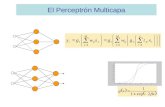
Aprendizaje de un perceptrón simple
5
Click here to load reader
-
Upload
evelyn-gabriela-lema-vinueza -
Category
Education
-
view
111 -
download
2
description
Aprendizaje de un perceptrón simple
Transcript of Aprendizaje de un perceptrón simple

Página 1
UNIVERSIDAD DE FUERZAS ARMADAS “ESPE” DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA
ASIGNATURA: CONTROL INTELIGENTE
Actividad No4. Aprendizaje de un perceptrón simple
Fecha: Lunes, 14 de Abril del 2014.
Nombre alumno: Evelyn Gabriela Lema Vinueza.
NRC: 2055.
1. Determine y grafique la ecuación de una línea recta que separe los patrones en la
compuerta AND
Para una compuerta AND de dos entradas tenemos que:
in1 in2 out
0 0 0
0 1 0
1 0 0
1 1 1
Por lo tanto la ecuación de la recta es:
Si realizamos una gráfica de los valores de las entradas de la compuerta AND (puntos de color
amarillo) podremos determinar los posibles valores de los parámetros de la red para dicha compuerta.
Si:
La ecuación de la recta estará dada por:
Dicha ecuación corresponde a la recta de negro puesto que:
Ecuación de la recta que separa los parámetros de
una compuerta AND

Página 2
2. Demuestre analítica y gráficamente que el problema de clasificación de aviones es
linealmente separable
Se tendrá dos tipos de aviones:
Aviones de Carga (■)
Aviones de Transporte de tropa ( ),
Ambos tipos de aviones poseen coordenadas (in1, in2), se puede demostrar analíticamente y gráficamente la
clasificación de dichos aviones es linealmente utilizaremos un único hiper plano para clasificarlos, empleando la
ecuación anteriormente dada:
Se tendrá entonces los dos casos para la clasificación de aviones:
Avión de Carga (C).
Avión de Transporte de tropa (T).
En el siguiente gráfico de ubicación de aviones se muestra la solución gráfica y las coordenadas de ubicación de los
mismos:
Para la demostración analítica reemplazamos los valores de coordenadas de (■) en la ecuación se tiene:
Donde se puede expresar:
∑
Al reemplazar los valores de coordenadas de ( ) en la ecuación se tiene:
Donde se puede expresar:
∑

Página 3
De forma gráfica como analítica el problema de separación de aviones es linealmente separable, la recta de decisión
separa los aviones tipo carga de los aviones tipo transporte de tropa.
3. Justifique mediante la separabilidad lineal, la imposibilidad de encontrar los parámetros
para que una neurona de 2 entradas realice la función XOR.
Con el uso de la tabla de verdad de la función XOR obtenemos las desigualdades es así que es evidente que la
segunda y tercera desigualdad son incompatibles con la cuarta por lo que se deduce que la función XOR no es
linealmente separable.
Por lo tanto:
Las desigualdades obtenidas son:
Como se ve en la figura se puede determinar que no es posible encontrar los parámetros de la red ya que se
necesitaría de dos rectas de decisión para que una neurona de 2 entradas realice la función XOR.
4. Escriba la ecuación del hiperplano para una neurona de 5 entradas

Página 4
5. Justifique la razón por la que “ Existe un compromiso que existe entre Generalización y
Aprendizaje, cuando mejora la una característica, la otra empeora”
6. Explique los términos “aprendizaje”, “pesos iniciales aleatorios” y “algoritmo de
aprendizaje iterativo” en el entrenamiento de un perceptrón.
Aprendizaje.- El aprendizaje se lo realiza con el fin de que la red sea entrenada para realizar un
determinado tipo de procesamiento, el entrenamiento de un perceptrón es un procedimiento general
que se basa en que la red aprenda los pesos adecuados desde un conjunto representativo de datos de
entrenamiento.
Pesos iniciales aleatorios.- Debido a que el cálculo directo de los pesos es intratable,
se empieza con pesos iniciales aleatorios esto quiere decir que partiendo de un conjunto de pesos
sinápticos aleatorios, el proceso de aprendizaje busca un conjunto de pesos que permitan a la red
desarrollar correctamente una determinada tarea, son aleatorios ya que se debe ajustarlos en pequeños
pasos hasta que se produzcan los resultados requeridos.
Algoritmo de aprendizaje iterativo.- El algoritmo de aprendizaje iterativo hace referencia a un
método por el cual, el perceptrón aprende de acuerdo a una tabla de patrones de entrenamiento,
corriendo los desplazamientos ocurridos para cada patrón. Esto permite que luego de varias
interacciones el perceptrón aprenda, tomando así los valores de los pesos y los umbrales adecuados,
para resolver el problema propuesto.
Se establece un compromiso entre la generalización y el aprendizaje puesto que cuando mejora
la una empeora la otra, esto se debe a que la capacidad de aprendizaje es un proceso de
entrenamiento o acondicionamiento en el que se necesita suficientes conexiones entre los nodos
para que la red neuronal sea capaz de aproximar la función, durante este proceso la causa más
común de la pérdida de capacidad de generalización es la generación de un sobre aprendizaje.
Esto se debe a que la cantidad de ciclos de entrenamientos tiende a ser muy alta. Se observa que
la respuesta de la red a los patrones de entrenamiento es muy buena mientras que la respuesta a
nuevos patrones tiende a ser muy pobre. Al aumentar el número de ciclos la red tiende a sobre
ajustar la respuesta a los patrones de entrenamiento, a expensas de una menor capacidad de
generalización.
Todo lo anteriormente expuesto se puede mostrar en la figura en la primera grafica vemos que
existe un buen compromiso entre el aprendizaje y la generalización mientras que en la segunda
gráfica hay una mejor generalización que puede producir un mal aprendizaje y resultados.

Página 5
7. Explique en detalle la “regla de aprendizaje del perceptrón”
Yo Evelyn Gabriela Lema Vinueza afirmo que esta actividad es de mi autoría y establezco que
para la elaboración de la misma he seguido los lineamientos del Código de Ética de la
Universidad de las Fuerzas Armadas ESPE
(∑ )
La regla de aprendizaje del perceptrón, es un procedimiento en el que se modifican los pesos y el
umbral de una red es conocida también como algoritmo de entrenamiento.
El objetivo de la regla de aprendizaje es estrenar a la red para realizar una tarea. En este algoritmo de
entrenamiento se proporciona ejemplos denominados un set de entrenamiento (training set), además
de un conjunto de respuestas que se espera a la salida y que normalmente se denomina set de salida
objetivo (target set). En conclusión se puede decir que el algoritmo se usa para ajustar los pesos y los
umbrales para ajustar la respuesta de la neurona a lo que se desea obtener.
Para demostrar la regla de aprendizaje se debe seguir estos pasos:
Si los pesos de la red en el momento t son wij(t), entonces el proceso de cambio corresponde
a moverlos por una cantidad ∆ wij(t), de modo que en el tiempo t+1 se tenga:
Para la formulación del cambio de pesos se supone que el objetivo de producción de la
unidad j es targj y la salida actual es:
Donde ini son las activaciones de la capa anterior de las neuronas. Entonces se puede simplemente ir a
través de todas las posibilidades de llegar a un conjunto apropiado de pequeños cambios de peso, y
colocar todo en una forma común:
=0
Donde ∑ es demasiado grande.
=1
Donde ∑ es demasiado pequeño
Cada caso se puede escribir en la forma:
Donde el parámetro n positiva se llama la tasa de aprendizaje o tamaño de paso y determina la
suavidad con que se cambia los límites de decisión.