
Amplificadores Operacionales
65
COLEGIO DON BOSCO DEPARTAMENTO DE ELECTRÓNICA GUIA DE INVESTIGACIÓN TERCER AÑO DE BACHILLERATO INTEGRANTES: CARNET: 1. Ricardo Moisés Herrera Miranda HM152246 2. César Antonio Fuentes Juárez FJ152243 Colegio Don Bosco, San Salvador, Septiembre 2015
-
Upload
richard-herrera -
Category
Documents
-
view
9 -
download
3
description
Descripcion de Conceptos de Amplificadores Operacionales y Ejemplos respectivos de cada uno.
Transcript of Amplificadores Operacionales

COLEGIO DON BOSCO
DEPARTAMENTO DE ELECTRÓNICA
GUIA DE INVESTIGACIÓN
TERCER AÑO DE BACHILLERATO
INTEGRANTES: CARNET:
1. Ricardo Moisés Herrera Miranda HM152246
2. César Antonio Fuentes Juárez FJ152243
Colegio Don Bosco, San Salvador, Septiembre 2015
GUÍA DE INVESTIGACIÓN
GANANCIA DE LAZO ABIERTO Y FRECUENCIA
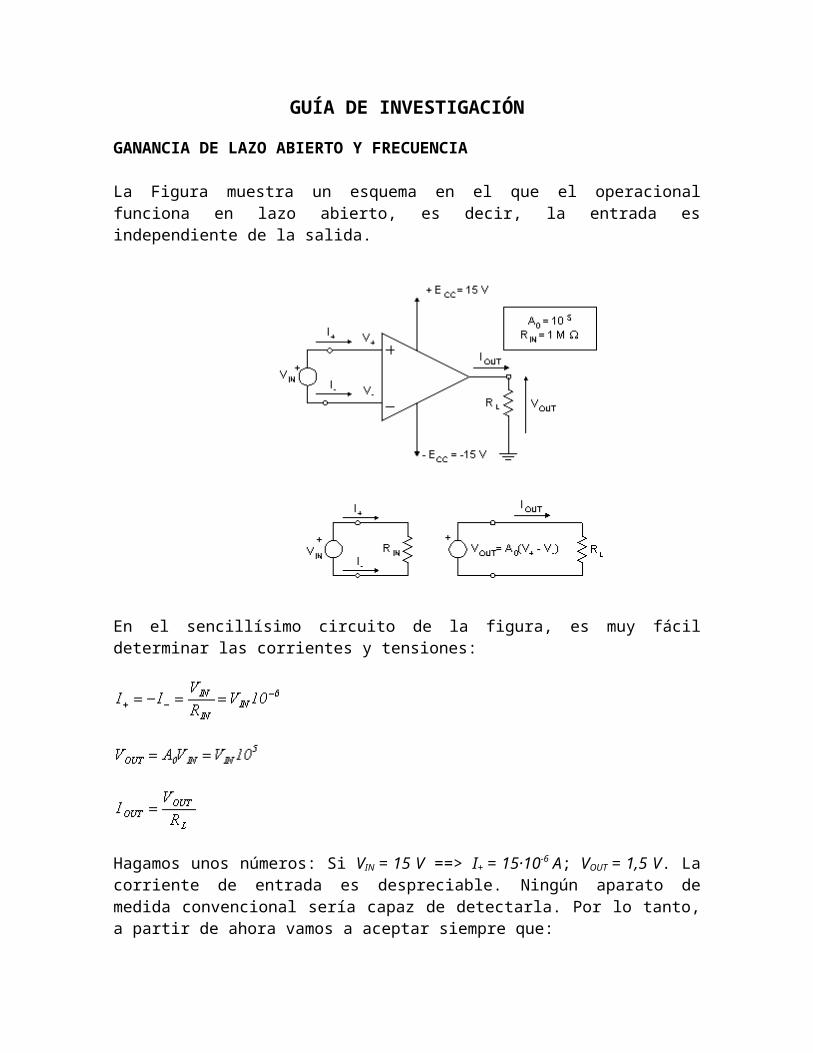
La Figura muestra un esquema en el que el operacional funciona en lazo abierto, es decir, la entrada es independiente de la salida.
En el sencillísimo circuito de la figura, es muy fácil determinar las corrientes y tensiones:
Hagamos unos números: Si VIN = 15 V ==> I+ = 15·10-6 A; VOUT = 1,5 V. La corriente de entrada es despreciable. Ningún aparato de medida convencional sería capaz de detectarla. Por lo tanto, a partir de ahora vamos a aceptar siempre que:

La tensión de salida es proporcional a la de entrada. Si VIN = 100 V => VOUT = 10 V. ¿Qué sucedería si VIN vale 200 V? Según la fórmula obtenida, VOUT sería de 20 V, pero no olvidemos que la alimentación es de 15 V, es decir, la salida no puede superar los 15 V. A partir de 150 V en la entrada, por mucho que aumentemos la tensión no obtendremos más de 15 V en la salida: el amplificador se satura. En la figura 10.4 se representa la curva VIN - VOUT de este ejemplo.
El funcionamiento como amplificador en lazo abierto presenta varios inconvenientes:
El intervalo de tensiones que pueden amplificarse es muy pequeño (en el ejemplo 150 V). El amplificador se satura con gran facilidad.
La tensión de salida depende directamente de la ganancia del operacional. Este parámetro tiene fuertes dispersiones de unos componentes a otros.
Por estos motivos, nunca se emplea este esquema cuando se quieren amplificar señales mediante operacionales. En la práctica cualquier señal provoca la saturación. Esto sí se emplea en los comparadores, como se explicará más adelante.
GANANCIA DE LAZO CERRADO Y FRECUENCIA
El concepto de realimentación implica que la entrada del amplificador operacional no es independiente de la salida. Parte de la señal de salida se aplica a la entrada, con lo que se puede controlar la ganancia. Para comprender mejor este concepto veamos un sencillo ejemplo:

El análisis del circuito permite plantear las siguientes ecuaciones:
V- = VIN
V+ = VOUT
Además podemos añadir las ecuaciones características del operacional:
I+ = I- = 0
VOUT = A0(V+ - V-)
Sustituyendo:
VOUT = A0(VOUT - VIN) =>
Si A0 = 100.000, ==> VOUT = 1,00001 VIN. Evidentemente, podemos y debemos olvidarnos del 5º decimal:
Además, de este ejemplo podemos sacar una interesante conclusión: al aplicar la realimentación:

Aquí aparece una realimentación negativa. Para conocer el funcionamiento de esta configuración se parte de las tensiones en las dos entradas exactamente iguales, se supone que la tensión en la pata + sube y, por tanto, la tensión en la salida también se eleva. Como existe la realimentación entre la salida y la pata -, la tensión en esta pata también se eleva, por tanto la diferencia entre las dos entradas se reduce, disminuyéndose también la salida. Este proceso pronto se estabiliza, y se tiene que la salida es la necesaria para mantener las dos entradas, idealmente, con el mismo valor.
Siempre que hay realimentación negativa se aplican estas dos aproximaciones para analizar el circuito:
V+ = V- (lo que se conoce como principio del cortocircuito virtual).
I+ = I- = 0
Cuando se realimenta negativamente un amplificador operacional, al igual que con cualquier circuito amplificador, se mejoran algunas características del mismo como una mayor impedancia en la entrada y una menor impedancia en la salida. La mayor impedancia de entrada da lugar a que la corriente de entrada sea muy pequeña y se reducen así los efectos de las perturbaciones en la señal de entrada. La menor impedancia de salida permite que el amplificador se comporte como una fuente eléctrica de mejores características. Además, la señal de salida no depende de las variaciones en la ganancia del amplificador, que suele ser muy variable, sino que depende de la ganancia de la red de realimentación, que puede ser mucho más estable con un menor coste. Asimismo, la frecuencia de corte superior es mayor al realimentar, aumentando el ancho de banda.
Así mismo, cuando se realiza realimentación positiva (conectando la salida a la entrada no inversora a través de un cuadripolo determinado) se buscan efectos muy distintos. El más aplicado es obtener un oscilador para generar señales oscilantes.
COMPARADORES CON AMPLIFICADORES OPERACIONALES
Un Amplificador Operacional puede ser utilizado para determinar cuál de dos señales en sus entradas es mayor. (Se utiliza como comparador). Basta con que una de estas señales sea ligeramente mayor para que cause que la salida del amplificador operacional sea máxima, ya sea positiva (+Vsat) o negativa (-Vsat).
Esto se debe a que el operacional se utiliza en lazo abierto (tiene ganancia máxima). La ganancia real de un amplificador operacional es de 200,000 o más y la fórmula de la señal de salida es: Vout = AOL (V1 – V2)
Dónde:- Vout = tensión de salida- AOL = ganancia de amplificador operacional en lazo abierto (200,000 o más)- V1 y V2 = tensiones de entrada (las que se comparan)
Vout no puede exceder la tensión de saturación del amplificador operacional, sea esta saturación negativa o positiva. (Normalmente este valor es aproximadamente unos 2 voltios menor que el valor de la fuente (V+ ó V-)
Del gráfico se ve que el valor de la entrada en V2 es mayor que la de V1 (que se utiliza como referencia y tiene un valor fijo), hasta que en un momento t1, V2 cambia y ahora es menor que V1.
Como V2 está conectado a la entrada no inversora del operacional, la salida (Vout) está en saturación positiva, hasta que llega a t1, en donde la salida ahora está en saturación negativa.
COMPARADOR INVERSOR, COMPARADOR NO INVERSOR
Tienen como misión comparar una tensión variable con otra, normalmente constante, denominada tensión de referencia, dándonos a la salida una tensión positiva o negativa. Se basan en hacer trabajar a saturación los A.O. dando a la salida una tensión Vcc (caso ideal). Existen dos tipos básicos de comparadores:
O sea que un Amplificador Operacional puede ser utilizado para determinar cual de dos señales en sus entradas es mayor. (se utiliza como comparador). Basta con que una de estas señales sea ligeramente mayor para que cause que la salida del amplificador operacional sea máxima, ya sea positiva (+Vsat) o negativa (-Vsat).
Esto se debe a que el operacional se utiliza en lazo abierto (tiene ganancia máxima)

La ganancia real de un amplificador operacional es de 200,000 o más y la fórmula de la señal de salida es: Vout = AOL (V1 – V2)
Si la señal a detectar tenga una tensión superior a la tensión de referencia, la salida será una tensión igual a +Vsat (tensión de saturación positiva).
Si la señal de entrada tiene una tensión inferior a la señal de referencia, la salida será igual a -Vsat
(tensión de saturación negativa)
COMPARADOR INVERSOR
En este comparador la tensión de referencia se aplica a la entrada no inversora, y la señal a detectar será aplicada a la entrada inversora. La tensión de referencia puede ser positiva o negativa

- Si la señal a detectar tenga una tensión superior a la tensión de referencia, la salida será una tensión igual a -Vsat (tensión de saturación negativa).
- Si la señal de entrada tiene una tensión inferior a la señal de referencia, la salida será igual a +Vsat
(tensión de saturación positiva)
APLICACIONES DEL AMPLIFICADOR OPERACIONAL
AMPLIFICADOR INVERSOR
Se llama así este montaje porque la señal de salida es inversa de la de entrada, en polaridad, aunque pude ser mayor, igual o menor, dependiendo esto de la ganancia que le demos al amplificador en lazo cerrado. La señal, como vemos en la figura, se aplica al terminal inversor o negativo del amplificador y el positivo o no inversor se lleva a masa. La resistencia R2, que va desde la salida al terminal de entrada negativo, se llama de realimentación.
En todo A.O. podemos decir que:
Por tanto si:
con lo cual las corrientes I1 e I2:

Como quedamos que Vx=0 quedará:
Al ser Ix=0, entonces: I1=I2 y por lo tanto:
Al final tenemos:
Fórmula que nos indica que la tensión de salida Vo es la tensión de entrada Vi multiplicada por una ganancia R2/R1. El signo negativo de la expresión indica la inversión de fase entre la entrada y la salida.
- Impedancia de entrada:
- Impedancia de salida:
El amplificador operacional no amplifica de la misma manera para todo el rango de frecuencias. Conforme la frecuencia de la señal a amplificar aumenta, la capacidad del Amplificador Operacional para amplificar disminuye.
Hay una frecuencia para la cual la ganancia de tensión ha disminuido al 70.7 % de la ganancia a frecuencias medias. (la ganancia a disminuido en 3 dB. (Decibeles))

Esta es la frecuencia de corte y nos indica el límite superior del ancho de banda (BW) de este Op. Amp.
Saturación
Si se aumenta la señal de entrada en amplificador operacional, aumentará también la salida. Pero hay un límite máximo al que puede llegar la salida (aproximadamente entre 1.5 y 2 voltios menos que la tensión entregada por las fuentes de alimentación). Después de esta tensión, aunque aumentemos la entrada la salida no aumentará
Entonces hay una señal de entrada máxima que hará que la señal de salida llegue también a su máximo. (máximo permitido por la fuente). Si señal de entrada es mayor a ésta se produce la saturación y la tensión de salida será recortada en los picos negativos y positivos. Ver la figura.
Tierra virtual
Cuando un amplificador operacional no está saturado, trabaja en condiciones normales.
Así la diferencia de tensión entre la entrada inversora y tierra es casi 0 voltios. Entonces se dice que la entrada inversora es una tierra virtual.
Si el amplificador entra en saturación, lo anterior ya no es cierto, pues aparece una tensión entre la entrada inversora y tierra.
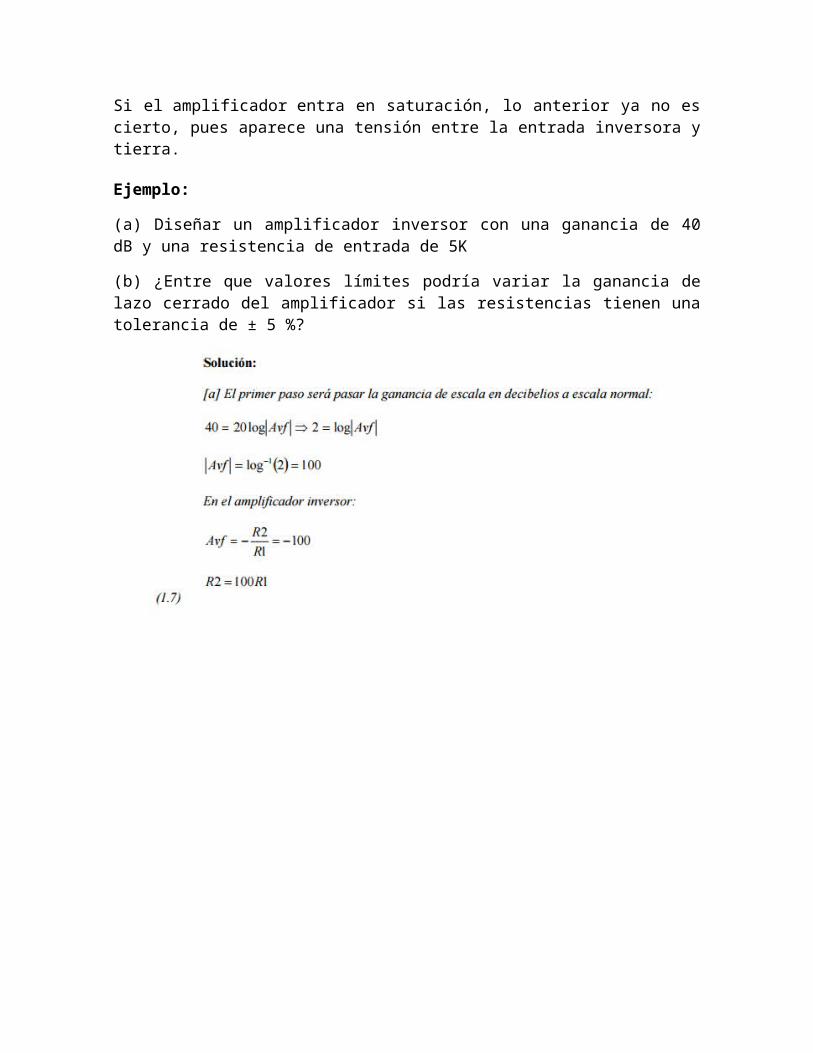
Ejemplo:
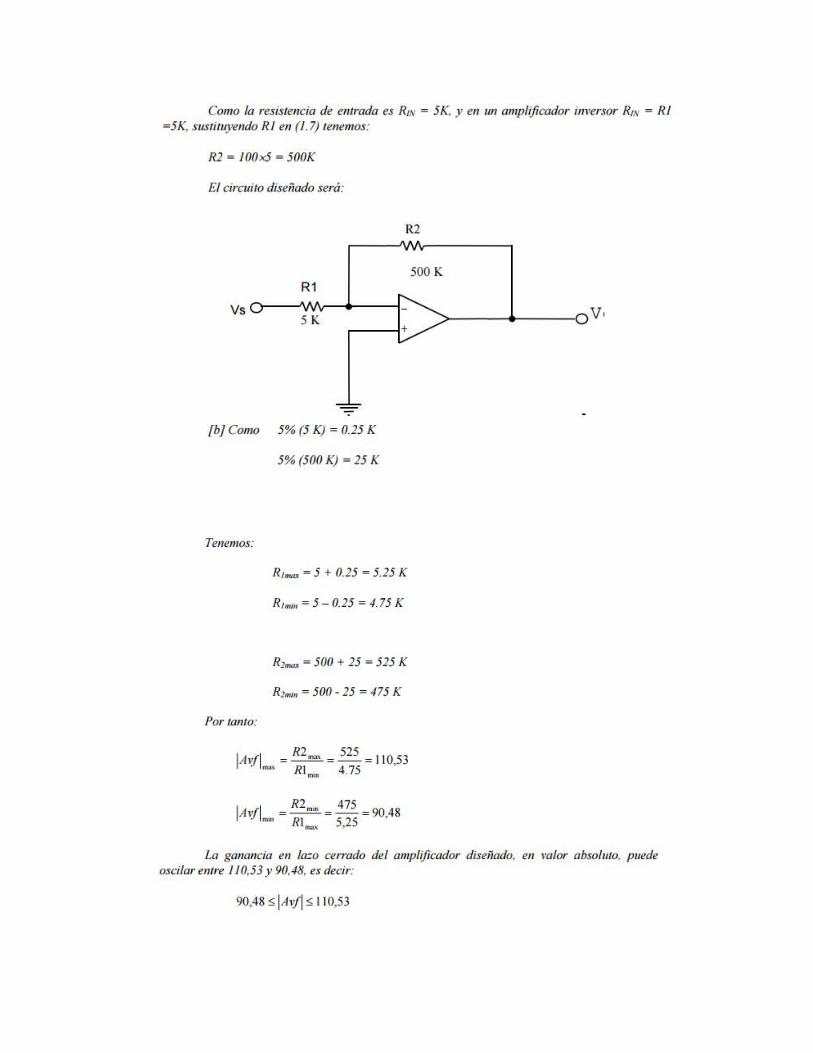
(a) Diseñar un amplificador inversor con una ganancia de 40 dB y una resistencia de entrada de 5K
(b) ¿Entre que valores límites podría variar la ganancia de lazo cerrado del amplificador si las resistencias tienen una tolerancia de ± 5 %?


NO INVERSOR
Aunque la forma de configuración más estándar de un amplificador operacional es un circuito inversor, hay algunas aplicaciones en las que dicha inversión no se desea, por lo que se utiliza el Circuito No Inversor. Puesto que un amplificador operacional en sí es en realidad un amplificador diferencial, no hay razón para que no se pueda operar en modo no inversor.
Sin embargo, sigue siendo necesaria una realimentación negativa para controlar la ganancia del circuito. Por lo tanto, se mantiene la estructura de las resistencias del circuito inversor y se cambian las conexiones de las entradas. Por supuesto, al hacer esto, se van a cambiar las características del circuito global, de modo que su comportamiento será diferente de alguna manera.
En esta configuración, la señal de entrada (Vin) se aplica directamente en la entrada no-inversora, lo que significa que la ganancia de salida del amplificador se convierte en positiva en contraste con el circuito inversor. El resultado es que la señal de salida está en fase con la señal de entrada.
Resumiendo, el Circuito No Inversor difiere del Circuito Inversor en las siguientes características:
La señal de entrada (Vin) se aplica a la entrada no-inversora del amplificador operacional.
La señal de salida (Vout) está en fase con la entrada.
FUNCIONAMIENTO y CÁLCULOS
Aplicando las leyes de Kirchoff en el lazo de realimentación, se obtienen las siguientes expresiones, suponiendo que el amplificador operacional es ideal:
Esta última ecuación se puede escribir de esta otra manera:
En un amplificador operacional ideal, se supone que las dos tensiones de entrada tienen el mismo valor, y como la entrada no-inversora está conectada a la señal de entrada (Vin):
Sustituyendo V- por Vin en la ecuación anterior:
Despejando Vout se obtiene la expresión de la señal de salida del Circuito No Inversor:

Para igualar en la medida de lo posible las corrientes de entrada del operacional en estado de reposo, se suele colocar una resistencia en la entrada no-inversora. Esta resistencia se calcula a partir del paralelo de R1 y R2:
DIFERENCIAL
El Amplificador Diferencial dispone de dos señales de entrada (aplicadas a los terminales inversor y no inversor), produciendo una tensión de salida proporcional a la diferencia entre las tensiones de entrada.
Notación: La diferencia entre las tensiones de entrada se llama tensión de entrada diferencial Vid. La ganancia diferencial (Ad) es la ganancia del amplificador. La tensión de entrada de modo común (Vicm) es la media de las tensiones de entrada.
El Circuito Diferencial es un circuito que realiza la diferencia algebraica entre dos tensiones de entrada y utiliza la amplificación diferencial natural del amplificador operacional. Para realizar esta operación, las tensiones se aplican a ambas entradas del amplificador operacional al mismo tiempo y la diferencia entre ellos se amplifica. Es decir, la tensión de salida es una constante multiplicada por la señal diferencial de entrada.

Para comprender el circuito, primero se estudiarán las dos señales de entrada por separado, y después combinadas. Como siempre Vd = 0 y la corriente de entrada en los terminales es cero.
Recordar que Vd = V(+) - V(-) ==> V(-) = V(+)
La tensión a la salida debida a V1 la llamaremos V01
Y como V(-) = V(+)
La tensión de salida debida a V1 (suponiendo V2 = 0) valdrá:
Y la salida debida a V2 (suponiendo V1 = 0) será, usando la ecuación de la ganancia para el circuito inversor, V02
Y dado que, aplicando el teorema de la superposición la tensión de salida V0 = V01 + V02 y haciendo que R3 sea igual a R1 y R4 igual a R2 tendremos que:
Por lo que concluiremos

Que expresando en términos de ganancia:
Que es la ganancia de la etapa para señales en modo diferencial
Esta configuración es única porque puede rechazar una señal común a ambas entradas. Esto se debe a la propiedad de tensión de entrada diferencial nula, que se explica a continuación.
En el caso de que las señales V1 y V2 sean idénticas, el análisis es sencillo. V1 se dividirá entre R1 y R2, apareciendo una menor tensión V(+) en R2. Debido a la ganancia infinita del amplificador, y a la tensión de entrada diferencial cero, una tensión igual V(-) debe aparecer en el nudo suma (-). Puesto que la red de resistencias R3 y R4 es igual a la red R1 y R2, y se aplica la misma tensión a ambos terminales de entrada, se concluye que Vo debe estar a potencial nulo para que V(-) se mantenga igual a V(+); Vo estará al mismo potencial que R2, el cual, de hecho está a masa. Está muy útil propiedad del amplificador diferencial, puede utilizarse para discriminar componentes de ruido en modo común no deseables, mientras que se amplifican las señales que aparecen de forma diferencial. Si se cumple la relación
La ganancia para señales en modo común es cero, puesto que, por definición, el amplificador no tiene ganancia cuando se aplican señales iguales a ambas entradas.
Las dos impedancias de entrada de la etapa son distintas. Para la entrada (+), la impedancia de entrada es R1 + R2. La impedancia para la entrada (-) es R3. La impedancia de entrada diferencial (para una fuente flotante) es la impedancia entre las entradas, es decir, R1+R3.

DETECTORES DE CRUCE POR CERO
Para disparar los tiristores es necesario una referencia a partir de la cual se cuente la duración de los disparos. Para ello hace falta el diseño de un subsistema (fig 1.) que se encarga de detectar los pasos por cero. En nuestro caso el paso por cero se tomará cuando la tensión de fase VRn,VSn y VTn se anulen.
El filtro de la entrada del primario es un filtro RC paso bajo para eliminar los armónicos múltiplos de 50 Hz. El problema de este filtro, así como el de todos los filtros analógicos, es que introduce un desfase. Para solucionar el desfase se deben elegir correctamente los valores de R y C teniendo en cuenta la inductancia del trafo:
Para que el condensador no introduzca un desfase dimensionaremos el condensador para que resuene con la Ltrafo, a 50 Hz (frecuencia de la red):
Sólo nos falta conocer la inductancia L del trafo, para ello realizamos el ensayo de vacío y experimentalmente obtuvimos:
De la condición de resonancia obtenemos:
De esta ecuación obtenemos la C, y con ella calculamos la R para una frecuencia de corte de 300 Hz.

A continuación analizaremos el circuito que está en el secundario del transformador:
Analizando el amplificador operacional vemos que cuando Vx pretende ser positiva el diodo conduce, por tanto el amplificador operacional estará realimentado negativamente y en Vx aparecerá la tensión de masa (0 V), por otro lado cuando Vx pretende ser negativa el Operacional trabaja en Bucle Abierto y satura a un valor positivo.
De esta forma el pulso está centrdo en el paso por cero.
Nos interesa que este pulso sea pequeño, pero sin reducirlo tanto que no se pueda detectar. Para obtener el ancho de pulso aplicamos:
Con ángulo pequeño podemos aproximar que:
Por tanto:
(mseg)
Siendo al duración del impulso, controlable con el potenciómetro.
Valores habituales para las resistencias R1 y R2 son:

V=-5Votlios
Y finalmente para la correcta polarización del amplificador operacional se
toma
Por último se presenta el montaje final de los circuitos detectores de paso de cero para cada una de las fases:

SEGUIDOR DE TENSIÓN
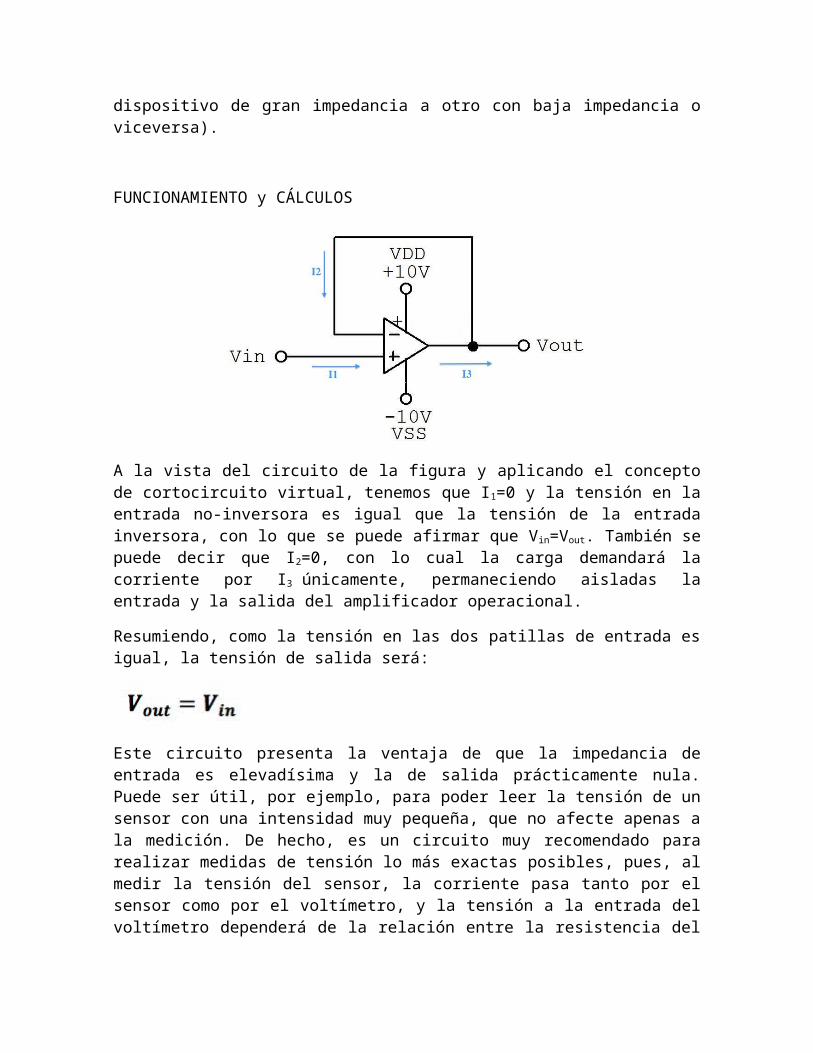
En el amplificador operacional en modo Seguidor de Tensión, la tensión de la señal de entrada, Vin, es igual a la tensión de salida, Vout, es decir, la señal de salida sigue a la de entrada, de ahí su nombre.
Estos circuitos tratan de aprovechar las características de alta impedancia de entrada y baja de salida de los amplificadores operacionales. Se utiliza como buffer, para eliminar efectos de carga, pero su uso más corriente es el de adaptador de impedancias de diferentes etapas (conectar un dispositivo de gran impedancia a otro con baja impedancia o viceversa).
FUNCIONAMIENTO y CÁLCULOS
A la vista del circuito de la figura y aplicando el concepto de cortocircuito virtual, tenemos que I1=0 y la tensión en la entrada no-inversora es igual que la tensión de la entrada inversora, con lo que se puede afirmar que V in=Vout. También se puede decir que I2=0, con lo cual la carga demandará la corriente por I3 únicamente, permaneciendo aisladas la entrada y la salida del amplificador operacional.

Resumiendo, como la tensión en las dos patillas de entrada es igual, la tensión de salida será:
Este circuito presenta la ventaja de que la impedancia de entrada es elevadísima y la de salida prácticamente nula. Puede ser útil, por ejemplo, para poder leer la tensión de un sensor con una intensidad muy pequeña, que no afecte apenas a la medición. De hecho, es un circuito muy recomendado para realizar medidas de tensión lo más exactas posibles, pues, al medir la tensión del sensor, la corriente pasa tanto por el sensor como por el voltímetro, y la tensión a la entrada del voltímetro dependerá de la relación entre la resistencia del voltímetro y la resistencia del resto del conjunto formado por sensor, cableado y conexiones.

AMPLIFICADOR CONTROLADO POR TENSIÓN

CONVERTIDOR DE CORRIENTE A TENSIÓN
También llamados amplificadores de transresistencia. Responden a la necesidad de construir fuentes de tensión constante independiente de la carga y controlados por corriente. Existen dos circuitos básicos: con la salida invertida y con la salida no invertida. - Salida Invertida

Siendo K la constante de traducción -R1. - Salida no invertida
Por la masa virtual tenemos:
Siendo K = R1
CONVERTIDOR DE TENSIÓN A CORRIENTE
A veces es deseable poder disponer de una corriente proporcional a una tensión dada.
Si se utiliza la ley de Ohm se podría lograr lo mismo: I = V / R, donde la relación entre la corriente y la tensión está dada por 1/R. Pero en este caso la corriente dependerá de la resistencia de carga.
Lo ideal sería tener una fuente de corriente con la capacidad de entregar una corriente constante, sin importar la carga que se le ponga. (Característica de impedancia de salida infinita.)
El siguiente circuito tiene una impedancia de salida muy alta (se puede suponer infinita). La corriente de salida tiene un valor dado por: I = Vin / R. Si la tensión de entrada Vin cambia, la corriente también, sin importar el valor de RL
Este circuito tiene la desventaja de que los dos terminales de la carga “flotan”, ya que ninguno de los terminales de salida está a tierra. En el circuito siguiente, este problema es eliminado.
Suponiendo que una tensión desconocida (V) exista entre los puntos 1 y 2, la realimentación que tiene el circuito, mantiene estos puntos al mismo potencial (a la misma tensión). Con los datos que se tienen se pueden obtener las corrientes en la resistencia R1 y R2 del lado izquierdo de los puntos 1 y 2 y la tensión en el punto 3.
Con esto se obtienen todas las corrientes que entran en el punto 3. La corriente en la carga RL será: Vin / R donde R = 1K.

1. Convertidor de voltaje a corriente constante con carga flotante
Esta configuración está caracterizada básicamente en una entrada de voltaje (vi), con una corriente de salida (IL).
Por lo que debido a la retroalimentación negativa tenemos un corto circuito virtual por lo que Vi = VR y que IL = IR
Por lo tanto IR = VR/R = Vi/R,
Observamos que la corriente de salida (en la carga) es función del voltaje de entrada, multiplicado por un factor (inverso de la resistencia) a esto se le llama factor de Transconductancia y por eso esta configuración también se le llama Amplificador de Transconductancia.
Por ejemplo si tenemos que IR = 3v/1k = 3mA
Fig. 1 Amplificador de Transconductancia. Con vi = 3 y R1= 1k y R3 = 1k
Ahora el mismo voltaje Vi pero con diferente resistencia R1. Ver Fig.2

Fig. 2 Amplificador de Transconductancia. Con vi = 3 y R1= 2.2k y R3 = 1k
Ahora si de R1 la dejamos igual pero R3 la cambiamos:
Fig. 3 Amplificador de Transconductancia. Con vi = 3 y R1= 2.2k y R3 = 3k
Claro que la configuración tiene un límite.
Tenemos que RLmax = (Vomax - Vi )/ IL, RLmax = (Vcc - Vi )/ IL,
Y sustituyendo IL también podemos expresar que:
RLmax = (Vcc - Vi )*R/ Vi, o que RLmax = (Vcc/Vi - 1)*R
En este caso RL seria:
RLmax = (Vcc/Vi - 1)*R1
RLmax = (15/3 - 1)1k
RLmax = 4k
Entonces con valores mayores al 4 k la Transconductancia ya no se cumplirá. Por lo que si agregamos una R3 = 10k, la corriente empezara a variar.

Fig. 4 Amplificador de Transconductancia. Con vi = 3 y R1= 1k y R3 = 10k
La diferencia es muy pequeña pero conforme se aumente la R3, la corriente aumentará.
2. Convertidor de voltaje a corriente constante con carga aterrizada
Considerando que la retroalimentación negativa es mayor que la positiva, el sistema es estable y se puede observar un corto circuito virtual en las entradas del OPAMP.
El análisis en esta configuración es muy parecido al de carga flotante. La corriente que pasa por IRF1 = IRF2, por lo que
(VI – VL)/RF1 = (VL – Vo)/RF2 factorizando Vo = VL - (-RF1/RI1)(VI - VL)
IL = IF2 - II2 , IL = (Vo – VL)/RF2 – VL/R I2
Si sustituimos Vo en la ecuación de IL tenemos:
IL = -(RF1/RI1 x RF2) x Vi + ( RF1/RI1 x RF2 – 1 /RI2) x VL
En esta última expresión IL depende de VL, por lo que debemos hacer cero ese término para así no depender de otros voltajes.
Por lo que si hacemos VL=0
( RF1/RI1 x RF2 – 1 /RI2) x VL RF1/RI1 x RF2 = 1 /RI2 RF1/RI1 = RF2/RI2

Entonces solo quedaría esta ecuación:
IL = -(RF1/RI1 x RF2) x Vi pero como: RF1 = RF2 x RI1/RI2 IL = (-1/RI2)Vi
Un ejemplo seria: IL = -(1/5k)5v, IL = 1mA, Ver Fig. 5
R2 = RL; RI2 = R7
Fig. 4 Amplificador de Transconductancia. Con vi = 5 y RL= 1 y RI2 = 5
AMPLIFICADORES DIFERENCIALES DE PRECISIÓN
Un amplificador operacional de precisión es aquel que incorpora algún tipo de corrección de la tensión de offset de entrada. La tensión de offset de entrada es la diferencia de tensión entre las entradas inversora y no inversora del amplificador, que puede variar entre microvoltios y milivoltios. La cantidad de offset depende mucho del emparejamiento de los transistores de entrada.

Además de la tensión de offset de entrada inicial, otros factores también pueden afectar el comportamiento de esta tensión de error, como la tensión en modo común, la tensión de trabajo, la tensión de salida, la temperatura e incluso el tiempo.
Dependiendo de la aplicación, estos factores externos pueden determinar la mejor arquitectura de amplificador para cada diseño.
Ajuste por EPROM
Algunos amplificadores operacionales utilizan fusibles EPROM no volátiles para corregir la tensión de offset de entrada. En muchos casos esto se lleva a cabo dentro del encapsulado durante la etapa de test final y es una manera muy económica de lograr un amplificador con una baja tensión de offset inicial. Dado que el amplificador se ajusta durante la fase posterior al ensamblaje, se puede corregir cualquier offset relacionado con el ensamblaje. La otra ventaja de esta arquitectura es que el amplificador es ajustado por el fabricante y no requiere ajuste alguno por parte del cliente. El inconveniente es que el fusible EPROM ocupa espacio en el chip, de ahí que sea difícil disponer de dispositivos con ajuste por EPROM en encapsulados muy compactos. Del mismo modo que los amplificadores de aplicación general, esta arquitectura será sensible a factores del entorno como la temperatura, así como a cambios en la tensión en modo común y de trabajo.
Ajuste láser
Otro método que se utiliza a menudo para aumentar la precisión de un amplificador operacional es el ajuste láser. En este proceso se utiliza un láser para ajustar el valor de resistencia de unas resistencias de película fina integradas en la oblea de silicio. La precisión de esta técnica puede ser relativamente elevada dado que el proceso de ajuste es continuo, a diferencia de la serie de pasos discretos en el ajuste por EPROM. Otra ventaja es que las resistencias de película fina son inherentemente más estables frente a la temperatura, aumentando así la precisión del amplificador para un amplio rango de temperaturas.
Sin embargo, el ajuste láser se debe realizar a nivel de oblea y no puede realizarse en el encapsulado del dispositivo. Los procesos de corte de la oblea en pastillas individuales, la colocación de la pastilla en el encapsulado y la conexión de la pastilla a las patillas del encapsulado pueden provocar un estrés mecánico en la oblea que afectará negativamente a la precisión total del dispositivo.

Estos cambios relacionados con el ensamblaje no pueden valorarse en los amplificadores con ajuste láser y por tanto añaden error al amplificador.Al igual que los fusibles EPROM no volátiles, el ajuste láser sólo se realiza una sola vez durante la fase de fabricación del dispositivo, sin posibilidad de reajustar el dispositivo. Los cambios en las condiciones de trabajo externas, como los cambios de temperatura y de la tensión de trabajo, afectarán de forma adversa a la precisión del amplificador y pueden tener un impacto directo sobre las prestaciones del diseño en general.
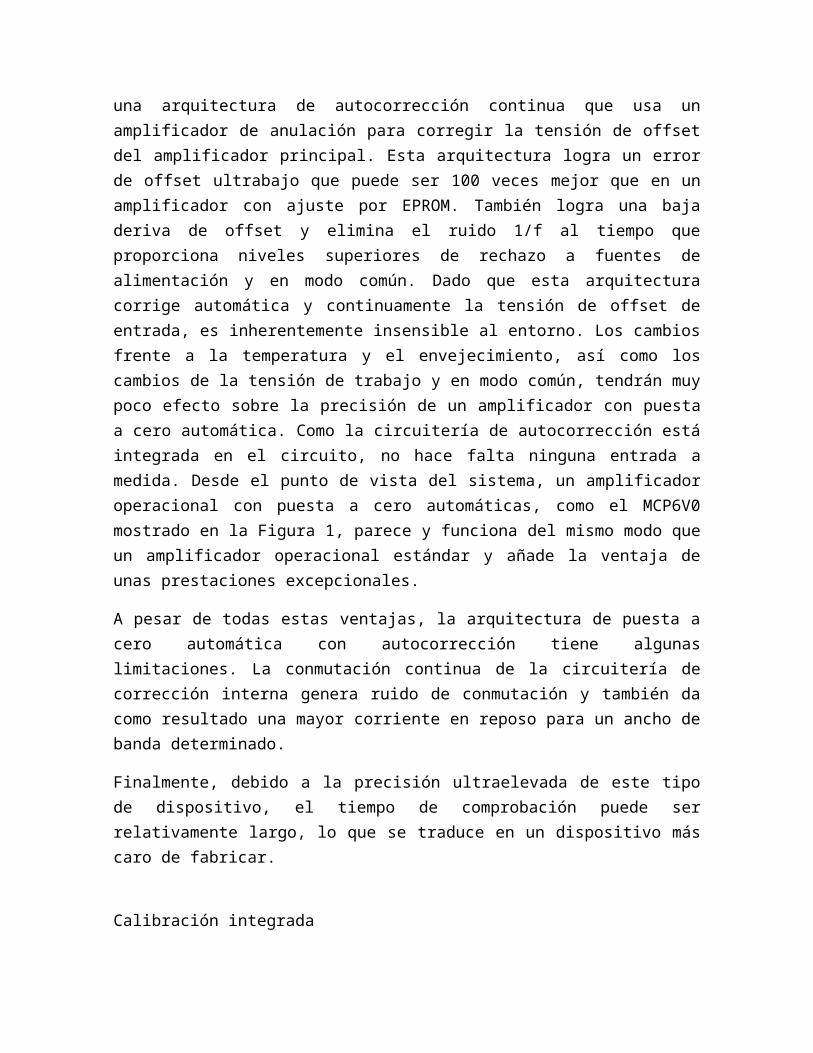
Amplificadores operacionales con puesta a cero automáticaLa arquitectura de puesta a cero automáticas (auto-zero) es una arquitectura de autocorrección continua que usa un amplificador de anulación para corregir la tensión de offset del amplificador principal. Esta arquitectura logra un error de offset ultrabajo que puede ser 100 veces mejor que en un amplificador con ajuste por EPROM. También logra una baja deriva de offset y elimina el ruido 1/f al tiempo que proporciona niveles superiores de rechazo a fuentes de alimentación y en modo común. Dado que esta arquitectura corrige automática y continuamente la tensión de offset de entrada, es inherentemente insensible al entorno. Los cambios frente a la temperatura y el envejecimiento, así como los cambios de la tensión de trabajo y en modo común, tendrán muy poco efecto sobre la precisión de un amplificador con puesta a cero automática. Como la circuitería de autocorrección está integrada en el circuito, no hace falta ninguna entrada a medida. Desde el punto de vista del sistema, un amplificador operacional con puesta a cero automáticas, como el MCP6V0 mostrado en la Figura 1, parece y funciona del mismo modo que un amplificador operacional estándar y añade la ventaja de unas prestaciones excepcionales.
A pesar de todas estas ventajas, la arquitectura de puesta a cero automática con autocorrección tiene algunas limitaciones. La conmutación continua de la circuitería de corrección interna genera ruido de conmutación y también da como resultado una mayor corriente en reposo para un ancho de banda determinado.

Finalmente, debido a la precisión ultraelevada de este tipo de dispositivo, el tiempo de comprobación puede ser relativamente largo, lo que se traduce en un dispositivo más caro de fabricar.
Calibración integrada
Otra alternativa consiste en utilizar un amplificador operacional de alta precisión con un circuito de calibración integrado.
La tecnología de calibración mCal de Microchip permite que los amplificadores operacionales obtengan una tensión de offset inicial tan baja como las otras arquitecturas pero, a diferencia de los amplificadores con ajuste por EPROM o láser, la calibración está activa en cuanto se conecta a la alimentación o mediante una patilla de calibración externa. Esto permite que el usuario recalibre el amplificador siempre que lo desee.
Una re calibración frecuente puede hacer que la precisión del amplificador sea insensible al entorno. Por ejemplo, si un cliente está muy preocupado por la deriva respecto a la temperatura, el error de deriva puede minimizarse recalibrando el dispositivo cada vez que la temperatura varíe cinco grados. Si bien esta solución puede reducir significativamente la deriva del amplificador frente a la temperatura, también exige que el usuario inicie activamente una rutina de calibración conectando la patilla de calibración al amplificador.
AMPLIFICADORES DIFERENCIALES DE INSTRUMENTACIÓN

El amplificador de instrumentación es un amplificador diferencial, cuya ganancia puede establecerse de forma muy precisa y que ha sido optimizado para que opere de acuerdo a sus propias especificaciones aún en un entorno hostil.
Es un elemento esencial de los sistemas de medida, en los que se ensambla como un bloque funcional que ofrece características funcionales propias e independientes de los restantes elementos con los que interacciona.
Estos circuitos amplifican la diferencia entre dos señales de entrada y rechazan cualquier señal que sea común a ambas señales. Estos circuitos se utilizan principalmente para amplificar señales diferenciales muy pequeñas en muchos procesos industriales, medición, adquisición de datos y aplicaciones médicas.
Ante las exigencias de medida que imponen los sensores, estos circuitos deben cumplir unos requisitos generales:
Ganancia: seleccionable, estable y lineal.
Entrada diferencial: con CMMR alto.
Error despreciable debido a las corrientes y tensiones de offset.
Impedancia de entrada alta.
Impedancia de salida baja.
FUNCIONAMIENTO y CÁLCULOS

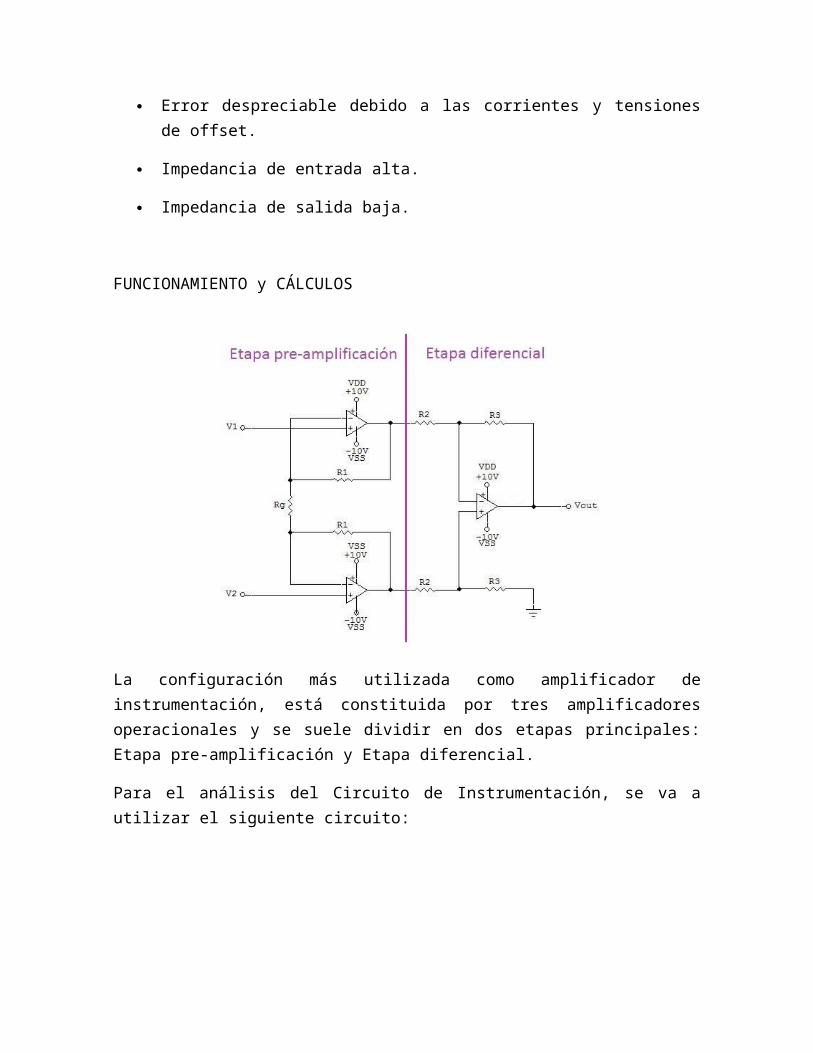
La configuración más utilizada como amplificador de instrumentación, está constituida por tres amplificadores operacionales y se suele dividir en dos etapas principales: Etapa pre-amplificación y Etapa diferencial.
Para el análisis del Circuito de Instrumentación, se va a utilizar el siguiente circuito:
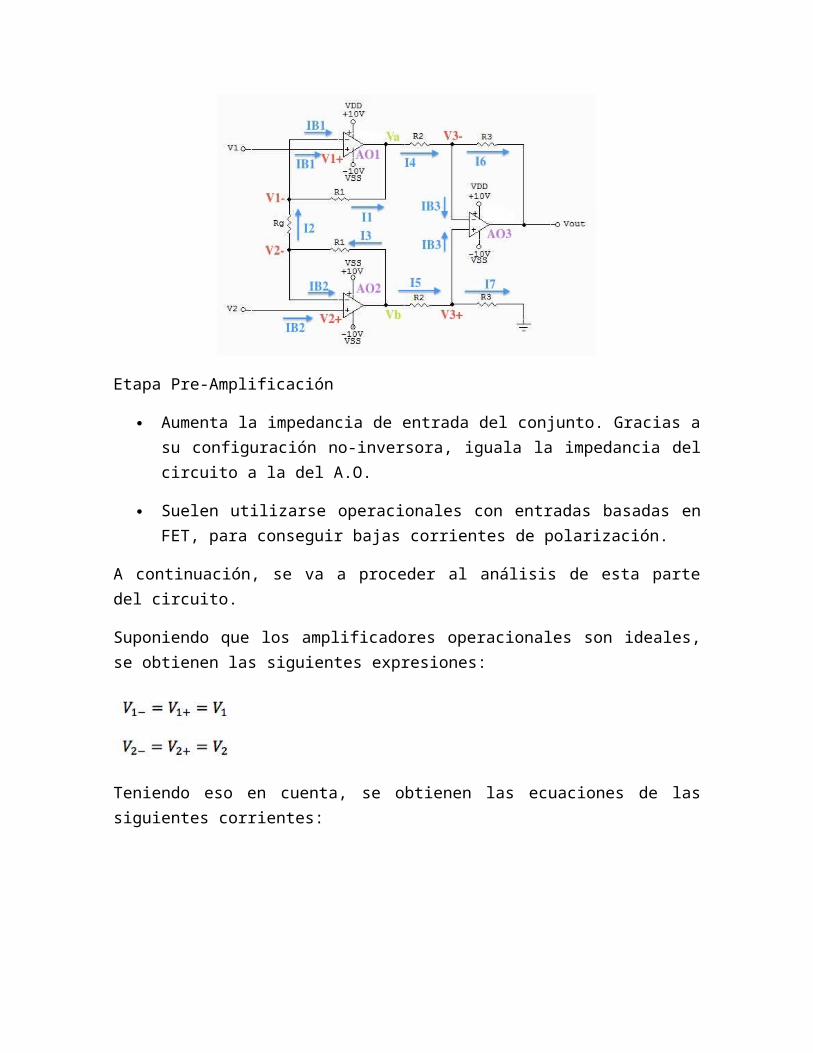
Etapa Pre-Amplificación
Aumenta la impedancia de entrada del conjunto. Gracias a su configuración no-inversora, iguala la impedancia del circuito a la del A.O.

Suelen utilizarse operacionales con entradas basadas en FET, para conseguir bajas corrientes de polarización.
A continuación, se va a proceder al análisis de esta parte del circuito.
Suponiendo que los amplificadores operacionales son ideales, se obtienen las siguientes expresiones:
Teniendo eso en cuenta, se obtienen las ecuaciones de las siguientes corrientes:
Puesto que el amplificador operacional no extrae ninguna corriente y aplicando las leyes de Kirchoff para las corrientes:
De manera que:
Se resuelve esa ecuación para conseguir VA y VB en función de V1 y V2:

Dicho de otra manera:
Restando ambas expresiones, se obtiene:
Observar que el paréntesis representa la ganancia diferencial de la etapa pre-amplificadora, y que, variando RG, se puede variar la ganancia.
Etapa Diferencial
Esta parte del circuito es un circuito diferencial.
A continuación, se va a proceder al análisis de esta parte del circuito.
Aplicando las leyes de Kirchoff, se obtienen las expresiones de las siguientes corrientes:

Suponiendo que el amplificador operacional es ideal, se obtiene la siguiente expresión:
Sustituyendo V3- por V3+ en las ecuaciones anteriores:
Puesto que el amplificador operacional no extrae ninguna corriente y aplicando las leyes de Kirchoff para las corrientes:
De manera que dichas ecuaciones se pueden escribir de la siguiente forma:

Se despeja Vout de la primera expresión y V3+ de la segunda:
Sustituyendo V3+ en la expresión de Vout:
Por último, se sustituye la expresión (VB-VA) conseguida en la etapa pre-amplificadora en la ecuación anterior:
Observar que con RG se puede ajustar la ganancia. Aun así, hay que tener en cuenta que el ajuste no es lineal, ya que RG está en el denominador.
FILTROS PASIVOS
TIPOS DE FILTROS PASIVOS
La frecuencia de corte es el punto donde la respuesta en frecuencia se reduce a una fracción determinada. Este punto suele ser el punto de -3dB, que en potencia es el punto donde la respuesta se reduce a la mitad. Por la forma de percibir del oído humano, la disminución de la respuesta a la mitad no se percibe como "la mitad de alto" sino como "un poquito más bajo".
Un filtro puede dejar pasar las frecuencias mayores que la frecuencia de corte, o al contrario, dejar pasar sólo las frecuencias menores que la frecuencia de corte. O se pueden dejar pasar sólo las frecuencias de una banda (entre dos frecuencias de corte).
Filtros paso alto: dejan pasar la frecuencia más alta que la frecuencia de corte.
Filtros paso bajo: Dejan pasar las frecuencias menores que la frecuencia de corte.
Filtros paso banda: Dejan pasar las frecuencias entre dos frecuencias de corte. Normalmente son una combinación en serie de un paso alto y un paso bajo, pero pueden implementarse de otras maneras.
Filtro elimina banda: Al contrario que la pasa banda, estos eliminan una banda. En altavoces no tiene mucho sentido. Al igual que los paso banda, pueden implementarse con un paso bajo y un paso alto, pero en paralelo.
Otros: muesca (notch), y otras redes: Red Zobel, L-pad.
Los filtros pasivos se basan en la impedancia variable y dependiente de la frecuencia que tienen las bobinas y los condensadores.
Condensadores
Cuanto mayor sea f, menor será su impedancia, por lo que un condensador dejará pasar las frecuencias altas y ofecerá una gran resistencia a las bajas frecuencias, que se verán atenuadas
Bobinas
Cuanto mayor sea f, mayor será la impedancia de la bobina, por lo que a través de una bobina, pasarán sin ningún problema las frecuencias bajas, y las frecuencias altas se verán atenuadas, por atravesar una resistencia mayor.

PARÁMETRO Q DE UN FILTRO
A partir de ahora nos encontramos con un nuevo problema: La Q del filtro.
Q suele ser sinónimo de un factor de calidad, pero en los filtros no tiene nada que ver con eso. Q define la proporción entre Z nominal, L y C. En los ejemplos de fórmulas y gráficas se han utilizado exclusivamente filtros de 2º orden, pero esto es común a todos los filtros de orden mayor a 1. El filtro de primer orden sólo tiene una Q, la de Butterworth.
Dependiendo de los valores de Q se obtiene respuesta u otra en la banda cercana a la frecuencia de corte. Algunos de estos valores de Q producen que una característica sea óptima: respuesta plana, alineamiento en fase o brusquedad de la caída.Ahora ya no tiene mucho sentido hablar de 6, 12, 18 o 56dB/oct, porque eso son comportamientos asintóticos, muy por debajo de la banda audible, o por lo menos sin enmascarar. Sin embargo, nos referiremos al orden para indicar ese comportamiento.
Los tipos de filtro más importantes en función de Q, para altavoces y audio son los siguientes:
Butterworth: Produce la respuesta en frecuencia más plana posible. Tchebychev: Produce la caída más brusca de todas, a pesar de tener un pico
de respuesta cerca de la frecuencia de corte. Este es el motivo por el que no se use demasiado.
Bessel: No decae tan rápido como los anteriores, pero produce los menores errores de fase de todos.
Linkwitz-Riley: El punto de corte no se produce a -3dB, sino a -6dB. Se construye a partir de dos filtros butterworth de orden menor. Como ventajas tiene que la respuesta es plana y sobre todo: en todo momento la reproducción de ambos drivers está en fase. Es una idea diferente a los filtros convencionales y es exclusiva del audio.
En lugar de definir Q con un número, que cambia para diferentes órdenes, se emplean los nombres de matemáticos ilustres que definieron funciones que luego han sido usadas para deducir el comportamiento de los filtros en base al comportamiento de esas funciones (sobre amortiguado, su amortiguado...). Entre ellos están Bessel, Tchebychev, Butterworth, Legendre, Cauer,...
En el caso del Linkwitz-Riley, Siegfrid Linkwitz es un prestigioso ingeniero que ahora retirado se dedica a la acústica. Las peculiaridades de su configuración son que la suma eléctrica del paso bajo y paso alto es exactamente 1, y ambos filtros reproducen con la misma fase.

La respuesta es completamente plana y la reedición sonora muy homogénea.
En la gráfica de la derecha se ve cómo se comportan estos filtros dependiendo de su Q. Por debajo de la parte mostrada en la gráfica, el filtro de Tchebychev es el que más atenuación produce. El de Bessel, el que menos.
Puede parecer en un principio que el de Tchebychev no sirve para nada, tiene un gran pico en la respuesta,... Esto es porque se muestra la respuesta en voltaje. Falta la intensidad, y juntas la intensidad y el voltaje forman la potencia. En potencia, que es como funciona un filtro pasivo, no hay ganancia de ningún tipo. Algo pasivo no puede producir ganancia.
Parámetro Q de un filtro
Pero en circuitos activos más complejos, la propiedad de atenuar más que los demás hace que un filtro de 6º orden Tchebychev acabe funcionando mejor que uno de Butterworth de 8º orden. De hecho, es la Q que se utiliza en los filtros anti-alising en los conversores analógico-digital.
A la izquierda se ve cómo se comporta la fase de cada filtro. La peor es la de Tchebychev, es la que más cambios bruscos produce, y el de Bessel es el más suave. Butterworth, como en el caso anterior, es algo intermedio.
En el fondo es un compromiso entre fase, respuesta temporal, respuesta en frecuencia y atenuación en la banda eliminada. No se puede tener todo a la vez, así que hay que decidir cuál es el factor más importante.
SUMA DE LAS RESPUESTAS
Una vez que la señal pasa por el filtro, llega al altavoz. Pero quedan cosas pendientes. Queda por saber qué pasa cuando el sonido sale del altavoz. Hay que pensar que está desplazado en fase.
Vamos a ver qué nuevos problemas surgen ahora en el caso concreto del filtro de 2º orden.
Ahora, a la derecha tenemos las señales que resultan de filtrar, paso bajo y paso alto, para conectarlas a los drivers. Se ha señalado la Q de todos los filtros
Y la suma de las respuestas tiene este aspecto, desolador. ¿Qué es lo que está pasando? Pues que a la frecuencia de corte el desfase es de 180º, y eso supone que una se resta a la otra, y es una cancelación perfecta.La solución es invertir la fase de uno de los dos altavoces (cambiar el cable rojo por el negro, así de fácil). Normalmente se invierte la fase del de agudos, ya que en los agudos no es posible percibir la fase absoluta.
La suma en voltaje más plana es la de Linkwitz-Riley, granate. La siguiente es la de Butterworth, azul oscuro.A la derecha se ve la fase de la suma de ambas pastes del filtro en el caso que están los dos altavoces en fase. Se ve que el desfase máximo es de 90º.
El caso en el que más bruscamente se desvía la fase es el de Cebiche y el que menos, el de Bessel.
Ahora, la respuesta en fase de la suma con el tweeter invertido de fase. Se aleja de cero, pero esto es a costa de no tener una cancelación. Es el precio que hay que pagar.
Esto es común a los filtros de orden par. Hay que elegir entre una cancelación o un desfase, y es completamente lógico elegir el desfase, es decir, hay que invertir la polaridad del tweeter. Esto es así con los de 2, 4º, 6º,...orden, excepto en el filtro activo de 4º orden LR, donde no hay que invertir la fase de ninguno de los drivers.
En el caso de un filtro de orden impar, concretamente el 3er orden tenemos este resultado.
Se trata de un filtro de 3er orden Butterworth. Se puede observar a primera vista que la suma de las respuestas es perfectamente plana. En caso de invertir la fase del tweeter también es plana.La respuesta en fase se muestra a la derecha. Los drivers reproducen a +135º y -135º a 1kHz, la frecuencia de corte. Esto quiere decir que hay un desfase de 270º entre ellos... o visto de otra manera, -90º.
Es un artificio matemático perfectamente válido.
A pesar de lo aparatosa que resulta la gráfica, la respuesta en fase no está mal para ser un filtro de 3er orden.La tentación de invertir la fase del tweeter puede ser demasiado grande. A la derecha se ve lo que pasa en ese caso. La respuesta tiene un desfase de -90º a la frecuencia de corte, pero luego avanza hacia los 180º que tiene el tweeter de desfase.En definitiva, no produce ningún beneficio sin que produzca otro perjuicio. Como viene siendo habitual, es cuestión de decidir qué característica nos conviene.
GROUP DELAY (retardo de grupo)
El retardo de grupo es la variación del desfase (fi) frente a la frecuencia angular (omega), que es proporcional a la frecuencia.
Es una magnitud que ha permanecido ignorada durante mucho tiempo pero parece que ahora empieza por fin a despertar interés.Es una medida de la respuesta temporal que produce un filtro. Cuanto más grande, más tiempo tarda en reaccionar, pero no es un problema de tiempo sino de uniformidad. No podemos percibir un retraso absoluto en la música, es como pulsar el play 300 microsegundos antes o después, pero se puede distinguir cuándo el platillo empieza a sonar en relación con el bombo.
Los casos más dramáticos se producen en graves, donde los desfases y los retrasos temporales son perceptibles por nuestro oído. En los casos de las cajas acústicas basadas en sistemas resonantes, como las bass-reflex y la pasa banda, es donde mayor importancia tiene, cuando los retrasos empiezan a superar los 25ms, cosa que nuestro oído percibe como un eco.
A la derecha se observa el retardo de grupo para los 4 órdenes de filtro visto aquí. Todos son de Q Butterworth. Es obvio que no sólo aumenta el retraso, sino que aumenta también su no uniformidad, que es el principio del problema. Group delay frente al orden

Aquí se muestra la dependencia del retardo de grupo con la Q del filtro. Tras ver las dos gráficas ya se puede deducir algo. Cuanto mayor es la atenuación del filtro, mayor es la no uniformidad y peor la respuesta temporal.
La Q de Bessel es la mejor mientras que la de Chebychev es la peor.
Group delay frente a Q
El resultado de todo lo expuesto anteriormente (fase, respuesta temporal, group delay,... es el "ringing", o sobreoscilación. Es una distorsión añadida por el filtro a la onda original.
El ejemplo más acertado es la onda cuadrada, que aunque muchos opinan que no es un test válido, resulta ser la onda con mayor contenido en armónicos y la más exigente para la respuesta temporal. A la derecha se observa una onda cuadrada con un periodo de 10ms.
Respuesta a la onda cuadrada
En el detalle de la derecha se aprecia mejor: el filtro de Tchebychev produce unos picos bastante grandes. Le sigue el de Butterworth, algo mejor. Luego vienen Bessel y L-R con una respuesta bastante buena...
Detalle de la sobreoscilaciónEl circuito empleado para esta última simulación se muestra aquí. Son los filtros de 2º orden con una entrada de onda cuadrada.
FILTRO NOTCH
El altavoz tiende a moverse con gran facilidad a la frecuencia de resonancia. Esto, como en los motores eléctricos en funcionamiento quiere decir que consume poca corriente, y se traduce como una gran impedancia.

En un altavoz, esto se produce sólo a esa frecuencia y sus alrededores, y crea picos de valores muy diversos según el tipo de altavoz. En los woofer, los picos tienden a ser grandes y estrechos, y en los tweeter pasa lo contrario.
El caso es que este pico de impedancia interacciona con el filtro y es un problema serio, sobre todo en los diseños donde se trabaja cerca de la frecuencia de resonancia del driver.
El uso habitual del filtro notch es corregir este pico de impedancia, y dejarla plana, para que el filtro pueda funcionar correctamente.
También un notch sirve para ecualizar picos en la respuesta. (Resonancias del diafragma, etc...). Se hace con una resistencia en serie con toda la red RLC y driver. Su comportamiento es como el de la red atenuadora L.pad, pero ésta, a diferencia de R2 de la L-pad, es selectiva a la frecuencia.
Filtro notch (corrector de impedancia)
Una solución al pico de impedancia, empleada especialmente en tweeters es el ferrofluído. Es un aceite con partículas magnéticas en suspensión que elimina prácticamente los picos de impedancia.
REDES DE ATENUACIÓN L-PAD
Normalmente la eficiencia de un tweeter es mayor que la de un woofer. Esto quiere decir que recibiendo la misma potencia RMS, el tweeter producirá más sonido que el woofer, y la respuesta en frecuencia no será plana.
Existe una manera sencilla de evitar esto. Hay que evitar que el tweeter aproveche toda la potencia, es necesario que parte de esta potencia se pierda. Esto se consigue añadiendo una resistencia suficientemente grande. El problema es que los filtros están preparados para trabajar con una determinada impedancia, y si esta varía, el comportamiento no será el mismo.
Mediante resistencias en serie y paralelo se puede conseguir que la impedancia vista por el filtro sea la misma, y que parte de la potencia se pierda en las resistencias, con lo cual el filtro funciona bien y se obtiene una respuesta más plana.
L-PAD
REDES ZOBEL.
Los altavoces tienen inductancia porque tienen una bobina, que cuando le pasa corriente es la que se encarga de reaccionar contra el campo magnético del imán, lo que pone en movimiento el diafragma.
El problema es que los filtros necesitan una impedancia constante para funcionar correctamente. Si la impedancia no es plana, aparecen picos en la respuesta (cambia la Q), e incluso se puede llegar a reducir un orden la respuesta del filtro.
Añadir una red Zobel no aumenta la pendiente de caída. La deja como tiene que ser, sin que la inductancia del altavoz interactúe con el filtro. Es cierto que añadir la red Zobel al de graves le aumenta la caída, porque la inductancia impide filtrar bien a la bobina, y con red puesta la impedancia es plana, no hay inductancia. Y no aumenta el orden, lo que pasa es que sin la red, el orden disminuye.
Red Zobel
Izquierda: circuito simulado L1 y L3 son las inductancias de las bobinas de voz de los woofers. El altavoz ideal no tiene inductancia.
Derecha: Respuesta del circuito simulado con Spice.
En la gráfica de la derecha se observan los efectos de la red Zobel en un filtro de 3er orden a 2kHz, en un altavoz de 8Ohm y una inductancia de 0,8mH, caso que puede tratarse perfectamente de un altavoz de 6.5 u 8" en configuración dos vías. La respuesta del circuito ideal se ha desplazado ligeramente hacia abajo en ambos casos porque la gráfica era completamente coincidente con la del circuito con red Zobel. Las conclusiones son obvias.
Los altavoces reproducen con su propia fase. Las gráficas de impedancia de un tweeter, Fs y los parámetros Q sirven para saber cómo será la respuesta en graves de un altavoz. Esto incluye los tweeter.

A ambos lados de Fs se definen dos polos, que se comportan como un filtro. Si el tweeter tiene Fs a 1000Hz, en un tweeter normal se puede pensar que los polos estén a 750Hz y a 1500Hz. Si cortas con un condensador el tweeter a 2000Hz, algo normal (el doble de Fs), lo que se está haciendo matemáticamente es poner un polo a esa frecuencia.
De 2000 a 1500 bajará a 6dB/oct, de 1500 a 750 con 12dB/oct y de 750Hz para abajo, con 18dB/ oct, porque cada polo añade una caída de 6dB, y un desfase de 90º. A 1500Hz ha caído 4dB, casi nada, y sigue siendo audible su comportamiento, y a 750Hz ha caído 9 dB, 5 más de lo debido, aunque ya no es tan audible. El caso es que la banda entre 1000 y 2000 es de todo menos un filtro de 1er orden. Crea errores de fase de 135º y no de 90º a 1500Hz.
Respuesta del filtro ideal y lo que tenemos en realidad
Si se hubiese usado un filtro de 3er orden a 3000Hz, a 1500Hz su respuesta habría caído 18-21dB y todo sería matemáticamente correcto. A 1500Hz, con una atenuación de 11dB (5 más que con el de 1er orden), se desvía sólo 2dB y 70º de la respuesta ideal.
Pero sobre todo, algo muy importante: tal y como es la respuesta usual de la música, a esas frecuencias baja desde los medios hasta los agudos con una pendiente aproximada de 12dB/oct. Un filtro de 1er orden no limita el movimiento del tweeter, de hecho va aumentando (porque la música es así) hasta que llega a los polos de al lado de Fs.
Respuesta del filtro de 3er orden a 3kHz, real e ideal
Con un filtro de 2º orden el movimiento se hace más o menos constante, y con uno de 3º se reduce el movimiento del diafragma, que es lo que realmente protege al tweeter.
Otro tema importante es que un filtro de 1er orden es más simple, es más fácil de atacar por el amplificador y es menos intrusivo con la música, porque cada componente aporta su "destrucción" particular al sonido.
Análisis de frecuencias de una pieza musical

A bajo volumen son mejores los filtros suaves, aunque no recomiendo menos de 2º orden para 2 vías, pero para gran volumen sonoro, los filtros duros son necesarios y mejores.
FILTROS ACTIVOSLos filtros son circuitos capaces de controlar las frecuencias permitiendo o no el paso de éstas dependiendo de su valor.
Se llaman activos ya que constan de elementos pasivos (células R-C) y elementos activos como el OP-AMP ya estudiado. Las células R-C están compuestas por una resistencia y un condensador (en las estructuras a tratar) y dependiendo del número de estas células usadas se determinará el orden del filtro así como su respuesta y su calidad.
El funcionamiento de las células se basa principalmente en su actuación como divisor de tensión. Al aumentar la frecuencia de señal, la reactancia del condensador disminuirá y entrará más o menos tensión al OP-AMP, dependiendo de si es pasa altos o pasa bajos respectivamente.
Para cualquier tipo de filtros se emplean las siguientes definiciones:
Frecuencia de corte. Es aquella en que la ganancia del circuito cae a -3 dB por debajo de la máxima ganancia alcanzada. En los filtros pasa y elimina banda existen dos: una superior y otra inferior.
Banda pasante. Conjunto de frecuencias de ganancia superior a la de corte en un margen menor o igual a 3 dB.
Calidad: especifica la eficacia del filtro, es decir, la idealidad de su respuesta. Se mide en dB / octava; dB / década. Lo ideal sería que tomara un valor de infinito.
Hay gran variedad de estructuras en filtros. Cada una suele llevar el nombre de su inventor. Para las prácticas aquí estudiadas sólo se usarán las estructuras de Sallen-Key debido a su gran sencillez y su bajo coste, logrando una respuesta bastante fiable. Existen gran número de fórmulas deducibles por las cuales se logra el correcto funcionamiento del filtro, pero para que no resulte muy complicado de entender nos limitaremos a mencionar las más importantes.
Valor de la frecuencia de corte, a partir de esta ecuación se deducirán todas las demás:

Tanto para montar un filtro de orden 1 como de orden 2 conocida la frecuencia central o de corte se debe fijar el valor de C1 = C2 = C para pasar a obtener los valores de las resistencias del circuito R1 = R2:
Ahora fijamos el valor de R3 y calculamos el valor de P para lograr la ganancia correcta del filtro:La ganancia de cada etapa es importante ajustarla para compensar el consumo de las células R-C y no afecte a la ganancia total del filtro. Dicha ganancia para cada orden de filtro viene dado por la siguiente tabla:
Av0
Av1 Av2 Av3 Av4
n = 1
1
n = 2
1,586
n = 3
1 2
n = 4
2,235
1,152
n = 5
12,38
21,38
2
n = 6
2,482
1,586
1,068
n = 7
12,55
51,75
31,19
8
n = 8
2,610
1,889
1,337
1,038
Se pueden construir filtros mucho más selectivos con las frecuencias encadenando varios filtros de dichos tipos. Así encadenando un filtro de orden 1 y otro de orden 2, se obtiene un nuevo filtro de orden 3. Para lograr esto se deben usar siempre el mayor número posible de filtros de orden 2 situando en primer lugar el de orden 1, dependiendo del orden de filtro a construir. De este modo se logra que la curva de respuesta sea mucho más vertical y más próxima a la frecuencia central acercándose a la respuesta ideal. Pero esta construcción también es más cara y no siempre merece la pena emplearla. Más tarde, se muestran las distintas estructuras de orden 1 y 2 para filtros pasa altos y pasa bajos.
Filtro pasa altos

Se trata de un filtro que permita el paso de las frecuencias superiores a una frecuencia conocida llamada frecuencia central (fc) atenuando enormemente las frecuencias inferiores a dicha frecuencia central. En los gráficos inferiores se puede observar la respuesta ideal para un filtro de este tipo y la respuesta real lograda debido a las limitaciones de la electrónica; y es que ya se sabe: En electrónica no existe nada ideal. Su símbolo es el que se muestra en el dibujo de la derecha. Para este caso la frecuencia de corte estará establecida en fc = 1 KHz.
En los siguientes montajes se puede observar los diferentes circuitos para filtros pasa altos de orden 1 (a) y de orden 2 (b). Su diseño obedece a la estructura de Sallen-Key. Obsérvese que el número de orden del montaje coincide con el número de células R-C, cuyo fundamento ya se explicó con anterioridad y que será el mismo para cualquier tipo de filtro.
Práctica para filtro pasa altosAplicando las ecuaciones antes explicadas, se definen los valores para los distintos componentes: Las resistencias R1 y R2: para ellos se fija el valor de los condensadores a 10nF:R1 = R2 = 1 / ( 2 · · C · f0 ) => 1 / ( 2 · · 10 · 10-9 · 103) = 15K9 Ahora se ajusta la resistencia P: la resistencia R3 se fija, en este caso, a R3 = 10K, y la ganancia según la tabla es de 1,586 dBP = R3 · ( Av - 1 ) => 10 · 103 · ( 1,586 - 1 ) = 5860 Una vez obtenidos todos los valores, se monta el circuito experimentalmente:




