Álgebra Superior I Lascurain
171
´ Algebra Superior I 30 de noviembre de 2011
description
Este libro trata de algunos temas introductorios de Álgebra que se hanenseñado en la Facultad de Ciencias de la UNAM en las últimas décadas,en el primer semestre de las carreras de Matemáticas, de Actuaría, y hastahace algunos años, de Física. Estos temas son fundamentales para todas lasramas de las matemáticas.El objetivo es que los alumnos de los primeros semestres de las carreras deMatemáticas, Actuaría, Ciencias de la Computación y Física cuenten con untexto simple y breve donde puedan entender sin mucha dificultad los temasque se cubren en el curso Álgebra Superior I. Esta materia es un fundamentoesencial en la formación de los estudiantes de estas carreras, y no solamentede aquéllos que se van a especializar en Álgebra. Los temas que se discutenson los del programa vigente, es decir, conjuntos, funciones, relaciones deequivalencia, inducción, cálculo combinatorio, el espacio vectorial Rn, matrices,determinantes y sistemas de ecuaciones lineales. Además se incluye eltema del anillo de los enteros y los anillos Zm.
Transcript of Álgebra Superior I Lascurain

Algebra Superior I
30 de noviembre de 2011

Prologo
Este libro trata de algunos temas introductorios de Algebra que se hanensenado en la Facultad de Ciencias de la UNAM en las ultimas decadas,en el primer semestre de las carreras de Matematicas, de Actuarıa, y hastahace algunos anos, de Fısica. Estos temas son fundamentales para todas lasramas de las matematicas.
El objetivo es que los alumnos de los primeros semestres de las carreras deMatematicas, Actuarıa, Ciencias de la Computacion y Fısica cuenten con untexto simple y breve donde puedan entender sin mucha dificultad los temasque se cubren en el curso Algebra Superior I. Esta materia es un fundamentoesencial en la formacion de los estudiantes de estas carreras, y no solamentede aquellos que se van a especializar en Algebra. Los temas que se discutenson los del programa vigente, es decir, conjuntos, funciones, relaciones deequivalencia, induccion, calculo combinatorio, el espacio vectorial Rn, ma-trices, determinantes y sistemas de ecuaciones lineales. Ademas se incluye eltema del anillo de los enteros y los anillos Zm.
Existen dos buenos libros sobre el tema: el primero, Algebra superior,de los autores H. Cardenas, E. Lluis, F. Raggi y F. Tomas [2], y el segundo,editado en anos recientes con el mismo tıtulo, de los autores A. Bravo, C.Rincon y H. Rincon [1]. Estos dos libros han constituido la herramienta delos estudiantes en los ultimos anos para estudiar esta importante materia delinicio de la carrera. Sin embargo, el primero [2] contiene un numero excesivode erratas, no ha sido actualizado y en algunos temas es impreciso y pocoformal; algunos resultados no los prueba como el hecho de que los anillosZm, en efecto lo son. El segundo [1] es, en cierto sentido, mas adecuado queel primero al ser mas actual y al profundizar mas en los temas; el proble-ma radica en que es demasiado extenso, lo cual, aunque lo convierte en unexcelente libro de referencia, no resulta adecuado como texto.
i

II
Por otro lado, el libro Algebra superior, de Cardenas et al. [2] es, de algunamanera, bastante bueno. Esto se debe, en parte, a que contiene ejemplos muydidacticos, como son los de la baraja inglesa. Otra cualidad que presenta, esla de estar ordenado conforme al temario vigente. Sin embargo, desde quese edito, hace ya mas de cuarenta anos, solo se han hecho reimpresiones(sin revision), y no parece que se vaya a actualizar. Este hecho, junto con lademanda de mis estudiantes por mis notas manuscritas, motivo la elaboraciondel presente libro, el cual retoma varios de los ejemplos de [2], pero enmarca lateorıa en un discurso matematico mas actual. Cabe senalar que esta materiatiene un alto ındice de reprobacion, ya que un sector amplio de los estudiantesviene de la preparatoria con una formacion deficiente, por lo que un textode apoyo como el presente puede coadyuvar a mejorar el aprovechamiento delos alumnos.
El presente texto, basado principalmente en el de Cardenas et al [2], pre-tende presentar los temas de manera simple y rigurosa. En la parte inicial sehace enfasis en algunos aspectos de la logica formal, con el objeto de describirla simbologıa y facilitar el manejo de las pruebas formales en matematicas.En la parte de combinatoria se hace claramente la diferencia de la parte for-mal y de la intuitiva. En general, se subraya la relacion con otras ramas comoel calculo y la geometrıa analıtica, por ejemplo, en el capıtulo del espacio vec-torial Rn, se hace una breve descripcion de las ecuaciones de los planos; en elcapıtulo de determinantes, se proporcionan tambien las ideas geometricas deeste tema. Ademas, en el capıtulo de ecuaciones, probando algunos teoremassimples de algebra lineal, se demuestran de manera rigurosa los resultadosnecesarios para resolver cualquier sistema de m ecuaciones con n incogni-tas; la inclusion de estos resultados, faciles de probar, ciertamente aclaran alestudiante el tema, el cual se entiende mejor a la luz de la teorıa que me-diante una aplicacion mecanica de algoritmos. Finalmente, en el capıtulo delos enteros se prueba formalmente que los conjuntos Zm son en efecto anillos.
En este libro aparecen tambien algunos temas mas avanzados que no for-man parte del material basico que se pretende cubrir en un curso disenadopara el primer semestre de la carrera, la razon de incluirlos es motivar a losestudiantes. Por ejemplo, la discusion del significado geometrico del determi-nante ciertamente es un tema mas avanzado, por lo que se sugiere verlo alfinal del curso y no incluirlo como tema por examinar.
En resumen, el espıritu del libro es proporcionar a los alumnos un textobreve, simple, formal, que pone enfasis en que las matematicas no son ramasaisladas, sino que interactuan unas con otras.

III
Los temas del libro se pueden cubrir en un semestre, una posible distribu-cion de ellos es la siguiente: 5 semanas para cubrir los primeros dos capıtulos(conjuntos, funciones, induccion, relaciones de equivalencia y combinatoria);otras 5 semanas para estudiar el espacio vectorial Rn, las matrices y laspermutaciones; las siguientes 5 semanas para los temas de los determinantes(aspectos algebraicos), las ecuaciones y los enteros; y la ultima semana parala interpretacion geometrica del determinante.
Quiero agradecer a Cristina Angelica Nunez Rodrıguez que capturo enLatex y elaboro las figuras de las notas que fui escribiendo por varios anos,al impartir el curso en mas de diez ocasiones. Mi agradecimiento tambien aManuel Flores Galicia que reviso cuidadosamente el texto y sugirio muchasmejoras. Y a varios de mis alumnos de esta materia por sus pertinentesintervenciones. Asimismo, a algunos de mis colegas que me han enriquecidocon sus comentarios sobre la ensenanza de esta materia. Finalmente, a lasautoridades de la Facultad de Ciencias y la Direccion General de Asuntos delPersonal Academico (DGAPA), que me apoyaron en la publicacion de estelibro, con el proyecto PAPIME PE-103811.


Contenido
1. Fundamentos 1
1.1. Conjuntos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Subconjuntos . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3. Operaciones con conjuntos . . . . . . . . . . . . . . . . . . . . 3
1.4. Producto cartesiano . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5. Relaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.6. Funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.7. Composicion de funciones . . . . . . . . . . . . . . . . . . . . 12
1.8. Funciones inyectivas, suprayectivas y biyectivas . . . . . . . 15
1.9. Cardinalidad y conjuntos finitos . . . . . . . . . . . . . . . . . 17
1.10. Induccion matematica . . . . . . . . . . . . . . . . . . . . . . 19
1.11. El teorema del binomio . . . . . . . . . . . . . . . . . . . . . . 21
1.12. Relaciones de equivalencia y particiones . . . . . . . . . . . . . 23
1.13. Estructuras numericas y algebraicas . . . . . . . . . . . . . . . 28
2. Calculo combinatorio 31
2.1. Ordenaciones con repeticion (version intuitiva) . . . . . . . . . 31
2.2. Ordenaciones (version intuitiva) . . . . . . . . . . . . . . . . . 32
2.3. Permutaciones (version intuitiva) . . . . . . . . . . . . . . . . 33
2.4. Combinaciones . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.5. Funciones (2a visita) . . . . . . . . . . . . . . . . . . . . . . . 36
2.6. Funciones inyectivas, suprayectivas y biyectivas (2a visita) 39
2.7. Ordenaciones con repeticion (version formal) . . . . . . . . . . 41
2.8. Ordenaciones (version formal) . . . . . . . . . . . . . . . . . . 43
2.9. Permutaciones (version formal) . . . . . . . . . . . . . . . . . 45
2.10. Combinaciones y coeficientes binomiales . . . . . . . . . . . . 46
v

VI Contenido
3. El espacio vectorial Rn 533.1. Vectores y sus operaciones . . . . . . . . . . . . . . . . . . . . 533.2. Rn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.3. Subespacios vectoriales . . . . . . . . . . . . . . . . . . . . . . 633.4. Combinaciones lineales, dependencia e independencia lineal . . 693.5. Bases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4. Matrices y determinantes 814.1. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 814.2. El rango de una matriz . . . . . . . . . . . . . . . . . . . . . . 834.3. Permutaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.4. Determinantes . . . . . . . . . . . . . . . . . . . . . . . . . . . 934.5. Propiedades de los determinantes . . . . . . . . . . . . . . . . 954.6. Desarrollo por menores . . . . . . . . . . . . . . . . . . . . . . 1024.7. Calculo de determinantes . . . . . . . . . . . . . . . . . . . . . 1074.8. Caracterizacion del rango de una matriz usando determinantes 1094.9. El determinante como area o volumen . . . . . . . . . . . . . . 113
5. Sistemas de ecuaciones lineales 1215.1. Preliminares . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1215.2. Existencia de soluciones . . . . . . . . . . . . . . . . . . . . . 1235.3. Sistemas de n ecuaciones y n-incognitas . . . . . . . . . . . . 1265.4. Sistemas homogeneos, funciones lineales . . . . . . . . . . . . 1325.5. Sistema homogeneo asociado . . . . . . . . . . . . . . . . . . . 1365.6. Resolucion de sistemas . . . . . . . . . . . . . . . . . . . . . . 138
6. Los anillos Z y Zm 1476.1. Anillos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1476.2. Anillos Zm . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1486.3. Propiedades de los enteros . . . . . . . . . . . . . . . . . . . . 1526.4. Orden y unidades en Z . . . . . . . . . . . . . . . . . . . . . . 1556.5. Principio de induccion . . . . . . . . . . . . . . . . . . . . . . 158

Capıtulo 1
Fundamentos
1.1. Conjuntos
No se profundizara en la definicion axiomatica de conjunto, simplemente setratara de manera intuitiva como una coleccion de elementos, por ejemplo,una coleccion de libros, o de peces, o de numeros. Se dira que 2 conjuntosson iguales si tienen los mismos elementos.
Se usaran las letras mayusculas A,B,C... para los conjuntos y las minuscu-las a, b, c, . . . , n,m, . . . para los elementos. Para especificar los elementos deun conjunto se usaran llaves, por ejemplo
A = {a, b, c}.
Un conjunto importante son los enteros positivos llamados numeros na-turales, denotado por N = {1, 2, 3, ...}, y por supuesto los enteros
Z = {...,−3,−2,−1, 0, 1, 2, 3, ...}.
Notacion: x ∈ A significa que el elemento x pertenece al conjunto A,y x 6∈ A querra decir que x no pertenece al conjunto A.
Ejemplos
1) Sea el conjunto A = {1, 3, 5, 7}. Se tiene que 5 ∈ A y 6 6∈ A.
2) Sea A = {1, 4, 9, 16, ..., n2, ...}. En este caso 169 ∈ A, pero 50 6∈ A.
3) El conjunto de las letras de la palabra Uaxactun es {a, c, n, t, u, x}.
1

2 1.2. Subconjuntos
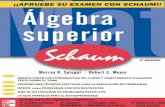
Otros ejemplos importantes son los numeros reales, que son los puntos dela recta, este conjunto se denota por R. Tambien, el plano cartesiano.
R2 = {(x, y) |x, y ∈ R},
ası como sus subconjuntos, por ejemplo, la recta y = 3x+ 3.
Figura 1.1: La recta y = 3x + 3 es un subconjunto del plano
El sımbolo ∅ se usara para describir el conjunto que no tiene elementos,a este conjunto se le llama el conjunto vacıo.
Es conveniente usar condiciones para describir conjuntos:
{2, 4, 6, 8, ...} = {n ∈ N | n es par}= {n ∈ N | n = 2m, m ∈ N},
o{1, 3, 5, 7, 9} = {n ∈ N | 1 ≤ n ≤ 9 y n es impar}.
Otro ejemplo serıa
{1, 4, 9, 25, 36, ...,m2, ...} = {n ∈ N | n = m2, m ∈ N}.
1.2. Subconjuntos
Definicion 1 Sean A y B conjuntos, se dice que B es un subconjunto deA, si cada elemento de B lo es tambien de A, se denota B ⊂ A, en casocontrario se escribira B 6⊂ A.
Observese que si B ⊂ A, se tiene x ∈ B ⇒ x ∈ A y, viceversa, sipara todo x ∈ B se tiene x ∈ A, entonces B ⊂ A. En general, cuando laproposicion P se cumple si y solo si se cumple la proposicion Q, escribiremosP ⇐⇒ Q.

1. Fundamentos 3
La proposicion de arriba se puede reescribir
B ⊂ A ⇐⇒ (x ∈ B ⇒ x ∈ A) .
Si B ⊂ A, escribiremos tambien A ⊃ B, y se dira que B esta contenidoen A, o que A contiene a B.
Ejemplos
1. Si A = {golondrinas}, B = {aves} y C = {reptiles},
A ⊂ B, pero B 6⊂ C.
2. A = {n ∈ N | 1 ≤ n ≤ 7}, B = {2, 3, 7} y C = {2, 3, 8},
B ⊂ A, pero B 6⊂ C.
3. Si z, w ∈ L, donde L es una recta en R2 y si A = {t ∈ L | t ∈ zw},entonces z ∈ L y A ⊂ L, donde zw es el segmento en L que une zcon w.
1.3. Operaciones con conjuntos
Al comparar 2 conjuntos es conveniente pensar que ambos son subconjuntosde un mismo conjunto fijo, llamado universal.
Definicion 2 La union de dos conjuntos A y B se define como el conjunto:
A ∪ B = {x | x ∈ A o x ∈ B}.
Las propiedades siguientes son consecuencia inmediata de la definicion.
i) A ⊂ A ∪ B, B ⊂ A ∪ B,
ii) A ∪ B = B ∪ A (conmutatividad),
iii) (A ∪ B) ∪ C =A ∪ (B ∪ C) (asociatividad).
La ultima observacion permite no poner parentesis al denotar la union demas de dos conjuntos.

4 1.3. Operaciones con conjuntos
Definicion 3 La interseccion de dos conjuntos A y B se define como
A ∩ B = {x | x ∈ A y x ∈ B}.
De nuevo se sigue de manera inmediata que
iv) A ∩ B ⊂ A, A ∩ B ⊂ B,
v) A ∩ B = B ∩ A (conmutatividad),
vi) (A ∩ B) ∩ C =A ∩ (B ∩ C) (asociatividad).
Como antes se pueden quitar los parentesis.
A AB B
A ∪ B A ∩ B
Figura 1.2: Union e interseccion de conjuntos
Proposicion 1.3.1 (Ley distributiva) Sean A, B y C conjuntos, enton-ces se tiene
vii) A ∩ (B ∪ C)= (A ∩ B) ∪ (A ∩ C)
viii) A ∪ (B ∩ C)= (A ∪ B) ∩ (A ∪ C).
Demostracion. Probamos vii) y dejamos viii) como ejercicio.Lease primero ⇒ y luego ⇐
x ∈ A ∩ (B ∪ C) ⇔ x ∈ A y x ∈ (B ∪ C)
⇔ x ∈ A y (x ∈ B o x ∈ C)
⇔ (x ∈ A y x ∈ B) o (x ∈ A y x ∈ C)
⇔ x ∈ (A ∩ B) ∪ (A ∩ C).
�

1. Fundamentos 5
� significa fin de la prueba. Otras tecnicas de prueba muestran que
(A ∩ B) ∪ (A ∩ C) ⊂ A ∩ (B ∪ C) :
Se tiene A ∩ B ⊂ A y A ∩ C ⊂ A, ademas A ∩ B ⊂ B ⊂ B ∪ C yA ∩ C ⊂ C ⊂ B ∪ C, por lo cual
(A ∩ B) ⊂ A ∩ (B ∪ C) y (A ∩ C) ⊂ A ∩ (B ∪ C).
Recordamos que un conjunto universal es un conjunto fijo que contienea todos los conjuntos en discusion. Por ejemplo, en la geometrıa analıticael plano R2 es el conjunto universal y los subconjuntos son las rectas, lasparabolas, los cırculos, etcetera. En otras geometrıas, los subconjuntos delplano pueden ser objetos simples, o muy complejos como los fractales.
Definicion 4 Sea X un conjunto universal y A un subconjunto de X sedefine el complemento del conjunto A, denotado por Ac, como los elementosde X que no pertenecen a A, especıficamente
Ac = {x |x ∈ X, x 6∈ A}.
Evidentemente el complemento de un conjunto varıa si el universal dondevive cambia, por ejemplo, el complemento de A = {1, 2} en X = {1, 2, 3}es {3} pero en X = {1, 2, 3, 4} es {3, 4}.
Las propiedades basicas de la complementacion son:
ix) (Ac)c =A,
x) A ∪ Ac = X,
xi) A ∩ Ac = ∅.
Las propiedades x) y xi) se siguen directamente de la definicion, paraprobar ix) sea x ∈ (Ac)c, entonces como x ∈ X y x 6∈ Ac, se sigue dex) que x ∈ A. Viceversa, si x ∈ A, entonces x ∈ X pero x 6∈ Ac
∴ x ∈ (Ac)c.∴ significa de donde.

6 1.3. Operaciones con conjuntos
Otra propiedad importante es
xii) A ⊂ B ⇔ Bc ⊂ Ac.
A
B
A ⊂ B ⇔ Bc⊂ A
c
Figura 1.3: La contencion de conjuntos se invierte al tomar complementos
Probamos primero ⇒) Se debe probar que si x ∈ Bc, entonces x ∈ Ac.Suponiendo que no es cierto lo afirmado se tendrıa que existe una x ∈ Bc
que no pertenece a Ac, i.e., ( del latın id est, que significa es decir) x 6∈ Ac,por lo que x ∈ A, pero entonces se sigue por hipotesis que x ∈ B, lo cualcontradice x ∈ Bc. Por lo tanto se concluye que suponer lo contrario de loafirmado llevo a una contradiccion, por lo que lo afirmado debe ser cierto.Este tipo de demostracion usada por Aristoteles, se le llama por reduccion alabsurdo, y conlleva el razonamiento elemental de la logica formal que dice:
(La proposicion M ⇒ La proposicion N) ⇔ (∼ N ⇒∼M),∼ significa no.
⇐) Esta propiedad es dual de la anterior, solo tendrıamos que escribirE = Bc y F = Ac. Por la primera parte, como E ⊂ F, se sigue F c ⊂ Ec,i.e., A ⊂ B.
�
Proposicion 1.3.2 (Leyes de De Morgan) Sean A y B conjuntos, en-tonces
xiii) (A ∪ B)c = Ac ∩ Bc,
xiv) (A ∩ B)c = Ac ∪ Bc.

1. Fundamentos 7
(A ∪ B)c = Ac∩ B
c
A AB B
(A ∩ B)c = Ac∪ B
c
Figura 1.4: Complementos de union e interseccion
Demostracion. Probamos xiv) y dejamos xiii) como ejercicio.Lease primero ⇒ y luego ⇐
x ∈ (A ∩ B)c ⇔ x 6∈ (A ∩ B)
⇔ x 6∈ A o x 6∈ B
⇔ x ∈ Ac o x ∈ Bc
⇔ x ∈ Ac ∪ Bc.
�Otra demostracion de
(A ∩ B)c ⊃ Ac ∪ Bc :
Se tiene A ∩ B ⊂ A y A ∩ B ⊂ B, por lo que (A ∩ B)c ⊃ Ac y(A ∩ B)c ⊃ Bc, entonces
(A ∩ B)c ⊃ Ac ∪ Bc.
Definicion 5 La diferencia entre dos conjuntos A y B es el conjunto:
A − B = {x | x ∈ A y x 6∈ B}.
Notese que A − B = A ∩ Bc.
Proposicion 1.3.3 A− (B ∩ C) = (A−B) ∪ (A− C).

8 1.4. Producto cartesiano
Demostracion.
A− (B ∩ C) = A ∩ (B ∩ C)c
= A ∩ (Bc ∪ Cc)
= (A ∩ Bc) ∪ (A ∩ Cc)
= (A−B) ∪ (A− C).
�EJERCICIOS 1.31. Demuestre la Proposicion 1.3.1 viii).2. Demuestre la Proposicion 1.3.2 xiii).
1.4. Producto cartesiano
Definicion 6 Sea A un conjunto, las parejas ordenadas de A son aquellasde la forma (a, b), tal que a ∈ A y b ∈ A.
Por ejemplo, el plano cartesiano consiste de las parejas ordenadas de reales:
R × R = {(x, y) |x, y ∈ R}.
Si A = {1, 2} las parejas ordenadas de A son (1, 1), (1, 2), (2, 1), (2, 2).
Tambien se pueden considerar parejas ordenadas de un par de conjuntosA y B, de tal manera que el primer termino este en A y el segundo en B.
Figura 1.5: Retıcula N × N
Definicion 7 Sean A y B conjuntos, el producto cartesiano de A y B,denotado por A × B, es el conjunto de parejas ordenadas
A × B = {(a, b) | a ∈ A y b ∈ B}.

1. Fundamentos 9
Por ejemplo, si A = {1, 2} y B = {a, b}, entonces
A × B = {(1, a), (1, b), (2, a), (2, b)}.
Otros ejemplo es la retıcula descrita en la Figura 1.5
N × N = {(n,m) | n ∈ N y m ∈ N}.
Tambien, son ejemplos de productos cartesianos Z × Z y R × R.Observese que (a, b) = (c, d) si y solo si a = c y b = d. En particular,
(1, 2) 6= (2, 1) (6= significa es distinto). Se escribira A2 por A × A.
EJERCICIOS 1.41. Sea A = {a, b} demuestre que N× A es infinito.
1.5. Relaciones
Definicion 8 Sean A y B conjuntos, una relacion entre A y B es unsubconjunto del producto cartesiano.
Por ejemplo, si A = {a} y B = {1, 2}, A × B tiene 2 relacionesde un elemento R1 = {(a, 1)} y R2 = {(a, 2)}, tambien tiene una solarelacion de 2 elementos (la total) R3 = {(a, 1), (a, 2)}, finalmente contienela relacion vacıa, i.e., ∅, por lo que A × B tiene exactamente 4 relaciones.Por convencion el vacıo es subconjunto de todo conjunto A, ya que ∀ x ∈ ∅,se tiene x ∈ A.
∀ significa para todo.Encontramos ahora las relaciones entre A y B, donde A = {a, b} y
B = {1, 2}. Estas son:
R1 = {(a, 1)}, R9 = {(a, 2), (b, 2)},R2 = {(a, 2)}, R10 = {(b, 1), (b, 2)},R3 = {(b, 1)}, R11 = {(a, 1), (a, 2), (b, 1)},R4 = {(b, 2)}, R12 = {(a, 1), (a, 2), (b, 2)},R5 = {(a, 1), (a, 2)}, R13 = {(a, 1), (b, 1), (b, 2)},R6 = {(a, 1), (b, 1)}, R14 = {(a, 2), (b, 1), (b, 2)},R7 = {(a, 1), (b, 2)}, R15 = {(a, 1), (a, 2), (b, 1), (b, 2)},R8 = {(a, 2), (b, 1)}, R16 = ∅.

10 1.6. Funciones
Definicion 9 El dominio de una relacion R ⊂ A × B se define como:
DR = {a ∈ A | ∃ b ∈ B, (a, b) ∈ R}.
∃ significa existe.En los ejemplos anteriores se tiene
DR5 = {a}, DR7 = A, DR3 = {b}.
Definicion 10 La imagen de una relacion R ⊂ A × B se define como:
IR = {b ∈ B | ∃ a ∈ A, tal que (a, b) ∈ R}.
Usando los ejemplos anteriores se tendrıa
IR3 = {1}, IR5 = B, IR2 = {2}.
El codominio de una relacion A × B es el segundo factor B, observeseque la imagen de una relacion siempre es un subconjunto del codominio.
1.6. Funciones
Algunas relaciones son muy importantes.
Definicion 11 Sea R una relacion entre A y B se dice que R es unafuncion si R cumple las siguientes 2 condiciones:
1) DR = A, i.e., ∀x ∈ A ∃ b ∈ B � (a, b) ∈ R.
2) Cada elemento en A tiene asociado un unico elemento en B, i.e., si(x, y1) ∈ R y (x, y2) ∈ R, entonces necesariamente y1 = y2.
� significa tal que.Si R ⊂ A × B es una funcion, la pareja (x, y) ∈ R se escribira como
(x, f(x)) y la funcion se denotara por
f : A −→ B o Af−−→ B
y se dira que f(x) es la imagen de x bajo f. El conjunto A se le llama eldominio de la funcion y B es el codominio.

1. Fundamentos 11
Ejemplos
1. Retomando los ejemplos de la seccion anterior A = {a, b} y B = {1, 2},se tiene que R8 = { (a, 2) , (b, 1) } es una funcion, sin embargoR2 = {(a, 2)} y R10 = {(b, 1), (b, 2)} no lo son ¿por que?
2. f : N −→ N dada por la regla de correspondencia f(n) = n2 + 1 esuna funcion.
3. Sean A = {seres humanos}, B = {paises}, f : A −→ B la relacionque a cada persona le asocia su pais de nacimiento, y g : A −→ B larelacion que a cada persona le asocia su nacionalidad. Entonces, f esfuncion pero g no lo es ¿ por que?
4. Sea A cualquier conjunto, la relacion 1A : A −→ A que tiene la reglade correspondencia 1A(x) = x, ∀x ∈ A llamada funcion identica esuna funcion.
Observese que 2 funciones
f : A −→ B y g : C −→ D
son iguales si y solo si
a) A = C,
b) B = D,
c) f(x) = g(x) ∀x ∈ A.
Esto nos permite reformular nuestra definicion: Una funcion f : A −→ Bes una regla de correspondencia que a cada elemento del conjunto A le aso-cia uno y solo un elemento de B.
En resumen, una funcion consiste de 3 cosas: 2 conjuntos (dominio ycodominio) y una regla de correspondencia.
Definicion 12 La imagen de una funcion f : A −→ B es
Im f = {b ∈ B | ∃ a ∈ A, f(a) = b}.

12 1.7. Composicion de funciones
Ejemplos
1. Sean A = {1, 2}, B = {a, b}, f : A → B dada por f(1) = a, yf(2) = a, entonces Im f = {a}.
2. Sea f : N ∪ {0} −→ N dada por f(n) = n+ 1, entonces Im f = N.
Observese que Im f siempre es un subconjunto del codominio. Traba-jando con funciones cuyo codominio es un conjunto finito, y donde no esnecesario especificar el codominio, algunas veces conviene denotarlas de lasiguiente manera
f =
(a1 a2 · · · an
b1 b2 · · · bn
),
donde A = {a1, a2, ..., an}, bi ∈ B ∀i, f : A −→ B y f(ai) = bi ∀i.
Por ejemplo, si A = {1, 2, 3, 4, 5}, entonces f(x) = x2 se puede denotar
f =
(1 2 3 4 51 4 9 16 25
),
el codominio puede ser N o Z o cualquier conjunto finito que contenga a{1, 4, 9, 16, 25}.
EJERCICIO 1.61. Sean f : Z −→ Z y g : N −→ Z dadas por f(n) = n2 + 1 = g(n), ¿soniguales?
1.7. Composicion de funciones
Si el codominio de una funcion coincide con el dominio de otra se puedeconstruir una nueva funcion.
Definicion 13 Sean f : A −→ B y g : B −→ C funciones, se puedeconstruir entonces una nueva funcion g ◦ f : A −→ C con dominio A,codominio C y con regla de correspondencia
x −→ g(f(x)),
A esta funcion se le llama f compuesta con (o seguida de) g, y se denota porg ◦ f. Tambien, se escribe g ◦ f(x) = g(f(x)).

1. Fundamentos 13
Ejemplos
1. Sean f : R −→ R dada por f(x) = x2 + 1 y g : R −→ R dada porg(x) = 4x − 1, entonces g ◦ f : R −→ R y f ◦ g : R −→ R estandadas por
g ◦ f(x) = g(x2 + 1) = 4(x2 + 1)− 1 = 4x2 − 3,
y f ◦ g(x) = f(4x− 1) = (4x− 1)2 + 1 = 16x2 − 8x+ 2.
2. Sean A = {a1, a2, a3}, B = {b1, b2}, C = {c1, c2, c3} y
f =
(a1 a2 a3
b1 b1 b2
)y g =
(b1 b2c1 c2
),
entonces
g ◦ f =
(a1 a2 a3
c1 c1 c2
).
3. Sean A = {1, 2} y f : A −→ A dada por(1 22 1
),
entonces f 2 = f ◦ f = IA.
4. Sean f, g : R −→ R dadas por f(x) = x3 y g(x) = −2, entonces
f ◦ g(x) = f(−2) = (−2)3 = −8 y g ◦ f(x) = g(x3) = −2.
Observese que si f : A −→ B es una funcion, entonces
IB ◦ f = f y f ◦ IA = f.
Proposicion 1.7.1 Sean f : A −→ B, g : B −→ C y h : C −→ Dfunciones, entonces
h ◦ (g ◦ f) = (h ◦ g) ◦ f,
es decir, la composicion de funciones es asociativa y por lo tanto se puedenomitir los parentesis.

14 1.7. Composicion de funciones
Demostracion. Como ambas composiciones tienen dominio A y codo-minio D, basta verificar que tienen la misma regla de correspondencia.
Si x ∈ A,
h ◦ (g ◦ f)(x) = h[g ◦ f(x)] = h[g(f(x))],
tambien
(h ◦ g) ◦ f(x) = h ◦ g(f(x)) = h[g(f(x))].
�
Definicion 14 Sea f : A −→ B una funcion, si existe otra funcion de laforma g : B −→ A � g ◦ f =1A, a g se le llama inverso izquierdo de f,(y a f inverso derecho de g).
Por ejemplo, sea g : Z −→ Z definida por g(n) = [n2], donde [x] es
el maximo entero menor o igual a x ([2.1]= 2, [0.3]= 0, [-1.2] = -2), y seaf(n) = 2n, f : Z −→ Z, entonces
g ◦ f(n) = g(2n) =
[2n
2
]= [n] = n y g ◦ f = 1Z,
i.e. g es inverso izquierdo de f.De manera analoga se define el inverso derecho de f : A −→ B, como
otra funcion h : B −→ A � f ◦h=1A. Observese que en el ejemplo anteriorla funcion g no tiene a f como inverso derecho, ya que por ejemplo:
f ◦ g(3) = f
([3
2
])= f(1) = 2 i.e. f ◦ g 6= 1Z.
Sin embargo, como se probo, f es inverso derecho de g (ya que g es inversoizquierdo de f).
Definicion 15 Sean f : A −→ B y g : B −→ A � g◦f =1A, y f ◦g=1B,entonces se dice que f es invertible y a g se le llama simplemente inverso.
Por ejemplo, si f : R −→ R, f(x) = 2x, g : R −→ R, g(x) = x2,
entonces g es inverso de f .
Teorema 1.7.2 Si f tiene inverso izquierdo g1 e inverso derecho g2, enton-ces g1 = g2, i.e., f es invertible.

1. Fundamentos 15
Demostracion. Por hipotesis si f : A −→ B se tiene g1 ◦ f = 1A yf ◦ g2 = 1B, por lo que
g1 = g1 ◦ 1B = g1 ◦ f ◦ g2 = 1A ◦ g2 = g2.
�
Corolario 1.7.3 Sea f :A−→B invertible, entonces su inverso g :B−→Aes unico.
EJERCICIOS 1.71. Sean f : R −→ R, g : R −→ R dadas por f(x) = 4x2 + x + 1 yg(x) = 2x− 3, calcule g ◦ f y f ◦ g.
1.8. Funciones inyectivas, suprayectivas y
biyectivas
Definicion 16 Una funcion f :A −→ B se llama inyectiva si ∀x1, x2 ∈ A,tales que x1 6= x2, se tiene f(x1) 6= f(x2).
Ejemplos
1. f(x) = x+ 1, f : R −→ R.
2. f(n) = 2n, f : Z −→ Z.
Es claro que estas funciones son inyectivas ya que mandan puntos distintosen puntos distintos, sin embargo la funcion f : R −→ R dada por f(x) = x2
no es inyectiva, ya que f(1) = f(−1) = 1.En general, si la afirmacion M dice x1, x2 ∈ A, x1 6= x2 y la afirmacion
N dice f(x1) 6= f(x2), probar que f es inyectiva es mostrar que M ⇒ N,para esto (como ya se menciono) basta demostrar que ∼ N ⇒∼ M, estoes, f es inyectiva, si dados a1, a2 ∈ A, tales que f(a1) = f(a2) se debetener a1 = a2.
Por ejemplo, f(x) = 2x + 3 es inyectiva, ya que si 2x + 3 = 2y + 3,entonces, 2x = 2y y x = y (esta es la forma mas comun de probar queuna funcion es inyectiva).

16 1.8. Funciones inyectivas, suprayectivas y biyectivas
Definicion 17 Sea f : A −→ B se dice que f es suprayectiva (o sobre) siImf = B, i.e., si ∀ y ∈ B ∃x ∈ A � f(x) = y.
Retomando los ejemplos anteriores, f : R −→ R, dada por f(x) = x+1,f es suprayectiva ya que si y ∈ R, escribiendo y = x+ 1, se puede tomarx = y − 1 y f(y − 1 + 1) = x.
Sin embargo, f : Z −→ Z, f(n) = 2n no es suprayectiva, ya que laimagen de esta funcion consiste de los numeros pares.
Definicion 18 Una funcion que es inyectiva y suprayectiva se le llama biyec-tiva.
La funcion f : R −→ R, f(x) = 3x + 1 es biyectiva: si f(x) = f(y),entonces 3x + 1 = 3y + 1 ∴ 3y = 3y y x = y, por lo que es inyectiva.Tambien dado y ∈ R escribiendo y = 3x + 1 y tomando x = y−1
3, se
tiene f(y−13
) = 3 (y−13
) + 1 = y, i.e. f es suprayectiva.
Como ultimo ejemplo se toma la funcion g : Z −→ Z dada por
g(n) =[n2
],
g es suprayectiva ya que dada m ∈ Z, tomando x = 2m,
g(2m) =
[2m
2
]= m,
sin embargo, g no es inyectiva, ya que
g(2n+ 1) =
[2n+ 1
2
]= n =
[2n
2
]= g(2n).
Proposicion 1.8.1 Una funcion f : A −→ B es biyectiva si y solo si esinvertible.
Demostracion. Si f es biyectiva se define g : B −→ A de la maneraobvia: g(y) = x � f(x) = y, a y ∈ B se le asocia la unica x ∈ A quecumple f(x) = y (la existencia de dicha x se sigue de la inyectividad y lasuprayectividad). Tomando entonces g(y) = x se tendra que si y ∈ Bg(y) = x, f(x) = y, esto es, f ◦ g(y) = f(x) = y y f ◦ g = 1B, y six ∈ A g ◦ f(x) = g(y) = x por lo que g ◦ f = 1A.

1. Fundamentos 17
Viceversa, si f es invertible sea g : B −→ A su inversa, y se tiene quesi f(a1) = f(a2), entonces g ◦ f(a1) = g ◦ f(a2) y a1 = a2, por lo cualf es inyectiva. Dada y ∈ B, si g(y) = x, y = f ◦ g(y) = f(x) y f essuprayectiva.
�Observese que la composicion de funciones inyectivas es inyectiva:
dadas g : A −→ B y f : B −→ C funciones inyectivas, a1, a2 ∈ A talesque f ◦g(a1) = f ◦g(a2) se sigue que g(a1) = g(a2), ya que f es inyectiva,mas aun a1 = a2 por la inyectividad de g.
Tambien si f : A −→ B y g : B −→ C son suprayectivas se tiene queg◦f lo es, esto se sigue ya que si c ∈ C existe b ∈ B � g(b) = c y tam-bien a ∈ A � f(a) = b (por la suprayectividad de f y g) ∴ g◦f(a) = cy por consiguiente g ◦ f es suprayectiva.
EJERCICIOS 1.81. Sea f(x) = x2 +1 f : R −→ R pruebe que f no es inyectiva ni tampocosuprayectiva.2. Sea f : R −→ R dada por f(x) = 4x + 7, pruebe que f es biyectiva,encuentre la inversa.3. Exhiba f : N −→ N y g : N −→ N tales que f es inyectiva, gsuprayectiva, pero g ◦ f no sea inyectiva ni suprayectiva.
1.9. Cardinalidad y conjuntos finitos
Definicion 19 Dados 2 conjuntos A y B se dice que tienen la mismacardinalidad si existe f : A −→ B biyectiva.
Se usara el sımbolo In para denotar el conjunto de los primeros n naturales,
In = {1, 2, 3, ..., n} = {a ∈ N | 1 ≤ a ≤ n}.
Definicion 20 Un conjunto A es finito si existe una biyeccion (funcionbiyectiva)
f : A −→ In,
para alguna n ∈ N. En este caso se dice que el cardinal de A, denotadopor #A, es n.

18 1.10. Cardinalidad y conjuntos finitos
Definicion 21 Sea A un conjunto que no es finito, entonces se dice que Aes infinito.
Con lo anterior se tienen las siguientes observaciones que relacionan lasfunciones y la cardinalidad de conjuntos finitos.
1. Sea f : A −→ B una funcion inyectiva entre 2 conjuntos finitos,entonces
#A ≤ #B.
Para probar esto, notese que si A = {a1, a2, ..., an}, entonces el con-junto {f(a1), f(a2), ..., f(an)} consiste de elementos distintos (ya quef es inyectiva).
2. Sea f : A −→ B una funcion suprayectiva entre 2 conjuntos finitos,entonces
#A ≥ #B.
Esto se cumple ya que si B = {b1, b2, ..., bm}, como f es suprayectivaexisten a1, a2, ..., an ∈ A tales que f(ai) = bi, i = 1, 2, ...,m. yademas las ai son todas distintas, ya que f es funcion.
3. Sea f : A −→ B una funcion biyectiva entre 2 conjuntos finitos,entonces
#A = #B.
Por las 2 observaciones anteriores se da la igualdad.
Proposicion 1.9.1 Sea f : A −→ B una funcion, donde A y B sonfinitos con la misma cardinalidad, entonces,
f es inyectiva ⇔ f es suprayectiva.
Demostracion. Se tiene como hipotesis que: #A = n = #B.
⇒) Dado que f es inyectiva, se tienen n imagenes distintas i.e. todaslo son.
⇐) Si f no es inyectiva, entonces #Imf < n, pero eso contradice lahipotesis.
�Esta propiedad no es valida para conjuntos infinitos, por ejemplo la fun-
cion f : N −→ N, f(n) = 2n es inyectiva pero no suprayectiva. Tam-bien, como ya se probo, g : Z −→ Z, g(n) = [n
2] es suprayectiva pero no
inyectiva.

1. Fundamentos 19
1.10. Induccion matematica
La induccion matematica consiste de una manera de probar multiples afir-maciones, o propiedades (tantas como los naturales), y que dependen de losmismos numeros naturales.
Por ejemplo si se quiere probar que
1 + 2 + · · ·+ n =n(n+ 1)
2, (1.1)
observese que cada n ∈ N define una igualdad, el Axioma o Principio deinduccion establece que si se cumplen dos condiciones, la propiedad es validapara todos los naturales, estas condiciones son:
A) 1 cumple la propiedad,
B) si la propiedad es valida para n, entonces tambien lo es para n+ 1.
En nuestro ejemplo particular probaremos que se cumplen las 2 condi-ciones y concluiremos que (1.1) se cumple ∀n ∈ N :
A) 1 = 1(2)2
por lo que (1.1) se cumple si n = 1,
B) si (1.1) es valida para n, entonces
1 + 2 + · · ·+ n =n(n+ 1)
2,
sumando n+ 1 se tiene
1 + 2 + · · ·+ n+ n+ 1 =n(n+ 1)
2+ n+ 1
= (n+ 1)(n
2+ 1)
=(n+ 1)(n+ 2)
2,
es decir, (1.1) se cumple para n+1 y se sigue del Principio de induccionque (1.1) se cumple ∀n ∈ N.
Intuitivamente es clara la validez del principio: si vale para 1, vale para2, si tambien es valido para 2, entonces tambien para 3, etcetera.

20 1.11. Induccion matematica
Otros ejemplos:
1) Se afirma que2n < n! si n ≥ 4, (1.2)
donde n! = 1 · 2 · 3 · · · · (n− 1)(n), por ejemplo, 4! = 4 · 3 · 2 = 24.
Se debe probar que
2n+3 < (n+ 3)! ∀n ∈ N,
usamos induccion.
A) 21+3 = 16 < (1 + 3)! = 24,
B) si 2n+3 < (n+ 3)!, como 2 < n+ 4 se tiene2 · 2n+3 < (n+ 3)!(n+ 4), esto es 2n+4 < (n+ 4)!
∴ (1.2) se cumple ∀n ≥ 4.
2)n3 − n es un multiplo de 6 ∀n ∈ N. (1.3)
Para probar (1.3) se aplica induccion probando A y B :
A) si n = 1 ⇒ 13 − 1 = 6 · 0,
B) si se cumple (1.3) para m, se tiene m3 − 1 = 6 · k, k ∈ Z.Ahora
(m+ 1)3 − (m+ 1) = m3 + 3m2 + 3m+ 1−m− 1
= m3 −m+ 3(m2 +m)
= 6k + 6t, t ∈ Z,
i.e., (1.3) se cumple para m+1 y por lo tanto ∀m ∈ Z (usamosel hecho de que m2+m siempre es par: (2n+1)2 = 4n2+4n+1).
EJERCICIOS 1.101. Demuestre por induccion que si r ∈ R, r 6= 1
1 + r + r2 + · · ·+ rn =1− rn+1
1− r.
2. Demuestre que
12 + 22 + 32 + · · ·+ n2 =n(n+ 1)(2n+ 1)
6.

1. Fundamentos 21
1.11. El teorema del binomio
Dado n un numero natural se define n-factorial, denotado por n!, como
n(n− 1)(n− 2) · · · 3 · 2 · 1.
Por convencion 0! = 1. Observese que se puede definir n! inductivamente,esto es, n! = n (n− 1)!. Por ejemplo, 4! = 4 (3)! = 24.
Teorema 1.11.1 (Pascal) Sean n,m enteros no negativos y
Cmn =
n!
m!(n−m)!, n ≥ m,
entonces se tieneCm
n−1 + Cm−1n−1 = Cm
n .
Demostracion. Sumamos
(n− 1)!
m!(n− 1−m)!+
(n− 1)!
(m− 1)!(n− 1− (m− 1))!
=(n− 1)!
m!(n−m− 1)!+
(n− 1)!
(m− 1)!(n−m)!=
(n− 1)!(n−m)
m!(n−m)!+
(n− 1)!m
m!(n−m)!
=(n− 1)![(n−m) +m]
m!(n−m)!=
n!
m!(n−m)!= Cm
n .
�
Corolario 1.11.2 Cmn ∈ N
Demostracion. Lo probamos por induccion sobre n.
A) Si n = 1 C11 = 1!
1!(1−1)!= 1 y C0
1 = 1!0!(1−0)!
= 1,
B) Si suponemos cierto el teorema para n−1 se tiene que tanto Cmn−1 como
Cm−1n−1 son numeros naturales, y por lo tanto en virtud del teorema de
Pascal, se sigue que Cmn tambien es un numero natural �
Teorema 1.11.3 (Del binomio de Newton) Si a, b ∈ R y n es un enterono negativo, entonces
(a+ b)n = C0na
n + C1na
n−1b + · · · + Cnnb
n.

22 1.11. El teorema del binomio
Por ejemplo (a+b)2 = a2 + 2ab+ b2 y (a+b)3 = a3 + 3a2b+ 3ab2 + b3, ya
que C12 = 2!
1!(2−1)!, C2
3 = 3!2!(3−2)!
, etcetera. Observese que los superındices
y los subındices que definen el teorema crecen y decrecen conforme a lasiguiente formula
n∑j=0
Cjn a
n−j bj,
donde el signo∑
significa sumatoria y cada ındice desde j = 0 hasta nrepresenta un sumando, i.e., el teorema del binomio dice:
(a+ b)n =n∑
j=0
Cjn a
n−j bj.
Demostracion. Probamos el teorema usando induccion sobre n.
A) Si n = 1 (a+ b)1 = C01 a
1 + C11 a
0 b1 = 1 · a + 1 · b = a + b.
B) Si el teorema es cierto para n− 1, se tiene
(a+ b)n−1 =n−1∑j=0
Cjn−1 a
n−1−j bj,
y entonces
(a+ b)n = (a+ b)(a+ b)n−1 = a
n−1∑j=0
Cjn−1a
n−1−jbj + b
n−1∑j=0
Cjn−1a
n−1−jbj
=n−1∑j=0
Cjn−1a
n−jbj +n−1∑j=0
Cjn−1a
n−1−jbj+1,
expresando la segunda sumatoria en terminos de k = j + 1, en lugarde j, i.e., corriendo los ındices, se tiene
(a+ b)n =n−1∑j=0
Cjn−1 a
n−j bj +n∑
k=1
Ck−1n−1 a
n−k bk.

1. Fundamentos 23
Finalmente, homologando ındices y factorizando
(a+ b)n =n−1∑i=1
Cin−1a
n−ibi +n−1∑i=1
Ci−1n−1a
n−ibi + C0n−1a
n + Cn−1n−1b
n
=n−1∑i=1
(Cin−1 + Ci−1
n−1)an−ibi + C0
nan + Cn
nbn
=n∑
i=0
Cina
n−ibi,
en virtud del teorema de Pascal. �
1.12. Relaciones de equivalencia y particiones
Definicion 22 Una relacion R ⊂ A × A se le llama de equivalencia sisatisface:
1) (a, a) ∈ R ∀ a ∈ A (reflexividad),
2) si (a, b) ∈ R, entonces (b, a) ∈ R (simetrıa),
3) si (a, b) ∈ R y (b, c) ∈ R, entonces (a, c) ∈ R (transitividad).
Observese que la simetrıa se puede expresar como:
(a, b) ∈ R ⇔ (b, a) ∈ R.
Ejemplos
1. Sea A cualquier conjunto, entonces la mınima relacion de equivalenciaes la diagonal
R = {(a, a) | a ∈ A},
i.e., toda relacion de equivalencia incluye a la diagonal ¿por que?
2. Sea A la familia de los triangulos del plano y
R = {(a, b) ∈ A × A | a y b son semejantes},
evidentemente R es de equivalencia.

24 1.12. Relaciones de equivalencia y particiones
3. Sea A = {1, 2, 3} y
R = {(1, 1), (1, 2), (2, 1)(2, 2)},
entonces R no es de equivalencia. Aunque es simetrica y transitiva, noes reflexiva pues (3, 3) /∈ R.
4.- Sea A = {1, 2, 3} y
R = {(1, 1), (2, 2), (3, 3)(1, 2), (2, 1), (2, 3), (3, 2)},
R tampoco es de equivalencia, ya que no es transitiva pues (1, 3) /∈ R.
Dada cualquier relacion de equivalencia R, escribiremos
a ∼ b si (a, b) ∈ R.
Definicion 23 Sea A un conjunto, una particion P de A consiste de unafamilia de subconjuntos de A no vacıos {Ai}i∈ I �
1) si Ai 6= Aj, entonces Ai ∩ Aj = ∅,
2)⋃
i∈ I Ai = A.
Ejemplos
1. Si A = {1, 2, 3, 4, 5}, una particion de A es
A1 = {1, 2}, A2 = {3} y A3 = {4, 5}.
2. Si A = N, una particion de A es
A1 = {pares} y A2 = {nones}.
3. Sea A = {instrumentos de una orquesta sinfonica} y
A1 = {cuerdas}, A2 = {alientos}, A3 = {metales},
A4 = {percusiones},
entonces estos subconjuntos forman una particion de A.

1. Fundamentos 25
4. Si A = {1, 2, 3, .., 10} y
A1 = {1, 3, 5}, A2 = {1, 4, 6} y A3 = {2, 7, 8, 9, 10},
entonces A1, A2, A3 no forman una particion de A pues 1 ∈ A1 ∩ A2.
Teorema 1.12.1 Sea A cualquier conjunto y R una relacion de equivalen-cia en A × A, entonces R induce una particion en A.
Demostracion. Sea x ∈ A, se define
Ax = {y ∈ A | y ∼ x},
donde y ∼ x significa (y, x) ∈ R. Observese que Ax 6= ∅, ya que x ∈ Ax.Se afirma que {Ax}x∈A es una particion P de A.
La propiedad 2) es inmediata, ya que como Ax ⊂ A, ∀x ∈ A, cierta-mente
⋃i∈AAx ⊂ A. Ademas, como dada x ∈ A, se tiene que x ∈ Ax
se sigue que A ⊂⋃
i∈AAx.
Para probar la propiedad 1) supongamos que z ∈ Ax ∩ Ay, x, y, z ∈ A,se debe probar que Ax = Ay.
Como z ∈ Ax ∩ Ay, se sigue que z ∼ x y z ∼ y, por lo que x ∼ y(simetrıa y transitividad).
Finalmente, probamos Ax ⊂ Ay (y viceversa). Sea w ∈ Ax, entoncesw ∼ x y por transitividad w ∼ y, i.e., w ∈ Ay ∴ Ax ⊂ Ay. La otracontencion se prueba de la misma manera.
�El recıproco tambien se cierto.
Teorema 1.12.2 Sea A un conjunto arbitrario y P una particion en A,entonces P induce una relacion de equivalencia en A.
Demostracion. Se define una relacion R en A × A de la siguientemanera (x, y) ∈ R si existe Ai en P � x, y ∈ Ai. Probamos que estarelacion es de equivalencia.
Evidentemente x ∼ x ∀x, tambien es obvio que si x ∼ y entoncesy ∼ x, finalmente si x ∼ y y y ∼ z, entonces existe Ai y Aj en laparticion tales que x, y ∈ Ai y y, z ∈ Aj, como Ai y Aj se intersectandeben ser iguales i.e. x, z ∈ Ai = Aj, y x ∼ z (por lo que la relacion estransitiva).
�

26 1.12. Relaciones de equivalencia y particiones
Definicion 24 Dada una relacion de equivalencia R en A × A a los sub-conjuntos de la particion inducida por R se les llama clases de equivalencia.
Ejemplos
1. Sean A un conjunto arbitrario y R la relacion diagonal, i.e.,
R = {(x, x) |x ∈ A},
entonces la particion inducida por R es
A =⋃
x∈A
{x}.
2. Sean A = {1, 2, 3} y R = {(1, 1), (1, 2), (2, 1), (2, 2), (3, 3)}, en-tonces la particion inducida por R es
A = {1, 2} ∪ {3}.
3. Sea m ∈ N fijo. Se define una relacion R ⊂ Z × Z de la siguientemanera: (x, y) ∈ R si x − y = mt, t ∈ Z. Esta relacion es deequivalencia (ejercicio), y la particion inducida es
Z =m−1⋃j=0
[j],
donde
[j] = {s ∈ Z | s− j = mt, t ∈ Z}, j ∈ {1, 2, ..., k − 1}.
Esto se sigue del algoritmo de la division y del hecho de que dadosh 6= k, h, k ∈ N ∪ {0} � h, k < m, entonces m no es un factor deh− k. El algoritmo de la division establece que dado t ∈ Z y m ∈ Nexisten s, r unicos tales que
t = sm + r, 0 ≤ r < m.
En el caso en que t < 0, tomando −t = sm + r
t = −sm − r −m+m = −(s+ 1)m + (m− r),
(m− r) es el nuevo residuo, cf. [2] o [5].

1. Fundamentos 27
Por ejemplo, si m = 3 la particion es
Z = A0 ∪ A1 ∪ A2 donde
Aj = {3t + j | t ∈ Z} j = 0, 1, 2.
Sea RA el conjunto de las relaciones de equivalencia en un conjunto Ay PA las particiones de A. Los teoremas anteriores muestran que existenfunciones
ϕ : RA −→ PA y ψ : PA −→ RA,
definidas por la asociacion natural.
Proposicion 1.12.3 Sean ϕ, ψ, RA, PA y A como arriba, entonces se tiene
a) ψ ◦ ϕ = IRA,
b) ϕ ◦ ψ = IPA.
Demostracion.
a) Dada una relacion de equivalencia R en A, ϕ(R) es la particiondefinida por las clases de equivalencia de A determinadas por R yciertamente ψϕ(R) = R, ya que la definicion de ψ establece que doselementos de A estan relacionados si pertenecen al mismo subconjunto(estos subconjuntos son las clases de equivalencia de R).
b) Dada P una particion de A, ψ(P ) es una relacion de equivalenciacuyas clases de equivalencia son precisamente los subconjuntos de Py se concluye que ϕψ(P ) es de nuevo P. Esto se sigue, ya que pordefinicion ϕ le asocia a ψ(P ) la particion definida por sus clases deequivalencia.
�EJERCICIOS 1.121. Demuestre que la siguiente relacion es de equivalencia. Sea m ∈ N fijo,se define una relacion R ⊂ Z × Z de la siguiente manera: (x, y) ∈ R six− y = mt, t ∈ Z.2. Describa la particion en Z inducida por la relacion de equivalencia descritaen el Ejercicio 1. Pruebe sus afirmaciones.3. Defina en R, x ∼ y, si x−y ∈ Z, pruebe que esta relacion es de equivalen-cia, y demuestre que cada clase de equivalencia tiene un unico representanteen el intervalo [0, 1).

28 1.13. Estructuras numericas y algebraicas
1.13. Estructuras numericas y algebraicas
Las estructuras algebraicas mas elementales son las numericas, es decir, con-juntos de numeros que cumplen ciertos axiomas. Algunas de estas son:
los naturales
N = {1, 2, 3, ...},
el anillo de los numeros enteros
Z = {...,−2,−1, 0, 1, 2, ...},
el campo de los numeros racionales, denotados por Q,
Q ={ab
∣∣ a, b, ∈ Z, b 6= 0},
el campo de los numeros reales
R = {A.b1b2b3...},
donde A ∈ Z y bj ∈ {1, 2, ..., 0}, i.e los numeros enteros conexpansiones decimales infinitas, y sin colas infinitas de nueves, estospuntos se pueden pensar como los puntos de la recta,
el campo de los numeros complejos
C = {a + ib | a, b ∈ R},
donde i = (0, 1) satisface i2 = −1, estos puntos pueden pensarse
como los puntos del plano.
Una operacion binaria en un conjunto A es una funcion
µ : A × A −→ A.

1. Fundamentos 29
Por ejemplo, en los enteros la suma y el producto son operaciones binariasque satisfacen ciertas propiedades.
SUMA
S1) a + b = b + a ∀ a, b ∈ Z (conmutatividad),
S2) (a + b) + c = a + (b + c) ∀ a, b, c ∈ Z (asociatividad),
S3) ∃ 0 ∈ Z � a + 0 = a ∀ a ∈ Z (existencia del neutro aditivo),
S4) a + (−a) = 0 ∀ a ∈ Z (existencia del inverso aditivo).
PRODUCTO
P1) a b = b a ∀ a, b ∈ Z (conmutatividad),
P2) (a b) c = a (b c) ∀ a, b, c ∈ Z (asociatividad),
P3) ∃ 1 ∈ Z � a · 1 = a ∀ a ∈ Z (existencia del neutro multiplicativo),
DISTRIBUTIVIDAD
D) a (b + c) = a b + a c ∀ a, b, c ∈ Z.
Estas propiedades implican otra.
LEY DE LA CANCELACION DE LA SUMA
Si a + c = b + c, entonces a = b.
Esto ley se cumple, ya que (a + c) + (−c) = (b + c) + (−c) ⇒ a = b.
Los numeros racionales, reales y complejos tambien cumplen estas propiedadesy otra mas:
P4) a a−1 = 1 ∀ a 6= 0 (existencia del inverso multiplicativo).

30 1.13. Estructuras numericas y algebraicas
De manera analoga a la suma se tiene la siguiente propiedad.
LEY DE LA CANCELACION DEL PRODUCTO
Si a b = a c, a 6= 0, entonces b = c.
Esto se sigue, ya que a b = a c ⇒ a−1(a b) = a−1(a c) ⇒ b = c.
En estas estructuras (salvo en C) existe tambien una relacion de orden,denotada por <, que satisface las siguientes cuatro propiedades:
a) si a < b y b < c, entonces a < c (transitividad),
b) dados a y b se cumple una y solo una de las siguientes afirmaciones:
i) a = b,
ii) a < b,
iii) b < a,
a esta propiedad se le llama ley de tricotomıa,
c) si a < b ⇒ a + c < b + c ∀ a, b, c(compatibilidad del orden con la suma),
d) si a < b y 0 < c, entonces ac < bc ∀ a, b, c(compatibilidad del orden con el producto).
Una estructura algebraica que satisface S1), ..., S4), P1), P2), P3) y D)se le llama anillo conmutativo con unidad, si ademas cumple P4) se le llamacampo.
Si un anillo cumple tambien las propiedades de orden se le llama anilloordenado, por ejemplo Z. Ejemplos de campos ordenados, son Q y R.
La estructura algebraica mas simple se le llama grupo, es un conjuntoG con una operacion binaria, que se le llama usualmente producto, de talmanera que cada elemento tiene un inverso, existe un neutro, y el productoes asociativo. Por ejemplo, el conjunto de biyecciones (funciones biyectivas)de un conjunto cualquiera en sı mismo constituye un grupo, donde el productoes la composicion, lease de derecha a izquierda.
EJERCICIOS 1.131. Demuestre la ultima afirmacion de esta seccion.

Capıtulo 2
Calculo combinatorio
Describiremos primero los conceptos del calculo combinatorio de manera in-tuitiva y posteriormente los estudiaremos rigurosamente.
2.1. Ordenaciones con repeticion (version in-
tuitiva)
Consideremos el conjunto A = {a, b, c}, al conjunto de “palabras” de dosletras formadas con elementos de A se les llama ordenaciones con repeticionde las letras a, b, c tomadas de dos en dos ( “palabras” porque no necesaria-mente se tiene vocal-constante, etcetera). Se les llama con repeticion ya que,por ejemplo, puede aparecer aa .
En este caso hay 9 ordenaciones con repeticion, un metodo para obtenertodas se ilustra en la Figura 2.1.
a
a
b
b
c
c
a a
b ba b
a c b c c c
b c
a ca b
Figura 2.1: Tabla de ordenaciones con repeticion de dos elementos
Si tomamos ahora como ejemplo las trasmisiones telegraficas de dos sonidos:uno corto denotado por · y uno largo denotado por −. A las senales deun sonido se les puede considerar como las ordenaciones con repeticion delconjunto A = {·,−} tomadas de uno en uno, estas son:
· y −
31

32 2.2. Ordenaciones (version intuitiva)
Las senales de 2 sonidos serıan las ordenaciones con repeticion tomadasde 2 en 2, estas las podemos derivar de las de un sonido, como se muestra enla siguiente tabla, el numero de ellas es 2×2=4.
−
− ·
· − · · ·
· −−−
Figura 2.2: Tabla de ordenaciones con repeticion de dos sonidos
Las de tres sonidos serıan las ordenaciones con repeticion tomadas de tresen tres, que a su vez se pueden derivar de la tabla anterior, el numero de ellases 2×4=8. Son todas, ya que cualquier senal de 3 sonidos consiste de unade un sonido seguida de una de 2 sonidos.
−
·
− · · ·· −−−
− − − − − · − · − − · ·
· · ·· · −· − ·· − −
Figura 2.3: Tabla de ordenaciones con repeticion de tres sonidos
Se denotara por ORmn al numero de ordenaciones con repeticion de un
conjunto de n elementos tomados de m en m. Se deduce de los ejemplosanteriores que
OR23 = 32, OR1
2 = 2, OR22 = 22, OR3
2 = 23.
Probaremos posteriormente que ORmn = nm.
2.2. Ordenaciones (version intuitiva)
Supongamos ahora que se quiere formar palabras de 2 letras en {a, b, c},pero con la condicion que estas sean distintas, se tienen 6 casos
ab, ac, ba, bc, ca, cb.
A estas palabras se les llamara ordenaciones del conjunto {a, b, c}, tomadasde 2 en 2.
Si consideramos ahora el conjunto A = {a, b, c, d}, las ordenaciones deA tomadas de dos en dos son 12:
ab, ac, ad, ba, bc, bd, ca, cb, cd, da, db, dc.

2. Calculo combinatorio 33
Observese que el numero de ordenaciones es el numero de ordenaciones conrepeticion menos el numero de ordenaciones con letras repetidas.
En nuestro ejemplo, el numero de las ordenaciones es:
42 − 4 = 4(4 − 1) = 12.
Se denotara por Omn al numero de ordenaciones en un conjunto de n
elementos tomados de m en m. Observese que m ≤ n ¿por que? Se siguede nuestros ejemplos que
O23 = 6, O2
4 = 12.
Se probara que Omn = n!
(n−m)!.
Consideremos ahora el siguiente problema, se tienen 4 lienzos de colores:rojo, azul, verde y blanco ¿Cuantas banderas tricolores se pueden formar? Lapregunta es equivalente a encontrar las ordenaciones de 3 en 3 del conjunto{r, a, v, b}.
Un primer grupo de banderas serıa,
rav, rab, rva, rvb, rba, rbv,
intercambiando el rojo con los otros 3 colores se obtienen todas las posibili-dades, i.e., hay 24 banderas tricolores, lo cual coincide con nuestra formula
O34 =
4!
(4− 3)!= 24.
2.3. Permutaciones (version intuitiva)
A las ordenaciones de un conjunto de n elementos tomados de n en n seles llama permutaciones de n elementos.
Por ejemplo: si A = {1, 2, 3}, las permutaciones de A son
123, 132, 213, 231, 312, 321.
Las banderas bicolores tambien se pueden pensar como permutaciones de2 elementos, cuando se trabaja con solo 2 colores.

34 2.4. Combinaciones
La formula que probamos para el numero de ordenaciones exhibe comocaso particular el numero de permutaciones de un conjunto de n elementos.Este numero, denotado por Pn, esta dado por
Pn = Onn =
n!
(n− n)!= n!.
Notese que esta formula se aplica a nuestros ejemplos.
r rv v
Figura 2.4: Banderas bicolores con dos lienzos verde y rojo
Como un ultimo ejemplo calcularemos cuantos numeros de 4 cifras dis-tintas se pueden formar con los digitos 1,3,7 y 8.
Los que empiezan con 1 son:
1378, 1387, 1738, 1783, 1837 y 1873,
intercambiando 1 con los otros 3 dıgitos se obtienen un total de 24 i.e. 4!.
2.4. Combinaciones
Definicion 25 Sea A un conjunto de n elementos, a los subconjuntos de Aque tienen m elementos se les llama combinaciones de los n elementos deA tomados de m en m.
Ejemplos
1. Sea A = {1, 2, 3, }, las combinaciones de A tomadas de 2 en 2 son:
{1, 2}, {1, 3} y {2, 3},
tomadas de 1 en 1 son:
{1}, {2} y {3},
tomadas de 3 en 3 son:{1, 2, 3}.

2. Calculo combinatorio 35
2. Si se tiene un grupo de 5 musicos y se quiere elegir un trıo, el numeroposible de trıos es el numero de combinaciones de un conjunto de 5elementos tomados de 3 en 3; si los musicos son Andrea, Itzel, Laura,Pedro y Juan, los trıos posibles son:
{A, I, L}, {A, I, P}, {A, I, J}, {A,L, P}, {A,L, J},{A,P, J}, {I, L, P}, {I, L, J}, {I, P, J}, {L, P, J},
por lo que se pueden formar 10 trıos.
3. Si ahora se quiere elegir un trıo entre Andrea, Itzel, Laura y Pedro lasposibilidades son :
{A, I, L}, {A, I, P}, {A,L, P}, y {I, L, P},estas son cuatro, que es el mismo numero de posibilidades para elegiruna persona entre 4, i.e., elegir 3 de 4 es eliminar uno de 4.
Se probara que el numero de combinaciones de un conjunto de n ele-mentos tomados de m en m esta dado por los coeficientes binomiales (delteorema del binomio)
Cmn =
n!
m!(n−m)!, (2.1)
Suponiendo cierto este hecho, usamos tambien el sımbolo Cmn para denotar
el numero de estas combinaciones.Habiendo probado la formula de las ordenaciones se demostrara que
Cmn Pm = Om
n ,
lo cual implica la formula (2.1), y justifica el uso del sımbolo Cmn como
numero de combinaciones, ya que
Cmn m! =
n!
(n−m)!.
La baraja inglesa provee de buenos ejemplos al analısis combinatorio,se tienen 52 cartas, cada una con un numero y un palo, los numeros sonA, 2, 3, 4, 5, 6, 7, 8, 9, 10, J,Q y K, los palos son: {�, , ♣ y ♠}, es decir,diamantes, corazones, treboles y espadas (o pics), respectivamente.
Dado que una mano de poker consta de 5 cartas, el numero total de manoses
C552 =
52!
5!47!=
52 · 51 · 50 · 49 · 48
5 · 4 · 3 · 2= 52 · 51 · 10 · 49 · 2.

36 2.5. Funciones (2a visita)
2 Q
♠ ♣
Figura 2.5: Ejemplos de cartas de baraja inglesa
2.5. Funciones (2a visita)
Las funciones surgen en una infinidad de situaciones damos unos ejemplos.
1. Sea A el conjunto de alumnos de la primaria Benito Juarez y B lossalones de dicha primaria, la asociacion que a cada alumno le asociasu salon es una funcion (en la Facultad de Ciencias esta asociacion noserıa una funcion).
2. Sea A el conjunto de casas de la calle Uxmal y B = N, la asignaciona cada casa de un numero oficial es una funcion. Las casas que tienen2 numeros no serıan ejemplo de funcion (por ejemplo, # 20 antes 5).
3. Las parejas ordenadas de numeros se pueden pensar tambien comofunciones, i.e., si A = {1er lugar, 2o lugar}, B = Z, entonces(2, 5) o (7, 7) son funciones:
1er lugar −→ 2,
2o lugar −→ 5, etcetera.
4. Sea A un conjunto de 12 jugadores de Beisbol (numerados del 1 al12) y B el conjunto de posiciones en dicho juego: lanzador, receptor,primera, segunda y tercera base, jardineros izquierdo, derecho y central,esto es,
B = {L,R, Pb, Sb, Tb, JI , JD, JC}.
Si el capitan asigna a cada posicion un jugador esta formando unafuncion, digamos
L → 7 Sb → 2 JD → 4R → 11 Tb → 6 JC → 10.Pb → 1 JI → 5

2. Calculo combinatorio 37
5. La funcion f : Z −→ Z, dada por f(n) = n3.
En los ejemplos anteriores siempre se menciono:
a) un conjunto A (el dominio) de: alumnos, casas, 1o y 2o lugar, posi-ciones de baseball y los numeros enteros Z,
b) otro conjunto B (el codominio) al cual se le asocian los elementos deA: salones, numeros naturales, numeros enteros, jugadores y de nuevonumeros enteros,
c) una forma de asociacion que a cada elemento de A le asigna un unicoelemento de B. A esta se le llama regla de correspondencia.
Como se menciono, estas funciones se designan por
f : A −→ B,
y f(a) = b, si b ∈ B es el elemento de B asociado a a. Por ejemplo,f(2) = 8, en el ejemplo 5.
Otros ejemplos
1. Sean A = {x, y, z} y B = {1,−1}, la funcion f : A −→ B dadapor f(x) = 1, f(y) = −1, f(z) = 1, se puede expresar como
f =
(x y z1 −1 1
).
Una expresion de la forma
(x x z1 −1 1
)no serıa funcion.
2. Un problema que puede ser relevante, es saber cuantas funciones hay deun conjunto en otro. Una ejemplo trivial pero didactico es la siguiente:
¿Cuantas banderas bicolores se pueden formar con 3 colores: verde,blanco y rojo? Esta pregunta se puede expresar en terminos de fun-ciones como sigue. Sean A = {1, 2} y B = {v, b, r}, donde 1 serefiere el lugar izquierdo de la bandera y 2 al derecho. De esta maneralas banderas son funciones.

38 2.6. Funciones (2a visita)
1 2
v b
Figura 2.6: Bandera bicolor
Por ejemplo, la bandera en la Figura 2.3 esta representada por lafuncion (
1 2v b
),
las demas son (1 2v r
)(1 2b v
)(1 2b r
)(1 2r v
)(
1 2r b
)(1 2v v
)(1 2b b
)(1 2r r
),
sin embargo las ultimas 3, aunque son funciones, no representan ban-deras bicolores, i.e. hay 6 banderas bicolores.
EJERCICIOS 2.51. Interprete como funcion el resultado de un examen en un grupo de 20alumnos.2. Que diagramas son funciones en la Figura 2.7.
a) b)
c)
Figura 2.7: ¿Cuales son funciones?

2. Calculo combinatorio 39
2.6. Funciones inyectivas, suprayectivas y
biyectivas (2a visita)
Recordamos las definiciones. Sea f : A −→ B una funcion.
a) Se dice que f es inyectiva si ∀ a1, a2 ∈ A � a1 6= a2, se tienef(a1) 6= f(a2).
b) Se dice que f es suprayectiva si ∀ y ∈ B, existe x ∈ A � f(x) = y.
c) Se dice que f es biyectiva si es inyectiva y suprayectiva.
Ejemplos
1. El problema de buscar banderas bicolores con los colores {v, b, r} sepuede reformular y afirmar que hay 6 al ser este el numero de fun-ciones inyectivas que hay del conjunto A = {1, 2} en B = {v, b, r}.Observese que de las 9 funciones establecidas en dicho ejemplo ningunaes suprayectiva ¿por que?
2. Considerese los conjuntos A = {x, y, z} y B = {7, 8}, hay 8 fun-ciones de A en B :(
x y z7 7 7
) (x y z7 7 8
) (x y z7 8 7
) (x y z7 8 8
)(x y z8 7 7
) (x y z8 7 8
) (x y z8 8 7
) (x y z8 8 8
).
Observese que este procedimiento es el mismo que el de encontrar lasordenaciones con repeticion de un conjunto de 2 elementos tomados de3 en 3, se tenıa OR3
2 = 23, ninguna de estas funciones es inyectiva, y
todas salvo la primera y la ultima son suprayectivas.
En general, si f : A −→ B, A tiene n elementos y B m elementos,y n > m, entonces f no puede ser inyectiva ¿por que?

40 2.7. Funciones inyectivas, suprayectivas y biyectivas (2a visita)
Observese que una funcion es:
a) inyectiva, si a elementos distintos del dominio le corresponden elemen-tos distintos del codominio,
b) suprayectiva, si su imagen es el codominio,
c) biyectiva, si a cada elemento del codominio le corresponde uno y soloun elemento en el dominio.
Definicion 26 Sea f : A −→ B una funcion, el subconjunto de B
{y ∈ B | ∃x ∈ A � f(x) = y},
se llama la imagen de f y se denota por Imf .
Ejemplo: sea f : R −→ R, f(x) = 2x + 1, f es inyectiva ya quesi f(x1) = f(x2), se tiene 2x1 + 1 = 2x2 + 1 y x1 = x2. Tambien es
suprayectiva, ya que si y ∈ R f(x) = 2x + 1 = y si y solo si x = y− 12
i.e. f(y− 12
) = 2(y− 12
) + 1 = y.
Notese que si se tienen dos funciones g : A −→ B y f : B −→ C,tales que f ◦ g es inyectiva, entonces g es inyectiva. Esto se sigue ya que sig(x1) = g(x2), necesariamente fg(x1) = fg(x2) y x1 = x2.
Tambien si f : A −→ B y g : B −→ C son tales que g ◦ f essuprayectiva, entonces g es suprayectiva. Esto se sigue ya que dado z ∈ C,∃x ∈ A � g ◦ f(x) = z, por lo cual g(y) = z, donde f(x) = y.
Por otra parte si f : A −→ B es suprayectiva y g, h : B −→ Cson tales que g ◦ f = h ◦ f, entonces g = h. Para probar esto se tomay ∈ B, entonces ∃x ∈ A tal que f(x) = y y se tiene gf(x) = hf(x), i.e.,g(y) = h(y).
EJERCICIOS 2.6
1. Pruebe que si si f : B −→ C es inyectiva y g, h : A −→ B son talesque f ◦ g = f ◦ h, entonces g = h.

2. Calculo combinatorio 41
2.7. Ordenaciones con repeticion (version for-
mal)
Definicion 27 Sea A un conjunto de n elementos, las ordenaciones conrepeticion de A tomadas de m en m son las funciones f : Im −→ A,donde Im = {1, 2, ...,m}.
Recordando el ejemplo de las senales de 2 sonidos, usando las sonidos · −,estas se pueden interpretar en terminos de funciones, como sigue
(1 2 3· · ·
) (1 2 3· · −
) (1 2 3· − ·
) (1 2 3· − −
)(
1 2 3− · ·
) (1 2 3− · −
) (1 2 3− − ·
) (1 2 3− − −
).
Como un segundo ejemplo consideremos la ordenaciones con repeticion del
conjunto A = {x, y, z} tomadas de 2 en 2, estas son:(1 2x x
) (1 2x y
) (1 2x z
) (1 2y x
) (1 2y y
) (1 2y z
)(
1 2z x
) (1 2z y
) (1 2z z
).
Observese que estas parejas son, en cierta manera, los elementos del pro-ducto cartesiano A × A. Analogamente, las ordenaciones con repeticion de3 en 3 del conjunto A son, en cierta manera, los elementos de A × A × A.
Algunas veces en lugar de escribir(1 2 3 · · · na1 a2 a3 · · · an
)se escribe simplemente (a1, a2, a3, ..., an).
Definicion 28 Sean f : A −→ B, g : C −→ B funciones, tales queA ⊂ C, . Supongase tambien que
f(x) = g(x) ∀x ∈ A.
Bajo estas hipotesis se dice que g es una extension de f y que g restringidaa A, denotado por g |A, es igual a f (se escribe g |A = f).

42 2.7. Ordenaciones con repeticion (version formal)
Por ejemplo, si f : Z −→ Z, f(n) = n2 y g : R −→ R, g(x) = x2,entonces g |Z = f .
Consideramos ahora un ejemplo que nos servira para entender la pruebade que ORm
n = nm.
Sean A un conjunto de 10 elementos, a y b dos elementos de A nonecesariamente distintos y f : I2 −→ A � f(1) = a y f(2) = b, es claroque el numero de funciones que extienden f a funciones con dominio I3 son10, ya que hay 10 maneras de elegir la imagen de 3.
Teorema 2.7.1 Sea A un conjunto de n elementos, y m ≤ n, entonces
ORmn = nm.
Demostracion. Induccion sobre m, donde n es fija.Si m = 1
OR1n = n,
ya que es el numero de funciones de I1 en A.Suponemos cierto el teorema para m− 1, se afirma que
ORmn = nORm−1
n .
La afirmacion implica el resultado ya que n · nm−1 = nm. Para probarla afirmacion basta probar que dada f : Im−1 −→ A existen n funcionesque extienden f a funciones de Im en A, esto es claro ya que la imagen dem puede ser cualquier elemento de A. �
Definicion 29 Sea A un conjunto, el producto cartesiano
A × A × · · · × A︸ ︷︷ ︸n−veces
,
denotado por An, es el conjunto cuyos elementos son las n-eadas de elemen-tos de A, es decir, elementos de la forma
(a1, a2, ..., an), ai ∈ A, i ∈ {1, 2, ..., n}.
Por ejemplo: si n = 2, estas son las parejas ordenadas. Si n = 3 sonternas ordenadas, etcetera. Si A = R, R3 = {(x, y, z) |x, y, z ∈ R}.

2. Calculo combinatorio 43
Definicion 30 Una correspondencia biunıvoca entre 2 conjuntos A y B esuna funcion biyectiva f : A −→ B.
Las observaciones anteriores muestran que si A es un conjunto de nelementos, la cardinalidad de Am es precisamente el numero ORm
n . Esto sesigue ya que hay una correspondencia biunıvoca entre las ordenaciones conrepeticion de A tomadas de m en m con los elementos de Am.
Si A = {a1, ..., an}, esta correspondencia esta dada por(1 2 · · · mai1 ai2 · · · aim
)←→
(ai1 , ai2 , ..., aim
),
aij ∈ A ∀ j.
2.8. Ordenaciones (version formal)
Definicion 31 Dado A un conjunto de n elementos y m ≤ n, las or-denaciones de los elementos de A tomadas de m en m son las funcionesinyectivas del conjunto Im en A.
Observemos que la inyectividad es la condicion que establece que nohaya repeticiones. Como ejemplo, consideremos las ordenaciones del conjuntoA = {a, b, c, d, e}, tomadas de tres en tres. Estas se pueden pensar tambiencomo palabras con 3 letras distintas.
Un metodo para encontrarlas es considerar, por ejemplo, la funcion in-yectiva f : I2 −→ A dado por (
1 2a e
).
Ahora la pregunta relevante es ¿Cuantas funciones inyectivas hay de I3en A que extiendan a f? Estas son(
1 2 3a e x
),
donde x = b, c, d, es decir hay 5-2 funciones. Se concluye que por cada
funcion inyectiva de I2 en A hay 3 de I3 en A.

44 2.8. Ordenaciones (version formal)
Teorema 2.8.1 Sean n,m ∈ N, m ≤ n, entonces
Omn =
n!
(n−m)!.
Demostracion. Induccion sobre m. Sea A un conjunto de n elementos.En el caso m = 1, es evidente que hay n funciones inyectivas de I1 en Ay se sigue que
O1n =
n!
(n− 1)!.
Suponemos cierta la formula para m− 1
Om−1n =
n!
(n− (m− 1))!.
El ejemplo anterior ilustra el paso inductivo. Dada cualquier funcion in-yectiva f de Im−1 en A, f se puede extender a n − (m − 1) funcionesinyectivas de Im en A, ya que al elemento m se le puede asociar cualquierelemento que no sea la imagen de 1, 2, ...,m− 1 (por la inyectividad).
En consecuencia
Omn = (n− (m− 1))Om−1
n = (n− (m− 1))n!
(n− (m− 1))!
= (n−m+ 1)n!
(n−m+ 1)!=
n!
(n−m)!
�La formula en el Teorema 2.7.1 resuelve el siguiente problema ¿Cuantas
placas de automovil hay que consten de 3 letras y 2 cifras?Considerando 27 letras en el alfabeto, placas de 3 letras hay OR3
27 = 273,y de 2 cifras hay OR2
10 = 102, por cada ordenacion (con repeticion) en laprimera lista, esto es, la de las letras, se puede generar OR2
10 placas distintas,lo cual muestra el caracter multiplicativo y es claro que el numero total deplacas es
OR327 OR2
10 = 273 · 102
Ejemplos
1. ¿Cuantos numeros telefonicos de 6 cifras hay que comiencen con 5, 7, 2, 6o 8?
De 5 cifras hay OR510 = 105, considerando la 1a cifra se tienen 5 · 105.

2. Calculo combinatorio 45
2. ¿Cuantas placas de automovil hay que consten de 2 letras y 3 cifras, sila primera letra es K y la segunda una letra de la A a la D?
4× 103.
3. ¿Cuantas placas de 7 cifras distintas pueden formarse si la 1a, la 2a yla 5a son cifras pares?
Las posibilidades de ordenaciones tomadas de 3 en 3 con cifras pares sonO3
5 (lugares 1, 2 y 5). Fijando cualquiera de ellas, las posibilidades deordenaciones que existen son O4
7 (puesto que 3 numeros, ya aparecenen los lugares 1,2 y 5) ∴ el numero total es O3
5 O47.
EJERCICIOS 2.8
1. Sean B = {x, y, z} y f : I3 −→ B tal que manda 1 y 2 en x y 3 en y,¿Cuantas extensiones hay de f a I5?2. ¿Cuantos numeros telefonicos hay con tres numeros, no necesariamentedistintos, si exactamente dos de ellos son impares?3. ¿Cuantas placas de automovil hay de tres cifras y cuatro letras, si las cifrasson distintas?4. ¿Cuantas cifras de cuatro dıgitos distintos hay, si exactamente dos de ellosson impares?5. ¿Cuantas placas de cuatro numeros hay, que tengan al menos dos numerosiguales?
2.9. Permutaciones (version formal)
Definicion 32 Las permutaciones de un conjunto A son las funciones biyec-tivas de A en A.
Se demostro que si A es finito y f : A −→ A es inyectiva, entonces fes biyectiva.
Sean A = {a1, a2, .., an} y f : A −→ A una permutacion, entonces sepuede identificar a f con la ordenacion g : In −→ A dada por
g =
(1 2 · · · n
f(a1) f(a2) · · · f(an)
),
y viceversa dada cualquier funcion inyectiva de In en A se le puede asociaruna unica permutacion de A.

46 2.10. Combinaciones y coeficientes binomiales
Por ejemplo, si A = {a, b, c}, las seis permutaciones de A son :
(a b ca b c
)(a b ca c b
)(a b cb a c
)(a b cb c a
)(a b cc a b
)(a b cc b a
)que se pueden indentificar con las ordenaciones
(1 2 3a b c
)(1 2 3a c b
)(1 2 3b a c
)(1 2 3b c a
)(1 2 3c a b
)(1 2 3c b a
).
Dada esta correspondencia biunıvoca se sigue del Teorema 2.8.1 que
Pn = Onn =
n!
(n− n)!= n!.
2.10. Combinaciones y coeficientes binomiales
Recordamos la definicion de combinacion.
Definicion 33 Sea A un conjunto de n elementos, y 0 ≤ m ≤ n, a lossubconjuntos de A que tienen m elementos se les llama combinaciones deA tomadas de m en m. El numero de estas se denota por Cm
n .
Probaremos ahora que Cmn es precisamente el coeficiente binomial n!
(n−m)!m!,
lo cual justifica el uso doble de este sımbolo.
Teorema 2.10.1 Sea A un conjunto de n elementos, entonces
Cmn Pm = Om
n .
Demostracion. Sea S el conjunto de las ordenaciones de los elementosde A tomados de m en m y T el conjunto de las combinaciones de loselementos de A tomados de m enm. Observese que #S = Om
n y #T = Cmn .
Sea ψ : S −→ T dada por
ψ
[(1 2 · · · ma1 a2 · · · am
)]= {a1, a2, ..., am},
donde aj ∈ A ∀ j y ai 6= aj si i 6= j, esencialmente la funcion ψ“olvida” el orden. Claramente ψ es suprayectiva, ya que dados m elementos

2. Calculo combinatorio 47
distintos en A se puede contruir una funcion inyectiva de Im en A cuyasimagenes sean estos elementos.
Ademas existen exactamente Pm ordenaciones a las que se les asocia lamisma combinacion. En consecuencia
Cmn Pm = Om
n .
�Observese que el teorema anterior establece que
Cmn =
Omn
Pm
=n!
(n−m)!m!.
Un ejemplo que ilustra la ultima parte de la prueba del teorema anteriores el siguiente.
Sea A = {a, b, c, ..., z} y consideramos las ordenaciones asociadas a lacombinacion {a, b, c}, estas son:(
1 2 3a b c
)(1 2 3a c b
)(1 2 3b a c
)(1 2 3b c a
)(1 2 3c a b
)(1 2 3c b a
).
A los numeros Cmn se les llama coeficientes binomiales ya que aparecen
en el desarrollo del binomio de Newton.
(a+ b)n = Con a
n + C1n a
n−1 b1 + · · · + Cnn b
n
Observese que Con = 1, ya que el numero de subconjuntos que no tienen
elementos del conjunto A = {a1, a2, ..., an} es uno, el vacıo.
Teorema 2.10.2 Sean m,n, enteros no negativos, m ≤ n, entonces
Cmn = Cn−m
n .
Demostracion. Sea A un conjunto de n elementos, S las combinacionesde A tomadas de m en m y T las combinaciones de A tomadas de n−men n−m.
Definimos una funcion ψ : S −→ T de la siguiente manera: a cadacombinacion {a1, a2, ..., am} en S se le asocia A − {a1, a2, ..., am} en T,i.e., su complemento.
Esta funcion ψ es claramente inyectiva, ya que 2 subconjuntos distintosde A tienen complementos distintos. Tambien es suprayectiva, ya que siB ⊂ A, entonces ψ(Bc) = B.

48 2.10. Combinaciones y coeficientes binomiales
Por lo tanto, ψ es biyectiva y se sigue el teorema
#S = #T, i.e., Cmn = Cn−m
n .
�Otra prueba mas simple del teorema anterior, pero menos ilustrativa, es
la siguienten!
(n−m)! m!=
n!
(n− (n−m))! (n−m)!.
Definicion 34 Sea B un subconjunto de A. Se define la siguiente funcionfB : A −→ {0, 1}, llamada caracterıstica, como sigue
fB(x) =
{1 si x ∈ B,0 si x 6∈ B.
Observese que la asociacion
B −→ fB
es una biyeccion entre los subconjuntos de A y las funciones caracterısticasdefinidas en A, i.e. las funciones de A en {0, 1}. Si B1 6= B2, es claro quefB1 6= fB2 . Mas aun, dada una funcion caracterıstica g : A −→ {0, 1},esta viene del subconjunto que la define, i.e., si g−1(1) = B, se sigue queg = fB.
Teorema 2.10.3 Sea n un numero natural, entonces
C0n + C1
n + · · · + Cnn = 2n.
Demostracion. Observese que el miembro izquierdo es el numero total desubconjuntos de un conjunto A de n elementos, por lo que se sigue de laobservacion anterior que es el numero de funciones de A en {0, 1}. Se afirmaque este numero es 2n, esto se puede probar por induccion sobre n. Si Atiene un elemento hay 2 funciones de A en {0, 1}.
Suponiendo cierta la afirmacion para n−1, i.e., si A = {a1, a2, ..., an−1}hay 2n−1 funciones de A en {0, 1}. Se sigue entonces que cada una de estasfunciones tiene dos extensiones a funciones de {a1, a2, ..., an} en {0, 1}, alelemento an se le puede asignar el 0, o el 1 .
�

2. Calculo combinatorio 49
Otra demostracion mas breve se sigue del teorema del binomio
(1 + 1)n =n∑
j=0
Cjn.
Terminamos esta seccion con una segunda demostracion de la formula deltriangulo de Pascal
Cr−1n + Cr
n = Crn+1.
Sea A = {1, 2, ..., n+ 1}. Los subconjuntos de A con r elementos (queson un total de Cr
n+1) son de 2 tipos:
a) los que no contienen al elemento n+ 1, de estos hay Crn,
b) los que contienen al elemento n+1, estos quedan determinados por lossubconjuntos de {1, 2, ..., n} que contienen r − 1 elementos, de estoshay Cr−1
n .
En consecuencia, se sigue la formula de Pascal.
1
11
1
11
1
2
3 3
4 46
55 10 10
1
1
1
1
C0
0
C0
4C1
4C2
4C3
4C4
4
C0
3
C0
2
C0
1
C1
2C2
2
C1
1
C1
3C2
3C3
3
Figura 2.8: Triangulo de Pascal
El domino consta de 28 fichas cada una con dos lados, cada lado es blanco,o tiene 1, 2, 3, 4, 5 o 6 puntos, por ejemplo,
,
1 3 0 6
Figura 2.9: Ejemplo de fichas de domino
Veamos por que son 28 fichas. En efecto, una ficha se puede pensar comouna ordenacion con repeticion de 2 lugares con 7 sımbolos: blanco, o
, , · · · , ,

50 2.10. Combinaciones y coeficientes binomiales
i.e., son 72, sin embargo las que no son dobles se repiten, por ejemplo,
=
.
Por lo que el numero de fichas es
49− 7
2+ 7 = 21 + 7 = 28.
Ejemplos
1. De un grupo de 20 personas debe elegirse un comite de 5 miembrosen el que debe estar Juan o Pedro, pero no ambos ¿Cuantos comitespueden ser electos?
Excluyendo a Juan y a Pedro, hay C418 maneras de elegir los otros 4
miembros, i.e., hay 2 · C428 maneras.
2. En la baraja simplificada: 3 numeros y 2 palos ¿Cuantas manos de 3cartas hay que no tengan 2 cartas del mismo numero?
El numero es: manos posibles − manos con un par. Ahora, hay C36
manos posibles. Por otro lado, las manos con un par se obtienen alelegir un numero entre 3, i.e., hay C1
3 maneras, la 3a, carta se puedeelegir de 4 maneras distintas. Por lo que el numero total es
C36 − 3 · 4 =
6!
3!3!− 3 · 4 = 5 · 4 − 3 · 4 = 8.
3. El domino consta de 28 fichas, una mano de domino consta de 7 fichas¿Cuantas manos de domino hay?
El numero de manos son C728.
4. Sea A un conjunto con n elementos, n ≥ 5 y x0 un elemento de A¿Cuantos subconjuntos de A hay con 5 elementos, tales que contenganal elemento x0?
El numero es C4n−1, ya que hay que seleccionar en un conjunto de n−1
elementos 4 elementos.
5. ¿Cuantas manos de Poker hay que no tengan dos cartas del mismonumero?

2. Calculo combinatorio 51
Se selecciona primero los 5 numeros distintos, estos son tantos comoC5
13. Ahora dados 5 numeros distintos, las posibilidades para los pa-los son las ordenaciones con repeticion de un conjunto de 4 elementos{�, , ♣, ♠} tomados de 5 en 5. Fijando, por ejemplo 7,8,9,Q,K lasposibles manos con estos numeros corresponden a las palos distintos,funciones de I5 en {�, , ♣, ♠}. Por lo tanto hay C5
13·OR54 = 13!
5!8!·45.
6. ¿Cuantas manos de Poker hay que tengan exactamente un par?
Elegir un par es elegir un numero de 13, i.e., C113, ahora hay 4 palos y
se deben tomar 2 de 4 i.e., C24 . Fijando este par se piensa cuantas
formas hay de elegir las otras 3 cartas, para esto hay C312 maneras
de elegir 3 numeros distintos (13 - 1 = 12), y para los palos, siguiendola tecnica del ejemplo 5, hay OR3
4 maneras de elegir los palos. Por lotanto el numero total es
C113C
24C
312OR
34 = 13 · 4!
2!2!· 12!
9!3!· 43 = 13 · 12 · 11 · 10 · 43.
7. ¿Cuantas manos de Poker hay que tengan 2 pares distintos, que no seafull? (es decir una tercia y un par).
Hay C213 maneras de elegir 2 numeros distintos de 13, como en el ejem-
plo anterior hay C24 maneras de elegir 2 palos para un par y C2
4 parael otro. Finalmente hay 44 = 52 - 8 maneras de elegir la 5a carta, porlo que el numero de manos es
44(C24)2C2
13 = 44 · 4!
2!2!· 4!
2!2!· 13!
11!2!= 22 · 36 · 13 · 12.
8. ¿Cuantas manos de Poker hay que tengan al menos 3 cartas del mismonumero?
Calculamos independientemente el numero de tercias y de poker (4cartas iguales). Hay 13 maneras de elegir un numero, C3
4 = C14 maneras
de elegir 3 palos de 4, y C248 maneras de elegir las 2 cartas restantes
(de 2 numeros distintos a la tercia), i.e., el numero de tercias es
13 · 4 · 48!
46!2!= 13 · 2 · 48 · 47.
El numero de manos poker es 13 · 48 por lo que el numero total es
13 · 2 · 48 · 47 + 13 · 48 = 13 · 48 · 95.

52 2.10. Combinaciones y coeficientes binomiales
9. ¿Cuantas diagonales se pueden trazar en un polıgono regular de n la-dos?
Por cada 2 vertices se puede trazar una diagonal, sin embargo el seg-mento de recta que une un vertice con su adyacente no es diagonal
∴ el numero es
C2n − n =
n!
(n− 2)!2!− n =
n(n− 1)
2− n = n
(n
2− 3
2
)=n(n− 3)
2.
10. ¿Cuantas manos de domino hay que tengan exactamente 4 fichas dobles?
C47 son las posibilidades de elegir 4 numeros de 7 (fichas dobles), habi-
endo elegido las 4 dobles las 3 restantes se pueden elegir entre 21 (lasotras 3 dobles se excluyen).
∴ la respuesta es C47 C
321.
11. ¿Cuantas manos de domino hay que tengan por lo menos 3 fichasdobles?
Exactamente 3 dobles C37 C4
21, exactamente 4 hay C47 C3
21, etcetera,por lo que el total es
C37 C
421 + C4
7 C321 + C5
7 C221 + C6
7 C121 + 1.
EJERCICIOS 2.101. ¿De cuantas maneras se pueden distribuir 4 libros distintos entre 2 estu-diantes?2. ¿Cuantas manos de Poker hay que tengan full, i.e, tercia y par?3. ¿Cuantas manos de Poker hay que tengan flor (todos los numeros delmismo palo)?4. ¿Cuantas manos de Poker hay que tengan flor imperial, i.e., todas lascartas del mismo palo, y los numeros cıclicamente consecutivos?5. ¿Cuantos numeros telefonicos con cuatro cifras, no necesariamente distin-tas, hay, si exactamente dos de ellas son impares?

Capıtulo 3
El espacio vectorial Rn
3.1. Vectores y sus operaciones
Definicion 35 El producto cartesiano R × R es el conjunto de parejas or-denadas (a, b), a ∈ R, b ∈ R, se le designa como R2 y se le identifica conlos puntos del plano.
(3, 2)
Figura 3.1: Puntos del plano cartesiano
A los elementos del plano o puntos de R2 se les llama vectores y a losnumeros reales se les llama escalares. Por ejemplo, el vector (3, 2) es el puntodescrito en la Figura 3.1. Se definen las siguientes operaciones en R2.
1) SUMA DE VECTORES
(a, b) + (c, d) = (a+ c, b+ d) ∀ (a, b), (c, d) ∈ R2.
2) PRODUCTO DE UN ESCALAR POR UN VECTOR
λ(a, b) = (λ a, λ b) ∀ λ ∈ R y ∀ (a, b) ∈ R2.
53

54 3.1. Vectores y sus operaciones
Si (a, b) es un vector, a la primera coordenada a se le llama abcisa y ala segunda coordenada b se la llama ordenada.
Ejemplos
(−1, 2) + (1, 2) = (0, 4),
(a, 0) + (0, b) = (a, b),
3(1, 2) = (3, 6),
b(0, 1) = (0, b).
Observese que (a, b) = a(1, 0) + b(0, 1). Exhibimos ahora una inter-pretacion geometrica de la adicion, para esto recordamos 2 hechos de lageometrıa elemental.
m
m1m1
m2
m2
α
α
A B
C
D
Figura 3.2: Un cuadrilatero cuyas diagonales se encuentran en su punto medioes un paralelogramo
I. Si las diagonales de un cuadrilatero se intersecan en su punto medio,entonces es un paralelogramo.
Para probar este hecho, notese primero que el triangulo 4AmC esigual al triangulo 4DmB y tambien que4AmD = 4C mB. Estose sigue ya que tienen un lado comun delimitado por lados iguales. Porconsiguiente, los angulos δ, que aparecen en la Figura 3.3, son iguales.Lo cual implica que AC es paralela a BD, y que AD tambien lo esa CB. De otra manera, por ejemplo, se toma la paralela a AC quepasa por D, y al considerar angulos alternos internos, se llega a unacontradiccion.

3. El espacio vectorial Rn 55
m
m1
m1
m2
m2
A B
C
D
δ
δ
m
m1
m1
m2
m2
A B
C
D
δ
δ
Figura 3.3: Prueba de la afirmacion I
a
a
Figura 3.4: En un paralelogramo las diagonales se intersectanen el punto medio
Observese que tambien es cierto el recıproco, en un paralelogramolas diagonales se intersecan en su punto medio. Esto se sigue, ya quelos 4 triangulos que se generan son iguales, dos a dos, al ser semejantesy tener un lado comun, vease la Figura 3.4.
II. Si A1 = (x1, y1) y A2 = (x2, y2) son 2 puntos del plano, entonces el
punto medio del segmento A1A2 esta dado por
m =
(x1 + x2
2,y1 + y2
2
).
Por semejanza, en los trıangulos descritos en la Figura 3.5, se sigue que
y2 − y1
y2 − m2
= 2, i.e., y2 − y1 = 2 (y2 − m2),
donde m = (m1,m2). En consecuencia, 2m2 = y1 + y2. Un argumentosimilar prueba que tambien 2m1 = x1 + x2.

56 3.1. Vectores y sus operaciones
m = (m1, m2)
A2 = (x2, y2)
A1 = (x1, y1)
l l1
l
l1= 2
Figura 3.5: Punto medio de un segmento
INTERPRETACION GEOMETRICA DE LA ADICION DE VECTORES
Dados vectores P = (a, b), Q = (c, d), el cuadrilatero formado por losvectores O, P, Q y P +Q es un paralelogramo.
Esto se sigue, ya que si
P + Q = R = (a+ c, b+ d),
los puntos medios de OR y de PQ son iguales, ya que estos estan dadospor (
a + c + 0
2,b + d + 0
2
)y
(a + c
2,b + d
2
),
respectivamente, vease la Figura 3.6. Observese que la suma de los vectores,P + Q es el vector determinado por la diagonal desde el origen a P + Q,por lo que se le llama la resultante.
P
O
Q
R = P + Q
Figura 3.6: Interpretacion geometrica de la adicion

3. El espacio vectorial Rn 57
P
O
QP + Q
Figura 3.7: La resultante
INTERPRETACION GEOMETRICA DEL PRODUCTO ESCALAR POR UN VECTOR
Probamos primero un resultado. Recordamos que dados 2 puntos P = (x1, y1)y Q = (x2, y2), se define su distancia como
d(P,Q) =√
(x2−x1)2 + (y2− y1)2.
La motivacion para esta definicion es, por supuesto, el teorema de Pitagoras.
P
Q
y2 − y1
x2 − x1
Figura 3.8: Distancia entre 2 puntos
Proposicion 3.1.1 Sean P1, P2, P3 3 puntos del plano tales que P2 ∈ P2P3,entonces
d(P1, P2) + d(P2, P3) = d(P1, P3).
Demostracion. Sean P2 − P1 = (x1, y1) y P3 − P2 = (x2, y2), entonces
d(P1, P2) =√x1
2 + y12 y d(P2, P3) =
√x2
2 + y22.
En virtud de la semejanza de triangulos en la Figura 3.9, se sigue que
y1
x1
=y2
x2
=y1 + y2
x1 + x2
= λ.

58 3.1. Vectores y sus operaciones
En consecuencia, se sigue el resultado, i.e.√x1
2 + y12 +
√x2
2 + y22 =
√(x1 + x2)2 + (y1 + y2)2,
ya que este es equivalente a la ecuacion
x1
√1 + λ2 + x2
√1 + λ2 = (x1 + x2)
√1 + λ2.
�
x1 x2
y2
y1
P3
P2
P1
Figura 3.9: Proporcionalidad de las distancias en 3 puntos alineados
El recıproco tambien es cierto como se muestra en el siguiente resultado.
Proposicion 3.1.2 Si se cumple
d(P1, P2) + d(P2, P3) = d(P1, P3), (3.1)
entonces P2 ∈ P1P3.
P3
P2
P1
Figura 3.10: Prueba de la Proposicion 3.1.2
Demostracion. Si P2 /∈ P1P3 probamos que no se cumple la igualdad(3.1)
Si P2 esta en la misma lınea que P1 y P3 y P2 /∈ P1P3, por ejemplo,P3 /∈ P1P2. No se puede cumplir (3.1), ya que en virtud de la Proposicion3.1.1 se sigue d(P1, P3) < d(P1, P2), vease la Figura 3.10. El otro caso esanalogo.

3. El espacio vectorial Rn 59
P3
P2
P1
P′
2 P3
P2
P1
P′
2
Figura 3.11: Prueba de la Proposicion 3.1.2
Si P2 no esta en la recta determinada por el segmento P1P3, se tienenotros dos casos, como se muestra en la Figura 3.11.
En el primer caso de la figura se cumple la igualdad para P ′2, y por lo
tanto no se cumple para P2 (por el teorema de Pitagoras). En el segundocaso de la figura tampoco, ya que d(P1, P2) > d(P1, P
′2) > d(P1, P3). Un
argumento similar muestra tambien que no se cumple la igualdad, si P2 seproyecta del lado de P1. �
Proposicion 3.1.3 (Interpretacion geometrica del producto de un escalarpor un vector) Sean P 6= O y Q = λP, puntos del plano, donde O = (0, 0)y λ ∈ R, entonces
a) si λ ≥ 1, P esta en el segmento OQ,
b) si 0 ≤ λ ≤ 1, Q ∈ OP,
c) si λ ≤ 0, O ∈ PQ.
P
Q = λP P
P
λP
λP
a) b) c)
O
λ > 1 0 < λ < 1 λ < 0
Figura 3.12: 3 casos de la Proposicion 3.1.3

60 3.2. Rn
Demostracion. Sean P = (a, b) y |P | = d(O,P ) i.e. |P | =√a2 + b2,
entoncesd(O, λP ) =
√(λa)2 + (λb)2 = |λ||P |,
y tambien
d(P,Q) =√
(a− λa)2 + (b− λb)2 = |1− λ||P |.Consideramos casos.
Caso 1: λ ≥ 1. Se tiene
d(O,P ) + d(P,Q) = |P |+ (λ− 1)|P | = λP = |λ||P | = d(O,Q),
ya que λ ≥ 1, y por lo tanto P ∈ OQ (por la Proposicion 3.1.2).
Caso 2: 0 ≤ λ ≤ 1. Se tiene
d(O,Q) + d(Q,P ) = λ|P |+ (1− λ)|P | = |P | = d(O,P )
y Q ∈ OP.Caso 3: λ ≤ 0. Se tiene
d(Q,O) + d(O,P ) = −λ|P |+ |P | = (1− λ)|P | = |1− λ||P | = d(P,Q)
∴ O ∈ QP.�
3.2. Rn
Definicion 36 El espacio vectorial Rn es el conjunto de todas las colec-ciones ordenadas de n numeros reales (a1, a2, ..., an), i.e.,
Rn = {(a1, a2, ..., an) | ai ∈ R ∀i ∈ {1, 2, ..., n}}.Se tienen 2 operaciones:
SUMA
(a1, a2, ..., an) + (b1, b2, ..., bn) = (a1 + b1, a2 + b2, ..., an + bn).
PRODUCTO POR ESCALARES
λ(a1, a2, ..., an) = (λa1, λa2, ..., λan).
A los elementos (a1, a2, ..., an) se les llama vectores, a los numeros realesse les llama escalares.

3. El espacio vectorial Rn 61
PROPIEDADES
1. Conmutatividad
A+B = B + A ∀ A,B ∈ Rn.
2. Asociatividad
(A+B) + C = A+ (B + C) ∀A,B,C ∈ Rn.
3. Existencia del neutro aditivo
A+ 0 = A ∀A ∈ Rn donde 0 = (0, 0, ..., 0).
4. Existencia del inverso aditivo
∀A ∈ Rn existe B ∈ Rn �
A+B = 0, si A = (a1, a2, ..., an), B = (−a1,−a2, ...,−an),
el inverso aditivo B se denota por −AEstas cuatro propiedades se derivan de las mismas leyes para los
numeros reales, por ejemplo,
(a1, a2, a3) + (b1, b2, b3) = (a1 + b1, a2 + b2, a3 + b3)
= (b1 + a1, b2 + a2, b3 + a3)
= (b1, b2, b3) + (a1, a2, a3).
5. Si A ∈ Rn y λ, µ ∈ R, entonces λ(µA) = (λµ)A.
Demostracion. Sea A = (a1, a2, ..., an), entonces
λ(µA) = λ(µa1, ..., µan) = (λµa1, ..., λµan) = (λµ)A.
6. Si A,B ∈ Rn y λ ∈ R, entonces λ(A+B) = λA+ λB.
Demostracion. Sean A = (a1, a2, ..., an) y B = (b1, b2, ..., bn)
λ(A+B) = λ[(a1, ..., an) + (b1, ..., bn)]
= (λ(a1 + b1), ..., λ(an + bn))
= (λa1 + λb1, ..., λan + λbn)
= λA+ λB.

62 3.3. Rn
7. Si A,B ∈ Rn, y λ, µ ∈ R, entonces (λ+ µ)A = λA+ µA.
Demostracion.
(λ+ µ)A = (λ+ µ)[(a1, ..., an)]
= ((λ+ µ)a1, ..., (λ+ µ)an)
= (λa1 + µa1, ..., λan + µan)
= λA+ µA.
8. Se tiene que 1 · A = A ∀A ∈ Rn.
Demostracion. 1 (a1, ..., an) = (1 · a1, ..., 1 · an) = (a1, ..., an) = A.
Definicion 37 Un conjunto que satisface las propiedades 1 a 8 se le llamaespacio vectorial sobre los reales.
Notese que en Rn, tambien se cumple que −A = (−1)A, ya que
(−1)A = (−1)(a1, ..., an) = ((−1) · a1, ..., (−1) · an)) = (−a1, ...,−an) = −A.
Tambien, como 0[(a1, ..., an)] = (0 · a1, ..., 0 · an) = 0, en Rn se cumple que0 · A = 0 ∀A ∈ Rn.
Finalmente, notese que si λA = 0, entonces λ = 0 o A = 0, dondeλ ∈ R y A ∈ Rn.
Esto se sigue, ya que si λ 6= 0, como λA = (λa1, ..., λan) = 0, se sigueque λ ai = 0 ∀ i, por lo que λ−1 λ ai = λ−1 0 = 0, y ai = 0 ∀ i.
De manera analoga se pueden definir espacios vectoriales sobre otros cam-pos, por ejemplo
Cn = C × · · · × C︸ ︷︷ ︸n−veces
es un espacio vectorial sobre C o
Qn = Q × · · · × Q︸ ︷︷ ︸n−veces
lo es sobre Q.

3. El espacio vectorial Rn 63
3.3. Subespacios vectoriales
Definicion 38 Sea W ⊂ Rn, se dice que W es un subespacio vectorial deRn, si se cumplen las siguientes propiedades
a) 0 ∈ W,
b) ∀A,B ∈ W, se tiene A+B ∈ W,
c) ∀A ∈ W y λ ∈ R, se tiene λA ∈ W.
Ejemplos
1. Sea W = {(x, y) ∈ R2 |x = 0}, i.e. W es el eje de las ordenadas enR2. Entonces W es un subespacio vectorial, ya que
a) 0 ∈ W,b) si A, B ∈ W , entonces A = (0, y1) y B = (0, y2), por lo
que A+B = (0, y1 + y2) ∈ W,c) si A ∈ W y λ ∈ R, entonces A = (0, y) y λA = (0, λy) ∈ W.
2. Sea W = {(x, y) ∈ R2 | (x, y) = λ(x0, y0), λ ∈ R}, donde (x0, y0) ∈ R2
es un vector fijo, entonces W es un subespacio vectorial de R2:
a) 0 = 0(x0, y0) ∴ 0 ∈ W,b) si A1, A2 ∈ W , entonces A1 = λ1(x0, y0) y A2 = λ2(x0, y0)
∴ A1 + A2 = (λ1x0 + λ2x0, λ1y0 + λ2y0) = (λ1 + λ2)(x0, y0) ∈ W,c) si A ∈ W y µ ∈ R, entonces A = λ(x0, y0)
∴ µA = µ[λ(x0, y0)] = (µλ)(x0, y0) ∈ W.
W
(x0, y0)
Figura 3.13: La recta W = {(x, y) ∈ R2 | (x, y) = λ(x0, y0), λ ∈ R} es unsubespacio vectorial de R2

64 3.3. Subespacios vectoriales
3. Sea W = {(x1, x2, x3) ∈ R3 |x1 = 0 = x2}, entonces W es unsubespacio vectorial de R3:
a) 0 ∈ W,
b) si (0, 0, x3) ∈ W y (0, 0, x′3) ∈ W, se tiene (0, 0, x3 + x′3) ∈ W,
c) si (0, 0, x3) ∈ W, entonces λ(0, 0, x3) = (0, 0, λx3) ∈ W.
W
Figura 3.14: La rectaW = {(x1, x2, x3) ∈ R3 |x1 = 0 = x2} es un subespaciovectorial de R3
4. El plano W = {(x1, x2, x3) ∈ R3 |x3 = 0}, es un subespacio vectorialde R3; ya que 0 ∈ W, (x1, x2, 0)+(x′1, x
′2, 0) = (x1+x
′1, x2+x
′2, 0) ∈ W
y λ(x1, x2, o) = (λx1, λx2, 0) ∈ W.
W
Figura 3.15: El plano W = {(x1, x2, x3) ∈ R3 |x3 = 0} es un subespaciovectorial de R3

3. El espacio vectorial Rn 65
5. Sean A,B ∈ R3 y W = {x ∈ R3 |x = λA + λB, λ, µ ∈ R}, en-tonces W es un subespacio vectorial. Observese que W es el plano“generado” por A y B, vease la Figura 3.16. Esto se sigue, ya que secumplen las 3 condiciones:
a) 0 = 0 · A+ 0 ·B ∴ 0 ∈ W,b) si x1 ∈ W y x2 ∈ W, x1 = λ1A + µ1B y x2 = λ2A + µ2B,
entonces
x1 +x2 = λ1A+µ1B+λ2A+µ2B = (λ1 +λ2)A+(µ1 +µ2)B ∈ W,
c) si x ∈ W y t ∈ R, x = λA+µB, entonces se tiene que
t x = t (λA+ µB) = (t λ)A+ (t λ)B ∈ W.
W
A
B
Figura 3.16: El plano por el origen W en R3 dado por la siguiente ecuacion{x ∈ R3 |x = λA+ λB, λ, µ ∈ R} es un subespacio vectorial
6. 0 es un subespacio vectorial Rn:
0 + 0 = 0 y λ 0 = 0 ∀λ ∈ R.
Recordamos que el producto punto de dos vectores en R3, esta definidopor
(x1, y1, z1) · (x2, y2, z2) = x1 x2 + y1 y2 + z1 z2.
Analogamente, se define en R2 (o en Rn). Este producto determina la per-pendicularidad u ortogonalidad, como se muestra a continuacion.
Definicion 39 Los vectores A y B en R2 (o R3) son ortogonales o per-pendiculares, si |A − B| = |A + B|, i.e., las magnitudes de sus diagonalesson iguales.

66 3.3. Subespacios vectoriales
Teorema 3.3.1 Dos vectores A y B en R2 (o R3) son perpendiculares siy solo si A ·B = 0.
Demostracion. |A+B|2 − |A−B|2 = 4 A ·B.�
A
B
A + B
A−B
Figura 3.17: Dos vectores son perpendiculares si y solo sisus diagonales miden lo mismo
Ahora, si se tienen dos vectores A,B ∈ R3 de longitud unitaria, como enla Figura 3.18. Aplicando el Teorema 3.3.1, se sigue que el vector A − tBes perpendicular al vector B si y solo si (A− tB) ·B = 0. Esta condicion esequivalente a su vez a que A ·B = t. Por otra parte, dicha ortogonalidad setiene si t = cos θ, vease la Figura 3.18. En consecuencia
A ·B = cos θ,
por supuesto, A ·B = 0⇐⇒ θ = π/2.
A
B
t
θ θ
cos θ
1A− tB
Figura 3.18: Si |A| = 1 , |B| = 1 , t = cos θ,entonces A − t B es perpendicular a B.
Ahora, la ecuacion de un plano en R3 esta dada por
(P − P0) · n = 0,
es decir,[(x, y, z)− (x0, y0, z0)] · (n1, n2, n3) = 0,

3. El espacio vectorial Rn 67
donde n = (n1, n2, n3) es una normal al plano y P0 = (x0, y0, z0) es unpunto del plano. Dicho de otra manera, la ecuacion general de un plano enR3 esta dada por
ax+ by + cz = d.
n
P0
P
Figura 3.19: Ecuacion general de un plano P en R3
p · n =constante, donde n es la normal y p ∈ P
Otros ejemplos
1. Probamos que W = {(x, y) ∈ R2 | 2x − 3y = 0} es un subespaciovectorial de R2:
a) 2 · 0− 3 · 0 = 0 ∴ 0 ∈ W,
b) si (x1, y1) y (x2, y2) ∈ W, se tiene 2x1 − 3x2 = 0 y 2x2 − 3y2 = 0∴ 2(x1 + x2)− 3(y1 + y2) = 0 ∴ (x1 + x2, y1 + y2) ∈ W,
c) si (x, y) ∈ W y λ ∈ R, 2x − 3y = 0 ∴ 2λx − 3λ y = 0∴ (λx, λ y) ∈ W.
Wy =
2
3x
Figura 3.20: La recta W = {(x, y) ∈ R2 | 2x − 3y = 0} es un subespaciovectorial

68 3.4. Subespacios vectoriales
2. Probamos que
W = {(x, y, z) ∈ R3 | 2x+ y + z = 0, 3x− 5y + z = 0}
es un subespacio vectorial en R3. Notese que W es la interseccion de2 planos distintos, por lo que es una recta. Como la interseccion desubespacios vectoriales es un subespacio vectorial, basta probar que
W1 = {(x, y, z) ∈ R3 | 2x+ y + z = 0}
y
W2 = {(x, y, z) ∈ R3 | 3x− 5y + z = 0}
lo son. Probamos que W1 es un subespacio vectorial la prueba paraW2 es analoga.
a) Como 2 · 0 + 0 + 0 = 0, 0 ∈ W1,
b) si
2x1 + y1 + z1 = 0,2x2 + y2 + z2 = 0
entonces
2(x1 + x2) + (y1 + y2) + (z1 + z2) = 0,
i.e., la suma de vectores en W1 esta en W1,
c) si 2x + y + z = 0 y λ ∈ R, entonces 2λx + λ y + λ z = 0 y(λx, λ y, λ z) ∈ W1.
EJERCICIOS 3.31. Pruebe que un plano en R3 por el origen , i.e., un conjunto de laforma W = {(x, y, z) ∈ R3 | ax+ by+ cz = 0, a, b, c ∈ R} es un subespaciovectorial.2. Pruebe que W = {(x, y, z) ∈ R3 | 3x − 3y + z = 0} es un subespaciovectorial de R3.3. Pruebe que W = {(x1, x2, x3, x4) ∈ R4 | x1 + x2 + x3 + x4 = 0} es unsubespacio vectorial.4. Pruebe que la interseccion de 2 subespacios vectoriales en Rn es unsubespacio vectorial.

3. El espacio vectorial Rn 69
3.4. Combinaciones lineales, dependencia e in-
dependencia lineal
Definicion 40 Sean A1, A2 , ..., An vectores en Rn, se dice que C ∈ Rn
es combinacion lineal de A1, A2 , ..., An, si existen λ1, λ2 , ..., λn ∈ R� C = λ1A1 + λ2A2 + · · ·+ λnAn.
Ejemplos
1. El vector (−4, 5) en R2 es combinacion lineal de A1 = (1, 1) yA2 = (2,−1), ya que (−4, 5) = 2(1, 1) + (−3)(2,−1).
2. En R2, (2, 1) no es combinacion lineal de los vectores (1, 0) y (−2, 0),esto se sigue ya que λ(1, 0) + µ(−2, 0) = (λ− 2µ, 0).
3. En R3 todo vector es combinacion lineal de los vectores (1, 0, 0), (0, 1, 0)y (0, 0, 1):
(x, y, z) = x (1, 0, 0) + y(0, 1, 0) + z(0, 0, 1).
4. En Rn todo vector es combinacion lineal de los vectores canonicose1, e2, ..., en, donde ej = (0, 0, ... , 0, 1, 0,︸ ︷︷ ︸
j-esimo lugar
..., 0):
(x1, x2, ..., xn) = x1e1 + x2e2 + · · · + xnen.
5. Dados vectores A1, A2, ..., Ak, cualquiera de ellos es combinacion linealde los otros, por ejemplo
A1 = 1 · A1 + 0 · A2 + ... + 0 · Ak.
6. 0 es combinacion lineal de cualquier conjunto de vectores A1, A2, ..., Ak :
0 = 0 · A1 + 0 · A2 + · · · + 0 · Ak.
7. Si tanto C como D son combinacion lineal de A1, ..., Ak, entoncesC +D tambien lo es:
C =k∑
i=1
λiAi , D =k∑
i=1
µiAi ∴ C + D =k∑
i=1
(λi + µi)Ai.

70 3.4. Combinaciones lineales, dependencia e independencia lineal
8. En R3 todo vector (x, y, z) es combinacion lineal de (1, 0, 0), (1, 1, 0)y (1, 1, 1).
Para probar este hecho se toma (x, y, z) ∈ R3, se buscan escalaresλ1, λ2, λ3 tales que
(x, y, z) = λ1(1, 0, 0) + λ2(1, 1, 0) + λ3(1, 1, 1)
= (λ1 + λ2 + λ3, λ2 + λ3, λ3)
tomando λ3 = z, se tiene λ2 = y − λ3 = y − z, y x = λ1 + y − z + z,i.e. λ1 = x− y.
9. Se expresa al vector (8,−1) como combinacion lineal de (2, 1) y (3,−1).
Para esto, se buscan λ y µ tales que (8,−1) = λ(2, 1)+µ(3,−1) i.e.{8 = 2λ+ 3µ
−1 = λ− µ⇔
{8 = 2λ+ 3µ
−3 = 3λ− 3µ,
sumando tenemos 5 = 5λ, λ = 1 y µ = 2.
Definicion 41 Dados vectores A1, ..., Ak en Rn, al conjunto de combina-ciones lineales de A1, A2, ..., Ak, es decir,
{λ1A1 + λ2A2 + · · · + λkAk |λi ∈ R,∀i}.
se le llama el subespacio generado por A1, A2, ..., Ak, y se le denota por< A1, A2, ..., Ak > .
Proposicion 3.4.1 Dados vectores A1, ..., Ak, entonces
W =< A1, A2, ..., Ak >
es un subespacio vectorial.
Demostracion. El vector nulo esta en W , ya que 0 = 0 ·A1 + · · ·+0 ·An.Ahora, si λ1A1 + · · ·+ λnAn, µ1A1 + · · ·+ µnAn ∈ W, entonces
(λ1 + µ1)A1 + · · ·+ (λn + µn)An ∈ W,
y si λ ∈ R, se tiene
λλ1A1 + · · ·+ λλnAn ∈ W.
�

3. El espacio vectorial Rn 71
Dependencia lineal
Definicion 42 Se dice que C ∈ Rn depende linealmente de A1, A2, ..., Ak,si C es combinacion lineal de A1, A2, ..., Ak i.e. si existen λ1, λ2, ..., λk ∈R �
C = λ1A1 + λ2A2 + · · · + λkAk.
Observese que C depende linealmente de A1, A2, ... , Ak, si y solo siC ∈< A1, ..., Ak > .
Definicion 43 Se dice que los vectores A1, A2, ..., Ak en Rn son lineal-mente dependientes, si alguno de ellos depende linealmente de los otros.
Por ejemplo, si A = (1, 1, 0), B = (4, 4, 0) y C = (0, 0, 7), entoncesA,B,C son linealmente dependientes, ya que B = 4 · A+ 0 · C.
Observese que cuando se dice que uno de ellos depende linealmente de losotros, no se tiene que necesariamente cada uno de ellos es combinacion linealde los otros, por ejemplo si A,B y C son como arriba, C no es combinacionlineal de A y B.
Teorema 3.4.2 Sean A1, A2, ..., Ak vectores en Rn, entonces estos vectoresson linealmente dependientes si y solo si existe una combinacion lineal deellos igual a 0 con algun coeficiente distinto de 0, i.e.
λ1A1 + λ2A2 + · · · + λkAk = 0
y λj 6= 0 para alguna j ∈ {1, 2, ..., k}.
Demostracion.⇒) Si A1, A2, ..., Ak son linealmente dependientes, alguno de ellos, digamosAj , depende linealmente de los otros, i.e. existen λ1, λ2, ..., λj−1, λj+1, ..., λk ∈R, tales que
Aj =
j−1∑i=1
λiAi +k∑
i=j+1
λiAi,
y por lo tanto
λ1A1 + · · · + λj−1Aj−1 + (−1)Aj + λj+1Aj+1 + · · · + λkAk = 0.

72 3.4. Combinaciones lineales, dependencia e independencia lineal
⇐) Viceversa, si existen λ1, λ2, ..., λk ∈ R � λ1A1 + λ2A2 + · · ·+ λkAk = 0,donde λj 6= 0, entonces despejando se tiene
Aj =
(−λ1
λj
A1
)+ · · ·+
(−λj−1
λj
Aj−1
)+
(−λj+1
λj
Aj+1
)+ · · ·+
(−λk
λj
Ak
).
�
Definicion 44 Se dice que una coleccion de vectores A1, A2, ..., Ak en Rn
son linealmente independientes, si no son linealmente dependientes.
Esta definicion se puede reformular como sigue: A1, A2, ..., Ak son lineal-mente independientes, si ninguno de ellos es combinacion lineal de los otros.
Corolario 3.4.3 Sean A1, A2, ..., Ak vectores en Rn. Entonces, estosvectores son linealmente independientes si y solo si para toda combi-nacion lineal λ1A1 + · · · + λkAk = 0, se tiene que λi = 0 ∀ i.
Demostracion.
⇒) Si A1, A2, ..., Ak son linealmente independientes, entonces no son lineal-mente dependientes. En consecuencia, se sigue del Teorema 3.4.1 que si
λ1A1 + · · · + λk Ak = 0,
necesariamente λi = 0 ∀ i.⇐) Si para toda combinacion lineal λ1A1 + · · · + λkAk = 0, se tiene queλi = 0 ∀ i, se sigue del Teorema 3.4.2 que A1, A2, ..., Ak no pueden serlinealmente dependientes i.e. son linealmente independientes.
�
Por ejemplo, en R2 los vectores (1, 0) y (1, 1) son linealmente indepen-dientes, en efecto si λ(1, 0) + µ(1, 1) = 0, entonces λ + µ = 0 y µ = 0,por lo que λ = 0.
Notese que si un conjunto de vectores {A1, A2, ..., Ak} es linealmentedependiente, entonces cualquier otro conjunto que lo contenga, por ejemplo{A1, A2, . . . , Ak, Ak+1, . . . , As} tambien es linealmente dependiente.
Esto se sigue ya que existen λ1, λ2, . . . , λk ∈ R, alguno distinto de 0,tales que λ1A1 + · · ·+ λkAk = 0, por lo cual se tiene
λ1A1 + · · ·+ λkAk + 0 · Ak+1 + . . .+ 0 · Ak+s = 0.

3. El espacio vectorial Rn 73
Ejemplos
1. Probamos que los vectores D1 = (1, 0, 0), D2 = (1, 1, 0) y D3 = (1, 1, 1)son linealmente independientes en R3:
si λ1D1 + λ2D2 + λ3D3 = 0, entonces
λ1 + λ2 + λ3 = 0,λ2 + λ3 = 0,
λ3 = 0,
y por lo tanto λ1, λ2, λ3 = 0.
2. En Rn, los vectores D1 = (1 , 0 , . . . , 0), D2 = (1 , 1 , 0 , . . . , 0), . . . ,Di = (1, . . . , 1 , 1,︸︷︷︸
i-esima coordenada
0, . . . , 0), . . . , Dn = (1, . . . , 1)
son linealmente independientes:
sin∑
i=1
λiDi = 0,
se tieneλ1 + λ2 + · · · + λn = 0,
...λ2 + · · · + λn = 0,
...λn = 0,
y por lo tanto λ1, λ2, . . . , λn = 0.
3. Probamos que en R2 los vectores (−1, 1) , (2, 3) y (−5, 2) son lineal-mente dependientes:
si λ1(−1, 1) + λ2(2, 3) + λ3(−5, 2) = 0, entonces{−λ1 + 2λ2 − 5λ3 = 0,
λ1 + 3λ2 + 2λ3 = 0,
sumando se tiene 5λ2 − 3λ3 = 0, tomando λ2 = 3 se obtiene λ3 = 5.Sustituyendo estos valores, por ejemplo en la primera ecuacion se tiene−λ1 + 6 − 25 = 0 y λ1 = −19. Se concluye que los vectores sonlinealmente dependientes, ya que −19(−1, 1) + 3(2, 3) + 5(−5, 2) = 0.

74 3.5. Bases
EJERCICIOS 3.41. Demuestre que en R2 todo vector es combinacion lineal de (1, 2) y (0, 1).2. Exprese el vector (3, 4) como combinacion lineal de (1, 2) y (0, 1).3. Dados u1 = (3,−1, 0), u2 = (0, 1, 0) y u3 = (5, 4, 0), exprese el vector u3
como combinacion lineal de los otros dos.4. Probar que en R3 los vectores (2, 0, 0), (1, 3, 0) y (1, 2, 4) son linealmenteindependientes.5. Probar que en R3 los vectores (1, 0,−2), (1, 1, 0), (1, 0, 4) y (1, 1, 1) sonlinealmente dependientes.
3.5. Bases
Definicion 45 Un conjunto {A1, A2, ..., Ar} de vectores en Rn se llamabase del subespacio vectorial W ⊂ Rn, si
a) {A1, A2, ..., Ar} son linealmente independientes,
b) < A1, A2, ..., Ar >= W, i.e. A1, A2, ..., Ar generan W .
Ejemplos
1. Si e1 = (1, 0) y e2 = (0, 1), entonces {e1, e2} es una base de R2,esto se sigue ya que e1 y e2 son linealmente independientes y generanR2 : (x, y) = x e1 + y e2.
2. Si D1 = (1, 0) y D2 = (1, 1), entonces {D1, D2} es una base deR2: si λ1(1, 0) + λ2(1, 1) = 0, entonces λ1 = λ2 = 0 y D1, D2
son linealmente independientes. Ahora probamos que generan: dado(x, y) ∈ R2, se debe resolver el sistema (x, y) = λ1(1, 0) + λ2(1, 1),es decir, {
x = λ1 + λ2,
y = λ2.
El cual evidentemente tiene solucion.
3. En Rn los vectores canonicos e1, e2, ..., en, forman una base, donde
ei = (0, 0, ..., 0, 1, 0, ..., 0),

3. El espacio vectorial Rn 75
con coordenada i-esima igual a 1 y las demas 0. Estos son linealmente
independientes ya que sin∑
i=1
λiei = 0, se tiene λi = 0 ∀ i. Por
otra parte, se mostro en la seccion anterior que todo vector en Rn es
combinacion lineal de estos: si x = (x1, ..., xn) ∈ Rn, x =n∑
i=1
xiei.
4. Tambien los vectores D1, D2, ..., Dn forman una base de Rn, dondeD1 = (1, 0, 0, ..., 0), D2 = (1, 1, 0, ..., 0),...,Dn = (1, 1, 1, ..., 1).
Se mostro al final de la seccion anterior que en efecto estos vectoresson linealmente independientes, mostramos ahora que generan, dado(x1, x2, ..., xn) ∈ Rn se deben encontrar λ1, λ2, ..., λn ∈ R �
n∑i=1
λiDi = (x1, ..., xn),
esto es, λ1 + λ2 + · · · + λn = x1,
λ2 + · · · + λn = x2,... =
...
λn = xn,
y la solucion esta dada por: λn = xn,
λn−1 + λn = xn−1, i.e., λn−1 = xn−1 − xn,
λn−2 = xn−2 − (xn−1 − xn)− xn = xn−2 − xn−1,
λn−3 = xn−3 − (xn−2 − xn−1)− (xn−1 − xn)− xn = xn−3 − xn−2,
inductivamente se sigue que λn−j = xn−j − xn−j+1 (ejercicio).
5. Sea W = {(x, y, z) ∈ R3 | 2x + 3y − z = 0}, W es un subespaciovectorial con base {(1, 0, 2) , (0, 1, 3)}: por una parte los vectores sonlinealmente independientes: λ(1, 0, 2) + µ(0, 1, 3) = 0 ⇒ λ = µ = 0;estos vectores tambien generan W , dado (x, y, z) ∈ W , se tienez = 2x+ 3y, hay que probar
(x, y, z) = λ(1, 0, 2) + µ(0, 1, 3)
i.e. (x, y, z) = (λ, µ, 2λ + 3µ), tomando λ = x y µ = y se sigue elresultado.

76 3.5. Bases
6. Sea A ∈ Rn − {0} y W = {x ∈ Rn |x = λA, λ ∈ R}, entonces Aes una base de W : A es linealmente independiente ya que si λA = 0,entonces λ = 0, tambien genera ya que si y ∈ W, entonces y = λA.
7. En R3, W = {(x1, x2, x3) ∈ R3 |x3 = 0} es un subespacio vectorialcon base e1 = (1, 0, 0) y e2 = (0, 1, 0): ya se mostro que e1 y e2son linealmente independientes, ahora dado (x, y, z) ∈ W se tiene
(x, y, z) = xe1 + ye2.
Geometricamente es evidente que si A,B,C son vectores en R2, (vease laFigura 3.21) estos deben ser linealmente dependientes, probaremos esto demanera formal y mas general.
B C
A
Figura 3.21: En R2 cualesquiera 3 vectoresson linealmente dependientes
Teorema 3.5.1 Sea W un subespacio vectorial generado por k vectores,entonces cualquier conjunto de k+1 vectores en W es linealmente dependi-ente. Y por ende, cualquier otro conjunto de k +m vectores en W, m ≥ 1,tambien es linealmente dependiente.
Antes de probar el teorema mostramos un ejemplo. Sea W un subespaciovectorial generado por A1 y A2 en Rn y
B1 = α11A1 + γ1A2,
B2 = α21A1 + γ2A2,
B3 = α31A1 + γ3A2,
donde alguna γi 6= 0 (si γi = 0 ∀ i son 3 vectores generados por un solovector, lo cual no es el planteamiento), digamos γ1 6= 0, entonces

3. El espacio vectorial Rn 77
B′2 = B2 − γ2
γ1B1 = (escalar)A1,
B′3 = B3 − γ3
γ1B1 = (escalar)A1,
por lo que B′2 y B
′3 son linealmente dependientes.Y en consecuencia, B1, B2,
y B3 tambien lo son, ya que una combinacion lineal de B′2 y B
′3 igual a 0,
con algun coeficiente distinto de 0, genera una analoga para B1, B2, B3 (elcoeficiente de B2 es el mismo que el de B
′2, y tambien el de B3 es el de B
′3).
Demostracion del Teorema 3.5.1. Se prueba por induccion sobre k.Si k = 1, W = {λA |λ ∈ R}, donde A ∈ Rn − {0} es un vector fijo.
Dados B1 y B2 ∈ W , B1 6= B2, entonces B1 = λ1A y B2 = λ2A,
donde podemos suponer λ1 6= 0 ∴ B2 = λ2
(1λ1B1
)y B1, B2 son lineal-
mente dependientes.
Suponiendo cierto el resultado para k, ahora probamos para k+1, seanA1, A2, ...., Ak+1 vectores que generan W y B1, B2, ..., Bk+2 vectores en W,entonces
B1 = α11A1 + · · · + α1kAk + γ1Ak+1
B1 = α21A1 + · · · + α2kAk + γ2Ak+1...
...Bk+2 = α(k+2)1A1 + · · · + α(k+2)kAk + γ(k+2)Ak+1.
Se tienen 2 casos:
Caso 1: alguna γi 6= 0. Sin perder generalidad, se puede tomar γ1 6= 0.En este caso los vectores B
′2, ..., B
′
k+2, definidos por
B′
2 = B2 −γ2
γ1
B1, ... , B′
k+2 = Bk+2 −γk+2
γ1
B1,
son k + 1 vectores que pertenecen al subespacio vectorial generado porA1, A2, ...., Ak (analogamente al ejemplo, se elimino Ak+1 y B1).
Se sigue entonces de la hipotesis de induccion que B′2, ..., B
′
k+2 son lin-ealmente dependientes, por lo que existe una combinacion lineal
λ1B′
2 + · · ·+ λk+1B′
k+2 = 0

78 3.5. Bases
con alguna λi 6= 0, substituyendo se tiene
λ2B2 + · · ·+ λk+2Bk+2 + (coeficiente)B1 = 0
∴ B2, ..., Bk+2 son linealmente dependientes.
Caso 2: γi = 0 ∀ i. En este caso, B1, B2, ..., Bk+2 estan en el sube-spacio generado por A1, ..., Ak, se sigue entonces de la hipotesis de induc-cion que B1, B2, ..., Bk+1 son li- nealmente dependientes, y por lo tantoB1, B2, ..., Bk+2 tambien lo son. �
Corolario 3.5.2 En Rn, cualquier conjunto de mas de n vectores es lineal-mente dependiente.
Demostracion. La base canonica e1, e2, ..., en genera Rn. �
Existencia de bases
Lema 3.5.3 Sea W un subespacio vectorial de Rn generado por losvectores linealmente independientes B1, B2, ..., Bk. Supongase tambien queB ∈ Rn −W , entonces B,B1, B2, ..., Bk son linealmente independientes.
Demostracion. Sea
λ1B1 + · · ·+ λkBk + λB = 0
una combinacion lineal. Necesariamente λ = 0, ya que de otra maneraB ∈ W , por lo cual
λ1B1 + ...+ λkBk = 0.
Se sigue entonces que λi = 0 ∀ i (ya que B1, B2, ..., Bk son linealmenteindependientes),
∴ {B,B1, B2, ..., Bk} son linealmente independientes.
�
Teorema 3.5.4 Sea W un subespacio vectorial de Rn y B1, B2, ..., Bk
vectores de W linealmente independientes, entonces existen vectores
Bk+1, Bk+2, ..., Bk+t
tales queB1, B2, ..., Bk, ..., Bk+t
es una base de W .

3. El espacio vectorial Rn 79
Demostracion. Si B1, B2, ..., Bk generan W no hay nada que probar. Deotra manera, sea W1 =< B1, B2, ..., Bk > y Bk+1 ∈ W −W1, por el Lema3.5.3
{B1, B2, ..., Bk, Bk+1}son linealmente independientes. Si estos generan W , ya terminamos, de otramanera, sea Bk+2 ∈ W −W2, donde W2 =< B1, ..., Bk+1 >, etcetera.
El proceso debe terminar antes de que k + t sea menor o igual a n, encaso contrario se tendrıan mas de n vectores linealmente independientes enRn, lo cual contradice el Corolario 3.5.2.
∴ Existe t ∈ N � k + t ≤ n y los vectores {B1, B2, ..., Bk+t} formanuna base de W .
�
Corolario 3.5.5 Todo subespacio vectorial de Rn (distinto de 0 ) tiene unabase.
Demostracion. Si W 6= 0, entonces existe A ∈ W � A 6= 0, como {A}es linealmente independiente, el resultado se sigue del Teorema 3.5.4.
�
dimension
Teorema 3.5.6 Todas las bases de un subespacio vectorial W de Rn tienenel mismo numero de elementos.
Demostracion. Sean {A1, ..., Ak} y {B1, ..., Bt} dos bases de W , hayque probar que k = t.
Como A1, A2, ..., Ak generan W y B1, B2, ..., Bt son linealmente inde-pendientes, se sigue del Teorema 3.5.1 que t ≤ k (si t > k dicho teoremadice que B1, B2, ..., Bt son linealmente dependientes).
Aplicando el mismo argumento al reves se tiene k ≤ t.�
Definicion 46 Sea W un subespacio vectorial de Rn, se define su dimen-sion como el numero de elementos de cualquier base.
Ejemplos
1. R tiene dimension 1, R2 dimension dos, R3 dimension tres y Rn
dimension n.

80 3.5. Bases
2. Cualquier recta por el origen en R2 tiene dimension 1.Una recta conestas caracterısticas es de la forma
L = {λ(x0, y0) |λ ∈ R},
donde (x0, y0) ∈ L− {0} es un vector fijo.
3. Si se toma el vacıo como base de {0}, entonces {0} tiene dimension0 (el numero de elementos de la base es 0). De otra manera, se puedeconvenir que su dimension es 0.
4. En R3 las rectas por el origen tienen dimension 1 y los planos dimen-sion 2 : si P es un plano por el origen en R3, sea A1 6= 0, A1 ∈ P ,debe existir tambien A2 ∈ P − < A1 >, ya que de otra manera Pes una recta. Se afirma que P =< A1, A2 >; esto se sigue ya que siA3 ∈ P − < A1, A2 >, se sigue del Lema 3.5.3 que A1, A2 y A3 sonlinealmente independientes, y entonces P = R3 (de otra manera existeA4 ∈ R3− < A1, A2, A3 >, y R3, tendrıa dimension mayor a 3).
5. En Rn se les llama rectas por el origen a los subespacios de dimension1, planos por el origen a los subespacios de dimension 2, hiperplanosa los subespacios de dimension k, 2 < k < n, y subespacios de codi-mension 1, a los de dimension n− 1 en Rn.
EJERCICIOS 3.51. Acabar los argumentos formales en el ejemplo 4 antes del Teorema 3.5.1.2. Sea W = {(x, y, z) ∈ R3 | 5x + y + z = 0}, encuentre una base de W ypruebe que en efecto lo es.3. Sea W = {(x1, x2, x3, x4) ∈ R4 |x1 + x2 + x3 + x4 = 0}, encuentre unabase de W , verifique formalmente.
4. Encuentre una base para la recta,
W = {(x, y, z) ∈ R3 | 2x− y − z = 0, 3x+ y − 2z = 0}.Justifique rigurosamente sus afirmaciones.
5. Encuentre una base para el plano
W = {(x1, x2, x3, x4) ∈ R4 | 2x1 +x2−x3 +x4 = 0, x1−x2−x3 +5x4 = 0}.Verifique formalmente.

Capıtulo 4
Matrices y determinantes
4.1. Definiciones
En las matematicas aparecen frecuentemente arreglos rectangulares de numeros.Por ejemplo, al estudiar un sistema de ecuaciones lineales
a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2...
...
am1x1 + am2x2 + · · · + amnxn = bm,
es natural considerar el siguiente arreglo de numerosa11 a12 · · · a1n
a21 a22 · · · a2n...
...am1 am2 · · · amn
. (4.1)
Este tipo de arreglos se llaman matrices, las hileras verticales se llamancolumnas y las horizontales renglones, en este caso tiene m renglones y ncolumnas, se dice que se trata de una matriz de m × n. Tambien con losterminos constantes del sistema se obtiene una matriz de m× 1.
b1b2...bm
.
81

82 4.1. Definiciones
Por ejemplo, al sistema3x − 2y + z = 0
y − 3z = 7
2x + 7y = 4,
se le asocian las matrices 3 −2 10 1 −32 7 0
y
074
Los elementos que forman una matriz se toman en un anillo como Z, o en
un campo como en Q, R, o C. El sımbolo aij denotara el numero ubicadoen el renglon i y la columna j. Por ejemplo en la matriz de 3× 3 descritaanteriormente a2 3 = −3.Una matriz de n × n se le llama cuadrada, a loselementos de una matriz cuadrada de la forma ajj, se les llama diagonales.Una matriz cuadrada se llama diagonal si sus unicos elementos distintos de0 son los diagonales, por ejemplo
(4 00 1
)o
5 0 00 6 00 0 0
Sean aij, las entradas de una matriz cuadrada 1 ≤ i ≤ n, y 1 ≤ j ≤ n.
Notese que si i > j, aij esta abajo de la diagonal, y si i < j, entonces aij
esta arriba de la diagonal. Para constatar este hecho considerese el rengloni ≥ 2 y la primera columna, esto es abajo de la diagonal, moviendose decolumna en el mismo renglon, el numero de columna crece, en la diagonal esigual a i, etcetera.
Definicion 47 Una matriz cuadrada se le llama triangular si todas las en-tradas de arriba (o todas las de abajo) de la diagonal son 0.
Por ejemplo, las siguientes matrices son triangulares 1 0 05 2 00 1 3
triangular superior,
(2 10 3
)triangular inferior.

4. Matrices y determinantes 83
Observese que si A es una matriz de m×n como en (4.1), a los renglonesde A se les pueden asociar
R1 = (a11, a12, . . . , a1n)R2 = (a21, a22, . . . , a2n)...
...Rm = (am1, am2, . . . , amn),
(4.2)
que son m vectores en Rn, llamados vectores renglon; y a las columnas seles puede asociar
C1 = (a11, a21, . . . , am1)C2 = (a12, a22, . . . , am2)...
...Cn = (a1n, a2n, . . . , amn),
(4.3)
que son n vectores en Rm, llamados vectores columna.Si una matriz B se obtiene de otra A eliminando algunos renglones y/o
columnas se dice que B es una submatriz de A.
4.2. El rango de una matriz
Definicion 48 Sea A la matriz definida en (4.1), se define el rango de Acomo la dimension del subespacio vectorial en Rn generado por los vectoresrenglon, i.e los descritos en (4.2).
Se probara, al final del capıtulo, que esta dimension es la misma que la delsubespacio vectorial en Rm generado por los vectores columna. Observeseque si r es el rango, entonces r ≤ m (ya que son m vectores renglon) ytambien r ≤ n ( ya que estos vectores viven en Rn).
Por ejemplo, el rango de la siguiente matriz es 2
1 0 00 1 04 4 0
,
y de esta otra es 3 1 2 3 40 2 4 50 0 2 1
.

84 4.2. El rango de una matriz
Operaciones elementales
A continuacion se definen ciertas operaciones llamadas elementales para ren-glones (tambien se puede hacer lo mismo para columnas).
OPERACION 1: intercambio de renglones.
OPERACION 2: multiplicacion de un renglon por un escalar distintode 0.
OPERACION 3: sumar un renglon a otro.
Definicion 49 Dos matrices A y B son equivalentes si se puede obte–ner una de otra mediante un numero finito de operaciones elementales, seescribira A ∼ B. Observese que ∼ es de equivalencia (ejercicio).
Ejemplo de operacion 1:(1 3 04 π 7
)∼(
4 π 71 3 0
),
de operacion 2: 1 0 42 1 31 1 2
∼ 3 0 12
2 1 31 1 2
,
de operacion 3: (1 3 04 π 7
)∼(
5 π + 3 74 π 7
).
Otros ejemplos: x1 x2
y1 y2
z1 z2
∼ x1 x2
αy1 αy2
z1 z2
∼ x1 + αy1 x2 + αy2
y1 y2
βz1 βz2
∼
x1 + αy1 + βz1 x2 + αy2 + βz2
y1 y2
z1 z2
,
es decir usando operaciones elementales, a un renglon se le puede sumar unacombinacion lineal de otros renglones.

4. Matrices y determinantes 85
Este procedimiento permite hacer ceros, por ejemplo: 1 2 32 1 13 0 1
∼ 1 2 3
0 −3 −53 0 1
∼ 1 2 3
0 −3 −50 −6 −8
Observese que siempre se puede hacer 0 debajo de una entrada distinta
de 0 (si las entradas estan en un campo), por ejemplo si a1 6= 0, a1 a2 a3
b1 b2 b3c1 c2 c3
∼ 1 a2/a1 a3/a1
b1 b2 b3c1 c2 c3
∼ 1 ∗ ∗
0 ∗ ∗0 ∗ ∗
Teorema 4.2.1 Las operaciones elementales no alteran el rango y por con-siguiente 2 matrices equivalentes tienen el mismo rango.
Demostracion. Sean R1, R2, . . . , Rm los vectores renglon de una matrizA, entonces el rango de A resulta ser la dimension del subespacio vectorialW , generado por estos vectores, i.e. W =< R1, R2, . . . , Rm >. Hay queprobar que cada una de las 3 operaciones no altera el rango:
La operacion 1 ciertamente no lo cambia (ya que al intercambiar 2 ren-glones el espacio W no cambia).
Con respecto a la operacion 2, si multiplicamos Ri por λ, se tiene<R1, R2, . . . , Rm >=<R1, . . . , λRi, . . . , Rm >, ya que los vectores que gene-ran el primer subespacio estan el el segundo, y viceversa,
Ri =1
λ(λRi).
Finalmente, en cuanto a la operacion 3, si
W ′ =< R1, . . . , Rj−1, Ri +Rj, Rj+1, . . . , Rm >,
ciertamente W ′ ⊂ W, ya que todas las combinaciones de los vectores quedefinen W ′, lo son tambien de R1, R2, . . . , Rm. Finalmente, para probar queW ⊂ W ′, basta probar que Rj ∈ W ′, lo cual se sigue de la identidad
Rj = (Ri +Rj)−Ri.
�

86 4.2. El rango de una matriz
Observese que la prueba del teorema anterior muestra algo mas general:El subespacio vectorial generado por los vectores renglon no se altera bajo lasoperaciones elementales, i.e. es invariante. Este teorema permite calcular elrango de una matriz al transformarla mediante operaciones elementales enotra, para la cual es facil calcular el rango.
Definicion 50 Una matriz es escalonada si la primera entrada distinta decero de cada renglon esta mas a la derecha de la primera entrada distinta decero del renglon anterior.
Ejemplos de matrices escalonadas:
(1 3 π 40 0 0 1
),
(9 4 00 1 0
),
0 2 5 30 0 1 20 0 0 8
.
Por otra parte, la matriz
(0 1 4 1 10 3 0 0 0
)no es escalonada.
Lema 4.2.2 En una matriz escalonada, los vectores renglon distintos de 0son linealmente independientes.
Antes de probar el lema exhibimos un ejemplo:1 1 1 1 10 1 1 1 10 0 0 1 10 0 0 0 0
,
entonces
λ1(1, 1, 1, 1, 1) + λ2(0, 1, 1, 1, 1) + λ3(0, 0, 0, 1, 1) = 0,
por lo cual λ1 = 0
λ1 + λ2 = 0
λ1 + λ2 + λ3 = 0,
y λ1, λ2, λ3 = 0.
Demostracion del lema. En una matriz de m× n sean
1≤ j1 < j2 < · · ·< jk ≤ n, k ≤ n,

4. Matrices y determinantes 87
tales que j1 es el numero de columna donde aparece el primer numero 6= 0del 1er renglon, j2 el numero de columna donde aparece el primer numero6= 0 del 2o renglon, etcetera.
Ahora siλ1R1 + λ2R2 + · · ·+ λmRm = 0,
donde Ri son los vectores renglon de la matriz. Considerando la ecuacionescalar determinada por la coordenada j1, se tiene λ1 = 0. Con la definidapor la coordenada j2, se obtiene λ1a1j2 + λ2a2j2 = 0, por lo que λ2 = 0,etcetera.
�
Por consiguiente, para calcular el rango de una matriz basta transformarlamediante operaciones elementales en un escalonada y contar los renglones deesta distintos de 0.
Ejemplos
1. Sea
A =
1 −1 3 −52 −3 4 −10−3 3 −9 153 −3 −6 −4
,
haciendo ceros debajo de la entrada a11, se tiene
A ∼
1 −1 3 −50 −1 −2 00 0 0 00 0 −15 11
∼
1 −1 3 −50 −1 −2 00 0 −15 110 0 0 0
,
por lo que A tiene rango 3.
2. Sea A la matriz
0 1 2 3 1 00 −1 −2 −4 2 10 0 0 2 0 10 1 2 2 4 1
,
A ∼
0 1 2 3 1 00 0 0 −1 3 10 0 0 2 0 10 0 0 −1 3 1
∼
0 1 2 3 1 00 0 0 −1 3 10 0 0 0 6 30 0 0 0 0 0
,
i.e A tiene rango 3.

88 4.3. Permutaciones
EJERCICIOS 4.21. Calcular el rango de las siguientes matrices 1 2 3
4 2 −13 0 1
,
1 1 2 02 3 1 41 5 0 2
,
2 0 1 −1 31 2 −1 1 21 1 1 2 43 0 1 1 −1
.
2. Pruebe que la relacion definida en la Definicion 49 es de equivalencia.
4.3. Permutaciones
Recordamos que una permutacion de In = {1, 2, . . . , n} es una funcionbiyectiva de In en In y que hay n! permutaciones de In. El conjunto deellas, se denota por Sn, por ejemplo
S2 =
{(1 21 2
),
(1 22 1
)},
S3 =
{(1 2 31 2 3
),
(1 2 31 3 2
),
(1 2 32 1 3
),
(1 2 32 3 1
),
(1 2 33 1 2
),
(1 2 33 2 1
)}.
Escribiremos para una permutacion σ ∈ Sn
σ =
(1 2 · · · n
σ(1) σ(2) · · · σ(n)
)o simplemente σ = (σ(1), σ(2), . . . , σ(n)).
Permutaciones pares e impares
Consideramos primero el siguiente ejemplo: sea
σ =
(1 2 3 4 5 6 73 7 1 5 6 2 4
),
diremos que σ(2) = 7 y σ(3) = 1, en el 2o renglon forman una inversion,ya que 2 < 3, pero σ(2) = 7 > σ(3) = 1, tambien σ(5) y σ(7) lo hacen.Sin embargo, σ(3) y σ(6) no la forman, ya que σ(3) = 1 < 2 = σ(6). Enconsecuencia, la definicion formal general es la siguiente.
Definicion 51 Sea σ ∈ Sn, se dice que σ(i) y σ(j) forman inversion, sii < j y σ(i) > σ(j).

4. Matrices y determinantes 89
Para contar el numero de inversiones de una permutacion dada bastacontar cuantos numeros mayores a un numero dado en el 2o renglon lopreceden. En el ejemplo anterior a 1 lo preceden 3 y 7, a 5 el 7, a 6 el 7, a2, lo hacen 3,7,5 y 6, y a 4, 7,5 y 6. Por lo que esta permutacion tiene 11inversiones.
Definicion 52 Se dice que una permutacion es par si tiene un numero parde inversiones, e impar si este numero es impar (la paridad de la permutaciones la propiedad de ser par o impar).
Por ejemplo, la permutacion (1 2 3 4 5) es par, ya que tiene cero inver-siones y la permutacion (2 1 3 4 5) es impar, ya que tiene una inversion(σ(1) > σ(2)). Nuestro ejemplo original σ = (3 7 1 5 6 2 4) es impar, ya quetiene 11 inversiones.
Transposiciones
Definicion 53 Una transposicion es una permutacion que consiste de inter-cambiar 2 elementos.
Por ejemplo (1 2 3 4 51 5 3 4 2
).
Construiremos una nueva permutacion a partir de una permutacion dada, alintercambiar dos elementos en el 2o renglon, i.e., si
σ =
(1 2 · · · r · · · s · · · n
σ(1) σ(2) · · · σ(r) · · · σ(s) · · · σ(n)
)y τ es la transposicion que intercambia σ(r) y σ(s), se obtiene una nuevapermutacion µ = τ · σ
µ =
(1 2 · · · r · · · s · · · n
σ(1) σ(2) · · · σ(s) · · · σ(r) · · · σ(n)
),
probaremos que si σ es par, entonces µ es impar, y que si σ es impar, µes par, i.e., σ y µ tienen paridad distinta.

90 4.3. Permutaciones
Por ejemplo, si
σ =
(1 2 3 4 5 6 73 7 1 5 6 2 4
)y µ =
(1 2 3 4 5 6 73 7 5 1 6 2 4
),
se habıa mostrado que σ tiene 11 inversiones, entonces µ tiene 12, ya quetiene todas las de σ y una mas, 1 con 5.
Lema 4.3.1 Sea µ la permutacion obtenida de σ mediante la transposicionde 2 elementos consecutivos en el 2o renglon de σ, entonces σ y µ tienendistinta paridad.
Demostracion. Probamos que si σ tiene k inversiones, entonces µ tienek − 1 o k + 1 inversiones. Sean
σ =
(1 2 · · · j j + 1 · · · n
σ(1) σ(2) · · · σ(j) σ(j + 1) · · · σ(n)
)y
µ =
(1 2 · · · j j + 1 · · · n
σ(1) σ(2) · · · σ(j + 1) σ(j) · · · σ(n)
).
Todas las parejas que forman inversion en σ, tambien lo hacen en µ, salvoσ(j) y σ(j + 1); estas lo forman en σ si y solo si no lo forman en µ.
�Generalizamos ahora este resultado.
Teorema 4.3.2 Sea µ la permutacion obtenida de la permutacion σ me–diante la transposicion de 2 elementos en el 2o renglon de σ, entonces σ yµ tienen distinta paridad.
Demostracion. El caso en los numeros que se transponen son consecutivosse probo en el lema. Supongamos ahora que estos numeros estan separadospor s lugares, i.e,
σ =
(1 2 · · · r · · · r + s · · · n
σ(1) σ(2) · · · σ(r) · · · σ(r + s) · · · σ(n)
), y
µ =
(1 2 · · · r · · · r + s · · · n
σ(1) σ(2) · · · σ(r + s) · · · σ(r) · · · σ(n)
).
En el 2o renglon de σ podemos mover σ(r) a la derecha mediante s trans-posiciones de elementos consecutivos, hasta que ocupe el lugar σ(r + s),obteniendose

4. Matrices y determinantes 91
σ′
=
(1 2 · · · r · · · r + s · · · n
σ(1) σ(2) · · · σ(r + 1) · · · σ(r) · · · σ(n)
),
posteriormente mediante s − 1 transposiciones de elementos consecutivospodemos mover σ(r + s) a la izquierda, hasta que ocupe el lugar originalde σ(r), la permutacion obtenida es precisamente µ. Por lo tanto se puedepasar de σ a µ mediante 2s−1 transposiciones de elementos consecutivos,como la paridad cambia en cada paso y el numero de estos es impar, se sigueel resultado.
�
Teorema 4.3.3 Sean σ ∈ Sn y m el numero de inversiones de σ, entoncesσ se puede expresar como composicion de m transposiciones.
Demostracion. La siguiente representacion de σ ilustra la idea de laprueba
σ =
(· · · · · · · · ·
· · · ·x 1 · · · ·
).
Se mueve el 1 a la izquierda en el 2o renglon con transposiciones de elementosconsecutivos (todos estos numeros precedentes forman inversion con el 1),hasta que ocupe el 1er lugar. Observese que este movimiento no altera lasinversiones que forman otros numeros distintos de 1 entre sı. Posteriormente,se repite el proceso con el 2 hasta obtener (1, 2, ...), etcetera. Se sigue queσm · · · · ·σ1 ·σ = I, donde las σj denotan las transposiciones descritas. Noteseque el numero de estos movimientos, i.e. m, es exactamente el numero deinversiones de σ. Finalmente, σ = σ1 · · · · · σm.
�
Inversa de una permutacion
Dada σ ∈ Sn, σ es una funcion biyectiva de In en In, por lo que existeσ−1 : In −→ In y σ−1 ∈ Sn. Observese que σ(i) = k si y solo si σ−1(k) = i.
Si
σ =
(1 2 · · · n
σ(1) σ(2) · · · σ(n)
),
la inversa se puede expresar como(σ(1) σ(2) · · · σ(n)
1 2 · · · n
),

92 4.3. Permutaciones
o como (1 2 · · · n
σ−1(1) σ−1(2) · · · σ−1(n)
).
Por ejemplo, si
σ =
(1 2 3 44 1 3 2
), σ−1 =
(4 1 3 21 2 3 4
)=
(1 2 3 42 4 3 1
).
Observese que las transposiciones son involuciones, i.e., ellas son su propioinverso, ya que si τ es una transposicion, entonces τ 2 = τ · τ = Id.
Podemos enumerar los inversos de los elementos de S3.
σ1 =
(1 2 31 2 3
)= σ−1
1 , σ2 =
(1 2 31 3 2
)= σ−1
2 ,
σ3 =
(1 2 32 1 3
)= σ−1
3 ,
σ4 =
(1 2 32 3 1
), σ−1
4 =
(2 3 11 2 3
)=
(1 2 33 1 2
),
σ5 =
(1 2 33 1 2
), σ−1
5 =
(3 1 21 2 3
)=
(1 2 32 3 1
),
σ6 =
(1 2 33 2 1
)= σ−1
6 ,
por lo que σ4 = σ−15 y σ5 = σ−1
4 .
Observese que la asociacion σ 7→ σ−1, es una biyeccion de Sn. Si σ, τson distintas, entonces σ−1 y τ−1 lo son, y dada una permutacion µ ∈ Sn,µ es la imagen de su inversa bajo esta asociacion.
Proposicion 4.3.4 Una permutacion σ es par si y solo si σ−1 lo es.
Consideremos primero un ejemplo:
σ =
(1 2 3 4 5· 5 · 1 ·
), σ−1 =
(· 5 · 1 ·· 2 · 4 ·
)=
(1 · · · 54 · · · 2
),
i.e σ(2) = 5 y σ(4) = 1, forman inversion en σ si y solo si σ−1(1) = 4,lo hace con σ−1(5) = 2, en σ−1. La relacion: el numero chico en el primerrenglon va al numero grande en el segundo renglon se preserva.

4. Matrices y determinantes 93
Demostracion de la Proposicion. La biyecion σ 7→ σ−1 en Sn preservainversiones:
i < j y r = σ(i) > σ(j) = s
⇔s < r y σ−1(s) = j > i = σ−1(r),
i.e. las parejas que forman inversion en σ se corresponden de manera biunıvo-ca con las que lo hacen en σ−1. Por consiguiente, el numero de inversionesde σ es el mismo que el de σ−1. �
Notese que la inversion tambien se puede definir en terminos del 1er
renglon i < j y σ(i) > σ(j).
EJERCICIOS 4.31. Encuentra la paridad de las siguientes permutaciones(
3 5 6 1 2 4)
y(
1 7 8 2 4 3 5 6)
4.4. Determinantes
El determinante es una funcion que le asocia a una matriz un numero. Estosson muy importantes en matematicas, por ejemplo en el estudio de las ecua-ciones lineales. En muchos casos, estos numeros representan el area o el volu-men de los lugares geometricos asociados a sus vectores renglon, es decir loscorrespondientes paralelogramos o paralelepıpedos, como se muestra al finalde este capıtulo.
Definicion 54 Se define el determinante de una matriz cuadrada
A =
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...an1 an2 · · · ann
.
como detA =∑
σ ∈Sn
ε(σ)a1σ(1)a2σ(2) · · · anσ(n),
donde
ε(σ) =
{1 si σ es par,
−1 si σ es impar.

94 4.4. Determinantes
En particular, para el caso n = 2, esta definicion es mas simple y familiar.
Definicion 55 Sea
A =
(a bc d
)una matriz con entradas reales, al numero ad− bc se le llama determinantede A y se le denota por detA o por |A|.
Ejemplos
1. Si
A =
(a11 a12
a21 a22
),
entonces detA = a11a22 − a12a21, ya que las permutaciones de {1, 2} son(1 21 2
)que es par, y
(1 22 1
)que es impar.
2. Calculamos el determinante de la matriz
A =
a11 a12 a13
a21 a22 a23
a31 a32 a13
.
Calculamos primero las permutaciones de {1, 2, 3}, y sus paridades.(1 2 31 2 3
)es par (cero inversiones), genera el sumando a11a22a33,(
1 2 31 3 2
)es impar (una inversion), genera −a11a23a32,(
1 2 32 1 3
)es impar (una inversion), genera −a12a21a33,(
1 2 32 3 1
)es par (dos inversiones), genera a12a23a31,(
1 2 33 1 2
)es par (dos inversiones), genera a13a21a32, y finalmente(
1 2 33 2 1
)es impar (tres inversiones), define el sumando −a13a22a31.

4. Matrices y determinantes 95
Por consiguiente,
detA = a11a22a33−a11a23a32−a12a21a33 +a12a23a31 +a13a21a32−a13a22a31.
Volviendo al caso general de matrices de n × n, observese que los suman-dos estan hechos por factores que son uno por cada renglon (ya que losprimeros subındices son 1, 2, . . . , n), y uno por cada columna. Esto se sigueya que los segundos subındices son σ(1), σ(2), . . . , σ(n), y σ es una per-mutacion.
Dada una matriz diagonal A, su determinante es a11 a22 . . . ann, i.e., elproducto de los elementos de la diagonal. Esto se sigue, ya que todos lossumandos donde aparecen factores ajσ(j) con σ(j) 6= j son 0, esto es, launica permutacion que produce sumandos distintos de 0 es la identidad.
Proposicion 4.4.1 Sea A una matriz tiangular A = (aij), 1 ≤ i, j ≤ n,entonces det A = a11a22 · · · ann.
Demostracion. Probamos la proposicion para triangulares superiores (ele-mentos debajo de la diagonal son 0), el otro caso es analogo. Se afirma quelos sumandos donde aparece ajσ(j), σ(j) 6= j son todos 0. Para probar laafirmacion consideramos dos casos, donde σ es fija y no es la identidad.
Caso 1: j > σ(j). En este caso por ser A triangular superior ajσ(j) = 0,y se sigue la afirmacion.
Caso 2: j < σ(j). En este caso, alguna otra i, de los primeros n naturales,cumple i > σ(i). De otra manera, σ(n) ≥ n, y σ(n) = n. Asimismoσ(n− 1) ≥ n− 1, por lo cual σ(n− 1) = n− 1, procediendo de esta manera,se tiene σ(j) = j, lo cual contradice la hipotesis j < σ(j). Se concluye queexiste dicha i, y entonces aiσ(i) = 0 (por ser triangular superior).
�
4.5. Propiedades de los determinantes
Propiedad 1
Si el vector renglon Ri de una matriz A es la suma de 2 vectores renglon,digamos Ri = R
′i +R
′′i , entonces
|A| = |A′|+ |A′′|,

96 4.5. Propiedades de los determinantes
donde A′
y A′′
son las matrices cuyos renglones i-esimos estan determi-nados por R
′i y R
′′i , respectivamente y los demas renglones son los mismos
que los de A.
Ejemplo∣∣∣∣a+ a′ b+ b′
c d
∣∣∣∣=(a+a′)d− (b+ b′)c= ad− bc+a′d− b′c=∣∣∣∣a bc d
∣∣∣∣+ ∣∣∣∣a′ b′
c′ d′
∣∣∣∣ .Demostracion de la Propiedad 1. Sea
A=
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...an1 an2 · · · ann
. (4.4)
Si el vector renglon Ri de A es R′i +R
′′i , podemos escribir
(ai1, ai2, . . . , ain) = (a′
i1, a′
i2, . . . , a′
in) + (a′′
i1, a′′
i2, . . . , a′′
in),
y se tiene que
|A|=∑σ∈Sn
ε(σ)a1σ(1)a2σ(2)· · ·aiσ(i)· · ·anσ(n)
=∑σ∈Sn
ε(σ)a1σ(1)a2σ(2)· · ·(a′
iσ(i) + a′′
iσ(i))· · ·anσ(n)
=∑σ∈Sn
ε(σ)a1σ(1)a2σ(2)· · ·a′
iσ(i)· · ·anσ(n)+∑σ∈Sn
ε(σ)a1σ(1)a2σ(2)· · ·a′′
iσ(i)· · ·anσ(n)
=|A′|+ |A′′|.
�
Esta propiedad nos permite simplificar determinantes, por ejemplo:∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 + 0 b1 + 0 c1 + 0a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 b1 0a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ +∣∣∣∣∣∣
0 0 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣=
∣∣∣∣∣∣a1 0 0a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ +
∣∣∣∣∣∣0 b1 0a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ +
∣∣∣∣∣∣0 0 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ .

4. Matrices y determinantes 97
Propiedad 2
Si el vector renglon Ri de la matriz A es de la forma Ri = λR′i, entonces
|A| = λ|A′|,
donde A′
es la matriz que se obtiene de A cambiando el renglon definidopor Ri por el renglon asociado a R
′i.
Ejemplos
1.
∣∣∣∣ λa λbc d
∣∣∣∣ = λad− λbc = λ
∣∣∣∣ a bc d
∣∣∣∣ .2. Observando que en la expresion del determinante aparece un y solo unfactor de la forma a1j por cada sumando, 1 ≤ j ≤ 3, se tiene∣∣∣∣∣∣
λa1 λb1 λc1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ = λ
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ .Demostracion de la Propiedad 2. Sea A como en (4.4) yRi = λR
′i,
dondeRi = (ai1, ai2, . . . , ain) = λ(a
′
i1, a′
i2, . . . , a′
in),
entonces
|A| =∑σ∈Sn
ε(σ)a1σ(1)a2σ(2) · · · aiσ(i) · · · anσ(n)
=∑σ∈Sn
ε(σ)a1σ(1)a2σ(2) · · ·λa′
iσ(i) · · · anσ(n)
= λ∑σ∈Sn
ε(σ)a1σ(1)a2σ(2) · · · a′
iσ(i) · · · anσ(n)
= λ|A′|.
�
Propiedad 3
Si la matriz A′se obtiene intercambiando dos renglones de otra matriz A,
entonces|A′| = −|A|.

98 4.5. Propiedades de los determinantes
Ejemplo
Sean A =
(a bc d
)y A
′=
(c da b
),
entonces |A′| = cb− da = −(ad− bc) = −|A|.Demostracion de la Propiedad 3. Sean
A=
a11 a12 · · · a1n...
.... . .
...an1 an2 · · · ann
y A′=
b11 b12 · · · b1n...
.... . .
...bn1 bn2 · · · bnn
,
dondebij = aij ∀ i, j, i 6= r, i 6= s,brj = asj ∀ j.bsj = arj ∀ j,
i.e. A y A′
son la misma matriz excepto por los renglones r y s intercam-biados.
Ahora dada σ ∈ Sn, se define τ ∈ Sn como sigue:
τ(i) = σ(i), ∀ i 6= r, s,τ(r) = σ(s),τ(s) = σ(r),
es decir
τ =
(1 · · · r · · · s · · · n
σ(1) · · · σ(s) · · · σ(r) · · · σ(n)
).
Notese que τ tiene distinta paridad de σ, ya que se obtiene de esta medianteuna transposicion.
Finalmente
|A| =∑σ∈Sn
ε(σ)a1σ(1) · · · arσ(r) · · · asσ(s) · · · anσ(n)
=∑σ∈Sn
ε(σ)b1σ(1) · · · bsσ(r) · · · brσ(s) · · · bnσ(n)
=∑τ∈Sn
−ε(σ)b1τ(1) · · · bsτ(s) · · · br τ(r) · · · anτ(n)
= −|A′|.

4. Matrices y determinantes 99
Si σ recorre todas las permutaciones, τ tambien, ya que σ 7→ τ es unabiyeccion en Sn.
�
Propiedad 4
Sea A la matriz identidad, esto es, donde A = (aij), y aij = δij, donde
δij =
{1 si i = j,
0 si i 6= j.
Entonces, |A| = 1, a la funcion δij se le llama la delta de Kronecker.Demostracion. Cada sumando a1σ(1) · · · anσ(n) es 0 salvo si σ(j) = j ∀j,i.e., si σ = Id.
�Ejemplo ∣∣∣∣ 1 0
0 1
∣∣∣∣ = 1.
Propiedad 5
Si una matriz cuadrada tiene 2 renglones iguales su determinante es 0.Demostracion. Sea A dicha matriz y A
′la que se obtiene intercambiando
los 2 renglones que son iguales i.e. A′= A, se sigue entonces de la Propiedad
3 que |A| = −|A′| = −|A|, por lo que 2|A| = 0 y |A| = 0.�
Propiedad 6
Si una matriz cuadrada tiene un renglon de ceros, entonces su determinantees cero.Demostracion. En la definicion de determinante aparece en cada sumandoun factor de cada uno de los renglones, i.e., cada sumando tiene un factor 0,i.e., todos lo sumandos son 0.
Otra demostracion se obtiene usando la Propiedad 2: se puede factorizar0 del renglon de ceros y se tiene |A| = 0 · |A|, i.e., |A| = 0.
�Ejemplo∣∣∣∣∣∣a1 b1 c1
a2 + λa3 b2 + λb3 c2 + λc3a3 b3 c3
∣∣∣∣∣∣=∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣+∣∣∣∣∣∣a1 b1 c1λa3 λb3 λc3a3 b3 c3
∣∣∣∣∣∣=∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣

100 4.5. Propiedades de los determinantes
Las igualdades son consecuencia de las Propiedades 1, 2 y 5. La siguientepropiedad es una generalizacion de este ejemplo.
Propiedad 7
Si la matriz A′
se obtiene de la matriz cuadrada A sumando a un renglonun multiplo de otro, entonces |A′| = |A|.Demostracion. Supongase que al renglon Ri se le sumo el renglon Rk
multiplicado por λ, entonces por las Propiedad 1 y la Propiedad 2 se tieneque
|A′| = |A|+ λ|B|,
donde B es una matriz igual a A excepto por el renglon i que es el mismoque el renglon k. Finalmente la Propiedad 5 establece que |B| = 0.
�Iterando este proceso se tiene
Corolario 4.5.1 Si a un renglon de una matriz cuadrada A le sumamosuna combinacion lineal de los demas renglones, obteniendo una matriz A
′,
entonces |A′| = |A|.
Corolario 4.5.2 Si los vectores renglon de una matriz cuadrada A son li-nealmente dependientes, entonces |A| = 0.
Demostracion. Las hipotesis implican que alguno de los vectores renglones combinacion lineal de los otros, restando a dicho renglon dicha combinacionlineal se obtiene un renglon de ceros.
�Por ejemplo, si
A =
1 2 34 5 66 9 12
,
entonces (6, 9, 12) = 2(1, 2, 3) + (4, 5, 6) y |A| = 0, ya que
|A| =
∣∣∣∣∣∣1 2 34 5 6
6− 2 · 1− 4 9− 2 · 2− 5 12− 2 · 3− 6
∣∣∣∣∣∣ .

4. Matrices y determinantes 101
Definicion 56 Dada una matriz A = (aij), 1 ≤ i ≤ n, 1 ≤ j ≤ m,se define otra matriz llamada la transpuesta de A, denotada por tA (o At),como sigue
tA = (bij), donde bij = aji,
Por ejemplo, si
A =
(a 2 0π ε 1
), entonces tA =
a π2 εo 1
.
Es decir, el 1er renglon se transforma en la 1a columna y el 2o renglon enla 2a columna.
Propiedad 8
|A| = |tA|.Ejemplo (
a bc d
)= ad− bc = ad− cb =
∣∣∣∣ a cb d
∣∣∣∣Demostracion de la Propiedad 8. Sean A = (aij) y tA = (bij), i.e.,aij = bji ∀ i, j. Ahora
|A| =∑σ∈Sn
ε(σ)a1σ(1) · · · anσ(n) =∑σ∈Sn
ε(σ)bσ(1)1 · · · bσ(n)n,
como bσ(j)j = biσ−1(i), donde σ(j) = i; se pueden reordenar los factores decada sumando y se tiene
bσ(1)1bσ(2)2 · · · bσ(n)n = b1σ−1(1) · · · bnσ−1(n).
Ademas Sn = {σ1, . . . , σn!} = {σ−11 , . . . , σ−1
n! } y ε(σ) = ε(σ−1), en virtudde la Proposicion 4.3.4, por lo que
|A| =∑σ∈Sn
ε(σ)b1σ(1) · · · bnσ(n) = |tA|.
�

102 4.6. Desarrollo por menores
Corolario 4.5.3 Las propiedades 1 a 7 para renglones son tambien validaspara columnas.
Ejemplo∣∣∣∣∣∣a1 λb1 c1a2 λb2 c2a3 λb3 c3
∣∣∣∣∣∣ =
∣∣∣∣∣∣a1 a2 a3
λb1 λb2 λb3c1 c2 c3
∣∣∣∣∣∣ = λ
∣∣∣∣∣∣a1 a2 a3
b1 b2 b3c1 c2 c3
∣∣∣∣∣∣ = λ
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ .4.6. Desarrollo por menores
Este metodo nos permite expresar el determinante de una matriz de n × ncomo la suma de determinantes de matrices de (n− 1)× (n− 1).
Dada una matriz
A =
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...am1 am2 · · · amn
,
se denota por Aij la matriz obtenida de A eliminando el renglon i y lacolumna j.
Por ejemplo, si
A =
a π 02 4 79 6 8
, (4.5)
entonces
A11 =
(4 76 8
), A23 =
(a π9 6
), A32 =
(a 02 7
),
etcetera.
Definicion 57 Al determinante |Aij| de una matriz cuadrada A se le llamael menor del elemento aij.
Por ejemplo, si A es la matriz (4.5), se tiene |A11| = −10 y |A32| = 7a.

4. Matrices y determinantes 103
Podemos desarrollar el determinante de una matriz de 3×3 con respectoa los menores del 1er renglon. Sea
A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
,
entonces
|A| = a11a22a33 − a11a23a32 − a12a21a33 + a12a23a31 + a13a21a32 − a13a22a31
= a11|A11| − a12|A12|+ a13|A13|.
Probaremos que este proceso se pueden generalizar a cualquier renglon ocolumna.
Lema 4.6.1 Sea
A =
a11 a12 · · · a1n
a21 a22 · · · a2n...
.... . .
...an1 an2 · · · ann
,
tal que anj = 0 ∀ j 6= n, entonces
|A| = ann|Ann|.
Ejemplo ∣∣∣∣∣∣∣∣1 0 2 43 7 1 8−1 4 0 20 0 0 7
∣∣∣∣∣∣∣∣ = 7
∣∣∣∣∣∣1 0 23 7 1−1 4 0
∣∣∣∣∣∣ .Demostracion.
|A| =∑σ∈Sn
ε(σ)a1σ(1) · · · anσ(n),
como anσ(n) = 0 si σ(n) 6= n, se tiene
|A| =∑
σ∈Sn−1
ε(σ)a1σ(1) · · · an−1σ(n−1)ann = ann|Ann|,

104 4.6. Desarrollo por menores
ya que las permutaciones que fijan a n estan en correspondencia biunıvo-ca con las permutaciones de Sn−1 (el numero de inversiones tambien es elmismo).
�
Corolario 4.6.2 Sea A = (aij) una matriz de n× n, tal que ajn = 0 paralos naturales j menores a n, entonces |A| = ann|Ann|.
Demostracion. Aplicando el Lema 4.6.1 a At, se tiene |At| = ann|(At)nn|.Ahora, en virtud de la Propiedad 8 se sigue que |A| = ann|Ann|. En esteultimo paso usamos el hecho de que (Ann)t = (At)nn.
�Ejemplo
Si A =
2 3 15 7 20 2 7
, entonces At =
2 5 03 7 21 2 7
.
Por lo cual
(A33)t =
(2 53 7
)= (At)33.
Lema 4.6.3 Si en una matriz cuadrada todos los elementos distintos de aij
en el renglon i son cero, entonces
|A| = (−1)i+jaij|Aij|.
Demostracion. Intercambiamos renglones y columnas consecutivas hastaobtener la situacion del Lema 4.6.1. Especıficamente sean
A =
a1,1 · · · a1,j−1 a1,j a1,j+1 · · · a1,n...
...ai−1,1 ai−1,j−1 ai−1,j ai−1,j+1 ai−1.n
ai,1 ai,j−1 ai,j ai,j+1 ai,n
ai+1,1 ai+1,j−1 ai+1,j ai+1,j+1 ai+1,n...
...an,1 · · · an,j−1 an,j an,j+1 · · · an,n
y

4. Matrices y determinantes 105
A′=
a1,1 · · · a1,j−1 a1,j+1 · · · a1,n a1,j...
......
ai−1,1 ai−1,j−1 ai−1,j+1 ai−1,n ai−1,j
ai+1,1 ai+1,j−1 ai+1,j+1 ai+1,n ai+1,j...
......
an,1 · · · an,j−1 an,j+1 · · · an,n an,j
ai,1 ai,j−1 ai,j+1 ai,n ai,j
.
Observese que se pueden intercambiar renglones consecutivos, de tal maneraque el renglon Ri de A se transforme en el renglon n-esimo, esto se obtienemediante n−i intercambios. Analogamente se puede intercambiar la columnaCj por la columna Cj+1, despues por Cj+2 hasta que ocupe la columna Cj
el lugar de Cn. Es claro entonces que A′
se obtiene de A mediante n − iintercambios de renglones y n − j de columnas. Finalmente, como cadaintercambio de columnas o reglones cambia el signo del determinante, setiene por el Lema 4.6.1 que
|A| = (−1)2n−i−j|A′| = (−1)i+j|A′| = (−1)i+jaij|A′
nn| = (−1)i+jaij|Aij|,
puesto que (−1)k = (−1)−k = 1(−1)k , y evidentemente la submatriz A
′nn
es igual a la submatriz Aij (ambas consisten de eliminar el renglon i y lacolumna j en A).
�
Corolario 4.6.4 Si en una matriz cuadrada todos los elementos distintos deaij en la columna j son cero, entonces
|A| = (−1)i+jaij|Aij|.
Demostracion. Exactamente la misma prueba del Lema 4.6.3, aplicandoel Corolario 4.6.2 en lugar de Lema 4.6.1, implica el resultado.
�Estos resultados permiten desarrollar el determinante de una matriz uti-
lizando cualquier renglon o columna.
Propiedad 9
Sea A una matriz de n× n, y 1 ≤ i, j ≤ n, entonces
|A| = (−1)i+1ai,1|Ai,1|+ (−1)i+2ai,2|Ai,2|+ · · ·+ (−1)i+nai,n|Ai,n|= (−1)1+ja1,j|A1,j|+ (−1)2+ja2,j|A2,j|+ · · ·+ (−1)n+jan,j|An,j|.

106 4.6. Desarrollo por menores
Antes de probar esta propiedad damos algunos ejemplos. Calculamos elsiguiente determinante desarrollando con respecto a la 2a columna:∣∣∣∣∣∣
5 7 92 1 03 4 5
∣∣∣∣∣∣ = (−1)1+2 · 7∣∣∣∣ 2 0
3 5
∣∣∣∣+(−1)2+2
∣∣∣∣ 5 93 5
∣∣∣∣+(−1)3+2 · 4∣∣∣∣ 5 9
2 0
∣∣∣∣= −70− 2− 4(−18) = 0.
En la siguiente matriz desarrollamos con respecto al 3er renglon:∣∣∣∣∣∣∣∣1 0 2 03 0 1 00 0 2 12 1 0 3
∣∣∣∣∣∣∣∣ = (−1)3+3 · 2
∣∣∣∣∣∣1 0 03 0 02 1 3
∣∣∣∣∣∣+ (−1)3+4
∣∣∣∣∣∣1 0 23 0 12 1 0
∣∣∣∣∣∣= 2 · 0− [1(−1) + 2(3)] = −5,
Demostracion de la Propiedad 9. Probamos primero para el caso delos renglones, sea Ri = (ai1 , ai2 , . . . , ain) el vector renglon i-esimo de A,entonces si los renglones se denotan tambien por R1, R2, . . . , Rn (abusandode la notacion), se tiene por la Propiedad 1 que
|A| =
∣∣∣∣∣∣∣∣∣∣∣∣∣
R1
R2...Ri...Rn
∣∣∣∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣∣∣∣
R1
R2...
ai1 0 · · · 0...Rn
∣∣∣∣∣∣∣∣∣∣∣∣∣+
∣∣∣∣∣∣∣∣∣∣∣∣∣
R1
R2...
0 ai2 0 · · · 0...Rn
∣∣∣∣∣∣∣∣∣∣∣∣∣+ · · ·+
∣∣∣∣∣∣∣∣∣∣∣∣∣
R1
R2...
0 · · · 0 ain...Rn
∣∣∣∣∣∣∣∣∣∣∣∣∣=
n∑k=1
(−1)i+kaik |Aik |,
aplicando el Lema 4.6.3. El mismo argumento se aplica para columnas, usan-do ahora el Corolario 4.6.4:
|A| =
∣∣∣∣∣∣∣∣∣∣∣C1 C2 · · ·
aij
00...0
· · ·Cn
∣∣∣∣∣∣∣∣∣∣∣+ · · ·+
∣∣∣∣∣∣∣∣∣∣∣C1 C2 · · ·
00...0anj
· · ·Cn
∣∣∣∣∣∣∣∣∣∣∣,
donde Ck denota la columna k-esima, etcetera. �

4. Matrices y determinantes 107
EJERCICIOS 4.61. Calcular el determinante de las siguientes matrices
1 1 2 −13 0 1 −1−1 2 3 11 2 −1 −2
,
2 1 0 −11 3 2 1−1 1 0 32 −1 2 1
,
1 3 −1 2 10 2 0 1 21 3 2 1 10 1 −2 0 21 3 1 3 0
.
4.7. Calculo de determinantes
Calcular un determinante a partir de la definicion no es muy apropiado,por ejemplo el determinante de una matriz de 7 × 7 involucra 7! = 5040sumandos. El metodo de menores simplifica un poco esta situacion, pero nomucho, por ejemplo, encontrar un determinante de 8× 8 involucra sumar 8determinantes de 7× 7, etcetera.
En general, la manera mas eficaz es simplificar la matriz haciendola tri-angular usando las propiedades 1 a 8. En algunos casos es conveniente usartambien el metodo de menores.
Ejemplos
1. Primero, se hacen ceros debajo de a11)∣∣∣∣∣∣∣∣1 1 1 11 1 −1 −12 −1 2 −11 2 −1 −2
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣1 1 1 10 0 −2 −20 −3 0 −30 1 −2 −3
∣∣∣∣∣∣∣∣ = 6
∣∣∣∣∣∣0 1 11 0 11 −2 −3
∣∣∣∣∣∣ ,= 6
[−∣∣∣∣ 1 1
1 −3
∣∣∣∣+ ∣∣∣∣ 1 01 −2
∣∣∣∣] = 6[4− 2] = 12.
En el ultimo paso, se desarrollo por menores en el primer renglon.
2. Haciendo ceros∣∣∣∣∣∣∣∣1 1 1 11 2 3 41 3 6 101 4 10 20
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣1 1 1 10 1 2 30 2 5 90 3 9 19
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣1 2 32 5 03 9 19
∣∣∣∣∣∣ =
∣∣∣∣∣∣1 2 30 1 30 3 10
∣∣∣∣∣∣ .= 10− 9 = 1.
En el ultimo paso, se desarrollo por menores en la 1a columna.

108 4.7. Calculo de determinantes
3. Sumando las 4 columnas∣∣∣∣∣∣∣∣1 2 3 42 3 4 13 4 1 24 1 2 3
∣∣∣∣∣∣∣∣ =
∣∣∣∣∣∣∣∣10 2 3 410 3 4 110 4 1 210 1 2 3
∣∣∣∣∣∣∣∣ = 10
∣∣∣∣∣∣∣∣1 2 3 41 3 4 11 4 1 21 1 2 3
∣∣∣∣∣∣∣∣
= 10
∣∣∣∣∣∣∣∣1 2 3 40 1 1 −30 2 −2 −20 −1 −1 −1
∣∣∣∣∣∣∣∣ = 20
∣∣∣∣∣∣1 1 −31 −1 −1−1 −1 −1
∣∣∣∣∣∣ = 20
∣∣∣∣∣∣1 1 −30 −2 20 0 −4
∣∣∣∣∣∣ = 160.
Determinantes tipo Van der Monde
Multiplicando por a1 la 2a columna y restandola de la 3a, y posterior-mente multiplicando la 1a columna por a1 y restandola de la 2a, se tiene
∣∣∣∣∣∣∣∣∣∣1 a1 a2
1
1 a2 a22
1 a3 a23
∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣1 a1 0
1 a1 a22 − a1a2
1 a1 a23 − a1a3
∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣1 0 0
1 a2 − a1 a22 − a1a2
1 a3 − a1 a23 − a1a3
∣∣∣∣∣∣∣∣∣∣
= (a2 − a1)(a3 − a1)
∣∣∣∣ 1 a2
1 a3
∣∣∣∣ = (a2 − a1)(a3 − a1)(a3 − a2).
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 a1 a21 a3
1
1 a2 a22 a3
2
1 a3 a23 a3
3
1 a4 a24 a3
4
∣∣∣∣∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 a1 a21 0
1 a2 a22 a3
2 − a1a22
1 a3 a23 a3
3 − a1a23
1 a4 a24 a3
4 − a1a24
∣∣∣∣∣∣∣∣∣∣∣∣∣∣

4. Matrices y determinantes 109
=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 a1 0 0
1 a2 a22 − a1a2 a3
2 − a1a22
1 a3 a23 − a1a3 a3
3 − a1a23
1 a4 a24 − a1a4 a3
4 − a1a24
∣∣∣∣∣∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 0 0 0
1 a2 − a1 a22 − a1a2 a3
2 − a1a22
1 a3 − a1 a23 − a1a3 a3
3 − a1a23
1 a4 − a1 a24 − a1a4 a3
4 − a1a24
∣∣∣∣∣∣∣∣∣∣∣∣∣∣= (a2 − a1)(a3 − a1)(a4 − a1)
∣∣∣∣∣∣∣∣∣∣1 a2 a2
2
1 a3 a23
1 a4 a24
∣∣∣∣∣∣∣∣∣∣=
∏j<k
(ak − aj),
donde∏
significa producto.
EJERCICIOS 4.71. Generalizar el ultimo ejemplo probando que∣∣∣∣∣∣∣
1 a1 a21 · · · an−1
1...
......
. . . ,...
1 an a2n · · · an−1
n
∣∣∣∣∣∣∣ =∏j<k
(ak − aj).
2. Calcular los determinantes de las siguientes matrices1 −1 2 3 42 1 0 1 23 −1 0 1 45 1 0 2 71 2 1 0 1
,
7 1 0 2 41 −1 1 1 14 3 2 1 05 1 −1 0 71 2 3 4 5
.
4.8. Caracterizacion del rango de una matriz
usando determinantesProbaremos que el rango de una matriz es tambien la dimension del sub-espacio vectorial generado por los vectores columna.
Teorema 4.8.1 Un conjunto de vectores {A1, A2, . . . , Ak} en Rn son li–nealmente dependientes ⇔ todos los determinantes de las submatrices dek × k obtenidos al fijar k coordenadas de los vectores A1, A2, . . . , Ak, soncero.

110 4.8. Caracterizacion del rango de una matriz usando determinantes
Exibimos primero unos ejemplos que ilustran las tecnicas de la prueba.Primero, si A = (a1, a2, . . . , an) y B = (b1, b2, . . . , bn) son vectores lineal-mente dependientes, entonces existen escalares α, β ∈ R � αA+ βB = 0 yalguno de ellos es distinto de 0, digamos β 6= 0. Bajo estas hipotesis, se tieneentonces que αai + βbi = 0 ∀ i ∈ {1, . . . , n}, y
0 =
∣∣∣∣ ai aj
0 0
∣∣∣∣ =
∣∣∣∣ ai aj
αai + βbi αaj + βbi
∣∣∣∣ = β
∣∣∣∣ ai aj
bi bj
∣∣∣∣ ∴
∣∣∣∣ ai aj
bi bj
∣∣∣∣ = 0 ∀i, j.
Por otra parte, sean A = (a1, . . . , an) y B = (b1, . . . , bn) vectores quesatisfacen la siguiente condicion∣∣∣∣ ai aj
bi bj
∣∣∣∣ = 0 ∀ i, j, i 6= j.
Si A = 0, A,B son linealmente dependientes, por lo que podemos suponerA 6= 0, digamos aj 6= 0. Se tiene entonces que
−bjA+ ajB = (−bja1 + ajb1, . . . ,−bjan + ajbn) = 0,
como aj 6= 0, se sigue que A y B son linealmente dependientes (claramente,la condicion aibi − aibi = 0 siempre se cumple).
Demostracion del Teorema 4.8.1. Probamos primero la necesidad, sean
A1 = (a11, a12, . . . , a1n),
A2 = (a21, a22, . . . , a2n),...
Ak = (ak1, ak2, . . . , akn),
vectores linealmente dependientes, entonces existen escalares α1, α2, . . . , αk,alguno distinto de 0, tales que
α1A1 + α2A2 + · · ·+ αkAk = 0.
Sin perder generalidad, αk 6= 0. Tomando coordenadas j = 1, 2, . . . , n, setiene que α1a1,j + α2a2,j + · · ·αkak,j = 0.
Finalmente, sean 1 ≤ i1 < i2 < · · · < ik ≤ n, k coordenadas distintas,entonces
0 =
∣∣∣∣∣∣∣∣∣a1,i1 · · · a1,ik
a2,i1 a2,ik...
...α1a1,i1 + α2a2,i1 + · · ·+ αkak,i1 · · · α1a1,ik + α2a2,ik + · · ·+ αkak,ik
∣∣∣∣∣∣∣∣∣

4. Matrices y determinantes 111
= αk
∣∣∣∣∣∣∣∣∣a1,i1 · · · a1,ik
a2,i1 · · · a2,ik...
...ak,i1 · · · ak,ik
∣∣∣∣∣∣∣∣∣ ,y se sigue que cualquier submatriz de k × k tiene determinante igual a 0,ya que αk 6= 0.
Probamos ahora el recıproco por induccion. Si k = 1 el resultado es tri-vial, un vector cuyas coordenadas son cero, es el vector 0 que es linealmentedependiente.
Suponemos cierto el teorema para k − 1 vectores y probamos para kvectores, digamos A1, . . . , Ak−1, Ak. Si todas las submatrices de k−1×k−1obtenidas de los vectores A1, . . . , Ak−1 tienen determinante 0, se sigue dela hipotesis de induccion que A1, . . . , Ak−1 son linealmente dependientes, ypor lo tanto A1, . . . , Ak−1, Ak tambien lo son. De otra manera, existe unasubmatriz con determinante distinto de 0 de la forma∣∣∣∣∣∣∣∣∣
a1,i1 a1,i2 · · · a1,ik−1
a2,i1 a2,i2 · · · a2,ik−1
......
. . ....
ak−1,i1 ak−1,i2 · · · ak−1,ik−1
∣∣∣∣∣∣∣∣∣ = γ 6= 0.
Finalmente, ∀ j ∈ {1, . . . , n}, se tiene por hipotesis
0 =
∣∣∣∣∣∣∣∣∣a1,i1 · · · a1,ik−1
a1,j
a2,i1 · · · a2,ik−1a2,j
......
...ak,i1 · · · ak,ik−1
ak,j
∣∣∣∣∣∣∣∣∣= α1a1j + α2a2j + · · ·+ γak,j,
donde las αs denotan los correspondientes menores a asj multiplicados por(−1)(s+j). Notese tambien que que si j = is para alguna s ∈ {i1, i2, . . . , ik−1},se trata de una matriz con 2 columnas iguales. Por lo tanto
α1A1 + α2A2 + · · ·+ γAk = 0,
y como γ 6= 0, se tiene que A1, A2, . . . , Ak son linealmente dependientes. �

112 4.9. Caracterizacion del rango de una matriz usando determinantes
Corolario 4.8.2 Sea A una matriz, entonces el rango de A es k ⇔ todaslas submatrices de r × r, r > k tienen determinante 0, y A tiene unasubmatriz de k × k con determinante no nulo.
Demostracion.⇒) Si el rango de A es k, entonces A tiene k renglones linealmente inde-pendientes. En general, cualquier conjunto de generadores de un subespaciovectorial contiene una base (ejercicio). Se sigue entonces del teorema an-terior que existe una submatriz de k × k con determinante distinto de 0.Tambien se sigue del mismo teorema que si r > k, cualquier submatriz der× r tiene determinante 0, ya que cualesquiera r renglones son linealmentedependientes.⇐) Se sigue tambien del teorema anterior que como existe una submatrizde k × k con determinante no nulo, los renglones involucrados son lineal-mente independientes, y que si todo submatriz de r× r, donde r > k, tienedeterminante 0, entonces cualesquiera r vectores renglon son linealmentedependientes. En otras palabras, el rango es k.
�
Corolario 4.8.3 El rango de una matriz es igual a la dimension del sub-espacio vectorial generado por las columnas.
Demostracion. Provisionalmente denotamos por rango1, a la definicionoriginal y rango2 a la dimension del subespacio vectorial generado por lascolumnas. Se sigue entonces del Corolario 4.8.2 que
rango2(A) = rango1(At) = rango1(A),
ya que este corolario permite definir rango sin mencionar columnas o ren-glones, sino solamente submatrices, y estas y sus transpuestas tienen losmismos determinantes.
�
Corolario 4.8.4 Una matriz de n× n es de rango n ⇔ su determinantees distinto de 0.
Demostracion. Se sigue del Teorema 4.8.1 que los vectores renglon sonlinealmente dependientes si y solo si el determinante de la matriz es 0.
�
EJERCICIOS 4.81. Pruebe que cualquier conjunto finito de generadores de un subespaciovectorial en Rn contiene una base.

4. Matrices y determinantes 113
4.9. El determinante como area o volumen
Definicion 58 Sea f : Rn × Rn × · · · × Rn︸ ︷︷ ︸m veces
−→ R, se dice que f es
multilineal, si es lineal con respecto a cada variable, i.e., se cumplen las si-guientes dos condiciones ∀λ ∈ R, ∀ k ∈ {1, 2, . . . ,m} y ∀ xk, xk′ ∈ Rn :
i) f(x1, . . . , xk−1, xk + xk′ , xk+1, . . . , xm)
= f(x1, . . . , xk−1, xk, xk+1, . . . , xm)+f(x1, . . . , xk−1, xk′ , xk+1, . . . , xm),
ii)f(x1, . . . , λ xk, . . . , xn) = λ f(x1, . . . , xk, . . . , xn).
Observese que la funcion determinante se puede pensar como una funcionmultilineal de n vectores en Rn, ya sea las columnas, o los renglones (porlas propiedades demostradas). Esto se ve claro al escribir, por ejemplo
Det A = Det (v1, v2, . . . , vn), donde A =
v1
v2...vn
.
Recordamos que el determinante como funcion de los n vectores renglon (ocolumna) en Rn cumple las siguientes 3 propiedades:
i) (Rn × Rn × · · · × Rn)Det−−→ R es multilineal,
ii) Det (v1, v2, . . . , vj−1, vj, vj, vj+2, . . . , vn) = 0, i.e., si se tienen 2 ren-glones consecutivos iguales, el determinante es 0,
iii) Det (e1, e2, . . . , en) = 1, i.e., Det (I) = 1.
Teorema 4.9.1 Existe una unica funcion con dominio
Rn × Rn × · · · × Rn︸ ︷︷ ︸n veces
y valores reales, que satisface i), ii) y iii), esta funcion es el determinante.

114 4.9. El determinante como area o volumen
Probamos primero un lema.
Lema 4.9.2 Bajo las hipotesis del Teorema 4.9.1, una transposicion de ele-mentos consecutivos cambia el signo de la funcion.
Demostracion.
0 = f(v1, . . . , vk + vk′ , vk + vk′ , vk+2, . . . , vn),
por lo cual
f(v1, . . . , vk−1, vk, vk′ , vk+2, . . . , vn) = −f(v1, . . . , vk−1, vk′ , vk, vk+2, . . . , vn).
�Demostracion del Teorema 4.9.1 Sea f dicha funcion, entonces
f
(n∑
i=1
a1 i ei, . . . ,n∑
i=1
an i ei
)=
∑σ ∈Sn
a1 σ(1) · · · an σ(n) f(eσ(1), . . . eσ(n)).
Ya que al aplicar la propiedad de multilinealidad se tienen tantos sumandoscomo permutaciones.
Finalmente, usando el Teorema 4.3.3, si la permutacion
σ =
(1 · · · n
σ(1) · · · σ(n)
)consiste de m inversiones, entonces se puede mediante m transposicionesde elementos consecutivos, componer σ y obtener la identidad.
Por lo cual
f
(n∑
i=1
a1 i ei, . . . ,
n∑i=1
an i ei
)=
∑σ ∈Sn
a1 σ(1) · · · an σ(n) ε(σ).
�
Area - volumen
Definicion 59 Sean v, w ∈ R2 y P (v, w) el paralelogramo generado porv y w. Se denota por vol0 (v, w) al area de P (v, w) si Det (v, w) ≥ 0 ymenos el area de P (v, w) si Det (v, w) ≤ 0.

4. Matrices y determinantes 115
Notese que si el area se denota por vol (v, w), entonces
|vol0 (v, w)| = vol (v, w).
Se usaran propiedades simples del area como las siguientes:
1. Area (segmento)= 0,
2. Si Area(A) = m, Area(T (A)) = m, donde T es una traslacion,
3. Si A ∩ B = ∅ o A ∩ B es un conjunto de area cero, entonces
Area(A ∪ B) = Area(A) ∪ Area(B),
La prueba formal de estas propiedades se lleva a cabo en el curso decalculo de varias variables, donde se define al area como una integral doble
AE(R) =
∫R
dA.
La invariabilidad bajo traslacion se sigue del teorema de cambio de variableaplicado a x 7→ x+ x0, ya que el jacobiano es la identidad.
Teorema 4.9.3 Sean v, w ∈ R2, entonces
vol0 (v, w) = Det (v, w).
Necesitamos primero unos lemas antes de probar el teorema.
Lema 4.9.4 Si c ∈ R, c ≥ 0 y v, w ∈ R2, entonces
vol (c v, w) = c vol (v, w).
Demostracion. Basta probar el caso cuando v y w son linealmente in-dependientes. En este caso, si n ∈ N, el paralelogramo generado por n v yw consiste de n paralelogramos paralelos a P (v, w).
Los paralelogramos obtenidos son traslaciones por v, 2 v, . . . , (n−1) v delparalelogramo P (v, w) y se tiene que
vol (n v, w) = n vol (v, w).

116 4.9. El determinante como area o volumen
Tambien
vol(vn, w)
=1
nvol (v, w),
y si m,n ∈ N
vol(mnv,w
)=
m
nvol (v, w).
Esto se sigue, ya que si v1 = vn, se tiene de la observacion anterior que
vol (n v1, w) = n vol (v1, w).
Mas aun,
vol
(m
1
nv, w
)= m vol
(1
nv, w
)= m
1
nvol (v, w).
vw
P (v, w)
(n− 1) v
n v
2 v
Figura 4.1: Paralelogramo generado por n v y w
Finalmente, si c ∈ R, c > 0, entonces vol (c v, w) = c vol (v, w). Para
probar esto, sean r1, r2 ∈ Q, 0 < r1 < c < r2. Entonces
r1 vol (v, w) = vol (r1 v, w) ≤ vol (c v, w) ≤ vol (r2 v, w) = r2 vol (v, w),

4. Matrices y determinantes 117
(vease la Figura 4.2). Haciendo tender r1 y r2 a c, en el lımite se tiene que
c vol (v, w) = vol (c v, w).
�
r1 v
r2 v
c v
Figura 4.2: c vol (v, w) = vol (c v, w)
Por otro lado, al trasladar el paralelogramo P (v, w) por −v se sigue elsiguiente resultado.
Lema 4.9.5 Sean v, w ∈ R2, entonces
vol (−v, w) = vol (v, w).
vw
P (v, w)
P (−v, w)
−v
Figura 4.3: vol (−v, w) = vol (v, w)
Lema 4.9.6 Sean v, w ∈ R2, y c ∈ R, entonces
vol0 (c v, w) = c vol0 (v, w).
Demostracion. El resultado es evidente si v y w son linealmente depen-dientes. Consideramos casos

118 4.9. El determinante como area o volumen
Caso 1: Det (v, w) > 0 y c < 0. En este caso, Det (c v, w) ≤ 0 ytomando c = −d, se sigue en virtud del Lema 4.9.5 que
vol0 (c v, w) = −vol(c v, w) = −vol (−d v, w) = −vol (d v, w)
= −d vol (v, w) = c vol (v, w) = c vol0 (v, w).
El caso Det (v, w) > 0, c > 0 ya se probo. De manera analoga, se pruebanlos dos casos restantes (ejercicio). �
Para probar que vol0 distribuye la suma usamos los siguientes resultados.
Lema 4.9.7 Sean v, w ∈ R2, y c ∈ R, entonces
vol0 (v, w) = −vol0 (w, v).
Demostracion.Caso 1: Det (v, w) ≤ 0.
vol0 (v, w) = −vol (v, w) = −vol (w, v) = −vol0 (w, v),
puesto que det (w, v) ≥ 0.
Caso 2: det (v, w) > 0.
vol0 (v, w) = vol (v, w) = vol (w, v) = −vol0 (w, v),
puesto que det (w, v) ≤ 0.�
A
B
v
w
v + w
A+
w
Figura 4.4: vol (v + w,w) = vol (v, w)
Lema 4.9.8 Sean v, w vectores en el plano, entonces
vol (v + w,w) = vol (v, w).

4. Matrices y determinantes 119
Demostracion. El paralelogramo generado por v y w consiste de 2triangulos A y B. Por otra parte, el generado por v+w y w consiste deltriangulo B y del triangulo A+ w, por lo que tienen la misma area (ver laFigura 4.4).
�
Lema 4.9.9 Sean v, w ∈ R2, y d ∈ R, entonces
vol0 (v + dw,w) = vol0 (v, w).
Demostracion.
d vol0 (v + dw,w) = vol0 (v + dw, dw) = vol (v, dw) = d vol (v, w).
�Demostracion del Teorema 4.9.3 Basta probar que el vol0 (v, w) cumplelas propiedades i), ii) y iii). Hay que demostrar i), ya que ii) y iii) sontriviales. Es decir, hay que probar la multilinealidad. En virtud de los Lemas4.9.4, 4.9.6 y 4.9.7 es suficiente probar que
vol0 (v1 + v2, w) = vol0 (v1, w) + vol0 (v2, w).
w
2 w
w
2 w
v v
v + 2w
Figura 4.5: Interpretacion geometrica del Lema 4.9.9, para el caso d = 2, setiene que vol (v + 2w,w) = vol (v, w)
Si w = 0 no hay nada que probar. De otra manera, tomando como base{v, w}, se tiene
v1 = c1 v + d1w y v2 = c2 v + d2w.

120 4.9. El determinante como area o volumen
Finalmente, usando los Lemas 4.9.6 y 4.9.9, se tiene
vol0 (v1 + v2, w) = vol0 (c1 v + d1w + c2 v + d2w,w)
= (c1 + c2) vol0 (v, w) = c1 vol0 (v, w) + c2 vol0 (v, w)
= vol0 (c1 v, w) + vol0 (c2 v, w)
= vol0 (v1, w) + vol0 (v2, w).
�
Un hecho interesante es que la misma prueba se aplica para R3 o Rn.Esto se sigue ya que las condiciones que caracterizan el determinante involu-cran 2 coordenadas a la vez por lo cual los argumentos se pueden adaptar alcaso bidimensional. Por ejemplo, tomando paralelepıpedos y trasladandoloscomo en el caso bidimensional, se siguen todos los argumentos.
Notese que el teorema se puede formular como sigue
|Det (v, w) | = vol (v, w).
Otros resultados interesantes sobre areas y determinantes se puede consultaren [4]. Uno de estos resultados establece que si L : R2 −→ R2 es lineal,entonces
Area L(P ) = |det A| Area P,
donde A es la matriz que define L.
EJERCICIOS 4.91. Terminar la prueba del Lema 4.9.6.

Capıtulo 5
Sistemas de ecuaciones lineales
5.1. Preliminares
Estudiaremos un sistema de m ecuaciones lineales con n incognitas:a11x1 + a12x2 + · · · + a1nxn = b1
a21x1 + a22x2 + · · · + a2nxn = b2...
...
am1x1 + am2x2 + · · · + amnxn = bm.
(5.1)
Las incognitas o variables por resolver son x1, x2, . . . , xn, las constantesai j, bj se toman generalmente en un campo como los reales o los complejos,o tambien en un anillo como los enteros. A los terminos b1, b2, . . . , bm se lesllama libres.
A un sistema se le asocian 2 matrices a1 1 · · · a1 n...
...am 1 · · · am n
y
a1 1 · · · a1 n b1...
...am 1 · · · an n bm
,
a la primera se les llama matriz del sistema y a la segunda se le conoce comola matriz aumentada.
Observese que si denotamos las columnas de la matriz por C1, C2, . . . , Cn
y a B la columna de los terminos libres, el sistema (5.1) se puede reescribircomo
x1C1 + x2C2 + · · ·+ xnCn = B. (5.2)
121

122 5.1. Preliminares
Mas aun, si X = (x1, x2, . . . , xn) es solucion, entonces B ∈< C1, . . . , Cn >.Por ejemplo, el sistema
2x + 3y − z = 5x − y + z = 2
se puede escribir como x(2, 1) + y(3,−1) + z(−1, 1) = (5, 2).
Definicion 60 Al sistema (5.1) se le llama homogeneo si
B = (b1, . . . , bm) = 0.
Algunos sistemas tienen muchas soluciones, otros exactamente una, yalgunos otros ninguna.
Por ejemplo, {x + y = 3
x − y = 1
tiene una unica solucion, ya que las ecuaciones implican 2x = 4, y y = 1.
(2, 1)
Figura 5.1: Las rectas x+ y = 3, x− y = 1 se intersectan en (2, 1)
Por otra parte, la ecuacion 2x− y = 0 tiene una infinidad de soluciones.Estas son los puntos de la recta 2x = y.
(1, 2)
Figura 5.2: Las soluciones de 2x− y = 0

5. Sistemas de ecuaciones lineales 123
Sin embargo, el sistema{y − x = 1
y − x = 2
no tiene soluciones. Si ası fuera, restando se tendrıa 0 = −1.
Figura 5.3: Las rectas y = x+ 1, y = x+ 2 no se intersecan, al ser paralelas
Ciertamente un sistema homogeneo siempre tiene al menos la soluciontrivial, i.e., el vector 0.
5.2. Existencia de soluciones
Conocer el rango de las matrices del sistema es muy util para resolver unsistema. En el siguiente teorema usamos la notacion de la ecuacion (5.2).
Teorema 5.2.1 Un sistema de ecuaciones lineales tiene solucion si y solo siel rango de la matriz del sistema es igual al rango de la matriz aumentada.
Demostracion. La existencia de soluciones significa que existe x ∈ Rn,x = (x1, . . . , xn) tal que
x1C1 + x2C2 + · · ·+ xnCn = B.
Esto sucede si y solo si
B ∈< C1, C2, . . . , Cn > .
Mas aun, esta condicion se cumple si y solo si
< C1, C2, . . . , Cn > = < B,C1, C2, . . . , Cn > .

124 5.2. Existencia de soluciones
Finalmente, esta condicion equivale a que los rangos de la matriz del sistema,y de la matriz aumentada sean iguales: si B /∈< C1, C2, . . . , Cn >, entoncesel rango de < B,C1, C2, . . . , Cn > es mayor al de la matriz del sistema, yB junto con una base de {C1, C2, . . . , Cn} forman un conjunto linealmenteindependiente.
�
Ejemplos
1. Consideremos el siguiente sistema de ecuacionesx + y − w = 0
x + z − w = −1
−x + y − 2z + w = 3 .
La matriz aumentada es
1 1 0 −1 01 0 1 −1 −1−1 1 −2 1 3
∼
1 1 0 −1 00 −1 1 0 −10 2 −2 0 3
∼ 1 1 0 −1 0
0 −1 1 0 −10 0 0 0 1
,
y la matriz tiene rango 3. Las mismas operaciones muestran que la
matriz del sistema 1 1 0 −11 0 1 −1−1 1 −2 1
∼ 1 1 0 −1
0 −1 1 00 0 0 0
,
tiene rango 2, por lo que el sistema no tiene soluciones.
2. Analizamos ahora el sistemax − y + 2z = 1
y − z = 1
3x + y − z = 0
4x + y = 2 .

5. Sistemas de ecuaciones lineales 125
La matriz aumentada de este sistema de ecuaciones es1 −1 2 10 1 −1 13 1 −1 04 1 0 2
∼
1 −1 2 10 1 −1 10 4 −7 −30 5 −8 −2
∼
1 −1 2 10 1 −1 10 0 −3 −70 0 −3 −7
∼
1 −1 2 10 1 −1 10 0 −3 −70 0 0 0
,
es decir, tiene rango 3. Las mismas operaciones establecen que
1 −1 20 1 −13 1 −14 1 0
∼
1 −1 20 1 −10 0 −30 0 0
,
que tambien tiene rango 3, y por lo tanto el sistema sı tiene solucion.
3. Consideramos el sistema X1 C1 + X2 C2 + · · · +Xn Cn = B, dondelos vectores columna Cj son vectores en Rn (y B tambien), supongasetambien que
det(C1C2 · · ·Cn) 6= 0.
Entonces el sistema tiene solucion, esto se sigue ya que esta hipotesisimplica que la matriz del sistema tiene rango n (Corolario 4.8.4).Ademas, el rango de la matriz aumentada (que siempre es mayor oigual que el de la matriz del sistema) es ≤ n, ya que sus vectorescolumna viven en Rn. Es decir, ambos rangos son iguales.
4. Otra prueba de que cualquier sistema homogeneo tiene solucion es ob-servando que las columnas de las 2 matrices del sistema generan elmismo subespacio vectorial (la ultima columna es de ceros).
5. Un sistema de m ecuaciones y n incognitas, donde m < n, y talque el rango de la matriz sea m, tiene solucion. Esto se sigue de que elrango de la matriz aumentada es ≤ m (los vectores columna viven enRm), y por lo tanto es m.

126 5.3. Sistemas de n ecuaciones y n-incognitas
EJERCICIOS 5.21. Determine si los siguientes sistemas tienen solucion.
a)
x − y + 2z = 7
y + z = 5
2z = 6,
b)
x + y − z = 1
2x − 3z = 5
2y + 5z = 2,
c)
2x + 3y + z = 7
2x − 4y + 6z = 10
3x − 5y + 3z = 4,
d)
x − y + 2z = −2
3x − 3y + 6z = 1
2x − 2y + 4z = 0.
5.3. Sistemas de n ecuaciones y n-incognitasConsideremos el siguiente sistema de ecuaciones
a11x1 + a12x2 + · · · + a1nxn = k1
a21x1 + a22x2 + · · · + a2nxn = k2
......
an1x1 + a22x2 + · · · + annxn = kn.
(5.3)
Denotaremos por d al determinante de la matriz del sistema, i.e.,
d = det
a11 a12 · · · a1n
a21 a21 · · · a2n...
.... . .
...an1 an1 · · · ann
.
Observese que si d 6= 0, el sistema (5.3) tiene solucion. Esto se sigue delargumento del ejemplo 3 de la seccion anterior. Para encontrar la solucion(se probara que es unica), se usan los siguientes determinantes
d1 =
∣∣∣∣∣∣∣∣∣k1 a12 · · · a1n
k2 a22 · · · a2n...
.... . .
...,kn an2 · · · ann
∣∣∣∣∣∣∣∣∣ , d2 =
∣∣∣∣∣∣∣∣∣a11 k1 a13 · · · a1n
a21 k2 a23 · · · a2n...
......
. . ....
an1 kn an3 · · · ann
∣∣∣∣∣∣∣∣∣ ,
· · · , dn =
∣∣∣∣∣∣∣∣∣a11 · · · a1,n−1 k1
a21 · · · a2,n−1 k2...
. . ....
...an1 · · · an,n−1 kn
∣∣∣∣∣∣∣∣∣ .

5. Sistemas de ecuaciones lineales 127
Ahora sea S = (s1, s2, . . . , sn) una solucion del sistema, entonces
a11s1 + · · · + a1nsn = k1
a21s1 + · · · + a2nsn = k2...
. . ....
...an1s1 + · · · + annsn = kn,
y se tiene usando las propiedades del determinante que
d1 =
∣∣∣∣∣∣∣∣∣k1 a12 · · · a1n
k2 a22 · · · a2n...
.... . .
...kn an2 · · · ann
∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣a11s1 + · · ·+ a1nsn a12 · · · a1n
a21s1 + · · ·+ a2nsn a22 · · · a2n...
.... . .
...an1s1 + · · ·+ annsn an2 · · · ann
∣∣∣∣∣∣∣∣∣=
∣∣∣∣∣∣∣∣∣a11s1 a12 · · · a1n
a21s1 a22 · · · a2n...
.... . .
...an1s1 an2 · · · ann
∣∣∣∣∣∣∣∣∣ = s1d.
Analogamente, d2 = s2d, . . . , dn = snd. Hemos probado el siguiente teo-rema.
Teorema 5.3.1 (Regla de Cramer) El sistema (5.3) tiene una unica solucion
s =
(d1
d,d2
d, . . . ,
dn
d
).
Corolario 5.3.2 Si la matriz de un sistema homogeneo de n ecuaciones yn incognitas, tiene determinante distinto de 0, entonces su unica solucion esla trivial, i.e., el vector 0.
Demostracion. Se tiene que d1 = · · · = dn = 0, ya que estas matricestienen una columna de ceros. �
Otra demostracion se obtiene al observar que 0 siempre es solucion, ypor la Regla de Cramer es la unica.

128 5.3. Sistemas de n ecuaciones y n-incognitas
Ejemplos
1. Dado el sistema
{x + y = a
x − y = b, se tiene que d =
∣∣∣∣ 1 11 −1
∣∣∣∣ = −2,
d1 =
∣∣∣∣ a 1b −1
∣∣∣∣ = −a− b
y d2 =
∣∣∣∣ 1 a1 b
∣∣∣∣ = b− a,
∴ la solucion unica es (x, y) =(
a+b2, a−b
2
).
2. Para el sistema {x senα + y cosα = sen 2α
x cosα − y senα = cos 2α,
se tiene que d =
∣∣∣∣ senα cosαcosα − senα
∣∣∣∣ = −1,
d1 =
∣∣∣∣ sen 2α cosαcos 2α − senα
∣∣∣∣= − senα sen 2α− cosα cos 2α
= − senα(2 senα cosα)− cosα(cos2 α− sen2 α)
= −2 sen2 α cosα− cosα(1− 2 sen2 α )
= − cosα,
d2 =
∣∣∣∣ senα sen 2αcosα cos 2α
∣∣∣∣= (cos2 α− sen2 α) senα− 2 senα cos2 α
= (2 cos2 α− 1) senα− 2 senα cos2 α
= − senα,
y la solucion es (cosα, senα).

5. Sistemas de ecuaciones lineales 129
Usando un poco de geometrıa analıtica y notacion compleja el ultimoejemplo se puede interpretar geometricamente.
Se busca (x, y) ∈ R2 �(senα cosαcosα − senα
) (xy
)=
(sen 2αcos 2α
),
observese que(0 11 0
) (senα cosαcosα − senα
)=
(cosα − senαsenα cosα.
). (5.4)
x = y
α
2
Figura 5.4: Reflexion en la recta por 0 y ei(π4−α
2)
Ahora las transformaciones definidas por(cosα − senαsenα cosα
)y
(0 11 0
)son respectivamente, rotacion por α, y reflexion en la recta x = y (la ultimaintercambia x por y). Si denotamos la rotacion por R y la reflexion por T,usando (5.4) se tiene(
senα cosαcosα − senα
)=
(0 11 0
) (cosα − senαsenα cosα
), (5.5)
(ya que T = T−1) y como R(eiα) = ei(2α) = cos 2α + isen 2 α, al componercon T se tiene ( sen 2α, cos 2α), i.e., la solucion es (cosα, senα).
Observese que se sigue de la ecuacion (5.5) que la transformacion definidapor (
senα cosαcosα − senα
)

130 5.3. Sistemas de n ecuaciones y n-incognitas
es la reflexion en la recta que pasa por ei(π4−α
2), ya que al rotar ei(π
4−α
2) por
eiα y reflejar en x = y, se tiene ei(π4−α
2) (se sigue del algebra lineal que como
la matriz tiene determinante −1 es una reflexion). Vease la Figura 5.4.El sımbolo eix corresponde a (cosx, sen x). La multiplicacion de matrices
se define como(a bc d
) (α βγ δ
)=
(aα + b γ a β + b δc α + d γ c β + d δ
),
y (a bc d
) (xy
)=
(ax+ bycx+ dy
).
Otros ejemplos
1. Se resuelve el sistemax + y + z = 1
ax + by + cz = k
a2x + b2y + c2z = k2,
donde a, b, c son tres numeros distintos. El determinante del sistemaes de tipo Van der Monde y esta dado por
d =
∣∣∣∣∣∣1 1 1a b ca2 b2 c2
∣∣∣∣∣∣ = (c− b)(b− a)(c− a).
Los determinantes d1, d2, d3 son tambien de tipo Van der Monde, y sesigue de la regla de Cramer que la solucion esta dada por(
(c− k)(c− b)(b− k)(c− b)(b− a)(c− a)
,(c− k)(k − a)(c− a)(c− b)(b− a)(c− a)
,(k − b)(k − a)(b− a)(c− b)(b− a)(c− a)
)
=
((c− k)(b− k)(b− a)(c− a)
,(c− k)(k − a)(c− b)(b− a)
,(k − b)(k − a)(c− b)(c− a)
).
2. Exprese K = (5, 1, 11) como combinacion lineal de B1 = (3, 2, 2),B2 = (2, 3, 1) y B3 = (1, 1, 3). Se debe resolver
x1B1 + x2B2 + x3B3 = K,

5. Sistemas de ecuaciones lineales 131
es decir, 3x1 + 2x2 + x3 = 5
2x1 + 3x2 + x3 = 1
2x1 + x2 + 3x3 = 11.
Se tiene
d =
∣∣∣∣∣∣3 2 12 3 12 1 3
∣∣∣∣∣∣ =
∣∣∣∣∣∣6 2 16 3 16 1 3
∣∣∣∣∣∣ = 6
∣∣∣∣∣∣1 2 11 3 11 1 3
∣∣∣∣∣∣ = 6
∣∣∣∣∣∣1 2 10 1 00 −1 2
∣∣∣∣∣∣ = 12,
∴ hay una unica solucion.
Ahora
d1 =
∣∣∣∣∣∣5 2 11 3 111 1 3
∣∣∣∣∣∣ =
∣∣∣∣∣∣1 5 21 1 33 11 1
∣∣∣∣∣∣ =
∣∣∣∣∣∣1 5 20 −4 10 −4 −5
∣∣∣∣∣∣ = 24,
d2 =
∣∣∣∣∣∣3 5 12 1 12 11 3
∣∣∣∣∣∣ =
∣∣∣∣∣∣1 3 51 2 13 2 11
∣∣∣∣∣∣ =
∣∣∣∣∣∣1 3 50 −1 −40 −7 −4
∣∣∣∣∣∣ = −24,
d3 =
∣∣∣∣∣∣3 2 52 3 12 1 11
∣∣∣∣∣∣ = 3
∣∣∣∣ 3 11 11
∣∣∣∣ − 2
∣∣∣∣ 2 12 11
∣∣∣∣ + 5
∣∣∣∣ 2 32 1
∣∣∣∣= 3 · 32− 40− 20 = 36,
∴ la solucion es (2,−2, 3).
3. ¿Son los vectores B1 = (1, 5, 3), B2 = (2, 1,−1) y B3 = (4, 2, 1)linealmente independientes?
Se debe probar que el determinante de la matriz formada con estostres vectores es distinto de 0, esto se sigue del teorema que relaciona elrango con vectores linealmente independientes. Dicho de otra manera,escribiendo x1B1 +x2B2 +x3B3 = 0, la independencia lineal se siguesi x1, x2, x3 son 0, esto es, la unica solucion es la trivial, lo cual usandoel teorema de Cramer se obtiene si el determinante es distinto de 0. Enefecto, al calcular se obtiene∣∣∣∣∣∣
1 2 45 1 23 −1 1
∣∣∣∣∣∣ =
∣∣∣∣∣∣1 2 40 −9 −180 −7 −11
∣∣∣∣∣∣ = −9
∣∣∣∣ 1 2−7 −11
∣∣∣∣ = −27 6= 0.

132 5.4. Sistemas homogeneos, funciones lineales
EJERCICIOS 5.31. Encuentre la solucion a los siguientes sistemas usando la regla de Cramer.
a)
x + y − z = −2
3x − y + 2z = 4
−x + 2y − z = 6,
b)
x − y + z = −1
2x − y − z = 4
3x + 2y + z = −1,
c)
x − y + 3z = 4
2x − y + z = 6
3x − 2y + 2z = 10.
2. Exprese el vector K = (1, 5, 9) como combinacion lineal de los vectoresB1 = (1, 3, 7), B2 = (1, 2, 3) y B3 = (0, 1, 1).
5.4. Sistemas homogeneos, funciones linealesLos sistemas homogeneos son aquellos de la forma
a11x1 + a12x2 + · · · + a1nxn = 0
a21x1 + a22x2 + · · · + a2nxn = 0...
...
am1x1 + am2x2 + · · · + amnxn = 0,
(5.6)
o en la notacion de la ecuacion (5.2) x1C1 + x2C2 + · · ·+ xnCn = 0.
Teorema 5.4.1 Si W es el conjunto de soluciones de (5.6), entonces Wes un subespacio vectorial de Rn.
Demostracion. Evidentemente 0 ∈ W . Tambien, si X,Y ∈ W, dondeX = (x1, x2, . . . , xn) y Y = (y1, y2, . . . , yn), se tiene que
x1C1 + · · · + xnCn = 0y1C1 + · · · + ynCn = 0,
y en consecuencia (x1 + y1)C1 + · · ·+ (xn + yn)Cn = 0, i.e., X + Y ∈ W.
Finalmente, si λ ∈ R y X = (x1, x2, . . . , xn) ∈ W , entonces
λx1C1 + · · ·+ λxnCn = 0
y λX ∈ W. �

5. Sistemas de ecuaciones lineales 133
Observese que en general para cualquier sistema de ecuaciones como en(5.1), siempre se pueden reordenar las variables, renombrandolas de tal ma-nera que las primeras columnas C1, C2, . . . , Cr sean una base del espaciovectorial generado por las columnas, i.e., < C1, C2, . . . , Cn > . En el casohomogeneo probaremos que W el espacio de soluciones del sistema tienedimension n− r.
Los siguientes resultados relacionan la dimension de W y n.
Teorema 5.4.2 Sean C1, C2, . . . , Cr una base del subespacio vectorial Wgenerado por las columnas C1, C2, . . . , Cn del sistema (5.2), i.e.,
x1C1 + x2C2 + · · ·+ xnCn = B.
Supongase tambien que el sistema tiene solucion, entonces dados n−r numeros
sr+1, sr+2, . . . , sn,
existen otros r numeros unicos s1, s2, . . . , sr, tales que
s = (s1, s2, . . . , sr, sr+1, . . . , sn)
es solucion de (5.2).
Demostracion. Sea C = sr+1Cr+1 + sr+2Cr+2 + · · · + snCn, como
C1, C2, . . . , Cr generan W , entonces C ∈ W. Ademas, como el sistematiene solucion se tiene que B ∈ W. Por lo cual B − C ∈ W y existen
s1, s2, . . . , sr �B − C = s1C1 + · · ·+ srCr,
i.e.,B = s1C1 + · · ·+ srCr + sr+1Cr+1 + · · ·+ snCn,
y s = (s1, s2, . . . , sr, sr+1, . . . , sn) es solucion.
Para probar la unicidad, supongase que (s′1, . . . , s
′r, sr+1, . . . , sn) tambien
es solucion, entonces
s′
1 C1 + · · ·+ s′
r Cr + sr+1 Cr+1 + · · ·+ sn Cn = B
ys1 C1 + · · ·+ sr Cr + sr+1 Cr+1 + · · ·+ sn Cn,= B.

134 5.4. Sistemas homogeneos, funciones lineales
Por lo cual restando, se tiene que
(s′
1 − s1) C1 + · · ·+ (s′
r − sr) Cr = 0,
y como C1, C2, . . . , Cr son linealmente independientes, se sigue que s′i = si
∀ i ∈ {1, . . . , r}.�
Definicion 61 Se dice que una funcion f : Rn −→ Rm es lineal, si cumplelas siguientes 2 condiciones
a) f(X + Y ) = f(X) + f(Y ) ∀ X,Y ∈ Rn,
b) f(tX) = t f(X) ∀ t ∈ R y ∀ X ∈ Rn.
Notese que si f es lineal, entonces f(0) = 0. Esto es consecuencia de lacondicion b), puesto que f(0X) = 0f(X).
Si f : Rn −→ Rm es lineal, al conjunto {X ∈ Rn | f(X) = 0} se le llamael nucleo de f y se le denota por ker f (del aleman kernel). Observese quese sigue de manera inmediata de la definicion que ker f es un subespaciovectorial de Rn.
Por otra parte, a un sistema de ecuaciones como (5.2) con n incognitas ym ecuaciones
x1C1 + · · ·+ xnCn = B,
se le puede asociar una funcion f de Rn en Rm con regla de correspondencia
f ((x1, . . . , xn)) = x1C1 + · · ·+ xnCn. (5.7)
Esta funcion es lineal:si X = (x1, . . . , xn) y Y = (y1, . . . , yn), entonces
f(X + Y ) = (x1 + y1)C1 + · · ·+ (xn + yn)Cn
= x1C1 + · · ·+ xnCn + y1Cn + · · ·+ ynCn
= f(X) + f(Y ),
y si λ ∈ R y X = (x1, . . . , xn) ∈ Rn, entonces
f(λX) = λx1C1 + · · ·+ λxnCn = λ f(X).
Es importante destacar que ker f es el conjunto de soluciones del sistemahomogeneo asociado, es decir, el definido por la ecuacion
x1C1 + · · ·+ xnCn = 0.

5. Sistemas de ecuaciones lineales 135
Lema 5.4.3 Sea f : Rn −→ Rm lineal, entonces
Imf = {Y ∈ Rm | ∃X ∈ Rn � f(X) = Y }
es un subespacio vectorial de Rm.
Demostracion. Si Y1, Y2 ∈ Imf , existen X1, X2 ∈ Rn � f(Xi) = Yi,i = 1, 2, por lo que
f(X1 +X2) = f(X1) + f(X2) = Y1 + Y2,
y Y1 + Y2 ∈ Imf,
Tambien, si Y ∈ Imf y λ ∈ R, entonces existe X ∈ Rn � f(X) = Y .Por lo que f(λX) = λ f(X) = λY, y λY ∈ Imf . �
Notese que en el caso de una funcion lineal f asociada a un sistema dela forma
x1C1 + · · ·+ xnCn = B,se tiene que Imf es precisamente el subespacio vectorial generado por lascolumnas < C1, C2, . . . , Cn > .
Teorema 5.4.4 Sea f : Rn −→ Rm lineal, entonces
dim(ker f) + dim(Imf) = n.
Demostracion. Sean C1, . . . , Cr una base de Imf y B1, . . . , Bk unabase de ker f (si ker f = {0} no se considera ningun vector Bi).
Ahora, existen vectores D1, . . . , Dr ∈ Rn � f(Di) = Ci ∀ i. Se afirmaque el conjunto de vectores D1, D2, . . . , Dr, B1, B2, . . . , Bk constituyen unabase de Rn, lo cual prueba el teorema, por lo que basta probar la afirmacion.
Los vectores son linealmente independientes ya que si
λ1D1 + · · ·+ λr Dr + µ1B1 + · · ·+ µk Bk = 0,
entonces
f(λ1D1 + · · ·+ λr Dr + µ1B1 + · · ·+ µk Bk) = f(0) = 0.
Por lo cual, usando la linealidad se tiene
λ1 f(D1) + · · ·+ λr f(Dr) = 0 y λ1C1 + · · ·+ λr Cr = 0.

136 5.5. Sistema homogeneo asociado
Como C1, . . . , Cr son linealmente independientes, λ1 = · · · = λr = 0, locual implica que
µ1B1 + · · ·+ µk Bk = 0,
y entonces µ1 = · · · = µk = 0.
Estos vectores tambien generan. Si X ∈ Rn,
f(X) = α1C1 + α2C2 + · · ·+ αr Cr,
en terminos de los vectores Di, i = 1, 2, . . . , r, esto se escribe
f(X) = α1 f(D1) + α2 f(D2) + · · ·+ αr f(Dr),
y la linealidad nos permite afirmar que
f(X − α1D1 − · · · − αr Dr) = 0.
En consecuencia, X − α1D1 − · · · − αr Dr ∈ ker f y
X − α1D1 − · · · − αr Dr = µ1B1 + · · ·+ µk Bk,
para algunas µj ∈ R, j = 1, 2, . . . , k. Es decir, D1, . . . Dr, B1, . . . , Bk ge-neran Rn. �
Este resultado implica que si se tiene una ecuacion vectorial
x1C1 + · · ·+ xnCn = 0
y las columnas C1,. . .,Cr son una base del subespacio vectorial <C1,. . .,Cn>,entonces
dim(ker f) = n− r,donde f es como en (5.7). Esto es, el espacio de soluciones de un sistemahomogeneo tiene dimension n− r (comparese este resultado con el Teorema5.4.2).
5.5. Sistema homogeneo asociado
De manera natural al sistema (5.2)
x1C1 + · · ·+ xnCn = B,
se le asocia el sistema homogeneo (5.6)
x1C1 + · · ·+ xnCn = 0,
por lo que se le llama sistema homogeneo asociado.

5. Sistemas de ecuaciones lineales 137
Teorema 5.5.1 Las soluciones del sistema (5.2) consisten en todos los vec-tores de la forma
X0 + S,donde X0 es una solucion particular de (5.2) y S es cualquier solucion de(5.6) el sistema homogeneo asociado.
Demostracion. Sea X0 = (x1, . . . , xn) y Y cualquier solucion de (5.2),Y = (y1, . . . , yn), entonces
x1C1 + · · ·+ xnCn = B
yy1C1 + · · ·+ ynCn = B,
por lo cual
(y1 − x1)C1 + · · ·+ (yn − xn)Cn = B −B = 0,
y Y −X0 = S es solucion de (5.6), i.e., Y = X0 + S.
Finalmente si S es solucion de (5.6), S = (s1, . . . , sn), entonces
(x1 + s1)C1 + · · ·+ (xn + sn)Cn = x1C1 + · · ·+ xnCn + s1C1 + · · ·+ snCn
= B + 0 = B,
y X0 + S es solucion. �
EjemploConsideremos x+ y = 2.
El sistema homogeneo asociado es x + y = 0, una solucion particular delsistema es (1, 1), por lo que las soluciones de este sistema consisten de lospuntos de la recta y = −x trasladados por (1, 1).
y = −x
(0, 2)
(2, 0)(1, 1)
Figura 5.5: Soluciones a los sistemasx+ y = 2 y x+ y = 0

138 5.6. Resolucion de sistemas
5.6. Resolucion de sistemas
La primera simplificacion consiste en aplicar operaciones elementales a losvectores renglon.
Teorema 5.6.1 Si un sistema de ecuaciones lineales se obtiene de otro me-diante operaciones elementales en los renglones de la matriz aumentada, en-tonces ambos sistemas tienen las mismas soluciones.
Antes de probar el teorema primero exhibimos un ejemplo, consideremoslos sistemas:
(1)
{x − 2y = 3
3x + 5y = 6(2)
{x − 2y = 3
9x + 15y = 18
(3)
{x − 2y = 3
(3x+ x) + (5y − 2y) = 6 + 3(4)
{3x + 5y = 6
x − 2y = 3
El sistema (2) se obtuvo de (1), multiplicando por 3 el 2o renglon. Ademas,multiplicando por 3 (o dividiendo entre 3), se sigue que
(x, y) es solucion de (1) ⇐⇒ es solucion de (2).
Ahora si (x, y) satisface (1) tambien satisface (3), ya que sumando lasdos ecuaciones en (1) se obtiene la 2a ecuacion en (3). Asimismo, si (x, y)satisface (3), restando en este sistema la 1a ecuacion de la 2a, se sigue que(x, y) satisface (1). La equivalencia de (1) y (4) es evidente.
Demostracion del Teorema 5.6.1 La 1a operacion elemental de inter-cambiar renglones ciertamente no altera las soluciones del sistema, ya quesi (x1, x2, . . . , xn) cumple m ecuaciones, el orden en el que aparezcan esirrelevante.
Ahora si se multiplica en el sistema (5.1) el renglon (ai1, ai2, . . . , ain, bi)por λ 6= 0, entonces
λx1 ai1 + λx2 ai2 + · · ·+ λxn ain = λ bi
⇐⇒x1 ai1 + x2 ai2 + · · ·+ xn ain = bi.

5. Sistemas de ecuaciones lineales 139
Finalmente, si (x1, . . . , xn) satisface{x1 ai1 + x2 ai2 + · · · + xn ain = bi (1)
x1 aj1 + x2 aj2 + · · · + xn ajn = bj, (2)
entonces (x1, x2, . . . , xn) satisface
x1 (ai1 + aj1) + x2 (ai2 + aj2) + · · ·+ xn (ain + ajn) = bi + bj. (3)
Y viceversa, si (x1, x2, . . . , xn) satisface (3) y (2), entonces restando (2) de(3), se sigue que este punto satisface tambien la ecuacion (1). �
Sabiendo que un sistema de ecuaciones lineales tiene solucion, por ejem-plo, verificando que los rangos de las matrices sean iguales, un metodo pararesolverlo es el siguiente:
Paso 1. Aplicar operaciones elementales a los renglones de la matrizaumentada hasta que esta sea escalonada.
Paso 2. Se pueden reordenar las columnas de la matriz del sistema (sies necesario), renombrando las variables, para que el nuevo sistema sea de laforma
a11x1 + a12x2 + · · · + a1rxr + · · · + a1nxn = b1
a22x2 + · · · + a2rxr + · · · + a2nxn = b2...
...
arrxr + · · · + arnxn = br,
(5.8)
donde los primeros r vectores columna de la matriz del sistema son lineal-mente independientes.
Usando el Teorema 5.4.2 se obtienen todas las soluciones. Primero seaplica, para encontrar una particular. Posteriormente, se usa para encon-trar las soluciones del sistema homogeneo asociado. Y de esta manera seobtienen todas las soluciones del sistema en virtud del Teorema 5.5.1. Recor-damos que el Teorema 5.4.2 establece que dados n − r numeros arbitrariossr+1, sr+2, . . . , sn, existen otros r numeros unicos s1, s2, . . . , sn, tales que
s = (s1, . . . , sr, sr+1, . . . , sn)
es solucion de (5.8).

140 5.6. Resolucion de sistemas
Paso 3. Para encontrar la solucion particular, se toma la eleccion facil,es decir, sr+1 = sr+2 = · · · = sn = 0. Este paso es muy simple, ya que bastaresolver el sistema
a11x1 + a12x2 + · · · + a1rxr = b1
a22x2 + · · · + a2rxr = b2...
arrxr = br,
que es muy facil de resolver, ya sea directamente por sustitucion, o usandola regla de Cramer. A esta solucion particular encontrada del sistema (5.8)la denotamos por X0.
Paso 4. Finalmente, en virtud del Teorema 5.5.1 se encuentran todas lassoluciones. Para esto, basta encontrar una base del subespacio de solucionesdel sistema homogeneo asociado a (5.8)
Esta base se obtiene directamente aplicando de nuevo el Teorema 5.4.2,n− r veces, ahora al sistema homogeneo asociado para los valores
sr+1 = 1, sr+2 = 0, · · · , sn = 0
sr+1 = 1, sr+2 = 1, · · · , sn = 0...
.... . .
...
sr+1 = 1, sr+2 = 1, · · · , sn = 1.
Las soluciones se obtienen facilmente, por sustitucion, o usando la regla deCramer.
Los vectores solucion en Rn generados por estos valores que denota-mos por X1, . . . , Xn−r son evidentemente linealmente independientes (yaque tienen una submatriz de r × r con determinante igual a 1), y por lotanto forman una base. Esto ultimo se sigue, ya que si se toma f : Rn −→ Rm
determinada porx 7−→ x1C1 + · · ·+ xnCn,
donde las Ci son las columnas de (5.8), se tiene en virtud del Teorema 5.4.4que el kernel de f tiene dimension n− r.
Por consiguiente, todas las soluciones de (5.8) estan dadas por{X0 +
n−r∑i=1
tiXi | ti ∈ R, i ∈ {1, 2, ..., n− r}
}.

5. Sistemas de ecuaciones lineales 141
Ejemplos
1. Resolvemos el sistemax + y − 2z = 1
2x − y − z − 3t = −4
x + 2y − 3z + t = 3
2x + y − 3z − t = 0.
Se aplican operaciones elementales a la matriz del sistema1 1 −2 0 12 −1 −1 −3 −41 2 −3 1 32 1 −3 −1 0
∼
1 1 −2 0 10 −3 3 −3 −60 1 −1 1 20 −1 1 −1 −2
∼
1 1 −2 0 10 −1 1 −1 −20 1 −1 1 20 0 0 0 0
∼
1 1 −2 0 10 −1 1 −1 −20 0 0 0 00 0 0 0 0
.
Se concluye que el sistema original tiene las mismas soluciones que elsistema {
x + y − 2z = 1
− y + z − t = −2,
tomando los valores (t, z) = (0, 0), se obtiene la solucion particularX0 = (−1, 2, 0, 0).
Resolvemos ahora el sistema homogeneo asociado. Estas mismasoperaciones elementales por renglones, se aplican para simplificar elsistema homogeneo asociado, la ultima columna, que son ceros, no cam-bia. Notese que la dimension del subespacio vectorial de las solucioneses 4−2 = 2. Se puede encontrar una base de este tomando para (z, t),los valores (1, 0) y (0, 1).
Si z = 1 y t = 0 se tiene{x + y − 2 = 0
− y + 1 = 0,

142 5.6. Resolucion de sistemas
cuya solucion es X1 = (1, 1, 1, 0). En el caso z = 0, y t = 1 se tiene{x + y = 0
− y + −1 = 0,
i.e., X2 = (1,−1, 0, 1). Por lo cual el sistema de soluciones del sistemaesta dado por
{X0 + t1X1 + t2X2 | t1, t2 ∈ R},
o alternativamente, usando las variables originales
{X0 + z X1 + tX2 | z, t ∈ R}.
2. x − y + z + 2t = 0
2x + y − z − 5t = −6
x − 2y + z + 4t = −1
x + y + 2z − t = 5.
La matriz aumentada del sistema es1 −1 1 2 02 1 −1 −5 −61 −2 1 4 −11 1 2 −1 5
∼
1 −1 1 2 00 3 −3 −9 −60 −1 0 2 −10 2 1 −3 5
∼
1 −1 1 2 00 1 −1 −3 −20 −1 0 2 −10 0 1 1 3
∼
1 −1 1 2 00 1 −1 −3 −20 0 −1 −1 −30 0 1 1 3
,
y el sistema es equivalente ax − y + z + 2t = 0
y − z − 3t = −2
z + t = 3.
Tomando el valor t = 0, se obtiene de manera inmediata una solucionparticular X0 = (−2, 1, 3, 0) (se encuentra z, luego y y finalmente x).

5. Sistemas de ecuaciones lineales 143
Ahora resolvemos el sistema homogeneo asociado, tomando t = 1se tiene
x − y + z = −2
y − z = 3
z = −1,
cuya solucion es X1 = (1, 2,−1, 1). En consecuencia, el conjunto desoluciones esta dado por
{X0 + tX1 | t ∈ R}.
Notese que el conjunto de soluciones se puede expresar en terminosde las variables originales, como en los dos ejemplo anteriores. Estosiempre se puede hacer, ya que las variables libres pueden ser usadascomo parametros, ya que los vectores elegidos tienen coordenadas ceroen estas variables, salvo en una de ellas donde toman el valor uno.
3. x − y + 2z = 1
y − z = 1
3x + y − z = 0
4x + y = 2.
La matriz aumentada del sistema esta dada por1 −1 2 10 1 −1 13 1 −1 04 1 0 2
∼
1 −1 2 10 1 −1 10 4 −7 −30 5 −8 −2
∼
1 −1 2 10 1 −1 10 0 −3 −70 0 −3 −7
,
i.e., las soluciones son las mismas que las del sistemax − y + 2z = 1
y − z = 1
3z = 7.
Por consiguiente, la unica solucion es
X0 =
(−1
3,10
3,7
3
), ya que x =
3
3− 14
3+
10
3.

144 5.6. Resolucion de sistemas
4. Considerese el sistemax1 + x2 + 2x4 = 2
x2 + 2x3 = 0
x4 = 2.
La matriz aumentada asociada es 1 1 0 2 20 1 2 0 00 0 0 1 2
.
Aunque esta matriz es escalonada, las primeras 3 columnas no sonlinealmente independientes, por lo que se debe renombrar las variables.
Sean y1 = x1, y2 = x2, y3 = x4 y y4 = x3, entonces el sistema seescribe
y1 + y2 + 2 y3 = 2
y2 + 2 y4 = 0
y3 = 2,
y la matriz aumentada del nuevo sistema es 1 1 2 0 20 1 0 2 00 0 1 0 2
.
Observese que esta matriz se obtuvo al intercambiar dos columnas dela original. Ahora podemos encontrar las soluciones, tomando y4 = 0,se obtiene una solucion particular
Y0 = (−2, 0, 2, 0).
Para el sistema homogeneo, si y4 = 1 se obtiene la solucion
Y1 = (4,−2, 0, 1),
y todas las soluciones son
{Y0 + y4 Y1 | y4 ∈ R}.

5. Sistemas de ecuaciones lineales 145
En terminos de las variables originales, se obtiene
X0 = (−2, 0, 0, 2), X1 = (4,−2, 1, 0),
y todas las soluciones son
{X0 + x3X1 | x3 ∈ R}.
EJERCICIOS 5.6
1. Resolver los siguientes sistemas de ecuaciones encontrando una solucionparticular y una base del subespacio de soluciones del sistema homogeneoasociado.
a)
2x + 3y + z − t + w = 2
3x + z + 2t − 5w = 0
x + y − 2z − 4w = 0,
b)
x1 + x2 + x3 + x4 + x5 + x6 = 7
2x2 + x3 − 4x5 = 8
4x1 + 2x5 − x6 = 2,
c)
x + 3y + z + t − w = 2
3 y − 2 z − 3w = 0
2 t + 5w = 2,
d)
x − 2y + z + t = 5
y + 2 z − t = 3
5 z − 2 t = −1.


Capıtulo 6
Los anillos Z y ZmSe establecen las propiedades del anillo de los enteros de manera axiomatica,se definen los anillos Zm, y se prueba que en efecto son anillos. Posterior-mente, se discuten los dominios enteros, el orden y las unidades. El libroconcluye probando la equivalencia del principio de induccion con el del buenorden.
6.1. Anillos
Definicion 62 El conjunto de los enteros, denotados por Z, consiste de losnumeros
{. . . ,−2,−1, 0, 1, 2, . . .}.
Un axioma es un fundamento de verdad o un hecho evidente, que seacepta por verdadero pero no se demuestra. Los axiomas que fundamentanla matematica son pocos, estos esencialmente son los de Peano, que estanbasados en razonamientos que de alguna manera, su validez es evidente, dichode otra manera, se aceptan como verdaderos. El estudio de estos axiomas sonobjeto de estudio en los cursos de Logica Matematica y Teorıa de Conjuntos.Recordamos ahora la siguiente importante definicion.
Definicion 63 Sea A un conjunto, una operacion binaria en A es unafuncion
µ : A × A −→ A.
Por ejemplo, la suma y la multiplicacion en Z son operaciones binarias.Recordamos del primer capıtulo que estas cumplen los siguientes axiomas.
147

148 6.2. Anillos Zm
S1) a + b = b + a ∀ a, b ∈ Z (conmutatividad),
S2) (a + b) + c = a + (b + c) ∀ a, b, c ∈ Z (asociatividad),
S3) ∃ 0 ∈ Z � a + 0 = a ∀ a ∈ Z (existencia del neutro aditivo),
S4) a + (−a) = 0 ∀ a ∈ Z (existencia del inverso aditivo).
P1) a b = b a ∀ a, b ∈ Z (conmutatividad),
P2) (a b) c = a (b c) ∀ a, b, c ∈ Z (asociatividad),
P3) ∃ 1 ∈ Z � a · 1 = a ∀ a ∈ Z (existencia del neutro multiplicativo),
D) a (b + c) = a b + a c ∀ a, b, c ∈ Z (distributividad).
Definicion 64 A un conjunto X con dos operaciones binarias que satis-facen los axiomas S1, S2, S3, S4, P1, P2, P3 y D se le llama anillo con-mutativo con elemento unitario (o unidad). Si no satisface P1 y P3 se lellama simplemente anillo.
Con esta terminologıa Z es un anillo conmutativo con unidad. No se prue-ba este hecho, aceptaremos las propiedades S1, S2, S3, S4, P1, P2, P3 yDcomo ciertas, y simplemente nos referiremos a estas como los primeros ochoaxiomas de los enteros, llamandolos Axioma 1, Axioma 2,..., y Axioma 8,respectivamente. Estos axiomas, junto con otros axiomas, se tomaran comoel fundamento para el estudio de los anillos Zm y de otros temas que se es-tudian en el 2o curso Algebra superior II, como por ejemplo, la divisibilidady los numeros reales.
6.2. Anillos Zm
Sea A = {0, 1}, se definen operaciones de suma y producto mediante lassiguientes tablas.
1
+
0
1
0 1
1 0
0
1
0
1
0
1
0
0×
0
Figura 6.1: Tablas de suma y producto en Z2

6. Los anillos Z y Zm 149
Se les puede llamar suma y producto a estas operaciones, el conjunto Acon estas operaciones resulta ser un anillo conmutativo con unidad, que se ledenota por Z2.
Se deben verificar las propiedades de anillo, por ejemplo
0 + 1 = 1 + 0.
Demostrar otras propiedades es largo y tedioso. En particular, para probar laasociatividad hay que considerar todas las posibles ternas en los valores 0 y1 (el numero de posibilidades es OR3
2 = 23). Mas aun, hay ocho propiedadesde anillo por probar. Una manera mas eficaz es establecer un patron generalque ahora presentamos.
Recordamos del primer capıtulo que dada un numero m ∈ N fijo, larelacion a ∼ b, si a − b = km, k ∈ Z es de equivalencia. Denotaremospor a la clase de equivalencia a la que pertenece a.
Por ejemplo, si m = 2
0 = {. . . ,−4,−2, 0, 2, 4, . . .} = {pares},
1 = {. . . ,−3,−1, 1, 3, 5, . . .} = {impares}.Esto se sigue, ya que
0 = {t ∈ Z | t ∼ 0} y 1 = {t ∈ Z | t ∼ 1},
i.e., t ∼ 0, si t es par. Y tambien t ∼ 1, si t− 1 es par, lo cual sucedesi t es impar.
Para el caso m = 3, las clases de equivalencia son
0 = {. . . ,−6,−3, 0, 3, 6, . . .},
1 = {. . . ,−5,−2, 1, 4, . . .},
2 = {. . . ,−4,−1, 2, 5, . . .}.Una mejor descripcion serıa
0 = {t | t = 3k, i.e., t es un multiplo de 3},
1 = {t | t− 1 = 3k, i.e., t− 1 es un multiplo de 3},
2 = {t | t− 2 = 3k, i.e., t− 2 es un multiplo de 3}.
Observese que con la convencion adaptada se tiene que en el presente casom = 3, por ejemplo, 5 = 2 = −1.

150 6.2. Anillos Zm
Definicion 65 Al conjunto de clases de equivalencia en Z definidas por larelacion
a ∼ b si a− b = km, k ∈ Z, m ∈ N fijo,
se le denota por Zm.
Resulta que este conjunto es un anillo conmutativo con unidad, lo cualprobamos ahora. Observese primero que
Zm = {0, 1, 2, . . . ,m− 1}
(ejercicio).Se definen 2 operaciones en Zm
a + b = a1 + b1, donde a1 ∈ a y b1 ∈ b,
a b = a1 b1, donde a1 ∈ a y b1 ∈ b.
Hay que probar que estas operaciones estan bien definidas y no dependende los representantes a1 y b1. Si
a1 ∼ a2 y b1 ∼ b2,
se tiene
a1 − a2 = mk1 y b1 − b2 = mk2, donde k1, k2 ∈ Z.
Por lo tantoa1 + b1 − (a2 + b2) = m(k1 − k2)
∴ a1 + b1 ∼ a2 + b2.
Tambien,
a1 b1 − a2 b2 = a1 b1 − a2 b1 + a2 b1 − a2 b2
= (a1 − a2) b1 + a2 (b1 − b2)= mk1 b1 + a2mk2 = m(entero),
y a1 b1 ∼ a2 b2.Resulta ahora facil probar para todos los conjuntos Zm que son en efecto
anillos conmutativos con unidad.
Teorema 6.2.1 ∀m ∈ N, Zm es un anillo conmutativo con unidad.

6. Los anillos Z y Zm 151
Demostracion. El teorema se sigue esencialmente del hecho de que estasmismas propiedades las cumplen los enteros y de que las operaciones estanbien definidas. Probamos seis de estas propiedades y las dos restantes quedancomo ejercicio. Tomando cualesquiera representantes a, b, y c de a, b y c,se tiene
S1) a+ b = a+ b = b+ a = b+ a,
S2) a+ (b+ c) = a+ b+ c = a+ (b+ c) = (a+ b) + c = a+ b+ c
= (a+ b) + c,
S3) a+ 0 = a+ 0 = a,
P1) a · 1 = a · 1 = a,
P3) a b = a b = b a = b a,
D) a (b+ c) = a(b+ c) = a(b+ c) = ab+ ac = ab+ ac = a b+ a c.
�Habiendo probado que Zm es un anillo podemos usar m sımbolos unicos
para los elementos. Por ejemplo, Z3 = {0, 1, 2}. Sin embargo, esto no impidepensar, o escribir, cualquier elemento en otros terminos, por ejemplo, en Z3
4 es 7. Esta manera de razonar es la herramienta adecuada para sumar ymultiplicar.
La relacion a ∼ b se escribira posteriormente como a ≡ b mod m, sedira que a es congruente con b modulo m. Este tema se estudiara con masdetalle en el 2o curso.
Podemos ahora, sin mayor dificultad establecer las tablas de multiplicarde algunos de estos anillos, por ejemplo Z4.
1
0
1
1
0
0
2
3
2
0
3
0
3
2
2 1
2
2 3
1
+
0
1
0 1
1 0
0
2
3
2
3 0
3
0
3
2
2
3
1
1
2
2 3
0
0
0
0
0
×
Figura 6.2: Tablas de suma y producto en Z4
Notese la simetrıa en las tablas, la cual se debe a la conmutatividad dela suma y del producto.

152 6.3. Propiedades de los enteros
EJERCICIOS 6.21. Sea m ∈ N fijo. Demuestre que Zm = {0, 1, 2, . . . ,m− 1}. Sugerencia:usar el algoritmo de la division.2. Terminar la prueba de que Zm es una anillo conmutativo con unidad, esdecir, hay que probar las propiedades S4) y P2).3. Escribir las tablas de Z3, Z5 y Z6.
6.3. Propiedades de los enteros
Probaremos primero ciertas propiedades que solo dependen de los axiomasde la suma y el producto junto con la distributividad. Por lo que son tambienvalidas para todo anillo comnutativo con unidad.
LEY DE LA CANCELACION POR LA IZQUIERDA
Dados a, b, c ∈ Z tales que a + b = a + c, se tiene b = c.
Usando la existencia del inverso y la asociatividad, se tiene
(−a) + (a+ b) = (−a) + (a+ c) y b = c.
LEY DE LA CANCELACION POR LA DERECHA
Dados a, b, c ∈ Z tales que a+ c = b+ c, se tiene a = b.
Esta ley se sigue ahora de la conmutatividad. Como consecuencia se tieneque el neutro aditivo es unico. Si a+ b = a, entonces a+ b = a+0, y b = 0.
Proposicion 6.3.1 ∀ a ∈ Z, a · 0 = 0.
Demostracion. Como
0 + 0 · a = 0 · a = (0 + 0) a = 0 · a+ 0 · a,
por cancelacion0 = 0 · a.
�La cancelacion implica tambien que el inverso aditivo es unico. Si a+c = 0,
entonces a+ (−a) = a+ c , por lo tanto −a = c.

6. Los anillos Z y Zm 153
Proposicion 6.3.2 ∀ a ∈ Z −(−a) = a.
Demostracion. Como a+ (−a) = 0, entonces el inverso aditivo de (−a),es decir, −(−a) es a, por unicidad.
�Una propiedad fundamental es la siguiente.
Proposicion 6.3.3 (Regla de los signos) ∀ a, b ∈ Z se tiene
i) (−a) b = −(a b) = a (−b),
ii) (−a)(−b) = a b.
Demostracion. Como
(−a) b+ a b = ((−a) + a) b = 0,
por unicidad(−a) b = −(a b).
La otra igualdad en i) se prueba de manera analoga.Para probar ii), usando i) se tiene
(−a)(−b) + [−(ab)] = (−a)(−b) + [(−a) b] = (−a)(−b+ b) = 0,
por lo que (por unicidad) (−a)(−b) = a b.�
Como caso particular de la Proposicion 6.3.3 se tiene (−1) a = −a y(−1)(−1) = 1.
Definicion 66 Sean a, b ∈ Z, se define la resta o diferencia de a menosb como
a+ (−b),
se denota por a− b.
Observese que a (b− c) = ab− ac, ya que
a(b+ (−c)) = a b+ a (−c) = a b+ (−(ac)),
por la regla de los signos.

154 6.3. Propiedades de los enteros
Notese que la unicidad del inverso aditivo implica que
−(a+ b) = −a− b,
ya que ambos son inversos aditivos de a+ b.Los enteros tienen otras propiedades que no son consecuencia de los
primeros 8 axiomas: S1), S2), S3), S4), P1), P2), P3) y D), que los hemosdenotado tambien como Axioma 1, Axioma 2,. . . , Axioma 8.
Axioma 9 ∀ a, b ∈ Z− {0}, se tiene a b 6= 0. q
Una formulacion equivalente es decir ∀ a, b ∈ Z � a b = 0 se tieneque a = 0 o b = 0. Esta propiedad valida en Z no se cumple en otrosanillos conmutativos con unidad, por ejemplo en Z4, 2 · 2 = 0, o en Z9,3 · 3 = 0. Tambien, en Z6, 2 · 3 = 0.
Observese que la existencia de estos ejemplos prueba que, en efecto, elAxioma 9 no es consecuencia de los primeros 8 axiomas.
Una manera intuitiva de convencerse de la veracidad del Axioma 9, essuponer a b = 0, introducir sus inversos multiplicativos, es decir los numeros
racionales 1/a y 1/b y llegar a una contradiccion:
1 =
(1
a
)(1
b
)a b =
(1
a
)(1
b
)0 = 0.
Sin embargo, este argumento no tiene validez formal, ya que no se handefinido los numeros racionales.
Definicion 67 Sean A un anillo, y a, b ∈ A tales que a b = 0, entonces alos elementos a y b se les llama divisores del cero.
El axioma 9 dice que en Z no hay divisores de cero distintos de cero.
Definicion 68 Un dominio entero es un anillo conmutativo con unidad, queno tiene divisores de 0 distintos de 0.
Un ejemplo de dominio entero es Z, mientras que Z4, Z6, Z9, Z18, nolo son. Observese que en un dominio entero A vale la LEY DE LA CANCELACION
PARA LA MULTIPLICACION:
Sean a, b, c ∈ A, a 6= 0, tales que a b = a c, entonces b = c.

6. Los anillos Z y Zm 155
Esta ley se sigue ya que la hipotesis implica a b − a c = 0, por lo cual setiene a (b− c) = 0, y dado que a 6= 0, necesariamente b− c = 0.
En particular, esta ley es valida en Z. Notese que es necesaria la condi-cion a 6= 0, ya que 0 · b = 0 · c ∀ b, c ∈ A. El recıproco es cierto: si A esun anillo conmutativo con 1, para el cual vale la ley de la cancelacion parael producto, entonces A es un dominio entero (ejercicio).
EJERCICIOS 6.31. Probar que si A es un anillo conmutativo con 1, para el cual vale la leyde la cancelacion para el producto, entonces A es un dominio entero.
6.4. Orden y unidades en ZSe quiere formalizar el hecho de que un numero entero es mayor que otro siesta mas a la derecha en la recta.
1 20−1−2
Figura 6.3: Los enteros como puntos en la recta real
Este concepto lo podemos relacionar con los naturales, N = {1, 2, 3, . . .},primero necesitamos algunos axiomas de cerradura y tricotomıa.
Axioma 10 Si a, b ∈ N, entonces a+ b ∈ N.Axioma 11 Si a, b ∈ N, entonces a b ∈ N.Axioma 12 Si a ∈ Z, entonces se cumple una y solo una de las si-
guientes afirmaciones :i) a ∈ N,
ii) a = 0,
iii) −a ∈ N.
Estos axiomas junto con las leyes de los signos establece que Z es unconjunto cerrado bajo la suma y el producto. Como se menciono antes, es-tos 12 axiomas de los enteros se basan en otro conjunto menor de axiomasllamados de Peano, y estos a su vez se basan en otros pocos axiomas fun-damentales que de alguna manera son hechos contundentes, por ejemplo, elaxioma de extension que establece que 2 conjuntos son iguales si tienen losmismo elementos, otros axiomas son el de especificacion y el de infinito. Cf.[3]

156 6.4. Orden y unidades en Z
Definicion 69 Sean a, b ∈ Z, se dice que a es mayor que b, si
a− b ∈ N,Se escribe a > b.
Observese que
a > 0 ⇔ a− 0 ∈ N ⇔ a ∈ N.
Proposicion 6.4.1 (Transitividad) Sean a, b, c ∈ Z tales que a > b yb > c, entonces a > c.
Demostracion. Como a− b ∈ N, y b− c ∈ N, se tiene
a− b+ b− c = a− c ∈ N
(en virtud del Axioma 10), es decir a > c.�
Observese que el Axioma 12 se puede reescribir de la siguiente manera:dado a ∈ Z, sucede una y solo una de las siguientes tres afirmaciones:
a > 0, a < 0, o a = 0.
Esto se sigue ya que a ∈ N ⇔ a > 0,
a < 0 ⇔ 0 > a ⇔ 0− a ∈ N ⇔ −a ∈ N.
El orden es compatible con la suma y el producto.
Proposicion 6.4.2 Sean a, b, c ∈ Z tales que a > b, entonces
a+ c > b+ c.
Demostracion. Como a− b ∈ N, se tiene
a+ c− (b+ c) ∈ N.
�
Proposicion 6.4.3 Sean a, b, c ∈ Z tales que a > b y c > 0, entonces
a c > b c.

6. Los anillos Z y Zm 157
Demostracion. a− b ∈ N y c ∈ N, por lo cual
(a− b) c = a c− b c ∈ N,
es decir, a c > b c.�
OTRAS PROPIEDADES DE ORDEN
1. a2 > 0 ∀ a ∈ Z− {0}:Si a ∈ N, se sigue del Axioma 11 que tambien a2 es un natural Si−a ∈ N, (−a)(−a) ∈ N y a2 ∈ N, por la regla de los signos.
2. Si a ≥ 0 y b ≥ 0, entonces a+ b ≥ 0 :
a, b ∈ N ⇒ a+ b ∈ N.
3. a < b ⇔ −a > −b (−b < −a) :
b− a ∈ N ⇔ −a− (−b) ∈ N.
UNIDADES EN Z
Se mostro que todos lo elementos de Z tienen un inverso aditivo, sin embargo,solo 1 y -1 tienen inverso multiplicativo. Lo cual se prueba a continuacion.
Definicion 70 En un anillo a los elementos que tienen inverso multiplica-tivo se les llama unidades.
Por ejemplo, en Z5 todos los elementos no cero son unidades, ya que2 · 3 = 1, y 4 · 4 = 1, sin embargo, en Z6 ,2 no es unidad, ya que
2 · 1 = 2, 2 · 2 = 4, 2 · 3 = 0, 2 · 4 = 2, 2 · 5 = 4, 2 · 0 = 0.
Proposicion 6.4.4 Las unicas unidades en Z son 1 y -1.
Demostracion. 0 no es unidad, ya que 0 a = 0 ∀ a ∈ Z. Como 1· 1 = 1y (−1) (−1) = 1, 1 y −1 sı lo son.
Ahora, si a > 1, a no es unidad. Probamos que a b 6= 1 ∀ b ∈ Z.Primero, a 0 = 0 y a 1 = a. Si b < 0, entonces a b < a · 0 = 0 y a b 6= 1.Tambien si b > 1, a b > a 1 = a y a b 6= 1.

158 6.5. Principio de induccion
Si a < −1, a tampoco es unidad. Si a fuera unidad, se tendrıa a b = 1y (−a)(−b) = 1, i.e., −a, que es mayor a 1, serıa unidad, contradiciendo la1a parte.
�EJERCICIOS 6.4
1. Encuentre las unidades en los anillos Z4, Z6, y Z7.
6.5. Principio de induccion
Profundizamos sobre este tema que se presento al inicio del libro.
Axioma 13 (Principio de induccion)
Sea M un subconjunto de los naturales tales que se cumplen las siguientescondiciones:
i) 1 ∈ M
ii) si n ∈ M, entonces n+ 1 ∈ M .
Bajo estas hipotesis se concluye que
M = N.
Este axioma, o principio, dice que si un subconjunto de los naturalescumple las condiciones i) y ii), entonces ese subconjunto consiste de todoslos naturales.
Su importancia radica en ser muy util para probar propiedades que cumplentodos los naturales, por ejemplo, para probar la identidad
1 + 3 + 5 + 7 + · · ·+ (2n− 1) = n2. (6.1)
Sea M ⊂ N, aquellos numeros que cumplen (6.1), se tiene que
i) 1 ∈ M, ya que 1 = 12,
ii) si n ∈ M, entonces
1 + 3 + 5 + 7 + · · ·+ (2n− 1) + (2n+ 1) = n2 + (2n+ 1) = (n+ 1)2,
por lo que n+ 1 ∈ M .

6. Los anillos Z y Zm 159
El Principio de induccion implica que (6.1) es valido para todos los naturales.Como un 2o ejemplo, considerese la igualdad
20 + 21 + 22 + · · ·+ 2n−1 = 2n − 1. (6.2)
La prueba de esta identidad se puede interpretar como sigue: para cadanumero n, la identidad (6.2) es una proposicion que denotamos por Pn, sise logra probar que P1 es correcta, y que cada vez que Pn lo es, la proposicionPn+1 tambien lo es, se concluye que (6.2) se cumple ∀ n ∈ N.
i) 21−1 = 20 = 21 − 1 y por lo tanto P1 se cumple,
ii) si Pn se cumple
20 + 21 + 22 + · · ·+ 2n−1 + 2n = 2n − 1 + 2n = 2 · 2n − 1 = 2n+1 − 1,
por lo que Pn+1 se cumple.
Algunas veces es util usar un principio equivalente al de induccion.
PRINCIPIO DE INDUCCION MODIFICADO
Sea M ⊂ N tal que cumple las siguientes 2 condiciones :
a) 1 ∈ M
b) cada vez que 1, 2, . . . , n ∈ M, se tiene que n+ 1 ∈ M.
Bajo estas hipotesis se concluye que M = N.
Teorema 6.5.1 El principio de induccion es equivalente al principio de in-duccion modificado.
Demostracion. Denotamos por 1© al Principio de induccion y por 2©al Principio modificado. Para probar que 1© implica 2©, hay que probarque las hipotesis de 2© implican las de 1©. Para esto se debe probar que sin ∈ M, entonces n+ 1 ∈ M . Aplicando a) junto con n veces la hipotesisb) se tiene que si n ∈ M , entonces n + 1 ∈ M : 1, 2 ∈ M ⇒ 3 ∈ M ,1, 2, 3 ∈ M ⇒ 4 ∈ M . Iterando este proceso se obtiene n + 1 ∈ M , porlo que se cumple ii). Por lo tanto M = N , y se sigue 2©.
Finalmente para probar que 2© implica 1©, se debe probar que lashipotesis de 1© implican las de 2©, lo cual es evidente. �

160 6.5. Principio de induccion
El texto concluye estableciendo otra propiedad de los enteros que sor-prendentemente es equivalente al principio de induccion.
PRINCIPIO DEL BUEN ORDEN
Sea A ⊂ N, A 6= ∅, entonces A tiene un menor elemento, i.e., ∃m0 ∈ N,� m0 ≤ n ∀ n ∈ A.
Teorema 6.5.2 El principio de induccion es equivalente al de buen orden.
Demostracion. Probamos primero que el de induccion implica el del buenorden. Si A ⊂ N, A 6= ∅, y A no tiene un menor elemento, sea
B = {m ∈ N | m < n ∀n ∈ A},
es decir, el conjunto de las cotas inferiores de A. Observese que A y B nose intersecan, ya que ningun elemento es menor a sı mismo.
Resulta que 1 ∈ B: si 1 ∈ A, 1 es el menor elemento. Tambien sik ∈ B, k+1 tambien esta en B, ya que de otra manera k+1 no es menorque algun elemento de A. Esta ultima situacion solo acontece si k+ 1 ∈ A,puesto que se esta suponiendo que todos los elementos de A son mayores ak. Sin embargo si k + 1 ∈ A, k + 1 serıa el menor elemento de A.
El principio de induccion implica entonces que B = N y A = ∅, locual contradice las hipotesis, ∴ A tiene un menor elemento.
Finalmente, probamos que el principio de buen orden implica el de induc-cion. Sea M ⊂ N tal que cumple las hipotesis del principio de induccion,probamos que M c = ∅. Si M c 6= ∅, sea m el menor elemento de M c, en-tonces m−1 ∈ M y por hipotesis de induccion m ∈ M , lo cual contradicem ∈ M c, ∴ M c = ∅.
�EJERCICIOS 6.5
1. Probar la siguiente identidad
13 + 23 + 33 + · · ·+ n3 =
(n (n+ 1)
2
)2
.

Bibliografıa
[1] Bravo A., Rincon H. y Rincon C. Algebra Superior, Facultad deCiencias, UNAM, 2008.
[2] Cardenas H., Lluis E., Raggı F., Tomas F., Algebra Superior,Editorial Trillas, 1982.
[3] Halmos, P., Naive Set Theory, Springer-Verlag, New York, 1974.
[4] Lang, S., Introduccion al algebra lineal, Addison-Wesley, 1990.
[5] Lascurain, A., Algebra Superior II, En preparacion.
161

Indice analıtico
n factorial, 21
abcisa, 54anillo, 30, 148
conmutativo, 148axioma
de extension, 155de infinito, 155especificacion, 155
axiomasPeano, 147
base, 74buen orden
principio del, 160
campo, 30cardinalidad, 17clase de equivalencia, 26, 149coeficientes binomiales, 47combinacion lineal, 69combinaciones, 34, 46conjunto
de combinaciones lineales, 70conjunto (s), 1
complemento de, 5diferencia de, 7finito, 17infinito, 18interseccion de, 4union de, 3
vacio, 2corresponencia biunıvoca, 43Cramer
regla de, 127
DeMorganleyes de, 6
dependencia lineal, 71determinante, 93
propiedades, 95dominio entero, 154
escalares, 53espacio vectorial
Rn, 60sobre los reales, 62
estructuras algebraicas, 28
funcion (es), 10, 36biyectiva, 16, 39caracterıstica, 48codominio de, 10composicion de, 12dominio de, 10extension de, 41imagen de, 11, 40, 135inverso derecho de, 14inverso izquierdo de, 14invertible, 14inyectiva, 15, 39kernel, 134
162

6. Indice analıtico 163
lineal, 134multilineal, 113suprayectiva, 16, 39
grupo, 30
induccionprincipio modificado de, 159principio de, 19, 158
inversion, 88
leyde cancelacion para el producto,
30de cancelacion para la suma, 29de la cancelacion, 152de tricotomıa, 30
ley distributiva, 4
matrices, 81matriz
aumentada, 121cuadrada, 82del sistema, 121determinante, 126diagonal, 82escalonada, 86menores, 102rango de, 83, 112, 123transpuesta, 101triangular, 82
numeroscomplejos, 28enteros, 28, 147naturales, 28racionales, 28reales, 28
Newton
teorema del binomio, 21
operacion binaria, 147ordenaciones, 32, 43
con repeticion, 31, 41ordenada, 54
pareja ordenada, 8particion, 24Pascal
formula del triangulo de, 49teorema de, 21
permutacionimpar, 89inversa, 91par, 89
permutaciones, 33, 45, 88producto
cartesiano, 8, 42, 53de un escalar por un vector, 53por escalares, 60punto, 65
regla de correspondencia, 11relacion, 9
de equivalencia, 23, 149dominio de, 10imagen de, 10
signosregla de los, 153
sistemahomogeneo, 122solucion, 123
sistema homogeneo, 132asociado, 136
subconjunto, 2subespacio
generado, 70

164 6.5. Indice analıtico
vectorial, 70vectorial de Rn, 63vectorial generado, 76
suma, 60de vectores, 53
transposicion, 89
unidades, 157
Van der Monde, 130determinante tipo, 108
vectores, 53linealmente dependientes, 71linealmente independiantes, 72ortogonales, 65