Apuntes Estatica Ejercicios Resueltos
50
Estática – Apuntes del curso (Profesor Mario Gálvez H.) ESTÁTICA Apuntes del curso Profesor: Mario Gálvez H. Estática – Apuntes del curso (Profesor Mario Gálvez H.) 1 CONTENIDOS pág INTRODUCCION 3 I. INTRODUCCION A LA ESTATICA 4 1.1. Fundamentos de la Mecánica 4 1.2. Unidades (Sistema Internacional: SI) 5 II. ALGEBRA VECTORIAL 7 2.1. Vectores 7 2.2. Suma de Vectores 8 2.3. Descomposición de una fuerza en sus componentes 8 2.4. Producto punto de vectores 9 2.5. Producto cruz de vectores 9 III. EQUILIBRIO DE UNA PARTICULA 10 3.1. Equilibrio de Fuerzas 10 3.2. Fuerza de Roce 12 IV. CUERPOS RIGIDOS: SISTEMAS EQUIVALENTES DE FUERZAS 20 4.1. Introducción 20 4.2. Fuerzas Externas e Internas 20 4.3. Momento de una fuerza respecto a un punto 21 4.4. Momento de una fuerza respecto a un eje 23 4.5. Momento de un par de Fuerzas 24 V. EQUILIBRIO DE CUERPOS RIGIDOS 31 5.1. Introducción 31 5.2. Diagrama de cuerpo libre 31 5.3. Reacciones en los puntos de apoyo y conexiones de una Estructura bidimensional 32 5.4. Equilibrio de un cuerpo rígido en dos dimensiones 33 5.5. Estabilidad y grados de indeterminación 36 5.6. Equilibrio de un cuerpo rígido en tres dimensiones 40 VI. CENTRO DE GRAVEDAD, CENTROIDES Y FUERZAS DISTRIBUIDAS 45 6.1. Centro de Gravedad en Coordenadas Cartesianas 46 6.2. Centroides de área en Coordenadas Polares 47 6.3. Cuerpos Compuestos 48 6.4. Teorema de Pappus-Guldinus 50 6.5. Resultantes de fuerzas paralelas distribuidas 53
-
Upload
alexander-bustamante -
Category
Documents
-
view
791 -
download
64
Transcript of Apuntes Estatica Ejercicios Resueltos

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
ESTÁTICA
Apuntes del curso
Profesor: Mario Gálvez H.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
1
CONTENIDOS
pág INTRODUCCION 3 I. INTRODUCCION A LA ESTATICA 4 1.1. Fundamentos de la Mecánica 4 1.2. Unidades (Sistema Internacional: SI) 5 II. ALGEBRA VECTORIAL 7 2.1. Vectores 7 2.2. Suma de Vectores 8 2.3. Descomposición de una fuerza en sus componentes 8 2.4. Producto punto de vectores 9 2.5. Producto cruz de vectores 9 III. EQUILIBRIO DE UNA PARTICULA 10 3.1. Equilibrio de Fuerzas 10 3.2. Fuerza de Roce 12 IV. CUERPOS RIGIDOS: SISTEMAS EQUIVALENTES DE FUERZAS 20 4.1. Introducción 20 4.2. Fuerzas Externas e Internas 20 4.3. Momento de una fuerza respecto a un punto 21 4.4. Momento de una fuerza respecto a un eje 23 4.5. Momento de un par de Fuerzas 24 V. EQUILIBRIO DE CUERPOS RIGIDOS 31 5.1. Introducción 31 5.2. Diagrama de cuerpo libre 31 5.3. Reacciones en los puntos de apoyo y conexiones de una Estructura bidimensional 32 5.4. Equilibrio de un cuerpo rígido en dos dimensiones 33 5.5. Estabilidad y grados de indeterminación 36 5.6. Equilibrio de un cuerpo rígido en tres dimensiones 40 VI. CENTRO DE GRAVEDAD, CENTROIDES Y FUERZAS DISTRIBUIDAS 45 6.1. Centro de Gravedad en Coordenadas Cartesianas 46 6.2. Centroides de área en Coordenadas Polares 47 6.3. Cuerpos Compuestos 48 6.4. Teorema de Pappus-Guldinus 50 6.5. Resultantes de fuerzas paralelas distribuidas 53

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
2
pág VII. RETICULADOS 60 7.1. Estabilidad y Determinación Estática 61 7.2. Métodos de Análisis de Reticulados 62 7.3. Reticulados Compuestos y Complejos 73 VIII. ESFUERZOS INTERNOS EN VIGAS 75 8.1. Esfuerzo de Corte y Momento Flector en Vigas 76 IX. PRINCIPIOS DEL TRABAJO 90 9.1. Principio del trabajo Virtual 92
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
3
INTRODUCCION El presente documento es un complemento a las clases del curso de “Estática” impartidas en la Universidad Diego Portales, es utilizado como texto guía. Se presentan una serie de temas que pretenden introducir al alumno al mundo de las estructuras. Es el primer acercamiento que existe a las estructuras. Los fundamentos aquí presentados son las bases para los cursos siguientes como Mecánica de Sólidos, Análisis Estructural (I y II) Ingeniería Antisísmica y todos los cursos de diseño, tanto en hormigón armado como en estructuras de acero. En estas páginas se resumen los principales contenidos necesarios para comenzar con el cálculo de esfuerzos en los elementos, tales como columnas y vigas. Una vez determinados los esfuerzos en los elementos se procede al proceso de diseño. Dentro de los contenidos se hace un repaso del álgebra vectorial, primordial para los cursos de ingeniería, ya que las fuerzas, momentos y desplazamientos están definidos a partir de magnitudes vectoriales. En este curso es importante el concepto de equilibrio (de ahí el nombre estática, a diferencia de la dinámica que estudia los cuerpos en movimiento), este concepto es aplicable tanto a partículas como a cuerpos rígidos (que poseen dimensiones medibles). Para poder concentrar los pesos de los cuerpos rígidos, es necesario conocer un punto, dentro del mismo, apropiado para tal fin. Este punto se determina utilizando el concepto de centroide. Se analizan, también, estructuras de tipo reticulado, utilizadas en el uso de puentes y cerchas; y estructuras formadas por columnas y vigas, para la construcción de edificios. Finalmente se analiza el principio del trabajo para la determinación de fuerzas externas (reacciones en los apoyos de las estructuras) e internas (para los procesos de diseño). Para terminar, te invito a participar de este curso para que puedas comprender el funcionamiento de las estructuras y así utilizar estos conceptos en tu vida profesional cuando ya seas un ingeniero.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
4
I. INTRODUCCIÓN A LA ESTÁTICA 1.1. Fundamentos de la Mecánica 1.1.1. Introducción a la Mecánica Mecánica es la ciencia que describe y predice las condiciones de reposo o movimiento de los cuerpos bajo la acción de fuerzas. La mecánica se divide en tres partes: mecánica de los cuerpos rígidos, mecánica de cuerpos deformables y mecánica de fluidos. La mecánica de los cuerpos rígidos se divide en estática y dinámica. La primera trata sobre los cuerpos en reposo y la segunda, sobre los cuerpos en movimiento. El estudio de la mecánica se remonta a tiempos de Aristóteles y Arquímedes (siglos III y IV a. de C.). i) Fuerza La fuerza representa la acción de un cuerpo sobre otro. Esta puede ser ejercida a través de un contacto directo o a distancia, como el caso de las fuerzas gravitacionales y magnéticas. Una fuerza está caracterizada por un punto de aplicación, su magnitud y su dirección, y se representa por medio de un vector. ii) Ley del Paralelogramo para suma de fuerzas “Dos fuerzas que actúan sobre una partícula pueden ser reemplazadas por una sola fuerza llamada resultante, que se obtiene dibujando la diagonal del paralelogramo cuyos lados son iguales a las fuerzas dadas”.
Figura 1.1: Ley del Paralelogramo
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
5
iii) Leyes de Newton - 1ª Ley de Newton “Si la fuerza resultante que actúa sobre una partícula es cero, la partícula permanecerá en reposo (si originalmente se encontraba en reposo) o se moverá a velocidad constante y en línea recta (si originalmente estaba en movimiento)”. - 2ª Ley de Newton “Si la fuerza resultante que actúa sobre una partícula no es cero, la partícula tendrá una aceleración proporcional a la magnitud de la resultante y en la misma dirección que esta última”
amF rr⋅=
donde: F
r: Fuerza resultante
m : Masa de la partícula ar : Aceleración de la partícula - 3ª Ley de Newton “Las fuerzas de acción y reacción entre cuerpos en contacto tienen la misma magnitud, la misma dirección y sentidos opuestos (principio de acción y reacción)”. 1.2. Unidades (Sistema Internacional: SI)
Cantidad Unidad Símbolo Fórmula Aceleración Metro por seg al cuadrado ---- m/seg2 Ac. Angular Radián por seg al cuadrado ---- rad/seg2
Angulo Radián rad ---- Area Metro cuadrado ---- m2
Densidad Kilógramo por metro cúbico ---- kg/m3 Energia Joule J N*m Esfuerzo Pascal Pa N/m2
Frecuencia Hertz Hz s-1 Fuerza Newton N kg*m/seg2 Impulso Newton-segundo ---- kg*m/seg Longitud Metro m m
Masa Kilógramo kg kg Momento Newton-metro ---- N*m

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
6
Cantidad Unidad Símbolo Fórmula Potencia Watt W J/seg Presión Pascal Pa N/m2 Tiempo Segundo s seg Trabajo Joule J N*m
Velocidad Metro por segundo ---- m/seg Velocidad angular Radián por segundo ---- rad/seg Volúmen Sólidos Metro cúbico ---- m3 Volúmen Líquidos Litro L 10-3m3
Tabla 1.1: Unidades (Sistema Internacional)
La masa de 1 kg es atraída por la tierra con una aceleración de un “g” (9.81 m/seg2) la que produce una fuerza dada por:
F = m * a = 1 kg * 9.81 m/seg2 = 9.81 N = 1 kgf (kilofuerza)
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
7
II. ALGEBRA VECTORIAL La magnitud de una fuerza está caracterizada por un cierto número de unidades. La línea de acción es la línea recta infinita a lo largo de la cual actúa la fuerza, ésta está caracterizada por el ángulo que forma con respecto a un eje fijo. El sentido de la fuerza debe ser indicado por una punta de flecha.
Figura 2.1: Elementos que componen una fuerza 2.1. Vectores Los vectores son expresiones matemáticas que poseen magnitud y dirección, las cuales se suman de acuerdo con la ley del paralelogramo. Los desplazamientos, velocidades, aceleración y momentos son cantidades físicas que se pueden expresar como vectores, por otro lado, el volumen, la masa, la energía, el tiempo son cantidades escalares. El vector negativo de un vector P
r dado se define como el vector que tiene
la misma magnitud y dirección de Pr
pero con sentido contrario.
Figura 2.2: Vector y su vector negativo

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
8
2.2. Suma de vectores Se tienen dos vectores:
Se cumple que: P + Q = Q + P P – Q = P + (-Q) P + Q + S = (P + Q) + S = P + (Q + S)
∑=
n
i
P1
=n P
Si P = (a , b) y Q = (c , d), entonces P + Q = (a , b) + (c , d) = ( a+c , b+d ) 2.3. Descomposición de una fuerza en sus componentes Una fuerza se puede descomponer como:
Figura 2.3: Descomposición de una fuerzas en dos ejes ortogonales La fuerza P también puede descomponerse en ejes x e y que no sean ortogonales.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
9
2.4. Producto punto de vectores (producto escalar) Si se tiene el vector ),...,,,( 321 naaaaA =
r y el vector ),...,,,( 321 nbbbbB =
r, el
producto punto entre ambos vectores se define como:
∑=
⋅=⋅++⋅+⋅+⋅=⋅n
iiinn bababababaBA
1332211 ...
rr
2.5. Producto cruz de vectores (producto vectorial) El producto cruz entre dos vectores es aquel vector resultante (ortogonal a ambos) calculado siguiendo la regla de la mano derecha. Se tienen los vectores unitarios (módulo igual a la unidad) dados por:
Figura 2.4: Vectores unitarios ortogonales Donde: i x j = k j x k = i k x i = j i x i = 0 Si se define: P = (Px,Py,Pz) Q = (Qx,Qy,Qz)
Luego, P x Q = (Px*i + Py*j + Pz*k) x (Qx*i + Qy*j + Qz*k) = (Py*Qz – Pz*Qy)*i + (Pz*Qx – Px*Qz)*j + (Px*Qy – Py*Qx)*k En forma más didáctica:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
10
III. EQUILIBRIO DE UNA PARTICULA 3.1. Equilibrio de Fuerzas “Cuando la resultante de todas las fuerzas que actúan sobre una partícula es cero, la partícula está en equilibrio” Esto es 0=∑ F Ejemplo 3.1: Un bloque de peso 75 kgf es soportado por dos cables inextensibles de masa despreciable que pasan por poleas sin roce. Determine las tensiones de ambos cables.
Solución: Se debe hacer el diagrama de cuerpo libre del bloque (diagrama que incluye todas las fuerzas que se ejercen en el bloque)
Figura E3.1: Diagrama de cuerpo libre
0=∑ Fx T2*cos30º - T1*cos50º = 0
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
11
0=∑ Fy T1*sen50º + T2*sen30º - 75 = 0 Resolviendo,
T1 = 65.948 kgf T2 = 48.966 kgf
Para resolver problemas en tres dimensiones es necesario determinar el vector unitario de las fuerzas que se ejercen sobre el sistema. Si se tiene el vector ),,( zyx aaaA =
r, el vector unitario asociado a A
r
(magnitud igual a la unidad cuya dirección y sentido es la misma que Ar
) queda determinado por:
222
),,(
zyx
zyxA
aaa
aaa
AA
++== r
rλ
Ejemplo 3.2: Determine las tensiones en los cables AB, AC y la fuerza P, para que el sistema se encuentre en equilibrio. Asuma que W = 200 kgf. Los puntos están ubicados en: A( 0 ; 1.2 m ; 2 m ), B( 8 m ; 0 ; 12 m) y C( -10 m ; 0 ; 12 m)

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
12
Solución:
)777.0;0933.0;6219.0()10;2.1;8( −==→−=ABABAB ABλ
)7045.0;0845.0;7045.0()10;2.1;10( −−==→−−=ACACAC ACλ
Para el equilibrio debe cumplirse que:
0=++⋅+⋅ WPTT ACACABAB λλ
0=∑ Fx TAB*0.6219 – TAC*0.7045 = 0
0=∑ Fy -TAB*0.0933 – TAC*0.0845 + P = 0
0=∑ Fz TAB*0.777 + TAC*0.7045 = 200
Resolviendo las ecuaciones.
TAB = 142.97 kgf TAC = 126.2 kgf
P = 24 kgf 3.2. Fuerza de Roce (fricción) 3.2.1. Roce en bloques Cuando dos superficies están en contacto, siempre se presentan fuerzas tangenciales, llamadas fuerzas de fricción, cuando se trata de mover una de las superficies con respecto de la otra. Por otra parte, estas fuerzas de fricción están limitadas en magnitud y no impedirán el movimiento si se aplican fuerzas lo suficientemente grandes. Se tiene el siguiente bloque:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
13
Figura 3.1: Diagrama de cuerpo libre de un bloque Si P es pequeña el bloque no se moverá, entonces debe existir alguna fuerza horizontal que equilibra a P, esta fuerza es el “roce estático”. Si se incrementa la fuerza P, también se incrementa la fuerza de roce Fr la cual continúa oponiéndose a P, hasta que su magnitud alcanza un cierto valor máximo Frm. Si P se incrementa aún más, la fuerza de roce ya no la puede equilibrar y el bloque comienza a deslizar. Ahora Fr cae de Frm a Frk.
Frm = µs * N
Frk = µk * N Donde: µs : Coeficiente de roce estático µk : Coeficiente de roce cinético
µs > µk
Figura 3.2: Ángulos de roce estático y dinámico Se cumple que:
( ) ( ) ( )kksssrm
s tgtgN
NN
Ftg φµφµ
µφ =→=→
⋅==

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
14
Ejemplo 3.3: Sobre el bloque de la figura actúan dos fuerzas. Se tiene que ms = 0.35 y mk = 0.25. Determinar P que se requiere para:
a) el bloque comience a moverse hacia arriba a lo largo del plano inclinado. b) para que el bloque continúe moviéndose hacia arriba. c) para prevenir que el bloque deslice hacia abajo a lo largo del plano.
Solución Parte a)
Figura E3.2.1: Diagrama de cuerpo libre
0=∑ Fy N – P sen(25º) – 800 cos(25º) = 0
0=∑ Fx Fr + 800 sen(25º) – P cos(25º) = 0 Para que el bloque comience a deslizar, entonces, debe cumplirse que:
Fr = Frm = µs * N = 0.35 N Reemplazando y resolviendo el sistema de ecuaciones se obtiene:
N = 1054.864 kgf
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
15
P = 780.416 kgf Parte b) Para que el bloque continúe moviéndose entonces:
Fr = Frk = µk * N = 0.25 N Reemplazando y resolviendo el sistema de ecuaciones se obtiene:
N = 999.184 kgf P = 648.665 kgf
Parte c)
Figura E3.2.2: Diagrama de cuerpo libre
0=∑ Fy N – P sen(25º) – 800 cos(25º) = 0
0=∑ Fx -Fr + 800 sen(25º) – P cos(25º) = 0
Fr = Frm = µs * N = 0.35 N Reemplazando y resolviendo el sistema de ecuaciones se obtiene:
N = 758.852 kgf P = 80 kgf
3.2.2. Roce en bandas Se considera una banda plana que pasa sobre un tambor cilíndrico fijo (Figura 3.2). Se desea determinar la relación que existe entra las fuerzas T1 y T2

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
16
de la tensión en las dos partes de la banda cuando esta última está a punto de deslizar hacia la derecha.
Figura 3.2: Banda plana sobre un tambor cilíndrico Se separa de la banda un segmento PP’ que abarca un ángulo ∆θ (Figura 3.3). Se representa con T la tensión en P y por T + ∆T a la tensión en P’.
Figura 3.3: Segmento PP’ de la banda Con el diagrama de cuerpo libre sobre el segmento de la banda se pueden hacer las ecuaciones de equilibrio.
( )0 cos cos 02 2x sF T T T Nθ θ
µ∆ ∆ = + ∆ ⋅ − ⋅ − ⋅ ∆ =
∑ (1)
( )0 02 2yF N T T sen T senθ θ∆ ∆ = ∆ − + ∆ ⋅ − ⋅ =
∑ (2)
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
17
Despejando de (2) ∆N y reemplazando en (1), luego dividiendo por ∆θ. Se obtiene:
2cos 02 2
2
s
senT TT
θθ
µθθ
∆ ∆ ∆ ∆ ⋅ − ⋅ + ⋅ = ∆∆
Luego, si
cos 12
20 1
20
sen
T
θ
θ
θθ
∆ →
∆ ∆ → ⇒ →∆
∆ →
Entonces:
s sdT dT
-μ T=0 μ dθdθ T
⋅ ⇒ = ⋅
Integrando entre P1 y P2:
2
1
T
sT 0
dT= μ dθT
β⋅∫ ∫
2 1 sln ln μT T β− = ⋅
sμ2 1T T e β⋅= ⋅ (β en radianes)

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
18
Ejemplo 3.4: Determinar la fuerza P necesaria para mover el sistema
Solución Haciendo diagrama de cuerpo libre en el bloque:
0=∑ Fx T = Fr = µ * N
0=∑ Fy N = 700 kgf Resolviendo: T = 0.3 * 700 = 210 kgf La relación entre P y T está dada por:
0.252 311 kgfP T eπ⋅
= ⋅ =
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
19
IV. CUERPOS RIGIDOS: SISTEMAS EQUIVALENTES DE FUERZAS 4.1. Introducción El estudio de las fuerzas ejercidas sobre cuerpos rígidos consiste en reemplazar un sistema de fuerzas dado, por un sistema equivalente más simple. 4.2. Fuerzas Externas e Internas Las fuerzas que actúan sobre un cuerpo rígido pueden dividirse en: fuerzas externas y fuerzas internas. 4.2.1. Fuerzas Externas Representan la acción que ejercen otros cuerpos sobre el cuerpo rígido bajo consideración. Estas fuerzas causan que el cuerpo se mueva o permanezca en reposo. 4.2.2. Fuerzas Internas Son aquellas que mantienen unidas las partículas que conforman el cuerpo rígido. Para entender mejor lo anterior se presenta el siguiente ejemplo:
Se tiene un bote con ruedas a vela que tiene un ventilador como mecanismo de propulsión. El hecho que este vehículo se desplace, ¿puede ser posible? La respuesta es NO, ya que, como el ventilador está dentro del bote. Sólo hace que el bote se estire. No hay ninguna fuerza
externa al sistema que haga que el vehículo se mueva (sólo hay un esfuerzo interno). Por otro lado, si el ventilador está fuera del bote, éste se moverá debido a que hay una fuerza externa al sistema (el viento del ventilador) que actúa sobre el bote.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
20
4.3. Momento de una fuerza respecto a un punto Consideremos una fuerza F que actúa sobre un cuerpo rígido (Figura 4.1). El efecto de la fuerza sobre el cuerpo rígido también depende de su punto de aplicación A. Definimos como el “vector de posición A” como aquél que va desde O a Ha llamado r. El vector posición r y la fuerza F definen el plano mostrado en la figura. El momento de F con respecto a O se define como el producto cruz entre r y F, esto es:
Mo = r x F
Figura 4.1: Fuerza que actúa sobre un cuerpo rígido
Expresando por “q” el ángulo entre las líneas de acción del vector posición r y la fuerza F, se puede decir que la magnitud del momento Mo puede escribirse como:
( )Mo r F sen F dθ= ⋅ ⋅ = ⋅ La magnitud Mo mide la tendencia de la fuerza F a hacer rotar al cuerpo rígido alrededor de un eje dirigido a lo largo de Mo. Ejemplo 4.1: Una fuerza vertical P se aplica en el extremo de una palanca de 24 cm de largo. Determinar:
a) El momento que ejerce P (P = 100 kgf) con respecto a O. b) La fuerza horizontal aplicada en A que origina el mismo momento con
respecto a O.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
21
c) La mínima fuerza aplicada en A que origina el mismo momento con respecto a O.
d) ¿Qué tan lejos de O debe actuar una fuerza vertical de 240 kgf para producir el mismo momento con respecto a O?
Solución: Parte a)
( )24 cos 60º 12 cm1200 kgf cm
dMo F d
= ⋅ =
= ⋅ = ⋅
Parte b)
( )
( )
24 60º1200
57.74 kgf24 60º
Mo sen F
Fsen
= ⋅ ⋅
= =⋅

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
22
Parte c)
241200 50 kgf
24
Mo F
F
= ⋅
= =
Parte d)
( )
( )
240 '1200' 5 cm cos 60º240
5 10 cmcos 60º
Mo d
d OB
OB
= ⋅
= = = ⋅
= =
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
23
4.4. Momento de una fuerza respecto a un eje Recordando que el producto escalar entre 2 vectores está dado por:
( )cosx x y y z zP Q P Q P Q P Q P Q θ⋅ = ⋅ + ⋅ + ⋅ = ⋅ ⋅ Se requiere determinar el momento que ejerce la fuerza F con respecto al eje OL (Figura 4.2).
Figura 4.2: Momento de una fuerza con respecto a un eje.
Se sabe que: Mo = r x F Se necesita proyectar el momento Mo en la dirección unitaria λ (cosenos directores), es decir:
( ) ( )( )
cosOL
OL
M Mo Mo r F
M r F
θ λ λ
λ
= ⋅ = ⋅ = ⋅ ×
= ⋅ ×
Desarrollando el triple producto escalar, se tiene:
( ) ( ) ( ) ( )x z y y x z z y xr F y F z F z F x F x F y Fλ λ λ λ⋅ × = ⋅ ⋅ − ⋅ + ⋅ ⋅ − ⋅ + ⋅ ⋅ − ⋅

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
24
En forma más simple este producto puede expresarse como:
x y z
OL
x y z
M x y zF F F
λ λ λ=
donde: λx, λy, λz : Cosenos directores del eje OL. x, y, z : Coordenadas del punto de aplicación de F. Fx, Fy, Fz : Componentes de la fuerza F. El momento MOL de F con respecto a OL mide la tendencia de la fuerza F de impartirle al cuerpo rígido un movimiento de rotación alrededor del eje fijo OL. 4.5. Momento de un par de fuerzas
Se dice que dos fuerzas F y –F, que tienen la misma magnitud, líneas de acción paralelas y sentidos opuestos, forman un par de fuerzas. Aunque la fuerza resultante de este par de fuerzas es cero, el momento resultante no lo es, ya que estas fuerzas generan un giro.
En un par de fuerzas en tres dimensiones (Figura 4.3), la suma de momentos con respecto al origen O, de ambas fuerzas, queda definida por:
( )A B A Br F r F r r F× + × = − × Si se define r = rA – rB, entonces el momento que genera el par de fuerzas es:
M r F= × La magnitud del momento está dada por:
( )M r F sen F dθ= ⋅ ⋅ = ⋅ donde d es la distancia perpendicular entre las líneas de acción de F y –F. El sentido de M está definido por la regla de la mano derecha.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
25
Figura 4.3: Momento de un par de fuerzas
También se concluye que dos pares de fuerzas, uno constituido por las fuerzas F1 y –F1 y el otro, por las fuerzas F2 y –F2, que se encuentran en planos paralelos (o en el mismo plano) y tienen el mismo sentido, tendrán momentos iguales si:
1 1 2 2F d F d⋅ = ⋅ Una fuerza F puede descomponerse en una fuerza dada en O y en un par de fuerzas que generan un momento (Mo = r x F)
También se puede hacer lo siguiente:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
26
Luego, Mo’ = Mo + s x F Esto es análogo si se quiere reducir un sistema de fuerzas a una fuerza y un momento. Esto es:
El sistema equivalente de fuerzas está definido por las ecuaciones:
( ) RR F Mo Mo r F= = = ×∑ ∑ ∑ Ejemplo 4.2: Una losa de cimentación cuadrada soporta las 4 columnas mostradas en la figura. Determine la magnitud y el punto de aplicación de la resultante de las 4 cargas.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
27
Solución Se define la siguiente convención:
R = 40 + 12 + 8 + 20 = 80 tonf Mx = 20*4 + 8*10 + 12*10 = 280 tonf*m
My = 20*10 + 8*5 = 240 tonf*m Ahora se necesita ubicar la resultante R de modo de eliminar los momentos Mx y My.
Haciendo equivalencia de momentos:
3.5 m x 3 m
x R R
y R R
M y R yM x R
= ⋅ → =
= ⋅ → =
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
28
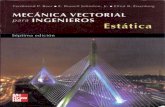
Ejemplo 4.3: Un cuerpo homogéneo de peso W, altura H y base de largo 2a es empujado por una fuerza horizontal F (como se muestra en la figura). El coeficiente de roce estático es µ, determine la condición para que, al romperse el equilibrio, debido al aumento de F, el cuerpo deslice o vuelque.
Solución: Para que el equilibrio se rompa por deslizamiento y volcamiento, respectivamente, debe cumplirse lo siguiente:
(Condición de deslizamiento) (Desliza)
d
d
fr N N WF WF W
µµµ
= ⋅ == ⋅> ⋅
(Condición de Volcamiento)
v vW aF H W a F
H⋅
⋅ > ⋅ → >
Para que el equilibrio se rompa primero por deslizamiento, entonces:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
29
d vF FaW WH
aH
µ
µ
<
⋅ < ⋅
<
Si se cumple que µ > a/H, entonces el equilibrio se rompe por volcamiento. Ejemplo 4.4: Una lámina de peso W en forma de triángulo equilátero de lado a, puede moverse en un plano vertical estando el vértice A articulado en un punto fijo. Si en el vértice C se aplica una fuerza vertical hacia arriba de magnitud F, determine el ángulo θ en la situación de equilibrio.
Solución: La ubicación del centro de gravedad del triángulo es:
( )
( )
60º
2 2 360º
3 3 3
a sen h
hd a sen a
⋅ =
= = ⋅ ⋅ =

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
30
Se tiene lo siguiente:
( ) ( )
( ) ( )( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( )
1
0 cos cos 0
30ºcos cos 30º
cos 30º cos 30º cos 30º
3cos cos 30º cos 30º
33 3 1
3 2 2
6 33
AM F a W d
F a W d
sen sen
F a W a sen sen
F W tg
FtgW
θ α
α θ
θ θ
θ θ θ
θ θ θ
θ
θ −
= → ⋅ ⋅ − ⋅ ⋅ =
= −
⋅ ⋅ = ⋅ ⋅ −
− = ⋅ + ⋅
⋅ ⋅ = ⋅ ⋅ + ⋅
= ⋅ +
⋅
= − ⋅
∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
31
V. EQUILIBRIO DE CUERPOS RIGIDOS 5.1. Introducción En el capítulo anterior se mostró que las fuerzas externas que actúan sobre un cuerpo rígido pueden reducirse s un sistema de fuerzas y momentos equivalentes en un punto arbitrario O. Cuando la fuerza y el momento son iguales a cero, se dice que el cuerpo rígido se encuentra en equilibrio. Las condiciones necesarias y suficientes para el equilibrio de un cuerpo rígido se pueden obtener igualando a cero las resultantes de fuerzas y momentos, esto es:
( )0 0F M r F= = × =∑ ∑ ∑ Separando por componentes:
0 00 00 0
x x
y y
z z
F MF MF M
= == =
= =
∑ ∑∑ ∑∑ ∑
Las ecuaciones obtenidas se pueden emplear para determinar fuerzas desconocidas que están aplicadas sobre el cuerpo rígido o reacciones desconocidas ejercidas sobre éste en sus puntos de apoyo. Para un cuerpo en equilibrio, el sistema de fuerzas externas no le impartirá un movimiento traslacional o rotacional, es decir, está fijo en el espacio. 5.2. Diagrama de Cuerpo Libre Al resolver un problema relacionado con el equilibrio de un cuerpo rígido, es esencial que se consideren todas las fuerzas que actúan sobre éste. Para realizar un buen diagrama de cuerpo libre es importante tener presente lo siguiente:
a) Todas las fuerzas deben indicarse en el diagrama de cuerpo libre. b) Usualmente las fuerzas externas desconocidas consisten en las reacciones
a través de las cuales el suelo y otros cuerpos se oponen a un posible movimiento del cuerpo libre.
c) El diagrama de cuerpo libre también debe incluir dimensiones puesto que éstas se pueden necesitar para el cálculo de momentos de fuerzas.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
32
5.3. Reacciones en los puntos de apoyo y conexiones de una estructura bidimensional
Antes de comenzar el análisis es necesario tener en cuenta los tipos de apoyos que existen: 5.3.1. Apoyo fijo
Este apoyo presenta una rótula, por este motivo se generan reacciones verticales y horizontales. No se generan momentos ya que se permite el giro. 5.3.2. Apoyo deslizante
Igual al caso anterior pero el desplazamiento vertical y horizontal está permitido. Sólo hay una reacción y todas las demás son nulas.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
33
5.3.3. Empotramiento fijo
Al estar todos los desplazamientos y giros impedidos todas las reacciones son distintas de cero. 5.3.4. Empotramiento deslizante
Igual que el caso anterior, pero uno de los desplazamientos no está impedido lo que no origina reacción en ese sentido. 5.4. Equilibrio de un cuerpo rígido en dos dimensiones En el caso bidimensional se tienen las siguientes ecuaciones de equilibrio:
0 0 0x yF F M= = =∑ ∑ ∑

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
34
Ejemplo 5.1: Determine las reacciones en los apoyos A y B.
Solución: En el diagrama de cuerpo libre se tiene:
Se dibujan todas las fuerzas que actúan en el cuerpo. Usando las ecuaciones de equilibrio se tiene:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
35
( )
( )
0 0 0 0 0 2 2 0
1 2
x ax x x x ax x x x
y ay by y y y ay by y y y
A by x x x y y
by y y x x x
F R P Q S R P Q SF R R P Q S R R P Q SM R a P Q S a Q a S a
R S Q P Q S
= → − − − = → = + +
= → + − − − = → + = + += → ⋅ + + + ⋅ − ⋅ − ⋅ =
= + − − −
∑∑∑
( )1 2ay y y y by y y x x xR P Q S R P Q P Q S= + + − = + + + +
Por lo general se utilizan dos ecuaciones de suma de fuerzas (vertical y horizontal) y una de momentos. La razón de utilizar sólo una de momentos es debido a que más ecuaciones podrían ser linealmente dependientes de la primera. En una estructura tridimensional se necesita más de una ecuación de momentos. En el ejemplo anterior había tres ecuaciones y tres incógnitas. Cuando esto ocurre se dice que el sistema es “estáticamente determinado”. En el caso que haya más incógnitas que ecuaciones se dice que el sistema es “estáticamente indeterminado”. En la práctica todas las estructuras son estáticamente indeterminadas, pero ese es tema de otro curso. La figura 5.1 muestra un pórtico sometido a un cierto estado de carga. Puede verse que el sistema tiene 6 incógnitas: Rax, Ray, Ma, Rbx, Rby y Mb. Sólo existen tres ecuaciones para resolver este sistema. Si hubiesen tres incógnitas el sistema sería estáticamente determinado, por lo tanto el sistema posee tres redundantes (es tres veces estáticamente indeterminado).
Figura 5.1: Sistema Estáticamente
Indeterminado
Figura 5.2: Estructura impropiamente
restringida

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
36
Es importante señalar que el hecho que el número de incógnitas sea igual al número de ecuaciones no garantiza que el cuerpo esté completamente en restringido o que las reacciones en sus apoyos son estáticamente determinadas (Figura 5.2). Una estructura está impropiamente restringida siempre que los apoyos, aunque proporcionen un número suficiente de reacciones, estén ubicados de forma tal que las reacciones sean concurrentes o paralelas. La figura 5.3 muestra una estructura cuyas reacciones Rax, Ray, Rbx y Rcy son concurrentes. Esto implica que la estructura puede girar libremente en torno al punto A.
Figura 5.3: Reacciones concurrentes
5.5. Estabilidad y grados de indeterminación En cualquier problema que se deba resolver se tienen ecuaciones linealmente independientes (q) obtenidas del equilibrio de fuerzas y momentos; y reacciones (r) que se quieren determinar. La Estática facilita tres ecuaciones (q=3) en el caso plano y seis en el caso tridimensional (q=6). Teniendo el cuanta lo anterior se presentan tres casos:
a) r < q : La estructura es un conjunto inestable (externamente inestable). Esto es lo que se conoce como “mecanismo”.
b) r = q : Se cumple que la estructura es externamente isostática. Puede darse que la estructura sea inestable si posee algunas reacciones que sean concurrentes o paralelas. De lo anterior, se dice que esta condición es necesaria pero no suficiente.
c) r > q : La estructura es hiperestática. Se necesitan métodos de análisis estructural para calcular las reacciones desconocidas.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
37
Figura 5.4: Tres casos de estabilidad en estructuras
Ejemplo 5.2: Una grúa tiene una masa de 1000 kg y se usa para levantar una caja de 2400 kg. Determine las reacciones en los apoyos A y B.
Solución: Haciendo el diagrama de cuerpo libre de la grúa se tiene:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
38
0 0 0 1000 2400 3400 3.4 0 1.5 1000 2 2400 6 0 10933.33 10.93
-10933.33 -10.93
x ax bx ax bx
y ay ay
A bx bx
ax
F R R R RF R R kgf tonfM R R kgf tonf
R kgf tonf
= → + = → = −= → = + → = == → ⋅ − ⋅ − ⋅ = → = =
= =
∑∑∑
Ejemplo 5.3: El marco de la figura sostiene un techo de un pequeño edificio. Este marco está sujeto por medio de un cable que pasa por una polea sin roce. Determine la tensión del cable y las reacciones en los apoyos A y B.
Solución:
Se corta el cable y se realiza el diagrama de cuerpo libre de la parte restante.
( )
( ) ( ) ( )
6 53.13º4.50
20 4 1.8 20 3 1.8 20 2 1.8 20 1.8 cos 6 0 100
A
tg
M
TT kgf
α α
α
= → =
=
⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ +
+ ⋅ − ⋅ ⋅ ==
∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
39
0 cos 0 60
0 4 20 0 160 x ax ax
y ay ay
F R T R kgf
F R T sen R kgf
α
α
= → + ⋅ = → = −
= → − ⋅ − ⋅ = → =∑∑
Por otro lado, en el apoyo B:
0 cos 0 60
0 0 80 x bx bx
y by by
F R T R kgf
F R T sen R kgf
α
α
= → − ⋅ = → =
= → + ⋅ = → = −∑∑
Ejemplo 5.4: Un peso de 180 kgf se une a una palanca de 21 cm de largo en el punto A. La palanca AO es sostenida por medio de un tambor cilíndrico de 7.5 cm de radio. La constante del resorte es K = 45 kgf/cm y este no se encuentra deformado cuando θ = 0º. Determine el ángulo θ en el cual el sistema está en equilibrio.
Solución: Haciendo el diagrama de cuerpo libre se tiene:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
40
Representando por δ la deformación del resorte a partir de la posición en que éste no se encuentra deformado y observando que δ = rθ, se tiene: F=Kδ=Krθ.
2
0 180 0
0.67180
(85.22º ,0º ) 85.22º
OM L sen K r r
K rsenL
θ θ
θθ θ
θ
= → ⋅ ⋅ − ⋅ ⋅ ⋅ =
⋅ ⋅= = ⋅
⋅= =
∑
5.6. Equilibrio de un cuerpo rígido en tres dimensiones Para el caso de tres dimensiones deben cumplirse las siguientes ecuaciones de equilibrio:
0 00 00 0
x x
y y
z z
F MF MF M
= == =
= =
∑ ∑∑ ∑∑ ∑
Estas ecuaciones se pueden resolver para un máximo de seis incógnitas las cuales, generalmente, representarán reacciones en los apoyos o en las conexiones. En la mayoría de los problemas, las ecuaciones escalares anteriores se obtienen de una forma más conveniente si primero se expresan en forma vectorial,
( )0 0F M r F= = × =∑ ∑ ∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
41
y se representan las fuerzas “F” y los vectores de posición “r” en términos de componentes escalares y vectores unitarios. Debe tenerse en cuenta para el cálculo de reacciones la cantidad de desplazamientos o giros que están impedidos. Es importante recordar que cada restricción (impedimento) genera una reacción. Ejemplo 5.5: Una escalera de 20 kgf de peso que se usa para alcanzar los estantes superiores en una biblioteca está apoyada en dos ruedas A y B, montadas sobre un riel, y un punto C, apoyado en el estante. Un hombre de 80 kgf se para sobre la escalera y se inclina hacia la derecha. Asuma que el peso del hombre y de la escalera se concentran en la fuerza W. Determine las reacciones en los apoyos A, B y C.
Solución: Primero se debe hacer el diagrama de cuerpo libre de la escalera.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
42
Puntos:
( )( )( )
0,0,0
0;1.2;0
1.2;0.6;3
A
BC −
Fuerzas:
( ) ( ) ( )( )( )( )
0;0; 20 0;0; 80 0;0; 100
,0,
,0,
,0,0
a ax az
b bx bz
c cx
WR R R
R R R
R R
= − + − = −
=
=
=
Equilibrio de Fuerzas:
0 0 0 0
a b c
ax bx cx
az bz
F R R R WR R RR R
= → + + + =
+ + =
+ =
∑
Equilibrio de Momentos:
( )( )( )( )
0,0,0
0;1.2;0
1.2;0.6;3
0.6;0.9;0
a
b
c
w
rr
rr
=
=
= −
= −
0 0a a b b c c wM r R r R r R r W= → × + × + × + × =∑
( )
0
0 1.2 0 0 1.2 1.2 ;0; 1.20 0
a a
b b bz bx
bx bz bx
r Ri j k i j
r R R RR R R
× =
× = = ⋅ − ⋅
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
43
( )
( )
1.2 0.6 3 1.2 0.6 0;3 ; 0.60 0 0
0.6 0.9 0 0.6 0.9 90; 60;00 0 100 0 0
c c cx cx
cx cx
w
i j k i jr R R R
R R
i j k i jr W
× = − − = ⋅ − ⋅
× = − − = − −−
Ordenando,
( )
1.2 90 75 3 60 20
1.2 0.6 0 10 10
100 100 75 25
bz bz
cx cx
bx cx bx
ax bx cx
az
R R kgfR R kgf
R R R kgfR R R kgfR Rbz kgf
⋅ = → =⋅ = → =
− ⋅ − ⋅ = → = −
= − + = −
= − = − =

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
44
VI. CENTRO DE GRAVEDAD, CENTROIDES Y FUERZAS DISTRIBUIDAS Un cuerpo cualquiera en tres dimensiones genera fuerzas en todo su volumen. Hasta ahora hemos visto fuerzas que se aplican en un punto. De lo anterior, el tratamiento que se realiza a un cuerpo rígido es aplicar su peso en un punto llamado “centro de gravedad”. Se define, entonces, “eje baricéntrico de un cuerpo” como la línea de acción de la fuerza gravitacional que actúa sobre ese cuerpo. Un punto interesante de ver consiste en que si hay un elemento que posee un plano de simetría (Figura 6.1), necesariamente, el eje baricéntrico coincide con la recta que representa al plano.
Figura 6.1: Elemento con un plano de simetría
Una plancha (Figura 6.2), por ejemplo, tiene dos ejes baricéntricos ya que tiene dos planos de simetría.
Figura 6.2: Plancha que posee dos planos de simetría
La figura 6.3 muestra que el centro de gravedad de un cuerpo es el punto de intersección de todos los ejes baricéntricos del cuerpo.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
45
Figura 6.3: Intersección de ejes baricéntricos
La ubicación del centro de gravedad en el espacio se le conoce como “centroide”. 6.1. Centro de Gravedad en Coordenadas Cartesianas Para un cuerpo homogéneo, existe un punto ( ), ,x y z que coincide con el centro de gravedad del cuerpo, conocido como centroide. Este punto se puede determinar como (Figura 6.4):
1
1
1
dV dx dy dz
V dx dy dz
x x dVV
y y dVV
z z dVV
= ⋅ ⋅
= ⋅ ⋅
= ⋅ ⋅
= ⋅ ⋅
= ⋅ ⋅
∫∫∫
∫
∫
∫
Figura 6.4: Elemento diferencial de un cuerpo cualquiera Ejemplo 6.1: Determine el centro de gravedad de un cono Solución: Se muestra un cono formado por elementos infinitesimales.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
46
El diferencial de volumen está dado por:
( )( ) ( )
( )
2
2 2
dV r x dx
r x x tg
dV tg x dx
π
α
π α
= ⋅ ⋅
= ⋅
= ⋅ ⋅ ⋅
El volumen del cono es:
( ) ( )22 2 3
0 3h tg
V tg x dx hπ α
π α⋅
= ⋅ ⋅ ⋅ = ⋅∫
Reemplazando,
( ) ( )2 22 3 0
1 3 34
hx x dV x tg x dx h
V tg hπ α
π α= ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅ ⋅ = ⋅
⋅ ⋅∫ ∫
6.2. Centroides de área en Coordenadas Polares
Figura 6.5: Elemento diferencial bidimensional en coordenadas polares
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
47
La figura 6.5 muestra un elemento diferencial plano en coordenadas polares. El área de este elemento es: dA = (dr)*(r*dθ)=r*dr*dθ. De la figura se desprende que: x = r*cosθ e y = r*senθ. A continuación se muestra la forma en que se determina el centroide de un elemento semicircular de radio “a” para el cual resulta conveniente usar las coordenadas polares.
Se sabe, por simetría, que:
0x = El área del elemento es:
2
0 0 2a
A r dr d aπ π
θ = ⋅ ⋅ = ⋅ ∫ ∫
Luego, el centroide está dado por:
( )( )0 02
1 1 43
2
a ay y dA r sen r dr dA a
πθ θ
π π= ⋅ = ⋅ ⋅ ⋅ ⋅ =∫ ∫ ∫
6.3. Cuerpos Compuestos Un cuerpo compuesto consta de varias partes cuyos pesos y centros de gravedad se conocen. La figura 6.6 muestra un cuerpo compuesto en que los centros de gravedad de las partes que lo componen son conocidos.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
48
Figura 6.6: Cuerpo cuyos componentes tienen centroides conocidos
Hasta ahora se ha visto la forma en que se determina el centroide en elementos continuos, la analogía para elementos discretos es la siguiente:
1 1 2 2
1 1 2
1 1 2 2
1 1 2
1 1 2 2
1 1 2
1 ......
1 ......
1 ......
nn n
i ii nn
n ni i
i nn
n ni i
i n
x V x V x Vx x VV V V V
y V y V y Vy y VV V V V
z V z V z Vz z VV V V V
=
=
=
⋅ + ⋅ + + ⋅= ⋅ =
+ + +
⋅ + ⋅ + + ⋅= ⋅ =
+ + +
⋅ + ⋅ + + ⋅= ⋅ =
+ + +
∑
∑
∑
Para el caso de la figura 6.6 se tiene que n = 6. Ejemplo 6.2: Determine la ubicación del centroide de la siguiente figura
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
49
La figura anterior se puede descomponer de la siguiente forma:
21 1 1
22 2 2
23 3 3
24 4 4
12 2 1.5 1 0.5 0.5 1 2.5 2.5 4 5 1
A m x m y mA m x m y mA m x m y mA m x m y m
= = == = == = == = =
Reemplazando en la fórmula:
12 2 1 0.5 1 2.5 4 5 2.928 12 1 1 4
12 1.5 1 0.5 1 2.5 4 1 1.357 12 1 1 4
x m
y m
⋅ − ⋅ − ⋅ + ⋅= =
− − +⋅ − ⋅ − ⋅ + ⋅
= =− − +
6.4. Teorema de Pappus-Guldinus 6.4.1. Teorema de Pappus-Guldinus para las áreas de superficies “Si un arco C de una curva que se encuentra en un plano gira cubriendo un ángulo θ (con θ entre 0 y 2π) alrededor de un eje que también se encuentre en el plano y que no se intersecte con el arco C, el área de la superficie generada por ese arco C al girar cubriendo el ángulo θ es igual a la longitud de C multiplicada por la longitud de la trayectoria recorrida por el centroide de C durante la rotación θ”. Considerando la definición anterior, si la longitud del arco es L y ρ es la distancia del eje de rotación al centroide de ese arco, el área S de la superficie generada por este último al girar cubriendo el ángulo θ alrededor del eje de rotación es:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
50
S L ρ θ= ⋅ ⋅ Para demostrar el teorema se define una cuerda de largo L que gira con respecto al eje x (Figura 6.7)
Figura 6.7: Cuerda de largo L que gira alrededor del eje x
La superficie que se obtiene al girar la cuerda está dada por:
1
B B
A A
B B
A A
S y ds y ds
y y ds y L y dsL
θ θ= ⋅ ⋅ = ⋅ ⋅
= ⋅ ⋅ → ⋅ = ⋅
∫ ∫
∫ ∫
Luego,
S L y Lθ ρ θ= ⋅ ⋅ = ⋅ ⋅ 6.4.1. Teorema de Pappus-Guldinus para volúmenes “Si un área A que se encuentra en un plano se hace girar describiendo un ángulo θ (con θ entre 0 y 2π) alrededor de un eje que también se encuentre en el plano y que no se intersecte con el área A, el volumen del sólido generado por esa área A al girar cubriendo el ángulo θ es igual al área A multiplicada por la longitud de la trayectoria recorrida por el centroide del área A durante la rotación θ”. Considerando la definición anterior, si ρ es la distancia del eje de rotación al centroide de esa área, el volumen V del sólido generado por este último al girar cubriendo el ángulo θ alrededor del eje de rotación es:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
51
V A ρ θ= ⋅ ⋅ Para demostrar el teorema se define un área A que gira con respecto al eje x (Figura 6.8)
Figura 6.8: Área A girada en torno al eje x
El volumen que se obtiene al girar el área A está dada por:
1
b b
a a
b b b
a a a
V y L dy y L dy
y y dA y A y dA y L dyA
θ θ= ⋅ ⋅ ⋅ = ⋅ ⋅ ⋅
= ⋅ ⋅ → ⋅ = ⋅ = ⋅ ⋅
∫ ∫
∫ ∫ ∫
Luego,
V A y Aθ ρ θ= ⋅ ⋅ = ⋅ ⋅ Ejemplo 6.3: Determine el volumen de un cono sólido de altura “a” y radio basal “b”.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
52
Solución: Se había visto que el volumen de un cono de altura h es:
( )
( )
23
2
3
3
tgV h
btga
h aabV
π α
α
π
⋅= ⋅
=
=
=
El centroide del triángulo y su área son:
1 3 2by A ab= =
Aplicando Pappus:
2123 2 3b abV y A abθ π π= ⋅ ⋅ = ⋅ ⋅ =
6.5. Resultantes de fuerzas paralelas distribuidas Con lo visto anteriormente se puede decir que se puede hallar la resultante y la línea de acción de una fuerza distribuida sobre una línea por analogía con el centroide de un área plana (Figura 6.9). También se puede decir que se puede hallar la resultante y la línea de acción de una fuerza distribuida sobre un área plana por analogía con el centroide de un volumen.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
53
Figura 6.9: Fuerza distribuida sobre una línea y un área plana
En algunos casos se pueden determinar los efectos de una fuerza distribuida al reemplazarla por su resultante. Por ejemplo, la fuerza resultante tiene el mismo efecto sobre el equilibrio (o el movimiento) de un cuerpo rígido como el de la fuerza distribuida; en este caso, los dos sistemas de fuerzas son equivalentes. 6.5.1. Fuerzas Distribuidas sobre un segmento rectilíneo Suponga una carga distribuida q(x) (fuerza por unidad de longitud) que actúa sobre una barra recta (Figura 6.10). Considerando un elemento infinitesimal dx de la carga, a una distancia x del punto A. Se puede considerar la fuerza infinitesimal correspondiente a q(x)dx, como una fuerza puntual que actúa en x.
Figura 6.10: Carga distribuida que actúa sobre una barra recta
De esta forma, la resultante de la fuerza distribuida q(x) queda dada por:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
54
( )0
LR q x dx= ⋅∫
Para determinar la línea de acción de R, su ubicación, se debe determinar el momento que ejerce la carga distribuida sobre el punto A. El momento que ejerce la carga q(x)dx sobre el punto A es x*q(x)dx, por lo tanto el momento resultante es:
( )0
LM x q x dx= ⋅ ⋅∫
Si se divide el momento M por la resultante R se obtendrá la ubicación de la línea de acción:
( )0
1 LMx x q x dxR R
= = ⋅ ⋅ ⋅∫
Puede verse que:
( )
( )
2
2 3
Lq x cte x
q x x x L
= → =
= → =
6.5.2. Carga Distribuida sobre un área plana Considere una carga distribuida q(x,y) que actúa sobre un área plana A (Figura 6.11)
Figura 6.11: Carga distribuida sobre un área plana
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
55
Si se selecciona un área infinitesimal dA = dxdy en el área A, la resultante de la carga distribuida asociada a esa área infinitesimal es q(x,y)dxdy. La resultante R de la carga distribuida sobre el área A está dada por:
( ),A
R q x y dx dy= ⋅ ⋅∫∫
Del mismo modo, los momentos Mx y My de la carga distribuida q(x,y), respecto a los ejes x e y, respectivamente, quedan dados por:
( )
( )
,
,
x A
y A
M y q x y dx dy
M x q x y dx dy
= ⋅ ⋅ ⋅
= ⋅ ⋅ ⋅
∫∫∫∫
De esta forma, la ubicación de la línea de acción es:
( )
( )
1 ,
1 ,
y
A
xA
Mx x q x y dx dy
R RMy y q x y dx dyR R
= = ⋅ ⋅ ⋅ ⋅
= = ⋅ ⋅ ⋅ ⋅
∫∫
∫∫
Ejemplo 6.4: Una viga simplemente apoyada se somete a una carga distribuida q(x) definida por la ecuación Kxn.
a) Determine la magnitud y la línea de acción de la resultante de la carga q(x).
b) Para n=1 determine las reacciones en los apoyos de la viga.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
56
Solución: Parte a) La fuerza sobre un elemento de longitud dx es:
( ) ndR q x dx k x dx= ⋅ = ⋅ Por lo que la fuerza total sobre la viga se obtiene integrando lo siguiente:
1
0 1
nL n LR k x dx kn
+
= ⋅ =+∫
Puede verse que el momento de la fuerza dR con respecto a x=0 es x*q(x)dx. Luego, el momento de la carga distribuida con respecto a x=0 es:
2
0 2
nL n LM x k x dx kn
+
= ⋅ ⋅ =+∫
Para obtener la ubicación de la línea de acción se procede de la siguiente forma:
2
1
122
1
n
n
LkM nnx LLR nkn
+
+
++= = =+
+
Parte b) Para n=1 se tiene q(x)=kx
1 12
1 1 21 1 21 2 3
L kF k L
x L L
+
= =++
= =+
Haciendo equilibrio:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
57
2
2
2
2
0 2
0 020
2 3
3
6
y ay by
x ax
A by
by
ay
kF R R L
F RkM R L L L
kR L
kR L
= → + =
= → =
= → ⋅ = ⋅
=
=
∑∑∑
Ejemplo 6.5: Un área rectangular A se somete a una carga uniformemente distribuida q(x,y). Determine la magnitud R de la resultante y la línea de acción de la misma.
Solución: Ya que la carga distribuida es constante el valor de la resultante y los momentos es:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
58
0 0
2
0 0
2
0 0
1212
a b
a b
x
a b
y
R q dxdy abq
M q y dxdy ab q
M q x dxdy a bq
= ⋅ =
= ⋅ ⋅ =
= ⋅ ⋅ =
∫ ∫
∫ ∫
∫ ∫
Para obtener la ubicación de la línea de acción de R se debe realizar lo siguiente:
2
2
12 2
12 2
y
x
M a bq axR abq
M ab q byR abq
= = ⋅ =
= = ⋅ =
Ejemplo 6.6: Determine las reacciones en los apoyos de la estructura mostrada en la figura.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
59
Solución: Primero se procede con el diagrama de cuerpo libre en el cual se colocan las fuerzas equivalentes de las cargas distribuidas.
Haciendo equilibrio:
0 900 600 300
0 800 400
0 900 2 - 600 8 400 6 8 0 675 525
y ay
x ax cx
A cx
ax
cx
F R kgf
F R R
M RR kgfR kgf
= → = − =
= → + + =
= → ⋅ ⋅ − ⋅ + ⋅ =
== −
∑∑∑

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
60
VII. RETICULADOS Un reticulado es un montaje de elementos delgados y rectos que soportan cargas principalmente axiales (tracción o compresión) en esos elementos. La disposición de estos elementos hace un sistema eficiente para soportar cargas. Un reticulado puede soportar fuertes cargas en comparación a su peso. A continuación se muestran algunos tipos de reticulados (Figura 7.1)
Figura 7.1: Tipos de reticulados
Los reticulados mostrados en la figura 7.1 se denominan “reticulados planos”, porque todos sus elementos y todas las cargas se encuentran en el mismo plano. Los materiales usados en los reticulados pueden ser madera, acero o aluminio, entre otros. Debido a que el principio fundamental de los reticulados es el de soportar cargas axiales (en dirección longitudinal) en los elementos que la conforman, se deben considerar algunas hipótesis para facilitar su análisis:
a) Todos los elementos de un reticulado son rectos. b) Los nudos en los extremos de los elementos se pueden representar por
medio de puntos. c) Todos los nudos son rótulas (sin roce). d) A un reticulado sólo se le pueden aplicar cargas concentradas, y éstas se
aplican en los nudos.
Si se tienen dos barras (Figura 7.2) (A y B) a las cuales se le aplica una carga de tracción F. Al separarlas se generan fuerzas Fab y Fba. Como el sistema está en equilibrio, necesariamente Fab + Fba = 0 (equilibrio en el nudo a).
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
61
Figura 7.2: Dos barras sometidas a una carga de tracción
7.1. Estabilidad y Determinación Estática En la figura 7.3 puede verse que el reticulado es estable, es decir, no cambia su configuración bajo la acción de la fuerza
Figura 7.3: Reticulazo simple sometido a una carga horizontal
En contraste con el caso anterior, el reticulado mostrado en la figura 7.4, formado por cuatro elementos, no es estable ya que este sistema sufre un cambio de configuración. Sus elementos sufren una gran deformación. En consecuencia, se dice que el sistema constituye un “reticulado inestable”. De modo más general, cualquier sistema de cuatro o más elementos conectados por barras, que forman un polígono, no es estable.
Figura 7.4: Reticulado Inestable
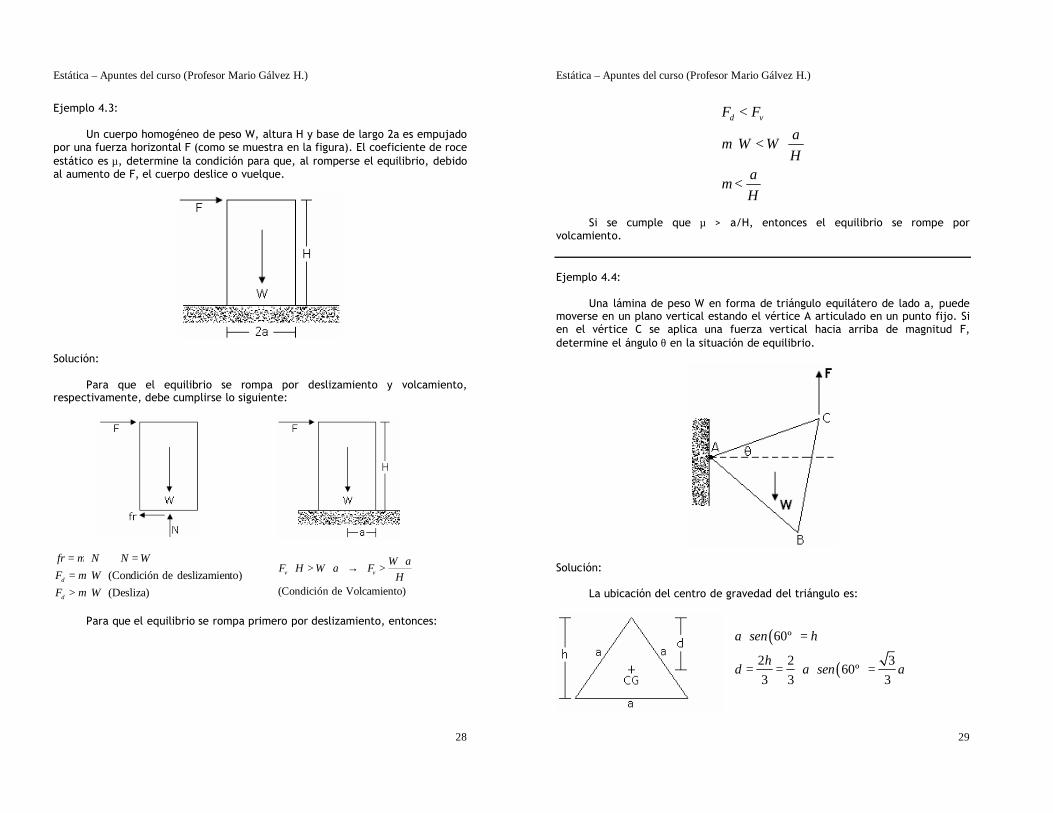
Un reticulado formado por elementos triangulares se denomina “reticulado simple” (Figura 7.5 (a) y (b)).
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
62
Figura 7.5: Dos ejemplos de reticulados simples
Cada uno de estos reticulados satisface la ecuación:
2m r j+ = ⋅
m : Número de elementos r : Número de reacciones en los apoyos j : Número de nudos
Reemplazando los valores correspondientes a los ejemplos de la figura 7.5:
( ) ( )( ) ( )
: 5; 3; 4 5 3 2 4
: 13; 3; 8 13 3 2 8
a m r j
b m r j
= = = + = ⋅
= = = + = ⋅
En el caso que m + r > 2j entonces el reticulado es “estáticamente indeterminado”. Por otro lado, si m + r < 2j, el reticulado es “inestable” (mecanismo). 7.2. Métodos de Análisis de Reticulados El análisis de un reticulado consiste en calcular las fuerzas en los elementos, y las reacciones que surgen en los nudos y apoyos. Los métodos que se utilizan para resolver estas estructuras son: métodos de los nudos y método de las secciones. 7.2.1. Método de los nudos El método de los nudos es un método de análisis de un reticulado estáticamente determinado al escribir y resolver las ecuaciones de equilibrio para los nudos del reticulado.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
63
En este método, se dibujan los diagramas de cuerpo libre de los nudos del reticulado y se escriben las ecuaciones de equilibrio para cada uno de estos nudos. Para la resolución de las ecuaciones es preferible colocar las fuerzas de los elementos (barras) saliendo del nudo. Esto asume que la barra está en tracción. Si al resolver el sistema de ecuaciones resulta alguna fuerza de alguna barra negativa, significa que esa barra se encuentra en compresión. Ejemplo 7.1: Determine los esfuerzos en cada una de las barras del reticulado de la figura. Indique si estos esfuerzos son de tracción o compresión.
Solución: En el método de los nudos se deben usar dos ecuaciones de equilibrio: suma de fuerzas verticales y horizontales. Nudo A

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
64
( )
( )
0 cos 0
0 30 030 37.5
22.5
x ac ab
y ab
ab
ac
F T T
F T sen
T kgf tracciónsen
T kgf compresión
α
α
α
= → − − ⋅ =
= → ⋅ − =
= =
= −
∑∑
Nudo C
( )0
22.5
0 0
x cd ac
cd
y bc
F T T
T kgf compresión
F T
= → =
= −
= → =
∑
∑
Nudo B
0 cos cos 0.6 37.5 0.6
x eb bd ab
eb bd
F T T TT T
α α= → + ⋅ = ⋅
+ ⋅ = ⋅∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
65
( )( )
0 0
37.5
45
y bd ab
bd ab
bd
eb
F T sen T senT TT kgf compresión
T kgf tracción
α α= → ⋅ + ⋅ =
= −
= −
=
∑
Nudo E
0 0 R 45
0 0
x eb ex
ex
y de
F T Rkgf
F T
= → + =
= −
= → =
∑
∑
Nudo D
0 cos 0 R 45
0 0 R 30
x bd cd dx
dx
y bd de dy
dy
F T T Rkgf
F T sen T Rkgf
α
α
= → ⋅ + + =
=
= → ⋅ + + =
=
∑
∑

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
66
Ejemplo 7.2: Determine los esfuerzos en cada una de las barras del reticulado de la figura. Indique si estos esfuerzos son de tracción o compresión.
Solución Primero se deben determinar las reacciones en los apoyos. Para ello debe realizarse el diagrama de cuerpo libre del reticulado completo.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
67
( )0 12 3 200 12 24 200
0 0
0 400 200
A fy
fy
x ax
y ay fy
ay
M RR kgf
F R
F R R kgfR kgf
= → ⋅ ⋅ = ⋅ +
=
= → =
= → + =
=
∑
∑∑
Nudo A
( )
2 10 5 0.857 cos 0.514512 30 cos 0
0 0 por simetría
0 0
x ac
ac
df
y ay ab ac
tg sen
F TT kgfT kgf
F R T T sen
α α α
α
α
⋅= = → = → =
= → ⋅ =
=
=
= → + + ⋅ =
∑
∑( )( )
200 compresión
200 por simetríaab
ef
T kgfT kgf
= −
= −

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
68
Nudo B
( )
10 22.62º2 1210 39.8º12
0 cos cos 0
0
624.82 compresión
520
x bc bd
y bc bd ab
bc de
bd ce
tg
tg
F T T
F T sen T sen T
T T kgf
T T kgf
β β
χ χ
χ β
χ β
= → =⋅
= → =
= → ⋅ + ⋅ =
= → ⋅ + ⋅ =
= = −
= =
∑∑
( ) tracción
Nudo C
( )
0 cos cos
0 200 0
960 compresión
x bc ce cd
y bc ce
cd
F T T T
F T sen T sen
T kgf
χ β
χ β
= → ⋅ = ⋅ +
= → + ⋅ + ⋅ =
= −
∑∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
69
7.2.2. Método de las secciones El método de las secciones para el análisis de reticulados se basa en el equilibrio de cuerpo rígido de una parte del reticulado. Si un reticulado completo está en equilibrio, bajo la acción de un conjunto de fuerzas coplanares, cualquier parte del mismo también debe estar en equilibrio. Así, se puede cortar el reticulado en 2 o más partes, cada una de las cuales es un cuerpo rígido en equilibrio. Ejemplo 7.3: Determine las fuerzas en los elementos AB, BC y CD del reticulado de la figura. Indique si estas fuerzas son de tracción o compresión.
Se cortan las barras CD, BC y AB considerando el segmento derecho del reticulado, esto es:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
70
Haciendo equilibrio en esta parte del reticulado:
( )0 1.2 30 0.9 0
22.5 compresión
0 0.9 0 0
B cd
cd
A bc
cd
M T
T kgf
M TT kgf
= → ⋅ + ⋅ =
= −
= → ⋅ =
=
∑
∑
Para determinar TAB se puede obtener a partir de equilibrio de fuerzas verticales u horizontales.
( )
( )
0 cos 0
37.5 tracción
0 30
37.5 tracción
x cd ab
ab
y ab
ab
F T T
T kgf
F T sen
T kgf
α
α
= → + ⋅ =
=
= → ⋅ =
=
∑
∑
Ejemplo 7.4: Determine las fuerzas en los elementos BD, BE, BC, CE y DE del reticulado de la figura. Indique si estos esfuerzos son de tracción o compresión.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
71
Solución: Primero se deben determinar las reacciones en los apoyos.
0 4 10 200 10 400 20 250
0 0
0 200 400 350
A hy
hy
x ax
y ay hy
ay
M RR kgf
F R
F R RR kgf
= → ⋅ ⋅ = ⋅ + ⋅
=
= → =
= → + = +
=
∑
∑∑
Luego, se escoge una parte segmento del reticulado y se hace equilibrio de cuerpo rígido.
( )
( )
0 12 400 10 250 3 10
291.667 tracción
0 12 250 2 10 0
416.667 compresión
0 250 400
B ce
ce
E bd
bd
y be
M T
T kgf
M T
T kgf
F T senα
= → ⋅ + ⋅ = ⋅ ⋅
=
= → ⋅ + ⋅ ⋅ =
= −
= → ⋅ + =
∑
∑
∑( )
50.194º
195.256 tracciónbeT kgf
α =
=

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
72
Para determinar TBC se puede hacer el siguiente corte (barras AC, BC, BE y BD):
0 12 350 10 2 200 10 10 0
E bd bc
bc
M T TT kgf
= → ⋅ + ⋅ ⋅ = ⋅ + ⋅
=∑
Para determinar la tensión en la barra DE es más simple hacer equilibrio en el nudo D.
( )0 400 0
400 compresióny de
de
F T
T kgf
= → + =
= −∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
73
7.3. Reticulados Compuestos y Complejos Cono ya se mencionó, un reticulado simple es aquel que se puede armar agregando sucesivamente dos elementos no colineales a un elemento triangular inicial. A medida que se agrega cada pareja de elementos se agrega otro nudo. Un reticulado compuesto está formado por dos o más reticulados simples unidos entre sí por uno o más nudos comunes o por elementos adicionales. A continuación se muestran dos reticulados compuestos (Figura 7.6).
Figura 7.6: Ejemplos de reticulados compuestos
En la figura 7.6(a), dos reticulados simples están unidos en el nudo común A. En la figura 7.6(b), dos reticulados simples están unidos entre sí por tres elementos adicionales. Los reticulados simples se muestran como áreas sombreadas.
Figura 7.7: Ejemplos de reticulados complejos
Las configuraciones de reticulados que no se pueden clasificar como simples o compuestos se conocen como “reticulados complejos”. En general, un reticulado complejo puede estar compuesto por cualquier combinación de elementos triangulares, cuadrados y poligonales. En la figura 7.7 se presentan

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
74
dos tipos de reticulados complejos. Es necesario tener en presente que ambos casos son reticulados estáticamente determinados y estables.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
75
VIII. ESFUERZOS INTERNOS EN VIGAS Una viga es un elemento estructural, recto o curvo, apoyado en uno o más puntos en todo su largo. Las vigas se usan mucho en estructuras como edificios y puentes. Generalmente, las vigas se someten a cargas dirigidas perpendicularmente a sus ejes longitudinales. Se someten a cargas concentradas, momentos y fuerzas distribuidas. Algunos tipos de vigas se muestran en la figura 8.1.
Figura 8.1: Tipos de vigas: (a) viga en voladizo; (b) viga simplemente apoyada
Ejemplo 8.1: Determine las reacciones en los apoyos de la viga mostrada en la figura.
Solución:
0 2 4 10 2 20 4 35 10 10 29.375
0 10 20 10 10.625
0 0
A by
by
y ay by
ay
x ax
M RR kgf
F R RR kgf
F R
= → ⋅ ⋅ = ⋅ + ⋅ + + ⋅
=
= → + = + +
=
= → =
∑
∑
∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
76
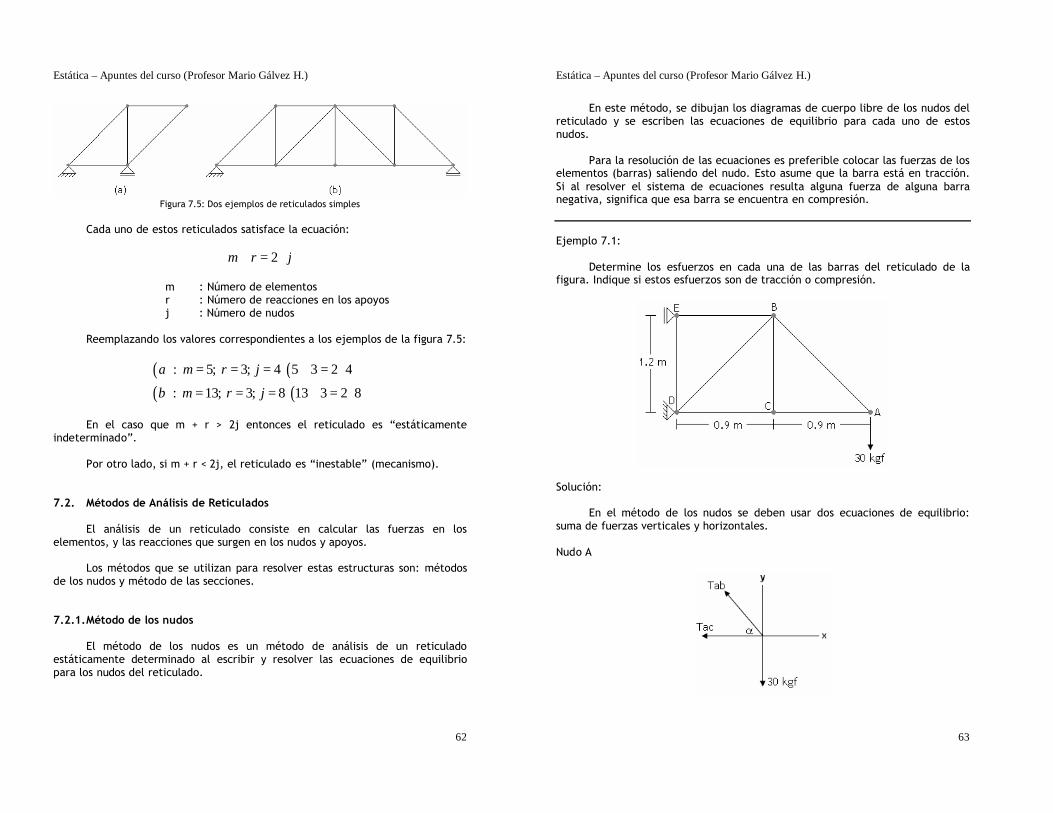
8.1. Esfuerzo de Corte y Momento Flector en Vigas El esfuerzo de corte y el momento flector son fuerzas internas en las vigas. Son causados por cargas transversales y momentos exteriores. La viga en voladizo mostrada en la figura 8.2 tiene una deformación en el extremo libre debido a flexión y a esfuerzo de corte.
Figura 8.2: Deformación por flexión y esfuerzo de corte en una viga en voladizo
Para calculas las reacciones en los apoyos de una viga se debe hacer diagrama de cuerpo libre de toda la viga y aplicar ecuaciones de equilibrio. En análisis de fuerzas internas (o esfuerzos internos), también se usan diagramas de cuerpo libre, pero en partes de una viga. La figura 8.2 muestra una viga sometida a un estado de carga determinado, se muestran además los valores de las reacciones en los apoyos. Se quieren determinar las fuerzas que existen en la sección a-a.
Figura 8.2: Viga sometida a un estado de carga
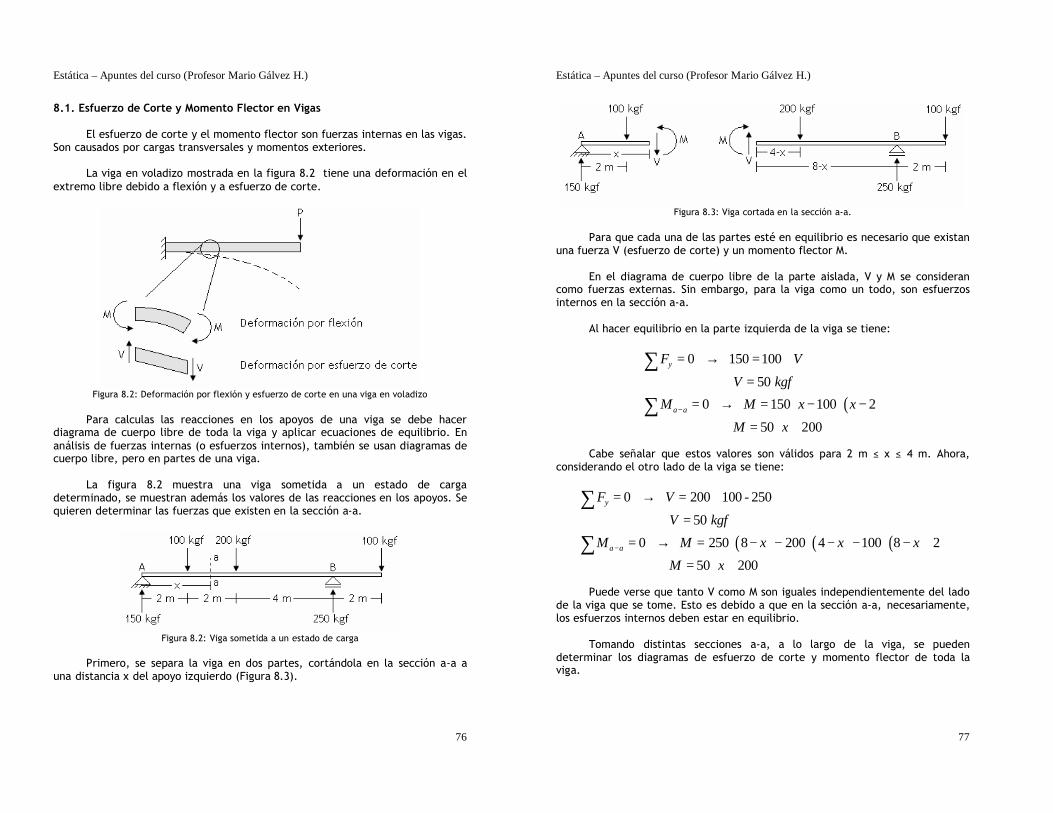
Primero, se separa la viga en dos partes, cortándola en la sección a-a a una distancia x del apoyo izquierdo (Figura 8.3).
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
77
Figura 8.3: Viga cortada en la sección a-a.
Para que cada una de las partes esté en equilibrio es necesario que existan una fuerza V (esfuerzo de corte) y un momento flector M. En el diagrama de cuerpo libre de la parte aislada, V y M se consideran como fuerzas externas. Sin embargo, para la viga como un todo, son esfuerzos internos en la sección a-a. Al hacer equilibrio en la parte izquierda de la viga se tiene:
( )
0 150 100 50
0 150 100 2 50 200
y
a a
F VV kgf
M M x xM x
−
= → = +
=
= → = ⋅ − ⋅ −
= ⋅ +
∑
∑
Cabe señalar que estos valores son válidos para 2 m ≤ x ≤ 4 m. Ahora, considerando el otro lado de la viga se tiene:
( ) ( ) ( )
0 200 100 - 250 50
0 250 8 200 4 100 8 2 50 200
y
a a
F VV kgf
M M x x xM x
−
= → = +
=
= → = ⋅ − − ⋅ − − ⋅ − +
= ⋅ +
∑
∑
Puede verse que tanto V como M son iguales independientemente del lado de la viga que se tome. Esto es debido a que en la sección a-a, necesariamente, los esfuerzos internos deben estar en equilibrio. Tomando distintas secciones a-a, a lo largo de la viga, se pueden determinar los diagramas de esfuerzo de corte y momento flector de toda la viga.

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
78
Para poder determinar los diagramas es necesario definir una convención de signos.
Figura 8.4: Viga simplemente apoyada con una carga central aplicada (deformación por flexión)
La figura 8.4 muestra una viga simplemente apoyada con una carga concentrada aplicada en el centro de la viga. La línea punteada representa la deformada de la viga por flexión. Si se toma un elemento de esa deformada puede verse que, para el caso del momento flector, la parte inferior está en tracción (fibra traccionada)y la parte superior, en compresión (fibra comprimida). Como convención de momentos flectores se supone que es positivo cuando la fibra traccionada se encuentra en el inferior de la viga (figura 8.5). El diagrama de momentos siempre se dibuja para el lado de la fibra traccionada, ya que es para ese lado donde se va a deformar la viga.
Figura 8.5: Convención para momento positivo
Igual al caso anterior, la figura 8.6 muestra una viga simplemente apoyada con una carga concentrada aplicada en el centro de la viga. En este caso, la línea punteada representa la deformada de la viga por esfuerzo de corte.
Figura 8.6: Viga simplemente apoyada con una carga central aplicada (deformación por corte)
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
79
Se asume que el corte es positivo cuando se cumple que α > 0 (Figura 8.7).
Figura 8.7: Convención para esfuerzo de corte positivo
Siguiendo con el ejemplo anterior, para determinar el diagrama de esfuerzos internos de toda la viga, se procede con la sección a-a ubicada en 0 ≤ x ≤ 2 m. 0 m ≤ x ≤ 2 m
( )( )
0 150
0 150y
a a
F V x kgf
M M x x−
= → =
= → = ⋅∑∑
2m ≤ x ≤ 4 m Ya se ha calculado. 4m ≤ x ≤ 8 m
( )0 150 100 200 150 yF V x kgf= → = − − = −∑

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
80
( ) ( ) ( )( )
0 150 100 2 200 4
150 1000a aM M x x x x
M x x− = → = ⋅ − ⋅ − − ⋅ −
= − ⋅ +∑
8 m ≤ x ≤ 10 m
( )( ) ( )
( )
0 100
0 100 10
100 1000
y
a a
F V x kgf
M M x x
M x x−
= → =
= → = − ⋅ −
= ⋅ −
∑∑
Luego, el diagrama de esfuerzos internos es:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
81
Ejemplo 8.1: Determine los diagramas de esfuerzos internos de carga axial (N), esfuerzo de corte (V) y momento flector (M) de la estructura de la figura.
Solución: Primero se determinan las reacciones en los apoyos:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
82
0 2 2
2
0 2
A cy
cy
y ay cy
ay
ax
L LM R L P P P L
R P
F R P RR PR P
= → ⋅ = ⋅ + ⋅ + ⋅
=
= → = −
= −
=
∑
∑
Ahora es necesario analizar las secciones por tramos: 0 ≤ y ≤ L/2
( )( )
( )
0 2
0
0 2
x
y
a a
F V y P
F N y P
M M y P y−
= → =
= → =
= → = ⋅
∑∑∑
0 ≤ y ≤ L/2
( )( )
( )
( )
0 2
0
0 22
2
x
y
a a
F V y P P P
F N y P
LM M y P y P y
PLM y P y
−
= → = − =
= → =
= → = ⋅ − ⋅ −
= ⋅ +
∑∑
∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
83
0 ≤ x ≤ L/2
( )( )
( )
( )
0
0 2
0 22
1.5
y
x
a a
F V x P
F N x P P PPLM M x P L P x
M x P L P x
−
= → = −
= → = − =
= → = ⋅ − − ⋅
= ⋅ − ⋅
∑∑
∑
L/2 ≤ x ≤ L
( )( )
0 2
0 2y
x
F V x P P P
F N x P P P
= → = − − = −
= → = − =∑∑

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
84
( )
( )
0 22 2
2 2
a aPL LM M x P L P x P x
M x P L P x
− = → = ⋅ − − ⋅ − ⋅ −
= ⋅ − ⋅
∑
Finalmente, los diagramas de esfuerzos internos son:
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
85
Ejemplo 8.2: Determine el diagrama de esfuerzos internos de la estructura de la figura sometida a una carga distribuida constante q.
Solución: Las reacciones de la viga en los apoyos son:
Puede verse que para los diagramas de esfuerzos internos no existe carga axial (N = 0). Luego,
( )
( )
( )2
0 2
0 2 2
2 2
y
a a
qLF V x q x
qL xM M x x q x
qL xM x x q
−
= → = − ⋅
= → = ⋅ − ⋅ ⋅
= ⋅ − ⋅
∑
∑
Puede verse que:
( )2
2 2qL xM x x q= ⋅ − ⋅

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
86
( ) ( )
( ) ( )
( )
2
dM x qL q x V xdx
dM xV x
dxdV x
qdx
= − ⋅ =
→ =
→ = −
Finalmente los diagramas resultantes son:
Puede verse que cuando el momento flector es máximo, el esfuerzo de corte es cero.
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
87
Ejemplo 8.3: Determine los diagramas de esfuerzos internos (momento flector y esfuerzo de corte) de la estructura de la figura.
Solución: Primero deben determinarse las reacciones.
( ) ( )
0 020 6 120 2 0.5 36 4 4 18 4 63
144 36 40 120 18 4
2 120
x ax
A by
by
y ay by
ay
F R
M R
R kgf
F R R
R kgf
= → =
= → ⋅ = ⋅ + ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅
=
⋅= → + = + + ⋅
=
∑∑
∑
Cortando la viga se tiene: 0 m ≤ x ≤ 2 m
( )
( )
( )
( )
2
3
90 1202
120 4.5
0 120 92 3
120 1.5
y
a a
x xF V x
V x xx xM M x x x
M x x x
−
⋅= → + =
= − ⋅
= → = ⋅ − ⋅ ⋅ ⋅
= ⋅ − ⋅
∑
∑

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
88
2 m ≤ x ≤ 4 m
( )
( )
( ) ( )
( )
2
3
90 120 1202
4.5
0 120 9 120 22 3
240 1.5
y
a a
x xF V x
V x xx xM M x x x x
M x x
−
⋅= → = − −
= − ⋅
= → = ⋅ − ⋅ ⋅ ⋅ − ⋅ −
= − ⋅
∑
∑
4 m ≤ x ≤ 6 m
( ) ( )( )
( ) ( ) ( ) ( )
( ) 2
0 18 8 144
18
80 144 8 2 18 8
2 288 9
y
a a
F V x x
V x xx
M M x x x
M x x
−
= → = ⋅ − −
= − ⋅
−= → = ⋅ − − − ⋅ − ⋅
= − ⋅
∑
∑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
89
6 m ≤ x ≤ 8 m
( ) ( )( )
( ) ( ) ( )
( ) 2
0 18 8
144 18
80 18 8
2 576 144 9
y
a a
F V x x
V x x
xM M x x
M x x x
−
= → = ⋅ −
= − ⋅
−= → = − ⋅ − ⋅
= − + ⋅ − ⋅
∑
∑
Finalmente los diagramas de esfuerzos internos son:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
90
IX. PRINCIPIOS DEL TRABAJO Como trabajo se define al producto entre la fuerza y la distancia. Es una cantidad escalar.
Figura 9.1: Fuerza aplicada sobre una cuerda
Si se tiene una cuerda en la cual existe una fuerza F aplicada (Figura 9.1), el trabajo que realiza la fuerza al trasladarse por la cuerda está dado por:
cost
tC C
dU F ds
U F ds F dsθ
= ⋅
= ⋅ = ⋅ ⋅∫ ∫
Se tiene un resorte de largo natural lo (Figura 9.2) (el resorte no ejerce fuerza). Si se deforma una distancia x entonces la fuerza que debe hacerse para deformarlo esa distancia es F=K*x (donde k es la constante del resorte, a un k mayor, mayor deberá ser la fuerza que debe aplicarse al resorte para deformarlo una distancia x)
Figura 9.2: Fuerza aplicada a un resorte
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
91
El trabajo realizado al estirar el resorte una distancia “x” está dado por:
2
0 0
12
x x
FU F dx k x dx k x= ⋅ = ⋅ ⋅ = ⋅∫ ∫
A la magnitud 0.5k*x2 también se le conoce como “energía elástica” almacenada en el resorte. Ejemplo 9.1: Calcular el trabajo que hace una fuerza cuando se traslada en una línea recta de 3 m de largo.
Solución:
( )
( )
( )3 3
0 0
3cos 30º2
130º2
2 3
3 1 32 3 32 2 2
3 33 3 3 9.7 2 2
dx ds ds
dy ds sen ds
Fx kgf Fy kgf
dU Fx dx Fy dy ds ds ds
U dU ds J Joule
= ⋅ =
= ⋅ =
= =
= ⋅ + ⋅ = ⋅ + ⋅ = + ⋅
= = + ⋅ = + ⋅ = ∫ ∫
La fuerza de gravedad realiza un trabajo positivo cuando un cuerpo desciende una distancia determinada. El valor del trabajo es el producto entre el peso del cuerpo y la distancia que desciende. Si el cuerpo asciende, entonces la

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
92
fuerza de gravedad realiza un trabajo negativo. El trabajo es positivo cuando el desplazamiento va en la misma dirección que la fuerza que lo produce. Los momentos también realizan trabajo. El trabajo sobre un cuerpo de un momento es igual al producto entre el momento y la deformación angular que experimenta. Esto es:
2
1U M d
θ
θθ= ⋅∫
9.1. Principio del Trabajo Virtual El trabajo virtual de una fuerza real es el trabajo efectuado por esa fuerza durante un desplazamiento virtual (imaginario). Un desplazamiento virtual es un desplazamiento imaginario y no ocurre, necesariamente, como un movimiento real del sistema. El trabajo de las fuerzas reales que actúan durante un desplazamiento de este tipo se llama “trabajo virtual”. Durante un desplazamiento virtual se considera que las fuerzas reales permanecen constantes.
Figura 9.3: Trabajo virtual en una balanza
Una balanza proporciona una aplicación práctica más significativa del principio del trabajo virtual. Si se hace girar una balanza horizontal (Figura 9.3) de modo que describa un ángulo virtual δθ, el trabajo que realizan los pesos, en cada extremo de la balanza, es:
2 1U W b W aδ δθ δθ= ⋅ ⋅ − ⋅ ⋅ Puede verse que el sistema está en equilibrio si se cumple que δU = 0 ya que W2bδθ = W1aδθ.
2 1W b W a⋅ = ⋅
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
93
Lo que muestra la figura 9.4 se llama “Balanza de Roberval”. En muchos aspectos esta balanza es distinta a la anterior. Si el peso W2 desciende una distancia δs, el peso W1 asciende esa misma distancia δs. Por lo tanto el trabajo virtual efectuado por el sistema es:
2 1U W s W sδ δ δ= ⋅ − ⋅
Figura 9.4: Balanza de Roberval
Puede verse que δU se hace cero para W2 = W1, esta es una condición de equilibrio, es decir, pesos iguales colocados en la balanza de Roberval están en equilibrio sin importar sus ubicaciones b y c en las barras horizontales. Ejemplo 9.2: Determine la reacción del apoyo B usando el método de los trabajos virtuales.
Solución: Para resolver este problema se quita el apoyo B y se rota la viga un ángulo δθ con respecto al punto A.
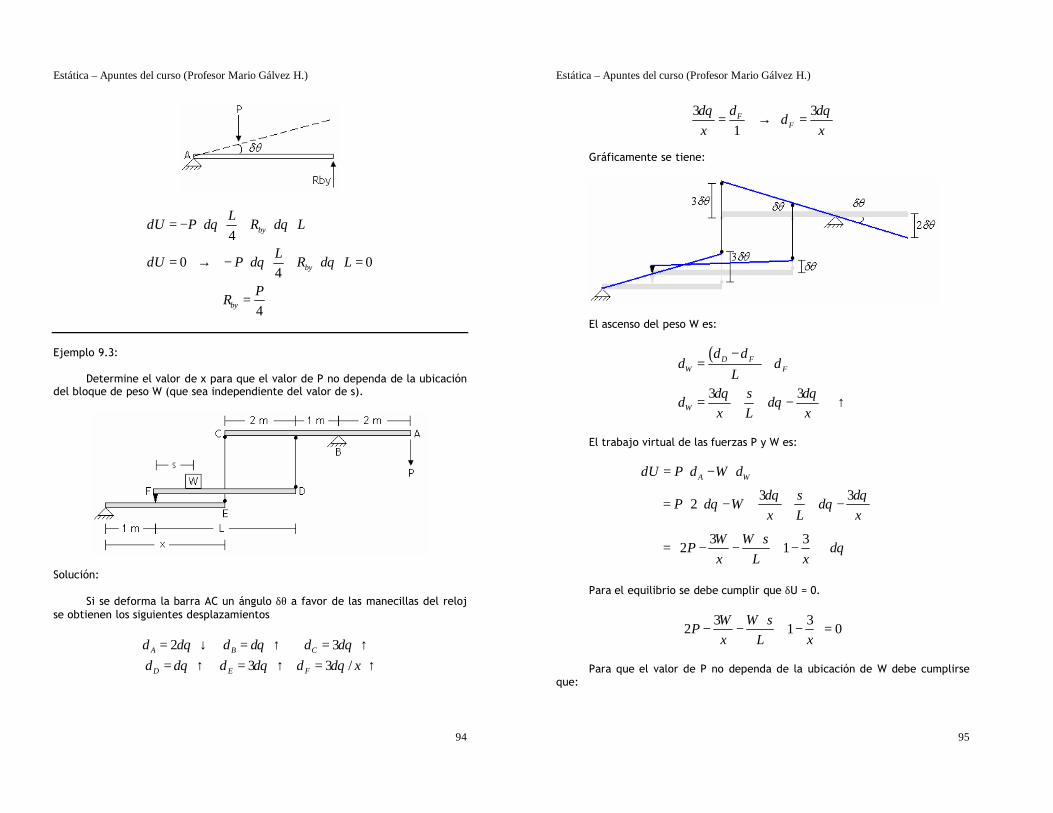
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
94
4
0 04
4
by
by
by
LU P R L
LU P R L
PR
δ δθ δθ
δ δθ δθ
= − ⋅ ⋅ + ⋅ ⋅
= → − ⋅ ⋅ + ⋅ ⋅ =
=
Ejemplo 9.3: Determine el valor de x para que el valor de P no dependa de la ubicación del bloque de peso W (que sea independiente del valor de s).
Solución: Si se deforma la barra AC un ángulo δθ a favor de las manecillas del reloj se obtienen los siguientes desplazamientos
2 3 3 3 /
A B C
D E F xδ δθ δ δθ δ δθδ δθ δ δθ δ δθ
= ↓ = ↑ = ↑= ↑ = ↑ = ↑
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
95
3 3 1F
Fx xδθ δ δθ
δ= → =
Gráficamente se tiene:
El ascenso del peso W es:
( )
3 3
D FW F
W
Ls
x L x
δ δδ δ
δθ δθδ δθ
−= +
= + ⋅ − ↑
El trabajo virtual de las fuerzas P y W es:
3 3 2
3 3 2 1
A WU P W
sP Wx L x
W W sPx L x
δ δ δ
δθ δθδθ δθ
δθ
= ⋅ − ⋅
= ⋅ ⋅ − ⋅ + ⋅ −
⋅ = − − ⋅ − ⋅
Para el equilibrio se debe cumplir que δU = 0.
3 32 1 0W W sPx L x
⋅ − − ⋅ − =
Para que el valor de P no dependa de la ubicación de W debe cumplirse que:

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
96
31 0 3 x mx
− = → =
Luego, despejando P se tiene:
32 0 2
W WP Px
− = → =
Ejemplo 9.4: Determine el valor del momento flector en una sección ubicada en la mitad de la viga utilizando el método de los trabajos virtuales.
Solución: Para determinar el momento flector en la mitad de la viga, debe quebrarse ésta haciendo que solamente haga trabajo el momento y la fuerza P conocida. Es importante tener presente que la fuerza externa realiza un trabajo externo y el momento, por ser un esfuerzo interno, realiza un trabajo interno. En este caso debe cumplirse que el trabajo interno es igual al trabajo externo. En el ejemplo 9.2 el trabajo interno era cero, por eso se tenía δU = 0 (δUE=δUI=0).
22
E
I
LU P
U M
δ δθ
δ δθ
= ⋅ ⋅
= ⋅
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
97
22
4
E ILU U P M
PLM
δ δ δθ δθ= → ⋅ ⋅ = ⋅
=
Ejemplo 9.5 Determine el valor de la fuerza P para que el sistema esté en equilibrio.
Solución: Se rota el sistema en un ángulo virtual δθ. Luego queda:
( )
( )
2 1.5 40º0
2 1.789
1.5 40º
E
I
E I
U W P senU
WU U P Wsen
δ δθ δθ
δ
δ δ
= ⋅ ⋅ − ⋅ ⋅ ⋅
=⋅
= → = = ⋅⋅

Estática – Apuntes del curso (Profesor Mario Gálvez H.)
98
Ejemplo 9.6 Determine el valor del esfuerzo de corte en la sección a-a, ubicado a una distancia x=6 m del punto A. Considere q = 5 kgf/m.
Solución: Utilizando para el corte la siguiente convención:
Cortando en la sección a-a y desplazando, para que sólo haga trabajo el esfuerzo de corte (trabajo interno).
5 2 2 202
V 10
E
I
E I
UU VU U kgf
δ δθ δθδ δθδ δ
= ⋅ ⋅ ⋅ = ⋅= ⋅ ⋅= → =
Estática – Apuntes del curso (Profesor Mario Gálvez H.)
99
Ejemplo 9.7: Usando el método de los trabajos virtuales, determine la reacción vertical del apoyo B.
Solución: Primero se calculan las cargas resultantes a partir de las cargas distribuidas.
Desplazando el apoyo B en 1 se tiene:
by
1 4 48 1 3 2 4.5 1 13 9 9
0 R 3.333
E by
I
E I
U R
UU U kgf
δ
δδ δ
= − ⋅ ⋅ − ⋅ ⋅ + ⋅ ⋅ + ⋅
== → =