados en ellas.
Las técnicas de obtención de los códigos son, entre otras:
- Correlación estrecha. Se utiliza para reconstruir los códigos C/A y P, éste últimocuando no está encriptado.
- Correlación cruzada más cuadratura. Esta técnica se utiliza para desencriptar elcódigo P cuando el A/S está activado. También recibe esta técnica el nombre de ―P-codeadied‖. Se fundamenta en encontrar el código W que es el responsable de que P no estédisponible para el usuarios.
- Tracking. Es otra técnica para desencriptar el código P. Para ello, utiliza dos filtrosde paso bajo para reducir el nivel de ruido. Hasta el momento, es la técnica que menordegradación produce en la señal (18 dB) y mejores resultados proporciona.
Para reconstruir las portadoras se utiliza principalmente:
- Cuadratura. Consiste en elevar la onda al cuadrado, limpiando dicha onda de toda lainformación modulada en ella (códigos y mensaje). Este método tiene el inconveniente de que
se produce un empeoramiento importante de la relación señal/ruido por el aumento de ésteúltimo, produciendo una degradación importante en la señal. Debemos añadir que toda señalrecibida con una relación señal/ruido menor de 30 no debe ser considerada como útil ennuestros trabajos.
- Reconstrucción a partir de los códigos. Si por algunas de las técnicas anterioreshemos conseguido acceder a los códigos, podemos reconstruir las fases de las portadoras dondeestán modulados. La portadora L1 se puede reconstruir a través del código C/A y del código P,mientras que la L2 sólo a través del código P, ya que no contiene el C/A.
El sensor tiene unos canales de recepción, de doble señal si es un receptor bifrecuenciay de señal única si es Simple Frecuencia. Cada canal recibe las señales de un satélite diferente,y dependiendo del número de canales obtendremos mayor o menor información en un momentodado. Los receptores disponen de un reloj u oscilador que sincroniza los tiempos de recepción.Estos relojes suelen ser de cuarzo con una alta estabilidad, dando precisiones de 10 -7 s. Conellos se obtiene el desfase respecto al tiempo GPS. Este aspecto es el que supone el añadir unaincógnita en el cálculo posterior, que no es otra que el estado del reloj en cada época degrabación.
Es muy frecuente encontrar equipos de observación en los cuales el sensor y la antenaforman un elemento único, lo que facilita el paso de información y agiliza el proceso, evitandolos retardos que se producen en la transmisión por cable.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 11/170
10
- El controlador realiza las siguientes tareas:
* Controlar el sensor.* Gestionar la observación.
* Almacenar los datos.
En definitiva, con él vamos a marcar las pautas y modos de trabajo que consideremosoportunos en cada caso. Entre estas pautas destacan:
* Tipo de observación (estática, stop & go, cinemática, etc.).* Parámetros de la observación (máscara de elevación, modo de grabación,determinación de las épocas, datos meteorológicos, etc.).* Estado y salud de los satélites.* Seguimiento de los mismos y calidad de la señal que transmiten.* Filtrado de observaciones y datos.* Definición y atributos de los puntos de observación.
* Estados de aviso en conceptos de geometría y pérdidas de ciclo.* Definición del sistema de referencia.* Tiempos de observación y actualización de tiempos.* Control del nivel energético.* Posición inicial y secuencial.* Etc.
El buen manejo del controlador es fundamental en los procesos de observación, así como el conocimiento y aplicación de los parámetros adecuados en cada situación o necesidad.
Los datos suelen ser grabados en unidades independientes de memoria o tarjetas RAM
PCMCIA, que varían desde los 512 Kbytes a los 4 Mbytes de capacidad. También pueden seralmacenados directamente en un PC portátil conectado al receptor.
Es muy importante controlar la capacidad de grabación de datos y el tiempo deobservación marcado. Estos son algunos ejemplos de almacenamiento por tiempo deobservación en función del número de satélites y señales recibidas:
0,5 Mb 1 Mb 2 Mb 4 Mb6 satélites sobre L1 y L2 con épocas de 2 s. 1 h. 2 h. 4 h. 8 h.6 satélites sobre L1 y L2 con épocas de 5 s. 2,4 h. 4,8 h. 9,6 h. 19,2 h.6 satélites sobre L1 y L2 con épocas de 15 s. 7,2 h. 14,4 h. 28,8 h. 57,6 h.
Tras la observación se obtienen los siguientes datos:
* Mensaje de navegación.* Efemérides radiodifundidas por los satélites.* Datos meteorológicos.* Almanaque de estado de los satélites.* Fichero de observación.
Estos datos pueden ser volcados en un ordenador para ser tratados con un software depost- proceso, o bien tratados ―in situ‖ por el mismo controlador si éste dispone de un software
de proceso y así obtener los resultados en tiempo real.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 12/170
11
El usuario debe saber que los datos citados anteriormente pueden ser transformados aun formato estándar independiente en modo ASCII para insertarlos y ser tratados por cualquiersoftware de proceso de datos GPS. Este formato es el denominado RINEX, que en la actualidad
ya figura como RINEX-2, con la posibilidad de incluir observaciones realizadas a través de laconstelación GLONASS.
A continuación se va a describir los distintos tipos de ficheros RINEX-2 para que elusuario pueda interpretar, tratar y modelar sus observaciones:
1.- Características del fichero de observación:
ETIQUETA DE CABECERA DESCRIPCIÓN
RINEX VERSION / TYPE - Versión de RINEX.- Tipo de fichero (―O‖ observ.)
- Sistema de satélite:* G: GPS.* R: GLONASS.* T: NNSS Transit.* M: Mixto.
PGM / RUN BY / DATE - Programa de creación del fichero.- Agencia de creación del fichero.- Día de creación del fichero.
COMMENT - Comentarios.
MARKER NAME - Nombre del punto de observación.
MARKER NUMBER - Número del punto de observación.
OBSERVER / AGENCY - Nombre del observador y agencia.
REC # / TYPE / VERS - Número de receptor, tipo y software.
ANT # / TYPE - Número y tipo de antena.
APPROX POSITION XYZ - Posición absoluta aproximada del punto en laúltima época.
ANTENNA: DELTA H/E/N - Altura de antena y excentricidadesrelativas al este y al norte (m).
WAVELENGTH FACT L1/2 - Factores de para L1 y L2:* 1: Ciclo completo.* 2: Medio ciclo (cuadratura).* 0 en L2: Sólo una frecuencia.
- Número de satélites con estos factores.- Lista de PRNs satélites.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 13/170
12
# / TYPES OF OBSERV - Número de observables grabados.- Tipos de observables grabados.
* L1,L2: Medidas de fase L1 o L2.
* C1: Pseudodist. con C/A en L1.* P1,P2: Idem con P en L1 o L2.* D1,D2: Doppler en L1 o L2.* T1,T2: Transit Integrated
Doppler en 150 o 400 MHz.- Las unidades de las medidas son:
* Fase: ciclos enteros.* Pseudodistancia: metros.* Doppler: Hz.* Transit: ciclos.
INTERVAL - Intervalo de observación (épocas) en s.
TIME OF FIRST OBS -Tiempo de la primera época de grabación(año, mes, día, hora, minuto y segundo).
- Sistema de tiempo:* GPS: tiempo GPS.* GLO: tiempo UTC.
TIME OF LAST OBS - Tiempo de la última época de grabación.La estructura es análoga a la anterior.
LEAP SECONDS - Salto de segundos desde el 6-1-1980. Es
recomendable su uso con datos mixtos.
END OF HEADER - Final de cabecera.
OBS RECORD - Epoca (año, mes, mes, día, min, seg).- Señal 0 (OK) ó 1 (falta de sincronismo
entre la época anterior y la actual.- Número de satélites en la época actual.- Lista de PRNs en la época actual.- Valores de las observables.- Desfase del reloj del receptor.
Ejemplo de fichero de observación bifrecuencia para datos GPS:
2 OBSERVATION DATA RINEX VERSION / TYPEOBSTORNX Version 2.1 08-OCT-97 13:39 PGM / RUN BY / DATE
OBSERVER / AGENCYBIFRE MARKER NAMEBIFRE MARKER NUMBER-30541 SR399 3.7 REC # / TYPE / VERS149231 internal ANT # / TYPE4855544.6069 -308073.2051 4111359.4373 APPROX POSITION XYZ
0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N1 1 WAVELENGTH FACT L1/24 P1 L1 P2 L2 # / TYPES OF OBSERV
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 14/170
13
1997 10 8 9 4 60.000000 TIME OF FIRST OBSEND OF HEADER
97 10 8 9 4 55.0000000 0 7G14G16G15G29G 7G18G25 0.00000078920334437.585 106858192.87049 20334432.094 83266097.2954821069475.052 110720842.32949 21069470.067 86275958.6094821114179.659 110955756.93548 21114174.583 86459014.94248
21615000.501 113587593.78448 21614995.008 88509788.3604821818293.814 114655901.16948 21818288.971 89342245.0314723855069.991 125359245.22047 23855066.453 97682506.7764624828116.724 130472667.93945 0.000 0.0004097 10 8 9 5 0.0000000 0 7G14G16G15G29G 7G18G25 0.00000077420334920.310 106860729.54049 20334914.789 83268073.9134821068014.636 110713167.72749 21068009.637 86269978.3944821115965.620 110965142.22548 21115960.552 86466328.1244821616369.479 113594787.93848 21616363.995 88515394.1974821816559.604 114646787.64448 21816554.738 89335143.5724723851498.353 125340476.07447 23851494.780 97667881.4974624827247.528 130468100.22145 0.000 0.00040
Ejemplo de fichero de observación Simple Frecuencia para datos GPS:
2 OBSERVATION DATA RINEX VERSION / TYPEOBSTORNX Version 2.1 08-OCT-97 13:40 PGM / RUN BY / DATE
OBSERVER / AGENCYMONOFRE MARKER NAMEMONOFRE MARKER NUMBER095141 SR261 3.52 REC # / TYPE / VERS096446 external without GP ANT # / TYPE4855541.2873 -308058.4193 4111402.0074 APPROX POSITION XYZ
0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N1 0 WAVELENGTH FACT L1/22 C1 L1 # / TYPES OF OBSERV
1997 10 8 9 5 5.000000 TIME OF FIRST OBSEND OF HEADER
97 10 8 9 5 5.0000000 0 6G14G 7G15G16G18G29 -0.00000065720335021.239 106861263.86749
21816663.151 114647339.6644821116064.242 110965689.5474821068117.944 110713706.0514823851605.473 125341102.7424721616468.709 113595311.7734897 10 8 9 5 10.0000000 0 6G14G 7G15G16G18G29 -0.00000067820335456.952 106863553.5554921814882.551 114637982.5514821117802.817 110974826.82048
Ejemplo de fichero de observación Simple Frecuencia para datos combinados GPS / GLONASS:
2 OBSERVATION DATA RINEX VERSION / TYPERINEX Version 2.1 08-OCT-97 13:40 PGM / RUN BY / DATE
OBSERVER / AGENCYMONOFREMIXTO MARKER NAMEMONOFREMIXTO MARKER NUMBER5141 S61 3.52 REC # / TYPE / VERS446 external without GP ANT # / TYPE4855541.2873 -308058.4193 4111402.0074 APPROX POSITION XYZ
0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N1 0 WAVELENGTH FACT L1/2
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 15/170
14
2 C1 L1 # / TYPES OF OBSERV11 LEAP SECONDS
1997 10 8 9 5 5.000000 TIME OF FIRST OBSEND OF HEADER
97 10 8 9 5 5.0000000 0 9G14G 7G15G16G18G29R12R 3R1020335021.239 106861263.86749
21816663.151 114647339.6644821116064.242 110965689.5474821068117.944 110713706.0514823851605.473 125341102.7424721616468.709 113595311.7734820335456.952 106863553.5554921814882.551 114637982.5514821117802.817 110974826.82048
2.- Características del fichero del mensaje de navegación:
ETIQUETA DE CABECERA DESCRIPCION
RINEX VERSION / TYPE - Formato y tipo de fichero(―N‖ Naveg.)
PGM / RUN BY / DATE - Nombre, agencia y día de creación.
COMMENT - Comentario.
ION ALPHA - Parámetros ionosféricos A0-A3 delalmanaque.
ION BETA - Parámetros ionosféricos B0-B3 delalmanaque.
DELTA-UTC: A0,A1,T,W - Parámetros del almanaque para calcular eltiempo en el sistema UTC:
* A0,A1: Términos del polinomio.* T: Tiempo de referencia para
datos UTC.* W: Número de la semana UTC
de referencia.
LEAP SECONDS - Error en el tiempo por el salto de segundo
END OF HEADER - Final de cabecera.
OBS. RECORD Grupo 1 -Número PRN, año,mes,día,hora,min.,sec.- Error del reloj del satélite (s).- Deriva del reloj del satélite (s/s).- Período de deriva (s -1).
Grupo 2 - Edad de las efemérides (s).- Corrección Crs (m).- Diferencia media de movimiento (rad / s).- Anomalía media (rad).

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 16/170
15
Grupo 3 - Corrección Cuc (rad).- Excentricidad.- Corrección Cus (rad).- Raíz cuadrada del semieje mayor (m1/2).
Grupo 4 - Tiempo de las efemérides (segundos desemana GPS).- Corrección Cic (rad).- Nodo de longitud (OMEGA) (rad).- Corrección Cis (rad).
Grupo 5 - Inclinación (rad).- Corrección Crc (m).- Argumento del perigeo (omega) (rad).- Velocidad del nodo de longitud (OMEGADOT) (rad / s) .
Grupo 6 - Velocidad de inclinación (IDOT) (rad / s)- Códigos en el canal L2.- Semana GPS.- Aviso de datos de código P en L2.
Grupo 7 - Precisión del satélite (m).- Salud del satélite (entrada MSB).- Retardo ionosférico (TGD) (s).- Edad de los datos del reloj (s).
Grupo 8 - Tiempo de transmisión del mensaje (s desemana GPS).- De repuesto / sin información.- De repuesto / sin información.- De repuesto / sin información.
Ejemplo de fichero de navegación de datos GPS:
2 NAVIGATION DATA RINEX VERSION / TYPEEPHTORNX Version 2.1 08-OCT-97 13:39 PGM / RUN BY / DATE
END OF HEADER14 97 10 8 9 59 60.0 0.228183344007D-04 0.341060513165D-12 0.000000000000D+00
0.590000000000D+02-0.460312500000D+02 0.431589386451D-08 0.123485942917D+01-0.239536166191D-05 0.151082023513D-02 0.914372503757D-05 0.515376567459D+040.295200000000D+06 0.279396772385D-07 0.136000332260D+01 0.130385160446D-070.969519034508D+00 0.206718750000D+03 0.294364805951D+01-0.789104337429D-080.140720143871D-09 0.100000000000D+01 0.926000000000D+03 0.000000000000D+000.700000000000D+01 0.000000000000D+00-0.232830643654D-08 0.590000000000D+020.000000000000D+00
16 97 10 8 9 59 44.0 0.310195609927D-04 0.159161572810D-11 0.000000000000D+000.820000000000D+02-0.466250000000D+02 0.445554260153D-08 0.109773916963D+01
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 17/170
16
-0.235624611378D-05 0.221713271458D-02 0.879168510437D-05 0.515362895393D+040.295184000000D+06 0.465661287308D-07 0.136628704583D+01 0.186264514923D-070.965927376055D+00 0.210343750000D+03 0.664243366688D-01-0.796533150549D-080.717887069235D-10 0.100000000000D+01 0.926000000000D+03 0.000000000000D+000.700000000000D+01 0.000000000000D+00-0.232830643654D-08 0.820000000000D+020.000000000000D+00
3.- Características del fichero de datos meteorológicos:
ETIQUETA DE CABECERA DESCRIPCION
RINEX VERSION / TYPE - Formato y tipo de fichero ( ―M‖ met.).
PGM / RUN BY / DATE - Programa, agencia y día de creación.
COMMENT - Comentario.
MARKER NAME - Nombre de la estación.
MARKER NUMBER - Número de la estación.
# / TYPES OF OBS - Número y tipos de observación grabados.* PR: presión (mbar).* TD: temperatura seca ( ºcelsius).
* HR: humedad relativa (%).
SENSOR MOD/TYPE - Sensor de observación meteorológico:* Modelo.* Tipo.
* Precisión.* Observable (PR, TD o HR).
SENSOR POS XYZH - Posición aproximada del sensor.* XYZ geocent. (ITRF o WGS84).* H elipsoidal.* Tipo de observable (PR,TD,HR).
END OF HEADER - Final de cabecera.
OBS. RECORD - Epoca en tiempo GPS(año,mes,dia,hora,minuto y segundo).- Datos PR, TD y HR.
Ejemplo de fichero de datos meteorológicos:
2 METEOROLOGICAL DATA RINEX VERSIONXXRINEXM V9.9 AIUB 2-APR-97 00:10 PGM / RUN BY / DATEEJEMPLO DE FICHERO METEOROLOGICO COMMENTA 1000 MARKER NAME
3 PR TD HR # / TYPES OF OBSMETEORO 234-655 0.2 PR SENSOR MOD / TYPEMETEORO 234-655 0.2 TD SENSOR MOD / TYPEMETEORO 234-655 3.0 HR SENSOR MOD / TYPE
3333.3 3333.3 3333.3 345.1223 SENSOR POS / XYZHEND OF HEADER
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 18/170
17
97 4 1 0 0 15 988.0 15.2 88.097 4 1 0 0 30 988.2 15.4 88.097 4 1 0 0 45 988.2 15.2 88.3
Tipos de receptores. Fundamentalmente existen:
- Navegación. Reciben únicamente observables de código (tiempos). Son losinstrumentos menos precisos, aunque su evolución está siendo espectacular. Sus aplicacionesmás comunes son la navegación, catastro, GIS y levantamientos de escalas menores de 1/ 5000en los más sofisticados.
- Simple Frecuencia. Reciben las observables de código y fase de la portadora L1. Laprecisión de estos instrumentos ya es significativa, y son de aplicación topográfica y geodésicaen pequeñas distancias (hasta 100 km).
- Doble Frecuencia. Reciben las observables de código y fase de las portadoras L1 y
L2. La precisión y el rendimiento son mucho mayores debido a la posibilidad de combinar losdatos y formar en post-proceso combinaciones de observables que agilizan el cálculo yeliminan los errores de retardo atmosférico. Están indicados para trabajos de precisión y allí donde el rendimiento y los buenos resultados requeridos sean máximos.
-Triple Frecuencia. Reciben las observables de código y fase de las portadoras L1, L2y L5. La precisión y el rendimiento son mucho mayores debido a la posibilidad de combinar losdatos y formar en post-proceso combinaciones de observables que agilizan el cálculo yeliminan los errores de retardo atmosférico. Están indicados para trabajos de precisión y allí donde el rendimiento y los buenos resultados requeridos sean máximos, se obtienen resultadosmucho mas rápidos conservando las altísimas precisiones.
Los formatos de entrega de la información han variado muchísimo dependiendo de laaplicación para la cual ha sido fabricado el receptor GPS, desde los simple frecuencia que estánen dos grandes formatos, los conocidos navegadores o equipos que en modo autónomoproporcionan precisiones de 15 metros típicamente, siendo utilizados para seguimiento devehículos, integrados a celulares, como equipos de navegación deportiva y un sin numero deaplicaciones para recreación. Por otro lado los hay simple frecuencia para aplicacionessubmetricas, los cuales se emplean asociados a algún sistema de corrección diferencial, paraaplicaciones topográficas, o de Sistemas de Información Geográfica. En tanto los Instrumentosde Doble y Triple frecuencia, se emplean para las labores más exigentes en cuanto a precisión y
velocidad de toma de datos.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 19/170
18
CAPÍTULO II. INTRODUCCIÓN AL SISTEMA GLONASS.
El Sistema de Posicionamiento Global NAVSTAR no es el único Sistema dePosicionamiento existente. El Sistema Ruso GLONASS es también operativo, y a pesar de que
actualmente la constelación no está completada, proporciona a los usuarios civiles unasprecisiones en el posicionamiento absoluto típicamente mejores que las que proporciona elSistema GPS, debido a la aplicación de la degradación intencionada de la informacióndenominada Disponibilidad Selectiva (SA).
1. INTRODUCCION.
En agosto de 2001, el gobierno de la Federación Rusa adoptó un programa especial federal alargo plazo "Sistema Mundial de Navegación" por 10 años. Los principales objetivos delprograma son:
* Restablecer el segmento orbital del sistema GLONASS a 24 satélites para el período 2007-2008;
* Modernizar los satélites de navegación, comenzando con la segunda generación de satélites(GLONASS-M) que tienen más prestaciones y una vida útil que se ha elevado a siete años. Seincorpora en estos satélites la señal L2 en 2005.
* Después de 2007 (se prevé completar la constelación en 2012), remplazar gradualmente lossatélites con los de la tercera generación (GLONASS-K) que, junto con unas mejoresprestaciones y una vida útil de 10 a 12 años, tendrán la posibilidad de emitir la señal denavegación en la frecuencia L3 (además de L1 y L2) por la banda de radionavegaciónaeronáutica.[1]
* Proveer al GLONASS con capacidades de Búsqueda y Salvamento (SAR) a partir deGLONASS-Km de manera similar al sistema COSPAS – SARSAT.
Los satélites de segunda generación GLONASS-M, además incorporar la nueva señal civil L2(mejorando con esto la exactitud y fiabilidad de la navegación y mejora la inmunidad frente ainterferencias en el receptor para uso civil), posee radioenlaces entre satélites para realizar elcontrol en línea de la integridad del sistema y aumentar la duración de la operación autónomade la constelación de satélites sin pérdida de la exactitud de navegación.
Los satélites de tercera generación GLONASS-K tendrán parámetros de tamaño y masa
considerablemente mejores. Su peso no excederá de 700 kg, lo que permitirá lanzar estossatélites empleando el cohete de lanzamiento Protón con seis satélites en un solo lanzamiento; asu vez, esto permitirá restablecer el segmento orbital en un corto período de tiempo y el cohetede lanzamiento Soyuz, con dos satélites en un lanzamiento, permitirá mantener el segmentoorbital en el futuro. Estas capacidades permitirán reducir varias veces los costos de despliegue ymantenimiento del segmento orbital del sistema GLONASS.
El programa prevé también realizar tareas de investigación científica y de diseño experimentalpara el desarrollo de la nueva generación de satélites, a fin de modernizar el complejo decontrol de tierra del sistema GLONASS y para iniciar la producción de equipo de usuario,aumentaciones y un sistema de vigilancia del estado del segmento orbital.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 20/170
19
El uso del sistema GLONASS con otros GNSS permitirá aumentar considerablemente lasprestaciones de los Sistemas de Navegación por Satélite: la precisión, el acceso, la integridad ycontinuidad de los servicios de navegación para los usuarios de la aviación.
Sin embargo, la historia de GLONASS comienza a principios de los 70s, quizá comouna respuesta al desarrollo del Sistema GPS, el antiguo Ministro de Defensa Soviéticodesarrolló el Global‘ naya Navigatsionnaya Sputnikova Sistema o Sistema Global de
Navegación por Satélite (GLONASS). El Sistema GLONASS es similar al GPS en muchosaspectos, aunque como se verá también hay muchas diferencias.
En el año 1993, oficialmente el Gobierno Ruso colocó el programa GLONASS enmanos de Fuerzas Espaciales Militares Rusas (RSF). Este organismo es el responsable deldesarrollo de satélites GLONASS, de su mantenimiento y puesta en órbita, y certificación a losusuarios. Este organismo opera en colaboración con el CSIC (Coordinational ScientificInformation Center), el cual publica la información sobre GLONASS.
Durante los 80s, la información acerca de GLONASS era escasa. No se sabía mucho delas órbitas de los satélites ni de las señales usadas para transmisión de las señales denavegación. Pero actualmente, gracias a estudios e investigaciones sobre este sistema, sedispone ya de gran cantidad de información acerca GLONASS. Los Rusos, a través del RSF ydel CSIC publican el documento ICD (Interface Control Document). Este documento es similaren estructura al Segmento Espacial del sistema NAVSTAR GPS, donde se describe el sistema,sus componentes, estructura de la señal y el mensaje de navegación para uso civil.
La constelación ha experimentado un gran progreso desde los años 1994 y 1995. Losplanes de GLONASS son ofrecer dos niveles de servicio:
El Channel of Standard Accuracy (CSA), similar al Standar Positioning Service (SPS) delSistema GPS, disponible para uso civil.El Channel of High Accuracy (CHA), similar al Precise Positioning Service (PPS) delSistema GPS, disponibble solo para usuarios autorizados.
La Organización Internacional de Aviación Civil (ICAO) aceptó formalmente en Julio1996, el uso de GLONASS/CSA para uso en aviación civil, como ya se hizo en 1994 con elGPS/SPS.
2. DESCRIPCIÓN Y CONSTITUCIÓN DEL SISTEMA.
El Sistema GLONASS, al igual que el Sistema GPS, está formado por tres sectoresfundamentales: el Sector de Control, el Sector Espacial y el Sector Usuario.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 21/170
20
2.1. SECTOR DE CONTROL.
El Sector de Control está formado por un Sistema Central de Control (SCC) en laregión de Moscú (Golitsyno-2) y una red de estaciones de seguimiento y control (Command
Tracking Stations, CTS), emplazadas por todo el área alrededor de Rusia. El Sector de ControlGLONASS, al igual que el de GPS debe seguir y vigilar el estado de sus satélites, determinarlas efemérides y errores de los relojes de los satélites, es decir, la diferencia entre el tiempoGLONASS y la escala de tiempo UTC(SU). Además también deben actualizar los datos denavegación de los satélites. Estas actualizaciones se realizan dos veces al día.
Las estaciones de control (CTSs) realizan el seguimiento de los satélites y almacenanlos datos de distancias y telemetría a partir de las señales de los satélites. La informaciónobtenida en las CTSs es procesada en el Sistema Central de Control (SCC) para determinar losestados de las órbitas y relojes de los satélites, y para actualizar el mensaje de navegación decada satélite. Esta información es enviada a cada satélite por medio de las CTSs. Las CTSscalibran periódicamente los datos de distancias a los satélites mediante láser. Para ello, los
satélites GLONASS van provistos de unos reflectores especiales.
La sincronización de todos estos procesos en el Sistema GLONASS es muy importante.Para conseguir esta sincronización, se dispone de un reloj atómico de hidrógeno de altaprecisión, el cual determina la escala de tiempo GLONASS. Los satélites GLONASS llevan abordo un reloj de cesio y se sincronizan respecto a la State Etalon UTC(CIS) en Mendeleevo,a través de la escala de tiempo del sistema GLONASS.
A todas estas estaciones de control debemos añadir otras estaciones de seguimiento quese utilizan para obtener los parámetros de transformación del Sistema GLONASS PZ-90 alSistema GPS WGS-84, además de la determinación de las órbitas y observación y análisis de
las anomalías de los satélites. Estos parámetros de transformación se aplican cuando se trabajacon el sistema combinado GPS/GLONASS. Estas estaciones están repartidas por todo elmundo y utilizan técnicas láser, radar y ópticas. Estos parámetros son calculados por mínimoscuadrados utilizando 9 días de datos de seguimiento.
La calidad de las posiciones estimadas obtenidas a partir de GLONASS es comparablea la que se obtiene con GPS cuando la Disponibilidad Selectiva está desactivada. El valor delrms (URE) en la determinación de las órbitas para GLONASS es de aproximadamente 10 m.
El Gobierno de la Federación Rusa ha declarado que GLONASS proporcionará a losusuarios civiles una precisión en toda la Tierra para el posicionamiento absoluto en tiempo realbasado en medidas de código de unos 60 m en horizontal (99.7%) y de unos 75 m en vertical(99.7%). Los rusos han anunciado que no tienen previsto introducir ninguna medidaintencionada de degradación de la precisión del sistema.
Las estaciones de control de las Fuerzas Espaciales Rusas (RSF) publican unosboletines, llamados NAGUSs para los usuarios GLONASS con noticias, estado y anomalías delsistema, para así anunciar la inutilidad de alguno o varios satélites. Otras organizaciones, comoGLONASS Group del Laboratorio de Lincoln de Massachusetts o el DLR-DFD NeustrelitzRemote Sensing Ground Station en Alemania, también controlan la actividad de GLONASS.
Las anomalías se producen cuando los parámetros que manda el satélite en su mensajede navegación son incorrectos y el parámetro de salud indica que está sano. El resultado es una
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 22/170
21
incorrecta pseudodistancia y trae consigo posicionamientos incorrectos. Las anomalías delsistema se determinan por medio de las estaciones de control, que hacen uso del algoritmoRAIM. Esto consiste en receptores autónomos de seguimiento íntegro que detectan anomalíasen la transmisión de datos, aún figurando un buen estado de salud en los mensajes de
navegación y almanaques. Además, si un receptor dispone de este algoritmo RAIM puededetectar fácilmente estas anomalías.
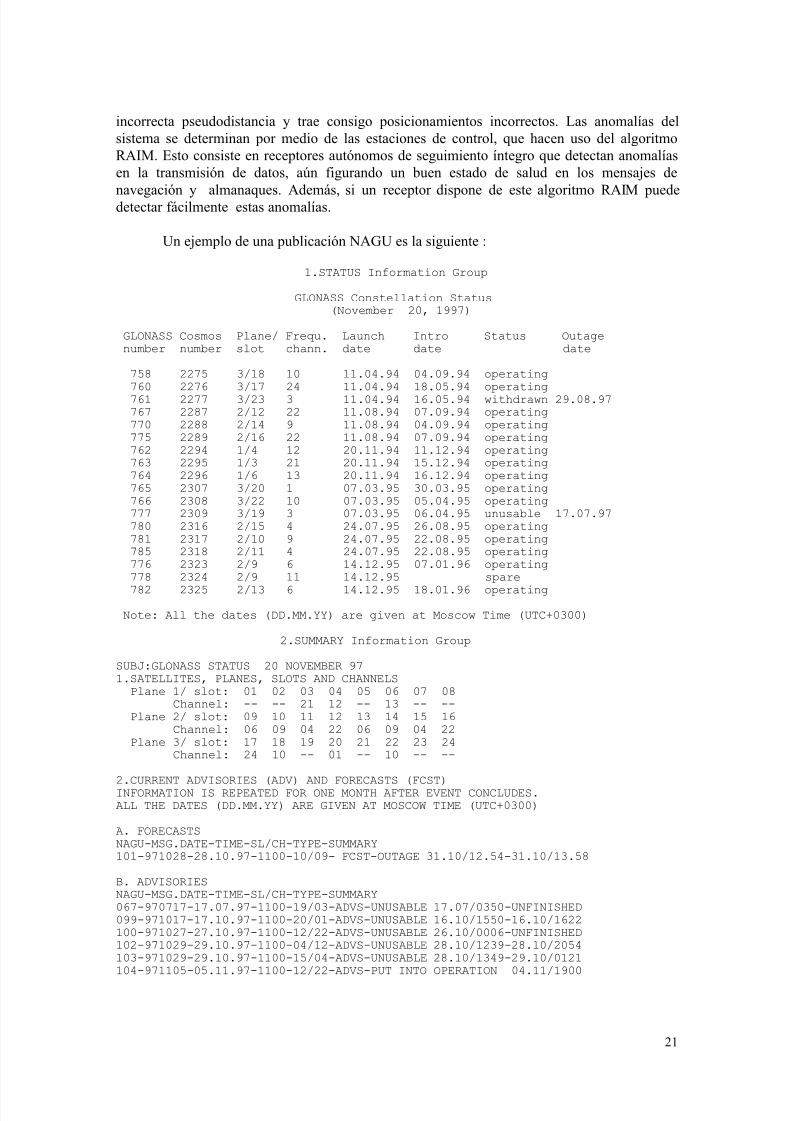
Un ejemplo de una publicación NAGU es la siguiente :
1.STATUS Information Group
GLONASS Constellation Status(November 20, 1997)
GLONASS Cosmos Plane/ Frequ. Launch Intro Status Outagenumber number slot chann. date date date
758 2275 3/18 10 11.04.94 04.09.94 operating
760 2276 3/17 24 11.04.94 18.05.94 operating761 2277 3/23 3 11.04.94 16.05.94 withdrawn 29.08.97767 2287 2/12 22 11.08.94 07.09.94 operating770 2288 2/14 9 11.08.94 04.09.94 operating775 2289 2/16 22 11.08.94 07.09.94 operating762 2294 1/4 12 20.11.94 11.12.94 operating763 2295 1/3 21 20.11.94 15.12.94 operating764 2296 1/6 13 20.11.94 16.12.94 operating765 2307 3/20 1 07.03.95 30.03.95 operating766 2308 3/22 10 07.03.95 05.04.95 operating777 2309 3/19 3 07.03.95 06.04.95 unusable 17.07.97780 2316 2/15 4 24.07.95 26.08.95 operating781 2317 2/10 9 24.07.95 22.08.95 operating785 2318 2/11 4 24.07.95 22.08.95 operating776 2323 2/9 6 14.12.95 07.01.96 operating778 2324 2/9 11 14.12.95 spare
782 2325 2/13 6 14.12.95 18.01.96 operating
Note: All the dates (DD.MM.YY) are given at Moscow Time (UTC+0300)
2.SUMMARY Information Group
SUBJ:GLONASS STATUS 20 NOVEMBER 971.SATELLITES, PLANES, SLOTS AND CHANNELSPlane 1/ slot: 01 02 03 04 05 06 07 08
Channel: -- -- 21 12 -- 13 -- --Plane 2/ slot: 09 10 11 12 13 14 15 16
Channel: 06 09 04 22 06 09 04 22Plane 3/ slot: 17 18 19 20 21 22 23 24
Channel: 24 10 -- 01 -- 10 -- --
2.CURRENT ADVISORIES (ADV) AND FORECASTS (FCST)INFORMATION IS REPEATED FOR ONE MONTH AFTER EVENT CONCLUDES.ALL THE DATES (DD.MM.YY) ARE GIVEN AT MOSCOW TIME (UTC+0300)
A. FORECASTSNAGU-MSG.DATE-TIME-SL/CH-TYPE-SUMMARY101-971028-28.10.97-1100-10/09- FCST-OUTAGE 31.10/12.54-31.10/13.58
B. ADVISORIESNAGU-MSG.DATE-TIME-SL/CH-TYPE-SUMMARY067-970717-17.07.97-1100-19/03-ADVS-UNUSABLE 17.07/0350-UNFINISHED099-971017-17.10.97-1100-20/01-ADVS-UNUSABLE 16.10/1550-16.10/1622100-971027-27.10.97-1100-12/22-ADVS-UNUSABLE 26.10/0006-UNFINISHED102-971029-29.10.97-1100-04/12-ADVS-UNUSABLE 28.10/1239-28.10/2054103-971029-29.10.97-1100-15/04-ADVS-UNUSABLE 28.10/1349-29.10/0121104-971105-05.11.97-1100-12/22-ADVS-PUT INTO OPERATION 04.11/1900
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 23/170
22
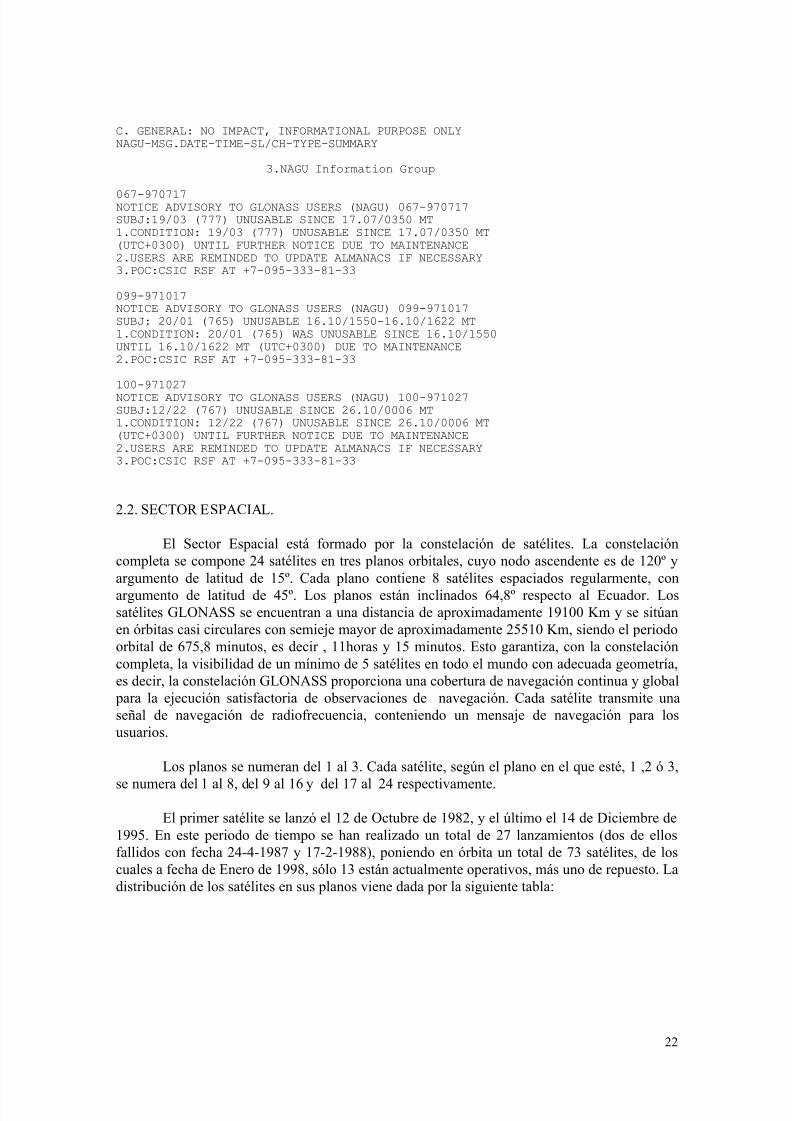
C. GENERAL: NO IMPACT, INFORMATIONAL PURPOSE ONLYNAGU-MSG.DATE-TIME-SL/CH-TYPE-SUMMARY
3.NAGU Information Group
067-970717NOTICE ADVISORY TO GLONASS USERS (NAGU) 067-970717SUBJ:19/03 (777) UNUSABLE SINCE 17.07/0350 MT1.CONDITION: 19/03 (777) UNUSABLE SINCE 17.07/0350 MT(UTC+0300) UNTIL FURTHER NOTICE DUE TO MAINTENANCE2.USERS ARE REMINDED TO UPDATE ALMANACS IF NECESSARY3.POC:CSIC RSF AT +7-095-333-81-33
099-971017NOTICE ADVISORY TO GLONASS USERS (NAGU) 099-971017SUBJ: 20/01 (765) UNUSABLE 16.10/1550-16.10/1622 MT1.CONDITION: 20/01 (765) WAS UNUSABLE SINCE 16.10/1550UNTIL 16.10/1622 MT (UTC+0300) DUE TO MAINTENANCE2.POC:CSIC RSF AT +7-095-333-81-33
100-971027NOTICE ADVISORY TO GLONASS USERS (NAGU) 100-971027SUBJ:12/22 (767) UNUSABLE SINCE 26.10/0006 MT1.CONDITION: 12/22 (767) UNUSABLE SINCE 26.10/0006 MT(UTC+0300) UNTIL FURTHER NOTICE DUE TO MAINTENANCE2.USERS ARE REMINDED TO UPDATE ALMANACS IF NECESSARY3.POC:CSIC RSF AT +7-095-333-81-33
2.2. SECTOR ESPACIAL.
El Sector Espacial está formado por la constelación de satélites. La constelacióncompleta se compone 24 satélites en tres planos orbitales, cuyo nodo ascendente es de 120º yargumento de latitud de 15º. Cada plano contiene 8 satélites espaciados regularmente, conargumento de latitud de 45º. Los planos están inclinados 64,8º respecto al Ecuador. Lossatélites GLONASS se encuentran a una distancia de aproximadamente 19100 Km y se sitúanen órbitas casi circulares con semieje mayor de aproximadamente 25510 Km, siendo el periodoorbital de 675,8 minutos, es decir , 11horas y 15 minutos. Esto garantiza, con la constelacióncompleta, la visibilidad de un mínimo de 5 satélites en todo el mundo con adecuada geometría,es decir, la constelación GLONASS proporciona una cobertura de navegación continua y globalpara la ejecución satisfactoria de observaciones de navegación. Cada satélite transmite unaseñal de navegación de radiofrecuencia, conteniendo un mensaje de navegación para losusuarios.
Los planos se numeran del 1 al 3. Cada satélite, según el plano en el que esté, 1 ,2 ó 3,
se numera del 1 al 8, del 9 al 16 y del 17 al 24 respectivamente.
El primer satélite se lanzó el 12 de Octubre de 1982, y el último el 14 de Diciembre de1995. En este periodo de tiempo se han realizado un total de 27 lanzamientos (dos de ellosfallidos con fecha 24-4-1987 y 17-2-1988), poniendo en órbita un total de 73 satélites, de loscuales a fecha de Enero de 1998, sólo 13 están actualmente operativos, más uno de repuesto. Ladistribución de los satélites en sus planos viene dada por la siguiente tabla:
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 24/170
23
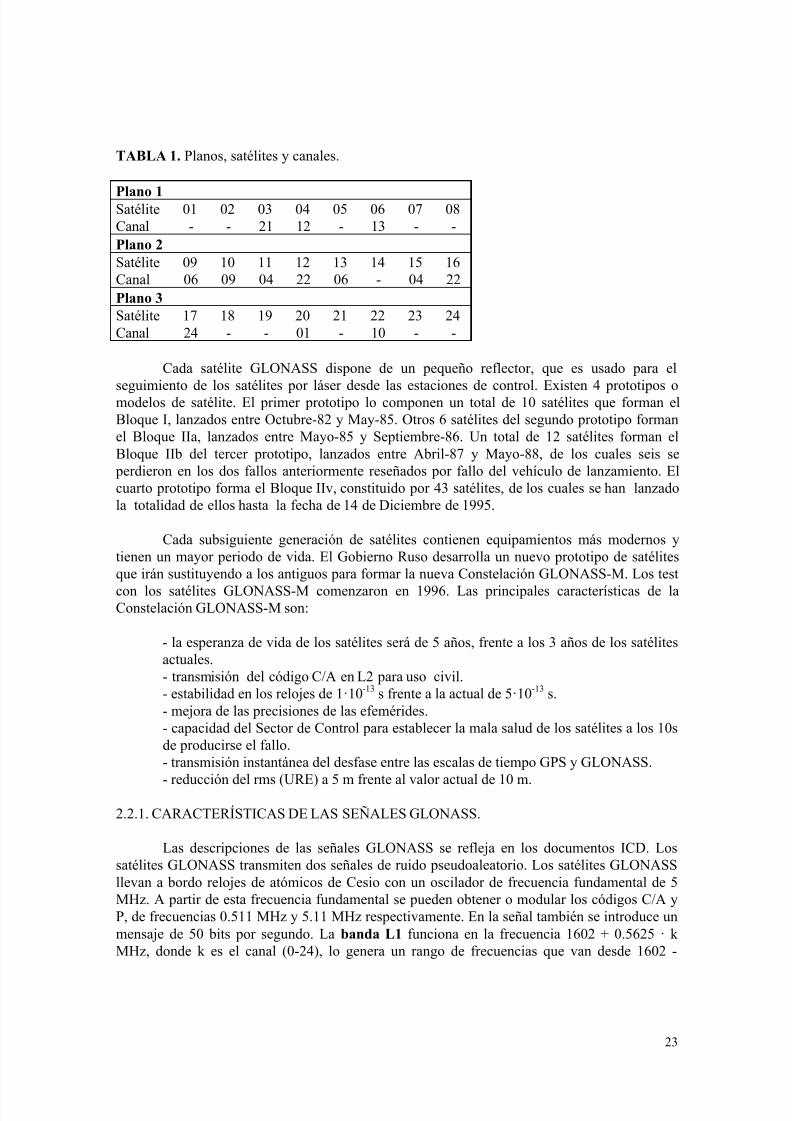
TABLA 1. Planos, satélites y canales.
Plano 1 Satélite 01 02 03 04 05 06 07 08Canal - - 21 12 - 13 - -Plano 2 Satélite 09 10 11 12 13 14 15 16Canal 06 09 04 22 06 - 04 22Plano 3Satélite 17 18 19 20 21 22 23 24Canal 24 - - 01 - 10 - -
Cada satélite GLONASS dispone de un pequeño reflector, que es usado para el
seguimiento de los satélites por láser desde las estaciones de control. Existen 4 prototipos omodelos de satélite. El primer prototipo lo componen un total de 10 satélites que forman elBloque I, lanzados entre Octubre-82 y May-85. Otros 6 satélites del segundo prototipo formanel Bloque IIa, lanzados entre Mayo-85 y Septiembre-86. Un total de 12 satélites forman elBloque IIb del tercer prototipo, lanzados entre Abril-87 y Mayo-88, de los cuales seis seperdieron en los dos fallos anteriormente reseñados por fallo del vehículo de lanzamiento. Elcuarto prototipo forma el Bloque IIv, constituido por 43 satélites, de los cuales se han lanzadola totalidad de ellos hasta la fecha de 14 de Diciembre de 1995.
Cada subsiguiente generación de satélites contienen equipamientos más modernos ytienen un mayor periodo de vida. El Gobierno Ruso desarrolla un nuevo prototipo de satélitesque irán sustituyendo a los antiguos para formar la nueva Constelación GLONASS-M. Los test
con los satélites GLONASS-M comenzaron en 1996. Las principales características de laConstelación GLONASS-M son:
- la esperanza de vida de los satélites será de 5 años, frente a los 3 años de los satélitesactuales.- transmisión del código C/A en L2 para uso civil.- estabilidad en los relojes de 1·10-13 s frente a la actual de 5·10-13 s.- mejora de las precisiones de las efemérides.- capacidad del Sector de Control para establecer la mala salud de los satélites a los 10sde producirse el fallo.- transmisión instantánea del desfase entre las escalas de tiempo GPS y GLONASS.
- reducción del rms (URE) a 5 m frente al valor actual de 10 m.
2.2.1. CARACTERÍSTICAS DE LAS SEÑALES GLONASS.
Las descripciones de las señales GLONASS se refleja en los documentos ICD. Lossatélites GLONASS transmiten dos señales de ruido pseudoaleatorio. Los satélites GLONASSllevan a bordo relojes de atómicos de Cesio con un oscilador de frecuencia fundamental de 5MHz. A partir de esta frecuencia fundamental se pueden obtener o modular los códigos C/A yP, de frecuencias 0.511 MHz y 5.11 MHz respectivamente. En la señal también se introduce unmensaje de 50 bits por segundo. La banda L1 funciona en la frecuencia 1602 + 0.5625 · kMHz, donde k es el canal (0-24), lo genera un rango de frecuencias que van desde 1602 -
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 25/170
24
1615.5 MHz. La banda L2 funciona en la frecuencia 1246 + 0.4375 · k MHz, lo que genera unrango de frecuencias que van desde 1246 - 1256.5 MHz.
Algunas transmisiones GLONASS crean interferencias con las señales astronómicas de
radio, que usan las bandas de frecuencia de 1610.6 - 1613.8 y 1660 - 1670 MHz, quecorresponden a los canales GLONASS del 15 al 20. Además, las transmisiones GLONASS defrecuencias superiores 1610 MHz tienen interferencias con las señales del servicio de satélitespara comunicaciones móviles en las frecuencias que van desde 1610 - 1626.5 MHz. Parasolucionar esto, y por la necesidad de minimizar las interferencias, las autoridades encargadasdel Sistema GLONASS decidieron reducir el número de frecuencias usadas (y por lo tanto elnúmero de canales), y bajar el intervalo de frecuencias utilizadas. Así, el sistema constará de 12canales de frecuencia, mas dos adicionales para los test de control. De esta forma la banda L1 se encontrará entre 1598.0625 - 1604.25 MHz y la banda L2 se encontrará entre 1242.9375 -1247.75 MHz. Los actuales y futuros canales de frecuencias GLONASS se pueden resumir dela forma siguiente:
* Frecuencias iniciales: f L1 = 1602 + 0.5625 · k MHz (k = 0,....,24)f L2 = 1246 + 0.4375 · k MHz (k = 0,....,24)
* Hoy y hasta 1998: 1602 - 1608.8 MHz (canales 1 - 12)1614.4 - 1615.5MHz (canales 22 - 24)
1246 - 1251.25 MHz (canales 1 - 12)1255.625 - 1256.5 MHz (canales 22 - 24)
Los canales 15-20 no están en uso y el ICD estipula el uso de los canales de frecuencia13, 14, y 21 en circunstancias excepcionales.
* 1998-2005: 1602 - 1608.8 MHz (canales 0 - 12)
1246 - 1251.25 MHz (canales 0 - 12)
* A partir de 2005: 1598.1 - 1604.25 MHz (canales -7 - 4)
1242.9375 - 1247.75 MHz (canales -7 - 4)
Los canales 5 y 6 serán utilizados para test de control.
Pero la cuestión que se plantea es cómo introducir los 24 satélites de la constelacióncompleta en sólo 12 canales. Lo que se plantea es introducir dos satélites antipodales de unmismo plano en el mismo canal, esto es, satélites separados 180º de argumento de latitud, deforma que un usuario colocado en cualquier punto de la Tierra nunca recibirá señalessimultáneas de los dos satélites sitiados en el mismo canal.
GLONASS transmite el código P en ambas bandas L1 y L2 y el código C/A, demomento sólo en la banda L1, pero está programado que la Constelación GLONASS-M lotransmita también en la banda L2 para uso civil.
El código C/A tiene una longitud de 511 chips y se propaga con una velocidad de 511Kchips/s y por lo tanto con una repetibilidad de 1 milisegundo. El código P tiene una longitud

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 26/170
25
de 5.11·106 chips y se propaga con una velocidad de 5.11 Mchips/s, cuya repetibilidad es de 1segundo. A diferencia de los satélites GPS, todos los satélites GLONASS transmiten losmismos códigos. Esto es así porque en GLONASS la identificación de los satélites se hace porla frecuencia de las portadoras y no por el PRN de los códigos como se hace en GPS.
Los errores que se pueden cometer en el posicionamiento absoluto de un punto con elcódigo C/A utilizando el Sistema GLONASS son de unos 60 m (99.7%) en horizontal y de unos75 m (99.7%) en vertical. Esta precisión es comparable a la que ofrece el Sistema GPS sin laDisponibilidad Selectiva.
2.2.2. MENSAJE DE NAVEGACIÓN.
El mensaje de navegación se transmite con una velocidad de 50 bit/s y se modula juntocon los códigos C/A y P. El mensaje de navegación GLONASS del código C/A divide losdatos en datos operacionales o inmediatos y datos no operacionales o no inmediatos. Los datos
operacionales son las efemérides, los parámetros de reloj y época del reloj del satélite. Las
efemérides de los satélites se dan en términos de posición, velocidad, y vector de aceleración dela época de referencia. Los datos no operacionales comprenden el almanaque (o efeméridesaproximadas) de la constelación, junto con los estados de salud de todos los satélitesGLONASS. Los datos de salud de los satélites no tienen tiempo de actualización. Además, enlos datos no operacionales hay un parámetro que indica la diferencia entre el sistema de tiempoGLONASS y el UTC, parámetro llamado c. Estos datos se determinan para el comienzo decada día.
Los parámetros de efemérides son generalmente cargados en cada satélite una vez aldía, junto con el parámetro c. El tiempo desde la última grabación o actualización de los datosdel mensaje se determina por un parámetro En, que determina la edad de las efemérides en
días. Los parámetros de reloj son grabados dos veces al día. El mensaje completo tiene unaduración de 2 min. y 30 seg., pero las efemérides y la información de reloj se repite cada 30seg.
Las autoridades GLONASS no han publicado hasta ahora los contenidos del mensajede navegación del código P. Sin embargo, se sabe que el mensaje completo dura 12 min. y quelas efemérides y la información de reloj se repite cada 10 seg.
El Sistema GLONASS dispone de un sistema de tiempos y de un sistema de referenciapropio y distinto al de GPS. El tiempo GLONASS está referido al UTC(SU). El UTC(SU) sediferencia en unos microsegundos al UTC(BIPM). El NTFS (National Time and FrecuencyService) se encarga de que el desfase sea de un microsegundo o menos. Para ello, endeterminadas ocasiones se introduce un salto de unos segundos, a diferencia del tiempo GPSque no requiere de estos saltos.
2.2.3. SISTEMA RE FERENCIA. DATUM PZ-90.
Las efemérides GLONASS están referidas al Datum Geodésico Parametry Zemli 1990o PZ-90, o en su traducción Parámetros de la Tierra 1990 o PE-90. Este sistema reemplazó alSGS-85, usado por GLONASS hasta 1993.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 27/170
26
El sistema PZ-90 es un sistema de referencia terrestre con coordenadas definidas de lamisma forma que el Sistema de Referencia Internacional Terrestre (ITRF). Las constantes yparámetros del PZ-90 se muestran en la siguiente tabla:
TABLA 2. Parámetros del Datum PZ-90.
Parámetro ValorRotación de la Tierra 72.92115 · 10-6 rad/sConstante Gravitacional 398600.44 · 109 m3 /s2 Constante Gravitacional de laatmósfera
0.35 · 109 m3 /s2
Velocidad de la luz 299792458 m/sSemieje mayor del elipsoide 6378136 m
Aplanamiento del elipsoide 1 / 298.257839303Aceleración de la gravedad enel Ecuador
978032.8 mgal
La realización del Sistema PZ-90 por medio de la adopción de coordenadas deestaciones de referencia ha dado como resultado el desfase en el origen y orientación de losejes, así como la diferencia en escala con respecto al ITRF y al Sistema WGS-84 también.
2.3. SECTOR USUARIO.
El Sistema GLONASS es un sistema militar y civil. Todos los usuarios militares yciviles constituyen el Sector Usuario. El desarrollo y diseño de nuevos receptores por parte delos fabricantes está en continua evolución.
Un equipo de recepción de señales GLONASS, al igual que uno de GPS, está formadopor una antena y un receptor. La antena suele llevar un plano de tierra para evitar el efectomultipath, es decir, la recepción de señales reflejadas en el suelo u otros objetos, que empeoranla precisión. Los receptores disponen de un reloj para sincronizar las señales recibidas.
Existen dos generaciones de receptores GLONASS. La primera generación contenían1,2 y 4 canales. La segunda generación son ya mucho más compactos y ligeros, incluyendo 5, 6y 12 canales, usados para aplicaciones civiles y capaces de operar con las dos constelaciones
GPS/GLONASS.
Fuera de Rusia, hay un número considerable de fabricantes e investigadores que handiseñado y construido receptores GLONASS o GPS/GLONASS incluyendo doble frecuencia ycódigos C/A y P. Algunos de ellos eran prototipos desarrollados para ganar experiencia conGLONASS, y otros para aplicaciones específicas.
Entre las principales marcas del receptores GLONASS o GPS/GLONASS seencuentran:
- GEOTRACER 2404: 12 canales GPS y 12 canales GLONASS.- Magnavox: 8 canales GLONASS.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 28/170
27
- 3S Navigation: 12 canales GNSS para navegación.- GG-24 Astech: 12 canales GPS y 12 canales GLONASS.- Sercel Scorpio 6001: 16 canales GPS/GLONASS.
CAPÍTULO III. USO COMBINADO DE LOS SISTEMAS GPS YGLONASS.
1. INTRODUCCIÓN.
Los Sistemas GPS y GLONASS son sistemas autónomos, es decir, cada uno tiene supropio sistema de referencia y su propio sistema o escala de tiempo. Usan diferentes sistemas
de referencia para expresar las posiciones de sus satélites, y por lo tanto, para determinar lasposiciones de los usuarios.
Para poder utilizar los dos Sistemas de Posicionamiento por Satélite, GPS yGLONASS, es decir, recibir señales de los satélites de la constelación GPS y de la constelaciónGLONASS, es necesario establecer la relación entre los sistemas de tiempo y sistemas dereferencia utilizados en los dos sistemas. El Sistema GPS utiliza el sistema de referencia WGS-84, mientras que el Sistema GLONASS utiliza el PZ-90. Los parámetros que definen los dossistemas de referencia son significativamente diferentes.
Analizando las seudodistancias medidas a los satélites GLONASS y GPS los errorescometidos vienen expresados por el valor error URE o URE (User Range Error). Este error
contempla los errores al predecir las efemérides, inestabilidades en el vehículo espacial, relojesde los satélites, efectos ionosféricos y troposféricos, efecto multipath, ruido de la señal, y paraGPS, la Disponibilidad Selectiva (SA). Todos estos errores en su conjunto se recogen en elvalor URE . El URE se define como la diferencia entre la seudodistancia y la distanciacalculada a partir de las posiciones dadas de los satélites, temiendo en cuenta sólo los erroresde reloj y de deriva. Para GLONASS, el valor del URE es de URE 10 m, mientras que paraGPS sin SA es de URE 7 m, y con SA es de URE 25 m. La diferencia en los valores de UREde 7 a 10 m entre los Sistemas GPS y GLONASS, es atribuida principalmente a la falta decorrección del efecto ionosférico en GLONASS.
2. ESTUDIOS REALIZADOS SOBRE LA UTILIZACIÓN DE AMBOS SISTEMAS Y
SU USO COMBINADO.
El Laboratorio Lincoln de Massachusetts hizo un estudio de las precisiones que ofrecenambos sistemas de posicionamiento y las precisiones de su uso combinado, analizando lasprecisiones obtenidas en posicionamiento absoluto usando en código C/A durante periodos de24 h. La precisión con GLONASS, obtenida en estas pruebas es mejor que los nivelesgarantizados por el Gobierno Ruso. Además, la precisión con GLONASS es mejor que laobtenida con GPS debido a que la Disponibilidad Selectiva está activada. Sin embargo, si la SAestuviera desactivada, la precisión con GPS sería mejor que con GLONASS. Los siguientesvalores muestran los resultados obtenidos por el Laboratorio Lincoln en una de las pruebasrealizadas para la obtención de posiciones absolutas utilizando la constelación GLONASS, laconstelación GPS y su uso combinado GPS/GLONASS:

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 29/170
28
* Posiciones estimadas con GLONASS:
- Error horizontal (m): 10 (50%) 21.2 (95%)
26.8 (99%) - Error vertical (m) : 14.6 (50%) 39.1 (95%) 46.3 (99%)
* Posiciones estimadas con GPS:
- Error horizontal (m): 20.6 (50%) 48.4 (95%) 62.9 (99%)
- Error vertical (m) : 26.7 (50%) 81.7 (95%) 105.1 (99%)
* Posiciones estimadas con la combinación GPS/GLONASS:
- Error horizontal (m): 6.5 (50%) 14.9 (95%) 25.8 (99%)
- Error vertical (m) : 16.7 (50%) 41.8 (95%) 49.5 (99%)
Con la disponibilidad de receptores GPS/GLONASS, el usuario puede tener acceso aun sistema combinado de hasta 48 satélites (con la dos constelaciones completas). Con todosestos satélites, los trabajos en desfiladeros y otras localizaciones de visibilidad restringida, talescomo áreas boscosas, etc., es mejorada debido a la posibilidad de mayor información de mássatélites. Además, una mayor constelación de satélites también mejora la ejecución delposicionamiento diferencial en tiempo real, ya que, el tiempo menor de toma de datos, conrespecto a un posicionamiento diferencial calculado en post-proceso, se ve compensado por laobtención de una mayor información de más satélites. Pero eso no es todo, además el tiempo deinicialización para alcanzar precisiones de nivel centimétrico mejora en un factor de 3 a 6 conuna constelación de 48 satélites.
El posicionamiento posee una integridad mayor. Para un nivel de confianza de 99.9% elposicionamiento con GPS requiere una recepción continua de 6 o mas satélites en susconstelación de 24 satélites. Para el mismo nivel de confianza, usando GPS/GLONASS serequiere una recepción continua de 7 satélites de los 48 de la combinación. Las operaciones decódigo diferencial vienen a ser más simples. Debido a que no existe una degradación deliberadade la precisión, el trabajo con GLONASS diferencial requiere mucha menor cantidad decorrecciones. Es posible la detección del 100% de los fallos, tanto en disponibilidad de lossatélites, como en la calidad de la información que transmiten, gracias a la existencia de losRAIM (Receiver Autonomous Integrity Monitoring), que son receptores autónomos deseguimiento íntegro que utilizan unos algoritmos que detectan anomalías en la transmisión dedatos, aún figurando un buen estado de salud en los mensajes de navegación y almanaques.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 30/170
29
Las principales ventajas del uso combinado GPS/GLONASS son la mejora en lageometría de los satélites y la mitigación de la Disponibilidad Selectiva. Las posiciones seestiman usando los parámetros de transformación entre el sistema PZ-90 y el WGS-84.
3. OBTENCIÓN DE LOS PARÁMETROS DE TRANSFORMACIÓN ENTRE PZ-90 YWGS-84.
Los parámetros que definen los dos sistemas de referencia PZ-90 y WGS-84 sonsignificativamente diferentes. Para poder utilizar el sistema combinado GPS/GLONASS esnecesario el conocimiento de las posiciones de todos los satélites utilizados, satélites GPS yGLONASS, en el mismo sistema de referencia. Para ello, lo que se realiza es el paso de lasposiciones de todos los satélites GLONASS al sistema de referencia WGS-84, y así trabajar conla constelación de los 48 satélites en un mismo sistema de referencia. Además de la unificación
del sistema de referencia, es necesario establecer también la relación entre los dos sistemas oescalas de tiempo utilizados. Esto se resuelve por medio de la información contenida en losmensajes de navegación de cada uno de los sistemas, donde aparecen las diferencias entre lostiempos GPS o tiempos GLONASS con respecto al Tiempo Universal Coordinado.
Para obtener las efemérides de los satélites GLONASS en el sistema WGS-84 esnecesario conocer los parámetros de transformación de PZ-90 a WGS-84, para lo cual senecesita un cierto número de satélites GLONASS con coordenadas en ambos sistemas. Conestos satélites se calculan los parámetros de transformación utilizando la técnica de mínimoscuadrados, y se aplican al resto de satélites.
Las coordenadas de los satélites GLONASS en PZ-90 aparecen en el mensaje denavegación que mandan los satélites. La estimación de las posiciones de los satélitesGLONASS en WGS-84 es realizada por una serie de estaciones de seguimiento que utilizantécnicas de medición láser, radar y ópticas para la determinación de las órbitas. Estas estacionesestán localizadas por todo el mundo:
* Técnicas láser: Estados Unidos, Alemania, Austria, Finlandia, Latvia, Rusia,Ucrania, Uzbekistan, Japón y Australia.
* Técnicas rádar: Westford y Kwajalein.* Técnicas ópticas: Estaciones MOTIFF en Hawai y Estaciones GEODSS
La determinación de las órbitas se realiza utilizando un software de alta precisión queusa la técnica de mínimos cuadrados. Las órbitas son calculadas usando nueve días de datos deseguimiento. Una vez que los parámetros orbitales son estimados, el programa genera vectoresde estado en intervalos de 30 minutos, correspondientes a las épocas de las efeméridesGLONASS transmitidas. La calidad de la determinación de las órbitas tras el cálculo se estimapor un error rms de la posición de los satélites del orden de 11 m.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 31/170
30
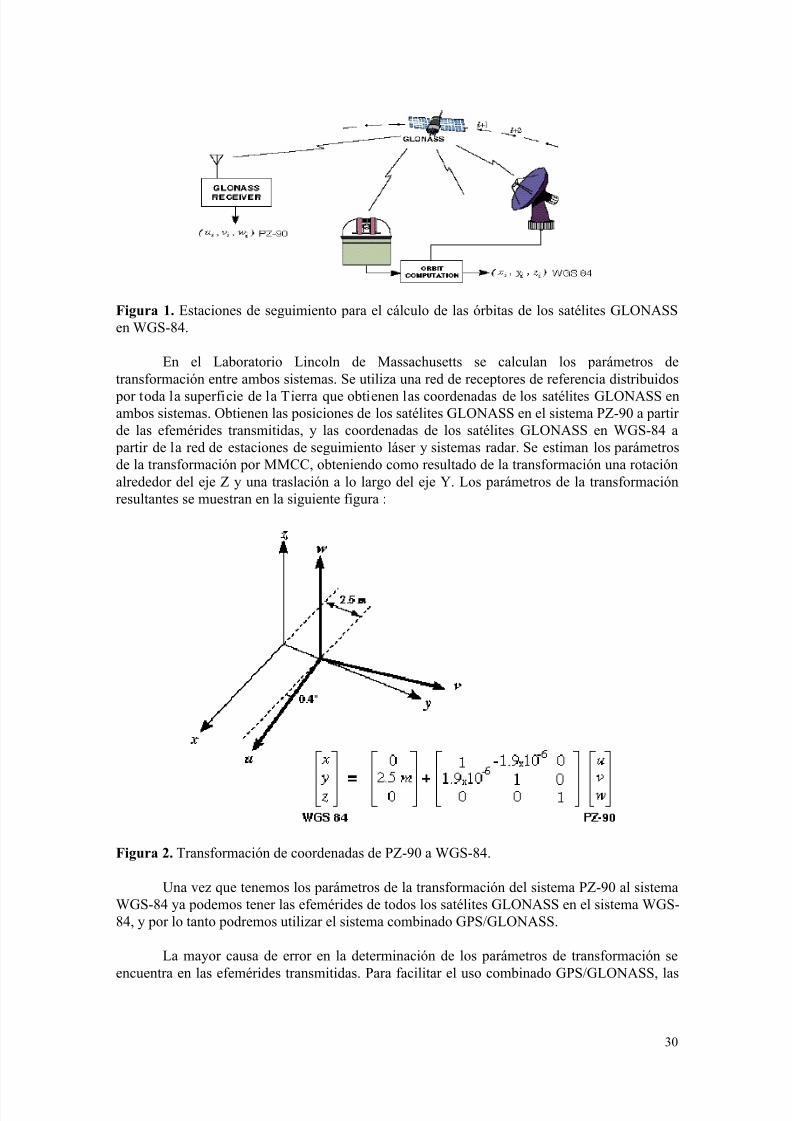
Figura 1. Estaciones de seguimiento para el cálculo de las órbitas de los satélites GLONASSen WGS-84.
En el Laboratorio Lincoln de Massachusetts se calculan los parámetros detransformación entre ambos sistemas. Se utiliza una red de receptores de referencia distribuidos
por toda la superficie de la Tierra que obtienen las coordenadas de los satélites GLONASS enambos sistemas. Obtienen las posiciones de los satélites GLONASS en el sistema PZ-90 a partirde las efemérides transmitidas, y las coordenadas de los satélites GLONASS en WGS-84 apartir de la red de estaciones de seguimiento láser y sistemas radar. Se estiman los parámetrosde la transformación por MMCC, obteniendo como resultado de la transformación una rotaciónalrededor del eje Z y una traslación a lo largo del eje Y. Los parámetros de la transformaciónresultantes se muestran en la siguiente figura :
Figura 2. Transformación de coordenadas de PZ-90 a WGS-84.
Una vez que tenemos los parámetros de la transformación del sistema PZ-90 al sistemaWGS-84 ya podemos tener las efemérides de todos los satélites GLONASS en el sistema WGS-84, y por lo tanto podremos utilizar el sistema combinado GPS/GLONASS.
La mayor causa de error en la determinación de los parámetros de transformación se
encuentra en las efemérides transmitidas. Para facilitar el uso combinado GPS/GLONASS, las

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 32/170
31
autoridades Rusas pretenden incluir en los nuevos mensajes de navegación de los satélites de laConstelación GLONASS-M, las diferencias entre los dos sistemas de tiempos y posiciones dereferencia.
CAPÍTULO IV. LAS OBSERVABLES.
1. INTRODUCCIÓN.Las observables del posicionamiento por satélite son fundamentalmente dos:
- Observables de tiempo:
* Código C/A modulado sobre la portadora L1.* Código P modulado sobre la portadora L1.* Código P modulado sobre la portadora L2.
- Observables de diferencia de fase de la portadora:
* Diferencia de fase de la portadora L1, denominado* Diferencia de fase de la portadora L2, denominado
A partir de estas observables podemos calcular la distancia satélite-receptor, mediantela comparación entre la señal que envía el satélite y la que genera el receptor. Pero estasdistancias están afectadas por una serie de errores, por consiguiente se denominanseudodistancias. Además con estas observables se pueden formar diferentes combinacionescomo las que mencionaremos más adelante.
2. MEDIDAS DE CÓDIGO.
Llamamos tS
al tiempo que marca el reloj del satélite cuando emite la señal y t R altiempo que marca el reloj del receptor cuando la recibe. Análogamente, los desfases o erroresde los relojes con respecto a las Escales de Tiempo serán
S y R. El valor del tiempo deemisión (tS), es transmitido en el código que envía el satélite. La diferencia entre ambaslecturas de tiempo ( t) es el tiempo que ha tardado la señal en llegar al receptor:
t = tR tS = (tR R) tS S) = (tR tS SR) = t +
donde t = tR tS y SR. El error del satélite S lo podemos modelar por medio de un
polinomio con los coeficientes que son transmitidos del mensaje de navegación. Por lo tanto,suponiendo conocido el valor de S y aplicada esta corrección al valor de tS , el valor de será

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 33/170
32
únicamente el valor de R. El intervalo de tiempo t multiplicado por la velocidad a la queviaja la onda, es decir la velocidad de la luz, c, nos da lugar a la medida de seudodistancia:
R = c · t = c · t(GPS) + c · + c ·
La distancia es la distancia real existente entre el satélite en la época tS y el receptoren la época tR .
La precisión de la seudodistancia derivada de las medidas de código se evalúanormalmente en un 1% la longitud del chip del código. Sin embargo, recientes desarrollosdemuestran que es posible llegar a obtener precisiones de 0,1% la longitud del chip del código.
3. MEDIDAS DE FASE.
La ecuación de fase para ondas electromagnéticas observada por un receptor es:
=t
t0f . dt
Asumiendo que la frecuencia se mantiene constante, en el instante inicial se cumple que(t0)=0, y teniendo en cuenta el tiempo t , necesario para que la señal recorra la distancia
geométrica entre el satélite y el receptor, la ecuación de fase queda:
= f t
t0dt = f . ( t - t ) siendo:
y sustituyendo en la expresión anterior, tendremos :
Llamamos S(t) a la fase de la portadora recibida por el receptor con una frecuencia f S yR(t) a la fase de una portadora de referencia generada en el receptor con frecuencia f R. El
parámetro t es una época en la escala de Tiempo del sistema. Para la época inicial (comienzo dela observación), se supone que t0 = 0. A partir de la ecuación de fase anterior se obtiene:
Las fases iniciales S0 y R0 son causadas por los errores de los relojes del satélite y
receptor:
La diferencia de fase entre ambas será:
SR(t) = S(t) - R(t) = - f S - f S · S + f R · R + ( f S - f R ) · t
c
= f . ( t - ) c
t =
c
S(t) = f S t - f S - S0
c
R(t) = f
Rt -
R0
S0 = f S · S
R0 = f R · R

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 34/170
33
El satélite genera una onda en un instante y el receptor genera otra onda en ese mismoinstante y compara, por lo tanto el receptor debe generar una onda de la misma frecuencia a ladel satélite para poderlas comparar y medir la diferencia de fase entre ambas, por ello la
diferencia de fase es:
Si comenzamos la medición en la época t0, empezamos a medir diferencias de fase, peroel valor inicial del nº entero de longitudes de onda (N) entre el satélite y el receptor no esconocido. Sin embargo, el valor de N (también llamada ambigüedad) es constante en el tiempoy después de un tiempo continuado de observación, la diferencia de fase para la época t será:
donde SR (medible) es la fracción de fase o lo que ha variado la fase desde t 0 a t. Una
interpretación geométrica de esto es:
Se considera que el valor inicial de la diferencia de fase es cero 0 = 0. Operando ysustituyendo en las expresiones anteriores, y expresando de forma arbitraria el valor de S
R
como - (para evitar los signos (-) en la expresión), se obtiene la ecuación de medida de fase:
Multiplicando toda la ecuación por la longitud de la onda , pasaremos de una medidade fase en ciclos a una medida de fase en unidades de longitud.
4. COMBINACIÓN DE OBSERVABLES.
1 c
donde c / f
S(t2) ÓrbitaS(t1)
SR
SR
S(t0)N N
N
RSuperficie
f S = f R = f
SR(t) = f S f
cdonde S
R
· c · ·
tS
R(t) = SR + N
t0

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 35/170
34
Las combinaciones de observables que se puedan forman van a depender de la cantidadde observables que dispongamos, es decir, se podrán utilizar o no todas las observablesdependiendo del tipo de receptor que se utilice (navegador, Simple Frecuencia, bifrecuencia,
etc. ).Cuando disponemos sólo de medidas de código sobre las dos portadoras, es decir, P1 y
P2, podemos formar una combinación lineal de ambos códigos que sea, por ejemplo la suma(P1+P2). Además se podrían formar otras combinaciones, de expresiones más complicadas, quetienen la ventaja de suavizar la señal y reducir el ruido.
Cuando disponemos sólo de medidas de código y fase sobre un portadora, es decir, C/Ao P, y L1, podemos formar una combinación de medidas de código y fase sobre una portadora.En este caso, el código se utilizará para obtener una solución aproximada del punto, mejor quela solución de navegación, y tomar ésta para calcular las coordenadas aproximadas del puntoque se utilizarán en la ecuación de fase.
Cuando disponemos de medidas de código y fase sobre las dos portadoras, es decir, detodos los observables podemos formar una gran combinación de observables. Como en el casoanterior las medidas de código nos ayudarán a obtener una solución más aproximada del punto,para luego trabajar con las medidas de fase.
Una combinación lineal de fases sobre L1 y L2, en su expresión general, se puededefinir como:
= n1 1 + n2 2
donde n1 y n2 son números arbitrarios. Expresando el valor como f it, para lascorrespondientes frecuencias f 1 y f 2, tenemos:
= n1 f 1t + n2 f 2t f · t
La frecuencia f será, f = n1 f 1 + n2 f 2 , siendo = c / f , la longitud de la onda de lacombinación lineal.
En el caso de señales GPS, se pueden formar unas combinaciones sencillas de lasportadoras L1 y L2, como son:
La banda estrecha (Ln): L1+L2 = L1 + L2
Los coeficientes n1 y n2 son la unidadLa longitud de onda es L1+L2 = 10,7 cm
La banda ancha (Lw): L1-L2 = L1 L2
El coeficiente n1 = 1 y n2 = -1La longitud de onda es L1 L2 = 86,2 cm
Una ventaja que tienen estas dos combinaciones se produce a la hora del cálculo de lasambigüedades (N), ya que al pasar de las dos frecuencias L1 y L2 a una, ya sea la formando la
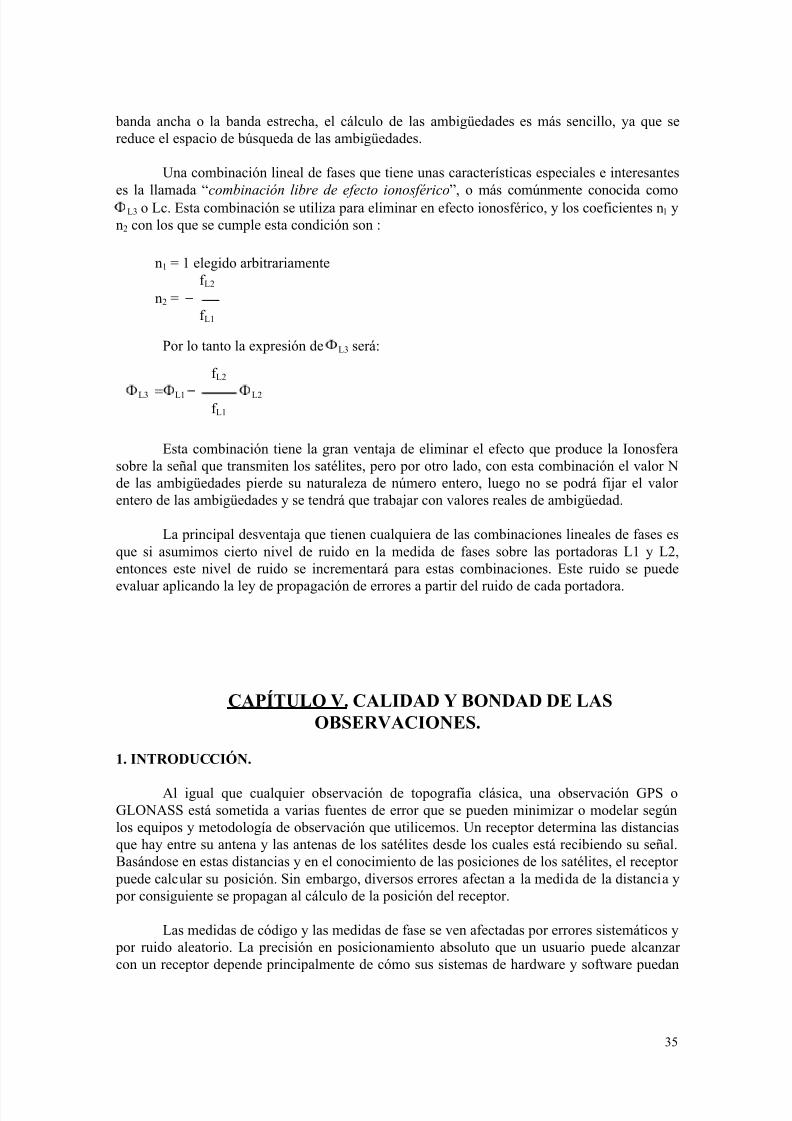
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 36/170
35
banda ancha o la banda estrecha, el cálculo de las ambigüedades es más sencillo, ya que sereduce el espacio de búsqueda de las ambigüedades.
Una combinación lineal de fases que tiene unas características especiales e interesantes
es la llamada ―combinación libre de efecto ionosférico‖, o más comúnmente conocida comoL3 o Lc. Esta combinación se utiliza para eliminar en efecto ionosférico, y los coeficientes n1 y
n2 con los que se cumple esta condición son :
Por lo tanto la expresión de L3 será:
Esta combinación tiene la gran ventaja de eliminar el efecto que produce la Ionosferasobre la señal que transmiten los satélites, pero por otro lado, con esta combinación el valor Nde las ambigüedades pierde su naturaleza de número entero, luego no se podrá fijar el valorentero de las ambigüedades y se tendrá que trabajar con valores reales de ambigüedad.
La principal desventaja que tienen cualquiera de las combinaciones lineales de fases esque si asumimos cierto nivel de ruido en la medida de fases sobre las portadoras L1 y L2,entonces este nivel de ruido se incrementará para estas combinaciones. Este ruido se puede
evaluar aplicando la ley de propagación de errores a partir del ruido de cada portadora.
CAPÍTULO V. CALIDAD Y BONDAD DE LASOBSERVACIONES.
1. INTRODUCCIÓN.
Al igual que cualquier observación de topografía clásica, una observación GPS oGLONASS está sometida a varias fuentes de error que se pueden minimizar o modelar segúnlos equipos y metodología de observación que utilicemos. Un receptor determina las distanciasque hay entre su antena y las antenas de los satélites desde los cuales está recibiendo su señal.Basándose en estas distancias y en el conocimiento de las posiciones de los satélites, el receptorpuede calcular su posición. Sin embargo, diversos errores afectan a la medida de la distancia ypor consiguiente se propagan al cálculo de la posición del receptor.
Las medidas de código y las medidas de fase se ven afectadas por errores sistemáticos ypor ruido aleatorio. La precisión en posicionamiento absoluto que un usuario puede alcanzarcon un receptor depende principalmente de cómo sus sistemas de hardware y software puedan
n1 = 1 elegido arbitrariamentef L2
n2 =f L1
f L2
L3 L1 L2
f L1

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 37/170
36
tener en cuenta los diversos errores que afectan a la medición. Estos errores pueden serclasificados en tres grupos: los errores relativos al satélite, los errores relativos a lapropagación de la señal en el medio, y los errores relativos al receptor.
ELEMENTO FUENTE DE ERROR
Satélite Errores en el osciladorErrores o variaciones en los parámetrosorbitales
Propagación de la señal Refracción ionosféricaRefracción troposféricaS/A. Disponibilidad SelectivaPérdidas de ciclosMultipath. Ondas reflejadas
Receptor Errores en el osciladorError en las coordenadas del punto dereferenciaError en el estacionamientoError en la manipulación del equipoVariación y desfase del centro de la antena
Figura 1. Fuentes de error.
Algunos de estos errores sistemáticos pueden ser modelados e incluso eliminadosutilizando combinaciones apropiadas de los observables a partir de una o dos frecuencias, o
trabajando en modo diferencial, utilizando dos receptores.
En la medida de la calidad y bondad de una observación van a influir o contribuir dostérminos: el URE y el DOP. El URE (User Range Error) es el error cometido en la medida dela seudodistancia por el usuario. Este error contempla los errores al predecir las efemérides,inestabilidades en el vehículo espacial, relojes de los satélites, efectos ionosféricos ytroposféricos, efecto multipath, ruido de la señal y para GPS, la Disponibilidad Selectiva (SA).Todos estos errores en su conjunto se recogen en el valor URE . El DOP o Dilución de laPrecisión es la contribución puramente geométrica al error en el posicionamiento de un punto.Es un valor adimensional que da una idea de la solidez de la figura formada por el receptor ylos satélites que tiene a la vista. Analizando estos factores de error en su conjunto, el error en el
posicionamiento de un punto viene expresado por :
error rms de posición = URE · DOP
2. ERRORES RELATIVOS AL SATÉLITE.
2.1. ERROR DEL RELOJ DEL SATÉLITE.
Este error es el desfase que tiene el reloj del satélite respeto al Tiempo GPS o respectoal Tiempo GLONASS. Los satélites llevan relojes atómicos con osciladores de cesio o derubidio, sin embargo ningún reloj, incluso el atómico es perfecto.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 38/170
37
Los errores en los osciladores de los satélites pueden eliminarse mediante lascorrecciones enviadas en el mensaje de navegación que recibe el receptor, y que son calculadasy actualizadas por las estaciones de seguimiento. Para cada reloj de satélite se determina sudesfase para una época inicial, y los coeficientes de la marcha o deriva del estado del reloj.
Estos parámetros se graban en el correspondiente satélite y se incluyen en el mensaje denavegación que manda el satélite. Pero aunque el receptor aplique las correcciones para el errordel reloj del satélite, sigue permaneciendo un pequeño error residual estimado en unos 10nanosegundos o menos, y que es debido a la imposibilidad de predecir exactamente la marchadel estado del reloj del satélite.
2.2. ERRORES EN LOS PARÁMETROS ORBITALES.
Para calcular su posición, el receptor debe conocer las posiciones de los satélites. Lasestaciones de seguimiento registran datos de seudodistancia y medidas de fase que mandan a laEstación de Control principal, donde con un sofisticado software se predicen las futurasposiciones orbitales de los satélites, es decir sus efemérides. Éstas son transmitidas en el
mensaje de navegación del satélite. Pero las efemérides transmitidas por los satélites tendránasociado un error a causa de que es imposible predecir exactamente sus posiciones. El efectodel error de las efemérides transmitidas en la medida de la seudodistancia se obtieneproyectando el vector error de la posición del satélite sobre el vector que une el satélite y elreceptor. Los errores en los parámetros orbitales se pueden eliminar trabajando con lasefemérides precisas de los días de observación, donde aparecen las verdaderas posiciones de lossatélites.
Para líneas base cortas, trabajando en modo diferencial con dos receptores, respecto alos mismos satélites de observación, podemos eliminar todos los errores relativos a los satélites,ya que afectan de igual forma a ambos receptores. Para líneas base largas, el error del reloj del
satélite se elimina igual, ya que es independiente de la línea base e igual en ambos puntos, perolos errores en los parámetros orbitales no se eliminan del todo, porque los errores que provocanen la seudodistancia a un satélite en un punto no son los mismos que los que se producen en elotro punto para el mismo satélite e instante. El error depende de la orientación del vector errorde la posición del satélite respecto de los vectores satélite-receptor para cada uno de los puntos.
3. ERRORES RELATIVOS A LA PROPAGACIÓN DE LA SEÑAL.
La velocidad de propagación de la señal es crítica para cualquier sistema de medida dedistancias. Esta velocidad multiplicada por el intervalo de tiempo en que se propagó la señalnos da una medida de la distancia. Si una onda electromagnética se propaga por el vacío, suvelocidad de propagación, sea cual sea su frecuencia es la velocidad de la luz (c). Sin embargo,en el caso de observaciones GPS o GLONASS, las señales deben atravesar las capas de laatmósfera hasta llegar al receptor posicionado sobre la superficie de la tierra. Las señalesinteraccionan con partículas cargadas, que provocan un cambio en la velocidad y dirección depropagación, es decir, las señales son refractadas. Cuando la señal viaja por un medio que no esel vacío, ésta sufre un retardo debido a que la velocidad de propagación es menor, y a que latrayectoria aumenta su longitud al curvarse por refracción, si el medio no es isótropo.
3.1. REFRACCIÓN IONOSFÉRICA.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 39/170
38
La Ionosfera es aquella región de la atmósfera comprendida entre 100 y 1000 Km dealtitud, donde las radiaciones solares y otras radiaciones ionizan una porción de las moléculasgaseosas liberando electrones, que interfieren en la propagación de ondas de radio. LaIonosfera es un medio disperso para ondas de radio, por lo tanto su índice de refracción es
función de la frecuencia de la onda. También es función de la densidad de electrones, y enmenor grado, de la intensidad del campo magnético de la tierra.
Este error es negativo para la medida de fase (se produce un avance de la portadora yse miden distancias más pequeñas), y positivo para las seudodistancias (se produce un retardo yse miden distancias más largas), pero tienen el mismo valor absoluto.
= + c + N - Iono(f)
R = + c + Iono(f)
El error es proporcional a la densidad de electrones (TEC-Total Electron Content) a lolargo del camino seguido por la señal, y está en función del cuadrado de la longitud de la onda(inversamente proporcional al cuadrado de la frecuencia de la portadora). Este error varíaespacial y temporalmente, es decir, para cada punto según su latitud y longitud, y momento dela observación. Se pueden utilizar modelos ionosféricos, como el de Klobuchar (1986) queestablecen la distribución del TEC, pero estas concentraciones de electrones son irregulares ypoco predecibles, por lo que cualquier modelo ionosférico es sólo una aproximación. El TEC esfunción del cambio constante en la ionización solar, de la actividad magnética, de los ciclos delas manchas solares, hora del día, lugar de observación, y dirección del camino de la señal. Unaexpresión en primer orden de aproximación para este retardo es:
TEC => electrones por m3.( Valores observados de 1016 a 1019).
Debido a la dificultad de encontrar un modelo satisfactorio, se emplea un método máseficiente para eliminar la refracción ionosférica que es la utilización de dos señales condiferentes frecuencias. Como el retardo depende de la longitud de la onda, será distinto paracada frecuencia y podremos observar un retardo diferencial entre ambas, que será mayor cuantomayor sea el retardo ionosférico sufrido, siendo por tanto este deducible.
También se pueden utilizar combinaciones de las observables que por su naturalezaestén libres del efecto ionosférico. Tal es el caso de la combinación de fases llamada―combinación libre de efecto ionosférico‖, en la que partiendo de la siguiente expresión:
lo que se pretende es obtener qué valores deben tener los coeficientes n1 y n2 para que losvalores del efecto ionosférico que sufren ambas portadoras sea eliminado. Desarrollando estaexpresión, se obtienen los valores de n1 y n2 para la combinación libre de efecto ionosférico,que quedaría de la forma:
AIono = TEC =
c f 2 f 2
L1,L2 = n1 L1 + n2 L2
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 40/170
39
La eliminación de la refracción ionosférica es la mayor ventaja de la combinación
lineal libre de efecto ionosférico, pero el término libre de efecto ionosférico no es del todocorrecto, ya que para su obtención hay que considerar algunas aproximaciones. Estacombinación libre de efecto ionosférico tiene la desventaja de que si NL1 y NL2 son valoresenteros, la combinación da un valor : N = n1NL1 + n2NL2 = NL1 - (f L2 /f L1)NL2, que no es un valorentero, luego el concepto de fijar las ambigüedades en este caso no se puede aplicar y este valorva a ser siempre un valor real.
Si sólo se registran medidas en una sola frecuencia, tanto en seudodistancias como enmedida de fase, entonces se tiene que emplear un procedimiento alternativo para eliminar elefecto ionosférico. Normalmente se usan modelos empíricos para corregir el efecto, en los quese modela el TEC en función del tiempo, lugar de observación y dirección de la señal. En elmensaje de navegación se incluyen unos parámetros para tal modelo. Usando este modelo se
pueden llegar a reducir en un 50% los efectos de la Ionosfera.
Actualmente, estamos saliendo de un mínimo en la actividad de las manchas solares (11años de ciclo), por lo que las condiciones ionosféricas son ahora más idóneas. Pero dentro deunos 4 años, estaremos cerca del máximo, y entonces los efectos de la Ionosfera en las señalesserán mucho peores.
El retardo ionosférico depende del ángulo de elevación del satélite, siendo menor en elcenit, y mayor cuando disminuye el ángulo de elevación. En observaciones nocturnas, losniveles de TEC son menores que durante el día, lo que implica un menor error en laseudodistancia.
Pero después de la aplicación del modelo empírico transmitido puede quedar algúnerror ionosférico residual que afectará principalmente a la componente altimétrica del punto y ala estimación del error del reloj del receptor. Este error contribuye poco a la posiciónplanimétrica cuando la concentración de electrones encima del receptor es uniforme.
3.2. REFRACCIÓN TROPOSFÉRICA.
La Troposfera es la última zona o capa de la atmósfera (hasta unos 80 Km, pero sólo enlos últimos 40 se producen retardos significativos), donde se produce retardo y donde lastemperaturas decrecen con el incremento de altura. El espesor de la Troposfera no es el mismoen todas las zonas. La presencia de átomos y moléculas neutros en la Troposfera afecta a lasseñales de propagación electromagnética. El índice de refracción para un área parcial esfunción de su temperatura, de la presión de los gases secos y del vapor de agua. Esta atmósferaneutra es un medio no disperso con respecto a las ondas de radio de frecuencias superiores a 15GHz, por lo tanto, la propagación es independiente de la frecuencia. Consecuentemente, no esnecesario distinguir entre medidas de código y fase sobre las portadoras L1 y L2. La desventajaestá en que no es posible eliminar la refracción troposférica con medidas en las dos frecuencias.El retardo troposférico experimentado por una señal que va desde un satélite a un punto en la
f L2
L1,L2 = L1 - L2 f L1
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 41/170
40
superficie, puede ser expresado en primera aproximación por la siguiente integral a lo largo delcamino recorrido por la señal:
Se introduce la aproximación de que la integral se realiza a lo largo del camino seguidopor la señal. Usualmente, en lugar del índice de refracción se utiliza la refractancia:
La integral puede ser evaluada conociendo el índice de refracción, o puede seraproximada por funciones analíticas. Pero lo más normal es utilizar aproximaciones basadas enmodelos atmosféricos simplificados. Algunos de estos modelos son: el modelo de Hopfield(1969), modelo de Saastamoinen (1972), modelo de Hopfield modificado, Goad y Goodman
(1974), Black (1978), Robinson (1986), etc.En la mayoría de los casos, se considera por separado la componente seca y la
componente húmeda :
donde la componente seca resulta de la atmósfera seca y la componente húmeda del vapor deagua.
Se puede mejorar el cálculo del retardo troposférico tomando datos meteorológicos enel lugar de observación. A diferencia de la componente seca, la componente húmeda variaespacialmente y temporalmente. La componente seca es la causante de un 90% del total
del retardo y puede ser obtenido con precisión de algunos milímetros a partir de medidas depresión en superficie. La componente húmeda es función del vapor de agua a lo largo delcamino de la señal.
El gradiente térmico admite modelación con precisión aceptable, pero el principalproblema está en la forma de modelar el vapor de agua, que tiene una irregular distribución. Elsimple uso de medidas meteorológicas en superficie no puede dar la precisión alcanzable conlos radiómetros de vapor de agua. Estos instrumentos miden la radiación basal que se recibedesde el espacio en la dirección de la observación, y son capaces de medir el contenido devapor de agua en la atmósfera.
El retardo se puede evaluar en 1.9-2.5 m en la dirección cenital e incrementaaproximadamente con la cosecante del ángulo de elevación, llegando a ser de 20-28 m a unos5º.
El efecto del retardo ionosférico y el troposférico debido al vapor de agua sobre lasemisiones de la banda radioeléctrica es menor cuanto mayor sea la frecuencia, o cuanto menorsea la longitud de la onda. La refracción ionosférica y troposférica puede ser eliminadatrabajando en modo diferencial, pero esto es sólo cierto para líneas base pequeñas, donde lasmedidas de distancias satélite-receptor se ven afectadas de igual forma por la refracción. Deotro modo, ya vimos que la refracción ionosférica puede ser eliminada utilizando una adecuadacombinación de datos en doble frecuencia.
Trop = ( n - 1 ) ds
NTrop = 10-6 (n - 1)
Trop = 10-6 NTrop ds
NTrop = NdTrop + Nw
Trop
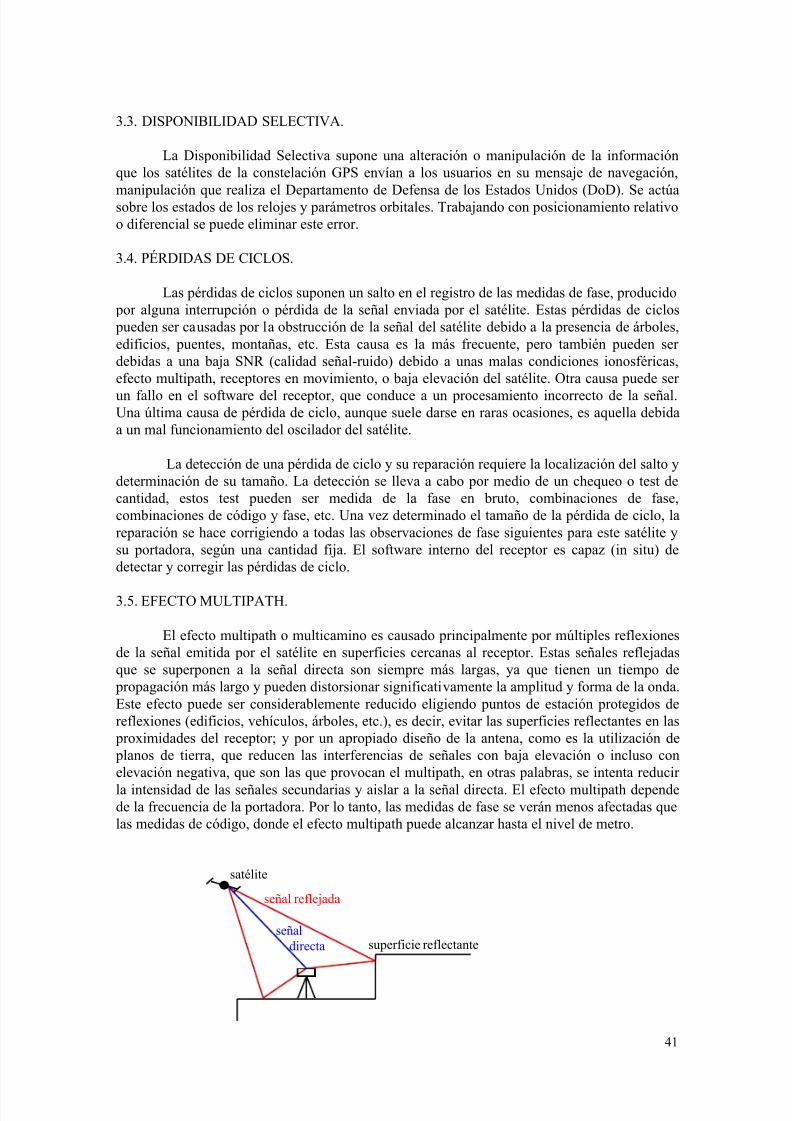
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 42/170
41
3.3. DISPONIBILIDAD SELECTIVA.
La Disponibilidad Selectiva supone una alteración o manipulación de la informaciónque los satélites de la constelación GPS envían a los usuarios en su mensaje de navegación,
manipulación que realiza el Departamento de Defensa de los Estados Unidos (DoD). Se actúasobre los estados de los relojes y parámetros orbitales. Trabajando con posicionamiento relativoo diferencial se puede eliminar este error.
3.4. PÉRDIDAS DE CICLOS.
Las pérdidas de ciclos suponen un salto en el registro de las medidas de fase, producidopor alguna interrupción o pérdida de la señal enviada por el satélite. Estas pérdidas de ciclospueden ser causadas por la obstrucción de la señal del satélite debido a la presencia de árboles,edificios, puentes, montañas, etc. Esta causa es la más frecuente, pero también pueden serdebidas a una baja SNR (calidad señal-ruido) debido a unas malas condiciones ionosféricas,efecto multipath, receptores en movimiento, o baja elevación del satélite. Otra causa puede ser
un fallo en el software del receptor, que conduce a un procesamiento incorrecto de la señal.Una última causa de pérdida de ciclo, aunque suele darse en raras ocasiones, es aquella debidaa un mal funcionamiento del oscilador del satélite.
La detección de una pérdida de ciclo y su reparación requiere la localización del salto ydeterminación de su tamaño. La detección se lleva a cabo por medio de un chequeo o test decantidad, estos test pueden ser medida de la fase en bruto, combinaciones de fase,combinaciones de código y fase, etc. Una vez determinado el tamaño de la pérdida de ciclo, lareparación se hace corrigiendo a todas las observaciones de fase siguientes para este satélite ysu portadora, según una cantidad fija. El software interno del receptor es capaz (in situ) dedetectar y corregir las pérdidas de ciclo.
3.5. EFECTO MULTIPATH.
El efecto multipath o multicamino es causado principalmente por múltiples reflexionesde la señal emitida por el satélite en superficies cercanas al receptor. Estas señales reflejadasque se superponen a la señal directa son siempre más largas, ya que tienen un tiempo depropagación más largo y pueden distorsionar significativamente la amplitud y forma de la onda.Este efecto puede ser considerablemente reducido eligiendo puntos de estación protegidos dereflexiones (edificios, vehículos, árboles, etc.), es decir, evitar las superficies reflectantes en lasproximidades del receptor; y por un apropiado diseño de la antena, como es la utilización deplanos de tierra, que reducen las interferencias de señales con baja elevación o incluso conelevación negativa, que son las que provocan el multipath, en otras palabras, se intenta reducirla intensidad de las señales secundarias y aislar a la señal directa. El efecto multipath dependede la frecuencia de la portadora. Por lo tanto, las medidas de fase se verán menos afectadas quelas medidas de código, donde el efecto multipath puede alcanzar hasta el nivel de metro.
superficie reflectante
señal reflejada
señaldirecta
satélite
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 43/170
42
Figura 2. Efecto Multipath.
4. ERRORES RELATIVOS AL RECEPTOR.
4.1. ERROR DEL RELOJ.
Cuando un receptor recibe una señal de un satélite, en ese momento su reloj internotendrá un desfase o error con respecto a la Escala de Tiempo. Este error afectará a todas lasmedidas de seudodistancias realizadas para cada época.
Los errores en los osciladores de los receptores los podemos eliminar trabajando conposicionamiento relativo por medidas de fase, planteando las ecuaciones de dobles diferencias.
4.2. ERROR EN EL ESTACIONAMIENTO DE LA ANTENA.
Los errores en el estacionamiento de la antena tienen menos influencia y las exigenciasde estacionamiento son muy inferiores a las de los instrumentos de observación clásica. Nonecesitan una altísima estabilidad, ya que pequeños desplazamientos, vibraciones o torsiones ennada afectan a la observación de las señales de los satélites.
4.3. ERRORES EN LA MANIPULACIÓN DE LOS EQUIPOS.
Los errores de manipulación se producen cuando no se siguen las instrucciones delfabricante del instrumento o cuando éstas suelen descuidarse cuando se trabaja rutinariamente.Por ejemplo, es importante no comenzar una observación hasta que no se hayan sincronizadoperfectamente todos los satélites, ya que lo único que estaremos haciendo es introducir ruido ala observación.
4. 4. VARIACIÓN DEL CENTRO RADIOELÉCTRICO DE LA ANTENA.
La variación y desfase del centro de la antena se debe a la falta de coincidencia entre elcentro radioeléctrico o punto que realmente se posiciona, ya que es el punto al que llega laseñal; y el centro mecánico o físico, generando un error residual por excentricidad que puedeser de unos milímetros. Para evitar este error en posicionamiento relativo se recomienda unaorientación aproximada común para todas las antenas, ya que el fabricante monta en el interiorde todas las carcasas el elemento físico receptor en la misma posición respecto a algunareferencia exterior del conjunto, y trabajando en modo diferencial este error se eliminará enambas estaciones.
5. DILUCIÓN DE LA PRECISIÓN.
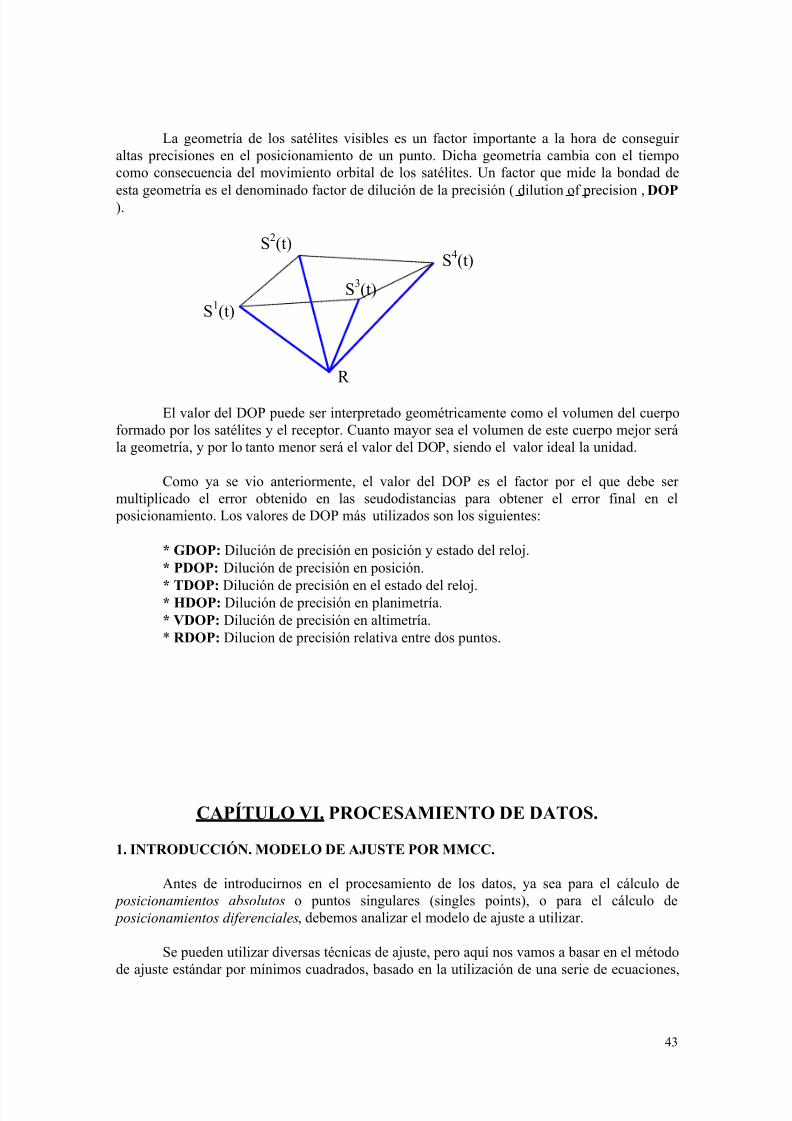
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 44/170
43
La geometría de los satélites visibles es un factor importante a la hora de conseguiraltas precisiones en el posicionamiento de un punto. Dicha geometría cambia con el tiempocomo consecuencia del movimiento orbital de los satélites. Un factor que mide la bondad de
esta geometría es el denominado factor de dilución de la precisión ( dilution of precision , DOP ).
El valor del DOP puede ser interpretado geométricamente como el volumen del cuerpoformado por los satélites y el receptor. Cuanto mayor sea el volumen de este cuerpo mejor serála geometría, y por lo tanto menor será el valor del DOP, siendo el valor ideal la unidad.
Como ya se vio anteriormente, el valor del DOP es el factor por el que debe sermultiplicado el error obtenido en las seudodistancias para obtener el error final en elposicionamiento. Los valores de DOP más utilizados son los siguientes:
* GDOP: Dilución de precisión en posición y estado del reloj.* PDOP: Dilución de precisión en posición.
* TDOP: Dilución de precisión en el estado del reloj.* HDOP: Dilución de precisión en planimetría.* VDOP: Dilución de precisión en altimetría.* RDOP: Dilucion de precisión relativa entre dos puntos.
CAPÍTULO VI. PROCESAMIENTO DE DATOS.
1. INTRODUCCIÓN. MODELO DE AJUSTE POR MMCC.
Antes de introducirnos en el procesamiento de los datos, ya sea para el cálculo de posicionamientos absolutos o puntos singulares (singles points), o para el cálculo de posicionamientos diferenciales, debemos analizar el modelo de ajuste a utilizar.
Se pueden utilizar diversas técnicas de ajuste, pero aquí nos vamos a basar en el métodode ajuste estándar por mínimos cuadrados, basado en la utilización de una serie de ecuaciones,
R
S1(t)
S2(t)
S3(t)
S4(t)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 45/170
44
donde las observaciones son expresadas en función de los parámetros incógnitas. En el caso deque las ecuaciones no sean lineales, es preciso linealizarlas por medio del desarrollo en serie deTaylor, para lo cual es preciso conocer unos valores aproximados de las incógnitas. Eldesarrollo en serie de Taylor puede ser truncado a partir de los términos de segundo orden, con
el fin de obtener una función lineal con respecto a las incógnitas.El modelo de observación lineal conseguido tras aplicar el desarrollo en serie de
Taylor, puede ser expresado en forma matricial de la siguiente forma : L = A . x .
Donde : L : Vector columna de las observaciones.A : Matriz de diseño.x : Vector columna de las incógnitas.
Si suponemos el caso en el que tengamos ―n‖ ecuaciones y ―u‖ incógnitas, siendo n > u,
entonces la matriz de diseño, A , tendrá ―n‖ filas y ―u‖ columnas. Pero para estas condiciones,
tendremos un sistema de ecuaciones compatible sobredeterminado (es decir existen másecuaciones que incógnitas), y por lo general, debido a los errores inherentes de la observación,no será un sistema consistente, existiendo unos residuos, V, para cada ecuación. Por lo tanto,teniendo en cuenta estos residuos, el modelo queda de la forma :
L + V = A . x
La resolución de este sistema se realiza aplicando el principio de mínimos cuadrados,que es: VTPV = mínimo. La aplicación de este principio en las ecuaciones de observación llevaal siguiente sistema de ecuaciones normales:
AT · P · A · x = AT · P · L
donde la solución para los parámetros incógnita, x, es:
x = ( AT · P · A )-1 · AT · P · L
que puede ser simplificada por:
x = NA-1 · t donde NA = (AT · P · A ) y t = AT · P · L.
2. CÁLCULO DE POSICIONAMIENTOS ABSOLUTOS.
La expresión de la seudodistancia para medidas de código para una época tcorrespondiente al receptor "i" y al satélite "j", tiene la siguiente expresión:
Ri j (t) = i
j (t) + c · j (t) c · i (t)
Receptor i
S1
(t)
S2(t)
S3(t)
S4(t)
Ri1 (t)
Ri2 (t)
Ri3 (t)
Ri4
(t)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 46/170
45
Siendo:Ri
j (t): La seudodistancia entre el satélite y el receptor.i j (t): La distancia geométrica real entre el satélite y el receptor.
c: Velocidad de la luz en el vacío.i j(t): Término que representa los errores o desfases de los relojes respecto a la escala
de tiempos.
Pero en esta ecuación, la expresión de la distancia geométrica real entre satélite-receptor, , tiene una forma no lineal, y por lo tanto, tendremos que linealizarla aplicando eldesarrollo en serie de Taylor y partiendo de unos valores aproximados de las coordenadas delpunto (Xio, Yio, Zio). En el modelo que vamos a considerar, únicamente tendremos en cuenta loserrores de los relojes, sin considerar los efectos ionosféricos y troposféricos. La ecuación, unavez linealizada la expresión de la seudodistancia queda de la siguiente forma:
siendo i el punto sobre la superficie y j el satélite. Operando, y dejando en la parte derecha de laexpresión únicamente los parámetros incógnita y en la izquierda los valores conocidos, tenemosque:
el término j (t) no se considera como incógnita, puesto que se supone conocido a partir de losdatos que envía el satélite en su mensaje de navegación.
La expresión anterior, válida para la época t contiene cuatro incógnitas ( Xi, Yi, Zi,i(t)), por lo tanto, si dispusiéramos de una única época t y quisiéramos resolver el sistema,
necesitaríamos un mínimo de 4 satélites. En este caso, nos encontramos ante un sistema
compatible determinado, en el que existe solución única. El sistema de ecuaciones formado porlas 4 seudodistancias a los 4 satélites se podría expresar de la forma la A . x = L, y los valoresde la incógnitas los obtendríamos mediante x = A -1 . L. Si se mide el valor de la seudodistanciaa un nº de satélites mayor que 4, sean j satélites en una época t , se puede plantear un sistema de
j ecuaciones de seudodistancia con 4 incógnitas y resolver por MMCC, siendo la expresión delvector de incógnitas, x, como se vio anteriormente, es decir, x = NA
-1 · t.
Obteniendo los valores de las incógnitas del punto Xi, Yi, Zi para cada época t,podemos añadir estos valores a las coordenadas aproximadas del punto y obtener los valoresX,Y,Z de las coordenadas del punto de estación. Hay que recalcar que la selección de los
X j(t) - Xio Y j(t) - Yio Z j(t) - Zio
Ri j (t) = j
io (t) Xi Yi Zi + c · j (t) c · i (t) j
io (t) jio (t)
jio (t)
X j(t) - Xio Y j(t) - Yio Z j(t) - Zio
Ri j (t) j
io (t) c · j (t) = Xi Yi Zi c · i (t) j
io (t) jio (t)
jio (t)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 47/170
46
valores aproximados de las coordenadas del punto es completamente arbitraria, incluso puedenser cero, pero esto requiere más iteraciones.
El posicionamiento absoluto de un punto se puede aplicar en cada época. Pero si
tenemos un cierto nº de épocas registradas, podremos resolver el sistema para cada época,obteniendo las coordenadas del punto en cada época y luego hacer una media de todas estascoordenadas para obtener una mejor solución en el posicionamiento del punto. Este proceso decálculo recibe el nombre de “ cálculo de un punto simple o single point ”.
Todo este proceso de cálculo de medidas de pseudistancia por código puede serplanteado para la portadora L1 y para la portadora L2, utilizando el código C/A o P, y el códigoP, respectivamente. También es posible realizar posicionamientos absolutos con medidas defase, pero no son aplicables debido a que resulta muy cara la herramienta para la precisiónesperada.
3. CÁLCULO DE POSICIONAMIENTOS DIFERENCIALES.
Mientras que en el posicionamiento absoluto sólo interviene un único receptor, del quese pretenden obtener sus coordenadas directamente a partir de las seudodistancias a lossatélites, en el posicionamiento diferencial intervienen dos receptores y el objetivo de este tipode posicionamiento es la determinación de las coordenadas de un punto desconocido a partir deotro punto, cuyas coordenadas son conocidas y del cálculo de la línea base que los une.
Sea A un punto conocido, B un punto desconocido y vAB el vector que los une,podemos expresar el vector de posición de B a partir del vector de posición de A por medio dela siguiente expresión:
XB = XA + vAB
Las componentes del vector son:
3.1. CÁLCULO DEL POSICIONAMIENTO DIFERENCIAL POR CÓDIGO.
Partiendo de la ecuación de la seudodistancia para medidas de código, ésta puede serplanteada para dos puntos A y B observando a un mismo satélite j y en una misma época de laforma siguiente:
RA j (t) = A
j (t) + c · j (t) - c · A (t)RB
j (t) = B j (t) + c · j (t) - c · B (t)
XB - XA XAB vAB = YB - YA = YAB
ZB - ZA ZAB
S j (t)
ABvAB
RA
j
(t)
RB j (t)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 48/170
47
El vector vAB puede ser expresado como diferencia de ambas seudodistancias:
vAB = RB j (t) - RA
j (t) = RAB j(t)
Sustituyendo los valores de RA j (t) y RB
j (t), se elimina el error del reloj del satélite, quedando:
vAB = B j (t) A
j (t) c · B (t) + c · A (t) == B
j (t) A j (t) c ( A (t) B (t)) = RAB
j(t)
Esta expresión representa la ecuación en simple diferencias para posicionamientorelativo por medida de código.
Sustituyendo en la expresión anterior, los valores de A j (t) y B
j (t) por su expresiónlinealizada, y colocando los términos conocidos a la izquierda, queda:
donde inicialmente el nº de incógnitas es 8. Sin embargo, para posicionamiento relativo odiferencial se supone un punto conocido, sea A, y por lo tanto XA = YA = ZA = 0, y laexpresión queda:
donde las incógnitas se reducen a 5. Una ecuación de este tipo puede ser planteada para cadaépoca t y para cada satélite j, por lo tanto para resolver el sistema en una época se necesitan unmínimo de 5 satélites. Si el nº de satélites es mayor se realiza un ajuste por mínimos cuadrados,como ya vimos en el caso de posicionamiento absoluto.
Por cada época que aumentemos tendremos 2 nuevas incógnitas de los relojes B (t) yA (t). Si tenemos un cierto nº de épocas, podemos resolver el sistema para cada época,
calculando un valor de RAB(ti), y luego hacer una media entre todos los valores obtenidos.
X j(t) - XBo Y j(t) - YBo Z j(t) - ZBo
RAB j (t) - j
Bo (t) + jAo (t) = XB YB ZB
jBo (t)
jBo (t) j
Bo (t)X j(t) - XAo Y j(t) - YAo Z j(t) - ZAo
+ XA + YA + ZA j
Ao (t) jAo (t) j
Ao (t)
+ c · ( A (t) B (t))
X j(t) - XBo Y j(t) - YBo Z j(t) - ZBo
RAB j (t) - j
Bo (t) + jAo (t) = XB YB ZB
jBo (t) j
Bo (t) jBo (t)
+ c · ( B (t) A (t))
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 49/170
48
Todo este proceso puede ser planteado tanto para la portadora L1 como para laportadora L2, donde la notación de las expresiones sería RAB
jL1 (ti) y RAB
jL2 (ti), para cada
satélite j y cada época t i.
3.2. CÁLCULO DEL POSICIONAMIENTO DIFERENCIAL POR FASE.
Simple diferencias.
Partiendo de la ecuación de seudodistancias para medidas de fase :
ésta puede ser planteada para dos puntos A y B observando a un mismo satélite en una mismaépoca t, de la forma siguiente:
Restando ambas ecuaciones, tendremos:
obteniendo la ecuación en simple diferencias. Podemos reducir la expresión considerando lassiguientes notaciones:
Sustituyendo en la ecuación de simples diferencias:
Obteniendo la forma final de la ecuación de simples diferencias, donde podemoscomprobar que se ha eliminado el error del estado del reloj del satélite (
j(t)).
Doble diferencias.
1
B j (t) A
j (t) = ( B j (t) A
j (t) ) + NB j NA
j f · ( B(t) A(t))
NAB j = NB
j - NA j
AB(t) = B(t) - A(t)
AB j(t) = B
j(t) - A j(t)
AB j(t) = B
j(t) - A j(t)
1A j (t) f j(t) = A
j (t) + NA j f A(t)
1i j (t) f j(t) = i
j (t) + Ni j f i(t)
1B j (t) = AB
j (t) + NAB j f AB(t)
1B j (t) f j(t) = B
j (t) + NB j f B(t)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 50/170
49
Suponiendo que tenemos dos receptores situados en los puntos de estación A y B, y dossatélites "j" y "k", podemos obtener dos expresiones en simple diferencia:
Si las frecuencias de emisión de los dos satélites son las misma (f j = f k), restandoambas expresiones obtenemos la ecuación en dobles diferencias :
podemos simplificar la expresión de la siguiente forma:
Donde:
Como podemos comprobar en esta ecuación de doble diferencias se han eliminado lasincógnitas de los estados de los relojes de los receptores. Esto es válido para el caso en el quese realicen observaciones simultáneas y siendo iguales las frecuencias de las señales de lossatélites.
Triple diferencias.
1
Bk (t) = AB
k (t) + NABk f k AB(t)
S j (t)
AB
vAB
A j (t)
B j (t)
Sk(t)B
k (t)
Ak(t)
1B
k (t) B j (t) = ( AB
k (t) AB j (t)) + NAB
k NAB j
1B jk (t) = AB
jk (t) + NAB jk
1B j (t) = AB
j (t) + NAB j f j AB(t)
AB jk(t) = B
k(t) B j(t) A
k(t) + A j(t)
AB jk(t) = B
k(t) B j(t) A
k(t) + A j(t)
NAB jk(t) = NB
k(t) NB j(t) NA
k(t) + NA j(t)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 51/170
50
Hasta ahora hemos considerado únicamente una época. Pero para eliminar la incógnitade las ambigüedades es necesario hacer la diferencia de dos ecuaciones de doble diferenciaspara dos épocas. Denotando las dos épocas por t1 y t2, tenemos:
Restando ambas expresiones de doble diferencias, tendremos:
obteniendo la ecuación de triple diferencias, que puede ser simplificada de la forma:
Donde:
Existen dos grandes ventajas a la hora de trabajar con ecuaciones en triple diferenciascomo son:
.- La eliminación de la incógnita N (ambigüedades).
.- La inmunidad de las ecuaciones en triple diferencias a los cambios en lasambigüedades, estos cambios son denominados pérdidas de ciclo.
Para desarrollar el cálculo del posicionamiento diferencial con medidas de fase vamos apartir del modelo de ecuación de doble diferencias, que multiplicada por para pasar aunidades de longitud, se obtiene:
jkAB (t) = jk
AB (t) + N jkAB
donde el término jkAB , contiene las siguientes distancias geométricas:
jkAB (t) = k
B (t) - jB (t) - k
A (t) + jA (t)
y cada uno de estos cuatro términos debe ser linealizado partiendo de unos valores aproximadosde la coordenadas de los puntos.
Si pasamos los términos conocidos a la parte izquierda de la expresión, el término quedenotaremos por l jkAB (t) de valores conocidos será:
1B jk (t1) = AB jk (t1) + NAB jk
1B jk (t2) = AB
jk (t2) + NAB jk
1B jk (t2) B
jk (t1) = ( AB jk (t2) AB
jk (t1))
1B jk (t12) = AB
jk (t12)
AB jk(t12) = B
k(t2) B j(t2) A
k(t2) + A j(t2) B
k(t1) B j(t1) A
k(t1) A j(t1)
AB
jk
(t12) = B
k
(t2) B
j
(t2) A
k
(t2) + A
j
(t2) B
k
(t1) B
j
(t1) A
k
(t1) A
j
(t1)

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 52/170
51
l jkAB (t) = jkAB (t) - k
Bo (t) + jBo (t) + k
Ao (t) - jAo (t)
el cual comprende el valor medido jkAB (t) por diferencia de fase y los términos calculados a
partir de los valores aproximados de las coordenadas. La ecuación de doble diferencias en suexpresión linealizada es:
l jkAB (t) = a jkXA (t) · XA + a jk
YA (t) · YA + a jkZA (t) · ZA
+ a jkXB (t) · XB + a jk
YB (t) · YB + a jkZB (t) · ZB + N jk
AB
donde los coeficientes a jk(t) forman parte de la linealización de la expresión de las distanciasgeométricas receptor-satélite. Esta expresión representa el caso general de una línea base dondelos dos puntos son desconocidos. Sin embargo, en el posicionamiento diferencial lascoordenadas de un punto deben ser conocidas, y por lo tanto se reduce el número de incógnitas.Si suponemos que el punto A es conocido, entonces XA , YA , ZA = 0, y la expresión quedade la forma:
l jkAB (t) = jkAB (t) - k
Bo (t) + jBo (t) + k
A (t) - jA (t)
l jkAB (t) = a jkXB (t) · XB + a jk
YB (t) · YB + a jkZB (t) · ZB + N jk
AB
Tomando un satélite de referencia, sea j, una ecuación de este tipo puede ser planteadapara cada época t y para cada satélite con el de referencia j. Para una época inicial t o , el númeroentero de longitudes de onda para un satélite S será N. Este valor de N se puede expresar como:
N = No + N
donde No es el valor aproximado de las ambigüedades para la época to inicial, calculado a partirde las coordenadas aproximadas del punto, por lo tanto, nuestra incógnita, en realidad es elvalor de N, que tenemos que sumar al valor inicial No para obtener el valor de la ambigüedadinicial. Este valor de N se puede considerar constante en el tiempo, y cada vez que la distanciasatélite-receptor varíe en una vez el valor de la longitud de la onda, el valor de N variará en unaunidad. Por lo tanto, si en un momento determinado calculamos N (el de la época inicial),podremos posteriormente calcular los N para el resto de épocas, ya que los de cada épocacon respecto a la época inicial son conocidos, gracias a las mediciones de diferencia defase. ay que considerar un valor N de ambigüedad de cada satélite para la época inicial t0, y apartir de aquí considerar el valor de N constante en el tiempo.
Se plantea un sistema de ecuaciones de doble diferencias y se resuelve por MMCCcomo en los casos anteriores. Se obtienen las coordenadas del punto desconocido y el valor, ennúmero real, de las ambigüedades. Con este valor real de N tenemos que llegar al valor enteroutilizando una de las técnicas de búsqueda de ambigüedades.
Las coordenadas aproximadas del punto desconocido se obtienen planteando lasecuaciones de triple diferencias donde se eliminaba el valor de la ambigüedad. Esta soluciónsólo puede ser aproximada debido a la correlación que existe en estas ecuaciones, pero que sinembargo, mejora la solución del punto obtenida por medidas de código. Estos valoresaproximados de XBo, YBo, y ZBo serán utilizados para los valores de Bo (t) a cada uno de lossatélites en cada época en las ecuaciones de dobles diferencias.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 53/170
52
Todo esto puede ser planteado tanto para la portadora L1 como para la portadora L2. Sise poseen medias de fase sobre ambas portadoras L1 y L2 pueden ser planteadas algunas de lascombinaciones tratadas.
Técnicas para la resolución de ambigüedades.
a) Resolución de ambigüedades para medidas de fase de una sóla frecuencia.
Este método tiene su más directa aplicación cuando sólo se dispone de las medidas defase en una única frecuencia ( L1 o L2 ). Las medidas son modeladas por medio de la ecuaciónanterior, y tras linealizarla es procesada. Dependiendo del modelo elegido, se tienen en cuentaen un ajuste común las incógnitas ( coordenadas del punto, errores de los relojes, ... ) junto conel valor de N. La naturaleza entera del valor de N se pierde y es estimado como valor real. Parafijar las ambigüedades a valores enteros, se realiza un ajuste secuencial, analizando ladesviación estandar de N para ser determinada con mayor fiabilidad.
b) Resolución de ambigüedades para medidas de fase de doble frecuencia.
La resolución de ambigüedades para medidas de fase de doble frecuencia cambiasignificativamente. Hay muchas ventajas en este caso porque se pueden formar variascombinaciones lineales. Se han propuesto varias técnicas como la de la banda ancha, y la de la
banda estrecha.
La expresión de la banda ancha es la siguiente : w = L1 - L2. La frecuencia de estaseñal es f w = 347,82 MHz y la longitud de onda correspondiente es w = 86,2 cm. Esto significaun incremento importante comparado con las longitudes de onda originales 19 cm (L 1) y 24,4cm (L2). El uso de la banda ancha ( Lw ) proporciona una reducción del espacio búsqueda de
ambigüedades. Esto es la clave para una solución más sencilla del valor entero de lasambigüedades. El ajuste basado en el modelo de banda ancha da como resultado ambigüedadesde banda ancha Nw , que son más fáciles de resolver que las ambigüedades de la portadora base.Lo mismo ocurre cuando se utiliza la banda estrecha.
Técnica de búsqueda.
La información resultante de la matriz de varianza-covarianza del ajuste de lasambigüedades, puede ser usada como una técnica de búsqueda. En esta técnica, todos losvalores enteros localizados en una determinada región de confianza alrededor de la solución,son considerados candidatos para la solución final de la ambigüedad. Por lo tanto, todas lascombinaciones posibles de estas ambigüedades son consideradas como valores conocidos ysustituidos en subsiguientes ajustes. Del conjunto de soluciones, la mejor solución que se tomaes la combinación de valores enteros en los que es menor el error medio cuadrático para laposición que es tomada como mejor solución. Esta solución se elige cuando el ratio (que indicala fiabilidad del cálculo) del error medio cuadrático entre la mejor y la segunda mejor soluciónes mayor de 2 ó 3. Este método solo se aplica para el cálculo de una única línea base.
Un método ligeramente más sofisticado es el denominado Método Rápido deResolución de Ambigüedades por Aproximación (FARA), desarrollado por Frei y Beutler(1992). Las principales características de este método son:
Usa información estadística del ajuste inicial para seleccionar un rango de búsqueda.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 54/170
53
Usa información de la matriz de varianza-covarianza para rechazar el conjunto deambigüedades que no son aceptables desde un punto de vista estadístico. Aplica hipótesis estadísticas para seleccionar los valores correctos de lasambigüedades.
El algoritmo de FARA puede ser dividido en cuatro pasos:
.- Cálculo de una solución flotante para la portadora.
.- Elección de los conjuntos de valores de las ambigüedades que serán testeadas.
.- Cálculo de una solución fija para cada conjunto de valores de las ambigüedades.
.- Comprobación o chequeo estadístico de la solución fijada con la menor varianza.
Se estiman valores reales para las ambigüedades en doble diferencias basándose en lasmedidas de fase sobre la portadora y realizando un ajuste donde se calcula la matriz cofactor delas incógnitas y la varianza a posteriori de la unidad de peso, de donde se puede calcular lamatriz de varianza-covarianza de las incógnitas y las desviaciones estándar de lasambigüedades. El criterio para elegir los valores de las ambigüedades que serán testeadas, estábasado en los intervalos de confianza de los valores reales de las ambigüedades. Con este yotros criterios se pretende reducir el número de posibles conjuntos de valores enteros de lasambigüedades. Incluso una más impresionante reducción se consigue si se dispone de medidasde fase en dos frecuencias. Seguidamente se realiza un ajuste por mínimos cuadrados convalores aproximados de las ambigüedades para cada conjunto de valores de las ambigüedades,consiguiendo componentes de líneas base ajustadas y un factor de varianza a posteriori.Finalmente se investiga la solución con la menor varianza a posteriori. Las componentes de lalínea base para esta solución son comparadas con la solución flotante o fluctuante (float). Si lasolución es compatible, se acepta. Esta compatibilidad puede ser chequeada por medio de la
distribución 2, que testea la compatibilidad de la varianza a posteriori con la varianza a priori.
Lo que es más, se puede aplicar un test de Fisher a la solución con la menor varianza y a la desegunda menor varianza para asegurar que no están correlados.
Euler en 1990 presentó técnicas de búsqueda muy eficientes y rápidas, basadas en latécnica FARA. Primero, se introduce un conjunto de valores enteros de las ambigüedades en elproceso de ajuste, consiguiéndose de este modo un constreñimiento de las soluciones de lasambigüedades, así como del valor de la varianza a posteriori. La influencia de otros conjuntosde ambigüedades sobre la solución inicial y la varianza a posteriori se determina sin recalcularel ajuste enteramente. Esta influencia puede ser calculada por medio de alguna matriz simple ypor la intervención de un vector donde debe ser invertida solo una matriz reducida con ladimensión de las ambigüedades constreñidas.
CAPÍTULO VII. MÉTODOS DE POSICIONAMIENTO.
Podemos diferenciar dos modos de posicionamiento, y dentro de ellos las variantes quese pueden considerar. Fundamentalmente son el absoluto y el diferencial.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 55/170
54
1. POSICIONAMIENTO ABSOLUTO.
Se realiza con un único receptor, y consiste en la solución de una intersección directa
de todas las distancias receptor-satélite sobre el lugar de estación en un período de observacióndado. La medida y la solución sor por lo tanto directas.
Para llevar a cabo el posicionamiento, el receptor recibe las señales de los satélites ydetermina su posición en coordenadas absolutas y en el sistema de referencia al que estánreferidos los satélites. Las observables utilizadas para el posicionamiento absoluto suelen serlos códigos, pero también se podrían utilizar las diferencias de fase o ambas.
Para resolver un posicionamiento absoluto es necesario recibir la información de almenos cuatro satélites, ya que cada uno de ellos proporciona una ecuación al sistema ynuestras incógnitas son cuatro (X,Y,Z y estado del reloj del receptor). Esto esta garantizadogracias a las configuraciones de las constelaciones NAVSTAR y GLONASS, según las cuales
siempre tendremos en cualquier lugar del planeta al menos cuatro satélites sobre el horizonte.
El posicionamiento absoluto tiene la ventaja de que con un sólo instrumento deobservación podemos obtener nuestra posición, pero posee una serie de inconvenientes querepercuten seriamente en la precisión del posicionamiento, y por ello no hace del método unaaplicación apropiada en trabajos de precisión. Entre los inconvenientes más relevantesdestacan:
* Influencia importante de los errores producidos por la atmósfera.* En el caso de recibir señales de la constelación NAVSTAR, el efecto de la
disponibilidad selectiva (S/A) hace que nuestro posicionamiento no sea el correcto.
* Imposibilidad de eliminar errores por compensación, como son el efecto multipath,osciladores, excentricidad de la antena, retardo atmosférico, etc.
Esto, hace sea una forma expedita de posicionamiento, resultando útil para usuarios debarcos, aviones, vehículos, deporte, ocio y todas aquellas aplicaciones donde la tolerancia deerror al determinar una posición esté por encima de los cien metros, que viene ser la precisiónque ofrece generalmente el método, en función del tipo de receptor, estado de la constelación ycondiciones de observación. Las soluciones se suelen obtener en tiempo real, bien con solucióninstantánea de navegación o por resolución de un sistema minimocuadrático en el que laredundancia del sistema está en función del tiempo de observación. Se habla entonces de los posicionamientos absolutos más precisos (puntos singulares o ―single point‖).
Situación de un posicionamiento absoluto.
2. POSICIONAMIENTO DIFERENCIAL.
SATELITE
RECEPTOR
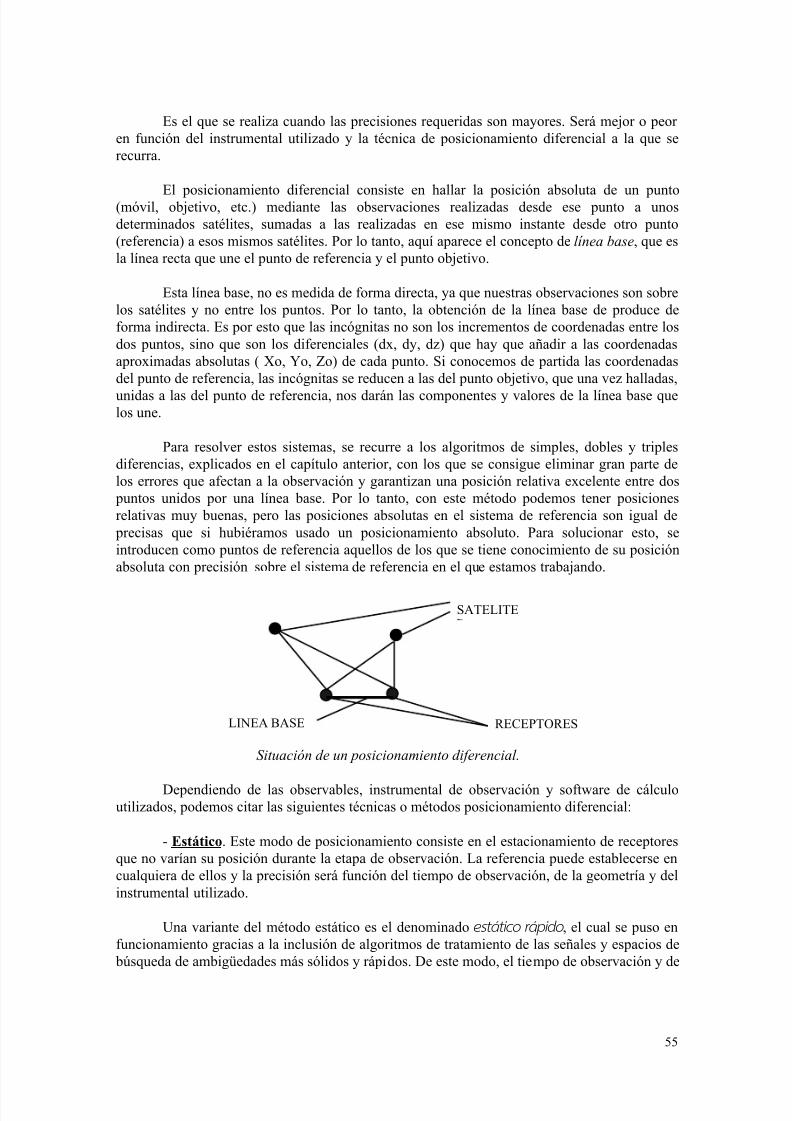
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 56/170
55
Es el que se realiza cuando las precisiones requeridas son mayores. Será mejor o peoren función del instrumental utilizado y la técnica de posicionamiento diferencial a la que serecurra.
El posicionamiento diferencial consiste en hallar la posición absoluta de un punto(móvil, objetivo, etc.) mediante las observaciones realizadas desde ese punto a unosdeterminados satélites, sumadas a las realizadas en ese mismo instante desde otro punto(referencia) a esos mismos satélites. Por lo tanto, aquí aparece el concepto de línea base, que esla línea recta que une el punto de referencia y el punto objetivo.
Esta línea base, no es medida de forma directa, ya que nuestras observaciones son sobrelos satélites y no entre los puntos. Por lo tanto, la obtención de la línea base de produce deforma indirecta. Es por esto que las incógnitas no son los incrementos de coordenadas entre losdos puntos, sino que son los diferenciales (dx, dy, dz) que hay que añadir a las coordenadasaproximadas absolutas ( Xo, Yo, Zo) de cada punto. Si conocemos de partida las coordenadasdel punto de referencia, las incógnitas se reducen a las del punto objetivo, que una vez halladas,
unidas a las del punto de referencia, nos darán las componentes y valores de la línea base quelos une.
Para resolver estos sistemas, se recurre a los algoritmos de simples, dobles y triplesdiferencias, explicados en el capítulo anterior, con los que se consigue eliminar gran parte delos errores que afectan a la observación y garantizan una posición relativa excelente entre dospuntos unidos por una línea base. Por lo tanto, con este método podemos tener posicionesrelativas muy buenas, pero las posiciones absolutas en el sistema de referencia son igual deprecisas que si hubiéramos usado un posicionamiento absoluto. Para solucionar esto, seintroducen como puntos de referencia aquellos de los que se tiene conocimiento de su posiciónabsoluta con precisión sobre el sistema de referencia en el que estamos trabajando.
Situación de un posicionamiento diferencial.
Dependiendo de las observables, instrumental de observación y software de cálculoutilizados, podemos citar las siguientes técnicas o métodos posicionamiento diferencial:
- Estático. Este modo de posicionamiento consiste en el estacionamiento de receptoresque no varían su posición durante la etapa de observación. La referencia puede establecerse encualquiera de ellos y la precisión será función del tiempo de observación, de la geometría y delinstrumental utilizado.
Una variante del método estático es el denominado estático rápido, el cual se puso enfuncionamiento gracias a la inclusión de algoritmos de tratamiento de las señales y espacios debúsqueda de ambigüedades más sólidos y rápidos. De este modo, el tiempo de observación y de
SATELITE
RECEPTORESLINEA BASE

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 57/170
56
cálculo se reducen considerablemente. Sirva como ejemplo que este tiempo se puede reducir adiez minutos en instrumentos Simple Frecuencia y a un minuto en instrumentos bifrecuencia.
Podemos dar una relación de tiempos mínimos y tiempos aconsejables de un modo
general en los cuales los resultados ya son satisfactorios:Tiempo mínimo Tiempo óptimo
Instr. Simple Frecuencia 10 min. 20 min.Instr. bifrecuencia 1 min. 10 min.
Cuando la distancia entre puntos supera los cien kilómetros o la diferencia de altitudentre ellos supera los 500 m, se debe plantear el prolongar estos tiempos de observación paracontrarrestar los errores producidos por la Ionosfera y la Troposfera.
El método estático es el que mayor precisión proporciona, pero también es el que mástiempo de observación requiere. Se pueden obtener precisiones mejores de una parte por millón
si utilizamos las observables de diferencia de fase.
Este método está especialmente indicado para:
* Confección de redes fundamentales en las cuales se vayan a apoyar trabajos deCartografía, Fotogrametría o proyectos de ingeniería.* Obtención de puntos de apoyo fotogramétrico y control de puntos existentes.* Control de deformaciones en superficies y estructuras.* Proyectos de investigación sobre el comportamiento y estructura de la atmósferaterrestre, como afecta a las señales, estudio de precisiones, etc.
No obstante, este método tiene la ventaja de que siempre se puede recurrir a él en casode problemas con la aplicación de otro, ya que es válido para cualquier aplicación. No hay queolvidar que es el método fundamental y en el que se apoyan el resto de métodos deposicionamiento diferencial.
- Reocupación o pseudoestático. El método de posicionamiento es el estático, peropuede ocurrir que las condiciones de observación no sean idóneas, bien porque la bondad de lageometría es muy alta (GDOP>8) o bien porque disponemos de menos de cuatro satélites porapantallamientos u obstrucciones.
Para poder dar solución al problema, volvemos a repetir la puesta al cabo de un ciertoperíodo (que puede ser visionado con los programas de planificación de observaciones a travésde almanaques radiodifundidos), con el fin de obtener información de satélites distintos a los dela primera puesta. Para resolver el problema, el software mezcla los datos de las dos puestaspara formar un único sistema de resolución como si todo se hubiera realizado una sola vez.
Por lo tanto, el estacionamiento es estático, y la reocupación una forma de solucionarproblemas que surgen debido a la falta de información necesaria en posicionamientos estáticos.Las aplicaciones y fundamentos en precisiones y tratamientos de observables son los mismosque los indicados en el método estático, aunque la precisión si que se puede ver mermada enocasiones.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 58/170
57
- Cinemático. Este método constituye una solución eficaz al inconveniente de losposicionamientos estáticos que requerían períodos de observación prolongados. Esta indicadopara el tratamiento de observables de diferencia de fase.
El fundamento es establecer una estación fija de referencia, estática, y otra estaciónmóvil que va a realizar las puestas en los puntos que se consideren necesarios. Para desarrollareste método es necesaria una inicialización, que supone calcular todos los parámetros de lalínea base que une el móvil y la referencia en un instante. Una vez hecho esto, se conservan losvalores de las ambigüedades, lo que hace que el número de incógnitas se reduzca a tres (X,Y,Zdel móvil), lo que requiere menos épocas de información para resolver el sistema y por lo tantomenor período de puesta. A modo de ejemplo, si tras la inicialización disponemos deinformación de seis satélites comunes entre la referencia y el móvil, tendremos en una épocacinco ecuaciones en doble diferencia y tres incógnitas, por lo que ya podríamos resolver laposición del móvil. Si tomamos tres épocas, la redundancia es mayor y el resultado más fiable.Si hemos establecido que una época son cinco segundos, tendremos la solución con tan sóloquince segundos de puesta. El problema puede ser resuelto en tiempo real o en post-proceso.
Este método presenta la gran ventaja de que con él se obtienen resultados fiables y conbuena precisión en poco tiempo, pero presenta el inconveniente de la posible pérdida de señal.Si esto se produce en un instante, las ambigüedades establecidas en la primera inicialización yano sirven, lo que requiere un nuevo proceso de inicialización en el lugar donde se produjo lapérdida de señal.
Existen varios modos de inicialización:
* Estático rápido. Se realiza una puesta estática de varias épocas hasta que se hayadeterminado la posición del móvil de forma satisfactoria. Es el modo más lento de
inicialización, y es función del tipo de instrumental utilizado, información recibida y potenciadel algoritmo de cálculo. Puede variar de uno a algunos minutos.
* Estática en punto conocido. El método es análogo al anterior, pero más rápido, ya queal conocer tres de la incógnitas del sistema (X,Y,Z del móvil) las que quedan por determinarson únicamente los incrementos de los valores de ambigüedad. Por lo tanto, necesitamos menosecuaciones y en consecuencia menor tiempo de observación para resolver el sistema. Puedevariar entre uno y dos minutos en función del tiempo en que se establezcan las épocas degrabación y la potencia del software de cálculo.
* En movimiento (OTF, On-The-Fly). Esta técnica desarrolla un algoritmo que aplicalas observaciones recibidas en movimiento y resuelve el sistema sin tener que realizar puestasestáticas. Es muy cómoda, ya que estamos inicializando mientras nos dirigimos al punto objetode posicionamiento.
La inicialización en modo OTF fue creada para aplicar técnicas de resolucióncinemática a elementos que no pueden estar parados para efectuar inicializaciones estáticas,como son barcos y aviones, y facilitar las aplicaciones que les conciernen, como levantamientosbatimétricos y vuelos fotogramétricos. En el caso del avión, el objeto es conocer lascoordenadas de la cámara en el momento de las tomas, y en el caso del barco tener lainformación planimétrica puntual que completa las tres dimensiones con la medida directa de laecosonda. Es evidente que si se produce una pérdida de señal, la inicialización se vuelve arealizar sin tener que detener los vehículos, cosa harto difícil en los dos casos mencionados.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 59/170
58
Pero la inicialización OTF no solamente se aplica en estos campos, sino queactualmente los equipos de observación por satélite terrestres incorporan esta posibilidad paracualquier tipo de trabajo, por su seguridad, rapidez y comodidad. Si las condiciones son
favorables, la inicialización se puede realizar en menos de un minuto.Dentro del modo cinemático, se puede trabajar con el modo continuo (denominado
cinemático propiamente dicho) o en modo discontinuo (stop & go).
- Stop & Go. Para posicionar un punto con el receptor móvil (tras la inicializaciónsatisfactoria) se realiza una parada en dicho punto de unas pocas épocas, después nos dirigimosal siguiente punto y actuamos de igual modo. El procedimiento se mantendrá hasta completar eltrabajo o hasta sufrir una pérdida de señal que obligue a inicializar otra vez.
Este método es apropiado para el levantamiento de puntos cercanos entre sí. Esimprescindible mantener la verticalidad de la antena en todo momento. La precisión del método
siempre es función del tipo de instrumentación utilizado. Puede llegar a ser de uno a cincocentímetros en el mejor de los casos. Las aplicaciones más comunes son:
* Levantamientos taquimétricos en general.* Determinación de superficies y parcelaciones.* Control y evolución de fenómenos y obras.* Densificación de información de una zona.* Obtención de perfiles transversales.
- Continuo. También denominado cinemático propiamente dicho. En este caso, elreceptor móvil no efectúa ninguna parada, normalmente porque no le es posible. Está indicado
para el uso de estaciones móviles ubicadas en vehículos en movimiento, como aviones, trenes,camiones, barcos, turismos, etc. Para su aplicación, basta con indicar el tiempo transcurridoentre una grabación y otra (épocas de grabación) para posicionar las situaciones puntuales delreceptor en movimiento continuo. Por ejemplo, si hemos establecido una época como cincosegundos, y queremos que el posicionamiento se produzca cada treinta segundos, deberántranscurrir seis épocas de observación para efectuar el posicionamiento. El intervalo degrabación (épocas) para el método cinemático es aconsejable que sea de cinco segundos omenos.
Este método presenta el mismo inconveniente que el anterior, que es la posible pérdidade señal. Si esto se produce, y se dispone del modo OTF, el vehículo no necesita detener sumarcha. Las aplicaciones más comunes de este método son:
* Determinación de la trayectoria de vehículos en movimiento.* Levantamientos batimétricos.* Navegación.* Determinación de itinerarios (carreteras, caminos, canales, rutas, líneas de enlace deredes, cauces fluviales, etc.).
DGPS. Aunque su traducción es ―GPS diferencial‖, se utiliza esta terminología para
trabajos diferenciales en los que solamente intervienen medidas de código (observables detiempo). Cierto es, que con las actuales técnicas de posicionamiento conjunto GPS/GLONASSeste término no es correcto, pero se sigue utilizando.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 60/170
59
Existen ocasiones en las que la precisión en los posicionamientos no requiere recurrir atécnicas de medición de diferencia de fase, lo que supone además un considerable ahorro eninstrumental de observación.
El posicionamiento diferencial con medidas de código se realiza resolviendo sistemasen simples diferencias, donde las incógnitas son las tres coordenadas de los puntos y el estadodel oscilador de los receptores en cada época.
Los resultados obtenidos con este método de posicionamiento son excelentes enmuchos de los casos, siendo mejores en distancias mayores de 200 Km. Las precisiones puedenalcanzar en algunos casos el decímetro, pero los resultados son muy inestables, ya que lageometría de observación, la calidad de recepción de la señal (relación señal /ruido) y elfuncionamiento del oscilador del receptor han de ser factores óptimos para obtener estosresultados. Para garantizarlos, se deben realizar puestas largas (15-30 min.) para que se dé laredundancia suficiente. Lo normal es asegurar los 30-50 cm.
La evolución de las técnicas de tratamiento de los códigos en la medida de distanciasestá siendo espectacular, y este método está llamado a ser la nueva alternativa a los trabajostopográficos y geodésicos por sus altos rendimientos, facilidad en el tratamiento de datos ymenor coste económico.
No obstante, las medidas de código pueden ser ―suavizadas‖ por las medidas de
diferencia de fase (si en la recepción se obtuvieron éstas) para obtener rendimientos aúnmejores. El proceso de los datos con código diferencial puede hacerse en tiempo real y en post-proceso.
Existe la posibilidad de trabajar en DGPS con un único receptor, al que se le debesumar una unidad de control y un transmisor/receptor de radiofrecuencia que emite los datos deobservación a una estación central de referencia, que envía datos de posicionamiento enformato RTCM o RTCA a la estación móvil, obteniendo la posición en tiempo real.
Las aplicaciones más comunes del DGPS son:
* Navegación de precisión.* Levantamientos y apoyo para cartografías de escalas menores de 1/5000.* Confección y actualización de sistemas de información geográfica.* Todo trabajo en general que no requiera precisiones mayores de 0,3-0,5 m.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 61/170
60
CAPÍTULO VIII. TRABAJO EN TIEMPO REAL.
En primer lugar, debe quedar claro que el trabajo en tiempo real no es un método deposicionamiento por satélite, sino que es una forma de obtener los resultados una vez
procesadas las observaciones.
El procesamiento de estas observaciones puede ser realizado con un software post-proceso, previa inserción de los datos de observación necesarios, ya sea en campo o engabinete. Ahora bien, este cálculo puede ser realizado de forma inmediata a la recepción de lasobservaciones y ser efectuado por la unidad de control, obteniendo las coordenadas en elinstante, es decir, en tiempo real. Para ello, se incorporan los algoritmos de cálculo de lossoftware post-proceso, o parte de ellos, a los controladores para este tipo de aplicaciones.
Esto, supone una gran ventaja, ya que todo el tiempo que se invierte en insertar, tratar,chequear y procesar los datos se suprime al obtener los resultados al instante. Pero tambiéntiene una serie de inconvenientes, que lo serán mayores o menores en función del tipo detrabajo y las condiciones de la observación. Entre ellos destacan:
* La limitación de los radiomodem de emisión y transmisión de datos. Chocamos conel problema de las licencias de frecuencias y potencias de señal permitidas. Un equipoque funcione con 0,5 w, que está permitido por las autoridades, está limitado a unradio de acción de unos pocos Km (7-8 Km con seguridad), lo que limita elrendimiento del trabajo. Sin embargo, con potencias de señal mayores se puede llegara trabajar en radios de hasta 50 km.
* Imposibilidad de chequear los ficheros de observación.
* Limitación en las correcciones de tipo atmosférico.
* Limitación en los procesos de transformación de coordenadas.
* Pobre tratamiento e información estadística.* Escasa manipulación de los parámetros de cálculo.
Es evidente que los fabricantes no van a proporcionar herramientas que den resultadoserróneos, ya que pasan severos controles de calidad, pero puede ocurrir que en ocasiones,debido a malas recepciones de señal o a planteamientos equivocados en las observaciones secometan errores que no pueden ser detectados si no se revisan los ficheros de proceso coninformación detallada y completa.
Por todo esto, es conveniente y recomendable que los usuarios incorporen en susgabinetes un software completo de procesamiento de datos por satélite, para su uso en trabajos
donde la precisión es muy importante y además para comprobar y verificar que se repiten losresultados obtenidos previamente en tiempo real.
En el argot actual de la Topografía aplicada al posicionamiento por satélite, sedenomina equipo de trabajo con módulo RTK (Real Time Kinematic) a aquel que incorpora unsoftware completo en la unidad de control y un sistema de transmisión de información quepermite la obtención de resultados en tiempo real. Los módulos RTK pueden procesarobservables de código y de diferencia de fase, y son aplicables a cualquier trabajo donde elposicionamiento por satélite sea necesario.
Las fases del trabajo en tiempo real con módulo RTK son las siguientes:
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 62/170
61
- El equipo de trabajo mínimo son dos equipos de observación (sensor y antena), dosradiomodems (transmisor y receptor) y un controlador en la unidad móvil con un software deproceso de datos.
- En primer lugar, se estaciona el equipo de referencia (sensor, antena y radiomodemtransmisor), que va a permanecer fijo durante todo el proceso. El radiomodem transmisor va atransmitir sus datos de observación por ondas de radio al receptor incorporado en el equipomóvil, que a su vez almacenará en la unidad de control.
- En segundo lugar, si el método escogido es el posicionamiento estático, el controladorcalculará la posición del móvil en tiempo real. Si el método elegido es del tipo cinemático (stop& go o cinemático continuo), se debe proceder a la inicialización, necesaria para poder efectuarestos modos de posicionamiento. Tras efectuarse con éxito, se pueden determinar coordenadasde puntos en pocos segundos. En ocasiones la inicialización es muy rápida y con una fiabilidadmuy alta, pero conviene comprobar las coordenadas obtenidas sobre un punto conocido paraverificar que la inicialización a sido correcta.
Hasta aquí hemos descrito el funcionamiento del módulo RTK, que como se ha podidover, está asociado a trabajos de cierta precisión, pero existen otras formas de trabajo en tiemporeal. Es cierto que en posicionamientos absolutos, la solución instantánea por navegación laestamos obteniendo en tiempo real.
Otro sistema de trabajos diferenciales en los cuales se pueden obtener resultados entiempo real es con métodos DGPS. En este caso, se trabajan con observables de código enmodo diferencial, donde se pueden obtener precisiones por debajo del metro, muy indicadaspara otras aplicaciones. Estos trabajos pueden ser solucionados si disponemos de un móduloRTK, pero también a través de correcciones RTCM o RTCA recibidas de una estación de
referencia que calcula y determina nuestra posición en modo diferencial ( al contrario que conRTK, que es el móvil el que incorpora el proceso de cálculo) y nos las envía a través de ondasde radio. De este modo, con un equipo de observación, un radiotransmisor/receptor y uncontrato de uso, podemos posicionarnos en modo diferencial. Estas emisiones suelen serrealizadas a través de satélites destinados para ello o por repetidores de superficie. Este métodode trabajo es, hoy por hoy, uno de los más usados en navegación, apoyos para cartografías depequeña escala, confección y actualización de GIS, control de volúmenes y superficies, deportey ocio, etc.
Es evidente que la obtención de resultados en tiempo real es una gran ventaja en todoslos trabajos de índole topo-geodésicos, así como en todos los campos donde esté presente elposicionamiento por satélite. Pero quizás, la aplicación donde mayor beneficio representa es enla topografía y replanteo de obras de ingeniería.
En la actualidad, los software de los controladores incorporan potentes programas parahallar datos de replanteo en cualquier sistema de referencia. Apoyados en la estación dereferencia, podemos replantear cualquier punto en la superficie, ya que obtenemos informaciónen tiempo real de la situación y dirección a seguir desde la referencia deseada ( ya sea una basede replanteo, el punto anterior u otro que resulte de interés) para localizar y materializar elpunto correspondiente.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 63/170
62
Todos los aspectos reseñados dan fuerza a recurrir a estas técnicas cuando el objetobuscado es la producción rápida y eficaz con buenos resultados, que es, hoy por hoy,esencial en el desarrollo tecnológico y económico de cualquier ente.
CAPÍTULO IX. CONSIDERACIONES FINALES.
El Sistema de Posicionamiento por Satélite, ya sea con GPS, GLONASS oGPS/GLONASS, es una herramienta imprescindible en la sociedad de nuestros días, y que lostécnicos en todas las materias afectadas deben saber tratar, manipular y ejecutar correctamente,ya que supone, como hemos dicho, un adelanto en la calidad y rendimiento de los trabajosrespecto a los métodos clásicos, que nunca se deben abandonar, pero que la evolución de otrastécnicas obliga a ir dejando a un lado y recurrir a técnicas, no sólo más modernas, sino másfructíferas y que en un futuro cercano estarán en el idioma y rutina cotidiano de losprofesionales de estos campos.
Se citan a continuación las ventajas que ofrece el posicionamiento por satélite ennuestro trabajo:
No es necesaria la intervisibilidad entre estaciones, ya que el sistema de medida es indirectoentre ellas y directo a los satélites. Esto reduce el número de estacionamientos al podersalvar los obstáculos y reduce los errores accidentales y sistemáticos al no tener que realizarpunterías ni tantos estacionamientos con intervisibilidad entre los puntos. En definitiva, sereduce el tiempo de observación y los errores que se producen en ella. Debemos añadirademás que la observación nocturna es totalmente operativa.Al trabajar con ondas de radio, estas no sufren efectos significativos a causa de la niebla,
lluvia, fríos y calores extremos, y otros tipos de incidencias.El rango de distancias que se pueden alcanzar es mucho mayor, al no ser medidas directas.El mejor de los distanciómetros no supera los 4-5 Km de distancia, además del error queintroduce. Con el posicionamiento por satélite podemos medir bases desde unos pocosmetros hasta centenas y miles de Km.Dado que no se dispone de sistemas ópticos, su fragilidad es menor y su mantenimiento ycalibración no es requerido con la frecuencia que lo requieren los instrumentos ópticos. Loscostes de mantenimiento por ello son menores.El servicio de las señales que ofrecen los sectores espaciales y de control es totalmentegratuito, lo que supone sólo desembolsos en instrumentación de observación, cálculo ygastos para I+D.
La obtención de los resultados es rápida, máxime si sumamos la obtención de los mismos entiempo real (RTK). Además, las observaciones y los resultados son interpretables y tienencomprobación.La variedad de métodos de posicionamiento hace que sean sistemas apropiados y aptos paracualquier tipo de trabajo.
Por otro lado, los inconvenientes más relevantes son :
No puede ser utilizado en obras subterráneas y a cielo cerrado.Tiene dificultades de uso en zonas urbanas, cerradas, con altos edificios y zonas arboladas yboscosas, debido a las continuas pérdidas de la señal de los satélites. Este problema, noobstante, se está solucionando, y de forma satisfactoria, con el uso combinado de las
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 64/170
63
constelaciones GPS y GLONASS para mantener siempre cinco o más satélites sobre elhorizonte.El desconocimiento del sistema. El sistema de posicionamiento por satélite es una granherramienta, y de fácil uso, pero ello no lleva consigo eximirse de su conocimiento y del
tratamiento de sus observables correctamente, ya que de lo contrario, se pueden obtenerresultados poco satisfactorios en precisión y rendimiento.
Hoy por hoy, podemos enumerar los siguientes campo en los que el Sistema dePosicionamiento por Satélite está presente :
* GEODESIA.
Determinación de las Redes fundamentales para la Cartografía, Topografía,Ingeniería y control de un país, región o localidad.
Obtención de la ondulación del Geoide de forma regional o global.
* GEOFÍSICA.
Estudio de deformaciones de la superficie terrestre. Determinación de la estructura de las distintas capas de la Atmósfera y
comportamiento de las mismas.
* TOPOGRAFÍA Y FOTOGRAMETRÍA.
Densificación de Redes Geodésicas. Levantamientos taquimétricos. Apoyo fotogramétrico.
Determinación de las coordenadas del centro óptico de la cámara en elmomento de la toma.
* INGENIERÍA.
Redes fundamentales para cartografías donde se apoyen los proyectos dearquitectura o infraestructuras de todo tipo.
Establecimiento de Redes básicas para el replanteo de una obra deingeniería.
Replanteo de puntos de un proyecto de ingeniería. Control de calidad en obra. Control de deformaciones de estructuras.
* HIDROGRAFÍA.
Levantamientos batimétricos. Estudios y análisis de la evolución de las cuencas hidrográficas. Determinación de itinerarios fluviales y marítimos.
* SISTEMAS DE INFORMACIÓN GEOGRÁFICA.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 65/170
64
Obtención de los datos geográficos para la formación y actualización debases de datos georeferenciadas y la cartografía de un Sistema deInformación Geográfica.
* NAVEGACIÓN. Situación instantánea de vehículos sobre un sistema de referencia. Actualización de cartas de navegación. Determinación de itinerarios idóneos. Deducción de la evolución e itinerario de un vehículo en movimiento. Inventarios de redes viales, fluviales, aéreas, navales y espaciales.
* DEFENSA.
Localización de objetivos de cualquier tipo. Evaluación de zonas y recorridos por las mismas.
* OCIO Y DEPORTE.
Localización y situación en expediciones, safaris, rallyes, viajes,competiciones, excursiones en zonas de cartografía desconocida, etc.
A continuación, vamos a describir las etapas y parámetros fundamentales que se debenseguir en todo posicionamiento por satélite donde se requiera precisión y rendimiento en eltrabajo. Las etapas son fundamentalmente tres : planificación, observación y cálculo.
1. PLANIFICACIÓN.
Es conveniente, para evitar pérdidas de tiempo en repeticiones de puestas y variacionesde planes, realizar una buena planificación de las observaciones y determinar cuál es la hora deldía donde hay un mayor número de satélites, así como cuándo la geometría de la observación esmás idónea, además de determinar el estado de salud de los satélites.
Para llevar a cabo esta etapa, los software para el post-proceso incorporan módulos deplanificación, los cuales, a través de los almanaques radiodifundidos de las constelaciones, quepodemos ir almacenando periódicamente o los almanaques ya existentes, y de las posiciones delos lugares de observación, podemos conocer el número de satélites, salud, bondad de lageometría de la observación, periodo óptimo de observación, etc. Podemos, además marcar laobstrucciones que puedan existir en el lugar de la observación. Esto se puede realizar paracualquier lugar del planeta durante las 24 horas del día.
2. OBSERVACIÓN.
Una vez decidido el lugar, el día y la hora de la observación, debemos elegir el métodode posicionamiento adecuado en función del tipo de trabajo a realizar y de sus precisiones.
Una vez en el campo, debemos introducir en la unidad de control del receptor losparámetros de la observación, entre los que destacan como más importantes :
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 66/170
65
Método de posicionamiento para que el software del receptor almacenecorrectamente los datos.Máscara de elevación. Se recomienda no usar máscaras inferiores a 10ºsexagesimales. Debemos tener en cuenta que en la etapa de observación podemos
usar máscaras amplias, y que luego en la etapa de cálculo las podemos reducir, esdecir aumentar el ángulo de elevación, si lo consideramos oportuno.Establecimiento del intervalo de grabación en segundos (épocas). Cada época va aser un tiempo de grabación de datos. Se pueden elegir y establecer en múltiplos de60, es decir, épocas de 1, 2, 3, 5, 10, 15, 30, etc, segundos. Hay que tener en cuentaque a menor valor de época, mayor cantidad de datos almacenados en la tarjeta, ypor lo tanto, se deberá elegir un menor tiempo de puesta de observación para noagotar su capacidad. A modo de ejemplo, se puede decir que 15 minutos deobservación grabando épocas cada 5 segundos equivale a 45 minutos grabandoépocas cada 15 segundos, ya que la cantidad de información grabada y la capacidadagotada de almacenamiento de la tarjeta es prácticamente la misma, en función delnúmero de satélites y de la cantidad de observables que se recojan en la observación.
Existen instrumentos que son capaces de grabar la información en modo compacto,es decir, utilizan toda la información disponible entre una época de grabación y lasiguiente, en lugar de grabar sólo la información del instante en el que se materializala época.
3. CÁLCULO.
En primer lugar se debe proceder a insertar los datos de las observaciones en elsoftware. En el caso de trabajar en tiempo real, esto lo realiza la propia unidad de control. Así mismo, se deben comprobar todos los datos y atributos referentes a cada punto, tales comonombres, alturas de antena, etc.
A continuación, se procede a calcular un punto singular o single point de todos lospuntos que hayan constituido una estación en el trabajo.
El siguiente paso es determinar los parámetros correctos y apropiados para el cálculo delas líneas base, es decir :
Máscara de elevación. Corrección ionosférica y troposférica. Tipo de efemérides usadas. Combinación de observables a utilizar. Parámetros estadísticos de errores máximos tolerables ( ratio, pérdidas de ciclo,
señal/ruido, satélite de referencia, etc. ...)
Seguidamente, se procede al cálculo de las líneas base de una manera ordenada, esdecir, siguiendo algún criterio, como puede ser aquel de calcular todas las líneas base quelleguen a un mismo punto antes de tomar éste como referencia para calcular otras líneas base, oalgún otro criterio que se estime adecuado.
Es importante que una línea base nunca debe ser calculada en las dos direcciones conlos mismos datos de observación, ya supondría incluir líneas linealmente dependientes en elsistema.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 67/170
66
B
B
A
DC
B
A
DC
Un criterio de cálculo puede ser el representado las siguientes figuras :
Una vez calculadas todas la líneas base, se deben revisar totalmente los ficheros de resultados,así como los resultados de todos los test estadísticos, ya que en ocasiones puede ocurrir que elcálculo no sea satisfactorio y debemos ser conscientes de ello en todo momento.
Tras el cálculo satisfactorio de las líneas base, el siguiente paso es realizar el ajuste dela figura formada por todas las líneas base calculadas. Los paquetes de software incorporan unmódulo de ajuste que utilizan la técnica de mínimos cuadrados y donde el usuario debeseleccionar una serie de parámetros para realizar el ajuste como son :
El número de iteraciones
Parámetros estadísticos del test de detección de errores groseros. Pesos de las observaciones, etc.
Finalmente, una vez obtenidas las coordenadas ajustadas de todos los puntos, puede sernecesario realizar una transformación de coordenadas para pasar los puntos al sistema decoordenadas locales. Para ello, los paquetes de software disponen de un módulo detransformación de coordenadas, en donde, a partir de una serie de puntos con coordenadas enlos dos sistemas se calculan los parámetros de transformación de un sistema a otro por mínimoscuadrados, parámetros que se aplican al resto de los puntos para transformarlos al sistema local.Para realizar la transformación debemos elegir el elipsoide al que queremos referir lascoordenadas, la proyección y la zona que determinan ese sistema local.
Una vez que ya tenemos las coordenadas de todos los puntos en el sistema decoordenadas locales, queda finalizada la etapa del cálculo.
B
A
DC
B
A
DC
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 68/170
67
SEGUNDA PARTE
PROCESAMIENTO DE DATOS CON SOFTWARE PINNACLE DEJAVAD: UNA VISION DE LOS ELEMENTOS MAS
IMPORTANTES PARA EL CALCULO DE MEDICIONES GNSSEN TOPOGRAFIA Y GEODESIA
2. Planificación completa: desde el diseñode la Network hasta el Plan de Trabajo deCampo.
2.1. Planificar Puntos de Network.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 69/170
68
2.1.1. Crear Nuevos Proyectos, Networks y Subnets.
Planificar un trabajo con GPS comienza con la apertura de un nuevoproyecto seguido por la creación de una New Network para este proyecto. Si seabre un proyecto existente, la planificación comienza con la creación de unaNueva Network para el proyecto. (Vea las Secciones 1.1 y 1.2 para crear unNuevo Proyecto y una New Network).
La situación de los puntos de estudio existentes y planificados seráincluida en sus correspondientes Subnets de la Network.
Cuando ejecuta una o varias Networks en el proyecto, crearánecesariamente una o varias Subnets gobernadas por los objetivos de laplanificación y sus propias preferencias. Networks separadas pueden serpartes independientemente creadas de una Network, en cambio las Subnets
pede ser para sesiones de colección de datos de campo planificados. Porejemplo, una por día.
Para crear una Subnet, abra la Network con un doble click en el iconocorrespondiente de la estructura de árbol, o pulsando Open en el menú decontexto. El botón (Open Network) también se puede usar para este fin. Trespaneles (Subnets, Solutions and Raw Data Sessions), aparecerán a la derechadel panel de Project Tree o Nertworks Tree (Arbol de Proyecto o Arbol de laNetwork).
Haga un click derecho en el panel izquierdo (Subnets) y elija ―New Subnet” del menú contextual. Una nueva Subnet aparecerá. Puede nombrarlas Subnets y Networks conforme a sus propios deseos.
Para introducir las situaciones de los puntos haga un click derecho sobreel icono de la Subnet y seleccione Network View en el menú contextual. Laventana Network View aparecerá.
Abajo podrá ver un ejemplo de ventana Network View donde han sidointroducidos ambos, los nuevamente especificados y los puntos de control,(observe que su Directorio de Datos de Ejemplo Pinnacle le ofrece toda lainformación necesaria para planificar, procesar y ajustar esta Subnet deejemplo).

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 70/170
69
En las siguientes secciones podrá ver que estos puntos (de control y node control) pueden ser añadidos a esta Subnet de ejemplo. Cuando construyela Subnet puede modificar la escala del mapa y la zona de interés usando losbotones de Zoom y la barra de desplazamiento. El mapa de la tierra y la rejillapueden ayudarle a localizar los datos con mayor precisión. Como referenciaaparecen las coordenadas de localización del cursor en la barra de estado dela ventana.
Si no puede ver el mapa use los botones Load Map y Mapon/off.
2.1.2. Introducir Puntos de Control.
Si los Datos de Control han sido especificados y guardados en la basede datos, estos Puntos de Control pueden desplegarse y visualizarse en laventana Network View
Una vez que dicho Control es desplegado, la planificación de nuevos
puntos de estudio se hace más fácilmente y su localización en la ventanaNetwork View puede hacerse con mayor precisión. (vea la sección 4.1.2 para laimportación de puntos de control).
En la ventana Network View, pulse el botón Select rectangle to add points from catalog (Rectángulo de selección para añadir puntos desde elcatálogo). El cursor cambiará su aspecto a . Pulse el botón izquierdo de suratón mientras dibuja un rectángulo que recubra el área de su Network. Suelteel botón cuando termine. Obtendrá un grupo de Lists Data Control (Listas deDatos de Control) disponible para su Network. Seleccione la lista que desee y
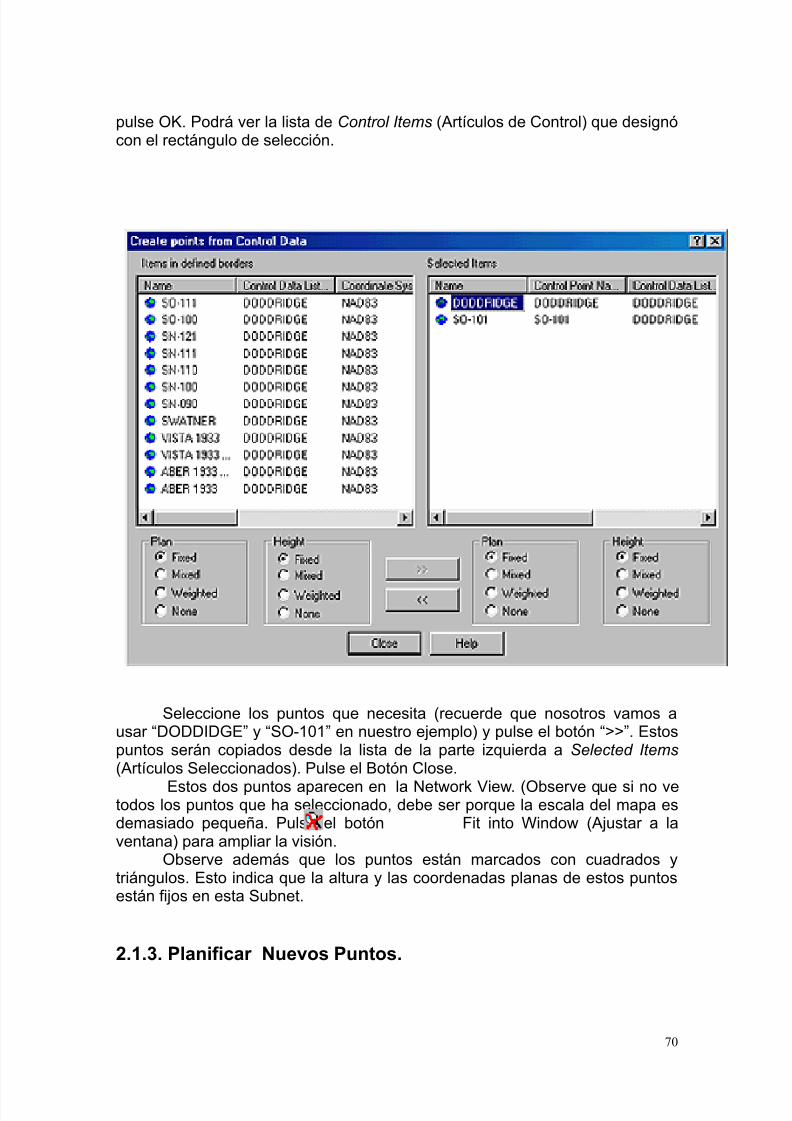
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 71/170
70
pulse OK. Podrá ver la lista de Control Items (Artículos de Control) que designócon el rectángulo de selección.
Seleccione los puntos que necesita (recuerde que nosotros vamos ausar ―DODDIDGE‖ y ―SO-101‖ en nuestro ejemplo) y pulse el botón ―>>‖. Estospuntos serán copiados desde la lista de la parte izquierda a Selected Items (Artículos Seleccionados). Pulse el Botón Close.
Estos dos puntos aparecen en la Network View. (Observe que si no vetodos los puntos que ha seleccionado, debe ser porque la escala del mapa esdemasiado pequeña. Pulse el botón Fit into Window (Ajustar a laventana) para ampliar la visión.
Observe además que los puntos están marcados con cuadrados ytriángulos. Esto indica que la altura y las coordenadas planas de estos puntosestán fijos en esta Subnet.
2.1.3. Planificar Nuevos Puntos.
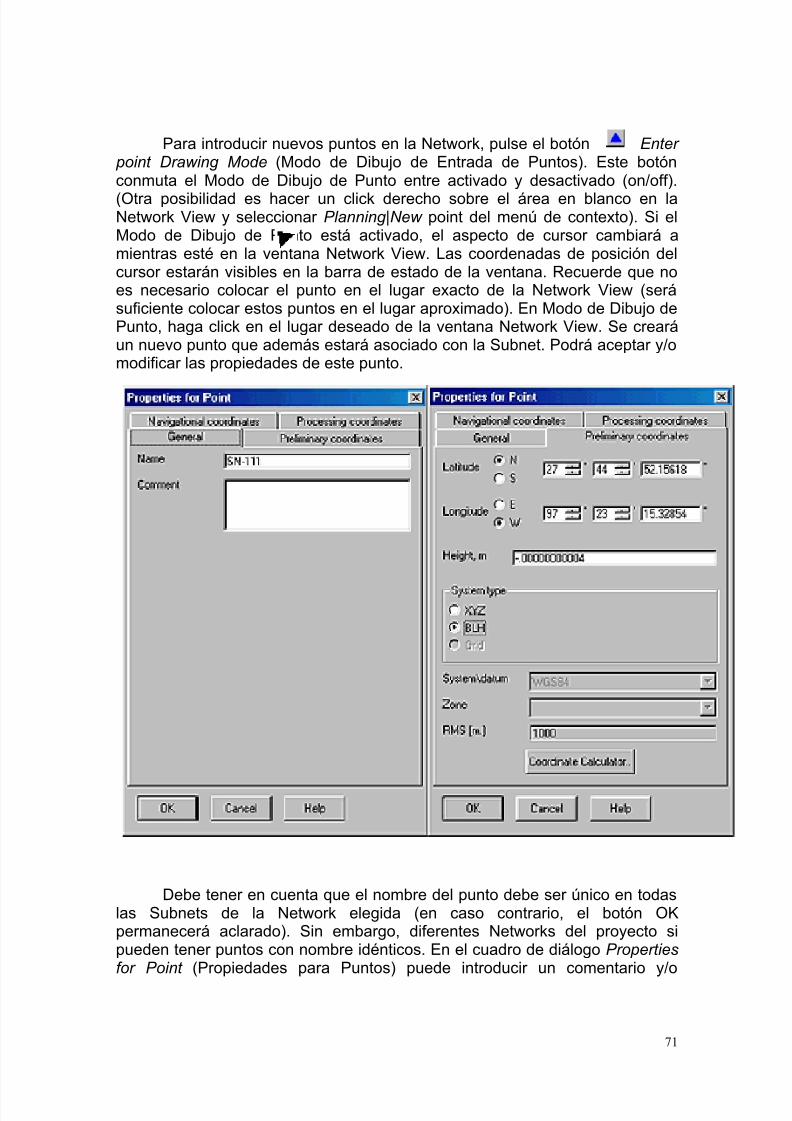
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 72/170
71
Para introducir nuevos puntos en la Network, pulse el botón Enter point Drawing Mode (Modo de Dibujo de Entrada de Puntos). Este botónconmuta el Modo de Dibujo de Punto entre activado y desactivado (on/off).
(Otra posibilidad es hacer un click derecho sobre el área en blanco en laNetwork View y seleccionar Planning|New point del menú de contexto). Si elModo de Dibujo de Punto está activado, el aspecto de cursor cambiará amientras esté en la ventana Network View. Las coordenadas de posición delcursor estarán visibles en la barra de estado de la ventana. Recuerde que noes necesario colocar el punto en el lugar exacto de la Network View (serásuficiente colocar estos puntos en el lugar aproximado). En Modo de Dibujo dePunto, haga click en el lugar deseado de la ventana Network View. Se crearáun nuevo punto que además estará asociado con la Subnet. Podrá aceptar y/omodificar las propiedades de este punto.
Debe tener en cuenta que el nombre del punto debe ser único en todaslas Subnets de la Network elegida (en caso contrario, el botón OKpermanecerá aclarado). Sin embargo, diferentes Networks del proyecto sipueden tener puntos con nombre idénticos. En el cuadro de diálogo Properties for Point (Propiedades para Puntos) puede introducir un comentario y/o
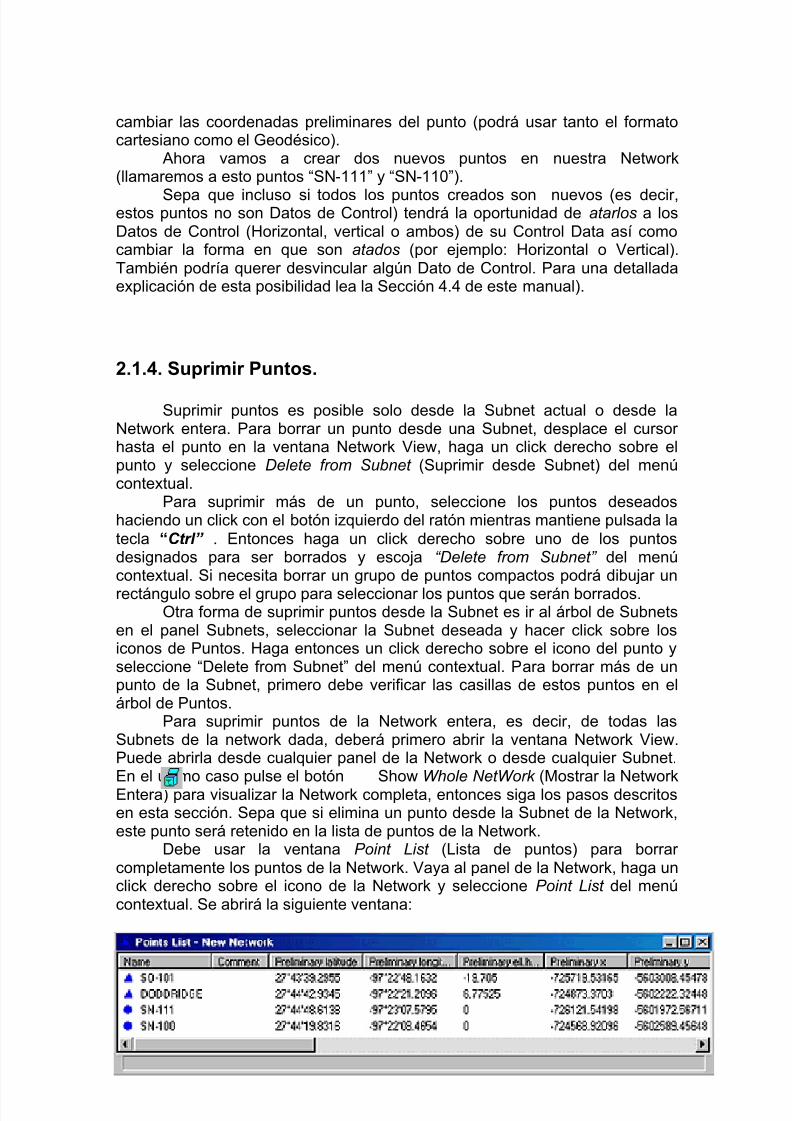
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 73/170
72
cambiar las coordenadas preliminares del punto (podrá usar tanto el formatocartesiano como el Geodésico).
Ahora vamos a crear dos nuevos puntos en nuestra Network(llamaremos a esto puntos ―SN-111‖ y ―SN-110‖).
Sepa que incluso si todos los puntos creados son nuevos (es decir,estos puntos no son Datos de Control) tendrá la oportunidad de atarlos a losDatos de Control (Horizontal, vertical o ambos) de su Control Data así comocambiar la forma en que son atados (por ejemplo: Horizontal o Vertical).También podría querer desvincular algún Dato de Control. Para una detalladaexplicación de esta posibilidad lea la Sección 4.4 de este manual).
2.1.4. Suprimir Puntos.
Suprimir puntos es posible solo desde la Subnet actual o desde laNetwork entera. Para borrar un punto desde una Subnet, desplace el cursorhasta el punto en la ventana Network View, haga un click derecho sobre elpunto y seleccione Delete from Subnet (Suprimir desde Subnet) del menúcontextual.
Para suprimir más de un punto, seleccione los puntos deseadoshaciendo un click con el botón izquierdo del ratón mientras mantiene pulsada latecla “Ctrl” . Entonces haga un click derecho sobre uno de los puntosdesignados para ser borrados y escoja “Delete from Subnet” del menúcontextual. Si necesita borrar un grupo de puntos compactos podrá dibujar unrectángulo sobre el grupo para seleccionar los puntos que serán borrados.
Otra forma de suprimir puntos desde la Subnet es ir al árbol de Subnetsen el panel Subnets, seleccionar la Subnet deseada y hacer click sobre losiconos de Puntos. Haga entonces un click derecho sobre el icono del punto yseleccione ―Delete from Subnet‖ del menú contextual. Para borrar más de unpunto de la Subnet, primero debe verificar las casillas de estos puntos en elárbol de Puntos.
Para suprimir puntos de la Network entera, es decir, de todas lasSubnets de la network dada, deberá primero abrir la ventana Network View.Puede abrirla desde cualquier panel de la Network o desde cualquier Subnet.
En el último caso pulse el botón Show Whole NetWork (Mostrar la NetworkEntera) para visualizar la Network completa, entonces siga los pasos descritosen esta sección. Sepa que si elimina un punto desde la Subnet de la Network,este punto será retenido en la lista de puntos de la Network.
Debe usar la ventana Point List (Lista de puntos) para borrarcompletamente los puntos de la Network. Vaya al panel de la Network, haga unclick derecho sobre el icono de la Network y seleccione Point List del menúcontextual. Se abrirá la siguiente ventana:

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 74/170
73
Use ―Ctrl‖ (o ―Mayúsculas‖) y el botón izquierdo del ratón paraseleccionar los puntos que se borrarán. Entonces haga un click derecho sobreuno de los puntos seleccionados y pulse Delete en el menú contextual.
Para borrar todos los puntos en un área, vaya a la ventana Network viewy seleccione los puntos deseados con un rectángulo construido arrastrando elratón con el botón izquierdo pulsado. Todos los puntos designados debenaparecer resaltados. Desplace el cursor hasta uno de los puntos, haga un clickderecho y pulse Delete del menú contextual.
2.1.5. Editar Obstrucciones de Puntos.
Además de editar las posiciones de los puntos el programa le permiteeditar también las Obstrucciones de los puntos. Seleccione un punto de laventana de Listas de Puntos y haga un click derecho sobre ella. SeleccioneEdit obstructions del menú de contexto. Aparecerá la ventana Obstruction window for Points (Ventana de Obstrucción para puntos) que le permitirá editarlas obstrucciones de los puntos. Esto se puede hacer también desde laventana Network View. Haga un click derecho sobre un punto y elija Edit obstructions desde le menú de contexto.
2.1.6. Importar Puntos de otra Subnets.
Los puntos que ya han sido definidos para la Network o su propiasSubnets, pueden ser incluidos fácilmente en una Subnet que será planificada.Para hacerlo vaya a la Point List y seleccione los puntos deseados (vea lasección 2.1.4). Entonces desplace el cursor a uno de los puntos, haga un clickderecho y pulse Save as Subnet del menú contextual. Las ventana Properties for Subnet aparecerá dándole la oportunidad de introducir el nombre de lanueva Subnet. Una vez que el nombre ha sido introducido, el puntocorrespondiente será añadido a la nueva Subnet.
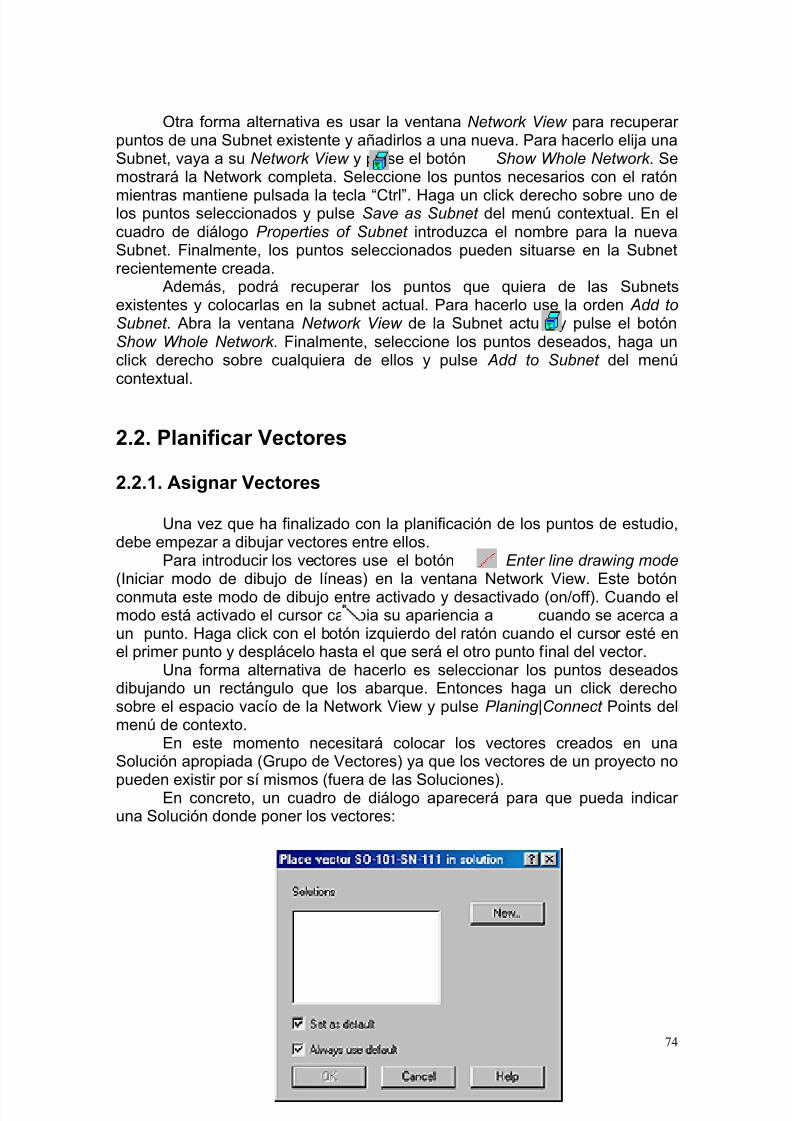
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 75/170
74
Otra forma alternativa es usar la ventana Network View para recuperarpuntos de una Subnet existente y añadirlos a una nueva. Para hacerlo elija unaSubnet, vaya a su Network View y pulse el botón Show Whole Network . Semostrará la Network completa. Seleccione los puntos necesarios con el ratón
mientras mantiene pulsada la tecla ―Ctrl‖. Haga un click derecho sobre uno delos puntos seleccionados y pulse Save as Subnet del menú contextual. En elcuadro de diálogo Properties of Subnet introduzca el nombre para la nuevaSubnet. Finalmente, los puntos seleccionados pueden situarse en la Subnetrecientemente creada.
Además, podrá recuperar los puntos que quiera de las Subnetsexistentes y colocarlas en la subnet actual. Para hacerlo use la orden Add to Subnet . Abra la ventana Network View de la Subnet actual y pulse el botónShow Whole Network . Finalmente, seleccione los puntos deseados, haga unclick derecho sobre cualquiera de ellos y pulse Add to Subnet del menúcontextual.
2.2. Planificar Vectores
2.2.1. Asignar Vectores
Una vez que ha finalizado con la planificación de los puntos de estudio,debe empezar a dibujar vectores entre ellos.
Para introducir los vectores use el botón Enter line drawing mode
(Iniciar modo de dibujo de líneas) en la ventana Network View. Este botónconmuta este modo de dibujo entre activado y desactivado (on/off). Cuando elmodo está activado el cursor cambia su apariencia a cuando se acerca aun punto. Haga click con el botón izquierdo del ratón cuando el cursor esté enel primer punto y desplácelo hasta el que será el otro punto final del vector.
Una forma alternativa de hacerlo es seleccionar los puntos deseadosdibujando un rectángulo que los abarque. Entonces haga un click derechosobre el espacio vacío de la Network View y pulse Planing|Connect Points delmenú de contexto.
En este momento necesitará colocar los vectores creados en unaSolución apropiada (Grupo de Vectores) ya que los vectores de un proyecto no
pueden existir por sí mismos (fuera de las Soluciones).En concreto, un cuadro de diálogo aparecerá para que pueda indicar
una Solución donde poner los vectores:

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 76/170
75
El panel de Soluciones listará todas las Soluciones donde puede ponersu vector. Observe que aparecen un par de puntos (conocidos como Baseline o Línea Base) y una solución, solo un vector relacionado con esta Baselinepuede ser colocado en una Solución. Aunque una Subnet puede contener másde un vector para una Línea Base en particular, cada uno de esto vectoresdeben tener su propia Solución. Para su vector puede seleccionar unaSolución existente de la lista o definir una nueva Solución. Para crear unanueva pulse el botón New (Nuevo). Como resultado aparecerá el cuadro dediálogo Properties for Solution (Propiedadespara Soluciones):
Introduzca el nombre de una nueva
solución en este cuadro de diálogo y pulse OK .Seguidamente verá un cuadro de diálogo
que le permitirá introducir las propiedades deprocesado para la nueva solución. Necesitaráseleccionar el tipo de solución correcta para elvector que está planificando (por ejemplo Static).
Puede crear varias soluciones para unamisma Línea Base. Aparecerán en la lista delcuadro de diálogo. Seleccione las Soluciones enlas que quiere emplazar sus vectores. Siselecciona m soluciones, se crearán m vectores
exactamente y cada uno de ellos estará en supropia solución.
En este panel Soluciones también aparecerá un árbol de Soluciones,Vectores, Puntos finales de Vectores y las Ocupaciones vacías para loscorrespondientes Puntos.
El cuadro de diálogo ―Place Vector...in Solution‖ (Colocar Vector...enSolución) posee las casillas ―Set as Default‖ (Configurar como Por Defecto) y―Always use default‖ (Usar siempre valores por defecto). Cuando se verifica lacasilla ―Set as default‖, las Soluciones que han sido seleccionadas en la lista,se convierten en las Soluciones por defecto. Cuando un vector nuevo seaintroducido se le presentará la lista actual de Soluciones. Si además verifica lacasilla ―Always use default‖, no tendrá que responder donde se deben colocar los vectores creados, se colocarán automáticamente en las Soluciones pordefecto. Si desea cambiar la lista por defecto de Soluciones salga del Modo deDibujo de Líneas y vuelva a activarlo.
2.2.2. Suprimir Vectores.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 77/170
76
Mientras diseña una Network puede corregir fácilmente un errorinadvertido que se halla producido durante el curso de la planificación. Porejemplo, puede borrar vectores erróneos o innecesarios. Esto puede hacersede la siguientes maneras.
Un vector debe ser suprimido desde la correspondiente Solución usandoel árbol de Soluciones en el panel Solutions . Para hacerlo desplace el cursorhasta el vector y haga un click derecho sobre él, entonces pulse Delete.
Para borrar un grupo de vectores debe usar el árbol de Soluciones en elpanel Subnet . Despliegue los iconos de vectores y verifique todas las casillasde los vectores que desea eliminar. Elija uno de estos vectores, mueva elcursor hasta su icono y haga un click derecho sobre él. Finalmente pulseDelete en el menú contextual.
Cuando está activado el Modo “Show Whole Network” , los vectoreseliminados serán marcados con una línea de puntos en la ventana NetworkView. Todos los vectores suprimidos serán asociados con el grupo ―‖. Los
vectores suprimidos no aparecerán cuando el campo ―Baselines without Vectors ‖ (Líneas Base sin Vectores) halla sido desactivado en la subventanaLegend , o la opción del menú de contexto Hide halla sido activada en lasubventana Leyend haciendo clicks derechos sobre los correspondientesvectores. Activando la opción Show en la ventana Leyend hará de nuevovisibles los vectores.
2.3. Planificar Ocupación.
Dos tareas principales se llevan a cabo cuando se PlanificanOcupaciones.
Una vez que los puntos y vectores deseados han sido definidos esnecesario examinar las Condiciones de Observación (Tales como visibilidad desatélites y DOPs). Lo hacemos con el fin de encontrar el mejor momento pararecoger datos de los puntos específicos con la vista puesta en la calidad final
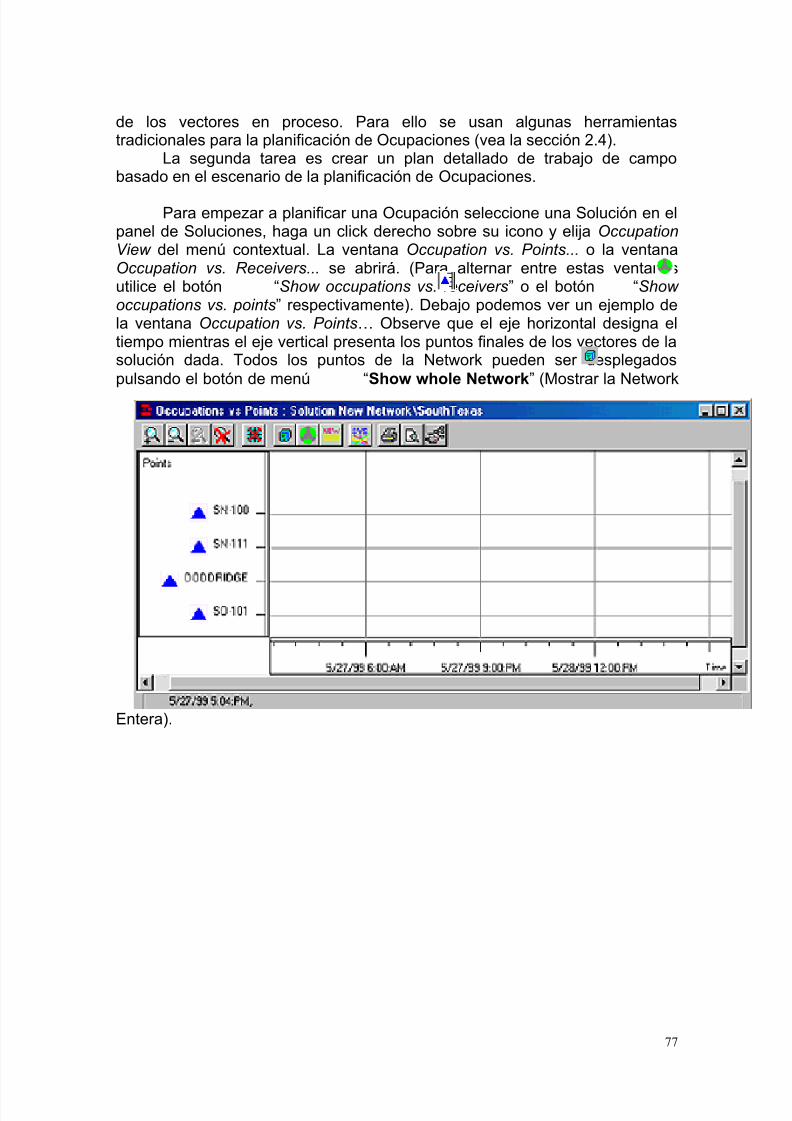
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 78/170
77
de los vectores en proceso. Para ello se usan algunas herramientastradicionales para la planificación de Ocupaciones (vea la sección 2.4).
La segunda tarea es crear un plan detallado de trabajo de campobasado en el escenario de la planificación de Ocupaciones.
Para empezar a planificar una Ocupación seleccione una Solución en elpanel de Soluciones, haga un click derecho sobre su icono y elija Occupation View del menú contextual. La ventana Occupation vs. Points... o la ventanaOccupation vs. Receivers... se abrirá. (Para alternar entre estas ventanasutilice el botón ―Show occupations vs. receivers ‖ o el botón ―Show occupations vs. points ‖ respectivamente). Debajo podemos ver un ejemplo dela ventana Occupation vs. Points … Observe que el eje horizontal designa eltiempo mientras el eje vertical presenta los puntos finales de los vectores de lasolución dada. Todos los puntos de la Network pueden ser desplegadospulsando el botón de menú ―Show whole Network‖ (Mostrar la Network
Entera).
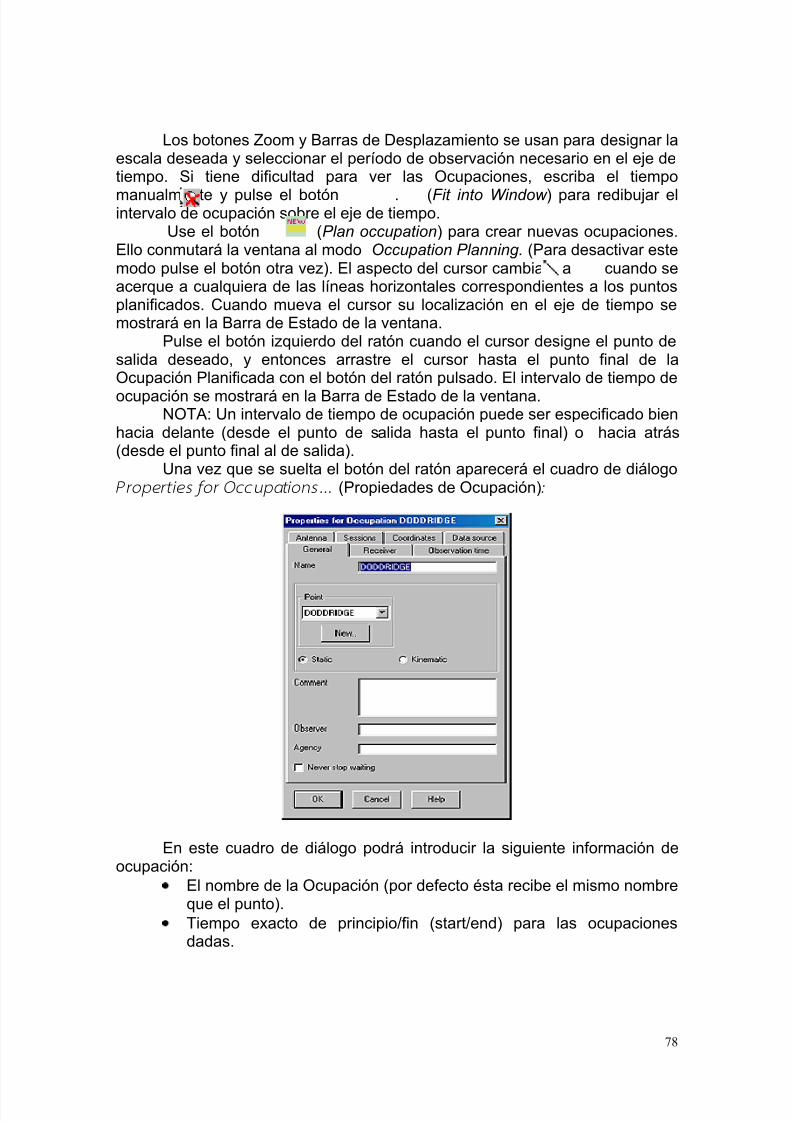
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 79/170
78
Los botones Zoom y Barras de Desplazamiento se usan para designar laescala deseada y seleccionar el período de observación necesario en el eje detiempo. Si tiene dificultad para ver las Ocupaciones, escriba el tiempo
manualmente y pulse el botón . (Fit into Window ) para redibujar elintervalo de ocupación sobre el eje de tiempo.
Use el botón (Plan occupation ) para crear nuevas ocupaciones.Ello conmutará la ventana al modo Occupation Planning. (Para desactivar estemodo pulse el botón otra vez). El aspecto del cursor cambiará a cuando seacerque a cualquiera de las líneas horizontales correspondientes a los puntosplanificados. Cuando mueva el cursor su localización en el eje de tiempo semostrará en la Barra de Estado de la ventana.
Pulse el botón izquierdo del ratón cuando el cursor designe el punto desalida deseado, y entonces arrastre el cursor hasta el punto final de laOcupación Planificada con el botón del ratón pulsado. El intervalo de tiempo de
ocupación se mostrará en la Barra de Estado de la ventana.NOTA: Un intervalo de tiempo de ocupación puede ser especificado bien
hacia delante (desde el punto de salida hasta el punto final) o hacia atrás(desde el punto final al de salida).
Una vez que se suelta el botón del ratón aparecerá el cuadro de diálogoProperties for Occupations... (Propiedades de Ocupación):
En este cuadro de diálogo podrá introducir la siguiente información deocupación:
El nombre de la Ocupación (por defecto ésta recibe el mismo nombreque el punto).
Tiempo exacto de principio/fin (start/end) para las ocupacionesdadas.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 80/170
79
Tipo de receptor, su número de serie y demás información pertinentesobre el receptor para ser usado para la ocupación planificada.
Número de serie de la antena.Una vez que se cierra el cuadro de diálogo Properties for Occupations
(para hacerlo pulse el botón OK) un cuadro de diálogo llamado Place Occupation in Session (Colocar Ocupaciones en Sesiones) comenzará deforma automática. Este cuadro le permitirá asignar la ocupación planificada a lasesión de observación deseada.
La forma de manejar esta ventana es similar a como se asignan losvectores planificados al grupo de Soluciones pertinente. (Vea la Sección 2.2.1).
Una vez que la ocupación ha sido asignada a la Sesión deseada, undiagrama de ocupación planificada (mostrada como un rectángulo sombreado)aparecerá en la ventana Occupation vs. Points… (u “Occupation vs.Receivers …), y esta Sesión aparecerá en el panel Raw Data Sessions (Sesiones de Datos Puros).
La ventana Properties for Occupation debe tener verificada la casillaNever stop waiting, lo cual es muy importante para una planificación apropiada.
Cuando una ocupación actual llega, el sistema identifica todas lasocupaciones planificadas que están en espera de la ocupación actual. Si unaocupación en espera es considerada acorde con la actual, la actual se colocarádentro de la ocupación de espera. Entonces, si la ocupación de espera tieneactivada la casilla Never stop waiting permanecerá en la sesión, esperandouna nueva entrada de datos pertinentes. Si desea que una Ocupaciónplanificada esté abierta para más de una ocupación actual, verifique estacasilla. También puede verificarla si necesita retener su Planning History
(historial de planificación) de forma que pueda comparar las ocupacionesplanificadas y los datos actuales recibidos. En la ventana Occupation View podrá ver las ocupaciones planificadas junto con las actuales.
Las reglas para determinar si una ocupación actual satisface losrequerimientos de una ocupación planificada (en espera) son las siguientes:
1. Si la ocupación en espera es en un punto (es decir, es estática), elnombre del punto igualaría al de la ocupación real.
2. Si un receptor específico ha sido asignado a la ocupación en espera,el ID de este receptor debe igualarse a la identificación del receptorusado para la ocupación real.
3. Si tiene verificada la casilla Occupation times must match (Deben
Igualarse los Tiempos de Ocupación), en la tabla Dispatcher deImport Setup los intervalos de tiempo especificados para estas dosocupaciones serán comparadas. La intersección de ambos intervalosno debe ser menor que el intervalo más corto.
4. Cuando planifique las ocupaciones, las condiciones de observación(tales como visibilidad de satélites y DOPs) también deben tenerseen cuenta. Para ello se usan las Planning Tools (Herramientas dePlanificación).
Para usar las Herramientas de Planificación para la ocupación de un solopunto vaya al panel Raw Data Sessions y seleccione una Sesión a la queesta ocupación esté asignada y abra su estructura de árbol. Haga un click
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 81/170
80
derecho sobre las ocupaciones y elija Occupation Planning del menú decontexto. La ventana Occupation Planning se abrirá en ese momento.
Si desea examinar las condiciones de observación para un vectorespecífico, en otras palabras, las condiciones de observación para el
subintervalo común de los puntos finales del vector, vaya al panel Solution,seleccione el vector, haga un click derecho sobre él y pulse Occupation Planning en el menú de contexto. La ventana Occupation Planning (paravectores) se abrirá, lo que le permitirá ver las obstrucciones comunes paraambos puntos finales o editar las obstrucciones de cada punto por separado.
Para más información acerca de los botones de la ventana Occupation Planning vea la sección 2.4 de este manual.
2.4. Herramientas de Planificación.Planning Tools (Herramientas de Planificación) le permiten desarrollar
un plan adecuado de trabajo en campo que garantice una disponibilidad delsatélite adecuada, etc. Debe manejar las dos constelaciones cuando planifiqueocupaciones: GPS (―G‖ en la ventana OP; OP se refiere a Occupation Planning) y GLONASS (“R” en la ventana OP). La ventana OP le permitedeterminar la visibilidad y posición de satélites, disponibilidad y DOPscorrespondientes con respecto a la ocupación planificada o el vector. Ademáspueden crearse y editarse con la ayuda de OP.
2.4.1. Ventana Principal de Occupation Planning (Ocupación Planificada).
La principal ventana de herramientas de Planificación, Ocupation Planning (OP), puede abrirse desde el Panel de Soluciones o desde el panelde Sesiones dependiendo de lo que esté planificando, una ocupación o unvector. Cuando planifique una ocupación mueva el cursor hacia la ocupacióndeseada en el panel Session, haga un click derecho sobre esta ocupación yseleccione la orden Occupation Planning del menú contextual. Una ventanaOP aparecerá mostrando un solo icono de árbol (este icono corresponde a la
ocupación seleccionada).

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 82/170
81
Cuando planifique un vector mueva el cursor hacia su icono en el panelde Soluciones y haga un click derecho sobre él, entonces seleccione
Occupation Planning del menú de contexto. La siguiente ventana Occupation Planning aparecerá:
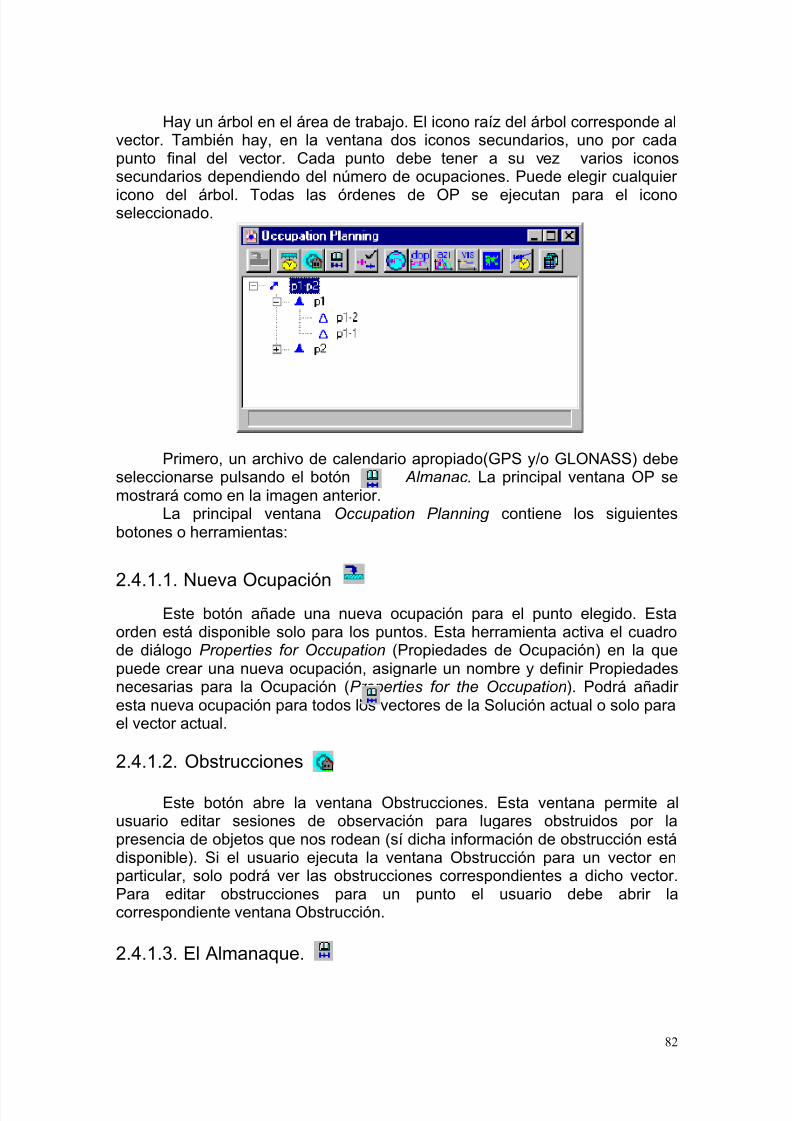
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 83/170
82
Hay un árbol en el área de trabajo. El icono raíz del árbol corresponde alvector. También hay, en la ventana dos iconos secundarios, uno por cadapunto final del vector. Cada punto debe tener a su vez varios iconossecundarios dependiendo del número de ocupaciones. Puede elegir cualquier
icono del árbol. Todas las órdenes de OP se ejecutan para el iconoseleccionado.
Primero, un archivo de calendario apropiado(GPS y/o GLONASS) debeseleccionarse pulsando el botón Almanac . La principal ventana OP semostrará como en la imagen anterior.
La principal ventana Occupation Planning contiene los siguientesbotones o herramientas:
2.4.1.1. Nueva OcupaciónEste botón añade una nueva ocupación para el punto elegido. Esta
orden está disponible solo para los puntos. Esta herramienta activa el cuadrode diálogo Properties for Occupation (Propiedades de Ocupación) en la quepuede crear una nueva ocupación, asignarle un nombre y definir Propiedadesnecesarias para la Ocupación (Properties for the Occupation ). Podrá añadiresta nueva ocupación para todos los vectores de la Solución actual o solo parael vector actual.
2.4.1.2. Obstrucciones
Este botón abre la ventana Obstrucciones. Esta ventana permite alusuario editar sesiones de observación para lugares obstruidos por lapresencia de objetos que nos rodean (sí dicha información de obstrucción estádisponible). Si el usuario ejecuta la ventana Obstrucción para un vector enparticular, solo podrá ver las obstrucciones correspondientes a dicho vector.Para editar obstrucciones para un punto el usuario debe abrir lacorrespondiente ventana Obstrucción.
2.4.1.3. El Almanaque.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 84/170
83
El botón Almanac permite al usuario seleccionar un almanaque que seráusado para la planificación (de hecho, el usuario elegirá el archivo más recienteentre aquellos que tengan la extensión .jps ; el usuario usará almanac.jps si no
existe otro archivo con esta extensión). El almanaque elegido puede cargarsedesde cualquier lugar. Observe que puede elegir entre almanaques GPS y/oGLONNAS.
Cuando se cambia el almanaque actual todos los datos de OP sepondrán al día en consonancia con el nuevo almanaque.
2.4.1.4. La Ventana Skyplot.
El botón Skyplot abre Skyplot View , la cual despliega el camino odirección de los satélites para el vector o icono de ocupación seleccionado.
2.4.1.5. DOPs.
El botón DOPs se usa para abrir las ventanas de Satélite Availability (Disponibilidad del satélite) y DOPs , que muestran parcelas VDOP-, HDOP-,TDOP-, PDOP- y GDOP- para los períodos de observación especificados.
2.4.1.6. Elevación / AcimutEl botón Elevación/Acimut se usa para abrir la ventana Satellite
Elevation and Azimuth, la cual nos da la elevación y acimut (con respecto alvector/ocupación seleccionado) para el período de observación especificado.
2.4.1.7. Visibilidad.
El botón Visibility (visibilidad) abre la ventana Satellite Visibility quemuestra la visibilidad de satélites durante el período de observaciónespecificado.
2.4.1.8. El Mapa de la Tierra.
El botón Earth Map (Mapa de la Tierra) abre al ventana Earth Map. Estaventana muestra las marcas de tierra de los satélites.
2.4.1.9. El Listado del Informe.
El Listado del Informe (Report Table), consiste en diferentes páginasque contienen las acimuts, elevaciones, latitudes y longitudes de los satélites
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 85/170
84
así como las correspondientes DOPs de los períodos de observaciónespecificados.
Los siguientes comandos están relacionados con las ventanas OP.
2.4.1.10. Hora/Fecha
Llama al editor Time/Date (Hora/fecha) que permite al usuario introducirun tiempo de observación para un vector u ocupación específicos. Cuando secambia el tiempo de observación para vector/ocupación, todo en lacorrespondiente ventana OP se actualiza.
2.4.1.11. Hora Local Actual
Muestra la barra de período de tiempo para el período de observaciónseleccionado. El usuario puede cambiar el tiempo deseado y presionar el botón. Entonces todas las ventanas relacionadas (aquellas en las que el botónno está pulsado) se presentarán al usuario con los valores actualizados que secorresponden con el tiempo especificado.
2.4.1.12. SVS Check.
El botón SVS Check activa un cuadro de diálogo que permiteactivar/desactivar (on/off) satélites. Cuando se produce un cambio en las
casillas de verificación el programa actualiza todas las ventanas relacionadas.
2.4.1.13. Activar desactivar (On/Off) Set Obstructions (Grupo deObstrucciones).
Esta orden permite al usuario activar las obstrucciones especificadaspara el icono seleccionado.
Cuando el botón está pulsado, las obstrucciones para el icono dadoserán tomadas en consideración. Cuando el botón no está pulsado, ni lainformación de obstrucción ni la elevación CutOff son tomadas en cuanta
mientras se computan las características para OP.
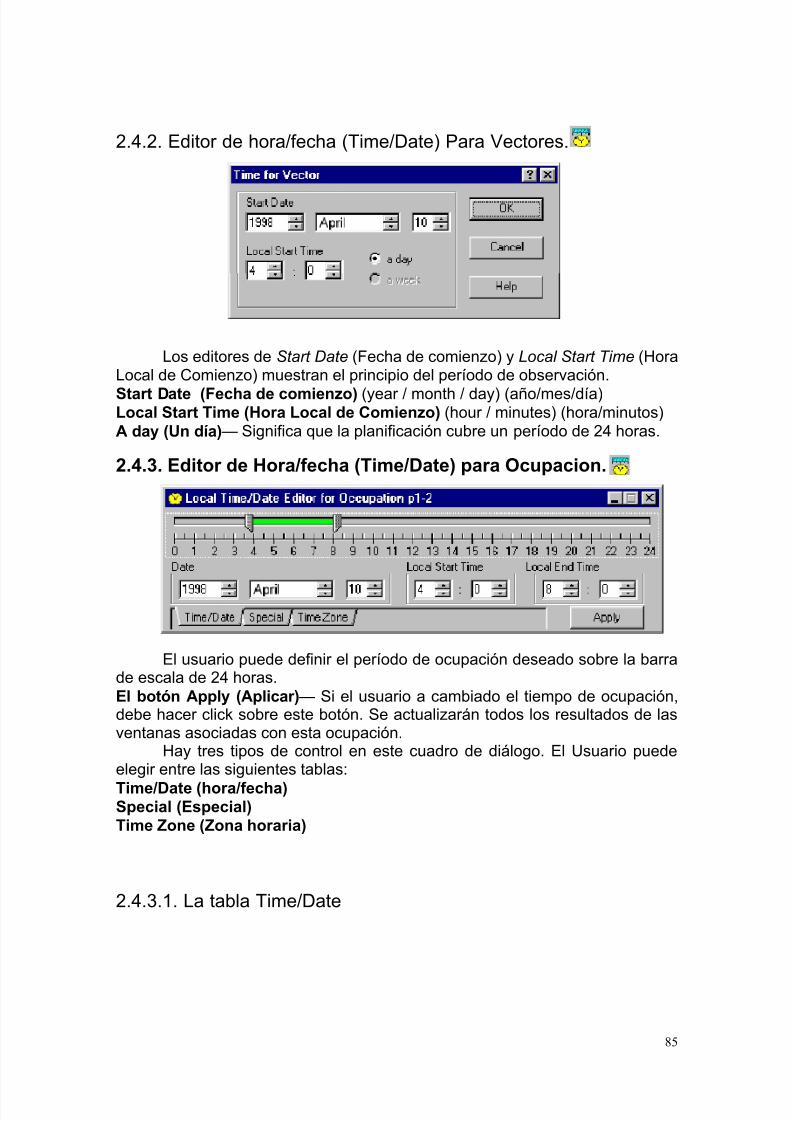
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 86/170
85
2.4.2. Editor de hora/fecha (Time/Date) Para Vectores.
Los editores de Start Date (Fecha de comienzo) y Local Start Time (HoraLocal de Comienzo) muestran el principio del período de observación.
Start Date (Fecha de comienzo) (year / month / day) (año/mes/día)Local Start Time (Hora Local de Comienzo) (hour / minutes) (hora/minutos)A day (Un día)— Significa que la planificación cubre un período de 24 horas.
2.4.3. Editor de Hora/fecha (Time/Date) para Ocupacion.
El usuario puede definir el período de ocupación deseado sobre la barrade escala de 24 horas.El botón Apply (Aplicar)— Si el usuario a cambiado el tiempo de ocupación,debe hacer click sobre este botón. Se actualizarán todos los resultados de lasventanas asociadas con esta ocupación.
Hay tres tipos de control en este cuadro de diálogo. El Usuario puedeelegir entre las siguientes tablas:
Time/Date (hora/fecha)Special (Especial)Time Zone (Zona horaria)
2.4.3.1. La tabla Time/Date
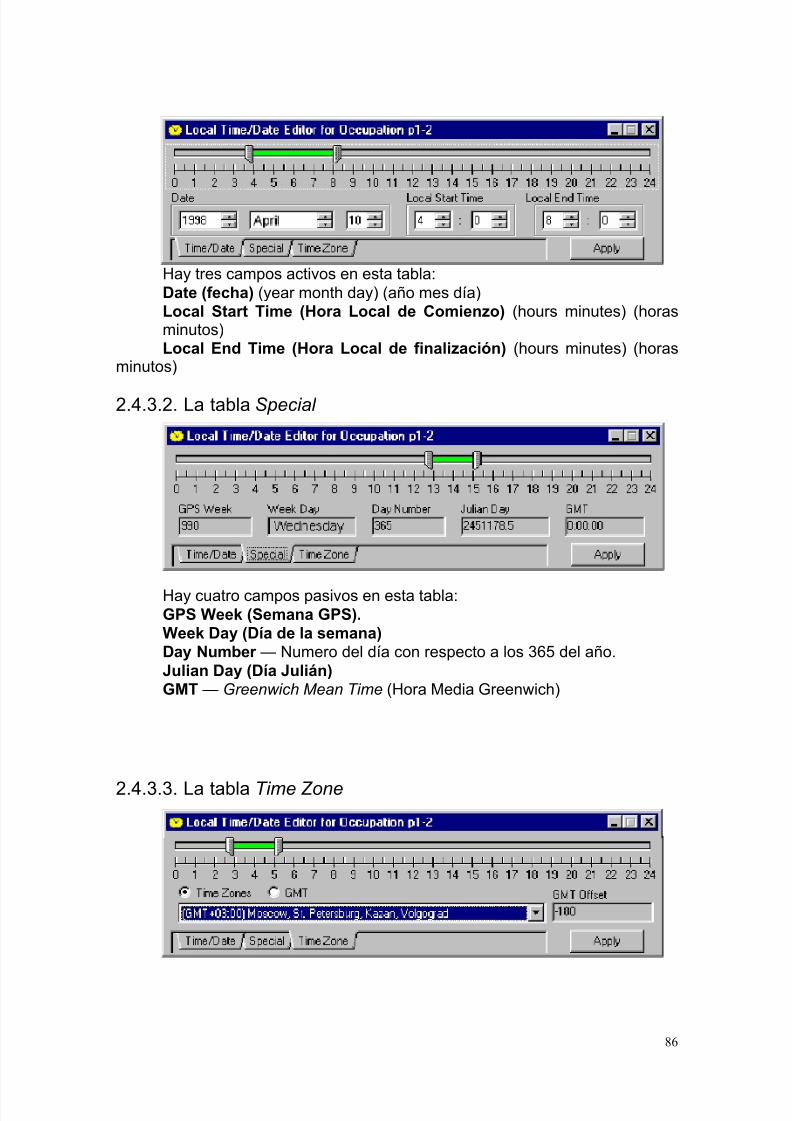
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 87/170
86
Hay tres campos activos en esta tabla:Date (fecha) (year month day) (año mes día)Local Start Time (Hora Local de Comienzo) (hours minutes) (horasminutos)Local End Time (Hora Local de finalización) (hours minutes) (horas
minutos)
2.4.3.2. La tabla Special
Hay cuatro campos pasivos en esta tabla:GPS Week (Semana GPS).Week Day (Día de la semana)Day Number — Numero del día con respecto a los 365 del año.Julian Day (Día Julián)GMT — Greenwich Mean Time (Hora Media Greenwich)
2.4.3.3. La tabla Time Zone
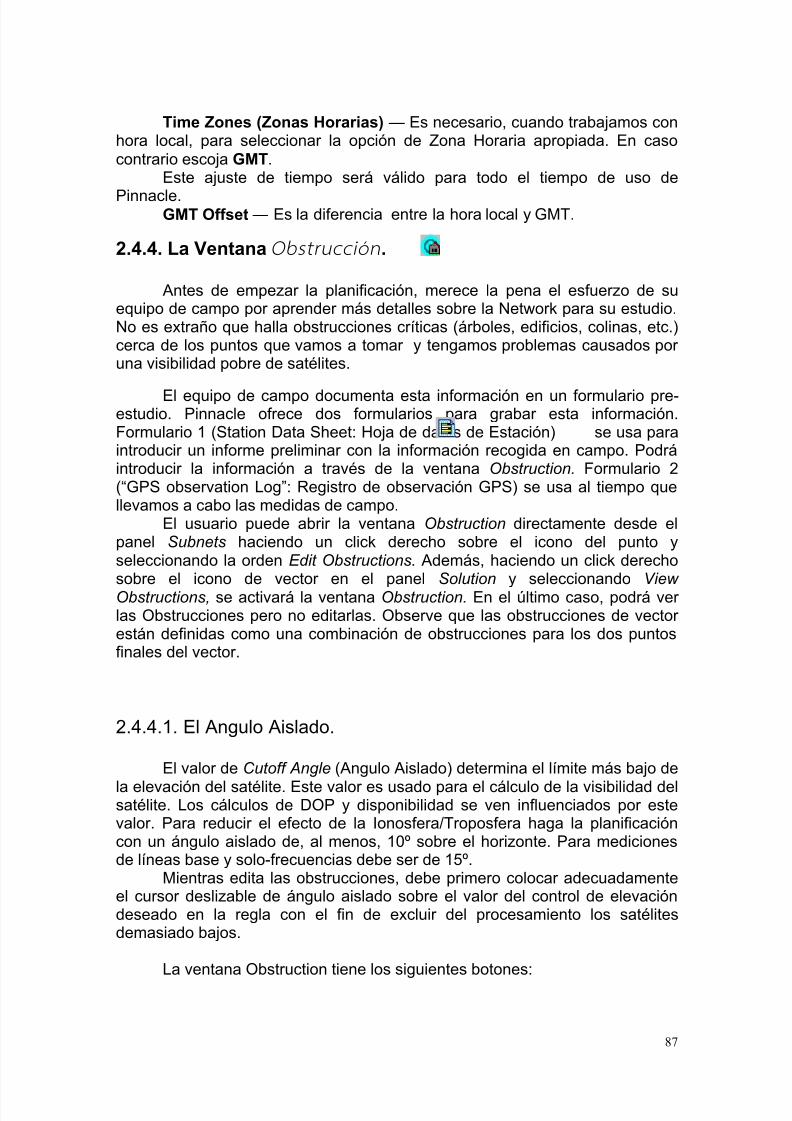
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 88/170
87
Time Zones (Zonas Horarias) — Es necesario, cuando trabajamos conhora local, para seleccionar la opción de Zona Horaria apropiada. En casocontrario escoja GMT.
Este ajuste de tiempo será válido para todo el tiempo de uso de
Pinnacle.GMT Offset — Es la diferencia entre la hora local y GMT.
2.4.4. La Ventana Obstrucción .
Antes de empezar la planificación, merece la pena el esfuerzo de suequipo de campo por aprender más detalles sobre la Network para su estudio.No es extraño que halla obstrucciones críticas (árboles, edificios, colinas, etc.)cerca de los puntos que vamos a tomar y tengamos problemas causados poruna visibilidad pobre de satélites.
El equipo de campo documenta esta información en un formulario pre-estudio. Pinnacle ofrece dos formularios para grabar esta información.Formulario 1 (Station Data Sheet: Hoja de datos de Estación) se usa paraintroducir un informe preliminar con la información recogida en campo. Podráintroducir la información a través de la ventana Obstruction. Formulario 2(―GPS observation Log‖: Registro de observación GPS) se usa al tiempo quellevamos a cabo las medidas de campo.
El usuario puede abrir la ventana Obstruction directamente desde elpanel Subnets haciendo un click derecho sobre el icono del punto yseleccionando la orden Edit Obstructions. Además, haciendo un click derecho
sobre el icono de vector en el panel Solution y seleccionando View Obstructions, se activará la ventana Obstruction. En el último caso, podrá verlas Obstrucciones pero no editarlas. Observe que las obstrucciones de vectorestán definidas como una combinación de obstrucciones para los dos puntosfinales del vector.
2.4.4.1. El Angulo Aislado.
El valor de Cutoff Angle (Angulo Aislado) determina el límite más bajo de
la elevación del satélite. Este valor es usado para el cálculo de la visibilidad delsatélite. Los cálculos de DOP y disponibilidad se ven influenciados por estevalor. Para reducir el efecto de la Ionosfera/Troposfera haga la planificacióncon un ángulo aislado de, al menos, 10º sobre el horizonte. Para medicionesde líneas base y solo-frecuencias debe ser de 15º.
Mientras edita las obstrucciones, debe primero colocar adecuadamenteel cursor deslizable de ángulo aislado sobre el valor del control de elevacióndeseado en la regla con el fin de excluir del procesamiento los satélitesdemasiado bajos.
La ventana Obstruction tiene los siguientes botones:
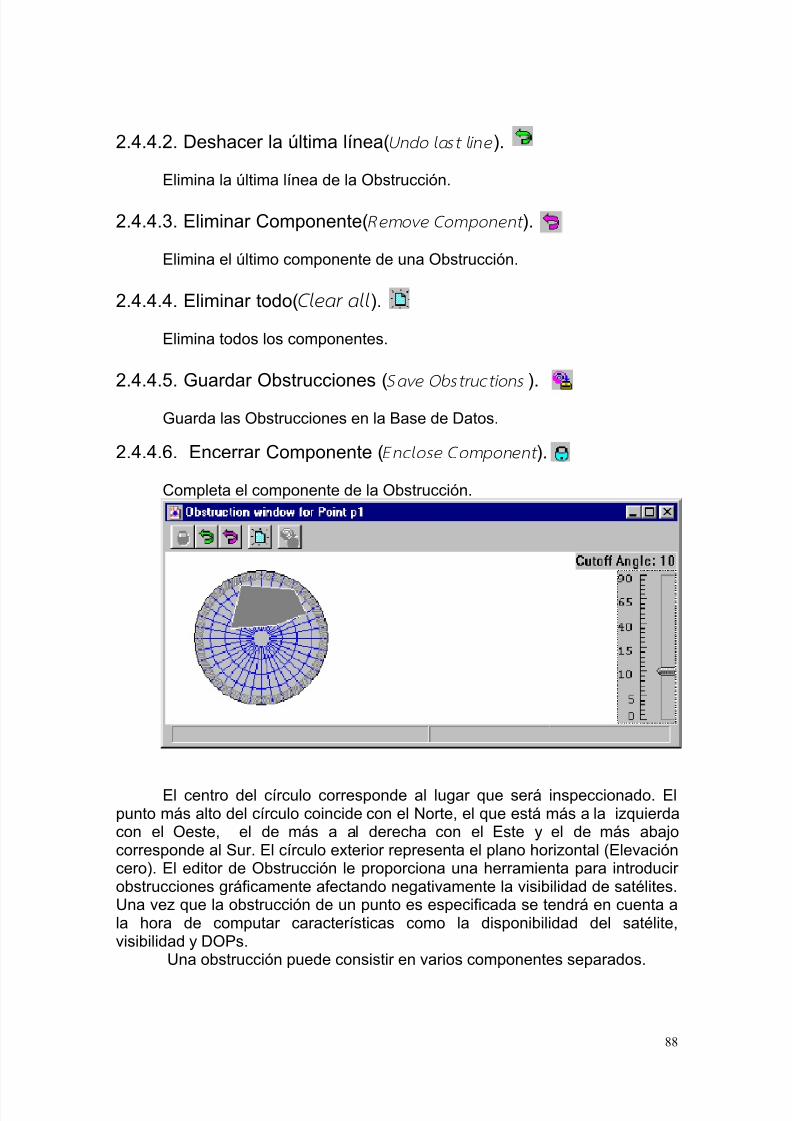
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 89/170
88
2.4.4.2. Deshacer la última línea(Undo last line ).
Elimina la última línea de la Obstrucción.
2.4.4.3. Eliminar Componente(Remove Component ).
Elimina el último componente de una Obstrucción.
2.4.4.4. Eliminar todo(Clear all ).
Elimina todos los componentes.
2.4.4.5. Guardar Obstrucciones (Save Obstructions ).
Guarda las Obstrucciones en la Base de Datos.
2.4.4.6. Encerrar Componente (Enclose Component ).
Completa el componente de la Obstrucción.
El centro del círculo corresponde al lugar que será inspeccionado. Elpunto más alto del círculo coincide con el Norte, el que está más a la izquierdacon el Oeste, el de más a al derecha con el Este y el de más abajocorresponde al Sur. El círculo exterior representa el plano horizontal (Elevacióncero). El editor de Obstrucción le proporciona una herramienta para introducirobstrucciones gráficamente afectando negativamente la visibilidad de satélites.Una vez que la obstrucción de un punto es especificada se tendrá en cuenta ala hora de computar características como la disponibilidad del satélite,visibilidad y DOPs.
Una obstrucción puede consistir en varios componentes separados.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 90/170
89
2.4.5. El Botón de los Satélites (Satellites).
Esta orden está disponible para todos los iconos del árbol ya seanvectores, puntos u ocupaciones. El cuadro de diálogo de lista de Satélites es elsiguiente.
Puede usar satélites GPS o GLONASS.Todos los satélites tienen su número ID.Podrá seleccionar los satélites que se usarán en las computaciones
utilizando las casillas de verificación.Show ill satellites — activa/desactiva la mala salud de los satélites.
(Observe que la mala salud de los satélites está siempre desactivada cuandocomputamos DOPs).
ALL ON – Se seleccionan todos los satélites GPS y GLONASS.ALL OFF -- Se deseleccionan todos los satélites GPS y GLONASS.
2.4.6. El botón Almanaque.
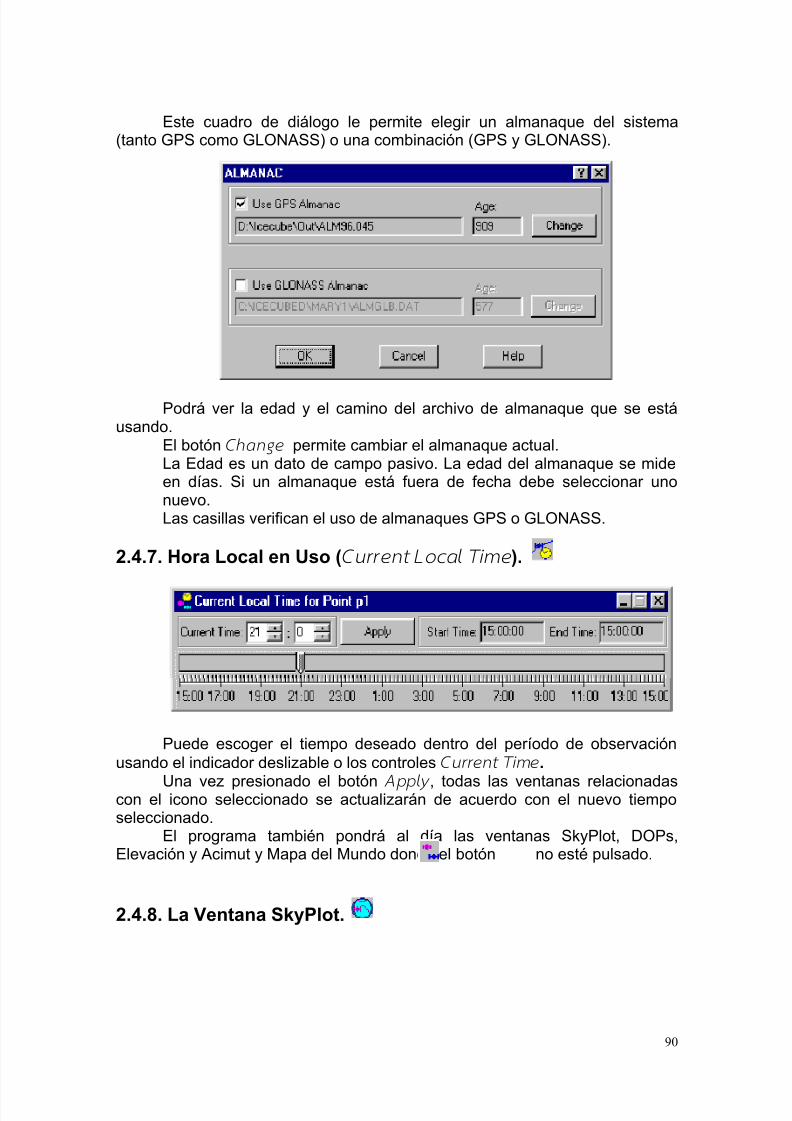
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 91/170
90
Este cuadro de diálogo le permite elegir un almanaque del sistema(tanto GPS como GLONASS) o una combinación (GPS y GLONASS).
Podrá ver la edad y el camino del archivo de almanaque que se estáusando.
El botón Change permite cambiar el almanaque actual.La Edad es un dato de campo pasivo. La edad del almanaque se mideen días. Si un almanaque está fuera de fecha debe seleccionar unonuevo.Las casillas verifican el uso de almanaques GPS o GLONASS.
2.4.7. Hora Local en Uso (Current Local Time ).
Puede escoger el tiempo deseado dentro del período de observaciónusando el indicador deslizable o los controles Current Time .
Una vez presionado el botón Apply , todas las ventanas relacionadascon el icono seleccionado se actualizarán de acuerdo con el nuevo tiemposeleccionado.
El programa también pondrá al día las ventanas SkyPlot, DOPs,Elevación y Acimut y Mapa del Mundo donde el botón no esté pulsado.
2.4.8. La Ventana SkyPlot.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 92/170
91
Dado un vector o una ocupación, esta ventana permite gráficos(Skyplots) e información numérica (tiempo, latitud, longitud, altitud y GMTOffset) aplicados al vector o la ocupación seleccionada.
Para visualizar/ocultar las obstrucciones use el botón .
La orden Grid (Rejilla) permite activar/desactivar los círculosconcéntricos.
El camino de cada satélite tiene en la ventana un solo color. Ustedpuede activar/desactivar el número ID del satélite con ayuda de la orden
SVS Numbers.
Así es como aparece en SkyPlot:
G14 – Satélite GPS número 14.N23 – Satélite GLONASS número 23.La orden SVS Schedule permite resaltar la posición de los satélites
sobre los caminos cada hora en punto.Así es como se verá en Skyplot:
El número del interior del círculo indica el tiempo GMT (en horasenteras).
El comando Current values se usa para mostrar la posición actualdel satélite en SkyPlot (observe el ejemplo siguiente):
2.4.9. La Disponibilidad de los Satélites y la Ventana de DOPs.
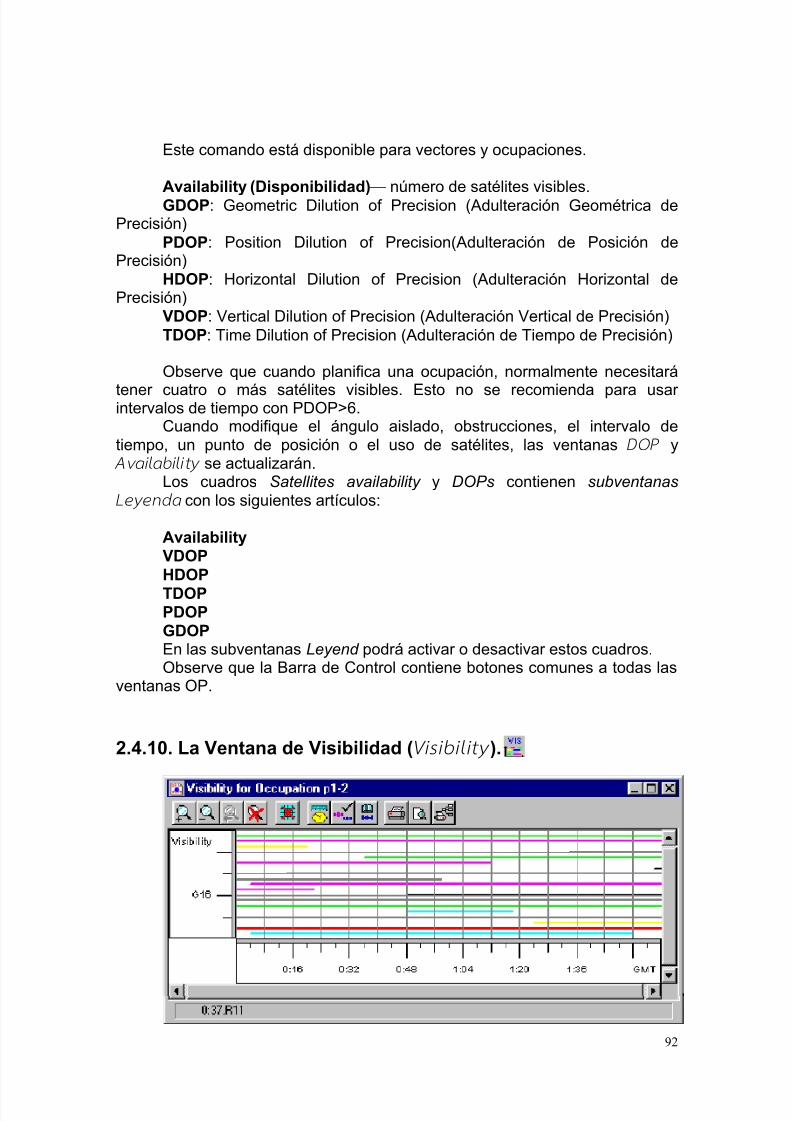
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 93/170
92
Este comando está disponible para vectores y ocupaciones.
Availability (Disponibilidad)— número de satélites visibles.GDOP: Geometric Dilution of Precision (Adulteración Geométrica de
Precisión)PDOP: Position Dilution of Precision(Adulteración de Posición de
Precisión)HDOP: Horizontal Dilution of Precision (Adulteración Horizontal de
Precisión)VDOP: Vertical Dilution of Precision (Adulteración Vertical de Precisión)TDOP: Time Dilution of Precision (Adulteración de Tiempo de Precisión)
Observe que cuando planifica una ocupación, normalmente necesitará
tener cuatro o más satélites visibles. Esto no se recomienda para usarintervalos de tiempo con PDOP>6.
Cuando modifique el ángulo aislado, obstrucciones, el intervalo detiempo, un punto de posición o el uso de satélites, las ventanas DOP yAvailability se actualizarán.
Los cuadros Satellites availability y DOPs contienen subventanas Leyenda con los siguientes artículos:
AvailabilityVDOPHDOPTDOPPDOPGDOPEn las subventanas Leyend podrá activar o desactivar estos cuadros.Observe que la Barra de Control contiene botones comunes a todas las
ventanas OP.
2.4.10. La Ventana de Visibilidad (Visibility ).
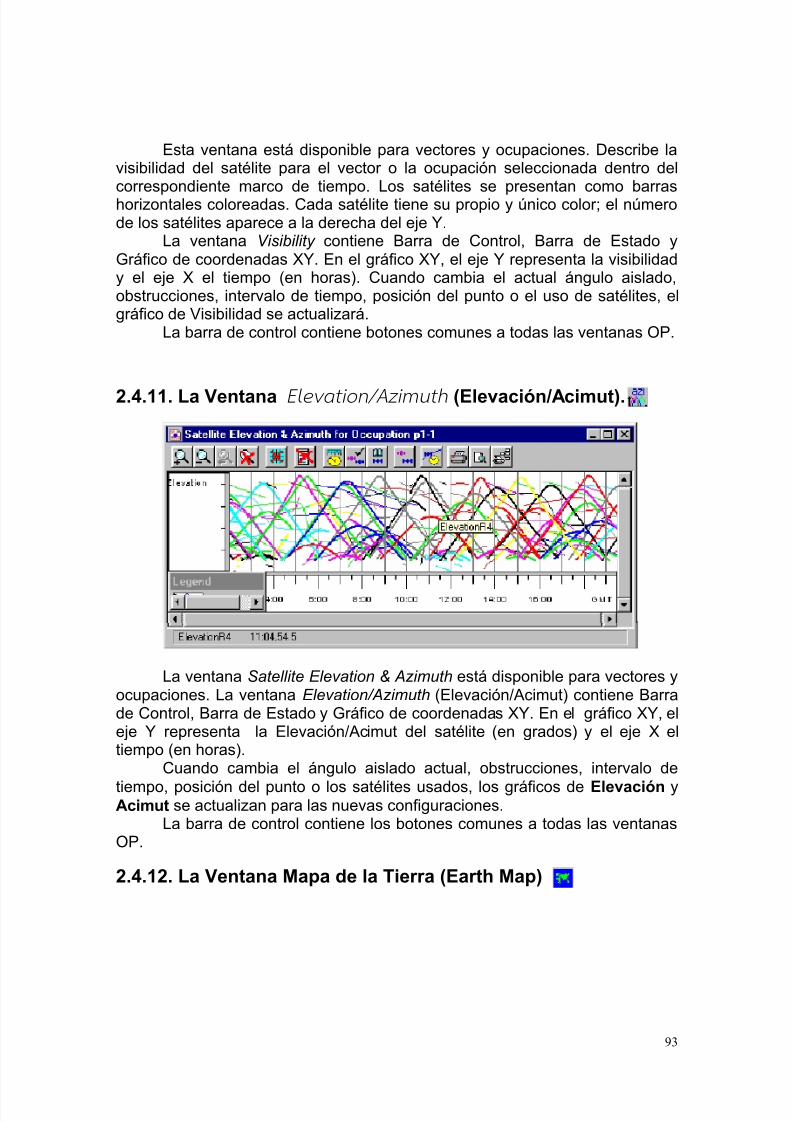
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 94/170
93
Esta ventana está disponible para vectores y ocupaciones. Describe lavisibilidad del satélite para el vector o la ocupación seleccionada dentro delcorrespondiente marco de tiempo. Los satélites se presentan como barrashorizontales coloreadas. Cada satélite tiene su propio y único color; el númerode los satélites aparece a la derecha del eje Y.
La ventana Visibility contiene Barra de Control, Barra de Estado yGráfico de coordenadas XY. En el gráfico XY, el eje Y representa la visibilidady el eje X el tiempo (en horas). Cuando cambia el actual ángulo aislado,obstrucciones, intervalo de tiempo, posición del punto o el uso de satélites, elgráfico de Visibilidad se actualizará.
La barra de control contiene botones comunes a todas las ventanas OP.
2.4.11. La Ventana Elevation/Azimuth (Elevación/Acimut).
La ventana Satellite Elevation & Azimuth está disponible para vectores yocupaciones. La ventana Elevation/Azimuth (Elevación/Acimut) contiene Barrade Control, Barra de Estado y Gráfico de coordenadas XY. En el gráfico XY, eleje Y representa la Elevación/Acimut del satélite (en grados) y el eje X eltiempo (en horas).
Cuando cambia el ángulo aislado actual, obstrucciones, intervalo de
tiempo, posición del punto o los satélites usados, los gráficos de Elevación y Acimut se actualizan para las nuevas configuraciones.
La barra de control contiene los botones comunes a todas las ventanasOP.
2.4.12. La Ventana Mapa de la Tierra (Earth Map)
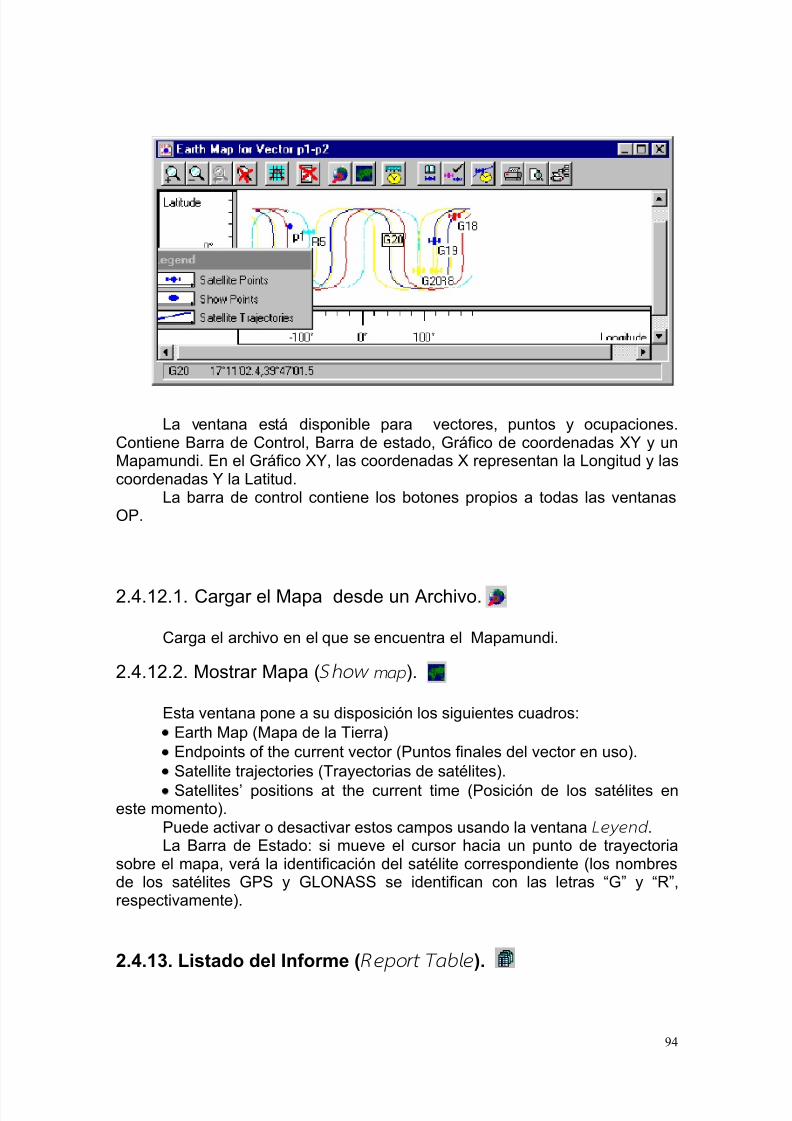
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 95/170
94
La ventana está disponible para vectores, puntos y ocupaciones.Contiene Barra de Control, Barra de estado, Gráfico de coordenadas XY y unMapamundi. En el Gráfico XY, las coordenadas X representan la Longitud y lascoordenadas Y la Latitud.
La barra de control contiene los botones propios a todas las ventanasOP.
2.4.12.1. Cargar el Mapa desde un Archivo.
Carga el archivo en el que se encuentra el Mapamundi.
2.4.12.2. Mostrar Mapa (Show map ).
Esta ventana pone a su disposición los siguientes cuadros:
Earth Map (Mapa de la Tierra)
Endpoints of the current vector (Puntos finales del vector en uso).
Satellite trajectories (Trayectorias de satélites).
Satellites’ positions at the current time (Posición de los satélites eneste momento).
Puede activar o desactivar estos campos usando la ventana Leyend .La Barra de Estado: si mueve el cursor hacia un punto de trayectoria
sobre el mapa, verá la identificación del satélite correspondiente (los nombresde los satélites GPS y GLONASS se identifican con las letras ―G‖ y ―R‖,respectivamente).
2.4.13. Listado del Informe (Report Table ).

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 96/170
95
Esta ventana le permite ver e imprimir los siguientes listados:
Satellite Azimuth : Acimut del satélite (grados)
Satellite Elevation : Elevación del satélite (grados )
Satellite Azimuth and Elevation : Elevación y acimut del satéliteSatellites’ DOPs and Availability : DOPs y disponibilidad del satélite
Satellite Latitude : Latitud del satélite
Satellite Longitude : Longitud del satéliteEstos listados presentan los cálculos de la posición y la sesión de
ocupación/vector en la fecha seleccionada y con tomas cada 30 minutos (Delta time ), empezando a las 0h. 00min. El control de Delta Time permite cambiar elDelta time que puede oscilar entre 1 min. y una hora con incrementos de unminuto. Además podrá obtener estos listados tanto en hora local como enGMT.
2.4.14. Imprimir Formularios para su uso en Campo.
La orden Print Form 1 en la barra de Control de Pinnacle se usa paraimprimir La Hoja de Datos de la Estación (Station Data Sheet) para su uso encampo.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 97/170
96
Station Data Sheet puede usarse para introducir información de campopre-estudio. La orden Print Form 2 permite, desde el menú contextual deOccupation, imprimir un formulario del (―GPS Observation Log‖) Registro de Observación GPS que se usa para documentar la información recogida encampo. Desde que un formulario se imprime para una proyecto/planificación deocupación seleccionado, el nombre del proyecto, nombre/posición del lugar,planificación de fecha/hora de observación y otros datos relevantes seránautomáticamente añadidos a este formulario previo para empezar las medidasde campo planificadas.
2.5. Análisis de Redes Planificadas
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 98/170
97
Para el análisis de una Network Planificada vaya a la correspondienteventana Network View, pulse el botón “Show analysis window” (Mostrarventana de Análisis) y seleccione la opción “Net structure test” (Test deEstructura de la Red) del menú contextual. Se mostrará la siguiente
información:Número total de puntos, líneas base y vectores.
Número de puntos de control – plano y/o vertical (si ha atado algúncontrol a su Network)
Líneas base con múltiples vectores.
Número de puntos ocupados más de una vez.
Número de puntos de control ocupados más de una vez.
Puntos, vectores o partes de la Network aislados.
Vectores de un solo final.Las estadísticas pueden usarse para comprobar una Network designada
(planificada) contra los estándares existentes (ejem: los requerimientos deNGS) antes de empezar a construir una Network real.Después de haber planificado las ocupaciones, podrá obtenerse
también la siguiente información:
Puntos para los que han sido planificadas las ocupaciones.
Vectores que no han sido provistos de ocupaciones planificadas.Cuando planifique ocupaciones para receptores específicos en puntos
específicos, podrá comprobar si existen receptores que hallan sido planificadospara usarse en diferentes puntos en el mismo momento.
Para comprobar si existen estos conflictos sólo tiene que cambiar de laventana "Occupation vs Points…" a la "Occupation vs. Receivers…".
Los diagramas ―Point vs. observation time…‖ y ―Receiver vs. observationtime…‖ se pueden imprimir primero con el fin de que los operadores de campolos usen durante el estudio. También, para cada ocupación planificada, lashojas del Registro de Observación GPS se pueden imprimir mostrando el ID dela estación y el principio/fin de los tiempos de observación (vea la sección 2.4).
Tras terminar las operaciones de campo y cargar la informaciónrecogida en la Base de Datos del proyecto, la correspondencia entre lasobservaciones reales y las planificadas será examinada. Todas lasobservaciones reales que no sean iguales a las ocupaciones planificadas(Teniendo en cuenta los mencionados niveles de tolerancia y otras cuestiones)serán emplazadas en las sesiones ―Unexpected‖. Para ver cómo de cercaestán los tiempos planificados y de ocupación real, vaya al panel Sessions yhaga un click derecho sobre la sesión de interés. La ventana "OccupationView" se abrirá y mostrará las ocupaciones planificadas como rectángulosazules y sombreados, en cambio las ocupaciones reales se mostrarán comorectángulos azules resaltados. Si pulsa el botón Show whole network podráver una información similar sobre las ocupaciones relacionadas con otrassesiones (se muestran como rectángulos grises).
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 99/170
98
3. Importación.
El módulo de importación de Pinnacle es una herramienta que puedeaplicarse a una Network. Esto significa que podrá acceder a esta herramientahaciendo un click derecho sobre un objeto de la Network y seleccionando lacorrespondiente opción del menú contextual. Cuando el módulo de Importaciónes ejecutado por primera vez, el usuario abrirá la ventana Import , donde semuestran los Data Chanels (Canales de datos) catalogados.
Un Data Chanel es un archivo en un disco local o una Network, o en ladirección de un archivo remoto u otra fuente.
El Data Chanels que el usuario establecerá aquí representa un Plan deImportación (Import Schedule). Normalmente, este plan pertenece a una
Network de manera que los Canales de Datos, por norma, proporcioneninformación a esta Network. Existen algunas excepciones a esta regla, losdatos de efemérides son una de ellas. Si importa un archivo que contengatransmisiones o efemérides precisas, estos datos serán accesibles a lo largodel proyecto, adjuntos a todas sus Networks. Observe, sin embargo, que estosCanales de Datos están explícitamente especificados solamente en esteNetwork’s Schedule (Plan de esta Network).
3.1. Agregar Archivos Locales.
Para añadir archivos a un Plan de Importación , pulse el botón(Local). Un cuadro de diálogo estándar aparecerá permitiendo seleccionar unoo más archivos del sistema local o en los alrededores de la Network. Tipos dearchivos: un cuadro desplegable lista todos los tipos de archivos importablesen Pinnacle. Esta lista depende del conjunto de Archivos Importables de quedisponga la instalación del programa. Para más detalles de Import Filters vea lasección 3.4 más adelante.
3.2. Agregar Datos de Control desde Fuentes Remotas.
Para añadir datos a tus canales desde fuentes remotas (internet) pulseel botón . Remote e introduzca la URL (dirección de internet o UniversalResource Locator) deseada exactamente como se hace en los navegadores deinternet:
<protocol>://<host name>/<file location>
Por ejemplo:ftp://ftp.mycompany.com/GPS/Data/1998/Site1.JPS
Si el sitio o directorio está protegido con contraseña puede incluir elLogin y la contraseña en la dirección de Internet:
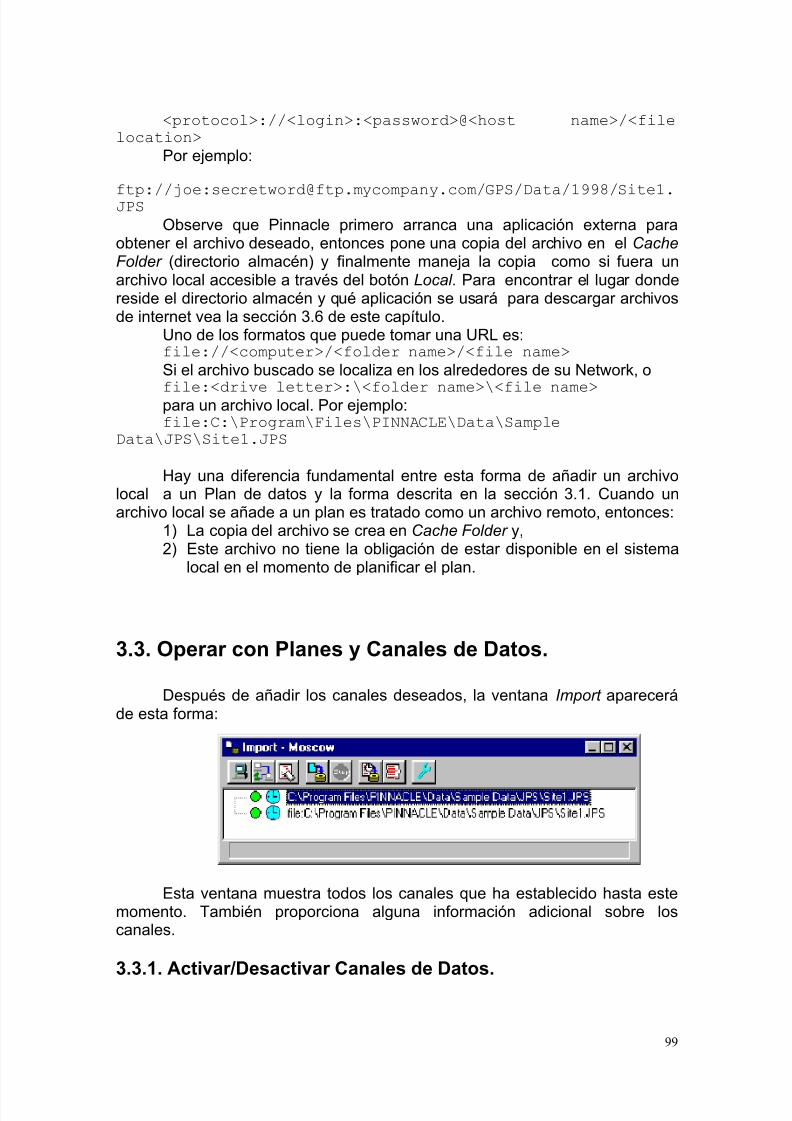
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 100/170
99
<protocol>://<login>:<password>@<host name>/<filelocation>
Por ejemplo:
ftp://joe:[email protected]/GPS/Data/1998/Site1.JPS
Observe que Pinnacle primero arranca una aplicación externa paraobtener el archivo deseado, entonces pone una copia del archivo en el Cache Folder (directorio almacén) y finalmente maneja la copia como si fuera unarchivo local accesible a través del botón Local . Para encontrar el lugar dondereside el directorio almacén y qué aplicación se usará para descargar archivosde internet vea la sección 3.6 de este capítulo.
Uno de los formatos que puede tomar una URL es:file://<computer>/<folder name>/<file name> Si el archivo buscado se localiza en los alrededores de su Network, o
file:<drive letter>:\<folder name>\<file name> para un archivo local. Por ejemplo:file:C:\Program\Files\PINNACLE\Data\Sample
Data\JPS\Site1.JPS
Hay una diferencia fundamental entre esta forma de añadir un archivolocal a un Plan de datos y la forma descrita en la sección 3.1. Cuando unarchivo local se añade a un plan es tratado como un archivo remoto, entonces:
1) La copia del archivo se crea en Cache Folder y,2) Este archivo no tiene la obligación de estar disponible en el sistema
local en el momento de planificar el plan.
3.3. Operar con Planes y Canales de Datos.
Después de añadir los canales deseados, la ventana Import apareceráde esta forma:
Esta ventana muestra todos los canales que ha establecido hasta estemomento. También proporciona alguna información adicional sobre loscanales.
3.3.1. Activar/Desactivar Canales de Datos.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 101/170
100
Los círculos verdes indican canales Activados. Si no necesita que uncanal esté activado la próxima vez que ejecute el Plan, puede desactivar estecanal haciendo un click sobre el correspondiente círculo verde o haciendo un
click derecho sobre el canal en la lista y seleccionando Disable del menúcontextual. El círculo se volverá rojo. Para volver a activar el canal, haga unclick sobre el círculo rojo o seleccione Enable del menú de contexto. Mientrasel canal está activo, el círculo será amarillo y no podrá activar ni desactivar estecanal.
3.3.2. Los Iconos de Estado
Los iconos reloj ( ) junto a los canales, indican que están preparadospara la activación. Puesto que los canales son procesados y sus estadoscambian, los iconos de los canales cambian también. La tabla siguientemuestra todos los estados posibles de los iconos:
Archivo importado con éxito a la base de datos del Proyecto.Ha habido un error – Este archivo no se puede abrir.Ha ocurrido un error durante el manejo del archivo. Este archivo debe
contener datos corruptos.La activación de este canal se ha aplazado de acuerdo con el Plan, y
entonces el usuario abortó la espera de datos.Ha ocurrido un error interno mientras se importaba el archivo.
Este archivo ya se ha cargado cargado en esta Network.El canal está activado. La importación está en progreso.Información adicional.Cuando el Plan es activado, la ventana Import muestra mensajes
indicando el estado de los diferentes canales y el progreso de la importaciónde datos y la ocupación que se filtra (vea sección 3.5). Además, estosmensajes están marcados con los iconos apropiados de la relación anterior.
3.3.3. Borrar Schedule (Plan)
Para borrar un Plan pulse el botón (Clear Schedule ). Todos loscanales de datos desaparecerán del plan. Otra forma de hacerlo es hacer unclick derecho en algún lugar de la ventana Import y seleccionar Clear Schedule del menú de contexto. Observe que este comando permanece desactivado (ysu botón correspondiente estará aclarado) mientras la importación de datosesté en progreso.
3.3.4. Activar el Plan Manualmente.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 102/170
101
Para activar todos los canales pulse el botón (Start ) o seleccioneStart desde el menú contextual que aparece al hacer un click derecho en algúnlugar de la ventana Import . Esto anulará cualquier plan en particular asignadoanteriormente a los canales de forma que estos canales se activarán
inmediatamente. Vea la sección 3.3.6 para saber como asignar un plan a uncanal.
Si la importación de datos esta en proceso el comando Start estarádesactivado y el botón correspondiente se verá aclarado.
3.3.5. Abortar Importación.
Pulse el botón (Skip rest) para abortar una importación. Si elarchivo se está cargando en el momento de pulsar este botón (Solo tiene quemirar al indicador de progreso en la barra de estado de la ventana para saber
el estado del proceso), entonces Pinnacle primero completará la carga delarchivo actual; sin embargo todos los canales que han sido activados perocuya carga no ha empezado todavía, serán desactivados. Además, todos loscanales que han sido aplazados pararán de esperar datos. Debe saber queeste comando está también disponible en el menú contextual. Hasta elcomienzo de la importación de datos, este comando permanece desactivado(el botón correspondiente estará aclarado).
3.3.6. Propiedades de Canal.
Haga un click derecho sobre el Canal de datos deseado y seleccioneProperties del menú contextual.
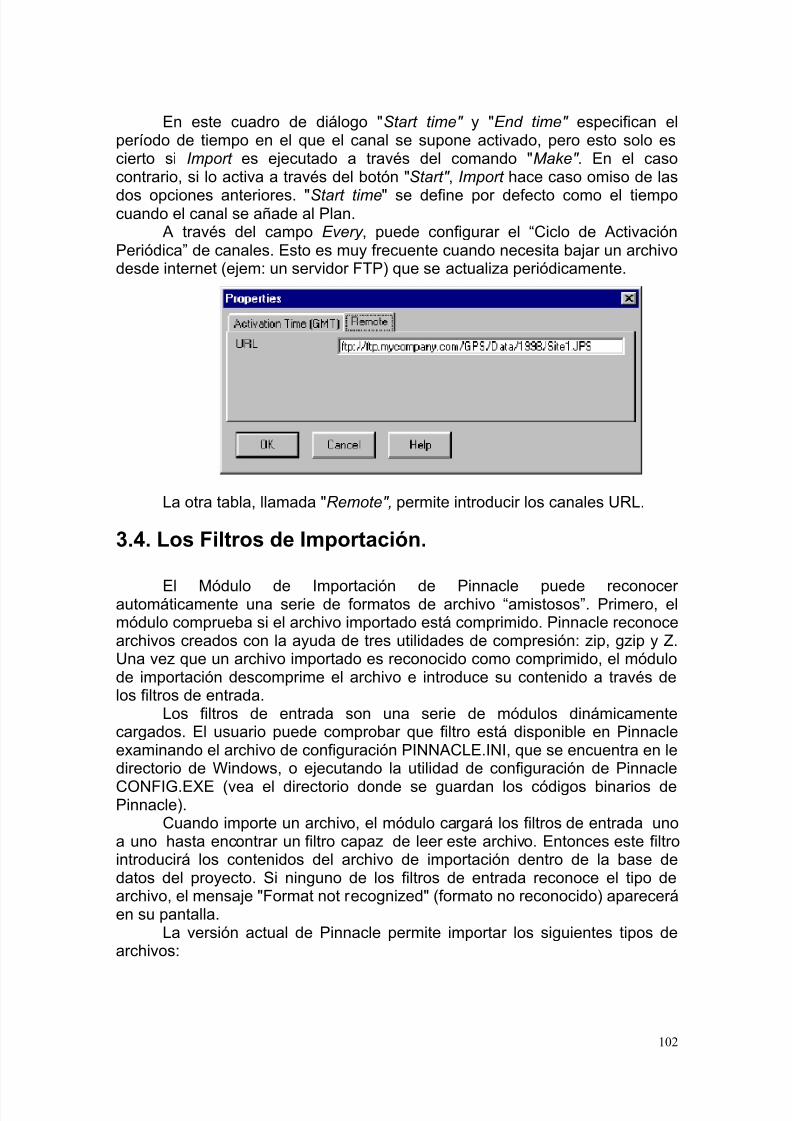
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 103/170
102
En este cuadro de diálogo "Start time" y "End time" especifican elperíodo de tiempo en el que el canal se supone activado, pero esto solo escierto si Import es ejecutado a través del comando "Make" . En el casocontrario, si lo activa a través del botón "Start" , Import hace caso omiso de las
dos opciones anteriores. "Start time " se define por defecto como el tiempocuando el canal se añade al Plan.
A través del campo Every , puede configurar el ―Ciclo de ActivaciónPeriódica‖ de canales. Esto es muy frecuente cuando necesita bajar un archivodesde internet (ejem: un servidor FTP) que se actualiza periódicamente.
La otra tabla, llamada "Remote", permite introducir los canales URL.
3.4. Los Filtros de Importación.
El Módulo de Importación de Pinnacle puede reconocerautomáticamente una serie de formatos de archivo ―amistosos‖. Primero, elmódulo comprueba si el archivo importado está comprimido. Pinnacle reconocearchivos creados con la ayuda de tres utilidades de compresión: zip, gzip y Z.Una vez que un archivo importado es reconocido como comprimido, el módulode importación descomprime el archivo e introduce su contenido a través delos filtros de entrada.
Los filtros de entrada son una serie de módulos dinámicamentecargados. El usuario puede comprobar que filtro está disponible en Pinnacleexaminando el archivo de configuración PINNACLE.INI, que se encuentra en ledirectorio de Windows, o ejecutando la utilidad de configuración de Pinnacle
CONFIG.EXE (vea el directorio donde se guardan los códigos binarios dePinnacle).
Cuando importe un archivo, el módulo cargará los filtros de entrada unoa uno hasta encontrar un filtro capaz de leer este archivo. Entonces este filtrointroducirá los contenidos del archivo de importación dentro de la base dedatos del proyecto. Si ninguno de los filtros de entrada reconoce el tipo dearchivo, el mensaje "Format not recognized" (formato no reconocido) apareceráen su pantalla.
La versión actual de Pinnacle permite importar los siguientes tipos dearchivos:
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 104/170
103
Archivo JPS de registro de receptor. A diferencia de los demásarchivos soportados, estos archivos son ―autosuficientes‖proporcionando todos los datos necesarios para el ciclo deprocesado de Pinnacle.
Archivos RINEX de observación y navegación (GPS y GLONASS).Archivos Ashtech B, E. Son archivos de observación y efeméridesrespectivamente.
Archivos Ashtech O. A diferencia de los anteriormente mencionados,los archivos O proporcionan vectores procesados en lugar demediciones puras o efemérides.
Archivos SNAP. Estos archivos ASCII son creados por el paquete deajuste SNAP.
Archivos de órbita precisa NGS (solo formato SP3).
Después de que el contenido del archivo ha sido satisfactoriamenteimportado dentro de la base de datos, el usuario debe borrar el archivo original.
3.5. Filtrado de Ocupación.
Tras terminar la importación de datos a través de los canales activados,empieza el pre-proceso de los datos puros importados. Para cada ocupación ypara cada época de medición, Pinnacle recupera las soluciones del punto con
el mismo nombre (coordenadas absolutas del receptor). Pinnacle tambiénverifica en esta fase si la base de datos del proyecto contiene informaciónadecuada de efemérides y bastantes mediciones de satélite, etc. Por ejemplo,si en una ocupación faltara la configuración de la altura de la antena, segeneraría una advertencia en el archivo de registro.
En contraposición con los archivos Ashtech B, los archivos deobservación RINEX no contienen en absoluto soluciones de puntos. Paraconseguirlas, el módulo de pre-proceso ("RawFilt") calcula por si mismosoluciones para puntos usando las mediciones puras y las efemérides de losarchivos RINEX de observación y navegación, respectivamente. Todas estascoordenadas estimadas se almacenan en la base de datos del proyecto.
Debe tener en cuenta que cuando aporta ocupaciones sus datos sonprimero remitidos a una Sesión especial llamada "_Import". Si se filtra conéxito, los datos se colocarán, bien dentro de las sesiones planificadas (vea laSección 2.3) bien en la sesión predefinida llamada ―Unexpected‖. Si ya existeuna sesión con este nombre se usará el nombre "Unexpected (n)", donde ―n‖representa a un número entero (1, 2, 3...). Si el pre-proceso de una ocupaciónfalla, los datos de esta ocupación permanecen en "_Import", y usted no podrápasar estos datos a otra sesión o solución. Más adelante, cuando empiece otravez una nueva importación, Pinnacle intentará pre-procesar de nuevo todos losproblemas de ocupaciones. Cobra sentido desde que llegan nuevamente datosque faciliten la ejecución de un nuevo pre-proceso. Por ejemplo, algunos pasos

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 105/170
104
previos de pre-proceso pueden haber fallado posiblemente por la falta deefemérides, pero cuando esos datos de efemérides han sido importados, elsiguiente pre-proceso se llevará a cabo con todo éxito.
3.6. Ejecutar Importación.
Pulse el botón (Setup ) en la ventana Import. Aparecerá el siguientecuadro de diálogo:
4. Listas de Control de Datos (Control Data Lists ).
Control Data Lists contiene las coordenadas de puntos de controlusados para el Proceso y el Ajuste de la Subnet (SubNet Adjustment). LasListas de datos de Control están disponibles tanto desde la raíz del Proyectocomo desde las Networks. Los Datos de Control localizados en la raíz delProyecto están accesibles solo desde sus propias Networks. Las Listas deDatos de Control contienen las posiciones de los Datos de Control junto consus nombres y atributos. Un Punto de Control puede estar compuesto de uno omás Artículos de Punto de Control conteniendo sus coordenadas de referenciaen un Sistema de Coordenadas dado.
4.1. Crear y Editar Listas de Datos de Control.
Las Listas de Datos de Control para un Proyecto o una Network sepueden crear manualmente importando datos desde diferentes tipos dearchivos externos, o exportando datos desde una Subnet.
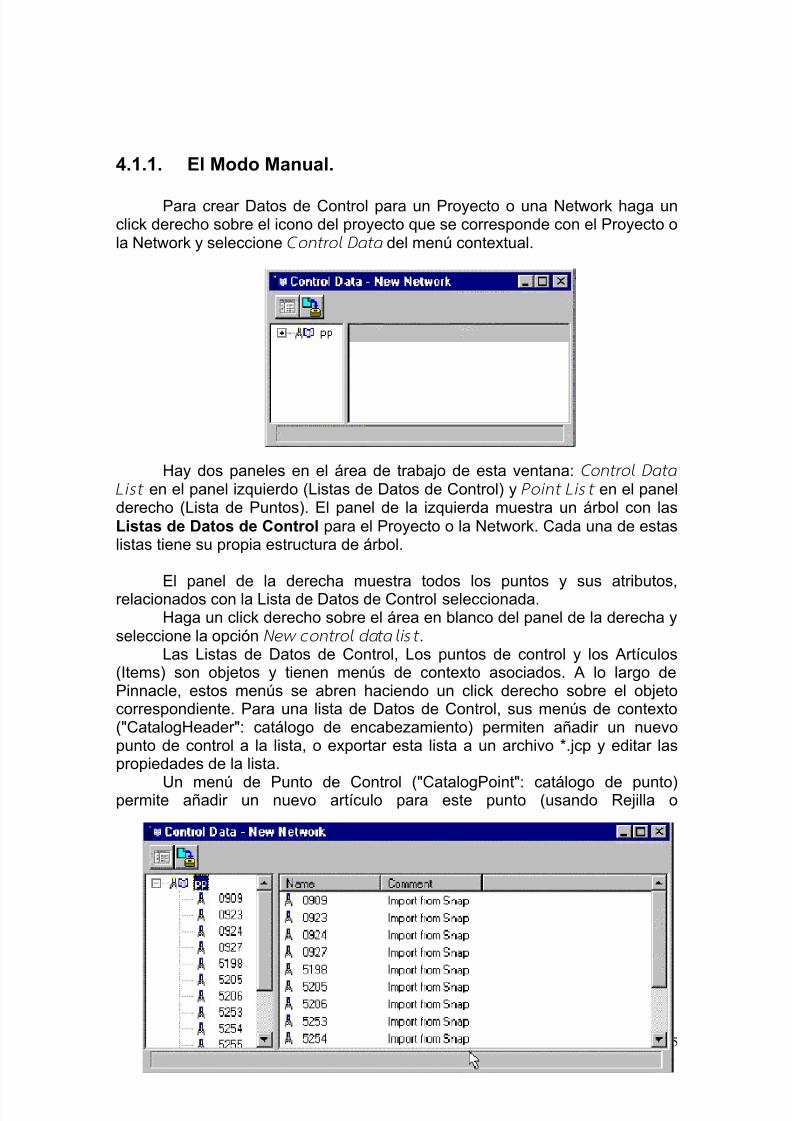
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 106/170
105
4.1.1. El Modo Manual.
Para crear Datos de Control para un Proyecto o una Network haga unclick derecho sobre el icono del proyecto que se corresponde con el Proyecto ola Network y seleccione Control Data del menú contextual.
Hay dos paneles en el área de trabajo de esta ventana: Control Data List en el panel izquierdo (Listas de Datos de Control) y Point List en el panelderecho (Lista de Puntos). El panel de la izquierda muestra un árbol con lasListas de Datos de Control para el Proyecto o la Network. Cada una de estaslistas tiene su propia estructura de árbol.
El panel de la derecha muestra todos los puntos y sus atributos,relacionados con la Lista de Datos de Control seleccionada.Haga un click derecho sobre el área en blanco del panel de la derecha y
seleccione la opción New control data list .Las Listas de Datos de Control, Los puntos de control y los Artículos
(Items) son objetos y tienen menús de contexto asociados. A lo largo dePinnacle, estos menús se abren haciendo un click derecho sobre el objetocorrespondiente. Para una lista de Datos de Control, sus menús de contexto("CatalogHeader": catálogo de encabezamiento) permiten añadir un nuevopunto de control a la lista, o exportar esta lista a un archivo *.jcp y editar laspropiedades de la lista.
Un menú de Punto de Control ("CatalogPoint": catálogo de punto)permite añadir un nuevo artículo para este punto (usando Rejilla o
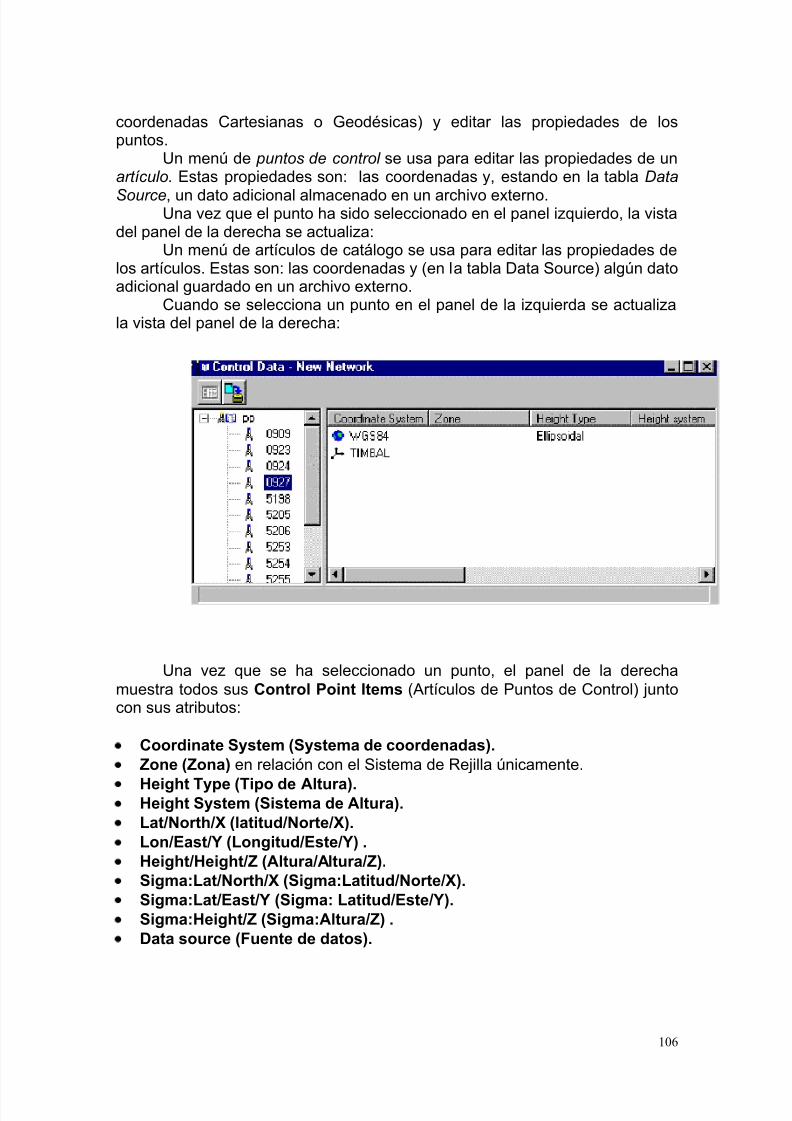
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 107/170
106
coordenadas Cartesianas o Geodésicas) y editar las propiedades de lospuntos.
Un menú de puntos de control se usa para editar las propiedades de unartículo. Estas propiedades son: las coordenadas y, estando en la tabla Data
Source , un dato adicional almacenado en un archivo externo.Una vez que el punto ha sido seleccionado en el panel izquierdo, la vista
del panel de la derecha se actualiza:Un menú de artículos de catálogo se usa para editar las propiedades de
los artículos. Estas son: las coordenadas y (en la tabla Data Source) algún datoadicional guardado en un archivo externo.
Cuando se selecciona un punto en el panel de la izquierda se actualizala vista del panel de la derecha:
Una vez que se ha seleccionado un punto, el panel de la derechamuestra todos sus Control Point Items (Artículos de Puntos de Control) juntocon sus atributos:
Coordinate System (Systema de coordenadas).Zone (Zona) en relación con el Sistema de Rejilla únicamente.
Height Type (Tipo de Altura).Height System (Sistema de Altura).Lat/North/X (latitud/Norte/X).Lon/East/Y (Longitud/Este/Y) .Height/Height/Z (Altura/Altura/Z).Sigma:Lat/North/X (Sigma:Latitud/Norte/X).Sigma:Lat/East/Y (Sigma: Latitud/Este/Y).Sigma:Height/Z (Sigma:Altura/Z) .Data source (Fuente de datos).
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 108/170
107
Los nuevos Artículos se pueden insertar haciendo un click derecho en elárea en blanco del panel. Un artículo o artículos seleccionados pueden serborrados, editados, copiados o marcados con los atributos solo-lectura o solo- escritura.
4.1.2. Importar Datos de Control.
Hay cuatro tipos de archivos que se pueden importar dentro de lasControl Data Lists:
Hojas de datos NGS (*.htm o *.dat se obtienen desde el sitio WebNGS, o un CD-ROM NGS).
Archivos de punto Ashtech (*.pts).
Archivos SNAP (sta*.dat).
Archivos de Puntos de Control JPS (*.jcp).
Import es accesible a través del botón Import Control Data List o laopción Import Control Data List del menú contextual.Se creará un nuevo catálogo que contiene todos los puntos del archivo
importado.
4.1.3 Exportar Datos de Control desde una Red de Ajuste.
Para exportar datos desde una Subnet (esta función sólo es aplicable aSubnets Ajustadas), debe emplear la opción SubNet to Control Points delmenú contextual que se despliega sobre el panel de la Subnet de la ventana
de Proyecto.Se creará una nueva Lista de datos de Control que incluye todos los
puntos de esta Subnet.
4.1.4 Copiar Datos de Control ("Arrastrar y soltar").
Las Listas de Datos de Control, Los Puntos de Control o Los Artículosde los Puntos de Control se deben copiar usando la técnica de ―arrastrar ysoltar‖:
Para las Listas de Datos de Control: desde una Network (o un Proyectoraíz) a otra Network (o Proyecto raíz).Para Puntos de Control: Desde una Lista de Datos de Control a otra.Para Artículos de Puntos de Control: desde un Punto de Control a otro
(el cual puede pertenecer a la misma Lista de Datos de Control o a unadiferente.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 109/170
108
4.2. Procesar y Ajustar (Processing and Adjustment) Puntos de Control.
Los puntos de control con coordenadas de referencia que se usan tantopara el Procesado (como ―puntos semilla‖ para la computación de vector) comopara Ajustes Necesarios (para adecuar las Networks de vector GPS a controllocal).
Esto explica por qué, en Pinnacle, algunos puntos deben asociarse conArtículos de Puntos de Control antes de ejecutar Processing y Adjustement .
4.3. Atar Puntos.Una vez que puede manejar los puntos (ejem: si está trabajando con
una Lista de Puntos de la Network, Network View, etc.), puede acceder a laopción Attach Control Point del menú contextual al que se accede haciendoun click derecho sobre la Subnet o Solución.
Si estos puntos atados son seleccionados desde la Network entera,dicho anudamiento será tomado en consideración cuando se lleva a cabo elprocesamiento y ajuste de todas las Subnets que han sido creadas despuésde hacer el anudamiento . Ocurre lo contrario para todas las Subnets existentesen el momento en que se activa el anudamiento , estos puntos mantendrán suestado de anudamiento (attached or unattached: anudado o desanudado ).
Si los puntos atados son seleccionados desde una Subnet (si trabajacon una Lista de Puntos de Subnet, Network View, etc.), dicho anudamiento solo será válido para el ajuste de esta Subnet en particular, estos puntos deSubnet son tratados en este momento como ―duplicados‖ de los Puntos deNetwork correspondientes.
Después de haber seleccionado puntos en la Lista de Puntos o en laNetwork View y haber activado la opción Attach Control Point , solo estospuntos se usarán cuando atamos datos de control. Es decir, solo estos puntosaparecerán en la lista de la izquierda de la ventana de diálogo Points to
Control Point Items .
4.4. Atar Datos de Control a los Puntos.
El proceso de anudamiento consiste en dos pasos:
Seleccionar los Datos de Control desde el cuadro de diálogo Select Control Data Lists .
Atar puntos a los Artículos de Puntos de Control con la ayuda delcuadro de diálogo Attach Points to Control Point Items .

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 110/170
109
4.4.1. Seleccionar Listas de Datos de Control.
En este cuadro de diálogo, Control Data incluye todas las Listas deDatos de Control desde la Network, así como todas las Listas de Datos decontrol desde el Proyecto raíz. Una vez que las Listas de Datos de Controldeseadas han sido seleccionadas, pulse el botón OK para abrir la ventana Attach points to control point items (Atar puntos a los Artículos de Puntos deControl).

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 111/170
110
4.4.2. Relacionar Puntos de Control a Puntos Observados.
El panel de la parte izquierda de la ventana muestra una lista de puntospara ser atados, el panel de la parte derecha muestra artículos de puntos decontrol seleccionados desde los catálogos seleccionados y la lista del panelinferior, los puntos que ya han sido atados.
Cuando seleccionamos un punto desde la lista Points to attach , elprograma clasificará los Artículos de Puntos de Control en consonancia con sudistancia al punto seleccionado. Una vez que ha seleccionado los Artículos dePuntos de Control deseados y ha hecho click en el botón Attach , los Datos deControl serán atados y el programa añadirá el punto y el correspondienteArtículo de Punto de Control a la lista Attached points . Seleccione un Control point item haciendo click sobre la distancia.
El botón Detach permite desactivar el anudamiento .

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 112/170
111
5. Transformación de Coordenadas yModelos de Geoide.
La transformación de coordenadas se aplica entre los tres tipossiguientes de coordenadas:
1. Coordenadas Cartesianas 3-D;2. Geográficas (Latitud, longitud, Altura del Elipsoide);3. Grid: Rejilla (También conocida como Planas).Los primeros dos tipos están basados en la tabla de datos seleccionada.La última está basada en la utilización de una tabla de datos apropiada,
la proyección y la zona.Pinnacle permite aplicar transformaciones entre estos tres tipos de
coordenadas.Para iniciar el Editor de Sistema (System editor), pulse el botón en
la ventana principal:
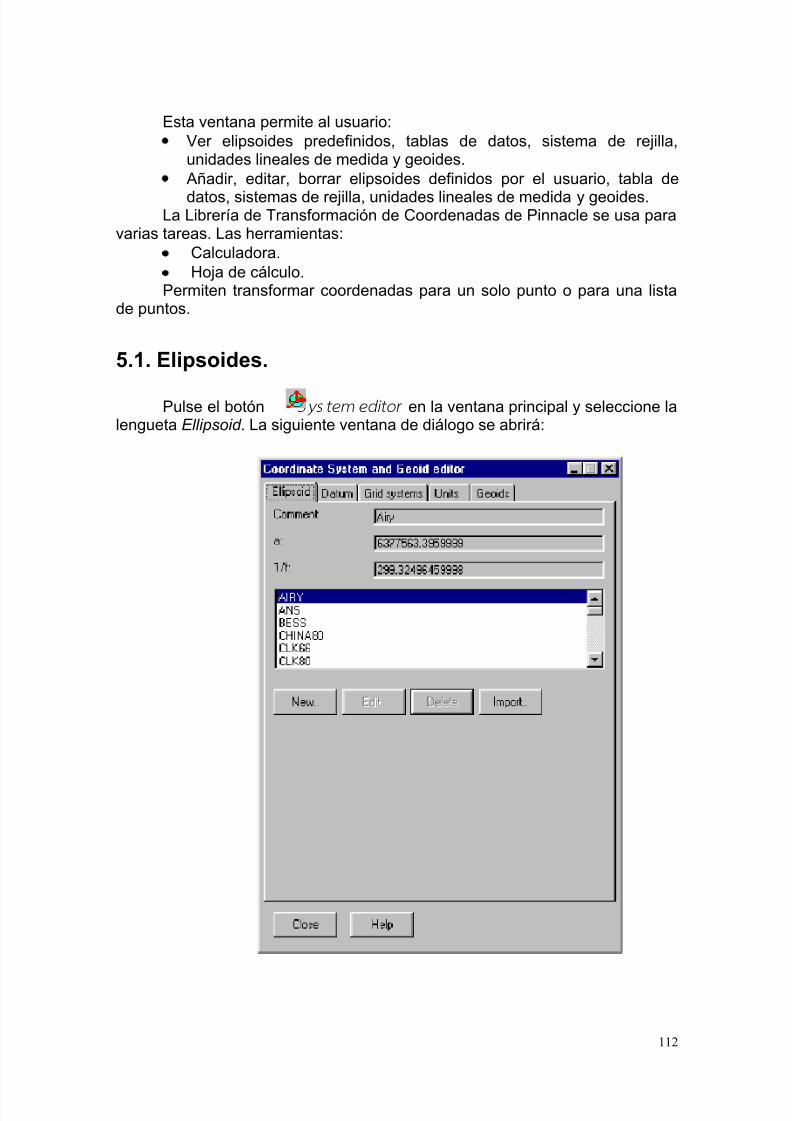
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 113/170
112
Esta ventana permite al usuario:
Ver elipsoides predefinidos, tablas de datos, sistema de rejilla,unidades lineales de medida y geoides.
Añadir, editar, borrar elipsoides definidos por el usuario, tabla de
datos, sistemas de rejilla, unidades lineales de medida y geoides.La Librería de Transformación de Coordenadas de Pinnacle se usa para
varias tareas. Las herramientas:
Calculadora.
Hoja de cálculo.Permiten transformar coordenadas para un solo punto o para una lista
de puntos.
5.1. Elipsoides.
Pulse el botón System editor en la ventana principal y seleccione lalengueta Ellipsoid . La siguiente ventana de diálogo se abrirá:
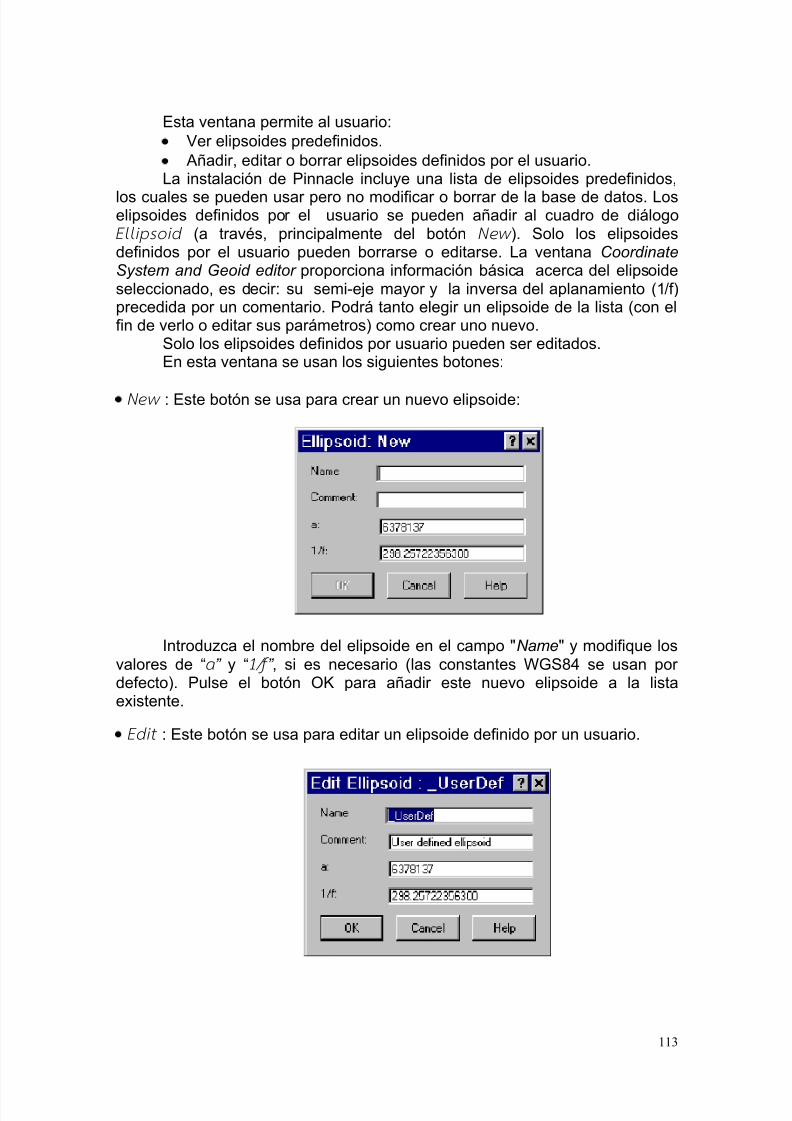
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 114/170
113
Esta ventana permite al usuario:
Ver elipsoides predefinidos.
Añadir, editar o borrar elipsoides definidos por el usuario.La instalación de Pinnacle incluye una lista de elipsoides predefinidos,
los cuales se pueden usar pero no modificar o borrar de la base de datos. Loselipsoides definidos por el usuario se pueden añadir al cuadro de diálogoEllipsoid (a través, principalmente del botón New ). Solo los elipsoidesdefinidos por el usuario pueden borrarse o editarse. La ventana Coordinate System and Geoid editor proporciona información básica acerca del elipsoideseleccionado, es decir: su semi-eje mayor y la inversa del aplanamiento (1/f)precedida por un comentario. Podrá tanto elegir un elipsoide de la lista (con elfin de verlo o editar sus parámetros) como crear uno nuevo.
Solo los elipsoides definidos por usuario pueden ser editados.En esta ventana se usan los siguientes botones:
New : Este botón se usa para crear un nuevo elipsoide:
Introduzca el nombre del elipsoide en el campo "Name " y modifique losvalores de ―a ” y ―1/f ” , si es necesario (las constantes WGS84 se usan pordefecto). Pulse el botón OK para añadir este nuevo elipsoide a la listaexistente.
Edit : Este botón se usa para editar un elipsoide definido por un usuario.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 115/170
114
Modifique todos o algunos de los valores mostrados. Pulse el botón OKpara guardar los nuevos valores del elipsoide.
Delete se usa para borrar el elipsoide seleccionado definido por usuario.
Import Se usa para importar un archivo de elipsoide de Pinnacle (estosarchivos tienen la extensión. jff ). Una vez pulsado, este botón abre un típicocuadro de diálogo de apertura de archivo. Este cuadro de diálogo permiteseleccionar de la lista el archivo de elipsoide de Pinnacle deseado (Pinnacleincluye en su instalación el archivo ellipses.jff )
5.2. Datums.
Pulse el botón System editor en el menú principal de Pinnacle y
seleccione la tabla Datums para:Ver tablas de datos predefinidas.
Añadir, editar y borrar tablas de datos definidas por usuario.Pinnacle ofrece una lista de tablas de datos predefinidas que pueden
usarse pero no modificarse o borrarse de la base de datos. Las tablas de datosdefinidas por el usuario se pueden añadir a la lista a través de la hoja Datum (con la ayuda del botón New ). Solo las tablas de datos definidas por el usuariopueden editarse o eliminarse.
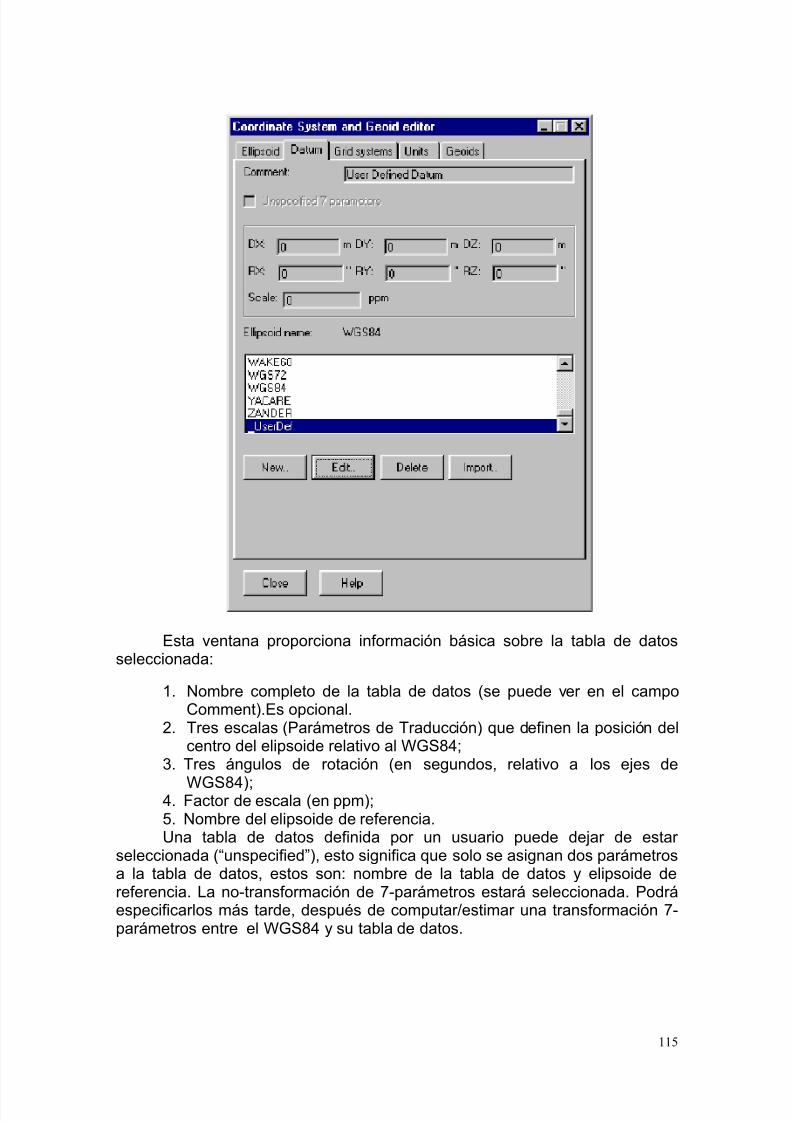
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 116/170
115
Esta ventana proporciona información básica sobre la tabla de datosseleccionada:
1. Nombre completo de la tabla de datos (se puede ver en el campoComment).Es opcional.
2. Tres escalas (Parámetros de Traducción) que definen la posición delcentro del elipsoide relativo al WGS84;
3. Tres ángulos de rotación (en segundos, relativo a los ejes de
WGS84);4. Factor de escala (en ppm);5. Nombre del elipsoide de referencia.Una tabla de datos definida por un usuario puede dejar de estar
seleccionada (―unspecified‖), esto significa que solo se asignan dos parámetrosa la tabla de datos, estos son: nombre de la tabla de datos y elipsoide dereferencia. La no-transformación de 7-parámetros estará seleccionada. Podráespecificarlos más tarde, después de computar/estimar una transformación 7-parámetros entre el WGS84 y su tabla de datos.
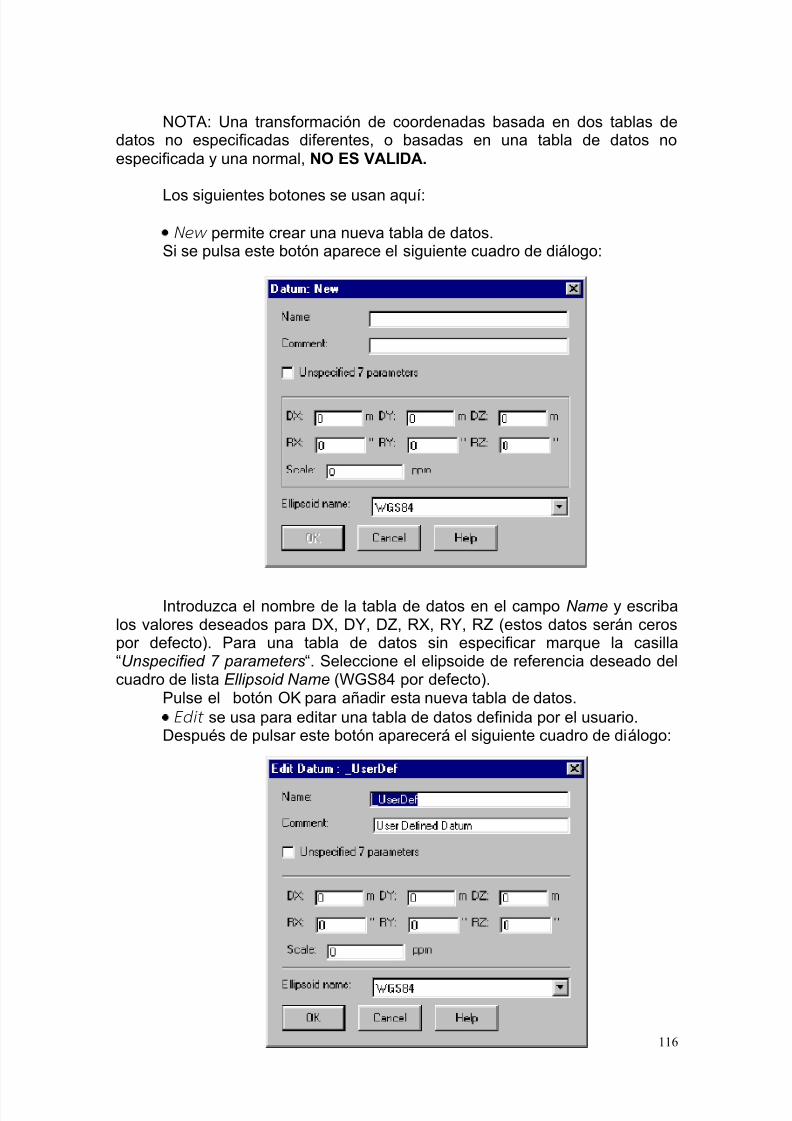
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 117/170
116
NOTA: Una transformación de coordenadas basada en dos tablas dedatos no especificadas diferentes, o basadas en una tabla de datos noespecificada y una normal, NO ES VALIDA.
Los siguientes botones se usan aquí:
New permite crear una nueva tabla de datos.Si se pulsa este botón aparece el siguiente cuadro de diálogo:
Introduzca el nombre de la tabla de datos en el campo Name y escribalos valores deseados para DX, DY, DZ, RX, RY, RZ (estos datos serán cerospor defecto). Para una tabla de datos sin especificar marque la casilla―Unspecified 7 parameters ―. Seleccione el elipsoide de referencia deseado delcuadro de lista Ellipsoid Name (WGS84 por defecto).
Pulse el botón OK para añadir esta nueva tabla de datos.
Edit se usa para editar una tabla de datos definida por el usuario.Después de pulsar este botón aparecerá el siguiente cuadro de diálogo:
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 118/170
117
Cambie los valores mostrados como prefiera.Pulse el botón OK para actualizar la tabla de datos seleccionada.
Delete Se usa para borrar la tabla de datos seleccionada definida porel usuario.
Import Se usa para importar un archivo Datum (tabla de datos). Estosarchivos tienen la extensión jff ).
Pulse este botón para abrir un típico cuadro de diálogo de apertura dearchivos.
Puede seleccionar el archivo Datum de la lista del cuadro (la instalaciónde Pinnacle incluye el archivo datums.jff ).
5.3. Sistemas de Rejilla (Grid Systems)
Pulse el botón System editor del menú principal y escoja la tablaGrid System para:
Ver Sistemas de Rejilla predefinidos.
Añadir, editar o borrar Sistemas de Rejilla definidos por el usuario.Pinnacle ofrece una lista de Sistemas de Rejilla predefinidos, estos se
pueden usar pero no modificar o borrar de la base de datos. Los Sistemas deRejilla definidos por el usuario pueden ser creados, editados o borrados a
través de la tabla Grid System .
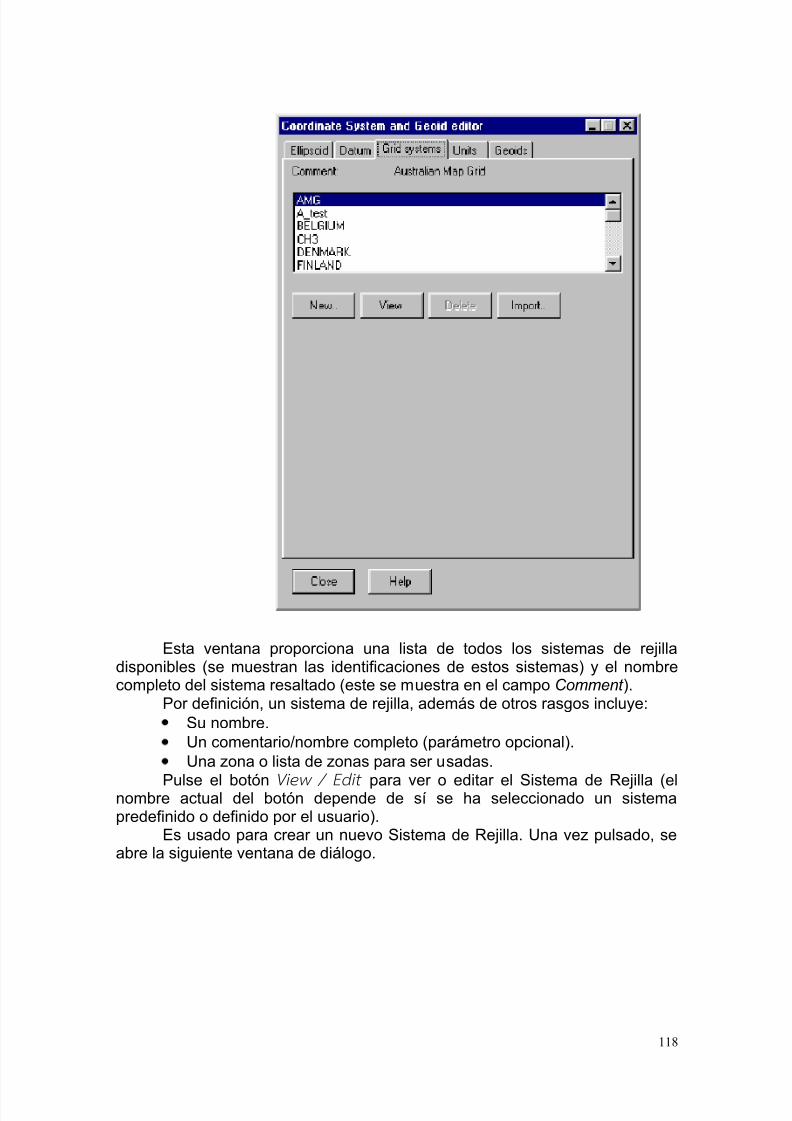
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 119/170
118
Esta ventana proporciona una lista de todos los sistemas de rejilladisponibles (se muestran las identificaciones de estos sistemas) y el nombrecompleto del sistema resaltado (este se muestra en el campo Comment ).
Por definición, un sistema de rejilla, además de otros rasgos incluye:
Su nombre.
Un comentario/nombre completo (parámetro opcional).
Una zona o lista de zonas para ser usadas.
Pulse el botón View / Edit para ver o editar el Sistema de Rejilla (elnombre actual del botón depende de sí se ha seleccionado un sistemapredefinido o definido por el usuario).
Es usado para crear un nuevo Sistema de Rejilla. Una vez pulsado, seabre la siguiente ventana de diálogo.
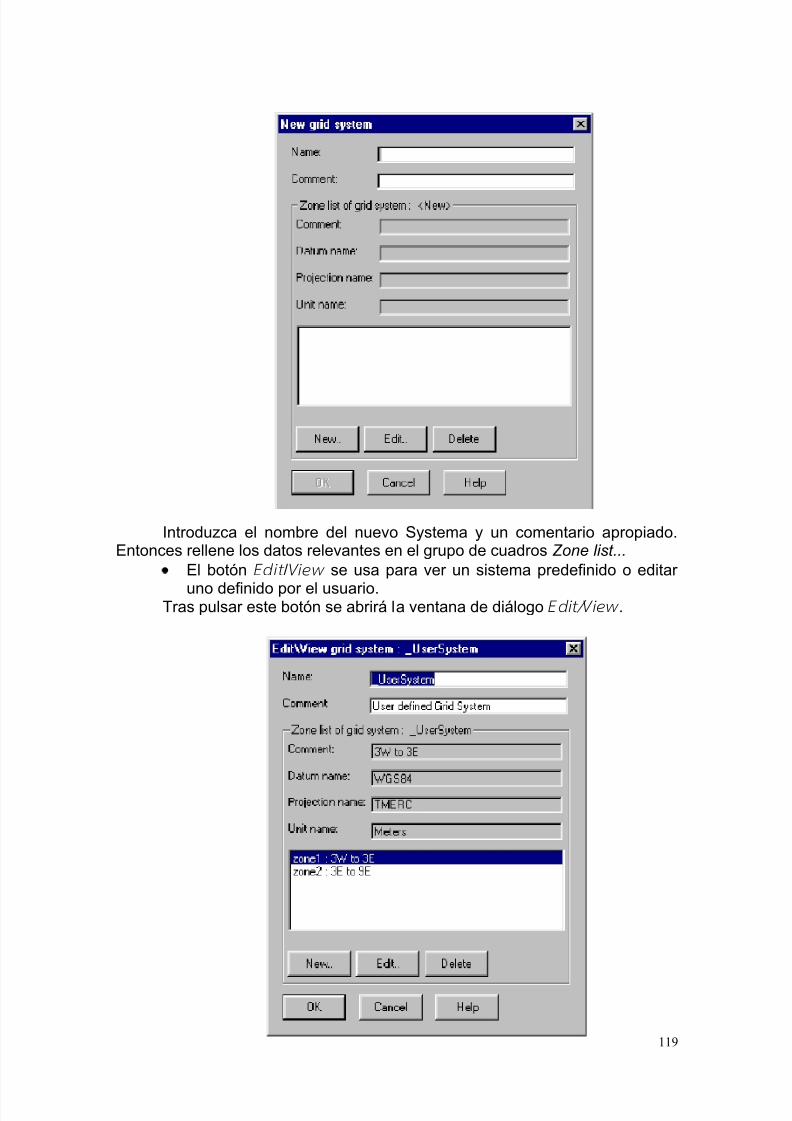
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 120/170
119
Introduzca el nombre del nuevo Systema y un comentario apropiado.Entonces rellene los datos relevantes en el grupo de cuadros Zone list...
El botón Edit / View se usa para ver un sistema predefinido o editar
uno definido por el usuario.Tras pulsar este botón se abrirá la ventana de diálogo Edit/View .
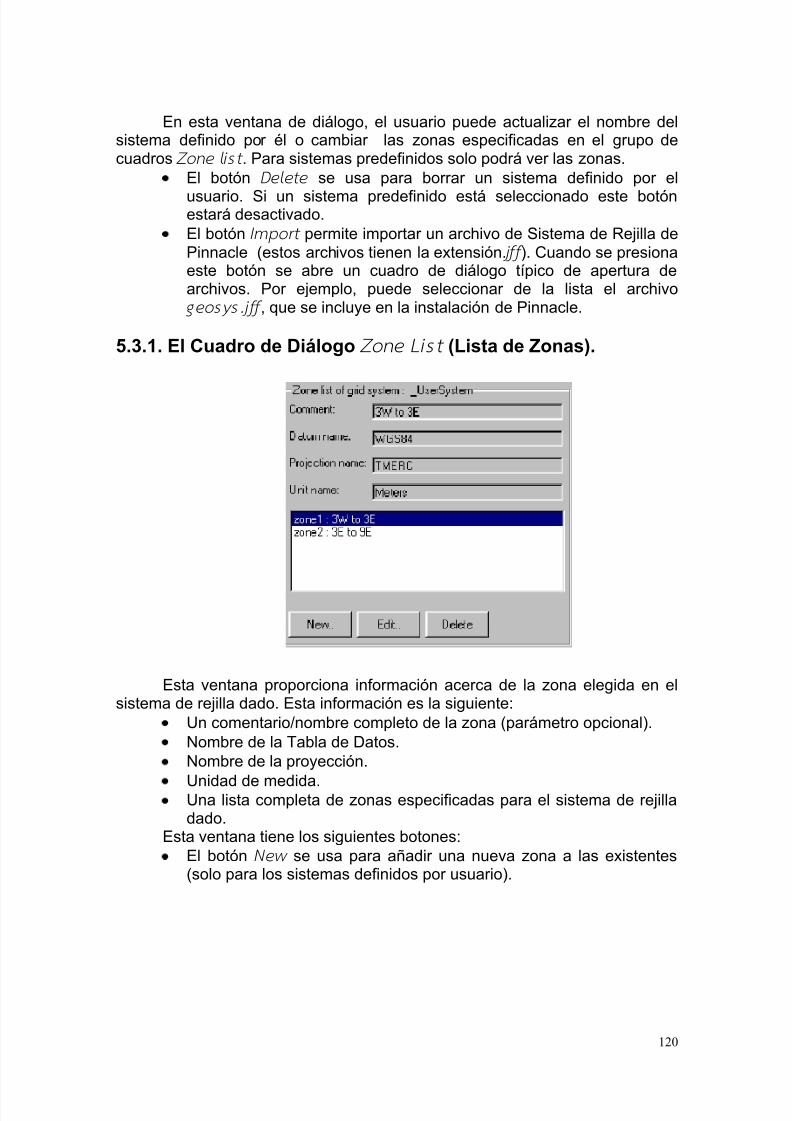
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 121/170
120
En esta ventana de diálogo, el usuario puede actualizar el nombre delsistema definido por él o cambiar las zonas especificadas en el grupo decuadros Zone list . Para sistemas predefinidos solo podrá ver las zonas.
El botón Delete se usa para borrar un sistema definido por el
usuario. Si un sistema predefinido está seleccionado este botónestará desactivado.
El botón Import permite importar un archivo de Sistema de Rejilla dePinnacle (estos archivos tienen la extensión. jff ). Cuando se presionaeste botón se abre un cuadro de diálogo típico de apertura dearchivos. Por ejemplo, puede seleccionar de la lista el archivogeosys.jff , que se incluye en la instalación de Pinnacle.
5.3.1. El Cuadro de Diálogo Zone List (Lista de Zonas).
Esta ventana proporciona información acerca de la zona elegida en elsistema de rejilla dado. Esta información es la siguiente:
Un comentario/nombre completo de la zona (parámetro opcional).
Nombre de la Tabla de Datos.
Nombre de la proyección.
Unidad de medida.Una lista completa de zonas especificadas para el sistema de rejilladado.
Esta ventana tiene los siguientes botones:
El botón New se usa para añadir una nueva zona a las existentes(solo para los sistemas definidos por usuario).
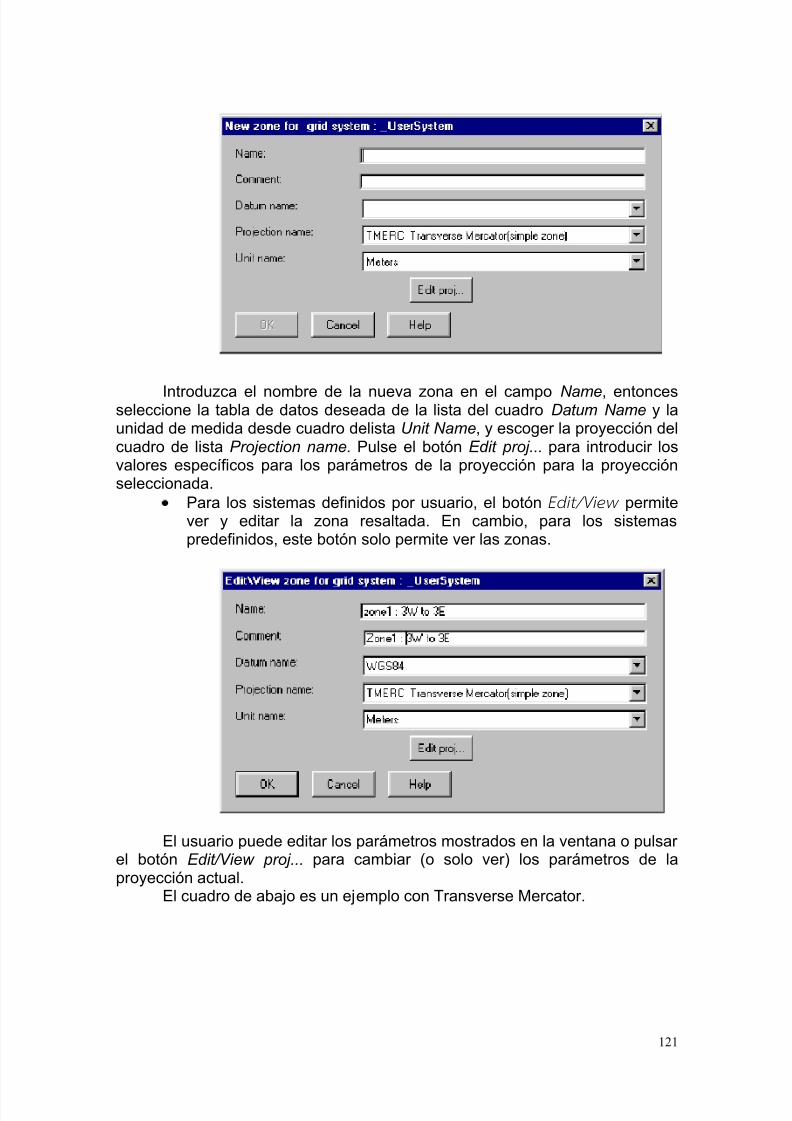
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 122/170
121
Introduzca el nombre de la nueva zona en el campo Name , entoncesseleccione la tabla de datos deseada de la lista del cuadro Datum Name y launidad de medida desde cuadro delista Unit Name , y escoger la proyección delcuadro de lista Projection name . Pulse el botón Edit proj... para introducir losvalores específicos para los parámetros de la proyección para la proyecciónseleccionada.
Para los sistemas definidos por usuario, el botón Edit/View permitever y editar la zona resaltada. En cambio, para los sistemaspredefinidos, este botón solo permite ver las zonas.
El usuario puede editar los parámetros mostrados en la ventana o pulsarel botón Edit/View proj... para cambiar (o solo ver) los parámetros de laproyección actual.
El cuadro de abajo es un ejemplo con Transverse Mercator.
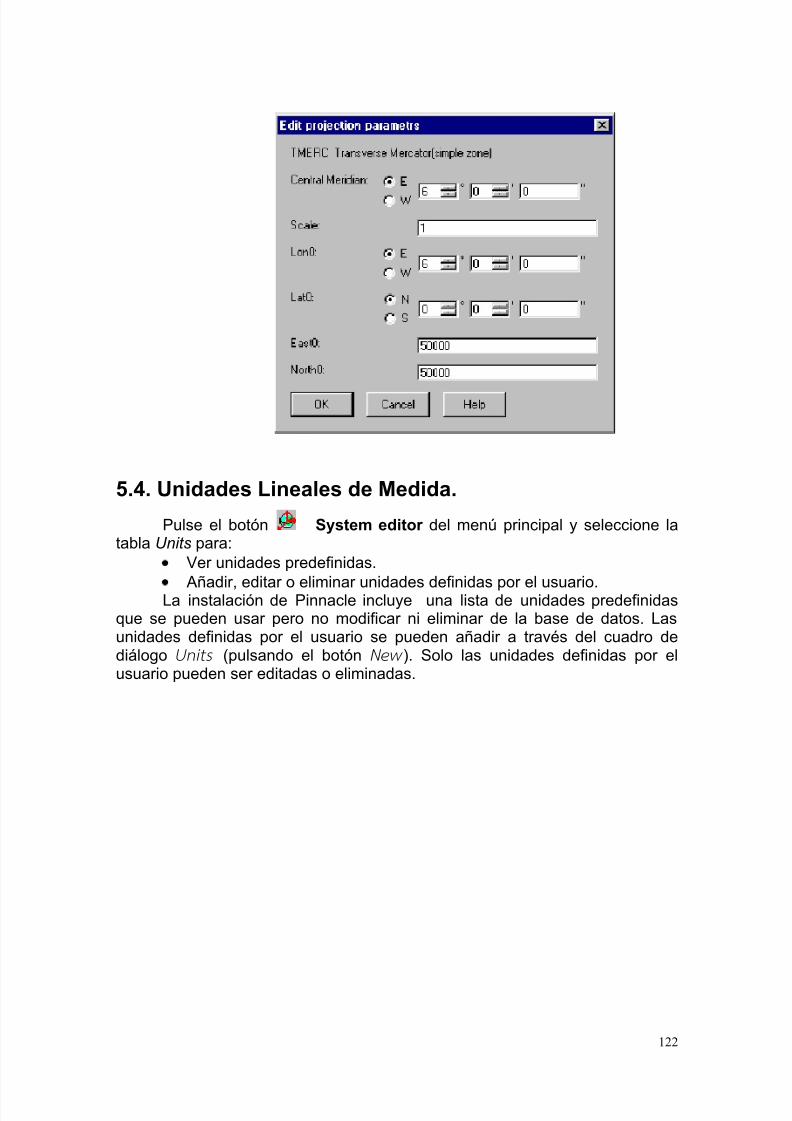
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 123/170
122
5.4. Unidades Lineales de Medida.
Pulse el botón System editor del menú principal y seleccione latabla Units para:
Ver unidades predefinidas.
Añadir, editar o eliminar unidades definidas por el usuario.La instalación de Pinnacle incluye una lista de unidades predefinidasque se pueden usar pero no modificar ni eliminar de la base de datos. Lasunidades definidas por el usuario se pueden añadir a través del cuadro dediálogo Units (pulsando el botón New ). Solo las unidades definidas por elusuario pueden ser editadas o eliminadas.
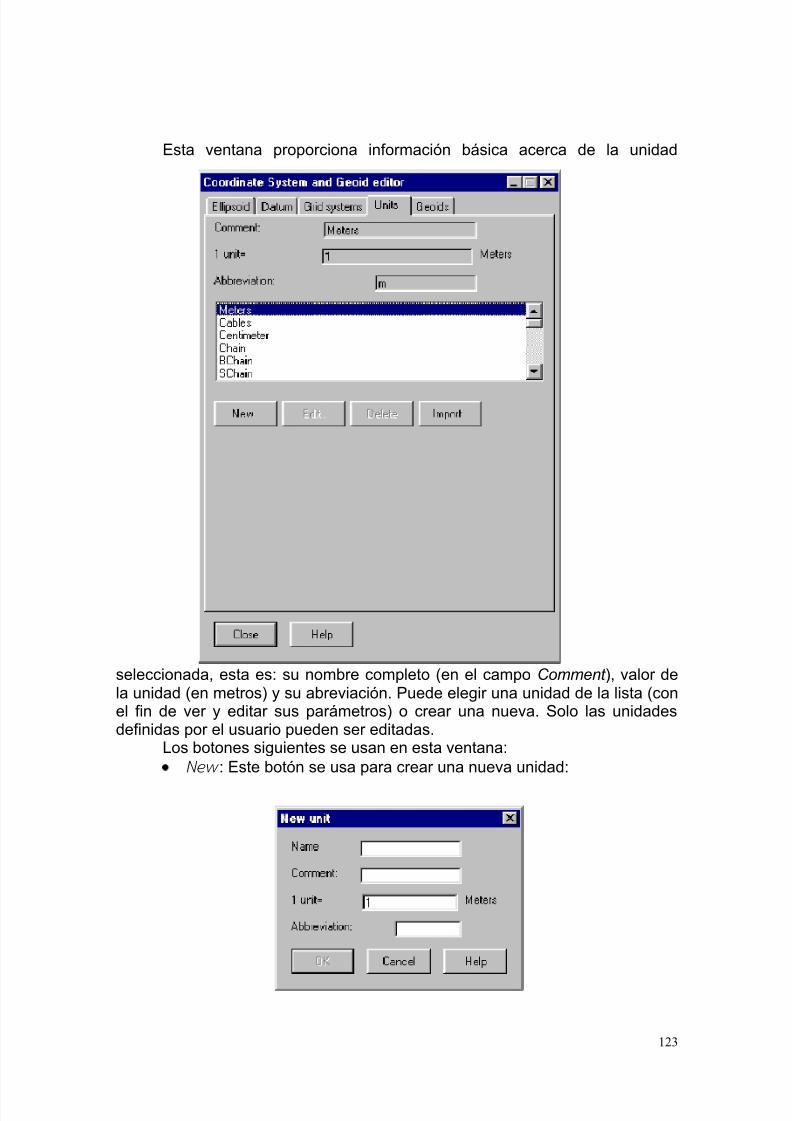
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 124/170
123
Esta ventana proporciona información básica acerca de la unidad
seleccionada, esta es: su nombre completo (en el campo Comment ), valor dela unidad (en metros) y su abreviación. Puede elegir una unidad de la lista (conel fin de ver y editar sus parámetros) o crear una nueva. Solo las unidadesdefinidas por el usuario pueden ser editadas.
Los botones siguientes se usan en esta ventana:
New : Este botón se usa para crear una nueva unidad:

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 125/170
124
Introduzca el nombre de la nueva unidad, su nombre completo(opcional), valor y abreviación (no más de 4 caracteres). Entonces pulse OKpara añadir una nueva unidad a la base de datos.
El botón Edit se usa para editar unidades definidas por el usuario.
Tras pulsar este botón se abrirá la ventana de diálogo Edit :
Modifique todos o algunos de los valores mostrados, si es necesario.Pulse el botón OK para guardar la unidad actualizada.
Delete se usa para eliminar la unidad seleccionada definida por elusuario.
Import se usa para importar un archivo de unidades Pinnacle (estearchivo tiene la extensión .jff ). Una vez pulsado el botón se abrirá untípico cuadro de diálogo de apertura de archivos. Este cuadro
permite seleccionar el archivo de unidades de Pinnacle seleccionadode la lista (la instalación de Pinnacle incluye el archivo units.jff ).
5.5. Calculadora de Coordenadas.
La calculadora de Coordenadas se usa para convertir las coordenadasde los puntos a otro sistema. Para activar la Calculadora de Coordenadaspulse el botón l del menú principal. La ventana se abrirá.Seleccione la tabla Calculator para iniciar la Calculadora de Coordenadas.
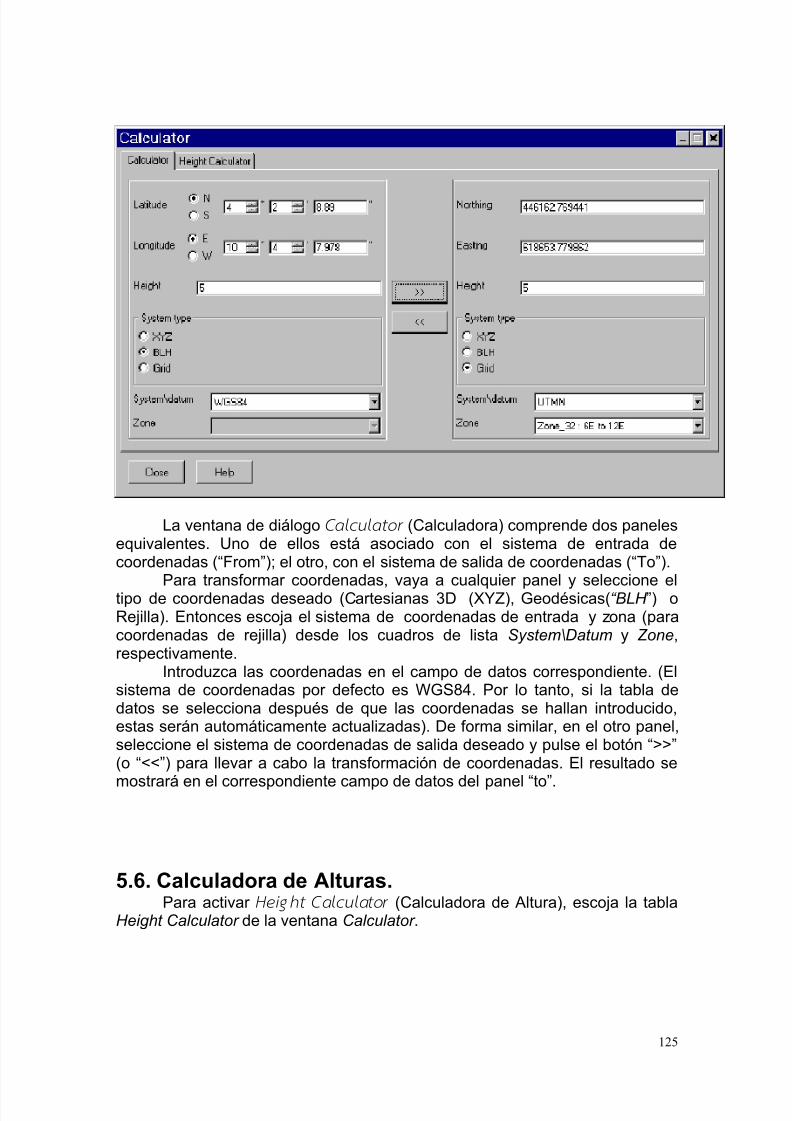
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 126/170
125
La ventana de diálogo Calculator (Calculadora) comprende dos panelesequivalentes. Uno de ellos está asociado con el sistema de entrada decoordenadas (―From‖); el otro, con el sistema de salida de coordenadas (―To‖).
Para transformar coordenadas, vaya a cualquier panel y seleccione eltipo de coordenadas deseado (Cartesianas 3D (XYZ), Geodésicas(“BLH ‖) oRejilla). Entonces escoja el sistema de coordenadas de entrada y zona (paracoordenadas de rejilla) desde los cuadros de lista System\Datum y Zone ,respectivamente.
Introduzca las coordenadas en el campo de datos correspondiente. (Elsistema de coordenadas por defecto es WGS84. Por lo tanto, si la tabla dedatos se selecciona después de que las coordenadas se hallan introducido,estas serán automáticamente actualizadas). De forma similar, en el otro panel,seleccione el sistema de coordenadas de salida deseado y pulse el botón ―>>‖(o ―<<‖) para llevar a cabo la transformación de coordenadas. El resultado se
mostrará en el correspondiente campo de datos del panel ―to‖.
5.6. Calculadora de Alturas.Para activar Height Calculator (Calculadora de Altura), escoja la tabla
Height Calculator de la ventana Calculator .
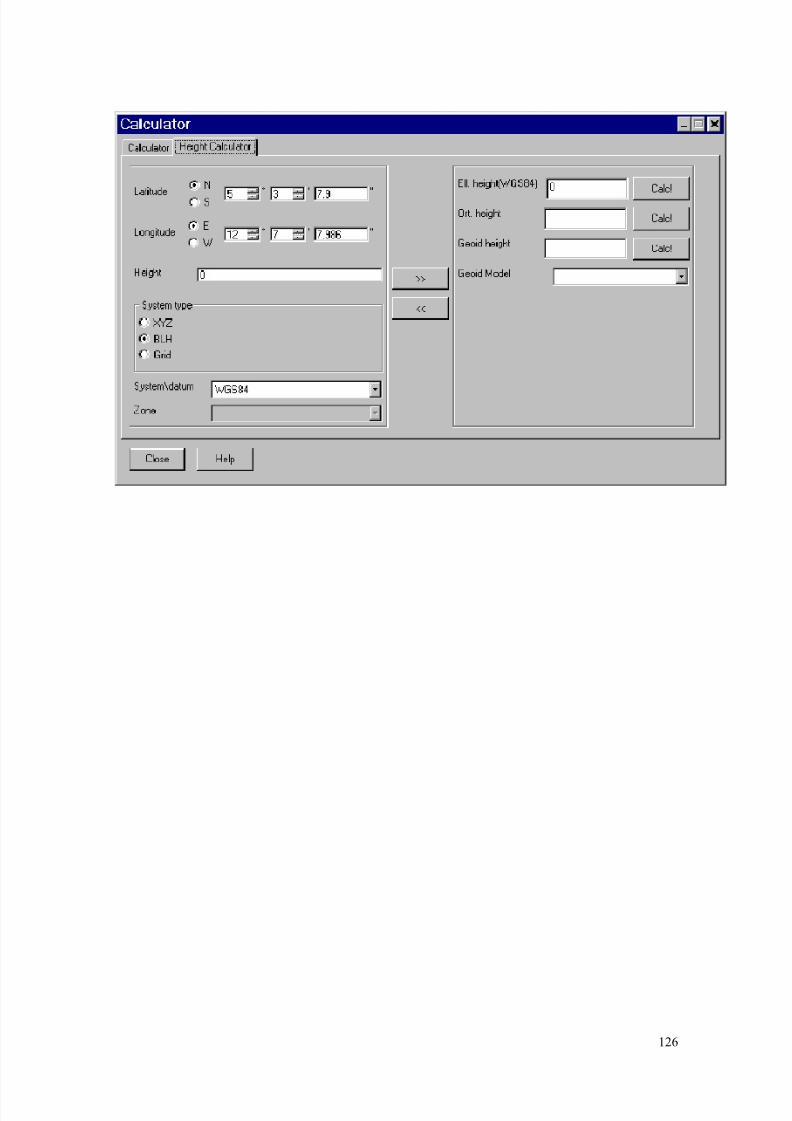
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 127/170
126

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 128/170
127
Esta ventana cumple dos funciones:
Primera: permite la conversión entre valores de alturas elipsoidales,ortométricas o separación del geoide.
Segunda: se utiliza para convertir coordenadas desde un sistema a
otro cuando solo están disponibles las alturas ortométricas (noelipsoidales), es decir (Lat, Lon, Altura ortométrica) o (Northing,Easting, Altura ortométrica).
Hay dos paneles en esta ventana. El panel izquierdo es igual al de latabla Calculator ; se usa para introducir las coordenadas de un punto. El panelde la derecha se usa para convertir alturas. La altura que se va a convertirdebe introducirse manualmente. También podrá copiar una altura elipsoidal delpanel izquierdo al derecho pulsando el botón ―>>‖. Las alturas elipsoidales enel panel derecho son siempre referidas al elipsoide WGS84. Esto significa quecuando desplazamos una altura referida al elipsoide local desde el panelizquierdo al derecho, el valor se actualiza desde le momento en que losparámetros se diferencian del elipsoide WGS84.
La altura de Geoide (también llamada Separación del Geoide) secomputa utilizando el modelo de geoide seleccionado en el cuadro de lista Geoid Model list . Para obtener la separación del geoide para un punto, debeprimero especificar las coordenadas del punto en el panel de la izquierda ypulsar el botón ―>>‖. Después abra el cuadro de lista Geoid Model , en el que seenumeran todos los modelos de geoide disponibles para el área donde elpunto dado es localizado. Una vez que el modelo adecuado es seleccionado, laaltura de geoide (correspondiente a este punto) será calculada y mostrada enle campo Geoid height .
Los botones “Calc!” se usan para calcular cualquiera de los tres valoresde altura interrelacionados cuando los otros dos valores son conocidos. Porejemplo, la altura elipsoidal y separación del geoide son especificadas en loscampos de datos Ell.height (WGS84) y Geoid height , la altura ortométrica sepuede calcular usando el botón “Calc!” más cercano al campo ―Ort.height” .
5.7. Tabla de la Calculadora.
Pulse el botón del menú principal para activar Table Calculator . Seabrirá la ventana siguiente:

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 129/170
128
Dado un punto, debe introducir sus coordenadas en el correspondientecampo de datos.Nota: Debe tenerse cuidado de que el sistema de coordenadas correcto sea
seleccionado antes de introducir los datos. En caso contrario las coordenadasse modificarán automáticamente para adecuarse al sistema seleccionado trasintroducir los datos.
Las coordenadas de un punto se pueden copiar desde:
El panel de Subnet de la ventana Proyect ;
El panel de Soluciones de la ventana Proyect ;
Control Point lists (listas de control de Puntos).Si la lista de la tabla de la Calculadora está vacía, las coordenadas
copiadas permanecerán tal cual en el sistema de coordenadas original. Encaso contrario se transformarán primero al sistema seleccionado. Si latransformación falla el punto no se copiará.
Cuando copie una Lista de Puntos de Control, las coordenadas de suspuntos no se transformarán. El sistema de coordenadas aplicado a la lista detabla de calculadora coincidirá con el que tenga asociado el primer artículo delprimer punto de control. Por cada punto solo uno (o ninguno) de sus artículospuede ser copiado. Si ninguno de los artículos de puntos pertenece a estesistema de coordenadas, este punto no se copia en la lista de la tabla de lacalculadora.
Nota: Si un sistema de coordenadas diferente ha sido seleccionado parauna lista de tabla de calculadora, la cual no está vacía, ningún punto se copiarádesde el Catálogo de Puntos de Control.
Table Calculator proporciona los siguientes botones:Choose/modify (seleccione/modifique) el sistema de coordenadas para
el panel de la ventana.
Convertir las coordenadas que el usuario ha introducido desde elsistema de coordenadas del panel izquierdo al especificado para el panelderecho.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 130/170
129
Convertir las coordenadas que el usuario a introducido desde el sistemade coordenadas del panel derecho al del panel izquierdo.
Calcular una transformación para una tabla de datos 7-parámetros.Imprimir.
Vista preliminar.Configurar impresión.Configurar fuente.El botón Calculate 7 parameters está activado solo si se cumplen las
siguientes condiciones:
Se dan más de tres puntos;
Uno de los dos sistemas es WGS84.Puntos idénticos (o comunes) deben tener nombres diferentes cuando
aparecen tanto en la lista del panel izquierdo como en la del derecho. Dospuntos cualesquiera ocupando la misma posición en cualquier lista se asumenpara definir uno y el mismo ―punto físico‖.
Cuando las listas son diferentes en tamaño, el número de puntoscomunes equivale a la longitud de la lista más corta.
Si el proceso de cálculo falla, aparecerá el mensaje “Error in 7 parameters calculation”.
Si el cálculo se realiza satisfactoriamente, los resultados se muestran enla ventana Datum Parameters and Transformation Residuals (Parámetros detabla de datos y Residuos de Transformación).
Por defecto, los residuos de transformación se computan en el sistemaNEU. Para cambiar al sistema XYZ haga un click derecho en cualquier lugardel panel Transformation Residuals y seleccione el tipo XYZ.
Los residuos de transformación deben aparecer en el formato de latabla. Para ello pulse el botón Show table (Mostrar Tabla).La siguienteventana se abrirá:
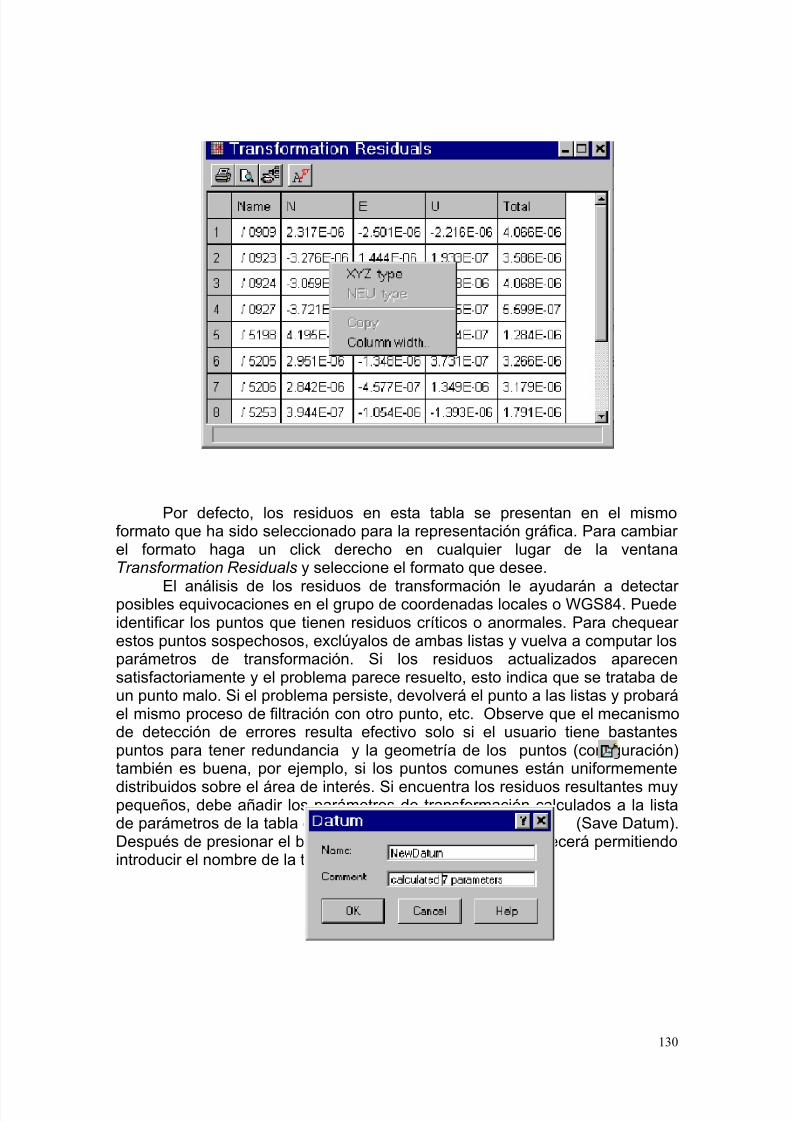
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 131/170
130
Por defecto, los residuos en esta tabla se presentan en el mismoformato que ha sido seleccionado para la representación gráfica. Para cambiarel formato haga un click derecho en cualquier lugar de la ventanaTransformation Residuals y seleccione el formato que desee.
El análisis de los residuos de transformación le ayudarán a detectarposibles equivocaciones en el grupo de coordenadas locales o WGS84. Puedeidentificar los puntos que tienen residuos críticos o anormales. Para chequearestos puntos sospechosos, exclúyalos de ambas listas y vuelva a computar losparámetros de transformación. Si los residuos actualizados aparecensatisfactoriamente y el problema parece resuelto, esto indica que se trataba deun punto malo. Si el problema persiste, devolverá el punto a las listas y probaráel mismo proceso de filtración con otro punto, etc. Observe que el mecanismode detección de errores resulta efectivo solo si el usuario tiene bastantespuntos para tener redundancia y la geometría de los puntos (configuración)también es buena, por ejemplo, si los puntos comunes están uniformemente
distribuidos sobre el área de interés. Si encuentra los residuos resultantes muypequeños, debe añadir los parámetros de transformación calculados a la listade parámetros de la tabla de datos. Para ello utilice el botón (Save Datum).Después de presionar el botón, una ventana de diálogo aparecerá permitiendointroducir el nombre de la tabla de datos y un comentario:

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 132/170
131
Es posible añadir una nueva tabla de datos o actualizar alguna definidapor el usuario ya existente. En el último caso, se recomienda un detalladocomentario.
Podrá entonces emplear los nuevos parámetros de tabla de datos paratransformar el resto de los puntos de la larga lista. Para ello regrese a laventana Table Calculator y reemplace el sistema de coordenadas designadopor la tabla de datos recientemente definida.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 133/170
132
Procesamiento
Descripcion del modulo de proceso de datos GNSS
El modulo de proceso de datos esta diseñado para realizar el proceso de datosalmacenados en Pinnacle. Las soluciones y resultado usados en los calculos de vectoresy trayectorias.
The Process module is intended for processing measurements stored in Pinnacle‘s
database. The resulting solution is used to compute vectors and trajectories. The user'sfinal objective is to estimate coordinates for points in a network or along a trajectory.The process module allows fast and accurate computation of the vectors connectingpoints to other points or points to known control. The network is adjusted in the
Network Adjustment module to produce final estimates of point coordinates.Control points are used during processing. Control points may be stored in the ControlData Catalog and retrieved by using the Attach Control Points menu. If no control pointsare attached Process will automatically select some to use by criteria based onobservation time and accuracy of the estimated coordinates.Processing coordinates are determined by known coordinates from control or calculatedusing a vector connecting the point to another with known coordinates. A point withknown processing coordinates may be either a control point or a network point whosecoordinates have been refined earlier.A pair of points for which simultaneous measurements are available is associated with a
baseline ( DBBaseLine). Computing a baseline results in a Vector ( DBVector).Trajectory ( DBTrajectory) is a set of points representing a rover‘s positions at
consecutive epochs of measurement. Trajectory processing results in a Fan ( DBFan), which is a set of vectors connecting the base to every point in the trajectory. Vectors andfans are grouped in a Solution ( DBSolution). Note that Solution also defines whichmethod of estimating vectors and fans is employed. A Solution may contain only oneestimate for each vector or fan. Each baseline can be processed more than once, but allof the obtained data will belong to different Solutions. Note that the initial processing
coordinates for all of the vectors and fans in the project will be the same for all relevantSolutions.
Engines
The Process module serves as an interface between the database and specialized sub-modules called engines. Each engine is tasked to solve the problems within its specificdomain.The Static engine is intended for computing static vectors. It supports the followingprocessing modes:
* Static — This allows the user to effectively process medium and long baselines evenwhen the number of measured satellites is relatively low. This processing modenormally requires long observation periods.
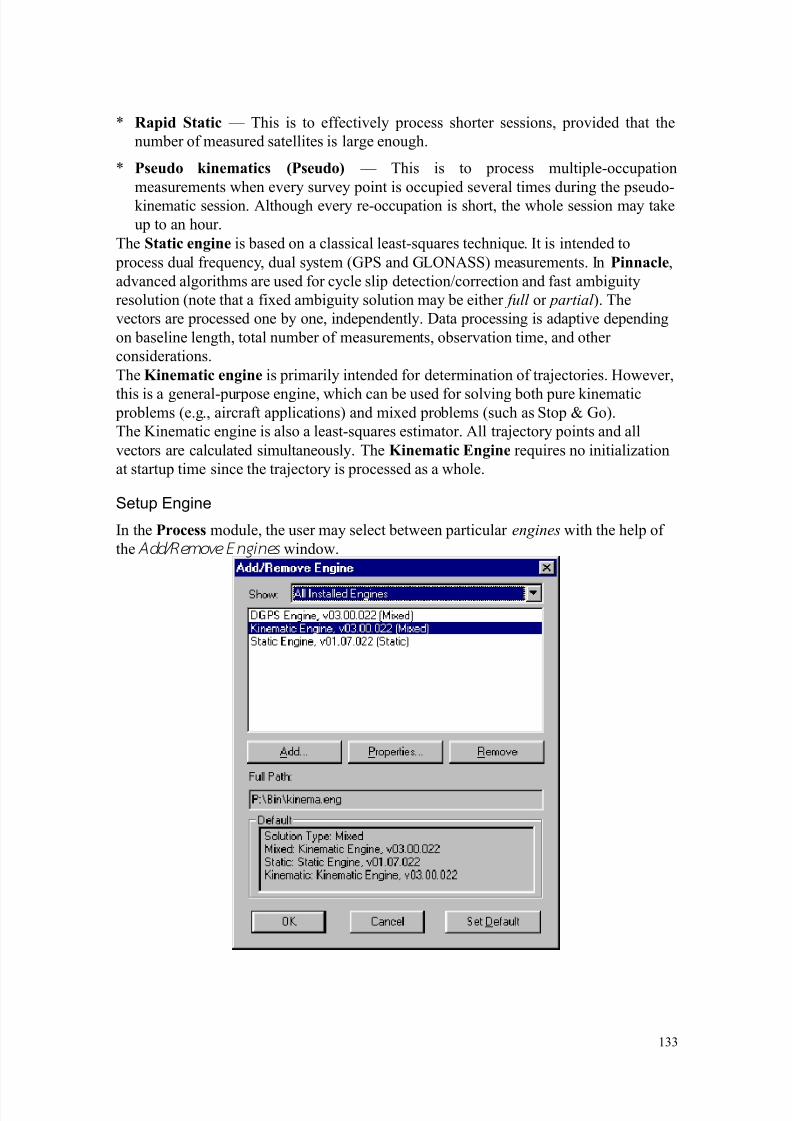
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 134/170
133
* Rapid Static — This is to effectively process shorter sessions, provided that thenumber of measured satellites is large enough.
* Pseudo kinematics (Pseudo) — This is to process multiple-occupationmeasurements when every survey point is occupied several times during the pseudo-kinematic session. Although every re-occupation is short, the whole session may takeup to an hour.
The Static engine is based on a classical least-squares technique. It is intended toprocess dual frequency, dual system (GPS and GLONASS) measurements. In Pinnacle,advanced algorithms are used for cycle slip detection/correction and fast ambiguityresolution (note that a fixed ambiguity solution may be either full or partial). Thevectors are processed one by one, independently. Data processing is adaptive dependingon baseline length, total number of measurements, observation time, and otherconsiderations.The Kinematic engine is primarily intended for determination of trajectories. However,
this is a general-purpose engine, which can be used for solving both pure kinematicproblems (e.g., aircraft applications) and mixed problems (such as Stop & Go).The Kinematic engine is also a least-squares estimator. All trajectory points and allvectors are calculated simultaneously. The Kinematic Engine requires no initializationat startup time since the trajectory is processed as a whole.
Setup Engine
In the Process module, the user may select between particular engines with the help of the Add/Remove Engines window.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 135/170
134
This dialog window displays a list of all the engines applicable to the specified Solution type. If the All Installed Engines option has been set in the Show box, the windowdisplays all of the installed engines.For each installed engine, its name, version, and type (mixed , static, or kinematic) are
displayed: Add... activates a standard File/Open dialog box. The user can install a new engine byselecting the corresponding file.
Properties... activates a dialog box to input necessary engine-specific settings. (Notethat such a dialog box is launched from the specified sub-module and, therefore, isunique to each engine in the list).
Remove deletes the selected engine from the engine list.The Full Path: field shows the location and name of the file representing the sub-module.The Default field shows default engines for each Solution type. To change default
settings, the user should select the desired solution type in the Show field, then choosean appropriate engine from the engine list and then press the Set Default button. Notethat these settings will then be valid throughout Pinnacle.
Solution Types
Three types of Solutions exist: static (such solutions contain only vectors), kinematic (these contain only trajectories) and mixed -- also known as Stop & Go -- (these maycontain both vectors and trajectories). The user chooses the right Solution type whencreating a new Solution. Note that once chosen, the solution type cannot be changed. Anew solution must be created using the same data to change the solution type.An appropriate processing engine is selected for each Solution. As a rule, the defaultengine is chosen. The name of the engine, together with its version, is stored in theSolution. Although it is possible to change the current engine at any time, the usershould keep in mind that this will result in the deletion of all the preceding processingresults from the database. This will not affect the solutions measurements, only theresults.
Changing the Engine
To change the current engine, select the Process Properties command in the Solution menu. A dialog box will appear showing a list of engines applicable to the specificsolution. Notice that this dialog box is similar to that used in Setup Engine. It provides
the same functions except for changing default settings.
The Engine Properties
In the Process module, all the engines have an easy-to-use interface. No experience orspecial training is necessary for the user to manage the engines properly. Moreexperienced users may wish to obtain better results by employing advanced enginesettings. The Engine Properties dialog box allows default settings to be changed if necessary.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 136/170
135
The Solution Process Properties
Specific engine properties may be set up for each particular Solution. These will applyto all of the vectors and trajectories of the given Solution by default. To specify engineproperties for a Solution, use the Process Properties command from the Solution menu
and press the Properties button. A dialog box, which is unique to each engine, willappear.
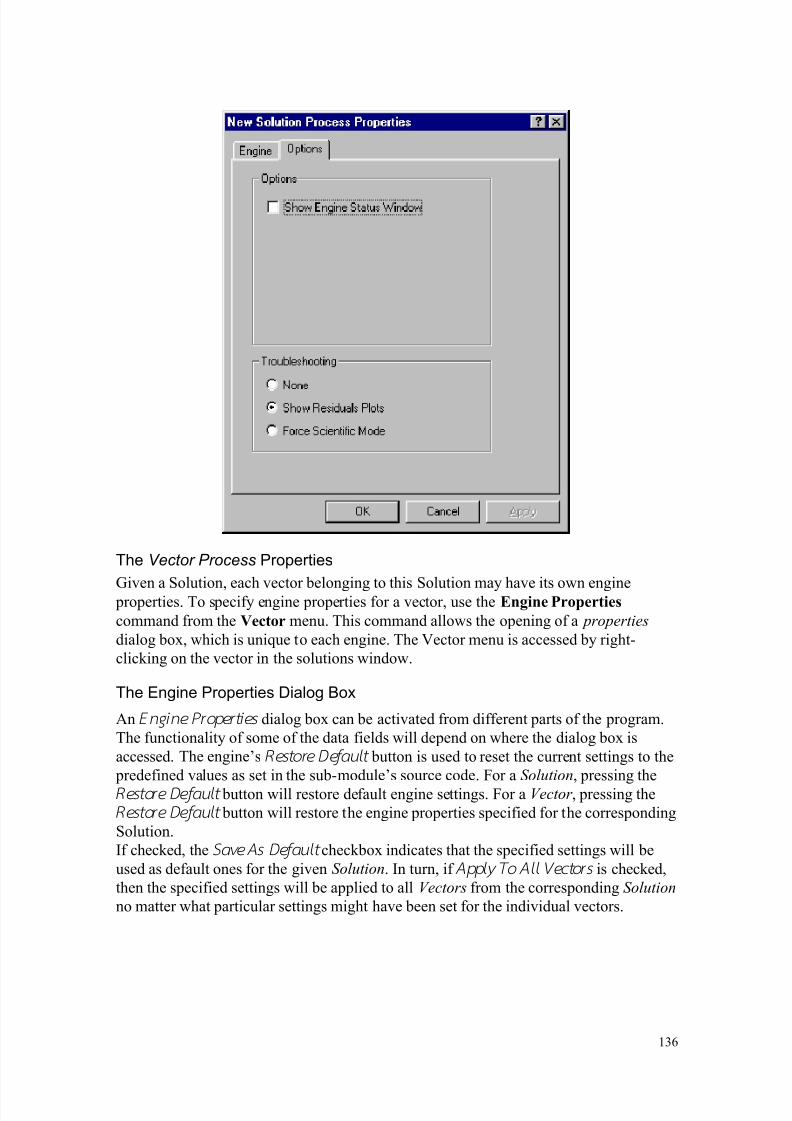
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 137/170
136
The Vector Process Properties
Given a Solution, each vector belonging to this Solution may have its own engineproperties. To specify engine properties for a vector, use the Engine Properties command from the Vector menu. This command allows the opening of a properties dialog box, which is unique to each engine. The Vector menu is accessed by right-clicking on the vector in the solutions window.
The Engine Properties Dialog Box
An Engine Properties dialog box can be activated from different parts of the program.The functionality of some of the data fields will depend on where the dialog box isaccessed. The engine‘s Restore Default button is used to reset the current settings to the
predefined values as set in the sub-module‘s source code. For a Solution, pressing the Restore Default button will restore default engine settings. For a Vector , pressing the Restore Default button will restore the engine properties specified for the correspondingSolution.If checked, the Save As Default checkbox indicates that the specified settings will beused as default ones for the given Solution. In turn, if Apply To All Vectors is checked,then the specified settings will be applied to all Vectors from the corresponding Solution
no matter what particular settings might have been set for the individual vectors.
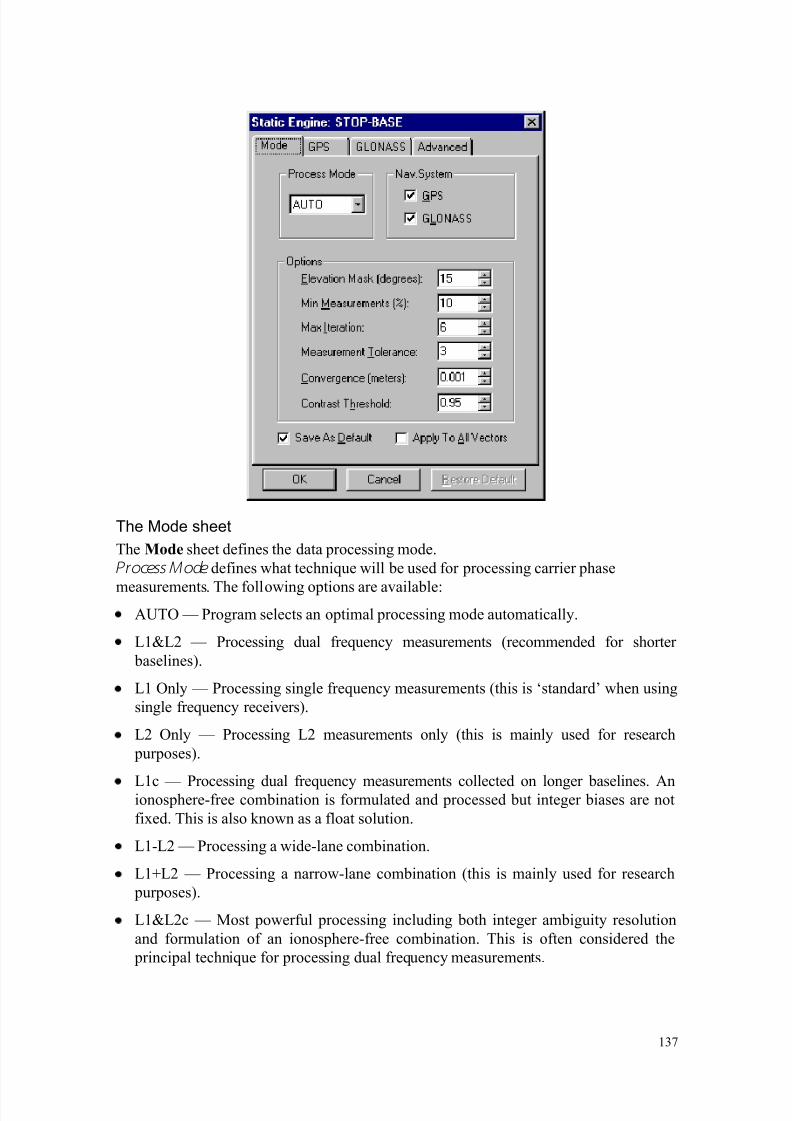
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 138/170
137
The Mode sheet
The Mode sheet defines the data processing mode. Process Mode defines what technique will be used for processing carrier phase
measurements. The following options are available:AUTO — Program selects an optimal processing mode automatically.
L1&L2 — Processing dual frequency measurements (recommended for shorterbaselines).
L1 Only — Processing single frequency measurements (this is ‗standard‘ when using
single frequency receivers).
L2 Only — Processing L2 measurements only (this is mainly used for researchpurposes).
L1c — Processing dual frequency measurements collected on longer baselines. Anionosphere-free combination is formulated and processed but integer biases are notfixed. This is also known as a float solution.
L1-L2 — Processing a wide-lane combination.
L1+L2 — Processing a narrow-lane combination (this is mainly used for researchpurposes).
L1&L2c — Most powerful processing including both integer ambiguity resolutionand formulation of an ionosphere-free combination. This is often considered theprincipal technique for processing dual frequency measurements.
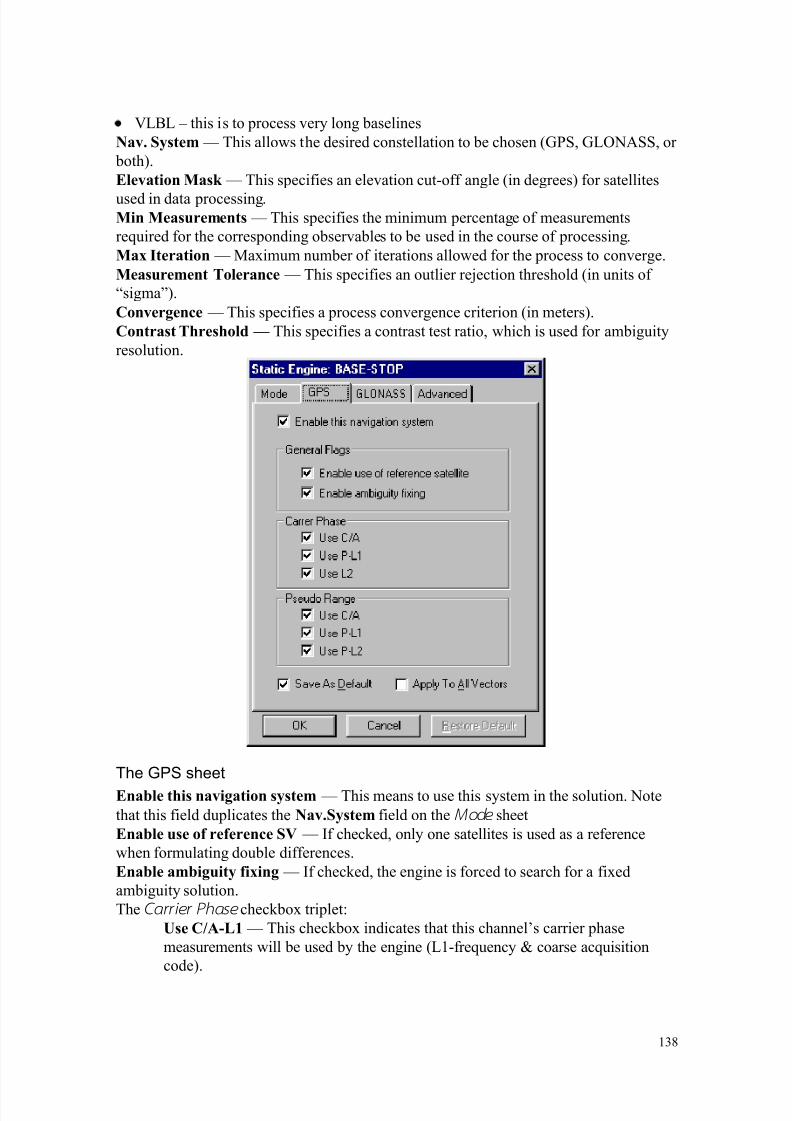
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 139/170
138
VLBL – this is to process very long baselinesNav. System — This allows the desired constellation to be chosen (GPS, GLONASS, orboth).Elevation Mask — This specifies an elevation cut-off angle (in degrees) for satellites
used in data processing.Min Measurements — This specifies the minimum percentage of measurementsrequired for the corresponding observables to be used in the course of processing.Max Iteration — Maximum number of iterations allowed for the process to converge.Measurement Tolerance — This specifies an outlier rejection threshold (in units of ―sigma‖). Convergence — This specifies a process convergence criterion (in meters).Contrast Threshold — This specifies a contrast test ratio, which is used for ambiguityresolution.
The GPS sheet
Enable this navigation system — This means to use this system in the solution. Notethat this field duplicates the Nav.System field on the Mode sheetEnable use of reference SV — If checked, only one satellites is used as a referencewhen formulating double differences.Enable ambiguity fixing — If checked, the engine is forced to search for a fixedambiguity solution.The Carrier Phase checkbox triplet:
Use C/A-L1 — This checkbox indicates that this channel‘s carrier phasemeasurements will be used by the engine (L1-frequency & coarse acquisitioncode).
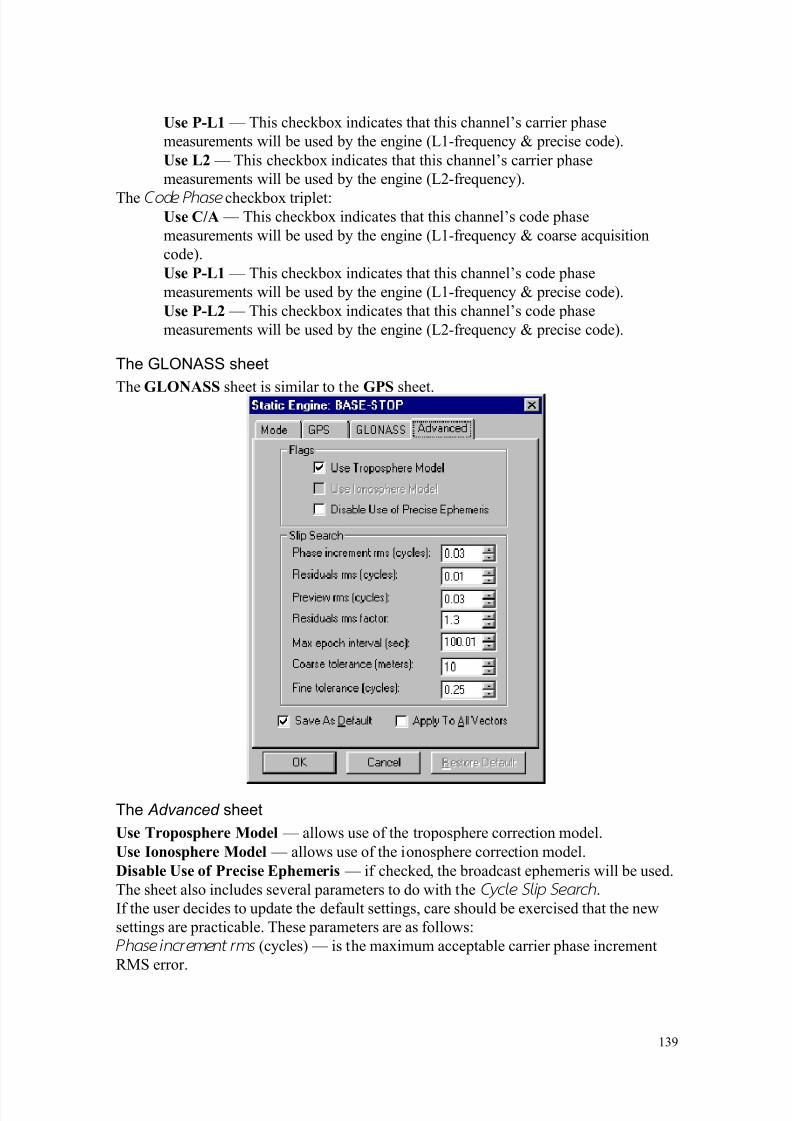
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 140/170
139
Use P-L1 — This checkbox indicates that this channel‘s carrier phase
measurements will be used by the engine (L1-frequency & precise code).Use L2 — This checkbox indicates that this channel‘s carrier phase
measurements will be used by the engine (L2-frequency).
The Code Phase checkbox triplet:Use C/A — This checkbox indicates that this channel‘s code phase
measurements will be used by the engine (L1-frequency & coarse acquisitioncode).Use P-L1 — This checkbox indicates that this channel‘s code phase
measurements will be used by the engine (L1-frequency & precise code).Use P-L2 — This checkbox indicates that this channel‘s code phase
measurements will be used by the engine (L2-frequency & precise code).
The GLONASS sheet
The GLONASS sheet is similar to the GPS sheet.
The Advanced sheet
Use Troposphere Model — allows use of the troposphere correction model.Use Ionosphere Model — allows use of the ionosphere correction model.Disable Use of Precise Ephemeris — if checked, the broadcast ephemeris will be used.The sheet also includes several parameters to do with the Cycle Slip Search.If the user decides to update the default settings, care should be exercised that the newsettings are practicable. These parameters are as follows:
Phase increment rms (cycles) — is the maximum acceptable carrier phase incrementRMS error.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 141/170
140
Residuals rms (cycles) — is the maximum acceptable (normalized) sum of squaredresiduals.
Preview rms (cycles) — is the maximum acceptable (normalized) sum of squaredcarrier phase increments as applicable to static occupations.
Residuals rms factor — this parameter (which must be >1) specifies a threshold ‗post-static increase‘ for the sum of squared residuals.
Max epoch interval (sec) — specifies the maximum acceptable gap between adjacentmeasurement times when checking for phase measurement consistency.Coarse tolerance (meters) — is the maximum acceptable discrepancy between codephases at adjacent measurement epochs. This is used when searching for large phaseslips caused by loss of lock in the carrier phase loop.
Fine tolerance (cycles) — is the maximum acceptable carrier phase discrepancy. If thefractional part of the phase exceeds this value, the measurement will be omitted.
The Occupation Properties
It is possible for the user to set specific engine parameters for each particularoccupation. These parameters are the start/end time and the forbidden satellite flags.The Occupation parameters dialog window is activated by selecting the EngineProperties command from the occupation menu in Solution. The dialog window iscomprised of two tabs: Timing and Satellites. Commands and fields relevant to eachsheet are described below.
The Timing sheet
This sheet allows the user to change an occupation‘s start and end times and to set the
Epoch Gap parameter. The Epoch Gap parameters associated with measurementdecimation. The Default Parameters column shows the initial occupation parameterswhereas the Parameters in Use column displays the user-specified (updated) values.The latter values are used for processing the corresponding occupation.
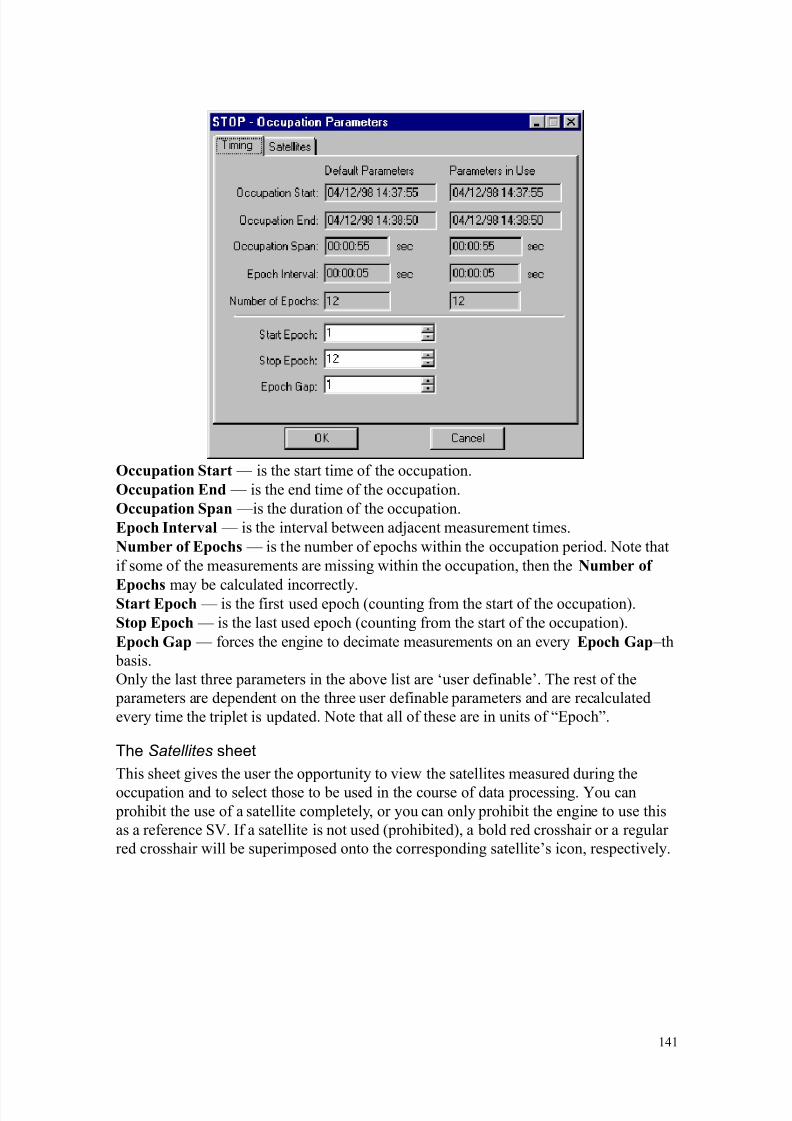
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 142/170
141
Occupation Start — is the start time of the occupation.Occupation End — is the end time of the occupation.Occupation Span — is the duration of the occupation.Epoch Interval — is the interval between adjacent measurement times.Number of Epochs — is the number of epochs within the occupation period. Note thatif some of the measurements are missing within the occupation, then the Number of
Epochs may be calculated incorrectly.Start Epoch — is the first used epoch (counting from the start of the occupation).Stop Epoch — is the last used epoch (counting from the start of the occupation).Epoch Gap — forces the engine to decimate measurements on an every Epoch Gap – thbasis.Only the last three parameters in the above list are ‗user definable‘. The rest of the
parameters are dependent on the three user definable parameters and are recalculatedevery time the triplet is updated. Note that all of these are in units of ―Epoch‖.
The Satellites sheet
This sheet gives the user the opportunity to view the satellites measured during theoccupation and to select those to be used in the course of data processing. You canprohibit the use of a satellite completely, or you can only prohibit the engine to use thisas a reference SV. If a satellite is not used (prohibited), a bold red crosshair or a regularred crosshair will be superimposed onto the corresponding satellite‘s icon, respectively.
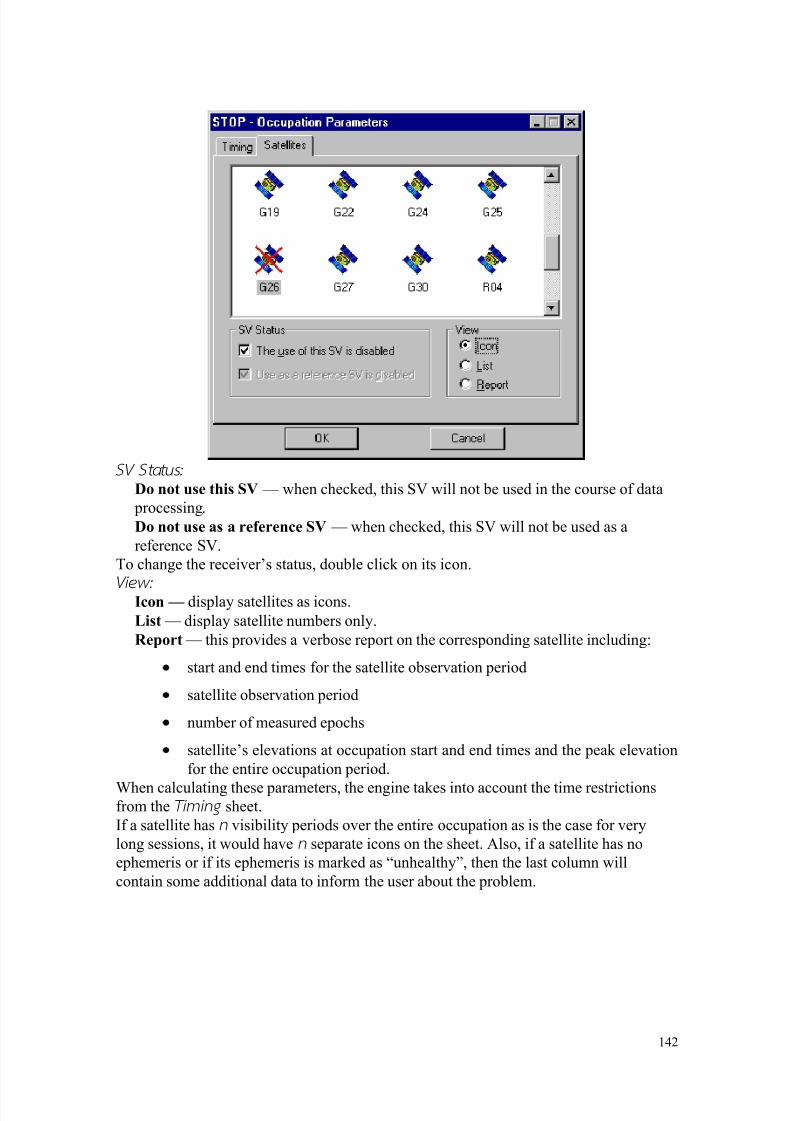
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 143/170
142
SV Status:
Do not use this SV — when checked, this SV will not be used in the course of dataprocessing.Do not use as a reference SV — when checked, this SV will not be used as areference SV.
To change the receiver‘s status, double click on its icon.
View:Icon — display satellites as icons.List — display satellite numbers only.Report — this provides a verbose report on the corresponding satellite including:
start and end times for the satellite observation period
satellite observation period
number of measured epochs
satellite‘s elevations at occupation start and end times and the peak elevation
for the entire occupation period.
When calculating these parameters, the engine takes into account the time restrictionsfrom the Timing sheet.If a satellite has n visibility periods over the entire occupation as is the case for verylong sessions, it would have n separate icons on the sheet. Also, if a satellite has noephemeris or if its ephemeris is marked as ―unhealthy‖, then the last column will
contain some additional data to inform the user about the problem.
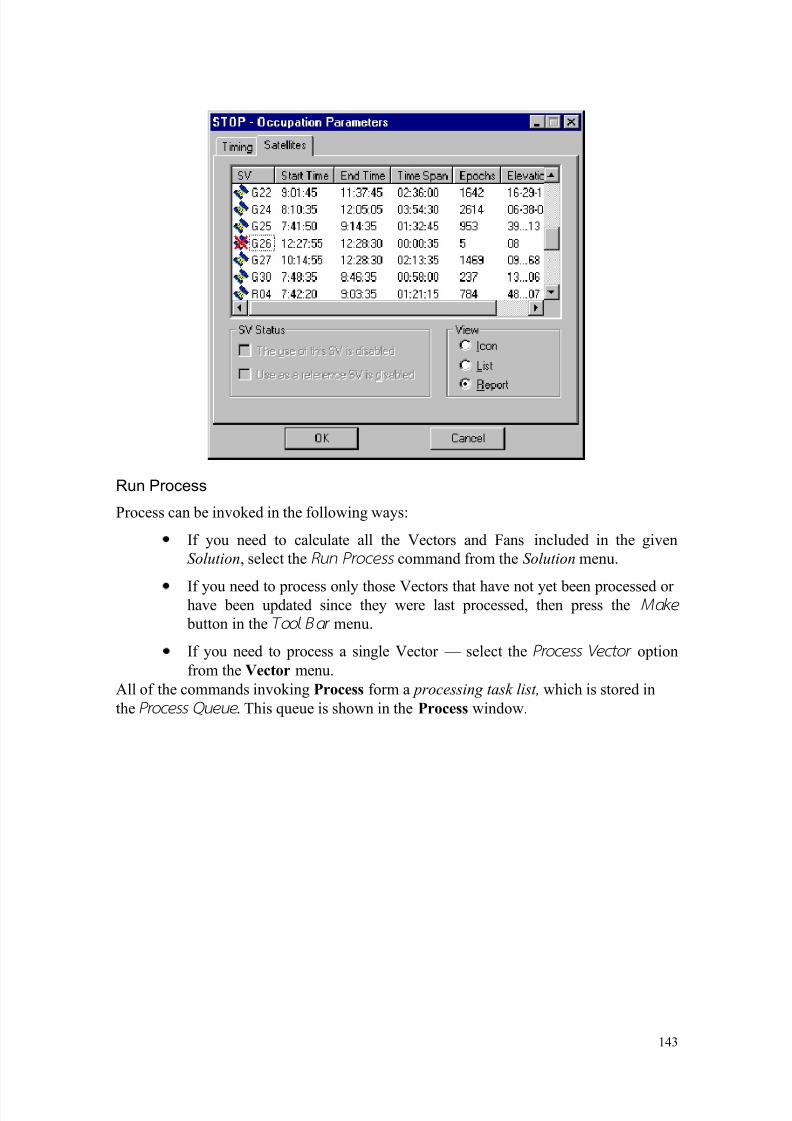
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 144/170
143
Run Process
Process can be invoked in the following ways:
If you need to calculate all the Vectors and Fans included in the givenSolution, select the Run Process command from the Solution menu.
If you need to process only those Vectors that have not yet been processed orhave been updated since they were last processed, then press the Make button in the Tool Bar menu.
If you need to process a single Vector — select the Process Vector optionfrom the Vector menu.
All of the commands invoking Process form a processing task list, which is stored inthe Process Queue. This queue is shown in the Process window.
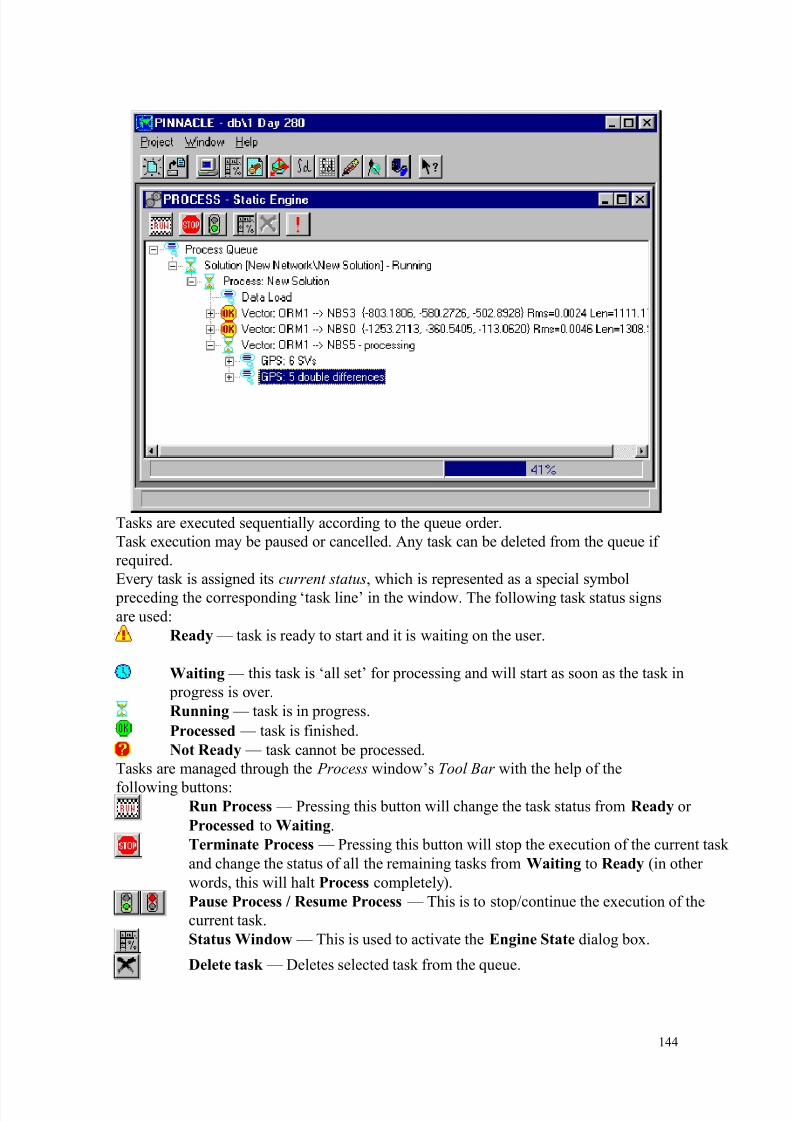
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 145/170
144
Tasks are executed sequentially according to the queue order.Task execution may be paused or cancelled. Any task can be deleted from the queue if required.Every task is assigned its current status, which is represented as a special symbol
preceding the corresponding ‗task line‘ in the window. The following task status signsare used:
Ready — task is ready to start and it is waiting on the user.
Waiting — this task is ‗all set‘ for processing and will start as soon as the task in
progress is over.Running — task is in progress.Processed — task is finished.Not Ready — task cannot be processed.
Tasks are managed through the Process window‘s Tool Bar with the help of the
following buttons:Run Process — Pressing this button will change the task status from Ready orProcessed to Waiting.Terminate Process — Pressing this button will stop the execution of the current taskand change the status of all the remaining tasks from Waiting to Ready (in otherwords, this will halt Process completely).Pause Process / Resume Process — This is to stop/continue the execution of thecurrent task.Status Window — This is used to activate the Engine State dialog box.
Delete task — Deletes selected task from the queue.
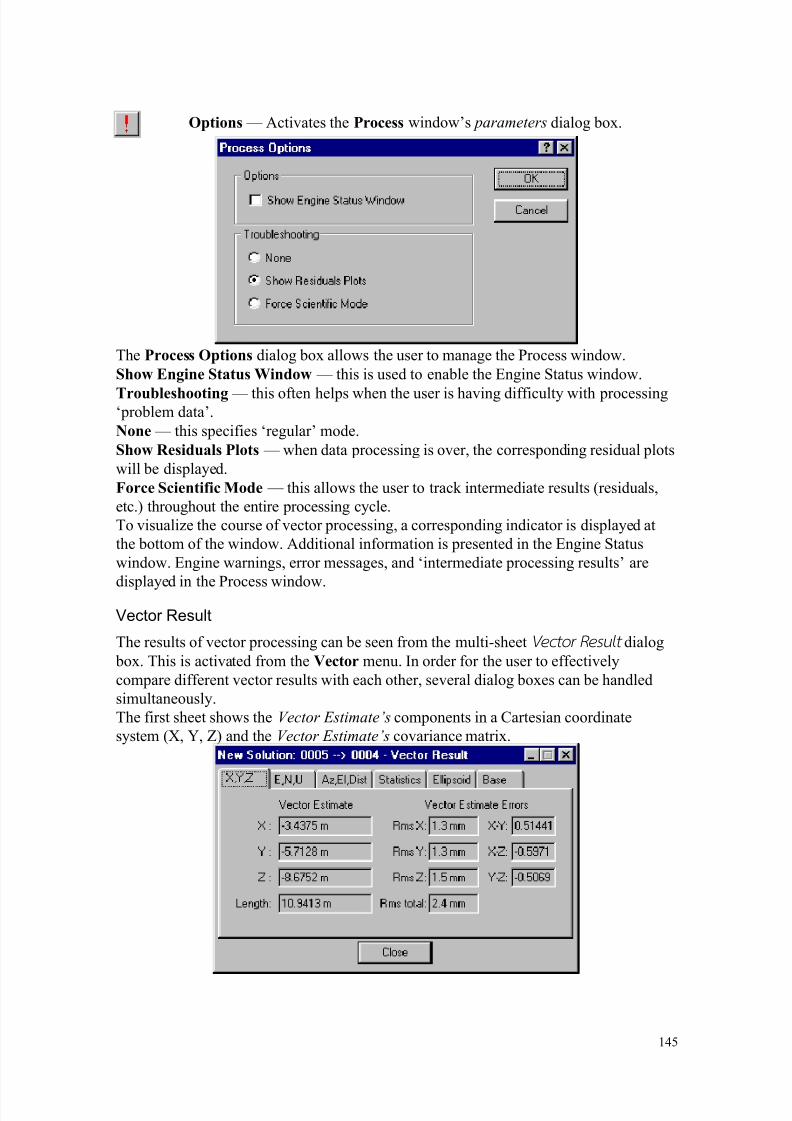
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 146/170
145
Options — Activates the Process window‘s parameters dialog box.
The Process Options dialog box allows the user to manage the Process window.Show Engine Status Window — this is used to enable the Engine Status window.
Troubleshooting — this often helps when the user is having difficulty with processing‗problem data‘. None — this specifies ‗regular‘ mode. Show Residuals Plots — when data processing is over, the corresponding residual plotswill be displayed.Force Scientific Mode — this allows the user to track intermediate results (residuals,etc.) throughout the entire processing cycle.To visualize the course of vector processing, a corresponding indicator is displayed atthe bottom of the window. Additional information is presented in the Engine Statuswindow. Engine warnings, error messages, and ‗intermediate processing results‘ are
displayed in the Process window.Vector Result
The results of vector processing can be seen from the multi-sheet Vector Result dialogbox. This is activated from the Vector menu. In order for the user to effectivelycompare different vector results with each other, several dialog boxes can be handledsimultaneously.The first sheet shows the Vector Estimate’s components in a Cartesian coordinatesystem (X, Y, Z) and the Vector Estimate’s covariance matrix.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 147/170
146
The second sheet shows the Vector Estimate components in a local coordinate system(E, N, U) and the estimate‘s covariance matrix.
The third sheet shows the Vector Estimate components in the topocentric coordinatesystem (azimuth, elevation, distance) and the corresponding RMS values.
The Statistics sheet displays the amount of available and used measurements, the totalnumber of used ambiguities and the number of ambiguities fixed, processing flags, andthe contrast ratio obtained when fixing the ambiguities.
The Ellipsoid sheet features the vector‘s error ellipsoid as well as its projections inplane and height.
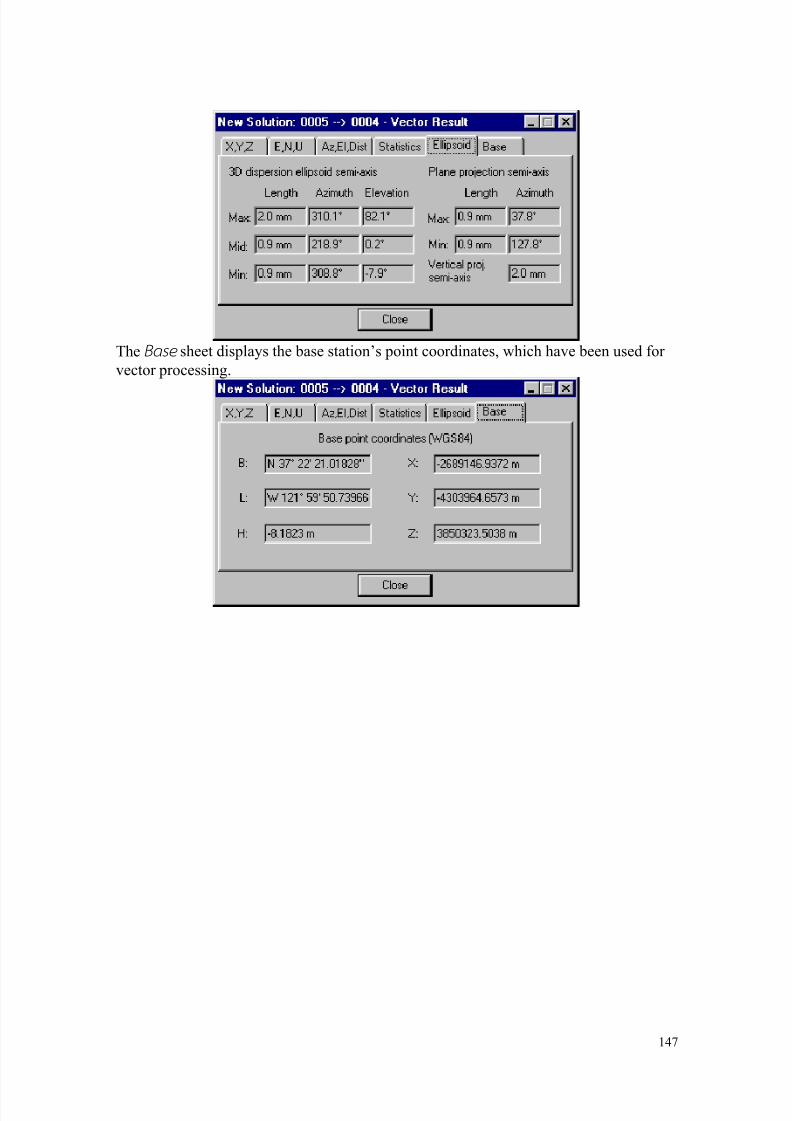
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 148/170
147
The Base sheet displays the base station‘s point coordinates, which have been used for
vector processing.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 149/170
148
Network adjustment
The adjustment of a GPS network (an entire network or a subnet) can be divided into thefollowing three stages:
Preliminary analysis of adjustment data (or pre-adjustment). This stage servestwo main purposes. First, it allows the user to check the consistency of a given GPSnetwork as a whole. Second, it allows the preliminary detection of possible blundersin the vector data.
Minimally constrained adjustment (or vector network adjustment). Thisadjustment is performed to evaluate the intrinsic accuracy of the GPS network. Oneof the network points can be held fixed or an inner constraint may be used.
Adjustment constrained by local control (or final adjustment). In this adjustmentthe GPS vector network is constrained by more than one local control point. After
this adjustment is completed, the user has the coordinates of the points in the localdatum.
Pre-adjustment
Dragging one or more solutions from the Solutions panel to the Subnets panel creates anetwork. Before an adjustment is carried out, the data contained in the network needs tobe checked for structure and blunders. Right-click on the icon in the Subnets panel
for a particular subnet and select Network View from the pop-up menu. Press thebutton to activate the Test Subnet menu. (The same dialog window is activated by right-clicking somewhere in the right-hand panel of the Network View window and selecting
Test Subnet ). The following options are available:Subnet/Solution Input Data Validation:
When a subnet is tested, the program displays an error for each enabled yet unprocessedvector, or a warning if the vector has been processed but the processing results areeither obsolete or contain unacceptably large errors.When a solution is tested, the program displays an error if an enabled vector is foundwhich has an enabled (planned) occupation lacking raw data or which has less than twoenabled occupations.
Subnet/Solution Validation: When a subnet is tested, the program displays an error if the subnet is not adjusted, or awarning if the adjustment results are "obsolete" (this is the case when some of theadjustment parameters or input data have been modified).When a solution is tested, this is similar to the Input Data Validation test for subnets.
Net structure test: This verifies the geometry of the network, i.e., it identifies the network's componentsthat are isolated from each other (―isolated components‖), or those spanned by a single
vector (―bridge‖) or point (―junction point‖). Network statistics are calculated, which
allows the user to compare the obtained results against the specified requirements (e.g.,NGS specifications).
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 150/170
149
Loop Misclosure and Repeated vectors serves two purposes. First, this test generatesvector loops and computes the corresponding XYZ- or NEU- misclosures. Second,this test shows the XYZ- or NEU-differences between the multiple measured vectors("repeated vectors") relating to the same baseline. To display misclosures for the
loops or multiple vector baselines, click on the corresponding items in the right-handpanel of the Network View window.
Non-Trivial Vector Set Constructor identifies and displays the Subnet's non-trivial vectors.
Control Tie Analysis checks the consistency of the control applied. For a pair of control points, this feature compares these points' positions against those computedby means of the GPS data.
It is not necessary to perform the above tests for the entire subnet. The Test Selected
option is used to carry out these tests for only selected vectors (recall that vectors can be
selected through either Subnets or Solutions).Note that all of the above mentioned options are also accessible through the Network
View Options dialog window. To access them, right-click somewhere in the Network
View window and select Options from the pop-up menu. After the Network View
Options dialog window is opened, select the Loop Misclosure and Repeated Vectors tabto see the settings associated with this test (see below).
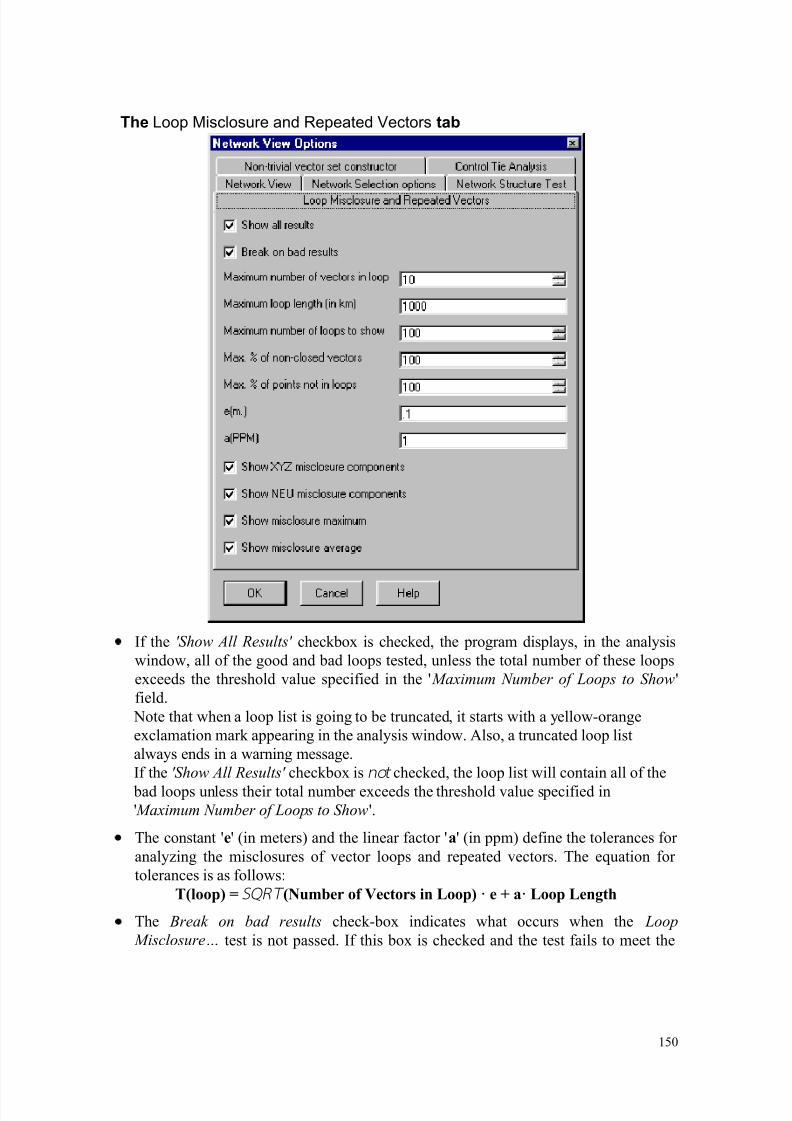
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 151/170
150
The Loop Misclosure and Repeated Vectors tab
If the 'Show All Results' checkbox is checked, the program displays, in the analysiswindow, all of the good and bad loops tested, unless the total number of these loopsexceeds the threshold value specified in the ' Maximum Number of Loops to Show'field.Note that when a loop list is going to be truncated, it starts with a yellow-orangeexclamation mark appearing in the analysis window. Also, a truncated loop listalways ends in a warning message.If the 'Show All Results' checkbox is not checked, the loop list will contain all of thebad loops unless their total number exceeds the threshold value specified in' Maximum Number of Loops to Show '.
The constant 'e' (in meters) and the linear factor 'a' (in ppm) define the tolerances foranalyzing the misclosures of vector loops and repeated vectors. The equation fortolerances is as follows:
T(loop) = SQRT (Number of Vectors in Loop) · e + a· Loop Length
The Break on bad results check-box indicates what occurs when the Loop
Misclosure… test is not passed. If this box is checked and the test fails to meet the
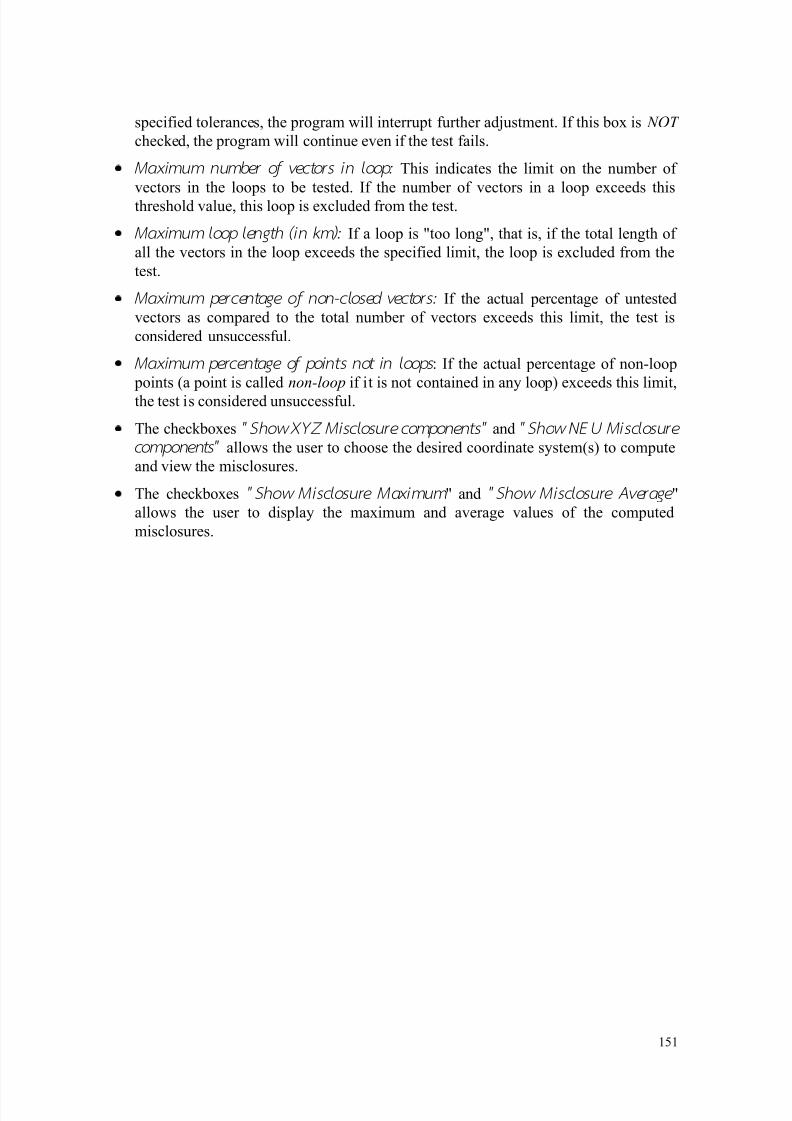
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 152/170
151
specified tolerances, the program will interrupt further adjustment. If this box is NOT checked, the program will continue even if the test fails.
Maximum number of vectors in loop: This indicates the limit on the number of
vectors in the loops to be tested. If the number of vectors in a loop exceeds thisthreshold value, this loop is excluded from the test.
Maximum loop length (in km): If a loop is "too long", that is, if the total length of all the vectors in the loop exceeds the specified limit, the loop is excluded from thetest.
Maximum percentage of non-closed vectors: If the actual percentage of untestedvectors as compared to the total number of vectors exceeds this limit, the test isconsidered unsuccessful.
Maximum percentage of points not in loops: If the actual percentage of non-looppoints (a point is called non-loop if it is not contained in any loop) exceeds this limit,the test is considered unsuccessful.
The checkboxes "Show XYZ Misclosure components" and "Show NEU Misclosure
components" allows the user to choose the desired coordinate system(s) to computeand view the misclosures.
The checkboxes "Show Misclosure Maximum" and "Show Misclosure Average"allows the user to display the maximum and average values of the computedmisclosures.
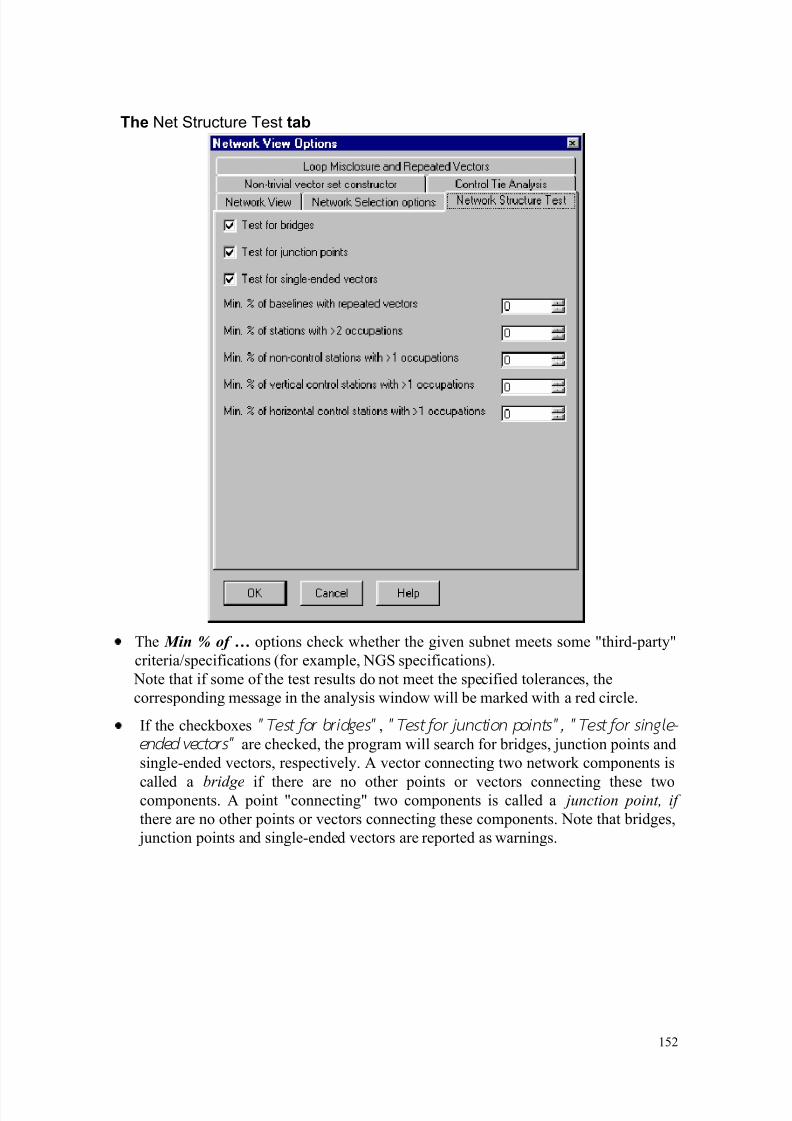
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 153/170
152
The Net Structure Test tab
The Min % of … options check whether the given subnet meets some "third-party"criteria/specifications (for example, NGS specifications).Note that if some of the test results do not meet the specified tolerances, thecorresponding message in the analysis window will be marked with a red circle.
If the checkboxes "Test for bridges", "Test for junction points", "Test for single-
ended vectors" are checked, the program will search for bridges, junction points andsingle-ended vectors, respectively. A vector connecting two network components is
called a bridge if there are no other points or vectors connecting these twocomponents. A point "connecting" two components is called a junction point, if there are no other points or vectors connecting these components. Note that bridges,
junction points and single-ended vectors are reported as warnings.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 154/170
153
The Network View tab
"Show map": For user reference, an appropriate map can be used as a backgroundwhen displaying the subnet in the Network View window. Such maps are stored inand loaded from the corresponding map files. Map files have the extensions .map and .dat (note that the Pinnacle installation includes the map file coast_w.map showing the world coastline). To load a map press the toolbar's Load Map button
and then choose the desired map file from the file list. After the map has been
loaded, it can be turned on and off by means of the toolbar's Show Map buttonor with the help of the Show Map checkbox in the Network View tab.
"Show error ellipsoids for vectors (points)": For reasons of convenience andsimplicity, vertical errors and horizontal error ellipses are used in the NetworkView window to describe the accuracy of the network's vectors and points. Errorellipsoids are converted from the XYZ-system into the corresponding NEU-systemif necessary. Then, these ellipsoids are projected on the local horizon plane, thusproducing the error ellipses indicating the horizontal accuracy of the network'svectors and points. In addition, the error ellipsoids are projected on the local normal,which shows the vertical accuracy estimates.
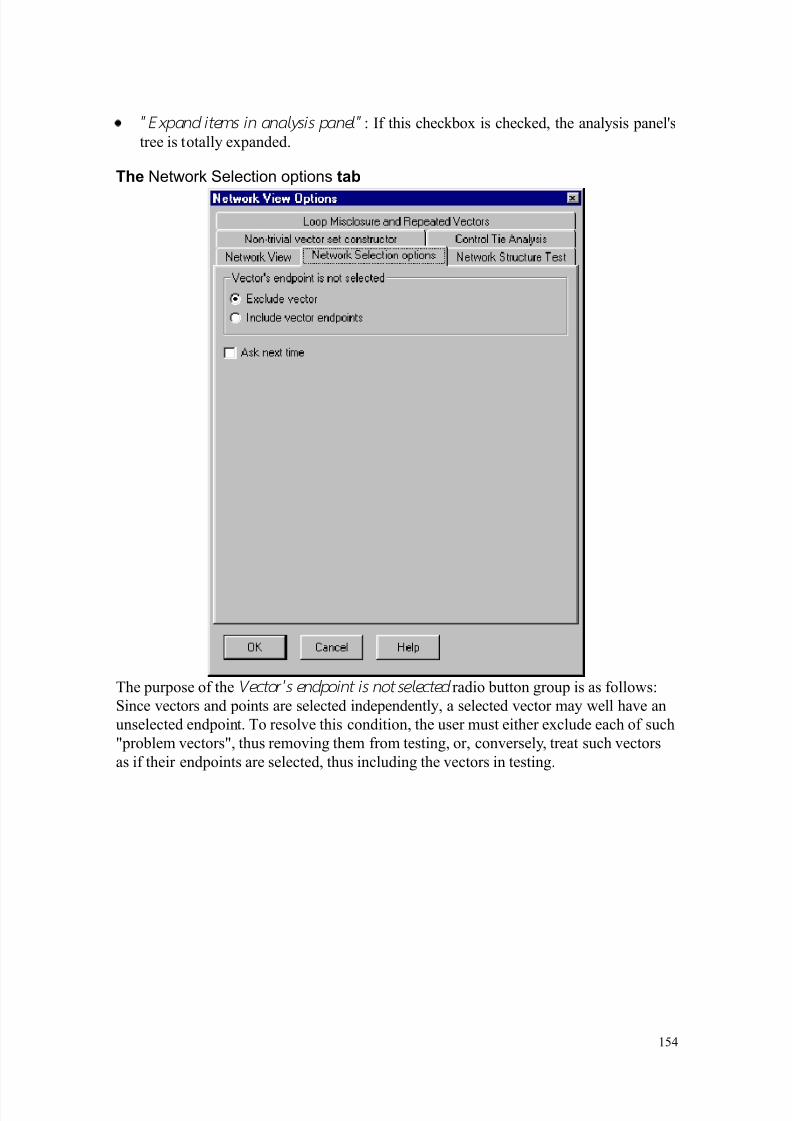
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 155/170
154
"Expand items in analysis panel": If this checkbox is checked, the analysis panel'stree is totally expanded.
The Network Selection options tab
The purpose of the Vector's endpoint is not selected radio button group is as follows:Since vectors and points are selected independently, a selected vector may well have anunselected endpoint. To resolve this condition, the user must either exclude each of such"problem vectors", thus removing them from testing, or, conversely, treat such vectorsas if their endpoints are selected, thus including the vectors in testing.
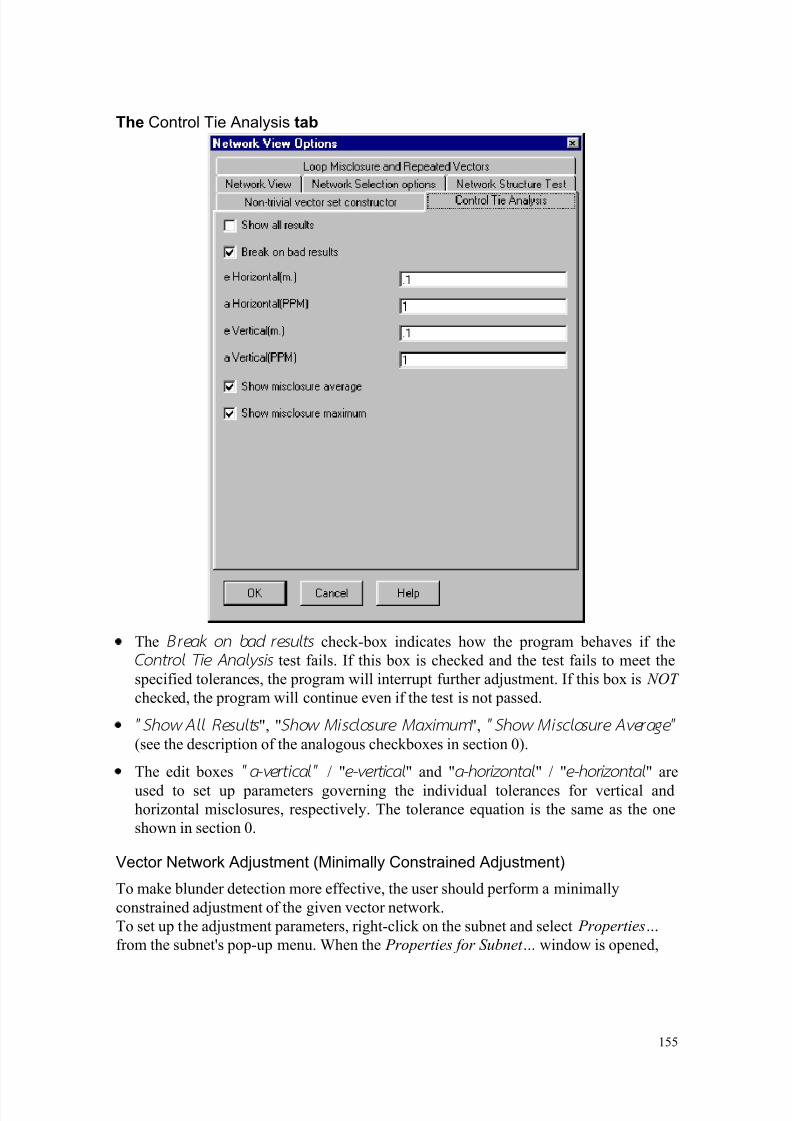
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 156/170
155
The Control Tie Analysis tab
The Break on bad results check-box indicates how the program behaves if theControl Tie Analysis test fails. If this box is checked and the test fails to meet thespecified tolerances, the program will interrupt further adjustment. If this box is NOT checked, the program will continue even if the test is not passed.
"Show All Results", "Show Misclosure Maximum", "Show Misclosure Average" (see the description of the analogous checkboxes in section 0).
The edit boxes "a-vertical" / "e-vertical " and " a-horizontal " / "e-horizontal " areused to set up parameters governing the individual tolerances for vertical andhorizontal misclosures, respectively. The tolerance equation is the same as the oneshown in section 0.
Vector Network Adjustment (Minimally Constrained Adjustment)
To make blunder detection more effective, the user should perform a minimallyconstrained adjustment of the given vector network.To set up the adjustment parameters, right-click on the subnet and select Properties… from the subnet's pop-up menu. When the Properties for Subnet… window is opened,
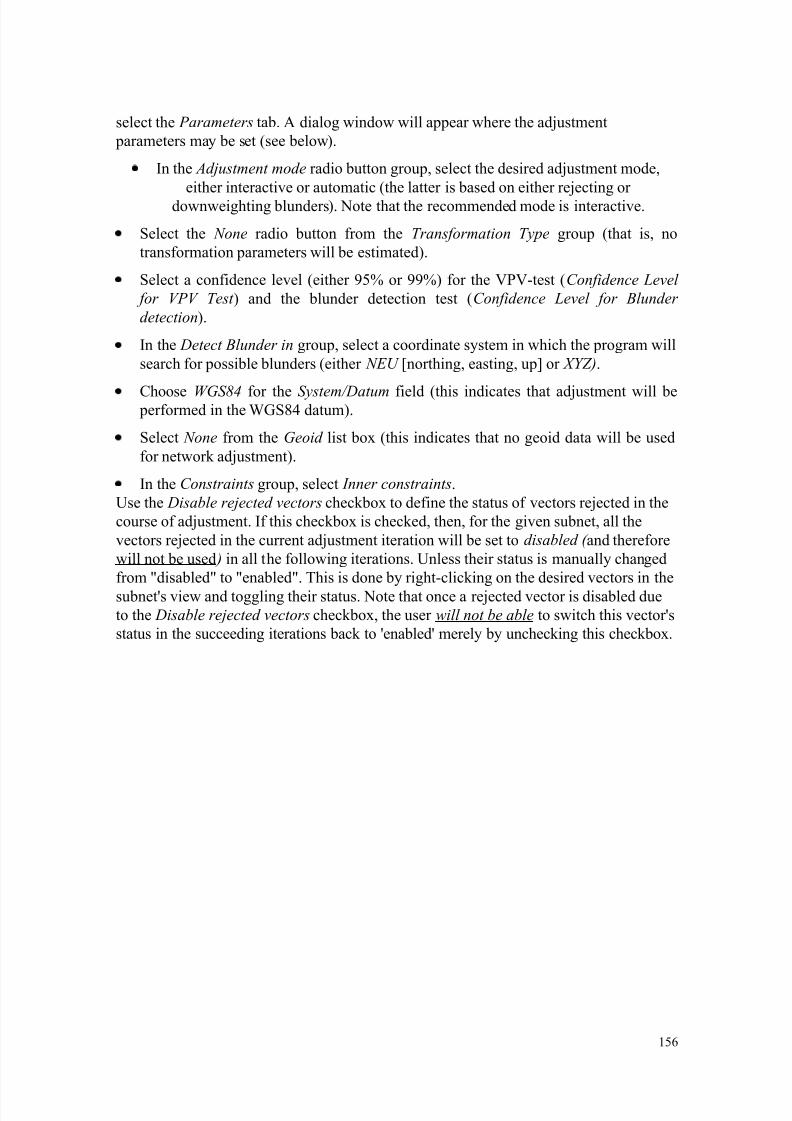
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 157/170
156
select the Parameters tab. A dialog window will appear where the adjustmentparameters may be set (see below).
In the Adjustment mode radio button group, select the desired adjustment mode,
either interactive or automatic (the latter is based on either rejecting ordownweighting blunders). Note that the recommended mode is interactive.
Select the None radio button from the Transformation Type group (that is, notransformation parameters will be estimated).
Select a confidence level (either 95% or 99%) for the VPV-test (Confidence Level
for VPV Test ) and the blunder detection test (Confidence Level for Blunder
detection).
In the Detect Blunder in group, select a coordinate system in which the program willsearch for possible blunders (either NEU [northing, easting, up] or XYZ).
Choose WGS84 for the System/Datum field (this indicates that adjustment will beperformed in the WGS84 datum).
Select None from the Geoid list box (this indicates that no geoid data will be usedfor network adjustment).
In the Constraints group, select Inner constraints.Use the Disable rejected vectors checkbox to define the status of vectors rejected in thecourse of adjustment. If this checkbox is checked, then, for the given subnet, all thevectors rejected in the current adjustment iteration will be set to disabled (and thereforewill not be used) in all the following iterations. Unless their status is manually changedfrom "disabled" to "enabled". This is done by right-clicking on the desired vectors in thesubnet's view and toggling their status. Note that once a rejected vector is disabled dueto the Disable rejected vectors checkbox, the user will not be able to switch this vector'sstatus in the succeeding iterations back to 'enabled' merely by unchecking this checkbox.
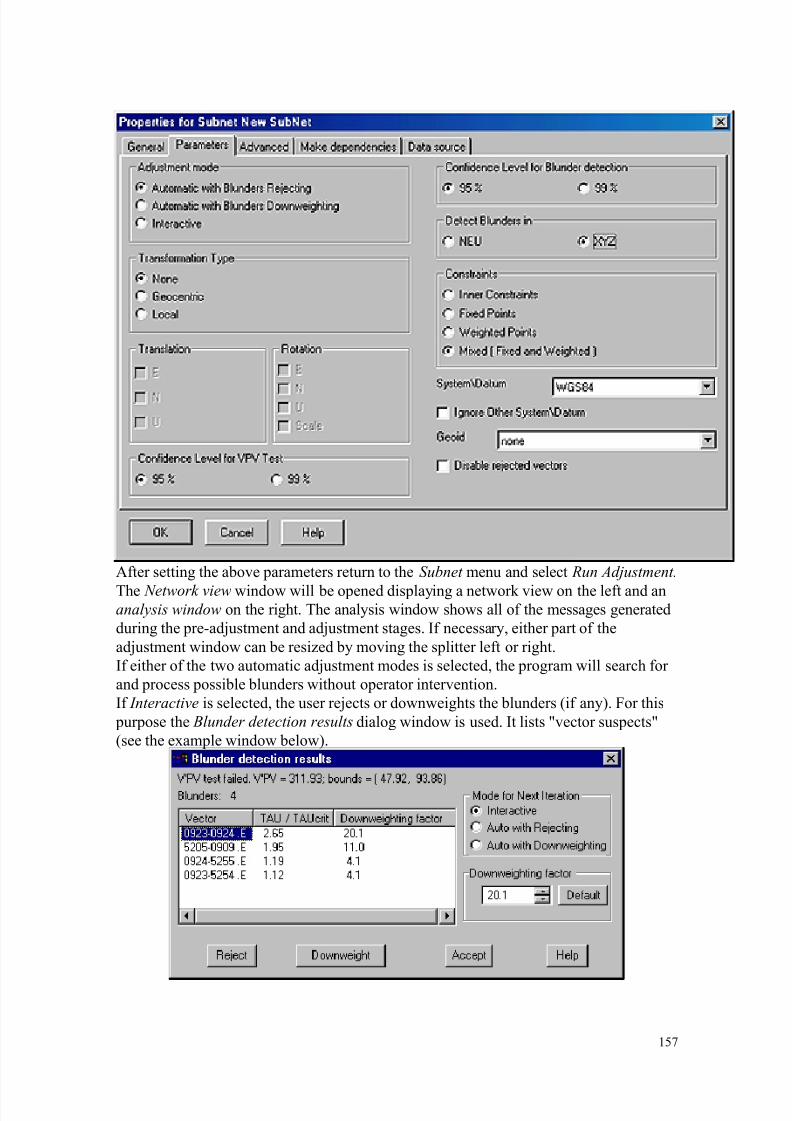
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 158/170
157
After setting the above parameters return to the Subnet menu and select Run Adjustment.
The Network view window will be opened displaying a network view on the left and ananalysis window on the right. The analysis window shows all of the messages generatedduring the pre-adjustment and adjustment stages. If necessary, either part of theadjustment window can be resized by moving the splitter left or right.If either of the two automatic adjustment modes is selected, the program will search forand process possible blunders without operator intervention.If Interactive is selected, the user rejects or downweights the blunders (if any). For thispurpose the Blunder detection results dialog window is used. It lists "vector suspects"(see the example window below).
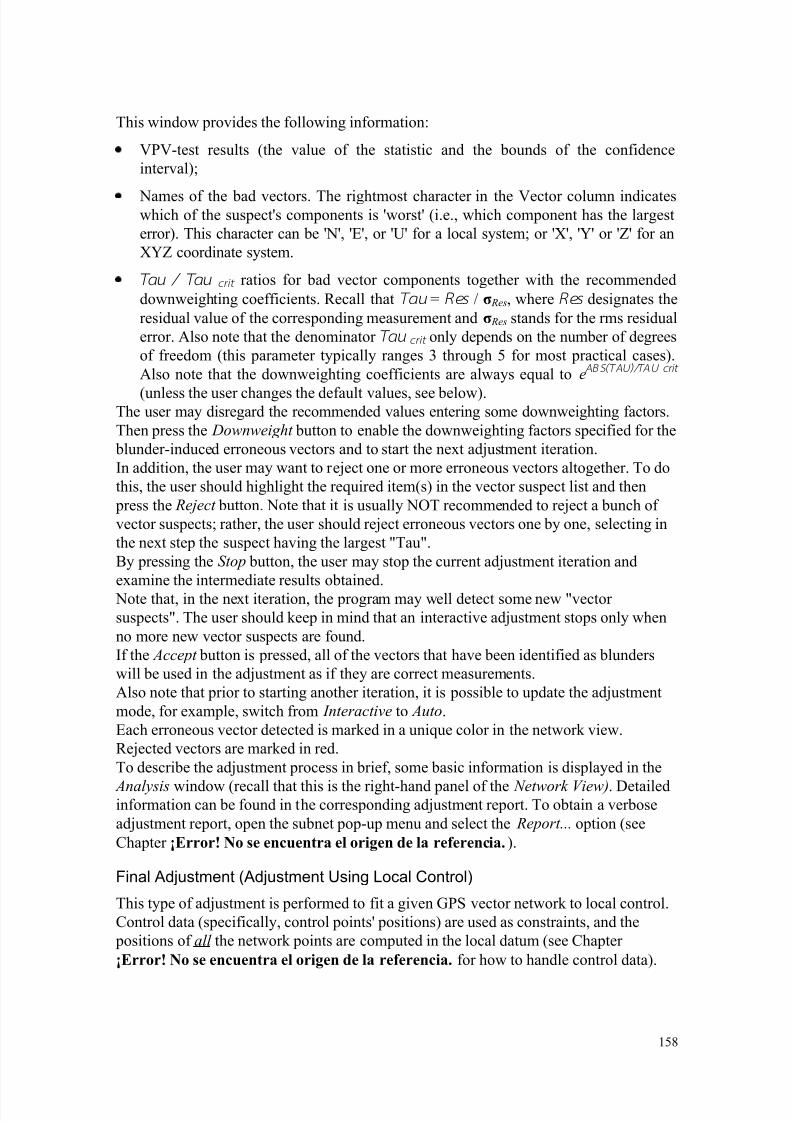
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 159/170
158
This window provides the following information:
VPV-test results (the value of the statistic and the bounds of the confidenceinterval);
Names of the bad vectors. The rightmost character in the Vector column indicateswhich of the suspect's components is 'worst' (i.e., which component has the largesterror). This character can be 'N', 'E', or 'U' for a local system; or 'X', 'Y' or 'Z' for anXYZ coordinate system.
Tau / Tau crit ratios for bad vector components together with the recommendeddownweighting coefficients. Recall that Tau = Res / σ Res, where Res designates theresidual value of the corresponding measurement and σ Res stands for the rms residualerror. Also note that the denominator Tau crit only depends on the number of degreesof freedom (this parameter typically ranges 3 through 5 for most practical cases).Also note that the downweighting coefficients are always equal to e
ABS(TAU)/TAU crit
(unless the user changes the default values, see below).The user may disregard the recommended values entering some downweighting factors.Then press the Downweight button to enable the downweighting factors specified for theblunder-induced erroneous vectors and to start the next adjustment iteration.In addition, the user may want to reject one or more erroneous vectors altogether. To dothis, the user should highlight the required item(s) in the vector suspect list and thenpress the Reject button. Note that it is usually NOT recommended to reject a bunch of vector suspects; rather, the user should reject erroneous vectors one by one, selecting inthe next step the suspect having the largest "Tau".By pressing the Stop button, the user may stop the current adjustment iteration and
examine the intermediate results obtained.Note that, in the next iteration, the program may well detect some new "vectorsuspects". The user should keep in mind that an interactive adjustment stops only whenno more new vector suspects are found.If the Accept button is pressed, all of the vectors that have been identified as blunderswill be used in the adjustment as if they are correct measurements.Also note that prior to starting another iteration, it is possible to update the adjustmentmode, for example, switch from Interactive to Auto.Each erroneous vector detected is marked in a unique color in the network view.Rejected vectors are marked in red.To describe the adjustment process in brief, some basic information is displayed in the
Analysis window (recall that this is the right-hand panel of the Network View). Detailedinformation can be found in the corresponding adjustment report. To obtain a verboseadjustment report, open the subnet pop-up menu and select the Report... option (seeChapter ¡Error! No se encuentra el origen de la referencia.).
Final Adjustment (Adjustment Using Local Control)
This type of adjustment is performed to fit a given GPS vector network to local control.Control data (specifically, control points' positions) are used as constraints, and thepositions of all the network points are computed in the local datum (see Chapter¡Error! No se encuentra el origen de la referencia. for how to handle control data).
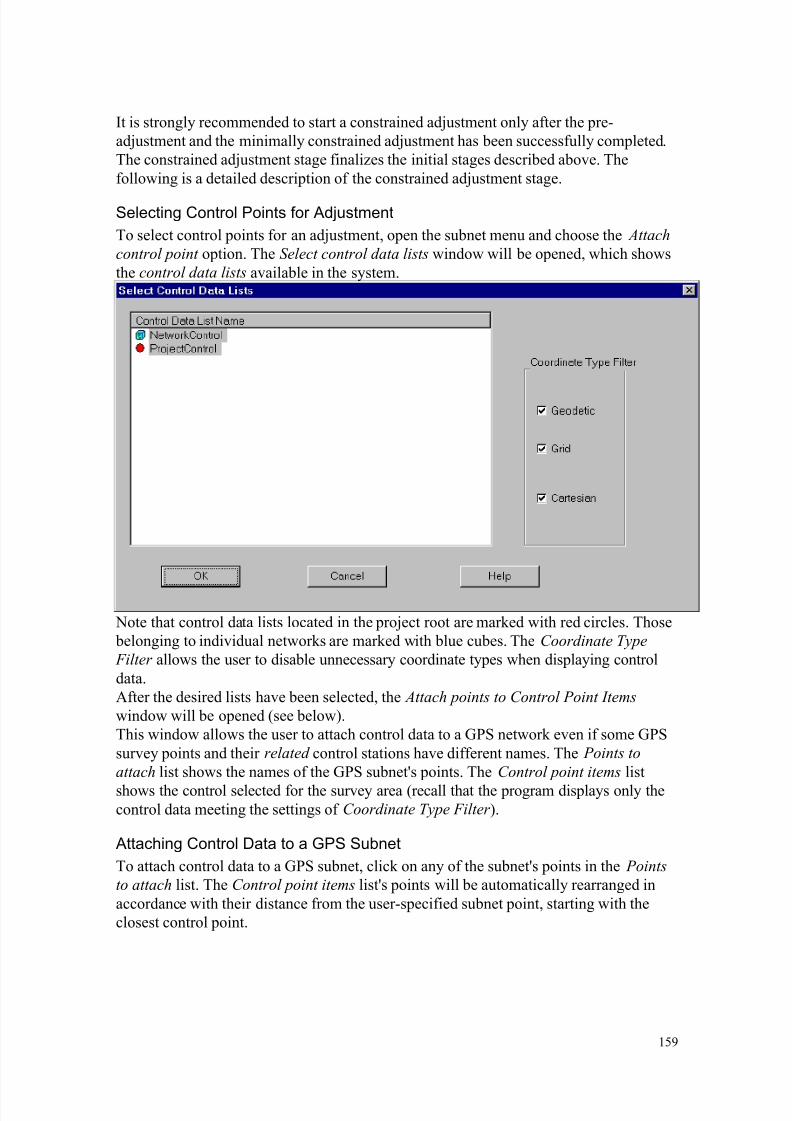
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 160/170
159
It is strongly recommended to start a constrained adjustment only after the pre-adjustment and the minimally constrained adjustment has been successfully completed.The constrained adjustment stage finalizes the initial stages described above. Thefollowing is a detailed description of the constrained adjustment stage.
Selecting Control Points for Adjustment
To select control points for an adjustment, open the subnet menu and choose the Attach
control point option. The Select control data lists window will be opened, which showsthe control data lists available in the system.
Note that control data lists located in the project root are marked with red circles. Thosebelonging to individual networks are marked with blue cubes. The Coordinate Type
Filter allows the user to disable unnecessary coordinate types when displaying controldata.After the desired lists have been selected, the Attach points to Control Point Items window will be opened (see below).This window allows the user to attach control data to a GPS network even if some GPSsurvey points and their related control stations have different names. The Points to
attach list shows the names of the GPS subnet's points. The Control point items listshows the control selected for the survey area (recall that the program displays only thecontrol data meeting the settings of Coordinate Type Filter ).
Attaching Control Data to a GPS Subnet
To attach control data to a GPS subnet, click on any of the subnet's points in the Points
to attach list. The Control point items list's points will be automatically rearranged inaccordance with their distance from the user-specified subnet point, starting with theclosest control point.
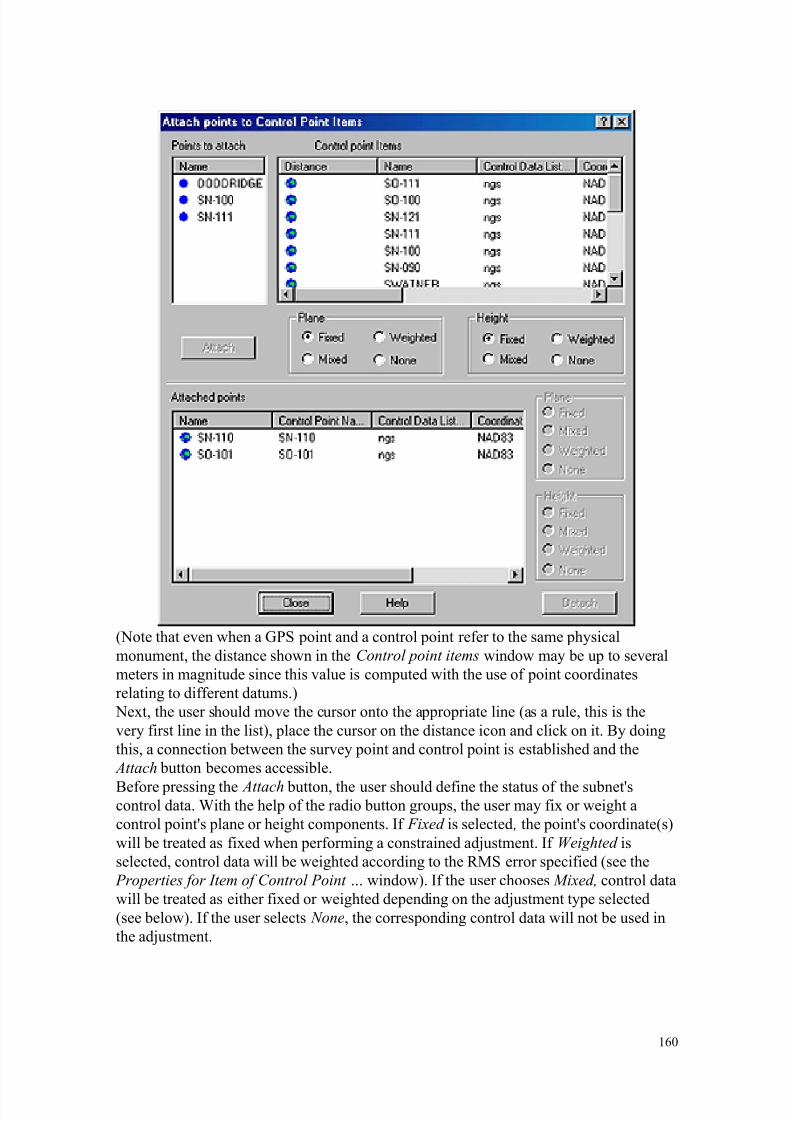
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 161/170
160
(Note that even when a GPS point and a control point refer to the same physicalmonument, the distance shown in the Control point items window may be up to severalmeters in magnitude since this value is computed with the use of point coordinatesrelating to different datums.)Next, the user should move the cursor onto the appropriate line (as a rule, this is thevery first line in the list), place the cursor on the distance icon and click on it. By doingthis, a connection between the survey point and control point is established and the
Attach button becomes accessible.
Before pressing the Attach button, the user should define the status of the subnet'scontrol data. With the help of the radio button groups, the user may fix or weight acontrol point's plane or height components. If Fixed is selected , the point's coordinate(s)will be treated as fixed when performing a constrained adjustment. If Weighted isselected, control data will be weighted according to the RMS error specified (see the
Properties for Item of Control Point … window). If the user chooses Mixed, control datawill be treated as either fixed or weighted depending on the adjustment type selected(see below). If the user selects None, the corresponding control data will not be used inthe adjustment.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 162/170
161
After defining the control data status, press the Attach button. The associated pair “GPS
survey point — control point” will be saved to the project's database. In the Attach
points to control point items window, this pair will be moved down to the Attached
points box. The corresponding GPS point will be marked in the Network view with a
blue triangle (for horizontal control) and/or with a blue square (for vertical control).Additional control may be attached to survey points in the same manner.The upper half of the Attach points to control point items window will maintain onlythose survey points that either do not have appropriate control or, for some reason, havenot been attached to the control data available.The status of the attached control data may be changed, for example, to change Fixed toWeighted , or to detach points. To do this, choose the desired point from the Attached
points list and then use the appropriate checkboxes in the bottom right-hand corner of the Attach points to control point items window, or press the Detach button. Detachedpoints will be replaced in the upper half of the window. Note that, once detached, subnet
points are no longer marked as "attached" in the Network view.Control Tie Analysis
After control data are attached, it is worth comparing the relative (differential) positionsof the control points with the relative positions of the corresponding network points.This allows the earliest possible detection of major errors both in control data (e.g.,typos in printed catalogs) and GPS measurements (e.g., incorrect or misused antennaheight).First, the user should specify appropriate tolerances for the control tie analysis. Open the
Network View window and move the cursor onto the network view. Then, right-click themouse and choose Options from the pop-up menu. Select the Control Tie Analysis tab.
A dialog window will appear as shown in Section 0 above.Two pairs of values are selected to be used in determining the tolerances for the pointsattached to control when comparing their control differential coordinates against thecorresponding measured differential coordinates. As it follows from the mnemonics, thefirst pair of values defines the horizontal tolerance whereas the second pair - the verticaltolerance (see Section 0).If the Show All Results checkbox is checked, all possible pairs of control points will beexamined. Note that when the Break on bad results box is checked, the constrainedadjustment will not be started until the accuracy achieved meets the specified tolerances.
Having set the desired tolerances, open the Network View window and press the
button. Then select the Test Subnet menu's Control Tie Analysis option. Test results areshown in a message displayed in the right side of the Network View window. If the testfails, the message displayed is marked with a red circle.In order to detect bad data more effectively, the user can force the program to generate avector traverse for an arbitrary pair of control points. To mark off the vectors for thetraverse, click on the necessary vectors while holding down the left SHIFT key. In the
Network View window, this traverse will be highlighted in a dark color. Then press the
button and select the Test selected option. In the next step, select the Control Tie
Analysis option. The Network selection options dialog window is opened, checks the
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 163/170
162
Add vector ends checkbox. Finally, press the OK button to start the control tie analysisfor the selected traverse.
Setting the Adjustment Parameters
Open the Subnet's context menu and select Properties. The Properties for Subnet… window will open. Choose the Parameters tab and a dialog window featuring theadjustment parameters will open (see Section 0).Specify which adjustment mode will be applied — interactive or automatic (based oneither rejecting or downweighting erroneous data). It is recommended to use theinteractive mode.In the Constraints radio button group, choose among Fixed points, Weighted points and
Mixed …. If Fixed points is selected , the adjustment will be constrained by control data whosestatus is either Fixed or Mixed (see the Properties for Item of Control Point … window).
If Weighted points is selected, the adjustment will be based only on weighted control,that is, only those control points will be used whose positions are defined as Weighted or Mixed .If Mixed is selected (Fixed and Weighted), control points whose status is either Fixed or
Mixed will be used as fixed, and those marked as Weighted will be used with theappropriate weights applied. The System\Datum list box is used to specify the coordinate system in which the data isadjusted and then presented in the corresponding adjustment report.If the Ignore other system\datum checkbox is checked, the adjustment engine will omitany control data specified in a coordinate system different than that selected from theSystem\Datum list.
From the Geoid list box, the user selects the geoid model that will be used to convertbetween ellipsoidal and orthometric heights. The user may choose a global, regional orlocal (GPS derived) geoid model. If None is selected, the actual geoid undulation isneglected (specifically, zeros will be used for geoid heights when adjusting the data).Note that the None option may be used with good results only when the given surveyarea is fairly small and the geoid is assumed flat over this area.In the Transformation Type group, the user specifies which transformation parameters,if any, will be estimated in the course of adjustment (a transformation between theWGS84 datum and the local datum specified in System\Datum is meant here). If None isselected, no transformation parameters are estimated. If the user chooses Geocentric or
Local, four transformation parameters — a scale factor and three rotation angles — aredetermined. If the Geocentric radio button is used, the rotation angles are determinedwith respect to the XYZ ECEF system's axes. If the Local radio button is used, therotation angles are determined relative to the local system's NEU axes. Once eitherGeocentric or Local is selected, the Rotation group‘s checkboxes, which are associated
with the rotation angles and scale factor, will become accessible. By using thesecheckboxes, the user may define a desired combination of transformation parameters tobe estimated in the course of adjustment (note that these parameters will be treated as"additional" unknowns when adjusting data). In case there is not enough control data todetermine the checked transformation parameters, the adjustment will stop and awarning message will be displayed.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 164/170
163
To fine-tune the adjustment process, press the Advanced tab from the Properties for
Subnet… window (see below). In this dialog window, the user may update the a priori errors of unit weight (UWEs)applied to both the vector network and control points. Care should be taken in updating
the UWEs properly. The user is supposed to have enough information on the weightsbefore changing them; such data would comprise a posteriori UWEs estimated in thecourse of adjustment; qualitative information on the control used; intermediate resultsobtained in the previous iterations, etc.Also, if there is enough a priori information, the user may enter some constraints on thetransformation parameters determined on his/her own. To do this, the Transformation
parameter constraints group is used.After all necessary adjustment parameters have been set, a constrained adjustment canbe started. This looks very much like running a minimally constrained adjustment. Notethat there is one new feature here.
If the user chooses the Interactive adjustment mode and some of the control positionsbeing used are marked as Weighted, the Point Blunders dialog window will be openedshowing all the blunders detected (if any):
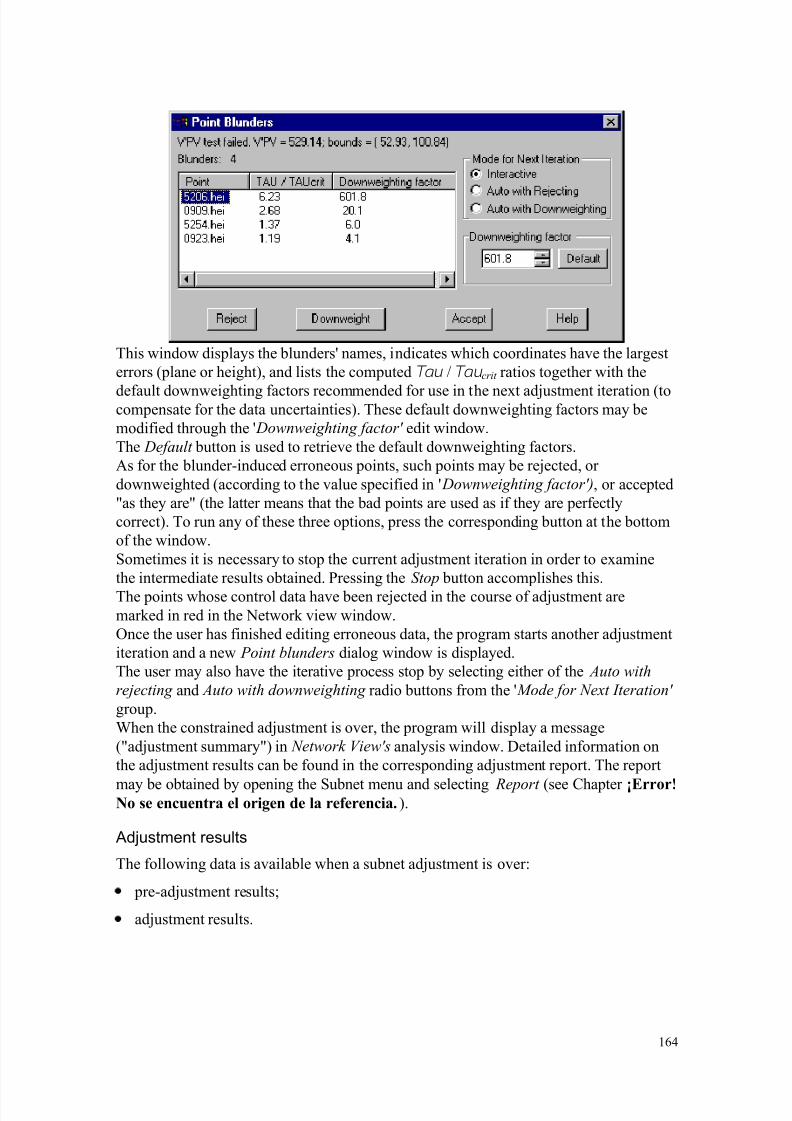
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 165/170
164
This window displays the blunders' names, indicates which coordinates have the largesterrors (plane or height), and lists the computed Tau / Taucrit ratios together with the
default downweighting factors recommended for use in the next adjustment iteration (tocompensate for the data uncertainties). These default downweighting factors may bemodified through the ' Downweighting factor' edit window.The Default button is used to retrieve the default downweighting factors.As for the blunder-induced erroneous points, such points may be rejected, ordownweighted (according to the value specified in ' Downweighting factor'), or accepted"as they are" (the latter means that the bad points are used as if they are perfectlycorrect). To run any of these three options, press the corresponding button at the bottomof the window.Sometimes it is necessary to stop the current adjustment iteration in order to examinethe intermediate results obtained. Pressing the Stop button accomplishes this.The points whose control data have been rejected in the course of adjustment aremarked in red in the Network view window.Once the user has finished editing erroneous data, the program starts another adjustmentiteration and a new Point blunders dialog window is displayed.The user may also have the iterative process stop by selecting either of the Auto with
rejecting and Auto with downweighting radio buttons from the ' Mode for Next Iteration' group.When the constrained adjustment is over, the program will display a message("adjustment summary") in Network View's analysis window. Detailed information onthe adjustment results can be found in the corresponding adjustment report. The report
may be obtained by opening the Subnet menu and selecting Report (see Chapter ¡Error!No se encuentra el origen de la referencia.).
Adjustment results
The following data is available when a subnet adjustment is over:
pre-adjustment results;
adjustment results.
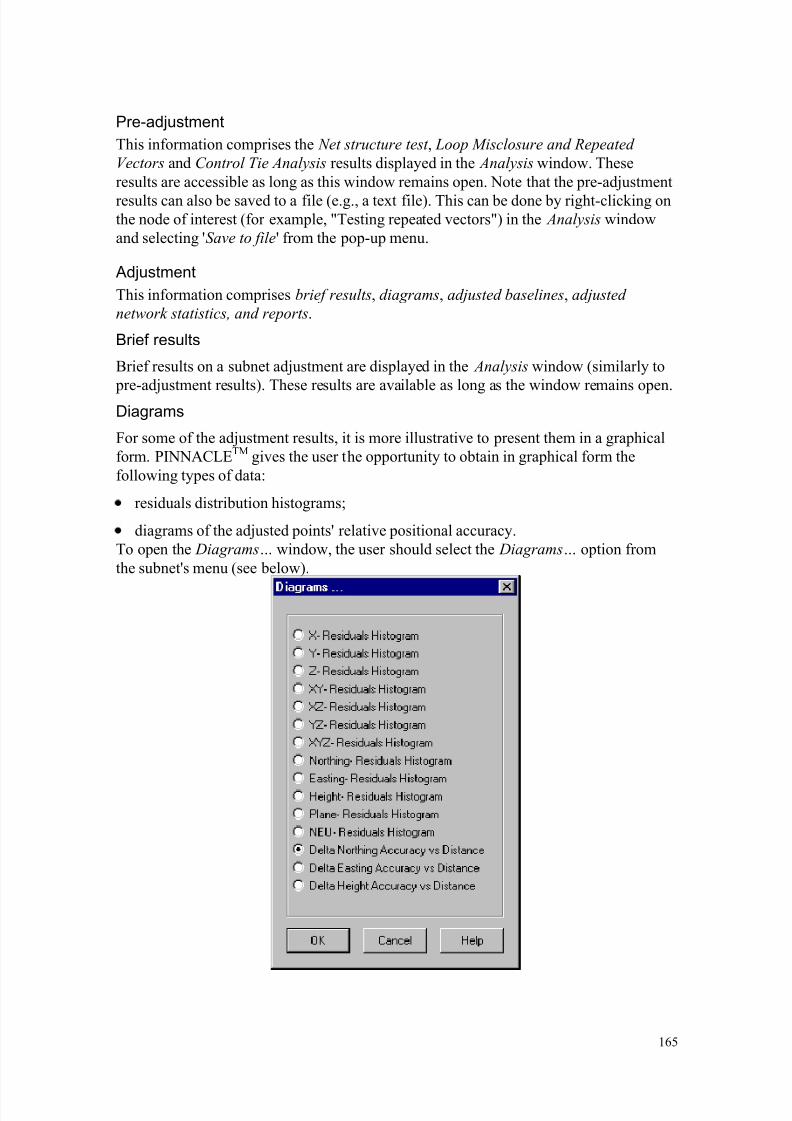
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 166/170
165
Pre-adjustment
This information comprises the Net structure test , Loop Misclosure and Repeated
Vectors and Control Tie Analysis results displayed in the Analysis window. Theseresults are accessible as long as this window remains open. Note that the pre-adjustment
results can also be saved to a file (e.g., a text file). This can be done by right-clicking onthe node of interest (for example, "Testing repeated vectors") in the Analysis windowand selecting 'Save to file' from the pop-up menu.
Adjustment
This information comprises brief results, diagrams, adjusted baselines, adjusted
network statistics, and reports.
Brief results
Brief results on a subnet adjustment are displayed in the Analysis window (similarly to
pre-adjustment results). These results are available as long as the window remains open.Diagrams
For some of the adjustment results, it is more illustrative to present them in a graphicalform. PINNACLETM gives the user the opportunity to obtain in graphical form thefollowing types of data:
residuals distribution histograms;
diagrams of the adjusted points' relative positional accuracy.To open the Diagrams… window, the user should select the Diagrams… option fromthe subnet's menu (see below).
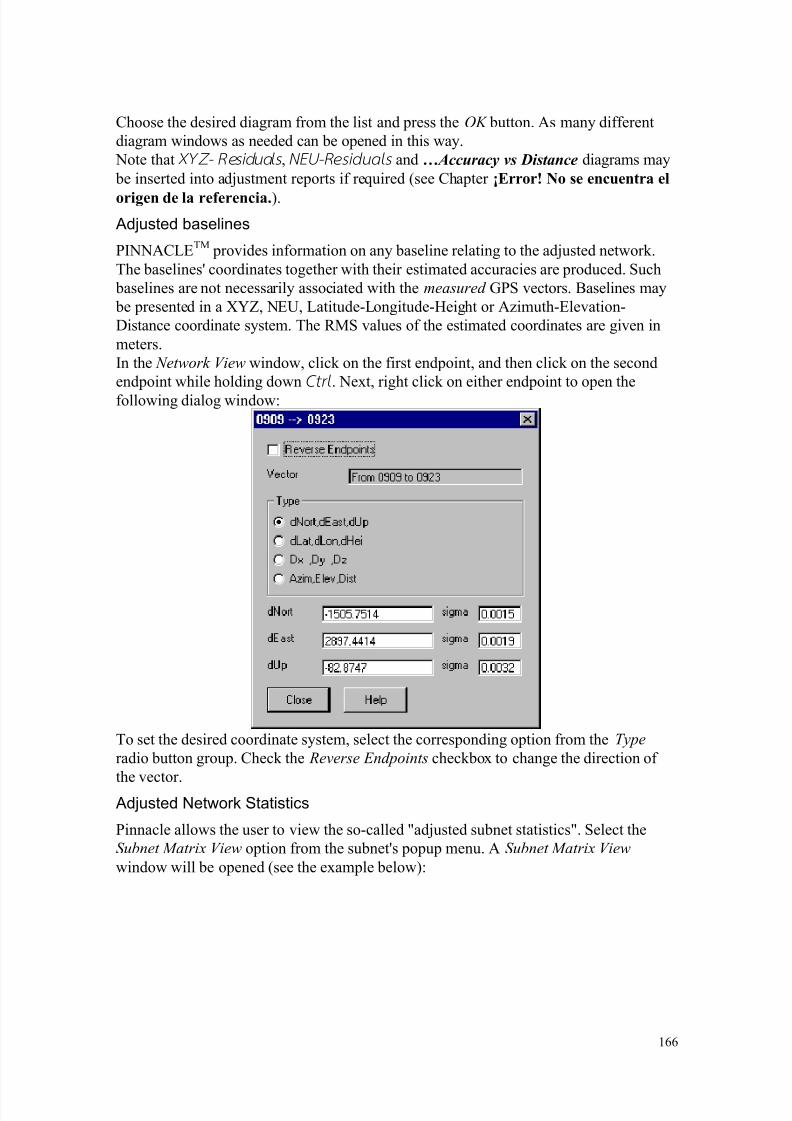
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 167/170
166
Choose the desired diagram from the list and press the OK button. As many differentdiagram windows as needed can be opened in this way.Note that XYZ- Residuals, NEU-Residuals and …Accuracy vs Distance diagrams maybe inserted into adjustment reports if required (see Chapter ¡Error! No se encuentra el
origen de la referencia.).Adjusted baselines
PINNACLETM provides information on any baseline relating to the adjusted network.The baselines' coordinates together with their estimated accuracies are produced. Suchbaselines are not necessarily associated with the measured GPS vectors. Baselines maybe presented in a XYZ, NEU, Latitude-Longitude-Height or Azimuth-Elevation-Distance coordinate system. The RMS values of the estimated coordinates are given inmeters.In the Network View window, click on the first endpoint, and then click on the secondendpoint while holding down Ctrl . Next, right click on either endpoint to open thefollowing dialog window:
To set the desired coordinate system, select the corresponding option from the Type radio button group. Check the Reverse Endpoints checkbox to change the direction of
the vector.Adjusted Network Statistics
Pinnacle allows the user to view the so-called "adjusted subnet statistics". Select theSubnet Matrix View option from the subnet's popup menu. A Subnet Matrix View
window will be opened (see the example below):
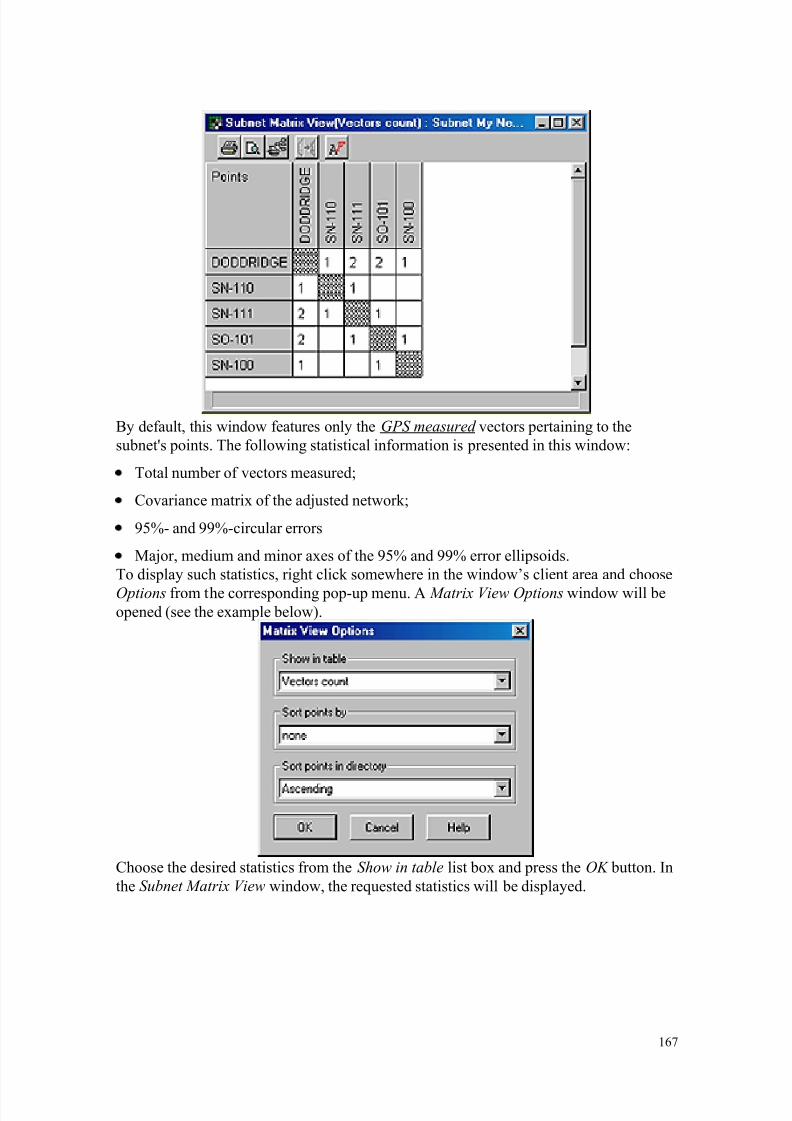
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 168/170
167
By default, this window features only the GPS measured vectors pertaining to thesubnet's points. The following statistical information is presented in this window:
Total number of vectors measured;
Covariance matrix of the adjusted network;
95%- and 99%-circular errors
Major, medium and minor axes of the 95% and 99% error ellipsoids.To display such statistics, right click somewhere in the window‘s client area and chooseOptions from the corresponding pop-up menu. A Matrix View Options window will beopened (see the example below).
Choose the desired statistics from the Show in table list box and press the OK button. Inthe Subnet Matrix View window, the requested statistics will be displayed.
5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 169/170
168
Adjustment reports
Adjustment reports provide detailed information on the adjustment results. Reports aredescribed in Chapter ¡Error! No se encuentra el origen de la referencia. of thisManual.
BIBLIOGRAFÍA
1.- Gibbons, G., Punting on L5, in GPS World of April 1997.
2.- Hofmann-Wenllenhof, B., 1994, GPS Theory and Practice, Springer-Verlag, New York.
3.- Holanda Blas, M.P., Bermejo Ortega, J.C., Hernanz Villalba, P., GómezSánchez, F., Madrid 1997, Estudio de la precisión que el sistema GPS proporciona encada una de sus cinco observables y comportamiento de las mismas en función de
diversos condicionantes para la medida de líneas base en un amplio rango de distancias.
4.- Langley, R., The GPS Error Budget, in GPS World of March 1997.
5.- Langley, R., GPS Receiver System Noise, in GPS World of June 1997.
6.- Langley, R., Review and Update of GPS and GLONASS, in GPS World of July 1997.
7.- Leick, A., 1996, GPS Satellite Surveying, Wiley-Interscience, New York.
8.- Mikhail, E. M., 1981, Analysis and Adjustment of Survey Measurement, VanNostrand Reinhold, New York.
9.- Núñez-García, A.,Valbuena Durán, J.L., Velasco Gómez, J., 1992, GPS LaNueva Era de la Topografía, Ediciones de las Ciencias Sociales, Madrid.
10.- Documentos de Internet publicados por el Laboratorio Lincoln deMassachusetts, el Coordinational Scientific Information Center ruso y por el DLR-DFDNeustrelitz Remote Sensing Ground Station en Alemania, Noviembre 1997.

5/11/2018 Apuntes Gps Version 5.0 - slidepdf.com
http://slidepdf.com/reader/full/apuntes-gps-version-50 170/170