ALMACEN LPAIC
30
CAPITULO 5 ALMACEN MATRICIAL LIBRO DE PRÁCTICAS DEL LPAIC 179 ALMACÉN MATRICIAL FOTOGRAFÍA DE LA VISTA FRONTAL DEL AS/RS
-
Upload
andrees-liceea-pinaa -
Category
Documents
-
view
304 -
download
6
description
PRACTICAS DE ALMACEN
Transcript of ALMACEN LPAIC
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 179
ALMACN MATRICIAL
FFOOTTOOGGRRAAFFAA DDEE LLAA VVIISSTTAA FFRROONNTTAALL DDEELL AASS//RRSS
-
CAPITULO 5 ALMACEN MATRICIAL
180 LIBRO DE PRCTICAS DEL LPAIC
GENERALIDADES
Los sistemas AS/RS (Automatic Storage and Retrieval System o Sistema Automtico de Almacenamiento y Recuperacin) son usados en los procesos automatizados de produccin porque nos permite llevar un mejor control de nuestra produccin, logrando identificar en el mismo almacn la cantidad de materia prima con la que contamos, productos intermedios y terminados. El CIM L.P.A.I.C. cuenta con un AS/RS (ver fig. 1) compuesto por una estructura de aluminio de perfil estructural, un manipulador neumtico, un sistema servomotor controlador cartesiano para ubicar al manipulador en la posicin que deseemos dentro del rea de trabajo y un PLC Siemens 226 con tarjeta de comunicacin PROFIBUS para poder trabajar con el AS/RS de modo autnomo o integrado al sistema como un modulo del CIM. El concepto importante dentro de este mdulo es la utilizacin y programacin del sistema servomotor controlador en una aplicacin real de AS/RS siendo tambin capaz de comunicarse con otro dispositivo; en este caso el PLC 226, para integrar el mdulo a un sistema ms complejo; en este caso al LPAIC por medio de la red PROFIBUS. Para iniciar con la programacin del sistema servomotor controlador, debemos identificar los elementos que lo componen y definir el uso y caractersticas de cada uno de ellos.
Sistema Servomotor - Controlador.- El sistema bsico est compuesto por un servomotor, drive, controlador y el elemento de expansin es un mdulo de entradas y salidas. Estos elementos se describen a continuacin con ms detalle.
Servomotores.- Para formar el sistema cartesiano, el sistema AS/RS cuenta con un servomotor del fabricante Parker por cada eje, pero debido a que el servomotor pierde su torque si cortamos el suministro de energa, el servomotor del eje y cuenta con un freno electromecnico que evita que el manipulador pueda caer estrepitosamente y daarse si es que se corta la energa y este est a una altura considerable.
Fig. 1. Diagrama de la vista del programador del AS/RS
PLC 200
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 181
DEL almacn Campo de Texto Comando
MA 00Campo de datos binarios (correspondientes a los ejes 1 y 2)Comando
; Campo para comentarios. ; Los comentarios seseparan de los comandos con un punto y coma.;;;
Controlador.- El controlador instalado en el sistema es un 6K2 de Parker (6K es el modelo del controlador y el siguiente nmero es el que indica el nmero de ejes que puede manejar, en este caso son 2). Este elemento se encarga de leer los datos digitales de posicin, velocidad y aceleracin de los servomotores y por medio de los Drives manda la seal de retroalimentacin de nuevo a los servomotores.
Drives o Amplificadores.- El drive es el elemento usado para controlar a un elemento elctrico o electrnico, normalmente contiene circuitos amplificadores basados en transistores de potencia para la conversin de voltaje de AC a DC. Los drives usados son del modelo Aries de Parker.
Mdulo de expansin de entradas y salidas (EVM32).- Este mdulo nos permite tener hasta cuatro tarjetas de expansin para entradas y salidas digitales. Cada una de las tarjetas contiene ocho entradas o salidas para comunicacin con otros dispositivos.
Programacin del 6K.- Motion Planner es el software usado para configurar y programar el 6K, adems del Drive/Controlador GV6K y GT6K. El Motion Planner tiene una estructura y comandos de programacin muy parecidos a los de lenguaje C.
Instrucciones en 6k.- El lenguaje de programacin del 6K est compuesto por comandos, cada comando se guarda en el buffer interno del controlador 6K y se ejecutan en el orden en el que fueron recibidos.
Tipos de valores y variables.- El lenguaje 6K acepta valores numricos y binarios.
D5000; define el valor de distancia a 5,000 unidades, aproximadamente 1cm.DRIVE10; el drive del eje x est encendido, mientras que el del eje y est apagado
DEL almacn DEF almacn MA00
D10000, 10000 GO
END
Fig. 2. Tipos de valores usados en el 6K
Variables.- Para calcular ciertos datos, estos los podemos guardar en variables. Las variables no necesitan darse de alta ni inicializarlas, estas pueden ser numricas o binarias.
-
CAPITULO 5 ALMACEN MATRICIAL
182 LIBRO DE PRCTICAS DEL LPAIC
Las variables numricas empiezan con VAR y le sigue el nmero de la variable (1-225), se le puede asignar cualquier valor entre 999,999,999,99999999. Las variables binarias empiezan con VARB y le sigue el nmero de la variable (1-125), los valores que se le pueden asignar son mximo de 32 bits.
Ej.: VAR1=10 ; Se le asigna a la variable numrica 1 el valor de 10VARB8=b10001 ; Se le asigna a la variable binaria 8 el valor de 10001
Las coordenadas de las bahas pueden ser manejadas como variables, por ejemplo, la baha 1 tiene las coordenadas 2500,-53650. Lo primero que hacemos es guardar estos datos antes de comenzar el ciclo del programa:
var10=-2500; Posicin en el eje horizontal (pulsos) en la columna1var11=-53650; Posicin en el eje vertical (pulsos) en la baha 1
Despus si necesitamos que el manipulador se dirija a la baha 1, solo escribiremos las variables en las instrucciones:
d(var10),(var11);direccin de la baha 1go
Comandos bsicos.- Tomando en cuenta su funcin, los comandos bsicos podemos dividirlos en diferentes grupos: comandos de programa, de configuracin, comandos de movimiento, comandos de flujo de informacin, comandos de comunicacin y comandos de status.
Comandos de programa.- Estos comandos son necesarios para definir un programa
DEL.- Borra el programa que tiene el nombre que lo acompaa, el nombre del programa es igual o menor a 6 caracteres.
DEL PRUEBA; Borra el programa prueba
DEF.- Define un programa con el nombre que lo acompaa, el nombre debe ser igual omenor a 6 caracteres
DEF PRUEBA; Define un programa llamado prueba
END.- Indica el trmino del programa definido
END; Indica trmino del programa
A continuacin vemos la estructura bsica de un programa en lenguaje 6K.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 183
Comandos de control de flujo.- Los comandos de control de flujo son aqullos que nos permiten definir el orden en el que se van a ejecutar las instrucciones del programa. Tal vez necesitemos que una serie de instrucciones se repitan n nmero de veces antes de ejecutar la siguiente instruccin, o que ciertas instrucciones se ejecuten o no, si se cumple una condicin.
T.- El comando T define una espera dada por el nmero que le sigue, ese valor est dado en segundos.
T3; Espera 3 segundos antes de continuar T0.5; Espera medio segundo antes continua
GOSUB - Llamadas a subrutinas.- El comando GOSUB llama al programa o subrutina correspondiente cuando es ejecutado. Cuando se termine de ejecutar la subrutina a la que llama el comando GOSUB, el programa regresa al control una lnea delante de dnde fue llamado.
WAIT.- El comando WAIT se utiliza para esperar a que se cumpla una condicin establecida. Ningn comando ser ejecutado hasta que se cumpla la condicin contenida en los parntesis que acompaan al comando WAIT.
Todos los operadores lgicos (AND, OR, NOT) y los operadores aritmticos (=, >, >=,
-
CAPITULO 5 ALMACEN MATRICIAL
184 LIBRO DE PRCTICAS DEL LPAIC
IF NIFEvala una condicin especfica una vez. Si la condicin es verdadera, los Comandos entre IF y NIF son ejecutados. Si la condicin es falsa, los comandos entre IF y NIF son ignorados y la ejecucin de comandos contina despus del NIF.
IF (IN.5 = B1)D25000GO1NIF
Comandos de comunicacin.- Estos comandos nos van a permitir establecer una comunicacin con otros dispositivos u otros elementos, o simplemente con el usuario. Obviamente para eso necesitamos comandos de entrada y comandos de salida.
WRITE.- El comando WRITE nos permite escribir un mensaje en la pantalla, esto es muy til para saber que parte del programa se est ejecutando o qu es lo que esta esperando el programa.
OUT.- El comando OUT sirve para activar o desactivar una salida, la cual puede estar conectada a otro dispositivo.
1OUT.14- 1; Activa la salida 14. Extiende el manipulador. 1OUT.14- 0; Desactiva la salida 14. Contrae el manipulador. 1OUT.15- 1; Activa la salida 15. Gira el gripper hacia la banda Conveyor. 1OUT.15- 0; Desactiva la salida 15. Gira el gripper hacia el almacn. 1OUT.16- 1; Activa la salida 16. Cierra el gripper. 1OUT.16- 0; Desactiva la salida 16. Abre el gripper.
IN.- El comando IN nos sirve para leer las entradas digitales, estas entradas pueden ser usadas dentro de comparaciones en los programas. Para trabajar con mdulos de expansin, al comando IN hay que anteponerle el nmero de mdulo de expansin con el que queremos trabajar.
WAIT (1IN.32=B1); Espera a que el manipulador est contradoWAIT (1IN.31=B1); Espera a que el manipulador est extendido
Comandos de configuracin.- Los comandos de configuracin permiten elegir cmo queremos que trabaje tanto el programa como el sistema.
MA.- Define si la forma de moverse de cada eje va a ser en coordenadas absolutas o incrementales.
MA11; Movimiento absoluto en los ejes x y. El manipulador toma como origen la esquina inferior izquierda del almacn.
MA00; Movimiento relativo en los ejes x y. El manipulador toma como origen las coordenadas donde se encuentra actualmente.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 185
SGP.- Define el valor de la ganancia proporcional para cada eje.
SGP 8,10; Define una ganancia de 8 para el eje 1 y de 10 para el eje 2
SGV.- Define el valor de la ganancia derivativa para cada eje.
SGP 4,2; Define una ganancia de 4 para el eje 1 y de 2 para el eje 2
HOM.- Con este comando mandamos llamar la rutina de Home, previamente configurada por los valores que contienen los comandos HOMA, HOMAD, HOMV, HOMVF, HOMBAC, HOMDF y HOMEDG. El comando HOM utiliza valores binarios, teniendo un espacio para cada uno de los ejes y definiendo un valor bajo (0) para la bsqueda del Home en la direccin positiva y un valor alto (1) para la bsqueda del Home en la direccin negativa. Para mayores referencias acerca de la rutina de Home, busque el comando en la ayuda del Motion Planner.
-
CAPITULO 5 ALMACEN MATRICIAL
186 LIBRO DE PRCTICAS DEL LPAIC
PRCTICA No. 1OBJETIVO:
Al trmino de la prctica, el alumno tendr los conocimientos y habilidades necesarias para operar y programar el almacn matricial, llevando a cabo tareas de rutinas y subrutinas de movimientos del manipulador con la finalidad de mover pallets para carga y descarga de los mismos en las diferentes bahas del almacn y en la plataforma de la banda.
REPORTE DE LA PRCTICA
Para poder realizar cada prctica en el laboratorio, debe elaborar previamente; consultando la informacin del libro, un reporte en manuscrito o a computadora cuyo requisito ser redactar a mano el desarrollo de la prctica.
Los puntos a desarrollar en su reporte son los siguientes:
1. Portada: nombre de la prctica, nombre del alumno y del profesor, grupo y fecha.
2. Objetivo.
3. Introduccin. Elaborar un diagrama de flujo de la prctica (procedimiento paso a paso desde el encendido
hasta el apagado del equipo).
4. Generalidades Escribir una breve resea histrica (consultar otras bibliografas sobre el AS/RS). Describir los grados de libertad del robot o manipulador. Investigar y mencionar las medidas de seguridad requeridas para trabajar con el equipo.
5. Mencionar el equipo a utilizar.6. Mencionar la bibliografa consultada.
El complemento de acuerdo al desarrollo de la prctica y las conclusiones, las redactar en el reporte que debe entregar al finalizar la prctica.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 187
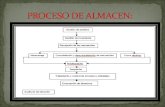
DESARROLLO:
1 ENCENDIDO DEL SISTEMA
1.1 Encender la energa elctrica y la neumtica.1.1.1 Encender el regulador.1.2 Encender la computadora.1.3 Encienda el sistema servomotor-controlador.1.4 Inicie el programa Motion Planner desde el men de Inicio
de Windows.1.5 Cuando se despliegue la pantalla Default
Communications Settings haga clic en el botn Aceptar.1.6 Aparecer la pantalla principal Wizard, desde donde
tendr acceso a las opciones de trabajo del programa Motion Planner.
2 ANLISIS DE UN PROGRAMA YA DISEADO
2.1 En la pantalla Wizard haga clic en el cono (new).2.2 Seleccione Progam Editor.
2.3 Abra los archivos PRACTICA, TOMARP y DEJARP que se encuentran en C:\Documents and Settings\Administrador\Escritorio\PRACTICA. Estos programas se muestran a continuacin.
-
CAPITULO 5 ALMACEN MATRICIAL
188 LIBRO DE PRCTICAS DEL LPAIC
2.3.1 Programa principal
; CONDICIONES INICIALESSCALE0 ; Deshabilita las escalasDEL PRACTICA ; Borra el programa PRCTICA. En caso que est cargado alguno con el mismo nombre, lo
borrarDEF PRACTICA ; Define el programa PRCTICA
ma11 ; Movimiento absolutoTRACE00 ; Deshabilita Program Trace Modedrive00 ; Apaga los drives
CMDDIR11 ; Configura la direccin en la que se movern los motores (+,+)LIMLVL110110 ; Define el estado activo de los lmites de hometlim ; Reporta el estado de las entradas de los lmitesLS0,0 ; Movimiento sin restriccionesSGP8.0,12.0 ; Configura las ganancias proporcionalesSGV3.0,3.0 ; Configura las ganancias derivativas
; Apagamos todas las seales de salida 1out.16-0 ; Abre el gripper1out.15-0 ; Gira el manipulador hacia el almacn1out.14-0 ; Contrae el manipulador1out.13-0 ; Seal auxiliar1out.12-0 ; Seal auxiliar1out.11-0 ; Seal auxiliar1out.10-0 ; Seal auxiliar1out.9-0 ; Seal auxiliar1out.8-0 ; Seal auxiliar1out.7-0 ; Seal auxiliar1out.6-0 ; Seal auxiliar1out.5-0 ; Seal auxiliar1out.4-0 ; Seal auxiliar1out.3-0 ; Seal auxiliar1out.2-0 ; Seal auxiliar1out.1-0 ; Seal auxiliarWAIT (1IN.32=B1); Espera que el manipulador este contradodrive11 ; Enciende los drives de los ejes X,Y
HOMA1, 1 ; Define la aceleracin (u/s2)HOMAD1, 1 ; Define la desaceleracinHOMV3, 3 ; Define la velocidad (unidades/segundo)HOMVF1, 1 ; Define la velocidad de retroalimentacin (u/s)HOMBAC11 ; Habilita la nueva bsqueda de homeHOMDF00 ; Define la direccin de los ejes para homeHOMEDG11 ; Define la direccin de bsqueda
HOM00 ; Define la direccin de los ejes, para la bsqueda de homeWait (MOV=B00); Espera que termine el movimiento
; Variables de datosvar200=0; Variable que guarda el valor de la columna de trabajovar201=0; Variable que guarda el valor de la baha de trabajovar202=0; Variable que guarda el ltimo modo de operacin 1 carga y 2 descargavar203=0; Variable que guarda el nmero de variable que guarda la coordenada x
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 189
var204=0; Variable que guarda el nmero de variable que guarda la coordenada yvar205=0; Variable que guarda el valor anterior de la columna de trabajovar206=0; Variable que guarda el valor anterior de operacin de trabajovar207=0; Variable que habilita de nuevo el rechazo del cdigo de barrasvar208=0; Guarda el valor de la coordenada horizontalvar209=0; Guarda el valor de la coordenada verticalvar210=0; Variable que controla las repeticiones de rutina de cdigo de barrasvar211=0; Variable que controla la lectura del modo de operacin de plc
; Variables de posicin de columnas y plataformas; distancia entre bahas vertical 106700; distancia entre bahas horizontal 130700var10=-2500; Posicin en el eje horizontal (pulsos) en la columna1var11=-53650; Posicin en el eje vertical (pulsos) en la baha 1 var12=-152800; Posicin en el eje vertical (pulsos) en la baha 2var13=-252850; Posicin en el eje vertical (pulsos) en la baha 3var14=-352300; Posicin en el eje vertical (pulsos) en la baha 4var15=-454350; Posicin en el eje vertical (pulsos) en la baha 5var16=-552100; Posicin en el eje vertical (pulsos) en la baha 6
var20=-127568; Posicin en el eje horizontal (pulsos) en la columna2var21=-54350; Posicin en el eje vertical (pulsos) en la baha 1 var22=-154100; Posicin en el eje vertical (pulsos) en la baha 2var23=-254050; Posicin en el eje vertical (pulsos) en la baha 3var24=-353600; Posicin en el eje vertical (pulsos) en la baha 4var25=-452850; Posicin en el eje vertical (pulsos) en la baha 5var26=-552600; Posicin en el eje vertical (pulsos) en la baha 6
var30=-253336; Posicin en el eje horizontal (pulsos) en la columna3var31=-54350; Posicin en el eje vertical (pulsos) en la baha 1 var32=-153900; Posicin en el eje vertical (pulsos) en la baha 2var33=-254050; Posicin en el eje vertical (pulsos) en la baha 3var34=-353300; Posicin en el eje vertical (pulsos) en la baha 4var35=-453500; Posicin en el eje vertical (pulsos) en la baha 5var36=-553800; Posicin en el eje vertical (pulsos) en la baha 6
var40=-378504; Posicin en el eje horizontal (pulsos) en la columna4var41=-54650; Posicin en el eje vertical (pulsos) en la baha 1 var42=-154400; Posicin en el eje vertical (pulsos) en la baha 2var43=-254000; Posicin en el eje vertical (pulsos) en la baha 3var44=-354000; Posicin en el eje vertical (pulsos) en la baha 4var45=-453900; Posicin en el eje vertical (pulsos) en la baha 5var46=-553800; Posicin en el eje vertical (pulsos) en la baha 6
var50=-501172; Posicin en el eje horizontal (pulsos) en la columna5var51=-55050; Posicin en el eje vertical (pulsos) en la baha 1 var52=-154800; Posicin en el eje vertical (pulsos) en la baha 2var53=-254050; Posicin en el eje vertical (pulsos) en la baha 3var54=-354300; Posicin en el eje vertical (pulsos) en la baha 4var55=-453040; Posicin en el eje vertical (pulsos) en la baha 5var56=-553800; Posicin en el eje vertical (pulsos) en la baha 6
Posicin en la plataforma de la bandavar1=-505971; Posicin en el eje horizontal de los puntos sobre y lugarvar2=-333084; Posicin vertical del punto sobre
-
CAPITULO 5 ALMACEN MATRICIAL
190 LIBRO DE PRCTICAS DEL LPAIC
var3=-393044; Posicin vertical del punto lugar y enfrentevar4=-346020; Posicin horizontal del punto enfrentevar5=-300000; Posicin horizontal del punto de seguridadvar6=-300000; Posicin vertical del punto de seguridad
COLUMNA05 COLUMNA04 COLUMNA03 COLUMNA02 COLUMNA01
V50,V51 V40,V41 V30,V31 V20,V21 V10,V11
BAHIA 05 BAHIA 04 BAHIA 03 BAHIA 02 BAHIA 01X = -500711 X = -376530 X = -252349 X = -128168 X = -3000Y = -50850 Y = -50850 Y = -50850 Y = -50850 Y = -50850
V50,V52 V40,V42 V30,V32 V20,V22 V10,V12
BAHIA 10 BAHIA 09 BAHIA 08 BAHIA 07 BAHIA 06X = -500711 X = -376530 X = -252349 X = -128168 X = -3000Y = -150100 Y = -150100 Y = -150100 Y = -150100 Y = -150100
V50,V53 V40,V43 V30,V33 V20,V23 V10,V13
BAHIA 15 BAHIA 14 BAHIA 13 BAHIA 12 BAHIA 11X = -500711 X = -376530 X = -252349 X = -128168 X = -3000Y = -250150 Y = -250150 Y = -250150 Y = -250150 Y = -250150
V50,V54 V40,V44 V30,V34 V20,V24 V10,V14
BAHIA 20 BAHIA 19 BAHIA 18 BAHIA 17 BAHIA 16X = -500711 X = -376530 X = -252349 X = -128168 X = -3000Y = -355600 Y = -350600 Y = -350600 Y = -350600 Y = -350600
V50,V55 V40,V45 V30,V35 V20,V25 V10,V15
BAHIA 25 BAHIA 24 BAHIA 23 BAHIA 22 BAHIA 21X = -500711 X = -376530 X = -252349 X = -128168 X = -3000Y = -450250 Y = -450250 Y = -450250 Y = -450250 Y = -450250
V50,V56 V40,V46 V30,V36 V20,V26 V10,V16
BAHIA 30 BAHIA 29 BAHIA 28 BAHIA 27 BAHIA 26X = -500711 X = -376530 X = -252349 X = -128168 X = -3000Y = -551900 Y = -551900 Y = -551900 Y = -551900 Y = -551900
Esquema de localizacin de las bahas
; Rutina de espera ; Ciclo principalV15, 15 ; Velocidad del manipulador (unidades/segundo)A5, 5 ; Aceleracin del manipulador (u/s2)AD5, 5 ; Desaceleracin del manipulador(u/s2)
; Punto de seguridadd(var5),(var6); Define la distancia de coordenadas (300000,-300000)go ; Inicia el movimiento en ambos ejest2 ; Espera un tiempo de 2 segundos
Write "realizando movimientos"; Enva el mensaje d(var10),(var15)got2
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 191
gosub TOMARP; Llama a la subrutina TOMARPt3d(var20),(var24)got2
gosub DEJARPt3
d(var5),(var6)goend ;Termina el programa
1.1.1 Subrutina 1
DEL TOMARP DEF TOMARP
V15,15A5,5AD5,5
MA00 ;Movimiento Relativo1OUT.16-01OUT.14-1 ;Extiende el manipuladorWAIT(1IN.31=B1) ;Espera que el manipulador est extendidoT1.000
1OUT.16-1 ;Cierra el gripperT1.000
D0,10000 ;Asigna la distancia 0 en el eje X, 10000 unidades en el eje Y
GOWAIT(MOV=B00)
1OUT.14-0WAIT(1IN.32=B1)
D0,-10000GO
MA11 ;Movimiento Absoluto
END ;Fin de subrutina
1.1.2 Subrutina 2
DEL DEJARP DEF DEJARP
V15,15A5,5AD5,5
MA001OUT.14-0D0,10000GOWAIT(MOV=B00)
1OUT.14-1WAIT(1IN.31=B1)T1.000
D0,-10000GOWAIT(MOV=B00)
1OUT.16-0T2.000
1OUT.14-0WAIT(1IN.32=B1)T1.000MA11
END
Guarde el programa haciendo clic en el cono (save) con el nombre de PRCTICA, de la misma forma guarde las dos subrutinas con los nombres TOMARP y DEJARP respectivamente.
Cargue el programa principal y las dos subrutinas haciendo clic en el cono (download editor) de cada pantalla del editor.
Espere a que aparezca la confirmacin de que el programa est correcto y haga clic en el botn Aceptar.
-
CAPITULO 5 ALMACEN MATRICIAL
192 LIBRO DE PRCTICAS DEL LPAIC
Abra la TERMINAL1 que se encuentran en C:\Documents and Settings\Administrador\Escritorio\PRACTICA.
PRECAUCIN: EL MANIPULADOR DEBE ESTAR COLOCADO AL CENTRO DEL ALMACN Y NO DEBE HABER NINGN PALLET EN LAS BAHAS.
2.4 Ya en la terminal, teclee el nombre del programa a ejecutar (PRACTICA).
PRECAUCIN: UNA PERSONA DEBE ESTAR ALERTA PARA PRESIONAR EL BOTN DE PARO DE EMERGENCIA DEL ALMACN Y LA PERSONA QUE EST EN LA COMPUTADORA DEBE ESTAR ATENTA A LAS TECLAS ctrl. y k Y PULSARLAS EN CASO DE OBSERVAR CUALQUIER MOVIMIENTO DEL MANIPULADOR NO PROGRAMADO.
2.5 Presione la tecla ENTER.
PRECAUCIN: AL TRMINO DE LA EJECUCIN DEL PROGRAMA, EN LA TERMINAL APARECER EL PROMPT Y EL CURSOR PARPADEANDO; ESTO INDICA QUE EL PROGRAMA LLEG A SU FIN. SI POR ALGUNA CIRCUNSTANCIA NO LLEGARA A SUCEDER ESTO, PRESIONE LAS TECLAS ctrl. y k PARA DETENER EL PROGRAMA.
2.6 Observe la rutina y comente cada una de las lneas del programa.2.7 Analice cada comando.
3 CREACIN DE UN PROGRAMA
3.1 En la pantalla Wizard haga clic en el cono (new).Seleccione Progam Editor. Desarrolle un programa para crear dos subrutinas (carga1 y descarga1) con la siguiente secuencia de movimientos. Deber escribir estas subrutinas en distintos editores, con distintos nombres.
Subrutina para cargar un pallet en la plataforma de la banda conveyor.
En el punto de seguridad Girar el gripper hacia la plataforma de la conveyor.Llevarlo sobre la plataforma de la conveyor.Bajarlo al nivel de la superficie de la plataforma de la conveyor (lugar).Abrir el gripper.Llevar el manipulador enfrente de la plataforma.Llevarlo al punto de seguridad.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 193
Girar el gripper hacia las bahas
.
Subrutina para descargar un pallet de la plataforma de la conveyor.
En el punto de seguridad Girar el gripper hacia la plataforma de la conveyor.Abrir el gripper.Llevar el pallet enfrente de la plataforma.Introducir el gripper en la plataforma para tomar el pallet (lugar).Cerrar el gripper.Llevarlo sobre la plataforma.Llevarlo al punto de seguridad.Girar el gripper hacia las bahas.
PRECAUCIN: PARA EVITAR UN MALFUNCIONAMIENTO O COLISIN DEL MANIPULADOR PRINCIPALMENTE, VERIFIQUE EN EL PROGRAMA LOS VALORES CORRESPONDIENTES AL MOVIMIENTO ABSOLUTO MA, LA DIRECCIN DE LOS EJES CMDDIR Y LAS DISTANCIAS QUE NO EXCEDAN LAS 50000 UNIDADES.
SOBRE
LUGAR
Distancia: pallet y medio
Plataforma de la banda
Banda conveyorAlmacn
ENFRENTE
-
CAPITULO 5 ALMACEN MATRICIAL
194 LIBRO DE PRCTICAS DEL LPAIC
3.2 Guarde en una carpeta con su nombre en C:\Documents and Settings\Administrador\Escritorio
y cargue cada una de las subrutinas y abra la terminal haciendo clic en el cono .3.3 Ya en la terminal, teclee el nombre de la primera subrutina a ejecutar (carga1).
PRECAUCIN: UNA PERSONA DEBE ESTAR ALERTA PARA PRESIONAR EL BOTN DE PARO DEL ALMACN Y LA PERSONA QUE EST EN LA COMPUTADORA DEBE ESTAR ATENTA A LAS TECLAS ctrl. y k PARA PULSARLAS SIMULTNEAMENTE EN CASO DE OBSERVAR CUALQUIER MOVIMIENTO NO PROGRAMADO O CUANDO SE SOBREPASAN LOS LMITES DE MOVIMIENTO.
3.4 Presione la tecla ENTER.3.5 Comente su programa, repita las operaciones 3.3 y 3.4 para la subrutina descarga1.
4 APAGADO DEL SISTEMA
4.1 Lleve el manipulador a las coordenadas de seguridad.4.2 Borre sus programas carga1 y descarga1 de C:\Documents and Settings\ Administrador\Escritorio.4.3 Cierre la terminal.4.4 Cierre el editor de programas.4.5 Cierre el programa Motion Planner.4.6 Apague la computadora.4.7 Apague el sistema servomotor-controlador.4.8 Apague el regulador de tensin.
TERMINE EL REPORTE Y ENTREGUELO A SU PROFESOR
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 195
PRCTICA No. 2
OBJETIVO:
El alumno al trmino de la prctica tendr los conocimientos y habilidades necesarias para realizar una rutina de movimiento del manipulador para mover pallets del almacn a la plataforma de la banda conveyor y viceversa. Adems programar el PLC 200 del almacn para seleccionar la baha a utilizar.
REPORTE DE LA PRCTICA:
Para poder realizar cada prctica en el laboratorio debe elaborar previamente, consultando la informacin del libro, un reporte en manuscrito o a computadora cuyo requisito ser redactar a mano el desarrollo de la prctica.
Los puntos a desarrollar en su reporte son los siguientes:
1. Portada: nombre de la prctica, nombre del alumno y del profesor, grupo y fecha.
2. Objetivo.
3. Introduccin. Elaborar un diagrama de flujo de la prctica (procedimiento paso a paso desde el encendido
hasta el apagado del equipo).
4. Generalidades Escribir una breve resea histrica (consultar otras bibliografas sobre el PLC) Mencione un ejemplo utilizando lgica booleana para programar un PLC.
5. Mencionar el equipo a utilizar.6. Escribir la bibliografa consultada.
El complemento de acuerdo al desarrollo de la prctica y las conclusiones, las redactar en el reporte que debe entregar al finalizar la prctica.
INTRODUCCIN:
Para llevar a cabo esta prctica es necesario trabajar con el programa Motion Planner y tambin con STEP 7-Micro/Win que es el software utilizado para programar el PLC200 del almacn. Utilizaremos el PLC 200 para que la seleccin de las bahas sea automtico y para mandar las seales de carga y descarga.
-
CAPITULO 5 ALMACEN MATRICIAL
196 LIBRO DE PRCTICAS DEL LPAIC
Programacin utilizando Motion Planner.
En esta prctica solo ocuparemos las dos primeras columnas del Almacn. De la columna 1 se tomarn los pallets que sern cargados en la plataforma de la banda conveyor, siendo el pallet de la baha 1 el que tendr prioridad y as sucesivamente hasta la baha 6. Los pallets descargados de la banda conveyor se dejarn en la columna 2, siendo el pallet de la baha 1 el que tendr prioridad y as sucesivamente hasta la baha 6.
A continuacin revisaremos algunas instrucciones necesarias para programar en Motion Planner.
1. Configurar direcciones y lmites. Se deshabilita cualquier escala, despus se define el programa y configura las direcciones en las cuales removern los ejes del almacn y sus lmites.SCALE0DEL nombreDEF nombrema11TRACE0drive00CMDDIR11LIMLVL110110tlim
Configura las ganancias de los motores para que tengan un mejor desempeo.LS0,0SGP8.0,12.0SGV3.0,3.0
Limpia las salidas, para no guardar datos anteriores al programa en ejecucin.
1out.16-0 ; abre gripper1out.15-0 ; regresa el giro1out.14-0 ; contrae el manipulador1out.13-0 ; salida auxiliar1out.12-0
1out.11-0 1out.10-0 1out.9-0
1out.8-0
1out.7-01out.6-01out.5-01out.4-01out.3-01out.2-01out.1-0
2. Ir a home. Configure las velocidades para moverse a buscar home. De la misma forma que las direcciones a las cuales se va a mover.
drive11HOMA1,1HOMAD1,1HOMV3,3HOMVF1,1HOMBAC11HOMDF00HOMEDG11
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 197
Va a home.HOM00wait (MOV=B00)
3. Limpiar las variables. Definir e inicializar las variables a utilizar en la rutina. Incluyendo los pulsos de las ubicaciones para las bahas, la plataforma y el punto de seguridad. Copie las variablesque se encuentra en C:\Documents and Settings\Escritorio\PRACTICA y peguelas en el editor.
4. Configurar la velocidad de trabajo en cada uno de los ejes del manipulador.
V25,25A10,10AD5,5 Ir al punto de seguridad.d(var5),(var6)go
Estos fueron los pasos para la configuracin inicial del programa, as que slo los realizar la primera vez que se ejecute el programa en cada sesin. En seguida se muestran los pasos a seguir para la toma de decisiones en cuanto al tipo de trabajo y a la columna con la que se va a trabajar.
5. Esperar instruccin del PLC200. Espera la peticin de trabajo del PLC200. Este puede ser de carga o descarga por medio de las entradas 29 y 30 del controlador.
while(var202=0)t.2if(1in.29=b1) ; Si la entrada 29 del controlador est activada, realiza las siguientes instrucciones de carga en la plataforma de la bahavar202=1; carganif
if(1in.30=b1) ;Si la entrada 30 del controlador est activada, realiza las siguientes instrucciones de descarga en el almacn
var202=2 ; descarganift.2nwhilevar211=1; se esta realizando una operacin
6. Revisa la baha a trabajar. En seguida preguntar con qu baha va a trabajar de la columna seleccionada, por medio de las entradas del controlador (17 a 28), desplegando en pantalla el nmero de la baha seleccionada. Este procedimiento es realizado por el PLC 200, cuyo desarrollo lo podr ver en la seccin siguiente.
-
CAPITULO 5 ALMACEN MATRICIAL
198 LIBRO DE PRCTICAS DEL LPAIC
while (var201=0); no hay baha guardada
seleccionamos la baha a trabajarif(var202=1);si es de cargavar200=var10
if(1in.17=b1)var201=var11nifnwhile
d(var200),(var201)go
En este bloque de programa observaremos que si la variable 202=1 se realizar carga, la variable 200 tendr el valor de la variable 10 que es la coordenada en el eje Y. Al tener un pallet en la baha 1, la entrada 17 estar activa, por lo cual se cumplir la condicin if, la
write" seleccin de bahia1"; guardar baha 1variable 201 tendr el valor de la variable 11 que es la coordenada en el eje X, as d(var200),(var201) tendr los valores en X y Y de acuerdo a la baha que tenga pallet y el manipulador se dirigir a esas coordenadas.
7. Si es de tipo CARGA. Despliega en pantalla que es de tipo carga, y el manipulador se mueve hasta encontrar las coordenadas de la baha seleccionada. Al llegar a esas coordenadas, ejecuta la subrutina tomarp.
gosub tomarp ;llama a la subrutina para tomar el pallet de la baha
Subrutina tomarp. La cual extender el manipulador, despus cerrar el gripper, subir 10000 pulsos, contraer el manipulador, lo bajar 10000 pulsos e ir al punto de seguridad.
d(var5),(var6)go
Al llegar a las coordenadas de seguridad, ejecuta la subrutina carga1.
gosub carga1 ; llama a la subrutina para cargar el pallet en la plataforma de la Conveyor
Donde girar el gripper hacia la plataforma, lo llevar a un punto sobre la plataforma de la banda, bajar hasta colocarse en la plataforma, abrir el gripper, se mover enfrente de la plataforma y girar el gripper hacia las bahas.
En seguida se va al punto de seguridad, limpia variables y salidas.
d(var5),(var6) ; Punto de seguridadgo
var200=0; Variable que guarda el valor de la columna de trabajovar201=0; Variable que guarda el valor de la baha de trabajovar202=0; Variable que guarda el ltimo modo de operacin 1 carga y 2 descargavar203=0; Variable que controla la lectura de la operacin del PLCvar204=0; Variable que controla el nmero de repeticiones de la rutina de cdigo de barrasvar205=0; Variable que guarda el valor anterior de la columna de trabajovar206=0; Variable que guarda el valor anterior de operacin de trabajo
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 199
var207=0; Variable que habilita de nuevo el rechazo del cdigo de barrasvar208=0; Guarda valor de la coordenada horizontalvar209=0; Guarda el valor de a coordenada vertical
1out.3=01out.7=01out.8=01out.13=01out.4=0
Espera peticin de trabajo.
8. Si es de tipo DESCARGA. Despliega en pantalla que es de tipo descarga, manda llamar a la subrutina descarga1. Donde abrir el gripper, lo girar hacia la plataforma, lo llevar a un punto enfrente de la plataforma, despus al lugar en donde se encuentra el pallet, ah cerrar el gripper, ir a un punto localizado arriba de la plataforma e ir al punto de seguridad. Regresar el giro, recuperar las coordenadas de la baha en la que trabajar e ir hacia ella.
gosub descarga1
d(var5),(var6); Punto de seguridadgo
Ejecutar la subrutina de dejarp. La cual subir 10000 pulsos, extender el manipulador, bajar 10000 pulsos, abrir el gripper y contraer el manipulador.
Ir al punto de seguridad, limpia variables y salidas. Esperar peticin de trabajo.
gosub dejarp
d(var5),(var6) ; Punto de seguridadgo
var200=0; Variable que guarda el valor de la columna de trabajovar201=0; Variable que guarda el valor de la baha de trabajovar202=0; Variable que guarda el ltimo modo de operacin 1 carga y 2 descargavar203=0; Variable que controla la lectura de la operacin del PLCvar204=0; Variable que controla el nmero de repeticiones de la rutina de cdigo de barrasvar205=0; Variable que guarda el valor anterior de la columna de trabajovar206=0; Variable que guarda el valor anterior de operacin de trabajovar207=0; Variable que habilita de nuevo el rechazo del cdigo de barrasvar208=0; Guarda valor de la coordenada horizontalvar209=0; Guarda el valor de a coordenada verticalvar211=0; Habilitamos de nuevo la lectura del modo de operacin del PLC
1out.3=01out.7=01out.8=01out.4=01out.13=0
-
CAPITULO 5 ALMACEN MATRICIAL
200 LIBRO DE PRCTICAS DEL LPAIC
PROGRAMACIN UTILIZANDO STEP 7-MICRO/WIN PARA EL PLC 200
El S7-200 es el miembro ms pequeo de la familia Simatic S7, de controles programables. La unidad central de procesamiento (CPU) esta colocada dentro del PLC. Las entradas y las salidas (I/O) son los puntos de control del sistema. Las entradas monitorean los dispositivos de campo, tal y como los interruptores y sensores. Las salidas controlan otros dispositivos, tal como motores y bombas. El puerto de programacin es la conexin al dispositivo de programacin.
Micro S7-200
Existen cuatro modelos del S7-200: S7-221, S7-222, S7-224, y S7-226 y tres configuraciones con fuente de alimentacin para cada uno:
La descripcin del modelo indica la CPU, la fuente de alimentacin, el tipo de entrada y el tipo de salida.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 201
Caractersticas del S7-200
La siguiente tabla muestra un resumen de las caractersticas de la familia del S7-200.
Mdulos de expansin
El S7-200 es expandible, a travs de mdulos que contienen entradas y salidas adicionales. Estos se conectan a la base usando un cable plano. El cable plano esta protegido por una cubierta en la unidad de la base. Un conector que abarca de lado a lado al cable lo cubre y lo protege.
-
CAPITULO 5 ALMACEN MATRICIAL
202 LIBRO DE PRCTICAS DEL LPAIC
Conexin del mdulo de expansin
Indicadores de estado
Los indicadores de estado, muestran el estado actual de operacin de la CPU. Si por ejemplo, el interruptor de modo esta en RUN, el indicador luminoso verde de RUN estar encendido. Cuando el interruptor de modo este en la posicin STOP, la luz de color amarillo de STOP estar encendida. Los indicadores de estado representan el estado On u Off de las correspondientes entradas y salidas. Cuando la CPU sensa que una entrada est operando, la luz verde correspondiente estar encendida.
Numeracin I/O
Las entradas y salidas del S7-200 estn etiquetadas en las terminales de conexin, y junto a los indicadores de estado. Estos smbolos alfanumricos identifican las direcciones I/O a las cuales esta conectada el dispositivo. Estas direcciones las usa la CPU para determinar cual entrada esta presente y que salida deber ser encendida o apagada. I designa una entrada discreta y Q designa una salida discreta. El primer nmero identifica el byte, el segundo nmero identifica el bit, por ejemplo la entrada I0.0 es el byte 0 y el bit 0.
I0.0 = Byte 0, Bit 0 I0.1 = Byte 0, Bit 1 I1.0 = Byte 1, Bit 0 I1.1 = Byte 1, Bit 1
Designacin de entradas y salidas.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 203
Entradas
Los dispositivos de entrada, tal como interruptores, botones pulsadores u otros dispositivos sensores, se conectan a la regleta de terminales que est debajo de la cubierta inferior del PLC.
DESARROLLO:
1. ENCENDIDO DEL SISTEMA
1.1 Encender la energa elctrica y la neumtica.1.1.1 Encender el regulador.1.2 Encender la computadora del Almacn.1.3 Encienda el sistema servomotor-controlador.1.4 Inicie el programa Motion Planner desde el men de Inicio de Windows.1.5 Cuando se despliegue la pantalla Default Communications Settings haga clic en el botn Aceptar.1.6 Aparecer la pantalla principal Wizard, desde donde tendr acceso a las opciones de trabajo del programa Motion Planner.
1.7 En la pantalla Wizard haga clic en el cono (new).1.8 Seleccione Progam Editor. En esta pantalla puede crear su programa.
2. CREACIN DE UN PROGRAMA CON EL PROGRAMA MOTION PLANNER
2.1 Desarrolle un programa con la siguiente secuencia de movimientos:a. Establecer las condiciones iniciales.b. Mandar a home.c. Ir al punto de seguridad (30000,30000).d. Esperar peticin de trabajo (1in.29=b1).e. Revisar la baha a trabajar.
f. Tomar un pallet de la baha correspondiente (subrutina tomarp).g. Dejar el pallet en la plataforma de la banda transportadora (subrutina carga1).
h. Ir al punto de seguridad.
-
CAPITULO 5 ALMACEN MATRICIAL
204 LIBRO DE PRCTICAS DEL LPAIC
i. Esperar peticin de trabajo (1in.30=b1).j. Tomar el pallet de la plataforma (subrutina descarga1).k. Revisar la baha a trabajar.l. Dejar el pallet en la baha correspondiente (subrutina dejarp).
m. Ir al punto de seguridad.
PRECAUCIN: PARA EVITAR UN MALFUNCIONAMIENTO O COLISIN DEL MANIPULADOR. PRINCIPALMENTE VERIFIQUE EN EL PROGRAMA LOS VALORES CORRESPONDIENTES AL MOVIMIENTO ABSOLUTO MA, LA DIRECCIN DE LOS EJES CMDDIR Y LAS DISTANCIAS QUE NO EXCEDAN LAS 50000 UNIDADES.
2.2 Guarde y cargue . Este programa consta de uno principal (PRCTICA2) y cuatro subrutinas las cuales usted ya realiz en la prctica1; en total tendr 5 pantallas de editor con distintos nombres.
2.3 Abra la Terminal y teclee el nombre del programa a ejecutar (PRCTICA2).
PRECAUCIN: UNA PERSONA DEBE ESTAR ALERTA PARA PRESIONAR EL BOTN DE PARO DE EMERGENCIA DEL ALMACN Y LA PERSONA QUE EST EN LA COMPUTADORA DEBE ESTAR ATENTA A LAS TECLAS ctrl. y k Y PULSARLAS EN CASO DE OBSERVAR CUALQUIER MOVIMIENTO DEL MANIPULADOR NO PROGRAMADO O CUANDO SOBREPASA LOS LMITES DE MOVIMIENTO.
2.4 Presione la tecla ENTER.2.5 Comente su programa.
3. CREACIN DE UN PROGRAMA CON EL PROGRAMA STEP 7-Micro/Win
Comunicacin
Para establecer comunicacin entre el PLC y la PG, es necesario conectar el cable PC-PPI en el puerto 1 del PLC 200 y en el puerto serie de la PC.
Posteriormente, abra el programa STEP 7-Micro/Win y presione el cono de comunicacin en la barra de navegacin.
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 205
En el cuadro de dilogo que aparecer, d doble clic en la imagen del cable, aparecer el cuadro de
dilogo de comunicacin donde seleccionar el adaptador apropiado (PC/PPI cable PPI ), presione el botn Aceptar y d doble clic en la flecha azul, el
sistema buscar los PLCs conectados, si la comunicacin es apropiada, aparecer un cono que
simboliza la CPU conectada; verifique que la direccin remota corresponda con la direccin del icono (2). De lo contrario aparecer el siguiente mensaje de error; para corregir este error revise los parmetros de
comunicacin en el adaptador del cable PC/PPI, as como la conexin de los puertos.
-
CAPITULO 5 ALMACEN MATRICIAL
206 LIBRO DE PRCTICAS DEL LPAIC
Programacin.
Una vez en la pantalla de STEP 7-Micro/Win, podr realizar el diagrama de escalera de su programa, con solo dar clic en los botones de la barra de elementos, que incluye contactores, bobinas y herramientas para dibujar ramas.
Para elaborar el diagrama de escalera es necesario que tome en cuenta la siguiente tabla de entradas y salidas del PLC 200 y del 6K.
Tabla de entradas y salidas correspondientes al Almacn
COLUMNA 1BAHA #
ENTRADAS DEL PLC 200
SALIDAS DEL PLC 200
ENTRADAS DEL EVM32
1 I0.5 Q0.0 1in.17=b12 I0.4 Q0.1 1in.18=b13 I0.3 Q0.2 1in.19=b14 I0.2 Q0.3 1in.20=b15 I0.1 Q0.4 1in.21=b16 I0.0 Q0.5 1in.22=b1
COLUMNA 2BAHA #
ENTRADAS DEL PLC 200
SALIDAS DEL PLC 200
ENTRADAS DEL EVM32
1 I1.3 Q0.6 1in.23=b12 I1.2 Q0.7 1in.24=b13 I1.1 Q1.0 1in.25=b14 I1.0 Q1.1 1in.26=b15 I0.7 Q1.2 1in.27=b16 I0.6 Q1.3 1in.28=b1
Seal de carga en la conveyor Q1.4 1in.29=b1Seal de descarga en la conveyor Q1.5 1in.30=b1
Herramienta
Mensajes
Edicin
CatlogoTabla de Smbolos
Elementos
-
CAPITULO 5 ALMACEN MATRICIAL
LIBRO DE PRCTICAS DEL LPAIC 207
De acuerdo a la tabla, la entrada del PLC 200 I0.0 corresponde a la baha 1 de la columna 1 (C1B1), si presiona el interruptor de la C1B1, se encender el indicador I1.2 del PLC 200; adems las salidas del PLC 200 estn relacionadas directamente con las entradas del 6K.
Por ejemplo si elabora el siguiente diagrama de escalera, lo corre y presiona el interruptor de la C1B1, observar que los indicadores de la entrada I0.5, la salida Q0.0 del PLC 200 y la entrada 17 del 6K se encienden.
Por lo tanto, para programar en Motion Planner deber usar la entrada 17 para condicionar el movimiento del manipulador a la C1B1. Usted como programador podr utilizar los comandos (if, while, etc.) que considere adecuados para elaborar su programa.
Al terminar su diagrama, cargue el programa en la CPU (PG es el programador, la PC es donde editamos el programa, mientras que la CPU hace referencia al PLC). Aparecer el cuadro siguiente, donde presionar el botn Cargar en CPU, le preguntar si desea cambiar a modo STOP, presione el botn Aceptar.
Corra el programa presionando el botn RUN en la barra superior de herramientas. Para visualizar los cambios de estado de su diagrama presione el botn Estado del Programa.
Para Forzar las salidas Q1.4 y Q1.5 haga clic en el cono Estado de Tabla, en la columna de Descripcin escriba la salida a forzar y en Nuevo valor, 1 0; haga clic en Test y en Forzar. Cuando termine la prctica Desforce todo.
-
CAPITULO 5 ALMACEN MATRICIAL
208 LIBRO DE PRCTICAS DEL LPAIC
Para utilizar el PLC o el Motion Planner conecte el cable correspondiente en el puerto 1, solo podr trabajar con uno a la vez, por lo cual elija el que ms le convenga para correr todo el programa.
3. APAGADO DEL SISTEMA
3.1 Cierre la terminal.3.2 Cierre el editor de programas.3.3 Cierre los programas Motion Planner y STEP 7-Micro/Win3.4 Apague la computadora.3.5 Apague el sistema servomotor-controlador.3.6 Apague el regulador de tensin.
TERMINAR EL REPORTE Y ENTREGARLO A SU PROFESOR