Ana´lisis Cinema´tico de Mecanismos Planos Mediante ... · Aqu´ı se mostrar´a el empleo del...
23
An´ alisis Cinem´ atico de Mecanismos Planos Mediante Computadora Digital. Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıaMec´anica. Divisi´ on de Ingenier´ ıas, Campus Irapuato-Salamanca Universidad de Guanajuato Carretera Salamanca-Valle de Santiago Km. 3.5+ 1.8 CP 36885, Salamanca, Gto., M´ exico Tel. +52-464-647-9940 Ext. 2390 E-mail: [email protected] 1 An´ alisis Cinem´ atico de Mecanismos Planos Mediante Com- putadora Digital. En notas previas se mostr´ o que para mecanismos planos de cuatro barras y mecanismos de biela manivela corredera es posible obtener f´ormulas para resolver sus an´alisis de posici´on, velocidad y aceleraci´on. Desafortunadamente para mecanismos m´as complicados no es pr´actico, seguir el mismo procedimiento. Entonces, es necesario encontrar un m´ etodo general para la soluci´ on del an´alisis cinem´ atico de mecanismos planos. A f´ ın de encontrar las bases de este m´ etodo es necesario recordar que las ecuaciones, cuya soluci´ on constituye el an´alisis de posici´on de un mecanismo, se generan descomponiendo las ecuaciones vectoriales que aseguran la clausura de los lazos del mecanismo. Mas a´ un, por cada lazo independiente existen dos ecuaciones escalares. Suponga que las ecuaciones escalares correspondientes al an´alisis de posici´on del mecanismo est´ an dadas por f i (x 1 ,x 2 ,...,x n ,y n+1 ,y n+2 ,...,y n+k )=0 i =1, 2,...,n (1) Las ecuaciones escalares pueden escribirse de manera vectorial como f (x, y)= 0. (2) donde el vector f representa una funci´on vectorial real, con n componentes, de variable real, x ∈ R n y y ∈ R k . El vector x representa el vector de variables de la posici´on del mecanismo e incluye tanto las variables de entrada como las inc´ognitas del an´alisis de posici´on, el vector y representa el vector de par´ ametros del an´alisis de posici´on del mecanismo. Es importante se˜ nalar que en general, las ecuaciones (1) son no lineales en las inc´ognitas incluidas en el vector x. 2 An´ alisis de Posici´on de Mecanismos Planos. En esta secci´on se muestra la soluci´ on del an´alisis de posici´on de mecanismos planos, cuyas ecuaciones est´ an representadas vectorialmente por la ecuaci´ on (2). 1
Transcript of Ana´lisis Cinema´tico de Mecanismos Planos Mediante ... · Aqu´ı se mostrar´a el empleo del...

Analisis Cinematico de Mecanismos Planos Mediante
Computadora Digital.
Jose Marıa Rico Martınez
Departamento de Ingenierıa Mecanica.
Division de Ingenierıas, Campus Irapuato-Salamanca
Universidad de Guanajuato
Carretera Salamanca-Valle de Santiago Km. 3.5+ 1.8
CP 36885, Salamanca, Gto., Mexico
Tel. +52-464-647-9940 Ext. 2390
E-mail: [email protected]
1 Analisis Cinematico de Mecanismos Planos Mediante Com-
putadora Digital.
En notas previas se mostro que para mecanismos planos de cuatro barras y mecanismos de biela manivelacorredera es posible obtener formulas para resolver sus analisis de posicion, velocidad y aceleracion.
Desafortunadamente para mecanismos mas complicados no es practico, seguir el mismo procedimiento.Entonces, es necesario encontrar un metodo general para la solucion del analisis cinematico de mecanismosplanos.
A fın de encontrar las bases de este metodo es necesario recordar que las ecuaciones, cuya solucionconstituye el analisis de posicion de un mecanismo, se generan descomponiendo las ecuaciones vectorialesque aseguran la clausura de los lazos del mecanismo. Mas aun, por cada lazo independiente existen dosecuaciones escalares. Suponga que las ecuaciones escalares correspondientes al analisis de posicion delmecanismo estan dadas por
fi(x1, x2, . . . , xn, yn+1, yn+2, . . . , yn+k) = 0 i = 1, 2, . . . , n (1)
Las ecuaciones escalares pueden escribirse de manera vectorial como
~f(~x, ~y) = ~0. (2)
donde el vector ~f representa una funcion vectorial real, con n componentes, de variable real, ~x ∈ Rn
y ~y ∈ Rk. El vector ~x representa el vector de variables de la posicion del mecanismo e incluye tantolas variables de entrada como las incognitas del analisis de posicion, el vector ~y representa el vector deparametros del analisis de posicion del mecanismo. Es importante senalar que en general, las ecuaciones(1) son no lineales en las incognitas incluidas en el vector ~x.
2 Analisis de Posicion de Mecanismos Planos.
En esta seccion se muestra la solucion del analisis de posicion de mecanismos planos, cuyas ecuacionesestan representadas vectorialmente por la ecuacion (2).
1

Existe una multitud de metodos de solucion de sistemas de ecuaciones no lineales. Ademas, puestoque la solucion de un sistema no lineal puede transformarse en el problema equivalente de minimizacionde la suma de los cuadrados de los residuos de las ecuaciones, todos los metodos de optimizacion norestringida pueden emplearse en la solucion del sistema no lineal de ecuaciones.
Aquı se mostrara el empleo del metodo de Newton-Raphson en la solucion del problema del analisisde posicion de mecanismos planos. El apendice muestra el desarrollo de funciones de varias variablesmediante series de Taylor, un importante prerequisito para el estudio del metodo de Newton-Raphson.
De acuerdo al desarrollo del apendice, cada una de las componentes escalares del lado izquierdo de laecuacion (2) puede aproximarse como
fi(~x) ≈ fi(~x0) +[
∂fi∂x1
∂fi∂x2
· · · ∂fi∂xn
]
x1 − x10
x2 − x20
...xn − xn0
(3)
El conjunto de las n ecuaciones se aproxima mediante
f1(~x) ≈ f1(~x0) +[
∂f1∂x1
∂f1∂x2
· · · ∂f1∂xn
]
x1 − x10
x2 − x20
...xn − xn0
f2(~x) ≈ f2(~x0) +[
∂f2∂x1
∂f2∂x2
· · · ∂f2∂xn
]
x1 − x10
x2 − x20
...xn − xn0
...
fn(~x) ≈ fn(~x0) +[
∂fn∂x1
∂fn∂x2
· · · ∂fn∂xn
]
x1 − x10
x2 − x20
...xn − xn0
El conjunto de las ecuaciones anteriores puede escribirse en forma vectorial como
~f(~x) ≈ ~f(~x0) + J(~x0)(~x− ~x0) (4)
donde
J =
∂f1∂x1
∂f1∂x2
· · · ∂f1∂xn
∂f2∂x1
∂f2∂x2
· · · ∂f2∂xn
......
. . ....
∂fn∂x1
∂fn∂x2
· · · ∂fn∂xn
(5)
Esta matriz se conoce como la matriz Jacobiana del sistema de ecuaciones.Suponga que en el analisis de posicion del mecanismo se conoce una aproximacion lineal, ~x0,
1 y,empleando la aproximacion lineal, ecuacion (4), del sistema de ecuaciones del analisis de posicion, se
1En el analisis de posicion de mecanismos planos, esa aproximacion inicial puede facilmente obtenerse mediante unesquema a mano alzada del mecanismo.
2

desea mejorar esa aproximacion. Si se emplearan todos los terminos del desarrollo de la funcion mediantede series de Taylor, la “aproximacion” dejaria de serla y se convertiria en la ecuacion,
~0 = ~f(~x) = ~f(~x0) + J(~x0)(~x− ~x0) + . . . (6)
la solucion ~x del sistema no lineal de ecuaciones satisface la condicion
~f(~x) = ~0
Por lo tanto, la ecuacion se reduce a
~0 = ~f(~x0) + J(~x0)(~x− ~x0) + . . . (7)
Sin embargo, esta ecuacion no puede resolverse de manera sencilla. Si exclusivamente se emplean hastalos terminos lineales, solo podemos esperar que el valor de ~f(~x) se aproxime a ~0, pero la ecuacion sereduce a
~0 ≈ ~f(~x0) + J(~x0) δ~x (8)
dondeδ~x = ~x− ~x0. (9)
Debe notarse que la ecuacion (8) representa un sistema lineal en la incognita δ~x, la solucion del sistemapuede representarse simbolicamente por2
δ~x = −J(~x0)−1 ~f(~x0) (10)
Como en el calculo de δ ~x se emplea una aproximacion del sistema de ecuaciones, el proceso genera unanueva aproximacion a la solucion, dada por
~x1 = ~x0 + δ~x, o ~x1 = ~x0 − J(~x0)−1 ~f(~x0) = ~x0 + J(~x0)
−1[
−~f(~x0)]
. (11)
No es muy difıcil observar que este representa el primer paso de un proceso iterativo y que, en general,la nueva aproximacion esta mas cercana a la solucion que la aproximacion original.
Generalizando el proceso, el paso de la j−1-esima aproximacion a la j-esima aproximacion, esta dadopor
~xj = ~xj−1 − J(~xj−1)−1 ~f(~xj−1) = ~xj + J(~xj−1)
−1[
−~f(~xj−1)]
. (12)
En general, la nueva aproximacion esta mas cercana a la solucion y el proceso debe repetirse.
2.1 Criterio de Finalizacion.
El proceso de solucion, de acuerdo con el metodo de Newton-Raphson, finaliza cuando la aproximacionsatisface uno o varios de los posibles criterios de finalizacion. Algunas alternativas se muestran a conti-nuacion
1. Magnitud del error de la solucion.| ~f(~xj) |≤ ǫ (13)
2Si la matrix Jacobiana es singular el sistema de ecuaciones no tiene solucion unica y el metodo de Newton-Raphsonfalla. Puede mostrarse que en esta situacion el mecanismo se encuentra en una posicion extrema de alguno de los eslabonesmotrices. En el caso particular de un mecanismo plano de cuatro barras, las posiciones extremas del eslabon motriz sonlas posiciones de puntos muertos. Ademas, es importante senalar que esta representacion simbolica, no es la mas adecuadadesde el punto de vista computacional.
3

2. Magnitud del vector de correccion.
| δ~xj |=| ~xj − ~xj−1 |≤ ǫ (14)
3. Magnitudes de las componentes del vector de correccion.
| xj,i − xj−1,i |≤ ǫi para i = 1, 2, . . . , n (15)
donde xj,i y xj−1,i son las i-esimas componentes de la j-esima y j − 1-esima aproximacion, respec-tivamente.
donde ǫ y ǫi son numeros positivos suficientemente pequenos. El mejor criterio es el ultimo porquepermite control independiente sobre la precision de las incognitas asociadas a angulos y distancias, lascuales suelen tener diferentes ordenes de magnitud en sus valores numericos.
2.2 Amortiguamiento del Metodo de Newton-Raphson Para Mejorar la Posi-
bilidad de Convergencia.
Es bien conocida la posibilidad de que el metodo de Newton-Raphson, bajo ciertas circunstancias, oscileindefinidamente entre dos aproximaciones o bien que la aproximacion no converja. A fın de mejorar laposibilidad de convergencia se emplea una modificacion conocida como amortiguamiento, “damping”.
Suponga que ~xj y ~xj−1 son dos aproximaciones sucesivas de la solucion del sistema no lineal generadasa partir del metodo de Newton-Raphson. Las aproximaciones estan relacionadas mediante la ecuacion
~xj = ~xj−1 + J(~xj−1)−1
[
−~f(~xj−1)]
..
El proceso de amortiguamiento requiere de calcular la magnitud de los vectores de errores asociados acada una de las aproximaciones; es decir | ~f(~xj) | y | ~f(~xj−1) |. Entonces, el amoriguamiento procedecomo se indica a continuacion
1. Si | ~f(~xj) |<| ~f(~xj−1) |, la nueva aproximacion es mejor que la anterior y no es necesaria ningunamodificacion.
2. Si | ~f(~xj) |≥| ~f(~xj−1) |, la nueva aproximacion tiene un error mayor que la anterior, por lo tanto,se propone una nueva aproximacion mediante la ecuacion
~xj = ~xj−1 +1
2kδ~x = ~xj−1 −
1
2kJ(~xj−1)
−1 ~f(~xj−1). (16)
donde k es el numero natural mas pequeno que satisface el criterio
| ~f(~xj) |<| ~f(~xj−1) | .
donde k = 1, 2, . . . , nmax, es el numero natural mas pequeno que satisface la condicion dada por laecuacion (16), nmax es el numero maximo de veces que este procedimiento puede repetirse. Si estenumero se excede, debe proveerse de una nueva aproximacion o revisar la programacion de las ecuacionesy la matriz Jacobiana.
4

3 Ejemplo: Mecanismo plano de cuatro barras.
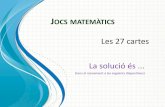
Para ilustrar el metodo considere el mecanismo plano de cuatro barras mostrado en la figura 1. Laecuacion del lazo del mecanismo esta dado por
~a2 + ~a3 = ~a1 + ~a4. (17)
Si se seleccionan los angulos asociados a los vectores, θ1, θ2, θ3, θ4, a partir del semieje positivo X, lascomponentes escalares de la ecuacion (17), a lo largo de los ejes X y Y estan dadas por
a2 Cθ2 + a3 Cθ3 = a1 Cθ1 + a4 Cθ4
a2 Sθ2 + a3 Sθ3 = a1 Sθ1 + a4 Sθ4 (18)
Figure 1: Mecanismo plano de cuatro barras.
Debe notarse que los parametros del mecanismo son a1, a2, a3, a4, θ1, mientras que las variables sonθ2, θ3, θ4. Mas aun, si el eslabon motriz es el eslabon 2, el angulo θ2 aun cuando es una variable, es undato necesario para realizar el analisis de posicon, de modo que las dos ecuaciones (18) cuya solucionconstituye el analisis de posicion estan dadas por
f1(θ3, θ4) = a2 Cθ2 + a3 Cθ3 − a1 Cθ1 − a4 Cθ4 = 0
f2(θ3, θ4) = a2 Sθ2 + a3 Sθ3 − a1 Sθ1 − a4 Sθ4 = 0 (19)
La matriz Jacobiana asociada a este sistema de dos ecuaciones con dos incognitas esta dada por
J(θ3, θ4) =
[
∂f1∂θ3
∂f1∂θ4
∂f2∂θ3
∂f2∂θ4
]
=
[
−a3 S θ3 a4 S θ4a3 C θ3 −a4 C θ4
]
. (20)
Es importante notar que el determinante de la matriz jacobiana esta dado por3
|J(θ3, θ4)| = a3 a4 (S θ3 C θ4 − C θ3 S θ4) = a3 a4 S (θ3 − θ4) . (21)
3Mas aun, el determinante de la matriz Jacobiana es 0, cuando S (θ3 − θ4) = 0; es decir, cuando θ3 − θ4 = 0◦ ocuando θ3 − θ4 = 180◦, cuando el mecanismo se encuentra en una posicion de puntos muertos, que marcan los lımites de larotabilidad del eslabon motriz.
5

Con las ecuaciones (19, 20) es posible realizar el analisis de posicion del mecanismo plano de cuatrobarras. Suponga ahora que se ha realizado el analisis de posicion del mecanismo plano de cuatro barras,derivando las ecuaciones (19), con respecto al tiempo se obtienen las ecuaciones correspondientes alanalisis de velocidad del mecanismo plano de cuatro barras. Estas ecuaciones estan dadas por
g1(ω3, ω4) = −a2 Sθ2 ω2 − a3 Sθ3 ω3 + a4 Sθ4 ω4 = 0
g1(ω3, ω4) = a2 Cθ2 ω2 + a3 Cθ3 ω3 − a4 Cθ4 ω4 = 0 (22)
Debe notarse que, una vez resuelto el analisis de posicion del mecanismo plano de cuatro barras, lasecuaciones (22) representan un sistema lineal de dos ecuaciones con dos incognitas, ω3 y ω4. Este sistemade ecuaciones puede escribirse en forma matricial como
[
−a3 S θ3 a4 S θ4a3 C θ3 −a4 C θ4
] [
ω3
ω4
]
=
[
a2 Sθ2 ω2
−a2 Cθ2 ω2
]
(23)
Debe notarse que la matriz de coeficientes de la ecuacion (23) es la misma matriz jacobiana del sistemano lineal de ecuaciones asociada al analisis de posicion del mecanismo. Por lo que, excepto en un caso, siel analisis de posicion tiene solucion, entonces el analisis de velocidad del mecanismo tiene una solucionunica.
La solucion del analisis de velocidad del mecanismo plano de cuatro barras esta dada por
ω3 =
∣
∣
∣
∣
a2 S θ2 ω2 a4 S θ4−a2 C θ2 ω2 −a4 C θ4
∣
∣
∣
∣
a3a4S(θ3 − θ4)= ω2
a2
a3
S(θ4 − θ2)
S(θ3 − θ4)(24)
y
ω4 =
∣
∣
∣
∣
−a3 S θ3 −a2 C θ2 ω2
a3 C θ3 a2 S θ2 ω2
∣
∣
∣
∣
a3a4S(θ3 − θ4)= ω2
a2
a4
S(θ3 − θ2)
S(θ3 − θ4)(25)
Derivando las ecuaciones (22), con respecto al tiempo, se obtienen las ecuaciones correspondientes alanalisis de aceleracion del mecanismo plano de cuatro barras. Estas vienen dadas por
h1(α3, α4) = −a2 Sθ2 α2 − a2 Cθ2 ω22 − a3 Sθ3 α3 − a3 Cθ3 ω
23 + a4 Sθ4 α4 + a4 Cθ4 ω
24 = 0
h1(α3, α4) = a2 Cθ2 α2 − a2 Sθ2 ω22 + a3 Cθ3 α3 − a3 Sθ3 ω
23 − a4 Cθ4 α4 + a4 Sθ4 ω
24 = 0 (26)
De nueva cuenta, si previamente se han resuelto los analisis de posicion y velocidad del mecanismoplano de cuatro barras, las ecuaciones (26) representan un sistema lineal de dos ecuaciones con dosincognitas α3, α4. Este sistema de ecuaciones puede escribirse en forma matricial como
[
−a3 S θ3 a4 S θ4a3 C θ3 −a4 C θ4
] [
α3
α4
]
=
[
a2 Sθ2α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23 − a4 Cθ4 ω
24
−a2 Cθ2α2 + a2 Sθ2 ω22 + a3 Sθ3 ω
23 − a4 Sθ4 ω
24
]
(27)
De nueva cuenta, la matriz de coeficientes de la ecuacion (27) es la misma matriz jacobiana del sistemano lineal de ecuaciones asociada al analisis de posicion del mecanismo. Por lo que, excepto en un caso, siel analisis de posicion tiene solucion, entonces el analisis de aceleracion del mecanismo tiene una solucionunica.
En forma simbolica, la solucion del analisis de aceleracion viene dado por
α3 =
∣
∣
∣
∣
a2 Sθ2α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23 − a4 Cθ4 ω
24 a4 S θ4
−a2 Cθ2α2 + a2 Sθ2 ω22 + a3 Sθ3 ω
23 − a4 Sθ4 ω
24 −a4 C θ4
∣
∣
∣
∣
a3a4S(θ3 − θ4)(28)
6

y
α4 =
∣
∣
∣
∣
−a3 S θ3 a2 Sθ2α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23 − a4 Cθ4 ω
24
a3 C θ3 −a2 Cθ2α2 + a2 Sθ2 ω22 + a3 Sθ3 ω
23 − a4 Sθ4 ω
24
∣
∣
∣
∣
a3a4S(θ3 − θ4)(29)
4 Mecanismo de Biela Manivela Corredera.
En esta seccion, se mostrara como el mecanismo de biela manivela corredera tambien puede analizarsemediante los procedimientos mostrados en la seccion anterior.
Figure 2: Mecanismo de biela manivela corredera.
Considere el mecanismo de biela manivela corredera mostrado en la figura 2. La ecuacion del lazo delmecanismo esta dado por
~a2 + ~a3 = ~e+ ~s. (30)
Si se seleccionan los angulos asociados a los vectores, θe = 270◦, θ2, θ3, θs = 0◦, a partir del semiejepositivo X, las componentes escalares de la ecuacion (30), a lo largo de los ejes X y Y estan dadas por
a2 Cθ2 + a3 Cθ3 = eCθe + sCθs
a2 Sθ2 + a3 Sθ3 = e Sθe + s Sθs (31)
o, substituyendo los valores de los angulos θs y θe, se tiene que
a2 Cθ2 + a3 Cθ3 = s
a2 Sθ2 + a3 Sθ3 = −e (32)
Debe notarse que los parametros del mecanismo son e, θe, a2, a3, θs, mientras que las variables sonθ2, θ3 y s. Mas aun, si el eslabon motriz es el eslabon 2, el angulo θ2 aun cuando es una variable, es undato necesario para realizar el analisis de posicion, de modo que las dos ecuaciones (32) cuya solucionconstituye el analisis de posicion estan dadas por
f1(θ3, s) = a2 Cθ2 + a3 Cθ3 − s = 0
f1(θ3, s) = a2 Sθ2 + a3 Sθ3 + e = 0 (33)
7

La matriz Jacobiana asociada a este sistema de dos ecuaciones con dos incognitas esta dada por
J(θ3, s) =
[
∂f1∂θ3
∂f1∂s
∂f2∂θ3
∂f2∂s
]
=
[
−a3 S θ3 −1a3 C θ3 0
]
. (34)
Es importante notar que el determinante de la matriz jacobiana esta dado por
|J(θ3, θ4)| = a3 C θ3. (35)
Debe notarse que la matriz Jacobiana es singular cuando
C θ3 = 0 o θ3 ∈ {90◦,−90◦}.
Los valores de θ3 = 90◦ o θ3 = −90◦ corresponden a posiciones de puntos muertos, que indican los lımitesdel movimiento de la manivela, o eslabon 2.
Con las ecuaciones (33, 34) es posible realizar el analisis de posicion del mecanismo plano de cuatrobarras. Suponga ahora que se ha realizado el analisis de posicion del mecanismo plano de cuatro barras,derivando las ecuaciones (33), con respecto al tiempo se obtienen las ecuaciones correspondientes alanalisis de velocidad del mecanismo plano de cuatro barras. Estas ecuaciones estan dadas por
g1(ω3, s) = −a2 Sθ2 ω2 − a3 Sθ3 ω3 − s = 0
g1(ω3, s) = a2 Cθ2 ω2 + a3 Cθ3 ω3 = 0 (36)
Debe notarse que, una vez resuelto el analisis de posicion del mecanismo plano de cuatro barras, lasecuaciones (36) representan un sistema lineal de dos ecuaciones con dos incognitas, ω3 y s. Este sistemade ecuaciones puede escribirse en forma matricial como
[
−a3 S θ3 −1a3 C θ3 0
] [
ω3
s
]
=
[
a2 Sθ2 ω2
−a2 Cθ2 ω2
]
(37)
Debe notarse que la matriz de coeficientes de la ecuacion (37) es la misma matriz jacobiana del sistemano lineal de ecuaciones asociada al analisis de posicion del mecanismo. Por lo que, excepto en un caso—cuando los resultados del analisis de posicion coinciden de manera exacta con una posicion de puntosmuertos, lo cual es altamente improbable—, si el analisis de posicion tiene solucion, entonces el analisisde velocidad del mecanismo tiene una solucion unica.
La solucion del analisis de velocidad del mecanismo plano de cuatro barras esta dada por
ω3 =
∣
∣
∣
∣
a2 S θ2 ω2 −1−a2 C θ2 ω2 0
∣
∣
∣
∣
a3 C θ3= −ω2
a2
a3
C θ2
C θ3(38)
y
s =
∣
∣
∣
∣
−a3 S θ3 a2 S θ2 ω2
a3 C θ3 −a2 C θ2 ω2
∣
∣
∣
∣
a3 C θ3= ω2 a2
S(θ3 − θ2)
C θ3(39)
Derivando las ecuaciones (36), con respecto al tiempo, se obtienen las ecuaciones correspondientes alanalisis de aceleracion del mecanismo de biela manivela corredera. Estas vienen dadas por
h1(α3, s) = −a2 Sθ2 α2 − a2 Cθ2 ω22 − a3 Sθ3 α3 − a3 Cθ3 ω
23 − s = 0
h1(α3, s) = a2 Cθ2 α2 − a2 Sθ2 ω22 + a3 Cθ3 α3 − a3 Sθ3 ω
23 = 0. (40)
8

De nueva cuenta, si previamente se han resuelto los analisis de posicion y velocidad del mecanismode biela manivela corredera, las ecuaciones (40) representan un sistema lineal de dos ecuaciones con dosincognitas α3, s. Este sistema de ecuaciones puede escribirse en forma matricial como
[
−a3 S θ3 −1a3 C θ3 0
] [
α3
s
]
=
[
a2 Sθ2α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23
−a2 Cθ2α2 + a2 Sθ2 ω22 + a3 Sθ3 ω
23
]
(41)
De nueva cuenta, la matriz de coeficientes de la ecuacion (41) es la misma matriz jacobiana del sistemano lineal de ecuaciones asociada al analisis de posicion del mecanismo. Por lo que, excepto en un caso, siel analisis de posicion tiene solucion, entonces el analisis de aceleracion del mecanismo tiene una solucionunica.
En forma simbolica, la solucion del analisis de aceleracion viene dado por
α3 =
∣
∣
∣
∣
a2 Sθ2α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23 −1
−a2 Cθ2α2 + a2 Sθ2 ω22 + a3 Sθ3 ω
23 0
∣
∣
∣
∣
a3C θ3(42)
y
s =
∣
∣
∣
∣
−a3 S θ3 a2 Sθ2α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23
a3 C θ3 −a2 Cθ2α2 + a2 Sθ2 ω22 + a3 Sθ3 ω
23
∣
∣
∣
∣
a3C θ3(43)
5 Mecanismo de Retorno Rapido.
En esta seccion, se mostrara como el mecanismo de retorno rapido mostrado en la figura 3 tambien puedeanalizarse mediante los procedimientos mostrados en las secciones anteriores.
Figure 3: Mecanismo de retorno rapido.
La ecuacion del lazo del mecanismo esta dado por
~a2 = ~a1 + ~a3. (44)
9

Donde el angulo θ1 = 0◦, ademas si se definen los angulos asociados a los vectores, θ2 y θ3, a partir delsemieje positivo X, las componentes escalares de la ecuacion (44), a lo largo de los ejes X y Y estandadas por
a2 Cθ2 = a1 + a3 Cθ3
a2 Sθ2 = a3 Sθ3. (45)
Debe notarse que los parametros del mecanismo son a1 y a2, mientras que las variables son θ2, θ3y a3. Mas aun, si el eslabon motriz es el eslabon 2, el angulo θ2 aun cuando es una variable, es undato necesario para realizar el analisis de posicion, de modo que las dos ecuaciones (45) cuya solucionconstituye el analisis de posicion estan dadas por
f1(θ3, a3) = −a2 Cθ2 + a1 + a3 Cθ3 = 0
f2(θ3, a3) = −a2 Sθ2 + a3 Sθ3 = 0 (46)
La matriz Jacobiana asociada a este sistema de dos ecuaciones con dos incognitas esta dada por
J(θ3, a3) =
[
∂f1∂θ3
∂f1∂a3
∂f2∂θ3
∂f2∂a3
]
=
[
−a3 S θ3 C θ3a3 C θ3 S θ3
]
. (47)
Es importante notar que el determinante de la matriz jacobiana esta dado por
|J(θ3, θ4)| = −a3 S2 θ3 − a3 C
2 θ3 = −a3(
S2 θ3 + C2 θ3)
= −a3. (48)
Debe notarse que la matriz Jacobiana es singular cuando
a3 = 0.
Esta condicion se obtiene cuando a2 = a1 y θ2 = 0◦. En esta situacion, dos revolutas son coaxiales, yesta posicion puede obtenerse, aun cuando serıa imposible determinar las velocidades angulares de lasrevolutas coaxiales. Concluyendo, en un mecanismo plano de retorno rapido, el eslabon 2 siempre puederotar.
Con las ecuaciones (46, 47) es posible realizar el analisis de posicion del mecanismo plano de retornorapido. Suponga ahora que se ha realizado el analisis de posicion del mecanismo plano de retorno rapido,derivando las ecuaciones (46), con respecto al tiempo se obtienen las ecuaciones correspondientes alanalisis de velocidad del mecanismo plano de retorno rapido. Estas ecuaciones estan dadas por
g1(ω3, a3) = a2 Sθ2 ω2 − a3 Sθ3 ω3 + a3 C θ3 = 0
g2(ω3, a3) = −a2 Cθ2 ω2 + a3 Cθ3 ω3 + a3 S θ3 = 0, (49)
donde ω2 es la velocidad angular del eslabon 2, el eslabon motriz, ω3 es la velocidad angular del eslabon3, el eslabon conducido y a3 es la velocidad de variacion de la longitud a3.
Debe notarse que, una vez resuelto el analisis de posicion del mecanismo plano de cuatro barras, lasecuaciones (49) representan un sistema lineal de dos ecuaciones con dos incognitas, ω3 y a3. Este sistemade ecuaciones puede escribirse en forma matricial como
[
−a3 S θ3 C θ3a3 C θ3 S θ3
] [
ω3
a3
]
=
[
−a2 Sθ2 ω2
a2 Cθ2 ω2
]
(50)
Es importante notar que la matriz de coeficientes de la ecuacion (50) es la misma matriz jacobianadel sistema no lineal de ecuaciones asociada al analisis de posicion del mecanismo. Por lo que, exceptoen un caso —cuando los resultados del analisis de posicion coinciden de manera exacta con una posicion
10

de puntos muertos, lo cual es altamente improbable—, si el analisis de posicion tiene solucion, entoncesel analisis de velocidad del mecanismo tiene una solucion unica.
La solucion del analisis de velocidad del mecanismo plano de retorno rapido esta dada por
ω3 =
∣
∣
∣
∣
−a2 S θ2 ω2 C θ3a2 C θ2 ω2 S θ3
∣
∣
∣
∣
−a3= ω2
a2
a3C (θ3 − θ2) (51)
y
a3 =
∣
∣
∣
∣
−a3 S θ3 −a2 S θ2 ω2
a3 C θ3 a2 C θ2 ω2
∣
∣
∣
∣
−a3= ω2 a2S(θ3 − θ2) (52)
Derivando las ecuaciones (49), con respecto al tiempo, se obtienen las ecuaciones correspondientes alanalisis de aceleracion del mecanismo de retorno rapido. Estas vienen dadas por
h1(α3, a3) = a2 Sθ2 α2 + a2 Cθ2 ω22 − a3 Sθ3 ω3 − a3 Sθ3 α3 − a3 Cθ3 ω
23 + a3 C θ3 − a3 ω3 S θ3 = 0
h1(α3, a3) = −a2 Cθ2 α2 + a2 Sθ2 ω22 + a3 Cθ3 ω3 + a3 Cθ3 α3 − a3S θ3 ω
23 + a3 Sθ3 + a3 Cθ3 ω3 = 0.
(53)
De nueva cuenta, si previamente se han resuelto los analisis de posicion y velocidad del mecanismode retorno rapido, las ecuaciones (53) representan un sistema lineal de dos ecuaciones con dos incognitasα3, s. Este sistema de ecuaciones puede escribirse en forma matricial como
[
−a3 S θ3 C θ3a3 C θ3 S θ3
] [
α3
a3
]
=
[
−a2 Sθ2α2 − a2 Cθ2 ω22 + a3 Cθ3 ω
23 + 2 a3 ω3 S θ3
a2 Cθ2α2 − a2 Sθ2 ω22 + a3 Sθ3 ω
23 − 2 a3 ω3 C θ3
]
(54)
De nueva cuenta, la matriz de coeficientes de la ecuacion (54) es la misma matriz jacobiana del sistemano lineal de ecuaciones asociada al analisis de posicion del mecanismo. Por lo que, excepto en un caso, siel analisis de posicion tiene solucion, entonces el analisis de aceleracion del mecanismo tiene una solucionunica.
En forma simbolica, la solucion del analisis de aceleracion viene dado por
α3 =
∣
∣
∣
∣
−a2 Sθ2α2 − a2 Cθ2 ω22 + a3 Cθ3 ω
23 + 2 a3 ω3 S θ3 C θ3
a2 Cθ2α2 − a2 Sθ2 ω22 + a3 Sθ3 ω
23 − 2 a3 ω3 C θ3 S θ3
∣
∣
∣
∣
−a3(55)
y
s =
∣
∣
∣
∣
−a3 S θ3 −a2 Sθ2α2 − a2 Cθ2 ω22 + a3 Cθ3 ω
23 + 2 a3 ω3 S θ3
a3 C θ3 a2 Cθ2α2 − a2 Sθ2 ω22 + a3 Sθ3 ω
23 − 2 a3 ω3 C θ3
∣
∣
∣
∣
−a3(56)
6 Analisis Cinematico de un Mecanismo de Dos Lazos.
En esta seccion se presenta el analisis cinematico del mecanismo plano de dos lazos mostrado en la figura4. La secuencia de los calculos esta dada por: Analisis de posicion del mecanismo, analisis de velocidaddel mecanismo y analisis de aceleracion del mecanismo.
11

Figure 4: Mecanismo plano de dos lazos.
7 Analisis de Posicion del Mecanismo Plano de Dos Lazos.
Las ecuaciones vectoriales de dos lazos independientes estan dadas por
~a2 + ~a3 = ~a1 + ~a4
~a2 +~b3 + ~c3 + ~a5 = ~b1 + ~s6
Las ecuaciones escalares asociadas a las ecuaciones vectoriales; es decir, las componentes x y y deestas ecuaciones vectoriales, se denotan por E y estan dadas por
a2 C θ2 + a3 C θ3 = a1 C θ1 + a4 C θ4
a2 S θ2 + a3 S θ3 = a1 S θ1 + a4 S θ4
a2 C θ2 + b3 C θ3 + c3 C (θ3 +π
2) + a5 C θ5 = b1 Cθb1 + s6 C (θ5 −
π
2)
a2 S θ2 + b3 S θ3 + c3 S (θ3 +π
2) + a5 S θ5 = b1 Sθb1 + s6 S (θ5 −
π
2)
Los parametros del mecanismo son:
a1, a2, a3, b3, c3, a4, a5, θ1 = 0◦, θb1 = 90◦
donde se indican aquellos valores que simplifican las ecuaciones. Las coordenadas generalizadas delmecanismo, denotadas por C, son:
θ2, θ3, θ4, θ5, s6.
De manera que aplicando el criterio de Paul, se tiene que la mobilidad del mecanismo, esta dada por
F = C − E = 5− 4 = 1.
12

En este analisis, se supondra que el eslabon motriz es el 2, de manera que, θ2 se supone conocida,ademas, la sustitucion de las identidades trigonometricas
C (θ3 +π
2) = C θ3 C
π
2− S θ3 S
π
2= −S θ3
C (θ5 −π
2) = C θ5 C
π
2+ S θ5 S
π
2= S θ5
S (θ3 +π
2) = S θ3 C
π
2+ C θ3 S
π
2= C θ3
S (θ5 −π
2) = S θ5 C
π
2− C θ5 S
π
2= −C θ5
Conduce a la formulacion de las ecuaciones de clausura cuya solucion constituye el analisis de posiciondel mecanismo
f1(~x) = f1(θ3, θ4, θ5, s6) = a2 C θ2 + a3 C θ3 − a1 − a4 C θ4 = 0 (57)
f2(~x) = f2(θ3, θ4, θ5, s6) = a2 S θ2 + a3 S θ3 − a4 S θ4 = 0 (58)
f3(~x) = f3(θ3, θ4, θ5, s6) = a2 C θ2 + b3 C θ3 − c3 S θ3 + a5 C θ5 − s6 S θ5 = 0 (59)
f4(~x) = f4(θ3, θ4, θ5, s6) = a2 S θ2 + b3 S θ3 + c3 C θ3 + a5 S θ5 − b1 + s6 C θ5 = 0 (60)
donde ~x = (θ3, θ4, θ5, s6). Estas ecuaciones pueden expresarse de manera condensada como
~f(~x) = ~0. (61)
De estas ecuaciones, se deduce la matriz Jacobiana del sistema de ecuaciones, dada por
J(~x) =
[
∂fi
xj
]
=
∂f1∂x1
∂f1∂x2
∂f1∂x3
∂f1∂x4
∂f2∂x1
∂f2∂x2
∂f2∂x3
∂f2∂x4
∂f3∂x1
∂f3∂x2
∂f3∂x3
∂f3∂x4
∂f4∂x1
∂f4∂x2
∂f4∂x3
∂f4∂x4
−a3 S θ3 a4 S θ4 0 0a3 C θ3 −a4 C θ4 0 0
−b3 S θ3 − c3 C θ3 0 −a5 S θ5 − s6 C θ5 −S θ5b3 C θ3 − c3 S θ3 0 a5 C θ5 − s6 S θ5 C θ5
(62)Empleando la expansion de Laplace generalizada, puede probarse que el determinante de la matriz
Jacobiana esta dada por
|J(~x)| =
∣
∣
∣
∣
−a3 S θ3 a4 S θ4a3 C θ3 −a4 C θ4
∣
∣
∣
∣
∣
∣
∣
∣
−a5 S θ5 − s6 C θ5 −S θ5a5 C θ5 − s6 S θ5 C θ5
∣
∣
∣
∣
= [a3 a4(S θ3 C θ4 − C θ3 S θ4] [−a5 S θ5 C θ5 + a5 S θ5 C θ5]]
−s6(C2 θ5 + S2 θ5)
]
= −a3 a4 s6 S(θ3 − θ4)
El mecanismo de dos lazos no tendra una solucion del analisis de posicion cuando
0 = a3 a4 s6 S(θ3 − θ4)
Es decir cuando
1. S(θ3 − θ4) = 0; es decir cuando θ3 − θ4 = 0 o cuando θ3 − θ4 = π. Estas dos condiciones estanasociadas a la rotabilidad del eslabon 2 del mecanismo plano de cuatro barras.
2. s6, esta condicion esta asociada, principalmente, con los eslabones 5 y 6 del mecanismo.
Las ecuaciones (61) y (62) permiten resolver el analisis de posicion por el metodo de Newton-Raphsonde acuerdo al esquema
~xn+1 = ~xn − [J(~xn)]−1 ~f(~xn). (63)
13

7.1 El proceso iterativo de solucion del sistema de ecuaciones no-lineales,
mediante el metodo de Newton-Raphson.
En esta seccion se ilustrara el proceso de solucion del sistema de ecuaciones dado por (57-refEqPos4)mediante el metodo de Newton-Raphson.
Los valores de los parametros del mecanismo que todavıa no se han sustituido son:
a1 = 6 pulg. a2 = 1.5 pulg. a3 = 10.5 pulg. a4 = 5 pulg.
b3 = 7 pulg. c3 = 2 pulg. a5 = 1.5 pulg. b1 = 7 pulg.
El valor del angulo del eslabon motriz es θ2 = 180◦. Se supondran las siguientes aproximacionesiniciales de las restantes coordenadas generalizadas del mecanismo
~x0 = (θ30, θ40, θ50, s60) = (40◦, 90◦, 60◦, 6 pulg.)
7.1.1 Primera iteracion.
En la primera iteracion, se tiene que calcular ~f(~x0) y J(~x0), de la siguiente manera.
~f(~x0) =
f1(~x0)f2(~x0)f3(~x0)f4(~x0)
=
1.5C 180◦ + 10.5C 40◦ − 6.0− 5.0C 90◦
1.5S 180◦ + 10.5S 40◦ − 5S 90◦
1.5C 180◦ + 7.0C 40◦ − 2.0S 40◦ + 1.5C 60◦ − 6S 60◦
1.5S 180◦ + 7.0S 40◦ + 2.0C 40◦ + 1.5S 60◦ − 7.0 + 6C 60◦
=
0.54341.7492−1.86943.3306
y
J(~x0) =
−10.5S 40◦ 5S 90◦ 0 010.5C 40◦ −5C 90◦ 0 0
−7.0S 40◦ − 2.0C 40◦ 0 −1.5S 60◦ − 6C 60◦ −S 60◦
7.0C 40◦ − 2.0S 40◦ 0 1.5C 60◦ − 6S 60◦ C 60◦
=
−6.7492 5 0 08.0434 0 0 0−6.0316 0 −4.2990 −0.86604.0767 0 −4.4461 0.5
El esquema del metodo de Newton-Raphson, dado por la ecuacion (63), puede reformularse como
[J(~x0)] [~x1 − ~x0] = −~f(~x0) o [J(~x0)]∆ ~x = −~f(~x0) (64)
donde
∆ ~x = ~x1 − ~x0 =
∆x1
∆x2
∆x3
∆x4
. (65)
El proceso de solucion de la ecuacion
−6.7492 5 0 08.0434 0 0 0−6.0316 0 −4.2990 −0.86604.0767 0 −4.4461 0.5
∆x1
∆x2
∆x3
∆x4
= −
0.54341.7492−1.86943.3306
=
−0.5434−1.74921.8694−3.3306
14

procede como se indica, de la segunda ecuacion, se tiene que
∆x1 =−1.7492
8.0434= −0.21747 rad = −12.4601◦.
Sustituyendo este resultando en la primera ecuacion
5∆x2 = −0.5434 + 6.7492∆x1 = −0.5434 + 6.7492 (−0.21747) = −2.0111
Por lo tanto
∆x2 =−2.0111
5= −0.40223 rad = −23.0460◦.
Sustituyendo estos resultados en las ultimas dos ecuaciones, se tiene que
−4.2990∆x3 − 0.8660∆x4 = 6.0316∆x1 + 1.8694 = 0.5577
−4.4461∆x3 + 0.5∆x4 = −4.0767∆x1 − 3.3306 = −2.4440
Este sistema de ecuaciones se resolvera mediante la regla de Cramer
∆ =
∣
∣
∣
∣
−4.2990 −0.8660−4.4461 0.5
∣
∣
∣
∣
= −5.9998
Por lo tanto
∆x3 =
∣
∣
∣
∣
0.5577 −0.8660−2.4440 0.5
∣
∣
∣
∣
∆=
−1.8376
−5.9998= 0.30628 rad = 17.5488◦
y
∆x4 =
∣
∣
∣
∣
−4.2990 0.5577−4.4461 −2.4440
∣
∣
∣
∣
∆=
12.9863
−5.9998= −2.1644 pulg
Reuniendo estos resultados, se tiene que
∆ ~x =
−12.4601◦
−23.0460◦
17.5488◦
−2.1644 pulg
Por lo tanto, se tiene, de la ecuacion (65), se tiene que
~x1 = ~x0 +∆ ~x =
40◦
90◦
60◦
6 pulg.
−
−12.4601◦
−23.0460◦
17.5488◦
−2.1644 pulg
=
27.5399◦
66.954◦
77.5488◦
3.8356 pulg.
7.1.2 Segunda iteracion.
En la segunda iteracion, se tiene que calcular ~f(~x1) y J(~x1), de la siguiente manera.
~f(~x1) =
f1(~x1)f2(~x1)f3(~x1)f4(~x1)
=
1.5C 180◦ + 10.5C 27.5399◦ − 6.0− 5.0C 66.954◦
1.5S 180◦ + 10.5S 27.5399◦ − 5S 66.954◦
1.5C 180◦ + 7.0C 27.5399◦ − 2.0S 27.5399◦ + 1.5C 77.5488◦ − 3.8356S 77.5488◦
1.5S 180◦ + 7.0S 27.5399◦ + 2.0C 27.5399◦ + 1.5S 77.5488◦ − 7.0 + 3.8356C 77.5488◦
=
−0.14710.25380.36010.3016
15

y
J(~x1) =
−10.5S 27.5399◦ 5S 66.954◦ 0 010.5C 27.5399◦ −5C 66.954◦ 0 0
−7.0S 27.5399◦ − 2.0C 27.5399◦ 0 −1.5S 77.5488◦ − 3.8356C 77.5488◦ −S 77.5488◦
7.0C 27.5399◦ − 2.0S 27.5399◦ 0 1.5C 77.5488◦ − 3.8356S 77.5488◦ C 77.5488◦
=
−4.8548 4.6009 0 09.3102 −1.9573 0 0−5.0089 0 −2.2917 −0.97645.2820 0 −3.4219 0.2156
Es importante notar que la norma euclideana del vector ~f(~x1) es evidentemente menor que la norma
euclideana del vector ~f(~x0), de manera que no hay ninguna necesidad de recurrir al esquema de amor-tiguamiento.
El esquema del metodo de Newton-Raphson, dado por la ecuacion (63), puede reformularse ahora
[J(~x1)] [~x2 − ~x1] = −~f(~x1) o [J(~x1)]∆ ~x = −~f(~x1) (66)
donde
∆ ~x = ~x2 − ~x1 =
∆x1
∆x2
∆x3
∆x4
(67)
El proceso de solucion de la ecuacion
−4.8548 4.6009 0 09.3102 −1.9573 0 0−5.0089 0 −2.2917 −0.97645.2820 0 −3.4219 0.2156
∆x1
∆x2
∆x3
∆x4
= −
−0.14710.25380.36010.3016
=
0.1471−0.2538−0.3601−0.3016
procede como se indica, primero se resuelve el sistema lineal[
−4.8548 4.60099.3102 −1.9573
] [
∆x1
∆x2
]
=
[
0.1471−0.2538
]
mediante la regla de Cramer,
∆ =
∣
∣
∣
∣
−4.8548 4.60099.3102 −1.9573
∣
∣
∣
∣
= −33.3329
Entonces
∆x1 =
∣
∣
∣
∣
0.1471 4.6009−0.2538 −1.9573
∣
∣
∣
∣
∆=
0.8797
−33.3329= −0.02639 rad = −1.5122◦
y
∆x2 =
∣
∣
∣
∣
−4.8548 0.14719.3102 −0.2538
∣
∣
∣
∣
∆=
−0.1373
−33.3329= 0.004121 rad = 0.2361◦
Una vez, este sistema, se formula el siguiente sistema[
−2.2917 −0.9764−3.4219 0.2156
] [
∆x3
∆x4
]
=
[
−0.3601 + 5.0089∆x1
−0.3016− 5.2820∆x1
]
=
[
−0.49228−0.1622
]
16

Resolviendo el sistema mediante la regla de Cramer, se tiene que
∆2 =
∣
∣
∣
∣
−2.2917 −0.9764−3.4219 0.2156
∣
∣
∣
∣
= −3.83523
Por lo tanto
∆x3 =
∣
∣
∣
∣
−0.49228 −0.9764−0.1622 0.2156
∣
∣
∣
∣
∆2=
−0.2645
−3.83523= 0.06896 rad. = 3.9515 ◦
y
∆x4 =
∣
∣
∣
∣
−2.2917 −0.49228−3.4219 −0.1622
∣
∣
∣
∣
∆2=
−1.3128
−3.83523= 0.3423 pulg.
Por lo tanto,
~x2 = ~x1 +∆ ~x =
27.5399◦
66.954◦
77.5488◦
3.8356 pulg.
+
−1.5122◦
0.2361◦
3.9515 ◦
0.3423 pulg.
=
26.0277◦
67.1901◦
81.5003◦
4.1779 pulg.
Para finalizar, se calculara la funcion ~f(~x2)
~f(~x2) =
f1(~x2)f2(~x2)f3(~x2)f4(~x2)
=
1.5C 180◦ + 10.5C 26.0277◦ − 6.0− 5.0C 67.1901◦
1.5S 180◦ + 10.5S 26.0277◦ − 5S 67.1901◦
1.5C 180◦ + 7.0C 26.0277◦ − 2.0S 26.0277◦ + 1.5C 81.5003◦ − 4.1779S 81.5003◦
1.5S 180◦ + 7.0S 26.0277◦ + 2.0C 26.0277◦ + 1.5S 81.5003◦ − 7.0 + 4.1779C 81.5003◦
=
−0.003263−0.0015210.06238−0.03016
De nueva cuenta puede observarse que la norma euclideana del vector ~f(~x2) es evidentemente menor
que la norma euclideana del vector ~f(~x1), de manera que no hay ninguna necesidad de recurrir al esquemade amortiguamiento.
7.2 Analisis de velocidad del mecanismo de dos lazos.
En esta seccion, se determinaran las ecuaciones correspondientes al analisis de velocidad del mecanismode dos lazos. Derivando las ecuaciones (57-60) respecto al tiempo, se tiene que
−a2 S θ2 ω2 − a3 S θ3 ω3 + a4 S θ4 ω4 = 0 (68)
a2 C θ2 ω2 + a3 C θ3 ω3 − a4 C θ4 ω4 = 0 (69)
−a2 S θ2 ω2 − b3 S θ3 ω3 − c3 C θ3 ω3 − a5 S θ5 ω5 − s6 S θ5 − s6 C θ5 ω5 = 0 (70)
a2 C θ2 ω2 + b3 C θ3 ω3 − c3 S θ3 ω3 + a5 C θ5 ω5 + s6 C θ5 − s6 S θ5 ω5 = 0 (71)
En forma matricial, el sistema esta dado por
−a3 S θ3 a4 S θ4 0 0a3 C θ3 −a4 C θ4 0 0
−b3 S θ3 − c3 C θ3 0 −a5 S θ5 − s6 C θ5 −S θ5b3 C θ3 − c3 S θ3 0 a5 C θ5 − s6 S θ5 C θ5
ω3
ω4
ω5
s6
=
a2 S θ2 ω2
−a2 C θ2 ω2
a2 S θ2 ω2
−a2 C θ2 ω2
(72)
17

Debe notarse que la matriz Jacobiana del analisis de velocidad es la misma matriz asociada al analisisde posicion del mecanismo y el analisis de velocidad, una vez resuelto el analisis de posicion, se reduce ala solucion del sistema lineal dado por la ecuacion (72).
7.3 Analisis de aceleracion del mecanismo de dos lazos.
En esta seccion, se determinaran las ecuaciones correspondientes al analisis de aceleracion del mecanismode dos lazos. Derivando las ecuaciones (68-71) respecto al tiempo, se tiene que
−a2 S θ2 α2 − a2 C θ2 ω22 − a3 S θ3 α3 − a3 C θ3 ω
23 + a4 S θ4 α4 + a4 C θ4ω
24 = 0
a2 C θ2 α2 − a2 S θ2 ω22 + a3 C θ3 α3 − a3 S θ3 ω
23 − a4 C θ4 α4 + a4 S θ4ω
24 = 0
−a2 S θ2 α2 − a2 C θ2 ω22 − b3 S θ3 α3 − b3 C θ3ω
23 − c3 C θ3 α3 + c3 S θ3 ω
33
−a5 S θ5 α5 − a5 C θ5 ω25 − s6 S θ5 − s6 C θ5 ω5 − s6 C θ5 α5 + s6 S θ5 ω
25 − s6 C θ5 ω5 = 0
a2 C θ2 α2 − a2 S θ2 ω22 + b3 C θ3 α3 − b3 S θ3ω
23 − c3 S θ3 α3 − c3 C θ3 ω
33
+a5 C θ5 α5 − a5 S θ5 ω25 + s6 C θ5 − s6 S θ5 ω5 − s6 S θ5 α5 − s6 C θ5 ω
25 − s6 S θ5 ω5 = 0
En forma matricial, el sistema esta dado por
−a3 S θ3 a4 S θ4 0 0a3 C θ3 −a4 C θ4 0 0
−b3 S θ3 − c3 C θ3 0 −a5 S θ5 − s6 C θ5 −S θ5b3 C θ3 − c3 S θ3 0 a5 C θ5 − s6 S θ5 C θ5
α3
α4
α5
s6
=
a2 S θ2 α2 + a2 C θ2 ω22 + a3 C θ3 ω
23 − a4 C θ4ω
24
−a2 C θ2 α2 + a2 S θ2 ω22 + a3 S θ3 ω
23 − a4 S θ4ω
24
a2 S θ2 α2 + a2 C θ2 ω22 + b3 C θ3ω
23 − c3 S θ3 ω
33 + a5 C θ5 ω
25 + 2 s6 C θ5 ω5 − s6 S θ5 ω
25
−a2 C θ2 α2 + a2 S θ2 ω22 + b3 S θ3ω
23 + c3 C θ3 ω
33 + a5 S θ5 ω
25 + 2 s6 S θ5 ω5 + s6 C θ5 ω
25
(73)
Debe notarse que la matriz Jacobiana del analisis de aceleracion es la misma matriz asociada al analisisde posicion del mecanismo y el analisis de aceleracion, una vez resuelto el analisis de posicion y el analisisde velocidad, se reduce a la solucion del sistema lineal dado por la ecuacion (73).
8 Analisis Cinematico de otro Mecanismo de Dos Lazos.
En esta seccion, se mostrara como siguiendo la metodologıa mostrada en las primeras secciones de estasnotas es posible realizar el analisis cinematico de mecanismos mas complicados. Considere el mecanismomostrado en la figura 5, tambien puede analizarse mediante los procedimientos mostrados en las seccionesanteriores.
Las ecuaciones de los dos lazos del mecanismo estan dadas por
~a2 + ~a3 = ~s
~a7 + ~a6 = ~a2 +~b3 + ~a5 (74)
Donde todos los angulos se definen a partir del semieje positivo X. Ademas θs = 180◦ y θ7 = 90◦ y elangulo θ3 esta asociado a ambos vectores ~a3 y ~b3. Las componentes escalares de la ecuacion (74), a lolargo de los ejes X y Y estan dadas por
a2 Cθ2 + a3 Cθ3 = s,
18

Figure 5: Mecanismo de dos lazos.
a2 Sθ2 + a3 Sθ3 = 0,
a6 Cθ6 = a2 Cθ2 + b3 Cθ3 + a5 Cθ5,
a7 + a6 Sθ6 = a2 Sθ2 + b3 Sθ3 + a5 Sθ5. (75)
Debe notarse que ademas de θs y θ7, los restantes parametros del mecanismo son
a2 = O2A = 2 pulgadas a3 = AC = 8 pulgadas b3 = AB = 4 pulgadas
a5 = BD = 6 pulgadas a6 = O6D = 6 pulgadas a7 = O2O6 = 4 pulgadas
mientras que las variables son θ2, θ3, θ5, θ6, y s. Mas aun, si el eslabon motriz es el eslabon 2, el anguloθ2 aun cuando es una variable, es un dato necesario para realizar el analisis de posicion, de modo que lascuatro ecuaciones (75) cuya solucion constituye el analisis de posicion estan dadas por
f1(θ3, θ5, θ6, s) = a2 Cθ2 + a3 Cθ3 − s = 0,
f2(θ3, θ5, θ6, s) = a2 Sθ2 + a3 Sθ3 = 0,
f3(θ3, θ5, θ6, s) = a6 Cθ6 − a2 Cθ2 − b3 Cθ3 − a5 Cθ5 = 0,
f4(θ3, θ5, θ6, s) = a7 + a6 Sθ6 − a2 Sθ2 − b3 Sθ3 − a5 Sθ5 = 0. (76)
La matriz Jacobiana asociada a este sistema de cuatro ecuaciones con cuatro incognitas esta dada por
J(θ3, θ5, θ6, s) =
∂f1∂θ3
∂f1∂θ5
∂f1∂θ6
∂f1∂s
∂f2∂θ3
∂f2∂θ5
∂f2∂θ6
∂f2∂s
∂f3∂θ3
∂f3∂θ5
∂f3∂θ6
∂f3∂s
∂f4∂θ3
∂f4∂θ5
∂f4∂θ6
∂f4∂s
=
−a3 S θ3 0 0 −1a3 C θ3 0 0 0b3 S θ3 a5 S θ5 −a6 S θ6 0−b3 C θ3 −a5 C θ5 a6 C θ6 0
. (77)
Con las ecuaciones (76, 77) es posible realizar el analisis de posicion del mecanismo plano de dos lazos.Suponga ahora que se ha realizado el analisis de posicion del mecanismo plano de dos lazos, derivando
19

las ecuaciones (76), con respecto al tiempo se obtienen las ecuaciones correspondientes al analisis develocidad del mecanismo. Estas ecuaciones estan dadas por
g1(ω3, ω5, ω6, s) = −a2 Sθ2 ω2 − a3 Sθ3 ω3 − s = 0
g2(ω3, ω5, ω6, s) = a2 Cθ2 ω2 + a3 Cθ3 ω3 = 0,
g3(ω3, ω5, ω6, s) = −a6 Sθ6 ω6 + a2 Sθ2 ω2 + b3 S θ3 ω3 + a5 Sθ5 ω5 = 0,
g4(ω3, ω5, ω6, s) = a6 Cθ6 ω6 − a2 Cθ2 ω2 − b3 C θ3 ω3 − a5 Cθ5 ω5 = 0. (78)
donde ω2 es la velocidad angular del eslabon 2, el eslabon motriz, ω3, ω5, ω6 son las velocidades angularesde los eslabones 3, 4 y 5 y s es la velocidad de la corredera o piston.
Debe notarse que, una vez resuelto el analisis de posicion del mecanismo plano de dos lazos, lasecuaciones (78) representan un sistema lineal de cuatro ecuaciones con cuatro incognitas, ω3, ω5, ω6 y s.Este sistema de ecuaciones puede escribirse en forma matricial como
J ~w = ~b (79)
Donde la matriz de coeficientes del sistema lineal, J , el vector de incognitas, ~w y el vector de terminosindependientes ~b estan dados por
J =
−a3 S θ3 0 0 −1a3 C θ3 0 0 0b3 S θ3 a5 S θ5 −a6 S θ6 0−b3 C θ3 −a5 C θ5 a6 C θ6 0
, ~ω =
ω3
ω5
ω6
s
, ~b =
a2 Sθ2 ω2
−a2 Cθ2 ω2
−a2 Sθ2 ω2
a2 Cθ2 ω2
(80)
Es importante notar que la matriz de coeficientes de la ecuacion (80) es la misma matriz jacobiana delsistema no lineal de ecuaciones asociada al analisis de posicion del mecanismo, (77). Por lo que, exceptoen un caso —cuando los resultados del analisis de posicion coinciden de manera exacta con una posicionde puntos muertos, lo cual es altamente improbable—, si el analisis de posicion tiene solucion, entoncesel analisis de velocidad del mecanismo tiene una solucion unica.
Derivando las ecuaciones (78), con respecto al tiempo, se obtienen las ecuaciones correspondientes alanalisis de aceleracion del mecanismo de dos lazos. Estas vienen dadas por
h1(α3, α5, α6, s) = −a2 Sθ2 α2 − a2 Cθ2 ω22 − a3 Sθ3 α3 − a3 Cθ3 ω
23 − s = 0
h2(α3, α5, α6, s) = a2 Cθ2 α2 − a2 Sθ2 ω22 + a3 Cθ3 α3 − a3S θ3 ω
23 = 0
h3(α3, α5, α6, s) = −a6 Sθ6 α6 − a6 Cθ6ω26 + a2 Sθ2 α2 + a2 Cθ2ω
22 + b3 Sθ3 α3 + b3 Cθ3ω
23
+a5 Sθ5 α5 − a5 Cθ5ω25 = 0
h4(α3, α5, α6, s) = a6 Cθ6 α6 − a6 Sθ6ω26 − a2 Cθ2 α2 + a2 Sθ2ω
22 − b3 Cθ3 α3 + b3 Sθ3ω
23
−a5 Cθ5 α5 + a5 Cθ5ω25 = 0 (81)
De nueva cuenta, si previamente se han resuelto los analisis de posicion y velocidad del mecanismo dedos lazos, las ecuaciones (81) representan un sistema lineal de cuatro ecuaciones con cuatro incognitasα3, α5, α6, s. Este sistema de ecuaciones puede escribirse en forma matricial como
J ~α = ~c (82)
Donde la matriz de coeficientes del sistema lineal, J , el vector de incognitas, ~α y el vector de terminosindependientes ~c estan dados por
J =
−a3 S θ3 0 0 −1a3 C θ3 0 0 0b3 S θ3 a5 S θ5 −a6 S θ6 0−b3 C θ3 −a5 C θ5 a6 C θ6 0
, (83)
20

y
~α =
α3
α5
α6
s
, ~c =
a2 Sθ2 α2 + a2 Cθ2 ω22 + a3 Cθ3 ω
23
−a2 Cθ2 α2 + a2 Sθ2 ω22 + a3S θ3 ω
23
a6 Cθ6ω26 − a2 Sθ2 α2 − a2 Cθ2ω
22 − b3 Cθ3ω
23 + a5 Cθ5ω
25
a6 Sθ6ω26 + a2 Cθ2 α2 − a2 Sθ2ω
22 − b3 Sθ3ω
23 − a5 Sθ5ω
25
(84)
De nueva cuenta, la matriz de coeficientes de la ecuacion (80) es la misma matriz jacobiana del sistemano lineal de ecuaciones asociada al analisis de posicion del mecanismo, (77). Por lo que, excepto en uncaso, si el analisis de posicion tiene solucion, entonces el analisis de aceleracion del mecanismo tiene unasolucion unica.
Apendice: Desarrollo de Funciones Mediante Series de Taylor.
En este apendice se muestra como llevar a cabo el desarrollo de funciones mediante series de Taylor,es decir mediante polinomios. El apendice se dividira en tres partes, en la primera parte se analizarauna funcion real de una variable real, en la segunda parte se analizara una funcion real de una variablevectorial; es decir una funcion real de varias variables reales y, finalmente, en la tercera parte se analizarauna funcion vectorial de una variable vectorial; es decir, en este caso, la funcion tiene varias componentes.El enfasis en estos desarrollos es el obtener la aproximacion lineal de la funcion.
8.1 Desarrollo de una funcion real de una variable real.
Considere una funcion real f(x) de variable real que es continuamente diferenciable en el intervalo (a, b).Sea x0 ∈ (a, b) y suponga que deseamos conocer, al menos aproximadamente, el valor de la funcion f(x)en un punto x ∈ (a, b) y “cercano” a x0 en terminos del valor de la funcion y sus derivadas en x0.
La aproximacion puede realizarse mediante una serie de potencias cuya variable sea (x− x0), es decir
f(x) = a0 + a1 (x− x0) + a2 (x− x0)2+ · · · =
∞∑
n=0
an (x− x0)n. (85)
Esta expresion se conoce como una serie de Taylor.Entonces, el problema se reduce, desde el punto de vista operativo, al calculo de los coeficientes a0,
a1, a2, · · · de la serie de potencias.
1. Para el calculo de a0, haga x = x0, entonces
f(x0) = a0 + a1 (x0 − x0) + a2 (x0 − x0)2+ · · · = a0, y a0 = f(x0) (86)
2. Para el calculo de a1, obtenga la primera derivada, respecto de x, de la serie de Taylor, ecuacion(85),
d f
d x= a1 + 2 a2 (x− x0) + · · · (87)
y sustituya x = x0,
d f (x0)
d x= a1 + 2 a2 (x0 − x0) + · · · = a1, y a1 =
d f (x0)
d x(88)
3. Para el calculo de a2, obtenga la segunda derivada, respecto de x, de la serie de Taylor, ecuacion(85),
d2 f
d x2= 2 a2 + · · · (89)
21

y sustituya x = x0,d2 f (x0)
d2 x= 2 a2 = 2 a2, y a2 =
1
2
d2 f (x0)
d2 x(90)
4. Los restantes coeficientes se calculan de manera semejante
Ası pues, la aproximacion cuadratica de la funcion original esta dada por
f(x) = f(x0) +d f (x0)
d x(x− x0) +
1
2
d2 f (x0)
d2 x(x− x0)
2(91)
8.2 Desarrollo de una funcion real de una variable vectorial.
Considere, ahora, el caso de una funcion real de una variable vectorial, o equivalentemente una funcionreal de varias variables reales
f(~x) = f(x1, x2, . . . , xn) (92)
El problema de aproximacion de esta funcion puede establecerse de la siguiente manera. Suponga quese conoce el valor de la funcion y sus derivadas, en este caso parciales, en el punto ~x0, determine unaaproximacion de la funcion en un punto ~x “cercano” a ~x0.
La aproximacion lineal de la ecuacion original esta dada por
f(~x) ≈ a0 + b1(x1 − x10) + b2(x2 − x20) + . . .+ bn(xn − xn0) +
c11(x1 − x10)2 + c12(x1 − x10)(x2 − x20) + . . .+ c1n(x1 − x10)(xn − xn0) +
c21(x2 − x20)(x1 − x10) + c22(x2 − x20)2 + . . .+ c2n(x2 − x20)(xn − xn0) + · · ·
cn1(xn − xn0)(x1 − x10) + cn2(xn − xn0)(x2 − x20) + . . .+ cnn(xn − xn0)2
+ · · · (93)
De esa manera, el problema de aproximacion se reduce de manera operativa a la determinacion de loscoeficientes a0, b1, b2, · · ·, bn, c11, c12, ... cnn. Para obtener los valores de los coeficientes y, de esamanera, resolver el problema de aproximacion de funcions debe procederse como se indica a continuacion
1. Para determinar a0, sustituya en la aproximacion lineal (93), ~x = ~x0; es decir x1 = x10, x2 = x20,· · ·, xn = xn0. De aquı que
f(~x0) = a0 + b1(x10 − x10) + b2(x20 − x20) + . . .+ bn(xn0 − xn0) = a0. (94)
2. Para determinar cualesquiera de los coeficientes bi, determine la derivada parcial de la aproximacioncon respecto a xi
∂ f(~x)
∂ xi
= bi + · · · (95)
y sustituya en la derivada parcial (95), ~x = ~x0; es decir x1 = x10, x2 = x20, · · ·, xn = xn0. De aquıque
∂ f(~x0)
∂ xi
= bi (96)
Por lo tanto, la aproximacion lineal de la funcion f(~x) esta dada por
f(~x) ≈ f(~x0) +∂ f(~x0)
∂ x1(x1 − x10) +
∂ f(~x0)
∂ x2(x2 − x20) + . . .+
∂ f(~x0)
∂ xn
(xn − xn0) + · · · (97)
22

o en forma matricial
f(~x) ≈ f(~x0) +[
∂ f(~x0)∂ x1
∂ f(~x0)∂ x2
· · · ∂ f(~x0)∂ xn
]
x1 − x10
x2 − x20
...xn − xn0
= f(~x0) +∇f(~x0)T (~x− ~x0) (98)
donde ∇f(~x0) representa el gradiente de la funcion f evaluado en el punto ~x0 y como usualmente serepresenta como un vector columna, debe transponerse para que el producto punto entre ∇f(~x0) y ~x−~x0
puede representarse como una multiplicacion matricial.
8.3 Desarrollo de una funcion vectorial de una variable vectorial.
Finalmente, considere una funcion vectorial de una variable vectorial, es decir considere
~f(~x) =
f1(~x)f2(~x)
...fn(~x)
=
f1(x1, x2, · · · , xn)f2(x1, x2, · · · , xn)
...fn(x1, x2, · · · , xn)
(99)
La aproximacion lineal de esta funcion vectorial se obtiene de manera muy sencilla notando que cadauna de las componentes de la funcion vectorial es una funcion real de variable vectorial. Por lo tanto, esaplicable la ecuacion (98), ası pues
~f(~x) ≈
f1(~x0) +∇f1(~x0)T (~x− ~x0)
f2(~x0) +∇f2(~x0)T (~x− ~x0)
...fn(~x0) +∇fn(~x0)
T (~x− ~x0)
=
f1(~x0)f2(~x0)
...fn(~x0)
+
∇f1(~x0)T (~x− ~x0)
∇f2(~x0)T (~x− ~x0)...
∇fn(~x0)T (~x− ~x0)
(100)
Mediante simples operaciones matriciales, esta aproximacion lineal se reduce a
~f(~x) ≈
f1(~x0)f2(~x0)
...fn(~x0)
+
∇f1(~x0)T (~x− ~x0)
∇f2(~x0)T (~x− ~x0)...
∇fn(~x0)T (~x− ~x0)
= ~f(~x0)+
∇f1(~x0)T
∇f2(~x0)T
...∇fn(~x0)
T
(~x−~x0) = ~f(~x0)+J(~x0)(~x−~x0)
(101)donde J(~x0) denota la matriz jacobiana del sistema de ecuaciones y esta dada por
J(~x0) =
∂ f1(~x0)∂ x1
∂f1(~x0)∂ x2
· · · ∂ f1(~x0)∂ xn
∂ f2(~x0)∂ x1
∂f2(~x0)∂ x2
· · · ∂ f2(~x0)∂ xn
......
. . ....
∂ fn(~x0)∂ x1
∂fn(~x0)∂ x2
· · · ∂ fn(~x0)∂ xn
(102)
23