
ANEXO 1. PRUEBAS Y ESTUDIO DE LA ETAPA DE POTENCIA
12
Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 106 ANEXO 1. PRUEBAS Y ESTUDIO DE LA ETAPA DE POTENCIA La parte mecánica del prototipo está constituida por una rueda de un tamaño y peso considerable y de un motor de elevalunas eléctrico. Antes de diseñar la etapa de potencia del nodo Brake-by-Wire, se ha hecho un estudio del consumo del motor en régimen nominal, de los picos de corriente que puede dar y de la temperatura que puede alcanzar. De manera análoga se ha procedido con el resto de componentes de la etapa de potencia. El primer paso ha sido mediante las especificaciones del motor presuponer una etapa de potencia (sobredimensionada por si acaso) y montar en una placa araña la propuesta. Se le han aplicado las señales de control que recibirá en el prototipo final y se ha hecho un estudio de qué parámetros son los idóneos. El resultado ha sido satisfactorio, la etapa de potencia predimensionada cumple con los requisitos y hemos pasado a implementarla en la PCB-CONTROL. Gracias a este estudio se ha podido escoger algunos parámetros de diseño. En concreto se ha hecho un estudio de los picos de corriente, de la frecuencia idónea del PWM y ciclo de trabajo y de temperatura. Estos parámetros están todos relacionados entre sí. Por ejemplo, si la frecuencia de PWM es muy elevada, las pérdidas por los efectos inductivos serán más elevadas lo que supone un aumento de temperatura. Por otro lado, si la frecuencia es excesivamente baja, las pérdidas debidas a las transiciones ON-OFF y OFF- ON de los transistores MOSFET resultarán muy elevadas subiendo también la temperatura. Así pues, el compromiso está ahí. De hecho, hay muchos otros parámetros y la mejor manera para realmente apreciar el funcionamiento es probando. 5.1. Estudio de los picos de corriente El puente en H escogido no destaca por sus rápidos tiempos de subida y bajada y garantiza un correcto funcionamiento para frecuencias menores a 1Khz. Así pues nos moveremos en este rango. Se ha comprobado como a frecuencias cercanas a 1 Khz, el motor no integra bien la señal sobre todo para ciclos de trabajo pequeños. Por otro lado, para frecuencias muy pequeñas su funcionamiento es brusco. El rango 75 -500 Hz parece el más adecuado. Veamos un seguido de capturas variando los parámetros que nos ayudarán a determinar la solución óptima. Las medidas de corriente están hechas con una sonda amperimétrica a escala 100mV por Amperio. El formato de los datos es: “FRECUENCIA(HZ)-CICLO TRABAJO-PICO DE CORRIENTE”
Transcript of ANEXO 1. PRUEBAS Y ESTUDIO DE LA ETAPA DE POTENCIA

Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 106
ANEXO 1. PRUEBAS Y ESTUDIO DE LA ETAPA DE POTENCIA
La parte mecánica del prototipo está constituida por una rueda de un tamaño y peso considerable y de un motor de elevalunas eléctrico. Antes de diseñar la etapa de potencia del nodo Brake-by-Wire, se ha hecho un estudio del consumo del motor en régimen nominal, de los picos de corriente que puede dar y de la temperatura que puede alcanzar. De manera análoga se ha procedido con el resto de componentes de la etapa de potencia. El primer paso ha sido mediante las especificaciones del motor presuponer una etapa de potencia (sobredimensionada por si acaso) y montar en una placa araña la propuesta. Se le han aplicado las señales de control que recibirá en el prototipo final y se ha hecho un estudio de qué parámetros son los idóneos. El resultado ha sido satisfactorio, la etapa de potencia predimensionada cumple con los requisitos y hemos pasado a implementarla en la PCB-CONTROL. Gracias a este estudio se ha podido escoger algunos parámetros de diseño. En concreto se ha hecho un estudio de los picos de corriente, de la frecuencia idónea del PWM y ciclo de trabajo y de temperatura. Estos parámetros están todos relacionados entre sí. Por ejemplo, si la frecuencia de PWM es muy elevada, las pérdidas por los efectos inductivos serán más elevadas lo que supone un aumento de temperatura. Por otro lado, si la frecuencia es excesivamente baja, las pérdidas debidas a las transiciones ON-OFF y OFF-ON de los transistores MOSFET resultarán muy elevadas subiendo también la temperatura. Así pues, el compromiso está ahí. De hecho, hay muchos otros parámetros y la mejor manera para realmente apreciar el funcionamiento es probando.
5.1. Estudio de los picos de corriente El puente en H escogido no destaca por sus rápidos tiempos de subida y bajada y garantiza un correcto funcionamiento para frecuencias menores a 1Khz. Así pues nos moveremos en este rango. Se ha comprobado como a frecuencias cercanas a 1 Khz, el motor no integra bien la señal sobre todo para ciclos de trabajo pequeños. Por otro lado, para frecuencias muy pequeñas su funcionamiento es brusco. El rango 75 -500 Hz parece el más adecuado. Veamos un seguido de capturas variando los parámetros que nos ayudarán a determinar la solución óptima. Las medidas de corriente están hechas con una sonda amperimétrica a escala 100mV por Amperio. El formato de los datos es:
“FRECUENCIA(HZ)-CICLO TRABAJO-PICO DE CORRIENTE”

Pruebas y estudio de la etapa de potencia__ ____107
Fig. 5.1 Estudio picos de corriente del motor 100-10-12
Fig. 5.2 Estudio picos de corriente del motor 100-90-3

Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 108
Fig. 5.3 Estudio picos de corriente del motor 150-8-10
Fig. 5.4 Estudio picos de corriente del motor 150-43-5.6

Pruebas y estudio de la etapa de potencia__ ____109
Fig. 5.5 Estudio picos de corriente del motor 150-90-3.2
Fig. 5.6 Estudio picos de corriente del motor 300-10-7.2

Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 110
Fig. 5.7 Estudio picos de corriente del motor 300-30-8
Fig. 5.8 Estudio picos de corriente del motor 300-75-3.84

Pruebas y estudio de la etapa de potencia__ ____111
Fig. 5.9 Estudio picos de corriente del motor 300-90-3.2
Fig. 5.10 Estudio picos de corriente del motor 500-5-5.28

Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 112
Fig. 5.11 Estudio picos de corriente del motor 500-50-6.3
Fig. 5.12 Estudio picos de corriente del motor 500-90-3.6

Pruebas y estudio de la etapa de potencia__ ____113
Del conjunto de capturas se aprecia como para frecuencias más bajas los picos de corriente son más altos, sobre todo en los ciclos de trabajo pequeños. Empíricamente se ha observado que el motor alcanza un óptimo comportamiento alrededor de los 150Hz. Para esta frecuencia tenemos en el caso más crítico unos picos de 10 A. Por otro lado vemos como la corriente nominal media en todos los casos está cercana a los 3-4 amperios. En conclusión, los parámetros ideales de diseño serían:
Picos de corriente máximos 10 A Corriente nominal 4 A Frecuencia de trabajo PWM 150Hz Ciclos de trabajo recomendados 10 al 100%
Tabla 5.1 Parámetros de diseño de funcionamiento del motor
5.2. Estudio de temperatura El conjunto puente-motor gestiona grandes corrientes además de movimiento en el caso del motor y es conveniente observar que no alcancen temperaturas excesivamente elevadas. Por eso, se ha hecho un estudio empírico probando la etapa a la frecuencia indicada y observando su comportamiento a lo largo del tiempo con diferentes programas. El resultado ha sido satisfactorio ya que por una parte se han apreciado los puntos del circuito que más calor disipan (y así se ha tenido en cuenta a la hora de diseñar la PCB-CONTROL) y además se ha comprobado que ninguno de los componentes, pese a alcanzar temperaturas elevadas, no supera el límite que pone el fabricante en el cual podría haber destrucción del mismo. Las medidas se han hecho con una cámara termográfica. En condiciones iniciales (después de un largo periodo de inactividad de la etapa), tanto el motor como la etapa de potencia presentan la siguiente distribución de temperatura:

Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 114
MOTOR PUENTE EN H
Fig. 5.13 Temperatura motor y puente en H en condiciones iniciales
Excitamos el motor con una frecuencia de 150Hz y un ciclo de trabajo del 90% y obtenemos:
30 segundos 60 segundos
Fig. 5.14 Temperatura motor y puente en H con frecuencia 150Hz y Duty 90%
Pruebas y estudio de la etapa de potencia__ ____115
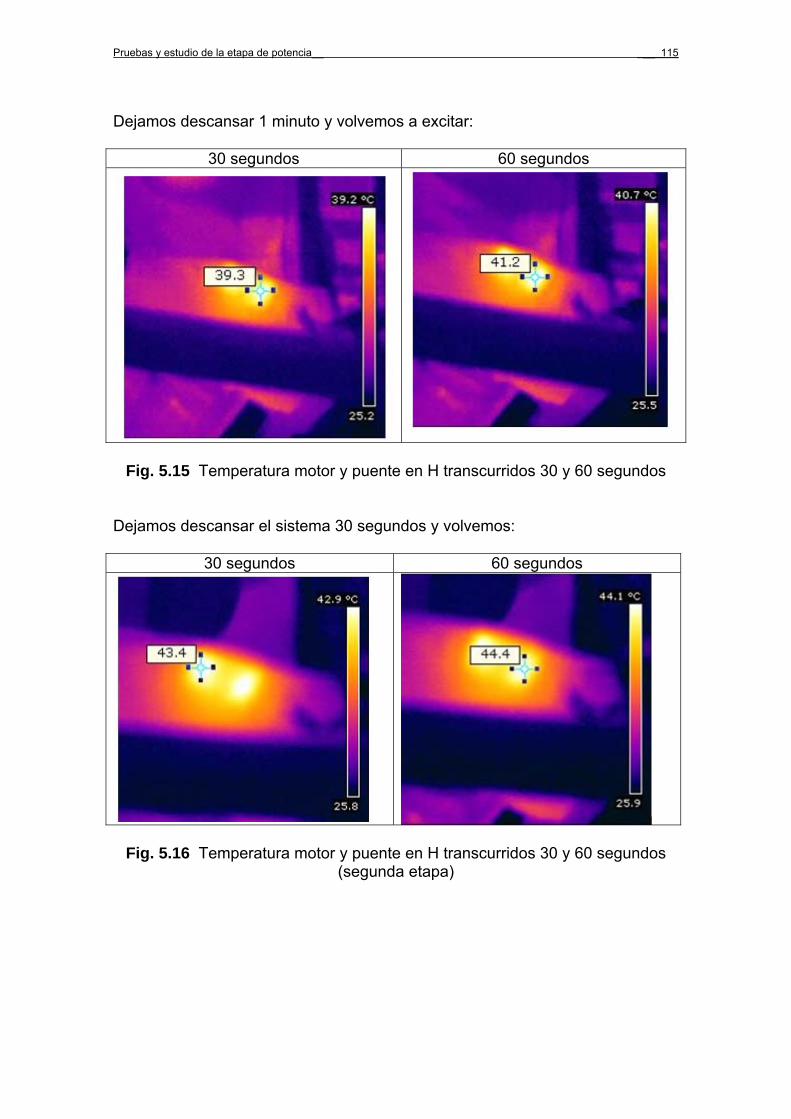
Dejamos descansar 1 minuto y volvemos a excitar:
30 segundos 60 segundos
Fig. 5.15 Temperatura motor y puente en H transcurridos 30 y 60 segundos Dejamos descansar el sistema 30 segundos y volvemos:
30 segundos 60 segundos
Fig. 5.16 Temperatura motor y puente en H transcurridos 30 y 60 segundos (segunda etapa)

Estudio del nuevo bus de automoción Flexray y diseño de un prototipo ilustrativo de la tecnología 116
En estas primeras pruebas el puente en H apenas se ha calentado. Por eso se aumenta el tiempo de la prueba y nos fijamos en este componente:
Inicio 30 segundos
60 segundos 90 segundos
Fig. 5.17 Evolución temperatura del puente en H a lo largo del tiempo

Pruebas y estudio de la etapa de potencia__ ____117
En esta última tanda, vamos a dejar el motor 4 minutos seguidos trabajando al 100% para ver una situación límite (el fabricante recomienda no usarlo más de 5 minutos seguidos) Las temperaturas localizadas en los diferentes puntos de la etapa de potencia son:
Puente Diodo MBR Motor
Fig. 5.18 Temperatura etapa potencia transcurridos 4 minutos trabajando al
100% CONCLUSIONES: • Observamos que para el tiempo de crucero máximo idóneo del motor
ningún componente llega a una temperatura crítica que pudiera dañarlo. • El motor llega a una temperatura máxima de 50 grados, lo cual nos permite
colocarle una carcasa de plástico para taparlo. • El componente que más se calienta es el diodo MBR, se ha tenido en
cuenta para su correcta disipación térmica a la hora de diseñar la PCB-CONTROL.
Por tanto, como especificación Software, el programa del motor deberá tener en cuenta de no ir nunca más de 5 minutos al máximo ciclo de trabajo.


















