Análisis en Frecuencia - udec.cljrohten/SDC_TEL/549160_SDC_Cap_06.pdf · El Diagrama de Bode es la...
64
Jaime A. Rohten C. 2012-2 Universidad de Concepción Departamento de ingeniería Eléctrica Análisis en Frecuencia Jaime Rohten
Transcript of Análisis en Frecuencia - udec.cljrohten/SDC_TEL/549160_SDC_Cap_06.pdf · El Diagrama de Bode es la...

Jaime A. Rohten C.
2012-2
Universidad de Concepción
Departamento de ingeniería Eléctrica
Análisis en Frecuencia
Jaime Rohten

2012-2
Jaime A. Rohten C. - 2 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Análisis en Frecuencia
Una ventaja del enfoque de la respuesta en frecuencia es su aplicabilidad experimental, puesto
que las pruebas en frecuencia son, en general, sencillas y pueden ser muy precisas con el uso de
generadores de señales sinusoidales y un equipo de medición. Como resultado, se puede obtener
la F. de T. y/o M. de T. de sistemas en forma experimental independiente de la complejidad del
sistema. Además, este enfoque suele ser una poderosa herramienta en la etapa de diseño de
sistemas. .

2012-2
Jaime A. Rohten C. - 3 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Análisis en Frecuencia
Hasta ahora todo el análisis se ha referido a S.L.I. en que la entrada no es una señal periódica.
Ahora quedan interrogantes tales como, ¿ qué señal aparece en la salida si se utiliza una entrada
sinusoidal ?. Por ejemplo, en el caso de tener un sistema con una F.de T. dada por h(s) = 1/(s + a),
para una entrada sinusoidal u(t) = Asin(ωt) se tiene que la salida es,
Por lo que la respuesta en el tiempo es,
2 2
1y s L u t h s A
s s a
1 1
2 2 2 2 2 2 2 2
2 2 2 2
1
2 2 2 2
1 1
at
at
Transiente Estacionaria
s ay t L A L A A
s s a a s a a s
aA e A cos t sin t
a a
A e A sin t tana a a

2012-2
Jaime A. Rohten C. - 4 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Análisis en Frecuencia
Se aprecia que la parte estacionaria de la salida es también una señal sinusoidal, pero de
amplitud y fase modificadas de acuerdo a la F. de T. del S.L.I.. Es decir, bastaría conocer la F. de
T. del sistema para predecir correctamente la amplitud y fase de la salida. Por otro lado, es sabido
que una señal periódica arbitraria puede ser descompuesta en una sumatoria de señales
sinusoidales; por lo tanto, la salida de un S.L.I. a estas entradas será la sumatoria de la respuesta
a cada sinusoidal, lo que puede ser abordado con el análisis en frecuencia. La salida del sistema
mostrado en la Fig. 6.18 se puede escribir como,
Fig. 6.18 Sistema S.L.I..
y t h t * u t h u t d

2012-2
Jaime A. Rohten C. - 5 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Análisis en Frecuencia
donde h(t) es la respuesta impulso del S.L.I.. Considerando la entrada como u(t) = ejωt, que
corresponde a la base de generación de señales periódicas, en particular sinusoidales, se tiene
que, j t j t j j t jy t h e d h e e d e h e d
donde el término integral corresponde a la T.F. de la respuesta a impulso del sistema; es decir,
jh h e d
luego, la señal de salida queda como,
j ty t h e
donde se ve claramente que la señal periódica de entrada, ejωt, se ve reflejada en la salida como
una señal de igual frecuencia a la señal de entrada, pero atenuada /amplificada y
adelantada/retrasada en el factor h(ω). Nótese que h(ω) es una propiedad del sistema y es un
número complejo, el cual se puede representar en un plano complejo o en módulo y ángulo.
Recordar que para obtener la T.F. de una señal se puede reemplazar s por jω en su T.L. bilateral.

2012-2
Jaime A. Rohten C. - 6 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
El Diagrama de Bode es la gráfica de la T.F. de un sistema como se aprecia de la definición
siguiente.
Def.: El Diagrama de Bode (D. de B.) es el gráfico del módulo, en dB, y la fase, en grados, de una
F. de T. con s = jω en función de la frecuencia en base logarítmica.
Una ventaja de utilizar el D. de B. en el análisis de sistemas lineales, es que la multiplicación
entre F. de T. se transforma en adición de magnitudes y fases, de los Bode respectivos. Esto
debido a que se consideran dBs.

2012-2
Jaime A. Rohten C. - 7 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
Dibujar el D. de B. para la F. de T.
Ejemplo 35
1
h ss
En este caso por lo que 1
h ,j
1
90h , y arg h º
Así el diagrama de bode esta determinado por 20 log |h(ω)|=20 log (1/ω)=-20 log (ω)

2012-2
Jaime A. Rohten C. - 8 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
Dibujar el D. de B. para la F. de T.
Ejemplo 36
1
h ss a
En este caso por lo que 1
h ,j a
1
2 2
1h , y arg h tan
aa
Así el diagrama de bode esta determinado por 20 log |h(ω)|
2 2 2 2
2 2
120 20 10log log a log a
a

2012-2
Jaime A. Rohten C. - 9 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
En el caso de tener un sistema con una F.de T. dada por h(s) = 1/(s + a), para una entrada
sinusoidal u(t) = Asin(ωt) se encontró que la salida es,
Sistemas de Primer Orden
Analizando el módulo y la fase de la respuesta estacionaria del sistema se tiene que,
i. Si la señal de entrada es de baja frecuencia, ω << a, la salida se atenúa en -20log{a}dB y se
retrasa en 0°.
ii. Si la señal de entrada es de alta frecuencia, ω >> a, la salida se atenúa en -20log{ω}dB y se
retrasa en 90°.
iii. si la señal de entrada es de frecuencia ω = a, la salida se atenúa en 20log{1/(a√2)}dB que es
igual a -20log{a} - 10log{2} dB = -20log{a} – 3.01 dB y se retrasa en 45°.
1
2 2 2 2
at
Transiente Estacionaria
y t A e A sin t tana a a

2012-2
Jaime A. Rohten C. - 10 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
El análisis anterior también puede derivarse del D. de B. del sistema, que se encuentra en la Fig.
del ejemplo 36, para a = 10 (nótese que a es el polo del sistema). Es decir, teniendo el D. de B. de
un sistema se puede predecir la atenuación/amplificación y/o el retraso/adelanto que se producirá
a la salida de un S.L.I. para una entrada sinusoidal en S.S.. Asimismo, dado que una señal
periódica es la suma de un conjunto de sinusoidales, con la ayuda del D. de B. se podrá predecir la
salida para señales periódicas generales. Nótese también que el sistema tiene una magnitud que
cae 20 dB por década a partir de frecuencias superiores a a, lo que es idéntico al caso de la F. de
T. dada por h(s) = 1/s. Esto se fundamenta en que la F. de T. dada por h(s) = 1/(s + a) tiene una
T.F. dada por h(ω) = 1/(jω + a), por lo que para valores muy grandes de ω, el número complejo jω
+ a tiende a jω por lo que h(ω) tiende más bien a 1/jω, que corresponde a la T.F. de la F. de T. dada
por h(s) = 1/s.
Sistemas de Primer Orden

2012-2
Jaime A. Rohten C. - 11 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
Dibujar el D. de B. para la F. de T.
Ejemplo 37
1h s
s s a
En este caso por lo que
1h ,
j j a
1
2 2
190h , y arg h º tan
aa
Así el diagrama de bode esta determinado por 20 log |h(ω)|
2 2
2 2
120 20 10log log log a
a
El(la) módulo(fase) del D. de B. resultante es sin duda la suma de los(las) módulos(fases)
ilustrados en las figuras de los ejemplos 36 y 35.
El ejemplo anterior deja en evidencia que el D. de B de una F. de T. puede dibujarse por parte. Es
decir, para cada polo y luego para cada cero, el D. de B. resultante es simplemente la suma de
cada uno de ellos.

2012-2
Jaime A. Rohten C. - 12 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
El desafío es dibujar el D. de B. de un sistema de segundo orden, cuyo polinomio característico
no puede reducirse al producto de dos raíces reales. En este caso la F. de T. a considerar es,
Sistemas de Segundo Orden
Si ξ >1, el factor cuadrático se puede expresar como el producto de dos factores de primer orden
con polos reales y se utilizan las reglas de construcción anteriores. Si este parámetro toma valores
0 < ξ < 1, el factor cuadrático no se puede reducir y se procede como explicado a continuación. Al
dividir la expresión por 2ωn , se obtiene,
2
2 22
n
n n
h s ks s
22
1
2 1n n
h s ks s

2012-2
Jaime A. Rohten C. - 13 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
Por lo que su F.de T. es,
Sistemas de Segundo Orden
El módulo del D. de B. resulta ser,
2 2
1 1
2 1 1 2n n n n
h k kj j j
2 2
1 1
2 1 1 2n n n n
h k kj j j
y la fase del D. de B es,
1
2
2
1
n
n
jarg h tan
El D. de B. para varias combinaciones de parámetros se muestran en la Fig. 6.19, todos los
cuales tienen una ganancia fija para bajas frecuencias y caen en 40 dB por década para altas
frecuencias, siendo esta frecuencia umbral a en el sistema de primer orden (su polo) y ωn en el
sistema de segundo orden (su frecuencia natural de oscilación).

2012-2
Jaime A. Rohten C. - 14 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
Sistemas de Segundo Orden
Fig. 6.19 D. de B. de un sistema de segundo orden estándar.

2012-2
Jaime A. Rohten C. - 15 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
En los D. de B. anteriores es posible apreciar que los comportamientos asintóticos son fáciles de
distinguir. Por ejemplo, sistemas de primer orden caen en 20 dB y los de segundo en 40 dB,
después de la frecuencia característica de éstos. Este comportamiento asintótico se puede
generalizar como descrito a continuación, lo que permite construir un D. de B. aproximado en
forma rápida, que es conocido como el D. de B. Asintótico.
Diagrama de Bode Asintótico
En general una década antes y una después de la frecuencia del polo se pueden utilizar los
valores asintóticos. A continuación, se enuncian las reglas para la construcción del D. de B.
asintótico para sistemas mínimos de fase. Para la introducción de reglas de construcción se
definen los sistemas tipo N.
Def.: Se definen los sistemas Tipo N como aquellos que tienen un polo de orden N en el origen y
sistemas de Tipo -N a aquellos que tienen un cero de orden N en el origen.

2012-2
Jaime A. Rohten C. - 16 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode
A. Parte inicial del D. de B.
Sistema Tipo 0. 1
h ss a
- el módulo es 20log{h(0)} dB que es una recta horizontal,
- la fase es 0° que es una recta horizontal.
Sistema Tipo N. 1N
h ss
- el módulo es 20N dB/dec que es una recta con pendiente negativa,
- la fase es 90° N que es una recta horizontal.
Sistema Tipo -N. Nh s s
- el módulo es 20N dB/dec que es una recta con pendiente positiva,
- la fase es 90° N que es una recta horizontal.
2012-2
Jaime A. Rohten C. - 17 - Universidad de Concepción
Departamento de ingeniería Eléctrica
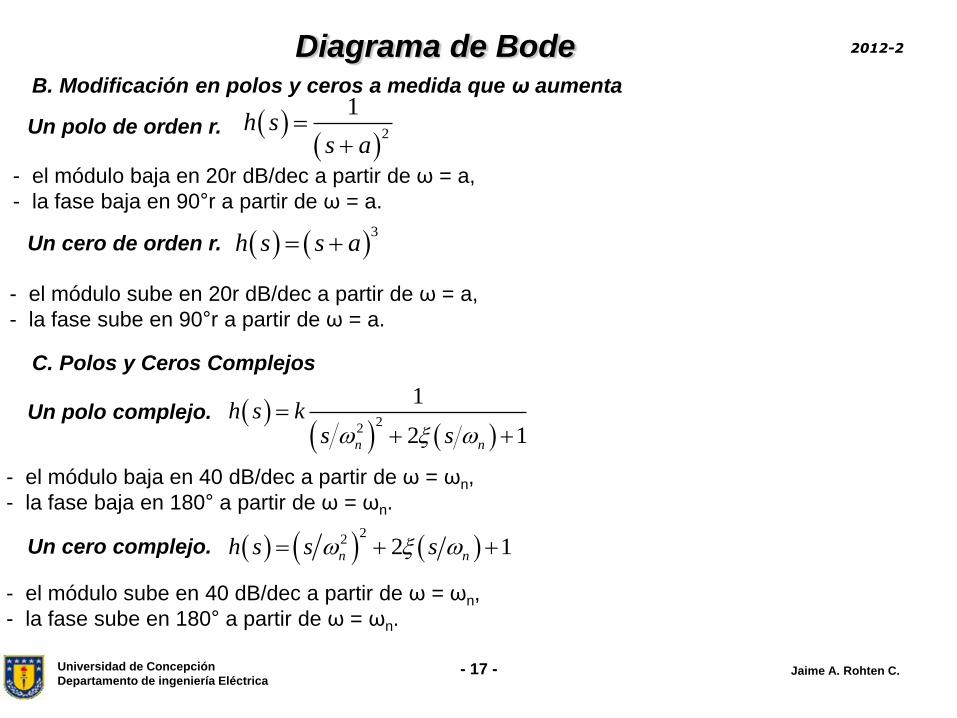
Diagrama de Bode B. Modificación en polos y ceros a medida que ω aumenta
Un polo de orden r.
2
1h s
s a
- el módulo baja en 20r dB/dec a partir de ω = a,
- la fase baja en 90°r a partir de ω = a.
3
h s s a
- el módulo sube en 20r dB/dec a partir de ω = a,
- la fase sube en 90°r a partir de ω = a.
Un polo complejo.
- el módulo baja en 40 dB/dec a partir de ω = ωn,
- la fase baja en 180° a partir de ω = ωn.
Un cero de orden r.
22
1
2 1n n
h s ks s
Un cero complejo.
- el módulo sube en 40 dB/dec a partir de ω = ωn,
- la fase sube en 180° a partir de ω = ωn.
2
2 2 1n nh s s s
C. Polos y Ceros Complejos

2012-2
Jaime A. Rohten C. - 18 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode D. Corrección de Magnitud
El D. de B. asintótico hasta aquí descrito resulta en rectas bien definidas. Sin embargo, se sabe
que las curvas son suaves. Una forma de corregirlo es mejorando la aproximación en las
frecuencias de los polos y/o ceros . En efecto, si hay un polo(cero) de orden r en una frecuencia
ωp, en esta frecuencia se agregan -3r(3r) dB a la curva de magnitud.

2012-2
Jaime A. Rohten C. - 19 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode Ejemplo 38
Dibujar el D. de B. asintótico 1
10h s
s
Dibujar el D. de B. asintótico
2
2 2
110 1000 0 2
10 2
nn
n n
sh s k , con k , , .
s s s

2012-2
Jaime A. Rohten C. - 20 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode Sistemas con Retardo
El retardo tiene el comportamiento equivalente a un sistema de fase no-mínima, aportando un
retraso excesivo a altas frecuencias. La T.L. de un retardo td es,
por lo que la T.F. es,
Por lo tanto, el módulo es unitario y la fase,
dt se
d dt j j t
d de e cos t j sin t
1 d
d d d
d
sin targ cos t j sin t tan t
cos t
Por consiguiente, el retardo en un sistema sólo altera la característica de fase de su D. de B..

2012-2
Jaime A. Rohten C. - 21 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode Sistemas de Fase No-Mínima
Los sistemas de fase no mínima son los que tienen ceros y/o polos en el S.P.D.. Para estos casos
el D. de B. también representa una alternativa de análisis en el dominio de la frecuencia.
Lamentablemente, se encuentra que distintos sistemas tienen igual módulo en el D. de B. y por lo
tanto esta información es insuficiente para su análisis y por lo tanto debe utilizarse la información
contenida en la fase. La evaluación de la fase de sistemas de fase no-mínima por medio de
softwares tradicionales debe realizarse cuidadosamente, puesto que pueden utilizar funciones
trigonométricas con argumentos principales, lo que puede incurrir en errores. Por ejemplo, la
evaluación de la fase de 1 - j y de -1 + j es tan-1{-1/1} y tan-1{1/-1}, respectivamente, y resuelta ser
en ambos casos -45° si se utiliza la función tan-1{} sólo con argumento principal. Sin embargo, -1 +
j se encuentra en el segundo cuadrante y por lo tanto su fase es -225° ó 135°, según la convención
de medición de ángulos, pero no es -45° (en este curso se prefiere 135°). En general, se miden en
sentido antihorario(horario) los ángulos en el primer(tercer) y segundo(cuarto) cuadrante.

2012-2
Jaime A. Rohten C. - 22 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode Ejemplo 39
Dibujar el D. de B. de 1 2
1 1
10 10h s y h s
s s
1 2
1 1
10 10h y h
j j
,y sus módulos son
1 22 2 2 2
1 1
10 10h y h
Sin embargo, al tomar la fase de cada uno se tiene que
1 1
1 010 10
arg h tan tan
1 1
2 010 10
arg h tan tan
En particular, como jω - 10 está en el segundo cuadrante, el ángulo está entre 90° (para ω→ ∞) y
180° (para ω→ 0), por lo que el ángulo de 1/( jω - 10) estará entre -90° (para ω→ ∞) y -180° (para
ω→ 0), lo que queda representado por arg{h2(ω)} = -180° + tan-1(ω/10).

2012-2
Jaime A. Rohten C. - 23 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Diagrama de Bode Sistemas de Fase No-Mínima
Fig. 6.20 D. de B. de sistemas no-mínimos de fase; a) 1/(s + 10), b) 1/(s - 10).
Jaime A. Rohten C.
2012-2
Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist

2012-2
Jaime A. Rohten C. - 25 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Contenido del Capitulo
Criterio de Nyquist
I. Introducción
II. Teorema de Cauchy.
III. Criterio de Nyquist para Sistemas Continuos.
III. Criterio de Nyquist para Sistemas Discretos.
IV. Estabilidad Relativa.

2012-2
Jaime A. Rohten C. - 26 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Introducción
Estabilidad es lo mínimo que se puede esperar al diseñar un sistema de control. Este
concepto tiene acepciones simples en sistemas lineales lo que permite su utilización
tanto para su análisis y diseño. En este capítulo se introducen los conceptos de
estabilidad absoluta y estabilidad relativa para el diseño de controladores.
El Criterio de Nyquist se deriva del cálculo complejo y su importancia radica al
proveer definiciones de margen de fase y margen de ganancia en sistemas de
cualesquier orden. Es más, su extensión natural a sistemas discretos es también
estudiada.

2012-2
Jaime A. Rohten C. - 27 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Introducción
La estabilidad puede analizarse al considerar los tipos y grados de ésta.
Tipos:
Estable (entrada acotada/salida acotada y entrada cero estabilidad asintótica)
Marginalmente estable.
Inestable.
Grados:
Estabilidad absoluta.
Estabilidad relativa.
Para el análisis de la estabilidad se tienen las siguientes herramientas,
Criterio de Routh-Hurwitz
Criterio de Nyquist
Diagrama de Bode
Diagrama de Nichols

2012-2
Jaime A. Rohten C. - 28 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Introducción A. Definiciones
• Se dice que un sistema es estable entrada-acotada/salida-acotada, si para condiciones
iniciales nulas (respuesta a estado cero), su salida es acotada para una entrada acotada; es decir,
∀ u(t) tal que |u(t)| ≤ M ⇒ |y(t)| ≤ N < ∞ ∀ t.
• Si la respuesta a entrada nula, sujeta a condiciones iniciales finitas, alcanza el cero cuando t
tiende a infinito, se dice que el sistema es estable a entrada cero (o asintóticamente estable);
es decir, |y(t)| ≤ M < ∞ ∀ t ≥ to y 0tlím y t
Afortunadamente, en sistemas lineales e invariantes en el tiempo, ambas definiciones necesitan
del mismo requisito, éste es que todas los valores propios de la representación en variables de
estado del sistema tengan parte real negativa. Por esta razón los sistemas que cumplen con esta
condición son conocidos simplemente como estables. Sin embargo, para que un sistema sea
estable entrada/salida sólo es necesario que los polos de su F. de T. estén en el S.P.I..

2012-2
Jaime A. Rohten C. - 29 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Introducción
• Un sistema es marginalmente estable si no hay raíces del polinomio característico en el S.P.D.
y a lo más hay raíces simples sobre el eje imaginario.
• Un sistema es inestable si por lo menos hay una raíz simple de la ecuación característica del
sistema en el S.P.D., o una raíz doble sobre el eje imaginario.
Fig. 6.1. L.G.R. de sistemas críticamente estables e inestables

2012-2
Jaime A. Rohten C. - 30 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Introducción
B. Usos y Limitaciones del Criterio de Routh-Hourwitz
¿ Cuál es el rango de k para que un sistema cuya F. de T. en L.D. es sea
estable en L.C.? Para responder se obtiene la ecuación característica,
1 2
kl s
s s s
3 21 1 0 3 2 01 2
kl s s s s k
s s s
al aplicar Routh-Hurwitz se obtiene que a2a1 > a0 por lo que 3 · 2 > k ó k < 6, por lo que la
ganancia crítica es kc = 6 y el rango entonces es, 0 < k < 6. Otra interrogante interesante es: si k =
2, ¿ en cuánto se puede aumentar la ganancia en L.D. antes de obtener un sistema inestable ?.
Como k = 2 y kc = 6 la ganancia k se puede aumentar en un kc/k = 6/2 = 3 p.u. = 300%. Esta
cantidad se conoce como el Margen de Ganancia. En general se puede definir un “margen de
estabilidad” como el cuociente entre el valor estable máximo al valor actual. Por lo que para la
ganancia se tiene que,
Ganancia establemáximaMargendeGanancia = M.G. =
Ganancia Actual

2012-2
Jaime A. Rohten C. - 31 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Introducción
Este concepto tiene las siguientes limitaciones, (a) no se puede aplicar siempre (no todos los
sistemas se hacen inestables cuando k → ∞) y (b) dos sistemas con igual M.G. pueden tener
comportamientos totalmente diferentes. Además, ¿ qué sucede si la planta incluye retraso ?. En
este caso se podría tener,
Ts
n sl s e
d s
por lo que la ecuación característica es,
0Tsd s n s e
la cual no corresponde a un polinomio y por tanto no se pueden definir los coeficientes an-1,…,a1,a0
sin utilizar una simplificación. Para estos casos se tiene el Criterio de Nyquist que se puede
enunciar para sistemas continuos y discretos, y que está basado en la teoría de números
complejos.

2012-2
Jaime A. Rohten C. - 32 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
Sea la F. de T. en L.D.: l(ψ) (donde ψ puede ser s o z), entonces, la ecuación característica
es 1 + l(ψ) = f(ψ). Si ψ = σ + jω, entonces, f(σ + jω) = u + jv. Es decir, la función transformada f(σ
+ jω) puede ser también un número complejo. La transformación también puede ser representada
gráficamente como se ilustra en el ejemplo siguiente. Un contorno arbitrario es escogido para
mapearlo al plano f(ψ). La elección del contorno arbitrario será fundamental a la hora de proyectar
esta teoría al control automático, muy en particular al análisis de la estabilidad de sistemas. Por lo
pronto, es necesario revisar algunos aspectos adicionales de la teoría de transformaciones.
,

2012-2
Jaime A. Rohten C. - 33 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
Para f(ψ)=2ψ+1 que tiene un cero en ψ = −1/2, determine su contorno transformado. El
contorno en ψ a transformar está en la Fig. 6.2(a). R.: f(σ +jω) = 2(σ + jω) + 1= 2σ+1+2 jω , por lo
que u =2σ+1, v=2ω . Ahora se procede a transformar cada segmento del contorno en ψ, ,
Ejemplo 29
1 1 1 1 1 1
3 2 2 3 1 2
1 1 1 1 1 1
1 2 2 1 3 2
A: B , : B :C ,
u , v : u ,v
C : D , D : A ,
u ,v u ,v
Fig. 6.2. Transformación de contorno; (a) contorno a transformar, (b) contorno transformado

2012-2
Jaime A. Rohten C. - 34 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
Def.: La curva cerrada A:B:C:D se conoce como contorno, normalmente se les asigna un
nombre (letra griega) tal como Γ, y un sentido de recorrido que puede ser horario (+) o antihorario
(−). ,
A. Transformación o Mapeo de Contornos
Def.: Los (el) puntos (área) al lado derecho del sentido de recorrido de un contorno se dicen
(dice) encerrados (encerrada).
Def.: El cambio del plano ψ = σ + jω al plano f(ψ) = u + jv del contorno Γ se conoce como
transformación de contorno, también se conoce como mapeo de contorno.
Def.: El número de encierros es la cantidad de veces que un punto está encerrado por un
contorno en sentido horario. Este valor será negativo si el contorno se mueve en sentido
antihorario. El valor se designa por N..
Nota: Para determinar el número de encierros se puede utilizar un vector auxiliar. El vector nace en
el punto en cuestión y termina en un punto (ψ1) de prueba sobre el contorno. Al mover ψ1 en el
sentido de recorrido del contorno, la flecha habrá recorrido 2πN grados, para llegar nuevamente al
punto de partida.

2012-2
Jaime A. Rohten C. - 35 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
A continuación se revisan algunos ejemplos de mapeo de contornos haciendo hincapié en la
presencia e incidencia de polos y ceros de f(ψ) en el resultado. Además, se comenta sobre la
ubicación de éstos respecto del contorno a transformar. Para efectos de simplificación, el contorno
a mapear es siempre el mismo.
B. Ejemplos de Contornos y Teorema de Cauchy
Fig. 6.3. Mapeo; (a) contorno a transformar, (b) contorno transformado
La función
f (ψ)=2ψ+1
tiene un cero en ψ = -1/2.
El plano f(ψ) encierra en
sentido horario una vez el
origen.

2012-2
Jaime A. Rohten C. - 36 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
B. Ejemplos de Contornos y Teorema de Cauchy
Fig. 6.4. Mapeo; (a) contorno a transformar, (b) contorno
transformado
La función :
f(ψ)= ψ/(ψ+2)
tiene un cero en ψ = 0 y un
polo en ψ = -2.
El plano f(ψ) encierra en
sentido horario una vez el
origen.
Fig. 6.5. Mapeo; (a) contorno a transformar, (b) contorno
transformado
La función :
f(ψ)= 1/(2ψ+1)
tiene un
polo en ψ = -1/2.
El plano f(ψ) encierra en
sentido anti-horario una vez
el origen.

2012-2
Jaime A. Rohten C. - 37 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
B. Ejemplos de Contornos y Teorema de Cauchy
Fig. 6.6. Mapeo; (a) contorno a transformar, (b) contorno
transformado
La función :
f(ψ)= ψ/(ψ+1/2)
tiene un cero en ψ = 0 y un
polo en ψ = -1/2.
El plano f(ψ) no encierra el
origen.
Teorema: (Teorema de Cauchy) Si un contorno Γ en el plano ψ encierra ηz ceros y ηp polos de
f(ψ)y no pasa a través de ningún polo y/o cero de f(ψ) a medida que se viaja en sentido horario
sobre Γ, entonces, el contorno transformado f(ψ) encierra al origen del plano f(ψ), un número N =
ηz − ηp de veces.

2012-2
Jaime A. Rohten C. - 38 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
Nota 1: La ecuación característica es 1 + l(ψ) = 0, si l(ψ) se puede escribir como n(ψ)/d(ψ) =
l(ψ), entonces los ceros de l(ψ) son las raíces de n(ψ) y los polos de l(ψ) son las raíces de d(ψ).
Nota 2: La ecuación característica se puede escribir como o
equivalentemente , por lo tanto, los ceros de f(Ψ) son los polos del
sistema en L.C. y los polos de l(Ψ) son también los polos de f(Ψ)
1 0
nf
d
0
d nf
d
Nota 3: Dado que f(ψ) = 1 + l(ψ), entonces, el origen de f(ψ) es equivalente a l(ψ) = −1 en el
plano l(ψ). Por lo tanto, el Teorema de Cauchy se escribe como,

2012-2
Jaime A. Rohten C. - 39 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Teorema de Cauchy
Teorema: (Teorema de Cauchy) Si un contorno Γ en el plano ψ encierra ηz ceros y ηp polos de 1
+ l(ψ) y no pasa a través de ningún polo y/o cero de 1 + l(ψ) a medida que viaja en sentido horario
sobre Γ, entonces, el contorno transformado l(ψ) encierra al punto (−1, 0) del plano l(ψ), un
número N = ηz − ηp de veces.
Cerciorarse que el contorno no pasa a través de ningún polo de 1 + l(ψ) es factible puesto que
es equivalente a cerciorarse que el contorno no pasa a través de ningún polo de l(ψ), la cual es
una función conocida. Sin embargo, no es posible cerciorarse que el contorno no pasa a través de
ningún cero de 1 + l(ψ) y por lo tanto se debe asumir que no lo hace. Afortunadamente, los
resultados de aplicar el Teorema de Cauchy permiten verificar esta premisa.

2012-2
Jaime A. Rohten C. - 40 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Notar que para esta parte del análisis se considera a la variable ψ = s, para limitar el tratamiento
a sistemas continuos. Por otro lado, si la función 1 + l(s) tiene ceros (es decir, ηz ≠ 0) en el S.P.D.,
entonces, el sistema es inestable. Por esto se usa un contorno Γ que encierra todo el S.P.D.
(contorno de Nyquist ó Γ, Fig. 6.7) y se inspecciona el valor resultante de ηz a partir del Teorema
de Cauchy. Entonces, si 1 + l(s) tiene Z ceros y P polos inestables (en el S.P.D.), el Teorema de
Cauchy afirma que el contorno transformado l(s) encierra al punto (-1, 0) un número N = Z – P de
veces. Finalmente se puede enunciar el Criterio de Nyquist de manera de tener un sistema estable
como sigue,
Fig. 6.7. Contorno de Nyquist para Sistemas Continuos

2012-2
Jaime A. Rohten C. - 41 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Criterio de Nyquist: Un sistema realimentado continuo es estable si y sólo si el contorno en el
plano l(s) no encierra el punto (-1, 0) cuando el número de polos de l(s) en el S.P.D. del plano s es
cero.
Este criterio se puede enunciar para el caso de que l(s) tiene P polos inestables (en el S.P.D.)
como,
Criterio de Nyquist: Un sistema realimentado continuo es estable si y sólo si el contorno en el
plano l(s) encierra el punto (-1, 0) en sentido anti-horario un número de veces o bien N = -P igual al
número de polos de l(s) con parte real positiva.

2012-2
Jaime A. Rohten C. - 42 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Estudie la estabilidad de la F. de T. en L.D si se utiliza en un esquema
realimentado.
Ejemplo 30
1
1gr s
s
Hay P = 0 polos inestables, por lo que N = 0 para tener un sistema estable. El contorno Γ
transformado es,
Fig. 6.8. Nyquist ejemplo 30

2012-2
Jaime A. Rohten C. - 43 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
A. Funciones con k Variable
Dado que f(s) = 1 + l(s) y en general puede ser f(s) = 1 + kgr(s), el origen de f(s) es el punto
−1/k de gr(s). Por lo tanto, el Criterio de Nyquist puede ser nuevamente enunciado al considerar el
caso general 1 + kgr(s), con el punto dado por (-1/k, 0).
Algunos aspectos generales a considerar para optimizar el tiempo dedicado a generar el
bosquejo del Nyquist de una función l(s) son,
B. Funciones en L.D. estrictamente propias
Funciones estrictamente propias son aquellas en que el denominador tiene un orden mayor que
el numerador. En este caso el tramo BC del Contorno de Nyquist siempre se mapea al origen y no
aporta información respecto de la estabilidad del sistema. En estos casos sólo se ocupará el tramo
con jω con ω: −∞ → ∞.

2012-2
Jaime A. Rohten C. - 44 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
C. Simetría respecto al eje real
Para sólo basta obtener la transformación para ω:0→∞ dado que para ω:0→-∞
es simétrica.
D. Funciones con polos en s=0
En este caso se re-define el contorno de Nyquist de manera de evitar los polos en el origen. En
general, si se tienen polos sobre el contorno a transformar se debe redefinir el contorno como en el
ejemplo siguiente.
i
j
s zgr s
s p

2012-2
Jaime A. Rohten C. - 45 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Estudie la estabilidad de la F. de T. en L.D si se utiliza en un esquema
realimentado.
Ejemplo 31
1
1gr s
s s
El contorno de Nyquist se redefine como se ilustra en la Fig. 6.9 dado que gr(s) tiene un polo en el
origen. Luego,
Fig. 6.9. Criterio de Nyquist contorno
modificado
0
0 2
10
1
10 0
1
1 1
1
j j j
j j
jj j j
j j
AB : gr j jj j j
BC : gr re e ere re
OA : gr re e e erre re
El tramo AB puede ser revisado en detalle y se tiene que:

2012-2
Jaime A. Rohten C. - 46 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Ejemplo 31
2
2 2 4 2
1 jAB : gr j
j
Por lo que
2
2 2 4 2
2 3 2 20
1
2 2
4 2 12 2
jAB : gr j
j
lim Re g j
Fig. 6.10. Nyquist Ejemplo 31
El resultado se muestra en la Fig. 6.10. Como el
contorno transformado no encierra el (-1,0), el
sistema es estable.

2012-2
Jaime A. Rohten C. - 47 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
E. Sistema con Retardo
No hay un tratamiento especial. Desafortunadamente, el tratamiento de estos casos no es fácil
de realizar manualmente.

2012-2
Jaime A. Rohten C. - 48 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Ejemplo 32
Estudie la estabilidad de la F.de T. en L.D. Si se utiliza en un esquema
realimentado.
0 91
1
. sl s es
El contorno transformado se muestra en la Fig. 6.11. La F. de T. en L.D. es estrictamente propia y
además simétrica respecto del eje real, por lo tanto, sólo se grafica s = jω, con 0 ≤ ω ≤ ∝. De la
Fig. 6.11 se puede apreciar que si -∝ < -1/k < -0.5 ó 1 < -1/k < ∝ , entonces el sistema es estable.
El rango para k resulta ser -1 < k < 2.
Fig. 6.11. Nyquist Ejemplo 32

2012-2
Jaime A. Rohten C. - 49 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Continuos
Estudie la estabilidad de la F. de T. en L.D si se utiliza en un esquema
realimentado.
Ejemplo 33
3
1
1gr s
s
Dado que P=0 entonces N=0 para tener un sistema estable. Se tiene que,
2 3
3 2 22 3
1 3 31
1 1 3 3
jgr j ,
j
Cuyo Nyquist se muestra en la Figura 6.12
Fig. 6.12. Nyquist Ejemplo 33
3 20 3 3 0
0 3
10 1 38
Im gr j ,
,
gr j ; gr j
Por lo tanto el sistema es estable si
1 18k

2012-2
Jaime A. Rohten C. - 50 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Discretos
Notar que para esta parte del análisis se considera a la variable ψ = z, para indicar
explícitamente el tratamiento de sistemas discretos. Por otro lado, si la función 1 + l(z) tiene ceros
(es decir, ηz ≠ 0) en el exterior del círculo unitario, entonces, el sistema es inestable. Por esto se
debiera usar un contorno Γ que encierre perfectamente el exterior del círculo de radio unitario. Sin
embargo, se puede replantear mediante la utilización de un contorno que encierre perfectamente el
interior del círculo de radio unitario (contorno de Nyquist ó Γ para sistemas discretos, Fig. 6.13).
Dado que 1 + l(z) tiene n polos y n ceros (para l(z) propias o estrictamente propias), y si P son los
polos inestables y Z los ceros inestables, entonces al interior de círculo (área encerrada por el
contorno a transformar) hay n - Z ceros y n - P polos. Por lo tanto, el Teorema de Cauchy afirma
que el contorno transformado l(s) encierra al punto (-1, 0) un número N = n - Z - (n - P) = P - Z de
veces. Finalmente se puede enunciar el Criterio de Nyquist de manera de tener un sistema estable,

2012-2
Jaime A. Rohten C. - 51 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Discretos
Criterio de Nyquist: Un sistema realimentado discreto es estable si y sólo si el contorno en el
plano l(z) no encierra el punto (-1, 0) cuando el número de polos de l(z) en el exterior del círculo
unitario del plano z es cero.
Este criterio se puede enunciar para el caso de que l(z) tiene P polos inestables (en el exterior
del círculo unitario) como,
Criterio de Nyquist: Un sistema realimentado discreto es estable si y sólo si el contorno en el
plano l(z) encierra el punto (-1, 0) en sentido horario un número de veces N = P igual al número de
polos de l(z) con módulo mayor que uno.
Similarmente al caso continuo, algunos aspectos generales a considerar para optimizar el tiempo
dedicado a generar el bosquejo del Nyquist de una función l(z) son,

2012-2
Jaime A. Rohten C. - 52 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Discretos
A. Funciones con k variable.
Dado que f(z) = 1 + l(z) y en general puede ser f(z) = 1 + kgr(z), el origen de f(z) es el punto -1/k de
gr(z). Por lo tanto, el Criterio de Nyquist puede ser nuevamente enunciado al considerar el caso
general 1 + kgr(z), con el punto dado por (-1/k, 0).
6.13 Contorno de Nyquist para Sistemas Discretos
B. Simetría respecto al eje real
Para sólo basta obtener la transformación para el contorno entre Ω:0→-π/T,
dado que para Ω: -π/T →2-π/T es simétrica.
i
j
z zgr z
z p

2012-2
Jaime A. Rohten C. - 53 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Discretos
C. Funciones con polos z=1
En este caso se re-define el contorno de Nyquist de manera de evitar los polos en z = 1. En
general, si se tienen polos sobre el contorno a transformar se debe redefinir el contorno.
D. Sistema con retardo
A diferencia de sistemas continuos, los retardos son equivalentes a polos en el origen (z = 0) y por
lo tanto, no hay un tratamiento especial. Más aún, las soluciones para k pueden obtenerse
analíticamente

2012-2
Jaime A. Rohten C. - 54 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Discretos
Estudie la estabilidad de la F. de T. en L.D (a) si se utiliza en un esquema
realimentado.
Ejemplo 34
1
1 5l z
z .
Dado que P=1.El Nyquist de este sistema se muestra en la figura 6.14 y se puede observar que el
contorno transformado rodea (-1,0) una vez en sentido horario, por lo tanto N=1 y el Teorema de
Cauchy indica entonces que Z=P-N=0; es decir, 1+l(z) tiene 0 ceros en el exterior del círculo
unitario, y por lo tanto el sistema es estable.
Fig. 6.14. Nyquist Ejemplo 34

2012-2
Jaime A. Rohten C. - 55 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Criterio de Nyquist para Sistemas Discretos
Estudie la estabilidad de la F. de T. en L.D si se utiliza en un esquema
realimentado.
Ejemplo 35
1 5
1 5
.l z k
z z .
Dado que P=1. El Nyquist de este sistema para k=1 se muestra en la figura 6.15 y se puede
observar que el contorno transformado rodea (-1,0) una vez en sentido antihorario, por lo tanto N=-
1 y el teorema de cauchy indica entonces que Z=P-N=2; es decir , 1 + l(z) tiene 2 ceros en el
exterior del círculo unitario, y por lo tanto el sistema es inestable. Como P=1, N debiera ser 1 para
tener Z=0, entonces los puntos encerrados una vez en sentido horario corresponderían a
ubicaciones para (-1/k,0) estables. La fig. 6.15 indica que esto se cumple para -3 < -1/k < -1.5 o
bien para 1/3 < k < 2/3
Fig. 6.15. Nyquist Ejemplo 35
2012-2
Jaime A. Rohten C. - 56 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Al diseñar controladores se pueden utilizar los índices numéricos tales como sobrepaso y tiempo
de asentamiento. Sin embargo, en sistemas de orden mayor no es posible encontrar una relación
directa entre los parámetros de diseño y estos índices. Por otro lado, falta explorar el concepto de
estabilidad relativa. Es decir, determinar cuantitativamente cuán estable es un sistema. Este
tratamiento se puede realizar para sistemas continuos y discretos indistintamente.
La idea es evaluar cuantitativamente cuan cerca/alejado está el contorno transformado de ser
inestable. Es decir, cuán alejada está la curva del punto (−1, 0). Para esto se cuantifica la
ubicación de los puntos α y β del Nyquist, Fig. 6.16. El punto α es donde la curva corta el eje real, y
β es donde la curva corta al círculo unitario. Con estas indicaciones se definen los índices de
estabilidad.

2012-2
Jaime A. Rohten C. - 57 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Def: Se define margen de ganancia (punto α) a la cantidad de ganancia en decibeles (dB) que se
puede añadir al lazo antes de que el sistema en L.C. se torne inestable.
Así el margen de ganancia (M.G.)= , donde ωp es la
frecuencia angular de cruce de fase definida por la ecuación, arg l(j ωp )=180º, una representación
gráfica se muestra en la figura 6.16 para un Nyquist de un sistema continuo arbitrario.
Para un sistema discreto se puede establecer que el margen de ganancia (M.G.)=
donde Ωp es la frecuencia angular de cruce de fase
definida por la ecuación, arg l(ej Ωp T)=180º.
10 10
120 20 p
p
log log l jl j
10 10
120 20 p
p
j T
j Tlog log l e
l e

2012-2
Jaime A. Rohten C. - 58 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Def: Se define el margen de fase (punto β) como el ángulo en grados que el contorno
transformado se debe rotar alrededor del origen para que el sistema en L.C. se torne inestable.
Así el margen de fase queda como M.F. =arg l(ωg)= 180º, donde ωg es la frecuencia angular de
cruce de ganancia definida por la ecuación | l(jωg) | = 1 una representación gráfica se muestra en
la Fig. 6.1x para un Nyquist de un sistema continuo arbitrario.
Para un sistema discreto se puede establecer que el margen de fase queda como
M.F.= arg l(ejΩpT)+180º, donde Ωp es la frecuencia angular de cruce de ganancia definida por la
ecuación | l(ejΩpT)| = 1

2012-2
Jaime A. Rohten C. - 59 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Es importante destacar que las definiciones anteriores tienen sentido en sistemas con F. de T. en
L.D. de fase mínima (es decir, en sistemas con l(s) ó l(z) sin ceros ni polos inestables y
estrictamente propias.
Fig. 6.16. MF y MG de un Nyquist

2012-2
Jaime A. Rohten C. - 60 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Es importante destacar que las definiciones anteriores tienen sentido en sistemas con F. de T. en
L.D. de fase mínima (es decir, en sistemas con l(s) ó l(z) sin ceros ni polos inestables y
estrictamente propias.
Fig. 6.16. MF y MG de un Nyquist

2012-2
Jaime A. Rohten C. - 61 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Relación entre el Margen de Fase y un Sistema de Segundo Orden Continuo.
Un sistema de Segundo Orden que da origen a una F. de T en L.C como la estandar es,
2
2
n
n
l ss s
el cual tiene un M.G. infinito, pero un M.F. finito. Para encontrar la frecuencia de cruce de
ganancia se utiliza la definición,
2
12g
n
g g n
l j ,j j
de donde,
22 2 2 22
2 2 2 2 2 2 2 2 2
2 2 2
22 2 2 2
1 4 4 04
4 0
nn g g n g n g n
g g n
n n
, ,
x x

2012-2
Jaime A. Rohten C. - 62 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
Finalmente,
1
1 4 2 1
4 2
180 180 902
1 290 4 1 2
2 4 1 2
g
g
g
M .F. º arg l j º º tg
º tg tg
Con este resultado se obtiene el M.F. como,
4 24 1 2g n
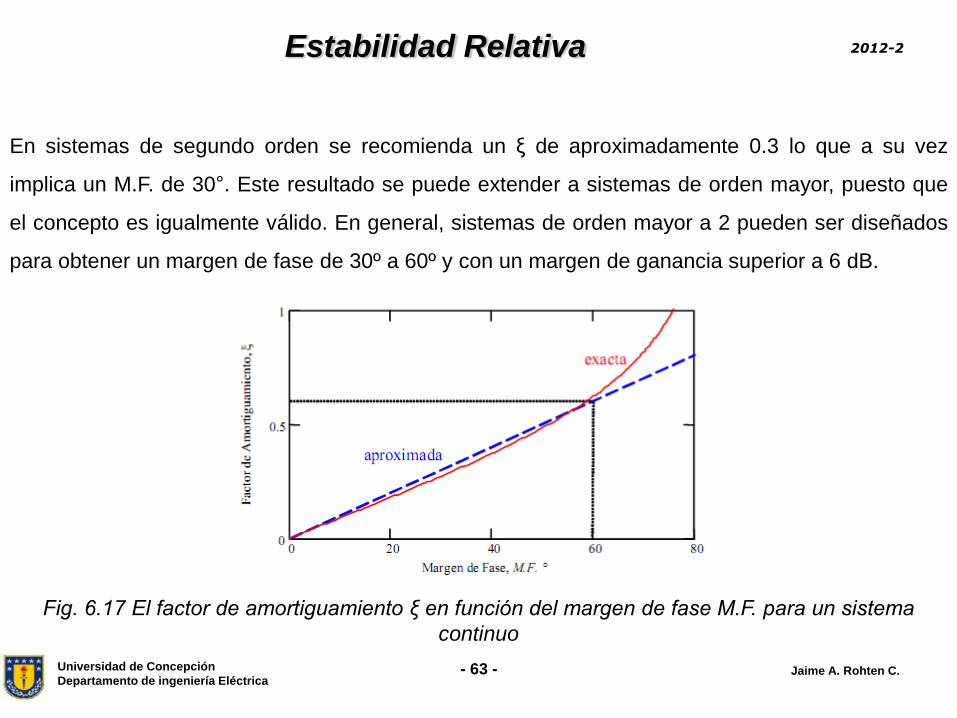
Este último resultado muestra que el M.F. es sólo función del factor de amortiguamiento. Es más,
al observar la gráfica del ξ vs M.F. (Fig. 6.17) se encuentra prácticamente una relación lineal dada
por ξ ≈ 0.01·M.F., para valores de M.F. de hasta 60°. Este resultado es de suma importancia
puesto que en sistemas de orden superior no es posible especificar un factor de amortiguamiento;
sin embargo, y gracias a esta relación se puede especificar un M.F. con resultados similares.
2012-2
Jaime A. Rohten C. - 63 - Universidad de Concepción
Departamento de ingeniería Eléctrica
Estabilidad Relativa
En sistemas de segundo orden se recomienda un ξ de aproximadamente 0.3 lo que a su vez
implica un M.F. de 30°. Este resultado se puede extender a sistemas de orden mayor, puesto que
el concepto es igualmente válido. En general, sistemas de orden mayor a 2 pueden ser diseñados
para obtener un margen de fase de 30º a 60º y con un margen de ganancia superior a 6 dB.
Fig. 6.17 El factor de amortiguamiento ξ en función del margen de fase M.F. para un sistema
continuo

Jaime A. Rohten C.
2012-2
Universidad de Concepción
Departamento de ingeniería Eléctrica
Análisis en Frecuencia
Jaime Rohten