Amplificadores de Instrumentaci%F3n(Doc)
17
AMPLIFICADORES DE INSTRUMENTACIÓN Los amplificadores de instrumentación surgen ante la necesidad de medir tensiones de un nivel muy bajo en presencia de señales indeseadas (ruidos); por ejemplo, la salida de un puente de medida con transductores de la figura 1. Por lo general, la señal que se obtiene en un puente de medida al variar la resistencia del transductor tiene un nivel muy bajo, por lo que se ha de recurrir a la utilización de un amplificador para adaptarla en nivel a los siguientes circuitos del sistema. Normalmente estas tensiones diferenciales de bajo nivel se encuentran superpuestas a tensiones de modo común elevadas, como pueden ser las interferencias debidas a la frecuencia de la red, o a la tensión de polarización del sensor; con lo cual debemos recurrir al empleo de algún dispositivo que presente un rechazo del modo común (CMR) muy elevado, para eliminar sus efectos en la salida. Ante esta situación, se puede pensar que un simple amplificador diferencial podría realizar perfectamente la función descrita, sin embargo, no es así, ya que surgen una serie de inconvenientes que más adelante se analizarán. 1.- Amplificador de señales de bajo nivel mediante diferencial. Como ya se ha comentado, una posible solución a la hora de amplificar señales diferenciales de bajo nivel, como pueden ser las originadas por un puente de transductores, eliminando las señales interferentes y de ruido que aparecen en el entorno de medida, consiste en utilizar un amplificador diferencial, tal y como se muestra en la figura 2. Sin embargo, este montaje presenta una serie de inconvenientes que originarán una mejora del circuito, dando lugar a los amplificadores de instrumentación. En el amplificador de la figura 2 la salida será: ( 1 2 1 2 1 2 1 2 1 2 2 R R V R R V V R R V R V V d o = - = - = siempre que R 1 =R 3 y R 2 =R 4 Figura 1. Puente de medida con transductor
-
Upload
sandoval-daniel -
Category
Documents
-
view
18 -
download
0
Transcript of Amplificadores de Instrumentaci%F3n(Doc)
AMPLIFICADORES DE INSTRUMENTACIÓN
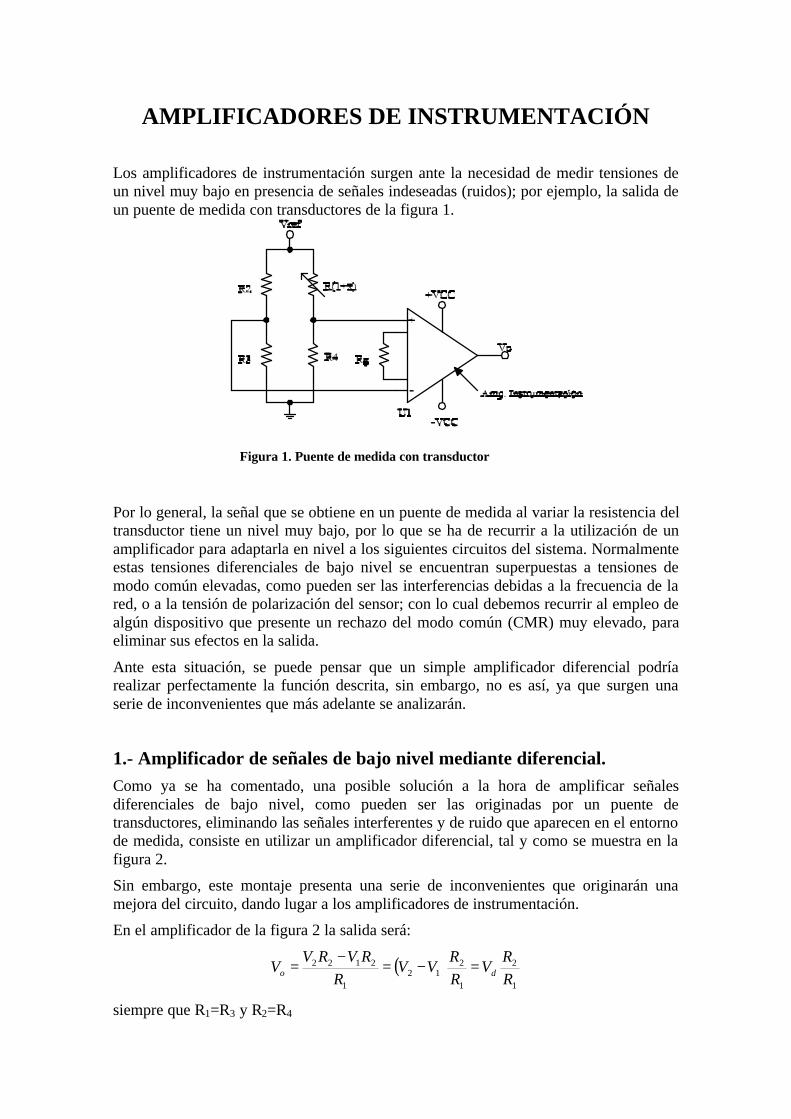
Los amplificadores de instrumentación surgen ante la necesidad de medir tensiones deun nivel muy bajo en presencia de señales indeseadas (ruidos); por ejemplo, la salida deun puente de medida con transductores de la figura 1.
Por lo general, la señal que se obtiene en un puente de medida al variar la resistencia deltransductor tiene un nivel muy bajo, por lo que se ha de recurrir a la utilización de unamplificador para adaptarla en nivel a los siguientes circuitos del sistema. Normalmenteestas tensiones diferenciales de bajo nivel se encuentran superpuestas a tensiones demodo común elevadas, como pueden ser las interferencias debidas a la frecuencia de lared, o a la tensión de polarización del sensor; con lo cual debemos recurrir al empleo dealgún dispositivo que presente un rechazo del modo común (CMR) muy elevado, paraeliminar sus efectos en la salida.
Ante esta situación, se puede pensar que un simple amplificador diferencial podríarealizar perfectamente la función descrita, sin embargo, no es así, ya que surgen unaserie de inconvenientes que más adelante se analizarán.
1.- Amplificador de señales de bajo nivel mediante diferencial.
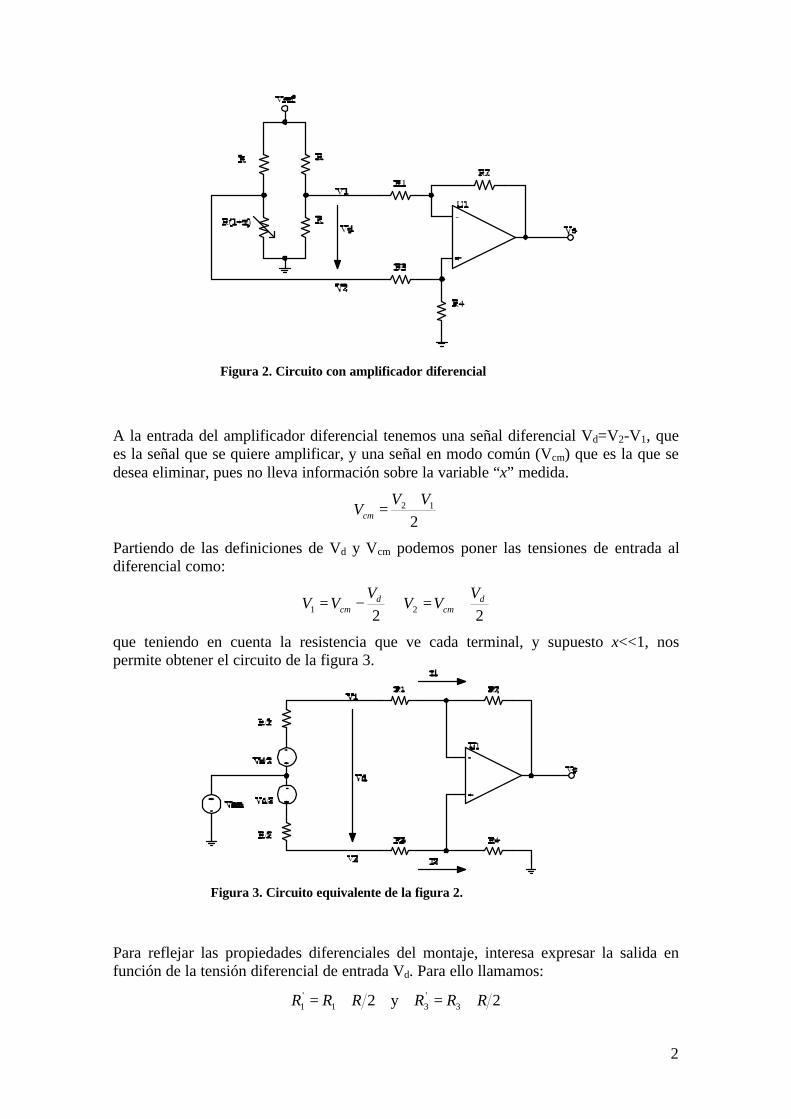
Como ya se ha comentado, una posible solución a la hora de amplificar señalesdiferenciales de bajo nivel, como pueden ser las originadas por un puente detransductores, eliminando las señales interferentes y de ruido que aparecen en el entornode medida, consiste en utilizar un amplificador diferencial, tal y como se muestra en lafigura 2.
Sin embargo, este montaje presenta una serie de inconvenientes que originarán unamejora del circuito, dando lugar a los amplificadores de instrumentación.
En el amplificador de la figura 2 la salida será:
( )1
2
1
212
1
2122
RR
VRR
VVR
RVRVV do =−=
−=
siempre que R1=R3 y R2=R4
Figura 1. Puente de medida con transductor
2
A la entrada del amplificador diferencial tenemos una señal diferencial Vd=V2-V1, quees la señal que se quiere amplificar, y una señal en modo común (Vcm) que es la que sedesea eliminar, pues no lleva información sobre la variable “x” medida.
212 VV
Vcm
+=
Partiendo de las definiciones de Vd y Vcm podemos poner las tensiones de entrada aldiferencial como:
2
2 21d
cmd
cm
VVV
VVV +=−=
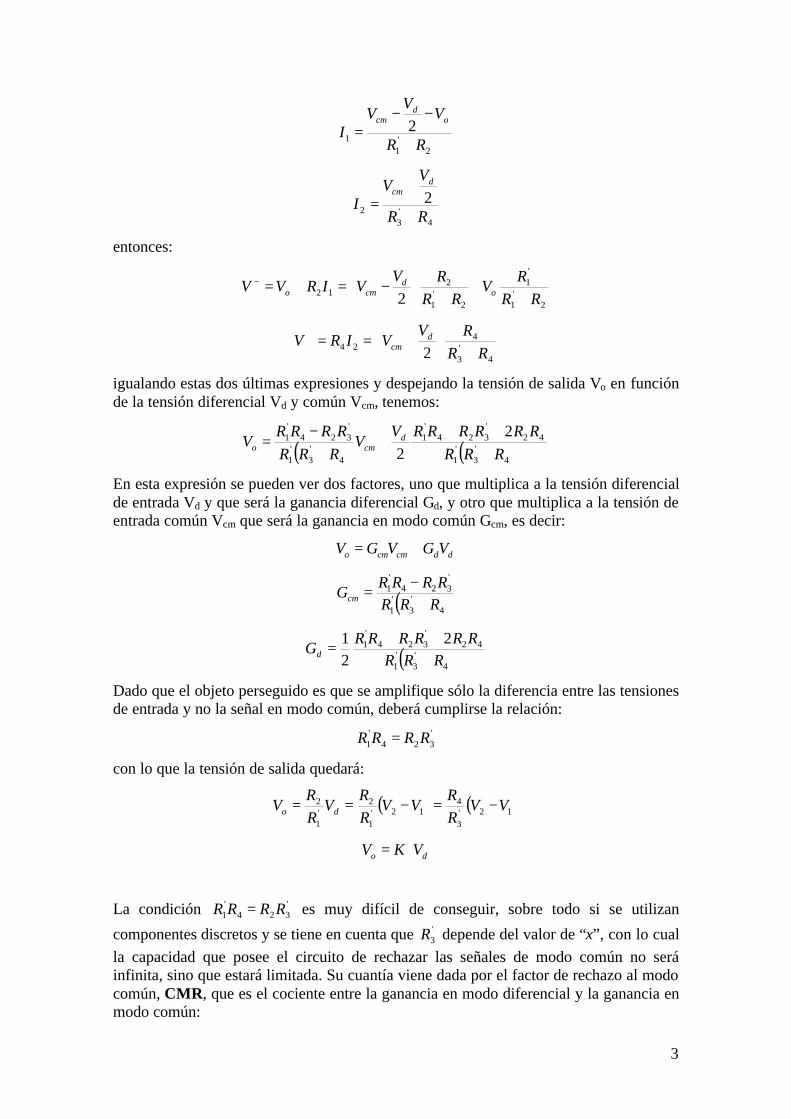
que teniendo en cuenta la resistencia que ve cada terminal, y supuesto x<<1, nospermite obtener el circuito de la figura 3.
Para reflejar las propiedades diferenciales del montaje, interesa expresar la salida enfunción de la tensión diferencial de entrada Vd. Para ello llamamos:
2y 2 3'31
'1 RRRRRR +=+=
Figura 2. Circuito con amplificador diferencial
Figura 3. Circuito equivalente de la figura 2.
3
2'1
12RR
VV
VI
od
cm
+
−−=
4'3
22
RR
VV
I
dcm
+
+=
entonces:
2'1
'1
2'1
212 2 RR
RV
RRRV
VIRVV od
cmo ++
+
−=+=−
4'3
424 2 RR
RVVIRV d
cm +
+==+
igualando estas dos últimas expresiones y despejando la tensión de salida Vo en funciónde la tensión diferencial Vd y común Vcm, tenemos:
( ) ( )4'3
'1
42'324
'1
4'3
'1
'324
'1 2
2 RRR
RRRRRRVV
RRR
RRRRV d
cmo +++
++
−=
En esta expresión se pueden ver dos factores, uno que multiplica a la tensión diferencialde entrada Vd y que será la ganancia diferencial Gd, y otro que multiplica a la tensión deentrada común Vcm que será la ganancia en modo común Gcm, es decir:
ddcmcmo VGVGV +=
( )4'3
'1
'324
'1
RRRRRRR
Gcm +−
=
( )4'3
'1
42'324
'1 2
21
RRRRRRRRR
Gd +++
=
Dado que el objeto perseguido es que se amplifique sólo la diferencia entre las tensionesde entrada y no la señal en modo común, deberá cumplirse la relación:
'324
'1 RRRR =
con lo que la tensión de salida quedará:
( ) ( )12'3
412'
1
2'1
2 VVRR
VVRR
VRR
V do −=−==
do VKV ⋅=
La condición '324
'1 RRRR = es muy difícil de conseguir, sobre todo si se utilizan
componentes discretos y se tiene en cuenta que '3R depende del valor de “x”, con lo cual
la capacidad que posee el circuito de rechazar las señales de modo común no seráinfinita, sino que estará limitada. Su cuantía viene dada por el factor de rechazo al modocomún, CMR, que es el cociente entre la ganancia en modo diferencial y la ganancia enmodo común:
4
'324
'1
42'324
'1 2
21
RRRR
RRRRRRGG
CMRcm
d
−++
==
En general el CMR se expresa en decibelios y se hace referencia a él como relación derechazo en modo común CMRR
CMRCMRR log20=
En este estudio hemos considerado un amplificador operacional ideal, en el caso de quese considere uno real el estudio sería más complicado, el CMRR del mismo se obtendríade las hojas de características y se realizaría el mismo proceso. La expresión final, unavez simplificada y reordenada conduce a una fórmula sencilla:
..
111
OARTOTAL CMRCMRCMR+=
Es decir, se combinan en paralelo el CMR debido a las resistencias con el del A.O.obtenido de características. (Para aplicar esta expresión el CMR debe estar dado enunidades fraccionarias y no en decibelios).
Otro efecto indeseable de este circuito es que el CMR se deteriora tanto más cuanto másdesequilibrado esté el puente.
En el circuito de la figura 3, la salida del diferencial del puente de resistencias se haaplicado a los puntos V1 y V2 lo cual tiene un inconveniente ya que, suponiendo losA.O. ideales, la resistencia de entrada diferencial es R1+R3, y esto lleva a valores de R2
y R4 elevados si se desea una resistencia de entrada y una ganancia elevadas. Unaresistencia de entrada elevada es necesaria para reducir los efectos de carga en lamedida de tensión y despreciar la variación de '
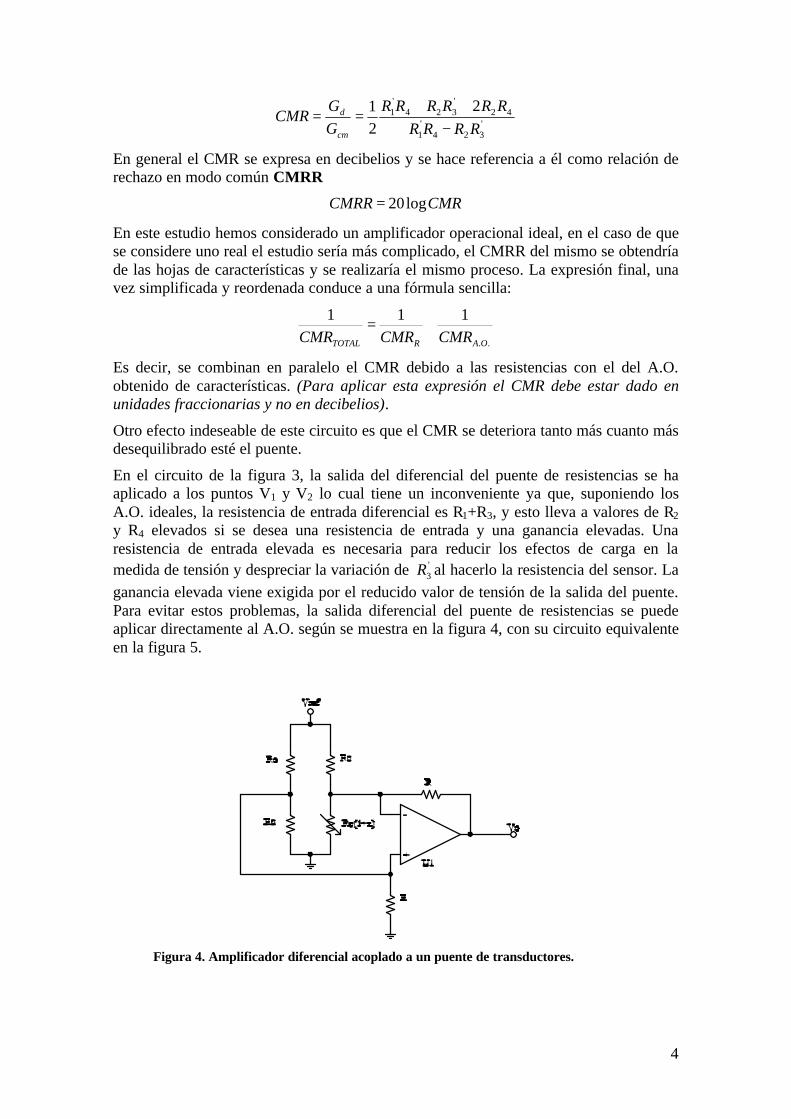
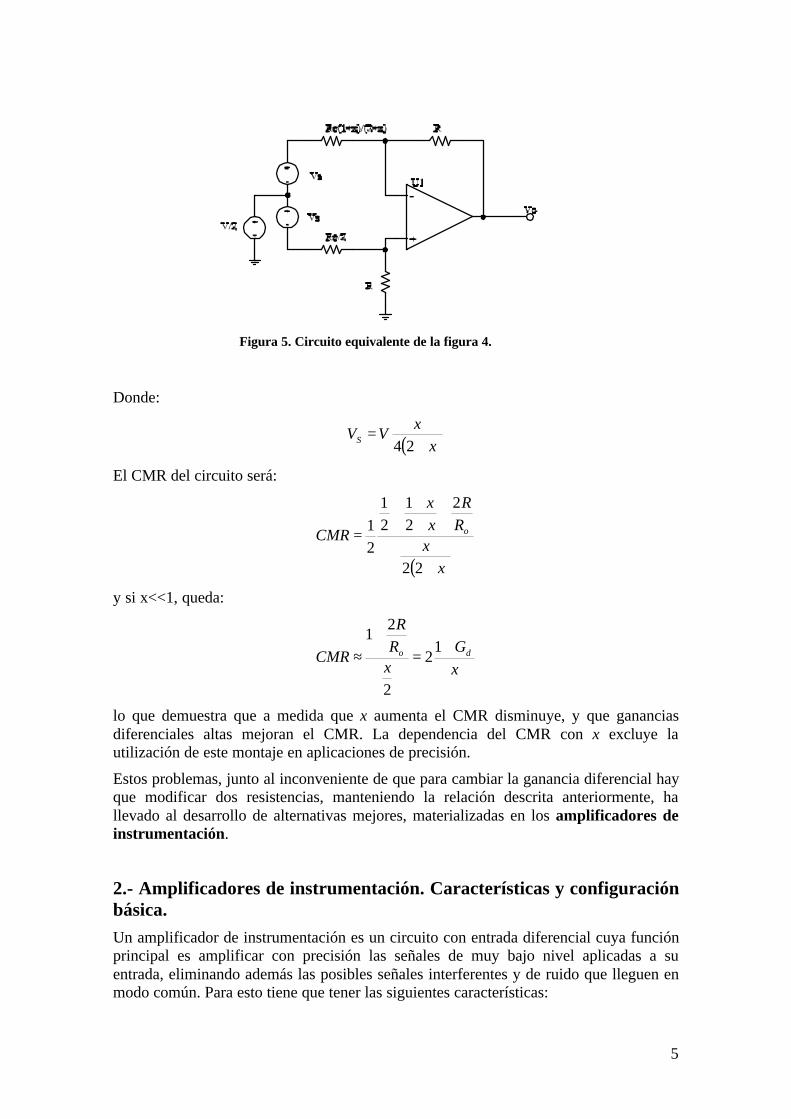
3R al hacerlo la resistencia del sensor. Laganancia elevada viene exigida por el reducido valor de tensión de la salida del puente.Para evitar estos problemas, la salida diferencial del puente de resistencias se puedeaplicar directamente al A.O. según se muestra en la figura 4, con su circuito equivalenteen la figura 5.
Figura 4. Amplificador diferencial acoplado a un puente de transductores.
5
Donde:
( )xx
VVS +=
24
El CMR del circuito será:
( )xx
RR
xx
CMR o
+
+++
+=
22
221
21
21
y si x<<1, queda:
xG
xRR
CMR do +=
+≈
12
2
21
lo que demuestra que a medida que x aumenta el CMR disminuye, y que gananciasdiferenciales altas mejoran el CMR. La dependencia del CMR con x excluye lautilización de este montaje en aplicaciones de precisión.
Estos problemas, junto al inconveniente de que para cambiar la ganancia diferencial hayque modificar dos resistencias, manteniendo la relación descrita anteriormente, hallevado al desarrollo de alternativas mejores, materializadas en los amplificadores deinstrumentación.
2.- Amplificadores de instrumentación. Características y configuraciónbásica.
Un amplificador de instrumentación es un circuito con entrada diferencial cuya funciónprincipal es amplificar con precisión las señales de muy bajo nivel aplicadas a suentrada, eliminando además las posibles señales interferentes y de ruido que lleguen enmodo común. Para esto tiene que tener las siguientes características:
Figura 5. Circuito equivalente de la figura 4.
6
• Ganancia diferencial en lazo cerrado estable, que pueda ajustarseexternamente sin modificar sensiblemente sus características de entrada.
• Rechazo al modo común (CMR) alto, tanto en continua como a lasfrecuencias a las que pueda aparecer ruido en modo común a la entrada.
• Impedancia de entrada elevada.
• Tensión y corriente de offset bajas y con pocas derivas.
• Impedancia de salida baja.
• Tensiones de entrada en modo común altas.
Comercialmente se dispone tanto de circuitos integrados monolíticos como de circuitosintegrados híbridos y circuitos modulares que cumplen estas condiciones. Para el casode estos dos últimos, todos los modelos tienen una estructura que deriva de una básicallamada amplificador de instrumentación con tres A.O’s.
El estudio de este circuito es de gran interés por cuanto se puede realizar empleandocomponentes discretos, incluso de bajo coste, obteniéndose a veces prestacionessuficientes para muchas aplicaciones, con un coste económico inferior al de losmontajes comerciales integrados.
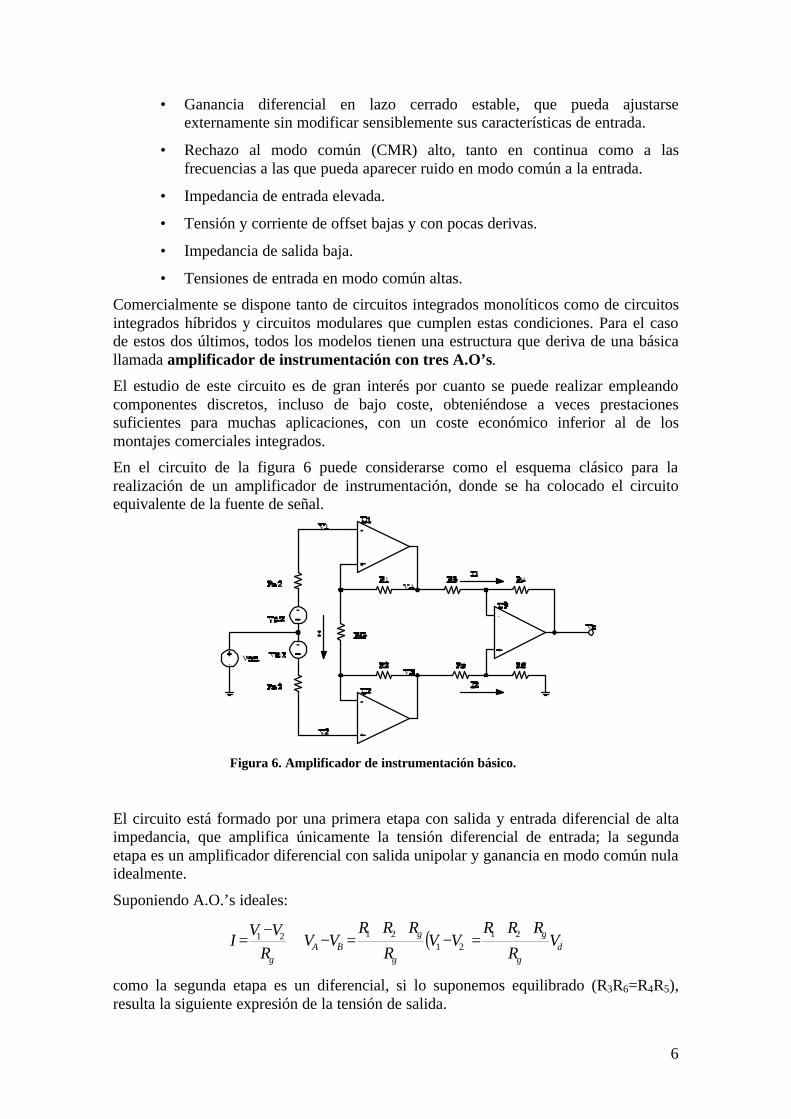
En el circuito de la figura 6 puede considerarse como el esquema clásico para larealización de un amplificador de instrumentación, donde se ha colocado el circuitoequivalente de la fuente de señal.
El circuito está formado por una primera etapa con salida y entrada diferencial de altaimpedancia, que amplifica únicamente la tensión diferencial de entrada; la segundaetapa es un amplificador diferencial con salida unipolar y ganancia en modo común nulaidealmente.
Suponiendo A.O.’s ideales:
( ) dg
g
g
gBA
g
VR
RRRVV
R
RRRVV
RVV
I++
=−++
=−⇒−
= 2121
2121
como la segunda etapa es un diferencial, si lo suponemos equilibrado (R3R6=R4R5),resulta la siguiente expresión de la tensión de salida.
Figura 6. Amplificador de instrumentación básico.
7
dg
go V
R
RRR
RR
V++
= 21
5
6
que bajo el supuesto R1=R2, resulta:
dg
o VRR
RR
V
+= 1
5
6 21
En la segunda etapa vemos:
21d
cmA
VVIRV −+=
22d
cmB
VVIRV ++−=
g
d
RV
I −=
dg
cmBA
cm VR
RRV
VVV
2212
etapaª2
−+=
+=
donde se observa que la tensión en modo común vista por la segunda etapa es igual a laque hay en la entrada mas un término que depende de la tensión diferencial, que va aproducir una variación del modo común en función de esta tensión de entrada. Paraeliminar el término de Vd debemos conseguir que se cumpla la igualdad R1=R2,condición que es normal aplicar en el diseño de cualquier amplificador deinstrumentación.
De este análisis podemos sacar las siguientes conclusiones:
1. La ganancia al modo común de la primera etapa es la unidad, siendo susfunciones:
• Amplificar la tensión diferencial.
• Proporcionar un ajuste cómodo de la ganancia mediante Rg.
• Presentar una elevada impedancia de entrada.
2. El CMR total depende del que presente la etapa diferencial de salida, y de laganancia diferencial de la primera etapa, si suponemos R1=R2:
ldiferencia12
1 CMRRR
CMRg
AI
+=
En el estudio anterior, hemos considerado los AO’s ideales, si tenemos en cuenta suCMR finito y que la ganancia diferencial de la segunda etapa es la unidad, obtendríamosla siguiente expresión del CMR total:
+
+++−=
R
g
AI CMRCMRRRCMRCMRCMR
11
12
1111
3121
8
vemos que si los AO’s 1 y 2 son idénticos sus efectos en cuanto al modo común sepueden anular. Por ello cuando queramos construir un amplificador de instrumentación,conviene utilizar un circuito integrado con dos AO’s para construir la primera etapa,porque al haber sido realizados bajo las mismas condiciones, es más probable que suscaracterísticas sean más similares.
El CMRR es el debido a las resistencias de la etapa diferencial R3, R4, R5 y R6. Estevale:
5463
645463 221
RRRRRRRRRR
CMRR −++
=
analizando esta expresión, el peor caso será para el denominador máximo (pues lavariación relativa del numerador es mucho menor que la del denominador). Sisuponemos de forma general que la ganancia de la etapa diferencial es “K”, tenemos lasiguiente relación entre las resistencias:
5
6
3
4
RR
RR
K ==
Si suponemos todas las resistencias con una tolerancia de ±α, para el peor casotendremos:
( ) ( ) ( ) ( )αααα −=−=+=+= 1 ;1 ;1 ;1 5463 RRKRRKRRRR
sustituyendo estos valores y haciendo la aproximación de que α<<1, nos queda lasiguiente expresión de gran interés para calcular CMRR:
α41 K
CMRR
+=
2.1.- Características de entrada de un amplificador de instrumentación
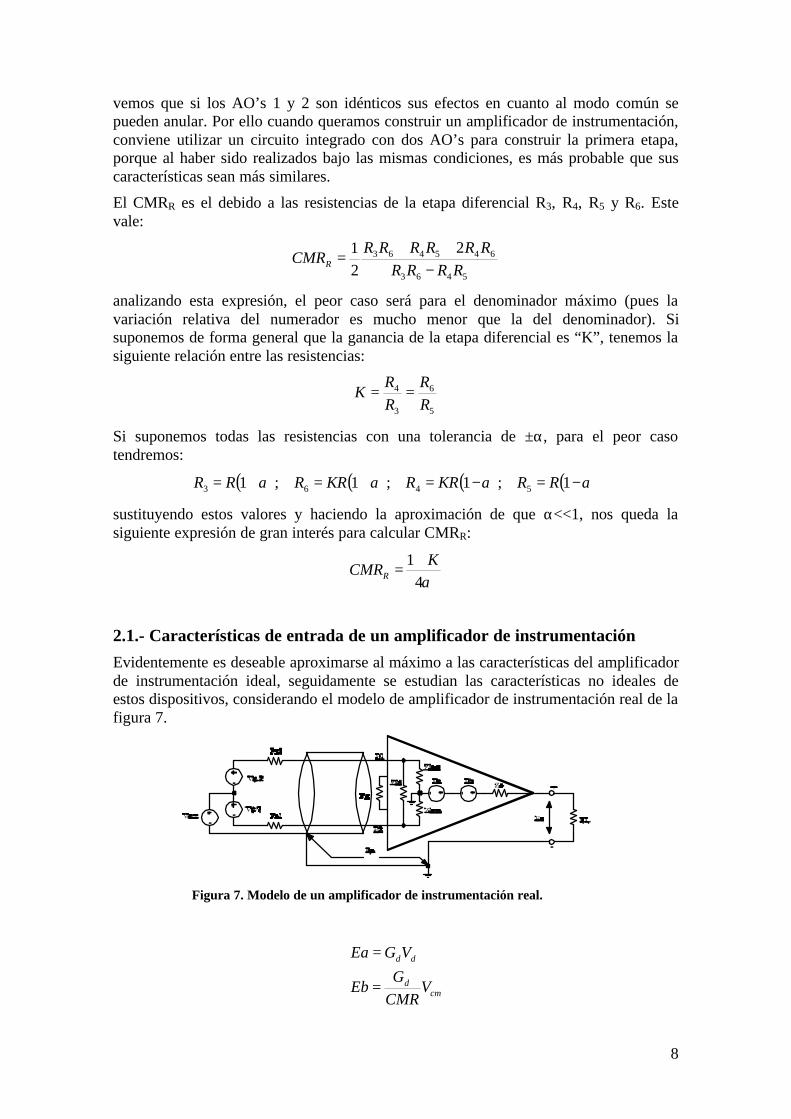
Evidentemente es deseable aproximarse al máximo a las características del amplificadorde instrumentación ideal, seguidamente se estudian las características no ideales deestos dispositivos, considerando el modelo de amplificador de instrumentación real de lafigura 7.
cmd
dd
VCMRG
Eb
VGEa
=
=
Figura 7. Modelo de un amplificador de instrumentación real.
9
Impedancia de entrada. El hecho de que las impedancias de entrada sean finitascontribuye a la existencia de un error en la ganancia efectiva debido a la resistencia desalida de la fuente.
La impedancia Zid representa la impedancia de entrada diferencial, depende de Rg y porello de la ganancia diferencial.
La impedancia de entrada en modo común Zicm está representada por dos componentesiguales entre cada entrada y masa. Esta impedancia puede haber sido medida de dosformas:
1. Como la existente entre cada entrada por separado y masa, siendo entoncessu representación en el circuito equivalente a la mostrada en la figura 7.
2. Como la medida entre las dos entradas cortocircuitadas y masa. En estemétodo obtendremos evidentemente la mitad que en la anterior.
Es importante que consideremos que la representación del circuito equivalente es tansólo conceptual. Por ello, la carga que ofrece el amplificador a la señal diferencial es Zid
y la que presenta al modo común es Zicm, como queda en evidencia a la vista de lasdefiniciones de estas.
La impedancia de entrada diferencial, debido a la resistencia de salida de la fuente deseñal, nos va a producir una pérdida de ganancia. El error de ganancia supuestoRs=Rs1+Rs2, tendrá el valor.
id
s
sid
s
sid
id
ZR
RZR
RZZ
≈+
=+
−1
Por otra parte si la Zicm no es igual en las dos entradas, ni lo son las resistencias desalida de la fuente de señal y los cables de transmisión, la señal se dividirádesigualmente en las dos entradas produciendo una tensión diferencial, debido al modocomún, que no se puede separar de la que realmente queremos amplificar. Este hechopuede deteriorar sensiblemente el CMR del circuito.
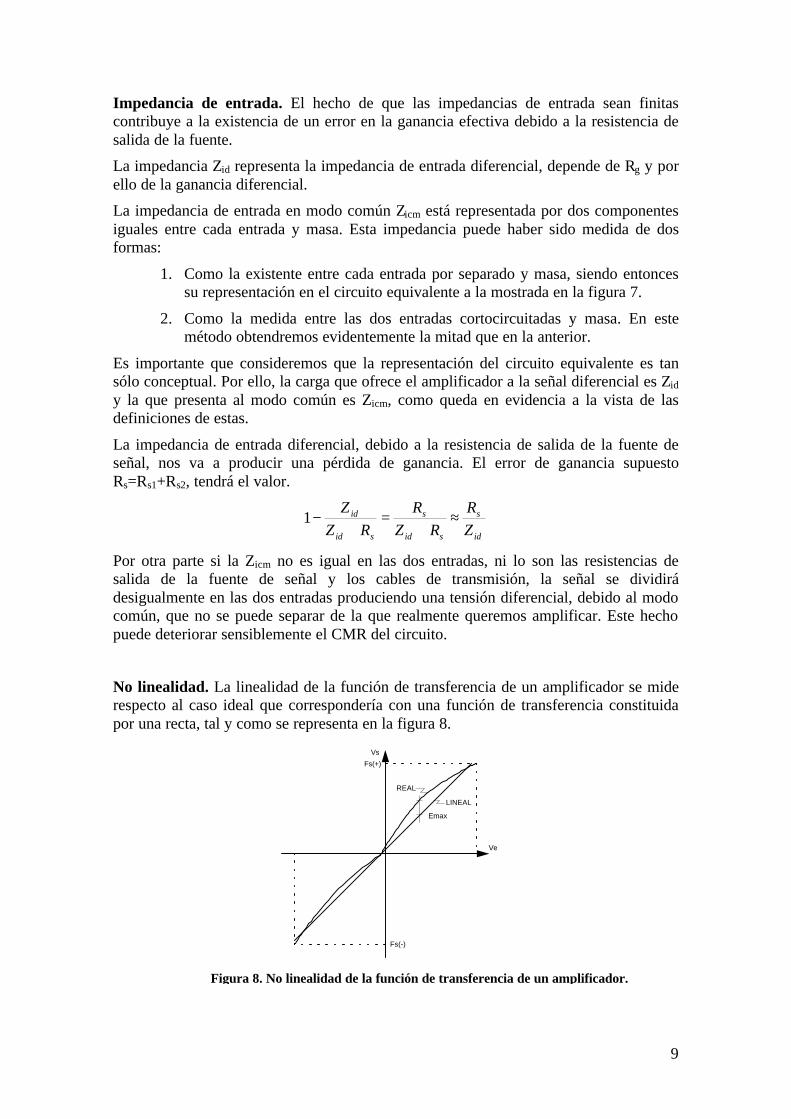
No linealidad. La linealidad de la función de transferencia de un amplificador se miderespecto al caso ideal que correspondería con una función de transferencia constituidapor una recta, tal y como se representa en la figura 8.
REAL
LINEAL
Emax
Ve
Vs
Fs(+)
Fs(-)
Figura 8. No linealidad de la función de transferencia de un amplificador.
10
Existen varias definiciones de linealidad según la recta que consideremos. Nosotrosvamos a usar la recta que mejor se adapte a la función de transferencia del amplificador,que suele ser la utilizada por los fabricantes cuando nos dan la linealidad de un AIintegrado. Esta recta no tiene por qué pasar por el origen, ni presentar la pendientemarcada por la ganancia esperada del AI. Tiene que ser aquella que nos de el menorvalor de no linealidad (NL), definida como:
escala de fondos entre salida la de variacióndeMargen
lineal Salida - real SalidamaxNL =
Rechazo al modo común. Como se ve en la figura 7, la tensión de salida tiene doscomponentes. Una de ellas es proporcional a la tensión de entrada diferencial y la otra ala tensión de modo común. La tensión de modo común que aparece entre los terminalesde entrada del amplificador se define como Ecm=(E2+E1)/2. Esta puede consistir en unacierta tensión de modo común de la fuente más cualquier tensión de ruido, En, entre elcomún de la fuente y el del amplificador. La constante Gd representa el factor deganancia del amplificador diferencial (fijado por la resistencia exterior de selección deganancia), mientras que la constante Gg/CMR representa la ganancia al modo común delamplificador. El CMRR (relación de rechazo al modo común) está directamenterelacionado con la ganancia diferencial y aumenta cuando lo hace esta. Idealmentedeben seguir la misma progresión, es decir si Gd aumenta 20 dB el CMRR deberíaaumentar 20 dB (suponiendo que Gcm se mantiene constante); pero en los circuitosreales esto no se cumple y el aumento de CMRR es menor. Se expresa habitualmentepara los valores máximo y mínimo de la ganancia del amplificador y se mide endecibelios.
Tensión de offset. Otro parámetro que define las características de un AI es la tensiónde offset y su deriva. La mayoría de los AI son dispositivos de dos etapas: tienen unaetapa de entrada de ganancia variable y otra de salida de ganancia fija. Por lo tantopodemos definir los siguientes parámetros:
• VIOS (Tensión offset de la etapa de entrada). Es la tensión que debeaplicarse a la entrada de la etapa de entrada para forzar que su salida seanula.
• VOOS (Tensión offset de la etapa de salida). Es la tensión que deberáaplicarse, en el caso de que sea accesible, a la entrada de la etapa de salidapara producir una salida de cero voltios.
• VOS (Tensión offset global). Es la tensión total de offset, referida a laentrada. Considerando que la etapa de entrada es la que presenta la gananciadiferencial del amplificador de instrumentación (a la segunda etapa se lesuele asignar la unidad), la expresión del voltaje offset total será la siguiente:
d
OOSIOSOS G
VVV +=
Se puede ver que a la salida tendremos un offset total de VOS Gd.
La tensión de offset inicial suele ser ajustable a cero. Por tanto, la deriva de tensión es eltérmino más importante porque no puede ser anulada. Tiene también dos componentes:una debida a la etapa de entrada del amplificador y la otra debida a la de salida. Cuandoel amplificador trabaja en alta ganancia, domina la deriva de la etapa de entrada.
11
Los coeficientes de variación de los voltajes de offset con la temperatura vienen dadospor:
• Deriva de la tensión offset de la etapa de entrada: T
VIOS
∆∆
• Deriva de la tensión offset de la etapa de salida: T
VOOS
∆∆
Con lo cual, para calcular la tensión offset total a una temperatura T, cuandopreviamente se ha hecho el ajuste de offset nulo a una temperatura T0, se aplica lasiguiente expresión:
( )
∆
∆
+∆
∆−=∆
d
OOS
IOSOS G
TV
TV
TTV 0
2.2.- Técnicas para aumentar el CMRR.
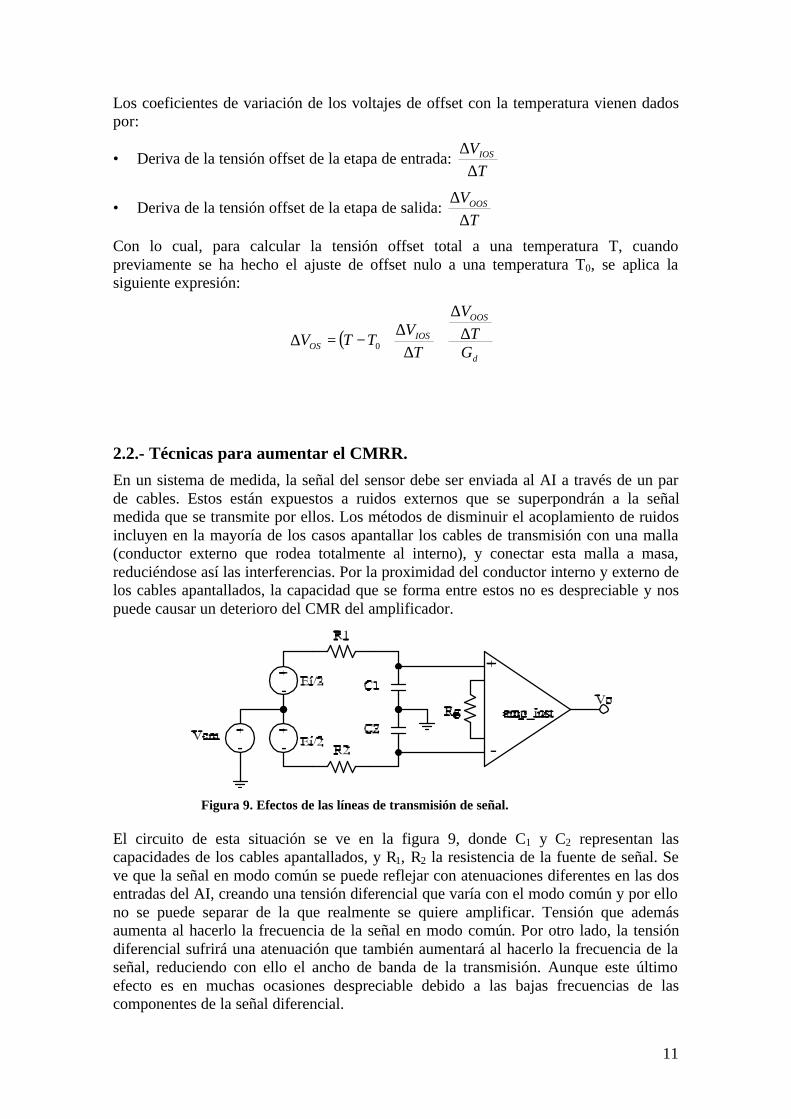
En un sistema de medida, la señal del sensor debe ser enviada al AI a través de un parde cables. Estos están expuestos a ruidos externos que se superpondrán a la señalmedida que se transmite por ellos. Los métodos de disminuir el acoplamiento de ruidosincluyen en la mayoría de los casos apantallar los cables de transmisión con una malla(conductor externo que rodea totalmente al interno), y conectar esta malla a masa,reduciéndose así las interferencias. Por la proximidad del conductor interno y externo delos cables apantallados, la capacidad que se forma entre estos no es despreciable y nospuede causar un deterioro del CMR del amplificador.
El circuito de esta situación se ve en la figura 9, donde C1 y C2 representan lascapacidades de los cables apantallados, y R1, R2 la resistencia de la fuente de señal. Seve que la señal en modo común se puede reflejar con atenuaciones diferentes en las dosentradas del AI, creando una tensión diferencial que varía con el modo común y por ellono se puede separar de la que realmente se quiere amplificar. Tensión que ademásaumenta al hacerlo la frecuencia de la señal en modo común. Por otro lado, la tensióndiferencial sufrirá una atenuación que también aumentará al hacerlo la frecuencia de laseñal, reduciendo con ello el ancho de banda de la transmisión. Aunque este últimoefecto es en muchas ocasiones despreciable debido a las bajas frecuencias de lascomponentes de la señal diferencial.
Figura 9. Efectos de las líneas de transmisión de señal.
12
En el circuito de la figura 9 se ve que si se cumple la condición R1C1=R2C2, la tensiónde salida diferencial debida al modo común es nula. Se podría pensar hacer unos ajustespara que se cumpliese la condición, pero esta es una solución poco adoptada debido a lasensible inestabilidad de los parámetros de la línea.
Para eliminar el efecto de las capacidades, debemos utilizar la técnica de la guardaactiva. Ésta consiste en conseguir que el potencial de malla externa del cable sea lo máspróximo posible al del conductor interno (en el caso ideal igual).
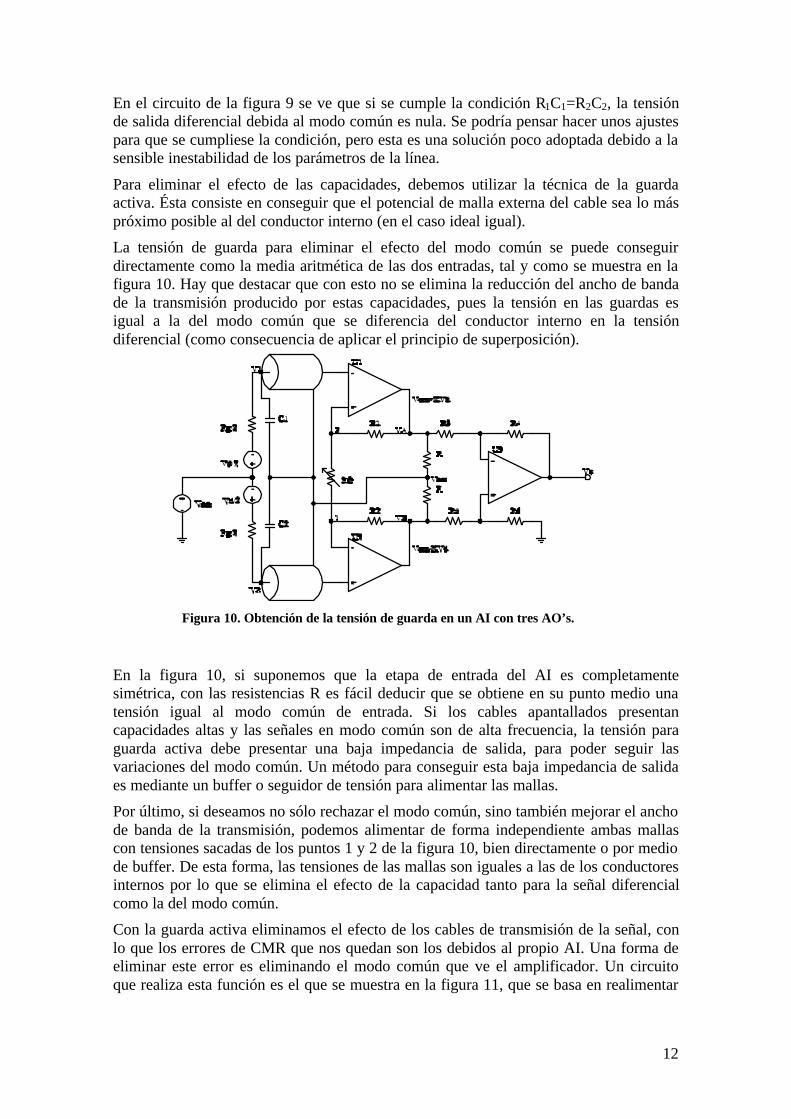
La tensión de guarda para eliminar el efecto del modo común se puede conseguirdirectamente como la media aritmética de las dos entradas, tal y como se muestra en lafigura 10. Hay que destacar que con esto no se elimina la reducción del ancho de bandade la transmisión producido por estas capacidades, pues la tensión en las guardas esigual a la del modo común que se diferencia del conductor interno en la tensióndiferencial (como consecuencia de aplicar el principio de superposición).
En la figura 10, si suponemos que la etapa de entrada del AI es completamentesimétrica, con las resistencias R es fácil deducir que se obtiene en su punto medio unatensión igual al modo común de entrada. Si los cables apantallados presentancapacidades altas y las señales en modo común son de alta frecuencia, la tensión paraguarda activa debe presentar una baja impedancia de salida, para poder seguir lasvariaciones del modo común. Un método para conseguir esta baja impedancia de salidaes mediante un buffer o seguidor de tensión para alimentar las mallas.
Por último, si deseamos no sólo rechazar el modo común, sino también mejorar el anchode banda de la transmisión, podemos alimentar de forma independiente ambas mallascon tensiones sacadas de los puntos 1 y 2 de la figura 10, bien directamente o por mediode buffer. De esta forma, las tensiones de las mallas son iguales a las de los conductoresinternos por lo que se elimina el efecto de la capacidad tanto para la señal diferencialcomo la del modo común.
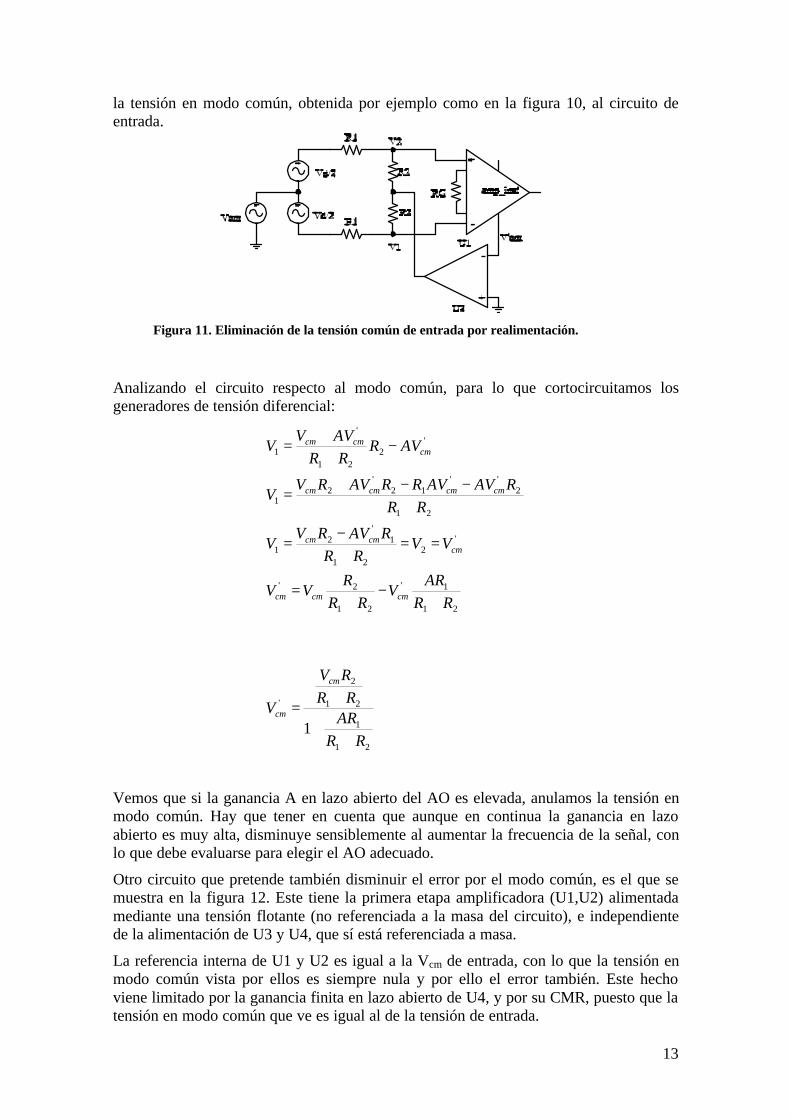
Con la guarda activa eliminamos el efecto de los cables de transmisión de la señal, conlo que los errores de CMR que nos quedan son los debidos al propio AI. Una forma deeliminar este error es eliminando el modo común que ve el amplificador. Un circuitoque realiza esta función es el que se muestra en la figura 11, que se basa en realimentar
Figura 10. Obtención de la tensión de guarda en un AI con tres AO’s.
13
la tensión en modo común, obtenida por ejemplo como en la figura 10, al circuito deentrada.
Analizando el circuito respecto al modo común, para lo que cortocircuitamos losgeneradores de tensión diferencial:
21
1
21
2
'
21
1'
21
2'
'2
21
1'
21
21
2''
12'
21
'2
21
'
1
1RR
ARRR
RV
V
RRAR
VRR
RVV
VVRR
RAVRVV
RRRAVAVRRAVRV
V
AVRRR
AVVV
cm
cm
cmcmcm
cmcmcm
cmcmcmcm
cmcmcm
++
+=
+−
+=
==+
−=
+−−+
=
−+
+=
Vemos que si la ganancia A en lazo abierto del AO es elevada, anulamos la tensión enmodo común. Hay que tener en cuenta que aunque en continua la ganancia en lazoabierto es muy alta, disminuye sensiblemente al aumentar la frecuencia de la señal, conlo que debe evaluarse para elegir el AO adecuado.
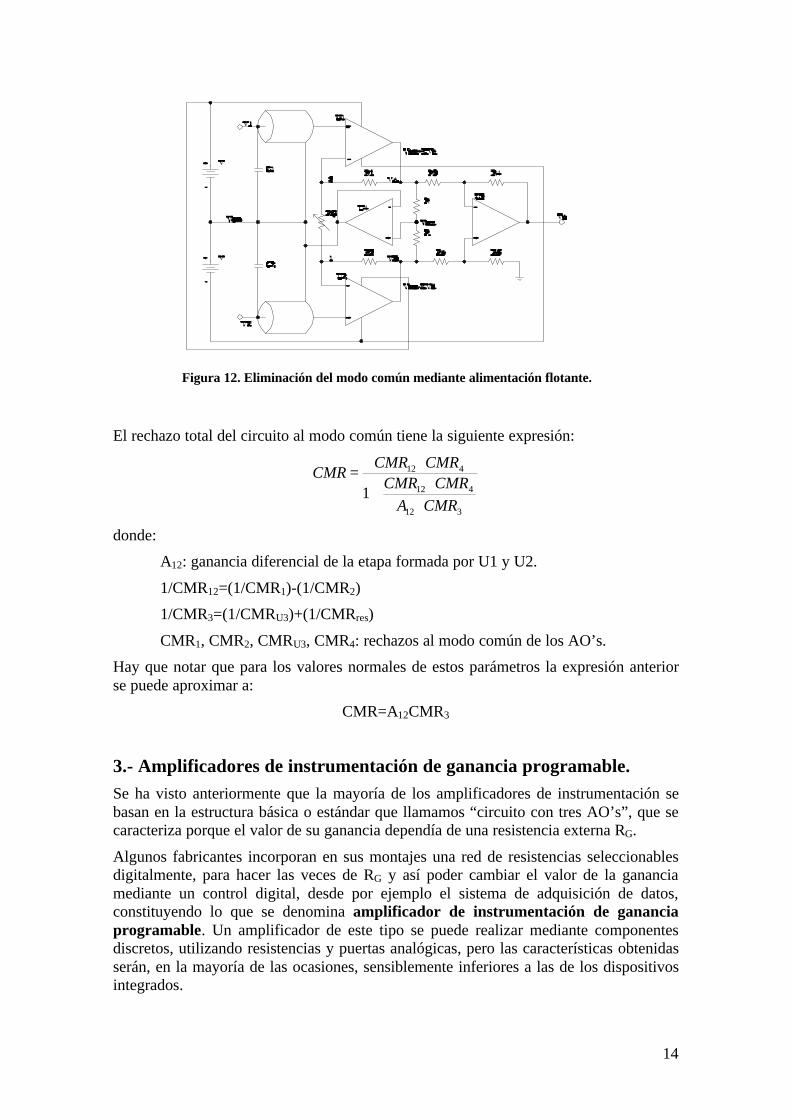
Otro circuito que pretende también disminuir el error por el modo común, es el que semuestra en la figura 12. Este tiene la primera etapa amplificadora (U1,U2) alimentadamediante una tensión flotante (no referenciada a la masa del circuito), e independientede la alimentación de U3 y U4, que sí está referenciada a masa.
La referencia interna de U1 y U2 es igual a la Vcm de entrada, con lo que la tensión enmodo común vista por ellos es siempre nula y por ello el error también. Este hechoviene limitado por la ganancia finita en lazo abierto de U4, y por su CMR, puesto que latensión en modo común que ve es igual al de la tensión de entrada.
Figura 11. Eliminación de la tensión común de entrada por realimentación.
14
El rechazo total del circuito al modo común tiene la siguiente expresión:
312
412
412
1CMRA
CMRCMRCMRCMR
CMR
⋅⋅
+
⋅=
donde:
A12: ganancia diferencial de la etapa formada por U1 y U2.
1/CMR12=(1/CMR1)-(1/CMR2)
1/CMR3=(1/CMRU3)+(1/CMRres)
CMR1, CMR2, CMRU3, CMR4: rechazos al modo común de los AO’s.
Hay que notar que para los valores normales de estos parámetros la expresión anteriorse puede aproximar a:
CMR=A12CMR3
3.- Amplificadores de instrumentación de ganancia programable.
Se ha visto anteriormente que la mayoría de los amplificadores de instrumentación sebasan en la estructura básica o estándar que llamamos “circuito con tres AO’s”, que secaracteriza porque el valor de su ganancia dependía de una resistencia externa RG.
Algunos fabricantes incorporan en sus montajes una red de resistencias seleccionablesdigitalmente, para hacer las veces de RG y así poder cambiar el valor de la gananciamediante un control digital, desde por ejemplo el sistema de adquisición de datos,constituyendo lo que se denomina amplificador de instrumentación de gananciaprogramable. Un amplificador de este tipo se puede realizar mediante componentesdiscretos, utilizando resistencias y puertas analógicas, pero las características obtenidasserán, en la mayoría de las ocasiones, sensiblemente inferiores a las de los dispositivosintegrados.
Figura 12. Eliminación del modo común mediante alimentación flotante.
15
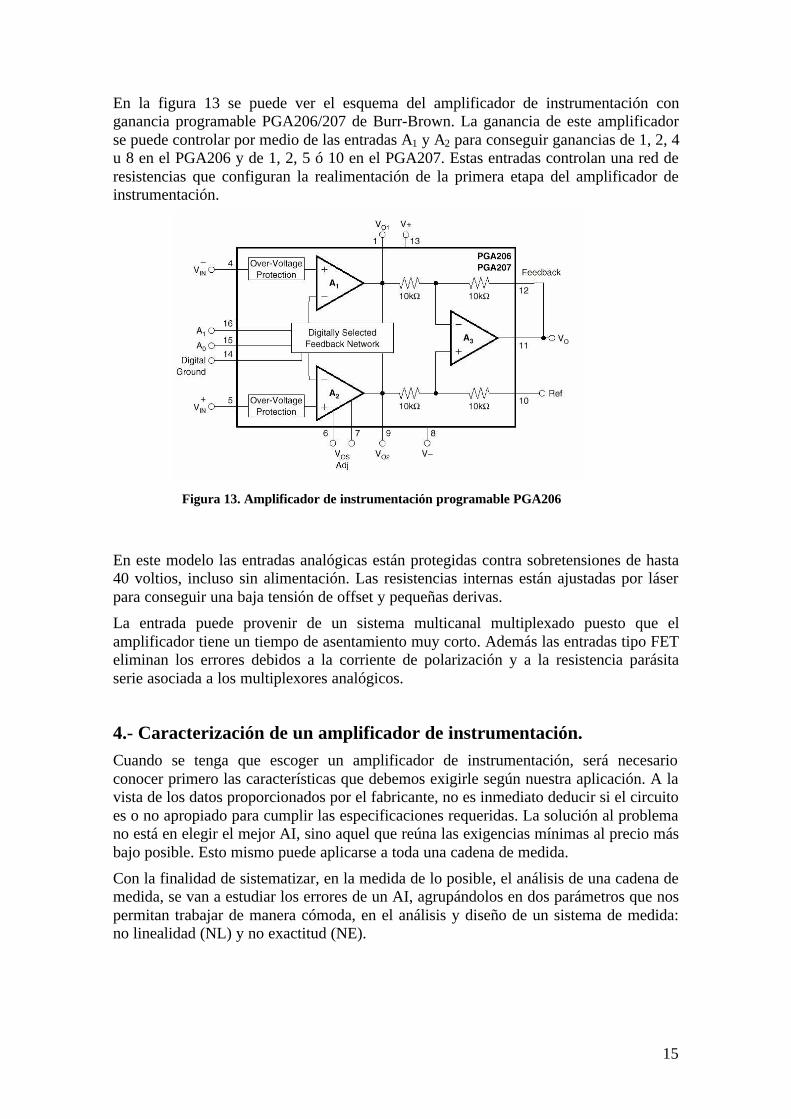
En la figura 13 se puede ver el esquema del amplificador de instrumentación conganancia programable PGA206/207 de Burr-Brown. La ganancia de este amplificadorse puede controlar por medio de las entradas A1 y A2 para conseguir ganancias de 1, 2, 4u 8 en el PGA206 y de 1, 2, 5 ó 10 en el PGA207. Estas entradas controlan una red deresistencias que configuran la realimentación de la primera etapa del amplificador deinstrumentación.
En este modelo las entradas analógicas están protegidas contra sobretensiones de hasta40 voltios, incluso sin alimentación. Las resistencias internas están ajustadas por láserpara conseguir una baja tensión de offset y pequeñas derivas.
La entrada puede provenir de un sistema multicanal multiplexado puesto que elamplificador tiene un tiempo de asentamiento muy corto. Además las entradas tipo FETeliminan los errores debidos a la corriente de polarización y a la resistencia parásitaserie asociada a los multiplexores analógicos.
4.- Caracterización de un amplificador de instrumentación.
Cuando se tenga que escoger un amplificador de instrumentación, será necesarioconocer primero las características que debemos exigirle según nuestra aplicación. A lavista de los datos proporcionados por el fabricante, no es inmediato deducir si el circuitoes o no apropiado para cumplir las especificaciones requeridas. La solución al problemano está en elegir el mejor AI, sino aquel que reúna las exigencias mínimas al precio másbajo posible. Esto mismo puede aplicarse a toda una cadena de medida.
Con la finalidad de sistematizar, en la medida de lo posible, el análisis de una cadena demedida, se van a estudiar los errores de un AI, agrupándolos en dos parámetros que nospermitan trabajar de manera cómoda, en el análisis y diseño de un sistema de medida:no linealidad (NL) y no exactitud (NE).
Figura 13. Amplificador de instrumentación programable PGA206
16
4.1.- Linealidad de un amplificador.
Anteriormente hemos definido la no linealidad de un amplificador como la diferenciamáxima entre la función de transferencia real y una recta que se aproxime lo máximoposible a esta función de transferencia, normalizando después por la excursión de latensión de salida. Este parámetro nos indica si a incrementos iguales en la entrada seproducen incrementos también iguales en la salida. Pero no se preocupa de si la relaciónentre estos incrementos tiene un valor determinado o no, esta situación se englobará enotro parámetro que se denomina exactitud. Lo que se estudia aquí es general paracualquier amplificador, aunque nos centremos en los amplificadores de instrumentación.
En los AI integrados, la NL es un parámetro que se suele suministrar por parte delfabricante, que puede venir de la siguiente forma:
( )%10102 53 GNL −− +⋅±=
Donde vemos que depende de la ganancia obtenida con el circuito, por ejemplo, siG=100 resulta NL=±30 ppm. La NL nos ocasionará el error comentado antes, pero si ala entrada tenemos una señal con componentes alternas, se producirá una distorsiónarmónica y de intermodulación, que se traduce a la salida en componentes de frecuenciaque no estaban presentes en la entrada.
Una forma de expresar los errores de un AI es por medio del número equivalente de bitsde un ADC. Se trata de calcular el número de bits que debe tener un ADC para que laaltura de su escalón fuera igual al máximo error del circuito. Para el ejemplo anterior enel que la NL=±30 ppm tendremos:
1421
60 =⇒= nppmn
Entonces, si la salida del AI la enviamos a un ADC de más de 14 bits, sólo los 14 demayor peso podemos decir que siguen una ley de variación lineal con la tensión deentrada al AI, con un error de ±1/2 LSB. El resto de bits menos significativos nos daráninformación de la variación en la tensión de entrada al amplificador, pero no seguiránuna ley lineal con ella, es decir, nos proporcionan resolución pero no linealidad.
Por ejemplo, si NL=±30 ppm y utilizamos un ADC de 16 bits, tendremos:
De n0 a n15 16 bits de resolución.
De n2 a n15 14 bits de linealidad a ±1/2n2
Si en nuestra aplicación nos interesa obtener a la salida del ADC un código que siga unavariación lineal con la máxima precisión, pero utilizando un ADC con el menor númerode bits posible, en el ejemplo anterior tomaríamos un ADC de 14 bits. El error delinealidad sería de ±1/2 LSB, que no se mejoraría aumentando el número de bits delconvertidor.
Calcular el valor de la NL en un circuito formado por componentes discretos es unatarea tediosa y a veces imposible por falta de información necesaria. Por este motivonos tendremos que limitar a amplificadores integrados, partiendo del parámetrosuministrado por el fabricante y realizar el estudio analíticamente. En los no integradosserá necesario experimentar con el circuito en el laboratorio para obtener este parámetroy poder trabajar posteriormente.
17
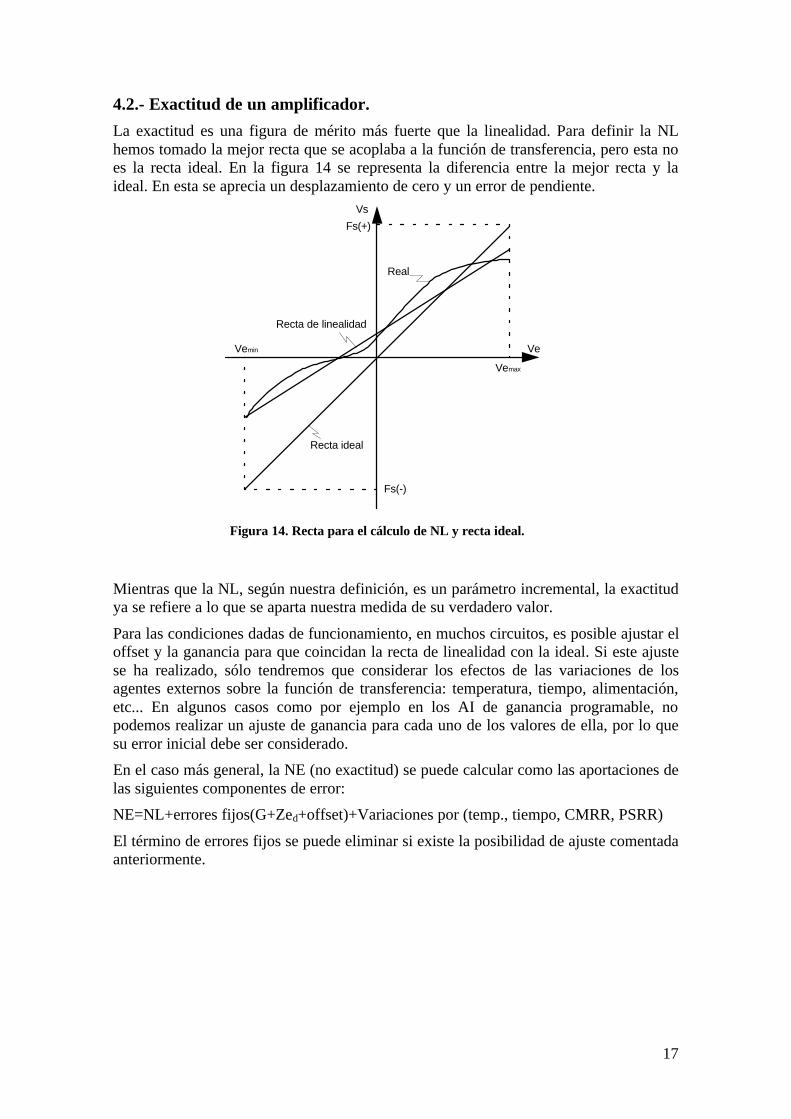
4.2.- Exactitud de un amplificador.
La exactitud es una figura de mérito más fuerte que la linealidad. Para definir la NLhemos tomado la mejor recta que se acoplaba a la función de transferencia, pero esta noes la recta ideal. En la figura 14 se representa la diferencia entre la mejor recta y laideal. En esta se aprecia un desplazamiento de cero y un error de pendiente.
Mientras que la NL, según nuestra definición, es un parámetro incremental, la exactitudya se refiere a lo que se aparta nuestra medida de su verdadero valor.
Para las condiciones dadas de funcionamiento, en muchos circuitos, es posible ajustar eloffset y la ganancia para que coincidan la recta de linealidad con la ideal. Si este ajustese ha realizado, sólo tendremos que considerar los efectos de las variaciones de losagentes externos sobre la función de transferencia: temperatura, tiempo, alimentación,etc... En algunos casos como por ejemplo en los AI de ganancia programable, nopodemos realizar un ajuste de ganancia para cada uno de los valores de ella, por lo quesu error inicial debe ser considerado.
En el caso más general, la NE (no exactitud) se puede calcular como las aportaciones delas siguientes componentes de error:
NE=NL+errores fijos(G+Zed+offset)+Variaciones por (temp., tiempo, CMRR, PSRR)
El término de errores fijos se puede eliminar si existe la posibilidad de ajuste comentadaanteriormente.
Real
Recta de linealidad
Ve
Vs
Fs(+)
Fs(-)
Recta ideal
Vemax
Vemin
Figura 14. Recta para el cálculo de NL y recta ideal.