
Aproximación a Los Filtros
38
Aproximación a los filtros Aproximación a los filtros Es conocido que un efecto puede descomponerse como una suma de otros efectos más simples. Fourier propuso descomponer una función en una suma infinita de funciones. Toda señal periódica y continua se puede descomponer en una suma infinita de funciones seno. Cada una de estas funciones se las denomina Armónica espectral. La frecuencia de una armónica, la denominada Armónica fundamental o Primer armónico, es igual a la frecuencia de repetición de la señal periódica. Las armónicas superiores a la primera tienen una frecuencia múltiplo de la fundamental. Las señales periódicas son determínisticas, es decir, es factible determinar un valor futuro en función de los valores pasados. Sin embargo las señales que llevan información son aperiódicas o sea no determinista. Observando la figura podemos ver sobre el lado izquierdo tenemos las señales en el tiempo y sobre las señales en la frecuencia. Se dispone de una señal rectangular de período T y cuyo ciclo de actividad es . El espectro de esta señal se compone de rayas espectrales las cuales simbolizan cada una de las armónicas. Las mismas se encuentran ubicadas, en la frecuencia múltiplos de la armónica fundamental. Esta armónica tiene frecuencia 1/T. Se tienen así armónicas en 1/T, 2/T, etc. Las amplitudes de las armónicas, están dadas por la altura de las rayas espectrales. Su valor corresponde a la función envolvente denominada función que se asemeja a un coseno amortiguado. Esta función se anula en los valores de frecuencia 1/, 2/, 3/, etc. I
-
Upload
sucheful-ly -
Category
Documents
-
view
230 -
download
2
description
Filtros Pasivos
Transcript of Aproximación a Los Filtros

Aproximación a los filtros
Aproximación a los filtros
Es conocido que un efecto puede descomponerse como una suma de otros efectos más simples. Fourier propuso descomponer una función en una suma infinita de funciones. Toda señal periódica y continua se puede descomponer en una suma infinita de funciones seno. Cada una de estas funciones se las denomina Armónica espectral. La frecuencia de una armónica, la denominada Armónica fundamental o Primer armónico, es igual a la frecuencia de repetición de la señal periódica. Las armónicas superiores a la primera tienen una frecuencia múltiplo de la fundamental.
Las señales periódicas son determínisticas, es decir, es factible determinar un valor futuro en función de los valores pasados. Sin embargo las señales que llevan información son aperiódicas o sea no determinista.
Observando la figura podemos ver sobre el lado izquierdo tenemos las señales en el tiempo y sobre las señales en la frecuencia.
Se dispone de una señal rectangular de período T y cuyo ciclo de actividad es . El espectro de
esta señal se compone de rayas espectrales las cuales simbolizan cada una de las armónicas. Las mismas se encuentran ubicadas, en la frecuencia múltiplos de la armónica fundamental. Esta
armónica tiene frecuencia 1/T. Se tienen así armónicas en
1/T, 2/T, etc.
Las amplitudes de las armónicas, están dadas por la altura de las rayas espectrales. Su valor corresponde a la función envolvente denominada función
que se asemeja a un coseno amortiguado. Esta función se anula en los valores de frecuencia 1/, 2/, 3/, etc.
Si tenemos que T = 2 tenemos el caso (a).
Si el ciclo de actividad se reduce a ’, manteniéndose el período T. Como ha disminuido, el valor 1/ ha aumentado y se produce un estiramiento de la envolvente sinc f. Este es el caso (b).
Si llegamos al caso de límite de 0, se tiene que la sinc f corta el eje infinito. Tenemos que todas las armónicas tienen igual amplitud.
Este es el caso (c).
Hasta aquí se mantuvo constante el período T y se redujo el ciclo de actividad . Ahora manteniendo constante y aumentamos el período T. Las armónicas se comprimen en la frecuencia. Esto es así pues T aumenta, 1/T disminuye. Este es el caso (d).
I

Aproximación a los filtros
En el caso límite de T las armónicas se han unificado en un espectro continuo. Este es el caso (e).
Concluimos en decir que a una señal periódica se le asocia un espectro discreto, mientras que a una señal aperiódica se obtiene un espectro contínuo.
II

Aproximación a los filtros
III
Aproximación a los filtros
El espectro de una señal periódica se obtiene mediante la serie de Fourier, en tanto que el espectro de una señal aperiódica se obtiene con la transformada de Fourier.
En una señal periódica la potencia está dada por la suma de las potencias de cada una de las armónicas. La potencia de cada armónica es proporcional al cuadrado de su amplitud. En una señal aperiódica la potencia es proporcional al cuadrado del área encerrada bajo el espectro contínuo.
La señal transformada de Fourier representa la señal en el dominio de la frecuencia.
Una señal puede estudiarse tanto en el dominio del tiempo como en el dominio de la frecuencia.
Una propiedad muy importante de la transformada de Fourier es la denominada reversibilidad mutua de las variables t y f.A la suma o diferencia de señales en el tiempo le corresponde la suma o diferencia de espectros.
Para el caso del producto de señales en el tiempo le corresponde la convolución para encontrar el espectro.
donde * indica convolución.
Debido a la reversibilidad mutua se tiene:
Respuesta impulsiva de un filtro ideal.
¿Cuál es la señal de salida de un filtro pasabajos ideal si a la entrada se le coloca un impulso?
IV

Aproximación a los filtros
Si se inyecta un impulso s(t) a la entrada, cuyo espectro es plano y contínuo S(f). La transferencia de un filtro pasabajos ideal FPBI es H(f) y tiene frecuencia máxima . La salida es el producto del espectro de la señal de entrada por la transferencia, esto es [H(f)S(f)]. La forma de la señal en el tiempo es una sinc t (que se anula en los tiempos 1/2, 1/, 3/2, etc, y corresponde a [h(t)S(t)].
Tenemos así que un impulso a la entrada de un FPBI, sale como una función sinc t. Cuanto más pequeño sea el ancho de banda del filtro, la sinc t se estira más. Expandir en el dominio del tiempo equivale a comprimir el dominio de la frecuencia.
V

Aproximación a los filtros
Ahora la señal de entrada tiene un espectro continuo pero no plano. Se presenta así que la salida depende del valor 1/ de S(f) y del ancho de banda del filtro .
Si << 1/, el producto [H(f).S(f)] es prácticamente plano y la salida se aproxima mucho a la sinc t del ejemplo anterior. Si en cambio el espectro de la señal de salida es prácticamente como la entrada S(f) y la forma de onda se aproxima mucho al pulso rectangular.
VI

Aproximación a los filtros
VII

Aproximación a los filtros
Un filtro esta caracterizado por tener para el par entrada-salida o excitación-respuesta, con la salida dada por
(1-1)
donde h(t) es la respuesta al impulso del filtro. La transformada de Laplace de y(t) es:
(1-2)
Aquí el filtro esta caracterizado por H(s), la función de transferencia(o la respuesta en frecuencia cuando s = j). H(s) o H(j) tiene una parte real Re[H(j)] y una parte imaginaria Im[H(j)],
Expresando esta formula en términos de la representación polar, podemos escribir
= H(j)H(-j )
VIII

Aproximación a los filtros
Función de amplitud o magnitud
Dada la ecuación (1-2), podemos establecer que
La señal de salida es el producto de la magnitud de la señal de entrada y la función de respuesta en frecuencia del filtro.
Si la media de la función de magnitud es igual a cero, entre s1 y s2, este intervalo se denomina banda de rechazo, y similarmente para una banda de frecuencias el valor de la función magnitud tiene un valor elevado p1 y p2, este intervalo es denominado banda de paso. Teniendo en cuenta estos intervalos se puede determinar la caracteristicas.
Funciones de fase y retardo de grupo
En el apartado anterior hemos visto que un filtro estaba caracterizado por su función magnitud. Otra de las funciones que caracteriza a un filtro es ángulo de fase (), o en forma equivalente, la función retardo de grupo () definida por
IX
Aproximación a los filtros
Para comprender la implementación física del ángulo de fase o la función de retardo de grupo de un filtro, veremos los dos siguientes casos:
1) Consideremos un filtro con la siguiente especificación
H1(j) = 1 para -c c
= 0 en otro caso
este es un filtro con un ángulo de fase cero y consecuentemente la función de retardo de grupo para toda . La respuesta al impulso esta dado por
2) Consideremos ahora el segundo filtro caracterizado por:
X

Aproximación a los filtros
para -c c
= 0 en otro caso
Este filtro difiere del último solamente por el ángulo de retraso de fase en la banda de paso.La respuesta impulsiva esta dada por
comparando h1(t) y h2(t) podemos ver que el último tiene un retraso en el tiempo de (k)/(2c) del primero. Notar que la función de retardo de grupo de el segundo filtro esta dado por
es igual al tiempo de retraso a la respuesta del impulso.
XI

Aproximación a los filtros
Una comparación de la respuesta al impulso de estos dos filtros indica que allí tiene una relación directa entre el grupo de retardo del filtro (equivalente al retraso del ángulo de fase), y el retraso del tiempo de la respuesta al impulso.
Para ser más preciso, consideremos un filtro caracterizado por una función de transferencia
Aquí la función de retardo de grupo del filtro es
Si excitamos este filtro con una entrada
x(t) = u(t – T0)
Entonces la salida es
y(t) = Ku[t – (t0 + T0)]
XII

Aproximación a los filtros
Esto implica que el retardo de grupo del filtro es esencialmente igual a tout – tin, donde tin es el tiempo en que comienza a alcanzar un valor de estado estable, y tout es el tiempo en que la salida toma estado bajo para la condición un estado estable.
Propiedades de la función de red
Una función de red es la transformada de Laplace de la respuesta al impulso. Si formamos la razón
de dos polinomios de variable compleja s.
Polinomio de una variable compleja
Un polinomio p(s) se dice que es par si la suma de las potencias es par y se dice que es impar si la suma de las potencias es impar.
Si M(s) es un polinomio par y N(s) es un polinomio impar, entonces
M(s) = M(-s)
N(s) = - N(-s)
Consideremos un polinomio p(s) dado por
p(s) = a0 + a1s + a2s2 + a3s3 + a4s4 + a5s5 +
XIII

Aproximación a los filtros
En el cual podemos agrupar en los términos par e impar
p(s) = M(s) + N(s)
Tenemos también
p(-s) = M(-s) + N(-s) = M(s) – N(s)
1.
donde denota al complejo conjugado de s.
2. Si M(s) es un polinomio par, entonces tenemos, que
3. Si N(s) es un polinomio impar, entonces tenemos, que
4. Si sk es una raíz de el polinomio p(s)
XIV

Aproximación a los filtros
5. La función magnitud cuadrada de p(s) esta dado por
De lo anterior se puede deducir que M(j) es real y N(j) es imaginario puro, M2(j) y N2(j) son reales, M2(j) 0 y N2(j) 0 para toda .
Por lo tanto
para toda
Además es un polinomio de 2, o es un polinomio par de .
6. Las raíces de ocurren con simetría en cuadrantes, significando que:
a) Las raíces sobre el eje real del plano s ocurren en pares en 1 y (-1).
b) Las raíces sobre el eje imaginario del plano s ocurren con multiplicidad par y en pares complejos conjugados [si j1 es una raíz de f(s), entonces ambas j1 y (-j1) son dobles, o cuádruples, o ..., ].
c) Las raíces complejas ocurren de manera cuádruple [si 1+ j1 es una raíz de p(s)p(-s), donde 1 0 y 1 0, entonces 1- j1, -(1+ j1), y –(1- j1) son todas raíces de p(s)p(-s)].
XV

Aproximación a los filtros
Función de red
Sí F(s) es una función de red tal que puede ser una función admitancia o impedancia de un elemento de un puerto tal que puede ser una función de transferencia entre la entrada de un puerto y la salida de un puerto, de una red de dos puertos.
Entonces F(s) es una función racional de con coeficientes reales y pueden escribirse como la razón de dos polinomios como sigue:
Donde M1(s) y N1(s) son las partes par e impar de A(s), numerador de F(s). Y M2(s) y N2(s) son las partes par e impar de B(s), denominador de F(s).
Si s=j, entonces M(j) es real y N(j) es imaginario puro. En consecuencia
Transformada de Hilbert
Las relaciones entre las partes real e imaginaria de una función de red puede ser expresada a través de la transformada de Hilbert como sigue:
Supóngase que F(s) es analítica en una región cerrada de la parte derecha (incluyendo el eje imaginario) del plano s. Así podemos escribir:
XVI
Aproximación a los filtros
Sí
Entonces R() y X() están relacionadas por
Note que aquí hay una falta de simetría entre X() y R(). Esta falta de simetría es debido al hecho que consideramos solo funciones de red cuya transformada inversa de Laplace son funcione reales del tiempo. Si consideramos funciones complejas del tiempo, entonces aquí hay un termino de X() sobre el lado derecho, y las dos ecuaciones serán simétricas. Sobre la otra mitad, la respuesta al impulso f(t), la cual es la transformada inversa de Laplace de F(s), conteniendo la función no impulsiva en t=0, entonces R()=0 y queda:
XVII

Aproximación a los filtros
Centrando nuestra atención en X() y R() podemos ver que ambas integrales son de la forma de una integral de convolución:
donde y g() es R().
Si n es un puerto de un elemento no conteniendo fuentes internas de energía. Asumiendo que todas las condiciones iniciales son ceros, entonces n puede ser caracterizado por I(s)=Y(s)V(s) o V(s)=Z(s)I(s), donde I(s) y V(s) son respectivamente, la transformada de Laplace de la corriente y la tensión a través de un puerto de un elemento. la síntesis básica con solamente valores positivos de resistores, inductores y capacitores, es el concepto de funciones reales positivas. Ha sido demostrado por Brune, que cada función de un elemento de red puede conteniendo solo elementos pasivos, es positiva real.
Por consiguiente, cada función positiva real puede ser realizada como una función de inmitancia conteniendo solo elementos pasivos tales como RLC, transformadores ideales, bobinas acoplada.
Una función F(s) se dice que es real positiva (PR), si satisface las siguientes dos condiciones:
1. F(s) es real cuando s es real.2. Re[F(s)] 0 siempre que Re[s] 0.
La primera condición puede ser verificada mas fácilmente por inspección, porque simplemente requiere que toda los coeficientes de F(s) es real.
La segunda condición requiere que la función compleja F() mapea el semiplano derecho y el eje imaginario del plano s dentro del semiplano derecho y el eje imaginario del plano F.
XVIII

Aproximación a los filtros
Con esta base, consideramos ahora conceptos fundamentales en síntesis de circuitos:
Teorema: Si n es una red de un puerto conteniendo elementos pasivos solamente. Entonces ambas funciones de impedancias y admitancias de n son reales positivas.
Para simplificar su demostración, asumimos que n contiene solo resistores, capacitores y bobinas. La extensión a esta simplificación demuestra que el caso general queda aclarado.
Teorema: Si F(s) es una función positiva real, entonces F(s) puede ser realizada como función de impedancia o admitancia de un puerto conteniendo solo elementos pasivos.
En vista de los dos teoremas anteriores concluimos que: si F(s) es real positiva si y solo si 1/F(s) es positiva real.
Polinomios de Hurwitz
En general es muy difícil chequear la condición 2 de una función positiva real (PR). En consecuencia es deseable tener una alternativa más condiciones equivalentes para comprobar que es una función positiva real.
Una manera de lograr este objetivo es a través del concepto de polinomio de Hurwitz y Hurwitz modificado.
Un polinomio p(s) se dice de Hurwitz si todas las raíces de p(s) son localizadas en el semiplano izquierdo del plano (sin incluir el eje imaginario); p(s) se dice ser Hurwitz estrictamente si ninguna de las raíces están en el semiplano derecho del plano s y todas las raíces sobre el eje imaginario son simples, con multiplicidad igual a uno.
Basándonos en la definición establecida anteriormente, necesitamos localizar todas las raíces de un polinomio p(s), después podemos decir si p(s) es un polinomio de Hurwitz o
XIX

Aproximación a los filtros
modificado de Hurwitz. Sabemos que el descubrir todas las raíces de un polinomio no es una tarea fácil.
Consecuentemente una aplicación directa de la definición de polinomio de Hurwitz o Hurwitz estrictamente no es aconsejable.
Vamos a desarrollar métodos para lograr determinar se un polinomio es de Hurwitz o Hurwitz estrictamente (o ninguno), sin encontrar las raíces.
Si p(s) es el polinomio en cuestión. Asumimos que p(s) es ni un polinomio par ni uno impar. Para testear si tal polinomio p(s) es verdaderamente un polinomio de Hurwitz, podemos usar el test de Hurwitz, el cual aplica los pasos de el algoritmo de Euclides (encontrando el más grande común denominador) para las partes par e impar con alguna modificación menor. Específicamente, primero descomponemos p(s) entre las partes par e impar, M(s) y N(s) respectivamente, como p(s)= M(s)+N(s). Usando M(s) y N(s) formamos la razón T(s), cuyo numerador tiene un grado más alto que el denominador. Supóngase que p(s) es un polinomio de grado d. Entonces
si d es entero impar
si d es un entero par
Luego realizamos la expansión en fracciones continua alrededor de infinito sobre la razón T(s), removiendo un polo a la vez en la forma de un cociente qs, resultando en
XX

Aproximación a los filtros
Donde qis es el cociente y el qi es el coeficiente asociado. Si aquí uno o más cocientes con coeficientes negativas, entonces p(s) ni es Hurwitz ni estrictamente Hurwitz. Por otro lado, si aquí d cocientes y cualquier cociente tiene coeficiente positivo, entonces p(s) es un polinomio de
Hurwitz. Finalmente, si un número de cociente es menor que d, mas cualquier cociente tiene un
coeficiente positivo, esta claro que aquí hay un factor común k(s) entre M(s) y N(s). De aquí, podemos escribir p(s) como
HASTA AQUÍ EL APUNTE FUE REALIZADO SEGÚN EL LAMP
Polos, Ceros y frecuencias propias
Una función de variable compleja que sea real cuando la variable es real recibe el nombre de función real. Así las funciones de red son funciones reales de s. Donde
Es decir las funciones de red toman valores conjugados en puntos conjugados del plano complejo.Si expresamos F(s) en función de polos y ceros, los cuales determinan sus propiedades analíticas.
XXI

Aproximación a los filtros
Sabemos que la respuesta libre viene regida por los polos de la función de red. Sacamos la conclusión de que la función de una red estable no puede tener polos en el semiplano de la derecha y que todos los polos que se hallen sobre el eje j deben ser simples.
De no ser así, la respuesta libre no estaría acotada y la red sería inestable.
Puede reforzarse esta conclusión en el caso de una función de entrada. Tanto la impedancia como la admitancia de entrada presentan esta propiedad y, como la una es el recíproco de la otra, las funciones de entrada no podrán tener ni polos ni ceros en el semiplano de la derecha.
En el caso de una función de transferencia el recíproco no es una función de red. Por tanto, no podemos decir nada acerca de los ceros. Podrán encontrarse en cualquier lugar del plano complejo, estando sometidos solamente a la propiedad de reflexión.
En general, F(s) tendrá potencias pares e impares de s; no será ni función par ni función impar de s. Luego podemos escribir
Podemos expresar las partes par e impar de una función de la manera siguiente:
Si agrupamos F(s) como una razón de potencias par e impar tanto en el numerador como en el denominador resulta,
Reemplazando esta expresión de F(s) en las ecuaciones precedentes, resulta:
XXII
Aproximación a los filtros
Es evidente que ParF(s) tiene polos donde los tiene F(s) y también donde los tiene F(-s). Pero los polos de F(-s) son las imágenes especulares, respecto al eje imaginario, de los polos de F(s).La función F(s) específica un valor de F para todos los valores complejos de s. De entre todos los valores de s, son de particular importancia los correspondientes al eje j. Para s= j, nos interesa a menudo el comportamiento de una de las siguientes cantidades: parte real, parte imaginaria, argumento y módulo.
La parte real de una función en los puntos del eje j es su parte par; la parte imaginaria en los puntos del eje j es su parte imaginaria dividida por j.
Módulo y argumento de una función.
Luego
XXIII

Aproximación a los filtros
Sustituyendo ahora por -, se ve que la función cuadrado del módulo es función racional par de .Para el argumento, tenemos
Estamos tentados a decir que el argumento es función impar de . No obstante es una función multiforme. Lo apuntado solo podrá decirse si permanecemos en la superficie apropiada de Riemann.
Función retardo
Una función de transferencia se dirá que es ideal se es de la forma F(s) = e -s . Para s=j, el módulo es idénticamente igual a 1, y el argumento es proporcional a . Si se excita con una señal e(t) una red que tenga esta función de transferencia, la respuesta de la red será, en virtud de la teoría de la transformada de Laplace, w(t)=e(t-). La señal de respuesta es la misma que la de excitación, con la diferencia de que está retrasada en el tiempo en una cantidad llamada tiempo retardo. Como
() = - para la función ideal, el tiempo de retardo es la derivada, cambiada de signo, de la función argumento. La función es la derivada cambiada de signo de la función fase. Así pues,
es la función retardo. A diferencia de la función argumento, el retardo es una función racional.
Funciones de fase mínima
Llamaremos función de fase nínima a la que no tenga ceros en el semiplano de la derecha. Inversamente, toda función de transferencia que tenga ceros (aunque sólo sea uno) en el semiplano de la derecha la llamaremos de fase no mínima.
XXIV
Aproximación a los filtros
Para determinar el efecto de los ceros del semiplano de la derecha sobre el módulo y argumento de una función de transferencia, consideremos la siguiente figura.
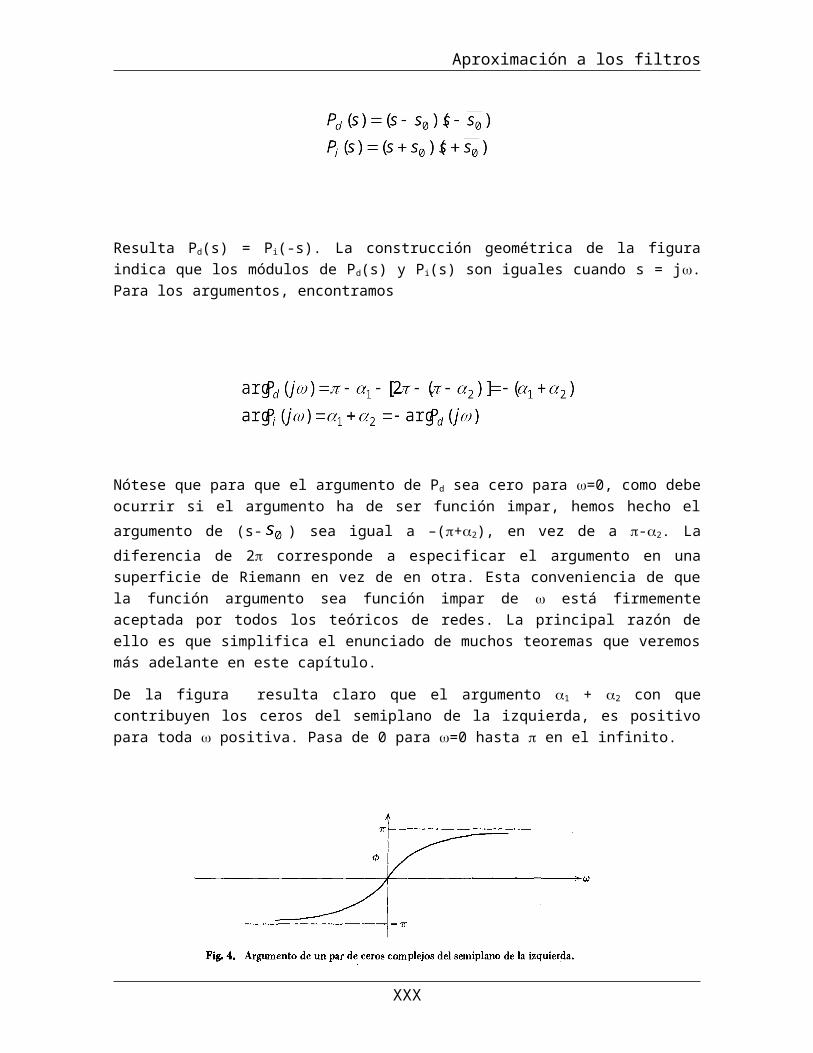
En esta figura puede verse un par de ceros conjugados en el semiplano de la derecha y la imagen de dicho par en el semiplano de la derecha y la imagen de dicho par en el semiplano de la izquierda. Sean Pd(s) y Pi(s) funciones cuadráticas que tengan, respectivamente, el par de factores del plano del plano de la derecha y el par de factores del plano de la izquierda; es decir
Resulta Pd(s) = Pi(-s). La construcción geométrica de la figura indica que los módulos de P d(s) y Pi(s) son iguales cuando s = j. Para los argumentos, encontramos
XXV

Aproximación a los filtros
Nótese que para que el argumento de Pd sea cero para =0, como debe ocurrir si el argumento ha de ser función impar, hemos hecho el argumento de (s- ) sea igual a –(+2), en vez de a -2. La diferencia de 2 corresponde a especificar el argumento en una superficie de Riemann en vez de en otra. Esta conveniencia de que la función argumento sea función impar de está firmemente aceptada por todos los teóricos de redes. La principal razón de ello es que simplifica el enunciado de muchos teoremas que veremos más adelante en este capítulo.
De la figura resulta claro que el argumento 1 + 2 con que contribuyen los ceros del semiplano de la izquierda, es positivo para toda positiva. Pasa de 0 para =0 hasta en el infinito.
Se deduce, pues, que el argumento de un par de ceros conjugados del semiplano de la derecha es siempre negativo para valores positivos de , pasando de 0 para =0 hasta - en el infinito. Consideremos ahora la siguiente figura, que presenta un cero real en el semieje real positivo y su imagen en el semiplano de la izquierda. De nuevo, los módulos de los dos factores (j - a) y (j + a) son iguales.
El argumento del factor (j + a) del semiplano de la izquierda es para positiva. (Será - para negativa). El argumento del factor (j - a) del semiplano de la derecha lo tomaremos igual a –(+) para positiva y + para negativa a fin de hacer que el argumento sea función impar.
En la figura siguiente se encuentran las gráficas de estos argumentos. Observese en la segunda figura una discontinuidad de 2 introducida simplemente por nuestro deseo de hacer que el argumento sea función impar. Esta discontinuidad corresponde al salto de una superficie de Riemann a otra.
XXVI
Aproximación a los filtros
Funciones pasa-todo y de fase mínima
Consideremos la siguiente función
donde so y su conjugado se encuentran en el semiplano de la derecha. Estas dos funciones son iguales salvo en el hecho de que F1(s) tiene un par de ceros en el semiplano de la derecha, mienstras que en F2(s) éstos están sustituidos por sus imágenes en el semiplano de la izquierda. La función común F(s) puede tener factores adicionales en el semiplano de la derecha. Supongamos que multiplicamos numerador y denominador de F1(s) por los factores del semiplano de la izquierda . Resultará
donde
XXVII

Aproximación a los filtros
Definamos una función pasa-todo como una función de transferencia cuyos ceros están todos en el semiplano de la derecha y cuyos polos son las imágenes en el semiplano de la izquierda de los ceros mencionados. Será claro, pues, que una función pasa-todo tiene módulo unidad para todos los valores de s=j. (Esta es la razón de su nombre). Examinando la última ecuación vemos que F0(s) es una función pasa-todo. Es una función pasa-todo de segundo orden, refiriéndose el orden al número de polos. El argumento de F0(j) resulta ser
Para pulsaciones positivas, este ángulo es negativo. Así pues, el argumento de una función pasa-todo es negativo para todas las pulsaciones positivas.
Podemos escribir
Este resultado nos dice que, a todas las pulsaciones positivas el argumento de una función que tenga los ceros en el semiplano de la derecha es menor que el de la función obtenida cuando se sustituye un par de dichos ceros por su imagen en el semiplano de la izquierda.
Este método de expresar una función de transferencia como producto de otras dos puede repetirse. En cada cada caso se puede sustituir un par de ceros complejos o un cero real del semiplano de la derecha por sus imágenes en el semiplano de la izquierda. Se obtendrá una sucesión de funciones, de las cuales F1 y F2 son las dos primeras. Cada miembro de la sucesión derecha no tendrá ceros en el semiplano de la derecha. Representémoslo por F m(s). Por definición, Fm(s) es una función de fase mínima.
Toda función de transferencia de fase no mínima puede escribirse como producto de una función de fase mínima por una función pasatodo; es decir,
XXVIII

Aproximación a los filtros
Redes de Resistencia Constante
Una función de transferencia de fase no mínima puede escribirse como producto de una función de fase mínima por una función pasa-todo. Esto tiene importancia en síntesis; si pueden realizarse por separado Fm(s) y Ft(s), la interconexión de las dos realizaciones dará la red deseada.
La figura anterior realiza cada tipo de función, esta realización no es adecuada, porque la carga que representa la segunda sobre la primera hace variar su función transferencia. Si pudiera eliminarse este efecto podría realizarse la conexión en cascada.
Una manera de eliminar el efecto de carga consiste en construir las bipuertas como redes de resistencia constante.
XXIX
Aproximación a los filtros
Se define una red de resistencia constante como una bipuerta cuya impedancia de entrada en una puerta es R cuando la otra puerta tiene conectada entre sus terminales una resistencia R.
Si se realiza la función de transferencia de cada bipuerta con una terminación R, se podrán conectar en cascada sin introducir carga alguna.
Por cálculo directo de la impedancia de entrada de distintas redes simples terminadas en R, se encuentra que las bipuertas de la figura 12 serán de resistencia constante si se cumple que ZaZb=R2; es decir, cuando las impedancias Za y Zb son inversas una de otra respecto a R2. Podemos.
XXX

Aproximación a los filtros
Se trabajará con la ganancia de tensión V2/V1 = G21(s)
Las redes de resistencia constante proporcionan un medio de realización de una función de transferencia dada de cualquier orden. La función puede descomponerse en producto de un número cualquiera de funciones de transferencia simples, cada una de las cuales puede realizarse por separado como red de resistencia constante, y los resultados pueden conectarse en cascada.
Toda función pasa-todo puede escribirse como producto de las siguientes funciones pasa-todo de primero y segundo orden.
XXXI

Aproximación a los filtros
XXXII


















